A neuro-wavelet method for multi-sensor system integration for vehicular navigation
10
This content has been downloaded from IOPscience. Please scroll down to see the full text. Download details: IP Address: 131.156.59.191 This content was downloaded on 01/09/2014 at 14:41 Please note that terms and conditions apply. A neuro-wavelet method for multi-sensor system integration for vehicular navigation View the table of contents for this issue, or go to the journal homepage for more 2004 Meas. Sci. Technol. 15 404 (http://iopscience.iop.org/0957-0233/15/2/013) Home Search Collections Journals About Contact us My IOPscience
Transcript of A neuro-wavelet method for multi-sensor system integration for vehicular navigation

This content has been downloaded from IOPscience. Please scroll down to see the full text.
Download details:
IP Address: 131.156.59.191
This content was downloaded on 01/09/2014 at 14:41
Please note that terms and conditions apply.
A neuro-wavelet method for multi-sensor system integration for vehicular navigation
View the table of contents for this issue, or go to the journal homepage for more
2004 Meas. Sci. Technol. 15 404
(http://iopscience.iop.org/0957-0233/15/2/013)
Home Search Collections Journals About Contact us My IOPscience

INSTITUTE OF PHYSICS PUBLISHING MEASUREMENT SCIENCE AND TECHNOLOGY
Meas. Sci. Technol. 15 (2004) 404–412 PII: S0957-0233(04)68011-8
A neuro-wavelet method for multi-sensorsystem integration for vehicularnavigationAboelmagd Noureldin1,4, Ahmed Osman2 and Naser El-Sheimy3
1 Department of Electrical and Computer Engineering, Royal Military College of Canada,PO Box 17000, Station Forces, Kingston, Ontario K7K 7B4, Canada2 Department of Electrical and Computer Engineering, University of Calgary,2500 University Dr. NW, Calgary, Alberta T2N 1N4, Canada3 Department of Geomatics Engineering, University of Calgary, 2500 University Dr. NW,Calgary, Alberta T2N 1N4, Canada
E-mail: [email protected]
Received 20 August 2003, in final form 21 October 2003, accepted forpublication 24 November 2003Published 19 December 2003Online at stacks.iop.org/MST/15/404 (DOI: 10.1088/0957-0233/15/2/013)
AbstractThe last two decades have shown an increasing trend in the use of navigationtechnologies in several applications including land vehicles and automatedcar navigation. Navigation systems incorporate the global positioningsystem (GPS) and the inertial navigation system (INS). While GPS providesposition information when there is direct line of sight to four or moresatellites, INS utilizes the local measurements of angular velocity and linearacceleration to determine both the vehicle’s position and attitude. Bothsystems are integrated together to provide reliable navigation solutions byovercoming each of their respective shortcomings. The present integrationschemes, which are predominantly based on Kalman filtering, have severalinadequacies related to sensor error models, immunity to noise andobservability. This paper aims at introducing a multi-sensor systemintegration approach for fusing data from an INS and GPS hardwareutilizing wavelet multi-resolution analysis (WMRA) and artificial neuralnetworks (ANN). The WMRA is used to compare the INS and GPS positionoutputs at different resolution levels. The ANN module is then trained topredict the INS position errors in real time and provide accurate positioningof the moving vehicle. The field-test results have demonstrated thatsubstantial improvements in INS/GPS positioning accuracy could beobtained by applying the proposed neuro-wavelet technique.
Keywords: vehicular navigation, inertial navigation, GPS,wavelet multi-resolution analysis, neural networks
(Some figures in this article are in colour only in the electronic version)
1. Introduction
Most of the present vehicle navigation instruments rely mainlyon the global positioning system (GPS) as the primary source
4 Author to whom any correspondence should be addressed.
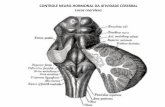
of information to provide the vehicle’s position [1]. As shownin figure 1, the position is usually defined with respect to anavigational frame by a component along the East direction(corresponding to the vehicle’s longitude λ), a componentalong the North direction (corresponding to the vehicle’slatitude ϕ) and a component along the vertical direction
0957-0233/04/020404+09$30.00 © 2004 IOP Publishing Ltd Printed in the UK 404

A neuro-wavelet method for multi-sensor system integration for vehicular navigation
e
g
E
UPN
Ye
Ze
Xe
Equator
Greenwich
ωe
g
E
UPN
λφ
Ye
Ze
Xe
Greenwich
Figure 1. The definition of the vehicle position along the East (E),North (N) and vertical (UP) directions.
(corresponding to the vehicle’s altitude h). GPS is capableof providing precise positioning information to an unlimitednumber of users anywhere on the planet. However, GPS canprovide this type of information only when there is a direct lineof sight to four or more satellites [1]. In other words, the systemdoes not work properly in urban areas due to signal blockageand attenuation that may deteriorate the overall positioningaccuracy.
An inertial navigation system (INS) is a self-containedpositioning and attitude device that continuously measuresthree orthogonal linear accelerations and three angularrates [2]. By measuring vehicle acceleration and angularvelocity in an inertial frame of reference, integrating itwith respect to time and transforming it to the navigationalframe, velocity, attitude and position components can beobtained [2]. Sensors used to implement such a systemare accelerometers for the measurement of a vehicle’s linearacceleration (specific force) and gyroscopes for monitoringvehicle rotation (angular velocity) with respect to an inertialframe [2]. Since specific force measurements containthe effect of the Earth’s gravity field, a gravity model isused to extract vehicle acceleration from the measurements.Because they employ three translational (accelerometers)and three rotational (gyroscopes) sensors, inertial measuringunits (IMU) can be used as positioning and attitude monitoringdevices [3].
In fact, INS cannot operate as a stand-alone navigationsystem. Residual bias errors in both the accelerometersand the gyroscopes may deteriorate the long-term positioningaccuracy. In addition, these bias errors are random in natureand need to be modelled using stochastic processes. In landvehicle and submarine navigation, regular updates are neededto limit the rapidly growing positional error. It is often possibleto considerably improve the accuracy of an INS by appropriateupdates from GPS [4].
1.1. INS/GPS integration
The integration of GPS and INS, therefore, provides anavigation system that has superior performance in comparisonwith either a GPS or an INS stand-alone system. Forinstance, GPS-derived positions have approximately white
Figure 2. Block diagram for a centralized INS/GPS integrationscheme.
noise characteristics over the whole frequency range. TheGPS-derived positions and velocities are therefore excellentexternal measurements for updating the INS and thusimproving its long-term accuracy [6]. On the other hand,the INS can provide precise position and velocity data forGPS signal acquisition and reacquisition after outages. Thisreduces the time and the search domain required for detectingand correcting cycle slips [5, 6].
To optimally combine both systems, the incorporation ofINS with GPS is usually implemented using a centralizedor decentralized Kalman filter [4, 5]. In the centralizedcase, a common state vector is used to model both the INSand the GPS errors. In this case, the INS measurementsare used to determine the reference trajectory and GPSmeasurements to update the solution and estimate the statevector components [5]. In the second approach, different filtersare run simultaneously and interact only occasionally. TheGPS data are Kalman filtered to obtain estimates of positionand velocity, which are then used as quasi-observations toupdate the INS Kalman filter. At the same time, the GPS dataare continuously checked for cycle slips [5]. Figure 2 showsthe Kalman filtering scheme for INS/GPS integration.
1.2. Problem statement
Although the Kalman filter represents one of the best solutionsfor INS/GPS integration, it still has some drawbacks. TheKalman filter only works well under certain predefined models.If the filter is exposed to input data that do not fit the model, itwill not result in reliable estimates [7]. Typically, the dynamicsmodel is based on an error model for three position errors,three velocity errors and three altitude errors in an INS (i.e. thesystem error states). These errors are also augmented by somesensor error states such as accelerometer biases and gyroscopedrifts, which are modelled as stochastic processes. In fact,there are several random errors associated with each inertialsensor. For instance, noise contributions in typical opticalgyroscope systems may include white noise, correlated randomnoise, bias instability and angle random walk (IEEE Standardno 647-1995). Therefore, it is usually difficult to set a certainstochastic model for each inertial sensor that works efficientlyin all environments and reflects the long-term behaviour ofsensor errors [8, 9]. Hence a model-less algorithm that can
405

A Noureldin et al
perform the self-following of the vehicle under all-conditionsmanoeuvring is thus required.
Another typical problem related to Kalman filtering isthe observability of the different states. The system isconsidered to be non-observable if there are one or more statevariables that are hidden from the view of the observer (i.e. themeasurements). Consequently, if the unobserved process isnot stable, the corresponding estimation errors will be similarlyunstable [10–13].
1.3. Objectives
This paper aims at introducing a new method based onartificial neural networks (ANN) to fuse the outputs of INSand GPS and provide accurate positioning information forthe vehicle. In addition, this paper suggests a wavelet multi-resolution analysis (WMRA) method to analyse and comparethe INS and GPS outputs at different resolution levels beforeprocessing them by the ANN module during either the trainingor prediction procedure.
2. Wavelet multi-resolution analysis of INS and GPSdata
If the INS or GPS output signals are analysed in thefrequency domain, one can determine that these signals arecomposed of several frequency components. For manysignals, frequency analysis using Fourier transform (FT) isextremely useful because the signal’s frequency content is ofgreat importance. However, Fourier analysis has a seriousdrawback. In transforming to the frequency domain, timedomain information is lost [14]. When looking at a Fouriertransform of a signal, it is impossible to tell when a particularevent took place. In an effort to overcome this deficiencyin FT, the same transform was adapted to analyse only asmall window of the signal at a time. This technique ispresently known as the short-time Fourier transform (STFT),which maps a signal onto a two-dimensional function of timeand frequency [15]. Apparently, a narrow window widthleads to good time localization but poor frequency resolution,while a wide window width leads to poor time localizationbut good frequency resolution. Therefore, it is necessary tohave multiple resolutions in time and frequency. The majordrawback of the STFT is that the window width is fixed, whichmeans that there will usually be a time–frequency tradeoffcorresponding to the choice of the window function’s width.
Wavelet analysis represents the next logical step, which isbased on a windowing technique with variable-sized windows.Wavelet transform (WT) allows the use of long time intervalswhere precise low frequency information is needed, and shorterintervals where high frequency information is considered [16].In general, the major advantage offered by wavelets is theability to perform local analysis; that is, to analyse a localizedarea of a larger signal. Therefore, it will be adopted in thisstudy to analyse both the INS and GPS position components.
2.1. Discrete wavelet transform (DWT)
The DWT of a discrete time sequence x(n) is given as [16]
C j,k = 2(− j/2)∑
n
x(n)ψ(2− j n − k) (1)
where ψ(n) is the wavelet function (the basis function utilizedin the wavelet transform) and 2(− j/2)ψ(2− j n − k) are scaledand shifted versions of ψ(n) based on the values of j (scalingcoefficient) and k (shifting coefficient) and are usually writtenas ψ j,k(n). The j and k coefficients take integer values fordifferent scaling and shifted versions of ψ(n) and C j,k arethe corresponding wavelet coefficients. The original signalx(n) can be generated from the corresponding wavelet functionusing the following equation [16]:
x(n) =∑
j
∑
k
C j,kψ j,k(n). (2)
The basis functions ψ j,k(n) are not limited to exponentialfunctions as in the case of FT or STFT. The only restrictionon ψ j,k(n) is that it must be short and oscillatory (it must havezero average and decay quickly at both ends). This restrictionensures that the summation in the DWT transform equation isfinite [16]. The function ψ j,k(n) has given the name ‘wavelet’or ‘small wave’ to the transform and is referred to as the ‘motherwavelet’ and its dilates and translates are simply referred toas ‘wavelets’ or ‘daughter wavelets’. Therefore, the wavelettransformation of a time-domain signal can be defined in termsof the projections of this signal onto a family of functionsthat are all normalized dilations and translations of a waveletfunction [16].
2.2. Multi-resolution analysis
Scaling a wavelet simply means stretching or compressing it.The smaller the scale the more compressed the wavelet is,while the larger the scale the more stretched the wavelet is.Therefore, lower scales allow for analysing rapidly changingdetails (high frequency components) [17, 18]. Similarly,higher scales allow for analysing slowly changing features (lowfrequency components). The low frequency contents of thesignal are usually the most important part of the signal thatidentifies the signal itself and are capable of providing a verygood approximation about the signal [17]. The approximationscorrespond to the high scale low frequency part. On theother hand, the high frequency contents carry few detailsabout the signal [17]. The details correspond to the low scalehigh frequency part. WMRA is therefore provided based onthe approximation and details provided using WT. WMRAdecomposes the signal into various resolution levels. Thedata with coarse resolution contain information about the lowfrequency components and retain the main features of theoriginal signal. The data with fine resolution retain informationabout the high frequency components [18].
In general, a space VJ can be separated into two sub-spaces: a subspace VJ −1 (approximation) and a space WJ −1
(detail) which is just the difference of these two spaces [16].If this process is iterated, successive approximations will bedecomposed in turn, so that one signal is broken into manyfine resolution components. The original signal can thenbe reconstructed from the sum of the final approximationcomponent and the detail components of all levels.
Consider j and k to be the dilation (scaling) index andthe translation (shifting) index, respectively. Each value of jmeans analysing different resolution levels of the signal. Themathematical procedure of WMRA for either the INS or GPSoutput signals is as follows [16–18]:
406

A neuro-wavelet method for multi-sensor system integration for vehicular navigation
(1) For an input signal x(n), calculate the approximationcoefficient a j,k at the j th resolution level as follows:
a j,k = 2(− j/2)∑
n
x(n)φ(2− j n − k)
where φ(n) is called the scaling function. Scalingfunctions are similar to wavelet functions except that theyhave only positive values. They are designed to smooth theinput signal (i.e. seeking the signal approximation). Theywork in the signal in a way similar to averaging the inputsignal x(n). The scaling function is applied to the inputsignal to determine the approximation. This operation isequivalent to low pass filtering.
(2) The approximation of x(n) at the j th resolution level isthen computed as
x j (t) =∞∑
k=−∞a j,kφ j,k(t).
(3) Calculate the detail coefficient d j,k at the j th resolutionlevel:
d j,k =∑
n
x(n)ψ j,k(n).
It can be noticed that the wavelet function is used incalculating the detail coefficient. Wavelet functionsψ j,k(n) are designed to seek the details of the signals.They work in the signal in a way similar to differentiation(giving the difference between two consecutive samplesof the input signal x(n)). This is why a wavelet functionψ j,k(n) consists of positive and negative parts. The detailfunction will be applied to the input signal to determine thedetails. This operation is equivalent to high-pass filtering.
(4) The detail of x(n) at the j th resolution level is thencomputed as follows:
g j (n) =∞∑
k=−∞d j,kψ j,k(n).
The above four steps are repeated for the j + 1 resolutionlevel but by using the approximation x j (n) obtained in step 2.The original signal x(n) can be reconstructed using all thedetails obtained during the decomposition process at allresolution levels:
x(n) =∞∑
j=−∞g j(n) =
∞∑
j=−∞
∞∑
k=−∞d j,kψ j,k(n). (3)
The above equation implies that one has to process theoriginal signal at an infinite number of resolutions, which isimpractical. Alternatively, the analysis can stop at the j thresolution level and the signal can be reconstructed using theapproximation at that level and all the details, starting from thefirst resolution level until the J th level. The following equationpresents this procedure [16]:
x(n) =∞∑
k=−∞a j,kφ j,k(n) +
J∑
j=1
∞∑
k=−∞d j,kψ j,k(n). (4)
The first term represents the approximation at level J andthe second term represents the details at resolution levelJ and lower. In conclusion, WMRA builds a pyramidal
INS - Output GPS - Output
INS –A1 INS –D1
INS –A2 INS –D2
INS –A3 INS –D3
GPS –D1 GPS –A1
GPS –D2 GPS –A2
GPS –D3 GPS –A3
+
+
+
+
+
+
+
INS/GPS – Error Signal
−
−
−
−
Figure 3. WMRA of the INS and GPS signals for computation ofthe error signal of one of the position components (East, North orvertical).
structure that requires an iterative application of scaling andwavelet functions as low-pass (LP) and high-pass (HP) filters,respectively. These filters initially act on the entire signal bandat the high frequency (lower scale values) first and graduallyreduce the signal band at each stage.
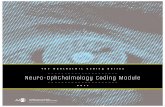
The WMRA is applied to both the INS and GPS positionoutput components (East, North and vertical) with individualanalysis provided for each position component. The INSmonitors the linear accelerations and angular velocities of thevehicle with minimum time delay. For short time intervals,the integration of acceleration and angular rate measurementsresults in an extremely accurate velocity, position and altitudewith almost no noise or time lags. However, becausethe INS outputs are obtained by integration, and the factthat the measurements contain residual bias errors fromboth the gyroscopes and the accelerometers, they drift atlow frequencies. To obtain very accurate outputs at allfrequencies, the INS is updated periodically using GPSpositions and/or velocities, which complement the INS outputin an ideal way. Therefore, as shown in figure 3, the WMRAtechnique determines the differences between the INS and GPSposition outputs after comparing the corresponding positioncomponents at several resolution levels. These differencesrepresent, in general, the INS errors, which are used to correctfor the INS outputs during GPS outages. This means thatthe proposed navigation system will rely on the GPS positioncomponents until the GPS signal is blocked. Wheneverthe GPS signal is available, the GPS position componentis compared to the corresponding INS position componentand the corresponding position error is computed. Optimalestimation and modelling of this error signal is performed byANN, which is discussed in the following section. It should behighlighted that separate WMRA of the form shown in figure 3is designed for each position component.
In this study, we decided to compare the INS and GPSposition outputs at three resolution levels. In the waveletdomain, using the DWT, the wavelet coefficients that representone of the INS position components in the three decompositionlevels are
CINS = [|c Ai1|cDi1|c Ai2|cDi2|c Ai3|cDi3|]. (5)
407

A Noureldin et al
NeuralNetwork
INS Position Component
Time
INS/GPS Position Error Signal
+−
Training Criterion
ANNParameter
Adjustment
WMRA Module
Figure 4. Training procedure for the ANN module for modellingINS position errors.
The corresponding wavelet coefficients of the GPS positioncomponent is represented as
CGPS = [|c Ag1|cDg1|c Ag2|cDg2|c Ag3|cDg3|]. (6)
In fact, c A and cD shown in the above two equations are theapproximation and the detail coefficients determined in steps 1and 3 of the WMRA procedure shown previously.
By subtracting the wavelet coefficients of each of the GPSposition outputs from the corresponding wavelet coefficientsof each of the INS position outputs, the wavelet coefficients ofthe error signals can be extracted as
E = [|c Ae1|cDe1|c Ae2|cDe2|c Ae3|cDe3|]. (7)
The error signal can then be reconstructed from thewavelet coefficients obtained in (7). The error signal canbe smoothed by neglecting the highest frequency band (theband reconstructed from the detail coefficients cDe1) from thereconstructed signal. This band contains the distortions in theposition and altitude components.
Comparing the INS and GPS position outputs at differentresolution levels provides several advantages. First, thedifferent frequency components (corresponding to differentvehicle dynamics) monitored separately by the INS and GPSwill be compared individually at different resolution levels.This provides a more accurate computation of the error signal.Second, de-noising of the INS and/or GPS outputs can beperformed within the WMRA process. This is implementedby thresholding the details of each position component, whichcontain the high frequency components. The thresholdingprocedure allows for cutting off some of the noise in theerror signal and improving its signal-to-noise ratio so that itcan be efficiently modelled using ANN. In this study, softthresholding is applied only to the detail coefficient of the firstdecomposition level. The thresholding procedure is standardand can be reviewed in the literature [16–18].
3. Design of an ANN module for position errorsignals
The ANN is adopted in this study to model the INS/GPSposition error and provide a prediction for this error in real time.
NeuralNetwork
INS Position Component
Time
INS predicted Position error
Figure 5. ANN operation for predicting INS position errors duringGPS outages.
ANN is a massively parallel distributed processor that allowsmodelling of highly complex and nonlinear problems with highlevels of stochastics that cannot be solved using conventionalalgorithmic approaches [19, 20]. It is composed of simpleelements operating in parallel. Being inspired by the biologicalnervous system these elements are called ‘neurons’ [20]. ANNfunctionality is determined by the connections between theneurons. It can be trained to perform a particular functionby tuning the values of the weights (connections) between theneurons. The ANN resembles the brain in two aspects. First,the network acquires knowledge through a learning process.Second, the interneuron connection weights are used to storethe knowledge. The ANN is utilized in this study to modelthe INS position errors. The input to the network includes theINS position component and the instantaneous time t whilethe network output is the corresponding INS position error.Therefore, three networks are developed for the East, Northand vertical components of the INS position. As shown infigure 4, during the training procedure of the network (whichis done while the GPS signal is available), the INS positioncomponent is fed to the network and the output is providedbased on the INS position and the present time instant. Thetime is counted once the system is turned on. As shown infigure 4, the network output is compared to the INS/GPS errorsignal computed at the end of the WMRA stage. The errorin between is fed to the learning criterion, which adjusts thenetwork parameters in a way to minimize the mean squarevalue of the error. Figure 5 shows the operation of the ANNmodule in the prediction mode during GPS outages. It providesa prediction of the INS position error based on the INS positioncomponent and the particular time instant provided at the input.The predicted error is removed from the corresponding INSposition component to give precise and reliable positioning ofthe moving vehicle.
In this study, a multi-layer perceptron (MLP) network withthe architecture shown in figure 6 is considered. The inputlayer of the network has two input neurons for the INS positioncomponent and the time, while the output layer has only oneoutput neuron for the corresponding INS position error. Wehave also considered only one hidden layer of six neurons.More complex network structures with more hidden layers andmore neurons in each layer can be adopted. However, we havedetermined that the network architecture shown in figure 6 isappropriate enough for modelling the INS position error andachieving the desired accuracy.
The weights W and the biases b are the ANN parametersthat are computed during the training procedure and theydetermine the input/output functionality of the network. Theweights are multiplied by the inputs to each neuron while thebiases are considered at each neuron to limit or lower theinput to the activation function ϕ [20]. A hyperbolic tangentfunction (tansigmoid) is employed inside the hidden neurons
408

A neuro-wavelet method for multi-sensor system integration for vehicular navigation
Figure 6. Architecture of a one hidden-layer MLP network for modelling INS position errors.
to model the non-linearity in the input/output relationship.A linear activation function is considered at the neuron ofthe output layer to perform as a linear superposition of theoutputs of the hidden neurons. It should be highlighted thatan individual ANN module of the form shown in figure 6is designed for each position component (East, North andvertical). These types of networks are known as feedforwardbackpropagation neural networks. The forward pass of thecomputation involves feeding the inputs to the network startingfrom the input layer [20]. The output is obtained and comparedto the target (desired performance) to determine the estimationerror. This error is propagated through the network in thebackward direction (opposite to the flow of the input data)starting from the output layer and is utilized to update thecomputation of the network parameters. The forward andbackward computations are repeated until the optimal values ofthe weights are achieved, which correspond to certain objectivemean square estimation errors. The network weights areupdated according to certain learning rules to minimize themean square value of the estimation error. In this study, wehave utilized the Levenberg–Marquardt learning rule, whichprovides the fastest training algorithm among other learningrules [20].
In general, INS/GPS integration employing ANN providesseveral advantages if compared to Kalman filtering. Acomparison between both techniques is given in table 1.
4. Experimental work
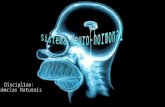
The kinematic data used in this study were collected in Laval,Quebec, by the VISAT van mobile mapping system [21]. Inthis test, an Ashtech Z12 GPS receiver and a navigation-gradeINS (Honeywell LRF-III) were used. The minimum numberof available satellites was 7 and the average van speed was50 km h−1. The trajectory of this test is given in figure 7.
All the development made in this study was implementedusing MATLAB computer-aided design software (MathWorks,Natick, MA) including the wavelets and neural networktoolboxes.
To investigate the performance of the proposed neuro-wavelet method for INS/GPS integration, the van data were
-73.45 -73.44 -73.43 -73.42 -73.41 -73.4 -73.3945.788
45.796
45.804
45.812
45.82
45.828La
titud
e (d
eg)
Longitude (deg)
Figure 7. Van test trajectory.
processed twice, once in a INS/GPS integration mode toobtain a reference solution and the second time in INS/GPSintegration mode with some simulated GPS outage periods.To obtain positioning errors accumulated during the selectedoutage periods, the reference solution was subtracted fromthe solution that contains these outages. Referring to thetest conditions mentioned above, and since GPS signals wereavailable all the time, the INS/GPS integrated solution canbe considered as an accurate reference for obtaining theresults during the simulated outages, which are intentionallyintroduced into the GPS data. A total number of 9 GPS outages(outage intervals ranged from 75 to 100 s) were selected (allin kinematic mode).
5. Results and discussions
5.1. Training the MLP neural network
The MLP network was trained using a feedforwardbackpropagation algorithm and utilizing the Levenberg–Marquardt learning rule. As mentioned earlier, a separatenetwork was designed for each of the three positioncomponents. The altitude network (for the position componentalong the vertical direction) was designed after processingthe INS and GPS data using the WMRA module. With
409

A Noureldin et al
Table 1. Comparison between ANN and Kalman filtering INS/GPS data fusion.
Kalman filtering ANN
Model dependence Mathematical model; deterministic Empirical and adaptive modelmodel + stochastic model
A priori knowledge Required (mainly Q and R matrix) Not required
Sensor dependence Re-design of Kalman filter parameters is An adaptable, platform andneeded for different systems system independent algorithm
Linearity Linear processing Nonlinear processing
Figure 8. The learning curve of the altitude network (verticalposition component).
Figure 9. The learning curve of the latitude network (North positioncomponent).
the Levenberg–Marquardt algorithm, we were successful intraining the network to achieve mean square estimation errorsof 10−10 m2 in less than 40 epochs as shown in figure 8.
In general, the error in the altitude position componentusually follows a very smooth and easy-to-predict trendcompared to the North (latitude) or the East (longitude)position errors. The position errors of these two componentsusually experience several disturbances and different trendsduring vehicle motion. Therefore, we were able to train theneural network to achieve 3 × 10−4 m2 for both the latitudeand longitude networks (see figures 9 and 10).
Figure 10. The learning curve of the longitude network (Eastposition component).
5.2. INS/GPS using the neuro-wavelet method
The ANN module designed in the previous section is thenused to predict the INS position errors along the East, Northand vertical directions during GPS outages. After the initialtraining procedure discussed in section 5.1 is completed, thenetworks are ready to work in the prediction mode. However,the parameters of the networks are modified during availabilityof the GPS signal (i.e. the training procedure continues) andthe network is considered working in the update mode. Inthe case of GPS outages, the network uses the latest estimatedparameters to perform in the prediction mode. This trainingprocedure is usually known as online training.
The position component along the vertical direction isshown in figure 11 for both the neuro-wavelet solution andthe reference solution. As mentioned earlier, the referencesolution is provided by GPS and we have intentionallyconsidered some GPS outages to test the performance of theneuro-wavelet method. Errors of less than 20 cm have beendetected along the altitude position component. Figure 12shows the neuro-wavelet solution and the reference solutionduring three GPS outages between t = 650 and 1150 s. Itcan be observed that the neuro-wavelet solution provides thealtitude with a slight deviation from the reference solution dueto the ANN prediction error.
The same analysis has been applied to the positioncomponents along both the East and the North directions.Figures 13 and 14 compare the position errors along theEast and the North directions of the neuro-wavelet method tothe conventional Kalman filtering technique before and afterapplying WMRA. In general, it can be seen from these twofigures that the error is kept to zero during the availability of the
410

A neuro-wavelet method for multi-sensor system integration for vehicular navigation
Figure 11. Comparison between the INS/GPS neuro-waveletsolution and the reference solution for the altitude positioncomponent.
Figure 12. The altitude position component during one part of theexperiment containing three GPS outages.
GPS signal and grows during GPS outages. As demonstrated infigures 13 and 14, position errors of less than 50 cm have beenachieved in both directions, which are noticeably smaller thanthose errors achieved when using Kalman filtering as the datafusion algorithm for INS/GPS integration (1–2 m of errors).In addition, the advantages of the WMRA method proposed inthis study in reducing the position errors at the output of theKalman-filtering-based method can be seen from both figures.It can be observed that, even before applying ANN data fusiontechniques, Kalman filtering performed better with the aid ofWMRA, which helped in limiting the noise level at the outputsof both INS and GPS.
6. Conclusion
This paper offers a new method for INS/GPS integrationin vehicular navigation. The proposed method combinesthe techniques of both wavelet multi-resolution analysis andartificial neural networks. Wavelet analysis was beneficial infiltering out some of the noise components and disturbancesthat may exist at the INS and GPS outputs. In addition,it provides the advantage of comparing the INS and GPSposition components at different levels of resolution. Theneural network, on the other hand, was capable of predicting
Figure 13. Position error along the East position component.
Figure 14. Position error along the North position component.
INS position errors during GPS outages after being trainedduring the availability of the satellite signal. The proposedneuro-wavelet method was capable of providing reliable andaccurate position information for the vehicle with accuraciesof less than 50 cm in all three directions.
Acknowledgments
This study is supported in part by a research fund fromRoyal Military College of Canada, Natural Science andResearch Council of Canada and GEOIDE National Centre ofExcellence. Mr Sameh Nassar is also thanked for his assistancein data processing.
References
[1] Shin E-H and El-Sheimy N 2002 Accuracy improvement oflow cost INS/GPS for land applications Proc. ION NationalTechnical Meeting (San Diego, 28–30 January 2002)(Fairfax, VA: Institute of Navigation) pp 146–57
[2] Wei M and Schwarz K P 1990 A strap-down inertial algorithmusing an earth-fixed Cartesian frame Navigation 37 153–67
[3] El-Sheimy N 2002 Introduction to Inertial Navigation (ENGO623 Lecture Notes (Jan. 2002)) (Calgary: Department ofGeomatics, University of Calgary)
411

A Noureldin et al
[4] Titterton D H and Weston J L 1997 Strapdown InertialNavigation Technology (London: Peter Peregrinus)
[5] Schwarz K P and El-Sheimy N 1999 Future Positioning andNavigation Technologies Study Performed under theScientific Services Agreement with Batelle (Fort Belvoir,VA: Columbus Division and Topographic EngineeringCenter)
[6] Schwarz K P, El-Sheimy N and Liu Z 1994 Fixing GPS CycleSlips By INS/GPS: Methods and Experience KIS94 (Banff,Canada, 1–2 September 1994) (Department of GeomaticsEngineering, University of Calgary) pp 265–75
[7] Gelb A 1974 Applied Optimal Estimation (Cambridge, MA:MIT Press)
[8] Vanicek P and Omerbasic M 1999 Does a navigation algorithmhave to use Kalman filter? Can. Aeronaut. Space J. 45 (3)
[9] Brown R G and Hwang P Y C 1992 Introduction to RandomSignals (New York: Wiley)
[10] Forrest M, Spracklen T and Ryan N 2000 An inertialnavigation data fusion system employing an artificial neuralnetwork as the data integrator Proc. ION National TechnicalMeeting (Anaheim, CA, 26–28 January 2000) (Fairfax, VA:Institute of Navigation) pp 153–8
[11] Salychev O 1998 Inertial Systems in Navigation andGeophysics (Moscow: Bauman MSTU Press)
[12] Ibrahim F, Al-Holou N, Pilutii T and Tascillo A 2000DGPS/INS integration using linear neurons Proc. ION
GPS 2000 (Salt Lake City, UT, 19–22 September 2000)(Fairfax, VA: Institute of Navigation) pp 2455–63
[13] Noureldin A, Irvine-Halliday D and Mintchev M P 2002Accuracy limitations of FOG-based continuousmeasurement-while-drilling surveying instrumentsfor horizontal wells IEEE Trans. Instrum. Meas. 511177–91
[14] Ogden R T 1997 Essential Wavelets for StatisticalApplications and Data Analysis (Boston, MA: Birkhauser)
[15] Cody M A 1992 The fast wavelet transform Dr Dobb’s J.(April) 16–28
[16] Strang G and Nguyen T 1997 Wavelets and Filter Banks(Wellesley: Cambridge Press)
[17] Burrus C S, Gopinath R A and Guo H 1998 Introduction toWavelets and Wavelet Transforms a Primer (EnglewoodCliffs, NJ: Prentice-Hall)
[18] Chui C K 1992 Wavelets: a Tutorial in Theory andApplications (New York: Academic)
[19] Haykin S 1994 Neural Networks—a ComprehensiveFoundation (Piscataway, NJ: IEEE)
[20] Ham F M and Kostanic I 2001 Principles of Neurocomputingfor Science and Engineering (New York: McGraw-Hill)
[21] El-Sheimy N 1996 The development of VISAT—a mobilesurvey system for GIS applications PhD Thesis Departmentof Geomatics Engineering, University of Calgary UCGEReport No 20101
412