4th Year Mechatronics Thesis Topics 2006 - Aeromech @ USyd
210
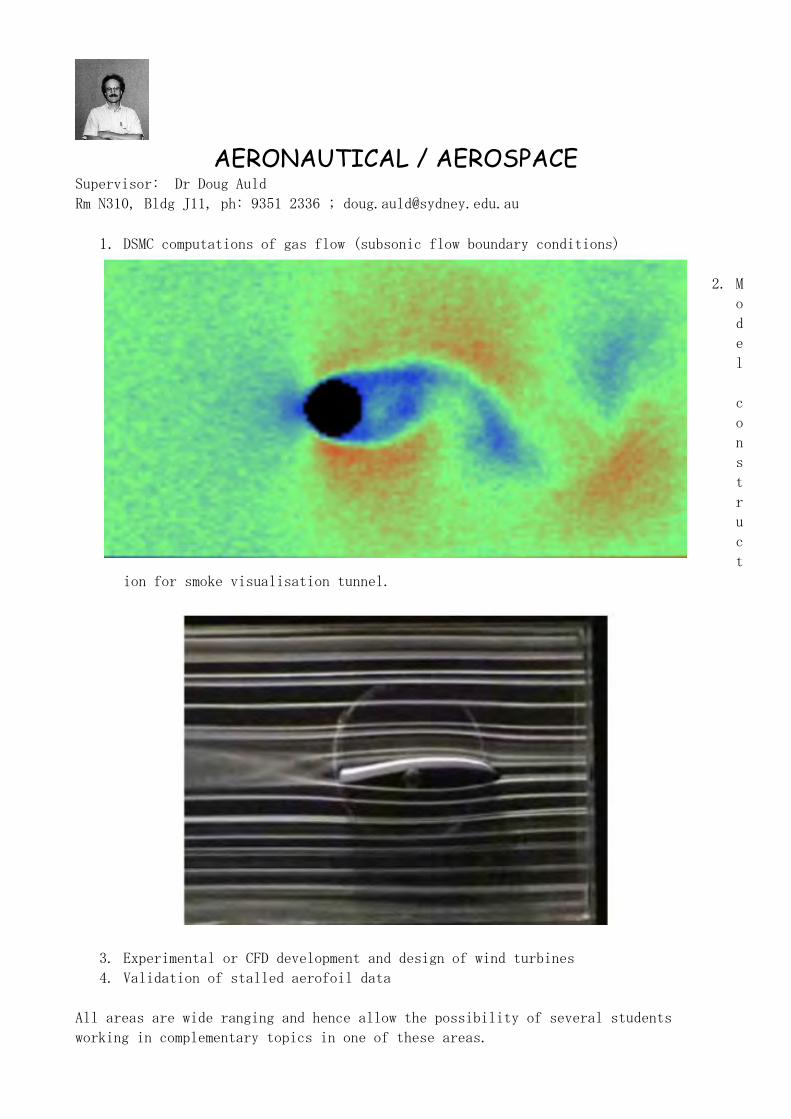
AERONAUTICAL / AEROSPACE Supervisor: Dr Doug Auld Rm N310, Bldg J11, ph: 9351 2336 ; [email protected] 1. DSMC computations of gas flow (subsonic flow boundary conditions) 2. M o d e l c o n s t r u c t ion for smoke visualisation tunnel. 3. Experimental or CFD development and design of wind turbines 4. Validation of stalled aerofoil data All areas are wide ranging and hence allow the possibility of several students working in complementary topics in one of these areas.
-
Upload
khangminh22 -
Category
Documents
-
view
4 -
download
0
Transcript of 4th Year Mechatronics Thesis Topics 2006 - Aeromech @ USyd
AERONAUTICAL / AEROSPACE Supervisor: Dr Doug Auld
Rm N310, Bldg J11, ph: 9351 2336 ; [email protected]
1. DSMC computations of gas flow (subsonic flow boundary conditions)
2. M
o
d
e
l
c
o
n
s
t
r
u
c
t
ion for smoke visualisation tunnel.
3. Experimental or CFD development and design of wind turbines
4. Validation of stalled aerofoil data
All areas are wide ranging and hence allow the possibility of several students
working in complementary topics in one of these areas.

2015 Thesis Topics ‐ supervised by P. Gibbens
Aerodynamic modelling and simulation of the Jabiru J400 aircraft
This project aims to develop an aerodynamic and inertial characterisation of the Jabiru J400
aircraft, and to implement the model into the Variable Stability Flight Simulator (VSFS). It
will involve using Datcom and CFD methods to estimate the aerodynamic properties of the
aircraft and the development of code to estimate the inertial properties. The intended end
result will be to fly the model in the flight simulator and (possibly) to verify the flight
dynamics against flight data.
Skills: Matlab proficiency, good understanding of flight mechanics.
Level: Thesis (preferred) or project

JabLab Data Acquisition System calibration and flight test
This project involves calibration of sensors in the JabLab flight data acquisition system
(FDAS) and flight testing the aircraft for aerodynamic parameter estimation. This will
potentially involve flight in VH‐USY (JabLab) to perform flight test manoeuvres for analysis.
The project is intended to give rise to a fully verified aerodynamic model of the aircraft for
implementation and verification in the VSFS. The participant is likely to work closely with the
aerodynamic modelling project above. The overriding objective is to prepare the system for
future operation in support of AERO5500 Advanced Flight Mechanics, Test and Evaluation.
Skills: Matlab proficiency, excellent understanding of flight mechanics. Will require pre‐study
of AERO5500 material and procedures and preparation of analytical tools.
Level: Thesis only (good WAM)

VSFS1 Helicopter simulator hardware and simulation modelling
Current activity is implementing flight control hardware for helicopter control into the static
simulator in the Bennett Lab. This work involves developing a simulation of helicopter flight
in Simulink for real‐time implementation and testing, including rotor dynamics. The
overriding objective is to prepare the system for future operation in support of AERO4206
Rotary Wing Aircraft.
Skills: Matlab proficiency, excellent understanding of flight mechanics. Will require pre‐study
of AERO4206 material and procedures and preparation of analytical tools.
Level: Thesis only (good WAM)
VSFS Aircraft Simulation and Modelling
The VSFS simulation environment has undergone numerous developments in recent years
involving GUI’s, simulation modelling component developments and aircraft models. This
project aims to integrate these components together into a single definitive simulation
model for use across our teaching and research programmes. Components requiring
integration include the universal polynomial aircraft model, the ground model
(undercarriage/ground interaction for simulation of landings and take‐off), weather and
turbulence models. Also we have developed numerous aircraft models over the years. These
need to be integrated together so they can be selected easily from the GUI. This is a good
project for someone who likes software and simulation.
Skills: Proficiency in Matlab. Programming skills in C/C++ (possibly).
Level: Thesis only (good WAM)
1 VSFS: Variable Stability Flight Simulator

Vision navigation and predictive control demonstrator UAV.
This project is a new initiative aimed at providing a test‐bed system for demonstration of
new approaches to control and navigation. The intention is to take a Parrot quad‐rotor
drone and implement communications and electronics to allow the vehicle to be controlled
from an external computer via wi‐fi. The computer will acquire motion information from the
on‐board sensors and send control commands to the vehicle to achieve certain control and
navigation objectives. The system will provide a demonstration capability for control
strategies and visual navigation methods developed in in‐house research investigations.
Ideally this project will culminate with working demonstrations of AMPC (Algebraic Model
Predictive Control) and feature based visual navigation techniques.
Skills: Proficiency in Matlab. Programming skills in C/C++.
Level: Thesis only (high WAM). There is possibly room for 2 or 3 good students on this
project working together on the system development but later specialising in the AMPC,
visual navigation and flight path optimisation elements.

Optimization of Shear Centre Location
Project/thesis topic
Supervisor Prof Grant Steven ([email protected])
The shear centre plays an important role in the analysis and design of aircraft structures. It is a
difficult quantity to calculate and on a long slender wing structure it can be very important to have a
certain quite precise relationship between the location of the shear centre and the centre of
aerodynamic pressure.
This thesis/project will look at the process for the determination of the shear centre for complex
aircraft type structures and methods for prescribing its position relative to other geometric aspects.
A kind of evolutionary algorithm will be used for this.

Ground and Air Robots – Honours Thesis 2015 [email protected] MX or MXSpace
Mawson is an all terrain rover that has been in operation over the last two years as part of a space robotics program. It needs to be overhauled. We are looking for a student who has an interest in advance computer hardware and software. The objective of the thesis is to give Mawson a whole new lease on life. The thesis would comprise of:
Selection of new computer hardware Software to drive motors and read sensors
already on board. Code for teleoperation
You will work closely with our engineers as part of the design and implementation process.
Aero, Aerospace, MX or MXSpace Continuum now has an arm that will give this rover the ability to look closely at objects and generate detail models of the object and of the terrain. Code is written in Matlab/Simulink. We are looking for 3 students for the following thesis topics:
1) Use the laser scanner on the arm to build a 3D model of a target rock given multiple viewpoints. Challenges include object segmentation from the laser data and motion planning for the arm.
2) Use the laser scanner on the arm to create an elevation map of the environment and then use this map to develop a path planner for Continuum.
3) Develop a energy model for the arm. e.g for a given trajectory calculate the energy used based on joint torques, etc. As an extension perhaps plan energy-optimal collision free trajectories for a given initial and final poses.
You will work closely with our engineers as part of the design and implementation process.
Aero, Aerospace, MX or MXSpace Mammoth is w wheel-legged robot. Code is written in Matlab/Simulink. We have a number of thesis topics including:
1) A student looking at how to create a rapid map of the Mars Yard using onboard laser sensors and generating traversability maps for Mammoth.
2) A student working on novel User Interfaces for tele-operating Mammoth including low-level control to high-level planning.
3) A student working on the planning problem, in particular to look at clambering gaits.
4) A student to investigate building a more effective force sensor unit to identify if Mammoth's wheels are touching the ground reliably.
You will work closely with our engineers as part of the design and implementation process.

Ground and Air Robots – Honours Thesis 2015 [email protected]
MX or MXSpace Ladybird is an electric powered robot designed for vegetable industry. We are looking for students to advance Ladybird with the following thesis topics:
1) To estimate and map the yield and vigour of leafy vegetable crops during the growing cycle, using geometry from lidar and stereo vision.
2) To develop and demonstrate fast (<500ms) planning for precision weeding using the Universal Robots UR5 arm mounted under Ladybird’s skirt.
You will work closely with our engineers as part of the design and implementation process.
MX or MXSpace Shrimp has been used in a number of trials for the tree-crop industry. We are looking for student to work on the following thesis topics:
1) To investigate the use of machine learning to model the geometric characteristics of an orchard, for the purpose of automatic tree detection and segmentation in three dimensional lidar data.
2) To use monocular vision to estimate the presence of obstacles in the path using normal visual appearance of a farm and detecting deviations from this model and by using image classification techniques to characterise obstacles detected with lidar.
3) To improve camera based yield estimation algorithms by using images of trees taken from multiple view-points.
You will work closely with our engineers as part of the design and implementation process.
Aero, Aerospace, MX or MXSpace We have an Astec Falcon 8 that will be used in agriculture. We are looking for students interested in thesis topics on:
Developing novel systems and sensors that can catch bugs.
Optimal path planning given terrain characteristics and energy constraints.
Search algorithms and path planning for detecting moving invasive pests.
You will work closely with our engineers as part of the design and implementation process.

Thesis/Projects – Ben Thornber ([email protected])
Interested students should first come to see me, and following the discussion if you are certain that
you are keen to do the project, then send an email outlining your interest in the project. For
students interested in learning the ‘nuts and bolts’ of CFD, there are also several possible projects
exploring the performance of state of the art numerical methods for fluid dynamics.
(1) Exploration of Using Method of Characteristics to Design a 10mN Attitude/Orbital Control
Thruster
Small cold gas thrusters are typically used as a cheap and reliable means of ensuring both
pointing accuracy and orbital position for satellites. The typical nozzle exit dimension is on
the order of milimeters, so despite their high Mach number, the typical Reynolds number is
low hence they are very viscous. Because of their size, most thrusters are conical, not
contoured like their much larger cousins. This project will explore the benefit (if any) of
designing a contoured nozzle through CFD simulations utilising Method of Characteristics
and/or ANSYS FLUENT.
(2) Investigation of the Flow around a Hemisphere
This project has been suggested by collaborators at DSTO who are interested in
understanding the impact of proturberances on aerodynamic performance and/or structural
vibration. Such hemispheres are very common on modern aircraft, to house cameras or
other optical devices for example. There are several interesting challenges, namely
unsteady vortex shedding from the back of the hemisphere, and the behaviour of flow
dependent on the thickness of the incoming boundary layer. We will investigate this using
CFD. The ideal student will have a background/affinity for CFD and will develop strong
analytical skills.

(3) Simulation of an Engine Precooler Matrix for a Mach 5 Vehicle
The precooled jet engine under development by Reaction Engines Ltd. relies on a very
compact heat exchanger to cool the incoming air. Perhaps surprisingly, the air passing
through the precooler is incompressible, and at a relatively low Reynolds number. We have
access to experimental data on a scaled up model of the precooler elements which shows
that the flow is unsteady, yet CFD to date implies that it should be steady. This thesis will
explore whether modern CFD methods can capture this unsteadiness, and elucidate the
source of the unsteadiness in the matrix. We will also aim to produce accurate predictions of
pressure drop, heat conduction and flow development length. The ideal student will have a
background/affinity for CFD and will develop strong analytical and programming skills.
(4) RANS models for transitional flows
A key engineering challenge is the development of aerofoils which can sustain laminar flow.
However, this makes the simulation (and thus the initial design) much more difficult as
modern turbulence models struggle to represent the transition between laminar and
transitional flows. This thesis can be either an exploration of methods of simulating
transitional flows in FLUENT comparing against experimental data, or the development and
validation of transitional models in an in-house code. The ideal student will have a
background/affinity for CFD for both projects, and an ability/willingness to learn Fortran to
use the in-house code.

(5) Ability of RANS models to capture vortex bursting
F1 teams are aiming to improve their ability to capture vortex bursting. The location of a
vortex burst, and it’s subsequent behaviour can influence the underbody Cp distributions
and performance of the rear end of the vehicle. This project will employ a simplified
configuration to explore the ability of ANSYS to capture this phenomenon. It is expected that
experimental data of this simplified configuration will be available. The ideal student will
have a background/affinity for CFD and will develop strong analytical skills.
(6) Investigation of Cavity Aeroacoustics
This project has been suggested by collaborators at DSTO who are interested in
understanding the aeroacoustic behaviour of cavities at transonic velocities. Cavity noise has
a major impact in several fields as a prime source of noise in aircraft wheel bays, weapons
bays, gaps between train carriages and open sunroofs/windows on cars. At high speeds the
noise levels are substantial (greater than 150dB) and can be severely damaging. This thesis
will explore the variation of acoustic noise in a generic cavity to give detailed insight into
experiments conducted at DSTO. We will investigate this using our in-house high order
accurate Computational Fluid Dynamics.

(7) Drag Reduction Techniques for Automotive Bodies
This project will extend a previous thesis projects to investigate the use of small
aerodynamic strips on the rear of a vehicle body to reduce the overall vehicle drag. This has
the potential to reduce drag by several counts, however it’s applicability under practical
situations has yet to be demonstrated. This thesis will explore the physics of the problem
through RANS simulations, and optimise the current design. The ideal student will have a
background/affinity for CFD and will develop strong analytical skills.
(8) Rectangular-to-Elliptical Shape Transition Scramjet Intake
The Rectangular-to-Elliptic Shape Transition (REST) intake is a class of intake designed for
scramjet engines. The rectangular capture shape is used for ease of vehicle integration
whilst the elliptic exit plane allows the use of an elliptic combustor section, which has been
found to be an efficient cross-sectional shape for scramjet combustors. These intakes have
been studied and tested over several years and are now being integrated into some of the
hypersonic vehicles being flight tested as part of the Australian/US collaborative program
HIFiRE. The aim of this project is to use CFD to study the flow physics of a Mach 8 REST
intake and to assess the capability of CFD to accurately predict these flowfields. The ideal
student will have a background/affinity for CFD and will develop strong analytical skills.

(9) Virtual environment for development and verification of Control Strategies in Urban
Environments
Here we aim to utilising CFD to develop a virtual environment with realistic wind profiles for
various generic urban configurations, which could include both internal and external air
flows. Here there would be several sub-thesis projects on (i) CFD of the environmental /
urban flow, (ii) Matlab setting up the environment/model (iii) simple aircraft model to test
within the environment and (iv) validation experiments.
(10) Stochastic modelling of rain radar data for near-term rainfall prediction
Rainfall prediction utilising numerical weather prediction is extremely complex. However, there
is great value in having a simplified heuristic model which can give accurate near-time (next few
hours) rain prediction. At the simplest level, this could be an extrapolation of the path of rain
from the BOM rain radar into the future. At the more advanced level, the thesis will develop a
multi-dimensional database of historical measurements to characterise how a particular rain
storm moving in a particular direction will grow or shrink in time. The overall aim is to produce a
simple but scientifically sound extrapolation of the BOM rain radar into the near future.

4th YEAR THESIS TOPICS Prepared by L. Tong
1. Topology design optimization of a rib in aircraft wing box An aircraft wing box typically consists of a number of ribs that are joined together by stringers and spars and skin panels as shown in the Figure 1-1. While exterior configuration of an aircraft rib could be well determined by the chosen airfoil, interior material distribution and structural topology could designed in a fashion to achieve lightweight and performing structure. The thickness of an aircraft rib could be different at different location and the cut-outs could take different shape. These selections could be determined by using topology design optimization from initial design via finite element analysis to the final design as depicted in Fig 1-2.
Fig 1-1 Fig 1-2
This project aims to find optimum topological design for an aircraft rib panel that could be subjected to a range of selected aerodynamic loads. For example, a particular airfoil section e.g. NACA-0012, could be selected and several typical air dynamic load cases could be considered. The project involves the use of finite element analysis software, interfacing with Matlab code developed and application to selected cases for topology design of an aircraft rib structure. A prototype is expected to be manufactured and tested if sufficient progress is made in the first semester.

2. Design and prototyping of pressure-actuated cellular structures for aircraft
morphing Aircraft design is a multi-disciplinary, complex and challenging engineering task. Its general design cycle can be broadly broken down into three technical phases, namely, the “Conceptual design”, “Preliminary structural design”, and “Detailed structural design” as shown in Fig 2-1. There are a vast number of design requirements for each phase. The function of morphing may appear familiar as we all see the control surfaces on modern jets moves during take-off, cruise and landing to achieve better flight performance. The challenging question is: Is it possible to move other airframe components to drastically change aircraft configuration to perform specific requirements during flight? How to define drastic configuration change, scope and extent? What are the limits? There are numerous questions to be answered.
Fig 2-1 This project aims to extend the current hydraulic actuation technology to achieve drastic configuration change and involves the use and design of pressurized cellular structures, which could be formed by an array of regular hexagonal honeycomb cells or pouches or even skewed or irregular honeycomb cells (an example is shown in Fig 2-2).
Fig 2-2 The project consists of design of cellular structural component in the form of leading or trailing edge in a typical aircraft, or selected wing or fuselage sections. Finite element analysis of the designed cellular structure will be conducted by considering different level of internal pressure applied. The deformation of the designed structural will be analysed to understand the capability of morphing. A prototype of hardboard model with pressure applied via balloons is expected to be used to demonstrate the proposed design.

3. Design and development of self-assembling mechanisms Self-assembly is referred to as the spontaneous and reversible organization of units or components into ordered structures via some sort of interactions. It can occur at different length scales from nanometers to centimeters and is everywhere in nature. Some relevant concepts drawn from natural contexts may have many applications in engineering. For example, a modern civilian aircraft has movable parts e.g. control surfaces, a UAV may have foldable wings. An aircraft can morph from one configuration to another via self-assembly. One basic and useful form of self-assembly involves folding two dimensional materials into three-dimensional (3D) structures and its reversal unfolding process. As in origami, folding is capable of complex shapes and can be scaled to different sizes, and it can turn flat or planar materials into 3D complex mechanisms. The figure below depicts: (a) an example of compressing a 4 by 4 Miura-origami into a small part; and (b) a recent example of self-folding a flat sheet of material into a complex 3D structures. Self folding requires employment of one or more actuation methods to actuate the folding and unfolding processes. It can be applied in remote, autonomous assembly as well as automation of certain aspects of manufacturing.
This topic aims to explore basic inexpensive self-folding and self-unfolding techniques for transforming planar material sheets to 3D structural mechanisms or machines. For example, a self-folding hinge that could be actuated by an external stimulus, such as heat, electricity, is considered as one of the key element in achieving the target of self-assembling mechanisms. An ideal self-folding hinge should have the shape-memory characteristics.

4. Design of shape adaptable rotor blade airfoil section using smart material based
actuators Morphing of rotor blade airfoil section is about actively changing the airfoil section shape using compact actuators, such as PZT, SMA based actuators, to achieve active airflow control for enhanced flight performance. This project aims to look into possible solution to design and analysis of shape adaptable NACA-0012 airfoil section with a rigid spar using smart material based actuators. Finite element based numerical simulations are to be performed for achieving desired airfoil shapes.
5. Digital image correlation for full field measurement
This project will offer an opportunity for a student who is keen in developing/implementing and verifying Matlab based software that is capable of performing digital image correlation between two images to extract relevant structural movement. It is expected that DIC software will be used to facilitate measurement of selected adhesive properties in bonded joints.
6. PZT based motion energy harvester This project aims to review various designs and prototypes of energy harvesters based on PZT and external motion. Typical design consists of a cantilever beam with a concentrated mass at the free end and a PZT film attached close to the clamped end. Motion of the clamped end will generate vibration of the beam, which in turn strains the PZT material and generate electrical charges that could be collected if an appropriate electric circuit system is chosen.

Airship Design Tool This project aims to develop an initial design and sizing tool for smal l airships to al low the e v a l u a t i o n o f a r a n g e o f propulsion technologies such as fuel cells and hybrid fuel-cell based solutions!1 Honours thesis!
Solar Powered Airship!What is the smallest possible airship that can be propelled by solar power? The aim of this work is to explore this question and work out the main drivers for the size of such an airship (latitude, longitude and alt i tude,…) 1 Honours thesis!
!!
UNMANNED AIRSHIP DESIGN!
Static Performance!Performance data for small propellers is virtually non-existent and static thrust and power are hard to predict. This project invo lves test ing of var ious propellers on a static test rig. Testing with and without bodies will be performed for a range of propellers and computational tools
will be used to analyse the i r pe r fo rmance prediction capability.!1 Honours thesis!
PROPELLER PERFORMANCE
Supervisor Details: Dries Verstraete [email protected], Rm N316, Aero Eng Bldg J11
Altitude performance The so-called Coleman engine, a semi-closed recuperated engine, is considered to be one of the major alternative cycles for high altitude long endurance UAVs. This project consists of an analysis of a range of different gas turbine configurations at altitude with the aim to quantify the impact of low Reynolds number operation on the different cycles. !1 Honours thesis!
Pulsed Turbine Analysis!Replacing the conventional combus t ion chamber w i th p ressu re r i se combus t ion systems like pulse detonation engines can improve the thermal efficiency of the engine provided that the effect of flow unsteadiness on the turbine is small. This project will investigate the impact of flow unsteadiness on the performance of small axial and radial turbines using 1D
approximate methods. If progress permits unsteady CFD analysis can be applied too.!1 Honours thesis!
MICRO GAS TURBINES!
HYPERSONIC AIRCRAFT AND SPACEPLANESGeneral Background The technical and commercial feasibility of both hypersonic aircraft and reusable space-planes is studied world-wide. The high temperatures associated with e i the r hyperson ic fl igh t o r atmospheric reentry result in severe thermal stress for the aircraft structure. Innovative structural designs are therefore required.!
Specific projects !A mult i tude of projects are available in this domain. Possible projects include but are not limited to:!• impact of low speed handling qualities on waverider design and optimisation !• design of a hydrogen fuelled supersonic transport aircraft!• analysis of pre-cooled and
variable cycle engines across a range of flight conditions!Up to 2 honours thesis

Dr Gareth A. Vio Rm N306, Bldg J11,
ph: 9351 2394 [email protected]
2015 THESIS
TOPICS
The topics I offer cover a number of fields, namely:
Fluid-Structure Interaction (Aeroelasticity) Non-Linear Structural Dynamics Aerodynamics
If you have your own idea on a project on any of these fields come and talk to me.
Vibration Problems Human - Structure Interaction
Slender bridges, new stadium tiers suffer from vibration problems due to the interaction with humans. This topic will investigate the modelling between such structures subjected to repeated loading and look at possible improvements in performance with the introduction of purpose tuned non-linearities.
Model Updating
A FE model requires to be validated against experiment for accuracy. Model updating allows you to modify the FE model based on experimental tests via the Model Assurance Criterion. This topic will aim to develope these techniques in computational setting and then apply it to the T-tail structure.
Design of Vibration Experiments

Vibration plays an important role in any vehicle or machinery. Vibration can lead to fatigue problems or in extreme cases to catastrophic failure of the structure. This topic will look at model the T-tail structure via Modal Updating Technique in order to develop an equivalent Finite Element Model.
Vibration Stability / Instability of Rotating Machinery
Vibration plays an important role in any vehicle or machinery. Vibration can lead to fatigue problems or in extreme cases to catastrophic failure of the structure. This topic will look at modelling the stability/instability of an engine.
The Sound of Silence
Can we engineer silence? By place a barrier between a source and the receiver is it possible to position a series of obstacles so that overall no sound is propagated in one direction, without the obstacle been solid. This work can lead to the study of Random Matrix Theory and will make use of computational tools to model sound propagation.
Fluid-Structure Interaction and Aeroelasticity
SU2 Force Mapping
This topic will aim to investigate different ways to map aerodynamic forces onto non matching structural grids using the SU2 CFD code.
Fluid - Structure Interaction

A number of commercial packages have developed the capability for 2-way coupling between the structure and the aerodynamics. This topic will investigate the capabilities against a number of default aeroelastic cases. ELMA, OpenFoam, Adina
Active Aeroelastic Structures
To improve an aircraft performance, its optimum flight envelope needs to be extended Active structure look at using the aerodynamic forces to generate a deformation in the structure, i.e. morphing it. This topic aims at evaluate the effect on a simple structure.
Active Gust Alleviation
To improve ride quality an aircraft must remain stable under gust loads. This topic aims at evaluate the effect on a simple structure.
Highly Flexible Structures
Flexible structures are becoming more and more common in aeronautical as well as civil applications. This topic aims at modelling and identifying changes in stability boundaries due to nonlinear geometric effects.
Flapping Aeroelasticity

How do birds fly and use aeroelasticity in their favour. This topic aims to investigate the motion, lift and propulsion generated by different birds. Effect of unsteady flow will be essential in this study with wind tunnel models tested to validate results.
Aeroelastic Tailoring – Symmetric, Anti-symmetric or
Asymmetric
Aeroelastic tailoring allows for the directional use of composite materials to gain an advantage beyond simple weight savings. This project aim to look at the effect of asymmetry in the ply lay-up of an aeroelastic wing under typical flight constraints.
Hypersonic Vehicles
Fatigue Issue for a Hypersonic Vehicle
Fatigue is major issue in hypersonic vehicle with large thermal loading. Using the new MSC.Nastran software the fatigue life of the MR-2 vehicle will be analysed.
Aerodynamic/Aeroelastically scaled Hypersonic Vehicle
An aerodynamic and aeroelastic scaled model will be design based on the MR-2 hypersonic vehicle. Ideally the models will be built and tested for ground vibration testing and wind tunnel testing This topic is part of a larger study into hypersonic vehicles conducted by Vio & Verstraete.
General Engineering Problems
Undercarriage Twisting in Flight

The front landing gear of a light aircraft twist in flight under aerodynamic load. A solution to this problem is sought. This research topic is in collaboration with an industry partner and KC.
Helicopter Stinger for UltraMag
A stinger of non-magnetic properties needs to be designed. It will need to support a magnetic sensor weighing approximately 1kg. The stinger will need to clear the helicopter by at least 6-9 meters at the front. It will need to be extremely rigid in both torsion and bending under all flight conditions. This research topic is in collaboration with an industry partner and KC.

For Internal Use Only – Not for external distribution
Dr KC Wong School of Aerospace, Mechanical and Mechatronic Engineering Email: [email protected] 2015 Honours/MPE Thesis (ver 1.0 – 3 Sep 2014) Please come and discuss possible topics with me as soon as possible. Subject areas supervised include Unmanned Aerial Vehicles (UAVs), Aircraft Design, Experimental Aerodynamics, Projects to enhance Experiential Learning, and Aeronautical Engineering Education. A particular focus will be on the development of Extreme UAVs, ie. Flight platforms with particularly extreme capabilities. Any topics within the following or related areas can be discussed and potentially agreed to. Possible Topic Areas include: (1) Continuing development and testing of a modular Multi-Disciplinary
Experimental UAV Test Aircraft.
(2) Global Collaborative Design Project – Fuel Cell Powered Low-Altitude Long-Endurance UAV – ongoing development of a Flight Research UAV airframe system jointly being developed with design teams in universities overseas.
(3) (multiple projects possible) mini UAV Airframe Systems: a. VTOL concepts; b. Aerodynamic Modelling, Stability and Control, Design Optimisation, Flight
Simulation and Testing of airframe concepts; c. Development and testing of tube-launched UAV concepts; d. Deployable and morphing structures for airframes; e. Development of UAVs deployed from underwater platforms; f. Development of thrust vectoring for VTOL and gust-tolerant mAV Flight Platforms for
urban operations; g. low Reynolds Number aerodynamics and bio-inspired concepts for indoor/outdoor
operation; h. Flight platform suitable for microgravity research.
(4) Multi-Role Multi-Mode (Aerial-Maritime-Terrestrial) UAV – need to see me to discuss details..
(5) Tethered Hovering UAV on floating platforms (multiple projects – need to see me to discuss details).
(6) (Multiple projects possible) High Performance BWB (blended wing body) UAV:
a. Investigate the shifting in neutral point due to propwash; b. Investigate the use of Split ailerons on BWB aircraft; c. Composite airframe structural optimisation and Rapid Prototyping; d. Dynamic testing of model in the 7 X 5 wind tunnel e. Improvement of the instrumentation and flight testing
i. Alpha-beta-V sensor ii. Control position sensors iii. Interface with X-Plane Flight Simulation iv. Inertia measurement system

For Internal Use Only – Not for external distribution
f. Graphical AVL/Panair editor with expansion to CATIA (part of a fast preliminary aircraft design optimisation tool)
g. Parameter estimation from flight testing i. BWB UAV ii. Cessna 182 (can be compared with full scale) iii. Jabiru J-400 (can be compared with full scale)
(7) Micro EDFs (Electric Ducted Fans) – effect of tailpipe design and thrust-
vectoring mechanisms.
(8) Exploring Rapid Prototyping for new UAV designs, using 3D printing (additive manufacturing) and other facilities.
(9) New mounting system for the 4x3 Wind Tunnel.
(10) Launcher for flight testing of small UAVs.
(11) Lighter-than-Air UAV flight systems.
(12) (priority continuing project) The Development of Experiential-Learning Laboratory
facilities for Thin-wall and Aircraft Structures.
(13) (continuing project) Development and review of integrated Experiential-Learning curriculum for Aeronautical Engineering education.
(14) Design and development of a low-cost self-launching two-seat sports glider (in
partnership with a gliding club).
(15) Design and development of a self-balancing flying personal transporter.
(16) …???...come and see me to discuss your ideas…

Dr Xiaofeng Wu, [email protected] ; Rm N314 1. QB50 CubeSat Mission (10 or more students required)
From 2013 to 2015, The University of Sydney is participating the international QB50 project, which will launch 50 2U CubeSats in the middle of 2015. In this project, a group of Thesis / project students are required to build an engineering model of a nanosatellite, which includes structure, electrical power system (EPS), telemetry tracking and communication (TT&C), attitude determination and control system (ADCS), on-board data handling (OBDH), and thermal. In this thesis, the students will develop a complete satellite. It will go through some environmental tests, like thermal vacuum, vibration and shock tests.
2. Vision based satellite formation flying control (Honour thesis only)
Spacecraft formation flying is an evolving technology with many possible applications, such as long base-line interferometry, stereographic imaging, synthetic apertures, and distinguishing spatial from temporal magnetospheric variations. A significant advantage of distributed spacecraft platforms over a single multi-functional spacecraft is that single point

failures can be rectified through replacement of cheaper and smaller spacecraft to maintain mission capability, thus providing a more reliable and robust system. Many missions (in particular interferometry missions) rely on precise relative position and attitude knowledge in order to maintain mission requirements. The objective of this research is to develop a robust and efficient approach for relative navigation and attitude estimation of spacecraft flying in formation. The approach developed here uses information from an optical sensor that provides a line of sight vector from the master spacecraft to the secondary satellite. The overall system provides a novel, reliable, and autonomous relative navigation and attitude determination system, employing relatively simple electronic circuits with modest digital signal processing requirements and is fully independent of any external systems.
3. Development of a Helmholtz cage for magnetic actuated satellite hardware in loop simulation
The attitude control system is a crucial subsystem for any satellite mission since precise pointing is often required to meet mission objectives. The accuracy and precision requirements are even more challenging for small satellites where limited volume, mass, and power are available for the attitude control system hardware. The magnetic torquer is the most efficient actuator for small satellite attitude control. Although the control system can be designed and simulated using software, like Matlab, it is desired that the control system can be verified in a real scenario. For magnet torquer, it is important to model the Earth magnetic field in the orbit. In this project, we will build a Helmholtz cage working together with the air bearing system for 3-axis control.

4. Nanothruster Design
The nanothruster project will investigate a novel charge exchange thruster (CXT) for nanosatellites. Like most spacecraft propulsion methods, electric propulsion works by ejecting mass in a specific direction, which imparts an equal and opposite momentum to the spacecraft, thus providing thrust. The efficiency of spacecraft propulsion is determined by the change in momentum (impulse) per unit weight of propellant, which is known as the specific impulse. Greater propulsion efficiency is achieved by increasing the specific impulse. Electric propulsion methods produce the highest specific impulse, which makes them suitable for spacecraft propulsion because this enables the reduction of the amount of propellant the spacecraft must carry. Ion propulsion systems consist of three parts: gas ionization, ion acceleration and neutralization. In the latter, electrons are injected into the ion plume so that the charge on the spacecraft will remain neutral - otherwise there will be a build-up of negative charge on the spacecraft that will eventually stop the exit of ions. Although there are several hundred satellites that use ion thrusters, as well as deep space missions such as the DEEP-SPACE 1 mission to Comet Borelly and the SMART 1 mission to the Moon, it remains a challenge to miniaturize these thrusters to make them applicable to nanosatellites. Limits to the available power in a nanosatellite are in the units of watts, and similarly, the total weight is of the order of 1kg. The power requirements and weight of ion thrusters currently in use far exceed these limitations. 5. Implementation of Computation-Intensive Navigation and Control Algorithms for Small Satellites/UAVs (Honour Thesis only). Navigation and control algorithms are computation intensive, which normally require a powerful computer to process. For small satellites or UAVs, however, the on-board resources are extremely limited in terms of volume, area and power. It becomes even more challenging when the algorithms are targeting real-time processing, which normally runs at a high sampling frequency. In this research, we will develop hardware IP cores for the algorithms.

The resulting IP cores will be integrated as a peripheral in a system-on-chip architecture, which is currently under development at the Space Engineering research group. 6. High Altitude Balloon The primary goal of the High Altitude Balloon Project is to build, design, test and operate a satellite on a weather balloon, and be capable of carrying payloads – the student built satellite and scientific instruments, to an altitude exceeding 20 km and successfully collect the data from the payloads using real time down linked telemetry or retrieve stored data after flight. A secondary objective of the High Altitude Balloon project is to operationally test the University of Sydney's nanosatellites in a near space environment. 7. Satellite attitude control with a flexible structure and the FASTSAT (Honour thesis only)
The attitude and orbital control system (AOCS) is one of the most essential systems on-board a spacecraft. This thesis will develop a revolutionary new method of executing attitude control for small spacecraft. Through the use smart materials such as Shape Memory Alloys (SMAs) to provide active shape control, it is possible to use a flexible structure to change the attitude of a small central spacecraft bus. Together with this thesis, we will develop a concept satellite ‘flexible Australian Smart Technologies Satellite (FASTSAT)’, which will demonstrate the feasibility of the satellites based on flexible structures.
8. State Estimation via Parallel Unscented Kalman Filters (Honour thesis only)
Kalman Filters in their various forms have been the standard approach to solving many state estimation problems. Indeed for non-linear estimation problems and in particular aerospace

applications, the Extended Kalman Filter (EKF) has been a workhorse. More recently a newer variant, the Unscented Kalman Filter (UKF) has gained popularity due to superior performance over the EKF in highly non-linear applications; this benefit of course comes at an increased computing cost. The increased computing cost arises from large matrix manipulations, the sizes of which are related to the size of the state vector. One possible way to alleviate this issue is to segment the state variables and use multiple UKFs in parallel though this raises many more issues. For example, consider a UAV following a pre-computed path in a given map (i.e. known landmarks): Which variables should be segmented? (Position and velocity separate? Or only segment the measurements of landmarks?) Will segmentation affect the accuracy of the state estimates? Will a recombination process (or global update) need to occur? If so, how should this be done? What additional overhead will recombination bring and under what conditions (if any) will the parallel implementation be superior? How will control actions be incorporated? This research will involve developing simulations (in Matlab) to answer some of these questions with the possible extension of implementation on a multi-core FPGA system. Ideas for other applications are also welcome.
9. Pointing, acquisition and tracking of laser beams (Honour thesis only) The laser is a very promising tool used in various applications in all fields of science and industry. In
aerospace applications, examples include range finding, high speed communication and possibly
even wireless power transmission. All of these applications involve the propagation of the laser
beam through free space. Because the energy of lasers is very directional, the major challenge of
using lasers is in precise pointing and acquisition towards the point of interest in free space.
Optical beam steering defines the hardware that is used to achieve the beam steering. Examples of
such hardware include the simple mirror on a gimbal mount, the optical switch which is a
miniaturized version of the gimballed mirror, decentred lens and optical phased arrays. Pointing and
acquisition, however, refers to the software that is used to guide the optical beam steering
hardware system to point towards the desired target. Pointing generally refers to finding roughly the
direction of the desired target and acquisition refers to very fine adjustments of the pointing angle
so that the laser beam hits the target at its highest (central) intensity. Acquisition is very important
in aerospace applications where the transmitter and receiver are typically many kilometres apart
and as such, the laser beam must be typically pointed within micro-radian precision.
This project will involve the full development of a pointing, acquisition and tracking of a laser beam,
both in terms of hardware and software. As of the current status, the application of this particularly
developed system is in wireless power transmission in fractionated satellite architectures.

Biomedical
Honours Thesis A/B or Engineering Project A/B Supervisors: Associate Professor Mehrdad Behnia ([email protected]) and Professor Masud Behnia ([email protected]) The project offered below is suitable for a Biomedical or Mechanical student.
Echocardiographic and fluid mechanic evaluation of pulmonary arterial pressure in
rowing athletes at rest and during exercise
Introduction: Pulmonary arterial hypertension (PAH) is defined as mean pulmonary arterial pressure of greater than 25 mmHg measured by a pulmonary arterial catheter at rest. PAH during exercise is a controversial subject that has not been defined clearly. There are studies showing that pulmonary arterial pressure does increase during maximum voluntary exercise. But a succinct cutoff pulmonary pressure for definition of exercise-induced PAH has not been agreed upon by researchers of the field. However, it appears that exercise-induced PAH is the cause of a large percentage of patients with unexplained shortness of breath. Furthermore, it appears that blood flow turbulence increases during exercise as measured by echocardiography. But correlation of blood turbulence and its relationship to pulmonary arterial pressure has not been studied in detail, either. Objective: Our aim is to measure and compare the blood flow turbulence and velocity as measured by echocardiography in rowing athletes at rest and also at peak exercise. We would further assess and evaluate if right ventricular systolic pressure, which is a surrogate for pulmonary artery pressure, is elevated at peak exercise and how it is correlated to peak oxygen consumption and other variables measured during complex cardiopulmonary exercise testing (CPET). Methodology: The rowing athletes will undergo a CPET using the bicycle ergometer protocol. Several physiological parameters such as maximum oxygen consumption (VO2 max) and maximum CO2 production (VCO2 max) will be measured during the test. A baseline echocardiogram will be done on each athlete at rest before the exercise. Immediately following cessation of CPET, another echocardiogram will be performed. Echocardiographic Doppler pressure waveforms will be analyzed to estimate pulmonary arterial pressure. Fluid mechanic properties of blood flow including shear stress and right ventricular pressure at peak exercise will be further studied and analyzed. Both the exercise testing and echocardiography will be done at Doctors hospital in Augusta, Georgia, USA. Exercise data analysis will be done in Augusta and to some extent by the faculty of the Physiology department at Mayo Clinic in Rochester, Minnesota. The echocardiography and Doppler data will be sent to Sydney University for further evaluation of fluid mechanic properties and for statistical analysis. Conclusion: Exercise-induced PAH, although existent, is not a well-studied or well-defined clinical entity. Fluid mechanics and physiological properties of this entity need further investigation. By studying these parameters, exercise-induced pulmonary hypertension, its definition and classification, and possible further therapeutic interventions will be better comprehended and accomplished.
Bibliography
1. Bogren,HG, Klipstein, RH, Mohiaddin, RH, et al. Pulmonary artery distensibility and blood flow patterns: A magnetic resonance study of normal subjects and of patients with pulmonary arterial hypertension. Amer Heart Journal 1989; 118: 990-999.
2. Haworth, SG. Pulmonary hypertension in the young. Heart 2002; 88: 658-664.
3. Oudiz, RJ, Barst, RJ Hansen, JE, et al. Cardiopulmonary exercise testing and Six-Minute Walk correlations in pulmonary arterial hypertension Amer J Cardiology 2006; 97: 123-126.
4. Barst, RB, McGoon, M, Torbicki, A, et al. Diagnosis and differential assessment of pulmonary arterial hypertension. J Amer Coll Cardiology 2004; 43: S40–S47.
5. Tolle, JJ, Waxman, AB, Van Horn,TL, et al. Exercise-Induced pulmonary arterial hypertension. Circulation 2008; 118:2183-2189.

Honours Thesis A/B or Engineering Project A/B
Supervisors: Associate Professor Kurosh Parsi ([email protected]) and Professor Masud Behnia ([email protected]) The two projects offered below are available for an individual or a group of students. Both projects are suitable for Biomedical or Mechanical students. Part of the research will be carried out at the Sydney Skin and Vein Clinic in Bondi Junction. Students are required to travel there and will be provided with office space and a computer at the clinic. The standard treatment for varicose veins is the injection of the diseased vessel with a detergent sclerosant, in order to close (sclerose) the vein. Sclerotherapy using modern sclerosants has been practiced for at least 50 years. Over this time, a number of technical innovations have been introduced (such as the introduction of sclerosant foam) that have increased the efficiency of the procedure. There are a number of side effects of the treatment, such as the passage of foam bubbles into the heart. Very little research has been performed to understand the fluid mechanics of the injection, foam and blood. Project 1 In order to improve clinical success rates and minimise side effects, a model must be developed to characterise the system in terms of clinical variables. This requires both the use of physical and computational models to simulate the geometry of the vascular networks, such as the saphenofemoral junction (great saphenous vein and femoral vein). The complexity of such a model necessitates experimental investigation into basic physics/chemistry of both liquid and foam properties of sclerosants. The flow also needs to be modelled using CFD and the experimental results will be used for validation of the computational predictions. We have already investigated the effects of foam constituents such as air ratio, temperature, sclerosant type and concentration on foam spreading, and this project will be an extension of this work. There is an existing experimental rig in the research laboratory of the Sydney Skin and Vein Clinic which will be used for this project. Some preliminary CFD simulations have been performed and need to be extended.
Project 2 The detergent sclerosant used for injection into the veins is usually prepared as foam right before the injection. The foam preparation is quite cumbersome and there are numerous parameters which affect the foam consistency and texture leading to a high degree of variability in the success of the treatment process. Therefore, it would be ideal to have a sclerosant foam with an optimum consistency which can be readily used for the purpose of injection. One possibility is to develop a canister with pre-packaging the foam in it. The project requires a detailed review of how the existing readily available consumer foam canisters (such as a shaving foam can) are designed, manufactured and function. The design of such devices as well as other concepts for producing a ready made foam will be explored. We are currently in the process of developing a canister in order to produce a reproducible sclerosant foam. A student is required to liaise with the biomedical engineers and assist in the development of a prototype and in the assessment of the foam consistency. The project will be performed in laboratory space at the Sydney Skin and Vein Clinic in Bondi Junction.

1. Bioactive Glass Development (industry linked) Supervisors: Dr Philip Boughton, Prof Andrew Ruys
Bioactive glasses are used in tissue engineering, bone putty, dental root therapy, implant coatings and bioabsorbable devices. This industry linked project aims to develop new applications and improve existing glass manufacturing processes. Opportunity to investigate and develop novel glass compositions and post-forming methods (microspheres/fibers/coatings) to address clinical needs will be provided. Bioglass science, process design, and analytical testing within a commercial context will provide invaluable device design and manufacturing experience. Contact: [email protected] | 0402890150 | Rm 242 J13 __ 2. Soft Tissue Scaffold Development (industry linked) Supervisors: Dr Philip Boughton, A Prof Andrew Ruys, Prof Sue McLennan
Variotis™ is a versatile bioactive soft tissue scaffold that can be used with a range of cells and tissues. New methods, modifications and applications will be investigated. Photo-activated capabilities and bioactive glass facilitated tissue adhesion are important areas for investigation. The project will also include refinement objectives for existing production and post-process routes for various scaffold forms. The final phase of the project will involve design customization of the scaffold form and type for a tissue engineering collaborator. Contact: [email protected] | 0402890150 | Rm 242 J13 __ 3. Tissue Engineering Bioreactor Systems (industry linked) Supervisors: Dr Philip Boughton, Dr Giang Tran, Prof Andrew Ruys
In vitro tissue engineering benefits from biomechanical stimulus. The novel iaxsys™ system has been designed to complement existing cell biology experimental methods and equipment constraints. This project aims to further develop and refine systems: actuation, sensors, feedback, interface, mechanical couplings, perfusion, plate-bank and in-situ microscopy. User requirement analysis, design and development, manufacturing and verification/validation aspects will be addressed. Ability and experience with design (CAD), cell testing, and software programming will be helpful. Contact: [email protected] | 0402890150 | Rm 242 J13 __

4. Spinal Implant Biomechanics (St George Hospital Linked). Supervisors: Spine Chief Ashish Diwan, Dr Philip Boughton, Prof Andrew Ruys
A minimally invasive spinal implant has been developed to treat low back pain. The nucleus prosthesis is designed to restore physiologic stress to the degenerate spinal disk joint. A posterior dynamic stabilization is being considered for complimentary use with the nucleus prosthesis. Biomechanical characterization of the spinal devices will be undertaken using a state-of-the-art 6-axis BOSE spine simulator. This biomechanical study will utilize synthetic and animal (ovine or kangaroo) models. Contact: [email protected] | 0402890150 | Rm 242 J13 __ 5. Valve Biomaterials Optimization (Industry Linked) Supervisors: Dr Philip Boughton, Dr Giang Tran, Prof Andrew Ruys
Bovine pericardium is the outer membrane of the heart that is widely used in bioengineering of variety of cardiovascular applications including heart valve leaflet, patches for pericardial for cardiovascular reconstructive procedure as well as in general surgery. Calcification of these tissues can lead to structural dysfunction, tissue degeneration and catastrophic implant failure. The onset of calcification and its effects will be studied by a range of techniques. Existing and novel methods to prevent calcification will be investigated. Other opportunities to further enhance heart valve materials and valve configurations are also available. Contact: [email protected] | 0402890150 | Rm 242 J13 __ 6. Optimization of Collagenous Implant Materials (Industry Linked). Supervisors: Dr Philip Boughton, Dr Giang Tran, Prof Andrew Ruys
Collagenous tissue such as bovine pericardium and porcine aortic wall have been used successfully in bioprosthetics for the past 40 years. The established route for collagenous tissue production utilizes glutaraldehyde crosslinking agent. A variety of processing conditions are employed by manufacturers. Concentration of glutaraldehyde, thickness of tissues, and strain conditions during crosslinking can be varied to enhance the mechanical performance of the bioprosthetic materials. This industry-sponsored study will provide opportunities to improve manufacturing processes, develop new approaches, engage in mechanical verification and analytical methods. This project is focussed on delivering process design, manufacturing and test recommendations. Contact: [email protected] | 0402890150 | Rm 242 J13

__ 7. Fibro-Cartilage Tissue Engineering (StGeorge Hospital & Industry Linked). Supervisors: Dr Philip Boughton, Dr Giang Tran, Dr Ashish Diwan, Prof Andrew Ruys
Fibrocartilage is an important complex hierarchical soft tissue that supports and constrains musculoskeletal joints. Sporting injuries, trauma and degenerative pathologies lead to loss in fibrocartilage integrity. Functional gradients in modulus and collagen type are observed in this type of tissue and should ideally be accounted for in scaffold design. A FGM (functionally graded material) biomimetic shape-matching tissue engineering scaffold for treating fibrocartilage defects is under development. The project will involve design and manufacture and mechanical and biologic verification of device prototypes. An existing FEA model will be further refined and validated against mechanical results. Design parameters to mitigate against device migration is essential. Prototypes will need to be compatible and ideally visible with MRI, CT, fluoroscopy imaging. Opportunity to employ an iaxsys™ bioreactor system for biologic verification of prototypes will be provided. Contact: [email protected] | 0402890150 | Rm 242 J13 __ 8. Skin Tissue Engineering (RPA & Industry Linked). Supervisors: Prof Sue McLennan, A Prof Karen Vickery, Dr Philip Boughton, Prof Andrew Ruys
Diabetes and diabetic ulcers is a growing problem in aging populations and among remote indigenous communities. A novel resorbable scaffold for treating serious diabetic ulcers is currently being developed. Dermal chronic wounds are typically necrotic, apoxic, compromised by entrenched infection, and poor in mechanical integrity. An elastic highly interconnective porous scaffold laden with antibiotics and antibacterial agents is being developed. This project will focus on further biologic verification testing and design improvement of this scaffold with particular focus on resorption rate optimization. Exposure to production methods, invitro cell testing, analytical methods, mechanical testing will be provided. Contact: [email protected] | 0402890150 | JO7 Rm S428 __
9. Development of an App for Clinical Research, Rehabilitation Engineering, and Bioinformatics (industry linked) Supervisors: Dr Philip Boughton, Dr Simon Poon, Tamer Sabet, Prof Andrew Ruys Popular mobile devices contain a variety of sensors and integrated systems that can be applied to rehabilitation engineering, clinical research and bioinformatics. A thorough review of published and patented methods will be conducted. Broad design opportunities will be mapped out. A new app for use in conjunction with a treatment for frozen shoulder will be developed for mainstream mobile device platforms. The app will track patient joint biomechanics, have capacity to detect treatment abnormalities to allow immediate intervention if necessary, while remotely transponding data for centralized bioinformatic analysis. The prototype app will be verified and validated to ensure mitigation of risks identified in a design risk analysis and safety risk matrix. Candidates will need good software and hardware engineering experience. Contact: [email protected] | 0402890150 | Rm 242 J13

__ 10. Height-Adjustable Pillow System for Optimal Cervical Support (The Sydney Spine Institute) Supervisors: Specialist Physio Tamer Sabet, Dr Philip Boughton
The project will involve development of a pillow-augmenting system to provide cervical spine near-neutral zone positioning in varied positions. In addition to biomechanical design – materials selection, fabrication, user-friendliness, aesthetics, life-cycle, and business case summary will be important aspects to be addressed by this project. Contact: [email protected] | 0402890150 | Rm 242 J13 __ 11. Supine Spine Manipulator (The Sydney Spine Institute) Supervisors: Specialist Physio Tamer Sabet, Dr Philip Boughton The aim is to develop a system to induce controlled amounts of displacement to select portions of the spine while supine. The system will incorporate a pressure sensor array and act via a pressure transducer system. The system will effectively provide manipulation therapy similar to that provided by a musculotskeletal physiotherapist, but in a quantified, repeatable, accessible manner. This system will also provide another method by which to track back pain foci with time. Contact: [email protected] | 0402890150 | Rm 242 J13 __ 12. Minimally-Invasive Trans-segmental Device for Treating Spondylolisthesis (The Sydney Spine Institute) Supervisors: Dr James Van Gelder, Dr Philip Boughton
“Slipped disk” is a major cause of serious low back pain. Surgical approaches to treating this condition A minimally invasive trans-segmental device design for treating spondylolisthesis is under development. Design process, prototype fabrication, specimen testing, biomechanical validation will be the mainstay of this project. Experience with CAD, FEA, mechanical testing, is preferred. Contact: [email protected] | 0402890150 | Rm 242 J13 __

13. Intracranial Pressure Monitoring System (Concord Hospital, Iosys Pty Ltd) Supervisors: Dr Philip Boughton, Dr Simon Poon, Dr James Van Gelder
Like ECG, Intercranial Pressure (ICP) is an important vital sign used in intensive care. It is often too costly to be employed outside of ICU. Intracranial pressure monitoring systems provide a lower cost possibility to obtain important relative measurements (RAP) to assist with clinical planning, particularly in geriatric medicine. A compact mobile intracranial pressure monitoring system concept is under development and if transferable to a smartphone APP would also become an important M-health resource. Contact: [email protected] | 0402890150 | Rm 242 J13 __ 14. Development of a Neural Engineering Conduit (Cochlear Pty Ltd) Supervisors: Dr Philip Boughton, Prof Andrew Ruys, Prof Sri Bandyopadhyay, Dr Paul Carter The development of electrospun nerve conduits for peripheral repair is a relatively new area. Prototype conduit specimens (of a variety of conductivities) will be fabricated and cell tested. Cell culture will be conducted with and without electrical stimulation. Verification and validation testing will be undertaken to confirm specification requirements. Medical science background and/or cell culture experience is preferred. Contact: [email protected] | 0402890150 | Rm 242 J13 __

15. Cancer Treatment Review & Innovation Recommendations (with Medicine)
Supervisors: Head of Discipline (Med. Imaging) Clin A/Prof Noel Young, Dr Philip Boughton
Current cancer treatments are a vital part of healthcare provision but place a substantive economic burden on society. Patient survivability across major forms of cancer have improved over the past decades but new techniques provide marginal increments of improvement with large increments in cost. In this study a range of strategies will be employed to assess the state of cancer treatment in use. Detail on current technology and methodologies will be captured, in addition to clinical expert opinion on opportunities for future innovation directions and technical support needs. Contact: [email protected] | 0402890150 | Rm 242 J13 __ 16. Design Process for Footwear (with Health Sciences, ASICS) Supervisors: Prof Richard Smith, Prof Andrew Ruys, Dr Caleb Wegener, Dr Philip Boughton
Our long term goal is to establish a many to many relationship between the mechanics of shoes and the gait characteristics of the person so that prescription of shoes/orthotics becomes a lot more certain in terms of achieving the desired change in gait characteristics. The process we would like to develop would be applicable to the clinic for foot and lower limb disorders and to performance for everyday exercise or sport. The current proposal is a proof of concept using the prevention and treatment of plantar fasciitis as a test bed. A broader design process for shoes will be a key outcome from this project. Contact: [email protected] | 0402890150 | Rm 242 J13 __ 17. Foot biomechanics study (with Health Sciences)
Supervisors: Prof Richard Smith, Prof Andrew Ruys, Dr Caleb Wegener, Dr Philip Boughton
This project will involve comprehensive review of foot anatomy and tissue omechanics followed by building and validation of an FEA model. Of interest will be understanding the plantar fascia and its junction with the calcaneus; behaviour of the plantar fascia under various types of stress; how the properties of plantar fascia will change with calcification of the fascia/calcaneus junction. Contact: [email protected] | 0402890150 | Rm 242 J13 __

18. Accessible Foot Injury Mitigating Solutions (Project ACESO, Royal Prince Alfred, Medicine) Supervisors: Prof Stephen Twigg, Prof Sue McLennan, Dr Philip Boughton
Elderly commonly suffer from some peripheral neuropathy and metabolic dysfunction (diabetes). Toe and foot injuries can go unnoticed and lead to chronic infections that may result in loss of limb and even loss of life. Custom footware is available to mitigate against injuries but they are costly and inaccessible to most. The project will focus on conception, design iteration and delivery of one or more prototype solutions in consultation with cross-disciplinary experts. Contact: [email protected] | 0402890150 | Rm 242 J13 19. Role of YAP/TAZ in stem cell mechanotransduction, differentiation, and migration (Sydney Medical School, Kolling Institute) Supervisors: Dr Yu Suk Choi, Dr Philip Boughton The statement ‘biomechanical and biophysical cues regulate cell behavior’ does sound familiar by now after recent emerging results from cell biology, biophysics, and mechanobiology fields. Mechanotransduction seems to be the universal terminology describing biological phenomenon; mechanical cues are transduced to biochemical signal. Cells have ability to ‘feel’ or ‘sense’ stiffness (rigidity or hardness) of their surroundings including extracellular matrix (ECM) such as fibronectin and collagen via integrin-mediated focal adhesion. Previously, I have shown that stem cells from human liposuction differentiated into nerve, muscle, and bone-like cells on hydrogels mimicked stiffness of brain, skeletal muscle, and bone tissue, respectively, by only mechanosensing without any other biochemical inductions. Among three lineages, adipose-derived stem cells (ASCs) expressed very high myogenic capacity by fusing into myotubes. There are several pathways and key signaling molecules suggested in mechanotransduction. Most of suggested pathways involve focal adhesion with extracellular binding of integrin to ECM protein as a starting point and intracellular interaction of beta unit of integrin to actin-myosin through focal adhesion kinase (FAK), talin, and vinculin binding. Intracellular forces generated by different matrix stiffness will decide localization (cytoplasmic vs. nucleic) of YAP/TAZ (transcriptional coactivator in Hippo pathway), which will control transcriptional level as a final step. Bone marrow-derived stem cells exhibited cytoplasmic localization of YAP/TAZ on soft hydrogel (fat-like stiffness) but YAP/TAZ was localized in nuclei on stiffer hydrogel (bone-like stiffness). Differentiations into fat and bone lineages were also observed and YAP/TAZ overexpression or knockdown cells altered mechanical induction (no bone differentiation on bone-like stiffness when YAP/TAZ knock-downed). Some have suggested YAP/TAZ effect on stem cell myogenesis, however, no conclusion has made yet due to lack of evidence. Moreover, most of studies with YAP/TAZ assumed it as a downstream of mechanotransduction (feeling itself) but more recent results (YAP/TAZ changes integrin expression profile in cancer research) suggest that YAP/TAZ may have feedback effect to ‘feeling’ or YAP/TAZ act as upstream of ‘feeling’ as well. In this project, I aim to investigate the effect of YAP/TAZ on mechanosensing (once considered as upstream of YAP/TAZ) in the context of intracellular force generation (direct response from extracellular stiffness), migration, and myogenic differentiation (where ASCs showed great potential). Contact Dr Yu Suk Choi T +61 2 9926 4907 | F +61 2 9926 5050 | M +61 415 499 330 E [email protected]

N-cadherin-mediated cell-cell and integrin-mediated cell-ECM mechanotransduction in heart (Sydney Medical School, Kolling Institute) Supervisors: Dr Yu Suk Choi & Dr Philip Boughton The human heart, a mechanically dynamic tissue, pumps out ~5L of blood/ minute. At tissue level, its mechanical function has been widely studied, but little is known at cellular level how cardiac muscle cells mechanically coordinate their beating with neighboring cells or how mechanical extracellular stimuli dictate cardiac muscle cell behavior. There is increasing emphasis on the role of extracellular matrix (ECM) as a dynamic influence rather than a simple repository for cells. This new field examines mechanotransduction, which deals with the cellular mechanisms that transduce extracellular or intercellular mechanical stimuli to intracellular biochemical signals. One cardiac muscle cell in vivo may make three principal connections with its surroundings (i) cell-ECM adhesion via integrin-mediated focal adhesion, (ii) cell-cell adhesion via N-cadherin, and (iii) cell-cell gap junction with ion channels including the calcium channel. In disease models in particular, not only biochemical signaling changes but also the mechanical environment alters the cell’s behaviour via these 3 main connections. For example after myocardial infarction (MI), excessive deposition of collagen causes greater ECM stiffness, which may alter focal adhesion complex / actinin (i.e. the Z-band - an important structure bearing contractile forces) and disrupt cytoskeletal structure resulting in loss of contraction and alteration of cell-cell interaction via N-cadherin. This project aims to address how these 3 main connections (N-cadherin, focal adhesion, and gap junction) control the cardiomyocyte’s function in development (e.g embryonic chicken cardiomyocyte) and disease (rat cardiomyocyte following ischemia –reperfusion injury and rabbit cardiomyocyte from MI). Three specific aims address 1) the effects of ECM stiffness on cardiomyocyte function; cell-ECM mechanotransduction, 2) mechanosensitivity of cardiomyocyte via N-cadherin; cell-cell mechanotransduction, and 3) ion handling capacity, especially calcium which is the main driving force for cardiomyocyte contraction, examining different cell-cell / cell-ECM situations Contact Dr Yu Suk Choi | T +61 2 9926 4907 | F +61 2 9926 5050 | M +61 415 499 330 | E [email protected] Mechanosensing-driven stem cell migration on stiffness gradient hydrogel (Sydney Medical School, Kolling Institute) Supervisors: Dr Yu Suk Choi & Dr Philip Boughton Adipose-derived stem cells (ASC) which could be isolated from patient by minimal invasive procedure, liposuction, has known to be capable of rapid growth (regenerating large volume of tissue) and skeletal muscle or fat differentiation. Previously, osteogenic (bone) and adipogenic (fat) differentiation has been heavily relied on biochemical methods, however, the efficiency remains questionable for large volume regeneration. More recently, it has been shown that surrounding extracellular matrix (ECM) could also influence the fate of stem cells. Particularly in respect to stiffness (one of the mechanical properties of ECM), my previous studies showed that ASCs were able to ‘feel’ and/or ‘sense’ how stiff the underneath was when cultured on hydrogels that mimicked stiffness of bone or adipose tissues without biochemical induction and be differentiated into bone or fat cells, respectively. Others also showed that ECM protein composition played significant role in stem cell differentiation as well as geometry, which will decide cell shape and size. Their combinatorial (biochemical and biomechanical) induction has yet to be examined. Here, I aim to develop a high-throughput screening platform to examine the most synergistic combinations of biochemical and biomechanical induction for bone or fat cell differentiation. For high-throughput screening, stiffness gradient hydrogel (stiffness ranges from fat-like soft to bone-like hard) was fabricated using two-layer hydrogel polymerization technique modified from my previous publication. Micro-contact printing technique will be used to stamp different ECM proteins (e.g. collagen) with different shapes and sizes on the stiffness gradient gel to test best combination of stiffness, ECM protein composition and shape/size. Fabricated high-throughput hydrogel will be placed in 6-well plate for cell culture with ~ 1000 patterns for cell adhesion at single-cell level and biochemical induction can be tested per well in cell culture media. The best combination will be evaluated in multi-cell condition by fabricating whole 6-well plate size hydrogel with known stiffness with known ECM protein coating and known density (shape/size). To summarize, this platform will allow us to test stem cell differentiation with 6 stiffness, 6 ECM proteins, 6 shape/size, and 6 biochemical induction media by 6 repeats in one 6-well plate. This high-throughput screening platform will ‘speed up’ tissue engineering approach using stem cells to regenerate bone and fat tissues. Contact: Dr Yu Suk Choi | T +61 2 9926 4907 | F +61 2 9926 5050 | M +61 415 499 330 | E [email protected]

ROAM Portable Pediatric Oxygen Supply System (Industry Linked) Supervisors: Marco Tallarida & Dr Philip Boughton The global market for oxygen therapy, estimated at US$1.8b inclusive of oxygen concentrators and regulators, is experiencing growth largely from the ageing population and demand for easy to use mobile/home systems. Pediatrics also constitutes an important sector of the market. ROAM is a light weight portable ‘humanised’ oxygen cylinder with an intuitive control interface designed initially for the paediatric market. Key attributes include (i) extended oxygen supply time compared to incumbent technology; (ii) 40% lighter than existing metal tanks; (iii) nasal mask specifically designed for paediatric use; and (iv) a design aesthetic of appeal to young patients. This medical device is being developed in line with ISO13485/IEC60601. Design & development projects on offer include: 1. Regulator control and safety systems 2. Hardware – software systems integration with smarhphone control 3. Chassis and composite storage system verification and validation Contact: [email protected] | 0402890150 | Rm 242 J13 Intraoccular Lens Implant System (Sydney Eye Hospital & Save Sight Institute)
Supervisors: Prof John Griff, Dr Philip Boughton, Prof Stepanie Watson
Prototype intraoccular lens prototype with clliary tethered haptics. The World Health Organisation estimates there were 161 million visually impaired people worldwide in 2002, cataract accounting for 47.8%. Over the next 20 years, there will be a doubling in the incidence of cataract, visual morbidity, and need for cataract surgery. The Global Intraocular Lens (IOL) Market is forecast to reach $3.1 Billion by 2017;compounded annual growth rate of 4%; due to: increase of cataracts in the aging global population; increase of risk factors such as diabetes and increase of new and available technologies. Current IOL designs are not appropriate for pediatrics, require a significant surgical portal for delivery, can migrate and misalign due to lack of appropriate fixation methods, and have significant chance of post capsule opacification. There may be opportunities to address some of these issues and develop a biomimetic compliant IOL that can be coupled to the ciliary for improved restoration of sight. In conjunction with opthamology specialists, this project seeks to identify priority IOL requirements and design risks to then lead to development of an IOL prototype proof of concept. Contact: [email protected] | 0402890150 | Rm 242 J13

Colin Dunstan Honours thesis topics: Evaluating implanted ceramic scaffolds in bone (1 possible in this area) Email: [email protected] Tel: 9351 7127 Evaluating cell responses to implanted ceramic scaffolds and polymer materials. Ceramic scaffolds of standard or novel materials have been inserted into defects in the bone of rat or rabbit tibiae. For this project the student will develop techniques to fully evaluate the bone inductive and conductive tissue responses to these scaffolds using microcomputerised tomography and plastic embedded and quantitative histologic measurements. Surface treatment of polymers will also be assessed for their ability to improve biocompatibility and bioactivity. Outcomes to be assessed will be extent of cell invasion, numbers of osteoblasts and osteoclasts and measurement of bone formation rates. Assessments will be histological using histomorphometry to determine the static and dynamic parameters of bone regeneration. Cell culture techniques will also be applied to evaluate the way cells interact with the materials in a defined environment. Cancer therapies (1-2 possible in this area) Email: [email protected] Tel: 9351 7127 Cancer cells in cell culture or in mice implanted with cancer cells will be treated with novel anti-cancer agents. Isolated cells from the cultures or tissues of these mice containing breast and prostate cancer tumours will be assessed by micro-computerized tomography and histological methods to determine the amount of bone destruction and new bone formation, and the growth rates and invasiveness of the tumours cells. Results will be analysed to determine the possible benefit of these compounds in reducing cancer metastasis to bone. And on the the incidence and progression rates of breast and prostate cancers. The student will be trained in some of the following techniques: tissue culture, molecular biology methods, immunohistochemistry the measurement of bone lesions using microCT, and histological techniques including hard tissue histology, histomorphometry, immunostaining and TUNEL staining for assessing cancer cell apoptosis (programmed cell death).

Finite Element Modelling of Orthodontic Tooth Movement Supervisors: Professor Qing Li (AMME) and Professor A. Darendeliler (Sydney Dental Hospital and Faculty of Dentistry) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607
[email protected] The ratio of patients who request orthodontic therapy to the total population is surprisingly high. Unofficial data reports that every year 60% of all adolescents in Australia undergo orthodontic treatment to improve their healthy start to life. Orthodontic tooth movement (OTM) within the dentoalveolar bone is based on the ability of surrounding bone and periodontal ligament (PDL) to react to a mechanical stimulus (e.g. stress/damage/strain energy) with remodelling processes. Orthodontic forces generate a complex set of mechanical stimuli triggering biological reactions in dentoalveolar and PDL, thereby causing teeth to move to ideal positions in the jaw. Although it is recognised that the change in biomechanical environment leads to OTM, it is unclear which of the mechanical signals are dominating the initiation of the bone remodelling and how to quantify a dynamic tooth movement process in response to the orthodontic force. This project aims to (1) develop a precise model of the orthodontic treatment based on CT images (NewTom – Sydney Dental Hospital in USyd Faculty of Dentistry), which may involve uses of Rhinoceros/ScanFE – Solidworks – Ansys or Strand7); (2) quantify the biomechanical responses in several different stages of OTM; (3) correlate the mechanical stimuli to the OTM rate measured in clinic. In this project, the student will use his/her CAD/FEA skills to an interdisciplinary topic, and he/she is expected to closely work with USyd dental specialists (Prof Darendeliler) at Department of Orthodontics.
Reference Field C, Ichim I, Swain MV, Chan E, Darendeliler MA, Li W, Li Q (2009) “Mechanical Responses to Orthodontic Loading: A Three-Dimensional Finite Element Multi-Tooth Model”. American Journal of Orthodontics And Dentofacial Orthopedics 135:174-181.

Biomechanical Investigation into Orthodontic Root Resorption Supervisors: Professor Qing Li (AMME) and Professor A. Darendeliler (Sydney Dental Hospital and Faculty of Dentistry) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607
[email protected] Orthodontic root resorption (ORR) is described as the loss of hard tissue especially of cementum and dentine of tooth tissue which can be an irreversible sequel of orthodontic treatment. It has been documented that the phenomenon of root resorption is a very common disorder, affecting up to 100% of all treated cases, and after treatment, 41% of adult patients had increased root resorption of over 2.5mm in one or more teeth. Under severe circumstances root resorption may potentially jeopardise the longevity and functional capacity of the treated teeth; and may result in ending the treatment and greatly compromising the outcome of a successful orthodontic therapy. This project aims to (1) elucidate the biomechanical pattern of orthodontic force distribution along the tooth root and its surrounding tissues by creating 3D finite element model and to develop a numerical prediction of ORR (by using micro-CT scanner SkyScan 1172 at Electronic Microscopic Unit and uses of Rhinoceros/ScanFE – Solidworks – Ansys or Strand7); (2) correlate the root stress/strain to the change in cementum properties; (3) To validate the numerical prediction through a clinical trial where the occurrence of orthodontic root resorption (ORR) is predicted and therefore may be prevented. In this project, the student will is expected to closely work with USyd dental specialists (Prof Darendeliler) at Department of Orthodontics.
Buccal
Root
resorption
Stress

Scaffold Design for Tissue Engineering Supervisor: Professor Qing Li (AMME) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607
[email protected] Each year an estimated millions of patients suffer from bone fracture, while hundreds of thousands of patients have conditions where large segments of bone are destroyed or must be removed. As such new clinical treatment schemes are necessary to augment the body‟s natural healing process. As a fast emerging interdisciplinary technology, tissue engineering provides alternative therapeutic strategies for repair of damaged tissue and organs, which shows enormous potential to generate host-grown tissue in sufficient quantity and quality. A milestone in the load-bearing tissue (e.g. bone/cartilage) engineering has been the development of 3D scaffold technique that guides cells to generate desirable functional tissue under appropriate mechanical and biological conditions. The success of tissue regeneration lies heavily on the architecture design of the scaffold and its bio-reaction with the seeding cells. Permeability has been recognised as one critical criterion for scaffold design in ensuring cell migration and nutrient delivery. This project aims to (1) characterise the effective permeability of different scaffold architecture; (2) develop finite element based homogenisation technique for permeable problem; (3) design optimisation for tailored effective permeability. The student is expected to closely work with the Research Fellow in the group and redevelop Matlab code for finite element analysis and homogenisation for the permeable problem. The results will be prototyped in commercial free-form solid fabrication facility.
Reference Chen YH, Schellekens M, Zhou SW, Cadman J, Li W, Appleyard R, Li Q (2011) Design of
Tissue Scaffolds Using Wall Shear Stress Criterion for Flow Induced Erosion, ASME Journal of Biomechanical Engineering - Transactions of the ASME, 133(8):081008.
Chen YH, Zhou SW, Li Q (2011) Microstructure Design of Biodegradable Scaffold and Its Effect on Tissue Regeneration, Biomaterials 32: 5003-5014.
Chen YH, Zhou SW, Li Q (2011). Mathematical modeling of degradation for bulk-erosive polymers: Applications in tissue engineering scaffolds and drug delivery systems. Acta Biomaterialia 7:1140–1149。
Chen YH, Zhou SW, Cadman J, Li Q (2010) Design of Cellular Porous Biomaterials for Wall Shear Stress Criterion, Biotechnology & Bioengineering 107(4):737-746.
Sturm S, Zhou SW, Mai YW, Li Q (2010) “On Stiffness of Scaffolds for Bone Tissue Engineering – A Numerical Study”. Journal of Biomechanics 43:1738–1744.
Design of periodic scaffold
Base cell
FEA model
Scaffold
structure

Design of safety systems for crashworthiness criteria Supervisors: Professor Qing Li (AMME) and Dr Guangyong Sun (AMME) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607
[email protected] Crashworthiness is one of the most important criteria in vehicle design, which often requires large-scale design analysis for a full vehicle model consisting of many structural parts and special safety elements. This project develops a two-stage procedure to cope with crashworthiness design of structural frame and occupant restraint system. In the first stage, a multiobjective optimization is carried out for structural parameters in the frontal parts without considering the details of the occupant restraint device. The foam filled thin-walled tube will be used as new energy absorber and a design optimisation will also be performed in this stage. In the second stage, the parameters of the occupant restraint system are optimized based on an optimized structural system. Human dummy and restraint system will be modelled and optimised in details. In these two stages, explicit finite element program (Dyna3D) and multi-body dynamics methods will be employed to respectively construct response surface and Kriging model with various design of experiment (DOE) techniques. A full-scale vehicle model will be developed to demonstrate the capability of the present two-stage design method.
References Liao X, Li Q, Zhang W, Yang X. (2008) Multiobjective Optimization for Crash Safety Design
of Vehicle Using Stepwise Regression Model. Structural and Multidisciplinary Optimization 35:561–569.
Liao XT, Li Q, Yang XJ, Li W, Zhang WG (2008) Two-Stage Multiobjective Optimization of Vehicle Crashworthiness under Frontal Impact. International Journal of Crashworthiness 13:279-288.
Sun GY, Li GY, Zhou SW, Li HZ, Hou SJ, Li Q (2011) Crashworthiness Design of Vehicle by Using Multiobjective Robust Optimization. Structural and Multidisciplinary Optimization 44:99–110.
t = 0ms t = 35ms t = 100ms

Design analysis and optimization for novel arterial stents Supervisors: Professors Qing Li (AMME) and Harry Lowe (Sydney Concord Hospital and Faculty of Medicine) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607
[email protected] Cardiovascular diseases (CVD) are one of the leading causes of death in western countries due to lifestyle and an increasingly ageing population. In Australia, more than 176,000 patients are hospitalised and 180,000 cardiovascular procedures are performed each year. Open-heart bypass surgery is one of the most widely used procedures for CVD, and carries with it the major problem of long waiting lists due to the large number of hospitalised patient-days (> 1.64 million totally in 2004–05) in the country. As a fast emerging interdisciplinary technology in interventional cardiology, stenting treatment provides an alternative therapeutic strategy, which uses a mechanical device (called a stent) to compress the plaque against the artery wall opening the lumen of the obstructed artery for restoring blood flow. This technology demonstrates the enormous potential to minimise surgical invasion/risk and shorten the hospital days. This research aims at developing a computational framework for stent design analysis and optimization. In this study, a newly designed cardiovascular stent with adapting the aorta stent geometry will be modelled and evaluated by three-dimensional finite element analysis. Compared with the existing conventional stents in the market, a series of novel designs will be assessed to characterise the stiffness, damage to the arterial wall, fatigue life, and other biomechanical behaviours. The geometry sharpness and increase the manufacturability.
a) Deliver crimped stent across a narrowing artery
b) Deploy stent & push plaque against arterial wall by inflating balloon.
c) Remove deflated balloon and leave stent on-site to support vessel wall.
Plastic deformation
Cardio-vascular diseases
Recoil??
PUC before deploying
R
Z

Modelling of femoral fracture after hip replacement surgery Supervisors: Professors Qing Li (AMME) and Richard Appleyard (Sydney North Shore Hospital and Macquarie University) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607
[email protected] Hip replacement surgery enables patients who once suffered from osteoarthritis to walk pain-free. However, there is a high incidence of failure due to bone fracture, resulting in huge additional public and private health costs, and a reduced quality of life for ageing Australians. This project aims to develop the science for a computer-based technology that will enable surgeons to optimise the match between a patient‟s individual needs and a standard implant device. The student is expected to work closely with the group in Murray Maxwell Biomechanics Lab at Sydney Royal North Shore Hospital on both FEA modelling and experimental studies. S/he will be trained to use Simpleware and ABAQUS for 3D modelling and fracture analysis in the following steps: (1) CT/MRI scanning of femur and hip replacement implants, segmentation of the images and modelling in Simpleware; (2) FE modelling of 3D femur and implants immediately after surgery; (3) modelling of the osseointegration process; (4) fracture modeling of the system in different time steps.
Experimental studies FE modelling of femur fracture

Design optimisation for metamaterials Supervisor: Professor Qing Li (AMME)
Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607, [email protected]
Metamaterials signify a new class of periodic materials and directly gain unusual properties from their special wavelength-scale microstructures. These properties have great potential to many electromagnetic applications and technological innovations such as super-lens and invisible cloaks. This project aims to develop a systematic method by formulating microstructural design in the topology optimisation framework. The evolutionary structural optimisation will be used to determine the novel configurations of unit cells for desirable physical properties. The student is expected to conduct (1) modelling of unit-cell of periodic metamaterials; (2) sensitivity analysis; (3) design optimisation for unit-cell configuration. S/he will closely work with the research fellow in the AMME School and School of Physics.
References Zhou SW; Li W; Sun GY; Li Q (2010) “A level-set procedure for the design of
electromagnetic metamaterials” Optics Express 18(7): 6693-6702. Zhou SW, Li W, Li Q (2010) Level-Set Based Topology Optimization for Electromagnetic
Dipole Antenna Design, Journal of Computational Physics 229 (2010) 6915–6930. Zhou SW, Li W, Chen YH, Sun GY, Li Q (2011) Topology Optimization for Negative
Permeability Metamaterials Using Level Set Algorithm, Acta Materialia 59:2624–2636. Zhou SW, Li W, Li Q (2010) “Design of 3D Periodic Metamaterials for Electromagnetic
Properties”. IEEE Transactions on Microwave Theory and Techniques 58(4):910-916.
Metamaterials unit-cells
Invisible cloak cloth

Modelling of cracking about dental composite restorations. Supervisors: Professor Qing Li (AMME) and Prof Michael Swain (Sydney Dental Hospital and Faculty of Dentistry) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607 [email protected] Composite or white fillings are very popular as dental clinical restorative materials. However curing of these materials induces considerable shrinkage of the material resulting in tensile stresses at the margin that may induce either interfacial or enamel fracture. The aim of this project is to utilise ABAQUS software to quantify the residual stresses and predict the conditions for the onset of failure and follow the extent of fracture. The student is expected to (1) create 3D FE model of a tooth with caries and in-lay filling; (2) model shrinkage of materials in different temperature; (3) simulate the crack initiation and propagation around the filling region; and (4) optimise the filling shape to minimize potential fracture failure. The student is also expected to work with PhD students in dental clinical and experimental studies.
References: 1. Ichim I, Li Q, Li W, Kieser J, Swain M (2007) “Modelling of Fracture Behaviour in
Biomaterials, A Leading Opinion Article”. Biomaterials, 28:1317-1326. 2. Ichim I, Li Q, Loughran JG, Kieser J and Swain MV (2007) “Restoration of Non-Carious
Cervical Lesions: Part I - Modelling of Restorative Fracture”. Dental Materials 23 (12): 1562-1569.
3. Ichim I, Schmidlin PR, Li Q, Swain MV, Kieser J (2007) “Restoration of Non-Carious Cervical Lesions: Part II - Restorative Material Selection to Minimise Fracture”. Dental Materials 23 (12): 1553-1561.
Composite
filling
Fracture

Biomechanics of Jaw functions Supervisors: Prof Greg Murray (Jaw Function & Orofacial Pain Research Unit, Westmead Hospital), Assoc Prof John Gal (Jaw Function & Orofacial Pain Research Unit, Westmead Hospital) and Professor Qing Li (AMME) Greg Murray: [email protected]
John Gal: [email protected]
Qing Li: [email protected] Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607
A new jaw motion tracking system has been implemented at JFOP consisting of three digital cameras, a controller and LED markers attached to the upper and lower jaws to allow the 3D motion of the mandible to be recorded. Student projects to improve the operation of this system would involve both software and hardware aspects and require a proficiency in C++. Jaw tracking system software modification. Currently, the movements of the LED markers are displayed in real-time during the recording session, but it is not possible to display in real-time the movement of a user defined point on the mandible during the recording. Such a user-defined point can be displayed post-recording using existing custom built programs, but is not included in the system program. The proposed project would require this function to be added to the C++ source code of the tracking system.
The project involves quite complex mathematical calculations as well as an ability to understand the existing C++ source code and how to integrate new code. Other software that was used in the creation of the existing source code includes the (free) FLTK (Fast Light Tool Kit) package. Synchronization of jaw tracking system with jaw muscle activity data acquisition system. Running in conjunction with the jaw tracking system is a separate EMG recording system. Currently, the two recording systems are synchronised by a complicated process that involves a lash-up of custom-built hardware and extensive post-recording data processing. There is a need to implement a better method of synchronising the start and finishing of the two recording systems perhaps by using free software such as Synergy.
The project requires first, the understanding of the operation of both recording systems and second, some familiarity with the process of interconnecting two different types of software/hardware systems.

Industry Project: Optimized Ortho (http://www.optimizedortho.com/)
OpenSIM Musculoskeletal modeling of deep knee bend in Total Knee Replacement patients. Supervisors: Professor Qing Li (AMME) and Dr Brad Miles (Optimized Ortho) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607, [email protected] Total Knee Replacement (TKR) is one of the most common and fastest growing orthopaedic surgeries in Australia, most commonly performed as a treatment for osteoarthritis of the knee. Most patients experience a dramatic improvement following recovery, but a significant portion do not. Musculoskeletal modelling is a technique involving muscle-actuation driven models of movement that may grant insight into why some patients fail to experience an improvement in their postoperative outcomes. This project aims to identify characteristic muscle actuation patterns in poor performing TKR patients throughout a deep knee bend motion cycle. The student will be provided with the motion outputs of a previously validated rigid body model of the knee and simulated forces on ligaments across the knee throughout the motion cycle. S/he will be expected to modify an existing musculoskeletal leg model such that it only contains muscle groups relevant to boundary conditions of the input motion data in addition to simulating the muscle behaviour using OpenSIM, an open source musculoskeletal modelling platform with an extensive library of previously validated models.
An OpenSIM leg model Simulated implants in a rigid body model

Industry Project: Optimized Ortho (http://www.optimizedortho.com/)
Patellofemoral alignment impact on knee kinematics following total knee replacement in a rigid body dynamics model. Supervisors: Professor Qing Li (AMME) and Dr Brad Miles (Optimized Ortho) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607
Total Knee Replacement (TKR) is one of the most common and fastest growing orthopaedic surgeries in Australia, most commonly performed as a treatment for osteoarthritis of the knee. Usually, the patella is resurfaced during this process, with a patellar button implanted into the surface of the bony tissue to articulate with the femoral implant directly. The angle of this resurfacing cut defines the positioning of the patella as the button articulated with the trochlear groove during a flexion cycle, but the biomechanical impact of the patellofemoral alignment so defined is poorly understood. This project will investigate the impact of the patellofemoral alignment in a previously developed rigid body dynamics model of TKR across a spectrum of patients. The student will be provided with access to the rigid body dynamics model and will be expected to segment and register the position in 3D space of the tibial, femoral and patellar articulating implants in patients who have undergone TKR, as well as CAD positioning of implants in patients who have not yet undergone their operation. In particular, any correlations between clinically observable demographic details of the patient and sensitivity of knee kinematics to patellofemoral alignment or insight into what an „ideal‟ alignment might be for each patient are desirable outcomes of this project.
CT Scan of implanted femur 3D CAD model w/ resurfaced patella

Industry Project: Optimized Ortho (http://www.optimizedortho.com/)
Reconstruction of bony landmarks using statistical analysis of matched radiographs and CT scans. Supervisors: Professor Qing Li (AMME) and Dr Brad Miles (Optimized Ortho) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607 [email protected]
X-ray computed tomography (CT) is a valuable imaging tool allowing segmentation and reconstruction of a patient‟s bone structures, providing the essential inputs for modelling a specific patient‟s kinematics. There is a considerable cost to this process in the form of radiation exposure, however. By comparison, plain film radiographs are a less costly and considerably safer option for patients. This project aims to develop a methodology for taking measurements from 2D radiographs and inferring the 3D coordinate space position of certain distinct bony landmarks in the pelvis and upper femur of patients. The student will be provided with coordinate landmarks of key bony landmarks extrapolated from segmented CT scans of patients, in addition to access to the CT scans themselves and radiographs of the same patients. Particular challenges include constructing a flexible transformation process for reversing the impact of perspective in the radiograph and developing an advanced model that can refine its placement of landmarks on the basis of additional demographic details of patients (which will characterise the shape and structure of their pelvis.)
Segmented CT scan of pelvis Radiograph w/ angular measurements

Industry Project: Optimized Ortho (http://www.optimizedortho.com/)
Design of a patient specific cutting guide for patella resection during Total Knee Replacement. Supervisors: Professor Qing Li (AMME) and Dr Brad Miles (Optimized Ortho) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607
Total Knee Replacement (TKR) is one of the most common treatment for osteoarthritis of the knee. Usually, the patella is resurfaced during this process, with a patellar button implanted into the surface of the bony tissue to articulate with the femoral implant directly. Current surgical technique controls the depth of resection into the bony patella and implantation of the button tightly, but the alignment of the patella is completely freehand. As further knowledge about the impact of patella alignment is developed, targeting a specific orientation of insertion will become increasingly relevant. This project aims to design a patient specific cutting guide that allows for a targeted alignment and depth of resection during surgery. The student will have access to a range of 3D models of segmented patella to aid in their design task. A particular challenge of this method will be developing a way to control the alignment of the patella resection with regards to the femur, to target a specific patellofemoral alignment rather than defining the resection simply in relation to the patella‟s own bony architecture. The student will also need to consider the limitations of soft tissue preserving surgical technique in their design of the tool.
Patella, anterior surface (healthy) Current depth targeting patella cutting guide

Industry Project: Optimized Ortho (http://www.optimizedortho.com/)
Ligament sensitivity analysis in total knee replacement using FEA modeling. Supervisors: Professor Qing Li (AMME) and Dr Brad Miles (Optimized Ortho) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607
Total Knee Replacement (TKR) is a commonly performed treatment for osteoarthritis of the knee. In the healthy knee, The Anterior and Posterior Cruciate Ligaments and Medial and Lateral Collateral Ligaments (ACL, PCL, MCL and LCL respectively) provide stability to the knee joint. Typical TKR operations will require the removal of the Anterior Cruciate Ligament (ACL) in order to access the joint space and resect the bony surfaces. In modelling these ligaments postoperatively, certain assumptions must be made as to the laxity and biomechanical properties of these ligaments for a given patient, as direct measurement is unfeasible. This project aims to examine the sensitivity of modelling of knee kinematics with regards to these assumptions. The student will develop a FEA model of the knee from known literature norms and segmentation of a subject‟s femur and tibia. An FEA platform optimised for non-linear use such as ABAQUS would be preferred. Students will need to vary both modelling assumptions from simple to very complex models and examine the impact on the model throughout a predefined motion path.
Meshed model of knee w/ ligaments Posterior view of dissected knee, PCL visible

Industry Project: Optimized Ortho (http://www.optimizedortho.com/)
OpenSIM Musculoskeletal modeling of a sit to stand event in total hip replacement patients Supervisors: Professor Qing Li (AMME) and Dr Brad Miles (Optimized Ortho) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607
Total Hip Replacement (THR) is a common orthopaedic performed most commonly to treat osteoarthritis of the joint. The ball and socket nature of the hip joint allows for great freedom of movement, and THR seeks to preserve these degrees of freedom while minimising the risk of dislocation. In order to assess THR on this basis, the hips movements are typically modelled over a specific functional event replicating a real world activity by the THR patient. Musculoskeletal modelling is a technique involving muscle-actuation driven models of movement. This project aims to develop a simulation of the sit to stand event using OpenSIM and solve for the muscle actuations required to drive the movement. The student will be provided with the motion outputs of a previously validated rigid body model of the hip. They will need to select an existing musculoskeletal leg model from OpenSIM‟s extensive library of previously validated models and modify it to model the specifics of a selected patient‟s Hip Replacement operation. As a further goal, the sensitivity of these solved muscle actuations to an altered surgery (which has had a computational change in offset or leg lengthening of the surgical limb) can be explored.
An OpenSIM model in motion CAD reconstruction of a hip implant
Mechanical Finite Element Modelling of Intracochlear Electrode Arrays
Cochlea Project 1: Finite element modelling of intracochlear electrode arrays to predict static equilibrium position and contact pressures within the cochlea Supervisors: Professor Qing Li (AMME) and Dr Nick Pawsey ([email protected]) (Cochlear Pty Ltd) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607 [email protected]
Background Cochlear implants provide the sensation of hearing to moderate to profoundly deaf recipients with sensorinerual hearing loss. An array of electrodes is inserted into the scala tympani of the cochlea in order to provide electrical stimulation to auditory neurons. Some arrays are pre-curved to match the spiral shape of the cochlea, to be closer to the spiral ganglion cells within the modiolus. The shape and mechanical properties of the array must be carefully selected to accommodate a range of cochlea sizes. The desire for proximity to the modiolus must be balanced with the need to limit chronic contact pressures, which may cause damage to cochlea structures.
Aims To develop a mechanical finite element model of a pre-curved electrode array within the cochlea, in order to predict, for a range of cochlea sizes and electrode shapes:
Static equilibrium position of the electrode within the cochlea Chronic contact pressures on cochlea structures Develop design guidelines for pre-curved electrodes based on these results
Methods The project would involve
A review of the literature to establish a picture of existing modelling work on cochlear implant electrodes.
Development of a detailed 3D CAD model of an electrode array Use of a commercial FEA software package to develop a model of the electrode using
realistic material properties Prediction of equilibrium position and contact pressures within a simplified cochlea

Mechanical Finite Element Modelling of Intracochlear Electrode Arrays
Cochlea Project 2: Modelling of intracochlear electrode arrays to predict insertion and removal dynamics
Supervisors: Professor Qing Li (AMME) and Dr Nick Pawsey ([email protected]) (Cochlear Pty Ltd) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607
Background
Cochlear implants provide the sensation of hearing to moderate to profoundly deaf recipients with sensorinerual hearing loss. An array of electrodes is inserted into the scala tympani of the cochlea in order to provide electrical stimulation to auditory neurons. Electrode arrays must be designed to facilitate reliable insertion into the desired position in the cochlea, minimising the risk of complications such as tip foldover or buckling. In addition, arrays need to be flexible to minimise contact forces with cochlea structures to prevent damage that may degrade hearing performance. Arrays may be straight, or pre-curved to match the spiral of the cochlea. Different designs have different insertion methods and risks. All must accommodate a range of cochlea sizes.
Aims
To develop a computational model of electrode arrays, in order to simulate insertion into the cochlea and explore factors which lead to successful placement. Secondary aims are to investigate the stability of the array within the cochlea, and the dynamics of electrode removal.
Methods The project would involve
Development of a model of the electrode array with realistic mechanical properties. This may take the form of a finite element model, or possibly a simplified model using a physics engine.
Some level of validation of the model by measurement of mechanical properties of physical electrode arrays
Simulation of various insertion scenarios to explore factors that contribute to successful insertion

Mechanical Finite Element Modelling of Intracochlear Electrode Arrays
Cochlea Project 1: Modelling of intracochlear electrode arrays to predict mechanical properties and robustness
Supervisors: Prof Qing Li (AMME) and Dr Nick Pawsey ([email protected]) (Cochlear Pty Ltd) Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607
Background
Cochlear implants provide the sensation of hearing to moderate to profoundly deaf recipients with sensorinerual hearing loss. An array of electrodes is inserted into the scala tympani of the cochlea in order to provide electrical stimulation to auditory neurons. Arrays need to be flexible to conform to the spiral shape of the cochlea, accommodate a range of individual cochlea sizes, and to minimise contact forces with cochlea structures to prevent damage that may degrade hearing performance. The fine wires within the array need to accommodate large deformations during the insertion or removal. The mechanical properties, dimensions and position of the wires within the silicone carrier are critical to the robustness and flexibility of the array.
Aims
To develop a mechanical finite element model of an intracochlear electrode array, in order to predict overall flexibility of the array, as well as the stresses experienced by its components. This model could be used to investigate the sensitivity of these to various design parameters, such as wire sizes, mechanical properties, wire placement and silicone grades.
Methods
The project would involve Development of a detailed 3D CAD model of an electrode array
Use of a commercial FEA software package to develop a model of the electrode using
realistic material properties
Recommendations for design guidelines for electrode flexibility and reliability

Design of Eye Drop Delivery Device Supervisors: Prof Qing Li (AMME), Dr Kenneth Ooi [email protected], and Professor Stephanie Watson ([email protected]) Sydney Eye Hospital, University of Sydney
Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607
Introduction: Dry eye, the most common eye disorder, is frequently accompanied by blepharitis (eyelid inflammation) which has an overall prevalence of nearly 40%. Patients with dry eye and blepharitis have their daily activities disrupted and work productivity lowered due to recurrent blurred vision and ocular discomfort. Moderate dry eye damages the ocular surface and can lead to blindness following infection. The consequences of these common conditions occur despite maximal use of lubricating drops and ointments which address only the symptoms and not the underlying cause. We have developed the first patented statin-based eye drop that safely and successfully treats the causes and symptoms of dry eye and blepharitis. Aims: We aim to develop new intellectual property by developing a novel delivery device that will combine both statin eye drop and gel or ointment administration to increase patient convenience of use. Medicine that is problematic to administer leads to poor compliance. Currently, different forms of ocular medications (i.e. eye drops, gels, ointments) come in separate delivery devices. Patients typically carry more than one form of medication at a time. This is because eye drops do not tend to blur the vision and may be preferred if the patient is reading or driving, whereas gels and ointments last longer, providing greater lubrication, but blur the vision. Current ocular therapeutics in drop/gel/ointment forms are in separate delivery devices, which is inconvenient. Further, current delivery mechanisms can be difficult to use, particularly for elderly patients with arthritis. At least 50% of patients have reported difficulty with self-administration, frequently saying they have trouble squeezing the bottle. The goal of this work is to manufacture a combination topical Atorvastatin eye drop and gel/ointment device that allows tailored drop and gel/ointment use according to vision, cosmetic, and duration of action needs. Methods: Delivery device prototypes have already been conceptualised and will be designed according to viscous and surface tension properties of the topical Atorvastatin formulations which will determine optimal tip length and opening(s), dose dispensing time, size and weight to reduce overflow, drainage and incidence of any systemic side effects. Force requirements will be factored according to known force generating capacities of the 3 most-used handgrips and applicator plastic rigidity. Computer-simulated models will be run according to the above, and also account for dispensing angles. 3-D printed prototypes will then be built according to established protocols. Expected outcomes:
A more convenient and novel combination topical Atorvastatin delivery system. Incorporating modern ergonomics, it will be easier to use than existing delivery devices and with improved aesthetics it will assist with product marketing.

Sydney Orthopaedic Research Institute – Topics 2015
Sydney Orthopaedic Research Institute is a not-for-profit organisation dedicated to the study
and research of orthopaedic disorders, in particular those associated with the knee joint. The
Institute uses high quality research methods to investigate the causes and development of
common knee disorders, as well as treatments and rehabilitative procedures employed for
these disorders. In addition, the Institute also conducts research on arthritis, cartilage
pathologies, ligament injuries, knee trauma, and methods for clinical assessment of these
conditions.
External Supervisor Details
Dr Corey Scholes, PhD Director of Research [email protected] 02 9904 7182 Suite 12, Level 1, 445 Victoria Avenue, Chatswood, 2067 Prerequisites Open to all disciplines
Curiosity in how the human body works
Interest in patient-centred research
Pride and confidence in their work
Willingness to learn new concepts and skills
Modelling, Matlab or general computer programming skills an advantage
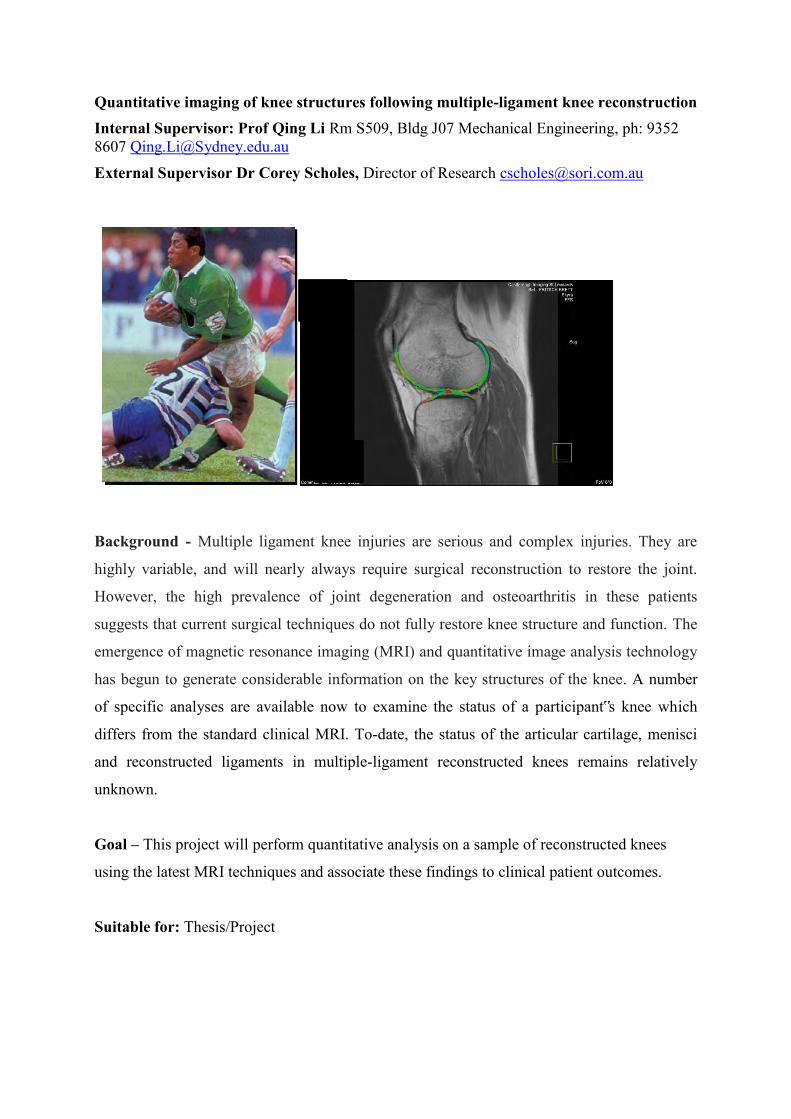
Quantitative imaging of knee structures following multiple-ligament knee reconstruction Internal Supervisor: Prof Qing Li Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607 [email protected]
External Supervisor Dr Corey Scholes, Director of Research [email protected]
Background - Multiple ligament knee injuries are serious and complex injuries. They are
highly variable, and will nearly always require surgical reconstruction to restore the joint.
However, the high prevalence of joint degeneration and osteoarthritis in these patients
suggests that current surgical techniques do not fully restore knee structure and function. The
emergence of magnetic resonance imaging (MRI) and quantitative image analysis technology
has begun to generate considerable information on the key structures of the knee. A number
of specific analyses are available now to examine the status of a participant‟s knee which
differs from the standard clinical MRI. To-date, the status of the articular cartilage, menisci
and reconstructed ligaments in multiple-ligament reconstructed knees remains relatively
unknown.
Goal – This project will perform quantitative analysis on a sample of reconstructed knees
using the latest MRI techniques and associate these findings to clinical patient outcomes.
Suitable for: Thesis/Project

Functional correlates of patient outcome during level walking following multiple-ligament knee reconstruction Internal Supervisor: Prof Qing Li Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607 [email protected]
External Supervisor Dr Corey Scholes, Director of Research [email protected]
Background - The relationship between joint disease, joint forces and muscle control is well
illustrated. Abnormal forces acting in one part of the knee are related to degeneration of key
structures and the severity of symptoms, such as pain and stiffness. This can be caused by
traumatic injuries which cause a rupture of one or more knee ligaments. Patients alter muscle
control, at the affected joint and across the body, to relieve pain during functional activities
such as walking. However, functional recovery after surgery is dependent on the pattern of
muscle activity used by the patient during movement. The timing and magnitude of muscle
forces regulates the forces acting on the knee and an optimal balance of forces is crucial to
maintain long-term joint health.
Goal – This project will use the latest techniques in biomechanics to analyse joint function in
a clinical population to identify at-risk individuals for future knee degeneration.
Suitable for: Thesis/Project
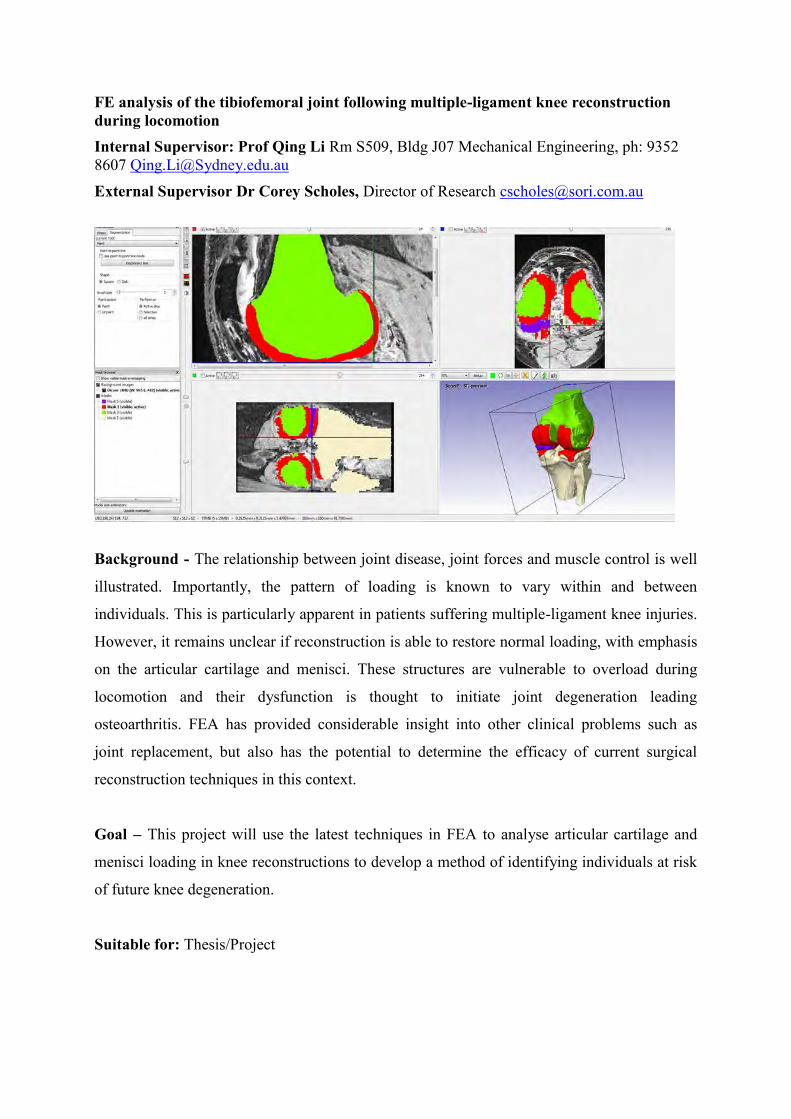
FE analysis of the tibiofemoral joint following multiple-ligament knee reconstruction during locomotion Internal Supervisor: Prof Qing Li Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607 [email protected]
External Supervisor Dr Corey Scholes, Director of Research [email protected]
Background - The relationship between joint disease, joint forces and muscle control is well
illustrated. Importantly, the pattern of loading is known to vary within and between
individuals. This is particularly apparent in patients suffering multiple-ligament knee injuries.
However, it remains unclear if reconstruction is able to restore normal loading, with emphasis
on the articular cartilage and menisci. These structures are vulnerable to overload during
locomotion and their dysfunction is thought to initiate joint degeneration leading
osteoarthritis. FEA has provided considerable insight into other clinical problems such as
joint replacement, but also has the potential to determine the efficacy of current surgical
reconstruction techniques in this context.
Goal – This project will use the latest techniques in FEA to analyse articular cartilage and
menisci loading in knee reconstructions to develop a method of identifying individuals at risk
of future knee degeneration.
Suitable for: Thesis/Project

Three-dimensional reconstruction of menisci during weight-bearing knee flexion Internal Supervisor: Prof Qing Li Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607 [email protected]
External Supervisor Dr Corey Scholes, Director of Research [email protected]
Background - Menisci are important cartilaginous structures within the knee that absorb
load, guide joint kinematics and stabilise the joint. Due to their function, the menisci are
vulnerable to traumatic tears and degeneration. Innovations in surgical repair have increased
the ability of surgeons to preserve the structure despite considerable damage, which
previously would have required removal to restore overall joint function. However, there is a
lack of objective evidence linking meniscal repair with reduced incidence of osteoarthritis.
Furthermore, there remains a lack of information regarding the ability of repaired menisci to
replicate the function of uninjured structures. This project will use the latest modelling
techniques to compare the loading response of uninjured and surgically repaired menisci.
Goal – This project will utilise Matlab and other image-processing platforms to generate 3-
dimensional surface models of the menisci and track their deformation and translation during
knee flexion.
Suitable for: Thesis/Project

The effect of acute knee injury and surgical reconstruction on tibiofemoral kinematics during locomotion Internal Supervisor: Prof Qing Li Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607 [email protected]
External Supervisor Dr Corey Scholes, Director of Research [email protected]
Background – Rupture of the anterior cruciate ligament is a common knee injury, which has
considerable impact on joint function. A key role of the ACL is to provide sensory
information such as limb position and movement velocity as well providing mechanical
restraint. However, there is limited information in the literature regarding the sensory
mechanisms that are affected by ACL rupture and whether individuals are able to compensate
following injury. Importantly, it is not known whether surgical reconstruction helps to restore
some sensory input during functional movements such as locomotion. Biomechanical analysis
of the knee during locomotion has revealed some information in this regard; however there
remains considerable potential for further research to examine this issue using emerging
analytical techniques.
Goal – This project will examine the effects of locomotion speed after ACL reconstruction
surgery on knee motion using the latest analytical techniques.
Suitable for: Thesis/Project

Passive mechanical properties of muscle in Parkinson’s disease and rigidity External Supervisor: Dr Joanna Diong, School of Medical Sciences, University of Sydney, ([email protected] )
External Supervisor: Associate Professor Kay Double.
Internal Supervisor: Prof Qing Li Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607 [email protected]
People with Parkinson‟s disease often experience ankle rigidity or stiffness during walking.
Rigidity in Parkinson‟s disease makes normal movement difficult and prolonged rigidity may
lead to loss of joint flexibility over time by changing the length and stiffness of muscles. The
effects of rigidity on muscle length and stiffness in Parkinson‟s disease are not well
understood.
This study aims to determine how passive (relaxed) muscle length and stiffness are different
in people who have Parkinson‟s disease and rigidity compared to healthy people. Specifically,
passive ankle joint stiffness will be measured at different knee angles in people with
Parkinson‟s disease who have ankle rigidity and healthy people. A biomechanical model will
be used to calculate passive gastrocnemius muscle length and stiffness, and these data will be
compared between groups.
This study will be the first clinical application of this biomechanical method in people with
Parkinson‟s disease to identify how rigidity changes muscle length and stiffness. Findings
from this study may guide the clinical management of rigidity in rehabilitation for
Parkinson‟s disease.
Opportunity
Masters or Honours theses

Building the right mouth: determining the difference between two clinically used jaw positions when restoring teeth
External supervisors: Professor Chris Peck: [email protected]
Internal supervisor: Qing Li: [email protected] Rm S509, Bldg J07 Mechanical Engineering, ph: 9352 8607
Internship can be offered in Sydney Westmead Dental Hospital
Background: The relationship of the upper and lower jaws is critically important in just about every part of clinical dentistry. It is important to determine the optimal jaw relationships when placing a dental filling, inserting crowns or bridges or removable dentures.
Unfortunately the determination of clinical jaw positions is often an art rather than based on science. Dentists will debate fiercely the correct jaw positions and the way to obtain it.
One common method to determine the jaw position is to electrically stimulate the jaw closing muscles to determine the “neuromuscular jaw position”
Proponents of this method suggest it produces a “functional jaw position” because it is determined by activation, albeit external stimulation, of the jaw muscles.
Opponents to this method suggest it does not produce the optimal jaw position because the electrical stimulation is directed at the outer part of the jaw closing muscles, and not entire muscle. These outer fibres, when activated, produce an anteriorly and superiorly directed force vector which would consequently position the lower jaw in a position anterior to where it should be.
Aim: In this study, you will aim to better understand the difference in jaw positions created by normal jaw closing (asking the subject to bring the teeth together) and neuromuscular jaw closing.
The hypothesis is that the neuromuscular jaw position is anterior to the normal/habitual jaw position.
Methods: The jaw positions of 200 human subjects have been recorded in position (1) the normal jaw closing position and in position (2) the neuromuscular position. For each subject, these positions have been digitised. Using position (1) as the global reference, you will determine the relative displacement of position (2). You will need to develop a way to describe the rotational and translational difference to dentists and others who are not familiar with transformation matrices, vectors or other descriptors of displacement.

Professor Andrew Ruys [email protected] Projects can be negotiated on a case by case basis. Anyone interested on doing a project with Andrew, please contact him directly.

Honours Thesis A/B (UOS: AMME4111/4112) Projects –2015
ARRESTING THE SPREAD OF DEADLY GLIOBLASTOMA BRAIN TUMOURS.
External Supervisor: A/Prof Geraldine O’NEILL. Email: [email protected] Children's Cancer Research Unit, Children’s Hospital at Westmead. Internal Supervisor: Professor Hala Zreiqat, NH&MRC Senior Research Fellow Head: Tissue Engineering & Biomaterials Research Unit, School of AMME/Faculty of Engineering and IT and Bosch Institute. Email: [email protected] Our lab investigates the mechanisms underlying the invasion of glioblastoma brain cancer cells. Unfortunately, there are currently no successful treatments for this cancer and there have been no improvements for patient survival over the last 20 years. One of the main difficulties in treating brain cancer is the rogue cancer cells that have already escaped the primary tumour at diagnosis and cannot be detected by current imaging technologies. These escaped cells inevitably lead to recurrence of the tumour. Our goal is to understand how the glioblastoma cells so readily invade the normal brain tissue. In particular we focus on how the mechanical features of the normal brain tissue contribute to the invasive journey taken by the brain cancer cells. To investigate these questions we use a range of cell biology approaches and cell culture models that recapitulate the biophysical characteristics and composition of the brain. Techniques employed include fluorescence microscopy, time-lapse microscopy and cell tracking and molecular biology and biochemistry. Further details can be found on the following web site: https://www.youtube.com/watch?v=0NGwxyoEZlI&feature=youtube
Stem Cell Mechanotransduction in Osteochondral Tissue Engineering External Supervisor: Yu Suk Choi Email: [email protected] Research Fellow, Sydney Medical School (Northern Clinical School) E25, Kolling Institute Internal Supervisor: Professor Hala Zreiqat, NH&MRC Senior Research Fellow Head: Tissue Engineering & Biomaterials Research Unit, School of AMME/Faculty of Engineering and IT and Bosch Institute. Email: [email protected]
The causes associated with osteochondral defects vary from natural wearing to trauma related injuries. With ageing, the natural degradation or wearing of the cartilage often leads to osteoarthritis. Tissue engineering approaches have

emerged in last two decades to regenerate damaged tissues using biomaterials, stem cells, and supplementary biochemical. One of the challenges in osteochondral tissue engineering was to fabricate or mimic bilayer structures at the border of articular cartilage and bone, which can further divided into superficial zone, middle zone, deep zone/calcified cartilage, and subchondral bone. The focus has mainly been in how to mimic structure (mechanical strength) and composition (protein and mineral), however, more recently it has been stressed that extracellular matrix (ECM) mechanosensing capacity of cells should also be taken account as cells could be misled into undesired cell types in different ECM stiffness (e.g. bone formation in stiffened heart after myocardial infarction from stem cells). As ECM components per zone from cartilage to bone vary, their compressive modulus (stiffness) show huge ranges in order of magnitude from 79KPa, 2.1MPa, 320MPa, and 5.7GPa where cells mechanosense very differently. Here, I aim to develop biomaterials (2D and 3D) that mimic stiffness step gradient to examine how stem cell mechanotransduction plays role in osteochondral tissue engineering. 2D stiffness step gradient hydrogel will be fabricated using two-layer hydrogel polymerization technique modified from my previous research. For 3D biomimicry scaffold, cutting-edge 3D printing technology will be available at Prof. Hala Zreiqat’s facility. Bone marrow-derived stem cells and adipose-derived stem cells will be tested their chondro- and osteo-genic capacity on both 2D and 3D biomaterials and their mechanotransduction will also be studied. Once this reductionist approach provide answers in mechanosensing of stem cells per stiffness, biochemical component of ECM can be added up to investigate synergistical effect of biomechanical (stiffness) and biochemical (ECM components) in osteochondral tissue engineering. To summarize, this study will enhance our understanding in mechanical influence at cellular level in both chondro- and osteo-genic regeneration and also provide deep insight for biomaterials fabrication in osteochondral tissue engineering.
An Imaging-Derived Disease Model in the Cloud External Supervisor: Dr. Jinman Kim Email: [email protected] Director, Nepean Telehealth Technology Centre Research Theme Leader, Institute of Biomedical Engineering and Technology (BMET), Faculty of Engineering Internal Supervisor: Professor Hala Zreiqat, Email: [email protected] NH&MRC Senior Research Fellow Head: Tissue Engineering & Biomaterials Research Unit, School of AMME/Faculty of Engineering and IT and Bosch Institute. As medical imaging datasets expand, opportunities have arisen to utilize the accumulated knowledge in these datasets to produce various models that represent how certain diseases occur within the human population. Individual patients can be compared to such models to determine or predict how their disease will evolve or change over time.

In this project, students will design an imaging-derived disease model. The major focus of the project will be to use existing technologies to develop a cloud-based method for building the model from massive amounts of imaging data and implementing a service to query this model using a new patient. As part of this project, students will worth with Microsoft’s Azure platform and will also have the opportunity to work on a multidisciplinary team that includes clinical staff.
Search and Retrieval of Patient Case Files External Supervisor: Dr. Jinman Kim Email: [email protected] Director, Nepean Telehealth Technology Centre Research Theme Leader, Institute of Biomedical Engineering and Technology (BMET), Faculty of Engineering Internal Supervisor: Professor Hala Zreiqat, Email: [email protected]
NH&MRC Senior Research Fellow Head: Tissue Engineering & Biomaterials Research Unit, School of AMME/Faculty of Engineering and IT and Bosch Institute. The ability to search increasingly large medical data repositories has important implications for diagnosis, treatment planning, education, and the ongoing management of patients. Akin to Google multimedia search, which uses text/images/audio as inputs, the challenge in searching medical repositories is using patient case files (a multimedia combination of demographics, limited symptoms, audio reports, tests results, and imaging studies). The idea is that diagnosis can be determined using multiple types of evidence from other, similar cases. In this project, students will design a framework for case-based retrieval from medical databases. The major focus of the project will be researching and designing a method for comparing patient case files using a combination of different inputs, including but not limited to, text keywords, semantic annotations, and image features. As part of this project, students will have the opportunity to work on a multidisciplinary team that includes clinical staff.
Optimal Image Feature Selection for Medical Image Retrieval External Supervisor: Dr. Jinman Kim Email: [email protected] Director, Nepean Telehealth Technology Centre Research Theme Leader, Institute of Biomedical Engineering and Technology (BMET), Faculty of Engineering Internal Supervisor: Professor Hala Zreiqat, Email:[email protected]

NH&MRC Senior Research Fellow Head: Tissue Engineering & Biomaterials Research Unit, School of AMME/Faculty of Engineering and IT and Bosch Institute. As imaging databases grow in volume, important applications such as evidence-based diagnosis, physician education, and biomedical research stand to benefit from image retrieval. The use of automatically extracted image features as search criteria instead of manually assigned text labels enables users to search these databases without requiring extensive annotations by physicians. One major challenge, especially for graph-based algorithms, is determining which features are important for different structures (tumours, organs) within the images. In this project, students will design a feature selection algorithm for a graph-based medical image retrieval engine. The major focus of the project will be researching and designing a methodology for feature selection in two parts: selecting important substructures with the images and selecting the important traditional image features (texture, shape, keypoints, etc.) within these substructures.
Similarity Matching and Indexing for Graph-Based Medical Image Retrieval External Supervisor: Dr. Jinman Kim Email: [email protected] Director, Nepean Telehealth Technology Centre Research Theme Leader, Institute of Biomedical Engineering and Technology (BMET), Faculty of Engineering Internal Supervisor: Professor Hala Zreiqat, Email: [email protected] NH&MRC Senior Research Fellow Head: Tissue Engineering & Biomaterials Research Unit, School of AMME/Faculty of Engineering and IT and Bosch Institute. Modern medical images contain complex information, such as the relationships between anatomical structures and pathology bearing regions. The ability to search medical image repositories based on these relationships is important for clinical applications, education, and research. Graph structures are a natural way of representing the attributes of anatomical and pathology regions as well as the relationships between these regions. One major challenge in using graph for search is in balancing the trade-off between matching accuracy and computational efficiency especially in the case of large graphs. In this project, students will design similarity matching and indexing algorithms for graph representations of medical images. The major focus will be on adapting existing heuristic graph matching algorithms by using domain knowledge to optimize the matching accuracy. Students will also examine the use of indexing techniques to enable efficient matching in a large database.
Graphene Reinforced Scaffolds for Tendon Repair External Supervisor: A/Prof Joselito M. Razal ARC Future Fellow Institute for Frontier Materials

Deakin University
Geelong, VIC Australia 3216
Email: [email protected]
Internal Supervisor: Professor Hala Zreiqat, Email: [email protected] NH&MRC Senior Research Fellow Head: Tissue Engineering & Biomaterials Research Unit, School of AMME/Faculty of Engineering and IT and Bosch Institute.
Biomimetic scaffolds can serve as effective templates for tissue regeneration whilst providing the necessary structural support. Ideal biomimetic scaffolds are those that mimic the anatomical features and mechanical properties of the target tissue to be repaired. For tendon repair applications, the scaffold must be in the form of hierarchically organised fibre bundles, with each fibre having surface properties and mechanical behaviour that matches the tendons' properties. This project will develop a conceptually new approach for the synthesis and formulation of graphene-reinforced biopolymer composites that will be processable by fibre spinning. This project will specifically use giant sheets of graphene oxide specifically because of their liquid crystalline behaviour in
solutions, and their outstanding mechanical properties. The novel composite fibres to be produced is anticipated to demonstrate remarkable improvements in mechanical properties. This project will attempt to develop a fundamental understanding of the various material compositions that are critical for producing the appropriate fibre dimension, morphology, porosity and mechanical properties and for engineering the scaffold for tendon repair. Since the fibre spinning process is anticipated to be amenable for large scale production, the project will also investigate tubular architectures that best mimic the structure of a tendon and evaluate the relevant mechanical and biological properties. An example of a heirarchical tubular scaffold is one that encases several bundles of nanofibres with a woven sheath of microfibers.
Activated protein C and Pancreatic cancer External Supervisor: Meilang Xue Email: [email protected] Postdoctoral Research Fellow, Sutton Research Laboratories Kolling Institute, Royal North Shore Hospital Internal Supervisor: Professor Hala Zreiqat, NH&MRC Senior Research Fellow Email: [email protected] Head: Tissue Engineering & Biomaterials Research Unit, School of AMME/Faculty of Engineering and IT and Bosch Institute. Pancreatic cancer is one of most common cause of cancer related mortality, with a 5year overall survival rate of only 4%. Advanced pancreatic cancer is strictly correlated with vessel leakage and inflammation. Activated protein C (APC) is natural anticoagulant with strong anti-inflammatory and barrier protective
properties. APC has favourable effects on both the quiescent and angiogenic endothelial phenotype, leading to the formation of a stable, intact vasculature. In both quiescent and angiogenic vessels, excess vascular leakage can cause organ dysfunction and is a common characteristic feature of many diseases, including cancers. Our proposed research will determine whether the production of APC or its precursor protein C, its specific receptor endothelial protein C receptor (EPCR) is altered in pancreatic cancer patients and whether and how APC affects pancreatic cancer cell growth and metastasis in vitro and its mechanisms of actions. The knowledge gained from this project may expand our understanding of the mechanisms underlying pancreatic cancer and provide direction for new strategies to treat this severe disease.
Activated protein C and skin epidermal barrier function External Supervisor: Meilang Xue Email: [email protected] Postdoctoral Research Fellow, Sutton Research Laboratories Kolling Institute, Royal North Shore Hospital Internal Supervisor: Professor Hala Zreiqat, NH&MRC Senior Research Fellow Head: Tissue Engineering & Biomaterials Research Unit, School of AMME/Faculty of Engineering and IT and Bosch Institute. Email: [email protected] The skin forms an effective barrier between the human body and outside environment and protects the body from dehydration and environmental insults. Disruption of this barrier function is responsible for many skin disorders, such as psoriasis and atopic dermatitis. Activated protein C (APC), a natural anticoagulant has been shown to promote the skin epidermal barrier function. This project will investigate whether and if so how APC affects the expression and distribution of tight juctional proteins, a group of proteins that are critical to the proper function of the skin barrier, using epidermal keratinocytes.
Understanding the mechanism of APC in rheumatoid arthritis External Supervisor: Helena Liang Email: [email protected] Postdoctoral Research Associate
Sutton Arthritis Research Laboratory Institute of Bone and Joint Research, Kolling Institute for Medical Research Royal North Shore Hospital
Internal Supervisor: Professor Hala Zreiqat, Email: [email protected] NH&MRC Senior Research Fellow Head: Tissue Engineering & Biomaterials Research Unit, School of AMME/Faculty of Engineering and IT and Bosch Institute. Rheumatoid arthritis (RA) is a common chronic inflammatory disease that ultimately leads to irreversible cartilage and bone destruction, and immobility in

patients. The precise etiology of this disease is still unknown. Activated protein C (APC), an anticoagulant that has been well-documented to possess anti-inflammatory and endothelial barrier stabilizing properties, is thought to be able to exert protective effects in RA by suppressing inflammation and preventing endothelial damage in the patients. This project investigates the cellular mechanism of APC in RA patients, with the goal to identify the molecular targets of APC and subsequently find biomarkers that may be used to predict patients’ responsiveness to APC therapy in RA and their disease outcome.
Mechanism by which novel biomaterials induce bone formation External Supervisor: Prof Arthur Conigrave and Professor Rebecca Mason Email: [email protected] School of Molecular Bioscience Charles Perkins Centre (D17) University of Sydney Internal Supervisor: Professor Hala Zreiqat, Email: [email protected] NH&MRC Senior Research Fellow Head: Tissue Engineering & Biomaterials Research Unit, School of AMME/Faculty of Engineering and IT and Bosch Institute
Biomaterials in contact with cells trigger a chain of reactions that will determine the ultimate fate f the cells and the tissues. The project involves testing the molecules that sense changes in response to the biomaterial they are in contact with. The student will be undertaking this research at the Charles Perkins Center (http://sydney.edu.au/perkins/) with Professor Arthur Conigrave research group.

Mechanical Professor Steven Armfield, [email protected]
Research Thesis: Developing a fast accurate solver for the Navier-Stokes equations
Accurate solutions of the Navier-Stokes equations are required for the direct and large eddy simulation of turbulent and transition flows. In this project a novel Poisson solver will be developed and tested for use on parallel architectures. The scheme will initially be applied to the heat equation, and subsequently will be included in a full Navier-Stokes solver.
Research Thesis: Natural convection flows
A number of projects are available in the simulation and analysis of natural convection flows, such as the flow that develops next to a heated plate. The fluid mechanics and heat transfer properties of such flows are important in determining the efficiency of heat transfer devices; ventilation systems; crystal growth and many other systems. The flow is analysed via direct numerical simulation using state of the art computing techniques; stability analysis and scaling analysis.
Research and Project Thesis: Investigation of Surfboard Hydrodynamics Investigate the effect of tail shapes on the hydrodynamic characteristics of surfboards. A numerical approach will be used, with the long term aim of using verified numerical models to predict the performance of production surfboards, and develop improved surfboard designs.
Research Thesis and Project: Fountain flows Fountains are jet flows with a buoyancy force acting in the direction opposite to jet direction. Such a flow occurs, for instance, in a room when a jet of heated air is directed downward from the ceiling as means of heating the room. Similar flows occur in many other industrial and environmental settings. In this project computational work will be undertaken to investigate the basic fountain structure, with particular regard to the stability and transition of the flow.
Research Thesis and Project: General Fluid Mechanics
Any projects students may wish to pursue involving the development and testing of wings, paddles, keels, hulls and other flow devices, flow measurement and visualisation and analysis and simulation.

Honours Thesis A/B or Engineering Project A/B
Masud Behnia, Room S426, Building J07, [email protected] 0414-369-518 (all are
available for individual or group of students)
(A) Efficient cooling and thermal management of Data Centres
With the increasing reliance on computers and servers the computer centres where many massive computers and servers are housed require substantial cooling capacities of the order of several megawatts. The dense packing of racks and servers does not allow air to be directed to the electronic components where heat is generated. Therefore, an understanding of the flow and heat transfer and optimisation of the flow path is critical for effective cooling. In this research CFD simulations will be undertaken to simulate the flow and heat transfer. The results will be compared with measurements in a real data centre. An industrial partner is also involved with this research. The research is divided into 6 UG projects as follows. Individual students will become part of a research group currently working on cooling of data centres.
1. Thermodynamic modelling of data centre cooling systems:
This project is for developing and presenting physics based models to allow the
prediction of the energy consumption and heat transfer phenomenon in a data
centre.
2. Exergy analysis of data centre airspace:
This project focuses on second law investigation of data centre environment. To
better understanding the irreversibilities regarding the mixing of hot air and cold
air in data centre airspace, exergy analysis is conducted. In this regard, the
wasted useful work can be estimated, and some relevant performance metrics are
introduced.
3. Thermal management of data centres:
In this project, the probable cooling issues in a typical data centre are
investigated. To rectify the problem, a few practical design solutions to improve
the cooling effectiveness have been proposed and examined to ensure a reduced
air-conditioning power requirement. Therefore, a better understanding of the
cooling issues and the respective proposed solutions can lead to an improved
design for future data centres.
4. Optimisation of data centre configuration:
Optimisation techniques will be utilised to investigate the effect of data centre
configuration on data centre cooling efficiency.
5. Rack level analysis of data centres:
This project analyses the thermal performance of a data centre on a rack
(cabinets containing IT systems) level, by utilising a number of rack models with
various server arrangements. Different rack models regarding server
arrangements with void spaces are presented and modelled. The objective is to
investigate the interaction of the various servers inside a semi-populated rack.
6. Investigation of under-floor blockages on data centre performance:
In this project, the effect of position of the under-floor blockages and percentage
opening of perforated tile are studied using computational fluid dynamics (CFD).
The results can provide an understanding of the fundamental fluid mechanical
processes controlling the airflow distribution through the perforated tiles and help
the facility designer to rearrange the blockages and improve the thermal
performance without altering the layout or cold air supply.

(B) Numerical analysis of blood flow
1. Pulsatile blood flow patterns in anatomically realistic coronary vessels
Hemodynamics factors and biomechanical forces play key roles in plaque
development in blood vessels and their final rupture. Many clinical studies
suggest that local blood flow patterns are involved in the location and
development of atherosclerosis. In coronary diseases, this assumption should be
corroborated by quantitative information on local hemodynamic parameters such
as pressure, velocity or wall shear stress. The flow field are very important and
need to be modeled accurately under different conditions. A simulation model
needs to be developed to incorporate pulsatility and turbulence with realistic
boundary conditions. CFD simulations will be carried out using a commercial flow
solver package (ANSYS CFX). A PhD student is working on this project in the
Faculty of Mechanical Engineering and will be assisting this investigation.
2. Fluid–structure interaction analysis of patient-specific arteries
Atherosclerotic disease is a major cause of mortality and morbidity in the
developed and developing world, of which one of the outcomes is heart attack.
Atherosclerosis shows a focal distribution, suggesting that mechanical factors
related to blood flow may contribute to its development. There is considerable
evidence implicating mechanical forces resulting from intravascular pressure and
flow (e.g. circumferential tensile stress and wall shear stress (WSS)) in the
regulation of blood vessel structure under physiological or pathological
circumstances. Coupled fluid–structure interaction (FSI) analysis of a stenosed
artery reconstructed based on multi slice computerized tomography (CT) images
needs to be carried out to investigate the effects of wall compliance on blood flow
characteristics. A commercial flow solver package (ANSYS CFX) will be used for
CFD simulations. A PhD student and a medical student are working on this project
in the Faculty of Mechanical Engineering and Medicine and will be assisting this
investigation.
3. Mass transport in an anatomically realistic human left coronary artery
The coronary arteries are common sites of atherosclerotic plaque formation,
which has been putatively linked to hemodynamic and mass transport patterns.
The purpose of this project is to study mass transport patterns in a human left
coronary artery model, focusing on the effects of local geometric features on
mass transfer from blood to artery walls. Local variations in mass transfer
patterns due to geometric features are significant and much larger in magnitude
than local variations in wall shear stress. In addition, it is well known that the
complex secondary flows in a realistic arterial model can produce very substantial
local variations in blood-wall mass transfer rates, and may be important in
atherogenesis. Using a commercial flow solver package, mass transfer
calculations need to be performed in a rigid, anatomically realistic model of a
human coronary artery. A PhD student is working on this project in the Faculty of
Mechanical Engineering and will be assisting this investigation.
(C) Optimum sizing of prime movers in Trigeneration systems
Combined heat and power (CHP) system may be defined as a system which
simultaneously generates electricity and heat using a single source of fuel. These
systems play a significant role in efficient usage of energy in industrial and
domestic applications. They also have less harmful effects on the environment. A
prime mover is the mechanical equipment which converts the energy of fuel to
electricity (e.g. gas turbine, gas engine, diesel engine). Adding an absorption
chiller to a CHP system, allows even more efficient fuel consumption. This
system, which generates electricity, cooling, and heating, is called Trigeneration.
Optimum sizing of Trigeneration systems is of great importance to maximize the
benefits of these systems. To select the optimum prime mover, performance
characteristics of engine as well as economic parameters should be taken into
consideration. The impact of carbon tax also needs to be considered. A thermo-
economic methodology has been developed for CHP systems, and some changes
should be made to allow its application to Trigeneration systems.

(D) CFD simulation of heat and mass transfer in Heat and Moisture
Exchangers (HME)
During normal breathing the inspired gases get warm and humidified inside upper
airways before entering to the trachea and lungs. When the upper airways are
bypassed in mechanically ventilated patients by oral or nasal endotracheal
intubation or tracheotomy it is essential to seek an alternative way to heat and
humidify inspiratory gases since mechanical ventilation with dry cold gases
results in drying of the mucosal membranes and heat loss. Heat and Moisture
Exchangers (HMEs) are widely used as a simple solution to the problem. HME is
an artificial nose (passive humidifier) that traps expiratory heat and moisture in a
porous medium and returns a portion of it at the next inspiration. It has
considerable advantages over traditional humidifier such as ease of use, low
weight and good price. To improve the efficiency and study design optimisation, it
is vital to investigate the mechanisms of heat and moisture transfer in the HME. A
Computational Fluid Dynamics (CFD) model will be developed to simulate heat
and mass transfer. This is a collaborative project with Saint Vincent Hospital in
Melbourne.
(E) Modelling of two-phase flow
Flows of gas and liquid are observed in a number of engineering and industrial
applications such as oil pipelines, refrigeration equipment etc. For the calculation
of the system parameters such as pressure drop the behaviour of the two phases
must be known. This is done either through experimental measurements or
modelling which can be very complex. Computer programs have been developed
for this purpose and it is necessary to test them for a range of parameters and to
check their accuracy.
(F) Simulation of jet impingement heat transfer
A jet impinging on a surface leads to a very high rate of heat transfer. This is one
of the most efficient heating/cooling techniques with numerous industrial and
engineering applications. Numerical simulations for a single jet impinging
normally on a flat plate have been carried out successfully. This needs to be
extended to the more realistic cases of an oblique jet and multiple jets. The
simulation results will be compared with available experimental data.
Honours Thesis A/B or Engineering Project A/B Supervisors: Associate Professor Mehrdad Behnia ([email protected]) and Professor Masud Behnia ([email protected]) The project offered below is suitable for a Biomedical or Mechanical student.
Echocardiographic and fluid mechanic evaluation of pulmonary arterial pressure in
rowing athletes at rest and during exercise
Introduction: Pulmonary arterial hypertension (PAH) is defined as mean pulmonary arterial pressure of greater than 25 mmHg measured by a pulmonary arterial catheter at rest. PAH during exercise is a controversial subject that has not been defined clearly. There are studies showing that pulmonary arterial pressure does increase during maximum voluntary exercise. But a succinct cutoff pulmonary pressure for definition of exercise-induced PAH has not been agreed upon by researchers of the field. However, it appears that exercise-induced PAH is the cause of a large percentage of patients with unexplained shortness of breath. Furthermore, it appears that blood flow turbulence increases during exercise as measured by echocardiography. But correlation of blood turbulence and its relationship to pulmonary arterial pressure has not been studied in detail, either. Objective: Our aim is to measure and compare the blood flow turbulence and velocity as measured by echocardiography in rowing athletes at rest and also at peak exercise. We would further assess and evaluate if right ventricular systolic pressure, which is a surrogate for pulmonary artery pressure, is elevated at peak exercise and how it is correlated to peak

oxygen consumption and other variables measured during complex cardiopulmonary exercise testing (CPET). Methodology: The rowing athletes will undergo a CPET using the bicycle ergometer protocol. Several physiological parameters such as maximum oxygen consumption (VO2 max) and maximum CO2 production (VCO2 max) will be measured during the test. A baseline echocardiogram will be done on each athlete at rest before the exercise. Immediately following cessation of CPET, another echocardiogram will be performed. Echocardiographic Doppler pressure waveforms will be analyzed to estimate pulmonary arterial pressure. Fluid mechanic properties of blood flow including shear stress and right ventricular pressure at peak exercise will be further studied and analyzed. Both the exercise testing and echocardiography will be done at Doctors hospital in Augusta, Georgia, USA. Exercise data analysis will be done in Augusta and to some extent by the faculty of the Physiology department at Mayo Clinic in Rochester, Minnesota. The echocardiography and Doppler data will be sent to Sydney University for further evaluation of fluid mechanic properties and for statistical analysis. Conclusion: Exercise-induced PAH, although existent, is not a well-studied or well-defined clinical entity. Fluid mechanics and physiological properties of this entity need further investigation. By studying these parameters, exercise-induced pulmonary hypertension, its definition and classification, and possible further therapeutic interventions will be better comprehended and accomplished.
Bibliography
1. Bogren,HG, Klipstein, RH, Mohiaddin, RH, et al. Pulmonary artery distensibility and blood flow patterns: A magnetic resonance study of normal subjects and of patients with pulmonary arterial hypertension. Amer Heart Journal 1989; 118: 990-999.
2. Haworth, SG. Pulmonary hypertension in the young. Heart 2002; 88: 658-664.
3. Oudiz, RJ, Barst, RJ Hansen, JE, et al. Cardiopulmonary exercise testing and Six-Minute Walk correlations in pulmonary arterial hypertension Amer J Cardiology 2006; 97: 123-126.
4. Barst, RB, McGoon, M, Torbicki, A, et al. Diagnosis and differential assessment of pulmonary arterial hypertension. J Amer Coll Cardiology 2004; 43: S40–S47.
5. Tolle, JJ, Waxman, AB, Van Horn,TL, et al. Exercise-Induced pulmonary arterial hypertension. Circulation 2008; 118:2183-2189.

Honours Thesis A/B or Engineering Project A/B
Supervisors: Associate Professor Kurosh Parsi ([email protected]) and Professor Masud Behnia ([email protected]) The two projects offered below are available for an individual or a group of students. Both projects are suitable for Biomedical or Mechanical students. Part of the research will be carried out at the Sydney Skin and Vein Clinic in Bondi Junction. Students are required to travel there and will be provided with office space and a computer at the clinic. The standard treatment for varicose veins is the injection of the diseased vessel with a detergent sclerosant, in order to close (sclerose) the vein. Sclerotherapy using modern sclerosants has been practiced for at least 50 years. Over this time, a number of technical innovations have been introduced (such as the introduction of sclerosant foam) that have increased the efficiency of the procedure. There are a number of side effects of the treatment, such as the passage of foam bubbles into the heart. Very little research has been performed to understand the fluid mechanics of the injection, foam and blood. Project 1 In order to improve clinical success rates and minimise side effects, a model must be developed to characterise the system in terms of clinical variables. This requires both the use of physical and computational models to simulate the geometry of the vascular networks, such as the saphenofemoral junction (great saphenous vein and femoral vein). The complexity of such a model necessitates experimental investigation into basic physics/chemistry of both liquid and foam properties of sclerosants. The flow also needs to be modelled using CFD and the experimental results will be used for validation of the computational predictions. We have already investigated the effects of foam constituents such as air ratio, temperature, sclerosant type and concentration on foam spreading, and this project will be an extension of this work. There is an existing experimental rig in the research laboratory of the Sydney Skin and Vein Clinic which will be used for this project. Some preliminary CFD simulations have been performed and need to be extended.
Project 2 The detergent sclerosant used for injection into the veins is usually prepared as foam right before the injection. The foam preparation is quite cumbersome and there are numerous parameters which affect the foam consistency and texture leading to a high degree of variability in the success of the treatment process. Therefore, it would be ideal to have a sclerosant foam with an optimum consistency which can be readily used for the purpose of injection. One possibility is to develop a canister with pre-packaging the foam in it. The project requires a detailed review of how the existing readily available consumer foam canisters (such as a shaving foam can) are designed, manufactured and function. The design of such devices as well as other concepts for producing a ready made foam will be explored. We are currently in the process of developing a canister in order to produce a reproducible sclerosant foam. A student is required to liaise with the biomedical engineers and assist in the development of a prototype and in the assessment of the foam consistency. The project will be performed in laboratory space at the Sydney Skin and Vein Clinic in Bondi Junction.

Development of a CAMWorks Postprocessor for use on Motoman Robot – 4/5 Axis Mill Mechanical
(Project) (1 student) March 2015 Start Supervisor: Paul Briozzo (Room S318, Bldg J07) <[email protected]> CAMWorks is a powerful and affordable CNC code generator which is used in conjunction with SolidWorks. There is a requirement from a teaching and workshop perspective to integrate CAMWorks with the School’s Motoman Robot and the School’s new 4/5 Axis Desktop Mill. This topic would initially involve a student learning to effectively use CAMWorks with an initial goal to develop a post-processor for the MoriSeiki NV4000 3 Axis Mill. Further work would involve the development of a Post Processor for Multi Axis Machines. Mechanical Design Modifications of the Desktop Machine are initially required. The chief requirements of the suitable candidate would be; Completion of either MECH36605660 or AMME5902 1. A very high interest in CAD/CAM. 2. A very high interest in Manufacturing Engineering. 3. A very high interest in Industrial Robots. Potential candidates must familiarise themselves with the topic before applying.

Rapid Engineering (Project or Honours Thesis) (Various) March 2015
Supervisor: Paul Briozzo (Room S318, Bldg J07) <[email protected]> Across the last five years, various 3D Printing Thesis topics have been offered that have generally been completed to a high standard. From 2015 on, pure 3D printing Honours Thesis \ Projects will no longer be offered without a genuinely different theme. The technology has evolved into devices that are productively used rather than devices that are researched at an Undergraduate level. Consequently, students will be encouraged to use rather than research the various 3D printers that will be available in room S319a from February onwards as part of their Honours Thesis \ Engineering Project with supervisors throughout the School.
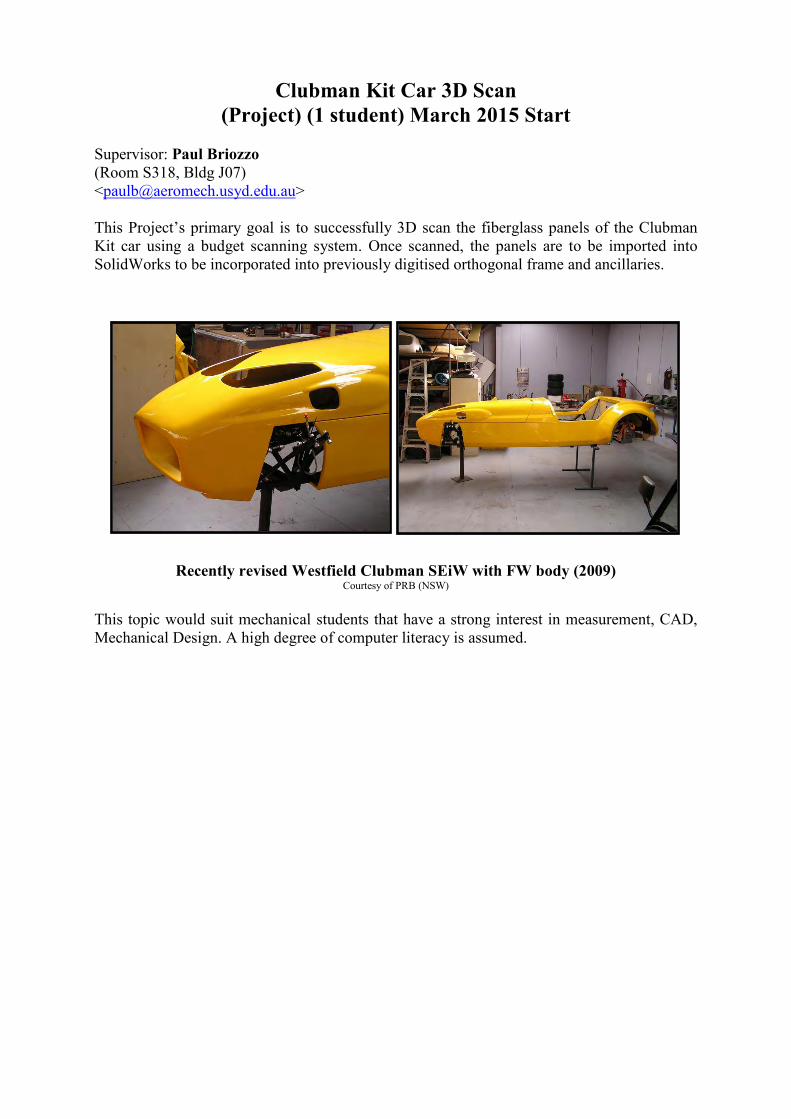
Clubman Kit Car 3D Scan (Project) (1 student) March 2015 Start
Supervisor: Paul Briozzo (Room S318, Bldg J07) <[email protected]> This Project’s primary goal is to successfully 3D scan the fiberglass panels of the Clubman Kit car using a budget scanning system. Once scanned, the panels are to be imported into SolidWorks to be incorporated into previously digitised orthogonal frame and ancillaries.
Recently revised Westfield Clubman SEiW with FW body (2009) Courtesy of PRB (NSW)
This topic would suit mechanical students that have a strong interest in measurement, CAD, Mechanical Design. A high degree of computer literacy is assumed.

The use of LS-DYNA in the Analysis of High Energy Aircraft Design for Impact of an Electronics Package – Mechanical (Project or Honours Thesis) (2 students) March 2015 Start
Supervisor: Paul Briozzo (Room S318, Bldg J07) <[email protected]> Recent global events indicate that knowledge gained during the catastrophic failure of an aircraft can yield valuable data related to the cause of the triggering incident.
The topic’s requirements would be to:
1. Convert an existing NURBS surface model of a Boeing 777 into a FEA model suitable for analysis.
2. Analyse the interaction of a collision between a Boeing 777 FEA model with the surface of an ocean using SPH methods. The aim being to generate an identifying a impulse of the collision.
Alternatively,
3. Analyse the interaction between the skin and fuselage of a Boeing 777 and a destructive high energy explosive velocity projectile.
The chief requirements of the suitable candidate would be; 1. A strong interest in CAD and FEA. 2. Completed AMME5912 or prepared to undertake the subject in Semester 1 2015. 3. A high skill level in the use of computers.

The Design of a Scalable, Collapsible Small Sided Football (Soccer) Goal Post
(Project) (1 student) March 2015 Start Supervisor: Paul Briozzo (Room S318, Bldg J07) <[email protected]> Existing designs for Small Sided Football (Soccer) Goal Posts used by Soccer players from a younger age group are generally designed with safety, light weight and cost as notable criteria. There is a need for a design which not only includes the previous criteria but also includes;
1. Easy Assembly by personnel who may or may not be familiar with the apparatus.
2. Fast Assembly and deployment.
3. Foldable storage in limited space and access.
The chief requirements of the suitable candidate would be; 1. An interest and knowledge of Soccer. 2. An interest in Mechanical Design. 3. An interest in FEA. Potential candidates must be available to visit a nominated soccer Club located in the North West of Sydney (Dundas Valley) during various times of the year. The “goal” of this project is to arrive at a prototype which would be evaluated by a working party for feedback.

Research Projects for Honours Thesis A/B and Engineering
Project A/B for 2015 - Proposed list of Projects
Contact: Mr. Rhett Butler, AM Adjunct Senior Lecturer, AMME
It is proposed that there will be opportunities for research projects thesis work in 2015 that compliment existing active humanitarian projects and development work in Africa, India and Latin America. The SkyJuice Foundation and its partners are keen to support capable undergraduates on a variety of applied projects.
These thesis projects focus on affordable sustainable services such as low cost potable water, decentralized water/energy hubs, off-grid lighting and power, as well as low cost heating. Key objectives of the project include, sustainable design principles and an imperative for maximizing local content and value adding.
These research topics have a high applied content and lend themselves to “market
ready’ deployment within a 12-18 month timeframe. Students should have a strong desire to utilise sound multi disciplinary design skills and a desire to commit to project implementation timelines. In most cases students will be offered travel stipends to facilitate “in country” concept design and value engineering assessments.
The following organisations outlined below will be participating partners (direct and indirect) in the projects. The thesis student will be the “approved project manger” and
collaborative assistance will be offered during the thesis and assistance with introductions to target user groups ;
<> SkyJuice Foundation Inc. (SJ)
<> AquaSynergy Solutions Pty. Ltd. (AS)
<> Evoqua Water Technologies Pty Ltd. (EVT)
<> Siemens Foundation (Siemens Stiftung, SF)
<> Barefoot Power (BFP)
<> The National Centre of Excellence in Desalination, Australia (NCEDA)
Students are also encouraged to utilise the additional resources of existing AMME faculty members and linkages on these thesis projects.

Thesis Topics
1) Low cost desalination for developing countries
This project will the develop the concept of “low cost” hybrid ultrafiltration (UF) and nanofiltration (NF) unit (i.e., UF>NF coupled unit) to treat brackish water sources in developing countries suitable for potable purposes. It is envisaged that volume production of the prototype will be say 5000-10,000 litres /day . Agricultural applications may be feasible but this will depend on the initial design cost/benefit review.
The objective will be to utilize known and proven gravity fed UF systems and couple it with NF to achieve affordable potable water outcomes for communities in developing countries. The design will critically address and target divalent species present in brackish water sources (not seawater), to remove hardness and essentially produce low TDS water suitable for drinking (or high value agriculture)
This is new, novel and innovative concept that has very real implications. Collaboration with the NCEDA will be provided
SUPPORTING ORGANISATIONS : SJ, NCEDA, SF
2) Improved low cost design for gravity fed membrane water filtration systems
Gravity ultrafiltration (UF) designs are now becoming benchmark technology for safe
potable options in developing countries. UF solutions now provide simple and
affordable treatment solutions that are below the “price point” for traditional water
filtration technology options. The project would explore the opportunity to further
drive down cost reductions in unit cost and manufacturing. It is envisaged that a
value-engineering program and prototype development phase will result in a “step
change” design for 50 -150 person village design. Existing 500 -2000-person units
are well established within the NGO sector
Initial work has resulted in a SkyBox design. This can be further enhanced to
investigate best design configurations and resulting performance benefits. It is
expected that the student will undertaking extensive testing and will critically
examine market potential of the unit. A requirement will be to prepare a realistic
“social” business plan based on the prototype.
SUPPORTING ORGANISATIONS : SJ, AS, SF
3) Concept deign of a low cost Hybrid Energy Water kiosk
The development of decentralised utility hubs in the developing world is a recent and
growing trend. These hubs (kiosks) are filling a much needed void in the provision of
basic utilities and essential services. Water kiosks and energy charging kiosks,
particularly in Africa, are surging ahead. The project will look at engineering a
combined water/ energy hub (kiosk) as a stand-alone facility. The design will market

focussed and involve real “ design “ hurdles to achieve a cost effective solution that
is replicable throughout the developing world. Capital coat of production, operating
cost of the internal utility functions and local assimilation are key objectives.
Apart from the design component of the project, the student will need to assess
business models that can enable a sustainable business entity. A business plan will
be required that examines social entrepreneurship options
SUPPORTING ORGANISATIONS: SJ, SF, BI
4) Recovery and recycle of used membrane modules for community potable
water devices in developing countries
This project will examine the harvesting of “used” or end of commercial life
ultrafiltration membrane modules. These membranes are currently discarded from
municipal water treatment plants in huge numbers and go into landfill. The objective
is to “reconfigure” and rework them into usable smaller potable water filter to be
“offered” into developing countries via direct and established NGO partners. The
“reconfigured” mini filters will provide a powerful and effective potable water solution
to the world’s most needy people. There is an immediate market pull for such
devices. NGO Partners are ready field test prototypes. A student with interests in
polymer chemistry, materials science and mechanical design would be preferable.
An important perspective on this work will be elimination of what is currently a waste
disposal issue for the Australian and global water industry. So, in principle, there are
winners all round on this project. The problem is real, the need is tangible.
Immediate market opportunities wait for prototype testing.
This project will require a strong skillset and commitment to innovative design
including lab testing /prototyping, as well strategic marketing/ business plan of the
prototype offerings. It is proposed that field-testing will be undertaken in several
countries within 6-12 months
SUPPORTING ORGANISATIONS: SJ, NCEDA, AS, SF
5) Low cost energy harvesting for developing countries
Communities in developing countries spend significant time energy and resources on
basic energy requirements for their daily life. Essentially, energy is used for
rudimentary cooking lighting and heating. Quite often the energy harvesting and
usage (kerosene, charcoal etc.,) is used inefficiently for lighting, heating or sterilising
water. It also has serious ongoing health implications for the users
Recent developments have seen improvements in LED technology and battery
charging technologies. This has resulted in a dramatic growth in off-grid lighting and
battery related mini business ventures.

This project will target the investigation of thermodynamically efficient options for
harvesting, storage and utilise of energy on a decentralised / village level.
Renewable energy options will be assessed in conjunction with sensible synergistic
design concepts that could result in local/ decentralised co-generation and or energy
hubs.
The investigation would include the utilisation of all available waste resources and
methane production option (anaerobic digestion, direct solar irradiation etc.) A
concept design could see a multipurpose energy generation device that can store
and transfer energy efficiently/indirectly and satisfy basic village needs
SUPPORTING ORGANISATIONS: SJ, SF

HONOURS PROJECTS Contact: A/Prof. Julie Cairney, Associate Professor, AMME Location: Australian Centre for Microscopy and Microanalysis, Madsen Building F09, LG Email: [email protected] Phone: + 61 2 9351 4523 The role of impurities on the properties of nanocrystalline metals This project will involve the development and application of innovative advanced microscopy methods for the study of the stability of new, nanocrystalline Ni alloys. Grain size stability is a critical issue for this important new class of engineering alloys, which has potential for mass commercialisation in Australia. The aim of this project is to determine the influence of solutes on grain coarsening behaviour by using advanced microscopy methods in the Australian Centre for Microscopy and Microanalysis, providing information that may be used in future alloy design. This project is suitable for Honours Thesis A/B
Figure: A reconstructed 3D atom map showing a triple point in a nanocrystalline Al alloy with Ga atoms at the grain boundaries.
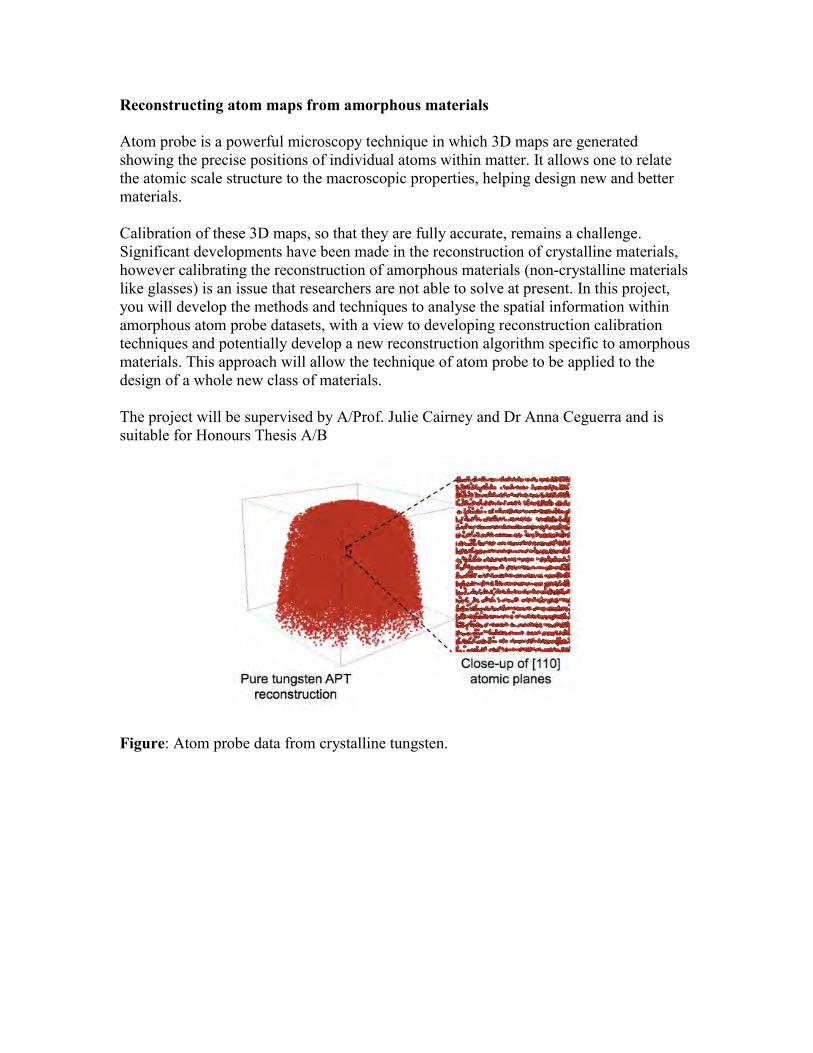
Reconstructing atom maps from amorphous materials Atom probe is a powerful microscopy technique in which 3D maps are generated showing the precise positions of individual atoms within matter. It allows one to relate the atomic scale structure to the macroscopic properties, helping design new and better materials. Calibration of these 3D maps, so that they are fully accurate, remains a challenge. Significant developments have been made in the reconstruction of crystalline materials, however calibrating the reconstruction of amorphous materials (non-crystalline materials like glasses) is an issue that researchers are not able to solve at present. In this project, you will develop the methods and techniques to analyse the spatial information within amorphous atom probe datasets, with a view to developing reconstruction calibration techniques and potentially develop a new reconstruction algorithm specific to amorphous materials. This approach will allow the technique of atom probe to be applied to the design of a whole new class of materials. The project will be supervised by A/Prof. Julie Cairney and Dr Anna Ceguerra and is suitable for Honours Thesis A/B
Figure: Atom probe data from crystalline tungsten.

3D imaging of cells on scaffolds The successful use of scaffolds for biomedical applications depends on how tissue grows into structures on the macroscopic scale but also at the cell level. The University of Sydney has recently acquired a state of the art ‘focused ion beam’ microscope that is capable of generating 3D images of cells on surfaces, along with the ability to analyse the composition and anatomic features of the tissue at and below cell level. This project will involve the 3D imaging of cells on scaffolds, providing completely new information about the morphology of the cells, the surface attachment preferences of the cell on bioactive materials, and possible resulting changes in the anatomy of the cells throughout attachment and proliferation phases. This will be useful in the design of future bioactive scaffolds and implant interfaces. The project will be supervised by Julie Cairney and Phil Boughton. This project is suitable for Honours Thesis A/B
Figure: A 3D image of a cell (not a model, but a reconstructed microscopy image!) and an image of an electron microscope similar to the focused ion beam.

High wear alloys for the mining industry (with Weir Minerals) Weir Minerals are multinational company, with a research lab in Artarmon, who produce metal parts for the minerals processing industry. They have developed a new alloy that has very high wear resistance and lasts up to three times as long than their previous product, and can lead to longer-lasting parts. This is critical for the mining sector, as instrument down time for replacement of parts can cost many millions of dollars per day in lost production. The aim of this project is to understand how the microstructure of these new alloys contributes to wear resistance, by using state of the art microscopy and microanalysis techniques. This information can then be used for further alloy improvements. The project will be carried out in collaboration with Weir Minerals This project is suitable for Honours Thesis A/B Figure: Scanning electron microscope / electron backscatter diffraction images showing the orientation of grains and carbides in cast iron samples from Weir minerals

Atom probe tomography of titanium alloys Grain boundaries are one of the most important factors that determine the properties of engineering alloys. This project will provide new information about grain boundaries at the atomic scale through new methods that allow both grain boundary structure and grain boundary composition to be compared. This information will be used in the development of new advanced Ti-based engineering alloys with exceptional properties and potential applications in the aerospace, petrochemical, automotive and nuclear industries. If the student is interested, there is also scope to participate in the development of the programs for data analysis (written in MATLAB ®), using graphics processors. This project is suitable for Honours Thesis A/B Figure: An atom map of a grain boundary at which atoms segregate and images of the atom probe.

A new tool to map the orientation of grains in nanocrystalline alloys Understanding how the grains are oriented in materials is often critical for the materials design process. At the University of Sydney, we have been instrumental in the development of a new microscopy technique, called ‘Transmission Kikuchi Diffraction (TKD)’. This method can be used to map the orientation of grains with a very high resolution, and is now being used to better understand fine-grained materials, such as nanocrystalline alloys. Although we can use the technique, we still don’t fully understand how it works. This project will involve the comparison of data from conventional transmission electron microscopy techniques with images obtained through TKD, to better understand the contrast mechanisms and the potential future applications. This project is suitable for Honours Thesis A/B
Figure: A nanocrystalline metal film imaged under different conditions using TKD

Assessment of new Nickel-based alloys as structural materials for future nuclear reactors. Nickel-based alloys are being studied to assess their suitability as structural materials for future Generation IV thorium molten salt reactor systems operating at much higher temperatures, corrosion environments and neutron radiation fluxes than currently used fission reactor technologies. At present, researchers at the Australian Nuclear Science and Technology Organisation (ANTSO) at Lucas Heights, in collaboration with the Shanghai Institute of Applied Physics (SINAP) in China, are working on specific nickel-based alloys identified for their potential to withstand the extreme environments in such systems. The project will explore the alloys’ microstructure and mechanical properties in simulated molten salt reactor conditions, using microanalysis techniques and mechanical testing. Information from this research can then be used to better understand the microstructure-property issues that may lead to possible service failure of the Ni-based alloys and to provide information about alloy in regards to safety and applicability. This project is suitable for Honours Thesis A/B
Figures: Molten salt reactor schematic and an image of the microstructure of an Ni-based alloy produced by Electron Backscatter Diffraction (EBSD)

Ex-situ EBSD observation of martensitic transformation in an intergranular corrosion area of austenitic stainless steel during thermal cycling For high temperature applications, such as in new-generation energy technologies, austenitic stainless steels offer an attractive combination of economy and mechanical / corrosion properties. For example, concentrated solar power (CSP) is a growing renewable energy technology, but its effective use requires cost-effective and corrosion resistant materials for tubing and piping that can operate for extended periods at high temperatures and withstand thermal cycling between around 900 oC in the day and room temperature at night. Like many energy technologies, this application demands affordable alloys characterized by high strength and superior high temperature corrosion resistance. Due to the high cost of Ni-based alloys, austenitic stainless steels (ASSs) are presently the most suitable materials. However, an oxidation-assisted martensitic phase transformation was observed in an austenitic stainless steel after thermal cycling up to 970 °C in air in a solar thermal steam reformer. The intergranular corrosion (IGC) areas were investigated by electron backscatter diffraction (EBSD), transmission Kikuchi diffraction (TKD) and transmission electron microscopy (TEM). The structural-and-chemical maps revealed that within IGC areas this martensitic transformation primarily occurs in oxidation-induced chromium-depleted zones, rather than due to only sensitization. This displacive transformation may also play a significant role in the rate at which intergranular corrosion takes place. The project will explore the mechanism behind this phase transformation within IGC areas in the ASS during thermal cycling. More specifically, ex-situ EBSD observation will be performed to understand this new failure mechanism. Samples from a commercial ASS (Sandvik 253MA) will be heat treated in a tube furnace in air at several selected temperatures (from 200°C up to 970°C, then down to 200°C). Information from this research can then be used to design new ASSs. This project is suitable for Honours Thesis A/B
Figures: Concentrated Solar Tower, CSIRO Newcastle and an intergranular corrosion crack with martensitic phase transformation highlighted in red
5 nm

Dr Li Chang
Field of Expertise: Precision Manufacturing and Nanotribology
Phone: +61-02-9351 5572
E-mail: [email protected]
Thesis Topics: Title: Determination of fracture behaviour of soft materials (1-2 students) (Honours thesis) In modern materials science, how to accurately characterize the fracture behaviour of soft materials has been a longstanding problem. The highly extensible behaviour of soft materials leads to both crack growth and crack blunting which are difficult to separate. Consequently, the existing standard fracture tests may not draw a clear distinction between fracture toughness (contributing to crack propagation) and strength (contributing to crack blunting) of soft specimens. Owing to the lack of the reliable data of fracture toughness, the design and use of soft matter in engineering applications are often limited.
Recently, the cutting methods (such as blade cutting, orthogonal cutting and wire cutting) have attracted significant research interest, in which materials are removed and the separation work, i.e., the fracture energy (GC) can be determined. The methods seem elegantly simple and promising. However, there are several issues still outstanding concerning the validity of the fracture analysis in cutting process. For instance, it remains unclear how the sharpness of the cutting tools effects on the fracture measurement. This project aims to understand the role of fracture in material removal in cutting process. It will deliver the necessary experimental data and the basic science in developing new standard methods for determining the fracture toughness throughout material removal i.e., the cutting tests. The new methods will provide new capabilities to characterise tough polymers, thin films, some biomaterials and more.
(a) (b) (c)
Figure 1 Schematic representation of fracture tests by using the cutting methods a) blade cutting [1], b) orthogonal cutting [2] and c) wire cutting [3]

Title: Shear-thickening and structure formation in suspensions (1-2 students) (Honours Thesis) Shear thickening fluids (STFs) are unique materials, displaying recoverable phase transitions between liquid and "solid" phases due to significant changes in viscosity at a critical rate of shear. Normally, shear-thickening is observed in highly concentrated dispersion systems. Such highly nonlinear behaviour is of
great practical and fundamental importance. One promising application of STFs is to develop adaptive, energy-dissipation systems, in which STFs can divert or dissipate the energy via viscosity, friction, "plasticity" or "fracture", depending on loading conditions. In fact, the use of STFs as adaptive energy-dissipation materials has created significant industrial and commercial innovations, e.g. new polishing techniques, smart damping and brake devices and "liquid armour".
However, fundamental knowledge of STFs at near to and after the shear thickening transition is lacking. There is still no a satisfying mathematical treatment of the mechanics of shear-thickening in the literature. This project aims to establish fundamental knowledge in developing STFs as adaptive energy dissipation materials for practical applications, which will be achieved by a thorough study on both rheological and "solid-like" behaviours of STFs before and after the shear thickening transition. The outcomes of the work will not only advance the basic knowledge of STFs for the research community, but also bring significant economic opportunities for the industries to develop new STFs-based energy-absorbing systems.
Fig. 2.2 Figure 2: SEM image of particles dispersed in the suspension shown in Figure 2.1
Figure 2.1: Photos of the experiment of removing a stick out of the STF at (a) low and (b) high speed.
(a) (b)
vBhighB vBlowB

3) Development of high performance wear-resistant polymeric nanocomposites (1-2 students)
(Honours Thesis)
Over the past decades, polymer composites have been increasingly applied as structural materials in the aerospace, automotive, and chemical industries, providing lower weight alternatives to metallic materials. A number of these applications are concentrated on tribological components, such as gears, cams, bearings and seals, where the self-lubrication of polymers is of special advantage. It is a current trend in the development of polymers to seek materials retaining reliable properties at high temperatures. One example for such requirement is the new generation of the bushings which is supposed to be used as camshaft bearings in high pressure, diesel fuel injection pumps (Figure 3), or even in the engine of the cars. In this case, polymer composites have to operate as tribo-elements at relatively high environmental temperature, e.g. 120o C, and the demand for high wear resistance becomes increasingly important. High temperature polymers such as polyetheretherketone (PEEK) or polyetherimide (PEI) are particularly interesting candidates for these tribological applications. To meet the increasing industrial demands, various fillers were used to overcome the inhibited weakness of polymers to achieve high wear resistance under extreme sliding conditions. In particular, with the booming of nano-phased materials, nano-sized fillers such as nanoparticles and carbon nanotubes have also come under consideration, and results have shown that such fillers are promising for improving the wear-resistance of polymers even at very low filler content (about 1 ~ 4 vol.-%). However, the role of nano-sized fillers in determining the hybrid polymeric composites is still unclear. This project aims to provide reliable material data for characterise the wear properties of polymer composites filled with and without nanoparticles. Further, the formation of transfer films with and without nanofillers will be particularly investigated. It can be considered as a first step towards a new generation high performance wear resistance polymeric nanocomposites.
Figure 3. Camshaft journal bearings in a diesel fuel injection pump (upper left: view into a real pump; upper right schematic, three dimensional drawing of the bearings’ position); Courtesy of Robert Bosch GmbH, Stuttgart, Germany (modified)
Camshaft Journal Bearings
Enhancement of Injection Pressure and
therefore of Engine‘s Degree of Efficiency
Operating
Temperature T = 100°C http://www.manager-magazin.de/magazin/artikel/0,2828,342084-2,00.html
Dr Matthew Cleary Room S513, ME Bldg , [email protected] Title: Modelling of NOx emissions from the burning of coal and biomass
The cofiring of coal and biomass can reduce CO2 emissions from electricity generation and also our reliance on fossil fuels. However, due to composition differences between coal and biomass, technical problems such variations in toxic gas emissions can arise when the biomass fraction rises above just a few percent. But with careful analysis and plant design, the addition of biomass can lead simultaneous reductions of global and local pollutants. We will develop quality computational combustion models to address this issue. The models will be accurate and affordable so as to provide valuable fundamental tools to assist both engineering designers and operators of electricity generating plant.
This project will focus on prediction of NOx from a single coal and/or biomass particle undergoing combinations of evaporation, pyrolysis and char reactions. It will involve implementation of the models into a numerical solver such as Matlab and validation of the predictions against available experimental data. Suitable for Honours Thesis or Engineering Project students.

Dr Matthew Cleary Room S513, ME Bldg , [email protected] Title: Computational fluid dynamics of swirl stabilised flames
Due to high mass throughput rates, modern gas turbine combustors operate very close to the point of flame blowoff. Avoidance of blowoff is the critical concern in combustor design as it can lead to complete loss of power. Swirl stabilisers are commonly used to hold the flame in place and minimise flame length. Due to environmental concerns and finite oil supplies, there is increasing use of exotic fuels with vastly different combustion properties. Fuel flexible gas turbines are in demand but the stabilisation mechanisms designed for conventional fuels are not always suitable and simple fuel substitution can lead to catastrophic failure. Gas turbine designers such as General Electric and Rolls Royce are increasingly using computational fluid dynamics (CFD) to improve their designs.
The aim of this thesis is to perform a CFD model of a swirl stabilised flame, make comparison to experimental data and explore the sensitivity to changes in the fuel. Suitable for Honours Thesis students only.

Dr Matthew Cleary Room S513, ME Bldg , [email protected] Title: Development of combustor system model for gas turbine engines
Gas turbines are widely used for propulsion and increasingly for electricity generation. Pollution regulations progressively demand reduced pollutant emissions and gas turbine designers need low cost predictive models to test the effects of fuel and combustor design changes. This project will build a sophisticated gas turbine combustion model based on combinations of reactor models. The reactor models exist in library files written in the Fortran, Matlab and C++ programming languages. The outcomes will be realistic predictions of gas turbine exhaust gas properties including carbon monoxide and nitric oxide emissions. Suitable for Honours Thesis or Engineering Project students.

Dr Matthew Cleary Room S513, ME Bldg , [email protected] Title: Dispersion of pulmonary drugs in inhaler devices and the respiratory tract
Pulmonary drug delivery via inhaled powders is an efficient form of therapy for a range of diseases. Although inhalers are part of a multi-billion dollar industry, currently available dry powder inhalers are unable to ensure consistent dose delivery to the lungs. Improvements will rely on improved computational fluid dynamics (CFD) modelling to gain a better understanding of the powder dispersion and de-agglomeration. The project will involve the development of models for particle de-agglomeration via a statistical population balance equation approach and comparison against idealised laboratory data. Two projects are available: one will concentrate on turbulent dispersion and deagglomeration and the other on deagglomeration by mechanical impaction. Suitable for Honours Thesis students only.
Title: WhaleCam 1 – development of real-time infrared image processing tools
This final year research project is associated with ongoing research surrounding minimisation of ship-strike during the annual migration of whales up the Sydney coast by means of infrared detection and whale track predictions. The aim of this particular project is to develop real-time software to recognise whale spouts and breaches on infrared images and to distinguish whales from other objects such as ships and lesser craft. Suitable for Honours Thesis or Engineering Project students.

Figure: Which of the above infrared images shows a whale spout? See http://www.learner.org/jnorth/tm/gwhale/Thermography.html for the answer!
Title: WhaleCam 2 – development of real-time whale track prediction software
This final year research project is associated with ongoing research surrounding minimisation of ship-strike during the annual migration of whales up the Sydney coast by means of infrared detection and whale track predictions. The aim of this particular project is to develop real-time software to predict whale tracks using infrared images as initial and boundary conditions. The whale track predictions could be used by shipping to avoid collisions and reduce whale injury and death. Suitable for Honours Thesis or Engineering Project students.

The Australian Centre for Innovation and International
Competitiveness, Faculty of Engineering & IT
University of Sydney 2006.
John Currie Tel 02 9351 5672 Fax 02 9351 3974 Email: [email protected]
INNOVATION
Topics will be finalised in consultation with the student and can be
selected from the following areas:
*leadership and the development of engineering managers - the
development of managers as leaders to enhance organizational
effectiveness is crucial in times of change. This topic will involve
students understanding the theory of leadership and its practical
application in engineering management.
*management of organisational change - the need to maintain
competitiveness means that change is the organisational norm. This
topic will investigate the factors and conditions that impact on change
in strategy, operations or projects that allow managers to make more
effective choices.
*organisational learning and knowledge management - this topic will
examine the readiness of engineer managers to undertake the
management of learning and knowledge in organisations, leading to a
better understanding of the factors necessary to generate effective
organisational outcomes.
*human resource development - career development for C21
professionals will mean inevitable job and career changes. This topic
will investigate the development of engineering careers,

organisational career planning and the personal and skill
development necessary for the development of successful careers.
*management of industrial research, innovation and technology
development - Competitiveness through new technology and product
development is a cornerstone of business success. This topic will
examine the factors that lead to success (and failure) in the
technology/product development process.
*gender equity/women in engineering - A previous legal decision has
focused attention on the inequality of working conditions for women in
engineering. This topic will examine the factors necessary for women
to enjoy successful careers in engineering, the factors that inhibit this,
and the implications for organisational competitiveness.
*Engineering Education#1 - the promotion of Mechanical,
Mechatronic and Aeronautical Engineering in schools - This topic will
involve investigating the relevance of the HSCʼs “Engineering
Studies” curriculum as a precursor to Engineering at University, and
whether the Aeromech degree program successfully builds on this
prior learning. It will also include how Aeromech can support
Engineering Studies in an attempt to encourage more students to
consider future careers in engineering.
*Engineering Education#2 – 2011 was the EA Year of Humanitarian
Engineering. This topic will seek to examine the extent to which
ideas of humanitarian engineering and social justice are utilised in
Aeromech curriculum and teaching , and how these ideas are, or
could be, utilised to enhance student learning and development of
graduate attributes.
* Attitudes to professional engineering - This topic will examine the
origins and the development of perceptions and understandings as to
what comprises professional engineering practice and its
appropriateness to both individuals and society. It is aimed at both
existing professionals and student engineers.

Supervisor: Dr. Matthew Dunn ([email protected]), Rm S 505 (Mech. Eng.) I am offering a number of topics in energy related areas including, but not limited to: combustion, fluid mechanics and heat transfer, solar reactors, heating ventilation and air conditioning (HVAC) and refrigeration. Some samples of the topics I am offering are detailed below. Please book an appointment with me to discuss further and to find out about additional topics not outlined below. Most projects can be tailored to take advantage of particular skills and interests in areas such as mechanical design, practical experiments, thermodynamics, fluid mechanics,
computational fluid dynamics (CFD), programming, chemistry, lasers, spectroscopy, physics and signal processing. All topics are available for honours thesis students. Engineering project students are advised to meet and discuss the suitability of a particular topic for an engineering project.
Oxy-fuel combustion as route towards carbon neutral power generation
Oxy-fuel combustion is a mode of combustion that utilizes an oxidiser of oxygen and a diluent such as carbon dioxide. Significant further developments in the understanding and prediction of oxy-fuel combustion are necessary for the development of next generation combustion cycles that allow carbon capture processes such as clean coal and natural gas power generation technologies. This project will seek to build upon recently obtained experimental results to further understand the flame stability, flame extinction and radiant emissions in oxyfuel flames. Both experiments utilising advanced laser diagnostic techniques and numerical modelling streams for this project are available.
Chemiluminescence image of a typical laboratory scale oxy-fuel flame.
Stratified combustion
Stratified combustion is a hybrid combustion mode that attempts to capture the favourable stability characteristics of non-premixed combustion whilst still possessing the low pollutant emission characteristics of lean premixed combustion. Previous measurements in stratified bluff body flames have indicated a complex flame stabilisation mechanism in the recirculation region that is still not completely understood. Both numerical modelling and experimental based streams are being offered.

Utilising high speed CMOS cameras for measurements in combustion
The use of high speed cameras in many popular TV shows (MythBusters) and YouTube channels (The Slow Mo Guys) is testament to insights that can be obtained from viewing events at high speed. Recent applications of high speed CMOS cameras to combustion applications have revealed many new insights into transient combustion phenomena. This project will focus on the application of high speed CMOS cameras to combustion applications where quantitative measurements are desired. A particular emphasis of this project will be to extend the use of high speed imaging to go beyond feature tracking to the analysis of temporally varying quantities such as temperature and fuel concentration.
Flame thermometry using SiC wires and ceramic phosphors
The measurement of flame temperature in high pressure and high temperature environments is a challenging task. Any viable measurement technique needs to be able to measure the flame temperature with both high spatial and temporal accuracy and precision. This project will explore the use of silicon carbide wire to measure gas phase temperature and laser induced phosphorescence from rare earth doped ceramics to measurement the wall temperature in optically harsh environments.
High voltage assisted lean premixed combustion
Lean premixed combustion has been shown to be a promising method to obtain low pollutant levels and increased fuel efficiency in many combustion applications such as gas turbines and internal combustion engines. However obtaining a stable and reliable lean premixed flame is challenging and such flames are often subject to undesirable oscillations that can prove to be catastrophic for the combustion device. This project aims to experimentally explore and understand the effects of applying high voltages to extend the stability limits and dampen the flame transfer function in both laminar and turbulent lean premixed flames. Laser diagnostic imaging of selected species will also be applied to understand the changes in the flame structure when high voltages are applied.

Active heat transfer technology
The ability to adequately cool high power density devices such as CPUs is becoming a major limitation to further advances in many applications. By utilizing active heat transfer technology whereby the heat transfer component is a non-stationary rotating component, the need for an external fan is eliminated and significantly increased heat transfer rates can be achieved compared to standard fan and passive heat sink methods. The aim of this project is to develop a detailed description of active heat transfer technology realised through the combination of heat pipe technology and a multiple disk Tesla type pump. The success of and optimisation of such a device relies on
developing an adequate understanding of the heat transfer and fluid mechanics between narrowly spaced rotating disks.
Solar fuels and solar reactors
Solar energy is an abundant energy source that is being investigated as a source to drive industrial energy intensive processes such as the formation of hydrocarbon fuels (such as Diesel and jet A fuel) from water, CO2 and air. Whilst this may initially seem ridiculous from a thermodynamic perspective, in that the formation of fuel from combustion products is highly endothermic process, they key point to understand here is that all of the energy to drive the reaction is delivered from the sun and is essentially free. This project will leverage high powered lasers to allow the simulation of very high irradiances similar to those found in large solar heliostats (10 000 suns) in the laboratory. The influence of irradiance levels relevant to solar reactors will be examined using laser diagnostics with a particular emphasis on soot, particle, aerosol and droplet behaviour under these very high irradiance levels.
The role of LED’s in fluid mechanics and combustion diagnostics
In the past 40 years lasers have made an enormous impact in advancing the experimental fields of fluid mechanics and combustion. Given the recent rapid developments in high power light emitting diode (LEDs) technology, LEDs are poised to deliver a new wave of advances in experimental fluid mechanics and combustion. Whilst LEDs will never replace lasers in many experiments, there are many new applications that can capitalise on the desirable properties of LEDs such as their wide ranges of spectral bandwidths, variable temporal pulse width, high repetition rates and their ability to be employed in a clusters due to their cost being potentially 4-5 orders of magnitude cheaper than an equivalent laser. This project will employ and evaluate experimental techniques based on LEDs to explore and understand fluid mechanic and combustion related phenomena. This topic is best suited to a student with a keen interest and skills in electronics.

Second generation biofuels as alternative transportation fuels
Second generation biofuels such as dimethyl ether (DME), are a promising renewable alternative transportation fuel for the future as they do not require the use of food crops for their production. Measurements in biofuel flames have indicated significantly lower emissions of pollutants such as soot compared to conventional fuels. However biofuels such as DME are far more complex in terms of their chemical mechanisms, flame behaviour and the application of laser diagnostic measurements when compared to more standard fuels such as methane. This project will utilize both laminar and turbulent flames to investigate the flame structure in terms of the established chemical mechanisms, transport properties and the behaviour of these fuels in turbulent flames. Both experimental and numerical streams are offered in this project.
Formation of nanoparticles in conventional and Biodiesel flames
Nanoparticles are renowned for featuring an extreme bio-reactivity, this bio-reactivity has recently been exploited in cancer drug delivery using nanoparticle encapsulated cancer drug delivery. The extreme bio-reactivity of nanoparticles can also be an extreme health hazard if the nanoparticles are formed in flames or other chemical processes resulting in particles with an extreme toxicity and carcinogenic properties. Combustion formed nanoparticles from Diesel engines are becoming an increasing concern and correspondingly modern emission regulations such as in Euro 5 and Euro 6 attempt to regulate their emission. Biodiesels are a promising alternative to fossil fuel derived Diesel in terms of sustainability and carbon cycle neutrality, however there is significant debate and conflicting experimental evidence as to if Biodiesels enhance or inhibit nanoparticle production when combusted. This project will the investigate the nanoparticle formation and sooting properties of different fuels including biodiesels to determine the presence, size and quantity of nanoparticles and soot using advanced laser diagnostic techniques.
Application of CFD in comfort air-conditioning
The application of Computational Fluid Dynamics (CFD) to comfort air conditioning is relatively new and little experimental data is available to back up the model results. The recent development of the Indoor Environmental Quality (IEQ) laboratory at the Faculty of Architecture, Design and Planning at the University of Sydney provides an ideal platform to validate and explore computational modelling of comfort with a sound experimental database. This project will work in collaboration with current projects and experiments being run in the IEQ lab to form CFD models of these experiments and explore the capability of current CFD models to faithfully explore the parameter space necessary to analyse, understand and design air-conditioning systems to optimise occupant comfort and minimise energy usage.

MECHANICAL DESIGN/SUSTAINABILITY BASED THESES
Supervisor: Dr Rod Fiford – [email protected]
1. THESIS – Engineers Without Borders Research Projects
I am willing to supervise students undertaking Engineers Without Borders research projects
(http://www.ewb.org.au/explore/initiatives/ugradresearch/researchprojects). Interested
students need to come and talk with me about the projects, then register and apply via the
Engineers Without Borders webpage.
2. THESIS – Mechanical Design – FEA & Optimisation of roller skate plate design
This thesis project involves the use of FEA (ANSYS) to optimise the design of roller skate plates
(minimize weight, explore new concepts) and to investigate the relationship between cushion
hardness, kingpin pre-load and kingpin angle on the dynamic behavior of the skates.
Roll-Line DB-12 Plate
3. THESIS or PROJECT – History & Philosophy of Engineering – Focus on Ethics
This topic involves investigating the current views and attitudes of Australian engineering students
towards engineering ethics and how this relates to past and current expectations of Australian
society. It is expected that this study will draw heavily on published research, case studies and
surveys/interviews with current engineering students.

4. THESIS – Biomimetics
Biomimetics involves the study of naturally occurring biological structures and application of these
structures to engineering designs. This thesis aims to investigate unique biomechanical
macroscopic structures and morphology from plants that may be of use in engineering; analyze
these structures with FEA and then construct and mechanically test 3D printed models based on
these biological structures.
Plant seed “bur” inspiration for Velcro
(http://commons.wikimedia.org/wiki/File:Bur_Macro_BlackBg.jpg)
5. THESIS OR PROJECT– Sustainable Engineering – Choose your own topic
I am willing to supervise students that have a genuine interest in sustainability, as applied to
Engineering technologies. Please come and see me if you have an innovative idea you think might
be worth investigating, these projects require self-motivated students.
6. THESIS or PROJECT– Mechanical Design – Choose your own topic
I am willing to supervise students that have a unique idea requiring mechanical design. Please come
and see me if you have an innovative idea you think might be worth investigating, these projects
require self-motivated students.

Supervisor: Dr. Ahmad Jabbarzadeh Room S311, Bldg J07, ph: 9351 2344 [email protected] These following research projects are available for Thesis A/B (AMME 4111/4112) 1- Tribology (experiments) (3 student) Tribology is the science that deals with friction, lubrication and wear. The objective of this project is to measure the tribological properties of soft materials used in biomedical applications. You will use tribometers and rheometers to characterize the materials and find the relationship between the frictional/mechanical properties of the material and its chemical/physical composition. 2 Polymer crystallization (experiments) (1 student) Understanding polymer crystallization is essential for polymer processing industry. Due to complex nature of polymers their mechanical properties are dependant on their morphology and degree of crystallinity. In semi-crystalline polymer materials, crystalline patches of molecules are imbedded within amorphous (non-crystalline) matrix. Understanding the degree of crystallinity of the end product and its dependence on cooling rate, additives, flow conditions and molecular structure is very important to design efficient processing techniques. You will use rheometers and microscopy to investigate some of these interesting problems. 3 Effect of nucleating agents in crystallization kinetics-Simulations (1 student) The microstructure of crystallized polymers can be significantly affected by presence of additives of various shape and size used for various purposes. In this project simulations of low molecular weight hydrocarbons will be conducted to study the effect of shape and size of particles in nucleation process during crystallization. The microstructure (morphology) of such systems and the rate of crystallization are believed to be affected by characteristic of the solid particles in the polymer melt. Polymer processing and nano-composites are areas that would benefit from the results of this project. Two research projects are available in this area to use molecular dynamics simulations to study these challenging problems. Programming is not required; you will use an existing computer program to run the simulations. 4 Flow Induced Crystallization of nano-particles (1 student) Simulations will be conducted to understand the crystallization of polymeric nano-particle subjected to flow. The aim is to understand the effect of nano-particle size, flow conditions and cooling rate on the crystallization kinetics and morphology of the polymers and comparison with the bulk crystallization. We will also explore the possibility to study this phenomenon using experimental means.

5-Computational nano-fluidics (2 students) Nano-fluidics is the science of flow at the nano-scale. There is considerable interest in this area due to advances made in nano science and engineering. The behaviour of flow at nano-scale where the size of pores and channels are comparable to the size of molecules could be very different from that of macroscopic flows. For example carbon nanotubes can be manufactured with sizes ranging from a fraction of nanometer to a few hundred nanometers. They can be used for transportation of particles and liquids in nano-scale applications. Experimental measurements and understanding the flow behaviour at such small scales is a daunting task. In computational nano-fluidics molecular dynamics simulations are used as one of the tools for analysing the nanoscopic local properties and flow conditions in such situations. There are two projects available in this area for two interested students. Students working on these projects will need to use an existing computer program to simulate the flow in nano-channels and nano-pores. They should have a basic understanding of fundamental physics, fluid mechanics and Newtonian dynamics. Some basic understandings are required about molecular structures such as atomic lattice structure and inter-atomic force potentials such as van der Waals forces. The research projects are computational so interest in working with computers is essential. You will be using existing software and computer programming will not be necessarily required. 5) Molecular dynamics simulation of flow over cylindrical and spherical particles in nano-scale. In this project the student will simulate the flow of a Newtonian fluid in a rectangular nano-channel over a cylindrical obstacle. The boundary conditions, pressure, stresses and velocity field will be calculated using molecular dynamics simulations. A few scenarios will be investigated and effect of molecular size and ratio of particle to channel size on the flow conditions will be analyzed. 5B) Simulation of flow through carbon nano-tubes This project requires some algorithmic development for molecular dynamics simulation of flow through carbon nano-tubes. Only flow simulations of simple fluids made of soft Lennard-Jones spheres will be conducted to demonstrate the effectiveness of the algorithm. You should have knowledge and passion in computer programming in FORTRAN or C languages and working with computers. 6- Effect of surface topology on diffusion and spreading of liquids (1 student) Physical properties of surfaces including their topology play an important role in spreading and diffusion of liquids that come into contact with them. Spreading of a liquid drop and its diffusion on the surface are of significant importance in many processes such as lubrication, surface induced diffusion, cell growth, and micro/nano fluidics. The project will use simulations at the molecular level to investigate such a process. The research projects are computational so interest in working with computers is essential.

You will be using existing software and computer programming will not be necessarily required. (a) (b)
Figure 1. Surfaces can be made liquid repelling (a) or liquid loving (b) by controlling their nano-scale topology.

Supervisor: A/Prof Michael Kirkpatrick
Room S422, Mechanical Engineering Building
phone: 9351 2675
email: [email protected]
Application process
I have a limited number of places for students and accept applications on a first come first
served basis. If you are interested in a project, drop by and have a chat. Once you are sure
you wish to apply, send me an email stating the project you are interested in. Do not send
me this email until you are sure you want to do the project.
Topics
Environmental Fluid Mechanics Laboratory Experiments (max 3 projects) (You will gain skills in: Fluid Mechanics / Environmental Engineering / Experimental Methods / Data Analysis and Processing)
I have three topics this year involving fluid mechanics based laboratory experiments.
1) An investigation of the destabilizing effects of river bends on density stratified
riverine flow. This is part of an ongoing research project that aims to develop a better
scientific understanding of stratified river flows.
2) An investigation of mixing and freshing in a strongly saline estuary due to inflow from
an upstream freshwater weir pond – this relates to a real situation in the Newcastle
area.
3) Development of a non-laser based particle image velocimetry flow visualization rig to
be used as an undergraduate laboratory experiment.
Topics 1) and 2) relate to my own primary research focus at the moment, namely turbulent
mixing processes in rivers and estuaries with saline and/or thermal stratification. Stable
stratification inhibits vertical transport of oxygen and other compounds through the water
column in rivers, estuaries and other water bodies such as lakes and reservoirs. As a result,
persistent stratification leads to poor water quality, resulting in fish-kills, disruption of
aquatic ecosystems, and eruptions of toxic cyanobacterial algal blooms. Water management
authorities are keen for more research to be done on the processes that lead to the
generation and breakdown of stable stratification in rivers. This will allow them to develop
river management practices to ensure that the health of Australia’s rivers and their
associated ecosystems are sustained into the future.
Requirements: These projects involve using existing experimental rigs, however almost all
projects will require that you extend or modify the rigs. You will be expected to design and
build most of the modifications yourself, as well as designing and undertaking the
experiments yourself. There will also be some Matlab programming and image processing
required.
Renewable Energy Projects (You will gain skills in: Renewable Energy / Mechanical Engineering / Design / Modelling / Construction / Experimental Methods / Data Analysis and Processing)
If you have a renewable energy related project in mind, come and see me and we can
discuss whether or not it will be feasible. These projects typically involve designing, building
and testing a renewable energy device. For this type of project, it is important that you have
the skills and facilities to build the device yourself (eg your backyard shed, lounge room or
the student workshop). The design process will usually involve some modelling of the device.
You will then compare the model predictions with the actual performance of the device.

Computational Fluid Dynamics Projects (You will gain skills in: Computational Fluid Dynamics / Fluid Mechanics / Numerical Methods / Data Analysis and Processing)
If you have a project in mind that primarily involves modelling of an interesting fluid flow,
come and see me and we can discuss whether or not it will be feasible. My expertise lies
mainly in incompressible engineering flows including flow over vehicles and wings, air-
conditioning simulations and environmental flows.
Engineers Without Borders Projects (You will gain skills in: Development Engineering / Design / Modelling / Energy / Water)
The University of Sydney is an official partner of Engineers Without Borders (EWB) Australia.
As part of this partnership, EWB will offer at least two thesis projects for University of
Sydney engineering students across all engineering disciplines. EWB projects typically
involve working to find solutions to real problems facing people living in remote or poor
communities either in Australia or overseas. There is an emphasis on the use of appropriate
technology and sustainable development. Current EWB project topics are listed at
http://www.ewb.org.au/explore/initiatives/ugradresearch/researchprojects.

Figure 1 – Hierarchical Al alloys with improved strength and
elongation
Enabling next generation high-strength and light-weight Al alloys:
Discovering new mechanisms for strength Honours Thesis A/B project
$4500 summer scholarship also available, 12 weeks (Dec-Feb)
Project description: In 2010 we produced bulk nanostructured
and hierarchical aluminium alloys exhibiting
record mechanical properties for strength –
Figure 1 and 2, Liddicoat et al., Nature
Communications, 2010, Volume 1, Issue 6, p.
63-69A.
As part of an ongoing project to develop new
alloys and study the origins of strength, one
summer scholarship and one honours project
is being offered on the following topic:
High-resolution mapping of
nanoscale grain boundary formation
To understand the grain-boundary to
strength relationship, students will be trained
to use state of the art research instruments.
Includes CAD / CAM work. May include using
and/or developing feature-recognition
algorithms. Projects scope will be managed
to produce journal publication at conclusion
of research.
Would suit Honours Thesis A/B students.
Project relevant to commercial/industrial
employers.
Upon successful completion, Ph.D. projects /
scholarships possible.
Contact to find out more:
Dr Peter Liddicoat
(02) 90366414
Office 328, Madsen Building Figure 2 – Nanoscale resolution mapping of grains and solute
structures within hierarchical 7075 Al alloy

Thesis Topics (2015) Dr. H-Y Liu, S519, JO7, [email protected], PH: 93517148 Dr. Jiefeng Gao, S514, JO7, [email protected], PH: 93517145 Dr. Weifu Sun, S521, JO7, [email protected], PH: 93517146 Experimental and Numerical Studies on Mechanical Properties of Nanofiller Modified Polymers and Polymer Matrix Fibre Composites Polymer and polymer composites have been widely used in many engineering applications, such as aircraft. However, some undesirable properties in these materials and their composites have limited their more extensive applications. The proposed research aims to experimentally and numerically study the mechanical behavious of Nanofiller Modified Polymers and Polymer Matrix Fibre Composites. The project can accommodate 3-4 students working as a group or individually on different types of fillers. This research project is suitable for Honours Thesis only. Basic knowledge of solid mechanics and Finite Element Analysis (ABAQUS or ANSYS or other FEA software) are preferred. Additional requirement: The students, who are interested in this topic, should be able to start the research before March 2015. Tasks:
1. Composites sample preparation (Nanocomposites, JO7) 2. Mechanical property measurement/data analysis (Testing Lab, JO7) 3. FE analyses of the stress field.
Applications of polymers as adhesive and bulk materials.

FSAE Thesis Topics 2015
THESIS & PROJECT IN FSAE
Supervisor: Dr Andrei Lozzi, room S317, [email protected]
2014 Team leaders Harley Boskovic ([email protected]), Michael Turton ([email protected]) , FSAE workshop S116.
You are invited to apply to join the FSAE team for 2015 as a Thesis or Project student. What is
presented here are 14 topics which we are aiming to make improvements in next year.
A FSAE team is essentially a small company that has to design, manufacture and market a small
competition car, all in one year. This task provides real-world engineering challenges and
experiences. It requires a good deal of work, but it will begin to make you into a competent
engineer, and provide you with excellent credentials when you apply for professional engineering
positions.
Our students learn how to actually work towards a consensus and how to deal with errors and
oversights. They discover that although some designs may be better than others, none are perfect,
and usually what is required is the resolution of many almost trivial problems.
The team invents, designs and analyses concepts, then manufactures parts in a well-planned and
regulated workshop, under very similar conditions that they will encounter when working as a
design engineer, together with technicians and machinists.

FSAE Thesis Topics 2015
At the annual FSAE competition, unlike what one encounters in the industrial world, competitors are
happy to discuss their designs and results. We can learn a huge amount by examining other
student’s concepts and executions. We take the view that what others do are experiments we need
not to repeat, but from which we must learn.
If you are interested and would like to know more, you may contact me, and or the current team
leaders at the locations mentioned above. Furthermore, if you are not planning to do a thesis next
year, but are interested in any of these projects, and would like to get involved, please get in touch
all the same. We are always on the look out for enthusiastic junior members to contribute to the
team.

FSAE Thesis Topics 2015
THESIS TOPICS FOR FSAE 2015:
The following topics are current areas for improvement, where development is necessary. These
have been identified as a result of sub standard performance- at either competitions or track days,
or in terms of system integration. The 2014 car has not been fully tested at track days and the
competition, and so all of the weaknesses have not yet fully been exposed. However, these are the
areas which we know we definitely need to focus on.
ESSENTIALS:
- Steering
- Ergonomics
- Chassis
- Suspension
- Tyres
- Pedal Box
- Bodywork/ Aero
- Wiring Loom
- CAN Bus
- PE3 Engine Control Unit
- Dynamometer development
DESIRABLES:
- Tyre temperature sensors
- Force model verification through strain gauges
- Powered Gearshifter
- Lap and points simulator
These topics all align with our overall goals for 2015, which are to improve on the areas which we
have struggled with in the past: ergonomics and engine. Many other areas of the car will need re-
designing as a result.
In each section we have listed a few details of why we are developing the area, what we want to
achieve, and who you would be working with.
In general we determine topics for development based on team goals for the future and
shortcomings from the past. These are selected by team leaders, senior members and academic
supervisor. If there is a topic that you are interested in that does not appear on the list, please
approach us and we will discuss it.

FSAE Thesis Topics 2015
Steering System:
Over the years, we have seen several designs for the steering system being trialled and implemented. Our
current system consists of an input shaft to a 90 degree bevel gear box, an output shaft to a rack and pinion.
Currently, our steering system suffers from a significant amount of slop and is relatively difficult to assemble
and adjust. The cause of both of these is mainly due to misalignment between the input and output shafts and
the rack and pinion (welding the mounts on the chassis distorts with sub standard jigging).
Task outline:
- Work with chassis and ergonomics people to determine a comfortable steering wheel position
- Investigate and implement a design with reduced slop
- Ensure steering design complies with the chassis leg room template and satisfies all SAE scrutineering
rules
You will be working closely with the design members working on the: chassis, ergo, suspension, wheel
package.
Current steering system Steering mount jig in position
Ergonomics:
Ergonomics is an important part of any design, but is particularly vital to the design of a racecar. The primary
motivation is that a comfortable driver who has good visibility is a fast and consistent driver. 2/3 of the points
at the competition are allocated to the dynamic events where the car competes in acceleration, skid pad,
autocross and endurance, and it is vital that we have driver who can perform well and consistently.
Task outline:
Utilise/modify existing ergonomics rig to develop a comfortable environment for the driver:
- Driver position (comfort and visibility). This involves many variables such as recline angle, and leg and
arm positioning
- Steering, shifter, pedal box and headrest positioning
- Shifter design
- Seat design
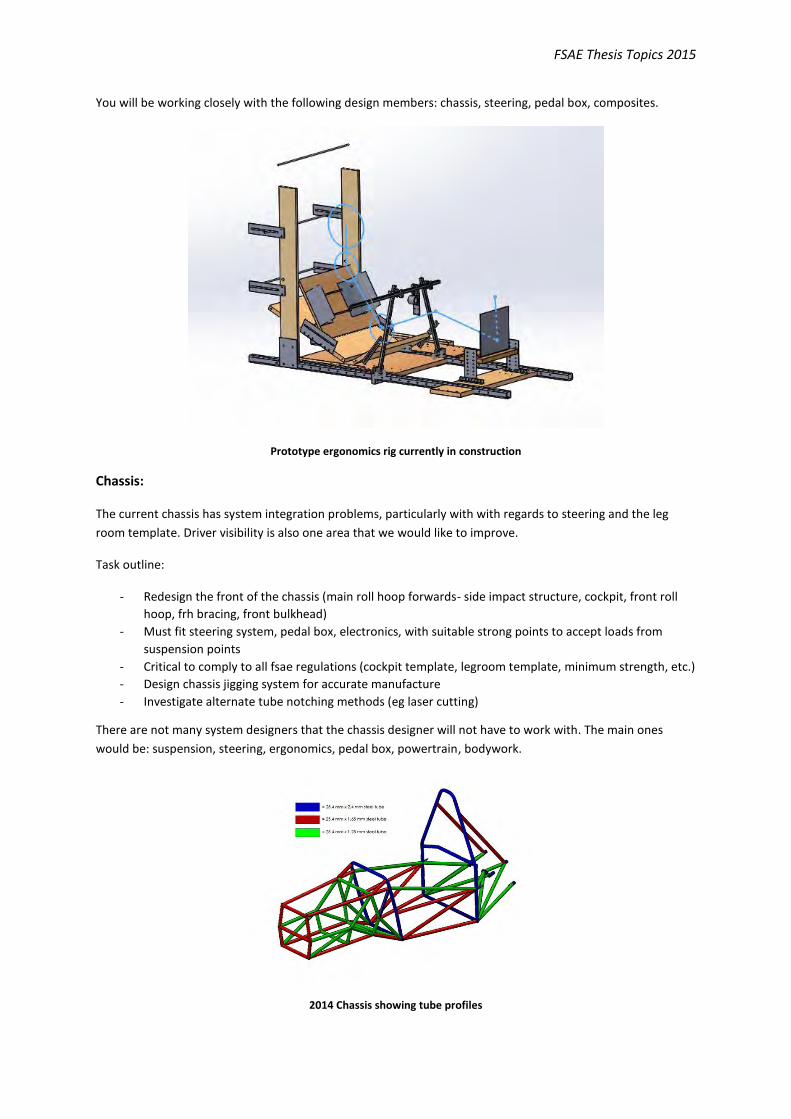
FSAE Thesis Topics 2015
You will be working closely with the following design members: chassis, steering, pedal box, composites.
Prototype ergonomics rig currently in construction
Chassis:
The current chassis has system integration problems, particularly with with regards to steering and the leg
room template. Driver visibility is also one area that we would like to improve.
Task outline:
- Redesign the front of the chassis (main roll hoop forwards- side impact structure, cockpit, front roll
hoop, frh bracing, front bulkhead)
- Must fit steering system, pedal box, electronics, with suitable strong points to accept loads from
suspension points
- Critical to comply to all fsae regulations (cockpit template, legroom template, minimum strength, etc.)
- Design chassis jigging system for accurate manufacture
- Investigate alternate tube notching methods (eg laser cutting)
There are not many system designers that the chassis designer will not have to work with. The main ones
would be: suspension, steering, ergonomics, pedal box, powertrain, bodywork.
2014 Chassis showing tube profiles

FSAE Thesis Topics 2015
Suspension:
Currently the team uses independent suspension- non-parallel, non-equal wishbones. This system is used
primarily for flexibility of kinematic design, and packaging. Wheels are sprung by coil springs, actuated by
pushrods and bellcranks on all 4 wheels. U-type anti roll bars (ARBs) are on each axle.
With a redesign of the front chassis, we will need to ensure that suspension geometry is designed desirable
wheel movement in mind (working with the TTC data), and that suspension points are mounted at strong node
points of the chassis.
A feasibility study should also be conducted in to direct acting springs (ie no pushrods or bellcranks). This
would reduce the number of components, overall system complexity and mass, but at the cost of less
favourable wheel motion ratios.
Task outline:
- In conjunction with tyre analyst and chassis designer, design suspension points for the new chassis
- Investigate feasibility of direct acting springs
Suspension kinematic design using Optimum K software
Tyres:
Tyres are the most important part of the car in terms of performance. You can have the best suspension,
engine, or brakes in the world but without tyres to transmit forces to the road they are useless. Currently the
team runs 13" Hoosier slick tyres with 7.5” width.
The Tyre Testing Consortium (TTC) in the USA conducts tests on a range of tyres commonly used FSAE racing
tyres, and makes the experimental results available to FSAE teams. This data (including lateral/ longitudinal
forces generated by the tyre for a range of slip angles, slip ratios, camber angles, normal loads, etc.) is an
invaluable resource as it allows suspension geometries to be designed to suit the particular tyre without the
need for very extensive amount of track testing. This is a very rare situation in all forms of motorsport-
typically tyre data is not made available.
At FSAE competitions, 3 of the 4 dynamics events (skid pad, acceleration, autocross), are undertaken without
much time for the tyres to warm up. Thus an area of research and experimentation for an enthusiastic thesis
member would be in smaller tyres (6” width or 10” diameter), and determining whether the faster warm up
rates would be of an overall advantage in these events, at the expense of reduced absolute grip.
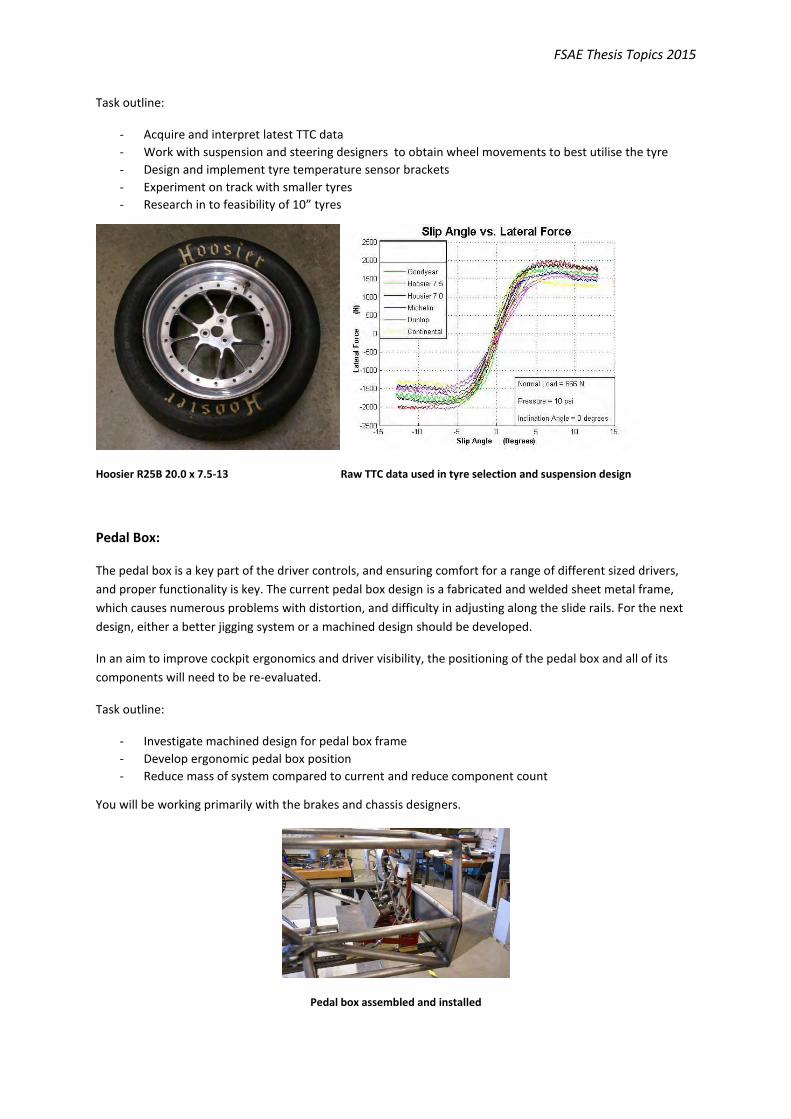
FSAE Thesis Topics 2015
Task outline:
- Acquire and interpret latest TTC data
- Work with suspension and steering designers to obtain wheel movements to best utilise the tyre
- Design and implement tyre temperature sensor brackets
- Experiment on track with smaller tyres
- Research in to feasibility of 10” tyres
Hoosier R25B 20.0 x 7.5-13 Raw TTC data used in tyre selection and suspension design
Pedal Box:
The pedal box is a key part of the driver controls, and ensuring comfort for a range of different sized drivers,
and proper functionality is key. The current pedal box design is a fabricated and welded sheet metal frame,
which causes numerous problems with distortion, and difficulty in adjusting along the slide rails. For the next
design, either a better jigging system or a machined design should be developed.
In an aim to improve cockpit ergonomics and driver visibility, the positioning of the pedal box and all of its
components will need to be re-evaluated.
Task outline:
- Investigate machined design for pedal box frame
- Develop ergonomic pedal box position
- Reduce mass of system compared to current and reduce component count
You will be working primarily with the brakes and chassis designers.
Pedal box assembled and installed

FSAE Thesis Topics 2015
Body Work:
A redesign of the frame will necessitate a bodywork redesign. Currently our bodywork is comprised of a
nosecone (in two halves), side panels (cover side of cockpit) and a sidepod (radiator duct). Current nosecone
design is essentially a bluff body, and we require a profile with lower drag. This would suit a student with an
interest in aerodynamics.
Construction of the nosecone is done by composite lay up into a female mould. Female mould is created by lay
up on a prepared machined male plug. All but the machining is done by students in house. Investigation of
alternate methods (eg sheet metal), and simplification of this process would be an important part of this study.
Task outline:
- Investigate faster method of nosecone manufacture
- Design of nosecone (CFD if interested), in collaboration with chassis design, ensuring compliance with
fsae rules
- Manufacture of nosecone
You will be working with chassis designer.
Nosecone design used 2011, 2012, 2013
Wiring Loom:
A wiring loom is essential for the running of our car, in terms of engine operation, engine health monitoring,
and vehicle data acquisition. Seeing as the loom must be carried around on the car during driving, minimising
the mass is important.
Required skills/ interests: electronics, DAQ
Fuse box and ECU installed under seat
FSAE Thesis Topics 2015
CAN Bus:
The use of a CAN bus system would reduce the overall mass of the wiring loom, through using a twisted pair
running to each corner of the car. Typically the wheel package of the car contains numerous sensors (wheel
speed, brake temperature, tyre temperature x 3) and so there is potential to simplify the wiring in this area
greatly. Currently the FSAE team has a prototype CAN bus system designed and built. Software for this system
needs to be developed further, and the whole system needs to be implemented and tested.
Required skills/ interests: electronics, DAQ
CAN node PCBs V1 Prototype CAN node
PE3 Engine Control Unit:
For many years the FSAE team has been using an OEM Walbro ECU to control our Aprilia RXV 550 V Twin
engine. Due to FSAE rules mandating the use of a 20mm inlet restrictor (ie all air into the engine must pass
through this single throat), air flow is significantly impeded, and stock ignition and fuel maps (as tuned by
Aprilia) do not work. In addition air flow through the engine is affected by different sizing and routing of intake
and exhaust systems on our FSAE car as compared to the bike. Thus tuning of ignition timing and fuelling is
needed to achieve engine operation with acceptable power and fuel economy.
Tuning the engine has proven difficult due to the high level of user ‘unfriendliness’ of the Walbro ECU, and the
difficulty of finding a dynamometer to use. An in house dynamometer is being developed as a solution to the
latter issue, and a Performance Electronics ECU has been purchased as a potential solution to the former. The
main advantage of such a unit would be the ability to ‘live’ tune, whereas the Walbro required an engine shut
down, map change, and reflash to change any settings. The current issue is the pulse to sync function not
operating correctly, meaning the ECU does not know where the engine is in its operating cycle.
The scope of this thesis would be to solve this problem by either programming the pulse to sync function, or
through the implementation of a cam position sensor. Beginning to tune the current engine package would be
the next step, with a strong emphasis on improving the fuel economy. The suitable candidate would work with
at least one other person to help with engine servicing and installation.
Required skills/ interests: Electronics, sensors, engines.
New PE3 ECU (left) and OEM Walbro unit (right)

FSAE Thesis Topics 2015
Dynamometer development:
Dynamometers are machines used to load an engine, and tune for different operating conditions, in one
indoor, convenient, location with repeatable conditions. Our prototype chassis dynamometer has had a frame
built and the rollers acquired. A purchase of various hardware and software has been made, and this
equipment will need to be implemented and developed in order to advance our engine development.
This project would suit someone with an interest in engines, mechanical design, and software.
Again somebody working in this area will be in close collaboration with the team members working on the ECU
and engine.
Current chassis dynamometer frame and rollers
Tyre Temperature Sensors:
Being able to obtain tyre temperature data would be useful for vehicle dynamics tuning and design. Out of the
4 dynamic events at the competition, 3 (skid pad, acceleration, autocross) are very short in duration and as
such there is minimal time for the tyres to reach operating temperature. Being able to measure how long the
tyres take to reach their operating temperature, and experiment with different driving styles, suspension set
ups, and different tyres, would give us an advantage. In addition to this, having multiple sensors per tyre would
enable us to visualise the tyre’s footprint in cornering, and tune to improve as a result.
Currently we require a tough design (to withstand rocks, gravel, etc), and new sensors and boards.
Required skills/ interests: sensors, DAQ
2012 front left tyre temperature sensors installed

FSAE Thesis Topics 2015
Force model verification through strain gauges:
During the design of the car, solid mechanics principles are based off force models, which in turn use peak and
average acceleration data. Being able to verify these force models, through the use of strain gauges on various
components of the car, would serve as a very useful tool to developing the models. Any over designed parts
can also be revealed, with weight savings to be had through a redesign for more accurate loads.
To start with, simple load cases (tension/ compression- such as on suspension links) would be examined, and if
successful, later utilised for more complex load cases (bending/ torsion/ combined loads- eg rear bulkhead).
There is room here for a 2 person thesis, with one focussing on strain gauge and DAQ, and the other on the
solid mechanics and mechanical design.
Required skills/ interests: strain gauges, DAQ, solid mechanics.
Powered Gearshifter:
The use of either a pneumatic or electronic shifter would reduce times to shift gears dramatically, allow the
driver to keep hands on the steering wheel (in the case of paddles), and improve cockpit ergonomics.
Additional gains could also be had in reducing driver mental workload through incorporating an ignition cut
feature to allow full throttle upshifts. This would require collaboration with people working on the ECU.
Required skills/ interests: mechanical/ mechatronic/ electrical design.
Lap and points simulator:
At the moment, all higher level design decisions in the team (ie what systems and components are chosen for
further development) are based mainly off a process of improving the weak areas. Whilst this process is logical
and progressive, we do not really know if the areas we are chasing are the ones that will give us the most
return possible. Developing a lap and points simulator gives us the ability to quantify the effects that changing
different systems has, and gives us direction to follow for our designs.
Developing a lap simulator would be the first step, whereby basic laws of physics are used to determine lap
times based off an imaginary, simplified vehicle on a simplified track. Different vehicle parameters are then
varied and the results analysed. Developing a points simulator would then link take this information and
estimate point score for a particular event.
Usyd already has one such simulator, so there is not a need to start completely from scratch. Many
assumptions and simplifications would need to be made, and whilst this simulator only predicts performance
in dynamic events (600 out of the 1000 points for the whole event), it would be an invaluable resource for
engineering design decisions.
Required skills/ interests: programming (Matlab or C)

UG Thesis topics for 2015 A R Masri, [email protected] Thesis only Project 1: Micro-combustion (up to two students) Micro-combustion is a relatively new field of research that is fast evolving due to interest in micro-power generation systems. Hydrocarbon fuels are particularly useful here due to their huge specific energy which is about two orders of magnitude higher than the best battery available. The most difficult problem is loss of flame stability due to thermal and radical quenching. This project studies the interaction between surface and gas chemistries using configuration shown here. Measurements are made for a variety of fuels and catalysts. Parallel calculations are also conducted using detailed chemical kinetics for the surface as well gaseous reactions. These will be validated against measurements performed using gas sampling and analysis. Thesis only Project 2a: Turbulent Propagating Flames (one student) This project is relevant for industrial safety, explosion risk and internal combustion engines. The burning rate of turbulent propagating flames is strongly affected by turbulence which changes the structure of the flame front. The combustion chamber shown here is built to study flames propagating from rest past baffle plates that generate significant turbulence. Fast video images, velocity measurements and laser induced fluorescence of hydroxyl radicals (LIF-OH) will be made at various stages of flame propagation. Processing the images to obtain an estimate of dimensionless numbers and turbulence levels will be a focus of the project.

Project 2b: Turbulent Propagating Flames with stratification (one student) This is a modified version of the combustion chamber sown here which is extended to include a secondary downstream chamber containing air. The mixture from the primary chamber stratifies the flow into the secondary chamber while combustion is occurring. The presence of obstacles will lead to further turbulence generation. The project involves the construction of the chamber along with initial testing and high-speed imaging of the propagating flames (using LIF-OH) at varying degrees of stratification. Thesis only Project 3: Transition from auto-ignition to premixed flame propagation. This project is aimed at studying the temperature regime over which fluid mixtures undergo a transition from auto-ignition to premixed flame propagation. Auto-ignition is a critical process in diesel and homogeneous charge compression ignition (HCCI) engines while premixed flame propagation dominates processes in standard spark ignition engines. Both processes may exist in modern engines. The model burner involves a fluid mixture issuing in a co-flow of varying temperature as shown in the opposite image. Measurements of temperature and species concentration will be performed at various experimental conditions. Thesis only Project 3a: Swirl stabilised flames (one student) This mode of flame stabilisation is common in industrial burners but the resulting turbulent flow is very complex and difficult to calculate even in the absence heat release. Large eddy simulation (LES) techniques are making significant advances in this area but the preliminary finding point to significant sensitivity of the calculations to the condition in the boundary layers at the burner’s surface. This project aims at studying experimentally the effects of boundary layers on flames stabilised on swirl burners similar to that shown here. Measurements of the velocity and turbulence fields in the boundary layers of this burner will be made. Project 3b: Swirl stabilised spray jets and flames (one student) These complex flows are highly relevant in industrial applications such as boilers and furnaces and may involve significant instabilities which affect the combustor’s

performance. A spray injector will be positioned in the central part of the burner and swirl is applied to the surrounding air. High swirl numbers can be generated. The flow and droplet fields will be measured for various levels of spray loadings. Flame stability characteristics will also be determined for the selection of flames for further investigations. Thesis only Project 4: Biofuel sprays (one student) Combustion of biofuels (or biofuel blends) in the form of sprays will be more common in the future of many industrial applications such as diesel engines, direct injection spark ignition engines, jet propulsion units, furnaces and incinerators. The opposite burner is designed to study spray flows in a controlled environment in order to resolve controlling physical processes such the interaction between droplets and turbulence. The atomization, evaporation, mixing, and combustion characteristics of spray jets and flames are important stages which remain only vaguely understood. Laser diagnostic tools will be used to measure the velocity and composition fields as well as the droplet number density and size distribution in controlled spray flows. Thesis only Project 5: Stratified Combustion (one student) This is a new project aimed at studying the characteristics of stratified combustion under conditions of high shear rates. This mode of combustion is highly relevant in modern engines but remain vaguely understood particularly at high turbulence levels. A new burner, consisting of two concentric tubes feeding premixed fuel-air mixtures at different equivalence ratios has been developed. Both tubes are centred in a hot co-flowing stream of combustion products. A schematic of this burner is shown here. The project will study the stability features of this burner under different levels of stratification. Thesis only Project 6: Droplets/Particles in flows with temperature gradients (one student) This is a new project aimed at studying the dynamics of droplets and particles in turbulent flows where a temperature gradient is imposed. It is envisaged that the local fluctuations in temperature will affect the local dissipation as well as evaporation rate of particles. A simple rig will be constructed for this experiment where measurements of velocity and temperature fields will be performed.

Simulating the Action of Sporting Equipment for Maximum Performance (Several potential honors projects) Professor Grant Steven [email protected] [email protected] e-mail for more information
Long before Finite Element Analysis was developed, people were participating in sports and as competition intensified is became clear that for many sports, the equipment used played as important a part in performance as did the athlete. With the use of modern materials and manufacturing processes there is always scope for maximizing the performance of sporting equipment. Traditionally improvements were incremental, as athletes fed-back suggestions to manufacturers and new prototypes were built and tested. Given the cost of tooling for many of the current manufacturing methods, carbon fibre with resin infusion to mention one, it is clear that such build and test iterations are not as preferable given the potential of limited success and high cost. Modern simulation techniques are capable of examining a “day–in–the-life” of an object and from an examination of the envelope of response the most sensitive regions can be detected. Iteration on the design variables, provided they remain within any constraints, physical or otherwise, can be incorporated to investigate their effect on performance. Methods such as Design of Experiments (DOE) and Response Surface Analysis (RSA), genetic algorithms (GA) and Monte-Carlo Methods are being increasingly applied to achieve optimisation goals For many sports the outcome depends in the interaction between the sportsperson and the equipment; boot with ball; bat with ball; bow and arrow, and so on. Previous research by my students has looked at tennis, cricket, and soccer. Although interesting results were obtained and valuable learning took place there are still many unanswered questions.
Pictures of ball impact in centre of tennis racquet and off-centre strike of cricket ball on bat.
Selecting this area for a project will involve selection of a sport, identification of desired improvements, leaning non-linear transient Finite Element Analysis with contact and other simulation skills.
----------------------------------------- An innovative and exciting new product is about to be launched onto the global market. There are challenges on how the technology of this product is described as well as devising a marketing strategy. This research would suit a student who is doing a double degree in Engineering and Commerce. Contact Professor Grant Steven ([email protected] ) for more information.

Supervisor: Nicholas Williamson
Room S414, Mechanical Engineering Building
phone: 9351 3098
email: [email protected] Thesis Projects in Thermodynamics or Fluid dynamics
1) Laboratory Investigation of the Natural Ventilation Heating and Cooling of the AMME Building.
The heating ventilation and cooling of a building can be modelled in a laboratory setting using
sources/sinks of fresh and saline water as a proxy for thermal heat flux. The aim of this project is to
produce a simple experimental rig representing the AMME building (J07) in the fluids laboratory using this
approach. The student would then be able to use dye visualisation and image capturing techniques to
obtain estimates of the temperature distribution in the building and suggest remedial measures to improve
airflow in our building.
(You will gain skills in: Fluid Mechanics / HVAC / Design and Commissioning of Experimental Rigs/
Experimental Methods / Data Analysis and Processing)
2) Laboratory Investigation of Mixing in Displacement Air-Conditioning- Fountain Flow/Negatively Buoyant
Jets
In displacement air-conditioning a situation can arise where a hot air jet is directed vertically upwards into
a cool room or a cool jet downwards into a warm room. In these situations buoyancy forces oppose the
inflow forming a kind of fountain like flow. If we understand the mixing between the fountain and the
ambient environment we can estimate the temperature distribution in the room and the turnover time for
ventilation. At present these attributes are poorly understood. This project will use an existing laboratory
rig to investigate these types of flows and aim to provide fundamental understanding of the flow regimes.
These flows are also important in other contexts. Erupting volcanoes also behave like a fountain flow
initially, and the mixing between the rising plume and the ambient determines whether the eruption
collapses as a pyroclastic flow. The rejection of hyper saline water from desalination plants often takes
place in ocean outfalls. These outfalls have the characteristics of a fountain flow. Designers must ensure
there is sufficient mixing at the source to provide dilution of the saline flow.
(You will gain skills in: Fluid Mechanics / Experimental Methods / Data Analysis and Processing)

Professor Lin Ye, [email protected]
1) Characterisation of fracture energy of tough adhesives using thick adherends The work includes experimental characterisation and FEA simulation aiming to find the correction factor for the current formulae for the very thick DCB (double cantilever beam) specimens
2) Characterisation of damage growth in carbon fibre composites using electrical resistance measurements The work includes experimental characterisation and FEA simulation aiming to find the relationship between the indentation damage state and the change in electrical resistance.
3) Fabrication of fibre composites using filament winding with in-situ impregnation 4) Determination of crack growth in composites using acoustic sensors

4th Year Mechatronics, Sensing & Biomechatronics Thesis Topics 2015
Tracker and Shooter Supervisor: Graham Brooker, ACFR [email protected] Javier Martinez, ACFR [email protected]
A fire control radar system needs to track fast moving enemy aircraft and accurately estimate their future position (based on the existing vehicle states) so that it can fire a canon shell to intercept them. Our take on the problem is to develop a 2D differential time of flight beacon tracker and a device to lob small marbles at a fast moving RC car carrying a beacon. Research Proposal (Thesis Only)
Develop a 2D differential time of flight based tracker mounted on a pan tilt unit
Build a device suitable for indoor operation that can lob a marble with an adjustable elevation and azimuth angle, but with a constant (and repeatable) launch velocity
Build a beacon that simultaneously transmits an acoustic and an IR pulse that can be attached to the RC car
Using a Raspberry Pi, or similar processor, develop the interface hardware and software to control the tracker, measure the target states and solve the ballistic trajectory calculations to determine the elevation and azimuth angle required by the gun
Develop a method to determine the miss distance under different conditions, and determine the circular error probability (CEP) for your fire control system
Required Skills
Excellent mechatronics skills including electronics, software development, networking, mechanical design etc.

1st Person Driver Supervisor: Graham Brooker, ACFR [email protected] Javier Martinez, ACFR [email protected]
This is a fun project with a serious side. It involves the integration of an Oculus Rift VR display with integrated head tracker to a stereo camera mounted on a PTU which is in turn mounted on an off-road RC car. The serious side of this development is that such devices can be used to control rovers exploring the moon and near-earth objects such as passing asteroids (where the latency isn’t too long) Research Proposal (Thesis Only)
Build the PTU and integrate a pair of good quality web cameras Using a Raspberry Pi, or similar processor link the cameras wirelessly to a PC
talking to the Oculus Wirelessly link the head tracker to the PTU on the RC car Optimise code to minimise latency
Required Skills Excellent mechatronics skills including electronics, software development,
networking, mechanical design etc.

Electromagnetic Gun (revisited) Supervisor: Graham Brooker, ACFR [email protected] Javier Martinez, ACFR [email protected]
There are a number of different electrical techniques that can be used to accelerate a small projectile up to a high velocity. A multi stage reluctance gun of the kind shown in the figure is one. Linear induction motors and rail guns are others. Research Proposal (Thesis Only)
Design and build the electronics for a multi stage reluctance gun that can accelerate a 1g projectile to a velocity of 50m/s
Develop a safe method to operate the gun, including charging and discharging Measure the kinetic energy of the projectile and compare it to the electrical
energy provided, to determine the overall conversion efficiency Compare that to the efficiency of air rifles that fire projectiles with a similar
mass and velocity. Required Skills
Analog and Digital Electronics Microcontroller programming An appropriate respect for high voltage, high energy systems

Contrast Enhancement Phantom for Remotely Operated CT Scanner Supervisor: Graham Brooker, ACFR [email protected] Elaine Ryan, Health Sciences [email protected] Javier Martinez, ACFR [email protected]
We have been working for a number of years on the robotic aspects of remote operation of a CT scanner. It uses a sophisticated plastic phantom (humanoid model containing realistic bones and soft tissue) seen in the figure. Our current requirement is to provide organs that can simulate the operation of contrast agents that are often injected into patients to provide improved images. Research Proposal (Thesis Only)
Develop a realistic organ (liver or kidneys etc) containing a simple vascular system using a 3D printer
Develop some means to circulate different concentrations of contrast medium through the organ to simulate the introduction and subsequent dissolution of the liquid
This will be a world first, so could make a real difference! Required Skills
Good SolidWorks skills An affinity for pumps Interest in chemistry (if possible)

Artefact Localisation in Archaeology Supervisor: Graham Brooker, ACFR [email protected]
The accurate position and orientation of every artefact removed from a dig must be logged. This is a time consuming activity and is prone to error. There must be a better way! Research Proposal (Thesis Only)
Develop an acoustic system based on triangulation, time of flight or phase to automate this localisation process
The accuracy should be better than 5mm in x,y,z over ranges in excess of 3m The device must be really easy to use, extremely robust and should interface to
existing archaeological databases Required Skills
Electronics Acoustics Signal Processing Microcontroller programming Networking
Outdoor Golf for the Blind Supervisor: Graham Brooker, ACFR [email protected]
As golfers age, many start to suffer from Age Related Macular Degeneration. This keeps them at home where they irritate their partners. We would like to develop a system that allows previously competent golfers to continue to play the game even once they have difficulty in seeing the ball on the tee.
Research Proposal (Thesis Only) Consider a number of methods that can be used to help the golfer align his
club with the ball, and align in the correct direction for his shot, prior to commencing the swing
Build a prototype of the device Patent the idea and make your fortune
Required Skills Interest (and skill) as a golfer
Sensors and transducers Analog and digital electronics
Microcontroller programming skills Signal Processing

Outdoor Golf for the Blind Supervisor: Graham Brooker, ACFR [email protected] Electronic devices to detect bat calls are fairly commonly available but generally quite expensive. Two different principles can be applied; the first is to down convert the ultrasonic signal to the audio range, and the second is to digitise and stretch the signal.
Research Proposal (Thesis Only) Investigate the different techniques used, and try to determine why these
devices are so expensive Develop the electronics and the software to perform the function in a low cost
manner Build into a robust battery powered device Travel around and record the calls of as many bats as you can
Required Skills Interest in bats
Interest in analog electronics Microcontroller programming skills Signal Processing

Speed Related Changes in the Radar Cross Section of Bullets at 77GHz Supervisors: Graham Brooker, ACFR [email protected] David Johnson, ACFR [email protected]
Outdoor measurements have shown that the radar cross sections (RCS) of high-velocity bullets is up to 5dB higher than those obtained from static measurements of the same object. The mechanism that results in this increase is unknown. This has implications for the RCS of the new generation of stealth aircraft when travelling at high speed This project aims at investigating the phenomenon by measuring the RCS of a number of different shapes under more controlled conditions using a supersonic nozzle.
Research Proposal (Thesis Only) Complete the integration of a 77GHz radar and a data acquisition system Because of the size of the bullets, it is possible to generate the appropriate
supersonic airflows using a supersonic nozzle driven by a low pressure reservoir
Assemble the compressor and reservoir coupled to the supersonic nozzle Confirm that the flow from the nozzle reaches the required speeds over a cross
section that is sufficiently large to encompass the bullet Measure RCS of a number of different types of bullets at a number of different
speeds and from different perspectives Try to determine what causes this increase in RCS Write a journal paper
Required Skills Some understanding of microwave and millimetre wave radar Aerodynamics etc Mechanical Design ( SolidWorks etc) Electronics Signal Processing MATLAB Programming

Micro-Doppler Gait Evaluation to Infer Fatigue Levels in Long-Distance Runners (Continuing project) Supervisor: Graham Brooker, ACFR [email protected]
Recent research has shown that changes in gait could be indicative of concussion, so we have speculated that similar changes could also be indicative of fatigue levels in long distance runners This project aims at determine whether these changes in gait are consistent with fatigue levels and whether they can be measured using a Doppler radar.
Research Proposal (Thesis Only) Acquire or build a suitable data acquisition and processor that could be
interfaced to one of our existing Doppler radars. Develop the signal processing to extract Doppler characteristics of a runner
from another moving platform (probably a bicycle) Develop qualitative means to determine the fatigue level of the runner
(distance travelled, effort, verbal feedback etc) Develop methods (can be classical or machine learning based) to correlate
features of the micro-Doppler signature of the runner with their fatigue level If possible, redo on treadmill with appropriate instrumentation to produce a
quantitative measure of runner fatigue
Required Skills Some understanding of microwave radar and the Doppler principle Low power & portable electronics Signal Processing MATLAB Programming Keen athlete

Navigation Using Ubiquitous Diffuse Fields (Continuing project) Supervisor: Graham Brooker, ACFR [email protected]
A typical indoor environment is filled with useful information that may help with reliable navigation. This information is in the form of diffuse fields such as acoustic, magnetic, electric, RF, temperature, light intensity, air flow and even odour. Most of these fields can be measured using very low cost sensors and therefore it should be possible to develop a cheap method to facilitate indoor navigation.
Research Proposal (Thesis Only) Use instrumented glasses (developed previously) to log the fields around an
indoor environment for a long time Determine whether there is sufficient information to uniquely identify the
position of the vehicle to within a few metres Develop machine learning algorithms to automate the learning and
subsequently the navigation process
Required Skills Some Mechanical Design Electronics Signal Processing Interest in Machine Learning C or C++ and MATLAB Programming

Integration and Testing of an Orthopaedic Measurement Device (Continuing project) Supervisors: Graham Brooker, ACFR [email protected]
Joe Lynch and Corey Scholes, SORI [email protected]
http://medgadget.com/2011/03/fraunhofers_monitoring_system_keeps_track_of_your_joints_while_they_heal.html If you are looking for a patient-centred project with long-term benefits for research and clinical assessment of patients suffering knee disorders, are keen to deepen your knowledge and understanding of human biomechanics and functional anatomy and would like to work directly with the “end users”, both patients and clinicians, then read on… Students have developed a wireless accelerometer, gyro and a separate goniometer to monitor the effectiveness of orthopaedic knee surgery. These devices need to be integrated into a single product that can be easily fitted and tested at home, while still retaining sufficient accuracy to provide essential feedback on knee joint performance including shock absorbing and knee angle.
Research Proposal (Thesis only for 1 or 2 students) Examine existing hardware (Arduino based) Select new processor with additional channels to accommodate all of the
sensors (2 x 3axis accelerometers, 2 x gyros, 2 x goniometers) Examine sensor mounting methods and update as required for ease of use,
repeatability and reliability Redevelop monitor from simple MATLAB display to enable local storage and
analysis Integrate with telemedicine network to enable remote monitoring and analysis
of measured data.
Required Skills Mechanical Design (SolidWorks etc)
Electronics Signal Processing C or C++ and MATLAB Programming Some biology

Energy Scavenging from Flying Pigeons (Continuing Project) Supervisor: Graham Brooker [email protected]
It has become practical to harvest sufficient power from biological processes, movement, vibration or heat gradients etc to generate sufficient power to run modern low-power electronic systems. Initial work has been conducted to obtain the acceleration profiles from a flying pigeon, and these will have been implemented on a vibration table (1 axis) to test energy scavenging options. Research Proposal (Thesis Only)
Investigate existing energy scavenging systems and select one that would be suitable to power a typical radio beacon and data logger attached to a bird
Develop such a system and demonstrate on a vibration table that it could supply sufficient power
Ethical approval has been obtained to test a data logger on a pigeon, and it is possible that this approval could be extended for tests of the scavenger
Required Skills
Electronics Mechanical design (SolidWorks etc) Affinity for animals

Low Cost Hand Orthotic (Continuing project) Supervisor: Graham Brooker, ACFR [email protected]
A low cost hand orthotic driven by pneumatic artificial muscles (PAMs) that may have applications in rehabilitation and in astronaut’s gloves has been under development for some time. The initial technique (shown in the figure) relied on the flexibility of a composite material (carbon or glass fibre). However these were not sufficiently strong and flexible. Subsequent attempts to use torsion springs are under consideration but are too bulky and too complex to be effective. Research Proposal (Thesis Only)
Perform a comprehensive review of the existing methods that could be used to drive this orthotic (passive closing and active opening)
Using the PAMs to open the orthotic, investigate alternative passive methods of closing that will be compliant and can accommodate different sized hands
Develop a working prototype of the orthotic Required Skills Mechanical Design & SolidWorks
Materials Electronics
Signal Processing C or C++ and MATLAB Programming

Scanning Millimetre-Wave Radar Foliage Penetration Study Supervisors: Graham Brooker [email protected] James Underwood [email protected] David Johnson [email protected] We have a 3D millimetre wave radar system that would be ideal to produce improved images of wooded terrain with the objective of measuring foliage penetration
Figure: New 3D radar, existing 2D radar hardware mounted on a Segbot and a radar
image showing some foliage penetration
Research Proposal (Thesis Only) A 3D millimetre wave radar system has been built This radar system needs to be commissioned A mounting to allow the radar to be attached to a moving platform needs to be
built This will initially be a trolley, but ultimately it will be on one of the Segbots Software to produce 3D images for analysis needs to be developed Images in various environments and their subsequent analysis needs to be
undertaken
Required Skills Communications and Interfaces Some understanding of RF Mechanical Design & SolidWorks Electronics Signal Processing C or C++ and MATLAB Programming

Scanning Millimetre-Wave Radiometer Supervisor: Graham Brooker [email protected] Radiometry at 94GHz offers an excellent option for ground imaging during adverse weather or at dusk and dawn when visible and IR sensors suffer from poor performance.
(a) (b)
Figure: Existing radiometer hardware and radiometric images
Research Proposal (Thesis Only) A prototype scanner and radiometer has been built that operates at 94GHz A new mirror must be made using the 3D printer as the old one has drooped Both the scanner and the millimetre wave receiver hardware need to be
hardened for installation in a UAV Interfaces to a microcontroller to read the radiometric signal, and the mirror
position as well as any aircraft INS data that is available must be developed so that images can be produced
Software to produce strip-map radiometric images from a moving aircraft must be written
Required Skills Communications and Interfaces Some understanding of RF Mechanical Design & SolidWorks Electronics Signal Processing C or C++ and MATLAB Programming

Quantification of the forces exerted during operative vaginal delivery Supervisors: Graham Brooker, ACFR [email protected]
Dr Jon Hyett, RPAH [email protected]
A significant (10-15%) proportion of babies require assistance during the process of vaginal delivery. This involves application of either forceps or ventouse (vacuum), allowing the acoucher (the person who assists at a birth) to guide the presenting part through the birth canal, onto the perineum and through to delivery.
Women and babies who have an operative vaginal delivery have higher risks of traumatic injury related to the delivery process. The forces involved in delivery are poorly understood. We hypothesize that injury would be more likely in circumstances where higher forces are developed during the delivery process. Real time measurement of these forces would provide the acoucher with information about the risks associated with delivery
Research Proposal (Thesis Only) This project involves the development of an instrument to quantify the forces exerted during operative vaginal delivery. The point of contact between the instrument and the acoucher (i.e. handle of instrument to gloves) is sterile, and this device needs to be able to be applied in this environment. The device should be able to quantify the amount of force and record the direction of force during the delivery process. The device will first be used in simulations of the birthing process, as proof of concept, prior to being applied to clinical studies.
Required Skills Some biology (or an interest in the subject)
Electronics & sensing Mechanical design (SolidWorks) Signal processing
Effect of Visual Stimulation on Standing and Walking Balance (continuing project) Supervisors: Graham Brooker, ACFR [email protected]
Dr Miriam Welgampola, RPAH [email protected]
http://www.geoffsnyder.com/wp-content/uploads/2010/11/WalkThePlank.jpg
Quiet stance is supported by 3 sensory inputs: proprioception, vision and vestibular sensation. These 3 sources of information overlap considerably allowing subjects with the loss of one or two modalities to stand and walk safely. Here we propose to examine the effect of visual stimulation on the stability and trajectory of gait and on the stability of stance. We hope to artificially manipulate the visual surrounds to create an illusion of movement in the pitch, yaw or roll planes. Research Proposal (Thesis Only)
Integrate a head mounted display (VR goggles) with a head tracker capable of measuring position and acceleration in 3D
Use this display to create of a normal visual surround which can then be manipulated
record the subject’s standing balance using the inertial measurement unit attached to the display.
The subjects will be tested whilst standing still and walking a straight line, and during normal visual stimulation vs abnormal visual stimulation is recorded
Specifically, during stance, anteroposterior and mediolateral deviation during a 10 second period will be recorded.
Whilst walking, change of trajectory produced by apparent rotation in yaw and roll planes will be explored.
Required Skills Some biology
Electronics Image Processing MATLAB Programming

A Portable Test of Subjective Visual Vertical (SVV) Supervisors: Graham Brooker, ACFR [email protected]
Dr Miriam Welgampola, RPAH [email protected]
The SVV is a useful measure of human perception of verticality. It is abnormal in inner ear balance disorders as well as brainstem stroke. During acute inner ear balance disorders, the eyes tort towards the affected ear. Since the visual meridian is also similarly torted, horizontal objects are perceived as tilted to the unaffected side. To correct this apparent tilt, the subject will bias it towards the affected side. Conversely, in upper brainstem strokes, the SVV is offset to the unaffected side. This non-invasive test conveys useful diagnostic information in subjects with acute of vertigo and is used in specialized balance clinics. We propose to develop a portable electronic test of SVV that can be used at the bedside. This will enable the test to be used by non-specialized centres and even in the patient’s own home. Research Proposal (Thesis Only)
Assemble the following hardware: o A pair of VR goggles capable of projecting a linear beam upon a
circular screen at a viewing distance of 40 cm. o User controlled joystick. o A head mounted attitude heading reference system (AHRS).
Develop the following software using LabVIEW: o Monitor the AHRS to ensure the head is held vertical with less than
one degree error. Deviations outside this range will result in rejection of the patients SVV setting.
o Deliver 10 consecutive presentations of the beam at random angles from -45 -+45 degrees.
o Read the joystick as the subject returns the beam to his/her perceived vertical
o The final position for each presentation will be logged, and averaged to produce the mean and SD for SVV.
Required Skills Some biology
Electronics Signal and Image Processing LabVIEW Programming (or learn on the job)

A Handheld Hearing Test Supervisors: Graham Brooker, ACFR [email protected]
Dr Miriam Welgampola, RPAH [email protected] Dr Craig Jin, EIE [email protected]
@ home Some balance disorders like Menieres Disease and Autoimmune inner ear diseases cause sudden unexpected hearing loss, which needs to be captured and acted upon. Patients with such diseases rely upon the availability of an audiology service. For those living in remote locations, such services are not available at short notice. An inexpensive method of testing hearing thresholds would make an immense impact on their management and hearing preservation. Research Proposal (Thesis Only)
Develop a calibrated sound source, capable of delivering pure tones of 125-8000 Hz at octave frequencies at intensities of 5-100 decibels normal Hearing Level (nHL) using LabVIEW software, a microprocessor with a sound card and calibrated headphones.
Develop the GUI to allow the entry and storage hearing thresholds and patient demographics in textfiles.
Develop an operational procedure to perform the following: o Reject recordings conducted in an environment where ambient noise
exceeds 20 dB nHL. o Generate tones at random amplitudes and in a random order will
enable the subject to self-test their hearing using a simple push-button o A hearing test thus completed would be dumped into a conventional
audiogram format that can be electronically shared with an audiologist or physician at a distant location.
Required Skills Some biology
Electronics Signal Processing LabVIEW Programming (or learn on the job)

Robust Method to Measure Eye Torsion Supervisors: Graham Brooker, ACFR [email protected]
Dr Miriam Welgampola, RPAH [email protected]
http://www.arringtonresearch.com/torsion.html Eye torsion, or rotation of the eye around the z-axis, is an important measurement made by neurologists investigating vestibular abnormalities. Video provided by eye trackers and rotational correlation algorithms are generally used to do this. However, gaze displacement, eyelid droop, and poor contrast of the iris make this process difficult to achieve. No really robust method as yet available to do this Research Proposal (Thesis Only)
Look at all of the algorithms which have been used to perform this function and try to determine their effectiveness, strengths and weaknesses
Consider spectral based (using hyperspectral imager or IR filters) methods to enhance iris contrast
Look at methods of modelling and accounting for gaze displacement and eyelid droop to improve algorithm effectiveness
Develop an effective torsion algorithm Become involved in trials of the new algorithm to determine its robustness
Required Skills Some biology
Electronics Image Processing MATLAB Programming

A Micro-mechanical Testing System for Biological Tissues Supervisors: Graham Brooker, ACFR [email protected]
Elizabeth Clarke, RNSH [email protected]
Engineering studies of biological tissues often involve controlled loading of very small or very soft tissues. This thesis involves expansion and optimisation of a micro-mechanical testing apparatus that is currently used for biomechanics studies of soft tissues. Some examples of the potential applications of this apparatus include 3-point-bending of mouse bones, tensile strength of a human hair or mouse tendon, and cyclic loading of joint cartilage. Note: the apparatus is located at RNS Hospital at St Leonards, and the student will be expected to perform the integration and testing at the Murray Maxwell Biomechanics Laboratory there. Research Proposal (Thesis Only)
Develop a custom LabVIEW program for precision control of a linear motor to provide maximum flexibility in a range of testing regimes:
o cyclic loading o threshold conditions o force control
Develop data acquisition system to acquire and log data from displacement and force sensors
There is scope within this thesis project to include optional mechanical design and manufacture:
o miniature 3-point-bending apparatus o mechanical testing of synthetic or biological tissues (e.g. Silicone gels, mouse
bones or soft biological tissues) Required Skills Some biology Control LabVIEW Programming (or learn on the job) SolidWorks (for phase 2)
Ultrasound Phased Array Imaging (Continuing project) Supervisor: Graham Brooker [email protected]
The object of this thesis is the extended development of an ultrasound phased array imaging system. Previous work has provided core signal processing electronics and software algorithms for imaging. Advanced topics in signal processing and end applications are now possible. Potential Research Areas (Thesis Only) Signal Processing: High fidelity coherent signal processing techniques:
synthetic aperture coherent motion detection multiple-pulse integration & fusion.
Applications: Incorporation onto a mobile platform 3D Volumetic visualisation methods 3D Object analysis Ground texture analysis Required Skills Communications and Interfaces Electronics Signal Processing C or C++ and MATLAB Programming

Tactile Feedback for a Prosthetic Hand Supervisor: Graham Brooker, ACFR [email protected]
In 2014 Mahdi Elsayed made a low cost prosthetic hand and arm. This year we would like to fit the finder tips with pressure sensors to drive vibro or electro tactile transducers to provide an amputee with feedback Research Proposal (Thesis Only)
Consider various ways of integrating pressure sensors into the existing (or modified) fingertips of the prosthesis
Ensure that any electrical connections do not interfere with the tendons Develop interfaces to vibro or electro tactile transducers that can be attached
to the amputee Integrate the complete system onto a harness that can be attached to a non-
amputee Test the capability of the feedback system
Required Skills
Good SolidWorks skills Interest in sensors Good electronics and microcontroller ability

Supervisor: Dr Andrew Hill RTCMA, The Engineering Link Building, J13, Rm 317 9351 4209 The Rio Tinto Centre for Mine Automation (RTCMA), part of the Australian Centre for Field Robotics (ACFR) conducts research in the automation of vehicles and systems, especially relating to mining applications, with a number of
projects now operating in production in the Pilbara. The main aims of the RTCMA’s automation projects are to improve safety and efficiency of existing practices through automation and data collection. Currently, we are developing two multi-‐purpose autonomous vehicles based on the Toyota Hilux, and have opportunities for students to design and develop add-‐ons for new concept vehicles. It is intended that the work in these projects would be integrated into the RTCMA’s on-‐going projects, running along-‐side the autonomous planning & scheduling projects being conducted by the RTCMA. The projects listed may be adapted to suit students’ specific skills or interests, where feasible. RTCMA—Autonomous Geophysics Sampling in Mining This project aims to automate a robotic arm, equipped with geophysics sensors, mounted on the back of our autonomous vehicles, to inspect blast-‐holes in surface mining operations. The intent is for this ‘Autonomous Geophysics Vehicle’ to follow an autonomous drill, and inspect each hole drilled in the mine to provide detailed feedback on the quality of the hole and underground geology. The project entails multiple challenges, including accurate sensing & detection of the blast holes (perception), generating sensible actions for the robotic arm (planning) and having the robotic arm safely and accurately follow the planned movements (control). This project has scope for 1-‐3 students.
RTCMA Autonomous Vehicles UR10 Robotic Arm

RTCMA—Heat-‐Mapping for Information Overlays This project aims to generate informative “heat-‐map” overlays for operators and high-‐level systems to easily get a picture of various conditions within a mine. The maps would be generated from geo-‐located data from a multitude of sensors, including vehicle vibration & terrain smoothness, Wi-‐Fi and radio signal strength and quality, vehicle fuel-‐usage, GPS satellite availability, etc. The data collected would be fused into 2D overlays to allow operators and high-‐level autonomous systems (such as vehicle scheduling algorithms) to quickly identify problem areas, and act accordingly. While not strictly necessary, a strong interest in mathematical modeling and/or Machine Learning would be desirable for a student interested in this project.
Example informative overlay used for operator feedback
RTCMA—Autonomous System Diagnostics Tools Large-‐scale autonomous systems are inherently complex, and made up of many interrelated parts, which must all function correctly for the system as a whole to work effectively. Further, developing (and debugging) such a system requires detailed information about the state of the interrelated parts and subsystems. This project aims to develop software & hardware tools for the RTCMA’s automated vehicles to provide simple operator feedback on the state of a variety of sub-‐systems and system states. Students interested in this project should have some prior experience or a strong, self-‐driven interest in the use of modern web technologies (e.g. AJAX or similar). There will also be some work in interfacing with sensors, and directly interfacing with hardware.
Example web-‐based diagnostics, showing sensor data on a robotic
platform

RTCMA—Health & Safety Monitoring via Smart Wearables This project aims to utilise wearable sensors for the purposes of monitoring people working in a mining environment, both to detect problems like stress/fatigue, as well as to provide their location to other operators & equipment in the mine. The intent is to improve safety by alerting workers and those around them when a situation becomes potentially unsafe, and to allow operators of large machinery (especially remote operators) to see where nearby personnel are, and whether it is safe to operate. The intent is to utilise commercially available products, such as modern phones or watches with built-‐in GPS, Wi-‐Fi/Bluetooth, accelerometers, heart-‐rate monitors, etc. There would be some scope also for integrating additional sensors, as necessary. Interested students should contact Dr Andrew Hill to discuss specific topics based on their interest & skills.

Robotic electronic warfare and countermeasures
Supervisor: Dr David Johnson, ACFR [email protected]
Research Proposal (Thesis only, 1 or more students)
We have built many robots and sensors over the years and have learnt one important lesson:
There are many more ways for a robot not to work than for it to work correctly!
Even the robots that do work may fail under certain known conditions. It is likely that there are
many unknown conditions under which they may also fail, particularly if someone, i.e. you, is going
out of their way to find that ‘unknown’ failure mode and exploit it. The most interesting case is when
the failure mode goes undetected and is then used for nefarious purposes.
In a world where autonomy is increasing along with the accessibility of cheap, almost throw-away
systems, which could be turned to doing naughty things, we need to know where the weak points
are so that we can do something about it.
Required Skills
Electronics
Signal Processing
C or C++ and MATLAB Programming
You should have done (or be planning to do) the Sensors and Signals course.
An interest in pursuing this topic at postgraduate level would also be a benefit.

Radar hardware design for 3D printing
Supervisor: Dr David Johnson, ACFR [email protected]
Research Proposal (Thesis only)
At high frequencies, radar hardware design becomes a lot like plumbing, except with rather tighter
tolerance constraints. The shape and structure of the cavity can make these devices difficult to
machine, but may present an excellent opportunity for 3D printing techniques. One drawback is the
low electrical conductivity of the majority of additive-printing or SLS materials, however this may be
overcome by novel electro (less) plating methods. I am keen to pursue this idea further, as it has
great possibilities, particularly for airborne millimetre-wave radar systems for UAVs, but I need
someone to do the time-consuming mechanical design and electromagnetic simulation.
Required Skills
Mechanical design (Solidworks)
Electronic design
You should have done (or be planning to do) the Sensors and Signals course.
Some prior knowledge of electro-magnetic wave theory would be a distinct benefit.

Cognitive radar development
Supervisor: Dr David Johnson, ACFR [email protected]
Research Proposal (Thesis only, 1 or more students)
At the ACFR, we have recently completed development of a 94GHz millimetre-wave radar testbed
with extremely high resolution and the ability to be reprogrammed on the fly. One of the interesting
applications of this technology involves changing the transmitted waveform dynamically to maximise
information about the environment. This may be to balance the requirements for range/angular
resolution vs maximum range or available communications bandwidth. It might also be to mitigate
(or employ) multipath or other interference sources.
There are a number of possible approaches to tackling this problem, including, but not limited to:
Developing a closed-loop control algorithm that adapts to existing data in order to improve
signal-to-noise in subsequent scans, by changing register values through the xml datalink.
Looking at non-linear-phase waveforms (of which the simplest is a chirp) to provide
multipath target discrimination at the FPGA-fabric level.
Required Skills
Electronics
Signal Processing
C, C++, MATLAB and/or Python Programming
Unix skills
A willingness to learn FPGA (VHDL) design
You should have done (or be planning to do) the Sensors and Signals course.
An interest in pursuing this topic at postgraduate level would also be a benefit.

Acoustic localisation, control and interaction of a robot
Supervisor: Dr David Johnson, ACFR [email protected]
Research Proposal (Thesis only, 1 or more students)
For robots to operate in a human-centric environment, they need to be able to communicate
efficiently with us. One obvious way of doing this is through speech. Voice-recognition algorithms
(such as Siri or Utter) have significantly improved in recent years, so it may be time to revisit this
problem and all the research pathways it may lead too. For instance:
Can a robot infer operator intent or other additional information from what is said to it?
Can a network of robots share acoustic information to localise themselves and the
operators, either through speech or other noises?
Does a mechanically actuated pinna (that’s earlobe) aid localisation accuracy?
What 2-way interactions lead to more efficient dialogue?
There are many more directions this topic could take and I am open to ideas.
Required Skills
Electronics
Signal Processing
C or C++ and MATLAB Programming
An interest in human psychology

Collaborative projects with the ARC Centre for Excellence in
Engineered Quantum Systems (Quantum Nanoscience Laboratory)
Supervisor: Dr David Johnson, ACFR [email protected]
Research Proposal (Thesis only, 1 or more students)
The eQus group is rapidly expanding within the Physics department and a number of interesting
projects requiring an engineering perspective are up for grabs under the general theme of “Custom
electronics for control of quantum systems”. These projects represent a great opportunity for
solving the real-world engineering problems that will extend the science of quantum computing.
While an interest in the underlying physics would be beneficial, it is not a pre-requisite. There are a
number of topics that may be of interest, including:
Multi-frequency readout of quantum systems
Real-time optimisation of quantum control circuits
Simulation of 2D arrays of quantum dots
Mixed signal analysis of high power RF devices
Nano-fabrication for quantum computation
These topics would particularly suit students studying for a combined science/engineering degree.
Required Skills
Mechanical design (Solidworks)
Electronics
Signal Processing
C or C++ and MATLAB Programming
A willingness to learn FPGA (VHDL) design
An interest in pursuing this topic at postgraduate level would also be a benefit.

Dr Ian Manchester, [email protected]
Modelling of spiking dynamics of live neurons
(Honours Thesis) Vertical nanowire arrays are a new technology for electrical probing and biomolecular delivery to individual live neurons in a slice of a rat’s brain (liberated from the rat’s body and kept alive in a bath of bovine serum). This thesis project is based on collaboration with MIT and Harvard University exploring the possibilities of this new technology for rapid-throughput neuroscience.
A neuron’s electrical dynamics are highly nonlinear and difficult to understand, but are extremely important as the key to understanding intelligence. Our role is to rapidly create a high-fidelity computational model of the neuron from the signals recorded via nanowires, so that an accurate simulation can be built of the entire neuronal network, i.e. “reverse engineering the brain” – one of the grand challenges of science in the 21st century.
Above: a live neuron from a rat’s hippocampus being probed with a patch clamp.
This thesis topic would be suitable for Biomedical and Mechatronic students. Advanced topics are available for those doing a double degree with Mathematics or Computer Science, including the use of graphics processing units (GPUs) for rapid neuron modelling.
Interested students should contact Dr Ian Manchester via email ASAP: [email protected]

Design and control of dynamic walking robots
(Honours Thesis or Engineering Project) As robots move out of the factories and into the wider world, many creative methods of locomotion are being proposed. Legged robots in particular are suitable for traversing terrain too rough or irregular for wheels to be useful. Recently, a new type of biped robot called “dynamic walkers” has been invented. These robots are based on co-design of the physical mechanism and the feedback control to generate highly efficient motions, much like a human. They are far more efficient than well-known robots such as Asimo or Big Dog. Some are so efficient they can walk down a shallow slope without any powered actuation at all! At the Australian Centre for Field Robotics (ACFR) we are designing new experimental biped systems which will be able to walk over rough terrain in a highly naturalistic and efficient manner. There are several options available for thesis or project work, covering mechanical design and construction, physical modelling and simulation, implementation of real-time feedback control, and computational analysis.
Above: one of our biped experiments at ACFR.
These thesis and project topics would particularly suit Mechanical and Mechatronic students with an interest in dynamics and control, state of the art robotics, or design of energy-efficient mechanisms.
Interested students should contact Dr Ian Manchester via email ASAP: [email protected]

Advanced nonlinear control and optimization
(Honours Thesis) Engineered systems are getting more and more complex, and increasingly the design process relies on advanced mathematical and computational methods. A particular focus recently has been using methods from semialgebriac geometry and semidefinite optimization to design and guarantee performance of highly nonlinear dynamical systems.
Above left: a rotary inverted pendulum (“Furuta pendulum”): a nonlinear, underactuated mechanical system and a popular test-bed for advanced nonlinear control theory.
Above right: a graphical representation of a three-dimensional spectrahedron, an important object for proving stability of nonlinear dynamical systems.
There are many challenging opportunities available in this area, both with experimental and theoretical focus. This project would suit ambitious and creative students from any stream, with extra possibilities for those doing a combined degree with mathematics or computer science.
Interested students should contact Dr Ian Manchester via email ASAP to discuss concrete project proposals: [email protected]
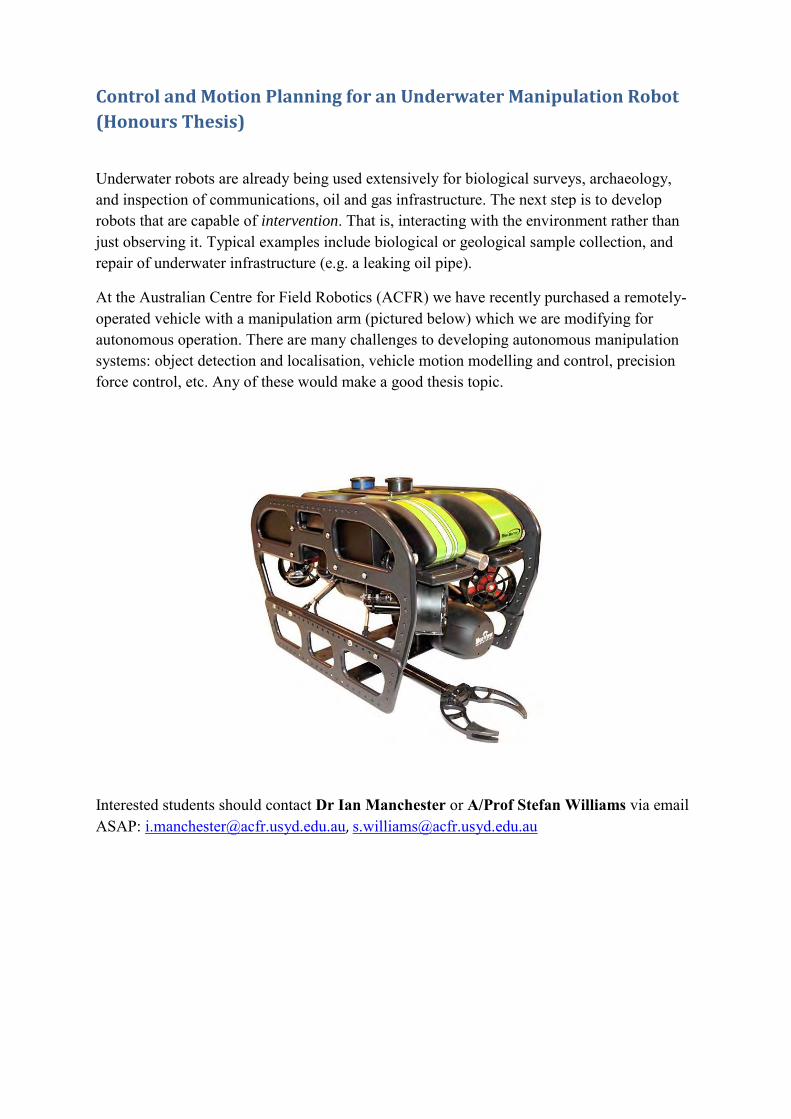
Control and Motion Planning for an Underwater Manipulation Robot
(Honours Thesis)
Underwater robots are already being used extensively for biological surveys, archaeology, and inspection of communications, oil and gas infrastructure. The next step is to develop robots that are capable of intervention. That is, interacting with the environment rather than just observing it. Typical examples include biological or geological sample collection, and repair of underwater infrastructure (e.g. a leaking oil pipe).
At the Australian Centre for Field Robotics (ACFR) we have recently purchased a remotely-operated vehicle with a manipulation arm (pictured below) which we are modifying for autonomous operation. There are many challenges to developing autonomous manipulation systems: object detection and localisation, vehicle motion modelling and control, precision force control, etc. Any of these would make a good thesis topic.
Interested students should contact Dr Ian Manchester or A/Prof Stefan Williams via email ASAP: [email protected], [email protected]

Dextrous Robot Manipulation
(Honours Thesis or Project)
The Baxter robot (pictured below) is a low-cost robot platform designed to work alongside humans in small to medium sized businesses. We have a Baxter at the Mechatronics Teaching Laboratory. This thesis project involves designing the “brain” of this robot, i.e. its perception, motion planning, and control systems.
Some potential topics include:
Using vision to analysing object shape to plan grasping motions Control of arms to cooperate with a human partner Learning precise control by demonstration and experience
This project would particularly suit Mechatronics students, especially those doing a combined degree with computer science. Interested students should contact Dr Ian Manchester via email ASAP to discuss concrete project proposals: [email protected]

Intelligent Vehicles and Safety Systems Group its.acfr.usyd.edu.au
Research Leader: Eduardo Nebot [[email protected]]
Researchers: Stewart Worrall [[email protected]]
James Ward [[email protected]]
Asher Bender [[email protected]]
The Intelligent Vehicles and Safety Systems Group (IVSSG: its.acfr.usyd.edu.au ) is part of the
Australian Center for Field Robotics (ACFR). Our research is related to improving the safety and
performance of vehicles with a range of projects related to sensing, perception, user interfaces
and automation. This is a very important area of research with the potential of improving safety,
minimizing environmental impact and increasing performance for the transportation of people
and goods. We are offering positions for undergraduate theses in a range of topics related to
intelligent vehicles including (but not limited to):
Determining Position Most projects involving vehicles require a good estimate of position. The most common way to
do this is using a GPS sensor, though these have well understood limitations. In vehicles,
problems arise when driving near tall buildings (urban canyon effect) as well as in tunnels and
covered areas.
We are currently looking into new methods of using sensors such as gyroscopes, accelerometers
and odometry incorporated with GPS and GLONASS to improve the estimation of position. There
is an opportunity for several undergraduate theses in this area, with great potential in exploring
both the experimental and theory behind estimating position.
Dead Reckoning (red dots) uses sensors to estimate position without GPS

Mobile Phone Positioning Mobile phones are ubiquitous in today’s society, in particular phones with a spectacular range of
on-board sensors. Most phones (even low end models) have gyroscopes, accelerometers, GPS,
cameras, magnetometers and other sensors. With appropriate algorithms, these sensors have
the potential to provide a high quality estimate of position for people, bicycles as well as
vehicles. At the same time we can use this information to estimate pedestrian intention,
activities etc. We have already developed basic software that currently run in Android and IOS
platform.
There is an opportunity for one or more students to work in this area for the undergraduate
thesis. There is a broad scope for working with this platform, including estimating activities,
intention, position and broadcasting this information to vehicles for safety applications. The
student are required to have a good background in programming.
Thermal Imaging – Working with Infrared Thermal imaging from infrared cameras can be used for a range of applications, particularly the
detection of vehicles, people and animals during the day or night. Even more, the infrared
camera is less sensitive to light conditions such as shadows and can operate to some extent
through dust and fog.
We have a commercial infrared camera which can be mounted on a vehicle and can be used in a
variety of applications. There is scope for undergraduate thesis work in processing the
information from the camera and investigating the use in the detection of obstacles.
A typical image from an infrared camera

Monocular Vision
Embedded microcontrollers such as the raspberry pi have the capability of capturing video and
performing complex image processing on board. For vehicle applications, this can be used to
track the position of the vehicle in the lane, perform visual odometry, detect people or bicycles,
detect road signs and a host of other applications. A project in this area would focus on using
open source tools such as scikit-image.org or opencv.org to process images in an embedded
system to solve problems in the area of intelligent transportation systems.

Human-Robot Interaction David Rye ACFR, Rose Street Building [email protected] We are working on projects that aim to investigate and understand the conditions that are necessary for a human to be comfortable in the close presence of a robot, and to provide an environment for effective, intuitive human-robot interaction. There are many opportunities for highly motivated and capable students to work on key areas of robotics and human-robot interaction. Areas of interest include but are not limited to Detection and tracking of people using vision or RGB-D sensors, including recognition and
interpretation of human features and gestures; Interpretation of prosody and frequency content in human speech; Haptics, including sensing and interpretation of surface- and joint-based force/torque sensing; Robot navigation and path planning in the presence of moving objects (people), including
planning and execution of paths coordinated with human movement; Design and implementation of robot behavior, including whole-body and coordinated arm
motion. Students will need strong programming skills (Matlab or C/C++) for topics in most of these areas. Specific project areas could include (but are not limited to) 1. Accurate detection, tracking, identification and re-identification of people A multi-camera, multi-person tracker has been implemented. There is broad scope for investigation and improvement of the tracker, including new algorithms for improving tracking accuracy; how people can be distinguished and identified; how best to deal with “merging” and “splitting” of people tracks as they cross; identification of the person‟s facing direction and/or eye gaze direction; methods for automatic or rapid camera calibration; methods for determining the best placement and sequencing of sensors for covering larger areas; and investigation of various sensor configurations for data acquisition and information processing. It will also be important to re-identify people who previously have interacted with the robot. 2. Estimation of human intent and/or human affect (emotion) There is great potential to improve human-robot (or human-computer) interaction if the intent of the person can be identified. Social human-robot interaction and some classes of human-computer interaction can be improved if the person‟s affective (emotional) state can correctly be identified. Topics could involve using computer vision for face location and tracking; to identify facial cues; body-part detection and tracking; to identify body movements and tactile interactions; or identifying intent and emotional content in speech. 3. How to choose a person How should a robot choose a person to interact with if there are several people to choose from? By assessing points of interest in an area and the locations and movement of people, the robot could perhaps use this information to interact with „free‟ people, or with „busy‟ people. By identifying groups of people, the robot could choose to interact with people who are not part of a group. 4. How to approach a person How should a robot approach a person? What factors, such as position and orientation of the person and the robot in a room, should be taken into account? The project area could include topics in pose estimation; path planning, including the “freezing robot” problem; and selection of a suitable person to interact with.

Ground and Air Robots – Honours Thesis 2015 [email protected] MX or MXSpace
Mawson is an all terrain rover that has been in operation over the last two years as part of a space robotics program. It needs to be overhauled. We are looking for a student who has an interest in advance computer hardware and software. The objective of the thesis is to give Mawson a whole new lease on life. The thesis would comprise of:
Selection of new computer hardware Software to drive motors and read sensors
already on board. Code for teleoperation
You will work closely with our engineers as part of the design and implementation process.
Aero, Aerospace, MX or MXSpace Continuum now has an arm that will give this rover the ability to look closely at objects and generate detail models of the object and of the terrain. Code is written in Matlab/Simulink. We are looking for 3 students for the following thesis topics:
1) Use the laser scanner on the arm to build a 3D model of a target rock given multiple viewpoints. Challenges include object segmentation from the laser data and motion planning for the arm.
2) Use the laser scanner on the arm to create an elevation map of the environment and then use this map to develop a path planner for Continuum.
3) Develop a energy model for the arm. e.g for a given trajectory calculate the energy used based on joint torques, etc. As an extension perhaps plan energy-optimal collision free trajectories for a given initial and final poses.
You will work closely with our engineers as part of the design and implementation process.
Aero, Aerospace, MX or MXSpace Mammoth is w wheel-legged robot. Code is written in Matlab/Simulink. We have a number of thesis topics including:
1) A student looking at how to create a rapid map of the Mars Yard using onboard laser sensors and generating traversability maps for Mammoth.
2) A student working on novel User Interfaces for tele-operating Mammoth including low-level control to high-level planning.
3) A student working on the planning problem, in particular to look at clambering gaits.
4) A student to investigate building a more effective force sensor unit to identify if Mammoth's wheels are touching the ground reliably.
You will work closely with our engineers as part of the design and implementation process.

Ground and Air Robots – Honours Thesis 2015 [email protected]
MX or MXSpace Ladybird is an electric powered robot designed for vegetable industry. We are looking for students to advance Ladybird with the following thesis topics:
1) To estimate and map the yield and vigour of leafy vegetable crops during the growing cycle, using geometry from lidar and stereo vision.
2) To develop and demonstrate fast (<500ms) planning for precision weeding using the Universal Robots UR5 arm mounted under Ladybird’s skirt.
You will work closely with our engineers as part of the design and implementation process.
MX or MXSpace Shrimp has been used in a number of trials for the tree-crop industry. We are looking for student to work on the following thesis topics:
1) To investigate the use of machine learning to model the geometric characteristics of an orchard, for the purpose of automatic tree detection and segmentation in three dimensional lidar data.
2) To use monocular vision to estimate the presence of obstacles in the path using normal visual appearance of a farm and detecting deviations from this model and by using image classification techniques to characterise obstacles detected with lidar.
3) To improve camera based yield estimation algorithms by using images of trees taken from multiple view-points.
You will work closely with our engineers as part of the design and implementation process.
Aero, Aerospace, MX or MXSpace We have an Astec Falcon 8 that will be used in agriculture. We are looking for students interested in thesis topics on:
Developing novel systems and sensors that can catch bugs.
Optimal path planning given terrain characteristics and energy constraints.
Search algorithms and path planning for detecting moving invasive pests.
You will work closely with our engineers as part of the design and implementation process.

4th Year Thesis Topics – 2015
Supervisor: Dr. Ali Haydar GÖKTOĞAN
For more information contact to
Email: [email protected]
Tel: +61 (2) 9351 8144
Office: Australian Centre for Field Robotics (ACFR)
Room 207, The Rose Str Building J04
Experimental Mars Rovers
1 Autonomous Target Tracking Using Pan-Tilt Mechanism
2 Real-Time 3D Localisation and Tracking of Mars Rover Using Multiple Cameras
3 Self-Localisation Using an Omnidirectional Camera
4 Visual Odometry Using Ground Faced Camera
5 Vision Based Obstacle Detection and Control
6 Autonomous Docking and Recharging System
7 Terramechanics: Modeling Wheel-Soil Interaction
8 Guidance Navigation and Control of a Lunabot
9 Motion Planning Using Parallel Computing for the Reconfigurable Robot MAMMOTH
Environmental and Agricultural
1 Wireless Sensor Network for Farm Animals
2 Intelligent Collar for Farm Animals
3 Radio Tracking of Farm Animals Using UAV
4 Autonomous Boat for Environmental Monitoring
Brain Computer Interface (BCI)
1 Brain Computer Interface (BCI) for Robotic Platforms
2 Functional Near-Infrared (fNIR) Spectroscopy Based Brain Computer Interface (BCI) for Robotic Platforms
UAVs
1 Development an Unmanned Autonomous Paramotor
2 Development of a Novel Multirotor UAV
3 Visual Servoing of a VTOL UAV
4 Flight Characterisation of a Returning Boomerang
5 High-Speed Tracking System for Ground-to-Air Video Recording

Telepresence Robot and Mobile Apps
1 Development of a Telepresence Robot
2 Mobile App Development for Robotic Platforms
Microrobotics
1 Path Planning and Control of a Microrobot Team
2 Vision Based Closed-Loop Control of Microrobots
3 Moving Microrobots in 3D Workspace Using Multiple Electromagnetic Coils
4

3
Aeronautical, Mechatronics and Space
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Autonomous Target Tracking Using Pan-Tilt Mechanism The Australian Centre for Field Robotics (ACFR) has developed a number of Experimental Mars Rover (EMR) platforms to be used in space robotics research. These rovers reside in the “Mars Yard” at the Powerhouse Museum and they are being actively used by our postgraduate and undergraduate research students. For this project, you will develop a target tracking algorithm to continuously keep a feature of interest (FoI) in view of the rover’s vision sensor. As illustrated in the figure, the rover will control the pan-tilt mechanism such a way that, it can “see” the FoI at all times regardless of the position and orientation of the rover. Required Skills:
Matlab/Simulink experience is essential Linux C/C++ or Python PHP OpenCV Math

4
Aeronautical, Mechatronics and Space
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Real-Time 3D Localisation and Tracking of Mars Rover Using Multiple Cameras
Multi-camera, vision based object localisation and tracking is an interesting area with many practical applications in a variety of domains including space robotics. For this project, you will develop a software program using OpenCV. Your software will capture live video frames from multiple cameras, processes each frame and track the 3D position and orientation of the Experimental Mars Rover (EMR) in real-time. This system will be demonstrated in the Mars Yard at the Powerhouse Museum. Required Skills:
Matlab/Simulink experience is essential Linux C/C++ or Python PHP OpenCV Math

5
Aeronautical, Mechatronics and Space
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Self-Localisation Using an Omnidirectional Camera
An omnidirectional camera is one that can capture with 360 degree horizontal field of view. For this project you will be given an omnidirectional camera to be positioned on the pan-tilt mechanism of the Experimental Mars Rover (EMR). You will develop image acquisition and localization software. The system will be able to capture omnidirectional images of the environment while the rover moves on the surface of the Mars Yard. These images than will be used to localize the EMR within the Mars Yard. There is a large volume of literature on omnidirectional vision based object tracking. This system will be developed and demonstrated in the Mars Yard at the Powerhouse Museum. Required Skills:
Matlab/Simulink experience is essential Linux, C/C++ or Python PHP OpenCV Math
Omnidirectional
Camera

6
Aeronautical, Mechatronics and Space
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Visual Odometry Using Ground Faced Camera
Pose (position and orientation) estimation of a robotic platform is essential in many robotics applications. The pose estimation is a challenging task on rough, uneven terrain. In these environments, approaches such as wheel encoder-based odometry or GPS-based localization and orientation estimation methods may be unsuitable or even inapplicable. To overcome these limitations, various odometry methods based on visual information have been introduced in literature. This thesis will focus on the development of a visual odometry method for an Experimental Mars Rover (EMR) platform using a single ground-facing camera.
Required Skills: Matlab/Simulink experience is essential Linux C/C++ or Python PHP OpenCV Math
Ground Faced
Camera

7
Aeronautical, Mechatronics and Space
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Vision Based Obstacle Detection and Control
The Experimental Mars Rover (EMR)-Mawson platform developed by the Australian Centre for Field Robotics (ACFR) is equipped with a pair of cameras for stereo vision. Using these cameras, 3D terrain representation can be derived from stereo image pairs. In this thesis, student will construct 3D representation of rover’s surroundings. Once the obstacles are detected, a feasible path will be selected and the EMR will be controlled to follow the selected path. This system will be demonstrated in the Mars Yard at the Powerhouse Museum. Required Skills:
Matlab/Simulink experience is essential Linux C/C++ or Python PHP OpenCV Math
Detected
Obstacles

8
Aeronautical, Mechatronics and Space
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Autonomous Docking and Recharging System
The Experimental Mars Rover (EMR)-Mawson platform developed by the Australian Centre for Field Robotics (ACFR) runs untethered using internal batteries. Depending on the type of experiments being performed, the batteries can provide energy for approx 4-6 hours non-stop operation. Once the batteries are low, operators drive the rover back to the station base and manually attach a charging cable to recharge its batteries. We want to make this process autonomous; i.e. rover will be able to drive to a charging bay, dock with a charging unit and recharge its batteries autonomously. In order to achieve this, the rover has been equipped with a pair of reverse pointed high-definition cameras. These cameras can provide stereo images for vision based servoing. For this thesis, student will develop a docking station for the rover and develop visual servoing algorithms to achieve autonomous docking and recharging of the rovers’ batteries. This system will be developed and demonstrated in the Mars Yard at the Powerhouse Museum. Required Skills:
Matlab/Simulink experience is essential Linux C/C++ or Python PHP OpenCV Math
Docking
Station
Charging
Connector

9
Aeronautical, Mechatronics and Space
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Terramechanics: Modeling Wheel-Soil Interaction
Understanding and modelling the interaction between a wheel and soil is fundamentally important in rover motion control. This interaction is influenced by many factors including the soil particle size distribution and compactness, wheel design, and tyre material etc. The performance of the rover’s wheel generally is characterised by the pull/push forces, and sinkage and slip relative to the normal load. In this project, student will construct a test rig in which a number of different wheels and tires will be tested on different types of soil and rock. The experimental data collected from these tests will be used to develop wheel-soil interaction models. These models will later be validated on the surface of the Mars Yard at the Powerhouse Museum. Required Skills:
Matlab/Simulink experience is essential Linux C/C++ or Python PHP OpenCV Math

10
Aeronautical, Mechatronics and Space
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Guidance Navigation and Control of a Lunabot
NASA Lunabotics Mining Competition is one of the most prestigious, university level space-robotics competitions. It aims to engage and retain students in Science, Engineering, Technology and Mathematics (STEM) fields. Students design and build a robot capable of mining min 10kg of regolith simulant in 10 minutes. In 2013, 50 teams competed from all over the world. Sydney Lunabotics team very successfully represented the University of Sydney and Australia in NASA Lunabotics Competition-2013. We were the first and the only team from Australia. In this project, you will work on the lunabot developed by the Sydney Lunabotic team. This lunabot is called “Space Wombat”. Your role is to develop and demonstrate a Guidance, Navigation and Control (GNC) system for the Space Wombat. See also:
http://sydneylunabotics.com/ https://www.facebook.com/SydneyLunabotics
Required Skills:
Matlab/Simulink experience is essential Linux C/C++ or Python PHP OpenCV Math Electronics

11
Aeronautical, Mechatronics and Space
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Motion Planning Using Parallel Computing for the Reconfigurable Robot MAMMOTH
Mars Analogue Multi-MOde Traverse Hybrid (MAMMOTH) is a complex, reconfigurable, wheel-on-leg rover designed and developed at the Australian Centre for Field Robotics (ACFR). MAMMOTH is a robot with high degree of freedom. Effective motion planning for MAMMOTH is a challenging task and requires considerable amount of computing power. In order to accelerate the motion planning we would like to use parallel computing. In this project, you will use Jetson TK1 from NVIDIA. It is a powerful platform for Tegra K1 embedded applications with 192 CUDA cores. Jetson TK1 is a small and low-cost board to develop high performance solutions in computer vision, robotics, security, and aerospace. Using Jetson TK1 and parallel computing techniques you will develop and test sampling based motion planning algorithms for MAMMOTH. This is an exciting and challenging topic and suitable for talented students with strong SW programming experience.
Required Skills: Strong SW programming experience Linux experience is essential Matlab/Simulink C/C++ or Python Math
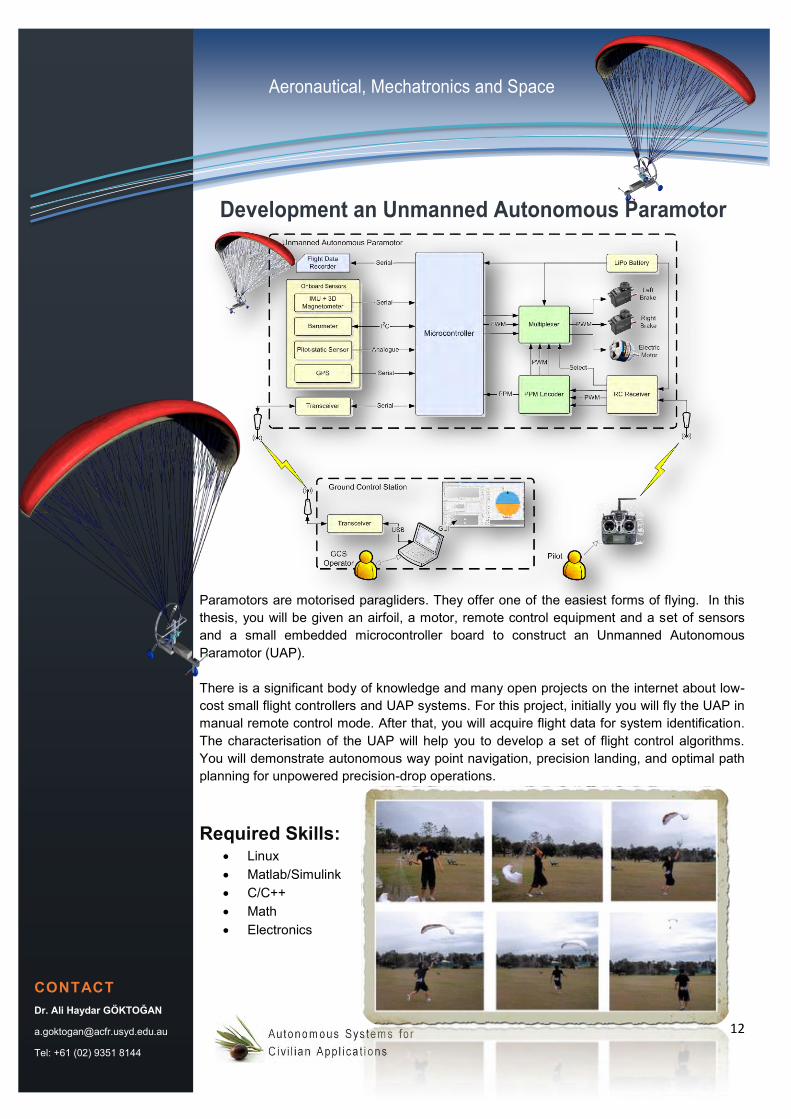
12
Aeronautical, Mechatronics and Space
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Development an Unmanned Autonomous Paramotor
Paramotors are motorised paragliders. They offer one of the easiest forms of flying. In this thesis, you will be given an airfoil, a motor, remote control equipment and a set of sensors and a small embedded microcontroller board to construct an Unmanned Autonomous Paramotor (UAP). There is a significant body of knowledge and many open projects on the internet about low-cost small flight controllers and UAP systems. For this project, initially you will fly the UAP in manual remote control mode. After that, you will acquire flight data for system identification. The characterisation of the UAP will help you to develop a set of flight control algorithms. You will demonstrate autonomous way point navigation, precision landing, and optimal path planning for unpowered precision-drop operations.
Required Skills:
Linux Matlab/Simulink C/C++ Math Electronics

13
Aeronautical, Mechatronics and Space
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Development of a Novel Multirotor UAV
A multi-rotor Unmanned Aerial Vehicle (UAV) is a type of vertical take-off and landing (VTOL) vehicle with independently controlled propellers. Its simplistic airframe design makes them attractive for demonstration of control applications. They can be operated in both an indoor and outdoor environments. There is a significant body of knowledge and open source projects on the internet about multi-rotor airframe design, as well as low-cost small flight controller projects for autonomous flight. This project requires student to design and build the mechanical structure and then develop flight control algorithms on an existing flight control computer (i.e. autopilot). If you are looking for an interesting, technically challenging project with significant outdoor time, and if you want to acquire some RC (Radio Control), flight experience and basic flight control theory, then this project is for you.
Required Skills:
Linux Matlab/Simulink C/C++ Math Electronics Hands-on-mechanical building skills

14
Aeronautical, Mechatronics and Space
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Visual Servoing of a VTOL UAV
Visual servoing process utilises feedback from vision sensor(s) to control the motion of a robot. In this project student will build a Vertical Take-Off and Landing (VTOL) Unmanned Aerial Vehicles (UAVs) and develop control algorithms utilising IR tracker or fiducial based visual servoing to demonstrate autonomous take-off and landing maneuvers. If you are looking for an interesting, technically challenging project and if you want to acquire some RC (Radio Control), flight experience basic flight control theory, visual servoing and pose estimation then this project is for you.
Required Skills:
Linux Matlab/Simulink C/C++ Math Electronics Hands-on-mechanical building skills
IR Tracker
IR Markers
Fiducial
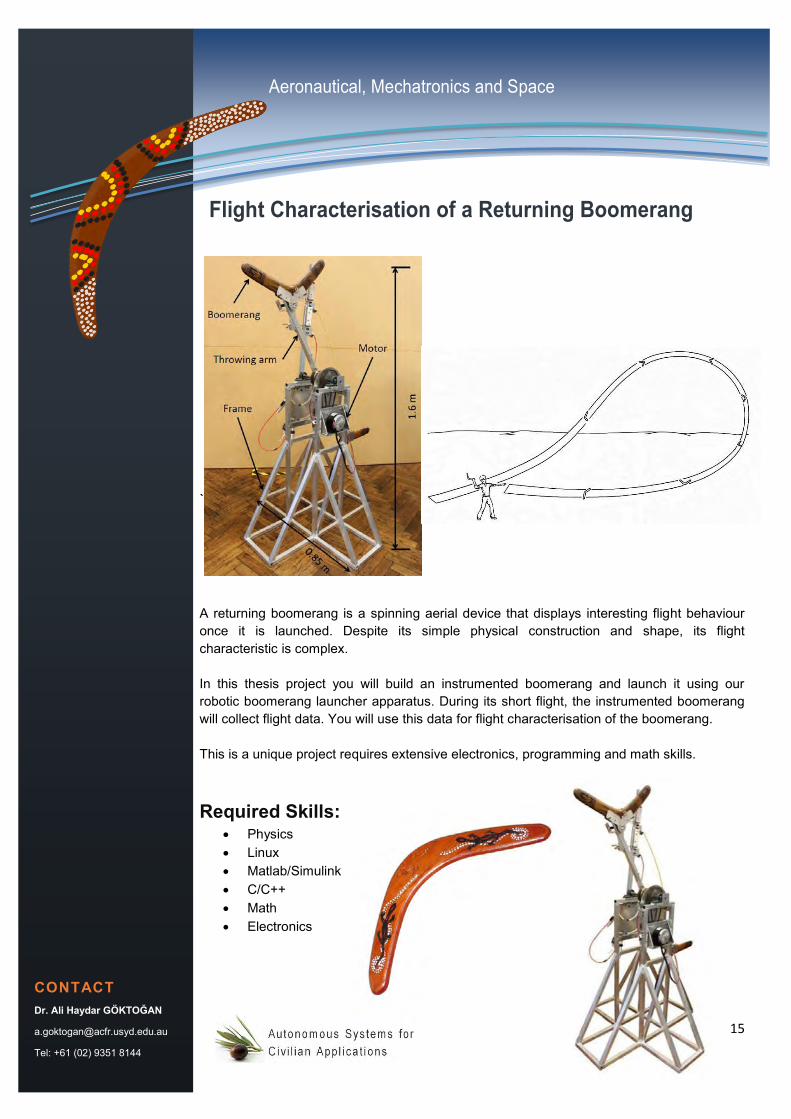
15
Aeronautical, Mechatronics and Space
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Flight Characterisation of a Returning Boomerang
`
A returning boomerang is a spinning aerial device that displays interesting flight behaviour once it is launched. Despite its simple physical construction and shape, its flight characteristic is complex. In this thesis project you will build an instrumented boomerang and launch it using our robotic boomerang launcher apparatus. During its short flight, the instrumented boomerang will collect flight data. You will use this data for flight characterisation of the boomerang. This is a unique project requires extensive electronics, programming and math skills. Required Skills:
Physics Linux Matlab/Simulink C/C++ Math Electronics

16
Aeronautical, Mechatronics and Space
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
High-Speed Tracking System for Ground-to-Air Video Recording
Video recording of a fast moving UAV manually from the ground is a challenging task even if the camera is mounted on a fluid head tripod. Tracking the UAV to keep it at a desired point in the video frame is particularly difficult when high zoom lens is used. Furthermore pointing the camera to UAV when the UAV flies straight over the camera (i.e. 90 degree elevation angle) may not be possible even for many high-end a fluid head tripods. This project is about designing, building and testing of a high-speed tracking system to be mounted on a tripod. The tracking system will be capable of carrying a DLSR (or similar) video camera with a zoom lens. The system will receive the GPS data from the UAV and be able to control the pan-tilt angle to keep the UAV in a desired spot in the video frame. Required Skills:
Linux Matlab/Simulink C/C++ Math Electronics Hands-on-mechanical building skills
Pan-Tilt Gimbal
Camera

17
Mechatronics
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Wireless Sensor Network for Farm Animals
`
Australia is the second largest beef exporter in the world (behind Brazil). Australia exported 927,000 tonnes of beef and veal in 2009, worth $4.3 billion. The live cattle exports in 2009 were worth $665.5 million. As these figures indicate, it is important to be able to sustain the beef and farming sectors. This thesis will investigate the possible application of Wireless Sensor Network (WSN) in animal farming practices. A number of animals will be wearing “Intelligent Collars” equipped with a wireless transceiver, a data logger and a suite of sensors including a GPS receiver. An adaptive WSN will be established between animals and a ground station. This WSN will be used to track individual animals and monitor animal health. Required Skills:
Linux Matlab/Simulink C/C++ Math Electronics

18
Mechatronics
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Intelligent Collar for Farm Animals
`
This thesis project will focus on developing an “Intelligent Collar” for farming animals. The collar will be equipped with an Inertial Measurement Unit (IMU), a GPS receiver, a data logger, and radio transceiver. The collected data will be analysed to better understand the animal behaviours. Intelligent Collars will be able to communicate with each other as well as with farmer’s hand-held terminals. They will provide opportunities for new ways for farmers to track their animals. If you are looking for an interesting, technically challenging, environmental and agricultural related project with significant outdoor time, and if you want to increase your experience in electronics then this project is for you. Required Skills:
Linux Matlab/Simulink C/C++ Math Electronics
IMU + GPS +
Data Logger +
Radio Transceiver
Energy
Harvesters
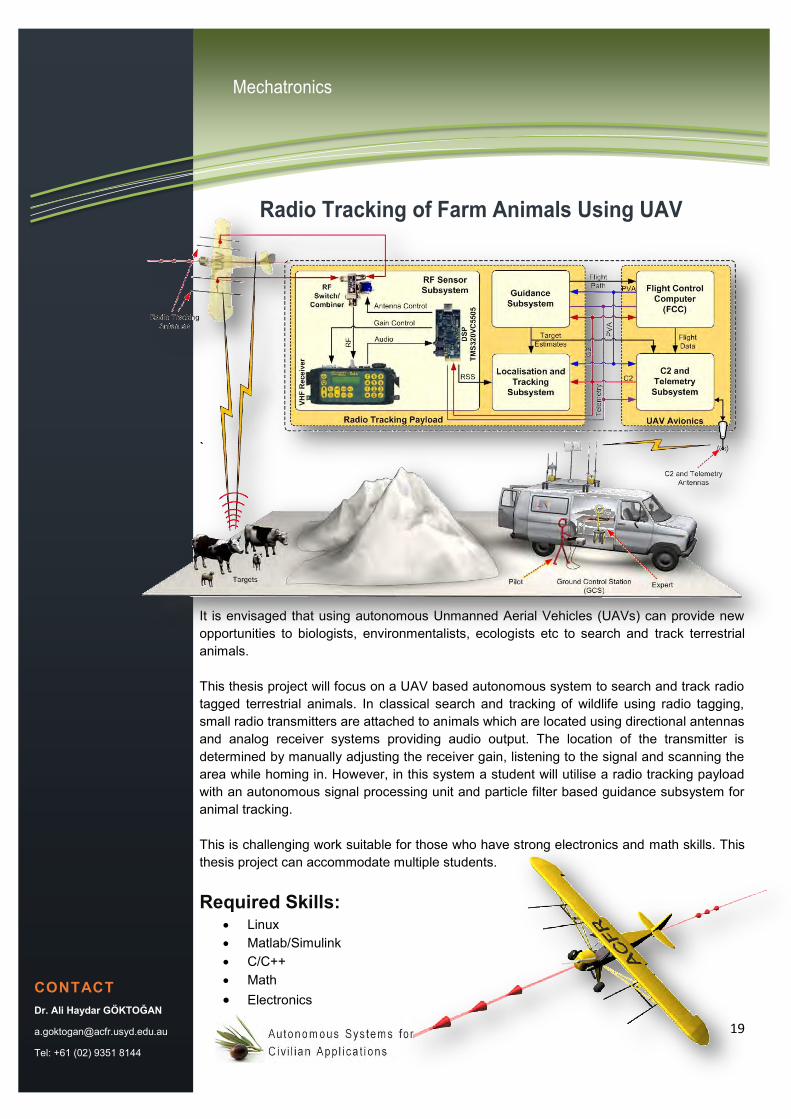
19
Mechatronics
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Radio Tracking of Farm Animals Using UAV
`
It is envisaged that using autonomous Unmanned Aerial Vehicles (UAVs) can provide new opportunities to biologists, environmentalists, ecologists etc to search and track terrestrial animals. This thesis project will focus on a UAV based autonomous system to search and track radio tagged terrestrial animals. In classical search and tracking of wildlife using radio tagging, small radio transmitters are attached to animals which are located using directional antennas and analog receiver systems providing audio output. The location of the transmitter is determined by manually adjusting the receiver gain, listening to the signal and scanning the area while homing in. However, in this system a student will utilise a radio tracking payload with an autonomous signal processing unit and particle filter based guidance subsystem for animal tracking. This is challenging work suitable for those who have strong electronics and math skills. This thesis project can accommodate multiple students.
Required Skills:
Linux Matlab/Simulink C/C++ Math Electronics

20
Mechatronics
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Autonomous Boat for Environmental Monitoring `
Robots and other autonomous mobile platforms can be used in many environmental monitoring applications. These platforms need to be able operate in real, unstructured environment. Performing data gathering missions in real, outdoor environment brings its own exciting challenges. This thesis topic is for you; if you feel that you want need to do something positive about the environment. This thesis project will focus on the development and operation of an autonomous boat on lakes and irrigation channels. You will design and build the boat and develop guidance, navigation and control codes for it. Required Skills:
Linux Matlab/Simulink C/C++ Math Electronics CAD

21
Mechatronics
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Brain Computer Interface (BCI) for Robotic Platforms `
Brain Computer Interface (BCI) aims to establish link between human neural system and external entities using signals generated in the brain. Recently we have successfully controlled a robotic arm using P300 waves acquired by an electroencephalography (EEG) device. EEG is the process of measuring electrical brain activity non-invasively on the scalp of a patient/user, and was first developed by Hans Berger in 1924. P300 waves are event-related potentials (ERP) generated approximately 300ms after an external sitimulus recognised by the person. This project aims to further develop the P300 based BCI to teleoperate an autonomous robotic platform. Required Skills:
Linux Matlab/Simulink C/C++ Math
Mini-Robot Arm EEG Electrodes

22
Mechatronics
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Functional Near-Infrared (fNIR) Spectroscopy Based Brain Computer Interface (BCI) for Robotic Platforms
Functional near-infrared (fNIR) spectroscopy is a non-invasive, optical neuroimaging technique to monitor changes in oxygenation and deoxygenating of hemoglobin concentrations at cortex using scattered response of light in NIR wavelengths. Variations in relative oxygenation of specific brain regions can be observed using fNIR instrument. These regional hemodynamic changes can be correlated to cognitive state of the user. Relationship between neural activities and vascular response is known as neurovascular coupling. This project aims to design, develop and test an fNIR instrument to utilise neurovascular coupling in a neurofeedback system. The developed system will constitute the Brain Computer Interface (BCI) to control an autonomous robotic platform using brain activities. Required Skills:
Matlab/Simulink Math Electronics Linux C/C++
Teleoperated
Robot Arm
Functional Near-
Infrared (fNIR)
Spectroscopy
Sensor Suit

23
Mechatronics
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Development of a Telepresence Robot
In a nut shell, a telepresence robot is a mobile platform with bidirectional audio-visual interface operated from a remote location. In a typical operational scenario, user connects to a telepresence robot and teleoperates it to move in its environment while getting live feedback from the robot. Communication bandwidth, packet loss rate, latency, type of human-machine-interface (HMI) presented to user, mechanical properties of the robot and many other factors affect the telepresence experience hence the user satisfaction. This thesis is about designing and building a telepresence robot with different levels of autonomy, including obstacle avoidance, assisted autonomy by providing to “go to destination”, “follow a person” types of functions. This project requires strong, hands-on mechanical, electronics and software design and development skills and experience. Furthermore, experience in web-technologies, such as PHP, HTML5, CSS3, JQuery, C/C++ on embedded Linux platforms are essential.
Required Skills: Matlab/Simulink Math Electronics Linux, PHP, HTML5, CSS3, JQuery, C/C++
CAD

24
Mechatronics
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Mobile App Development for Robotic Platforms
Ever increasing popularity of mobile devices has created an unprecedented market for innovative mobile apps. Although the overwhelming majority of mobile apps are using only the hardware of the mobile device and some web services, there is an increasing interest in directly linking mobile devices with external physical platforms. AR-Drone mobile app is an example in which an external physical platform (an AR-Drone multicopter) is controlled by a mobile device (such as iPhone or iPad, etc.). This thesis is focused on mobile app development for robotics platforms in which students will design, develop and demonstrate a teleoperated robotic platform using a mobile device (such as iPhone, iPad or an Android device). This project requires strong, hands-on electronics and software design and development skills and experience. Furthermore, experience in IOS and/or Android along with their app development environments (Objective-C, Swift and Java respectively) as well as experience in web-technologies (PHP, HTML5, CSS3, JQuery on embedded Linux platforms) is essential.
Required Skills:
Math Electronics IOS, Objective-C, Swift Android, Java Linux, PHP, HTML5, CSS3, JQuery, C/C++

25
Mechatronics
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Path Planning and Control of a Microrobot Team
Microrobotics is a rapidly developing field deals with robots smaller than 1mm. Applications of microrobotics range from in-vivo medical operations, to micro-fabrication, to micro-scale particle manipulation. Recently we have developed an experimental setup in which multiple microrobots have been operated on a 2D test arena using combination of magnetic field and mechanical surface waves. The size of these microrobots varies between 200-2000 microns. This thesis is focused on developing a path planning and control system for a team of microrobots on a 2D test arena. This project requires knowledge and interest in physics, particularly in the fields of electricity and magnetism, oscillations and waves. Furthermore hands-on experience in electronics circuit design, programming in Simulink, C/C++ and Python are essential.
Required Skills:
Physics Math Matlab/Simulink Electronics Linux
OpenCV
C/C++, Python

26
Mechatronics
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Vision Based Closed-Loop Control of Microrobots
Microrobotics is a rapidly developing field deals with robots smaller than 1mm. Applications of microrobotics range from in-vivo medical operations, to micro-fabrication, to micro-scale particle manipulation. Recently we have developed an experimental setup in which multiple microrobots have been operated on a 2D test arena using combination of magnetic field and mechanical surface waves. Size of these microrobots varies between 200-2000 microns. This thesis is focused on the development of a vision-based closed loop control system for the microrobots. This project requires knowledge and interest in physics, particularly in the fields of electricity and magnetism, oscillations and waves. Furthermore hands-on experience in electronics circuit design, programming in Simulink, C/C++ and Python are essential. As the microrobots moves very fast on the 2D test arena, the vision system has tpo be fast to track the microrobots. Therefore hands-on experience on OpenCV would be helpful.
Required Skills:
Physics Math Matlab/Simulink Electronics Linux
OpenCV
C/C++, Python
Microrobot
High-speed
Camera
Controller
Microrobot
Test Arena

27
Mechatronics
CONTACT Dr. Ali Haydar GÖKTOĞAN
Tel: +61 (02) 9351 8144
Moving Microrobots in 3D Workspace Using Multiple Electromagnetic Coils
Microrobotics is a rapidly developing field deals with robots smaller than 1mm. Applications of microrobotics range from in-vivo medical operations, to micro-fabrication, to micro-scale particle manipulation. There are various methods to move the microrobots in the test environment, including thermal, optical, chemical, electrostatic, electromagnetic, bacteria propelled systems. This thesis is focused on designing, building and testing of an experimental setup in which microrobots will be moved in 3D space using accurately controlled magnetic field vectors generated by multiple electromagnets. This project requires knowledge and interest in physics, particularly in the fields of electricity and magnetism, oscillations and waves. Furthermore hands-on experience in electronics circuit design, programming in Simulink, C/C++ and Python are essential.
Required Skills:
Physics Math Matlab/Simulink Electronics Linux
OpenCV
C/C++, Python
Microrobot
Workspace Top Camera
Side Camera
Controller
Electromagnetic
Coils