
2010-2-00452-SP bab 2
32
BAB 2 TINJAUAN KEPUSTAKAAN 2.1 Perencanaan Geometrik Jalan Perencanaan geometrik jalan merupakan bagian dari perencanaan jalan yang difokuskan pada perencanaan bentuk fisik jalan sehingga dihasilkan jalan yang dapat melayani lalu lintas secara optimal dan memberikan kenyamanan serta keamanan bagi para pengguna jalan. Untuk itu dalam perencanaan geometrik jalan perlu diperhatikan beberapa hal yang dapat mempengaruhi bentuk dari geometrik jalan tersebut, seperti halnya kelas jalan, klasifikasi medan, jari-jari kelengkungan rencana, sudut tikungan, kelandaian tanjakan/turunan jalan, panjang lengkung jalan vertikal, dan elevasi jalan. Pada perencanaan geometrik jalan dibagi menjadi tiga elemen yaitu alinyemen horizontal yang merupakan proyeksi horizontal dari sumbu jalan tegak lurus bidang peta situasi, dan alinyemen vertikal yang merupakan perpotongan bidang vertikal bidang permukaan perkerasan jalan melalui sumbu jalan, serta penampang melintang jalan yang juga merupakan potongan
Transcript of 2010-2-00452-SP bab 2

BAB 2
TINJAUAN KEPUSTAKAAN
2.1 Perencanaan Geometrik Jalan
Perencanaan geometrik jalan merupakan bagian dari
perencanaan jalan yang difokuskan pada perencanaan
bentuk fisik jalan sehingga dihasilkan jalan yang
dapat melayani lalu lintas secara optimal dan memberikan
kenyamanan serta keamanan bagi para pengguna jalan.
Untuk itu dalam perencanaan geometrik jalan perlu
diperhatikan beberapa hal yang dapat mempengaruhi
bentuk dari geometrik jalan tersebut, seperti halnya
kelas jalan, klasifikasi medan, jari-jari kelengkungan
rencana, sudut tikungan, kelandaian tanjakan/turunan
jalan, panjang lengkung jalan vertikal, dan elevasi
jalan.
Pada perencanaan geometrik jalan dibagi
menjadi tiga elemen yaitu alinyemen horizontal
yang merupakan proyeksi horizontal dari sumbu jalan
tegak lurus bidang peta situasi, dan alinyemen vertikal
yang merupakan perpotongan bidang vertikal bidang
permukaan perkerasan jalan melalui sumbu jalan, serta
penampang melintang jalan yang juga merupakan potongan

melintang jalan tegak lurus sumbu jalan.
2.2 Klasifikasi Jalan
Pada umumnya jalan raya dapat dikelompokkan dalam
klasifikasi menurut fungsinya, dimana peraturan ini
mencakup tiga golongan penting, yaitu:

1
a. Jalan Arteri (Utama)
Jalan arteri adalah jalan yang melayani angkutan
utama, dengan ciri-ciri perjalanan jarak jauh, dan
kecepatan rata-rata tinggi. Dalam komposisi lalu
lintasnya tidak terdapat kendaraan lambat dan
kendaraan bermotor. Jalan raya dalam kelas ini
merupakan jalan-jalan raya berjalur banyak dengan
konstruksi perkerasan dari jenis yang terbaik.
b. Jalan Kolektor (Sekunder)
Jalan kolektor adalah jalan raya yang melayani
angkutan dengan ciri-ciri perjalanan jarak sedang, dan
kecepatan rata-rata sedang.
c. Jalan Lokal (Penghubung)
Jalan penghubung adalah jalan yang melayani
angkutan setempat dengan ciri-ciri perjalanan yang
dekat, kecepatan rata-rata rendah dan jumlah jalan
masuk tidak dibatasi. Dimana merupakan konstruksi
jalan berjalur tunggal atau dua.
Adapun klasifikasi jalan menurut medan yang dilalui
tersebut terdiri dari tiga medan jalan yaitu sebagai
berikut:
Tabel 2.1 Klasifikasi Menurut Medan JalanNo. Jenis
MedanKemiringan Medan (%)1 Dataran (D) <
3

22 Perbukitan
(B)3 –253 Pegunungan
(P)>25
Kecepatan rencana untuk untuk masing-masing fungsi
dan medan jalan di tetapkan seperti dapat dilihat pada
Tabel 2.2.
3
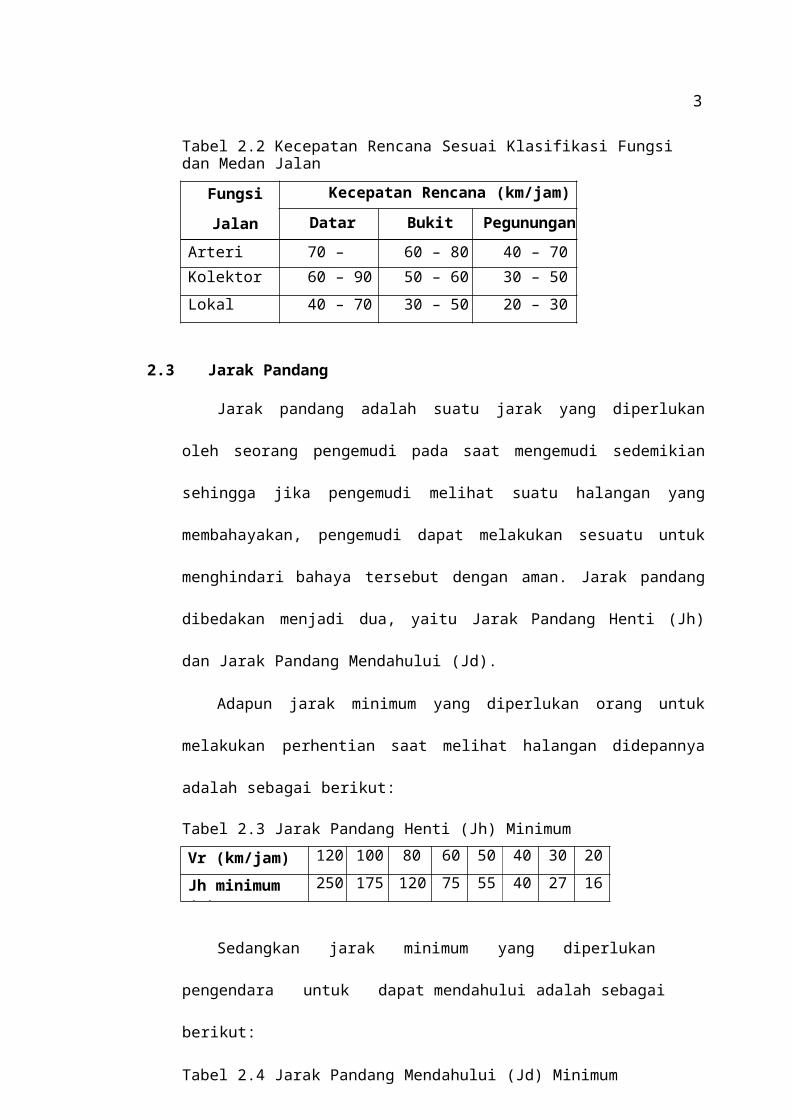
Tabel 2.2 Kecepatan Rencana Sesuai Klasifikasi Fungsi dan Medan Jalan
FungsiJalan
Kecepatan Rencana (km/jam)Datar Bukit Pegunungan
Arteri 70 – 120
60 – 80 40 – 70Kolektor 60 – 90 50 – 60 30 – 50Lokal 40 – 70 30 – 50 20 – 30
2.3 Jarak Pandang
Jarak pandang adalah suatu jarak yang diperlukan
oleh seorang pengemudi pada saat mengemudi sedemikian
sehingga jika pengemudi melihat suatu halangan yang
membahayakan, pengemudi dapat melakukan sesuatu untuk
menghindari bahaya tersebut dengan aman. Jarak pandang
dibedakan menjadi dua, yaitu Jarak Pandang Henti (Jh)
dan Jarak Pandang Mendahului (Jd).
Adapun jarak minimum yang diperlukan orang untuk
melakukan perhentian saat melihat halangan didepannya
adalah sebagai berikut:
Tabel 2.3 Jarak Pandang Henti (Jh) MinimumVr (km/jam) 120 100 80 60 50 40 30 20Jh minimum (m)
250 175 120 75 55 40 27 16
Sedangkan jarak minimum yang diperlukan
pengendara untuk dapat mendahului adalah sebagai
berikut:
Tabel 2.4 Jarak Pandang Mendahului (Jd) Minimum

4Vr (km/jam) 120 100 80 60 50 40 30 20Jd minimum (m)
800 670 550 350 250 200 150 100
5
2.4 Alinyemen Jalan
Alinyemen jalan merupakan bagian dari geometrik
jalan yang difokuskan pada perencanaan tikungan jalan
dan tanjakan maupun turunan suatu jalan. Maka dari itu
perencanaan alinyemen jalan harus diperhitungkan dengan
baik, agar hasil perencanaan yang didapatkan dapat
memberikan kenyamanan dalam berkendara.
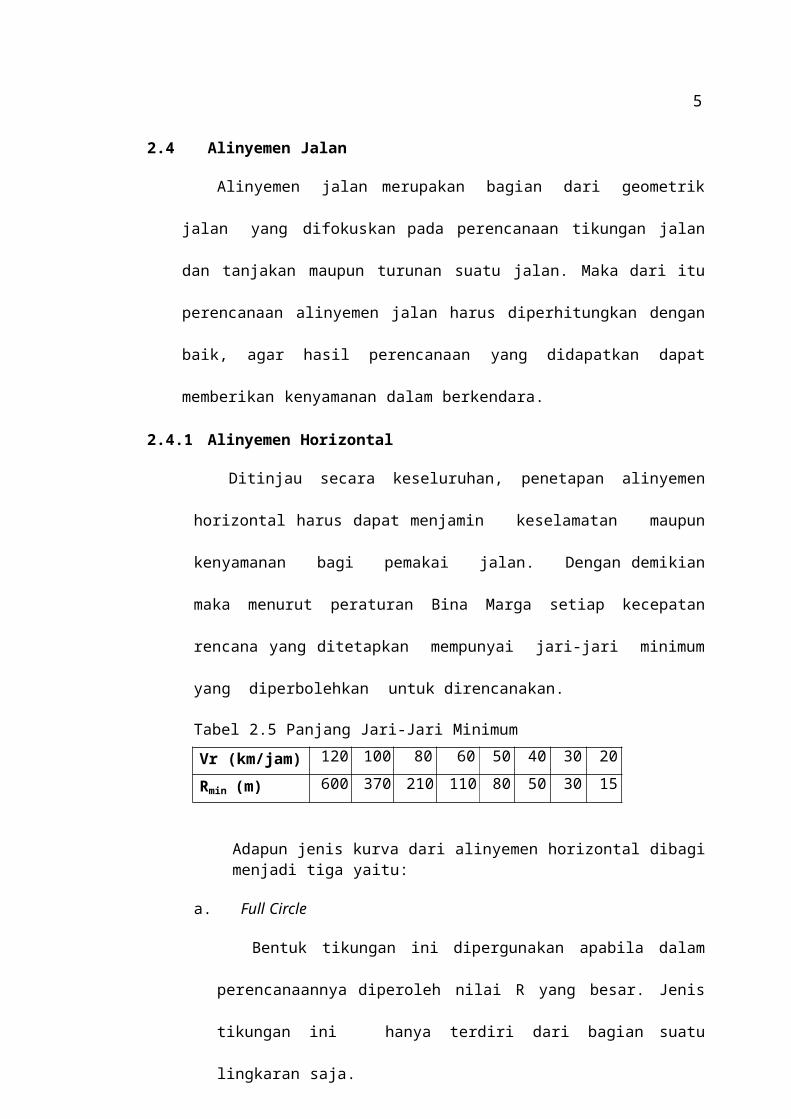
2.4.1 Alinyemen Horizontal
Ditinjau secara keseluruhan, penetapan alinyemen
horizontal harus dapat menjamin keselamatan maupun
kenyamanan bagi pemakai jalan. Dengan demikian
maka menurut peraturan Bina Marga setiap kecepatan
rencana yang ditetapkan mempunyai jari-jari minimum
yang diperbolehkan untuk direncanakan.
Tabel 2.5 Panjang Jari-Jari MinimumVr (km/jam) 120 100 80 60 50 40 30 20Rmin (m) 600 370 210 110 80 50 30 15
Adapun jenis kurva dari alinyemen horizontal dibagimenjadi tiga yaitu:
a. Full Circle
Bentuk tikungan ini dipergunakan apabila dalam
perencanaannya diperoleh nilai R yang besar. Jenis
tikungan ini hanya terdiri dari bagian suatu
lingkaran saja.

6b. Spiral Circle Spiral
Dalam bentuk tikungan ini, merupakan lengkung
peralihan dari bagian lurus (tangen) menjadi
bentuk lingkaran. Fungsi utama dari peralihan
lengkung tersebut adalah agar perubahan sentrifugal
yang timbul pada waktu
7
kendaraan memasuki atau meninggalkan tikungan dapat
terjadi secara berangsur-angsur dan tidak mendadak.
Dengan demikian diharapkan agar kendaraan dapat
melintasi jalur yang telah disediakan dengan nyaman.
c. Spiral Spiral
Tikungan berbentuk spiral-spiral adalah lengkung
tanpa busur lingkaran. Pada tikungan spiral-spiral
dipergunakan pada tikungan yang tajam. Adapun
persamaan yang digunakan untuk mencari parameter
tikungan sama seperti parameter yang digunakan pada
tikungan spiral circle spiral. Khusus untuk spiral-spiral
digunakan bila Lc < 25 meter.
Khusus untuk tikungan jenis spiral spiral, tikungan ini tidak
mempunyai lengkung circle. Maka berlaku kondisi
sebagai berikut: Karena θc = 0, maka
ll = 2θs
Lc = 0, maka L= 2Ls
2.4.2 Alinyemen Vertikal
Alinyemen vertikal dapat dibagi menjadi dua bentuk yaitu:
a. Lengkung Vertikal Cembung
Lengkung vertikal cembung adalah lengkung dimana

8titik perpotongan antara kedua tangen berada di atas
permukaan jalan yang bersangkutan.
Adapun jenis-jenis lengkung vertikalcembung adalah:
g1 = -
Gambar 2.1 Jenis Lengkung Vertikal Cembung

1
b. Lengkung Vertikal Cekung
Lengkung vertikal cekung adalah lengkung dimana
titik perpotongan antara kedua tangen berada di
bawah permukaan jalan.
Adapun jenis-jenis lengkung vertikal cembung adalah:
g1 = +
Gambar 2.2 Jenis Lengkung Vertikal Cekung
2.5 Parameter Perencanaan Geometrik Jalan
2.5.1 Parameter Perhitungan Alinyemen Horizontal
Adapun parameter-parameter dalam perhitungan
alinyemen horizontal terdiri dari:
2.5.1.1 Full Circle
Gambar 2.3 Alinyemen Horizontal Tipe Full Circle

2
Parameter yang digunakan dalam perhitungan full circle yaitu:a. Jarak antara TC dan PI
Nilai T (jarak antara TC dan PI) dapat dihitung dengan rumus sebagai
berikut:
Tc R .tan 1 ∆
.................................
......................(2.1)c 2
dimana: T = Jarak
antara TC dan PI Rc
= Jari-jari
tikungan
ll = Sudut tangen/sudut defleksi/sudut tikungan
b. Jarak PI ke Puncak Lengkung Tikungan
E R sec 1
2 1 ................................................(2.2)
dimana: E = Jarak PI ke puncak lengkung tikungan
Rc = Jari-jari tikungan
ll = Sudut tangen/sudut
defleksi/sudut tikungan c. Panjang
Lengkung Tikungan
L c 180 Rc ...........................................................(2.3)
dimana: L = Panjang
c

3lengkung tikungan
Rc = Jari-jari tikungan
π = 3,14
ll = Sudut tangen/sudut defleksi/sudut tikungan
4
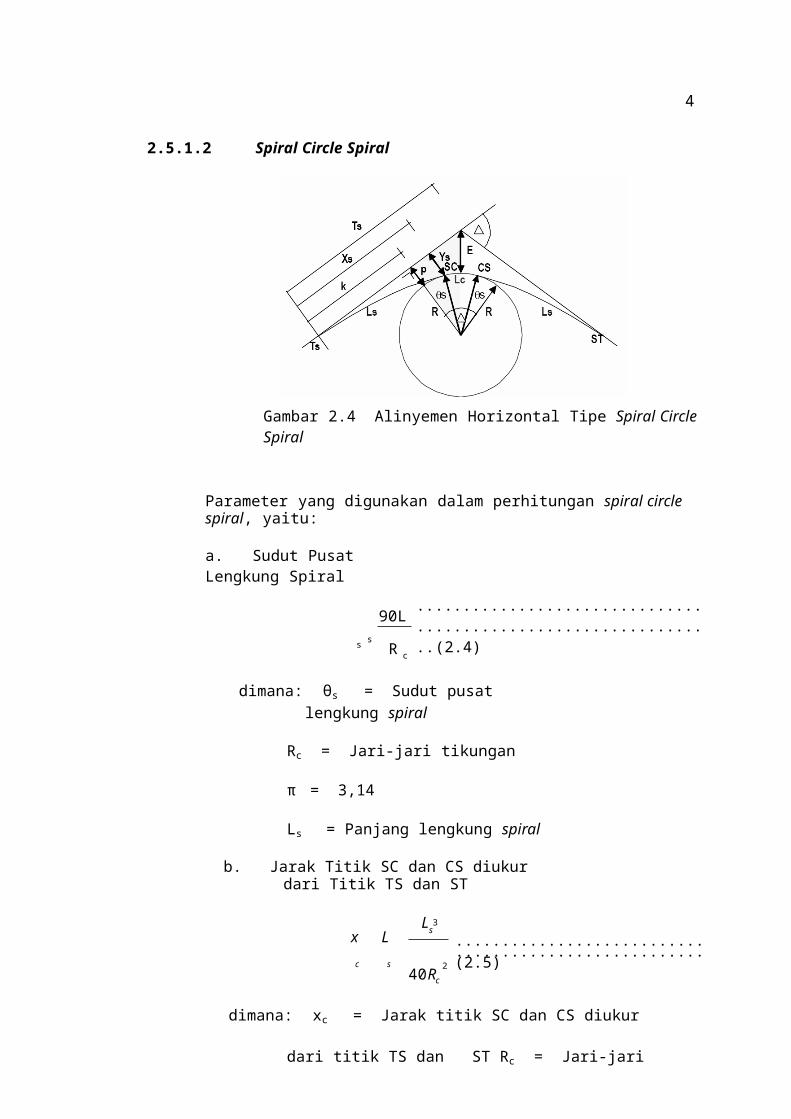
2.5.1.2 Spiral Circle Spiral
Gambar 2.4 Alinyemen Horizontal Tipe Spiral Circle Spiral
Parameter yang digunakan dalam perhitungan spiral circle spiral, yaitu:
a. Sudut Pusat Lengkung Spiral
90Ls s R
...............................
...............................
..(2.4)c
dimana: θs = Sudut pusatlengkung spiral
Rc = Jari-jari tikungan
π = 3,14
Ls = Panjang lengkung spiral
b. Jarak Titik SC dan CS diukurdari Titik TS dan ST
x LLs
......................................................(2.5)c s 40R 2
dimana: xc = Jarak titik SC dan CS diukur
dari titik TS dan ST Rc = Jari-jari
c
3

5tikungan
Ls = Panjang lengkung spiral

6
c. Jarak Titik SC dan CS diukur dari Bagian Tangen Jalan
yLs
.................................................................(2.6)c 6R
dimana: yc = Jarak titik SC dan CS diukur dari bagian tangen jalan
Rc = Jari-jari tikungan
Ls = Panjang lengkung spiral
d. Absis dari p pada garis tangen Spiral
k x c R c sin
s ....................................................(2.7)
dimana: k = Absis dari p padagaris tangen Spiral
xc = Jarak titik SC dan CS diukur
dari titik TS dan ST Rc = Jari-
jari tikungan
θs = Sudut pusat lengkung spiral
e. Panjang Pergeseran Lengkung Circle diukur tegak
lurus dari bagian tangen jalan
p y c R c 1
cos s
.......................
......................(2.8)
dimana: p = Panjang pergeseran lengkung circle
diukur tegak lurus dari bagian tangen
jalan
Rc = Jari-jari tikungan
2
c

7yc = Jarak titik SC dan CS diukur dari bagian tangen jalan
θs = Sudut pusat lengkung spiral
f. Jarak Antara Titik TC dan Titik PI
T R c p tan 2
k ..............................................(2.9)
dimana: T = Jarak antara titik TC dan titik PI

8
Rc = Jari-jari tikungan
P = Panjang pergeseran lengkung circle diukur
tegak lurus dari bagian tangen jalan
ll = Sudut tangen/sudut defleksi/sudut tikungan
k = Perpanjangan bagian tangen
jalan akibat
pergeseran
lengkung circle
g. Jarak PI ke Puncak Lengkung Tikungan
E R c p sec 2
R c
.........................
.................(2.10)
dimana: E = Jarak PI ke puncak lengkung tikungan
Rc = Jari-jari tikungan
P = Panjang pergeseran lengkung circle diukur
tegak lurus dari bagian tangen jalan
ll = Sudut tangen/sudut defleksi/sudut tikungan
h. Sudut Pusat Lengkung Circle
c 2 s ...........................................................(2.11)
dimana: ∆c = Sudut pusat lengkung circle
ll = Sudut tangen/sudut defleksi/sudut tikungan
θs = Sudut pusat lengkung spiral

9
i. Panjang Lengkung Circle
Lc
R c c
180...........................................................(2.12)
dimana: Lc = Panjang lengkung circle
Rc = Jari-jari tikungan

10
∆c = Sudut pusat lengkung circle
π = 3,14
j. Panjang Lengkung Tikungan
L 2Ls Lc ..........................................................(2.13)
dimana: L = Panjang lengkung tikungan
Ls = Panjang lingkung spiral
Lc = Panjang lengkung Circle
CATATAN: Lc > 25 meter
L 2
p s 0,25 meter24 R c
Jika nilai p seperti pada persamaan di atas maka tikungan menjadi full circle
2.5.1.3 Spiral Spiral
Gambar 2.5 Alinyemen Horizontal Tipe Spiral Spiral

11
Parameter yang digunakan dalam perhitungan spiral spiral, yaitu:
a. Jarak dari titik TS ke titik SC
x LL s
....................................................(2.14)c s 40R
dimana: xc = Jarak titik SC dan CS diukur
dari titik TS dan ST Rc = Jari-jari
tikungan
Ls = Panjang lengkung spiral
b. Jarak Titik SC dan CS diukur dari Bagian Tangen Jalan
yLs
...............................................................(2.15)c 6R
dimana: yc = Jarak titik SC dan CS diukurdari bagian tangen jalan
Rc = Jari-jari tikungan
Ls = Panjang lengkung spiral
c. Perpanjangan Bagian Tangen Jalan AkibatPergeseran Lengkung Circle
k x c R c sin
s ..................................................(2.16)
dimana: k = Perpanjangan bagian tangen jalan akibat pergeseran lengkung
circle
xc = Jarak titik SC dan CS diukur
dari titik TS dan ST Rc = Jari-
3
c
2
c
12jari tikungan
θs = Sudut pusat lengkung spiral
d. Panjang Pergeseran Lengkung Circle diukur tegak
lurus dari bagian tangen jalan
p y c R c
1cos s
.......................
....................(2.17)

13
dimana: p = Panjang pergeseran lengkung circle
diukur tegak lurus dari bagian tangen
jalan
Rc = Jari-jari tikungan
yc = Jarak titik SC dan CS diukur dari bagian tangen jalan
θs = Sudut pusat lengkung spiral
e. Jarak Antara Titik TC dan Titik PI
T R c p tan 2
k ............................................(2.18)
dimana: T = Jarak antara
titik TC dan titik PI Rc
= Jari-jari tikungan
P = Panjang pergeseran lengkung circle diukur tegak lurus dari
bagian tangenjalan
ll = Sudut tangen/sudut defleksi/sudut tikungan
k = Perpanjangan bagian tangen
jalan akibat
pergeseran
lengkung circle
f. Jarak PI ke Puncak Lengkung Tikungan
E R c p sec 2
R c
.........................

14.................(2.19)
dimana: E = Jarak PI ke puncak lengkung tikungan
Rc = Jari-jari tikungan
P = Panjang pergeseran lengkung circle diukur
tegak lurus dari bagian tangen jalan
ll = Sudut tangen/sudut defleksi/sudut tikungan
15
g. Panjang Lengkung Tikungan
L 2L s ..................................................................(2.20)
dimana: L = Panjang lengkung tikungan
Ls = Panjang lingkung spiral
Lc = Panjang lengkung Circle
h. Sudut Lengkung Spiral
s ...................................................................(2.21)2
dimana: θs = Sudut pusat lengkung spiral
ll = Sudut tangen/sudut
defleksi/sudut tikungan i. Panjang
Lengkung Peralihan
L s s R c .........................................................(2.22)90
dimana: Ls = Panjang lingkung spiral
θs = Sudut pusat lengkung spiral
Rc = Jari-jari tikungan
π = 3,14
2.5.2 Parameter PerhitunganAlinyemen Vertikal
g1 = -

16
g1 = +
Gambar 2.6 Jenis Lengkung Vertikal Cembung dan Cekung

17
Pada dasarnya perencanaan perhitungan lengkung
vertikal cekung sama dengan vertikal cembung. Yang
menjadi perbedaan adalah dalam perhitungan
kelandaiannya. Adanya kelandaian maksimum
dimaksudkan untuk memungkinkan kendaraan bergerak
terus tanpa kehilangan kecepatan yang berarti.
Kelandaian maksimum untuk berbagai kecepatan
rencana dapat dilihat pada Tabel 2.6.
Tabel 2.6 Kelandaian Maksimum untuk Berbagai VrVr (km/jam) 120 110 100 80 60 50 40 <40Kelandaian Maksimum (%)
3 3 4 5 8 9 10 10
Adapun parameter-parameter yang digunakan dalam
perhitungan lengkung vertikal adalah sebagai berikut:
A = g2 - g1 ............................................................................
..................(2.23) Jika nilai beda aljabar
negatif (-) maka lengkung vertikal berbentuk
cembung, sedangakan jika nilai beda aljabar (A)
adalah positif maka lengkung vertikal berbentuk
cekung.
Panjang lengkung vertikal, L dapat diperoleh dari
persamaan-persamaan berikut:
1. Lengkung Cembung Vertikal
18a. Berdasarkan Jarak Pandang Henti
A Jh 2Jh < L L ............................
..........................(2.24)399
Jh > L L 2 Jh
399 ........................
........................(2.25)A

1
b. Berdasarkan Jarak Pandang Mendahului
A Jd 2Jh < L L ...........................
..........................(2.26)840
Jh > L L 2 Jd
840 ........................
........................(2.27)A
c. Berdasarkan Kenyamanan
A V 2L .....................................
.......................................(2.28)389
d. Berdasarkan Keluwesan
L 0,6V ...............................................................................(2.29)
e. Berdasarkan Drainase
L 50 A................................................................................(2.30)
2. Lengkung Cekung Vertikal
a. Berdasarkan Jarak Pandang Henti
Jh < L L A Jh .........................
......................(2.31)120 3,5Jh
Jh > L L 2 Jh
120 3,5Jh ...................
.................(2.32)A
b. Berdasarkan Kenyamanan
A V 2L .....................................
.......................................(2.33)389
2
2c. Berdasarkan Keluwesan
L 0,6V ...............................................................................(2.34)
d. Berdasarkan Drainase
L 50 A................................................................................(2.35)

3
Berdasarkan persamaan rumus untuk
menghitung panjang lengkung vertikal tidak semua
persamaan dan hasil dapat digunakan. Karena pada setiap
hasil dan perencanaan berkaitan pula dengan tingkat
keekonomisan atau penghematan biaya. Untuk
mengatasi masalah tersebut, maka jalan perlu
diberikan rambu-rambu untuk pengendara agar dapat
mengantisipasi keadaan atau kondisi jalan di depannya.
Persamaan-persamaan yang digunakan dalam perhitungan lengkung
vertikal adalah sebagai berikut:
EVAL
800
yA
(untuk X = ½ L)..............................................................(2.36)
x 2
..........................................
..........................................(2.37)2 L
y Elev.Pg x
y .......................................................................(2.38)
dimana: L = Panjang lengkung vertikal
EV = Jarak dari titik PVI ke maksimum
lengkung (L/2). y' = Panjang lekuk
y = Elevasi jalan
A = Perbedaan aljabar
untuk kelandaian g =

4Kelandaian tangen (%)
CATATAN: - kelandaian mendaki (pendakian), diberi tanda, g(+)
- kelandaian menurun (penurunan), diberi tanda, g(−)













![arXiv:1002.0611v1 [cond-mat.mes-hall] 2 Feb 2010](https://static.fdokumen.com/doc/165x107/631f541d13819e2fbb0faf2f/arxiv10020611v1-cond-matmes-hall-2-feb-2010.jpg)




