¹ 1(17) 2014 - Известия Транссиба
146
í à ó ÷ í î - ò å õ í è ÷ å ñ ê è é æ ó ð í à ë ¹ 1(17) 2014 ISSN 2220-4245
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of ¹ 1(17) 2014 - Известия Транссиба

í à ó ÷ í î - ò å õ í è ÷ å ñ ê è é æ ó ð í à ë
¹ 1(17)
2014
ISSN 2220-4245
№ 1(17)
2014 2
УДК 621.333:621.314.26:621.313.33:621.317
В. Д. Авилов, Д. И. Попов, А. В. Литвинов
МЕТОДИКА ОПРЕДЕЛЕНИЯ ПОТЕРЬ
В ДВУХЗВЕННЫХ ПРЕОБРАЗОВАТЕЛЯХ ЧАСТОТЫ
В СОСТАВЕ СТЕНДА ДЛЯ ИСПЫТАНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
МЕТОДОМ ВЗАИМНОЙ НАГРУЗКИ
Приведена методика определения потерь в основных элементах двухзвенных преобразователей частоты
(выпрямителе и инверторе), которая позволяет дополнить математическую модель процесса испытаний
асинхронных двигателей методом взаимной нагрузки и использовать ее при проектировании испытательных
станций, в том числе для расчета мощности станции, потребляемой из сети. Практической ценностью дан-
ной методики является отсутствие необходимости использования приборов для измерения мощности пере-
менного тока с частотой, отличной от 50 Гц.
В настоящее время в связи с широким внедрением асинхронных двигателей на тягу (в
том числе на подвижном составе железных дорог) актуальны вопросы исследования и внед-
рения новых энергоэффективных методов и средств диагностирования асинхронных двига-
телей. Существует множество методов и схем испытания электрических машин. Особый ин-
терес представляют энергоэффективные методы и схемы, позволяющие добиться экономии
электроэнергии при испытании. К таким решениям относят метод взаимной нагрузки.
Одна из схем, реализующих метод взаимной нагрузки при испытании асинхронных дви-
гателей, предложена сотрудниками кафедр «Электрические машины и общая электротехни-
ка» и «Локомотивы» Омского государственного университета путей сообщения [1].
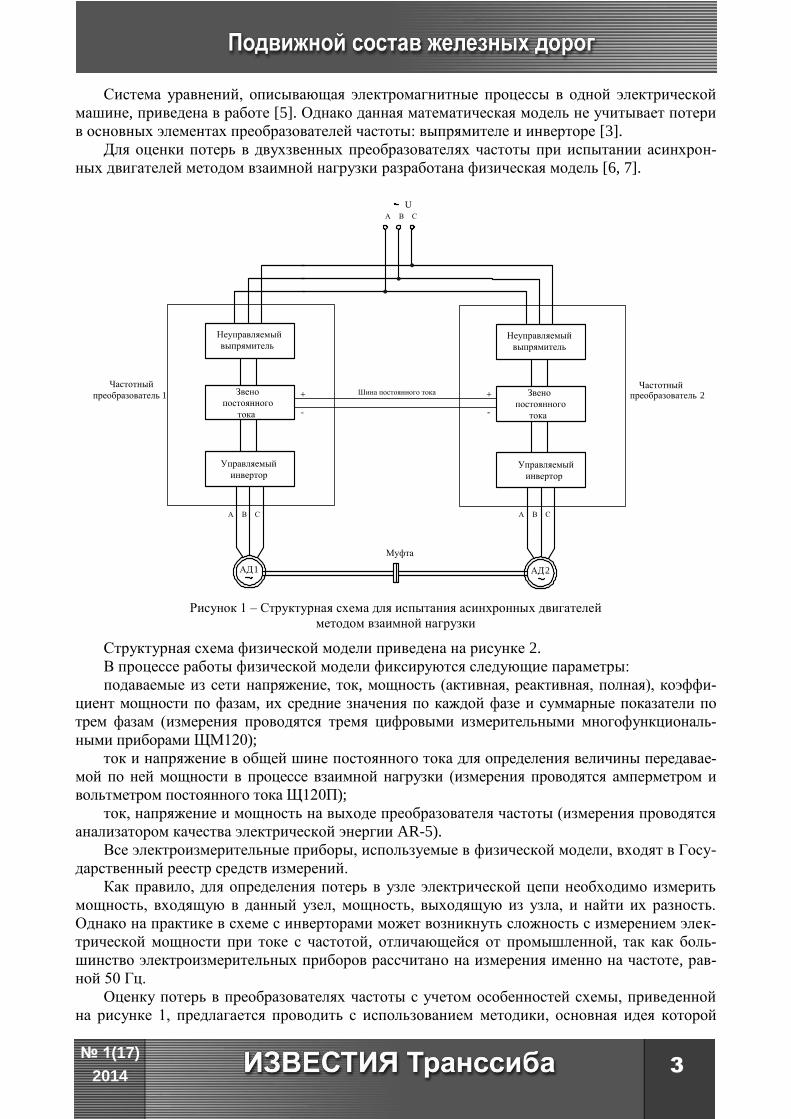
В составе схемы предусмотрено использование двух однотипных преобразователей ча-
стоты, осуществляющих двойное преобразование энергии: напряжение промышленной ча-
стоты, подведенное из сети, выпрямляется, а затем инвертируется в переменное напряжение
заданной частоты, подаваемое на обмотки статора двух однотипных асинхронных электро-
двигателей (рисунок 1). Режим взаимной нагрузки осуществляется за счет установки разных
частот переменного напряжения на выходе частотных преобразователей. Машина, на кото-
рую подается напряжение большей частоты, работает в двигательном режиме, а другая – в
генераторном. Вырабатываемая генератором электрическая энергия передается через обрат-
ные диоды инвертора в звено постоянного тока. Звенья постоянного тока, находящиеся меж-
ду выпрямителями и инверторами частотных преобразователей, объединены в одну систему
общей шиной постоянного тока. Таким образом, вырабатываемая генератором электрическая
энергия передается двигателю по цепи постоянного тока, не возвращаясь в трехфазную сеть.
Особенностью преобразователей частоты, работающих в данной схеме взаимной нагрузки,
является использование неуправляемых выпрямителей, что делает систему более простой и
дешевой, а также менее энергоемкой, чем при использовании управляемых выпрямителей [2].
Энергия, потребляемая из сети всей установкой, необходима для компенсации потерь во
всех частях схемы: асинхронных двигателях, частотных преобразователях и др. [3, 4].
Для приведенной схемы была разработана математическая модель, которая позволяет
оценить энергоемкость метода взаимной нагрузки при испытании асинхронных двигателей.
Математическая модель имеет вид системы из 13 дифференциальных уравнений:
первые шесть уравнений описывают электромагнитные процессы, происходящие в пер-
вой электрической машине;
другие шесть уравнений описывают электромагнитные процессы, происходящие во вто-
рой электрической машине;
одно уравнение системы определяет связь электромагнитных моментов обеих машин и
частоты совместного вращения их механически соединенных роторов.
3
№ 1(17)
2014
Система уравнений, описывающая электромагнитные процессы в одной электрической
машине, приведена в работе [5]. Однако данная математическая модель не учитывает потери
в основных элементах преобразователей частоты: выпрямителе и инверторе [3].
Для оценки потерь в двухзвенных преобразователях частоты при испытании асинхрон-
ных двигателей методом взаимной нагрузки разработана физическая модель [6, 7].
АД1
Неуправляемый
выпрямитель
Звено
постоянного
тока
Управляемый
инвертор
Частотный
преобразователь 1
АД2
Неуправляемый
выпрямитель
Звено
постоянного
тока
Управляемый
инвертор
Частотный преобразователь 2+ +
- -
Шина постоянного тока
А В С
U
А В С А В С
Муфта
Рисунок 1 – Структурная схема для испытания асинхронных двигателей
методом взаимной нагрузки
Структурная схема физической модели приведена на рисунке 2.
В процессе работы физической модели фиксируются следующие параметры:
подаваемые из сети напряжение, ток, мощность (активная, реактивная, полная), коэффи-
циент мощности по фазам, их средние значения по каждой фазе и суммарные показатели по
трем фазам (измерения проводятся тремя цифровыми измерительными многофункциональ-
ными приборами ЩМ120);
ток и напряжение в общей шине постоянного тока для определения величины передавае-
мой по ней мощности в процессе взаимной нагрузки (измерения проводятся амперметром и
вольтметром постоянного тока Щ120П);
ток, напряжение и мощность на выходе преобразователя частоты (измерения проводятся
анализатором качества электрической энергии AR-5).
Все электроизмерительные приборы, используемые в физической модели, входят в Госу-
дарственный реестр средств измерений.
Как правило, для определения потерь в узле электрической цепи необходимо измерить
мощность, входящую в данный узел, мощность, выходящую из узла, и найти их разность.
Однако на практике в схеме с инверторами может возникнуть сложность с измерением элек-
трической мощности при токе с частотой, отличающейся от промышленной, так как боль-
шинство электроизмерительных приборов рассчитано на измерения именно на частоте, рав-
ной 50 Гц.
Оценку потерь в преобразователях частоты с учетом особенностей схемы, приведенной
на рисунке 1, предлагается проводить с использованием методики, основная идея которой
№ 1(17)
2014 4
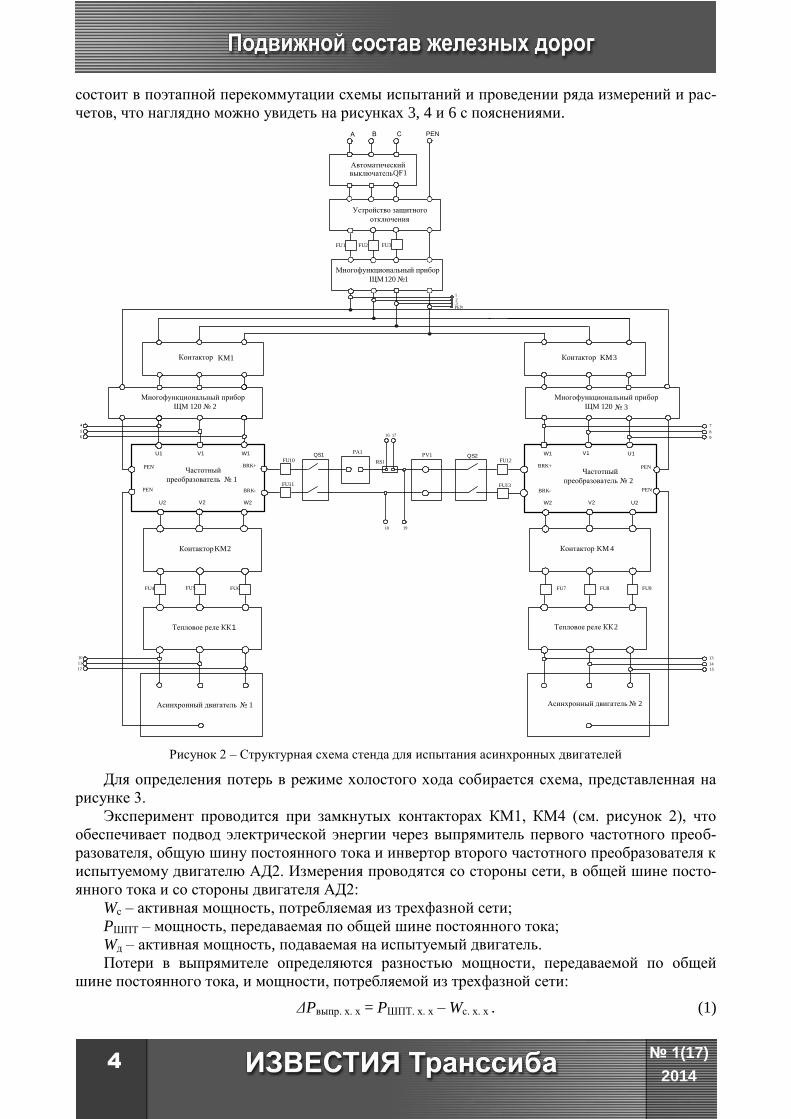
состоит в поэтапной перекоммутации схемы испытаний и проведении ряда измерений и рас-
четов, что наглядно можно увидеть на рисунках 3, 4 и 6 с пояснениями.
С
Автоматический выключатель
ВА PEN
Контактор KM2
Устройство защитного
отключения
FU1 FU2 FU3
Контактор KM 4
Многофункциональный прибор
ЩМ 120 № 2
Контактор KM1
Многофункциональный прибор
ЩМ 120 № 3
Контактор KM3
Частотный
преобразователь № 1
BRK+
BRK-
PEN
U2 V2 W2
U1 V1 W1
PEN
BRK+
BRK-
PEN
U2V2W2
U1V1W1
PEN
РА1РV1
FU10
FU11
FU12
FU13
QS1 QS2
Частотный
преобразователь № 2
FU4 FU5 FU6
Тепловое реле КК1
Асинхронный двигатель № 2
FU9FU8FU7
Тепловое реле КК2
RS1
Асинхронный двигатель № 1
Многофункциональный прибор
ЩМ 120 №1
QF1
123PEN
4
5
6
7
8
9
10
11
12
13
14
15
16 17
18 19
Рисунок 2 – Структурная схема стенда для испытания асинхронных двигателей
Для определения потерь в режиме холостого хода собирается схема, представленная на
рисунке 3.
Эксперимент проводится при замкнутых контакторах КМ1, КМ4 (см. рисунок 2), что
обеспечивает подвод электрической энергии через выпрямитель первого частотного преоб-
разователя, общую шину постоянного тока и инвертор второго частотного преобразователя к
испытуемому двигателю АД2. Измерения проводятся со стороны сети, в общей шине посто-
янного тока и со стороны двигателя АД2:
Wс – активная мощность, потребляемая из трехфазной сети;
PШПТ – мощность, передаваемая по общей шине постоянного тока;
Wд – активная мощность, подаваемая на испытуемый двигатель.
Потери в выпрямителе определяются разностью мощности, передаваемой по общей
шине постоянного тока, и мощности, потребляемой из трехфазной сети:
ΔPвыпр. х. х = PШПТ. х. х – Wс. х. х . (1)
5
№ 1(17)
2014
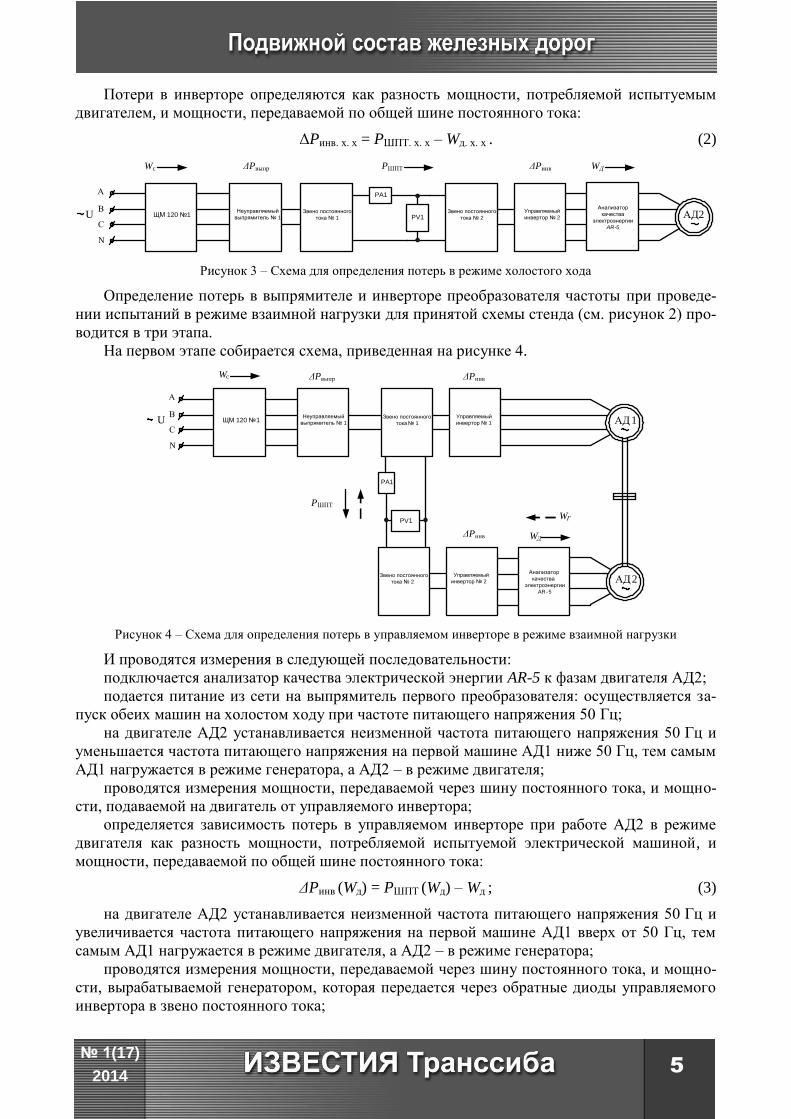
Потери в инверторе определяются как разность мощности, потребляемой испытуемым
двигателем, и мощности, передаваемой по общей шине постоянного тока:
ΔPинв. х. х = PШПТ. х. х – Wд. х. х . (2)
А
В
С
N
ЩМ 120 №1Неуправляемый
выпрямитель № 1Звено постоянного
тока № 1
PA1
PV1Звено постоянного
тока № 2
Управляемый
инвертор № 2 АД2UАнализатор
качества
электроэнергии
AR-5
Wc WДPШПТΔPвыпр ΔPинв
Рисунок 3 – Схема для определения потерь в режиме холостого хода
Определение потерь в выпрямителе и инверторе преобразователя частоты при проведе-
нии испытаний в режиме взаимной нагрузки для принятой схемы стенда (см. рисунок 2) про-
водится в три этапа.
На первом этапе собирается схема, приведенная на рисунке 4.
А
В
С
N
ЩМ 120 №1Неуправляемый
выпрямитель № 1Звено постоянного
тока № 1
PA1
Управляемый
инвертор № 1 АД1U
Звено постоянного
тока № 2
Управляемый
инвертор № 2 АД2Анализатор
качества
электроэнергии
AR-5
Wc
PШПТ
WД
WГ
ΔPинв
ΔPинв ΔPвыпр
PV1
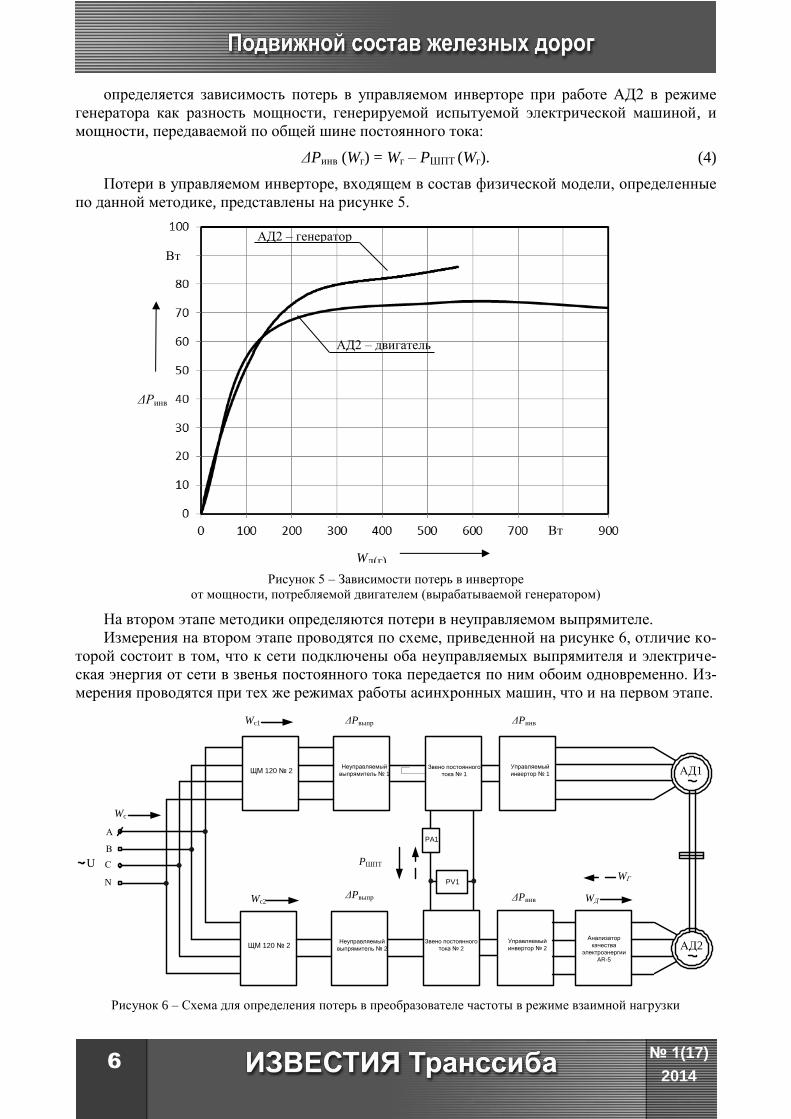
Рисунок 4 – Схема для определения потерь в управляемом инверторе в режиме взаимной нагрузки
И проводятся измерения в следующей последовательности:
подключается анализатор качества электрической энергии AR-5 к фазам двигателя АД2;
подается питание из сети на выпрямитель первого преобразователя: осуществляется за-
пуск обеих машин на холостом ходу при частоте питающего напряжения 50 Гц;
на двигателе АД2 устанавливается неизменной частота питающего напряжения 50 Гц и
уменьшается частота питающего напряжения на первой машине АД1 ниже 50 Гц, тем самым
АД1 нагружается в режиме генератора, а АД2 – в режиме двигателя;
проводятся измерения мощности, передаваемой через шину постоянного тока, и мощно-
сти, подаваемой на двигатель от управляемого инвертора;
определяется зависимость потерь в управляемом инверторе при работе АД2 в режиме
двигателя как разность мощности, потребляемой испытуемой электрической машиной, и
мощности, передаваемой по общей шине постоянного тока:
ΔPинв (Wд) = PШПТ (Wд) – Wд ; (3)
на двигателе АД2 устанавливается неизменной частота питающего напряжения 50 Гц и
увеличивается частота питающего напряжения на первой машине АД1 вверх от 50 Гц, тем
самым АД1 нагружается в режиме двигателя, а АД2 – в режиме генератора;
проводятся измерения мощности, передаваемой через шину постоянного тока, и мощно-
сти, вырабатываемой генератором, которая передается через обратные диоды управляемого
инвертора в звено постоянного тока;
№ 1(17)
2014 6
определяется зависимость потерь в управляемом инверторе при работе АД2 в режиме
генератора как разность мощности, генерируемой испытуемой электрической машиной, и
мощности, передаваемой по общей шине постоянного тока:
ΔPинв (Wг) = Wг – PШПТ (Wг). (4)
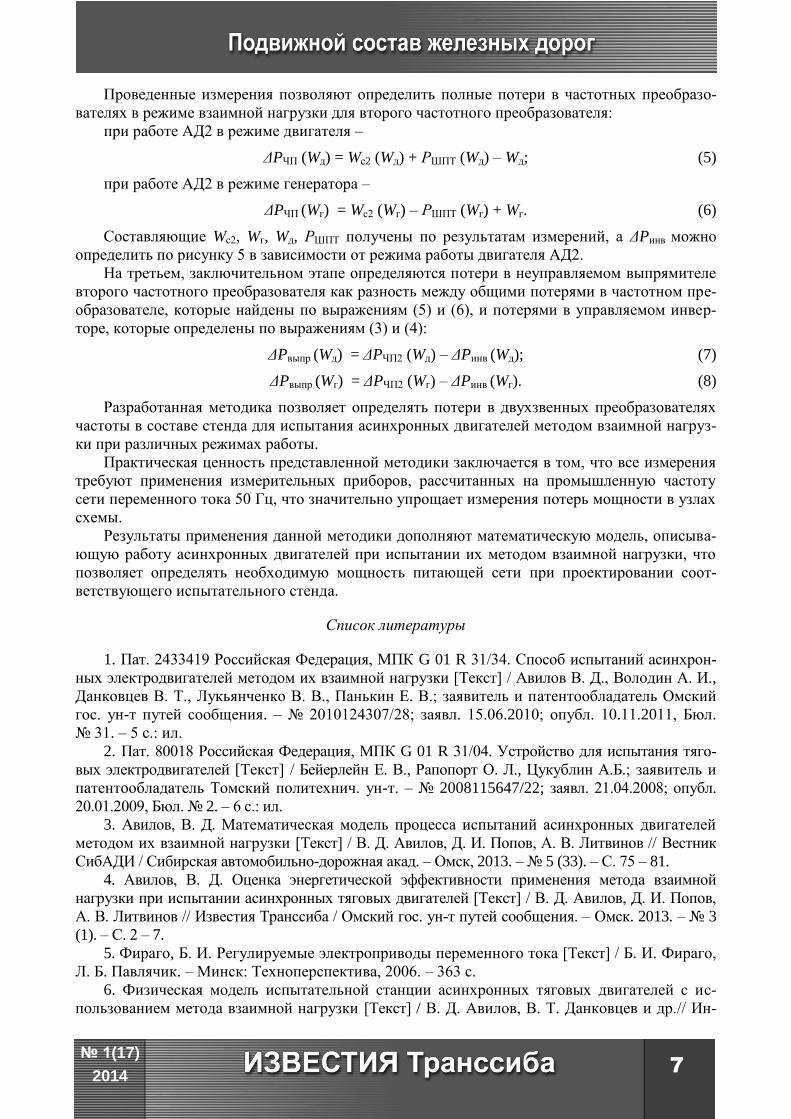
Потери в управляемом инверторе, входящем в состав физической модели, определенные
по данной методике, представлены на рисунке 5.
Рисунок 5 – Зависимости потерь в инверторе
от мощности, потребляемой двигателем (вырабатываемой генератором)
На втором этапе методики определяются потери в неуправляемом выпрямителе.
Измерения на втором этапе проводятся по схеме, приведенной на рисунке 6, отличие ко-
торой состоит в том, что к сети подключены оба неуправляемых выпрямителя и электриче-
ская энергия от сети в звенья постоянного тока передается по ним обоим одновременно. Из-
мерения проводятся при тех же режимах работы асинхронных машин, что и на первом этапе.
А
В
С
N
ЩМ 120 № 2Неуправляемый
выпрямитель № 1Звено постоянного
тока № 1
Управляемый
инвертор № 1 АД1
U
Звено постоянного
тока № 2
Управляемый
инвертор № 2 АД2Анализатор
качества
электроэнергии
AR-5
Wc1
PШПТ
WД
WГ
ΔPвыпр
ΔPинв
ΔPинв
ЩМ 120 № 2Неуправляемый
выпрямитель № 2
ΔPвыпр
Wc
Wc2
PA1
PV1
Рисунок 6 – Схема для определения потерь в преобразователе частоты в режиме взаимной нагрузки
АД2 – двигатель
АД2 – генератор
Вт
Вт
Wд(г)
ΔРинв
7
№ 1(17)
2014
Проведенные измерения позволяют определить полные потери в частотных преобразо-
вателях в режиме взаимной нагрузки для второго частотного преобразователя:
при работе АД2 в режиме двигателя –
ΔPЧП (Wд) = Wс2 (Wд) + РШПТ (Wд) – Wд; (5)
при работе АД2 в режиме генератора –
ΔPЧП (Wг) = Wс2 (Wг) – РШПТ (Wг) + Wг. (6)
Составляющие Wс2, Wг, Wд, РШПТ получены по результатам измерений, а ΔPинв можно
определить по рисунку 5 в зависимости от режима работы двигателя АД2.
На третьем, заключительном этапе определяются потери в неуправляемом выпрямителе
второго частотного преобразователя как разность между общими потерями в частотном пре-
образователе, которые найдены по выражениям (5) и (6), и потерями в управляемом инвер-
торе, которые определены по выражениям (3) и (4):
ΔPвыпр (Wд) = ΔPЧП2 (Wд) – ΔPинв (Wд); (7)
ΔPвыпр (Wг) = ΔPЧП2 (Wг) – ΔPинв (Wг). (8)
Разработанная методика позволяет определять потери в двухзвенных преобразователях
частоты в составе стенда для испытания асинхронных двигателей методом взаимной нагруз-
ки при различных режимах работы.
Практическая ценность представленной методики заключается в том, что все измерения
требуют применения измерительных приборов, рассчитанных на промышленную частоту
сети переменного тока 50 Гц, что значительно упрощает измерения потерь мощности в узлах
схемы.
Результаты применения данной методики дополняют математическую модель, описыва-
ющую работу асинхронных двигателей при испытании их методом взаимной нагрузки, что
позволяет определять необходимую мощность питающей сети при проектировании соот-
ветствующего испытательного стенда.
Список литературы
1. Пат. 2433419 Российская Федерация, МПК G 01 R 31/34. Способ испытаний асинхрон-
ных электродвигателей методом их взаимной нагрузки [Текст] / Авилов В. Д., Володин А. И.,
Данковцев В. Т., Лукьянченко В. В., Панькин Е. В.; заявитель и патентообладатель Омский
гос. ун-т путей сообщения. – № 2010124307/28; заявл. 15.06.2010; опубл. 10.11.2011, Бюл.
№ 31. – 5 с.: ил.
2. Пат. 80018 Российская Федерация, МПК G 01 R 31/04. Устройство для испытания тяго-
вых электродвигателей [Текст] / Бейерлейн Е. В., Рапопорт О. Л., Цукублин А.Б.; заявитель и
патентообладатель Томский политехнич. ун-т. – № 2008115647/22; заявл. 21.04.2008; опубл.
20.01.2009, Бюл. № 2. – 6 с.: ил.
3. Авилов, В. Д. Математическая модель процесса испытаний асинхронных двигателей
методом их взаимной нагрузки [Текст] / В. Д. Авилов, Д. И. Попов, А. В. Литвинов // Вестник
СибАДИ / Сибирская автомобильно-дорожная акад. – Омск, 2013. – № 5 (33). – С. 75 – 81.
4. Авилов, В. Д. Оценка энергетической эффективности применения метода взаимной
нагрузки при испытании асинхронных тяговых двигателей [Текст] / В. Д. Авилов, Д. И. Попов,
А. В. Литвинов // Известия Транссиба / Омский гос. ун-т путей сообщения. – Омск. 2013. – № 3
(1). – С. 2 – 7.
5. Фираго, Б. И. Регулируемые электроприводы переменного тока [Текст] / Б. И. Фираго,
Л. Б. Павлячик. – Минск: Техноперспектива, 2006. – 363 с.
6. Физическая модель испытательной станции асинхронных тяговых двигателей с ис-
пользованием метода взаимной нагрузки [Текст] / В. Д. Авилов, В. Т. Данковцев и др.// Ин-
№ 1(17)
2014 8
новационные проекты и новые технологии для транспортного комплекса: Материалы науч.-
практ. конф. / Омский гос. ун-т путей сообщения. – Омск, 2012. – С. 69 – 73.
7. Модернизированный стенд для испытания асинхронных двигателей методом взаимной нагрузки [Текст] / В. Д. Авилов, В. Т. Данковцев и др. // Повышение эффективности эксплуа-
тации коллекторных электромеханических преобразователей энергии: Материалы
IX междунар. науч.-техн. конф. / Омский гос. ун-т путей сообщения. – Омск, 2013. – С. 137 – 141.
УДК 621.436
А. С. Анисимов, М. Ю. Золотовский
РАСЧЕТ ОТНОШЕНИЯ ТЕПЛОЕМКОСТЕЙ РАБОЧЕГО ТЕЛА ПРИ СГОРАНИИ
СМЕСЕВЫХ ВИДОВ ТОПЛИВА В ЦИЛИНДРЕ ТЕПЛОВОЗНЫХ ДИЗЕЛЕЙ
В статье представлена методика расчета отношения теплоемкостей рабочего тела, образовавшегося в
процессе сгорания топлива. Представлены аналитические зависимости отношения теплоемкостей в зависи-
мости от температуры продуктов сгорания, коэффициента избытка воздуха и доли сгоревшего топлива для
различных составов смесевых видов углеводородного топлива.
При выполнении расчета процесса сгорания топлива в цилиндре тепловозного дизеля ме-
тодом Вибе, методика которого представлена в работах [1, 2], для расчета текущего значения
давления продуктов сгорания по углу поворота коленчатого вала используется уравнение:
1 2 1 1 2 1 2
2
1 2 2 1
ε zq x Р K v vР
K v v
, (1)
где ε – геометрическая степень сжатия дизеля;
zq – общая удельная использованная теплота сгорания;
1 2x – доля топлива, сгоревшего на элементарном участке процесса сгорания топлива;
1Р – давление продуктов сгорания в начале рассматриваемого элементарного участка
процесса сгорания топлива;
v1, v2 – удельный объем продуктов сгорания в начале и конце элементарного участка про-
цесса сгорания топлива;
1 21 2
1 2
1
1
kK
k
– средняя величина фактора теплоемкости рабочего тела;
1 2
1 2
1 2 1p
v
ck
c
– отношение средних теплоемкостей на элементарном участке процесса сго-
рания топлива.
При выполнении расчета процесса сгорания топлива отношение теплоемкостей рабочего
тела k следует определять по температуре, коэффициенту избытка воздуха и доле сгоревшего
топлива. Применение для этой цели приближенных формул В. Шюле [3] ограничено линей-
ной зависимостью отношения теплоемкости k от температуры. К тому же, формулы В.
Шюле не учитывают влияние на отношение теплоемкости k коэффициента избытка воздуха
и доли сгоревшего топлива.
Состав рабочего тела в процессе сгорания меняется от воздуха в начале процесса сгора-
ния до соответствующих избытку воздуха продуктов сгорания топлива в конце процесса сго-
рания. В общем виде формула отношения теплоемкостей для любого промежуточного состо-
яния рабочего тела будет иметь вид [3]:
9
№ 1(17)
2014
в в гk k k k x , (2)
где kв, kг – отношение теплоемкостей для воздуха и продуктов сгорания.
В работе [3] показано, что для продуктов сгорания дизельного топлива и воздуха урав-
нение (2) перепишется в виде:
α ,b
k a a a xT
(3)
где a и b – константы прямой для воздуха;
a – ордината, отсекаемая прямой, соответствующей данному коэффициенту избытка
воздуха, на оси ординат.
Константы a и b получены в результате проверки гиперболической зависимости значе-
ния k от температуры, перестроенные в функции 1/ Т . Аналогичным образом получено зна-
чение a в зависимости от обратной величины коэффициента избытка воздуха, для которой
получено уравнение:
1α 1
α
ba a . (4)
Окончательно уравнение (3) принимает вид:
11
α
bbk a a a x.
T
(5)
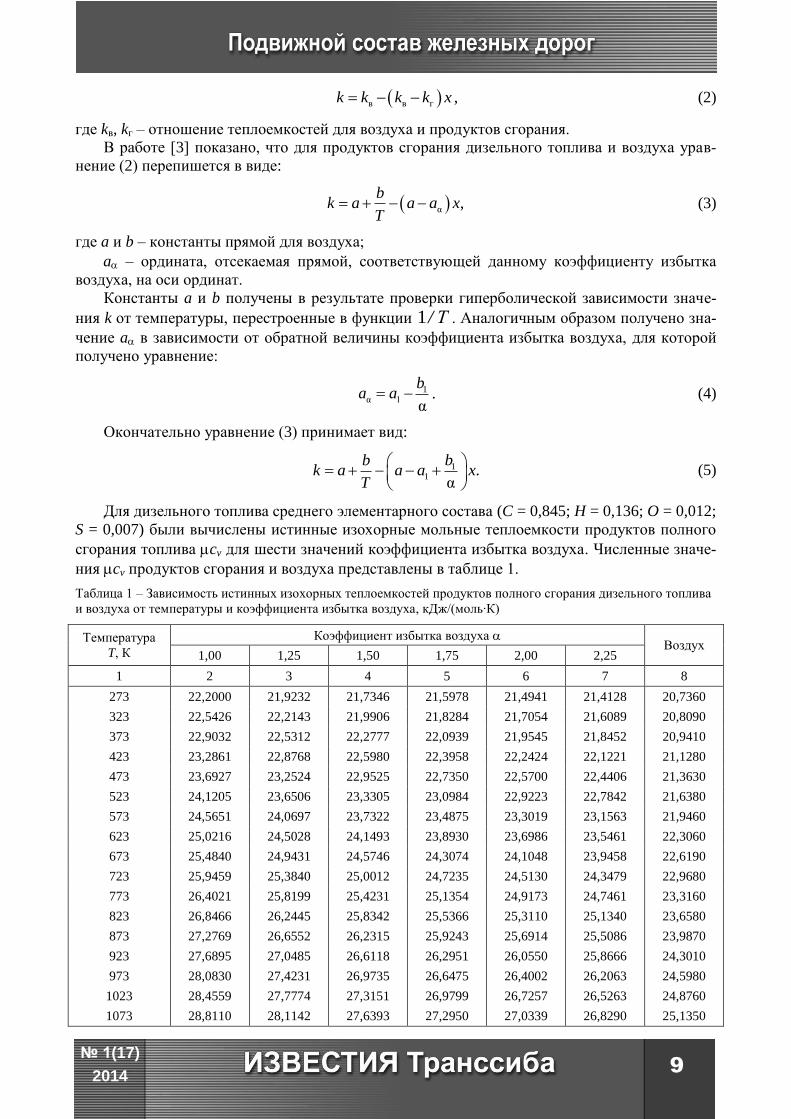
Для дизельного топлива среднего элементарного состава (C = 0,845; H = 0,136; O = 0,012;
S = 0,007) были вычислены истинные изохорные мольные теплоемкости продуктов полного
сгорания топлива cv для шести значений коэффициента избытка воздуха. Численные значе-
ния cv продуктов сгорания и воздуха представлены в таблице 1.
Таблица 1 – Зависимость истинных изохорных теплоемкостей продуктов полного сгорания дизельного топлива
и воздуха от температуры и коэффициента избытка воздуха, кДж/(моль∙К)
Температура
T, К
Коэффициент избытка воздуха Воздух
1,00 1,25 1,50 1,75 2,00 2,25
1 2 3 4 5 6 7 8
273 22,2000 21,9232 21,7346 21,5978 21,4941 21,4128 20,7360
323 22,5426 22,2143 21,9906 21,8284 21,7054 21,6089 20,8090
373 22,9032 22,5312 22,2777 22,0939 21,9545 21,8452 20,9410
423 23,2861 22,8768 22,5980 22,3958 22,2424 22,1221 21,1280
473 23,6927 23,2524 22,9525 22,7350 22,5700 22,4406 21,3630
523 24,1205 23,6506 23,3305 23,0984 22,9223 22,7842 21,6380
573 24,5651 24,0697 23,7322 23,4875 23,3019 23,1563 21,9460
623 25,0216 24,5028 24,1493 23,8930 23,6986 23,5461 22,3060
673 25,4840 24,9431 24,5746 24,3074 24,1048 23,9458 22,6190
723 25,9459 25,3840 25,0012 24,7235 24,5130 24,3479 22,9680
773 26,4021 25,8199 25,4231 25,1354 24,9173 24,7461 23,3160
823 26,8466 26,2445 25,8342 25,5366 25,3110 25,1340 23,6580
873 27,2769 26,6552 26,2315 25,9243 25,6914 25,5086 23,9870
923 27,6895 27,0485 26,6118 26,2951 26,0550 25,8666 24,3010
973 28,0830 27,4231 26,9735 26,6475 26,4002 26,2063 24,5980
1023 28,4559 27,7774 27,3151 26,9799 26,7257 26,5263 24,8760
1073 28,8110 28,1142 27,6393 27,2950 27,0339 26,8290 25,1350
№ 1(17)
2014 10
Окончание таблицы 1
1 2 3 4 5 6 7 8
1123 29,1441 28,4297 27,9430 27,5900 27,3223 27,1123 25,3760
1173 29,4601 28,7286 28,2301 27,8687 27,5946 27,3795 25,6000
1223 29,7592 29,0111 28,5013 28,1316 27,8513 27,6313 25,8090
1273 30,0427 29,2785 28,7578 28,3802 28,0939 27,8693 26,0040
1323 30,3114 29,5318 29,0007 28,6155 28,3234 28,0943 26,1870
1373 30,5669 29,7727 29,2315 28,8391 28,5415 28,3080 26,3590
1423 30,8083 30,0001 29,4493 29,0500 28,7471 28,5095 26,5230
1473 31,0358 30,2142 29,6543 29,2484 28,9405 28,6990 26,6790
1523 31,2302 30,3996 29,8337 29,4233 29,1120 28,8679 26,8260
1573 31,4306 30,5880 30,0139 29,5975 29,2818 29,0341 26,9680
1623 31,6177 30,7639 30,1821 29,7602 29,4403 29,1893 27,1010
1673 31,7936 30,9294 30,3405 29,9135 29,5897 29,3357 27,2260
1723 31,9616 31,0879 30,4925 30,0608 29,7334 29,4766 27,3440
1773 32,1288 31,2466 30,6455 30,2096 29,8791 29,6198 27,4540
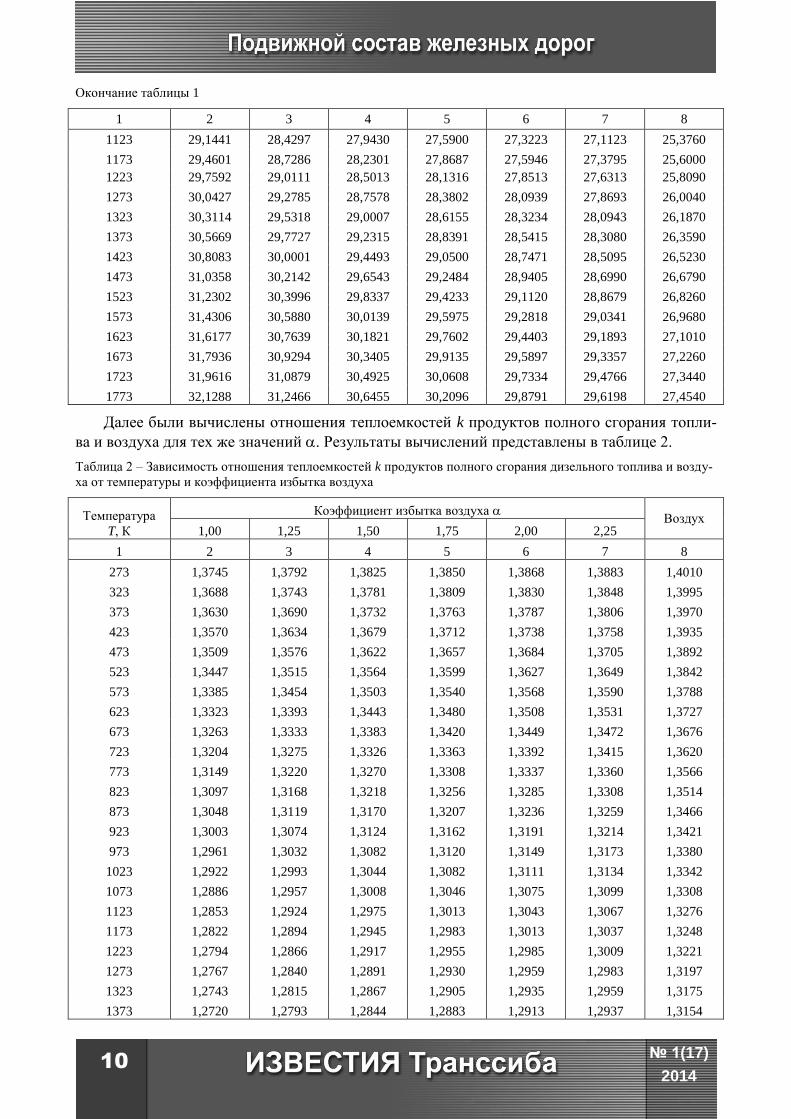
Далее были вычислены отношения теплоемкостей k продуктов полного сгорания топли-
ва и воздуха для тех же значений . Результаты вычислений представлены в таблице 2.
Таблица 2 – Зависимость отношения теплоемкостей k продуктов полного сгорания дизельного топлива и возду-
ха от температуры и коэффициента избытка воздуха
Температура
T, К
Коэффициент избытка воздуха Воздух
1,00 1,25 1,50 1,75 2,00 2,25
1 2 3 4 5 6 7 8
273 1,3745 1,3792 1,3825 1,3850 1,3868 1,3883 1,4010
323 1,3688 1,3743 1,3781 1,3809 1,3830 1,3848 1,3995
373 1,3630 1,3690 1,3732 1,3763 1,3787 1,3806 1,3970
423 1,3570 1,3634 1,3679 1,3712 1,3738 1,3758 1,3935
473 1,3509 1,3576 1,3622 1,3657 1,3684 1,3705 1,3892
523 1,3447 1,3515 1,3564 1,3599 1,3627 1,3649 1,3842
573 1,3385 1,3454 1,3503 1,3540 1,3568 1,3590 1,3788
623 1,3323 1,3393 1,3443 1,3480 1,3508 1,3531 1,3727
673 1,3263 1,3333 1,3383 1,3420 1,3449 1,3472 1,3676
723 1,3204 1,3275 1,3326 1,3363 1,3392 1,3415 1,3620
773 1,3149 1,3220 1,3270 1,3308 1,3337 1,3360 1,3566
823 1,3097 1,3168 1,3218 1,3256 1,3285 1,3308 1,3514
873 1,3048 1,3119 1,3170 1,3207 1,3236 1,3259 1,3466
923 1,3003 1,3074 1,3124 1,3162 1,3191 1,3214 1,3421
973 1,2961 1,3032 1,3082 1,3120 1,3149 1,3173 1,3380
1023 1,2922 1,2993 1,3044 1,3082 1,3111 1,3134 1,3342
1073 1,2886 1,2957 1,3008 1,3046 1,3075 1,3099 1,3308
1123 1,2853 1,2924 1,2975 1,3013 1,3043 1,3067 1,3276
1173 1,2822 1,2894 1,2945 1,2983 1,3013 1,3037 1,3248
1223 1,2794 1,2866 1,2917 1,2955 1,2985 1,3009 1,3221
1273 1,2767 1,2840 1,2891 1,2930 1,2959 1,2983 1,3197
1323 1,2743 1,2815 1,2867 1,2905 1,2935 1,2959 1,3175
1373 1,2720 1,2793 1,2844 1,2883 1,2913 1,2937 1,3154
11
№ 1(17)
2014
Окончание таблицы 2
1 2 3 4 5 6 7 8
1423 1,2699 1,2771 1,2823 1,2862 1,2892 1,2916 1,3135
1473 1,2679 1,2752 1,2804 1,2843 1,2873 1,2897 1,3116
1523 1,2662 1,2735 1,2787 1,2826 1,2856 1,2880 1,3099
1573 1,2645 1,2718 1,2770 1,2809 1,2839 1,2864 1,3083
1623 1,2630 1,2703 1,2755 1,2794 1,2824 1,2848 1,3068
1673 1,2615 1,2688 1,2740 1,2779 1,2810 1,2834 1,3054
1723 1,2601 1,2674 1,2727 1,2766 1,2796 1,2821 1,3041
1773 1,2588 1,2661 1,2713 1,2752 1,2783 1,2807 1,3028
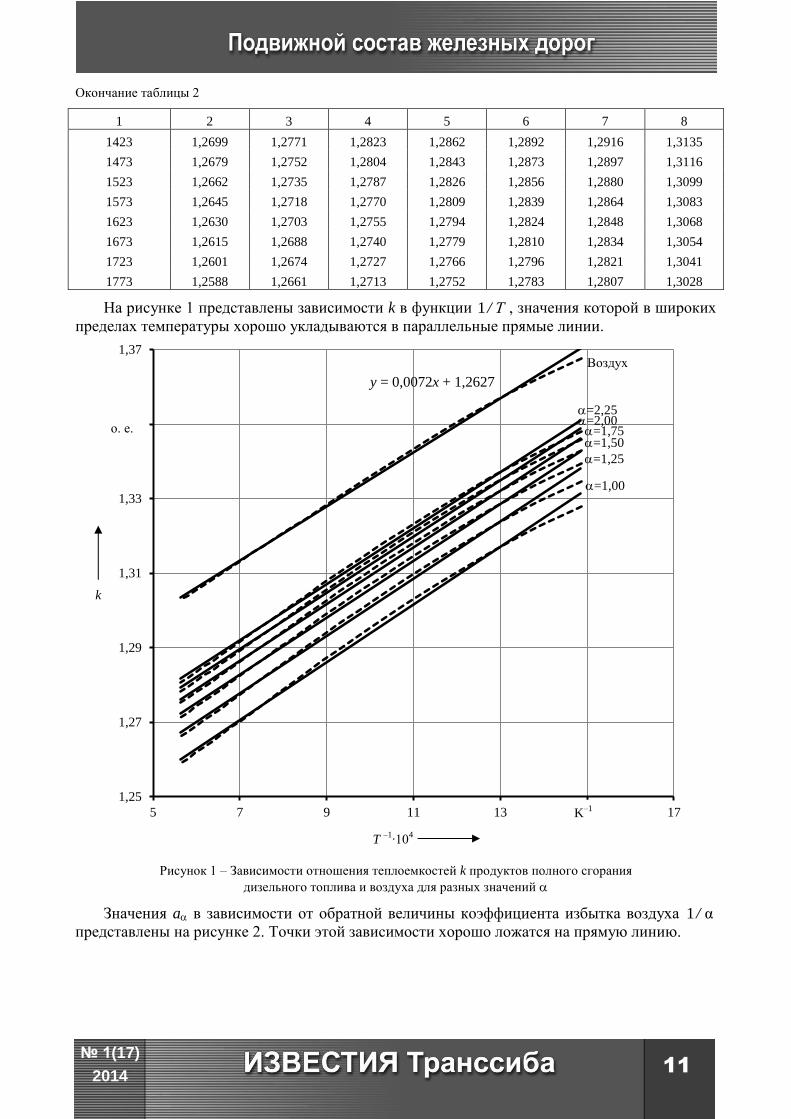
На рисунке 1 представлены зависимости k в функции 1 / Т , значения которой в широких
пределах температуры хорошо укладываются в параллельные прямые линии.
Рисунок 1 – Зависимости отношения теплоемкостей k продуктов полного сгорания
дизельного топлива и воздуха для разных значений
Значения a в зависимости от обратной величины коэффициента избытка воздуха 1 α/
представлены на рисунке 2. Точки этой зависимости хорошо ложатся на прямую линию.
y = 0,0072x + 1,2627
1,25
1,27
1,29
1,31
1,33
1,35
1,37
5 7 9 11 13 15 17
T –1∙10
4
k
K–1
Воздух
=2,25 =2,00
=1,75 =1,50
=1,25
=1,00
о. е.

№ 1(17)
2014 12
Подставляя численные значения коэффициентов уравнений прямых линий, представлен-
ных на рисунках 1 и 2, получаем в окончательном виде эмпирическое уравнение для продук-
тов сгорания дизельного топлива
72 0 0405
1 2627 0 0055α
,k , , x
T
. (6)
Рисунок 2 – График уравнения (4) для продуктов полного сгорания дизельного топлива
Для конечных продуктов сгорания дизельного топлива уравнение (6) принимает вид:
72 0 0405
1 2572α
,k ,
T . (7)
Проверка уравнения (6) показала, что точность определения отношения теплоемкостей k
по сравнению с данными таблицы 2 в пределах изменения температуры 700 – 1800 К состав-
ляет около ± 0,3 %.
В случае применения смесевого топлива расчетное уравнение для k следует определять с
учетом доли присадки альтернативного топлива к дизельному, которая влияет на элементар-
ный состав смесевого топлива.
Элементарный состав смесевого топлива рассчитаем с применением следующих выра-
жений:
(см) (ДТ) ( )С (1 )С С dd d ; (8)
(см) (ДТ) ( )H (1 )H H dd d ; (9)
(см) (ДТ) ( )O (1 )O O dd d ; (10)
(см) (ДТ) ( )S (1 )S S dd d , (11)
где (ДТ)С
, (ДТ)H
, (ДТ)O
, (ДТ)S
– элементарный состав дизельного топлива; ( )С d
, ( )H d
, ( )O d
, ( )S d
– элементарный состав альтернативной добавки.
Элементарный состав для представленных выше альтернативных добавок приведен в
таблице 3.
y = - 0,0405x + 1,2572
1,21
1,22
1,23
1,24
0,4 0,5 0,6 0,7 0,8 0,9 1,0 1,1
–1
a
13
№ 1(17)
2014
Таблица 3 – Элементарный состав альтернативных добавок
Наименование альтернативной
добавки и ее природный состав
Элементарный состав альтернативной добавки ( )С d
( )H d
( )O d
( )S d
Природный газ ПГ состава –
метан 100 %
0,75 0,25 – –
Биотопливо БТ1 состава –
метан – 87 %, углекислый газ – 13 %
0,688 0,218 0,094 –
Биотопливо БТ2 состава –
метан – 50 %, углекислый газ – 50 %
0,512 0,125 0,363 –
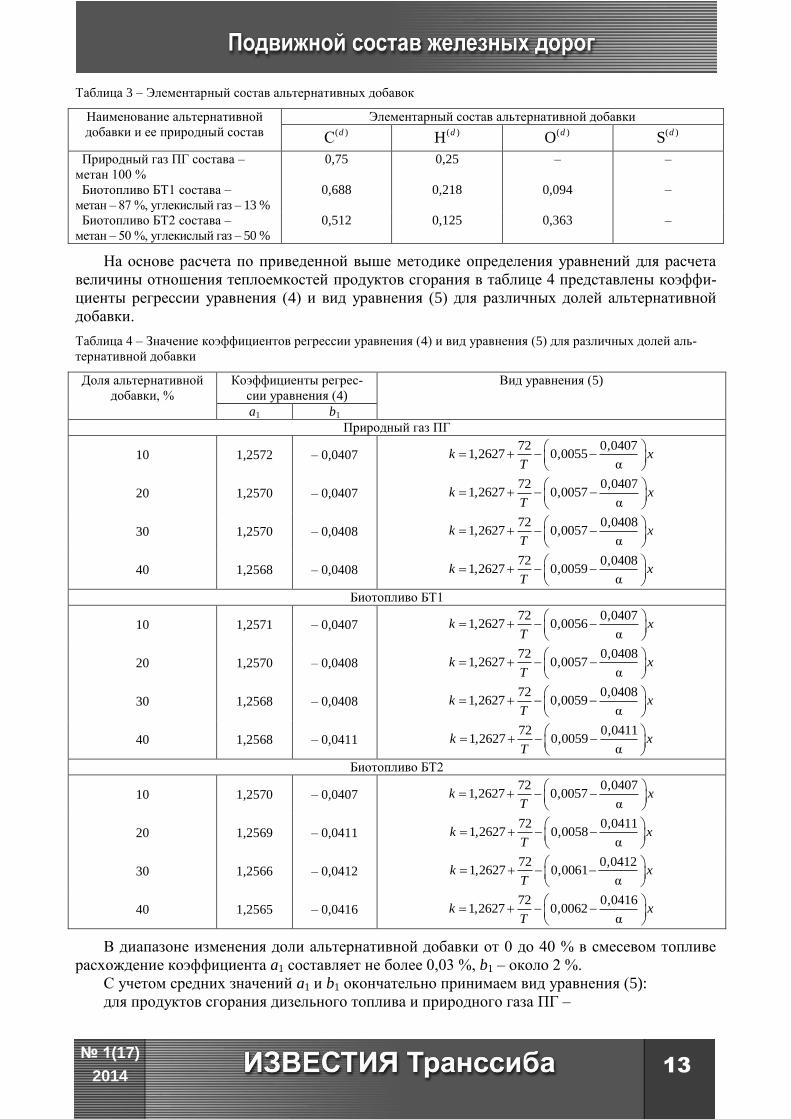
На основе расчета по приведенной выше методике определения уравнений для расчета
величины отношения теплоемкостей продуктов сгорания в таблице 4 представлены коэффи-
циенты регрессии уравнения (4) и вид уравнения (5) для различных долей альтернативной
добавки.
Таблица 4 – Значение коэффициентов регрессии уравнения (4) и вид уравнения (5) для различных долей аль-
тернативной добавки
Доля альтернативной
добавки, %
Коэффициенты регрес-
сии уравнения (4)
Вид уравнения (5)
a1 b1
Природный газ ПГ
10 1,2572 – 0,0407 72 0 0407
1 2627 0 0055α
,k , , x
T
20 1,2570 – 0,0407 72 0 0407
1 2627 0 0057α
,k , , x
T
30 1,2570 – 0,0408 72 0 0408
1 2627 0 0057α
,k , , x
T
40 1,2568 – 0,0408 72 0 0408
1 2627 0 0059α
,k , , x
T
Биотопливо БТ1
10 1,2571 – 0,0407 72 0 0407
1 2627 0 0056α
,k , , x
T
20 1,2570 – 0,0408 72 0 0408
1 2627 0 0057α
,k , , x
T
30 1,2568 – 0,0408 72 0 0408
1 2627 0 0059α
,k , , x
T
40 1,2568 – 0,0411 72 0 0411
1 2627 0 0059α
,k , , x
T
Биотопливо БТ2
10 1,2570 – 0,0407 72 0 0407
1 2627 0 0057α
,k , , x
T
20 1,2569 – 0,0411 72 0 0411
1 2627 0 0058α
,k , , x
T
30 1,2566 – 0,0412 72 0 0412
1 2627 0 0061α
,k , , x
T
40 1,2565 – 0,0416 72 0 0416
1 2627 0 0062α
,k , , x
T
В диапазоне изменения доли альтернативной добавки от 0 до 40 % в смесевом топливе
расхождение коэффициента a1 составляет не более 0,03 %, b1 – около 2 %.
С учетом средних значений a1 и b1 окончательно принимаем вид уравнения (5):
для продуктов сгорания дизельного топлива и природного газа ПГ –
№ 1(17)
2014 14
72 0 04075
1 2627 0 0057α
,k , , x
T
; (12)
для продуктов сгорания дизельного топлива и биотоплива БТ1 –
72 0 04085
1 2627 0 0058α
,k , , x
T
; (13)
для продуктов сгорания дизельного топлива и биотоплива БТ2 –
72 0 0412
1 2627 0 0059α
,k , , x
T
. (14)
Таким образом, полученные уравнения для определения отношения теплоемкостей про-
дуктов сгорания позволяют уточнить расчет процесса сгорания при моделировании рабочего
цикла тепловозных дизелей. При этом повышается точность определения работы газов и
скорости нарастания давления и температуры рабочего тела в течение рабочего цикла.
Список литературы
1. Совершенствование метода анализа процесса сгорания по индикаторной диаграмме
[Текст] / А. С. Анисимов, Е. И. Сковородников и др. // Наука и техника транспорта / Россий-
ская открытая акад. транспорта МИИТа. – М. – 2010. – № 4. – С. 57 – 63.
2. Володин, А. И. Комплексный анализ термодинамических, экономических и экологи-
ческих характеристик тепловозных дизелей в условиях эксплуатации: Монография [Текст]/
А. И. Володин, Е. И. Сковородников, А. С. Анисимов / Омский гос. ун-т путей сообщения. –
Омск, 2011. – 166 с.
3. Вибе, И. И. Новое о рабочем цикле двигателей [Текст] / И. И. Вибе. – М.; Свердловск:
Машгиз, 1962. – 271 с.
УДК 621.33
Е. Ю. Дульский, Н. С. Доценко, Е. М. Лыткина
ИССЛЕДОВАНИЕ ЭФФЕКТИВНОСТИ КОНВЕКТИВНОГО И
ТЕРМОРАДИАЦИОННОГО МЕТОДОВ КАПСУЛИРОВАНИЯ
ИЗОЛЯЦИИ ОБМОТОК ПРИ РЕМОНТЕ
ЭЛЕКТРИЧЕСКИХ МАШИН ТЯГОВОГО ПОДВИЖНОГО СОСТАВА
Статья посвящена исследованию эффективности использования терморадиационного и конвективного
методов сушки изоляции обмоток электрических машин тягового подвижного состава, пропитанной различ-
ными современными лаками и компаундами, при их деповском и заводском ремонте. Объективными фактора-
ми при сравнении методов являются такие параметры, как класс нагревостойкости, электрическая проч-
ность и цементирующая способность. Авторами обосновывается преимущество терморадиационного мето-
да перед конвективным.
Изоляция обмоток электрических машин тягового подвижного состава (ТПС) является
наиболее уязвимым и в то же время дорогим звеном машины. В процессе изготовления элек-
трических машин для повышения влаго-, электро- и термостойкости изоляции, а также в
процессе ремонта для восстановления ее физико-механических свойств применяют пропитку
15
№ 1(17)
2014
изоляции в пропиточном материале (лаке, компаунде и др.) с последующей ее сушкой раз-
личными способами.
В настоящее время на рынке электроизоляционных материалов ведущие производители
в России и за рубежом предлагают новые электроизоляционные материалы и системы изоля-
ции на их основе, в том числе и для изоляции электрических машин тягового подвижного
состава (электровозов, электропоездов и тепловозов). В России к таким производителям
можно отнести ЗАО «Электроизолит», ОАО «Диэлектрик», «Элинар» и др.
Узнать, какой из пропиточных материалов качественнее, представляется возможным
лишь из практики его применения, что влечет за собой большие затраты, а результат не все-
гда бывает положительным. Помимо этого каждый пропиточный материал требует индиви-
дуального подхода в процессе ремонта, обусловленного в основном температурными усло-
виями при его полимеризации. В связи с этим замена пропиточного материала также приво-
дит к необходимости реорганизации уже отработанной технологии ремонта с вытекающими
из этого затратами как времени, так и денежных средств.
Основными параметрами, характеризующими качество изоляционных материалов, яв-
ляются термостойкость, определяющая максимально допустимую температуру нагрева изо-
ляции; электрическая прочность, характеризующая защищенность изоляции от электриче-
ских пробоев и межвитковых замыканий; и цементирующая способность, влияющая на не-
разрушимость изоляции при воздействии вибрации.
Термостойкость изоляции производители пропиточных материалов указывают в виде
класса изоляции (B, F, H и т. д.), а такие параметры, как электрическая прочность и цементи-
рующая способность, обычно остаются для
потребителей не известными, но от их значе-
ний во многом зависит надежная работа элек-
трической машины.
В связи с этим сотрудниками кафедры
«Электроподвижной состав» (ЭПС) Иркут-
ского государственного университета путей
сообщения (ИрГУПСа) предлагается методи-
ка по определению эффективности изоляци-
онных конструкций и пропиточных материа-
лов в процессе деповского и заводского ре-
монта электрических машин ТПС, а именно
сравнение различных изоляционных лент,
пропитанных и закапсулированных в различ-
ных пропиточных материалах, различными
методами с целью выявления лучших по та-
ким параметрам, как электрическая прочность
и цементирующая способность.
Ранее [1] в наших работах на уровне ги-
потезы доказывалась эффективность термора-
диационного метода сушки пропитанной изо-
ляции обмоток электрических машин ТПС
(тепловым излучением) [2, 3] в сравнении с
конвективным при их деповском и заводском
ремонте. Были проведены экспериментальные
исследования по сравнению эффективности
данных методов для пропитанной изоляцион-
ной ленты типа ЛЭС-0,1-20 (далее – ЛЭС),
применяемой в качестве покровной изоляции
при изготовлении и ремонте тягового элек-
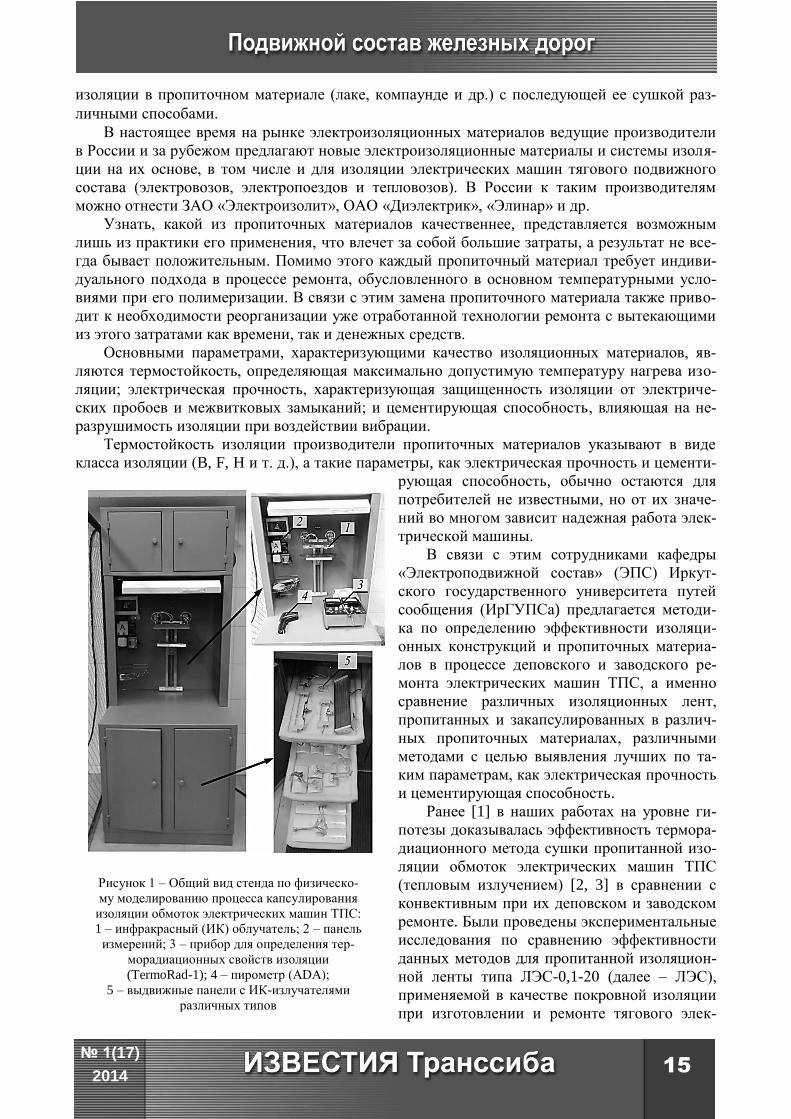
Рисунок 1 – Общий вид стенда по физическо-
му моделированию процесса капсулирования
изоляции обмоток электрических машин ТПС:
1 – инфракрасный (ИК) облучатель; 2 – панель
измерений; 3 – прибор для определения тер-
морадиационных свойств изоляции
(TermoRad-1); 4 – пирометр (ADA);
5 – выдвижные панели с ИК-излучателями
различных типов
№ 1(17)
2014 16
тродвигателя (ТЭД) типа НБ-514(Б). Капсулирование конвективным методом осуществля-
лось в печи типа СДО1 локомотивно-ремонтного депо «Нижнеудинское» [4], а терморадиа-
ционным – на лабораторном стенде по физическому моделированию процесса капсулирова-
ния изоляции обмоток электрических машин ТПС, находящемся в лаборатории кафедры
ЭПС ИрГУПСа «Эффективные методы и средства продления ресурса электрических машин
ТПС» [5]. Общий вид стенда представлен на рисунке 1.
В качестве пропиточного материала использовались лак ФЛ-98 и компаунды Эпласт 155,
ПК-11 и ПК-21, применяемые в настоящее время при деповском и заводском ремонте ТЭД
типа НБ-514(Б) в локомотивно-ремонтном депо
«Нижнеудинское» и на Улан-Удэнском локомотив-
но-ремонтном заводе.
При капсулировании терморадиационным мето-
дом пропитанные образцы изоляционной ленты ЛЭС
располагались на медной подложке стенда на рас-
стоянии 60 мм до ИК-излучателя, что соответствует
расстоянию от сегментов лобовой части обмотки
якоря до ИК-излучателей на опытно-производст-
венной установке [1, 2] (рисунок 2).
Процесс капсулирования осуществлялся при не-
прерывном инфракрасном энергоподводе при излу-
чении сначала некогерентным коротковолновым из-
лучателем типа J118, затем средневолновым им-пульсно-керамическим типа ECS-2.
На начальных этапах выполнения данного эксперимента было замечено, что по заверше-
нии процесса капсулирования изоляционной ленты она приклеивалась к медной подложке.
Данное явление доказывает, что ИК-излучение, проникая через пропитанную изоляцию,
нагревает и саму подложку, тем самым обеспечивая процесс полимеризации пропиточного
материала снизу вверх, формируя при этом дополнительный микрослой из пропиточного
состава на поверхности проводника обмотки.
Следующим этапом исследований является сравнение под микроскопом Olympus GX 41
микроструктуры изоляционной ленты, закапсулированной при конвективном и терморадиа-
ционном методах, для оценки эффективности применения названных методов в процессе ре-
монта электрических машин ТПС.
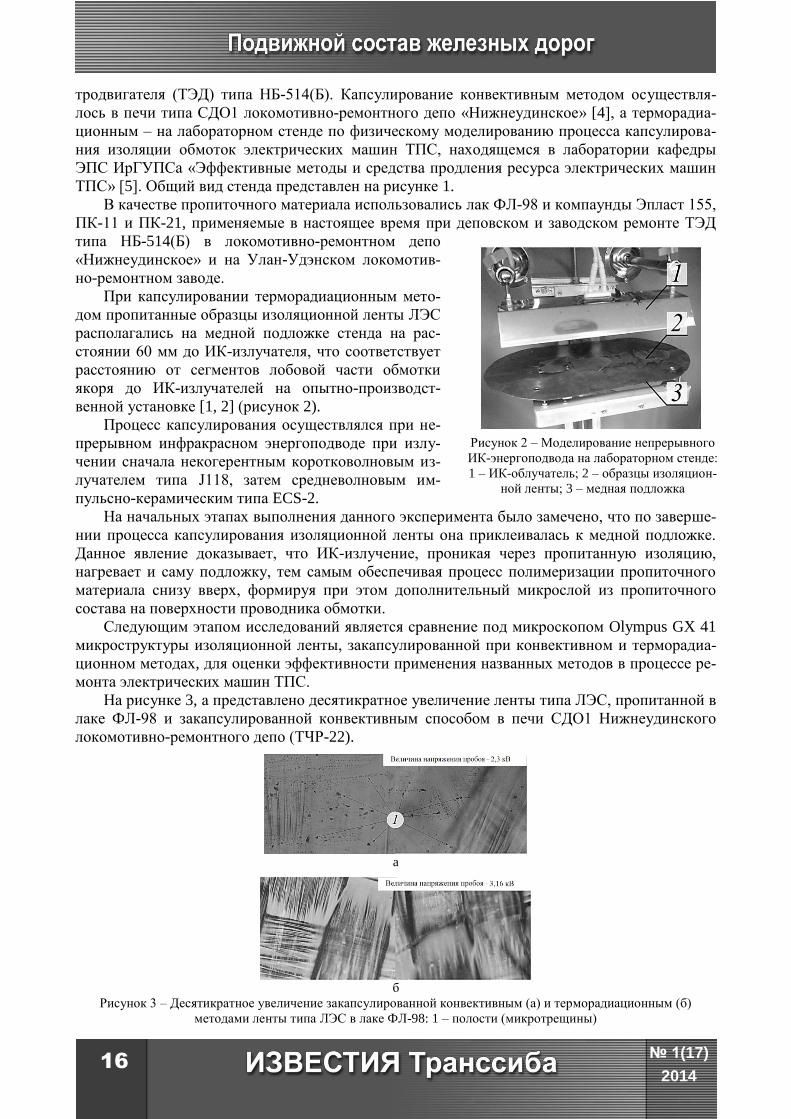
На рисунке 3, а представлено десятикратное увеличение ленты типа ЛЭС, пропитанной в
лаке ФЛ-98 и закапсулированной конвективным способом в печи СДО1 Нижнеудинского
локомотивно-ремонтного депо (ТЧР-22).
a
б
Рисунок 3 – Десятикратное увеличение закапсулированной конвективным (а) и терморадиационным (б)
методами ленты типа ЛЭС в лаке ФЛ-98: 1 – полости (микротрещины)
Рисунок 2 – Моделирование непрерывного
ИК-энергоподвода на лабораторном стенде:
1 – ИК-облучатель; 2 – образцы изоляцион-
ной ленты; 3 – медная подложка

17
№ 1(17)
2014
Из рисунка 3 видно, что при капсулировании конвективным методом на поверхности по-
лимерной пленки образуются полости (микротрещины) 1, о природе возникновения которых
говорилось ранее [1]. При капсулировании терморадиационным методом (рисунок 3, б) дан-
ные полости отсутствуют, что подтверждает выдвинутую ранее гипотезу о большей эффек-
тивности применения терморадиационного метода по сравнению с конвективным.
Аналогичные результаты были получены и при капсулировании ленты типа ЛЭС, про-
питанной в компаундах Эпласт 155, ПК-11 и ПК-21.
Далее у закапсулированных различными методами образцов изоляционной ленты ЛЭС
проверялись электрическая прочность и твердость.
Для определения электрической прочности образцов изоляции использовали аппарат
АИИ-70 (рисунок 4, а). Пробой образца производится в специальном разряднике – сосуде
(рисунок 4, б) емкостью 300 – 500 см2, в стенки которого вмонтированы латунные электро-
ды, имеющие шарообразную поверхность с целью создания точечного контакта.
а
б
Рисунок 4 – Вид аппарата АИИ-70 (а) и сосуда с шарообразными электродами (б):
1 – закапсулированная изоляционная лента типа ЛЭС
Гистограмма средних арифметических значений пробивного напряжения Ūпр в зависи-
мости от типа изоляции и пропиточного материала представлена на рисунке 5.
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
Пустая непропитанная
лента; 1,76
ФЛ
-98
; 2
,30
ПК
-11
; 2
,44
ПК
-21
; 2
,36
ФЛ
-98
; 3
,16
Эпласт 155; 3,10
ПК
-11
; 3
,02
ПК
-21
; 2
,94
ФЛ
-98
; 3
,06
Эпласт 155; 3,04
ПК
-11
; 2
,94
ПК
-21
; 2
,88
кВ
Конвективный
энергоподвод
ИК-энергоподвод
средневолновым
излучением
ИК-энергоподвод
коротковолновым
излучением
Напряжение пробоя, Uпр
Рисунок 5 – Результаты экспериментальных исследований по определению электрической прочности
закапсулированной изоляционной ленты типа ЛЭС
№ 1(17)
2014 18
Результаты данных исследований показывают, что электрическая прочность изоляцион-
ной ленты типа ЛЭС-0,1-20, закапсулированной терморадиационным методом при непре-
рывном режиме ИК-энергоподвода, на 30 – 35 % выше, чем при использовании конвективно-
го метода. Причиной пониженных показателей пробивного напряжения при использовании
конвективного метода капсулирования является наличие по-
лостей (см. рисунок 3, а), которые являются зонами возник-
новения частичных разрядов и приводят впоследствии к элек-
электрическому пробою.
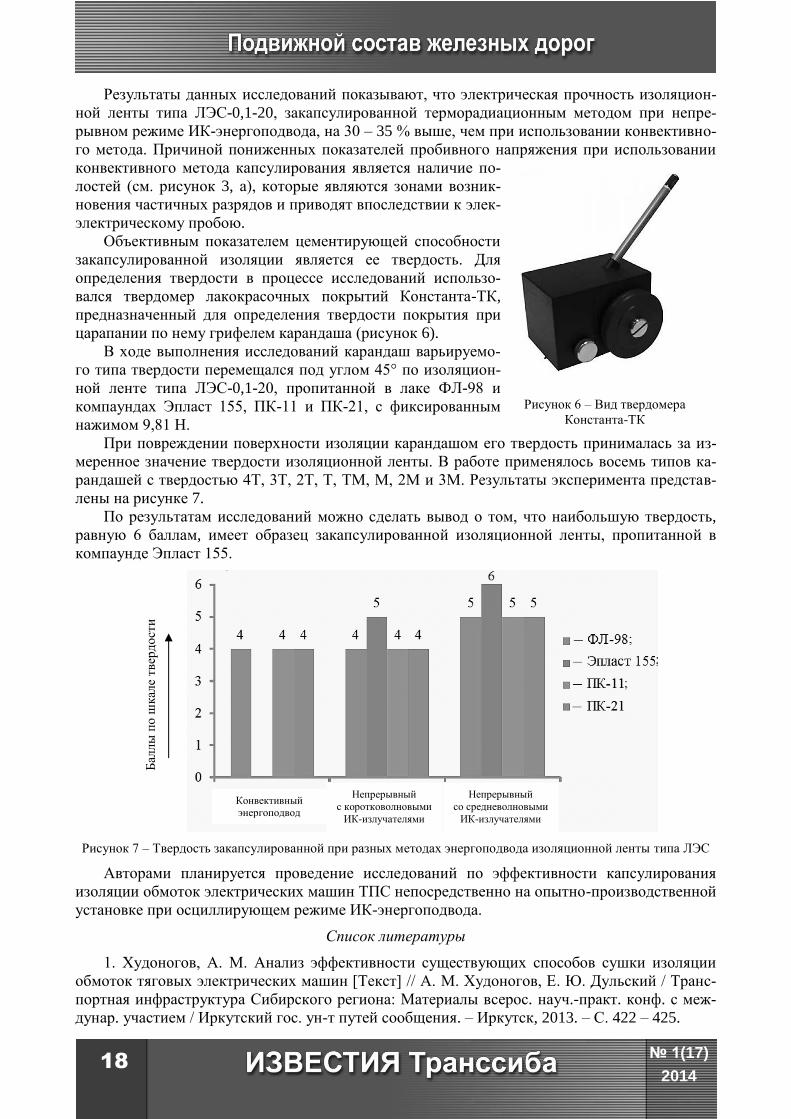
Объективным показателем цементирующей способности
закапсулированной изоляции является ее твердость. Для
определения твердости в процессе исследований использо-
вался твердомер лакокрасочных покрытий Константа-ТК,
предназначенный для определения твердости покрытия при
царапании по нему грифелем карандаша (рисунок 6).
В ходе выполнения исследований карандаш варьируемо-
го типа твердости перемещался под углом 45° по изоляцион-
ной ленте типа ЛЭС-0,1-20, пропитанной в лаке ФЛ-98 и
компаундах Эпласт 155, ПК-11 и ПК-21, с фиксированным
нажимом 9,81 Н.
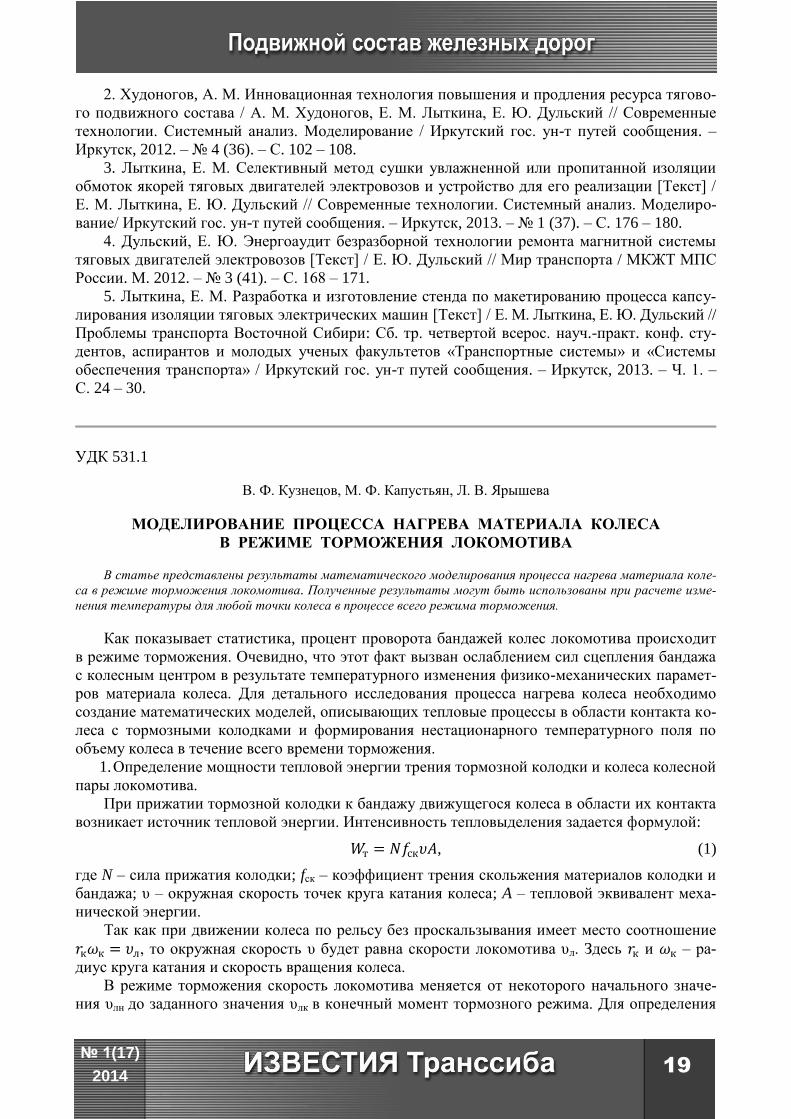
При повреждении поверхности изоляции карандашом его твердость принималась за из-
меренное значение твердости изоляционной ленты. В работе применялось восемь типов ка-
рандашей с твердостью 4Т, 3Т, 2Т, Т, ТМ, М, 2М и 3М. Результаты эксперимента представ-
лены на рисунке 7.
По результатам исследований можно сделать вывод о том, что наибольшую твердость,
равную 6 баллам, имеет образец закапсулированной изоляционной ленты, пропитанной в
компаунде Эпласт 155.
Рисунок 7 – Твердость закапсулированной при разных методах энергоподвода изоляционной ленты типа ЛЭС
Авторами планируется проведение исследований по эффективности капсулирования
изоляции обмоток электрических машин ТПС непосредственно на опытно-производственной
установке при осциллирующем режиме ИК-энергоподвода.
Список литературы
1. Худоногов, А. М. Анализ эффективности существующих способов сушки изоляции
обмоток тяговых электрических машин [Текст] // А. М. Худоногов, Е. Ю. Дульский / Транс-
портная инфраструктура Сибирского региона: Материалы всерос. науч.-практ. конф. с меж-
дунар. участием / Иркутский гос. ун-т путей сообщения. – Иркутск, 2013. – С. 422 – 425.
Баллы по шкале твердости
Рисунок 6 – Вид твердомера
Константа-ТК
Конвективный энергоподвод
Непрерывный
с коротковолновыми
ИК-излучателями
Непрерывный
со средневолновыми
ИК-излучателями
19
№ 1(17)
2014
2. Худоногов, А. М. Инновационная технология повышения и продления ресурса тягово-
го подвижного состава / А. М. Худоногов, Е. М. Лыткина, Е. Ю. Дульский // Современные
технологии. Системный анализ. Моделирование / Иркутский гос. ун-т путей сообщения. –
Иркутск, 2012. – № 4 (36). – С. 102 – 108.
3. Лыткина, Е. М. Селективный метод сушки увлажненной или пропитанной изоляции
обмоток якорей тяговых двигателей электровозов и устройство для его реализации [Текст] /
Е. М. Лыткина, Е. Ю. Дульский // Современные технологии. Системный анализ. Моделиро-
вание/ Иркутский гос. ун-т путей сообщения. – Иркутск, 2013. – № 1 (37). – С. 176 – 180.
4. Дульский, Е. Ю. Энергоаудит безразборной технологии ремонта магнитной системы
тяговых двигателей электровозов [Текст] / Е. Ю. Дульский // Мир транспорта / МКЖТ МПС
России. М. 2012. – № 3 (41). – С. 168 – 171.
5. Лыткина, Е. М. Разработка и изготовление стенда по макетированию процесса капсу-
лирования изоляции тяговых электрических машин [Текст] / Е. М. Лыткина, Е. Ю. Дульский //
Проблемы транспорта Восточной Сибири: Сб. тр. четвертой всерос. науч.-практ. конф. сту-
дентов, аспирантов и молодых ученых факультетов «Транспортные системы» и «Системы
обеспечения транспорта» / Иркутский гос. ун-т путей сообщения. – Иркутск, 2013. – Ч. 1. –
С. 24 – 30.
УДК 531.1
В. Ф. Кузнецов, М. Ф. Капустьян, Л. В. Ярышева
МОДЕЛИРОВАНИЕ ПРОЦЕССА НАГРЕВА МАТЕРИАЛА КОЛЕСА
В РЕЖИМЕ ТОРМОЖЕНИЯ ЛОКОМОТИВА
В статье представлены результаты математического моделирования процесса нагрева материала коле-
са в режиме торможения локомотива. Полученные результаты могут быть использованы при расчете изме-
нения температуры для любой точки колеса в процессе всего режима торможения.
Как показывает статистика, процент проворота бандажей колес локомотива происходит
в режиме торможения. Очевидно, что этот факт вызван ослаблением сил сцепления бандажа
с колесным центром в результате температурного изменения физико-механических парамет-
ров материала колеса. Для детального исследования процесса нагрева колеса необходимо
создание математических моделей, описывающих тепловые процессы в области контакта ко-
леса с тормозными колодками и формирования нестационарного температурного поля по
объему колеса в течение всего времени торможения.
1. Определение мощности тепловой энергии трения тормозной колодки и колеса колесной пары локомотива.
При прижатии тормозной колодки к бандажу движущегося колеса в области их контакта
возникает источник тепловой энергии. Интенсивность тепловыделения задается формулой:
, (1)
где N – сила прижатия колодки; fск – коэффициент трения скольжения материалов колодки и
бандажа; υ – окружная скорость точек круга катания колеса; A – тепловой эквивалент меха-
нической энергии.
Так как при движении колеса по рельсу без проскальзывания имеет место соотношение
, то окружная скорость υ будет равна скорости локомотива υл. Здесь и – ра-
диус круга катания и скорость вращения колеса.
В режиме торможения скорость локомотива меняется от некоторого начального значе-
ния υлн до заданного значения υлк в конечный момент тормозного режима. Для определения

№ 1(17)
2014 20
закона изменения скорости локомотива рассмотрим движение колесной пары под действием
сил инерции и сил трения с начальной скоростью υлн.
При движении колес по рельсу без скольжения мгновенный центр вращения колеса рас-
положен в точке контакта колеса с рельсом. Для составления уравнения движения колеса в
режиме торможения рассмотрим расчетную схему (рисунок 1). Воспользуемся уравнением относительно точки О1:
( ) (2)
здесь приняты обозначения:
mк.п, Jк.п –масса и момент инерции колесной пары; Rр=Рл – реакция рельса; Рл – вес ло-
комотива, приходящийся на одну колесную пару; fкач – коэффициент трения качения колес-
ной пары.
Так как при движении колеса без скольжения имеет место соотношение
=
, то уравнение (2) перепишется в виде:
(
) (3)
Первый интеграл уравнения (3) при начальных условиях ( ) дает решение:
, (4)
где ( )
( ).
Рисунок 1 – Расчетная схема движения колесной пары в режиме торможения:
x, φ – перемещение центра тяжести колесной пары и угол ее поворота вокруг оси
Полученная зависимость (4) является законом изменения скорости локомотива в режиме
торможения:
. (5)
При торможении до скорости υлк понадобится время
Fтр
01
Jкп
0
Pл
x
Rp
F
тр
21
№ 1(17)
2014
( ) . (6)
С учетом выражения (4) формула (1) интенсивности тепловыделения примет вид:
( ). (7)
2. Формирование температурного поля по объему колеса
Будем считать, что прижатие тормозной колодки к бандажу происходит равномерно.
Следовательно, распределение тепловой энергии по поверхности контакта колес с тормозной
колодкой будет равномерным.
Можно считать температурное поле определенным, если известен закон изменения тем-
пературы произвольной точки А колеса при его вращении вокруг оси колесной пары в тече-
ние всего режима торможения.
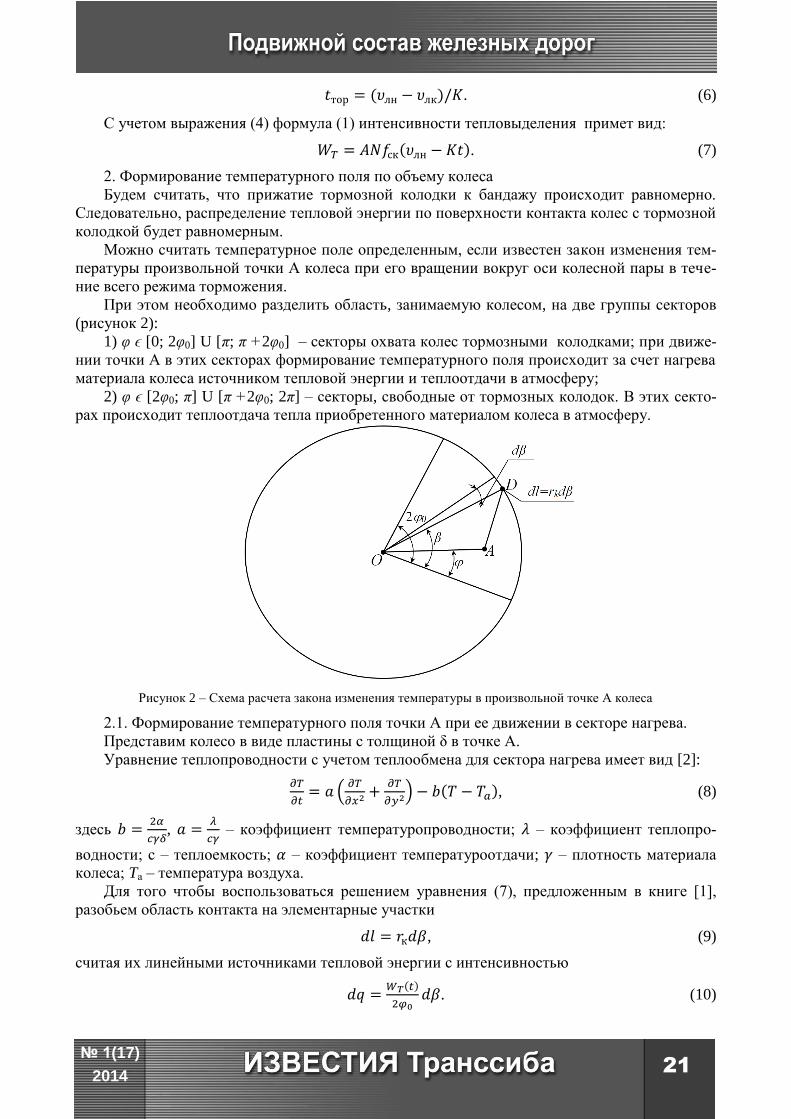
При этом необходимо разделить область, занимаемую колесом, на две группы секторов
(рисунок 2):
1) φ ϵ [0; 2φ0] U [π; π +2φ0] – секторы охвата колес тормозными колодками; при движе-
нии точки А в этих секторах формирование температурного поля происходит за счет нагрева
материала колеса источником тепловой энергии и теплоотдачи в атмосферу;
2) φ ϵ [2φ0; π] U [π +2φ0; 2π] – секторы, свободные от тормозных колодок. В этих секто-
рах происходит теплоотдача тепла приобретенного материалом колеса в атмосферу.
Рисунок 2 – Схема расчета закона изменения температуры в произвольной точке А колеса
2.1. Формирование температурного поля точки А при ее движении в секторе нагрева.
Представим колесо в виде пластины с толщиной δ в точке А.
Уравнение теплопроводности с учетом теплообмена для сектора нагрева имеет вид [2]:
(
) ( ), (8)
здесь
,
– коэффициент температуропроводности; – коэффициент теплопро-
водности; с – теплоемкость; – коэффициент температуроотдачи; – плотность материала
колеса; Tа – температура воздуха.
Для того чтобы воспользоваться решением уравнения (7), предложенным в книге [1],
разобьем область контакта на элементарные участки
, (9)
считая их линейными источниками тепловой энергии с интенсивностью
( )
. (10)
№ 1(17)
2014 22
Пусть источник тепла расположен в точке D (см. рисунок 2). Решение уравнения (8) можно представить в виде:
( ) . (11)
Подставляя выражение (11) в уравнение (8), получим уравнение для определения темпе-ратуры:
(
). (12)
Воспользуемся известным решением уравнения (12) в случае действия мгновенного ли-нейного источника тепла dq [3]:
( )
⁄ , (13)
где √ – расстояние от источника тепла до произвольной точки нагреваемого тела.
Температура в точке А определяется выражением:
( )
(
⁄ ) , (14)
здесь – расстояние от точки А до источника тепла (см. рисунок 2).
Если перейти к полярной системе координат и принять координаты точек ( ) и ( ), то величина
определится как
( ). (15)
Используя принцип суперпозиции и интегрируя выражение (14) по β, получим темпера-туру в произвольной точке А колеса от действия мгновенного источника тепловой энергии, распределенного по всей области контакта тормозной колодки и бандажа:
( ) ∫ ( )
(
( )
⁄ ) . (16)
Для непрерывно действующего источника тепла с интенсивностью ( ) закон измене-ния температуры в точке А найдем из следующих соображений. Считаем, что на интервале
времени [0; t] последовательно включаются мгновенные источники с интенсивностью и формируют температуру в точке А согласно выражению (16).
Рассмотрим произвольный момент времени на отрезке [0; t]. Мгновенный источник, включенный в данный момент времени, имеет мощность ( ) За элементарное время источник тепловой энергии выделит количество тепла
( ) . (17)
Тепло dQ распространяется по объему колеса в течение времени и к моменту вре-мени t приведет к повышению температуры в точке А в соответствии с выражением (16):
( )
[
∫ ( )
( )
(
( ) ( )⁄ ( ))
]
. (18)
По принципу суперпозиции закон изменения температуры в точке А в зависимости от времени действия источника тепловой энергии находим интегрированием выражения (17):
( )
∫
[
∫( )
( )
(
( ) ( )⁄ ( ))
]
.(19)
23
№ 1(17)
2014
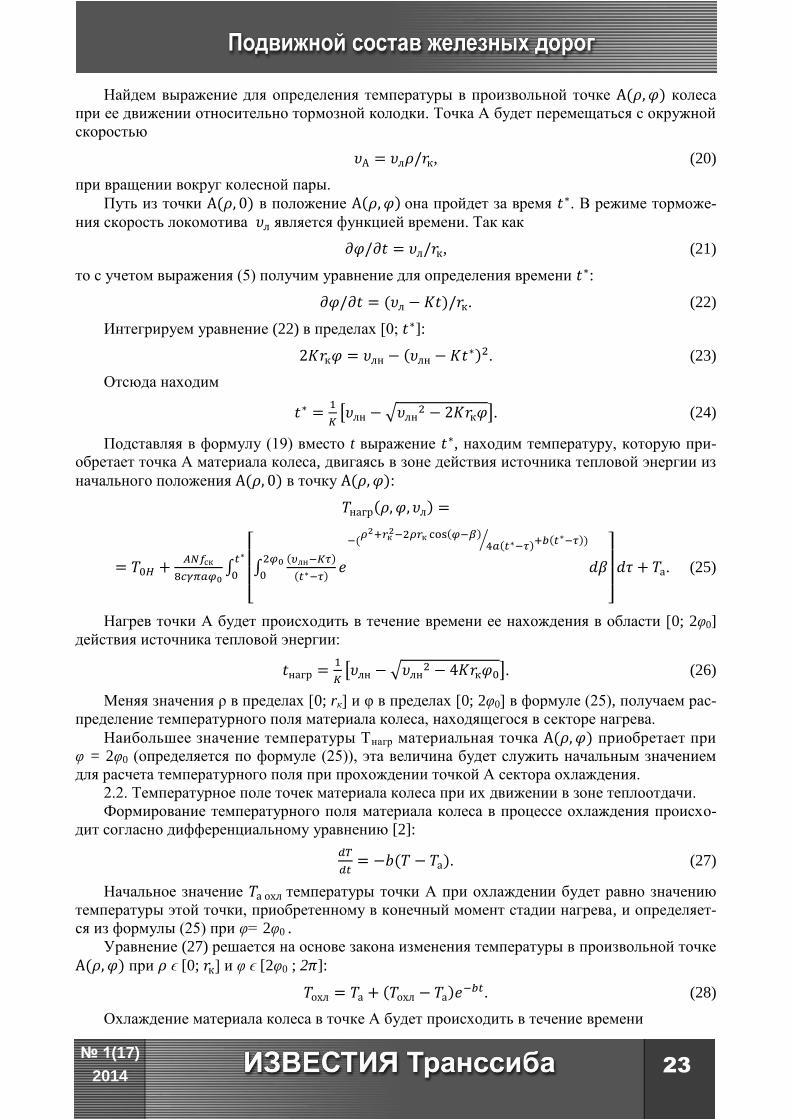
Найдем выражение для определения температуры в произвольной точке ( ) колеса при ее движении относительно тормозной колодки. Точка А будет перемещаться с окружной
скоростью
, (20)
при вращении вокруг колесной пары.
Путь из точки ( ) в положение ( ) она пройдет за время . В режиме торможе-ния скорость локомотива является функцией времени. Так как
, (21)
то с учетом выражения (5) получим уравнение для определения времени :
( ) . (22)
Интегрируем уравнение (22) в пределах [0; ]:
( ) . (23)
Отсюда находим
[ √ ]. (24)
Подставляя в формулу (19) вместо t выражение , находим температуру, которую при-обретает точка А материала колеса, двигаясь в зоне действия источника тепловой энергии из
начального положения ( ) в точку ( ):
( )
∫
[
∫( )
( )
(
( ) ( )⁄ ( ))
]
. (25)
Нагрев точки А будет происходить в течение времени ее нахождения в области [0; 2φ0]
действия источника тепловой энергии:
[ √ ]. (26)
Меняя значения ρ в пределах [0; rк] и φ в пределах [0; 2φ0] в формуле (25), получаем рас-
пределение температурного поля материала колеса, находящегося в секторе нагрева.
Наибольшее значение температуры Тнагр материальная точка ( ) приобретает при
φ = 2φ0 (определяется по формуле (25)), эта величина будет служить начальным значением
для расчета температурного поля при прохождении точкой А сектора охлаждения.
2.2. Температурное поле точек материала колеса при их движении в зоне теплоотдачи.
Формирование температурного поля материала колеса в процессе охлаждения происхо-
дит согласно дифференциальному уравнению [2]:
( ). (27)
Начальное значение температуры точки А при охлаждении будет равно значению температуры этой точки, приобретенному в конечный момент стадии нагрева, и определяет-
ся из формулы (25) при φ= 2φ0 .
Уравнение (27) решается на основе закона изменения температуры в произвольной точке
( ) при ϵ [0; ] и φ ϵ [2φ0 ; 2 ]:
( ) . (28)
Охлаждение материала колеса в точке А будет происходить в течение времени
№ 1(17)
2014 24
[ √
( )]. (29)
В конечный момент стадии охлаждения температура в точке A определится выражением:
( ) . (30)
Эта температура будет являться начальным значением для стадии нагрева материала ко-
леса в точке А при ее прохождении зоны охвата второй тормозной колодкой.
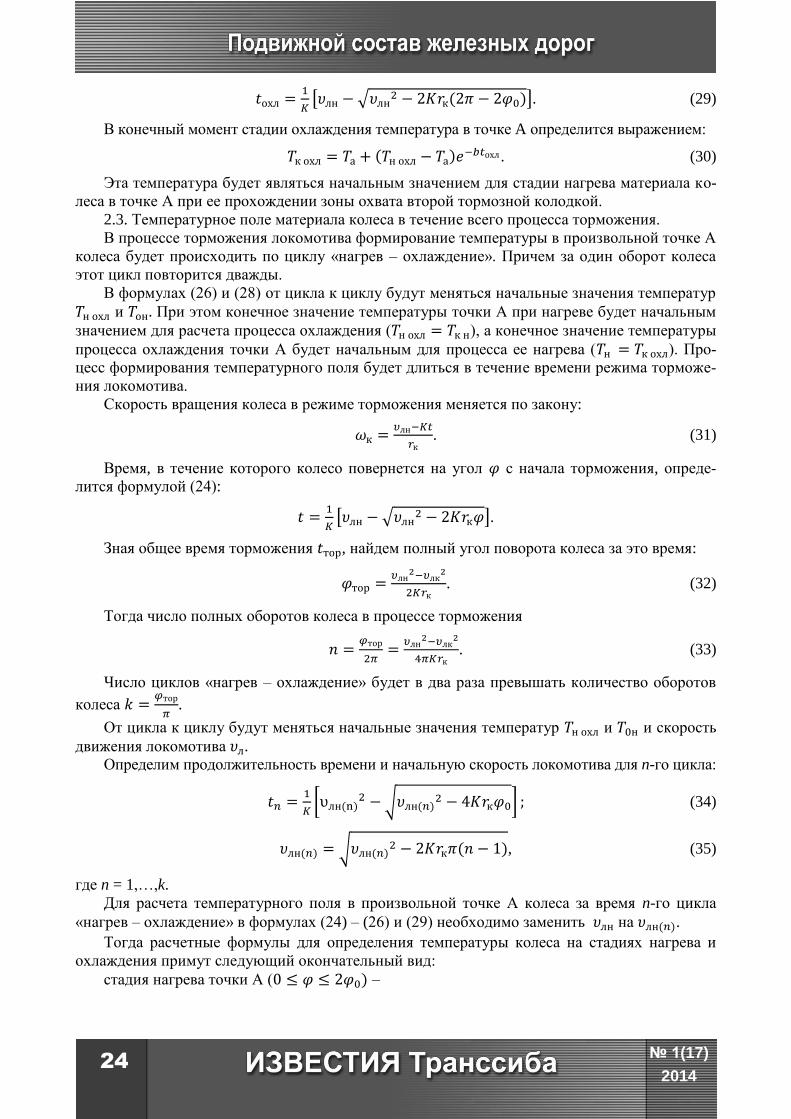
2.3. Температурное поле материала колеса в течение всего процесса торможения.
В процессе торможения локомотива формирование температуры в произвольной точке А
колеса будет происходить по циклу «нагрев – охлаждение». Причем за один оборот колеса
этот цикл повторится дважды.
В формулах (26) и (28) от цикла к циклу будут меняться начальные значения температур
и При этом конечное значение температуры точки А при нагреве будет начальным значением для расчета процесса охлаждения ( ), а конечное значение температуры процесса охлаждения точки А будет начальным для процесса ее нагрева ( ). Про-цесс формирования температурного поля будет длиться в течение времени режима торможе-
ния локомотива.
Скорость вращения колеса в режиме торможения меняется по закону:
. (31)
Время, в течение которого колесо повернется на угол с начала торможения, опреде-
лится формулой (24):
[ √ ].
Зная общее время торможения , найдем полный угол поворота колеса за это время:
. (32)
Тогда число полных оборотов колеса в процессе торможения
. (33)
Число циклов «нагрев – охлаждение» будет в два раза превышать количество оборотов
колеса
.
От цикла к циклу будут меняться начальные значения температур и и скорость
движения локомотива . Определим продолжительность времени и начальную скорость локомотива для n-го цикла:
[ ( )
√ ( ) ] (34)
( ) √ ( ) ( ), (35)
где n = 1,…,k.
Для расчета температурного поля в произвольной точке А колеса за время n-го цикла
«нагрев – охлаждение» в формулах (24) – (26) и (29) необходимо заменить на ( ).
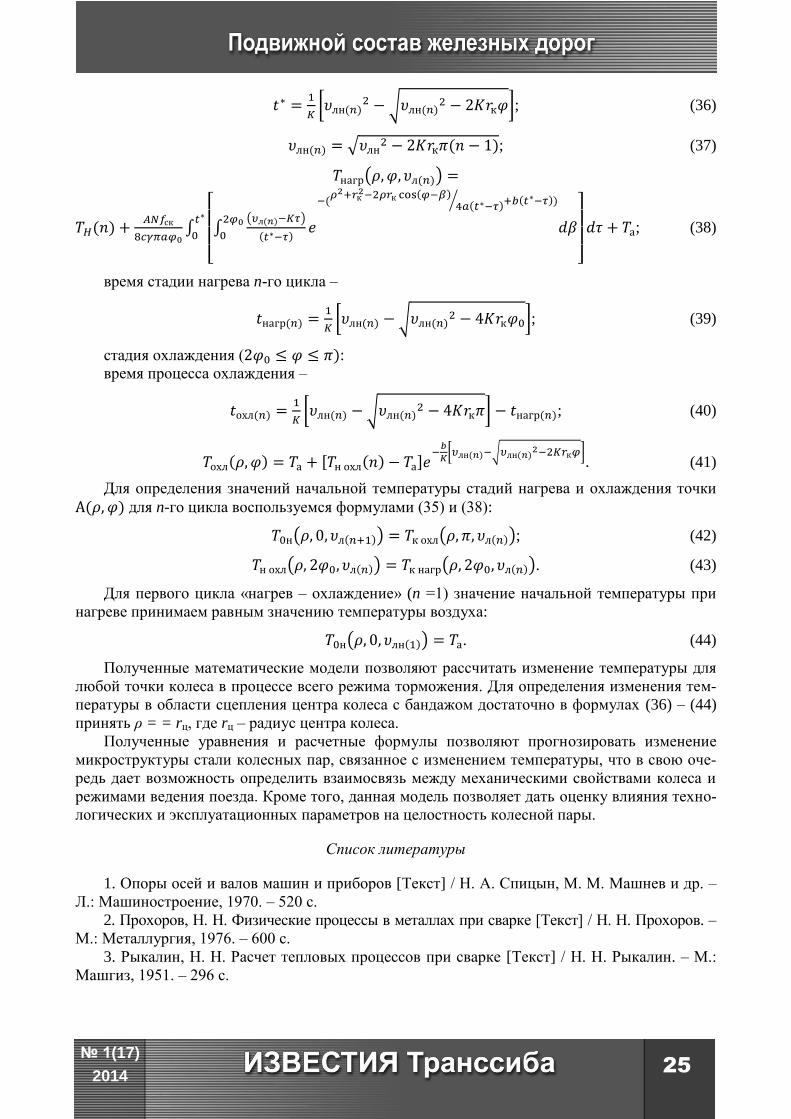
Тогда расчетные формулы для определения температуры колеса на стадиях нагрева и
охлаждения примут следующий окончательный вид:
стадия нагрева точки А ( ) –
25
№ 1(17)
2014
[ ( )
√ ( ) ]; (36)
( ) √ ( ); (37)
( ( ))
( )
∫
[
∫( ( ) )
( )
(
( ) ( )⁄ ( ))
]
; (38)
время стадии нагрева n-го цикла –
( )
[ ( ) √ ( ) ]; (39)
стадия охлаждения ( ): время процесса охлаждения –
( )
[ ( ) √ ( ) ] ( ); (40)
( ) [ ( ) ]
[ ( ) √ ( )
] (41)
Для определения значений начальной температуры стадий нагрева и охлаждения точки
( ) для n-го цикла воспользуемся формулами (35) и (38):
( ( )) ( ( )); (42)
( ( )) ( ( )). (43)
Для первого цикла «нагрев – охлаждение» (n =1) значение начальной температуры при
нагреве принимаем равным значению температуры воздуха:
( ( )) . (44)
Полученные математические модели позволяют рассчитать изменение температуры для
любой точки колеса в процессе всего режима торможения. Для определения изменения тем-
пературы в области сцепления центра колеса с бандажом достаточно в формулах (36) – (44)
принять ρ = = rц, где rц – радиус центра колеса.
Полученные уравнения и расчетные формулы позволяют прогнозировать изменение
микроструктуры стали колесных пар, связанное с изменением температуры, что в свою оче-
редь дает возможность определить взаимосвязь между механическими свойствами колеса и
режимами ведения поезда. Кроме того, данная модель позволяет дать оценку влияния техно-
логических и эксплуатационных параметров на целостность колесной пары.
Список литературы
1. Опоры осей и валов машин и приборов [Текст] / Н. А. Спицын, М. М. Машнев и др. –
Л.: Машиностроение, 1970. – 520 с.
2. Прохоров, Н. Н. Физические процессы в металлах при сварке [Текст] / Н. Н. Прохоров. –
М.: Металлургия, 1976. – 600 с.
3. Рыкалин, Н. Н. Расчет тепловых процессов при сварке [Текст] / Н. Н. Рыкалин. – М.:
Машгиз, 1951. – 296 с.
№ 1(17)
2014 26
УДК 621.33
Е. М. Лыткина, Е. Ю. Дульский, А. М. Худоногов
ОСНОВЫ ЛОКАЛЬНОГО МЕТОДА ПРОДЛЕНИЯ РЕСУРСА ИЗОЛЯЦИИ
ЭЛЕКТРИЧЕСКИХ МАШИН ТЯГОВОГО ПОДВИЖНОГО СОСТАВА
ТЕПЛОВЫМ ИЗЛУЧЕНИЕМ
Основным повреждаемым узлом тяговых электрических машин тягового подвижного состава является
изоляция в области основания лобовой части. Несовершенная система изоляции в торцевой части лобовых
обмоток приводит к влажности. Причиной неудовлетворительной надежности является также повышенная
напряженность в этой зоне. В качестве мероприятий, разработанных для продления ресурса электрических
машин, авторами предлагается система локального капсулирования изоляции энергией ИК-излучения.
Электрические машины (ЭМ) тягового подвижного состава (ТПС) относятся к предельно
нагруженному оборудованию, и поэтому с позиций комплексного воздействия на них тепло-
вых, электромагнитных, механических и климатических факторов, несмотря на постоянно
проводимые мероприятия конструктивно-технологического характера при изготовлении и
ремонте, уровень повреждаемости их в эксплуатации хотя и снижается, но остается довольно
высоким. Современные технологии по изготовлению коллекторных тяговых двигателей
электровозов позволяют повысить ресурс по остовам на пробег до 2,5 млн км, однако ис-
пользование этих же технологий для изготовления якорей не обеспечивает ресурс их более
чем на 1 млн км пробега. Наиболее высокие показатели по неудовлетворительной надежно-
сти – у тяговых электрических машин грузовых электровозов, особенно низкие – у грузовых
электровозов, эксплуатируемых на железных дорогах Восточного региона страны (Красно-
ярская, Восточно-Сибирская, Забайкальская, Дальневосточная железные дороги). Основным
лимитирующим элементом в надежности электрических машин тягового подвижного соста-
ва является изоляция. Одним из определяющих факторов, воздействующих на старение изо-
ляции, является скорость нагревания изоляции электрической машины, т. е. быстрое измене-
ние температуры обмоток до предельно допустимых значений для изоляции соответствую-
щего класса нагревостойкости, особенно с переходом через 0 °С, что характерно для эксплу-
атации локомотивов в зоне «северного хода» на Восточно-Сибирской железной дороге. Мо-
розы на участках эксплуатации достигают –50 °C и ниже, перепады температуры в течение
суток до 20 – 35 °С, продолжительность работы при отрицательной температуре внешней
среды составляет до 11 месяцев в году. При прохождении электровозами в зимний период
искусственных сооружений (Северо-Муйский тоннель) разница значений температуры за ко-
ротний период – более 60 °С. Аналогичное положение наблюдается и на других железных доро-
гах Сибири, Севера и Дальнего Востока [1]. Налицо проблемная ситуация, которая заключается
в необходимости увеличения срока службы ЭМ ТПС в неблагоприятных условиях эксплуатации
на железных дорогах Восточного региона и отсутствии соответствующей данным условиям зо-
нальной системы продления ресурса изоляции с минимальными затратами в процессах техниче-
ского обслуживания и ремонта локомотивов и мотор-вагонного подвижного состава.
Исследованию надежности, повышению и продлению ресурса тягового подвижного со-
става железных дорог, системам технического диагностирования и ремонта уделялось значи-
тельное внимание различными научными коллективами.
Большой вклад в изучение перечисленных проблем внесли Ю. А. Бахвалов, В. И. Бер-
винов, И. В. Бирюков, И. Н. Богаенко, В. И. Бочаров, А. А. Воробьев, А. И. Володин,
И. И. Галиев, З. Г. Гиоев, А. В. Горский, В. Г. Григоренко, А. А. Зарифьян, Д. Д. Захарченко,
И. П. Исаев, В. А. Камаев, В. И. Киселев, В. Г. Козубенко, В. А. Кучумов, А. Л. Курочка,
А. А. Лисицин, В. Н. Лисунов, В. Б. Медель, М. Д. Находкин, Е. С. Павлович, М. П. Пахомов,
А. В. Плакс, В. В. Привалов, Н. А. Ротанов, А. Н. Савоськин, И. В. Скогорев, В. В. Стрекопытов,
Т. А. Тибилов, В. П. Феоктистов, В. А. Четвергов, В. Г. Щербаков, В. П. Янов и другие иссле-
дователи.
27
№ 1(17)
2014
Значительный вклад в решение вопросов надежности наиболее «слабых» узлов тяговых
электрических машин – изоляционных конструкций и коллекторно-щеточного узла тяговых
двигателей внесли такие ученые, как В. Д. Авилов, А. Е. Алексеев, А. А. Бакланов,
В. Г. Галкин, М. Д. Глущенко, А. Т. Головатый, И. П. Гордеев, А. В. Грищенко,
Р. М. Девликамов, Г. Б. Дурандин, М. Г. Дурандин, Ш. К. Исмаилов, М. Ф. Карасев,
В. И. Карташев, А. С. Космодамианский, В. А. Кручек, А. С. Курбасов, А. Б. Лебедев,
Е. Ю. Логинова, А. С. Мазнев, Р. Я. Медлин, А. Т. Осяев, А. Д. Петрушин, В. М. Попов,
Н. П. Семенов, А. С. Серебряков, В. П. Смирнов, Л. Н. Сорин, Н. О. Фролов, В. В. Харламов,
О. И. Хомутов, В. А. Шевалин, и многие другие.
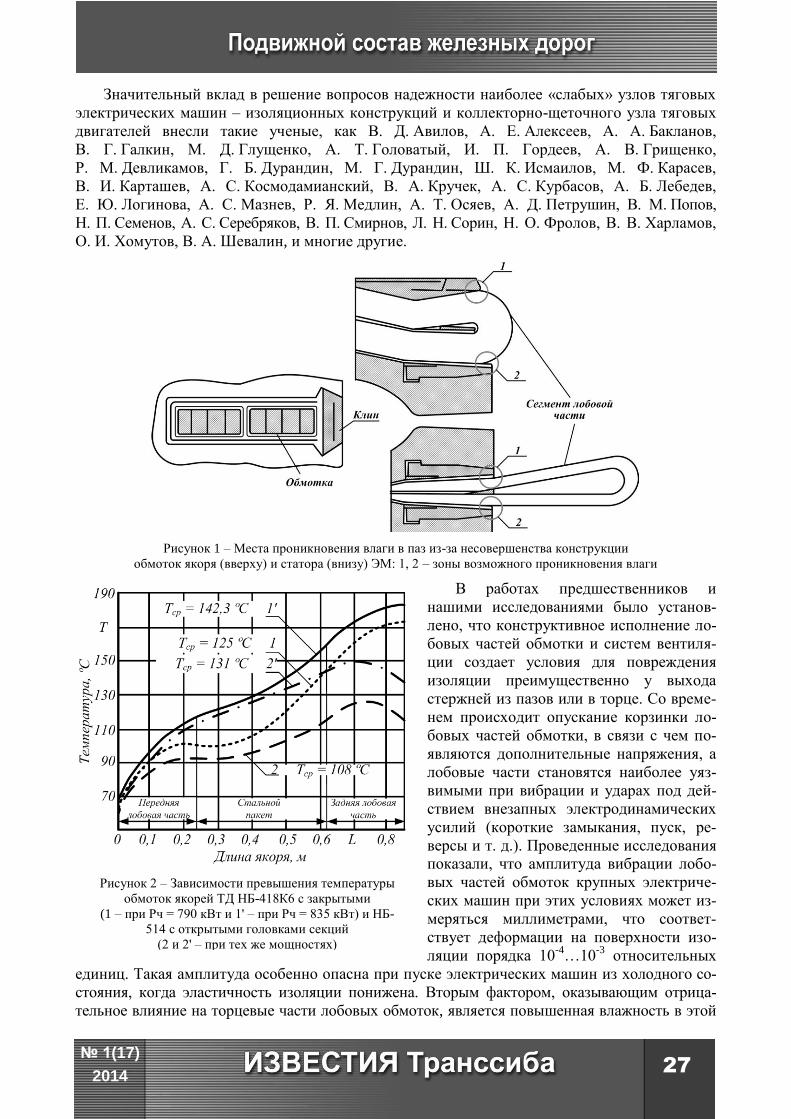
Рисунок 1 – Места проникновения влаги в паз из-за несовершенства конструкции
обмоток якоря (вверху) и статора (внизу) ЭМ: 1, 2 – зоны возможного проникновения влаги
В работах предшественников и
нашими исследованиями было установ-
лено, что конструктивное исполнение ло-
бовых частей обмотки и систем вентиля-
ции создает условия для повреждения
изоляции преимущественно у выхода
стержней из пазов или в торце. Со време-
нем происходит опускание корзинки ло-
бовых частей обмотки, в связи с чем по-
являются дополнительные напряжения, а
лобовые части становятся наиболее уяз-
вимыми при вибрации и ударах под дей-
ствием внезапных электродинамических
усилий (короткие замыкания, пуск, ре-
версы и т. д.). Проведенные исследования
показали, что амплитуда вибрации лобо-
вых частей обмоток крупных электриче-
ских машин при этих условиях может из-
меряться миллиметрами, что соответ-
ствует деформации на поверхности изо-
ляции порядка 10-4…10
-3 относительных
единиц. Такая амплитуда особенно опасна при пуске электрических машин из холодного со-
стояния, когда эластичность изоляции понижена. Вторым фактором, оказывающим отрица-
тельное влияние на торцевые части лобовых обмоток, является повышенная влажность в этой
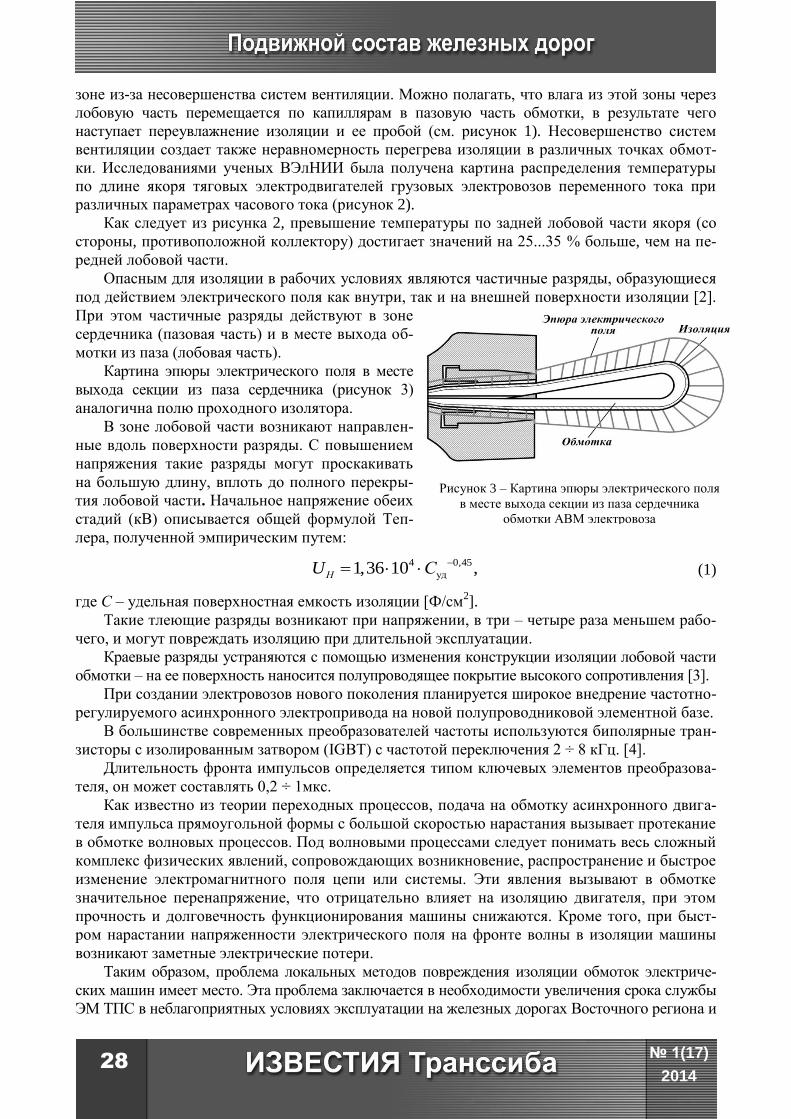
Рисунок 2 – Зависимости превышения температуры
обмоток якорей ТД НБ-418К6 с закрытыми
(1 – при Рч = 790 кВт и 1' – при Рч = 835 кВт) и НБ-
514 с открытыми головками секций
(2 и 2' – при тех же мощностях)
№ 1(17)
2014 28
зоне из-за несовершенства систем вентиляции. Можно полагать, что влага из этой зоны через
лобовую часть перемещается по капиллярам в пазовую часть обмотки, в результате чего
наступает переувлажнение изоляции и ее пробой (см. рисунок 1). Несовершенство систем
вентиляции создает также неравномерность перегрева изоляции в различных точках обмот-
ки. Исследованиями ученых ВЭлНИИ была получена картина распределения температуры
по длине якоря тяговых электродвигателей грузовых электровозов переменного тока при
различных параметрах часового тока (рисунок 2).
Как следует из рисунка 2, превышение температуры по задней лобовой части якоря (со
стороны, противоположной коллектору) достигает значений на 25...35 % больше, чем на пе-
редней лобовой части.
Опасным для изоляции в рабочих условиях являются частичные разряды, образующиеся
под действием электрического поля как внутри, так и на внешней поверхности изоляции [2].
При этом частичные разряды действуют в зоне
сердечника (пазовая часть) и в месте выхода об-
мотки из паза (лобовая часть).
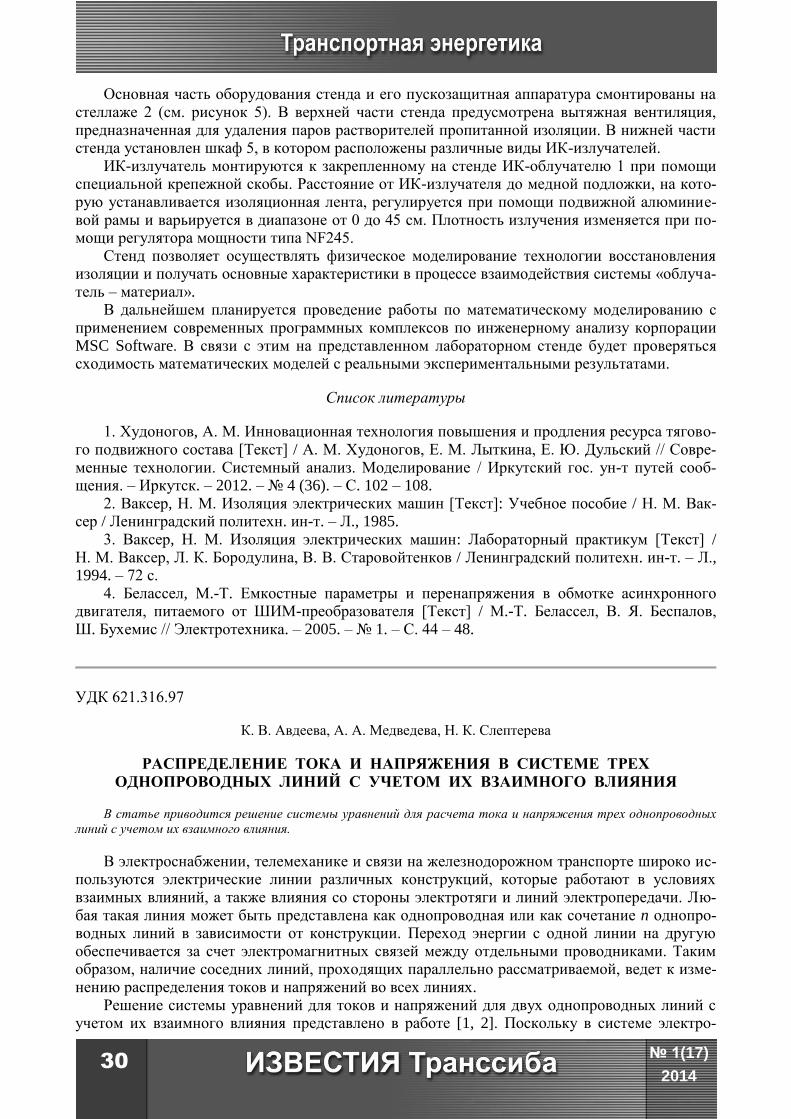
Картина эпюры электрического поля в месте
выхода секции из паза сердечника (рисунок 3)
аналогична полю проходного изолятора.
В зоне лобовой части возникают направлен-
ные вдоль поверхности разряды. С повышением
напряжения такие разряды могут проскакивать
на большую длину, вплоть до полного перекры-
тия лобовой части. Начальное напряжение обеих
стадий (кВ) описывается общей формулой Теп-
лера, полученной эмпирическим путем:
4 0,45
уд1,36 10 ,НU С (1)
где С – удельная поверхностная емкость изоляции [Ф/см2].
Такие тлеющие разряды возникают при напряжении, в три – четыре раза меньшем рабо-
чего, и могут повреждать изоляцию при длительной эксплуатации.
Краевые разряды устраняются с помощью изменения конструкции изоляции лобовой части
обмотки – на ее поверхность наносится полупроводящее покрытие высокого сопротивления [3].
При создании электровозов нового поколения планируется широкое внедрение частотно-
регулируемого асинхронного электропривода на новой полупроводниковой элементной базе.
В большинстве современных преобразователей частоты используются биполярные тран-
зисторы с изолированным затвором (IGBT) с частотой переключения 2 ÷ 8 кГц. [4].
Длительность фронта импульсов определяется типом ключевых элементов преобразова-
теля, он может составлять 0,2 ÷ 1мкс.
Как известно из теории переходных процессов, подача на обмотку асинхронного двига-
теля импульса прямоугольной формы с большой скоростью нарастания вызывает протекание
в обмотке волновых процессов. Под волновыми процессами следует понимать весь сложный
комплекс физических явлений, сопровождающих возникновение, распространение и быстрое
изменение электромагнитного поля цепи или системы. Эти явления вызывают в обмотке
значительное перенапряжение, что отрицательно влияет на изоляцию двигателя, при этом
прочность и долговечность функционирования машины снижаются. Кроме того, при быст-
ром нарастании напряженности электрического поля на фронте волны в изоляции машины
возникают заметные электрические потери.
Таким образом, проблема локальных методов повреждения изоляции обмоток электриче-
ских машин имеет место. Эта проблема заключается в необходимости увеличения срока службы
ЭМ ТПС в неблагоприятных условиях эксплуатации на железных дорогах Восточного региона и
Рисунок 3 – Картина эпюры электрического поля
в месте выхода секции из паза сердечника
обмотки АВМ электровоза

29
№ 1(17)
2014
в отсутствии соответствующей данным условиям зональной системы продления ресурса изоля-
ции. Внедрение зональной системы продления срока службы ЭМ ТПС путем локальных мето-
дов восстановления изоляции позволит с минимальными затратами получить требуемый резуль-
тат независимо от существующих систем технического обслуживания и ремонта.
В локальных методах восстановления изоляции предлагается использовать тепловое из-
лучение, позволяющее прецизионно транспортировать поток электронов в точку поврежде-
ния изоляции обмотки электрической машины с целью ее восстановления. Механизм восста-
новления изоляции локальным методом представлен на рисунке 4.
а б в
Рисунок 4 – Механизм восстановления изоляции локальным методом:
1 – электроизоляционный пропиточный материал (лак, компаунд и т. д.);
2 – пропитанный изоляционный материал; 3 – проводник обмотки ЭМ; 4 – пары растворителя
При восстановлении изоляции локальным методом с использованием теплового излуче-
ния используется вид нагрева, основывающийся на поглощении изоляционными материала-
ми энергии субинфра и инфракрасного
(ИК) излучения. Преобразование энергии
излучения в тепловую происходит в неко-
тором слое изоляции, глубина которого
определяется длиной волны и оптически-
ми свойствами изоляционных материалов.
Тепловые лучи, в основном коротко- и
средневолновые с длиной волны 0,8 – 5,0
мкм, проходят расстояние от источника
излучения до облучаемой поверхности
почти без потерь (коэффициенты отраже-
ния и поглощения), а основные диффузи-
онные процессы имеют оптимальное
направление (рисунок 4). Нагретые ос-
новным потоком ИК-лучей металлические
части обмотки 3, в свою очередь, нагре-
вают лакокрасочный материал 2 снизу,
способствуя передаче тепла от нижних
слоев изоляции к верхним и ускоряя уда-
ление растворителя 4, тем самым значи-
тельно сокращая процесс восстановления
изоляции (капсулирования).
С целью проверки гипотезы и изуче-
ния механизма процесса капсулирования
изоляции обмоток электрических машин
тепловым излучением была спроектиро-
вана и изготовлена лабораторная установ-
ка, общий вид которой представлен на ри-
сунке 5.
Рисунок 5 – Общий вид лабораторного стенда для физи-
ческого моделирования процессов восстановления изо-
ляции тепловым излучением: 1 – ИК-излучатель;
2 – панель измерений; 3 – прибор для определения тер-
морадиационных свойств изоляции (TermoRad-1);
4 – пирометр (ADA); 5 - выдвижные панели с ИК-
излучателями различных типов и видов
№ 1(17)
2014 30
Основная часть оборудования стенда и его пускозащитная аппаратура смонтированы на стеллаже 2 (см. рисунок 5). В верхней части стенда предусмотрена вытяжная вентиляция, предназначенная для удаления паров растворителей пропитанной изоляции. В нижней части стенда установлен шкаф 5, в котором расположены различные виды ИК-излучателей.
ИК-излучатель монтируются к закрепленному на стенде ИК-облучателю 1 при помощи специальной крепежной скобы. Расстояние от ИК-излучателя до медной подложки, на кото-рую устанавливается изоляционная лента, регулируется при помощи подвижной алюминие-вой рамы и варьируется в диапазоне от 0 до 45 см. Плотность излучения изменяется при по-мощи регулятора мощности типа NF245.
Стенд позволяет осуществлять физическое моделирование технологии восстановления изоляции и получать основные характеристики в процессе взаимодействия системы «облуча-тель – материал».
В дальнейшем планируется проведение работы по математическому моделированию с применением современных программных комплексов по инженерному анализу корпорации MSC Software. В связи с этим на представленном лабораторном стенде будет проверяться сходимость математических моделей с реальными экспериментальными результатами.
Список литературы
1. Худоногов, А. М. Инновационная технология повышения и продления ресурса тягово-го подвижного состава [Текст] / А. М. Худоногов, Е. М. Лыткина, Е. Ю. Дульский // Совре-менные технологии. Системный анализ. Моделирование / Иркутский гос. ун-т путей сооб-щения. – Иркутск. – 2012. – № 4 (36). – С. 102 – 108.
2. Ваксер, Н. М. Изоляция электрических машин [Текст]: Учебное пособие / Н. М. Вак-сер / Ленинградский политехн. ин-т. – Л., 1985.
3. Ваксер, Н. М. Изоляция электрических машин: Лабораторный практикум [Текст] / Н. М. Ваксер, Л. К. Бородулина, В. В. Старовойтенков / Ленинградский политехн. ин-т. – Л., 1994. – 72 с.
4. Белассел, М.-Т. Емкостные параметры и перенапряжения в обмотке асинхронного двигателя, питаемого от ШИМ-преобразователя [Текст] / М.-Т. Белассел, В. Я. Беспалов, Ш. Бухемис // Электротехника. – 2005. – № 1. – С. 44 – 48.
УДК 621.316.97
К. В. Авдеева, А. А. Медведева, Н. К. Слептерева
РАСПРЕДЕЛЕНИЕ ТОКА И НАПРЯЖЕНИЯ В СИСТЕМЕ ТРЕХ
ОДНОПРОВОДНЫХ ЛИНИЙ С УЧЕТОМ ИХ ВЗАИМНОГО ВЛИЯНИЯ
В статье приводится решение системы уравнений для расчета тока и напряжения трех однопроводных линий с учетом их взаимного влияния.
В электроснабжении, телемеханике и связи на железнодорожном транспорте широко ис-пользуются электрические линии различных конструкций, которые работают в условиях взаимных влияний, а также влияния со стороны электротяги и линий электропередачи. Лю-бая такая линия может быть представлена как однопроводная или как сочетание n однопро-водных линий в зависимости от конструкции. Переход энергии с одной линии на другую обеспечивается за счет электромагнитных связей между отдельными проводниками. Таким образом, наличие соседних линий, проходящих параллельно рассматриваемой, ведет к изме-нению распределения токов и напряжений во всех линиях.
Решение системы уравнений для токов и напряжений для двух однопроводных линий с учетом их взаимного влияния представлено в работе [1, 2]. Поскольку в системе электро-

31
№ 1(17)
2014
снабжения наиболее часто применяются линии с тремя проводниками (трехфазные воздуш-ные и кабельные линии), особый интерес представляет решение аналогичной системы для трех однопроводных линий с учетом их взаимного влияния.
Рассмотрим три параллельно расположенные однородные однопроводные изолирован-ные линии равной длины (рисунок 1). Каждая линия характеризуется первичными парамет-
рами на единицу длины: Ri – сопротивление i-й линии; Li – индуктивность i-й линии; Gi – проводимость изоляции i-й линии по отношению к земле; Ci – емкость изоляции i-й ли-нии по отношению к земле. Кроме собственных между линиями на единицу длины имеются Mij – взаимная ин-дуктивность между i-й и j-й линиями; Gij, Cij – взаимная проводимость изоляции и ем-кость между i-й и j-й линиями.
Схема замещения трех
однопроводных линий приве-
дена на рисунке 1.
Первичные и взаимные
параметры линий предпола-
гаются известными [3]. Для определения изменения тока и напряжения по длине линии со-
ставим систему дифференциальных уравнений:
11 1 1 12 2 13 3
22 2 2 21 1 23 3
33 3 3 31 1 32 2
11 1 1 12 12 2 13
( )( ω ) ( ) ω ( ) ω ( );
( )( ω ) ( ) ω ( ) ( );
( )( ω ) ( ) ω ( ) ω ( );
( )( ω ) ( ) ( ω ) ( ) (
dU xR j L I x j M I x j M I x
dx
dU xR j L I x j M I x j M I x
dx
dU xR j L I x j M I x j M I x
dx
dI xG j C U x G j C U x G
dx
13 3
22 2 2 21 21 1 23 23 3
33 3 3 31 31 1 32 32 2
ω ) ( );
( )( ω ) ( ) ( ω ) ( ) ( ω ) ( );
( )( ω ) ( ) ( ω ) ( ) ( ω ) ( ),
j C U x
dI xG j C U x G j C U x G j C U x
dx
dI xG j C U x G j C U x G j C U x
dx
(1)
где ;i i ijG G G .i i ijC C C
Рассмотрим случай трех одинаковых однопроводных линий. Учитывая равенство пер-
вичных, а также взаимных параметров, введем обозначения:
1 1 2 2 3 3( ω ) ( ω ) ( ω ) ;R j L R j L R j L A (2)
12 13 21 23 31 32ω ω ω ω ω ω ;j M j M j M j M j M j M B (3)
1 1 2 2 3 3( ω ) ( ω ) ( ω ) ;G j C G j C G j C C (4)
M12
M23
M13
U1
U2
U3
G1
I1
I2
I3
R1
R2
R3
L1
L2
L3
C1
G12 C12
G23 C23 G13 C13
G2 C2
G3 C3
Рисунок 1 – Схема замещения трех однопроводных линий
№ 1(17)
2014 32
12 12 13 13 21 21 23 23 31 31( ω ) ( ω ) ( ω ) ( ω ) ( ω )G j C G j C G j C G j C G j C
32 32( ω ) .G j C D (5)
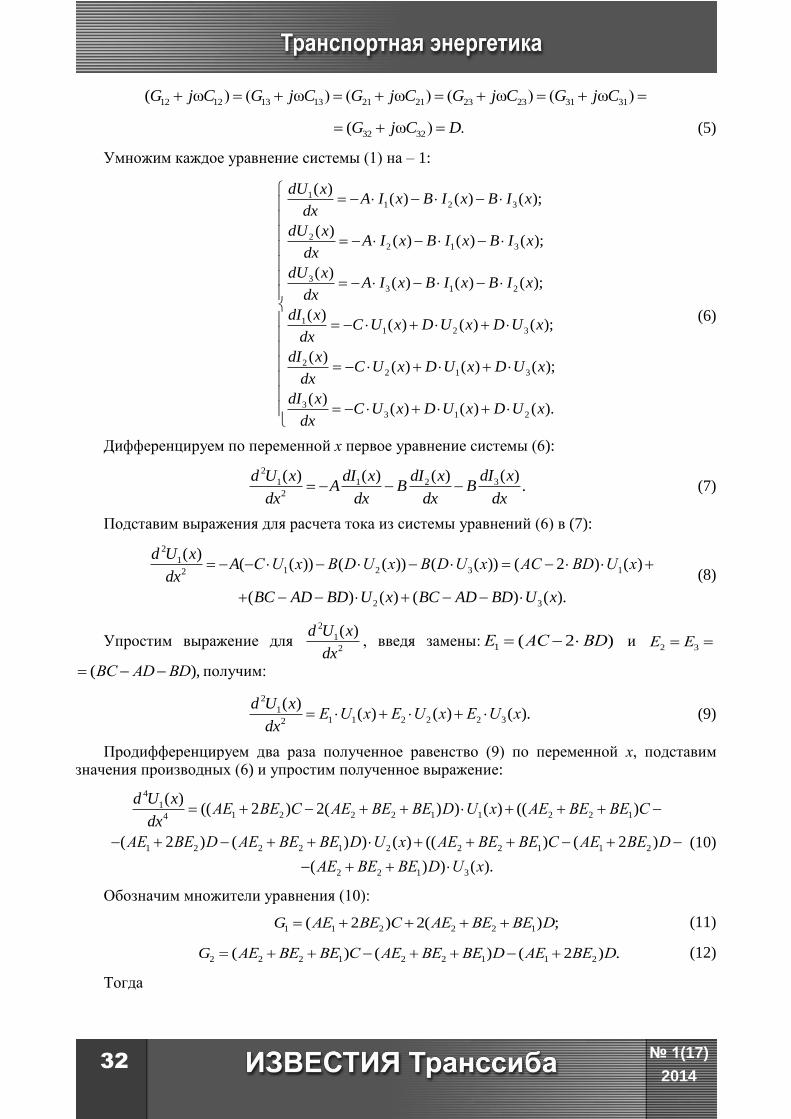
Умножим каждое уравнение системы (1) на – 1:
11 2 3
22 1 3
33 1 2
11 2 3
22 1 3
33 1 2
( )( ) ( ) ( );
( )( ) ( ) ( );
( )( ) ( ) ( );
( )( ) ( ) ( );
( )( ) ( ) ( );
( )( ) ( )
dU xA I x B I x B I x
dx
dU xA I x B I x B I x
dx
dU xA I x B I x B I x
dx
dI xC U x D U x D U x
dx
dI xC U x D U x D U x
dx
dI xC U x D U x D U
dx
( ).x
(6)
Дифференцируем по переменной х первое уравнение системы (6):
2
31 1 2
2
( )( ) ( ) ( ).
dI xd U x dI x dI xA B B
dx dx dx dx
(7)
Подставим выражения для расчета тока из системы уравнений (6) в (7):
2
11 2 3 12
2 3
( )( ( )) ( ( )) ( ( )) ( 2 ) ( )
( ) ( ) ( ) ( ).
d U xA С U x B D U x B D U x AС BD U x
dx
BC AD BD U x BC AD BD U x
(8)
Упростим выражение для 2
1
2
( )d U x
dx, введя замены: 1 ( 2 )Е AС BD и
2 3Е Е
( ),ВС АD BD получим:
2
11 1 2 2 2 32
( )( ) ( ) ( ).
d U xЕ U x Е U x Е U x
dx
(9)
Продифференцируем два раза полученное равенство (9) по переменной х, подставим значения производных (6) и упростим полученное выражение:
4
11 2 2 2 1 1 2 2 14
1 2 2 2 1 2 2 2 1 1 2
2 2 1 3
( )(( 2 ) 2( ) ) ( ) (( )
( 2 ) ( ) ) ( ) (( ) ( 2 )
( ) ) ( ).
d U xАE ВЕ C АE ВЕ ВЕ D U х АE ВЕ ВЕ C
dx
АE ВЕ D АE ВЕ ВЕ D U х АE ВЕ ВЕ C АE ВЕ D
АE ВЕ ВЕ D U х
(10)
Обозначим множители уравнения (10):
1 1 2 2 2 1( 2 ) 2( ) ;G АE ВЕ C АE ВЕ ВЕ D (11)
2 2 2 1 2 2 1 1 2( ) ( ) ( 2 ) .G АE ВЕ ВЕ C АE ВЕ ВЕ D АE ВЕ D (12)
Тогда

33
№ 1(17)
2014
4
11 1 2 2 2 34
( )( ) ( ) ( ).
d U хG U x G U x G U x
dx
(13)
Образуем систему из уравнений производных четвертого и второго порядка:
4
11 1 2 2 2 34
2
11 1 2 2 2 32
( )( ) ( ) ( );
( )( ) ( ) ( ).
d U хG U x G U x G U x
dx
d U xЕ U x Е U x Е U x
dx
(14)
Так как коэффициенты при U2(x) и U3(x) в первом и втором уравнениях системы (14) равны, то переменные при U2(x) и U3(x) можно исключить, умножив обе части первого урав-нения системы (14) на множитель Е2, а второго – на множитель G2:
4
12 1 2 1 2 2 2 2 2 34
2
12 1 2 1 2 2 2 2 2 32
( )( ) ( ) ( );
( )( ) ( ) ( ).
d U хE G E U x G E U x G E U x
dx
d U xG Е G U x Е G U x Е G U x
dx
(15)
Вычитая из первого уравнения системы (15) второе, получаем:
4 2
1 12 2 2 1 1 2 14 2
( ) ( )( ) ( ).
d U x d U xE G Е G Е G U x
dx dx (16)
Уравнение (16) – линейное однородное дифференциальное уравнение четвертого поряд-
ка с постоянными коэффициентами.
Перепишем уравнение (16) в виде:
4 2
1 12 2 2 1 1 2 14 2
( ) ( )( ) ( ) 0.
d U x d U xE G Е G Е G U x
dx dx (17)
Для рассматриваемого случая решение можно записать в виде уравнения:
4 2
1 114 2
( ) ( )( ) 0,
d U x d U xp q U x
dx dx (18)
где
2
2
;G
pE
1 2 2 1
2
.G E G E
qE
Характеристическое уравнение выражения (18) имеет вид:
4 2 0.k pk q (19)
Корни данного характеристического уравнения таковы:
2
2 4;
2 2
p qpk
(20)
2
2 2 2 2 1 1 22
2
4;
2
G G E E G E Gk
E
(21)
2
2 2 2 2 1 1 2
1
2
4;
2
G G E E G E Gk
E
(22)

№ 1(17)
2014 34
2
2 2 2 2 1 1 2
2
2
4.
2
G G E E G E Gk
E
(23)
Общее решение системы (15) запишется в виде:
1 1 2 2
1 1 2 3 4( ) ` ` .k x k x k x k x
U x p e p e p e p e
(24)
Аналогично найдем решение для уравнения системы (6):
11 2 3
( )( ) ( ) ( ).
dI xC U x D U x D U x
dx (25)
Общее решение для четвертого уравнения системы (6):
1 1 2 2
1 1 2 3 4( ) ` ` .k x k x k x k x
I x q e q e q e q e
(26)
Перепишем выражение (8) в виде:
2
12 2 3 1 12
( )( ( ) ( )) ( ).
d U xЕ U x U x Е U x
dx
(27)
Подставляя уравнение (24) в (27), получаем:
1 1 2 2
1 1 2 2
2 2 3 1 1 2 3 4
2
1 2 3 4
2
( ( ) ( )) ( ` ` )
( ` ` ).
k x k x k x k x
k x k x k x k x
Е U x U x Е p e p e p e p e
d p e p e p e p e
dx
(28)
Преобразуем уравнение (28): раскрыв производные и разделив обе части на Е2, получим
уравнение вида:
1 1
2 2
2 2
1 1 1 12 3 1 2
2 2
2 2
1 2 1 23 4
2 2
( ) ( )
` ` .
k x k x
k x k x
Е k Е kU x U x p e p e
E E
Е k Е kp e p e
E E
(29)
Введем следующие обозначения:
2
1 23 3
2
` ;Е k
p pE
(30)
2
1 24 4
2
` ;Е k
p pE
(31)
21 2
2 1
η .Е
k E
(32)
Для расчета значений тока имеем:
2
12 2 3 1 1 2
( )( ( ) ( )) ( ) ,
d I xN I x I x N I x
dx (33)
где 1 2 ;N АC ВD 2N BC AD ВD . Распишем выражение (33), подставляя полученные решения (27):

35
№ 1(17)
2014
1 1 2 2
1 1 2 2
2 2 3 1 1 2 3 4
2
1 2 3 4
2
( ( ) ( )) ( ` ` )
( ` ` ).
k x k x k x k x
k x k x k x k x
N I x I x N q e q e q e q e
d q e q e q e q e
dx
(34)
Возьмем вторую производную по переменной х и разделим обе части уравнения (34) на
К2, получим выражение:
1 1 2 2
2 2 2 2
1 1 1 1 1 2 1 22 3 1 2 3 4
2 2 2 2
( ) ( ) ` ` .k x k x k x k xN k N k N k N kI x I x q e q e q e q e
N N N N
(35)
Представим следующие замены:
2
1 23 3
2
` ;N k
p pN
(36)
2
1 24 4
2
` ;N k
p pN
(37)
22 2
2 1
η .N
k N
(38)
Получим систему уравнений:
1 1 2 2
1 1 2 2
1 1 2 2
1 1 2 2
1 1 2 1 3 4
2 3 2 1 2 3 4
- -
1 1 2 1 3 4
- -
2 3 1 1 2 3 4
( ) η ( ` ` );
( ) ( ) η ( ) ;
( ) η ( );
( ) ( ) η ( ) .
k x k x k x k x
k x k x k x k x
k x k x k x k x
k x k x k x k x
U x p e p e p e p e
U x U x p e p e p e p e
I x q e q e q e q e
I x I x q e q e q e q e
(39)
Выразим постоянные q1, q2, q3, q4 в зависимости от p1, p2, p3, p4. Для этого подставим по-лученные значения U1(x), (U2(x)+U3(x)), I1(x) и (I2(x)+I3(x)) в начальные уравнения (1):
11 1 1 2 3
( )( ω ) ( ) ω ( ( ) ( ));
dU xR j L I x j M I x I x
dx (40)
322 3 1
( )( )( ω ω )( ( ) ( )) ω ( ).
dU xdU xR j L j M I x I x j M I x
dx dx (41)
После приведения подобных имеем:
1 1 2 2 1
1 2
2
- - -
1 1 1 2 1 2 3 1 2 4 1 1
-
1 2 2 3
2 4
η η ( ω ω )
( ω ω ) ( η ( ω ) ω )
( η ( ω ) ω ) .
k x k x k x k x k x
k x k x
k x
k p e k p e k p e k p e R j L j M q e
R j L j M q e R j L j M q e
R j L j M q e
(42)
Сравнивая левые и правые части выражения (42), получим следующую систему уравне-ний:
1 1 1 1
1 2 1 2
1 2 3 2 3
1 2 4 2 4
( ω ω η ) ;
( ω ω η ) ;
η ( η ( ω ) ω ) ;
η ( η ( ω ) ω ) .
k p R j L j M q
k p R j L j M q
k p R j L j M q
k p R j L j M q
(43)

№ 1(17)
2014 36
Подставим значения из системы (39) в уравнение (41):
1 1 2 2
1 1 2 2
321 1 2 3 4
1 2 2 3 4
( )( )( ω ω )( η ( ) )
2 ω ( η ( )).
k x k x k x k x
k x k x k x k x
dU xdU xR j L j M q e q e q e q e
dx dx
j M q e q e q e q e
(44)
Продифференцировав левую часть уравнения (44), получим:
1 1 2 2 1
1 2
2
-
1 2 1 1 2 2 2 3 2 4 1 1
-
1 2 2 3
2 4
η η ( η ( ω ω ) 2 ω )
( η ( ω ω ) 2 ω ) ( ω ω 2η ω )
( ω ω 2η ω ) .
k x k x k x k x k x
k x k x
k x
k p e k p e k p e k p e R j L j M j M q e
R j L j M j M q e R j L j M j M q e
R j L j M j M q e
(45)
Получим систему уравнений:
1 1 1 1 1
1 1 2 1 2
2 3 2 3
2 4 2 4
η ( η ( ω ω ) 2 ω ) ;
η ( η ( ω ω ) 2 ω ) ;
( ω ω 2η ω ) ;
( ω ω 2η ω ) .
k p R j L j M j M q
k p R j L j M j M q
k p R j L j M j M q
k p R j L j M j M q
(46)
Из уравнений систем (43) и (46) составим систему:
1 1 1 1
1 2 1 2
2 3 2 3
2 4 2 4
( ω ω η ) ;
( ω ω η ) ;
( ω ω 2η ω ) ;
( ω ω 2η ω ) .
k p R j L j M q
k p R j L j M q
k p R j L j M j M q
k p R j L j M j M q
(47)
Введем обозначения:
1
1
ω ω η;a
R j L j MZ
k
(48)
2
2
ω( 2η ).b
R j L M MZ
k
(49)
Тогда 1
1 ;a
pq
Z 2
2 ;a
pq
Z
33 ;
b
pq
Z 4
4 .b
pq
Z
Подставим q1, q2, q3 и q4 в уравнения системы (39): 1 1 2 2
1 1 2 2
1 1 2 2
1 1 2
1 1 2 1 3 4
2 3 2 1 2 3 4
1 1 2 2 3 4
2 3 1 1 2 3 4
( ) η ( );
( ) ( ) η ( ) ;
1 1 1 1( ) η ;
1 1 1 1( ) ( ) η
k x k x k x k x
k x k x k x k x
k x k x k x k x
a a b b
k x k x k x
a a b b
U x p e p e p e p e
U x U x p e p e p e p e
I x p e p e p e p eZ Z Z Z
I x I x p e p e p e pZ Z Z Z
2 .k x
e
(50)
Выразим p1, p2, p3, p4 из приведенных выше решений U1(x), U2(x), U3(x), I1(x), I2(x), I3(x)
через начальные значения напряжения и тока при х = 0:
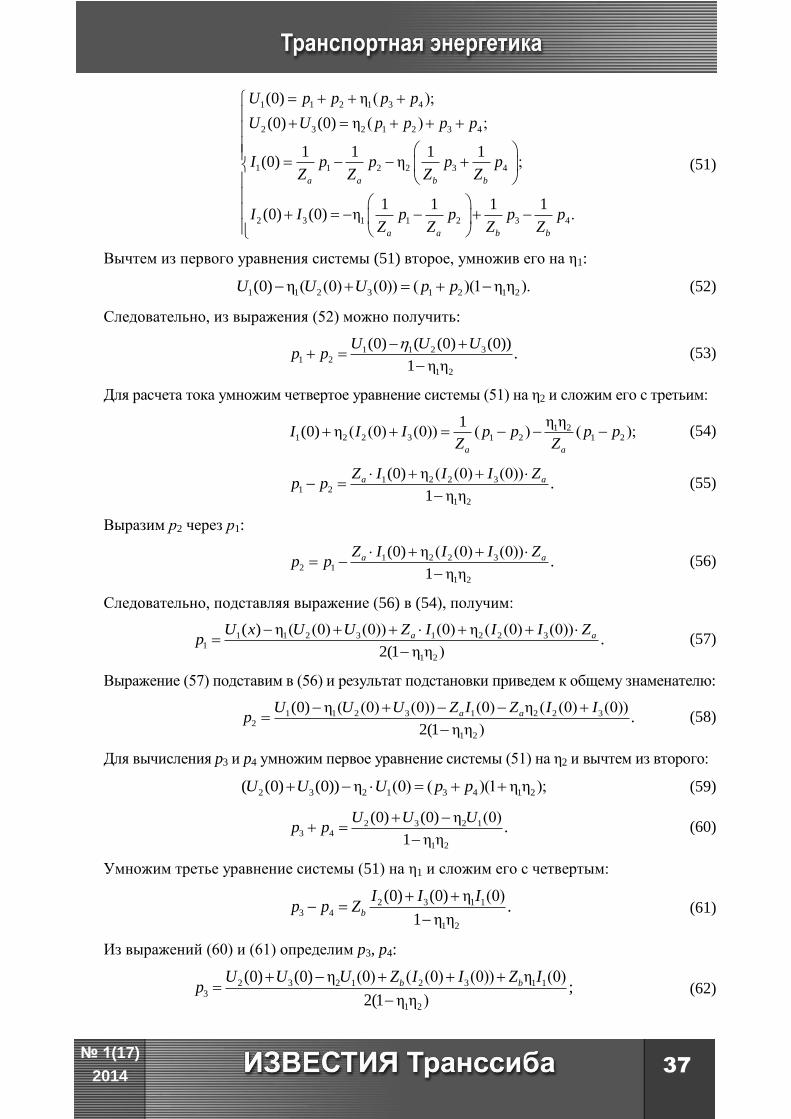
37
№ 1(17)
2014
1 1 2 1 3 4
2 3 2 1 2 3 4
1 1 2 2 3 4
2 3 1 1 2 3 4
(0) η ( );
(0) (0) η ( ) ;
1 1 1 1(0) η ;
1 1 1 1(0) (0) η .
a a b b
a a b b
U p p p p
U U p p p p
I p p p pZ Z Z Z
I I p p p pZ Z Z Z
(51)
Вычтем из первого уравнения системы (51) второе, умножив его на η1:
1 1 2 3 1 2 1 2(0) η ( (0) (0)) ( )(1 η η ).U U U p p (52)
Следовательно, из выражения (52) можно получить:
1 1 2 31 2
1 2
(0) ( (0) (0)).
1 η η
U U Up p
(53)
Для расчета тока умножим четвертое уравнение системы (51) на η2 и сложим его с третьим:
1 21 2 2 3 1 2 1 2
η η1(0) η ( (0) (0)) ( ) ( );
a a
I I I p p p pZ Z
(54)
1 2 2 31 2
1 2
(0) η ( (0) (0)).
1 η η
a aZ I I I Zp p
(55)
Выразим р2 через р1:
1 2 2 32 1
1 2
(0) η ( (0) (0)).
1 η η
a aZ I I I Zp p
(56)
Следовательно, подставляя выражение (56) в (54), получим:
1 1 2 3 1 2 2 31
1 2
( ) η ( (0) (0)) (0) η ( (0) (0)).
2(1 η η )
a aU x U U Z I I I Zp
(57)
Выражение (57) подставим в (56) и результат подстановки приведем к общему знаменателю:
1 1 2 3 1 2 2 32
1 2
(0) η ( (0) (0)) (0) η ( (0) (0)).
2(1 η η )
a aU U U Z I Z I Ip
(58)
Для вычисления p3 и p4 умножим первое уравнение системы (51) на η2 и вычтем из второго:
2 3 2 1 3 4 1 2( (0) (0)) η (0) ( )(1 η η );U U U p p (59)
2 3 2 13 4
1 2
(0) (0) η (0).
1 η η
U U Up p
(60)
Умножим третье уравнение системы (51) на η1 и сложим его с четвертым:
2 3 1 13 4
1 2
(0) (0) η (0).
1 η ηb
I I Ip p Z
(61)
Из выражений (60) и (61) определим p3, p4:
2 3 2 1 2 3 1 13
1 2
(0) (0) η (0) ( (0) (0)) η (0);
2(1 η η )
b bU U U Z I I Z Ip
(62)
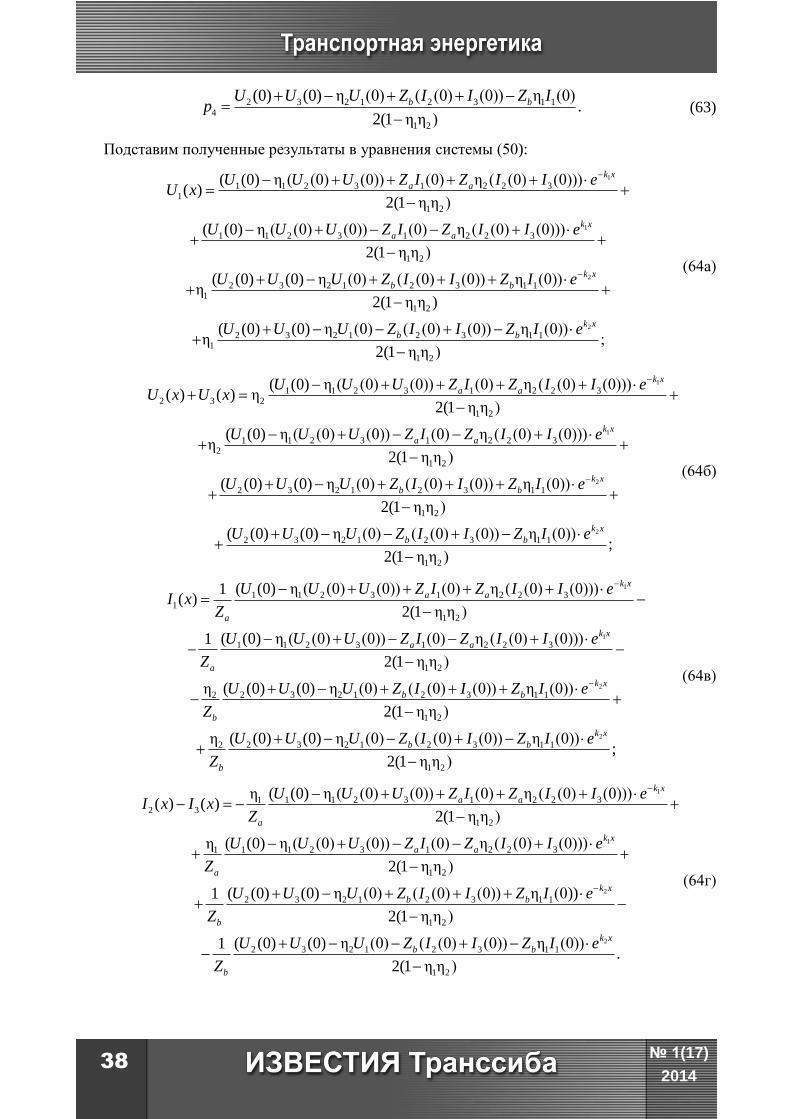
№ 1(17)
2014 38
2 3 2 1 2 3 1 14
1 2
(0) (0) η (0) ( (0) (0)) η (0).
2(1 η η )
b bU U U Z I I Z Ip
(63)
Подставим полученные результаты в уравнения системы (50):
1
1
2
1 1 2 3 1 2 2 31
1 2
1 1 2 3 1 2 2 3
1 2
2 3 2 1 2 3 1 11
1 2
( (0) η ( (0) (0)) (0) η ( (0) (0)))( )
2(1 η η )
( (0) η ( (0) (0)) (0) η ( (0) (0)))
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (0))η
2(1 η η
k x
a a
k x
a a
k x
b b
U U U Z I Z I I eU x
U U U Z I Z I I e
U U U Z I I Z I e
2
2 3 2 1 2 3 1 11
1 2
)
( (0) (0) η (0) ( (0) (0)) η (0))η ;
2(1 η η )
k x
b bU U U Z I I Z I e
(64а)
1
1
2
1 1 2 3 1 2 2 32 3 2
1 2
1 1 2 3 1 2 2 32
1 2
2 3 2 1 2 3 1 1
( (0) η ( (0) (0)) (0) η ( (0) (0)))( ) ( ) η
2(1 η η )
( (0) η ( (0) (0)) (0) η ( (0) (0)))η
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (0))
k x
a a
k x
a a
k x
b b
U U U Z I Z I I eU x U x
U U U Z I Z I I e
U U U Z I I Z I e
2
1 2
2 3 2 1 2 3 1 1
1 2
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (0));
2(1 η η )
k x
b bU U U Z I I Z I e
(64б)
1
1
2
1 1 2 3 1 2 2 31
1 2
1 1 2 3 1 2 2 3
1 2
2 3 2 1 2 3 1 12
( (0) η ( (0) (0)) (0) η ( (0) (0)))1( )
2(1 η η )
( (0) η ( (0) (0)) (0) η ( (0) (0)))1
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (0))η
k x
a a
a
k x
a a
a
k x
b b
b
U U U Z I Z I I eI x
Z
U U U Z I Z I I e
Z
U U U Z I I Z I e
Z
2
1 2
2 3 2 1 2 3 1 12
1 2
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (0))η;
2(1 η η )
k x
b b
b
U U U Z I I Z I e
Z
(64в)
1
1
1 1 2 3 1 2 2 312 3
1 2
1 1 2 3 1 2 2 31
1 2
2 3 2 1 2 3 1 1
( (0) η ( (0) (0)) (0) η ( (0) (0)))η( ) ( )
2(1 η η )
( (0) η ( (0) (0)) (0) η ( (0) (0)))η
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (01
k x
a a
a
k x
a a
a
b b
b
U U U Z I Z I I eI x I x
Z
U U U Z I Z I I e
Z
U U U Z I I Z I
Z
2
2
1 2
2 3 2 1 2 3 1 1
1 2
))
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (0))1.
2(1 η η )
k x
k x
b b
b
e
U U U Z I I Z I e
Z
(64г)
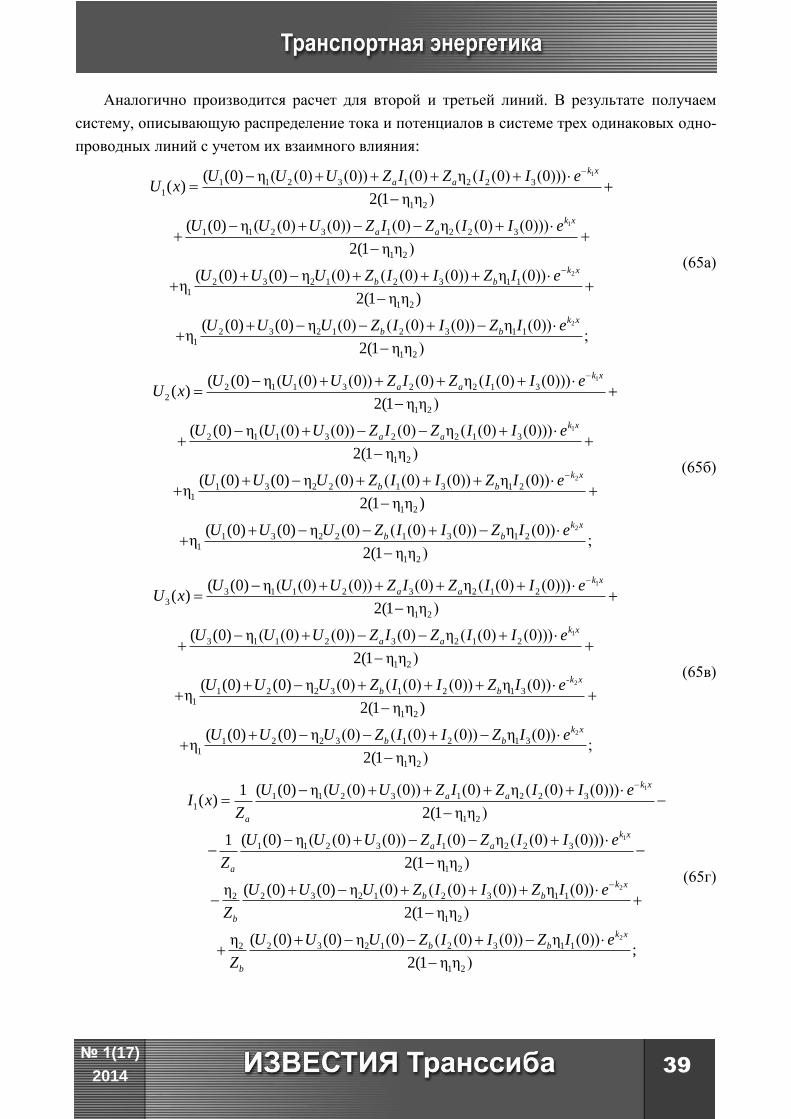
39
№ 1(17)
2014
Аналогично производится расчет для второй и третьей линий. В результате получаем
систему, описывающую распределение тока и потенциалов в системе трех одинаковых одно-
проводных линий с учетом их взаимного влияния:
1
1
2
1 1 2 3 1 2 2 31
1 2
1 1 2 3 1 2 2 3
1 2
2 3 2 1 2 3 1 11
1 2
( (0) η ( (0) (0)) (0) η ( (0) (0)))( )
2(1 η η )
( (0) η ( (0) (0)) (0) η ( (0) (0)))
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (0))η
2(1 η η
k x
a a
k x
a a
k x
b b
U U U Z I Z I I eU x
U U U Z I Z I I e
U U U Z I I Z I e
2
2 3 2 1 2 3 1 11
1 2
)
( (0) (0) η (0) ( (0) (0)) η (0))η ;
2(1 η η )
k x
b bU U U Z I I Z I e
(65а)
1
1
2
2 1 1 3 2 2 1 32
1 2
2 1 1 3 2 2 1 3
1 2
1 3 2 2 1 3 1 21
1 2
( (0) η ( (0) (0)) (0) η ( (0) (0)))( )
2(1 η η )
( (0) η ( (0) (0)) (0) η ( (0) (0)))
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (0))η
2(1 η η
k x
a a
k x
a a
k x
b b
U U U Z I Z I I eU x
U U U Z I Z I I e
U U U Z I I Z I e
2
1 3 2 2 1 3 1 21
1 2
)
( (0) (0) η (0) ( (0) (0)) η (0))η ;
2(1 η η )
k x
b bU U U Z I I Z I e
(65б)
1
1
2
3 1 1 2 3 2 1 23
1 2
3 1 1 2 3 2 1 2
1 2
-
1 2 2 3 1 2 1 31
1 2
( (0) η ( (0) (0)) (0) η ( (0) (0)))( )
2(1 η η )
( (0) η ( (0) (0)) (0) η ( (0) (0)))
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (0))η
2(1 η η
k x
a a
k x
a a
k x
b b
U U U Z I Z I I eU x
U U U Z I Z I I e
U U U Z I I Z I e
2
1 2 2 3 1 2 1 31
1 2
)
( (0) (0) η (0) ( (0) (0)) η (0))η ;
2(1 η η )
k x
b bU U U Z I I Z I e
(65в)
1
1
2
1 1 2 3 1 2 2 31
1 2
1 1 2 3 1 2 2 3
1 2
2 3 2 1 2 3 1 12
( (0) η ( (0) (0)) (0) η ( (0) (0)))1( )
2(1 η η )
( (0) η ( (0) (0)) (0) η ( (0) (0)))1
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (0))η
k x
a a
a
k x
a a
a
k x
b b
b
U U U Z I Z I I eI x
Z
U U U Z I Z I I e
Z
U U U Z I I Z I e
Z
2
1 2
2 3 2 1 2 3 1 12
1 2
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (0))η;
2(1 η η )
k x
b b
b
U U U Z I I Z I e
Z
(65г)
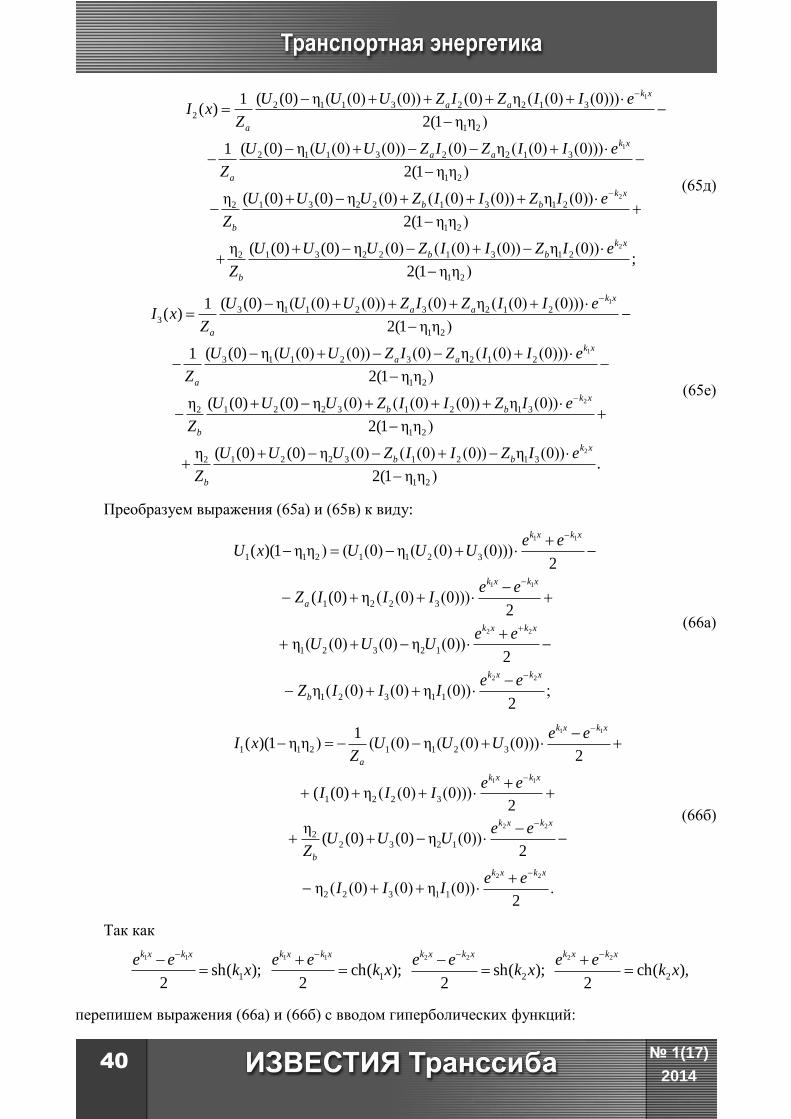
№ 1(17)
2014 40
1
1
2
2 1 1 3 2 2 1 32
1 2
2 1 1 3 2 2 1 3
1 2
1 3 2 2 1 3 1 22
( (0) η ( (0) (0)) (0) η ( (0) (0)))1( )
2(1 η η )
( (0) η ( (0) (0)) (0) η ( (0) (0)))1
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (0))η
k x
a a
a
k x
a a
a
k x
b b
b
U U U Z I Z I I eI x
Z
U U U Z I Z I I e
Z
U U U Z I I Z I e
Z
2
1 2
1 3 2 2 1 3 1 22
1 2
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (0))η;
2(1 η η )
k x
b b
b
U U U Z I I Z I e
Z
(65д)
1
1
2
3 1 1 2 3 2 1 23
1 2
3 1 1 2 3 2 1 2
1 2
1 2 2 3 1 2 1 32
( (0) η ( (0) (0)) (0) η ( (0) (0)))1( )
2(1 η η )
( (0) η ( (0) (0)) (0) η ( (0) (0)))1
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (0))η
k x
a a
a
k x
a a
a
k x
b b
b
U U U Z I Z I I eI x
Z
U U U Z I Z I I e
Z
U U U Z I I Z I e
Z
2
1 2
1 2 2 3 1 2 1 32
1 2
2(1 η η )
( (0) (0) η (0) ( (0) (0)) η (0))η.
2(1 η η )
k x
b b
b
U U U Z I I Z I e
Z
(65е)
Преобразуем выражения (65а) и (65в) к виду:
1 1
1 1
2 2
2 2
1 1 2 1 1 2 3
1 2 2 3
1 2 3 2 1
1 2 3 1 1
( )(1 η η ) ( (0) η ( (0) (0)))2
( (0) η ( (0) (0)))2
η ( (0) (0) η (0))2
η ( (0) (0) η (0)) ;2
k x k x
k x k x
a
k x k x
k x k x
b
e eU x U U U
e eZ I I I
e eU U U
e eZ I I I
(66а)
1 1
1 1
2 2
2 2
1 1 2 1 1 2 3
1 2 2 3
22 3 2 1
2 2 3 1 1
1( )(1 η η ) ( (0) η ( (0) (0)))
2
( (0) η ( (0) (0)))2
η( (0) (0) η (0))
2
η ( (0) (0) η (0)) .2
k x k x
a
k x k x
k x k x
b
k x k x
e eI x U U U
Z
e eI I I
e eU U U
Z
e eI I I
(66б)
Так как
1 1
1sh( );2
k x k xe e
k x
1 1
1ch( );2
k x k xe e
k x
2 2
2sh( );2
k x k xe e
k x
2 2
2ch( ),2
k x k xe e
k x
перепишем выражения (66а) и (66б) с вводом гиперболических функций:

41
№ 1(17)
2014
1 1 2 1 1 2 3 1 1 2 2 3
1 1 2 3 2 1 2 1 2 3 1 1 2
1 1 2 1 1 2 3 1 1
( )(1 η η ) (0) η ( (0) (0)) ch( ) ( (0) η ( (0) (0)))
sh( ) η ( (0) (0) η (0)) ch( ) η ( (0) (0) η (0)) sh( );
1( )(1 η η ) ( (0) η ( (0) (0)) sh( ) ( (0)
a
b
a
U x U U U k x Z I I I
k x U U U k x Z I I I k x
I x U U U k x IZ
2 2 3
21 2 3 2 1 2 2 2 3 1 1 2
η ( (0) (0)))
ηch( ) ( (0) (0) η (0)) sh( ) η ( (0) (0) η (0))) ch( ).
b
I I
k x U U U k x I I I k xZ
(67)
Подставим в систему (67) замены:
1 1 2 31н
1 2
( (0) η ( (0) (0));
(1 η η )
U U UU
(68)
1 2 2 31н
1 2
( (0) η ( (0) (0)));
(1 η η )
I I II
(69)
2 3 2 11н
1 2
( (0) (0) η (0))= ;
(1 η η )
U U UU
(70)
2 3 1 11н
1 2
( (0) (0) η (0)),
(1 η η )
I I II
(71)
тогда получим:
1 1н 1 1н 1 1 1н 2 1 1н 2
21 1н 1 1н 1 1н 2 2 1н 2
( ) ch( ) sh( ) η ch( ) η sh( );
η1( ) sh( ) ch( ) sh( ) η ch( ).
a b
a b
U x U k x Z I k x U k x Z I k x
I x U k x I k x U k x I k xZ Z
(72)
Выражения системы (72) схожи по структуре с уравнениями для двухпроводной
линии [1], что подтверждает соответствие полученных формул системы (72) физическим
процессам, происходящим в линии.
В качестве примера приведем расчет для жил кабеля АПвАШв 3×95 с известными пара-
метрами и значениями напряженя и тока в начале линии длиной 10 км на частоте 50 Гц:
1 2 3 0,285R R R Ом/км; 5
1 2 3 4,99 10L L L Гн/км; 9
1 2 3 6,31 10G G G Сим/км; 1C 7
2 3 1,004 10C C Ф/км; 10
12 13 23 21 31 32 7,18 10G G G G G G Сим/км; 12 13 23C C C 7
21 31 32 1,14 10C C C Ф/км; 6
12 13 23 21 31 32 3,53 10M M M M M M Гн/км.
Значения напряжения в начале линии: 4 0
1(0) 10 B;jU e 2π
j( )4 3
2 (0) 10 B;U e 3(0)U
4πj( )
4 310 B.e
Значения тока в начале линии: jφ
1(0) = 120 A;I e 2π
j( +φ)3
2 (0) = 120 A;I e 4π
j( +φ)3
3(0) = 120 A,I e
где – фаза входного сопротивления линии. По выражениям (72) в среде Mathcad рассчитано распределение тока и напряжения по
длине линии, результаты расчетов приведены на рисунке 2.
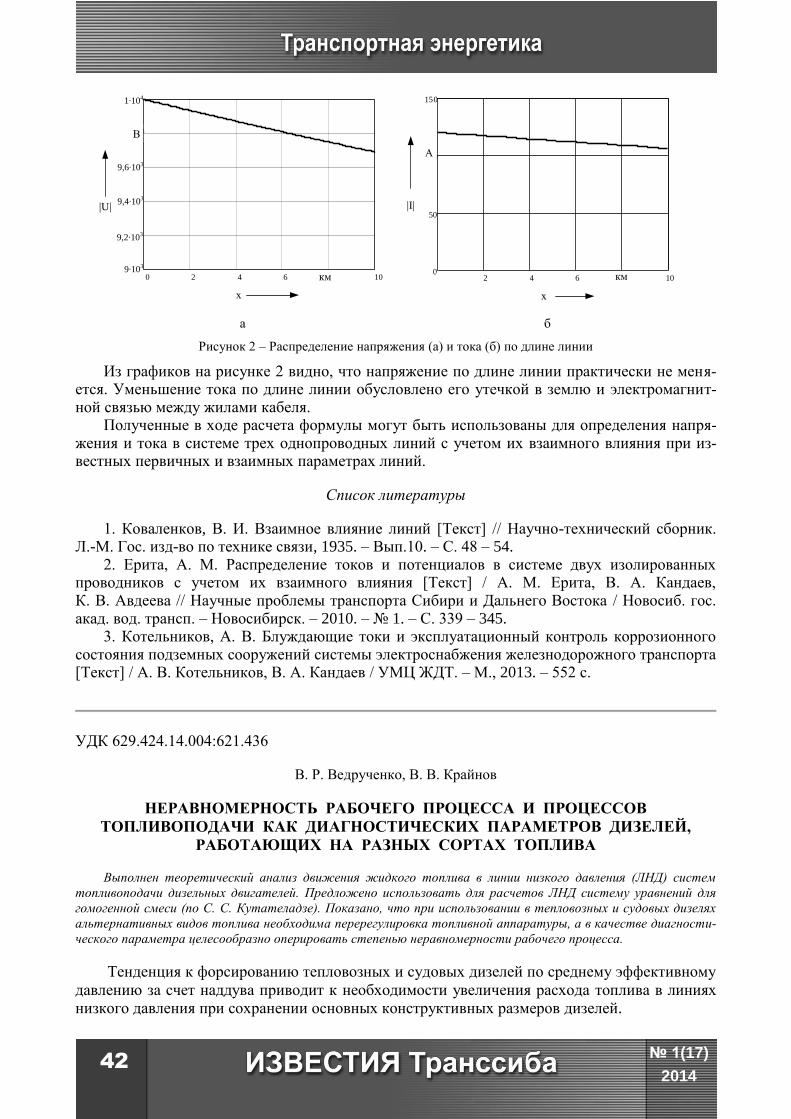
№ 1(17)
2014 42
0 2 4 6 8 10
9.8 103
В
|U|
км
х
1∙104
9,6∙103
9,2∙103
9,4∙103
9∙103
0 2 4 6 8 100
50
100
150
км
х
А
|I|
а б
Рисунок 2 – Распределение напряжения (а) и тока (б) по длине линии
Из графиков на рисунке 2 видно, что напряжение по длине линии практически не меня-ется. Уменьшение тока по длине линии обусловлено его утечкой в землю и электромагнит-ной связью между жилами кабеля.
Полученные в ходе расчета формулы могут быть использованы для определения напря-жения и тока в системе трех однопроводных линий с учетом их взаимного влияния при из-вестных первичных и взаимных параметрах линий.
Список литературы
1. Коваленков, В. И. Взаимное влияние линий [Текст] // Научно-технический сборник. Л.-М. Гос. изд-во по технике связи, 1935. – Вып.10. – С. 48 – 54.
2. Ерита, А. М. Распределение токов и потенциалов в системе двух изолированных проводников с учетом их взаимного влияния [Текст] / А. М. Ерита, В. А. Кандаев, К. В. Авдеева // Научные проблемы транспорта Сибири и Дальнего Востока / Новосиб. гос. акад. вод. трансп. – Новосибирск. – 2010. – № 1. – С. 339 – 345.
3. Котельников, А. В. Блуждающие токи и эксплуатационный контроль коррозионного состояния подземных сооружений системы электроснабжения железнодорожного транспорта [Текст] / А. В. Котельников, В. А. Кандаев / УМЦ ЖДТ. – М., 2013. – 552 с.
УДК 629.424.14.004:621.436
В. Р. Ведрученко, В. В. Крайнов
НЕРАВНОМЕРНОСТЬ РАБОЧЕГО ПРОЦЕССА И ПРОЦЕССОВ
ТОПЛИВОПОДАЧИ КАК ДИАГНОСТИЧЕСКИХ ПАРАМЕТРОВ ДИЗЕЛЕЙ,
РАБОТАЮЩИХ НА РАЗНЫХ СОРТАХ ТОПЛИВА
Выполнен теоретический анализ движения жидкого топлива в линии низкого давления (ЛНД) систем
топливоподачи дизельных двигателей. Предложено использовать для расчетов ЛНД систему уравнений для
гомогенной смеси (по С. С. Кутателадзе). Показано, что при использовании в тепловозных и судовых дизелях
альтернативных видов топлива необходима перерегулировка топливной аппаратуры, а в качестве диагности-
ческого параметра целесообразно оперировать степенью неравномерности рабочего процесса.
Тенденция к форсированию тепловозных и судовых дизелей по среднему эффективному
давлению за счет наддува приводит к необходимости увеличения расхода топлива в линиях
низкого давления при сохранении основных конструктивных размеров дизелей.
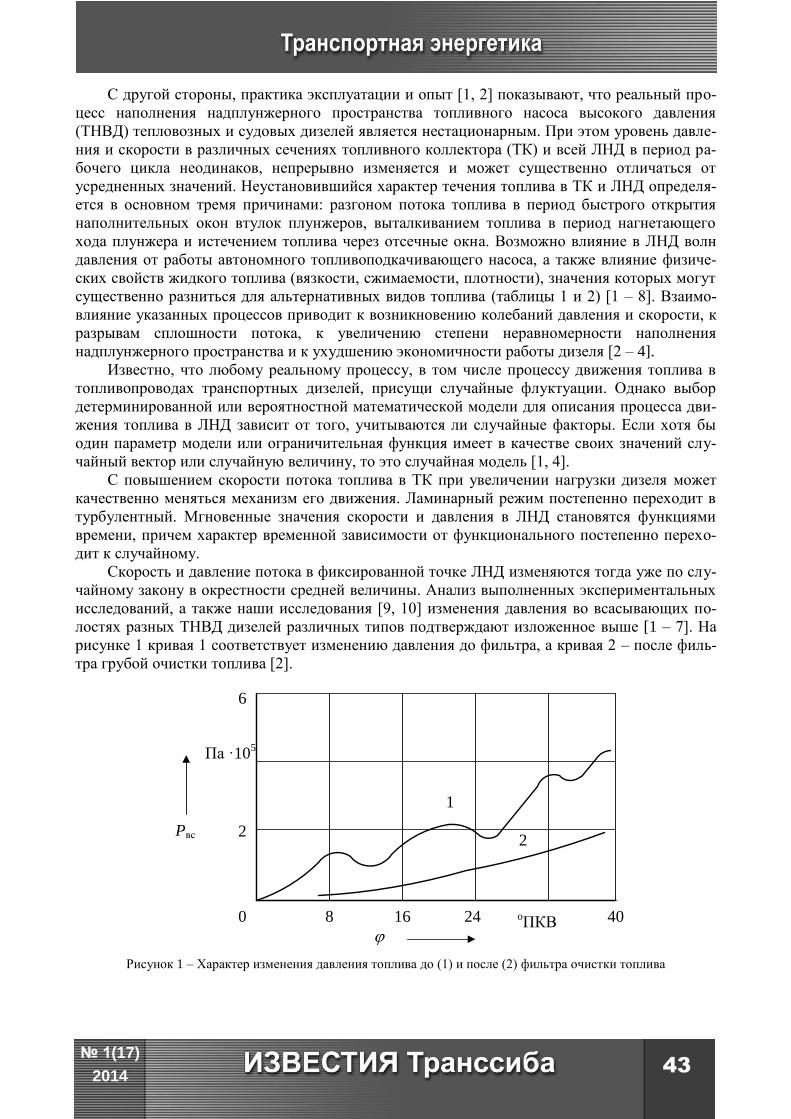
43
№ 1(17)
2014
С другой стороны, практика эксплуатации и опыт [1, 2] показывают, что реальный про-
цесс наполнения надплунжерного пространства топливного насоса высокого давления
(ТНВД) тепловозных и судовых дизелей является нестационарным. При этом уровень давле-
ния и скорости в различных сечениях топливного коллектора (ТК) и всей ЛНД в период ра-
бочего цикла неодинаков, непрерывно изменяется и может существенно отличаться от
усредненных значений. Неустановившийся характер течения топлива в ТК и ЛНД определя-
ется в основном тремя причинами: разгоном потока топлива в период быстрого открытия
наполнительных окон втулок плунжеров, выталкиванием топлива в период нагнетающего
хода плунжера и истечением топлива через отсечные окна. Возможно влияние в ЛНД волн
давления от работы автономного топливоподкачивающего насоса, а также влияние физиче-
ских свойств жидкого топлива (вязкости, сжимаемости, плотности), значения которых могут
существенно разниться для альтернативных видов топлива (таблицы 1 и 2) [1 – 8]. Взаимо-
влияние указанных процессов приводит к возникновению колебаний давления и скорости, к
разрывам сплошности потока, к увеличению степени неравномерности наполнения
надплунжерного пространства и к ухудшению экономичности работы дизеля [2 – 4].
Известно, что любому реальному процессу, в том числе процессу движения топлива в
топливопроводах транспортных дизелей, присущи случайные флуктуации. Однако выбор
детерминированной или вероятностной математической модели для описания процесса дви-
жения топлива в ЛНД зависит от того, учитываются ли случайные факторы. Если хотя бы
один параметр модели или ограничительная функция имеет в качестве своих значений слу-
чайный вектор или случайную величину, то это случайная модель [1, 4].
С повышением скорости потока топлива в ТК при увеличении нагрузки дизеля может
качественно меняться механизм его движения. Ламинарный режим постепенно переходит в
турбулентный. Мгновенные значения скорости и давления в ЛНД становятся функциями
времени, причем характер временной зависимости от функционального постепенно перехо-
дит к случайному.
Скорость и давление потока в фиксированной точке ЛНД изменяются тогда уже по слу-
чайному закону в окрестности средней величины. Анализ выполненных экспериментальных
исследований, а также наши исследования [9, 10] изменения давления во всасывающих по-
лостях разных ТНВД дизелей различных типов подтверждают изложенное выше [1 – 7]. На
рисунке 1 кривая 1 соответствует изменению давления до фильтра, а кривая 2 – после филь-
тра грубой очистки топлива [2].
0 8 16 24 40
2
6
Pвс
Па ·105
oПКВ
1
2
Рисунок 1 – Характер изменения давления топлива до (1) и после (2) фильтра очистки топлива
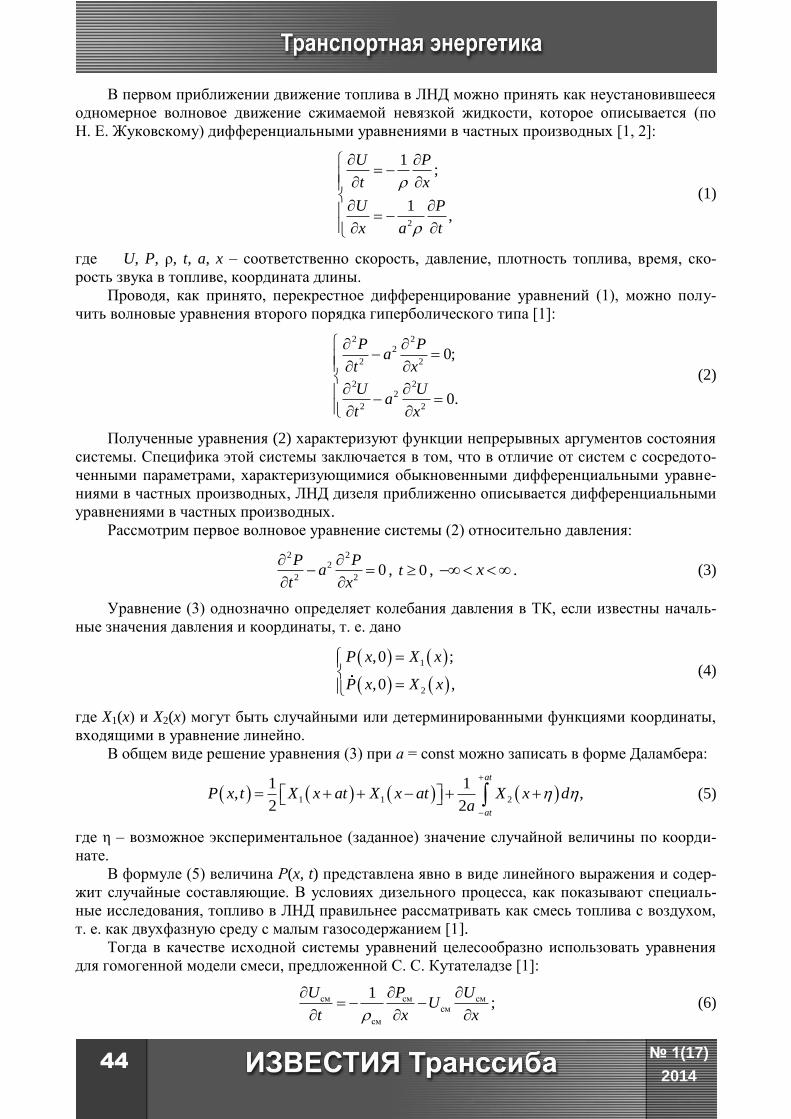
№ 1(17)
2014 44
В первом приближении движение топлива в ЛНД можно принять как неустановившееся
одномерное волновое движение сжимаемой невязкой жидкости, которое описывается (по
Н. Е. Жуковскому) дифференциальными уравнениями в частных производных [1, 2]:
2
1;
1,
U P
t x
U P
x a t
(1)
где U, P, ρ, t, a, x – соответственно скорость, давление, плотность топлива, время, ско-
рость звука в топливе, координата длины.
Проводя, как принято, перекрестное дифференцирование уравнений (1), можно полу-
чить волновые уравнения второго порядка гиперболического типа [1]:
2 22
2 2
2 22
2 2
0;
0.
P Pa
t x
U Ua
t x
(2)
Полученные уравнения (2) характеризуют функции непрерывных аргументов состояния
системы. Специфика этой системы заключается в том, что в отличие от систем с сосредото-
ченными параметрами, характеризующимися обыкновенными дифференциальными уравне-
ниями в частных производных, ЛНД дизеля приближенно описывается дифференциальными
уравнениями в частных производных.
Рассмотрим первое волновое уравнение системы (2) относительно давления:
2 2
2
2 20
P Pa
t x
, 0t , x . (3)
Уравнение (3) однозначно определяет колебания давления в ТК, если известны началь-
ные значения давления и координаты, т. е. дано
1
2
,0 ;
,0 ,
P x X x
P x X x
(4)
где X1(x) и X2(x) могут быть случайными или детерминированными функциями координаты,
входящими в уравнение линейно.
В общем виде решение уравнения (3) при а = const можно записать в форме Даламбера:
1 1 2
1 1, ,
2 2
at
at
P x t X x at X x at X x da
(5)
где η – возможное экспериментальное (заданное) значение случайной величины по коорди-
нате.
В формуле (5) величина Р(x, t) представлена явно в виде линейного выражения и содер-
жит случайные составляющие. В условиях дизельного процесса, как показывают специаль-
ные исследования, топливо в ЛНД правильнее рассматривать как смесь топлива с воздухом,
т. е. как двухфазную среду с малым газосодержанием [1].
Тогда в качестве исходной системы уравнений целесообразно использовать уравнения
для гомогенной модели смеси, предложенной С. С. Кутателадзе [1]:
см см смсм
см
1U P UU
t x x
; (6)

45
№ 1(17)
2014
смсм смU
t x
. (7)
где Uсм, ρсм, Pсм – соответственно скорость, плотность, давление смеси топлива с воздухом.
Значение ρсм определяется по формуле:
см в1 .f (8)
где ρв, ε – соответственно плотность воздуха и текущее относительное количество воздуха в
смеси. Значение можно оценить по удельному весу смеси [1].
Уравнение (6) можно выразить в форме:
см см
2
см
1U P
x a t
. (9)
Если, как и ранее, продифференцировать уравнение (6) по t, а (9) по x и вычесть резуль-
таты, то получим волновое уравнение для Uсм:
2 2
2см смсм2 2
U Ua
t x
. (10)
Если же уравнение (6) продифференцировать по x, а (9) по t и сложить результаты, то
получим волновое уравнение для Pсм:
2 2
2см смсм2 2
P Pa
t x
. (11)
где aсм – скорость звука в смеси топлива с воздухом.
Для каждого из полученных уравнений для смеси можно проводить преобразования,
аналогичные (10) и (11), а общие решения записать также в форме Даламбера.
Важной особенностью перевода дизелей на нетрадиционные (альтернативные) виды
топлива является возможность обеспечения требуемых эксплуатационно-технических и
названных экологических показателей без изменения конструкции двигателя или при ее не-
значительных изменениях. Это позволяет организовать работу дизелей не только на тради-
ционных дизельных видах топлива, но и на нетрадиционном топливе (в том числе и на газо-
образном), т. е. можно обеспечить «всеядность» двигателей. Применение таких двигателей
значительно облегчает решение вопросов снабжения транспортных средств топливом в ре-
альных условиях эксплуатации и придает им большую автономность. Такие «всеядные»
(многотопливные) двигатели могут быть использованы в различных отраслях: на флоте, в
сельском хозяйстве, военной технике, малой энергетике, а также при освоении северных и
северо-восточных регионов страны, в районах добычи и переработки нефти, природного га-
за, газовых конденсатов и попутных нефтяных газов, в высокогорных условиях и т. д. [2 – 7].
Для обеспечения «всеядности» дизелей необходимо организовать процессы топливопо-
дачи, смесеобразования, воспламенения и сгорания топлива с различными свойствами (вяз-
кость, плотность, сжимаемость, фракционный и углеводородный состав) (см. таблицы 1, 2).
Значительное влияние на работу дизелей оказывает протекание процесса топливоподачи.
При переводе дизелей на нетрадиционные виды топлива может возникнуть проблема кор-
ректирования топливоподачи и последующих процессов их воспламенения и сгорания [2, 4,
8, 10]. В частности, при работе дизелей со штатной системой топливоподачи на легком топ-
ливе (облегченные нефтяные и альтернативные виды топлива (АВТ), спирты, диметиловый
эфир, газовые конденсаты, сжиженный нефтяной газ, водород и др.) наблюдаются уменьше-
ние массового часового расхода топлива и соответствующее снижение мощности двигателя,
увеличение периода задержки воспламенения [2, 4, 6, 8, 10].
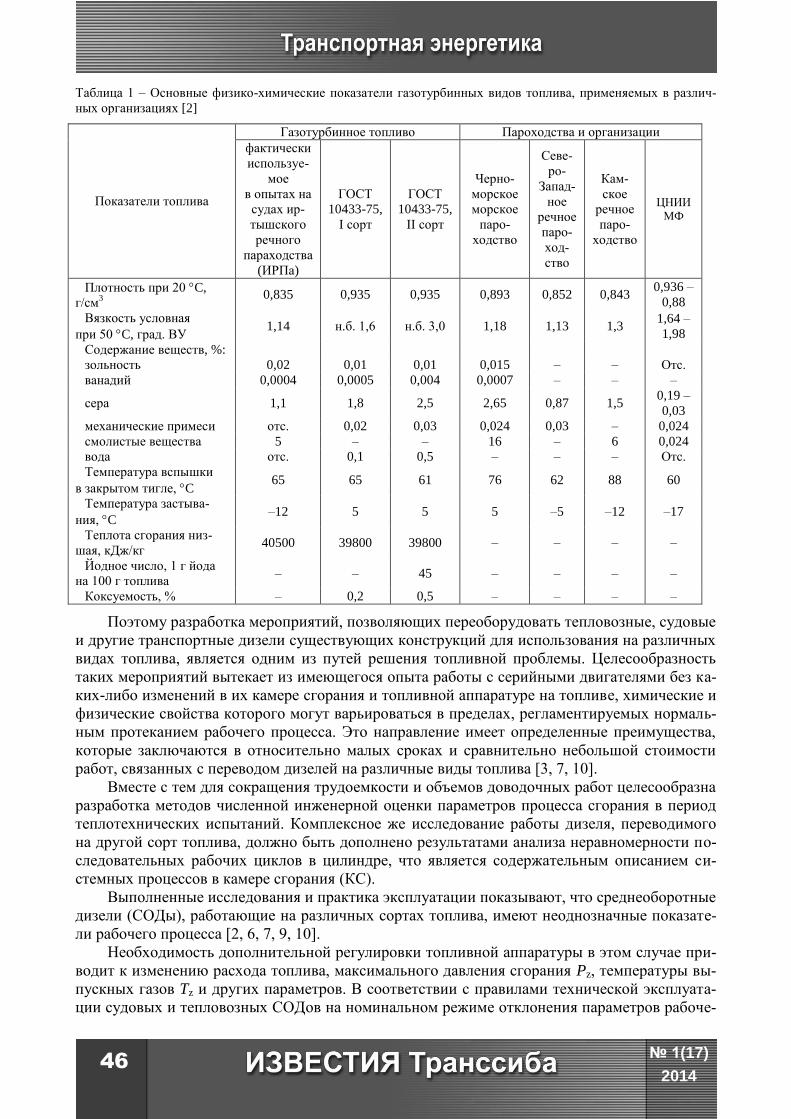
№ 1(17)
2014 46
Таблица 1 – Основные физико-химические показатели газотурбинных видов топлива, применяемых в различ-
ных организациях [2]
Показатели топлива
Газотурбинное топливо Пароходства и организации
фактически
используе-
мое
в опытах на
судах ир-
тышского
речного
параходства
(ИРПа)
ГОСТ
10433-75,
I сорт
ГОСТ
10433-75,
II сорт
Черно-
морское
морское
паро-
ходство
Севе-
ро-
Запад-
ное
речное
паро-
ход-
ство
Кам-
ское
речное
паро-
ходство
ЦНИИ
МФ
Плотность при 20 C,
г/см3
0,835 0,935 0,935 0,893 0,852 0,843 0,936 –
0,88
Вязкость условная
при 50 C, град. ВУ 1,14 н.б. 1,6 н.б. 3,0 1,18 1,13 1,3
1,64 –
1,98
Содержание веществ, %:
зольность 0,02 0,01 0,01 0,015 – – Отс.
ванадий 0,0004 0,0005 0,004 0,0007 – – –
сера 1,1 1,8 2,5 2,65 0,87 1,5 0,19 –
0,03
механические примеси отс. 0,02 0,03 0,024 0,03 – 0,024
смолистые вещества 5 – – 16 – 6 0,024
вода отс. 0,1 0,5 – – – Отс.
Температура вспышки
в закрытом тигле, C 65 65 61 76 62 88 60
Температура застыва-
ния, C –12 5 5 5 –5 –12 –17
Теплота сгорания низ-
шая, кДж/кг 40500 39800 39800 – – – –
Йодное число, 1 г йода
на 100 г топлива – – 45 – – – –
Коксуемость, % – 0,2 0,5 – – – –
Поэтому разработка мероприятий, позволяющих переоборудовать тепловозные, судовые
и другие транспортные дизели существующих конструкций для использования на различных
видах топлива, является одним из путей решения топливной проблемы. Целесообразность
таких мероприятий вытекает из имеющегося опыта работы с серийными двигателями без ка-
ких-либо изменений в их камере сгорания и топливной аппаратуре на топливе, химические и
физические свойства которого могут варьироваться в пределах, регламентируемых нормаль-
ным протеканием рабочего процесса. Это направление имеет определенные преимущества,
которые заключаются в относительно малых сроках и сравнительно небольшой стоимости
работ, связанных с переводом дизелей на различные виды топлива [3, 7, 10].
Вместе с тем для сокращения трудоемкости и объемов доводочных работ целесообразна
разработка методов численной инженерной оценки параметров процесса сгорания в период
теплотехнических испытаний. Комплексное же исследование работы дизеля, переводимого
на другой сорт топлива, должно быть дополнено результатами анализа неравномерности по-
следовательных рабочих циклов в цилиндре, что является содержательным описанием си-
стемных процессов в камере сгорания (КС).
Выполненные исследования и практика эксплуатации показывают, что среднеоборотные
дизели (СОДы), работающие на различных сортах топлива, имеют неоднозначные показате-
ли рабочего процесса [2, 6, 7, 9, 10].
Необходимость дополнительной регулировки топливной аппаратуры в этом случае при-
водит к изменению расхода топлива, максимального давления сгорания Pz, температуры вы-
пускных газов Tz и других параметров. В соответствии с правилами технической эксплуата-
ции судовых и тепловозных СОДов на номинальном режиме отклонения параметров рабоче-
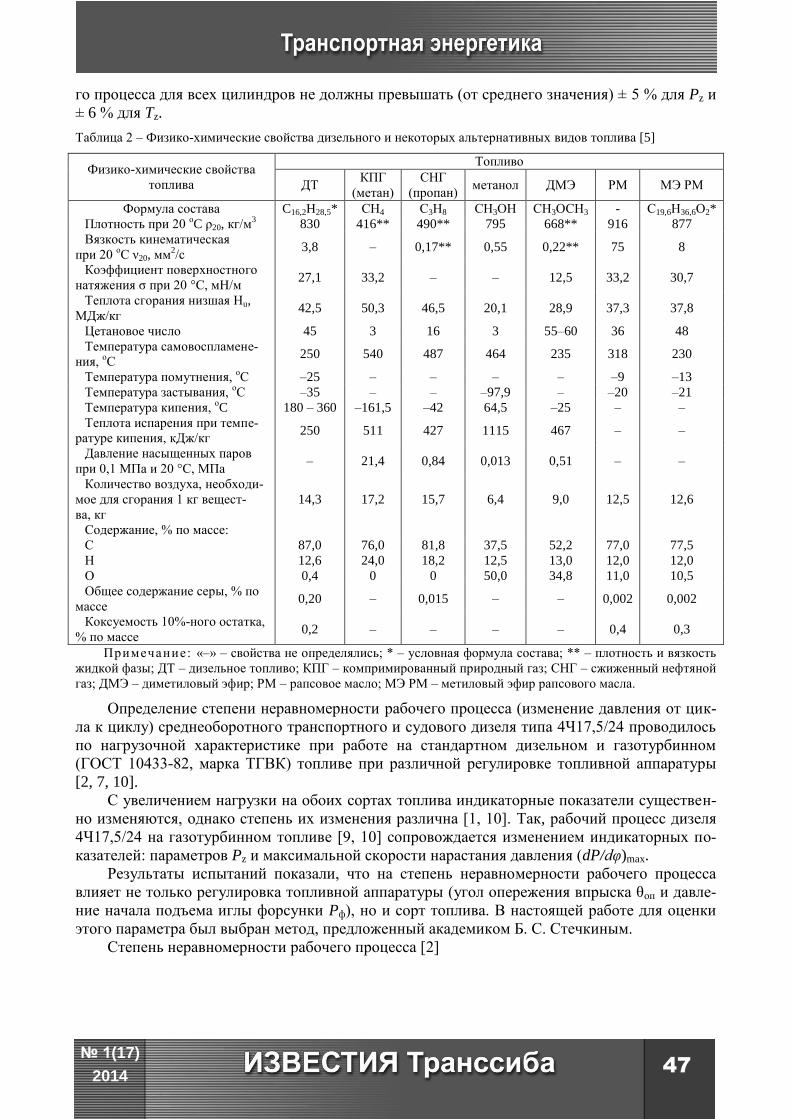
47
№ 1(17)
2014
го процесса для всех цилиндров не должны превышать (от среднего значения) ± 5 % для Pz и
± 6 % для Tz.
Таблица 2 – Физико-химические свойства дизельного и некоторых альтернативных видов топлива [5]
Физико-химические свойства
топлива
Топливо
ДТ КПГ
(метан)
СНГ
(пропан) метанол ДМЭ РМ МЭ РМ
Формула состава C16,2H28,5* СН4 С3Н8 СН3ОН СН3ОСН3 - С19,6Н36,6О2*
Плотность при 20 оC ρ20, кг/м
3 830 416** 490** 795 668** 916 877
Вязкость кинематическая
при 20 оС ν20, мм
2/с
3,8 – 0,17** 0,55 0,22** 75 8
Коэффициент поверхностного
натяжения σ при 20 °С, мН/м 27,1 33,2 – – 12,5 33,2 30,7
Теплота сгорания низшая Нu,
МДж/кг 42,5 50,3 46,5 20,1 28,9 37,3 37,8
Цетановое число 45 3 16 3 55–60 36 48
Температура самовоспламене-
ния, оС
250 540 487 464 235 318 230
Температура помутнения, оС –25 – – – – –9 –13
Температура застывания, оС –35 – – –97,9 – –20 –21
Температура кипения, оC 180 – 360 –161,5 –42 64,5 –25 – –
Теплота испарения при темпе-
ратуре кипения, кДж/кг 250 511 427 1115 467 – –
Давление насыщенных паров
при 0,1 МПа и 20 °С, МПа – 21,4 0,84 0,013 0,51 – –
Количество воздуха, необходи-
мое для сгорания 1 кг вещест-
ва, кг
14,3 17,2 15,7 6,4 9,0 12,5 12,6
Содержание, % по массе:
С
Н
О
87,0
12,6
0,4
76,0
24,0
0
81,8
18,2
0
37,5
12,5
50,0
52,2
13,0
34,8
77,0
12,0
11,0
77,5
12,0
10,5
Общее содержание серы, % по
массе 0,20 – 0,015 – – 0,002 0,002
Коксуемость 10%-ного остатка,
% по массе 0,2 – – – – 0,4 0,3
Примечание: «–» – свойства не определялись; * – условная формула состава; ** – плотность и вязкость
жидкой фазы; ДТ – дизельное топливо; КПГ – компримированный природный газ; СНГ – сжиженный нефтяной
газ; ДМЭ – диметиловый эфир; РМ – рапсовое масло; МЭ РМ – метиловый эфир рапсового масла.
Определение степени неравномерности рабочего процесса (изменение давления от цик-
ла к циклу) среднеоборотного транспортного и судового дизеля типа 4Ч17,5/24 проводилось
по нагрузочной характеристике при работе на стандартном дизельном и газотурбинном
(ГОСТ 10433-82, марка ТГВК) топливе при различной регулировке топливной аппаратуры
[2, 7, 10].
С увеличением нагрузки на обоих сортах топлива индикаторные показатели существен-
но изменяются, однако степень их изменения различна [1, 10]. Так, рабочий процесс дизеля
4Ч17,5/24 на газотурбинном топливе [9, 10] сопровождается изменением индикаторных по-
казателей: параметров Pz и максимальной скорости нарастания давления (dP/dφ)max.
Результаты испытаний показали, что на степень неравномерности рабочего процесса
влияет не только регулировка топливной аппаратуры (угол опережения впрыска θоп и давле-
ние начала подъема иглы форсунки Pф), но и сорт топлива. В настоящей работе для оценки
этого параметра был выбран метод, предложенный академиком Б. С. Стечкиным.
Степень неравномерности рабочего процесса [2]
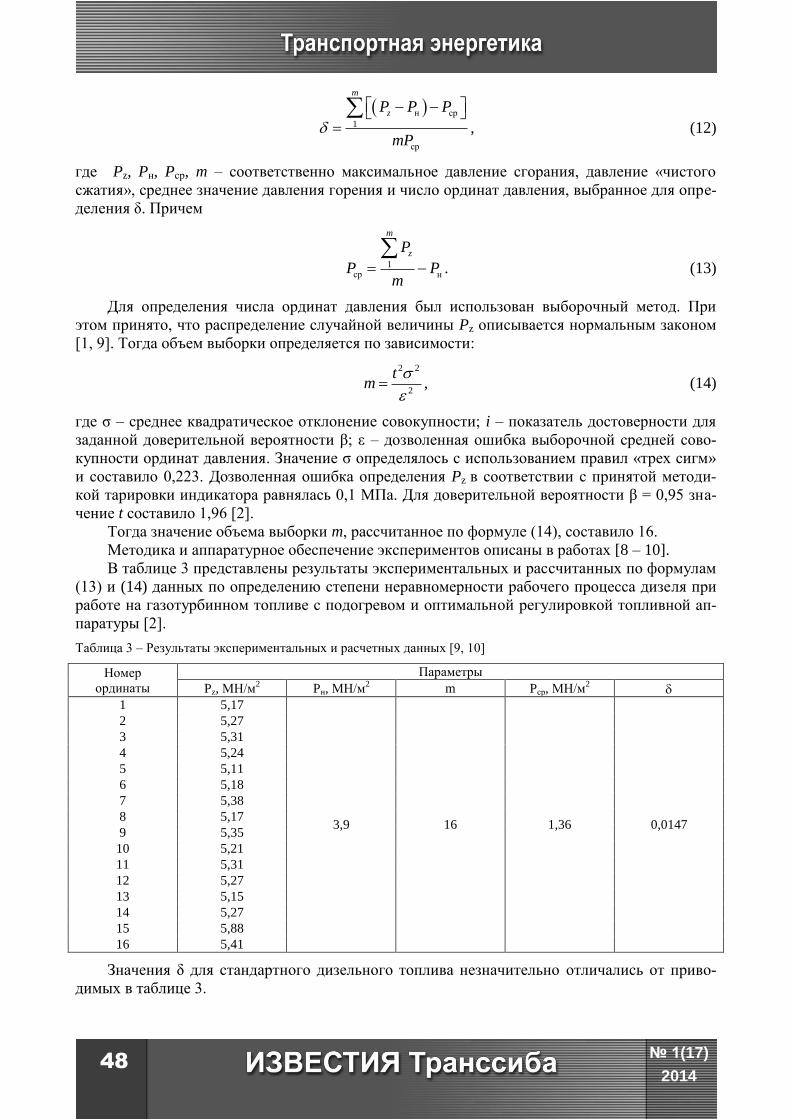
№ 1(17)
2014 48
н ср
1
ср
m
zP P P
mP
, (12)
где Pz, Pн, Pср, m – соответственно максимальное давление сгорания, давление «чистого
сжатия», среднее значение давления горения и число ординат давления, выбранное для опре-
деления δ. Причем
1ср н
m
zP
P Pm
. (13)
Для определения числа ординат давления был использован выборочный метод. При
этом принято, что распределение случайной величины Pz описывается нормальным законом
[1, 9]. Тогда объем выборки определяется по зависимости:
2 2
2,
tm
(14)
где σ – среднее квадратическое отклонение совокупности; i – показатель достоверности для
заданной доверительной вероятности β; ε – дозволенная ошибка выборочной средней сово-
купности ординат давления. Значение σ определялось с использованием правил «трех сигм»
и составило 0,223. Дозволенная ошибка определения Pz в соответствии с принятой методи-
кой тарировки индикатора равнялась 0,1 МПа. Для доверительной вероятности β = 0,95 зна-
чение t составило 1,96 [2].
Тогда значение объема выборки m, рассчитанное по формуле (14), составило 16.
Методика и аппаратурное обеспечение экспериментов описаны в работах [8 – 10].
В таблице 3 представлены результаты экспериментальных и рассчитанных по формулам
(13) и (14) данных по определению степени неравномерности рабочего процесса дизеля при
работе на газотурбинном топливе с подогревом и оптимальной регулировкой топливной ап-
паратуры [2].
Таблица 3 – Результаты экспериментальных и расчетных данных [9, 10]
Номер
ординаты
Параметры
Pz, МН/м2 Pн, МН/м
2 m Pср, МН/м
2
1 5,17
3,9 16 1,36 0,0147
2 5,27
3 5,31
4 5,24
5 5,11
6 5,18
7 5,38
8 5,17
9 5,35
10 5,21
11 5,31
12 5,27
13 5,15
14 5,27
15 5,88
16 5,41
Значения δ для стандартного дизельного топлива незначительно отличались от приво-
димых в таблице 3.
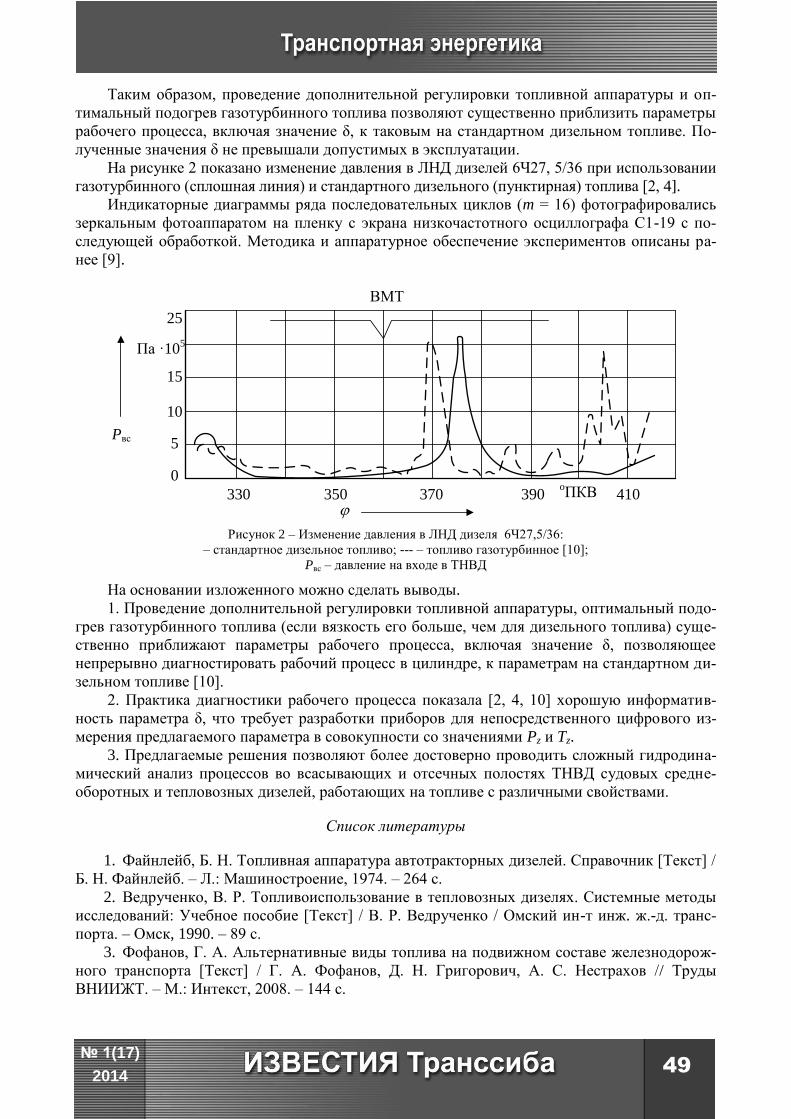
49
№ 1(17)
2014
Таким образом, проведение дополнительной регулировки топливной аппаратуры и оп-
тимальный подогрев газотурбинного топлива позволяют существенно приблизить параметры
рабочего процесса, включая значение δ, к таковым на стандартном дизельном топливе. По-
лученные значения δ не превышали допустимых в эксплуатации.
На рисунке 2 показано изменение давления в ЛНД дизелей 6Ч27, 5/36 при использовании
газотурбинного (сплошная линия) и стандартного дизельного (пунктирная) топлива [2, 4].
Индикаторные диаграммы ряда последовательных циклов (m = 16) фотографировались
зеркальным фотоаппаратом на пленку с экрана низкочастотного осциллографа С1-19 с по-
следующей обработкой. Методика и аппаратурное обеспечение экспериментов описаны ра-
нее [9].
0
5
10
15
25
ВМТ
330 350 370 390 410
Pвс
Па ·105
oПКВ
Рисунок 2 – Изменение давления в ЛНД дизеля 6Ч27,5/36:
– стандартное дизельное топливо; --- – топливо газотурбинное [10];
Pвс – давление на входе в ТНВД
На основании изложенного можно сделать выводы.
1. Проведение дополнительной регулировки топливной аппаратуры, оптимальный подо-
грев газотурбинного топлива (если вязкость его больше, чем для дизельного топлива) суще-
ственно приближают параметры рабочего процесса, включая значение δ, позволяющее
непрерывно диагностировать рабочий процесс в цилиндре, к параметрам на стандартном ди-
зельном топливе [10].
2. Практика диагностики рабочего процесса показала [2, 4, 10] хорошую информатив-
ность параметра δ, что требует разработки приборов для непосредственного цифрового из-
мерения предлагаемого параметра в совокупности со значениями Pz и Tz.
3. Предлагаемые решения позволяют более достоверно проводить сложный гидродина-
мический анализ процессов во всасывающих и отсечных полостях ТНВД судовых средне-
оборотных и тепловозных дизелей, работающих на топливе с различными свойствами.
Список литературы
1. Файнлейб, Б. Н. Топливная аппаратура автотракторных дизелей. Справочник [Текст] / Б. Н. Файнлейб. – Л.: Машиностроение, 1974. – 264 с.
2. Ведрученко, В. Р. Топливоиспользование в тепловозных дизелях. Системные методы исследований: Учебное пособие [Текст] / В. Р. Ведрученко / Омский ин-т инж. ж.-д. транс-
порта. – Омск, 1990. – 89 с.
3. Фофанов, Г. А. Альтернативные виды топлива на подвижном составе железнодорож-ного транспорта [Текст] / Г. А. Фофанов, Д. Н. Григорович, А. С. Нестрахов // Труды
ВНИИЖТ. – М.: Интекст, 2008. – 144 с.
№ 1(17)
2014 50
4. Селиверстов, В. М. Экономия топлива на речном флоте [Текст] / В. М. Селиверстов, М. И. Браславский. – М.: Транспорт, 1983. – 231 с.
5. Работа дизелей на нетрадиционных топливах [Текст] / В. А. Марков, А. И. Гайворон-ский и др. – М.: Легион-Автодата, 2008. – 464 с.
6. О выборе схем и разработке технических решений систем топливоподачи альтерна-тивных и тяжелых топлив в дизелях [Текст] / В. Р. Ведрученко, В. В. Крайнов и др. // Омский
научный вестник / Омский гос. техн. ун-т. – Омск, 2010. – № 2. – Ч. 1. – С. 157 – 162.
7. Деревянин, С. Н. Растительные масла и топлива на их основе для дизельных двигате-лей [Текст] / С. Н. Деревянин, В. А. Марков, В. Г. Семенов. – Харьков: Новое слово, 2007. –
45 с.
8. Ведрученко, В. Р. Требования к первичным преобразователям и аппаратуре для ис-следования рабочего процесса дизелей [Текст] / В. Р. Ведрученко // Тез. докл. III всесоюз.
науч.-техн. конф. «Автоматизированные системы испытаний объектов железнодорожного
транспорта» / Омский ин-т инж. ж.-д. транспорта. – Омск, 1991. – С. 83, 84.
9. Ведрученко, В. Р. Методика индицирования среднеоборотного судового дизеля [Текст] / В. Р. Ведрученко // Передовой опыт и новая техника / ЦБНТИ МРФ. – М., 1981. –
Вып. 4. – С. 37 – 41.
10. Ведрученко, В. Р. Исследование влияния сорта топлива на характеристики средне-оборотного дизеля [Текст]: Автореф. дис… канд. техн. наук / В. Р. Ведрученко. – Николаев,
1978. – 21 с.
УДК 621.331:621.311
А. С. Вильгельм, В. И. Гутников, М. М. Никифоров
АПРОБАЦИЯ РАСЧЕТНОЙ МОДЕЛИ СИСТЕМЫ ТЯГОВОГО
ЭЛЕКТРОСНАБЖЕНИЯ ЖЕЛЕЗНЫХ ДОРОГ ПОСТОЯННОГО ТОКА
ДЛЯ ОЦЕНКИ ПОТЕНЦИАЛА ЭНЕРГОЭФФЕКТИВНОСТИ
РЕКУПЕРАТИВНОГО ТОРМОЖЕНИЯ
В статье описаны общие принципы создания расчетной модели системы тягового электроснабжения
железных дорог постоянного тока для оценки потенциала энергоэффективности рекуперативного торможе-
ния, а также способы апробации полученной модели с целью установления степени ее адекватности.
Рекуперативное торможение на электроподвижном составе железных дорог предназна-
чено в первую очередь для обеспечения безопасности движения поездов и является эффек-
тивным способом сокращения удельного расхода электроэнергии на тягу поездов.
К основным факторам, определяющим эффективность применения рекуперативного
торможения, относятся следующие:
– повышение технической скорости движения поездов за счет поддержания постоянной
скорости на спусках;
– экономия тормозных колодок, снижение затрат на их замену;
– экономия на обточке колесных пар вагонов.
На эффективность применения рекуперативного торможения и использования энергии
рекуперации влияет большое количество факторов:
– профиль пути;
– вес и количество поезда (размеры движения);
– характеристика состава поезда;
– уровень напряжения в контактной сети;
– наличие потребителей возвращенной энергии;
51
№ 1(17)
2014
– квалификация машиниста;
– качество настройки систем рекуперативного торможения;
– неравномерность тоннокилометровой работы в четном и нечетном направлениях;
– количество погрузочно-разгрузочных станций и разветвленность сети магистральных
путей.
Многочисленность факторов, влияющих на эффективность применения рекуперативно-
го торможения и использования энергии рекуперации, обусловливает необходимость реше-
ния целого комплекса научно-исследовательских задач для определения потенциала рекупе-
ративного торможения на каждом действующем участке и способов достижения расчетного
уровня потенциала, а именно перечня организационно-технических мероприятий для повы-
шения энергоэффективности рекуперативного торможения.
Экспериментальные исследования [1] показывают высокую эффективность рекупера-
тивного торможения на участках постоянного тока с холмистым профилем пути, но по их
результатам невозможно дать основательные ответы на вопросы потокораспределения энер-
гии рекуперации в системе тягового электроснабжения на двухпутных участках постоянного
тока. Ввиду этого оптимальным средством для решения задач оценки потенциала рекупера-
тивного торможения на поездоучастках и определения перечня организационно-технических
мероприятий для достижения расчетного уровня потенциала является расчетная модель ра-
боты системы тягового электроснабжения.
Такая расчетная модель должна включать в себя комплекс расчетов, учитывающих
большую часть факторов, влияющих на объем реализуемой энергии рекуперации, а также
анализ экспериментальных исследований, опытных поездок на участках и статистической
отчетности депо, работающих на данном участке.
В ходе выполнения работ по оценке энергоэффективности тяги поездов по сети желез-
ных дорог специалистами ОмГУПСа была создана расчетная модель на базе имитационного
моделирования работы системы тягового электроснабжения в программном комплексе
«КОРТЭС». Общие принципы проведения расчета потенциала энергоэффективности рекупе-
ративного торможения приведены в статье [2].
Полученная расчетная модель позволяет вносить корректировки в расчеты с целью ак-
туализации параметров плана и профиля пути, параметров системы тягового электроснабже-
ния, графика движения поездов, ограничений скорости, технической (участковой) скорости и
др. Это позволяет выполнять многовариантные расчеты с целью определения оптимального
варианта с точки зрения реализации энергии рекуперации. Кроме того, в данной расчетной
модели предусмотрена возможность повышения степени адекватности производимых расче-
тов на основании анализа статистической отчетности депо, контрольных поездок по участ-
кам и других практических мероприятий.
Общая блок-схема расчетной модели системы тягового электроснабжения представлена
на рисунке 1.
На начальном этапе расчета выполняются анализ исходных данных и актуализация ис-
ходных файлов КОРТЭС с параметрами пути, действующим на участке электроподвижным
составом, размерами движения поездов на участке, параметрами системы тягового электро-
снабжения.
Как видно из рисунка 1, все работы по оценке потенциала энергоэффективности рекупе-
ративного торможения можно разделить на несколько этапов:
1) проведение тяговых расчетов;
2) составление графика движения поездов;
3) проведение электрических расчетов и получение результатов оценки потенциала, та-
ких как абсолютные значения расхода и рекуперации, удельные расход и рекуперация по
участку, уровень потерь электроэнергии в тяговой сети, выполненная тоннокилометровая
работа.
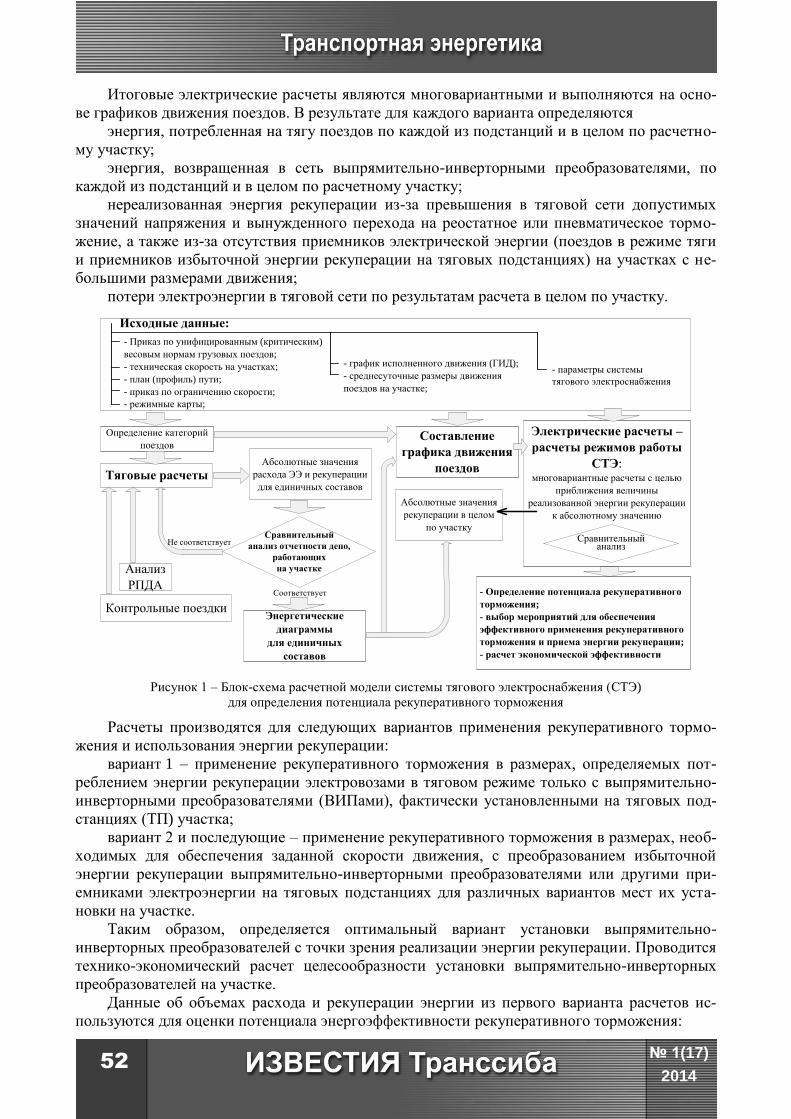
№ 1(17)
2014 52
Итоговые электрические расчеты являются многовариантными и выполняются на осно-
ве графиков движения поездов. В результате для каждого варианта определяются
энергия, потребленная на тягу поездов по каждой из подстанций и в целом по расчетно-
му участку;
энергия, возвращенная в сеть выпрямительно-инверторными преобразователями, по
каждой из подстанций и в целом по расчетному участку;
нереализованная энергия рекуперации из-за превышения в тяговой сети допустимых
значений напряжения и вынужденного перехода на реостатное или пневматическое тормо-
жение, а также из-за отсутствия приемников электрической энергии (поездов в режиме тяги
и приемников избыточной энергии рекуперации на тяговых подстанциях) на участках с не-
большими размерами движения;
потери электроэнергии в тяговой сети по результатам расчета в целом по участку.
Тяговые расчеты
- Приказ по унифицированным (критическим)
весовым нормам грузовых поездов;
- техническая скорость на участках;
- план (профиль) пути;
- приказ по ограничению скорости;
- режимные карты;
Составление
графика движения
поездов
- график исполненного движения (ГИД);
- среднесуточные размеры движения
поездов на участке;
Электрические расчеты –
расчеты режимов работы
СТЭ:многовариантные расчеты с целью
приближения величины
реализованной энергии рекуперации
к абсолютному значению
- параметры системы
тягового электроснабжения
Исходные данные:
Энергетические
диаграммы
для единичных
составов
Анализ
РПДА
Контрольные поездки
- Определение потенциала рекуперативного
торможения;
- выбор мероприятий для обеспечения
эффективного применения рекуперативного
торможения и приема энергии рекуперации;
- расчет экономической эффективности
Абсолютные значения
расхода ЭЭ и рекуперации
для единичных составов
Сравнительный
анализ отчетности депо,
работающих
на участке
Не соответствует
Соответствует
Абсолютные значения
рекуперации в целом
по участку
Определение категорий
поездов
Сравнительный анализ
Рисунок 1 – Блок-схема расчетной модели системы тягового электроснабжения (СТЭ)
для определения потенциала рекуперативного торможения
Расчеты производятся для следующих вариантов применения рекуперативного тормо-
жения и использования энергии рекуперации:
вариант 1 – применение рекуперативного торможения в размерах, определяемых пот-
реблением энергии рекуперации электровозами в тяговом режиме только с выпрямительно-
инверторными преобразователями (ВИПами), фактически установленными на тяговых под-
станциях (ТП) участка;
вариант 2 и последующие – применение рекуперативного торможения в размерах, необ-
ходимых для обеспечения заданной скорости движения, с преобразованием избыточной
энергии рекуперации выпрямительно-инверторными преобразователями или другими при-
емниками электроэнергии на тяговых подстанциях для различных вариантов мест их уста-
новки на участке.
Таким образом, определяется оптимальный вариант установки выпрямительно-
инверторных преобразователей с точки зрения реализации энергии рекуперации. Проводится
технико-экономический расчет целесообразности установки выпрямительно-инверторных
преобразователей на участке.
Данные об объемах расхода и рекуперации энергии из первого варианта расчетов ис-
пользуются для оценки потенциала энергоэффективности рекуперативного торможения:
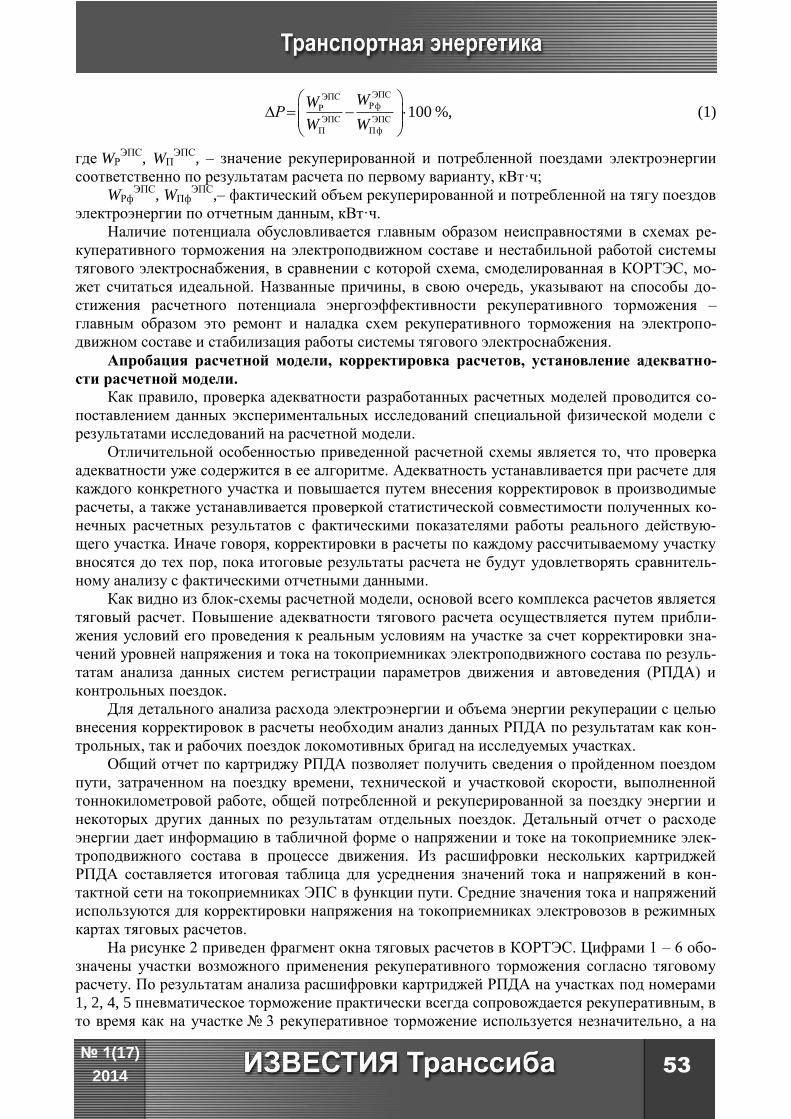
53
№ 1(17)
2014
ЭПСЭПСРфР
ЭПС ЭПС
П Пф
100 %,WW
РW W
(1)
где WРЭПС
, WПЭПС
, – значение рекуперированной и потребленной поездами электроэнергии
соответственно по результатам расчета по первому варианту, кВт·ч;
WРфЭПС
, WПфЭПС
,– фактический объем рекуперированной и потребленной на тягу поездов
электроэнергии по отчетным данным, кВт·ч.
Наличие потенциала обусловливается главным образом неисправностями в схемах ре-
куперативного торможения на электроподвижном составе и нестабильной работой системы
тягового электроснабжения, в сравнении с которой схема, смоделированная в КОРТЭС, мо-
жет считаться идеальной. Названные причины, в свою очередь, указывают на способы до-
стижения расчетного потенциала энергоэффективности рекуперативного торможения –
главным образом это ремонт и наладка схем рекуперативного торможения на электропо-
движном составе и стабилизация работы системы тягового электроснабжения.
Апробация расчетной модели, корректировка расчетов, установление адекватно-
сти расчетной модели.
Как правило, проверка адекватности разработанных расчетных моделей проводится со-
поставлением данных экспериментальных исследований специальной физической модели с
результатами исследований на расчетной модели.
Отличительной особенностью приведенной расчетной схемы является то, что проверка
адекватности уже содержится в ее алгоритме. Адекватность устанавливается при расчете для
каждого конкретного участка и повышается путем внесения корректировок в производимые
расчеты, а также устанавливается проверкой статистической совместимости полученных ко-
нечных расчетных результатов с фактическими показателями работы реального действую-
щего участка. Иначе говоря, корректировки в расчеты по каждому рассчитываемому участку
вносятся до тех пор, пока итоговые результаты расчета не будут удовлетворять сравнитель-
ному анализу с фактическими отчетными данными.
Как видно из блок-схемы расчетной модели, основой всего комплекса расчетов является
тяговый расчет. Повышение адекватности тягового расчета осуществляется путем прибли-
жения условий его проведения к реальным условиям на участке за счет корректировки зна-
чений уровней напряжения и тока на токоприемниках электроподвижного состава по резуль-
татам анализа данных систем регистрации параметров движения и автоведения (РПДА) и
контрольных поездок.
Для детального анализа расхода электроэнергии и объема энергии рекуперации с целью
внесения корректировок в расчеты необходим анализ данных РПДА по результатам как кон-
трольных, так и рабочих поездок локомотивных бригад на исследуемых участках.
Общий отчет по картриджу РПДА позволяет получить сведения о пройденном поездом
пути, затраченном на поездку времени, технической и участковой скорости, выполненной
тоннокилометровой работе, общей потребленной и рекуперированной за поездку энергии и
некоторых других данных по результатам отдельных поездок. Детальный отчет о расходе
энергии дает информацию в табличной форме о напряжении и токе на токоприемнике элек-
троподвижного состава в процессе движения. Из расшифровки нескольких картриджей
РПДА составляется итоговая таблица для усреднения значений тока и напряжений в кон-
тактной сети на токоприемниках ЭПС в функции пути. Средние значения тока и напряжений
используются для корректировки напряжения на токоприемниках электровозов в режимных
картах тяговых расчетов.
На рисунке 2 приведен фрагмент окна тяговых расчетов в КОРТЭС. Цифрами 1 – 6 обо-
значены участки возможного применения рекуперативного торможения согласно тяговому
расчету. По результатам анализа расшифровки картриджей РПДА на участках под номерами
1, 2, 4, 5 пневматическое торможение практически всегда сопровождается рекуперативным, в
то время как на участке № 3 рекуперативное торможение используется незначительно, а на
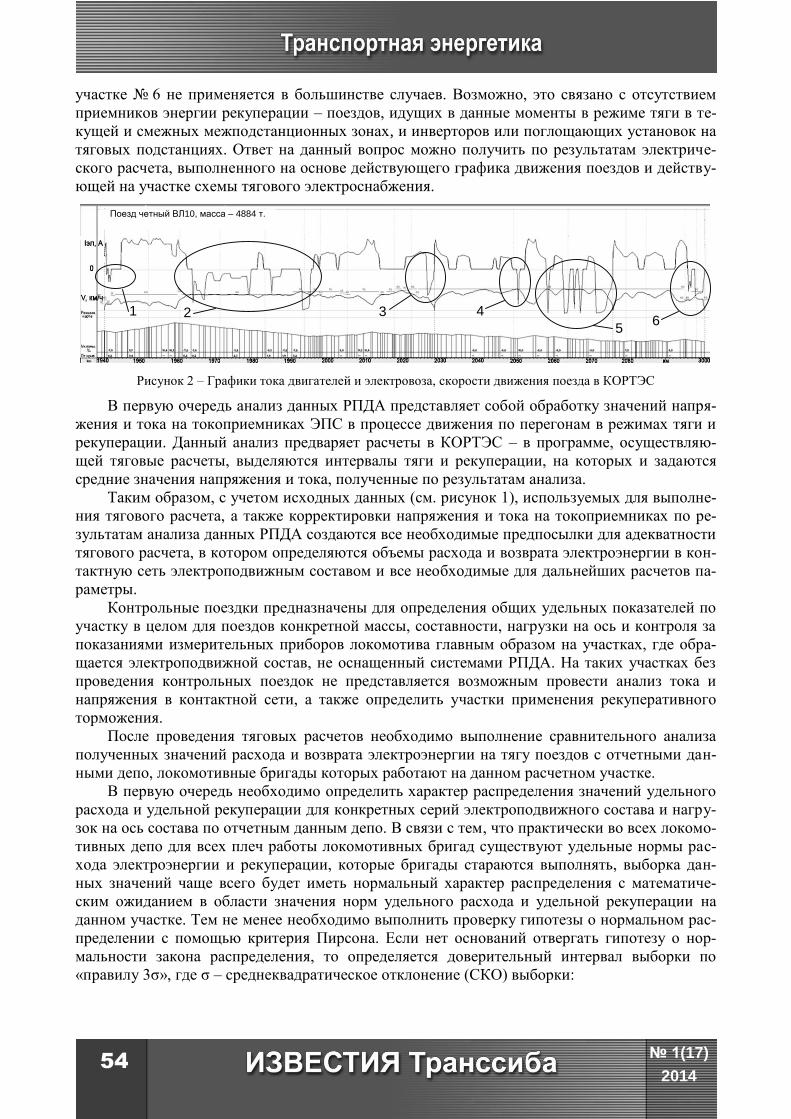
№ 1(17)
2014 54
участке № 6 не применяется в большинстве случаев. Возможно, это связано с отсутствием
приемников энергии рекуперации – поездов, идущих в данные моменты в режиме тяги в те-
кущей и смежных межподстанционных зонах, и инверторов или поглощающих установок на
тяговых подстанциях. Ответ на данный вопрос можно получить по результатам электриче-
ского расчета, выполненного на основе действующего графика движения поездов и действу-
ющей на участке схемы тягового электроснабжения.
1 2 3 4
56
Поезд четный ВЛ10, масса – 4884 т.
Рисунок 2 – Графики тока двигателей и электровоза, скорости движения поезда в КОРТЭС
В первую очередь анализ данных РПДА представляет собой обработку значений напря-
жения и тока на токоприемниках ЭПС в процессе движения по перегонам в режимах тяги и
рекуперации. Данный анализ предваряет расчеты в КОРТЭС – в программе, осуществляю-
щей тяговые расчеты, выделяются интервалы тяги и рекуперации, на которых и задаются
средние значения напряжения и тока, полученные по результатам анализа.
Таким образом, с учетом исходных данных (см. рисунок 1), используемых для выполне-
ния тягового расчета, а также корректировки напряжения и тока на токоприемниках по ре-
зультатам анализа данных РПДА создаются все необходимые предпосылки для адекватности
тягового расчета, в котором определяются объемы расхода и возврата электроэнергии в кон-
тактную сеть электроподвижным составом и все необходимые для дальнейших расчетов па-
раметры.
Контрольные поездки предназначены для определения общих удельных показателей по
участку в целом для поездов конкретной массы, составности, нагрузки на ось и контроля за
показаниями измерительных приборов локомотива главным образом на участках, где обра-
щается электроподвижной состав, не оснащенный системами РПДА. На таких участках без
проведения контрольных поездок не представляется возможным провести анализ тока и
напряжения в контактной сети, а также определить участки применения рекуперативного
торможения.
После проведения тяговых расчетов необходимо выполнение сравнительного анализа
полученных значений расхода и возврата электроэнергии на тягу поездов с отчетными дан-
ными депо, локомотивные бригады которых работают на данном расчетном участке.
В первую очередь необходимо определить характер распределения значений удельного
расхода и удельной рекуперации для конкретных серий электроподвижного состава и нагру-
зок на ось состава по отчетным данным депо. В связи с тем, что практически во всех локомо-
тивных депо для всех плеч работы локомотивных бригад существуют удельные нормы рас-
хода электроэнергии и рекуперации, которые бригады стараются выполнять, выборка дан-
ных значений чаще всего будет иметь нормальный характер распределения с математиче-
ским ожиданием в области значения норм удельного расхода и удельной рекуперации на
данном участке. Тем не менее необходимо выполнить проверку гипотезы о нормальном рас-
пределении с помощью критерия Пирсона. Если нет оснований отвергать гипотезу о нор-
мальности закона распределения, то определяется доверительный интервал выборки по
«правилу 3σ», где σ – среднеквадратическое отклонение (СКО) выборки:
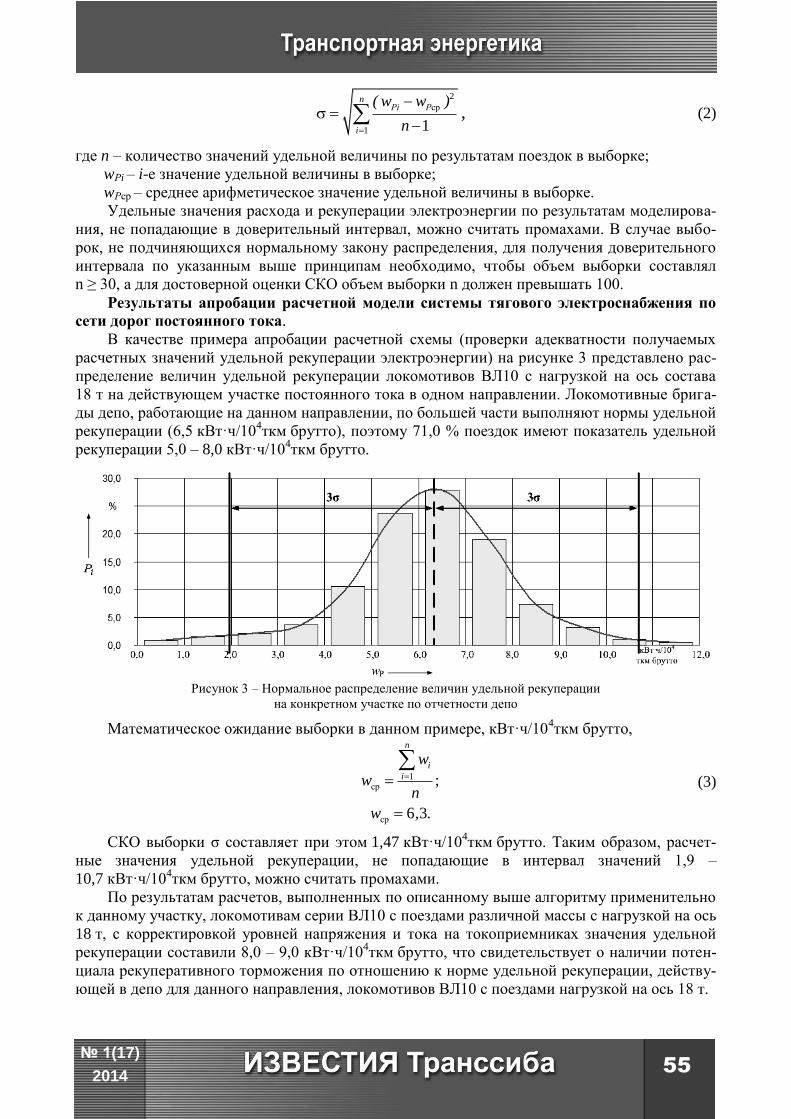
55
№ 1(17)
2014
2
ср
1 1
nРi Р
i
( w w )
n
, (2)
где n – количество значений удельной величины по результатам поездок в выборке;
wРi – i-е значение удельной величины в выборке;
wРср – среднее арифметическое значение удельной величины в выборке.
Удельные значения расхода и рекуперации электроэнергии по результатам моделирова-
ния, не попадающие в доверительный интервал, можно считать промахами. В случае выбо-
рок, не подчиняющихся нормальному закону распределения, для получения доверительного
интервала по указанным выше принципам необходимо, чтобы объем выборки составлял
n ≥ 30, а для достоверной оценки СКО объем выборки n должен превышать 100.
Результаты апробации расчетной модели системы тягового электроснабжения по
сети дорог постоянного тока.
В качестве примера апробации расчетной схемы (проверки адекватности получаемых
расчетных значений удельной рекуперации электроэнергии) на рисунке 3 представлено рас-
пределение величин удельной рекуперации локомотивов ВЛ10 с нагрузкой на ось состава
18 т на действующем участке постоянного тока в одном направлении. Локомотивные брига-
ды депо, работающие на данном направлении, по большей части выполняют нормы удельной
рекуперации (6,5 кВт·ч/104ткм брутто), поэтому 71,0 % поездок имеют показатель удельной
рекуперации 5,0 – 8,0 кВт·ч/104ткм брутто.
Рисунок 3 – Нормальное распределение величин удельной рекуперации
на конкретном участке по отчетности депо
Математическое ожидание выборки в данном примере, кВт·ч/104ткм брутто,
1ср
ср
;
6 3
n
i
i
w
wn
w , .
(3)
СКО выборки σ составляет при этом 1,47 кВт·ч/104ткм брутто. Таким образом, расчет-
ные значения удельной рекуперации, не попадающие в интервал значений 1,9 –
10,7 кВт·ч/104ткм брутто, можно считать промахами.
По результатам расчетов, выполненных по описанному выше алгоритму применительно
к данному участку, локомотивам серии ВЛ10 с поездами различной массы с нагрузкой на ось
18 т, с корректировкой уровней напряжения и тока на токоприемниках значения удельной
рекуперации составили 8,0 – 9,0 кВт·ч/104ткм брутто, что свидетельствует о наличии потен-
циала рекуперативного торможения по отношению к норме удельной рекуперации, действу-
ющей в депо для данного направления, локомотивов ВЛ10 с поездами нагрузкой на ось 18 т.
№ 1(17)
2014 56
Необходимо отметить, что, как правило, расчетные результаты удовлетворяют «сравни-
тельному анализу», который, вместе с тем, необходим для выявления явных промахов и ис-
правления расчетов или исключения расчетных файлов с такими промахами из дальнейшего
моделирования.
Полученные по результатам тяговых расчетов итоговые значения энергии рекуперации
можно считать абсолютной энергией рекуперации, так как в тяговом расчете не учитываются
параметры системы тягового электроснабжения и график движения поездов и, следователь-
но, не учитывается наличие приемников энергии рекуперации. Таким образом, полученная в
результате тягового расчета величина энергии рекуперации – это максимально возможная
величина возврата по физико-механическим свойствам каждой единицы электроподвижного
состава. Дальнейшие расчеты направлены на определение объемов энергии рекуперации, ко-
торые можно реализовать в текущих условиях работы участка, а также в условиях внедрения
технических средств и мероприятий, направленных на повышение энергетической эффек-
тивности применения рекуперативного торможения.
Результаты тяговых расчетов используются в дальнейшем для построения энергетиче-
ских диаграмм [3]. Расчетные файлы, созданные при проведении тяговых расчетов, служат
основой для составления графика движения поездов.
Таким образом, основным преимуществом блок-схемы расчетной модели работы систе-
мы тягового электроснабжения, представленной на рисунке 1, является то, что она уже со-
держит в себе алгоритм апробации. На основе применения данной схемы к действующим
участкам постоянного тока железных дорог РФ специалистами ОмГУПСа была выполнена
оценка потенциала рекуперативного торможения на поездоучастках постоянного тока, в ходе
которой была проведена апробация и установлена адекватность расчетной модели.
Тяговые расчеты были выполнены на основании Приказа по унифицированным и кри-
тическим весовым нормам грузовых поездов, Плана технической и участковой скоростей
движения поездов на участках, информации о плане и профиле пути, Приказа по ограниче-
нию скоростей, режимных карт вождения поездов и ряда других нормативных документов.
Корректировка тяговых расчетов выполнялась на основании детального анализа расшифров-
ки картриджей РПДА, а все результаты расчетов проходили проверку статистических гипо-
тез, и только в случае адекватности сам расчет принимался за основу при построении энерге-
тических диаграмм, а также при составлении графика движения поездов и проведении элек-
трических расчетов.
Многовариантные электрические расчеты позволили оценить потенциал рекуперативно-
го торможения для всех участков постоянного тока российских железных дорог, а также со-
ставить перечень мероприятий, экономически целесообразных для внедрения с целью до-
стижения расчетного уровня потенциала.
Разработанная расчетная модель системы тягового электроснабжения железных дорог
постоянного тока была использована для оценки технико-экономической эффективности
внедрения на тяговых подстанциях сети железных дорог постоянного тока выпрямительно-
инверторных преобразователей [4] и накопителей электрической энергии [5], а также для
оценки эффективности применения рекуперативного торможения на двухпутных участках
железных дорог при отсутствии выпрямительно-инверторных преобразователей [6].
Список литературы
1. Вильгельм, А. С. Экспериментальные исследования по оценке потенциала повышения
энергетической эффективности тяги поездов за счет применения рекуперативного торможе-
ния [Текст] / А. С. Вильгельм, А. Н. Ларин // Известия Транссиба / Омский гос. ун-т путей
сообщения. – Омск. – 2011. – № 1 (5). – С. 50 – 56.
2. Никифоров, М. М. Методика оценки потенциала энергоэффективности применения
рекуперативного торможения [Текст] / М. М. Никифоров, А. Л. Каштанов, В. А. Кандаев //
57
№ 1(17)
2014
Известия Транссиба / Омский гос. ун-т путей сообщения. – Омск. – 2012. – № 1 (9). –
С. 72 – 78.
3. Вильгельм, А. С. Принципы построения энергетических диаграмм для оценки эффек-
тивности применения рекуперативного торможения [Текст] / А. С. Вильгельм, А. Л. Кашта-
нов, М. М. Никифоров // Известия Транссиба / Омский гос. ун-т путей сообщения. – Омск. –
2012. – № 2 (10). – С. 63 – 68.
4. Черемисин, В. Т. Оценка потенциала повышения энергетической эффективности си-
стемы тягового электроснабжения [Текст] / В. Т. Черемисин, М. М. Никифоров // Известия
Транссиба / Омский гос. ун-т путей сообщения. – Омск. – 2013. – № 2 (14). – С. 75 – 84.
5. Черемисин, В. Т. Выбор мест установки накопителей электрической энергии на поли-
гоне постоянного тока железнодорожного транспорта по критерию энергоэффективности
[Текст] / В. Т. Черемисин, М. М. Никифоров, В. Л. Незевак // Наука и транспорт. Модерниза-
ция железнодорожного транспорта. – СПб. – 2013. – № 2 (6). – С. 48 – 52.
6. Повышение энергетической эффективности системы тягового электроснабжения в
условиях рекуперации электроподвижного состава [Текст] / В. Т. Черемисин, А. С. Виль-
гельм и др.// Локомотив. – 2013. – № 8. – С. 5 – 8.
УДК 621.336.2
А. В. Паранин, А. В. Ефимов, Д. А. Ефимов
МОДЕЛИРОВАНИЕ ЧИСТОГО КОНТАКТА МЕЖДУ КОНТАКТНЫМ
ПРОВОДОМ И ТОКОСЪЕМНОЙ ПЛАСТИНОЙ В СТАТИКЕ
МЕТОДОМ КОНЕЧНЫХ ЭЛЕМЕНТОВ
В статье предложена конечно-элементная модель работы электрического контакта между контакт-
ным проводом и токосъемной пластиной токоприемника, учитывающая сложную взаимосвязь электрических
и тепловых процессов. Исследовались контактные пары, состоящие из изношенного контактного провода
МФ-100 и токосъемных пластин из металлокерамики ВЖ3П или графита. Микрогеометрия поверхности тел в
месте контакта получена на основе модели Гринвуда – Вильямсона. Было рассмотрено два крайних возмож-
ных случая соприкосновения контактного провода с пластиной. Результаты были проанализированы и сравне-
ны с известными опытными данными. Рассчитано, при каких соотношениях контактного нажатия и тока
из-за выгорания контактов возникнет искровой или дуговой разряд. Определены пути совершенствования мо-
дели.
Электрический контакт «контактный провод – токосъемная пластина токоприемника» яв-
ляется важным элементом, обеспечивающим связь системы электроснабжения с электрифици-
рованным транспортом, поэтому необходимо уметь определять параметры работы контакта по
заданным исходным данным. В настоящее время для описания и расчета электрических кон-
тактов широко используется теория, созданная еще в 50 гг. XX в. Р. Хольмом [1]. Однако раз-
работанная модель имеет ряд допущений: обязательное подобие температурного и электриче-
ского полей, отсутствие микрошероховатостей в месте соприкосновения, представление элек-
трических контактов двумя бесконечными полупространствами, линейность зависимости
электрических и теплофизических свойств материалов от температуры. Сейчас имеются ин-
струменты, которые позволяют отказаться от перечисленных допущений. Сразу разработать
такую модель электрического контакта, которая учитывала бы всю его структурную слож-
ность и условия работы (включая динамику) практически нереально. Авторы настоящей ста-
тьи решили вначале рассмотреть данный контакт без движения пластины по контактному про-
воду и при чистых металлических поверхностях без пленок. Далее по мере необходимости и
целесообразности эту модель можно постепенно совершенствовать. Следует отметить, что ав-
торы статьи уже имеют положительный опыт применения метода конечных элементов для
№ 1(17)
2014 58
расчета нагрева токоприемника и полоза при токосъеме с учетом токораспределения между
токосъемными пластинами [8, 9]. В этих моделях электрический контакт был условно заменен
сначала просто потоком тепла, а позднее – «фиктивным телом», которое распределяло тепло-
вую мощность, выделяющуюся в месте контакта от протекания тока, между полозом и кон-
тактным проводом автоматически в зависимости от поля температуры. Значение контактного
сопротивления рассчитывалось аппроксимацией опытных данных.
Наиболее часто используемый подход для описания механического контакта шерохова-
тых поверхностей основан на модели Гринвуда – Вильямсона [2, с. 61]. В этой модели шеро-
ховатая поверхность принимается состоящей из сферических неровностей постоянного ра-
диуса, равного среднему радиусу кривизны исходных поверхностей. В предположении нор-
мального распределения высот неровностей в соответствии с известной плотностью матери-
ала для нормальной нагрузки были получены выражения для расчета количества контактных
площадок, средней площади контакта, фактической площади контакта и зазора между по-
верхностями. Впервые модель Гринвуда – Вильямсона (с последующими ее усовершенство-
ваниями) для описания контакта токосъемной пластины и контактного провода была исполь-
зована в работе [3, с. 50]. Авторы данной работы показали последовательность расчета коли-
чества контактных пятен и реальной площади контакта на основе указанной модели шерохо-
ватости. Кроме этого указываются численные значения параметров, необходимых для расче-
та, в случае медного контактного провода и графитовой токосъемной пластины. Расчет ве-
дется для случая, когда шероховатая деформируемая поверхность находится в нормальном
контакте с абсолютно твердой идеально плоской поверхностью. Для понимания дальнейших
рассуждений приведем необходимые формулы из работы [3, с. 50].
Функция плотности распределения высоты d шероховатости относительно средней по-
верхности тела подчиняется экспоненциальному закону:
( ) , (1)
где c и – параметры распределения.
Количество выступов (контактных точек) на высоте d относительно средней поверхнос-
ти тела определяется выражением:
К
, (2)
где η – поверхностная плотность выступов;
An – номинальная площадь контакта.
Реальная площадь контакта будет определяться по выражению:
( ( )), (3)
где – стандартное отклонение высоты шероховатости σ;
r – радиус верхней сферической части шероховатости;
δcr – параметр, определяемый началом пластической деформации.
(
) , (4)
где – коэффициент пластической деформации;
– твердость материала;
– эквивалентный коэффициент упругости.
Усилие в контакте определяется выражением:
(5)
Численные значения необходимых для расчета параметров для меди и графита взяты из
работы [3, с. 58]. Коэффициент пластических деформаций K принят для всех материалов
равным 0,6. Для металлокерамики ВЖ3П значения большинства параметров в литературе
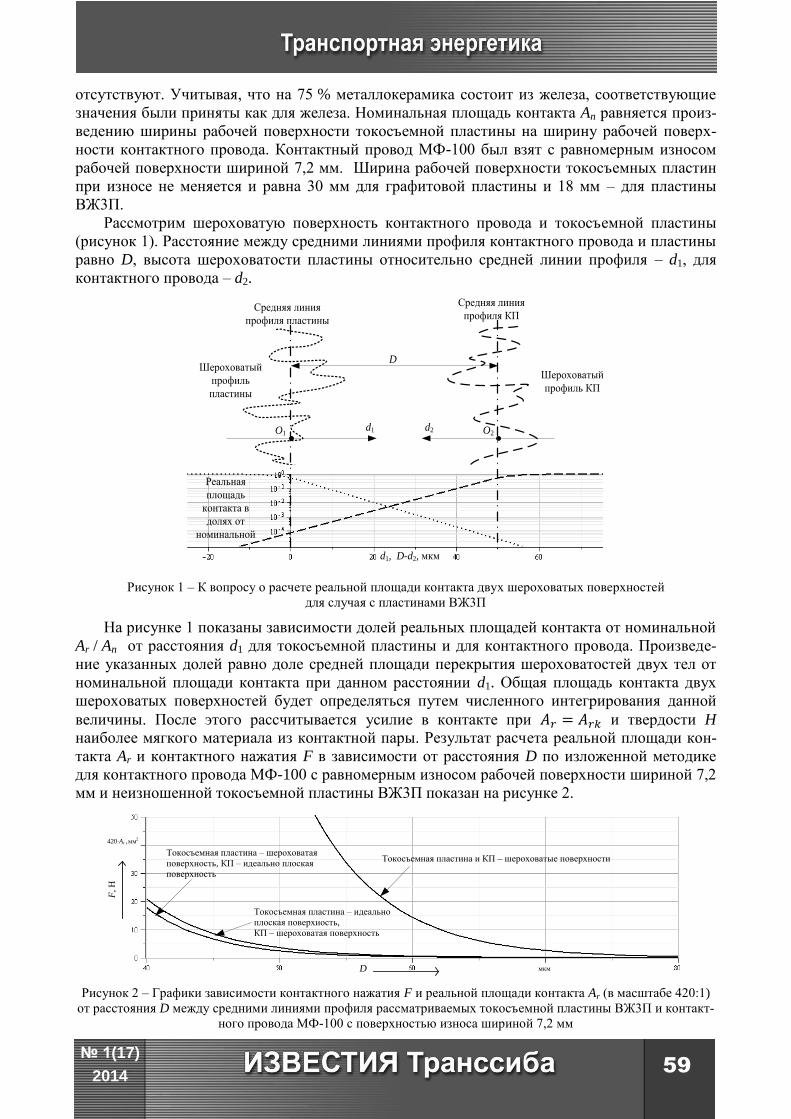
59
№ 1(17)
2014
отсутствуют. Учитывая, что на 75 % металлокерамика состоит из железа, соответствующие
значения были приняты как для железа. Номинальная площадь контакта An равняется произ-
ведению ширины рабочей поверхности токосъемной пластины на ширину рабочей поверх-
ности контактного провода. Контактный провод МФ-100 был взят с равномерным износом
рабочей поверхности шириной 7,2 мм. Ширина рабочей поверхности токосъемных пластин
при износе не меняется и равна 30 мм для графитовой пластины и 18 мм – для пластины
ВЖ3П.
Рассмотрим шероховатую поверхность контактного провода и токосъемной пластины
(рисунок 1). Расстояние между средними линиями профиля контактного провода и пластины
равно D, высота шероховатости пластины относительно средней линии профиля – d1, для
контактного провода – d2.
Средняя линия
профиля КПСредняя линия
профиля пластины
D
d1 d2O1 O2
Реальная
площадь
контакта в
долях от
номинальной
d1, D-d2, мкм
Шероховатый
профиль
пластины
Шероховатый
профиль КП
Рисунок 1 – К вопросу о расчете реальной площади контакта двух шероховатых поверхностей
для случая с пластинами ВЖ3П
На рисунке 1 показаны зависимости долей реальных площадей контакта от номинальной
Ar / An от расстояния d1 для токосъемной пластины и для контактного провода. Произведе-
ние указанных долей равно доле средней площади перекрытия шероховатостей двух тел от
номинальной площади контакта при данном расстоянии d1. Общая площадь контакта двух
шероховатых поверхностей будет определяться путем численного интегрирования данной
величины. После этого рассчитывается усилие в контакте при и твердости H
наиболее мягкого материала из контактной пары. Результат расчета реальной площади кон-
такта Ar и контактного нажатия F в зависимости от расстояния D по изложенной методике
для контактного провода МФ-100 с равномерным износом рабочей поверхности шириной 7,2
мм и неизношенной токосъемной пластины ВЖ3П показан на рисунке 2.
Токосъемная пластина – шероховатая
поверхность, КП – идеально плоская
поверхность
Токосъемная пластина – идеально
плоская поверхность,
КП – шероховатая поверхность
Токосъемная пластина и КП – шероховатые поверхности
F, H
D
420∙Ar , мм2
мкм
Рисунок 2 – Графики зависимости контактного нажатия F и реальной площади контакта Ar (в масштабе 420:1)
от расстояния D между средними линиями профиля рассматриваемых токосъемной пластины ВЖ3П и контакт-
ного провода МФ-100 с поверхностью износа шириной 7,2 мм
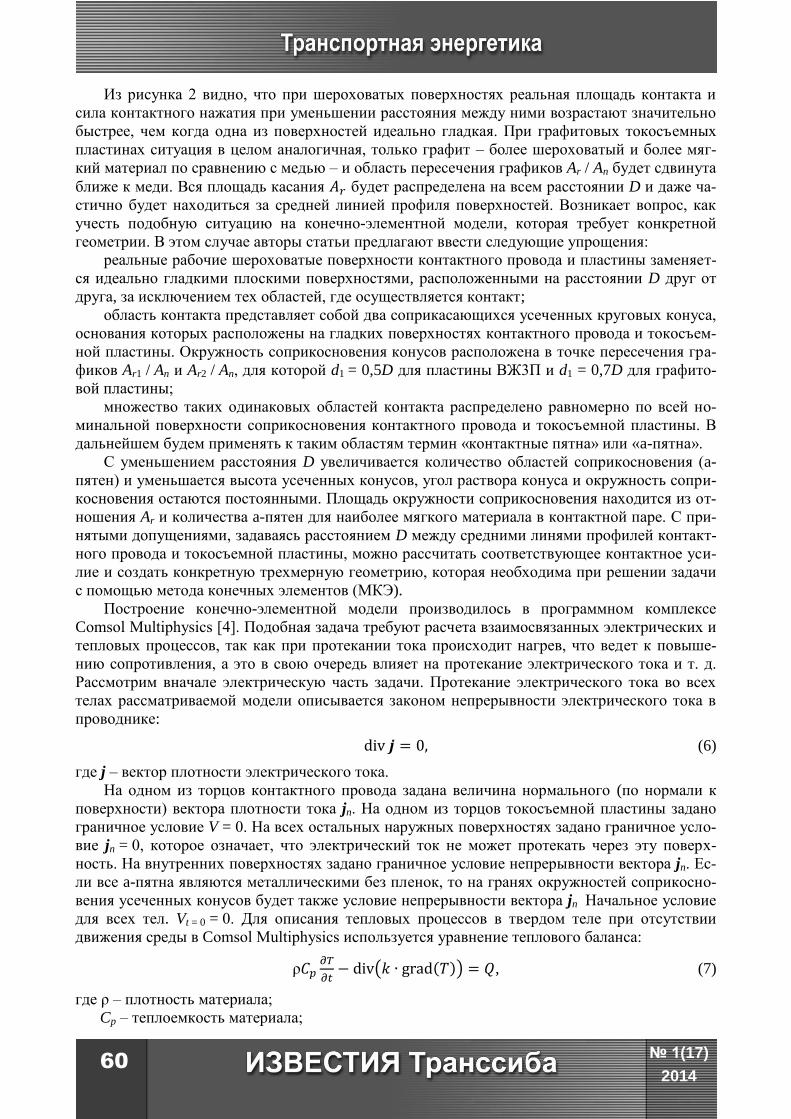
№ 1(17)
2014 60
Из рисунка 2 видно, что при шероховатых поверхностях реальная площадь контакта и
сила контактного нажатия при уменьшении расстояния между ними возрастают значительно
быстрее, чем когда одна из поверхностей идеально гладкая. При графитовых токосъемных
пластинах ситуация в целом аналогичная, только графит – более шероховатый и более мяг-
кий материал по сравнению с медью – и область пересечения графиков Ar / An будет сдвинута
ближе к меди. Вся площадь касания будет распределена на всем расстоянии D и даже ча-
стично будет находиться за средней линией профиля поверхностей. Возникает вопрос, как
учесть подобную ситуацию на конечно-элементной модели, которая требует конкретной
геометрии. В этом случае авторы статьи предлагают ввести следующие упрощения:
реальные рабочие шероховатые поверхности контактного провода и пластины заменяет-
ся идеально гладкими плоскими поверхностями, расположенными на расстоянии D друг от
друга, за исключением тех областей, где осуществляется контакт;
область контакта представляет собой два соприкасающихся усеченных круговых конуса,
основания которых расположены на гладких поверхностях контактного провода и токосъем-
ной пластины. Окружность соприкосновения конусов расположена в точке пересечения гра-
фиков Ar1 / An и Ar2 / An, для которой d1 = 0,5D для пластины ВЖ3П и d1 = 0,7D для графито-
вой пластины;
множество таких одинаковых областей контакта распределено равномерно по всей но-
минальной поверхности соприкосновения контактного провода и токосъемной пластины. В
дальнейшем будем применять к таким областям термин «контактные пятна» или «a-пятна».
С уменьшением расстояния D увеличивается количество областей соприкосновения (a-
пятен) и уменьшается высота усеченных конусов, угол раствора конуса и окружность сопри-
косновения остаются постоянными. Площадь окружности соприкосновения находится из от-
ношения Ar и количества a-пятен для наиболее мягкого материала в контактной паре. С при-
нятыми допущениями, задаваясь расстоянием D между средними линями профилей контакт-
ного провода и токосъемной пластины, можно рассчитать соответствующее контактное уси-
лие и создать конкретную трехмерную геометрию, которая необходима при решении задачи
с помощью метода конечных элементов (МКЭ).
Построение конечно-элементной модели производилось в программном комплексе
Comsol Multiphysics [4]. Подобная задача требуют расчета взаимосвязанных электрических и
тепловых процессов, так как при протекании тока происходит нагрев, что ведет к повыше-
нию сопротивления, а это в свою очередь влияет на протекание электрического тока и т. д.
Рассмотрим вначале электрическую часть задачи. Протекание электрического тока во всех
телах рассматриваемой модели описывается законом непрерывности электрического тока в
проводнике:
(6)
где j – вектор плотности электрического тока.
На одном из торцов контактного провода задана величина нормального (по нормали к
поверхности) вектора плотности тока jn. На одном из торцов токосъемной пластины задано
граничное условие V = 0. На всех остальных наружных поверхностях задано граничное усло-
вие jn = 0, которое означает, что электрический ток не может протекать через эту поверх-
ность. На внутренних поверхностях задано граничное условие непрерывности вектора jn. Ес-
ли все a-пятна являются металлическими без пленок, то на гранях окружностей соприкосно-
вения усеченных конусов будет также условие непрерывности вектора jn Начальное условие
для всех тел. Vt = 0 = 0. Для описания тепловых процессов в твердом теле при отсутствии
движения среды в Comsol Multiphysics используется уравнение теплового баланса:
ρ
( ( )) , (7)
где ρ – плотность материала;
Cp – теплоемкость материала;
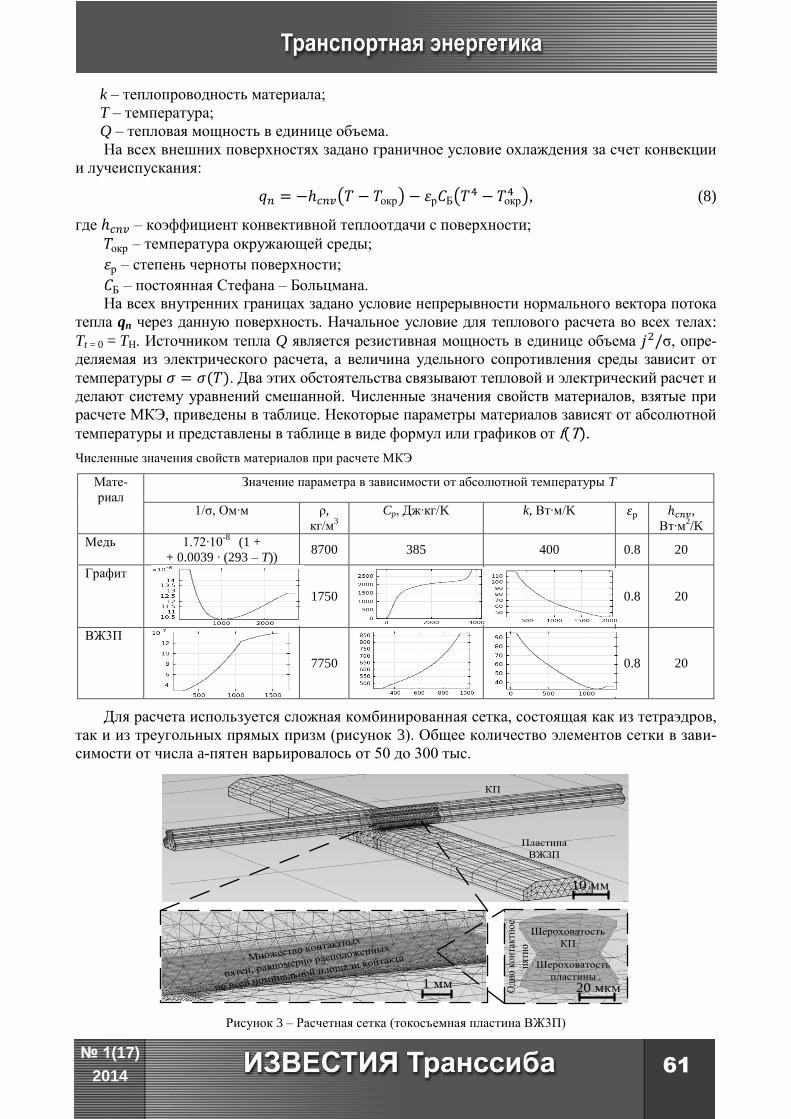
61
№ 1(17)
2014
k – теплопроводность материала;
T – температура;
Q – тепловая мощность в единице объема.
На всех внешних поверхностях задано граничное условие охлаждения за счет конвекции
и лучеиспускания:
( окр) р Б( окр
), (8)
где – коэффициент конвективной теплоотдачи с поверхности;
окр – температура окружающей среды;
р – степень черноты поверхности;
Б – постоянная Стефана – Больцмана.
На всех внутренних границах задано условие непрерывности нормального вектора потока
тепла qn через данную поверхность. Начальное условие для теплового расчета во всех телах:
Tt = 0 = TН. Источником тепла Q является резистивная мощность в единице объема σ, опре-деляемая из электрического расчета, а величина удельного сопротивления среды зависит от
температуры ( ). Два этих обстоятельства связывают тепловой и электрический расчет и делают систему уравнений смешанной. Численные значения свойств материалов, взятые при
расчете МКЭ, приведены в таблице. Некоторые параметры материалов зависят от абсолютной
температуры и представлены в таблице в виде формул или графиков от f(T).
Численные значения свойств материалов при расчете МКЭ
Мате-
риал
Значение параметра в зависимости от абсолютной температуры T
1/σ, Ом∙м ρ,
кг/м3
Cp, Дж∙кг/K k, Вт∙м/K ,
Вт∙м2/K
Медь 1.72∙10-8
(1 +
+ 0.0039 ∙ (293 – T)) 8700 385 400 0.8 20
Графит
1750
0.8 20
ВЖ3П
7750
0.8 20
Для расчета используется сложная комбинированная сетка, состоящая как из тетраэдров,
так и из треугольных прямых призм (рисунок 3). Общее количество элементов сетки в зави-
симости от числа a-пятен варьировалось от 50 до 300 тыс.
1 мм 20 мкм
10 мм
Пластина
ВЖ3П
КП
Одно контактное
пятно
Множество ко
нтактных
пятен, равномерно
расположенн
ых
по всей номи
нальной площ
ади контакта
Шероховатость
КП
Шероховатость
пластины
Рисунок 3 – Расчетная сетка (токосъемная пластина ВЖ3П)
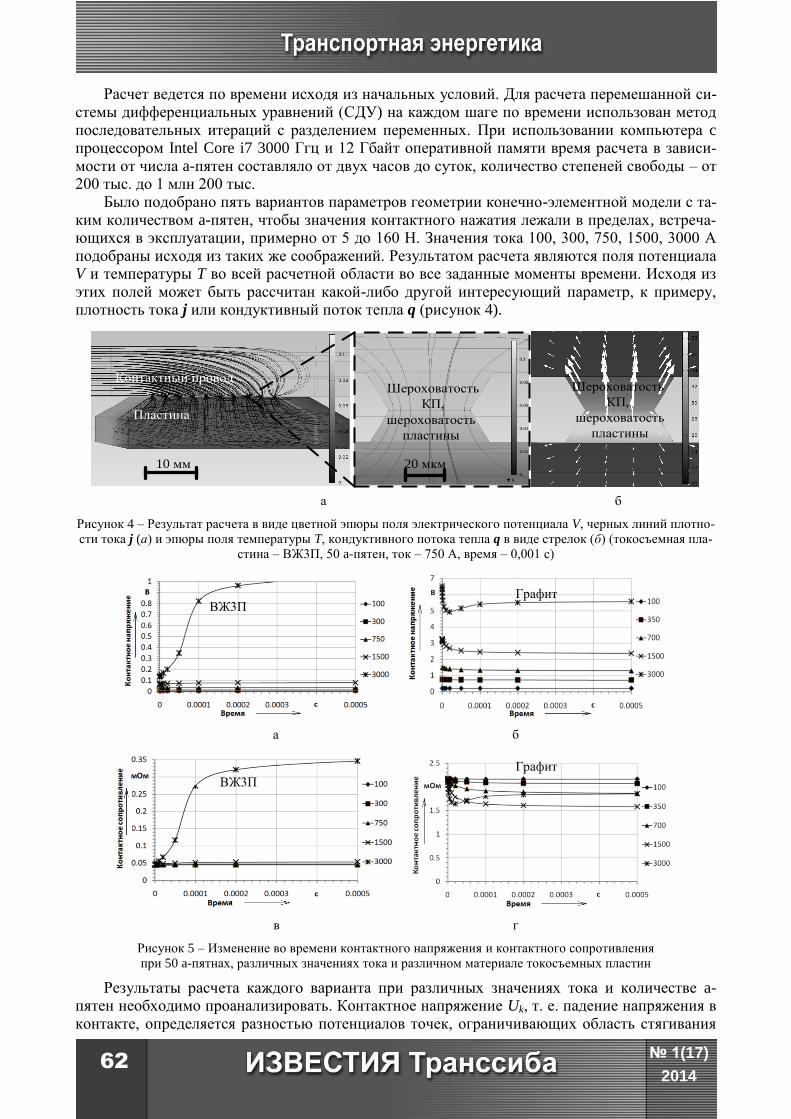
№ 1(17)
2014 62
Расчет ведется по времени исходя из начальных условий. Для расчета перемешанной си-стемы дифференциальных уравнений (СДУ) на каждом шаге по времени использован метод последовательных итераций с разделением переменных. При использовании компьютера c процессором Intel Core i7 3000 Ггц и 12 Гбайт оперативной памяти время расчета в зависи-мости от числа a-пятен составляло от двух часов до суток, количество степеней свободы – от 200 тыс. до 1 млн 200 тыс.
Было подобрано пять вариантов параметров геометрии конечно-элементной модели с та-ким количеством a-пятен, чтобы значения контактного нажатия лежали в пределах, встреча-ющихся в эксплуатации, примерно от 5 до 160 Н. Значения тока 100, 300, 750, 1500, 3000 А подобраны исходя из таких же соображений. Результатом расчета являются поля потенциала V и температуры T во всей расчетной области во все заданные моменты времени. Исходя из этих полей может быть рассчитан какой-либо другой интересующий параметр, к примеру, плотность тока j или кондуктивный поток тепла q (рисунок 4).
20 мкм10 мм
Контактный провод
Пластина
Шероховатость
КП,
шероховатость
пластины
Шероховатость
КП,
шероховатость
пластины
а б
Рисунок 4 – Результат расчета в виде цветной эпюры поля электрического потенциала V, черных линий плотно-сти тока j (а) и эпюры поля температуры T, кондуктивного потока тепла q в виде стрелок (б) (токосъемная пла-
стина – ВЖ3П, 50 a-пятен, ток – 750 А, время – 0,001 с)
а б
в г
Рисунок 5 – Изменение во времени контактного напряжения и контактного сопротивления при 50 a-пятнах, различных значениях тока и различном материале токосъемных пластин
Результаты расчета каждого варианта при различных значениях тока и количестве a-пятен необходимо проанализировать. Контактное напряжение Uk, т. е. падение напряжения в контакте, определяется разностью потенциалов точек, ограничивающих область стягивания
Графит
Графит
ВЖ3П
ВЖ3П
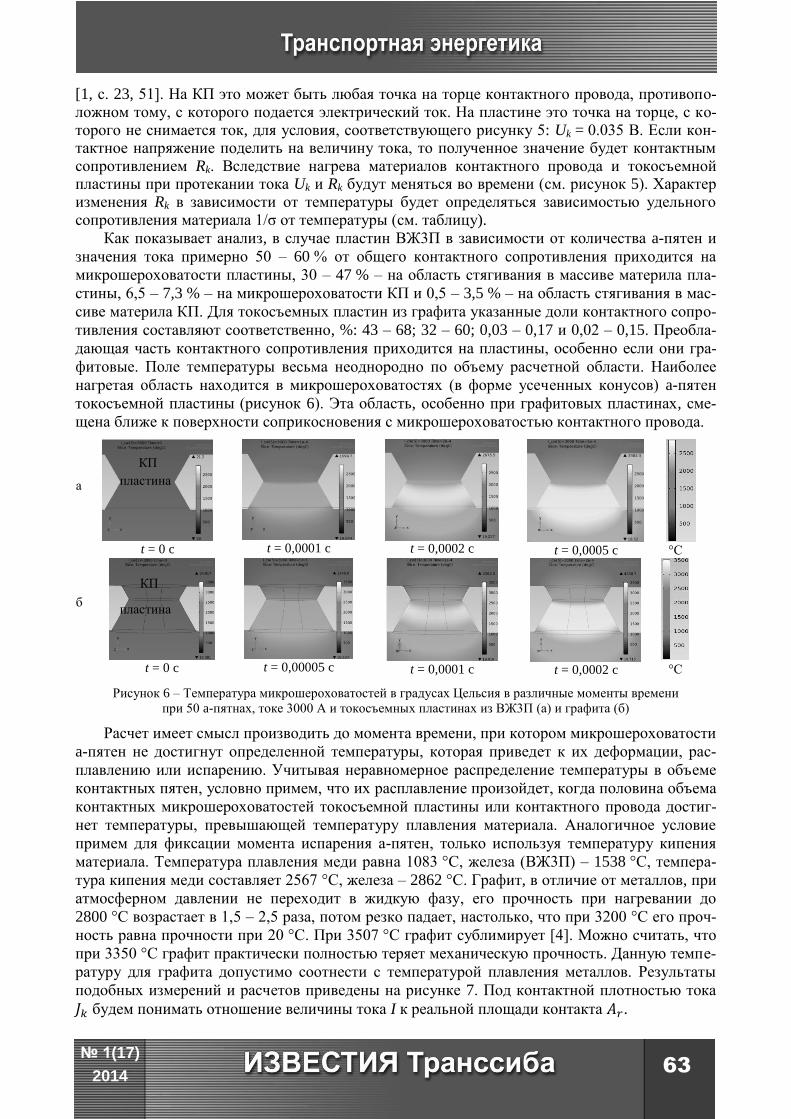
63
№ 1(17)
2014
[1, с. 23, 51]. На КП это может быть любая точка на торце контактного провода, противопо-ложном тому, с которого подается электрический ток. На пластине это точка на торце, с ко-торого не снимается ток, для условия, соответствующего рисунку 5: Uk = 0.035 В. Если кон-тактное напряжение поделить на величину тока, то полученное значение будет контактным сопротивлением Rk. Вследствие нагрева материалов контактного провода и токосъемной пластины при протекании тока Uk и Rk будут меняться во времени (см. рисунок 5). Характер изменения Rk в зависимости от температуры будет определяться зависимостью удельного сопротивления материала 1/σ от температуры (см. таблицу).
Как показывает анализ, в случае пластин ВЖ3П в зависимости от количества a-пятен и
значения тока примерно 50 – 60 % от общего контактного сопротивления приходится на
микрошероховатости пластины, 30 – 47 % – на область стягивания в массиве материла пла-
стины, 6,5 – 7,3 % – на микрошероховатости КП и 0,5 – 3,5 % – на область стягивания в мас-
сиве материла КП. Для токосъемных пластин из графита указанные доли контактного сопро-
тивления составляют соответственно, %: 43 – 68; 32 – 60; 0,03 – 0,17 и 0,02 – 0,15. Преобла-
дающая часть контактного сопротивления приходится на пластины, особенно если они гра-
фитовые. Поле температуры весьма неоднородно по объему расчетной области. Наиболее
нагретая область находится в микрошероховатостях (в форме усеченных конусов) a-пятен
токосъемной пластины (рисунок 6). Эта область, особенно при графитовых пластинах, сме-
щена ближе к поверхности соприкосновения с микрошероховатостью контактного провода.
t = 0 c
t = 0,0001 c
t = 0,0002 c
t = 0,0005 c
°С
t = 0 c
t = 0,00005 c
t = 0,0001 c
t = 0,0002 c
°С
Рисунок 6 – Температура микрошероховатостей в градусах Цельсия в различные моменты времени
при 50 a-пятнах, токе 3000 А и токосъемных пластинах из ВЖ3П (а) и графита (б)
Расчет имеет смысл производить до момента времени, при котором микрошероховатости
a-пятен не достигнут определенной температуры, которая приведет к их деформации, рас-
плавлению или испарению. Учитывая неравномерное распределение температуры в объеме
контактных пятен, условно примем, что их расплавление произойдет, когда половина объема
контактных микрошероховатостей токосъемной пластины или контактного провода достиг-
нет температуры, превышающей температуру плавления материала. Аналогичное условие
примем для фиксации момента испарения а-пятен, только используя температуру кипения
материала. Температура плавления меди равна 1083 °С, железа (ВЖ3П) – 1538 °С, темпера-
тура кипения меди составляет 2567 °С, железа – 2862 °С. Графит, в отличие от металлов, при
атмосферном давлении не переходит в жидкую фазу, его прочность при нагревании до
2800 °С возрастает в 1,5 – 2,5 раза, потом резко падает, настолько, что при 3200 °С его проч-
ность равна прочности при 20 °С. При 3507 °С графит сублимирует [4]. Можно считать, что
при 3350 °С графит практически полностью теряет механическую прочность. Данную темпе-
ратуру для графита допустимо соотнести с температурой плавления металлов. Результаты
подобных измерений и расчетов приведены на рисунке 7. Под контактной плотностью тока
будем понимать отношение величины тока I к реальной площади контакта .
а
б
пластина
КП
пластина
КП
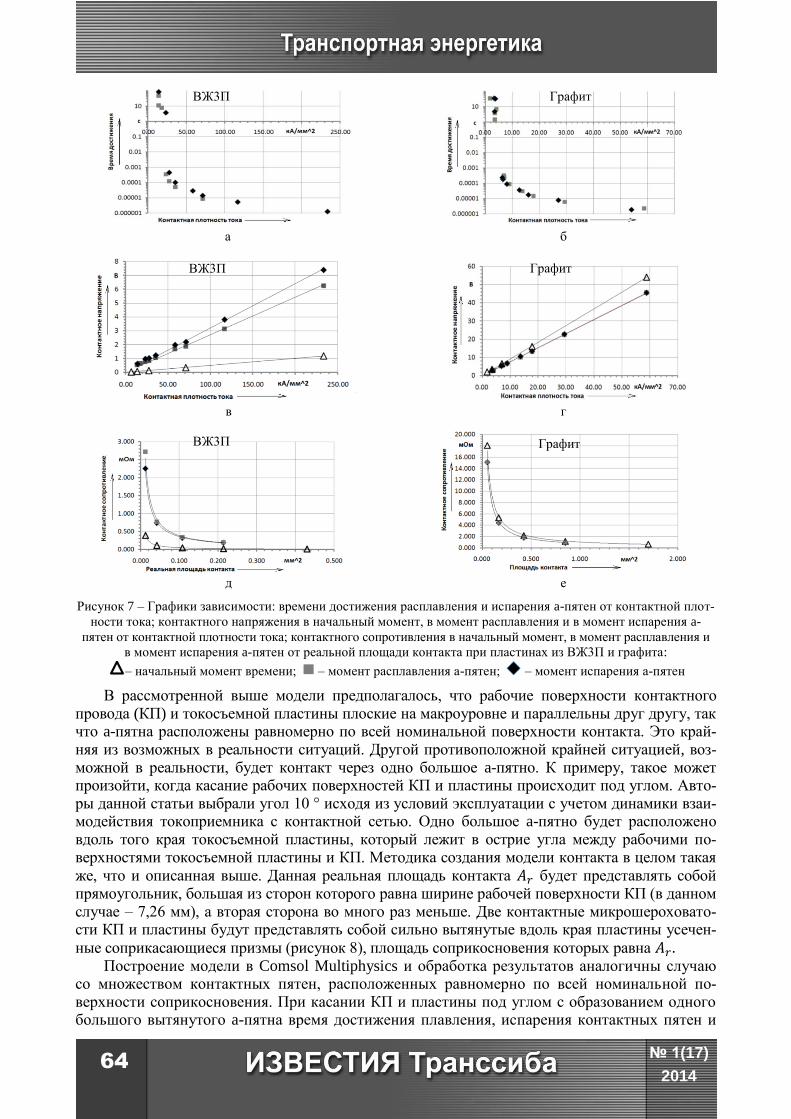
№ 1(17)
2014 64
а б
в г
д е
Рисунок 7 – Графики зависимости: времени достижения расплавления и испарения a-пятен от контактной плот-
ности тока; контактного напряжения в начальный момент, в момент расплавления и в момент испарения a-
пятен от контактной плотности тока; контактного сопротивления в начальный момент, в момент расплавления и
в момент испарения a-пятен от реальной площади контакта при пластинах из ВЖ3П и графита:
– начальный момент времени; – момент расплавления a-пятен; – момент испарения a-пятен
В рассмотренной выше модели предполагалось, что рабочие поверхности контактного провода (КП) и токосъемной пластины плоские на макроуровне и параллельны друг другу, так что a-пятна расположены равномерно по всей номинальной поверхности контакта. Это край-няя из возможных в реальности ситуаций. Другой противоположной крайней ситуацией, воз-можной в реальности, будет контакт через одно большое a-пятно. К примеру, такое может произойти, когда касание рабочих поверхностей КП и пластины происходит под углом. Авто-ры данной статьи выбрали угол 10 ° исходя из условий эксплуатации с учетом динамики взаи-модействия токоприемника с контактной сетью. Одно большое a-пятно будет расположено вдоль того края токосъемной пластины, который лежит в острие угла между рабочими по-верхностями токосъемной пластины и КП. Методика создания модели контакта в целом такая
же, что и описанная выше. Данная реальная площадь контакта будет представлять собой прямоугольник, большая из сторон которого равна ширине рабочей поверхности КП (в данном случае – 7,26 мм), а вторая сторона во много раз меньше. Две контактные микрошероховато-сти КП и пластины будут представлять собой сильно вытянутые вдоль края пластины усечен-
ные соприкасающиеся призмы (рисунок 8), площадь соприкосновения которых равна Построение модели в Comsol Multiphysics и обработка результатов аналогичны случаю
со множеством контактных пятен, расположенных равномерно по всей номинальной по-верхности соприкосновения. При касании КП и пластины под углом с образованием одного большого вытянутого a-пятна время достижения плавления, испарения контактных пятен и
ВЖ3П Графит
ВЖ3П
ВЖ3П
Графит
Графит
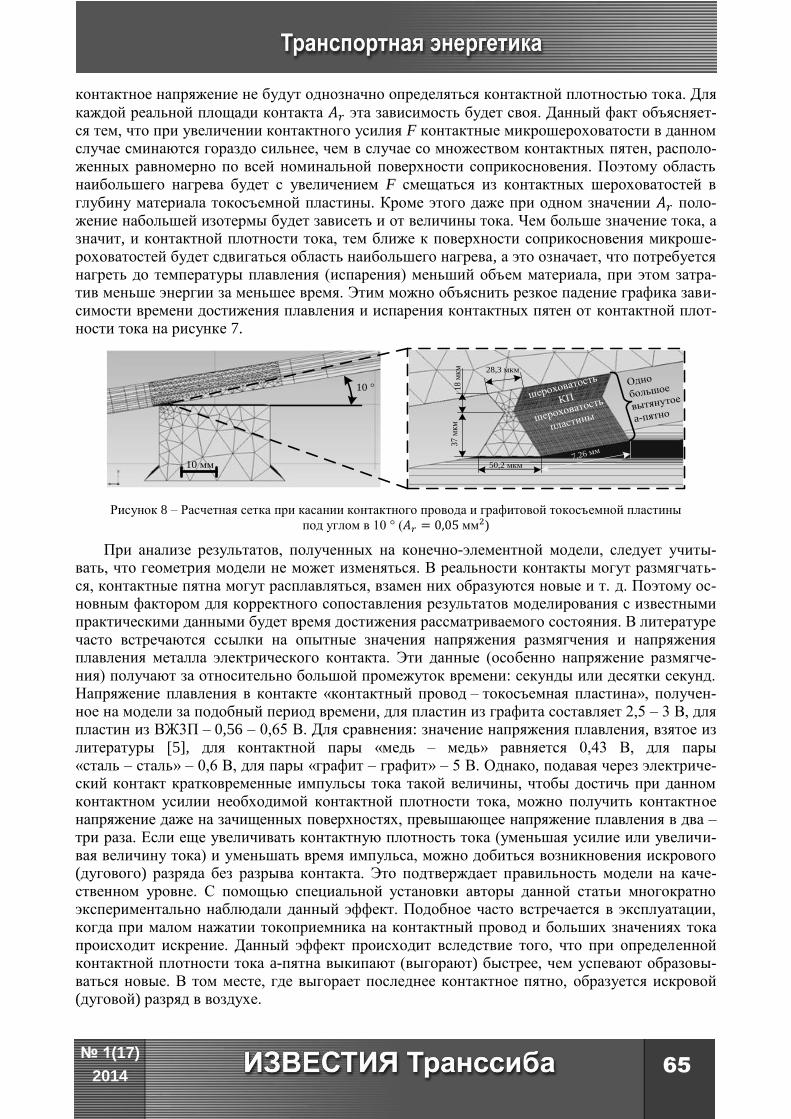
65
№ 1(17)
2014
контактное напряжение не будут однозначно определяться контактной плотностью тока. Для
каждой реальной площади контакта эта зависимость будет своя. Данный факт объясняет-ся тем, что при увеличении контактного усилия F контактные микрошероховатости в данном случае сминаются гораздо сильнее, чем в случае со множеством контактных пятен, располо-женных равномерно по всей номинальной поверхности соприкосновения. Поэтому область наибольшего нагрева будет с увеличением F смещаться из контактных шероховатостей в
глубину материала токосъемной пластины. Кроме этого даже при одном значении поло-жение набольшей изотермы будет зависеть и от величины тока. Чем больше значение тока, а значит, и контактной плотности тока, тем ближе к поверхности соприкосновения микроше-роховатостей будет сдвигаться область наибольшего нагрева, а это означает, что потребуется нагреть до температуры плавления (испарения) меньший объем материала, при этом затра-тив меньше энергии за меньшее время. Этим можно объяснить резкое падение графика зави-симости времени достижения плавления и испарения контактных пятен от контактной плот-ности тока на рисунке 7.
10 мм
шерохова
тость
КП
шерохова
тость
пластины
10 °
37
мкм
18
мкм
50,2 мкм
28,3 мкм
7,26 мм
Одно
большое
вытянутое
a-пятно
Рисунок 8 – Расчетная сетка при касании контактного провода и графитовой токосъемной пластины
под углом в 10 ° ( мм )
При анализе результатов, полученных на конечно-элементной модели, следует учиты-вать, что геометрия модели не может изменяться. В реальности контакты могут размягчать-ся, контактные пятна могут расплавляться, взамен них образуются новые и т. д. Поэтому ос-новным фактором для корректного сопоставления результатов моделирования с известными практическими данными будет время достижения рассматриваемого состояния. В литературе часто встречаются ссылки на опытные значения напряжения размягчения и напряжения плавления металла электрического контакта. Эти данные (особенно напряжение размягче-ния) получают за относительно большой промежуток времени: секунды или десятки секунд. Напряжение плавления в контакте «контактный провод – токосъемная пластина», получен-ное на модели за подобный период времени, для пластин из графита составляет 2,5 – 3 В, для пластин из ВЖ3П – 0,56 – 0,65 В. Для сравнения: значение напряжения плавления, взятое из литературы [5], для контактной пары «медь – медь» равняется 0,43 В, для пары «сталь – сталь» – 0,6 В, для пары «графит – графит» – 5 В. Однако, подавая через электриче-ский контакт кратковременные импульсы тока такой величины, чтобы достичь при данном контактном усилии необходимой контактной плотности тока, можно получить контактное напряжение даже на зачищенных поверхностях, превышающее напряжение плавления в два – три раза. Если еще увеличивать контактную плотность тока (уменьшая усилие или увеличи-вая величину тока) и уменьшать время импульса, можно добиться возникновения искрового (дугового) разряда без разрыва контакта. Это подтверждает правильность модели на каче-ственном уровне. С помощью специальной установки авторы данной статьи многократно экспериментально наблюдали данный эффект. Подобное часто встречается в эксплуатации, когда при малом нажатии токоприемника на контактный провод и больших значениях тока происходит искрение. Данный эффект происходит вследствие того, что при определенной контактной плотности тока a-пятна выкипают (выгорают) быстрее, чем успевают образовы-ваться новые. В том месте, где выгорает последнее контактное пятно, образуется искровой (дуговой) разряд в воздухе.
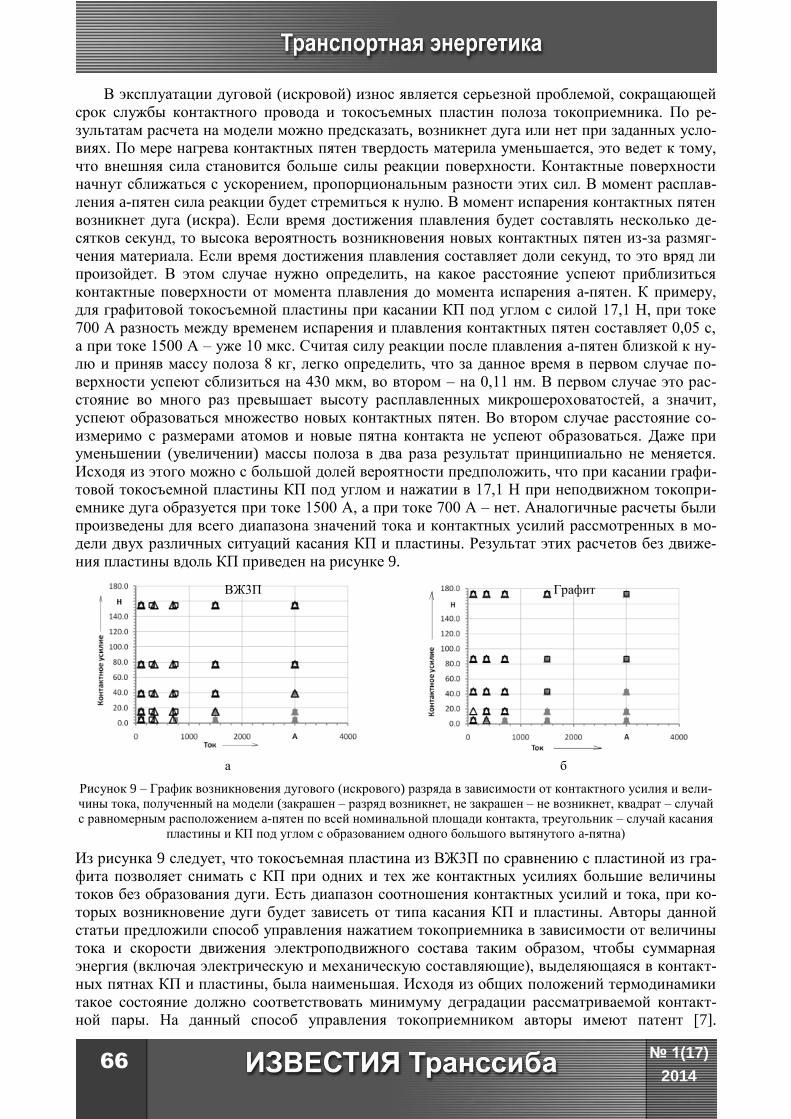
№ 1(17)
2014 66
В эксплуатации дуговой (искровой) износ является серьезной проблемой, сокращающей срок службы контактного провода и токосъемных пластин полоза токоприемника. По ре-зультатам расчета на модели можно предсказать, возникнет дуга или нет при заданных усло-виях. По мере нагрева контактных пятен твердость материла уменьшается, это ведет к тому, что внешняя сила становится больше силы реакции поверхности. Контактные поверхности начнут сближаться с ускорением, пропорциональным разности этих сил. В момент расплав-ления a-пятен сила реакции будет стремиться к нулю. В момент испарения контактных пятен возникнет дуга (искра). Если время достижения плавления будет составлять несколько де-сятков секунд, то высока вероятность возникновения новых контактных пятен из-за размяг-чения материала. Если время достижения плавления составляет доли секунд, то это вряд ли произойдет. В этом случае нужно определить, на какое расстояние успеют приблизиться контактные поверхности от момента плавления до момента испарения a-пятен. К примеру, для графитовой токосъемной пластины при касании КП под углом с силой 17,1 Н, при токе 700 А разность между временем испарения и плавления контактных пятен составляет 0,05 с, а при токе 1500 А – уже 10 мкс. Считая силу реакции после плавления a-пятен близкой к ну-лю и приняв массу полоза 8 кг, легко определить, что за данное время в первом случае по-верхности успеют сблизиться на 430 мкм, во втором – на 0,11 нм. В первом случае это рас-стояние во много раз превышает высоту расплавленных микрошероховатостей, а значит, успеют образоваться множество новых контактных пятен. Во втором случае расстояние со-измеримо с размерами атомов и новые пятна контакта не успеют образоваться. Даже при уменьшении (увеличении) массы полоза в два раза результат принципиально не меняется. Исходя из этого можно с большой долей вероятности предположить, что при касании графи-товой токосъемной пластины КП под углом и нажатии в 17,1 Н при неподвижном токопри-емнике дуга образуется при токе 1500 А, а при токе 700 А – нет. Аналогичные расчеты были произведены для всего диапазона значений тока и контактных усилий рассмотренных в мо-дели двух различных ситуаций касания КП и пластины. Результат этих расчетов без движе-ния пластины вдоль КП приведен на рисунке 9.
а б
Рисунок 9 – График возникновения дугового (искрового) разряда в зависимости от контактного усилия и вели-чины тока, полученный на модели (закрашен – разряд возникнет, не закрашен – не возникнет, квадрат – случай с равномерным расположением a-пятен по всей номинальной площади контакта, треугольник – случай касания
пластины и КП под углом с образованием одного большого вытянутого a-пятна)
Из рисунка 9 следует, что токосъемная пластина из ВЖ3П по сравнению с пластиной из гра-фита позволяет снимать с КП при одних и тех же контактных усилиях большие величины токов без образования дуги. Есть диапазон соотношения контактных усилий и тока, при ко-торых возникновение дуги будет зависеть от типа касания КП и пластины. Авторы данной статьи предложили способ управления нажатием токоприемника в зависимости от величины тока и скорости движения электроподвижного состава таким образом, чтобы суммарная энергия (включая электрическую и механическую составляющие), выделяющаяся в контакт-ных пятнах КП и пластины, была наименьшая. Исходя из общих положений термодинамики такое состояние должно соответствовать минимуму деградации рассматриваемой контакт-ной пары. На данный способ управления токоприемником авторы имеют патент [7].
ВЖ3П Графит
67
№ 1(17)
2014
Результаты, полученные на данной модели при неподвижных контактах, можно исполь-зовать в качестве первого приближения для того, чтобы при любом значении тока задать нижнюю границу контактного нажатия (усилия), исключающую появление дуги (искры).
Список литературы
1. Хольм, Р. Электрические контакты [Текст] / Р. Хольм. – М.: Изд-во иностр. лит.,1961. – 464 с.
2. Мохель, А. Н. Контактное взаимодействие упругих тел при наличии двух резко раз-личных по протяженности масштабов шероховатости их границ [Текст] / А. Н. Мохель, Р. Л. Салганик, А. А. Федотов // Вычислительная механика сплошных сред. – 2008. – Т. 1. – № 4. – С. 61 – 68
3. Bucca, G. A procedure for the wear prediction of collector strip and contact wire in panto-graph–catenary system [Текст]/ G. Bucca, A. Collina // Wear 266. – 2009. – Р. 46 – 59.
4. Химическая энциклопедия [Текст]. – М.: Советская энциклопедия, 1988. – Т. 1. – 623 с. 5. Бредихин, А. Н. Электрические контактные соединения [Текст] / А. Н. Бредихин,
М. В. Хомяков. – М.: Энергия, 1980. – 168 с. 6. Огар, П. М. Контактирование шероховатых поверхностей: фрактальный подход
[Текст] / П. М. Огар, Д. Б. Горохов // Братский гос. ун-т. – Братск, 2007. – 171 с. 7. Пат. 124478 Российская Федерация МПК U1 В60L 5/00. Токоприемник транспортного
средства [Текст] / А. В. Ефимов (Россия). – № 2012130080; Заявлено 16.07.2012; Опубл. 27.01.2013, Бюл. № 3.
8. Паранин, А. В. Расчет распределения тока в контактном проводе и полозе токоприем-ника при токосъеме [Текст] / А. В. Паранин, Д. А. Ефимов // Транспорт Урала / Уральский гос. ун-т путей сообщения. – Екатеринбург. – 2009. – № 4 (23). – С. 82 – 84.
9. Паранин, А. В. Математическое моделирование тепловых процессов при взаимодейст-вии токоприемника и контактного провода [Текст] / А. В. Паранин // Транспорт Урала / Уральский гос. ун-т путей сообщения. – Екатеринбург. – 2009. – № 4 (23). – С. 85 – 88.
УДК 004.021
С. С. Грицутенко
ОПРЕДЕЛЕНИЕ МИНИМУМА КОЛИЧЕСТВА ОПЕРАЦИЙ ДЛЯ ВЫЧИСЛЕНИЯ
ПОЛИНОМА ПРИ ЭКСТРАПОЛЯЦИИ СКОРОСТИ И КООРДИНАТ
ДВИЖУЩЕГОСЯ ЛОКОМОТИВА
В статье определяется минимум количества операций, которые необходимо произвести для вычисления обычного полинома. Результаты исследования оформлены в виде доказательства одной леммы и одной теоремы.
В настоящее время на железнодорожном транспорте идет масштабное внедрение новой вычислительной техники, выполняющей задачи управления и анализа информации в реаль-ном масштабе времени. Например, актуальным является прогнозирование положения локо-мотива и его скорости по дискретным данным, предоставляемым датчиком GPS/ГЛОНАСС. Другими словами, речь идет об экстраполяции.
Одним из наиболее популярных численных методов решения этой задачи является экс-траполяция полиномом. При реализации вычислений на бортовом компьютере важную роль играет число операций, которые необходимо осуществить для вычисления той или иной формулы [1 – 6]. В данной статье определяется минимум операций для вычисления обычного полинома в том случае, если производятся только операции умножения и сложения. Основ-ная теорема, приведенная в настоящей работе, строится на вспомогательной лемме [7].
№ 1(17)
2014 68
Лемма: В случае вычисления полинома с использованием только операций «сложение» и «умножение» истинны следующие утверждения.
Нижняя граница суммарного количества операций для полинома вида
1
1
2
210
1
0
......
N
N
n
n
N
n
n
n xaxaxaxaaxa (1)
равна 22 N . Вычисление полинома
,...... 1
1
2
210
1
0
NN
N
n
n
NN
n
n
n GxxaxaxaxaaGxxa
(2)
где G – любой полином с целыми неотрицательными степенями, невозможно за суммарное
количество операций 22 N или менее. Для доказательства этих утверждений используем метод математической индукции.
Действительно, для случая 1N полином (1) имеет вид: 0a .
Очевидно, что минимальное суммарное количество бинарных операций, к которым от-носятся «сложение» и «умножение», при вычислении этой формулы равно нулю, что удовле-творяет первому утверждению доказываемой леммы. Очевидно также, что за ноль операций
вычислить полином Gxa 0 не представляется возможным.
Теперь предположим, что для kN оба утверждения доказываемой леммы верны.
Тогда доказательство для случая 1 kN имеет смысл провести «от противного».
Итак, пусть для случая 1 kN доказываемая лемма не выполняется, т. е. можно вы-числить полином вида
k
k
k
k xaxaxaxaa
1
1
2
210 ... (3)
за суммарное количество бинарных операций, меньшее, чем .2k Это приводит к следующим выводам.
Рассмотрим, каким образом в любой алгоритм вычисления полинома (3) можно вклю-
чить коэффициент .ka Так как мы используем только две операции, то включение возможно
только двумя способами: при помощи бинарной операции «умножения»:
rkr PaP 1 ; (4)
при помощи бинарной операции «сложение»:
rkr PaP 1 , (5)
где rP и 1rP – некие промежуточные результаты.
Рассмотрим способ 1 включения коэффициента .ka
Если коэффициент ka приравнять к нулю, то полином (3) очевидным образом преобра-
зуется в полином
1
1
2
210 ...
k
k xaxaxaa . (6)
В этом случае промежуточный результат rkr PaP 1 можно не вычислять, так как он и
так известен: 01 rP . Это позволяет сэкономить одну операцию, но промежуточный резуль-
тат 1rP сам является операндом очередной бинарной операции: либо 12 rlr PPP , либо
12 rlr PPP , где lP – тоже какой-то промежуточный результат. Следовательно, 2rP также
нет необходимости вычислять, ибо он равен либо нулю, либо lP . Таким образом, мы эконо-

69
№ 1(17)
2014
мим минимум две операции, и если полином (3) может быть вычислен менее чем за k2 опе-
раций, то полином (6) может быть вычислен менее чем за 22 k операций, а это противоре-
чит нашему предположению для случая kN .
Замечание: умножение rkr PaP 1 не может быть конечной операцией в вычислении по-
линома (т. е. обязательно существует и результат 2rP ), так как в противном случае полу-
чается, что
,1
...111 1
1
2
210
kk
k
kkkk
r xxaa
xaa
xaa
aa
P
(7)
т. е. результат rP зависит, от еще не включенного коэффициента ka .
Исследуем способ 2 включения коэффициента .ka
Сначала рассмотрим случай, когда ka включается в вычисления (служит операндом би-
нарной операции) более чем один раз. В этом случае должны быть как минимум две опера-
ции: rkr PaP 1 и lkl PaP 1 . Очевидно, что при 0ka данные операции можно опу-
стить, так как rr PP 1 и ll PP 1 . При этом полином (3) обращается в полином (6) и если по-
лином (3) вычислялся менее чем за k2 операций, то полином (6) может быть вычислен менее
чем за 22 k операций, а это противоречит нашему предположению для случая .kN
Теперь рассмотрим случай, когда ka включается в вычисления (служит операндом би-
нарной операции) только один раз. Тогда схема включения коэффициента ka имеет вид:
112 ... rkrlrkr PGaPPPaP , (8)
где rP , 1rP , 2rP , lP – некоторые промежуточные результаты.
Замечание: умножение на 1rP (и, следовательно, существование результата 2rP ) обя-
зательно, так как если вообще никакого умножения ka не будет, то член k
k xa в полиноме
(3) получить невозможно, а это необходимо в случае равенства нулю всех коэффициентов
na кроме коэффициента с индексом .kn
Так как мы используем только операции «сложение» и «умножение», а исходные данные
для вычисления это коэффициенты na и переменная x , то выражение GPP lr ... являет-
ся обычным полиномом с целыми неотрицательными степенями. Поэтому если ka включа-
ется через операцию сложения с полиномом G , то должен быть механизм компенсации по-
явления в результате полинома Gxk , так как иначе имеем:
GxxaxaxaxaaxGaxaxaxaa kk
k
k
k
k
k
k
k
1
1
2
210
1
1
2
210 ...... . (9)
При этом механизм компенсации должен иметь вид:
k
k
k
k
kk
k
k
k xaxaxaxaaGxxGaxaxaxaa
1
1
2
210
1
1
2
210 ...1... . (10)
Следовательно, если мы приравняем к нулю ka и исключим из вычислений операцию
,Gak то формула (8) приобретет вид:
00 112 rrkr PPGaP , (11)
а это означает, что промежуточный результат 2rP вычислять нет необходимости. И мы эко-
номим минимум две операции, а сам полином (10) преобразуется из-за упомянутого меха-низма компенсации в полином вида:
Gxxaxaxaa kk
k 1... 1
1
2
210
. (12)

№ 1(17)
2014 70
При этом если исходный полином (10) вычислялся менее чем за k2 операций, то полу-
ченный полином (12) будет вычисляться даже менее чем за 22 k операций, а это противо-
речит нашему предположению для случая .kN
Наконец, докажем вторую часть леммы для случая :1 kN вычисление полинома
Qxxaxaxaxaa kk
k
k
k
11
1
2
210 ...
(13)
невозможно за количество операций k2 или менее. Доказательство продолжаем вести от противного.
Предположим, что полином (13) может быть вычислен за количество операций k2 или
менее. Тогда если мы включаем ka при помощи бинарной операции «умножения» согласно
формуле (4), в случае 0ka получается, что полином (13) преобразуется в полином
Qxxaxaxaa kk
k
11
1
2
210 ...
. (14)
За счет экономии двух операций данный полином может быть вычислен уже за 22 k
операций, но это противоречит нашему предположению для случая .kN
Отдельно рассмотрим случай, когда мы включаем в вычисления коэффициент ka при
помощи бинарной операции «сложение» согласно формуле (5). Тогда если ka включается
минимум дважды, то за счет обнуления ka мы, как было описано выше, экономим две опе-
рации, а сам полином (13) преобразуется в полином (14). Другими словами, полином (14)
можно вычислить за 22 k операций, но это противоречит нашему предположению для слу-
чая .kN
Если же ka включается в вычисления только один раз и при помощи бинарной операции
сложения, то тогда необходим описанный выше механизм компенсации полинома .Gxk Это
в свою очередь приводит к двум вариантам при приравнивании к нулю ka и исключению
суммирования полинома G с .ka
Вариант 1. Компенсаторный механизм порождает полином Gxk , и экономится мини-
мум две операции. В итоге получается полином вида
QxGxxaxaxaa kkk
k
11
1
2
210 ...
, (15)
который вычисляется за 22 k операций, а это противоречит нашему предположению для
случая .kN
Вариант 2. Компенсаторный механизм порождает не полином Gxk , а полином
.1 1Qxk Как было показано выше, если коэффициент ka включается согласно формуле (8),
то когда мы приравняем к нулю ka и исключаем из вычислений операцию ,Gak при этом
экономится не менее двух операций, а фактически экономия составляет не менее трех опера-
ций. Это является следствием того, что в этом случае .02 rP Следующий результат 3rP
тоже нет необходимости вычислять, так как
0023 llrr PPPP (16)
либо
lllrr PPPPP 023 . (17)
Замечание: существование результата 3rP (иначе говоря, вычисления на результате
2rP не заканчиваются и есть возможность сэкономить минимум три операции) можно
71
№ 1(17)
2014
обосновать от обратного. Если 2rP – последний результат, то последнюю операцию при
вычислении полинома можно выразить формулой:
1112 rrkrkr GPPaPGaP . (18)
Тогда если k
r xP 1 , то очевидно в получаемом полиноме не будут присутствовать чле-
ны со степенью ниже k , а именно 0a , xa1 , 2
2xa и т. д. Если же 1rP xk, то в получаемом
полиноме уже будут присутствовать члены, содержащие ,ka но отличные от ak xk, т. е. на
их устранение потребуются дополнительные операции. В итоге получается полином вида
1
1
2
210
111
1
2
210 ...1...
k
k
kkk
k xaxaxaaQxQxxaxaxaa , (19)
который вычисляется менее чем за 22 k операций, а это противоречит нашему предполо-
жению для случая ,kN что и требовалось доказать.
Теперь докажем теорему о минимальном количестве операций при вычислении полинома. Теорема: вычисления полинома вида
N
N
n
n
N
n
n
n xaxaxaxaaxa
......2
2100
(20)
возможно только за N2 операций «сложение» и «умножение». Как следует из доказанной выше леммы, минимальная граница количества операций
«сложение» и «умножение» для вычисления полинома равна ,2N но известная схема Горне-
ра позволяет вычислять полином именно за N2 операций:
xxxxaaaaaxaxaxaa NNN
N
N ......... 1210
2
210 . (21)
Следовательно, нижняя оценка оказывается точной, что и требовалось доказать.
Список литературы.
1. Альтман, Е. А. Повышение эффективности метода перекрытия с накоплением для вы-числения дискретной свертки [Текст] / Е. А. Альтман, С. С. Грицутенко // Вопросы радио-электроники / ОАО ЦНИИ «Электроника». – М. – 2010. – Т. 1. – № 3. – С. 88 – 96.
2. Грицутенко, С. С. Распараллеливание алгоритма быстрого преобразования фурье на несколько DSP-ядер с линковыми портами [Текст] / С. С. Грицутенко, А. С. Сидоренко // Во-просы радиоэлектроники / ОАО ЦНИИ «Электроника». – М. – 2010. – Т. 1. – № 3. – С. 97 – 103.
3. Черемисин, В. Т. Особенности построения алгоритмов измерения показателей каче-ства электроэнергии в тяговых сетях электрифицированных железных дорог [Текст] / В. Т. Черемисин, С. С. Грицутенко // Транспорт Урала / Уральский гос. ун-т путей сообще-ния. – Екатеринбург. – 2007. – № 2. – С. 2 – 5.
4. Грицутенко, С. С. Быстрые алгоритмы [Текст] / С. С. Грицутенко // Вестник Ижевско-го гос. техн. ун-та / Ижевский гос. техн. ун-т. – Ижевск. – 2010. – № 4. – С. 169 – 172.
5. Королева, К. А. Применение метода оптимальной интерполяции вектором, нейтраль-ным по свертке в приемном тракте коммуникационного железнодорожного оборудования [Текст] / К. А. Королева // Известия Транссиба / Омский гос. ун-т путей сообщения. – Омск. – 2013. – № 2 (14). – С. 90 – 96.
6. Королева, К. А. Метод оптимальной интерполяции нейтральным по свертке вектором, определенным на пространстве Гильберта [Текст] / К. А. Королева // Омский научный вест-ник / Омский гос. политехн. ун-т. – Омск. – 2013. – № 2 (120). – С. 283 – 286.
7. Грицутенко, С. С. Повышение достоверности измерения показателей качества элек-трической энергии в системе тягового электроснабжения [Текст] / С. С. Грицутенко: Дис… канд. техн. наук. – Омск, 2007. – 154 с.
№ 1(17)
2014 72
УДК 621.396.6
В. Е. Митрохин, А. В. Ряполов, А. Е. Гаранин
МЕТОДИКА РАСЧЕТА ЭФФЕКТИВНОСТИ ЭКРАНИРОВАНИЯ
РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ ПРИ ВОЗДЕЙСТВИИ
ИМПУЛЬСНЫХ ЭЛЕКТРОМАГНИТНЫХ ПОЛЕЙ
В статье рассмотрена методика расчета экранирующих оболочек радиоэлектронной аппаратуры. Про-ведено исследование однослойных и многослойных экранов, состоящих из алюминия, меди и стали. Выполнено моделирование воздействия импульсного электромагнитного поля на экран из проводящего материала с ис-пользованием метода конечных разностей во временной области. Приведены временные зависимости сопро-тивления экранов. Представлены примеры картины распределения электромагнитного поля в окружающем экран пространстве. Приведены примеры временных зависимостей электрического поля на внешней и внут-ренней границах экрана, наглядно показывающие ослабление импульсного электромагнитного поля.
Традиционным средством защиты радиоэлектронной аппаратуры от электромагнитных полей является экранирование. Экраном может быть сплошная металлическая оболочка, по-крытие из проводящей краски, композитных материалов, сетки определенной ячеистости и т. д. Практически всегда экранирующая оболочка имеет технологические отверстия, через которые осуществляются вентиляция, визуальный контроль, заводятся кабели питания и свя-зи. Ослабление электромагнитного поля зависит от размеров и количества отверстий, а также от частотного диапазона влияющего поля.
Наиболее опасными для чувствительной радиоэлектронной аппаратуры являются им-пульсные помехи. Источниками появления импульсных помех являются искровые процессы в контактной сети железных дорог, короткие замыкания в ЛЭП, грозовые разряды, радиопе-редающие и радиолокационные приборы и т. д. Импульсные электромагнитные поля харак-теризуются высокой проникающей способностью за счет наличия широкого спектра частот. При этом воздействие одних частот эффективно подавляется, а другие, не получив требуемо-го ослабления, проникают внутрь топологического объема аппаратуры, вызывают появление наведенных ЭДС на радиоэлектронных платах. Одной из худших ситуаций считается та, при которой частотные характеристики воздействующего электромагнитного поля совпадают с частотами сигналов в цепях аппаратуры. В этом случае для радиоэлектронной аппаратуры, имеющей цифровые и микропроцессорные устройства, возрастает риск возникновения сбоя или нестабильной работы.
Оценка стойкости аппаратуры к электромагнитным полям является сложной задачей, по-скольку на этапе разработки трудно учесть все возможные условия, в которых будет рабо-тать система. Для решения такой задачи применяются расчетные и экспериментальные мето-ды. Экспериментальные методы дают наиболее точные и наглядные результаты, но проведе-ние таких испытаний требует много времени и специального аппаратного обеспечения. Рас-четные методы не требуют особых затрат, но имеют серьезные недостатки.
Существующие методы расчета электромагнитных экранов можно разбить на аналити-ческие [1 – 3] и численные [6, 8, 10]. Основным недостатком аналитических методов являет-ся невысокая точность при расчете экранов сложной формы: заданный экран заменяется иде-ализированной формой (шар, цилиндр, плоскость) эквивалентного размера. К наиболее по-пулярным численным методам, основанным на решении уравнений Максвелла, относятся метод конечных элементов (FEM) и метод конечных разностей во временной области (FDTD). Недостатки обоих методов заключаются в необходимости значительных вычисли-тельных ресурсов и бόльшем времени расчета, чем на основе аналитических выражений. Од-нако возможность задания трехмерных объектов с учетом особенностей формы и неодно-родностей в структуре позволяет оценивать экранирующие оболочки с большой точностью.
Для задач исследования электромагнитного поля в ограниченном объеме возможности обоих упомянутых расчетных методов примерно равны. В данной статье описана методика, основанная на методе конечных разностей во временной области, поскольку он, по сравне-нию с методом конечных элементов, более простой, наглядный и интуитивно понятный.
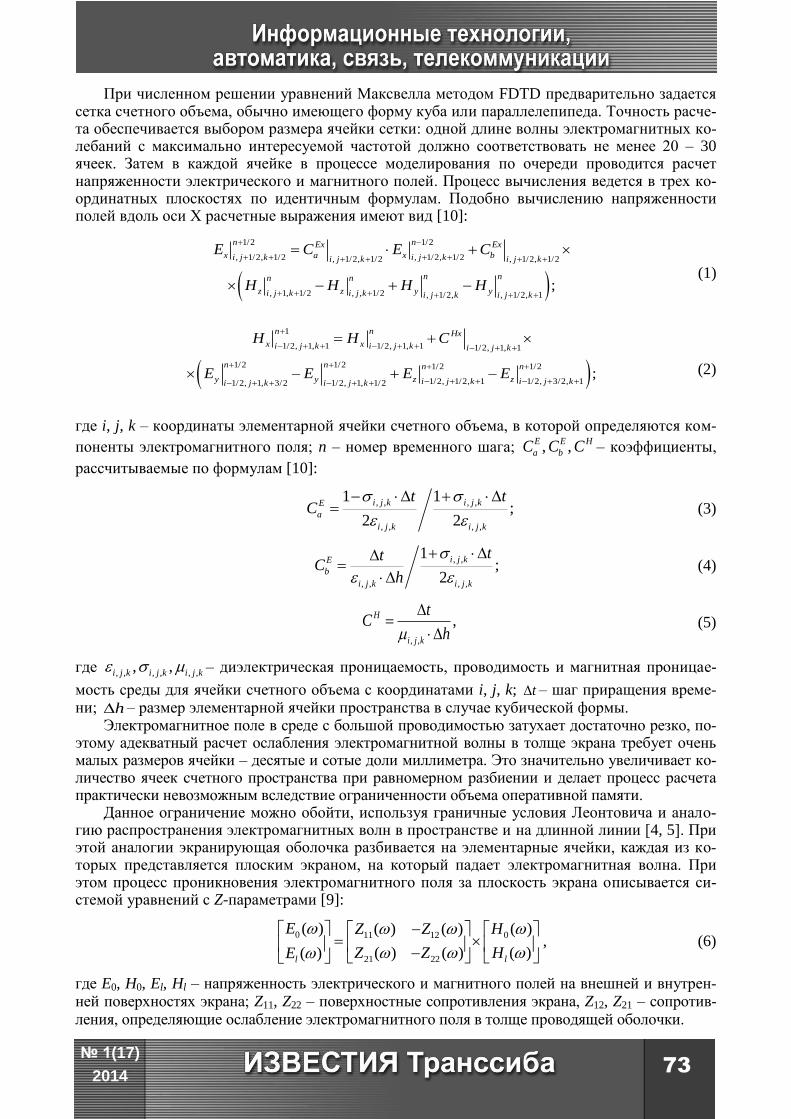
73
№ 1(17)
2014
При численном решении уравнений Максвелла методом FDTD предварительно задается сетка счетного объема, обычно имеющего форму куба или параллелепипеда. Точность расче-та обеспечивается выбором размера ячейки сетки: одной длине волны электромагнитных ко-лебаний с максимально интересуемой частотой должно соответствовать не менее 20 – 30 ячеек. Затем в каждой ячейке в процессе моделирования по очереди проводится расчет напряженности электрического и магнитного полей. Процесс вычисления ведется в трех ко-ординатных плоскостях по идентичным формулам. Подобно вычислению напряженности полей вдоль оси Х расчетные выражения имеют вид [10]:
1/2 1/2
, 1/2, 1/2 , 1/2, 1/2, 1/2, 1/2 , 1/2, 1/2
, 1, 1/2 , , 1/2 , 1/2, , 1/2, 1;
n nEx Ex
x a x bi j k i j ki j k i j k
n nn n
z z y yi j k i j k i j k i j k
E C E C
H H H H
(1)
1
1/2, 1, 1 1/2, 1, 1 1/2, 1, 1
1/2 1/2 1/2 1/2
1/2, 1/2, 1 1/2, 3/2, 11/2, 1, 3/2 1/2, 1, 1/2;
n n Hx
x xi j k i j k i j k
n n n n
y y z zi j k i j ki j k i j k
H H C
E E E E
(2)
где i, j, k – координаты элементарной ячейки счетного объема, в которой определяются ком-
поненты электромагнитного поля; n – номер временного шага; , ,E E H
a bC C C – коэффициенты,
рассчитываемые по формулам [10]:
, , , ,
, , , ,
1 1;
2 2
i j k i j kE
a
i j k i j k
t tC
(3)
, ,
, , , ,
1;
2
i j kE
b
i j k i j k
ttC
h
(4)
, ,
,H
i j k
tC
h
(5)
где , , , , , ,, ,i j k i j k i j k – диэлектрическая проницаемость, проводимость и магнитная проницае-
мость среды для ячейки счетного объема с координатами i, j, k; t – шаг приращения време-ни; h – размер элементарной ячейки пространства в случае кубической формы.
Электромагнитное поле в среде с большой проводимостью затухает достаточно резко, по-этому адекватный расчет ослабления электромагнитной волны в толще экрана требует очень малых размеров ячейки – десятые и сотые доли миллиметра. Это значительно увеличивает ко-личество ячеек счетного пространства при равномерном разбиении и делает процесс расчета практически невозможным вследствие ограниченности объема оперативной памяти.
Данное ограничение можно обойти, используя граничные условия Леонтовича и анало-гию распространения электромагнитных волн в пространстве и на длинной линии [4, 5]. При этой аналогии экранирующая оболочка разбивается на элементарные ячейки, каждая из ко-торых представляется плоским экраном, на который падает электромагнитная волна. При этом процесс проникновения электромагнитного поля за плоскость экрана описывается си-стемой уравнений с Z-параметрами [9]:
0 011 12
21 22
( ) ( )( ) ( )
( )( ) ( )( ) ll
E HZ Z
HZ ZE
, (6)
где E0, H0, El, Hl – напряженность электрического и магнитного полей на внешней и внутрен-ней поверхностях экрана; Z11, Z22 – поверхностные сопротивления экрана, Z12, Z21 – сопротив-ления, определяющие ослабление электромагнитного поля в толще проводящей оболочки.
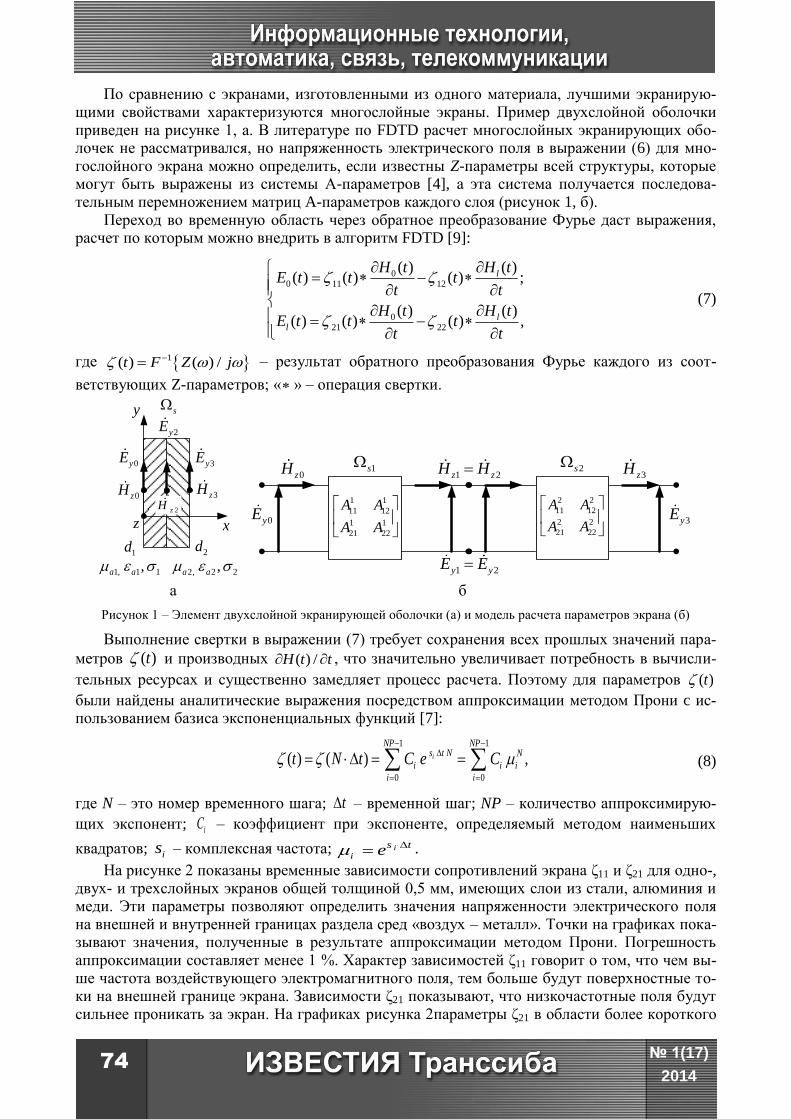
№ 1(17)
2014 74
По сравнению с экранами, изготовленными из одного материала, лучшими экранирую-щими свойствами характеризуются многослойные экраны. Пример двухслойной оболочки приведен на рисунке 1, а. В литературе по FDTD расчет многослойных экранирующих обо-лочек не рассматривался, но напряженность электрического поля в выражении (6) для мно-гослойного экрана можно определить, если известны Z-параметры всей структуры, которые могут быть выражены из системы А-параметров [4], а эта система получается последова-тельным перемножением матриц A-параметров каждого слоя (рисунок 1, б).
Переход во временную область через обратное преобразование Фурье даст выражения, расчет по которым можно внедрить в алгоритм FDTD [9]:
00 11 12
021 22
( ) ( )( ) ( ) ( ) ;
( ) ( )( ) ( ) ( ) ,
l
ll
H t H tE t t t
t t
H t H tE t t t
t t
(7)
где 1( ) ( ) /t F Z j – результат обратного преобразования Фурье каждого из соот-
ветствующих Z-параметров; « » – операция свертки.
1, 1 1,a a
s
xz
y
0yE
0zH 3zH
3yE
1d
2zH
2yE
2d
2, 2 2,a a
1 1
11 12
1 1
21 22
A A
A A
1s
0yE
1 2y yE E
0zH 1 2z zH H 2s
3yE
3zH
2 2
11 12
2 2
21 22
A A
A A
а б
Рисунок 1 – Элемент двухслойной экранирующей оболочки (а) и модель расчета параметров экрана (б)
Выполнение свертки в выражении (7) требует сохранения всех прошлых значений пара-
метров ( )t и производных ( ) /H t t , что значительно увеличивает потребность в вычисли-
тельных ресурсах и существенно замедляет процесс расчета. Поэтому для параметров ( )t
были найдены аналитические выражения посредством аппроксимации методом Прони c ис-пользованием базиса экспоненциальных функций [7]:
1 1
0 0
( ) ( ) ,i
NP NPs t N N
i i i
i i
t N t C e C
(8)
где N – это номер временного шага; t – временной шаг; NP – количество аппроксимирую-
щих экспонент; iС – коэффициент при экспоненте, определяемый методом наименьших
квадратов; is – комплексная частота; i
i
s te
.
На рисунке 2 показаны временные зависимости сопротивлений экрана ζ11 и ζ21 для одно-, двух- и трехслойных экранов общей толщиной 0,5 мм, имеющих слои из стали, алюминия и меди. Эти параметры позволяют определить значения напряженности электрического поля на внешней и внутренней границах раздела сред «воздух – металл». Точки на графиках пока-зывают значения, полученные в результате аппроксимации методом Прони. Погрешность аппроксимации составляет менее 1 %. Характер зависимостей ζ11 говорит о том, что чем вы-ше частота воздействующего электромагнитного поля, тем больше будут поверхностные то-ки на внешней границе экрана. Зависимости ζ21 показывают, что низкочастотные поля будут сильнее проникать за экран. На графиках рисунка 2параметры ζ21 в области более короткого
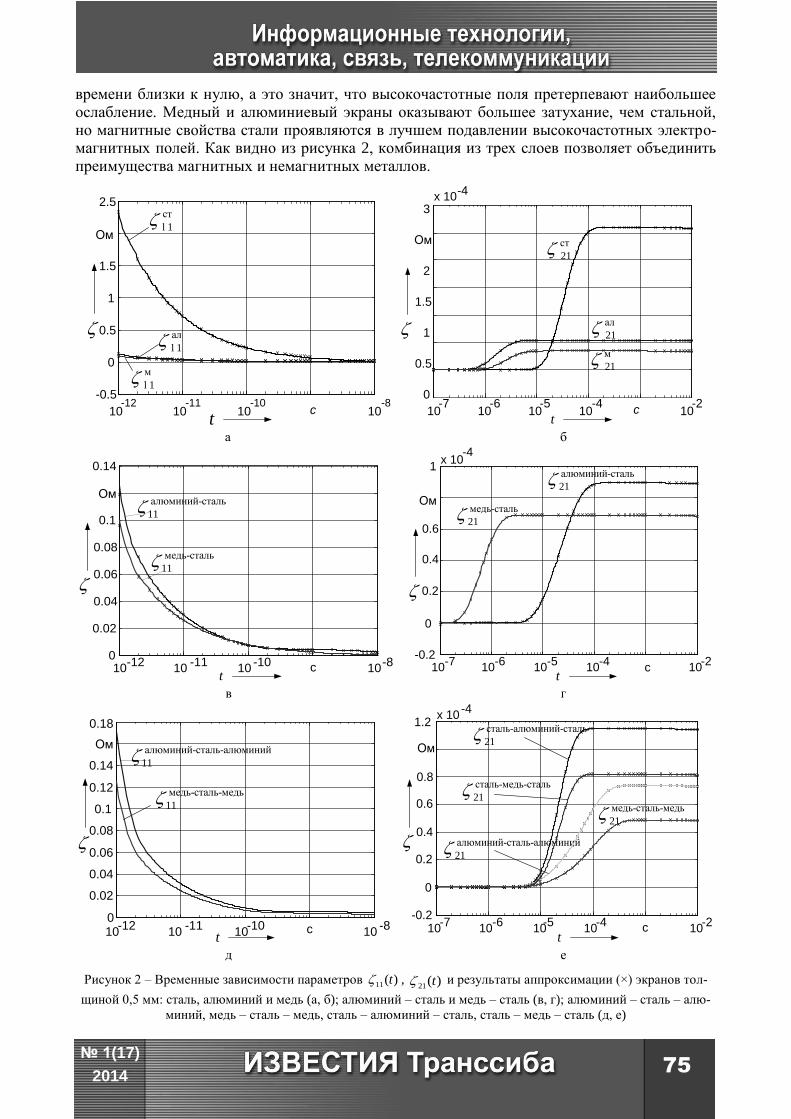
75
№ 1(17)
2014
времени близки к нулю, а это значит, что высокочастотные поля претерпевают наибольшее ослабление. Медный и алюминиевый экраны оказывают большее затухание, чем стальной, но магнитные свойства стали проявляются в лучшем подавлении высокочастотных электро-магнитных полей. Как видно из рисунка 2, комбинация из трех слоев позволяет объединить преимущества магнитных и немагнитных металлов.
10-12
10-11
10-10
10-8
-0.5
0
0.5
1
1.5
2.5
Ом
ct
ст
1
ал
1
м
1
10
-710
-610
-510
-410
-20
0.5
1
1.5
2
3
ст
21
ал
21
м
21
Ом
ct
x 10-4
а б
10-12
10-11
10-10
10-8
0
0.02
0.04
0.06
0.08
0.1
0.14
ct
Ом
медь-сталь
11
алюминий-сталь
11
10
-710
-610
-510
-410
-2-0.2
1x 10
-4
ct
Ом
медь-сталь
21
алюминий-сталь
21
0
0.2
0.4
0.6
в г
10-12
10-11
10-10
10-8
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.18
алюминий-сталь-алюминий
11
медь-сталь-медь
11
ct
Ом
0.2
0.4
0.6
0.8
1.2сталь-алюминий-сталь
21
алюминий-сталь-алюминий
21
сталь-медь-сталь
21медь-сталь-медь
21
ct
Ом
10-7
10-6
10-5
10-4
10-2
-0.2
0
x 10-4
д е
Рисунок 2 – Временные зависимости параметров 11( )t , 21( )t и результаты аппроксимации (×) экранов тол-
щиной 0,5 мм: сталь, алюминий и медь (а, б); алюминий – сталь и медь – сталь (в, г); алюминий – сталь – алю-
миний, медь – сталь – медь, сталь – алюминий – сталь, сталь – медь – сталь (д, е)
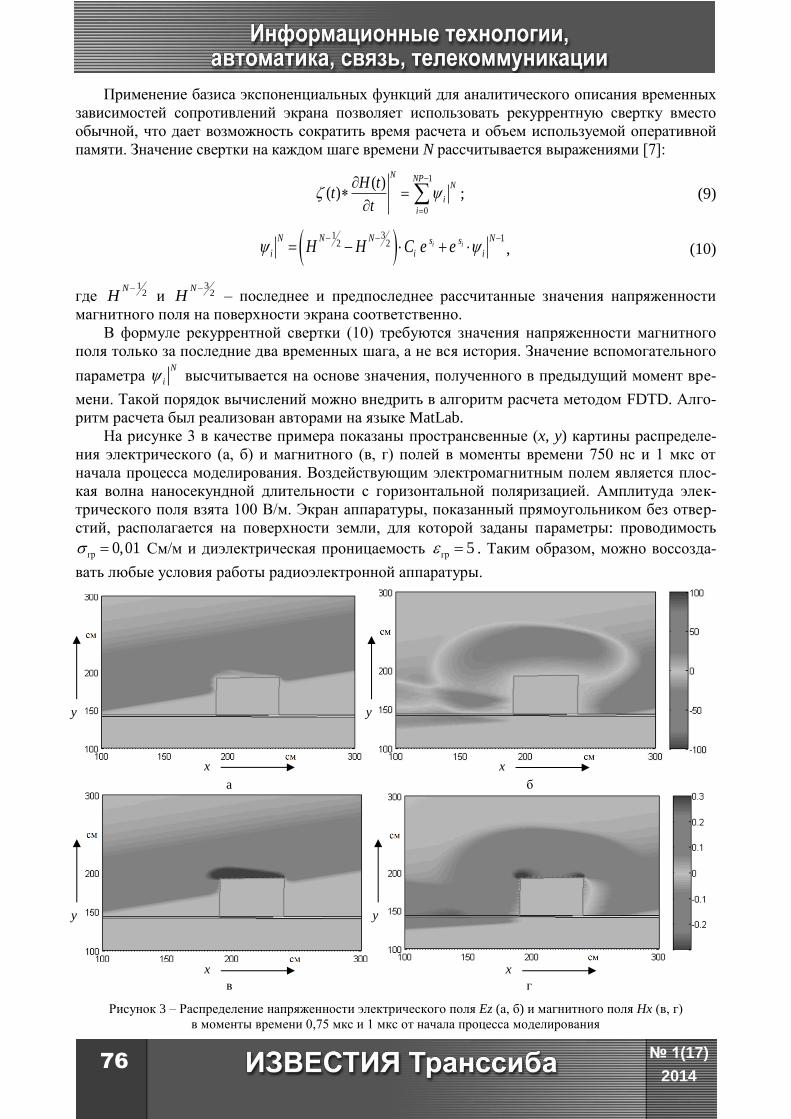
№ 1(17)
2014 76
Применение базиса экспоненциальных функций для аналитического описания временных
зависимостей сопротивлений экрана позволяет использовать рекуррентную свертку вместо
обычной, что дает возможность сократить время расчета и объем используемой оперативной
памяти. Значение свертки на каждом шаге времени N рассчитывается выражениями [7]:
1
0
( )( )
N NPN
i
i
H tt
t
; (9)
31 1
2 2 i iN N N Ns s
i i iH H C e e
, (10)
где 1
2N
H
и 3
2N
H
– последнее и предпоследнее рассчитанные значения напряженности
магнитного поля на поверхности экрана соответственно.
В формуле рекуррентной свертки (10) требуются значения напряженности магнитного
поля только за последние два временных шага, а не вся история. Значение вспомогательного
параметра N
i высчитывается на основе значения, полученного в предыдущий момент вре-
мени. Такой порядок вычислений можно внедрить в алгоритм расчета методом FDTD. Алго-
ритм расчета был реализован авторами на языке MatLab.
На рисунке 3 в качестве примера показаны пространсвенные (x, y) картины распределе-
ния электрического (а, б) и магнитного (в, г) полей в моменты времени 750 нс и 1 мкс от
начала процесса моделирования. Воздействующим электромагнитным полем является плос-
кая волна наносекундной длительности с горизонтальной поляризацией. Амплитуда элек-
трического поля взята 100 В/м. Экран аппаратуры, показанный прямоугольником без отвер-
стий, располагается на поверхности земли, для которой заданы параметры: проводимость
гр 0,01 См/м и диэлектрическая проницаемость гр 5 . Таким образом, можно воссозда-
вать любые условия работы радиоэлектронной аппаратуры.
a б
в г
Рисунок 3 – Распределение напряженности электрического поля Ez (а, б) и магнитного поля Hx (в, г)
в моменты времени 0,75 мкс и 1 мкс от начала процесса моделирования
y
x
y
x
y
x
y
x
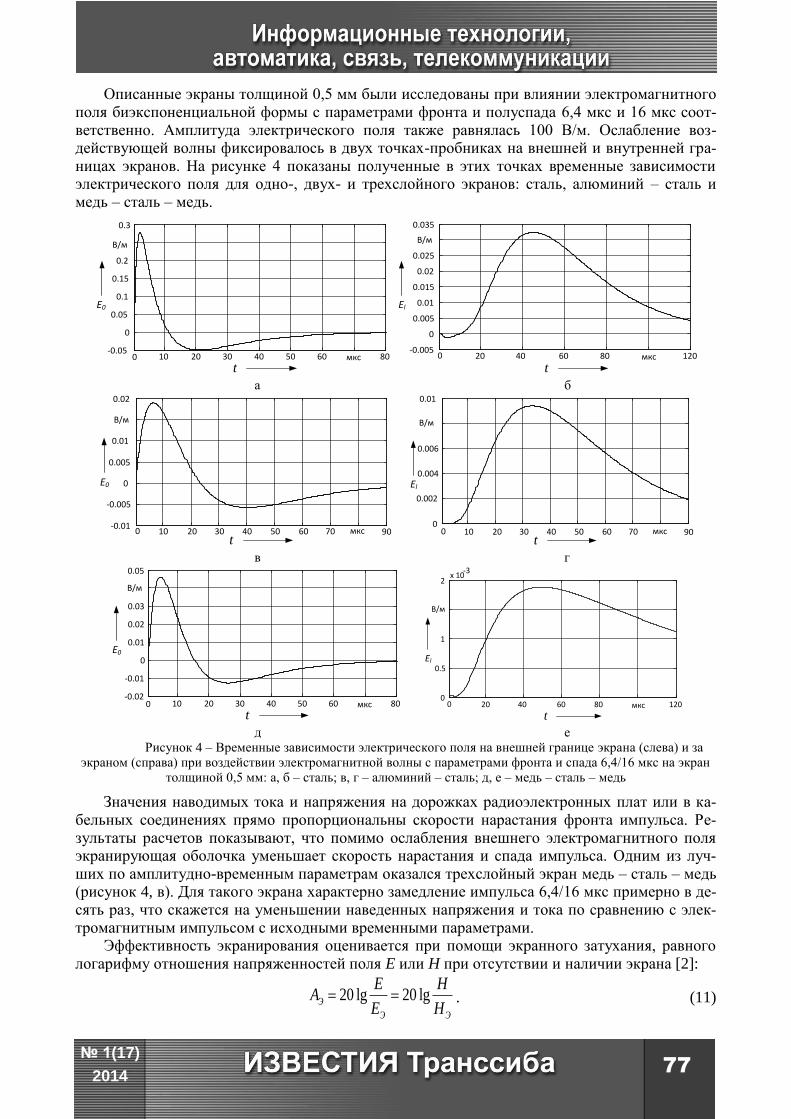
77
№ 1(17)
2014
Описанные экраны толщиной 0,5 мм были исследованы при влиянии электромагнитного поля биэкспоненциальной формы с параметрами фронта и полуспада 6,4 мкс и 16 мкс соот-ветственно. Амплитуда электрического поля также равнялась 100 В/м. Ослабление воз-действующей волны фиксировалось в двух точках-пробниках на внешней и внутренней гра-ницах экранов. На рисунке 4 показаны полученные в этих точках временные зависимости электрического поля для одно-, двух- и трехслойного экранов: сталь, алюминий – сталь и медь – сталь – медь.
10 20 30 40 50 60 80-0.05
0
0.05
0.1
0.15
0.2
0.3
0 мкс
t
E0
В/м
20 40 60 80 120-0.005
0
0.005
0.01
0.015
0.02
0.025
0.035
0 мкс
t
El
В/м
а б
-0.01
-0.005
0
0.005
0.01
0.02
10 20 30 40 50 60 70 900 мксt
E0
В/м
0
0.002
0.004
0.006
0.01
10 20 30 40 50 60 70 900 мксt
El
В/м
в г
-0.02
-0.01
0
0.01
0.02
0.03
0.05
10 20 30 40 50 60 800 мкс
t
E0
В/м
0
0.5
1
2x 10
-3
20 40 60 80 1200 мкс
t
El
В/м
д е
Рисунок 4 – Временные зависимости электрического поля на внешней границе экрана (слева) и за экраном (справа) при воздействии электромагнитной волны с параметрами фронта и спада 6,4/16 мкс на экран
толщиной 0,5 мм: а, б – сталь; в, г – алюминий – сталь; д, е – медь – сталь – медь
Значения наводимых тока и напряжения на дорожках радиоэлектронных плат или в ка-бельных соединениях прямо пропорциональны скорости нарастания фронта импульса. Ре-зультаты расчетов показывают, что помимо ослабления внешнего электромагнитного поля экранирующая оболочка уменьшает скорость нарастания и спада импульса. Одним из луч-ших по амплитудно-временным параметрам оказался трехслойный экран медь – сталь – медь (рисунок 4, в). Для такого экрана характерно замедление импульса 6,4/16 мкс примерно в де-сять раз, что скажется на уменьшении наведенных напряжения и тока по сравнению с элек-тромагнитным импульсом с исходными временными параметрами.
Эффективность экранирования оценивается при помощи экранного затухания, равного логарифму отношения напряженностей поля E или H при отсутствии и наличии экрана [2]:
20 lg 20 lgЭ
Э Э
E HA
E H . (11)
№ 1(17)
2014 78
Графики на рисунках 4, б, г, е позволяют увидеть, насколько ослабляется электрическое
поле за экраном. На основе амплитудных значений ослабленного и исходного полей можно
рассчитать максимальные значения экранного затухания для приведенных примеров, дБ:
69,9, 80,9 и 94,8 соответственно.
В представленной методике экраны аппаратуры исследуются во временной области, что
позволяет оценивать воздействие как гармонических, так и импульсных электромагнитных
полей. Расчет экранирующих оболочек посредством аналитических выражений дает частот-
ные зависимости, которые требуют дополнительной интерпретации.
Наиболее трудоемкими процессами в данной методике являются описание геометриче-
ской формы экрана и задание окружающего пространства, но благодаря этому процесс моде-
лирования максимально приближен к реальности. Визуальное наблюдение распределения
электрических и магнитных полей вокруг и внутри экрана позволяет наглядно определять,
где не следует размещать наиболее чувствительные элементы устройств.
Список литературы
1. Проводящие оболочки в импульсном электромагнитном поле [Текст] / В. В. Васильев, Л. Л. Коленский и др. – М.: Энергоатомиздат, 1982. – 200 с.
2. Гроднев, И. И. Электромагнитное экранирование в широком диапазоне частот [Текст] / И. И. Гроднев. – М.: Связь, 1972. – 112 с.
3. Каден, Г. Электромагнитные экраны в высокочастотной технике и технике электросвя-зи [Текст] / Г. Каден; Пер. с нем. В. М. Лаврова. – М.-Л.: Госэнергоиздат, 1975. – 327 с.
4. Каллер, М. Я. Теория линейных электрических цепей железнодорожной автоматики, телемеханики и связи: Учебник [Текст] / М. Я. Каллер, Ю. В. Соболев, А. Г. Богданов. – М.:
Транспорт, 1987. – 335 с.
5. Лавров, В. И. Теория электромагнитного поля и основы распространения радиоволн
[Текст] / В. И. Лавров. – М.: Связь, 1964. – 368 с.
6. Митра, Р. Вычислительные методы в электродинамике [Текст] / Р. Митра; Пер. с англ. под ред. Э. Л. Бурштейна. – М.: Мир, 1977. – 485 с.
7. Finite-difference time-domain implementation of surface impedance boundary conditions
[Текст] / J. H. Beggs, R. J. Luebbers and others // IEEE Transactions on Antennas and propagation.
– 1992. – Vol. 40. – № 1. – P. 49.
8. Bondeson, A. Computational Electromagnetics [Текст] / A. Bondeson, T. Rylander, P. In-
gelstrom. – New York: Springer, 2005. – 244 p.
9. Feliziani, M. A Hybrid Numerical Technique to Predict the Electromagnetic Field in Pene-
trable Conductive Boxes [Текст] / M. Feliziani, F. Maradei // Electromagnetics. – 2002. – Vol.
22. – Р. 405.
10. Taflove, A. Computational Electrodynamics: The Finite-Difference Time-Domain Method.
Second Edition [Текст] / A. Taflove, S. C. Hagness. – Boston: Artech House, 2000. – 866 p.
УДК 624.19.035.2
А. Л. Ланис, Ю. А. Цибариус
СОВЕРШЕНСТВОВАНИЕ МЕТОДИКИ УЧЕТА ВРЕМЕННОЙ
НАБРЫЗГБЕТОННОЙ КРЕПИ В РАСЧЕТАХ НАПРЯЖЕННОГО
СОСТОЯНИЯ КОНСТРУКЦИЙ ТОННЕЛЬНЫХ ОБДЕЛОК
Одним из наиболее распространенных видов временной крепи при строительстве транспортных тонне-
лей является набрызгбетонная крепь. В настоящее время учет набрызгбетонной крепи в расчетах конструк-
ций постоянных обделок затруднителен в связи с отсутствием универсальной методики проектирования, что
79
№ 1(17)
2014
влечет за собой увеличение материалоемкости конструкций и трудоемкости производимых работ. Данные о
степени и характере влияния основных механических характеристик скальных грунтов и геометрических раз-
меров сооружения на значение коэффициента учета податливой временной набрызгбетонной крепи, получен-
ные в результате проведенных исследований, послужили основой для дальнейшей разработки универсальной
методики проектирования.
В ходе теоретических исследований установлены эмпирические зависимости распределения напряжений
между временной набрызгбетонной крепью и постоянной монолитной железобетонной обделкой. Результаты
экспериментальных исследований напряженного состояния временной набрызгбетонной крепи и постоянной
обделки, проведенных в натурных условиях, подтвердили возможность применения полученных в ходе теоре-
тических исследований эмпирических зависимостей при расчете конструкций постоянных обделок тоннелей с
учетом временной набрызгбетонной крепи. Использование предложенных зависимостей при проектировании
конструкций обделок позволит значительно снизить материало- и трудоемкость строительства транспорт-
ных тоннелей.
Совершенствование транспортной системы и повышение эффективности ее функциони-
рования являются необходимыми условиями развития экономики России. Для решения
транспортных проблем в Российской Федерации необходимо дальнейшее развитие транс-
портной инфраструктуры, предусматривающее увеличение объема строительства таких важ-
ных объектов, как транспортные тоннели. Одними из основных целей Постановления Пра-
вительства Российской Федерации от 05.12.2001 г. № 848 (редакция от 02.11.2013 г.) «О Фе-
деральной целевой программе «Развитие транспортной системы России (2010 – 2020 годы)»
являются эффективное использование финансовых средств и широкое внедрение в произ-
водственную практику новейших достижений научно-технического прогресса во всех сфе-
рах транспортного строительства, в том числе и в тоннелестроении. Эффективность процес-
са строительства транспортных тоннелей достигается путем повышения качества работ, уве-
личения скоростей проходки при оптимизации материало- и трудоемкости как основных, так
и вспомогательных операций на всех этапах производственного цикла.
Одним из наиболее важных и технически сложных процессов при строительстве транс-
портных тоннелей, сооружаемых горным способом, является возведение временной крепи и
постоянной обделки, требующее значительных материальных и трудовых затрат.
В последнее время в практике отечественного тоннелестроения отмечается существен-
ный рост объемов применения набрызгбетона в качестве временной крепи, что позволяет
получить значительный экономический эффект и обеспечить полную механизацию строи-
тельно-монтажных работ [1, 2]. Однако эффективность применения конструкций обделок
тоннелей, сооружаемых горным способом, в значительной мере снижается из-за отсутствия
универсальной методики учета при проектировании предварительно сооруженной времен-
ной набрызгбетонной крепи, воспринимающей значительную часть основных видов статиче-
ских нагрузок, воздействующих на тоннель, что не позволяет оптимизировать материальные
и трудовые затраты производимых строительно-монтажных работ.
Таким образом, разработка и внедрение в производственный процесс методики учета
временной набрызгбетонной крепи в расчетах напряженного состояния конструкций тон-
нельных обделок позволит оптимизировать материальные и трудовые затраты при строи-
тельстве тоннелей, сооружаемых горным способом.
При проведении теоретических исследований необходимо было установить степень и
характер влияния на напряженное состояние постоянной обделки тоннеля с учетом наличия
временной набрызгбетонной крепи
– основных физико-механических характеристик грунта;
– жесткости временной набрызгбетонной крепи;
– размеров поперечного сечения тоннельной выработки.
Состав теоретических исследований представлен на рисунке 1.
Исследование напряженного состояния постоянной обделки тоннеля выполнено в про-
граммном геотехническом комплексе «PLAXIS 3D Tunnel» (Нидерланды). В ходе теоретиче-
ских исследований оценивалось напряженное состояние обделки в трех контрольных сече-
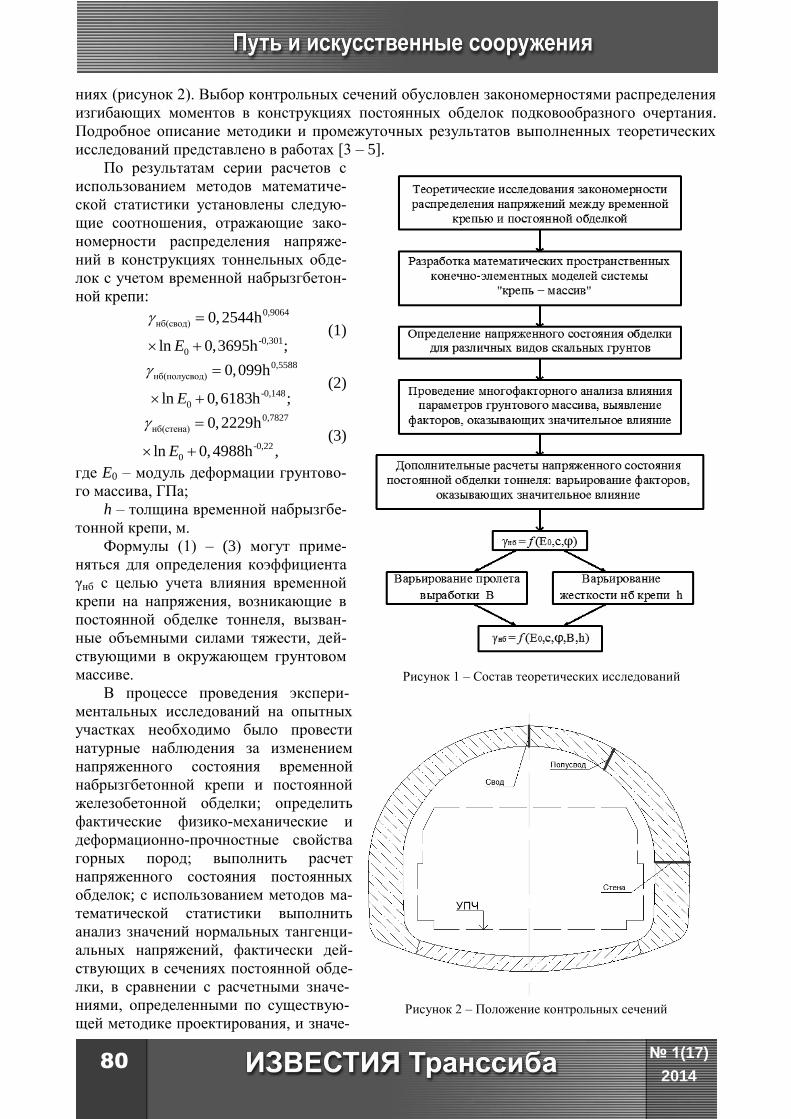
№ 1(17)
2014 80
ниях (рисунок 2). Выбор контрольных сечений обусловлен закономерностями распределения
изгибающих моментов в конструкциях постоянных обделок подковообразного очертания.
Подробное описание методики и промежуточных результатов выполненных теоретических
исследований представлено в работах [3 – 5].
По результатам серии расчетов с
использованием методов математиче-
ской статистики установлены следую-
щие соотношения, отражающие зако-
номерности распределения напряже-
ний в конструкциях тоннельных обде-
лок с учетом временной набрызгбетон-
ной крепи: 0,9064
нб(свод)
-0,301
0
0,2544h
ln 0,3695h ;
E
(1)
0,5588
нб(полусвод)
-0,148
0
0,099h
ln 0,6183h ;
E
(2)
0,7827
нб(стена)
-0,22
0
0,2229h
ln 0,4988h ,E
(3)
где E0 – модуль деформации грунтово-
го массива, ГПа;
h – толщина временной набрызгбе-
тонной крепи, м.
Формулы (1) – (3) могут приме-
няться для определения коэффициента
γнб с целью учета влияния временной
крепи на напряжения, возникающие в
постоянной обделке тоннеля, вызван-
ные объемными силами тяжести, дей-
ствующими в окружающем грунтовом
массиве.
В процессе проведения экспери-
ментальных исследований на опытных
участках необходимо было провести
натурные наблюдения за изменением
напряженного состояния временной
набрызгбетонной крепи и постоянной
железобетонной обделки; определить
фактические физико-механические и
деформационно-прочностные свойства
горных пород; выполнить расчет
напряженного состояния постоянных
обделок; с использованием методов ма-
тематической статистики выполнить
анализ значений нормальных тангенци-
альных напряжений, фактически дей-
ствующих в сечениях постоянной обде-
лки, в сравнении с расчетными значе-
ниями, определенными по существую-
щей методике проектирования, и значе-
Рисунок 1 – Состав теоретических исследований
Рисунок 2 – Положение контрольных сечений
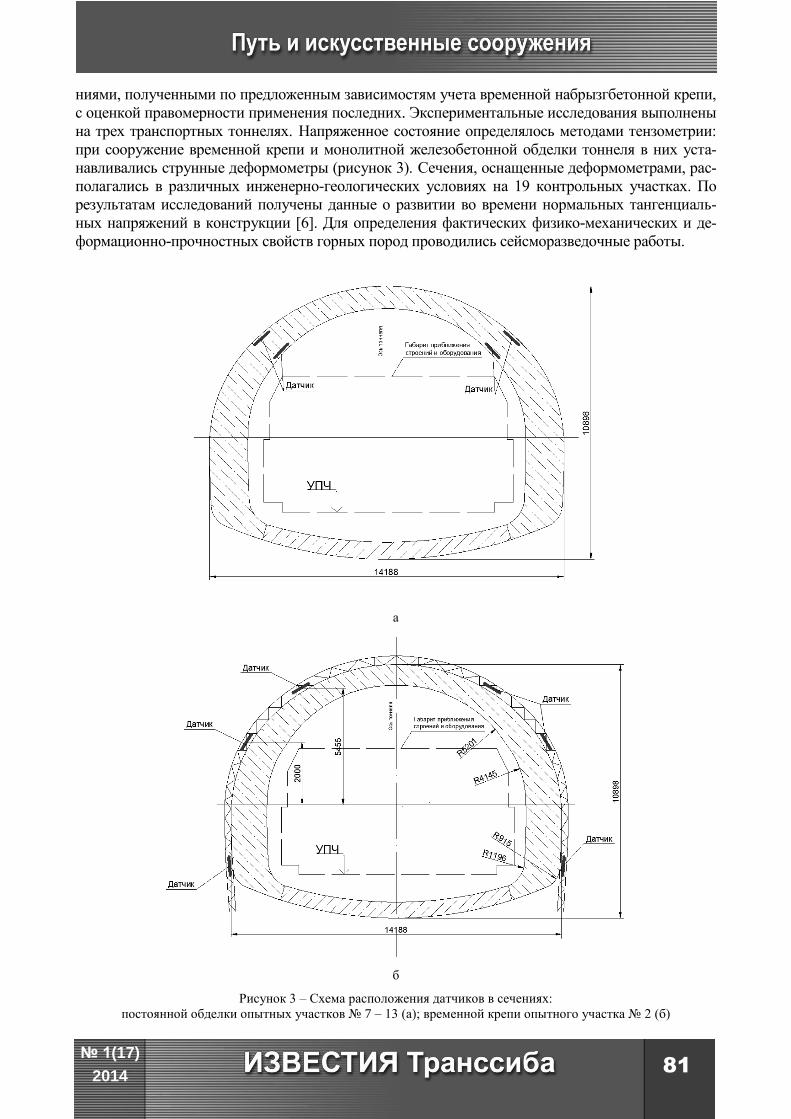
81
№ 1(17)
2014
ниями, полученными по предложенным зависимостям учета временной набрызгбетонной крепи,
с оценкой правомерности применения последних. Экспериментальные исследования выполнены
на трех транспортных тоннелях. Напряженное состояние определялось методами тензометрии: при сооружение временной крепи и монолитной железобетонной обделки тоннеля в них уста-
навливались струнные деформометры (рисунок 3). Сечения, оснащенные деформометрами, рас-полагались в различных инженерно-геологических условиях на 19 контрольных участках. По
результатам исследований получены данные о развитии во времени нормальных тангенциаль-
ных напряжений в конструкции [6]. Для определения фактических физико-механических и де-
формационно-прочностных свойств горных пород проводились сейсморазведочные работы.
а
б
Рисунок 3 – Схема расположения датчиков в сечениях:
постоянной обделки опытных участков № 7 – 13 (а); временной крепи опытного участка № 2 (б)
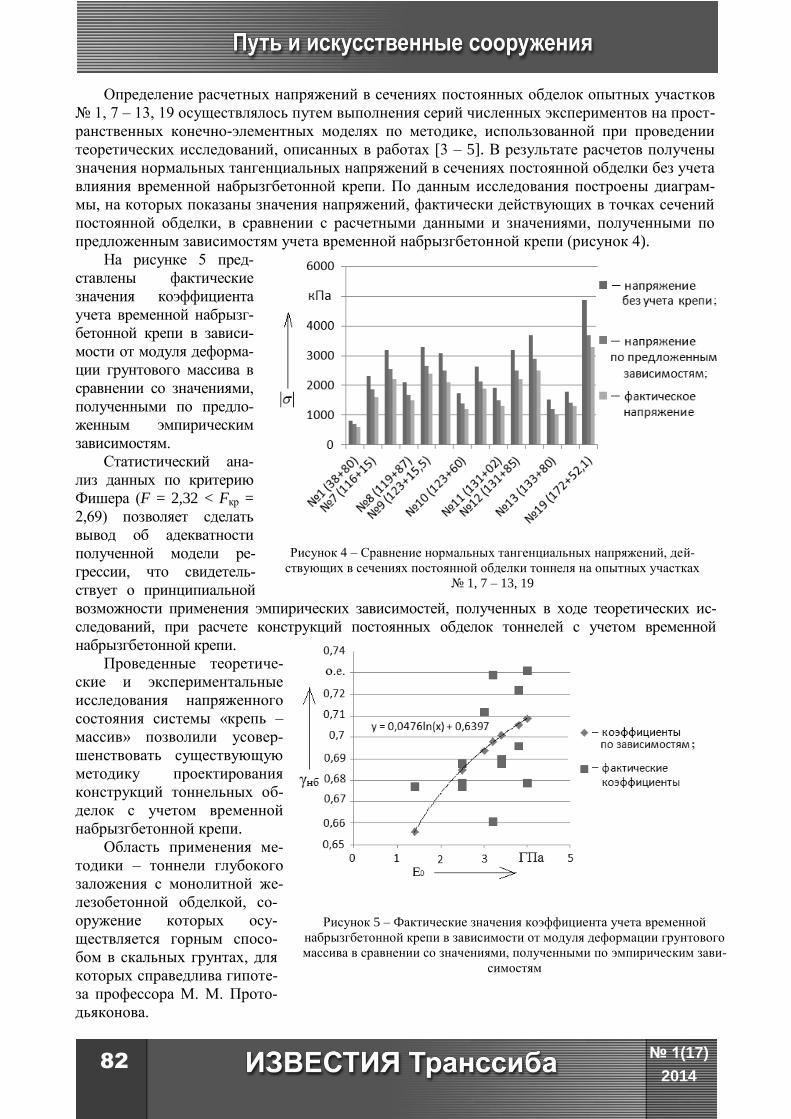
№ 1(17)
2014 82
Определение расчетных напряжений в сечениях постоянных обделок опытных участков
№ 1, 7 – 13, 19 осуществлялось путем выполнения серий численных экспериментов на прост-
ранственных конечно-элементных моделях по методике, использованной при проведении
теоретических исследований, описанных в работах [3 – 5]. В результате расчетов получены
значения нормальных тангенциальных напряжений в сечениях постоянной обделки без учета
влияния временной набрызгбетонной крепи. По данным исследования построены диаграм-
мы, на которых показаны значения напряжений, фактически действующих в точках сечений
постоянной обделки, в сравнении с расчетными данными и значениями, полученными по
предложенным зависимостям учета временной набрызгбетонной крепи (рисунок 4).
На рисунке 5 пред-
ставлены фактические
значения коэффициента
учета временной набрызг-
бетонной крепи в зависи-
мости от модуля деформа-
ции грунтового массива в
сравнении со значениями,
полученными по предло-
женным эмпирическим
зависимостям.
Статистический ана-
лиз данных по критерию
Фишера (F = 2,32 < Fкр =
2,69) позволяет сделать
вывод об адекватности
полученной модели ре-
грессии, что свидетель-
ствует о принципиальной
возможности применения эмпирических зависимостей, полученных в ходе теоретических ис-
следований, при расчете конструкций постоянных обделок тоннелей с учетом временной
набрызгбетонной крепи.
Проведенные теоретиче-
ские и экспериментальные
исследования напряженного
состояния системы «крепь –
массив» позволили усовер-
шенствовать существующую
методику проектирования
конструкций тоннельных об-
делок с учетом временной
набрызгбетонной крепи.
Область применения ме-
тодики – тоннели глубокого
заложения с монолитной же-
лезобетонной обделкой, со-
оружение которых осу-
ществляется горным спосо-
бом в скальных грунтах, для
которых справедлива гипоте-
за профессора М. М. Прото-
дьяконова.
Рисунок 4 – Сравнение нормальных тангенциальных напряжений, дей-
ствующих в сечениях постоянной обделки тоннеля на опытных участках
№ 1, 7 – 13, 19
Рисунок 5 – Фактические значения коэффициента учета временной
набрызгбетонной крепи в зависимости от модуля деформации грунтового
массива в сравнении со значениями, полученными по эмпирическим зави-
симостям
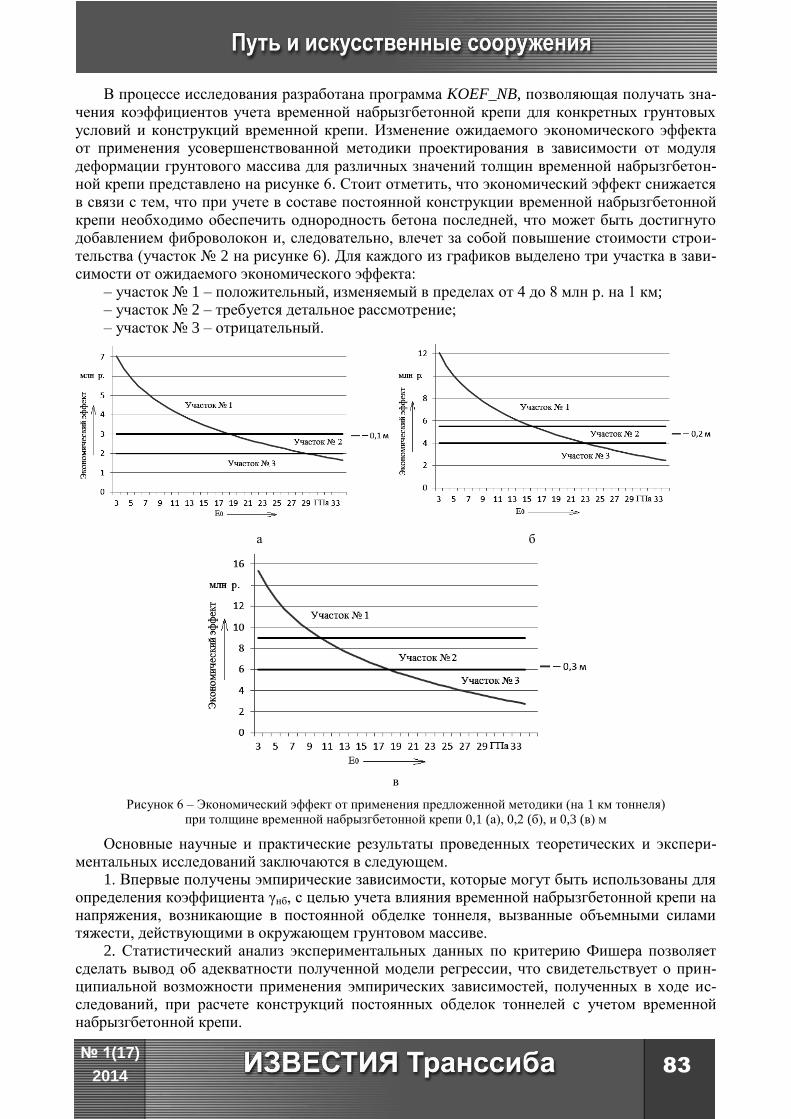
83
№ 1(17)
2014
В процессе исследования разработана программа KOEF_NB, позволяющая получать зна-чения коэффициентов учета временной набрызгбетонной крепи для конкретных грунтовых условий и конструкций временной крепи. Изменение ожидаемого экономического эффекта от применения усовершенствованной методики проектирования в зависимости от модуля деформации грунтового массива для различных значений толщин временной набрызгбетон-ной крепи представлено на рисунке 6. Стоит отметить, что экономический эффект снижается в связи с тем, что при учете в составе постоянной конструкции временной набрызгбетонной крепи необходимо обеспечить однородность бетона последней, что может быть достигнуто добавлением фиброволокон и, следовательно, влечет за собой повышение стоимости строи-тельства (участок № 2 на рисунке 6). Для каждого из графиков выделено три участка в зави-симости от ожидаемого экономического эффекта:
– участок № 1 – положительный, изменяемый в пределах от 4 до 8 млн р. на 1 км; – участок № 2 – требуется детальное рассмотрение; – участок № 3 – отрицательный.
а б
в
Рисунок 6 – Экономический эффект от применения предложенной методики (на 1 км тоннеля) при толщине временной набрызгбетонной крепи 0,1 (а), 0,2 (б), и 0,3 (в) м
Основные научные и практические результаты проведенных теоретических и экспери-ментальных исследований заключаются в следующем.
1. Впервые получены эмпирические зависимости, которые могут быть использованы для определения коэффициента γнб, с целью учета влияния временной набрызгбетонной крепи на напряжения, возникающие в постоянной обделке тоннеля, вызванные объемными силами тяжести, действующими в окружающем грунтовом массиве.
2. Статистический анализ экспериментальных данных по критерию Фишера позволяет сделать вывод об адекватности полученной модели регрессии, что свидетельствует о прин-ципиальной возможности применения эмпирических зависимостей, полученных в ходе ис-следований, при расчете конструкций постоянных обделок тоннелей с учетом временной набрызгбетонной крепи.
№ 1(17)
2014 84
3. Разработана программа KOEF_NB, позволяющая получать значения коэффициентов
учета временной набрызгбетонной крепи для конкретных грунтовых условий и конструкций
временной крепи.
4. Усовершенствована методика проектирования, повышающая качество проектных ре-
шений для строительства транспортных тоннелей, учитывающая в составе постоянной
конструкции временную набрызгбетонную крепь. Внедрение усовершенствованной методи-
ки в практику проектирования позволит значительно снизить материало- и трудоемкость
строительства. Экономический эффект от применения предложенной методики должен со-
ставить до 8 млн р. на 1 км тоннеля.
Список литературы
1. Набрызгбетон для тоннелей [Текст] / В. С. Арутюнов, И. В. Гиренко и др. // Транспорт-
ное строительство / Всероссийский науч.-исследоват. ин-т. – М., 1986. – № 4. – С. 24 – 26.
2. Жуков, В. Н. Современные технологии набрызгбетонных работ в подземном строи-
тельстве [Текст] / В. Н. Жуков, Ш. Р. Магдиев // Метро и тоннели. – 2003. – № 4. – С. 20 – 23.
3. Цибариус, Ю. А. Учет временной набрызгбетонной крепи при определении напряжен-
ного состояния постоянной обделки тоннеля [Текст] / Ю. А. Цибариус // Вестник СибАДИ /
Сибирская гос. автомобильно-дорожная акад. – Омск, 2013. – №4 (32). – С. 76 – 81.
4. Цибариус, Ю. А. Исследование влияния податливой временной набрызгбетонной крепи
на напряженное состояния постоянной обделки тоннеля [Текст] / Ю. А. Цибариус // Извес-
тия Транссиба / Омский гос. ун-т путей сообщения. – Омск. – 2013. – № 3. – С. 125 – 133.
5. Цибариус, Ю. А. Напряженное состояние постоянной обделки тоннеля с учетом подат-
ливой временной набрызгбетонной крепи [Текст] / Ю. А. Цибариус // Модернизация и науч-
ные исследования в транспортном комплексе: Материалы междунар. науч.-практ. конф. /
Пермский национальный исследоват. политехн. ун-т. – Пермь, 2013. – Т. 3. – С. 440 – 448.
6. Цибариус, Ю. А. Теоретические и экспериментальные исследования закономерностей
распределения напряжений в конструкциях тоннельных обделок с учетом временной
набрызгбетонной крепи [Текст] / Ю. А. Цибариус // Интернет-журнал «Науковедение» / Ин-т
гос. управления, права и инновационных технологий. – М. – 2014. – № 1 (20). – С. 1 – 12.
УДК 656.073.7
Р. Р. Ахмедов
АКТУАЛЬНОСТЬ ИССЛЕДОВАНИЯ ПРОБЛЕМЫ ОПТИМИЗАЦИИ
ГРУЗООБОРОТА ПОРТОВ БАЛТИЙСКОГО МОРЯ В УСЛОВИЯХ
МОДЕРНИЗАЦИИ ТРАНСПОРТНОГО КОМПЛЕКСА
В статье рассматриваются особенности транспортной сети портов Балтийского моря, проблемы ее
оптимизации с целью увеличения грузооборота и отражения вызовов, связанных с модернизацией транспорт-
ного комплекса России.
Порты Балтийского бассейна являются не только важнейшими экономическими объек-
тами национальной экономики, они лидируют в суммарном грузообороте среди российских
портов. По прогнозам они сохранят лидерство по этому показателю и в перспективе, вплоть
до 2030 г. Кроме того, отличительной особенностью портов Балтийского моря является их
близость к наиболее развитым промышленным районам России, а также к странам Европы.
Данные преференции позволяют им обрабатывать постоянно растущие потоки грузов раз-
личного наименования, превращая порты в уникальные транспортные узлы. В условиях мо-
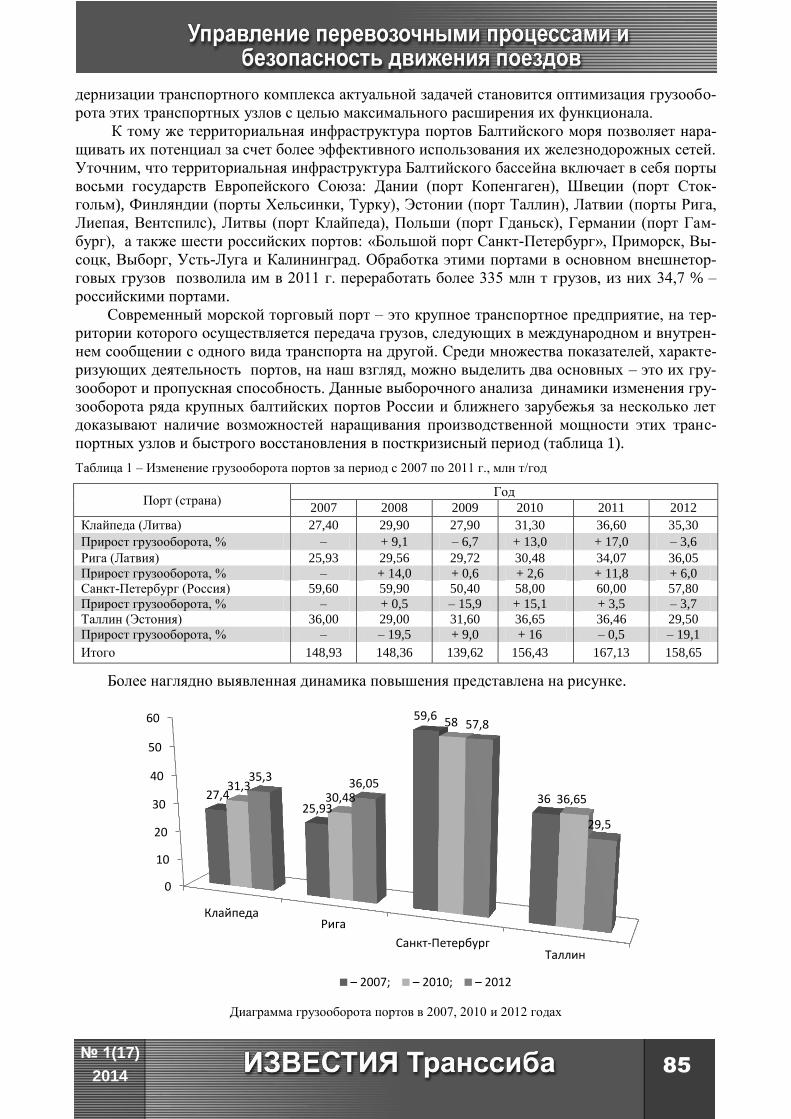
85
№ 1(17)
2014
дернизации транспортного комплекса актуальной задачей становится оптимизация грузообо-
рота этих транспортных узлов с целью максимального расширения их функционала.
К тому же территориальная инфраструктура портов Балтийского моря позволяет нара-
щивать их потенциал за счет более эффективного использования их железнодорожных сетей.
Уточним, что территориальная инфраструктура Балтийского бассейна включает в себя порты
восьми государств Европейского Союза: Дании (порт Копенгаген), Швеции (порт Сток-
гольм), Финляндии (порты Хельсинки, Турку), Эстонии (порт Таллин), Латвии (порты Рига,
Лиепая, Вентспилс), Литвы (порт Клайпеда), Польши (порт Гданьск), Германии (порт Гам-
бург), а также шести российских портов: «Большой порт Санкт-Петербург», Приморск, Вы-
соцк, Выборг, Усть-Луга и Калининград. Обработка этими портами в основном внешнетор-
говых грузов позволила им в 2011 г. переработать более 335 млн т грузов, из них 34,7 % –
российскими портами.
Современный морской торговый порт – это крупное транспортное предприятие, на тер-
ритории которого осуществляется передача грузов, следующих в международном и внутрен-
нем сообщении с одного вида транспорта на другой. Среди множества показателей, характе-
ризующих деятельность портов, на наш взгляд, можно выделить два основных – это их гру-
зооборот и пропускная способность. Данные выборочного анализа динамики изменения гру-
зооборота ряда крупных балтийских портов России и ближнего зарубежья за несколько лет
доказывают наличие возможностей наращивания производственной мощности этих транс-
портных узлов и быстрого восстановления в посткризисный период (таблица 1).
Таблица 1 – Изменение грузооборота портов за период с 2007 по 2011 г., млн т/год
Порт (страна) Год
2007 2008 2009 2010 2011 2012
Клайпеда (Литва) 27,40 29,90 27,90 31,30 36,60 35,30
Прирост грузооборота, % – + 9,1 – 6,7 + 13,0 + 17,0 – 3,6
Рига (Латвия) 25,93 29,56 29,72 30,48 34,07 36,05
Прирост грузооборота, % – + 14,0 + 0,6 + 2,6 + 11,8 + 6,0
Санкт-Петербург (Россия) 59,60 59,90 50,40 58,00 60,00 57,80
Прирост грузооборота, % – + 0,5 – 15,9 + 15,1 + 3,5 – 3,7
Таллин (Эстония) 36,00 29,00 31,60 36,65 36,46 29,50
Прирост грузооборота, % – – 19,5 + 9,0 + 16 – 0,5 – 19,1
Итого 148,93 148,36 139,62 156,43 167,13 158,65
Более наглядно выявленная динамика повышения представлена на рисунке.
Диаграмма грузооборота портов в 2007, 2010 и 2012 годах
0
10
20
30
40
50
60
Клайпеда Рига
Санкт-Петербург Таллин
27,4 25,93
59,6
36 31,3
30,48
58
36,65
35,3 36,05
57,8
29,5
– 2007; – 2010; – 2012
№ 1(17)
2014 86
Одним из крупнейших портов Балтийского бассейна является «Большой порт Санкт-
Петербург», грузооборот которого составляет почти 18 % от всего объема грузооборота пор-
тов Балтийского бассейна. Этот порт представляет собой сложный транспортный комплекс,
включающий в свой состав такие пять портов, как Приморск, Усть-Луга, Выборг, Высоцк и
непосредственно Санкт-Петербург. Главным конкурентом этого порта на Балтике выступает
Клайпедский морской порт, являющийся самым северным незамерзающим портом на Во-
сточном побережье Балтийского моря. Условия круглогодичной деятельности позволяют
этому порту обеспечивать порядка 11% объема грузооборота всех портов Балтийского бас-
сейна [1]. В отличие от «Большого порта Санкт-Петербург» и порта Таллин порты Клайпеда
и Рига состоят из одного порта.
Объединение нескольких портов в один общий многофункциональный транспортный
узел часто встречается в европейских, азиатских и американских государствах, и делается
это с целью оптимизации грузопотоков и повышения эффективности использования имею-
щейся портовой инфраструктуры. Как правило, данная организационная форма чаще всего
реализуется при необходимости территориального слияния расположенных рядом портов.
Мировая практика показывает, что перспективы развития порта для освоения растущих
объемов работы требуют не только наличия соответствующих территорий, но и создания их
резерва. Поэтому в последние годы при проектировании строительства или развития мор-
ских портов большое внимание уделяется поиску решений, обеспечивающих строительным
затратам требуемый срок окупаемости, предполагающий соотнести выгоды за счет освоения
грузооборота порта и размеры доходов от основной деятельности. Как правило, эти меро-
приятия связаны с необходимостью освоения растущего железнодорожного грузооборота за
счет усиления пропускной способности соединительных портовых подъездных путей и
улучшения условий производства маневровой работы в порту. Поэтому важным условием на
стадии проектирования схемы железнодорожной сети порта является обеспечение доступа к
информации о возможном изменении грузооборота и его величины.
Поскольку величина грузооборота порта зависит от многих взаимосвязанных факторов,
имеющих сложно зависимый, а иногда и взаимоисключающий характер, исследователю
необходимо установить наиболее приемлемый для прогнозирования уровень совпадения
теоретических и эмпирических данных. Существенную помощь в этом оказывают методы и
приемы математической статистики, дающие возможность использовать широкий круг
функциональных зависимостей для прогнозирования расчетного показателя во времени. В
частности, для описания изменения величины общего и железнодорожного грузооборотов
порта можно использовать полином 3-й, 4-й или 5-й степени.
Циклическая полиномиальная функция представляет собой кривую, построенную на ос-
нове соответствующих систематических данных с использованием прикладного программ-
ного продукта Excel, в котором имеются подпрограммы расчета различных математических
функций, в том числе полиномов, таким образом, целью подбора полиномиальных функций
для описания соответствующего массива статистических данных является требуемый уро-
вень совпадения теоретических и эмпирических знаний.
Должным образом спроектированная схема и путевое развитие железнодорожной сети
порта с четко сформулированными и определенными по времени этапами развития являются
исходным условием освоения наличного грузооборота порта. К примеру, нами приведены
возможные варианты полиномов для рассматриваемых портов Балтийского моря (таблица 2).
В таблице нами использовались следующие обозначения и допущения: R2 – величина досто-
верности аппроксимации; значение R в квадрате; число от 0 до 1, которое отражает близость
значений линии тренда к фактическим данным; линия тренда наиболее соответствует дей-
ствительности, когда значение R в квадрате близко к 1(оно также называется квадратом
смешанной корреляции).
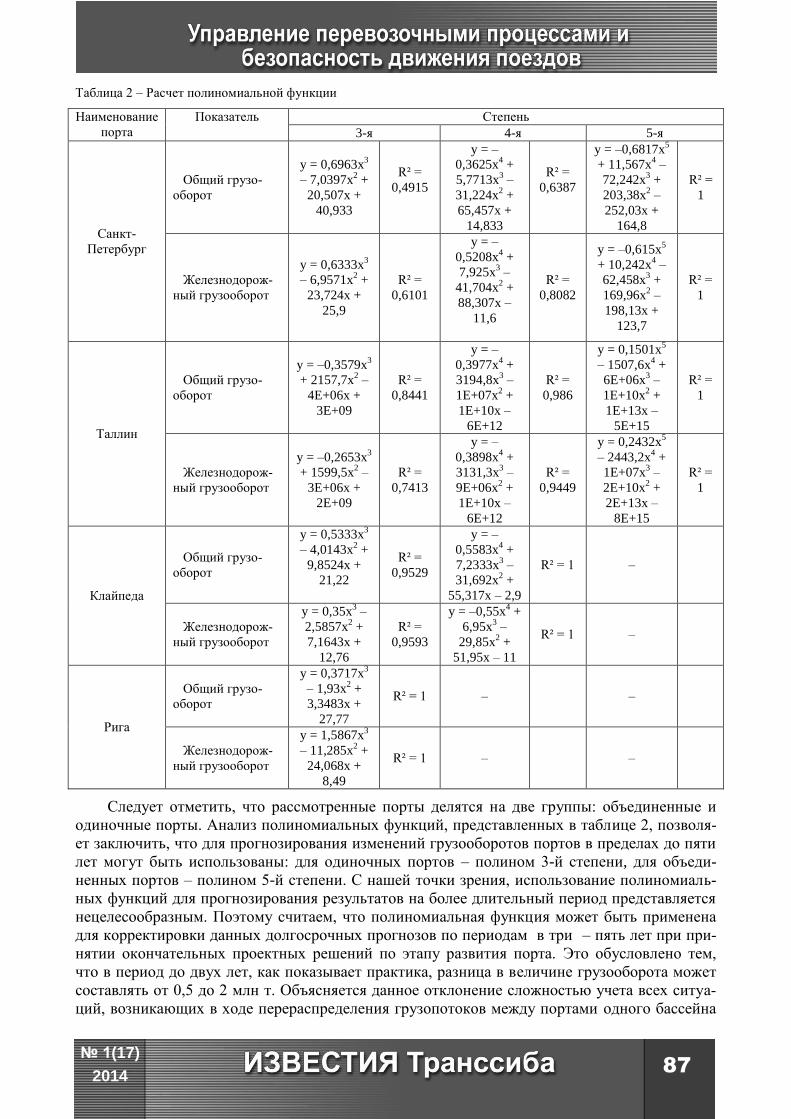
87
№ 1(17)
2014
Таблица 2 – Расчет полиномиальной функции
Наименование
порта
Показатель Степень
3-я 4-я 5-я
Санкт-
Петербург
Общий грузо-
оборот
y = 0,6963x3
– 7,0397x2 +
20,507x +
40,933
R² =
0,4915
y = –
0,3625x4 +
5,7713x3 –
31,224x2 +
65,457x +
14,833
R² =
0,6387
y = –0,6817x5
+ 11,567x4 –
72,242x3 +
203,38x2 –
252,03x +
164,8
R² =
1
Железнодорож-
ный грузооборот
y = 0,6333x3
– 6,9571x2 +
23,724x +
25,9
R² =
0,6101
y = –
0,5208x4 +
7,925x3 –
41,704x2 +
88,307x –
11,6
R² =
0,8082
y = –0,615x5
+ 10,242x4 –
62,458x3 +
169,96x2 –
198,13x +
123,7
R² =
1
Таллин
Общий грузо-
оборот
y = –0,3579x3
+ 2157,7x2 –
4E+06x +
3E+09
R² =
0,8441
y = –
0,3977x4 +
3194,8x3 –
1E+07x2 +
1E+10x –
6E+12
R² =
0,986
y = 0,1501x5
– 1507,6x4 +
6E+06x3 –
1E+10x2 +
1E+13x –
5E+15
R² =
1
Железнодорож-
ный грузооборот
y = –0,2653x3
+ 1599,5x2 –
3E+06x +
2E+09
R² =
0,7413
y = –
0,3898x4 +
3131,3x3 –
9E+06x2 +
1E+10x –
6E+12
R² =
0,9449
y = 0,2432x5
– 2443,2x4 +
1E+07x3 –
2E+10x2 +
2E+13x –
8E+15
R² =
1
Клайпеда
Общий грузо-
оборот
y = 0,5333x3
– 4,0143x2 +
9,8524x +
21,22
R² =
0,9529
y = –
0,5583x4 +
7,2333x3 –
31,692x2 +
55,317x – 2,9
R² = 1 –
Железнодорож-
ный грузооборот
y = 0,35x3 –
2,5857x2 +
7,1643x +
12,76
R² =
0,9593
y = –0,55x4 +
6,95x3 –
29,85x2 +
51,95x – 11
R² = 1 –
Рига
Общий грузо-
оборот
y = 0,3717x3
– 1,93x2 +
3,3483x +
27,77
R² = 1 – –
Железнодорож-
ный грузооборот
y = 1,5867x3
– 11,285x2 +
24,068x +
8,49
R² = 1 – –
Следует отметить, что рассмотренные порты делятся на две группы: объединенные и
одиночные порты. Анализ полиномиальных функций, представленных в таблице 2, позволя-
ет заключить, что для прогнозирования изменений грузооборотов портов в пределах до пяти
лет могут быть использованы: для одиночных портов – полином 3-й степени, для объеди-
ненных портов – полином 5-й степени. С нашей точки зрения, использование полиномиаль-
ных функций для прогнозирования результатов на более длительный период представляется
нецелесообразным. Поэтому считаем, что полиномиальная функция может быть применена
для корректировки данных долгосрочных прогнозов по периодам в три – пять лет при при-
нятии окончательных проектных решений по этапу развития порта. Это обусловлено тем,
что в период до двух лет, как показывает практика, разница в величине грузооборота может
составлять от 0,5 до 2 млн т. Объясняется данное отклонение сложностью учета всех ситуа-
ций, возникающих в ходе перераспределения грузопотоков между портами одного бассейна

№ 1(17)
2014 88
при реализации экономических интересов грузовладельцев. Примером может служить порт
Клайпеда, где из-за остановки одного из терминалов на полтора месяца в связи с проведени-
ем ремонтных работ годовой грузооборот порта уменьшился на 0,5 млн т.
Поскольку рассмотренные нами порты обслуживаются преимущественно железнодо-
рожным транспортом, причем доля железнодорожного грузооборота составляет от 75 до
86 % от общего грузооборота, то снижение доли участия железнодорожного грузооборота в
обслуживании порта в отдельных случаях может привести к потере конкурентоспособности
данного вида перевозок по сравнению с автомобильным и трубопроводным видами транс-
порта. За перевозку конкретных видов грузов в адрес морского порта между ними идет
жесткая конкуренция. Об этом в своей работе упоминает председатель Комитета по транс-
порту и транзиту Международного конгресса промышленников и предпринимателей
Л. Н. Козлов: «Каждый из видов транспорта развивает свои корпоративные информационные
системы, направленные исключительно на решение внутренних задач, а не на интеграцию с
информационными системами смежных видов транспорта. Стихийное развитие локальных и
корпоративных систем формирует среду, в которой интеграция в международную интеллек-
туальную транспортную систему, в частности в сеть международных транспортных коридо-
ров, может оказаться технически невозможной» [2, с. 128].
Таким образом, анализ данных общего и железнодорожного грузооборотов портов Бал-
тийского бассейна за исследуемый период показал, что в большинстве случаев порты обла-
дают необходимым резервом пропускной способности морских грузовых фронтов, но имеют
недостатки схемных решений в железнодорожной сети. Это напрямую отражается на темпе
изменения железнодорожного грузооборота в условиях подъема и спада общего грузооборо-
та порта. В целом изменение железнодорожного и общего грузооборота происходит син-
хронно и с одинаковой интенсивностью. Выявленные случаи расхождения темпов изменений
обусловлены несоответствием пропускных способностей портовой инфраструктуры и же-
лезнодорожной сети порта.
Учитывая имеющиеся тенденции увеличения грузопотоков в смешанном железнодо-
рожно-водном сообщении, можно утверждать, что грузооборот существующих портов в
ближайшее десятилетие будет возрастать. Поддерживать данный тренд можно лишь при
условии сохранения железнодорожного транспорта в качестве основного партнера порта.
Акцент на этом усилен в Транспортной стратегии России на период до 2030 года, где в каче-
стве одной из главных задач развития транспортной сети обозначена необходимость обеспе-
чения такого уровня ее инфраструктуры, чтобы добиться ускорения товарообмена, вызыва-
ющего развитие экономики и сохраняющего равную доступность транспортной сети для всех
жителей России [3]. Несмотря на трудность реализации данной задачи считаем, что для ее
достижения, а также для осуществления оптимизации грузооборота портов Балтийского мо-
ря в условиях модернизации транспортного комплекса научному и предпринимательскому
сообществу необходимо уделять постоянное внимание совершенствованию методики
построения и развития железнодорожной сети порта, так как обширность российской терри-
тории позволяет активно развивать транзитную доставку грузов и в перспективе достигнуть
уровня международного сервиса.
Список литературы
1. Стратегия развития морской портовой инфраструктуры России до 2030 года [Текст] /
М., 2013. – 180 с.
2. Козлов, Л. Н. О приоритетах в формировании и развитии международных транспорт-
ных коридоров [Текст] / Л. Н. Козлов // Евразийская экономическая интеграция. – М., 2009. –
№ 4 (5). – С. 121 – 134.
3. Стратегия развития железнодорожного транспорта в РФ до 2030 года [Текст] / М.,
2008. – 171 с.
89
№ 1(17)
2014
УДК 656.33:65.011.56
Я. Л. Либерман, Л. Н. Горбунова
АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ
ВНУТРИЗАВОДСКОГО РЕЛЬСОВОГО ТРАНСПОРТА
В статье рассматривается проблема обеспечения точности позиционирования транспортирующих ма-
шин (железнодорожных кранов, мотовозов, электровозов и др.), перемещающихся по рельсовому пути на
внутризаводском промышленном транспорте.
Для улучшения точности системы автоматизированного позиционирования, ориентированной на приме-
нение на внутризаводском рельсовом железнодорожном транспорте, предложено техническое решение, за-
щищенное патентом РФ.
Известно, что наряду со специальными системами управления, решающими некоторую
узкую задачу, но используемыми в транспортирующих машинах самых разных типов, сущест-
вуют и системы управления узкоспециализированными транспортирующими машинами,
предназначенные для почти однотипных машин. К таким системам могут быть отнесены,
например, системы управления позиционированием внутризаводского рельсового железно-
дорожного транспорта. Подобный транспорт, имеющий, как правило, унифицированную хо-
довую часть, представлен весьма ограниченным типом: железнодорожными кранами сравни-
тельно малой грузоподъемности, мотовозами, маневровыми электровозами. Эксплуатируют-
ся эти машины чаще всего совместно с общезаводскими и цеховыми складами, куда они до-
ставляют штучные или размещенные в таре грузы и забирают их оттуда.
Для осуществления требуемого манипулирования грузами указанные выше транспорти-
рующие машины необходимо останавливать в тех или иных точках (позициях) рельсового
пути с достаточно высокой точностью, что и обеспечивается с помощью специальных систем
управления позиционированием.
Обычно внутризаводским транспортом управляют машинисты, которые ведут наблюде-
ние за тем, нет ли на пути движения машины объектов, создающих опасную ситуацию, опре-
деляют момент достижения машиной нужной позиции остановки, подают приводу машины
команду на торможение и остановку. Для обеспечения точности определения момента до-
стижения машиной нужной позиции используют специальные устройства, которые выдают
машинисту информацию о текущем положении или перемещении машины. Системы управ-
ления позиционированием образуются этими устройствами в сочетании с самим машини-
стом и элементами исполнения подаваемой им команды «стоп». Поскольку в такой системе
оказывается задействованным человек, она получается не автоматической, а автоматизиро-
ванной, однако именно это обеспечивает ее безопасность и надежность. Тем не менее суще-
ствующие системы позиционирования рельсового транспорта, подобные описанной, не ли-
шены недостатков, и главный из них – невысокая точность отсчета перемещений транспор-
тирующей машины.
В настоящее время устройства, выдающие машинисту информацию о положении или
перемещении машины, выполняются по разным принципам. Первый из них (рисунок 1, а)
заключается в установке на рельсе релейного индуктивного датчика.
С помощью кронштейна 1 сбоку рельса закрепляется коробка 2 с блоком питания и пе-
редачи сигнала от индуктивного датчика 3. Последний располагается так, чтобы некоторое
колесо 4 транспортирующей машины при ее движении по рельсу 5 своей ребордой могло
входить в магнитное поле датчика. Кронштейн 1 может быть размещен в различных местах
рельса. Для этого он снабжен крепежными элементами: прижимом 6, парой «винт – гайка» 7
и направляющей пружиной 8. Ослабив крепежные элементы, кронштейн 1 вместе с коробкой
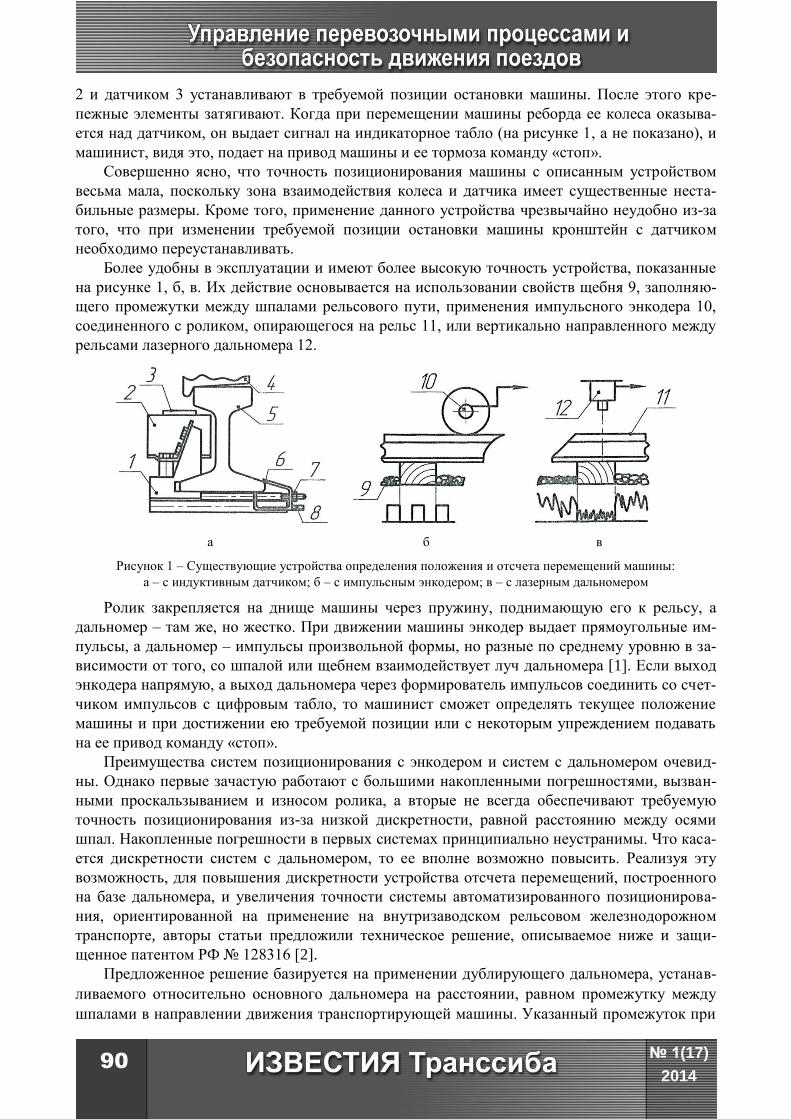
№ 1(17)
2014 90
2 и датчиком 3 устанавливают в требуемой позиции остановки машины. После этого кре-
пежные элементы затягивают. Когда при перемещении машины реборда ее колеса оказыва-
ется над датчиком, он выдает сигнал на индикаторное табло (на рисунке 1, а не показано), и
машинист, видя это, подает на привод машины и ее тормоза команду «стоп».
Совершенно ясно, что точность позиционирования машины с описанным устройством
весьма мала, поскольку зона взаимодействия колеса и датчика имеет существенные неста-
бильные размеры. Кроме того, применение данного устройства чрезвычайно неудобно из-за
того, что при изменении требуемой позиции остановки машины кронштейн с датчиком
необходимо переустанавливать.
Более удобны в эксплуатации и имеют более высокую точность устройства, показанные
на рисунке 1, б, в. Их действие основывается на использовании свойств щебня 9, заполняю-
щего промежутки между шпалами рельсового пути, применения импульсного энкодера 10,
соединенного с роликом, опирающегося на рельс 11, или вертикально направленного между
рельсами лазерного дальномера 12.
а б в
Рисунок 1 – Существующие устройства определения положения и отсчета перемещений машины:
а – с индуктивным датчиком; б – с импульсным энкодером; в – с лазерным дальномером
Ролик закрепляется на днище машины через пружину, поднимающую его к рельсу, а
дальномер – там же, но жестко. При движении машины энкодер выдает прямоугольные им-
пульсы, а дальномер – импульсы произвольной формы, но разные по среднему уровню в за-
висимости от того, со шпалой или щебнем взаимодействует луч дальномера [1]. Если выход
энкодера напрямую, а выход дальномера через формирователь импульсов соединить со счет-
чиком импульсов с цифровым табло, то машинист сможет определять текущее положение
машины и при достижении ею требуемой позиции или с некоторым упреждением подавать
на ее привод команду «стоп».
Преимущества систем позиционирования с энкодером и систем с дальномером очевид-
ны. Однако первые зачастую работают с большими накопленными погрешностями, вызван-
ными проскальзыванием и износом ролика, а вторые не всегда обеспечивают требуемую
точность позиционирования из-за низкой дискретности, равной расстоянию между осями
шпал. Накопленные погрешности в первых системах принципиально неустранимы. Что каса-
ется дискретности систем с дальномером, то ее вполне возможно повысить. Реализуя эту
возможность, для повышения дискретности устройства отсчета перемещений, построенного
на базе дальномера, и увеличения точности системы автоматизированного позиционирова-
ния, ориентированной на применение на внутризаводском рельсовом железнодорожном
транспорте, авторы статьи предложили техническое решение, описываемое ниже и защи-
щенное патентом РФ № 128316 [2].
Предложенное решение базируется на применении дублирующего дальномера, устанав-
ливаемого относительно основного дальномера на расстоянии, равном промежутку между
шпалами в направлении движения транспортирующей машины. Указанный промежуток при
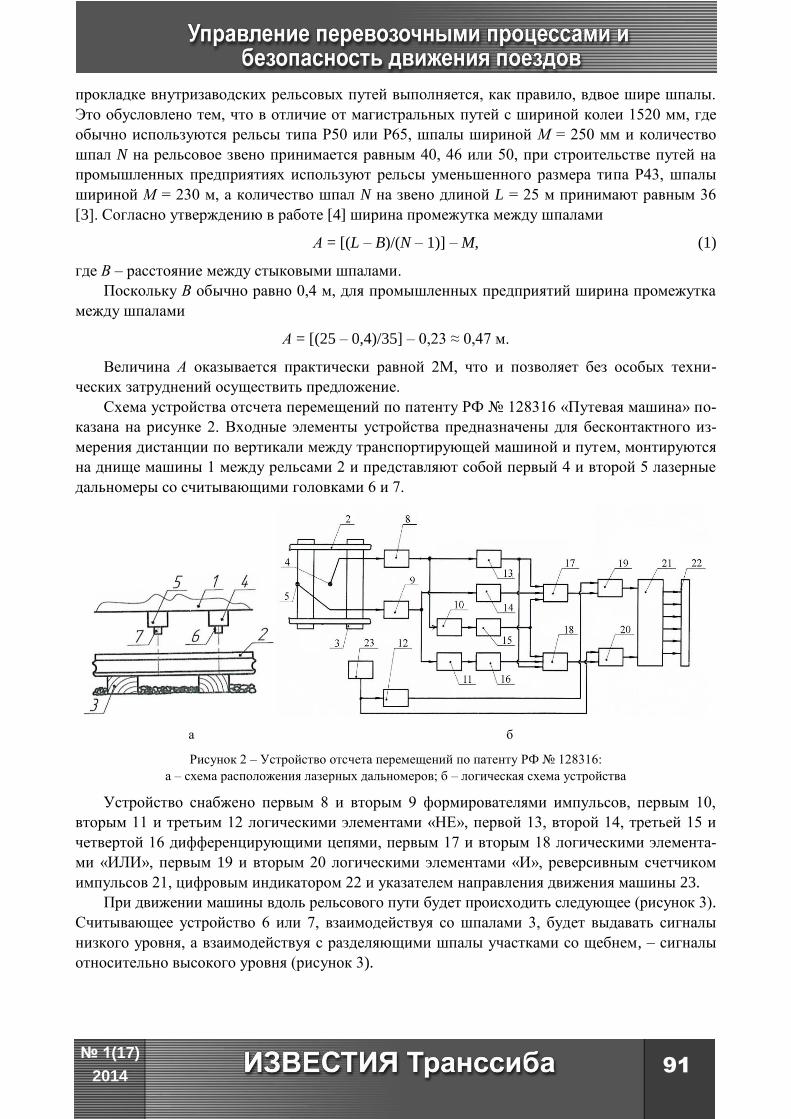
91
№ 1(17)
2014
прокладке внутризаводских рельсовых путей выполняется, как правило, вдвое шире шпалы.
Это обусловлено тем, что в отличие от магистральных путей с шириной колеи 1520 мм, где
обычно используются рельсы типа Р50 или Р65, шпалы шириной М = 250 мм и количество
шпал N на рельсовое звено принимается равным 40, 46 или 50, при строительстве путей на
промышленных предприятиях используют рельсы уменьшенного размера типа Р43, шпалы
шириной М = 230 м, а количество шпал N на звено длиной L = 25 м принимают равным 36
[3]. Согласно утверждению в работе [4] ширина промежутка между шпалами
А = [(L – B)/(N – 1)] – M, (1)
где В – расстояние между стыковыми шпалами.
Поскольку В обычно равно 0,4 м, для промышленных предприятий ширина промежутка
между шпалами
А = [(25 – 0,4)/35] – 0,23 ≈ 0,47 м.
Величина А оказывается практически равной 2М, что и позволяет без особых техни-
ческих затруднений осуществить предложение.
Схема устройства отсчета перемещений по патенту РФ № 128316 «Путевая машина» по-
казана на рисунке 2. Входные элементы устройства предназначены для бесконтактного из-
мерения дистанции по вертикали между транспортирующей машиной и путем, монтируются
на днище машины 1 между рельсами 2 и представляют собой первый 4 и второй 5 лазерные
дальномеры со считывающими головками 6 и 7.
а б
Рисунок 2 – Устройство отсчета перемещений по патенту РФ № 128316:
а – схема расположения лазерных дальномеров; б – логическая схема устройства
Устройство снабжено первым 8 и вторым 9 формирователями импульсов, первым 10,
вторым 11 и третьим 12 логическими элементами «НЕ», первой 13, второй 14, третьей 15 и
четвертой 16 дифференцирующими цепями, первым 17 и вторым 18 логическими элемента-
ми «ИЛИ», первым 19 и вторым 20 логическими элементами «И», реверсивным счетчиком
импульсов 21, цифровым индикатором 22 и указателем направления движения машины 23.
При движении машины вдоль рельсового пути будет происходить следующее (рисунок 3).
Считывающее устройство 6 или 7, взаимодействуя со шпалами 3, будет выдавать сигналы
низкого уровня, а взаимодействуя с разделяющими шпалы участками со щебнем, – сигналы
относительно высокого уровня (рисунок 3).
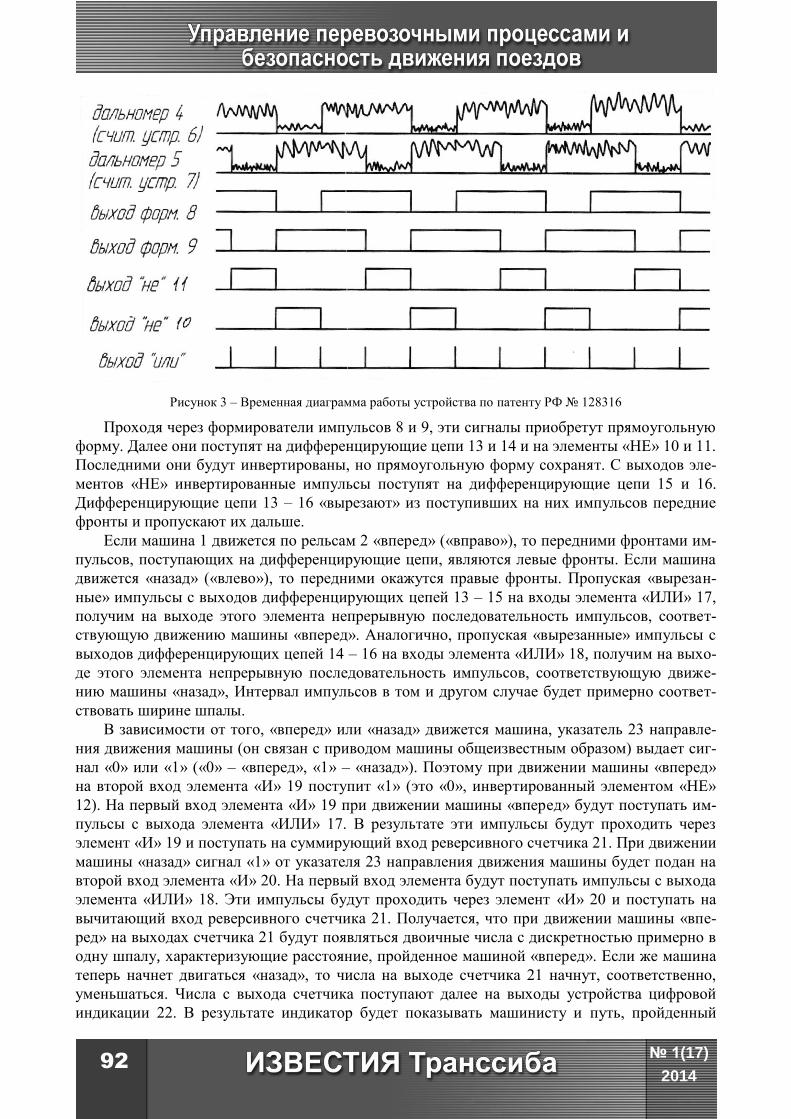
№ 1(17)
2014 92
Рисунок 3 – Временная диаграмма работы устройства по патенту РФ № 128316
Проходя через формирователи импульсов 8 и 9, эти сигналы приобретут прямоугольную
форму. Далее они поступят на дифференцирующие цепи 13 и 14 и на элементы «НЕ» 10 и 11.
Последними они будут инвертированы, но прямоугольную форму сохранят. С выходов эле-
ментов «НЕ» инвертированные импульсы поступят на дифференцирующие цепи 15 и 16.
Дифференцирующие цепи 13 – 16 «вырезают» из поступивших на них импульсов передние
фронты и пропускают их дальше.
Если машина 1 движется по рельсам 2 «вперед» («вправо»), то передними фронтами им-
пульсов, поступающих на дифференцирующие цепи, являются левые фронты. Если машина
движется «назад» («влево»), то передними окажутся правые фронты. Пропуская «вырезан-
ные» импульсы с выходов дифференцирующих цепей 13 – 15 на входы элемента «ИЛИ» 17,
получим на выходе этого элемента непрерывную последовательность импульсов, соответ-
ствующую движению машины «вперед». Аналогично, пропуская «вырезанные» импульсы с
выходов дифференцирующих цепей 14 – 16 на входы элемента «ИЛИ» 18, получим на выхо-
де этого элемента непрерывную последовательность импульсов, соответствующую движе-
нию машины «назад», Интервал импульсов в том и другом случае будет примерно соответ-
ствовать ширине шпалы.
В зависимости от того, «вперед» или «назад» движется машина, указатель 23 направле-
ния движения машины (он связан с приводом машины общеизвестным образом) выдает сиг-
нал «0» или «1» («0» – «вперед», «1» – «назад»). Поэтому при движении машины «вперед»
на второй вход элемента «И» 19 поступит «1» (это «0», инвертированный элементом «НЕ»
12). На первый вход элемента «И» 19 при движении машины «вперед» будут поступать им-
пульсы с выхода элемента «ИЛИ» 17. В результате эти импульсы будут проходить через
элемент «И» 19 и поступать на суммирующий вход реверсивного счетчика 21. При движении
машины «назад» сигнал «1» от указателя 23 направления движения машины будет подан на
второй вход элемента «И» 20. На первый вход элемента будут поступать импульсы с выхода
элемента «ИЛИ» 18. Эти импульсы будут проходить через элемент «И» 20 и поступать на
вычитающий вход реверсивного счетчика 21. Получается, что при движении машины «впе-
ред» на выходах счетчика 21 будут появляться двоичные числа с дискретностью примерно в
одну шпалу, характеризующие расстояние, пройденное машиной «вперед». Если же машина
теперь начнет двигаться «назад», то числа на выходе счетчика 21 начнут, соответственно,
уменьшаться. Числа с выхода счетчика поступают далее на выходы устройства цифровой
индикации 22. В результате индикатор будет показывать машинисту и путь, пройденный
93
№ 1(17)
2014
машиной, и ее текущее положение с момента начала движения. Учитывая то, что период
следования импульсов, поступающих на счетчик, примерно равен ширине одной шпалы,
можно полагать, что именно ширина одной шпалы определяет погрешность отсчета переме-
щений и расстояний, пройденных предлагаемой машиной. Принято считать, что при извест-
ном периоде следования импульсов в измерительной последовательности импульсов, по-
грешность измерения равна половине периода следования импульсов. Таким образом по-
грешность определения расстояний, пройденных транспортирующей машиной при ее дви-
жении, будет равна примерно половине ширины шпалы (втрое меньше, чем у устройства,
описываемого в источнике [1]). Причем эта величина не зависит от пройденного машиной
расстояния.
На базе рассмотренного устройства разработана автоматизированная система позицио-
нирования широко используемого в промышленности мотовоза МПТ-4. Манипулятор мото-
воза, установленный на крыше кабины и дистанционно управляемый из нее, при этом был
заменен манипулятором SD-251-51 с аналогичными техническими характеристиками [5], но
устанавливаемым на платформе сзади кабины. Там же был размещен и пульт управления
манипулятором. Это повысило удобство работы машиниста мотовоза при выполнении им
погрузочно-разгрузочных операций с помощью манипулятора и освободило место в кабине
для аппаратуры устройства отсчета перемещений, в частности, блока цифровой индикации.
Устройства управления приводом и тормозами мотовоза изменениям не подвергались. Для
установки же дальномеров под кабиной были расположены кронштейны. На них
болтами были закреплены два лазерных дальномера LDM41, имеющие диапазон измерения
0,1 – 30 м и точность ±2 мм. Их потребляемая мощность – 1,5 Вт, напряжение питания –
10 – 30 В. Входной сигнал токовый – от 4 до 20 мА.
Разработанная система позиционирования и модернизированный с ее применением мо-
товоз могут существенно повысить производительность транспортно-складских систем про-
мышленных предприятий (становится ненужным реверсивное движение мотовоза при пози-
ционировании, к которому в настоящее время часто приходится прибегать для обеспечения
точной остановки). Поскольку точность позиционирования улучшается, появляется возмож-
ность уменьшить коэффициенты запаса по габаритным размерам складов, совместно с кото-
рыми работает мотовоз. Экономически применение описанной системы, по-видимому, также
целесообразно, так как она может быть построена на типовых микросхемах и себестоимость
ее невелика.
Список литературы
1. Пат. 2228988 Российская Федерация, МПК Е 01 В 35/06, G 01 С 3/00. Машина и спо-
соб для определения положения шпал рельсового пути [Текст] / Й. Тойрер, Б. Лихтбергер
(Австрия). – № 2002121059; Заявлено 08.08.2002; Опубл. 20.05. 2004. Бюл. № 5.
2. Пат. 128316 Российская Федерация, МПК G 01 С 3/00. Устройство для определения рас-
стояний, пройденных машиной по железнодорожному пути [Текст] / Я. Л. Либерман, Л. Н. Гор-
бунова (Россия). – № 2012153511; Заявлено 11.12.2012; Опубл. 20.05. 2013. Бюл. № 14.
3. СНиП 2.05.07–91*. Промышленный транспорт. Железнодорожный транспорт шири-
ной колеи 1520 мм [Текст]. М., 1996. – Гл. 3. – 120 с.
4. Виноградов, В. В. Расчеты и проектирование железнодорожного пути: Учебное посо-
бие [Текст] / В. В. Виноградов, А. М. Никонов, Т. Г. Яковлева. – М.: Маршрут, 2003. – 486 с.
5. Гурин, М. А. Проектирование ручных манипуляторов: Учебное пособие [Текст] /
М. А. Гурин / Уральский политехн. ин-т. – Свердловск, 1986. – 112 с.
№ 1(17)
2014 94
УДК 656.259.12:621.372.5: 517.54
С. А. Лунев, С. С. Сероштанов, М. М. Соколов, А. Г. Ходкевич
ПРИМЕНЕНИЕ АППАРАТА КОНФОРМНЫХ ОТОБРАЖЕНИЙ
ДЛЯ НЕПРЕРЫВНОГО КОНТРОЛЯ
КООРДИНАТЫ ПОДВИЖНОЙ ЕДИНИЦЫ НА ПУТИ
В статье рассматриваются вопросы определения координаты подвижного состава на участке железно-
дорожного пути. Предложено и обосновано применение математического аппарата конформных отображе-
ний.
Стратегия развития ОАО «РЖД» на перспективу до 2030 года предусматривает модер-
низацию инфраструктуры железнодорожного транспорта, в том числе устройств автоматики
и телемеханики, для обеспечения повышения скоростей движения поездов в грузовом и пас-
сажирском сообщении. Вопросы обеспечения безопасности движения поездов, основу кото-
рых составляют системы и устройства автоматики и телемеханики, всегда были в центре
внимания, особенно при скоростном движении. Точное и надежное определение местополо-
жения поездов дает возможность обеспечить безопасность их движения. Для реализации
этой задачи наибольшее распространение получили рельсовые цепи (РЦ), которые имеют
следующие преимущества перед другими аналогичными устройствами:
– минимальная вероятность ложной свободности контролируемого участка пути;
– контроль целостности рельсовых нитей;
– передача сигнала автоматической локомотивной сигнализации (АЛС) на локомотив.
Однако на современном этапе развития средств автоматики и телемеханики все чаще РЦ
заменяют или дополняют различными устройствами с целью снижения дискретности при
определении местоположения поездов, так как при высокой скорости движения необходимо
иметь более подробную информацию о движении поезда: точные координаты головы и хво-
ста поезда, реальную скорость движения. Большинство существующих систем автоматики
дают информацию только о номере занятой рельсовой цепи. Например, при пересечении
границы блок-участка поездом, длина которого не превышает длины одной РЦ, он занимает
две РЦ, что существенно снижает пропускную способность железных дорог.
В настоящее время определение координаты нахождения подвижной единицы нашло
широкое применение на участках подгорочных путей сортировочных горок с помощью
напольных технических средств: точечных путевых датчиков, рельсовых цепей, индуктивно-
проводных датчиков, устройств импульсного зондирования. Наличие недостатков этих тех-
нических средств, а также трудностей, связанных с их эксплуатацией, привели к необходи-
мости поиска альтернативных решений.
Авторами предлагается методика определения координаты подвижной единицы, осно-
ванная на использовании математического аппарата конформных отображений, применяемо-
го для анализа изменения параметров рельсовой линии. Данный математический аппарат
позволяет в режиме реального времени определять области входных сопротивлений рельсо-
вой линии, что дает возможность по изменению входного сопротивления определять коор-
динату подвижной единицы на пути с высокой точностью [1].
Пусть несущая частота сигнального тока равна 420 Гц, длина рельсовой линии – 625 м,
сопротивление изоляции рельсовой линии изменяется от 0,5 до 5 Ом/км. Соглас-
но утверждению в статье [2], правая полуплоскость 0ZRe при конформном отображении
перейдет на окружность с центром в точке, координаты которой рассчитываются по формуле
(1), и радиусом, рассчитываемым по формуле (2). Построение областей нормальных состоя-
ний четырехполюсника рельсовой линии для различных значений сопротивления изоляции
представлено на рисунке 1. Областью нормального состояния рельсовой линии будем назы-
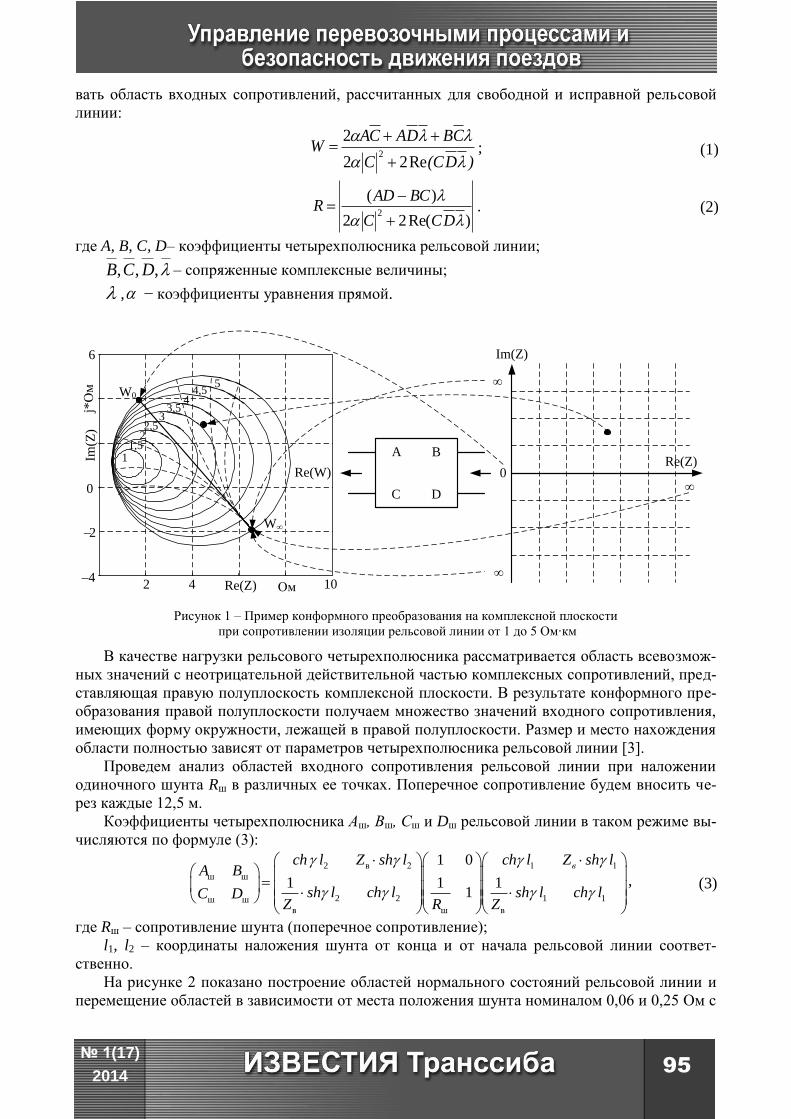
95
№ 1(17)
2014
вать область входных сопротивлений, рассчитанных для свободной и исправной рельсовой
линии:
)D(CC
CBDACAW
Re22
22
; (1)
)Re(22
)(2
DCC
BCADR
. (2)
где A, B, C, D– коэффициенты четырехполюсника рельсовой линии;
,,, DCB – сопряженные комплексные величины;
, − коэффициенты уравнения прямой.
A B
C D
Im(Z)
Re(Z)
∞
∞
0∞
Re(W)
W∞
W0
0
4
2
j*Ом
6
Re(Z)
Im(Z
)
11,5
2
33,5
44,5
2 4 Ом
2,5
5
10
Рисунок 1 – Пример конформного преобразования на комплексной плоскости
при сопротивлении изоляции рельсовой линии от 1 до 5 Ом∙км
В качестве нагрузки рельсового четырехполюсника рассматривается область всевозмож-
ных значений с неотрицательной действительной частью комплексных сопротивлений, пред-
ставляющая правую полуплоскость комплексной плоскости. В результате конформного пре-
образования правой полуплоскости получаем множество значений входного сопротивления,
имеющих форму окружности, лежащей в правой полуплоскости. Размер и место нахождения
области полностью зависят от параметров четырехполюсника рельсовой линии [3].
Проведем анализ областей входного сопротивления рельсовой линии при наложении
одиночного шунта Rш в различных ее точках. Поперечное сопротивление будем вносить че-
рез каждые 12,5 м.
Коэффициенты четырехполюсника Аш, Вш, Сш и Dш рельсовой линии в таком режиме вы-
числяются по формуле (3):
2 в 2 1 1
ш ш
2 2 1 1ш ш
в ш в
1 0
1 1 11
вch l Z sh l ch l Z sh lA B
sh l ch l sh l ch lC DZ R Z
, (3)
где Rш – сопротивление шунта (поперечное сопротивление);
l1, l2 – координаты наложения шунта от конца и от начала рельсовой линии соответ-
ственно.
На рисунке 2 показано построение областей нормального состояний рельсовой линии и
перемещение областей в зависимости от места положения шунта номиналом 0,06 и 0,25 Ом с
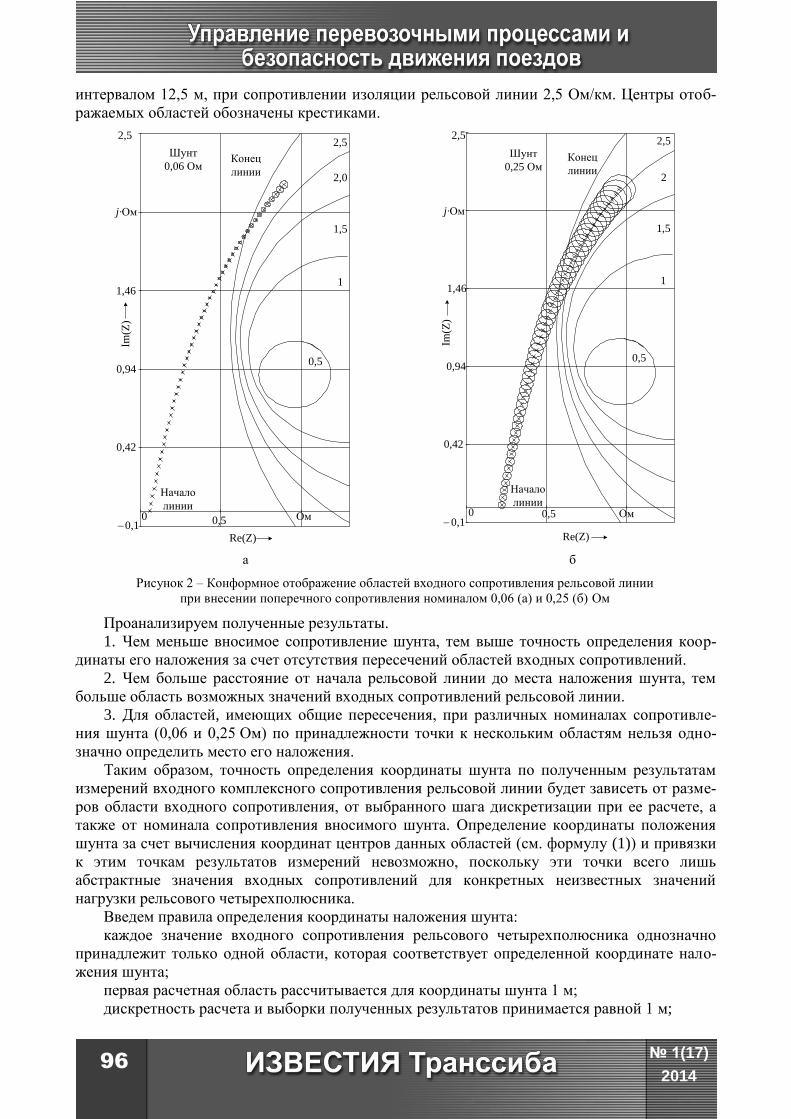
№ 1(17)
2014 96
интервалом 12,5 м, при сопротивлении изоляции рельсовой линии 2,5 Ом/км. Центры отоб-
ражаемых областей обозначены крестиками.
0 0,5 Ом0,1
0,42
0,94
1,46
j∙Ом
2,5
Re(Z)
Im(Z
)
Шунт
0,06 ОмКонец
линии
Начало
линии
0,5
1
1,5
2,0
2,5
0 0,5 Ом0,1
0,42
0,94
1,46
j∙Ом
2,5
Re(Z)
Im(Z
)
Конец
линии
Начало
линии
Шунт
0,25 Ом
0,5
1
1,5
2
2,5
а б
Рисунок 2 – Конформное отображение областей входного сопротивления рельсовой линии
при внесении поперечного сопротивления номиналом 0,06 (а) и 0,25 (б) Ом
Проанализируем полученные результаты.
1. Чем меньше вносимое сопротивление шунта, тем выше точность определения коор-динаты его наложения за счет отсутствия пересечений областей входных сопротивлений.
2. Чем больше расстояние от начала рельсовой линии до места наложения шунта, тем больше область возможных значений входных сопротивлений рельсовой линии.
3. Для областей, имеющих общие пересечения, при различных номиналах сопротивле-
ния шунта (0,06 и 0,25 Ом) по принадлежности точки к нескольким областям нельзя одно-
значно определить место его наложения.
Таким образом, точность определения координаты шунта по полученным результатам
измерений входного комплексного сопротивления рельсовой линии будет зависеть от разме-
ров области входного сопротивления, от выбранного шага дискретизации при ее расчете, а
также от номинала сопротивления вносимого шунта. Определение координаты положения
шунта за счет вычисления координат центров данных областей (см. формулу (1)) и привязки
к этим точкам результатов измерений невозможно, поскольку эти точки всего лишь
абстрактные значения входных сопротивлений для конкретных неизвестных значений
нагрузки рельсового четырехполюсника.
Введем правила определения координаты наложения шунта:
каждое значение входного сопротивления рельсового четырехполюсника однозначно
принадлежит только одной области, которая соответствует определенной координате нало-
жения шунта;
первая расчетная область рассчитывается для координаты шунта 1 м;
дискретность расчета и выборки полученных результатов принимается равной 1 м;
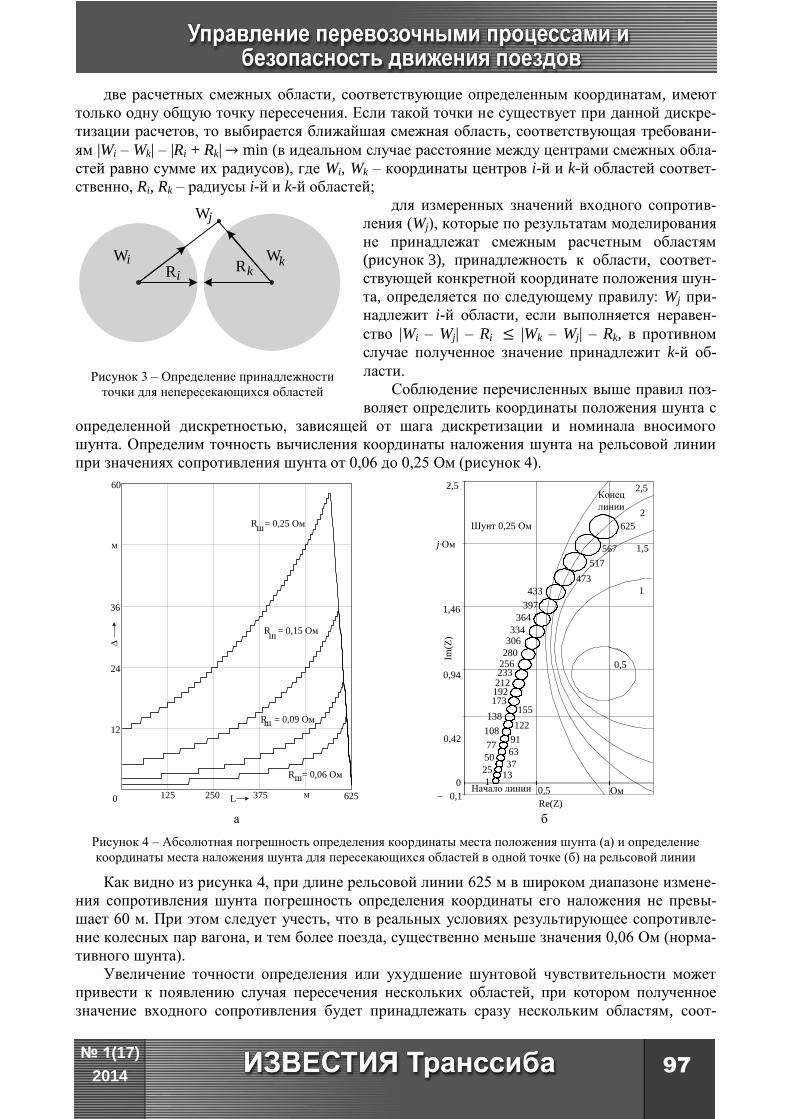
97
№ 1(17)
2014
две расчетных смежных области, соответствующие определенным координатам, имеют
только одну общую точку пересечения. Если такой точки не существует при данной дискре-
тизации расчетов, то выбирается ближайшая смежная область, соответствующая требовани-
ям |Wi – Wk| – |Ri + Rk| min (в идеальном случае расстояние между центрами смежных обла-
стей равно сумме их радиусов), где Wi, Wk – координаты центров i-й и k-й областей соответ-
ственно, Ri, Rk – радиусы i-й и k-й областей;
для измеренных значений входного сопротив-
ления (Wj), которые по результатам моделирования
не принадлежат смежным расчетным областям
(рисунок 3), принадлежность к области, соответ-
ствующей конкретной координате положения шун-
та, определяется по следующему правилу: Wj при-
надлежит i-й области, если выполняется неравен-
ство |Wi – Wj| – Ri |Wk – Wj| – Rk, в противном
случае полученное значение принадлежит k-й об-
ласти.
Соблюдение перечисленных выше правил поз-
воляет определить координаты положения шунта с
определенной дискретностью, зависящей от шага дискретизации и номинала вносимого
шунта. Определим точность вычисления координаты наложения шунта на рельсовой линии
при значениях сопротивления шунта от 0,06 до 0,25 Ом (рисунок 4).
125 250 375 6250
12
24
36
м
60
мL
∆
R = 0,25 Омш
R = 0,15 Омш
R = 0,09 Омш
R = 0,06 Омш
00,5 Ом
0,1
0,42
0,94
1,46
j∙Ом
2,5
Re(Z)
Im(Z
)
Конец
линии
Начало линии
Шунт 0,25 Ом 625
517
567
473
433
397
364
334306
280256233212192173
155138
122108
9177
6350
3725
131
0,5
1
1,5
2
2,5
а б
Рисунок 4 – Абсолютная погрешность определения координаты места положения шунта (а) и определение
координаты места наложения шунта для пересекающихся областей в одной точке (б) на рельсовой линии
Как видно из рисунка 4, при длине рельсовой линии 625 м в широком диапазоне измене-
ния сопротивления шунта погрешность определения координаты его наложения не превы-
шает 60 м. При этом следует учесть, что в реальных условиях результирующее сопротивле-
ние колесных пар вагона, и тем более поезда, существенно меньше значения 0,06 Ом (норма-
тивного шунта).
Увеличение точности определения или ухудшение шунтовой чувствительности может
привести к появлению случая пересечения нескольких областей, при котором полученное
значение входного сопротивления будет принадлежать сразу нескольким областям, соот-
RiRk
WkWi
Wj
Рисунок 3 – Определение принадлежности
точки для непересекающихся областей
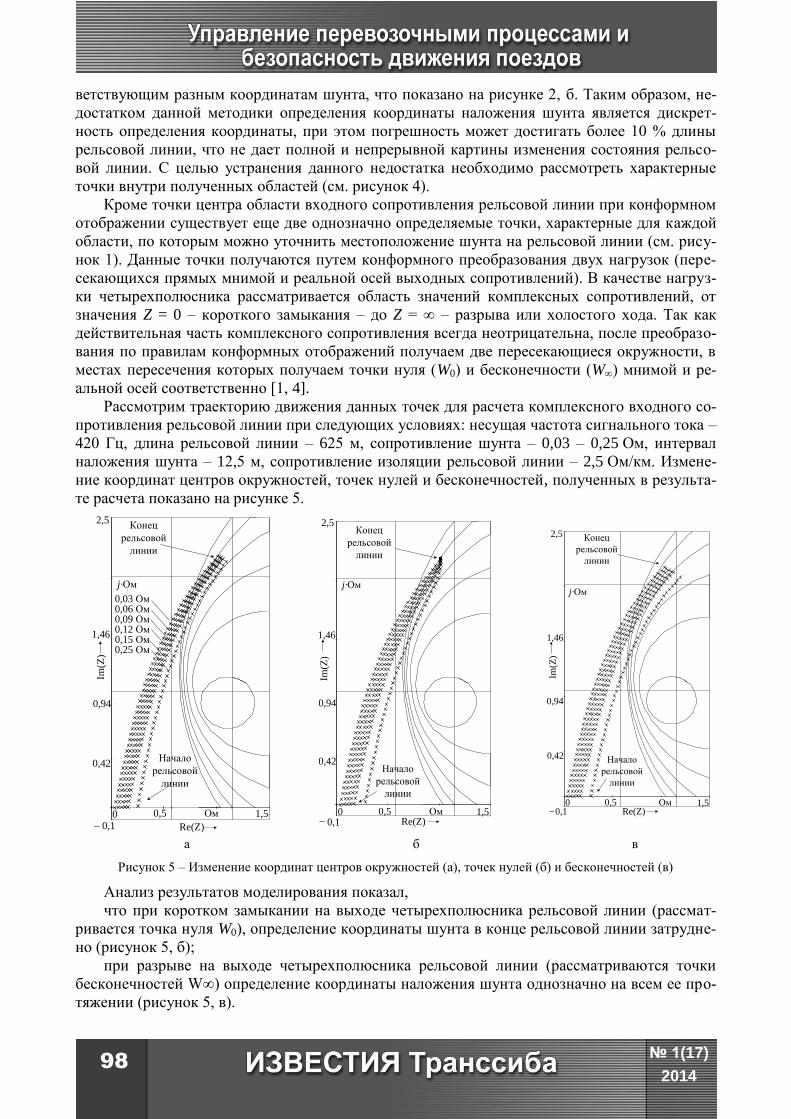
№ 1(17)
2014 98
ветствующим разным координатам шунта, что показано на рисунке 2, б. Таким образом, не-
достатком данной методики определения координаты наложения шунта является дискрет-
ность определения координаты, при этом погрешность может достигать более 10 % длины
рельсовой линии, что не дает полной и непрерывной картины изменения состояния рельсо-
вой линии. С целью устранения данного недостатка необходимо рассмотреть характерные
точки внутри полученных областей (см. рисунок 4).
Кроме точки центра области входного сопротивления рельсовой линии при конформном
отображении существует еще две однозначно определяемые точки, характерные для каждой
области, по которым можно уточнить местоположение шунта на рельсовой линии (см. рису-
нок 1). Данные точки получаются путем конформного преобразования двух нагрузок (пере-
секающихся прямых мнимой и реальной осей выходных сопротивлений). В качестве нагруз-
ки четырехполюсника рассматривается область значений комплексных сопротивлений, от
значения Z = 0 – короткого замыкания – до Z = ∞ – разрыва или холостого хода. Так как
действительная часть комплексного сопротивления всегда неотрицательна, после преобразо-
вания по правилам конформных отображений получаем две пересекающиеся окружности, в
местах пересечения которых получаем точки нуля (W0) и бесконечности (W∞) мнимой и ре-
альной осей соответственно [1, 4].
Рассмотрим траекторию движения данных точек для расчета комплексного входного со-
противления рельсовой линии при следующих условиях: несущая частота сигнального тока –
420 Гц, длина рельсовой линии – 625 м, сопротивление шунта – 0,03 – 0,25 Ом, интервал
наложения шунта – 12,5 м, сопротивление изоляции рельсовой линии – 2,5 Ом/км. Измене-
ние координат центров окружностей, точек нулей и бесконечностей, полученных в результа-
те расчета показано на рисунке 5.
0,5 Ом 1,5
Re(Z)
00,1
0,42
0,94
1,46
j∙Ом
Im(Z
)
2,5Конец
рельсовой
линии
Начало
рельсовой
линии
0,03 Ом
0,09 Ом0,06 Ом
0,12 Ом0,15 Ом0,25 Ом
� 0,5 Ом 1,5
Re(Z)0
0,1
0,42
0,94
1,46
j∙Ом
Im(Z
)
2,5
Начало
рельсовой
линии
Конец
рельсовой
линии
�
0,5 Ом 1,5Re(Z)
00,1
0,42
0,94
1,46
j∙Ом
Im(Z
)
2,5 Конец
рельсовой
линии
Начало
рельсовой
линии
�
а б в
Рисунок 5 – Изменение координат центров окружностей (а), точек нулей (б) и бесконечностей (в)
Анализ результатов моделирования показал,
что при коротком замыкании на выходе четырехполюсника рельсовой линии (рассмат-
ривается точка нуля W0), определение координаты шунта в конце рельсовой линии затрудне-
но (рисунок 5, б);
при разрыве на выходе четырехполюсника рельсовой линии (рассматриваются точки
бесконечностей W∞) определение координаты наложения шунта однозначно на всем ее про-
тяжении (рисунок 5, в).
99
№ 1(17)
2014
На основании предложенных расчетов и утверждений коллективом ученых ОмГУПСа
(ОмИИТа) получен патент «Устройство непрерывного контроля технического состояния
рельсовых цепей» [5].
На основе изложенного можно сделать выводы.
1. Возможность применения математического аппарата конформных отображений под-
тверждена аналитическими расчетами.
2. Графическое отображение областей состояния рельсовой линии может быть использо-
вано как наглядное и эффективное средство исследования функциональных зависимостей ее
электрических характеристик от внутренних (проводимость изоляции, изменение сопротив-
ления токопроводящих и изолирующих стыков) и внешних (помехи электрического тягового
подвижного состава, линий электропередач) параметров в широком диапазоне их изменения.
3. Для исключения дискретности определения координаты наложения шунта целесооб-
разно рассматривать нагрузку, соответствующую точкам бесконечности (наличие изолиру-
ющих стыков в конце рельсовой линии).
4. Координата наложения шунта может быть определена путем сопоставления расчетных
кривых и полученных экспериментально значений входного сопротивления рельсовой линии.
5. Анализ рельсовой линии и определение ее параметров допускает графическое реше-
ние, точность которого достаточна. Использование автоматической классификации состоя-
ний рельсовой линии расширяет возможности их исследования в каждом из основных режи-
мов работы, что особенно актуально для сложных условий эксплуатации.
Список литературы
1. Сероштанов, С. С. Методы и алгоритмы диагностирования технического состояния то-
нальных рельсовых цепей [Текст]: Дис... канд. техн. наук. – Санкт-Петербург, 2006. – 137 с.
2. Шабат, Б. В. Введение в комплексный анализ [Текст] / Б. В. Шабат. – М.: Наука, 1969. –
576 с.
3. Сероштанов, С. С. Применение математического аппарата конформных отображений
для непрерывного контроля и прогнозирования состояния тональных рельсовых цепей
[Текст] / С. С. Сероштанов, С. А. Лунев // Омский научный вестник / Омский гос. техн. ун-т. –
Омск. – 2006. – № 9 (46). – С. 98 – 102.
4. Сероштанов, С. С. Непрерывный контроль технического состояния рельсовых цепей
[Текст] / С. С. Сероштанов, Р. Ш. Аюпов / Научные проблемы транспорта Сибири и Дальне-
го Востока / Новосибирская гос. акад. водного трансп. – Новосибирск. – 2008. – № 2. – 288 –
290 с.
5. Пат. 78580 Российская Федерация, МПК G 01 R 17/02. Устройство непрерывного кон-
троля технического состояния рельсовых цепей [Текст] / С. А. Лунев, Р. Ш. Аюпов (Россия). –
№ 2008131276/22; Заявлено 29.07.2008; Опубл. 27.11.2008. Бюл. № 33.
УДК 629.4.027
М. Х. Минжасаров
КРАТКИЙ АНАЛИЗ ОСОБЕННОСТЕЙ ЖЕЛЕЗНОДОРОЖНЫХ ЭКИПАЖЕЙ
С НЕЛИНЕЙНЫМИ УПРУГИМИ ЭЛЕМЕНТАМИ
В статье приведен краткий теоретический анализ особенностей железнодорожных экипажей с нели-
нейными упругими элементами. Рассмотрены отличительные черты рессорного подвешивания электровозов
старого и новых поколений. На основе отличий построена расчетная схема и выведена математическая мо-
дель вертикальной динамики условного «одноосного» электровоза нового поколения, позволяющая оценить
критическую скорость железнодорожного экипажа и показатели его динамических качеств.
№ 1(17)
2014 100
Железнодорожный экипаж и путь приставляют собой единую нелинейную механиче-
скую систему, которую называют таковой, если нелинейны соотношения, описывающие
процессы ее движения или статического деформирования, в частности, если хотя бы одна из
обобщенных сил нелинейно связана с обобщенными координатами и (или) обобщенными
скоростями. Хотя всякая реальная механическая система в той или иной степени нелинейна
[1]. При исследовании рессорного подвешивания единиц подвижного состава железных до-
рог необходимо опираться на современные достижения теории колебаний и автоматического
регулирования и рассматривать подрессоренную единицу как разомкнутую систему автома-
тического регулирования. Системы автоматического регулирования бывают как линейные,
так и нелинейные – в зависимости от наличия в системе звеньев с нелинейной статической
характеристикой.
Система «экипаж – путь» как нелинейная механическая система содержит ряд характер-
ных черт, которые вносят особенности в исследование ее колебаний. К ним следует отнести
нелинейные упругие элементы (пружины, рессоры, пневморессоры), фрикционные гасители
колебаний, нелинейную жесткость основания пути, билинейные упругие амортизаторы, свя-
зи кузова и тележек, выполненные с предварительным натяжением пружин, силы крипа. Рас-
смотрим наиболее важные из особенностей нелинейной системы «экипаж – путь».
Во-первых, нелинейные динамические системы не подчиняются принципу суперпози-
ции, который широко применяется для исследования линейных систем. В этом главное отли-
чие свойств нелинейных систем от свойств линейных [1].
Во-вторых, важной особенностью нелинейных механических систем является формаль-
ная возможность существования нескольких решений, характеризующих состояние системы
при заданных значениях ее параметров и параметров возмущающего действия. Поэтому при
исследовании колебаний таких систем возникает проблема оценки возможности существо-
вания нескольких состояний системы, отбора действительно реализуемых состояний или
оценки вероятности появления того или иного состояния [1].
В-третьих, на динамическое поведение железнодорожных экипажей значительное влия-
ние оказывают силы взаимодействия колеса и рельса. Эти силы зависят от характеристик
сцепления колес с рельсами, упругого скольжения или крипа, а также от износа колеса и
рельса и параметров рельсовой колеи. На перечисленные характеристики влияют геометрия
профилей колеса и рельса и динамическое поведение самого экипажа, так как силы крипа
существенно зависят от площади контакта и контактного напряжения между колесом и рель-
сом [2].
Как показали исследования сил взаимодействия колеса и рельса, модель этого взаимо-
действия не может быть описана в рамках линейной теории. В частности, необходимо учесть
следующие нелинейные факторы: нелинейные геометрические функции колеса и рельса, свя-
занные с профилями колеса и рельса, и ограничения на область сцепления, которые накла-
дываются на соотношение между силой крипа и крипом. Модель, применяемая для описания
взаимодействия колеса и рельса, носит нелинейный характер, следовательно, данное обстоя-
тельство будет вносить нелинейность во всю динамику системы «экипаж – путь».
Важной особенностью колебаний железнодорожных экипажей является случайный ха-
рактер внешних возмущений. Математически это возмущение описывается случайной функ-
цией. В теории случайных процессов для характеристики случайных функций пользуются
статистическими характеристиками, которые являются не числами, а функциями, причем
функциями неслучайными. Для стационарных случайных процессов такими характеристи-
ками являются корреляционная функция и спектральная плотность [3].
В настоящее время не существует единой точки зрения относительно математической
модели внешнего возмущения. Теоретическому и экспериментальному изучению возмуще-
ний, действующих на рельсовые экипажи со стороны пути, посвящены работы отечествен-
ных и зарубежных ученых. При этом делались многочисленные попытки описания экспери-
101
№ 1(17)
2014
ментальных данных о возмущениях с помощью аналитических выражений. Однако так как
эксперименты проводились в разных условиях (например, различное состояние участков же-
лезных дорог и подвижного состава, отличающиеся по конструкции экипажи, неодинаковые
погодные условия и др.) и с использованием различных методик, то полученные при этом
результаты в ряде случаев существенно отличаются друг от друга. Это иногда затрудняет их
использование при теоретических исследованиях колебаний рельсовых экипажей. Краткий
анализ этих работ приведен в монографии [3].
Процесс возникновения колебаний в движущемся экипаже связан с необходимостью ис-
следования нелинейной системы при случайных параметрических возмущениях, поскольку
реакции пути и подвешивания нелинейно связаны с их деформациями. Однако результаты
многочисленных натурных исследований взаимодействия подвижного состава и пути, как и
опыт эксплуатации, не обнаруживают явлений, характерных для параметрических колебаний
или систем с существенно нелинейными свойствами.
Это объясняется преимущественно низким относительным уровнем таких возмущений.
Вместе с тем объективно проявляется общее увеличение жесткости пути в случае глубокого
промерзания полотна зимой. Экспериментально показано, что в вертикальном направлении
рельсовый путь имеет жесткость, меняющуюся по мере роста нагрузки, выбора зазоров и
сжатия подрельсовых прокладок; жесткость, вначале низкая, значительно возрастает, а затем
остается практически постоянной, если отвлечься от ее изменения в пределах шпального
ящика, т. е. система приобретает свойства линейной системы.
В связи с этим непостоянство свойств пути по длине практически эквивалентно некото-
рой случайной геометрической неровности. Все это позволяет в качестве возмущающей
функции принять некоторую эквивалентную геометрическую неровность пути ηэ(x), которая
приближенно учитывает все причины, вызывающие появление колебаний подвижного соста-
ва. Статистические характеристики эквивалентной геометрической неровности получают
экспериментально при записи ускорений букс колесных пар или их абсолютных переме-
щений.
Нелинейные упругодемпфирующие связи, применяемые на единицах подвижного соста-
ва, – еще одна немаловажная особенность в системе «экипаж – путь». В рессорном подвеши-
вании подвижного состава нашли широкое применение витые пружины (цилиндрические и
конические), листовые рессоры, билинейные упругие элементы, пневморессоры, фрикцион-
ные гасители и гидродемпферы.
Витые цилиндрические пружины применены в рессорном подвешивании всех видов под-
вижного состава. На рисунке 1,а – пружины типа «Flexicoil», применяемые на кузовной сту-
пени рессорного подвешивания грузовых электровозов 2ЭС6 «Синара», 2ЭС10 «Гранит»,
2ЭС4К «Дончак», пассажирского электровоза ЭП2К; б – пружины буксовой ступени. При
этом силовые характеристики витых пружин напрямую зависят от их формы и расположения
относительно друг друга в конструкции подвески. Цилиндрические пружины имеют линей-
ную силовую характеристику. При параллельной работе нескольких пружин (двухрядных)
силовая характеристика становится билинейной в тех случаях, когда одна пружина по высоте
меньше другой. Кубическую упругую характеристику имеют конические металлические
пружины, или пневморессоры, которые нашли широкое применение в скоростном движении.
У винтовых пружин, образующая которых выполнена в виде конуса, а также у резинокорд-
ных упругих элементов коэффициент жесткости возрастает с увеличением приложенной си-
лы, и в результате силовая характеристика является жесткой. Жесткая силовая характеристи-
ка, представленная кривой и описываемая, как правило, кубической нелинейностью (или
тангенсоидой), предпочтительна для плавного ограничения динамического хода системы
обрессоривания и получения, во многих случаях, наилучших показателей динамических ка-
честв [4].
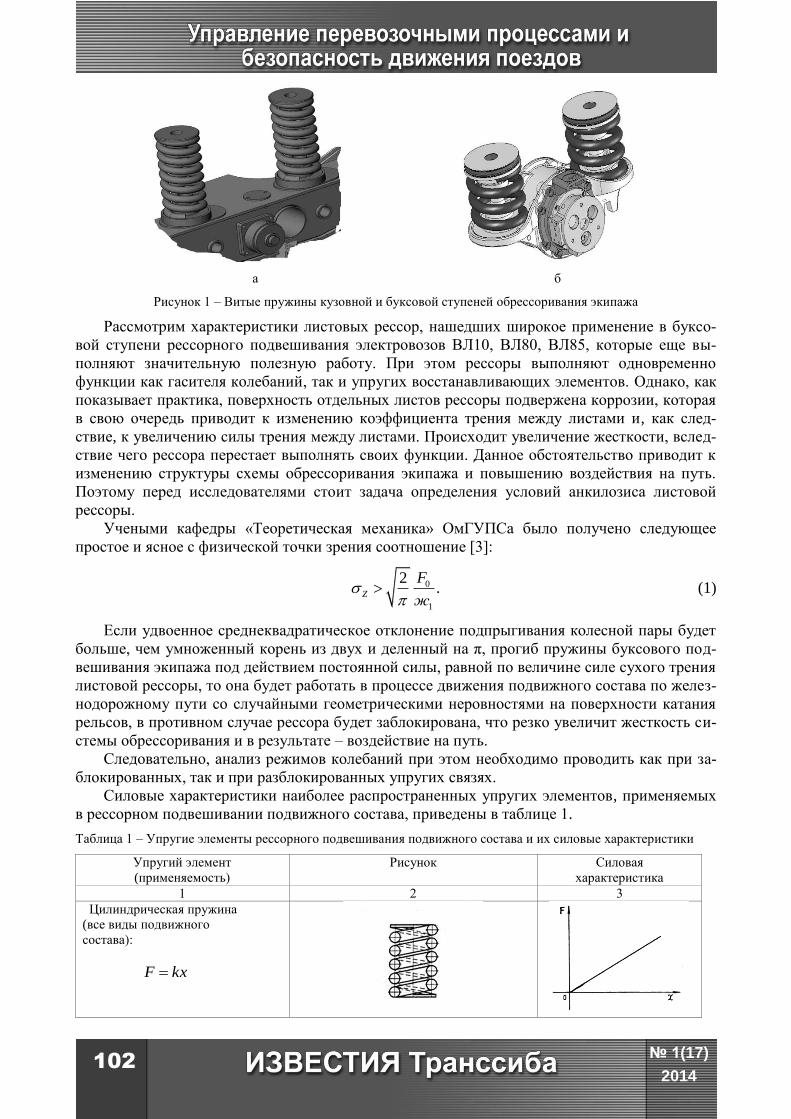
№ 1(17)
2014 102
а б
Рисунок 1 – Витые пружины кузовной и буксовой ступеней обрессоривания экипажа
Рассмотрим характеристики листовых рессор, нашедших широкое применение в буксо-
вой ступени рессорного подвешивания электровозов ВЛ10, ВЛ80, ВЛ85, которые еще вы-
полняют значительную полезную работу. При этом рессоры выполняют одновременно
функции как гасителя колебаний, так и упругих восстанавливающих элементов. Однако, как
показывает практика, поверхность отдельных листов рессоры подвержена коррозии, которая
в свою очередь приводит к изменению коэффициента трения между листами и, как след-
ствие, к увеличению силы трения между листами. Происходит увеличение жесткости, вслед-
ствие чего рессора перестает выполнять своих функции. Данное обстоятельство приводит к
изменению структуры схемы обрессоривания экипажа и повышению воздействия на путь.
Поэтому перед исследователями стоит задача определения условий анкилозиса листовой
рессоры.
Учеными кафедры «Теоретическая механика» ОмГУПСа было получено следующее
простое и ясное с физической точки зрения соотношение [3]:
0
1
2.Z
F
ж
(1)
Если удвоенное среднеквадратическое отклонение подпрыгивания колесной пары будет
больше, чем умноженный корень из двух и деленный на π, прогиб пружины буксового под-
вешивания экипажа под действием постоянной силы, равной по величине силе сухого трения
листовой рессоры, то она будет работать в процессе движения подвижного состава по желез-
нодорожному пути со случайными геометрическими неровностями на поверхности катания
рельсов, в противном случае рессора будет заблокирована, что резко увеличит жесткость си-
стемы обрессоривания и в результате – воздействие на путь.
Следовательно, анализ режимов колебаний при этом необходимо проводить как при за-
блокированных, так и при разблокированных упругих связях.
Силовые характеристики наиболее распространенных упругих элементов, применяемых
в рессорном подвешивании подвижного состава, приведены в таблице 1.
Таблица 1 – Упругие элементы рессорного подвешивания подвижного состава и их силовые характеристики
Упругий элемент
(применяемость) Рисунок Силовая
характеристика 1 2 3
Цилиндрическая пружина
(все виды подвижного
состава):
kxF
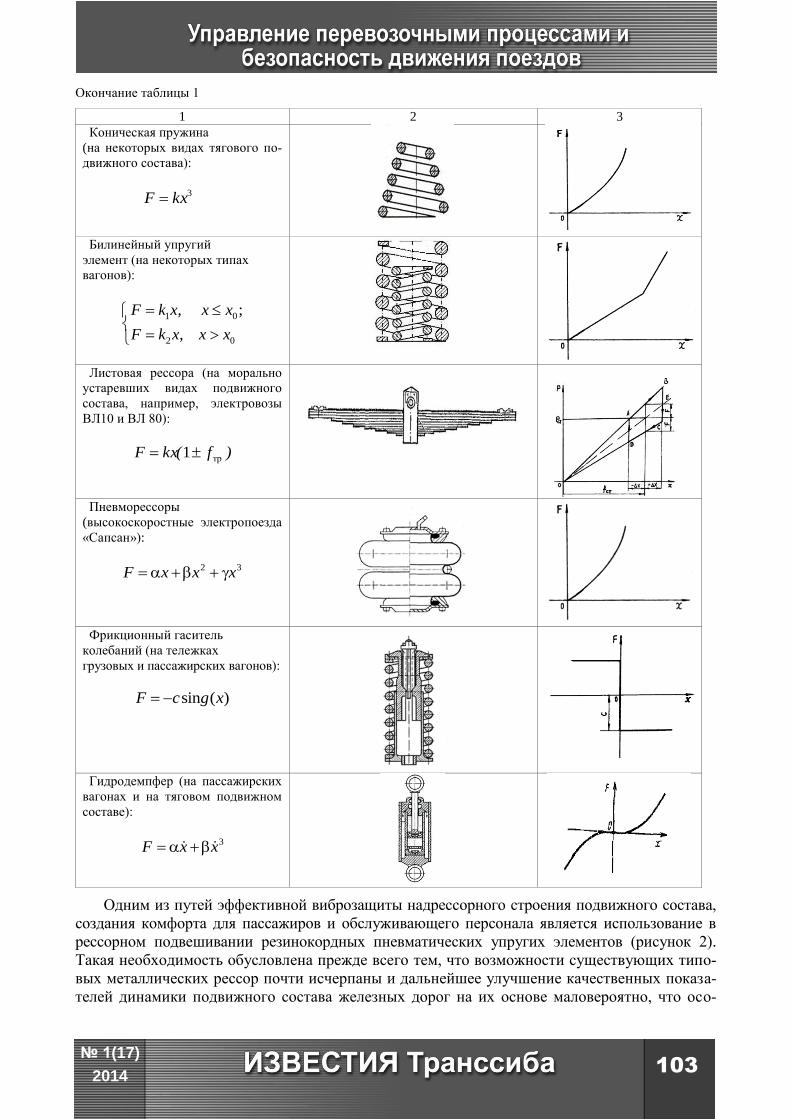
103
№ 1(17)
2014
Окончание таблицы 1
1 2 3
Коническая пружина
(на некоторых видах тягового по-
движного состава):
3kxF
Билинейный упругий
элемент (на некоторых типах
вагонов):
1 0
2 0
, ;
,
F k x x x
F k x x x
Листовая рессора (на морально
устаревших видах подвижного
состава, например, электровозы
ВЛ10 и ВЛ 80):
)f(kxF тр1
Пневморессоры
(высокоскоростные электропоезда
«Сапсан»):
32 xxxF
Фрикционный гаситель
колебаний (на тележках
грузовых и пассажирских вагонов):
sin ( )F c g x
Гидродемпфер (на пассажирских
вагонах и на тяговом подвижном
составе):
3xxF
Одним из путей эффективной виброзащиты надрессорного строения подвижного состава,
создания комфорта для пассажиров и обслуживающего персонала является использование в
рессорном подвешивании резинокордных пневматических упругих элементов (рисунок 2).
Такая необходимость обусловлена прежде всего тем, что возможности существующих типо-
вых металлических рессор почти исчерпаны и дальнейшее улучшение качественных показа-
телей динамики подвижного состава железных дорог на их основе маловероятно, что осо-
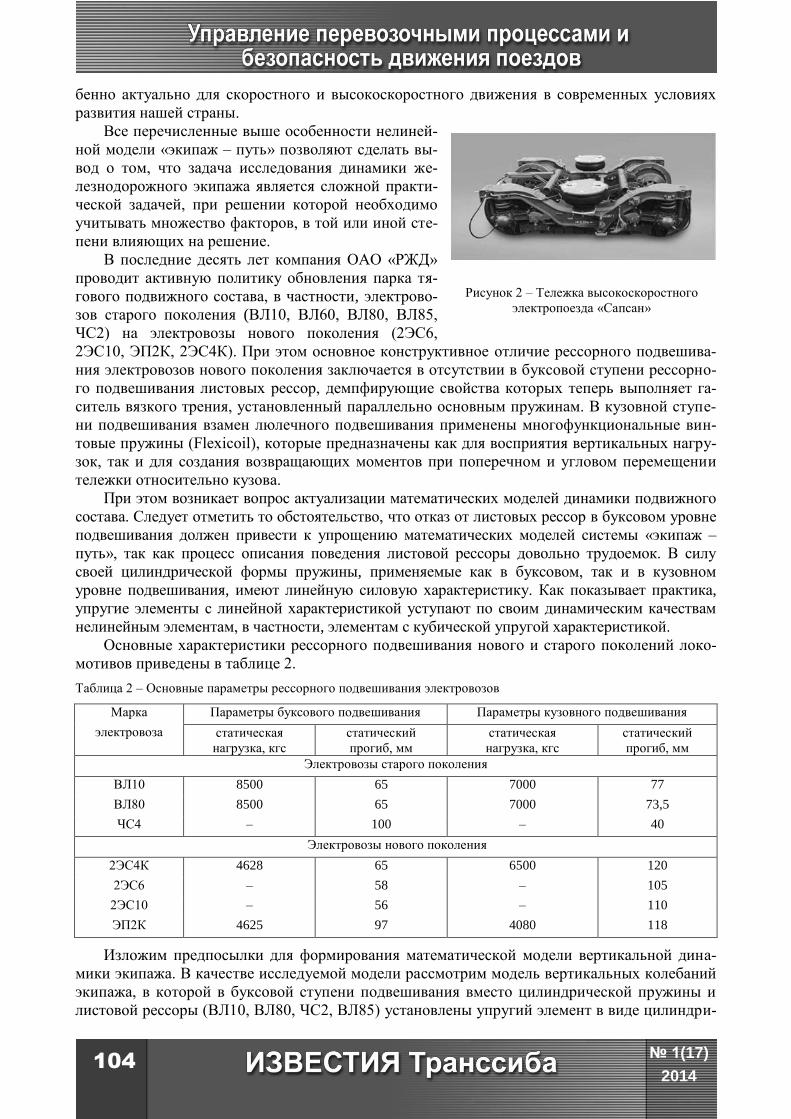
№ 1(17)
2014 104
бенно актуально для скоростного и высокоскоростного движения в современных условиях
развития нашей страны.
Все перечисленные выше особенности нелиней-
ной модели «экипаж – путь» позволяют сделать вы-
вод о том, что задача исследования динамики же-
лезнодорожного экипажа является сложной практи-
ческой задачей, при решении которой необходимо
учитывать множество факторов, в той или иной сте-
пени влияющих на решение.
В последние десять лет компания ОАО «РЖД»
проводит активную политику обновления парка тя-
гового подвижного состава, в частности, электрово-
зов старого поколения (ВЛ10, ВЛ60, ВЛ80, ВЛ85,
ЧС2) на электровозы нового поколения (2ЭС6,
2ЭС10, ЭП2К, 2ЭС4К). При этом основное конструктивное отличие рессорного подвешива-
ния электровозов нового поколения заключается в отсутствии в буксовой ступени рессорно-
го подвешивания листовых рессор, демпфирующие свойства которых теперь выполняет га-
ситель вязкого трения, установленный параллельно основным пружинам. В кузовной ступе-
ни подвешивания взамен люлечного подвешивания применены многофункциональные вин-
товые пружины (Flexicoil), которые предназначены как для восприятия вертикальных нагру-
зок, так и для создания возвращающих моментов при поперечном и угловом перемещении
тележки относительно кузова.
При этом возникает вопрос актуализации математических моделей динамики подвижного
состава. Следует отметить то обстоятельство, что отказ от листовых рессор в буксовом уровне
подвешивания должен привести к упрощению математических моделей системы «экипаж –
путь», так как процесс описания поведения листовой рессоры довольно трудоемок. В силу
своей цилиндрической формы пружины, применяемые как в буксовом, так и в кузовном
уровне подвешивания, имеют линейную силовую характеристику. Как показывает практика,
упругие элементы с линейной характеристикой уступают по своим динамическим качествам
нелинейным элементам, в частности, элементам с кубической упругой характеристикой.
Основные характеристики рессорного подвешивания нового и старого поколений локо-
мотивов приведены в таблице 2.
Таблица 2 – Основные параметры рессорного подвешивания электровозов
Марка
электровоза
Параметры буксового подвешивания Параметры кузовного подвешивания
статическая
нагрузка, кгс
статический
прогиб, мм
статическая
нагрузка, кгс
статический
прогиб, мм
Электровозы старого поколения
ВЛ10 8500 65 7000 77
ВЛ80 8500 65 7000 73,5
ЧС4 – 100 – 40
Электровозы нового поколения
2ЭС4К 4628 65 6500 120
2ЭС6 – 58 – 105
2ЭС10 – 56 – 110
ЭП2К 4625 97 4080 118
Изложим предпосылки для формирования математической модели вертикальной дина-
мики экипажа. В качестве исследуемой модели рассмотрим модель вертикальных колебаний
экипажа, в которой в буксовой ступени подвешивания вместо цилиндрической пружины и
листовой рессоры (ВЛ10, ВЛ80, ЧС2, ВЛ85) установлены упругий элемент в виде цилиндри-
Рисунок 2 – Тележка высокоскоростного
электропоезда «Сапсан»
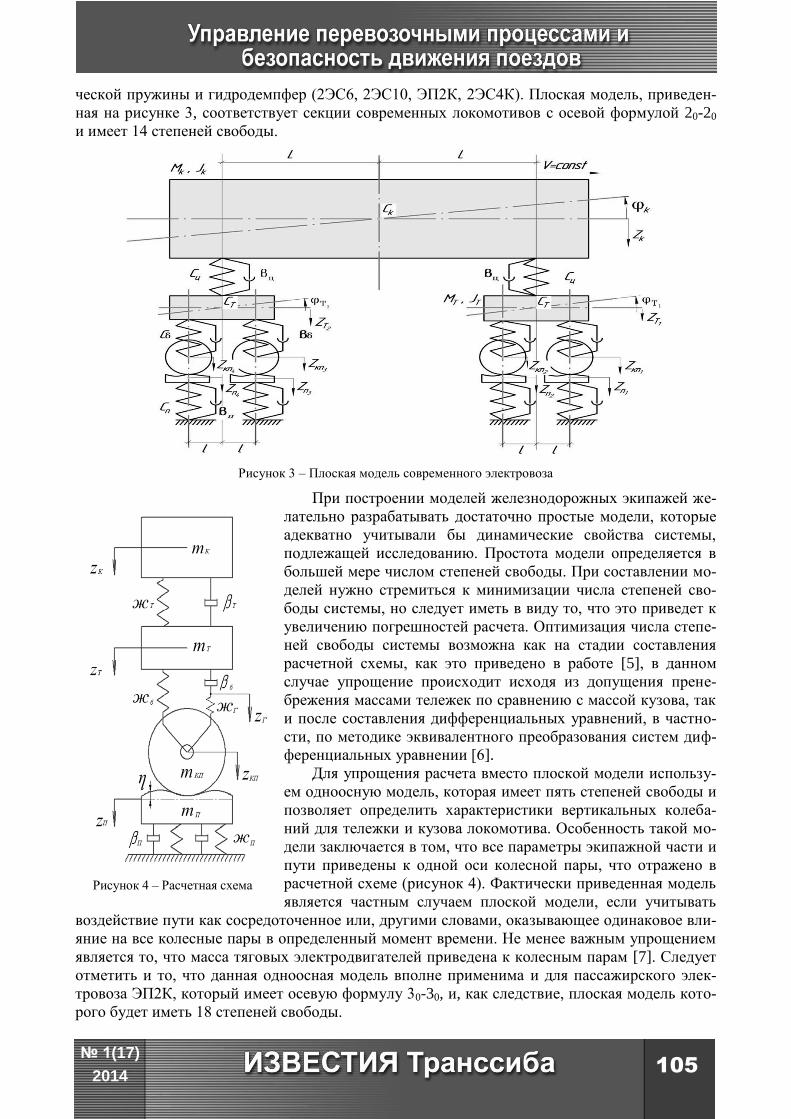
105
№ 1(17)
2014
ческой пружины и гидродемпфер (2ЭС6, 2ЭС10, ЭП2К, 2ЭС4К). Плоская модель, приведен-
ная на рисунке 3, соответствует секции современных локомотивов с осевой формулой 20-20
и имеет 14 степеней свободы.
Рисунок 3 – Плоская модель современного электровоза
При построении моделей железнодорожных экипажей же-
лательно разрабатывать достаточно простые модели, которые
адекватно учитывали бы динамические свойства системы,
подлежащей исследованию. Простота модели определяется в
большей мере числом степеней свободы. При составлении мо-
делей нужно стремиться к минимизации числа степеней сво-
боды системы, но следует иметь в виду то, что это приведет к
увеличению погрешностей расчета. Оптимизация числа степе-
ней свободы системы возможна как на стадии составления
расчетной схемы, как это приведено в работе [5], в данном
случае упрощение происходит исходя из допущения прене-
брежения массами тележек по сравнению с массой кузова, так
и после составления дифференциальных уравнений, в частно-
сти, по методике эквивалентного преобразования систем диф-
ференциальных уравнении [6].
Для упрощения расчета вместо плоской модели использу-
ем одноосную модель, которая имеет пять степеней свободы и
позволяет определить характеристики вертикальных колеба-
ний для тележки и кузова локомотива. Особенность такой мо-
дели заключается в том, что все параметры экипажной части и
пути приведены к одной оси колесной пары, что отражено в
расчетной схеме (рисунок 4). Фактически приведенная модель
является частным случаем плоской модели, если учитывать
воздействие пути как сосредоточенное или, другими словами, оказывающее одинаковое вли-
яние на все колесные пары в определенный момент времени. Не менее важным упрощением
является то, что масса тяговых электродвигателей приведена к колесным парам [7]. Следует
отметить и то, что данная одноосная модель вполне применима и для пассажирского элек-
тровоза ЭП2К, который имеет осевую формулу 30-30, и, как следствие, плоская модель кото-
рого будет иметь 18 степеней свободы.
Рисунок 4 – Расчетная схема
№ 1(17)
2014 106
Для данной системы составим дифференциальные уравнения колебания кузова, тележек, колесной пары и пути. Решим задачу, используя уравнения Лагранжа второго рода:
Ф П
.ii i i i
d дТ дТ д дF
dt дq дq дq дq
(2)
В первую очередь введем параметры, необходимые для расчета: кz – вертикальное пере-
мещение кузова; тz – вертикальное перемещение тележки; кпz – вертикальное перемещение
колесной пары; пz – вертикальное перемещение пути; – случайная геометрическая неров-
ность пути; кm – масса кузова; тm – масса обрессоренных частей тележки; кпm – масса колес-
ной пары; пm – приведенная масса пути; тж – жесткость кузовной ступени подвешивания;
бж – жесткость буксовой ступени подвешивания; пж – приведенная жесткость пути; т – ко-
эффициент вязкого трения кузовной ступени подвешивания; б – коэффициент вязкого тре-
ния буксовой ступени подвешивания; п – приведенный коэффициент вязкого трения пути;
iq и iq – соответственно i-я обобщенная координата и обобщенная скорость.
Необходимо найти все виды механической энергии системы и обобщенные силы для каждой из координат и составить систему из трех дифференциальных уравнений, однозначно определяющих механическую систему:
к к к к
т т т т
к.п к.п к.п к.п
Ф П0;
Ф П0;
Ф П0.
d дТ дТ д д
dt дz дz дz дz
d дТ дТ д д
dt дz дz дz дz
d дТ дТ д д
dt дz дz дz дz
(3)
Находим все необходимые слагаемые в уравнений (4) по каждой из координат, подстав-ляем в систему (3), преобразуем и получим систему уравнений динамики системы:
к к т к т к т т т т
т т т т к б к.п т т т к б т к.п
к.п п к.п б к.п т п к.п б к.п т п к.п п п п
г г кп б т г
ж ж 0;
( ) ( ) ж ( ) ж ( ) 0;
( ) ( ) ж ( ) ж ж ;
( ) ( ) 0.
m z z z z z
m z z z z z z z z z
m m z z z z z z z m
ж z z z z
(4)
Полученная система дифференциальных уравнений является актуальной для оценки вер-тикальной динамики электровозов 2ЭС6, 2ЭС7, ЭП2К, 2ЭС4К.
Исследование динамики рельсовых железнодорожных экипажей обычно приводит к сис- темам дифференциальных уравнений высокого порядка, и если механическая система ли-нейная или каким-либо способом линеаризована, то следует применить матричный метод, который позволяет свести задачу изучения динамических качеств подвижного состава к од-ному дифференциальному уравнению вида:
,Аq Bq Cq D E F (5)
где A, B, C – матрицы инерционных, диссипативных и жесткостных коэффициентов соот- ветственно; D, E, F – вспомогательные матрицы, характеризующие инерционные, диссипа-тивные и жесткостные параметры железнодорожного пути (обычно они являются диагональ-ными, но отличны от нуля только элементы в конце и их число равно числу колесных пар в
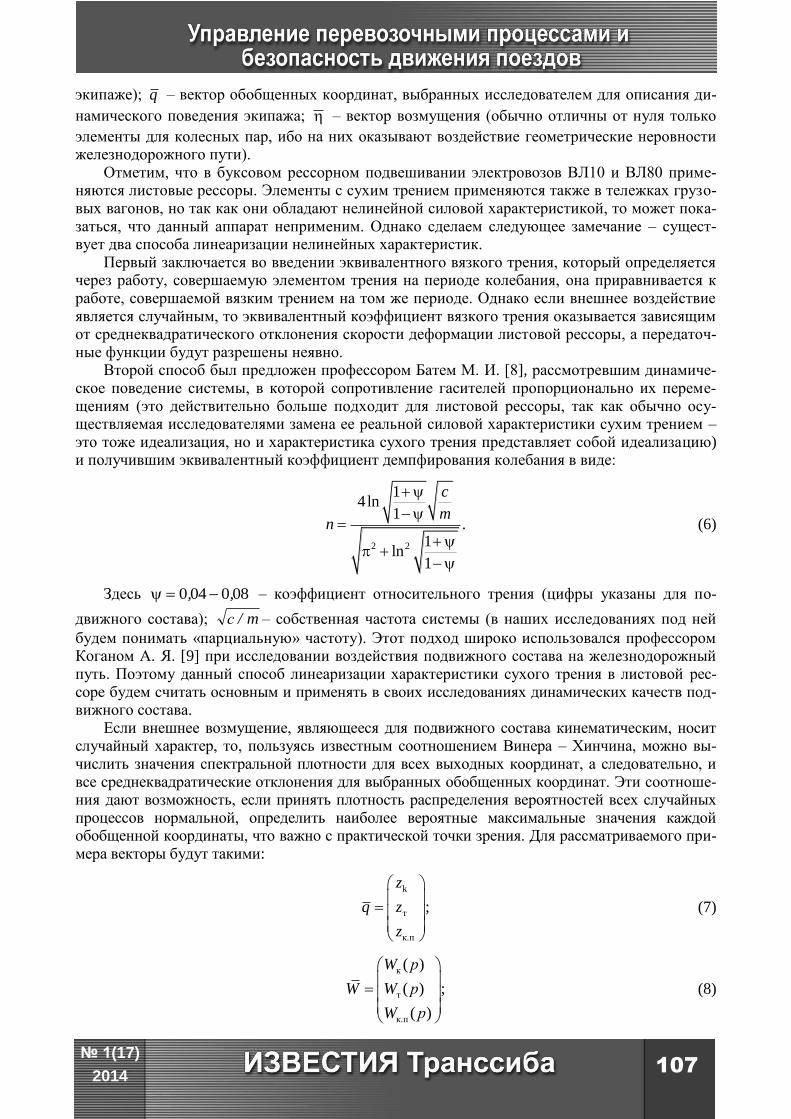
107
№ 1(17)
2014
экипаже); q – вектор обобщенных координат, выбранных исследователем для описания ди-
намического поведения экипажа; – вектор возмущения (обычно отличны от нуля только
элементы для колесных пар, ибо на них оказывают воздействие геометрические неровности железнодорожного пути).
Отметим, что в буксовом рессорном подвешивании электровозов ВЛ10 и ВЛ80 приме-няются листовые рессоры. Элементы с сухим трением применяются также в тележках грузо-вых вагонов, но так как они обладают нелинейной силовой характеристикой, то может пока-заться, что данный аппарат неприменим. Однако сделаем следующее замечание – сущест- вует два способа линеаризации нелинейных характеристик.
Первый заключается во введении эквивалентного вязкого трения, который определяется через работу, совершаемую элементом трения на периоде колебания, она приравнивается к работе, совершаемой вязким трением на том же периоде. Однако если внешнее воздействие является случайным, то эквивалентный коэффициент вязкого трения оказывается зависящим от среднеквадратического отклонения скорости деформации листовой рессоры, а передаточ-ные функции будут разрешены неявно.
Второй способ был предложен профессором Батем М. И. [8], рассмотревшим динамиче-ское поведение системы, в которой сопротивление гасителей пропорционально их переме-щениям (это действительно больше подходит для листовой рессоры, так как обычно осу-ществляемая исследователями замена ее реальной силовой характеристики сухим трением – это тоже идеализация, но и характеристика сухого трения представляет собой идеализацию) и получившим эквивалентный коэффициент демпфирования колебания в виде:
2 2
14ln
1.
1ln
1
c
mn
(6)
Здесь 080040 ,, – коэффициент относительного трения (цифры указаны для по-
движного состава); m/с – собственная частота системы (в наших исследованиях под ней
будем понимать «парциальную» частоту). Этот подход широко использовался профессором Коганом А. Я. [9] при исследовании воздействия подвижного состава на железнодорожный путь. Поэтому данный способ линеаризации характеристики сухого трения в листовой рес-соре будем считать основным и применять в своих исследованиях динамических качеств под- вижного состава.
Если внешнее возмущение, являющееся для подвижного состава кинематическим, носит случайный характер, то, пользуясь известным соотношением Винера – Хинчина, можно вы-числить значения спектральной плотности для всех выходных координат, а следовательно, и все среднеквадратические отклонения для выбранных обобщенных координат. Эти соотноше-ния дают возможность, если принять плотность распределения вероятностей всех случайных процессов нормальной, определить наиболее вероятные максимальные значения каждой обобщенной координаты, что важно с практической точки зрения. Для рассматриваемого при-мера векторы будут такими:
k
т
к.п
;
z
q z
z
(7)
к
т
к.п
( )
( ) ;
( )
W р
W W р
W р
(8)
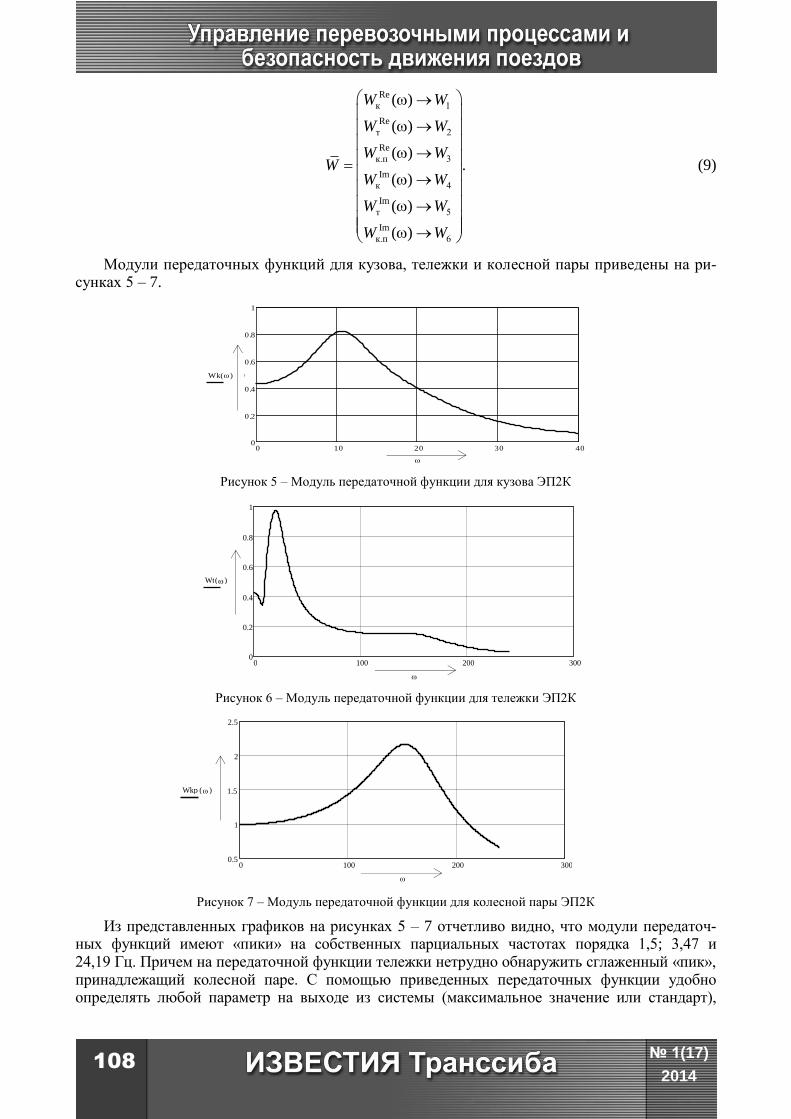
№ 1(17)
2014 108
Re
к 1
Re
т 2
Re
к.п 3
Im
к 4
Im
т 5
Im
к.п 6
( )
( )
( ).
( )
( )
( )
W W
W W
W WW
W W
W W
W W
(9)
Модули передаточных функций для кузова, тележки и колесной пары приведены на ри-сунках 5 – 7.
Рисунок 5 – Модуль передаточной функции для кузова ЭП2К
Рисунок 6 – Модуль передаточной функции для тележки ЭП2К
Рисунок 7 – Модуль передаточной функции для колесной пары ЭП2К
Из представленных графиков на рисунках 5 – 7 отчетливо видно, что модули передаточ-ных функций имеют «пики» на собственных парциальных частотах порядка 1,5; 3,47 и 24,19 Гц. Причем на передаточной функции тележки нетрудно обнаружить сглаженный «пик», принадлежащий колесной паре. С помощью приведенных передаточных функции удобно определять любой параметр на выходе из системы (максимальное значение или стандарт),
0 10 20 30 400
0.2
0.4
0.6
0.8
1
Wk ( )
0 10 20 30 400
0.2
0.4
0.6
0.8
1
Wk ( )
0 100 200 300 0
0.2
0.4
0.6
0.8
1
Wt ( )
0 100 200 300 0.5
1
1.5
2
2.5
Wkp ( )
109
№ 1(17)
2014
который принимают в качестве операторов для оценки динамических качеств электровоза ЭП2К.
Список литературы
1. Вибрация в технике: Справочник: В 6 т. Т. 2. Колебания нелинейных механических с- истем [Текст] / Под ред. И. И. Блехмана. – М.: Машиностроение, 1980. – 351 с.
2. Гарг, В. К. Динамика подвижного состава [Текст] / В. К. Гарг, Р. В. Дуккипати. – М.: Транспорт, 1988. – 388 с.
3. Галиев, И. И. Научные направления школы М. П. Пахомова за 50 лет (1961 – 2011) [Текст] / И. И. Галиев, В. А. Нехаев, В. А. Николаев / Омский гос. ун-т путей сообщения. – Омск, 2012. – 175 с.
4. Галиев, И. И. Методы и средства виброзащиты железнодорожных экипажей [Текст] / И. И. Галиев, В. А. Нехаев, В. А. Николаев / УМЦ ЖДТ. – М., 2010. – 340 с.
5. Ахмадеева, А. А. Рациональное задание числа степеней свободы динамической моде-ли грузового вагона [Текст] / А. А. Ахмадеева, В. Е. Гозбенко // Системы. Методы. Техноло-гии. – 2012. – № 4. – С. 25 – 28.
6. Хохлов, А. А. Динамика сложных механических систем [Текст] / А. А. Хохлов / МИИТ. – М., 2002. – 172 с.
7. Бирюков, И. В. Механическая часть тягового подвижного состава [Текст] / И. В. Би-рюков. – М.: Транспорт, 1992. – 440 с.
8. Бать, М. И. Вынужденные колебания в системе с гистерезисом [Текст] / М. И. Бать // Прикладная математика и механика / АН СССР. – М., 1940. – Т. 4. – Вып. 3. – С. 13 – 30.
9. Коган, А. Я. Расчеты железнодорожного пути на вертикальную нагрузку [Текст] / А. Я. Коган // Науч. тр. / ВНИИЖТ. – М., 1973. – Вып. 502. – 243 с.
10. Основы механики подвижного состава [Текст] / И. И. Галиев, В. А. Нехаев и др. / Омский гос. ун-т путей сообщения. – Омск, 2013. – Ч. 2. – 165 с.
УДК 519.6:311
В. Ф. Фролов, В. А. Начигин
ПРОЦЕДУРА ВЫБОРА ПРЕДПОЧТИТЕЛЬНОГО СЦЕНАРИЯ РАЗВИТИЯ ПЕРЕВОЗОЧНОГО ПРОЦЕССА
Предложены формализация и постановка многокритериальной задачи выбора предпочтительного сцена-рия развития перевозочного процесса железнодорожным транспортом на региональном уровне, учитываю-щей, что этот процесс является сложной системой, функционирующей в условиях многовариантности и неопределенности.
В соответствии с Федеральным законом о железнодорожном транспорте перевозочный процесс – это совокупность организационно и технологически взаимосвязанных операций, выполняемых при подготовке, осуществлении и завершении перевозок пассажиров, грузов, багажа и грузобагажа железнодорожным транспортом.
Особенностью перевозочного процесса на региональном уровне является то, что он осу-ществляется совокупностью дирекций, филиалов и служб, имеющих центральное управле-ние. Это потребовало реализации усовершенствованной системы управления компанией ОАО «РЖД»: в ее вершине – Корпоративный центр, возглавляемый президентом ОАО «РЖД», а в регионах – региональные центры корпоративного управления (РЦКУ), возглав-ляемые начальниками железных дорог [1]. Базовой функцией РЦКУ является обеспечение технологической и корпоративной координации всех структурных подразделений филиалов, центральных дирекций и дочерних зависимых обществ, осуществляющих свою деятельность в границах дороги.
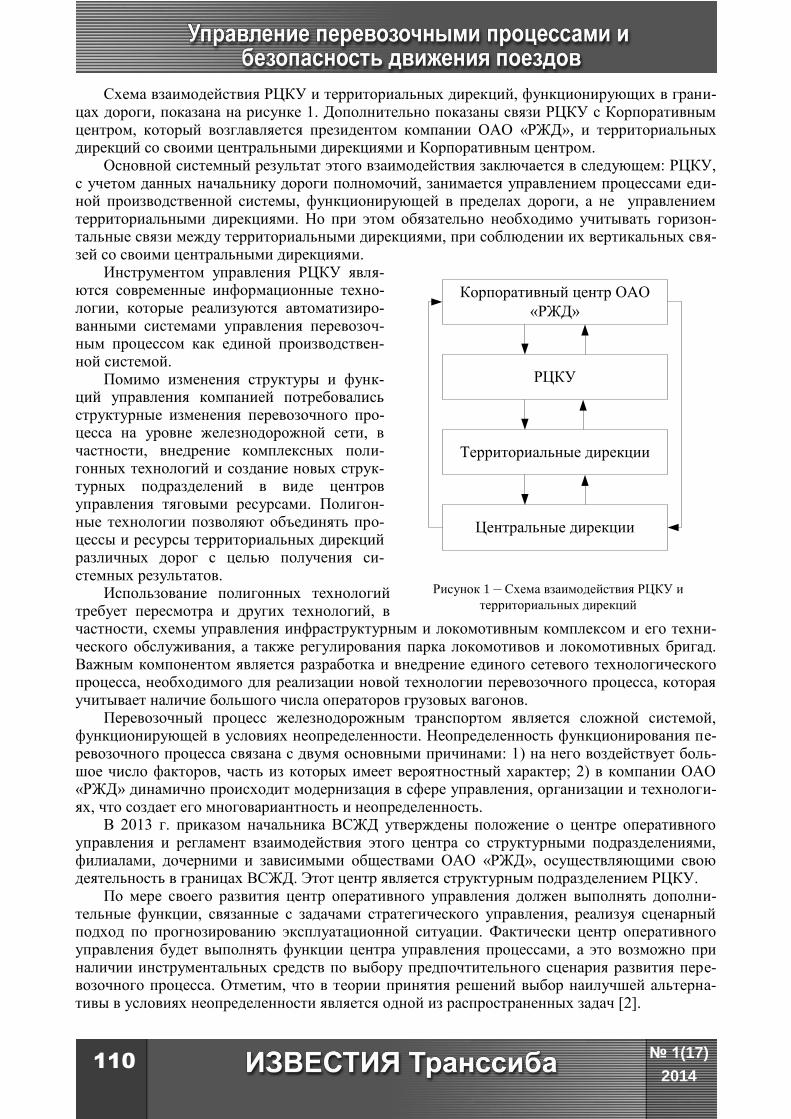
№ 1(17)
2014 110
Схема взаимодействия РЦКУ и территориальных дирекций, функционирующих в грани-цах дороги, показана на рисунке 1. Дополнительно показаны связи РЦКУ с Корпоративным центром, который возглавляется президентом компании ОАО «РЖД», и территориальных дирекций со своими центральными дирекциями и Корпоративным центром.
Основной системный результат этого взаимодействия заключается в следующем: РЦКУ, с учетом данных начальнику дороги полномочий, занимается управлением процессами еди-ной производственной системы, функционирующей в пределах дороги, а не управлением территориальными дирекциями. Но при этом обязательно необходимо учитывать горизон-тальные связи между территориальными дирекциями, при соблюдении их вертикальных свя-зей со своими центральными дирекциями.
Инструментом управления РЦКУ явля-ются современные информационные техно-логии, которые реализуются автоматизиро-ванными системами управления перевозоч-ным процессом как единой производствен-ной системой.
Помимо изменения структуры и функ-ций управления компанией потребовались структурные изменения перевозочного про-цесса на уровне железнодорожной сети, в частности, внедрение комплексных поли-гонных технологий и создание новых струк-турных подразделений в виде центров управления тяговыми ресурсами. Полигон-ные технологии позволяют объединять про-цессы и ресурсы территориальных дирекций различных дорог с целью получения си-стемных результатов.
Использование полигонных технологий требует пересмотра и других технологий, в частности, схемы управления инфраструктурным и локомотивным комплексом и его техни-ческого обслуживания, а также регулирования парка локомотивов и локомотивных бригад. Важным компонентом является разработка и внедрение единого сетевого технологического процесса, необходимого для реализации новой технологии перевозочного процесса, которая учитывает наличие большого числа операторов грузовых вагонов.
Перевозочный процесс железнодорожным транспортом является сложной системой, функционирующей в условиях неопределенности. Неопределенность функционирования пе-ревозочного процесса связана с двумя основными причинами: 1) на него воздействует боль-шое число факторов, часть из которых имеет вероятностный характер; 2) в компании ОАО «РЖД» динамично происходит модернизация в сфере управления, организации и технологи-ях, что создает его многовариантность и неопределенность.
В 2013 г. приказом начальника ВСЖД утверждены положение о центре оперативного управления и регламент взаимодействия этого центра со структурными подразделениями, филиалами, дочерними и зависимыми обществами ОАО «РЖД», осуществляющими свою деятельность в границах ВСЖД. Этот центр является структурным подразделением РЦКУ.
По мере своего развития центр оперативного управления должен выполнять дополни-тельные функции, связанные с задачами стратегического управления, реализуя сценарный подход по прогнозированию эксплуатационной ситуации. Фактически центр оперативного управления будет выполнять функции центра управления процессами, а это возможно при наличии инструментальных средств по выбору предпочтительного сценария развития пере-возочного процесса. Отметим, что в теории принятия решений выбор наилучшей альтерна-тивы в условиях неопределенности является одной из распространенных задач [2].
Корпоративный центр ОАО
«РЖД»
РЦКУ
Территориальные дирекции
Центральные дирекции
Рисунок 1 – Схема взаимодействия РЦКУ и
территориальных дирекций
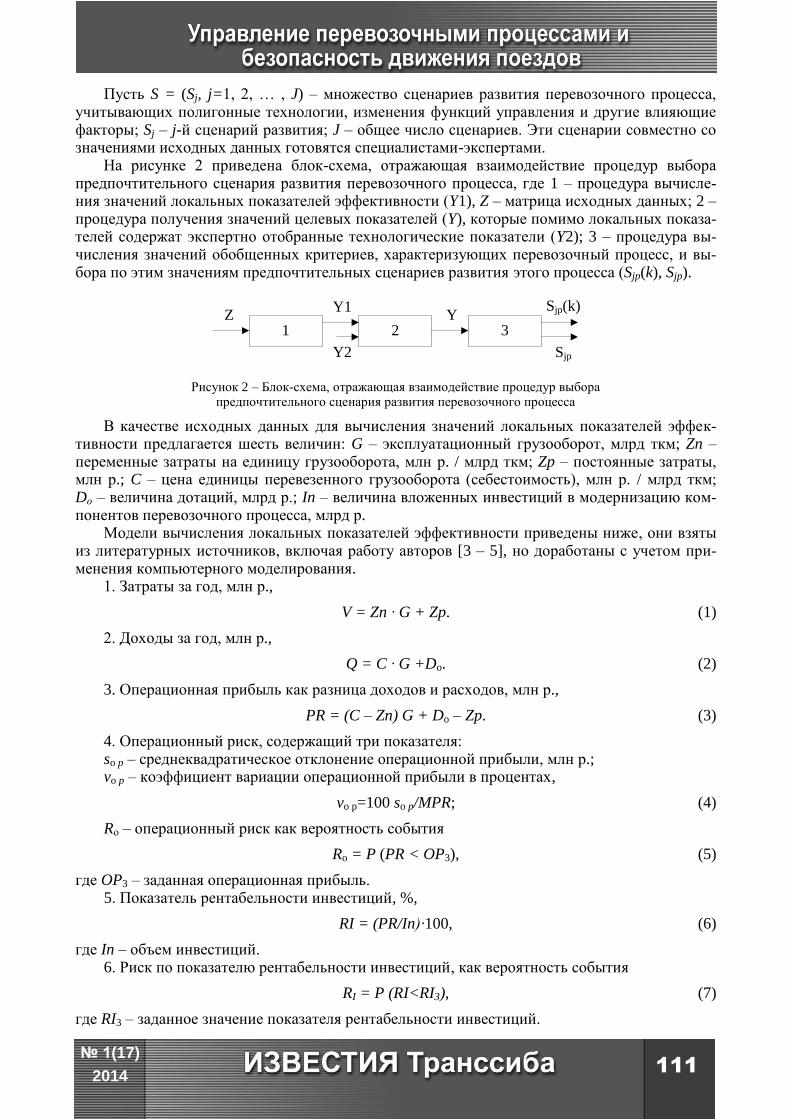
111
№ 1(17)
2014
Пусть S = (Sj, j=1, 2, … , J) – множество сценариев развития перевозочного процесса, учитывающих полигонные технологии, изменения функций управления и другие влияющие факторы; Sj – j-й сценарий развития; J – общее число сценариев. Эти сценарии совместно со значениями исходных данных готовятся специалистами-экспертами.
На рисунке 2 приведена блок-схема, отражающая взаимодействие процедур выбора предпочтительного сценария развития перевозочного процесса, где 1 – процедура вычисле-ния значений локальных показателей эффективности (Y1), Z – матрица исходных данных; 2 – процедура получения значений целевых показателей (Y), которые помимо локальных показа-телей содержат экспертно отобранные технологические показатели (Y2); 3 – процедура вы-числения значений обобщенных критериев, характеризующих перевозочный процесс, и вы-бора по этим значениям предпочтительных сценариев развития этого процесса (Sjp(k), Sjp).
1 2 3Z
Y1
Y2
YSjp(k)
Sjp
Рисунок 2 – Блок-схема, отражающая взаимодействие процедур выбора предпочтительного сценария развития перевозочного процесса
В качестве исходных данных для вычисления значений локальных показателей эффек-тивности предлагается шесть величин: G – эксплуатационный грузооборот, млрд ткм; Zn – переменные затраты на единицу грузооборота, млн р. / млрд ткм; Zp – постоянные затраты, млн р.; C – цена единицы перевезенного грузооборота (себестоимость), млн р. / млрд ткм; Dо – величина дотаций, млрд р.; In – величина вложенных инвестиций в модернизацию ком-понентов перевозочного процесса, млрд р.
Модели вычисления локальных показателей эффективности приведены ниже, они взяты из литературных источников, включая работу авторов [3 – 5], но доработаны с учетом при-менения компьютерного моделирования.
1. Затраты за год, млн р.,
V = Zn ∙ G + Zp. (1)
2. Доходы за год, млн р.,
Q = C ∙ G +Do. (2)
3. Операционная прибыль как разница доходов и расходов, млн р.,
PR = (C – Zn) G + Do – Zp. (3)
4. Операционный риск, содержащий три показателя: so p – среднеквадратическое отклонение операционной прибыли, млн р.; vo p – коэффициент вариации операционной прибыли в процентах,
vo p=100 so p/MPR; (4)
Rо – операционный риск как вероятность события
Ro = P (PR < OP3), (5)
где OP3 – заданная операционная прибыль. 5. Показатель рентабельности инвестиций, %,
RI = (PR/In)∙100, (6)
где In – объем инвестиций. 6. Риск по показателю рентабельности инвестиций, как вероятность события
RI = P (RI<RI3), (7)
где RI3 – заданное значение показателя рентабельности инвестиций.
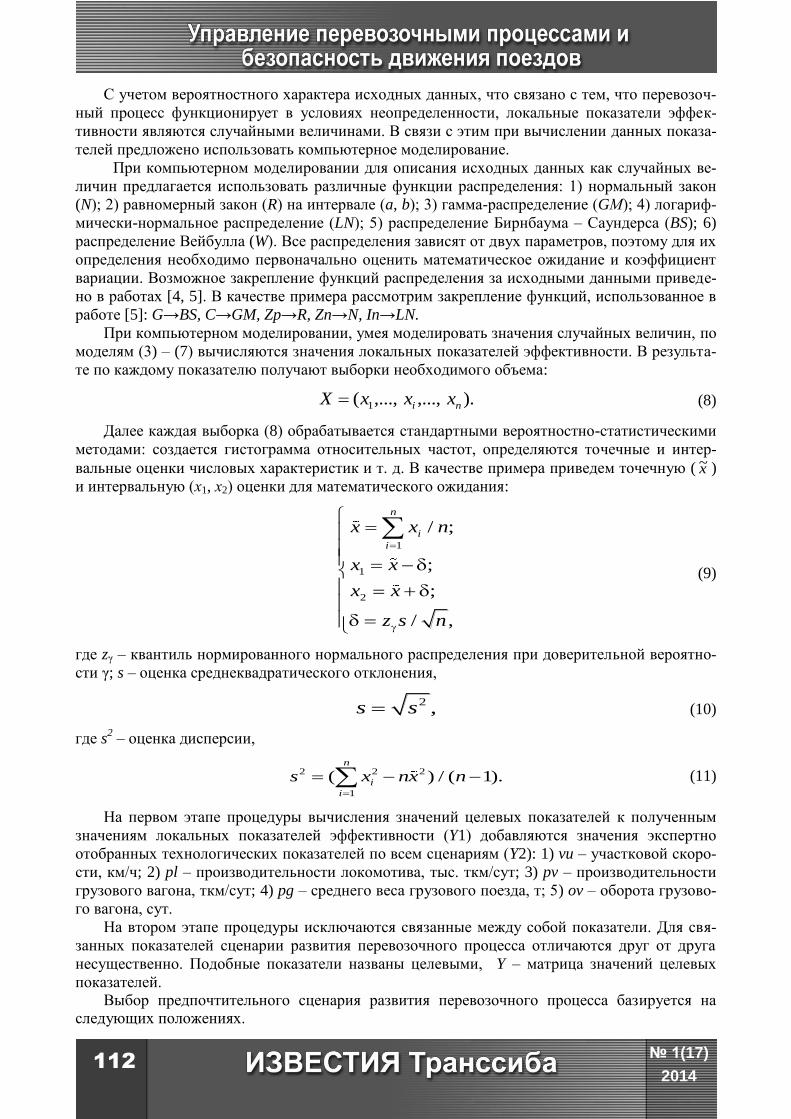
№ 1(17)
2014 112
С учетом вероятностного характера исходных данных, что связано с тем, что перевозоч-
ный процесс функционирует в условиях неопределенности, локальные показатели эффек-
тивности являются случайными величинами. В связи с этим при вычислении данных показа-
телей предложено использовать компьютерное моделирование.
При компьютерном моделировании для описания исходных данных как случайных ве-
личин предлагается использовать различные функции распределения: 1) нормальный закон
(N); 2) равномерный закон (R) на интервале (a, b); 3) гамма-распределение (GМ); 4) логариф-
мически-нормальное распределение (LN); 5) распределение Бирнбаума – Саундерса (BS); 6)
распределение Вейбулла (W). Все распределения зависят от двух параметров, поэтому для их
определения необходимо первоначально оценить математическое ожидание и коэффициент
вариации. Возможное закрепление функций распределения за исходными данными приведе-
но в работах [4, 5]. В качестве примера рассмотрим закрепление функций, использованное в
работе [5]: G→BS, C→GM, Zp→R, Zn→N, In→LN.
При компьютерном моделировании, умея моделировать значения случайных величин, по
моделям (3) – (7) вычисляются значения локальных показателей эффективности. В результа-
те по каждому показателю получают выборки необходимого объема:
).,...,,...,( 1 ni xxxX (8)
Далее каждая выборка (8) обрабатывается стандартными вероятностно-статистическими
методами: создается гистограмма относительных частот, определяются точечные и интер-
вальные оценки числовых характеристик и т. д. В качестве примера приведем точечную ( x~ )
и интервальную (х1, х2) оценки для математического ожидания:
1
1
2
/ ;
;
;
/ ,
n
i
i
x x n
x x
x x
z s n
(9)
где zγ – квантиль нормированного нормального распределения при доверительной вероятно-
сти γ; s – оценка среднеквадратического отклонения,
2 ,s s (10)
где s2 – оценка дисперсии,
2 2 2
1
( ) / ( 1).
n
i
i
s x nx n (11)
На первом этапе процедуры вычисления значений целевых показателей к полученным
значениям локальных показателей эффективности (Y1) добавляются значения экспертно
отобранных технологических показателей по всем сценариям (Y2): 1) vu – участковой скоро-
сти, км/ч; 2) pl – производительности локомотива, тыс. ткм/сут; 3) pv – производительности
грузового вагона, ткм/сут; 4) pg – среднего веса грузового поезда, т; 5) ov – оборота грузово-
го вагона, сут.
На втором этапе процедуры исключаются связанные между собой показатели. Для свя-
занных показателей сценарии развития перевозочного процесса отличаются друг от друга
несущественно. Подобные показатели названы целевыми, Y – матрица значений целевых
показателей. Выбор предпочтительного сценария развития перевозочного процесса базируется на
следующих положениях.
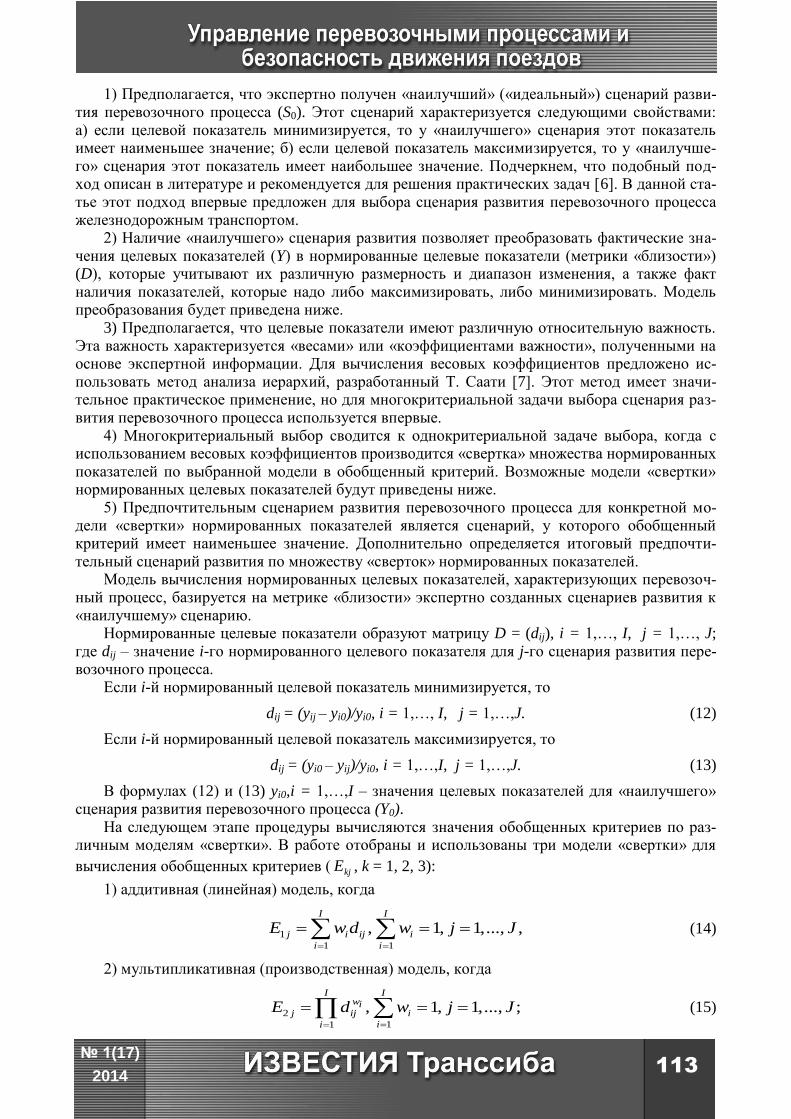
113
№ 1(17)
2014
1) Предполагается, что экспертно получен «наилучший» («идеальный») сценарий разви-тия перевозочного процесса (S0). Этот сценарий характеризуется следующими свойствами: а) если целевой показатель минимизируется, то у «наилучшего» сценария этот показатель имеет наименьшее значение; б) если целевой показатель максимизируется, то у «наилучше-го» сценария этот показатель имеет наибольшее значение. Подчеркнем, что подобный под-ход описан в литературе и рекомендуется для решения практических задач [6]. В данной ста-тье этот подход впервые предложен для выбора сценария развития перевозочного процесса железнодорожным транспортом.
2) Наличие «наилучшего» сценария развития позволяет преобразовать фактические зна-чения целевых показателей (Y) в нормированные целевые показатели (метрики «близости») (D), которые учитывают их различную размерность и диапазон изменения, а также факт наличия показателей, которые надо либо максимизировать, либо минимизировать. Модель преобразования будет приведена ниже.
3) Предполагается, что целевые показатели имеют различную относительную важность. Эта важность характеризуется «весами» или «коэффициентами важности», полученными на основе экспертной информации. Для вычисления весовых коэффициентов предложено ис-пользовать метод анализа иерархий, разработанный Т. Саати [7]. Этот метод имеет значи-тельное практическое применение, но для многокритериальной задачи выбора сценария раз-вития перевозочного процесса используется впервые.
4) Многокритериальный выбор сводится к однокритериальной задаче выбора, когда с использованием весовых коэффициентов производится «свертка» множества нормированных показателей по выбранной модели в обобщенный критерий. Возможные модели «свертки» нормированных целевых показателей будут приведены ниже.
5) Предпочтительным сценарием развития перевозочного процесса для конкретной мо-дели «свертки» нормированных показателей является сценарий, у которого обобщенный критерий имеет наименьшее значение. Дополнительно определяется итоговый предпочти-тельный сценарий развития по множеству «сверток» нормированных показателей.
Модель вычисления нормированных целевых показателей, характеризующих перевозоч-ный процесс, базируется на метрике «близости» экспертно созданных сценариев развития к «наилучшему» сценарию.
Нормированные целевые показатели образуют матрицу D = (dij), i = 1,…, I, j = 1,…, J; где dij – значение i-го нормированного целевого показателя для j-го сценария развития пере-возочного процесса.
Если i-й нормированный целевой показатель минимизируется, то
dij = (yij – yi0)/yi0, i = 1,…, I, j = 1,…,J. (12)
Если i-й нормированный целевой показатель максимизируется, то
dij = (yi0 – yij)/yi0, i = 1,…,I, j = 1,…,J. (13)
В формулах (12) и (13) yi0,i = 1,…,I – значения целевых показателей для «наилучшего» сценария развития перевозочного процесса (Y0).
На следующем этапе процедуры вычисляются значения обобщенных критериев по раз-личным моделям «свертки». В работе отобраны и использованы три модели «свертки» для
вычисления обобщенных критериев ( kjE , k = 1, 2, 3):
1) аддитивная (линейная) модель, когда
1
1 1
, 1, 1,..., ,I I
j i ij i
i i
E w d w j J
(14)
2) мультипликативная (производственная) модель, когда
2
11
, 1, 1,..., ;I I
wij ij i
ii
E d w j J
(15)
№ 1(17)
2014 114
3) нелинейная модель, когда
3
1
max , 1, 1,..., .I
j i i ij i
i
E w d w j J
(16)
В моделях (14) – (16) wi – весовые коэффициенты, учитывающие важность целевых по-
казателей.
Для каждой модели «свертки» определяется предпочтительный сценарий развития. При
этом используется следующее правило: предпочтительным является сценарий развития пе-
ревозочного процесса, у которого обобщенный критерий (14) – (16) имеет минимальное зна-
чение
Sjp(k) = arg[minj( kjE )], k = 1, 2, 3. (17)
Здесь jpk (k = 1, 2, 3) – номер предпочтительного сценария развития для k-й модели
«свертки», jрk є (1, 2, …, J).
Завершается вычислительный алгоритм определением итогового предпочтительного
сценария развития, который вычисляется по множеству моделей «свертки». В этом случае
первоначально необходимо найти значения «взвешенного» обобщенного критерия по мно-
жеству моделей «свертки»
1 1
, 1, 1,..., ,
K Ko o
j k kj k
k k
E q E q j J (18)
где Ко – число моделей «свертки»; qk – коэффициент важности для k-й модели «свертки».
Эти коэффициенты предлагается определять, используя метод анализа иерархий.
Итоговым предпочтительным сценарием развития перевозочного процесса является сце-
нарий с минимальным значением критерия (17)
Sjp = arg[minj( jE )]. (19)
Здесь jp – номер итогового предпочтительного сценария развития перевозочного процес-
са, jр є (1, 2, …, J).
Процедура выбора предпочтительного сценария развития перевозочного процесса про-
верена по исходным данным РЦКУ ВСЖД, которые приведены в таблице 1: Y – целевые по-
казатели (результат процедуры понижения размерности): PR – операционная прибыль (3);
R0 – операционный риск (5); RI – риск по показателю рентабельности инвестиций (7); pl –
производительность локомотива; pg – средний вес грузового поезда; S1, S2, S3 – варианты
сценариев развития; S0 – «наилучший» сценарий; YM – цель показателя (максимизация или
минимизация); W – весовые коэффициенты для целевых показателей.
Таблица 1 – Исходные данные для определения предпочтительных сценариев развития перевозочного процесса
Y S1 S2 S3 S0 YM W
PR 3,25 3,05 3,35 3,55 Max 0,302
R0 0,275 0,305 0,265 0,250 Min 0,172
RI 0,265 0,250 0,215 0,200 Min 0,167
pl 2215 2332 2410 2500 Max 0,109
pg 3835 3508 4256 4500 Max 0,250
В таблице 2 приведены полученные значения нормированных целевых показателей (12),
(13) по трем сценариям.
На основе значений, приведенных в таблице 2, по моделям (14) – (16) получены значения
объединенных критериев (таблица 3) по всем трем сценариям, дополнительно найдены зна-
чения «взвешенного» обобщенного критерия (17). Весовые коэффициенты по моделям
«свертки» таковы: 0,364; 0,252; 0,384.
115
№ 1(17)
2014
Таблица 2 – Значения нормированных целевых показателей
D S1 S2 S3
PR 0,0845 0,1408 0,0563 R0 0,100 0,220 0,060 RI 0,325 0,250 0,075 pl 0,114 0,067 0,036 pg 0,1478 0,2204 0,0542
Таблица 3 – Значения обобщенных критериев
Е S1 S2 S3
E1j 0,1464 0,1846 0,0573
E2j 0,1294 0,1729 0,0563
E3j 0,0543 0,0551 0,0170
Ej 0,1201 0,1039 0,0502
По значениям обобщенных критериев (см. таблицу 3) найдены предпочтительные сцена-
рии развития перевозочного процесса, соответствующие исходным данным для расчета (см.
таблицу 1):
а) независимо от модели «свертки» предпочтительным является третий сценарий;
б) итоговым является также третий сценарий перевозочного процесса.
Проведенные исследования показывают, что, создавая и используя экспертно-
статистическую информацию, можно количественно оценивать показатели различных сце-
нариев развития перевозочного процесса, тем самым способствуя повышению эффективно-
сти принятия управленческих решений. Можно утверждать, что проведенные формализация,
постановка и реализация многокритериальной задачи выбора предпочтительного сценария,
основанные на обработке экспертно-статистической информации, позволяют прогнозировать
результаты развития выбранных сценариев до натурного эксперимента.
Список литературы
1. Морозов, В. Н. К новой структуре управления [Текст] / В. Н. Морозов // Пульт управ-
ления // Гудок. – 2011. – № 1. – С. 5 – 9.
2. Черноруцкий, И. Г. Методы принятия решений [Текст] / И. Г. Черноруцкий. – СПб:
БХВ-Петербург, 2005. – 416 с.
3. Домбровский, И. А. Вероятностный анализ безубыточности грузовых перевозок на ос-
нове метода Монте-Карло [Текст] / И. А. Домбровский, Ю. М. Краковский // Известия Тран-
сиба / Омский гос. ун-т путей сообщения. – Омск. – 2013. – № 1 (13). – С. 125 – 130.
4. Краковский, Ю. М. Исследование влияния неопределенности исходных данных на по-
казатели пассажирских перевозок [Текст] / Ю. М. Краковский, Д. И. Жарий // Современные
технологии. Системный анализ. Моделирование / Иркутский гос. ун-т путей сообщения. –
Иркутск. – 2011. – №1. – С. 96 – 101.
5. Каргапольцев, С. К. Алгоритмическое обеспечение оценки целевых показателей пере-
возочного процесса перевозок [Текст] / С. К. Каргапольцев, В. А. Начигин, В. Ф. Фролов //
Современные технологии. Системный анализ. Моделирование / Иркутский гос. ун-т путей
сообщения. – Иркутск. – 2013. – №1. – С. 144 – 149.
6. Петровский, А. Б. Многокритериальное ранжирование объектов по противоречивым
данным [Текст] / А. Б. Петровский // Искусственный интеллект / Ин-т проблем искусствен-
ного интеллекта. – Донецк. – 2006. – № 2. – С. 215 – 220.
7. Саати, Т. Принятие решений. Метод анализа иерархий [Текст] / Т. Саати. – М.: Радио и
связь, 1993. – 320 с.
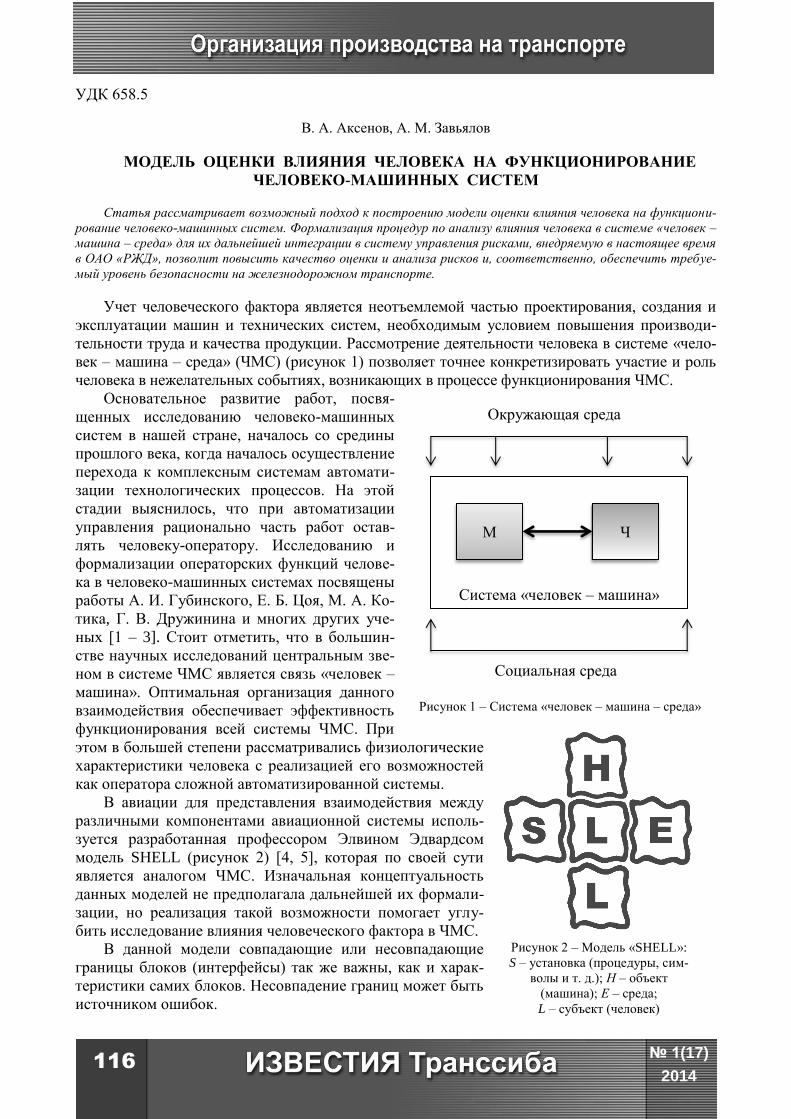
№ 1(17)
2014 116
УДК 658.5
В. А. Аксенов, А. М. Завьялов
МОДЕЛЬ ОЦЕНКИ ВЛИЯНИЯ ЧЕЛОВЕКА НА ФУНКЦИОНИРОВАНИЕ
ЧЕЛОВЕКО-МАШИННЫХ СИСТЕМ
Статья рассматривает возможный подход к построению модели оценки влияния человека на функциони-
рование человеко-машинных систем. Формализация процедур по анализу влияния человека в системе «человек –
машина – среда» для их дальнейшей интеграции в систему управления рисками, внедряемую в настоящее время
в ОАО «РЖД», позволит повысить качество оценки и анализа рисков и, соответственно, обеспечить требуе-
мый уровень безопасности на железнодорожном транспорте.
Учет человеческого фактора является неотъемлемой частью проектирования, создания и
эксплуатации машин и технических систем, необходимым условием повышения производи-
тельности труда и качества продукции. Рассмотрение деятельности человека в системе «чело-
век – машина – среда» (ЧМС) (рисунок 1) позволяет точнее конкретизировать участие и роль
человека в нежелательных событиях, возникающих в процессе функционирования ЧМС.
Основательное развитие работ, посвя-
щенных исследованию человеко-машинных
систем в нашей стране, началось со средины
прошлого века, когда началось осуществление
перехода к комплексным системам автомати-
зации технологических процессов. На этой
стадии выяснилось, что при автоматизации
управления рационально часть работ остав-
лять человеку-оператору. Исследованию и
формализации операторских функций челове-
ка в человеко-машинных системах посвящены
работы А. И. Губинского, Е. Б. Цоя, М. А. Ко-
тика, Г. В. Дружинина и многих других уче-
ных [1 – 3]. Стоит отметить, что в большин-
стве научных исследований центральным зве-
ном в системе ЧМС является связь «человек –
машина». Оптимальная организация данного
взаимодействия обеспечивает эффективность
функционирования всей системы ЧМС. При
этом в большей степени рассматривались физиологические
характеристики человека с реализацией его возможностей
как оператора сложной автоматизированной системы.
В авиации для представления взаимодействия между
различными компонентами авиационной системы исполь-
зуется разработанная профессором Элвином Эдвардсом
модель SHELL (рисунок 2) [4, 5], которая по своей сути
является аналогом ЧМС. Изначальная концептуальность
данных моделей не предполагала дальнейшей их формали-
зации, но реализация такой возможности помогает углу-
бить исследование влияния человеческого фактора в ЧМС. В данной модели совпадающие или несовпадающие
границы блоков (интерфейсы) так же важны, как и харак-
теристики самих блоков. Несовпадение границ может быть
источником ошибок.
Система «человек – машина»
М Ч
Социальная среда
Окружающая среда
Рисунок 1 – Система «человек – машина – среда»
Рисунок 2 – Модель «SHELL»:
S – установка (процедуры, сим-
волы и т. д.); Н – объект
(машина); Е – среда;
L – субъект (человек)
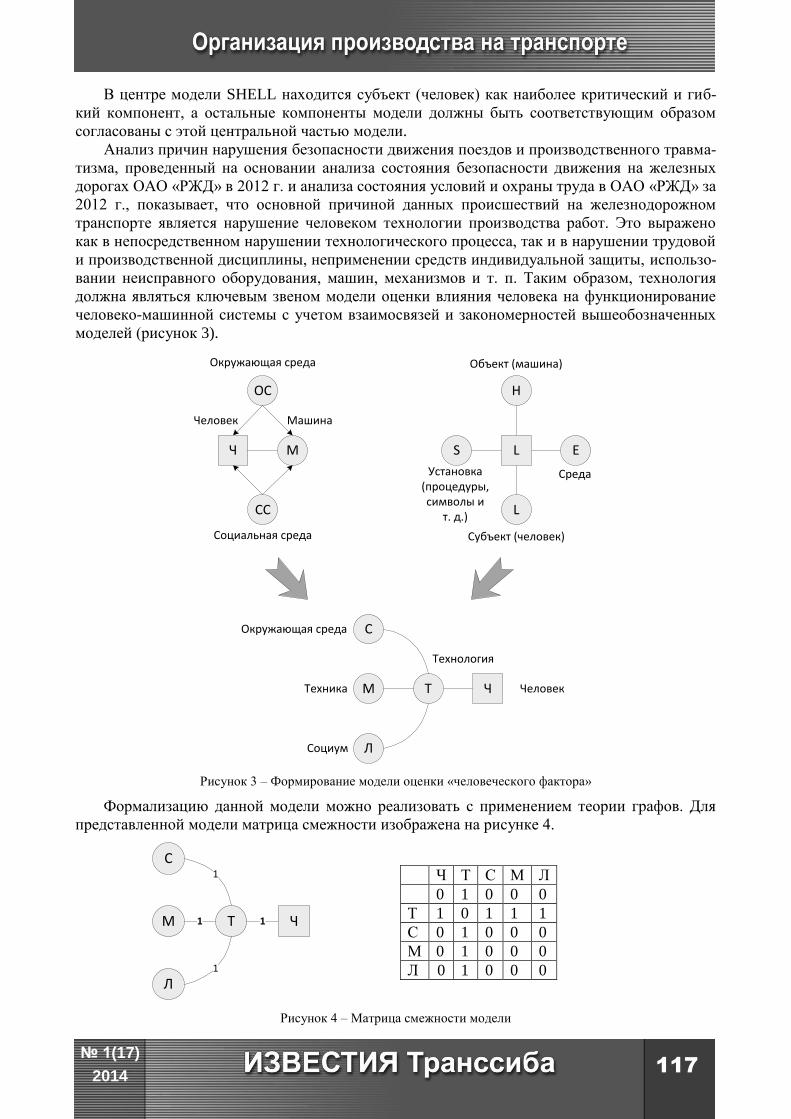
117
№ 1(17)
2014
В центре модели SHELL находится субъект (человек) как наиболее критический и гиб-
кий компонент, а остальные компоненты модели должны быть соответствующим образом
согласованы с этой центральной частью модели.
Анализ причин нарушения безопасности движения поездов и производственного травма-
тизма, проведенный на основании анализа состояния безопасности движения на железных
дорогах ОАО «РЖД» в 2012 г. и анализа состояния условий и охраны труда в ОАО «РЖД» за
2012 г., показывает, что основной причиной данных происшествий на железнодорожном
транспорте является нарушение человеком технологии производства работ. Это выражено
как в непосредственном нарушении технологического процесса, так и в нарушении трудовой
и производственной дисциплины, неприменении средств индивидуальной защиты, использо-
вании неисправного оборудования, машин, механизмов и т. п. Таким образом, технология
должна являться ключевым звеном модели оценки влияния человека на функционирование
человеко-машинной системы с учетом взаимосвязей и закономерностей вышеобозначенных
моделей (рисунок 3).
H
S E
L
L
Объект (машина)
Субъект (человек)
Среда
Технология
Окружающая среда
Техника
Установка (процедуры, символы и
т. д.)
Социум
М
CC
ОС
Окружающая среда
Социальная среда
Человек Машина
С
ТМ
Л
Ч Человек
Ч
Рисунок 3 – Формирование модели оценки «человеческого фактора»
Формализацию данной модели можно реализовать с применением теории графов. Для
представленной модели матрица смежности изображена на рисунке 4.
С
ТМ 1
Л
Ч1
1
1
Рисунок 4 – Матрица смежности модели
Ч Т С М Л
Ч 0 1 0 0 0
Т 1 0 1 1 1
С 0 1 0 0 0
М 0 1 0 0 0
Л 0 1 0 0 0
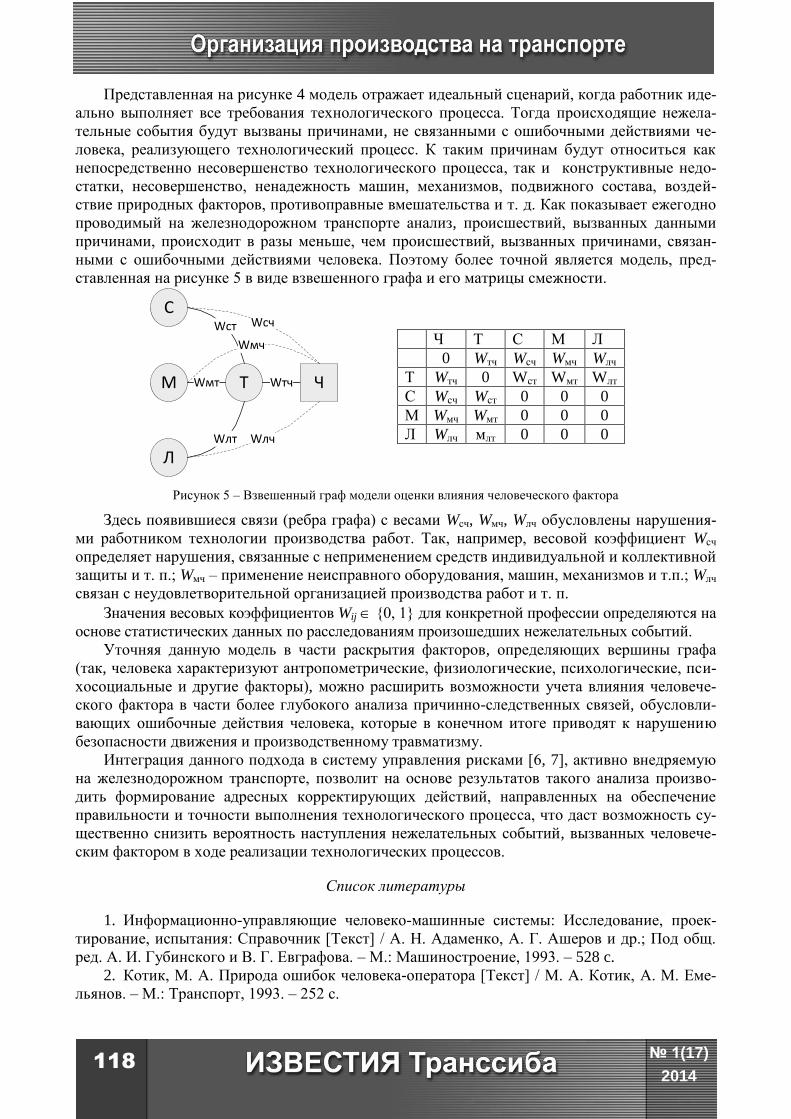
№ 1(17)
2014 118
Представленная на рисунке 4 модель отражает идеальный сценарий, когда работник иде-
ально выполняет все требования технологического процесса. Тогда происходящие нежела-
тельные события будут вызваны причинами, не связанными с ошибочными действиями че-
ловека, реализующего технологический процесс. К таким причинам будут относиться как
непосредственно несовершенство технологического процесса, так и конструктивные недо-
статки, несовершенство, ненадежность машин, механизмов, подвижного состава, воздей-
ствие природных факторов, противоправные вмешательства и т. д. Как показывает ежегодно
проводимый на железнодорожном транспорте анализ, происшествий, вызванных данными
причинами, происходит в разы меньше, чем происшествий, вызванных причинами, связан-
ными с ошибочными действиями человека. Поэтому более точной является модель, пред-
ставленная на рисунке 5 в виде взвешенного графа и его матрицы смежности.
С
ТМ Wтч
Л
ЧWмт
Wст
Wлт
Wмч
Wлч
Wсч
Рисунок 5 – Взвешенный граф модели оценки влияния человеческого фактора
Здесь появившиеся связи (ребра графа) с весами Wсч, Wмч, Wлч обусловлены нарушения-
ми работником технологии производства работ. Так, например, весовой коэффициент Wсч
определяет нарушения, связанные с неприменением средств индивидуальной и коллективной
защиты и т. п.; Wмч – применение неисправного оборудования, машин, механизмов и т.п.; Wлч
связан с неудовлетворительной организацией производства работ и т. п.
Значения весовых коэффициентов Wij {0, 1} для конкретной профессии определяются на
основе статистических данных по расследованиям произошедших нежелательных событий.
Уточняя данную модель в части раскрытия факторов, определяющих вершины графа
(так, человека характеризуют антропометрические, физиологические, психологические, пси-
хосоциальные и другие факторы), можно расширить возможности учета влияния человече-
ского фактора в части более глубокого анализа причинно-следственных связей, обусловли-
вающих ошибочные действия человека, которые в конечном итоге приводят к нарушению
безопасности движения и производственному травматизму.
Интеграция данного подхода в систему управления рисками [6, 7], активно внедряемую
на железнодорожном транспорте, позволит на основе результатов такого анализа произво-
дить формирование адресных корректирующих действий, направленных на обеспечение
правильности и точности выполнения технологического процесса, что даст возможность су-
щественно снизить вероятность наступления нежелательных событий, вызванных человече-
ским фактором в ходе реализации технологических процессов.
Список литературы
1. Информационно-управляющие человеко-машинные системы: Исследование, проек-
тирование, испытания: Справочник [Текст] / А. Н. Адаменко, А. Г. Ашеров и др.; Под общ.
ред. А. И. Губинского и В. Г. Евграфова. – М.: Машиностроение, 1993. – 528 c.
2. Котик, М. А. Природа ошибок человека-оператора [Текст] / М. А. Котик, A. M. Еме-льянов. – М.: Транспорт, 1993. – 252 с.
Ч Т С М Л
Ч 0 Wтч Wсч Wмч Wлч
Т Wтч 0 Wст Wмт Wлт
С Wсч Wст 0 0 0
М Wмч Wмт 0 0 0
Л Wлч млт 0 0 0
119
№ 1(17)
2014
3. Дружинин, Г. В. Учет свойств человека в моделях технологий [Текст] / Г. В. Дружи-нин / МАИК «Наука/Интерпериодика». – М., 2000. – 327 с.
4. Основные принципы учета человеческого фактора в руководстве по проведению про-верок безопасности полетов [Текст] / Междунар. организация гражданской авиации (ИКАО). –
Монреаль, Канада, 2002. – 224 с.
5. Роль человеческого фактора в обеспечении безопасности производственных процес-сов на транспорте [Текст] / В. А. Аксенов, А. М. Завьялов и др. // Восточноукраинский
нац. ун-т им. В. Даля / Вiсник СНУ iм. В. Даля. – Луганск. – 2013. – № 18 (207). – Ч. 2. –
C.151 – 155.
6. Аксенов, В. А. Совершенствование системы управления рисками для решения задач по обеспечению безопасности производственных процессов [Текст] / В. А. Аксенов,
Д. Л. Раенок, А. М. Завьялов // Надежность. – М. – 2013. – № 3 (46). – C. 103 – 111.
7. Аксенов, В. А. Пути повышения эффективности содержания объектов инфраструкту-ры железных дорог [Текст] / В. А. Аксенов, А. М. Завьялов // Известия Транссиба / Омский
гос. ун-т путей сообщения. – Омск. – 2013. – № 2 (14). – С. 113 – 117.
№ 1(17)
2014 120
УДК 621.333:621.314.26:621.313.33:621.317
МЕТОДИКА ОПРЕДЕЛЕНИЯ ПОТЕРЬ
В ДВУХЗВЕННЫХ ПРЕОБРАЗОВАТЕЛЯХ ЧАСТОТЫ
В СОСТАВЕ СТЕНДА ДЛЯ ИСПЫТАНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
МЕТОДОМ ВЗАИМНОЙ НАГРУЗКИ
Авилов Валерий Дмитриевич
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Доктор технических наук, профессор, заведующий кафедрой «Электрические машины и
общая электротехника», ОмГУПС.
Попов Денис Игоревич
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Кандидат технических наук, доцент кафедры «Электрические машины и общая электро-
техника», ОмГУПС.
E-mail: [email protected]
Литвинов Артем Валерьевич
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Аспирант кафедры «Электрические машины и общая электротехника», ОмГУПС.
E-mail: [email protected]
Приведена методика определения потерь в основных элементах двухзвенных преобразо-
вателей частоты (выпрямителе и инверторе), которая позволяет дополнить математиче-
скую модель процесса испытаний асинхронных двигателей методом взаимной нагрузки и
использовать ее при проектировании испытательных станций, в том числе для расчета
мощности станции, потребляемой из сети. Практической ценностью данной методики яв-
ляется отсутствие необходимости использования приборов для измерения мощности пере-
менного тока с частотой, отличной от 50 Гц.
Ключевые слова: методика, потери, преобразователь частоты, асинхронный двига-
тель, испытания, метод взаимной нагрузки.
METHODOLOGY FOR ASSIGNING LOSSES
IN TWO-ELEMENT FREQUENCY CONVERTER
IN INDUCTION MOTOR TEST RIG
Avilov Valery Dmitrievich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Dr. Sci. Tech., professor, head of the department «Electrical machinery and general electrical»,
OSTU.
Popov Denis Igorevich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
121
№ 1(17)
2014
Ph. D., associate professor of the department «Electrical machinery and general electrical», OSTU.
E-mail: [email protected]
Litvinov Artyom Valerievich Omsk State Transport University (OSTU). 35, Marx av., Omsk, 644046, Russia. The post-graduate student of the department «Electrical machinery and general electrical»,
OSTU. E-mail: [email protected] The article contains methodology for assigning losses in two-element frequency converter (in
rectifier and dc-ac converter). which allow to replenish mathematical model of back to back rig test method for induction motors and to use it in design induction motor rig test, also for calculation electrical power test rig which consumed from electrical network. Practical value of the methodol-ogy is no need in using electrical measurement instrument for ac-dc power with frequency different from 50 Gz.
Keywords: methodology, losses, frequency converter, induction motor, testing, back-to-back
method.
УДК 621.436
РАСЧЕТ ОТНОШЕНИЯ ТЕПЛОЕМКОСТЕЙ РАБОЧЕГО ТЕЛА ПРИ СГОРАНИИ
СМЕСЕВЫХ ВИДОВ ТОПЛИВА В ЦИЛИНДРЕ ТЕПЛОВОЗНЫХ ДИЗЕЛЕЙ
Анисимов Александр Сергеевич Омский государственный университет путей сообщения (ОмГУПС). 644046, г. Омск, пр. Маркса, 35. Кандидат технических наук, доцент кафедры «Локомотивы», ОмГУПС. Тел.: (3812) 31-34-17.
Золотовский Михаил Юрьевич Омский государственный университет путей сообщения (ОмГУПС). 644046, г. Омск, пр. Маркса, 35. Студент ОмГУПСа. Тел.: (3812) 31-34-17. В статье представлена методика расчета отношения теплоемкостей рабочего тела,
образовавшегося в процессе сгорания топлива. Представлены аналитические зависимости отношения теплоемкостей в зависимости от температуры продуктов сгорания, коэффи-циента избытка воздуха и доли сгоревшего топлива для различных составов смесевых видов углеводородного топлива.
Ключевые слова: дизельное топливо, теплоемкость, альтернативная добавка, рабочий
цикл, дизельный двигатель.
THE CALCULATION OF HEAT CAPACITY WORKING RELATIONSHIP DURING
THE COMBUSTION OF MIXED TYPES OF FUEL IN THE CYLINDER OF A
DIESEL LOCOMOTIVE ENGINES
Anisimov Alexandr Cergeevich Omsk State Transport University (OSTU).
№ 1(17)
2014 122
35, Marx av., Omsk, 644046, Russia.
Ph. D., associate professor of the department «Locomotives», OSTU.
Phone: (3812) 31-34-17.
Zolotovsky Mikhail Urevich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Student of OSTU.
Phone: (3812) 31-34-17.
The article presents the method of calculation of heat capacity working relations in the process
of fuel combustion. Analytical dependence of heat capacity ratio are presented depending on the
temperature of products of combustion, excess air ratio and proportion of burnt fuel for different
formulations of mixed types of hydrocarbon fuel.
Keywords: diesel fuel, heat capacity, alternative supplement, duty cycle, diesel engine.
УДК 621.33
ИССЛЕДОВАНИЕ ЭФФЕКТИВНОСТИ КОНВЕКТИВНОГО И
ТЕРМОРАДИАЦИОННОГО МЕТОДОВ КАПСУЛИРОВАНИЯ
ИЗОЛЯЦИИ ОБМОТОК ПРИ РЕМОНТЕ
ЭЛЕКТРИЧЕСКИХ МАШИН ТЯГОВОГО ПОДВИЖНОГО СОСТАВА
Дульский Евгений Юрьевич
Иркутский государственный университет путей сообщения (ИрГУПС).
664074, г. Иркутск, ул. Чернышевского, 15.
Аспирант, ассистент кафедры «Электроподвижной состав», ИрГУПС.
Тел.: 8-983-403-46-43.
E-mail: [email protected]
Доценко Наталия Сергеевна
Иркутский государственный университет путей сообщения (ИрГУПС).
664074, г. Иркутск, ул. Чернышевского, 15.
Аспирант кафедры «Электроподвижной состав», ИрГУПС.
Тел.: 8-902-578-77-16.
E-mail: [email protected]
Лыткина Екатерина Михайловна
Иркутский государственный университет путей сообщения (ИрГУПС).
664074, г. Иркутск, ул. Чернышевского, 15.
Кандидат технических наук, доцент кафедры «Электроподвижной состав», ИрГУПС.
Тел.: (3952) 63-83-66.
E-mail: [email protected]
Статья посвящена исследованию эффективности использования терморадиационного и
конвективного методов сушки изоляции обмоток электрических машин тягового подвиж-
ного состава, пропитанной различными современными лаками и компаундами, при их депов-
ском и заводском ремонте. Объективными факторами при сравнении методов являются
такие параметры, как класс нагревостойкости, электрическая прочность и цементирую-
123
№ 1(17)
2014
щая способность. Авторами обосновывается преимущество терморадиационного метода
перед конвективным.
Ключевые слова: электрические машины тягового подвижного состава, изоляция, суш-
ка, терморадиационный, конвективный, электрическая прочность, цементирующая способ-
ность.
RESEARCH OF EFFECTIVENESS OF CONVECTION AND METHODS
THERMORADIATIVE CAPSULATING WINDING INSULATION FOR REPAIR OF
ELECTRIC MACHINES TPN
Dulsky Evgeny Urievich
Irkutsk State Transport University (ISTU).
15, Chernyshevsky st., Irkutsk, 664074, Russia.
Post-graduate student, assistant of the department «Electrorolling composition», ISTU.
Phone: 8-983-403-46-43.
E-mail: E.Dulskiy @ mail.ru
Dotsenko Natalia Sergeevna
Irkutsk State Transport University (ISTU).
15, Chernyshevsky st., Irkutsk, 664074, Russia.
Post-graduate student, assistant of the department «Electrorolling composition», ISTU.
Phone: 8-902-578-77-16.
E-mail: [email protected]
Lytkina Ekaterina Mikhailovna
Irkutsk State Transport University (ISTU).
15, Chernyshevsky st., Irkutsk, 664074, Russia.
Ph. D., assistant professor of the department «Electrorolling composition», ISTU.
Phone: 8 (3952) 63-83-66.
E-mail: [email protected]
The article studies comparing the effectiveness of using thermoradiation and convective drying
methods insulation windings of electrical machines of traction rolling stock, impregnated with vari-
ous modern varnishes and compounds at their factory and depot repair. Objective factors in the
comparison methods are parameters such as temperature class, electric strength and cementing
capacity. The author substantiates advantage thermoradiation method over convective.
Keywords: electric machines of traction rolling stock, insulation, drying, thermoradiation,
convection, electric strength, cementing ability.
УДК 531.1
МОДЕЛИРОВАНИЕ ПРОЦЕССА НАГРЕВА МАТЕРИАЛА КОЛЕСА
В РЕЖИМЕ ТОРМОЖЕНИЯ ЛОКОМОТИВА
Кузнецов Виктор Федорович
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Кандидат технических наук, доцент кафедры «Высшая математика», ОмГУПС.
Тел.: (3812) 31-18-11.
№ 1(17)
2014 124
Капустьян Михаил Федорович
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Кандидат технических наук, доцент кафедры «Технология транспортного машинострое-
ния и ремонта подвижного состава», ОмГУПС.
Тел.: (3812) 31-18-11.
E-mail: [email protected]
Ярышева Лилия Владимировна
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Аспирант кафедры «Теория механизмов и детали машин», ОмГУПС.
Телефон: (3812) 31-06-18.
E-mail: [email protected]
В статье представлены результаты математического моделирования процесса нагре-
ва материала колеса в режиме торможения локомотива. Полученные результаты могут
быть использованы при расчете изменения температуры для любой точки колеса в процессе
всего режима торможения.
Ключевые слова: моделирование, колесная пара, торможение локомотива, тормозная
колодка, температурное поле.
MODELING OF HEATING MATERIAL OF THE WHEEL
IN BRAKING MODE OF LOCOMOTIVE
Kuznetsov Viktor Fedorovich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Ph. D., the senjor lecturer of the department «Higher mathematics», OSTU.
Phone: (3812)31-18-11
Kapustyan Mikhail Fedorovich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Ph. D., the senjor lecturer of the department «Technology of transport engineering and repair of
rolling stock», OSTU.
Phone: (3812) 31-18-11.
E-mail: [email protected]
Yarysheva Lilia Vladimirovna
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Post-graduate student of the department «Technology of transport engineering and repair of
rolling stock», OSTU.
Phone: (3812) 31-06-18.
E-mail: [email protected]
125
№ 1(17)
2014
The results of mathematical modeling of the heating process of the wheel material during brak-
ing mode of the locomotive are presented in article. The results can be used to calculate the tem-
perature change for any point of the wheel during the braking operation.
Keywords: modeling, wheels, braking mode of the locomotive, brake shoes, temperature field.
УДК 621.33
ОСНОВЫ ЛОКАЛЬНОГО МЕТОДА ПРОДЛЕНИЯ РЕСУРСА ИЗОЛЯЦИИ
ЭЛЕКТРИЧЕСКИХ МАШИН ТЯГОВОГО ПОДВИЖНОГО СОСТАВА
ТЕПЛОВЫМ ИЗЛУЧЕНИЕМ
Лыткина Екатерина Михайловна
Иркутский государственный университет путей сообщения (ИрГУПС).
664074, г. Иркутск, ул. Чернышевского, 15.
Кандидат технических наук, доцент кафедры «Электроподвижной состав», ИрГУПС.
Тел.: (3952) 63-83-66.
E-mail: [email protected]
Дульский Евгений Юрьевич
Иркутский государственный университет путей сообщения (ИрГУПС).
664074, г. Иркутск, ул. Чернышевского, 15.
Аспирант, ассистент кафедры «Электроподвижной состав», ИрГУПС.
Тел.: 8-983-403-46-43.
E-mail: [email protected]
Худоногов Анатолий Михайлович
Иркутский государственный университет путей сообщения (ИрГУПС).
664074, г. Иркутск, ул. Чернышевского, 15.
Доктор технических наук, профессор кафедры «Электроподвижной состав», ИрГУПС.
Тел.: 8-914-88-14-675.
E-mail: [email protected]
Основным повреждаемым узлом тяговых электрических машин тягового подвижного
состава является изоляция в области основания лобовой части. Несовершенная система
изоляции в торцевой части лобовых обмоток приводит к влажности. Причиной неудовле-
творительной надежности является также повышенная напряженность в этой зоне. В
качестве мероприятий, разработанных для продления ресурса электрических машин, авто-
рами предлагается система локального капсулирования изоляции энергией ИК-излучения.
Ключевые слова: тяговый электрический двигатель, изоляция, ИК-излучатель, нагрев,
сушка, ресурс, надежность.
BASIS OF LOCAL LIFE EXTENSION METHOD INSULATION OF ELECTRIC
MACHINES OF LOCOMOTIVES THERMAL RADIATION
Lytkina Ekaterina Mikhailovna
Irkutsk State Transport University (ISTU).
15, Chernyshevsky st., Irkutsk, 664074, Russia.
Ph. D., assistent professor of the department «Electrorolling composition», ISTU.
№ 1(17)
2014 126
Phone: 8 (3952) 63-83-66.
E-mail: [email protected]
Dulsky Evgeny Urievich
Irkutsk State Transport University (ISTU).
15, Chernyshevsky st., Irkutsk, 664074, Russia.
Post-graduate student, assistant of the department «Electrorolling composition», ISTU.
Phone: 8-983-403-46-43.
E-mail: E.Dulskiy @ mail.ru
Hudonogov Anatoly Mikhailovich
Irkutsk State Transport University (ISTU).
15, Chernyshevsky st., Irkutsk, 664074, Russia.
Dr.Sci.Tech., professor of the departament «Electrorolling composition», ISTU.
Phone: 8-914-88-14-675.
E-mail: [email protected]
The main damaged knot of traction electric motors of a traction rolling stock is isolation,
namely in the field of the basis of front part. The imperfect system of isolation in face part of front
windings results in humidity. Also the increased intensity in this zone is the reason of low reliabil-
ity. Authors propose the system of local insulation encapsulation energy of infrared radiation as life
extension activities of electrical machines.
Keywords: drive electric motor, insulation, IR-emitter, heating, drying, resource, reliability.
УДК 621.316.97
РАСПРЕДЕЛЕНИЕ ТОКА И НАПРЯЖЕНИЯ В СИСТЕМЕ ТРЕХ
ОДНОПРОВОДНЫХ ЛИНИЙ С УЧЕТОМ ИХ ВЗАИМНОГО ВЛИЯНИЯ
Авдеева Ксения Васильевна
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Кандидат технических наук, преподаватель кафедры «Инфокоммуникационные системы
и информационная безопасность», ОмГУПС.
Тел.: (3812)31-06-94.
Медведева Анна Александровна
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Аспирант кафедры «Инфокоммуникационные системы и информационная безопас-
ность», ОмГУПС.
Тел.: 8-923-673-68-15.
Е-mail: [email protected]
Слептерева Надежда Константиновна
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Аспирант кафедры «Инфокоммуникационные системы и информационная безопас-
ность», ОмГУПС.
Тел.: (3812)31-06-94.
127
№ 1(17)
2014
В статье приводится решение системы уравнений для расчета тока и напряжения
трех однопроводных линий с учетом их взаимного влияния.
Ключевые слова: взаимные влияния, первичные параметры, вторичные параметры,
напряжение, ток.
DISTRIBUTION OF CURRENT AND VOLTAGE IN THE THREE SINGLE-WIRE
LINES TAKING INTO ACCOUNT THEIR MUTUAL INFLUENCE
Avdeeva Ksenia Vasilyevna
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Ph. D., teacher of the departament « Information and communication systems and information
security », OSTU.
Phone: (3812) 31-06-23.
Medvedeva Anna Alecsandrovna
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
The post-graduate student of the departament « Information and communication systems and
information security », OSTU.
Phone: 8-923-673-68-15.
E-mail: [email protected]
Sleptereva Nadezhda Konstantinovna
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
The post-graduate student of the departament « Information and communication systems and
information security », OSTU.
Phone: (3812)31-06-94.
The article provides a solution to the system of equations for the voltages and currents of three
single-wire lines with regard to their inductive and galvanic influence.
Keywords: mutual influences, primary parameters, secondary parameters, voltage, current.
УДК 629.424.14.004:621.436
НЕРАВНОМЕРНОСТЬ РАБОЧЕГО ПРОЦЕССА И ПРОЦЕССОВ
ТОПЛИВОПОДАЧИ КАК ДИАГНОСТИЧЕСКИХ ПАРАМЕТРОВ ДИЗЕЛЕЙ,
РАБОТАЮЩИХ НА РАЗНЫХ СОРТАХ ТОПЛИВА
Ведрученко Виктор Родионович
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Доктор технических наук, профессор кафедры «Теплоэнергетика», ОмГУПС.
Тел.: (3812) 31-06-23.
Е-mail: [email protected]
№ 1(17)
2014 128
Крайнов Василий Васильевич
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Кандидат технических наук, доцент кафедры «Теплоэнергетика», ОмГУПС.
Тел.: (3812) 31-06-23.
E-mail: [email protected]
Выполнен теоретический анализ движения жидкого топлива в линии низкого давления
(ЛНД) систем топливоподачи дизельных двигателей. Предложено использовать для расче-
тов ЛНД систему уравнений для гомогенной смеси (по С. С. Кутателадзе). Показано, что
при использовании в тепловозных и судовых дизелях альтернативных видов топлива необхо-
дима перерегулировка топливной аппаратуры, а в качестве диагностического параметра
целесообразно оперировать степенью неравномерности рабочего процесса.
Ключевые слова: топливо, альтернативные виды топлива, дизель, горение.
UNEVENNESS OF WORKING PROCESS AND FUEL SUPPLY AS DIAGNOSTIC
INDICATORS OF DIESEL ENGINES WORKING ON DIFFERENT FUEL GRADES
Vedruchenko Viktor Rodionovich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Dr. Sci. Tech., professor of the departament «Power system», OSTU.
Phone: (3812) 31-06-23.
E-mail: [email protected]
Krajnov Vasily Vasilevich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Ph. D., associate professor of the departament «Power system», OSTU.
Phone: (3812) 31-06-23.
E-mail: [email protected]
Theoretical analyze of liquid fuel movement in low-pressure line (LPL) of diesel fuel supply
systems is implemented. To solve LPL the equations set of homogeneous blend is suggested. It is
shown that when using alternative fuels in locomotive and ship diesels the retrimming of fuel
equipment is required, and it’s reasonable to use the degree of irregularity of working process as
diagnostic indicator.
Keywords: fuel, alternative fuels, diesel engine, burning.
УДК 621.331:621.311
АПРОБАЦИЯ РАСЧЕТНОЙ МОДЕЛИ СИСТЕМЫ ТЯГОВОГО
ЭЛЕКТРОСНАБЖЕНИЯ ЖЕЛЕЗНЫХ ДОРОГ ПОСТОЯННОГО ТОКА
ДЛЯ ОЦЕНКИ ПОТЕНЦИАЛА ЭНЕРГОЭФФЕКТИВНОСТИ
РЕКУПЕРАТИВНОГО ТОРМОЖЕНИЯ
Вильгельм Александр Сергеевич
Омский государственный университет путей сообщения (ОмГУПС).
129
№ 1(17)
2014
644046, г. Омск, пр. Маркса, 35.
Кандидат технических наук, инженер научно-производственной лаборатории «Энерго-
сберегающие технологии и электромагнитная совместимость», ОмГУПС.
Тел.: (3812) 44-39-23.
E-mail: [email protected]
Гутников Вячеслав Иванович
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Старший научный сотрудник научно-производственной лаборатории «Энергосберегаю-
щие технологии и электромагнитная совместимость», ОмГУПС.
Тел.: (3812) 44-39-23.
Никифоров Михаил Михайлович
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Кандидат технических наук, начальник научно-производственной лаборатории «Энерго-
сберегающие технологии и электромагнитная совместимость», ОмГУПС.
Тел.: (3812) 44-39-23.
E-mail: [email protected]
В статье описаны общие принципы создания расчетной модели системы тягового
электроснабжения железных дорог постоянного тока для оценки потенциала энергоэф-
фективности рекуперативного торможения, а также способы апробации полученной мо-
дели с целью установления степени ее адекватности.
Ключевые слова: система тягового электроснабжения, электроподвижной состав,
имитационное моделирование, рекуперативное торможение.
APPROBATION OF SETTLEMENT MODEL OF SYSTEM OF TRACTION
POWER SUPPLY OF THE RAILROADS OF THE DIRECT CURRENT
FOR THE ASSESSMENT OF POTENTIAL OF ENERGY EFFICIENCY
OF RECUPERATIVE BRAKING
Vilgelm Alexander Sergeevich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Ph. D., the engineer of research-and-production laboratory «Power saving up technologies and
electromagnetic compatibility», OSTU.
Phone: (3812) 44-39-23.
E-mail: [email protected]
Gutnikov Vyacheslav Ivanovich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
The senior researcher of research-and-production laboratory «Power saving up technologies
and electromagnetic compatibility», OSTU.
Phone: (3812) 44-39-23.
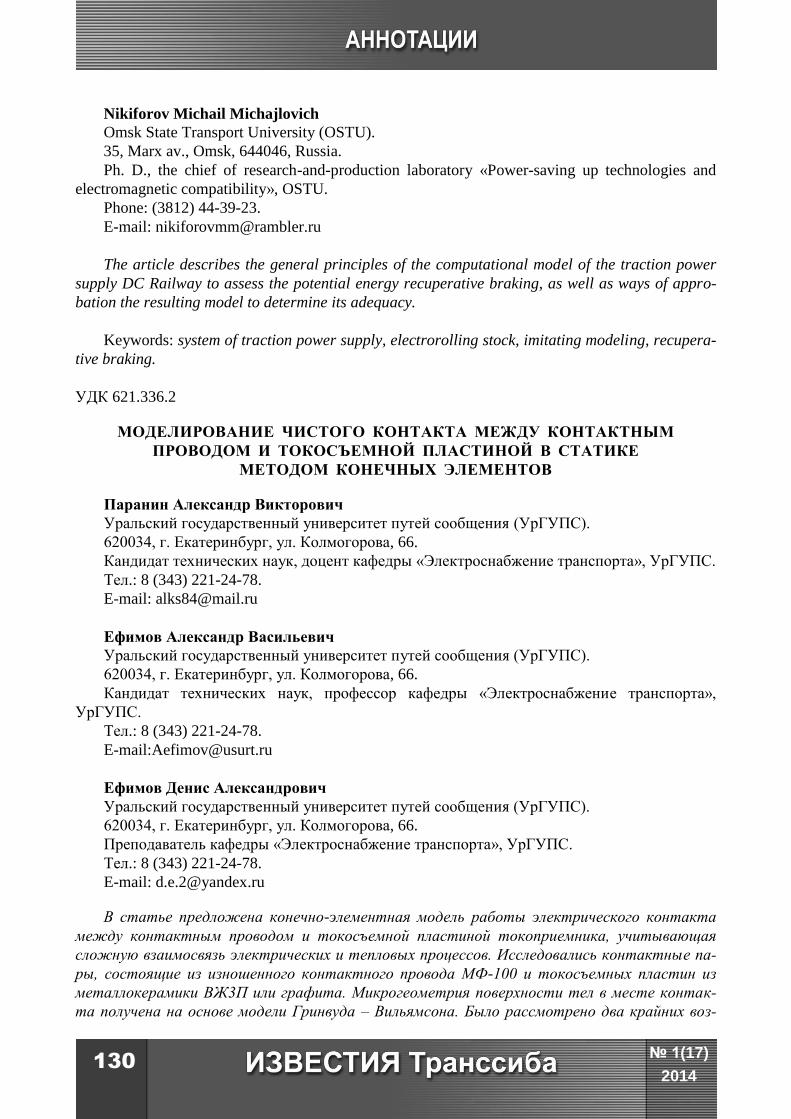
№ 1(17)
2014 130
Nikiforov Michail Michajlovich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Ph. D., the chief of research-and-production laboratory «Power-saving up technologies and
electromagnetic compatibility», OSTU.
Phone: (3812) 44-39-23.
E-mail: [email protected]
The article describes the general principles of the computational model of the traction power
supply DC Railway to assess the potential energy recuperative braking, as well as ways of appro-
bation the resulting model to determine its adequacy.
Keywords: system of traction power supply, electrorolling stock, imitating modeling, recupera-
tive braking.
УДК 621.336.2
МОДЕЛИРОВАНИЕ ЧИСТОГО КОНТАКТА МЕЖДУ КОНТАКТНЫМ
ПРОВОДОМ И ТОКОСЪЕМНОЙ ПЛАСТИНОЙ В СТАТИКЕ
МЕТОДОМ КОНЕЧНЫХ ЭЛЕМЕНТОВ
Паранин Александр Викторович
Уральский государственный университет путей сообщения (УрГУПС).
620034, г. Екатеринбург, ул. Колмогорова, 66.
Кандидат технических наук, доцент кафедры «Электроснабжение транспорта», УрГУПС.
Тел.: 8 (343) 221-24-78.
E-mail: [email protected]
Ефимов Александр Васильевич
Уральский государственный университет путей сообщения (УрГУПС).
620034, г. Екатеринбург, ул. Колмогорова, 66.
Кандидат технических наук, профессор кафедры «Электроснабжение транспорта»,
УрГУПС.
Тел.: 8 (343) 221-24-78.
E-mail:[email protected]
Ефимов Денис Александрович
Уральский государственный университет путей сообщения (УрГУПС).
620034, г. Екатеринбург, ул. Колмогорова, 66.
Преподаватель кафедры «Электроснабжение транспорта», УрГУПС.
Тел.: 8 (343) 221-24-78.
E-mail: [email protected]
В статье предложена конечно-элементная модель работы электрического контакта
между контактным проводом и токосъемной пластиной токоприемника, учитывающая
сложную взаимосвязь электрических и тепловых процессов. Исследовались контактные па-
ры, состоящие из изношенного контактного провода МФ-100 и токосъемных пластин из
металлокерамики ВЖ3П или графита. Микрогеометрия поверхности тел в месте контак-
та получена на основе модели Гринвуда – Вильямсона. Было рассмотрено два крайних воз-

131
№ 1(17)
2014
можных случая соприкосновения контактного провода с пластиной. Результаты были про-
анализированы и сравнены с известными опытными данными. Рассчитано, при каких соот-
ношениях контактного нажатия и тока из-за выгорания контактов возникнет искровой
или дуговой разряд. Определены пути совершенствования модели.
Ключевые слова: контактный провод, токосъемная пластина, электрический контакт,
микрошероховатость, контактные пятна, модель Гринвуда – Вильямсона, конечный эле-
мент, граничные условия, теплопроводность, температура, электрический потенциал,
удельная электропроводность, контактное напряжение, контактное сопротивление, кон-
тактная плотность тока, испарение и плавление металла, дуговой и искровой разряд.
MODELING CLEAN CONTACT BETWEEN THE CONTACT WIRES
AND COLLECTOR STRIP WITH STATIC FINITE ELEMENT METHODS
Paranin Alexander Viktoroivch
Ural State University of Railway Transport (USURT).
66, Kolmogorov st., Ekaterinburg 620034, Russia.
Ph. D., the senior lecturer of the department «Electric power supply of transport», USURT.
Phone: 8 (343) 221-24-78.
E-mail: [email protected]
Efimov Alexander Vasilievich
Ural State University of Railway Transport (USURT).
66, Kolmogorov st., Ekaterinburg 620034, Russia.
Ph. D., the professor of the department «Electric power supply of transport», USURT.
Phone: 8 (343) 221-24-78.
E-mail:[email protected]
Efimov Denis Alexandrovich
Ural State University of Railway Transport (USURT).
66, Kolmogorov st., Ekaterinburg 620034, Russia.
The tutor of the department «Electric power supply of transport», USURT.
Phone: 8 (343) 221-24-78.
E-mail: [email protected]
In the article the finite element model of the electrical contact pin wire – collector strip, which
takes into account the complex interaction of electric and thermal processes. As the contact wire is
selected worn MF-100, the current collection plate – two brands VJZ-metal and graphite. Microge-
ometry the body surface at the contact point is obtained based on the model of Greenwood – Wil-
liamson. It was considered the two extreme cases of possible contact between the contact wire to
the plate. The results were analyzed and compared with the known experimental data. Calculated at
what proportions contact force and contact current due to burnout occurs spark or arc. Identify
ways to improve the model.
Keywords: contact wire, the current collection plate, electric contact, micro-roughness, the
contact spots, Greenwood – Williamson model, finite element, boundary conditions , thermal con-
ductivity, temperature, electric potential, electrical conductivity, surface pressure, the contact re-
sistance, contact current density, evaporation and melting metal arc and spark .
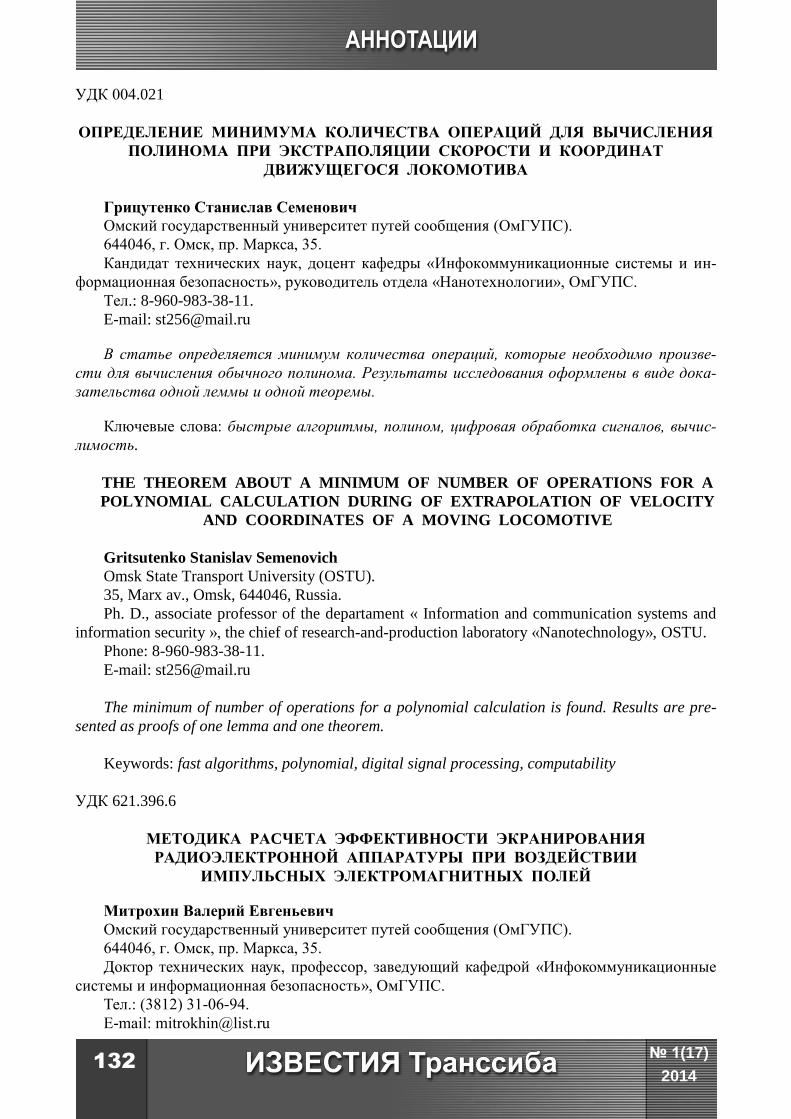
№ 1(17)
2014 132
УДК 004.021
ОПРЕДЕЛЕНИЕ МИНИМУМА КОЛИЧЕСТВА ОПЕРАЦИЙ ДЛЯ ВЫЧИСЛЕНИЯ
ПОЛИНОМА ПРИ ЭКСТРАПОЛЯЦИИ СКОРОСТИ И КООРДИНАТ
ДВИЖУЩЕГОСЯ ЛОКОМОТИВА
Грицутенко Станислав Семенович
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Кандидат технических наук, доцент кафедры «Инфокоммуникационные системы и ин-
формационная безопасность», руководитель отдела «Нанотехнологии», ОмГУПС.
Тел.: 8-960-983-38-11.
E-mail: [email protected]
В статье определяется минимум количества операций, которые необходимо произве-
сти для вычисления обычного полинома. Результаты исследования оформлены в виде дока-
зательства одной леммы и одной теоремы.
Ключевые слова: быстрые алгоритмы, полином, цифровая обработка сигналов, вычис-
лимость.
THE THEOREM ABOUT A MINIMUM OF NUMBER OF OPERATIONS FOR A
POLYNOMIAL CALCULATION DURING OF EXTRAPOLATION OF VELOCITY
AND COORDINATES OF A MOVING LOCOMOTIVE
Gritsutenko Stanislav Semenovich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Ph. D., associate professor of the departament « Information and communication systems and
information security », the chief of research-and-production laboratory «Nanotechnology», OSTU.
Phone: 8-960-983-38-11.
E-mail: [email protected]
The minimum of number of operations for a polynomial calculation is found. Results are pre-
sented as proofs of one lemma and one theorem.
Keywords: fast algorithms, polynomial, digital signal processing, computability
УДК 621.396.6
МЕТОДИКА РАCЧЕТА ЭФФЕКТИВНОСТИ ЭКРАНИРОВАНИЯ
РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ ПРИ ВОЗДЕЙСТВИИ
ИМПУЛЬСНЫХ ЭЛЕКТРОМАГНИТНЫХ ПОЛЕЙ
Митрохин Валерий Евгеньевич
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Доктор технических наук, профессор, заведующий кафедрой «Инфокоммуникационные
системы и информационная безопасность», ОмГУПС.
Тел.: (3812) 31-06-94.
E-mail: [email protected]
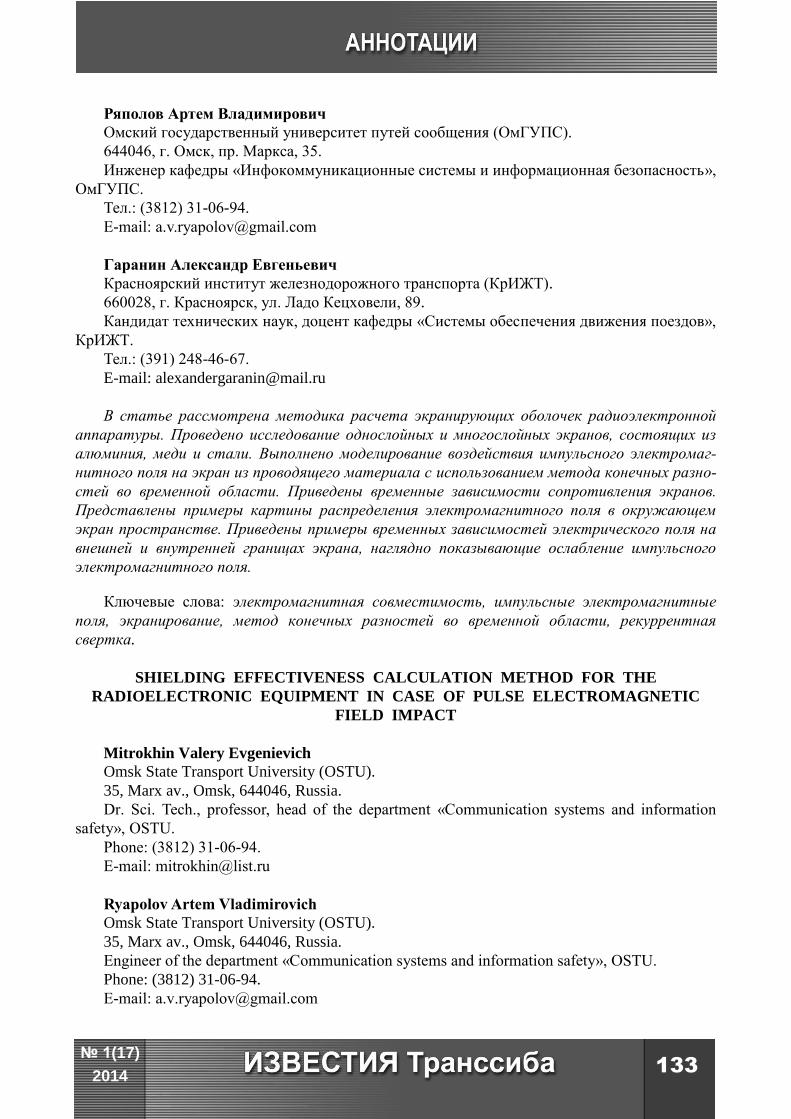
133
№ 1(17)
2014
Ряполов Артем Владимирович
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Инженер кафедры «Инфокоммуникационные системы и информационная безопасность»,
ОмГУПС.
Тел.: (3812) 31-06-94.
E-mail: [email protected]
Гаранин Александр Евгеньевич
Красноярский институт железнодорожного транспорта (КрИЖТ).
660028, г. Красноярск, ул. Ладо Кецховели, 89.
Кандидат технических наук, доцент кафедры «Системы обеспечения движения поездов»,
КрИЖТ.
Тел.: (391) 248-46-67.
E-mail: [email protected]
В статье рассмотрена методика расчета экранирующих оболочек радиоэлектронной
аппаратуры. Проведено исследование однослойных и многослойных экранов, состоящих из
алюминия, меди и стали. Выполнено моделирование воздействия импульсного электромаг-
нитного поля на экран из проводящего материала с использованием метода конечных разно-
стей во временной области. Приведены временные зависимости сопротивления экранов.
Представлены примеры картины распределения электромагнитного поля в окружающем
экран пространстве. Приведены примеры временных зависимостей электрического поля на
внешней и внутренней границах экрана, наглядно показывающие ослабление импульсного
электромагнитного поля.
Ключевые слова: электромагнитная совместимость, импульсные электромагнитные
поля, экранирование, метод конечных разностей во временной области, рекуррентная
свертка.
SHIELDING EFFECTIVENESS CALCULATION METHOD FOR THE
RADIOELECTRONIC EQUIPMENT IN CASE OF PULSE ELECTROMAGNETIC
FIELD IMPACT
Mitrokhin Valery Evgenievich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Dr. Sci. Tech., professor, head of the department «Communication systems and information
safety», OSTU.
Phone: (3812) 31-06-94.
E-mail: [email protected]
Ryapolov Artem Vladimirovich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Engineer of the department «Communication systems and information safety», OSTU.
Phone: (3812) 31-06-94.
E-mail: [email protected]
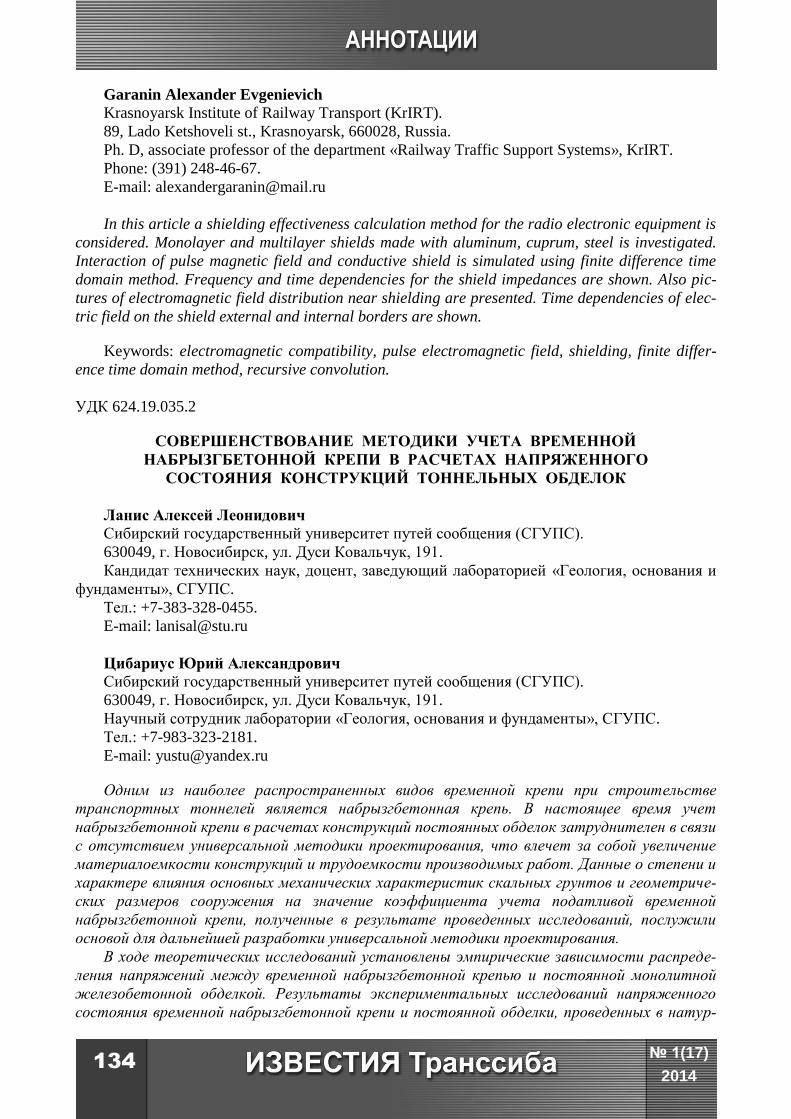
№ 1(17)
2014 134
Garanin Alexander Evgenievich
Krasnoyarsk Institute of Railway Transport (KrIRT).
89, Lado Ketshoveli st., Krasnoyarsk, 660028, Russia.
Ph. D, associate professor of the department «Railway Traffic Support Systems», KrIRT.
Phone: (391) 248-46-67.
E-mail: [email protected]
In this article a shielding effectiveness calculation method for the radio electronic equipment is
considered. Monolayer and multilayer shields made with aluminum, cuprum, steel is investigated.
Interaction of pulse magnetic field and conductive shield is simulated using finite difference time
domain method. Frequency and time dependencies for the shield impedances are shown. Also pic-
tures of electromagnetic field distribution near shielding are presented. Time dependencies of elec-
tric field on the shield external and internal borders are shown.
Keywords: electromagnetic compatibility, pulse electromagnetic field, shielding, finite differ-
ence time domain method, recursive convolution.
УДК 624.19.035.2
СОВЕРШЕНСТВОВАНИЕ МЕТОДИКИ УЧЕТА ВРЕМЕННОЙ
НАБРЫЗГБЕТОННОЙ КРЕПИ В РАСЧЕТАХ НАПРЯЖЕННОГО
СОСТОЯНИЯ КОНСТРУКЦИЙ ТОННЕЛЬНЫХ ОБДЕЛОК
Ланис Алексей Леонидович
Сибирский государственный университет путей сообщения (СГУПС).
630049, г. Новосибирск, ул. Дуси Ковальчук, 191.
Кандидат технических наук, доцент, заведующий лабораторией «Геология, основания и
фундаменты», СГУПС.
Тел.: +7-383-328-0455.
E-mail: [email protected]
Цибариус Юрий Александрович
Сибирский государственный университет путей сообщения (СГУПС).
630049, г. Новосибирск, ул. Дуси Ковальчук, 191.
Научный сотрудник лаборатории «Геология, основания и фундаменты», СГУПС.
Тел.: +7-983-323-2181.
E-mail: [email protected]
Одним из наиболее распространенных видов временной крепи при строительстве
транспортных тоннелей является набрызгбетонная крепь. В настоящее время учет
набрызгбетонной крепи в расчетах конструкций постоянных обделок затруднителен в связи
с отсутствием универсальной методики проектирования, что влечет за собой увеличение
материалоемкости конструкций и трудоемкости производимых работ. Данные о степени и
характере влияния основных механических характеристик скальных грунтов и геометриче-
ских размеров сооружения на значение коэффициента учета податливой временной
набрызгбетонной крепи, полученные в результате проведенных исследований, послужили
основой для дальнейшей разработки универсальной методики проектирования.
В ходе теоретических исследований установлены эмпирические зависимости распреде-
ления напряжений между временной набрызгбетонной крепью и постоянной монолитной
железобетонной обделкой. Результаты экспериментальных исследований напряженного
состояния временной набрызгбетонной крепи и постоянной обделки, проведенных в натур-
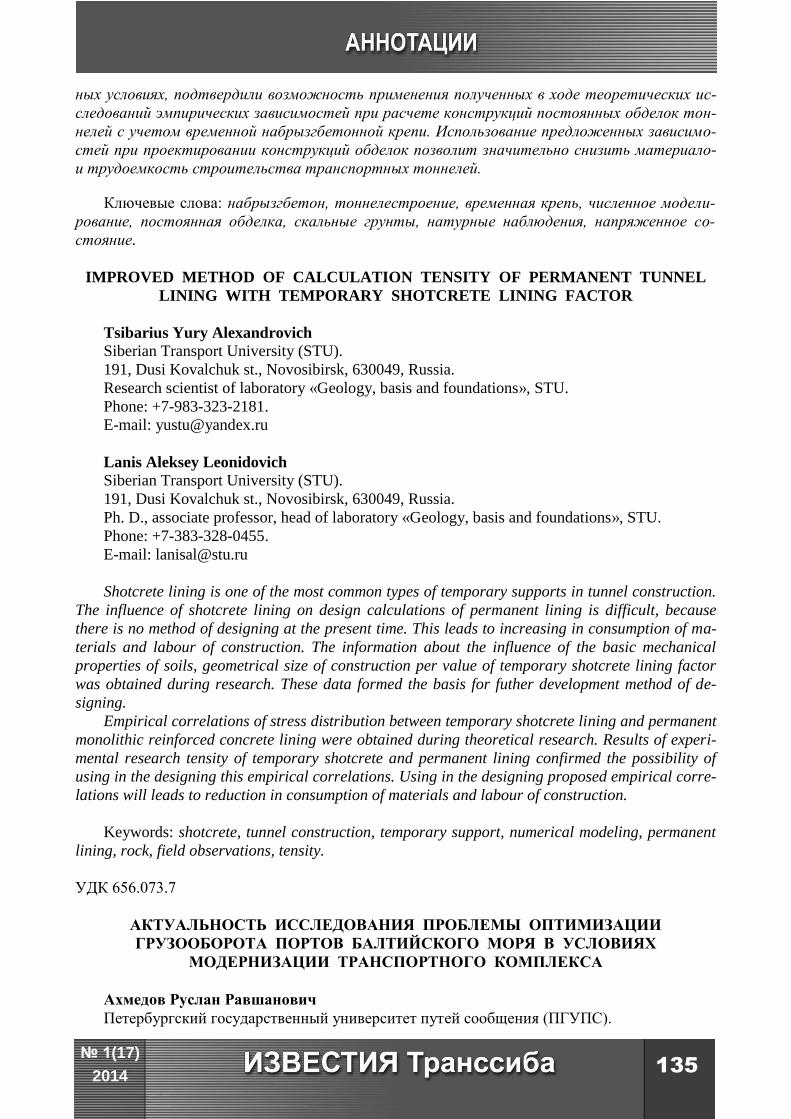
135
№ 1(17)
2014
ных условиях, подтвердили возможность применения полученных в ходе теоретических ис-
следований эмпирических зависимостей при расчете конструкций постоянных обделок тон-
нелей с учетом временной набрызгбетонной крепи. Использование предложенных зависимо-
стей при проектировании конструкций обделок позволит значительно снизить материало-
и трудоемкость строительства транспортных тоннелей.
Ключевые слова: набрызгбетон, тоннелестроение, временная крепь, численное модели-
рование, постоянная обделка, скальные грунты, натурные наблюдения, напряженное со-
стояние.
IMPROVED METHOD OF CALCULATION TENSITY OF PERMANENT TUNNEL
LINING WITH TEMPORARY SHOTCRETE LINING FACTOR
Tsibarius Yury Alexandrovich
Siberian Transport University (STU).
191, Dusi Kovalchuk st., Novosibirsk, 630049, Russia.
Research scientist of laboratory «Geology, basis and foundations», STU.
Phone: +7-983-323-2181.
E-mail: [email protected]
Lanis Aleksey Leonidovich
Siberian Transport University (STU).
191, Dusi Kovalchuk st., Novosibirsk, 630049, Russia.
Ph. D., associate professor, head of laboratory «Geology, basis and foundations», STU.
Phone: +7-383-328-0455.
E-mail: [email protected]
Shotcrete lining is one of the most common types of temporary supports in tunnel construction.
The influence of shotcrete lining on design calculations of permanent lining is difficult, because
there is no method of designing at the present time. This leads to increasing in consumption of ma-
terials and labour of construction. The information about the influence of the basic mechanical
properties of soils, geometrical size of construction per value of temporary shotcrete lining factor
was obtained during research. These data formed the basis for futher development method of de-
signing.
Empirical correlations of stress distribution between temporary shotcrete lining and permanent
monolithic reinforced concrete lining were obtained during theoretical research. Results of experi-
mental research tensity of temporary shotcrete and permanent lining confirmed the possibility of
using in the designing this empirical correlations. Using in the designing proposed empirical corre-
lations will leads to reduction in consumption of materials and labour of construction.
Keywords: shotcrete, tunnel construction, temporary support, numerical modeling, permanent
lining, rock, field observations, tensity.
УДК 656.073.7
АКТУАЛЬНОСТЬ ИССЛЕДОВАНИЯ ПРОБЛЕМЫ ОПТИМИЗАЦИИ
ГРУЗООБОРОТА ПОРТОВ БАЛТИЙСКОГО МОРЯ В УСЛОВИЯХ
МОДЕРНИЗАЦИИ ТРАНСПОРТНОГО КОМПЛЕКСА
Ахмедов Руслан Равшанович
Петербургский государственный университет путей сообщения (ПГУПС).
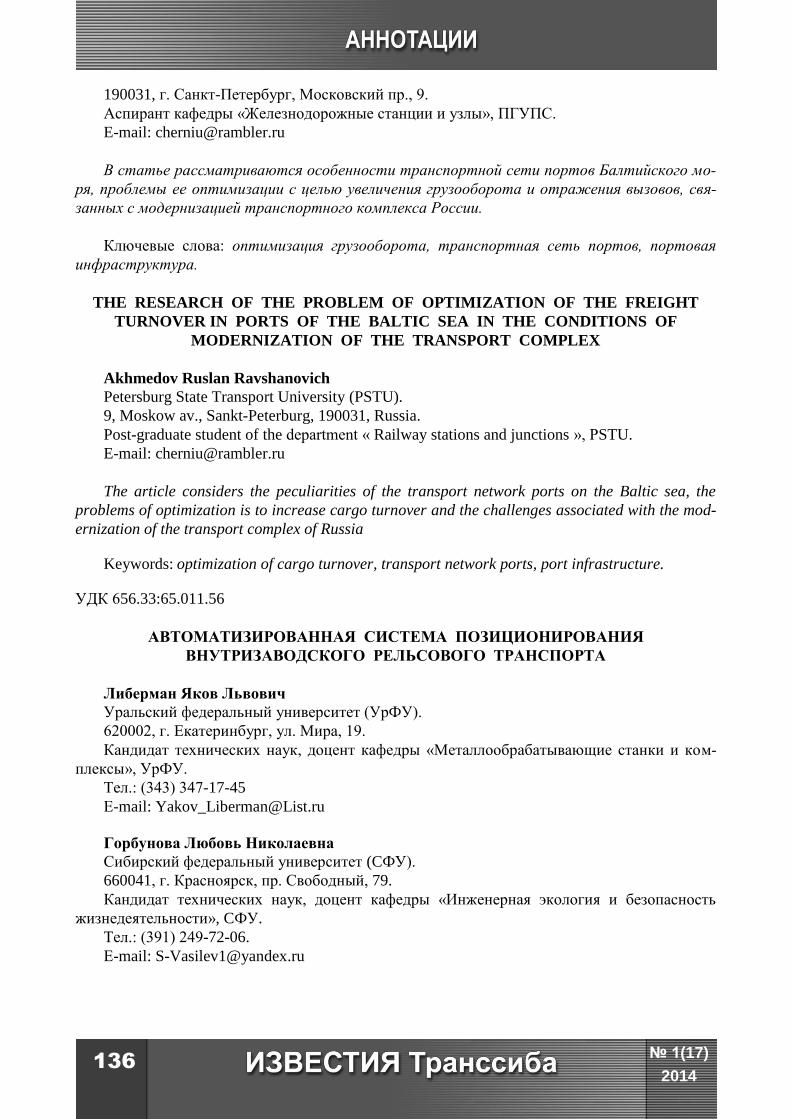
№ 1(17)
2014 136
190031, г. Санкт-Петербург, Московский пр., 9.
Аспирант кафедры «Железнодорожные станции и узлы», ПГУПС.
E-mail: [email protected]
В статье рассматриваются особенности транспортной сети портов Балтийского мо-
ря, проблемы ее оптимизации с целью увеличения грузооборота и отражения вызовов, свя-
занных с модернизацией транспортного комплекса России.
Ключевые слова: оптимизация грузооборота, транспортная сеть портов, портовая
инфраструктура.
THE RESEARCH OF THE PROBLEM OF OPTIMIZATION OF THE FREIGHT
TURNOVER IN PORTS OF THE BALTIC SEA IN THE CONDITIONS OF
MODERNIZATION OF THE TRANSPORT COMPLEX
Akhmedov Ruslan Ravshanovich
Petersburg State Transport University (PSTU).
9, Moskow av., Sankt-Peterburg, 190031, Russia.
Post-graduate student of the department « Railway stations and junctions », PSTU.
E-mail: [email protected]
The article considers the peculiarities of the transport network ports on the Baltic sea, the
problems of optimization is to increase cargo turnover and the challenges associated with the mod-
ernization of the transport complex of Russia
Keywords: optimization of cargo turnover, transport network ports, port infrastructure.
УДК 656.33:65.011.56
АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ
ВНУТРИЗАВОДСКОГО РЕЛЬСОВОГО ТРАНСПОРТА
Либерман Яков Львович
Уральский федеральный университет (УрФУ).
620002, г. Екатеринбург, ул. Мира, 19.
Кандидат технических наук, доцент кафедры «Металлообрабатывающие станки и ком-
плексы», УрФУ.
Тел.: (343) 347-17-45
Е-mail: [email protected]
Горбунова Любовь Николаевна
Сибирский федеральный университет (CФУ).
660041, г. Красноярск, пр. Свободный, 79.
Кандидат технических наук, доцент кафедры «Инженерная экология и безопасность
жизнедеятельности», CФУ.
Тел.: (391) 249-72-06.
Е-mail: [email protected]
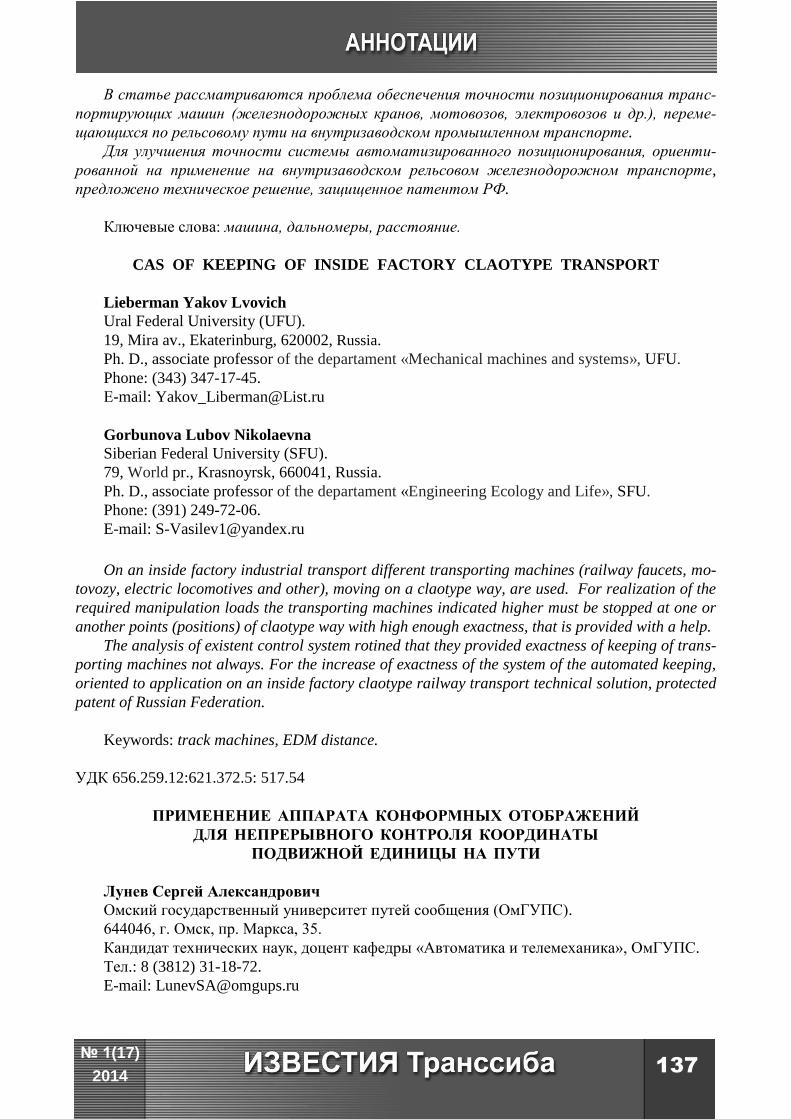
137
№ 1(17)
2014
В статье рассматриваются проблема обеспечения точности позиционирования транс-
портирующих машин (железнодорожных кранов, мотовозов, электровозов и др.), переме-
щающихся по рельсовому пути на внутризаводском промышленном транспорте.
Для улучшения точности системы автоматизированного позиционирования, ориенти-
рованной на применение на внутризаводском рельсовом железнодорожном транспорте,
предложено техническое решение, защищенное патентом РФ.
Ключевые слова: машина, дальномеры, расстояние.
CAS OF KEEPING OF INSIDE FACTORY CLAOTYPE TRANSPORT
Lieberman Yakov Lvovich
Ural Federal University (UFU).
19, Mira av., Ekaterinburg, 620002, Russia.
Ph. D., associate professor of the departament «Mechanical machines and systems», UFU.
Phone: (343) 347-17-45.
Е-mail: [email protected]
Gorbunova Lubov Nikolaevna
Siberian Federal University (SFU).
79, World pr., Krasnoyrsk, 660041, Russia.
Ph. D., associate professor of the departament «Engineering Ecology and Life», SFU.
Phone: (391) 249-72-06.
E-mail: [email protected]
On an inside factory industrial transport different transporting machines (railway faucets, mo-
tovozy, electric locomotives and other), moving on a claotype way, are used. For realization of the
required manipulation loads the transporting machines indicated higher must be stopped at one or
another points (positions) of claotype way with high enough exactness, that is provided with a help.
The analysis of existent control system rotined that they provided exactness of keeping of trans-
porting machines not always. For the increase of exactness of the system of the automated keeping,
oriented to application on an inside factory claotype railway transport technical solution, protected
patent of Russian Federation.
Keywords: track machines, EDM distance.
УДК 656.259.12:621.372.5: 517.54
ПРИМЕНЕНИЕ АППАРАТА КОНФОРМНЫХ ОТОБРАЖЕНИЙ
ДЛЯ НЕПРЕРЫВНОГО КОНТРОЛЯ КООРДИНАТЫ
ПОДВИЖНОЙ ЕДИНИЦЫ НА ПУТИ
Лунев Сергей Александрович
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Кандидат технических наук, доцент кафедры «Автоматика и телемеханика», ОмГУПС.
Тел.: 8 (3812) 31-18-72.
E-mail: [email protected]
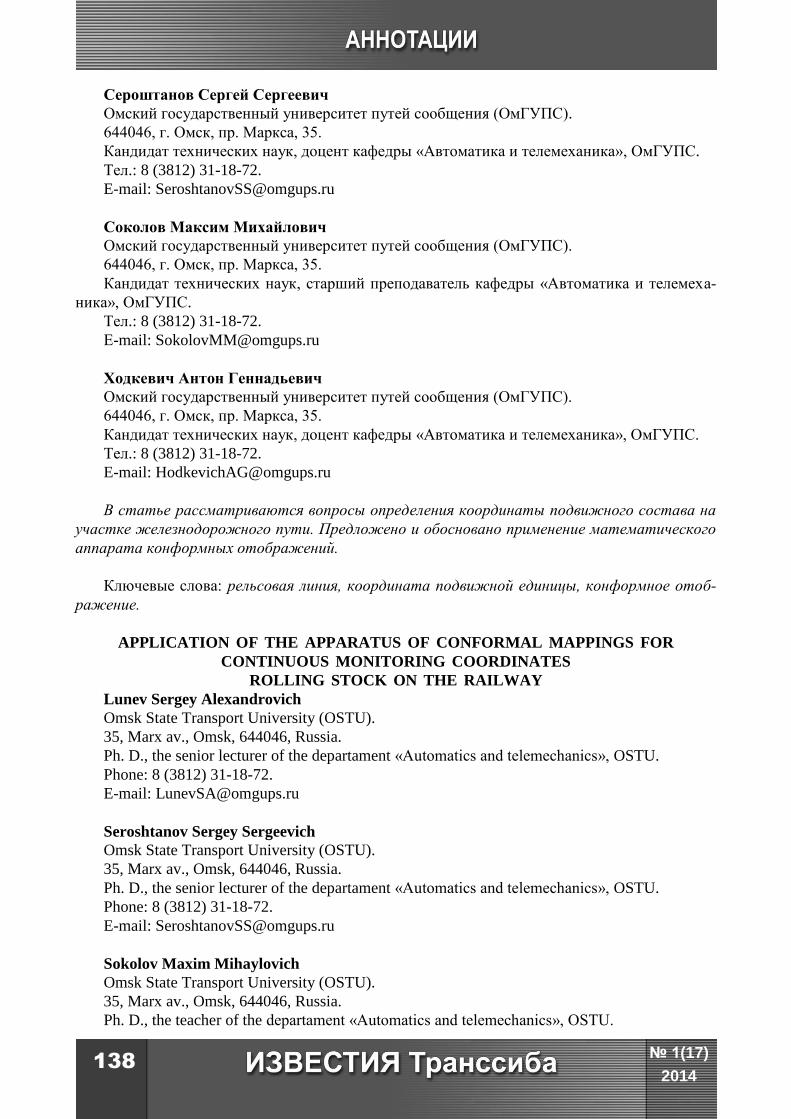
№ 1(17)
2014 138
Сероштанов Сергей Сергеевич
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Кандидат технических наук, доцент кафедры «Автоматика и телемеханика», ОмГУПС.
Тел.: 8 (3812) 31-18-72.
E-mail: [email protected]
Соколов Максим Михайлович
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Кандидат технических наук, старший преподаватель кафедры «Автоматика и телемеха-
ника», ОмГУПС.
Тел.: 8 (3812) 31-18-72.
Е-mail: [email protected]
Ходкевич Антон Геннадьевич
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Кандидат технических наук, доцент кафедры «Автоматика и телемеханика», ОмГУПС.
Тел.: 8 (3812) 31-18-72.
E-mail: [email protected]
В статье рассматриваются вопросы определения координаты подвижного состава на
участке железнодорожного пути. Предложено и обосновано применение математического
аппарата конформных отображений.
Ключевые слова: рельсовая линия, координата подвижной единицы, конформное отоб-
ражение.
APPLICATION OF THE APPARATUS OF CONFORMAL MAPPINGS FOR
CONTINUOUS MONITORING COORDINATES
ROLLING STOCK ON THE RAILWAY
Lunev Sergey Alexandrovich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Ph. D., the senior lecturer of the departament «Automatics and telemechanics», OSTU.
Phone: 8 (3812) 31-18-72.
E-mail: [email protected]
Seroshtanov Sergey Sergeevich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Ph. D., the senior lecturer of the departament «Automatics and telemechanics», OSTU.
Phone: 8 (3812) 31-18-72.
E-mail: [email protected]
Sokolov Maxim Mihaylovich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Ph. D., the teacher of the departament «Automatics and telemechanics», OSTU.
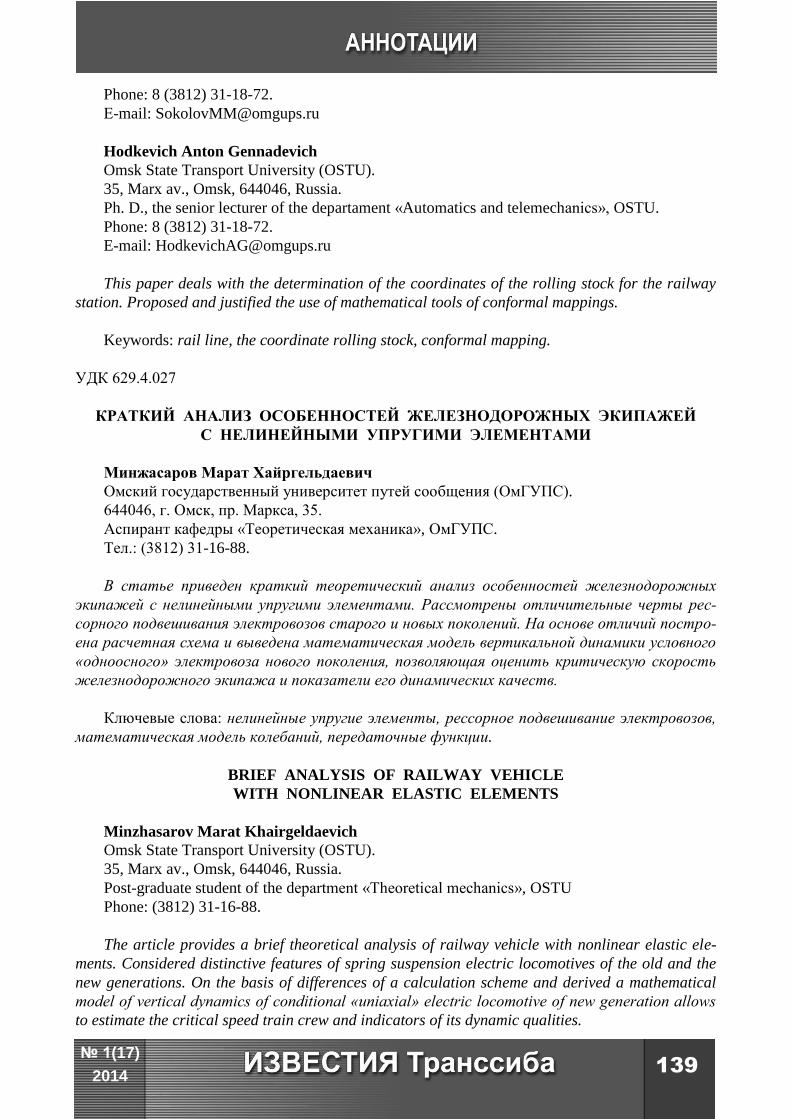
139
№ 1(17)
2014
Phone: 8 (3812) 31-18-72.
Е-mail: [email protected]
Hodkevich Anton Gennadevich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Ph. D., the senior lecturer of the departament «Automatics and telemechanics», OSTU.
Phone: 8 (3812) 31-18-72.
E-mail: [email protected]
This paper deals with the determination of the coordinates of the rolling stock for the railway
station. Proposed and justified the use of mathematical tools of conformal mappings.
Keywords: rail line, the coordinate rolling stock, conformal mapping.
УДК 629.4.027
КРАТКИЙ АНАЛИЗ ОСОБЕННОСТЕЙ ЖЕЛЕЗНОДОРОЖНЫХ ЭКИПАЖЕЙ
С НЕЛИНЕЙНЫМИ УПРУГИМИ ЭЛЕМЕНТАМИ
Минжасаров Марат Хайргельдаевич
Омский государственный университет путей сообщения (ОмГУПС).
644046, г. Омск, пр. Маркса, 35.
Аспирант кафедры «Теоретическая механика», ОмГУПС.
Тел.: (3812) 31-16-88.
В статье приведен краткий теоретический анализ особенностей железнодорожных
экипажей с нелинейными упругими элементами. Рассмотрены отличительные черты рес-
сорного подвешивания электровозов старого и новых поколений. На основе отличий постро-
ена расчетная схема и выведена математическая модель вертикальной динамики условного
«одноосного» электровоза нового поколения, позволяющая оценить критическую скорость
железнодорожного экипажа и показатели его динамических качеств.
Ключевые слова: нелинейные упругие элементы, рессорное подвешивание электровозов,
математическая модель колебаний, передаточные функции.
BRIEF ANALYSIS OF RAILWAY VEHICLE
WITH NONLINEAR ELASTIC ELEMENTS
Minzhasarov Marat Khairgeldaevich
Omsk State Transport University (OSTU).
35, Marx av., Omsk, 644046, Russia.
Post-graduate student of the department «Theoretical mechanics», OSTU
Phone: (3812) 31-16-88.
The article provides a brief theoretical analysis of railway vehicle with nonlinear elastic ele-
ments. Considered distinctive features of spring suspension electric locomotives of the old and the
new generations. On the basis of differences of a calculation scheme and derived a mathematical
model of vertical dynamics of conditional «uniaxial» electric locomotive of new generation allows
to estimate the critical speed train crew and indicators of its dynamic qualities.
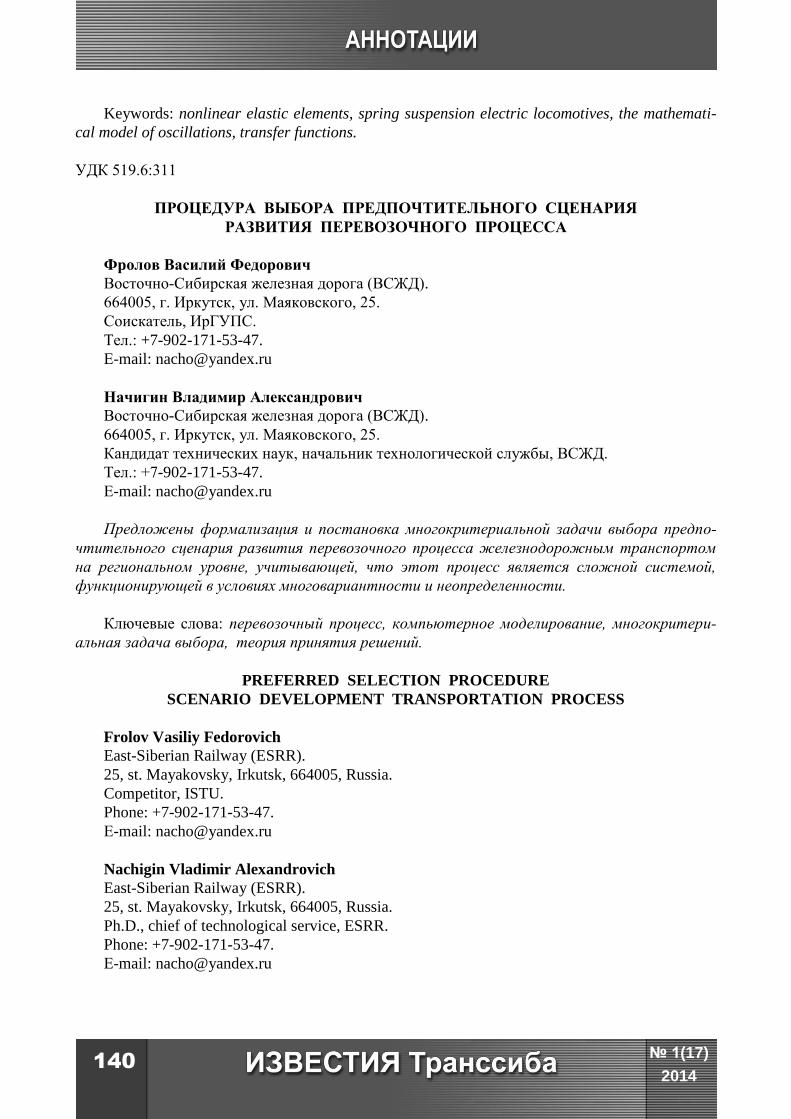
№ 1(17)
2014 140
Keywords: nonlinear elastic elements, spring suspension electric locomotives, the mathemati-
cal model of oscillations, transfer functions.
УДК 519.6:311
ПРОЦЕДУРА ВЫБОРА ПРЕДПОЧТИТЕЛЬНОГО СЦЕНАРИЯ
РАЗВИТИЯ ПЕРЕВОЗОЧНОГО ПРОЦЕССА
Фролов Василий Федорович
Восточно-Сибирская железная дорога (ВСЖД).
664005, г. Иркутск, ул. Маяковского, 25.
Соискатель, ИрГУПС.
Тел.: +7-902-171-53-47.
Е-mail: [email protected]
Начигин Владимир Александрович
Восточно-Сибирская железная дорога (ВСЖД).
664005, г. Иркутск, ул. Маяковского, 25.
Кандидат технических наук, начальник технологической службы, ВСЖД.
Тел.: +7-902-171-53-47.
Е-mail: [email protected]
Предложены формализация и постановка многокритериальной задачи выбора предпо-
чтительного сценария развития перевозочного процесса железнодорожным транспортом
на региональном уровне, учитывающей, что этот процесс является сложной системой,
функционирующей в условиях многовариантности и неопределенности.
Ключевые слова: перевозочный процесс, компьютерное моделирование, многокритери-
альная задача выбора, теория принятия решений.
PREFERRED SELECTION PROCEDURE
SCENARIO DEVELOPMENT TRANSPORTATION PROCESS
Frolov Vasiliy Fedorovich
East-Siberian Railway (ESRR).
25, st. Mayakovsky, Irkutsk, 664005, Russia.
Competitor, ISTU.
Phone: +7-902-171-53-47.
Е-mail: [email protected]
Nachigin Vladimir Alexandrovich
East-Siberian Railway (ESRR).
25, st. Mayakovsky, Irkutsk, 664005, Russia.
Ph.D., chief of technological service, ESRR.
Phone: +7-902-171-53-47.
Е-mail: [email protected]
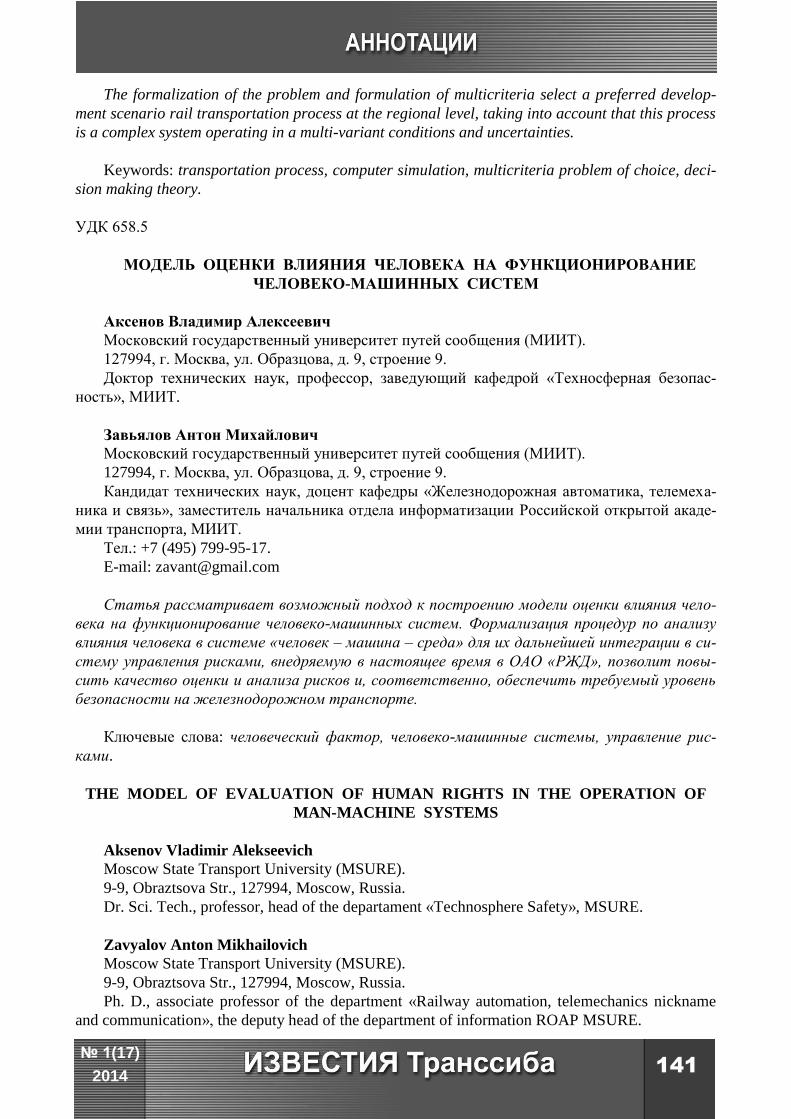
141
№ 1(17)
2014
The formalization of the problem and formulation of multicriteria select a preferred develop-
ment scenario rail transportation process at the regional level, taking into account that this process
is a complex system operating in a multi-variant conditions and uncertainties.
Keywords: transportation process, computer simulation, multicriteria problem of choice, deci-
sion making theory.
УДК 658.5
МОДЕЛЬ ОЦЕНКИ ВЛИЯНИЯ ЧЕЛОВЕКА НА ФУНКЦИОНИРОВАНИЕ
ЧЕЛОВЕКО-МАШИННЫХ СИСТЕМ
Аксенов Владимир Алексеевич
Московский государственный университет путей сообщения (МИИТ).
127994, г. Москва, ул. Образцова, д. 9, строение 9.
Доктор технических наук, профессор, заведующий кафедрой «Техносферная безопас-
ность», МИИТ.
Завьялов Антон Михайлович
Московский государственный университет путей сообщения (МИИТ).
127994, г. Москва, ул. Образцова, д. 9, строение 9.
Кандидат технических наук, доцент кафедры «Железнодорожная автоматика, телемеха-
ника и связь», заместитель начальника отдела информатизации Российской открытой акаде-
мии транспорта, МИИТ.
Тел.: +7 (495) 799-95-17.
E-mail: [email protected]
Статья рассматривает возможный подход к построению модели оценки влияния чело-
века на функционирование человеко-машинных систем. Формализация процедур по анализу
влияния человека в системе «человек – машина – среда» для их дальнейшей интеграции в си-
стему управления рисками, внедряемую в настоящее время в ОАО «РЖД», позволит повы-
сить качество оценки и анализа рисков и, соответственно, обеспечить требуемый уровень
безопасности на железнодорожном транспорте.
Ключевые слова: человеческий фактор, человеко-машинные системы, управление рис-
ками.
THE MODEL OF EVALUATION OF HUMAN RIGHTS IN THE OPERATION OF
MAN-MACHINE SYSTEMS
Aksenov Vladimir Alekseevich
Moscow State Transport University (MSURE).
9-9, Obraztsova Str., 127994, Moscow, Russia.
Dr. Sci. Tech., professor, head of the departament «Technosphere Safety», MSURE.
Zavyalov Anton Mikhailovich
Moscow State Transport University (MSURE).
9-9, Obraztsova Str., 127994, Moscow, Russia.
Ph. D., associate professor of the department «Railway automation, telemechanics nickname
and communication», the deputy head of the department of information ROAP MSURE.

№ 1(17)
2014 142
Phone: +7 (495) 799-95-17.
E-mail: [email protected]
The article examines a possible approach to the construction of evaluation model of human in-
fluence on the functioning of human-machine systems. Formalization of procedures for the analysis
of human influence in the «man – machine – environment» for their further integration into the risk
management system is being implemented at JSC «Russian Railways» will improve the quality as-
sessment and risk analysis, and, accordingly, to ensure the required level of security in rail
transport.
Keywords: human factor, man-machine systems, risk management.
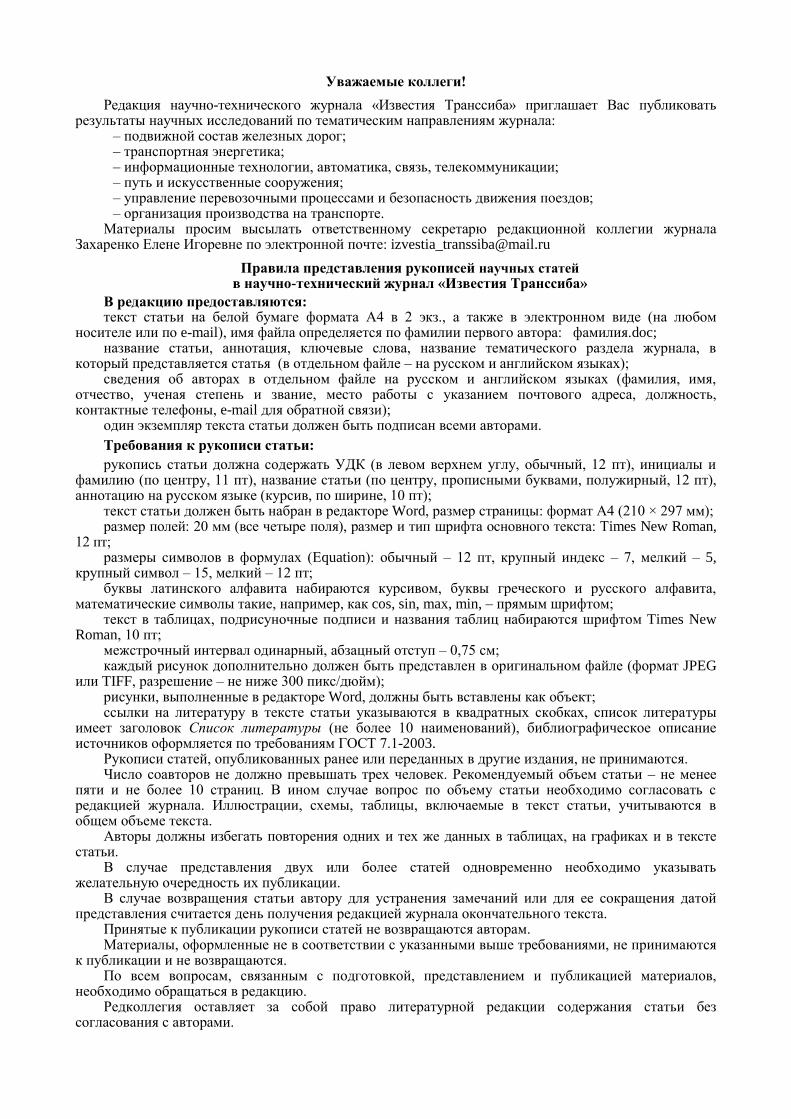
Уважаемые коллеги!
Редакция научно-технического журнала «Известия Транссиба» приглашает Вас публиковать результаты научных исследований по тематическим направлениям журнала:
– подвижной состав железных дорог; – транспортная энергетика; – информационные технологии, автоматика, связь, телекоммуникации; – путь и искусственные сооружения; – управление перевозочными процессами и безопасность движения поездов; – организация производства на транспорте.
Материалы просим высылать ответственному секретарю редакционной коллегии журнала Захаренко Елене Игоревне по электронной почте: [email protected]
Правила представления рукописей научных статей в научно-технический журнал «Известия Транссиба»
В редакцию предоставляются: текст статьи на белой бумаге формата А4 в 2 экз., а также в электронном виде (на любом
носителе или по e-mail), имя файла определяется по фамилии первого автора: фамилия.doc; название статьи, аннотация, ключевые слова, название тематического раздела журнала, в
который представляется статья (в отдельном файле – на русском и английском языках); сведения об авторах в отдельном файле на русском и английском языках (фамилия, имя,
отчество, ученая степень и звание, место работы с указанием почтового адреса, должность, контактные телефоны, e-mail для обратной связи);
один экземпляр текста статьи должен быть подписан всеми авторами.
Требования к рукописи статьи:
рукопись статьи должна содержать УДК (в левом верхнем углу, обычный, 12 пт), инициалы и фамилию (по центру, 11 пт), название статьи (по центру, прописными буквами, полужирный, 12 пт), аннотацию на русском языке (курсив, по ширине, 10 пт);
текст статьи должен быть набран в редакторе Word, размер страницы: формат А4 (210 × 297 мм); размер полей: 20 мм (все четыре поля), размер и тип шрифта основного текста: Тimes New Roman,
12 пт; размеры символов в формулах (Еquation): обычный – 12 пт, крупный индекс – 7, мелкий – 5,
крупный символ – 15, мелкий – 12 пт; буквы латинского алфавита набираются курсивом, буквы греческого и русского алфавита,
математические символы такие, например, как cos, sin, max, min, – прямым шрифтом; текст в таблицах, подрисуночные подписи и названия таблиц набираются шрифтом Times New
Roman, 10 пт; межстрочный интервал одинарный, абзацный отступ – 0,75 см; каждый рисунок дополнительно должен быть представлен в оригинальном файле (формат JPEG
или TIFF, разрешение – не ниже 300 пикс/дюйм); рисунки, выполненные в редакторе Word, должны быть вставлены как объект; ссылки на литературу в тексте статьи указываются в квадратных скобках, список литературы
имеет заголовок Список литературы (не более 10 наименований), библиографическое описание источников оформляется по требованиям ГОСТ 7.1-2003.
Рукописи статей, опубликованных ранее или переданных в другие издания, не принимаются. Число соавторов не должно превышать трех человек. Рекомендуемый объем статьи – не менее
пяти и не более 10 страниц. В ином случае вопрос по объему статьи необходимо согласовать с редакцией журнала. Иллюстрации, схемы, таблицы, включаемые в текст статьи, учитываются в общем объеме текста.
Авторы должны избегать повторения одних и тех же данных в таблицах, на графиках и в тексте статьи.
В случае представления двух или более статей одновременно необходимо указывать желательную очередность их публикации.
В случае возвращения статьи автору для устранения замечаний или для ее сокращения датой представления считается день получения редакцией журнала окончательного текста.
Принятые к публикации рукописи статей не возвращаются авторам. Материалы, оформленные не в соответствии с указанными выше требованиями, не принимаются
к публикации и не возвращаются. По всем вопросам, связанным с подготовкой, представлением и публикацией материалов,
необходимо обращаться в редакцию. Редколлегия оставляет за собой право литературной редакции содержания статьи без
согласования с авторами.
№ 2(2)
2010 144
Научное издание
Научно-технический журнал «Известия Транссиба»
РЕДАКЦИОННАЯ КОЛЛЕГИЯ
1. Бородин Анатолий Васильевич – д.т.н., профессор, ОмГУПС (Омск); 2. Ведрученко Виктор Родионович – д.т.н., профессор, ОмГУПС (Омск); 3. Горюнов Владимир Николаевич – д.т.н., профессор, ОмГТУ (Омск); 4. Гончар Игорь Иванович – д.ф.-м.н., профессор, ОмГУПС (Омск); 5. Демин Юрий Васильевич – д.т.н., профессор, НГАВТ (Новосибирск); 6. Ермоленко Дмитрий Владимирович – д.т.н., доцент, ВНИИЖТ (Москва); 7. Кандаев Василий Андреевич – д.т.н., профессор, ОмГУПС (Омск); 8. Костюков Владимир Николаевич – д.т.н., профессор, НПЦ «Динамика» (Омск); 9. Кузнецов Андрей Альбертович – д.т.н., профессор, ОмГУПС (Омск); 10. Лебедев Виталий Матвеевич – д.т.н., профессор, ОмГУПС (Омск); 11. Медведев Владимир Ильич – д.т.н., профессор, СГУПС (Новосибирск); 12. Митрохин Валерий Евгеньевич – д.т.н., профессор, ОмГУПС (Омск); 13. Мочалин Сергей Михайлович – д.т.н., профессор, СибАДИ (Омск); 14. Нехаев Виктор Алексеевич – д.т.н., профессор, ОмГУПС (Омск); 15. Николаев Виктор Александрович – д.т.н., профессор, ОмГУПС (Омск); 16. Рауба Александр Александрович – д.т.н., профессор, ОмГУПС (Омск); 17. Сафронов Эдуард Алексеевич – д.т.н., профессор, СибАДИ (Омск); 18. Сидоров Олег Алексеевич – д.т.н., профессор, ОмГУПС (Омск); 19. Cидорова Елена Анатольевна – д.т.н., профессор, ОмГУПС (Омск); 20. Сковородников Евгений Иванович – д.т.н., профессор, ОмГУПС (Омск); 21. Харламов Виктор Васильевич – д.т.н., профессор, ОмГУПС (Омск); 22. Четвергов Виталий Алексеевич – д.т.н., профессор, ОмГУПС (Омск); 23. Шпалтаков Владимир Петрович – д.э.н., профессор, ОмГУПС (Омск).
EDITORIAL BOARD
1. Borodin Anatoly Vasilyevich – D. Sc., professor, OSTU (Omsk); 2. Vedruchenko Viktor Rodionovich – D. Sc., professor, OSTU (Omsk); 3. Gorjunov Vladimir Nikolaevich – D. Sc., professor, OmSTU (Omsk); 4. Gonchar Igor Ivanovich – D. Sc., professor, OSTU (Omsk); 5. Demin Yury Vasilyevich – D. Sc., professor, NSAWT (Novo-sibirsk); 6. Ermolenko Dmitry Vladimirovich – D. Sc., associate profes-sor, JSC «VNIIZhT» (Moscow); 7. Kandaev Vasily Andreevich – D. Sc., professor, OSTU (Omsk); 8. Kostjukov Vladimir Nikolaevich – D. Sc., professor, SPC «The dynamics» (Omsk); 9. Kuznetsov Andrey Albertovich – D. Sc., professor, OSTU (Omsk); 10. Lebedev Vitaly Matveevich – D. Sc., professor, OSTU (Omsk); 11. Medvedev Vladimir Ilyich – D. Sc., professor, SSTU (Novo-sibirsk); 12. Mitrokhin Valery Evgenyevich – D. Sc., professor, OSTU (Omsk); 13. Mochalin Sergey Mikhailovich – D. Sc., professor, SibADI (Omsk); 14. Nekhaev Viktor Alexeevich – D. Sc., professor, OSTU (Omsk); 15. Nikolaev Viktor Alexandrovich – D. Sc., professor, OSTU (Omsk); 16. Rauba Alexander Alexandrovich – D. Sc., professor, OSTU (Omsk); 17. Safronov Edward Alexeevich – D. Sc., professor, SibADI (Omsk); 18. Sidorov Oleg Alexeevich – D. Sc., professor, OSTU (Omsk); 19. Sidorova Elena Anatolyevna – D. Sc., professor, OSTU (Omsk); 20. Skovorodnikov Evgeny Ivanovich – D. Sc., professor, OSTU (Omsk); 21. Kharlamov Viktor Vasilyevich – D. Sc., professor, OSTU (Omsk); 22. Chetvergov Vitaly Alexeevich – D. Sc., professor, OSTU (Omsk); 23. Shpaltakov Vladimir Petrovich – D. Sc., professor, OSTU (Omsk).
Редактор – Майорова Н. А. Компьютерная верстка – Захаренко Е. И. Научно-технический журнал «Известия Транссиба» зарегистрирован Федеральной службой по надзору в сфере связи, информационных технологий и массовых коммуникаций (Роскомнадзор) 3 июня 2009 г. Свидетельство о регистрации – ПИ № ФС77-36469. Номер ISSN – 2220-4245. Подписной индекс в общероссийском каталоге «Роспечать» – 66087. Журнал включен в Перечень российских рецензируемых научных журналов, в которых должны быть опубликова-ны основные научные результаты диссертаций на соискание ученых степеней доктора и кандидата наук. Адрес редакции (издательства): 644046, г. Омск, пр. Маркса, 35; тел.: (3812) 31-05-54; e-mail: [email protected] Подписано в печать 24.03.2014. Тираж 500 экз.