VISUALISASI KUALITAS UDARA UNTUK MENENTUKAN...
7
1 Abstrak— Saat ini pencemaran udara di perkotaan menjadi permasalahan yang serius. Peningkatan penggunaan kendaraan bermotor dan konsumsi energi di kota- kota, jika tidak dikendalikan akan memperparah pencemaran udara, kemacetan, dan dampak perubahan iklim yang menimbulkan kerugian kesehatan, produktivitas, dan ekonomi bagi Negara. Permasalahan tersebut menyebabkan penurunan kualitas udara khususnya di Kota Surabaya sehingga pengendalian dan meningkatkan kualitas udara menjadi perhatian untuk pemerintah maupun masyarakat. Penelitian ini menggunakan data mining untuk mengungkapkan informasi tersembunyi terhadap distribusi polusi udara dalam data yang diambil dari pemantauan pihak terkait. Lalu akan disajikan pula desain parameter untuk pemodelan kualitas udara dan clustering kedalam kelas sesuai dengan kondisi polusi masing- masing daerah. Selanjutnya disajikan pula model desain, pre-processing data, desain dari berbagai struktur dari Kohonen’s self - organizing feature maps (KSOFM), pengelompokan (clustering) oleh K-means algorithm dan analisis akhir dalam pemetaan pada pengelompokan yang telah diidentifikasi pada lokasi geografis. Penelitian ini menghasilkan model clustering yang baik dan memiliki generalisasi yang baik serta visualisasi kualitas udara yang mampu menentukan titik rawan polusi di bagian wilayah kota Surabaya. Sehingga hasil yang didapatkan mampu menjadi gambaran tentang situasi kualitas udara saat ini dan berfungsi sebagai referensi bagi instansi pemerintah dalam mengevaluasi dan merancang kebijakan terhadap polusi udara kedepannya. Kata Kunci— Data mining, Air pollution management, Self- organization neural network, Air quality, modelling, Kohonen’s self-organizing feature maps, K-means algorithm, classification I. PENDAHULUAN OLUSI atau pencemaran udara menurut UU Republik Indonesia nomor 23 tahun 1997 adalah masuk atau di masukkannya zat, energi, makhluk hidup dan atau komponen lain kedalam suatu lingkungan yang dilakukan oleh manusia sehingga kualitas dari lingkungan tersebut turun sampai pada tingkat tertentu yang menyebabkan lingkungan tidak bisa digunakan sebagaimana mestinya. Polusi atau pencemaran juga merupakan perubahan komposisi dari zat udara sehingga kualitas dari zat tersebut menjadi berkurang atau tidak bisa lagi diperuntukkan sesuai fungsinya. Berdasarkan peraturan pemerintah Republik Indonesia nomor 41 tahun 1999 tentang pengendalian pencemaran udara, maka udara perlu dilakukan pengendalian terhadap pencemaran udara. Pengendalian pencemaran udara terhadap udara dilakukan dengan berbagai teknik dan pengukuran tertentu, dimana tujuannnya adalah untuk mengurangi kecepatan pertumbuhan polusi udara secara langsung maupun tidak langsung. Pengukuran secara teknisnya melibatkan teknologi, material, pengoptimalan ataupun pembatasan terhadap parameter ukuran [13]. Pengukuran terhadap kualitas udara dimodelkan dengan pengklasteran daerah kedalam kelas tertentu berdasarkan keadaan polusi udara. Pada penelitian ini, metode yang dilakukan adalah metode unsupervised dimana metode tersebut mampu menggambarkan kesesuaian untuk mempelajari, melakukan generalisasi, dan pemodelan non- linear relations. Output yang dihasilkan mampu direpresentasikan dengan lokasi daerah, waktu dan pengelompokan terhadap kelas tertentu. Clustering dilakukan dengan menggunakan metode unsupervised dimana menggabungkan konsep dasar dari Self-Organizing Maps dengan K-means algorithm [16][17]. Metode dilakukan dengan memberikan desain parameter untuk pemodelan terhadap polusi udara. Desain parameter terbentuk berdasarkan polutan- polutan tertentu yang menjadi faktor yang berpengaruh terhadap kualitas udara. Sehingga didapatkan data dimana menunjukkan karakteristik daerah berdasarkan parameter tertentu. II. URAIAN PENELITIAN A. Air Quality Management Kota Surabaya Status kualitas udara saat ini telah disajikan di Indonesia khususnya di kota-kota tertentu yang tercakup dalam Air Quality Management System (AQMS). AQMS di Indonesia meliputi 10 kota VISUALISASI KUALITAS UDARA UNTUK MENENTUKAN TITIK RAWAN POLUSI MENGGUNAKAN ALGORITMA SELF- ORGANIZING MAP DAN K-MEANS STUDI KASUS KOTA SURABAYA Reza Claudia Istanto, Rully A. Hendrawan, dan Irmasari Hafidz Jurusan Sistem Informasi, Fakultas Tekhnologi Informasi, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim, Surabaya 60111 Indonesia e-mail: [email protected] dan [email protected] P
Transcript of VISUALISASI KUALITAS UDARA UNTUK MENENTUKAN...
1
Abstrak— Saat ini pencemaran udara di perkotaan menjadi
permasalahan yang serius. Peningkatan penggunaan kendaraan
bermotor dan konsumsi energi di kota- kota, jika tidak
dikendalikan akan memperparah pencemaran udara, kemacetan,
dan dampak perubahan iklim yang menimbulkan kerugian
kesehatan, produktivitas, dan ekonomi bagi Negara.
Permasalahan tersebut menyebabkan penurunan kualitas udara
khususnya di Kota Surabaya sehingga pengendalian dan
meningkatkan kualitas udara menjadi perhatian untuk
pemerintah maupun masyarakat. Penelitian ini menggunakan
data mining untuk mengungkapkan informasi tersembunyi
terhadap distribusi polusi udara dalam data yang diambil dari
pemantauan pihak terkait. Lalu akan disajikan pula desain
parameter untuk pemodelan kualitas udara dan clustering
kedalam kelas sesuai dengan kondisi polusi masing- masing
daerah. Selanjutnya disajikan pula model desain, pre-processing
data, desain dari berbagai struktur dari Kohonen’s self-
organizing feature maps (KSOFM), pengelompokan (clustering)
oleh K-means algorithm dan analisis akhir dalam pemetaan pada
pengelompokan yang telah diidentifikasi pada lokasi geografis.
Penelitian ini menghasilkan model clustering yang baik dan
memiliki generalisasi yang baik serta visualisasi kualitas udara
yang mampu menentukan titik rawan polusi di bagian wilayah
kota Surabaya. Sehingga hasil yang didapatkan mampu menjadi
gambaran tentang situasi kualitas udara saat ini dan berfungsi
sebagai referensi bagi instansi pemerintah dalam mengevaluasi
dan merancang kebijakan terhadap polusi udara kedepannya.
Kata Kunci— Data mining, Air pollution management, Self-
organization neural network, Air quality, modelling, Kohonen’s
self-organizing feature maps, K-means algorithm, classification
I. PENDAHULUAN
OLUSI atau pencemaran udara menurut UU Republik
Indonesia nomor 23 tahun 1997 adalah masuk atau di
masukkannya zat, energi, makhluk hidup dan atau komponen
lain kedalam suatu lingkungan yang dilakukan oleh manusia
sehingga kualitas dari lingkungan tersebut turun sampai pada
tingkat tertentu yang menyebabkan lingkungan tidak bisa
digunakan sebagaimana mestinya. Polusi atau pencemaran
juga merupakan perubahan komposisi dari zat udara sehingga
kualitas dari zat tersebut menjadi berkurang atau tidak bisa
lagi diperuntukkan sesuai fungsinya.
Berdasarkan peraturan pemerintah Republik Indonesia
nomor 41 tahun 1999 tentang pengendalian pencemaran
udara, maka udara perlu dilakukan pengendalian terhadap
pencemaran udara. Pengendalian pencemaran udara terhadap
udara dilakukan dengan berbagai teknik dan pengukuran
tertentu, dimana tujuannnya adalah untuk mengurangi
kecepatan pertumbuhan polusi udara secara langsung
maupun tidak langsung. Pengukuran secara teknisnya
melibatkan teknologi, material, pengoptimalan ataupun
pembatasan terhadap parameter ukuran [13].
Pengukuran terhadap kualitas udara dimodelkan dengan
pengklasteran daerah kedalam kelas tertentu berdasarkan
keadaan polusi udara. Pada penelitian ini, metode yang
dilakukan adalah metode unsupervised dimana metode
tersebut mampu menggambarkan kesesuaian untuk
mempelajari, melakukan generalisasi, dan pemodelan non-
linear relations. Output yang dihasilkan mampu
direpresentasikan dengan lokasi daerah, waktu dan
pengelompokan terhadap kelas tertentu. Clustering dilakukan
dengan menggunakan metode unsupervised dimana
menggabungkan konsep dasar dari Self-Organizing Maps
dengan K-means algorithm [16][17]. Metode dilakukan
dengan memberikan desain parameter untuk pemodelan
terhadap polusi udara. Desain parameter terbentuk
berdasarkan polutan- polutan tertentu yang menjadi faktor
yang berpengaruh terhadap kualitas udara. Sehingga
didapatkan data dimana menunjukkan karakteristik daerah
berdasarkan parameter tertentu.
II. URAIAN PENELITIAN
A. Air Quality Management Kota Surabaya
Status kualitas udara saat ini telah disajikan di Indonesia
khususnya di kota-kota tertentu yang tercakup dalam Air Quality
Management System (AQMS). AQMS di Indonesia meliputi 10 kota
VISUALISASI KUALITAS UDARA UNTUK MENENTUKAN TITIK
RAWAN POLUSI MENGGUNAKAN ALGORITMA SELF-
ORGANIZING MAP DAN K-MEANS STUDI KASUS KOTA
SURABAYA
Reza Claudia Istanto, Rully A. Hendrawan, dan Irmasari Hafidz
Jurusan Sistem Informasi, Fakultas Tekhnologi Informasi, Institut Teknologi Sepuluh Nopember (ITS)
Jl. Arief Rahman Hakim, Surabaya 60111 Indonesia
e-mail: [email protected] dan [email protected]
P
2
di Indonesia, yaitu Jakarta, Bandung, Semarang, Surabaya,
Denpasar, Medan, Pekanbaru, Palangka Raya, Jambi, dan
Pontianak. Setiap kota dilengkapi dengan stasiun tetap monitoring,
stasiun pemantauan ponsel, pusat regional dan pusat kalibrasi
regional. Informasi Pemantauan dibuat untuk publik melalui
elektronik data yang ditampilkan setiap hari. Beberapa kendala,
dampak kesehatan dan ekonomi akibat emisi kendaraan sebagai
sumber utama polusi di Jakarta ditampilkan melalui AQMS
tersebut.
Kementrian Lingkungan Hidup1 terlibat dalam menangani
masalah yang disebutkan di atas dengan instansi lain yaitu nasional
dan lokal pemerintah, sektor swasta dan masyarakat sipil mengenai
berbagai isu kebijakan dan pelaksanaannya.
Adapun stasiun pemantauan udara ambient secara permanen di
Kota Surabaya diletakkan pada tabel II.1. Lokasi penempatan
stasiun ini akan mempengaruhi analisa terhadap pengolahan data
dalam menentukan titik rawan polusi di Kota Surabaya.
Tabel II. 1 Lokasi Pemantauan di Kota Surabaya Stasiun Lokasi Pemantauan Wilayah
SUF1 Halaman Taman Prestasi, Jl.Ketabang Kali Surabaya
Pusat
SUF2 Halaman Kantor Kelurahan Perak Timur,
Jl.Selangor
Surabaya
Utara
SUF3 Halaman Kantor Pembantu Walikota Surabaya
Barat, Jl.Sukomanunggal
Surabaya
Barat
SUF4 Halaman Kecamatan Gayungan, Jl.Gayungan Surabaya
Selatan
SUF5 Halaman Convention Hall, Jl.Arif Rahman Hakim Surabaya
Timur
B. Desain Parameter untuk Pemodelan Kualitas Udara
Parameter yang diukur dalam stasiun pemantau kualitas
udara di Kota Surabaya ada 16 (enam belas) parameter, yang
terdiri dari:
1. 5 (lima) parameter kunci: PM10, SO2, O3, NO2, CO.
2. 11 (sebelas) parameter pendukung dan meteorologi: NO,
NOx, kecepatan angin (FF), kecepatan hembusan angina
(FF Boe), arah angina (DD), arah hembusan angina (DD
Boe), kelembaban udara ambien, kelembaban udara
ambien, kelembaban udara container, suhu udara
ambien, suhu container dan global radiasi. [22]
Tabel II. 2 Parameter Indeks Standar Pencemar Udara (ISPU)
dan Periode Waktu
No. Parameter Waktu Pengukuran
1 Partikulat (PM10) 24 Jam
2 Sulfur Dioksida (SO2) 24 Jam
3 Carbon Monoksida (CO) 8 Jam
4 Ozon (O3) 1 Jam
5 Nitrogen Dioksida (NO2) 1 Jam
Evaluasi terhadap kualitas udara di Kota Surabaya
menggunakan Index Standar Pencemar Udara (ISPU).
Standar inilah yang menentukan jumlah dari polutan yang
1 Kementrian Lingkungan Hidup Indonesia Sub Divisi Kualitas Udara yang
merupakan badan pemerintah yang bergerak didalam lingkungan hidup.
mempengaruhi lingkungan, evaluasi, dan pengaturan
terhadap kondisi udara. Batasan- batasan jumlah pada ISPU
bertujuan sebagai perlindungan terhadap kesehatan,
pertumbuhan, dan ekosistem.
Tabel II. 3 Batasan Indeks Standar Pencemar Udara (ISPU) Kualitas Udara Batas Nilai ISPU
Baik 0 -50
Sedang 51 - 100
Tidak Sehat 101- 199
Sangat Tidak Sehat 200 – 299
Berbahaya 300 – 500
III. METODE PENELITIAN
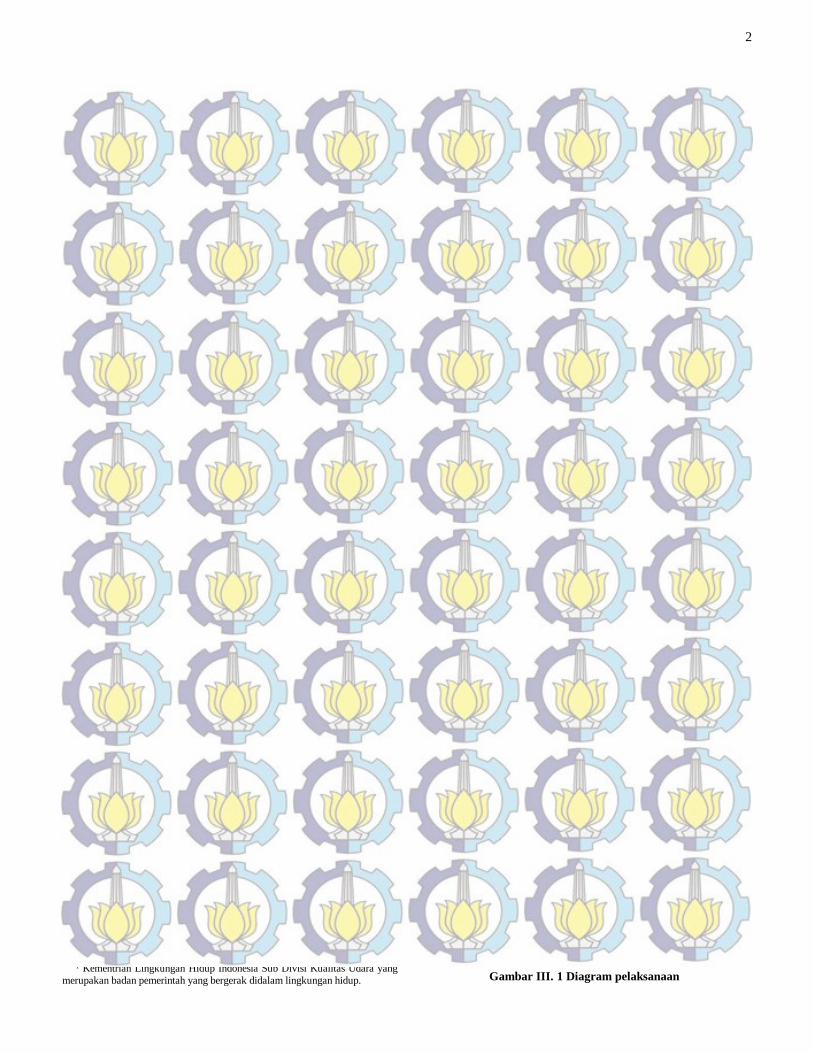
A. Prosedur pelaksanaan penelitian
Pelaksanaan penelitian ini melibatkan dua tahapan yang
saling berhubungan yaitu tahap clustering dan tahap
visualisasi. Pada tahap clustering dilakukan penerapan
terhadap dua algoritma yaitu SOM dan K-Means. Pada tahap
tersebut merupakan pelaksanaan algoritma yang bertujuan
untuk memodelkan kualitas udara dan menggambarkan
kondisi udara. Pada Tahap visualisasi, dilakukan
penggambaran terhadap hasil yang didapatkan yaitu visual
inspection terhadap bentuk pemodelan, pemetaan hasil
klaster pada SOM Map, dan bentuk visual pada peta Kota
Surabaya.
Menerapkan Algoritma SOM
untuk high dimensional dataset
untuk mengurangi korelasi
lemah pada dataset dan
memperoleh jumlah cluster
Mendapatkan nilai K dan initial
centroid yang diterapkan pada
Algoritma K-Means untuk
mendapatkan hasil klaster
Kalkulasi terhadap
tingkat keakuratan hasil
klaster yang dihasilkan
Profiling terhadap hasil
klaster sesuai dengan
kondisi kualitas udara
Visualisasi kondisi kualitas
udara menggunakan Plot SOM
Neighbour Distance, Plot Som
Sample Hits, Plot SOM Weight
Positions, SOM Map, dan Peta
Kota Surabaya
Tahap Clustering
Tahap Visualisasi
Gambar III. 1 Diagram pelaksanaan
3
B. Kohonen Self Organizing Map
Kohonen Self Organizing Map atau SOM merupakan
algoritma yang melakukan pemetaan dari data yang ada di
ruang vector berdimensi tinggi ke ruang vector dua dimensi
yang terletak pada lokasi yang berdekatan. SOM terdiri dari
dua lapisan (layer), yaitu lapisan input dan lapisan output.
Setiap Neuron dalam lapisan input terhubung dengan setiap
neuron pada lapisan output. Setiap Neuron pada lapisan
output merepresentasikan kelas (cluster) dari input yang telah
diberikan.
Langkah- langkah dalam melakukan algoritma SOM
adalah
1. Menentukan pembobotan weight sesuai dengan jumlah
data input, kemudian weight tersebut akan digunakan
pada rumus untuk mendapatkan nilai yang paling kecil
2. Kemudian setelah menemukan nilai terkecil, weight akan
diperbarui dengan dilakukan berulang kali dan
didapatkan weight akhir. Dari weight akhir tersebut akan
dicari jarak diantara keduanya, jarak paling dekat antara
weight akan menentukan termasuk kedalam klaster mana
data tersebut. Neighbour disekitar weight akan termasuk
kedalam klaster dengan weight terdekat.
3. Langkah 1 dan 2 dilakukan berulang kali untuk
menentukan jumlah klaster paling optimal untuk
dilakukan tahap algoritma selanjutnya yaitu K-means
C. K-Means
Algoritma K-Means merupakan algoritma clustering
iteratif sederhana di mana semua partisi dataset yang
diberikan menjadi beberapa pengguna tertentu cluster, k.
Algoritma ini sederhana untuk melaksanakan dan
menjalankan, relatif cepat, mudah beradaptasi, dan umum
dalam praktek. Langkah sederhana dalam mengerjakan
metode ini, pertama-tama kita memilih K (merupakan initial
dari centroid) untuk menentukan centroid dapat kita
mengambil point secara random. Setiap poin yang berada
pada sekitar centroid akan membentuk sebuah kumpulan baru
yang dinamakan klaster, Lakukan hal tersebut berulang kali
sampai tidak terdapat perubahan pada point klaster ataupun
pada centroid dengan menggunakan jarak Ecludean untuk
menentukan jarak terdekat poin terhadap centroid.
Langkah-langkah dalam algoritma kmeans adalah
1. Menentukan jumlah cluster
2. Menentukan nilai centroid
Dalam menentukan nilai centroid untuk awal iterasi,
nilai awal centroid dilakukan berdasarkan hasil jumlah
cluster dari algoritma SOM. Sedangkan jika menentukan
nilai centroid yang merupakan tahap dari iterasi.
3. Menghitung jarak antara titik centroid dengan titik tiap
objek menggunakan Euclidean Distance.
4. Pengelompokan Objek untuk menentukan anggota
cluster adalah dengan memperhitungkan jarak minimum
objek
5. Kembali ke tahap 2, lakukan perulangan hingga nilai
centroid yang dihasilkan tetap dan anggota cluster tidak
berpindah ke cluster lain
D. Kalkulasi terhadap tingkat akurasi
Pada penelitian dilakukan kalkulasi terhadap tingkat
akurasi yaitu dengan melakukan uji verifikasi dan validasi.
Uji verifikasi terhadap kluster yaitu rata- rata dari
quantization errors (QE) dan beberapa topographic errors
(TE). Sedangkan uji validasi dalam menentukan apakah hasil
klaster telah sesuai dan optimal diukur menggunakan
beberapa teknik clustering validation yang tertera pada tabel
berikut
Tabel III. 1 Metode validasi
Metode Metode Validasi
Self Organizing Maps RMSSTD
K-means Pengukuran nilai entropy
Self Organizing Maps
kombinasi dengan K-
means
Pengukuran terhadap nilai R-
squared Value (RS) dan
Perhitungan nilai index
Davies Bouldin (DBI)
IV. HASIL PENELITIAN
Hasil yang didapatkan dibagi menjadi 3 jenis analisis yaitu
1) Analisis Interaksi Terhadap Data
a. Deskripsi Klasifikasi
Dilakukan analisis yang bertujuan untuk
mengeksplorasi dan membentuk klasifikasi/
taksonomi secara empiris (berdasarkan pengetahuan
yang diperoleh dari observasi dilapangan).
Tabel IV. 1 Deskripsi terhadap atribut
Nama Atribut/
Tabel Keterangan
Nilai Konsentrasi Nilai konsentrasi yang didapatkan
dengan cara pengukuran otomatis pada
masing- masing unsur
Stasiun Lokasi pengukuran yang telah
ditempatkan di bagian- bagian Kota
Surabaya
Bulan Pengukuran nilai konsentrasi
berdasarkan waktu setiap bulannya
Tabel IV. 2 Inisialisasi bentuk klaster
Nama
Klaster
Jumlah Klaster Inisialisasi
Kluster 1 2 klaster yang terbentuk Klaster a b
Kluster 2 3 klaster yang terbentuk Klaster c d e
Kluster 3 4 klaster yang terbentuk Klaster f g h i

4
b. Desain terhadap penelitian dalam penentuan analisis
cluster
Tiga hal penting dalam tahap ini adalah standarisasi
data, mengukur kesamaan data, dan pendeteksian
outlier.
1. Standarisasi Data
Standarisasi terhadap data dilakukan dengan
melakukan substraksi nilai rata- rata dan membagi
dengan standar deviasi masing- masing variabel.
2. Mengukur kesamaan data
Dengan menggunakan metode RMSSTD
merupakan salah satu metode untuk mengukur
kesamaan data atau proses evaluasi yang digunakan
untuk mengukur kualitas dari clustering algorithm.
Semakin kecil nilai dari RMSSTD, maka semakin
baik pembagian dari bentuk cluster.
Tabel IV. 3 Nilai RMSSTD yang didapatkan
Klaster Nama Klaster Nilai RMSSTD
Klaster 1 Klaster a b 1.009044
Klaster 2 Klaster c d e 1.00178
Klaster 3 Klaster f g h i 1.072923
Dari data yang didapatkan klaster 2 yang berisikan
3 klaster yang dibentuk memiliki nilai RMSSTD
paling kecil, hal ini dapat disimpulkan bahwa
klaster tersebut memiliki tingkat homogenitas
klaster yang paling tinggi.
3. Pendeteksian outlier
Entropy merupakan salah satu teknik validitas
proses clustering yang digunakan untuk mengukur
biased effect yaitu tingkat penyimpangan hasil
clustering yang dihasilkan. Semakin kecil nilai
entropy, maka semakin kecil pula tingkat
penyimpangan dari hasil. Tabel dibawah
menunjukkan klaster sebanyak 3 memiliki nilai
terkecil. Oleh karena itu, dapat disimpulkan klaster
tersebut merupakan klaster paling optimal untuk
dilanjutkan proses algoritma.
Tabel IV. 4 Nilai Entropy yang didapatkan
Nama Kluster Keterangan Nilai
Entropy
Klaster 1 Klaster a b 3.139779
Klaster 2 Klaster c d e 2.802700
Klaster 3 Klaster f g h i 2.943659
c. Proses validasi dan verifikasi
Dari hasil perbandingan pada tabel IV.5 dan IV.6
menunjukkan bahwa dengan menggunakan
kombinasi metode SOM dan K-Means dari hasil
klaster c d e (Klaster 2) yang didapatkan memiliki
tingkat kesalahan lebih kecil dibandingkan dengan
metode SOM saja ataupun K-Means saja yang
ditunjukkan dengan nilai QE dan TE serta nilai DBI
yang lebih kecil.
Tabel IV. 5 Perbandingan nilai QE dan TE
Algoritma QE TE
SOM kombinasi K-Means 0.285 0.016
SOM 0.401 0.042
K-Means 0.486 0.068
Tabel IV. 6 Perbandingan nilai DBI
Algoritma Nilai DBI
Kombinasi SOM dan K-Means 1.853457
SOM 2.46322
Dengan perbandingan- perbandingan tersebut maka
dapat disimpulkan bahwa klaster yang paling
optimum yaitu hasil klaster dengan metode
pengkombinasian SOM dan K-means.
d. Pembuatan Profil terhadap hasil cluster
Dengan pembagian sebanyak 3 klaster dengan nama
Klaster c, d, dan e, maka akan dilakukan
penggambaran terhadap karakteristik tiap klaster
terhadap ISPU (Nilai keseluruhan).
Tabel IV. 7 Karakteristik hasil klaster
Klaster Karakteristik Hasil
Klaster
c
Jumlah
Anggota
Jumlah untuk kluster c adalah
sebanyak 353 (32.2%)
Nilai
Minimum
7
Nilai
Maksimum
96
Rata- Rata
Nilai
Rata- rata nilai ISPU untuk
kluster c adalah 51. Dengan
dominasi nilai antara 0- 50
sebesar 79% dari jumlah anggota
Stasiun Anggota lebih banyak dari
stasiun 1, 4, dan 5
Klaster
d
Jumlah
Anggota
Jumlah untuk kluster d adalah
sebanyak 334 (30.4%)
Nilai
Minimum
52
Nilai
Maksimum
131
Rata- Rata
Nilai
Rata- rata nilai ISPU untuk
kluster 2 adalah 84. Dengan
dominasi nilai antara 51- 100
sebesar 97% dari jumlah anggota
Stasiun Anggota lebih banyak dari
stasiun 3 dan 4
Klaster
e
Jumlah
Anggota
Jumlah untuk kluster e adalah
sebanyak 409 (37.3%)
Nilai 87
5
Minimum
Nilai
Maksimum
189
Rata- Rata
Nilai
Rata- rata nilai ISPU untuk
kluster e adalah 101. Dengan
dominasi nilai antara 101- 199
sebesar 71% dari jumlah anggota
Stasiun Anggota lebih banyak dari
stasiun 1, 4, dan 5
Tabel IV. 8 Pembagian kategori berdasarkan klaster yang
terbentuk
Klaster Kategori Index Penjelasan
Klaster c Baik 0 – 50 Tingkat kualitas udara
yang tidak memberikan
efek bagi kesehatan
manusia atau hewan
dan tidak berpengaruh
pada tumbuhan,
bangunan ataupun nilai
estetika
Klaster d Sedang 51 – 100 Tingkat kualitas udara
yang tidak berpengaruh
pada kesehatan
manusia atau hewan
dan tidak berpengaruh
pada tumbuhan yang
sensitif, dan nilai
estetika
Klaster e Tidak
Sehat
101 – 199 Tingkat kualitas udara
yang bersifat
merugikan pada
manusia ataupun
kelompok hewan yang
sensitif atau
bisa menimbulkan
kerusakan pada
tumbuhan ataupun nilai
estetika
e. Penentuan Titik Rawan Polusi
Berikut ini adalah analisis untuk menentukan titik
rawan polusi. Penulis mendeskripsikan bahwa rawan
polusi dapat diketahui dari hasil clustering yang
terbentuk pada cluster dengan predikat Tidak Sehat
(Klaster e).
Tabel IV. 9 Titik rawan polusi
Kondisi Tidak Sehat
Bulan Terjadi Setiap bulan pada tiga tahun
penelitian
Lokasi SUF 1 (Surabaya Pusat) berjumlah
144
SUF 4 (Suarabaya Selatan)
berjumlah 130
SUF 5 (Surabaya Timur)
berjumlah 101
2) Analisis Interaksi terhadap Visualisasi
Gambar IV. 1 Plot SOM
Neighbor Distances
Gambar IV. 2 Plot SOM
Weight Planes
Gambar IV. 3 Plot SOM
Sample Hits
Gambar IV. 4 Plot SOM
Weight Positions
Keterangan untuk visualisasi yang dihasilkan adalah
sebagai berikut
Tabel IV. 10 Penjelasan terhadap hasil visualisasi
ISPU
Plot SOM
Neighbor
Distances
Plot didominasi dengan warna cerah
yaitu kuning dan oranye yang
menunjukkan jarak yang lebih dekat
dan data terlihat berkorelasi tinggi,
namun hanya terlihat sedikit warna
gelap. Sehingga konvergensi terhadap
hasil clustering terlihat cukup tinggi
Plot SOM Weight
Planes
Grafik ini menunjukkan visualisasi
dari weight setiap input pada masing-
masing neuron. Untuk Input 1 yang
menunjukkan nilai ISPU, lebih
didominasi dengan warna cerah
dengan bobot lebih kecil, namun
untuk input yang lainnya nilai cerah
dan gelap cukup merata.
Plot SOM Sample
Hits
Grafik ini menunjukkan berapa titik
data yang terkait dengan setiap
neuron. Data yang terbaik adalah jika
grafik menunjukkan jumlah data yang
cukup merata disetiap neuron
6
Plot SOM Weight
Positions
Lokasi dari titik data dan weight
vector (vector berat). Pada hasil yang
ditunjukkan merupakan hasil dari 200
kali iterasi dari algoritma batch yang
telah dilakukan pada keseluruhan
data.
Berikut ini adalah hasil dari analisis terhadap data yang
telah diolah sehingga menghasilkan visualisasi yang
ditampilkan untuk mengetahui hasil clustering terhadap
lokasi pada map SOM dan porsinya
Gambar IV. 5 Visualiasi SOM Map
Berikut ini adalah hasil dari visualisasi menggunakan
peta. maka hasil cluster terlihat dari perbedaan warna
yang didapatkan menunjukkan kondisi dari kualitas
udara. Terdapat pilihan terhadap wilayah, terhadap
waktu, dan pilihan berdasarkan parameter tertentu.
Pilihan- pilihan tersebut akan mempengaruhi hasil peta
yang ada ditengah- tengah visualisasi.
Gambar IV. 6 Visualisasi Map
V. KESIMPULAN/RINGKASAN
Berdasarkan proses – proses pengerjaan tugas akhir yang
telah diselesaikan ini maka terdapat beberapa kesimpulan
yang dapat diambil, diantaranya adalah:
1. Dalam proses clustering terhadap kualitas udara,
diperlukan nilai ISPU, CO, NO2, O3, PM10, dan SO2 untuk
dilakukan pengolahan menggunakan algoritma Self-
Organizing Maps dan K-means
2. Dimulai dari preprocessing data, pelaksanaan metode Self-
Organizing Maps dan K-means yang dilanjutkan dengan
proses validasi dan verifikasi dan proses visualisasi
terhadap hasil jumlah dan bentuk klaster.
3. Berdasarkan data yang di praproses kemudian diklasterisasi
dengan algoritma SOM yang telah tervalidasi sehingga
didapatkan jumlah klaster sebanyak 3 dengan nama Klaster
c, d, dan e yang merupakan bentuk clustering paling
optimal. Dan dilanjutkan dengan K-means untuk
mendapatkan hasil clustering yang presisi dan stabil.
4. Tingkat akurasi terhadap hasil clustering menggunakan
Davies Bouldin Index, Quantization Error dan Topography
Error dengan hasil yang paling rendah. Hasil clustering
yang didapat sudah sesuai karena nilai DBI terhadap
clustering SOM dan K-means lebih rendah daripada
menggunakan metode clustering k-means. Hasil DBI untuk
SOM dan K-means adalah 1.853457 sedangkan SOM
sebesar 2.46322. Hasil QE dan TE untuk SOM dan K-
means adalah 0.285 dan 0.016 sedangkan SOM saja
sebesar 0.401 dan 0.042 dan untuk K-means saja sebesar
0.486 dan 0.068.
5. Pada pembentukan karakteristik yang didapatkan hasil
dimana hasil clustering kualitas udara pada tahun 2010
sampai 2013 tersebut mampu mengetahui lokasi titik rawan
polusi wilayah kota Surabaya. Stasiun pemantau yang
menunjukkan nilai ISPU dengan Predikat Tidak Sehat yang
sering terjadi pada Stasiun Pemantau 1 (Surabaya Pusat), 4
(Surabaya Selatan), dan 5 (Surabaya Timur). Kondisi
rawan polusi dengan predikat Tidak Sehat sering terjadi
disetiap bulannya pada tiga tahun penelitian.
VI. DAFTAR PUSTAKA
[1] Y. Zhao and G. Karypis, "Criterion functions for document
clustering: Experiments and analysis," Machine Learning,
55(3), p. 311–331, June 2004.
[2] J. Vesanto, "Self-Organizing Map of Matlab: The SOM
Toolbox," elsinsky University of Technology, 2000.
[3] E. A. Uriarte and F. D. Martín, "Topology Preservation in
SOM," International Journal of Applied Mathematics and
Computer Sciences 1;1 © www.waset.org Winter , p. 19, 2005.
[4] R. D. Tamin, "INTEGRATED AIR QUALITY
MANAGEMENT IN INDONESIA," 2003.
[5] M. Steinbach, G. Karypis and V. Kumar, "A comparison of

7
document clustering techniques. In KDD Workshop on Text
Mining," p. 2000.
[6] G. Salazar, A. Veles, M. Parra and L. Ortega, "A Cluster
Validity Index for Comparing Non-hierarchical Clustering
Methods," 2002. [Online]. Available:
http://citeseer.ist.psu.edu/rd/salazar02cluster.pdf.
[7] G. Pölzlbauer, "Survey and Comparison of Quality Measures
for Self-Organizing Maps," Department of Software Technology
Vienna University of Technology.
[8] R. Piyatida and C. Boonorm, "Comparison of Clustering
Techniques for Cluster Analysis," Kasetsart J. (Nat. Sci.) 43,
pp. 378 - 388, 2009.
[9] J. Moehrmann, A. Burkovski, E. Baranovskiy, G.-A. Heinze, A.
Rapoport and G. Heidemann, "A Discussion on Visual
Interactive Data Exploration using Self-Organizing Maps,"
http://www.vis.uni-stuttgart.de/institut.html, p. 6.
[10] S.-T. Li, "Multi-Resolution Spatio-temporal Data Mining for
the Study of Air Pollutant Regionalization," Proceedings of the
33rd Hawaii International Conference on System Sciences,
2000.
[11] S.-T. Li, "Data mining to aid policy making in air pollution
management. Expert Systems with Applications," pp. 331-340,
2004.
[12] T. Kohonen, "Engineering Applications of Self-Organizing
Map," PROCEEDINGS OF THE IEEE, p. 84, 2004.
[13] KABAPEDAL, "Laporan Pemeliharaan Stasiun Monitoring
Udara Ambient," Badan Pengendalian Lingkungan Hidup,
Surabaya, 2008.
[14] L. Jouko, "Generative Probability Density Model in the Self-
Organizing Map. Laboratory of Computational Engineering,
Helsinski University of Technology.".
[15] D. R. Jain AK, "Algorithms for Clustering Data," New Jersey:
Prentice Hall , 1998.
[16] P. Hájek and V. Olej, "Air Quality Modelling by Kohonen’s
Self-organizing Feature Maps and LVQ," WSEAS
TRANSACTIONS on ENVIRONMENT and DEVELOPMENT,
2008.
[17] P. Hájek, "Air Quality Indices and their Modelling by
Hierarchical Fuzzy Inference," WSEAS TRANSACTIONS on
ENVIRONMENT and DEVELOPMENT, 2009.
[18] H. D. Ferita, "City Report of Surabaya. AUICK First 2006
Workshop," 2006.
[19] K. Ferenc, L. Csaba and B. Attila, "Cluster Validity
Measurement Techniques," Department of Automation and
Applied Informatics Budapest University of Technology and
Economics.
[20] M. Efraimidou, "Data Mining Air Quality Data for Athens,
Greece," Shaker Verlag, Managing Environmental Knowledge
(978-3-8322-5321-9), 2006.
[21] M. Dittenbach, "The Growing Hierarchical Self-Organizing
Map," Proceedings of the Int’l Joint Conference on Neural
Networks (IJCNN’2000), 2000.
[22] Asdep PPU Sumber Bergerak, "EVALUASI KUALITAS
UDARA PERKOTAAN 2012. KEMENTERIAN
LINGKUNGAN HIDUP," Jakarta, 2012.
[23] "The Global Source for Summaries & Reviews," 19 Mei 2014.
[Online]. Available: http://id.shvoong.com/internet-and-
technologies/universities-research-institutions/2232943-
verifikasi-dan-.
[24] "Managing Air Quality by 'Data Mining' UK," 2006.
[25] 2014. [Online]. Available:
http://archive.ics.uci.edu/ml/datasets/.