Tugas Fisika Yakin Full
24
Now, the instantaneous power is computed P = τ ω (8.17) = (500. dyne.cm) (419 rad/s) P = 2.10 x 10 6 erg/s = 210.mW EXAMPLE 8.34 The instantaneous power output of an electric motor is known to be 1500.W, while it is exerting a torque of 2.50 N.m on a pump. Find the rate at which the motor is rotating (in r/min) Solution : P = τ ω (8.17) ω = P/ τ = (1500.W)/ (2.50 N.m) = 600 rad/s = (600 rad/s) (1 r/2 π rad) (60.0s/1 min) ω = 5730 r/min 8.6 ROTATIONAL FORM OF NEWTON’S SECOND LAW If more than one torque is acting on the object in Figure 8.11 about the axis of rotation and you wish to compute the total work done on the object, the torque τ in Equation 8.16 could be replaced by the resultant torque ∑τ ,thus giving * W = (∑τ)θ (8.18) Of course, in adding up the torques to obtain a resultant, we would have to assign a positive ( + ) or negative (- ) sign to each torque (see Chapter 4 ), depending on the direction (CCW or CW, respectively) in which the torque was attemping to rotate the object. The resultant torque would than also be positive (CCW) or negative ( CW ). The angle θ that the object rotated through would also be positive (+ ) or negative ( - ), depending on which direction (CCW or CW, respectively) the object actually turned. This work is equal to the change in the kinetic energy of the object, or*
-
Upload
nur-yakhin -
Category
Documents
-
view
232 -
download
0
Transcript of Tugas Fisika Yakin Full
8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 1/24
Now, the instantaneous power is computed
P = τ ω (8.17)
= (500. dyne.cm) (419 rad/s)
P = 2.10 x 106 erg/s = 210.mW
EXAMPLE 8.34
The instantaneous power output of an electric motor is known to be 1500.W, while it is
exerting a torque of 2.50 N.m on a pump. Find the rate at which the motor is rotating (in
r/min)
Solution :
P = τ ω (8.17)ω = P/ τ
= (1500.W)/ (2.50 N.m) = 600 rad/s
= (600 rad/s) (1 r/2 π rad) (60.0s/1 min)
ω = 5730 r/min
8.6 ROTATIONAL FORM OF NEWTON’S SECOND LAW
If more than one torque is acting on the object in Figure 8.11 about the axis of rotation
and you wish to compute the total work done on the object, the torque τ in Equation 8.16
could be replaced by the resultant torque ∑τ ,thus giving *
W = (∑τ)θ (8.18)
Of course, in adding up the torques to obtain a resultant, we would have to assign a
positive ( + ) or negative (- ) sign to each torque (see Chapter 4 ), depending on the
direction (CCW or CW, respectively) in which the torque was attemping to rotate the
object. The resultant torque would than also be positive (CCW) or negative ( CW ). The
angle θ that the object rotated through would also be positive (+ ) or negative ( - ),
depending on which direction (CCW or CW, respectively) the object actually turned.
This work is equal to the change in the kinetic energy of the object, or*
8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 2/24
(∑τ)θ = ½ I ωf 2 – I ωi
2
∑τ = I [ωf 2 - ωi
2] (8.19)
2 θ
Recall
ωf 2 = ωi
2 + 2αθ (8.3)
Solving this for α, we get
α = = I [ωf 2 - ωi2]2 θ
* A more complete discussion of vectors in rotation is given in section 8.9
This expression when substituted back into Equation 8.19 gives
(8.20)
Equation 8.20 is the rotational form of Newton’s second law. It states that the resultant
torque acting on an object equals the object’s moment of inertia times the object’s
angular acceleration. It is frequently used in conjuction with one of the rotational
kinematics equations first encountered in Section 8.1. Since Equation 8.16 was used to
derive it, the angular measure must be in radians in the angular acceleration (e.g., rad/s2)
EXAMPLE 8.35
An object whose moment of inertia is 35.0 kg.m2 about its axis of rotation has an angular
acceleration of 4.20 rad/s2 in a clockwise direction. Find the resultant torque that must be
acting on this object.
∑τ = I α
8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 3/24
Solution :
In this example, it is assumed that the clockwise direction is the negative direction
∑τ = I α (8.20)
=(35.0 kg.m2) (- 4.20 rad/s2)
∑τ = - 147 kg.m2/s2 = -147 N.m
Therefore, the resultant torque acting on this object must be 147 N.m in the clockwise
direction.
EXAMPLE 8.36
A resultant torque of 2500.dyne.cm in the counterclockwise direction is acting on an
object whose angular acceleration is 865 mr/s2 in the counterclockwise direction. Find the
moment of inertia of this object about its axis of rotation.
Solution :
The counterclockwise direction is assumed to be the positive direction. The angular
acceleration must first changed to rad/s2
α = ( + 0.865 r/s2) (2π rad/1 r)
α = + 5.43 rad/s2
8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 4/24
Now, the moment of inertia is computed
∑τ = I α (8.20)
(+ 2500 dyne.cm ) = I (+ 5.43 rad/s2)
I = (+ 2500 dyne.cm ) / (+ 5.43 rad/s2)
I = 460 dyne.cm.s2
Since 1 dyne = 1 g.cm/s2
EXAMPLE 8.37
A resultant torque of 18.0 N in the clockwise direction acts on a wheel whose moment of
inertia is 4.50 kg.m2 about its axis of rotation. Find the angular acceleration of this
whel(in r/min2)
Solution :
The clockwise direction is chosen to be the negative (-) direction.
∑τ = Iα
α = ∑τ
I
= (-18.0 N.m)
(4.50 kg.m2) (8.20)
α = - 4.00 rad / s2
8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 5/24
Changing these α units to r/min2, we get
α = (- 4.00 rad / s2 ) (I r/2π rad ) (60 s/1 min)2
α = -2290 r/min2
EXAMPLE 8.38
Two Torques are acting on a wheel whose moment of inertia is 8.00 x 10-4 kg.m2 about
it’s axis of rotation. One of the torques is 6.00 N.m in the clockwise direction. The wheel
is known to have an angular acceleration of 5.80 rad/s2 in the clock wise direction. Findthe second torque acting on this subject.
Solution :
The clocwise direction is assumed as the negative (-) direction.
∑τ = I
α (8.20)
Since two torques are acting,
τ1 - τ2 = I α
τ2 = I α - τ1
= (8.00 x 10-4 kg.m2) (5.80 rad/s2) – (-6.00 X 10-3 N.m)
τ2 = +1.36 mN.m

8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 6/24
8.7 ANGULAR IMPULSE AND MOMENTUM
The symbol that is frequenly used for angular impulse is J θ. The definition of angular
impulse for a rotation in two dimensions with a constant torque acting on an object is
J θ = τ Δt
Where J θ is the angular impulse acting on the system, τ is the torque acting on the system,
and Δt is the time interval that this torque acts. Notice that angular impulse is a vector,
the means, for rotation in two dimensions, a positive (+) or negative (-) sign must be placed in front of it, depending or whether it is acting is acting in the counterclockwise
(CCW) or clockwise (CW) direction, respectively. The sign of the angular impulse must
be the same as the torque that causes it.
EXAMPLE 8.39
A (CW) torque of – 3.30 N.m acts for 4.60 s on an object. Find the angular impulse
delivered to this object by this torque.
Solution :
J θ = τ Δt
J θ = ( – 3.30 N.m ) (4.60 s)
J θ = - 15.2 N.m.s
Notice in Example 8.39 the units of angular impulse: N.m.s the SI system, dyne.cm.s in
the CGS system, and lb.ft.s in the english system. Units of angular impulse are not thesame as the unit of translational impulse first mentioned in chapter 7. Therefore, angular
impulse is a totally different quantity from tranlational impulse. These two quantities
cannot be added to or subtracted from one another since their units are different and they
are not same type of quantity.
8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 7/24
EXAMPLE 8.40
A torque of 286 mN.m acts on an object for 865 ms in the counterclockwise directin. Find
the angular impulse exerted on the object by this torque.
Solution :
The counterclockwise direction is considered the positive direction.
J θ = τ Δt
=( + 0.286 N.m )(0.865 s)
=+ 0.247 N.m.s, or
J θ = 0.247 N.m.s in the counterclockwise direction
The symbol for angular momentum is Pθ. Angular momentum is a property of an object at
an instant and is defined by
Pθ=Iω
I in Equation 8.22 is the moment of inertia of the object at the instant the angular
momentum is being computed andω
is the instantaneous angular velocity of the object atthe instant that the angular momentum is being computed.
Angular momentum is a vector. This means (in two-dimensional rotation) that a positive
(+) or negative (-) sign must be placed in front of it, depending on whether the object is
rotating in a counterclockwise or clockwise direction, respectively.
The angular velocity ω must be in terms of radians in Equation 8.22.
8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 8/24
EXAMPLE 8.41
An object whose moment of inertia is 360. mg.m2 has a a – 1.50 r/min angular velocity.
Find the angular momentum of this object.
Solution :
First, the angular celocity is changed to rad/s.
ω = (- 1.50 r/min) (2π rad/r) (1 min/60 s)
ω = - 0.157 rad/s
Now, the angular momentum is computed.
Pθ = Iω (8.22)
= (360.mg.m2) (- 0.157 rad/s)
` = - 56.5 mg.m2/s
Pθ = -5.65 x 10-5 kg.m2/s
The kg.m2/s is the unit of angular momentum and the gr.cm2/s is the unit in the
CGS system. These are not the same units of translational momentum first discussed in
Chapter 7. Therefore, angular momentum and translational momentum are two differentquantities and cannot be added to or subtracted from each other.
If you recall that 1 dyne = 1 g.cm/s2, 1 lb = 1 slug.ft/s2, and 1 N = 1 kg.m/s2,
another interesting fact about the units of angular momentum can be shown. The units of
angular impulse are the same as the units of angular momentum when the appropriate
subtitution is made.
1 N.m.s = 1 (kg.m.s2).m.s = 1 kg.m2/s
1 dyne = 1 (g.cm/s2).cm.s = 1 g.cm2/s
1 lb.ft.s = 1 (slug.ft/s2).ft.s = 1 slug.ft/s2
Therefore, in Example 8.41, the answer was stated as Pθ = -5.65 x 10-5 kg.m2/s, but it also
could have been stated as Pθ = -5.65 x 10-5 N.m.s just as correctly.
8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 9/24
EXAMPLE 8.42
An object has a comment of inertia of 2.60 kg.m2 when its instantaneous angular velocity
is 300 r/min in a counterclockwise direction. Find the angular momentum of this object.
Solution :
ω = (+ 300 r/min) (2π rad/1 r) (1 min/60 s) = + 31.4 rad/s
Now angular momentum is computed
Pθ = Iω (8.22)
=(2.60 kg.m2) (+ 31.4 rad/s)
= + 81.6 kg.m2/s, or
= 81.6 kg.m2/s in the counterclockwise direction, or
Pθ = 81.6 N.m.s in the counterclockwise direction
It is occasionaly interesting to compute the change in the angular momentum of an
object. The change in the angular momentum is given by
ΔPθ = Pθf - Pθi (8.23)
Often, however, the object being considered is not a rigid body and is therefore capable
of changing its shape. When its shape changes, its moment of inertia also changes. For
this reason, the previous equation is rewritten as
ΔPθ = If ωf – Ii ωi (8.23)
EXAMPLE 8.43
8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 10/24
The rubber tire on an automobile initially has an angular velocity of +20.0 r/min and a
2.85 kg.m2 moment of inertia. As it increases its angular speed, it stretches to a larger size
until (when its final angular velocity is + 65.0 r/min) it has a 3.10 kg.m2 moment of
inertia. Find its change in angular momentum.
Solution :
First the angular velocity are converted to rad/s
ωi = (+ 20.0 r/min) (2π rad/r)(1 min/60 s)= +2.09 rad/s
ω f = (+ 65.0 r/min) (2π rad/r)(1 min/60 s)= +6.81 rad/s
Now,the change in angular momentum is computed
Δ P Ɵ= I f ω f - I i ωi
= ( 3.10 kg.m2) (+6.81 rad/s) – (2.85 kg.m2) (+ 2.09 rad/s)
=(+ 21.1 kg.m2/s) – (+ 5.96 kg.m2/s)
=+ 15.1 kg.m2/s atau
Δ P Ɵ= + 15.1 N.m.s
8.8 CONSERVATION OF ANGULAR MOMENTUM
As is the case beetween translational impulse and momentum, there is a relationship
between angular impulse and angular momentum. That relationship is
J θ = Δ PƟ
Equation 8.24 simply states that the resultant angular impulse acting on an object equals
the change in the angular momentum of the object.
EXAMPLE 8.44
8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 11/24
A tire has an initial angular velocity of + 18.0 r/min and a 4.30 kg.m2 initial moment of
inertia. It speeds up for 5.00 s until its final angular velocity is +200. r/min when it has a
4.70 kg.m2 moment of inertia . Find the constant resultant torque that is acting on this
wheel.
Solution :
First, the angular velocities are converted to rad/s.
ωi = (+ 180.0 r/min) (2π rad/r)(1 min/60 s)= +1.88 rad/s
ω f = (+ 200 r/min) (2π rad/r)(1 min/60 s)= +20.9 rad/s
The relationship between angular impulse and angular momentum is
J θ = Δ PƟ (8.24)
and subtituting 8.21 and 8.22 into it, we get
τ (Δt) = I f ω f - I i ωi
τ = I f ω f - I i ωi
Δt
= (4.70 kg.m2)(+ 20.9 rad/s) – (430 kg.m2)(+ 1.88 rad/s)
(5.00s)
= + 98.2 kg.m2/s – 8.08 kg.m2/s
(5.00 s)
= (+ 90.1 kg.m2/s)
(5.00s)
τ = + 18.0 kg.m2/s2 = + 18.0 N.m
EXAMPLE 8.45
8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 12/24
A solid grindstone has a constant torque of +30.0 N.m acting on it. For 2.50 s, it speeds
up from a + 4.00 r/min initial angular velocity to a +9.00 r/min finally angular velocity.
Find the constant moment of inertia of this grindstone about its axis of rotation.
Solution :
First, the angular velocities are converted to rad/s.
ωi = (+ 4.00 r/min) (2π rad/r)(1 min/60 s)= +0.419 rad/s
ωf = (+ 9.00 r/min) (2π rad/r)(1 min/60 s)= +0.942 rad/s
Jθ = Δ PƟ (8.24)
Subtituting equation as 8.21 and 8.22 into this, we get
τ (Δt) = I f ω f - I i ωi
Since the moment of inertia does not change,
τ (Δt) = I f ω f - I i ωi
(+ 30.0 Nm)(2.50 s) = I (0.942 rad/s) – I (0.419 rad/s)
75.0 N.m.s = I (0.523 rad/s)
I = 143 kg.m2
If no outside resultant torque is acting on an object ( or on a system of object ), the
angular impulse delivered is zero. Equation 8.24 then states that the angular momentum
of this object or sytem of objects does not change, or
Δ P Ɵ= 0
P f Ɵ - P iƟ = 0
P f Ɵ = P iƟ (8.25)
Equation 8.25 is only valid if no outside resultant torque is acting on the object or system
of objects.
EXAMPLE 8.46
8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 13/24
An ice skater has a moment of inertia about this central vertical axis of 20.0 kg.m2 when
his arms are extended and 6.00 kg.m2 when his arms are held against his body. He is
initially rotating at + 80.0 r/min when he begin as a spin with his arms extended. Find his
angular velocity when he brings his arms in against his body. Neglect all frinction forces.
Solution:
Since no outside resultant torques are acting on the skater angular momentum is
conserved
P f Ɵ = P iƟ (8.25)
I f ω f = I i ωi
ω f = I i ωi
I f
= (20.0 kg.m2 ) ( + 80.0 r/min) (2π rad /r)(1 min/60 s)
(6.00 kg.m2)
ω f = (+ 267 x 2π/60) rad/s
Now, this final angular velocity can be converted back to r/minωf =[ (+ 267 x 2π/60) rad/s] (1 r/ 2π rad) (60 s/1 min)
ωf = + 267 r/min
Notice in example 8.46 how the unit where converted back and forth. We never
the units of angular velocity are given in other than rad/s, one should convert it to rad/s to
avoid errors. But in other to avoid complicated arithmetic operations, do not actually
multiply by the conversion factors separately. Instead, suibtitute the angular velocity in to
equation 8.25 as a product of several conversion factors. Quite often, the convertion
factors will cancel out before the final answer is computed as happened in the solution to
example 8.46.
8.9 VECTORS IN ROTATION

8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 14/24
Many of the quantities used in discussing angular motion may be treated as
vectors. However, in order to more fully appreciate their usefulness, we must first
understand some other operations that are performed with vectors. One such operation is
multiplication.
In chapter 3, you learned various ways in which vectors can be added or
subtracted but no mention was made of the operation of multiplication. In regular
algebra, multiplication between two scalars can be shown by any one of a number of
symbols. For example, the multiplication of the scalar A and scalar B can be indicated by
A.B, A x B, or AB. (Note that these scalar symbols are shown in italics using standard
typeface)
In vector multiplication, there are several different multiplication methods. Each
method not only uses a different symbols but actually is a different operation. Thedifferent multiplication method arrive at different answers.
For example, if two vectors are multiplied according to the dot-product rules, as
symbolized by A . B, they yield a certain answer. If the same two vectors are multiplied
according to the cross-product rules, as symbolized by A x B, an entirely different answer
is arrived at. These two methods of vector multiplication, the dot product and the cross
product, are discussed in this section. (Note that vector symbols are shown in boldface
italic
type)When two vectors are multiplied using the dot product, the answer is a scalar . To
discuss the rules involved in the dot product, we have to imagine two vectors that are to
be multiplied together. It should be possible to imagine redrawing these two vectors such
that their tails are butted together. Two such vectors, A and B, are shown in figure 8.12.
The angle Ɵ in Figure 8.12 is the smallest angle thet can be drawn between the two
vectors A and B. Note that 00 ≤ ≤ 180Ɵ0. The dot product of two vectors defined as
Where A is the (absolute) magnitude of A , B is the (absolute) magnitude of B, and Ɵ is
the angle between them
EXAMPLE 8.47
A . B = AB cos Ɵ
8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 15/24
A is 40.0 m, 35.00 south of east and B is 60.0 m, 10.00 west of north. Find A . B
Solution:
Drawing the two vectors, we obtain a figure very similar to figure 8.12 in which Ɵ is
135o;, therefore
A . B = AB cos Ɵ (8.26)
= (40.0 m)(60.0 m) cos 135.00
= (40.0 m)(60.0 m)(-0.707)
A . B = - 1700 m2
Notice in Example 8.47 that the dot product can be a negative number (scalars can
be either positive ir negative), depending on the size of the angle Ɵ , but also notice that
it does not have a direction associated with it; it has only a magnitude. Of course, unitsmust be carried through and appear in the dot product.
One other important item to notice is that the dot product of two vectors is
commutative; that is, A . B = B . A
B Ɵ
A
Several quantities in physics are defined using the dot product. One such quantity
that has already been studied is work that was defined (chapter 6) as
W = FX cos Ɵ (6.1)
Work can now be redefined as

8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 16/24
(8.27)
Where F is the force exerted on an object and X is the displacement of the object.
EXAMPLE 8.48
An object is displaced 2.00 m while a constant force of magnitude 28.0 N acts on
it. If the force maintains an angle of 30.00 with the displacement of the object, compute
the work done by this force.
Solution :
(Refer to example 6.1) W = F . X = FD cos Ɵ
= (28.0 N) (2.00 m) cos 300
= (28.0 N) (2.00 m)(0.866)
W = 48.5 J
When two vectors are mulitiplied using the cross product , the answer is a vector .
Therefore, in order to find the cross product of two vectors, we have to compute twothings; the direction and magnitude of the cross-product vector.
We will learn first how to compute the magnitude of the cross product. The two
vectors always must be drawn so that their tails are together (as A and B have been drawn
in Figure 8.12). The angle Ɵ ia again the smallest angle between the two vectors. The
magkitude of the cross product is defined as
(8.28)
Where A and B are the magnitudes of A and B, respectively, and │ A x B│is the
magnitude of the cross-product vector. You may have recognized the two vertical bars
from your math studies as meaning “ the absolute value” in algebra. When two vertical
bars are used with quantity, they mean something else, namely, the magnitude of the
vector.
W = F . X
│A x B│= AB sin Ɵ
8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 17/24
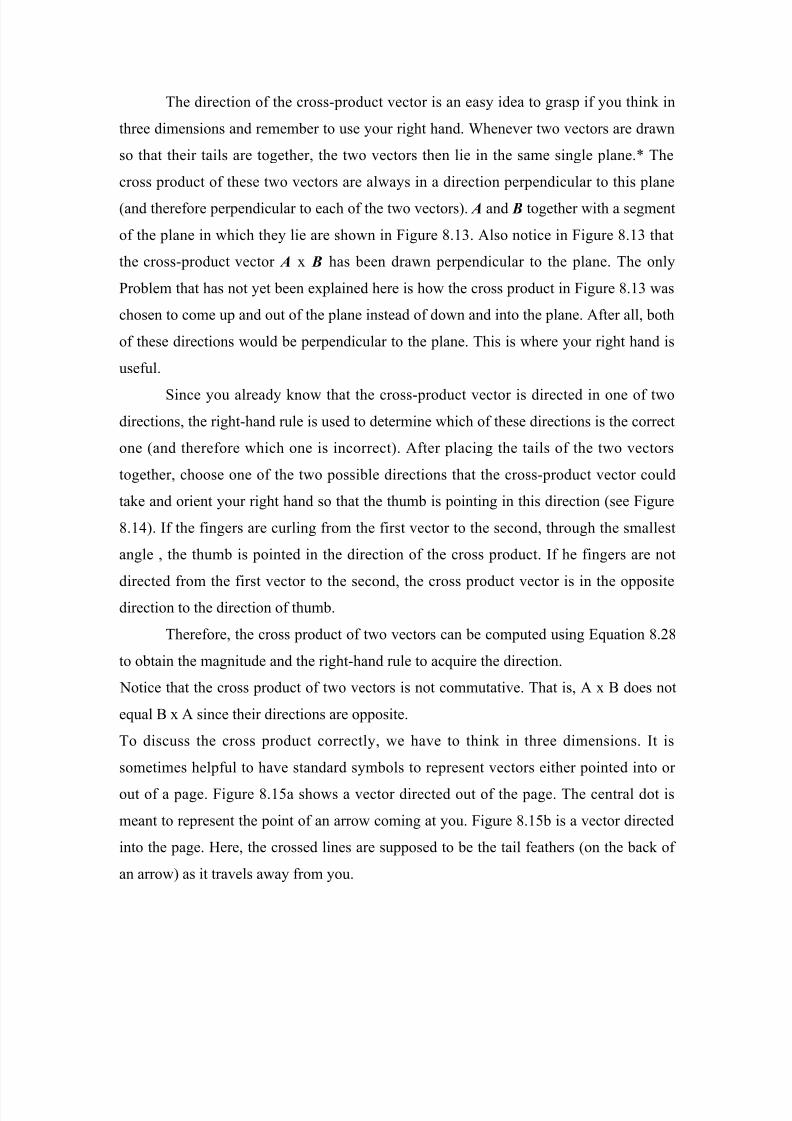
The direction of the cross-product vector is an easy idea to grasp if you think in
three dimensions and remember to use your right hand. Whenever two vectors are drawn
so that their tails are together, the two vectors then lie in the same single plane.* The
cross product of these two vectors are always in a direction perpendicular to this plane
(and therefore perpendicular to each of the two vectors). A and B together with a segment
of the plane in which they lie are shown in Figure 8.13. Also notice in Figure 8.13 that
the cross-product vector A x B has been drawn perpendicular to the plane. The only
Problem that has not yet been explained here is how the cross product in Figure 8.13 was
chosen to come up and out of the plane instead of down and into the plane. After all, both
of these directions would be perpendicular to the plane. This is where your right hand is
useful.
Since you already know that the cross-product vector is directed in one of twodirections, the right-hand rule is used to determine which of these directions is the correct
one (and therefore which one is incorrect). After placing the tails of the two vectors
together, choose one of the two possible directions that the cross-product vector could
take and orient your right hand so that the thumb is pointing in this direction (see Figure
8.14). If the fingers are curling from the first vector to the second, through the smallest
angle , the thumb is pointed in the direction of the cross product. If he fingers are not
directed from the first vector to the second, the cross product vector is in the oppositedirection to the direction of thumb.
Therefore, the cross product of two vectors can be computed using Equation 8.28
to obtain the magnitude and the right-hand rule to acquire the direction.
Notice that the cross product of two vectors is not commutative. That is, A x B does not
equal B x A since their directions are opposite.
To discuss the cross product correctly, we have to think in three dimensions. It is
sometimes helpful to have standard symbols to represent vectors either pointed into or
out of a page. Figure 8.15a shows a vector directed out of the page. The central dot is
meant to represent the point of an arrow coming at you. Figure 8.15b is a vector directed
into the page. Here, the crossed lines are supposed to be the tail feathers (on the back of
an arrow) as it travels away from you.

8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 18/24
One example of a cross product is a torque, which was introduced in Chapters 4.3 Recall
that torque was defined there as
(4.3)*
*Two other definitions of torque were also given in chapter 4, but since they are all
equivalent, only this one is discussed here.
Where F is the magnitude of the force, D is the magnitude of the displacement vector
drawn from the axis of rotation to the force, and θ is the angle between F and B. please
recall that a sign convention [(+) or (-)] was also used. The torque can now be redefined
as
(8.29)
Where D is the displacement vector drawn from the axis of rotation to the point of
application of the force F that is causing the torque. Note that torque actually is vector
and has both a magnitude and a direction.
EXAMPLE 8.49
The board in Figure 8.16a is balanced horizontally when a weight W1 is placed on its left
edge ang a weight W2 is at its right edge. If W1= 50.0 N and D1 is 4.00 m, find the torque
caused by this force about the fulcrum.
Solution:
; therefore, the magnitude of the torque is

8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 19/24
The direction can be found by first positioning the tails of the D1 and W1 vectors together,
as in Figure 8.16b, and applying the right-hand rule. The direction in this case is out of
page. Therefore, we can finally say
; out of the page
Other variables in rotational physics may also be considered to be vectors. To start, an
angle itself may be considered a vector. The magnitude of such an angular displacement
vector is measured in terms of one of the units of angular measure (e.g., rad or degrees).
The direction of the angular displacement vector is given by a slightly different version
of the right-hand rule. If the fingers of the right hand are oriented in such a way that they
curl in the direction in which the object has rotated, the thumb is pointing in the directionof the angular displacement vector. Try it yourself with the angle shown in Figure 8.17.
Angular velocity is also a vector. To the find the direction of an angular velocity vector,
curl the fingers of your right hand in the direction in which the object is actually rotating.
The thumb points in the direction of the angular velocity vector. Try it with Figure 8.18
to verify the direction of ω.
Angular acceleration is a vector also, but to find its direction, one must go back to thedefinition of angular acceleration, Equation 8.2, where
Therefore, to find the direction of an angular acceleration vector, we must subtract the
initial angular velocity vector from the final angular velocity vector to determine the
change in angular velocity. The direction of this change angular velocity is the same asthe direction of the angular acceleration vector.

8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 20/24
Quite a few other angular quantities may also be considered vector quantities. Angular
momentum Pθ is a vector that has the same direction as the direction of the angular
velocity of the object since.
(8.22)
Several equations are written as vector equations; for example, the resultant torque acting
on an object is
(8.20)
Which states that the resultant torque is in the same direction as the angular acceleration.
Combining this with Equation 8.2, we get
But since Iω is angular momentum, this could be written as
(8.30)
Notice that the torque is in the same direction as the change in the angular momentum of
the abject.
8.10 THE TOP AND THE GYROSCOPE
Consider the device shown in Figure 8.19. It consist of a rotating disk of a fairly high
moment of inertia supported by a light but rigid axle that runs from point A to point B. As
it is shown, the right- hand rule would tell us that the initial angular momentum of this
device, P θi , is to the right.
While the top was being started, forces were probably being exerted at several points
along the axis to keep it in its present horizontal position. However, we assume that only

8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 21/24
the upward force F and the weight of the disk itself are acting on the system. The
question is: What will happen to the device; that is, will is fall? Will it remain where it is?
If you attempt to compute the resultant torque acting on the system about point A, you
will first find that the only torque about this point will be the torque due to the weight of
the disk itself. This torque could be computed using the methods givens in Section 8.9, in
which
The D and W vectors have been drawn in Figure 8.20 and the resultant torque acting on
the top about point A is shown to be directed into the page.
Now recall that
This could be rewritten as
τ . ΔƩ t = Δ PƟ
Equation 8.24 tells us that the resultant torque acting on an object is in the same direction
as the change in the angular momentum of the object. Therefore, the change in angular
momentum of the top that was first shown in Figure 8.19 is directed into the page. But,
again, how does this affect the top? The new angular momentum must be equal to the old
angular momentum plus the change in angular momentum,or
P f Ɵ = P i Ɵ + Δ P Ɵ
Since these vectors, vector addition must be used, However, since Δ P Ɵ is directed into
the page and P i Ɵ is directed to the right. It is difficult to the draw the vector diagram from
the same view point as the previous figures. Therefore, the diagram showing the addition

8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 22/24
of the angular momentum vectors has been drawn from above the device (looking down)
as in Figure 8.21
Picture 8.19.20.21
Notice in Figure 8.21 that the final angular momentum vector is turned slightly toward
the back. The right-hand rule then tells us that this means the axis of rotation of the top
has itself rotated or precessed and the top has not fallen down. Tops do indeed precess
like this. Remember that the precession phenomenon is predicteble from the vector nature
of angular quantities.
Now, we find the rate at which the top preccesses, sometimes called the rate of
precession. The symbol that is commonly used for the rate of precession is Ω, anuppercase Greek omega.
If you recall that in Figure 8.21 the change in angular momentum Δ P Ɵ took place over a
small time interval Δt and the angle through which the top precessed is shown as ΔØ ,
the rate of precession of the top is given by
Ω = ΔØ
Δt
In the absence of friction, the final angular momentum has the same magnitude as the
initial angular momentum. Since the solid disk itself keeps rotating about its axis at a
constant angular velocity ω, we could call this P ϴ, or
Therefore, the triangle shown in Figure 8.21 has equal legs and we approximate the
relationship between P ,ϴ △ P ϴ, and △ø using
(8.7)

8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 23/24
(8.33)
Combining Equations 8.30, 8.32, and 8.33, we get
(8.34)
This is the basic equation for computing the rate of precession of a top. The only problem
with this equation is that all angular quantities must be in radians (as is the case with
Equation 8.7).
EXAMPLE 8.50
A top is constructed as in Figure 8.19 with the disk having 0.0500 kg*m2 moment of
inertia. The weight of the disk is 8.00 N and its center of gravity is 60.0 mm from the
support point. If the disk is rotating about is horizontal axis at 300 r/min, at what rate will
the top precess? Assume friction forces and the weight of the axle are negligible.
Solution:
The angular velocity of the disk will first be changed to rad/s as follows:

8/3/2019 Tugas Fisika Yakin Full
http://slidepdf.com/reader/full/tugas-fisika-yakin-full 24/24
An interesting point to notice is that as the angular velocity ω of the top increases, the
magnitude of the angular momentum P ϴ of the top also increases. Therefore, the rate of
precession of the top Ω decreases.
Bearings are sometimes used to mount a top in such a manner that the top’s center of
gravity always remains in the same position. Such a device is called a gyroscope. The
rotor in gyroscope is often brought to speed by means of a small motor mounted with the
gyroscope. When the rotor is spinning, the gyroscope does not precess unless an outside
torque acts on it.
Gyroscope are frequently mounted on gimbal rings as shown in Figure 8.22. If the
friction in the mounting bearings is negligible, the gimbals are not capable of exertingany net torque on the rotor (with the exception of the case in which all gimbal rings are
oriented exactly in the same plane). Such a gyroscope then maintains the same (original)
axis of rotation (it does not precess). This type of device has proved to be quite useful in
the area of navigation.