SYSTEM PENGENDALI RUANG PENYIKATAN PADA … · inti penulisan, tahap perancangan ... suatu pokok...
12
76 SYSTEM PENGENDALI RUANG PENYIKATAN PADA PROTOTYPE PENCUCIAN MOBIL BERBASIS MIKROKONTROLLER AT89C51 Halimatussa’diah Program Studi Teknik Informatika, Unindra PGRI Jalan Nangka No.58 C Tanjung Barat Jakarta Selatan Email: [email protected] Abstrak Banyaknya peralatan elektronika yang bekerja secara analog dan manual yang mempunyai kemampuan dan efektifitas yang rendah membuat orang berpikir untuk membuat peralatan elektronika yang mempunyai kemampuan dan keandalan yang tinggi. Salah satu contohnya adalah aplikasi pencucian mobil otomatis berbasis mikrokontroler. Pada kesempatan ini penulis mencoba merancang sistim kerja mesin pencucian mobil otomatis menggunakan mikrokontroler AT 89C51. Adapun tujuannya adalah untuk mengaplikasikan ilmu pengetahuan yang didapat kedalam bentuk nyata yaitu perancangan pembuatan suatu alat. Dengan batasan masalahnya yaitu perancangan dan pembuatan perangkat keras dan lunak dari mesin pencucian mobil otomatis yang menggunakan bahasa Assembly MCS-51, Mikrokontroler ATMEL 89C51, Motor Stepper penggerak belt conveyer. Metode penelitiannya adalah melakukan studi mengenai sistem mesin pencucian mobil otomatis menggunakan mikrokontroler dan rangkaian elektronika. Urutan dari sistematika penyajian adalah menyajikan latar belakang, tujuan penulisan, batasan masalah, dan diakhiri dengan sistematika pembahasan. Menyajikan gambaran tentang karakteristik dari mikrokontroler ATMEL AT89C51 yang merupakan komponen utama. Ini merupakan inti penulisan, tahap perancangan alat mulai dari tujuan, perancangan, percobaan perakitan sampai ketahap setelah dinyatakan alat berfungsi. Alat hasil rancangan akan diukur dan diuji secara keseluruhan untuk mengetahui karakteristik alat dan kendalanya yang akan diuraikan tentang prinsip kerja dan blok diagram rangkaian, rangkaian lengkap, perancangan alat, analisa rangkaian dan program komputer. Kata kunci : Efektifitas, AT89C51, mikrokontroler, otomatis I. PENDAHULUAN 1.1. Latar Belakang Dalam kehidupan manusia di dunia yang serba modern ini, banyak manusia menggunakan perangkat elektronika sebagai penunjang kebutuhan hidupnya. Dengan kemajuan elektronika maka dapat membantu mempermudah pekerjaan yang dilakukan oleh manusia. Banyaknya peralatan-peralatan elektronika yang bekerja secara analog dan manual yang mempunyai kemampuan dan efektifitas yang rendah membuat orang berpikir untuk membuat peralatan elektronika yang mempunyai kemampuan dan keandalan yang tinggi. Penggunaan komputer sebagai perantara pengendali pada dasarnya untuk malaksanakan otomatisasi kerja pada perangkat yang dikendalikan. Salah satu contohnya adalah aplikasi pencucian mobil otomatis berbasis mikrokontroler. Berdasarkan pemikiran di atas, pada kesempatan ini penulis mencoba merancang sistim kerja mesin pencucian mobil otomatis menggunakan mikrokontroler AT 89C51, dimana penggunaan mikrokontroler sebagai komponen utama dikarenakan mikrokontroler mempunyai kemampuan menggerakkan alat atau sistem berdasarkan program yang dimasukkan ke dalam mikrokontroler tersebut. Jurnal Maklumatika Vol. 5, No. 1, Juli 2018 ISSN : 2407-5043
Transcript of SYSTEM PENGENDALI RUANG PENYIKATAN PADA … · inti penulisan, tahap perancangan ... suatu pokok...

76
SYSTEM PENGENDALI RUANG PENYIKATAN PADA PROTOTYPE PENCUCIAN
MOBIL BERBASIS MIKROKONTROLLER AT89C51
Halimatussa’diah
Program Studi Teknik Informatika, Unindra PGRI
Jalan Nangka No.58 C Tanjung Barat Jakarta Selatan
Email: [email protected]
Abstrak
Banyaknya peralatan elektronika yang bekerja secara analog dan manual yang mempunyai
kemampuan dan efektifitas yang rendah membuat orang berpikir untuk membuat peralatan elektronika
yang mempunyai kemampuan dan keandalan yang tinggi. Salah satu contohnya adalah aplikasi
pencucian mobil otomatis berbasis mikrokontroler. Pada kesempatan ini penulis mencoba merancang
sistim kerja mesin pencucian mobil otomatis menggunakan mikrokontroler AT 89C51. Adapun tujuannya
adalah untuk mengaplikasikan ilmu pengetahuan yang didapat kedalam bentuk nyata yaitu perancangan
pembuatan suatu alat. Dengan batasan masalahnya yaitu perancangan dan pembuatan perangkat keras dan
lunak dari mesin pencucian mobil otomatis yang menggunakan bahasa Assembly MCS-51,
Mikrokontroler ATMEL 89C51, Motor Stepper penggerak belt conveyer. Metode penelitiannya adalah
melakukan studi mengenai sistem mesin pencucian mobil otomatis menggunakan mikrokontroler dan
rangkaian elektronika. Urutan dari sistematika penyajian adalah menyajikan latar belakang, tujuan
penulisan, batasan masalah, dan diakhiri dengan sistematika pembahasan. Menyajikan gambaran tentang
karakteristik dari mikrokontroler ATMEL AT89C51 yang merupakan komponen utama. Ini merupakan
inti penulisan, tahap perancangan alat mulai dari tujuan, perancangan, percobaan perakitan sampai
ketahap setelah dinyatakan alat berfungsi. Alat hasil rancangan akan diukur dan diuji secara keseluruhan
untuk mengetahui karakteristik alat dan kendalanya yang akan diuraikan tentang prinsip kerja dan blok
diagram rangkaian, rangkaian lengkap, perancangan alat, analisa rangkaian dan program komputer.
Kata kunci : Efektifitas, AT89C51, mikrokontroler, otomatis
I. PENDAHULUAN
1.1. Latar Belakang
Dalam kehidupan manusia di dunia yang serba modern ini, banyak manusia menggunakan perangkat
elektronika sebagai penunjang kebutuhan hidupnya. Dengan kemajuan elektronika maka dapat membantu
mempermudah pekerjaan yang dilakukan oleh manusia. Banyaknya peralatan-peralatan elektronika yang
bekerja secara analog dan manual yang mempunyai kemampuan dan efektifitas yang rendah membuat
orang berpikir untuk membuat peralatan elektronika yang mempunyai kemampuan dan keandalan yang
tinggi.
Penggunaan komputer sebagai perantara pengendali pada dasarnya untuk malaksanakan otomatisasi
kerja pada perangkat yang dikendalikan. Salah satu contohnya adalah aplikasi pencucian mobil otomatis
berbasis mikrokontroler. Berdasarkan pemikiran di atas, pada kesempatan ini penulis mencoba merancang
sistim kerja mesin pencucian mobil otomatis menggunakan mikrokontroler AT 89C51, dimana
penggunaan mikrokontroler sebagai komponen utama dikarenakan mikrokontroler mempunyai
kemampuan menggerakkan alat atau sistem berdasarkan program yang dimasukkan ke dalam
mikrokontroler tersebut.
Jurnal Maklumatika
Vol. 5, No. 1, Juli 2018 ISSN : 2407-5043

Halimatussa’diah, System Pengendali Ruang Penyikatan…
77
Adapun tujuan penulisan adalah untuk mengaplikasikan ilmu pengetahuan yang didapat kedalam
bentuk nyata yaitu perancangan pembuatan suatu alat.
Disamping itu dengan membuat perancangan suatu alat penulis dituntut untuk dapat menyelesaikan
suatu pokok permasalahan secara ilmiah dan dapat mempertanggungjawabkan hasil suatu pemikiran.
1.2. Rumusan Masalah
Dalam penulisan akan dibahas hal-hal yang berhubungan dengan proses pencucian mobil
otomatis dan untuk membatasi masalah maka hanya dibahas hal-hal sebagai berikut:
1. Bagaimana merancang dan membuat perangkat keras dari mesin pencucian mobil otomatis.
2. Bagaimana merancang dan membuat perangkat lunak dari mesin pencucian mobil otomatis
yang menggunakan bahasa assembly MCS-51.
3. Bagaimana alat utama mikrokontroler ATMEL 89C51 digunakan untuk pengendali dan
pengontrol utama mesin pencucian mobil otomatis.
4. Bagaimana motor stepper digunakan untuk penggerak belt conveyer.
2. METODOLOGI
2.1 MIKROKONTROLER ATMEL MCS-51
2.1.1 . Dasar Pemilihan Mikrokontroler
Bila sebuah mikroprosesor dikombinasikan dengan I/O dan memory (RAM dan ROM) akan
dihasilkan sebuah mikrokontroler, dimana kombinasi dari komponen–komponen tersebut sudah terdapat
dalam satu Chip Integrated Circuit, ada dalam tulisan penelitian Freddy Kurniawan (April, 2009). Karena
mikrokontroler telah dilengkapi dengan berbagai periferal yang sudah terdapat pada satu chip IC, maka
mikrokontroler memiliki keunggulan dalam hal :
1) Ukuran sistem yang jauh lebih ringkas
2) Harga yang ekonomis
3) Kemudahan dalam merancang sistem yang berbasiskan Mikrokontroler.
4) Tingkat keamanan yang lebih dijamin
5) Kehandalan yang lebih dijamin.
Kerugiannya adalah kemampuan sistem yang terbatas jika menggunakan mikrokontroler. Hal ini
disebabkan karena adanya keterbatasan dari memori yang digunakan. Berdasarkan perbedaan dalam suatu
aplikasi, mikrokontroler mempunyai beberapa set instruksi yang berbeda dengan mikroprosesor. Set
instruksi mikroprosesor bersifat processing intensive untuk operasi data volume besar, yang beroperasi
secara nibble, byte and word .
Berikut ini adalah kemampuan dari mikrokontroler AT89C51.
1) Kompatible dengan MCS 51
2) 8 Bit Mikrokontroler
3) 4 Kbytes In System Reprogrammable Flash Memory dengan kemampuan sampai 1000
kali pemrograman/penghapusan.
4) Range operasi 0 – 24 MHz
5) 128 x 8 Bit RAM
6) 32 Jalur I/O
7) Dua 16 Bit Timer/Counter
8) Enam sumber interupsi
9) On–Chip Oscillator dan Clock Cicuity
10) Programmable serial channel.
2.1.2. Metode Pengalamatan
Metode pengalamatan pada AT89C51 adalah sebagai berikut :
1. Pengalamatan Langsung (Direct Addressing)

78
Pada pengalamatan langsung, di dalam instruksinya operand ditunjukkan oleh suatu alamat
yang lebarnya 8 bit, dan hanya bisa digunakan untuk data internal RAM dan SFR
MOV A, direct (pindahkan langsung dari byte tertentu ke akumulator)
2. Pengalamatan Tidak Langsung (Indirect Addressing).
Pada pengalamatan tidak langsung, Instruksi menunjukkan suatu register yang isinya
adalah alamat dari operand.
External dan Internal RAM dapat dialamati secara tidak langsung. Register alamat untuk
alamat dengan lebar 8 bit bisa berupa R0 dan R1 yang digunakan untuk memilih register
bank atau Stack Pointer. Register alamat untuk alamat dengan lebar 16 bit digunakan data
pointer DPTR.
MOV A, @Ri (Pindahkan Indirect RAM ke akumulator).
3. Pengalamatan Berindeks (Indexed Addressing)
Yang dapat diakses dengan pengalamatan berindeks hanya memori program. Mode ini
dimaksudkan untuk membaca look up table di memori program. MOVC A,@A+PC
(Pindahkan kode byte relatif program counter ke akumulator). MOVC A,@A+DPTR
(Pindahkan kode byte relatif relatif DPTR ke akumulator)
4. Pengalamatan segera (Immediate Addressing).
Dalam memori program suatu opcode dapat langsung diikuti oleh suatu konstanta, sebagai
contoh :
MOV A,#16 : isi akumulator dengan decimal 16
Bila digunakan bilangan heksadesimal, hasilnya tetap sama yaitu MOV A,#0FH
Ada dalam buku ajar Siswo Wardoyo (2011)
3. HASIL DAN PEMBAHASAN
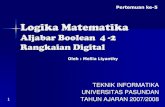
3.1. Diagram Blok dan Cara Kerja Tahap selanjutnya dalam perancangan suatu alat adalah membuat suatu diagram blok, dimana
diagram blok ini berfungsi untuk mempermudah didalam memahami rangkaian dan perakitan alat.
Dengan demikian dalam tahap perancangan dan perakitan alat akan dibuat berdasarkan per-blok diagram
rangkaian, dimana tiap blok rangkaian mempunyai fungsi masing-masing dan satu sama lain saling
berkaitan. Adapun diagram blok rangkaian yang dimaksud ditampilkan pada gambar sebagai berikut :
Gambar 1. Blok diagram Sistim Otomatisasi Pencucian mobil
Prinsip kerja alat :
Mengambil acuan dari tulisan Alfa Anindita dkk (2013) Pada alat ini terdapat 6 penempatan sensor
photodioda, dimana photodiode tersebut bekerja secara parallel dan digunakan untuk melakukan 2 fungsi
yang berbeda. Fungsi pertama dari photodioda untuk membaca tinggi dari sebuah kendaraan, fungsi
kedua photodioda gunanya untuk memantau apakah kendaraan sudah sampai ruang penyikatan atau
Jurnal Maklumatika Vol. 5, No. 1, Juli 2018, hlm. 76 – 87

Halimatussa’diah, System Pengendali Ruang Penyikatan…
79
belum. Ketika tombol start diaktifkan maka mikrokontroler bekerja dengan membuka gerbang pengapit
kiri maupun kanan, kemudian menggerakkan gerbang pengapit atas naik sampai batas maksimal.
Mikrokontroler kemudian memantau sampai sensor photodioda yang terpasang di pintu masuk akan
terhalang kendaraan bagian depan atau tidak. Kondisi ini menandakan bahwa proses selanjutnya adalah
pembacaan tinggi kendaraan.
Ketika kendaraan menghalangi photodioda, mikrokontroler melakukan proses pembacaan tinggi
kendaraan sekaligus menyimpannya. Data hasil dari pembacaan tinggi kendaraan yang berulang – ulang
ini merupakan data sampling dari bentuk fisik kendaraan. Proses pembacaan tinggi kendaraan dan
penyikatan kendaraan diselingi dengan yang diterima mikrokontroler dari mikrokontroler penggerak
konveyer. Dengan adanya komunikasi ini proses penggerakkan gerbang atas akan selalu sesui dengan
tinggi kendaraannya.
Data–data sampling tadi akan digunakan pada proses penyikatan. Setelah proses pembacaan tinggi
kendaraan selesai mikrokontroler menggerakkan gerbang pengapit atas dan memutar sikat atas dan
samping secara bersamaan. Mikrokontroler kemudian menggerakkan penggerak sikat atas sesuai dengan
level tinggi kendaraan. Begitu proses ini dilakukan berulang–ulang sampai pada ketinggian terakhir.
3.2. Perancangan Software
Setelah alat atau bagian hardware dibuat maka langkah berikutnya adalah membuat perangkat lunak
atau software yang akan mendukung kerja dari hardware karena tanpa software maka hardware tidak
akan bekerja, dengan demikian perangkat lunak atau software merupakan pola pikir dari alat / hardware
dan memegang peranan yang penting.
Dalam pembuatan software, listing program dibuat dengan sistem prosedur dimana setiap
prosedur mempunyai fungsi tertentu dan secara keseluruhan prosedur membentuk sistem dari program
yang diharapkan. Langkah awal dalam membuat listing program adalah membuat diagram alur atau
flowchart sebagai acuan dasar dalam membuat program. Kemudian setiap fungsi dari flowchart tersebut
dibuat listing programnya.
Adapun untuk membuat listing program dapat menggunakan bahasa assembler yang khusus untuk
keluarga mikrokontroler MCS-51, dengan bantuan program khusus misalnya ASEM-51. Listing program
dibuat dengan Word atau notepad kemudian dikompilasi oleh ASEM-51 sehingga berekstensi OBJ dan
terakhir dikompilasi kembali sehingga berekstensi HEX. File yang berekstensi HEX inilah yang akan
dimasukkan ke mikrokontroler AT89C51.
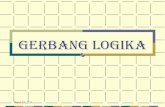
Gambar 2. Flowchart Utama Mikrokontroler

80
Keterangan flowchart mikrokontroler. Proses inisialisasi pada mikrokontroler slave untuk mengontrol driver motor stepper pengendali
gerbang sikat atas dan menset posisi gerbang pengapit. Setelah proses inisialisasi mikrokontroler akan
memantau kondisi start switch melalui pin P3.3, jika pada pin P3.3 mendapat logika 1 maka
mikrokontroler akan looping pada alamat ini sedangkan jika pin P3.3 mendapat logika 0 maka
mikrokontroler akan melakukan proses selanjutnya.
Proses yang selanjutnya adalah menggerakkan motor stepper pengendali gerbang sikat atas dari
level 0 sampai dengan level 3. Proses ini dilakukan dengan mengirim data ke driver motor stepper
melalui port P1 dimana satu level adalah sebanding dengan jarak antara 2 sensor ketinggian dengan
jumlah step motor sebanyak 1020 langkah. Buffer level digunakan sebagai counter tiap 1020 langkah.
Begitu proses penggerakkan gerbang motor sikat atas sampai dengan 4 level. Setelah proses tersebut
mikrokontroler akan menggerakkan motor penggerak gerbang pengapit untuk menutup gerbang dengan
memberikan logika 1 melalui pin P1.0 dan memberikan logika 0 melalui pin P1.1 untuk menggerakkan
gerbang pengapit kanan dan memberikan logika 1 melalui pin P1.2 dan memberikan logika 0 melalui pin
P1.3 untuk menggerakkan gerbang pengapit kiri.
Kemudian mikrokontroler akan menunggu instruksi dari mikrokontroler pengendali konveyer
untuk melakukan proses scanning ketinggian kendaraan dan proses penyikatan. Jika pada pin P3.1
mendeteksi adanya perubahan logika dari 1 menjadi 0 maka mikrokontroler akan memberi signal 0 ke pin
P3.0 untuk mengindikasikan bahwa mikrokontroler dalam kondisi busy. Perbandingan pada artikel
zulfikar dkk (2011) Untuk mengetahui ketinggian kendaraan mikrokontroler memantau kondisi port 0.
Jika kondisi port 0 bernilai 00h merupakan indikasi bahwa tidak ada kendaraan. Setelah memperoleh data
tinggi kendaraan mikrokontroler akan membandingkan tinggi kendaraan dengan posisi pengapit atas. Jika
posisi gerbang pengapit atas lebih tinggi dari tinggi kendaraan maka mikrokontroler akan menurunkan
gerbang pengapit atas 1 level. Proses penurunan ini diulang – ulang terus sampai data tinggi kendaraan
sama dengan tinggi gerbang pengapit atas. Begitu pula sebaliknya, jika posisi pengapit gerbang atas lebih
rendah dari pada tinggi kendaraan mikrokontroler akan menaikkan gerbang pengapit atas satu level.
Proses menaikkan gerbang pengapit atas ini diulang – ulang terus sampai data tinggi kendaraan sama
dengan tinggi gerbang pengapit atas.
Setelah proses ini selesai mikrokontroler kembali memantau pin P3.1 jika terjadi perubahan
logika dari 1 menjadi 0 kembali mikrokontroler mengulang proses pembacaan ketinggian kendaraan dan
proses penyikatan.
3.3. Rangkaian Kontroller
Rangkaian kontroller ini merupaka jantung dan sebagai pengendali utama seluruh rangkaian, dimana
pengendali menggunakan Mikrokontroler AT89C51. Adapun rangkaian pada kontroler ini ditunjukan
pada gambar 3 berikut :
VCC
C2 30pFC1 30pF
U1
AT89C51
91819 29
30
31
12345678
2122232425262728
1011121314151617
3938373635343332
RSTXTAL2XTAL1 PSEN
ALE/PROG
EA/VPP
P1.0P1.1P1.2P1.3P1.4P1.5P1.6P1.7
P2.0/A8P2.1/A9
P2.2/A10P2.3/A11P2.4/A12P2.5/A13P2.6/A14P2.7/A15
P3.0/RXDP3.1/TXD
P3.2/INTOP3.3/INT1
P3.4/TOP3.5/T1
P3.6/WRP3.7/RD
P0.0/AD0P0.1/AD1P0.2/AD2P0.3/AD3P0.4/AD4P0.5/AD5P0.6/AD6P0.7/AD7
SW1
C310uFR1 10K
Y112MHz
DCEn
KonvEn
Stepper.2Stepper.3
Star tSw
RCSw
Stepper.1Stepper.0
LCSw
Clean SwSpin Sw
LOSw
ROSw
Wash
INT IRClean
Wai tDone
Gambar 3. Rangkaian Kontroller
Jurnal Maklumatika Vol. 5, No. 1, Juli 2018, hlm. 76 – 87

Halimatussa’diah, System Pengendali Ruang Penyikatan…
81
Agar mikrokotroller dapat bekerja, maka dibutuhkan suatu rangkaian oscillator sebagai pembangkit
sinyal clock. Dalam hal ini digunakan oscillator yang sudah ada dalam mikrokontroler 89C51, hanya
dihubungkan dengan sebuah kristal. Kristal disini digunakan kristal 12 MHz agar mikrokontroler bekerja
dengan kecepatan maksimum. Kapasitor digunakan sebagai penyetabil clock dan merupakan saran atau
rekomendasi dari pabrik ATMEL. Prinsip kerja dari mikrkontroler ini sesuai dengan program yang
dibuat, sehingga penjelasan menyeluruh akan dijelaskan bersama dengan diagram alir atau flowchart
program yang dibuat pada sub pembahasan perancangan software.
3.4. Rangkaian Driver Motor Stepper
Karena output dari mikrokontroler arus dan tegangannya kecil maka untuk mengendalikan motor
dibuat driver seperti pada tulisan Firman Syafarudin dan Budhi Anto (2017), seperti yang ditunjukkan
pada gambar 4 berikut :
Input 1A, 2A, 3A serta 3A akan mengaktifkan driver dimana IC L293 cocok untuk aplikasi
pengendalian motor stepper. 1Y – 4Y akan mengendalikan 2 kumparan motor stepper dimana logika
input 1Y – 4Y dicantumkan pada data sheet book IC L293.
Gambar 5. Rangkaian Infra-red
12V
12V
12V
VCC
U2
L293
27
1015
19
361114
1A2A3A4A
1,2EN3,4EN
1Y2Y3Y4Y
MG1MOTOR STEPPER
123
4 5
6
D8
IN4002
D7
IN4002
D6
IN4002
D5
IN4002
D4
IN4002
D3
IN4002
D2
IN4002
D1
IN4002
J2
PORT2
1234
P2.0P2.1P2.2P2.3
VCC
VCC
VCC
VCC
VCC
VCC
VCC
VCC
VCC
VCC
VCC
VCC
D28
PHOTODIODE
1 2
D27
PHOTODIODE
1 2
D26
PHOTODIODE
1 2
D25
PHOTODIODE
1 2
D24
PHOTODIODE
1 2
D23
PHOTODIODE
1 2
U5F74LS14
13 12
U5E74LS14
11 10
U5D74LS14
9 8
U5C74LS14
5 6
U5B74LS14
3 4
U5A74LS14
1 2
Q2BC550
12
3
Q3BC550
12
3
Q4BC550
12
3
Q5BC550
12
3
Q6BC550
12
3
Q7BC550
12
3
R5 22K
R6 22K
R7 22K
R8 22K
R9 22K
R10 22K
R11 3K3
R12 3K3
R13 3K3
R14 3K3
R15 3K3
R16 3K3
R17 100K
R18 100K
R19 100K
R20 100K
R21 100K
R22 100K
J1
PORT 0
12345678
VCC
U3A
74LS132
1
23
147
U3B
74LS132
4
56
147
U3C
74LS132
9
108
147
R2POT
13
2C410nF
R3 2K
R4 100K
Q1BC548
12
3
D9 D10 D11 D12 D13 D14
Gambar 4. Rangkaian Driver Motor Stepper

82
Rangkaian pemancar infra red bekerja dengan menggunakan 3 buah gebang NAND seperti pada
gambar diatas. Rangkaian RC akan membentuk sinyal clock dengan frekuensi yang dapat diatur dengan
mengubah nilai R variabelnya. Rangkaian gerbang NAND bekerja untuk memperkuat sinyal clock yang
dihasilkan oleh rangkaian RC sebelumnya. Pada bagian akhir terdapat rangkaian switching menggunakan
transistor. Dengan demikian rangkaian transmitter infra red tersebut bekerja tidak dengan konstan akan
tetapi bekerja dengan intensitas pancaran yang dapat diatur.
3.5. Rangkaian Driver Motor DC
Rangkaian driver motor DC pada sistim pencucian otomatis ini adalah sebagai penggerak peralatan
pendukung pada alat tersebut. Di dalam alat ini terdapat 2 buah motor DC. Motor DC pertama digunakan
sebagai motor penggerak gerbang pengapit kiri dan motor DC kedua sebagai motor penggerak gerbang
pengapit kanan. Masing – masing motor bergerak maju – mundur. Rangkaian motor DC tersebut dapat
dilihat pada gambar 6 berikut ini:
Gambar 6 di atas adalah rangkaian driver motor DC yang dibentuk oleh IC driver tipe L293. Pada
prototype tersebut menggunakan motor DC dengan tegangan catu daya 12 VDC. Pergerakan motor
tersebut adalah berdasarkan logic yang diberikan oleh mikrokontroler kemudian ke IC L293. Motor akan
aktif jika mendapatkan logic 1 (high) dan akan dinonaktifkan dengan logic 0 (low).
Untuk menggerakkan gerbang kanan membuka mikrokontroler akan memberi output P1.0 dengan
logika 1, P1.1 dengan logika 0. dengan demikian pin output 1Y dan 2Y masing – masing akan
bertegangan 12V dan 0V yang akan membuat motor DC berputar membuka. Jika kondisi input L293
berbalik maka motor akan berputar menutup. Selama kondisi input berlogika sama maka motor tidak akan
berputar.
3.6. Perancangan Software
Setelah alat atau bagian hardware dibuat maka langkah berikutnya adalah membuat perangkat lunak
atau software yang akan mendukung kerja dari hardware karena tanpa software maka hardware tidak
akan bekerja, dengan demikian perangkat lunak atau software merupakan pola pikir dari alat / hardware
dan memegang peranan yang penting. Dalam pembuatan software, listing program dibuat dengan
sistem prosedur dimana setiap prosedur mempunyai fungsi tertentu dan secara keseluruhan prosedur
membentuk sistem dari program yang diharapkan. Langkah awal dalam membuat listing program adalah
membuat diagram alur atau flowchart sebagai acuan dasar dalam membuat program. Kemudian setiap
fungsi dari flowchart tersebut dibuat listing programnya.
Setelah melakukan perancangan dan pembuatan alat maka langkah berikutnya adalah melakukan
pengukuran pada blok-blok yang perlu. Pengukuran dalam hal ini diperlukan alat bantu multimeter digital.
12V
VCCD15
IN4002
U4
L293
27
1015
19
361114
1A2A3A4A
1,2EN3,4EN
1Y2Y3Y4Y
A -+
MG2
Mtr Gerbang
1 2
A -+
MG3
Mtr Gerbang
1 2
D22
IN4002
D20
IN4002
D17
IN4002
D16
IN4002
D19
IN4002
D18
IN4002
D21
IN4002J3
PORT1
1234
P1.0P1.1P1.2P1.3
Gambar 6. Rangkaian Driver Motor DC
Jurnal Maklumatika Vol. 5, No. 1, Juli 2018, hlm. 76 – 87

Halimatussa’diah, System Pengendali Ruang Penyikatan…
83
3.7. Prosedur Uji Coba
Setelah perancangan dan pemahaman alat selesai, maka langkah selanjutnya adalah pengukuran
dan analisa sistem. Hal ini dilakukan untuk lebih memahami dan mengetahui karakteristik setiap blok
rangkaian sampai fungsi alat secara keseluruhan. Dengan demikian dapat kita bandingkan antara
perancangan dan alat yang telah dibuat.
3.7.1 Setup Alat
Setup alat adalah langkah awal agar peralatan dapat bekerja secara optimal. Dalam penulisan ini
dilakukan langkah - langkah setup alat sebagai berikut :
1). Photodiode.
Sensor photodiode berfungsi sebagai penerima sinyal berupa pancaran sinar yang dikeluarkan
oleh infrared, yang nantinya akan menjadi input bagi Mikrokontroler untuk pengerjaan suatu
task.
2). Mikrokontroler AT89C51
Mikrokontroler AT89C51 ini merupakan keluarga dari MCS yang memiliki pin berjumlah 40,
tetapi di sini saya hanya akan menjelaskan pin - pin yang digunakan pada perancangan alat,
dimana masing-masing port - port pada mikrokontroler memiliki fungsi/kendali khusus. Hampir
semua port pada mikrokontroler dapat digunakan sebagai input serta output. Untuk lebih jelasnya,
di bawah ini akan dijelaskan fungsi dari masing - masing port mikrokontroler.
3.7.2. Upload software
Setelah melakukan perancangan dan pembuatan alat, langkah selanjutnya adalah penyusunan
program pengendali alat yang disertakan pada sistem ini. Program pengendalian tersebut diberikan untuk
mengatur proses kerja pada masing-masing rangkaian.
Pengendali disusun berbasis mikrontroller menggunakan ATMEL 89C51. Bahasa pemrograman
yang digunakan sebagai pengatur sistem alat ini adalah bahasa pemrograman assembler.
Adapun langkah-langkah upload software yang dilakukan agar program pengendali tersebut dapat
berfungsi sebagaimana mestinya adalah sebagai berikut :
1). Hidupkan komputer dan masukan pada sistem assembler.
2). Susunan pembuatan program harus sesuai dengan flowchart sebagai alur pengatur.
3). Jika pembuatan program selesai, maka jalankan program sesuai dengan perintah.
4). Apabila tidak ditemukan masalah pada program, lakukan penyimpanan program ke
mikrokontroler.
5). Tutup program dan lakukan pengecekan pada IC tersebut.
6). Lakukan uii coba terhadap alat, apakah sesuai dengan perancangan yang disusun atau
belum. Jika belum, lakukan pengecekan pada alur program atau rubah program sampai
kerja alat sempurna.
3.7.3. Tujuan
Tujuan dari pengukuran sistem pengaturan otomatisasi pencucian mobil berbasis mikrokontroler
AT89C51 adalah untuk :
1). Mengetahui, apakah perangkat kerasnya dapat bekerja dengan baik atau tidak.
2). Melakukan pengambilan data untuk mendapatkan hasil kerja yang optimal.
3) Menarik kesimpulan dari seluruh proses kerja perangkat keras sistem tersebut secara
otomatis.
Sebelum melakukan pengukuran dan analisa ini, maka dilakukan prosedur kerja untuk
mendapatkan hasil pengukuran yang akurat dan sempurna. Terlebih dahulu dipersiapkan hal - hal sebagai
berikut :
1). Pengukuran diatur dengan mengukur bagian - bagian pada setiap blok - blok rangkaian.
Dalam hal ini dilakukan beberapa kali agar mendapatkan hasil yang benar.
2). Komponen yang digunakan.

84
a). IC mikrokontroler AT89C51.
b). IC 74LS373
c). IC 74LS14
d). IC L293
e). IC 74LS132
f). IC 4017
g). Photodiode
h). Infrared
3). Alat ukur
a. Multitester digital
3.7.4. Pengukuran Catu Daya
Rangkaian catu daya adalah hal pertama yang harus mendapat perhatian mengingat catu daya
merupakan sumber daya alat sehingga jika catu daya tidak bekerja maka alatpun tidak akan bekerja,
dalam penuisan Firman Syafarudin & Budhi Anto (2017).Pengukuran catu daya dapat diperlihatkan
dengan menggunakan blok diagram sbb :
Multimeter
Digital
Rangkaian
Catu daya.
Pengukuran dilakukan berulang – ulang dengan tujuan untuk meyakinkan apakah data yang diukur
telah memenuhi standar rangkaiaan atau tidak.
3.7.5. Pengukuran Photodiode
Pada alat ini digunakan photodiode untuk menerima sinyal berupa pancaran sinyal dari infrared.
Fungsi dari kedua blok rangkaian tersebut adalah sebagai pengukur ketinggian pada kendaraan yang akan
memasuki ruang pencucian. Penempatan sensor tersebut terletak ditiga bagian dengan prosedur
pengerjaan output yang berbeda seperti yang telah dijelaskan pada bab sebelumya.
Pengamatan dilakukan dengan cara yang sama dengan pengamatan catu daya. Pada saat
photodiode terhalang, maka akan diperoleh output tegangan . Begitu juga ketika photodiode tidak
terhalang dan tentu saja tegangan tersebut berbeda dengan tegangan yang diperoleh pada saat
photodiode tersebut terhalang oleh benda.
Pengukuran Vout terhalang Vout tidak terhalang
1 4,7 0
2 4,7 0,2
3 4,6 0
4 4,7 0,1
5 4,7 0,1
Gambar 7. diagram blok pengukuran catu daya
Table 1. hasil pengukuran output tegangan photodiode
Jurnal Maklumatika Vol. 5, No. 1, Juli 2018, hlm. 76 – 87

Halimatussa’diah, System Pengendali Ruang Penyikatan…
85
Analisa :
Dari data pengujian diatas dapat disimpulkan bahwa logika output photodiode sudah sesuai
dengan level TTL dan dapat dibaca mikrokontroler dengan baik.
3.7.6. Pengukuran Driver Motor Stepper
Motor yang digunakan pada rangkaian adalah sebuah stepper motor dengan tegangan VCC 12
Vdc. Pengukuran pada rangkaian ini dilakukan dengan mengumpankan input tegangan pada input – input
driver-nya. Sebenarnya pada prototype yang dibuat tegangan input – input driver ini diambil dari output
mikrokontroler, tetapi pada langkah pengukuran di sini digunakan sebuah sumber tegangan DC biasa
sebagai inputnya. Dari pengukuran – pengukuran yang dilakukan diperoleh hasil seperti data yang
tercantum pada tabel 2. berikut ini:
Input Output (Votl DC)
1A 2A 3A 4A 1Y 2Y 3Y 4Y
0 0 0 0 11,8 11,8 11,8 11,8
0 0 0 1 11,8 11,8 11,8 0,15
0 0 1 0 11,8 11,8 0,15 11,8
0 1 0 0 11,8 0,15 11,8 11,8
1 0 0 0 0,15 11,8 11,8 11,8
Analisa :
Untuk mengetahui arah putaran stepper motor, input dari 1A, 2A, 3A, 4A secara berurutan
yaitu : 9, 5, 6, A dan diulang terus menerus. Sedangkan untuk membalik arah putaran dikirim data ke
1A, 2A, 3A, 4A secara berurutan yaitu: A, 6, 5, 9.
Pada bagian input, ‘0’ berarti input dalam keadaan low dengan tegangan sekitar 0,12 Vdc
dan ‘1’ berarti input dalam keadaan high dengan tegangan sekitar 4,98 Vdc.
Dari hasil pengukuran pada tabel 2.8 di atas terlihat motor akan bergerak pada saat En1 dengan
input yang ‘aktif low’ dimana pada saat input low maka tegangan output menjadi rendah, hal ini
meyebabkan motor bergerak karena ada tegangan sebesar 12 Vdc sesuai dengan tegangan kerja
motor. Dengan hasil pengukuran yang diperoleh tersebut maka dapat dikatakan rangkaian driver
motor ini dapat bekerja dengan baik.
3.7.7. Pengukuran Driver Motor DC
Pengujian terhadap rangkaian pengendali Motor DC dilakukan untuk mengetahui kondisi gerbang
dan status motor. Cara pengukuran driver motor DC tersebut terlihat pada gambar 7, dan hasil
pengukuran tegangan keluaran (Vout) driver motor DC dapat dilihat pada tabel 1, dan 2.
Pada pengujian ini keluaran port – port 1.0 dan 1.1 disimulasikan dengan sumber tegangan 5 V
DC dan ground yang dilengkapi dengan saklar S1 untuk port 1.0 dan saklar S2 untuk port 1.1. Data
hasil pengujian terlihat pada tabel berikut
1A 2A Kondisi Gerbang
0 Volt 0 Volt Tertutup
0 Volt 5 Volt Terbuka
Table 2. Hasil pengukuran rangkaian Motor Stepper
Table 3. Hasil pengukuran Motor Gerbang

86
1A 2A Status Motor
0 Volt 0 Volt Motor Off
0 Volt 5 Volt Motor On
Analisa :
Dari table 2.9.1. dan tabel 2.9.2., pengujian diatas dapat dilihat bahwa untuk dapat menset
kondisi gerbang keluaran dari port 1.0 dan port 1.1 harus selalu berlawanan karena kondisi ini akan
menghasilkan beda potensial pada kumparan motor DC. Apabila keluaran port 1.0 dan port 1.1 sama
maka kondisi gerbang sikat akan tetap pada kondisi sebelumnya karena tidak akan menghasilkan beda
potensial pada kumparan motor DC.
Gambar 8. Rangkaian lengkap system pengendali ruang penyikatan pada prototype pencucian mobil
berbasis mikrokontroller at89c51
4. KESIMPULAN
Dari hasil yang diperoleh dan analisa terhadap sistem dapat ditarik beberapa kesimpulan, yaitu :
1. dengan memilih mikrokontroller at89c51 dengan membuat metode pengalamatan dalam
perancangan suatu alat adalah membuat suatu diagram blok, dimana diagram blok ini
berfungsi untuk mempermudah didalam memahami rangkaian dan perakitan alat. Dengan
demikian dalam tahap perancangan dan perakitan alat akan dibuat berdasarkan per-blok
diagram rangkaian, dimana tiap blok rangkaian mempunyai fungsi masing-masing dan satu
sama lain saling berkaitan. Dengan cara kerja ini terdapat 6 penempatan sensor photodioda,
dimana photodiode tersebut bekerja secara parallel dan digunakan untuk melakukan 2 fungsi
yang berbeda. Fungsi pertama dari photodioda untuk membaca tinggi dari sebuah kendaraan,
Table 4. Hasil pengukuran Motor Sikat
Jurnal Maklumatika Vol. 5, No. 1, Juli 2018, hlm. 76 – 87

Halimatussa’diah, System Pengendali Ruang Penyikatan…
87
fungsi kedua photodioda gunanya untuk memantau apakah kendaraan sudah sampai ruang
penyikatan atau belum, dengan menggunakan data sampling sebagai proses penyikatan.
2. Sedang perancangan software listing program dengan menggunakan bahasa assembler yang
khusus untuk keluarga mikrokontroler MCS-51 dibuat dengan sistem prosedur dimana setiap
prosedur mempunyai fungsi tertentu dan secara keseluruhan prosedur membentuk sistem dari
program yang diharapkan. Langkah awal dalam membuat listing program adalah membuat
diagram alur atau flowchart sebagai acuan dasar dalam membuat program. Kemudian setiap
fungsi dari flowchart tersebut dibuat listing programnya. Setelah perancangan baru dilakukan
upload software secara keseluruhan.
3. Rangkaian kontroller ini merupakan jantung dan sebagai pengendali utama seluruh rangkaian,
dimana pengendali menggunakan Mikrokontroler AT89C51, Agar mikrokotroller dapat
bekerja, maka dibutuhkan suatu rangkaian oscillator sebagai pembangkit sinyal clock. Dalam
hal ini digunakan oscillator yang sudah ada dalam mikrokontroler 89C51, hanya dihubungkan
dengan sebuah kristal. Kristal disini digunakan kristal 12 MHz agar mikrokontroler bekerja
dengan kecepatan maksimum.
4. Rangkaian driver motor stepper, Karena output dari mikrokontroler arus dan tegangannya
kecil maka untuk mengendalikan motor dibuat driver, pemancar infra red bekerja dengan
menggunakan 3 buah gebang NAND, rangkaian gerbang NAND bekerja untuk memperkuat
sinyal clock yang dihasilkan oleh rangkaian RC sebelumnya. Pada bagian akhir terdapat
rangkaian switching menggunakan transistor. Dengan demikian rangkaian transmitter infra
red tersebut bekerja tidak dengan konstan akan tetapi bekerja dengan intensitas pancaran yang
dapat diatur, di tambah dengan rangkaian motor DC serta pengukuran driver motor stepper
dan motor DC.
DAFTAR PUSTAKA
Alfa Anindita, Sudjadi & Darjat. 2013. Sistem Informasi Area Parkir Berbasis Mikrokontroler ATMEGA
16. TRANSMISI, 15, (3), 2013, 133.
Firman Syafarudin & Budhi Anto. 2017. Rancang Bangun Saklar Pemindah Otomatis Berpenggerak
Motor Stepper Variable Reluctance Dengan Pengendali Mikrokontroler ATMega8535. Jom
FTEKNIK Volume 4 No.2 Oktober 2017.
Fredy Kurniawan. 2009. Implementasi Mikrokontroler Sebagai Pencacah Berbasis Pengukuran Periode
Isyarat Masukan. Telkomnika Vol. 7, No. 1, April 2009.
Siswo Wardoyo. 2011. Dasar Mikroprosessor” Buku Ajar Universitas Sultan Ageng Tirtayasa,
November 2011.
Zulfikar, Tarmizi, Agus Andria. 2011. Perancangan Pengontrolan Traffic Light Otomatis. Jurnal
Rekayasa ElektrikaVol. 9, No. 3, April 2011.















![GERBANG dan ALJABAR BOOLE.ppt [Read-Only] - ocw.usu.ac.idocw.usu.ac.id/.../tke_113-1_slide_gerbang_dan_aljabar_boole.pdf · GERBANG dan ALJABAR BOOLE Gerbang NOT Berfungsi untuk membalik](https://static.fdokumen.com/doc/165x107/5c85d3b309d3f2ea4b8d2681/gerbang-dan-aljabar-booleppt-read-only-ocwusuacidocwusuacidtke113-1slidegerbangdanaljabarboolepdf.jpg)