Stabilisasi Suhu Heatrig Menggunakan Metode Kontrol Logika ...
10
JURNAL ELKOLIND, SEPTEMBER 2019, VOL.06, N0. 3 55 H Abstrak — Heatrig merupakan alat yang digunakan untuk pengamatan atau pengukuran sensor suhu.Selain itu, heatrig juga dapat digunakan untuk kalibrasi sensor suhu. Suhu yang dihasilkan heatrig disetiap bagian cekungan alumunium berbeda-beda dan tidak stabil.Oleh karena itu dibuatkan alat yang dapat mengatasi permasalahan ketidakstabilan suhu yang dihasilkan heatrig dikarenakan faktor suhu lingkungan dan arus listrik. Alat yang digunakan adalah mikrokontroler sebagai pusat pengendali sistem yang bekerja pada alat, elemen heater dimana panasnya akan menyala disesuaikan dengan alat pengendali sehingga dapat menjaga kestabilan suhu. Sistem kendali yang digunakan adalah kontrol logika Fuzzy.Pada pengambilan data resistansi sensor NTC diketahui bahwa sensor NTC bukan merupakan sensor yang rasponnya linier.Pembacaan sensor dengan menggunakan thermometer dan LCD memilili error total sebesar 0,11%. Pada saat pengambilan data respon heatrig, untuk mencapai suhu 90°C membutuhkan waktu 22,5 menit. Range suhu yang akan dikontrol adalah 25°C sampai 90°C. Setiap setpoint pada suhu 40ºC, 50ºC, 60ºC, 70ºC dan 80ºC akan meberikan respon yang berbeda-beda tetapi tetap stabil. Saat pengujian dengan gangguan, meskipun sistem diberi gangguan respon kontroller masih berjalan dan tetap kembali pada set point suhu yang telah dipilih. Hal ini membuktikan bahwa kontroler Fuzzy (KLF) yang telah direncanakan berhasil. Kata kunci : Heatrig, Kestbilan Suhu, Kontrol Logika Fuzzy I. PENDAHULUAN eatrig merupakan salah satu alat yang terdapat pada laboratorium instrumentasi. Heatrig berfungsi untuk pengamatan atau pengukuran sensor suhu. Selain itu Heatrig juga dapat digunakan untuk kalibrasi sensor suhu. Pada heatrig terdapat tiga bagian.Bagian pertama yaitu heater, heater berfungsi untuk memanaskan rig alumunium. Bagian kedua yaitu rig alumunium, pada bagian rig alumunium terdapat beberapa cekungan yang memiliki suhu berbeda-beda. Cekungan yang letaknya semakin dekat dengan heater menghasilkan suhu yang semakin tinggi, sedangkan cekungan yang letaknya jauh dari heater suhu yang dihasilkan akan berkurang. Bagian ketiga yaitu heatsink, Laily Ratnaningtyas adalah mahasiswa D4 Teknik Elektronika Politeknik Negeri Malang Eka Mandayatma dan Herwandi adalah dosen Jurusan Teknik Elektro Politeknik Negeri Malang heatsink berfungsi untuk menyerap panas atau mengurangi suhu pada ujung lain rig alumunium yang diharapkan pada bagian ini suhunya sama dengan suhu ruang. Suhu yang dihasilkan heatrig tidak stabil. Ketidakstabilan suhu terjadi karena gangguan yang berasal dari suhu lingkungan sekitar, misalnya suhu dalam ruangan, suhu AC (Air Conditioner) yang terdapat didalam ruangan dan arus listrik yang tidak stabil serta pembebanan. Selama ini heatrig yang ada pada laboratorium instrumentasi bekerja tanpa kontrol sehingga menyebabkan ketidakstabilan suhu dan memungkinkan terjadinya banyak kesalahan (error). Berdasarkan permasalahan yang ada akan dirancang sebuah alat yang mampu mengendalikan suhu untuk menstabilkan suhu heatrig. Maka diusulkan judul untuk Skripsi yaitu “Stabilisasi Suhu Heatrig Menggunakan Metode Kontrol Logika Fuzzy (KLF)”. Dengan dirancangnya alat ini diharapkan memberikan keunggulan dalam meningkatkan efisiensi kerja heatrig, diantaranya yaitu dapat mengurangi error suhu yang dihasilkan, serta meningkatkan ketahanan proses dan konsistensi output. II. TINJAUAN PUSTAKA 2.1 Mikrokontroler ATmega32 Microcontroller AVR (Alf and Vegard’s Risc processor) standar memiliki arsitektur 8bit, dimana semua instruksi dikemas dalam kode 16-bit, dan sebagian besar dari instruksi dieksekusi dalam 1 (satu) siklus clock. AVR dikelompokkan menjadi empat kelas, yaitu keluarga ATtiny, keluarga ATSOSxx, keluarga ATmega, dan AT86RFxx. Yang membedakan masing-masing kelas adalah memori. Gambar 1 Konfigurasi Pin ATmega32 Fungsi umum dari susunan pin microcontrollerATmega32 adalah sebagai berikut: Stabilisasi Suhu Heatrig Menggunakan Metode Kontrol Logika Fuzzy (KLF) Laily Ratnaningtyas, Eka Mandayatma, Herwandi
Transcript of Stabilisasi Suhu Heatrig Menggunakan Metode Kontrol Logika ...

JURNAL ELKOLIND, SEPTEMBER 2019, VOL.06, N0. 3
55
H
Abstrak — Heatrig merupakan alat yang digunakan untuk
pengamatan atau pengukuran sensor suhu.Selain itu, heatrig
juga dapat digunakan untuk kalibrasi sensor suhu. Suhu yang
dihasilkan heatrig disetiap bagian cekungan alumunium
berbeda-beda dan tidak stabil.Oleh karena itu dibuatkan alat
yang dapat mengatasi permasalahan ketidakstabilan suhu yang
dihasilkan heatrig dikarenakan faktor suhu lingkungan dan
arus listrik. Alat yang digunakan adalah mikrokontroler
sebagai pusat pengendali sistem yang bekerja pada alat,
elemen heater dimana panasnya akan menyala disesuaikan
dengan alat pengendali sehingga dapat menjaga kestabilan
suhu. Sistem kendali yang digunakan adalah kontrol logika
Fuzzy.Pada pengambilan data resistansi sensor NTC diketahui
bahwa sensor NTC bukan merupakan sensor yang rasponnya
linier.Pembacaan sensor dengan menggunakan thermometer
dan LCD memilili error total sebesar 0,11%. Pada saat
pengambilan data respon heatrig, untuk mencapai suhu 90°C
membutuhkan waktu 22,5 menit. Range suhu yang akan
dikontrol adalah 25°C sampai 90°C. Setiap setpoint pada suhu
40ºC, 50ºC, 60ºC, 70ºC dan 80ºC akan meberikan respon yang
berbeda-beda tetapi tetap stabil. Saat pengujian dengan
gangguan, meskipun sistem diberi gangguan respon kontroller
masih berjalan dan tetap kembali pada set point suhu yang
telah dipilih. Hal ini membuktikan bahwa kontroler Fuzzy
(KLF) yang telah direncanakan berhasil.
Kata kunci : Heatrig, Kestbilan Suhu, Kontrol Logika Fuzzy
I. PENDAHULUAN
eatrig merupakan salah satu alat yang terdapat
pada laboratorium instrumentasi. Heatrig berfungsi
untuk pengamatan atau pengukuran sensor suhu.
Selain itu Heatrig juga dapat digunakan untuk
kalibrasi sensor suhu. Pada heatrig terdapat tiga bagian.Bagian
pertama yaitu heater, heater berfungsi untuk memanaskan rig
alumunium. Bagian kedua yaitu rig alumunium, pada bagian
rig alumunium terdapat beberapa cekungan yang memiliki
suhu berbeda-beda. Cekungan yang letaknya semakin dekat
dengan heater menghasilkan suhu yang semakin tinggi,
sedangkan cekungan yang letaknya jauh dari heater suhu yang
dihasilkan akan berkurang. Bagian ketiga yaitu heatsink,
Laily Ratnaningtyas adalah mahasiswa D4 Teknik Elektronika Politeknik
Negeri Malang
Eka Mandayatma dan Herwandi adalah dosen Jurusan Teknik Elektro
Politeknik Negeri Malang
heatsink berfungsi untuk menyerap panas atau mengurangi
suhu pada ujung lain rig alumunium yang diharapkan pada
bagian ini suhunya sama dengan suhu ruang. Suhu yang
dihasilkan heatrig tidak stabil. Ketidakstabilan suhu terjadi
karena gangguan yang berasal dari suhu lingkungan sekitar,
misalnya suhu dalam ruangan, suhu AC (Air Conditioner)
yang terdapat didalam ruangan dan arus listrik yang tidak
stabil serta pembebanan. Selama ini heatrig yang ada pada
laboratorium instrumentasi bekerja tanpa kontrol sehingga
menyebabkan ketidakstabilan suhu dan memungkinkan
terjadinya banyak kesalahan (error).
Berdasarkan permasalahan yang ada akan dirancang
sebuah alat yang mampu mengendalikan suhu untuk
menstabilkan suhu heatrig. Maka diusulkan judul untuk
Skripsi yaitu “Stabilisasi Suhu Heatrig Menggunakan Metode
Kontrol Logika Fuzzy (KLF)”. Dengan dirancangnya alat ini
diharapkan memberikan keunggulan dalam meningkatkan
efisiensi kerja heatrig, diantaranya yaitu dapat mengurangi
error suhu yang dihasilkan, serta meningkatkan ketahanan
proses dan konsistensi output.
II. TINJAUAN PUSTAKA
2.1 Mikrokontroler ATmega32
Microcontroller AVR (Alf and Vegard’s Risc
processor) standar memiliki arsitektur 8bit, dimana semua
instruksi dikemas dalam kode 16-bit, dan sebagian besar dari
instruksi dieksekusi dalam 1 (satu) siklus clock. AVR
dikelompokkan menjadi empat kelas, yaitu keluarga ATtiny,
keluarga ATSOSxx, keluarga ATmega, dan AT86RFxx.
Yang membedakan masing-masing kelas adalah memori.
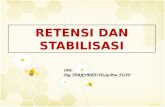
Gambar 1 Konfigurasi Pin ATmega32
Fungsi umum dari susunan pin
microcontrollerATmega32 adalah sebagai berikut:
Stabilisasi Suhu Heatrig Menggunakan Metode
Kontrol Logika Fuzzy (KLF)
Laily Ratnaningtyas, Eka Mandayatma, Herwandi

JURNAL ELKOLIND, SEPTEMBER 2019, VOL.06, N0. 3
56
1. VCC sebagai catu daya positif.
2. GND sebagai pin ground catu daya negatif.
3. Port A (PAO..PA7) merupakan pin I/O dua arah dan
sebagai pin dari ADC.
4. Port B (PBO..PB7) merupakan pin I/O dua arah yang
berfungsi sebagai, timer/counter, komparator analog, dan
SPI.
5. Port C (PCO..PC7) merupakan pin I/O dua arah yang
berfungsi sebagai, TWI, komparator analog, dan timer
osilator.
6. Port D (PDO..PD7) merupakan pin I/O dua arah yang
berfungsi sebagai, komparator analog, interupsi eksternal
dan komunikasi serial.
7. Reset adalah pin yang digunakan untuk me-reset
microcontroller.
8. XTAL 1 dan XTAL 2 adalah pin clock eksternal.
Pada microcontroller membutuhkan sumber (clock) untuk
mengeksekusi instruksi yang ada di memori. Semakin
tinggi nilai kristalnya, maka semakin cepat
microcontroller.
9. AVCC yaitu sebagai pin tegangan untuk ADC.
10. AREF yaitu sebagai pin tegangan referensi.
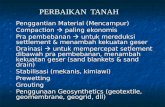
Pada gambar 2 dalam datasheet didasarkan pada
simulasi dan characterization microcontrollers AVR, nilai
tegangan pada ATmega32 adalah CMOS 8-bit daya
rendah. Maka microcontroller akan meningkatkan
Arsitektur RISC, dengan cara mengeksekusi instruksi dalam
satu siklus. ATmega32 mencapai throughputs mendekati 1
MIPS per MHz yang memungkinkan system ini untuk
mengoptimalkan konsumsi daya pada pengolahan kecepatan.
(ATMEL, 2003).
Gambar 2 Diagram Blok Atmega32
2.2 Sensor Suhu NTC
NTC adalah jenis resistor non linier yang besar nilai
hambatannya terpengaruh oleh perubahan suhu. Semakin
tinggi suhu maka semakin kecil nilai hambatannya. NTC
atau termistor mempunyai koefisient negatif yang tinggi,
termistor jenis ini dibuat dari oksida logam yang terdapat
dar golongan transisi, seperti ZrO2 - Y2P3 NiAI2O3
Mg(Al, Cr,Fe). Oksida-oksida ini sebenarnya mempunyai
resistansi yang sangat tinggi, tetapi dapat diubah menjadi
bahan semikonduktor dengan menambahkan beberapa ion
lain yang mempunyai valensi yang berbeda dan disebut
dengan doping. Pengaruh dari resistansinya dipengaruhi
perubahan temperatur yang diberikan.
Gambar 3 Bentuk Fisik NTC
Kebanyakan 56ystem56e5656 digunakan pada daerah
56ystem56e565656 dalam konsentrasi inonisasi (n atau p)
yang berpengaruh pada fungsi 56ystem56e565656. Dimana
energy aktivasi Ea adalah hubungan antara 56ystem gap dan
tingkat impuritas. Dimana nilai hambatan semakin kecil
ketika temperaturnya naik, ini yang biasa disebut
56ystem56e5656 NTC.
Dimana R adalah hambatan pada suhu T, R0 adalah
hambatan awal ketika T0 (pada 56ystem56e565656 ruang),
B merupakan konstanta 56ystem56e5656 dimana besarnya
bergantung dari jenis bahan dan memiliki dimensi yang
sama dengan suhu.
Dengan
yaitu merupakan resistivitas listrik
thermistor. Selain konstanta thermistor (B), sensitivitas (α)
juga dapat menentukan karakteristik dari 56ystem56e5656.
Nilai sensitivitas akan menentukan sejauh mana
56ystem56e5656 yang dibuat dapat dengan cepat mendeteksi
perubahan 56ystem56e565656 lingkunagan 56ystem56e5656.
Termistor yang baik sensitifitasnya lebih besar dari -2,2%/K.
Ciri khas dari harga α adalah sekitar = -5% yang mana 10
kali lebih 56ystem56e56 dari 56ystem56e 56ystem56e565656
resistansi metal. Resistansi dari 56ystem56e5656 berada
didaerah 1 KΩ sampai 10 MΩ.
2.3 Heater (Pemanas)
Heater atau alat pemanas banyak digunakan pada
perangkat elektronik yang sering dipakai untuk memenuhi
kebutuhan sehari-hari.Peralatan tersebut antara lain setrika,
pemanas air, pemanas pada akuarium agar suhu dalam air
tetap terjaga, alat pemagang roti, 56ystem56e56 dan lain
sebagainya.Prinsip kerja dari alat pemanas adalah
mengkonversikan 56ystem listrik menjadi 56ystem panas.Pada
peralatan pemanas tertentu diperlukan pengaturan terhadap
suhu panas yang dihasilkan oleh peralatan tersebut, sehingga
perlu adanya pengontrolan terhadap suhu sesuai dengan
kebutuhan.Pengaturan suhu dari peralatan tersebut masih
bersifat manual sehingga suhu yang dihasilkan tidak stabil dan
tidak sesuai dengan setting point dari nilai suhu yang
diinginkan.Pengaturan suhu yang tidak stabil dapat
menyebabkan kinerja dari 56ystem pemanas tidak bekerja
dengan maksimal. Pada penelitian ini akan dirancang dan
dibuat sebuah 56ystem pengontrolan suhu pada pemanas atau
heater.
2.4 Kontrol Logika Fuzzy
Menurud (Kusumadewi, 2010) Logika Fuzzy adalah:
“Sebuah metodologi berhitung dengan 56ystem56e kata-kata
(linguistic variable) sebagai pengganti berhitung dengan

JURNAL ELKOLIND, SEPTEMBER 2019, VOL.06, N0. 3
57
bilangan. Kata-kata digunakan dalam Fuzzy logic memang
tidak sepresisi bilangan, namun kata-kata jauh lebih dekat
dengan intuisi manusia” [NAB-2009]. Logika Fuzzy pada
dasarnya tidak semua keputusan dapat dijelaskan dengan 0
atau 1, namun ada kondisi diantara keduanya, dan daerah
diantara keduanya inilah yang disebut dengan Fuzzy atau
tersamar. Secara umum ada beberapa konsep 57ystem logika
Fuzzy yaitu sebagai berikut ini:
a. Himpunan tegas merupakan nilai keanggotaan suatu item
dalam suatu himpunan tertentu.
b. Himpunan Fuzzy merupakan suatu himpunan yang
digunakan untuk mengatasi kekakuan dari himpunan tegas.
c. Fungsi keanggotaan yang memiliki interval 0 sampai 1.
d. Variabel linguistic merupakan suatu 57ystem57e yang
memiliki nilai berupa kata-kata yang dinyatakan dalam
bahasa alamiah dan bukan angka.
e. Operasi dasar himpunan Fuzzy merupakan operasi yang
berfungsi untuk menggabungkan atau memodifikasi
himpunan Fuzzy.
f. Aturan (rule) if-then Fuzzy merupakan suatu pernyataan if-
then, yaitu beberapa kata-kata dalam pernyataan tersebut
ditentukan oleh fungsi keanggotaan.
Dalam proses pemanfaatan logika Fuzzy, ada beberapa
hal yang harus diperhatikan salah satunya seperti cara
mengolah input menjadi output melalui 57ystem inferensi
Fuzzy. Metode inferensi Fuzzy yaitu cara merumuskan
pemetaan dari masukan yang diberikan kepada sebuah
keluaran. Proses ini melibatkan fungsi keanggotaan, operasi
logika, dan aturan IF-THEN. Hasil proses ini menghasilkan
sebuah 57ystem yang disebut dengan FIS (Fuzzy Inferensi
System). Dalam logika Fuzzytersedia beberapa jenis FIS
diantaranya adalah Mamdani, Sugeno, dan Tsukamoto.
III. METODOLOGI
3.1 Diagram Blok Sistem
Pada sistem alat untuk mengendalikan suhu heatrig ini
terdapat beberapa komponen elektronik yang saling
terkoneksi, berikut adalah diagram blok yang direncanakan.
Power Supply
ATmega
Push Button LCD
Potensio Multiturn
Sensor Suhu
(NTC)
Driver Heater
Heater
INPUT PROSES OUTPUT
Gambar 4 Diagram Blok Sistem
Penjelasan fungsi dari masing – masing diagram blok
gambar 4 adalah sebagai berikut :
1. Power Supply
Alat ini menggunakan sumber daya listrik sebesar AC 220
Volt.
2. Input
Sensor yang digunakan adalah sensor suhu NTC, sebagai
deteksi panas pada area heater.Potensio digunakan untuk
memasukkan set point suhu yang diinginkan dengan
rentang suhu 25C-90C.
3. Proses
Pada sistem ini menggunakan ATmega32 untuk
memproses hasil pendeteksian sensor. Pada ATmega32 ini
akan ditanamkan program Fuzzy untuk mengendalikan
panas dari heater dengan menggunakan driver heater.
4. Output
LCD digunakan sebagai tampilan masukkan set point
selanjutnya digunakan sebagai tampilan nilai set point dan
suhu yang dibaca oleh sensor NTC. Driver heater
digunakan untuk mengatur panas pada heater.
3.2 Rangkaian Mikrokontroler ATmega32
Mikrokontroler yang digunakan pada perancangan
minimum system (minsys) adalah mikrokontroler ATmega
32.Mikrokontroler ATmega 32 berfungsi sebagai kontroler
dari alat ini. Pemilihan ATmega 32, disesuaikan dengan
kapasitas memori untuk program yang ingin dibuat.
Kemampuan memori penyimpanan pada ATmega 32 ini sudah
mencukupi untuk menyimpan program pada alat ini.
Mikrokontroler ATmega 32 memiliki 40 pin input/output,
dimana jumlah dan fungsi dari setiap pin pada ATmega 32
tersebut sudah sesuai dengan kebutuhan alat ini seperti pin
ADC, PWM, serial, dll.
MEGA32-P Gambar 5 Skema Rangkaian Minimum System
Gambar 5 merupakan skema rangkaian minimum
system.Konfigurasi pin ATmega 32 untuk menunjang sistem
kerja alat ini yaitu sebagai berikut :
a. PORT A0 (ADC 0) digunakan sebagai port untuk ADC
output sensor suhu NTC, port ini akan menerima sinyal
perubahan suhu dari NTC.
b. PORT A6 digunakan sebagai input push button.
c. PORT A7 digunakan sebagai input potensiometer
multiturn yang berfungsi untuk memasukkan nilai set point
suhu yang diinginkan.
d. PORT C0 – C7 digunakan sebagai output LCD 16x2.

JURNAL ELKOLIND, SEPTEMBER 2019, VOL.06, N0. 3
58
e. PORT D5 digunakan sebagai outputdriver heater, port ini
yang nantinya akan memberikan kontrol berupa sinyal
PWM ke heater.
f. VCC dihubungkan dengan sumber tegangan 5 Volt.
g. GND dihubungkan dengan ground power supply.
h. RESET dihubungkan dengan rangkaian reset yang akan
mengakibatkan program akan kembali pada awal ketika
tombol ditekan. Rangkaian reset ini terdiri dari resistor dan
kapasitor yang dihubungkan secara pararel dan terhubung
dengan push button.
i. XTAL 1 dan XTAL 2 digunakan sebagai masukan clock
external dan osilator, yang menghubungkan secara pararel
dengan kristal sebesar 16MHz, dengan nilai C3 dan C4
33pF (Atmel:2007).
j. AVCC merupakan pin masukan untuk tegangan ADC 5
Volt, dihubungkan dengan Vcc.
k. AREF dihubungkan dengan tegangan 5 V. penggunaan
AREF sebesar 5 Volt bertujuan agar output leveling 0 – 5
Volt mampu diolah oleh ADC
3.3 Rangkaian NTC
Berikut merupakan rangkaian yang digunakan untuk
merancang rangkaian jembatan wheatstone dan rangkaian
penguat instrumentasi :
Gambar 6 Rangkaian Jembatan Wheatstone
Gambar 7 Rangkaian Penguat Instrumentasi
3.4 Rangkaian Driver Heater
Berikut ini adalah rangkaian driver heater yang
digunakan :
Gambar 8 Rangkaian Driver Heater
3.5 Perencanaan Sistem Kontrol Logika Fuzzy (KLF)
3.5.1 Perancangan Logika Fuzzy
Pada penelitian ini, sistem kotrol logika fuzzy terdiri atas
dua masukan yaitu nilai error (E) dan error (dE) dan
terdapat satu keluaran yaitu dalam bentuk tegangan yang
digunakan untuk mengatur besarnya tegangan heater.
Error = set point – nilai aktual (1)
dimana,
set poin t : besarnya nilai yang diinginkan
nilai aktual : besarnya nilai sebenarnya/yang terbaca
melalui sensor
Error = error (t) – error (t–1) (2)
dimana,
error (t) : nilai error pada waktu t
error (t–1) : nilai error pada waktu t–1
3.5.2 Fungsi Keanggotaan Masukan
Fungsi keanggotaan untuk error (E) dan error (dE)
dapat dilihat pada gambar 9 dan gambar 10 :
Gambar 9 Fungsi Keanggotaan Error
Gambar 10 Fungsi Keanggotaan Error
3.5.3 Fungsi Keanggotaan Keluaran
Gambar 11 menunjukkan fungsi keanggotaan output
heater.

JURNAL ELKOLIND, SEPTEMBER 2019, VOL.06, N0. 3
59
Gambar 11 Fungsi Keanggotaan Output Heater
3.5.4 Perancangan Rule
Pada tabel 1 menunjukkan perancangan rule fuzzy yang
dibuat :
Tabel 1 Rule Fuzzy
dE
E N Z P
N N N N
Z N Z Z
P Z P P
3.5.5 Defuzzifikasi
Defuzzifikasi yaitu proses untuk mengubah fuzzy output
menjadi crisp output. Hasil defuzzifikasi inilah yang
menentukan besarnya tegangan yang dihasilkan driver heater.
Metode defuzzifikasi yang digunakan pada penelitian ini
adalah Mean Of Maximum (MOM). Pada metode Mean Of
Maximum (MOM) solusi crisp diperoleh dengan cara
mengambil nilai rata-rata domain yang memiliki nilai
meanggotaan maksimum.
3.6 Software
Berikut ini adalah flowchart program yang berguna
untuk melihat alur kerja dari sistem yang dibuat. Mulai
Potensio= PA7
PB = PA6
NTC = PA0
LCD = PC0 – PC7
Heater = PD5
Baca Potensio
Start = 1 ?
Baca Sensor
Proses Fuzzy
Pengaktifan Heater
Stop = 1 ?
Selesai
Ya
Tidak
Ya
Tidak
Gambar 12 Flowchart Program
3.7 Perancangan Mekanik
Perancangan mekanik yang dimaksud adalah suatu
bagian yang berfungsi untuk melindungi bagian elektrik dan
untuk meningkatkan penampilan dari alat.Box electric berisi
rangkaian dari sistem yang meliputi rangkaian NTC,
rangkaian mikrokontroler, driver heater, push button,
potensiometer multiturn, LCD. Box electric terbuat dari
akrilik bening yang berukuran 24cm x 16,6cm x 11,5cm (P x
L x T), dengan desain seperti pada Gambar 3.4 dibawah ini.
Gambar 13 Desain Perancangan Mekanik
IV. HASIL DAN ANALISA
4.1 Pengujian Perblok Sistem
4.1.1 Pengujian Sensor NTC
Pada pengujian sensor suhu NTC (Negative Coefisien
Temperature) terbagi menjadi beberapa pengambilan data,
yaitu :
1. Pengambilan data resistansi sensor NTC
Pada peneltian ini penulis menggunakan NTC yang
memiliki kapasitas 10KΩ (RNTC).
Tabel 2 Pengambilan data resistansi sensor NTC
No. Suhu
(°C)
Resistansi
(KΩ)
Resistansi
Datasheet (KΩ)
Error
(%)
1. 25 9,1 10 9
2. 30 7,5 8,315 9,802
3. 35 6,35 6,948 8,607
4. 40 5,4 5,834 7,439
5. 45 4,6 4,917 6,447
6. 50 3,9 4,161 6,273
7. 55 3,4 3,535 3,819
8. 60 2,7 3,014 10,418
9. 65 2,3 2,356 11,06
10. 70 1,9 2,228 17,722
11. 75 1,7 1,925 11,688
12. 80 1,5 1,669 10,126
13. 85 1,3 1,452 10,468
14. 90 1,2 1,268 5,363
Dari tabel 2 , dapat dianalisis bahwa perbedaan besar
resistansi hasil pengukuran dengan data sheet menghasilkan

JURNAL ELKOLIND, SEPTEMBER 2019, VOL.06, N0. 3
60
error rata-rata yaitu 8,945%. Selain itu, untuk menentukan
besar nilai R1, R2, dan R4 berdasarkan dari besar resistansi
sensor NTC pada suhu ruangan. Dilihat dari tabel 4.1, pada
suhu 25°C besar resistansi sensor NTC (RNTC) adalah 9,1 KΩ,
maka besar R1, R2, dan R4 adalah 9,1 KΩ. Berikut ini adalah
rangkaian jembatan wheatstone yang telah dibuat:
Gambar 14 Rangkaian Jembatan Wheatstone
Gambar 15 Lay Out Jembatan Wheatstone
Besar resistansi pada sensor NTC berubah-ubah karena
dipengaruhi oleh besar suhu yang berubah-ubah.Besar
tegangan pada VOUT2 tidak berubah-ubah karena resistansi R2
dan R4 tetap. Sedangkan besar tegangan pada VOUT1akan
berubah-ubah dikarenakan resistansi RNTC yang berubah-ubah
mengikuti suhu disekitar sensor NTC walaupun resistansi R1
tetap. Maka dari itu, untuk perhitungan pada titik OUT-1 yaitu
a. Pada suhu 25°C, resistansi NTC adalah 9,1 KΩ
b. Pada suhu 90°C, resistansi NTC adalah 1,2 KΩ
Karena pada peneltian ini penulis menggunakan set
point 25°C sampai 90°C, maka resistansi NTC dari
perhitungan diatas diambil berdasarkan suhu terendah dan
suhu tertinggi pada set point yang diinginkan. Berikut rumus
untuk mengetahui besar tegangan output maksimal jembatan
wheatstone :
Dari perhitungan diatas didapat jembatan
wheatstone adalah . Pada penelitian ini penulis
mengiinginkan sebesar . Maka, untuk
mencapan tegangan keluaran rangkaian wheatstone
harus dikuatkan menggunakan penguat instrumentasi. Berikut
adalah perhitungan untuk membuat rangkaian penguat
instrumentasi :
Pengali (AV)
= 1,0865
| |
| |
√
√
9074,85 Ω 9,075 KΩ
Untuk mempermudah dalam proses pembacaan dan
analisa maka dari tabel 4.1 dapat dibuat dalam bentuk grafik
yang di bawah ini:
Gambar 16 Grafik Karakteristik Sensor NTC
Dari garafik diatas, dapat membuktikan bahwa
karakteristik sensor NTC adalah semakin rendah suhu maka
resistansi NTC akan semakin besar dan semakin tinggi suhu
maka resistansi NTC akan semakin kecil. Sensor NTC juga
bukan merupakan sensor yang responnya linier.
Tabel 3 Pengambilan data suhu thermometer dan LCD
No. Thermometer
(°C) LCD Error (%)
1. 30 29 3,333
2. 35 35 0
3. 40 41 2,5
4. 45 45 0
5. 50 51 2
6. 55 55 0
7. 60 60 0
8. 65 63 3,077
9. 70 68 2,857
10. 75 71 5,333
11. 80 78 2,5
12. 85 84 1,176
Dari tabel 3, perbandingan pembacaan sensor
menggunakan thermometer dan LCD memiliki selisih yang

JURNAL ELKOLIND, SEPTEMBER 2019, VOL.06, N0. 3
61
tidak jauh, rata-rata error dari kedua pembacaan thermometer
dan LCD adalah 1,898%.
2. Pengambilan data rangkaian penguat instrumentasi
Tabel 4 Pengambilan data rangkaian pengkondisi sinyal
No. Suhu
(°C)
VA
(V)
VB
(V)
VAB
(V)
VO
(V)
1. 25 5,1 5,1 0 0
2. 30 4,7 5,1 0,4 0,5
3. 35 4,3 5,1 0,8 1
4. 40 3,8 5,1 1,3 1,5
5. 45 3,4 5,1 1,7 2
6. 50 3,1 5,1 2 2,5
7. 55 2,7 5,1 2,4 3
8. 60 2,3 5,1 2,8 3,4
9. 65 2,1 5,1 3 3,8
10. 70 1,9 5,1 3,2 4
11. 75 1,6 5,1 3,5 4,3
12. 80 1,5 5,1 3,6 4,6
13. 85 1,3 5,1 3,8 4,7
14. 90 1,1 5,1 4 4,97
Untuk mempermudah dalam proses pembacaan dan
analisa maka dari tabel 4 dapat dibuat dalam bentuk grafik
yang di bawah ini:
Gambar 16 Grafik VA(V)
Gambar 17 Grafik VAB(V)
Gambar 18 Grafik VO(V)
Dari gambar 16-18, terdapat ketidak linieran sensor pada
suhu 60°C sampai 90°C karena dipengaruhi oleh keluaran
jembatan (VAB), yang mana terlihat pada gambar 18 terlihat
adanya ketidak linieran sensor pada suhu 60°C sampai 90°C.
Ini dapat membuktikan bahwapengkondisi sinyal akan
menguatkan data atau tegangan pada VAB.
Jika dilihat dari karakteristik sensor yang digunakan
(NTC) pada gambar 16, menunjukkan bahwa output dari
sensor sudah tidak linier yang menyebabkan output
pengkondisi sinyal juga tidak linier.
4.1.2 Pengujian Mikrokontroller
Hasil pengujian dapat dilihat pada tabel 5
Tabel 5 Pengukuran Tegangan Pin Mikrokontroler
No. ATmega32 Tegangan Keterangan
1. Port A 5 V Baik
2. Port B 5 V Baik
3. Port C 5 V Baik
4. Port D 5 V Baik
Berikut ini adalah lay out minimum system yang telah
dibuat
4.1.3 Pengujian Respon Heatrig
Berikut ini merupakan grafik hasil pengujian heater
tanpa menggunakan kontrol logika fuzzy :
Gambar 19 Grafik Respon Heater Tanpa Kontrol
Hasil dari gambar 19 diperoleh dengan time sampling
setiap 15 detik. Terdapat 3 tempat peletakan thermometer
dalam pengujian dengan waktu yang sama yaitu thermometer
diletakkan didekat heater, thermometer diletakkan dibagian
tengah rig, dan thermometer diletakkan didekat heatsink.

JURNAL ELKOLIND, SEPTEMBER 2019, VOL.06, N0. 3
62
Thermometer yang diletakkan didekat heater jika dalam
kondisi heatrig dinyalakan terus menerus dapat mencapai suhu
90°C.Thermometer yang diletakkan ditengah rig jika dalam
kondisi heatrig dinyalakan terus menerus dapat mencapai suhu
maksimum 56°C. Sedangkan, thermometer yang diletakkan
didekat heatsink jika dalam kondisi heatrig dinyalakan terus
menerus dapat mencapai suhu maksimum 40°C.
Dari data tersebut, pada penelitian ini yang akan
distabilkan suhunya yaitu pada bagian didekat heater
dikarenakan range suhu yang diinginkan adalah 25°C sampai
90°C.
4.1.4 Pengujian Driver Heater
Rangkaian driver pada modul skripsi ini berfungsi
sebagai kontak dari tegangan DC ke tegangan AC. Prinsip
kerjanya dengan memanfaatkan fungsi MOC 3041 yaitu,
ketika MOC 3041 mendapat tegangan dari mikrokontroller
maka akan saturasi sehingga dapat menghidupkan triac
BT138 dengan kontak AC. Dan ketika MOC tidak
mendapatkan tegangan sehingga triac akan mati karena
Gate tidak mendapatkan tegangan dari MOC.
Untuk perhitungan mencari besar resistansi R4
menggunakan persamaan berikut :
R4
R4
R4 Ω
Berikut ini adalah rangkaian driver heater yang telah
dibuat:
Gambar 20 Rangkaian Driver Heater
Untuk menghitung hasil tegangan output yang dihasilkan
driver heater menggunakan rumus berikut :
VOUT VIN 100%
Berikut adalah hasil pengujian driver heater tanpa
metode kontrol logika fuzzy :
Tabel 6 Pengujian Driver
N
o
Duty
Cycle
VOUT
(V)
Hitung
VOUT
(V)
Hasil
T1
(°C)
T2
(°C)
T3
(°C)
1 10% 22 30 45 35 29
2 20% 44 90 52 38 30
3 30% 66 110 60 40 30,5
4 40% 88 130 69 44 31
5 50% 110 160 73 47 32
6 60% 132 180 78 49 32,5
7 70% 154 200 84 51 33
8 80% 176 210 92 55 34
9 90% 198 220 98 57 35
1
0 100% 220 220 99 58 35,5
Dari data tabel 6 dapat dianalisa bahwa semakin kecil
duty cycleakan menyebabkan tegangan yang dihasilkan driver
heater juga semakin kecil. Jika tegangan yang dihasilkan
driver heater kecil maka daya heater yang dihasilkan juga
kecil, sehingga suhu heater akan rendah.
4.2 Pengujian Sistem
4.2.1 Pengujian Tanpa Gangguan
a. Pengujian pada suhu 40ºC
Grafik hasil pengujian sistem pada suhu 40ºC dapat
dilihat pada gambar 4.13
Gambar 21 Grafik Respon Sistem Suhu 40ºC
Dari hasil pengujian sistem dengan suhu 40°C
didapatkan grafik seperti pada gambar 21, sehingga
didapatkan analisa sebagai berikut:
1. Waktu tunda (delay time) : td = 2,27 menit.
2. Waktu naik (rise time) : tr = 0,169 menit.
3. Waktu puncak (peak time) : tp = 7,209 menit.
4. Overshoot maksimum (maximum overshoot) : Mp
=41,6°C. Biasanya dirumuskan dalam presentase :
5. Waktu settling (settling time) : ts = 2,321 menit.
b. Pengujian pada suhu 50ºC
Grafik hasil pengujian sistem pada suhu 50ºC dapat
dilihat pada gambar 4.8
Gambar 22 Grafik Respon Sistem Suhu 50ºC
Dari hasil pengujian sistem dengan suhu 50°C
didapatkan grafik seperti pada gambar 22, sehingga
didapatkan analisa sebagai berikut:
1. Waktu tunda (delay time) : td = 2,12 menit.

JURNAL ELKOLIND, SEPTEMBER 2019, VOL.06, N0. 3
63
2. Waktu naik (rise time) : tr = 0,446 menit.
3. Waktu puncak (peak time) : tp = 6,044 menit.
4. Overshoot maksimum (maximum overshoot) : Mp =
50,5°C.Biasanya dirumuskan dalam presentase :
5. Waktu settling (settling time) : ts = 3,795 menit.
c. Pengujian pada suhu 60ºC
Gambar 23 Grafik Respon Sistem Suhu 60ºC
Dari hasil pengujian sistem dengan suhu 60°C
didapatkan grafik seperti pada gambar 23, sehingga
didapatkan analisa sebagai berikut:
1. Waktu tunda (delay time) : td = 3,588 menit.
2. Waktu naik (rise time) : tr = 0,396 menit.
3. Waktu settling (settling time) : ts = 5,147 menit.
d. Pengujian pada suhu 70ºC
Grafik hasil pengujian sistem pada suhu 70ºC dapat dilihat
pada gambar 24
Gambar 24 Grafik Respon Sistem Suhu 70ºC
e. Pengujian pada suhu 80ºC
Grafik hasil pengujian sistem pada suhu 80ºC dapat
dilihat pada gambar 25
Gambar 25 Grafik Respon Sistem Suhu 80ºC
Pada gambar24 dan gambar 25, grafik respon sistem
suhu 70°C dan 80ºC tidak mencapai set point.Tidak
tercapainya suhu yang diinginkan tersebut karena dipengaruhi
suhu luar ruangan atau pada saat pengambilan data berada di
ruang terbuka yang kondisinya berangin.
4.2.2 Pengujian dengan Gangguan
Gambar 26 Grafik Respon Sistem Suhu 50ºC dengan
Gangguan
Dari hasil pengujian sistem dengan suhu 50°C yang
diberikan gangguan didapatkan grafik seperti pada gambar 26,
sehingga didapatkan analisa sebagai berikut:
Respon sistem pada suhu 50°C dengan ditambahkannya
gangguan berupa penambahan air pada tabung heatrig dapat
membuktikan bahwa kontrol logika fuzzy berjalan dengan
baik. Pada saat suhu telah mencapai setpoint 50°C dan
diberikan gangguan dengan menurunkan suhu menjadi 30°C,
maka kontrol logika fuzzy akan memerintahkan driver heater
untuk menambah tengangan untuk memanaskan heater.
V. PENUTUP
5.1 Kesimpulan
Dari hasil perancangan serta pengujian yang telah
dilakukan dapat diambil kesimpulan bahwa :
1. Perancangan kontrol logika fuzzy (KLF) sebagai
pengendali suhu pada heatrig menggunakan metode
mamdani. Sistem kotrol logika fuzzy terdiri atas dua
masukan yaitu nilai error (E) dan error (dE) dan
terdapat satu keluaran untuk mengatur besarnya tegangan
heater. Pada perancangan rule, terdapat 9 aturan yang
dihasilkan dari kombinasi antara 3 variabel yaitu Negative
(N), Zero (Z), dan Positive (P).
2. Pembuatan alat yang dapat mengatur suhu pada proses
stabilisasi suhu heatrig secara efektif dan efisien dalam
penggunaannya dilakukan dengan menggunakan kontrol
logika fuzzy yang ditanamkan pada mikrokontroler
ATmega32 untuk mengatur aktuator berupa heater, dan
sensor NTC sebagai pembaca suhu yang dihasilkan.
3. Penggunaan kontrol logika fuzzy dapat meningkatkan
efisiensi kerja pada heatrig, diantaranya yaitu mengurangi
error suhu yangdihasilkan, serta meningkatkan ketahanan
proses dan konsistensi output sehingga diperoleh suhu
heatrig yang stabil. Pada pengujian sistem tanpa gangguan,
diperoleh hasil yang paling baik yaitu pada set point 40°C
dikarenakan besar overshoot dan undershoot yang

JURNAL ELKOLIND, SEPTEMBER 2019, VOL.06, N0. 3
64
dihasilkan kecil. Saat pengujian dengan gangguan,
meskipun sistem diberi gangguan respon kontroler masih
berjalan dan tetap kembali pada set point suhu yang telah
dipilih. Hal ini membuktikan bahwa kontroler fuzzy (KLF)
yang telah direncanakan berhasil.
5.2 Saran
Rancangan yang telah dibuat ini masih perlu adanya
perbaikan agar dapat bekerja secaraoptimal. Untuk
pengembangan lebih lanjut yang dapat dilakukan diantaranya:
1. Menggunakan heater yang dayanya lebih besar agar
responnya lebih cepat dan dapat mencapai suhu 100°C.
DAFTAR PUSTAKA
[1] Arissandi, Rizky. 2014. Implementasi Kontrol Logika Fuzzy(KLF)
sebagai Pengendali Suhu Sistem Pasteurisasi Kuning Telur Cair
Berbasis Mikrokontroler Arduino. Program Sarjana. Universitas
Brawijaya. Malang.
[2] Dicarara, Marina. 2014. Implementasi Pengendalian Suhu pada Sistem
Fermentasi Susu dengan Kontrol Logika FuzzyBerbasis Mikrokontroler
Arduino Mega. Program Sarjana. Universitas Brawijaya. Malang.
[3] Fadhila, Erwin dkk.2014. Pengendalian Suhu Berbasis Mikrokontroler
pada Ruang Penetas Telur.Program Sarjana.Institut Teknologi
Nasional. Bandung.
[4] Kusumadewi, Sri & Purnomo, Hari. (2004). Aplikasi Logika Fuzzy
Untuk Sistem Pendukung Keputusan Edisi Pertama.Yogyakarta: Graha
Ilmu.
[5] Kusumadewi, Sri & Hartati, Sri. (2006). Neuro Fuzzy-Integrasi Sistem
Fuzzy dan Jaringan Syaraf.Yogyakarta: Graha Ilmu.
[6] Putra, Achmad Rochman dkk. 2013. Sistem Pengendalian Suhu pada
Tungku Bakar Menggunakan Kontrol Logika Fuzzy. Program Sarjana.
Universitas Brawijaya. Malang.
[7] Romadhan, Setiawan dkk.2014. Menggunakan Kontrol Fuzzyuntuk
Pengaturan SuhuCairan Berbasis Atmega16.Program Sarjana.
Universitas Diponegoro. Semarang.
[8] Rusdi, Akhbar Prachaessardhi. 2014. Sistem Pengendalian Suhu pada
Proses Distilasi Vakum Bioetanol Menggunakan Kontrol Logika Fuzzy.
Program Sarjana. Universitas Brawijaya. Malang.