SDH Primer
73
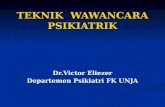
7/28/2019 SDH Primer http://slidepdf.com/reader/full/sdh-primer 1/73 SDH Primer 16/2/97 Telecommunications Standards Primer x What is SDH? This document is intended as an introductory guide to the Synchronous Digital Hierarchy (SDH) multiplexing standard. Standards in the telecommunications field are always evolving. Information in this SDH primer is based on the latest information available from the ITU-T standardisation organization. Use this primer as an introduction to the technology of SDH. Consult the actual material from ITU-T, paying particular attention to the latest revision, if more detailed information is required. For help in understanding the language of SDH telecommunications, a comprehensive List of Terms appears at the end of this document. The STM-1 frame is the basic transmission format for SDH. The frame lasts for 125 microseconds, therefore, there are 8000 frames per second. The STM-1 frame consists of overhead plus a virtual container capacity. The first 9 columns of each frame make up the Section Overhead, and the last 261 columns make up the Virtual Container (VC) capacity. The VC plus the pointers (H1, H2, H3 bytes) is called the AU (Administrative Unit). Carried within the VC capacity, which has its own frame structure of 9 rows and 261 columns, is the Path Overhead and the Container. The first column is for Path Overhead, it is followed by the payload container, which can itself carry further containers. 9 Rows Administrative Unit Capacity of the Virtual Container + Pointers 1 2 3 4 5 6 7 8 9 Regenerator Section Overhead Multiplex Section Overhead H3 H1 H2 Pointers STM-1 = 270 Columns (2430 bytes) 1 byte = One 64 kbit/s channel H1H1H1H2H2 H2H3H3H3 Frame = 125 s µ Frame = 125 s µ Frame = 125 s µ Overhead width = 9 columns SDH Primer 16/2/97
-
Upload
ashok-chavhan -
Category
Documents
-
view
242 -
download
0
Transcript of SDH Primer

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 1/73
SDH Primer 16/2/97
Telecommunications Standards Primer
x
What is SDH?
This document is intended as an introductory guide to the Synchronous Digital Hierarchy (SDH)multiplexing standard.
Standards in the telecommunications field are always evolving. Information in this SDH primer is based on the latest information available from the ITU-T standardisation organization.
Use this primer as an introduction to the technology of SDH. Consult the actual material fromITU-T, paying particular attention to the latest revision, if more detailed information is required.
For help in understanding the language of SDH telecommunications, a comprehensive List of Terms appears at the end of this document.
The STM-1 frame is the basic transmission format for SDH. The frame lasts for 125 microseconds, therefore,there are 8000 frames per second.
The STM-1 frame consists of overhead plus a virtual container capacity. The first 9 columns of each frame make upthe Section Overhead, and the last 261 columns make up the Virtual Container (VC) capacity. The VC plus the
pointers (H1, H2, H3 bytes) is called the AU (Administrative Unit).
Carried within the VC capacity, which has its own frame structure of 9 rows and 261 columns, is the Path Overhead and the Container. The first column is for Path Overhead, it is followed by the payload container, which can itself carry further containers.
9 Rows
Administrative Unit
Capacity of the
Virtual Container
+
Pointers
1
2
3
4
5
6
7
8
9
Regenerator SectionOverhead
MultiplexSection
Overhead
H3H1 H2Pointers
STM-1 = 270 Columns (2430 bytes)
1 byte = One 64 kbit/s channel
H1H1H1H2H2 H2H3H3H3
Frame = 125 sµ Frame = 125 sµFrame = 125 sµ
Overhead width = 9 columns
SDH Primer 16/2/97

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 2/73
Virtual Containers can have any phase alignment within the Administrative Unit, and this alignment is indicated by the Pointer in row four, as will be described later in the Pointers section. Within the Section Overhead, the first threerows are used for the Regenerator Section Overhead, and the last 5 rows are used for the Multiplex SectionOverhead.
The STM frame is transmitted in a byte-serial fashion, row-by-row, and is scrambled immediately prior totransmission to ensure adequate clock timing content for downstream regenerators.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 3/73
Contents
Contents
Page
SDH Primer 36/2/97

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 4/73
Contents
List of Figures
SDH Primer 46/2/97

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 5/73
Introduction
SDH (Synchronous Digital Hierarchy) is a standard for telecommunications transport formulated by the International Telecommunication Union (ITU), previously called the InternationalTelegraph and Telephone Consultative Committee (CCITT).
SDH was first introduced into the telecommunications network in 1992 and has been deployed atrapid rates since then. It is deployed at all levels of the network infrastructure, including theaccess network, and the long-distance trunk network. It is based on overlaying a synchronousmultiplexed signal onto a light stream transmitted over fibre-optic cable. SDH is also defined for use on radio relay links, satellite links, and at electrical interfaces between equipment.
The comprehensive SDH standard is expected to provide the transport infrastructure for worldwide telecommunications for at least the next two or three decades.
The increased configuration flexibility and bandwidth availability of SDH provides significantadvantages over the older telecommunications system. These advantages include:
• A reduction in equipment requirements and an increase in network reliability.
• The provision of overhead and payload bytes - the overhead bytes permitting
management of the payload bytes on an individual basis and facilitatingcentralised fault sectionalisation.
• The definition of a synchronous multiplexing format for carrying lower-level digital
signals (such as 2 Mbit/s, 34 Mbit/s, 140 Mbit/s) which greatly simplifies theinterface to digital switches, digital cross-connects, and add-drop multiplexers.
• The availability of a set of generic standards, which enable products from different
vendors to be connected and inter-operated.
• The definition of a flexible architecture capable of accommodating future applications,
with a variety of transmission rates.
In brief, SDH defines synchronous transport modules (STMs) for the fibre-optic basedtransmission hierarchy.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 6/73
Introduction
Background
Before SDH, the first generations of fibre-optic systems in the public telephone network used
proprietary architectures, equipment, line codes, multiplexing formats, and maintenance procedures. The users of this equipment wanted standards so they could mix and matchequipment from different suppliers. The task of creating such a standard was taken up in 1984 bythe Exchange Carriers Standards Association (ECSA) in the U.S. to establish a standard for connecting one fibre system to another. In the late stages of the development, the CCITT becameinvolved so that a single international standard might be developed for fibre interconnect betweentelephone networks of different countries. The resulting international standard is known asSynchronous Digital Hierarchy (SDH).
Synchronisation of Digital Signals
To understand correctly the concepts and details of SDH, it is important to be clear about themeaning of Synchronous, Plesiochronous, and Asynchronous.
In a set of Synchronous signals, the digital transitions in the signals occur at exactly the samerate. There may however be a phase difference between the transitions of the two signals, and thiswould lie within specified limits. These phase differences may be due to propagation time delays,or wander introduced in the transmission network. In a synchronous network, all the clocks are
traceable to one Primary Reference Clock (PRC). The accuracy of the PRC is better than ±1 in
1011 and is derived from a cesium atomic standard.
If two digital signals are Plesiochronous, then their transitions occur at "almost" the same rate,
with any variation being constrained within tight limits. These limits are set down in ITU-Trecommendation G.811. For example, if two networks need to interwork, their clocks may bederived from two different PRCs. Although these clocks are extremely accurate, there is a smallfrequency difference between one clock and the other. This is known as a plesiochronousdifference.
In the case of Asynchronous signals, the transitions of the signals do not necessarily occur at thesame nominal rate. Asynchronous, in this case, means that the difference between two clocks ismuch greater than a plesiochronous difference. For example, if two clocks are derived from free-running quartz oscillators, they could be described as asynchronous.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 7/73
Introduction
SDH Advantages
The primary reason for the creation of SDH was to provide a long-term solution for an optical
mid-span meet between vendors, that is, to allow equipment from different vendors tocommunicate with each other. This ability is referred to as multi-vendor interworking and allowsone SDH-compatible network element to communicate with another, and to replace severalnetwork elements, which may have previously existed solely for interface purposes.
The second major advantage of SDH is the fact that it is synchronous. Currently, most fibre andmultiplex systems are plesiochronous. This means that the timing may vary from equipment toequipment because they are synchronised from different network clocks. In order to multiplex thistype of signal, a process known as bit-stuffing is used. Bit-stuffing adds extra bits to bring allinput signals up to some common bit-rate, thereby requiring multi-stage multiplexing anddemultiplexing. Because SDH is synchronous, it allows single-stage multiplexing anddemultiplexing. This single-stage multiplexing eliminates hardware complexity, thus decreasing
the cost of equipment while improving signal quality.
In plesiochronous networks, an entire signal had to be demultiplexed in order to access a particular channel, then the non-accessed channels had to be re-multiplexed back together in order to be sent further along the network to their proper destination. In SDH format, only thosechannels that are required at a particular point are demultiplexed, thereby eliminating the need for back-to-back multiplexing. In other words, SDH makes individual channels “visible” and they caneasily be added and dropped.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 8/73
Plesiochronous Digital Hierarchy (PDH)
Traditionally, digital transmission systems and hierarchies have been based on multiplexing signalswhich are plesiochronous (running at almost the same speed). Also, various parts of the world use
different hierarchies which lead to problems of international interworking, for example, betweenthose countries using 1.544 Mbit/s systems (U.S.A. and Japan) and those using the 2.048 Mbit/ssystem.
To recover a 64 kbit/s channel from a 140 Mbit/s PDH signal, it is necessary to demultiplex thesignal all the way down to the 2 Mbit/s level before the location of the 64 kbit/s channel can beidentified. PDH requires "steps" (140-34, 34-8, 8-2 demultiplex; 2-8, 8-34, 34-140 multiplex) todrop out or add an individual speech or data channel. This is due to the bit-stuffing used at eachlevel.
140-34 DEMUX
34-8 DEMUX
8-2 DEMUX
34-140 MUX
8-34 MUX
2-8 MUX
140 Mb/s 140 Mb/s
8 Mb/s
2 Mb/s
34 Mb/s
Drop & Add
8 Mb/s
34 Mb/s
Figure 1 PDH multiplexing by steps, showing add/drop function
Limitations of PDH Network
The main limitations of PDH are:
• Inability to identify individual channels in a higher-order bit stream;
• Insufficient capacity for network management;
• Most PDH network management is proprietary;
• There is no standardised definition of PDH bit rates greater than 140 Mbit/s; and,
• There are different hierarchies in use around the world. Specialized interface
equipment is required to interwork the two hierarchies.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 9/73
Basic SDH Signal
The basic format of an SDH signal allows it to carry many different services in its VirtualContainer (VC) because it is bandwidth-flexible. This capability will allow for such things as thetransmission of high-speed, packet-switched services, ATM, contribution video and distributionvideo. However, SDH still permits transport and networking at the 2 Mbit/s, 34 Mbit/s and140 Mbit/s levels, accommodating the existing digital hierarchy signals. In addition, SDHsupports the transport of signals based on the 1.5 Mbit/s hierarchy.
Transmission Hierarchies
Following ANSI’s development of the SONET standard, the ITU-T undertook to define astandard that would address interworking between the 2048 kbit/s and 1554 kbit/s transmissionhierarchies. That effort culminated in 1989 with ITU-T’s publication of the Synchronous DigitalHierarchy (SDH) standards.
The tables below compare the Non-synchronous and Synchronous transmission hierarchies.
Table 1. Non-Synchronous Hierarchy
SignalDigital Bit RateChannels64 kbit/s64 kbit/sOne 64 kbit/sE12.048 Mbit/s32 E0E28.448 Mbit/s128E0E334.368 Mbit/s16 E1E4139.264 Mbit/s64 E1
Table 2. SDH Hierarchy
Bit RateAbbr.SDHSDH Capacity51.840 Mbit/s51 Mbit/sSTM-021 E1155.520 Mbit/s155 Mbit/sSTM-163E1 or 1 E4622.080 Mbit/s622 Mbit/sSTM-4252 E1 or 4 E42488.320 Mbit/s2.4 Gbit/sSTM-161008 E1 or 16 E49953.280 Mbit/s10 Gbit/sSTM-644032 E1 or 64 E4STM = Synchronous Transport Module

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 10/73
Why Synchronise?
Synchronous versus Asynchronous
Traditionally, transmission systems have been asynchronous, with each terminal in the network running on its own recovered clock timing. In digital transmission, "timing" is one of the mostfundamental operations.
Since these clocks are not synchronised, large variations can occur in the clock rate and thus the
signal bit rate. For example, a E3 signal specified at 34 Mbit/s ± 20 ppm (parts per million) can
produce a timing difference of up to 1789 bit/s between one incoming E3 signal and another.
Asynchronous multiplexing uses multiple stages. Signals such as asynchronous E1s (2 Mbit/s) aremultiplexed (bit-interleaving), extra bits are added (bit-stuffing) to account for the variations of each individual stream and are combined with other bits (framing bits) to form an E2 (8 Mbit/s)stream. Bit-interleaving and bit-stuffing is used again to multiplex up to E3 (34 Mbit/s). The E1sare neither visible nor accessible within an E3 frame. E3s are multiplexed up to higher rates in thesame manner. At the higher asynchronous rate, they cannot be accessed without demultiplexing.
In a synchronous system, such as SDH, the average frequency of all clocks in the system will bethe same. Every slave clock can be traced back to a highly stable reference clock. Thus, theSTM-1 rate remains at a nominal 155.52 Mbit/s, allowing many synchronous STM-1 signals to bemultiplexed without any bit-stuffing. Thus, the STM-1s are easily accessed at a higher
STM− N rate.
Low-speed synchronous virtual container (VC) signals are also simple to interleave and transportat higher rates. At low speeds, 2.048 Mbit/s E1 signals are transported within synchronous
VC-12 signals which run at a constant rate of 2.304 Mbit/s. Single-step multiplexing up toSTM-1 requires no bit-stuffing and VCs are easily accessed.
A mechanism known as "pointers" accommodates differences in the reference source frequenciesand phase wander, and so prevents data loss during synchronisation failures. This is discussed inmore detail later in this primer.
Synchronisation Hierarchy
Digital switches and digital cross-connect systems are commonly employed in the digital network synchronisation hierarchy. The network is organized with a master-slave relationship with clocks
of the higher level nodes feeding timing signals to clocks of the lower level nodes. All nodes can be traced up to a Primary Reference Clock (PRC).

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 11/73
Why Synchronise?
Synchronising SDH
The internal clock of an SDH terminal may derive its timing signal from a Synchronisation SupplyUnit (SSU) used by switching systems and other equipment. Thus, this terminal can serve as a
master for other SDH nodes, providing timing on its outgoing STM− N signal. Other SDH nodes
will operate in a slave mode with their internal clocks timed by the incoming STM − N signal.
Present standards specify that an SDH network must ultimately be able to derive its timing from aPrimary Reference Clock (PRC).
This is a time of great change for Timing and Synchronisation in the network and there are manychallenges for operators and suppliers - and many issues to resolve:
• Synchronisation networks are changing with the introduction of SDH; the historical PDH-
based sync network will be replaced by an SDH-based architecture.
• New equipment, network timing, and sync standards have been developed (Tektronix is
contributing expertise at ITU and ETSI).
• Transport networks are evolving and hybrid SDH/PDH has specific problems due to the
quantisation of network phase variation as pointer justifications.
• New services like video and ATM depend on excellent timing and network sync to deliver
good Quality of Service.
• Jitter/Wander measurement technology is changing from analogue to digital, leading to
dramatically new instrument capabilities.
• New test equipment standards are being developed (Tektronix is taking a leading role at ITU).
These and many other timing and sync issues are addressed in another publication from Tektronix:“ Performance Assessment of Timing and Synchronisation in Broadband Networks”. Copies can be requested from Tektronix offices around the world, or by Internet email [email protected].

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 12/73
Frame Format Structure
The STM-1 frame is the basic transmission format for SDH. The frame lasts for
125 microseconds, therefore, there are 8000 frames per second.
The STM-1 frame consists of overhead plus a virtual container capacity. The first 9 columns of each frame make up the Section Overhead, and the last 261 columns make up the VirtualContainer (VC) capacity. The VC plus the pointers (H1, H2, H3 bytes) is called the AU(Administrative Unit).
Carried within the VC capacity, which has its own frame structure of 9 rows and 261 columns, isthe Path Overhead and the Container. The first column is for Path Overhead, it is followed by the payload container, which can itself carry other containers.
Virtual Containers can have any phase alignment within the Administrative Unit, and thisalignment is indicated by the Pointer in row four, as will be described later in the Pointers section.Within the Section Overhead, the first three rows are used for the Regenerator Section Overhead,and the last 5 rows are used for the Multiplex Section Overhead.
The STM frame is transmitted in a byte-serial fashion, row-by-row, and is scrambled immediately prior to transmission to ensure adequate clock timing content for downstream regenerators.
9 Rows
Administrative Unit
Capacity of the
Virtual Container
+
Pointers
1
2
3
4
5
6
7
8
9
Regenerator
Section
Overhead
Multiplex
Section
Overhead
H3H1 H2Pointers
STM-1 = 270 Columns (2430 bytes)
1 byte = One 64 kbit/s channel
H1H1H1H2 H2H2H3H3H3
Frame = 125 sµ Frame = 125 sµFrame = 125 sµ
Overhead width = 9 columns
Figure 2 STM-1 Frame Structure
Virtual Containers

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 13/73
Virtual Container
SDH supports a concept called virtual containers (VC). Through the use of pointers and offsetvalues, VCs can be carried in the SDH payload as independent data packages. VCs are used totransport lower-speed tributary signals. The figure below illustrates the location of a VC-4 withinthe STM-1 frame. Note that it can start (indicated by the J1 path overhead byte) at any pointwithin the STM-1 frame. The start location of the J1 byte is indicated by the pointer byte values.
Virtual containers can also be concatenated to provide more capacity in a flexible fashion.
The following table lists the names and some of the parameters of the virtual containers.
Table 3. Virtual Containers (VC).
SDHDigital Bit RateSize of VCVC-111.728 Mbit/s9 rows, 3 columnsVC-122.304 Mbit/s9 rows, 4columnsVC-26.912 Mbit/s9 rows, 12 columnsVC-348.960 Mbit/s9 rows, 85 columnsVC-4150.336 Mbit/s9
rows. 261 columns

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 14/73
9 Rows
STM-1 = 270 Columns
Regenerator
SectionOverhead
Multiplex
Section
Overhead
1
2
3
4
5
6
7
8
9
Pointers
B2
D4
D7
K1 K2
A1
B1
D1
H1
A1
B2
A1
B2
A2
E1
D2
H2
A2
H2
A2
H2
J0/
Z0
F1
D3
H3H3H3
D10
D5 D6
D8 D9
D11 D12
S1 M1 E2
Frame = 125 µ sFrame = 125 µ s Frame = 125 µ s
Unidad Administrativa
Bounded by 270 columns
Wrap-around within SDH frame
B3
C2
G1
F2
H4
F3
K3
N1
J1
Figure 3 Virtual Container
SDH Overhead

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 15/73
SDH Overhead
The SDH standard was developed using a client/server layer approach. The overhead andtransport functions are divided into layers. They are the:
• Regenerator Section;
• Multiplex Section; and,
• Path.
The layers have a hierarchical relationship, with each layer building on the services provided by allthe lower layers.
PathTermination
SectionTermination
Multiplex SectionTermination
PathTermination
SectionTermination
Service (2Mbit/s,140Mbit/s ...)
Mapping
Demapping
PTEADM
Path
Multiplex Section
Regenerator Section Regenerator Section
Multiplex Section
REGPTE
REG
Service
Mapping
Demapping
Legend
PTE= Path Terminating Element
REG= Regenerator
ADM= Add/Drop Multiplexer
Figure 4 Regenerator Section, Multiplex Section, Path
The next pages detail the different SDH overhead information, specifically:

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 16/73
• Regenerator Section Overhead;
• Multiplex Overhead; and,
• Path Overhead.
SDH Pointer

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 17/73
SDH Overhead
Regenerator Section Overhead
The Regenerator Section Overhead contains only the information required for the elementslocated at both ends of a section. This might be two regenerators, a piece of line terminatingequipment and a regenerator, or two pieces of line terminating equipment.
STM-1
J0/Z0
B2 B2
Figure 5 STM-1 Section Regenerator Overhead

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 18/73
SDH Overhead
The Regenerator Section Overhead is found in the first three rows of Columns 1 - 9 of theSTM-1 frame. Byte by byte, the Regenerator Section Overhead consists of:
ByteDescription A1 and A2Framing bytes - These two bytes indicate the beginning of the STM- 1
frame. The A1, A2 bytes are unscrambled. A1 has the binary value 11110110, and A2 has the binaryvalue 00101000. The frame alignment word of an STM-N frame is composed of (3 x N) A1 bytesfollowed by (3 x N) A2 bytes.J0Regenerator Section (RS) Trace message (ex-C1). It is used totransmit a Section Access Point Identifier so that a section receiver can verify its continued connection tothe intended transmitter. The coding of the J0 byte is the same as for J1 and J2 bytes. This byte isdefined only for STM-1 number 1 of an STM-N signal.Z0These bytes, which are located at positionsS[1,6N+2] to S[1,7N] of an STM-N signal (N > 1), are reserved for future internationalstandardisation.B1RS bit interleaved parity code (BIP-8) byte - This is a parity code (even parity),used to check for transmission errors over a regenerator section. Its value is calculated over all bits of the previous STM-N frame after scrambling, then placed in the B1 byte of STM-1 before scrambling.Therefore, this byte is defined only for STM-1 number 1 of an STM-N signal.E1RS orderwire byte - Thisbyte is allocated to be used as a local orderwire channel for voice communication between regenerators,cross-connects, and remote terminal locations.F1RS user channel byte - This byte is set aside for theusers’ purposes; it terminates at all section terminating equipment within a line; that is, it can be read
and/or written to at each section terminating equipment in that line.D1, D2, D3RS data communicationschannel (DCC) bytes - Together, these three bytes form a 192 kbit/s message channel providing amessage-based channel for Operations, Administration and Maintenance (OAM) between pieces of section terminating equipment. The channel can be used from a central location for alarms, control,monitoring, administration and other communication needs. It is available for internally generated,externally generated, or manufacturer-specific messages.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 19/73
SDH Overhead
Multiplex Section Overhead
The Multiplex Section Overhead contains the information required between the multiplex sectiontermination equipment at each end of the Multiplex section (that is, between consecutive network
elements excluding the regenerators).
STM-1
J0/Z0
B2 B2
Multiplex
Section
Figure 6 STM-1 Multiplex Section Overhead

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 20/73
SDH Overhead
The Multiplex Section Overhead is found in Rows 5 to 9 of Columns 1 - 9 of the STM-1 frame.Byte by byte, the Multiplex Section Overhead consists of:
Byte DescriptionB2Multiplex Section (MS) bit interleaved parity code (MS BIP-24) byte - This bit
interleaved parity 24 code is used to determine if a transmission error has occurred over a multiplexsection. It is even parity, and is calculated over all bits of the MS Overhead and the STM-N frame of theprevious STM-N frame before scrambling. The value is placed in the B2 bytes of the MS Overheadbefore scrambling. These bytes are provided for all STM-1 signals in an STM-N signal.K1 andK2Automatic Protection Switching (APS channel) bytes - These two bytes are used for MSP(Multiplex Section Protection) signaling between multiplex level entities for bi-directional automatic protection switching and for communicating Alarm Indication Signal (AIS) andRemote Defect Indication (RDI) conditions.D4 to D12MS data communications channel (DCC) bytes -These 9 bytes form a 576 kbit/s message channel from a central location for OAM information (alarms,control, maintenance, remote provisioning, monitoring, administration and other communication needs).This message channel is available for internally generated, externally generated, and manufacturer specific messages. A protocol analyzer is required to access the MS-DCC information.S1S1 byte isused for synchronisation information. Bits 1 to 4 of this S1 byte are used to carry the synchronisationmessages. The following is the assignment of bit patterns to the four synchronisation levels agreed to
within ITU-T.
0000 Quality unknown (existing sync.network)
0001 Reserved
0010 G.811
0011 Reserved
0100 G.812 transit
0101 Reserved
0110 Reserved
0111 Reserved1000 G.812 local
1001 Reserved
1010 Reserved
1011 Synchronous Equipment Timing
Source (SETS)
1100 Reserved
1101 Reserved
1110 Reserved

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 21/73
SDH Overhead
1111 Do not use for synchronisation.This message may be emulated byequipment failures and will beemulated by a Multiplex SectionAIS signal.M1The M1 byte of an STM-1 or the first STM-1 of an STM-N is used for a MS layer
remote error indication (MS-REI). Bits 2 to 8 of the M1 byte are used to carry the error count of theinterleaved bit blocks that the MS BIP-8 has detected to be in error at the far end of the section. Thisvalue is truncated at 255 for STM-N >4.E2MS orderwire byte - This orderwire byte provides a 64 kbit/schannel between multiplex entities for an express orderwire. It is a voice channel for use by craftspersons and will be ignored as it passes through the regenerators.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 22/73
SDH Overhead
Higher-Order Path Overhead (VC-4/ VC-3)
The Path Overhead is assigned to, and transported with the Virtual Container from the time it iscreated by path terminating equipment until the payload is demultiplexed at the termination pointin a piece of path terminating equipment.
J1 J1 VC-n Path Trace
B3 B3 Path BIP-8
C2 C2 Path Signal Label
G1 G1 Path Status
F2 F2 Path User Channel
H4 H4 TU Multiframe Indicator
F3 F3 Path User Channel (ex-Z3)
K3 K3 Automatic Protection Switching (ex-Z4)
N1 N1 Network Operator (ex-Z5)
1
2
3
4
5
6
7
8
9
Path Overhead
Figure 7 Higher-Order Path Overhead (VC-4/VC-3)

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 23/73
SDH Overhead
The Path Overhead is found in Rows 1 to 9 of the first column of the VC-4 or VC-3. Byte by byte, the Path Overhead consists of:
J1 Higher-Order VC-n path trace byte - This user-programmable byte repetitively transmits a 15-byte,
plus 1-byte CRC-7 E.164 format string. A 64-byte free-format string is also permitted. This allows thereceiving terminal in a path to verify its continued connection to the intended transmitting terminal.B3Path bit interleaved parity code (Path BIP-8) byte - This is a parity code (even), used to determine if atransmission error has occurred over a path. Its value is calculated over all the bits of the previous virtualcontainer before scrambling.C2 Path signal label byte - This byte specifies the mapping type in the VC-n. Standard binary values for C2 are:
0000 0000 - unequipped
0000 0001- equipped, non-specific
0000 0010 - TUG structure
0000 0011 - Locked TU-n
0000 0100 - 34 Mbit/s or 45 Mbit/s intoC-3 async0001 0010 - 140 Mbit/s/s into C-4 async
0001 0011 - ATM mapping
0001 0100 - MAN (DQDB) mapping
0001 0101 - FDDI mapping
1111 1110 - Test signal, O.181 specific
mapping
1111 1111 - VC-AISG1 Path status byte - This byte is used to convey the path terminating status andperformance back to the originating path terminating equipment. Therefore thebi-directional path in its entirety can be monitored, from either end of the path. F2 Path user channelbyte - This byte is used for user communication between path elements.H4 Tributary Unit (TU)multiframe indicator byte - This byte provides a generalized multiframe indicator for payloadcontainers. At present, it is used only for tributary unit structured payloads. A 4-value incrementing count(0-3) is used to indicate the frame number within a 2 Mbit/s multiframe structure.F3This byte is allocatedfor communication purposes between path elements and is payload dependent.K3APS signalling isprovided in K3 (b1-b4) bits, allocated for protection at the VC-4/3 path levels.
K3 (b5-b8) bits are allocated for future use. These bits have no defined value. The receiver is required
to ignore their content.N1Network operator byte - This byte is allocated to provide a Higher-Order Tandem Connection Monitoring (HO-TCM) function.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 24/73
SDH Overhead
Lower-Order Path Overhead (VC-2/VC-1)
The bytes V5, J2, N2 and K4 are allocated to the VC-2/VC-1 POH. The V5 byte is the first byteof the multiframe and its position is indicated by the TU-2/TU-1 pointer. The V5 byte providesthe functions of error checking, signal label, and path status of the VC-2/VC-1 paths. The bit
assignments for the V5 byte are illustrated in the figure below.
1 2 3 4 5 6 7 8
BIP-2 REI RFI Signal Label RDI
BIP Bit Interleaved Parity
REI Remote Error Indication
RFI Remote Failure Indication
RDI Remote Defect Indication
Figure 8 Lower-Order Path Overhead − V5 Byte
Bits 1 and 2 of the V5 byte are allocated for error performance monitoring. A Bit InterleavedParity (BIP) scheme is specified.
Bit 3 is a VC-2/VC-1 path Remote Error Indication (LP-REI) that is set to one and sent back towards a VC-2/VC-1 path originator if one or more errors were detected by the BIP-2, and isotherwise set to zero.
Bits 4 is a VC-2/VC-1 path Remote Failure Indication (LP-RFI). This bit is set to one if a failure
is declared, otherwise it is set to zero. A failure is a defect that persists beyond the maximum timeallocated to the transmission system protection mechanisms.
Bits 5 through 7 provide a VC-2/VC-1 signal label.
Virtual Container path REI coding: 0 = 0 errors1 = 1 or more errors
The Virtual Container path Signal Label coding follows:b5b6b7Description000Unequipped or supervisory-unequipped001Equipped - non-specific
010Asynchronous011Bit synchronous100Byte synchronous101Reserved for future use110Test signal,
O.181 specific mapping111VC-AISBit 8 is set to 1 to indicate a VC-2/VC-1 path Remote DefectIndication (LP-RDI), otherwise it is set to zero.
Byte J2 is used to transmit repetitively a Lower-Order Access Path Identifier so that a pathreceiving terminal can verify its continued connection to the intended transmitter. A 16-byte frameis defined for the transmission of Path Access Point Identifiers. This 16-byte frame is identical tothe 16-byte frame of the byte J1.
Byte N2 is allocated to provide a Lower-Order Tandem Connection Monitoring (LO-TCM)function.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 25/73
SDH Overhead
Byte K4 - Bits 1 through 4 are allocated for APS signalling for protection at the Lower-Order path level. Bits 5 through 7 are reserved for optional use.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 26/73
SDH Overhead
SDH Anomalies, Defects, Failures and Alarms
The SDH frame structure has been designed to contain a large amount of overhead information.The overhead information provides for a variety of management and other functions such as:
• Alarm Indication Signals (AIS);
• Error performance monitoring using BIP-n;
• Pointer adjustment information;
• Path status;
• Path Trace;
• Section Trace;
• Remote Defect, Error, and Failure Indications;
• Signal labels;
• New Data Flag indications;
• Data Communications Channels (DCC);
• Automatic Protection Switching (APS) control;
• Orderwire; and,
• Synchronisation Status Message.
Much of this overhead information is involved with alarm and in-service monitoring of the
particular SDH sections. Table 4 and Figure 9, that follow the definitions, list the criteria for errors and the performance monitoring for errors.
Definitions
Anomaly - The smallest discrepancy which can be observed between the actual and desiredcharacteristics of an item. The occurrence of a single anomaly does not constitute an interruptionin the ability to perform a required function. Examples of SDH Anomalies are: B1 BIP; B2 BIP;Path B3 BIP; REI; and, Pattern Bit.
Defect - The density of anomalies has reached a level where the ability to perform a requiredfunction has been interrupted. Defects are used as input for performance monitoring, the control
of consequent actions, and the determination of fault cause. Examples of SDH Defects are:Out-of-Frame; AIS; RDI; LOP; LOP; and LOM.
Failure - The inability of a function to perform a required action persisted beyond a maximumtime allocated.
Alarm - The maintenance signal used in the digital network to alert downstream equipment that adefect or equipment failure has been detected.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 27/73
SDH Overhead
Table 4. Anomalies, Defects, Failures, Alarms
Abbr.DescriptionCriteriaLOSLoss of SignalLOS is raised when the synchronous signal (STM-N) leveldrops below the threshold at which a BER of 1 in 103 is predicted. It could be due to a cut cable,
excessive attenuation of the signal or equipment fault.
The LOS state will clear when two consecutive framing patterns are received and no new LOS conditionis detected. OOFOut of Frame alignmentOOF state occurs when several consecutive SDH frames arereceived with invalid (errored) framing patterns (A1 and A2 bytes). The maximum time to detect OOF is625 microseconds.
OOF state clears within 250 microseconds when two consecutive SDH frames are received with validframing patterns.LOFLoss of Frame alignmentLOF state occurs when the OOF state exists for aspecified time in microseconds.
The LOF state clears when an in frame condition exists continuously for a specified time inmicroseconds.
The time for detection and clearance is normally 3 milliseconds.LOPLoss of PointerLOP state occurswhen N consecutive invalid pointers are received or "N" consecutive New Data Flags (NDF) are received(other than in a concatenation indicator), where N = 8,9 or 10.
LOP state is cleared when three equal valid pointers or three consecutive AIS indications are received.
LOP can be identified as:
AU-LOP (Administrative Unit Loss of Pointer)
TU-LOP (Tributary Unit Loss of Pointer)AISAlarm Indication SignalAIS is an all-ONES characteristic or adapted information signal. It is generated to replace the normal traffic signal when it contains a defectcondition in order to prevent consequential downstream failures being declared or alarms being raised.
AIS can be identified as:
MS-AIS (Multiplex Section Alarm Indication Signal)
AU-AIS (Administrative Unit Alarm Indication Signal)
TU-AIS (Tributary Unit Alarm Indication Signal)REIRemote Error IndicationAn indication returned to atransmitting node (source) that an errored block has been detected at the receiving node (sink). Thisindication was previously known as FEBE (Far End Block Error).
REI can be identified as:

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 28/73
SDH Overhead
MS-REI (Multiplex Section Remote Error Indication)HP-REI (Higher-order Path Remote Error Indication)LP-REI (Lower-order Path Remote Error Indication)RDIRemote Defect IndicationA signal returned to
the transmitting Terminating Equipment upon detecting a Loss of Signal, Loss of Frame, or AIS defect.RDI was previously known as FERF (Far End Receiver Failure).
RDI can be identified as:
MS-RDI (Multiplex Section Remote Defect Indication)HP-RDI (Higher-order Path Remote Defect Indication)LP-RDI (Lower-order Path Remote Defect Indication)RFIRemote Failure IndicationA failure is a defect
that persists beyond the maximum time allocated to the transmission system protection mechanisms.When this situation occurs, an RFI is sent to the far end and will initiate a path protection switch if thisfunction has been provisioned.
RFI can be identified as:LP-RFI (Lower-order Path Remote Failure Indication)B1 errorB1 errorParity errors evaluated by byte B1
(BIP-8) of an STM-N shall be monitored. If any of the eight parity checks fail, the corresponding block isassumed to be in errorB2 errorB2 errorParity errors evaluated by byte B2 (BIP-24 x N) of an STM-N shallbe monitored. If any of the N x 24 parity checks fail, the corresponding block is assumed to be in errorB3errorB3 errorParity errors evaluated by byte B3 (BIP-8) of a VC-n (n=3,4) shall be monitored. If any of the eight parity checks fail, the corresponding block is assumed to be in errorBIP-2 errorBIP-2 errorParityerrors contained in bits 1 and 2 (BIP-2) of byte V5 of anVC-m (m=11,12,2) shall be monitored. If any of the two parity checks fail, the corresponding block isassumed to be in error.LSSLoss of Sequence Synchronisation
Bit error measurements using pseudo-random sequences can only be performed if the referencesequence produced on the receiving side of the test set-up is correctly synchronised to the sequence
coming from the object under test. In order to achieve compatible measurement results, it is necessarythat the sequence synchronisation characteristics are specified. The following requirement is applicableto all ITU-T O.150 Recommendations dealing with error performance measurements using pseudo-random sequences.
Sequence synchronisation shall be considered to be lost and resynchronisation shall be started if:
• the bit error ratio is ≥ 0.20 during an integration interval of 1 second; or
• it can be unambiguously identified that the test sequence and the reference sequence are
out of phase.
NOTE – One method to recognize the out-of-phase condition is the evaluation of the error patternresulting from the bit-by-bit comparison. If the error pattern has the same structure as the pseudo-random test sequence, the out-of-phase condition is reached.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 29/73
SDH Overhead

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 30/73
SDH Overhead
SDH Error Performance Monitoring
Error performance monitoring in the SDH is based on Bit-Interleaved-Parity (BIP) checkscalculated on a frame-by-frame basis. These BIP checks are inserted in the Regenerator Section
Overhead, Multiplex Section Overhead and Path Overheads.
In addition, Higher-Order Path Terminating Equipment (HO PTE) and Lower-Order PathTerminating Equipment (LO PTE) produce Remote Error Indications (REI) based on errorsdetected in the HO Path and LO Path BIP respectively. The REI signals are sent back to theequipment at the originating end of a path. All errors listed in the following figure are described inthe previous Table 4.
MSTE RSTEHO PTELO PTE RSTE RSTE MSTE HO PTE LO PTE
Regenerator Section (RSOH)
Multiplex Section (MSOH)
Higher Order Path
Lower Order Path
Alarm Transmission
Alarm Detection
RDI(V5)
RDI
(G1)
RDI
(K2)
RDI
(K2)
RDI(G1)
RDI(V5)
MS
AIS
LOPLOSLOF
AU-AIS
(H1,H2)
LOP
TU-AIS
(V1,V2)
MS
AIS
LOSLOF
LOSLOF
Tributary
AIS
Figure 9 Interaction between defects and errors in forward and backward directions, accordingto the different SDH levels

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 31/73
SDH Pointer
SDH provides payload pointers to permit differences in the phase and frequency of the VirtualContainers (VC-n) with respect to the STM-N frame. Lower-order pointers are also provided to permit phase differences between VC-1/VC-2 and the higher-order VC-3/VC-4.
AU-3 H1 H1 H1 H2 H2 H2 H3 H3 H3
AU-4 H1 Y Y H2 1 1 H3 H3 H31= All 1s
Y= 1001SS11
(S bits unspecified)
Figure 10 Pointer 9-byte structure
H1 and H2 Pointer bytes - These two bytes, the VC payload pointer, specify the location of the VC frame.It is used to align the VC and STM-1 Section Overheads in an STM-N signal, to perform frequency
justification, and to indicate STM-1 concatenation.H3 Pointer action byte - This byte is used for frequency justification. Depending on the pointer value, the byte is used to adjust the fill input buffers.The byte only carries valid information in the event of negative justification, otherwise it is not
defined.One of SDH’s main advantages is that it is synchronous. On a frame by frame basis, the payload pointer indicates the offset between the VC container and the STM-1 frame by identifying
the location of the first byte of the VC in the container. In other words, the VC is allowed to“float” within the STM-N frame capacity.
To make this possible, within each STM-1 frame, there is a pointer, known as the VC PayloadPointer, that indicates where the actual payload container starts. For a VC-4 payload, this pointer is located in columns 1 and 4 of the fourth row of the Section Overhead. The bytes H1 and H2(two 8-bit bytes) of the Overhead can be viewed as one value.
The pointer value indicates the offset in bytes from the pointer to the first byte of the VC, which isthe J0 byte. Because the Section Overhead bytes are not counted, and starting points are at3-byte increments for a VC-4 payload, the possible range is:
Total STM-1 bytes - Section Overhead bytes = Pointer value range,

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 32/73
for example, (2430-81)/3 = 783 valid pointer positions
SDH Multiplexing

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 33/73
SDH Pointer
That is, the value of the pointer has a range of 0 to 782. For example, if the VC-4 Payload Pointer has a value of 0, then the VC-4 begins in the byte adjacent to the H3 byte of the Overhead; if thePayload Pointer has a value of 87, then the VC-4 begins in the byte adjacent to the K2 byte of theOverhead in the next row.
The pointer value, which is a binary number, is carried in bits 7 through 16 of the pointer word.The first four bits of the VC-n payload pointer make provision for indicating a change in the VC,and thus an arbitrary change in the value of the pointer. These four bits, the N-bits, are known asthe New Data Flag. The VC pointer value that accompanies the New Data Flag will indicate thenew offset.
Payload Pointer
When there is a difference in phase or frequency, the pointer value is adjusted. To accomplish this,a process known as byte stuffing is used. In other words, the VC payload pointer indicates where
in the container capacity an VC starts, and the byte stuffing process allows dynamic alignment of the VC in case it slips in time.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 34/73
SDH Pointer
Positive Stuffing
When the data rate of the VC is too slow in relation to the rate of the STM-1 frame, bits 7, 9, 11 ,13, and 15 of the pointer word are inverted in one frame, thus allowing 5-bit majority voting atthe receiver (these bits are known as the I-bits or Increment bits). Periodically, when the VC isabout one byte off, these bits are inverted, indicating that positive stuffing must occur. Anadditional byte is stuffed in, allowing the alignment of the container to slip back in time. This isknown as positive stuffing, and the stuff byte is made up of non-information bits. The actual positive stuff byte immediately follows the H3 byte (that is, the stuff byte is within the VC portion). The pointer is incremented by one in the next frame, and the subsequent pointers containthe new value.
Simply put, if the VC is running more slowly than the STM-1 frame, every now and then“stuffing” an extra byte in the flow gives the VC a one-byte delay.
H1 H2 H3
H1 H2 H3
H1 H2 H3
H1 H2 H3
Frame n + 1
Frame n
Frame n + 2
Frame n +3
P
P
P + 1
500 microsec
elapsed
J1
J1
J1
J1
Extra bytes allow the VC to slip back in time.
A positive stuff byte immediately follows the H3 byte
Figure 11 Payload Pointer - Positive Justification

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 35/73
SDH Pointer
Negative Stuffing
Conversely, when the data rate of the VC is too fast in relation to the rate of the STM-1 frame, bits 8, 10, 12, 14, and 16 of the pointer word are inverted thus allowing 5-bit majority voting atthe receiver (these bits are known as the D-bits, or Decrement bits). Periodically, when the VC isabout one byte off, these bits are inverted, indicating that negative stuffing must occur.
Because the alignment of the container advances in time, the payload capacity must be movedforward. Thus, actual data is written in the H3 byte, the negative stuff opportunity within theOverhead; this is known as negative stuffing. The pointer is decremented by one in the next frame,and the subsequent pointers contain the new value. Simply put, if the VC is running more quicklythan the STM-1 frame, every now and then pulling an extra byte from the flow and stuffing it intothe Overhead capacity (the H3 byte) gives the VC a one-byte advance.
In either positive or negative case, there must be at least three frames in which the pointer remainsconstant before another stuffing operation (and, therefore a pointer value change) can occur.
H1 H2 H3
H1 H2 H3
H1 H2
H1 H2 H3
Frame n + 1
Frame n
Frame n + 2
Frame n +3
P
P
P - 1
500 microsec
elapsed
J1
J1
J1
J1
The VC moves forward in time when a data byte
has been stuffed into the H3 byte.Actual payload data is written in the H3 byte.
H
3
Figure 12 Payload Pointer - Negative Justification

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 36/73
SDH Multiplexing
The multiplexing principles of SDH follow, using these terms and definitions:
• Mapping - A process used when tributaries are adapted into Virtual Containers
(VCs) by adding justification bits and Path Overhead (POH) information.
• Aligning - This process takes place when a pointer is included in a Tributary Unit
(TU) or an Administrative Unit (AU), to allow the first byte of the VirtualContainer to be located.
• Multiplexing - This process is used when multiple lower-order path layer signals
are adapted into a higher-order path signal, or when the higher-order pathsignals are adapted into a Multiplex Section.
• Stuffing - SDH has the ability to handle various input tributary rates from PDH. Asthe tributary signals are multiplexed and aligned, some spare capacity has beendesigned into the SDH frame to provide enough space for all these various tributaryrates. Therefore, at certain points in the multiplexing hierarchy, this space capacity isfilled with "fixed stuffing" bits that carry no information, but are required to fill up the particular frame.
The figure on the next page illustrates the ITU-T SDH multiplexing structure. The notations inthe boxes, such as C-1, VC-3, and AU-4, are explained in the table after the figure.
At the lowest level, containers (C) are input to virtual containers (VC). The purpose of thisfunction is to create a uniform VC payload by using bit-stuffing to bring all inputs to a common
bit-rate ready for synchronous multiplexing. Various containers (ranging from VC-11 at1.728 Mbit/s to VC-4 at 150.336 Mbit/s) are covered by the SDH hierarchy. Next, VCs arealigned into tributary units (TUs), where pointer processing operations are implemented.
These initial functions allow the payload to be multiplexed into TU groups (TUGs). As the figureillustrates, the xN label indicates the multiplexing integer used to multiplex the TUs to the TUGs.The next step is the multiplexing of the TUGs to higher level VCs, and TUG-2 and TUG-3 aremultiplexed into VC-3 (ANSI mappings) and VC-4. These VCs are multiplexed with fixed byte-stuffing to form administration units (AUs) which are finally multiplexed into the AU group(AUG). This payload then is multiplexed into the Synchronous Transport Module (STM).
PDH Access

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 37/73
2.5 Gbit/s
622 Mbit/s
155Mbit/s
STM-4
STM-1
STM-16
VC-4AU-4AUG
TUG-2
TUG-3
C-11TU-11 VC-11
C-4
C-12TU-12 VC-12
C-2TU-2 VC-2
C-3TU-3 VC-3
VC-3AU-3
x16
x7
x3
x4
x7
x4
x3
x3
140 Mbit/s
45 Mbit/s34 Mbit/s
6 Mbit/s
2 Mbit/s
1.5 Mbit/s
ETSI Multiplexing
ANSI Multiplexing
Pointer processing
Figure 13 SDH Multiplexing Hierarchy
Table 5. SDH Multiplexing Structure
TermContentsUser C-nn = 1 to 4Payload at lowest multiplexing levelVC-nn = 1, 2 (Lower-Order)SingleC-n plus VC POHVC-nn = 3,4 (Higher-Order)C-n, TUG-2s, or TUG-3s, plus POH for the specificlevelTU-nn = 1 to 3VC-n plus tributary unit pointerTUG-21, 3 or 4 (TU-n)Multiplex of various TU-n sTUG-3TU-3 or 7 TUG-2sTU-3 or multiplex of 7 TUG-2sAU-nn = 3, 4VC-n plus AU pointerAUG1, 3 (AU-
n)Either 1 AU-4 or multiplex of 3 AU-3sSTM-nn = 1, 4, 16, 64 AUGsN synchronously-multiplexed STM-1signals
POH = Path OverheadC = Container TU = Tributary UnitAU = Administrative UnitVC = Virtual Container TUG = Tributary Unit GroupSTM = Synchronous Transport Module

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 38/73
PDH Access and Multiplexing in SDH
Examples of 140 Mbit/s, 34 Mbit/s and 2 Mbit/s PDH access and mapping/demapping process
follow in the next three figures.
The 140 Mbit/s payload “floats” under the H1-H2 pointer
155 Mbit/s
AU-4
J1
H1-H2
VC-4
140 Mbit/s
C-4Path Overhead
STM-1 VC-4 AU-4 C-4
Figure 14 The VC-4 with 140 Mbit/s Payload PDH Access and Multiplexing
SDH Tributary Multiplexing

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 39/73
Each 34 Mbit/s payload “floats” under the corresponding TU-3 pointer
STM-1 AUG-4 VC-4 AU-4155 Mbit/s
TUG-3 TU-3 VC-3 C-3
x3
34 Mbit/sJ1
H4
C-3 (A)
TU-3 A
TU-3 B
C-3 (B)TU-3 C
C-3 (C)
VC-4
Each TU-3 consists of 86
columns, so that 3 TU-3s are
258 columns. This, together with
the two stuffing columns and thepath overhead form the 261
columns of the VC-4.
Figure 15 Each VC-3 with 34 Mbit/s Payload PDH Access and Multiplexing

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 40/73
The TU-3 payload is fixed, the TUG-2s don’t “float”.
AUG-4STM-1 VC-4 AU-4155 Mbit/s
TUG-3
x3
TUG-2
TU-12 VC-12 C-12
x7
x3
2 Mbit/s
J1
H4
C-3 (A)
TU-3 A
TU-3 B
C-3 (B)TU-3 C
7 TUG-2s
VC-4
Each 2 Mbit/s payload “floats” in the TU-12 Mul tiframe with the TU pointers
There are 4 Columns for for each
TU-12 so that the 3 TU-12 form
the 12 columns of each TUG-2.
Each TU-12 has 4 col. by 9 rows,
a total of 36 bytes for each frame
of 125 microseconds.
STM-1 AU-4 AUG-4155 Mbit/s
TUG-3
x3
TUG-2
TU-12 VC-12 C-12
x7
x3
2 Mbit/s
To form VC-12 virtual containers,
a multiframe has to be formed.J1
H4
C-3 (A)
TU-3 A
TU-3 B
C-3 (B)TU-3 C
TU-3Pointer
7 TUG-2
VC-4
Multiframe Indicator
(A)
(B)
There are 12 columns for each TUG-2, so that the
7 TUG-2s make up 84 columns. Together with
the stuff columns and the null pointer indicator,
the TUG-3 makes up 86 columns.
VC-4
TU-12B
1 TUG-2 = 3 TU-12
TU-12A
TU-12C
V 1 V 1 V 1
Figure 16 The TUG-3 Payload 2 Mbit/s PDH Access and Multiplexing
SDH Tributary Multiplexing

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 41/73
SDH Tributary Multiplexing
In order to accommodate mixes of different TU types within an VC-4, the TUs are groupedtogether (refer to the previously presented SDH Multiplexing Hierarchy diagram - Figure 13). AVC-4 that is carrying Tributary Units is divided into three TUG-3, each of which may containseven TUG-2s or a single TU-3. There can be a mix of the different TU Groups. For example, thefirst TUG-3 could contain twelve TU-12 and three TU-2, making a total of seven TUG-2 groups.Thus a VC-4 can carry a mix of three times any of the seven TUG-2 groups. The TU groups haveno overhead or pointers; they are just a way of multiplexing and organizing the different TUswithin the VC-4 of a STM-1.
The columns in a TU Group are not consecutive within the VC; they are byte-interleaved column- by-column with respect to the other TU groups (see figure below).
The figure also shows several columns allocated for fixed stuffing. NPI (Null Pointer Indicators)are used to indicate when a TUG-2 structure is being carried, rather than a TU-3 with itsassociated TU-3 pointer.
Figure 17 SDH Tributary Structure showing TUG-3 multiplexing in VC-4

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 42/73
Automatic Protection Switching

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 43/73
SDH Tributary Multiplexing
Tributary Unit Group
The first TUG-2 Group within a TUG-3, called Group 1, would be found in every seventhcolumn, skipping columns 1 and 2 of the TUG-3, and starting with column 3.
The Tributary Unit columns within a group are not placed in consecutive columns within thatgroup. The columns of the individual TUs within the TU Group are byte-interleaved as well.
Tributary Units are optimized in different sizes to accommodate different signals. Each size of TUis known as a “type” of TU. A 36-byte structure, or 4 columns by 9 rows, could accommodatethe 2.048 Mbit/s signal. This particular TU is simply designated a TU-12. In this case the four columns provide a signal rate of 2.304 Mbit/s, allowing capacity for overhead. Other signalsrequire TUs of different sizes.
With each TU Group using 12 columns of the VC-4; note that the number of columns in each of the different Lower-Order TU types are all factors of 12, so a TU group could contain one of the
following combinations:
• Three TU-12s (with four columns per TU-12)
• One TU-2 (with twelve columns per TU-2)
TU-3 is a Higher-Order TU type. Each TU Group can contain only one size (type) of TributaryUnit.
Figure 18 Tributary Unit Structures

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 44/73
SDH Tributary Multiplexing
TU Multiframe
In the floating TU mode, four consecutive 125-microsecond frames of the VC-4 are combinedinto one 500-microsecond structure, called a TU Multiframe. In other words, the
500-microsecond multiframe is overwritten on, and aligned to the 125-microsecond VC-4s. Theoccurrence of the TU Multiframe and its phase is indicated in the VC-n Path Overhead, in theMultiframe Indicator byte (H4). A value XXXXXX00 in the Multiframe Indicator byte indicatesthat the next STM VC frame contains the first frame in the TU Multiframe; a value XXXXXX01in the Multiframe Indicator byte indicates that the next VC-4 contains the second frame in the TUMultiframe, and so on. (Only the last two bits of the H4 byte have a value of 0 or 1 assigned; thefirst six bits are unassigned and this is denoted by the X.)
The Tributary Units (TUs) also contain payload pointers to allow for flexible and dynamicalignment of the VC. In this case, the TU pointer value indicates the offset from the TU to thefirst byte of the VC. TU pointers allow AU and TU payloads to differ in phase with respect toeach other and the network while still allowing AUs and TUs to be synchronously multiplexed.
The TU Multiframe overhead consists of four bytes, V1, V2, V3, and V4. Each of these four bytes, V1 to V4, is located in the first byte of the respective TU frame in the TU Multiframe. The payload pointers V1 and V2 indicate the start of the payload within the multiframe and V3 provides a 64 kbit/s channel for a payload pointer movement opportunity. The remaining bytes inthe TU Multiframe define the TU container capacity which carries the TU Virtual Container, andthe TU Path Overhead. The container capacity differs for the different TU types because their sizevaries according to the number of columns in each type.
The container capacity for each type of TU is as follows:
TU TypeTU Capacity Calculation *TU PointerTU Container CapacityTU-113 x 9 x 44 bytes104
bytesTU-124 x 9 x 44 bytes140 bytesTU-212 x 9 x 44 bytes428 bytes* columns x rows x frames
Figure 19 TU Multiframe Structure

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 45/73
SDH Tributary Multiplexing
1 2 3 4 5 6 7 8
BIP-2 REI RFI Signal Label RDI
1 2 3 4 5 6 7 8
BIP-2 REI RFI Signal Label RDI
BIP Bit Interleaved Parity
REI Remote Error Indication
RFI R emote Failure Indication
RDI R emote Defect Indication
Figure 20 TU Path Overhead

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 46/73
SDH Tributary Multiplexing
TU Payload Pointer
The TU Payload Pointer allows dynamic alignment of the lower-order VC-m within the TUMultiframe in much the same fashion as described for the higher-order VC-n. The alignment of any one lower-order VC-m is independent of the other VC-m's; in other words, all VCs within anSTM can float independently of each other.
This payload pointer, which is located in positions V1 and V2 of the TU Multiframe, is made upof two 8-bit bytes, and it can be viewed as one word. The value of the pointer is a binary number found in bits 7 to 16 of V1 and V2. This value indicates the offset in bytes from the end of the pointer (byte V2) to the first byte of the TU VC; the V3 and V4 bytes are not counted. The rangeof the offset differs for each TU type.
TU TypeTotal TU bytesV1 to V4Pointer value rangeTU-111084104TU-121444140TU-24324428Thatis, the value of the pointer for a TU-12 has a range of 0 to 140. For example, if the TU PayloadPointer has a value of 0, then the VC-m begins in the byte adjacent to the V2 byte; if the TUPayload Pointer has a value of 35, then the VC-m begins in the byte adjacent to the V3 byte.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 47/73
Automatic Protection Switching
Automatic Protection Switching (APS) is the capability of a transmission system to detect afailure on a working facility and to switch to a standby facility to recover the traffic. This capacityhas a positive effect on the overall system availability.
Only the Multiplex Section in SDH is protected in this automatic fashion. The Multiplex Section protection mechanisms are coordinated by the K1 and K2 bytes in the Multiplex SectionOverhead. Path protection is managed at a higher level by network management functions.
Multiplex Section Protection, K1/ K2 byte
In SDH, the transmission is protected on optical sections from the Near End (the point at whichthe MS Overhead is inserted) to the Far End (the point where the MS Overhead is terminated).
Bytes K1 and K2 in the MS Overhead of the STM-1 signal carry a Multiplex Section Protection(MSP) protocol used to coordinate protection switching between the Near End and the Far End.
Protection switching is initiated as a result of one of the following situations:
• Signal failure,
• Signal degradation,
• Or, in response to commands from a local craft terminal or a remote network manager.
Two modes of APS are provided: 1+1 protection switching; and, 1:N protection switching.
The K1 byte contains both the switching preemption priorities (in bits 1 to 4), and the channelnumber of the channel requesting action (in bits 5 to 8).
The K2 byte contains the channel number of the channel that is bridged onto protection (bits 1 to4), and the mode type (bit 5); as well, bits 6 to 8 contain various conditions such as MS-AIS, MS-RDI, indication of unidirectional or bi-directional switching.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 48/73
K1 K2
1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8
Switch Priority Switch Action Channel Number Provisioned
Channel Request Bridged bi-directional switch
uni-directional switch
MS-AISMS-RDIProvisioned
1:n/1+1
Figure 21 APS/ MSP, K1/K2 byte functions
1+1 Protection
In 1+1 protection switching, there is a protection facility (backup line) for each working facility.
At the Near End of the section, the optical signal is bridged permanently (split into two signals)
and sent over both the working and the protection facilities simultaneously, producing a workingsignal and a protection signal that are identical.
At the Far End of the section, both signals are monitored independently for failures. The receivingequipment selects either the working or the protection signal. This selection is based on the switchinitiation criteria which are either a signal fail (hard failure such as the loss of frame (LOF) withinan optical signal), or a signal degrade (soft failure caused by the error rate exceeding some pre-defined value).
Normally, 1+1 protection switching is unidirectional, although if the line terminating equipment at both ends support bi-directional switching, the unidirectional default can be overridden.
Switching can be either revertive (the flow reverts to the working facility as soon as the failurehas been corrected) or non-revertive (the protection facility is treated as the working facility).
In 1+1 protection architecture, all communication from the Near End to the Far End is carried outover the APS channel, using the K1 and K2 bytes. In 1:1 bi-directional switching, the K-bytesignaling indicates to the Near End that a facility has been switched so that it can start to receiveon the now active facility.
SDH Network Elements

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 49/73
Near End Far End
Source Destination
Normal Condition:
one signal is chosen per pair
Failure Condition:
the “best” signal is chosen
Working Facility
Protection Facility
Working Facility
Protection Facility
Working Facility
Protection Facility
Figure 22 1+1 Protection Switching

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 50/73
Automatic Protection Switching
1:N Protection
In 1:N protection switching, there is one protection facility for several working facilities (therange is from 1 to 14). In 1:N protection architecture, all communication from the Near End tothe Far End is carried out over the APS channel, using the K1 and K2 bytes. All switching isrevertive, that is, the traffic reverts to the working facility as soon as the failure has beencorrected.
In 1:N protection switching, optical signals are normally sent only over the working facilities, withthe protection facility being kept free until a working facility fails. Let’s look at a failure in a bi-directional architecture. Suppose the Far End detects a failure on working facility 2. The Far Endsends a message in bits 5-8 of the K-1 byte to the Near End over the protection facility requestingswitch action. The Near End then can act directly, or if there is more than one problem, the Near End decides which is top priority. On a decision to act on the problem on working facility 2, the Near End carries out the following steps:
1. Bridges working facility 2 at the Near End to the protection facility2. Returns a message on the K2 byte indicating the channel number of the traffic on the
protection channel to the Far End
3. Sends a Reverse Request to the Far End via the K1 byte to initiate bi-directional switch.
On receipt of this message, the Far End carries out the following steps:
1. Switches to the protection facility to receive
2. Bridges working facility 2 to the protection facility to transmit back.
Now transmission is carried out over the new working facility.
Near End Far End
Source Destination
Normal Condition:
protection on channel empty
Failure Condition:
protection channel contains
failed line
Working Facility
Protection Facilty
Working Facility
Protection Facility
Figure 23 1:N Protection Switching

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 51/73
SDH Network Elements
Terminal Multiplexer
The path terminating element (PTE) acts as a concentrator of E1s as well as other tributarysignals.
Its simplest deployment would involve two terminal multiplexers linked by fibre with or without aregenerator in the link. This implementation represents the simplest SDH link (Regenerator Section; Multiplex Section; and Path, all in one link).
One of the main benefits of SDH as seen by the network operator is the network simplification brought about through the use of synchronous equipment. A single synchronous node can perform the function of an entire plesiochronous "multiplexing by steps", leading to significantreductions in the amount of equipment used and consequently space and energy savings.
E-1
E-3
STM-NVC
STM-1
E-1
E-3
STM-N
STM-1
Terminal Configuration
STM-1
Figure 24 Terminal Multiplexer

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 52/73
SDH Network Elements
Regenerator
A regenerator is needed when due to the long distance between multiplexers, the signal level inthe fibre becomes too low.
The regenerator recovers timing from the received signal and replaces the Regenerator Sectionoverhead bytes before re-transmitting the signal; the Multiplex Section overhead, path overhead,and payload are not altered.
STM-NSTM-N
Figure 25 Regenerator
Add/Drop Multiplexer
One of the major advantages of SDH is its ability to Add and Drop tributaries directly fromhigher-order aggregate bit streams.
Although network elements (NEs) are compatible at the STM-N level, they may differ in featuresfrom vendor to vendor. SDH does not restrict manufacturers from providing a single type of product, nor require them to provide all types. For example, one vendor might offer an add/dropmultiplexer with access at E1 only, whereas another might offer simultaneous access at E1 and E4rates. See the following figure.
STM-N Bus
STM-N
STM-N E1 E4
2 Mbit/s 140 Mbit/s
AU-4TUSTM-NSTM-N
STM-N
STM-N
ADM Configuration
Figure 26 Add/Drop Multiplexer

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 53/73
SDH Network Elements
A single-stage multiplexer/demultiplexer can multiplex various inputs into an STM-N signal. Atan add/drop site, only those signals that need to be accessed are dropped or inserted. Theremaining traffic continues through the network element without requiring special pass-throughunits or other signal processing.
In rural applications, an ADM can be deployed at a terminal site or any intermediate location for
consolidating traffic from widely separated locations. Several ADMs can also be configured as asurvivable ring.
SDH enables drop-and-continue, a key capability in both telephony and cable TV applications.With drop and continue, a signal terminates at one node, is duplicated, and is then sent to the nextnode and to subsequent nodes.
In ring-survivability applications, drop-and-continue provides alternate routing for traffic passingthrough interconnecting rings in a "matched-nodes" configuration. If the connection cannot bemade through one of the nodes, the signal is repeated and passed along an alternate route to thedestination node.
In multi-node distribution applications, one transport channel can efficiently carry traffic between
multiple distribution nodes. When transporting video, for example, each programming channel isdelivered (dropped) at the node and repeated for delivery to the next and subsequent nodes. Notall bandwidth (program channels) need be terminated at all the nodes. Channels not terminating ata node can be passed through without physical intervention to other nodes.
Wideband Digital Cross-connect
An SDH cross-connect accepts various SDH rates, accesses the STM-1 signals, and connects payloads, for example, at a TU-12 level. One major difference between a cross-connect and anadd-drop multiplexer is that a cross-connect may be used to interconnect a much larger number of STM-1s. The broadband cross-connect can be used for grooming (consolidating or segregating)
of STM-1s or for broadband traffic management. For example, it may be used to segregate high- bandwidth from low-bandwidth traffic and send them separately to the high-bandwidth, (for example video), switch and a low-bandwidth (voice) switch. It supports hubbed network architectures.
This type of cross-connect is similar to the broadband cross-connect except that the switching isdone at TU-12 level. It is suitable for E1 level grooming applications at cross-connect locations.One major advantage of wideband digital cross-connects is that less demultiplexing andmultiplexing is required because only the required tributaries are accessed and switched.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 54/73
SDH Network Elements
STM-1 2Mbit/s 2Mbit/sSTM-NSTM-N
STM-1 E1 E4STM-N
TU-12TU-12TU-12TU-12
TU-12 Switch Matrix
DCS Configuration
Figure 27 Wideband Digital Cross-connect
Broadband Digital Cross-connect
The Broadband Digital Cross-connect interfaces SDH signals and possibly high-rate tributaries. Itaccesses the STM-N signals, and typically switches at an AU-4 level.
It is best used as an SDH cross-connect, where it can be used for grooming STM-1s, for broadband restoration purposes, or for routing traffic.
140Mbit/sSTM-N
STM-N E1 E4STM-N
AU-4AU-4
Transparent Switch Matrix
STM-N STM-1 2Mbit/s
AU-4 AU-4
Broadband DCS Configuration
Figure 28 Broadband Digital Cross-connect

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 55/73
SDH Network Elements
Flexible Multiplexer
The Flexible Multiplexer may be considered a concentrator of low-speed services before they are brought into the local exchange for distribution. If this concentration were not done, the number
of subscribers (or lines) that an exchange could serve would be limited by the number of linesserved by the exchange. The Flexible Multiplexer itself is actually a system of multiplexers andswitches designed to perform some traffic concentration and limited switching at a remotelocation.
Exchange
Switch
64 Kb/s STM-1
Remote
Locations
(subscribers)
64 Kbit/s
SDHConcen-
trator
SDH Concen-
trator
Exchange
VoiceData
ISDN
Public Phone
Figure 29 Flexible Multiplexer

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 56/73
SDH Network Configurations
Point-to-Point
The simplest network configuration would involve two terminal multiplexers linked by fibre withor without a regenerator in the link.
In this configuration, the SDH path and the Service path (for example, E1 or E3 links end-to-end)are identical and this synchronous island can exist within an asynchronous network world. In thefuture, point-to-point service path connections will span across the whole network and willalways originate and terminate in a multiplexer.
REGREG PTEPTEPTEPTE
Figure 30 Point-to-Point
Point-to-Multipoint
A point-to-multipoint (linear add/drop) architecture includes adding and dropping circuits alongthe way. The SDH ADM (add/drop multiplexer) is a unique network element specificallydesigned for this task. It avoids the current cumbersome network architecture of demultiplexing,cross-connecting, adding and dropping channels, and the re-multiplexing. The ADM typically will be placed in an SDH link to facilitate adding and dropping tributary channels at intermediate points in the network.
REG REGPTE ADM PTE
Figure 31 Point-to-Multipoint
What are the Benefits of SDH?

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 57/73
SDH Network Configurations
Cross-connect
The cross-connect network architecture accommodates unexpected growth and change moreeasily than simple point-to-point networks. A cross-connect function concentrates traffic at a
central site and allows easy reprovisioning of the circuits.
There are two possible implementations of this type of network function:
1. Cross-connection at higher-order path levels, for example, using AU-4 granularity in theswitching matrix.
2. Cross-connection at lower-order path levels, for example, using TU-12 granularity in theswitching matrix.
REG
REG REG
REG
MUX
MUX
MUX
MUXDCS
Figure 32 Cross-connect

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 58/73
SDH Network Configurations
Ring
The SDH building block for a ring architecture is the ADM. Multiple ADMs can be put into a ringconfiguration for either Bi-directional or Uni-directional traffic. The main advantage of the ring
topology is its survivability, so if a fibre cable is cut, the multiplexers have the local intelligence tosend the services affected via an alternate path through the ring without a lengthy interruption.
The demand for survivable services, diverse routing of fibre facilities, flexibility to rearrangeservices to alternate serving nodes, as well as automatic restoration within seconds, have maderings a popular SDH topology.
ADM
ADM
ADM
ADM
Figure 33 Ring

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 59/73
What are the Benefits of SDH?
The transport network using SDH provides much more powerful networking capabilities thanexisting asynchronous systems. The key benefits provided by SDH are:
• Pointers, MUX/DEMUX
As a result of SDH transmission, the network clocks are referenced to a highly stable reference point; so the need to align the data streams using non-deterministic bit-stuffing is unnecessary.Therefore, a lower rate signal such as E1 is directly accessible, and intermediate demultiplexing is
not needed to access the bitstreams.
For those situations in which reference frequencies may vary, SDH uses pointers to allow thestreams to "float" within the payload. Pointers are the key to synchronous timing ; they allow avery flexible allocation and alignment of the payload within the transmission frame.
• Reduced Back-to-Back Multiplexing
In the asynchronous PDH systems, care must be taken when routing circuits in order to avoidmultiplexing and demultiplexing too many times since electronics (and their associated capitalcost) are required every time an E1 signal is processed. With SDH, E1s can be multiplexed
directly to the STM-N rate. Because of synchronisation, an entire optical signal does not have to be demultiplexed, only the individual VC or STM signals that need to be accessed.
• Optical Interconnect
A major SDH benefit is that it allows mid-span meet with multi-vendor compatibility. Today'sSDH standards contain definitions for fibre-to-fibre interfaces at the physical level. Theydetermine the optical line rate, wavelength, power levels, pulse shapes, and coding. The currentstandards also fully define the frame structure, overhead, and payload mappings. Enhancementsare being developed to define the messages in the overhead channels to provide increased OAMfunctionality.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 60/73
SDH allows optical interconnection between network providers regardless of who makes theequipment. The network provider can purchase one vendor's equipment and convenientlyinterface with other vendors' SDH equipment at either operator locations or customer premises.Users may now obtain the STM-N equipment of their choice and meet with their network provider of choice at that STM-N level.
• Multi-point Configurations
Most existing asynchronous transmission systems are only economic for point-to-pointapplications, whereas SDH can efficiently support a multi-point or cross-connect configuration.
A cross-connect is an intermediate site from which traffic is distributed onward into the network.The cross-connect allows many nodes or sites to communicate as a single network instead of asseparate systems. Cross-connecting reduces requirements for back-to-back multiplexing anddemultiplexing, and helps realize the benefits of traffic grooming.
Network providers no longer need to own and maintain customer-located equipment. A multi- point implementation permits STM-N interconnects and mid-span meets, allowing network providers and their customers to optimize their shared use of the SDH infrastructure.
• Convergence, ATM, Video and SDH
Convergence is the trend toward delivery of voice, data, images, and video through diversetransmission and switching systems that supply high-speed transportation over any medium to anylocation. Tektronix is pursuing new opportunities to lead the market by providing test and
measurement equipment to users who process or transport voice, data, image, and video signalsover high speed networks.
Many of the new broadband services may use Asynchronous Transfer Mode (ATM) - a fast packet-switching technique using short, fixed-length packets called cells. Asynchronous Transfer Mode multiplexes a service into cells that may be combined and routed as necessary. Because of the capacity and flexibility that it offers, SDH is a logical transport mechanism for ATM.
In principle, ATM is quite similar to other packet-switching techniques; however, the detail of ATM operation is somewhat different. Each ATM cell is made up of 53 octets, or bytes. Of these,48 octets make up the user-information field and five octets make up the header. The cell header identifies the "virtual path" to be used in routing the cell through the network. The virtual path
defines the connections through which the cell is routed to reach its destination.
SONET for Reference

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 61/73
The ATM cell consists of two parts: a five-byte header
and a 48-byte information field.
Byte 1 GFC (UNI) or VPI (NNI)
VPI ↑
Byte 2 VPI VCI 5
Byte 3 VCI Byte
Byte 4 VCI PT CLP Header
Byte 5 HEC ↓
USER INFO
(48 bytes)(Payload)
USER INFO
GFC:
VCI: Virtual Channel Identifier PTI: Payload Type Indicator VPI: Virtual Path Identifier CLP: Cell Loss PriorityHEC: Header Error Check Generic Flow Control
Figure 34 ATM Cell
J1
B3
C2
G1
F2
H4
F3
K3
N1
Figure 35 ATM SDH Mapping

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 62/73
An ATM-based network is bandwidth-flexible, which allows handling of a dynamically variablemixture of services at different bandwidths. ATM also easily accommodates traffic of variablespeeds. An example of a service that realizes the benefits of a variable-rate interface is that of avideo service, where video can be digitally coded into packetised within ATM cells.
The rate at which cells can be transmitted through the network is dependent upon the physical
layer of the network used for transport of the cells. The interface rate presented to the user mayvary between a minimum and maximum rate, which ensures a much more efficient utilization of the bandwidth made available to the end user.
• Grooming
Grooming refers to either consolidating or segregating traffic to make more efficient use of thenetwork facilities. Consolidation means combining traffic from different locations onto onefacility, while segregation is the separation of traffic.
Grooming eliminates inefficient techniques like back-hauling. It is possible to groom traffic onasynchronous systems, however to do so requires expensive back-to-back configurations andmanual or electronic cross-connects. By contrast, an SDH system can segregate traffic at either anSTM-1 or VC level to send it to the appropriate nodes.
Grooming can also provide segregation of services. For example, at an interconnect point, anincoming SDH line may contain different types of traffic, such as switched voice, data, or video.An SDH network can conveniently segregate the switched and non-switched traffic.
• Enhanced OAM
SDH allows integrated network OAM, in accordance with the philosophy of single-endedmaintenance. In other words, one connection can reach all network elements within a givenarchitecture; separate links are not required for each network element. Remote provisioning provides centralized maintenance and reduced travel for maintenance personnel - which translatesto expense savings.
Note: OAM is sometimes referred to as OAM&P.
• Enhanced Performance Monitoring
Substantial overhead information is provided in SDH to allow quicker troubleshooting and
detection of failures before they degrade to serious levels.
SONET for Reference

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 63/73
SONET for Reference
Transmission standards in the U.S., Canada, Korea, Taiwan, and Hong Kong (ANSI) and the restof the world (ITU-T) evolved from different basic-rate signals in the non-synchronous hierarchy.ANSI Time Division Multiplexing (TDM) combines twenty four 64 kbit/s channels (DS0) intoone 1.544-Mbit/s DS-1 signal. ITU TDM multiplexes thirty 64 kbit/s channels (E0) into one2.048 Mbit/s E1 signal (an extra two channels provide frame alignment and signalling, makingthirty-two (32) total).
An important issue for the ITU-T to resolve was how to efficiently accommodate both the1.5 Mbit/s and the 2 Mbit/s non-synchronous hierarchies in a single network standard. The
agreement reached specified a basic transmission rate of 51 Mbit/s for SONET and a basic rate of 155 Mbit/s for SDH.
Synchronous and Non-synchronous line rates and the relationships between each are shown in thetwo tables that follow.
Table 6. SONET/SDH Hierarchies
SONETBit RateSDHSONET CapacitySDH CapacitySTS-1, OC-151.84 Mbit/sSTM-028 DS1 or 1DS321 E1STS-3, OC-3155.52 Mbit/sSTM-184 DS1 or 3 DS363 E1 or 1 E4STS-12, OC-12622.08 Mbit/sSTM-4336 DS1 or 12 DS3252 E1 or 4 E4STS-48, OC-482488.32 Mbit/sSTM-161344 DS1 or 48 DS31008 E1 or 16 E4STS-192, OC-1929953.28 Mbit/sSTM-645376 DS1 or 192 DS34032 E1 or
64 E4Note: Although an SDH STM-1 has the same bit rate as the SONET STS-3, the twosignals contain different frame structures.
STM = Synchronous Transport Module (ITU-T)STS = Synchronous Transport Signal (ANSI)OC = Optical Carrier (ANSI)
Table 7. Non-Synchronous Hierarchies

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 64/73
SONET for Reference
ANSI RateITU RateSignalDigital Bit RateChannelsSignalDigital Bit RateChannelsDS064 kbit/s1DS064 kbit/s64 kbit/s64 kbit/sDS11.544 Mbit/s24 DS0E12.048 Mbit/s32 E0DS26.312 Mbit/s96DS0E28.448 Mbit/s128 E0DS344.7 Mbit/s28 DS1E334.368 Mbit/s16 E1not definedE4139.264
Mbit/s64 E1SONET and SDH Hierarchies
SONET and SDH converge at SDH's 155 Mbit/s base level, defined as STM-1 or "SynchronousTransport Module-1." The base level for SONET is STS-1 (or OC-1) and is equivalent to51.84 Mbit/s. Thus, SDH's STM-1 is equivalent to SONET's STS-3 (3 x 51.84 Mbit/s =155.5 Mbit/s). Higher SDH rates of STM-4 (622 Mbit/s), STM-16 (2.4 Gbit/s), and STM-64(10 Gbit/s) have also been defined.
Multiplexing is accomplished by combining - or interleaving - multiple lower-order signals(1.5 Mbit/s, 2 Mbit/s, etc.) into higher-speed circuits (51 Mbit/s, 155 Mbit/s, etc.). By changingthe SONET standard from bit-interleaving to byte-interleaving, it became possible for SDH toaccommodate both transmission hierarchies. This modification allows an STM-1 signal to carrymultiple 1.5 Mbit/s or 2 Mbit/s signals - and multiple STM signals to be aggregated to carryhigher orders of SONET or SDH tributaries.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 65/73
List of Terms
Three sets of terms are arranged at the beginning of this section because it is important to see thatthey are not equivalent terms, which is how they get used in normal discussions. They are:
• Add/ Drop
• The process where a part of the information carried in a transmission system is extracted
(dropped) at an intermediate point and different information is inserted (added) for subsequent transmission. The remaining traffic passes straight through the multiplexer without additional processing.
• Map/ Demap
• A term for multiplexing, implying more visibility inside the resultant multiplexed bit stream
than available with conventional asynchronous techniques.
• Multiplex/ Demultiplex
• Multiplex (MUX) - To transmit two or more signals over a single channel. Demultiplex
(DEMUX) - To separate two or more signals previously combined by compatiblemultiplexing equipment. Demultiplexing - A process applied to a multiplex signal for recovering signals combined within it and for restoring the distinct individual channels of the signals.
Add/Drop Multiplexer (ADM) - A multiplexer capable of extracting and inserting lower-ratesignals from a higher-rate multiplexed signal without completely demultiplexing the signal.
Administrative Unit (AU) - An Administrative Unit is the information structure which providesadaptation between the Higher-Order path layer and the Multiplex Section layer. The VirtualContainer (VC) plus the pointers (H1, H2, H3 bytes) is called the Administrative Unit (AU).
AIS (Alarm Indication Signal) - A code sent downstream indicating an upstream failure hasoccurred.
AMI - Alternate Mark Inversion. The line-coding format in transmission systems wheresuccessive ones (marks) are alternatively inverted (sent with polarity opposite that of the preceding mark).

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 66/73
ANSI - American National Standards Institute. A standards-setting, non-governmentorganization, which develops and publishes standards for "voluntary" use in the United States.
Asynchronous - A network where transmission system payloads are not synchronised and eachnetwork terminal runs on its own clock.
Asynchronous Transfer Mode (ATM) - A multiplexing/switching technique in whichinformation is organized into fixed-length cells with each cell consisting of an identification header field and an information field. The transfer mode is asynchronous in the sense that the use of thecells depends on the required or instantaneous bit rate.
Attenuation - Reduction of signal magnitude or signal loss, usually expressed in decibels.
Automatic Protection Switching (APS) - The ability of a network element to detect a failedworking line and switch the service to a spare (protection ) line. 1+1 APS pairs a protection linewith each working line. 1:N APS provides one protection line for every N working lines.
Backhauling - Cumbersome traffic management technique used to reduce the expense of multiplexing/demultiplexing.
Bandwidth - Information-carrying capacity of a communication channel. Analog bandwidth is therange of signal frequencies that can be transmitted by a communication channel or network.
Bidirectional - Operating in both directions. Bi-directional APS allows protection switching to beinitiated by either end of the line.
Binary N-Zero Suppression (BNZS) - Line coding system that replaces N number of zeros witha special code to maintain pulse density required for clock recovery. N is typically 3, 6, or 8.
BIP-8 (Bit Interleaved Parity-8) - A method of error checking in SDH which allows in-service performance monitoring. For example, a BIP-8 creates eight-bit (one-byte) groups, then does a parity check for each of the eight bit positions in the byte.
B-ISDN (Broadband Integrated Services Digital Network) - A single ISDN network which
can handle voice, data, and eventually video services.
Bit - One binary digit; a pulse of data.
Bit Error vs. Block Error
Error rate statistics play a key role in measuring the performance of a network. As errorsincrease, user payload (especially data) must be re-transmitted, or lost entirely.
Bit Error Rate (BER) - The number of bit errors detected in a unit of time, usually onesecond. Bit Error rate (BER) is calculated with this formula:
BER = errored bits received/ total bits sent.
Block Error rate (BLER) - One of the underlying concepts of error performance is thenotion of Errored Blocks, i.e., blocks in which one or more bits are in error. A block is a setof consecutive bits associated with the path or section monitored by means of an Error Detection Code (EDC), such as Bit Interleaved Parity (BIP). Block Error rate (BLER) iscalculated with this formula:
BLER = errored blocks received/ total blocks sent.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 67/73
Bit-Interleaved Parity (BIP) - A parity check that groups all the bits in a block into units (suchas byte), then performs a parity check for each bit position in the group.
Bit-Stuffing - In asynchronous systems, a technique used to synchronise asynchronous signals toa common rate before multiplexing.
Bits per second (bit/s) - The number of bits passing a point every second. The transmission ratefor digital information.
Broadband - Services requiring over 2 Mbit/s transport capacity.
CCITT - See ITU.
Channel - The smallest subdivision of a circuit that provides a type of communication service;
usually a path with only one direction.Circuit - A communications path or network; usually a pair of channels providing bi-directionalcommunication.
Circuit Switching - Basic switching process whereby a circuit between two users is opened ondemand and maintained for their exclusive for the duration of the transmission.
Coding Violation (CV) - A transmission error detected by the difference between the transmittedline code and that expected at the receive end by the logical coding rules.
Concatenation - The linking together of various data structures, for example two channels joinedto form a single channel. In SDH, a number (M) of TUs can be linked together to produce aconcatenated container, M times the size of the TU. An example of this is the concatenation of
five TU-2s to carry a 32 Mbit/s video signal, known as VC-2-5c. Once assembled, anyconcatenated VC structure is multiplexed, switched and transported through the network as asingle entity.
Cyclic Redundancy Check (CRC) - A technique for using overhead bits to detect transmissionerrors.
Data Communications Channel (DCC) - Data channels in SDH that enable OAMcommunications between intelligent controllers and individual network nodes as well as inter-node communications.
Defect - A limited interruption in the ability of an item to perform a required function. Persistenceof a defect can cause a failure.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 68/73
Digital Cross-connect (DCS) - An electronic cross-connect which has access to lower-ratechannels in higher-rate multiplexed signals and can electronically rearrange (cross-connect) thosechannels.
Digital Signal - An electrical or optical signal that varies in discrete steps. Electrical signals arecoded as voltages, optical signals are coded as pulses of light.
ETSI (European Telecommunications Standards Institute) - Organization responsible for defining and maintaining European standards, including SDH.
Failure - A termination of the ability of an item to perform a required function. A failure is caused by the persistence of a defect.
FEBE (Far End Block Error) - See Remote Error Indication (REI).
FERF (Far End Receive Failure) - See Remote Defect Indication (RDI).
Fixed Stuff - A bit or byte whose function is reserved. Fixed stuff locations, sometimes calledreserved locations, do not carry overhead or payload.
Floating mode - A virtual tributary mode that allows the VC synchronous payload envelope to
begin anywhere in the VC. Pointers identify the starting location of the LO-VC. LO-VCs indifferent multiframes may begin at different locations.
Framing - Method of distinguishing digital channels that have been multiplexed together.
Frequency - The number of cycles of periodic activity that occur in a discrete amount of time.
Grooming - Consolidating or segregating traffic for efficiency.
HDB3 - High Density Bipolar 3. A bipolar coding method that does not allow more than threeconsecutive zeros.
Interleave - The ability of SDH to mix together and transport different types of input signals in anefficient manner, thus allowing higher-transmission rates.
ITU (International Telecommunication Union) - An agency of the United Nations responsiblefor the regulation, standardization, coordination and development of internationaltelecommunications as well as the harmonization of national policies. It functions throughinternational committees of telecommunications administrations, operators, manufacturers andscientific/industrial organizations.
Jitter - The short term variations of the significant instants of a timing signal from their ideal positions in time (where short term implies that these variations are of frequency greater than or equal to 10 Hz).
Locked Mode - A virtual tributary mode that fixes the starting location of the VC. Locked modehas less pointer processing than floating mode.
Mapping - The process of associating each bit transmitted by a service into the SDH payloadstructure that carries the service. For example, mapping a E1 service into an SDH VC-12associates each bit of the E1 with a location in the VC-12.
Multiframe - Any structure made of multiple frames. SDH has facilities to recognize multiframesat the E1 level and at the VC-n level.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 69/73
Multiplex Section Alarm Indication Signal (MS-AIS) - MS-AIS is generated by Section
Terminating Equipment (STE) upon the detection of a Loss of Signal or Loss of Frame defect, onan equipment failure. MS-AIS maintains operation of the downstream regenerators, and therefore prevents generation of unnecessary alarms. At the same time, data and orderwire communicationis retained with the downstream Line Terminating Equipment (LTE).
Multiplex Section Remote Defect Indication (MS-RDI) - A signal returned to the transmittingLine Terminating Equipment (LTE) upon detecting a Loss of Signal, Loss of Frame, or MS-AISdefect. MS-RDI was previously known as Multiplex Section FERF.
Multiplex Section Overhead (MSOH) - 18 bytes of overhead accessed, generated, and processed by MS terminating equipment. This overhead supports functions such as locating the payload in the frame, multiplexing or concatenating signals, performance monitoring, automatic protection switching and line maintenance.
Multiplexer - A device for combining several channels to be carried by a single physical channel.
Narrowband - Services requiring up to 2-Mbit/s transport capacity.
Network Element (NE) - In SDH, the five basic network elements are:
add/drop multiplexer; broadband digital cross-connect;wideband digital cross-connect;flexible multiplexer; and,regenerator.
Any device which is part of an SDH transmission path and serves one or more of the section, line
and path-terminating functions.
OAM - Operations, Administration, and Maintenance. Also called OAM&P.
OAM&P (Operations, Administration, Maintenance, and Provisioning) - Provides thefacilities and personnel required to manage a network.
Orderwire - A dedicated voice channel used by installers to expedite the provisioning of lines.
OS (Operations System) - Sophisticated applications software that manages operation of theentire network.
OSI Seven-layer Model - A standard architecture for data communications. Layers definehardware and software required for multi-vendor information processing equipment to be
mutually compatible. The seven layers from lowest to highest are: physical, link, network,transport, session, presentation, and application.

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 70/73
Overhead - Extra bits in a digital stream used to carry information besides traffic signals.Orderwire, for example, would be considered overhead information.
Packet Switching - An efficient method for breaking down and handling high-volume traffic in anetwork. A transmission technique that segments and routes information into discrete units.Packet switching allows for efficient sharing of network resources as packets from different
sources can all be sent over the same channel in the same bitstream.
Parity check - An error-checking scheme which examines the number of transmitted bits in a block which hold the value of "one". For even parity, an overhead parity bit is set to either one or zero to make the total number of transmitted ones in the data block plus parity bit an evennumber. For odd parity, the parity bit is set to make the total number of ones in the block an oddnumber.
Path - A logical connection between a point where a service in a VC is multiplexed to the pointwhere it is demultiplexed.
Path Overhead (POH) - Overhead accessed, generated, and processed by path-terminatingequipment.
Path Terminating Equipment (PTE) - Network elements such as fibre optic terminatingsystems which can access, generate, and process Path Overhead.
Payload - The portion of the SDH signal available to carry service signals such as E1 and E3. Thecontents of a VC.
Payload Pointer - Indicates the beginning of a Virtual Container.
Payload capacity - The number of bytes the payload of a single frame can carry.
Plesiochronous - A network with nodes timed by separate clock sources with almost the sametiming.
Pointer - A part of the SDH overhead that locates a floating payload structure. AU-n pointers
locate the payload. TU-m Pointers locate floating mode virtual tributaries. All SDH frames useAU pointers; only floating mode virtual containers use TU pointers.
POP (Point-of-Presence) - A point in the U.S. network where inter-exchange carrier facilitiesmeet with access facilities managed by telephone companies or other service providers.
PRC (Primary Reference Clock) - In a synchronous network, all the clocks are traceable to onehighly stable reference supply, the Primary Reference Clock (PRC). The accuracy of the PRC is
better than ±1 in 1011 and is derived from a cesium atomic standard.
Remote Alarm Indication (RAI) - A code sent upstream in a E-n network as a notification thata failure condition has been declared downstream. (RAI signals were previously referred to asYellow signals.)
Remote Defect Indication (RDI) - A signal returned to the transmitting Terminating Equipmentwhen the receiving Terminating Equipment detects a Loss of Signal, Loss of Frame, or AISdefect. RDI was previously known as Far End Receive Failure (FERF).

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 71/73
Remote Error Indication (REI) - An indication returned to a transmitting node (source) that an
errored block has been detected at the receiving node (sink). REI was previously known as Far End Block Error (FEBE).
Remote Failure Indication (RFI) - A failure is a defect that persists beyond the maximum timeallocated to the transmission system protection mechanisms. When this situation occurs, an RFI issent to the far end and will initiate a protection switch if this function has been enabled.
Regenerator - Device that restores a degraded digital signal for continued transmission; alsocalled a repeater.
SDH (Synchronous Digital Hierarchy) - The ITU-defined international networking standardwhose base transmission level is 155 Mbit/s (STM-1). SDH standards were first published in 1989to address interworking between the ITU and ANSI transmission hierarchies.
SEC (Synchronous Equipment Clock) - G.813 slave clock contained within an SDH network element.
Section - The span between two SDH network elements capable of accessing, generating, and processing only SDH Section overhead.
Section Overhead - Nine columns of SDH overhead accessed, generated, and processed bysection terminating equipment. This overhead supports functions such as framing the signal and performance monitoring.
Section Terminating Equipment (STE) - Equipment that terminates the SDH Section layer.STE interprets and modifies or creates the Section Overhead.
Slip - An overflow (deletion) or underflow (repetition) of one frame of a signal in a receiving buffer.
SONET (Synchronous Optical Network) - A standard for optical transport in the United,States, Canada, Japan, Korea and Hong Kong that defines optical carrier levels and their electrically equivalent synchronous transport signals. SONET allows for a multi-vendor environment and positions the network for transport of new services, synchronous networking,and enhanced OAM&P.
SSM (Synchronisation Status Message) - Bits 5 to 8 of SDH overhead byte S1 are allocatedfor Synchronisation Status Messages. For further details on the assignment of bit patterns for byteS1, see the section of this primer on Multiplex Section Overhead.
Stuffing - see bit-stuffing

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 72/73
Synchronous - A network where transmission system payloads are synchronised to a master (network) clock and traced to a reference clock. A network where all clocks have the same longterm accuracy under normal operating conditions.
Synchronisation Supply Unit (SSU) - A network equipment clock.
Synchronous Transport Module (STM) - A structure in the SDH transmission hierarchy. STM-1 is SDH's base-level transmission rate equal to 155.52 Mbit/s. Higher rates of STM-4,STM-16, and STM-64 are also defined.
Tributary Unit (TU) - A Tributary Unit is an information structure which provides adaptation between the Lower-Order path layer and the Higher-Order path layer. It contains the VirtualContainer (VC) plus a tributary unit pointer.
Tributary Unit Group (TUG) - Contains several Tributary Units.
Virtual Container (VC) A signal designed for transport and switching of sub-SDH payloads.
Wander - The long term variations of the significant instants of a digital signal from their ideal position in time (where long term implies that these variations are of frequency less than 10 Hz).
Yellow Signal - See Remote Alarm Indication (REI).

7/28/2019 SDH Primer
http://slidepdf.com/reader/full/sdh-primer 73/73
Reference MaterialsITU-TG.701Vocabulary of digital transmission and multiplexing and PCM termsG.702Digital Hierarchybit ratesG.703Physical/ electrical characteristics of hierarchical digital interfacesG.704Synchronousframe structures used at 1544, 6312, 2048, 8448 and 4476 kbit/s hierarchical levelsG.706Framealignment and cyclic redundancy check (CRC) procedures relating to basic frame structures defined inRecommendation G.704G.707Network Node Interface for the SDHG.772Protected monitoring pointsprovided on digital transmission systemsG.780Vocabulary of terms for SDH networks andequipmentG.783Characteristics of SDH equipment functional blocksG.784SDHmanagementG.802Interworking between networks based on different and speech codinglawsG.803Architectures of transport networks based on the SDHG.825Control of jitter and wander inSDHG.826Error performance parameters and objectives for international, constant bit rate digital pathsat or above the primary rateG.827Availability parameters and objectives for path elements of
international constant bit-rate digital paths at or above the primary rateG.831Management capabilities of transport network based on SDHG.841Types and characteristics of SDH network protectionarchitecturesG.861Principles and guidelines for the integration of satellite and radio systems inSDHG.957Optical interfaces for equipment and systems relating to the SDHG.958Digital line systemsbased on SDH for use on optical fibre cablesI.432B-ISDN User -network interface - Physical layer specificationM.2100Performance Limits for Bringing-into-Service and maintenance of international digitalpaths, sections, and transmission systemsM.2101Performance Limits for BIS and Maintenance of Int'SDH Paths and Multiplex SectionsO.150General requirements for instrumentation for performancemeasurements on digital transmission equipmentO.181Equipment to assess error performance on STM-N interfacesF.750 (ITU-R)Architectures and functional aspects of radio-relay systems for SDH-basednetworks
Copyright ©1997, Tektronix, Inc. All rights reserved. Printed in U.S.A. Tektronix products are covered by
U.S. and foreign patents, issued and pending. Information in this publication supersedes that in all
previously published material. Specification and price change privileges reserved. TEKTRONIX and TEKare registered trademarks.
For further information, contact:
Tektronix, Inc.P.O. Box 500Beaverton, Oregon 97077-0001(800) 426-2200(503) 627-7111