
RANCANG BANGUN SISTEM PENCITRAAN LOKASI PUNA …biofarmaka.ipb.ac.id/biofarmaka/2013/PIRS 2012 -...
4
0081: Siswayudi Azhari dkk. HK-7 RANCANG BANGUN SISTEM PENCITRAAN LOKASI PUNA DENGAN PENGENALAN POLA Siswayudi Azhari * , Fadjar Rahino Triputra, dan I Made Astawa PUSAT TEKNOLOGI INFORMASI DAN KOMUNIKASI BPPT Gedung Teknologi III Lantai 3 Puspiptek Serpong, Tangerang 15111 * e-mail: [email protected] Disajikan 29-30 Nop 2012 ABSTRAK Negara Indonesia memiliki wilayah yang cukup luas serta berbatasan banyak negara lain. Untuk menjaga kedaulatan ne- gara RI khususnya pada daerah yang berbatasan dengan negara tetangga, maka TNI sangat mebutuhkan dukungan teknologi untuk memantau wilayah tersebut. Saat ini pemantauan biasa dilakukan dengan menggunakan pesawat berawak dengan jadwal pemantauan berkala. Hal ini membutuhkan biaya operasional yang sangat besar untuk keperluan pengadaan pesawat, opera- tor yang terlatih, bandar udara perintis yang tesebar serta biaya kebutuhan operasional lainnya. Untuk tujuan mengurangi anggaran yang signifkan, maka pengunaan pesawat udara nir awak adalah suatu hal yang sangat mendesak. Akan tetapi, peng- gunaan pesawat nir awak membutuhkan panduan GPS untuk menentukan koordinat wilayah dan GPS menggunakan satelit yang umumnya adalah milik pemerintah negara lain. Jika kemudian terjadi krisis hubungan dengan negara yang bersangkutan maka ketergantungan terhadap penggunaan peralatan GPS akan menjadi kendala bagi kelangsungan operasional pengawasan tersebut. Oleh karena itu, perlu dikembangkan suatu sistem penentuan koordinat wilayah yang tidak lagi bergantung pada GPS, akan tetapi menggunakan sistem pencitraan dengan pengenalan pola. Teknologi pengenalan pola merupakan salah satu teknologi yang mampu membaca citra/gambar untuk dikenali sebagai sesuatu yang hendak dimaksud seperti misalnya huruf. Teknologi ini akan diterapkan pada sistem pencitraan lokasi pesawat udara nir awak agar dapat mengenali posisi yang hendak dituju oleh pesawat yang kemudian melakukan misi yang telah ditetapkan dan kemudian kembali ke basis pesawat diterbangkan tanpa perlu menggunakan GPS sebagai acuan lokasinya. Kata Kunci: kemandirian, navigasi, pengolahan citra, system koordinat I. PENDAHULUAN Dalam rangka kemandirian industri dalam negeri dalam memenuhi kebutuhan alutsista TNI khusus- nya PUNA (pesawat udara nir awak), BPPT melihat pentingnya teknologi sistem navigasi pesawat menjadi bagian dari bagian terdepan dalam sistem pertahanan dan keamanan yang dimiliki bangsa ini, terutama ketika bangsa lain sudah menapakkan diri pada alat tempur berbasis teknologi tinggi ini. Hal ini tentunya menjadikan BPPT sebagai lembaga pengkajian dan penerapan teknologi memiliki peran penting dalam rangka membantu bangsa dan negara khususnya di bidang pertahanan dan keamanan untuk menguasai teknologi sistem navigasi yang memanfa- atkan pencitraan di sekitarnya untuk mengetahui po- sisinya berada tanpa menggunakan GPS. Komponen sistem embedded yang memiliki sistem navigasi menggunakan pencitraan lokasi ini telah sulit didapat baik di dalam negeri maupun luar negeri karena memiliki nilai pertahanan dan keamanan yang sangat tinggi pada suatu negara tertentu, sehingga perlu melakukan pengkajian dan pengembangan tek- nologi sistem navigasi pencitraan lokasi yang diimple- mentasikan pada PUNA (Pesawat Udara Nir Awak) BPPT. II. METODOLOGI Citra gambar yang diambil dengan kamera ter- pasang di PUNA seperti contohnya gimbal, diolah sedemikian rupa menjadi suatu pola gambar tertentu yang berbentuk seperti layaknya mozaik. Ketika pe- sawat melintas suatu track baru di udara, seluruh citranya diambil dan diubah menjadi gambar-gambar mozaik dan disimpan dalam memori sebagai suatu pembelajaran awal untuk mengenali daerah tersebut. Citra yang diperoleh akan disimpan di memory dengan koordinat stamp-nya. Penggabungan frame citra se- cara sekuen diperoleh melalui metode image registra- Prosiding InSINas 2012
Transcript of RANCANG BANGUN SISTEM PENCITRAAN LOKASI PUNA …biofarmaka.ipb.ac.id/biofarmaka/2013/PIRS 2012 -...

0081: Siswayudi Azhari dkk. HK-7
RANCANG BANGUN SISTEM PENCITRAAN LOKASI PUNA DENGANPENGENALAN POLA
Siswayudi Azhari∗, Fadjar Rahino Triputra, dan I Made Astawa
PUSAT TEKNOLOGI INFORMASI DAN KOMUNIKASI BPPTGedung Teknologi III Lantai 3
Puspiptek Serpong, Tangerang 15111
∗e-mail: [email protected]
Disajikan 29-30 Nop 2012
ABSTRAK
Negara Indonesia memiliki wilayah yang cukup luas serta berbatasan banyak negara lain. Untuk menjaga kedaulatan ne-gara RI khususnya pada daerah yang berbatasan dengan negara tetangga, maka TNI sangat mebutuhkan dukungan teknologiuntuk memantau wilayah tersebut. Saat ini pemantauan biasa dilakukan dengan menggunakan pesawat berawak dengan jadwalpemantauan berkala. Hal ini membutuhkan biaya operasional yang sangat besar untuk keperluan pengadaan pesawat, opera-tor yang terlatih, bandar udara perintis yang tesebar serta biaya kebutuhan operasional lainnya. Untuk tujuan mengurangianggaran yang signifkan, maka pengunaan pesawat udara nir awak adalah suatu hal yang sangat mendesak. Akan tetapi, peng-gunaan pesawat nir awak membutuhkan panduan GPS untuk menentukan koordinat wilayah dan GPS menggunakan satelityang umumnya adalah milik pemerintah negara lain. Jika kemudian terjadi krisis hubungan dengan negara yang bersangkutanmaka ketergantungan terhadap penggunaan peralatan GPS akan menjadi kendala bagi kelangsungan operasional pengawasantersebut. Oleh karena itu, perlu dikembangkan suatu sistem penentuan koordinat wilayah yang tidak lagi bergantung padaGPS, akan tetapi menggunakan sistem pencitraan dengan pengenalan pola. Teknologi pengenalan pola merupakan salah satuteknologi yang mampu membaca citra/gambar untuk dikenali sebagai sesuatu yang hendak dimaksud seperti misalnya huruf.Teknologi ini akan diterapkan pada sistem pencitraan lokasi pesawat udara nir awak agar dapat mengenali posisi yang hendakdituju oleh pesawat yang kemudian melakukan misi yang telah ditetapkan dan kemudian kembali ke basis pesawat diterbangkantanpa perlu menggunakan GPS sebagai acuan lokasinya.
Kata Kunci: kemandirian, navigasi, pengolahan citra, system koordinat
I. PENDAHULUANDalam rangka kemandirian industri dalam negeri
dalam memenuhi kebutuhan alutsista TNI khusus-nya PUNA (pesawat udara nir awak), BPPT melihatpentingnya teknologi sistem navigasi pesawat menjadibagian dari bagian terdepan dalam sistem pertahanandan keamanan yang dimiliki bangsa ini, terutamaketika bangsa lain sudah menapakkan diri pada alattempur berbasis teknologi tinggi ini.
Hal ini tentunya menjadikan BPPT sebagai lembagapengkajian dan penerapan teknologi memiliki peranpenting dalam rangka membantu bangsa dan negarakhususnya di bidang pertahanan dan keamanan untukmenguasai teknologi sistem navigasi yang memanfa-atkan pencitraan di sekitarnya untuk mengetahui po-sisinya berada tanpa menggunakan GPS.
Komponen sistem embedded yang memiliki sistemnavigasi menggunakan pencitraan lokasi ini telah sulitdidapat baik di dalam negeri maupun luar negeri
karena memiliki nilai pertahanan dan keamanan yangsangat tinggi pada suatu negara tertentu, sehinggaperlu melakukan pengkajian dan pengembangan tek-nologi sistem navigasi pencitraan lokasi yang diimple-mentasikan pada PUNA (Pesawat Udara Nir Awak)BPPT.
II. METODOLOGICitra gambar yang diambil dengan kamera ter-
pasang di PUNA seperti contohnya gimbal, diolahsedemikian rupa menjadi suatu pola gambar tertentuyang berbentuk seperti layaknya mozaik. Ketika pe-sawat melintas suatu track baru di udara, seluruhcitranya diambil dan diubah menjadi gambar-gambarmozaik dan disimpan dalam memori sebagai suatupembelajaran awal untuk mengenali daerah tersebut.Citra yang diperoleh akan disimpan di memory dengankoordinat stamp-nya. Penggabungan frame citra se-cara sekuen diperoleh melalui metode image registra-
Prosiding InSINas 2012
HK-8 0081: Siswayudi Azhari dkk.
tion. Gabungan citra yang diperoleh dan korelasi koor-dinat per bagian elemennya disimpan dalam basis datasebagai acuan.
Selanjutnya, dengan memanfaatkan gambar-gambarmozaik sebagai basis data sebagai acuan yang tersim-pan tersebut, penerbangan berikutnya adalah mengam-bil citra di posisi itu, lalu membandingkan hasilnyagambar olahannya dengan gambar-gambar yang adadalam memori menggunakan perbandingan image sim-ilarity (dengan metode histogram atau yang lainnya).Jika ada kesesuai gambar sesuai dengan keunikandari gambar tersebut, maka kemudian gambar berikutyang tersimpan di memori akan menjadi acuan gam-bar menuju arah berikutnya. Sistem ini dikenal puladengan nama registrasi sekuensial gambar (Image Se-quence Registration). Dengan mengikuti sekuensialgambar yang tersimpan di memori, maka secara otoma-tis PUNA akan mengikuti track yang telah dilalui olehpesawat pertama yang mengambil citra gambar un-tuk pertama kalinya. Hasil simpanan gambar ini da-pat digunakan bagi pesawat-pesawat berikutnya untukmengikuti track yang telah ditetapkan tersebut.
III. HASIL DAN PEMBAHASAN- Pemanfaatan algoritma TLD (Tracking Learning De-
tection:TLD digunakan untuk mendapatkan optimalisasiwaktu pemrosesan.
- Kelengkapan Aplikasi untuk Menjalankan TLD
GAMBAR 1: Menjalankan TLD melalui Matlab
Pengujian Sistem Pencitraan Lokasi PUNA UntukMenentukan Koordinat Objek
Perekaman gambar referensi posisi berdasarkan lin-tang dan bujur dengan kamera beresolusi 640×480 pik-selfile data01.txt:
439,223,465,255,107.4814053172,-6.9063315695
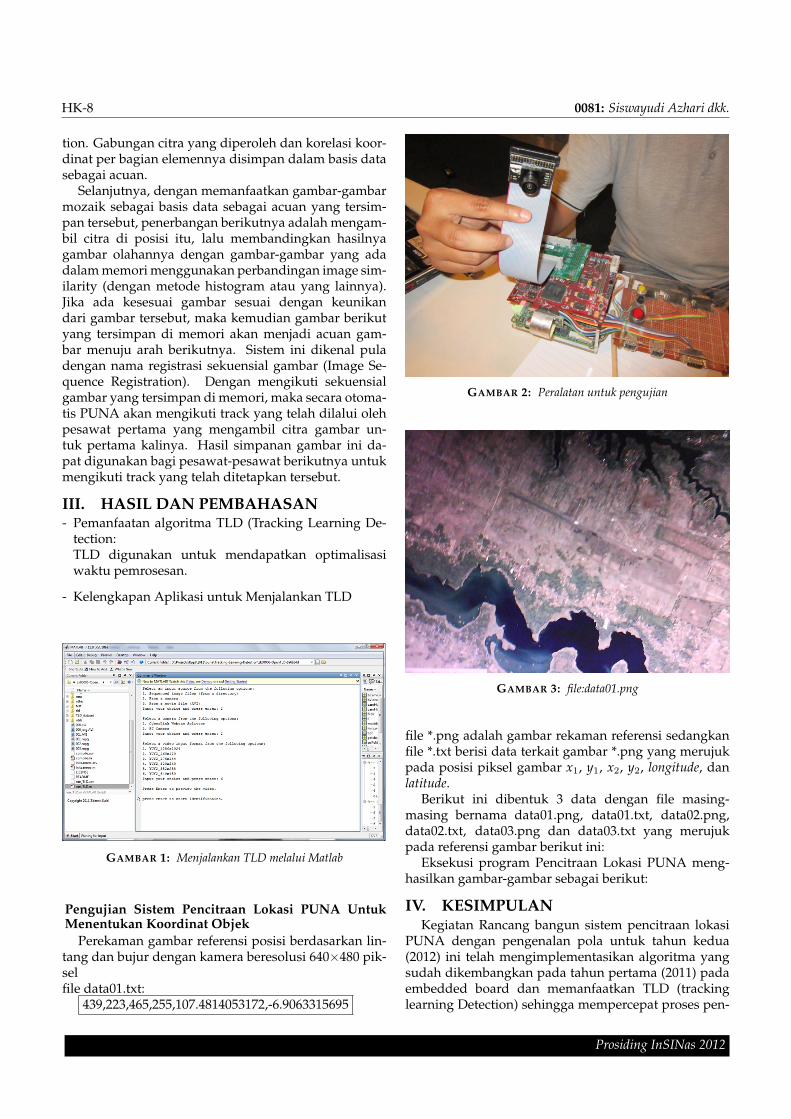
GAMBAR 2: Peralatan untuk pengujian
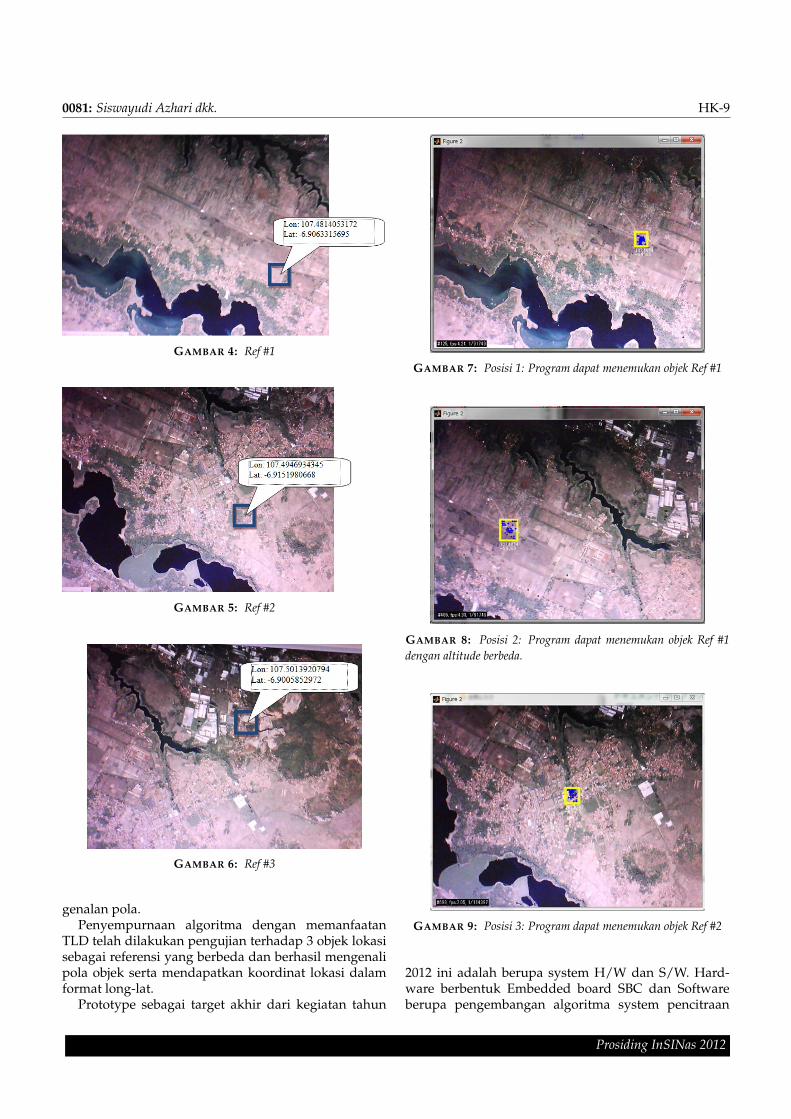
GAMBAR 3: file:data01.png
file *.png adalah gambar rekaman referensi sedangkanfile *.txt berisi data terkait gambar *.png yang merujukpada posisi piksel gambar x1, y1, x2, y2, longitude, danlatitude.
Berikut ini dibentuk 3 data dengan file masing-masing bernama data01.png, data01.txt, data02.png,data02.txt, data03.png dan data03.txt yang merujukpada referensi gambar berikut ini:
Eksekusi program Pencitraan Lokasi PUNA meng-hasilkan gambar-gambar sebagai berikut:
IV. KESIMPULANKegiatan Rancang bangun sistem pencitraan lokasi
PUNA dengan pengenalan pola untuk tahun kedua(2012) ini telah mengimplementasikan algoritma yangsudah dikembangkan pada tahun pertama (2011) padaembedded board dan memanfaatkan TLD (trackinglearning Detection) sehingga mempercepat proses pen-
Prosiding InSINas 2012
0081: Siswayudi Azhari dkk. HK-9
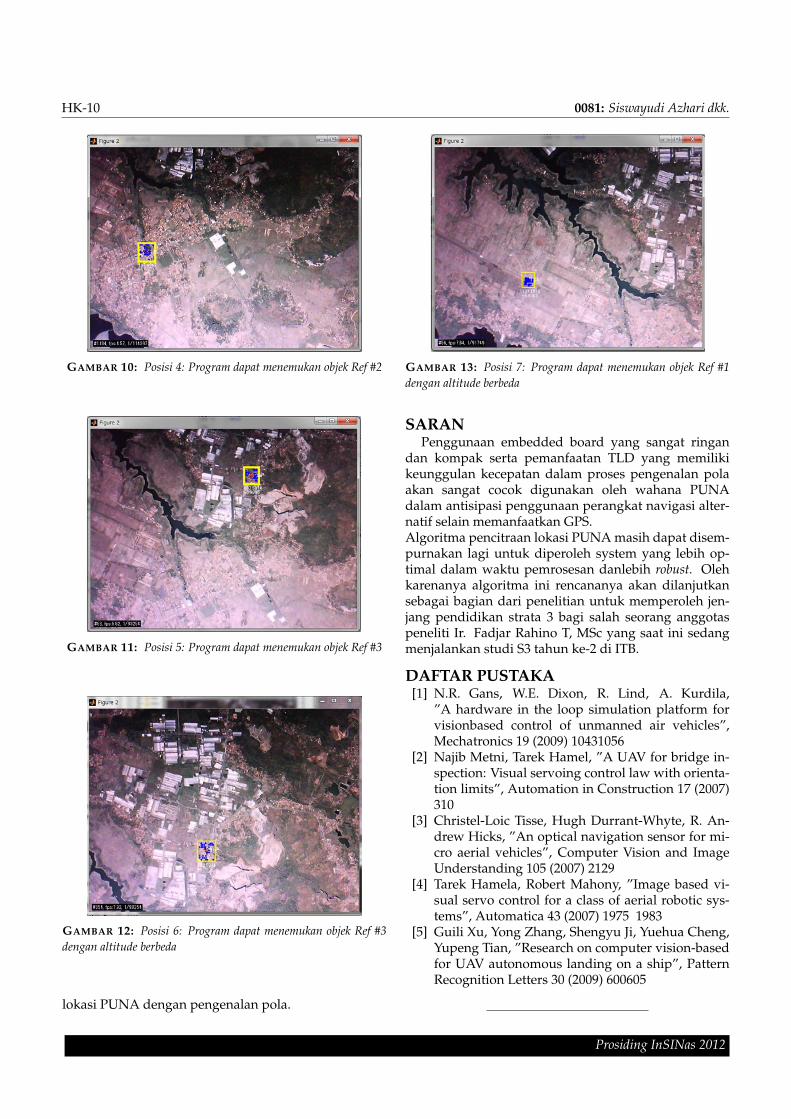
GAMBAR 4: Ref #1
GAMBAR 5: Ref #2
GAMBAR 6: Ref #3
genalan pola.Penyempurnaan algoritma dengan memanfaatan
TLD telah dilakukan pengujian terhadap 3 objek lokasisebagai referensi yang berbeda dan berhasil mengenalipola objek serta mendapatkan koordinat lokasi dalamformat long-lat.
Prototype sebagai target akhir dari kegiatan tahun
GAMBAR 7: Posisi 1: Program dapat menemukan objek Ref #1
GAMBAR 8: Posisi 2: Program dapat menemukan objek Ref #1dengan altitude berbeda.
GAMBAR 9: Posisi 3: Program dapat menemukan objek Ref #2
2012 ini adalah berupa system H/W dan S/W. Hard-ware berbentuk Embedded board SBC dan Softwareberupa pengembangan algoritma system pencitraan
Prosiding InSINas 2012
HK-10 0081: Siswayudi Azhari dkk.
GAMBAR 10: Posisi 4: Program dapat menemukan objek Ref #2
GAMBAR 11: Posisi 5: Program dapat menemukan objek Ref #3
GAMBAR 12: Posisi 6: Program dapat menemukan objek Ref #3dengan altitude berbeda
lokasi PUNA dengan pengenalan pola.
GAMBAR 13: Posisi 7: Program dapat menemukan objek Ref #1dengan altitude berbeda
SARANPenggunaan embedded board yang sangat ringan
dan kompak serta pemanfaatan TLD yang memilikikeunggulan kecepatan dalam proses pengenalan polaakan sangat cocok digunakan oleh wahana PUNAdalam antisipasi penggunaan perangkat navigasi alter-natif selain memanfaatkan GPS.Algoritma pencitraan lokasi PUNA masih dapat disem-purnakan lagi untuk diperoleh system yang lebih op-timal dalam waktu pemrosesan danlebih robust. Olehkarenanya algoritma ini rencananya akan dilanjutkansebagai bagian dari penelitian untuk memperoleh jen-jang pendidikan strata 3 bagi salah seorang anggotaspeneliti Ir. Fadjar Rahino T, MSc yang saat ini sedangmenjalankan studi S3 tahun ke-2 di ITB.
DAFTAR PUSTAKA[1] N.R. Gans, W.E. Dixon, R. Lind, A. Kurdila,
”A hardware in the loop simulation platform forvisionbased control of unmanned air vehicles”,Mechatronics 19 (2009) 10431056
[2] Najib Metni, Tarek Hamel, ”A UAV for bridge in-spection: Visual servoing control law with orienta-tion limits”, Automation in Construction 17 (2007)310
[3] Christel-Loic Tisse, Hugh Durrant-Whyte, R. An-drew Hicks, ”An optical navigation sensor for mi-cro aerial vehicles”, Computer Vision and ImageUnderstanding 105 (2007) 2129
[4] Tarek Hamela, Robert Mahony, ”Image based vi-sual servo control for a class of aerial robotic sys-tems”, Automatica 43 (2007) 1975 1983
[5] Guili Xu, Yong Zhang, Shengyu Ji, Yuehua Cheng,Yupeng Tian, ”Research on computer vision-basedfor UAV autonomous landing on a ship”, PatternRecognition Letters 30 (2009) 600605
Prosiding InSINas 2012














