PERBAIKAN PENGENDALI PID UNTUK MODUL...
16
PERBAIKAN PENGENDALI PID UNTUK MODUL PRAKTIKUM INSTRUMENTASI DAN SISTEM KENDALI REPAIR OF PID CONTROLLER FOR A MODULE PRACTICUM INSTRUMENTATION AND CONTROL SYSTEM Proyek Akhir Untuk memenuhi sebagian persyaratan mencapai derajat Diploma Tiga Program Studi Teknik Listrik Jurusan Teknik Elektro Oleh : Jajang Nurjaman 091321082 POLITEKNIK NEGERI BANDUNG 2012
Transcript of PERBAIKAN PENGENDALI PID UNTUK MODUL...

PERBAIKAN PENGENDALI PID UNTUK MODUL
PRAKTIKUM INSTRUMENTASI
DAN SISTEM KENDALI
REPAIR OF PID CONTROLLER FOR A MODULE PRACTICUM
INSTRUMENTATION AND CONTROL SYSTEM
Proyek Akhir
Untuk memenuhi sebagian persyaratan mencapai derajat Diploma Tiga
Program Studi Teknik Listrik
Jurusan Teknik Elektro
Oleh :
Jajang Nurjaman
091321082
POLITEKNIK NEGERI BANDUNG
2012

ii

iii
DATA PRIBADI
Nama Lengkap : Jajang Nurjaman
NIM : 091321082
Tempat,Tanggal Lahir : Garut,10 Februari 1990
Alamat Lengkap : Kp.Kiarakoneng RT/RW 04/04
Desa Suci Kaler Kecamatan
Karangpawitan Kabupaten
Garut Propinsi Jawa Barat
Riwayat Pendidikan (Formal)
Politeknik Negeri Bandung : 2009-2012
SMA Negeri 2 Tarogong Kidul Garut : 2006-2009
SMP Negeri 3 Garut : 2003-2006
SD Negeri Suci Kaler 2 : 1997-2003
Riwayat Organisasi
Anggota Divisi Humas Himpunan Mahasiswa Listrik Politeknik Negeri
Bandung Periode Kepengurusan 2010-2011.
Koordinator Divisi Biro dan Kesekretariatan Assalam Politeknik Negeri
Bandung Periode Kepengurusan 2010-2011.
Ketua Ikatan Pelajar Mesjid Nur At-ta’lim (IPMA) SMA Negeri 2
Tarogong Kidul Garut Periode Kepengurusan 2007-2008.
Wakil Ketua Musyawarah Perwakilan Kelas (MPK) SMA Negeri 2
Tarogong Kidul Garut Periode Kepengurursan 2007-2008.

iv
KATA MUTIARA
Allah mengangkat orang-orang beriman di antara kamu dan juga orang-orang yang dikaruniai ilmu
pengetahuan hingga beberapa derajat. ( Al-Mujadalah : 11 )
Belajar adalah sikap berani menantang segala ketidakmungkinan bahwa ilmu yang tak dikuasai akan
menjelma di dalam diri manusia menjadi sebuah ketakutan, belajar dengan keras hanya bisa dilakukan
oleh seseorang yang bukan penakut. ( Anwar Fuadi )
Orang berilmu lebih utama daripada orang yang selalu berpuasa, shalat dan berjihad. Karena apabila
mati orang berilmu, maka terdapatlah kekosongan dalam islam yang tidak dapat ditutup selain oleh
penggantinya,yaitu orang berilmu juga. ( Umar bin Khattab )
Ilmu lebih utama daripada harta. Sebab ilmu warisan para nabi adapun harta adalah warisan Qorun,
Firaun dan lainnya. Ilmu lebih utama dari harta karena ilmu itu menjaga kamu, kalau harta kamulah
yang menjaganya. (Ali bin Abi Thalib )
Orang sukses adalah orang yang dimana jika dia gagal dalam suatu hal maka dia tidak akan berputus
asa dan akan selalu belajar menerima kegagalannya dan akan menjadikannya sebuah pelajaran yang
paling berharga dalam hidupnya.
Jadilah orang yang jujur,bertanggung jawab,dewasa dalam menyikapi suatu
masalah,bijaksana,berilmu pengetahuan yang baik,bisa memberikan manfaat pada diri sendiri,orang
tua,keluarga,sahabat dan semua orang yang selalu ada di sekeliling kita,agama,Bangsa dan Negara.
Karya ini Ku Persembahkan untuk
Ibu,Ayahku Tercinta yang telah tiada,kakak-kakakku
Dan orang-orang dekat yang selalu memberikan semangat
dan selalu ada baik suka maupun duka
(Penulis)

v
ABSTRAK
Perbaikan pengendali PID analog dengan menggunakan sistem kendali
loop terbuka bertujuan untuk mengetahui berbagai macam karakterisktik, baik
karakteristik proporsional,proporsional - integral,proporsional - derivatif maupun
gabungan antara proporsional,integral,derivatif dengan melakukan tunning
parameter - parameternya.Selain itu,dapat mengatur juga tegangan output yang
dihasilkan agar tetap stabil dan dapat diatur sesuai percobaan. Pengaturan ini
dilakukan dengan bantuan menggunakan cassey software untuk mengetahui
karakteristik atau keluarannya tersebut.
Selain menggunakan cassey software untuk melihat keluaran atau
karakteristik dari tunning parameter pengendali – pengendali itu maka digunakan
pembanding,yaitu dengan menggunakan software matlab untuk membedakan
karakteristiknya.Kombinasi pengendali proporsional, integral, dan derivatif
menghasilkan output yang memiliki respon cepat, teliti, stabil, dan teredam,
karena ketiga pengendali tersebut dapat saling melengkapi kekurangan masing-
masing.
Kata Kunci : Pengendali PID (Proporsional, Integral, Derivatif) cassey
software,matlab,sistem kendali loop terbuka,tunning parameter.

vi
ABSTRACT
The repair of analog PID controller using open loop control system aims
to determine various characteristic, the characteristics of proportional,
proportional - integral, proportional - derivative or a combination of
proportional, integral, derivative by tunning parameters.Moreover, it can also
regulate the output voltage to remain stable and can be adjusted according to the
experiment. This setting is done with the help of using the cassey sofware to know
the characteristics or the output.
In addition to using cassey software to view the output or the
characteristics of the tunning parameter controllers is then used comparison, by
using matlab software to distinguish it characteristic.A combination between
controller proportional, integral, and derivative produce output that has a rapid
response, precise, stable, and damped , because the three controllers are able to
complement disadvantages of each.
Keywords: Controller PID (Proportional, Integral, Derivative), cassey software,
matlab, open loop control system, tunning parameter.

vii
KATA PENGANTAR
Puji dan syukur penulis panjatkan kehadirat Allah SWT atas rahmat dan
karunia-Nya, sehingga penulis dapat menyelesaikan laporan Proyek Akhir dengan
baik dan tepat waktu. Laporan ini disusun dan diajukan untuk memenuhi salah
satu syarat penyelesaian Pendidikan Diploma III Program Studi Teknik Listrik
Jurusan Teknik Elektro Politeknik Negeri Bandung. Laporan Proyek Akhir ini
berjudul "PERBAIKAN PENGENDALI PID UNTUK MODUL
PRAKTIKUM INSTRUMENTASI DAN SISTEM KENDALI".
Dalam pengerjaan proyek akhir dan penyusunan laporan, penulis telah
banyak menerima bantuan dan dukungan baik secara materil, moral, dan spiritual
dari berbagai pihak. Oleh karena itu, penulis mengucapkan terima kasih kepada
semua pihak yang telah berkenan membantu. Adapun pihak-pihak yang sangat
berjasa telah membantu penulis antara lain :
1. Ibu dan keluarga tercinta yang senantiasa selalu memberikan doa, kasih
sayang, dorongan materil, moral dan spiritual kepada penulis.
2. Bapak Dedi Nono Suharno, Ir., M.T. selaku dosen pembimbing utama
yang telah banyak memberi motivasi, ilmu pengetahuan, masukan,
evaluasi dan kesediaan waktunya untuk membimbing dengan ikhlas dari
awal sampai selesainya proyek akhir kepada penulis.
3. Bapak Sarjono Wahyu Jadmiko, ST., M.Eng. selaku dosen pembimbing
pendamping yang telah banyak memberi motivasi, ilmu pengetahuan,
masukan, evaluasi dan kesediaan waktunya untuk membimbing dengan
ikhlas dari awal sampai selesainya proyek akhir kepada penulis.
4. Bapak Sunarto, ST. M.Eng. sebagai Ketua Program Studi Teknik Listrik.
5. Bapak Hari Purnama, Ir., M.Eng. sebagai Ketua Jurusan Teknik Elektro.
6. Bapak Yudi Prana Hikmat, ST., M.T. selaku Wali Kelas 3C atas waktu,
perhatian dan bimbingannya sehingga penulis bisa menyelesaikan
penyusunan proyek akhir ini.

viii
7. Seluruh panitia Proyek Akhir Program Studi Teknik Listrik Politeknik
Negeri Bandung.
8. Seluruh staf pengajar Program Studi Teknik Listrik yang telah banyak
memberikan ilmu pengetahuan yang sangat bermanfaat selama penulis
melakukan studi di Politeknik Negeri Bandung.
9. Teman - teman seperjuangan lab Sistem Kendali, yaitu Eka, Tri Eka, Dibi,
Nadya, Hadi, Hertalina, Dini, Mustofa,dan Edi.
10. Seluruh rekan-rekan mahasiswa Teknik Listrik 2009 Politeknik Negeri
Bandung khsusnya kelas 3C, yang sama-sama melaksanakan Proyek Akhir
terima kasih atas dukungan, serta adik-adik kelas Teknik Listrik 2010 dan
2011.
Harapan penulis tiada lain adalah semoga laporan ini dapat bermanfaat
khususnya bagi penulis, dan umumnya bagi pembaca. Penulis juga berharap
laporan ini dapat dijadikan salah satu acuan untuk penelitian lebih lanjut dan
dikembangkan dalam penulisan selanjutnya dalam bidang yang berkaitan.
Seluruh isi laporan Proyek Akhir ini sepenuhnya menjadi tanggung jawab
penulis. Dan penulis yakin laporan ini telah disusun dengan sangat baik dan
maksimal, namun dengan lapang hati penulis menerima kritik dan saran yang
bersifat membangun dari para pembaca, agar dalam pembuatan laporan
selanjutnya bisa menjadi lebih baik lagi.
Bandung, Juli 2012
Penulis

ix
DAFTAR ISI
Halaman
HALAMAN JUDUL ........................................................................................ i
LEMBAR PENGESAHAN ............................................................................. ii
LEMBAR DATA PRIBADI ............................................................................ iii
LEMBAR KATA MUTIARA ......................................................................... iv
ABSTRAK ........................................................................................................ v
ABSTRACT ....................................................................................................... vi
KATA PENGANTAR ...................................................................................... vii
DAFTAR ISI ..................................................................................................... ix
DAFTAR GAMBAR ........................................................................................ xii
DAFTAR TABEL ............................................................................................ xiv
DAFTAR LAMPIRAN .................................................................................... xv
BAB I PENDAHULUAN ................................................................................. 1
1.1 Latar Belakang ................................................................................. 1
1.2 Tujuan .............................................................................................. 2
1.3 Perumusan Masalah ......................................................................... 2
1.4 Pembatasan Masalah ....................................................................... 2
1.5 Metoda Pelaksanaan ........................................................................ 3
1.5.1 Studi Literatur ........................................................................ 3
1.5.2 Bimbingan .............................................................................. 3
1.5.3 Studi Lapangan ...................................................................... 3
1.5.4 Perbaikan Alat ........................................................................ 3
1.5.5 Analisa dan Evaluasi .............................................................. 3
1.5.6 Uji kerja alat dan Penyempurnaan ......................................... 3
1.6 Sistematika Penulisan ..................................................................... 4

x
BAB II LANDASAN TEORI .......................................................................... 5
2.1 Sistem Kendali ................................................................................ 5
2.2 Sistem Kendali Otomatis ................................................................ 5
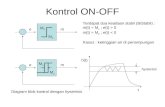
2.2.1 Sistem Pengendalian Loop Terbuka ..................................... 5
2.2.2 Sistem Pengendalian Loop Tertutup ..................................... 6
2.3 Macam-Macam Pengendali............................................................. 7
2.4 Pengendali Proporsional ................................................................. 8
2.5 Pengendali Integral ......................................................................... 10
2.6 Pengendali Derivatif ....................................................................... 13
2.7 Pengendali Proporsional – Integral ................................................. 15
2.8 Pengendali Proporsional – Derivatif ............................................... 17
2.9 Pengendali Proporsional – Integral – Derivatif............................... 17
2.10 Tanggapan Step ............................................................................. 20
2.11 Tanggapan Sistem Kendali Secara Umum ................................... 22
2.11.1 Tanggapan Transien .......................................................... 23
2.12 Operasional Amplifier (Op-Amp) ................................................. 24
2.12.1 Inverting Amplifier ............................................................ 25
2.12.2 Non-Inverting Amplifier .................................................... 26
2.12.3 Integrator .......................................................................... 28
2.12.4 Summing Amplifier ............................................................ 28
2.12.5 Penguat Differentiator ...................................................... 29
BAB III PERBAIKAN ALAT ......................................................................... 31
3.1 Spesifikasi ....................................................................................... 31
3.1.1 Spesifikasi Alat ................................................................... 31
3.1.2 Spesifikasi DC Power Supply ............................................. 31
3.2 Tahapan Perbaikan .......................................................................... 32
3.3 Pembuatan DC Supply / Catu Daya ................................................ 33
3.4 Modul DC Power Supply ±15V ...................................................... 34
3.5 Daftar Komponen Modul Pengendali PID ...................................... 35
3.6 Modul Pengendali PID .................................................................... 38

xi
3.7 Peralatan Pengukuran ..................................................................... 39
BAB IV PENGUJIAN DAN ANALISA ......................................................... 40
4.1 Tujuan Pengujian .......................................................................... 40
4.2 Tahapan Pengujian ........................................................................ 40
4.2.1 Pengujian Menggunakan Cassey Software .......................... 40
4.2.2 Hasil Pengujian Menggunakan Cassey Software ................. 41
4.2.3 Pengujian Menggunakan Matlab Software .......................... 46
4.2.4 Hasil Pengujian Menggunakan Matlab Software ................. 47
4.3 Analisa Hasil Pengujian ................................................................. 51
BAB V PENUTUP ............................................................................................ 53
5.1 Kesimpulan ..................................................................................... 53
5.2 Saran ............................................................................................... 54
DAFTAR PUSTAKA
LAMPIRAN

xii
DAFTAR GAMBAR
Halaman
Gambar 2.1 Diagram Blok Sistem Pengendalian Loop Terbuka .................... . 6
Gambar 2.2 Diagram Blok Sistem Pengendalian Loop Tertutup ................... . 6
Gambar 2.3 Diagram Blok Pengendali Proposional ........................................ . 9
Gambar 2.4 Contoh Grafik Respon Pengendali P Orde 1 dan Orde 2 ............. . 9
Gambar 2.5 Kurva Sinyal Kesalahan e(t) Terhadap t Dan Kurva u(t)
Terhadap t Pada Pembangkit Kesalahan Nol ........................... . 11
Gambar 2.6 Blok Diagram Hubungan Antara Besaran Kesalahan
Dengan Pengendali Integral ......................................................... . 11
Gambar 2.7 Perubahan Keluaran Sebagai Akibat Penguatan dan Kesalahan.... 12
Gambar 2.8 Blok Diagram Pengendali Derivatif ............................................ . 13
Gambar 2.9 Kurva Waktu Hubungan Input-Output Pengendali Derivatif ....... 14
Gambar 2.10 Diagram Blok Pengendali PI Pada Sistem Kendali Close Loop .. 16
Gambar 2.11 Blok Diagram Pengendali PID Paralel ....................................... . 19
Gambar 2.12 Rangkaian Pengendali PID Analog Paralel Sederhana .............. . 20
Gambar 2.13 Tanggapan Step Alat Pengendalian PI ......................................... 21
Gambar 2.14 Kurva Peredaman ....................................................................... . 22
Gambar 2.15 Kurva Tanggapan Sistem ........................................................... . 23
Gambar 2.16 Perbandingan Antara Amplifier Transistor dan Op-Amp .......... . 25
Gambar 2.17 Rangkaian Pembalik (Inverting Amplifier) ................................ . 26
Gambar 2.18 Non-Inverting Amplifier ............................................................ . 27
Gambar 2.19 Rangkaian Integrator ................................................................. . 28
Gambar 2.20 Rangkaian Summing Amplifier ................................................... . 29

xiii
Gambar 2.21 Rangkaian Penguat Differentiator ............................................. . 30
Gambar 3.1 Rangkaian DC Power Supply ±15V ............................................. . 34
Gambar 3.2 Modul DC Power Supply ±15V ................................................... . 34
Gambar 3.3 Modul Pengendali PID ................................................................. . 38
Gambar 4.1 Pengujian Dengan Cassey Software ............................................... 41
Gambar 4.2 Karakteristik Output Ketika Nilai Kp=1 ........................................ 41
Gambar 4.3 Karakteristik Output Ketika Nilai Kp=2 ........................................ 42
Gambar 4.4 Karakteristik Output Ketika Nilai Ki=0.5 ..................................... 42
Gambar 4.5 Karakteristik Output Ketika Nilai Ki=1 ......................................... 43
Gambar 4.6 Karakteristik Output Ketika Nilai Kd=1 ........................................ 43
Gambar 4.7 Karakteristik Output Ketika Nilai Kp=3,Ki=1 ............................... 44
Gambar 4.8 Karakteristik Output Ketika Nilai Kp=4,Ki=0.5 ............................ 44
Gambar 4.9 Karakteristik Output Ketika Nilai Kp=2 Kd=0.1 ........................... 45
Gambar 4.10 Karakteristik Output Ketika Nilai Kp=2 Ki=1 Kd=0.1................ 45
Gambar 4.11 Pengujian Dengan Matlab Software ............................................. 46
Gambar 4.12 Karakteristik Output Ketika Nilai Kp=1 ...................................... 47
Gambar 4.13 Karakteristik Output Ketika Nilai Kp=2 ...................................... 47
Gambar 4.14 Karakteristik Output Ketika Nilai Ki=0.5 .................................... 48
Gambar 4.15 Karakteristik Output Ketika Nilai Ki=1 ....................................... 48
Gambar 4.16 Karakteristik Output Ketika Nilai Kd=1 ...................................... 49
Gambar 4.17 Karakteristik Output Ketika Nilai Kp=3,Ki=1 ............................. 49
Gambar 4.18 Karakteristik Output Ketika Nilai Kp=4,Ki=0.5 .......................... 50
Gambar 4.19 Karakteristik Output Ketika Nilai Kp=2,Kd=0.1 ......................... 50
Gambar 4.20 Karakteristik Output Ketika Nilai Kp=1, Ki=0.1,Kd=0.1............ 51
Gambar 4.21 Karakteristik Output Ketika Nilai Kp=2, Ki=0.1,Kd=0.1............ 51

xiv
DAFTAR TABEL
Halaman
Tabel 2.1 Tanggapan Sistem Kendali PID Terhadap Perubahan Parameter .... . 19
Tabel 2.2 Karakteristik Penguatan Pengendali PI (Proposional & Integral) ... . 22
Tabel 3.1 Daftar Spesifikasi DC Power Supply ±15V ..................................... . 31
Tabel 3.2 IC Pada Rangkaian ........................................................................... . 35
Tabel 3.3 Kapasitor Pada Rangkaian ............................................................... . 35
Tabel 3.4 Resistor Pada Rangkaian Bagian 1 .................................................. . 36
Tabel 3.5 Resistor Pada Rangkaian Bagian 2 .................................................. . 37
Tabel 3.6 Trimpot Pada Rangkaian ................................................................. . 37

xv
DAFTAR LAMPIRAN
LAMPIRAN 1 : Datasheet LM741/UA741

xvi
DAFTAR PUSTAKA
[1]. Muhamad, Ali. 2004. Pembelajaran Perancangan Sistem Kontrol PID
Dengan Software Matlab. Yogyakarta: Universitas Negeri Yogyakarta.
[2]. Nugroho,Eko. 2011. Rancang Bangun Simulator Orde Satu dan Plant Orde
Dua Dengan Menggunakan Kontroler PID Berbasis PLC. Proyek Akhir,
Politeknik Negeri Bandung.
[3]. Rahmat, Basuki. 2004. Diktat Dasar Sistem Kontrol EE-3133. Bandung:
Sekolah Tinggi Teknologi Telekomunikasi.
[4]. _____. “ Control - Loop Tertutup dan Loop Terbuka “. Style Sheet.
http://avatar-engineering.blogspot.com/2009/12/control-loop-terbuka dan-
loop-tertutup.html
[5]. _____. “ Metode Ziegler- Nichols pada Sistem Kontrol Servo Posisi
Berbasis Komputer IBM-PC “, Elektro Indonesia,1998.
Http://www.elektroindonesia.com/elektro/kend15.html/
[6]. _____. “Pengertian Kendali PID (Proporsional – Integral – Derivative)
Controller “. R.A.D.E.N.
http://catatan-elektro.blogspot.com/2011/11/pengertian-kendali-pid.html
[7]. _____. “ Teori Kontrol PID (Proposional-Integral-Derivative) “. Style Sheet.
http://menanamilmu.blogspot.com/2010/09/teori-kontrol-pid-
proportionalintegrald.html