PERANCANGAN PENGENDALI FORMASI PADA KOORDINASI...
111
LAPORAN AKHIR PENELITIAN FUNDAMENTAL PERANCANGAN PENGENDALI FORMASI PADA KOORDINASI SISTEM MULTI-ROBOT MENGUNAKAN PENGENDALI LOGIKA FUZZY Tahun ke 2 dari rencana 2 tahun DIBIAYAI: SURAT PERJANJIAN NO: 012/K3/KM/SPK/2013 DIREKTORAT JENDRAL PENDIDIKAN TINGGI KEMENTRIAN PENDIDIKAN DAN KEBUDAYAAN Dr. Ir. Andi Adriansyah, M.Eng (0327027002) Ir. Eko Ihsanto, M.Eng (0309106802) Ir. Badaruddin, MT (0323086404) UNIVERSITAS MERCU BUANA DESEMBER 2013
Transcript of PERANCANGAN PENGENDALI FORMASI PADA KOORDINASI...

LAPORAN AKHIR PENELITIAN FUNDAMENTAL
PERANCANGAN PENGENDALI FORMASI PADA KOORDINASI SISTEM MULTI-ROBOT
MENGUNAKAN PENGENDALI LOGIKA FUZZY
Tahun ke 2 dari rencana 2 tahun
DIBIAYAI: SURAT PERJANJIAN NO: 012/K3/KM/SPK/2013
DIREKTORAT JENDRAL PENDIDIKAN TINGGI KEMENTRIAN PENDIDIKAN DAN KEBUDAYAAN
Dr. Ir. Andi Adriansyah, M.Eng (0327027002)
Ir. Eko Ihsanto, M.Eng (0309106802) Ir. Badaruddin, MT (0323086404)
UNIVERSITAS MERCU BUANA DESEMBER 2013

Judul
Peneliti/ PelaksanaNama LengkaPNIDNlabatan FungsionalProgram StudiNo. FIP
Alamat surel (e-mail)Anggota (1)Nama LengkaPNIDNPerguruan TinggiAnggota (2)Nama LengkaPNIDNPerguruan Tinggi
Tahun PelaksanaanBiaya Tahun BerjalanBiaya Keseluruhan
HALAMAI\ PENGESAHAN
Perancangan Pengendali Formasi pada
Koordinaii Sistem Multi-Robot Menggunakan
Pengendal i Logika F uzzY
Dr.Ir. Andi AdriansYah, M.Eng
0327027002Lektor KePala 700
Teknik Elektro081 1 1 884220andi@mercubuana. ac. id
Ir. Eko Ihsanto, M.Eng03091 06802Universitas Mercu Buana, Jakarta
Ir. Badaruddin S., MTa3na86404Universitas Mercu Buana, Jakarta
Tahunn ke-2 dari rencana 2tahunRp. 37.000.000Rp.68.735.000
Jakarta l9 Desember 2013
Ketuao
/t2g(Dr.Ir. Andi AdriansYah, M.Eng)
NIK: 1 9470 0122(Ir. Dana Santoso, M.ENIK: I 8763 0016
I 9263 0070

iii
RINGKASAN
Teknologi dan aplikasi robot bergerak terus berkembang secara cepat, baik dari sisi kehandalan, jangkauan kemampuan dan bidang aplikasinya. Karena aplikasinya yang luas dan perkembangan teknologi pendukungnya berkembang sangat cepat penyelidikan di bidang robot menjadi topik yang menarik bagi para peneliti. Namun, pada dekade ini, para peneliti mulai mengubah arah penelitiannya, dari investigasi sistem robot bergerak tunggal kepada koordinasi sistem multi-robot. Hal ini dikarenakan sistem multi-robot memiliki beberapa kentungan yang menjanjikan.
Salah satu pendekatan yang banyak digunakan untuk mengendalikan sistem multi-robot adalah dengan menerapkan sistem pengendalian formasi. Untuk mendapatkan performa kinerja sistem multi-robot yang handal, maka para peneliti telah mencoba menerapkan beberapa jenis sistem pengendalian. Sejauh ini, sistem pengendalian yang diterapkan pada sistem multi-robot dapat diklasifikasn pada dua kategori, yaitu sistem pengendalian klasik dan sistem pengendalian modern. Sistem pengendalian klasik, pada umumnya, memanfaatkan pendekatan model analitik, logika Boolean dan crisp serta hubungan linear. Akibatnya, sistem akan dimodelkan harus dengan pendekatan yang lengkap dan presisi. Namun, pada sistem multi-robot keadaan sistem dan lingkungannya tidak begitu akurat dan selalu berubah-ubah dengan cepat sehingga sulit dimodelkan secara presisi. Oleh karena itu, diperlukan sistem pengendalian modern untuk mengatasi problem tersebut. Salah satu sistem pengendalian modern yang dianggap mampu untuk menyelesaikan problema sistem multi-robot adalah sistem pengendalian berbasis logika fuzzy (Fuzzy Logic Controller). Karakteristik utama Logika Fuzzy adalah kekokohan mekanisme penalaran dan pengambilan keputusan yang interpolatif sehingga sesuai untuk sistem yang tidak presisi dan informasi yang tidak lengkap. Karakter tersebut merupakan kemampuan yang amat dibutuhkan dalam pengendalian sistem multi-robot.
Oleh karena itu, penelitian ini telah berupaya untuk menyelesaikan beberapa masalah pada sistem multi-robot. Pertama adalah menghasilkan serangkaian model sistem multi-robot yang dapat bergerak sesuai dengan tugas dan fungsinya dengan memberikan informasi tentang posisi dan lingkungannya. Model diujicobakan dalam beberapa eksperimen. Secara umum dapat dikatakan bahwa model robot tungal dan model system multi-robot telah bekerja dengan baik. Komunikasi antara robot juga telah berjalan sesuai dengan rancangan. Kedua adalah merancang sebuah algoritma pengendalian yang dapat mengendalikan formasi sistem multi-robot dengan formasi tertentu. Algoritma ini akan memberikan keputusan dengan cara menghubungkan informasi mengenai jarak (d) dan orientasi (δ) antar robot dengan kecepatan (v) dan arah (ω) tiap-tiap robot dengan logika fuzzy. Beberapa percobaan akan dilakukan untuk menguji performa hasil pemodelan dan algortima yang telah dilakukan. Setelah itu, hasil pemodelan dan algoritma tersebut akan diimplementasikan pada beberapa buah robot sebenarnya, yaitu robot laboratorim NXT Mindstorm. Komparasi terhadap performa pemodelan dan simulasi dengan implementasi pada robot sebenarnya akan dianalisa untuk menghasilkan performa yang optimal. Keywords: multi-robot, kendali formasi, fuzzy logic
iv
PRAKATA
Alhamdulillah, segala puji hanya bagi Allah SWT, pencipta, pemilik dan
pemelihara alam semesta, atas segala kehendak dan petunjuknya, sehingga laporan
kemajuan kegiatan penelitian ini dapat diselesaikan sesuai dengan jadwal yang telah
ditentukan. Sholawat dan salam semoga selalu tercurah bagi Nabi Muhammad SAW
yang telah membimbing ummat manusia ke jalan yang benar. Semoga kita selalu
mendapatkan bimbingan dan hidayah-Nya.
Laporan kemajuan kegitan penelitian berjudul Perancangan Pengendali
Formasi pada Koordinasi Sistem Multi-Robot Menggunakan Pengendali Logika
Fuzzy ini dimaksudkan sebagai upaya untuk merancang sistem pengendali beberapa
buah robot yang disusun dengan formasi tertentu dimana pengendalinya berbasiskan
pengendali logika fuzzy. Penelitian ini ditujukan untuk dapat menjawab bagaimana
mendapatkan sistem pengendali yang sesuai, efektif dan handal untuk sistem multi-
robot yang dirancang.
Terima kasih kami ucapkan kepada Kaprodi Teknik Elektro atas upayanya
untuk mendorong para dosen untuk melaksanakan kegiatan ini. Juga terima kasih
ditujukan kepada Dekan Fakultas Teknik yang selalu mengingatkan untuk
bersemangat menunaikan kegiatan Tridharma Perguruan Tinggi. Dan, terima kasih
yang tak terhingga kepada Kepala Pusat Penelitian Universitas Mercu Buana yang
telah memberikan jadwal, ketentuan, pedoman pengajuan kegiatan pengabdian ini.
Semoga apa yang telah direncanakan dapat berjalan sesuai dengan harapan
dan mendapatkan bimbingan dari Allah SWT.
Jakarta, 19 Desember 2013
Ketua Peneliti
Andi Adriansyah, Dr., Ir., M.Eng

v
DAFTAR ISI
Halaman
HALAMAN SAMPUL i
HALAMAN PENGESAHAN ii
RINGKASAN iii
PRAKATA iv
DAFTAR ISI v
DAFTAR GAMBAR vi
DAFTAR TABEL vii
DAFTAR LAMPIRAN viii
BAB 1. PENDAHULUAN 1
BAB 2. TINJAUAN PUSTAKA 5
BAB 3. TUJUAN DAN MANFAAT PENELITIAN 19
BAB 4. METODE PENELITIAN 20
BAB 5. HASIL YANG DICAPAI 24
BAB 6. RENCANA TAHAPAN BERIKUTNYA 36
BAB 7. KESIMPULAN DAN SARAN 37
DAFTAR PUSTAKA 38
LAMPIRAN
Lampiran 1 Laporan Rekapitulasi Penggunaan Dana Penelitian 41
Lampiran 2 Instrumen 42
Lampiran 3 Personalia Tenaga Peneliti beserta Kualifikasinya 43
Lampiran 4 Logbook 44
Lampiran 5 Luaran 47

vi
DAFTAR GAMBAR
Halaman
Gambar 2.1. Implementasi Sistem Multi-Robot berbasis Bioinspired
Paradigm
7
Gambar 2.2. Implementasi Sistem Multi-Robot berbasis Organizational
and Social Paradigm
8
Gambar 2.3. Perbandingan Himpuan Logika Crisp dan Himpunan Logika
Fuzzy
10
Gambar 2.4. Sistem pengendali logika fuzzy 11
Gambar 2.5. Elemen-elemen utama dari pengendali logika fuzzy. 11
Gambar 2.6. Model dan Alokasi Robot 13
Gambar 2.7. Differentially Steered Drive Systems 14
Gambar 2.8. Sistem Pergerakan Robot Tunggal 16
Gambar 2.9. Posisi Relatif Robot terhadap Titik Tujuan 17
Gambar 2.10. Mekanisme Navigasi menuju Titik Tujuan 17
Gambar 2.11. Konfigurasi Sensor Sonar 17
Gambar 2.12. Proses Simulasi Kalkulasi Jarak Sonar 18
Gambar 4.1. Formasi Sistem Multi-Robot 21
Gambar 4.2. Robot-Majemuk dalam Formasi V 21
Gambar 4.2. Model Formasi Robot-Majemuk 22
Gambar 4.3. Perbedaan Posisi Robot Follower 22
Gambar 4.4. Robot Lego NXT Mindstorms 23
Gambar 5.1. Robot hasil perancangan 24
Gambar 5.2. Pergerakan robot tunggal dengan kombinasi pergerakan 25
Gambar 5.3. Formasi Sistem Multi-robot 26
Gambar 5.4. Pergerakan Lurus pada Sistem Multi-robot 27
Gambar 5.5. Pergerakan Melingkar pada Sistem Multi-robot 28
Gambar 5.6. Pergerakan Kombinasi pada Sistem Multi-robot 30
Gambar 5.7. Formasi Dua Robot NXT Mindstorms 33
Gambar 5.8. Pergerakan Dua Robot NXT Mindstorms Formasi Berurutan 34
Gambar 5.9. Pergerakan Dua Robot NXT Mindstorms Formasi
Berdampingan
35

vii
DAFTAR TABEL
Halaman
Tabel 5.1. Data Pergerakan Multi-robot Gerakan Berbelok ke Kanan 28
Tabel 5.2. Data Pergerakan Multi-robot Gerakan Kombinasi 31

viii
DAFTAR LAMPIRAN
Halaman
Lampiran 1 Laporan Rekapitulasi Penggunaan Dana Penelitian 41
Lampiran 2 Logbook 42
Lampiran 3 Luaran 45

ix
IDENTITAS DAN URAIAN UMUM
1. Judul Penelitian : Perancangan Pengendali Formasi pada
Koordinasi Sistem Multi-robot menggunakan Pengendali Logika Fuzzy
2. Ketua Peneliti
a) Nama Lengkap : Dr. Ir. Andi Adriansyah, M.Eng b) Jabatan : Wakil Dekan Fakultas Teknik c) Jurusan/Fakultas : Teknik Elektro/ Fakultas Teknik d) Perguruan Tinggi : Universitas Mercu Buana e) Alamat Surat : Jl. Meruya Selatan, Kembangan, Jakarta Barat, 11650 f) Telp/Faks : 021-58471335 g) Email : [email protected]
3. Anggota Peneliti No. Nama dan Gelar
Akademik Bidang Keahlian Instansi Alokasi
Waktu Jam/Minggu
1. Ir. Eko Ihsanto, M.Eng
Mikroprosesor, Embedded System
T. Elektro, UMB 15
2. Ir. Badaruddin, MT
Sistem Tenaga, Power Supply
T. Elektro, UMB 15
4. Objek Penelitian Penelitian difokuskan untuk merancang sebuah algoritma pengendalian formasi untuk mempertahankan jarak (d) dan orientasi (δ) sebuah robot dengan robot-robot lainnya pada suatu formasi tertentu. Algoritma pengendalian ini berupa hasil sebuah sistem logika fuzzy yang menghubungkan jarak (d) dan orientasi (δ) tersebut dengan kecepatan (v) dan arah (ω) pergerakan masing-masing robot. 5. Masa Pelaksanaan Mulai : April 2012 Akhir : Desember 2013 6. Anggaran yang diusulkan Tahun I : Rp. 31.735.000 Tahun II : Rp. 37.000.000 7. Lokasi Penelitian Penelitian akan diadakan di lingkungan Universitas Mercu Buana. Tahap perancangan dan simulasi akan dipusatkan pada Lab. Simulasi dan Komputer serta Lab. Elektronika Dasar. Sedangkan tahap implementasi dan pengujian akan dilakukan di Lab. Mikroprosesor dan Lab. Mekatronika. 8. Temuan yang ditargetkan Target dari penelitian ini adalah menghasilkan menghasilkan temuan:
a. Model pergerakan dan simulasi pergerakan multi-robot (r1, r2, ..., rn) dengan kecepatan (v) dan arah (ω) masing-masing robot yang sama dan berbeda.

x
b. Algoritma pengendalian formasi multi-robot menggunakan logika fuzzy, yang menghubungkan jarak (d) dan orientasi (δ) sebuah robot (r1) dengan robot lainnya (r2, ..., rn) dengan kecepatan (v) dan arah (ω) masing-masing robot dalam rangka mempertahankan formasi tertentu.
9. Jurnal Ilmiah
Hasil penelitian secara bertahap akan dipublikasikan dalam beberapa jurnal, yaitu:
a. Jurnal Terakreditasi Nasional TELKOMNIKA b. International Journal of Intelligent System Technologies and Applications
(IJISTA) dan c. International Journal of Computer Science Engineering and
Technology (IJCSET) 10. Instansi lain yang telibat
Tidak ada
11. Keterangan lain yang dianggap perlu Tidak ada 12. Kontribusi Mendasar
Penelitian ini merupakan penelitian dasar pada bidang robotika dan sistem kendali, yang memfokuskan kontribusinya untuk menghasilkan sebuah model multi-robot bergerak dan algoritma pengendalian formasi robot yang efektif. Bidang kajian ini sangatlah relevan, karena hasil penelitian ini dapat diaplikasikan pada aspek akademik, industri, perkantoran, keamanan dan hiburan yang mendidik.

1
BAB 1. PENDAHULUAN
1. 1. Latar Belakang
Teknologi dan aplikasi robot terus berkembang secara cepat, baik dari sisi
kehandalan, jangkauan kemampuan dan bidang aplikasinya. Di dalam teknologi
robot, tergabung beberapa tema-tema penelitian yang juga berkembang, seperti
teknologi sensor, teknologi motor, teknologi suplai daya, teknologi telekomunikasi,
teknologi pengendalian dan teknologi kecerdasan buatan (Nehmzow, 2001). Dari
segi jangkauan, robot telah dapat diaplikasikan di daratan, di bawah air, di udara,
bahkan di daerah planet yang akan dieksplorasi lebih jauh. Sedangkan
pengaplikasian robot telah merambah berbagai bidang kehidupan, dari mulai bidang
akademik, industri, perkantoran, hiburan sehingga bidang kedokteran (Keramas,
1999).
Robot bergerak (mobile robots) adalah salah satu jenis robot yang memiliki
kemampuan untuk bekerja yang lebih fleksibel dalam ruang tiga dimensi dan dapat
beraktifitas tanpa intervensi manusia (Mondada dan Floreano, 1996). Karena
aplikasinya yang luas dan perkembangan teknologi pendukungnya berkembang
sangat cepat, penyelidikan di bidang robot bergerak menjadi topik yang menarik bagi
para peneliti (Nehmzow, 2000). Pada pembahasan berikutnya, yang dimaksud robot
dalam proposal ini adalah jenis robot bergerak.
Namun, pada dekade ini, para peneliti mulai mengubah arah penelitiannya,
dari investigasi sistem robot tunggal kepada koordinasi sistem multi-robot. Hal ini
dikarenakan sistem multi-robot memiliki beberapa kentungan. Beberapa keuntungan
sistem multi-robot dibanding sistem robot tunggal salah satunya adalah penurunan
total pembiayaan dengan cara mengimplementasikan beberapa robot sederhana dan
murah dibandingkan dengan robot tunggal yang mahal dan kompleks. Selain itu,
terdapat banyak proses yang memerlukan sistem multi-robot dan tidak dapat
dilakukan oleh robot tunggal. Termasuk di dalamnya adalah memperluas cakupan
kerja sistem tunggal. Secara umum, sistem multi-robot diklaim dapat meningkatkan
efisiensi, keandalan, dan fleksibilitas system (Wawerla et al, 2002). Beberapa
aplikasi sistem multi-robot terdapat dalam pemanfaatan robot pada kerja-kerja
surveilans, pencarian dan penyelamatan (SAR), sistem pengamanan dan pengamatan,
eksplorasi daerah tak dikenal atau berbahaya (Parker, 2007).

2
Sejak dimulainya penyelidikan terhadap sistem multi-robot, terdapat
beberapa jenis penyelidikan. Jenis penyelidikan tersebut bervariasi, dimulai dari
penyelidikan terhadap pergerakan beberapa robot dalam mencari sebuah objek
tertentu (foraging) sehingga penyelidikan terhadap pergerakan robot dalam
permainan (robo-soccer) yang kompleks. Kekompleksan sistem multi-robot
bertumpu pada beberapa hal, yaitu banyaknya robot yang terlibat, variasi pekerjaan
yang harus dilakukan oleh robot dan mekanisme komunikasi dan interaksi antar
robot. Dari hal-hal diatas, maka arah penyelidikan sistem multi-robot mengarah ke
beberapa klasifikasi, yaitu: pengorganisasian (mult-robot organization), topologi
komunikasi (multi-robot communication topology) dan formasi (multi-robot
formation) (Parker, 2007).
Salah satu pendekatan yang banyak digunakan untuk mengendalikan sistem
multi-robot adalah dengan menerapkan sistem pengendalian formasi dengan
memanfaatkan mekanisme robot leader-follower (Chen dan Wang, 2005) (Shao, dkk,
2005). Pada sistem ini, setiap robot follower mengukur posisi dan orientasi dirinya
terhadap posisi robot leader pada masing-masing koordinatnya. Kemudian,
berdasarkan formasi yang dikehendaki, setiap robot follower akan menentukan
kecepatan (v) dan arah (ω) masing-masing dengan menerapkan sistem pengendalian
tertentu. Performa kinerja sistem multi-robot ini akan ditentukan oleh kehandalan
sistem pengendalian yang digunakan.
Untuk mendapatkan performa kinerja sistem multi-robot yang handal, maka
para peneliti telah mencoba menerapkan beberapa jenis sistem pengendalian. Sejauh
ini, sistem pengendalian yang diterapkan pada sistem multi-robot dapat diklasifikasn
pada dua kategori, yaitu sistem pengendalian klasik dan sistem pengendalian
modern. Beberapa sistem pengendalian konvensional yang digunakan antara lain
adalah metoda sliding mode (Sanchez dan Fierro, 2003), metode feedback
linearization (Mariottini dkk, 2005), metoda backstepping (Li, Xiao dan Cai, 2005)
dan metoda Pengendali PD (Cruz dan Carelli, 2006). Sistem pengendalian klasik,
pada umumnya, memanfaatkan pendekatan model analitik, logika Boolean dan crisp
serta hubungan linear. Akibatnya, sistem akan dimodelkan harus dengan pendekatan
yang lengkap dan presisi. Namun, pada sistem multi-robot keadaan sistem dan
lingkungannya tidak begitu akurat dan selalu berubah-ubah dengan cepat sehingga
sulit dimodelkan secara presisi. Oleh karena itu, diperlukan sistem pengendalian
modern untuk mengatasi problem tersebut.

3
Salah satu sistem pengendalian yang dianggap mampu untuk menyelesaikan
problema sistem multi-robot adalah sistem pengendalian berbasis logika fuzzy
(Fuzzy Logic Controller) (Lee, 1990). Logika Fuzzy diperkenalkan oleh Lotfi Zadeh
(1965) yang menyediakan bahasa dan logika manusia, di mana seorang pakar dapat
menerjemahkan pengetahuan kualitatifnya tentang masalah yang dihadapi.
Karakteristik utama Logika Fuzzy adalah kekokohan mekanisme penalaran dan
pengambilan keputusan yang interpolatif sehingga sesuai untuk sistem yang tidak
presisi dan informasi yang tidak lengkap (Zadeh, 1997).
Oleh karena itu, penelitian ini berupaya untuk merancang sebuah algoritma
pengendalian formasi sistem multi-robot dengan menggunakan Pengendali Logika
Fuzzy. Beberapa komponen Pengendali Logika Fuzzy, seperti fungsi keanggotaan,
proses fuzzifikasi/defuzzifikasi dan mekanisme pengambilan keputusan akan
ditentukan untuk mendapatkan kinerja sistem multi-robot yang baik.
1.2. Perumusan Masalah
Pada umumnya, penelitian pada bidang robot bergerak, harus
mempertimbangkan karakteristiknya yang khas, yaitu: robot bergerak harus
menghadapi lingkungan yang kompleks, memahami hasil pemindaian yang tidak
presisi, namun harus menentukan tindakan dengan aktuator yang tidak tepat dalam
waktu respon yang cepat. Untuk sistem multi-robot, masalah tersebut di atas
ditambah lagi dengan mekanisme pengendalian formasi antar robot, sehingga robot-
robot tersebut dapat bekerja sesuai dengan tugas yang diberikan kepadanya.
Maka, untuk melakukan pengkajian mengenai sistem multi-robot harus
dimiliki serangkaian model robot yang bergerak dengan kecepatan (v) dan arah (ω),
dapat memperlihatkan posisinya (xr,yr,θr) pada sebuah koordinat kartesius dan
mengetahui jarak (d) serta orientasi (δ) antar robot. Selain itu, diperlukan pula sebuah
algoritma pengendalian yang mengatur formasi sistem multi-robot berdasarkan jarak
(d) dan orientasi (δ) antar robot berdasarkan formasi tertentu.
Oleh karena itu, penelitian ini berupaya untuk menyelesaikan beberapa
masalah pada sistem multi-robot. Pertama adalah bagaimana menghasilkan
serangkaian model sistem multi-robot yang dapat bergerak sesuai dengan tugas dan
fungsinya dengan memberikan informasi tentang posisi dan lingkungannya. Kedua
adalah bagaimana merancang sebuah algoritma pengendalian yang dapat
mengendalikan formasi sistem multi-robot dengan formasi tertentu. Algoritma ini

4
akan memberikan keputusan dengan cara menghubungkan informasi mengenai jarak
(d) dan orientasi (δ) antar robot dengan kecepatan (v) dan arah (ω) tiap-tiap robot
dengan logika fuzzy.
5
BAB 2. TINJAUAN PUSTAKA
2.1. Latar Belakang Sistem Multi-robot
Sistem multi-robot adalah suatu sistem dari suatu entitas robot yang bekerja
bersama untuk menyelesaikan tugas tertentu. Sebagaimana manusia, kita telah
terbiasa dengan sistem bekerja bersama dalam suatu tim. Misalnya, tim manajemen
suatu korporasi terdiri dari beberapa spesialis, seperti Chief Executive Officer
(CEO), Chief Operating Officer (COO) dan lain-lain. Demikian juga yang
diharapkan oleh para peneliti, mencoba untuk menerapkan sistem kerjasama ini pada
suatu entitas robot.
Sebagai sebuah topik penelitian, kajian sistem multi-robot telah meningkat
popularitasnya selama tahun-tahun belakangan ini. Menurut data dari Web of
Science, selama tahun 2006 saja terdapat hampir 1000 publikasi . Beberapa bidang
yang termasuk dalam kajian sistem multi-robot, antara lain adalah: distributed
intelligence, distributed artificial intelligence, multi-agent system dan multi-robot
system (Parker, 2007).
Terdapat beberapa keuntungan potensial dari pengaplikasian sistem multi-
robot. Secara umum, pengaplikasian sistem multi-robot dibanding sistem robot
tunggal adalah menghasilkan sistem yang lebih baik dalam rangka menyelesaikan
permasalahan sistem. Jika sebuah sistem diselesaikan dengan cara membaginya
dalam beberapa subsistem secara parallel, maka penggunaan sistem multi-robot akan
menghasilkan sistem yang dapat mengurangi waktu penyelesaian secara keseluruhan.
Selain itu, sistem multi-robot menawarkan kemungkinan untuk meningkatkan
keandalan sistem. Sistem multi-robot dapat menggantikan peran robot yang
mengalami kegagalan fungsi. Hal ini tidak dimungkinkan pada sistem robot tunggal.
Keuntungan lainnya, untuk menyelesaikan sistem yang ada menggunakan sistem
robot tunggal membutuhkan pembiayaan yang besar dan sistem yang kompleks.
Dengan sistem multi-robot, sistem yang ada dapat dikerjakan secara bersama dengan
menggunakan robot yang murah dan sederhana (Wawerla et al, 2002).

6
2.2. Klasifikasi dan Arah Pengkajian Sistem Multi-robot
Untuk lebih memahami sistem multi-robot, terdapat beberapa jenis interaksi
antar robot yang dapat terjadi dalam suatu sistem. Jenis interaksi tersebut dipandang
dari tiga aspek, yaitu (Gerkey and Mataric, 2003):
a. tujuan tiap robot,
b. pengetahuan masing-masing robot terhadap robot lainnya, dan
c. kemampuan tiap robot untuk membantu robot yang lain.
Dipandang dari tujuan tiap robot, jenis interaksi multi-robot diklasifikasikan ke
dalam 2 (dua) golongan, yaitu jenis interaksi robot yang tiap robotnya memiliki
tujuan individu dan interaksi robot yang tiap robotnya memiliki tujuan bersama. Jika
dipandang dari pengetahuan masing-masing robot terhadap robot lainya, terdapat 2
(dua) golongan pula, yaitu jenis interaksi robot yang setiap robot mengetahui
keadaan robot lainnya dan interaksi robot yang semuanya tidak saling mengetahui.
Terakhir, terdapat 2 (dua) klasifikasi interaksi robot dipandang dari kemampuan
robot untuk membantu robot lainnya, yaitu interaksi robot yang tiap robotnya mampu
mengerjakan pekerjaan robot lainnya dan yang tidak mampu.
Dari jenis-jenis interaksi robot diatas, akan terbentuk beberapa bentuk
interaksi, yaitu (Parker, 2007):
a. collective,
b. cooperative,
c. collaborative dan
d. coordinative.
Selain terdapat klasifikasi berdasarkan jenis interaksinya, terdapat juga
beberapa paradigma untuk merancang sebuah sistem multi-robot. Setiap paradigma
yang ada merupakan sudut pandang yang berbeda sebagai sebuah solusi strategis dari
sistem yang akan dirancang. Paradigma yang biasa digunakan untuk membangun
sebuah sistem multi-robot, adalah:
a. Bioinspired paradigm
b. Organizational and social paradigm, dan
c. Knowledge base paradigm.
Bioinspired paradigm adalah cara memandang sistem multi-robot seperti
kumpulan binatang-binatang kecil yang berinteraksi secara kolektif. Pada paradigma
ini, kebutuhan tiap robot untuk berkomunikasi sangat rendah, dengan asumsi bahwa
mereka memiliki kemampuan untuk mengetahui keadaan sekelilingnya dengan baik.

7
Dari asumsi ini menyimpulkan bahwa aplikasi yang dibutuhkannya cukup sederhana,
aturan pengendalian yang serupa untuk setiap robot, tidak membutuhkan interaksi
yang komplek dan masing-masing mampu untuk saling dipertukarkan. Paradigma ini
sesuai untuk aplikasi multi-robot yang mengutamakan ruangan yang tersebar, seperti
proses pencarian, pembentukan formasi dan pencakupan area.
Gambar 2.1. Implementasi Sistem Multi-Robot berbasis Bioinspired Paradigm
Organizational and social paradigm didasari oleh teori organisasi yang
diturunkan dari sistem manusia. Pengetahuan dari berbagai bidang kemanusiaan,
seperti sosiologi, ekonomi atau psikologi telah terbukti mampu untuk memahami
bagaimana menciptkan sistem yang dapat bekerjasama untuk menyelesaikan
problematika yang kompleks. Pada pendekatan ini, interaksi robot dirancang
menggunakan model individual dan dinamika grup sebagai bagian dari organisasi
sehingga dapat mengurangi kebutuhan komunikasi antara robot. Aplikasi umum dari
pendekatan ini adalah robo-soccer, yaitu pembagian tugas masing-masing robot
sesuai dengan fungsinya, seperti sebuah organisasi.

8
Gambar 2.2. Implementasi Sistem Multi-Robot berbasis Organizational and
Social Paradigm
Paradigma ketiga yang biasanya digunakan untuk membangun sebuah sistem
multi-robot adalah knowledge base paradigm. Fokus dari pendekatan ini adalah pada
proses saling berbagi pengetahuan diantara robot-robot yang heterogen, yang
tujuannya adalah terciptanya sistem yang memiliki pengetahuan yang sama
walaupun posisinya tersebar. Paradigma ini jarang digunakan, karena harus dapat
mengatasi berbagai macam keterbatasan, seperti keterbatasan komunikasi, daya dan
komputasi.
Karena sistem dan mekanisme komunikasinya yang sederhana, para peneliti
banyak memanfaatkan Bioinspired paradigm dalam penelitiannya dan lebih dikenal
dengan istilah swarm robots. Robot-robot swarm ini mencoba untuk menirukan
sistem yang diinspirasikan dari kerja-kerja yang dilakukan oleh makhluk-makhluk
hidup yang kecil, seperti bergerak berduyun-duyun (foraging), mencari makan,
membentuk formasi untuk pertahanan dan lain-lain. Pendekatan sistem multi-robot
ini dapat diklasifikasikan dalam tiga pendekatan, yaitu: pendekatan struktur virtual
(virtual structure), pendekatan berdasarkan perilaku (behavioral-base) dan
pendekatan leader-follower.
Pendekatan struktur virtual memperlakukan keseluruhan formasi sistem
multi-robot sebagai struktur virtual yang rigid (Egerstedt dan Hu, 2001) (Rend dan
Beard, 2003). Pergerakan yang diinginkan dinyatakan sebagai struktur virtual secara
keseluruhan yang pada hasilnya nanti menjadi suatu lintasan yang harus ditelusuri
oleh seluruh robot dalam mempertahankan formasinya pada saat melakukan
pergerakan. Namun terdapat kekurangan pada pendekatan ini, yaitu struktur virtual

9
yang dihasilkan akan berbentuk sebuah sentralisasi, yang jika terjadi kesalahan pada
titik sentral tersebut akan mengakibatkan kesalahan pada keseluruhan robot.
Sedangkan pada pendekatan berdasarkan perilaku, beberapa perilaku telah
ditanamkan pada masing-masing robot. Beberapa perilaku yang biasa dikaji adalah
perilaku menghindar halangan, perilaku menuju target dan juga perilaku
mengendalikan formasi. Aksi akhir dari setiap robot adalah menghitung resultan
keseluruhan perilaku dengan bobot-bobot tertentu pada tiap-tiap perilakunya. (Balch
dan Arkin, 1998). Kekurangan dari pendekatan berdasarkan perilaku adalah
tingginya tingkat kesulitan untuk menganalisa model robot secara matematis,
sehingga sulit untuk dapat menjamin sistem pengendalian secara presisi.
Pada pendekatan leader follower, salah satu robot ditetapkan sebagai leader
sedangkan sisanya ditentukan sebagai robot follower. Robot-robot follower akan
memposisikan diri mereka dan mempertahankannya relatif terhadap robot leader
(Monterion dan Bicho, 2008) (Yun dkk, 2008). Pendekatan ini dicirikan oleh
kesederhanaan, kehandalan dan tidak perlu pengetahuan global dan komputasi. Oleh
karena itu, pendekatan leader follower banyak diadopsi oleh para penilti untuk
mengembangkan kajian mengenai sistem multi-robot ini.
Dalam rangka mengendalikan formasi dengan pendekatan leader follower,
telah ditentukan terlebih dahulu pergerakan robot leader dan posisi relatif antara
robot leader dan follower. Ketika pergerakan robot leader telah ditentukan, posisi
relatif yang diinginkan (jarak (d) dan orientasi (δ)) oleh robot-robot follower dapat
dicapai dengan menerapkan sistem pengendali bagi masing-masing robot follower.
Oleh karena itu, problem pengendalian formasi dapat dipandang sebagai
pengembangam dari problem pengendalian pelacakan lintasan biasa.
Untuk menyelesaikan problem tersebut, maka para peneliti telah mencoba
menerapkan beberapa jenis sistem pengendalian. Sejauh ini, sistem pengendalian
yang diterapkan pada sistem multi-robot dapat diklasifikasn pada dua kategori, yaitu
sistem pengendalian klasik dan sistem pengendalian modern. Beberapa sistem
pengendalian konvensional yang digunakan antara lain adalah metoda sliding mode
(Sanchez dan Fierro, 2003), metode feedback linearization (Mariottini dkk, 2005),
metoda backbackstepping (Li, Xiao dan Cai, 2005) dan metoda Pengendali PD (Cruz
dan Carelli, 2006). Sistem pengendalian klasik tersebut di atas, pada umumnya,
memanfaatkan pendekatan model analitik, logika Boolean dan crisp serta hubungan
linear. Akibatnya, sistem akan dimodelkan harus dengan pendekatan yang lengkap

10
dan presisi. Namun, pada sistem multi-robot keadaan sistem dan lingkungannya tidak
begitu akurat dan selalu berubah-ubah dengan cepat sehingga sulit dimodelkan
secara presisi. Oleh karena itu, diperlukan sistem pengendalian modern untuk
mengatasi problem tersebut.
Salah satu sistem pengendalian yang dianggap mampu untuk menyelesaikan
problema pengendali formasi pada sistem multi-robot adalah sistem pengendalian
berbasis logika fuzzy (Fuzzy Logic Controller) (Lee, 1990). Logika Fuzzy
diperkenalkan oleh Lotfi Zadeh (1965) yang menyediakan bahasa dan logika
manusia, di mana seorang pakar dapat menerjemahkan pengetahuan kualitatifnya
tentang masalah yang dihadapi. Karakteristik utama Logika Fuzzy adalah kekokohan
mekanisme penalaran dan pengambilan keputusan yang interpolatif sehingga sesuai
untuk sistem yang tidak presisi dan informasi yang tidak lengkap (Zadeh, 1997).
2.3. Pengendali Logika Fuzzy (Fuzzy Logic Controller)
Pemakaian konsep teori logika fuzzy dilatar-belakangi oleh kebutuhan akan
suatu metode untuk merepresentasikan dan menganalisa fenomena di alam nyata
yang serba tidak presisi ditinjau dari cara pikir manusia. Ada suatu transisi yang
berangsur-angsur (gradual, fuzzy) antara suatu penggolongan dengan penggolongan
yang lain, atau dengan batasan yang samar. Berdasarkan batasan yang samar itu ada
hubungan dan aturan yang samar pula dalam proses berpikir manusia dalam
mengambil keputusan sehubungan dengan persoalan-persoalan yang dihadapinya
(Zadeh, 1965) (Zadeh, 1997).
Teori himpunan klasik yang biasa disebut crisp set hanya memiliki nilai
keanggotaan 0 dan 1. Sedangkan himpunan fuzzy adalah berasal dari
pengelompokkan elemen-elemen ke dalam kelas yang samar, yang memiliki nilai
keanggotaan banyak, mulai dari 0 hingga 1. Perbandingan kedua nilai ini
diperlihatkan pada Gambar 2.3.
Gambar 2.3. Perbandingan Himpuan Logika Crisp dan Himpunan Logika Fuzzy

11
Pengendali logika fuzzy dapat digabung dengan sistem untuk membentuk
suatu sistem pengaturan loop tertutup seperti pada Gambar 2.4 berikut (Lee, 1990):
Gambar 2.4. Sistem pengendali logika fuzzy
Bagian-bagian pada pengendali logika fuzzy adalah fuzzifikasi, basis
pengetahuan, logika pengambilan keputusan, dan defuzzifikasi. Gambar 2.5 ini
memperlihatkan elemen-elemen utama dari pengendali logika fuzzy.
Gambar 2.5. Elemen-elemen utama dari pengendali logika fuzzy.
Fuzzifikasi adalah proses pemetaan dari masukan-masukan crisp menuju
himpunan fuzzy. Proses ini mirip seperti proses konversi nilai analog ke digital
(ADC). Sementara itu, basis pengetahuan mempunyai 2 buah fungsi, yaitu sebagai:
Basis Data dan Basis Kaidah. Fungsi dari basis data adalah mendefinisikan
himpunan-himpunan fuzzy ke dalam daerah masukan dan keluaran agar dapat
digunakan oleh kaidah atur linguistik dalam basis kaidah serta memanipulasi data
fuzzy. Sedangkan basis kaidah memilik aturan-aturan pada pengaturan fuzzy
ditampilkan dalam bentuk aturan if-then, yang menghubungkan antara input yang
didapatkan dengan aksi pengendalian yang diinginkan. Bentuk sebuah aturan
ditampilkan sebagai berikut:

12
RBn : if X1 is A1n and … Xm is Amn then Y is Bn (2.1)
dimana Amn dan Bn adalah himpunan fuzzy, Xm dan Y adalah variabel bahasan bagi
masukan dan keluaran, sedangkan m dan n adalah jumlah masing-masing masukan
dan keluaran. Keluaran Bn dari aturan RBn adalah hasil agregasi himpunan fuzzy ke
dalam keluaran dengan variabel Y.
Bagian lain adalah logika pengambilan keputusan. Bagian ini merupakan
pengambil suatu kesimpulan mengenai aksi pengendalian fuzzy yang harus
dilakukan dengan menggunakan implikasi fuzzy dan mekanisme inferensi fuzzy.
Pengendali fuzzy mengambil keputusan berdasarkan masukan menurut variabel
lingustiknya. Setiap respon dari masing-masing kaidah dibobotkan berdasarkan
derajat keanggotaan dari masukan dan juga kombinasi dari respon-respon tersebut
sehingga memungkinkan perhitungan untuk menghasilkan suatu nilai keluaran. Hasil
ini merupakan aksi pengendalian sistem yang didapatkan dari penerapan salah satu
teknik defuzzifikasi.
Sistem dengan menggunakan logika fuzzy diyakini dapat merepresentasikan
proses-proses yang tidan presisi dan pemahaman model yang tidak sempurna. Sistem
ini menggunakan mekanisme keputusan aproksimasi, yang membolehkannya untuk
menghasilkan keputusan berdasarkan informasi yang vague dan tidak lengkap
(Martinez et al., 1994). Sistem fuzzy ini menawarkan keuntungan dengan
mamanfaatkan konsep linguistik tanpa harus membutuhkan model matematika yang
kompleks dan presisi (Tunstel, 1995). Selain itu, kemampuan mekanisme interpolasi
sistem pengendali fuzzy menghasilkan sistem pengendalian yang halus dan degradasi
yang baik untuk mengatasi persoalan pemindaian lingkungan. Berdasarkan
karakteristik-karakteristik tersebut di atas, pengendali logika fuzzy diharapkan sesuai
untuk menyelesaikan problem pengendalian formasi pada sistem multi-robot.
2.4. Studi Pendahuluan
Pada penelitian ini, telah dilakukan beberapa studi pendahuluan untuk
melakukan tahap pemodelan pergerakan robot tunggal dan proses pemindaian
lingkungannya. Pemodelan yang telah dilakukan ini berdasarkan penelitian peneliti
terdahulu yang telah dipublikasikan (Adriansyah dan Amin, 2007) dan (Adriansyah
dan Amin, 2008).

13
a. Pemodelan Robot Tunggal
Masing-masing robot akan dimodelkan dalam bentuk lingkaran silindris.
Robot-robot ini akan digerakkan menggunakan 2 (dua) buah motor DC untuk dapat
melakukan gerakan tertentu. Robot dialokasikan pada sebuah ruang berkoordinat
kartesius XOY dengan menganggap bahwa posisi robot adalah pc = (xc, yc, θc),
dimana (xc, yc) mengindikasikan pusat posisi spasial robot pada sistem koordinat
kartesius dan θc adalah sudut orientasi robot terhadap sumbu aksis berlawanan arah
dengan jarum jam, sebagaimana terlihat pada Gambar 2.6.
Gambar 2.6. Model dan Alokasi Robot
Prinsip pergerakan robot dimodelkan menggunakan metoda differential drive
model (Dudek and Jenkin, 2000) atau differentially steered drive system (Lucas,
2000). Sistem ini berasaskan 2 (dua) buah motor yang ditempatkan pada aksis
bersama dan dikendalikan secara terpisah. Jika kecepatan dari masing-masing roda
berbeda maka robot akan berotasi dengan berpusatkan pada sebuah titik yang sejajar
dengan aksis bersama kedua roda. Titik dimana robot berotas dikenal dengan istilah
Pusat Lengkungan Sesaat (Instantaneous Center of Curvature, ICC), sebagaimana
diperlihatkan pada Gambar 2.7.
xc
yc
D
2r
θc
C
X
Y
O

14
Gambar 2.7. Differentially Steered Drive Systems
dimana R adalah jarak antara titik ICC dengan titik pusat robot, ωc adalah kecepatan
rotasi robot, W adalah jarak roda dengan titik tengah robot, dan vl serta vr adalah
masing-masing kecepatn roda kanan dan kecepatan roda kiri.
Dengan mengubah-ubah kecepatan pada kedua roda, maka trayektori robot
juga berubah-ubah pula. Karena kecepatan rotasi robot, ωc, pada titik ICC harus
sama, maka didapat persamaan:
rc vW
R )2
( (2.2)
lc vW
R )2
( (2.3)
dimana R adalah jarak titik ICC dengan titik pusat antara kedua roda pada robot, W
adalah jarak antara titk pusat dengan roda, ωc adalah kecepatan rotasi robot dan vr
serta vl adalah masing-masing kecepatan roda.
Pada saat waktu tertentu, Persamaan (2.2) dan Persamaan (2.3) dapat
diselesaikan untuk variabel R dan ωc dimana:
)(2 lr
lr
vv
vvWR
(2.4)
)(W
vv lrc
(2.5)
dan
vr
vl
W/2
(x, y)
θ R
ωc ICC

15
)2
( lrc
vvv
(2.6)
dimana vc adalah kecepatan translasi robot sebagai rata-rata dari kecepatan kedua
rodanya.
Terdapat beberapa kasus menarik dari persamaan (2.5) dan (2.6) tersebut,
yaitu:
1. Jika vl = vr, maka robot bergerak lurus dengan kecepatan translasi vc, R
menjadi tidak terhingga dan akibatnya tidak terjadi rotasi, sebab kecepatan
rotasi ωc adalah nol.
2. Jika vl = - vr, maka R menjadi nol dan robot akan berotasi dengan berpusat
titik tengah antara kedua rodanya.
3. Jika vr adalah sama dengan nol, maka robot akan berotasi dengan berpusat
pada roda kiri dan R = W/2. Demikian pula sebaliknya. jika vl adalah sama
dengan nol.
Jadi, perbedaan kecepatan pada kedua motor tersebut akan menghasilkan
resultan gaya dan resultan rotasi tertentu yang membuat robot bergerak secara
translasi dan rotasi. Pergerakan ini akan mengakibatkan robot akan memiliki
kecepatan translasi, vc, dan kecepatan rotasi, ωc, yang beragam.
Berdasarkan kombinasi ini, maka robot dapat bergerak ke posisi yang
berbeda dengan orientasi yang berbeda pula sesuai dengan fungsi waktu. Penurunan
harga-harga x, y and θ dapat dituliskan sebagai berikut:
ccvdt
dx cos (2.7)
ccvdt
dy sin (2.8)
cdt
d
(2.9)
Kemudian, dengan mengaplikasikan bahwa posisi robot sesaat adalah pc = (xc, yc, θc),
maka posisi robot berikutnya adalah pc+1 = (xc+1, yc+1, θc+1), dimana:

16
cccc vxx cos1 (2.10)
cccc vyy sin1 (2.11)
ccc 1 (2.12)
Proses pergerakan robot tunggal diilustrasikan pada Gambar 2.8.
Gambar 2.8. Sistem Pergerakan Robot Tunggal
b. Pemodelan Posisi Relatif Robot
Posisi relative robot terhadap titik tujuan dapat dikalkulasi berdasarkan posisi
dan orientasi robot dan titik tujuan yang telah ditentukan. Posisi relative robot
dikenali dengan variabel jarak (d) dan orientasi (δ), dimana:
22 ))(())(( gg ytyxtxd (2.13)
)()((
))((tan t
xtx
ytyarc
g
g
(2.14)
dimana pg = (xg, yg, θg) adalah posisi titik tujuan dan pt = (xt, yt, θt) adalah posisi
robot sesaat. Variabel jarak (d) dan orientasi (δ) ini akan digunakan sebagai masukan
agar robot dapat memiliki kemampuan berperilaku menuju target tertentu. Gambar 9
memperlihatkan posisi relatif robot dengan titik tujuannya.

17
Gambar 2.9. Posisi Relatif Robot terhadap Titik Tujuan
Kemudian, nantinya robot akan melakukan aksi pengendalian dengan menentukan
kecepatan translasi, vc, dan kecepatan rotasi, ωc tertentu agar sampai ke tempat yang
dituju. Pergerakan menuju ke tempat tujuan diperlihatkan pada Gambar 2.10.
Gambar 2.10. Mekanisme Navigasi menuju Titik Tujuan
c. Pemodelan Sensor Sonar
Dalam rangka upaya untuk menghindari rintangan telah diturunkan pula
model sensor sonar. Model sensor sonar ini menghitung jarak antara sonar yang
diletakkan pada robot dengan rintangan yang ada di hadapannya. Posisi sonar pada
diperlihatkan pada Gambar 2.11.
Gambar 2.11. Konfigurasi Sensor Sonar
O X
Y
d δ pg
p(t)
L R

18
Model sonar ini diinspirasikan dari kalkulasi posisi robot sebagaimana
terdapat pada persamaan (2.13) dan (2.14). Namun, pada pemodelan sonar
persamaan ini digunakan untuk mengukur jarak antara posisi sibar dengan objek di
hadapannya. Kemudian, semua orientasi δ pada sensor dibandingkan untuk
mendapatkan harga jarak d yang sesuai. Proses penghitungan jarak ini diperlihatkan
pada Gambar 2.12.
Gambar 2.12. Proses Simulasi Kalkulasi Jarak Sonar
X
Y
(d1,δ1)
po
(d2,δ2)

19
BAB 3. TUJUAN DAN MANFAAT PENELITIAN
Tujuan penelitian ini adalah merancang sistem multi-robot yang dapat
menyelesaikan tugas-tugas sederhana di area tertentu. Tujuan khusus ini akan
ditunjang oleh beberapa tujuan pendukung, yaitu:
1. Merancang sebuah model matematika sistem multi-robot yang dapat melakukan
pergerakan dan memindai lingkungannya
2. Merancang sebuah algoritma sistem pengendali yang mampu melakukan
koordinasi pada sistem multi robot dengan formasi tertentu yang berbasiskan
logika fuzzy
Penelitian ini merupakan integrasi pengkajian dasar pada bidang robotika dan
sistem pengendali, yang memfokuskan kontribusinya dalam rangka menghasilkan
sebuah proses pemodelan multi-robot bergerak dan pengenalan lingkungannya serta
proses perancangan algoritma pengendalian formasi robot yang efektif. Bidang
kajian ini sangatlah relevan dalam bidang penelitian/pendidikan, industri dan
masyarakat luas. Karena pengembangan dari hasil penelitian ini dapat
diimplementasikan untuk menggerakkan beberapa buah robot dalam formasi tertentu.
Robot-robot dalam formasi tersebut dapat diaplikasikan pada aspek akademik pada
proses pengajaran perkuliahan di bidang teknik elektro dan teknik mesin, aktifitas
pemindahan material pada proses industri atau perkantoran, aktifitas keamanan pada
daerah berbahaya atau sulit dan hiburan yang mendidik masyarakat.

20
BAB 4. METODE PENELITIAN
Penelitian ini dilaksanakan berdasarkan permasalahan dan tujuan
sebagaimana telah dijelaskan di atas. Pelaksanaan penelitian ini mengandung
beberapa metode, seperti kajian pustaka, pemodelan dan simulasi komputer dan serta
implementasi pada robot laboratorim NXT Mindstorm.
Kajian Pustaka adalah langkah pertama dari penelitian ini untuk
mengumpulkan sebanyak mungkin informasi dan ide serta memperkaya untuk
wawasan mengenai sistem multi-robot, tahapan perancangan arsitektur pengendali
sebuah robot serta mekanisme komunikasi dan interaksinya. Teori-teori dasar dan
persamaan-persamaan matematika untuk mekanisme pergerakan robot akan
diperdalam untuk mendapatkan model matematika yang sesuai bagi tiap robot. Selain
itu, kajian pustaka ini dilakukan untuk mempertajam identifikasi masalah dari
perancangan sistem multi-robot dan posisi penelitian ini pada penelitian sistem
multi-robot lainnya.
Perangkat lunak MATLAB Versi 7.6 R2008a akan digunakan untuk
mensimulasikan model sistem multi-robot ini. Proses pemodelan robot dikerjakan
terlebih dahulu. Beberapa persamaan matematika akan diujikan melalui simulasi ini.
Selain itu, variabel-variabel tertentu, seperti kecepatan (v dan ω), posisi dan jalur
perjalanan robot akan dikumpulkan pula. Setelah itu, pemodelan sistem pengendalian
formasi multi-robot. Pergerakan keseluruhan robot, termasuk mekanisme
pengendalian formasi multi-robot divisualisasikan berupa simulasi berdasarkan
model matematika yang telah dihasilkan sebelumnya.
Setelah didapatkan model pergerakan robot secara individual seperti yang
telah dijelaskan pada bab sebelumnya, penelitian dilanjutkan dengan
mengembangkan model untuk formasi multi-robot dan posisinya. Sistem
pemformasian yang digunakan adalah sistem leader – follower, dimana sebuah robot
akan menjadi leader dan beberapa robot lainnya akan berperan sebagai follower.
Robot follower akan menempati posisi tertentu relatif terhadap robot leader.
Beberapa formasi yang sederhana dicoba terlebih dahulu demi mengetahui
tingkat kesulitan untuk mempertahakan robot pada posisinya masing-masing.
Beberapa formasi diperlihatkan pada Gambar 4.1, yaitu: formasi sejajar, formasi
kolom, formasi berlian dan formasi V.

21
Gambar 4.1. Formasi Sistem Multi-Robot
Namun, untuk memudahkan tahapan penelitian, formasi yang akan dikaji terlebih
dahulu secara mendalam adalah formasi V, seperti yang tampak pada Gambar 4.2.
Gambar 4.2. Robot-Majemuk dalam Formasi V
Secara grafis, formasi V tersebut akan dapat terbentuk, jika antara robot
follower berada pada jarak sejauh rn dan sudut αn dari robot leader, sebagaimana
terlihat pada Gambar 4.1. Untuk formasi V, robot follower akan memiliki posisi
sebagai berikut:
)sin(*
)cos(*
)sin(*
)cos(*
111
111
LnnLFn
LnnLFn
LLF
LLF
ryy
rxx
ryy
rxx
(4.1)

22
dimana (xL, yL, θt) adalah posisi robot leader dan (xFn, yFn, θFn) posisi robot follower
ke-n.
Gambar 4.2. Model Formasi Robot-Majemuk
Kemudian, berdasarkan pergerakan robot, baik robot leader maupun robot
follower, akan terjadi perbedaan antara posisi robot follower yang seharusnya dengan
robot follower yang sebenarnya. Perbedaan yang terjadi meliputi perbedaan jarak,
dL, dan perbedaan sudut, dθ, sebagaimana diilustrasikan pada Gambar 4.3.
Gambar 4.3. Perbedaan Posisi Robot Follower
Pada Gambar 4.3 tersebut menggambarkan posisi robot follower yang aktual pRF
(xRF, yRF, θRF) dan posisi robot follower yang seharusnya pF (xF, yF, θF) serta
perbedaan posisi di antara keduanya untuk setiap robot follower.
Kemudian, berdasarkan harga-harga perbedaan tersebut, dL, dan dθ,
dirancanglah aturan pengendalilan berbasiskan logika fuzzy agar formasi robot-
majemuk dapat dipertahankan sebaik mungkin.

23
Pengendali Logika Fuzzy dirancang untuk dapat memberikan sistem
pengendalian dengan mengambil masukan berupa perbedaan posisi dL, dan dθ, dan
menghasilkan keluaran berupa kecepatan translasi, vc, dan kecepatan rotasi, ωc untuk
masing-masing robot follower. Untuk itu, akan dirancang fungsi keanggotaan
(membership function) untuk masing-masing masukan dan keluaran.
Setelah itu, akan dirancang pula aturan-aturan yang menghubungkan setiap
fungsi keanggotaan dari masing-masing robot follower, dalam bentuk aturan sebagai
berikut:
RBn : if X1 is A1n and … Xm is Amn then Y is Bn (4.2)
Jumlah aturan yang harus dibuat sebanding dengan banyakya variabel lingusitik yang
akan digunakan.
Setelah proses pemodelan dan simulasi selesai, maka penelitian akan
memasuki tahap pengimplementasi algoritma keseluruhan sistem multi-robot ini.
Keseluruhan sistem pengendalian sistem multi-robot akan diimplementasikan ke
dalam sejumlah robot laboratorium bernama Lego NXT Mindstorms robot,
sebagaimana terlihat pada Gambar 4.4.
Gambar 4.4. Robot Lego NXT Mindstorms
Robot ini biasa digunakan sebagai robot peneltian untuk membuktikan
performansi yang telah dirancang sebelumnya. Robot ini juga dilengkapi oleh
beberapa jenis sensor yang dapat digunakan pada masa percobaan. Dengan
menggunakan robot ini, akan dibandingkan antara hasil proses pemodelan dan
simulasi dengan hasil implementasi program tersebut dalam robot sebenarnya.
24
BAB 5. HASIL DAN PEMBAHASAN
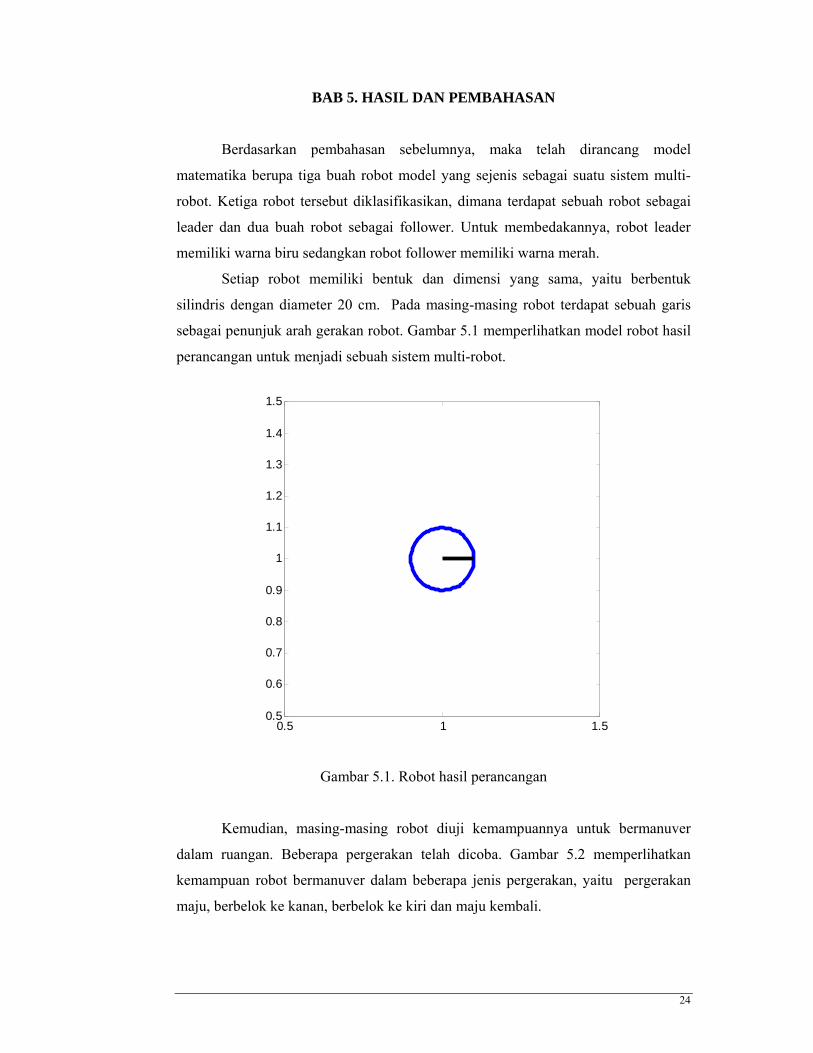
Berdasarkan pembahasan sebelumnya, maka telah dirancang model
matematika berupa tiga buah robot model yang sejenis sebagai suatu sistem multi-
robot. Ketiga robot tersebut diklasifikasikan, dimana terdapat sebuah robot sebagai
leader dan dua buah robot sebagai follower. Untuk membedakannya, robot leader
memiliki warna biru sedangkan robot follower memiliki warna merah.
Setiap robot memiliki bentuk dan dimensi yang sama, yaitu berbentuk
silindris dengan diameter 20 cm. Pada masing-masing robot terdapat sebuah garis
sebagai penunjuk arah gerakan robot. Gambar 5.1 memperlihatkan model robot hasil
perancangan untuk menjadi sebuah sistem multi-robot.
0.5 1 1.50.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
Gambar 5.1. Robot hasil perancangan
Kemudian, masing-masing robot diuji kemampuannya untuk bermanuver
dalam ruangan. Beberapa pergerakan telah dicoba. Gambar 5.2 memperlihatkan
kemampuan robot bermanuver dalam beberapa jenis pergerakan, yaitu pergerakan
maju, berbelok ke kanan, berbelok ke kiri dan maju kembali.

25
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
Gambar 5.2. Pergerakan robot tunggal dengan kombinasi pergerakan
Berdasarkan pergerakan robot tunggal yang ditampilkan pada Gambar 5.2, dapat
dikatakan bahwa pergerakan robot tunggal tersebut sudah baik, karena mampu
bergerak dengan pergerakan maju, belok kanan dan belok kiri dengan sempurna.
Kemudian, untuk menguji kemampuan komunikasi dalam sistem multi-robot,
ketiga robot disusun dalam formasi segitiga. Dalam formasi segitiga itu, sebuah robot
dijadikan sebagai robot leader dan dua robot lainnya sebagai robot follower. Robot
leader bergerak dengan pergerakan yang telah diprogram terlebih dahulu, sementara
robot follower tidak diberikan program pergerakan. Robot follower bergerak sesuai
dengan pergerakan yang diperintahkan oleh robot follower. Posisi robot leader dan
robot follower diperlihatkan pada Gambar 5.3.

26
0.5 1 1.50.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
Gambar 5.3. Formasi Sistem Multi-robot
Terdapat tiga pengujian sistem komunikasi pada multi-robot ini, yaitu:
pergerakan lurus, pergerakan melingkar dan pergerakan kombinasi. Untuk
mempermudah analisa, pergerakan dan data pergerakan ditampilkan dalam bentuk
gambar dan tabel. Dalam gambar, robot leader diperlihatkan dengan warna biru,
sedangkan robot follower ditampilkan dengan warna merah.
Hasil pergerakan multirobot dalam gerakan lurus diperlihatkan pada Gambar
5.4.

27
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
Gambar 5.4. Pergerakan Lurus pada Sistem Multi-robot
Pada Gambar 5.4 tampak bahwa multi-robot dapat bergerak dengan baik dengan
formasi segitiga yang dapat dipertahankan. Hal ini dapat dikatakan bahwa
komunikasi antara robot leader dengan dua buah robot follower telah berlangsung
dengan efektif, dimana robot-robot bergerak dengan kecepatan yang sama sesuai
dengan perintah yang dikirimkan oleh robot leader.
Hasil pergerakan dan data pergerakan multirobot dalam gerakan berbelok ke
kanan diperlihatkan pada Gambar 5.5. dan Tabel 5.1.

28
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
Gambar 5.5. Pergerakan Melingkar pada Sistem Multi-robot
Pada Gambar 5.5 tampak bahwa robot bergerak dengan kecepatan dan arah yang
sama, namun mengakibatkan terjadi perubahan formasi segitiga. Tabel 5.1
memperlihatkan bahwa terjadi perubahan posisi robot dari posisi formasi segitiga
yang seharusnya. Hal ini terjadi karena robot leader melakukan gerakan berbelok ke
kanan yang ternyata diikuti langsung oleh robot follower sehingga terjadi perubahan
formasi yang berakumulasi.

29
Tabel 5.1. Data Pergerakan Multi-robot Gerakan Berbelok ke Kanan
Kecepatan Jarak Deviasi Formasi
Robot Leader Robot
Follower1
Robot
Follower2
Kanan
(m/s)
Kiri
(m/s)
dx
(m)
dy
(m)
dx
(m)
dy
(m)
0.12 0.08 0.00 0.00 0.00 0.00
0.12 0.08 0.01 -0.01 0.01 0.01
0.12 0.08 0.02 -0.02 0.02 0.02
0.12 0.08 0.03 -0.03 0.03 0.03
0.12 0.08 0.04 -0.04 0.04 0.04
0.12 0.08 0.05 -0.05 0.05 0.05
0.12 0.08 0.05 -0.06 0.06 0.05
0.12 0.08 0.06 -0.08 0.08 0.06
0.12 0.08 0.07 -0.09 0.09 0.07
0.12 0.08 0.08 -0.10 0.10 0.08
0.12 0.08 0.08 -0.11 0.11 0.08
0.12 0.08 0.09 -0.12 0.12 0.09
0.12 0.08 0.10 -0.14 0.14 0.10
0.12 0.08 0.10 -0.15 0.15 0.10
0.12 0.08 0.11 -0.16 0.16 0.11
0.12 0.08 0.11 -0.18 0.18 0.11
0.12 0.08 0.12 -0.19 0.19 0.12
0.12 0.08 0.12 -0.20 0.20 0.12
0.12 0.08 0.12 -0.22 0.22 0.12
0.12 0.08 0.13 -0.23 0.23 0.13
0.12 0.08 0.13 -0.24 0.24 0.13
0.12 0.08 0.13 -0.26 0.26 0.13
0.12 0.08 0.13 -0.27 0.27 0.13
0.12 0.08 0.13 -0.29 0.29 0.13
0.12 0.08 0.14 -0.30 0.30 0.14
0.12 0.08 0.14 -0.31 0.31 0.14
30
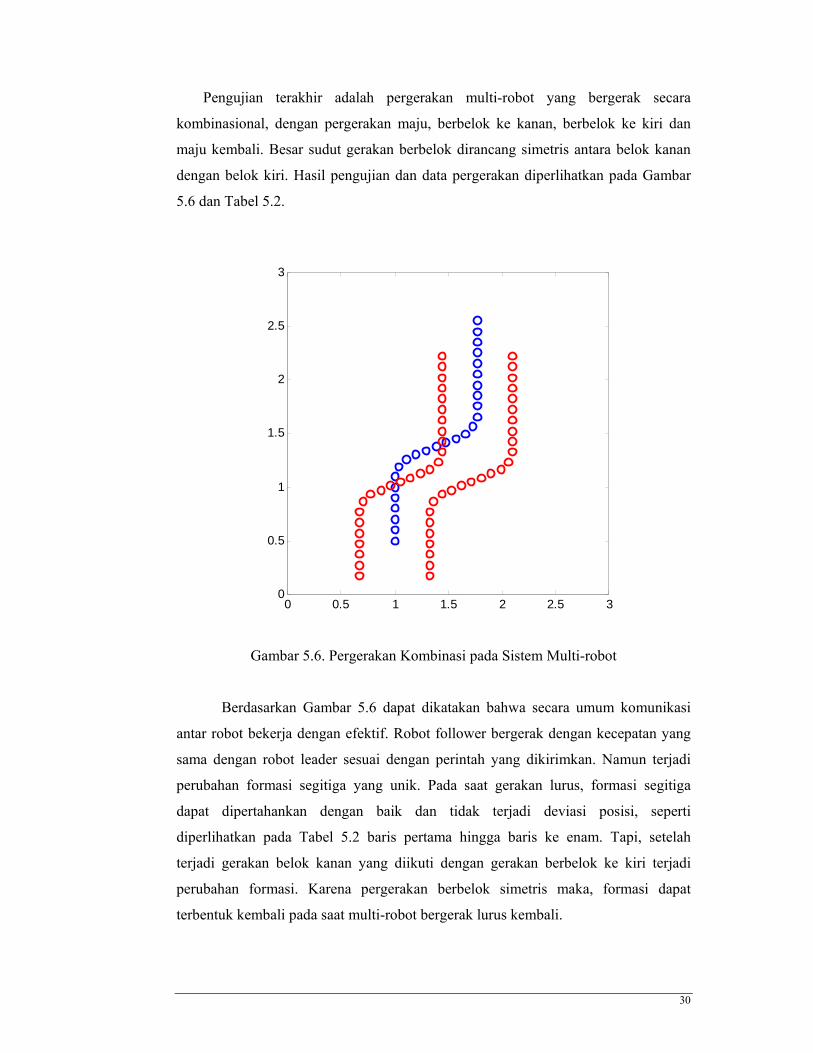
Pengujian terakhir adalah pergerakan multi-robot yang bergerak secara
kombinasional, dengan pergerakan maju, berbelok ke kanan, berbelok ke kiri dan
maju kembali. Besar sudut gerakan berbelok dirancang simetris antara belok kanan
dengan belok kiri. Hasil pengujian dan data pergerakan diperlihatkan pada Gambar
5.6 dan Tabel 5.2.
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
Gambar 5.6. Pergerakan Kombinasi pada Sistem Multi-robot
Berdasarkan Gambar 5.6 dapat dikatakan bahwa secara umum komunikasi
antar robot bekerja dengan efektif. Robot follower bergerak dengan kecepatan yang
sama dengan robot leader sesuai dengan perintah yang dikirimkan. Namun terjadi
perubahan formasi segitiga yang unik. Pada saat gerakan lurus, formasi segitiga
dapat dipertahankan dengan baik dan tidak terjadi deviasi posisi, seperti
diperlihatkan pada Tabel 5.2 baris pertama hingga baris ke enam. Tapi, setelah
terjadi gerakan belok kanan yang diikuti dengan gerakan berbelok ke kiri terjadi
perubahan formasi. Karena pergerakan berbelok simetris maka, formasi dapat
terbentuk kembali pada saat multi-robot bergerak lurus kembali.

31
Tabel 5.2. Data Pergerakan Multi-robot Gerakan Kombinasi
Kecapatan Jarak Deviasi Formasi
Robot Leader Robot
Follower1
Robot
Follower2
Kanan
(m/s)
Kiri
(m/s)
dx
(m)
dy
(m)
dx
(m)
dy
(m)
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.12 0.08 0.00 0.00 0.00 0.00
0.12 0.08 0.10 0.15 0.15 0.10
0.12 0.08 0.14 0.33 0.33 0.14
0.12 0.08 0.10 0.51 0.51 0.10
0.1 0.1 0.10 0.51 0.51 0.10
0.1 0.1 0.10 0.51 0.51 0.10
0.1 0.1 0.10 0.51 0.51 0.10
0.1 0.1 0.10 0.51 0.51 0.10
0.08 0.12 0.10 0.51 0.51 0.10
0.08 0.12 0.14 0.33 0.33 0.14
0.08 0.12 0.10 0.15 0.15 0.10
0.08 0.12 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00

32
Hasil simulasi matematika kemudia diimplementasikan pada robot
sebenarnya, yaitu robot Lego NXT Mindstorms. Pengujian dilakukan dengan
membuat formasi bagi dua buah robot NXT Mindstorms. Kedua robot tersebut
berkomunikasi dengan menggunakan teknologi Bluetooth. Sebelum terjadi
komunikasi, harus dipastikan terlebih dahulu, bahwa peralatan tekniologi Bluetooth
keduanya telah terpasang dan terhubung secara pair.
Selain itu pola hubungan kedua robot telah disiapkan, dimana terdapat robot
leader dan robot follower. Robot leader memberikan perintah kepada robot follower,
sedangkan robot follower hanya melaksanakan perintah tersebut.
Pengujian dilakukan dengan dua formasi, yaitu formasi berurutan (depan dan
belakang) serta formasi berdampingan (sisi kiri dan kanan). Formasi awal robot
diperlihatkan pada Gambar 5.7.
(a)

33
(b)
Gambar 5.7. Formasi Dua Robot NXT Mindstorms:
(a) Berurutan dan (b) Berdampingan
Hasil pengujian pergerakan sistem multi robot terhadap kedua formasi
diperlihatkan pada Gambar 5.8 dan Gambar 5.9, secara berurutan.

34
Gambar 5.8. Pergerakan Dua Robot NXT Mindstorms Formasi Berurutan

35
Gambar 5.9. Pergerakan Dua Robot NXT Mindstorms Formasi Berdampingan
Pergerakan robot dirancang memiliki pergerakan dasar, yaitu: pergerakan
lurus, pergerakan belok ke kanan 30 derajat dan pergerakan belok ke kiri juga 30
derajat. Dari Gambar 5.8 dan Gambar 5.9 dapat dilihat bahwa secara umum kedua
robot mampu melakukuan pergerakan dasar, baik pergerakan lurus, belok ke kanan
mapun belok ke kiri. Selain itu dapat dikatakan bahwa telah terjadi pula hubungan
komunikasi yang baik antara robot leader dengan robot follower, dimana robot
follower dapat bergerak sesuai dengan perintah yang diberikan oleh robot ledaer
melalui teknologi Bluetooth.
Sedangankan pada sisi formasi sistem multi robot, dapat dilihat bahwa kedua
robot berusaha untuk mempertahankan formasinya, baik formasi berurutan maupun
formasi berdampingan. Namun, formasi ini tidak dapat bertahan dengan baik. Hal ini
dikarenakan terdapat perbedaan persiapan daya dari masing-masing robot yang
menyebabkan kecepatan tiap-tiap robot tidak sama. Ketidaksamaan kecepatan ini
mengakibatkan sulitnya mempertahankan formasi robot sebagaimana yang telah
direncanakan.

36
BAB 6. RENCANA TAHAPAN BERIKUTNYA
Dari hasil penelitian yang telah dilakukan, terdapat beberapa kegiatan yang
dapat dilakukan untuk merancang penelitian berikutnya . Terdapat dua kegiatan besar
yang dikerjakan pada tahap berikutnya, yaitu: tahap peningkatan performansi
pengendali formasi dan tahap implementasi pengendali formasi pada kondisi
kompleks.
Tahap peningkatan pengendali formasi dilakukan dengan menggunakan
program MATLAB. Pengendali formasi dilakukan dengan berbasiskan pengendali
logika fuzzy atau pengendali jenis lainnya. Beberapa parameter dikaji untuk
dijadikan sebagai input. Input-input tersebut dihubungkan dengan aturan tertentu
untuk menghasilkan output yang sesuai dengan lingkungan pergerakan robot. Hasil
dari tahapan ini adalah berupa sebuah model pengendalian formasi robot majemuk
dengan performansi yang lebih baik.
Tahap kedua adalah mengimplementasikan pengendali formasi robot
majemuk yang telah dihasilkan pada robot sebenarnya dengan kondisi yang lebih
kompleks. Robot yang digunakan adalah robot lego NXT mindstorms. Beberapa
model percobaan pada formasi robot lego NXT mindstorms dengan bentuk formasi
yang berbeda-beda dilakukan. Performasi pergerakan robot diukur dan dianalisa
untuk mendapatkan hasil yang lebih baik lagi.

37
BAB 7. KESIMPULAN DAN SARAN
Secara umum, kegiatan penelitian telah berhasil mendisain sebuah model
komunikasi pada sistem multi-robot dengan media komuniasi tertentu. Masing-
masing robot telah dirancang berbentuk silindris dengan sistem perhitungan dan
iterasi dinamik tertentu. Pergerakan robot tunggal telah diuji dengan hasil yang baik.
Sistem multi-robot telah pula diujikan. Secara keseluruhan komunikasi perintah
pergerakan dari robot leader ke masing-masing robot follower bekerja dengan baik.
Hanya perlu dirancang lebih lanjut agar formasi sistem multi-robot dapat
dipertahakan bagi pergerakan yang lebih kompleks.

38
DAFTAR PUSTAKA
Adriansyah, A. dan Amin, S.H.M (2007), Fuzzy Behavior Coordination with
Flexible Fuzzy Context Rule using Particle Swarm Optimizaiton,
International Conference on Control, Instrumentation and Mechatronics
(CIM ‘07), Malaysia, 28-29 May 2007.
Adriansyah, A. dan Amin, S.H.M (2008), Learning of Fuzzy Behaviours using
Particle Swarm Optimization in Behaviour-based Mobile Robot.
International Journal of Intelligent System Technologies and Applications
(IJISTA), Vol. 5 – Issue 1/2 - 2008, Inderscience Publishers, ISSN: 1740-
8865, pp. 49-67.
Balch, T., dan R.C.Arkin (1998), Behavior-based formation control for multi-robot
teams, IEEE Transaction on Robotics and Automation, 14 (6), pp. 926-939,
1998
Chen, Y.Q dan Wang, Z (2005), Formation control: a review and a new
consideration, Proc. IEEE Internacional Conference on Intelligent Robots and
Systems, pp. 3181-3186, Agustus 2005.
Cruz, C.D.L dan Carelli, R. (2006), Dynamic modeling and centralized formation
control of mobile robots, Proc. IEEE Conference on Industrial Electroanics, pp.
3880-3885, November 2006
Dudek, G. and Jenkin, M. (2000). Computational Principles of Mobile Robotics. 1st
ed. Cambridge, MA: Cambridge University Press.
Egerstedt, M dan Hu, K (2001)., Formation contrained multi-agent control, Proc.
IEEE International Conference on Robotics adn Automatiion, pp. 3961-3966,
Korea, May 2001.
Gerkey, B.P. dan Mataric, M.J. (2003), A Formal Analysis and Taxonomy of Task
Allocation in Multi-robot Systems, International Journal of Robotics
Research, USA, 2003.
Keramas, J. G. (1999), Robot technology fundamentals, Delmar Publishers: New
Cork, 1999
Lee, C. (1990). Fuzzy Logic in Control Systems: Fuzzy Logic Controller (Parts I and
II). IEEE Transaction on Systems, Man, and Cybernetics. 10(2): 404-434.

39
Li, X., Xiao, J., dan Cai, Z. (2005), Backstepping based multiple mobile robots
formation control, Proc. IEEE International Conference on Intelligent Robots
and Systems, pp. 887-892, Agust, 2005
Lucas, G.W. (2000) A Tutorial and Elementary Trajectory Model for the Differential
Steering System of Robot Wheel Actuators. The Rossum Project. Unpublished.
Mariottini, G.L, dkk (2005). Visionbased Localization of Leader-Follower
Formations. In Proc. 44th IEEE Conference on Decision and Control, pages
635–640, 2005.
Miglino, O., Lund. H. And Nolfi, S. (1995). Evolving mobile robots in simulated and
real environments. Technical Report NSAL-95007, Roma. 1995.
Nehmzow, U. (2000). Mobile Robotics: A Practical Introduction. London: Springer-
Verlag.
Nehmzow, U. (2001). Mobile Robotics: Research, Applications and Challenges,
Proceeding of Future Trends in Robotics, Institution of Mechanical Engineer,
London, UK. 2001.
Parker, L. E., (2007). Distributed Intelligence: Overview of the Field and its
Application in Multi-Robot Systems, 2007 AAAI Fall Symposium, pp. 1-6,
The AAAI Press, California, 2007
Sanchez, J., dan Fierro, R. (2003), Sliding Mode Control for Robot Formations, Proc.
IEEE International Symposium on Intelligent Control, pp. 483-443, 2003.
Shao, J., dkk. (2005), Leader-following Formation Control of Multiple Mobile
Robots, Proc. IEEE/RSJ International Symposium on Intelligent Control, pp.
808-813, 2005.
Tunstel, E.W (1995). Coordination of Distributed Fuzzy Behaviors in Mobile Robot.
IEEE International Conference on Systems, Man, & Cybernetics. Canada,
October 1995. 4009-4014.
Wawerla, J. et al (2002), Collective Construction with Multipler Robots, Proceeding
of the International Conference on Intelligence Robots and Systems,
Switzerland, 2002
Yun, B., dkk (2008)., A leadaer-follower formation flight control scheme for UAV
helicopters, Proc. IEEE International Conference on Automatics and Logistics,
pp. 39-44, China, 2008.
Zadeh, L.A. (1965) Fuzzy Sets. Information and Control. 8(1): 338-353.

40
Zadeh, L.A. (1997). The Roles of Fuzzy Logic and Soft Computing in the
Conception, Design and Deployment of Intelligence Systems. Software Agents
and Soft Computing. 1997: 183-190

41
LAMPIRAN 1. REKAPITULASI PENGGUNAAN DANA
PUSAT PENELITIAN
UNIVERSITAS MERCU BUANA
LAPORAN REKAPITULASI PENGGUNAAN DANA PENELITIAN
JUDUL PENELITIAN : Perancangan Pengendali Formasi Pada Koordinasi Sistem Multi-Robot menggunakan Pengendali Logika Fuzzy
JENIS PENELITIAN : Hibah Fundamental (APID)
TAHUN : 2013
No. Uraian
Pemasukan (Rp) Pengeluaran (Rp)
1. Nilai Kontrak Bruto
37.000.000
2. Biaya Upah/HR
12.000.000
3. Belanja Bahan
2.757.000
4. Belanja Perjalanan
7.342.750
5. Belanja Barang Operasional Lainnya
14.909.800
Total Pengeluaran
37.009.550
Saldo
(9.550)
42
LAMPIRAN 2. INSTRUMEN
1. Perangkat Lunak Simulasi: MATLAB Versi R2008a
MATLAB (matrix laboratory) adalah sebuah lingkungan komputasi numerikal dan bahasa pemrograman
komputer generasi keempat. Dikembangkan oleh The MathWorks, MATLAB memungkinkan manipulasi
matriks, pem-plot-an fungsi dan data, implementasi algoritma, pembuatan antarmuka pengguna, dan peng-
antarmuka-an dengan program dalam bahasa lainnya.
2. Robot Lego NXT Mindstorms

43
LAMPIRAN 3. PERSONALIA TENAGA PENELITI
1. Ketua Peneliti
a. Nama Lengkap : Dr. Ir. Andi Adriansyah, M.Eng
b. Jabatan/ Golongan : Lektor Kepala / IVc
d. Institusi : FT Universitas Mercu Buana
e. Jurusan : Teknik Elektro
f. Program Studi : Teknik Elektro
g. Bidang Keahlian : Mekatronik, Robotika dan Kecerdasan Buatan
h. NIDN : 032027002
2. Anggota Peneliti 1
a. Nama Lengkap : Ir. Eko Ihsanto, M.Eng
b. Jabatan/ Golongan : Asisten Ahli
d. Institusi : FT Universitas Mercu Buana
e. Jurusan : Teknik Elektro
f. Program Studi : Teknik Elektro
g. Bidang Keahlian : Mikroprosesor, Embedded System, dan
Pemrograman Komputer
h. NIDN : 0309106802
Anggota Peneliti 2
a. Nama Lengkap : Ir. Badaruddin, MT
b. Jabatan/ Golongan : Lektor / IIIc
d. Institusi : FT Universitas Mercu Buana
e. Jurusan : Teknik Elektro
f. Program Studi : Teknik Elektro
g. Bidang Keahlian : Tenaga Listrik, Catu Daya, dan Battere
h. NIDN : 0323086404

44
LAMPIRAN 4. LOGBOOK
No. Tanggal Kegiatan
1 7 Mei 2013 Diskusi Tim Peneliti mengenai kelanjutan aktifitas
penelitian. Pembahasan difokuskan pada Tahap
Simulasi dan Implementasi
2 15 Mei 2013 Menjadi Pembicara pada Konferensi Internasional
ICTS 2013 di Bali
3 21 Mei 2013 Melakukan pemrograman robot majemuk dasar sebagai
pembentukan formasi robot dengan MATLAB
4 4 Juni 2013 Melakukan pemrograman robot majemuk dengan
MATLAB, mengendalikan gerakan robot majemuk:
gerakan lurus, gerakan miring dan gerakan kombinasi
5 18 Juni 2013 Melakukan pemrograman dengan MATLAB dan
diimplementasikan ke Robot NXT Lego. Percobaan
desain awal
6 2 Juli 2013 Diskusi Tim Peneliti mengenai hasil sementara
penelitian
Ketua Peneliti
Andi Adriansyah, Dr., Ir., M.Eng

45
No. Tanggal Kegiatan
7 16 Juli 2013 Melakukan pemrograman robot majemuk dan
diimplementasikan ke Robot NXT Lego. Mencoba
pergerakan robot majemuk dan mengatur formasi yang
diperlukan
8 30 Juli 2013 Melakukan pemrograman robot majemuk dengan
MATLAB dan implementasi ke Robot Lego NXT,
pergerakan dalam formasi berbanjar
9 20 Agustus 2013 Diskusi Tim Peneliti mengenai hasil penelitian
sementara. Penelitian akan dilanjutkan dengan formasi
robot majemuk lainnya
10 3 September 2013 Melakukan pemrograman robot majemuk dengan
MATLAB dan implementasi ke Robot Lego NXT.
Difokuskan pada gerakan robot majemuk dengan
formasi berbaris
11 17 September 2013 Diskusi Tim Peneliti mengenai hasil penelitian
sementara dan persiapan pembuatan laporan kemajuan
penelitian
12 8 Oktober 2013 Diskusi Tim Peneliti untuk finalisasi Laporan
Kemajuan Penelitian (70%) dan penjilidan Laporan
Kemajuan Penelitian
Ketua Peneliti
Andi Adriansyah, Dr., Ir., M.Eng
46
No. Tanggal Kegiatan
13 18 November 2013 Melakukan pemrograman robot majemuk dan
diimplementasikan ke Robot NXT Lego. Mencoba
pergerakan robot majemuk dan mengatur formasi yang
diperlukan dengan bentuk formasi yang berbeda-beda
14 25 November 2013 Diskusi Tim Peneliti mengenai hasil penelitian
sementara dengan pakar dan organisasi internasional
yang sejenis.
15 2 Desember 2013 Melakukan pemrograman robot majemuk dan
diimplementasikan ke Robot NXT Lego. Mencoba
pergerakan robot majemuk dan mengatur formasi yang
diperlukan dengan bentuk formasi yang berbeda-beda
16 9 Desember 2013 Diskusi Tim Peneliti untuk finalisasi Laporan Akhir
Penelitian (100%) dan penjilidan Laporan Akhir
Penelitian
Ketua Peneliti
Andi Adriansyah, Dr., Ir., M.Eng

47
LAMPIRAN 5. LUARAN
1. Jurnal Nasional
Andi Adriansyah, Perancangan Sistem Komunikasi Multi-robot Menggunakan Xbee,
Journal TICOM, Vol. 1, No. 1, September 2012, Aptikom Wil. 3, Jakarta,
ISSN No. 2302 – 3252, pp. 16-23
2. Seminar Nasional
Andi Adriansyah, Implementasi Sistem Komunikasi Multi-robot Menggunakan Xbee,
Seminar Nasional Aplikasi Sains dan Teknologi (SNAST) 2012, 3 November
2012, IST AKPRIND Yogyakarta, ISSN: 1979-911X, pp. B16-B21.
3. Jurnal Internasional
Andi Adriansyah, Design of Mini Multi-Robot System using XBee, International
Journal of Advances in Soft Computing and Its Application (IJASCA),
(submitted)
4. Seminar Internasional
Andi Adriansyah, Design of Simple Multi-robot System, MICEEI 2012, Makasar,
28th December 2012, pp. 175-178
Andi Adriansyah dan Yuliza, X-Bee Implementaion on Mini Multi-Robot System,
The 7th International Conference on Information and Communication
Technology and Systems, Bali, 15th-16th May 2013, pp. 221-226.
5. Buku Ajar
Andi Adriansyah, Belajar Membuat Robot dengan Arduino, (draft).

Jurnal TICOM Vol.1 No.1 September 2012
ISSN 2302 - 3252 16
Perancangan Sistem Komunikasi Multi-Robot
Menggunakan XBee Andi Adriansyah
Program Studi Teknik Elektro, Fakultas Teknik, Universitas Mercu Buana
Jl. Raya Meruya Selatan, Kembangan, Jakarta 11650, Indonesia, Tlp/Fax : 06221-5871335
Abstract -- In this decade the study of multi-robot systems
have been popular because it is able to reduce processing
time, cost and complexity of the system. However, multi-
robot system has a major problem is the reliability of
communication between robots. Several methods are
available to solve the existing problem. One is through the
use of ZigBee-based communication media. This paper
discusses the implementation of in simple multi-robot
system. Some experiments were performed to determine
the reliability and effectiveness of communication in some
movement of the robot and its ability to keep a certain
formation. Based on experiments conducted can be said
that the inter-robot communication is effective and well
run.
Keywords: Multi-robot system, Multi-robot
Communication, ZigBee
Abstrak – Pada dekade ini kajian sistem multi-robot telah
popular karena mampu mereduksi waktu proses, biaya
dan kompleksitas sistem. Namun, sistem multi-robot
memiliki masalah utama yaitu kehandalan komunikasi
antar robot. Beberapa metode telah ditawarkan untuk
menyelesaikan problem yang ada. Salah satunya adalah
melalui pemanfaatan media komunikasi berbasis ZigBee.
Tulisan ini membahas pengimplementasian ZigBee dalam
sistem multi-robot sederhana. Beberapa percobaan
dilakukan untuk mengetahui kehandalan dan efektifitas
komunikasi dalam beberapa pergerakan robot dan
kemampuannya menjaga formasi tertentu. Dari
percobaan yang dilakukan dapat dikatakan bahwa
komunikasi antar robot berjalan cukup efektif dan baik.
Kata kunci: Sistem Multi-robot, Komunikasi Multi-robot,
ZigBee
I. PENDAHULUAN
Teknologi dan aplikasi robot terus berkembang
secara cepat, baik dari sisi kehandalan, jangkauan
kemampuan dan bidang aplikasinya. Di dalam teknologi
robot, tergabung beberapa tema-tema penelitian yang
juga berkembang, seperti teknologi sensor, teknologi
motor, teknologi suplai daya, teknologi telekomunikasi,
teknologi pengendalian dan teknologi kecerdasan
buatan. Perkembangan masing-masing teknologi
tersebut saling menyempurnakan untuk mendukung
kemajuan teknologi robot. Oleh karena itu, penyelidikan
di bidang teknologi robot menjadi topik yang memiliki
daya tarik yang cukup kuat bagi para peneliti [1].
Pada dekade ini, telah terjadi pergeseran yang
signifikan pada bidang fokus penyelidikan tentang robot.
Para peneliti mulai mengarahkan arah penelitiannya,
dari investigasi sistem robot tunggal kepada koordinasi
sistem multi-robot. Sistem multi-robot adalah suatu
sistem dari suatu entitas robot yang bekerja bersama
untuk menyelesaikan tugas tertentu. Sebagai sebuah
topik penelitian, kajian sistem multi-robot telah
meningkat popularitasnya selama tahun-tahun
belakangan ini. Menurut data dari Web of Science,
selama tahun 2006 saja terdapat hampir 1000 publikasi
mengenai multi-robot. Beberapa bidang yang termasuk
dalam kajian sistem multi-robot, antara lain adalah:
distributed intelligence, distributed artificial
intelligence, multi-agent sistem dan multi-robot system
[2].
Terdapat beberapa keuntungan potensial dari
pengaplikasian sistem multi-robot. Secara umum,
pengaplikasian sistem multi-robot dibanding sistem
robot tunggal adalah menghasilkan sistem yang lebih
baik dalam rangka menyelesaikan permasalahan sistem.
Jika sebuah sistem diselesaikan dengan cara
membaginya dalam beberapa subsistem secara parallel,
maka penggunaan sistem multi-robot akan
menghasilkan sistem yang dapat mengurangi waktu
penyelesaian secara keseluruhan. Selain itu, sistem
multi-robot menawarkan kemungkinan untuk
meningkatkan keandalan sistem. Sistem multi-robot
dapat menggantikan peran robot yang mengalami
kegagalan fungsi. Hal ini tidak dimungkinkan pada
sistem robot tunggal. Keuntungan lainnya, untuk
menyelesaikan sistem yang ada menggunakan sistem
robot tunggal membutuhkan pembiayaan yang besar dan
sistem yang kompleks. Dengan sistem multi-robot,
sistem yang ada dapat dikerjakan secara bersama
dengan menggunakan robot yang murah dan sederhana
[3].
Dalam sistem multi-robot terdapat tujuh topik riset
utama yang menjadi bahan kajian para peneliti, yaitu:
model inspirasi biologis, sistem komunikasi, sistem
aristektur, mekanisme lokalisasi,
manipulasi/transportasi objek, koordinasi pergerakan
dan rekonfigurasi robot [4], [5].
Sistem komunikasi multi-robot (multi-robot

Jurnal TICOM Vol.1 No.1 September 2012
ISSN 2302 - 3252 17
communication) termasuk topik riset yang cukup
berkembang dan menantang. Hal ini disebabkan karena
problem besar sistem multi-robot adalah keperluannya
terhadapa komunikasi yang andal untuk
mengkoordinasikan seluruh robot. Penambahan jumlah
robot akan makin meningkatkan kompleksitas
komunikasi yang ada [2].
Oleh karena itu, tulisan ini berupaya untuk
membahas perancangan sistem komunikasi multi-robot
demi mengatasi masalah yang disebutkan di atas.
Perancangan sistem komunikasi diupayakan
sesederhana mungkin dibandingkan dengan yang telah
ada. Fokus perancangan ditujukan kepada kemampuan
robot untuk bermanuver dengan pergerakan dan formasi
tertentu. Pada tulisan ini, media transmisi yang
digunakan antar robot adalah sistem nir kabel dengan
frekuensi radio (Radio Frequnecy, RF) menggunakan
Xbee Beberapa eksperimen dilakukan untuk menguji
efektifitas komunikasi dalam manuver dan pergerakan
seluruh robot.
II. TINJAUAN PUSTAKA
A. Komunikasi Multi-robot
Komunikasi multi-robot adalah teknologi yang
memiliki kemampuan untuk memberikan jalur
komunikasi terdahap dua atau lebih robot [6]. Dengan
menggunakan teknologi wireless yang ada maka dapat
dirancang semacam ‘bahasa’ antara robot untuk
membentuk sebuah sistem multi-robot. Kemudian,
sistem robot yang telah memiliki jalur komunikasi ini
dapat saling bertukar informasi, seperti data pengukuran,
lokasi atau posisi masing-masing robot, data lingkungan
atau perintah pergerakan. Dengan demikian, komunikasi
multi-robot dapat menjadli solusi untuk menyelesaikan
permasalahan sistem multi-robot yang lebih luas dan
kompleks.
Komunikasi multi-robot biasa diklasifikasikan
dalam beberapa kategori, yaitu: komunikasi implisit,
komunikasi eksplisit, komunikasi keadaam dan
komunikasi tujuan [2]. Pembahasan mengenai jenis-
jenis komunikasi tersebut adalah sebagai berikut.
1. Komunikasi Implisit
Komunikasi implisit adalah sistem komunikasi
melalui perubahan di lingkungan. Robot dapat
meninggalkan bekas dan jejak yang dapat
menyampaikan informasi kepada robot lainnya yang
akan mengenali perubahan lingkungan. Tindakan
tersebut dapat dibandingkan dengan perbuatan manusia
seperti menuliskan tanda anak panah di jalan atau semut
meninggalkan jejak aroma tertentu di permukaan yang
dilewatinya.
2. Komunikasi Eksplisit
Jenis komunikasi ini terbentuk dalam sistem
pengiriman dan penenerimaan data melalui jenis
protokol atau bahasa sebagai media. Komunikasi
eksplisit harus terjadi secara real pada setiap robot.
Sebuah perangkat komunikasi diperlukan untuk
komunikasi seperti untuk melayani sebagai media,
misalnya untuk radio atau wireless Ethernet.
3. Komunikasi Keadaan
Dalam komunikasi keadaan, robot harus dapat
mengamati perilaku robot lainnya. Komunikasi dapat
diterapkan dalam bentuk beberapa robot bergerak
berdasarkan keberadaan cahaya. Untuk dapat
menerapkan komunikasi ini robot harus mampu
mengenali dan mengerti pergerakan robot lainnya.
4. Komunikasi Tujuan
Jenis komunikasi melibatkan transmisi dan
penerimaan informasi yang berorientasi pada tujuan
tertetntu. Pelaksanaan pada mobile robot membutuhkan
data yang akan dikodekan, dikirim, diterima dan
diterjemahkan. Komunikasi tujuan berbeda dari
komunikasi negara dalam bahwa pengirim sengaja
mengirim atau menyiarkan informasi. Sebuah contoh
alam dari jenis komunikasi ditemukan dalam perilaku
lebah madu.
B. ZigBee dan XBee
Zigbee adalah sebuah spesifikasi protokol
komunikasi radio digital berdaya rendah berdasarkan
standar IEEE 802.15.4 tahun 2003 [7]. Sedangkan
XBee adalah brand yang mensupport dari berbagai
protokol komunikasi termasuk ZigBee 802.15.4 dan
WiFi.
Secara umum, standar protokol ZigBee sama
dengan standar Bluetooth. Manufaktur device standar
ZigBee suatu pabrik sepenuhnya mendukung dan
bersesuaian dengan ZigBee device buatan pabrik
lainnya. Gambar XBee module ditunjukkan pada
Gambar 1.
Gbr 1. ZigBee Modul
ZigBee banyak digunakan dipasaran karena
ZigBee mempunyai banyak keunggulan yaitu :
a. Jangkauan 1 meter - 100 meter.
b. ISM (Industrial, Scientific & Medical) radio
bands : 2.4 GHz, 868 MHz dan 915 MHz

Jurnal TICOM Vol.1 No.1 September 2012
ISSN 2302 - 3252 18
c. Konsumsi daya rendah
d. CSMA-CA channel access.
e. Jaringan besar (65.000 node).
f. Sangat aman (AES enkripsi).
g. Jaringan topologi star, mesh dan saling
mendukung berbagai aplikasi
h. Interoperabilitas di seluruh dunia dengan
produk-produk lainnya
i. Co-eksistensi dengan media nirkabel lainnya
(misalnya,WLAN, Bluetooth, selular)
Keunggulan dari ZigBee tersebut membuat teknologi
ZigBee banyak diaplikasikan di berbagai kebutuhan
masyarakat antara lain sebagai remote control,
pemantau jarak jauh, pengirim data dan wireless sensor.
Gambar 2 memperlihatkan arsitektur jaringan yang
terdapat dalam ZigBee [7].
Gbr 2. Arsitektur Jaringan ZigBee
C. Penelitian Sejenis
Sistem komunikasi memainkan peranan yang amat
penting dalam implementasi sistem multi-robot. Oleh
karena itu, sistem komunikasi yang efisien dan handal
menjadi sebuah harapan yang ingin dicapai dalam
seluruh riset mengenai komunikasi multi-robot ini.
Berbagai media komunikasi telah diupayakan oleh para
peneliti untuk mendapatkan sistem yang ideal tersebut.
Pada tahapan awal, Radio Frekuensi (RF) menjadi
media komunikasi yang banyak digunakan [8], [9].
Kemudian, setelah dikenalnya media Wireless Fidellity
(WiFi), maka media ini juga menjadi alternative. Gill
Pinto dan kawan-kawan [10] mencoba untuk
mengembangkan media WiFi, bukan sekedar sebagai
media komunikasi multi-robot, bahkan juga menjadi
alat pengukur posisi antara robot dengan mengkalkulasi
kekuatan sinyalnya. Selanjutnya, pengembangan WiFi
menjadi bahan riset peneliti selanjutnya, seperti WLAN
[11] dan TCP/IP [12], [13], yang
mengimplementasikannya pada sistem multi-robot
rekaanya. Menuturnya, Xiao-Lin [11] sistem WLAN
memiliki performansi yang relative baik, murah dan
praktis penggunaannya.
Pengembangan lainnya adalah penggunaan RFID
sebagai media komunikasi multi-robot yang dipelopori
oleh Kang [14]. Namun, karena RFID memiliki
keterbatasan jarak untuk dapat berkomunikasi, maka
belum banyak dikembangkan.
Terakhir, yang mulai popular dijadikan sebagai
media komunikasi multi-robot adalah ZigBee [15].
Sejak dikenalkannya, penggunaan ZigBee dengan salah
satu brandnya, yaitu XBee, pengkajian media ini mulai
berkembang. Tulisan ini mencoba
mengimplementasikan XBee dalam sistem multi-robot
sederhana.
III. PERANCANGAN
Terdapat beberapa tahap perancangan yang
dilakukan, yaitu: perancangan robot, perancangan
pergerakan robot dan perancangan komunikasi multi-
robot. Tiga buah robot sederhana dan sejenis dirancang
berbentuk persegi pipih terbuat dari bahan multipleks.
Robot memiliki dimensi sebagai berikut:
Sisi = 20 cm
Tinggi = 12 cm (tanpa roda)
Tinggi = 16 cm (dengan roda)
Pada masing-masing robot dirancang terdapat
sebuah sistem minimum mikrokontroler sebagai
pengendali, sebuah penggerak motor (motor driver),
sepasang motor dengan rodanya dan seperangkat sistem
komunikasi. Sistem minimum yang digunakan adalah
Arduino Duemilanove yang berbasiskan mikrokontroler
ATMega 328. Sementara penggerak motor yang dipakai
berbasiskan IC L293D yang mampu mengendalikan
arah dan kecepatan dua buah motor sekaligus. Motor
yang dikendalikan adalah motor DC yang memiliki
sistem gear sederhana. Bentuk robot yang dirancang
diilustrasikan pada Gambar 3.
Gbr 3. Bentuk Robot yang akan dirancang
Robot-robot tersebut digerakkan menggunakan dua
buah motor DC yang diletakan di sisi kiri dan kanan
robot untuk dapat melakukan berbagai gerakan tertentu.
Pergerakan robot menggunakan prinsip differential
drive motor [16], [17]. Prinsip ini mengkombinasikan
perbedaan kecepatan antara motor roda kanan dengan
motor roda kiri, sehingga didapatkan pergerakan robot
yang melingkar dengan jarak dan sudut tertentu dari
titik pusatnya. Kemampuan ini membuat robot dapat

Jurnal TICOM Vol.1 No.1 September 2012
ISSN 2302 - 3252 19
dapat bergerak dengan arah yang berbeda-beda. Gambar
4 memperlihatkan prinsip pergerakan ini, dimana vl dan
vr adalah kecepatan translasi motor kiri dan kanan, ωc
adalah kecepatan rotasi motor keseluruhan, W adalah
jarak antara roda, R adalah jari-jari lingkaran dan ICC
adalah titik pusat gerakan melingkarnya
Gbr 4. Prinsip Pergerakan differential drive motor
Kemudian, sistem komunikasi antara robot
dirancang berbasisikan sistem komunikasi implisit. Pada
sistem ini digunakan media tanpa kabel (wireless).
Setiap robot difasilitasi dengan sebuah Xbee yang
berperan sebagai Pemancar dan Penerima, sehingga
dapat terjadi komunikasi antar seluruh robot. Model
komunikasi berupa sistem pemancar (Transmitter, Tx)
dan sistem penerima (Receiver, Rx) diletakan pada
setiap robot. Dengan demikian, setiap robot dapat saling
berkomunikasi dengan mekanisme full duplex. Ilustrasi
mekanisme komunikasi multi-robot diperlihatkan pada
Gambar 5.
Gbr 5. Sistem Komunikasi Multi-robot
Secara umum direncanakan robot diatur dalam
sistem pengendalian khusus. Sistem pengendalian yang digunakan adalah sistem leader – follower, dimana sebuah robot akan menjadi leader dan beberapa robot lainnya akan berperan sebagai follower [18], [19]. Robot follower akan menempati posisi tertentu relatif terhadap robot leader. Robot leader akan memberikan perintah pergerakan sesuai dengan pergerakan dirinnya ke semua robot follower. Dalam tulisan ini robot diformasikan dalam bentuk segitiga, dimana sebuah robot leader di depan dan dua buah robot follower di sebelah kiri dan kanan robot leader. Formulasi ini ditampilkan pada Gambar 6.
Gbr 6. Robot-Majemuk dalam Formasi V
IV. HASIL DAN PEMBAHASAN
Berdasarkan perancangan yang telah disampaikan
pada bagian sebelumnya, maka telah dirancang tiga
buah robot sederhana yang sejenis sebagai suatu sistem
multi-robot. Ketiga robot tersebut diklasifikasikan
sebagai berikut: terdapat sebuah robot sebagai leader
dan dua buah robot sebagai follower. Untuk
membedakannya, robot leader memiliki tiga buah
sensor ultarsonik yang memiliki kemampuan mengukur
jarak dengan benda di hadapannya.
Setiap robot memiliki bentuk dan dimensi yang
sama, yaitu berbentuk persegi berukuran 20 X 20 cm
dengan masing-masing sudutnya telah dirapihkan.
Sebuah sistem minimum mikrokontroler sebagai
pengendali sistem secara keseluruhan ditempatkan pada
masing-masing robot. Disamping itu, sebuah penggerak
motor (motor driver), sepasang motor dengan rodanya
dan seperangkat sistem komunikasi diletakan pada
sebagai sistem pelengkap untuk bekerjanya robot
dengan baik. Sistem minimum yang digunakan adalah
Arduino Duemilanove yang berbasiskan mikrokontroler
ATMega 328. Sementara penggerak motor yang dipakai
berbasiskan IC L293D yang mampu mengendalikan
arah dan kecepatan dua buah motor sekaligus. Motor
yang dikendalikan adalah motor DC yang memiliki
sistem gear sederhana. Terakhir, sistem komunikasi
yang diaplikasikan berbasis sistem telekomunikasi
ZigBee dengan merek Xbee yang memiliki kemampuan
mengirimkan dan menerima data secara duplex. Gambar
7 memperlihatkan robot hasil perancangan untuk
menjadi sebuah sistem multi-robot.
vr
vl
W/2
(x, y)
θ R
ωc ICC

Jurnal TICOM Vol.1 No.1 September 2012
ISSN 2302 - 3252 20
(a)
(b)
(c)
Gambar 7. Robot hasil perancangan: (a) Tampak Depan, (b) Tampak
Samping dan (c) Tampak Atas
Kemudian, masing-masing robot diuji kemampuannya
untuk bermanuver dalam ruangan. Beberapa pergerakan
telah dujiicoba. Gambar 8 memperlihatkan kemampuan
robot tunggal bermanuver dalam beberapa jenis
pergerakan, yaitu pergerakan maju, berbelok ke kanan,
berbelok ke kiri dan maju kembali.
Gbr 8. Pergerakan robot tunggal dengan kombinasi pergerakan
Berdasarkan pergerakan robot tunggal yang ditampilkan
pada Gambar 8, dapat dikatakan bahwa pergerakan
robot tunggal tersebut sudah baik, karena mampu
bergerak dengan pergerakan maju, belok kanan dan
belok kiri dengan sempurna.
Kemudian, untuk menguji kemampuan komunikasi
dalam sistem multi-robot, ketiga robot disusun dalam
formasi segitiga. Dalam formasi segitiga itu, sebuah
robot dijadikan sebagai robot leader dan dua robot
lainnya sebagai robot follower. Robot leader bergerak
dengan pergerakan yang telah diprogram terlebih dahulu,
sementara robot follower tidak diberikan program
pergerakan. Robot follower bergerak sesuai dengan
pergerakan yang diperintahkan oleh robot follower.
Posisi robot leader dan robot follower diperlihatkan
pada Gambar 9.
(a)
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3

Jurnal TICOM Vol.1 No.1 September 2012
ISSN 2302 - 3252 21
(b)
Gbr 9. Formasi Sistem Multi-robot: (a) Tampak Atas dan (b) Tampak
Depan
Terdapat tiga pengujian sistem komunikasi pada
multi-robot ini, yaitu: pergerakan lurus, pergerakan
melingkar dan pergerakan kombinasi. Untuk
mempermudah analisa, pergerakan dan data pergerakan
ditampilkan dalam bentuk gambar dan tabel. Dalam
gambar, robot leader diperlihatkan dengan warna biru,
sedangkan robot follower ditampilkan dengan warna
merah.
Hasil pergerakan multirobot dalam gerakan lurus
diperlihatkan pada Gambar 10.
Gbr 10. Pergerakan Lurus pada Sistem Multi-robot
Pada Gambar 10 tampak bahwa multi-robot dapat
bergerak dengan baik dengan formasi segitiga yang
dapat dipertahankan. Hal ini menunjukkan bahwa
komunikasi antara robot leader dengan dua buah robot
follower telah berlangsung dengan efektif, dimana
robot-robot bergerak dengan kecepatan yang sama
sesuai dengan perintah yang dikirimkan oleh robot
leader melalui Xbee.
Hasil pergerakan dan data pergerakan multirobot
dalam gerakan berbelok ke kanan diperlihatkan pada
Gambar 11 dan Tabel 1.
Gbr 11. Pergerakan Melingkar pada Sistem Multi-robot
Pada Gambar 11 tampak bahwa robot bergerak dengan
kecepatan dan arah yang sama, namun mengakibatkan
terjadi perubahan formasi segitiga. Tabel 1
memperlihatkan bahwa terjadi perubahan posisi robot
dari posisi formasi segitiga yang seharusnya. Hal ini
terjadi karena robot leader melakukan gerakan berbelok
ke kanan yang ternyata diikuti langsung oleh robot
follower sehingga terjadi perubahan formasi yang
berakumulasi.
TABEL 1
DATA PERGERAKAN MULTI-ROBOT GERAKAN
BERBELOK KE KANAN
Kecepatan Jarak Deviasi Formasi
Robot Leader Robot Follower1 Robot Follower2
Kanan
(m/s)
Kiri
(m/s)
dx
(m)
dy
(m)
dx
(m)
dy
(m)
0.12 0.08 0.00 0.00 0.00 0.00
0.12 0.08 0.01 -0.01 0.01 0.01
0.12 0.08 0.02 -0.02 0.02 0.02
0.12 0.08 0.03 -0.03 0.03 0.03
0.12 0.08 0.04 -0.04 0.04 0.04
0.12 0.08 0.05 -0.05 0.05 0.05
0.12 0.08 0.05 -0.06 0.06 0.05
0.12 0.08 0.06 -0.08 0.08 0.06
0.12 0.08 0.07 -0.09 0.09 0.07
0.12 0.08 0.08 -0.10 0.10 0.08
0.12 0.08 0.08 -0.11 0.11 0.08
0.12 0.08 0.09 -0.12 0.12 0.09
0.12 0.08 0.10 -0.14 0.14 0.10
0.12 0.08 0.10 -0.15 0.15 0.10
0.12 0.08 0.11 -0.16 0.16 0.11
0.12 0.08 0.11 -0.18 0.18 0.11
0.12 0.08 0.12 -0.19 0.19 0.12
0.12 0.08 0.12 -0.20 0.20 0.12
0.12 0.08 0.12 -0.22 0.22 0.12
0.12 0.08 0.13 -0.23 0.23 0.13
0.12 0.08 0.13 -0.24 0.24 0.13
0.12 0.08 0.13 -0.26 0.26 0.13
0.12 0.08 0.13 -0.27 0.27 0.13
0.12 0.08 0.13 -0.29 0.29 0.13
0.12 0.08 0.14 -0.30 0.30 0.14
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3

Jurnal TICOM Vol.1 No.1 September 2012
ISSN 2302 - 3252 22
0.12 0.08 0.14 -0.31 0.31 0.14
Pengujian terakhir adalah pergerakan multi-robot
yang bergerak secara kombinasional, dengan pergerakan
maju, berbelok ke kanan, berbelok ke kiri dan maju
kembali. Besar sudut gerakan berbelok dirancang
simetris antara belok kanan dengan belok kiri. Hasil
pengujian dan data pergerakan diperlihatkan pada
Gambar 12 dan Tabel 3.
Gbr 12. Pergerakan Kombinasi pada Sistem Multi-robot
Berdasarkan Gambar 12 dapat dikatakan bahwa secara
umum komunikasi antar robot bekerja dengan efektif.
Robot follower bergerak dengan kecepatan yang sama
dengan robot leader sesuai dengan perintah yang
dikirimkan. Namun terjadi perubahan formasi segitiga
yang unik. Pada saat gerakan lurus, formasi segitiga
dapat dipertahankan dengan baik dan tidak terjadi
deviasi posisi, seperti diperlihatkan pada Tabel 3 baris
pertama hingga baris ke enam. Tapi, setelah terjadi
gerakan belok kanan yang diikuti dengan gerakan
berbelok ke kiri terjadi perubahan formasi. Karena
pergerakan berbelok simetris maka, formasi dapat
terbentuk kembali pada saat multi-robot bergerak lurus
kembali.
TABEL 2
DATA PERGERAKAN MULTI-ROBOT GERAKAN
KOMBINASI
Kecapatan Jarak Deviasi Formasi
Robot Leader Robot Follower1 Robot Follower2
Kanan
(m/s)
Kiri
(m/s)
dx
(m)
dy
(m)
dx
(m)
dy
(m)
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.12 0.08 0.00 0.00 0.00 0.00
0.12 0.08 0.10 0.15 0.15 0.10
0.12 0.08 0.14 0.33 0.33 0.14
0.12 0.08 0.10 0.51 0.51 0.10
0.1 0.1 0.10 0.51 0.51 0.10
0.1 0.1 0.10 0.51 0.51 0.10
0.1 0.1 0.10 0.51 0.51 0.10
0.1 0.1 0.10 0.51 0.51 0.10
0.08 0.12 0.10 0.51 0.51 0.10
0.08 0.12 0.14 0.33 0.33 0.14
0.08 0.12 0.10 0.15 0.15 0.10
0.08 0.12 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
0.1 0.1 0.00 0.00 0.00 0.00
V. PENUTUP
Tulisan ini telah membahas proses perancangan
sebuah sistem komunikasi pada sistem multi-robot
dengan media komunikasi berbasisis Xbee. Tiga buah
robot telah dirancang berbentuk persegi dengan sistem
mikrokontroler, sistem penggerak motor dan sistem
komunikasi sendiri-sendiri. Pergerakan robot tunggal
telah diuji dengan hasil yang baik. Sistem multi-robot
telah pula diujikan. Secara keseluruhan komunikasi
perintah pergerakan dari robot leader ke masing-masing
robot follower bekerja dengan baik. Hanya perlu
difikirkan metoda lebih lanjut agar formasi sistem
multi-robot dapat dipertahakan bagi pergerakan yang
lebih kompleks.
REFERENSI
[1] Nehmzow, U., “Mobile Robotics: Research,
Applications and Challenges, Proceeding of Future
Trends in Robotics”, Institution of Mechanical
Engineer, London, UK. 2001.
[2] Parker, L. E., “Distributed Intelligence: Overview of
the Field and its Application in Multi-Robot
Systems”, 2007 AAAI Fall Symposium, pp. 1-6,
The AAAI Press, California, 2007
[3] Wawerla, J. et al., “Collective Construction with
Multipler Robots”, Proceeding of the International
Conference on Intelligence Robots and Systems,
Switzerland, 2002
[4] Arai, T., et al., Editorial: Advances in Multi-robot
System, Int. J. of Computers, Communications &
Control, ISSN 1841-9836, E-ISSN 1841-9844, Vol. III
(2008), Suppl. issue: Proceedings of ICCCC 2008, pp.
92-107
[5] Lefrance, G., Colony of robots: New Challenge,
IEEE Trans. Robotics and Automation, Vol. 18,
No. 5, October 2002, pp 655-661
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3

Jurnal TICOM Vol.1 No.1 September 2012
ISSN 2302 - 3252 23
[6] Xiao-Lin, L., Jing-Ping, J., and Kui, X., , Proc.
International Conference on Robotics and
Biomimetics (ROBIO 2004), 2004, pp. 307-312
[7] Faludi, R., Buidling Wireless Sensor Networks,
O’Reilly Media, Inc, USA, 2011
[8] Pan, Q.W., Lowe, D., Search and Rescue Robot
Team RF Communication via Power Cable
Transmission Line - A Proposal, International
Symposium on Signals, Systems and Electronics
(ISSSE 2007), pp. 287-290
[9] Rivard, F, et al., .Ultrasonic relative positioning for
multi-robot systems, International Conference on
Robotics and Automation (ICRA 2008), pp. 323-
328
[10] Gil-Pinto, A. Fraisse, P. Zapata, R., Wireless
communication for secure positioning in multi
robot formations of non holonomic ground
vehicles , International Conference on Intelligent
Robots and Systems (IROS 2008), pp. 4198
[11] Xiao-Lin, L., Jing-Ping, J., Kui, X., , International
Conference on Robotics and Biomimetics (ROBIO
2004), pp. 307-212
[12] Hui-ping, L., et al., Communication of multi-robot
system on the TCP/IP, International Conference
on Mechatronics Science (MEC 2011), pp. 1432-
1435
[13] Hui, et al., A common wireless remote control
system for mobile robots in laboratory, IEEE
International Instrumentation and Measurement
Technology Conference (I2MTC 2012), pp. 688-
693
[14] Kang, S.H., et al., Implementation of Smart Floor
for multi-robot system, International Conference
on Automation, Robotics and Applications
(ICARA 2011), pp. 46-51
[15] Wan, J., et al., Multi-robots' communication system
based on ZigBee network, International
Conference on Electronic Measurement, (ICEMI
2009), pp. 3-14 – 3-19
[16] Lucas, G.W. (2000) A Tutorial and Elementary
Trajectory Model for the Differential Steering
System of Robot Wheel Actuators. The Rossum
Project. http://
rossum.sourceforge.net/papers/DiffSteer. (10
December 2006)
[17] Dudek, G. and Jenkin, M. (2000). Computational
Principles of Mobile Robotics. 1st ed. Cambridge,
MA: Cambridge University Press.
[18] Zhang, Y., Zeng, L., Li, Y., and Liu, Q., Multi
robot formation control using leader-follower for
MANET, Proc. International Conference on
Robotics and Biometrics (ROBIO 2009), pp. 337-
342.
[19] Ghommam, J., Mehrjerdi, H., and Saad, M.,
Leader-follower formation control of
nonholonomics with fuzzy logic based approach
for obstacle avoidance, Proc. International
Conference on Intelligent Robots and Systems
(IROS 2011), 2011, pp. 2340-2345

Prosiding Seminar Nasional Aplikasi Sains & Teknologi (SNAST) Periode III ISSN: 1979-911X Yogyakarta, 3 November 2012
B-16
Implementasi Sistem Multi-Robot Menggunakan Xbee
Andi Adriansyah Program Studi Teknik Elektro, Fakultas Teknik, Universitas Mercu Buana
Jl. Raya Meruya Selatan, Kembangan, Jakarta 11650 Email: [email protected]
Abstrak
Sistem multi-robot telah menjadi fokus kajian yang popular karena mampu mereduksi waktu proses, biaya dan kompleksitas sistem. Masalah utama sistem multi-robot terletak pada kehandalan komunikasi antar robot. Salah satu metode untuk menyelesaikan problem ini adalah melalui pemanfaatan media komunikasi berbasis ZigBee. Tulisan ini membahas implementasi XBee dalam sistem multi-robot sederhana. Untuk mengetahui kehandalan dan efektifitas komunikasi dalam beberapa pergerakan robot dan kemampuannya menjaga formasi tertentu beberapa percobaan telah dilakukan. Dari percobaan yang dilakukan dapat dikatakan bahwa komunikasi antar robot berjalan cukup efektif dan baik.
Kata kunci: Sistem Multi-robot, Komunikasi Multi-robot, ZigBee
Pendahuluan
Perkembangan teknologi dan aplikasi robot melaju dengan . Perkembangan ini meliputi sisi kehandalan, jangkauan kemampuan dan bidang aplikasinya. Beberapa tema penelitian yang berhubungan dengan teknologi robot juga turut berkembang. Perkembangan masing-masing teknologi tersebut saling menyempurnakan untuk mendukung kemajuan teknologi robot. Oleh karena itu, penyelidikan di bidang teknologi robot menjadi topik yang memiliki daya tarik yang cukup kuat bagi para peneliti [1].
Secara umum, telah terjadi perkembangan yang signifikan pada bidang fokus penyelidikan tentang robot. Para peneliti mulai mengarahkan fokus penelitiannya, dari investigasi sistem robot tunggal kepada koordinasi sistem multi-robot. Sistem multi-robot adalah suatu sistem dari suatu entitas robot yang bekerja bersama untuk menyelesaikan tugas tertentu [2] dan [3]. Dalam sistem multi-robot terdapat tujuh topik riset utama yang menjadi bahan kajian para peneliti, yaitu: model inspirasi biologis, sistem komunikasi, sistem aristektur, mekanisme lokalisasi, manipulasi/transportasi objek, koordinasi pergerakan dan rekonfigurasi robot [4], [5].
Sistem komunikasi multi-robot (multi-robot communication) termasuk topik riset yang cukup berkembang dan menantang. Hal ini disebabkan karena problem besar sistem multi-robot adalah keperluannya terhadapa komunikasi yang andal untuk mengkoordinasikan seluruh robot. Penambahan jumlah robot akan makin meningkatkan kompleksitas komunikasi yang ada [2].
Oleh karena itu, tulisan ini berupaya untuk membahas perancangan sistem komunikasi multi-robot demi mengatasi masalah yang disebutkan di atas. Perancangan sistem komunikasi diupayakan sesederhana mungkin dibandingkan dengan yang telah ada. Fokus perancangan ditujukan kepada kemampuan robot untuk bermanuver dengan pergerakan dan formasi tertentu. Pada tulisan ini, media transmisi yang digunakan antar robot adalah sistem nir kabel dengan frekuensi radio (Radio Frequnecy, RF) menggunakan Xbee Beberapa eksperimen dilakukan untuk menguji efektifitas komunikasi dalam manuver dan pergerakan seluruh robot.
Tinjauan Pustaka
A. Komunikasi Multi-robot
Komunikasi multi-robot adalah teknologi yang memiliki kemampuan untuk memberikan jalur komunikasi terdahap dua atau lebih robot [6]. Dengan menggunakan teknologi wireless yang ada maka dapat dirancang semacam ‘bahasa’ antara robot untuk membentuk sebuah sistem multi-robot. Kemudian, sistem robot yang telah memiliki jalur komunikasi ini dapat saling bertukar informasi, seperti data pengukuran, lokasi atau posisi masing-masing robot, data lingkungan atau perintah pergerakan. Dengan demikian, komunikasi multi-robot dapat menjadli solusi untuk menyelesaikan

Prosiding Seminar Nasional Aplikasi Sains & Teknologi (SNAST) Periode III ISSN: 1979-911X Yogyakarta, 3 November 2012
B-17
permasalahan sistem multi-robot yang lebih luas dan kompleks.
Komunikasi multi-robot biasa diklasifikasikan dalam beberapa kategori, yaitu: komunikasi implisit, komunikasi eksplisit, komunikasi keadaan dan komunikasi tujuan [2].
B. ZigBee dan XBee
ZigBee adalah sebuah spesifikasi protokol komunikasi radio digital berdaya rendah berdasarkan standar IEEE 802.15.4 tahun 2003 [7]. Sedangkan XBee adalah brand yang mensupport dari berbagai protokol komunikasi termasuk ZigBee 802.15.4 dan WiFi.
Secara umum, standar protokol ZigBee sama dengan standar Bluetooth. Manufaktur device standar ZigBee suatu pabrik sepenuhnya mendukung dan bersesuaian dengan ZigBee device buatan pabrik lainnya. Gambar XBee module ditunjukkan pada Gambar 1.
Gambar 1. ZigBee Modul
ZigBee banyak digunakan dipasaran karena mempunyai banyak keunggulan yaitu, jangkauan 1 meter - 100 meter, ISM (Industrial, Scientific & Medical) radio bands : 2.4 GHz, 868 MHz dan 915 MHz, konsumsi daya rendah, CSMA-CA channel access, jaringan besar (65.000 node), sangat aman, jaringan topologi star, mesh dan saling mendukung berbagai aplikasi, interoperabilitas di seluruh dunia dengan produk-produk lainnya dan co-eksistensi dengan media nirkabel lainnya (misalnya,WLAN, Bluetooth, selular).
Keunggulan dari ZigBee tersebut membuat teknologi ini banyak diaplikasikan di berbagai kebutuhan masyarakat antara lain sebagai remote control, pemantau jarak jauh, pengirim data dan wireless sensor [7].
C. Penelitian Sejenis
Sistem komunikasi memainkan peranan yang amat penting dalam implementasi sistem multi-robot. Oleh karena itu, sistem komunikasi yang efisien dan handal menjadi sebuah harapan yang ingin dicapai dalam seluruh riset mengenai komunikasi multi-robot ini. Berbagai media komunikasi telah diupayakan oleh para peneliti untuk mendapatkan sistem yang ideal tersebut.
Pada tahapan awal, Radio Frekuensi (RF) menjadi media komunikasi yang banyak digunakan [8], [9]. Kemudian, setelah dikenalnya media Wireless Fidellity (WiFi), maka media ini juga menjadi alternative. Gill Pinto dan kawan-kawan [10] mencoba untuk mengembangkan media WiFi, bukan sekedar sebagai media komunikasi multi-robot, bahkan juga menjadi alat pengukur posisi antara robot dengan mengkalkulasi kekuatan sinyalnya. Selanjutnya, pengembangan WiFi menjadi bahan riset peneliti selanjutnya, seperti WLAN [11] dan TCP/IP [12], [13], yang mengimplementasikannya pada sistem multi-robot rekaanya. Menuturnya, Xiao-Lin [11] sistem WLAN memiliki performansi yang relative baik, murah dan praktis penggunaannya.
Pengembangan lainnya adalah penggunaan RFID sebagai media komunikasi multi-robot yang dipelopori oleh Kang [14]. Namun, karena RFID memiliki keterbatasan jarak untuk dapat berkomunikasi, maka belum banyak dikembangkan.
Terakhir, yang mulai popular dijadikan sebagai media komunikasi multi-robot adalah ZigBee [15]. Sejak dikenalkannya, penggunaan ZigBee dengan salah satu brandnya, yaitu XBee, pengkajian

Prosiding Seminar Nasional Aplikasi Sains & Teknologi (SNAST) Periode III ISSN: 1979-911X Yogyakarta, 3 November 2012
B-18
media ini mulai berkembang. Tulisan ini mencoba mengimplementasikan XBee dalam sistem multi-robot sederhana.
Perancangan
Terdapat beberapa tahap perancangan yang dilakukan, yaitu: perancangan robot, perancangan pergerakan robot dan perancangan komunikasi multi-robot. Tiga buah robot sederhana dan sejenis dirancang berbentuk persegi pipih terbuat dari bahan multipleks. Robot memiliki dimensi sebagai berikut sisi = 20 cm, tinggi tanpa roda = 12 cm dan tinggi dengan roda = 16 cm. Pada masing-masing robot dirancang sebuah sistem minimum mikrokontroler sebagai pengendali, sebuah penggerak motor (motor driver), sepasang motor dengan rodanya dan seperangkat sistem komunikasi. Sistem minimum yang digunakan adalah Arduino Duemilanove yang berbasiskan mikrokontroler ATMega 328. Sementara penggerak motor yang dipakai berbasiskan IC L293D yang mampu mengendalikan arah dan kecepatan dua buah motor sekaligus. Motor yang dikendalikan adalah motor DC yang memiliki sistem gear sederhana.
Robot-robot tersebut digerakkan menggunakan dua buah motor DC yang diletakan di sisi kiri dan kanan robot untuk dapat melakukan berbagai gerakan tertentu. Pergerakan robot menggunakan prinsip differential drive motor [16], [17]. Prinsip ini mengkombinasikan perbedaan kecepatan antara motor roda kanan dengan motor roda kiri, sehingga didapatkan pergerakan robot yang melingkar dengan jarak dan sudut tertentu dari titik pusatnya. Kemampuan ini membuat robot dapat dapat bergerak dengan arah yang berbeda-beda.
Kemudian, sistem komunikasi antara robot dirancang berbasisikan sistem komunikasi implisit. Pada sistem ini digunakan media tanpa kabel (wireless). Setiap robot difasilitasi dengan sebuah Xbee yang berperan sebagai Pemancar dan Penerima, sehingga dapat terjadi komunikasi antar seluruh robot. Model komunikasi berupa sistem pemancar (Transmitter, Tx) dan sistem penerima (Receiver, Rx) diletakan pada setiap robot. Dengan demikian, setiap robot dapat saling berkomunikasi dengan mekanisme full duplex.
Secara umum direncanakan robot diatur dalam sistem pengendalian khusus. Sistem pengendalian yang digunakan adalah sistem leader – follower, dimana sebuah robot akan menjadi leader dan beberapa robot lainnya akan berperan sebagai follower [18], [19]. Robot follower akan menempati posisi tertentu relatif terhadap robot leader. Robot leader akan memberikan perintah pergerakan sesuai dengan pergerakan dirinnya ke semua robot follower. Dalam tulisan ini robot diformasikan dalam bentuk segitiga, dimana sebuah robot leader di depan dan dua buah robot follower di sebelah kiri dan kanan robot leader.
Hasil dan Analisa
Telah dirancang tiga buah robot sederhana yang sejenis sebagai suatu sistem multi-robot. Ketiga robot tersebut diklasifikasikan sebagai berikut: sebuah robot sebagai leader dan dua buah robot sebagai follower. Untuk membedakannya, robot leader memiliki tiga buah sensor ultarsonik yang memiliki kemampuan mengukur jarak benda yang ada di hadapannya. Gambar 2 memperlihatkan robot hasil perancangan untuk menjadi sebuah sistem multi-robot.
(a) (b) (c)
Gambar 2. Robot hasil perancangan: (a) Tampak Depan, (b) Tampak Samping dan (c) Tampak Atas

Prosiding Seminar Nasional Aplikasi Sains & Teknologi (SNAST) Periode III ISSN: 1979-911X Yogyakarta, 3 November 2012
B-19
Kemudian, masing-masing robot diuji kemampuannya untuk bermanuver dalam ruangan. Beberapa jenis pergerakan telah dujiicoba. Gambar 3 memperlihatkan kemampuan robot tunggal bermanuver dalam beberapa jenis pergerakan, yaitu pergerakan maju, berbelok ke kanan, berbelok ke kiri dan maju kembali.
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
Gambar 3. Pergerakan robot tunggal dengan kombinasi pergerakan
Berdasarkan pergerakan robot tunggal yang ditampilkan pada Gambar 8, dapat dikatakan bahwa pergerakan robot tunggal tersebut sudah baik, karena mampu bergerak dengan pergerakan maju, belok kanan dan belok kiri dengan sempurna.
Kemudian, untuk menguji kemampuan komunikasi dalam sistem multi-robot, ketiga robot disusun dalam formasi segitiga. Dalam formasi segitiga itu, sebuah robot dijadikan sebagai robot leader dan dua robot lainnya sebagai robot follower. Robot leader bergerak dengan pergerakan yang telah diprogram terlebih dahulu, sementara robot follower tidak diberikan program pergerakan. Robot follower bergerak sesuai dengan pergerakan yang diperintahkan oleh robot follower. Posisi robot leader dan robot follower diperlihatkan pada Gambar 4.
(a) (b)
Gambar 4. Formasi Sistem Multi-robot: (a) Tampak Atas dan (b) Tampak Depan
Terdapat tiga pengujian sistem komunikasi pada multi-robot ini, yaitu: pergerakan lurus, pergerakan melingkar dan pergerakan kombinasi. Untuk mempermudah analisa, pergerakan dan data pergerakan ditampilkan dalam bentuk gambar. Dalam gambar, robot leader diperlihatkan dengan warna biru, sedangkan robot follower ditampilkan dengan warna merah. Hasil pergerakan multirobot dalam gerakan lurus diperlihatkan pada Gambar 5.

Prosiding Seminar Nasional Aplikasi Sains & Teknologi (SNAST) Periode III ISSN: 1979-911X Yogyakarta, 3 November 2012
B-20
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
(a) (b)
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
(c)
Gambar 5. Pergerakan Lurus pada Sistem Multi-robot: (a) Gerakan Lurus, (b) Gerakan Melingkar dan (c) Gerakan Kombinasi
Pada Gambar 5(a) tampak bahwa multi-robot dapat bergerak dengan baik dengan formasi segitiga yang dapat dipertahankan. Hal ini menunjukkan bahwa komunikasi antara robot leader dengan dua buah robot follower telah berlangsung dengan efektif, dimana robot-robot bergerak dengan kecepatan yang sama sesuai dengan perintah yang dikirimkan oleh robot leader melalui Xbee.
Pada Gambar 5 (b) tampak bahwa robot bergerak secara melingkar dengan kecepatan dan arah yang sama, namun mengakibatkan terjadi perubahan formasi segitiga. Hal ini terjadi karena robot leader melakukan gerakan berbelok ke kanan yang ternyata diikuti langsung oleh robot follower sehingga terjadi perubahan formasi yang berakumulasi.
Pengujian terakhir adalah pergerakan multi-robot yang bergerak secara kombinasional, dengan pergerakan maju, berbelok ke kanan, berbelok ke kiri dan maju kembali. Besar sudut gerakan berbelok dirancang simetris antara belok kanan dengan belok kiri. Hasil pengujian dan data pergerakan diperlihatkan pada Gambar 5 (c). Dari gambar ini dapat dikatakan bahwa secara umum komunikasi antar robot bekerja dengan efektif. Robot follower bergerak dengan kecepatan yang sama dengan robot leader sesuai dengan perintah yang dikirimkan. Namun terjadi perubahan formasi segitiga yang unik. Pada saat gerakan lurus, formasi segitiga dapat dipertahankan dengan baik dan tidak terjadi deviasi posisi. Tapi, setelah terjadi gerakan belok kanan yang diikuti dengan gerakan berbelok ke kiri terjadi perubahan formasi. Karena pergerakan berbelok simetris maka, formasi dapat terbentuk kembali pada saat multi-robot bergerak lurus kembali.
Kesimpulan
Proses perancangan sebuah sistem komunikasi pada sistem multi-robot dengan media berbasisis Xbee telah dibahas. Tiga buah robot berbentuk persegi telah dirancang. Tiap robot dilengkapi dengan sistem mikrokontroler, sistem penggerak motor dan sistem komunikasi sendiri-sendiri. Pergerakan tunggal dari masing-masing robot telah diuji dengan hasil yang baik. Pergerakan robot dalam bentuk

Prosiding Seminar Nasional Aplikasi Sains & Teknologi (SNAST) Periode III ISSN: 1979-911X Yogyakarta, 3 November 2012
B-21
sistem multi-robot telah pula diujikan. Secara keseluruhan komunikasi perintah pergerakan dari robot leader ke masing-masing robot follower bekerja dengan baik. Hanya perlu difikirkan metoda lebih lanjut agar formasi sistem multi-robot dapat dipertahakan bagi pergerakan yang lebih kompleks.
Referensi
[1] Nehmzow, U., “Mobile Robotics: Research, Applications and Challenges, Proceeding of Future Trends in Robotics”, Institution of Mechanical Engineer, London, UK. 2001.
[2] Parker, L. E., “Distributed Intelligence: Overview of the Field and its Application in Multi-Robot Systems”, 2007 AAAI Fall Symposium, pp. 1-6, The AAAI Press, California, 2007
[3] Wawerla, J. et al., “Collective Construction with Multipler Robots”, Proceeding of the International Conference on Intelligence Robots and Systems, Switzerland, 2002
[4] Arai, T., et al., Editorial: Advances in Multi-robot System, Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844, Vol. III (2008), Suppl. issue: Proceedings of ICCCC 2008, pp. 92-107
[5] Lefrance, G., Colony of robots: New Challenge, IEEE Trans. Robotics and Automation, Vol. 18, No. 5, October 2002, pp 655-661
[6] Xiao-Lin, L., Jing-Ping, J., and Kui, X., , Proc. International Conference on Robotics and Biomimetics (ROBIO 2004), 2004, pp. 307-312
[7] Faludi, R., Buidling Wireless Sensor Networks, O’Reilly Media, Inc, USA, 2011 [8] Pan, Q.W., Lowe, D., Search and Rescue Robot Team RF Communication via Power Cable
Transmission Line - A Proposal, International Symposium on Signals, Systems and Electronics (ISSSE 2007), pp. 287-290
[9] Rivard, F, et al., .Ultrasonic relative positioning for multi-robot systems, International Conference on Robotics and Automation (ICRA 2008), pp. 323-328
[10] Gil-Pinto, A. Fraisse, P. Zapata, R., Wireless communication for secure positioning in multi robot formations of non holonomic ground vehicles , International Conference on Intelligent Robots and Systems (IROS 2008), pp. 4198
[11] Xiao-Lin, L., Jing-Ping, J., Kui, X., , International Conference on Robotics and Biomimetics (ROBIO 2004), pp. 307-212
[12] Hui-ping, L., et al., Communication of multi-robot system on the TCP/IP, International Conference on Mechatronics Science (MEC 2011), pp. 1432-1435
[13] Hui, et al., A common wireless remote control system for mobile robots in laboratory, IEEE International Instrumentation and Measurement Technology Conference (I2MTC 2012), pp. 688-693
[14] Kang, S.H., et al., Implementation of Smart Floor for multi-robot system, International Conference on Automation, Robotics and Applications (ICARA 2011), pp. 46-51
[15] Wan, J., et al., Multi-robots' communication system based on ZigBee network, International Conference on Electronic Measurement, (ICEMI 2009), pp. 3-14 – 3-19
[16] Lucas, G.W. (2000) A Tutorial and Elementary Trajectory Model for the Differential Steering System of Robot Wheel Actuators. The Rossum Project. http:// rossum.sourceforge.net/papers/DiffSteer. (10 December 2006)
[17] Dudek, G. and Jenkin, M. (2000). Computational Principles of Mobile Robotics. 1st ed. Cambridge, MA: Cambridge University Press.
[18] Zhang, Y., Zeng, L., Li, Y., and Liu, Q., Multi robot formation control using leader-follower for MANET, Proc. International Conference on Robotics and Biometrics (ROBIO 2009), pp. 337-342.
[19] Ghommam, J., Mehrjerdi, H., and Saad, M., Leader-follower formation control of nonholonomics with fuzzy logic based approach for obstacle avoidance, Proc. International Conference on Intelligent Robots and Systems (IROS 2011), 2011, pp. 2340-2345

CREATING THE FUTURE GREEN AND SUSTAINABLE MODERN LIFE THROUGH THE INNOVATIVE ADVANCEMENT OF SCIENCE & TECHNOLOGY�
MICEEI 2012
175 Proceeding of 3rd Makassar International Conference on Electrical Engineering and Informatics (MICEEI), 28 November-1 December 2012, Makassar Golden Hotel, Indonesia ©2012 Electrical Engineering Department, Universitas Hasanuddin, ISBN 978-602-8509-18-3
Design of Simple Multi-Robot System
Andi Adriansyah Department of Electrical Engineering, Faculty of Engineering, Universitas Mercu Buana
Jl. Meruya Selatan, Kembangan, Jakarta 11650 [email protected]
Abstract— Technology and application of robotic grow rapidly. Moreover, the study of multi-robot systems has been increasing in popularity over recent years. However, a multi-robot system needs reliable communication for coordinating the entire robot. Therefore, this paper attempts to discuss the design of simple multi-robot system in order to overcome the problems mentioned above. The focus of the design intended for the ability to maneuver and a certain formation. Several experiments were conducted. Generally, the overall communication of robots works well where some follower robots able to move in any ordered by a leader robot.
I. INTRODUCTION
Technology and application of robotic grow rapidly, in terms of reliability, coverage ability and field applications. There are several research themes were also developing, such as sensor technology, motor technology, power supply technology, telecommunications technology, control technology and artificial intelligence technology. The development of these technologies support each other’s to robotic technology. Therefore, investigations of robotic become interesting area for researchers [1].
In this decade, there has been an important variation in robotic research focus. Researchers are beginning to modify the direction of robotic research, from investigation of a single robot system to exploration of coordination of multi-robot systems. Multi-robot system is a system of a robot entities that work together to complete a specific task [2]. There are several advantageous of the application of multi-robot systems. Generally, the application of multi-robot system is to produce a better system in order to solve the problems of the system. With the multi-robot system, the existing complex and difficult system can be performed using the robot with a cheap and simple [3].
As a research topic, the study of multi-robot systems has been increasing in popularity over recent years. According to data from the Web of Science, during the year 2006 alone there were nearly 1000 publications on multi-robot. Some of the areas included in the study of multi-robot systems, include: distributed intelligence, distributed artificial intelligence, multi-agent systems and multi-robot system [4], [5]. Multi-robot communication system one of including research topic
that is developing and challenging [6]. This is because the problem of multi-robot system is its need for reliable communication for coordinating the entire robot. Increasing the number of robots will further increase the complexity of communication.
Therefore, this paper attempts to discuss the design of simple multi-robot system in order to overcome the problems mentioned above. The focus of the design intended for the ability to maneuver the robot movement and a certain formation. Three square-shaped robots have been designed. Each robot is performed by a microcontroller-based system using Arduino, the motor driver system with IC L293D and communication systems using XBee [7].
II. MULTI-ROBOT COMMUNICATION
Communication system plays a very important role in the implementation of multi-robot systems. Therefore, an efficient and reliable communication is becomes an expectation to be achieved in all of multi-robot communication research.
Multi-robot communication is a technology that has the ability to provide a line of communication for two or more robots [6]. Existing wireless technologies can be used to design a kind of 'language' between the robots to form a multi-robot system. Then, a multi-robot system that has communication line is able to exchange information, such as measurement data, the location or position of each robot, the data environment or movement commands. Thus, multi-robot communication can be a solution to the problem of multi-robot system even in more extensive and complex.
A variety of communication media has been attempted by researchers to obtain an ideal system. In the early stages, Radio Frequency (RF) as a medium of communication that is widely used [8], [9]. Then, after the media knew as Wireless Fidelity (WiFi) is developed, this media is also an alternative. Gill Pinto et al [10] tried to develop a WiFi media, not just as a communication medium multi-robot, even the position measurement of the robot using the power of signal calculation. Furthermore, the development of WiFi become further research topic, such as WLAN [11] and TCP / IP [12], [13], that implemented in multi-robot system. According to Xiao-Lin [11] WLAN systems have a relatively good performance, low-cost and practical to use.
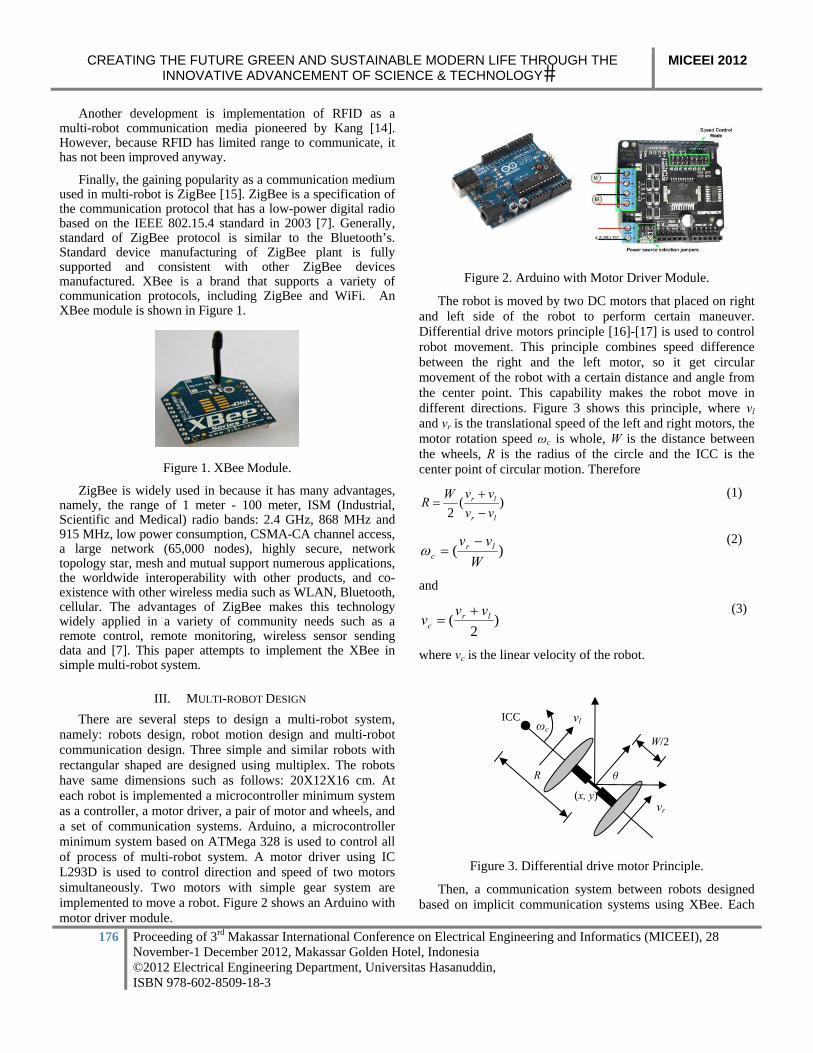
CREATING THE FUTURE GREEN AND SUSTAINABLE MODERN LIFE THROUGH THE INNOVATIVE ADVANCEMENT OF SCIENCE & TECHNOLOGY�
MICEEI 2012
176 Proceeding of 3rd Makassar International Conference on Electrical Engineering and Informatics (MICEEI), 28 November-1 December 2012, Makassar Golden Hotel, Indonesia ©2012 Electrical Engineering Department, Universitas Hasanuddin, ISBN 978-602-8509-18-3
Another development is implementation of RFID as a multi-robot communication media pioneered by Kang [14]. However, because RFID has limited range to communicate, it has not been improved anyway.
Finally, the gaining popularity as a communication medium used in multi-robot is ZigBee [15]. ZigBee is a specification of the communication protocol that has a low-power digital radio based on the IEEE 802.15.4 standard in 2003 [7]. Generally, standard of ZigBee protocol is similar to the Bluetooth’s. Standard device manufacturing of ZigBee plant is fully supported and consistent with other ZigBee devices manufactured. XBee is a brand that supports a variety of communication protocols, including ZigBee and WiFi. An XBee module is shown in Figure 1.
Figure 1. XBee Module.
ZigBee is widely used in because it has many advantages, namely, the range of 1 meter - 100 meter, ISM (Industrial, Scientific and Medical) radio bands: 2.4 GHz, 868 MHz and 915 MHz, low power consumption, CSMA-CA channel access, a large network (65,000 nodes), highly secure, network topology star, mesh and mutual support numerous applications, the worldwide interoperability with other products, and co-existence with other wireless media such as WLAN, Bluetooth, cellular. The advantages of ZigBee makes this technology widely applied in a variety of community needs such as a remote control, remote monitoring, wireless sensor sending data and [7]. This paper attempts to implement the XBee in simple multi-robot system.
III. MULTI-ROBOT DESIGN
There are several steps to design a multi-robot system, namely: robots design, robot motion design and multi-robot communication design. Three simple and similar robots with rectangular shaped are designed using multiplex. The robots have same dimensions such as follows: 20X12X16 cm. At each robot is implemented a microcontroller minimum system as a controller, a motor driver, a pair of motor and wheels, and a set of communication systems. Arduino, a microcontroller minimum system based on ATMega 328 is used to control all of process of multi-robot system. A motor driver using IC L293D is used to control direction and speed of two motors simultaneously. Two motors with simple gear system are implemented to move a robot. Figure 2 shows an Arduino with motor driver module.
Figure 2. Arduino with Motor Driver Module.
The robot is moved by two DC motors that placed on right and left side of the robot to perform certain maneuver. Differential drive motors principle [16]-[17] is used to control robot movement. This principle combines speed difference between the right and the left motor, so it get circular movement of the robot with a certain distance and angle from the center point. This capability makes the robot move in different directions. Figure 3 shows this principle, where vl and vr is the translational speed of the left and right motors, the motor rotation speed ωc is whole, W is the distance between the wheels, R is the radius of the circle and the ICC is the center point of circular motion. Therefore
)(2 lr
lr
vv
vvWR
(1)
)(W
vv lrc
(2)
and
)2
( lrc
vvv
(3)
where vc is the linear velocity of the robot.
Figure 3. Differential drive motor Principle.
Then, a communication system between robots designed based on implicit communication systems using XBee. Each
vr
vl
W/2
(x, y)
θ R
ωc ICC

CREATING THE FUTURE GREEN AND SUSTAINABLE MODERN LIFE THROUGH THE INNOVATIVE ADVANCEMENT OF SCIENCE & TECHNOLOGY�
MICEEI 2012
177 Proceeding of 3rd Makassar International Conference on Electrical Engineering and Informatics (MICEEI), 28 November-1 December 2012, Makassar Golden Hotel, Indonesia ©2012 Electrical Engineering Department, Universitas Hasanuddin, ISBN 978-602-8509-18-3
robot is facilitated with an XBee that acts as a transmitter and receiver so that communication can occur between all robots respectively. Thus, each robot can communicate with full duplex mechanism.
Generally, robots maneuver are designed in special control schema named as leader - follower system. In leader - follower system, a robot would become a leader and other robots will act as a follower [18], [19]. Follower robots will occupy a certain position relative to the robot leader. Leader robot will send a command about his maneuver to all follower robots. While the follower robots will move according to the command of the leader robot, respectively.
IV. RESULTS AND ANALYSIS
Three similar simple robots have been designed as a multi-robot system. The three robots are classified as follows: a robot as a leader and two follower robots. To distinguish it, the robot leader has three ultrasonic sensors that have the ability to measure the distance of objects in front of him. Figure 4 shows the robot.
Figure 4. The Robot Leader.
Then, each robot was verified for their ability to maneuver in the room. Several types of movements have been tested. Figure 5 shows the ability of a single robot to maneuver in some kind of movement, such as follow: forward, turn right, turn left and forward movement again.
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
Figure 5. Single Robot Movement.
Based on Figure 8, it can be said that the movement of a single robot is already good, that robot being able to move forward, turn right and turn left perfectly.
Then, to test the ability of communication in multi-robot systems, the three robots are arranged in a triangular formation. Robot leader moves with the movement that has been programmed in advance, while the robot follower will move according to the movement that ordered by the leader robot. There are three experiments performed on multi-robot communication, namely: forward, circular and combination movements. To simplify the analysis, the movement displayed in the form of images where robot leader are shown in blue and follower robots are shown in red. The results are shown in Figure 6.
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
(a)
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
(b)

CREATING THE FUTURE GREEN AND SUSTAINABLE MODERN LIFE THROUGH THE INNOVATIVE ADVANCEMENT OF SCIENCE & TECHNOLOGY�
MICEEI 2012
178 Proceeding of 3rd Makassar International Conference on Electrical Engineering and Informatics (MICEEI), 28 November-1 December 2012, Makassar Golden Hotel, Indonesia ©2012 Electrical Engineering Department, Universitas Hasanuddin, ISBN 978-602-8509-18-3
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
(c)
Figure 6. Multi-robot Movement: (a) Forward Movement, (b) Circular Movement and (c) Combination Movement.
According to Figure 6, it can be said that the communication between the robots are good. However, due to the change in direction of movement of the robot the formation of multi-robot system cannot be maintained properly. It required for certain system that the multi-robot formation can be controlled continuously.
V. CONCLUSION
The process of designing a simple multi-robot system was discussed. Three rectangular shaped robots have been designed. The robots are equipped with a microcontroller system, motor driver systems and communication systems, respectively. Several single movements of each robot have been tested with good results. Some movements of the robots in the form of multi-robot system were also tested. Generally, it can be concluded that communication between leader robot and each follower robot works well. However, it should be considered further method so that the formation of multi-robot system can be maintained for more complex movements.
ACKNOWLEDGEMENT
The author wishes to express his sincere thanks to the Directorate General of Higher Education, Ministry of Education and Culture which awarded the grant funding for fundamental research (SK No. 005/K3.KU/2012).
REFERENCES
[1] Nehmzow, U., “Mobile Robotics: Research, Applications and
Challenges, Proceeding of Future Trends in Robotics”, Institution of Mechanical Engineer, London, UK. 2001.
[2] Parker, L. E., “Distributed Intelligence: Overview of the Field and its Application in Multi-Robot Systems”, 2007 AAAI Fall Symposium, pp. 1-6, The AAAI Press, California, 2007
[3] Wawerla, J. et al., “Collective Construction with Multipler Robots”, Proceeding of the International Conference on Intelligence Robots and Systems, Switzerland, 2002
[4] Arai, T., et al., Editorial: Advances in Multi-robot System, Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844, Vol. III (2008), Suppl. issue: Proceedings of ICCCC 2008, pp. 92-107
[5] Lefrance, G., Colony of robots: New Challenge, IEEE Trans. Robotics and Automation, Vol. 18, No. 5, October 2002, pp 655-661
[6] Xiao-Lin, L., Jing-Ping, J., and Kui, X., , Proc. International Conference on Robotics and Biomimetics (ROBIO 2004), 2004, pp. 307-312
[7] Faludi, R., Buidling Wireless Sensor Networks, O’Reilly Media, Inc, USA, 2011
[8] Pan, Q.W., Lowe, D., Search and Rescue Robot Team via Power Cable Transmission Line - A Proposal, International Symposium on Signals, Systems and Electronics (ISSSE 2007), pp. 287-290
[9] Rivard, F, et al., .Ultrasonic relative positioning for multi-robot systems, International Conference on Robotics and Automation (ICRA 2008), pp. 323-328
[10] Gil-Pinto, A. Fraisse, P. Zapata, R., Wireless communication for secure positioning in multi robot formations of non holonomic ground vehicles, International Conference on Intelligent Robots and Systems (IROS 2008), pp. 4198
[11] Xiao-Lin, L., Jing-Ping, J., Kui, X., , International Conference on Robotics and Biomimetics (ROBIO 2004), pp. 307-212
[12] Hui-ping, L., et al., of multi-robot system on the TCP/IP, International Conference on Mechatronics Science (MEC 2011), pp. 1432-1435
[13] Hui, et al., A common remote control system for mobile robots in laboratory, IEEE International Instrumentation and Measurement Technology Conference (I2MTC 2012), pp. 688-693
[14] Kang, S.H., et al., Implementation of Smart Floor for multi-robot system, International Conference on Automation, Robotics and Applications (ICARA 2011), pp. 46-51
[15] Wan, J., et al., Multi-robots communication system based on ZigBee network, International Conference on Electronic Measurement, (ICEMI 2009), pp. 3-14 – 3-19
[16] Lucas, G.W. (2000) A Tutorial and Elementary Trajectory Model for the Differential Steering System of Robot Wheel Actuators. The Rossum Project. http:// rossum.sourceforge.net/papers/DiffSteer. (10 December 2006)
[17] Dudek, G. and Jenkin, M. (2000). Computational Principles of Mobile Robotics. 1st ed. Cambridge, MA: Cambridge University Press.
[18] Zhang, Y., Zeng, L., Li, Y., and Liu, Q., Multi robot formation control using leader-follower for MANET, Proc. International Conference on Robotics and Biometrics (ROBIO 2009), pp. 337-342.
[19] Ghommam, J., Mehrjerdi, H., and Saad, M., Leader-follower formation control of nonholonomics with fuzzy logic based approach for obstacle avoidance, Proc. International Conference on Intelligent Robots and Systems (IROS 2011), 2011, pp. 2340-2345

7-01 Xbee Implementation On Mini Multi-Robot System
221
XBEE IMPLEMENTATION ON MINI MULTI-ROBOT SYSTEM
Andi Adriansyah Yuliza Department of Electrical Engineering, Faculty of Engineering, Universitas Mercu Buana
Jl. Meruya Selatan, Kembangan, Jakarta 11650 [email protected] [email protected]
ABSTRACT
Wireless communications are now growing very rapidly because it is very efficient to use. Wireless technology that is widely used at close range is a device that can interface the other devices. Communication between robots is the process of delivering informations to do something. Communication between robots is an important component in the interaction of the multiple robots and their environment. In multiple robot systems, robot leader delivering orders to the follower robot to complete a task that occurs coordination between the robot forms of communication between the robot wirelessly using XBee signals. This form of communication is in the form of a command to the robot follower robot to follow the movement of the robot leader. Advantages of communication between the robots are efficient in completing the task. With time quickly orders can be delivered in a broadcast to the follower so that the job can be completed simultaneously.
Key Word: Robot, Leader, follower, communication, XBee, Microcontroller 1 INTRODUCTION
Wireless technology has been developing
very rapidly due to highly efficient wireless communications. One of the wireless communication technologies in great demand is Wireless Local Area Network (WLAN). WLANs are based on IEEE 802.11 standards that use has some advantageous, such as high capacity, wide coverage and able to broadcast directly (Labiod et al., 2007).
If the area used in wireless is not too widely, a kind of wireless technology applied are Wireless Personal Area Network known as WPAN. WPAN is a network communication among devices over wireless technologies. The reach of a WPAN varies from a few centimeters to a few meters. WPANs are widely used for communication between sensors and electronic devices. There are
some technologies used in WPAN such as IrDA, Wireless USB, Bluetooth, Z-Wave and ZigBee.
Nowadays, ZigBee is applied in many applications. ZigBee has a defined rate of 250 kbit/s, best suited for periodic or intermittent data or a single signal transmission from a sensor or input device. Applications include wireless light switches, electrical meters with in-home-displays, traffic management systems, and other consumer and industrial equipment that requires short-range wireless transfer of data at relatively low rates. The technology defined by the ZigBee specification is intended to be simpler and less expensive than other WPANs, such as Bluetooth or Wi-Fi.
In another side, technology and application of robotic grow rapidly, in terms of reliability, coverage ability and field applications. There are several research themes were also developing, such as sensor technology, motor technology, power supply technology, telecommunications technology, control technology and artificial intelligence technology. The development of these technologies support each other’s to robotic technology. Therefore, investigations of robotic become interesting area for researchers [1].
In this decade, there has been an important variation in robotic research focus. Researchers are beginning to modify the direction of robotic research, from investigation of a single robot system to exploration of coordination of multi-robot systems. Multi-robot system is a system of a robot entities that work together to complete a specific task [2]. There are several advantageous of the application of multi-robot systems. Generally, the application of multi-robot system is to produce a better system in order to solve the problems of the system. With the multi-robot system, the existing complex and difficult system can be performed using the robot with a cheap and simple [3].
Therefore, this paper seeks to address multiple robot communication system design. A communication system design attempted as possible compared to the existing ones. The focus of the design is intended for communication between the leader and the follower so that the follower can follow the movement leaders. The transmission medium used among the robots is a wireless system using the XBee, Arduino

7-01 Xbee Implementation On Mini Multi-Robot System
222
microcontroller where the mobile robot is able to perform bi-directional communication and recognize the controller ID. 2 DESIGN AND IMPLEMENTATION 2.1. ZigBee and XBee
ZigBee is a specification of the
communication protocol low-power digital radios based on the IEEE 802.15.4 specification in 2003 and Zigbee alliance with a maximum range of 100 meters. IEEE 802.15.4 specification is the basis for the lower layers of the ZigBee MAC and PHY and determine the standard 2.4 GHz radio that is used in the world.
XBee is a brand that supports a variety of communication protocols including ZigBee 802.15.4 and WiFi. Figure Xbee module is shown in Figure 1.
Figure 1. XBee Module
The ZigBee protocol is a standard the
same way that Bluetooth is a standard. Any manufacturer’s device that fully supports the ZigBee standard can communicate with any other company’s ZigBee device. So just as your Motorola Bluetooth headset can communicate with your Apple iPhone, a CentralLite ZigBee light switch can communicate with a Black & Decker door lock (Faludy, 2010). Architecture ZigBee protocol shown in Figure 2.
ZigBee is widely used in the market for ZigBee has many advantages, such as (Gislason, 2008):
• Reach 1 meter - 100 meter. • ISM (Industrial, Scientific and Medical)
radio bands: 2.4 GHz, 868 MHz and 915 MHz.
• Low power consumption. • CSMA-CA channel access. • Large networks (65,000 nodes) • Highly secure (AES encryption) • Network topology star, mesh and mutual
support various applications.
• Interoperability across the world with other products
• Co-existence with other wireless media (eg, WLAN, Bluetooth, cellular).
Figure 2. ZigBee Architecture
The process of sending and receiving data on ZigBee. Using standard ZigBee network to transmit data specified by IEEE 802.15.4:
• Request data means the data transmission • Data Confirm means the knowledge of the
data request • Data Indication means receiving data
2.2 System Design
The system is designed as shown in Figure 3.
Figure 3. Block Diagram System Designed
The leader robot consists of an Arduino
microcontroller as the center of all the systems, and manages all activities of the input/output system. Sensor system which uses ultrasonic sensors
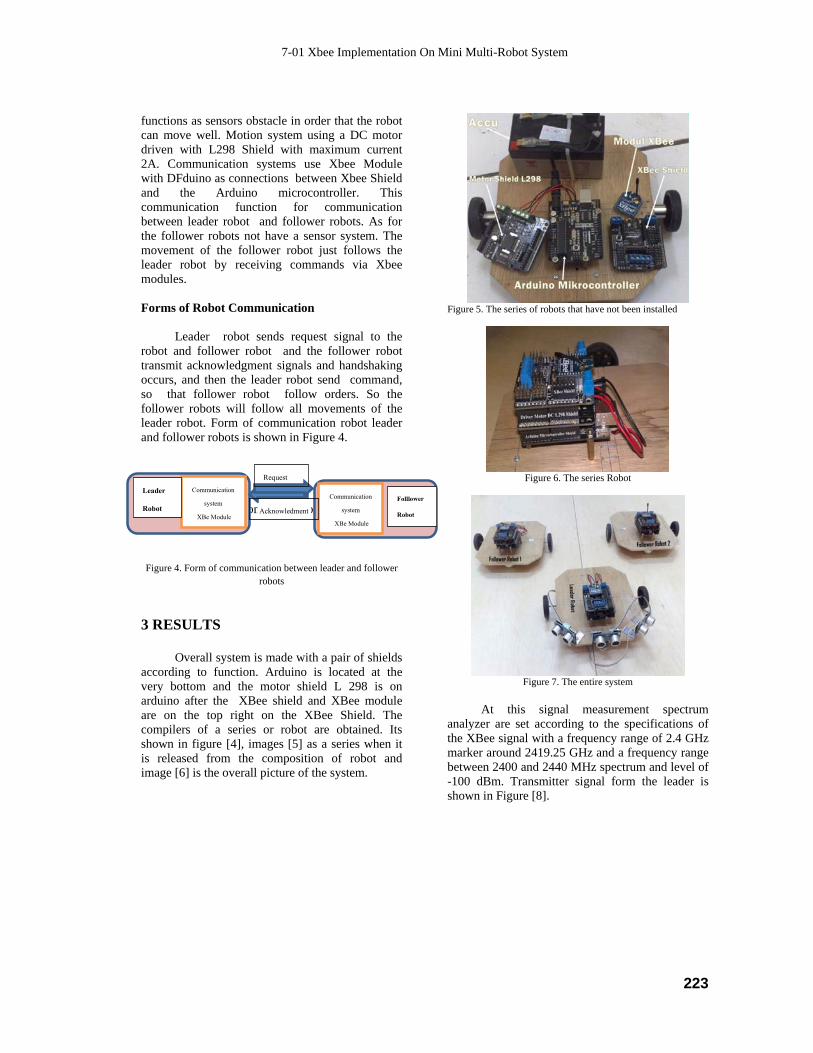
7-01 Xbee Implementation On Mini Multi-Robot System
223
functions as sensors obstacle in order that the robot can move well. Motion system using a DC motor driven with L298 Shield with maximum current 2A. Communication systems use Xbee Module with DFduino as connections between Xbee Shield and the Arduino microcontroller. This communication function for communication between leader robot and follower robots. As for the follower robots not have a sensor system. The movement of the follower robot just follows the leader robot by receiving commands via Xbee modules.
Forms of Robot Communication
Leader robot sends request signal to the
robot and follower robot and the follower robot transmit acknowledgment signals and handshaking occurs, and then the leader robot send command, so that follower robot follow orders. So the follower robots will follow all movements of the leader robot. Form of communication robot leader and follower robots is shown in Figure 4.
Figure 4. Form of communication between leader and follower robots
Figure 4. Form of communication between leader and follower
robots
3 RESULTS
Overall system is made with a pair of shields according to function. Arduino is located at the very bottom and the motor shield L 298 is on arduino after the XBee shield and XBee module are on the top right on the XBee Shield. The compilers of a series or robot are obtained. Its shown in figure [4], images [5] as a series when it is released from the composition of robot and image [6] is the overall picture of the system.
Figure 5. The series of robots that have not been installed
Figure 6. The series Robot
Figure 7. The entire system
At this signal measurement spectrum
analyzer are set according to the specifications of the XBee signal with a frequency range of 2.4 GHz marker around 2419.25 GHz and a frequency range between 2400 and 2440 MHz spectrum and level of -100 dBm. Transmitter signal form the leader is shown in Figure [8].
Communication system
XBe Module
Leader
Robot Folllower
Robot
Communication system
XBe Module
Request
Acknowledment

7-01 Xbee Implementation On Mini Multi-Robot System
224
Figure 8. Transmitter signal form the leader
From the results of measurements of the spectrum analyzer are shown in transmitter signal power level leader, it is Maximum -81 dBM and -97.4 dBM. The interaction between the leader and the follower is shown in the Figure 9.
Figure 9. Forms signaling interactions between
leaders and followers. Here are the results of measurements of transmit power (power level) signal transmitter XBee leader based on the distance traveled as shown in Table [2].
Table 2 The results of measurements of the signal power level Xbee
Distance (meter) Power Level (dBm)
1 -80
2 -80
3 -82 4 -90,4
5 -86,9
6 -91,9
7 -91,4
8 -86,8 9 -90,3
10 -89,5
12 -99,1 Average -88,02
From the table [2] it can be explained that the farther the distance, the smaller the signal power level. From the results of measuring the power level can be displayed in graphical form as shown in figure [10]. This measurement is performed in the space in the Lab.Tehnik Electro VII.
Figure 10. Graphics power level XBee transmitter signal
Based on the graph it can be concluded that the further the distance, the smaller the power level. It means that the distance also affects the communication between the robot so it will affect system performance.
Table 3 The results of the test leader and follower robots

7-01 Xbee Implementation On Mini Multi-Robot System
225
Based on the table [3] The leader and the follower robots can communicate with a maximum distance of 11 meters and at a distance of 12 meters robots are not the connected because of the low power level that is -99.1 dBm. Based on the specifications XBee is shows the minimum receiver sensitivity -92 dBm so that if the price is less than -92 dBm, the signal can not be captured by the XBee receiver on the follower. Experiments The distance between the Leader and Follower Robot (Meter)
Table 4 The results of testing the communication leader (room I) with the position of the displaced
follower Experiments Follower
position distance (meter)
Status
1 2 3 Connected 2 3 3 Connected 3 4 4 Connected 4 5 5 Connected 5 6 7 Connected 6 7 10 Connected 7 8 >12 Not
Connected From the results of table [4] it can be concluded that the signal can penetrate barriers XBee in a room according to the results of previous measurements that for distances that are less than 12 meter. The power level is still more than -92
dBM to the room of Electrical Technical Lab. XBee transceiver is connected less than 12 meters. • Measurement of the duration time of the
communication between the leader and follower robots
Measure the time required communication between the leader and the follower so that everything started to move. It aims to determine the speed of the robot performance in receiving orders and execute it. Table 5. Results of measuring the communication
time leader and follower Experiment Duration process the
communication between the follower
and leader 1 11 2 10 3 11 4 11 5 12 6 13 7 15 8 13 9 15 10 15
average 12,5 From the measurement results in Table [5] that the communication between the leader and the follower robots takes 12.5 seconds. These measurements do not take up the position between the leader and follower robots. Testing outdoor Electrical Technical Lab.Room.
The experiments were conducted to determine the performance of signal XBee outdoor and environmental influences on the robot XBee signal. The experiments were done at the of Electrical Technical of Mercu Buana University. These test results are shown outdoors on a table [6]. Table 6. Test results XBee communication outdoors.
Experiments
Distance Leader and Follower
Robot (Meter)
Status
1 1 Connected 2 2 Connected 3 3 Connected 4 4 Connected 5 5 Connected 6 6 Connected 7 7 Connected 8 8 Connected 9 9 Connected
10 10 Connected11 11 Connected12 12 Not
Connected 13 13 Not
Connected
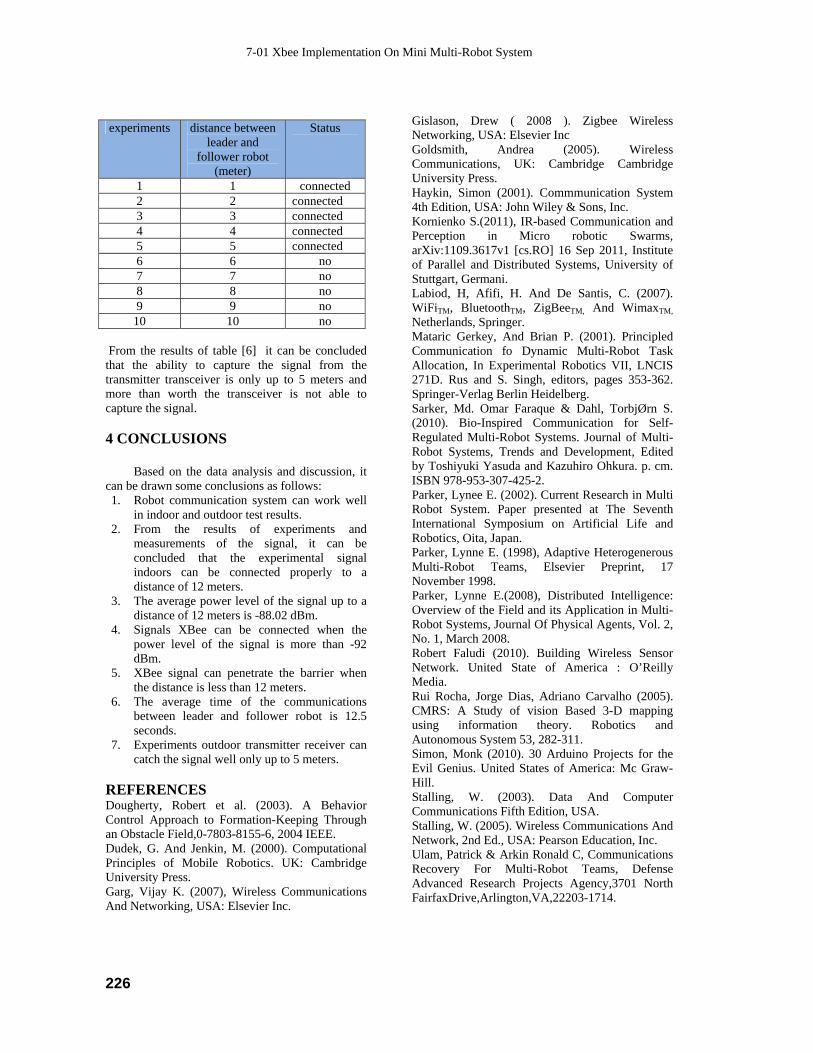
7-01 Xbee Implementation On Mini Multi-Robot System
226
From the results of table [6] it can be concluded that the ability to capture the signal from the transmitter transceiver is only up to 5 meters and more than worth the transceiver is not able to capture the signal. 4 CONCLUSIONS
Based on the data analysis and discussion, it can be drawn some conclusions as follows: 1. Robot communication system can work well
in indoor and outdoor test results. 2. From the results of experiments and
measurements of the signal, it can be concluded that the experimental signal indoors can be connected properly to a distance of 12 meters.
3. The average power level of the signal up to a distance of 12 meters is -88.02 dBm.
4. Signals XBee can be connected when the power level of the signal is more than -92 dBm.
5. XBee signal can penetrate the barrier when the distance is less than 12 meters.
6. The average time of the communications between leader and follower robot is 12.5 seconds.
7. Experiments outdoor transmitter receiver can catch the signal well only up to 5 meters.
REFERENCES Dougherty, Robert et al. (2003). A Behavior Control Approach to Formation-Keeping Through an Obstacle Field,0-7803-8155-6, 2004 IEEE. Dudek, G. And Jenkin, M. (2000). Computational Principles of Mobile Robotics. UK: Cambridge University Press. Garg, Vijay K. (2007), Wireless Communications And Networking, USA: Elsevier Inc.
Gislason, Drew ( 2008 ). Zigbee Wireless Networking, USA: Elsevier Inc Goldsmith, Andrea (2005). Wireless Communications, UK: Cambridge Cambridge University Press. Haykin, Simon (2001). Commmunication System 4th Edition, USA: John Wiley & Sons, Inc. Kornienko S.(2011), IR-based Communication and Perception in Micro robotic Swarms, arXiv:1109.3617v1 [cs.RO] 16 Sep 2011, Institute of Parallel and Distributed Systems, University of Stuttgart, Germani. Labiod, H, Afifi, H. And De Santis, C. (2007). WiFiTM, BluetoothTM, ZigBeeTM, And WimaxTM, Netherlands, Springer. Mataric Gerkey, And Brian P. (2001). Principled Communication fo Dynamic Multi-Robot Task Allocation, In Experimental Robotics VII, LNCIS 271D. Rus and S. Singh, editors, pages 353-362. Springer-Verlag Berlin Heidelberg. Sarker, Md. Omar Faraque & Dahl, TorbjØrn S. (2010). Bio-Inspired Communication for Self-Regulated Multi-Robot Systems. Journal of Multi-Robot Systems, Trends and Development, Edited by Toshiyuki Yasuda and Kazuhiro Ohkura. p. cm. ISBN 978-953-307-425-2. Parker, Lynee E. (2002). Current Research in Multi Robot System. Paper presented at The Seventh International Symposium on Artificial Life and Robotics, Oita, Japan. Parker, Lynne E. (1998), Adaptive Heterogenerous Multi-Robot Teams, Elsevier Preprint, 17 November 1998. Parker, Lynne E.(2008), Distributed Intelligence: Overview of the Field and its Application in Multi-Robot Systems, Journal Of Physical Agents, Vol. 2, No. 1, March 2008. Robert Faludi (2010). Building Wireless Sensor Network. United State of America : O’Reilly Media. Rui Rocha, Jorge Dias, Adriano Carvalho (2005). CMRS: A Study of vision Based 3-D mapping using information theory. Robotics and Autonomous System 53, 282-311. Simon, Monk (2010). 30 Arduino Projects for the Evil Genius. United States of America: Mc Graw-Hill. Stalling, W. (2003). Data And Computer Communications Fifth Edition, USA. Stalling, W. (2005). Wireless Communications And Network, 2nd Ed., USA: Pearson Education, Inc. Ulam, Patrick & Arkin Ronald C, Communications Recovery For Multi-Robot Teams, Defense Advanced Research Projects Agency,3701 North FairfaxDrive,Arlington,VA,22203-1714.
experiments distance between leader and
follower robot (meter)
Status
1 1 connected 2 2 connected 3 3 connected 4 4 connected 5 5 connected 6 6 no 7 7 no 8 8 no 9 9 no
10 10 no

Design of Mini Multi-Robot System using XBee
Andi Adriansyah Department of Electrical Engineering, Faculty of Engineering, Universitas Mercu Buana
Jl. Meruya Selatan, Kembangan, Jakarta 11650 [email protected] [email protected]
Abstract -- Wireless communications are now growing very rapidly because it is very efficient to use. Wireless technology that is widely used at close range is a device that can interface the other devices. Communication between robots is the process of delivering informations to do something. Communication between robots is an important component in the interaction of the multiple robots and their environment. In multiple robot systems, robot leader delivering orders to the follower robot to complete a task that occurs coordination between the robot forms of communication between the robot wirelessly using XBee signals. This form of communication is in the form of a command to the robot follower robot to follow the movement of the robot leader. Advantages of communication between the robots are efficient in completing the task. With time quickly orders can be delivered in a broadcast to the follower so that the job can be completed simultaneously.
Key Word: Robot, Leader, follower, communication, XBee, Microcontroller
1. INTRODUCTION Wireless technology has been developing very rapidly
due to highly efficient wireless communications. One of the wireless communication technologies in great demand is Wireless Local Area Network (WLAN). WLANs are based on IEEE 802.11 standards that use has some advantageous, such as high capacity, wide coverage and able to broadcast directly (Labiod et al., 2007).
If the area used in wireless is not too widely, a kind of wireless technology applied are Wireless Personal Area Network known as WPAN. WPAN is a network communication among devices over wireless technologies. The reach of a WPAN varies from a few centimeters to a few meters. WPANs are widely used for communication between sensors and electronic devices. There are some technologies used in WPAN such as IrDA, Wireless USB, Bluetooth, Z-Wave and ZigBee.
Nowadays, ZigBee is applied in many applications. ZigBee has a defined rate of 250 kbit/s, best suited for periodic or intermittent data or a single signal transmission from a sensor or input device. Applications include wireless light switches, electrical meters with in-home-displays, traffic management systems, and other consumer and industrial equipment that requires short-range wireless transfer of data at relatively low rates. The technology defined by the ZigBee specification is intended to be simpler and less expensive than other WPANs, such as Bluetooth or Wi-Fi.
In another side, technology and application of robotic grow rapidly, in terms of reliability, coverage ability and field applications. There are several research themes were also developing, such as sensor technology, motor technology, power supply technology, telecommunications technology, control technology and artificial intelligence technology. The development of
these technologies support each other’s to robotic technology. Therefore, investigations of robotic become interesting area for researchers [1].
In this decade, there has been an important variation in robotic research focus. Researchers are beginning to modify the direction of robotic research, from investigation of a single robot system to exploration of coordination of multi-robot systems. Multi-robot system is a system of a robot entities that work together to complete a specific task [2]. There are several advantageous of the application of multi-robot systems. Generally, the application of multi-robot system is to produce a better system in order to solve the problems of the system. With the multi-robot system, the existing complex and difficult system can be performed using the robot with a cheap and simple [3].
Therefore, this paper seeks to address multiple robot communication system design. A communication system design attempted as possible compared to the existing ones. The focus of the design is intended for communication between the leader and the follower so that the follower can follow the movement leaders. The transmission medium used among the robots is a wireless system using the XBee, Arduino microcontroller where the mobile robot is able to perform bi-directional communication and recognize the controller ID.
2. DESIGN AND IMPLEMENTATION 2.1. ZigBee and XBee
ZigBee is a specification of the communication protocol low-power digital radios based on the IEEE 802.15.4 specification in 2003 and Zigbee alliance with a maximum range of 100 meters. IEEE 802.15.4 specification is the basis for the lower layers of the ZigBee MAC and PHY and determine the standard 2.4 GHz radio that is used in the world.
XBee is a brand that supports a variety of communication protocols including ZigBee 802.15.4 and WiFi. Figure Xbee module is shown in Figure 1.
Figure 1. XBee Module
The ZigBee protocol is a standard the same way that
Bluetooth is a standard. Any manufacturer’s device that fully supports the ZigBee standard can communicate with

any other company’s ZigBee device. So just as your Motorola Bluetooth headset can communicate with your Apple iPhone, a CentralLite ZigBee light switch can communicate with a Black & Decker door lock (Faludy, 2010). Architecture ZigBee protocol shown in Figure 2.
ZigBee is widely used in the market for ZigBee has many advantages, such as (Gislason, 2008): • Reach 1 meter - 100 meter. • ISM (Industrial, Scientific and Medical) radio bands:
2.4 GHz, 868 MHz and 915 MHz. • Low power consumption. • CSMA-CA channel access. • Large networks (65,000 nodes) • Highly secure (AES encryption) • Network topology star, mesh and mutual support
various applications. • Interoperability across the world with other products • Co-existence with other wireless media (eg, WLAN,
Bluetooth, cellular).
Figure 2. ZigBee Architecture
The process of sending and receiving data on ZigBee. Using standard ZigBee network to transmit data specified by IEEE 802.15.4: • Request data means the data transmission • Data Confirm means the knowledge of the data
request • Data Indication means receiving data 2.2 System Design
The system is designed as shown in Figure 3. The leader robot consists of an Arduino microcontroller as the center of all the systems, and manages all activities of the input/output system. Sensor system which uses ultrasonic sensors functions as sensors obstacle in order that the robot can move well. Motion system using a DC motor driven with L298 Shield with maximum current 2A. Communication systems use Xbee Module with DFduino as connections between Xbee Shield and the Arduino microcontroller. This communication function for communication between leader robot and follower robots. As for the follower robots not have a sensor system. The movement of the follower robot just follows
the leader robot by receiving commands via Xbee modules.
Figure 3. Block Diagram System Designed
Forms of Robot Communication
Leader robot sends request signal to the robot and follower robot and the follower robot transmit acknowledgment signals and handshaking occurs, and then the leader robot send command, so that follower robot follow orders. So the follower robots will follow all movements of the leader robot. Form of communication robot leader and follower robots is shown in Figure 4.
Figure 4. Form of communication between leader and follower robots
3. RESULTS
Overall system is made with a pair of shields according to function. Arduino is located at the very bottom and the motor shield L 298 is on arduino after the XBee shield and XBee module are on the top right on the XBee Shield. The compilers of a series or robot are obtained. Its shown in figure [4], images [5] as a series when it is released from the composition of robot and image [6] is the overall picture of the system.
Figure 5. The series of robots that have not been installed

Figure 6. The series Robot
Figure 7. The entire system
At this signal measurement spectrum analyzer are set
according to the specifications of the XBee signal with a frequency range of 2.4 GHz marker around 2419.25 GHz and a frequency range between 2400 and 2440 MHz spectrum and level of -100 dBm. Transmitter signal form the leader is shown in Figure [8].
Figure 8. Transmitter signal form the leader
From the results of measurements of the spectrum analyzer are shown in transmitter signal power level leader, it is Maximum -81 dBM and -97.4 dBM. The interaction between the leader and the follower is shown in the Figure 9.
Figure 9. Forms signaling interactions between
Here are the results of measurements of transmit power (power level) signal transmitter XBee leader based on the distance traveled as shown in Table 1.
Table 1 The results of measurements of the signal power level Xbee
Distance (meter) Power Level (dBm)
1 -80
2 -80
3 -82 4 -90,4
5 -86,9
6 -91,9
7 -91,4
8 -86,8 9 -90,3
10 -89,5
12 -99,1 Average -88,02
From Table 1 it can be explained that the farther the distance, the smaller the signal power level. From the results of measuring the power level can be displayed in graphical form as shown in figure [10]. This measurement is performed in the space in the Lab.
Figure 10. Graphics power level XBee transmitter signal

Based on the graph it can be concluded that the further the distance, the smaller the power level. It means that the distance also affects the communication between the robot so it will affect system performance.
Table 2. The results of the test leader and follower robots
Based on the table [3] The leader and the follower robots can communicate with a maximum distance of 11 meters and at a distance of 12 meters robots are not the connected because of the low power level that is -99.1 dBm. Based on the specifications XBee is shows the minimum receiver sensitivity -92 dBm so that if the price is less than -92 dBm, the signal can not be captured by the XBee receiver on the follower. Experiments The distance between the Leader and Follower Robot (Meter)
Table 4 The results of testing the communication leader (room I) with the position of the displaced follower
Experiments Follower position
distance (meter)
Status
1 2 3 Connected 2 3 3 Connected 3 4 4 Connected 4 5 5 Connected 5 6 7 Connected6 7 10 Connected 7 8 >12 Not
Connected From the results of table [4] it can be concluded that the signal can penetrate barriers XBee in a room according to the results of previous measurements that for distances that are less than 12 meter. The power level is still more than -92 dBM to the room of Electrical Technical Lab. XBee transceiver is connected less than 12 meters. • Measurement of the duration time of the
communication between the leader and follower robots Measure the time required communication between
the leader and the follower so that everything started to move. It aims to determine the speed of the robot performance in receiving orders and execute it.
Table 5. Results of measuring the communication time leader and follower
Experiment Duration process the communication
between the follower and leader
1 11 2 10 3 11 4 11 5 12 6 13 7 15 8 13 9 15
10 15 average 12,5
From the measurement results in Table [5] that the communication between the leader and the follower robots takes 12.5 seconds. These measurements do not take up the position between the leader and follower robots. Testing outdoor Electrical Technical Lab.Room.
The experiments were conducted to determine the performance of signal XBee outdoor and environmental influences on the robot XBee signal. The experiments were done at the of Electrical Technical of Mercu Buana University. These test results are shown outdoors on a table [6].
experiments distance between leader and
follower robot (meter)
Status
1 1 connected 2 2 connected 3 3 connected 4 4 connected 5 5 connected 6 6 no 7 7 no 8 8 no 9 9 no
10 10 no

From the results of table [6] it can be concluded that the ability to capture the signal from the transmitter transceiver is only up to 5 meters and more than worth the transceiver is not able to capture the signal.
4. CONCLUSIONS
Based on the data analysis and discussion, it can be drawn some conclusions as follows: 1. Robot communication system can work well in
indoor and outdoor test results. 2. From the results of experiments and measurements
of the signal, it can be concluded that the experimental signal indoors can be connected properly to a distance of 12 meters.
3. The average power level of the signal up to a distance of 12 meters is -88.02 dBm.
4. Signals XBee can be connected when the power level of the signal is more than -92 dBm.
5. XBee signal can penetrate the barrier when the distance is less than 12 meters.
6. The average time of the communications between leader and follower robot is 12.5 seconds.
7. Experiments outdoor transmitter receiver can catch the signal well only up to 5 meters.
REFERENCES Dougherty, Robert et al. (2003). A Behavior Control
Approach to Formation-Keeping Through an Obstacle Field,0-7803-8155-6, 2004 IEEE.
Dudek, G. And Jenkin, M. (2000). Computational Principles of Mobile Robotics. UK: Cambridge University Press.
Garg, Vijay K. (2007), Wireless Communications And Networking, USA: Elsevier Inc.
Gislason, Drew ( 2008 ). Zigbee Wireless Networking, USA: Elsevier Inc
Goldsmith, Andrea (2005). Wireless Communications, UK: Cambridge Cambridge University Press.
Haykin, Simon (2001). Commmunication System 4th Edition, USA: John Wiley & Sons, Inc.
Kornienko S.(2011), IR-based Communication and Perception in Micro robotic Swarms, arXiv:1109.3617v1 [cs.RO] 16 Sep 2011, Institute of Parallel and Distributed Systems, University of Stuttgart, Germani.
Labiod, H, Afifi, H. And De Santis, C. (2007). WiFiTM, BluetoothTM, ZigBeeTM, And WimaxTM, Netherlands, Springer.
Mataric Gerkey, And Brian P. (2001). Principled Communication fo Dynamic Multi-Robot Task Allocation, In Experimental Robotics VII, LNCIS 271D. Rus and S. Singh, editors, pages 353-362. Springer-Verlag Berlin Heidelberg.
Sarker, Md. Omar Faraque & Dahl, TorbjØrn S. (2010). Bio-Inspired Communication for Self-Regulated Multi-Robot Systems. Journal of Multi-Robot Systems, Trends and Development, Edited by Toshiyuki Yasuda and Kazuhiro Ohkura. p. cm. ISBN 978-953-307-425-2.
Parker, Lynee E. (2002). Current Research in Multi Robot System. Paper presented at The Seventh International
Symposium on Artificial Life and Robotics, Oita, Japan.
Parker, Lynne E. (1998), Adaptive Heterogenerous Multi-Robot Teams, Elsevier Preprint, 17 November 1998.
Parker, Lynne E.(2008), Distributed Intelligence: Overview of the Field and its Application in Multi-Robot Systems, Journal Of Physical Agents, Vol. 2, No. 1, March 2008.
Robert Faludi (2010). Building Wireless Sensor Network. United State of America : O’Reilly Media.
Rui Rocha, Jorge Dias, Adriano Carvalho (2005). CMRS: A Study of vision Based 3-D mapping using information theory. Robotics and Autonomous System 53, 282-311.
Simon, Monk (2010). 30 Arduino Projects for the Evil Genius. United States of America: Mc Graw-Hill.
Stalling, W. (2003). Data And Computer Communications Fifth Edition, USA.
Stalling, W. (2005). Wireless Communications And Network, 2nd Ed., USA: Pearson Education, Inc.
Ulam, Patrick & Arkin Ronald C, Communications Recovery For Multi-Robot Teams, Defense Advanced Research Projects Agency,3701 North FairfaxDrive,Arlington,VA,22203-1714.
Belajar
MEMBUAT ROBOT dengan ARDUINO
OLEH:
ANDI ADRIANSYAH

1
BAB 1 □ □ □ □ □ □ □ □ □
PENDAHULUAN 1.1. Apa itu Mikroprosesor?
Pernah dengar mikroprosesor, kan? Secara tertulis, biasanya,
mikroprosesor disingkat menjad uP (dibaca: mikro pi). Secara harfiah,
mikroprosesor terdiri dari dari dua kata, yaitu mikro (micro) yang berarti
sangat kecil dan prosesor (processor) yang artinya alat untuk memproses
atau mengolah data. Jadi, kalau digabung, mikroprosesor bisa didefinisikan
sebagai chip digital sangat kecil yang digunakan untuk memproses atau
mengolah data. Di dalam chip digital tersebut terdapat rangkaian
elektronika yang rumit namun telah dipaket dalam suatu bentuk yang
kompak dan terpadu (sering disebut dengan integrated circuit, atau biasa
dikenal dengan istilah IC). Sedikitnya, ada dua bentuk mikroprosesor yang
banyak digunakan, yaitu: bentuk persegiempat (Quad Flat Package, QFP)
dan bentuk persegipanjang (Dual Inline Package, DIP). Beberapa bentuk
mikroprosesor diperlihatkan pada Gambar 1.1.
Gambar 1.1. Beberapa Bentuk Mikroprosesor

2
Setelah tahu apa itu mikroprosesor, pasti muncul pertanyaannya
berikutnya. Betul! Apa saja, sih, isi mikroprosesor? Isi mikroprosesor biasa
disebut dengan istilah arsitektur mikroposesor. Secara umum, arsitektur
mikroprosesor memiliki tiga unit utama. Ketiga unit tersebut adalah: Unit
Register, Unit Aritmatika dan Logika (Arithmetic and Logic Unit, ALU) serta
Unit Pengendali (Control Unit). Unit Register berfungsi tempat menyimpan
data temporal. Sementara itu, ALU bertugas untuk melakukan operasi
aritmatika dan logika. Sedangkan Unit Pengendali berfungsi untuk
mengendalikan dan mengkoordinasikan semua proses yang ada. Gambar
1.2 memperlihatkan susunan sederhana unit-unit di dalam sebuah
mikroprosesor.
Gambar 1.2. Unit-unit Internal Mikroprosesor
Sebagaimana definisinya, fungsi mikroprosesor secara umum adalah
mengambil data masukan (input), kemudian memproses data tersebut
sesuai dengan aturan yang dikehendaki, lalu menghasilkan data keluaran
(output) untuk dapat dimanfaatkan lebih lanjut. Karena mikoprosesor
merupakan chip digital, maka data yang diumpan padanya juga harus
dalam bentuk digital. Setelah diproses, hasil olahannya dikeluarkan dalam
bentuk digital juga.
Contoh sederhana aplikasi mikroprosesor adalah pendeteksi kode
batang (barcode) suatu benda tertentu serta menampilkan harganya,
Control Unit ALU
REGISTER
MIKROPROSESOR

3
seperti yang terlihat di toko-toko swalayan. Barcode adalah data input,
pembaca barcode (barcode reader) adalah perangkat input, mikroprosesor
sebagai pemproses bacaan kode dan hasilnya ditampilkan pada alat
penampil (display) sebagai perangkat output. Gambar 1.3 mengilustrasikan
aplikasi tersebut.
Gambar 1.3. Aplikasi Sederhana Mikroprosesor
1.2. Bagaimana Kerja Mikroprosesor?
Kalau sudah tahu apa itu mikroprosesor, muncul lagi pertanyaan
berikutnya. Pertanyaannya adalah bagaimana mikroprosesor bekerja? Agar
dapat bekerja, mikroprosesor memerlukan komponen digital lainnya.
Komponen digital lain yang diperlukan adalah komponen Memori dan
komponen Input/Output. Komponen memori berfungsi sebagai penyimpan
data dan penyimpan instruksi yang akan diperintahkan ke mikroprosesor.
Mikroprosesor mengambil dan mengeksekusi instruksi satu per satu sesuai
urutan letaknya pada memori dan sesuai pula dengan jenis instruksinya.
Random Access Memory (RAM) dan Read Only Memory (ROM) merupakan
beberapa jenis komponen memori ini. Sedangkan komponen Input/Output
bertugas sebagai penghubung mikroprosesor dengan dunia luar, seperti
perangkat input dan perangkat output. Blok diagram kerja mikroprosesor
bisa dilihat pada Gambar 1.4.
MIKROPROSESOR
INPUT
DATA DIGITAL
OUTPUT
DATA DIGITAL

4
Bingung? Tenang saja, proses ini berjalan secara otomatis dan terus
menerus, kok. Sehingga, seorang pemrogram mikrokontroler tidak perlu
harus mengetahui langkah-demi langkah kerjanya secara mendetail. Selain
itu, walaupun tampak panjang dan rumit, proses tersebut berlangsung
sangatlah cepat. Setiap satu instruksi diproses tidak lebih dari satu
microsecond (artinya, cuma memerlukan waktu sepersejuta detik saja).
Waw….! Jadi, tidak perlu bingung, kan.
Gambar 1.4. Blok Diagram Cara Kerja Mikroprosesor
1.3. Komputer, Mikroprosesor dan Mikrokontroler
Terdapat tiga istilah yang terkadang sering tertukar. Ketiga istilah
tersebut adalah komputer, mikroprosesor dan mikrokontroler. Sebagaimana
telah disebutkan sebelumnya, untuk dapat bekerja mikroprosesor harus
didukung oleh komponen memori dan komponen input/output. Nah, jenis
hubungan dari ketiga komponen ini yang membedakan istilah tersebut.
Jika, komponen mikroprosesor, memori dan input/output
diintegrasikan dalam sebuah papan induk (motherboard) serta dilengkapi
dengan perangkat-perangkat input/output lain yang memadai maka sistem
ini disebut dengan minicomputer, atau istilah yang telah dikenal
masyarakatnya adalah komputer. Bentuk komputer ini bisa dalam ukuran
yang besar (seperti komputer mainframe), dalam ukuran yang sedang
(seperti Komputer Pribadi atau Personal Computer, PC) atau dalam ukuran
MIKROPROSESOR
MEMORI
INPUT/OUTPUT
Instruksi / data
Data

5
yang kecil (seperti netbook). Contoh motherboard dan PC diperlihatkan
pada Gambar 1.5.
Gambar 1.5. Sistem Komputer: (a) Motherboard dan (b) Komputer Pribadi
Sementara itu, jika mikroprosesor dipadukan dengan komponen
memori dan komponen input/output dalam sebuah papan elektronika yang
lebih sederhana (seperti sebuah Papan Rangkaian Tercetak atau Printed
Circuit Board, PCB) guna menjalankan tugas yang lebih spesifik maka
sistem ini disebut dengan sistem mikroprosesor.
Gambar 1.6. Sistem Mikroprosesor
Sedangkan, jika mikroprosesor dipadukan dengan komponen memori
dan komponen input/output dalam sebuah IC guna menjalankan tugas yang
sangat spesifik maka sistem ini disebut dengan sistem mikrokontroler. Jadi,
dalam sebuah mikrokontroler telah terdapat sebuah mikroprosesor,
komponen memori, komponen input/output dan komponen-komponen lain
yang diperlukan. Agar lebih mudah dipahami, Gambar 1.7 mengilustrasikan
sebuah IC mikrokontroler yang merupakan perpaduan beberapa IC-IC yang
(a)(b)
(a)(b)

6
diperlukan. Saat ini, sistem mikrokontroler lebih disukai oleh para pengguna
sistem elektronika karena jauh lebih efektif dan efisien.
Gambar 1.7. Sebuah IC Mikrokontroler
Secara umum hampir telah disepakati suatu kesepakatan tidak
tertulis. Yaitu, sistem yang di dalamnya terdapat sebuah mikroprosesor
atau mikrokontroler akan disebut sebagai sistem berbasis mikroprosesor.
Begitu, ya. Biar tidak rancu dan membingungkan. Pembahasan-
pembahasan berikutnya dari keseluruhan buku ini memfokuskan kepada
aplikasi sistem mikrokontroler sebagaimana diperlihatkan pada Gambar 1.7.
1.4. Tipe Mikroprosesor dan Mikrokontroler
Terdapat beberapa penghasil mikroprosesor dan mikrokontroler yang
umum digunakan. Mikroprosesor yang biasa digunakan dalam komputer
adalah merek Intel (dari Intel Corporation), AMD (Advanced Micro Devices,
dari AMD Incoorporation) dan Cyrx (produksi Cyrix Corporation). Produk
terkini dari ketiga produksi mikroprosesor di atas adalah Intel Core i7 (dari
Intel), AMD Athlon X2 (dari AMD) dan Cyrix MII (dari Cyrix).

7
Gambar 1.8. Jenis-jenis Mikroprosesor: (a) Intel, (b) AMD dan (c) Cyrix
Demikian juga, terdapat beberapa jenis mikrokontroler yang banyak
dipakai dalam aplikasi teknis elektronika. Beberapa merek tersebut antara
lain adalah: Atmel, PIC, Maxim dan Texas Instrument. Atmel merupakan
sebuah perusahaan semikonduktor di Amerika Serikat. Perusahaan ini
memproduksi berbagai macam jenis mikrokontroler, seperti MCS-51
(AT89S51), AVR ATMega, AT Tiny dan lain-lain. Sedangkan PIC adalah
keluarga mikrokontroler yang diproduksi oleh Microchip Techology dari
Amerika Serikat. PIC 16F84 adalah jenis mikrokontroler yang banyak
dipakai dalam aplikasi elektronika. Walaupun tidak sebanyak Atmel dan PIC,
merek Maxim juga sering digunakan. Jenis yang banyak dipakai adalah
MAX186.
Gambar 1.9. Jenis-jenis Mikrokontroler: (a) Atmel, (b) PIC dan (c) Maxim
1.5. Aplikasi Sistem Mikroprosesor
Saat ini, aplikasi sistem mikroprosesor sudah meluas ke hampir
seluruh bidang kehidupan manusia, seperti pendidikan, kesehatan,
kependudukan, politik, perang dan lain-lain. Berbeda dengan sistem analog
(a) (b) (c)
(a) (b) (c)

8
maupun sistem digital hardwire, sistem berbasis mikroprosesor memiliki
beberapa keunggulan berikut:
a. Bentuknya kecil dan ringkas; karena dengan sistem ini, banyak
komponen yang direduksi keberadaannya dan digantikan dengan
sebuah mikroprosesor saja.
b. Portable; karena bentuknya yang kecil, sehingga secara keseluruhan
alat tersebut juga mempunyai ukuran yang kecil serta mudah dibawa
ke mana-mana
c. Konsumsi daya rendah; sejak digunakannya bahan semikonduktor,
komponen IC tidak lagi memerlukan daya yang yang tinggi untuk
aktifasi dan tidak lagi membuang panas yang besar.
d. Biaya rendah; selain karena banyak komponen yang dikurangi, biaya
produksi IC terus menurun, sehingga secara keseluruhan harga
peralatan yang berbasis mikroprosesor terus menurun.
e. Programmable; keuntungan utama sistem mikroprosesor adalah
kemampuannya yang dapat diprogram ulang jika diperlukan
perubahan tertentu, sehingga tidak banyak yang harus dilakukan
kecuali perubahan isi memori saja.
Secara umum, penggunaan sistem mikroprosesor dapat dibagi
menjadi 3 katagori, yaitu :
a. Sistem Komputer.
b. Sistem Komunikasi.
c. Sistem Kendali dan Instrumentasi.
Hampir seluruh komputer yang ada pada hari ini, merupakan
komputer digital yang tentu saja merupakan sistem mikroprosesor. Mulai
dari komputer ukuran kecil yaitu PDA, komputer mikro atau Personal
Computer, mini komputer, mainframe, sampai super komputer. Sebelum
tahun 1970-an, komputer hanya mampu dibeli oleh perusahaan besar,
tetapi hari ini, hampir setiap rumah mampu membeli komputer PC.
Meskipun unjuk kerja dan kapasitasnya meningkat, harga komputer
cenderung turun karena kemajuan teknologi dan sistem fabrkasi yang ada
berakibat ada penghematan ongkos produksi.

9
Gambar 1. 10. Berbagai Jenis Komputer
Dengan hardware yang sama, sebuah komputer PC dapat dipakai
untuk berbagai aplikasi, bahkan berbagai sistem operasi. Ada ribuan
program aplikasi untuk beragam keperluan dapat dijalankan pada PC dan
Sistem Operasi yang sama. Berikut ini adalah contoh aplikasi komputer
yang dapat bekerja pada komputer PC dengan Sistem Operasi Windows :
MS OFFICE, untuk perkerjaan perkantoran seperti mengetik,
spreadsheet, presentasi, database, penjadwalan,
MATLAB, untuk berbagai kalkulasi teknik, ekonomi,
AUTOCAD, untuk berbagai operasi gambar, 2 atau 3 dimensi,
Protel, EWB, dan Multisim untuk keperluan perancangan elektronika
dan lain-lain
Selain PC, mini komputer, mainframe dan super komputer telah
digunakan untuk urusan-urusan publik atau skala besar seperti pusat data
kependudukan, rumah sakit, perbankan, pernerbangan komersial hingga
operasi militer. Bayangkan, jika sistem pembayaran rekening listrik atau
telepon tidak dilakukan dengan bantuan komputer, mungkin tagihan listrik
pada hari ini adalah untuk membayar pemakaian 6 bulan yang lalu, apalagi
kalau sistem administrasinya buruk sekali. Dengan teknologi pusat data,
pembayaran telepon dapat dilakukan melalui ATM.
Komputer kapasitas besar juga digunakan untuk mengolah gambar
seperti komputer untuk MRI (Magnetic Resonance Imagine), komputer
untuk ramalan cuaca, komputer unuk pemetaan sampai pertambangan.
Seluruh komputer yang disebutkan tadi menggunakan mikroprosesor
10
sebagai pengendali utamanya, baik mikroprosesor tunggal maupun multi
prosesor.
Pada sistem komunikasi, hampir semua alat penting menggunakan
sistem mikroprosesor. Pada hari ini, sistem komunikasi hampir terkait
dengan komputer atau mikroprosesor. Berikut ini adalah beberapa
contohnya.
a. Sentral Telepon PSTN atau saluran analog dengan bandwidth 4 KHz.
Saat ini, hampir semua sistem switching atau penyambungan telepon
dilakukan secara digital, random input sequential ouput atau
sebaliknya. Tentu saja semua ini diwujudkan dengan menyertakan
sistem mikroprosesor.
b. Provider Telepon Digital seperti ISDN dan DSL. Selain untuk switching
atau penyambungan dan queuing atau antrian, sistem mikroprosesor
pada penyedia telepon digital juga dimanfaatkan untuk banyak hal lain
termasuk network management dan optimasi Quality of Service (QoS).
c. Provider Telepon Seluler. Meskipun menggunakan saluran radio
frekuensi, hampir semua telepon seluler menerapkan komunikasi
digital.
d. Handphone. Handphone yang kecil dan murah sekalipun, harus
dilengkapi dengan mikroprosesor, karena untuk membaca keypad,
menyimpan phonebook, kalkulator dan mengirim SMS memerlukan
sistem instrumentasi digital.
e. Komunikasi Satelit. Selain untuk sistem kendali dan instrumentasi
satelit, mikroprosesor juga digunakan untuk switching, muliplexing,
queuing hingga error correction.

11
Gambar 1. 11. Aplikasi Mikroprosesor pada Sistem Telekomunikasi
Penggunaan mikroprosesor pada sistem kendali dan instrumentasi
diterapkan di hampir semua instrumen dan alat kendali, mulai dari
instrumen kecil seperti barcode reader, sampai instrumen besar seperti
panel pesawat terbang. Mulai dari alat kedokteran seperti MRI (Magnetic
Resonance Imaging) sampai alat perang seperti stinger missile untuk
serangan darat ke udara. Berikut ini adalah beberapa contoh penerapan
sistem mikroprosesor untuk alat kendali dan instrumentasi.
a. Electronic Fuel Injection (EFI) yang diterapkan pada mesin-mesin
bakar modern. Alat ini dipakai untuk mengoptimalkan pemakaian
bahan bakar untuk torsi dan kecepatan maksimum.
b. Instrumen Lift. Mikroprosesor digunakan untuk membaca tekanan
tombol dan mengendalikan gerakan motor listrik, sehingga lift dapat
begerak sesuai dengan tekanan tombol dan cukup nyaman bagi
pemakai, tidak berhenti atau bergerak mendadak.
c. Sistem pengatur ketepatan cetak dan potong pada mesin pengganda
media kertas seperti koran dan majalah. Tanpa koreksi dari sistem
mikroprosesor, selain hasil yang kurang rapi, alat pemotong atau
pencetak harus sering disetting ulang dan ini sangat tidak realistis.
Kita dapat lihat, pada setiap halaman koran atau majalah ada terdapat

12
mark atau tanda, baik tanda untuk warna maupun tanda untuk alat
potong.
d. Alat pengolah data pada VCD atau DVD player. Karena data disimpan
dalam CD dalam keadaan dikompres, maka untuk mengubahnya
menjadi gambar atau suara perlu dilakukan dekompresi data yang
jelas memerlukan algoritma tertentu yang diwujudkan dengan
program. Tentu saja ini memerlukan sistem mikroprosesor.

13
BAB 2 □ □ □ □ □ □ □ □ □
SISTEM MIKROKONTROLER 2.1. Mikrokontroler AT Mega 328
Pasti anda sudah tidak sabar lagi untuk berkata, “Jadi, Arduino itu
apa?”. Tenang! Sebelum sampai ke sana, ada beberapa hal yang harus
dibahas terlebih dahulu. Yang pasti, komponen utama Arduino adalah
mikrokontroler ATMega 328, produksi Atmel. Jadi, mari kita bahas dulu
mikrokontroler jenis ini, ya.
Salah satu mikrokontroler yang sekarang banyak digunakan adalah
mikrokontroler produksi Atmel generasi AVR. Ada dua versi kepanjangan
dari AVR, yaitu Advanced Versatile RISC yang maknanya adalah
mikroprosesor berteknologi tinggi RISC atau Alfa and Vegard’s RISC yang
artinya prosesor yang dirancang oleh dua mahasiswa Norwegia bernama
Alf-Egil Bogen dan Vegard Wollan dengan teknologi RISC.
RISC (Reduced Instruction Set Computers) adalah sebuah tren
teknologi terbaru mikroprosesor untuk mempercepat proses pelaksanaan
instruksi sehingga berefek kepada perubahan desain dan ukurannya.
Berbeda dengan teknologi sebelumnya yaitu CISC (Complex Instruction Set
Computers) yang membutuhkan 12 siklus clock setiap instruksi, teknologi
RISC hanya memerlukan 1 siklus clock setiap instruksi.
Secara umum AVR dapat dikelompokan menjadi 4 golongan, yaitu:
keluarga ATTiny, AT90Sxx, ATMega dan AT86RFxx. Yang membedakan
masing-masing golongan adalah kapasitas memori, peripheral, dan
fungsinya. Dari segi arsitektur dan instruksi yang digunakan keseluruhan
golongan tersebut hampir sama.
OK, sekarang kembali ke ATMega 328 sebagai komponen utama
Arduino! ATMega 328 adalah mikrokontroler AVR produk Atmel yang
harganya relatif murah dan mudah didapatkan di pasaran serta memiliki

14
fasilitas yang lengkap. Fitur yang terdapat dalam ATMega 328 antara lain
adalah:
1. Sistem mikroprosessor 8 bit berbasis RISC dengan kecepatan
maksimal 16 MHz.
2. Kapasitas memori flash 32 KB, SRAM 2 KB byte dan EEPROM
(Electrically Erasable Programmable Read Only Memory) sebesar 1 KB.
3. Memiliki 19 pin Input/Output Digital dan 6 pin Input Analog
4. Analog to Digital Converter (ADC) internal dengan fidelitas 10 bit
sebanyak 8 chanel, 2 buah Timer/Counter 8 bit, sebuah Timer/Counter
16 bit dan 6 buah kanal PWM
5. Portal komunikasi serial (USART) dengan kecepatan maksimal
2.5Mbps, Serial Interface dan I2C.
Kalau mau tahu arsitektur mikrokontroler ATMega 328 lengkap, dapat
dilihat pada Gambar 2.1. Sementara, bentuk fisik dan konfigurasi pin
ditampilkan pada Gambar 2.2.
Gambar 2.1. Arsitektur Mikrokontroler ATMega 328

15
Gambar 2.2. Bentuk Fisik dan Pin-Out ATMega 328
Secara garis besar, sebagaimana terlihat pada Gambar 2.2,
mikrokontroler ATMega dengan kemasan DIP (Dual In-line Package)
memiliki 28 buah pin. Fungsi masing-masing pin tersebut adalah sebagai
berikut:
1. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya.
2. GND merupakan pin ground.
3. Port C (PC0 ... PC6) merupakan I/O(Input Output) dua arah dan pin
masukan ADC ( Analog to Digital Converter).
4. Port B (PB0 ... PB7) merupakan pin I/O digital dua arah dan pin fungsi
khusus, yaitu interrupt, XTAL1, XTAL2, serta MOSI, MISO dan SCK
untuk komunikasi serial
5. Port D (PD0 ... PD7) merupakan pin I/O dua arah dan fungsi pin
khusus, yaitu interrupt dan Tx/RX sebagai transceiver
6. RESET meupakan pin yang digunakan untuk me-reset mikrokontroller.
7. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
8. AREF merupakan pin masukan tegangan referensi ADC.
Sekali lagi, tenang! Jangan terburu-buru bingung. Semua ini akan tampak
sangat jelas, ketika mikrokontroler mulai diaplikasikan pada rangkaian
aplikasi tertentu.

16
2.2. Sistem Minimum
Sebuah sistem mikrokontroler tidak dapat dioperasikan dengan hanya
sebuah mikrokontroler saja. Namun, untuk menjalankannya diperlukan
serangkaian komponen yang terbentuk dalam sebuah sistem minimum
mikrokontroler. Jika mikrokontroler sudah terangkai dalam sebuah sistem
minimum, maka barulah sistem tersebut sudah siap untuk diaplikasikan
dalam menjalankan fungsi tertentu.
Sebuah sistem minimum mikrokontroler terdiri dari tiga blok
rangkaian, yaitu: rangkaian power regulator, rangkaian reset dan rangkaian
osilator. Gambar 2.3 mengilustrasikan blok-blok sebuah sistem minimum.
Gambar 2.3. Sistem Minimum
Blok pertama dalam sebuah sistem minimum adalah rangkaian power
regulator. Rangkaian ini diperlukan agar tegangan yang masuk ke dalam
rangkaian mikrokontroler dalam kondisi yang stabil, yaitu +5 volt. Pada
umumnya, rangkaian power regulator terdiri dari beberapa buah dioda
sebagai penyearah tegangan, beberapa keping capacitor sebagai penyaring,
sebuah chip regulator LM7805 serta pasangan LED dan resistor sebagai
indikator. Rangkaian lengkap power regulator dan bentuk fisik chip
regulator LM7805 diperlihatkan pada Gambar 2.4.
Power Regulator
RESET
MIKROPROSESOR
OSILATOR
SISTEM MINIMUM

17
Gambar 2.4. Rangkaian Power Regulator
Gambar 2.5. IC LM 7805
Rangkaian lain yang dibutuhkan adalah rangkaian reset. Rangkaian
ini berguna bagi mengembalikan program sistem mikrokontroler ke nilai
awalnya (Address Memory = 0). Mikrokotroler bekerja dengan cara
melaksanakan instruksi yang disimpan pada Address Memory. Pelaksanaan
instruksi ini dimulai dari Address Memory = 0. Setelah sebuah instruksi
dijalankan maka instruksi Address Memory berikutnya akan dipanggil dan
dijalankan pula. Dengan demikian, jika saklar reset ini ditekan berarti
mikrokontroler akan mengulangi program dari awal lagi. Biasanya, saklar
reset ditekan apabila terdapat kesalahan atau gangguan pada saat
menjalankan program. Sebuah rangkaian reset diperlihatkan pada Gambar
2.6.

18
Gambar 2.6. Rangkaian Reset
Blok terakhir dalam sebuah sistem minimum adalah rangkaian
osilator. Rangkaian osilator ini berfungsi untuk menghasilkan suatu
gelombang osilasi. Gelombang ini digunakan sebagaik clock (detak) bagi
mikrokontroler. Dengan detak ini, mikrokontroler berfungsi secara sinkron
(serempak) dari satu instruksi ke instruksi berikutnya. Rangkaian osilator
terdiri dari sebuah kristal (XTAL) dan 2 buah capacitor. Interkoneksi
rangkaian reset dengan mikrokontroler ditampilkan pada Gambar 2.7.
Gambar 2.7. Rangkaian Osilator
Dari rangkaian-rangkaian diatas, maka dirakitlah sistem minimum
mikrokontroler. Dengan sistem minimum ini, berarti sistem mikrokontroler
telah siap untuk dioperasikan untuk melaksanakan fungsi tertentu. Contoh
sebuah sistem minimum mikrokontroler, yang telah dilengkapi dengan
berbagai konektor, diperlihatkan pada Gambar 2.8.

19
Gambar 2.8. Sistem Minimun Mikronkontroler
Jika ingin lebih sederhana dan instan, telah tersedia banyak
rangkaian minimum mikrokontroler dalam bentuk modul yang dijual secara
bebas. Dengan modul ini, maka akan terjamin rangkaian berada dalam
kondisi baik, tidak terjadi kesalahan pensolderan dan memberikan
kemudahan dalam pemasangan. Namun, jika dibandingkan membuatnya
sendiri, pasti harga modul ini jauh lebih mahal. Beberapa modul system
minimum yang banyak dijual di pasaran dalam negeri antara lain adalah:
DT 51 produksi dari PT Inovative Electronics atau DI Smart produksi dari
Depok Instruments. Contoh modul sistem minimum dari kedua merek
tersebut dapat dilihat pada Gambar 2.9.

20
Gambar 2.9. Modul Sistem Minimun Mikrokontroler Berbentuk Modul
2.3. Pemrograman Mikrokontroler
Sistem minimum mikrokontroler hanya sekumpulan komponen-
komponen elektronika yang belum dapat dioperasikan. Agar dapat
dioperasikan, haruslah terlebih dahulu dimasukkan program ke dalam IC
mikrokontroler. Progam yang akan dimasukkan haruslah sesuai dengan
tujuan dan fungsi dari sistem tersebut dibuat. Misalnya, diinginkan sebuah
peralatan yang dapat mengendalikan suhu ruangan, maka seorang
perancang harus membuat program berisi instruksi-instruksi yang dapat
membaca dan mengendalikan suhu dalam ruangan.
Kemudian, program tersebut disimpan ke dalam mikrokontroler pada
bagian penyimpanan (memory). Ketika sistem dijalankan, maka baris per
baris pada memory akan dibaca dan dijalankan instruksinya oleh
keseluruhan sistem. Dengan demikian, barulah sistem tersebut dapat
bekerja dengan baik. Proses pemrograman ini diilustrasikan pada Gambar
2.10.
Gambar 2.10. Proses Pembuatan Pemrograman Mikrokontroler
Perancangan program
Penulisan program
Peyimpanan program

21
Agar komputer memahami kehendak si perancang, maka program
yang dimasukkan harus dipahami oleh sistem mikrokontroler. Oleh karena
itu, diperlukan sebuah bahasa yang dipahami oleh si perancang dan juga
mikrokontroler. Bahasa ini dikenal Bahasa Pemrograman (Programming
Language).
Bahasa Pemrograman, atau sering diistilahkan juga dengan bahasa
komputer adalah teknik komando/instruksi standar untuk memerintah
system computer. Bahasa ini memungkinkan seorang programmer dapat
menentukan secara persis data mana yang akan diolah oleh komputer,
bagaimana data ini akan disimpan/diteruskan, dan jenis langkah langkah
apa secara persis yang akan diambil dalam berbagai situasi. Menurut
tingkat kedekatannya dengan mesin komputer, bahasa pemrograman terdiri
dari:
1. Bahasa Mesin, yaitu memberikan perintah kepada komputer dengan
memakai kode bahasa biner, contohnya 1001 0110 0110. Terkadang,
untuk memudahkan penulisan, bahasa biner ini dituliskan dalam
bilangan heksadesimal, seperti: 2A, F5 dan BC. File yang dihasilkan
dari penulisan Bahasa Mesin berekstensi *.hex.
2. Bahasa Tingkat Rendah, atau dikenal dengan istilah bahasa rakitan
(bahasa Inggrisnya Assembly Language), yaitu memberikan perintah
kepada komputer dengan memakai kode-kode singkat (kode
mnemonic), contohnya MOV, SUB, CMP, JMP, JGE, JL, LOOP, dsb. File
yang dihasilkan dari penulisan bahasa ini berekstensi *.asm.
3. Bahasa Tingkat Menengah, yaitu bahasa komputer yang memakai
campuran instruksi dalam kata-kata bahasa manusia (lihat contoh
Bahasa Tingkat Tinggi di bawah) dan instruksi yang bersifat simbolik,
contohnya {, }, ?, <<, >>, &&, || dan sejenisnya. Contoh yang
termasuk dalam kategori ini adalah Bahasa C dan semua turunannya.
4. Bahasa Tingkat Tinggi, yaitu bahasa komputer yang memakai
instruksi berasal dari unsur kata-kata bahasa manusia, contohnya
begin, end, if, for, while, and, or, dsb. Bahasa BASIC adalah bahasa
yang termasuk dalam kategori ini.
Beberapa bahasa pemrograman yang biasa dipakai dalam aplikasi
system mikrokontroler adalah bahasa C++ dalam bentuk mikroC (mikroC
for AVR, mikroC for PIC) dan Code Vision AVR (CV AVR). Sedangkan dalam

22
bahasa BASIC yang terkenal adalah BASCOM (Basic Compiler dalam bentuk
BASCOM for AVR dan BASCOM for 8051). Selain itu, terdapat pula
perangkat yang banyak dikenal dan digunakan dalam system
mikrokontroler, yaitu M-IDE. M-IDE Studio adalah salah satu editor untuk
bahasa asembler. Selain bisa digunakan sebagai editor M-IDE bisa juga
digunakan untuk melakukan pengubahan dari bahasa asembler (file .asm)
menjadi file berekstensi .hex.
Semua bahasa pemrograman, pada akhirnya, harus mengubah
formatnya ke dalam Bahasa Mesin (*.hex). Karena, hanya Bahasa Mesin
yang dapat dikirimkan dan dimasukkan ke dalam IC Mikrokontroler.
2.4. Proses Pengisian Program
Secara umum, proses pengisian program sangat sederhana sekali.
Proses ini meluputi 3 (tiga) tahapan saja, yaitu:
Tahap 1: Penulisan Program
Tahap 2: Tahap Pengkodean Program, dan
Tahap 3: Tahap Pemindahan Program ke Mikrokontroler
Tahap 1 adalah Penulisan Program. Tahap ini adalah tahap dimana
program dituliskan pada perangkat lunak yang disebut dengan Editor.
Terdapat banyak program Editor, seperti Notepad atau WordPad. Editor
yang sering digunakan saat ini, misalnya M-IDE Studio, yang mampu
menuliskan program baik untuk Atmel Versi MCS51 atau AVR.
Pada Editor ini, program dituliskan dan akan disimpan dalam
ekstensi *.asm (jangan lupa untuk menyimpannya dengan ekstensi ini,
kalau tidak ia akan dianggap seperti tulisan biasa saja). Setelah
penyimpanan, biasanya akan tampak warna-warna yang berbeda, untuk
memudahkan pengecekan kesalahan penulisan program.
Tahap 2 adalah Tahap Pengkodean Program. Pada tahap ini, program
akan diverifikasi dan dikodekan. Pemverikasian dilakukan untuk mengecek
apakah terjadi kesalahan penulisan pada program atau tidak. Hal ini untuk
mencegah kekeliruan pengerjaan program ketika dijalankan pada sistem.
Keterangan hasil pengecekan program akan ditampilkan pada bagian
bawah program. Apabila terdapat kesalahan, maka akan ditampilkan baris

23
dan penyebab kesalahannya. Apabila tidak terdapat kesalahan, maka
otomatis proses pengkodeaan akan dilakukan. Hasil dari proses
pengkodeaan ini adalah file *.hex yaitu bentuk heksadesimalnya.
Tahap Ketiga adalah Tahap Pemindahan Program ke Mikrokontroler.
Pada tahap ini, file program yang berekstensi *.hex akan dipindahkan ke
bagian memori IC. Bagian ini adalah memasukkan file berekstensi *.hex ke
dalam IC. Tahapan ini sering dikenal dengan istilah pengunduhan program
ke mikrokontroler.
2.4. Pengunduhan ke Mikrokontroler
Untuk dapat mengunduh program ke dalam mikrokontroler, terdapat
2 (dua) metoda, yaitu: metoda penggunaan downloader dan metoda In
System Programming (ISP).
Metoda penggunaan downloader yaitu metoda memasukkan
program ke dalam memory yang memerlukan tambahan peralatan yang
disebut downloader. IC mikrokontroler yang akan diisi program diletakkan
ke dalam downloader yang telah terhubung ke PC melalui kabel port serial
(COM). Kemudian, dengan menggunakan software tertentu, program yang
telah siap dapat dimasukkan ke dalam IC mikrokontroler.
Gambar 2.11. Peralatan Pengisian Program menggunakan Downloader
Metoda ini mempunyai beberapa kelemahan. Kelemahan pertama
adalah diperlukannya alat tambahan, yang berarti memerlukan dana
tambahan pula. Selain itu, IC mikrokontroler yang digunakan harus dicabut

24
dari sistemnya untuk dimasukkan ke dalam downloader dan dimasukkan
kembali ke dalam sistem. Jika pemrograman dilakukan berulang-ulang,
maka proses pemindahan IC mikrokontroler akan terjadi berulang-ulang
pula. Hal ini akan menyebabkan umur IC menjadi lebih pendek. Beberapa
Perangkat Lunak yang dapat menuliskan program, antara lain adalah: Turbo
Asembler (TASM) atau M-IDE. Perangkat Lunak ini mengubah penulisan
program yang berekstensi *.asm ke *.hex (bahasa pemrograman asembli
ke bahasa pemrograman mesin atau bilangan hexadesimal). Sedangkan
program yang dapat memasukkan file yang telah berekstensi *.hex ke
dalam memory adalah program.exe.
Metoda lainnya, yaitu metoda In System Programming (ISP) bekerja
dengan cara memasukkan program dari PC langsung ke sistem melalui
kabel port paralel (LPT) yang telah dimodifikasi dengan tambahan
komponen tertentu. Di hujung kabel paralel terdapat port yang
disambungkan dengan beberapa kaki tertentu dari IC mikrokontroler, yaitu
kaki MISO, MOSI, SCK, RESET, GND dan VCC.
Gambar 2.12. Peralatan Pengisian Program menggunakan In System
Programming
Penggunaan In System Programming (ISP) amat efisien, karena tidak
perlu menggunakan perangkat tambahan serta IC mikrokontroler tidak
perlu pula dipindah-pindah. Hal ini disebabkan, pemrograman dilakukan
langsung ke sistem dimana mikrokontroler terletak. Untuk penggunaan In
System Programming (ISP) perangkat lunak yang dipakai berasal dari
produsen IC mikrokontroler tersebut, seperti Atmel ISP dan lain-lain.