Motor Listrik.docx
32
TUGAS II MEKATRONIKA “MOTOR LISTRIK’ OLEH ALDO RIZAL 0810912047 EMIL YUSRA 0810913141 RONALD PUTRA 0810912078 DOSEN ZULKIFLI AMIN,PhD
-
Upload
ronald-putra -
Category
Documents
-
view
40 -
download
2
Transcript of Motor Listrik.docx

TUGAS II
MEKATRONIKA
“MOTOR LISTRIK’
OLEH
ALDO RIZAL 0810912047
EMIL YUSRA 0810913141
RONALD PUTRA 0810912078
DOSEN
ZULKIFLI AMIN,PhD
JURUSAN TEKNIK MESIN
FAKULTAS TEKNIK
UNIVERSITAS ANDALAS
2013

Motor DC
Motor DC merupakan jenis motor yang menggunakan tegangan searah sebagai sumber
tenaganya. Dengan memberikan beda tegangan pada kedua terminal tersebut, motor akan
berputar pada satu arah, dan bila polaritas dari tegangan tersebut dibalik maka arah putaran
motor akan terbalik pula. Polaritas dari tegangan yang diberikan pada dua terminal menentukan
arah putaran motor sedangkan besar dari beda tegangan pada kedua terminal menentukan
kecepatan motor.
Motor DC memiliki 2 bagian dasar :
1. Bagian yang tetap/stasioner yang disebut stator. Stator ini menghasilkan medan magnet, baik
yang dibangkitkan dari sebuah koil (elektro magnet) ataupun magnet permanen.
2. Bagian yang berputar disebut rotor. Rotor ini berupa sebuah koil dimana arus listrik
mengalir.
Gaya elektromagnet pada motor DC timbul saat ada arus yang mengalir pada penghantar
yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh megnet
permanen. Garis-garis gaya magnet mengalir diantara dua kutub magnet dari kutub utara ke
kutub selatan. Menurut hukum gaya Lourentz, arus yang mengalir pada penghantar yang terletak
dalam medan magnet akan menimbulkan gaya. Gaya F, timbul tergantung pada arah arus I, dan
arah medan magnet B.
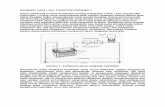
Belitan stator merupakan elektromagnet, dengan penguat magnet terpisah F1-F2. Belitan
jangkar ditopang oleh poros dengan ujung-ujungnya terhubung ke komutator dan sikat arang A1-
A2. Arus listrik DC pada penguat magnet mengalir dari F1 menuju F2 menghasilkan medan
Gambar Konstruksi Motor DC

magnet yang memotong belitan jangkar. Belitan jangkar diberikan listrik DC dari A2 menuju ke
A1. Sesuai kaidah tangan kiri jangkar akan berputar berlawanan jarum jam.
Gaya elektromagnet pada motor DC timbul saat ada arus yang mengalir pada penghantar
yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh megnet
permanen. Garis-garis gaya magnet mengalir diantara dua kutub magnet dari kutub utara ke
kutub selatan. Menurut hukum gaya Lourentz, arus yang mengalir pada penghantar yang terletak
dalam medan magnet akan menimbulkan gaya. Gaya F, timbul tergantung pada arah arus I, dan
arah medan magnet B. Arah gaya F dapat ditentukan dengan aturan tangan kiri seperti pada
gambar berikut.
Gambar Penentuan Arah Gaya Pada Kawat Berarus Listrik Dalam Medan Magnet
Berdasarkan sumber arus penguat magnetnya, motor arus searah (DC) dibedakan menjadi dua,
yaitu:
1. Motor arus searah penguat terpisah, (jika arus penguat magnet diperoleh dari sumber arus
searah di luar motor tersebut).
Pada motor penguat terpisah, kumparan medan dihubungkan dengan sumber sendiri dan
terpisah dengan tegangan angker.

2. Motor arus searah dengan penguat sendiri, (jika arus penguat magnet diperoleh dari motor itu
sendiri).
Berdasarkan hubungan lilitan penguat magnet terhadap lilitan jangkar, motor arus searah
dibedakan menjadi:
2.1 Motor Shunt
Motor shunt mempunyai kecapatan hampir konstan. Pada tegangan jepit konstan, motor ini
mempunyai putaran yang hampir konstan walaupun terjadi perubahan beban
Gambar Rangkain Motor Shunt
Pada motor penguat shunt, kumparan medan dihubungkan paralel dengan angker.

2.2 Motor seri
Merupakan motor arus searah yang mempunyai putaran kecapatan yang tidak konstan, jika
beban tinggi maka putaran akan lambat.
Gambar Rangkaian Motor Seri
2.3 Motor Kompon
Motor kompon ini mempunyai sifat seperti motor seri dan shunt, tergantung lilitan mana
yang kuat (kumparan seri atau shunt).
Gambar Rangkaian Motor Kompon Panjang

Pada motor kompon mempunyai dua buah kumparan medan dihubungkan seri dan paralel
dengan angker. Bila motor seri diberi penguat shunt tambahan seperti gambar diatas disebut
motor kompon shunt panjang.
Gambar Rangkain Motor Kompon Pendek
Motor kompon mempunyai dua buah kumparan medan dihubungkan seri dan paralel dengan
angker. Bila motor shunt diberi tambahan penguat seri seperti gambar diatas disebut motor
kompon shunt pendek.
Sebagai simulasi (karena alat yang dibuat miniatur) maka disini dipilih motor yang memiliki
daya tidak terlalu tinggi, yaitu menggunakan motor arus searah. Sedangkan motor yang
dipakai dalam proyek akhir ini adalah jenis motor arus searah dengan penguat sendiri karena
motor tersebut mempunyai magnet permanen pada statornya dan memperoleh sumber arus
searah dari motor itu sendiri. Untuk membalik arah putaran motor arus searah, dapat
dilakukan dengan dua cara yaitu :

1. Membalik arah arus angkernya, sedangkan katup magnet tetap.
2. Membalik katup magnetnya, sedangkan arah arus angkernya tetap.
Jika kedua-duanya dibalik (katup magnet dan arah arus angker), maka putaran motor akan
tetap (tidak dapat membalik). Cara yang lazim dipakai atau dilakukan dalam membalik
putaran motor arus searah ialah dengan cara membalik arah arus angkernya sedangkan
membalik arah arus pada penguat magnetnya jarang dilakukan.
Keuntungan dan kekurangan motor DC
Kelebihan motor DC jika dibandingkan dengan motor AC adalah:
1. Torka dan kecepatannya mudah dikendalikan
2. Torka awalnya besar
3. Performansinya mendekati linier
4. Sistem kontrolnya relatif lebih murah dan sederhana
5. Cocok untuk aplikasi motor servo karena respon dinamiknya yang baik
6. Untuk aplikasi berdaya rendah, motor DC lebih murah dari motor AC
Adapun kekuarangan dari motor DC adalah:
1. Membutuhkan perawatan yang ekstra
2. Lebih besar dan lebih mahal (jika dibandingkan dengan motor AC induksi)
3. Tidak cocok untuk aplikasi kecepatan tinggi
4. Tidak cocok untuk aplikasi berdaya besar
5. Tidak cocok digunakan pada kondisi lingkungan yang cepat berdebu
Jenis-Jenis Motor DC
Berdasarkan sumber arus eksitasinya, motor DC dapat dibagi menjadi 4 jenis yaitu motor
DC eksitasi terpisah (biasanya berupa motor DC magnet permanen atau motor stepper), motor
DC eksitasi seri, shunt, dan campuran seperti yang diperlihatkan pada bagan di bawah ini.

A. Karakteristik motor DC eksitasi terpisah adalah:
Kelebihan :
1. Kecepatan motor dan torka beban mudah untuk dikendalikan
2. Arus eksitasinya tidak bergantung dengan arus jangkarnya
Kekurangan :
1. Memerlukan dua buah sumber arus DC yang terpisah
B. Karakteristik motor DC eksitasi sendiri tipe Seri :
Kelebihan :
1. Torka yang dihasilkan berbanding kuadrat dengan arus sumber motor DC
2. Hanya memerlukan satu sumber DC
3. Rangkaian eksitasinya sederhana
Kekurangan :
1. Kecepatan motor bervariasi dan sensitif terhadap perubahan torka beban
2. Arus eksitasinya sebanding dengan arus jangkar, sehingga membutuhkan kawat medan
yang cukup besar
C. Karakteristik motor DC eksitasi sendiri tipe Shunt :
Kelebihan :
1. Regulasi kecepatan motor terhadap perubahan torka beban lebih stabil
2. Hanya memerlukan satu sumber DC
Kekurangan :
1. Torka yang dihasilkan relatif kecil
2. Kecepatan motor dan torka beban relatif sulit untuk dikendalikan
D. Karakteristik motor DC eksitasi sendiri tipe campuran/compound :
Tipe ini merupakan penggabungan dari motor DC seri dan motor DC shunt. Tujuan dari
tipe campuran ini adalah mendapatkan keleebihan yang ada dari masing-masing tipe. Torka yang
besar dari tipe seri dan regulasi tegangan yang baik dari tipe shunt. Berdasarkan tujuan tersebut
inilah, motor DC tipe compound dapat dibedakan menjadi 2 tipe yaitu, compound panjang dan
tipe compound pendek.

Motor AC
Motor arus bolak-balik menggunakan arus listrik yang membalikkan arahnya secara
teratur pada rentang waktu tertentu. Motor listrik memiliki dua buah bagian dasar listrik: "stator"
dan "rotor" seperti ditunjukkan daalam Gambar 7. Stator merupakan komponen listrik statis.
Rotor merupakan komponen listrik berputar untuk memutar as motor. Keuntungan utama motor
DC terhadap motor AC adalah bahwa kecepatan motor AC lebih sulit dikendalikan. Untuk
mengatasi kerugian ini, motor AC dapat dilengkapi dengan penggerak frekwensi variabel untuk
meningkatkan kendali kecepatan sekaligus menurunkan dayanya. Motor induksi merupakan
motor yang paling populer di industri karena kehandalannya dan lebih mudah perawatannya.
Motor induksi AC cukup murah (harganya setengah atau kurang dari harga sebuah motor DC)
dan juga memberikan rasio daya terhadap berat yang cukup tinggi (sekitar dua kali motor DC).
2.1 Motor sinkron
Motor sinkron adalah motor AC, bekerja pada kecepatan tetap pada sistim frekwensi
tertentu. Motor ini memerlukan arus searah (DC) untuk pembangkitan daya dan memiliki torque
awal yang rendah, dan oleh karena itu motor sinkron cocok untuk penggunaan awal dengan
beban rendah, seperti kompresor udara, perubahan frekwensi dan generator motor. Motor sinkron
mampu untuk memperbaiki faktor daya sistim, sehingga sering digunakan pada sistim yang
menggunakan banyak listrik.
Komponen utama motor sinkron adalah (Gambar 7):
Rotor. Perbedaan utama antara motor sinkron dengan motor induksi adalah bahwa rotor
mesin sinkron berjalan pada kecepatan yang sama dengan perputaran medan magnet. Hal ini
memungkinkan sebab medan magnit rotor tidak lagi terinduksi. Rotor memiliki magnet
permanen atau arus DC-excited, yang dipaksa untuk mengunci pada posisi tertentu bila
dihadapkan dengan medan magnet lainnya.

Stator. Stator menghasilkan medan magnet berputar yang sebanding dengan frekwensi yang
dipasok.
Motor ini berputar pada kecepatan sinkron, yang diberikan oleh persamaan berikut (Parekh,
2003):
Dimana:
f = frekwensi dari pasokan frekwensi
P= jumlah kutub
2.2 Motor induksi
Motor induksi merupakan motor yang paling umum digunakan pada berbagai peralatan industri.
Popularitasnya karena rancangannya yang sederhana, murah dan mudah didapat, dan dapat
langsung disambungkan ke sumber daya AC.
a. Komponen
Motor induksi memiliki dua komponen listrik utama (Gambar 8):
· Rotor. Motor induksi menggunakan dua jenis rotor:
Rotor kandang tupai terdiri dari batang penghantar tebal yang dilekatka dalam petak-petak
slots paralel. Batang-batang tersebut diberi hubungan pendek pada kedua ujungnya dengan
alat cincin hubungan pendek.
Lingkaran rotor yang memiliki gulungan tiga fase, lapisan ganda dan terdistribusi. Dibuat
melingkar sebanyak kutub stator. Tiga fase digulungi kawat pada bagian dalamnya dan
ujung yang lainnya dihubungkan ke cincin kecil yang dipasang pada batang as dengan
sikat yang menempel padanya.
· Stator. Stator dibuat dari sejumlah stampings dengan slots untuk membawa gulungan tiga fase.
Gulungan ini dilingkarkan untuk sejumlah kutub yang tertentu. Gulungan diberi spasi geometri
sebesar 120 derajat

b. Klasifikasi motor induksi
Motor induksi dapat diklasifikasikan menjadi dua kelompok utama (Parekh, 2003):
Motor induksi satu fase. Motor ini hanya memiliki satu gulungan stator, beroperasi
dengan pasokan daya satu fase, memiliki sebuah rotor kandang tupai, dan memerlukan
sebuah alat untuk menghidupkan motornya. Sejauh ini motor ini merupakan jenis motor
yang paling umum digunakan dalam peralatan rumah tangga, seperti fan angin, mesin
cuci dan pengering pakaian, dan untuk penggunaan hingga 3 sampai 4 Hp.
Motor induksi tiga fase. Medan magnet yang berputar dihasilkan oleh pasokan tiga fase
yang seimbang. Motor tersebut memiliki kemampuan daya yang tinggi, dapat memiliki
kandang tupai atau gulungan rotor (walaupun 90% memiliki rotor kandang tupai); dan
penyalaan sendiri. Diperkirakan bahwa sekitar 70% motor di industri menggunakan jenis
ini, sebagai contoh, pompa, kompresor, belt conveyor, jaringan listrik , dan grinder.
Tersedia dalam ukuran 1/3 hingga ratusan Hp.
c. Kecepatan motor induksi
Motor induksi bekerja sebagai berikut. Listrik dipasok ke stator yang akan menghasilkan medan
magnet. Medan magnet ini bergerak dengan kecepatan sinkron disekitar rotor. Arus rotor
menghasilkan medan magnet kedua, yang berusaha untuk melawan medan magnet stator, yang
menyebabkan rotor berputar.
Walaupun begitu, didalam prakteknya motor tidak pernah bekerja pada kecepatan sinkron namun
pada “kecepatan dasar” yang lebih rendah. Terjadinya perbedaan antara dua kecepatan tersebut
disebabkan adanya “slip/geseran” yang meningkat dengan meningkatnya beban. Slip hanya
terjadi pada motor induksi. Untuk menghindari slip dapat dipasang sebuah cincin geser/ slip ring,
dan motor tersebut dinamakan “motor cincin geser/ slip ring motor”.
Persamaan berikut dapat digunakan untuk menghitung persentase slip/geseran (Parekh,
2003):
Dimana:
Ns = kecepatan sinkron dalam RPM
Nb = kecepatan dasar dalam RPM

d. Hubungan antara beban, kecepatan dan torque
Gambar 9 menunjukan grafik torque-kecepatan motor induksi AC tiga fase dengan arus yang
sudah ditetapkan. Bila motor (Parekh, 2003):
- Mulai menyala ternyata terdapat arus nyala awal yang tinggi dan torque yang rendah
(“pull-up torque”).
- Mencapai 80% kecepatan penuh, torque berada pada tingkat tertinggi (“pull-out
torque”) dan arus mulai turun.
- Pada kecepatan penuh, atau kecepatan sinkron, arus torque dan stator turun ke nol.
Keuntungan dan kekurangan motor AC
Motor industri yang paling umum dan sederhana adalah tiga fase motor induksi AC, kadang-
kadang dikenal sebagai motor "sangkar tupai". informasi substansial dapat ditemukan mengenai
motor dengan memeriksa (rancang) nya.
Keuntungan ;
• Desain Sederhana
• Biaya rendah
• Pengoperasian Terpercaya
• Mudah Ditemukan Penggantian
• Ragam Mounting Styles
• Banyak Lampiran Lingkungan Berbeda

Desain sederhana
Desain sederhana motor AC - hanya serangkaian tiga gulungan dalam ayat (stator) eksterior
dengan bagian berputar sederhana (rotor). Bidang mengubah disebabkan oleh 50 atau 60 Hertz
tegangan AC garis menyebabkan rotor berputar di sekitar sumbu motor.
Kecepatan motor AC tergantung hanya pada tiga variabel:
1. Jumlah tetap set berkelok-kelok (dikenal sebagai tiang) dibangun ke motor, yang menentukan
kecepatan dasar motor.
2. Frekuensi dari tegangan saluran AC. Variabel kecepatan drive perubahan frekuensi ini untuk
mengubah kecepatan motor.
3. Jumlah pembebanan torsi pada motor, yang menyebabkan slip.
Biaya rendah
Motor AC memiliki keuntungan menjadi motor biaya terendah untuk aplikasi yang memerlukan
lebih dari sekitar 1 / 2 hp (325 watt) kekuasaan. Hal ini disebabkan desain sederhana motor.
Untuk alasan ini, motor AC yang sangat disukai untuk aplikasi kecepatan tetap dalam aplikasi
industri dan untuk aplikasi komersial dan domestik di mana AC power line dapat dengan mudah
menempel. Lebih dari 90% dari semua motor adalah motor AC induksi. Mereka ditemukan di
AC, mesin cuci, pengering, mesin industri, fans, blower, penyedot debu, dan banyak, banyak
aplikasi lainnya.
Reliable Operasi
Desain sederhana dari hasil AC motor di sangat dapat diandalkan, operasi, pemeliharaan rendah.
Berbeda dengan motor DC, tidak ada sikat untuk mengganti. Jika berjalan di lingkungan yang
sesuai untuk kandang, motor AC dapat mengharapkan untuk kebutuhan bantalan baru setelah
beberapa tahun beroperasi. Jika aplikasi tersebut dirancang dengan baik, sebuah motor AC
mungkin tidak perlu bantalan baru untuk lebih dari satu dekade.
Penggantian Mudah Ditemukan
Luasnya penggunaan motor AC telah menyebabkan penggantian dengan mudah ditemukan.
Banyak produsen mematuhi baik (NEMA) standar Eropa (metrik) atau Amerika. (Untuk Motors
Penggantian)

Ragam Mounting Styles
Motor AC yang tersedia di banyak gaya mount yang berbeda seperti:
• Kaki Gunung
• C-Face
• Besar Flange
• Vertikal
• Specialty
Banyak Lampiran Lingkungan yang berbeda
Karena berbagai lingkungan di mana orang ingin menggunakan motor, motor AC telah
disesuaikan dengan menyediakan berbagai lampiran:
• ODP - Bukti Drip Terbuka
• TEFC - Fan Totally Tertutup Berpendingin
• TEAO - Totally Udara Tertutup Selama
• TEBC - Totally Tertutup Blower Berpendingin
• TENV - Totally Terlampir Non-Ventilasi
• TEWC - Benar-benar Tertutup Berpendingin Air
Kekurangan
• Mahal kontrol kecepatan
• Ketidakmampuan untuk beroperasi pada kecepatan rendah
• Miskin posisi kontrol
Mahal kontrol kecepatan
Speed kontrol mahal. Elektronik yang dibutuhkan untuk menangani drive inverter AC yang jauh
lebih mahal dari yang dibutuhkan untuk menangani motor DC. Namun, jika persyaratan kinerja
dapat dipenuhi - yang berarti bahwa rentang kecepatan yang dibutuhkan adalah lebih dari 1/3rd
kecepatan dasar - AC inverter dan motor AC biasanya lebih hemat biaya daripada motor DC dan
DC drive untuk aplikasi yang lebih besar dari sekitar 10 tenaga kuda , karena penghematan biaya
dalam motor AC.
Ketidakmampuan untuk beroperasi pada kecepatan rendah
AC motor standar tidak boleh beroperasi pada kecepatan kurang dari sekitar 1/3rd kecepatan
dasar. Hal ini karena pertimbangan termal. Sebuah motor DC harus dipertimbangkan untuk
aplikasi ini.

Miskin posisi kontrol
Positioning kontrol mahal dan kasar. Bahkan drive vektor sangat kasar ketika mengendalikan
motor AC standar. Servo motor lebih tepat untuk aplikasi ini.
Motor Linier
Motor Induksi Linier adalah sebuah motor linier sinkron AC dimana prinsip kerjanya sama
dengan motor induksi lainnya tapi pada LIM didesain untuk menghasilkan gerak lurus saja.
Pada desain motor elektrik kali ini,kekuatan yang dihasilkan yaitu untuk menggerakkan bidang
magnetik secara linier di atas bidang penghantar. Alat penghantar apapun,ini akan menjadi
proses yang berulang-ulang,sebuah koil atau hanya beberapa lembar dari lempeng logam,
dimana lempeng logam tadi akan ditaruh di atas bidang penghantar maka arus Eddy akan
menginduksinya barulah kemudian muncul medan magnet yang berlawanan.
Menurut hukum Lenz’s.Dua bidang yang mempunyai medan magnet berlawanan maka akan
terjadi tolak menolak antara satu dengan yang lainnya,kemudian dari sini muncul medan magnet
yang melalui lempeng logam. Motor induksi linier mempunyai prinsip kerja yang sama dengan
motor induksi squirel cage. motor induksi squirel cage dapat menjadi motor induksi linier hanya
dengan meluruskan koil menjadi bidang datar (flat).
Prinsip Kerja Motor Induksi Linier
Gambar Motor Induksi Linier
Bila Dilihat dari gambar, Ketika koil disupply tegangan AC, maka akan menghasilkan
gelombang magnetik yang berkeliling. Arus diinduksi di dalam lempeng reaction oleh
gelombang magnetik yang berkeliling membuat sebuah secondary magnetic. Ini tidak menjamin
untuk dapat menjaga bidang (field) yang bergerak sinkron agar dapat tetap berada pada posisi
lempeng reaction, dari saat bidang (field) kedua diinduksi oleh stator koil. Jadi sebuah daya tolak
linier akan dihasilkan dari reaksi di antara kedua bidang tersebut.

Motor Stepper
Motor stepper adalah perangkat elektromekanis yang bekerja dengan mengubah pulsa elektronis
menjadi gerakan mekanis diskrit. Motor stepper bergerak berdasarkan urutan pulsa yang
diberikan kepada motor. Karena itu, untuk menggerakkan motor stepper diperlukan pengendali
motor stepper yang membangkitkan pulsa-pulsa periodik. Penggunaan motor stepper memiliki
beberapa keunggulan dibandingkan dengan penggunaan motor DC biasa. Keunggulannya antara
lain adalah :
Sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih mudah diatur.
Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak
Posisi dan pergerakan repetisinya dapat ditentukan secara presisi
Memiliki respon yang sangat baik terhadap mulai, stop dan berbalik (perputaran)
Sangat realibel karena tidak adanya sikat yang bersentuhan dengan rotor seperti pada
motor DC
Dapat menghasilkan perputaran yang lambat sehingga beban dapat dikopel langsung ke
porosnya
Frekuensi perputaran dapat ditentukan secara bebas dan mudah pada range yang luas.
Pada dasaranya terdapat 3 tipe motor stepper yaitu:
1. Motor stepper tipe Variable reluctance (VR)
Motor stepper jenis ini telah lama ada dan merupakan jenis motor yang secara struktural
paling mudah untuk dipahami. Motor ini terdiri atas sebuah rotor besi lunak dengan
beberapa gerigi dan sebuah lilitan stator. Ketika lilitan stator diberi energi dengan arus
DC, kutub-kutubnya menjadi termagnetasi. Perputaran terjadi ketika gigi-gigi rotor
tertarik oleh kutub-kutub stator. Berikut ini adalah penampang melintang dari motor
stepper tipe variable reluctance (VR):

Gambar Penampang melintang dari motor stepper tipe variable reluctance (VR)
2. Motor stepper tipe Permanent Magnet (PM)
Motor stepper jenis ini memiliki rotor yang berbentuk seperti kaleng bundar (tin can)
yang terdiri atas lapisan magnet permanen yang diselang-seling dengan kutub yang
berlawanan (perhatikan gambar 2.9). Dengan adanya magnet permanen, maka
intensitas fluks magnet dalam motor ini akan meningkat sehingga dapat
menghasilkan torsi yang lebih besar. Motor jenis ini biasanya memiliki resolusi
langkah (step) yang rendah yaitu antara 7,50 hingga 150 per langkah atau 48 hingga 24
langkah setiap putarannya. Berikut ini adalah ilustrasi sederhana dari motor stepper
tipe permanent magnet:
Gambar 2.9. Ilustrasi sederhana dari motor stepper tipe permanent magnet (PM)
3. Motor stepper tipe Hybrid (HB)
Motor stepper tipe hibrid memiliki struktur yang merupakan kombinasi dari kedua
tipe motor stepper sebelumnya. Motor stepper tipe hibrid memiliki gigi-gigi seperti
pada motor tipe VR dan juga memiliki magnet permanen yang tersusun secara aksial
pada batang porosnya seperti motor tipe PM. Motor tipe ini paling banyak digunkan
dalam berbagai aplikasi karena kinerja lebih baik. Motor tipe hibrid dapat
menghasilkan resolusi langkah yang tinggi yaitu antara 3,60 hingga 0,90 per langkah

atau 100-400 langkah setiap putarannya. Berikut ini adalah penampang melintang
dari motor stepper tipe hibrid:
Gambar Penampang melintang dari motor stepper tipe hibrid
Berdasarkan metode perancangan rangkain pengendalinya, motor stepper dapat
dibagi menjadi jenis unipolar dan bipolar. Rangkaian pengendali motor stepper
unipolar lebih mudah dirancang karena hanya memerlukan satu switch / transistor
setiap lilitannya. Untuk menjalankan dan menghentikan motor ini cukup dengan
menerapkan pulsa digital yang hanya terdiri atas tegangan positif dan nol (ground)
pada salah satu terminal lilitan (wound) motor sementara terminal lainnya dicatu
dengan tegangan positif konstan (VM) pada bagian tengah (center tap) dari lilitan
(perhatikan gambar 2.11).
Gambar Motor stepper dengan lilitan unipolar
Untuk motor stepper dengan lilitan bipolar, diperlukan sinyal pulsa yang berubah-
ubah dari positif ke negatif dan sebaliknya. Jadi pada setiap terminal lilitan (A & B)
harus dihubungkan dengan sinyal yang mengayun dari positif ke negatif dan
sebaliknya (perhatikan gambar 2.12). Karena itu dibutuhkan rangkaian pengendali
yang agak lebih kompleks daripada rangkaian pengendali untuk motor unipolar.

Motor stepper bipolar memiliki keunggulan dibandingkan dengan motor stepper
unipolar dalam hal torsi yang lebih besar untuk ukuran yang sama.
Gambar 2.12. Motor stepper dengan lilitan bipolar
Motor Servo
Motor servo adalah motor yang mampu bekerja dua arah (CW dan CCW) dimana arah dan sudut
pergerakan rotornya dapat dikendalikan hanya dengan memberikan pengaturan duty cycle sinyal
PWM pada bagian pin kontrolnya. Motor servo merupakan sebuah motor dengan sistem closed
feedback di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada
di dalam motor servo.
Motor Servo ditunjukkan pada gambar 1:
Gambar Parallax standard servo
Parallax Standard Servo (Gambar 1) memiliki spesifikasi sebagai berikut:
>>Catu daya : 6 VDC (maksimum),
>>Waktu putar : 1,5 detik / 180 derajat (rata-rata),
>>Berat fisik : 45 gram,
>>Torsi putar : 3,40 kg-cm,
>>Ukuran fisik : 40,5 mm (P) x 20,0 mm (L) x 38,0 mm (T).[12]

Motor ini terdiri dari sebuah motor, serangkaian gear, potensiometer dan rangkaian kontrol.
Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari
sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel
motor (gambar 2)
Gambar 2. Sistem Mekanik Motor Servo
Motor servo biasanya hanya bergerak mencapai sudut tertentu saja dan tidak kontinyu seperti
motor DC maupun motor stepper. Walau demikian, untuk beberapa keperluan tertentu, motor
servo dapat dimodifikasi agar bergerak kontinyu. Pada robot, motor ini sering digunakan untuk
bagian kaki, lengan atau bagian bagian lain yang mempunyai gerakan terbatas dan membutuhkan
torsi cukup besar.
Motor servo adalah motor yang berputar lambat, dimana biasanya ditunjukkan oleh rate
putarannya yang lambat, namun demikian memiliki torsi yang kuat karena internal gearnya.
Lebih dalam dapat digambarkan bahwa sebuah motor servo memiliki :
>>Jalur kabel : power, ground, dan control
>>Sinyal control mengendalikan posisi
>>Operasional dari servo motor dikendalikan oleh sebuah pulsa selebar ± 20 ms, dimana lebar
pulsa antara 0.5 ms dan 2 ms menyatakan akhir dari range sudut maksimum.
>>Konstruksi didalamnya meliputi internal gear, potensiometer, dan feedback control.
Sedangkan warna dari masing-masing kabel bergantung pada merek servo tersebut, Beberapa di
antaranya terlihat pada gambar di bawah ini :

Gambar 3.Beberapa jenis kabel motor servo untuk menentukan sinyal input
Cara yang paling mudah untuk menentukan posisi kabel signal adalah dengang mengingat Kabel
Merah adalah (+), Kabel Hitam adalah (-), Warna lain selain Merah dan hitam adalah kabel
signal.
Untuk dapat melakukan controling pada servo, kabel signal di sambung langsung pada Salah satu
port Mikrocontroller, dan di set sebagai Output. kemudian servo di beri suplay 5-6 V. Sedangkan
nilai sinyal yang di kirm dan sudut yang di hasilkan terlihat seperti pada gambar 3.
Gambar 3. Nilai sinyal yang dikirim dan sudut yang dihasilkan
Jenis-jenis motor servo
>>Motor Servo Standar 180°
Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-
masing sudut mencapai 90° sehingga total defleksi sudut dari kanan – tengah – kiri adalah 180°.
>>Motor Servo Continuous
Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut
putar (dapat berputar secara kontinyu).

Kegunaan motor servo
Kebanyakan motor servo digunakan sebagai :
>>Manipulators.
>>Moving camera’s.
>>Robot arms.
Pensinyalan motor servo
Mode pensinyalan motor servo tampak pada gambar berikut :
Gambar 4. Pensinyalan Motor Servo
Contoh dimana bila diberikan pulsa dengan besar 1.5ms mencapai gerakan 90 derajat, maka bila
kita berikan data kurang dari 1.5 ms maka posisi mendekati 0 derajat dan bila kita berikan data
lebih dari 1.5 ms maka posisi mendekati 180 derajat. Contoh Posisi dan Waktu Pemberian Pulsa
tampak pada gambar 5.
Contoh 5. Posisi dan Waktu Pemberian Pulsa
Keteangan gambar 5 :
>>Motor Servo akan bekerja secara baik jika pada bagian pin kontrolnya diberikan sinyal PWM
dengan frekuensi 50Hz.
>>Dimana pada saat sinyal dengan frekuensi 50Hz tersebut dicapai pada kondisi Ton duty cycle
1.5ms, maka rotor dari motor akan berhenti tepat di tengah-tengah (sudut 0° / netral).

>>Pada saat Ton duty cycle dari sinyal yang diberikan kurang dari 1.5ms, maka rotor akan
berputar ke arah kiri dengan membentuk sudut yang besarnya linier terhadap besarnya Ton duty
cycle, dan akan bertahan diposisi tersebut.
>>Dan sebaliknya, jika Ton duty cycle dari sinyal yang diberikan lebih dari 1.5ms, maka rotor
akan berputar ke arah kanan dengan membentuk sudut yang linier pula terhadap besarnya Ton
duty cycle, dan bertahan diposisi tersebut.
Dimensi Motor Servo tampak pada gambar 6.
Gambar 6. Dimensi motor servo
Gambar 7. Pin-pin dan pengkabelan pada motor servo
Driver motor DC Servo
Bentuk motor servo dapat dilihat pada gambar 5. Terdapat tiga utas kabel dengan warnamerah,
hitam, dan kuning. Kabel merah dan hitam harus dihubungkan dengan sumber tegangan 4-6 volt
dc agar motor servo dapat bekerja normal. Sedangkan kabel berwarna kuning adalahkabel data
yang dipakai untuk mengatur arah gerak dan posisi servo. Pergerakan motor servo terhadap
perubahan lebar pulsa tampak pada gambar 8.
Gambar 8. Pergerakan motor servo terhadap perubahan lebar pulsa

Rangkaian motor servo
Rangkaian berikut adalah rangkaian driver motor servo. Rangkaian tersebut digunakan untuk
mengendalikan motor servo.
Gambar 9. Rangkaian driver motor servo