PENGENDALIAN KEBISINGAN BERDASARKAN KONTUR LEVEL INTENSITAS KEBISINGAN
Upload
bayu-ragilCategory
view
453download
76description

PENGENDALIAN PROSESSEMESTER GENAP TAHUN AJARAN 2015/2016
MODUL : Pengendalian Level
PEMBIMBING : Ir. Heriyanto
Oleh :
Kelompok : VI
Nama : Prima Dia Utami (141411052)
Rahmad Catur Bayu (141411053)
Rd. Riana Gumelar P (141411054)
Kelas : 2B – Teknik Kimia
PROGRAM STUDI DIPLOMA III TEKNIK KIMIA
JURUSAN TEKNIK KIMIA
POLITEKNIK NEGERI BANDUNG2016
Praktikum : 22 Maret 2016Penyerahan Laporan : 29 Maret 2016

PENGENDALIAN LEVEL
I. TUJUAN
1. Menentukan kurva karakteristik static pada beban berbeda.
2. Melakukan identifikasi system untuk menentukan parameter model proses.
3. Mempelajari pengaruh nilai parameter pengendali pada respon level.
II. LANDASAN TEORI
II.1 Karakteristik Statik
Karakteristik system proses adalah perilaku system yang tidak bergantung waktu.
Dengan kata lain menunjukan hubungan steady-state antara variable proses dan sinyal
kendali. Karakteristik static lebih baik digambarkan dalam bentuk kurva hubungan
antara variable proses dan sinyal kendali. Dari situ dapat dilihat pada sinyal kendali
berapa untuk menghasilkan nilai variable proses tertentu. Dengan karakteristik static
dapat diperoleh informasi:
Linieritas system.
Jenis aksi system proses (direct atau reverse acting)
Steady state gain (Kc)
Pengaruh beban pada kebutuhan besar manipulated variable
Batas pengendalian yang dapat dilakukan (controllability)
II.2 Identifikasi Sistem Proses
Identifikasi system proses dilakukan untuk mengetahui parameter model proses.
Metode sederhana dapat dilakukan dengan uji kurva reaksi. Uji dilakukan dengan
mengubah nilai sinyal kendali pada kerja/operasi ke nilai baru, misal dari 60% ke
70%. Dari uji kurva reaksi dapat diperoleh model FOPDT (first order plus dead time)
yang memiliki tiga parameter:
Steady state gain (Kp), yang menentukan sensitivitas respon
Time constant (τp), yang menentukan kecepatan respon.
Dead time (θp), yang menentukan besar tundaan respon.
II.3 Pengendalian Level
Dalam pengendalian level ini sebagai PV adalah level air, MV adalah level air
masuk, SP adalah level yang diinginkan, gangguan adalah level air keluar. Sebagai
sensor level adalah jenis sensor tekanan hidrostatik. Tekanan hidrostatik menunjukkan

tinggi level cairan. Oleh transmitter, ketinggian cairan dikorelasikn dengan sinyal arus
4-20 mA. Sinyal dari transmitter dikirim ke pengendali (computer). Aksi pengendali
berjenis berkebalikan (reverse acting). Artinya jika level naik maka level air yang
masuk berkurang.
Sinyal kendali dari pengendali (computer) berupa sinyal tegangan 1-5 V, yang
selanjutnya diubah menjadi sinyal arus 4-20 mA. Oleh converter sinyal arus diubah
menjadi sinyal pneumatic 0,2-1 bar (3-15 psi). Control valve (unit kendali akhir)
adalah jenis pneumatic yang mendapat sinyal pneumatic tersebut.
II.4 Pengaruh Parameter Pengendali
Parameter pengendali PID adalah: gain (Kc) atau Proportional Band (PB), waktu
integral (τi), dan waktu derivative (τd). Pengaruh masing masing adalah:
Gain proportional: semakin besar nilainya, respon semakin cepat tetapi
system cenderung tidak stabil. Pada pengendali proportional saja (P-
control) dengan memperbesar Kc maka offset lebih kecil.
Waktu integral: integral menghilangkan offset, menambah tundaan
(pergeseran fase), dan membuat system cenderung tak stabil (overshoot dan
decay ratio semakin besar). Semakin kecil waktu integral, respon semakin
cepat tetapi semakin tak stabil.
Waktu derivative: derivative tidak menghilangkan offset, mempercepat
respons, membuat system lebih stabil (overshoot dan decay ratio semakin
kecil ) tetapi system menjadi peka terhadap gangguan cepat (noise).
Semakin besar waktu derivative respons semakin cepat.

III. PERALATAN
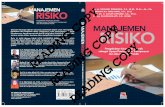
Diagram instrument dari pengendalian level sebagai berikut.
Gambar 1. Diagram instrument pengendalian level
Gambar 2. Susunan Peralatan

Keterangan Gambar:
1. Bak berisi air 8. Pengendali luar
2. Pompa 9. Panel kendali
3. Control valve 10. Komputer
4. I/P transmitter 11. Tangki penampung
5. Udara instrument 12. Katung buang manual
6. Manometer 13. Sensor dan transmitter level
7. Regulator tekanan udara 14. Katup solenoida
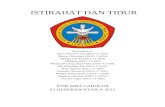
IV. PERCOBAAN4.1 Kurva karakteristik statik
10% 20% 30% 40% 50% 60% 70% 80% 90% 100% 110%0
2
4
6
8
10
12
14
16
SInyal Kendali (MV)
Tekn
an (P
si)
Gambar 3. Kurva antara Tekanan dengan Sinyal Kendali

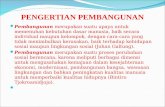
4.2 Menentukan konstanta waktu proses (τp), steady state gain (Kp), dan waktu mati (θp).
0 100 200 300 400 500 600 7000
10
20
30
40
50
60
70
80
90
100PV SP
Waktu (s)
Leve
l (%
)
Gambar 4. Grafik Variable Proses dan Set Point
0 100 200 300 400 500 600 7000
20
40
60
80
100
120
Waktu (s)
Laju
Alir
(%)
Gambar 5. Grafik Manipulated Variable
Kp, dapat ditentukan dengan :
Kp=∆ y∆ u
Kp= 55,08−49,5465,04−55 ,28
=0 ,567
∆ y
∆ u
t (6,32)t (start )

τp, dapat ditentukan dengan:
Pertama, tentukan dulu tstart, pada proses ini tstart pada waktu : 496 s Tentukan titik y pada saat y63,2, dengan cara:
y (63,2 )=49,73+∆ y (0,632 )
y (63,2 )=49,73+3,5=53,23
Setelah menemukan titik y63,2, plot titik tersebut terhadap waktu, dan didapat t63,2. Tentukan τp dengan:
τ ( p )=t (63,2 )−t (start )
τ ( p )=536−496=40 s
θp, dapat ditentukan dengan:
Tentukan tUstep dengan melihat waktu ketika merubah sinyal kendali. tUstep bernilai: 486 s Lihat proses ketika menghasilkan data terukur dengan jelas, disebut dengan tstart, yang
bernilai : 505 s Tentukan θp dengan:
θ ( p )=t (start )−t (Ustep )
θ ( p )=505−486=19 s

4.3 Pengendali Proportional (P)
Kondisi 1 :
PB = 200%
τi = 100000 s
0 50 100 150 200 250 300 350 400 450 5000
10
20
30
40
50
60
70
80PV SP
0 50 100 150 200 250 300 350 400 450 5000
2
4
6
8
10
12
14
16
18
20

Kondisi 2 :
PB = 100 %
τi = 100000 s
0 20 40 60 80 100 1200
10
20
30
40
50
60
70
80PV SP
0 20 40 60 80 100 1200
5
10
15
20
25
30

Kondisi 3 :
PB = 400%
τi = 100000 s
0 20 40 60 80 100 1200
10
20
30
40
50
60
70
80PV SP
0 20 40 60 80 100 1200
1
2
3
4
5
6
7
8

4.4 Pengendali Proportional – Integral
Kondisi 1 :
PB = 200%
τi = 0,5 s
0 20 40 60 80 100 120 140 1600
10
20
30
40
50
60
70
80PV SP
0 20 40 60 80 100 120 140 1600
5
10
15
20
25

Kondisi 2 :
PB = 100%
τi = 0,5 s
0 20 40 60 80 100 120 1400
10
20
30
40
50
60
70
80PV SP
0 20 40 60 80 100 120 1400
5
10
15
20
25
30
35
40
45

Kondisi 3 :
PB = 200 %
τi = 1 s
0 20 40 60 80 100 120 140 1600
10
20
30
40
50
60
70
80PV SP
0 20 40 60 80 100 120 140 1600
2
4
6
8
10
12
14
16
18
20

Kondisi 4 :
PB = 100%
τi = 1 s
0 20 40 60 80 100 120 140 1600
10
20
30
40
50
60
70
80PV SP
0 20 40 60 80 100 120 140 1600
5
10
15
20
25
30
35
40

4.5 Pengendali Proporsional – Integral – Derivative
Kondisi 1 :
PB = 200 %
τi = 0,5 s
τd = 0,5 s
0 20 40 60 80 100 120 140 160 180 2000
10
20
30
40
50
60
70
80
90
100PV SP
0 20 40 60 80 100 120 140 160 180 2000
10
20
30
40
50
60

Kondisi 2 :
PB = 200 %
τi = 1 s
τd = 0,5 s
0 20 40 60 80 100 120 1400
10
20
30
40
50
60
70
80PV SP
0 20 40 60 80 100 120 1400
5
10
15
20
25
30
35
40

Kondisi 3 :
PB = 200 %
τi = 2 s
τd = 0,5 s
0 20 40 60 80 100 1200
10
20
30
40
50
60
70
80PV SP
0 20 40 60 80 100 1200
10
20
30
40
50
60

Kondisi 4 :
PB = 100 %
τi = 0,5 s
τd = 1 s
0 20 40 60 80 100 120 140 1600
10
20
30
40
50
60
70
80PV SP
0 20 40 60 80 100 120 140 1600
20
40
60
80
100
120

Kondisi 5 :
PB = 100 %
τi = 1 s
τd = 1 s
0 20 40 60 80 100 120 140 1600
10
20
30
40
50
60
70
80PV SP
0 20 40 60 80 100 120 140 1600
20
40
60
80
100
120

Kondisi 6 :
PB = 100 %
τi = 2 s
τd = 1 s
0 20 40 60 80 100 120 140 1600
10
20
30
40
50
60
70
80PV SP
0 20 40 60 80 100 120 140 1600
20
40
60
80
100
120

Kondisi 7 :
PB = 50 %
τi = 0,5 s
τd = 2 s
0 20 40 60 80 100 120 140 160 180 2000
10
20
30
40
50
60
70
80PV SP
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120

Kondisi 8 :
PB = 50 %
τi = 1 s
τd = 2 s
0 50 100 150 200 2500
10
20
30
40
50
60
70
80
90PV SP
0 50 100 150 200 2500
20
40
60
80
100
120

Kondisi 9 :
PB = 50 %
τi = 2 s
τd = 2 s
0 20 40 60 80 100 120 140 160 180 2000
10
20
30
40
50
60
70
80PV SP
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120

V. PEMBAHASAN
5.1 Prima Dia Utami (141411052)
5.2 Rahmad Catur Bayu Ragil (141411053)
5.4 Rd. Riana Gumelar Pratama (141411054)
Pada praktikum pengendalian level ini, instrument menggunakan sensor dengan jenis sensor tekanan hidrostatik dimana tekanan hidrostatik ini akan menunjukan tinggi level cairan. Aksi pengendali yang berfungsi pada proses ini adalah reverse acting, dimana jika level naik maka level air yang masuk pun akan berkurang.
Pada percobaan pertama, yakni membuat kurva karakteristik static antara tekanan dengan sinyal kendali. Dari kurva static, dilihat bahwa semakin tinggi sinyal kendali yang diberikan, maka tekanan pun semakin tinggi, dan ketika sinyal kendali pada saat maksimum, menunjukan bahwa tekanan maksimum pada proses tersebut adalah sebesar 15 psi. Papa proses, terlihat bahwa system merupakan linier.
Pada percobaan kedua, dilakukan identifikasi pada system proses, dengan cara ketika system berada pada keadaan steady state sinyal kendali diubah dengan menambahkan 10% dari nilai sinyal kendali sebelumnya. Dan dari reaksi tersebut, dapat terlihat sensitivitas, kecepatan serta besar tundaan respon. Setelah diidentifikasi, nilai Kp pada proses sebesar 0,567 dimana nilai tersebut bernilai positif yang menujukan bahwa proses berjalan dengan aksi berupa reverse actin, nilai Kp sendiri menunjukan respon perubahan ketika controller diubah (sensitivitas). Identifikasi selanjutnya yakni nilai dari τp, nilai waktu konstan pada proses sebesar 40 s, dimana hal tersebut menunjukan seberapa cepat sebuah variable proses yang terukur ketika controller diubah secara tiba tiba. Identifikasi selanjutnya yaitu θp, nilai dari waktu mati proses sebesar 19 s, hal tersebut menunjukan waktu yang berjalan atau dilewati (tunda) dari ketika controller diubah hingga ketika proses variable terukur dengan jelas.
Pada percobaan selanjutnya yakni dilakukan percobaan dengan pengendali P, pengendali P merupakan pengendali paling sederhana dalam pengendalian proses. Pengendali P berfungsi agar pengukuran atau hasil sama dengan set point, akan tetapi pada pengendali ini, timbul masalah yaitu offset. Offset timbul jika setpoint dan proses variable tidak berada pada posisi yang sama. Sehingga pada percobaan yang dilakukan, masih ada offset yang dihasilkan, akan tetapi dengan menambahkan Kc (100%/PB) maka offset akan berkurang namun osilasi akan bertambah sehingga proses tidak stabil.
Pada pengendali PI, fungsi dari Integral yakni dapat menghilangkan offset yang terjadi pada proses. Karena ketika error muncul, nilai integral akan bertambah atau berkurang sehingga sinyal keluaran akan berubah. Sehingga pengendali PI ini merupakan tipe pengendali yang digunakan secara luas. Akan tetapi, kekurangan dari pengendali ini yakni karena ada dua parameter yang diatur, sehingga untuk

menentukan proses yang terbaik pun cukup sukar. Pada proses, dapat dilihat bahwa semakin kecil waktu integral, maka respon yang ditimbulkan semakin cepat, akan tetapi menyebabkan proses tidak stabil.
Pada pengendali PID, fungsi dari derivative yakni mempercepat respon dalam berubah secara instant. Akan tetapi, dengan adanya fungsi pengendali ini, maka proses akan lebih peka terhadap gangguan, sehingga semakin besar nilai derivative, maka proses akan tidak stabil. Keuntungan dari pengendali ini yakni dapa mengurangi osilasi karena proses berubah dengan cepat.

VI. KESIMPULAN
Pengendalian proses dapat dilakukan dengan kendali P, PI, PID. Hal tersebut memengaruhi respon proses, sehingga keadaan proses berbeda tergantung dari kendali tersebut. Pada pengendalian proses, ada beberapa parameter yang dapat kita ketahui dari uji kurva, diantaranya Steady – state gain (Kp), Time Constant (τp) dan dead time (θp) sehingga dari parameter tersebut, kita dapat mengidentifikasi proses.
VII. DAFTAR PUSTAKA
Heriyanto. “Modul Praktikum Pengendalian Level”. Bandung : Politeknik Negeri Bandung
Cooper. J. Douglas. 2005. Practial Process Control using LOOP-PRO Software. Tolland: Control Station, Inc.
Copyright © 2022 FDOKUMEN