
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2014) 1-6 Filter ... · harmonisa. Berbagai jenis filter aktif...
6
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2014) 1-6 Abstrak-Tugas akhir ini menyajikan filter aktif shunt 3 phasa berkapasitas 25KW untuk mengkompensasi harmonisa pada sistem distribusi 220/380 Volt. Sistem kendali pada aktif filter tersebut diproses menggunakan PQ teori selanjutnya kinerja filter tersebut dibandingkan, apabila menggunakan kompensator. Keluaran dari transformasi PQ tersebut diolah dalam 3 macam perlakuan : tanpa kompensator, menggunakan kompensator PI dan menggunakan kompensator artificial neural network (ANN). Filter aktif shunt disimulasikan dengan menggunakan 3 macam beban nonlinier. Beban yang digunakan bervariasi yakni sebesar 13KW, 20 KW dan 25KW. Hasil simulasi menunjukan bahwa kinerja Filter aktif shunt optimal pada saat beban penuh 25KW, yaitu THD 6.51% (tanpa kompensator), 4.20% (kompensator PI), dan 3.12% (kompensator ANN). Sedangkan pada saat beban rendah 13KW filter dengan ANN menunjukan hasil yang terbaik yaitu diperoleh arus THD sebesar 4.83%, dibanding dengan tanpa kompensator 7.10% dan dengan kompensator PI sebesar 5.38%. Sesuai IEEE Standard 519-1992 sebesar 5%. Kata kunci: Shunt Active Power Filter, ANN, THD. I. Pendahuluan Masalah kualitas daya pada sistem peralatan listrik merupakan masalah yang komplek, tetapi efeknya sangat mengganggu. Kemajuan teknologi perangkat semikonduktor merangsang sebuah revolusi dalam daya elektronik lebih dari satu dekade, dan ada indikasi bahwa tren ini akan terus [1]. Arus harmonisa yang dihasilkan oleh beban nonlinier, konverter penyearah daya elektronik, variable speed drive controller untuk motor, power supply elektronik, DC motor drive, pengisi daya baterai, ballast elektronik semua itu bertanggung jawab untuk peningkatan terkait masalah kualitas daya[2]. Beban nonlinier ini muncul untuk menjadi sumber utama Harmonisa di daya sistem distribusi. Arus harmonisa yang dihasilkan oleh beban nonlinier disuntikkan kembali ke dalam sistem distribusi listrik melalui point common coupling (PCC). Seperti arus harmonisa melewati impedansi line sistem, harmonisa tegangan muncul, menyebabkan distorsi pada PCC. Harmonisa memiliki sejumlah efek yang tidak diinginkan pada sistem distribusi. Mereka masuk ke dalam dua kategori dasar: jangka pendek dan jangka panjang. Efek jangka pendek biasanya paling terlihat dan terkait dengan gangguan tegangan berlebih. Di sisi lain, efek jangka panjang sering tidak terdeteksi dan biasanya terkait dengan peningkatan kerugian resistif atau stress tegangan[3]. Selain itu, arus harmonisa yang dihasilkan oleh beban nonlinier dapat berpengaruh negatif dengan berbagai macam sistem peralatan listrik, terutama kapasitor, transformer dan motor, menyebabkan kerugian tambahan seperti panas dan beban lebih (over loading). Arus harmonisa ini juga dapat menyebabkan gangguan pada jalur telekomunikasi dan kesalahan dalam perangkat pengukuran[2]. Karena efek yang merugikan pada harmonisa daya, standar seperti IEEE 519- 1992,IEC telah dikembangkan untuk mendefinisikan suatu kerangka kerja yang masuk akal untuk kontrol harmonisa[4]. Tujuannya adalah untuk memastikan batas- batas harmonisa yang dapat diterima oleh peralatan listrik. Distorsi harmonisa dalam sistem distribusi listrik dapat ditekan dengan menggunakan 2 pendekatan yakni filter pasif dan filter aktif. Filter pasif adalah solusi sederhana untuk mengurangi distorsi harmonisa. Meskipun sederhana dan paling murah, filter pasif mempunyai beberapa kekurangan yakni komponen sangat besar, tergantung pada sumber impedansi, serta masalah resonansi, sehingga mempengaruhi stabilitas sistem distribusi listrik[5]. Filter daya aktif tampaknya merupakan solusi untuk mengkompensasi daya aktif dan reaktif serta untuk menghilangkan arus harmonisa. Berbagai jenis filter aktif telah diteliti dan dikembangkan untuk kualitas pengkondisian termasuk koreksi faktor daya. Dalam desain filter aktif dan kontrolnya, perhitungan kompensasi saat ini dan pengolah sinyal referensi adalah tugas utama. Karakteristik filter sangat bergantung pada keakuratan sinyal referensi dan kecepatan komputasi[6]. Seperti banyak skema telah dikembangkan dan dipelajari untuk kontrol filter aktif seperti fast fourier transform (FFT), kalman filter dan Artificial Neural Networ (ANN) [4]. Backward propagation ANN, dilatih untuk memperkirakan komponen harmonisa. Pendekatan ini memerlukan banyak data-untuk pelatihan ANN dan bisa saja mengakibatkan hasil yang tidak akurat. Filter Aktif Shunt 3 Phase Berbasis Artificial Neural Network (ANN) Untuk Mengkompensasi Harmonisa Pada Sistem Distribusi 220/380 Volt Andyka bangun wicaksono, Prof.Ir.Mochamad Ashari,M.Eng.,Ph.D,dan Ir. Arif Musthofa, MT. Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim, Surabaya 60111 1
Transcript of JURNAL TEKNIK POMITS Vol. 1, No. 1, (2014) 1-6 Filter ... · harmonisa. Berbagai jenis filter aktif...
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2014) 1-6
Abstrak-Tugas akhir ini menyajikan filter aktif shunt 3 phasa berkapasitas 25KW untuk mengkompensasi harmonisa pada sistem distribusi 220/380 Volt. Sistem kendali pada aktif filter tersebut diproses menggunakan PQ teori selanjutnya kinerja filter tersebut dibandingkan, apabila menggunakan kompensator. Keluaran dari transformasi PQ tersebut diolah dalam 3 macam perlakuan : tanpa kompensator, menggunakan kompensator PI dan menggunakan kompensator artificial neural network (ANN). Filter aktif shunt disimulasikan dengan menggunakan 3 macam beban nonlinier. Beban yang digunakan bervariasi yakni sebesar 13KW, 20 KW dan 25KW. Hasil simulasi menunjukan bahwa kinerja Filter aktif shunt optimal pada saat beban penuh 25KW, yaitu THD 6.51% (tanpa kompensator), 4.20% (kompensator PI), dan 3.12% (kompensator ANN). Sedangkan pada saat beban rendah 13KW filter dengan ANN menunjukan hasil yang terbaik yaitu diperoleh arus THD sebesar 4.83%, dibanding dengan tanpa kompensator 7.10% dan dengan kompensator PI sebesar 5.38%. Sesuai IEEE Standard 519-1992 sebesar 5%. Kata kunci: Shunt Active Power Filter, ANN, THD.
I. Pendahuluan Masalah kualitas daya pada sistem peralatan listrik merupakan masalah yang komplek, tetapi efeknya sangat mengganggu. Kemajuan teknologi perangkat semikonduktor merangsang sebuah revolusi dalam daya elektronik lebih dari satu dekade, dan ada indikasi bahwa tren ini akan terus [1]. Arus harmonisa yang dihasilkan oleh beban nonlinier, konverter penyearah daya elektronik, variable speed drive controller untuk motor, power supply elektronik, DC motor drive, pengisi daya baterai, ballast elektronik semua itu bertanggung jawab untuk peningkatan terkait masalah kualitas daya[2]. Beban nonlinier ini muncul untuk menjadi sumber utama Harmonisa di daya sistem distribusi. Arus harmonisa yang dihasilkan oleh beban nonlinier disuntikkan kembali ke dalam sistem distribusi listrik melalui point common coupling (PCC). Seperti arus harmonisa melewati impedansi line sistem, harmonisa tegangan muncul, menyebabkan distorsi pada PCC. Harmonisa memiliki sejumlah efek yang tidak diinginkan pada sistem distribusi. Mereka masuk ke dalam dua kategori dasar:
jangka pendek dan jangka panjang. Efek jangka pendek biasanya paling terlihat dan terkait dengan gangguan tegangan berlebih. Di sisi lain, efek jangka panjang sering tidak terdeteksi dan biasanya terkait dengan peningkatan kerugian resistif atau stress tegangan[3]. Selain itu, arus harmonisa yang dihasilkan oleh beban nonlinier dapat berpengaruh negatif dengan berbagai macam sistem peralatan listrik, terutama kapasitor, transformer dan motor, menyebabkan kerugian tambahan seperti panas dan beban lebih (over loading). Arus harmonisa ini juga dapat menyebabkan gangguan pada jalur telekomunikasi dan kesalahan dalam perangkat pengukuran[2]. Karena efek yang merugikan pada harmonisa daya, standar seperti IEEE 519-1992,IEC telah dikembangkan untuk mendefinisikan suatu kerangka kerja yang masuk akal untuk kontrol harmonisa[4]. Tujuannya adalah untuk memastikan batas-batas harmonisa yang dapat diterima oleh peralatan listrik. Distorsi harmonisa dalam sistem distribusi listrik dapat ditekan dengan menggunakan 2 pendekatan yakni filter pasif dan filter aktif. Filter pasif adalah solusi sederhana untuk mengurangi distorsi harmonisa. Meskipun sederhana dan paling murah, filter pasif mempunyai beberapa kekurangan yakni komponen sangat besar, tergantung pada sumber impedansi, serta masalah resonansi, sehingga mempengaruhi stabilitas sistem distribusi listrik[5]. Filter daya aktif tampaknya merupakan solusi untuk mengkompensasi daya aktif dan reaktif serta untuk menghilangkan arus harmonisa. Berbagai jenis filter aktif telah diteliti dan dikembangkan untuk kualitas pengkondisian termasuk koreksi faktor daya. Dalam desain filter aktif dan kontrolnya, perhitungan kompensasi saat ini dan pengolah sinyal referensi adalah tugas utama. Karakteristik filter sangat bergantung pada keakuratan sinyal referensi dan kecepatan komputasi[6]. Seperti banyak skema telah dikembangkan dan dipelajari untuk kontrol filter aktif seperti fast fourier transform (FFT), kalman filter dan Artificial Neural Networ (ANN) [4]. Backward propagation ANN, dilatih untuk memperkirakan komponen harmonisa. Pendekatan ini memerlukan banyak data-untuk pelatihan ANN dan bisa saja mengakibatkan hasil yang tidak akurat.
Filter Aktif Shunt 3 Phase Berbasis Artificial Neural Network (ANN) Untuk Mengkompensasi Harmonisa Pada Sistem Distribusi 220/380 Volt
Andyka bangun wicaksono, Prof.Ir.Mochamad Ashari,M.Eng.,Ph.D,dan Ir. Arif Musthofa, MT. Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
Jl. Arief Rahman Hakim, Surabaya 60111
1
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2014) 1-6
Sebagian besar dari skema ini mempunyai kontrol yang kompleks dan sulit untuk mendapatkan mendekati kondisi ideal. ADALINE, teknik jaringan saraf yang adaptif, juga diselidiki untuk aplikasi dalam filter daya aktif [8][10]. Dalam penelitian ini, jaringan saraf dikendalikan filter aktif yang telah dikoreksi. Controller diusulkan dari data pengkondisian (adapting), cepat dan sederhana dalam arsitektur dan berhasil diterapkan untuk menyaring harmonisa diberbagai kondisi sistem daya. Controller yang diusulkan telah dievaluasi dalam kondisi berbeda nonsinusoidal dan sumber beban seimbang.
II. System Configuration Gambar 1 menunjukkan skema dasar filter aktif termasuk beban nonlinier pada sebuah sistem pasokan tiga phasa. Beban baik fase tunggal, dua fasa atau tiga fase dapat seimbang atau seimbang dihubungkan ke sumber listrik pasokan melalui rectifier yang menentukan beban non-linear. Dalam kasus ini, rectifier dioda tiga fase - beban resistif dianggap sebagai beban nonlinier yang terhubung ke stop kontak dan pasokan. Beban ini menarik arus dari catu daya. Isolated gate bipolar transistor-(IGBT) berbasis voltage source inverter (VSI) [11] digunakan sebagai kompensator kualitas daya untuk mengimbangi harmonisa yang diperlukan dan daya reaktif dibutuhkan oleh beban nonlinier. Inverter diadopsi terdiri dari enam IGBT switch dengan tegangan stres Vdc, satu DC kapasitor dan induktor coupling.
Gambar 1. Diagram distribusi dengan filter
aktif[6]
III. Instantaneous Power Theory Based Control Strategy
Teori ini telah ditetapkan oleh Akagi [13] dan Gyugyi [14], bahwa sebuah voltage source inverter (VSI) seketika dapat pasokan daya Alfa-beta seketika nyata dan reaktif beban saat ini Berdasarkan komponen dc dan ac kekuatan aktif reaktif (PQ), dua persamaan penting arus beban dapat dinyatakan, sebagai berikut:
reaktif dan kompensasi harmonisa beban nonlinier. Teori ini menyebabkan perumusan daya reaktif teori p-q. Berdasarkan teori p-q kompensator daya reaktif sesaat yang terdiri dari perangkat switching---- yang hampir tidak memerlukan komponen Penyimpanan energi---- dapat mengimbangi daya reaktif bersama dengan arus harmonisa yang disebabkan oleh kekuatan imajiner seketika beban. Dasar teori diagram algoritma kontrol blok p-q ditampilkan dalam persamaan 1 dan 2 dari persamaan tersebut, teori p-q dasar terdiri dari transformasi aljabar diukur sumber tegangan (Vsc,Vsb,Vsa ), dan beban saat ini (ILc,ILb,ILa ) dalam koordinat a-b-c ke koordinat αβ, diikuti oleh perhitungan seketika kekuatan komponen (q,p).
−
−−=
sc
sb
sa
v
vv
v
v
2
3
2
32
1
2
1
0
1
3
2
β
α
(1)
−
−−=
Lc
Lb
La
L
L
i
ii
i
i
2
3
2
32
1
2
1
0
1
3
2
β
α
(2)
)()()()(
)()()()(
tiVtitVtq
tiVtitVtp
ββαα
ββαα
+−=
+=
(3) Sebuah persamaan matematika yang rinci mengenai teori daya reaktif diberikan dalam [12]. Akagi [13] telah mengembangkan hubungan yang menjelaskan kompensasi daya reaktif dan harmonisa beban nonlinier menggunakan inverter terkendali common coupling voltage source inverter (CC-VSI). Oleh karena itu, CC-VSI (aktif filter) dikenal sebagai contoh pemanfaatan model matematis. Semua perhitungan dilakukan sehubungan dengan arus dalam teori p-q konvensional beban. Lebih lanjut, Alfa-beta komponen arus beban dapat dibagi ke dalam komponen sumbu mendasar dalam sumber, hal ini diperlukan untuk menyaring tegangan AC dengan low-pass filter, sehingga memperoleh komponen fundamental seperti yang digunakan dalam teori p-q konvensional [15], [16].
Diagram blok dari skema kontrol diusulkan ditampilkan dalam Gambar 2. Pertama, 3 phasa ke 2 phasa transformasi dilakukan. Kemudian
andyka bangun
Typewriter
2
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2014) 1-6
~
2222
~
2222.... q
vv
vq
vv
vp
vv
vp
vv
viL
βα
β
βα
β
βα
α
βα
αα +
−+
+
−+
++
+=
−−
~
2222
~
2222.... q
vv
vq
vv
vp
vv
vp
vv
viL
βα
α
βα
α
βα
β
βα
ββ +
++
++
++
=−− (4)
Persamaan di atas menunjukkan berbagai komponen arus beban. Kebutuhan filter aktif untuk mengimbangi harmonisa kedua, ketiga, dan keempat bagian arus yaitu kompensasi arus filter aktif I*cc, I*cb, I*ca bisa berasal dari kekuatan berosilasi diekstraksi dan daya reaktif yang disediakan oleh filter.Biasanya, filter low pass yang digunakan untuk memisahkan komponen fundamental dari tegangan yang ideal dalam situasi aktual yang diusulkan di Mehmet [15] dan Murat [16]. Keputusan urutan tertentu dan frekuensi cut-off memainkan peran utama dalam merancang filter.
IV. Proposed Control Architecture Bagian penting dari desain kontrol adalah memproses sinyal referensi. Teori p-q cocok untuk tegangan listrik yang ideal, nilai-nilai sinyal bolak-balik daya aktif dan reaktif memiliki harmonisa arus dan tegangan. Akibatnya, filter aktif tidak menghasilkan kompensasi harmonisa. Untuk memaksakan sinusoidal arus dengan frekuensi yang tepat mendasar dalam sumber, hal ini diperlukan untuk menyaring tegangan AC dengan low-pass filter, sehingga memperoleh komponen fundamental seperti yang digunakan dalam teori p-q konvensional [15], [16]. Tetapi low-pass filter menghasilkan keterlambatan phasa dalam sistem dan fine tuning diperlukan dalam hal pengaturan error margin dan phasa. PLL blok dapat digunakan sebagai low-pass filter untuk menghasilkan komponen fundamental. Untuk mengatasi keterbatasan ini, Neural Network (ANN) berbasis p-q teori diusulkan untuk mengurangi distorsi harmonisa total dalam rentang tertentu untuk kondisi tegangan pasokan beban ideal. Di sini skema LPF ini digantikan oleh jaringan saraf yang kuat. jaringan saraf mengkstrak komponen fundamental [10] dari tegangan dan arus sinyal yang selanjutnya digunakan untuk menghitung pertukaran daya nyata antara sumber dan beban.
Komponen fundamental mengekstraksi dengan cepat dan akurat bahkan dalam kasus distorsi dalam pasokan listrik. Sumber ini tidak hanya memasok daya aktif untuk komponen arus beban, tetapi juga kehilangan komponen arus untuk mempertahankan tegangan rata-rata dari bus dc kapasitor nilai konstan. Kerugian umpan saat ini di inverter seperti kerugian switching, kebocoran arus kapasitor di bawah kondisi stabil dan untuk mengatur energi yang tersimpan pada bus dc filter aktif kondisi transien yang dikenakan pada sistem. Komponen ini dihitung dengan menggunakan tegangan dc rata-rata bus (Vdc) dan nilai referensi tegangan dc bus (Vdc, ref) yang diperlukan Persamaan (5) menunjukkan daya nyata.
−=+= pppp lossf
(5)
pvv
vi
pvv
vi
s
s
.*
.*
22
22
βα
ββ
βα
αα
+=
+=
(6)
Arus supply Instaneous reference 3 phasa (I*sc,I*sb, I*sa) dihitung dengan 2 phasa diubah menjadi 3 phasa seperti pada persamaan (7). Nilai aktual arus sumber dapat dimonitor secara langsung.
−−
−=
β
α
c
c
cc
cb
ca
i
i
i
ii
*
*
*
*
*
23
23
21
21
01
32
(7)
Aturan teknik kontrol histeresis berbasis carrierless PWM yakni arus tiga phasa bekerja atas merasakan kesalahan saat ini dan referensi arus filter aktif berasal gating sinyal untuk IGBT.Pelatihan berulang dengan tingkat belajar 0,0006.
Gambar 2. Basic scheme of p-q theory based control algorithm using LPF
andyka bangun
Typewriter
3
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2014) 1-6
A. Adaptive ANN Extraction Circuit Sumber arus 3 phasa Isc,Isb,Isa dan pasokan tegangan Vsc,Vsb,Vsa pertama berubah menjadi 2 phasa yakni komponen α dan β. Komponen dasar dua fase Alfa-beta komponen dapat diekstraksi dengan diusulkan adaptif linier jaringan saraf (ADALINE) [10], [17]. Akhirnya komponen sumber tegangan dan arus 2 phasa yang digunakan untuk menghitung daya aktif listrik dari sumber ke beban ke sistem 3 phasa. Lebih lanjut, sumbu sumber α dan β arus referensi diperkirakan dengan melakukan inverse mengubah sumber referensi 3 phasa saat ini dapat diperkirakan. Diagram blok diusulkan NN berbasis controller ditunjukkan dalam gambar 2.
Gambar 3. Neural Network extraction unit[8]
Arsitektur jaringan saraf ADALINE diusulkan memiliki dua lapisan (input dan output) jaringan memiliki n-input dan output tunggal. Blok dasar dari jaringan ini adalah vektor input signal penundaan, fungsi transfer purelin, matriks pembobotan dan bias. Hubungan input output dinyatakan sebagai:
biwy nn
n +=∑=
*61
1
(8)
Mana 'b' adalah bias, 'w' adalah berat, dan 'aku' adalah input ke NN. Input ke jaringan adalah waktu serangkaian sinyal tertunda komponen fundamental yang akan diambil. Panjang dari seri penundaan ini adalah 61, yang telah diputuskan mengingat diharapkan maksimum distorsi dan ketidak seimbangan dalam 3-phasa sinyal input. Menargetkan data (sumbu α dan β mendasar arus) diperlukan untuk pelatihan ANN diusulkan dibuat menggunakan teknik dekomposisi saat ini seperti yang disajikan dalam [10], [17]. Masukan dari sistem ANN adalah tegangan dan arus dan output dari sistem referensi filter aktif saat ini. Penyesuaian pembobotan dilakukan selama proses pelatihan ADALINE menggunakan Widrow-Hoff. Error berarti akar antara output yang diinginkan dan hasil aktual diturunkan menjadi 3.2 x 10-5 oleh
B. PI Extraction Circuit Dalam waktu kontinyu, sinyal keluaran pengendali PI dapat dirumuskan sebagai berikut.
+= ∫ dtte
TteKpCo
t
i 0
)(1
)( (9)
Dengan: Co = sinyal keluaran pengendali PI. Kp = konstanta proporsional. Ti= waktu integral. Ki = konstanta integral. e(t) = sinyal kesalahan.
Diagram blok pengendali PI dapat dilihat pada Gambar 4.
Gambar 4 Diagram blok pengendali PI.
Pengolahan parameter-parameter PI menjadi konstanta-konstanta pengendalian secara diskrit sesuai dengan penjelasan perhitungan berikut. Dengan menggunakan Transformasi Laplace, didapatkan persamaan PI sebagai berikut persamaan 10:
)()()(
)()(
)(
)()()(
sET
KssEKsco
s
sET
KssEK
sco
sEsT
KsEKsCo
i
p
p
i
p
p
i
p
p
+=
+=
+=
(10)
Persamaan ini diubah kembali ke kawasan waktu, sehingga menjadi persamaan 11 :
)()()(
teTi
K
dt
tdeK
dt
tdco pp += (11)
Untuk mengubah persamaan diatas ke dalam bentuk diskrit, digunakan persamaan backward difference, di mana persamaan 12:
22
2 )2()1(2)()(
)1()()(
T
kykyky
dt
tyd
danT
kyky
dt
tdy
−+−−=
−−= (12)
Sehingga persamaannya menjadi persamaan 13: [ ]
[ ] )1()()1()(
)()1()()1()(
)()1()()1()(
−−
++−=
+−−=−−
+
−−=−−
keKkeT
TKKkcokco
keT
KkekeKkcokco
keT
K
T
kekeK
T
kcokco
pi
pp
i
pp
i
pp
(13)
andyka bangun
Typewriter
4
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2014) 1-6
Persamaan ini menunjukkan persamaan pengendali PI dalam bentuk diskrit. Dari persamaan ini dapat diketahui bahwa pengendali PI menggunakan konstanta-konstanta pengendalian sebagai berikut :
)1()()1()( 32 −−+−= keKkeKkcokCo (14)
Dengan :
p
i
pp
KK
T
TKKKKK
=
=⇒+=
3
112 )( (15)
Pemilihan nilai setting pada pengontrol PI adalah penentuan besaran penguatan-penguatan P dan I sehingga diperoleh karakteristik sistem yang baik. Ada beberapa cara Pemilihan nilai setting kontroler PI diantaranya yaitu metode relay feedback Ziegler-Nichols, manual (hand-tuning/trial-error), metode analitik dengan optimasi, penempatan pole (pole placement), atau otomatis (auto tuning)[8]. V. Hasil Simulasi Simulasi pengurangan harmonisa dengan power filter aktif dilakukan melalui simulasi menggunakan SIMULINK . Filter aktif dipasang paralel dengan beban nonlinier. Filter tersebut berfungsi sebagai sumber arus untuk melawan harmonisa arus yang dibangkitkan oleh beban nonlinier dari 13KW (9.7HP), 20KW (15HP) dan
25KW (19HP).
Tegangan = 220/380Volt induktansi coupling = 1mH Kapasitor dc = 40µF tegangan DC= 850 Volt DC time sampling =50e-6 detik FFT sampling time = 350e-6 detik
Tabel 1. Perbandingan komponen harmonisa arus pada simulasi beban
BEBAN TIDAK DI FILTER
FILTER tanpa
kompensator
FILTER dan
kompensator PI
FILTER dan
kompensator ANN
13KW 30.29% 7.10% 5.38% 4.83%
20KW 30.17% 6.28% 4.04% 3.70%
25KW 30.10% 6.51% 4.20% 3.12% Sesuai dengan Tabel 1 perbandingan THD dengan proses filter aktif dengan PQ teori serta dengan kompensator PI dan ANN atau tanpa kompensator terlihat batas kemampuan kerja kompensator. Penggunaan kompensator hanya membantu meredam harmonis yang muncul sehingga didapatkan nilai yang terendah. Kontrol yang digunakan akan maksimal ketika beban sebesar 25KW. Kompensator PI telah mencapai batas kemampuannya ketika beban sebesar 13KW tetapi kompensator masih mampu bekerja dengan baik. Perbandingan antara kompensator PI dan ANN terlihat pada beban 13KW, kompensator ANN masih dibawah batas IEEE sedangkan kompensator PI melebihi batas 5% yakni bernilai 5.38%. Dengan menggunakan aktif filter ini mampu mengurangi harmonisa dengan baik pada saluran distribusi 220/380 Volt 3 phasa.
Gambar 6. Analisa FFT harmonisa arus sumber menggunakan kompensator PI beban 13KW
Gambar 5. Blok sistem shunt aktif
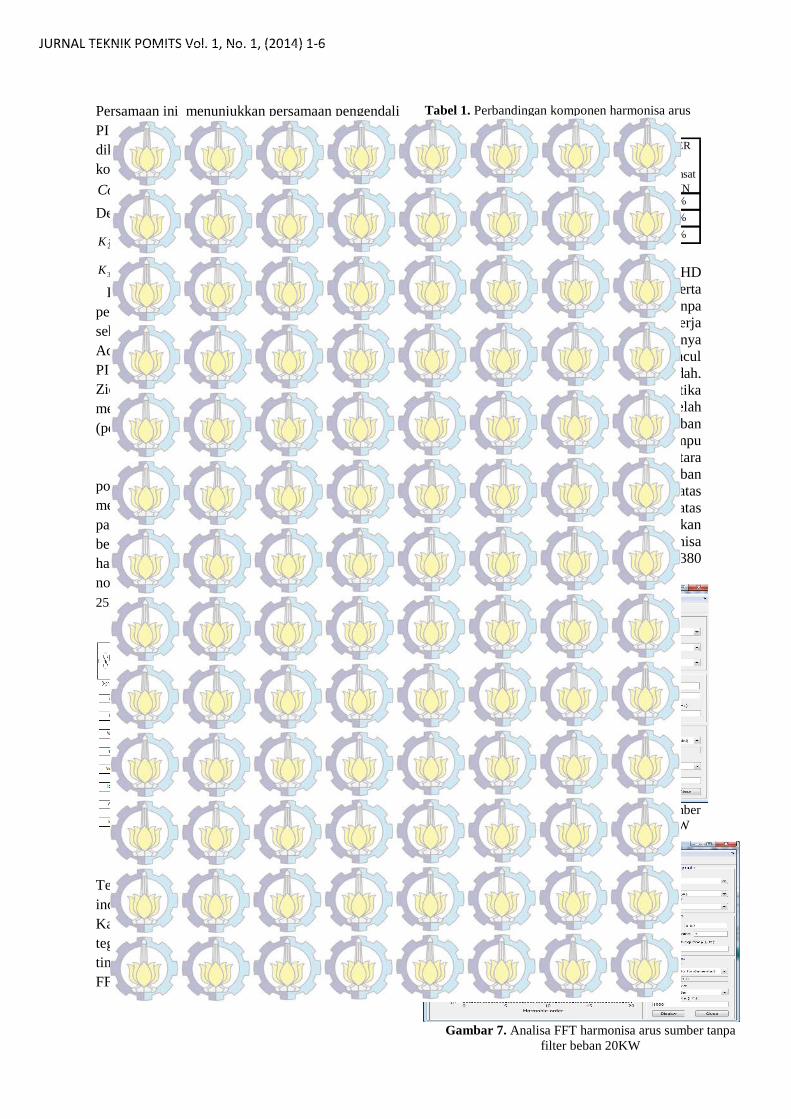
Gambar 7. Analisa FFT harmonisa arus sumber tanpa
filter beban 20KW
andyka bangun
Typewriter
5
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2014) 1-6
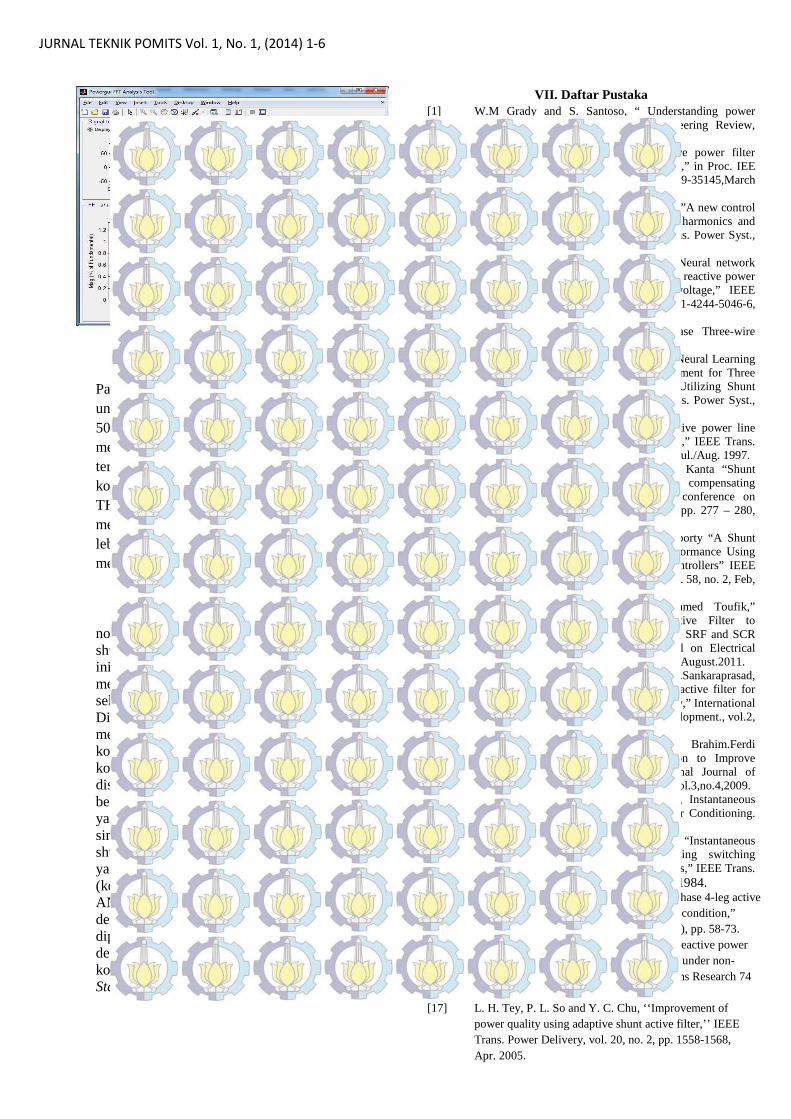
Pada gambar 6, 7 dan 8 menunjukan analisa FFT untuk harmonisa dengan frekuensi fundamnetal 50Hz. Dengan membandingkan antara menggunakan kompensator dan tidak difilter terlihat bahwa nilai THD yang menggunakan kompensator lebih sinusoidal dan mempunyai THD yang kecil. Pada analisa FFT tanpa menggunakan filter bentuk gelombang cenderung lebih kotak dan mempunyai THD yang tinggi melebihi standard.
VI. Kesimpulan Harmonisa yang ditimbulkan oleh beban nonlinier dapat ditekan menggunakan filter aktif shunt yang didesain berbasis ANN. Tugas akhir ini berfungsi sebagai error kompensator, yaitu mengkompensasi transformasi PQ, yang selanjutnya diumpankan pada modulator PWM. Dilakukan simulasi sistem kendali yang menggunakan 3 macam perlakuan : tanpa kompensasi, dengan kompensasi PI, dan dengan kompensasi ANN. Filter aktif shunt disimulasikan dengan menggunakan 3 macam beban nonlinier. Beban yang digunakan bervariasi yakni sebesar 13KW, 20 KW dan 25KW. Hasil simulasi menunjukan bahwa kinerja Filter aktif shunt optimal pada saat beban 20KW dan 25KW , yaitu THD 30.10% (tanpa kontroller), 4.20% (kompensator PI), dan 3.12% (kompensator ANN). Sedangkan pada saat beban 13KW filter dengan PI menunjukan hasil yang buruk yaitu diperoleh arus THD sebesar 5.38%, dibanding dengan tanpa kompensator 7.10% dan dengan kompensator ANN sebesar 4.83%. Sesuai IEEE Standard 519-1992 sebesar 5%.
Gambar 8. Analisa FFT arus sumber dengan
kompensator ANN 25KW
VII. Daftar Pustaka [1] W.M Grady and S. Santoso, “ Understanding power
system harmonics,” IEEE Power engineering Review, vol.21, no. 11, pp.8-11,2001.
[2] J.R Vazquez and P. Salmeron, “ Active power filter control using neural network technologies,” in Proc. IEE Electr. Power Appl., vol.150, no.2, pp.139-35145,March 2003.
[3] B. Singh, K. Al-Haddad, and A. Chandrs ,”A new control approach to three-phase active filter for harmonics and reactive power compensation,” IEEE Trans. Power Syst., vol.13, no.1, pp.133-138, Feb.1998.
[4] G. Nitin, S.P. Singh, and S.P. Dubey,” Neural network based shunt active filter for harmonic and reactive power compensation under non-ideal mains voltage,” IEEE Trans. Power Syst., vol.10, no.5, pp.978-1-4244-5046-6, 2010.
[5] Wang, Jidong,”Simulation of Three-phase Three-wire Shunt Active Power Filter,”.
[6] A.K. Senthil and P.Ajay-D-Vimal Raj ,” Neural Learning Algorithm based Power Quality Enhancement for Three Phase Three Wire Distribution System Utilizing Shunt Active Power Filter Strategy,” IEEE Trans. Power Syst., vol.11, pp. 978-1-4577-1510-5, 2011.
[7] Y. M. Chen and R. M. O’Connell, “Active power line conditioner with a neural network control,” IEEE Trans. Ind.Appl., vol. 33, no. 4, pp. 1131– 1136, Jul./Aug. 1997.
[8] Karuppanan P and Mahapatra, Kamala Kanta “Shunt Active Power Line Conditioners for compensating harmonics and reactive power” IEEE conference on Environment and Electrical Engineering, pp. 277 – 280, May, 2010.
[9] Avik Bhattacharya and Chandan Chakraborty “A Shunt Active Power Filter With Enhanced Performance Using ANN-Based Predictive and Adaptive Controllers” IEEE Transactions On Industrial Electronics, vol. 58, no. 2, Feb, 2011.
[10] Chennai Salim and Benchouia Mohamed Toufik,” Intelligent Controllers for Shunt Active Filter to Compensate Current Harmonics Based on SRF and SCR Control Strategies,” International Journal on Electrical Engineering and Informatics., vol.3, no.3, August.2011.
[11] V.V.M. Appalanaidu, B.Sankaraprasad, K.Kotyada,”Neural network based shunt active filter for harmonic reduction:A technological review,” International Journal of Engineering Research and Development., vol.2, no.11, August.2011.
[12] Rachid.Dehini, Abdesselam.Bassou, Brahim.Ferdi ,”Artificial Neural Networks Application to Improve Shunt Active Power Filter,” International Journal of Computer and information Engineering., vol.3,no.4,2009.
[13] H. Akagi, E. H. Watanabe, and M. Aredes, Instantaneous Power Theory and Applications to Power Conditioning. Piscataway, NJ: IEEE Press, 2007.
[14] Akagi, H., Kanazawa,Y., and Nabae, A., “Instantaneous reactive power compensators comprising switching devices without energy storage components,” IEEE Trans. Ind. Appl., vol. 20, no. 3, pp. 625–630, 1984.
[15] M. Ucar and E. Ozdemir, “Control of a 3-phase 4-leg active power filter under non-ideal mains voltage condition,” Electric Power Systems Research 78 (2008), pp. 58-73.
[16] M. Kale and E. Ozdemir, “Harmonic and reactive power ompensation with shunt active power filter under non-ideal mainsvoltage,” Electric Power Systems Research 74 (2005), pp. 363-370.
[17] L. H. Tey, P. L. So and Y. C. Chu, ‘‘Improvement of power quality using adaptive shunt active filter,’’ IEEE Trans. Power Delivery, vol. 20, no. 2, pp. 1558-1568, Apr. 2005.
andyka bangun
Typewriter
6




















