Hand Out t Otomatis

of 32
-
Upload
faizalamri2013 -
Category
Documents
-
view
220 -
download
0
Transcript of Hand Out t Otomatis
-
7/26/2019 Hand Out t Otomatis
1/32
Kontrol Otomatis
I. PENDAHULUAN
1.1. Definisi SP (Sistem Pengendalian)Sistem Pengendalian didefinisikan sebagai suatu teknologi yang berkaitan dengan
aplikasi mekanik, elektronik dan sistem yang berbasis komputer (komputer, PLC atau
mikro). Semuanya bergabung menjadi satu untuk memberikan fungsi terhadap
manipulator (mekanik) sehingga akan memiliki fungsi tertentu.
1.2. Penggolongan SP
Sistem kendali digolongkan menjadi dua golongan dasar yaitu kendali jerat
tertutup dan sistem kendalai jerat terbuka
a. Sistem kendali jerat tertutup / berumpan balik apabila aksi kendalinya dipengarui
oleh variable keluarnya.
b. Sistem kendali jerat terbuka apabila aksi kendalinya tidak dipengaruhi oleh variabel
keluarannya..
MasukanKontroler Proses
Elemen ukur
Keluaran
a. Sistem lup tertutup
MasukanKontroler Proses
Elemen ukur
Keluaran
Masukan Kontroler Proses Keluaran
b. Sistem lup terbuka
Masukan Kontroler Proses Keluaran
.
-
7/26/2019 Hand Out t Otomatis
2/32
Kontrol Otomatis
1.3. Bebea!a "onto# il$stasi sistem %ontol otomatis
. !ntuk lup tertutup
a. Sistem "ontrol #ekanan
Elemenpengukurtekanan
Cerobong
Aktuator
Damper
Kontroler
Tungku
PembakarMinyak
Udara
Gambar 1.1 . Sistem kontrol tekanan
.b. Sistem "ontrol Permukaan Cairan
KontrolerKatuppneumatik
Aliran
masuk
Aliran keluar
Gambar 1.2. Sistem kontrol permukaan cairan
$. !ntuk lup terbuka
a. Sistem "ontrol S%a&kerja
Air
Gambar 1. . Sistem kontrol s!a"ker#a
-
7/26/2019 Hand Out t Otomatis
3/32
Kontrol Otomatis
b.Sistem "ontrol "e'epatan
Uap Ke mesin
Titiksetel
Gambar 1.4. Sistem kontrol kecepatan
-
7/26/2019 Hand Out t Otomatis
4/32
Teknik Kontrol Otomatis
II.Peistila#an Dalam Sistim Pengendalian
2.1. Diagam blo% dasa
iagram blok adalah suatu pernyataan gambar yang ringkas dari hubungan
sebab dan akibat antara masukan dan keluaran dari suatu sistim fisis.
2.2. Diagam blo% $m!an bali%
$lok&blok yang menyatakan berbagai komponen suatu system pengendalian
dihubungkan dengan 'ara yang men'irikan hubungan fungsional di dalam system itu.
2.3. Peistila#an dalam diagam blo% $m!an bali%
& Plant g2disebut sistim terkendali,adalah benda, proses atau mesin besaran
atau keadaan tertentu harus dikendalikan.
- Elemen pengendalian g1disebut pengendali adalah komponen yang diperlukan
untuk membangkitkan isyarat pengendalian yang tepat m yang diterapkan ke
plant tersebut
%lok
Masukan Keluaran
ariabel#ermanipulasi
Gangguanu
*asukan
Plantg+
Elemenumpan"balik
&
lemenpengendali
g-
'syarat umpan"
balik
e$
b
m
(
"eluaran
"
-
7/26/2019 Hand Out t Otomatis
5/32
Teknik Kontrol Otomatis
- Elemen umpan balik #adalah komponen yang diperlukan untuk menetapkan
hubungan fungsional antara isyarat umpanbalik primer b dan keluaran
terkendali '
& Masukan acuan adalah isyarat luar yang diterapkan ke sistem pengendalian
umpan balik untuk memerintahkan tindakan tertentu dari plant tersebut
& Keluaran terkendali " adalah besaran atau keadaan plant yang dikendaliak
& Isyarat umpan balik primer b adalah isyarat yang merupakan fungsi dari
keluaran terkendali '
& Isyarat penggerake yang disebut tindakan pengendalian adalah jumlah aljabar
dari masukan a'uan r ditambah atau dikurangi umpan balik primer b
& Variabel termanipulasimadalah besaran atau keadaan yang diterapkan oleh
elemen pengendalain g- ke plant g+
& Gangguan$adalah isyarat masukan yang tak diinginkan yang mempengaruhi
harga dari keluaran terkendali '
& Lintasan majuadalah lintasan transmisi dari isyarat penggerak e ke keluaran
terkendali '
& Lintasan umpan balikadalah lintasan transmisi dari keluaran terkendali ' ke
isyarat umpan balik primer b
2.&. '$$an !engg$naan sistem %endali otomati%
a. *elindungi keselamatan pekerja dan peralatan
b. *enjaga kualitas produk dan meminimumkan biaya
'. Peraturan lingkungan
d. Pembatasan saat operasi
2.. SIS* DAN +I+*
Sisitem kendali yang sederhana dengan keluaran tunggal dikendaliakn oleh
masukan tunggal dan sistim ini disebut SS (single input single output.Suatu sistem
kendali yang mempunyai lebiih dari satu masukan dan keluaran disebut ** (multiinput multi outputatau sistem multi variabel.
.
)
-
7/26/2019 Hand Out t Otomatis
6/32
Teknik Kontrol Otomatis
2.,. Posed$ !ean"angan sistem %endali otomati%
Prosedur dasar dalam peran'angan sistem kendali dengan metode analitis.
0aitu1
a. Penentuan spesifikasi kinerja
b. Peran'angan pada tingkat konseptual
'. Pembuatan model matematik
d. *odifikasi daniterasi
e. Pembuatan dan pengujian
Penggerak
Penggerak
Stir
2em
Pedal gas
3eniskendali
$atas ke'epatan
*asukanMobil
4angguan
Gambar 2.1.Sistim kendali MIMOpengemudi mobil
*
ra&
"eluaran
-
7/26/2019 Hand Out t Otomatis
7/32
Teknik Kontrol Otomatis
III. A%t$ato
ktuator adalah alat penggerak dari suatu sistem otomasi. *a'am&ma'am
aktuator adalah1
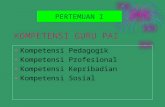
3.1. A%t$ato linie
a. Silinder Penggerak #unggal (!ingle "cting #ylinder)
Pada silinder penggerak tunggal hanya dapat menghasilkan kerja dalam satu
arah sedangkan untuk mengembalikan torak ke posisi a%al dengan pegas yang
terpasang tetap dengan ke'epatan 'ukup tinggi.
Gambar 3.1. Silinder Penggerak Tunggal: 1. Silinder barel! 2. tutup! 3.tutup bearing!
4.batang torak! ".sealing ring! #.bearing! $. Scraping ring! %.duoble packing! &. Pegas!'
b.Silinder Penggerak 4anda ($ouble "cting #ylinder)
Gambar 3.2. Silinder Penggerak Ganda (1. Silinde bael- 2. '$t$!- 3.t$t$! beaing- &.
Batang toa%- . Sealing ing- ,. Beaing b$s#- . S"a!ing ing- /. D$oble !a"%ing- 0-
o$nd "od ing- 1.sal$an $daa-)
+
)+
*1$
( ,
-
)
$ 1
*
+
1(
-,
-
7/26/2019 Hand Out t Otomatis
8/32
Teknik Kontrol Otomatis
engan memberikan udara bertekanan pada satu sisi piston, satu sisi yang lain
akan terbuka ke atmosfer. Silinder kerja ganda tidak memiliki pegas pengembali. ua
saluran udara berfungsi untuk saluran pengembangan dan saluran masukan.
Gambar 3.3. (entuk)bentuk silinder penggerak ganda
3.2.A%t$ato otai
Pada a'tuator ini udara bertekanan menggerakkan sudu&sudu yang ada didalam
rumah a'tuator, sehingga akan bergerak berputar se'ara rotasi.
Gambar 3.4. *ctuator rotari
-
-
7/26/2019 Hand Out t Otomatis
9/32
Teknik Kontrol Otomatis
3.3 at$! +al,e'
"atup berfungsi untuk mengatur arah aliran maupun tekanan fluida kerja, dimana pada
umumnya katup mempunyai dudukan berbentuk bola atau piringan.
*a'am&ma'am katup1
a. "atup 5/+ dengan Penggerak #uas 2ol Pengembali Pegas
Posisi *ff Posisi *n
Gambar 3.". -atup 32 dengan Penggerak Tuas /ol
b. "atup $erpenutup 2elief (%&rottle 'elie Val)e)
"atup ini dikenal juga sebagai katup pengatur ke'epatan satu arah
aliran. "atup&katup ini digunakan untuk mengatur ke'epatan pada silinder&
silinder pneumatik.
Gambar 3.# -atup kontrol aliran satu ara0
,
%aut
Penyetel
Sal. UdaraMasuk Sal. UdaraKeluar
-
7/26/2019 Hand Out t Otomatis
10/32
Teknik Kontrol Otomatis
'. "atup 6/+ Solenoid 4anda
Solenoid bekerja berdasarkan prinsip dasar lektromagnet, apabila
konduktor (kabel tembaga) dibentuk menjadi lilitan (koil) dan arus listrik
mengalir melalui konduktor, maka akan terjadi electromoti)e orce (EM*.Suplai tenaga elektrik yang dibutuhkan bisa diperke'il. alam sirkuit dengan
rangkaian aksi yang komplek, posisi silinder ditahan tanpa membutuhkan
susunan saklar yang menyulitkan, untuk mengun'i katup dan posisi silinder.
Gambar 3.$. -atup "2 dengan Penggerak Solenoid
3.& +oto listi%
Pada sistem elektrik motor listrik adalah salah satu elemen penggerak (alat
aktuasi), dengan mengubah energi listrik menjadi energi mekanik. #erdapat tiga jenis
motor listrik dalam hal perbedaan penggunaannya, yaitu1
a. *otor C, dioperasikan oleh arus listrik bolak&balik
b. *otor C, dioperasikan oleh arus listrik searah.
'. *otor Stepper, dioperasikan oleh pulsa&pulsa listrik.
1
/$
akti0
/1
akti0
/
$
/
1
/
1
-
7/26/2019 Hand Out t Otomatis
11/32
Teknik Kontrol Otomatis
Pada prinsipnya, motor listrik mengubah dari elektrik menjadi tenaga gerak .
Setiap motor mempunyai dua bagian dasar, yaitu1
a. Stator ini menghasilkan medan magnet, baik yang dibangkitkan dari sebuah
koil ( electromagnet )
b. 2otor ini berupa sebuah koil dimana arus listrik mengalir.
Gambar 3.%. Motor istrik 1.cela0 ,entilasi! 2.stator! 3.rotor! 4.komutator! ". -atrol
penggerak dan kipas! #.sikat penedia arus! $.koil medan! %.bantalan peluru'
"arakteristik dasar dari sebuah motor, yaitu 1
a. aya *otor
alam kaitannya dengan motor listrik, perlu dibedakan antara daya listrik
dengan daya mekanik.
b. "e'epatan Putar *oto
"e'epatan rotasi atau putaran motor yang biasanya dinyatakan dalam rpm (rotation per
minute) adalah penghubung antara daya dan torsi yang akan mempengaruhi
penggunaan daya dari motor .
11
-
7/26/2019 Hand Out t Otomatis
12/32
Teknik Kontrol Otomatis
I. SENS*4
&.1. Penganta tentang senso
Sensor adalah suatu alat yang berfungsi sebagai penangkap isyarat tentang
status mesin atau proses dari suatu system.
da beberapa hal yang diperlukan sebagai pertimbangan untuk memilih suatu sensor
antara lain1
- "etepatan
- "eandalan dan "etahanan
- "e'epatan reaksi.
- Perasaan
- Siklus tiap unit per satuan
%aktu
- 2esolusi
- "emampuan beradaptasi
- Pemasangannya atau 'ara
penempatannya
- *aterial "onstruksi
- 7arga
- Layanan pas'a jual
Sensor yang paling umum digunakan antara lain1
- Saklar posisi elektro&mekanik& Sensor proksimiti
optik
- Sensor proksimiti magnet & Sensor ultrasonik
- Sensor induktif & Sensor pneumatik
- Sensor kapasitif & #eknik
koneksi dan sirkuit
3enis isyarat yang dihasilkan antara lain1
- "eluaran $iner8 berupa isyarat elektronik 90: atau
:#": (+n or +.
- "eluaran nalog8 volatse dan tegangan.
- "eluaran serial1 keluaran serial (2S&+5+C, 2S&;++&
, 2S&;
-
7/26/2019 Hand Out t Otomatis
13/32
Teknik Kontrol Otomatis
Sensor&sensor yang mendeteksi ya atau tidaknyasuatu obje't yang disebut sensor
$iner yang hanya dapat menentukan =0= atau =#"= status, yang memberi satu
=>= atau = ??=.
a.Saklar posisi elektro& mekanik
esain tersebut tergantung pada tegangan arus listrik relatif tinggi yang dapat
dipan'arkan. $atas dari saklar mikro mekanis sekitar - sampai -6 mikron.
Gambar 4.1. Sensor saklar elektro)mekanik
b. Sensor proksimiti magnet
Sensor proksimiti magnet bereaksi ke medan magnet permanent dan elektromagnet. Sensor proksimiti sering mempunyai dioda yang meman'arkan 'ahaya untuk
mengindikasikan status operasi.
1
-
7/26/2019 Hand Out t Otomatis
14/32
Teknik Kontrol Otomatis
Gambar 4.2. Sensor proksimiti magnet
'. Sensor nduktif
"omponen penting pada sensor induktif diantaranya1 osilator, re'tifier
demodulator, bistable amplifier dan sensor output. konduktor, dihubungkan ke pemindah
aliran listrik yang masih aktif, maka akan terjadi aliran pusaran, dimana energinya
berasal dari osilator.
d. Sensor "apasitif
Sensor jenis ini beroperasi pada pengukuran dari perubahan kapasitas listrik dari
kapasitor didalam sirkuit LC resonansi dengan mendekati dari berbagai bahan.
Gambar 4.3. Sensor capaciti,e sitc0
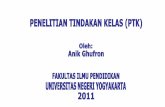
e.Sensor ptik
Sensor optik merupakan gabungan optik dan elektronik untuk memeriksa objek
menggunakan sinar mera0 inramera0dengan alat L9s. lat ini ke'il dan kuat
mempunyai daya tahan yang lama dan mudah diatur. Sensor optik terdiri dari + bagian
utama 1pemancar dan penerima.
Sensor optik tembus 'ahaya terdiri dari perlengkapan rakitan peman'ar dan komponen
penerima dimana jarak yang lebar dapat di%ujudkan. "euntungan sensor tembus
1(
-
7/26/2019 Hand Out t Otomatis
15/32
Teknik Kontrol Otomatis
'ahaya adalah 1( tahan uji karena sinar permanen ,jarak lebar, dapat mendeteksi benda
ke'il dari jarak yang jauh, sangat sensitive, dapat menangkap objek yang bergerak
'epat, bersifat reflek, pantulan)
Gambar 4.4 . /eaksi dari sensor optik tembus ca0aa
Sensor optik pembalik (pemantul) sinar peman'ar dan sinar penerima
pemasangannya pada satu tempat. "euntunganya1 (tahan uji karena 'ahaya permanen
sebelum dioperasikan, pemasangan yang sederhana dan mudah diatur, benda dapat
dipantulkan , jarak lebih besar disbanding sensor difusi)
"ekurangan sensor pembalik 1 (transparan, 'ahaya harus tepat ,pemantulan objek harus
tersusun )
Gambar 4." . Monitoring dan per0itungan benda ole0 sensor optik
pembalik
f. Sensor !ltrasonik
1)
-
7/26/2019 Hand Out t Otomatis
16/32
Teknik Kontrol Otomatis
Prinsip operasional dari sensor ultrasonik adalah berdasar pada pan'aran dan
pantulan dari gelombang&gelombang akustik antara benda dan penerima. Sensor ini
dibagi menjadi tiga bagian utama yaitu tansduser ultrasonik, unit penilai, dan ta&ap
keluaran ( &asil .
plikasi pemakaian sensor !ltrasonik 6 ( fasilitas tempat penyimpanan, sistem
transport, industri makanan, logam, ka'a dan proses pengolahan plastik, pemantauan
sebagian besar dari bahan&bahan)
Gambar 4.#. 5ilaa0 6eteksi Sensor 7ltrasonik
Contoh plikasi
Sensor ultrasonik digunakan untuk tingkat pengisian pada !ilos, untuk kendali trolly).
lustrasi yang diikuti ditunjukkan beberapa 'ontoh tambahan 1
1*
-
7/26/2019 Hand Out t Otomatis
17/32
Teknik Kontrol Otomatis
Gambar 4.$. *plikasi sensor ultrasonik
g. Sensor Pneumatik
engan sensor pneumatik, keadaan atau ketiadaan objek terkait dengan
hilangnya kontak sensor melalui air jet. "etika sebuah objek memperlihatkan suatu
tanda perubahan tekanan , dimana dapat diolah lebih lanjut.
Gambar 4.%. Sensor Pneumatik
*anfaat dari sensor ini adalah1 ( keamanan dalam pengoperasiannya di
lingkungan berdebu, suhu ambient yang tinggi, didaerah dengan bahaya ledakan,tidak
terganggu oleh pengaruh magneti' dan gelombang suara, transparan terhadap 'ahaya).
3enis&jenis sensor pneumati' adalah1
a.Sensor tekanan balik ( >o@@le #ekanan $alik )
b. Sensor 2efleksPenggunaan sensor pneumati' pada1 (pengukuran ke'epatan pengiriman terhadap
lapisan (lapisan plasti') untuk pen'etakan lapisan sutera, penga%asan terhadap
peralatan , memeriksa lubang setelah operasi pengeboran, pengujian piringan keramik
uji 'oba untuk tingkat kehalusan setelah pembakaran).
1+
-
7/26/2019 Hand Out t Otomatis
18/32
Teknik Kontrol Otomatis
Gambar 4.&. Memeriksa bor ang rusak terkait dengan peng0alang udara.
Gambar 4.18. Pengaasan tingkat pengisian dalam 0al pipa semprot tekanan balik
Gambar 4.11 . -ontrol tepian pita
&.3.'e%nologi %one%si dan onta%
#ombol keluaran Positif dan >egatif
$iasanya, desain dua proAimity sensors adalah dibedakan. P>P ( tombol positif)
dan >P> (tombol negatif). Perbedaan lain adalah P&s%it'hing atau tombol positif seperti
halnya >&s%it'hing atau tombol negatif proAimity sensors biasanya mempunyai sebuah
keluaran transistor P>P.
a. P>P&output
i dalam kasus proAimity sensors arus searah dengan keluaran P>P, keluaran
tersebut dihubungkan ke tenaga positif di bagian saklar(tombol).
b. >P>& ut
1-
-
7/26/2019 Hand Out t Otomatis
19/32
Teknik Kontrol Otomatis
i dalam masalah sensor dekat dengan >P>& keluaran , dihubungkan kepada
potensial yang negatif pada status saklar.
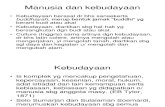
. P4*SES*4
.1. Pogammable Logi" 7ontolle (PL7)
BPL# adalah suatu peralatan elektronik yang bekerja se'ara digital, yang
didesain untuk peralatan industri, yang menggunakan sebuah memori yang dapat
diprogram untuk penyimpanan internal dari pengguna yang berorientasi pada perintah&
perintah untuk melakukan fungsi&fungsi khusus, seperti logic, seuencing, timing,
counting, dan arit&metic, untuk mengontrol berbagai input dan output baik berupa digital
ataupun analog.
Gambar ".1. Modul P9
Perangkat sistem PL#memiliki 'iri&'iri yang tidak dipunyai oleh sistem kontrol lain, yaitu
sebagai berikut1
a. Pemrograman yang sangat sederhana.b. Program dapat diubah tanpa mempengaruhi sistem.
1,
-
7/26/2019 Hand Out t Otomatis
20/32
Teknik Kontrol Otomatis
c. Lebih ringkas, murah dan lebih mudah pengaturannya dibandingkan dengan
sistem kontrol relay.d. Sederhana dan murah dalam pera%atannya.
.2 Pinsi! ea P9
Gambar ".2. Prinsip kera P9
Pada prinsipnya sebuah PL#melalui modul input bekerja menerima data&data
berupa sinyal dari peralatan input luar (eternal input de)ice) dari sistem yang dikontrol.
"omponen&"omponen PL#
PL#terdiri dari beberapa komponen, yaitu1
a /ard0areb !ot0are
c Programmer
$
-
7/26/2019 Hand Out t Otomatis
21/32
Teknik Kontrol Otomatis
Gambar ".3. -omponen P9
a. 7ard%are/ard0are dari rangkaian PL#adalah *odul nput/utput (/) yang terdiri
dari dua bagian yaitu modul input dan modul output.*odul nput dari sebuah PL#adalah modul yang merupakan penghubung dari
sensor&sensor. *odul nput memiliki fungsi&fungsi penting sebagai berikut1
*ampu mendeteksi dan menyaring sinyal dengan baik.
*engubah sinyal kontrol menjadi sinyal logika.
*elindungi komponen elektronik yang sensitif dari tegangan balik.
*odul utput menghubungkan sinyal dari programmer menuju elemen kendali
terakhir yaitu a'tuator. ?ungsi utama dari modul output1
*engubah sinyal logika menjadi sinyal kontrol.
*elindungi komponen elektronik sensitif dari tegangan balik dari
perangkat komputer.
*elindungi modul ouput dari hubungan arus pendek dan beban
berlebih.
*eningkatkan daya untuk aktuasi dari elemen kendali akhir utama
yaitu silinder pneumatik
bSoft%are
!ot0areyang dimaksudkan adalah bahasa pemrograman yang dilakukan dalam
membuat program perintah yang digunakan untuk mengotrol sistem pneumatik. $ahasa
pemrograman yang paling dominan digunakan adalah sebagai berikut1
-. iagramLadder (tangga) merupakan diagram kontrol pada PL#.
$1
-
7/26/2019 Hand Out t Otomatis
22/32
Teknik Kontrol Otomatis
Gambar ".4. 6iagram Tangga adder 6iagram)
"eterangan1 1 *asukan / tombol start$ 1 1ormally closed (1#C 1 1ormally open (1+ 1 "eluaran /relay0 1 "eluaran/relay
. Pada penggambaran diagram tangga dikenal dengan simbol&simbol sebagaiberikut1
Saklar1ormally +pen (1+, saklar ini menandakan keadaan
saklar yang normalnya pada posisi +**/terbuka, dan akan
+1/terhubung jika relai telah dialiri arus listrik.
Gambar ".". Simbol ;O
Saklar 1ormally #losed (1#, saklar ini menandakan kedaan
saklar yang normalnya pada kedaan +1/tertutup, jadi jika saklar
tersebut diaktifkan akan menjadi +**/terbuka.
Gambar ".#. Simbol ;9
"eluaran dapat berupa relayyang akan mengaktifkan kontak&
kontak 1+dan 1#.
$$
-
7/26/2019 Hand Out t Otomatis
23/32
Teknik Kontrol Otomatis
Gambar ".$.Simbol -eluaran /ela
2. !tatement List
Statement List tidak menampilkan bahasa pemrograman se'ara grafik namun
dideskripsikan dalam bentuk perkataan (verbal).
Contoh 1 S#P -
? S- > D #7> S# 0- 2S# 0+
S#P +
? - #7> S# 05 2S# 0;
'. Programmer
Programmer dalam sebuah PL#merupakan suatu perangkat berupa komputer
yang terdiri dari monitor, #entral Processing 3nit (#P3, dan kelengkapannya.
Pemrogram dapat berupa console. engan menggunakan perangkat komputer data
akan diolah dalam #P3. #P3mengontrol dan menjalankan semua operasi di dalam
PL#. Pada dasarnya #P3 adalah unit yang berisi mikroprosesor yang
menginterpretasikan sinyal&sinyal input dan melaksanakan tindakan&tindakan
pengontrolan, sesuai dengan program yang tersimpan di dalam memori. Lalu
mengkomunikasikan keputusan keputusan yang diambilnya sebagai sinyal&sinyal kontrol
ke modul output.
$
-
7/26/2019 Hand Out t Otomatis
24/32
Teknik Kontrol Otomatis
I. SIS'I+ BILAN8AN
,.1. Pengetian sistim bilangan desimal.
Sistem bilangan desimal adalahsistem bilanganyang menggunakan -D ma'am
angka dari D,-, sampai E. Setelah angka E, angka berikutnya adalah - D, - -, dan
seterusnya (posisi di angka E diganti dengan angka D, -, +, .. E lagi, tetapi angka di
depannya dinaikkan menjadi -).
angka desimal 123 < 1=182> 2=181> 3=188
Sebaliknya dalam sistem 'omputer digital, seluruh proses perhitungan bilangan
dilakukan hanya dengan + jenis angka yaitu D dan -. Sistem bilangan ini dikenal dengan
system bilangan binary atau biner.
,.2 5enis enis sistem bilangan
a. Sistem angka esimal (basis -D),
b. Sistem bilangan $iner (basis +),
'. Sistem bilangan 'ktal (basis
-
7/26/2019 Hand Out t Otomatis
25/32
Teknik Kontrol Otomatis
N 9 a n: 1 n ; an
-
7/26/2019 Hand Out t Otomatis
26/32
Teknik Kontrol Otomatis
6 DDDD D-D- DD6 D6
F DDDD D--D DDF DF
G DDDD D--- DDG DG
< DDDD -DDD D-D Do. Pakaian - + 5 ;
Jarna *erah ya tidak tidak ya
*otif bunga tidak ya tidak ya
Pakaian yang diinginkan tidak tidak tidak ya
3adi hanya apabila kedua syarat itu dipenuhi, maka ja%abannya baru benaatau ?a.
.2 *!eato AND
Cerita di atas adalah salah satu 'ontoh dari operasi nd. tau kalau kita hendak
menjalankan mobil, maka kita harus menghidupakan mesin dan memasukkan gigi
versneling. Se'ara simbolik maka operator nd dapat ditulis sebagai berikut 1
. $ H C
#abel kebenaran perator >
. $ H D
D . D H D
D . - H D
perator > digambarkan didalam symbol elektronik yaitu1& > 4ates C H .$ D D - -
$ $ D - D -
C D D D -
&> Cir'uits 1 pada rangkaian relay yangmembentuk > 4ate
$+
-
7/26/2019 Hand Out t Otomatis
28/32
Teknik Kontrol Otomatis
.2. H$%$m AND
ari pembahasan di depan, maka ada 5 hukum ljabar $oolean tentang operator
> yang akan dibahas di sini, yaitu 1
.- H KKKKKK..(-)
.D H D ..KKKKKK(+)
. H .KKKKKK.(5)
$erapapun harga , akan menyebabkan harga output akan sama dengan , bila input
lainnya adalah -. 7ukum kedua berapun harga, harga output akan sama dengan D,
bila input lainnya adalah D. 7ukum yang ketiga untuk dua harga yang sama, yaitu ,
maka harga outputnya adalah sama dengan harga input tersebut. pabila H D, maka
outputnya akan berharga D dan apabila harga H -, maka harga outputnya juga
berharga -.
.3 *!eato *4
Penggunaan perator 2 juga 'ukup banyak digunakan sehari&hari, misalnya
pada kondisi di mana kita dihadapkan pada pertanyaan apabila. *isalnya, apabila saya
datang terlambat atau tidak masuk kantor, maka pasti saya akan ditegur. pabila saya
tidak belajar dengan baik atau tidak ikut ujian, maka nilai ujian saya pasti jelek.
Se'ara simbolik maka perator 2 dapat ditulis sebagai berikut 1
$ H C
rtinya, C akan benar bila atau $ benar,
#abel kebenaran dari perator 2
$ H C
D M D H D
D - H -
- D H -
- - H -
perator 2 digambarkan didalam symbol elektronik yaitu1
&2 4ate C H $ D D - - $ $ D - D -
C D - - -
& 2 Cir'uit 1 pada operator relay yang membentuk 2 4ate
" E2lusi3e 45 Gate #ika sala& satu dari input dan bukan kedua"duanya adala& 16
maka outputnya akan ber&arga 1
$-
-
7/26/2019 Hand Out t Otomatis
29/32
Teknik Kontrol Otomatis
C H $ D D - -
$ $ D - D -
C D - - D
.&. H$%$m *4
Sama dengan operator >, maka operator 2 mempunyai 5 hukum ljabar
$oolean yang paling penting, yaitu
- H - KKKKKKKKKKKK..(-)
D H KKKKKKKKKKKK.(+)
H KKKKKKKKKKKK(5)
Pembuktian dari hukum pertama. $erapapun harga dari input , bila input
lainnya adalah -, maka harga outputnya juga akan -. 7ukum kedua. $ila salah satu dari
input berhagar D dan input lainnya adalah , maka harga dari output akan sama dengan
harga dari tersebut. 7ukum yang ketiga. $ila kedua input memiliki harga yang sama
yaitu , maka harga dari output juga sama dengan kedua harga tersebut.
. *!eato N*'
perator ># pada dasarnya adalah pembalikan dari suatu argument atau
statement.
*isalnya 1
"alau kita kaya, maka kita tidak miskin
"alau kita miskin, maka kita tidak kaya
Se'ara simbolik maka operator ># dapat ditulis dengan huruf yang mempuyai
garis di atasnya 1
H $ dan $ H
rtinya ,
"alau tidak pasti $ atau
"alau tidak $ pasti
perator ># digambarkan didalam symbol elektronik sebagai suatu inverter yaitu 1 $ $ D -
D -
$ - D
., H$%$m N*'
$eberapa hokum ljabar $oolean mengenai operator ># ini adalah 1
$,
-
7/26/2019 Hand Out t Otomatis
30/32
Teknik Kontrol Otomatis
D H -KKKKKKKKKKKKKKKK K(-)
- H D KKKKKKKKKKKKKKK KK(+)
bila H D maka : H - KKKKKKKK KK(5)
bila H - maka : H D KKKKKKKKKK.(;)
Pembuktian dari seluruh hukum ljabar $oolean bah%a hanya ada dua
kemungkinan harga input, yaitu logik D atau -. "alau inputnya D, maka outputnya adalah
- dan sebaliknya apabila inputnya - maka outputnya pasti harganya D. Salah satu
hukum tambahan dari perator ># ini adalah sebagai berikut 1
H
3adi nverter dari nvented adalah .
. H$%$m
-
7/26/2019 Hand Out t Otomatis
31/32
Teknik Kontrol Otomatis
7ukum ( atau
2, sebagai berikut 1
7okum (-;) H $
7okum (-6) . $ H $ .
"ebenarannya yang membuktikan dibolehkannya penukaran posisi dari > atau 2
dalam persamaan $ H $ . Sedangkan pada "ebenaran yang membuktikan
dibolehkannya penukaran posisi dari > di dalam persamaan .$ H $.
e. 7ukum sosiatif
engan hokum sosiatif ini kita dapat melakukan pengelompokkan variable&
variabel sebagai berikut 17okum (-F) ($ C) H ( $) C
7okum (-G) . ($ . C) H ( . $) . C
7ubungan 2 antara dan $ menghasilkan ( $) C. 7asil hubungan ini
dapat memberikan harga yang sama untuk harga dan ($ C).
1
-
7/26/2019 Hand Out t Otomatis
32/32
Teknik Kontrol Otomatis
f. 7ukum istributif
7ukum distributif ini memungkinkan pemisahan hasil operasi perkalian sebagai
berikut 1
7ukum (-# ataunverter 1
$C dapat dirubah menjadi ($ C)
&*emungkinkan transformasi dari bentuk Bsum&of&produ't: kedalam bentuk
Bprodu't&of&sum: seperti1
$C $C H ( $ C ) ( $ C )
#eori e *organ menjadi1 .$ H $