Elasticity of Anisotropic Bodies at Structural Phase Transitions
105
FOREWORD If you are interested in scientific research and discoveries, in the popular media these days, the majority of what you hear is about particle accelerators / particle physics, high energy physics, cosmic particles, space travel, but mostly something about cosmological topics like the Big Bang, the expansion of the universe, black holes, wormholes etc., and of course climate change. All this is currently quite 'in vogue'. Nevertheless, there are numerous 'classical' physics topics that - although seemingly relegated to the background - are being intensively researched and not infrequently produce important, unexpected and impressive results. In my opinion, this includes the field of solid state physics, in particular crystal physics. Powerful mathematical tools, such as group theory, as applied in the theory of the phase transitions (Landau’s Theory), not seldom lead to new theoretical insights. Since crystals are touchable, material substances, one can concretely measure their properties and compare these with the predictions. In this way, for example, materials with specific properties can be developed. The background of this paper lies mainly in the description and determination of the elasticity of crystals that have undergone a phase transition. Certain crystals exhibit so-called ferroelastic properties (by analogy with ferromagnetic and ferroelectric crystals). This group often shows different and also extreme elastic constants and deformations, which have to be measured and described. At this point I also point to a collection of articles I wrote in 2017. There it is about Landau’s Theory in general and applied to a number of concrete phase transitions. In the following article, in addition to the basics of anisotropic elasticity, various investigation possibilities were discussed in detail in connection with selected crystals. Hempel December 2021 PS: Interested parties shall feel free to make use of the attached considerations, but referencing to this source is highly appreciated. Contact: [email protected]
Transcript of Elasticity of Anisotropic Bodies at Structural Phase Transitions

FOREWORD
If you are interested in scientific research and discoveries, in the popular media
these days, the majority of what you hear is about particle accelerators / particle
physics, high energy physics, cosmic particles, space travel, but mostly something
about cosmological topics like the Big Bang, the expansion of the universe, black
holes, wormholes etc., and of course climate change. All this is currently quite 'in
vogue'.
Nevertheless, there are numerous 'classical' physics topics that - although
seemingly relegated to the background - are being intensively researched and not
infrequently produce important, unexpected and impressive results.
In my opinion, this includes the field of solid state physics, in particular crystal
physics. Powerful mathematical tools, such as group theory, as applied in the
theory of the phase transitions (Landau’s Theory), not seldom lead to new
theoretical insights. Since crystals are touchable, material substances, one can
concretely measure their properties and compare these with the predictions. In this
way, for example, materials with specific properties can be developed.
The background of this paper lies mainly in the description and determination of
the elasticity of crystals that have undergone a phase transition. Certain crystals
exhibit so-called ferroelastic properties (by analogy with ferromagnetic and
ferroelectric crystals). This group often shows different and also extreme elastic
constants and deformations, which have to be measured and described. At this
point I also point to a collection of articles I wrote in 2017. There it is about Landau’s
Theory in general and applied to a number of concrete phase transitions.
In the following article, in addition to the basics of anisotropic elasticity, various
investigation possibilities were discussed in detail in connection with selected
crystals.
Hempel
December 2021
PS: Interested parties shall feel free to make use of the attached considerations,
but referencing to this source is highly appreciated.
Contact: [email protected]

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 1 of 104
Table of Contents
1. Displacements in Continua………………
2. Stress and Elasticity……………………...
3. Hooke’s Law / Elastostatics / Energy….
4. Applications (selection)…………………..
a: Uniform Compression…………...
b: Uniaxial Extension…………….….
c: Shear………………………………..
d: Bending of Rods………………….
e: Torsion of Rods…………………...
5. Ferroelastics…………………………….…..
a: Hysteresis Loop…………………..
b: Domain Switching (and more).…
c: Torsion Pendulum (I. & II.)………
d: Practical Consideratins………….
6. Literature…………………………………….
2
8
10
14
14
16
18
20
28
54
54
56
76
99
103

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 2 of 104
1. Displacements in Continua
• Every point of a continuum shall have moved from a position, described
by to it new position, described by
• The displacement of that point can be described by
(1)
• Generally, displacements can be decomposed in a pure translation, rotation
and distortion
• Further it is assumed that all displacements are small, and located closely
to the origin of the System of Coordinates (SoC)*)
• The shift of the origin of SoC ( ) is described by
(2)
Note: The contents of chapters 1.-3. base mainly on dedicated textbooks (e.g. /1/,/2/)
*) Note: SoC means the (Cartesian) crystal-physical system of coordinates (x, y, z) – particularly defined for each crystal classes
r
r
rrrs
−=)(
0)0()0( ssr
==
0=r

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 3 of 104
• Taylor-Series’ development of at yields
(3)
with: = 2nd rank tensor of displacement
= anti-symmetric part
= symmetric part
shift of the origin of SoC
Antisymmetric Tensor – Representation of the Rotation
• Having done the (‘standard’) decomposition of tensor , for the anti-
symmetric part follows explicitly:
(4)
*) Note: Expressions of the kind are called dyad ( ͦ )and represent a tensor, not a scalar product!
s
sa
r
UrUrsUrssr
rsrs
++=+=
+=
=
00
0
0)(
=0s
0=r
0,,
,02
1
2
1
−
==
−
=
k
i
i
kk
kii
akik
kii
a
x
s
x
seeUee
rss
rU
sUaU
U
U
s
r

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 4 of 104
• Looking closer at the tensor’s components we find:
• is indeed anti-symmetric: ,
• has 3 independent components, which means that it can be
equivalently represented by an (axial) vector
• The rotational displacement can be written as (using (3), (4)):
(5)
whereby denotes the infinitesimal small (axial) rotation vector.
• Comparison yields:
, and in components: (6)
• In particular we obtain, invoking eqs. (6) and (4):
(7a)
Note: is the so called Levi-Civita symbol
aa UU
~−=
aki
aik UU −=
rrsrr
ssr
rUrrs arot
=
−
==
002
1
2
1)(
almklmk U
2
1=
0
0
)(2
1
2
1srots
r
=
=
klm
m
nimni
x
s
= 2
1
azy
ayz
yzx UU
z
s
y
s−==
−
==
0
12
1
aU
aU

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 5 of 104
(7b)
(7c)
• The resulting (infinitesimal) overall rotation calculates as the sum acc. to:
with being the unit vectors along the x-,y-,z-axes (8)
of the SoC
Symmetric Tensor – Representation of the Distortion (Strain)
• The symmetric part of tensor is named deformation-, respectively strain
tensor and is often denoted as (capital S - for strain)
(9)
axz
azx
zxy UU
x
s
z
s−==
−
==
0
22
1
ayx
axy
xyz UU
y
s
x
s−==
−
==
0
32
1
=
33
22
11
e
e
e
321 ,, eee
0,,02
1
2
1
+
==
+
==
k
i
i
kk
kiiikk
kii
S
x
s
x
seeSee
rss
rSU
U
sU
S

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 6 of 104
• Tensor has 6 independent components
• The 3 diagonal components stand for the relative change of length along
x-, y- and z-directions:
(10)
• The relative change of volume due to a strain calculates as the sum of the
diagonal components:
(11)
• The Trace is independent of the SoC.
• Taking eq. (9) for i=k (trace components) we get:
(12)
whereby stands for the displacement vector (ref. to eq. (1))
332211 Sz
zS
y
yS
x
x=
=
=
==++=
iii STrSSSS
V
V
332211
sdivr
s
x
s
x
s
x
seeSTr
i i
i
i
i
i
ii
ii
=
=
=
+
=
0002
1
s
STr
S

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 7 of 104
• The 3 non-diagonal components characterise the position of the tensor
ellipsoid in the SoC
• For subscripts I≠ k we have*): (13)
• After some calculation it follows (as approximation):
(14)
The non-diagonal strain
components represent one half
of the angles between the ‘old
and new’ directions (i.e. before
and after distortion) – see left
*) Note: vectores are not unit vectors anymore!
kikikiik eeeeeSeS
===
ik ee ,
+
=
+
=
+
=
=========
z
s
y
sS
z
s
x
sS
y
s
x
sS
SSSSSS
yzxzxy
2
1,
2
1,
2
1
22,
22,
22
231312
3232
2323
3131
1313
2121
1212
1e
1e
2e 2e
221
212

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 8 of 104
• Usually the strain tensor components are denoted with one subscript
(Voigt’s Notation /2/) instead of two – to shorten the expressions.
(15)
2. Stress and Elasticity
• The stress of a body is defined via the substitute forces that
maintain exactly the present deformation state (at the ‘cutting’ surfaces
at point )
(16)
(17)
with being the stress tensor.
222456
321
322331132112332211
SSSSSS
SSSSSSSSS
===
)(),( rTAdAdrFdFd
==
Fd
r
ikkki
i TeeT
=,T

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 9 of 104
• The stress tensor is a symmetric tensor of 2nd rank (see also later)
(18)
and its components have the following meaning:
Tik (i=k) are denoted as the
normal stresses
Tik (i≠k) are denoted as the
tangential stresses
TT
~= kiik TT =

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 10 of 104
• Likewise as the stains, the stress tensor’s components are denoted with one
subscript (Voigt’s Notation /2/) instead of two – to shorten the expressions.
(19)
3. Hook’s Law / Elastostatics / Energy
• Hooke’s Law describes the linear and unique relation between Stress and
Strain:
(in Voigt’s Notation (20)
• Shorter *):
Note 1: are the so called elastic stiffness coefficients
Note 2: Hooke’s Law is typically named to be the linear relation between and , whereby non-linear terms (of )
can be added. This is not in the focus here.
*) Note: It has to be summed up if subscripts appear several times in one expression
456321
322331132112332211
TTTTTT
TTTTTTTTT
===
==
ScTScTml
lmiklmik,
cc iklm,
ScTScT lmiklmik ==
T
S
S
)6...1:,

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 11 of 104
• Since and are symmetric tensors, the tensor of the elastic stiffness
has at maximum 21 independent components, when taking into
account the tensor’s symmetry (21)
• Crystals with lowest symmetry (triclinic) do have those 21 coefficients.
• Elastic coefficients for all crystallographic Point Groups (PGs) are listed
in respective textbooks (e.g. /2/).
• Furthermore the invers of eq. (20) is also valid, namely
(22)
• It has to be noticed that means the inverse stiffness tensor
component, denominated as the elastic compliance*) tensor component:
(23)
Note: The conversion from stiffness to compliance requires the calculation of the complete tensor inversion.
*) Note: The elastic compliance- and the elastic stiffness tensors exhibit the same symmetry.
c
cc =
( ) lmiklmik TcS 1−= ( ) TcS 1−
=
( ) 1−= cs
( ) 1−c
S
T

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 12 of 104
Static Equilibrium Conditions
1. Forces:
The sum of all acting forces has to be zero.
(24)
is the density of the external volume forces, and are the
area-proportional forces.
This can be reformed to be:
(25)
2. Torques:
The sum of all acting torques has to be zero.
(26)
0=+ AdTdVf
00 , =+=
+ klkl TfTr
f
f
AdT
0=− rTAdfrdV

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 13 of 104
Reforming of eq. (26) leads to *):
↓ ↓
(27)
Finally the equilibrium of the torques results in the symmetry of the
stress tensor (see e.g. /1/). It arises:
(28)
Energy of Elastic Continua
• As shown is respective textbooks (e.g. /1/) the elastic energy density
can be easily written in Voigt’s Notation**) (making use of eqs. (20) & (23)):
(29)
*) Note: Arrows indicate the targets of the action of the differential operators
**) Note: It has to be summed up if subscripts appear several times in one expression
00 =
=
milklmk
i
xTex
rTr
TT
~= kiik TT =
TsTTSScS2
1
2
1
2
1===

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 14 of 104
• The elastic coefficients are now calculated as the 2nd derivatives:
and (30)
• Comment: for the elastic stiffness components applies:
(30a)
and for the elastic compliance components applies:
(30b)
4. Applications (selection)
a: Uniform Compression
• If a pure hydrostatic pressure p acts on a surface of a body then these
compression forces are directed anti-parallel*) with respect to the normal
vectors , characterising the surface
*) Note: In case of a uniform expansion the directions will be parallel (minus sign turns into plus sign)
SSc
SSc
lmik
iklm
=
=
22
TTs
TTs
lmik
iklm
=
=
22
n
)6...1;6...1( === klijcc ijkl
)6,5,4;6,5,4(4
)3,2,1;6,5,4(2
)6,5,4;3,2,1(2
)3,2,1;3,2,1(
===
===
===
===
klijss
klijss
klijss
klijss
ijkl
ijkl
ijkl
ijkl

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 15 of 104
• The related boundary condition can be formulated like:
(31)
• This can be satisfied by:
(32)
Comment: is the unit tensor (symbolically: ) and is the Kronecker Symbol,
providing the values: ‘1’ if i=j and ‘0’ if i≠k.
• Turning now to the strains:
(33)
• From eq. (33) follows: with k=1,2,3 (34)
• The elastic compliances (i.e. the Compressibility Coefficients) for all the
crystallographic classes can be easily calculated or simply looked up in /2/.
ijij pnnTnpnT −=−=
ijij pTEpT −=−=
E
ij
100
010
001
klijklklijklij psTsSEpsTsS −==−==
psS ijkkij −=
ijkks

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 16 of 104
b: Uniaxial Extension
• A rod with an unchanging (but arbitrary) cross-section (of area A)
along the length shall experience uniformly distributed tensile forces
at the ends.
• Having a unit vector along the rod axis, the stress tensors
reads:
(35)
• For the resulting strain parallel to direction of follows:
(36)
• The elongation of the rod along can be obtained:
(37)
• The expression:
(38)
is called the reciprocal Young’s Modulus for direction
jiij qTqTqqTT ==
)1( =qq
lkijklij qqTsSqqsTS ==
lkjiijkljiij qqqqTsqqSl
l==
lkjiijkl qqqqsqE =− )(1
q
q
q
AT

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 17 of 104
Comment: Vector can be depicted as follows:
(39)
• To ease laborious calculations of eq. (38) Voigt’s Notation will be useful:
(40)
with acc. to : 11→1; 22→2; 33→3; 12→6; 13→5; 23→4
• Rewriting stress and strain (ref. to eqs. (35), (36)) this yields*):
and (41)
*) Note: The expression is called dyad and represents a tensor, not a scalar product!
)1( =qq
)cos(),cos(
)cos(),cos(
)cos(),cos(
3
2
1
===
===
===
zzz
yyy
xxx
eqeqqq
eqeqqq
eqeqqq
)( qqqq ji
=
→ji ,
z
x
y
xq
q
zq
yq
)()( qqTsSqqTT
==

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 18 of 104
• Finally the reciprocal Young’s Modulus can be expressed. It is listed
for the crystallographic classes e.g. in /2/.
(42)
c: Shear
• Let’s have a rectangular rod with uniformly distributed tangential forces
to the side faces. The rod shall be in equilibrium of forces.
• shall be a unit vector normal to the glide-planes and a unit vector
toward the glide-direction (e.g. ref. to eqs. (18), (19), and the pic there).
Both vectors shall be mutually perpendicular.
(43)
• Now the strain can be expressed*):
(44)
*) Note: Factor 2 in eq. (44) originates from the fact that it holds: (because of the symmetry of
regarding subscripts k and l)
)()()(1 qqqqsqE
=−
q
p
)()( jijiij pqqpTTpqqpTT +=+=
lkijklij qpTsSqpsTS 2)(2 ==
qppqqp
2=+ijkls

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 19 of 104
• Similar to eq. (37) the following shear component of is of interest:
(45)
with being the shear-angle, and use has been made of eqs. (13),(14)
• From eq. (45) the Shear Modulus is given:
(46)
which reads in Voigt’s Notation:
(47)
where (48)
Comment: It is worth to mention (/2/) that:
- The Shear Modulus is symmetric:
- Anisotropic bodies experience volume changes under shear stresses.
( ) ( )2
22
=== lkjiijkl qpqpTsqpsqpTqSp
S
( ) ( )T
qpqpsqpsqpqpG lkjiijkl
==− 44),(1
( ) ( )T
pqqppqqpsqpG
=++=−
),(1
),(),( 11 pqGqpG
−− =
( ) ( ) 6,...,1=+=+ ijpqqppqqp jiji

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 20 of 104
d: Bending of Rods
• Let’s assume a rectangular rod (length: c, width: 2a, thickness: 2b,
with c>>a,b),
fixed on its
left side.
• The vectors are unit vectors and belong to the special
(non-crystal-physical), but orthonormal SoC
• The bending moment (torque) is created by an external force
applied at the end : (49)
• The equilibrium condition for the torques demands the that sum of
the ‘replacement torque’ (which is uniform along axis ) and
the externally applied (also not depending on ) must be zero)
qnm,,
( )cx ='3
( )'3'2
'1 XXX
0F
0M
SM
'3X
0M
ncFFqcM
000 −==
b2
c
m
n
q
F0
→'3x
MS
→neutral plane
M0
→
'3X

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 21 of 104
(50)
• Assuming forces (per unit area) across the rod’s cross
section S like: (51)
we get:
and on the other hand:
• With eq. (50): we obtain (52)
• Eq. (52) expresses the boundary conditions regarding the
torques at the rod’s ends
03
4 30
=
+− nkabcF
30
4
3
ab
cFk =
00 =+ SMM
qkxTFS'1
' −==
nkabdxdxqkxmxdSFmxMa
a
b
b
S
S
S
3'
2'1
'1
'1
'1
3
4=−==
+
− −
ncFFqcM
000 −==
cxx == '3
'3 ,0
qxab
cFqT
'13
0'
4
3)( =

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 22 of 104
• Yielding a stress tensor like:
(53)
• In the special SoC only one component is non-zero:
(54)
• With Hooke’s Law follows:
(55)
• That strain results in a gradual bending of the rod along axis which can
be easily described by a rotation angle around whereby
(accord. to eq. (6)):
and in components (56)
)(4
3 '13
0' qqxab
cFT
=
'3
'13
0'33
4
3Tx
ab
cFT ==
'13
0'3
'3
'3
''33
'33
'
4
3x
ab
cFsTsSTsS ikik ==→=
'2X)( '
3'2 x
0
0
)(2
1
2
1srots
r
=
=
m
nimni
x
s
= 2
1

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 23 of 104
• To calculate we use the formulae:
(57)
Proof:
With eq. (56) we start with
whereby the last term, which has been arbitrarily added, is identical to zero and therefore
no mistake. Summarizing the expression and using definition of eq. (9) leads to:
Finally we verify eq. (57):
Comment:
It has to be carefully distinguished between (displacement vector) and (strain tensor)
The apostrophes always indicate that the given quantities are referred to the special SoC which
does not necessarily coincide with the crystal-physical SoC.
Elastic coefficients as listed in the textbooks are referred to the respective crystal-physical SoCs
and may need to be transformed according to current application.
'3
'2
x
''
'2
''
'2
''
'2
'
'
'
'
' 2
1
2
1
2
1
2
1
mn
jimn
mj
nimn
mj
nimn
m
nimn
jj xx
s
xx
s
xx
s
x
s
xx i
+
=
=
=
'
''
'
'
'
'''
'2
''
'2'
' 2
1
2
1
2
1nj
m
imn
n
j
j
n
m
imn
mn
jimn
mj
nimn
j
Sxx
s
x
s
xxx
s
xx
s
x i
=
+
=
+
=
ijnj
m
imni
j
SrotSxx
)( ''
'
'
'
=
=
ijnj
m
imni
j
SrotSxx
)( ''
'
'
'
=
=
'S
's

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 24 of 104
• Execution of eq. (57) results in:
(58)
• with eq. (55) follows:
(59)
and finally we get:
(60)
• Next step is the calculation of the dependence
(61)
• Constant C equals to zero, because must be zero
'1
'3
'3
'5
'1
'33
'3
'13
'1
'33
213'3
'13
231'3
'2
2
1
x
S
x
S
x
S
x
S
x
S
x
S
x
−
=
−
=
+
=
30'
33'1
'3
'3
'5
4
30
2
1
ab
cFs
x
S
x
S−=
−=
30'
33'3
'2
4
3
ab
cFs
x−=
−== '33
0'33
'2
'3
'2
4
3)( dx
ab
cFsdx
)( '3
'2 x
Cab
cxFsx +−=
3
'30'
33'3
'2
4
3)(
)0( '3
'2 =x

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 25 of 104
• Having now the bending angle of the rod we can calculate the
maximum deviation ( ) of the rod from axis at position
• Angle is defined like:
• Therefore we finally have:
(62)
with (reciprocal Young’s Modulus) along the rod axis (see
also eqs. (38, 42)) - within the special SoC.
Note 1: The arrangement of the special SoC (meaning: “how the crystal rod is cut”) in relation to the crystal-physical SoC might
require certain transformations of the elastic coefficients, which have been described in previous sections (e.g. eqs. (38-42)).
Note 2: Above made considerations also apply to other rod cross sections – just eqs. (51,52) need to be adjusted.
Note 3: The body’s material Is extended above the neutral plane (see pic.) and compressed underneath.
Note 4: The body’s volume doesn’t change during bending.
'3
'1
'3
'1'
2dx
dx
x
x=
Eab
cF
ab
csFdxxcxxl
c
X 3
30
3
3'330
0
'3
'3
'2
'3
'1
8
3
8
3)()('
1
−=−====
'2
cx ='3'3X
'2
'3x
'1x
'2
1'33
−= Es
'1X
l

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 26 of 104
Question: Are there other deformations when an anisotropic rod is bent?
• Similar like in the preceding considerations of this chapter we have
to check
(63)
and (64)
• With eq. (55) we get:
(65)
(66)
'2
'5
'1
'4
'2
'13
321'1
'23
312'3
'3
2
1
2
1
x
S
x
S
x
S
x
S
x
−
=
+
=
'3
'4
'2
'3
'3
'23
132'2
'33
123'3
'1
2
1
x
S
x
S
x
S
x
S
x
−
=
+
=
'33
0'34
'3
'3
8
3)( x
ab
cFsx =
0)( '3
'1 =x
2
2'340'
2'3
'3
'3
'1
4
3)()('
1 ab
csFdxcxcxxl
b
bX
===== −
00)(0
'3
'3
'2'
2
==== c
Xdxcxxl

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 27 of 104
Answer: Yes, there are more deformations – in particular twisting around
the rod’s axis! Not happens to isotropic bodies!
• The responsible elastic coefficient within the special SoC can be
expressed by the tabulated elastic constants (which refer to the
crystal-physical SoC):
(67)
• And for eq. (65) follows:
(68)
Comment:
The denote the projections (cosines) of vectors and onto the directions of
the respective crystal-physical SoC, as shown in eq. (39).
• Even more compact
eq. (68) reads: (69)
with
)()(22 '3332
'34 nqsqqss
==
lkjiijklXnqqqs
ab
cFl
2
20
4
3'2
=
lkji nqqq ,,, q
n
)()(4
32
20
'2
qnnqqqsab
cFlX
+=
)6,...,1()(
)6,...,1()(
=+=+
==
klqnnqqnnq
ijqqqq
lklk
ji

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 28 of 104
e: Torsion of Rods
• Let’s assume a round rod (length: l, radius: R) with l>R, fixed on its lower side.
(70)
• The torsion moment (torque) is created by an external force per unit area
applied at the end of the rod
• Beside the special (non-crystal-
physical) SoC we intro-
duce a local SoC at
each point of the rod
• The relationship between both
systems writes:
( )qnm,,R
0
'3X
M
ekrF
=
m
n
q
lx ='3
M→
'1X
'2X
l
re
q
e
( )qee r,,
'3
'3
'2
'1
sin
cos
xx
rx
rx
=
=
=
area S

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 29 of 104
• Calculating the torque we get:
with: (71)
• The boundary conditions can be expressed as follows:
→ no forces on the lateral surface of the rod
and (72)
→ only forces on the end-surface of the road
and are satisfied by the stress tensor:
(73)
• shall be now expressed in terms of the special (Cartesian) SoC
4
2
R
Mk
=
qkRddrrekrerdSFrMR
r
S
4
2
0 02
1
===
erR
MqT
)
2(
4
' =
( )
eqqerR
MT
+=
4
' 2
0' = reT
er

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 30 of 104
• Acc. to the pic above we can write:
(74)
• stands perpendicular to and →
(75)
• With eq. (73) we get:
(76)
• Introducing the following indexation for the special SoC:
leads to
2'2
2'1
'2
'1 xxrwithnxmxerr r +=+==
nxmx
xx
qnm
reqer r
'1
'2
'2
'1 0
100 +−===
er
req
( ) ( ) mxnxqqmxnxR
MT
'2
'1
'2
'14
' 2−+−=
( ) ( ) mqqmxnqqnxR
MT
+−+= '
2'14
' 2
3,2,1 qnm

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 31 of 104
(77)
and finally to:
(78)
• Now we can write down all the strains within the special SoC
(79)
+
−
+
=
001
000
000
000
000
100
010
000
000
000
100
0002 '
2'14
' xxR
MT
−
−
=
0
00
002
'1
'2
'1
'2
4
'
xx
x
x
R
MT
( )
( )
( )
( )
( )
( )'1'64
'2
'654
'6
'4
'64
'5
'65
'6
'1
'54
'2
'554
'5
'4
'54
'5
'55
'5
'1
'44
'2
'454
'4
'4
'44
'5
'45
'4
'1
'34
'2
'354
'3
'4
'34
'5
'35
'3
'1
'24
'2
'254
'2
'4
'24
'5
'25
'2
'1
'14
'2
'154
'1
'4
'14
'5
'15
'
2
2
2
2
2
21
xsxsR
MSTsTsS
xsxsR
MSTsTsS
xsxsR
MSTsTsS
xsxsR
MSTsTsS
xsxsR
MSTsTsS
xsxsR
MSTsTsS
+−=→+=
+−=→+=
+−=→+=
+−=→+=
+−=→+=
+−=→+=

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 32 of 104
• The axial torsion (per unit length) is acc. to eq. (57)
defined as:
(80)
and results together wit eq. (79) in: (81)
Comment: Other contributions from eq. (79) are not valid because of eq. (80)
• Next step is the calculation of the dependence
(82)
• Constant C equals to zero, because must be zero
−
=
−
=
= '
5'2
'4'
1
'13'
2
'23'
1
'3'
3
'
2
13
Sx
Sx
Sx
Sxx
( )'55
'444
'
3ss
R
M+=
'3
)( '3
'3 x
( ) +== '34
'55
'44
'3
'3
'2 )( dx
R
Mssdx
CxssR
Mx ++= '
3'55
'444
'3
'3 )()(
)0( '3
'3 =x

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 33 of 104
• Having now the torsion angle we have the maximum torsion
angle of the rod around axis
(83)1)
• Eq. (83) is valid within the special SoC.
• Rewriting the elastic compliances yield:
• This expression still refers to the special SoC. Using the direction cosines
of the rod’s vector it can be referred to the crystal-physical SoC
(see eq.(39)).
(84)
Note 1: Quantity C is called the torsion stiffness of the rod. This is the formula to be used to calculate in experiments.
Note 2: The arrangement of the special SoC (meaning: “how the crystal rod is cut”) in relation to the crystal-physical SoC might
require certain transformations of the elastic coefficients, which have been described in previous sections .
Note 3: Above made considerations do not apply to other rod cross sections.
)()()(
)()( '3
'3
'3
'3'
55'44
4'55
'444
'3
'3 lx
l
Clx
ssl
RMss
R
lMlx ===
+=+
==
)( '3
'3 x
'3X)( '
3'3 lx =
( ) ( ) ( )'3333
'33
'3333
'3333
'1313
'2323
'1313
'2323
'55
'44 444)( ssssssssss kk −=−++=+=+
( ) ( )( )ljkiikijkllkjiijkllikjkl qqqqsqqqqsqqs −=− 44
q
'55
'44 ss +

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 34 of 104
• With eq. (84) C can be written now:
• Further we obtain: (85)
and
This is called the reciprocal of the shear modulus and can be found
tabulated for the crystallographic classes e.g. in /2/
Question: Are there other deformations when an anisotropic rod is twisted?
•
Similar like in the preceding considerations (eqs. (57,80)) we have to check
whether it bends around axis respectively . With eq. (79) we get:
(86)
( )( )ljkiikijkl qqqqsR
qCqG
−=
=
2
1)(2)(
4
'354'
3
'4
'2
'3
'3
'23
132'2
'33
123'3
'1' 2
2
11
sR
M
x
S
x
S
x
S
x
S
x
−=
−
=
+
=
=
'344'
1
'3
'3
'5
'1
'33
213'3
'13
231'3
'2' 2
2
12
sR
M
x
S
x
S
x
S
x
S
x
=
−
=
+
=
=
'2X
'1X
( )( )ljkiikijkl qqqqs
RqC
−=
4)(
4
−= −− )(2)( 11 qEqZqqG

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 35 of 104
• There is an axis of bend parallel to with a magnitude of
(87)
• The radikand can be rewritten to be:
followed by the transformation to the crystal physical SoC which yields:
• This expression can be shortened, thus finally we have:
Answer: Yes, there are more deformations – in particular bending around the
rod’s axes perpendicular to torsion axis! Not happens to isotropic bodies!
nsms '
34'35 +
( ) ( )2'34
2'354
' 2ss
R
M+=
( ) ( )'3333
'3333
'333
'333
'3333
'3333
'3333
'3333
'3323
'3323
'3313
'3313
2'34
2'35 44)( ssssssssssssss kk −=−++=+
( ) ( )lkjiijkllkjiijklljiijklljiijklkk qqqqsqqqqsqqqsqqqsssss −=− 44 '3333
'3333
'333
'333
qqqqssqqqqqqqssqqqR
M
−=4
'
qqqsqqIsqqqR
M
−= )(4
'

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 36 of 104
• Let’s now focus on rods with an arbitrary cross-section, fixed on its
lower side. Details can be found in the literature (e.g. /8/,/9/)
• For sake of better illustration we use (in the beginning) the same pic as
done for rods with circular cross-section.
• We have the special (non-crystal-
physical) SoC
• The torsion angle per length is
constant and calculates:
(88)
• The displacements vector varies
along the rod’s axis:
• The radius vector is represented by:
( )qnm,,
0
'3X
m
n
q
M→
'1X
'2X
l
3
r
'3
area S
'3
''3
'3
'3'
33)( xx
dl
d==
rqxs
= )( '3
'3
'
2'2
2'1
'2
'1 xxrwithnxmxr +=+=
s→

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 37 of 104
• Calculation of the displacement yields:
(89)
• It has to be considered that - in general - every cross-section plane
along the rod’s axis can become, as a result of the torsion, curved, i.e.
is not planar anymore.
• Therefore the so called ‘torsion function’ has to be added to eq. (89)
and we get
(90)
• Next step is the calculation of the strain tensor components. According to
eqs. (9,14) we obtain:
and (91)
• All other strains are identical to zero.
nxxmxx
xx
x
qnm
s
+−== )()(
0
)(00 '3
'3
'1
'3
'3
'2
'2
'1
'3
'3
'
qxxnxxmxxs
++−= ),()()( '2
'13
'3
'3
'1
'3
'3
'2
'
)(22
1 '2'
1
'3'
13 xx
Sx
s
x
sS
k
i
i
kik −
=
+
=
)(2
'1'
2
'3'
23 xx
S +
=

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 38 of 104
• Next step is the calculation of the resulting stress components,
according to Hooke’s Law (see eq. (20)):
• In Voigt’s Notation this reads:
(92)
• Within the current formalism we have to stipulate that only certain
stresses and strains are present (here exclusively T’4, T’5, S’4, S’5 ).
• Therefore we have to demand that in the special SoC following elastic
coefficients are identical to zero:
+
+−
=+= )()(22 '
1'2
'1323
'2'
1
'1313
'3
'23
'1323
'13
'1313
'13 x
xcx
xcScScT
+
+−
=+= )()(22 '
1'2
'2323
'2'
1
'2313
'3
'23
'2323
'13
'2313
'23 x
xcx
xcScScT
+
+−
=+= )()( '
1'2
'54
'2'
1
'55
'3
'4
'54
'5
'55
'5 x
xcx
xcScScT
+
+−
=+= )()( '
1'2
'44
'2'
1
'45
'3
'4
'44
'5
'45
'4 x
xcx
xcScScT
'65
'35
'25
'15
'64
'54
'34
'24
'14 ,,,,,,,, ccccccccc
3,2,1,)()(22 '1'
2
'23
'2'
1
'13
'3
'23
'23
'13
'13
' =
+
+−
=+= kiwithx
xcx
xcScScT ikikikikik
'''lmiklmik ScT =
'''mimi ScT =
6,3,2,1)()( '1'
2
'4
'2'
1
'5
'3
'4
'4
'5
'5
' =
+
+−
=+= mwithx
xcx
xcScScT mmmmm

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 39 of 104
• If the special SoC and the crystal-physical SoC coincide, this is NOT(!) the
case for the Point Groups (PGs): triclinic, monoclinic, and trigonal /2/.
• In other cases – when the SoCs don’t coincide - the elastic coefficients of
the crystal-physical SoC have to be transferred into the special SoC –
reflecting the orientation of the rod as cut. If then, in the special SoC,
the above mentioned coefficients are not equal to zero (or at least very
small), the forthcoming formalism doesn’t apply precisely.
• Now we introduce the auxiliary function
and (93)
• Together with eqs. (91,92) we have:
and (94)
• Conversion of the equations lead to:
( )'2'1, xx
'2
'3
'5
xT
'1
'3
'4
xT
−
)()( '1'
2
'44'
1
'2'
1
'55'
2
xx
cx
xx
cx
+
−=
−
=
'1'
1'44
'2
'2'
2'55
'1
11x
xcxx
xcx−
−=
+
=

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 40 of 104
• Through formation of the difference we get the differential equation:
(95)
• The boundary conditions require special attention. We don’t want to
have forces on the lateral surface of the rod (also in accordance with the
experiment):
with
• With eq. (93) we get:
(96)
• Let’s now focus on the vector which stands perpendicular
on the surface, whereby we have
211
2'1
2
'44
2'2
2
'55
−=
+
xcxc
,0,0,0 '2
''1
''3
''''2
'1
'3
===== vvvvvvdSvTdFXXXkiki
11
11
2'1
2
'44
'2
'1
2'2
2
'55
'2
'1
−
−=
+
=
xcxxxcxx
00 '2
'4
'1
'5
'2
'32
'1
'31 =+=+ vTvTvTvT
0'2'
1
'3
'1'
2
'3 =
−
v
xv
x
0,0,0 '2
'1
'3 = vvv
nvmvv '
2'1
' +=

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 41 of 104
• We start with a vector along the circumference of the cross-section:
• This vector stands always perpendicular to which yields
• Normalisation means and leads together with
to and (97)
• Inserting of eq. (97) into eq. (96) we get:
• Multiplication by (-dl) leads finally to :
(98)
which equals the total differential (d) of the function
ndxmdxld
'2
'1
' +=
nvmvv '
2'1
' +=
'1
'2
'2'
1'2
'2
'1
'1
'' 0dx
dxvvdxvdxvldv −==+=
( ) ( )2'2
2'1
' 1 vvv +==
( ) ( ) ( )2'2
2'1
2' dxdxdl +=dl
dxv
dl
dxv
'1'
2
'2'
1 =−=
0'1
'1
'2
'2
=
−
−
dl
dx
xdl
dx
x
0'1'
1
'2'
2
=
+
dx
xdx
x

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 42 of 104
• Since d=0 on the circumference, itself must be constant there.
• In the differential equation (see eq. (95)) only derivatives of appear, thus
we can put 0 on the circumference.
• Now we must select a specific cross-section of the rod – and we are going
to choose a rectangular cross-section (view along the rod axis).
(99)
• Using the Fourier ‘Ansatz’: the (100)
boundary conditions in direction of X’1 (i.e. 1. and 2.) are already fulfilled.
'1X
'2X
'3X
a
b
• We do have 4 boundary conditions:
0),(.20),0(.1 '2
'1
'2
'1 ==== xaxxx
0)2
,(.40)2
,(.3 '2
'1
'2
'1 ===−=
bxx
bxx
( )
=
=0
'1
'2
'2
'1 sin),(
kk x
a
kxWxx

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 43 of 104
• We want now to set up a differential equation for the Fourier coefficients
• The scalar product looks like:
• Since we get:
(101)
• Finally, applying the definition of the scalar product, we obtain:
(102)
Note: To ease the scripting, until further notice the apostrophes are omitted.
)( '2xWk
( )
=
=0
'1
'2
'1
'2
'1
'1 sinsin),(sin
kk x
a
kxWx
a
mxxx
a
m
( ) '1
'1
0
'2
'2
'1
'1 sinsin),(sin x
a
kx
a
mxWxxx
a
m
kk
=
=
=
==mkif
amkif
ax
a
kx
a
mmk
2
0
2sinsin '
1'1
kma
xWxxxa
mm =
2)(),(sin '
2'2
'1
'1
'1
'2
'1
0
'1
'2 ),(sin
2)( dxxxx
a
k
axW
a
k
=

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 44 of 104
• The first integration by parts leads to:
• Due to the boundary conditions (see eq. (99)) the 1st term vanishes
• The second integration by parts leads to:
• Again the 1st term vanishes and we have:
(103)
• The differential equation (see eq. (95)) can be reformed to be:
and is inserted into eq. (103) →
+
=
=−=
a
k dxx
xxx
a
k
k
a
x
axxxx
a
k
k
a
axW
01
1
211
1
1
2112
),(cos
0),(cos
2)(
−
=
=
=
a
k dxx
xa
k
k
a
x
ax
xx
a
k
k
a
axW
012
1
2
122
2
1
1
1
122
2
2 sin0
sin2
)(
−=
a
k dxx
xa
k
k
axW
012
1
2
1222 sin2
)(
442
2
2
552
1
2 12 c
xcx
−−=
−−−=
a a
k dxc
cx
a
k
dx
ddxcx
a
k
k
axW
0 01
55
4412
2
2
1441222 sin2sin2
)(

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 45 of 104
• Acc. to eq. (101) the value of the last integral is and yields:
• Further reformation finally leads to the differential equation for
(104)
• First we go now for the homogeneous solution of eq. (104) and use the
‘Ansatz’ and get:
• The solution can be written down as:
)(2
2xWa
k
+=aa
k dxxa
k
dx
d
kc
acdxx
a
k
k
acxW
0112
2
2
2255
44
01122
442 sin
2sin
4)(
)(sin4
)( 22255
442
01122
442 xW
kc
cadxx
a
k
k
acxW k
a
k
+=
)( 2xWk
−=−a
kk dxxa
k
a
cxW
ac
kcxW
011
5522
44
2255
2 sin4
)()(
2)( 2x
k exW −=44
255
22
ca
ck =
244
255
22
244
255
22
212 )(x
ca
ckx
ca
ck
k ececxW
−+
+=

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 46 of 104
• Now we go for the particular solution of eq. (104) and use the ‘Ansatz’
• Insertion into eq. (104) yields
• The integral amounts to:
and is unequal to zero only if k=1,3,5,… and amounts then
• Consequently we get for A:
• The general solution of the differential equation is the sum of the
homogeneous and particular solutions and can be written down as:
AxWk =)( 2
−=−a
dxxa
k
a
cA
ca
kc0
1155
442
2255 sin
4
3344
28
k
caA =
( )1cos0
cossin1
1
10
11 −−==
=−=
k
k
a
x
axx
a
k
k
adxx
a
ka
k
a2
3344
2
212
8)(
244
255
22
244
255
22
k
caececxW
xca
ckx
ca
ck
k ++=−+

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 47 of 104
• Adjustment of the solution to the boundary conditions 3. and 4. results
for the constants c1 and c2 in:
• The general solution now reads:
bca
ckb
ca
ck
b
ca
ckb
ca
ck
ee
eeAccc
442
5522
442
5522
442
5522
442
5522
22
21
−+
−+
−
−−==
AececxWx
ca
ckx
ca
ck
k +
+=−+ 2
442
5522
244
255
22
22 )(
3344
22
2
2
1
3344
22
2
2
1
80
80
442
5522
442
5522
442
5522
442
5522
k
caecec
k
caecec
b
ca
ckb
ca
ck
b
ca
ckb
ca
ck
++=
++=
+−
−+

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 48 of 104
+
−= 1cosh2
sinh
2sinh
)( 2
442
5522
442
5522
442
5522
2 xca
ck
bca
ck
b
ca
ck
AxWk
• Making use of the identity
• Finally we get with eq. (100) the auxiliary stress function to be:
(105)
• Next task is the calculation of the torsion stiffness (see also eq. (83))
xxx coshsinh22sinh =
−=
2cosh
cosh
18
)(
442
5522
2
442
5522
3344
2
2b
ca
ck
xca
ck
k
caxWk
1
44
55
2
44
55
,...5,3,133
442
22 sin
2cosh
cosh
118
),( xa
k
bc
c
a
k
xc
c
a
k
k
caxx
k
−=
=

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 49 of 104
• Starting with the energy of the twisted rod we detail eq. (29)
• Inserting the strains from eq. (92) and the auxiliary stress function
(see eq. (93)) we get:
(106)
• Torsion energy per length requires the integration over the rod’s
cross-section S
( )
( ) ( )445544445555
3232232331311313
2
1
22
12
1
2
1
TSTSTSTSTSTS
TSTSTSTSTS ikik
+=+++
=
+++==
2
1
23
44
2
2
23
55
4
44
45
55
5
2
1
2
1
2
1
+
=
+=
xcxcT
c
TT
c
T
21
2
144
2
255
23
11
2
1dxdx
xcxcS
+
=
−
=
=
+
−
−=
=
=
−−
2
2
20
121
2
441
1
144
1
0
2
2
222
2
552
2
255
23
1
0
11
2
21
2
1dxdx
xcx
ax
xcdxdx
xcbx
bx
xc
b
b
aab
b

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 50 of 104
• The function is identical to zero on the circumference, and
consequently the terms are also zero.
• Further we get:
• The expression in brackets represents the differential equation (eq.(95))
and amounts exactly to -2 (depends only on the cross-section).
(107)
• To calculate the total energy of the entire rod, integration along the
rod’s axis is required. Use was also made of eq. (107).
(108)
Note: Now we are going to use the apostrophes again, in order to express that we are still moving
within the special SoC
2121
2
44
23122
2
2
55
23
1
2
11
2
1dxdx
xcdxdx
xc SS
−
−=
21
,xx
2121
2
4422
2
55
23
11
2
1dxdx
xcxcS
+
−=
212321
23 2
2
1dxdxCCdxdx
SS
===
l
Cl
l
Cl
Cdx
Cdx
ll
rod
2'3
'
2
2'3
'2'3
''3
0
2'3
'
0
'3
2222
=====

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 51 of 104
• The potential energy of a road twisted by an external torque M (M=D) (109)
can be generally expressed as follows:
(110)
• Comparing eqs. (108) & (110) we find: with l being the (111)
length of the rod. C is called torsion stiffness (see also eq. (83)).
• Now we need to calculate composition of C’, which is acc. to eq. (107)
road axis (112)
parallel to X3’
2'3
'
0
'3
'3
'
0
'3
2
1''
=== DdDdMpot
'
''
M
l
CD ==
−
=
−==2
20
'2
'1
'1
'44
'55
'
'44
'55
,...5,3,133
'44
2'2
'1
' sin
2cosh
cosh
118
222
b
b
a
kS
dxdxxa
k
bc
c
a
k
xc
c
a
k
k
cadxdxC
−==
=
bc
c
a
k
c
c
k
ab
k
caCC
kx '
44
'55
'55
'44
,...5,3,134
'44
3'
2tanh
2132'3

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 52 of 104
• Likewise we find:
road axis (113)
parallel to X1’
road axis (114)
parallel to X2’
• It needs to be mentioned that the case of a square cross-section is covered,
if we put simply: a=b
• Putting everything together (eqs. (108)-(114)) we can imagine to have the
following experimental approach / setup:
• The rod (dimensions: a, b, l) with defined orientation is excited
by a certain external torque M
• The respective twisting angle is measured
−==
=
bc
c
a
k
c
c
k
ab
k
caCC
kx '
66
'44
'44
'66
,...5,3,134
'66
3'
2tanh
2132'2
−==
=
bc
c
a
k
c
c
k
ab
k
caCC
kx '
55
'66
'66
'55
,...5,3,134
'55
3'
2tanh
2132'1
'i

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 53 of 104
• The value of is calculated according to
• Since the - depending on the PG – frequently consist of
two different elastic coefficients, the procedure for the
calculation of the single coefficients might be:
• to use a numerical iteration procedure, or
• to cut / do an approximation of the series expression
for the such way, that the elastic coefficients can be
approximatively calculated
• Special attention has to be paid to cases where the special SoC
is different to the crystal-physical SoC (i.e. in cases of special
cuts of the rod). Here the elastic coefficients have to be
transformed acc. to the recipe (see. eq. (122)):
and the applicability of the above outlined formalism has to be
checked – i.e. the non-existence of :
''
ix
MlC
i
=
'ix
C
'ix
C
'ix
C
nopqmqlpkoiniklm cDDDDc ='
'65
'35
'25
'15
'64
'54
'34
'24
'14 ,,,,,,,, ccccccccc

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 54 of 104
5. Ferroelastics
a: Hysteresis Loop
• A ferroelastic material is characterized by a non-zero spontaneous
strain (SS) – analogue to the spontaneous polarization (in ferroelectrics)
or to the spontaneous magnetization (in ferromagnetics) – see e.g. the
comprehensive overview papers /3/, /4/, /5/.
• A full ferroelastic crystal has at least two Orientation States (OS, domains)
which differ in their SS-tensors (/6/).
• Ferroelasticity is the result of a (real or fictive) Phase Transition (PT) from
a Paraelastic- (PP) to a Ferroelastic Phase (FP).
• Main (and obvious) differentiator between elastic and ferroelastic behaviour
is the dependence of the strain S on stress T.
• Ferroelastics (in contrast to classical elastic materials that follow Hooke’s
Law) are characterized by a non-linear S=S(T) dependence which is called
Ferroelastic Hysteresis Loop.

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 55 of 104
• Aizu (/6/) derived the specific forms of the SS-Tensors for all possible ferro-
elastic PTs within the framework of Point Groups.
• As outlined above, in the FP the crystal usually exists in a multi-domain
state, whereby the different OSs are separated by domain walls.
• Sapriel (/7/) provided tables with the permissible domain walls for all
ferroelastic PTs.
• Ferroelastic domains can be normally observed with the aid of polarizing
microscopy because through the ferroelastic PT the crystal system changes
(if the hexagonal and trigonal systems are treated as one system)
S
T
S
T
SS
Tc
Linear Elasticity Ferroelasticity
TC: Coercive
stress
SS: Spontaneous
strain

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 56 of 104
b: Domain Switching (and more)
• Under application of specific external stresses (Text) the OSs behave
differently – they can grow, disappear or even remain as they have been.
• The criterion for a potential change is the value of the interaction energy
Eint (see eq. (29) and /9/):
(115)
• Under the action of the stress the crystal tends to achieve the state with
the lowest interaction energy (the minimum).
• Wadhawan (/3/) proposed a simple scheme how to calculate the directions
of (compressive) stress to facilitate/generate a certain OS.
• In many cases the stress directions are obvious (see examples below), but
sometimes it requires indeed detailed calculations.
• Let’s now consider to use the Bending of Rods (see above ch. 4.d:) to record
hysteresis loops, and possibly to measure simultaneously elastic coefficients
iexti SSTE −=int

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 57 of 104
• With external bending forces F0 acting up and down, tensile and
compressive stresses interchange in the upper, respectively in the lower
part of the rod.
• That means we have got a ‘vehicle’ that can produce alternating pure
tensile and compressive stresses.
• The stresses are not homogeneously distributed across the rod’s cross-
section, but vary linearly along axis
m
n
q
F0
→
neutral plane
(zero stress)
Tensile stress
in upper part
Compressive
stress in lower part
( )mX'
1

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 58 of 104
(116)
• The coercive stress TC is the applied stress, where an OS switch to another
(ref. to the pic above in this chapter, showing the hysteresis loop)
• TC cannot be realized on the neutral plane, but it should be located in the
intervals 0< and 0< , respectively 0> and 0>
• This means, that within a stress-range of , which corresponds
acc. to eq. (116) to a certain band in the rod with regards to , no switching
of OSs can be initiated. This situation is depicted in the following drawing:
represents the neutral
plane of the rod (stress-free)
b ( )mX'
1
'13
0'1
'
4
3)( x
ab
cFxT =
'T
'
0
3'''
1'
3
4)(' CCT
TcF
abTTxx
C===
-b
0'1 =x
bx '1''bC TT bx −'1
''bC TT −
'''CC TTT −
Tension
Compression
'1X
'CT
'CT−
'
0
3'''
1'
3
4)(' CCT
TcF
abTTxx
C−=−==
−
''CT
x
''CT
x−
'bT
'bT −−

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 59 of 104
• Remember: In an elastically deformed rod (see chapter: 4.d:, eq. (62)) the
deviation l of the bar at its end calculates as:
(117)
• But, it must be noted that in the FP we have several OSs, which differ in
their orientation with regard to the crystal-physical SoC as set up in the PP.
• Expecting that trough the tensile stress in the upper and through the
compressive stress in the lower parts of the rod the domain situation is
unambiguously defined, but in the grey marked band (see pic above) not!
• In that area a randomized mixture of all possible OSs must be expected
m
n q
0
''CT
x
''CT
x−
No OS switching in
the grey marked area
cx ='3
Eab
cF
ab
csFle 3
30
3
3'330
8
3
8
3−=−=

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 60 of 104
• This means that for Ferroelastics in the FP the Young Module E, as
used in eq. (117), must be treated as an effective , stemming from:
1. The E-Module of the upper part with defined OS-structure
2. The E-Module of the lower part with defined OS-structure,
but (generally) different from 1.
3. The E-Module of the grey band with unknown OS-structure
• To this end we need to adjust eq. (117) using :
(118)
• In Ferroelastics in addition we have to consider the spontaneous strains
(SSs), that might occur along the rod’s axis, and consequently will contribute
to the overall deviation/bending of the rod.
• Those contributions will (generally) differ in the upper and lower parts, and
of course depend on the strength and on the direction of the externally
applied force.
E
Eab
cF
ab
csFle 3
30
3
3'330
8
3
8
3−=−=
E

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 61 of 104
• It is required to calculate those contributions to l of eqs. (117,118).
• lu and ll are the lengths of the rod’s upper and lower parts, and
varies between 0 and c
• Using the same procedure as previously we get the rod deviation
caused by strains (subscript S):
(119)
Note 1: stands for the strain in the upper part and in the lower part, respectively
( )nSSb
x
l
lb
r
nbr
ln
r
l
lu
l
u
ul
−−=→
−
=→
+−=−=
2
1
22
'3'
'
'3x
'3
'1
'3
'1
2dx
dx
x
x=
2
'3x
'1x
( ) ( )luc
luc
S SSb
cdxSS
b
xdxxcxxl −−=−−==== 42)()(
2
0
'3
'3
0
'3
'3
'2
'3
'1
uS lS

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 62 of 104
• As already mentioned above, in the FP the particular arrangement of the
OSs results in different Young’s Moduli in the different parts of the rod.
(This creates a significant difference to the considerations made in chapter
4.d:, where no spatial distribution of the E-Module is present)
• From eq. (55):
• Denoting the elastic coefficients acc. to the rod’s parts, we get
upper part
lower part
• The strains on the edges of the parts are written:
upper part
lower part
• Making use of eq. (119) we have:
(120)( )28
3 '33
'33
3
30
lu
e
ss
ab
cFl
+−=
'13
0'33
'3
'13
0'3
'
4
3
4
3x
ab
cFsSx
ab
cFsS =→=
l
u
s
s'33
'33
→
→
bab
cFsbxS
bab
cFsbxS
ll
uu
30'
33'1
'3
30'
33'1
'3
4
3)(
4
3)(
−=−=→
==→

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 63 of 104
• Finally the total deviation from the rod’s axis is obtained when the
contribution from the SSs are added ( in eq. (119) just need to
be replaced by the SSs: ):
(121)
Example I: ferroelastic species 4mmFmm2
• For the lattice parameters in the FP (PG mm2) it is assumed a || x is greater
than a of the tetragonal PP, and b || y is smaller than a of the PP. c || z is not
relevant here.
• Therefore schematically the 2 OSs are arranged as follows regarding the
crystal-physical SoC. They differ by a rotation of 90° around the z-axis.
( ) ( )lulu
SSetot SSSSb
css
ab
cFlll −−
+−=+=
428
3 2'33
'33
3
30
ye
xe
ze
OS 1 OS
2
tetragonal PP
lu SS ,lu SSSS ,

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 64 of 104
• The transformation of the tensors of the spontaneous strains was done
with the aid of the rotation matrix (angle ) around the z-axis:
acc. to the recipe: (122)
• Since in this particular case, tension favours OS 1 and
compression OS 2 (because the interaction energy is minimal, respectively)
)(2
1
000
00
00
000
00
00
2121 SSww
w
SSw
w
SS OSOS −=
−
=
−= rotation by
90° around z
−=
100
0cossin
0sincos
klD ( ) ( )imlmkikl SSDDSS =
F0
→
OS 1 OS 1 OS 1
OS 1 OS 1 OS 1
OS
2
OS
2
OS
2
OS
2
OS
2 F0
→
OS 1 OS 1 OS 1
OS 1 OS 1 OS 1OS
2
OS
2
OS
2
OS
2
OS
2
ye
xe
ze
0)(2
121 −= SSw
Case A Case B

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 65 of 104
• According to eq. (29,115) the interaction energy is defined as:
(123)
• Goal is to find the minimum, whereby tension is counted positive,
compression negative and shear positive, if the shear angle decreases
• First we have to achieve a defined (preferable mono-domain) state
in the upper and lower parts of the rod.
• This can be materialized via an applied force F0 of suitable strength that
initiates the switching of domains into the desired state(s).
• Afterwards the force shall be removed and the domains are expected to
remain in the defined status.
• According to eq. (124)
the bar shall be afterwards excited by F0 and the rod’s deviation le as
linear function of the force allows to calculate the elastic coefficient
along the rod axis.
• Switching of OSs must not happen when F0 is applied, i.e. the force to
measure the elastic coefficients must be small.
( ) ( )lulu
SSetot SSSSb
css
ab
cFlll −−
+−=+=
428
3 2'33
'33
3
30
( )lu ss '33
'33 +
iexti SSTE −=int

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 66 of 104
• In relation to the crystal-physical SoC we have:
and for Case A (125)
whereby for Case B just the superscripts u and l need to be interchanged.
• Finally we have: for Case A
and (126)
for Case B
• But again with the remark, that not the whole rod unambiguously
contributes to the elastic coefficients (because the grey band in the
pics above isn’t in a well defined state with regard to the OSs).
• Next undertaking is the consideration of the SSs.
• Assuming – as already mentioned above - that an applied force F0
which e.g. increases gradually and as a consequence, if the stress exceeds
the coercive stress in the upper und lower parts of the rod, the OSs should
switch and both parts shall enter (ideally) into a mono-domain (or at least
well defined) state.
( )28
3 22113
30 ss
ab
cFle
+−=
( )28
3 11223
30 ss
ab
cFle
+=
22222222'3311111111
'33 ssssssss lluu ======

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 67 of 104
• If then the switching force F0 is removed the rod are expected to remain
bent by the SSs exclusively.
• Using eq. (121) we calculate for Case A and
for Case B
• Thus the deviation lSS of the rod at zero forces (F0=0) is a direct measure
for the spontaneous strain w
• Moreover, this setup should allow to record Hysteresis Loops (also like the
forthcoming 2 examples)
OS 1 OS 1 OS 1
OS 1 OS 1 OS 1
OS
2
OS
2
OS
2
OS
2
OS
2
OS 1 OS 1 OS 1
OS 1 OS 1 OS 1OS
2
OS
2
OS
2
OS
2
OS
2ye
xe
ze
Case A Case BSSu=w
SSl=-w SSu=w
SSl=-w
( )wb
clSS 2
4
2
−= ( )wb
clSS 2
4
2
=

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 68 of 104
0)(2
1
000
022
3
02
3
2
000
022
3
02
3
2
000
00
00
21
321
−=
−
=
−
−−
=
−=
SSw
ww
ww
SSw
w
ww
SSw
w
SS OSOSOS
Example II: (NH4)2SO4 - (assumed) ferroelastic Species 6/mmmFmmm (/10/,/11/)
• Lattice parameters at room temperature (in FP with Point Group (PG) mmm)
• c = 7,728 Å
a = 10.636 Å (|| x)
b = 5,993 Å (||y) which is larger than the hexagonal
• Therefore schematically the 3 OSs are arranged as follows regarding the
SoC. They differ by a rotation of 120° around the y-axis.
7320,137746,1 ==b
a
xe
ze
ye
OS 1
rotation by
120°
around z
again
rotation by
120°
around z
hexagonal PP

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 69 of 104
• Since in this particular case, tension favours OS 1 and
compression OS 2 and OS 3 (because the interaction energy is minimal,
respectively) – see also eq. (123) above.
• Again looking at: (127)
we first focus on , using the transformation of 120° around z →
• OS 1: OS 2, OS 3:
• These are the results for Case A, whereby for Case B the superscipts l
and u need to be interchanged.
F0
→
OS 1 OS 1 OS 1
OS 1 OS 1 OS 1
F0
→
OS 1 OS 1 OS 1
OS 1 OS 1 OS 1
0)(2
121 −= SSw
Case A Case B
xe
ze
ye
( ) ( )lulu
SSetot SSSSb
css
ab
cFlll −−
+−=+=
428
3 2'33
'33
3
30
( )lu ss '33
'33 +
11111111'33 ssss uu === ( )6612221111
'33 369
16
1ssssss uu +++==

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 70 of 104
• Finally we get:
for Case A
and
for Case B
• Now step is to investigate the spontaneous strains:
• Using eq. (127) we calculate for Case A and
for Case B
( )32
36917
8
3 661222113
30 ssss
ab
cFle
+++−=
OS 1 OS 1 OS 1
OS 1 OS 1 OS 1
OS 1 OS 1 OS 1
OS 1 OS 1 OS 1
Case A Case B
xe
ze
ye
SSu=w
SSu=w
SSl=-w/2
SSl=-w/2
( )32
36917
8
3 661222113
30 ssss
ab
cFle
+++=
−= wb
clSS
2
3
4
2
= w
b
clSS
2
3
4
2

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 71 of 104
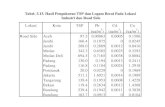
Example III: Rochelle Salt - ferroelastic Species 222F2 (/12/)
• Lattice parameters at 323 K (in PP with Point Group (PG) 222)
b =11,924 Å(||y); a=14,298 Å (||x); c=6,230 Å (||z)
• Lattice parameters at 274 K (in FP with Point Group (PG) 2)
b = 11,869 Å; a = 14,316 Å; c = 6,223; (a,c)= 89,26°
(the 2-fold b-axis being also a ferroelectric axis)
• In the FP we shall have 2 OSs as follows regarding the SoC. They
differ by a 2-fold rotation around the x- or z-axis
*)
5212
1
00
000
00
00
000
00
Sw
w
w
SS
w
w
SS OSOS =
−
−
=
= 2-fold rotation
around x or z
rhombic PP
ye
xe
ze
OS 1 OS 2
*) Note: Shear components of the strain tensor are counted positive if the shear angle decreases under
action of a shear stress.

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 72 of 104
• Since the SS-Tensors of the two OSs do not posses components in
x-direction, no interaction with the tensile nor compressive stress shall
be possible in the bar, and therefore also no domain switching.
• The way forward would be to try to rotate the crystal around y, thus the
desired SS-strain components would appear.
• To this end let’s rotate the crystal with regard to the SoC by 45° counter
clock-wise around y
• Applying the related rotation matrix and the recipe (see eq. (122)):
we get the rotated strain tensors, which now posses components in
x-direction (i.e. along the rod axis)
5212
1
00
000
00
00
000
00
Sw
w
w
SS
w
w
SS OSOS =
−
=
−
=
−
=
−
=
2
20
2
20102
20
2
2
cos0sin
010
sin0cos
klD( ) ( )imlmkikl SSDDSS =

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 73 of 104
• It is obvious that under the assumption , tension (Case A:
upper part) favours OS 1 and compression (Case A: lower part) OS 2
(because the interaction energy has to be at minimum – see eq. (115).
• Again looking at: (128)
we first focus on , using the transformation of 45° around y
and for OS 2 additionally of 180° around z we get:
for OS 2:
for OS 1:
( ) ( )lulu
SSetot SSSSb
css
ab
cFlll −−
+−=+=
428
3 2'33
'33
3
30
( )lu ss '33
'33 +
02
1513 == SSw
( )55351513331111'33 222
4
1ssssssss uu +++++==
F0
→
F0
→Case A Case B
( )55351513331111'33 222
4
1ssssssss ll +−−++==
ye
xe
ze

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 74 of 104
• Finally we have:
for Case A
and (129)
for Case B
• But again with the remark that not the whole rod unambiguously
contributes to the elastic coefficients (because the grey band in the
pics above isn’t in a defined state with regard to the OSs).
• Next undertaking is the consideration of the SSs.
• Assuming – as already mentioned above - that an applied force F0
which e.g. increases gradually and as a consequence, if the stress
exceeds the coercive stress in the upper und lower parts of the rod,
the OSs should switch and both parts shall enter (ideally) into a mono-
domain (or at least well defined) state.
( )4
2
8
3 551333113
30 ssss
ab
cFle
+++−=
( )4
2
8
3 551333113
30 ssss
ab
cFle
+++=

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 75 of 104
• If then the switching force F0 is removed the rod is expected to remain
bent by the SSs exclusively.
• Taking into account that and using eq. (128) we calculate
for Case A:
and
for Case B:
• Thus the deviation lSS of the rod at zero forces (F0=0) is a direct
measure for the spontaneous strain w=S13
Case
A
Case BSSu=w
SSu=w
SSl=-w
SSl=-w
( ) wb
cw
b
clSS
22
4
22
−=−=
02
1513 == SSw
( ) wb
cw
b
clSS
22
4
22
==
ye
xe
ze

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 76 of 104
c: Torsion Pendulum I.
• A pendulum shall be a device where an oscillating torque excites a (round)
rod to get it (alternating) twisted by a certain angle.
• Based on the considerations made in chapter 4. (e: Torsion of Rods)
an elastic pendulum (e.g. /13/) can be the means to measure shear moduli
as well as spontaneous strains SSs (latter of ferroelastics).
• At a first glance it becomes obvious that crystals are promising candidates
that exhibit ferroelastic behaviour accompanied by SSs that are pure shear
strains.
• According to /6/,/7/ following ferroelastic species are candidates (selection
only): 422F222, 4mmFmm2, 4/mmmFmmm, 422F2, 222F2, …
• Let’s look at Rochelle Salt - see chapter 5. (b: Domain Switching (and more),
example III).
• Having the torsion angle (see eq. (83)) at the end of the round rod of
length l in dependence on the exciting torque and of the elastic compliance
moduli:
(130))()( '
55'444
'3
'3 ss
R
lMlx +
==

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 77 of 104
• The orientation of the crystal regarding the rod’s special SoC
shall be as follows:
• We have for OS 2: and
and for OS 1: and
2323'2323
'44 44 sss ==
0
'3X
'1X
'2X
m
n
q
xe
ye
ze
1313'1313
'55 44 sss ==
2323'2323
'44 44 sss == 1313
'1313
'55 44 sss ==
crystal-
physical SoC
qnm,,
special SoC

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 78 of 104
• Since the crystal behaves uniformly regarding the torsion (i.e. OS 1 and
OS 2 do not differ in their the elastic coefficients), the sum can
be precisely measured (see eq. (83)), even in a not-mono-domain state
(but in latter case addt’l. contributions to the elastic coefficients from the
domain walls should be expected).
• If the position of the crystal in the rod is another one than depicted, a
corresponding transformation of the elastic coefficients (from one to the
other SoC) has to be performed
• The situation is getting more complicated if we now look at the spontaneous
strains (SSs)
• When the ferroelastic PT in Rochelle Salt occurs (species 222F2) and we
have the crystal’s orientation as shown in the pic above, then the crystal
exists typically in a mixture of the two OSs (with unknown spatial distribution).
• Reminder: the stress tensor in cylindrical coordinates (ref. to eq. (73))
reads:
(131)
Note: The stress tensor doesn’t depend on the rod’s axis coordinate
5544 ss +
( )
eqqerR
MT
+=
4
' 2
'3x

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 79 of 104
• This yields that 1) its value depends only on the radius coordinate r and
2) any interaction with the (fixed) crystal depends on the angle coordinate
➢ 1) means that, if we have a coercive stress TC (as discussed in chapter 5.
a: Hysteresis Loop, eq. (116)), with eq. (132) we can calculate a ‘coercive
radius’, which is independent from crystal’s orientation.
(132)
In the region the persisting stress (by value) is smaller than TC
which results in the fact that no switching of OSs shall be possible there.
BTW: The coercive radius will decrease if the exciting torque (M) increases.
➢ 2) means that we have to look at the mutual orientation of the stress tensor
ellipsoid (see eq. (78)) and the crystal (mono-domain state with OS 2 shown):
CC TM
Rr
2
4=
Crr
1
2
5
4
3OS 1 OS 2
rC )( '2Xn
)( '1Xm
)( '3Xq

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 80 of 104
• Exploration in which orientation of the crystal (1…6 in the pic above) the
interaction energy between the respective SS-Tensor and the stress tensor
becomes minimal, results in the OS that will be preferred and switched into.
• Next step is the calculation of the interaction energy for OS 1 and OS 2
(see eq. (115)).
We use the stress tensor (from eq. (78))
and the SS-Tensors for OS 1 and OS 2 (see previously) are:
• The interaction energies amount:
for OS 1 (133)
for OS 2 (134)
4'1
'2
'1
'2
4
' 2
0
00
002
R
MCwith
xx
x
x
R
MT
−
−
=
02
1
00
000
00
00
000
00
521 =
−
−
=
= Swwith
w
w
SS
w
w
SS OSOS
( )wxCSSTE OSi
extiOS
'2
1int1 2−−=−=
( )wxCSSTE OSi
extiOS
'2
2int2 2−=−=

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 81 of 104
• Now we’re going to investigate the individual position 1…6 for OS 1 and OS 2
• The positions differ in their coordinates which enter the stress tensor
• We do have for 1: for 2: for 3:
for 4: for 5: a.s.o. (135)
• It can be easily shown the same way that in the other (left) side of the rod
(i.e. the region where ) OS 1 is energetically preferred.
'2
'1, xx
0, '2
'1 =−= xxx
xxxx2
2,
2
2 '2
'1 == xxx == '
2'1 ,0
xxxx2
2,
2
2 '2
'1 =−=
0, '2
'1 == xxx
No. / angle Eint (OS 1) Eint (OS 2)Comment
(mind that w>0)
1 / 0° 0 0 OS 1 / OS 2 - no preference
2 / 45° OS 2 preferred
3 / 90° OS 2 preferred (with deeper energy
than in pos. 2 and 4)
4 / 135° OS 2 preferred
5 / 180° 0 0 OS 1 / OS 2 - no preference
xwC 2 xwC 2−
xwC 2 xwC 2−
xwC 2 xwC 2−
0'2 x

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 82 of 104
• All above made consideration base on the fact the exciting torque shall
be directed parallel to of the special SoC.
• Should the torque be directed anti-parallel to then OS 1 and OS 2
swap their roles (“switching”). Those circumstances are depicted on the
following picture.
• Looking at the pics it can be summarised:
• If the torque is positive (counter-clockwise twist as shown
on the right hand pic) than the rod is expected to exist in
two mono-domain regions (left, right acc. to the special SoC)
q
q
( )M
+
OS 1 OS 2
M
+M
−
( )M
−

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 83 of 104
• If the torque is negative (clockwise twist as shown on the
left hand pic) than the rod is expected also to exist in
two mono-domain regions – but swapped
• As discussed earlier, in the rod there is a region where
no OS-switching can be possible, because the value of
the stress doesn’t reach TC.
• Regarding the angle-dependence of the stress tensor around
the rod’s axis it has to be accepted that in pos. 1 & 5 no
relevant stress prevails (means stress smaller than TC).
• The stress increases from pos. 1 over pos. 2 to 3 where it
becomes maximal, followed by a decrease towards pos. 5
• To identify the regions of the rod where switching can be possible at all,
we need to check where the effective stress locally exceeds TC (taking into
consideration not only the absolute value but the value caused by the
mutual orientation (angle) between the stress and the crystal’s OSs).
• Having the ‘stress vector’ eqs. (72,75):
Crr
( )nxmxR
Mer
R
MT
'1
'244
' 22+−==

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 84 of 104
• The relevant component lies parallel to :
(136)
and depends only on .
• From that we have: (137)
• Combination of eqs. (136) and (137) yields:
(138)
'24
' 21
xR
MT X
−=
)( '2Xn
)( '1Xm
RR
MTRxTr
R
MTrxT RXCCCX 4
''2
'
4
''2
' 2)(,
2)(
11 ======
'2x
)( '1Xm
'24
'2
'' 21
xR
Mx
r
TT
C
CX
==
)( '2Xn
)( '1Xm
R
Cr Cr R
'CT
'RT
'
1XT

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 85 of 104
• Within the special SoC the stress
component equals, respectively
exceeds, the coercive stress in the
blue bordered regions.
• Therefore switching among the two
OSs (incl. monodomainisation) shall
be possible exactly only there.
• Remaining parts are idle.
)( '2Xn
)( '1Xm
'
1XT
'CT
• Now we want to investigate by which angle the rod will remain in a twisted
state - caused by the acting/prevailing spontaneous strains (SSs) – that
means without externally applied torque. Precondition would be of course
that the blue regiones above have been transferred into a monodomain state
beforehand (by a suitable torque, which has to be removed afterwards).
• In pic above we see 4 prominent points, characterised by the coordinates:
(139)
1
2
4
6
CCCC
CCCC
rxrRxRxxrxrRx
rxrRxRxxrxrRx
=−−====−=
−=−=−==−=−−=
'2
22'1
'2
'1
'2
22'1
'2
22'1
'2
'1
'2
22'1
,:6,0:5,:4
,:3,0:2,:1
'3
3
5

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 86 of 104
• The displacement vector of the unit cell can be simply drawn for OS 2.
• With lattice parameters a, b, c, and we have:
• (140)
• At the end of the rod (length l) we calculate the total displacement to be:
(141)
Remark
- this displacement value is only
locally correct at positions &
- In other positions projections are
to be considered and yield for the
component of along the circum-
ference:
OS 2
ye
xe
ze
mc
ec
s x
tantan' −=−=
OS 2
OS 2
OS 2
ml
s tot
tan' −=
l
c
'tots
's
2 5
'2
''
tanx
R
less totcircum
−==
'tots

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 87 of 104
• Finally the maximum displacements, with +M that twists the rod, are:
for the right hemisphere:
and likewise (142)
for the left hemisphere:
• The existing situation is depicted here:
)( '2Xn
)( '1Xm
'3
• The torsion angle of the rod can
be now expressed:
=
R
s tot'
'3 arctan
ml
s tot
tan' −=
ml
s tot
tan' =
tan' l
s tot =

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 88 of 104
• Finally we get with and with
(143)
and
• Thus through the measurement of the twisting angle after respective
switching of the OSs the SS (S13) can be determined and Hysteresis
Loops recorded – e.g. for Rochelle Salt.
• Analogue to eq. (121), it should be recognised that the torsion angle
consists of an elastic part (see eq. (83)) and of a portion stemming
from the spontaneous strain (eq. (143):
(144)
=
R
Sl
SR
l 13
13
'3
2arctan
2cotarctan
1329090 SSS −=−=
)2cot()290tan( 1313 SS =−
'313
2l
RS
'3
++
=+=
13
55444
'3
'3
'3
2cotarctan)(
SR
lss
R
lMSSetot

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 89 of 104
Torsion Pendulum II.
• In this chapter we want to investigate the behaviour of a rod with a
rectangular cross-section, which shall be excited by an oscillating torque.
• Because of easier preparation of specimens with quadratic/rectangular-
compared to circular-cross-sections, respective shapes and experiments
are clearly preferred.
• Based on the considerations made in chapter 4. (e: Torsion of Rods)
we want to concentrate on the elastic/ferroelastic properties of
(NH4)2SO4 (Species 6/mmmFmmm). This crystal was discussed already
in chapter 5. Ferroelastics, b: Domain Switching (and more), Example II.
• The orientation of the crystal (meaning OS 1…3) from page 68 have
been (via transformation of the coordinate system) referred to the rod’s
special SoC (see overleaf)
• This also concerns the SS-tensors, where we have now:
(145)
qnm,,
0)(2
1
20
2
30002
30
2
20
2
30002
30
2
00
000
00
21321 −=
−−
−
=
−
=
−
= SSww
w
ww
SSw
w
ww
SS
w
w
SS OSOSOS

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 90 of 104
'3X
'1X
'2X
m
n
q
xe
ye
ze
crystal-
physical SoC
special SoC
a
b
lOS 1
OS 3
OS 2
• The same transformation has to be performed for the elastic stiffnesses of
the orthorhombic OSs 1…3 to express (see eq. (112) through the
relevant coefficients referred to the crystal-physical SoC
• According to the ‘recipe’ (eq. (122)) we get after some cumbersome calculations:
'55
'44, cc

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 91 of 104
(146)
• Since the actual composition of the rod isn’t known regarding the OSs, we
would – if measuring the torsion stiffness – obtain a mixture of the coefficients
as shown in the table above.
• Therefore we should strive to bring the crystal (via suitable external stresses)
into a well defined domain status.
• Investigation of the interaction energy (see eq. (115)) together with definition
of the stress components (see eq. (92)) and the SS-Tensors (see eq. (145))
(147)
yields:
OS 1
OS 2
OS 3
='44c ='
55c
4
3 4455 cc +
66c55c
4
3 4455 cc +
16
4633 66122211 cccc +−+
16
4633 66122211 cccc +−+
'25
'2'
1
'55
'3
'5 )( xCx
xcT −−
=
'
14'1'
2
'44
'3
'4 )( xCx
xcT +
=

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 92 of 104
(148)
• The essence is that with stresses T’5 a monodomainization towards OS 2,
respectively OS 3 should be feasible in the two hemispheres!
(149)
Sign of x‘2 Eint (OS 1) Eint (OS 2) Eint (OS 3)Comment
(mind that w>0)
>0 0 >0 <0 OS 3 is preferred
=0 0 0 0 no OS preferred
<0 0 <0 >0 OS 2 is preferred
( ) 00'25
1int1 =−−=−= xCSSTE OS
iextiOS
( )
−−=−= wxCSSTE OS
iextiOS
2
3'25
2int2
( )
−−−=−= wxCSSTE OS
iextiOS
2
3'25
3int3
OS 3 OS 2
M
+M
−
Note:
T‘4 doesn‘t interact with the SS.

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 93 of 104
• As also in the previous chapter discussed the stress depends on the
coordinates (see eq. (132)) and in a certain region its value is
smaller than the coercive stress TC
Getting the stress vector (comp. eqs.
(72,75) and eq. (92)):
Assuming that C5 C4=C we have:
(150)
• This means that in the grey circle area no switching among the OSs shall
be possible. Consequently the domain situation there is undefined!
• Question: Taking into account the specific orientation of the (NH4)2SO4
crystal, what are the regions where switching can be possible at all?
• Answer: Only stress initiates switching.
Crr
)( '2Xn
Cr
)( '1Xm
nxCmxCT
+− '14
'25
'
CCC rCrrTT
rCxxCxCxCT
==
=++
)('
2'1
2'2
2'1
2
4
2'2
2
5'
'25
'5 xCT −

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 94 of 104
• Looking now at a potential measuring strategy:
• If the torque is positive (counter-clockwise twist as shown
on the right hand pic above, see pic (149)) than the rod is
expected to exist in two mono-domain regions (left, right
acc. to the special SoC)
• If the torque is negative (clockwise twist as shown on the
left hand pic) than the rod is expected also to exist in two
mono-domain regions – but swapped
)( '2Xn
Cr
)( '1Xm
• Within the special SoC the stress
component T’5 equals, respectively
exceeds, the coercive stress TC in
the blue bordered regions.
• Therefore switching among the two
OSs (incl. monodomainisation) shall
be possible exactly only there.
• Remaining parts are idle, as well
as OS 1.

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 95 of 104
• But, in the rod’s middle there is a region (surrounded in blue)
where no OS-switching can be possible, because the
value of the stress doesn’t reach TC. The domain situation
there is undefined.
• Initially the rod shall be increasingly twisted by a torque +M
(or –M) with the aim to achieve mono-domain states left and
right.
• Subsequently taking away the torque, it is assumed that the
domain states regarding OS 2 and OS 3 are conserved.
• If now the rod is subjected to twisting oscillations (small torque,
in order not to amend the domain structures), the elastic
coefficients can be measured.
• As outlined in table (146) we have the coefficients expressed
within the crystal-physical SoC
• This way we can measure the coefficients (which are
identical for OS 2 and OS 3), but have to accept, that
the contribution of the grey marked area (eq. (150)) is unknown.

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 96 of 104
• In particular the amount of OS 1 in the grey area cannot be
quantified, and leads to a certain/small measuring error.
• Ultimately with eqs. (111,112) and eq.(146) we get:
• Next we shall check the spontaneous strain (SS). We focus on OS 2 and
OS 3 since OS 1 cannot contribute. According to eqs. (14,145) we have the
relevant SS-Tensor components:
(151)
with
• The displacement vector of the unit cell can be schematically drawn
for OS 2, OS 3 as follows.
+
+−+
+−+
+−
+
==
=
bcc
cccc
a
k
cccc
cc
k
ab
k
ccal
MC
k
x
4455
66122211
66122211
4455
,...5,3,13
44455
3
'3
3
4633
4tanh
4633
341
)3(8'3
0)(2
12
3
22
3
2
21
'313'
3133
'213'
2132
−=
−====== −−
−−
SSw
wSSSwSSS OSOSOS
OSOSOS

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 97 of 104
• At the end of the rod (length l) we calculate the total displacement for
OS 2 and for OS 3 to be:
OS 2:
OS 3: (152)
• Finally the maximum displacements,
with applied +M that twists the rod, are:
for the right hemisphere:
and likewise
for the left hemisphere:
ye
xe
ze
mlmls tot
= '13
'13
' tan
l
'tots
's's
'13
mls tot
− '13
'
mls tot
'13
'
'13
'13
mlmls tot
−−= '13
'13
' tan

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 98 of 104
• The existing situation is depicted here:
• The torsion angle of the rod
can be now expressed:
(153)
• With eq. (151) we can write and with eq. (153) we
get the dependence of the torsion angle on the SS:
(154)
• Thus through the measurement of the twisting angle - after respective
switching of the OSs - the SS be determined
and Hysteresis Loops can be recorded – e.g. for (NH4)2SO4.
)( '2Xn
)( '1Xm
'3
=
b
s tot'
'3
2arctan
'13
' ls tot
'13
'13
' 2Slls =
'3
'13
'3
'13
'13'
34
tan4
4arctan
l
bS
l
bS
b
Sl
'3
)(4
3
2
321
'13 SSwS −==

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 99 of 104
d: Further Considerations
• The considerations in the previous chapters follow the ‘thread’:
Force → Stress → Strain >>>> Elastic Coefficients (compliances sijkl)
• Only for the torsion of non-square rods the derivation scheme differs:
• Strain → Stress >>>> Elastic Coefficients (stiffnesses cijkl), but certain
limitations apply.
• In the theoretical modelling of ferroelastic PTs (see e.g. /14/) the spon-
taneous strains play a central role (partly even as order parameter), as
well as the elastic stiffnesses (being the inverse tensor components to
the elastic compliances)
• At ferroleastic PTs specific (combinations of) elastic stiffnesses show typical
dependences on the temperature (and sometimes also on pressure).
• Moreover, to describe a ferroelastic PT with a suitable free energy function,
the state parameters are strains (Sij) and polarizations (Pk). Therefore the
elastic stiffnesses of interest are those at constant polarization (see e.g. /14/)

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 100 of 104
• Also, if – experimentally - elastic compliances are measured, the need
arises to convert them into elastic stiffnesses, with the aim to compare with
the theoretical models
• This isn’t a simple undertaking at all. Exemplarily, here the conversion is
provided for cubic and hexagonal crystals (/2/,/15/)
Cubic:
(3 components)
Hexagonal:
(5 components)
( )( ) ( )( ) 44
44
12111211
1213
12111211
121111
1
sc
ssss
sc
ssss
ssc =
+−
−=
+−
+=
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( )121166
44
44
2
13121133
13132
13121133
121133
12112
13121133
3312
12112
13121133
3311
2
11
22
1
22
11
22
1
cccs
c
ssss
sc
ssss
ssc
ssssss
sc
ssssss
sc
−==
−+−=
−+
+=
−−
−+=
−+
−+=

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 101 of 104
• Also it must be taken into account that elastic coefficients:
• depend on the (measuring) frequency, and there are
numerous measuring techniques available
• are complex numbers, which consists of real and imaginary
parts (focus was here entirely on the real part)
• are related to specific boundary/measuring conditions:
▪ isothermal measurement (in thermal equilibrium)
▪ adiabatic measurement (fast measurement)
▪ at constant electric polarization (superscript P) –
measured at an open circuit. (In the high-frequency
limit the elastic coefficients at constant polarization
are investigated (see e.g. /16/))
▪ at constant electric field (superscript E) – measured
at a short circuit (e.g. via an electric generator)
Comment: in non-piezoelectric crystals applies: and Eij
Pij
Eij
Pij ccss ==

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 102 of 104
• At the end a simple experimental setup is suggested to investigate the
findings/predictions as discussed beforehand.
• Taking into account all pros & cons of the methods, bending of bars seems
to be the most uncomplicated approach (incl. easy sample preparation)
• During the quasi-static bending, simultaneously the crystal could be observed
with the aid of a polarizing microscope, thus potentially watching the movement
of the domain walls within the process of domain switching, a.s.o.
• A respective device could look like this:
mirror
magnet
(neodymium)
bar
polarizer analyzer
magnet coil

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 103 of 104
6. Literature
/1/ Macke, W., “Mechanik der Teilchen, Systeme und Kontinua”, Akademische
Verlagsgesellschaft Geest & Portig K.-G., 1967
/2/ Sirotin, Yu. I., Shaskolskaya, M. P., “Fundamentals of Crystal Physics”,
Mir Publishers, Moscow, 1982
/3/ Wadhawan, V. K., Phase Transitions, 3, 3 (1982)
/4/ Wadhawan, V. K., Bull. Mater. Sci., 6, 733 (1984)
/5/ Wadhawan, V. K., Phase Transitions, 34, 3 (1991)
/6/ Aizu, K., J. of the Phys. Soc. of Japan, 28, 706 (1970)
/7/ Sapriel, J., Phys. Rev., B12, 5128 (1975)
/8/ Landau, L. D., Lifshitz, E. M., “Theory of Elasticity”, Pergamon Press Ltd., 1970
/9/ Pakulski, G., et al., Ferroelectrics, 48, 259 (1983)
/10/ Makita, Y., Sawada, A., Takagi, Y., J. of the Phys. Soc. of Japan, 41, 167 (1976)
/11/ Sawada, A., Makita, Y., Takagi, Y., J. of the Phys. Soc. of Japan, 41, 174 (1976)
/12/ Solans, X., et al., J. of Solid State Chemistry, 131, 350 (1997)
/13/ Gridnev, S. A., et al., J. Phys. D: Appl. Phys., 40, 856 (2007)

Elasticity of Anisotropic Bodies
Hempel 2020/21 Page 104 of 104
/14/ Hempel, H., “Structural Phase Transitions and Landau Theory”, 2018
/15/ Rabiei, M., et al., Materials 2020, 13, 4380
/16/ Burfoot, J. C., Taylor, G. W., “Polar Dielectrics and Their Applications”, The
Macmillan Press LTD, 1979