DESAIN LAMBUNG PONTOON PADA PEMBANGKIT …repository.its.ac.id/51131/1/4213105016-Undergraduate...
170
SKRIPSI – ME 141501 DESAIN LAMBUNG PONTOON PADA PEMBANGKIT LISTRIK ENERGI ARUS LAUT Danny Rahmanda NRP. 4213 105 016 Dosen Pembimbing Ir. Toni Bambang M., PGD Irfan Syarif Arief, ST. MT JURUSAN TEKNIK SISTEM PERKAPALAN Fakultas Teknologi Kelautan Institut Teknologi Sepuluh Nopember Surabaya 2016
Transcript of DESAIN LAMBUNG PONTOON PADA PEMBANGKIT …repository.its.ac.id/51131/1/4213105016-Undergraduate...

SKRIPSI – ME 141501
DESAIN LAMBUNG PONTOON PADAPEMBANGKIT LISTRIK ENERGI ARUSLAUT
Danny RahmandaNRP. 4213 105 016
Dosen PembimbingIr. Toni Bambang M., PGDIrfan Syarif Arief, ST. MT
JURUSAN TEKNIK SISTEM PERKAPALANFakultas Teknologi KelautanInstitut Teknologi Sepuluh NopemberSurabaya 2016

FINAL PROJECT – ME09 141501
DESIGN OF PONTOON HULL IN OCEANCURRENT ENERGY GENERATOR
Danny RahmandaNRP. 4212 105 018
SupervisorIr. Toni Bambang M., PGDIrfan Syarif Arief, ST. MT
DEPARTMENT OF MARINE ENGINEERINGFaculty of Marine TechnologySepuluh Nopember Institute of TechnologySurabaya 2016

LEN'fiFARPENSESASAN
DESAIN LAMBUNG PONTOON PADA PEMBA}IGKITLISTRIK ENERGI ARUS LAUT
SI{RIPSI
Diajukan untuk Memauhi Salah Satu SyaratMemperoleh Gelar Smjana Teknik
PadaBidang Studi Marine Manufacture and Design (MMD)Program Studi S-1 Jurusan Te*nik Sistem Perkapalan
Fakultas Teknologi Kelautanlnstitut Teknologi Sepuluh Nopernber
Surabaya
,Qlct:DANNY RAHMAF{DA
NRP.4213 105 016
Disetujui oleh Dosen Pembimbing Slaipsi :
1. Ir. Tony Bambang Mursiyadi PGD. a.: . . . . . . . . . )
2. Irfan Syarif ST. MT.
SII*4&AYAJANUARI2016
v

Lf,I,ffi&R PEI$GES#ilTANF
DESAIN LAMBUNG PONTOON PADA PEMBANGKITLISTRIK ENERGI ARUS LAUT
SKR}PSI
Diajukan untuk Memenuhi Salah Satu SyaratMemperoleh Gelar Sarjana Teknik
PadaBidang Studi Marine Manufacture and Design (MMD)Program Studi S-1 Jurusan Telnik Sistem Perkapalan
Fakultas Teknologi KelautmInstitut Teknologi Sepuluh Nopember
Surabaya
Oleh:DAI\INY RAHMANDA
NRP.4213 105 016
Disetujui oleh Ketua Jurusan
1. Dr.Eng M. Badrus
su'&.*&*vaJANUARI2016
vii

v
DESAIN LAMBUNG PONTOON PADA PEMBANGKITENERGI ARUS LAUT
Nama Mahasiswa : Danny RahmandaNRP : 4213 105 016Jurusan : Teknik Sistem PerkapalanDosen Pembimbing : 1. Ir. Toni Bambang M., PGD
2. Irfan Syarif Arief, ST. MT
ABSTRAK
Perencanaan PLTAL yang berfokus pada desain bentuk lambungdengan meninjau kekuatan dari lambung ponton tersebut apakahdapat menahan tegangan mooring terhadap arus laut, gaya angin dangelombang tersebut, Selain itu dalam mendesain lambung pontonakan menghitung kekuatan tension mooring yang terdapat padalambung dengan ukuran utama panjang 8 m, lebar 0.8 m perlambung, sarat 0.8 m dan tinggi 1.1 m. lambung dapat menahanarus laut. Sehingga dapat diketahui karakteristik kekuatanlambung terhadap tension mooring. Berdasarkan data bebanmuatan dari komponen konstruksi dan komponen turbin, dihitungnilai beban akibat faktor lingkungan dengan metode pendekatanrumus gaya angin sebesar 33 kN, gaya arus 29 kN, gayagelombang 29.33kN. Jenis mooring adalah sphread denganheading depan, samping dan belakang. Dari faktor pembebanandapat di dapatkan nilai tension per arah hambatan depan 2.6 kN,samping 2.7 kN dan belakang 2.7 kN. Data tension diinput untuksimulasi karakteristik kekuatan lambung yang terjadi padapontoon berkisar antara 0 – 26.229x103 N/m2.
Kata Kunci : Lambung Ponton, Faktor Lingkungan, TeganganTension, Tegangan

vi
Halaman ini sengaja dikosongkan

v
DESIGN OF PONTOON HULL IN OCEAN CURRENTENERGY GENERATOR
Name : Danny RahmandaNRP : 4213 105 016Departement : Marine EngineeringSupervisor : 1. Ir. Toni Bambang M., PGD
2. Irfan Syarif Arief, ST. MT
ABSTRACT
Planning Hydropower which focuses on the design of hull form withreviewing the strength of the ponton hull that is able to withstandvoltage mooring on ocean currents, the forces of wind and waves,addition in the design of the ponton hull will calculate the powervoltage / tension mooring contained in the Hull to the size of themain 8 m length, 0.8 m beam per hull, Draft 0.8 m and 1.1 m high.hull can withstand ocean currents. Thus characterizing the hullstrength to resist tension mooring. Based on the data payload ofconstruction components and turbine components, calculated loadvalues due to environmental factors with the formulation wind forceof 33 kN, 29 kN current style, style 29.33kN wave. Type of mooringis heading sphread with front, side and rear. loading factor ingetting a tension value per heading / direction of resistant 2.6 kNfront, side and rear 2.7 kN 2.7 kN. Data inputted tension tosimulated gastric strength characteristics that occur in pontoonrange between 0 - 26.229x103 N / m2.
Keyword : Ponton Hull, Environmental Factors, Tension, Stress

vi
Halaman ini sengaja dikosongkan

xiii
KATA PENGANTAR
Bismillahirrohmanirrohim, Rasa syukur Alhamdulillahpenulis panjatkan kepada Allah SWT atas kemudahan yangdiberikan sehingga penyusunan skripsi dengan judul : “DesainLambung Pontoon pada Energi Arus Laut” ini dapatdiselesaikan dengan baik sebagai persyaratan akademik padaBidang Studi Marine Manufacture and Design (MMD) ProgramStudi S-1 Jurusan Teknik Sistem Perkapalan Fakultas TeknologiKelautan Institut Teknologi Sepuluh Nopember Surabaya.
Dalam proses penyusunan skripsi ini, penulis banyakmenerima masukan dan sumbangan pemikiran dari berbagaipihak. Sehingga pada kesempatan ini penulis ingin mengucapkanbanyak terima kasih kepada :
1. Allah SWT yang telah memberi ridha-Nya dalammenyelesaikan Skripsi dan memberi sebuah anugerahyang tak ternilai.
2. Ayah, Ibu dan semua anggota keluarga penulis yang telahmemberikan motivasi dan doa dalam penyelesaian skripsiini.
3. Bapak Irfan Syarief Arief ST.MT, selaku DosenPemimbing dan Kepala Lab MMD yang telah membantumenentukan judul dan membimbing Tugas Akhir
4. Bapak Ir. Toni Bambang Mursiyadi, PGD selaku DosenPembimbing yang telah membimbing tugas akhir.
5. Bapak Dr.Eng Badrus Zaman, MT selaku Kepala JurusanTeknik Sistem Perkapalan Fakultas Teknologi Kelautan.
6. Teman – teman Lintas Jalur khusunya angkatan 2013terima kasih atas dukungan dan motivasinya
7. Teman – teman dan segenap pengurus LaboratoriumDesign and 3D Model Jurusan Teknik Sistem Perkapalan
xiv
8. Semua pihak yang tidak dapat penulis sebutkan satupersatu yang telah membantu hingga penyusunan skripsiini dapat diselesaikan.
Dalam penyusunan skripsi ini penulis merasakan bahwalaporan ini masih kurang dari kesempurnaan. Oleh karena itu,kritik dan saran yang bersifat membangun akan sangat diharapkanoleh penulis. Akhir kata, semoga semua ini mendapat berkah danrahmat dari Allah SWT dan dapat bermanfaat bagi para pembacamaupun penulis untuk bahan studi dan review selanjutnya di masamendatang.
Surabaya, Januari 2016
Penulis

xv
DAFTAR ISI
HALAMAN JUDUL.................................................................................. iLEMBAR PENGESAHAN ........................................................................ vABSTRAK ............................................................................................. ixKATA PENGANTAR ............................................................................ xiiiDAFTAR ISI...........................................................................................xvDAFTAR TABEL ...................................................................................xixDAFTAR GAMBAR ..............................................................................xxiBAB I PENDAHULUAN .......................................................................... 1
1.1 Latar Belakang Masalah ....................................................... 11.2 Perumusan Masalah............................................................. 31.3 Batasan Masalah .................................................................. 31.4 Manfaat ................................................................................ 41.5 Tujuan................................................................................... 4
BAB II TINJAUAN PUSTAKA ................................................................. 52.1 Dasar Teori ........................................................................... 52.1 Definisi Energi Laut............................................................... 5
2.1.1 Energi Ombak .......................................................... …52.1.2 Energi Pasang Surut....................................................7
2.2 Dasar Teori Analisis Struktur dan Tahanan arus Laut......... 112.3 Sistem tambat (Mooring Sistem)……………………………..…..…14
2.3.1 Spread Mooring........................................................ 152.3.1 Turret Mooring.…………………………………………………….152.3.3 Catenary Anchor Leg Mooring…..……………………..……172.3.4 Single Anchor Leg Mooring………..………………………....182.3.5 Dynamic Positioning……………………..……………….……..19
2.4 Bangunan Apung……………………………………..………………....….202.4.1 Gaya Pada Mooring Sistem………………..…………….....…232.4.2 Klasifikasi Desain Lambung………………….………….…..…31

xvi
2.5 Mooring Component…………………………………….…………..…….372.5.1 Mooring Lines………………………………………..……………….37
2.6 Tegangan (Stress)…………….…………………………………………….…402.6.1 Output Gaya-gaya pada Konstruksi…………………………422.6.2 Tegangan(stress) pada Struktur……………………………...42
2.7 Software Geometri Desain………………………………………………..44BAB III METODOLOGI.....................................................................48
3.1 Introduction Metodology ................................................... 483.2 Diagram Alir ....................................................................... 493.3 Penjelasan tentang Diagram Alir ........................................ 50
3.3.1 Studi Literatur………………………..………………….……....... 503.3.2 Pengumpulan Data .................................................... 503.3.3 Tahap Mendesain………………………………………………….. 513.3.4 Tahap Kesimpulan dan Saran…………………….……………51
BAB IV ANALISA DATA DAN PEMBAHASAN ...................................... 524.1 Karakteristik Penentuan Jenis Lambung............................. 534.2 Data Ukuran desain dan muatan........................................ 54
4.2.1 Desain Lambung Pontoon dan ukuran..………….......... 564.2.2 Perhitungan Faktor Beban Lambung Pontoon........... 574.2.3 Perhitungan Kontruksi Lambung …..……………............ 74
4.3 Pembuatan Model Geometri…………………………………………...764.4 Proses Simulasi Model Pada Software …………………………….78
4.3.1 Proses Analisa Beban……………..……………………........... 804.3.2 Pembahasan Hasil Simulasi.…..……………………............ 82
BAB V KESIMPULAN DAN SARAN ..................................................895.1 Kesimpulan ......................................................................... 835.2 Saran................................................................................... 83
DAFTAR PUSTAKA………………………………………………………………………..84LAMPIRAN……………………………………………………………………………………86

xix
DAFTAR TABEL
Tabel 2.1 Klasifikasi gelombang berdasarkan periode. ............. 22Tabel 2.2. koefisien bentuk benda diatas garis air. ..................... 24Tabel 2.3. koefisien tinggi benda diatas garis air........................ 25Tabel 2.4. Konfigurasi Mooring Line. ........................................ 39Tabel 4.1.1 Parameter Penentuan Lambung. ................................ 53Tabel 4.1.2 Berat Muatan. ............................................................ 55Tabel 4.1.3 Nilai x dan y pada grafik gaya gelombang untuk bowseas.……………………………………………………….....................66Tabel 4.1.4 Nilai x dan y pada grafik gaya gelombang untukquartering seas………………………………………………………….66Tabel 4.1.5 Nilai x dan y pada grafik gaya gelombang untuk beamseas……………………………………………………………...............66Tabel 4.1.6 Mooring line untuk Load case 0 (arus depan)............ 71Tabel 4.1.7 Mooring line untuk Load case (arus samping). ......... 71Tabel 4.1.8 Mooring line untuk Load case (arus belakang) ......... 72Tabel 4.1.9 Mooring line Average Tension ................................. 73Tabel 4.2.1 Mooring line Average Value. .................................... 73Tabel 4.2.2 Pembagian Force pada hook lambung ...................... 80Tabel 4.2.3 Hasil Simulasi Keseluruhan pada hook lambung. ..... 87Tabel 4.2.4 Hasil simulasi keseluruhan pada lambung. ............... 88

xx
“ Halaman ini sengaja dikosongkan ”
xxi
DAFTAR GAMBAR
Gambar 2.1.1 Skema OWC .………………………………............7Gambar 2.1.2 Skema Kerja Tidal Energi........................................8Gambar 2.1.3 Prototype Desain......................................................10Gambar 2.3.1 Spread Mooring. ..................................................... 15Gambar 2.3.2 External Turret Mooring......................................... 16Gambar 2.3.3 Internal Turret Mooring.......................................... 17Gambar 2.3.4 CALM……………………………………………..18Gambar 2.3.5 SALM..................................................................... 18Gambar 2.3.6 Dynamic Positioning. ............................................. 19Gambar 2.4.1 Grafik Koefisien drag. ............................................ 27Gambar 2.4.2 Grafik Gaya Gelombang......................................... 29Gambar 2.4.3 Grafik Gaya Gelombang Quarting Seas. ................ 30Gambar 2.4.4 Grafik Gaya Gelombang Beam Seas. .................... 30Gambar 2.4.5 Gambar lambung Simple box . .............................. 32Gambar 2.4.6 Gambar bangunan apung vertical cylinder. ............ 33Gambar 2.4.7 Gambar lambung Ship form. .................................. 34Gambar 2.4.8 Gambar TLP. .......................................................... 34Gambar 2.4.8 Gambar semisubmersible. ...................................... 35Gambar 2.4.8 Gambar lambung cylinder. ..................................... 36Gambar 2.7.1 Contoh Pemodelan.................................................. 47Gambar 4.1.1 Tampak atas desain pontoon.………………...........56Gambar 4.1.2 Tampak depan desain pontoon.................................56Gambar 4.1.3 Ilustrasi Sphread Mooring........................................58Gambar 4.1.4 Penampang Samping pontoon yang terkena angin. 60Gambar 4.1.5 Penampang depan pontoon yang terkena angin...... 60Gambar 4.1.6 Ilustrasi Bagian permukaan basah depan pontoon..60Gambar 4.1.7 Ilustrasi Bagian permukaan basah sampingpontoon…………………………………………………………...61Gambar 4.1.8 Ilustrasi gaya arus terhadap pontoon.......................62Gambar 4.1.9 Gaya-gaya yang terjadi pada pontoon. ................... 68Gambar 4.2.1 Letak antara End Link A dan B pada mooring. ...... 69

xxii
Gambar 4.2.2 Tampak penyebaran sphread mooring layout......... 70Gambar 4.2.3 Penamaan Ujung Mooring...................................... 70Gambar 4.3.1 Gambar model isometri yang akan disimulasikan.. 76Gambar 4.3.2 Gambar model lambung tampak samping yangakan disimulasikan. ....................................................................... 76Gambar 4.3.3 Gambar model tampak atas lambung solid hook yang
disimulasikan……………………………………...77Gambar 4.3.1 Gambar model hook mooring yang akandisimulasikan..................................................................................77Gambar 4.3.4 Spesifikasi material yang akan dipakai dalam
simulasi…………………………………………....78Gambar 4.3.6 Proses Meshing pada model solid ...........................82Gambar 4.3.7 Simulasi Stress terhadap hook lambung………......83Gambar 4.3.8 Simulasi displasement terhadap hook lambung...... 84Gambar 4.3.9 Simulasi strain terhadap hook lambung ………......85Gambar 4.4.1 Simulasi FOS pada hook lambung ………………..86

xxiii
“ Halaman ini sengaja dikosongkan “

1
BAB IPENDAHULUAN
1.1 Latar Belakang
Pada saat dekade ini sudah banyak muncul produksibangunan lepas pantai yang digunakan untuk kepentinganriset, inovasi dan bahkan sudah menjadi bisnis alternatif dinegara-negara besar di eropa dan amerika untuk desain danproduksinya.
Pembangkit yang menggunakan energi pasang-surutair laut sudah banyak dikembangkan di negara-negarabenua eropa, amerika dan australia dengan kapasitas lebihdari 1 MW. Setelah, itu bermunculan inovasi danpengembangaan desain berbagai pembangkit listrik yangditawarkan mulai dari jenis apung maupun ditanam didasar laut.
Listrik merupakan kebutuhan pokok masyarakat danmenjadi penunjang disegala aspek kehidupan danpembangunan nasional, termasuk peningkatan taraf hidupbangsa Indonesia. Dari tahun ke tahun kebutuhan energilistrik juga semakin meningkat pesat. Namun ketersediaanenergi listrik untuk kebutuhan nasional belummencukupi seperti dengan adanya pemadaman bergilir dibeberapa daerah di Indonesia. Pembangkit energi listrikyang menggunakan BBM (Bahan Bakar Minyak) sudahtidak ekonomis lagi dikarenakan persediaan bahan bakarfosil sudah menipis disertai dengan fluktuasi harga yangcenderung meningkat serta transportasi yang jauh ketempat pembangkitan, sehingga dibutuhkan alternatif lainsebagai tenaga pembangkitan listrik. Seperti arus laut yangmemiliki potensi besar di Indonesia karena memiliki

2
banyak pulau dengan potensi arus laut yang besar sepertidi Selat Alas, Kabupaten Lombok Timur NTB.
Saya berencana membuat tugas akhir untuk perencanaanPLTAL yang berfokus pada desain bentuk lambung platformdengan meninjau kekuatan dari lambung platform tersebutapakah dapat menahan tegangan mooring terhadap arus laut,gaya angina dan gelombang tersebut, Selain itu dalammendesain lambung platform akan menghitung tahanan –tahanan yang terdapat pada lambung apakah dapat menahanarus laut yang telah diketahui arus, gaya angin dan ketinggiangelombang

3
I.2 Perumusan Masalah
Permasalahan:
Berdasar uraian diatas disampaikan beberapa hipotesa yangantara lain:1. Bagaimana menentukan besar nilai gaya dan arah gaya
yang harus ditahan oleh mooring sistem padapembangkit energi laut
2. Bagaimana desain dan Karakteristik Kekuatan lambungterhadap beban muatan dan beban tension mooring
Batasan Masalah:
1. Desain pontoon menggunakan Software geometri2. Tidak memperhitungkan energi yang dihasilkan oleh
Turbin PLTAL.3. Perhitungan Sistem turbin, Support konstruksi dan
factor fatigue tidak masuk dalam permasalahan4. Bahan material konstruksi lambung sudah ditetapkan5. Pontoon yang di Desain ukuran Panjang 8000mm x
Span 6000mm menyesuaikan dengan ukuran utamaturbin 2000mm x 100mm x 4mm,
6. Perencanaan Pontoon ini menggunakan standar API danBKI
7. Kekuatan dan Spesifikasi Mooring danperlengkapannya tidak dibahas.

4
I.3 Tujuan Penulisan
Penulisan tugas akhir ini bertujuan untuk :
1. Mengetahui besar nilai gaya dan arah gaya yang harusditahan oleh lambung terhadap faktor lingkungan
2. Mengetahui desain dan karakteristik kekuatan LambungPontoon terhadap beban saat operasional
I.4 Manfaat
Manfaat yang dapat diperoleh dari penulisan tugas akhir iniadalah :
1. Dapat dijadikan refrensi dalam mendesain platformocean current untuk kedepannya
2. Dapat membantu dalam urusan desain PLTAL(Pembangkit Listrik Tenaga Arus Laut)
3. Menjadi reffrensi dalam desain Lambung Pontoon dandeck Platform Ocean Current Energy/PLTAL

5
BAB IITINJAUAN PUSTAKA
2.1 Energi LautBerbagai macam riset dan teknologi telah diterapkan oleh
beberapa lembaga dan perusahaan untuk mengembangkanmodel baru bagi sistem konversi energi yang berasal darilaut (ocean energy) dapat dikategorikan menjadi tigamacam :
1. Energi Ombak (Wave Energy),
2. Energi Pasang Surut (Tidal Energy),
3. Hasil konversi energi panas laut (ocean thermalenergy conversion).
2.1.1 Energi Ombak (Wave Energy)
Ombak dihasilkan oleh angin yang bertiup dipermukaan laut. Sesungguhnya ombak merupakansumber energi yang cukup besar, namun, untukmemanfaatkan energi yang terkandungnya tidaklahmudah; terlebih lagi mengubahnya menjadi listrikdalam jumlah yang memadai. Inilah sebabnyajumlah pembangkit listrik tenaga ombak yang ada didunia sangat sedikit.
Salah satu metode yang efektif untukmemanfaatkan energi ombak adalah denganmembalik cara kerja alat pembuat ombak yang biasaterdapat di kolam renang. Pada kolam renangdengan ombak buatan, udara ditiupkan keluarmasuk sebuah ruang di tepi kolam yang mendorongair sehingga bergoyang naik turun menjadi ombak.
Pada sebuah pembangkit listrik bertenaga ombak(PLTO), aliran masuk dan keluarnya ombak ke

6
dalam ruangan khusus menyebabkan terdorongnyaudara keluar dan masuk melalui sebuah saluran diatas ruang tersebut. Jika di ujung saluran diletakkansebuah turbin, maka aliran udara yang keluar masuktersebut akan memutar turbin yang menggerakkangenerator. Masalah dengan desain ini ialah alirankeluar masuk udara dapat menimbulkan kebisingan,akan tetapi, karena aliran ombak pun sudah cukupbising umumnya ini tidak menjadi masalah besar.Setelah selesai dibangun, energi ombak dapatdiperoleh secara gratis, tidak butuh bahan bakar,dan tidak pula menghasilkan limbah ataupun polusi.Namun tantangannya adalah bagaimanamembangun alat yang mampu bertahan dalamkondisi cuaca buruk di laut yang terkadang sangatganas, tetapi pada saat bersamaan mampumenghasilkan listrik dalam jumlah yang memadaidari ombak-ombak kecil (jika hanya dapatmenghasilkan listrik ketika terjadi badai besar makasuplai listriknya kurang dapat diandalkan).Beberapa perusahaan yang mengembangkan PLTOversi komersial sesuai dengan metode yangdijelaskan di atas antara lain: Wavegen dari Inggris,dengan prototipnya yang bernama LIMPET dengankapasitas 500 kW di pantai barat Skotlandia, danEnergetech dari Australia yang sedangmengusahakan proposal proyek PLTO berkapasitas2 MW di Rhode Island.

7
Gambar 2.1.1 Skema kerja OWC [9]
2.1.2 Energi Pasang Surut (Tidal Energy)
Pasang surut menggerakkan air dalam jumlah besarsetiap harinya dan pemanfaatannya dapat menghasilkanenergi dalam jumlah yang cukup besar. Dalam sehari bisaterjadi hingga dua kali siklus pasang surut. Oleh karenawaktu siklus bisa diperkirakan (kurang lebih setiap 12,5jam sekali), suplai listriknya pun relatif lebih dapatdiandalkan daripada pembangkit listrik bertenaga ombak.hanya terdapat sekitar 20 tempat di dunia yang telahdiidentifikasi sebagai tempat yang cocok untukpembangunan pembangkit listrik bertenaga pasang surutombak. Pada dasarnya ada dua metodologi untukmemanfaatkan energi pasang surut:

8
Gambar 2.1.2 Skema Kerja Tidal Energy [10]
Turbin lepas pantai (offshore turbines)Pilihan lainnya ialah menggunakan turbin lepas
pantai yang lebih menyerupai pembangkit listrik tenagaangin versi bawah laut. Keunggulannya dibandingkanmetode pertama yaitu: lebih murah biaya instalasinya,dampak lingkungan yang relatif lebih kecil daripadapembangunan dam, dan persyaratan lokasinya pun lebihmudah sehingga dapat dipasang di lebih banyak tempat.Beberapa perusahaan yang mengembangkan teknologiturbin lepas pantai adalah: Blue Energy dari Kanada, SwanTurbines (ST) dari Inggris, dan Marine Current Turbines(MCT) dari Inggris.
Teknologi MCT bekerja seperti pembangkit listriktenaga angin yang dibenamkan di bawah laut. Dua buahbaling dengan diameter 15-20 meter memutar rotor yangmenggerakkan generator yang terhubung kepada sebuahkotak gir (gearbox). Kedua baling tersebut dipasangkanpada sebuah sayap yang membentang horizontal darisebuah batang silinder yang diborkan ke dasar laut. Turbintersebut akan mampu menghasilkan 750-1500 kW per

9
unitnya, dan dapat disusun dalam barisan-barisan sehinggamenjadi ladang pembangkit listrik. Demi menjaga agarikan dan makhluk lainnya tidak terluka oleh alat ini,kecepatan rotor diatur antara 10-20 rpm (sebagaiperbandingan saja, kecepatan baling-baling kapal laut bisaberkisar hingga sepuluh kalinya).
Kelebihan:Setelah dibangun, energi pasang surut dapat
diperoleh secara gratis. Tidak menghasilkan gasrumah kaca ataupun limbah lainnya.Tidakmembutuhkan bahan bakar. Biaya operasi rendah.Produksi listrik stabil. Pasang surut air laut dapatdiprediksi. Turbin lepas pantai memiliki biayainstalasi rendah dan tidak menimbulkan dampaklingkungan yang besar.
Kekurangan:Sebuah dam yang menutupi muara sungai
memiliki biaya pembangunan yang sangat mahal,dan meliputi area yang sangat luas sehinggamerubah ekosistem lingkungan baik ke arah hulumaupun hilir hingga berkilo-kilometer. Hanyadapat mensuplai energi kurang lebih 10 jam setiapharinya, ketika ombak bergerak masuk ataupunkeluar.

10
Gambar 2.1.3 Prototype Desain Lambung Ponton dan deckPlatform OCE/PLTAL Mr.Erwandi [11]
Dam pasang surut (tidal barrages)Cara ini serupa seperti pembangkitan listrik secara
hidro-elektrik yang terdapat di dam/waduk penampunganair sungai. Hanya saja, dam yang dibangun untukmemanfaatkan siklus pasang surut jauh lebih besardaripada dam air sungai pada umumnya. Dam ini biasanyadibangun di muara sungai dimana terjadi pertemuan antaraair sungai dengan air laut. Ketika ombak masuk atau keluar(terjadi pasang atau surut), air mengalir melaluiterowongan yang terdapat di dam. Aliran masuk ataukeluarnya ombak dapat dimanfaatkan untuk memutarturbin.
Kekurangan terbesar dari pembangkit listrik tenagapasang surut adalah mereka hanya dapat menghasilkanlistrik selama ombak mengalir masuk (pasang) ataupunmengalir keluar (surut), yang terjadi hanya selama kuranglebih 10 jam per harinya. Namun, karena waktu operasinya

11
dapat diperkirakan, maka ketika PLTPs tidak aktif, dapatdigunakan pembangkit listrik lainnya untuk sementarawaktu hingga terjadi pasang surut lagi.
2.2 Analisis Struktur dan Tahanan terhadap arus laut Estimasi Berat
Sebelum menghitung estimasi berat berupa LWT danDWT, terlebih dahulu menghitung beberapa nilai coefisienyang dibutuhkan untuk menghitung LWT dan DWT.Dalam hal ini teori yang digunakan mengacu pada HarvaldSV Coefisian tersebut diantaranya :
Cb = block coefficient= 0.70 + 0.125 tan ‐1 ((23 – 100 Fn)/4)
Cm = midship coefficient= (1 +((1 – CB) 3.5)) – 1
Cwp = waterplane coefficient= 0.180 + 0.860 CP Series 60
LCB = longitudinal center of buoyancy= ‐13.5 +19.4 Cp → %L plus amidship
Cp = prismatic coefficient= Cb / Cm
▼ = volume displacement= L . B . T . Cb [ m3 ]
∆ = displacement= ▼ . ρ [ ton ]
ρ = 1.025 [ ton / m3 ]

12
Volume Displacement ( )
Volume displacement adalah volume air yangdipindahkan oleh badan yang tercelup air. Dan dari datayang sudah direncanakan sebelumnya dari Tugas RencanaGaris maka dapat diketahui besarnya nilai volumedisplacement dengan mengalikan panjang Lenght of WaterLine (LWL) dengan Lebar (B), Sarat (T) dan CoefisienBlock Water Line (wl) Sehingga dapat diketahui denganrumus:
= Lwl x B x T x 3m
Displacement ( )Berat displacement adalah berat yang dipindahkan
oleh badan yang tercelup air. Dan berat displacement dapatdiketahui jika kita terlebih dahulu menghitung besarvolume displacement dan dikalikan dengan massa jenis air
laut (). Jadi setelah itu dapat dicari dengan rumus :
= Lwl x B x T x x (Ton)
= x (Ton)
Perhitungan Coefisien Prismatik (Untuk mencarinilai
103 CR pada grafik Length Displacement Ratio (L/1/3)sehingga dapat diketahui nilai koefisien tahanan sisa (CR)).Sebelum kita menghitung Coefisien Prismatik terlebihdahulu kita mencari nilai Coefisien Middle denganmembagi antara Luas Area pada Middle (Am) denganLebar (B) dikalikan Sarat (T) sesuai dengan data dariTugas Rencana Garis yaitu dari rumus:

13
(Am) = B x TCm = Luas (Am) / B x TKoefisien Prismatik Cp (φ)Cp (φ) = Cb / Cm
Luas Permukaan Basah (S)Luas permukaan basah suatu kapal juga
mempengaruhi nilai koefisien tahanan gesek karena badanyang tercelup air jika bergerak akan terdapat gesekan makadari itu harus dicari nilai luas permukaan basah. Banyaksekali metode yang digunakan tapi dianjurkan memakaidua metode yaitu:
[1] Permukaan basah semua bentuk memakaikoefisien :
)5,2( TBL
SS
[2] Permukaan basah untuk kapal niaga yang normaldapat dihitung dengan memakai rumus berikut ini (versirumus Mumford):
S = 1,025 x Lpp [ ( pp x B) + (1,7 x T) ] 2m
Dari dua metode diatas maka digunakan versi rumusMumford dimana Luas permukaan basah badan dapatdicari dengan :
S = 1,025 x L [ ( pp x B) + (1,7 x T) ] 2m

14
2.3 Sistem Tambat (Mooring System)
Mooring System adalah sistem penambatan bendaapung yang ada di permukaan laut agar tetap terjaga diposisinya saat terkena gelombang, arus serta angin yangmengenai benda apung tersebut. Pada kapal saat berada dipelabuhan dan menunggu untuk bersandar, mooring systemmenggunakan jangkar yang ditenggelamkan di dasar lautagar kapal tidak mengalami pergerakan dan pergeseranyang bebas. Dalam laporan kali ini, benda apung yangharus dijaga agar tidak mengalami pergerakan bebas adalahpontoon yang digunakan sebagai tumpuan turbin padapembangkit listrik dengan memanfatkan gelombang laut.Sistem yang digunakan untuk mengubah dari gerakanpontoon yang terkena gelombang adalah dengan sebuahturbin yang terpasang pada pontoon tersebut. Sehinggadibutuhkan mooring system yang mampu menjaga pontoonagar tidak mengalami pergeseran dari posisinya, namunmasih bisa mengalami beberapa pergerakan bebas untukmenggerakkan turbin tersebut.
Ada beberapa jenis mooring system yang digunakanpada bangunan lepas pantai. Jenis mooring system yangdigunakan sangat bergantung pada jenis bangunan lepaspantai yang dirancang, kondisi lingkungan, serta fungsidari bangunan lepas pantai itu sendiri. Jenis mooringsystem yang digunakan pada bangunan lepas pantai antaralain adalah :
Spread Mooring Turret Mooring Catenary Anchor Leg Mooring (CALM) Single Anchor Leg Mooring (SALM) Thruster Assited Mooring Dynamic Positioning

15
2.3.1 Spread MooringSistem tambat jenis ini tediri dari beberapa mooring
line yang menambat ke dasar laut. Spread mooring ini tidakmemungkinkan bagi kapal atau bangunan apung untukbergerak/berputar akibat dari efek lingkungan yang terjadisemisal angin, arus dan gelombang. Walaupun beban yangditimbulkan relatif kecil, namun pergerakan bebas akanmengakibatkan beban akibat lingkungan terhadapbangunan apung semakin besar. Sehingga dapat berakibatpada bertambahnya jumlah mooring lines dan ataubertambahnya niali dari line tension-nya. Pada sistem inidigunakan satu set anchor legs dan mooring lines padasetiap sistem tambat yang digunakan.
Gambar 2.3.1 Spread Mooring [12]
2.3.2 Turret MooringPada sistem ini bangunan apung dihubungkan dengan
turret dimana turret tersebut terhubung dengan catenarymooring lines. Pada turret yang terpasang bearingmemungkinkan bangunan apung untuk dapat berputar.Dibandingkan dengan spread mooring, pada sistem iniriser jumlahnya dapat lebih banyak lagi. Turret mooringdapat berupa external turret atau internal turret.

16
External TurretExternal turret dapat diletakkan pada posisi depan
kapal atau stern ship, yang berada di luar lambung kapal.Sehingga memungkinkan kapal untuk dapat berputar 360derajat dan beroperasi pada kondisi cuaca normal maupunekstrem. Selain posisi turret, perbedaan lain dibandingkandengan Internal turret adalah posisi chain table-nya. Padaexternal turret, chain table terletak di atas garis airsedangkan pada internal turret, chain table terendam dibawah garis air.
Gambar 2.3.2 External Turret Mooring System
Internal TurretKeunggulan sistem ini adalah dapat terpasang secara
permanen maupun tidak (disconnectable). Dapatdiaplikasikan pada lapangan dengan kondisi lingkungan

17
yang normal sampai ekstrim, dan sesuai untuk kedalamanair.
Gambar 2.3.3 Internal Turret Mooring System [12]
2.3.3 Catenary Anchor Leg Mooring (CALM)Sistem tambat ini terdapat pelampung dengan ukuran
yang cukup besar dan terhubung dengan mooring line kedasar laut. Catenary anchor leg mooring sering digunakansebagai mooring point kapal dan untuk offloading fluidadari bangunan lepas pantai ke kapal. Terdapat beberapacara untuk menambatkan kapal ke pelampung besar dalamsistem ini. Misalnya penambatan kapal ke pelampungdengan structural kaku, atau bisa dengan tali.

18
Gambar 2.3.4 CALM menggunakan hawser (kiri) danCALM menggunakan fixed yoke (kanan) [12]
2.3.4 Single Anchor Leg Mooring (SALM)Single anchor leg mooring ini mirip dengan sistem
tambat catenary anchor leg mooring. Namun pada SALMmenggunakan riser vertikal yang terhubung langsung kedasar laut. Terdapat riser vertikal pada SALM yangmenggunakan structural kaku berbentuk turbular yanglangsung terhubung ke dasar laut. Jenis lain riser padaSALM menggunakan rantai, untuk jenis ini, penghubungkapal ke pelampung menggunakan tali.
Gambar 2.3.5 SALM menggunakan Turbular Riser (kiri)dan SALM menggunakan Chain Riser (kanan) [12]

19
Dynamic PositioningDynamic positioning adalah sistem yang secara
otomatis mempertahankan posisi kapal atau bangunanterapung dalam toleransi yang ditetapkan denganmengendalikan pendorong kapal yang menghasilkan arahgaya dorong untuk melawan gaya akibat angin, gelombangdan arus. Sistem ini termasuk sistem yang paling fleksibeluntuk mendapatkan posisi paling aman dalam prosesoperasi. Tetapi sistem ini sangat mahal sehingga menjadisebuah pilihan yang belum realistis secara ekonomi dalampenambatan kapal.
Tipe Pengaturan Posisi Penambatan :a. Stern line (bagian belakang/after).b. Bow line (bagian depan/fore).c. Spring line (tengah).d. Breast line (antara depan dan spring line).
Gambar 2.3.6 Dynamic Positioning [12]

20
2.4 Bangunan ApungPengertian dari bangunan apung adalah suatu
konstruksi yang mengapung di atas air yang digunakanuntuk tujuan tertentu. Contoh dari bangunan apung yangbanyak dikenal adalah kapal yang biasa digunakan sebagaisarana angkutan. Ponton juga merupakan salah satu jenisbangunan apung, tidak memiliki sistem penggeraksehingga gerakannya sangat dipengaruhi oleh gerakangelombang laut.
Pada bangunan apung, benda mendapat gaya beratdari bumi yang arahnya ke bawah, supaya terapung makabenda harus mendapat gaya apung atau gaya angkat keatas. Gaya apung harus sama besar dengan gaya beratsupaya benda tidak naik atau terbenam di air, sebagaimanahukum archimides yaitu gaya apung sama dengan gayaberat air yang dipindahkan. Gaya berat air yangdipindahkan merupakan perkalian antara volume, massajenis air, dan percepatan gravitasi. Sehingga apabila kitamengetahui gaya berat suatu bangunan apung, maka bisadihitung volume benda yang terbenam di air supaya bendabisa mengapung. [5]
Gelombang LautDeskripsi tentang sebuah gelombang hingga kini
masih belum jelas dan akurat, oleh karena permukaan lautmerupakan suatu bidang yang kompleks dengan pola yangselalu berubah dan tidak stabil. Gelombang merupakanfenomena alam penaikan dan penurunan air secara periodikdan dapat dijumpai di semua tempat di seluruh dunia.Gelombang ada;ah sesuatu yang terjadi secara periodikterutama gelombang yang disebabkan oleh adanyaperistiwa pasang surut.

21
Permukaan air selalu dalam keadaan bergerak,gerakan ini terutama ditimbulkan oleh kekuatan angin yangbertiup melintasi permukaan air dan menghasilkan energigelombang dan arus. Bentuk gelombang yang dihasilkancenderung tidak menentu dan tergantung pada beberapasifat gelombang, periode dan tinggi dimana gelombangdibentuk, gelombang jenis ini disebut “Sea”. Gelombangyang terbentuk akan bergerak ke luar menjauhi pusat asalgelombang dan merambat ke segala arah, serta melepaskanenerginya ke pantai dalam bentuk empasan gelombang.Rambatan gelombang ini dapat menempuh jarak ribuankilometer sebelum mencapai suatu pantai, jenis gelombangini disebut “Swell”.
Gelombang mempunyai ukuran yang bervariasimulai dari riak dengan ketinggian beberapa centimetersampai pada gelombang badai yang dapat mencapaiketinggian 30 m. Selain oleh angin, gelombang dapat jugaditimbulkan oleh adanya gempa bumi, letusan gunungberapi, dan longsor bawah air yang menimbulkangelombang yang bersifat merusak (Tsunami) serta olehdaya tarik bulan dan bumi yang menghasilkan gelombangtetap yang dikenal sebagai gelombang pasang surut.Sebuah gelombang tertdiri dari beberapa bagianantara lain :
- Puncak gelombang (Crest) adalah titik tertinggi darisebuah gelombang.
- Lembah gelombang (Trough) adalah titik terendahgelombang, diantara dua puncak gelombang.
- Panjang gelombang (Wave length) adalah jarak mendatarantara dua puncak gelombang atau antara dua lembahgelombang.

22
- Tinggi gelombang (Wave height) adalah jarak tegakantara puncak dan lembah gelombang.
- Periode gelombang (Wave period) adalah waktu yangdiperlukan oleh dua puncak gelombang yang berurutanuntuk melalui satu titik.
Antara panjang dan tinggi gelombang tidak ada satuhubungan yang pasti akan tetapi gelombang mempunyaijarak antar dua puncak gelombang yang makin jauh akanmempunyai kemungkinan mencapai gelombang yangsemakin tinggi. Klasifikasi gelombang berdasarkanperiodenya, seperti yang disajikan pada Tabel 1. berikutini.
Tabel 2.1. Klasifikasi gelombang berdasarkan periode [12]
Periode PanjangGelombang
JenisGelombang
0 – 0,2Detik0,2 – 0,9Detik
BeberapacentimeterMencapai130 meter
Riak (Riplles)Gelombangangina
0,9 -15Detik
Beberaparatus meter
Gelombangbesar (Swell)
15 – 30Detik0,5 menit– 1 jam
RibuanmeterRibuankilometer
Long SwellGelombangdenganperiode yangpanjang(termasukTsunami)
5, 12, 25jam
Beberapakilometer
Pasang surut

23
2.4.1 Gaya Pada Mooring SystemKeadaan lingkungan pada peletakan sistem tambat
akan berpengaruh terhadap gaya yang bekerja pada sistemtambat. Kondisi lingkungan akan mempengaruhi besar dankecilnya nilai dari gaya yang bekerja pada sistem tambat itusendiri. Gaya yang terjadi pada mooring system antara lainadalah :
- Gaya angin- Gaya arus- Gaya gelombang- Oblique Environment
Gaya Angin (Wind Force)Gaya anging terjadi karena adanya bagian lambung
yang berada di atas permukaan air terkena angin.Kecepatan angin akan memberikan gaya pada pontoon ataubenda apung, sehingga akan memberikan tekanan danpembebanan pada mooring system. Besar dari gaya akibatangin ini sangat bergantung pula pada arah datang anginterhadap penampang benda. Misalnya sudut antara arahdatang angin dengan penampang benda yang terkena anginmempunyai nilai sebesar 90˚, maka akan menghasilkannilai gaya yang besar. Untuk mendapatkan nilai dari gayayang diakibatkan oleh angin dapat digunakan rumusberikut : [7]
Fw = CWΣ(CSChA)Vw2
Dimana:- Fw = Gaya angin (N)- CW = Koefisien angin
= 0,615 Ns2/m4
- CS = Koefisien bentuk benda- Ch = Koefisien tinggi benda dari

24
garis air- A =Luas penampang benda yang
terkena angin (m2)- Vw = Kecepatan angin (m/s)
Dalam perhitungan gaya angin, tinggi benda yangberada di atas garis air harus dihitung secara keseluruhan.Jika diatas pontoon terdapat peralatan lain, maka harusdihitung total ketinggiannya dan luas penampangnya. Iniakan sangat mempengaruhi nilai dari gaya angin yangterjadi. Untuk nilai dari koefisien bentuk benda dapatdilihat pada tabel 2.2 dengan parameter bentuk benda diatas garis air. Sedangkan untuk nilai dari koefisien tinggibenda dari garis air dapat dilihat pada tabel 2.3.
Tabel 2.2. Koefisien bentuk benda di atas garis air.
Exposed Area CS
Cylindrical Shapes 0,50
Hull (surface above waterline) 1,00
Deck house 1,00
Isolated structural shapes
(crane, channels, beams, angles)1,50
Under deck areas
(smooth surface)1,00
Under deck areas 1,30

25
(exposed beams and girders)
Rig derrick 1,25
Tabel 2.3. Koefisien tinggi benda di atas garis air.
Height of area centroid above water level
(meter)Ch
0 – 15,3 1,00
15,3 – 30,5 1,18
30,5 – 46,0 1,31
46,0 – 61,1 1,40
61,1 – 76 1,47
Gaya Arus (Current Force)Gaya arus timbul akibat adanya penampang benda
yang terkena arus air, sehingga akan memberikan bebanterhadap mooring system. Besarnya nilai gaya ini dapatbergantung pada kecepatan arus yang mengenaipenampang benda dan luas permukaan basah. Pada gayaarus, terdapat beberapa arah gaya yang mungkin terjadi.Arah gaya dari depan benda apung dan dari samping bendaapung. Untuk mendapatkan besarnya nilai gaya yangdiakibatkan arus dapat digunakan rumus sebagai berikut :
Gaya arus pada bagian depan benda.
Fcx = CcxSVc2

26
Dimana :- Fcx = Gaya arus dari depan benda (N)- Ccx = Koefisien arus air dari depan benda
= 2,89 Ns2/m4
- S = Luas permukaan basah (m2)- Vc = Kecepatan arus air (m/s)
Gaya arus pada bagian samping benda.
Fcy = CcySVc2
Dimana :- Fcy = Gaya arus dari samping benda (N)- Ccy = Koefisien arus air dari samping benda
= 72,37 Ns2/m4
Gaya arus pada semisubmesible.
Fcs = CSS(Cd1Ac + Cd2Af)Vc2
Dimana :- Fcs = Gaya arus semisubmersible (N)- CSS = Koefisien arus air pada semisubmesible
= 515,62 Ns2/m4
- Cd1 = Koefisien drag luas potongan benda dibawah garis air.
- Cd2 = Koefisien drag luas bidang datar bendadi bawah garis air.
- Ac = Total luas potongan benda di bawahgaris air. (m2)
- Af = Total luas bidang datar benda di bawahgaris air. (m2)
Untuk nilai dari koefisien drag dapat dilihat padagambar 2.5.1 dengan nilai R. Dimana nilai R berada padaaxis x dan nilai dari koefisien drag ada pada axis y.

27
- Untuk nilai Cd1 dapat digunakan rumus berikut :R = r/2h- Untuk nilai Cd2 dapat digunakan rumus berikut :R = r/h
Dimana nilai “h” pada Cd1 adalah tinggi daripotongan benda apung atau pontoon yang terkena arus,sedangkan “h” pada Cd2 adalah lebar dari permukaan bendaapung atau pontoon yang terkena arus. Untuk nilai “r”adalah nilai dari jari – jari rounded pada potonganmelintang pontoon yang terkena arus (untuk Cd1) danpermukaan apung ayng terkena arus (untuk Cd2).
Gambar 2.4.1 Grafik koefisien drag [12]

28
Gaya Gelombang (Wave Force)Gaya gelombang timbul karena adanya gelombang
yang mengenai benda dan menimbulkan tarikan ataupembebanan terhadap mooring system. Periode gelombangyang terjadi akan mengakibatkan gerakan bebas kapalterhadap sumbu x, y dan z. Gerakan bebas kapal ini jugadapat menimbulkan tarikan atau pembebanan terhadap talitambat. Frekuensi gerakan bebas sangat mempengaruhiberapa besar nilai gaya akibat adannya gelombang. Untukmendapatkan nilai dari gaya gelombang dapat diprediksidengan menggunakan model tes atau program yang mampumesimulasikan pontoon terhadap tinggi gelombang danperiode gelombang, serta berapa besar frekuensi gerakanyang muncul akibat gelombang. Dari keseluruhan gayayang terjadi akibat adanya gelombang, harus dicari nilaigaya rata-rata yang terjadi. Nilai gaya rata-ratatersebutyang nanti akan digunakan sebagai acuanmerencanakan mooring system.

29
Gambar 2.4.2 Grafik gaya gelombang untuk bow sea [12]
Namun untuk mendapatkan nilai rata-rata dari gayagelombang, dapat digunakan diagram pada Gambar 2.5.2,Gambar 2.5.3, dan Gambar 2.5.4 Dimana parameter yangdigunakan pada sumbu x adalah tinggi gelombang yangterjadi. Pada gambar-gambar tersebut terdapat dua kurva,kurva pertama menggambarkan gaya tarik akibatgelombang. Sedangkan kurva kedua mengambarkanseberapa besar amplitude gerakan bebas yang timbulkarena gaya tarik dari gelombang.

30
Gambar 2.4.3 Grafik gaya gelombang untuk quarteringseas [12]
Gambar 2.4.4 Grafik gaya gelombang untuk beam seas[12]

31
Oblique Environment (Kemiringan Lingkungan)
Oblique environment timbul karena kemiringansudut datangnya arus atau angin terhadap sumbu x dan ypada pontoon. Kemiringan pada gaya harus dievaluasi,untuk mengecek besarnya nilai dari gaya yang ditimbulkanakibat dari kemiringan tersebut. Pendekatan nilai gaya yangtimbul karena kemiringan sudut dari arah gaya ini dapatdiperoleh melalui rumus berikut : [7]
= +
Dimana :- Fθ = Gaya akibat dari kemiringan sudut
arah datangnya arus atau anginterhadap sumbu x dan y pada pontoon.(N)
- Fx = Gaya yang terjadi pada bagian depanpontoon. (N)
- Fy = Gaya yang terjadi pada bagiansamping pontoon. (N)
- θ = Sudut kemiringan datangnya gayapada pontoon terhadap sumbu x dan y.
2.4.2 Desain Lambung ponton pada Pembangkit EnergiArus Laut
Konsep perancangan lambung ponton tidak lepas darikonsep desain spiral, umumnya suatu lambung kapal untukdapat dibuat harus memenuhi segala aspek yang tercantumdalam spiral desain, karena peninjauan kembali desainmenjadi hal penting karena kapal atau banguan lepas pantaitidak dapat dibuat dalam quantitas banyak dalam waktuyang sama maka pentingnya faktor kebutuhan material,

32
kondisi operasional lingkungan dan kodisi ekstrimlingkungan menjadi sangat krusial dalam perancangannya.Berikut ini ada beberapa jenis-jenis alternatif lambungponton yang bisa diaplikasikan untuk pembangkit energyarus laut dari sumber teknologi bangunan kepas pantai(Offshore Vessel).
Simple Box (Conventional Barge)Platform dengan tipe simpel box memiliki beberapakarakter, antara lain:1. Remotely operated units2. Pemasangan topsides dalam satu operatiaon,
menghilangkan angkat berat, dan mengurangioffshore hook-ups
3. Cocok untuk mengembangkan deposit yang besarpada perairan dalam atau sangat dalam.
4. Memiliki kapasitas yang besar hingga 350 m3
5. Mampu berada di kedalaman hingga 2000 meter
Gambar 2.4.5 Simple Box (Conventional Barge)
Vertical Cylinder (Spar)Platform dengan tipe simpel box memiliki beberapakarakter, antara lain:1. Remotely operated units2. Pemasangan topsides dalam satu operation,
mengurangi offshore hook-ups

33
3. Cocok untuk mengembangkan deposit yang besarpada perairan dalam atau sangat dalam.
4. Ultra harsh environment5. Mampu berada di kedalaman di antara 600 –
3000 meter
Gambar 2.4.6 Vertical Cylinder (Spar)
Ship Form (Cargo Ship)
Platform dengan tipe simpel box memiliki beberapakarakter, antara lain:1. Remotely operated units2. Pemasangan topsides dalam satu operatiaon,
menghilangkan angkat berat, dan mengurangioffshore hook-ups
3. Cocok untuk mengembangkan deposit yang besarpada perairan dalam atau sangat dalam
4. Memiliki kapasitas yang besar hingga 350000 m3
5. Mampu berada di kedalaman hingga 2000 meter

34
Gambar 2.4.7 Ship Form (Cargo Ship)
TLP (Tension Leg Platform)
Platform dengan tipe simpel box memiliki beberapakarakter, antara lain:1. Remotely operated units2. Pemasangan topsides dalam satu operation,
mengurangi offshore hook-ups3. Cocok untuk mengembangkan deposit yang besar
pada perairan dalam atau sangat dalam4. Memiliki wilayah pergerakan yang rendah5. Mampu berada di kedalaman hingga 2000 meter
Gambar 2.4.8 TLP

35
SemisubmersiblePlatform dengan tipe simpel box memiliki beberapakarakter, antara lain:1. Remotely operated units2. Pemasangan topsides dalam satu operatiaon,
menghilangkan angkat berat, dan mengurangioffshore hook-ups
3. Cocok untuk mengembangkan deposit yang besarpada perairan dalam atau sangat dalam
4. Pergerakannya baik5. Mampu berada di kedalaman 60 – 3000 meter
Gambar 2.4.9 Semisubmersible
CylinderPlatform dengan tipe simpel box memiliki beberapakarakter, antara lain:1. Remotely operated units2. Pemasangan topsides dalam satu operatiaon,
menghilangkan angkat berat, dan mengurangioffshore hook-ups
3. Cocok untuk mengembangkan deposit yang besarpada perairan dalam atau sangat dalam

36
4. Memiliki kemampuan operasi yang tinggi karenaminim pergerakan rol/pitch
5. Mampu berada di kedalaman 1000 meter
Gambar 2.5.1 Cylinder
Jack-Up Barger (Spud)Platform dengan tipe simpel box memiliki beberapakarakter, antara lain:1. Remotely operated units2. Pemasangan topsides dalam satu operatiaon,
menghilangkan angkat berat, dan mengurangioffshore hook-ups
3. Cocok untuk perairan dangkal4. Tidak terdapat pergerakan selama waktu
pengoperasian5. Mampu berada di kedalaman hingga 120 meter

37
Gambar 2.5.2 Cylinder
2.5 Mooring ComponentsPerlengkapan atau peralatan yang digunakan pada
setiap mooring system dapat berbeda. Perbedaan komponenperalatan yang digunakan dalam mooring systemtergantung dari tujuan mooring system tersebut. Komponenpenyusun mooring system pada bangunan offshore akanberbeda dengan komponen mooring system yang digunakanpada kapal. Selain itu, pemillihan komponen mooringsystem juga bergantung pada keadaan lingkungan perairan.Kedalaman laut dan cuaca juga mempengaruhi komponenapa saja yang digunakan dalam sistem tambat. Berikutadalah beberapa komponen dari mooring system.
2.5.1 Mooring LinesMooring lines untuk sistem tambat kapal maupun
bangunan apung dapat menggunakan rantai (chain), talibaja (wire rope), tali sintetis (synthetic rope) ataukombinasi dari itu. Dalam pemilihan dari mooring linesyang digunakan, harus memperhatikan jenis bangunanapung yang akan ditambatkan, keadaan lingkungan sertapermanen atau tidak mooring system yang akan dirancang.

38
Pada mooring system yang secara keseluruhanmenggunakan tali baja (wire rope) maupun tali sintetis(synthetic rope) mempunyai kelebihan yaitu dapatmengurangi gaya yang didapat selama pretension. Hal inidisebabkan pada karena berat dari wire rope atau syntheticrope lebih ringan dari rantai. Namun pada mooring systemyang menggunakan wire rope, lebih mudah terkena abrasi.Mooring lines dengan tali baja dapat digunakan untukmooring system permanen atau mobile.
Kombinasi penggunaan mooring lines, rantai dan talibaja atau tali sintetis, biasanya didesain denganmenghubungkan rantai ke jangkar. Ini dilakukan karenaberat rantai akan membantu jangkar dalam menahan gayatarik yang terjadi pada mooring system. Rantai jugamempunyai kelebihan tidak mudah mengalami abrasi saatmengalami kontak langsung dengan dasar laut. Darijangkar, rantai akan terhubung dengan bridle connectoratau bisa menggunakan link connector. Dimana dariconnector ini, akan terhubung dengan mooring lines yangmenggunakan tali baja atau tali sintetis. Tali bajadigunakan untuk menghubungkan dengan bangunan apung.Hal ini bertujuan untuk mengurangi gaya tarik yang terjadiselama pretension.
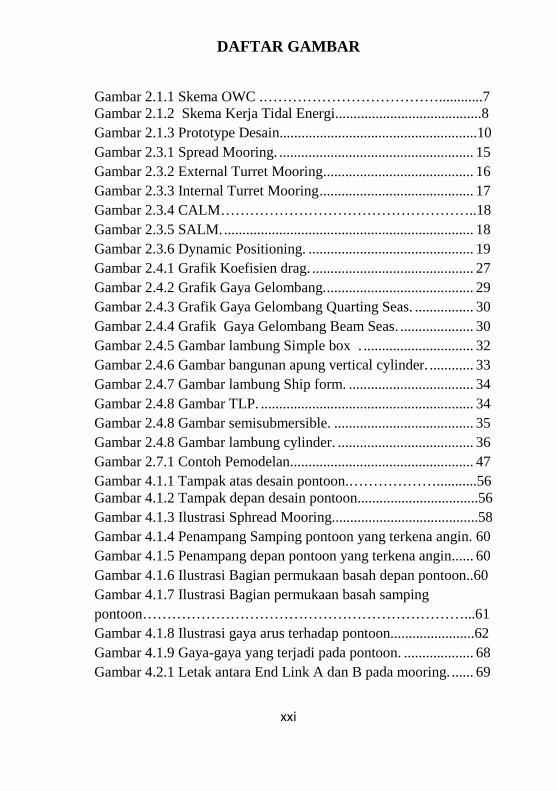
Dalam penggunaan mooring lines, terdapat beberapakonfigurasi dari mooring system. Masing-masing darikonfigurasi mooring lines mempunyai karakteristik danfungsi. Karakteristik adan fungsi dari konfigurasi mooringlines harus diperhatikan agar dalam perancangan mooringsystem dapat seefektif mungkin. Karakteristik darikonfigurasi mooring lines dapat dilihat pada Tabel 2.4.
39
Untuk dapat menggunakan mooring line padapembangkit listrik ini terdapat syarat yang harus dipenuhiyakni : Mooring Line system memiliki tujuan untuk dapat
mempertahankan struktur terapung pada posisi awaldengan toleransi yang ditentukan dalam kondisi normalmaupun ekstrim
Mooring system harus cukup memenuhi persyaratanbeban lingkungan untuk mengurangi gaya yang bekerjapada jangkar
Seluruh komponen harus memiliki kekuatan yangmemadai, masalah umur, kelelahan dan lingkunganmarine serta korosi juga harus diperhitungkan
Keseluruhan sistem harus dapat beroperasi selama 30tahun atau lebih dengan penggantian komponen tertentutidak kurang dari 5 tahun
Mooring Line harus cukup untuk mengakomodasirentang pasang surut di lokasi instalasi
Tabel 2.4. Konfigurasi mooring lines
Konfigurasi Mooring
KarakteristikKesesuaian
untukOWC
CatenaryMooring
Mooring linemerupakan catenarymooring yangbebabs menggantunghorizontal ke seabedsehingga titikjangkar hanyamengakibatkan gaya
High

40
horizontal. Restoringforce dihasilkan olehberat dari mooringline.
Multi-CatenaryMooring
Catenary mooringline menggabungkanberat denganpelampungtouchdown pointyang mungkinterjadi.
High
TautSpread
Mooring
(TetherdMooring)
Mooring line jenistaut spread mooringbiasanya membentuksudut terhadap dasarlaut sehingga anchormampu menahangaya vertikal danhorizontal.
High
2.6 TeganganTegangan menunjukkan kekuatan gaya yang
menyebabkan perubahan bentuk benda. Tegangan (stress)didefinisikan sebagai perbandingan antara gaya yangbekerja pada benda dengan luas penampang benda, adabeberapa jenis tegangan yang diklasifikasikan berdasarkanetak dan jenis pembebanannya. Jenis-jenis tegangantersebut antara lain adalah sebagai berikut :
- Tegangan Normal

41
Tegangan normal terjadi akibat adanya reaksi yangdiberikan pada benda.
- Tegangan TarikTegangan tarik pada umumnya terjadi pada rantai, tali,paku keling, dan lain-lain. Rantai yang diberi beban Wakan mengalami tegangan tarik yang besarnya tergantungpada beratnya.
- Tegangan TekanTegangan tekan terjadi bila suatu batang diberi gaya Fyang saling berlawanan dan terletak dalam satu garis gaya
- Tegangan GeserTegangan geser terjadi jika suatu benda bekerja dengandua gaya yang berlawanan arah, tegak lurus sumbubatang, tidak segaris gaya namun pada penampangnyatidak terjadi momen. Tegangan ini banyak terjadi padakonstruksi. Misalnya: sambungan keling, gunting, dansambungan baut. Tegangan geser terjadi karena adanyagaya radial F yang bekerja pada penampang normaldengan jarak yang relatif kecil, maka pelengkunganbenda diabaikan.
- Tegangan LengkungMisalnya, pada poros-poros mesin dan poros roda yangdalam keadaan ditumpu. Jadi, merupakan tegangantangensial.
- Tegangan PuntirTegagan puntir sering terjadi pada poros roda gigi danbatang-batang torsi pada mobil, juga saat melakukanpengeboran. Jadi, merupakan tegangan trangensial.

42
2.6.1 Output Gaya-gaya yang terjadi pada konstruksiPlatform
Gaya-gaya dalam pada elemen frame merupakan gayadan momen yang dihasilkan dari penjumlahan teganganpada potongan penampang elemen. Gaya-gaya dalamtersebut antara lain;
1. P, gaya aksial2. V2, gaya geser pada bidang 1-23. V3, gaya geser pada bidang 1-34. T, momen torsi aksial5. M2, momen pada bidang 1-3 (momenterhadap sumbu -2)6. M3, momen pada bidang 1-2 (momenterhadap sumbu -3)
2.6.2 Tegangan Pada Struktur
Tegangan Kerja pada Struktur
1. Tegangan Aksial
=
2. Tegangan Geser
=
3. Tegangan Lentur
=
Tegangan Izin
1. Tegangan izin aksial (allowable axialcompressive stress)

43
= 0,6 Fy
2.Tegangan izin lentur (allowable bending stress)
= 0,4 Fy
3. Tegangan izin geser (allowable shear stress)
= 0,4 Fy
Perhitungan ukuran konstruksi pelat kulit
Perhitungan pelat kapal untuk Panjang lambungL < 90 m,:Untuk ukuran 0,1 L panjang pada bagian depandan belakang lambung
Untuk ukuran 0,05 L panjang pada bagianbelakang dari depan ujung lambung :
nf = 0.83k = 0.91 (faktor bahan)tk = 1.5 mm (untuk t' < 10 mm)ao = 1.2σperm = (0.8+L/450)230/kp = 6.03 kN/m²

44
untuk ukuran panjang lambung L < 90 m(Ketebalan ukuran pelat sisi 0,4 L bagian tengahlambung) :
Untuk ukuran 0,1 L panjang pada bagian depan danbelakang lambung
2.7 Desain Geometri menggunakan Software
Software 3D geometri yang dikembangkan olehDassault team merupakan salah satu 3D CAD yang sangatpopuler saat ini. di Indonesia sudah banyak sekaliperusahhan manufacturing yang mengimplementasikansoftware. dalam penggambaran / pembuatan model 3Dmenyediakan feature-based, parametric solid modeling.Feature based dan parametric ini yang akan sangatmempermudah bagi usernya dalam membuat model 3D.
Karena hal ini akan membuat kita sebagai pengguna bisamembuat model sesuai dengan keinginan kita.

45
Simulasi Finite Element Method
Metode Elemen Hingga (Finite Element Method)adalah salah satu metode numerik untuk menyelesaikanberbagai problem rekayasa, seperti mekanika struktur,mekanika tanah, mekanika batuan, mekanika fluida,hidrodinamik, aerodinamik, medan magnet, perpindahanpanas, dinamika struktur, mekanika nuklir, aeronautika,akustik, mekanika kedokteran dan sebagainya.
Kontinum dibagi-bagi menjadi beberapa bagian yanglebih kecil, maka elemen kecil ini disebut elemen hingga.Proses pembagian kontinum menjadi elemen hinggadisebut proses “diskretisasi” (pembagian). Dinamakanelemen hingga karena ukuran elemen kecil ini berhingga(bukannya kecil tak berhingga) dan umumnya mempunyaibentuk geometri yang lebih sederhana dibanding dengankontinumnya.
Dengan metode elemen hingga kita dapat mengubahsuatu masalah dengan jumlah derajat kebebasan tertentusehingga proses pemecahannya akan lebih sederhana.Misalnya suatu batang panjang yang bentuk fisiknya tidaklurus, dipotong-potong sependek mungkin sehinggaterbentuk batang-batang pendek yang relatif lurus. Makapada bentang yang panjang tadi disebut kontinum danbatang yang pendek disebut elemen hingga.
Suatu bidang yang luas dengan dimensi yang tidakteratur, dipotong-potong berbentuk segi tiga atau bentuksegi empat yang beraturan. Bidang yang dengan dimensitidak beraturan tadi disebut kontinum, bidang segitiga atausegi empat beraturan disebut elemen hingga. Dan banyaklagi persoalan yang identik dengan hal diatas. Maka darisini dapat dikatakan bahwa elemen hingga merupakanelemen diskrit dari suatu kontinum yang mana perilaku

46
strukturnya masih dapat mewakili perilaku strukturkontinumnya secara keseluruhan.
Tujuan utama analisis dengan menggunakan metodeelemen hingga adalah untuk memperoleh pendekatantegangan dan peralihan (displacement) yang terjadi padasuatu struktur.
Konsep dasar metode elemen hingga adalah apabilasuatu sistem dikenai gaya luar, maka gaya luar tersebutdiserap oleh sistem tersebut dan akan menimbulkan gayadalam dan perpindahan. Untuk mengetahui besarnya gayadalam dan perpindahan akibat gaya luar tersebut, perludibentuk suatu persamaan yang mewakili sistem tersebut.Dalam metode elemen hingga keseluruhan sistem dibagikedalam elemen elemen dengan jumlah tertentu.Selanjutnya dibentuk persamaan : Proses pembentukanpersamaan diatas harus memenuhi kondisi berikut :
1.Kesetimbangan, yaitu kesetimbangan gaya gaya yangbekerja pada setiap elemen dan keseluruhan material.2.Kompatibilitas, berkaitan dengan geometri dari materialyaitu hubungan perpindahan dengan dan regangan.3.Persamaan konstitutif dari material, mengenaihubungan tegangan regangan yang merupakankareakteristik dari material.
Kondisi batas dan kondisi awal gaya-gaya danperpindahan secara khusus harus memenuhi kondisikesetimbangan dan kondisi kompatibilitas. Hubunganketiga kondisi diatas tergambar dalam bagan berikut:

47
Gambar 2.7.1 Contoh Pemodelan Geometri ElemenHingga

48
BAB III
METODOLOGI PENELITIAN
3.1 Pengenalan Metodologi
Mendesain bentuk lambung pontoon dan deck platform padaalat pembangkit tersebut dengan meninjau kekuatan dari lambungplatform tersebut apakah dapat menahan tahanan arus lauttersebut agar tidak terbawa arus dan dapat menahan tegangan darikonstruksinya, dalam hal ini saya akan mendesain danmenghitung kekuatan lambung platform menggunakan software.Selain itu dalam mendesain lambung pontoon akan menghitungbeban-beban lingkungan yang terkena lambung tersebut laluapakah lambung tersebut dapat menahan arus laut, beban angindan beban gelombang tersebut.

49
3.2 Diagram Alir Pelaksanaan Tugas Akhir
Tidak
Mulai
Pengumpulan data dimensiLambung pontoon dan dek
Platform L,B,T dll
Studi Literatur
Menghitung beban lambungpontoon terhadap mooring
Mendesain lambung pontoon - Membuatdesaingeometrilambungpontoon
Kesimpulan dan Saran
ApakahKarakteristikKekuatan dari
LambungPontoon sudah
terpenuhi

50
3.3 Penjelasan Diagram Alir (Flowchart)
Tahap-tahap dalam pembuatan tugas akhir ini adalahsebagai berikut :
3.3.1 Studi Literatur
Tahap ini bertujuan untuk mencari literatur dan referensimengenai bentuk desain lambung pontoon.
3.3.2 Pengumpulan data dimensi lambung pontonTahap ini adalah Merencanakan ukuran utama darilambung ponton tersebut.Perencanaan Muatan
Konstruksi : - Lambung- Dek Platform
Muatan : - Turbin- Komponen penunjang Turbin- Orang- Beban tension mooring terhadap arus
laut dan gaya gelombang
Maka dapat di rancang ukuran utama dari Pontoon ini
Dimensi
LOA (Length Over All)
LPP (Length betwen PerPendicular)
B (Breadth)
D (Depth)
d (draught)

51
3.3.3 Mendesain Lambung Platform
Dalam mendesain lambung pontoon dan dek platform adabeberapa masalah yang harus dihitung antara lain :
a) Bagaimana hasil bentuk desain Pontoonb) Menganalisa Kekuatan desain lambungc) Karakteristik kekuatan lambung pontoon terhadap gaya
mooringDari masalah diatas kita dapat mennghitung denganmenggunakan software maxsurf, Solid work, ansys danlain-lain
3.3.4 Simulasi dan analisa Karakteristik KekuatanLambung
Untuk mendapatkan hasil dari karakteristik kekuatanlambung pontoon ada beberapa masalah yang harus diinputdan disimulasikan menggunakan model yang telah dibuatantara lain :
1) Input data faktor lingkungan, ukuran lambung danmooring line pada software geometri
2) Eksekusi percobaan dengan simulasi arus laut, arusangin dan gelombang ombak
3) Mendapatkan nilai tension dan disimulasikan lagi dalambentuk software geometri kalkulasi stress terhadap bodilambung
3.3.5 Kesimpulan dan Saran
Setelah mendapatkan hasil desain yang terbaik maka dapatdisimpulkan bagaimana hasil desain dan karakteristiklambung terhadap gaya mooring

52
BAB IV
ANALISA DAN PEMBAHAHASAN
4.1 Karakteristik yang mempengaruhi penentuanLambung Ponton energy arus laut
Desain lambung ponton pada pembangkit energy aruslaut tidak lepas dari dasar teori dalam desain lambung padakapal, yang kita tahu bahwa kapal tradisional (single-hull)sudah banyak digunakan atau diaplikasikan pada bangunanapung namun pada kebutuhan desain energy arus laut tidaklepas dari faktor pembebanan dan pengoprasian turbin.
Lambung (single-hull) memiliki kelemahan yaitumuatan terbatas, stabilitas melintang yang rentan dan motorpenggerak atau propeller ditempatkan di bagian belakanglambung. Oleh sebab itu, untuk menyelesaikan problemtersebut mmaka perlu dikembangkan kapal dengan 2 badanlambung (twin-hull) yang mempunyai kapabilitas lebih darisatu badan lambung pada kasus energy arus laut.
4.1.2 Potensial Lambung Ponton
Ulasan ini dibuat untuk identifikasi model platformterhadap karakter utama yang mempengaruhi kesesuaiannya.Hal tersebut ditunjukkan pada tabel dibawah ini.
Tabel 4.1.1 Petunjuk Tabel (lebih jelasnya dapat dilihatpada bagian lampiran

53
Tabel 4.1.1 Tipe dan parameter lambung

54
Berdasar pemilihan platform tersebut maka type platform yangpaling memungkinkan untuk berbagai kondisi adalah tipe semisubmersible. Oleh karenanya studi ini akan menggunakan typesemi submersible platform sebagai wahana pembangkit listriktenaga arus laut. Design semisubmersible yang akandigunakan dapat ditunjukkan oleh gambar (untuk kejelasangambar tabel diatas dapat dilihat pada bab lampiran) .
4.2 Data ukuran dan muatan Lambung
Diketahui komponen keseluruhan dari pontoon denganmembagi bagian-bagian penting dari bagian konstruksi danbagian pendukung dari PLTAL. Umumnya bagian induk darikomponen dibagi menurut fungsi, yaitu :
a) Konstruksi : Lambung Dek Platform
b) Muatan : Turbin Komponen support turbin Orang
Dari perencanaan beban diatas kita bisa hitung beratnyasetelah itu kita cari ukuran utama lambung dan hitung ukurangeometri agar dapat membuktikan. Didapatkan ukuran Lenght: 8000 mm, Breadth : 800 mm, Draught (T) : 800 mm, Depth(H) : 1100 mm, Cb : 0.98 (Geometri model / Maxsurf) laludapat menghitung volume displacement dan displacement.Berikut ini adalah penjelasannya

55
Tabel 4.1.2 Berat Muatan
Load/Muatan
Komponen(Jumlah unit)
Berat
Turbin (1) 150 kg
Generator (1) 105 kg
Inverter/Control Daya (3) 96 kg
Battery (6) 180 kg
Orang (5) 400 kg
Jumlah931 kg
1 T
Mencari Displasment = Load+KonstruksiLoad = (Berat Muatan)Konstruksi = (Berat Konstruksi)Diketahui Payload = 1 TVol Displasement = L x B x T x Cb (m3)Vol Displasement = 5.02 m3Displasement = L x B x T x Cb x ρρ air laut = 1.025 ton/m3Displasmement = 5.14 ton (per Hull)2 Hull = 5.14 x 2 = 10.28 tonKonstruksi = Displasement – MuatanKonstruksi = 9.28 ton

56
4.2.1 Desain lambung ponton dan Ukuran
Gambar 4.1.1 tampak atas desain pontoon
Gambar 4.1.2 Front view
Gambar 4.1.2 tampak depan desain pontoon

57
- Tinggi = 1.1 meter- Sarat = 0.8 meter- Panjang = 8.0 meter- Lebar = 0.8 meter (per Lambung)- Span = 6.0 meter
(jarak bentang antar lambung)
4.2.2 Perhitungan Faktor beban Lambung pontoon
Model pontoon yang akan digunakan dalamperancangan mooring system untuk bangunan pembangkitenergi laut kali ini menggunakan model pontoon doublehull, Ilustrasi pontoon yang digunakan dapat dilihat padaGambar 4.1.1 dan Gambar 4.1.2 dengan bentuk danukuran pontoon sebagai berikut :
Data Lingkungan
Untuk menghitung nilai gaya yang bekerja padamooring system dibutuhkan beberapa data lingkunganyang berpengaruh. Perencanaan letak dari pontoon ini diPerairan larantuka Flores. Data lingkungan dalamperancangan mooring system kali ini antara lain adalah :- Vw = Kecepatan angin
= 10 Knot (1 Knot = 0,5144 m/s)= 5,144 m/s
- Vc = Kecepatan arus= 200 - 400 cm/s= 2,0 – 4,0 m/s
- Hs = Tinggi gelombang= 0.75 - 2 m

58
Perencanaan Mooring System
Mooring system yang direncanakan kali inimenggunakan sistem Spread Mooring. Dengan satu taliterhubung dengan plat yang menghubungkan pontoon.Sedangkan ujung tali yang satunya terhubung denganpemberat mooring yang tertanam secara fix di dasarperairan tersebut. Dimana masing – masing ujung taliterhubung dengan jangkar yang berada di dasar laut.
Gambar 4.1.3. Ilustrasi Sphread Mooring System. [18]
Perhitungan Gaya Angin (Wind Force)
Bagian pontoon yang berada di atas garis air akanmendapatkan gaya akibat dari adanya angin yangberhembus dan memukul bagian pontoon. Gaya yangdiakibatkan angin ini sangat berpengaruh terhadap tinggidari benda yang berada di atas garis air serta luasanbidang dari benda. Kecepatan angin juga sangatberpengaruh terhadap nilai gaya yang bekerja padapontoon. Untuk mendapatkan nilai gaya angin yangterjadi, dapat digunakan Rujukan 2.1.2

59
Fw = CWΣ(CSChA)Vw2
= 0,615 x (1 x 1 x 10.56) x 5,1442
= 33408.5 N
Dimana:- Fw = Gaya angin (N)- CW = Koefisien angin, untuk dari nilai
koefisien angin telah ditetapkan, yaitusebesar 0,615 Ns2/m4
- Σ(CSChA) = Hasil penjumlahan dari benda yangberada di atas garis air, yang mungkinterkena angin. Pada perencanaan kaliini hanya menghitung bagian pontoonyang berada di atas garis air, yangterkena gaya angin.
- CS = Koefisien bentuk benda, dapat dilihatpada Tabel 2.2. dengan parameteryang digunakan adalah bentuk bendayang berada diatas garis air danterkena angin.
= 1,00, dengan parameter yangdigunakan Hull (surface abovewaterline)
- Ch = Koefisien tinggi benda dari garis air,nilai dari koefisien dapat dilihat padaTabel 2.3. dengan parameter tinggibenda yang berada di atas garis air.
= 1,00 , diambil berdasarkan parameterpontoon yang berada di atas garis airyaitu setinggi 1 meter.
- A = Luas penampang benda yang terkenaangin (m2)

60
= 10.56 m2
- Vw = Kecepatan angin (m/s), mengacu padaRujukan data awal
= 5,144 m/s
Gambar 4.1.4. Penampang pontoon yang terkena angin.
Gambar 4.1.5 Penampang pontoon yang terkena gayaarus angin
Perhitungan Gaya Arus (Current Force)
Gaya arus pada bagian depan benda.
Gambar 4.1.6. Ilustrasi bagian permukaan basahpontoon.

61
Fcx = CcxSVc2
= 2,89 x 2.4 x 42
= 110.976 N
Dimana :- Fcx = Gaya arus pada bagian depan benda
(N).- Ccx = Koefisien arus air pada bagian depan
benda. Nilai koefisien telahditetapkan, yaitu sebesar 2,89 Ns2/m4
- S = Luas permukaan basah daripontoon. (m2)
= 2.4 m2
- Vc = Kecepatan arus air (m/s), mengacupada rujukan data awal
= 2-4 m/s
Gaya arus pada bagian samping benda.
Gambar 4.1.7 Ilustrasi bagian permukaan basah pontoon.
Fcy = CcySVc2
= 72,37 x 25.6 x 42
= 29643 N

62
Dimana :- Fcy = Gaya arus pada bagian samping benda
(N).- Ccy = Koefisien arus air pada bagian
samping benda. Nilai koefisien telahditetapkan, yaitu sebesar 72,37 Ns2/m4
- S = Luas permukaan basah daripontoon. (m2)
= 25.6 m2
- Vc = Kecepatan arus air (m/s)= 2-4 m/s
Gaya arus pada semi submesible
Gambar 4.1.8 Ilustrasi gaya arus terhadap pontoon.
Fcx = CSy(Cd1Ac + Cd2Af)Vc2
= 515,62 x (1 x 25.6 + 1 x 2.4) x 42
= 230997 N

63
Dimana :- Fcs = Gaya arus pada semisubmersible (N)- CSS = Koefisien arus air pada
semisubmersible, dimana untuk nilaidari koefisien ini telah ditetapkanyaitu sebesar 515,62 Ns2/m4.
- Ac = Total luas dari potongan melintangbenda yang berada di bawah garis air.(m2)
= 25.6 m2
- Af = Total luas dari bidang datar bendayang berada di bawah garis air. (m2)
= 2.4 m2
- Cd1 = Koefisien drag untuk luas potonganmelintang benda yang berada dibawah garis air.
- Cd2 = Koefisien drag untuk luas bidangdatar benda yang berada di bawahgaris air.
Nilai dari koefisien drag didapatkan dari grafik padaGambar 2.5.1 Axis x pada grafik menggamgambarkannilai R yang dapat dicari dengan menggunakan Rumusdibawah ini (untuk nilai dari Cd1) dan (untuk nilai dariCd2).- Untuk nilai Cd1:
R = r/2h= 0/(2x0.8)= 0

64
Dimana :- r = Jari – jari rounded pada potongan
melintang pontoon yang terkena arus.Pontoon yang digunakan tidakterdapat rounded, sehingga nilai radalah 0 meter.
- h = Tinggi dari potongan melintangpontoon yang terkena arus. Tinggi daripotongan melintang pontoon yangdigunakan adalah sebesar 0.8 meter.
-Untuk nilai Cd2:R = r/h
= 0/1= 0
Dimana :- r = Jari – jari rounded pada luas bidang
datar pontoon yang berada di bawahgaris air. Pada pontoon yangdigunakan tidak terdapat rounded padabidang datarnya, sehingga nilai radalah 0 meter.
- h = Lebar dari bidang datar pontoon yangberada di bawah garis air. Untukpontoon yang digunakan mempunyailebar 1 meter.
Dari nilai “R” diatas akan didapatkan nilai dari koefisiendrag melalui Gambar 2.5.1 dengan nilai Cd1 sebesar 1,5dan Cd2 sebesar 1,5.

65
Perhitungan Gaya Gelombang (Wave Force)
Gelombang yang mengenai ke pontoon akanmengakibatkan gaya pada mooring system. Ketinggianpada perairan akan menyebabkan tarikan pada tali tambatyang digunakan. Saat pontoon terkena gelombang akanmenyebabkan pergerakan bebas dari pontoon. Gerakanbebas pontoon baik secara vertical maupun horizontalakan menyebabkan beban tambahan pada tali tambat ataumooring system.
Pendekatan yang digunakan untuk mendapatkan nilaidari gaya gelombang adalah dengan menggunakan grafikyang ada pada Gambar 2.5.2, Gambar 2.5.3 dan Gambar2.5.4 Dengan parameter yang digunakan adalahketinggian gelombang. Pada perencanaan kali ini,ketinggian gelombang adalah sebesar 1,5-2 meter atausekitar 4,921 feet. Namun pada grafik nilai terkecil padasumbu x hanya sampai 5 feet. Sehingga untukmendapatak nilai gaya pada ketinggian gelombang 4,921feet, digunakan Formula ekstrapolasi sebagai berikut.[10]
( ) =( )( )…( )
( )( )…( )+
( )( )…( )( )( )…( )
+⋯+
( )( )…( )( )( )…( )
66
Dari formula di atas, nilai x adalah 4,921 feet,ketinggian gelombang. Sedangkan P(x) adalah nilai darigaya yang ada pada grafik berdasarkan ketinggiangelombang sebesar “x”. Untuk dapat memprediksi kurvayang ada pada grafik maka diambil beberapa nilai darisumbu x dan y yang telah ada pada grafik. Padaperhitungan kali ini, diambil masing - masing 6 titikkoordinat untuk setiap grafik pada Gambar 2.5.2, Gambar2.5.3 dan Gambar 2.5.4 Nilai kooridinat dapat dilihatpada tabel berikut :
Tabel 4.1.3 Nilai x dan y pada grafik gaya gelombanguntuk bow seas
x 10 15 20 25 30 35y 19,906 33,24 44,968 53,743 61,398 68,176
Tabel 4.1.4 Nilai x dan y pada grafik gaya gelombanguntuk quartering seas
x 10 15 20 25 30 35y 18,719 27,481 35,252 42,352 48,302 53,415
Tabel 4.1.5 Nilai x dan y pada grafik gaya gelombanguntuk beam seas
x 10 15 20 25 30 35y 20,062 33,125 44,807 54,697 62,816 70,193
Nilai dari x dan y pada tabel di atas, digunakan padaformula sebelumnya untuk mendapatkan nilai dari gaya

67
gelombang pada ketinggian 4,921 feet atau 1,5 meter.Dari perhitungan didapatkan nilai sebagai berikut :- Gaya gelombang pada grafik untuk bow seas.
Fwave1 = 8,402 Kips= 37373,5 N
- Gaya gelombang pada grafik untuk quartering seas.Fwave2 = 5,993 Kips
= 26659,6 N- Gaya gelombang pada grafik untuk beam seas.
Fwave3 = 5,667 Kips= 25210,3 N
Oblique Environment
Kemiringan sudut arah gaya arus ke pontoonterhadap sumbu x dan y harus dievaluasi agar dapatmengetahui seberapa besar gaya yang timbul akibatkemiringan arah tersebut. Pendekatan nilai dari gaya inidapat diperoleh dengan Rujukan 2.7.
= +
= 29454 ( )( )
+ 110.90 ( )( )
= 29.564 kN
Dimana :- Fθ = Oblique environment, atau gaya yang
terjadi karena kemiringan arah gayaterhadap sumbu x dan y pada pontoon.(N)

68
- Fx = Gaya yang arahnya mengenai bagiansamping pontoon. Dalam hal iniadalah gaya arus pada sampingpontoon (Fcx), yaitu sebesar 29454 N.
- Fy = Gaya yang arahnya mengenai bagiandepan dari pontoon. Dalam hal iniadalah gaya arus pada bagian depanpontoon (Fcy), yaitu sebesar 110.90 N.
- θ = Sudut kemiringan arah gaya yangbekerja pada pontoon terhadap sumbux. Perencanaan kali ini, sudutkemiringannya adalah 0˚.
Arah Gaya
Gambar 4.1.9 Sketsa Gaya-gaya yang terjadi padapontoon

69
Sketsa arah gaya yang terjadi pada pada perancanganmooring system kali ini dapat dilihat pada Gambar 4.1.9 diatas. Setelah data lingkungan dan data kapal diketahui kitadapat menghtung gaya tension terhadap mooring denganmenggunakan software analisis tension, batasanperhitungan tersebut hanya mengacu pada tension mooringsaja tidak mengacu pada desain mooring. Data tensiondapat dilihat sebagai berikut.
Pada
Gambar 4.2.1 letak antara End link A dan B pada mooring
Gambar diatas kita dapat melihat model yang dihasilkanpada software orcaflex bahwa Garis lingkaran warna merahpada bagian atas menunjukkan End A dan Garis ligkaranwarna merah pada bagian bawah menunjukkan End B

70
Mooring LayoutMooring untuk platform direncanakan menggunakanline dengan layout seperti gambar di bawah ini:
Gambar 4.2.2 tampak penyebaran sphreadmooring layout
Gambar 4.2.3 Penamaan ujung mooring

71
Simulasi dilakukan pada load case 0, 45 dan 90 Degreecollinear heading dimana gelombang, arus dan anginadating dari arah yang sama. Nilai mooring line tensionuntuk load case 0 Degree adalah sebagai berikut:
Tabel 4.1.6 Mooring Iine untuk load case 0 (arus depan)
CaseMax line Tension (kN)
End A End B
0 Deg L1 2.98 2.34
L2 2.34 2.75
L3 2.99 2.35
L4 2.33 2.73
L5 2.4 2.8
L6 2.6 2.8
L7 2.2 2.8
L8 2 2.6
Tabel 4.1.7 Mooring Iine untuk load case (arus samping)
CaseMax line Tension (kN)
End A End B
45 Deg L1 2.81 3.15
L2 3.08 2.45
L3 2.25 2.64
L4 2.53 2.96
L5 2.6 2.8
L6 2.4 2.8
L7 2.2 2.8
L8 2 2.6

72
Tabel 4.1.8 Mooring Iine untuk load case arus belakang
CaseMax line Tension (kN)
End A End B
90 Deg L1 2.82 3.15
L2 2.9 2.25
L3 2.45 2.87
L4 2.53 2.96
L5 2.4 2.8
L6 2.6 2.8
L7 2 2.8
L8 2.2 2.6
Berdasar hasil pemodelan dan simulas mooring dapatdisimpulkan bahwa dengan menggunakan 4 mooring linedidapatkan tension mooring line maximal pada tiap lineadalah sebagai berikut:

73
Tabel 4.1.9 Mooring Iine Average Tension
Tabel 4.2.1 Average Value
NoLine
CaseLine Tension
(kN)0 Deg 2.6 ton at End A
45 Deg 2.7 ton at End A90 Deg 2.7 ton at End A
Gaya – gaya yang didapatkan dari simulasi ini akandigunakan untuk design lambung dan melakukan verifikasiapakah yang sudah di design memenuhi kriteria yangdisyaratkan.
Line NoHeading Degree
0 45 901 2.98 2.81 2.82
2 2.34 3.08 2.93 2.99 2.25 2.454 2.33 2.53 2.535 2.34 3.15 3.156 2.75 2.45 2.257 2.35 2.64 2.878 2.73 2.96 2.96
Average 2.60125 2.734 2.74125

74
4.2.3 Perhitungan Konstruksi Lambung PenentuanTebal Plat Lambung Pontoon
Kondisi ini mendefinisikan tebal plat yang akan dipasangoleh benda yang akan dihitung. Kulit Plat-plat tersebutantara lain bottom plate, side plate, deck plate, dll akantetapi pada tugas akhir ini penulis menggunakan rumuspendekatan dari rules pada aplikasi lamung kapal BKI volII Hull Section [6].
a. Tebal Plat Dasar (Bottom Plate)
tB = 1,9 . nf . a0 . √ p/σpl + tk (mm)
Dimana :
nf = 0.83
k = 0.91 (faktor bahan)
tk = 1.5mm (untuk t' < 10 mm)
ao = 1.2
σperm = (0.8+L/450)230/k
p = 6.03 kN/m²
tBM = 1,9 . 1 . 0.7 √ Pb.k + tk
= 5.933 ~ 6mm
b. Tebal Plat sisi (Side Plate)
ts1 = 1,9 . nf . a0 √ ps*k + tk
σperm = 6.03 kN/m²
nf = 0.83
k = 0.91 (faktor bahan)

75
tk = 1.5 mm (untuk t' < 10 mm)
ao = 1.2
ps = 6,03 kN/m2ts1M = 1,9* 0.83* 1,2* √ 4,736*0,91 + 1.5
= 5.933 ~ 6 mm
c. Modulus Profil
W = n . c . a . l² . P . cr . kW = 8.534 cm3 (60 x 40 x 5)n = 0.9 -0,0035 . Lc = 0.6 (min)a = frame space (frame space lambung 1.2)
I = 2p = 6,03 kN/m²cr = 0,75 (min)k = 0,91 (factor bahan)
d. Modulus Profil Dek
W = 83.3/σpr . m . a . i² . PW = 7.233 cm3
(60 x 40 x 5)
σpr = 0.9 -0,0035 . Lm = k x na = frame space (frame space lambung 1.2)l = 2 (span)p = 6,03 kN/m²n = 0.9 -0,0035 . Lk = 0,91 (factor bahan)

76
4.3 Pembuatan Model
Berdasarkan data ukuran setiap komponen yang telah
dipilih sebelumnya, dilakukan pembuatan model setiap
komponen pada software solidwork.
Gambar 4.3.1 gambar model isometri yang akan
disimulasikan
a) Bagian Lambung
Gambar 4.3.2 gambar model solid tampak samping yangakan disimulasikan

77
b) Bagian Dek Plat atas
Gambar 4.3.3 gambar model solid tampak atas yang akan
disimulasikan
c) Bagian Hook Tali Mooring
Gambar 4.3.4 gambar model solid hook yang akan
disimulasikan

78
Selanjutnya dari model komponen yang telah dibuat, dimeshing guna mendeskirpsikan bahan material, jenis forceyang akan diaplikasikan dan berapa nilai force yang akan diaplikasikan pada lambung pontoon tersebut
Gambar 4.3.5 Spesifikasi material yang akan dipakai dalam
simulasi
4.4 Simulasi Model
Proses simulasi yang dilakukan analisa LambungPontoon pada software solidwork. Analisa Force Tensionmerupakan analisa untuk mengetahui kekuatan tarikan plat

79
lambung pada sebuah benda. Dalam percobaan inilambung pontoon kerja pada 4 beban yaitu, beban arus,gelombang, angina dan tarikan tension pada mooringmenyebabkan defleksi dan tekanan pada bagian lambungtersebut. Beban yang diterima pada Lambung Pontoon inidikarenakan adanya Tension pada mooring
Proses simulasi yang dilakukan pada analisa Lambungini menggunakan beban stasis dan dinamis dimana bebanstatis didapat dari berat muatan dan 4 kondisi lingkungan.Analisa simulasi statis yang digunakan untuk mengetahuistress, strain, displacement dan factor of safety.
Model yang telah diassembly, dilakukan pemberiangaya yang mengacu pada rujukan hasil perhitungan gayaarus laut, gelombang dan dari tarikan mooring padalambung. Proses meshing dilakukan setelah gaya telahdiberikan ke model yang dibuat. Semakin kecil ukuranyang diambil untuk proses meshing, maka hasil darisimulasi semakin sedikit kesalahan.
Fixed GeometryFixed geometry atau yang biasa disebut dengan tumpuanmati merupakan bagian yang menjadi diam dan menjadiletak tumpuan beban. Pada desain pondasi ini,
External LoadExternal load merupakan inputan data yang akan digunakanpada proses simulasi. Inputan data dapat berupa pressure,force, torsi, grafity, dan lain-lain. Simulasi yang dikakukanpada proses ini menggunakan external load berupa forcepada tuas mooring.

80
4.3.1 Proses Analisa Beban
Proses analisa yang dilakukan pada lambung ini merupakananalisa beban statis dan Dinamis yang merupakan jenispembebanan yang bersifat tetap dan berubah, dalam hal iniadalah pembebanan yang diberikan oleh berat total muatanpontoon dan 4 faktor lingkungan .
Tabel 4.2.2 Pembagian Force pada hook dan lambung
terhadap beban saat operasional
Loadname Load Image Load Details
WindForce
Entities: 2face(s)
Type: Applynormalforce
Value: 33408N
Fcx
Entities: 2face(s)
Type: Applynormalforce
Value: 23099N
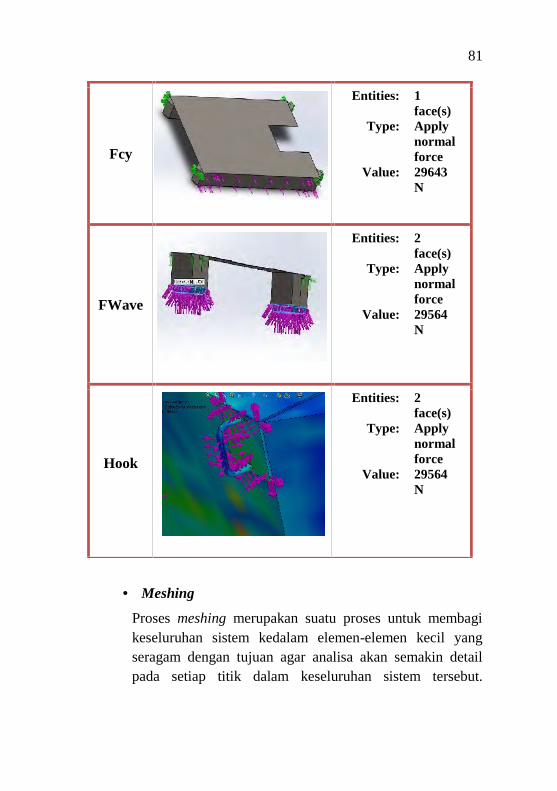
81
Meshing
Proses meshing merupakan suatu proses untuk membagikeseluruhan sistem kedalam elemen-elemen kecil yangseragam dengan tujuan agar analisa akan semakin detailpada setiap titik dalam keseluruhan sistem tersebut.
Fcy
Entities: 1face(s)
Type: Applynormalforce
Value: 29643N
FWave
Entities: 2face(s)
Type: Applynormalforce
Value: 29564N
Hook
Entities: 2face(s)
Type: Applynormalforce
Value: 29564N

82
Meshing dalam pemodelan ini sangat penting untukdiperhatikan. Ketidaksesuaian meshing bisa jadi modelyang telah didesain tidak dapat dijalankan dan hasil analisamenjadi tidak valid. Pada software solidworks, prosesmesing Lambung Pontoon dapat dilihat pada gambar 4.4.1dibawah
Gambar 4.3.6 Proses Meshing pada model
Setelah proses meshing selesai, kemudian dilakukansimulasi pada model dengan hasil analisa berupa gambaryang menunjukkan nilai stress, resultant displacement,equivalent strain dan factor of safety.
4.3.2 Pembahasan hasil Simulasi
Tegangan (Stress)
Tegangan merupakan kumpulan dari gaya (force) padasuatu permukaan benda. Semakin sempit permukaan, dangaya tetap, maka permukaan tegangan semakin besar.Tegangan menunjukan area tegangan material maksimal
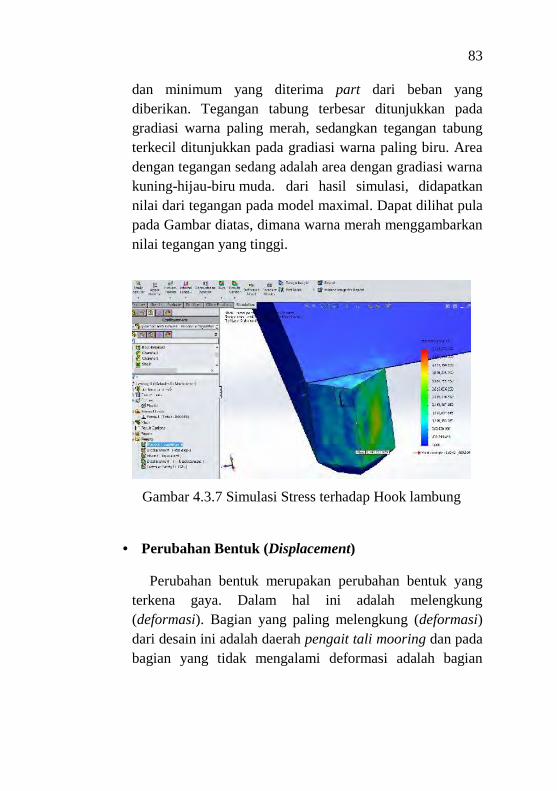
83
dan minimum yang diterima part dari beban yangdiberikan. Tegangan tabung terbesar ditunjukkan padagradiasi warna paling merah, sedangkan tegangan tabungterkecil ditunjukkan pada gradiasi warna paling biru. Areadengan tegangan sedang adalah area dengan gradiasi warnakuning-hijau-biru muda. dari hasil simulasi, didapatkannilai dari tegangan pada model maximal. Dapat dilihat pulapada Gambar diatas, dimana warna merah menggambarkannilai tegangan yang tinggi.
Gambar 4.3.7 Simulasi Stress terhadap Hook lambung
Perubahan Bentuk (Displacement)
Perubahan bentuk merupakan perubahan bentuk yangterkena gaya. Dalam hal ini adalah melengkung(deformasi). Bagian yang paling melengkung (deformasi)dari desain ini adalah daerah pengait tali mooring dan padabagian yang tidak mengalami deformasi adalah bagian

84
yang berdegradasi warna biru. Perubahan bentuk padalambung (displacement) ditunjukkan dibawah ini.
Gambar 4.3.8 Simulasi Displacement terhadap Hook dan
lambung ponton
Hasil simulasi yang berwarna tersebut terjadi padalambung dekat dengan pengait tali mooring.
Strain (Laju Perubahan Displacement)
Dapat dilihat, strain terbesar terjadi di sekitar sumberpanas, yang kemudian menyebar ke tempat sisi benda.Kontur strain yg ditunjukkan pada SolidWorks simulationdi bawah terlihat tidak smooth, dan ada sedikit ketidaksimetrisan pada nilai strainnya yaitu degradasi warna birudan biru muda. Hal ini disebabkan bentuk meshing yangmemang masih coarse/kasar. Strain maximal pada bagianlambung ditunjukkan pada degradasi warna biru tua,sedangkan strain minimal pada tabung ditunjukkan pada

85
degradasi warna biru muda. Strain maximal dan minimalditunjukkan pada gambar dibawah ini.
Gambar 4.3.9 Simulasi Strain terhadap hook dan lambung
Equivalent strain maksimal terjadi pada socket dan ujung –ujung tuas yang digunakan untuk mengaitkan tali mooringyang dekat dengan ujung-ujung dek. Sedangkan nilaiminimal dari strain berada pada atas dek.
Faktor Keamanan (Safety of Factor)
Faktor keamanan merupakan patokan yang paling utamayang digunakan dalam menentukan kualitas dari suatudesain. Acuannya adalah jika nilai FOS minimal kurangdari 1 maka desain tersebut kualitasnya jelek dan tidaklayak untuk di gunakan dan cenderungmembahayakan.sebaliknya jika nilai FOS lebih dari 1 danbiasanya antara 1-3 maka desain tersebut berkualitas baik,

86
aman dan layak untuk digunakan. Faktor keamanan jugamenunjukkan tingkat kemampuan suatu bahan untukmenerima beban dari luar dalam hal ini adalah beban tekan.Jika nilai FOS minimal mencapai 3 digit atau lebih, makadesain tersebut aman, berkualitas baik namun harganyasangat mahal dan cenderung mempunyai berat yang besar.
Gambar 4.4.1 Simulasi FOS pada Hook dan Lambung
Factor of safety pada simulasi model mempunyai nilaiminimal. Nilai maksimal dari factor of safety terletak diseluruh bagian lambung karena pada simulasi keseluruhanbagian hampir di bebani oleh beban 4 faktor lingkungan.

87
Tabel 4.2.3 Hasil Simulasi keseluruhan pada hook lambung
Hasil keseluruhan simulasi pada hook dan lambungterhadap beban operasional saat mooring / lego jangar
JenisSimulasi/
Nilaiterhadaptiap Gaya
GayaArusdepan
Gaya ArusSamping Kiri
GayaArus
SampingKanan
Gaya arusBelakang
Stress(N/m^2)
5.192e+006 N/m^2
25.863e+003N/m^2
7.933e+006 N/m^2
5.004e+006N/m^2
Displasemen
(mm)
5.795e-002mm
1.252e-004mm
2.961e-001mm
5.669e-002mm
Strain(URES)
1.347e-005 9.810e-008 2.769e-005 1.06483e-005
FOS 1.195e+002
1.910e+004 7.821e+001
1.240e+002

88
Tabel 4.2.4 Hasil simulasi keseluruhan pada modellambung tanpa hook
Hasil Simulasi Keseluruhan yang terjadi pada lambungterhadap faktor lingkungan saat operasional
JenisSimulasi/Nilaiterhadap tiap
Gaya
GayaArusdepan
Gaya ArusSamping
Kiri
Gaya ArusSampingKanan
Gaya arusBelakang
Stress(N/m^2)
5.425e+006 N/m^2
26.229e+003N/m^2
7.933e+006N/m^2
5.004e+006N/m^2
Displasemen
(mm)
6.087e-002mm
1.267e-004mm
2.961e-001mm
5.669e-002mm
Strain(URES) 1.415e-005 9.947e-008 2.769e-005 1.065e-005
FOS 1.144e+002
2.365e+004 7.821e+001 1.240e+002
83
BAB VKESIMPULAN DAN SARAN
5.1 Kesimpulan Desain pontoon yang dirancang adalah desain pontoon
dengan lambung jenis double hull karena jenis turbin itusendiri adalah jenis turbin darreius dengan posisi sumbuvertical maka perlu adanya posisi yang dapat membantuturbin tersebut tetap dalam posisi vertical, Pada DesainPontoon tersebut dengan ukuran L = 8 m, B = 0.8 m, T =0.8 m, H = 1.1 m, S = 6 m dan cb = 0.9 mendapatkanukuran Displasement 5.14 T (per lambung), karenadouble hull menjadi 10,28 T
Nilai perhitungan Gaya arus sebesar 29 kN, gaya angin33 kN dan gelombang sebesar 29.33 kN. disimulasikandalam software mendapatkan nilai pembebaban tensionsebesar 25 kN, 28 kN dan 30 kN pada heading 0, 45 dan90. Terakhir model lambung ponton di simulasi lagiuntuk melihat karakteristik kekuatan lambung jikaterkena gaya tension terhadap mooring dan karakteristikterhadap arus laut. Nilai Stress dari Hook depan5.425x10⁶ N/m², hook lambung samping kiri 26.229x103
N/m2, hook lambung belakang 5.004x10⁶ N/m², hooklambung kanan 7.933x10⁶ N/m²
5.2 Saran1. Perlu dilakukan penelitian menggunakan software yang
lebih akurat dalam menganalisa dan survey terhadapfaktor lingkungan agar lebih akurat
2. Perlu dilakukan penelitian untuk kekuatan dek konstruksiterhadap kelelahan material akibat getaran turbin tersebut.
3. Untuk mendapatkan hasil yang optimal dalam desaintersebut perlu adanya pengembangan bentuk lambung.

84
“ Halaman ini sengaja dikosongkan “

DAFTAR PUSTAKA
[1] Harvarld, SV. AA., [1983] “Resistance and Propulsion”,
Departement of Ocean Engineering
[2] Erlangga., [1978], “Mechanics of Materials, 2nd Edition
Mekanik Teknik
[3] Dassault System., [2008], “Solid Works” UGS.
[4] Energi Gelombang. [Online] [Cited: March 07, 2012.]
http://id.wikipedia.org.
[5] Indiyono, P. Hidrodinamika Bangunan Lepas Pantai.
Surabaya : SIC, 2004
[6] BKI Volume II [2006] “ Hull Construction”
[7] The Overseas Coastal Area Development Intitute Of Japan
(OCDI).[2002].PartII-DesignConditions.Japan
[8] Ship Construction Sketches and Notes Kemp and Young,
[1984] Stanford Maritime London,
[9] Oscillating Water Columm, Wikipedia [Online]
http://en.wikipedia.org/wiki/Oscillating_Water_Collum
[10] Tidal Energy, Wikipedia [Online]
http://en.wikipedia.org/wiki/Tidal_Power

[11] Erwandi, [2011] Marine Current Turbine, Indonesia
Hydrodinamics Laboratorary, Surabaya
[12] American Petroleum Institute. (2005). RecommendedPractice 2SK, Design and Analysis of Stationkeeping Systemsfor Floating Strctures. Edisi ke-3.
[13] Badan Meteorologi Klimatologi dan Geofisika. InformasiMeteologi Maritim. Data Prakiraan Angin [online]. Tersedia :http://maritim.bmkg.go.id/index.php/main/peta_prakiraan/peta_angin [20 Juni 2014]
[14] Badan Meteorologi Klimatologi dan Geofisika. InformasiMeteologi Maritim. Data Prakiraan Arus Permukaan [online].Tersedia :http://maritim.bmkg.go.id/index.php/main/peta_prakiraan/peta_arus [20 Juni 2014]
[15] Badan Meteorologi Klimatologi dan Geofisika. InformasiMeteologi Maritim. Data Prakiraan Gelombang Signifikan[online]. Tersedia :http://maritim.bmkg.go.id/index.php/main/peta_prakiraan/peta_gel_signifikan [20 Juni 2014]
[16] American Petroleum Institute. (2005). RecommendedPractice 2P, Analysis of Spread Mooring Sys for Floating.
[17] American Petroleum Institute. (1997). RecommendedPractice 2A-LRFD, Planning, Designing, and ConstructingFixed Offshore Platform-Load and Resistance Factor Design.First Edition
[18] American Petroleum Institute. (2000). RecommendedPractice 2A-WSD, Planning, Designing, and ConstructingFixed Offshore Platform-Working Stress Design. First Edition
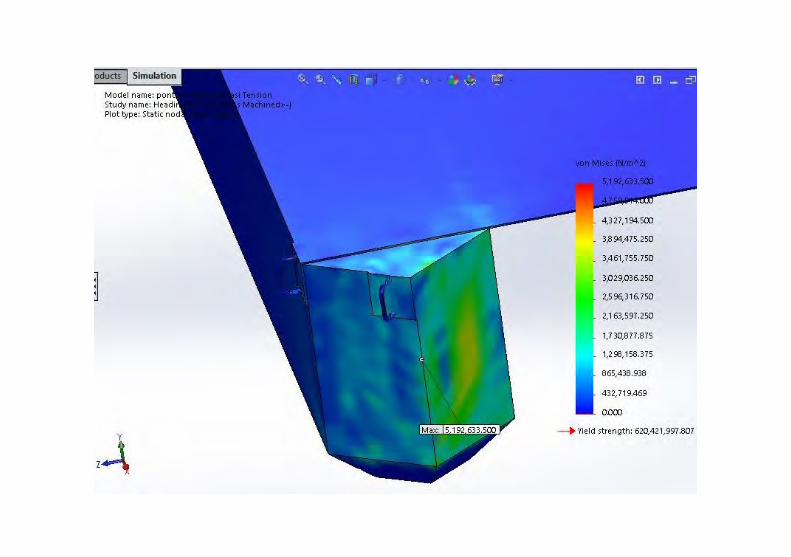



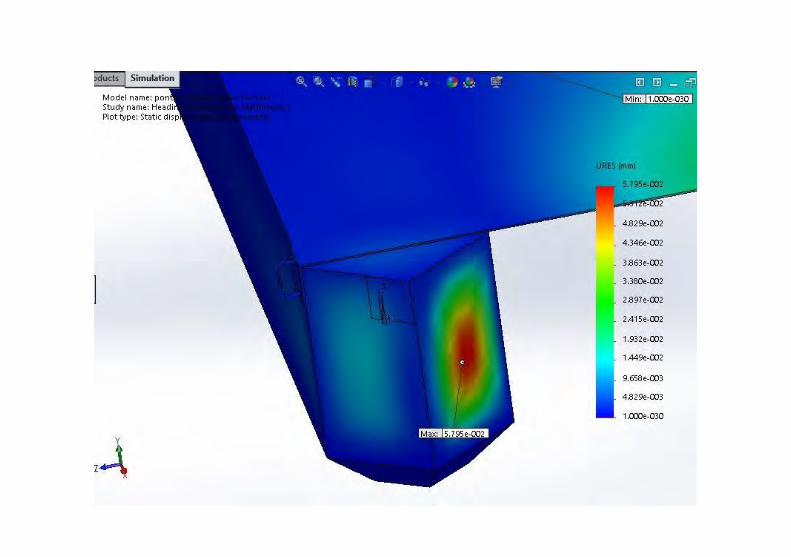

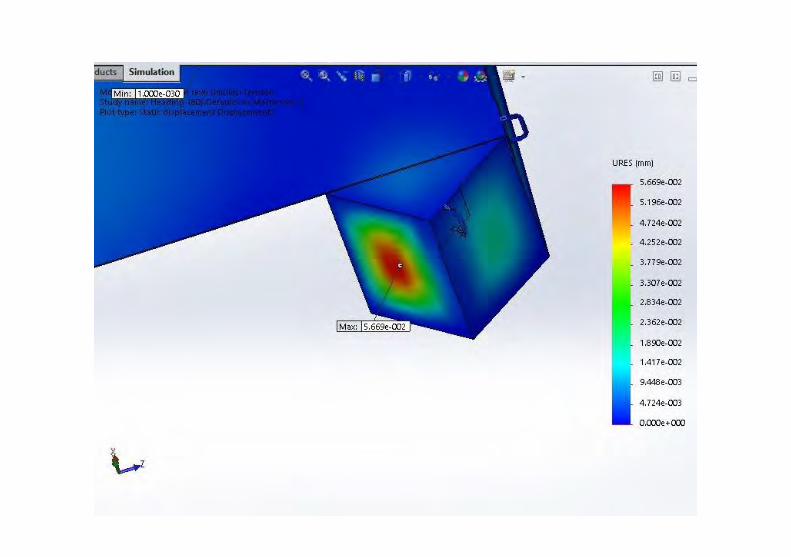
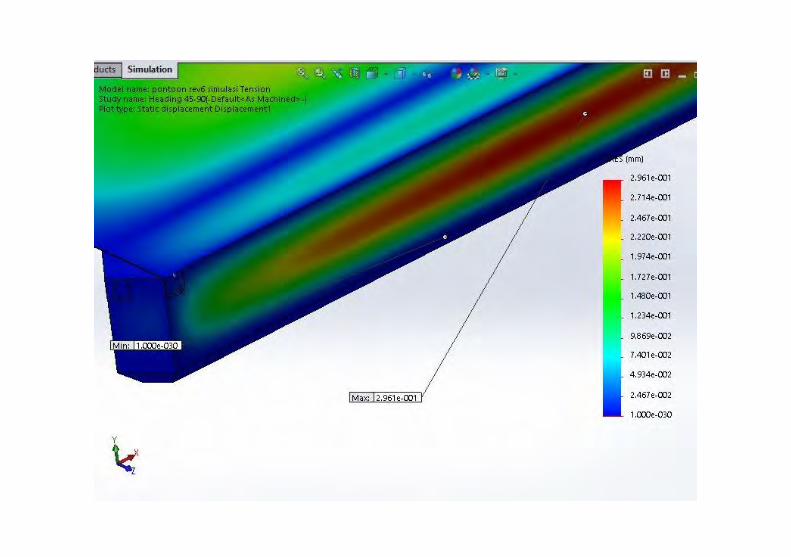









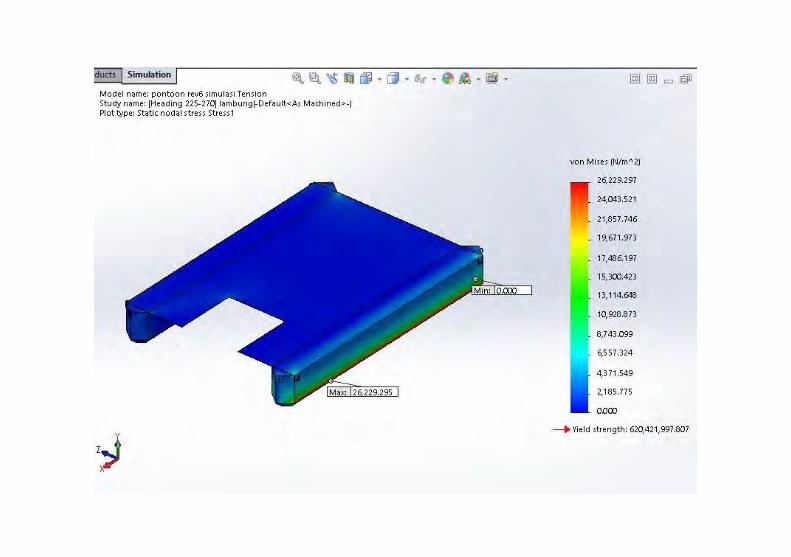






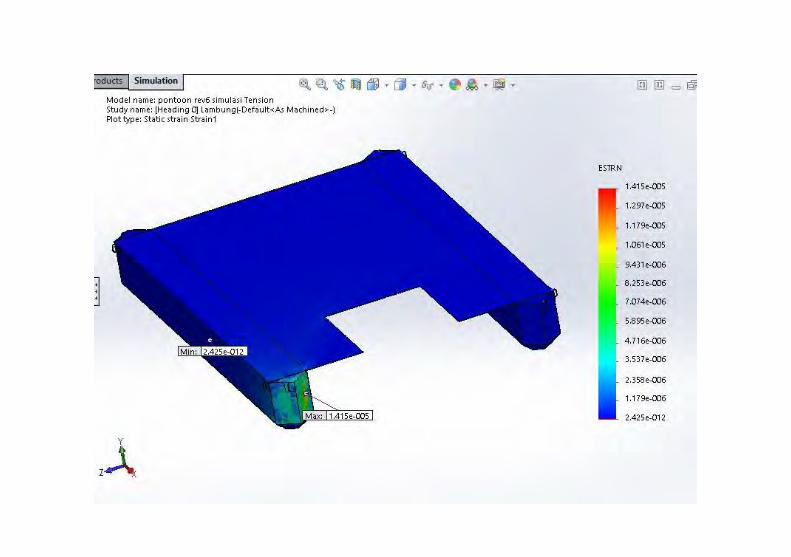





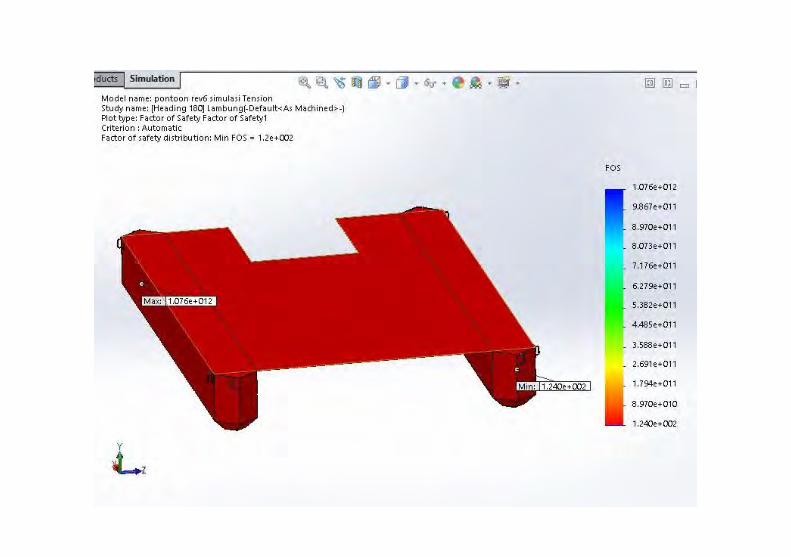




Data Kecepatan Angin

Data Kecepatan Arus

Data Ketinggian Gelombang










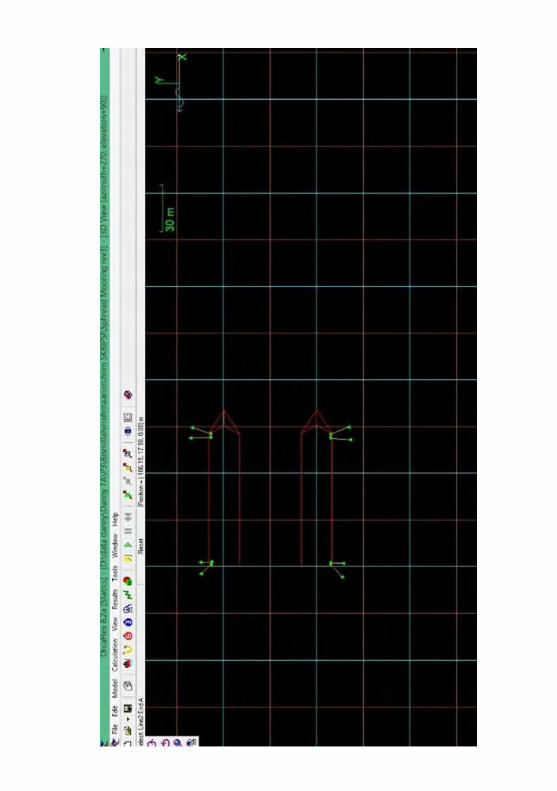













BIODATA PENULIS
Penulis dilahirkan di Gresik, 29 Juli1992, merupakan anak Kedua dari Tigabersaudara. Penulis telah menempuhpendidikan formal di beberapa sekolahantara lain yaitu SDN Randuagung 02,SMP YIMI dan SMA SEMEN Gresik,lulus dari SMA SEMEN pada tahun2010, penulis melanjutkan ke jenjangDiploma 3 dan diterima di JurusanTeknik Bangunan Kapal Politeknik
Perkapalan Negeri Surabayaa melalui PMDK pada tahun 2010.Lulus Tahun 2013 dengan Gelar A.md, Penulis melanjutkan Studidi ITS dengan jenjang Lintas Jalur ke Jurusan Teknik SistemPerkapalan. Penulis mengambil bidang studi marinemanufacturing and design (MMD), Lulus tahun 2016 dengangelar Sarjana Teknik. Jika ada yang kurang jelas dipersilahkankontak E-mail Beliau, [email protected]