BAB IV TO.doc
10
BAB IV ANALISA DATA & PEMBAHASAN 4.1 Analisa Data Ana lisa data ya ng did apa t dar i per cobaan kali ini terdapat rangkaian open loop dan closed loop. Tabel 4.1 Data hasil rangkaian open loop potensio rpm voltase 0 0 0 1 400 0,01 2 202 0 0,01 3 212 0 0,01 4 220 0 0,01 5 215 0 0,01 6 215 0 0,01 7 216 0,00 21
-
Upload
rio-ananda-putra -
Category
Documents
-
view
222 -
download
0
Transcript of BAB IV TO.doc

7/27/2019 BAB IV TO.doc
http://slidepdf.com/reader/full/bab-iv-todoc 1/10
BAB IV
ANALISA DATA & PEMBAHASAN
4.1 Analisa Data
Analisa data yang didapat dari percobaan kali ini
terdapat rangkaian open loop dan closed loop.
Tabel 4.1 Data hasil rangkaian open loop
potensio rpm voltase
0 0 0
1 400 0,01
2 202
0
0,01
3 212
0
0,01
4 220
0
0,01
5 215
0
0,01
6 215
0
0,01
7 216 0,00
21
7/27/2019 BAB IV TO.doc
http://slidepdf.com/reader/full/bab-iv-todoc 2/10
22
0
8 2180
0,00
9 221
0
0,01
10 222
0
0,01
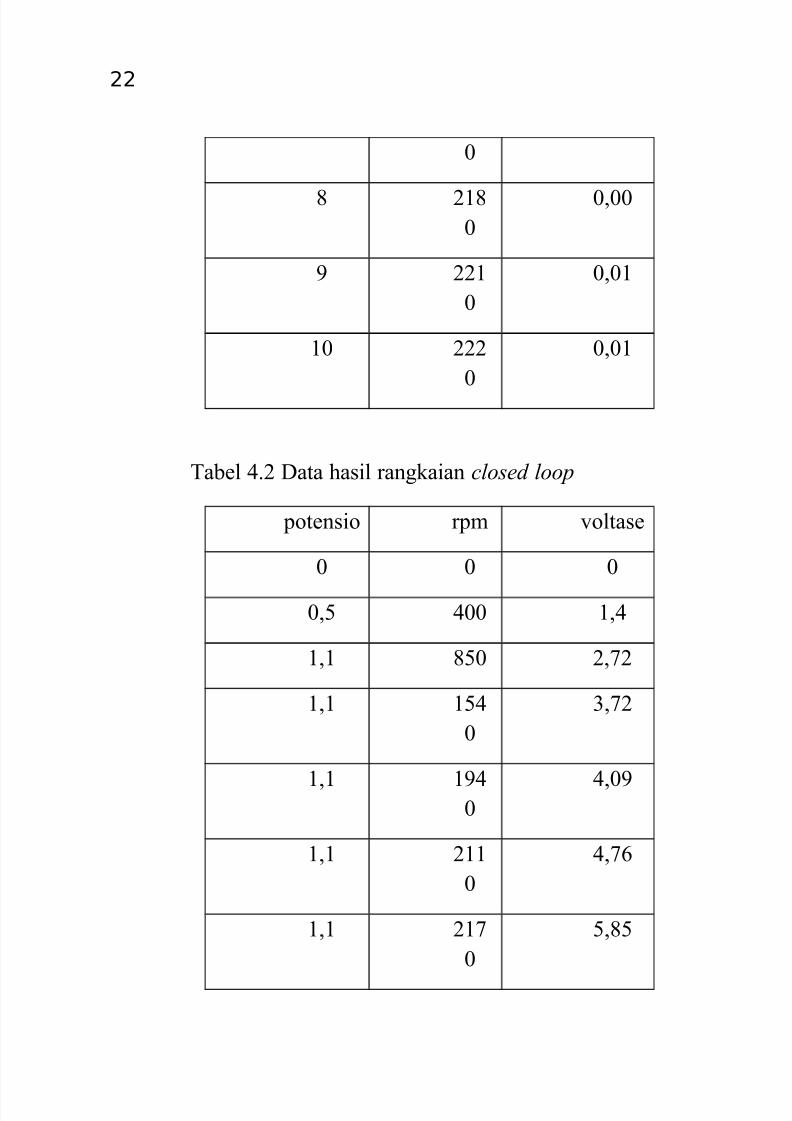
Tabel 4.2 Data hasil rangkaian closed loop
potensio rpm voltase
0 0 0
0,5 400 1,4
1,1 850 2,72
1,1 154
0
3,72
1,1 1940
4,09
1,1 211
0
4,76
1,1 217
0
5,85
7/27/2019 BAB IV TO.doc
http://slidepdf.com/reader/full/bab-iv-todoc 3/10
23
1,1 205
0
5,72
1,1 210
0
5,87
1,1 214
0
5,62
1,1 216
0
5,60
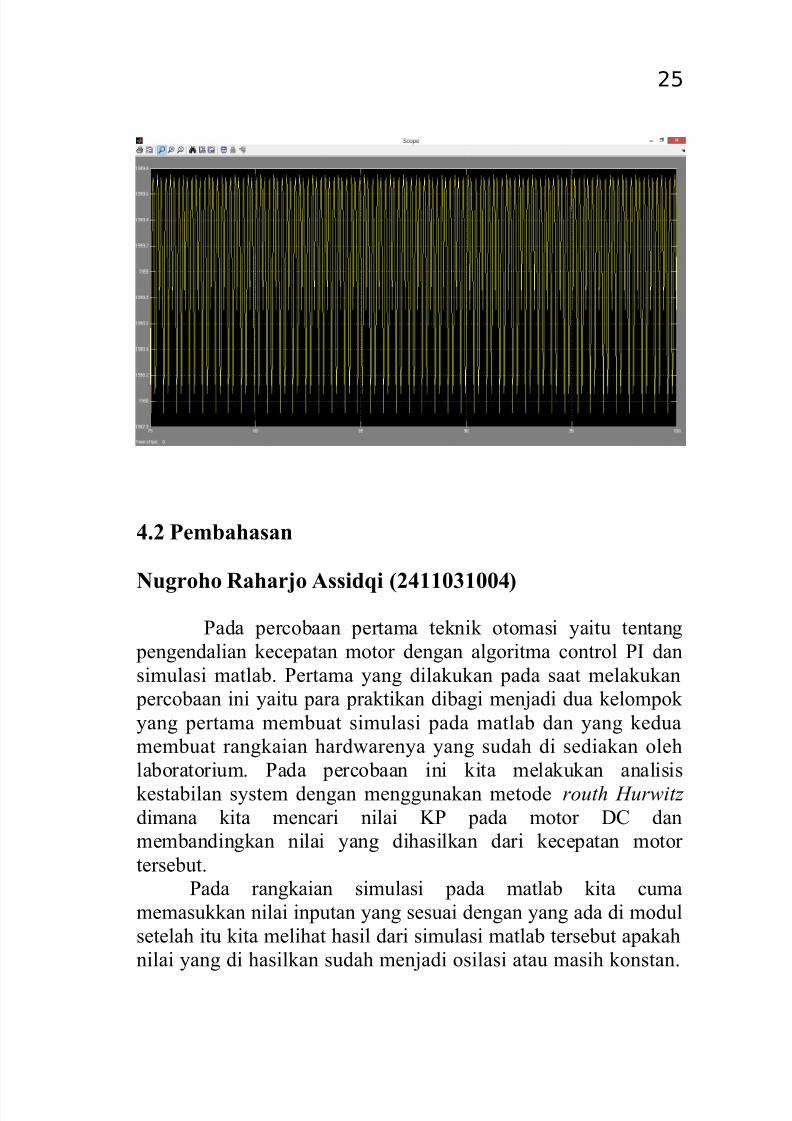
Grafik 4.1 Grafik pengendalian PID
7/27/2019 BAB IV TO.doc
http://slidepdf.com/reader/full/bab-iv-todoc 4/10
24
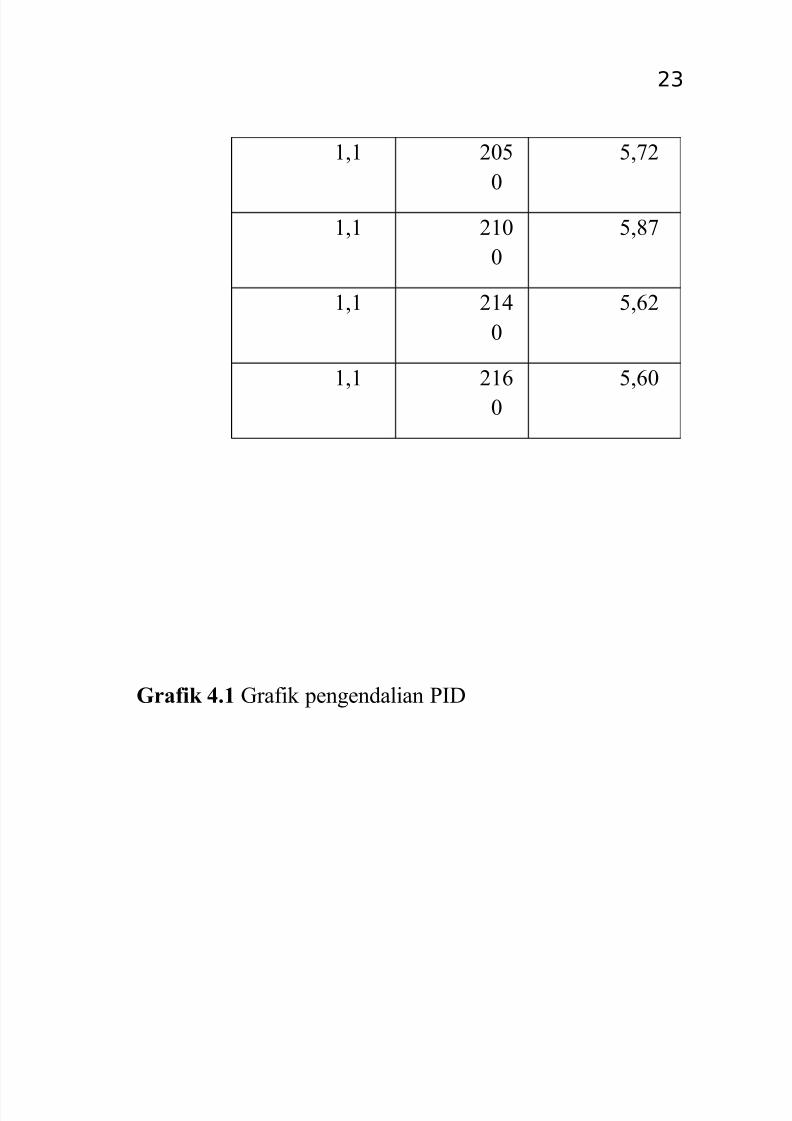
Grafik 4.2 Grafik pengendalian P
Grafik 4.3 Grafik Pengendalian PI
7/27/2019 BAB IV TO.doc
http://slidepdf.com/reader/full/bab-iv-todoc 5/10
25
4.2 Pembahasan
Nugroho Raharjo Assidqi (2411031004)
Pada percobaan pertama teknik otomasi yaitu tentang
pengendalian kecepatan motor dengan algoritma control PI dan
simulasi matlab. Pertama yang dilakukan pada saat melakukan
percobaan ini yaitu para praktikan dibagi menjadi dua kelompok
yang pertama membuat simulasi pada matlab dan yang kedua
membuat rangkaian hardwarenya yang sudah di sediakan oleh
laboratorium. Pada percobaan ini kita melakukan analisis
kestabilan system dengan menggunakan metode routh Hurwitz
dimana kita mencari nilai KP pada motor DC dan
membandingkan nilai yang dihasilkan dari kecepatan motor
tersebut.
Pada rangkaian simulasi pada matlab kita cuma
memasukkan nilai inputan yang sesuai dengan yang ada di modul
setelah itu kita melihat hasil dari simulasi matlab tersebut apakah
nilai yang di hasilkan sudah menjadi osilasi atau masih konstan.
7/27/2019 BAB IV TO.doc
http://slidepdf.com/reader/full/bab-iv-todoc 6/10
26
Dari hasil yang didapat pada data simulasi dan juga hardware
yang telah digunakan,disimpulkan data pada nilai yang
berpengaruh dalam osilasi adalah nilai K atau Kp. Hasil pengukuaran tegangan yang dikibatkan oleh putaran motor DC
lebih akurat dibandingkan dengan data ukur menggunakan
hardware hal tersebut di sebabkan oleh komponen dari hardware
ada yang mengalami kerusakan atau akurasi pembacaan telah
berkurang.
Moch Machrus Adhim (2411031041)
Percobaan pertama tentang pengendalian kecepatan putar
motor DC dengan sistem pengendalian open loop, diperoleh besar
nilai kecepatan rotasi yang dipengaruhi oleh perubahan tegangan
(potensio putar). Dari hasil percobaan, diperoleh hubungan
linieritas antara kecepatan rotasi dan tegangan yang diberikan dari
power supply.Pada percoaban kedua motor DC dengan sistem
penggendalian close loop, terdapat tiga macam mode kontrol
yakni P, P+I, dan P+I+D. Namun, pada percobaan ini hanya
menggunakan mode kontrol P saja, diperoleh hubungan naik
turun (osilasi), antara nilai P dengan tegangan (potensio putar)
pada tachometer. Hasil yang didapat pada percobaan motor DC
dengan sistem pengendalian close loop, dibandingkan dengan
simulasi software MATLAB. Pada kontrol P=6, nilai disimulasimenunjukan nilai tegangan sebesar 4,7 (nilai tegangan terukur =
5,13).
Sedangkan percobaan ketiga adalah simulasi mode
kontrol P, P+I, dan P+I+D pada simulink MATLAB. Diperoleh
data bahwa nilai P yang memiliki karakteristik paling baik adalah
1.1, nilai P+I yang paling baik adalah 1.1+0.1, dan nilai P+I+D
yang paling baik adalah 1.1+0.1+1. Pada dasarnya, nilai P yang
kecil akan membuat pengendali cenderung membawa loop
berosilasi, I yang kecil bermanfaat untuk menghilangkan offset,
7/27/2019 BAB IV TO.doc
http://slidepdf.com/reader/full/bab-iv-todoc 7/10
27
sedangkan D yang besar akan membuat respon loop cenderung
lebih cepat.
Geby Nur Hamzah 2411031055
Percobaan kali ini mengenai pengendalian kecepatan
motor dengan algoritma control P dan simulasi matlab. Dalam
percobaan diambil dua data sistem untuk analisa data yaitu open
loop system dan close loop system. Pada percobaan pertama
ditemukan kendala dalam pengambilan data yaitu nilai RPMnya
stabil pada pemutaran potensio 0 sampai 4 dan untuk pemutaran potensio 5 dan 6 nilai yang ditemukan yaitu osilasi. Dikarenakan
alat yang digunakan untuk praktikum belum terkalibrasi dan nilai
error yang didapat belum dikendalikan.
Pada percobaan kedua hasil yang didapat pada close loop
system akan dibandingkan dengan hasil yang didapat dari
Simulasi Matlab dan untuk kendala yang didapat pada percobaan
ini adalah simulasi terhadap motor DC pada bagian proportional,
pada proportional tersebut harus pemutaran potensio harus full,sehingga yang terbaca di display dapat mendekati nilai eror.
Pada percobaan menggunakan Simulink dengan
mengubah-ubah control proporsional, integral dan derivative
didapatkan hasil bahwa sistem memiliki respon baik pada nilai P
1 hingga 10, nilai Ti 0.01 hingga 1, dan Td 0.01 hingga 1.
Berdasarkan simulasi dapat dilihat respon lebih cepat
menggunakan control PID.
Indra Prasetiyo 2411031049
Praktikum Tenik Otomasi P1 kali ini membahas tentang
sistem open loop dan closed loop. Percobaan pertama adalah
merangkai rangkaian open loop. Rangkaian yang dipakai adalah
istem pengendalian motor DC dalam percobaan ini hanya
memakai power supply, potensio, tachometer dan motor DC.

7/27/2019 BAB IV TO.doc
http://slidepdf.com/reader/full/bab-iv-todoc 8/10
28
Percobaan kedua adalah membahas tentang rangkaian closed
loop. Rangkaian closed loop ini terdiri dari Set Point, Controller,
Actuator, Plan dan Sensor. Selanjutnya dari rangkaian tersebut
kembali disimulasikan ke software matlab.
Dari beberapa data yang didapatkan terjadi sebuah
hubungan grafik tegangan. Grafik tersebut adalah tidak stagnan.
Dalam sistem closed loop yang di uji adalah Proposionalnya saja.
Dalam sistem rangkaian pengendalian PID terjadi beberapa
kesalahan. Grafik dari simulsi di software matlab tidak bisa
ditampilkan. Hal ini dikarenakan nilai dari differensial atauturunan dari tegangan terlalu besar. Karena alat yang dipakai
untuk mengetahui nilai tidak layak pakai, atau tidak sesuai
dengan standar. Karena tidak kesesuaian tersebut tingkat akurat
tidak dapat dikatakan baik.
Rio Ananda Putra 2411031045
Percoaban motor DC dengan sistem pengendalian open
loop, diperoleh besar nilai kecepatan rotasi dan tegangan yangdipengaruhi oleh perubahan resistansi. Dari hasil percobaan,
diperoleh hubungan antara nilai resistansi dengan kecepatan
rotasi. jadi nilai resistansi besar maka hasil yang dihasilkan untuk
kecepatan rotasi semakin kecil. Namun, terdapat hubungan setara
antara resistansi dengan tegangan, Semakin besar nilai resistansi,
semakin besar pula tegangan yang terjadi. Namun, apabila dibuat
dalam grafik, terdapat ke-nonlinieritasan antara resistansi dengan
kecepatan rotasi dan antara resistansi dengan tegangan.Pada percoaban kedua motor DC dengan sistem
penggendalian close loop, terdapat tiga macam kontrol yang
digunakan yakni P. Pada kontrol P, diperoleh hubungan naik
turun, antara nilai P dengan tegangan pada tachometer.
Annisa Amadhea Firman 2411031056
Pada percobaan Teknik Otomasi kali ini yaitu mengenai
pegendalian kecepatan motor dengan algoritma control P dan
7/27/2019 BAB IV TO.doc
http://slidepdf.com/reader/full/bab-iv-todoc 9/10
29
simulasi matlab. Pada percobaan ini memakai dua rangkaian yaitu
open loop dan closed loop.
Pada percobaan pertama memakai rangkaian open loopdan mengalami kendala yaitu pada saat putaran ke 5 potensio
motor mati dan alat yang dipakai belum terkalibrasi. Pada
percobaan kedua motor DC menggunakan rangkaian c losed loop
yang menggunakan control P yang dibandingkan dengan simulasi
software MATLAB.
Pada percobaan ketiga menggunakan simulink MATLAB
untuk mode control P, P+I, dan P+I+D. Jika didapat nilai P
rendah maka pengendali cenderung loop berosilasi, jika I yangrendah bermanfaat untuk menghilangkan offset, sedangkan D
yang bernilai besar maka respon loop cenderung cepat.
Windha Ayu Prameswari 2411031053
Rangkaian yang dipakai adalah istem pengendalian motor
DC dalam percobaan ini hanya memakai power supply, potensio,
tachometer dan motor DC. Percobaan kedua adalah membahas
tentang rangkaian closed loop. Rangkaian closed loop ini terdiri
dari Set Point, Controller, Actuator, Plan dan Sensor. Selanjutnya
dari rangkaian tersebut kembali disimulasikan ke software
matlab.
Sedangkan percobaan ketiga adalah simulasi mode
kontrol P, P+I, dan P+I+D pada simulink MATLAB. Diperoleh
data bahwa nilai P yang memiliki karakteristik paling baik adalah
1.1, nilai P+I yang paling baik adalah 1.1+0.1, dan nilai P+I+D
yang paling baik adalah 1.1+0.1+1. Pada dasarnya, nilai P yang
kecil akan membuat pengendali cenderung membawa loop berosilasi, I yang kecil bermanfaat untuk menghilangkan offset,
sedangkan D yang besar akan membuat respon loop cenderung
lebih cepat.

7/27/2019 BAB IV TO.doc
http://slidepdf.com/reader/full/bab-iv-todoc 10/10
30
Halaman Ini Sengaja Dikosongkan