BAB III PERANCANGAN APLIKASI DAN MODUL AVROBJECT€¦ · yaitu motor stepper pada modul Avrobject....
28
13 BAB III PERANCANGAN APLIKASI DAN MODUL AVROBJECT Pada bab ini akan dibahas mengenai pembuatan aplikasi Avrobject dan modul Avrobject. Penulisan sengaja dijabarkan secara detail agar dapat dengan mudah dimengerti dan dapat dipraktekkan juga secara langsung. Dilakukan juga proses pembelajaran mikrokontroler yang diikuti oleh siswa-siswi SMK menggunakan aplikasi dan modul yang dibuat. Kemudian sebagai bahan penilaian diberikan sebuah kuisioner kepada siswa-siswi untuk dijawab. 3.1. Pembuatan Aplikasi Avrobject dengan Squeak Dibuat aplikasi Avrobject yang dapat mengontrol dua buah motor stepper dengan berbasis click and drag (klik dan seret) layaknya mengendalikan sebuah obyek. Aplikasi ini berisikan perintah-perintah pada kolom daftar perintah, jika perintah-perintah ini diseret kedalam kolom script dan bila dijalankan maka code dalam kolom script akan diunduh ke dalam mikrokontroler. Kemudian mikrokontroler akan menggerakkan motor yang mendapat perintah untuk bergerak. Tampilan pada Avrobject dibuat layaknya seperti perintah-perintah dalam bentuk obyek, sehingga pengguna tidak perlu lagi menulis script seperti sebagaimana biasanya dengan metode Basic memprogram sebuah mikrokontroler. Dengan adanya aplikasi ini maka seorang pemula bisa dengan mudah menggerakkan motor sesuai dengan keperluan. Dalam arti pengguna juga sedang melakukan pemrograman mikrokontroler, hanya saja terbatas pada modul yang ada yaitu motor stepper pada modul Avrobject. Dalam gambar 3.1 menunjukkan hal-hal yang dapat dilakukan oleh pengguna aplikasi Avrobject. Pengguna dapat membuka aplikasi, membuat script dengan cara klik dan seret, setelah membuat script bisa mencoba dan melihat jalannya animasi. Kemudian mengunduh script dan melihat pergerakan motor asli. Jika telah selesai digunakan, aplikasi dapat ditutup.
Transcript of BAB III PERANCANGAN APLIKASI DAN MODUL AVROBJECT€¦ · yaitu motor stepper pada modul Avrobject....

13
BAB III
PERANCANGAN APLIKASI DAN MODUL AVROBJECT
Pada bab ini akan dibahas mengenai pembuatan aplikasi Avrobject dan modul
Avrobject. Penulisan sengaja dijabarkan secara detail agar dapat dengan mudah
dimengerti dan dapat dipraktekkan juga secara langsung. Dilakukan juga proses
pembelajaran mikrokontroler yang diikuti oleh siswa-siswi SMK menggunakan
aplikasi dan modul yang dibuat. Kemudian sebagai bahan penilaian diberikan
sebuah kuisioner kepada siswa-siswi untuk dijawab.
3.1. Pembuatan Aplikasi Avrobject dengan Squeak
Dibuat aplikasi Avrobject yang dapat mengontrol dua buah motor stepper
dengan berbasis click and drag (klik dan seret) layaknya mengendalikan sebuah
obyek. Aplikasi ini berisikan perintah-perintah pada kolom daftar perintah, jika
perintah-perintah ini diseret kedalam kolom script dan bila dijalankan maka code
dalam kolom script akan diunduh ke dalam mikrokontroler. Kemudian
mikrokontroler akan menggerakkan motor yang mendapat perintah untuk bergerak.
Tampilan pada Avrobject dibuat layaknya seperti perintah-perintah dalam
bentuk obyek, sehingga pengguna tidak perlu lagi menulis script seperti
sebagaimana biasanya dengan metode Basic memprogram sebuah mikrokontroler.
Dengan adanya aplikasi ini maka seorang pemula bisa dengan mudah
menggerakkan motor sesuai dengan keperluan. Dalam arti pengguna juga sedang
melakukan pemrograman mikrokontroler, hanya saja terbatas pada modul yang ada
yaitu motor stepper pada modul Avrobject.
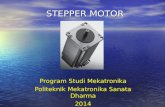
Dalam gambar 3.1 menunjukkan hal-hal yang dapat dilakukan oleh pengguna
aplikasi Avrobject. Pengguna dapat membuka aplikasi, membuat script dengan
cara klik dan seret, setelah membuat script bisa mencoba dan melihat jalannya
animasi. Kemudian mengunduh script dan melihat pergerakan motor asli. Jika telah
selesai digunakan, aplikasi dapat ditutup.

14
Gambar 3.1. Use Case Diagram Avrobject
3.1.1. Pendahuluan Pembuatan Aplikasi Avrobject
Sebelum aplikasi dibuat, terlebih dahulu diabstraksikan obyek-obyek yang
ingin dibuat dalam aplikasi ini :
- Avrobject
Avrobject adalah obyek morph yang terluar pada aplikasi yang dibuat.
Pada obyek Avrobject ditambahkan obyek-obyek morph lain sehingga
membentuk sebuah tampilan yang dapat digunakan.
- MainMenu
Merupakan sebuah obyek persegi panjang yang digunakan sebagai latar
belakang tampilan porgram.
- TaskObject
TaskObject merupakan kolom tempat blok-blok perintah ditempatkan.
- DragObject, ada beberapa obyek yang dibuat dari DragObyek, yaitu :
- X
Adalah variabel yang dapat diisikan dengan nilai integer yang digunakan
pada percabangan.
- Delay
Delay berfungsi untuk memberikan jeda pada bagian-bagian tertentu pada
program. Nilai waktu delay ditentukan dalam satuan detik.
- Motor1
Obyek motor satu. Dengan memberikan obyek ini pada bagian paling atas
sebuah script berarti bahwa script dibawahnya dikerjakan oleh motor satu.

15
- Motor2
Obyek motor dua. Dengan memberikan obyek ini pada bagian paling atas
sebuah script berarti bahwa script dibawahnya dikerjakan oleh motor dua.
- RotateLeft
DragObject putar kiri, bisa dimasukkan nilai bilangan bulat positif untuk
membuat motor berputar satu putaran dan diulang sebanyak nilai bilangan
bulat yang diberikan.
- RotateRight
DragObject putar kanan, bisa dimasukkan nilai bilangan bulat positif untuk
membuat motor berputar satu putaran dan diulang sebanyak nilai bilangan
bulat yang diberikan.
- TurnTo
DragObject menuju derajat tertentu, dimasukkan nilai bilangan bulat yang
berisi derajat per 360 derajat.
- TurnDegrees
DragObject bergerak sesuai derajat, dimasukkan nilai bilangan bulat positif
untuk putar kiri sebanyak derajat yang diberikan dan negatif untuk putar
kanan sebanyak derajat yang diberikan.
- If
Digunakan If untuk melakukan percabangan pada saat dimana nilai variabel
X sama dengan parameter yang dimasukkan pada DragObject If.
- For
Digunakan For untuk melakukan perulangan pada baris-baris program.
Dimasukkan sebuah bilangan bulat untuk melakukan perulangan sebanyak
angka bilangan bulat yang dimasukkan.
- Close
DragObject ini digunakan sebagai penutup dari percabangan dan
perulangan. Setelah ditutup dengan Close maka aplikasi akan mengeksekusi
blok yang ada dalam percabangan atau perulangan.
- ScriptLayout
ScriptLayout adalah tempat diletakkannya blok-blok perintah yang ingin
dikerjakan.

16
- AnimationScreen
AnimationScreen adalah layar tempat ditampilkan animasi yang terjadi
pada motor.
- Arrow
Adalah obyek jarum petunjuk posisi arah daripada sebuah jarum motor.
- StartButton
Tombol agar animasi dapat dijalankan, menampilkan pergerakan motor
secara animasi komputer ketika diklik.
- DownloadButton
Tombol agar stringcode diunduh ke dalam AVR, memberi perintah pada
AVR untuk menjalankan motor dan menampilkan animasi pada
AnimationScreen.
3.1.2. Pembuatan Aplikasi Avrobject (Class dan Instance Variable)
Pertama kali mengerjakan sebuah proyek pada Squeak, Squeak menyediakan
dua tipe proyek, yaitu MVCproject dan MorphicProject. Digunakan
MorphicProject untuk pembuatan aplikasi Avrobject karena melibatkan obyek-
obyek yang berupa gambar atau disebut juga morph. Dibuat proyek baru pada
Squeak dengan cara pilih New Project, kemudian New MorphicProject. Setelah
keluar World yang akan digunakan untuk membuat proyek kemudian buka class
browser.
Gambar 3.2. Pembuatan MorphicProject baru
Untuk mengawali pembuatan aplikasi diawali dengan membuat class
category yang baru yaitu Avrobject-Main. Aturan umum penulisan nama class dan
nama method pada Squeak sama pada bahasa Java, yaitu pada huruf paling depan
setiap kata dari class diberi tanda dengan huruf kapital. Sedangkan method atau

17
variabel ditulis dengan awalan huruf kecil dan kemudian jika variabel mengandung
dua kata atau lebih, huruf pertama kata berikutnya ditulis dengan huruf kapital.
Cara membuat class category yang baru yaitu dengan menekan tombol menu
pada mouse (klik kanan) pada kolom class category di class browser kemudian
pilih . Dinamakan class category yang baru dengan nama Avrobject-
Main kemudian Accept (ctrl + s). Class category ini hanya berfungsi seperti sebuah
folder agar ketika mencari class yang dibutuhkan dapat dengan mudah ditemukan.
Gambar 3.3. Pembuatan class category baru
Setelah dibuat class category Avrobject-Main, dalam class category ini
ditambahkan class-class baru yang lain sesuai dengan obyek-obyek yang telah
dirancang dari awal. Namun perhatikan bahwa dalam class DragObject hanya
perlu dibuat sebuah class karena bentuk obyek morph yang dihasilkan mirip satu
dengan yang lain. Dengan class yang dibuat ini dapat mengeluarkan obyek yang
serupa tetapi memiliki nama dan fungsi yang berbeda-beda. Cara membuat class
baru yaitu dengan cara klik pada class category Acrobject-Main kemudian pada
subclass-nya, NameOfSubclass diganti dengan nama class yang telah didaftarkan di
atas, yaitu : Avrobject; MainMenu; TaskObject; DragObject; ScriptLayout;
AnimationScreen; Arrow; StartButton; DownloadButton.
Gambar 3.4. Pembuatan class baru dengan mengganti nama subclass-nya

18
Dalam setiap class yang dibuat, sering akan dipakai sebuah instace Variable
yang digunakan sebagai sebuah variabel global sehingga dapat dipakai oleh class
lain juga. Oleh sebab itu perlu juga dideklarasikan instance variable dari masing-
masing class. Tentunya pertama diabstraksikan / dipikirkan dahulu variabel apa
saja yang akan dibutuhkan, tetapi apabila ingin ditambahkan lagi nantinya bisa
langsung ditambahkan. Cara penambahan intance Variable dengan diisikan
variabel yang dibutuhkan dalam tanda petik satu intanceVariableNames yang
dibatasi dengan spasi antar instance Variable.
- Avrobject : mainMenu taskMenu scriptLayout animationScreen
startButton downloadButton trashCan.
- MainMenu : label
- TaskObject : label motor1 motor2 turnLeft turnRight turnTo
turnDegree variableX ifX forX closeX delay
- ScriptLayout : label
- AnimationScreen : label circle motor1 motor2
- Arrow : delayTime
- StartButton : taskString taskList flagMode taskListIf taskListFor
taskListDo intIf intFor myNumberIf myNumberFor
myNumberDo myAvrobject boxValue valueOfX
taskStringFor taskStringIf
- DownloadButton : port
Gambar 3.5. Pembuatan intanice variable baru

19
Intance Variable tidak dapat diakses oleh class lain begitu saja, melainkan
jika tidak ada method untuk mengeluarkan nilainya, ia tidak akan bisa diakses oleh
class lain ( dalam arti setiap intance variable yang baru dibuat bersifat private ).
Untuk membuatnya dapat diakses oleh class lain, dalam Squeak ada yang namanya
accessor. Accessor ini berfungsi seperti halnya getter dan setter pada bahasa
pemrograman Java. Untuk membuat accessor dari tiap variabel klik tombol menu
mouse pada class yang ingin dibuat accessor-nya. Kemudian klik more, create inst
var accessors. Maka akan dibuat accessor dari tiap-tiap instance variable secara
otomatis.
Gambar 3.6. Pembuatan accessor dari intance variable secara otomatis
3.1.3. Pembuatan Aplikasi Avrobject ( Method )
Obyek tidak akan dapat melakukan apa-apa sebelum diberikan method.
Method membuat obyek menjadi kelihatan hidup dan dapat berinteraksi satu
dengan yang lain. Method pada Squeak sering disebut juga dengan message. Setiap
method yang dibuat pada masing-masing class akan lebih baik jika dimasukkan
dalam method category karena akan lebih mudah mencari method yang telah ditulis
jika sudah dikelompokkan. Seperti hanya terlihat pada accessor yang dibuat
sebelumnya, semua accessor ditempatkan dalam satu buah method category yang
bernama accessing.

20
Untuk mengeluarkan sebuah obyek dari sebuah class perlu ada method
initialize. Method initialize sendiri ketika ia dipanggil tidak dengan memberikan
message initialize, melainkan memberikan message new pada class yang dituju.
Dalam menginisialisasi sebuah obyek morph, pasti ada method draw didalamnya.
Pada umumnya method draw ini berisikan fungsi untuk membentuk obyek yang
akan dihasilkan oleh class tersebut. Untuk membuat proyek morph yang kompleks
akan lebih mudah jika dikerjakan dari morph yang paling terkecil dahulu. Pada
paragraf-paragraf selanjutnya dijelaskan tentang method yang dibuat dalam
masing-masing class dan penjelasannya.
Semua code pemrograman yang dibutuhkan untuk membangun aplikasi
Avrobject berada pada lampiran CD dalam image Squeak. Dilihat menggunakan
tool Class Browser ada komentar dengan tanda “ * ” merupakan komentar atau
penjelasan fungsi utama dari method. Sedangkan tanda “ # ” merupakan komentar
atau penjelasan dari ekspresi code dibawahnya. Tidak akan semua baris diberi
komentar, melainkan apabila pada bagian atas atau di class lain sudah ada
penjelasan mengenai sebuah baris code, jika ada code yang sama tidak diberi
komentar lagi.
MainMenu. Pada class MainMenu dibuat method baru dengan nama initialize.
Caranya dengan klik pada class MainMenu, kemudian pada kolom method
category dipilih “ --- all --- ”. Kemudian pada kolom dibawah diisikan dengan
method initialize. Pada setiap class yang dibuat dalam aplikasi Avrobject memiliki
method initialize dan draw agar dari setiap class bisa ditampilkan obyek yang
dihasilkan ke World Squeak.
initialize
"* Menginisialisasi MainMenu"
super initialize.
“# Menggabungkan diri dengan morph hasil dari method draw”
self addMorph: self draw.
^ self.
super initialize membuat obyek yang akan dihasilkan mewarisi class
yang di atasnya. Oleh sebab itu setiap initialize harus ada super initialize.
self merupakan sebuah obyek yang menunjuk ke obyek yang diberikan message.
addMorph: adalah method dari class Morph digunakan untuk menggambungkan

21
dua buah obyek morph. self addMorph: self draw digunakan untuk
menambahkan obyek yang diberi message dengan obyek hasil dari method draw.
Method draw belum dibuat, tetapi dibuat berikutnya. ^self menujukkan bahwa
method ini mengembalikan sebuah obyek yaitu dirinya sendiri.
Berikutnya dibuat method draw pada class MainMenu. Variabel mainMenu
digunakan sebagai variabel penyimpan obyek yang sedang dibuat. MainMenu
merupakan sebuah obyek PasteUpMorph yang diberi warna putih dan berukuran
1000 x 600 pixel. Sedangkan topBox adalah obyek persegi panjang sebagai tempat
akan ditaruh nama program yaitu teks yang terisi dalam label, “Avrobject”. on:
#startDrag send: #value to: topBox; dan on: #click send:
#value to: topBox; merupakan proteksi agar topBox tidak bisa dipindahkan.
DragObject merupakan obyek yang dapat diklik dan diseret. Apabila obyek
ini hanya diklik maka ia akan menggandakan dirinya sendiri. Obyek hasil
penggandaan ini kemudian diseret kedalam ScriptLayout yang digunakan sebagai
script. Agar bisa menggandakan diri dan diseret dipakai method copyByClick.
dilihat pada potongan program dibawah pada obyek m diberikan message on: send:
to: dan masing-masing mesagge selector diberi simbol (yang bertanda #). Simbol
ini yang dibaca pada saat dilakukan sesuatu, yaitu #startDrag dan #click. Saat
didapat #startDrag dikirim mesaage #grabMorph ke obyek m, begitu juga saat
didapat #click dilakukan method yang berada dalam kurung kotak.
m on: #startDrag send: #grabMorph: to: m.
m on: #click send: #value to:[bar := m duplicate. bar
position: ( ( m position ) + (5@5) ). bar
openInWorld. bar comeToFront].
Dibuat method draw: aString pada class DragObyek karena nantinya
DragObject yang dihasilkan bervariasi sehingga perlu dibuat method yang bisa
diberikan parameter, berbeda dengan MainMenu yang hanya ada satu obyek dalam
proyek ini. self copyByClick pada initialize mengaktifkan method copyByClick
agar apabila obyek ini diklik akan menggandakan diri tetapi apabila diseret/drag ia
tidak menggandakan diri, hanya berpindah tempat.
box merupakan sebuah persegi panjang yang menjadi dasar dari obyek ini.
aString adalah sebuah string yang akan ditulis pada box ini sehingga menjadi
pembeda antara DragObject yang satu dengan yang lain. textBox digunakan untuk

22
tempat diisikan nilai bilangan bulat yang akan menjadi parameter dari DragObject
ketika digunakan dalam script.
ScriptLayout, merupakan tempat diletakkan obyek DragObject yang akan
dibaca dan dijadikan sebuah script. Untuk merapikan posisi DragObject yang
diletakkan pada ScriptLayout, dibuat method onClick agar pada saat ScriptLayout
diklik method akan menjalankan method arrangeDragObject pada class
Avrobject. Prinsip merapikan yang dipakai adalah menetapkan nilai x dan spasi
nilai y antar DragObject. Kemudian diurutkan berdasarkan nilai y lalu ditempatkan
ulang pada World dengan nilai x dan y yang sudah ditetapkan.
TaskObject, merupakan sebuah kolom yang berisikan deretan DragObject
yang dapat digandakan dan diseret ke dalam kolom ScriptLayout. TaskObject
merupakan sebuah obyek PasteUpMorph. Dibuat method drawDragObject:
aString value: aValue untuk menampilkan DragObject pada kolom TaskObject ini.
aString dipakai sebagai nama DragObject dan aValue dipakai sebagai nilai awal
dari parameter tiap DragObject. Seperti pada Motor 1 dan Motor 2 tidak diberikan
aValue karena tidak membutuhkan parameter, sedangkan DragObyek seperti
turnLeft diberi „0‟ karena membutuhkan parameter.
motor1 := self drawDragObject: 'Motor 1' value: ' '.
turnLeft := self drawDragObject: 'Turn Left' value: '0'.
Pada method initialize dilihat bahwa pertama dibuat dahulu kotak terluar dari
TaskObject yaitu dengan method draw. Setelah itu dibuat satu per satu obyek yang
akan ditambahkan pada TaskObject, yaitu variabel X, motor1, motor2, turnLeft,
turnRight, turnTo, turnDegree, If, For, Close dan Delay. Digunakan method
drawDragObject: aString value: aValue untuk membuat DragObject-
nya. Variabel i dan space digunakan untuk memberikan nilai posisi y yang berbeda
pada tiap DragObject agar tidak saling menumpuk saat ditampilkan.
Kemudian yang paling penting juga dalam proyek ini adalah class Arrow.
Arrow menampilkan animasi pergerakan motor stepper pada layar komputer.
Walaupun Arrow sebernarnya diisikan pada obyek AnimationScreen, tetapi pada
class Arrow ditempatkan method turnLeft, turnRight, turnTo, dan turnDegree
bukan pada class AnimationScreen. Animasi Arrow memerlukan delayTime
sebagai skala waktu untuk menyeimbangkan animasi pada layar komputer dengan
modul motor stepper yang asli. Arrow merupakan sebuah morph jarum yang terdiri

23
dari warna biru dan warna merah. Obyek animasi Arrow tampak hanya sebuah
obyek persegi panjang.
Animasi pada Squeak merupakan perubahan bentuk atau posisi morph tiap
delay yang diberikan, caranya yaitu dengan mengubah posisi atau bentuk morph
kemudian diberikan delay dan memperbaharui/refresh World. Dibuat method
rotateLeft: anInteger untuk memutar Arrow berlawanan arah jarum jam dan
rotateRight: anInteger untuk memutar animasi motor searah jarum jam. Method ini
melakukan perubahan heading obyek sebanyak dua derajat tiap kalinya dan
diulangi sebanyak 180 kali. self heading: (self heading \\ 360) dibuat
untuk memproteksi apabila heading sudah lebih dari 360 derajat atau kurang dari
nol dearajat maka akan dikembalikan ke antara 0 hingga 359.
rotateRight: anInteger
"* Method rotateRight atau putar searah jarum jam sebanyak
anInteger yang diberikan"
| delay |
anInteger timesRepeat:[
180 timesRepeat: [
self heading: (self heading + 2).
delay := Delay forSeconds: delayTime.
delay wait.
self refreshWorld.
].
].
self heading: (self heading \\ 360).
Dibuat method turnDegrees: aDegrees untuk menganimasikan Arrow
berputar sebanyak derajat yang diberikan. Masukan dengan tanda negatif dan tanpa
tanda pada textBox turnDegrees akan mempegaruhi arah putarannya. Jika negatif,
maka Arrow akan berputar searah jarum jam sebanyak derajat dalam textBox. Jika
tanpa tanda negatif maka Arrow akan berputar berlawanan arah jarum jam.
turnDegrees: aDegrees
"* Memutar motor sebanyak aDegrees derajat. Tanda negatif
menandakan arah putaran searah jarum jam"
| delay anInteger |
aDegrees negative
ifTrue:[

24
anInteger := (aDegrees*(-1))\\360.
anInteger timesRepeat:[
self heading: ( (self heading + 1) \\360).
delay := Delay forSeconds: delayTime/2.
delay wait.
self refreshWorld.
].
]
ifFalse:[
anInteger := (aDegrees)\\360.
anInteger timesRepeat:[
self heading: ((self heading - 1) \\360).
delay := Delay forSeconds: delayTime/2.
delay wait.
self refreshWorld.
].
].
self heading: (self heading \\ 360).
Dibuat method turnTo: aDegrees untuk menganimasikan Arrow menuju arah
yang dimasukkan pada textBox obyek turnTo. degree > (self heading)
untuk menentukan arah perputaran yang akan digunakan searah jarum jam atau
berlawanan jarum jam, agar tidak terjadi kesalahan apabila derajat absis saat ini
telah melewati arah yang dituju.
turnTo: aDegrees
"* Membuat panah motor menunjuk ke arah aDegrees."
| delay anInteger degree |
degree := aDegrees\\360.
"# Mengetahui apakah derajat yang akan dituju lebih besar
dari posisi saat ini"
degree > ((360-(self heading))\\360)
ifTrue:[
anInteger := (degree - ((360-(self
heading))\\360) ) asInteger.

25
anInteger timesRepeat:[
"# Jika benar maka motor berputar ke berlawanan arah jarum
jam menuju derajat yang dituju"
self heading: ((self heading-1)\\360 ).
delay := Delay forSeconds: delayTime/2.
delay wait.
self refreshWorld.
].
]
ifFalse:[
anInteger := (((360-(self heading))\\360 ) -
degree) asInteger.
anInteger timesRepeat:[
"# Jika salah maka motor berputar searah jarum jam menuju
derajat yang dituju"
self heading: ((self heading+1)\\360 ).
delay := Delay forSeconds: delayTime/2.
delay wait.
self refreshWorld.
].
].
self heading: ((aDegrees \\ 360)*(-1)).
AnimationScreen, merupakan layar untuk menampilkan animasi Arrow.
AnimationScreen hanya merupakan sebuah morph persegi panjang. Tambahan
method lain pada initialize-release adalah drawCircle, method ini digunakan untuk
membuat obyek motor pada AnimationScreen. Dibuat dua obyek motor dengan
cara menggambarkan lingkaran kemudian pada tengah lingkaran ditambahkan
obyek Arrow. Jadi pada saat melakukan animasi yang bergerak hanyalah Arrow
sedangkan yang lain tidak bergerak, oleh sebab itu mengapa ditempatkan method
penganimasian pada class Arrow.
Setelah semua obyek selesai dibuat, saatnya untuk menyatukan obyek-obyek
tersebut. Obyek-obyek tersebut disatukan pada sebuah obyek utama yaitu
Avrobject. Setiap obyek dimasukkan dalam instance variable yang berada pada
class Avrobject agar nantinya dapat digunakan oleh class lain juga. Masing-masing
obyek diletakkan pada posisinya agar terlihat rapi dengan menggunakan message

26
position:. Kemudian digabungkan semua obyek morph yang telah
diinisialisasikan dengan message addMorph:.
mainMenu := MainMenu new.
taskMenu := TaskObject new.
taskMenu position: 10@25.
mainMenu addMorph: taskMenu;
Untuk menjalankan animasi diperlukan script pada ScriptLayout. Script dapat
dibuat dengan cara klik DragObject yang ingin ditambahkan pada TaskObject
untuk digandakan, kemudian diseret/drag ke ScriptLayout. Tetapi script yang
dibuat ini belum dapat dibaca. Oleh sebab itu dibuat sebuah category method baru
dengan nama count yang berisi method taskListArray untuk memasukkan
DragObyek yang berada dalam kolom ScriptLayout dalam sebuah array dan
taskListCount untuk menghitung jumlah DragObject dalam ScriptLayout.
taskListArray adalah method yang digunakan untuk mendaftarkan deretan
DragObject yang berada pada ScriptLayout, agar mudah diakses dibuat sebuah
array baru yang berisi DragObject. Pada Squeak akan terjadi error apabila
membaca sebuah obyek kosong ( null ), untuk mencegah hal ini diperlukan proteksi
dalam membaca obyek. Nilai variabel i merupakan proteksi yang digunakan untuk
mengetahui jumlah obyek pada ScriptLayout.
taskList := Array new: 30.
i := ((self scriptLayout submorphs at:1) submorphs
size) -1.
i timesRepeat: [
label := (self scriptLayout submorphs at:1)
submorphs at: j.
label class = DragObject
ifTrue: [
taskList at: j put: ( (self
scriptLayout submorphs at:1) submorphs at: j).
].
j := j+1.
].
Pada kolom perulangan, akan dilakukan perulangan sebanyak nilai variabel i.
Jika didapat bahwa obyek yang dimaksud adalah DragObject, maka obyek ini akan

27
dimasukkan dalam array taskList. Sedangkan method taskListCount digunakan
untuk menghitung jumlah DragObject yang berada pada ScriptLayout.
Dibutuhkan sebuah tombol untuk menjalankan animasi dan sebuah tombol
lain untuk mengunduh script ke mikrokontroler. Untuk menjalankan animasi akan
dibuat tombol “StartButton”. Sedangkan untuk mengunduh stringcode ke dalam
Arduino dibuat tombol “Download Button”.
Agar obyek StartButton dapat diklik, ditambahkan method startClicked,
method ini digunakan untuk mengecek apakah tombol StartButton sedang diklik
atau tidak. Jika diklik maka akan menjalankan method doAnimation. Method
doAnimation adalah method utama yang digunakan untuk menampilkan animasi
pada layar komputer. Method ini akan membaca setiap array obyek dalam
arrayTaskList kemudian dibandingkan satu-persatu berdasarkan labelnya dan
dijalankan dengan method doAnimationFor: motorObject taskNumber: myNumber
. motorObject adalah motor yang akan diaktifkan sebagai motor aktif dan
myNumber adalah pointer yang menunjuk ke arrayTaskList.
doAnimation
"* Menjalankan animasi motor sesuai taskList yang didapatkan"
| i motor motorObject |
"# Yang dipakai adalah obyek Avrobject ke-2"
myAvrobject := Avrobject allInstances at: 2.
taskList := self sorting.
i := self sorting size.
motor := 'Motor 1'.
taskString := String new.
taskStringIf := String new.
taskStringFor := String new.
taskListIf := Array new: 30.
taskListFor := Array new: 30.
myNumberIf := 0.
myNumberFor := 0.
flagMode := '1'.
1 to: i do: [:myNumber |
boxValue := ((taskList at: myNumber) textBox
contents) asString asInteger.
((taskList at: myNumber) label contents)='X'

28
ifTrue:[
valueOfX := boxValue.
“flagMode = „1‟ mode biasa, „e‟ mode
percabangan, „f‟ mode perulangan”
flagMode = '1'
ifTrue:[
“Mendaftarkan dalam stringcode yang akan dikirim”
taskString := (taskString, valueOfX, 'x').
].
flagMode = 'e'
ifTrue:[
taskStringIf :=(taskStringIf,valueOfX, 'x').
taskListIf at: myNumberIf put: (taskList at:
myNumber).
myNumberIf := (myNumberIf + 1).
].
flagMode = 'f'
ifTrue:[
taskStringFor:=(taskStringFor,valueOfX,'x').
taskListFor at: myNumberFor put: (taskList
at: myNumber).
myNumberFor := (myNumberFor + 1).
].
].
((taskList at: myNumber) label contents) = 'Motor 1'
ifTrue:[ “Jika didapati motor aktif adalah Motor 1”
flagMode = '1'
ifTrue:[
motor := 'Motor 1'.
taskString := (taskString, 'm').
].
flagMode = 'e'
ifTrue:[
taskStringIf := (taskStringIf, 'm').
taskListIf at: myNumberIf put: (taskList
at: myNumber).
myNumberIf := (myNumberIf + 1).

29
].
flagMode = 'f'
ifTrue:[
taskStringFor := (taskStringFor, 'm').
taskListFor at: myNumberFor put: (taskList
at: myNumber).
myNumberFor := (myNumberFor + 1).
].
].
((taskList at: myNumber) label contents) = 'Motor 2'
ifTrue:[ “Jika didapati motor aktif adalah Motor 2”
flagMode = '1'
ifTrue:[
motor := 'Motor 2'.
taskString := (taskString, 'n').
].
flagMode = 'e'
ifTrue:[
taskStringIf := (taskStringIf, 'n').
taskListIf at: myNumberIf put: (taskList
at: myNumber).
myNumberIf := (myNumberIf + 1).
].
flagMode = 'f'
ifTrue:[
taskStringFor := (taskStringFor, 'n').
taskListFor at: myNumberFor put: (taskList
at: myNumber).
myNumberFor := (myNumberFor + 1).
].
].
motor = 'Motor 1'
ifTrue:[
motorObject := (myAvrobject animationScreen motor1).
self doAnimationFor: motorObject taskNumber: myNumber.
]

30
ifFalse: [
motorObject := (myAvrobject animationScreen motor2).
self doAnimationFor: motorObject taskNumber: myNumber.
]
].
"# Menampilkan taskString ke layar Transcript"
Transcript show: taskString; cr.
Untuk menjalankan blok perulangan, saat mendapat DragObject Close,
doAnimationFor: akan menjalankan method doFor: iTimes taskList: taskListFor
iTaskList: iTaskListFor, dimana iTimes adalah jumlah perulangan yang akan
dilakukan, taskListFor adalah blok taskList dalam perulangan, iTaskListFor adalah
jumlah DragObject dalam blok perulangan.
Untuk menjalankan blok percabangan, saat mendapat DragObject Close,
doAnimationFor: akan menjalankan method doIf: aNumber1 sameTo: aNumber2,
dimana aNumber1 adalah nilai variabel X yang akan dibandingkan dengan
aNumber2 yang adalah nilai percabangan. Jika kedua nilai ini sama maka animasi
dalam blok percabangan akan dilakukan, kalau tidak sama tidak akan dijalankan.
Sambil menjalankan animasi, method ini juga mendaftarkan dalam taskString
sebuah string yang nanti akan dikirim ke mikrokontroler. String yang dikirim ini
berisikan deretan karakter-karakter yang digunakan untuk membandingkan
perintah yang satu dengan yang lain dan angka-angka yang merupakan parameter
dari masing-masing perintah.
Untuk mengurutkan script yang ditulis agar tidak salah dalam pembacaan
script dibuat sebuah method sorting. Karena dalam membaca script pada
ScriptLayout diinginkan berdasarakan urutan dari paling atas ke paling bawah
maka method sorting ini mengatur ulang posisi taskList berdasarkan nilai posisi y.
Saat pertama kali taskList dimasukkan, taskList masih diurutkan berdasarkan yang
mana lebih dahulu ditempatkan pada ScriptLayout. Metode pengurutan yang
dipakai adalah mengurutkan dahulu nilai-nilai y yang ada dari terbesar ke yang
terkecil, kemudian membandingkan nilai y dengan taskList yang belum diurutkan.
Jika sama maka DragObject ini dimasukkan dalam taskListSorted.

31
1 to: i do: [:myNumber |
1 to: i do: [:myNumber2 |
(taskListYSorted at: myNumber) =
((taskList at: myNumber2) y )
ifTrue:[
taskListSorted at: mySortNumber put:
(taskList at: myNumber2).
mySortNumber := mySortNumber - 1.
].
].
].
3.2. Pembuatan Modul Avrobject
Untuk pembuatan modul mikrokontroler ini diperlukan beberapa alat
elektronik yaitu :
- Arduino Uno R3
- 2 buah motor stepper 28BYJ-48 5 Volt
- 2 buah driver motor stepper ULN2003
- 2 buah kabel jumper yang tersambung dengan 4 pin female.
- 2 buah kabel jumper yang tersambung dengan 2 pin female.
- 20 cm x 50 cm Acrilic untuk membuat kotak alat.
Gambar 3.7. Diagram Alir Modul Avrobject

32
Kabel koneksi USB Arduino Uno R3 disambung langsung ke port 3 pada
komputer. Kabel koneksi ini berfungsi untuk memberikan daya listrik untuk
menghidupkan Arduino serta untuk melakukan pemrograman chip mikrokontroler
yang berada dalam Arduino dan mengirimkan data ke Arduino. Kedua motor
stepper disambung langsung pada driver motor. Kemudian dari driver motor
pertama yang akan digunakan sebagai driver motor satu, disambung dengan
menggunakan kabel jumper 4 pin pada kaki 4 sampai 7 di Arduino. Untuk motor
dua digunakan juga kabel jumper 4 pin disambungkan pada kaki 8 sampai 11 di
Arduino.
Untuk menjembatani aplikasi Avrobject dengan Arduino dikirimkan
stringcode dari aplikasi ke Arduino dengan menggunakan kabel USB. Avrobject
juga bisa mengirimkan data melalui USB, tetapi data yang dikirimkan hanya
dipakai untuk membaca posisi motor secara hitungan, tidak secara nyata. Sebab
motor stepper tidak memiliki sensor yang menunjukkan posisinya dalam keadaan
nyata seperti pada servo.
3.3. Pembuatan Penjembatanan Aplikasi Avrobject dengan Modul Avrobject
Program yang akan dibuat pada mikrokontroler merupakan deretan library
baru yang berfungsi untuk menggerakkan motor satu dan motor dua sesuai dengan
perintah yang diberikan. Perintah yang diberikan berupa deretan karakter-karakter
(stringcode) dari aplikasi Avrobject, dikirimkan melalui port USB 3 yaitu
menggunakan komunikasi serial. Untuk memprogram chip mikrokontroler dalam
Arduino menggunakan program dari Arduino sendiri yaitu Arduino1.0.5-r2 dengan
menggunakan bahasa perograman C.
Program akan membaca setiap karakter satu persatu mulai dari paling depan
hingga paling belakang dari stringcode yang dikirimkan pada mikrokontroler.
Berikut adalah penjelasan dari masing-masing karakter yang diberlakukan dalam
program.
- m, adalah karakter yang menandakan perintah berikutnya diberikan untuk motor
pertama.
- n, adalah karakter yang menandakan perintah berikutnya diberikan untuk motor
kedua.
- a, adalah karakter yang menandakan perintah putar kanan atau rotateRight.
- b, adalah karakter yang menandakan perintah putar kiri atau rotateLeft.

33
- c, adalah karakter yang menandakan perintah berputar sebanyak derajat tertentu
ke arah diingikan atau turnDegrees.
- d, adalah karakter yang menandakan perintah berputar ke derajat yang
diinginkan terhadap derajat awal (derajat nol) atau turnTo.
- e, adalah karakter yang menandakan memasuki blok if atau percabangan.
- f, adalah karakter yang menandakan memasuki blok for atau perulangan.
- g, adalah karakter yang menandakan akhir dari sebuah blok percabangan atau
perulangan.
- h, adalah karakter yang menandakan perintah delay sejumlah parameter yang
diberikan (dalam satuan detik)
- “ – “ , adalah karakter penanda yang digunakan dalam turnDegrees untuk
menentukan arah putarannya searah jarum jam. Jika tidak ada tanda “ – “ maka
arah putarannya adalah berlawanan dengan jarum jam.
- Angka 0 – 9, merupakan parameter dari tiap-tiap perintah. Jika ditemukan
deretan angka maka akan dibaca angka tersebut berupa puluhan, ratuasan atau
ribuan.
Pada fungsi coClockwise() memberikan output pada kaki-kaki Arduino
yang berubah sesuai urutan binarinya. Switch case mengatur bit yang ingin diubah
sesuai dengan perubahan variabel intMotor dan wiseMode mengatur variabel
intMotor berubah dari kecil ke besar atau sebaliknya untuk menentukan arah
putaran motor. Pemberian nilai HIGH pada sebuah kaki output pada Arduino
memberi tegangan 5 volt pada kaki itu, yaitu pada driver steppper motor.
Sedangkan pemberian nilai LOW pada kaki output memberikan nilai tegangan
ground. Sesuai dengan perubahan itu maka driver motor stepper memberi output
juga pada motor stepper sehingga motor stepper bergerak.
Tetapi setelah dilakukan percobaan error didapatkan bug pada aplikasi jika
menjalankan bit motor pertama kali dari bit 0000, akan ada kehilangan beberapa
derajat dari perintah yang seharusnya dikerjakan. Didapatkan bahwa hal ini
dikarenakan posisi awal motor 0o adalah berada pada bit 0011. Oleh sebab itu
variabel intMotor ditetapkan saat awal memiliki nilai 6, agar pada saat fungsi
coClockwise() dijalankan ia akan menjalankan case 6 terlebih dahulu yaitu bit
0011.

34
Berikut tabel perubahan binari untuk membuat motor stepper bergerak searah
jarum jam dan berlawanan arah jarum jam.
Tabel 3.1. Perubahan binari kaki-kaki output agar motor bergerak
sesuai arah jarum jam atau berlawanan arah jarum jam.
Searah Jarum Jam Berlawanan Arah Jarum Jam
A B C D A B C D
1 0 0 0 0 0 0 1
1 1 0 0 0 0 1 1
0 1 0 0 0 0 1 0
0 1 1 0 0 1 1 0
0 0 1 0 0 1 0 0
0 0 1 1 1 1 0 0
0 0 0 1 1 0 0 0
1 0 0 1 1 0 0 1
3.4. Menghubungkan Aplikasi Avrobject dengan Modul Avrobject
DownloadButton adalah obyek terakhir yang dibutuhkan untuk pengunduhan
stringcode yang telah didapat dari doAnimation pada saat animasi dijalankan.
DownloadButton berfungsi agar apabila ia diklik akan ditampilkan jalannya
animasi pada layar dan mengirim secara langsung stringcode pada animasi tadi.
Maka akan tampak bahwa animasi motor pada layar komputer bergerak
tersinkronisasi dengan motor asli yang digerakkan oleh mikrokontroler.
Ditambahkan method startCliked dan download agar obyek ini dapat
mendeteksi adanya penekanan tombol mouse pada dirinya. Method download
melakukan pengecekan port pada komputer dan mengirimkan data aString melalui
port tersebut. Disini menggunakan port 3 karena USB port yang dipakai untuk
mengirimkan data adalah USB port 3. Jika menggantinya dengan port lain maka
pengiriman data juga harus dilakukan melalui port yang digantikan.

35
download
"* Mengunduh Stringcode yang dihasilkan ke dalam Arduino"
| avrobjectNumber aString |
avrobjectNumber := 2.
aString := nil.
"# aString berisikan Stringcode dari taskString di class
StartButton"
aString := (StartButton allInstances at:
avrobjectNumber) taskString.
port := SerialPort new.
"# Mendeklarasikan atau membuka port USB, yang dipakai
adalah port USB 3"
port := port openPort: 3.
port ifNil: [ Transcript show: 'Something went wrong
with the open - ' ; show: (port); cr.
"# Mengeluarkan error jika port USB 3 kosong"
ifNotNil: [
"# Mengirimkan Stringcode sehingga motor asli bergerak"
port nextPutAll: aString.
port nextPutAll: String cr.
].
port close.
"# Menjalankan animasi pada animationScreen"
(StartButton allInstances at: 2) doAnimation.
Setelah semua obyek telah dibuat method dan class-nya, maka bagian terakhir
adalah menggabungkan semuanya. Yang belum digabungkan adalah obyek
StartButton dan DownloadButton, oleh karena itu pada method draw class
Avrobject ditambahkan pendeklarasian kedua obyek ini.
startButton := StartButton new.
downloadButton := DownloadButton new.
startButton position: 550@350.
downloadButton position: 680@350.
mainMenu addMorph: taskMenu;
addMorph: startButton;

36
addMorph: downloadButton.
Semua obyek telah digabungkan dalam class Avrobject. Kemudian cara untuk
membuat obyek baru dari class Avrobject ini dan kemudian ditampilkan di World
adalah dengan menggunakan tool Workspace dengan menjalankan perintah seperti
pada gambar 3.8.
Gambar 3.8. Membuat obyek Avrobject baru dan membukanya di World.
Gambar 3.9. Tampilan Avrobject di World.
Maka secara singkat semua yang telah dibuat mengenai Aplikasi Avrobject
ini akan tampak seperti Hierarchy Relationship Diagram pada Gambar 3.10, Class
Diagram pada Gambar 3.11 dan State Diagram pada Gambar 3.12.

37
Gambar 3.10. Hierarchy Relationship Diagram Avrobejct
Gambar 3.11. Class Diagram Avrobejct

38
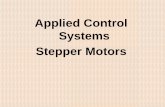
Gambar 3.12. State Diagram Avrobject

39
3.5. Pembelajaran Mikrokontroler pada Siswa-Siswi SMK
Dilakukan proses pembelajaran kepada tujuh orang siswa-siswi SMK Negeri
2 Salatiga kelas XII jurusan Elektronika mengenai pemrograman mikrokontroler.
Pembelajaran pemrograman yang diberikan ada dua metode, yaitu metode Basic
dan metode Flowcode. Metode Basic merupakan pembelajaran mikrokontroler
menggunakan aplikasi Arduino 1.0.5-r2 untuk memprogram mikrokontroler supaya
bisa menggerakkan motor putar kiri dan putar kanan. Metode Flowcode
menggunakan aplikasi Avrobject untuk memprogram mikrokontroler menggunakan
DragObject yang tersedia.
Proses pembelajaran dibagi menjadi dua tahap, tahap pertama yaitu selama
tiga puluh menit siswa mendapat pengajaran bagaimana memprogram Arduino
untuk menggerakkan motor berputar searah jarum jam dan berlawanan arah jarum
jam. Setelah itu selama tiga puluh menit juga dilakukan pembelajaran
pemrograman mikrokontroler menggerakkan motor sesuai fungsi yang ada pada
aplikasi Avrobject.
Siswa juga melakukan sesi tanya jawab dan pada bagian akhir memberi
tanggapan mengenai pembelajaran yang dilakukan dalam sebuah kuisioner.
Kuisioner yang diberikan merupakan sebuah pertanyaan yang siswa-siswi hanya
menjawabnya dengan pernyataan ya atau tidak. Dalam tabel berikut adalah sepuluh
pertanyaan yang diberikan.
Tabel 3.2. Pertanyaan Kuisioner dari Hasil Pembelajaran Mikrokontroler
No. Pertanyaan Kuisioner
1. Apakah anda senang belajar pelajaran tentang komputer ?
2. Apakah anda sudah pernah belajar bahasa pemrograman sebelumnya ?
3. Apakah aplikasi Avrobject terlihat menarik ?
4. Apakah modul Arduino dan motor terlihat menarik ?
5. Setelah melihat dan mencoba kedua metode belajar pemrograman Mikrokontroler
dengan metode Basic dan Flowcode, apakah metode Flowcode dirasakan lebih
mudah ?
6. Apakah dengan pembelajaran menggunakan metode Flowcode bisa membantu
siswa tingkat SMA dan SMK dalam mempelajari pemrograman Mikrokontroler ?
7. Apakah belajar pemrograman Mikrokontroler dengan metode Basic terkesan
susah ?
8. Apakah anda tertarik ketika mendengar hendak belajar pemrograman
Mikrokontroler dengan metode Flowcode ?
9. Apakah ada muncul ketertarikan untuk belajar lebih jauh memprogram
Mikrokontroler dengan metode Flowcode ?
10. Jika ada ekstra kulikuler mengenai Mikrokontroler di sekolah anda dengan
metode Flowcode, apakah anda tertarik untuk ikut ?

40