Penggerak Robot - relifline.files.wordpress.com · Motor Stepper • Biasa dipakai pada Floppy Disk...
34
Penggerak Robot 2275120 ROBOTIKA-Materi04 Nuryono S.W. – UAD
-
Upload
duongthien -
Category
Documents
-
view
226 -
download
0
Transcript of Penggerak Robot - relifline.files.wordpress.com · Motor Stepper • Biasa dipakai pada Floppy Disk...
Penggerak Robot
2275120 ROBOTIKA-Materi04
Nuryono S.W. – UAD
Pendahuluan
Actuator atau penggerak merupakan otot bagi robot
• Tipe penggerak yang umum digunakan:• Motor listrik(Electric Motors)
2275120 ROBOTIKA-Materi04
• Motor listrik(Electric Motors)• Aktuator Hidrolis• Aktuator Pneumatis
Karakteristik Aktuator
Dalam pemilihan suatu aktuator yang sesuai untuk suatu robot selalu terkait dengan
• Berat• Power to weight Ratio
2275120 ROBOTIKA-Materi04
• Power to weight Ratio• Operating Pressure• Stiffness• Compliance• Use of Reduction Gear
Electric
• Motor DC• Motor Stepper• Motor Induksi• Motor Servo
2275120 ROBOTIKA-Materi04
• Motor Servo• Solenoid
Motor DC
• Paling umum & Paling lama penggunaannya di Industri
• Terdiri dari Rotor dan Stator• Bisa memiliki stator permanent magnet
2275120 ROBOTIKA-Materi04
• Bisa memiliki stator permanent magnet maupun stator kumparan
• Kecepatan diatur dengan Tegangan• Torsi diatur dengan Arus
Motor DC
• Permanent magnet DC Motor
2275120 ROBOTIKA-Materi04
Motor DC
• Brushless DC Motor
2275120 ROBOTIKA-Materi04
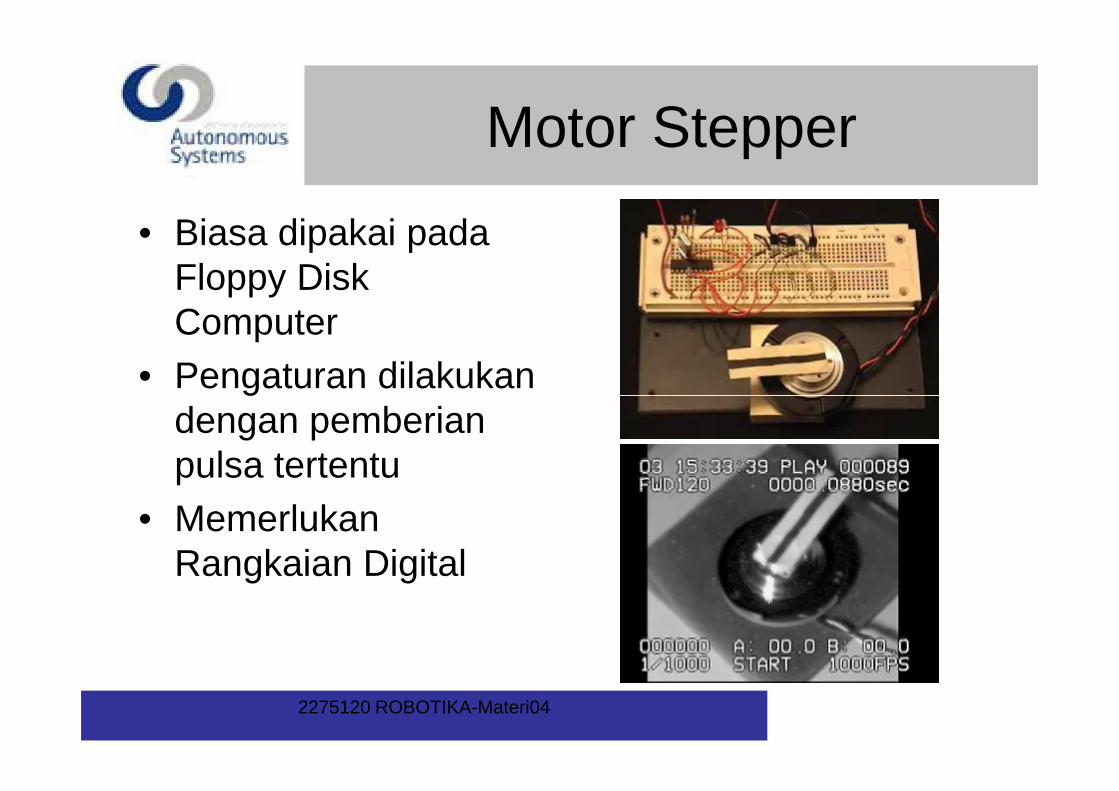
Motor Stepper
• Biasa dipakai pada Floppy Disk Computer
• Pengaturan dilakukan
2275120 ROBOTIKA-Materi04
• Pengaturan dilakukan dengan pemberian pulsa tertentu
• Memerlukan Rangkaian Digital
Motor Induksi
• AC Induction Motor
2275120 ROBOTIKA-Materi04
Servo Motor
• Servo Motor adalah suatu sistem yang terdiri dari motor (bisa berupa Motor DC, AC, ataupun stepper) yang memiliki konfigurasi pengendalian Close loop
2275120 ROBOTIKA-Materi04
konfigurasi pengendalian Close loop menggunakan elemen feedback, sehingga dapat diatur untuk berputar pada kecepatan dan torsi tertentu, serta bergerak menuju posisi atau sudut tertentu
Servo Motor
• Bisa sangat variatif ketelitian dan harganya
2275120 ROBOTIKA-Materi04
Reduction Gear
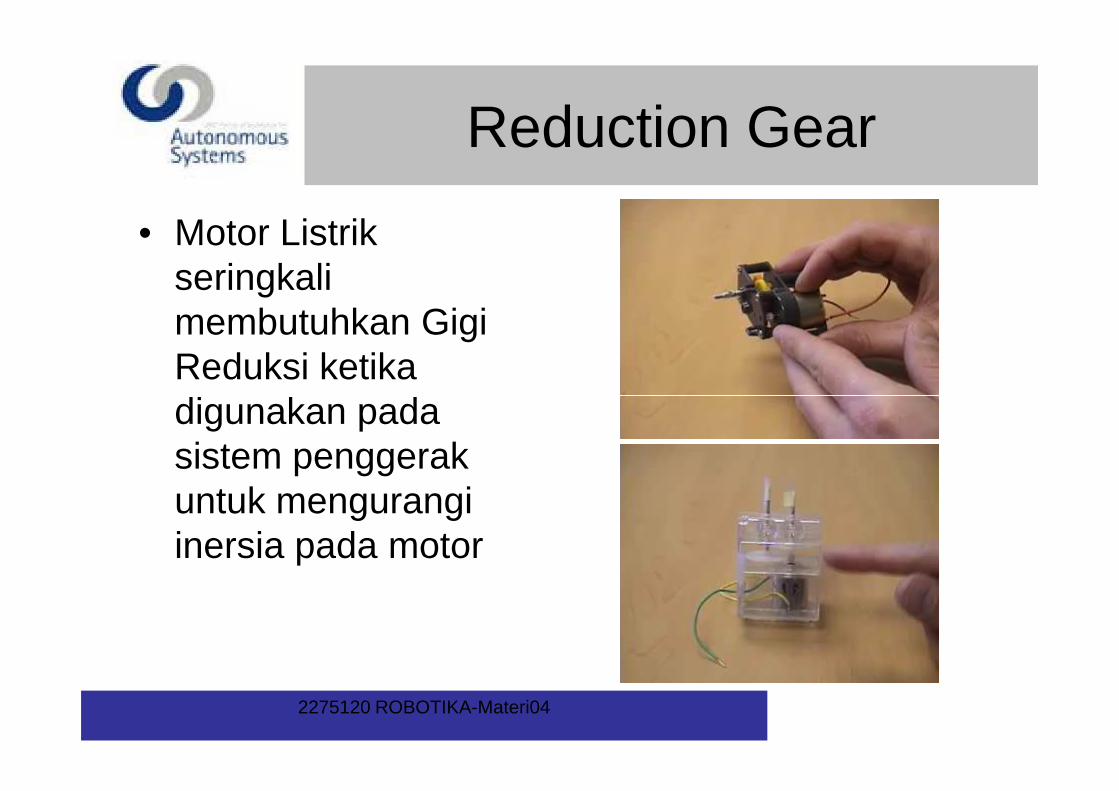
• Motor Listrik seringkali membutuhkan Gigi Reduksi ketika digunakan pada
2275120 ROBOTIKA-Materi04
digunakan pada sistem penggerak untuk mengurangi inersia pada motor
Hidrolis
• Penggerak ini menggunakan medium zat cair dan menggunakan pompa hidrolis sebagai sumber energi dan inverse pump atau silinder aktuator sebagai penyalur daya, serta menggunakan sejumlah katup untuk pengaturannya
2275120 ROBOTIKA-Materi04
pengaturannya• Penggerak ini memiliki power to weight ratio
yang tinggi• Kompatibilitas dengan Control electronic dan
Microprocessor• Umum digunakan pada produksi automotif
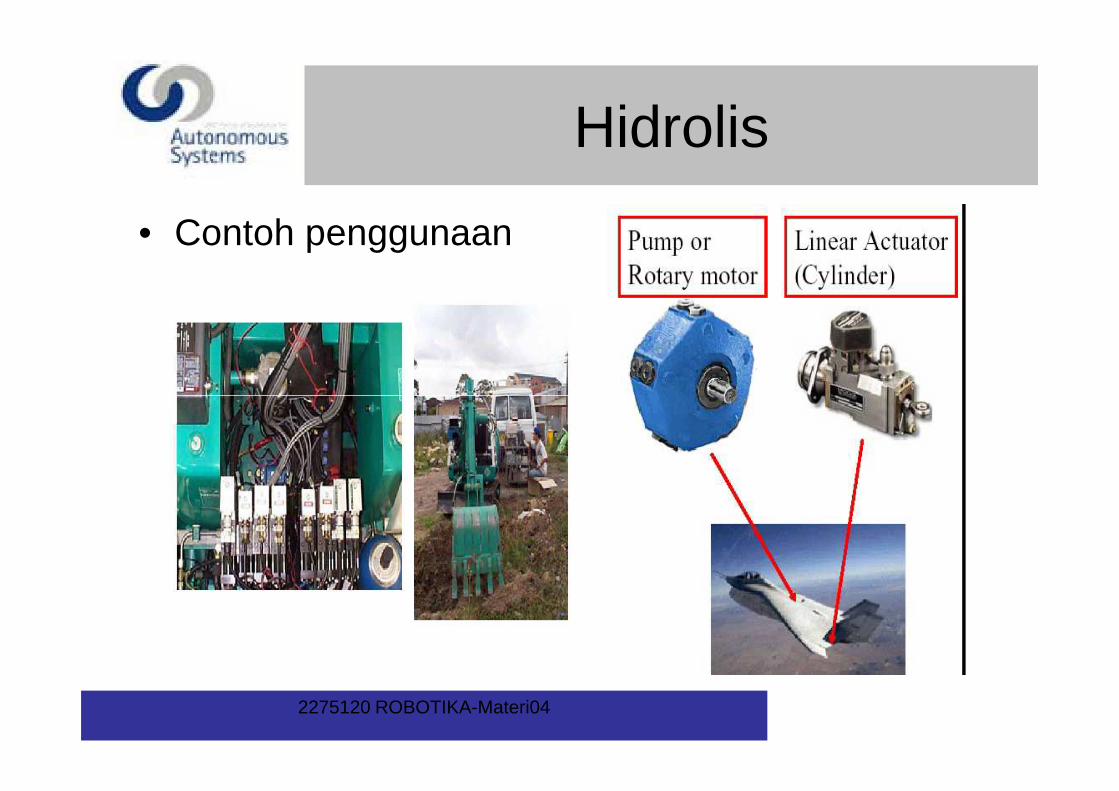
Hidrolis
• Contoh penggunaan
2275120 ROBOTIKA-Materi04
Hidrolis
Secara lebih detail tersusun atas:• Silinder Hidrolis Linear atau rotasional dan Ram• Pompa Hidrolis• Electric Motor• Sistem Pendingin
2275120 ROBOTIKA-Materi04
• Sistem Pendingin• Reservoir• Servovalves• Safety Check Valves• Connecting Hose• Sensory sistem
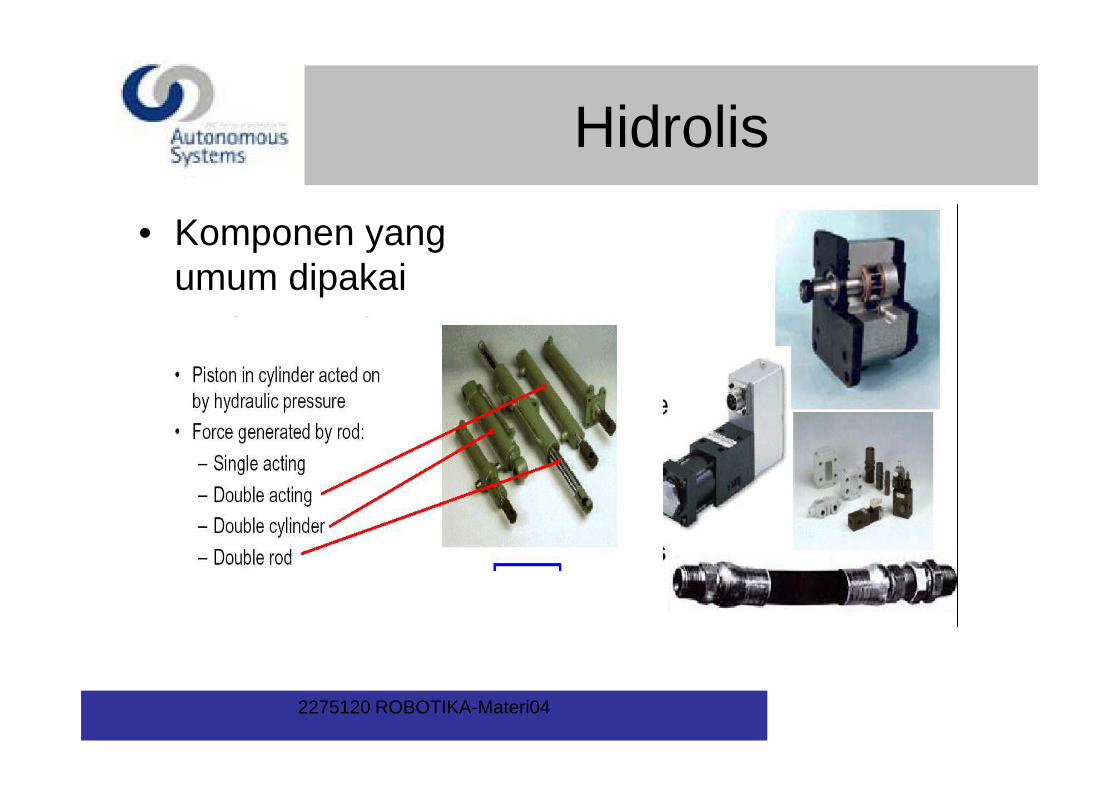
Hidrolis
• Komponen yang umum dipakai
2275120 ROBOTIKA-Materi04
Pneumatik
• Aktuator Pneumatik secara prinsip sama dengan aktuator hidrolis. Suatu sumber udara bertekanan digunakan untuk menggerakkan silinder linier ataupun
2275120 ROBOTIKA-Materi04
menggerakkan silinder linier ataupun rotari, dikendalikan oleh solenoid valves manual maupun electric
Pneumatik
• Contoh Sistem Pneumatik
2275120 ROBOTIKA-Materi04
Penggerak Elektris
• Dapat disesuaikan untuk semua ukuran Robot
• Kendali lebih mudah,baik utk Robot yang Presisi
2275120 ROBOTIKA-Materi04
Presisi• Relatif bersih• Reliable, low maintenance
Penggerak Elektris
• Stiffnessnya kurang• Memerlukan Gigi reduksi• Motor memerlukan piranti pengereman
2275120 ROBOTIKA-Materi04
Penggerak Hidrolis
• Cocok untuk beban berat• Cocok Untuk Robot yang besar• Power/Weight Rationya besar• Tidak memerlukan gigi reduksi
2275120 ROBOTIKA-Materi04
• Tidak memerlukan gigi reduksi• Dapat beroperasi pada berbagai
kecepatan• Dapat dibiarkan pada posisi tertentu tanpa
timbul kerusakan
Penggerak Hidrolis
• Kebocoran, tidak cocok utk ruangan• Memerlukan pompa, reservoir, pipa• Mahal& berisik• Terpegaruh oleh suhu
2275120 ROBOTIKA-Materi04
• Terpegaruh oleh suhu• Peka terhadap kotoran yg masuk
Penggerak Pneumatis
• Komponen mudah diperoleh• Realibilitas Komponen tinggi• Tak ada lelehan, tak ada percikan• Murah&Sederhana
2275120 ROBOTIKA-Materi04
• Murah&Sederhana• Tekanan yg lebih rendah dibanding sistem
hidrolis• Cocok utk aplikasi on-off, pick&place
Penggerak Pneumatis
• Berisik• Memerlukan Filter, tekanan tertentu• Linearitas kurang• Berubah bentuk pada beban konstan
2275120 ROBOTIKA-Materi04
• Berubah bentuk pada beban konstan• Stiffness kurang, respon kurang akurat• Power/weight ratio rendah
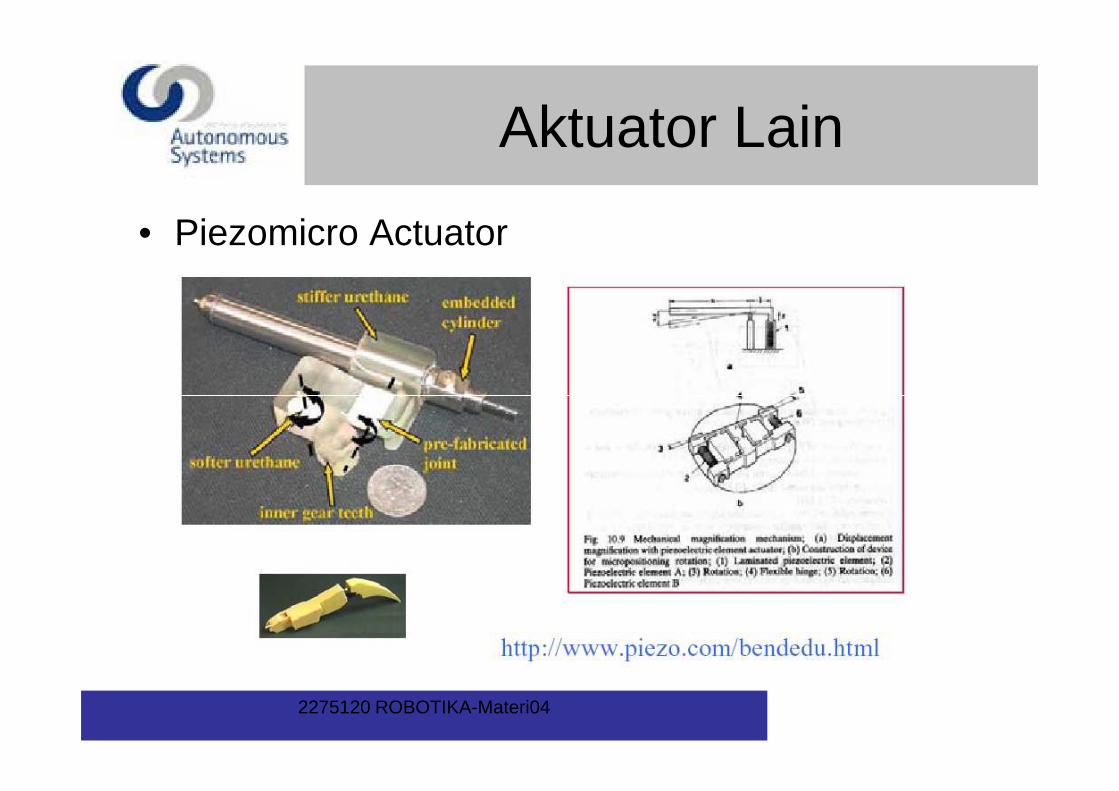
Aktuator Lain
• Piezomicro Actuator
2275120 ROBOTIKA-Materi04
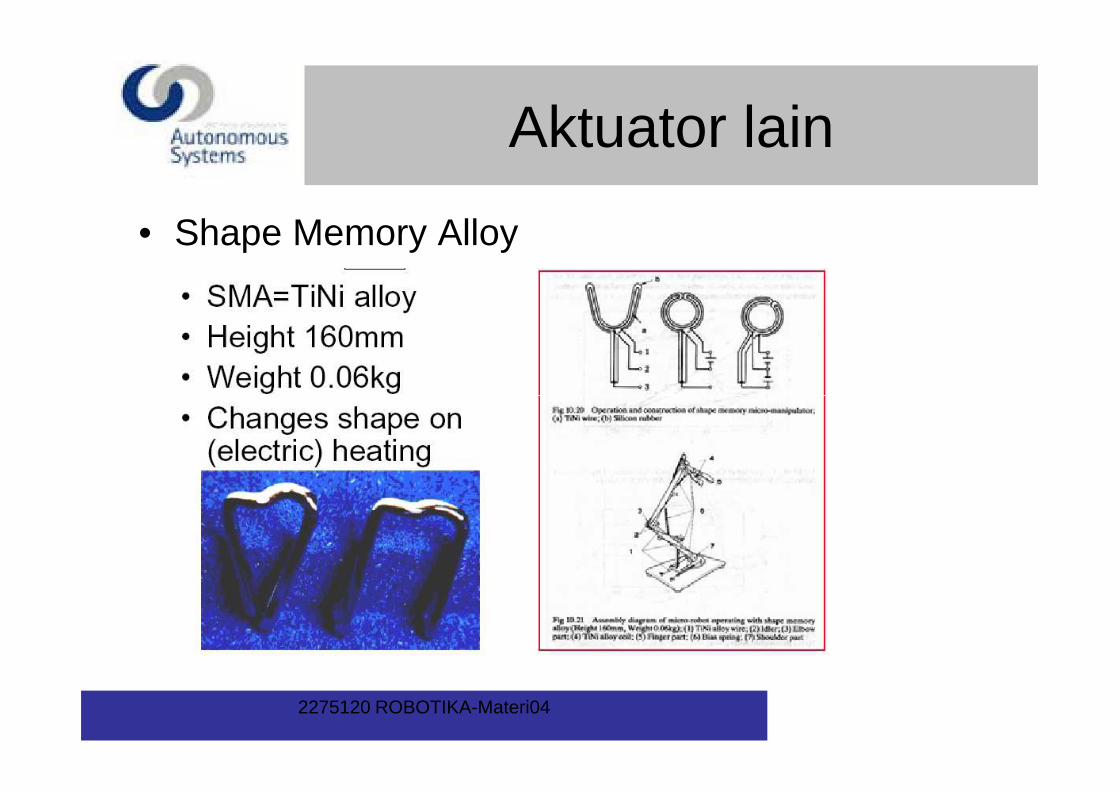
Aktuator lain
• Shape Memory Alloy
2275120 ROBOTIKA-Materi04
• Penggerak Elektris• DC servo motor berbasis ATmega8 atau
STM32F103C8T6 • Sensor yang digunakan potesiometer,
Dynamixel
2275120 ROBOTIKA-Materi04
• Sensor yang digunakan potesiometer, atau magnetic encoder dan sensor suhu
• Menggunakan sinyal TTL atau RS485
Dynamixel
2275120 ROBOTIKA-Materi04
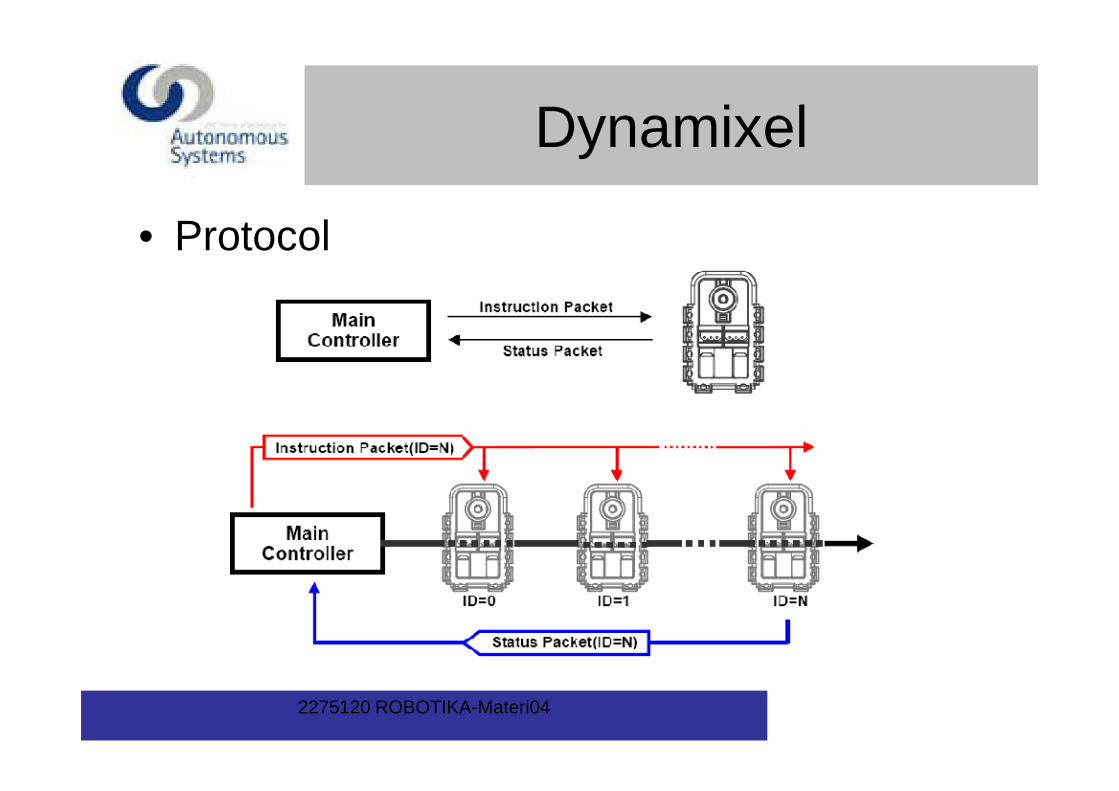
Dynamixel
• Protocol
2275120 ROBOTIKA-Materi04

Dynamixel
• Tersedia dalam berbagai pilihan torsi
2275120 ROBOTIKA-Materi04
Sensor
• Penggunaan potensiometer
2275120 ROBOTIKA-Materi04
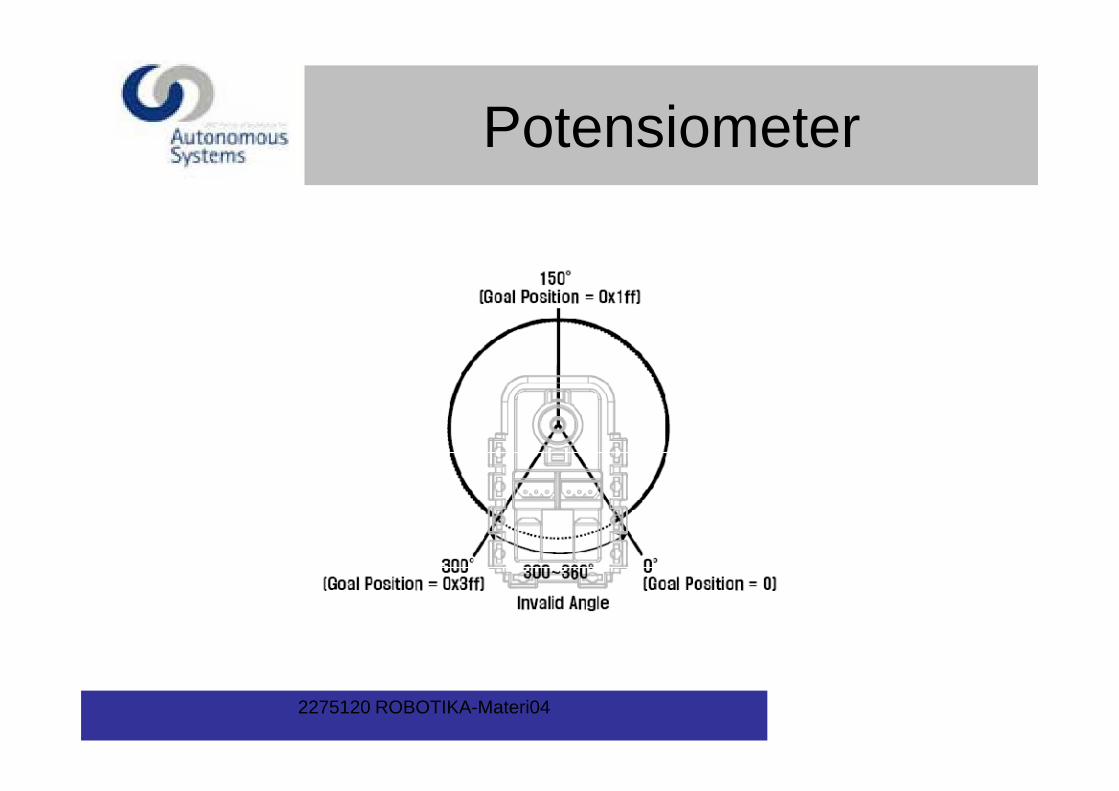
Potensiometer
2275120 ROBOTIKA-Materi04
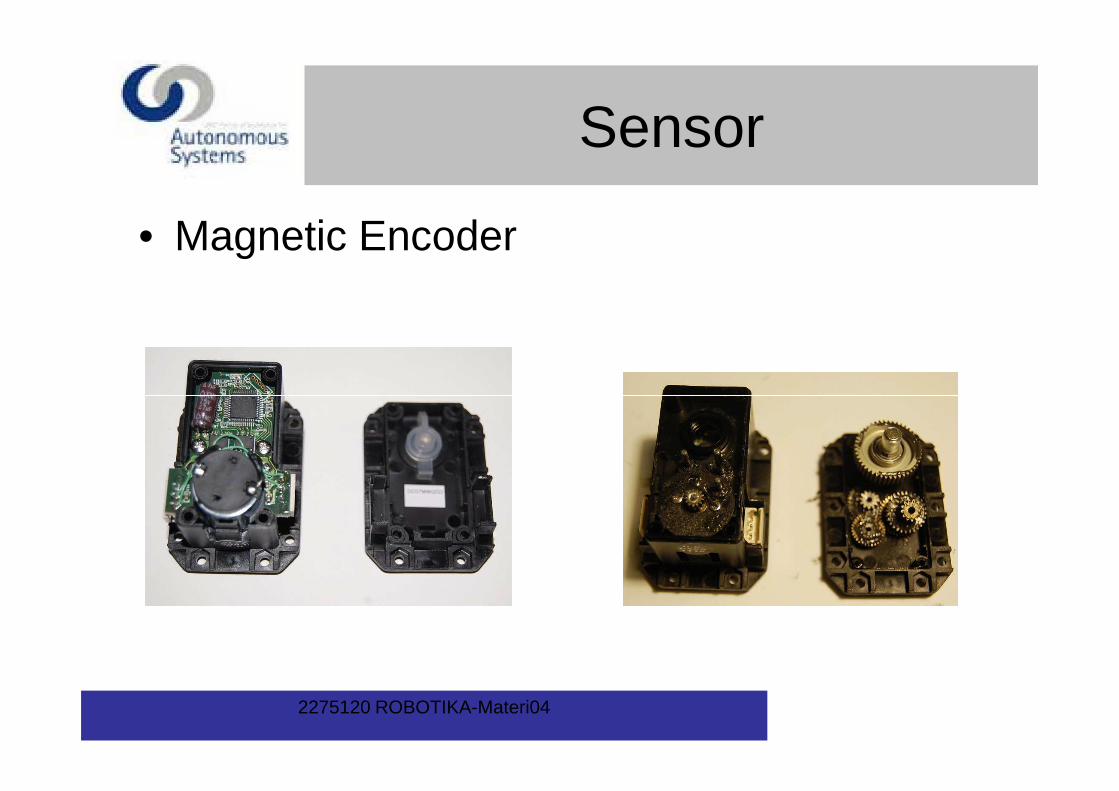
Sensor
• Magnetic Encoder
2275120 ROBOTIKA-Materi04
Referensi
• Yoram Koren,”Robotics for Engineers”, McGrawHill International halaman 51-81
• Saeed B Niku, Introduct. To Robotics Analysis, Systems, Appl.”, Prentice Hall
2275120 ROBOTIKA-Materi04
Analysis, Systems, Appl.”, Prentice Hall halaman 173-218
• http://www.engr.colostate.edu/~dga/video_demos/robotics/index.html