BAB II TINJAUAN PUSTAKA 2.1 Internet of Things
9
9 BAB II TINJAUAN PUSTAKA 2.1 Internet of Things Internet of thing (IoT) merupakan suatu konsep yang bertujuan untuk memperluas manfaat dari konektivitas internet yang tersambung secara terus menerus [14]. Jadi IoT secara simple nya merupakan benda-benda yang dapat kita integrasikan dengan konektivitas internet sehingga kita dapat mengontrol dan me-monitoring dengan bantuan perangkat keras berupa telepon pintar atau PC atau perangkat digital lainnya yang dapat terhubung dengan koneksi internet [15]. Dengan adanya teknologi IoT ini kita data mengontrol suatu smart sistem di manapun walpaun jaraknya sangat jauh sekalipun. Contoh teknologi yang memanfaatkan sistem IoT ini misalnya smart home, dimana pada sistem smart home yang membuat rumah kita menjadi pintar kita dapat menghidupkan dan mematikan dari mulai lampu, ac, mengunci pintu hanya dari telepon pintar kita dari jarak yang jauh hanya dengan mengandalkan koneksi internet, kemudian pemantauan kamera cctv yang di pasang di perempatan lampu lalu lintas dan gedung kita dapat memantaunya dengan telepon pintar kita pada jarak yang jauh [15]. 2.2 Protokol MAVLink MAVLink atau Micro Air Vehicle Link adalah protokol untuk berkomunikasi dengan perangkat kendaraan tak berawak atau Unmanned Aerial Vehicle(UAV) [9]. Protokol ini didesain sebagai paket data yang mempunyai aturan tertentu. MAVLink dirilis pertama kali tahun 2009 oleh Lorenz Meier. Aplikasi yang sering dipakai adalah komunikasi antara Ground Control Station dengan UAV [16]. Tujuan dari diciptakannya protokol ini adalah adanya standarisasi protokol untuk komunikasi antara GCS dan UAV sehingga pengembang Flight Controller dapat mengikuti protokol universal tersebut tanpa mengembangkan sendiri protokol mereka yang kemudian dapat memberatkan pengembang GCS dalam menentukan pembacaan data [16].
Transcript of BAB II TINJAUAN PUSTAKA 2.1 Internet of Things

9
BAB II TINJAUAN PUSTAKA
2.1 Internet of Things
Internet of thing (IoT) merupakan suatu konsep yang bertujuan untuk memperluas
manfaat dari konektivitas internet yang tersambung secara terus menerus [14].
Jadi IoT secara simple nya merupakan benda-benda yang dapat kita integrasikan
dengan konektivitas internet sehingga kita dapat mengontrol dan me-monitoring
dengan bantuan perangkat keras berupa telepon pintar atau PC atau perangkat
digital lainnya yang dapat terhubung dengan koneksi internet [15]. Dengan adanya
teknologi IoT ini kita data mengontrol suatu smart sistem di manapun walpaun
jaraknya sangat jauh sekalipun. Contoh teknologi yang memanfaatkan sistem IoT
ini misalnya smart home, dimana pada sistem smart home yang membuat rumah
kita menjadi pintar kita dapat menghidupkan dan mematikan dari mulai lampu, ac,
mengunci pintu hanya dari telepon pintar kita dari jarak yang jauh hanya dengan
mengandalkan koneksi internet, kemudian pemantauan kamera cctv yang di
pasang di perempatan lampu lalu lintas dan gedung kita dapat memantaunya
dengan telepon pintar kita pada jarak yang jauh [15].
2.2 Protokol MAVLink
MAVLink atau Micro Air Vehicle Link adalah protokol untuk berkomunikasi
dengan perangkat kendaraan tak berawak atau Unmanned Aerial Vehicle(UAV)
[9]. Protokol ini didesain sebagai paket data yang mempunyai aturan tertentu.
MAVLink dirilis pertama kali tahun 2009 oleh Lorenz Meier. Aplikasi yang
sering dipakai adalah komunikasi antara Ground Control Station dengan UAV
[16]. Tujuan dari diciptakannya protokol ini adalah adanya standarisasi protokol
untuk komunikasi antara GCS dan UAV sehingga pengembang Flight Controller
dapat mengikuti protokol universal tersebut tanpa mengembangkan sendiri
protokol mereka yang kemudian dapat memberatkan pengembang GCS dalam
menentukan pembacaan data [16].

10
Gambar 2.1 Struktur Data MAVLink.
Paket Mavlink pada dasarnya merupakan sebuah kumpulan data yang dikirimkan
dalam satu wadah yang dimana wadah tersebut memiliki nomor identitas sesuai
dengan data informasi apa yang dibawanya. Pada proses pemrogramannya
terdapat beberapa bahasa program yang dapat digunakan diantaranya yaitu bahasa
C, C++, Phyton, Java, JavaScript [12].
2.3 Flight Controller
Flight Controller (FC) bisa berupa perpaduan banyak sekali komponen & sensor
yg berfungsi menjadi pengontrol utama dalam UAV, pengontrol penerbangan
ramble mempunyai sensor pengatur pada bingkai Gyro & Accelerometer.
Beberapa FC terkini memang sudah membahas sensor berat (indikator, kompas
(magnetometer) & GPS. Kemampuan sensor indikator buat menjaga ketinggian
multirotor dalam ketinggian eksklusif dalam waktu itu magnetometer & GPS
dipakai buat mempertahankan pengenalan, autopilot & sorotan yg gagal [17].
2.3.1 Pixhawk PX4 Autopilot PIX 2.4.8
Pixhawk Px4 Autopilot PIX 2.4.8 merupakan flight controller yang sering
digunakan dalam pembuatan UAV, karena harganya yang masih terjangkau dan
spesifikasi yang cukup mumpuni. Manfaat sistem Pixhawk termasuk
multithreading terintegrasi, lingkungan pemrograman mirip Unix/Linux, fungsi
autopilot yang benar-benar baru seperti skrip misi dan perilaku penerbangan yang
canggih, dan lapisan driver PX4 khusus yang memastikan pengaturan waktu yang
ketat di semua proses. Kemampuan canggih ini memastikan bahwa tidak ada
batasan pada kendaraan otonom [17]. Pixhawk memungkinkan operator APM dan
PX4 yang ada untuk bertransisi dengan mulus ke sistem ini dan menurunkan
hambatan dapat berkomunikasi bagi pengguna baru untuk berpartisipasi dalam
dunia kendaraan otonom yang menarik. Pixhawk versi ini menggunakan chip
STM32F427. Bug perangkat keras hadir dalam chip ini yang membatasi memori
11
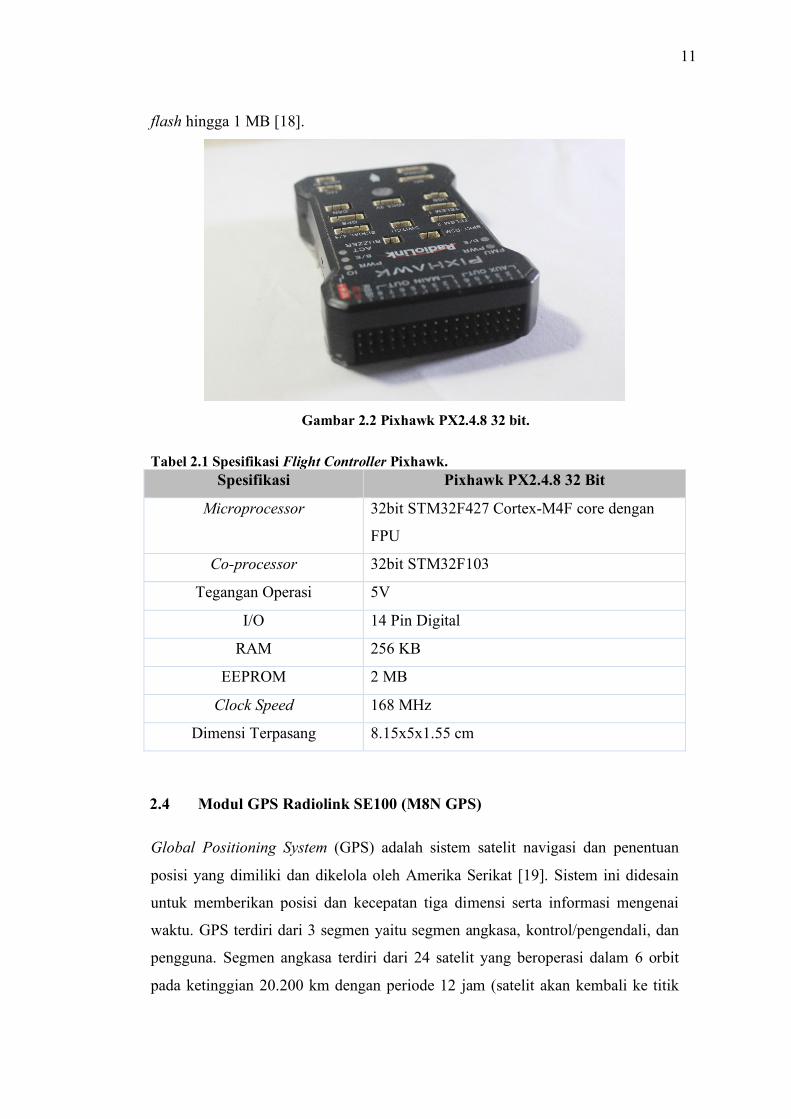
flash hingga 1 MB [18].
Gambar 2.2 Pixhawk PX2.4.8 32 bit.
Tabel 2.1 Spesifikasi Flight Controller Pixhawk. Spesifikasi Pixhawk PX2.4.8 32 Bit
Microprocessor 32bit STM32F427 Cortex-M4F core dengan
FPU
Co-processor 32bit STM32F103
Tegangan Operasi 5V
I/O 14 Pin Digital
RAM 256 KB
EEPROM 2 MB
Clock Speed 168 MHz
Dimensi Terpasang 8.15x5x1.55 cm
2.4 Modul GPS Radiolink SE100 (M8N GPS)
Global Positioning System (GPS) adalah sistem satelit navigasi dan penentuan
posisi yang dimiliki dan dikelola oleh Amerika Serikat [19]. Sistem ini didesain
untuk memberikan posisi dan kecepatan tiga dimensi serta informasi mengenai
waktu. GPS terdiri dari 3 segmen yaitu segmen angkasa, kontrol/pengendali, dan
pengguna. Segmen angkasa terdiri dari 24 satelit yang beroperasi dalam 6 orbit
pada ketinggian 20.200 km dengan periode 12 jam (satelit akan kembali ke titik
12
yang sama dalam 12 jam). Segmen Kontrol/Pengendali terdapat pusat pengendali
utama yang terdapat di Colorado Springs, dan 5 stasiun pemantau lainnya dan 3
antena yang tersebar di bumi ini. Pada sisi pengguna dibutuhkan penerima GPS
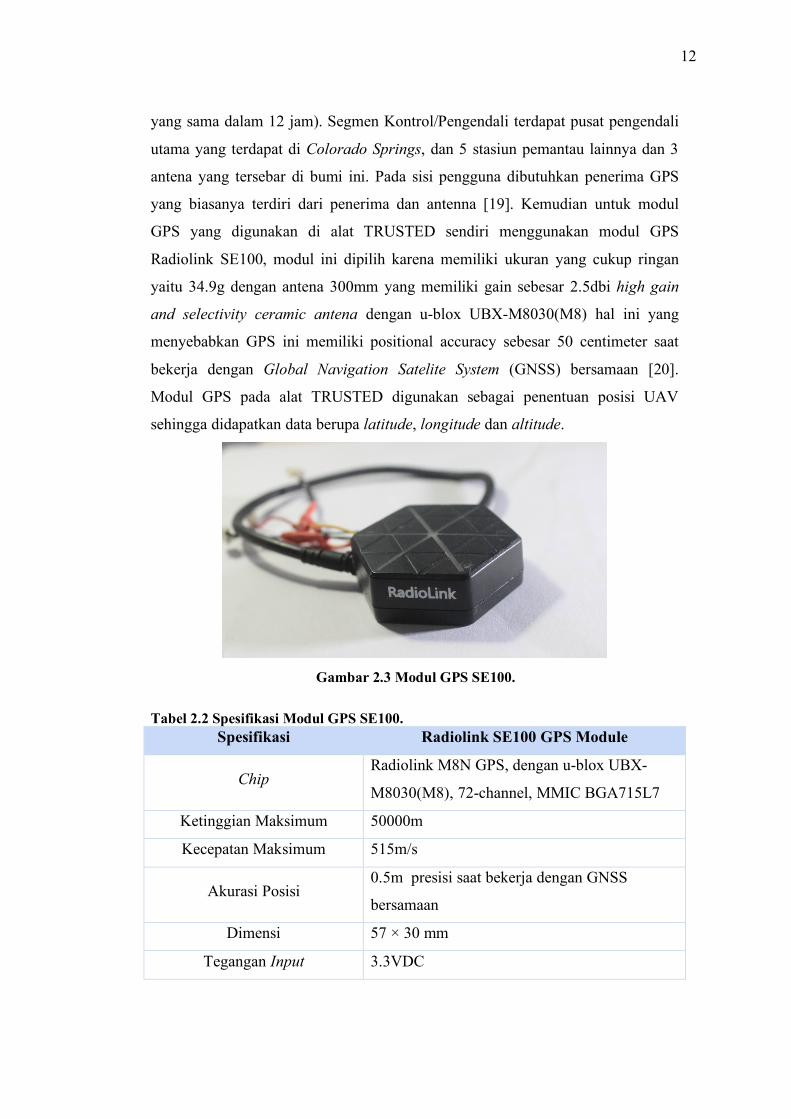
yang biasanya terdiri dari penerima dan antenna [19]. Kemudian untuk modul
GPS yang digunakan di alat TRUSTED sendiri menggunakan modul GPS
Radiolink SE100, modul ini dipilih karena memiliki ukuran yang cukup ringan
yaitu 34.9g dengan antena 300mm yang memiliki gain sebesar 2.5dbi high gain
and selectivity ceramic antena dengan u-blox UBX-M8030(M8) hal ini yang
menyebabkan GPS ini memiliki positional accuracy sebesar 50 centimeter saat
bekerja dengan Global Navigation Satelite System (GNSS) bersamaan [20].
Modul GPS pada alat TRUSTED digunakan sebagai penentuan posisi UAV
sehingga didapatkan data berupa latitude, longitude dan altitude.
Gambar 2.3 Modul GPS SE100.
Tabel 2.2 Spesifikasi Modul GPS SE100. Spesifikasi Radiolink SE100 GPS Module
Chip Radiolink M8N GPS, dengan u-blox UBX-
M8030(M8), 72-channel, MMIC BGA715L7
Ketinggian Maksimum 50000m
Kecepatan Maksimum 515m/s
Akurasi Posisi 0.5m presisi saat bekerja dengan GNSS
bersamaan
Dimensi 57 × 30 mm
Tegangan Input 3.3VDC

13
2.5 Modem
Gambar 2.4 Hardware modem Telkomsel LTE.
Modem yang merupakan singkatan dari modulator demodulator, dikenal sebagai
perangkat yang berfungsi untuk memodulasi sinyal informasi dan kemudian
mendemodulasi sinyal informasi tersebut [21]. Jadi proses modulasi sendiri pada
modem yaitu suatu proses pengubahan sinyal data digital menjadi sinyal analog
untuk dapat dikirimkan melalui media transmisi. Sedangkan proses demodulasi
yaitu pengubahan sinyal analog menjadi sinyal digital untuk dapat diteruskan ke
perangkat digital [21]. Maka modem itu sendiri dapat diartikan sebagai sepasang
perangkat transmisi untuk mengirimkan informasi dengan modulasi dan
mendemodulasikan kembali informasi tersebut. Pada alat TRUSTED sendiri
digunakan modem WiFi 4G Telkomsel K5188 yang sudah support 4G LTE
dengan kecepatan unduh hingga 150Mbps dan unggah mencapai 50 Mbps dengan
connectivity USB high speed 2.0 dan compatible pada sistem operasi Windows
XP, Windows Vista, Windows 7 ke atas yang memudahkan dalam proses
penggunaanya Tabel 2.3 Spesifikasi Modem Telkomsel LTE.
Spesifikasi Modem WiFi 4G Telkomsel K5188
Device Type USB LTE Wi-Fi Stick
Indicator Led
Support LTE, WCDMA, EDGE
LTE DL 100 MBps / UL 10 MBps – 1800 Mhz
GPRS Down Link 85,6 Kbps / Up Link 32,8 Kbps
Wi-Fi AP 10 pengguna

14
2.6 Buck Converter
Buck converter yang merupakan bagian dari dc-dc converter adalah suatu sistem
dc-dc converter yang memiliki fungsi sebagai penurun tegangan atau seperti trafo
step down. Untuk cara kerjanya sendiri yaitu dengan mengatur keluaran sinyal
Pulse Width Modulation (PWM) yang akan masuk pada transistor yang
mengakibatkan transistor berada pada kondisi terbuka dan tertutup, rata-rata
waktu terbuka dan tertutup ini lah yang mengakibatkan tegangan outputnya dapat
diturunkan. Dan biasanya Ic yang digunakan untuk mengatur keluran PWMnya
pada rangkaian buck converter adalah Ic bertipe LM2596 [22]. Pada alat
TRUSTED kami memilih buck converter ini karena memiliki tegangan masukan
dengan jangkauan 3 – 38VDC dan mampu menghasilkan tegangan keluaran
sebesar 1.25 – 35VDC, buck converter ini juga memiliki keluaran arus maksimum
sebesar 3A dan efisiensi 92% yang membuat energi yang dihasilkan tidak begitu
banyak yang hilang [22].
Gambar 2.5 Hardware buck converter LM2596.
Tabel 2.4 Spesifikasi Modul Buck Converter LM2596. Spesifikasi Buck Converter LM2596
Tegangan Masukan 3-38 VDC
Tegangan Keluaran 1.25 – 35 VDC
Keluaran Arus Maksimum 3A
Keluaran Daya 15W
Efisiensi 92%
Frekuensi 150 KHz
Dimensi 45mm x 20mm x 14 mm

15
2.7 Mikrokontroler
Mikrokontroler adalah sebuah komputer kecil yang di dalam satu IC yang berisi
CPU, memori, timer, saluran komunikasi serial dan paralel, port input/output,
ADC [23]. Biasanya mikrokontroler sering digunakan untuk suatu tugas dan
menjalankan suatu program, untuk mikrokontroler sendiri memiliki spesifikasi
yang bermacam-macam dari segi arsitektur yang digunakan, daya yang
dibutuhkan serta bahasa pemrograman yang dipakai. Untuk saat ini mungkin kita
sering melihat mikrokontroler yang digunakan pada papan Arduino Uno yang
biasanya berjenis Alf and Vegerad RISC (AVR), karena memang mikrokontroler
berjenis AVR sangat lazim digunakan dan beredar luas di pasaran, dalam proses
pemrogramannya mikrokontroler tersebut, kita dapat mengupload program yang
kita inginkan dan menghapusnya kembali sesuai keinginan kita [24].
2.7.1 Arduino Nano
Arduino Nano sendiri adalah sebuah papan mikrokontroler yang bersifat open
source dengan ukuran yang kecil dan sangat compact, sehingga daya yang
diperlukan untuk mengoperasikannya pun tidak terlalu besar namun hal ini tidak
mengurangi performa dari Arduino Nano itu sendiri karena chip yang
dibenamkan pada papan tersebut yaitu ATmega328 memiliki spesifikasi yang
cukup mumpuni dengan Clock Speed sebesar 16 Mhz dan SRAM 1KB sudah
mampu menjalankan program biasa hingga berat, [25]. Arduino Nano memiliki
kegunaan yang kurang lebih sama seperti papan mikrokontroler pada umumnya,
namun yang membedakan hanyalah ukurannya saja yang kecil sehingga saat
pembuatan suatu sistem menggunakan Arduino Nano tidak akan memakan
tempat pada packaging-nya. Arduino Nano ini dapat diprogram dengan
menggunakan software Arduino Ide dengan koneksi portnya berupa port USB
bertipe Mini [26].
Gambar 2.6 Hardware Arduino Nano.

16
Gambar 2.7 Konfigurasi pin Arduino Nano.
Dari Gambar 2.7 yang merupakan tampilan konfigurasi pada pin Arduino Nano.
Penjelasan pin dan fungsinya adalah sebagai berikut.
1. Pin Keluaran dan Masukan Digital
Fungsi utama dari pin ini adalah sebagai pembaca frekuensi digital, yaitu nilai
0 dan 1 atau ada juga yang menyebutnya logika true dan fals. Arduino Nano
sendiri memiliki 14 pin digital yang terdiri dari pin RX0, TX1, D2 – D13 [25].
2. Pin Masukan Analog
Secara umum fungsi dari pin masukan analog ini adalah sebagai pembaca
sinyal analog yang dimasukan dari luar. Pada Arduino Nano sendiri memiliki
8 pin untuk masukan analog diantaranya adalah A0, A1, A2, A3, A4, A5, A6
dan A7 [25].
3. Pin Tegangan
Pin tegangan pada Arduino Nano pada umumnya berfungsi sebagai
pengaturan tegangan baik yang masuk dan yang keluar. pada papan Arduino
Nano terdapat beberapa pin masukan dan keluran tegangan diantaranya adalah
sebgai berikut:
• VIN, pin ini biasanya digunakan sebagai masukan tegangan dari papan
Arduino Nano agar papan Arduino Nano dapat beroperasi. Untuk
tegangan masukannya biasanya pada papan Arduino Nano adalah
sebesar 7 – 12VDC [25].
• 5V, pin ini biasanya digunakan sebagai keluaran tegangan sebesar 5V

17
yang di supply dari papan Arduino Nano tersebut [25].
• 3,3V, pin ini biasanya digunakan sebagai keluaran tegangan sebesar
3,3V yang di supply dari papan Arduino Nano tersebut [25].
• GND (ground), pin ini biasanya digunakan sebagai keluaran dan
masukan pada Arduino Nano [25].
• AREF, pin ini biasanya digunakan sebagai pengatur tegangan referensi
eksternal untuk batas pin input analog [25].
• IOREF, pin ini biasanya digunakan sebagai referensi tegangan yang
beroperasi pada mikrokontroler [25].
4. Pin RESET
Pin Reset merupakan pin yang digunakan untuk me-restart program sehingga
papan Arduino Nano akan memulai dari awal kembali dalam pembacaan
programnya, sebenarnya di dalam papan Arduino Nano tersebut telah
disediakan juga berupa tombol resetnya [25].
Tabel 2.5 Spesifikasi Arduino Nano.
Spesifikasi STM32
Arsitektur ATmega328p
Tegangan kerja 5 Volt
Tegangan masukan 7-12 Volt
GPIO 14 (6 PWM)
Clock Speed 16 MHz
Keluaran PWM 72 Mhz
SRAM 1 KB
EEPROM 512b
Dimensi 18.5x43 mm