BAB II LANDASAN TEORI ELEKTRO...yang digunakan untuk komunikasi serial seperti pada RS-232, RS-422...
29
7 BAB II LANDASAN TEORI 2.1 Sensor Ultra sonik Sensor Ultra sonic adalah sebuah alat listrik yang mempnyai fungsi sebagai sensor yang bekerja berdasarkan prinsip pantulan dari sebuah gelombang suara yang di gunakan untuk mendeteksi keberadaan dari suatu benda atu objek tertentu yang ada di depanya. Sensor ini bekerja pada frekuensi di atas gelombang suara dari 40 KHz hingga 400 KHz dan mempunyai jangkauan 3 cm – 300 cm. gelombang ultra sonic ini merambat di udara dengan kecepatan 344 meter per detik. Sensor ini memiliki sebuah pin yang digunakan untuk memicu terjadinya pengukuran dan melaporkan jarak hasil pengukuran.
Transcript of BAB II LANDASAN TEORI ELEKTRO...yang digunakan untuk komunikasi serial seperti pada RS-232, RS-422...
7
BAB II
LANDASAN TEORI
2.1 Sensor Ultra sonik
Sensor Ultra sonic adalah sebuah alat listrik yang mempnyai fungsi
sebagai sensor yang bekerja berdasarkan prinsip pantulan dari sebuah
gelombang suara yang di gunakan untuk mendeteksi keberadaan dari suatu
benda atu objek tertentu yang ada di depanya. Sensor ini bekerja pada
frekuensi di atas gelombang suara dari 40 KHz hingga 400 KHz dan
mempunyai jangkauan 3 cm – 300 cm. gelombang ultra sonic ini
merambat di udara dengan kecepatan 344 meter per detik. Sensor ini
memiliki sebuah pin yang digunakan untuk memicu terjadinya pengukuran
dan melaporkan jarak hasil pengukuran.
8
.
Gambar 2.1 Sensor ultra sonic
Sensor ultrasonik terdiri dari dari dua unit, yaitu unit pemancar dan
unit penerima. Struktur unit pemancar dan penerima sangatlah sederhana,
sebuah kristal piezoelectric dihubungkan dengan mekanik jangkar dan
hanya dihubungkan dengan diafragma penggetar. Tegangan bolak-balik
yang memiliki frekuensi kerja 40 KHz – 400 KHz diberikan pada plat
logam. Struktur atom dari kristal piezoelectric akan berkontraksi
(mengikat), mengembang atau menyusut terhadap polaritas tegangan yang
diberikan, dan ini disebut dengan efek piezoelectric. Kontraksi yang terjadi
diteruskan ke diafragma penggetar sehingga terjadi gelombang ultrasonik
yang dipancarkan ke udara (tempat sekitarnya), dan pantulan gelombang
ultrasonik akan terjadi bila ada objek tertentu, dan pantulan gelombang
ultrasonik akan diterima kembali oleh oleh unit sensor penerima.
Selanjutnya unit sensor penerima akan menyebabkan diafragma penggetar
akan bergetar dan efek piezoelectric menghasilkan sebuah tegangan bolak-
balik dengan frekuensi yang sama.
9
2.2 Transducer Ultra sonik
Adalah sebuah komponen elektronika yang merupakan bagian dari
sebuah sensor ultra sonic yang dapat merubah energy listrik menjadi
energy mekanik dalam bentuk gelombang suara ultrasonik dan sebaliknya.
Gelombang ultra sonic adalah gelombang suara yang tidak dapat di dengar
oleh manusia secara normal karena frekuensi gelombang ultra sonic di atas
20KHz.
Gambar 2.2 Transducer ultra sonic
Transducer ultrasonic dalam pengaplikasinya selalu berpasangan,
seperti terlihat pada gambar 2.2 yaitu terdapat transducer ultrasonic yang
berfungsi sebagai pemancar (transmitter ) dan transducer ultrasonic
sebagai penerima (receiver).
2.2.1 Pemancar Ultrasonik (Transmitter)
Konstruksi transducer ultrasonic terdiri dari bagian utama yaitu
elemen aktif, dan wear plate (plat logam). Element aktif dari transducer
ultrasonic adalah piezoelectric yang berfungsi untuk mengubah energi
10
listrik menjadi energi mekanik dalam bentuk gelombang suara ultrasonic.
Piezoelectric yang digunakan dalam transducer ultrasonic pada umumnya
berbahan ceramic, akan tetapi untuk aplikasi atau keperluan khusus yang
membutuhkan performansi tinggi elemen piezoelectric pada transducer
ultrasonic ini dibuat dari bahan polymer atau composite
Pemancar Ultrasonik ini berupa rangkaian yang memancarkan sinyal
sinusoidal berfrekuensi di atas 20 KHz menggunakan sebuah transducer
transmitter ultrasonik
Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut adlah
sebagai berikut :
1. Sinyal 40 kHz dibangkitkan melalui mikrokontroler.
2. Sinyal tersebut dilewatkan pada sebuah resistor sebesar 3kOhm untuk
pengaman ketika sinyal tersebut membias maju rangkaian dioda dan
transistor.
3. Kemudian sinyal tersebut dimasukkan ke rangkaian penguat arus yang
merupakan kombinasi dari 2 buah dioda dan 2 buah transistor.
4. Ketika sinyal dari masukan berlogika tinggi (+5V) maka arus akan
melewati dioda D1 (D1 on), kemudian arus tersebut akan membias
transistor T1, sehingga arus yang akan mengalir pada kolektotr T1 akan
besar sesuai dari penguatan dari transistor.
5. Ketika sinyal dari masukan berlogika tinggi (0V) maka arus akan melewati
dioda D2 (D2 on), kemudian arus tersebut akan membias transistor T2,

11
sehingga arus yang akan mengalir pada kolektotr T2 akan besar sesuai dari
penguatan dari transistor.
6. Resistor R4 dan R6 berfungsi untuk membagi tengangan menjadi 2,5 V.
Sehingga pemancar ultrasonik akan menerima tegangan bolak – balik
dengan Vpeak-peak adalah 5V (+2,5 V s.d -2,5 V).
2.2.2 Penerima Ultrasonik (Receiver)
Penerima Ultrasonik ini akan menerima sinyal ultrasonik yang
dipancarkan oleh pemancar ultrasonik dengan karakteristik frekuensi yang
sesuai. Sinyal yang diterima tersebut akan melalui proses filterisasi
frekuensi dengan menggunakan rangkaian band pass filter (penyaring
pelewat pita), dengan nilai frekuensi yang dilewatkan telah ditentukan.
Kemudian sinyal keluarannya akan dikuatkan dan dilewatkan ke rangkaian
komparator (pembanding) dengan tegangan referensi ditentukan
berdasarkan tegangan keluaran penguat pada saat jarak antara sensor
kendaraan mini dengan sekat/dinding pembatas mencapai jarak minimum
untuk berbelok arah. Dapat dianggap keluaran komparator pada kondisi ini
adalah high (logika ‘1’) sedangkan jarak yang lebih jauh adalah low
(logika’0’). Logika-logika biner ini kemudian diteruskan ke rangkaian
pengendali (mikrokontroler).
Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut
adalah sebagai berikut :
12
1. Pertama – tama sinyal yang diterima akan dikuatkan terlebih dahulu oleh
rangkaian transistor penguat Q2.
2. Kemudian sinyal tersebut akan di filter menggunakan High pass filter pada
frekuensi > 40kHz oleh rangkaian transistor Q1.
3. Setelah sinyal tersebut dikuatkan dan di filter, kemudian sinyal tersebut
akan disearahkan oleh rangkaian dioda D1 dan D2.
4. Kemudian sinyal tersebut melalui rangkaian filter low pass filter pada
frekuensi < 40kHz melalui rangkaian filter C4 dan R4.
5. Setelah itu sinyal akan melalui komparator Op-Amp pada U3.
6. Jadi ketika ada sinyal ultrasonik yang masuk ke rangkaian, maka pada
komparator akan mengeluarkan logika rendah (0V) yang kemudian akan
diproses oleh mikrokontroler untuk menghitung jaraknya.
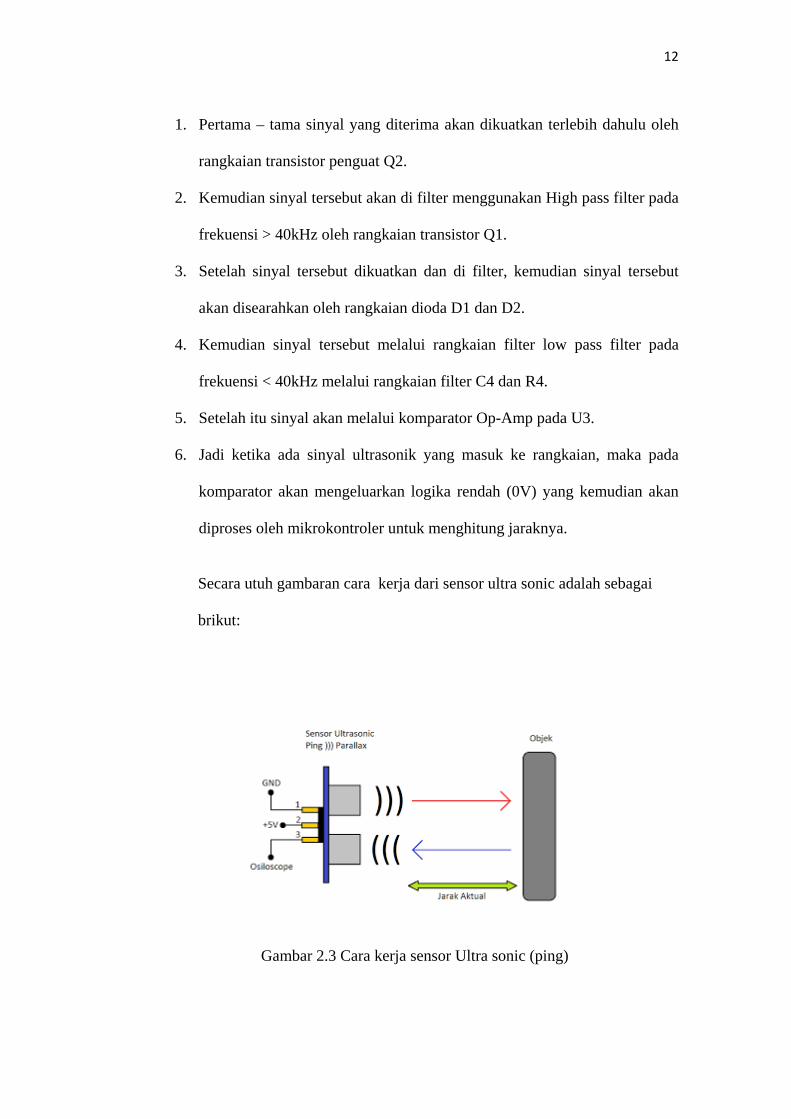
Secara utuh gambaran cara kerja dari sensor ultra sonic adalah sebagai
brikut:
Gambar 2.3 Cara kerja sensor Ultra sonic (ping)

13
1. Pin yang digunakan sebagai jalur data sensor dijadikan output.
2. Mikrokontroler memberikan pulsa trigger (pulsa high dengan tOUT
selama 2 µs sampai 5 µs).
3. Kemudian setelah memberikan trigger, pin tersebut dijadikan input.
4. Sensor memancarkan gelombang ultrasonic sebesar 40KHz selama 200 µs
(tBURST).
5. Gelombang ultrasonic ini akan merambat diudara dengan kecepatan
344.424 m/detik atau 1 cm setiap 29.034 µs.
6. Gelombang tersebut akan mengenai objek kemudian terpantul kembali ke
sensor.
7. Selama menunggu pantulan, sensor akan menghasilkan sebuah pulsa
(high)
8. Pulsa ini akan berhenti (low) ketika gelombang suara pantulan terdeteksi
oleh sensor.
9. Lebar pulsa tersebutlah yang yang dipresentasikan sebagai jarak antara
sensor ping dengan objek.
10. Lebar pulsa high (tIN) akan sesuai dengan lama waktu tempuh gelombang
ultrasonik untuk 2x jarak ukur dengan obyek yang kemudian dapat
merepresentasikan jarak antara sensor ping dengan objek.
11. Sinyal yang diterima oleh rangkaian receiver dikirimkan ke rangkaian
mikrokontroler untuk selanjutnya diolah untuk menghitung jarak terhadap
benda.
12. Benda di sini adalah benda yang bersifat memantul, bukan benda yang
bersifat meredam sinyal.

14
2.3 Arduino Uno
Arduino dikatakan sebagai sebuah platform dari physical computing yang
bersifat open source. Pertama-tama perlu dipahami bahwa kata “platform” di
sini adalah sebuah pilihan kata yang tepat. Arduino tidak hanya sekedar
sebuah alat pengembangan, tetapi ia adalah kombinasi dari hardware, bahasa
pemrograman dan Integrated Development Environment (IDE) yang canggih.
IDE adalah sebuah software yang sangat berperan untuk menulis program,
meng-compile menjadi kode biner dan meng-upload ke dalam memory
microcontroller. Ada banyak projek dan alat-alat dikembangkan oleh
akademisi dan profesional dengan menggunakan Arduino, selain itu juga ada
banyak modul-modul pendukung (sensor, tampilan, penggerak dan
sebagainya) yang dibuat oleh pihak lain untuk bisa disambungkan dengan
Arduino. Arduino berevolusi menjadi sebuah platform karena ia menjadi
pilihan dan acuan bagi banyak praktisi.
15
Gambar 2.4 Arduino Uno
Di antara sekian banyak alat pengembangan prototype, Arduino adalah
salah satunya yang
paling banyak digunakan karena selain harga yang relative terjangkau juga
memiliki sifat yang open source baik untuk hardware maupun software-nya.
Diagram rangkaian elektronik Arduino
digratiskan kepada semua orang. Kemudian Lintas platform, software Arduino
dapat dijalankan pada system operasi Windows, Macintosh OSX dan Linux,
sementara platform lain umumnya terbatas hanya pada Windows.
2.3.1 Komponen utama pada Arduino
Secara umum Arduino terdiri dari dua bagian, yaitu:
1. Hardware _ papan input/output (I/O)
2. Software _ Software Arduino meliputi IDE untuk menulis program, driver
untuk koneksi dengan komputer, contoh program dan library untuk
pengembangan program.
Komponen utama di dalam papan Arduino adalah sebuah microcontroller
8 bit dengan merk
ATmega yang dibuat oleh perusahaan Atmel Corporation. Berbagai papan
Arduino
menggunakan tipe ATmega yang berbeda-beda tergantung dari spesifikasinya,
sebagai contoh
16
Arduino Uno menggunakan ATmega328 sedangkan Arduino Mega 2560 yang
lebih canggih
menggunakan ATmega2560.
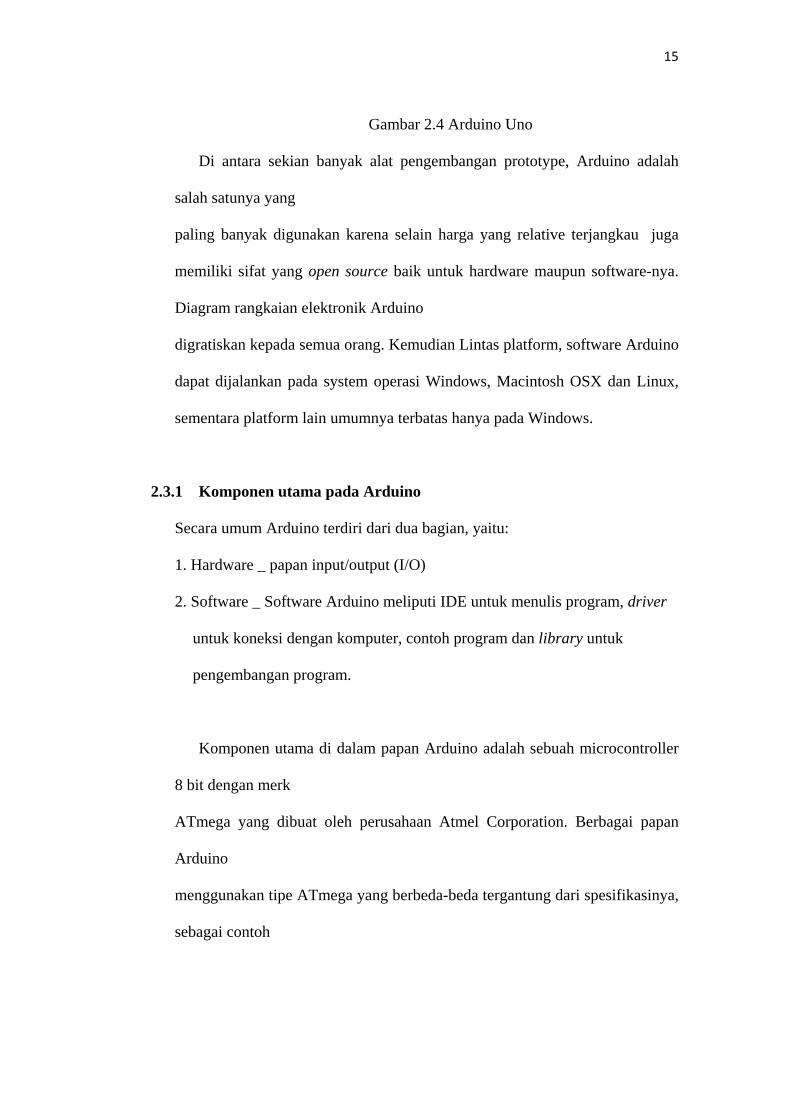
Berikut adalah diagram blok sederhana dari sebuah microcontrolor AT mega
328 yang di pakai pada Ardunio Uno.
UART ( antar muka serial )
2 KB RAM (memory kerja)
32 KB RAM flash
memoy (program)
Gambar 2.5 Diagram blok AT mega 328 Arduino Uno
Gambar di atas memiliki penjelasan sebagai berikut :
‐ Universal Asynchronous Receiver/Transmitter (UART) adalah antar muka
yang digunakan untuk komunikasi serial seperti pada RS-232, RS-422 dan
RS-485.
‐ 2KB RAM pada memory kerja bersifat volatile (hilang saat daya dimatikan),
digunakan
oleh variable-variabel di dalam program.
1 KB EEPROM CPU
Port Input / Outout
17
‐ 32KB RAM flash memory bersifat non-volatile, digunakan untuk
menyimpan program yang dimuat dari komputer. Selain program, flash
memory juga menyimpan bootloader.Bootloader adalah program inisiasi
yang ukurannya kecil, dijalankan oleh CPU saat daya dihidupkan. Setelah
bootloader selesai dijalankan, berikutnya program di dalam RAM akan
dieksekusi.
‐ 1KB EEPROM bersifat non-volatile, digunakan untuk menyimpan data yang
tidak boleh hilang saat daya dimatikan. Tidak digunakan pada papan Arduino.
‐ Central Processing Unit (CPU), bagian dari microcontroller untuk
menjalankan setiapinstruksi dari program.
‐ Port input/output, pin-pin untuk menerima data (input) digital atau analog,
danmengeluarkan data (output) digital atau analog.
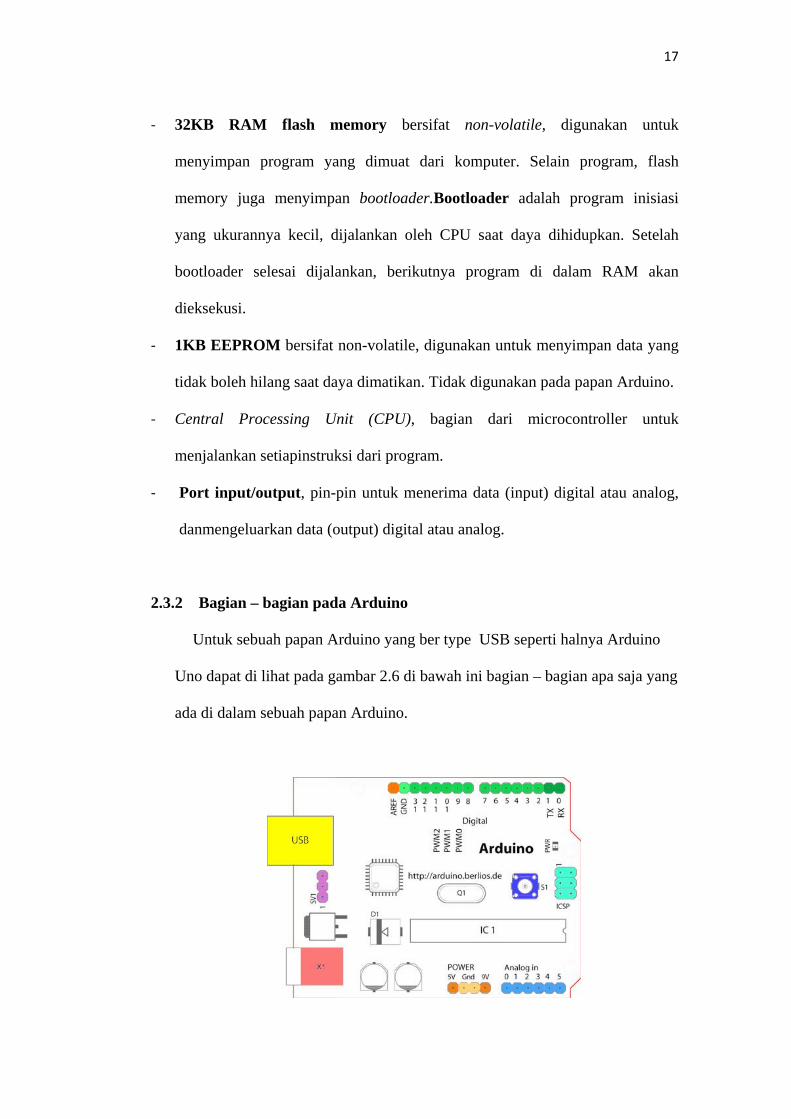
2.3.2 Bagian – bagian pada Arduino
Untuk sebuah papan Arduino yang ber type USB seperti halnya Arduino
Uno dapat di lihat pada gambar 2.6 di bawah ini bagian – bagian apa saja yang
ada di dalam sebuah papan Arduino.
18
Gambar 2.6 Bagian – bagian papan Arduino
Dari gambar di atas dapat di lihat dan di jelaskan sebagai berikut :
‐ 14 pin input/output digital (0-13)
Berfungsi sebagai input atau output, dapat diatur oleh program.
Khusus untuk 6 buah pin 3, 5, 6, 9, 10 dan 11, dapat juga berfungsi sebagai
pin analog output dimana tegangan output-nya dapat diatur. Nilai sebuah pin
output analog dapat diprogram antara 0 – 255, dimana hal itu mewakili nilai
tegangan 0 – 5V.
‐ USB
Berfungsi untuk: Memuat program dari komputer ke dalam papan,
Komunikasi serial antara papan dan computer dan member daya kepada
papan.
‐ Sambungan SV1
Sambungan atau jumper untuk memilih sumber daya papan, apakah dari
sumber eksternal atau menggunakan USB. Sambungan ini tidak diperlukan
lagi pada papan Arduino versi terakhir karena pemilihan sumber daya
eksternal atau USB dilakukan secara otomatis.
‐ Q1 – Kristal (quartz crystal oscillator)
19
Jika microcontroller dianggap sebagai sebuah otak, maka kristal adalah
jantung-nya karena komponen ini menghasilkan detak-detak yang dikirim
kepada microcontroller agar melakukan sebuah operasi untuk setiap detak-
nya. Kristal ini dipilih yang berdetak 16 juta kali per detik (16MHz).
‐ Tombol Reset S1
Untuk me-reset papan sehingga program akan mulai lagi dari awal.
Perhatikan bahwa tombol reset ini bukan untuk menghapus program atau
mengosongkan microcontroller.
‐ In-Circuit Serial Programming (ICSP)
Port ICSP memungkinkan pengguna untuk memprogram microcontroller
secara langsung, tanpa melalui bootloader. Umumnya pengguna Arduino
tidak melakukan ini sehingga ICSP tidak terlalu dipakai walaupun di
sediakan.
‐ IC 1 – Microcontroller Atmega
Komponen utama dari papan Arduino, di dalamnya terdapat CPU, ROM dan
RAM.
‐ X1 – sumber daya eksternal
Jika hendak disuplai dengan sumber daya eksternal, papan Arduino dapat
diberikan tegangan DC antara 9-12V.

20
‐ 6 pin input analog (0-5)
Pin ini sangat berguna untuk membaca tegangan yang dihasilkan oleh sensor
analog, seperti sensor suhu. Program dapat membaca nilai sebuah pin input
antara 0 – 1023, dimana hal itu mewakili nilai tegangan 0 – 5V.
2.4 Pemrograman Arduino
Arduino menggunakan pemrogaman dengan bahasa C. Berikut ini
adalah sedikit penjelasan yang ditujukan kepada seseorang yang hanya
mempunyai sedikit pengalaman pemrogaman dan membutuhkan penjelasan
singkat mengenai karakter bahasa C dan software Arduino. Untuk penjelasan
yang lebih mendalam, web http://Arduino.cc adalah sumber yang lengkap.
2.4.1 Struktur
Setiap program Arduino (biasa disebut sketch) mempunyai dua buah
fungsi yang harus ada.
• void setup () { }
Semua kode didalam kurung kurawal akan dijalankan hanya satu kali
ketika program Arduino dijalankan untuk pertama kalinya.
• void loop () { }
Fungsi ini akan dijalankan setelah setup (fungsi void setup) selesai.
Setelah dijalankan satu kali fungsi ini akan dijalankan lagi dan lagi
secara terus menerus sampai catu daya (power supply) dilepaskan.
21
2.4.2 Syntax
Berikut ini adalah elemen bahasa C yang dibutuhkan untuk format
penulisan.
• // (komentar satu baris)
Terkadang diperlukan untuk memberi catatan pada diri sendiri apa arti
dari kode-kode yang dituliskan . Cukup menuliskan dua buah garing
miring dan apapun yang diketik dibelakangnya akan diabaikan oleh
program.
• /* */ (komentar bnyak baris)
Jika mempunyai banyak catatan , maka hal itu dapat dituliskan pada
beberapa baris sebagai komentar . Semua hal yang terletak di antara
dua simbol tersebut akan diabaikan oleh program.
• { } (kurung kurawal)
Digunakan untuk mendefinisikan kapan blok program mulai dan
berakhir (digunakan juga pada fungsi dan pengulangan).
• ; (titik koma)
Setiap baris kode harus diakhiri dengan tanda titik koma (jika ada titik
koma yang hilang maka program tidak akan bisa dijalankan).

22
2.4.3 Variabel
Sebuah program secara garis besar dapat didefinisikan sebagai instruksi
untuk memindahkan angka dan karakter dengan cara yang cerdas.
• int (integer)
Digunakan untuk menyimpan angka dalam 2 byte (16 bit). Tidak
mempunyai angka desimal dan menyimpan nilai dari -32,768 dan 32,768.
• long (long)
Digunakan ketika integer tidak mencakup lagi. Memakai 4 byte (32 bit)
dari memori (RAM) dan mempunyai rentang dari -2,147,483,648 dan
2,147,483,648.
• boolean (boolean)
Variabel sedehana yang digunakan untuk menyimpan nilai TRUE (benar)
dan FALSE (salah). Sangat berguna karena hanya menggunakan 1 bit
dari RAM.
• float (float)
Digunakan untuk angka desimal (foating point). Memakai 4 byte (32 bit)
dari RAM dan mempunyai rentang dari -3.4028235E+38 dan
3.4028235E+38
• char (character)

23
Menyimpan 1 karakter menggunakan kode ASCII (misalnya ‘A’ = 65).
Hanya memakai 1 byte (8 bit) dari RAM.
2.4.4 Operator Matematika
Operator yang digunakakn untuk memanipulasi angka (bekerja seperti
matematika yang sederhana).
• = Membuat sesuatu menjadi sama dengan nilai yang lain (misalnya: x =
10 * 2, x sekarang sama dengan 20).
• % Menghasilkan sisa dari hasil pembagian suatu angka dengan angka
yang lain (misalnya: 12 % 10, ini akan menghasilkan angka 2).
• + Penjumlahan
• - Pengurangan
• * Perkalian
• / Pembagian
2.4.5 Operator Pembanding
Digunakan untuk membandingkan nilai logika.
• == Sama dengan (misalnya: 12 == 10 adalah FALSE (salah) atau 12 ==
12 adalah TRUE (benar)).
• = Tidak sama dengan (misalnya: 12 != 10 adalah TRUE (benar) atau 12
!= 12 adalah FALSE(salah))
• < Lebih kecil dari (misalnya: 12 < 10 adalah FALSE (salah) atau 12 < 12
adalah FALSE (salah) atau 12 < 14 adalah TRUE (benar)).
24
• > Lebih besar dari (misalnya: 12 > 10 adalah TRUE (benar) atau 12 > 12
adalah FALSE (salah) atau 12 > 14 adalah FALSE (salah)).
2.4.6 Struktur Pengaturan
Program sangat tergantung pada pengaturan apa yang akan dijalankan
berikutnya, berikut ini adalah elemen dasar pengaturan.
1. if..else, dengan format seperti berikut ini:
if (kondisi) { }
else if (kondisi) { }
else { }
Dengan struktur seperti diatas program akan menjalankan kode yang
ada di dalam kurung kurawal jika kondisinya TRUE, dan jika tidak FALSE
maka akan diperiksa apakah kondisi pada else if dan jika kondisinya FALSE
maka kode pada else akan dijalankan.
2. for, dengan format seperti berikut ini:
for (int i = 0 ; i <#pengulangan; i++) { }
Digunakan bila ingin melakukan pengulangan kode di dalam kurung
kurawal beberapa kali, ganti #pengulangan dengan jumlah pengulangan yang
diinginkan. Melakukan perhitungan ke atas dengan i++ atau kebawah dengan
i--.
3. while, dengan format seperti berikut ini:
25
while (kondisi) {
// pernyataan
}
While akan melakukan perulangan secara kontinyu dan tidak terbatas
sampai ekspresi tersebut menemukan kembali parenthesisnya, 0 menjadi
false. Biasanya digunakan untuk mngetes sebuah sensor karena perulangan
ini tidak akan berakhir sampai adanya kondisi eksternal yang menutupnya.
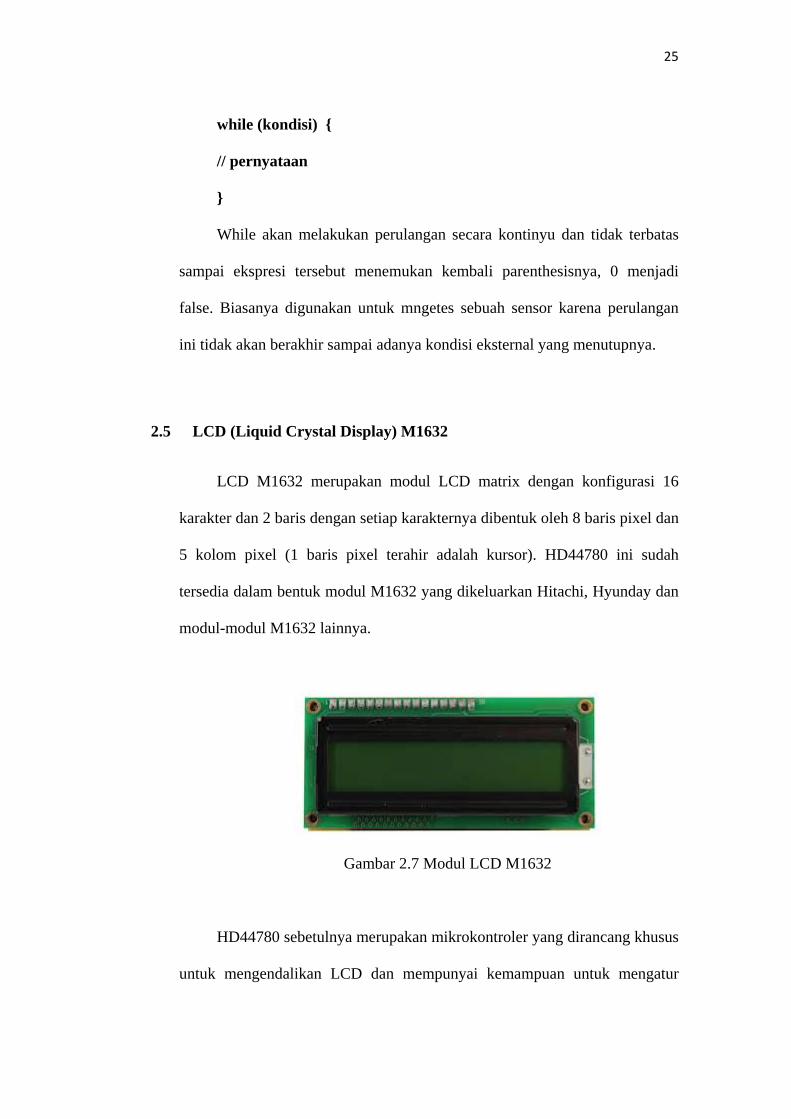
2.5 LCD (Liquid Crystal Display) M1632
LCD M1632 merupakan modul LCD matrix dengan konfigurasi 16
karakter dan 2 baris dengan setiap karakternya dibentuk oleh 8 baris pixel dan
5 kolom pixel (1 baris pixel terahir adalah kursor). HD44780 ini sudah
tersedia dalam bentuk modul M1632 yang dikeluarkan Hitachi, Hyunday dan
modul-modul M1632 lainnya.
Gambar 2.7 Modul LCD M1632
HD44780 sebetulnya merupakan mikrokontroler yang dirancang khusus
untuk mengendalikan LCD dan mempunyai kemampuan untuk mengatur

26
proses scanning pada layar LCD yang terbentuk oleh 16 COM dan 40 SEG
sehingga mikrokontroler/perangkat yang mengakses modul LCD ini tidak
perlu lagi mengatur proses scanning pada layar LCD. Mikrokontroler atau
perangkat tersebut hanya mengirimkan data-data yang merupakan karakter
yang akan ditampilkan pada LCD atau perintah yang mengatur proses
tampilan pada LCD saja.
2.5.1 STRUKTUR MEMORI LCD
Modul LCD M1632 memiliki beberapa jenis memori yang digunakan
untuk menyimpan atau memproses data-data yang akan ditampilkan pada
layar LCD. Setiap jenis memori mempunyai fungsi-fungsi tersendiri.
a. DDRAM
DDRAM merupakan tempat karakter yang ditampilkan berada.
Contohnya, karakter “A” yang ditulis pada alamat 00 akan tampil pada baris
pertama dan kolom pertama dari LCD. Apabila karakter tersebut ditulis pada
alamat 10, karakter tersebut akan tampil pada baris kedua kolom pertama
dari LCD.
b. CGRAM
CGRAM adalah memori untuk menggambarkan pola sebuah karakter
dan bentuk karakter dapat diubah-ubah sesuai keinginan. Akan tetapi isi
27
memori akan hilang saat power supply tidak aktif sehingga pola karakter akan
hilang.
c. CGROM
CGROM adalah memori untuk menggambarkan pola sebuah karakter
dan pola tersebut sudah ditentukan secara permanen dari HD44780 sehingga
pengguna tidak dapat mengubah lagi. Oleh karena ROM bersifat permanen,
pola karakter tersebut tidak akan hilang walaupun power supply tidak aktif.
2.6 Buzzer mini
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk
mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja
buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari
kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut
dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke
dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena
kumparan dipasang pada diafragma maka setiap gerakan kumparan akan
menggerakkan diafragma secara bolak-balik sehingga membuat udara
bergetar yang akan menghasilkan suara. Buzzer biasa digunakan sebagai
indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah
alat (alarm).

28
Gambar 2.8 Buzzer Mini
2.7 LED (Light Emitting Dioda)
LED (Light Emitting Dioda) adalah dioda yang dapat memancarkan
cahaya pada saat mendapat arus bias maju (forward bias). LED (Light
Emitting Dioda) dapat memancarkan cahaya karena menggunakan dopping
galium, arsenic dan phosporus. Jenis doping yang berbeda diata dapat
menhasilkan cahaya dengan warna yang berbeda. LED (Light Emitting
Dioda) merupakann salah satu jenis dioda, sehingga hanya akan mengalirkan
arus listrik satu arah saja. LED akan memancarkan cahaya apabil diberikan
tegangan listrik dengan konfigurasi forward bias. Berbeda dengan dioda pada
umumnya, kemampuan mengalirkan arus pada LED (Light Emitting Dioda)
cukup rendah yaitu maksimal 20 mA. Apabila LED (Light Emitting Dioda)
dialiri arus lebih besar dari 20 mA maka LED akan rusak, sehingga pada
rangkaian LED dipasang sebuah resistor sebgai pembatas arus. Simbol dan
29
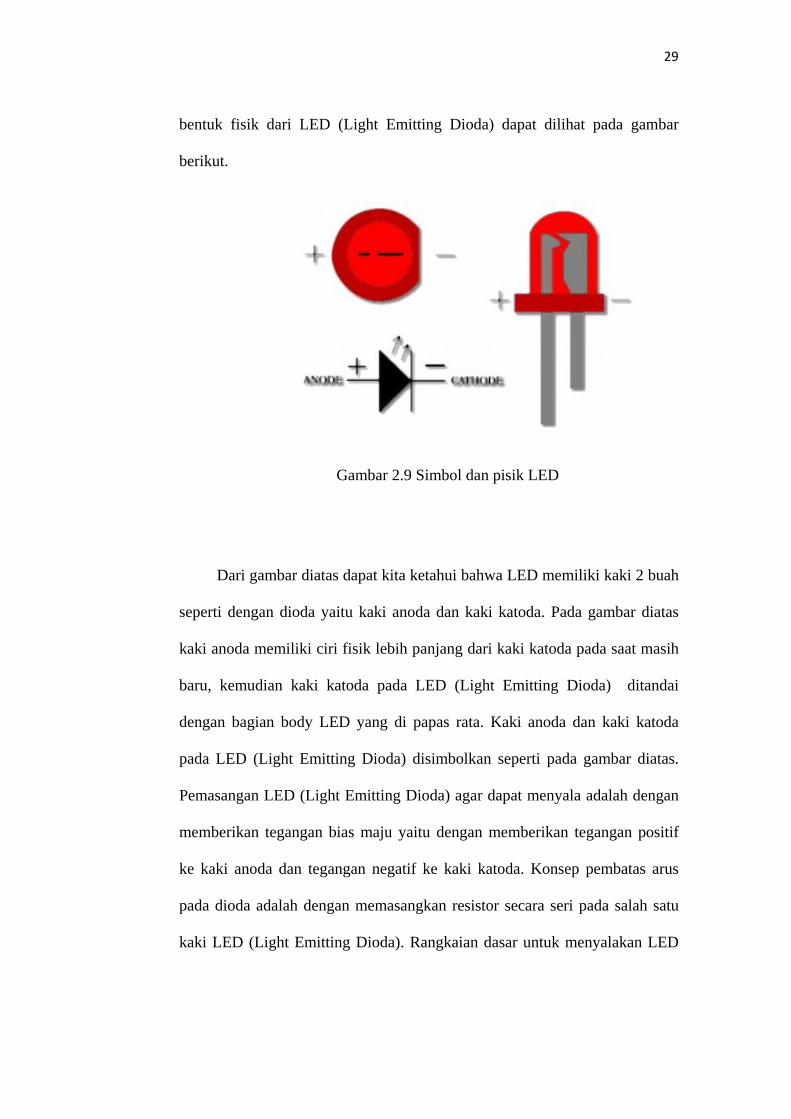
bentuk fisik dari LED (Light Emitting Dioda) dapat dilihat pada gambar
berikut.
Gambar 2.9 Simbol dan pisik LED
Dari gambar diatas dapat kita ketahui bahwa LED memiliki kaki 2 buah
seperti dengan dioda yaitu kaki anoda dan kaki katoda. Pada gambar diatas
kaki anoda memiliki ciri fisik lebih panjang dari kaki katoda pada saat masih
baru, kemudian kaki katoda pada LED (Light Emitting Dioda) ditandai
dengan bagian body LED yang di papas rata. Kaki anoda dan kaki katoda
pada LED (Light Emitting Dioda) disimbolkan seperti pada gambar diatas.
Pemasangan LED (Light Emitting Dioda) agar dapat menyala adalah dengan
memberikan tegangan bias maju yaitu dengan memberikan tegangan positif
ke kaki anoda dan tegangan negatif ke kaki katoda. Konsep pembatas arus
pada dioda adalah dengan memasangkan resistor secara seri pada salah satu
kaki LED (Light Emitting Dioda). Rangkaian dasar untuk menyalakan LED
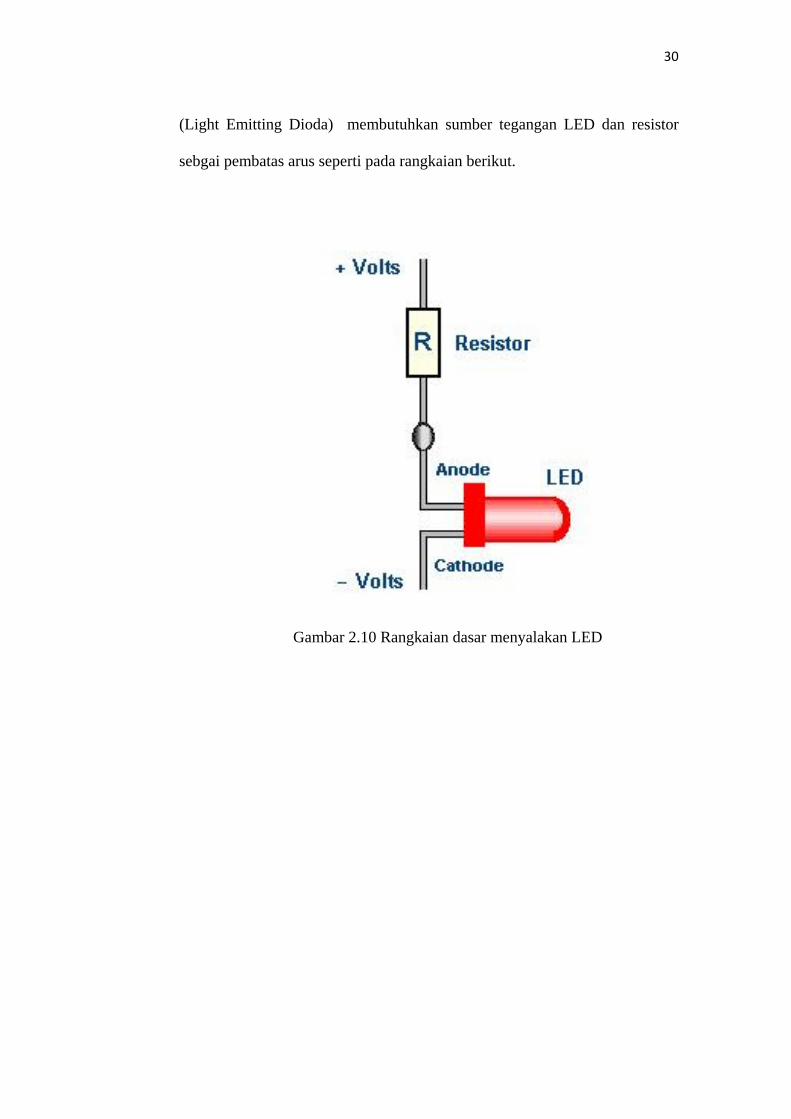
30
(Light Emitting Dioda) membutuhkan sumber tegangan LED dan resistor
sebgai pembatas arus seperti pada rangkaian berikut.
Gambar 2.10 Rangkaian dasar menyalakan LED

31
2.8 Project Board ( Bread Board )
Gambar 2.11 Project Board ( Bread Board )
Project Board atau yang sering disebut sebagai BreadBoard adalah
dasar konstruksi sebuah sirkuit elektronik dan merupakan prototipe dari suatu
rangkaian elektronik. Di zaman modern istilah ini sering digunakan untuk
merujuk pada jenis tertentu dari papan tempat merangkai komponen, dimana
papan ini tidak memerlukan proses menyolder ( langsung tancap ).
Karena papan ini solderless atau tidak memerlukan solder sehingga
dapat digunakan kembali, dan dengan demikian dapat digunakan untuk
prototipe sementara serta membantu dalam bereksperimen desain sirkuit
elektronika. Berbagai sistem elektronik dapat di prototipekan dengan
menggunakan breadboard, mulai dari sirkuit analog dan digital kecil sampai
membuat unit pengolahan terpusat (CPU).

32
Gambar 2.12 Jalur Bread Board
Penjelasan :
2 Pasang jalur Atas dan bawah terhubung secara horisontal sampai ke
bagian tengah dari breadboard. Biasanya jalur ini digunakan sebagai jalur
power atau jalur sinyal yg umum digunakan seperti clock atau jalur
komunikasi.
5 lobang komponen di tengah merupakan tempat merangkai komponen.
Jalur ke 5 lobang ini terhubung vertikal sampai bagian tengah dari
breadboard.
Pembatas tengah breadboard biasanya digunakan sebagai tempat
menancapkan komponen IC

33
2.9 Catu Daya
Catu daya atau power supply merupakan suatu rangkaian yang
mengubah arus listrik bolak-balik menjadi arus listrik searah. Catu daya
menjadi bagian penting dalam elektronika yang berfungsi sebagai sumber
tenaga listrik. Secara umum prinsip rangkaian catu daya terdiri atas
komponen utama yaitu: transformator step-down, dioda, kondensator dan
regulator. Karena tegangan keluaran dari transformator step-down masih
dalam bentuk tegangan AC, sedang rangkaian elektronika dibutuhkan
tegangan DC yang stabil maka perlu ditambahkan rangkaian penyearah.
1. Penyearah setengan gelombang
Gambar 2.13 Rangkaian penyearah setengah gelombang

34
2. Penyearah gelombang penuh
Gambar 2.14 Rangkaian penyearah gelombang penuh
Rangkaian penyearah sudah cukup bagus jika tegangan ripple-nya kecil,
namun ada masalah stabilitas tegangan jika tegangan PLN naik/turun, maka
tegangan outputnya juga akan naik atau turun. Seperti rangkaian penyearah diatas,
jika arus semakin besar ternyata tegangan DC keluaran juga ikut turun. Untuk
beberapa aplikasi perubahan tegangan ini cukup mengganggu, sehingga
diperlukan komponen aktif yang dapat meregulasi tegangan keluaran ini menjadi
stabil.
Regulator tegangan berfungsi sebagai filter tegangan agar sesuai
keinginan, oleh karena itu biasanya dalam rangkaian power supply maka IC
regulator tegangan ini selalu dipakai untuk stabilnya outputan tegangan.
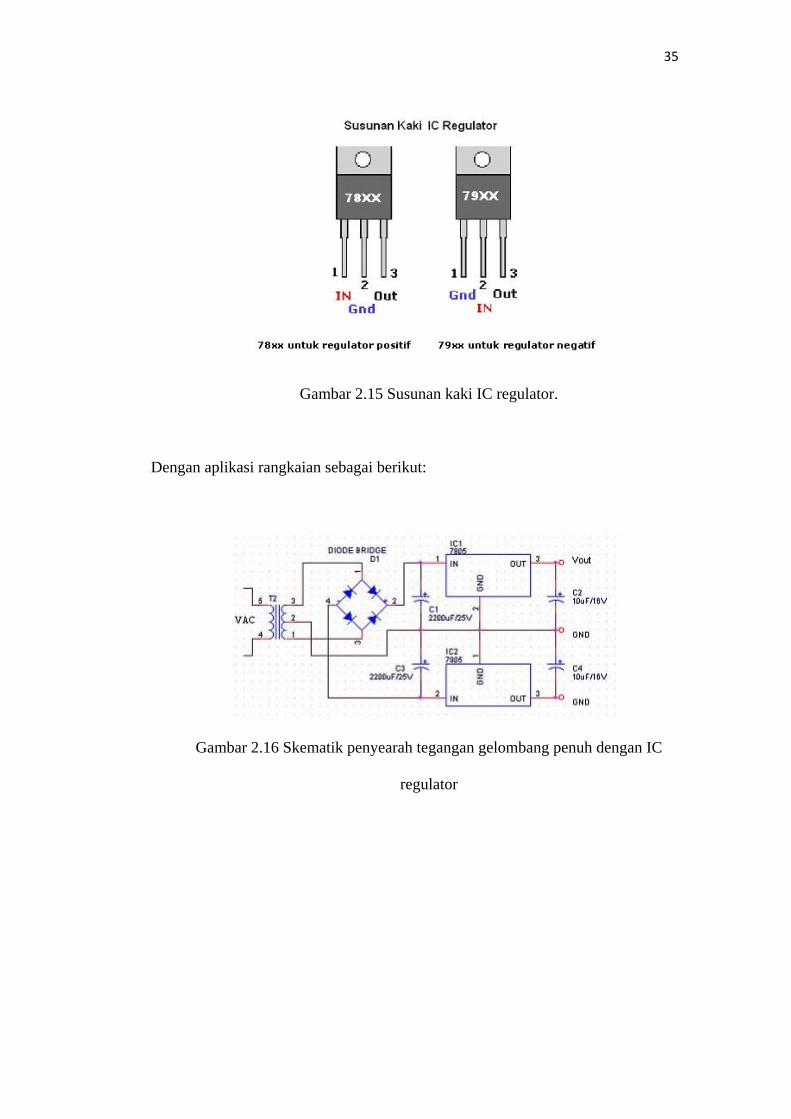
35
Gambar 2.15 Susunan kaki IC regulator.
Dengan aplikasi rangkaian sebagai berikut:
Gambar 2.16 Skematik penyearah tegangan gelombang penuh dengan IC
regulator

![ppid.dinkesjatengprov.go.id · 2020. 6. 30. · BPJS) 3.014; Rumah Sakit 306, terdiri dari RS Kemenkes RI 2; RS TN] Poiri 1 1; RS Kementerian lain 3; RS Pemda 63; RS Swasta 227. Subbag](https://static.fdokumen.com/doc/165x107/6097a354367c83431401e9fb/ppid-2020-6-30-bpjs-3014-rumah-sakit-306-terdiri-dari-rs-kemenkes-ri-2.jpg)