BAB I Pengenalan n Setting Alat
59
BAB I PENGENALAN DAN SETTING ALAT 1.1 Maksud dan Tujuan Maksud dan tujuan dari pelaksanaan praktikum pemetaan dan ilmu ukur tanah adalah agar para mahasiswa/mahasiswi mengenal bagian-bagian dari alat yang digunakan beserta fungsinya dan menyetting alat – alat yang digunakan dalam praktikum, sehingga dapat digunakan untuk pengukuran yang akan dilakukan. 1.2 Alat-alat yang digunakan Alat – Alat yang digunakan dalam praktikum ilmu ukur tanah dan pemetaan adalah : a. Theodolit Theodolit adalah sebuah alat optis buatan manusia yang mempunyai fungsi utama untuk mengukur sudut, baik sudut vertical maupun horizontal. Namun, alat ini juga dapat digunakan untuk mengukur jarak dan beda tinggi. o Komposisi alat a. Unit utama DT 200 series b. Baterai AA c. Plastik penutup alat d. Unting – unting e. Kotak alat 1
-
Upload
tri-gunawan -
Category
Documents
-
view
96 -
download
10
Transcript of BAB I Pengenalan n Setting Alat
BAB I
PENGENALAN DAN SETTING ALAT
1.1 Maksud dan Tujuan
Maksud dan tujuan dari pelaksanaan praktikum pemetaan dan ilmu ukur
tanah adalah agar para mahasiswa/mahasiswi mengenal bagian-bagian dari alat
yang digunakan beserta fungsinya dan menyetting alat – alat yang digunakan
dalam praktikum, sehingga dapat digunakan untuk pengukuran yang akan
dilakukan.
1.2 Alat-alat yang digunakan
Alat – Alat yang digunakan dalam praktikum ilmu ukur tanah dan pemetaan
adalah :
a. Theodolit
Theodolit adalah sebuah alat optis buatan manusia yang mempunyai
fungsi utama untuk mengukur sudut, baik sudut vertical maupun
horizontal. Namun, alat ini juga dapat digunakan untuk mengukur jarak
dan beda tinggi.
o Komposisi alat
a. Unit utama DT 200 series
b. Baterai AA
c. Plastik penutup alat
d. Unting – unting
e. Kotak alat
o Bagian – bagian alat :
1. Sighting Collimator
Berfungsi sebagai alat Bantu bidikan, bisa juga menggunakan
sinar laser yang telah disediakan dengan menekan tombol On atau
Off.
1

2. Objective Lens
Berfungsi untuk menangkap objek yang dibidik sehingga bisa
dibaca pada lensa okuler atau pengamat.
3. Instrumental Center Mark (Titik ketiggian theodolith)
Berfungsi sebagai titik pusat ketinggian dimana theodolith
didirikan yang di ukur dari permukaan tanah.
4. Horizontal Motion Clamp (Klem pengunci horizontal)
Berfungsi untuk mengunci perputaran theodolith ke arah
horizontal.
5. Horizontal Tanget Screw (Skrup penggerak halus horizontal)
Berfungsi untuk menggerakkan theodolit ke arah horizontal
secara halus.
6. Optical Plummet Telescope (Centering Optic)
Berfungsi untuk mengecek kedudukan theodolith, apakah sudah
tepat berada di atas patok atau belum.
7. Display (layar)
Berfungsi sebagai tempat untuk menampilkan pembacaan sudut
vertical maupun sudut horizontal, baik pembacaan sudut biasa
maupun luar biasa.
8. Handgrip (Pegangan)
Tempat untuk memegangatau membawa theodolith.
9. Handgrip Fixing Screw (Sekrup pengencang pegangan)
Sekrup untuk mengencangkan pegangan theodolith atau
handgrip.
10. Telescope Focusing Knob (Pengatur focus teropong)
Berfungsi untuk mengatur focus teropong sehingga objek yang
dibidik dapat terlihat dengan jelas.
11. Battery (baterai)
Sumber tenaga yang dipakai di theodolith.
12. Telescope Eyepiece (Lensa okuler atau pengamat)
2

Berfungsi untuk mengamati objek bidik dan mengamati bacaan
benang atas, benang tengah, dan benang bawah (pada rambu
ukur).
13. Vertical Motion Clamp (Klem pengunci vertical)
Berfungsi untuk mengunci perputaran theodolith ke arah vertikal.
14. Vertical Tangent Screw (Sekrup penggerak halus vertikal)
Befungsi untuk menggerakkan theodolith kea rah vertikal secara
halus.
15. Plate level (nivo tabung)
Berfungsi untuk mengetahui apakah theodolith sudah benar –
benar stabil. Dalam hal ini, sumbu I sudah benar – benar vertikal.
16. Operating Keys (Tombol pengoprasi)
Berfungsi untuk mengoperasikan theodolith, seperti menyalakan
theodolith, memunculkan pembacaan sudut vertikal, membaca
sudut biasa, dan luar biasa, dan lain – lain.
17. Circular Level (Nivo kotak)
Berfungsi untuk mengetahui posisi theodolith benar – benar sudah
datar (sumbu I vertikal).
18. Leveling Screw (Sekrup A, B, C)
Berfungsi untuk mengatur nivo kotak dan nivo tabung agar
sumbu I vertikal.
19. Centering Screw
Berfungsi untuk mengatur posisi theodolith agar berada tepat di
atas plat dasar sehingga posisinya stabil.
20. Connector (Penghubung)
21. Kompas
Berfungsi untuk mengatur arah utara bumi yang nantinya akan
dipakai sebagai titik refrensi (0º0'0") pada pengukuran polygon
tertutup.
Untuk lebih jelasnya dapat dilihat pada Gambar 1. 1 dan Gambar 1.2
3

handgrip
handgrip fixing screw
sighting collimator
objective lens Instrument
center mark
horizontal motion
clamp
Optical
plummet
telescope
horizontal
tangent
screw
Display
sekrup
Base
Gambar 1.1 Bagian-Bagian Theodolit (tampak depan)
4

Telescope focusing
knob
Battrey
Telescope
Eyeplace
vertical
motion clamp
plate level
vertical
tangent
screw
Gambar 1.2 Bagian-Bagian Theodolit (Tampak Belakang)
5

b. Waterpass
Water pass adalah sebuah alat optis buatan manusia yang berfungsi untuk
mengukur beda tinggi suatu titik atau suatu daerah
o Bagian – bagian alat :
1. Lensa objektif
Untuk menangkap objek yang dibidik sehingga bisa dibaca
pada lensa okuler.
2. Optical Micrometer alignment index (Kelurusan micrometer
optis indexing)
3. Cermin
Berfungsi untuk memberikan pencahayaan pada nivo kotak.
4. Pembidik
Sebagai alat bantu untuk membidik objek yang akan di amati.
5. Nivo Kotak
Berfungsi untuk mengetahui posisi water pass benar – benar
sudah datar (sumbu I vertikal)
6. Lensa Okuler (pengamat)
Untuk mengamati objek bidik dan mengamati bacaan benang
atas, benang tengah, dan benang bawah (pada rambu ukur).
7. Pelindung Lensa Okuler
Sebagai cover atau pelindung lensa okuler.
8. Sekrup Pengatur Fokus Teropong
Berfungsi untuk mengatur focus teropong sehingga objek yang
dibidik dapat terlihat dengan jelas.
9. Sekrup Penggerak Halus.
Untuk menggerakkan water pass ke arah horizontal secara
halus.
10. Sekrup A, B, C
Untuk mengatur nivo kotak agar sumbu I vertikal.
11. Plat dasar
6
Sebagai tempat dudukan water pass sehingga posisi water pass
stabil.
Untuk lebih jelasnya dapat dilihat pada Gambar 1.3
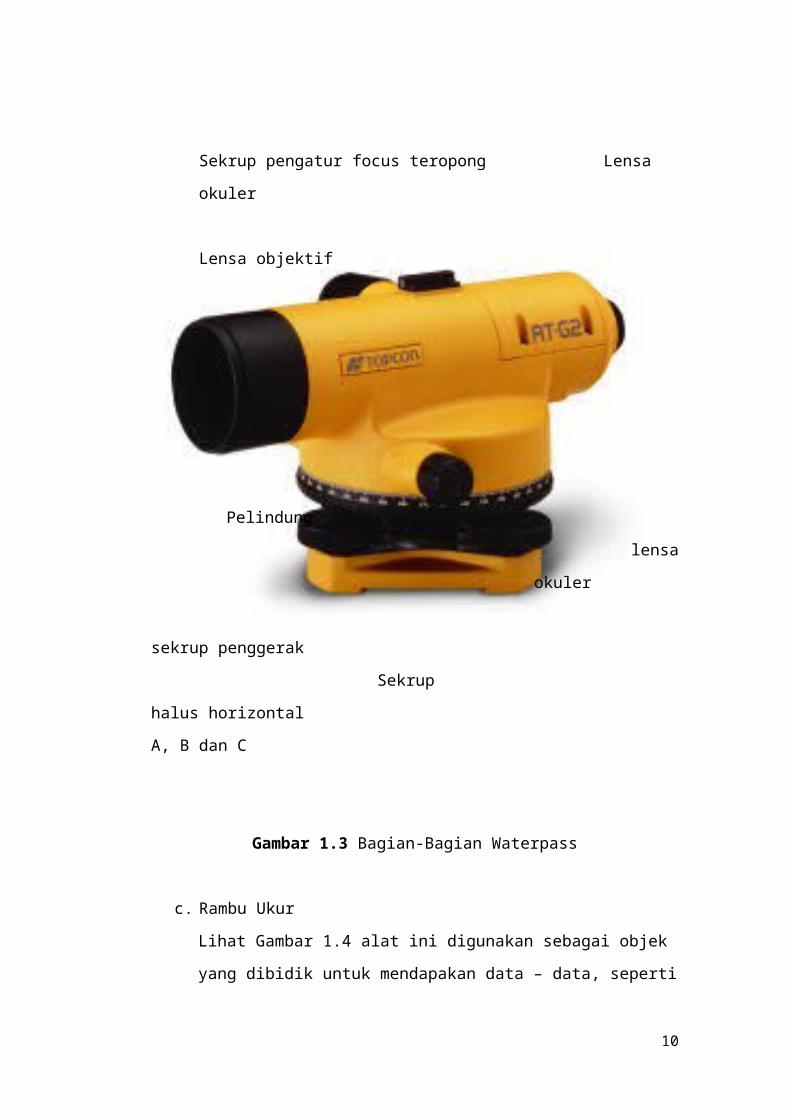
Pembidik
Sekrup pengatur focus teropong Lensa okuler
Lensa objektif
Pelindung
lensa okuler
sekrup penggerak Sekrup
halus horizontal A, B dan C
Gambar 1.3 Bagian-Bagian Waterpass
c. Rambu Ukur
Lihat Gambar 1.4 alat ini digunakan sebagai objek yang dibidik untuk
mendapakan data – data, seperti ketinggian, sudut vertikal, sudut
horizontal, benang atas, benang tengah, dan benang bawah.
7

Gambar 1.4 Rambu Ukur
d. Statif (Tripod)
Lihat Gambar 1.5 alat ini berfungsi tempat mendirikan alat (theodolith
dan waterpass).
Gambar 1.5 Statif (Tripod)
8

e. Meteran
Lihat Gambar 1.6 alat ini digunakan untuk memberi tanda dan mengukur
jarak langsung pada pengukuran penyipat datar dan untuk mengukur
ketinggian alat.
Gambar 1.6 Meteran
f. Unting – Unting
Lihat Gambar 1.7 digunakan untuk menempatkan sumbu I tepat di atas
patok.
Gambar 1.7 Unting-Unting
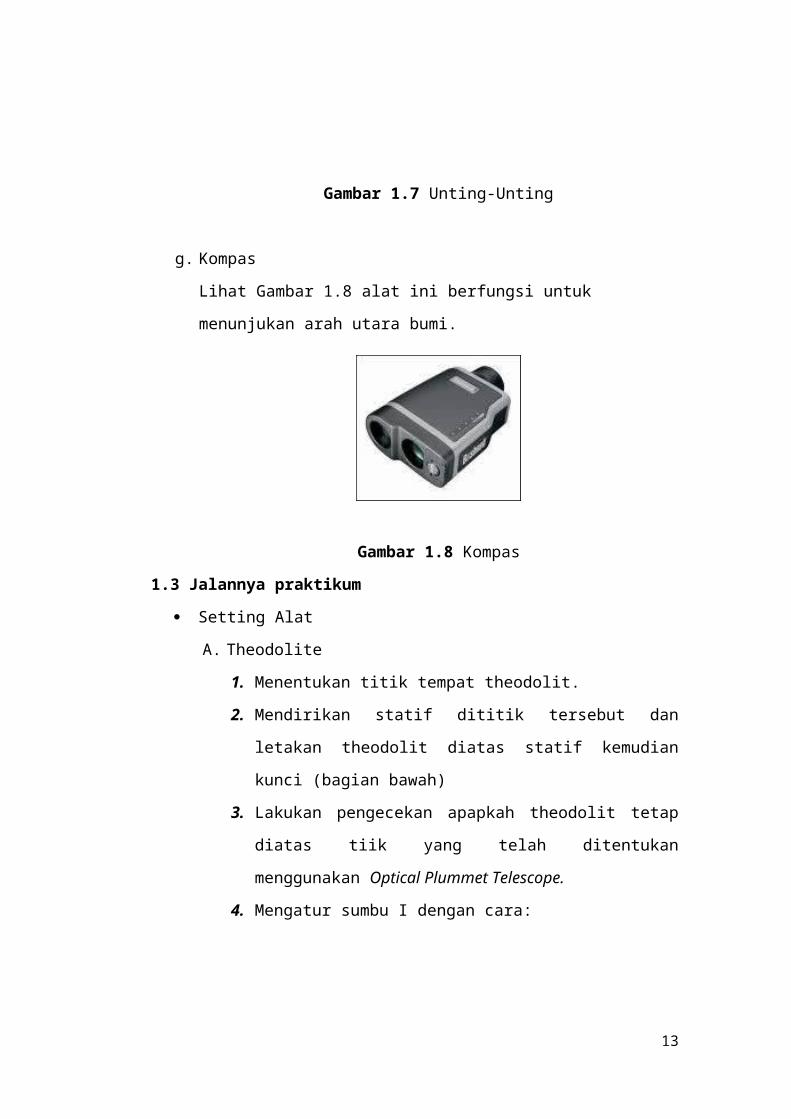
g. Kompas
Lihat Gambar 1.8 alat ini berfungsi untuk menunjukan arah utara bumi.
Gambar 1.8 Kompas
9
1.3 Jalannya praktikum
Setting Alat
A. Theodolite
1. Menentukan titik tempat theodolit.
2. Mendirikan statif dititik tersebut dan letakan theodolit diatas statif
kemudian kunci (bagian bawah)
3. Lakukan pengecekan apapkah theodolit tetap diatas tiik yang
telah ditentukan menggunakan Optical Plummet Telescope.
4. Mengatur sumbu I dengan cara:
a. Secara pendekatan pengaturan sumbu I dapat dilakukan dengan
perabraeaan nivo kotak, dengan memutar keriga sekrup A,B,C
b. Misalnya nivo mula-mula pada kedudukan I, maka pindahkan ke
kedudukan II dengan memutar sumbu A dan B bersama-sama
dengan perputaran seperti yang ditunjukan anak panah,
kemudian pindahkan nivo tersebut dari kedudukan II ke
kedudukan III dengan memutar sekrup penyetel C saja. Sebagai
cheking putarlah teropong terhadap sumbu I.
c. Lihatlah kedudukan nivo kotak bila masih pada kedudukan III
berarti upaya agar sumbu I mendekati vertical sudah selesai.
Tetapi bila nivo kotak masih berpindah kedudukan maka ulangi
tindakan-tindakan diatas sampai kedudukan seimbang (III) bila
diputar terhadap sumbu I seperti pada Gambar 1.9
10

C
A B
III
II
I
Gambar 1.9 Nivo kotak
d. Selanjutnya dipergunakan nivo tabung
Setimbangkan nivo tabung dengsn langkah awal, nivo tabung
diletakan diantara dua sekrup (misal sekrup A dan B) (kondisi I)
lihat gambar 1.10.kemudian putar salah satu saja dari dua sekrup
tersebut (memutar yang konsisten), bila kiri pakai kiri, bila pakai
kanan pakai kanan. Bila kondisi I nivo tabung sudah diposisi
tengah maka lanjut ke posisi II (memutar sekrup B dan C). jika
gelembung sudah berada ditengah maka lanjut ke kondisi III
dengan memutar sekrup C dan A seperti pada Gambar 1.10
11

III II
I
Gambar 1.10 nivo tabung
5. Pasang kompas di atas theodolith.
6. Nyalakan layer dengan menekan tombol “on”, lalu setting sudut
horizontal dengan menekan tombol “0 set” sebanyak 2 kali
sampai tertera 0º0'0".
7. Tampilkan pembacaan sudut vertikal (Vº/%)
8. Apabila di layar pada pembacaan sudut horizontal muncul huruf
R menunjukkan pembacaan sudut biasa, dan bila ingin diubah
menjadi pembacaan sudut luar biasa tekan tombol [R / L]
9. Ukur tinggi kedudukan alat dengan menggunakan meteran.
10. Pengukuran sudut horizontal dan vertikal menggunakan
theodolith model DT- 200 dilakukan dengan cara:
Sentring alat di titik C dan target di titik A dan B untuk lebih
jelasnya lihat Gambar 1.11.
12
C
BA
Gambar 1.11 Sudut Horizontal
Tekan power ON hingga tampil:
Bidik target A, tekan [0 SET ] :
Bidik target B maka sudut horizontal dan vertikal langsung
ditampilkan di layar:
13
α
V 83o55’53”
HR 133o06’37”
V 83o55’53”
HR 133o06’37”
V 83o55’53”
HR 133o06’37”
11. Setting sudut horizontal kanan/kiri (R/L) :
Tampilan HR di layar berarti bacaan horizontal membesar
jika teropong diputar searah jarum jam dan sebaliknya.
Tampilan HL di layar berarti bacaan horizontal mengecil jika
teropong diputar searah jarum jam dan sebaliknya.
12. Set pembacaan tertentu pada arah horizontal
Gerakkan teropong pada bacaan yang diinginkan
pembacaan tertentu
Tekan tombol ( HOLD )agar jika teropong diputar kearah
yang diinginkan pembacaan horizontal tidak berubah.
Untuk menormalkan kembali bacaan arah horizontal tekan (
HOLD ).
13. Pengukuran kemiringan (V%)
14. Pengukuran jarak (D)
Dengan bantuan pembacaan rambu ukur dan metode stadia
maka jarak alat DT-200 series dengan rambu ukur dapat
diketahui. Untuk lebih jelasnya lihat gambar 1.2
14
V 83o55’53”
HR 133o06’37”
V 83o55’53”
HR 133o06’37”Tekan tombol [V%]
V -30%
HR 133o06’37”

Gambar 1.12 garis bidik
Rumus yang digunakan:
D = 100 . (Ba-Bb) . cos2 H ……………………………………………….…(1.1)
D : jarak alat ke rambu ukur
100 : konstanta alat
Ba : pembacaan benang atas rambu ukur
Bb : pembacaan benang bawah rambu ukur
Z : pembacaan sudut vertikal
H : heling (900 – Z)
B. Waterpass
1. Menentukan titik tempat alat waterpass.
2. Mendirikan statif di titik tersebut dan letakkan waterpass diatasnya
kemudian dikunci (bagian bawah)
3. Pasang unting-unting di bawah kunci, kemudian atur posisi statif
dengan menggunakan unting-unting tepat di atas titik.
4. Membuat garis arah nivo tegak lurus sumbu I :
15

Untuk tipe semua alat tanpa sekrup heling, garis arah nivo sudah
tegak lurus sumbu I . Cara mengatur nivo seimbang adalah dengan
ketiga sekrup penyetel (lihat Gambar 1.9). Nivo kotak mula-mula
pada kedudukan II dengan memutar sekrup penyetel A dan B secara
bersama-sama dengan putaran seperti anak panah kemudian
pindahkan nivo tersebut dari kedudukan II kekedudukan III dengan
memutar sekrup penyetel C saja. Dengan mengikuti gerakan-
gerakan sebagai checking putarlah teropong terhadap sumbu I.lihat
kedudukan nivo kotak tadi, bila pada kedudukan III tidak berubah
berarti upaya agar sumbu I mendekati vertikan berhasil.
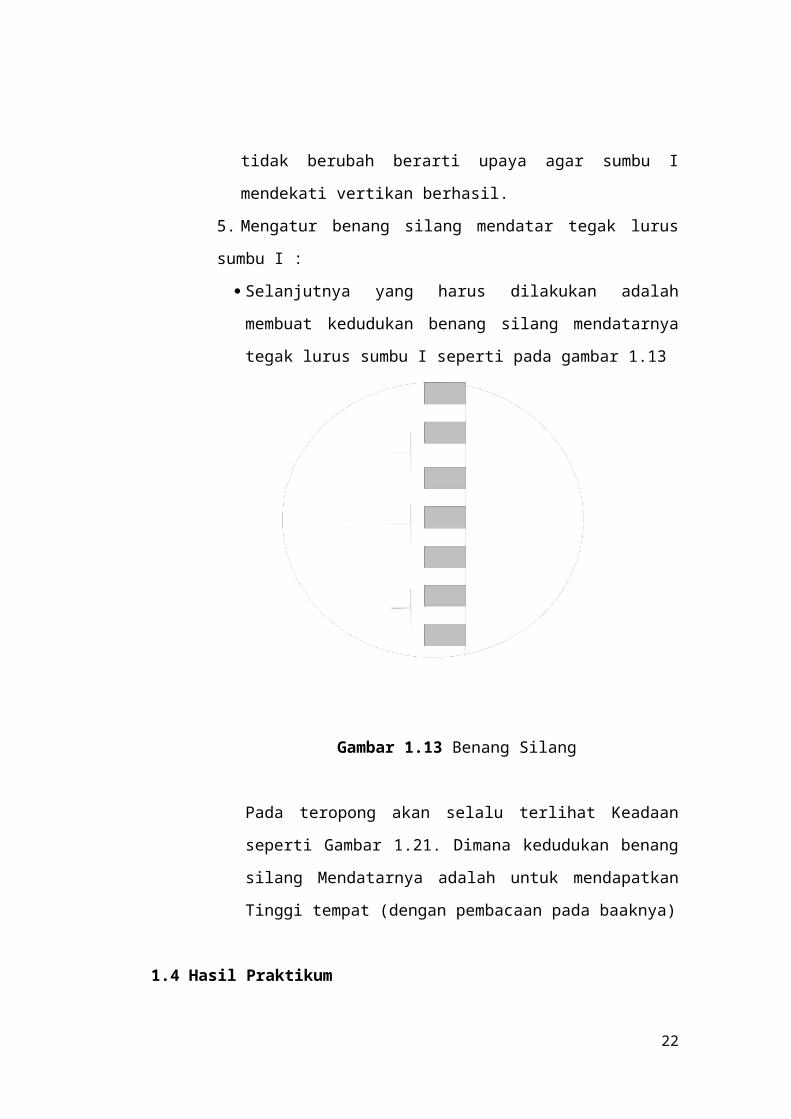
5. Mengatur benang silang mendatar tegak lurus sumbu I :
Selanjutnya yang harus dilakukan adalah membuat kedudukan
benang silang mendatarnya tegak lurus sumbu I seperti pada
gambar 1.13
Gambar 1.13 Benang Silang
Pada teropong akan selalu terlihat Keadaan seperti Gambar 1.21.
Dimana kedudukan benang silang Mendatarnya adalah untuk
mendapatkan Tinggi tempat (dengan pembacaan pada baaknya)
16

1.4 Hasil Praktikum
a. Theodolith
Data hasil pengamatan di lapangan:
1. Bb = 2.255 m
Ba = 2.410 m
Bt = 2.333 m
SV1 =88º53'55"
SH1 = 133º37'06"
ti = 1.678 m
D = A . Y cos2 h
= 100 . (ba - bb) cos2 (90o – SV)
= 100 . (2.410 – 2.255) cos2 (90o – 88o53’55”)
= 15.485 m
h = D tg h + (ti - bt)
= 100 tg (90o – 88o53’55”) + (1.678 – 2.333)
= 1.268 m
2. Bb = 2.113 m
Bt = 2.194 m
Ba = 2.275 m
SV1 = 88º53'54"
SH1 = 133º20'56"
ti = 1.678 m
D = A . Y cos2 h
= 100 . (ba - bb) cos2 (90o – 88º53'54")
= 100 . (2.275 – 2.113) cos2 (90o –88º53'54")
= 16.1935 m
h = D tg h + (ti - bt)
= 16.1935 tg (90o – 88º53'54") + (1.678 – 2.194)
= -0.2046 m
17

b. Waterp
ass
Data hasil pengamatan di lapangan:
1. ti = 1,531 m
Ba = 1,905 m
Bt = 1,827 m
Bb = 1,750 m
D = 100(Ba-Bb)
= 100 (1,905 – 1,750)
=15.5 m
2. Ba = 1,355 m
Bt = 1,290 m
Bb = 1,225 m
D = 100 (Ba - Bb)
= 100 (1,355 – 1,225)
=13 m
∆h = BtA - BtB
= 1,827 – 1,290
= 0.537 m
1.5 Kesimpulan
Dari praktikum ini dapat kita tarik kesimpulan setiap mahasiswa dapat
mempelajari menyeting dan memahami fungsi dari theodolit dan waterpass.
Sehingga dalam praktikum atau terjun kelapangan mahasiswa dapat mengatasi
kendala-kendala yang yang muncul dalam praktikum.
18

BAB II
POLIGON TERBUKA
1.1. Maksud dan Tujuan
Poligon Terbuka merupakan penghubungan antara beberapa titik yang
berguna dalam menentukan elevasi suatu bidang tanah sehingga dapat
dijadikan acuan pembangunan jalan.
Dalam hal ini, jarak titik satu dan lainnya harus di perhatikan
karena merupakan hal sensitif dalam perhitungan elevasi, serta perbedaan
tinggi bidang tanah juga merupakan hal penting yang harus diperhatikan
ketika melakukan perhitungan polygon terbuka.
1.2. Alat-Alat Yang Digunakan
a. Waterpass
b. Statif
c. payung
d. Rambu Ukur
e. Rambu Pancang
f. Unting – unting
g. Rol meter
h. Alat Tulis dan Kalkulator
1.3. Jalannya Praktikum
a. Pre test
Sebelum melaksanakan praktikum terlebih dahulu melaksankan pre
test yang bertujuan agar saat jalannya praktikum tidak menemui
kendala dalam permbacaan dan perhitungan jaraknya. berikut jalannya
pre test:
19

1. Ukur jarak sejauh 20 m kemudian letakan alat pada titik X dan
ukur menuju titik A dilanjutkan menuju titik B lalu tentukan h1
seperti pada kondisi I
2. Pindahkan alat ke titik Y dan ukur kembali menuju titik A dan
titik B kemudian tentukan h2 seperti pada kondisi II.
3. Dari hasil yang telah diperoleh dapat kita hitung h=0 jika
h=0 maka ulangi langkah-langkah diatas.
Lebih jelasnya dapat dilihat pada Gambar II
10 m A 10 m B
Kondisi I kondisi II
Gambar II Pre Test
b. praktikum
1. Menentukan titik-titik polygon secara horizontal (memanjang)
2. Ukur jarak titik polygon seluruhnya adalah 120 meter dapat kita
lihat pada gambar II.1, lalu bagi jarak tersebut menjadi 4 stasiun
saat berangkat masing-masing dengan jarak 30 meter. Lalu bagi
menjadi 3 statiun dari titik akhir dengan jarak antar stasiun adalah
40 meter seperti pada gambar II.1 dan II.2
3. Usahakan saat pulang tidak melalui patok yang telah digunakan
saat berangkat. Pergi dan berangkat dilakukan agar menegtahui
tingkat ketelitian saat melakukan waterpassing.
20

120 meter
Gambar II.1 Titik Jarak Polygon
A 30 m B 30 m C 30 m D 30m E
Gambar II.2 Titik Antar Polygon (Berangkat)
21
A 30 m B 30 m C 30 m D 30m E
Gambar II.3 Titik Antar Polygon (Berangkat)
4. Kemudian letakkan alat pada jarak tengah yaitu 15 meter dari titik
satu dengan lainnya. Seperti pada gambar II.3
5. Lakukan pensettingan alat disetiap jarak tengah titik di atas.
Usahakan agar unting-unting berada tepat diatas patok dan nivo
kotak pada waterpass gelembungnya tetap berada di tengah.
6. Untuk pembacaan rambu, saat berangkat letakkan rambu di titik A
(belakang) lalu bidik setelah itu pindahkan rambu di titik B
(muka) lalu bidik titik as terbih dahulu, kemudian pasang rambu
dalam keadaan melintang bagi menjadi 6 titik seperti gambar II.4
dan II.5
a b c d e f
0,5 m 0,5 m 1 m 0,5 m 0,5m
Gambar II.4 Posisi Rambu Horizontal
22

Gambar II.5 Pembacaan Ba Dan Bb
7. Lakukan hal yang sama hingga titik E.
8. Setelah melakukan waterpassing saat berangkat, kini lakukan
waterpassing saat pulang. Dari titik E, buatlah patok yang terdiri
dari 3 titik yang jarak antar masing-masing titik adalah 40 meter.
Letakkan alat pada jarak tengah titik-titik tersebut yaitu 20 meter.
A 20 m 20 m G 20 m 20 m F 20 m 20 m E
Gambar II.6 Pengukuran Saat Pulang
23

9. Lakukan bidikan awal di titik tengah E dan F dengan E belakang
dan F sebagai muka, lakukan terus bidikan tehadap rambu hingga
kembali ke titik A lebih jelasnya seperti gambar II.6.
1.4. Perhitungan Data
a. Data praktikum
Rumus yang digunakan:
Δhi = bt belakang – bt muka.............................................................. (2.1)
D = (ba – bb) belakang x 100 + (ba – bb) muka x 100.................... (2.2)
El1 = NIM + Δh................................................................................. (2.3)
K = D/ΣD (-Σ Δh)............................................................................ (2.4)
Elt = NIM+ Δh + koreksi................................................................ (2.5)
Δh2 = bti – btd .................................................................................. (2.6)
El2 = elevasi tetap (El1) + Δh2......................................................... (2.7)
∆ h1 : Beda tinggi sipat datar memanjang
bt belakang : Benang tengah belakang
bt muka : Benang tengah muka
D : Jarak antara titik
Ba : Pembacaan benang atas
bb : Pembacaan benang bawah
100 : Konstanta alat
El1 : Elevasi sementara sipat datar memanjang
NIM : Nomor induk mahasiswa (258)
K : Koreksi
ΣD : Jumlah jarak antara titik
Σ Δh : Jumlah beda tinggi
Elt : Elevasi tetap
∆ h2 : Beda tinggi sipat datar melintang
bti : Benang tengah ikat suatu titik
btd : Benang tengah titik detail
24

El : Elevasi sipat datar melintang
Perhitungan Titik Ikat
Pengukuran Δh (beda tinggi)
Rumus Δh = bt belakang – bt muka
1. Stasiun I titik A dan B
Δh = 1,835 – 0,62 = 1.22 m
2. Stasiun II titik B dan C
Δh = 1,685 – 0,695 = 0.99 m
3. Stasiun III titik C dan D
Δh = 1,700 – 0.765 = 0,93 m
4. Stasiun IV titik D dan E
Δh = 1,710 – 0.685 = 1.03 m
5. Stasiun V titik E dan F
Δh = 0.515 – 1, 86 = -1.34 m
6. Stasiun VI titik F dan G
Δh = 0, 52– 1.79 = -1,27 m
7. Stasiun VII titik G dan A
Δh = 0,55 – 2,028 = -1,57 m
Jarak Antar Titik
Rumus D = [(ba – bb) belakang + (ba – bb) muka] x 100
1. Jarak antara titik A dan B
D1 = [(1,91 – 1,76) + (0,695 – 0,545)] x 100 = 30 m
2. Jarak antara titik B dan C
D2 = [1.76 – 1,61) + (0,77 – 0,62)] x 100 = 30 m
3. Jarak antara titik C dan D
D3 = [(1,775 – 1,625) + (0.84 – 0.69)] x 100 = 30 m
4. Jarak antara titik D dan E
D4 = [(1,795 – 1,645) + (0.76 – 0.61)] x 100 = 30 m
5. Jarak antara titik E dan F
D5 = [(0.615 – 0.415) + (1.96 – 1.76)] x 100 = 40 m
25

6. Jarak antara titik F dan G
D6 = [(0.62 – 0,42) + (1.89 – 1.69)] x 100 = 40 m
7. Jarak antara titik G dan A
D7 = [(0,56 – 0,36) + (2,128 – 1.928)] x 100 = 40 m
Elevasi Sementara
Rumus Eln = Eln – 1 + Δh
1. Elevasi Sementara titik A dan B
ElB = ElA + Δh
= 268 + 1.22 = 269.22 m
2. Elevasi Sementara titik B dan C
ElC = ElB + Δh
= 269.22 + 0.99 = 270.21 m
3. Elevasi Sementara titik C dan D
ElD = ElC + Δh
= 270.21 + 0.93 = 271.14 m
4. Elevasi Sementara titik D dan E
ElE = ElD + Δh
= 271.14 + 1.03 = 272.17 m
5. Elevasi Sementara titik E dan F
ElF = ElE + Δh
= 272.17 – 1.34 = 270.83 m
6. Elevasi Sementara titik F dan G
ElG = ElF + Δh
= 270.83 – 1,27 = 269.56 m
7. Elevasi Sementara titik G dan A
ElA = ElG + Δh
=269.56 – 1.57 = 268 m
Koreksi
Rumus : K = D/ΣD (-Σ Δh)
26

1. Koreksi stasiun I
K1 = 30/240 (-0.01)
= -0,00125 m
2. Koreksi stasiun II
K2 = 30/240 (-0,01)
= -0,00125 m
3. Koreksi stasiun III
K3 = 30/240 (-0,01)
= -0,00125 m
4. Koreksi stasiun IV
K4 = 30/240 (-0,01)
= -0,00125 m
5. Koreksi stasiun V
K5 = 40/240 (-0,01)
= -0.0016 m
6. Koreksi stasiun VI
K6 = 40/240 (-0,01)
= -0.0016 m
7. Koreksi stasiun VII
K7 = 40/240 (-0,01)
= -0.0016 m
Perhitungan Elevasi Tetap
Rumus : Eltn = Elevasi tetap sementara + koreksi + beda tinggi
1. Elevasi tetap A
EltA = 268 m
2. Elevasi tetap B
EltB = 268 + 0,00125 + 1.22 = 269.2213 m
3. Elevasi tetap C
EltC = 269.2213 + 0,00125 + 0.99 = 270.2126 m
4. Elevasi tetap D
27

EltD = 270.2126 + 0,00125 +0.93 = 271.1439 m
5. Elevasi tetap E
EltE = 271.1439 + 0,00125 + 1.03 = 272.1752 m
6. Elevasi tetap F
EltF = 272.1752 + 0,0016 + (- 1.34) = 270.8368 m
7. Elevasi tetap G
EltG = 270.8368 + 0,0016 + (-1.27) = 269.5684 m
8. Elevasi tetap A
EltA = 269.5684 + 0,0016 + (1.57) = 268 m
Perhitungan Sifat Dasar Melintang
Perhitungan beda tinggi titik detail
Rumus : Δh = bti – btd bti = benang tengah ikat suatu titik
btd = benang tengah titik detail
1. Untuk titik ikat B bti = 0,62 m
Δha = 0,62 – 0,608 = 0,012 m
Δhb = 0,62 – 0,615 = 0,005 m
Δhc = 0,62 – 0,615 = 0,005 m
Δhd = 0,62 – 0,625 = -0,005 m
Δhe = 0,62 – 0,655 = -0,035 m
Δhf = 0,62 – 0,725 = -0,105 m
2. Untuk titk ikat C bti = 0,695 m
Δha = 0,695 – 0,694 = 0,001 m
Δhb = 0,695 – 0,6895 = 0,0055 m
Δhc = 0,695 – 0,685 = 0,001 m
Δhd = 0,695 – 0,7 = -0,015 m
Δhe = 0,695 – 0,715 = -0,02 m
Δhf = 0,695 – 0,725 = -0,01 m
3. Untuk titik ikat D bti = 0.685 m
Δha = 0.685 – 0.74 = 0,025 m
Δhb = 0.685 – 0.745 = 0,02 m
28

Δhc = 0.685 – 0.745 = 0,02 m
Δhd = 0.685 – 0.78 = -0,015 m
Δhe = 0.685 – 0.785 = -0,02 m
Δhf = 0.685 – 0.775 = -0,01 m
4. Untuk titik ikat E bti = 0.685 m
Δha = 0.685 – 0.7075 = -0,0225 m
Δhb = 0.685 – 0.6775 = 0,0075 m
Δhc = 0.685 – 0.685 = 0 m
Δhd = 0.685 – 0.695 = -0,01 m
Δhe = 0.685 – 0.71 = -0,025 m
Δhf = 0.685 – 0.7 = -0,015 m
5. Untuk titik ikat F bti = 1.86 m
Δha = 1.86 – 1.87 = -0,01 m
Δhb = 1.86 – 1.88 = -0,02 m
Δhc = 1.86 – 1.87 = -0,01 m
Δhd = 1.86 – 1.86 = 0 m
Δhe = 1.86 – 1.8575 = 0,0025 m
Δhf = 1.86 – 1.8575 = 0,0025 m
6. Untuk titik ikat G bti = 1.79 m
Δha = 1.79 – 1.835 = -0,045 m
Δhb = 1.79 – 1.81 = -0,02 m
Δhc = 1.79 – 1.7925 = -0,0025 m
Δhd = 1.79 – 1.78 = 0,01 m
Δhe = 1.79 – 1.78 = 0,01 m
Δhf = 1.79 – 1.77 = 0,02 m
7. Untuk titik ikat A bti = 2.028 m
Δha = 2.028– 2,1 = -0,072 m
Δhb = 2.028– 2,067 = -0,039 m
Δhc = 2.028– 2,047 = -0.019 m
Δhd = 2.028– 2,017 = 0,011 m
Δhe = 2.028– 2,002 = 0,026 m
29

Δhf = 2.028 – 2,006 = -0,022 m
Perhitungan elevasi titik detail
Rumus : Elevasi titik detail = elevasi titik ikat + ∆h titik detail
1. Untuk titik ikat B
Elevasi a = 269.2213 + 0,012 = +269.2333
Elevasi b = 269.2213 + 0,005 = +269.2263
Elevasi c = 269.2213 + 0,005 = +269.2263
Elevasi d = 269.2213 - 0,005 = +269.2163
Elevasi e = 269.2213 - 0,0035 = +269.1863
Elevasi f = 269.2213 - 0,105 = +269.1163
Untuk lebih lengkapnya lihat pada Gambar II.7
Gambar II.7 sketsa B
2. Untuk titik ikat C
Elevasi a = 270.2126 + 0,001 = +270.2136
Elevasi b = 270.2126 + 0,0055 = +270.2181
Elevasi c = 270.2126 + 0,01 = +270.2226
Elevasi d = 270.2126 - 0,005 = +270.2076
Elevasi e = 270.2126 - 0,02 = +270.1926
30

Elevasi f = 270.2126 - 0,03 = +270.1826
Untuk lebih lengkapnya lihat pada Gambar II.8
Gambar II.8 sketsa C
3. Untuk titik ikat D
Elevasi a = 271.1439 + 0,025 = +271.1689
Elevasi b = 271.1439 + 0,02 = +271.1639
Elevasi c = 271.1439 + 0,02 = +271.1639
Elevasi d = 271.1439 – 0,015 = +271.1289
Elevasi e = 271.1439 – 0,02 = +271.1239
Elevasi f = 271.1439 – 0,01 = +271.1339
Untuk lebih lengkapnya lihat pada Gambar II.9
31

Gambar II.9 sketsa D
4. Untuk titik ikat E
Elevasi a = 272.1752 - 0,0225 = +272.1527
Elevasi b = 272.1752 + 0,0075 = +272.1827
Elevasi c = 272.1752 + 0 = +272.1752
Elevasi d = 272.1752 - 0,01 = +272.1652
Elevasi e = 272.1752 - 0,025 = +272.1502
Elevasi f = 272.1752 - 0,015 = +272.1602
Untuk lebih lengkapnya lihat pada Gambar II.10
32

Gambar II.11 sketsa E
5. Untuk titik ikat F
Elevasi a = 270.8368 - 0,01 = +270.8268
Elevasi b = 270.8368 - 0,02 = +270.8168
Elevasi c = 270.8368 - 0,01 = +270.8268
Elevasi d = 270.8368 + 0 = +270.8368
Elevasi e = 270.8368 + 0,0025 = +270.8393
Elevasi f = 270.8368 + 0,0025 = +270.8393
Untuk lebih lengkapnya lihat pada Gambar II.11
33

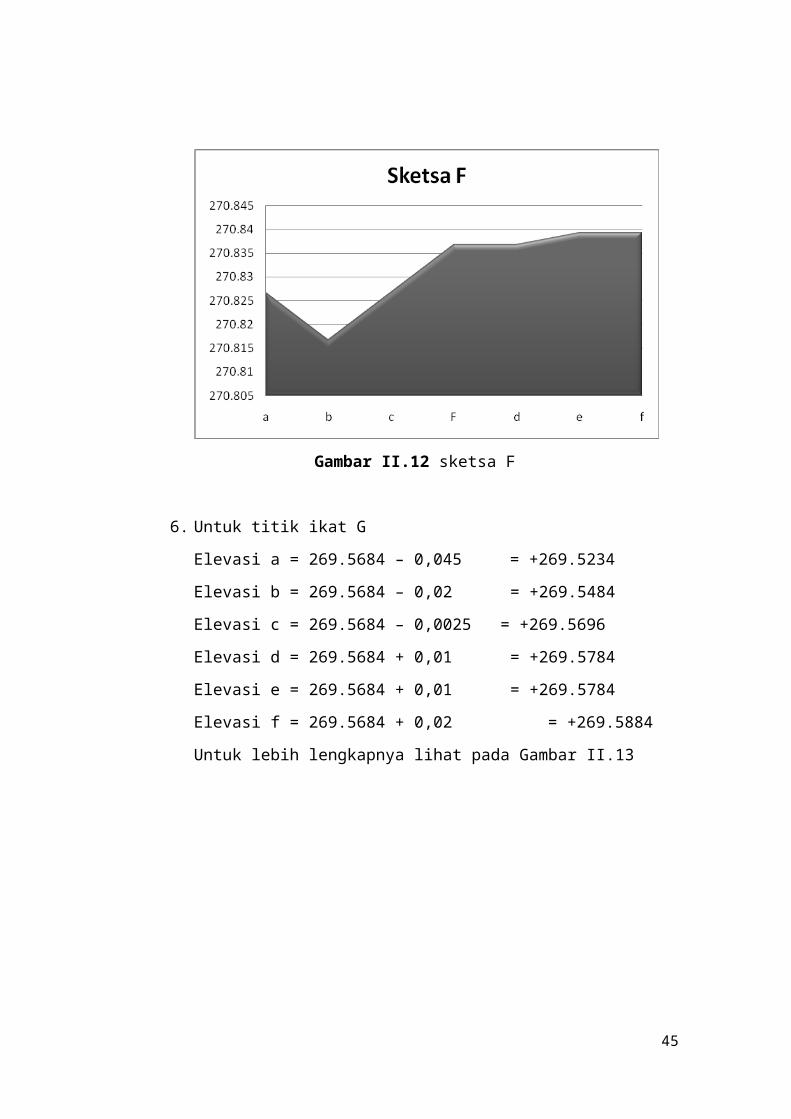
Gambar II.12 sketsa F
6. Untuk titik ikat G
Elevasi a = 269.5684 – 0,045 = +269.5234
Elevasi b = 269.5684 – 0,02 = +269.5484
Elevasi c = 269.5684 – 0,0025 = +269.5696
Elevasi d = 269.5684 + 0,01 = +269.5784
Elevasi e = 269.5684 + 0,01 = +269.5784
Elevasi f = 269.5684 + 0,02 = +269.5884
Untuk lebih lengkapnya lihat pada Gambar II.13
34
Gambar II.13 sketsa G
7. Untuk titik ikat A
Elevasi a = 268 - 0,072 = +267.928
Elevasi b = 268 - 0,039 = +267.961
Elevasi c = 268 - 0 = +268
Elevasi d = 268 + 0,011 = +268.011
Elevasi e = 268 + 0,026 = +268.026
Elevasi f = 268 + 0,022 = +268.022
Untuk lebih lengkapnya lihat pada Gambar II.14
35

Gambar II.14 Sketsa A
b. Perhitungan Galian dan Timbunan
c. Rumus :
H0 = Elevasi tetap B + 1,5 ....................................................(2.9)
y1 = H0– elevasi.......................................................................(2.10)
H0’ = H0 – (5‰ . LEF)..............................................................(2.11)
y2 = elevasi - H0....................................................................(2.12)
DBC.......................................................................(2.13)
LCD......................................................................(2.14)
Keterangan:H0 : tinggi elevasi di titik pertama
y1 : koordinat y timbunan
H0’ : tinggi elevasi di titik kedua
y2 : koordinat y galian
V1 : Volume timbunan
V2 : Volume galian
36
37

Volume Timbunan
Titik D-E
H0 = E levasi tetap E + 1,0
= 272,1752 + 1,0
= 273.1752 m
B = 2,5 m
I = 4 ‰
Titik D
-1.5 -1 -0.5 0 0.5 1 1.5
-1.25 1.25
P q
a
b c
D
d e f
y = elevasi - H0
ya = 271.1689 – 273.1752 = -2.0063 xa = -1,5
yb = 271.1639 – 273.1752 = -2.0113 xb = -1
yc = 271.1639 – 273.1752 = -2.0113 xc = -0,5
yD = 271.1439 – 273.1752 = -2.0313 xD = 0
yd = 271.1289 – 273.1752 = -2.0463 xd = 0,5
ye = 271.1239 – 273.1752 = -2.0513 xe = 1
38
yf = 271.1339 – 273.1752 = -2.0413 xf = 1,5
yp = 0 xp = -1,25
yq = 0 xq = 1,25
LD xP . yq ) + ( xq . yf ) + ( xf . ye ) + ( xe . yd ) + ( xd . yD ) + ( xD . yc ) +
( xc . yb ) + ( xb . ya ) + ( xa . yp ) – ( xp . ya ) – ( xa . yb ) – ( xb . yc ) – ( xc . yD ) – (
xD . yd ) – ( xd . ye ) – ( xe . yf ) – ( xf . yq ) – ( xq . yp )
= -1,25 . 0 ) + (1,25 . -2.0413) + (1,5 . -2.0513) + (1,0 . -2.0463) +
( 0,5 . -2.0313) + ( 0 . -2.0113 ) + ( -0,5. -2.0113) +
( -1,0 . -2.0063 ) + ( -1,5 . 0 ) – ( -1,25. -2.0063) – ( -1,5 . -2.0113) – ( -1,0 .
-2.0113) – (- 0,5 . -2.0313) – ( 0 . -2.0463) – ( 0,5 . -2.0513) –
( 1,0 . -2.0413) – ( 1,5 . 0 ) – ( 1,45 . 0)}
= . [-13.1544]
= 6.5772 m2
Titik E
b
c E
d e f
a
P q
-1.25 1.25
y = elevasi - H0’
39
ya = 272.1527 – 273.294 = -1.1413 xa = -1,5
yb = 272.1827 – 273.294 = -1.1113 xb = -1
yc = 272.1752 – 273.294 = -1.1188 xc = -0,5
yE = 272.1752 – 273.294 = -1.1188 xE = 0
yd = 272.1652 – 273.294 = -1.1288 xd = 0,5
ye = 272.1502– 273.294 = -1.1438 xe = 1
yf = 272.1602– 273.294 = -1.1338 xf = 1,5
yp = 0 xp = -1,25
yq = 0 xq = 1,25
LE xP . ya ) + ( xa . yb) + ( xb . yc ) + ( xc . yE ) + ( xE . yd ) + ( xd . ye ) +
( xe . yf ) + ( xf . yq ) + ( xq . yp ) - (xP . yq ) - ( xq . yf ) - ( xf . ye ) - ( xe . yd ) –
( xd . yE ) - ( xE . yc ) - ( xc . yb ) - ( xb . ya ) - ( xa . yp )
= -1,25 . -1.1413) + (-1,5 . -1.1113) + (-1,0. -1.1188) + (-0,5 . -1.1188)
+ ( 0 . -1.1288) + ( 0.5 . -1.1438) + ( 1 . -1.1438) + ( 1,5 . 0) + ( 1,25 . 0) –
( -1,25. 0 ) – ( 1,25 . -1.1338) – ( 1,5 . -1.1438) – ( 1. -1.1288) –
( 0.5 . -1.1188) – ( 0 . -1.1188) – (- 0.5 . -1.1113) – ( -1,0 . -1.1413) – ( -1,5 .
0)}
= 6.190275
= 3.095
H0’ = 273.1752 + 0.12
= 273.294
Vtot = 6.5772 + 3.095 x 30
2
= 145.08 m3
Volume Galian
40

Titik D-E
H0 = E levasi tetap A - 1,5
= 268 + 1,5
=266.5 m
B = 2,4 m
I = 6 ‰
Titik G
-1.5 -1 -0.5 0 0.5 1 1.5
p q
-1.2 1.2
d e f
c G
b
a
y = elevasi - H0
ya = 269.5234 – 266.5 = 3.0234 xa = -1,5
yb = 269.5484 – 266.5 = 3.0484 xb = -1
yc = 269.5696 – 266.5 = 3.0696 xc = -0,5
yG = 269.5684 – 266.5 = 3.0684 xE = 0
yd = 269.5784 – 266.5 = 3.0784 xd = 0,5
ye = 269.5784 – 266.5 = 3.0784 xe = 1
yf = 269.5884 – 266.5 = 3.0884 xf = 1,5
41

yp = 0 xp = -1,2
yq = 0 xq = 1,2
LG xP . yq ) + ( xq . yf ) + ( xf . ye ) + ( xe . yd ) + ( xd . yG ) + ( xG . yc ) +
( xc . yb ) + ( xb . ya ) + ( xa . yp ) – ( xp . ya ) – ( xa . yb ) – ( xb . yc ) – ( xc . yG ) – (
xG . yd ) – ( xd . ye ) – ( xe . yf ) – ( xf . yq ) – ( xq . yp )
= -1,2 . 0 ) + (1,2 . 3.0884) + (1,5 . 3.0784) + (1,0 . 3.0784) +
( 0,5 . 3.0684) + ( 0 . 3.0696) + ( -0,5. 3.0484) + ( -1,0 . 3.0234 ) +
( -1,5 . 0 ) – ( -1,2. 3.0234) – ( -1,5 . 3.0484) – ( -1,0 . 3.0696) –
(- 0,5 . 3.0684) – ( 0 . 3.0784) – ( 0,5 . 3.0784) – ( 1,0 . 3.0884) –
( 1,5 . 0 ) – ( 1,45 . 0)}
= . 16.5656
= 8.2828
H0’ = 266.5 – 0.24
= 266.24
Titik A
d e f
c A
b
a
42

p q
-1.2 1.2
y = elevasi - H0’
ya = 267.928 – 266.24 = 1.668 xa = -1,5
yb = 267.961 – 266.24 = 1.701 xb = -1
yc = 267.981 – 266.24 = 1.721 xc = -0,5
yA = 268 – 266.24 = 1.74 xA = 0
yd = 268.011 – 266.24 = 1.751 xd = 0,5
ye = 268.026 – 266.24 = 1.766 xe = 1
yf = 268.022 – 266.24 = 1.762 xf = 1,5
yp = 0 xp = -1,2
yq = 0 xq = 1,2
LA xP . ya ) + ( xa . yb) + ( xb . yc ) + ( xc . yA ) + ( xA . yd ) + ( xd . ye ) +
( xe . yf ) + ( xf . yq ) + ( xq . yp ) - (xP . yq ) - ( xq . yf ) - ( xf . ye ) - ( xe . yd ) –
( xd . yA ) - ( xA . yc ) - ( xc . yb ) - ( xb . ya ) - ( xa . yp )
= -1,2 . 1.668) + (-1,5 . 1.701) + (-1,0. 1.721) + (-0,5 . 1.74) +
( 0 . 1.751) + ( 0.5 . 1.766) + ( 1 . 1.762) + ( 1,5 . 0) + ( 1,2 . 0) –
( -1,2. 0 ) – ( 1,2 . 1.762) – ( 1,5 . 1.766) – ( 1. 1.751) –
( 0.5 . 1.74) – ( 0 . 1.721) – (- 0.5 . 1.701) – ( -1,0 . 1.668) – ( -1,5 . 0)}
= [-9.365]
= 4.682
Vtot = 8.2828 + (4.682) x 40
2
= 259.296 m3
43

1.5. Pembahasan
Praktikum poligon terbuka dilakukan untuk mengetahui perbedaan
elevasi tanah sehingga dapat digunakan untuk pedoman pembangunan jalan
(untuk mengetahui besar kecilnya volume galian dan timbunan). Peralatan
yang digunakan dalam praktikum ini antara lain waterpass, statif, rambu ukur,
unting-unting, paying dan rol meter. Dalam penggunaan semua alat ini
diperlukan ketelitian dalam penyetingan, pembacaan alat, dan pelaksanaan
dalam praktikum.
Dalam praktikum ini hal yang harus benar-benar diperhatikan adalah beda
tinggi (∆h) yaitu selisih ketinggian antara titik yang diukur terhadap titik
referensi dan jarak optis yaitu jarak antara titik pertama dan titik lainnya
dalam rangkaian poligon tersebut seharusnya praktikum ini menghasilkan data
yang sesuai dengan perhitungan, yakni beda tinggi (∆h) harus sama dengan
nol (0) serta titik awal (berangkat) harus sama dengan titik akhir pada saat
pulang. Namun dalam pelaksanaannya terdapat perbedaan data yang
dikarenakan adanya faktor-faktor penggangu seperti angin, cuaca, alat, dsb
serta kesalahan pembacaan data oleh pengguna.
1.6. Kesimpulan
Poligon terbuka adalah rangkaian titik yang dihubungkan untuk
membentuk suatu garis lurus. Tujuaannya adalah untuk mengetahui perbedaan
elevasi tanah sehingga dapat dijadikan pedoman perencanaan pembangunan
jalan. Bagian yang penting dalam poligon
terbuka adalah jarak optis dan beda tinggi. Alat yang digunakan adalah
waterpass beserta statif, rambu ukur, unting-unting, paying, dan rol meter.
Dalam praktikum poligon terbuka ini dibutuhkan ketelitian dalam
pengukuran jarak dan pembacaan alat. Watrepass dilakukan pulang pergi,
pulangnya diusahakan agar tidak melalui patok yang sudah diukur perginya
sehingga tidak terjadi kesalahan.
44
45