BAB I PENDAHULUAN -...
21
1 BAB I PENDAHULUAN I.1. Latar Belakang Pembangunan infrastruktur di Indonesia 3 tahun terakhir ini berjalan dengan pesat. Hal tersebut selalu membutuhkan informasi geospasial yang akurat dan harus dilakukan dengan waktu yang singkat untuk dapat mengimbangi pesatnya pembangunan infrastruktur. Salah satu metode akuisisi data spasial yang cepat adalah fotogrametri. Fotogrametri merupakan seni, ilmu, dan teknologi untuk memperoleh informasi terpercaya tentang objek fisik dan lingkungan melalui proses perekaman, pengukuran, dan interpretasi gambaran fotografik dan pola radiasi tenaga elektromagnetik yang terekam (Wolf, 1993). Pemetaan fotogrametri biasanya dilakukan menggunakan kamera metrik yang dipasang pada pesawat berawak. Pemetaan fotogrametri dengan teknologi tersebut memerlukan biaya yang sangat mahal dan resolusi foto yang didapatkan terbatas. Seiring dengan perkembangan teknologi, dikembangkan Wahana Udara Tanpa Awak (WUTA) untuk kegiatan pemetaan fotogrametri. Untuk luas area yang relatif lebih kecil (±100ha) pemotretan menggunakan wahana udara tanpa awak akan menjadi sangat efektif dan efisien jika dibandingkan dengan fotogrametri menggunakan pesawat berawak (Pérez dkk., 2013). Kamera yang dipasang pada WUTA adalah kamera non-metrik berformat kecil atau dikenal Foto Udara Format Kecil (FUFK). Meskipun kamera non-metrik tidak didesain untuk pemetaan, kamera non-metrik menjadi salah satu instrument penting pada sebuah misi pemotretan udara. Pemetaan fotogrametri menggunakan WUTA dapat diaplikasikan untuk menghasilkan peta kelurahan (Darpono dkk., 2017). Peta desa merupakan peta tematik yang berisi unsur alam maupun buatan dan informasi batas wilayah yang disajikan dalam peta citra, peta sarana dan prasarana, dll (Peraturan Kepala BIG nomor 3 Tahun 2016). Peta desa dapat disajikan pada skala 1:2.500 s.d. 1:10.000. Pemetaan fotogrametri menggunakan WUTA telah digunakan untuk membuat peta citra (ortofoto) skala 1:5.000 seperti pada Kelurahan Tanjungsekar (Darpono dkk., 2017).
Transcript of BAB I PENDAHULUAN -...
1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Pembangunan infrastruktur di Indonesia 3 tahun terakhir ini berjalan dengan
pesat. Hal tersebut selalu membutuhkan informasi geospasial yang akurat dan harus
dilakukan dengan waktu yang singkat untuk dapat mengimbangi pesatnya
pembangunan infrastruktur. Salah satu metode akuisisi data spasial yang cepat adalah
fotogrametri. Fotogrametri merupakan seni, ilmu, dan teknologi untuk memperoleh
informasi terpercaya tentang objek fisik dan lingkungan melalui proses perekaman,
pengukuran, dan interpretasi gambaran fotografik dan pola radiasi tenaga
elektromagnetik yang terekam (Wolf, 1993).
Pemetaan fotogrametri biasanya dilakukan menggunakan kamera metrik yang
dipasang pada pesawat berawak. Pemetaan fotogrametri dengan teknologi tersebut
memerlukan biaya yang sangat mahal dan resolusi foto yang didapatkan terbatas.
Seiring dengan perkembangan teknologi, dikembangkan Wahana Udara Tanpa Awak
(WUTA) untuk kegiatan pemetaan fotogrametri. Untuk luas area yang relatif lebih
kecil (±100ha) pemotretan menggunakan wahana udara tanpa awak akan menjadi
sangat efektif dan efisien jika dibandingkan dengan fotogrametri menggunakan
pesawat berawak (Pérez dkk., 2013). Kamera yang dipasang pada WUTA adalah
kamera non-metrik berformat kecil atau dikenal Foto Udara Format Kecil (FUFK).
Meskipun kamera non-metrik tidak didesain untuk pemetaan, kamera non-metrik
menjadi salah satu instrument penting pada sebuah misi pemotretan udara.
Pemetaan fotogrametri menggunakan WUTA dapat diaplikasikan untuk
menghasilkan peta kelurahan (Darpono dkk., 2017). Peta desa merupakan peta tematik
yang berisi unsur alam maupun buatan dan informasi batas wilayah yang disajikan
dalam peta citra, peta sarana dan prasarana, dll (Peraturan Kepala BIG nomor 3 Tahun
2016). Peta desa dapat disajikan pada skala 1:2.500 s.d. 1:10.000. Pemetaan
fotogrametri menggunakan WUTA telah digunakan untuk membuat peta citra
(ortofoto) skala 1:5.000 seperti pada Kelurahan Tanjungsekar (Darpono dkk., 2017).
2
Secara umum tahapan pemetaan fotogrametri menggunakan WUTA dimulai dari
tahap perencanaan dengan menentukan lokasi, tinggi terbang, rencana jalur terbang,
perakitan alat, ground test, kalibrasi kamera, pengambilan foto udara, dan pengolahan
citra hasil foto udara (Sirin dkk., 2015).
Metode fotogrametri menggunakan WUTA untuk menghasilkan peta ortofoto
skala besar merupakan metode yang dapat menghemat waktu dan biaya karena praktis
dan juga tidak memakan waktu yang lama serta memiliki keuntungan dalam hal temporal
waktu perekaman data karena yang direkam merupakan data terkini (Togatorop, 2016).
Waktu yang cepat dan hematnya biaya pada metode ini harus dilakukan kontrol kualitas
peta ortofoto yang dihasilkan dalam hal akurasi horisontal dan vertikal serta ketelitiannya
dengan mengacu pada standar peta ortofoto skala besar pada Peraturan Kepala BIG No.
15 Tahun 2014 tentang ketelitian geometri peta RBI.
I.2. Identifikasi Masalah
Sejak awal, kamera non metrik atau FUFK tidak didesain untuk kegiatan
pemetaan. Sistem lensa yang terdapat pada FUFK tidak sempurna dan akan
menurunkan kualitas geometri yang didapatkan (Pérez dkk., 2013). Oleh sebab itu,
perlu dilakukan uji ketelitian terhadap hasil ortofotonya untuk mengetahui ketelitian
horizontal dan vertikal hasil ortofoto yang diperoleh dari foto udara menggunakan
WUTA mengacu pada Peraturan Kepala BIG No. 15 Tahun 2014.
I.3. Pertanyaan Penelitian
Foto udara menggunakan WUTA dilengkapi FUFK. Mengacu pada identifikasi
masalah yang telah dijelaskan, bahwa pada awalnya fungsi FUFK tidak didesain untuk
kegiatan pemetaan. Maka, perlu dilakukan kontrol kualitas dari hasil peta ortofoto
menggunakan WUTA. Sehingga pertanyaan penelitian ini adalah apakah peta ortofoto
yang dihasilkan dari foto udara menggunakan WUTA memenuhi ketelitian peta skala
besar (1:1000-1:5000)?
I.4. Cakupan Penelitian
Lokasi pemotretan udara menggunakan WUTA sebagai bahan penelitian
dilakukan di Desa Segoroyoso, Kecamatan Pleret, Kabupaten Bantul, DIY. Penelitian
dilakukan dengan menggunakan WUTA bertipe fixed wing yang dilengkapi kamera
Sony RX-100.

3
Pengukuran Ground Control Point (GCP) dan Independent Control Point (ICP)
dilakukan menggunakan GPS metode radial, sedangkan pengukuran titik uji berupa
titik objek (post mark) menggunakan GPS metode RTK. Foto udara dari pengukuran
kemudian diolah menggunakan perangkat lunak Agisoft. Koordinat hasil peta ortofoto
dibandingkan dengan koordinat titik uji (ICP dan post mark).
I.5. Tujuan
Tujuan dari penelitian ini adalah :
1. Mengetahui akurasi horisontal dan vertikal peta ortofoto hasil foto udara
menggunakan WUTA yang dilengkapi kamera non metrik.
2. Mengetahui skala terbesar peta ortofoto yang dapat dihasilkan dari pemetaan
tersebut.
I.6. Manfaat
Kegiatan penelitian ini diharapkan dapat bermanfaat untuk memberikan
informasi akurasi horisontal dan vertikal dengan besar skala peta yang optimal dari
foto udara yang diperoleh menggunakan WUTA.
I.7. Tinjauan Pustaka
Permasalahan akurasi vertikal maupun horisontal pada ortofoto telah banyak
dikaji atau dibahas oleh peneliti dahulu. Akurasi ortofoto juga dipengaruhi kualitas
data foto udara mentahnya. Kualitas foto bergantung dari sistem yang digunakan untuk
akuisisi data (wahana, kamera, imu, gps, dll.). Terdapat beberapa faktor yang
mempengaruhi kualitas akurasi ortofoto yaitu overlap, sidelap, resolusi kamera, dan
tinggi terbang. Untuk membuktikan akurasi vertikal maupun horisontal pada ortofoto
berdasarkan faktor overlap dan sidelap, maka Pérez dkk. (2013) melakukan penelitian
dengan area cakupan 5000 m2. Perencanaan jalur terbang menggunakan modul
waypoint editor dengan overlap 60% dan sidelap 50%. Kalibrasi kamera dilakukan
dengan metode bundle adjustment menggunakan perangkat lunak Photomodeler
Scanner v.7. Ketelitian ortofoto diuji dengan membandingkan 40 titik ICP. ICP yang
digunakan dihasilkan dengan teknologi GPS metode Post Processing Kinematic. Hasil
yang diperoleh adalah RMSEx 6cm, RMSEy 4cm, dan RMSEz 7cm. Pérez
menyimpulkan pemotretan menggunakan kamera non metrik yang dipasang pada
4
WUTA dan diolah menggunakan perangkat lunak Photomodeler Scanner v.7 dapat
menghasilkan peta ortofoto dan DEM yang akurat untuk pekerjaan rekayasa dan
geomorfologi. Kecepatan dan resolusi yang dihasilkan oleh WUTA memungkinkan
untuk diaplikasikan pada permukaan yang datar.
Selain faktor overlap dan sidelap, tingkat akurasi ortofoto dari data WUTA juga
dipengaruhi oleh faktor resolusi kamera. Apabila resolusi kamera yang digunakan
untuk pemotretan udara memiliki resolusi yang baik, maka hasil ortofoto akan
memiliki hasil yang baik. Nafiah dkk. (2017) pernah melakukan penelitian tentang
akurasi ortofoto dari data WUTA yang dilengkapi kamera Sony ILCE-6000 dengan
resolusi 24 MP. Penelitian ini membahas tentang ketelitian ortofoto yang mengacu
pada Peraturan Kepala Badan Informasi Geospasial (BIG) No 15 Tahun 2014. Uji
ketelitian dilakukan dengan cara membandingkan koordinat mosaik ortofoto udara
dengan koordinat hasil pengukuran GPS tipe geodetik. Nilai RMSE yang didapatkan
dari penelitian ini ditampilkan pada Tabel I.1. dan nilai akurasi dari akurasi horisontal
dan vertikal ditampilkan pada Tabel I.2.
Tabel I. 1 Nilai RMSE
RMSE
Horisontal (m) Vertikal (m)
0,014 0,645
Tabel I. 2 Akurasi Horisontal dan Vertikal
Akurasi Horisontal CE90 1,5175 x RMSEr
0,022 m
Akurasi Vertikal LE90 1,6499 x RMSEz
1,064 m
Sehingga jika dilihat dari RMSE berdasarkan Peraturan Kepala BIG No 15 Tahun
2014 maka ortofoto dan DTM dapat digunakan untuk peta skala 1:1000 pada kelas 1
untuk ketelitian horisontal. Sedangkan untuk ketelitian vertikal maka dapat dibuat peta
skala 1:2500 pada kelas 3.
Faktor lainnya yang dapat mempengaruhi tingkat akurasi ortofoto dari data
WUTA adalah tinggi terbang. Togatorop (2016) pernah melakukan uji ketelitian
horisontal dan vertikal hasil pemetaan menggunakan WUTA. Lokasi kegiatan

5
dilakukan di Pelabuhan Perikanan Pantai (PPP) Sadeng dengan luas area 920 Ha.
Perencanaan tinggi terbang WUTA pada saat pemotretan adalah 250 m. Ortofoto dan
DTM yang dihasilkan diuji dengan membandingkan titik uji berupa objek yang diukur
dengan menggunakan GPS metode RTK. Hasil dari uji ketelitian tersebut dapat dilihat
pada Tabel I.3.
Tabel I. 3 Hasil uji ketelitian horisontal dan vertikal
Vertikal Horizontal
Total 3682,165 73,878
Rata-rata 1,872 0,037
RMSE 1,368 0,194
Akurasi 2,257 0,294
Tabel I.3 menunjukan akurasi vertikal yang didapatkan sebesar 2,257 m dan
akurasi horisontal sebesar 0,294 m. Berdasarkan hasil uji akurasi tersebut mengacu
pada Peraturan Kepala BIG No 15 Tahun 2014, peta ortofoto PPP Sadeng memenuhi
produksi kelas 2 peta planimetris pada skala 1:1000. Sedangkan berdasarkan nilai
akurasi vertikal peta ortofoto PPP Sadeng memenuhi produksi kelas 2 peta kontur pada
skala 1:10000.
Berdasarkan penelitian diatas, penelitian ini ditunjukan untuk mengkaji tingkat
akurasi peta ortofoto dan DTM yang dihasilkan dari pemetaan fotogrametri
menggunakan WUTA dengan tinggi terbang 312 m yang dilengkapi kamera Sony RX
100 dengan resolusi 20,1 MP. Lokasi penelitian adalah di Desa Segoroyoso,
Kecamatan Pleret, Kabupaten Bantul. Perangkat lunak yang digunakan untuk
pengolahan data foto adalah Agisoft Photoscan Professional.
I.8. Landasan Teori
I.8.1. Fotogrametri
American society of photogrammetry and Remote Sensing (ASPRS)
mendefinisikan fotogrametri sebagai seni, ilmu, dan teknologi untuk memperoleh
informasi terpercaya tentang objek fisik dan lingkungan melalui proses perekaman,
pengukuran, dan interpretasi gambaran fotografik pada pola radiasi tenaga
elektromagnetik yang terekam. Berdasarkan definisi tersebut, fotogrametri dapat

6
mencakup dua bidang yaitu fotogrametri metrik dan fotogrametri interpretative (Wolf,
1993).
Tugas fundamental dari fotogrametri adalah untuk menemukan hubungan
geometri antara gambar dan objek yang terdapat pada foto saat pemotretan (restitusi
fotogrametri). Setelah hubungan geometri ini berhasil ditemukan maka berbagai
informasi mengenai objek yang difoto dapat diketahui. Hubungan geometri dapat
ditentukan dengan berbagai cara, yang secara umum terbagi menjadi dua yakni, analog
dan analitis. Cara analog dilakukan menggunakan komponen optic, mekanik, dan
elektronik. Sementara cara analitis dilakukan dengan menggunakan pemodelan
matematis dan digital processing. Berkembangnya teknologi komputer yang sangat
pesat, saat ini cara analog mulai tergantikan oleh cara analitis sehingga muncul
terminology fotogrametri digital. Kelebihan dari teknik fotogrametri digital adalah
banyak pekerjaan yang dahulu dikerjakan secara manual, dapat dikerjakan secara
otomatis oleh komputer dan perangkat lunak sehingga lebih hemat waktu dan biaya
(Linder, 2006).
Pada dasarnya prinsip teknik fotogrametri digital sama dengan teknik
fotogrametri analog, hanya saja perbedaannya terletak pada data masukan berupa foto
dalam format digital dan sebagian besar pekerjaan pengolahannya dilakukan secara
otomatis dengan bantuan komputer dan perangkat lunak. Perkembangan fotogrametri
digital sangat bergantung terhadap perkembangan perangkat keras komputer, sistem
pencitraan digital (kamera/sensor) dan perangkat lunak pengolahannya. Beberapa
contoh hasil teknik fotogrametri digital adalah ortofoto digital dan pembuatan DEM
secara otomatis (Ahmad, 2005).
I.8.1.1. Geometri Foto Udara. Sistem proyeksi pada foto udara adalah proyeksi sentral
(Warner dkk., 1996). Artinya garis-garis proyeksi dari objek ke bidang proyeksi
melalui suatu pusat titik proyeksi. Jika sumbu kamera pada saat pemotretan benar-
benar vertikal, bidang foto sejajar dengan bidang datum, maka foto yang dihasilkan
disebut foto udara vertikal. Secara geometri foto udara vertikal sempurna dapat dilihat
pada gambar I.1.

7
Gambar I. 1 Geometri Foto udara vertikal (Wolf, 1993)
Gambar tersebut menggambarkan geometri foto udara vertikal. Titik a’,b’,c’ dan
d’ berada pada bidang negatif yang mempunyai kedudukan yang terbalik dengan titik
a, b, c dan d. Sedangkan titik A, B, C dan D adalah titik yang berada di permukaan
tanah. O adalah titik pusat pada bidang positif dan O’ adalah titik pusat pada bidang
negatif. L adalah titik pemotretan (exposure).
I.8.1.2. Foto Udara Format Kecil (FUFK). FUFK merupakan hasil dari pemotretan
udara menggunakan kamera non metrik, sehingga disebut juga foto udara non metrik.
FUFK memiliki ukuran foto sekitar 24 mm x 36 mm, lebih kecil dari ukuran foto udara
standar 23 cm x 23cm (Warner dkk., 1996). FUFK biasanya memanfaatkan WUTA
sebagai wahananya pada saat pemotretan udara. FUFK mempunyai ciri tidak adanya
informasi tepi foto seperti jam terbang, panjang fokus dan nivo. Foto yang dihasilkan
tidak dilengkapi nilai orientasi dalamnya seperti koordinat fiducial mark, panjang
fokus terkalibrasi, lokasi titik utama tidak diketahui.
FUFK memiliki keunggulan antara lain mudah dalam pengoperasian karena
peralatan yang digunakan pada saat pemotretan udara lebih sederhana, hasil foto udara
dapat diperoleh dengan skala yang lebih besar karena menggunakan WUTA yang
8
dapat terbang rendah di bawah awan, biaya yang diperlukan lebih murah karena
wahana, alat, dan bahan untuk pemotretan udara lebih mudah didapatkan di pasaran
(Harintaka dkk., 2008). Namun, FUFK juga memiliki beberapa kekurangan, antara
lain mengalami penurunan kualitas geometri. Hal tersebut disebabkan karena sistem
lensa yang digunakan pada FUFK tidak sempurna, panjang fokus dan principle point
tidak diketahui, dan adanya pergerseran bayangan (Warner dkk., 1996).
I.8.2. WUTA (Wahana Udara Tanpa Awak)
WUTA dapat diartikan sebagai wahana udara tanpa awak. Penerbangan WUTA
dapat dikontrol secara autonomous oleh komputer di dalamnya (autopilot), semi-
autonomous, atau dikendalikan dengan remote control oleh seorang navigator atau
pilot di atas tanah atau kendaraan lain. Jika dibandingkan dengan pesawat berawak
maka sangat jelas bahwa perbedaan utama antara kedua system tersebut adalah pada
WUTA tidak ada pilot yang secara fisik berada di dalam pesawat (Eisenbeiβ, 2009)
Kelebihan utama dari WUTA dibandingkan dengan pesawat berawak adalah
bahwa WUTA dapat digunakan pada situasi dengan resiko tinggi tanpa perlu
membahayakan nyawa manusia, pada area yang tidak dapat diakses dan terbang pada
ketinggian rendah dibawah awan sehingga foto yang dihasilkan terbebas dari awan.
Selain itu, salah satu faktor lain kelebihan WUTA adalah biaya. Harga perangkat
WUTA dan biaya operasionalnya jauh lebih murah jika dibandingkan dengan pesawat
berawak (Satyagama, 2013).
I.8.3. Pertampalan Foto
Pertampalan foto merupakan gabungan dari dua foto atau lebih yang saling
bertampalan dan membentuk paduan gambar yang berkesinambungan. Menurut Aber
dkk. (2010), pembentukan stereofoto memperhatikan rasio antara base dan height.
Perbandingan antara overlap dan panjang fokus kamera sekitar dua sampai enam kali.
Dalam blok jalur terbang yang banyak harus mampu menutup seluruh daerah
pemotretan dengan banyak stereofoto. Untuk menjamin stereofotonya, maka foto
harus bertampalan kesamping dan kedepan (Aber dkk., 2010).
Pertampalan kedepan merupakan pertampalan foto sepanjang arah jalur terbang.
Biasanya besar pertampalan kedepan sekitar 55-65%, namun pada prakteknya
9
biasanya digunakan 60% dari panjang jangkauan foto. Untuk pertampalan kedepan
dapat dihitung dengan persamaan (Falkner dan Morgan, 2002):
100/100** endpside owsg ……………………………………..………(I.1)
Dalam hal ini :
sideg : Jarak antara titik pengambilan foto (m)
ps : skala foto (m)
endo : pertampalan kedepan (%)
w : ukuran frame foto
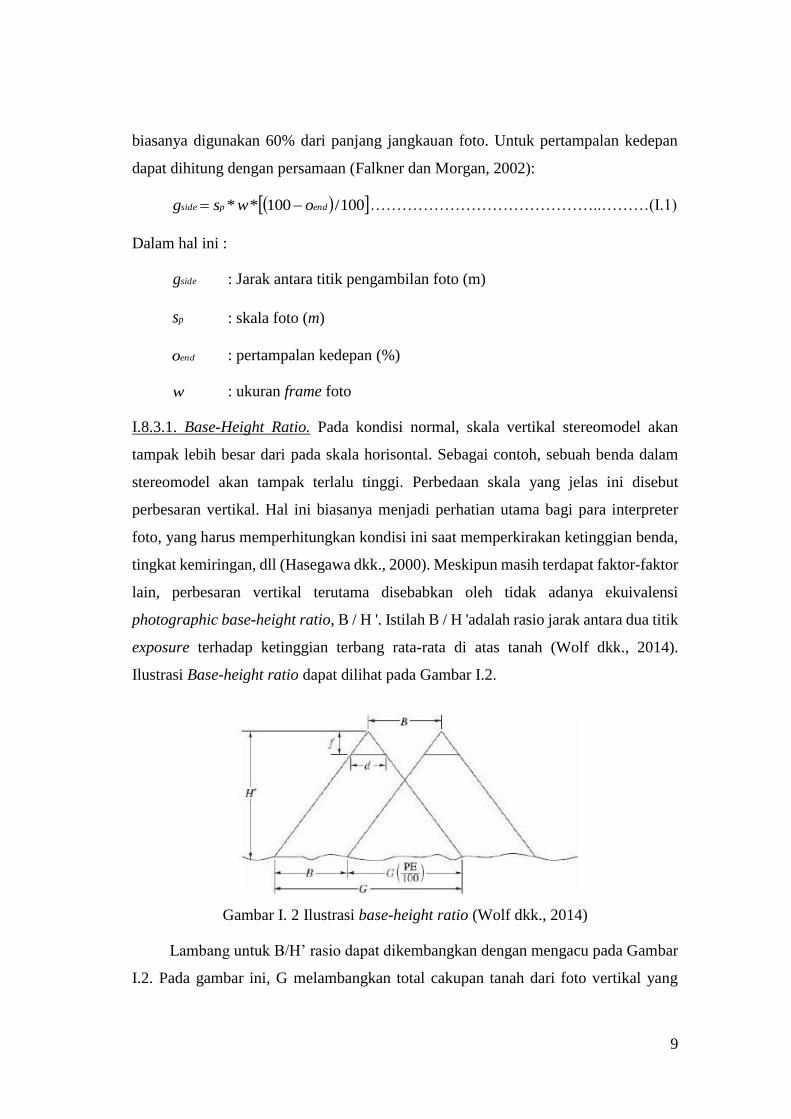
I.8.3.1. Base-Height Ratio. Pada kondisi normal, skala vertikal stereomodel akan
tampak lebih besar dari pada skala horisontal. Sebagai contoh, sebuah benda dalam
stereomodel akan tampak terlalu tinggi. Perbedaan skala yang jelas ini disebut
perbesaran vertikal. Hal ini biasanya menjadi perhatian utama bagi para interpreter
foto, yang harus memperhitungkan kondisi ini saat memperkirakan ketinggian benda,
tingkat kemiringan, dll (Hasegawa dkk., 2000). Meskipun masih terdapat faktor-faktor
lain, perbesaran vertikal terutama disebabkan oleh tidak adanya ekuivalensi
photographic base-height ratio, B / H '. Istilah B / H 'adalah rasio jarak antara dua titik
exposure terhadap ketinggian terbang rata-rata di atas tanah (Wolf dkk., 2014).
Ilustrasi Base-height ratio dapat dilihat pada Gambar I.2.
Gambar I. 2 Ilustrasi base-height ratio (Wolf dkk., 2014)
Lambang untuk B/H’ rasio dapat dikembangkan dengan mengacu pada Gambar
I.2. Pada gambar ini, G melambangkan total cakupan tanah dari foto vertikal yang

10
diambil dengan ketinggian H’ diatas permukaan tanah. Air Base B adalah jarak antar
eksposur. Maka dapat dibuat persamaan I.2 (Wolf dkk., 2014):
𝐵 = 𝐺 − 𝐺𝑃𝐸
100= 𝐺 (1 −
𝑃𝐸
100)………………………………………………(I.2)
Pada persamaan I.2, PE adalah persentasi dari lap akhir, yang kemudian
memberikan jumlah overlap antara foto pertama dan foto kedua. Dengan
menggunakan segitiga yang sama dari gambar (Wolf dkk., 2014):
𝐻′ =𝑓𝐺
𝑑……………………………………………………..……………….(I.3)
Pada persamaan I.3, f adalah panjang fokus dan d adalah format dimensinya.
Dengan membagi persamaan I.2 dan I.3, maka akan didapatkan (Wolf dkk., 2014):
𝐵
𝐻′= (1 −
𝑃𝐸
100)
𝑑
𝑓………………………………………………………….….(I.4)
I.8.4. Bundle Adjusment
Bundle Adjusment adalah model hitungan matematis yang digunakan untuk
mencari parameter orientasi luar dan koordinat titik ikat (Habib, 2012). Gambar I.3.
menunjukan hubungan antara sistem koordinat foto dan sistem koordinat tanah. XL,
YL, ZL, ω, φ, dan κ merupakan parameter orientasi luar. Sedangkan xo, yo, dan f, adalah
parameter orientasi dalam kamera.
Gambar I. 3 Hubungan antara sistem koordinat tanah dan sistem koordinat foto
(Wolf, 1993)

11
Dengan :
xa’ , ya’ : koordinat foto untuk titik a
f : panjang fokus kamera
xo , yo : koordinat principle point
XL,YL,ZL : koordinat untuk posisi kamera
XA,YA,ZA : koordinat tanah untuk titik A
ω,φ,κ : rotasi pada bidang foto
Persamaan kolinear digunakan pada proses Bundle Adjustment untuk
menyatakan hubungan antara objek difoto dengan objek di tanah. Prinsip kesegarisan
digunakan pada persamaan kolinear dimana posisi objek di foto, pusat proyeksi, dan
objek di tanah dinyatakan dalam satu garis lurus. Dari Gambar I.3. dapat dicari vektor
penghubung dari pusat proyeksi ke titik objek di lapangan (vo) Persamaan I.5 dan
vektor penghubung dari pusat proyeksi ke titik objek pada foto (vi) Persamaan I.6
(Wolf dkk., 2014).
𝑉𝑜 = [𝑋𝐴
𝑌𝐴
𝑍𝐴
] − [𝑋𝐿
𝑌𝐿
𝑍𝐿
] = [𝑋𝐴 − 𝑋𝐿
𝑌𝐴 − 𝑌𝐿
𝑍𝐴 − 𝑍𝐿
] ………………………………...…………(I.5)
𝑣𝑖 = [𝑥𝑎
𝑦𝑎
0] − [
𝑥𝑜
𝑦𝑜
𝑓] = [
𝑥𝑜 − 𝑥𝑎
𝑦𝑜 − 𝑦𝑎
−𝑓]………………….........................................(I.6)
Dengan demikian hubungan antara sistem koordinat foto dan koordinat tanah
dapat ditulis sebagai (Wolf dkk., 2014):
𝑣𝑖 = λ 𝑀(ω, φ, κ)𝑉𝑜
[
𝑥𝑜 − 𝑥𝑎
𝑦𝑜 − 𝑦𝑎
−𝑓] = λ [
𝑚11 𝑚12 𝑚13
𝑚21 𝑚22 𝑚23
𝑚31 𝑚32 𝑚33
] [𝑋𝐴 − 𝑋𝐿
𝑌𝐴 − 𝑌𝐿
𝑍𝐴 − 𝑍𝐿
] ……………………………...(I.7)
Dimana komponen masing-masing pada matriks M adalah sebagai berikut :
𝑚11 = cos φ ∗ cos κ
𝑚12 = sin ω ∗ sin φ ∗ cos κ + cos ω ∗ sin κ
𝑚13 = − cos ω ∗ sin φ ∗ cos κ + sin ω ∗ sin κ
12
𝑚21 = − cos φ ∗ sin κ
𝑚22 = − sin ω ∗ sin φ ∗ sin κ + cos ω ∗ cos κ
𝑚23 = cos ω ∗ sin φ ∗ cos κ + sin ω ∗ cos κ
𝑚31 = sin φ
𝑚32 = − sin ω ∗ cos φ
𝑚33 = cos ω ∗ cos φ
Dalam hal ini :
λ : faktor skala
M : matriks rotasi sudut (𝜔, 𝜑, 𝜅)
m11 … m33 : komponen matriks rotasi
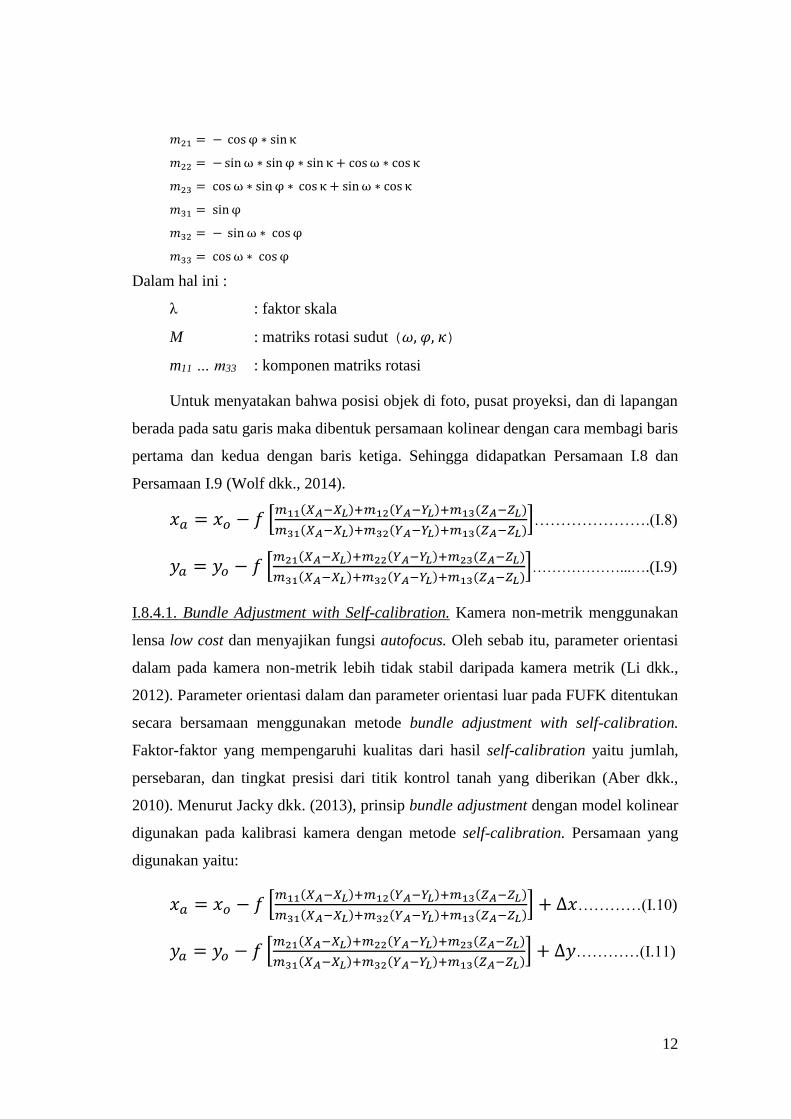
Untuk menyatakan bahwa posisi objek di foto, pusat proyeksi, dan di lapangan
berada pada satu garis maka dibentuk persamaan kolinear dengan cara membagi baris
pertama dan kedua dengan baris ketiga. Sehingga didapatkan Persamaan I.8 dan
Persamaan I.9 (Wolf dkk., 2014).
𝑥𝑎 = 𝑥𝑜 − 𝑓 [𝑚11(𝑋𝐴−𝑋𝐿)+𝑚12(𝑌𝐴−𝑌𝐿)+𝑚13(𝑍𝐴−𝑍𝐿)
𝑚31(𝑋𝐴−𝑋𝐿)+𝑚32(𝑌𝐴−𝑌𝐿)+𝑚13(𝑍𝐴−𝑍𝐿)]………………….(I.8)
𝑦𝑎 = 𝑦𝑜 − 𝑓 [𝑚21(𝑋𝐴−𝑋𝐿)+𝑚22(𝑌𝐴−𝑌𝐿)+𝑚23(𝑍𝐴−𝑍𝐿)
𝑚31(𝑋𝐴−𝑋𝐿)+𝑚32(𝑌𝐴−𝑌𝐿)+𝑚13(𝑍𝐴−𝑍𝐿)]………………...….(I.9)
I.8.4.1. Bundle Adjustment with Self-calibration. Kamera non-metrik menggunakan
lensa low cost dan menyajikan fungsi autofocus. Oleh sebab itu, parameter orientasi
dalam pada kamera non-metrik lebih tidak stabil daripada kamera metrik (Li dkk.,
2012). Parameter orientasi dalam dan parameter orientasi luar pada FUFK ditentukan
secara bersamaan menggunakan metode bundle adjustment with self-calibration.
Faktor-faktor yang mempengaruhi kualitas dari hasil self-calibration yaitu jumlah,
persebaran, dan tingkat presisi dari titik kontrol tanah yang diberikan (Aber dkk.,
2010). Menurut Jacky dkk. (2013), prinsip bundle adjustment dengan model kolinear
digunakan pada kalibrasi kamera dengan metode self-calibration. Persamaan yang
digunakan yaitu:
𝑥𝑎 = 𝑥𝑜 − 𝑓 [𝑚11(𝑋𝐴−𝑋𝐿)+𝑚12(𝑌𝐴−𝑌𝐿)+𝑚13(𝑍𝐴−𝑍𝐿)
𝑚31(𝑋𝐴−𝑋𝐿)+𝑚32(𝑌𝐴−𝑌𝐿)+𝑚13(𝑍𝐴−𝑍𝐿)] + ∆𝑥…………(I.10)
𝑦𝑎 = 𝑦𝑜 − 𝑓 [𝑚21(𝑋𝐴−𝑋𝐿)+𝑚22(𝑌𝐴−𝑌𝐿)+𝑚23(𝑍𝐴−𝑍𝐿)
𝑚31(𝑋𝐴−𝑋𝐿)+𝑚32(𝑌𝐴−𝑌𝐿)+𝑚13(𝑍𝐴−𝑍𝐿)] + ∆𝑦…………(I.11)

13
Dalam hal ini ∆x dan ∆y merupakan koreksi untuk parameter kalibrasi kamera.
Berikut adalah persamaan dari ∆x dan ∆y (Jacky dkk., 2013):
∆𝑥 = 𝑥𝑎𝑙′ (𝑘1𝑟𝑎𝑙
2 + 𝑘2𝑟𝑎𝑙4 + 𝑘3𝑟𝑎𝑙
6 ) + 𝑝1(𝑟𝑎𝑙
2 + 2𝑥′𝑎𝑙
2) + 2𝑝
2𝑥′𝑎𝑙𝑦′
𝑎𝑙+
𝑎1𝑥′𝑎𝑙 + 𝑎2𝑦′𝑎𝑙
…………………………………………………….(I.12)
∆𝑦 = 𝑦𝑎𝑙′ (𝑘1𝑟𝑎𝑙
2 + 𝑘2𝑟𝑎𝑙4 + 𝑘3𝑟𝑎𝑙
6 ) + 𝑝2(𝑟𝑎𝑙
2 + 2𝑦′𝑎𝑙
2) + 2𝑝
1𝑥′𝑎𝑙𝑦′
𝑎𝑙…....(I.13)
Dalam hal ini:
x,y : koordinat objek pada foto
ki : koefisien koreksi distorsi radial
pi : koefisien distorsi pusat kamera
a1,a2 : koreksi perbedaan skala pada jarak horizontal dan vertikal antara
sumbu x dan y
I.8.5. Structure From Motion (SfM)
SfM adalah sebuah metode dari pengembangan yang pada intinya mempunyai
kesamaan dengan fotogrametri standar (Westoby dkk., 2015). Pada fotogrametri
standar, untuk menentukan titik-titik 3D dibutuhkan orientasi kamera atau koordinat
3D dari serangkaian GCP. GCP yang di identifikasi secara manual pada foto udara
kemudian digunakan pada proses resection untuk menentukan posisi kamera.
Sementara pada SfM, GCP tidak diperlukan untuk menentukan posisi kamera. Posisi
kamera dan point cloud 3D akan di rekonstruksi secara bersamaan melalui identifikasi
otomatis dengan menggunakan fitur pencocokan gambar (Snavely dkk., 2008).
Namun, point cloud yang dihasilkan dari SfM masih memiliki koordinat relatif
terhadap posisi kamera atau masih terorientasi relatif, sehingga masih harus di
sesuaikan dengan posisi dunia nyata. Oleh sebab itu, di perlukan transformasi
koordinat dengan menambahkan titik 3D GCP. Menurut Westoby dkk. (2012), cara
kerja SfM meliputi langkah-langkah seperti berikut:
1. Akuisisi foto dan Ekstraksi Keypoint
Titik 3D objek pada proses SfM didapatkan dari pertampalan foto yang banyak,
sehingga akuisisi foto terhadap objek harus diambil dari banyak sudut. Resolusi

14
spasial yang dihasilkan bergantung terhadap banyaknya foto yang diambil.
Kemudian langkah selanjutnya adalah Ekstraksi Keypoint. Keypoint diekstraksi
secara otomatis berdasarkan keunikan dari nilai pixel objek. Jumlah keypoint
bergantung pada tekstur dan resolusi foto, sehingga foto yang kompleks dan
memiliki resolusi tinggi akan menghasilkan lebih banyak keypoint. Demikian
juga dengan mendekatkan jarak kamera ke objek akan meningkatkan resolusi
dan keypoint yang dihasilkan. Keypoint ini akan digunakan untuk melakukan
penggabungan foto yang memiliki overlap.
2. Rekonstruksi 3D
Penggabungan keypoint dilakukan dengan algoritma approximate nearest
neighbor. Algoritma approximate nearest neighbor menggabungkan keypoint
berdasarkan jarak minimal antara dua keypoint berdekatan. Keypoint yang tidak
memenuhi kriteria atau tidak digabungkan akan terhapus secara otomatis.
Rekonstruksi 3D didapatkan dari proses bundle adjustment dari keypoint yang
telah digabung dan menghasilkan sparse point cloud. Proses bundle adjustment
pada sparse point cloud juga akan menghasilkan estimasi dari orientasi kamera.
3. Post-Processing
Sparse point cloud yang dihasilkan masih terorientasi relatif. Sehingga
diperlukan post-processing. Post-processing yang dilakukan yaitu transformasi
koordinat menggunakan data dari pengukuran GCP agar diperoleh koordinat
absolut pada sparse point cloud yang dihasilkan
I.8.6. Ground Control Point (GCP)
Kontrol fotogrametri terdiri dari beberapa titik di permukaan tanah yang
diketahui dalam suatu sistem koordinat referensi dan gambarnya dapat diidentifikasi
pada foto. Adanya GCP pada foto udara memberikan cara untuk melakukan orientasi
atau menemukan hubungan geometri antara foto udara dengan permukaan tanah
(Linder, 2006). Tingkat akurasi dari produk fotogrametri tidak dapat lebih baik
daripada akurasi GCP yang digunakan, sehingga akurasi GCP yang digunakan sangat
penting. Kualitas GCP yang baik akan menghasilkan produk fotogrametri yang baik.

15
GCP yang terdistribusi harus merata pada area yang akan dilakukan pemotretan,
karena fotogrametri menggunakan proyeksi sentral (Subroto, 2014). Pada umumnya
untuk mendapatkan hasil yang baik pada pengolahan fotogrametri digunakan GCP
yang jumlahnya berlebih (redundant). Selain itu, GCP perlu dilakukan pemasangan
pada daerah yang ekstrim, agar diperoleh GCP yang mewakili kondisi medan yang
sesungguhnya.
Pembuatan GCP pada umumnya dilakukan dengan dua cara yakni, post-marking
dan pre-marking. Pada post-marking, pengukuran koordinat GCP dilakukan setelah
kegiatan pemotretan udara. Pemilihan GCP dilakukan dengan mengamati foto udara
hasil pemotretan. Objek yang akan digunakan sebagai GCP harus mudah diidentifikasi
pada foto udara. Sedangkan pre-marking dilakukan sebelum pemotretan udara dengan
cara memasang tanda buatan dan mengukur koordinat dari tanda buatan tersebut.
Tanda buatan tersebut harus tampak pada foto udara yang akan dihasilkan nanti.
Bentuk tanda buatan yang digunakan sebaiknya simetris, agar memungkinkan titik
tengah tanda buatan tersebut dapat diidentifikasi. Ukuran dari tanda buatan tergantung
pada skala foto yang digunakan. Menurut Falker dan Morgan (2002), ukuran pre-mark
titik kontrol tanah dapat dihitung menggunakan persamaan berikut :
Lebar :
w = S*0,002………………………………………………………………..(I.14)
Panjang :
l = 10*w………………………………………………………………………(I.15)
Dimana :
w = Lebar pre-mark titik kontrol tanah
S = Skala Foto
l = Panjang pre-mark titik kontrol tanah
I.8.7. Digital Surface Model (DSM) dan Digital Terrain Model (DTM)
Digital Surface Model (DSM) merepresentasikan permukaan puncak pantulan
yang diterima dari sensor kamera seperti bangunan, pohon dan fitur objek ketinggian
16
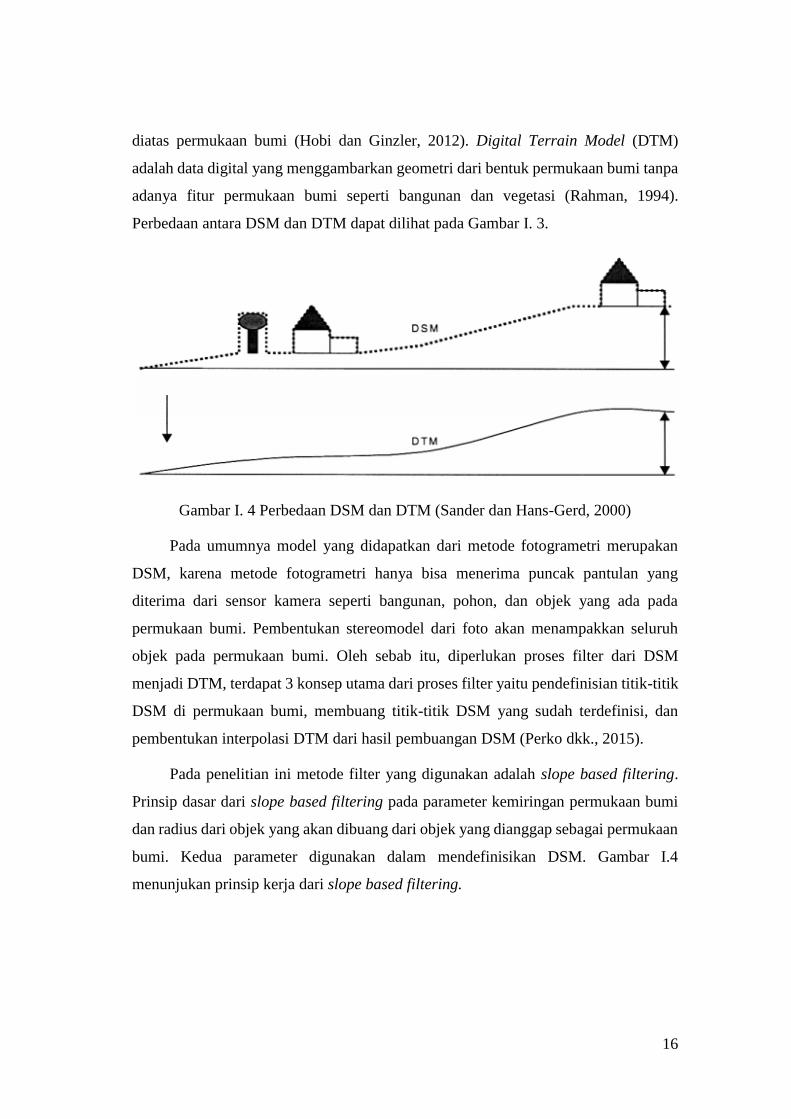
diatas permukaan bumi (Hobi dan Ginzler, 2012). Digital Terrain Model (DTM)
adalah data digital yang menggambarkan geometri dari bentuk permukaan bumi tanpa
adanya fitur permukaan bumi seperti bangunan dan vegetasi (Rahman, 1994).
Perbedaan antara DSM dan DTM dapat dilihat pada Gambar I. 3.
Gambar I. 4 Perbedaan DSM dan DTM (Sander dan Hans-Gerd, 2000)
Pada umumnya model yang didapatkan dari metode fotogrametri merupakan
DSM, karena metode fotogrametri hanya bisa menerima puncak pantulan yang
diterima dari sensor kamera seperti bangunan, pohon, dan objek yang ada pada
permukaan bumi. Pembentukan stereomodel dari foto akan menampakkan seluruh
objek pada permukaan bumi. Oleh sebab itu, diperlukan proses filter dari DSM
menjadi DTM, terdapat 3 konsep utama dari proses filter yaitu pendefinisian titik-titik
DSM di permukaan bumi, membuang titik-titik DSM yang sudah terdefinisi, dan
pembentukan interpolasi DTM dari hasil pembuangan DSM (Perko dkk., 2015).
Pada penelitian ini metode filter yang digunakan adalah slope based filtering.
Prinsip dasar dari slope based filtering pada parameter kemiringan permukaan bumi
dan radius dari objek yang akan dibuang dari objek yang dianggap sebagai permukaan
bumi. Kedua parameter digunakan dalam mendefinisikan DSM. Gambar I.4
menunjukan prinsip kerja dari slope based filtering.

17
Gambar I. 5 Prinsip slope based filtering (Wichmann dkk, 2012)
Kekurangan dari metode slope based filtering yaitu nilai parameter yang
digunakan tidak bisa digunakan pada semua area permukaan. Permukaan yang berbeda
seperti pemukiman dan bukit memiliki kemiringan yang berbeda dan luasan objek
yang dibuang berbeda. Perbedaan permukaan mengakibatkan tidak adanya nilai unik
untuk kedua parameter dalam proses filter yang berbeda (Wichmann dkk, 2012).
I.8.8. Peta Ortofoto
Peta Ortofoto adalah peta foto yang menyajikan gambaran objek pada posisi
orthogonal. Peta ortofoto memperlihatkan gambar-gambar fotografis yang sebenarnya
tidak ada proses generalisasi. Peta ortofoto merupakan peta yang terbentuk dari
stereofoto yang diperoleh dari permukaan bumi dari ketingian tertentu dan sudah
terkoreksi dengan koordinat titik dibumi (Darpono, 2017). Simbolisasi pada peta
ortofoto merupakan tambahan untuk memperjelas objek yang dianggap penting untuk
ditampilkan. Gambar I.6. Menunjukan contoh peta foto lahan pertanian.
18
Gambar I. 6 Peta Foto Lahan Pertanian (Muryamto dkk., 2015)
Ortofoto diproduksi dari perspektif yang telah diolah pada proses rektifikasi
diferensial, dimana dilakukan penghapusan untuk perubahan posisi objek difoto
dibandingkan pada posisi objek dipermukaan bumi yang disebabkan oleh kemiringan
pesawat ketika pengambilan data serta bentuk permukaan bumi yang tidak datar
(Mertotaroeno, 2010). Foto yang telah dilakukan proses pengolahan untuk
mendapatkan ortofoto telah memiliki skala yang sama dan berada pada proyeksi
orthogonal.
Menurut Mertotaroeno (2010), data yang dibutuhkan untuk menghasilkan
ortofoto secara digital yaitu:
1. Foto digital, dapat diperoleh dari foto analog yang telah disiam maupun dari
sensor digital ketika pengambilan data.
2. Digital Elevation Model (DEM), digunakan untuk melakukan proses
rektifikasi diferensial. Pada proses tersebut dilakukan penghapusan
pergeseran relief pada objek di foto.
3. Parameter orientasi luar foto.
4. Data kalibrasi kamera.
19
I.8.9. Ketelitian Peta
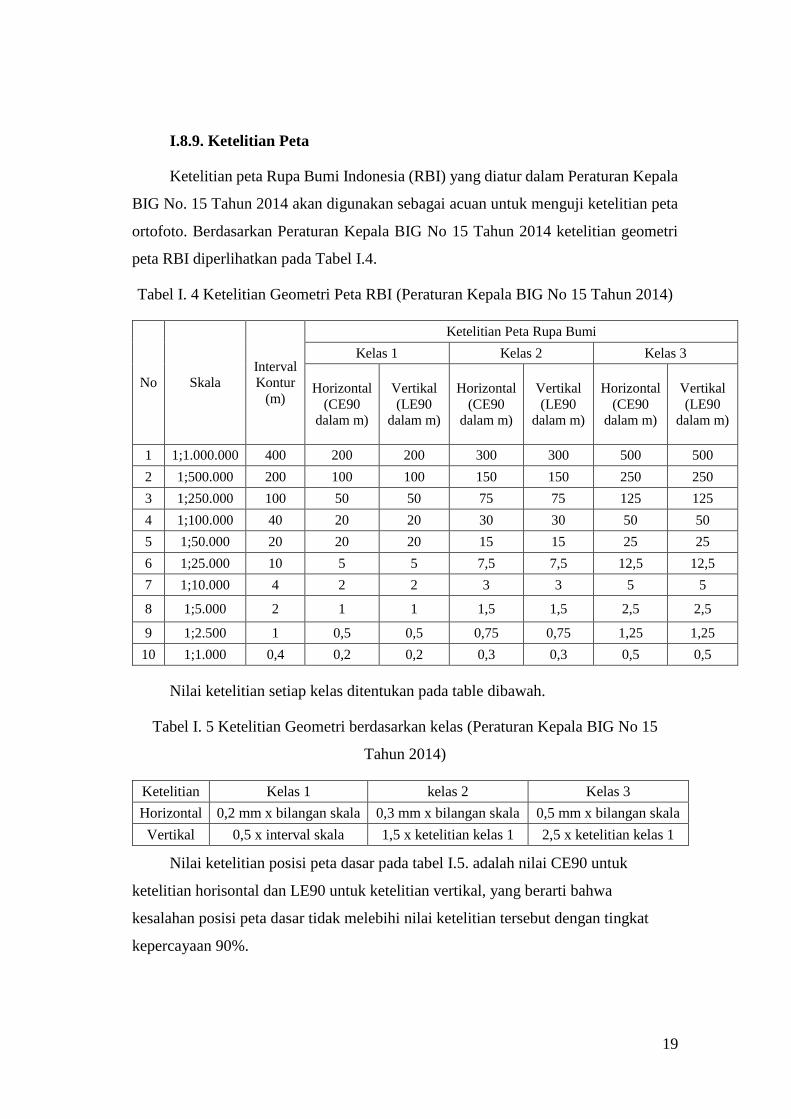
Ketelitian peta Rupa Bumi Indonesia (RBI) yang diatur dalam Peraturan Kepala
BIG No. 15 Tahun 2014 akan digunakan sebagai acuan untuk menguji ketelitian peta
ortofoto. Berdasarkan Peraturan Kepala BIG No 15 Tahun 2014 ketelitian geometri
peta RBI diperlihatkan pada Tabel I.4.
Tabel I. 4 Ketelitian Geometri Peta RBI (Peraturan Kepala BIG No 15 Tahun 2014)
No Skala
Interval
Kontur
(m)
Ketelitian Peta Rupa Bumi
Kelas 1 Kelas 2 Kelas 3
Horizontal
(CE90
dalam m)
Vertikal
(LE90
dalam m)
Horizontal
(CE90
dalam m)
Vertikal
(LE90
dalam m)
Horizontal
(CE90
dalam m)
Vertikal
(LE90
dalam m)
1 1;1.000.000 400 200 200 300 300 500 500
2 1;500.000 200 100 100 150 150 250 250
3 1;250.000 100 50 50 75 75 125 125
4 1;100.000 40 20 20 30 30 50 50
5 1;50.000 20 20 20 15 15 25 25
6 1;25.000 10 5 5 7,5 7,5 12,5 12,5
7 1;10.000 4 2 2 3 3 5 5
8 1;5.000 2 1 1 1,5 1,5 2,5 2,5
9 1;2.500 1 0,5 0,5 0,75 0,75 1,25 1,25
10 1;1.000 0,4 0,2 0,2 0,3 0,3 0,5 0,5
Nilai ketelitian setiap kelas ditentukan pada table dibawah.
Tabel I. 5 Ketelitian Geometri berdasarkan kelas (Peraturan Kepala BIG No 15
Tahun 2014)
Ketelitian Kelas 1 kelas 2 Kelas 3
Horizontal 0,2 mm x bilangan skala 0,3 mm x bilangan skala 0,5 mm x bilangan skala
Vertikal 0,5 x interval skala 1,5 x ketelitian kelas 1 2,5 x ketelitian kelas 1
Nilai ketelitian posisi peta dasar pada tabel I.5. adalah nilai CE90 untuk
ketelitian horisontal dan LE90 untuk ketelitian vertikal, yang berarti bahwa
kesalahan posisi peta dasar tidak melebihi nilai ketelitian tersebut dengan tingkat
kepercayaan 90%.

20
Nilai CE90 dan LE90 dapat diperoleh dengan persamaan yang mengacu pada
standar US NMAS (United States National Map Accuracy Standards) sebagai
berikut :
CE90 = 1,5175 x RMSEr…………………………………………….…….(I.16)
LE90 = 1,6499 x RMSEz………………………………………….....…….(I.17)
Dalam hal ini:
RMSEr : Root Mean Square Error pada posisi horisontal (x,y)
RMSEz : Root Mean Square Error pada posisi vertikal (z)
Uji ketelitian posisi dilakukan hingga mendapatkan tingkat kepercayaan peta
90% Circular Error dan Linear Error. Uji ketelitian posisi ditentukan dengan
menggunakan titik uji yang memenuhi ketentuan objek yang digunakan sebagai titik
uji, yaitu:
a. Dapat diidentifikasi dengan jelas di lapangan dan di peta yang akan
diuji.
b. Merupakan objek yang relatif tetap tidak berubah bentuk dalam jangka
waktu yang singkat.
c. Memiliki sebaran yang merata di seluruh area yang akan diuji.
Pengujian ketelitian posisi mengacu pada perbedaan koordinat (X,Y,Z) antara
titik uji pada gambar atau peta dengan lokasi sesungguhnya dari titik uji pada
permukaan tanah. Pengukuran akurasi menggunakan root mean square error (RMSE)
atau circular error.
Pada pemetaan dua dimensi yang perlu diperhitungkan adalah koordinat (X,Y)
titik uji dan posisi sebenarnya di lapangan. Analisis akurasi posisi menggunakan
RMSE, yang menggambarkan nilai perbedaan antara titik uji dengan titik sebenarnya.
RMSE digunakan untuk menggambarkan akurasi meliputi kesalahan random dan
sistematik. Nilai RMSE dipersamaankan sebagai berikut (Peraturan Kepala BIG No
15 Tahun 2014):
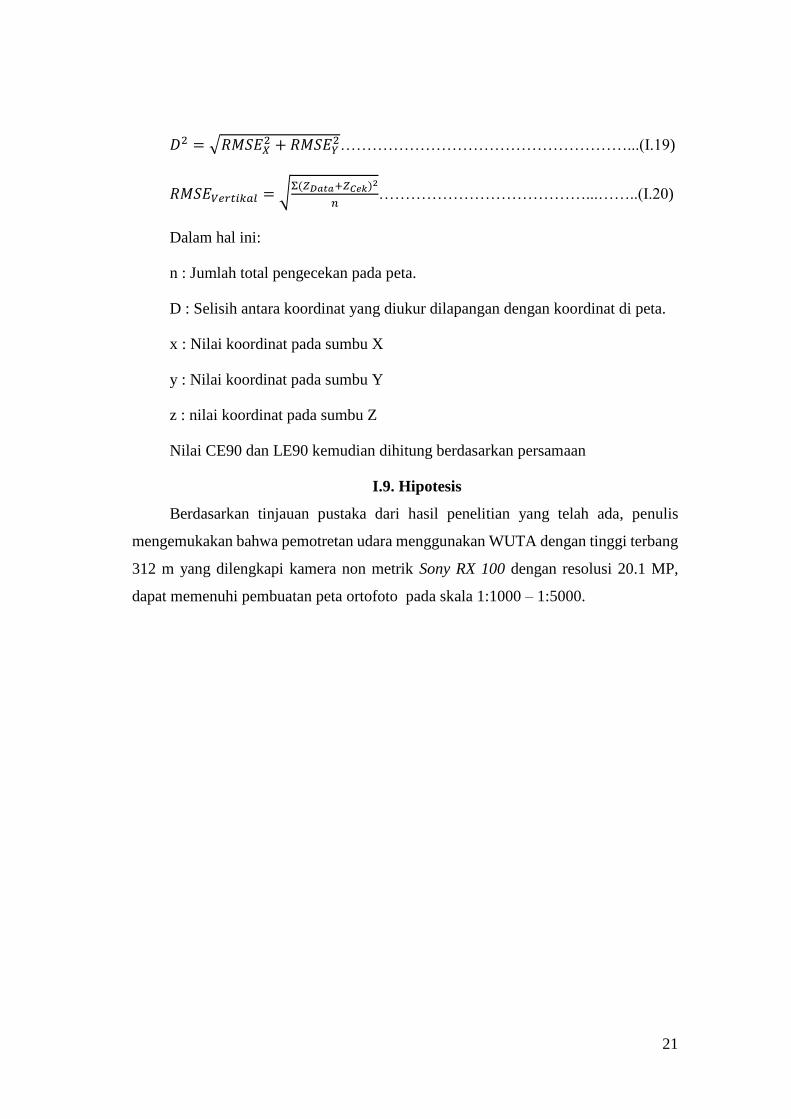
𝑅𝑀𝑆𝐸𝐻𝑜𝑟𝑖𝑠𝑜𝑛𝑡𝑎𝑙 = √𝐷2 𝑛⁄ ………………………………………..………(I.18)
21
𝐷2 = √𝑅𝑀𝑆𝐸𝑋2 + 𝑅𝑀𝑆𝐸𝑌
2………………………………………………...(I.19)
𝑅𝑀𝑆𝐸𝑉𝑒𝑟𝑡𝑖𝑘𝑎𝑙 = √Σ(𝑍𝐷𝑎𝑡𝑎+𝑍𝐶𝑒𝑘)2
𝑛…………………………………...……..(I.20)
Dalam hal ini:
n : Jumlah total pengecekan pada peta.
D : Selisih antara koordinat yang diukur dilapangan dengan koordinat di peta.
x : Nilai koordinat pada sumbu X
y : Nilai koordinat pada sumbu Y
z : nilai koordinat pada sumbu Z
Nilai CE90 dan LE90 kemudian dihitung berdasarkan persamaan
I.9. Hipotesis
Berdasarkan tinjauan pustaka dari hasil penelitian yang telah ada, penulis
mengemukakan bahwa pemotretan udara menggunakan WUTA dengan tinggi terbang
312 m yang dilengkapi kamera non metrik Sony RX 100 dengan resolusi 20.1 MP,
dapat memenuhi pembuatan peta ortofoto pada skala 1:1000 – 1:5000.