
BAB I...
22
BAB I PENDAHULUAN I.1. Latar Belakang Indonesia memiliki tempat wisata yang sangat beragam dan sangat diminati oleh wisatawan domestik maupun mancanegara. Salah satu tempat wisata yang banyak menarik minat para wisatawan baik wisatawan lokal maupun mancanegara adalah Candi Prambanan. Kawasan Candi Prambanan merupakan kompleks candi Hindu terbesar di Indonesia yang dibangun pada abad ke-9 masehi. Candi Prambanan terletak 17 kilometer dari pusat kota Yogyakarta tepatnya di Kecamatan Prambanan, Kabupaten Sleman dan Kecamatan Prambanan, Kabupaten Klaten. Kawasan wisata Candi Prambanan memiliki tiga candi utama yang berada di halaman utama kompleks candi, yaitu Candi Wisnu, Brahma dan Siwa. Komplek Candi Prambanan ini dibangun di tengah area yang memiliki taman yang indah. Oleh karena itu Kawasan Candi Prambanan tersebut harus dilestarikan oleh pihak pengelola maupun pengunjung yang berwisata ke kawasan tersebut. Pelestarian Kawasan Candi Prambanan dikelola oleh pihak PT. Taman Wisata Candi. Salah satu tindakan pelestarian yang dilakukan adalah terhadap sarana dan prasarana Kawasan Candi Prambanan tersebut yang memerlukan perencanaan, sehingga dapat dilakukan perbaikan ataupun pengembangan terhadap kawasan tersebut. Untuk memulai perencanaan yang baik sangat diperlukan proses pemetaan terhadap kawasan candi tersebut. Pemetaan tersebut dilakukan untuk mempermudah pengelolaan dan juga pengembangan agar kawasan tersebut semakin lebih baik. Pemetaan yang dimaksud meliputi pemetaan topografi (bagian atas tanah) dan juga pemetaan utilitas bawah tanah. Pemetaan topografi atau situasi merupakan pemetaan dari suatu lokasi/daerah yang mencakup penyajian dalam bentuk horizontal dan vertikal dalam suatu gambaran yang disebut peta topografi (Davis, 1981). Pemetaan topografi pada kawasan tersebut mencakup bangunan candi, topografi kawasan candi maupun seluruh utilitas yang berada di atas tanah yang ada pada kawasan Candi Prambanan. 1 PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADAR DI KAWASAN CANDI PRAMBANAN JOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
Transcript of BAB I...
1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Indonesia memiliki tempat wisata yang sangat beragam dan sangat diminati
oleh wisatawan domestik maupun mancanegara. Salah satu tempat wisata yang
banyak menarik minat para wisatawan baik wisatawan lokal maupun mancanegara
adalah Candi Prambanan. Kawasan Candi Prambanan merupakan
kompleks candi Hindu terbesar di Indonesia yang dibangun pada abad ke-9 masehi.
Candi Prambanan terletak 17 kilometer dari pusat kota Yogyakarta tepatnya di
Kecamatan Prambanan, Kabupaten Sleman dan Kecamatan Prambanan, Kabupaten
Klaten. Kawasan wisata Candi Prambanan memiliki tiga candi utama yang berada di
halaman utama kompleks candi, yaitu Candi Wisnu, Brahma dan Siwa. Komplek
Candi Prambanan ini dibangun di tengah area yang memiliki taman yang indah. Oleh
karena itu Kawasan Candi Prambanan tersebut harus dilestarikan oleh pihak
pengelola maupun pengunjung yang berwisata ke kawasan tersebut. Pelestarian
Kawasan Candi Prambanan dikelola oleh pihak PT. Taman Wisata Candi.
Salah satu tindakan pelestarian yang dilakukan adalah terhadap sarana dan
prasarana Kawasan Candi Prambanan tersebut yang memerlukan perencanaan,
sehingga dapat dilakukan perbaikan ataupun pengembangan terhadap kawasan
tersebut. Untuk memulai perencanaan yang baik sangat diperlukan proses pemetaan
terhadap kawasan candi tersebut. Pemetaan tersebut dilakukan untuk mempermudah
pengelolaan dan juga pengembangan agar kawasan tersebut semakin lebih baik.
Pemetaan yang dimaksud meliputi pemetaan topografi (bagian atas tanah) dan juga
pemetaan utilitas bawah tanah.
Pemetaan topografi atau situasi merupakan pemetaan dari suatu
lokasi/daerah yang mencakup penyajian dalam bentuk horizontal dan vertikal dalam
suatu gambaran yang disebut peta topografi (Davis, 1981). Pemetaan topografi pada
kawasan tersebut mencakup bangunan candi, topografi kawasan candi maupun
seluruh utilitas yang berada di atas tanah yang ada pada kawasan Candi Prambanan.
1
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
2
Pemetaan topografi tersebut dapat dilakukan dengan menggunakan alat seperti GPS,
Total Station maupun foto udara. Sedangkan pemetaan bawah tanah adalah pemetaan
yang dilakukan pada bagian bawah tanah kawasan candi yang meliputi pipa air
bawah tanah dan jalur listrik yang berada di bawah tanah. Untuk melakukan
pemetaan bawah tanah dapat digunakan alat Ground Penetrating Radar (GPR).
Ground Penetrating Radar atau GPR merupakan alat yang memancarkan
gelombang yang dapat menembus tanah sehingga dapat mendeteksi objek-objek yang
ada di bawah tanah kemudian mengembalikan gelombang tersebut yang diterima
kembali oleh alat GPR tersebut. Pemetaan yang dilakukan pada pekerjaan aplikatif
GPR dapat digunakan untuk mendeteksi utilitas bawah tanah yang terdapat pada
kawasan candi tersebut. Pada dasarnya teknologi GPR tidak hanya digunakan untuk
mengetahui jalur kabel listrik dan pipa air saja, melainkan semua material di bawah
tanah yang dapat mengembalikan gelombang yang dipancarkan oleh alat GPR,
termasuk juga akar-akar pohon yang sangat banyak ditemui. Alat GPR tersebut
kemudian dijalankan sesuai dengan line pengukuran yang telah memiliki desain jalur
pengukuran. Dengan menggunakan data yang diterima oleh alat tersebut dan
dilakukan interpretasi visual terhadap hasil citra GPR dapat diidentifikasi objek
bawah tanah tersebut. Pada pekerjaan aplikatif ini digunakan alat GPR MALA 500
Mhz dan kegiatan aplikatif ini difokuskan untuk memetakan jalur pipa air bawah
tanah yang menghubungkan beberapa reservoir air bersih pada kawasan Candi
Prambanan.
Kelemahan alat GPR MALA 500 Mhz tersebut adalah tidak dilengkapi dengan
alat penentuan posisi sehingga harus dilakukan penentuan posisi, dalam kegiatan
aplikatif ini dilakukan dengan menggunakan alat Total Station. Proses penentuan
posisi GPR dilakukan dengan mengukur titik awal dan titik akhir pada setiap line
pengukuran menggunakan metode terestris, menggunakan Total Station.
Kegiatan aplikatif ini melakukan pengukuran dengan alat GPR MALA 500
MHz untuk pembuatan peta utilitas pipa air bawah tanah. Hasilnya berupa peta utilitas
pipa air bawah tanah dengan profil kedalaman pipa air pada kawasan Candi
Prambanan. Hasil gabungan peta topografi dengan peta utilitas pipa air bawah tanah
yang dapat digunakan sebagai referensi untuk kegiatan perencanaan dan
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
3
pengembangan kawasan wisata, baik dalam kepentingan jangka pendek maupun
jangka panjang.
I.2. Lingkup Kegiatan
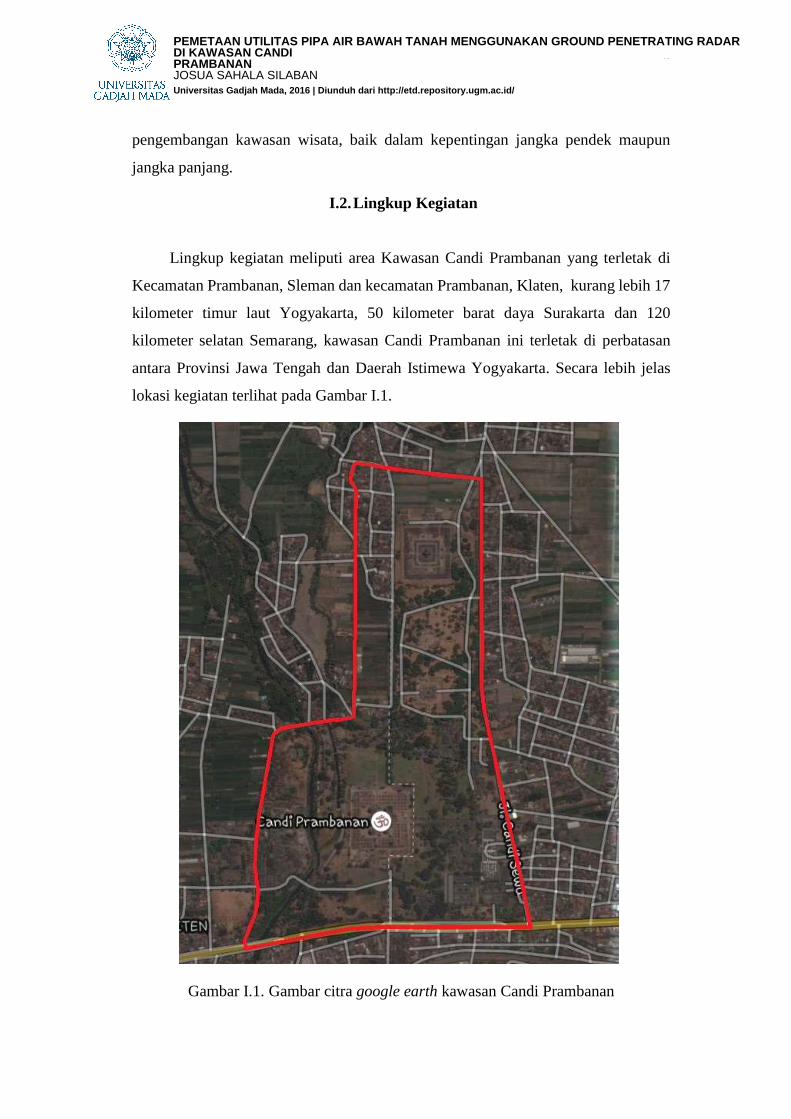
Lingkup kegiatan meliputi area Kawasan Candi Prambanan yang terletak di
Kecamatan Prambanan, Sleman dan kecamatan Prambanan, Klaten, kurang lebih 17
kilometer timur laut Yogyakarta, 50 kilometer barat daya Surakarta dan 120
kilometer selatan Semarang, kawasan Candi Prambanan ini terletak di perbatasan
antara Provinsi Jawa Tengah dan Daerah Istimewa Yogyakarta. Secara lebih jelas
lokasi kegiatan terlihat pada Gambar I.1.
Gambar I.1. Gambar citra google earth kawasan Candi Prambanan
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
4
Dalam kegiatan aplikatif ini dibatasi permasalahan yang ada dengan
menggunakan kriteria sebagai berikut:
1. Peralatan GPR yang digunakan adalah GPR MALA 500 MHz yang tidak
dilengkapi dengan alat penentuan posisi.
2. Jalur pipa yang dipetakan hanya jalur utama pipa air bawah tanah.
3. Penentuan posisi pipa air bawah tanah dilakukan secara terestris
menggunakan Total Station.
4. Pengolahan dilakukan menggunakan perangkat lunak Object Mapper,
sedangkan interpretasi dilakukan secara visual.
5. Penggambaran peta utilitas pipa air bawah tanah dilakukan dengan
perangkat lunak Autocad Civil 2013, demikian juga dengan penggambaran
profil memanjang kedalaman dan penggabungan dengan peta topografi.
6. Validasi jalur pipa air bawah tanah tidak dilakukan karena tidak ada izin
dari pengelola taman wisata Candi Prambanan.
I.3. Tujuan
Tujuan kegiatan ini meliputi:
1. Terbentuknya desain jalur pengukuran utilitas pipa air bawah tanah dengan
menggunakan alat GPR MALA 500 MHz.
2. Terbentuknya peta utilitas pipa air bawah tanah pada kawasan wisata
Candi Prambanan.
3. Terbentuknya profil kedalaman pipa air bawah tanah pada kawasan wisata
Candi Prambanan.
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
5
I.4. Manfaat
Manfaat kegiatan aplikatif ini yaitu :
1. Mengetahui bagaimana prosedur melakukan pemetaan utilitas pipa air
bawah tanah dengan menggunakan GPR mulai dari persiapan, pengukuran,
pengolahan data, interpretasi dan penggambaran.
2. Diperolehnya peta gabungan antara peta topografi dan peta utilitas bawah
tanah yang dapat digunakan untuk perencanaan dan pengelolaan kawasan
wisata Candi Prambanan.
I.5. Landasan Teori
I.5.1. Pemetaan Topografi
Pemetaan topografi atau situasi merupakan pemetaan dari suatu lokasi/daerah
yang mencakup penyajian dalam bentuk horizontal dan vertikal dalam suatu
gambaran yang disebut peta topografi (Davis, 1981). Peta topografi adalah peta yang
menggambarkan fitur-fitur alami dan buatan manusia. Pemetaan situasi dapat
dilakukan dengan dua metode yaitu metode terestris dan metode ekstraterestris.
Metode terestris adalah metode menggunakan alat seperti Teodolit, Waterpass, Total
Station, sedangkan metode ekstraterestris adalah metode menggunakan alat GPS,
penginderaan jauh maupun fotogrametri. Pengukuran horizontal dan vertikal serta
detil disebut juga pengukuran situasi. Jumlah detil topografi yang diukur harus
merepresentasikan kenampakan permukaan bumi yang sebenarnya. Semakin rapat
mengambil detil maka kenampakan aslinya akan lebih sesuai. Kerapatan detil yang
diambil sesuai dengan skala peta yang dibuat. Kerapatan detil untuk skala 1:250
berbeda dengan skala 1:10.000. Untuk skala 1:250 mempunyai arti 1 cm ukuran di
peta sama dengan 250 cm di lapangan atau 2,5 di lapangan maka setiap objek yang
memiliki dimensi 2,5 di lapangan tergambar 1 cm di peta.
Pelaksanaan pengukuran topografi meliputi beberapa prosedur sebagi berikut:
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
6
I.5.1.1. Pengukuran kerangka kontrol. Pengadaan kerangka kontrol pemetaan
merupakan tahapan awal yang dilakukan dalam kegiatan survei topografi. Adapun
kerangka kontrol pemetaan terbagi atas dua macam yaitu kerangka kontrol horizontal
dan kerangka kontrol vertikal. Pengukuran kerangka kontrol horizontal dimaksudkan
untuk memperoleh nilai koordinat 2D (X,Y) dan kerangka kontrol vertikal untuk
memperoleh nilai ketinggian (Z) titik kontrol pemetaan yang teliti.
Pengukuran kerangka kontrol horizontal ada berbagai metode yang dapat
digunakan, antara lain metode terestris dan extra-terestris. Metode yang digunakan
untuk kegiatan aplikatif ini adalah metode extra-terestris dengan menggunakan GPS
metode Real Time Kinematik berbasis radio. Pengukuran kerangka kontrol vertikal
dilakukan menggunakan teknologi GPS maka perlu dilakukan reduksi menggunakan
undulusi geoid untuk mengetahui tinggi titik terhadap geoid bukan lagi ellipsoid.
Global Positioning System (GPS) merupakan teknologi penentuan posisi
dengan menggunakan satelit yang berbeda-beda untuk penentuan posisi. Sistem GPS
terdiri atas tiga segmen yaitu segmen angkasa (space segment) yang terdiri atas
satelit-satelit yang dimiliki GPS, segmen sistem kontrol (control system segment)
terdiri atas stasiun kontrol yang mengendalikan GPS dari bumi dan segmen pengguna
(user segment) yang merupakan pengguna GPS termasuk alat yang digunakan serta
data GPS.
Prinsip penentuan posisi oleh GPS pada dasarnya adalah pemotongan ke
belakang (space resection). Pengukuran jarak dilakukan ke beberapa satelit GPS
yang telah diketahui koordinatnya, dengan pengamatan secara simultan ke minimal
empat buah satelit untuk mendapatkan tiga parameter posisi dan satu parameter
waktu. Jarak tersebut diperoleh dengan cara mengukur waktu rambat sinyal dari
satelit ke stasiun pengamatan. Posisi yang diberikan oleh GPS adalah posisi tiga
dimensi (X, Y, Z ataupun φ, λ, h) yang dinyatakan dalam datum World Geodetic
System (WGS) 1984 (Abidin, 2000).
Penentuan posisi menggunakan GPS diperoleh dengan dua metode penentuan
posisi secara umum, antara lain metode penentuan posisi secara absolut dan relatif.
Metode penentuan posisi secara absolut atau yang lebih dikenal dengan point
positioning merupakan penentuan posisi suatu titik secara mandiri dimana suatu
posisi suatu titik direferensikan terhadap pusat dari sistem koordinat. Metode ini
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
7
merupakan desain awal dari penentuan posisi dengan teknologi GPS. Dalam
penentuannya, posisi titik yang ditentukan tidak bergantung pada titik lainnya, maka
receiver yang digunakan hanya satu buah. Sedangkan metode penenntuan posisi
secara relatif pada dasarnya adalah pengamatan posisi satelit GPS dalam konstelasi
yang sama secara bersamaan dengan rentang waktu yang sama dan bertujuan untuk
menentukan posisi relatif dua atau lebih stasiun pengamatan serta menentukan jarak
antara dua stasiun atau lebih yang dikenal dengan jarak basis (baseline). Dalam
metode ini posisi suatu titik ditentukan relatif terhadap titik lain yang sudah diketahui
koordinatnya. Dalam hal ini, titik referensi tersebut adalah satelit-satelit GPS dan
GLONASS yang posisinya di orbit dapat diketahui melalui data broadcast ephemeris
maupun precise ephemeris. Berdasarkan data ephemeris tersebut, dapat diketahui
posisi satelit dari sinyal yang dipancarkan oleh satelit GNSS, sehingga posisi
pengamat atau receiver GPS dapat ditentukan.
Metode pengukuran kerangka dasar pemetaan horizontal dengan survei GPS
ada beberapa macam yaitu (SNI 10-6742, 2002):
1. Metode statik adalah metode survei GPS dengan waktu pengamatan yang
relatif lama (beberapa jam) di setiap titiknya. Titik-titik yang diukur posisinya
diam (tidak bergerak).
2. Metode stop and go adalah proses pengamatan GPS dengan melakukan
inisialisasi di titik awal untuk penentuan ambiguitas fase, receiver GPS
bergerak dari titik ke titik lainnya dan melakukan pengamatan dalam waktu
yang relatif singkat (sekitar 1 menit) pada setiap titiknya. Metode penentuan
posisi ini kadang disebut juga sebagai metode semi-kinematik
3. Metode pseudo-kinematik adalah metode survei GPS yang pengamatannya
dilakukan dua kali secara singkat (5 s.d 10 menit) pada satu titik dengan
selang waktu yang relatif cukup lama (1 s.d 2 jam) antara keduanya.
Metode Real Time Kinematic (RTK) merupakan metode berbasiskan pada carier
phase dalam penentuan posisi secara relatif dengan tingkat ketelitian mencapai
satuan sentimeter secara real time. Prinsip penentuan posisi secara RTK dengan cara
menggunakan satu stasiun penerima siyal (referensi/base station) dan beberapa rover
(receiver) yang dapat bergerak (mobile). Stasiun referensi penerima sinyal carrier
phase dan unit rover yang bergerak membandingkan pengukuran fase itu sendiri
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
8
dengan membandingkan pengukuran fase yang diterima dari stasiun referensi (base
stasion) sehingga nantinya didapat data koreksi yang dibutuhkan untuk
pengukurannya secara real time. Ada tiga komponen penting dalam pengukuran
menggunakan metode RTK (Abidin, 2000), yaitu :
1. Stasiun referensi
Stasiun referensi atau base station ini terdiri atas receiver dan antena. Base
station ini berfungsi untuk mengolah data differential dan melakukan koreksi
carrier phase yang dikirimkan via radio modem base station ke radio modem
rover.
2. Stasiun rover
Fungsi rover adalah untuk mengidentifikasi satelit-satelit pada daerah
pengamatan dan menerima data differential dan koreksi carrier phase dari
base station. Cara kerja rover dalam melakukan pengukuran secara RTK
dengan cara menggerakkan rover (mobile) dari suatu titik ke titik lainnya
yang ingin diketahui posisinya. Koreksi carrier phase tersebut dikirim via
radio link dengan radio modem antara base station dan rover sehingga bisa
mendapatkan posisi yang lebih teliti.
3. Data link (hubungan data) differential
Data link ini berfungsi mengirimkan data differential dan koreksi carrier
phase dari base station ke rover melalui radio modem. Kecepatan radio
modem dan band frekuensi pada base station dan rover harus sama sehingga
proses pengiriman data bisa lancar. Jenis-jenis band frekuensi yang
dimanfaatkan dalam survei GPS-RTK meliputi:
a. Ultra Height Frequency (UHF)
Bekerja pada frekuensi antara 300 Mhz s.d. 3 Ghz dengan panjang
gelombang antara 10 cm s.d. 1m.
b. Very Height Frequency (VHF)
Bekerja pada frekuensi antara 30 Mhz s.d. 300 Mhz dengan panjang
gelombang antara 1 m s.d 10 m.
c. Height Frequency (HF)
Bekerja pada frekuensi antara 3 Mhz s.d. 30 Mhz dengan panjang
gelombang antara 10 m s.d. 100 m.
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
9
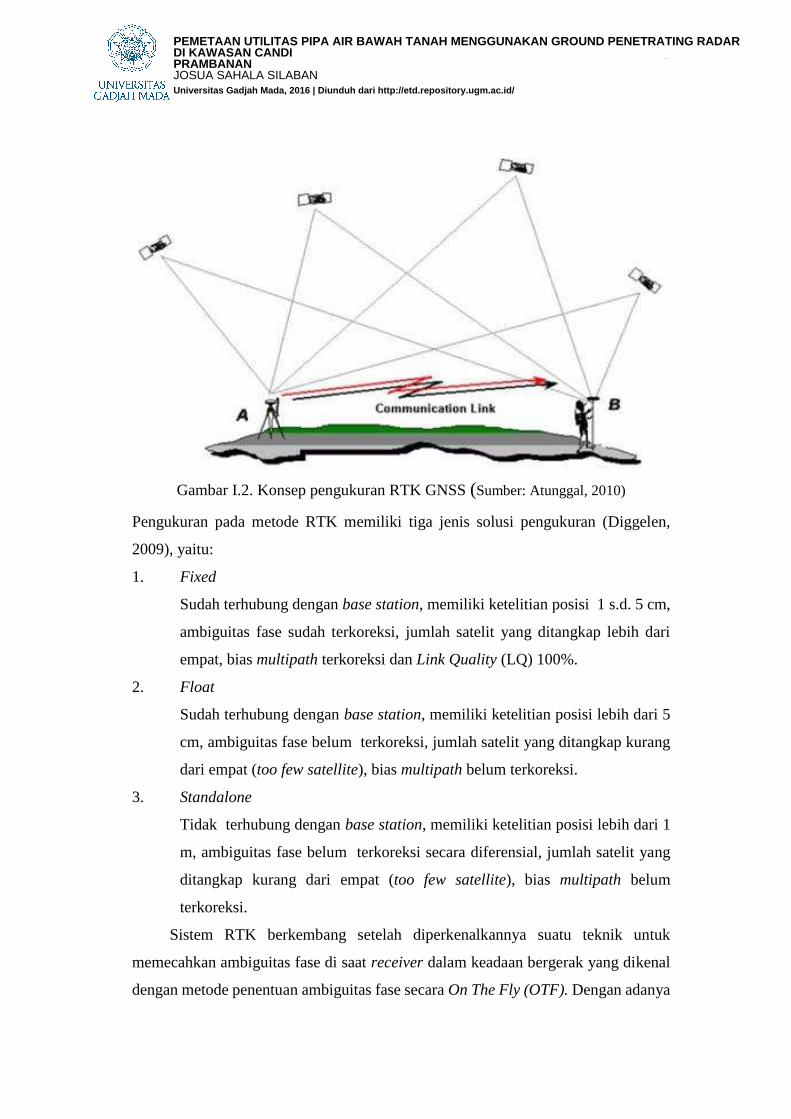
Gambar I.2. Konsep pengukuran RTK GNSS (Sumber: Atunggal, 2010)
Pengukuran pada metode RTK memiliki tiga jenis solusi pengukuran (Diggelen,
2009), yaitu:
1. Fixed
Sudah terhubung dengan base station, memiliki ketelitian posisi 1 s.d. 5 cm,
ambiguitas fase sudah terkoreksi, jumlah satelit yang ditangkap lebih dari
empat, bias multipath terkoreksi dan Link Quality (LQ) 100%.
2. Float
Sudah terhubung dengan base station, memiliki ketelitian posisi lebih dari 5
cm, ambiguitas fase belum terkoreksi, jumlah satelit yang ditangkap kurang
dari empat (too few satellite), bias multipath belum terkoreksi.
3. Standalone
Tidak terhubung dengan base station, memiliki ketelitian posisi lebih dari 1
m, ambiguitas fase belum terkoreksi secara diferensial, jumlah satelit yang
ditangkap kurang dari empat (too few satellite), bias multipath belum
terkoreksi.
Sistem RTK berkembang setelah diperkenalkannya suatu teknik untuk
memecahkan ambiguitas fase di saat receiver dalam keadaan bergerak yang dikenal
dengan metode penentuan ambiguitas fase secara On The Fly (OTF). Dengan adanya
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
10
radio modem, maka proses pengiriman data atau koreksi fase dapat dilakukan secara
seketika membuat informasi posisi yang dihasilkan oleh sistem ini dapat diperoleh
secara seketika (Rahmadi, 1997). Ketelitian tipikal posisi yang diberikan oleh sistem
RTK adalah sekitar 1 s.d. 5 cm, dengan asumsi bahwa ambiguitas fase dapat
ditentukan secara benar (Abidin, 2000). Dengan ketelitian yang sudah mencapai 1
s.d. 5cm maka akuisis detil topografi menggunakan teknologi RTK radio menjadi
lebih efektif dan cepat.
I.5.1.3. Pengukuran titik awal dan akhir jalur GPR. Tahapan setelah pengadaan
kerangka kontrol pemetaan adalah pengukuran titik awal dan akhir jalur GPR.
Metode pengambilan titik tersebut yang digunakan dalam kegiatan aplikatif ini
adalah metode polar menggunakan Total Station. Sebelum Total Station digunakan,
terlebih dahulu harus diketahui adanya beberapa syarat yang harus dipenuhi terlebih
dahulu sebelum digunakan untuk melakukan pengukuran di lapangan. Dalam praktik
pengukuran di lapangan, pada dasarnya Total Station sendiri harus memenuhi
beberapa syarat, yaitu:
1. Syarat dinamis
a. Centering adalah bahwa sumbu I segaris dengan garis gaya berat.
b. Sumbu I vertikal
2. Syarat statis:
a. Sumbu II tegak lurus sumbu I
b. Garis bidik/kolimasi tegak lurus sumbu II
c. Kesalahan indeks vertikal sama dengan nol
Penentuan posisi dari titik-titik awal dan akhir diikatkan pada titik-titik
kerangka pemetaan yang terdekat yang telah diukur sebelumnya atau mungkin juga
ditentukan dari garis ukur yang merupakan sisi-sisi dari kerangka peta ataupun garis
yang dibuat khusus untuk itu. Salah satu metode yang digunakan untuk pengukuran
titik awal dan akhir adalah metode polar atau ekstrapolasi koordinat kutub. Metode
polar dapat dilihat pada Gambar I.3.
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
11
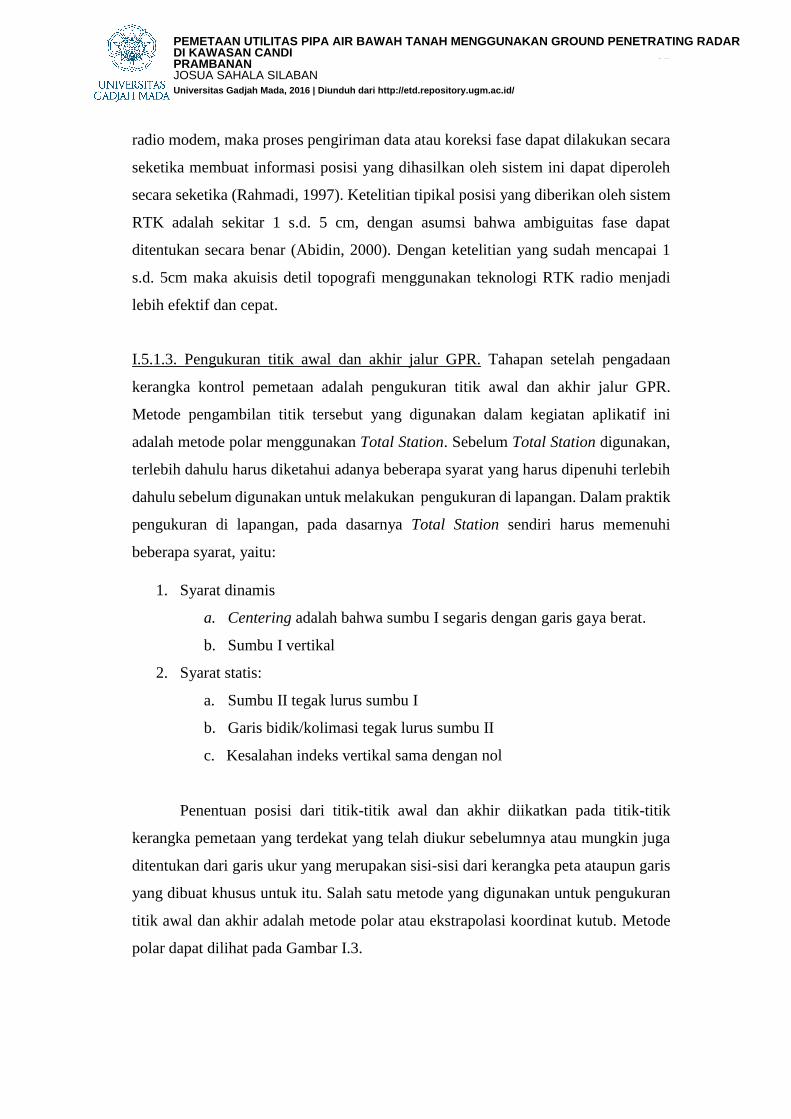
Gambar 0.3. Ilustrasi pengikatan detil metode polar
Keterangan :
Xd,Yd : Koordinat planimetrik titik detil
Xbm2, Ybm2 : Koordinat planimetrik titik BM2
Xbm1, Ybm1 : Koordinat planimetrik titik BM1
αbm2-bm1 : Azimut BM2 ke BM1
αbm2-d : Azimut BM2 ke titik detil
βbm2 : Sudut ukuran yang dibentuk antara BM1-BM2-titik detil
Dbm2-d : Jarak ukuran dari BM2 ke titik detil
Metode ini mengukur posisi tiga dimensi (X, Y, Z) dari setiap detil. Posisi
detil ditentukan berdasarkan data jarak horizontal dan jarak miring, jarak vertikal,
serta sudut horisontal dan sudut vertikal (Kavanagh, 2009) dari titik ikat atau bench
mark ke titik detil. Dengan menggunakan alat Total Station yang merupakan
gabungan antara teodolit dan Electronic Distance Meter (EDM), penentuan jarak
secara optis, pengukuran sudut horizontal untuk azimut serta pengukuran sudut
vertikal untuk penentuan beda tinggi dapat dilakukan secara bersamaan. Dalam
pengukuran detil secara ekstrapolasi koordinat kutub pada metode takhimetri,
komponen yang dikur meliputi :
a. Azimut/sudut antara titik BM dan titik awal dan akhir jalur GPR
b. Jarak antara titik BM dan titik titik awal dan akhir jalur GPR
Dalam penentuan posisi secara ekstrapolasi koordinat kutub pada metode takhimetri,
penentuan koordinat horizontal (X, Y) ditentukan dengan mengukur jarak optis dan
azimut antara titik BM dengan titik detil. Penentuan beda tinggi dari setiap detil
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
12
dilakukan secara trigonometris, dimana pengukuran beda tinggi dengan cara
trigonometris adalah suatu proses penentuan beda tinggi dari titik-titik pengamatan
dengan cara mengukur sudut miring atau vertikalnya dengan jarak yang diketahui,
baik jarak dalam bidang datar maupun jarak geodetis untuk menentukan nilai
koordinat Z dari titik detil tersebut.
I.5.1.4. Penggambaran peta topografi. Penggambaran peta topografi secara digital
dilakukan dengan mengolah data hasil download pengukuran, kemudian diolah
dengan perangkat lunak Microsoft Excel untuk data yang diperoleh melalui
pengukuran menggunakan Total Station. Untuk data hasil pengukuran GPS,
khususnya data dengan format rinex hasil pengukuran GPS metode RTK radio,
proses download data langsung dilakukan dari perangkat GPS tanpa harus diolah
menggunakan Microsoft Excel seperti data ukuran dengan Total Station. Setelah
proses download data, dapat dilakukan plotting titik-titik hasil pengukuran dengan
menggunakan perangkat lunak CAD yaitu Autocad Civil 3D 2013.
Penggambaran peta situasi secara digital menggunakan perangkat lunak
Autocad mencakup tahapan plotting, editing dan finishing dari data ukuran yang
meliputi :
1. Penggambaran titik kontrol.
2. Penggambaran titik awal dan akhir jalur GPR.
Titik awal dan akhir jalur GPR yang digambar berupa titik-titik yang telah
diukur dan telah diklompokkan menurut layernya. Titik-titik tersebut
digambarkan agar pada peta situasi yang dihasilkan jalur GPR yang
merepresentasikan kondisi sebenarnya dari daerah yang dipetakan.
3. Penggambaran garis kontur.
Garis kontur perlu digambarkan dalam suatu peta situasi dengan tujuan untuk
mengetahui gambaran topografi dari daerah yang dipetakan. Garis kontur
tersebut menggambarkan tren dari topografi di suatu daerah pemetaan karena
memuat informasi tinggi yang ditampilkan dalam bentuk nilai dari interval
kontur. Dalam proses penggambaran garis kontur harus mempertimbangkan
karakteristik dan spesifikasi garis kontur yang benar.
Garis kontur mempunyai beberapa sifat antara lain (Basuki, 2006) :
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
13
a. Tidak berpotongan.
b. Tidak bercabang.
c. Tidak bersilangan.
d. Semakin jarang menunjukkan daerah yang semakin datar.
e. Semakin rapat menunjukkan daerah yang semakin curam.
f. Tidak berhenti didalam peta.
Penggambaran kontur pada perangkat lunak autocad dilakukan dengan
menggunakan seluruh data dari titik tinggi topografi yang terkelompok dalam
layer khusus yang disebut spot height (kode SH). Dalam pelaksanaannya,
pembuatan kontur juga dipadu dengan layer-layer detil planimetrik yang telah
dibuat sebelumnya.
I.5.2. Ground Penetrating Radar (GPR)
GPR merupakan metode geofisika yang menggunakan elektromagnetik untuk
mendeteksi objek yang terkubur dalam tanah dan mengevaluasi kedalaman objek
tersebut. Menurut David dan Annan (1989) dalam Kearey dan Brooks (2002), GPR
merupakan teknik pencitraan tanah dan struktur batuan pada kedalaman dangkal
dengan tingkat resolusi yang tinggi. Teknik ini menggunakan propagasi gelombang
radar yang melewati media yang dikontrol oleh sumber elektrik dengan frekuensi
tinggi (900 MHz-1 GHz).
Dalam penerapannya, GPR dapat digunakan untuk pemetaan geologi
menggunakan antena < 500 MHz dan untuk rekayasa (uji tidak merusak)
menggunakan antena > 500 MHz. Metode GPR menggunakan tanggapan tanah
terhadap gelombang elektromagnetik yang merambat melaluinya. Gelombang
elektromagnetik merupakan gelombang medan yang merambat secara transversal.
Gelombang elektromagnetik terdiri atas dua komponen yang saling tegak lurus
terhadap arah getar dari medan listrik dan medan magnet.
Setelah menempuh jarak tertentu, amplitudo gelombang radar mengalami
peredaman/atenuasi (Supriyanto,2007). Amplitudo gelombang dapat dihitung
dengan persamaan I.1 :
E = E0 exp (-ax)............................................(I.1)
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/

14
Dalam hal ini :
E0 : amplitudo medan listrik
a : koefisien atenuasi
x : jarak
Faktor-faktor yang mempengaruhi amplitudo gelombang radar sehingga
mengalami peluruhan (atenuasi) adalah :
1. Geometrical spreading (penyebaran geometris)
2. Hamburan energi karena ketidakhomogenan medium
3. Pantulan energi pada bidang batas medium
4. Penyerapan energi
5. Rugi akibat antena
Sistem GPR terdiri atas pengirim (transmitter), yaitu antena yang terhubung
ke sumber pulsa dengan pengaturan timing circuit dan bagian penerima (receiver),
yaitu antena yang terhubung ke unit pengolahan dan display sebagai tampilan akhir.
Untuk mendapatkan hasil yang terbaik, GPR harus memiliki persyaratan, yaitu
kopling radiasi yang efisien ke dalam tanah, penetrasi gelombang elektromagnetik
yang efisien, menghsilkan sinyal dengan amplitudo yang besar dari objek yang
dideteksi, dan bandwith yang cukup untuk menghasilkan resolusi yang baik.
GPR memiliki kesamaan prinsip dengan seismik refleksi dan survei sonar.
Propagasi gelombang dikontrol oleh konstanta dielektrik (permitivitas relatif) dan
konduktivitas di bawah permukaan. Konstanta dielektrik dapat berpindah pada
konduktor buruk. Air memiliki konstanta dielektrik 80, dimana hampir seluruh
material geologi memiliki kisaran nilai konstanta dielektrik antara 4 s.d. 8.
Akibatnya, air yang terkandung dalam suatu material akan memiliki pengaruh kuat
untuk propagasi gelombang radar.
Kontras antara konduktivitas dan konstanta dielektrik yang melewati
permukaan mengakibatkan gelombang radar tersebut dipantulkan. Kedalaman objek
dapat diketahui dengan mengukur selang waktu antara pemancaran dan penerimaan
pulsa dimana kecepatan perambatan gelombang elektromagnetik harus diketahui
tergantung kepada kecepatan cahaya di udara. Jika konstanta dielektrik medium
semakin besar, maka kecepatan gelombang elektromagnetik yang dirambatkan
semakin kecil. Pulse Repetition Frequency (PRF) merupakan nilai yang menyatakan
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/

15
seberapa seringnya pulsa radar diradiasikan ke dalam tanah dan dilandasi dengan
kedalaman maksimum yang ingin dicapai.
I.5.3.1. Prinsip kerja GPR. GPR memiliki cara kerja yang sama dengan radar
konvensional. GPR mengirim pulsa energi antara 10 s.d. 1000 MHz ke dalam tanah
dari suatu antena, dan kemudian merekam pemantulannya dalam waktu yang sangat
singkat.
Gambar I.4. Prinsip kerja GPR (Sumber : https://georadargpr.files.wordpress.com/2014/10/prinsip-gpr.jpg)
Jika suatu pulsa GPR mengenai suatu lapisan atau objek dengan suatu
konstanta dielektrik berbeda, pulsa dipantulkan kembali, diterima oleh antena
receiver, waktu dan besar pulsa direkam, seperti ditunjukan pada Gambar 1.4. Pada
banyak kasus, antena transmitter dan antena receiver adalah sama. Walaupun GPR
beroperasi sama seperti sistem radar konvensional pada umumnya, dalam artian
bahwa ia mengirimkan gelombang elektromagnetik dan menerima radar yang
kembali, yang kemudian diproses untuk melihat target. Namun demikian, GPR
dikarekterisasi oleh tiga prinsip mendasar yang membedakannya dari sistem radar
konvensional.
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
16
Pertama, bandwidth operasi dari GPR diletakkan pada frekuensi rendah untuk
mendapatkan kedalaman penetrasi yang memadai ke dalam tanah. Kenyataannya,
kedalaman penetrasi dari sinyal yang dipancarkan, pada umumnya sangat terbatas
sesuai dengan panjang gelombangnya. Di sisi lain, radar harus mampu menyediakan
resolusi down-range yang memadai, untuk itu bandwidth operasi diperlukan
bandwidth operasi puluhan s.d. ratusan megahertz. Bandwidth operasi ini sesuai
dengan frekuensi tengah radar, yang menyebabkan bandwidth relatif (rasio
bandwidth terhadap frekuensi tengah) mendekati satu atau terkadang lebih besar. Ini
berarti GPR bersifat ultrawideband dan berbeda dengan sistem radar konvensional,
yang beroperasi pada band frekuensi yang lebih tinggi. Kompromi antara kedalaman
penetrasi dan resolusi harus selalu dilakukan, penetrasi yang lebih dalam dapat
dicapai dengan menggunakan frekuensi yang lebih rendah namun dengan resolusi
downrange yang lebih rendah pula.
Kedua, tidak seperti sistem radar konvensional, GPR beroperasi di dekat
permukaan tanah. Hal ini berakibat kekasaran dari permukaan tanah dan
ketidakhomogenan tanah dapat meningkatkan clutter. Dalam banyak kasus penguna
GPR dengan terpaksa harus melakukan image prosesing tingkat lanjut untuk
membedakan target dari clutter.
Ketiga, kebanyakan GPR merupakan sistem radar jarak dekat (short-range).
Pada kondisi ini target biasanya terletak di daerah medan dekat atau medan menengah
sehingga karakteristik medan dekat antenna menjadi sangat penting. Hal ini sangat
berbeda dengan radar konvensional, yang beroperasi pada medan jauh.
Kemampuan penetrasi GPR tergantung pada frekuensi sinyal, efisiensi radiasi
antena dan sifat dielektrik material. Sinyal radar dengan frekuensi yang tinggi
menghasilkan resolusi yang tinggi dengan kedalaman penetrasinya terbatas,
sebaliknya sinyal radar dengan frekuensi rendah menghasilkan penetrasi kedalaman
yang jauh tetapi resolusinya rendah (Arcone, 1984). Frekuensi gelombang radar yang
dipancarkan dapat diatur dengan mengganti antena. Dimensi antena bervariasi
dengan frekuensi gelombang radar, sebagai misal antena 1 Ghz berukuran 30 cm
sedangkan antena 25 Mhz mempunyai panjang 6 m (Astutik, 2001). Pemilihan
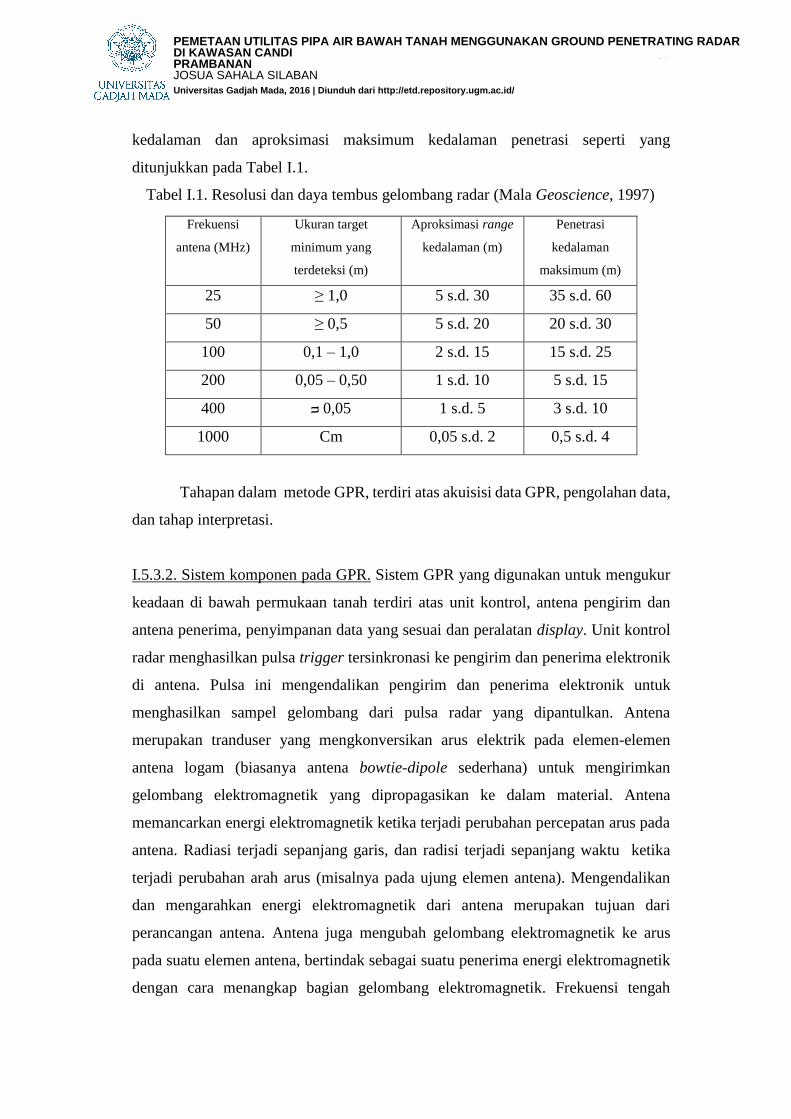
frekuensi yang digunakan tergantung pada ukuran target. Aproksimasi range
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
17
kedalaman dan aproksimasi maksimum kedalaman penetrasi seperti yang
ditunjukkan pada Tabel I.1.
Tabel I.1. Resolusi dan daya tembus gelombang radar (Mala Geoscience, 1997)
Frekuensi
antena (MHz)
Ukuran target
minimum yang
terdeteksi (m)
Aproksimasi range
kedalaman (m)
Penetrasi
kedalaman
maksimum (m)
25 ≥ 1,0 5 s.d. 30 35 s.d. 60
50 ≥ 0,5 5 s.d. 20 20 s.d. 30
100 0,1 – 1,0 2 s.d. 15 15 s.d. 25
200 0,05 – 0,50 1 s.d. 10 5 s.d. 15
400 ᴝ 0,05 1 s.d. 5 3 s.d. 10
1000 Cm 0,05 s.d. 2 0,5 s.d. 4
Tahapan dalam metode GPR, terdiri atas akuisisi data GPR, pengolahan data,
dan tahap interpretasi.
I.5.3.2. Sistem komponen pada GPR. Sistem GPR yang digunakan untuk mengukur
keadaan di bawah permukaan tanah terdiri atas unit kontrol, antena pengirim dan
antena penerima, penyimpanan data yang sesuai dan peralatan display. Unit kontrol
radar menghasilkan pulsa trigger tersinkronasi ke pengirim dan penerima elektronik
di antena. Pulsa ini mengendalikan pengirim dan penerima elektronik untuk
menghasilkan sampel gelombang dari pulsa radar yang dipantulkan. Antena
merupakan tranduser yang mengkonversikan arus elektrik pada elemen-elemen
antena logam (biasanya antena bowtie-dipole sederhana) untuk mengirimkan
gelombang elektromagnetik yang dipropagasikan ke dalam material. Antena
memancarkan energi elektromagnetik ketika terjadi perubahan percepatan arus pada
antena. Radiasi terjadi sepanjang garis, dan radisi terjadi sepanjang waktu ketika
terjadi perubahan arah arus (misalnya pada ujung elemen antena). Mengendalikan
dan mengarahkan energi elektromagnetik dari antena merupakan tujuan dari
perancangan antena. Antena juga mengubah gelombang elektromagnetik ke arus
pada suatu elemen antena, bertindak sebagai suatu penerima energi elektromagnetik
dengan cara menangkap bagian gelombang elektromagnetik. Frekuensi tengah
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
18
antena yang disediakan untuk tujuan komersial berkisar antara 10 s.d. 1000 MHz.
Antena ini menghasilkan pulsa yang secara khas memiliki 2 atau 3 oktav bandwidth.
Secara umum, antena dengan frekuensi rendah dapat menyediakan kedalaman
penetrasi yang lebih tinggi namun memiliki resolusi yang lebih rendah dibandingkan
dengan antena dengan frekuensi tinggi. Sistem GPR dikendalikan secara digital, dan
data selalu direkam secara digital untuk kebutuhan pemrosesan survei akhir dan
display. Kendali digital dan display bagian dari sistem GPR secara umum terdiri atas
sebuah mikroprosesor, memori, dan mass storage yaitu medium untuk menyimpan
bidang pengukuran. Sebuah mikrokomputer yang kecil dan operating system
standard kerapkali digunakan untuk mengendalikan proses pengukuran, menyimpan
data, dan bertindak sebagai penghubung dengan pengguna. Data kemungkinan dapat
mengalami proses penyaringan pada bidang untuk menghilangkan noise, atau data
kasar mungkin direkam terlebih dahulu dan pemrosesan data untuk menghilangkan
noise dilakukan di kemudian waktu. Penyaringan medan untuk menghilangkan noise
yang terdiri atas pemfilteran elektronik dan/atau pemfilteran digital dilakukan
terlebih dahulu untuk merekam data pada medium penyimpanan data. Bidang
pemfilteran secara normal harus diperkecil kecuali pada kasus-kasus tertentu ketika
data harus ditafsirkan segera setelah direkam.
I.5.3.3. Tahap akuisisi data GPR. Tahap akuisisi data GPR diawali dengan penentuan
kedalaman dan frekuensi. Kemudian dilanjutkan dengan mendeteksi kondisi bawah
permukaan dengan cara memindahkan kedua antena sesuai model yang dikehendaki.
Gelombang yang dipancarkan dapat dipantulkan setelah melalui two-way travel time
tertentu dan ditampilkan pada radargram yang berbentuk penampang. Konfigurasi
inilah yang merupakan perbedaan litologi.
Terdapat tiga model data GPR, yaitu reflection profiling, wide angel
reflection and refraction (WARR), dan radar tomografi. Reflection profiling
dilakukan dengan membawa antena yang bergerak dan kedalaman target atau
reflektor dapat diketahui jika cepat rambat gelombang diketahui. Metode WARR
dilakukan dengan meletakkan sumber pemancar dengan posisi tetap dan receiver
yang dipindahkan sepanjang lintasan penyelidikan. Metode ini biasanya dilakukan
pada reflektor yang relatif datar atau kemiringan rendah. Sedangkan metode radar
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
19
tomografi dilakukan dengan menempatkan transmitter dan receiver pada posisi
berlawanan.
I.5.3.4. Tahap pengolahan data. Setelah memperoleh data GPR, maka data ini harus
diproses. Untuk mempermudah teknik interpretasi dan visualisasi maka data perlu
diolah menggunakan teknik seperti berikut :
a. Konversi data ke penggunaan format digital.
b. Penghilangan/minimalisasi gelombang direct dan gelombang udara dari
data.
c. Penyesuaian amplitudo pada data.
d. Penyesuaian penguatan pada data.
e. Penyesuaian statis pada data.
f. Filtering data.
g. Velocity analisttis.
h. Migrasi.
Pemetaan pipa bawah tanah dengan menggunakan GPR dilakukan dengan
melakukan pengukuran cross section koridor 10 s.d. 20 m sepanjang jalur induk pipa
air yang dipetakan dengan interval 5 s.d.15 m. Material di bawah permukaan bumi
terdiri atas karakteristik yang berbeda (heterogen) sehingga sinyal yang dipancarkan
dan kembali dapat mengalami perubahan (atenuasi) di sepanjang lintasan. Tahap ini
terbagi menjadi dua fase, yaitu selama akuisisi dan setelah akuisisi. Selama akuisisi,
sinyal difiltrasi untuk mendapatkan data yang potensial sehingga tidak memerlukan
penyelidikan ulang. Sedangkan setelah akuisi, filtrasi data tetap dilakukan, terutama
data digital.
I.5.3.5. Tahap interpretasi. Yang perlu diperhatian dalam interpretasi adalah
interpretasi grafik, analisis kuantitatif, dan kegagalan interpretasi. Berdasarkan
interpretasi grafik, kecepatan gelombang dapat diketahui dengan asumsi suatu
konstanta dielektrik relatif yang mendekati suatu nilai material tertentu. Hal ini
mengakibatkan Two-Way Travel Time (TWT) dapat diterjemahkan menjadi
kedalaman dan dapat diketahui nilai sebenarnya dari kecepatan gelombang.
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
20
Dengan analisis kuantitatif, kedalaman target dapat diketahui dari cukup tidaknya
nilai yang diketahui dari analisis kecepatan, variasi konstanta dielektrik material yang
dilewati, amplitudo, dan koefisien refleksi. Namun, perlu diketahui interpretasi
menggunakan metode GPR ini memiliki kelemahan yaitu tidak mampu
mengidentifikasi permukaan tanah akibat perlakuan yang dialami oleh sinyal selama
perjalanan melewati medium.
1.5.3. Penentuan Posisi Pipa dengan Total Station
Proses interpretasi data citra dapat menghasilkan titik-titik pipa yang sudah pada citra
tersebut tetapi belum dalam bentuk titik-titik koordinat pipa. Oleh karena itu
diperlukan data pengukuran Total Station yang digabungkan sehingga titik titik pipa
yang telah diinterpretasikan dapat diketahui koordinat sesuai dengan sistem
koordinat yang telah ditentukan. Koordinat titik awal dan akhir pengukuran GPR
dapat langsung digabungkan dengan hasil dari pengolahan data GPR. Dengan
demikian diketahui posisi pipa dengan menggunakan fungsi waktu yaitu diukur
waktu tempuh alat GPR dari titik awal ke titik akhir dengan asumsi kecepatan GPR
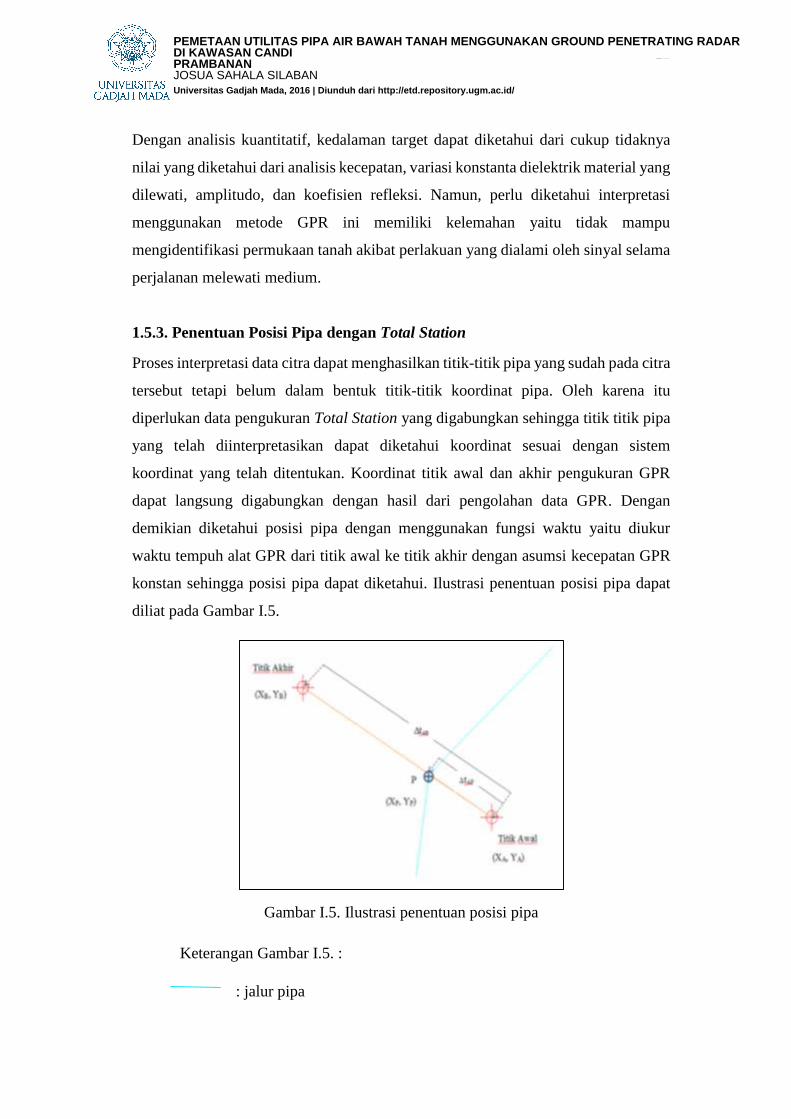
konstan sehingga posisi pipa dapat diketahui. Ilustrasi penentuan posisi pipa dapat
diliat pada Gambar I.5.
Gambar I.5. Ilustrasi penentuan posisi pipa
Keterangan Gambar I.5. :
: jalur pipa
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
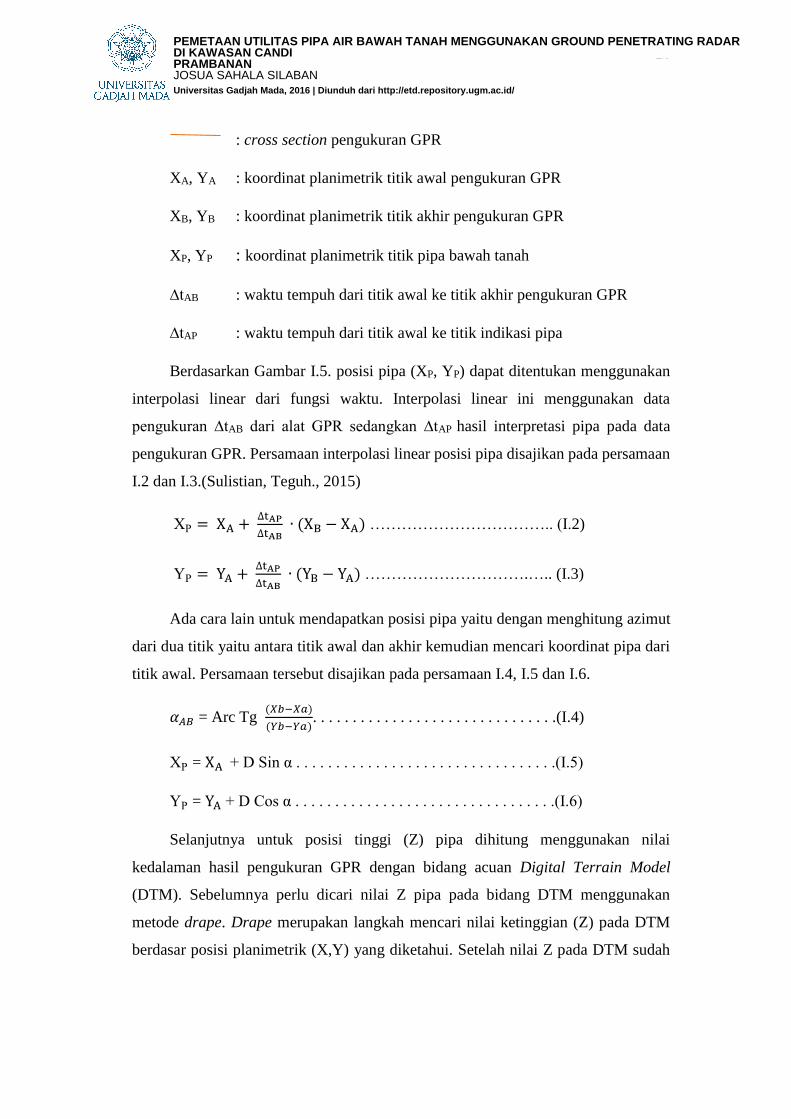
21
: cross section pengukuran GPR
XA, YA : koordinat planimetrik titik awal pengukuran GPR
XB, YB : koordinat planimetrik titik akhir pengukuran GPR
XP, YP : koordinat planimetrik titik pipa bawah tanah
∆tAB : waktu tempuh dari titik awal ke titik akhir pengukuran GPR
∆tAP : waktu tempuh dari titik awal ke titik indikasi pipa
Berdasarkan Gambar I.5. posisi pipa (XP, YP) dapat ditentukan menggunakan
interpolasi linear dari fungsi waktu. Interpolasi linear ini menggunakan data
pengukuran ∆tAB dari alat GPR sedangkan ∆tAP hasil interpretasi pipa pada data
pengukuran GPR. Persamaan interpolasi linear posisi pipa disajikan pada persamaan
I.2 dan I.3.(Sulistian, Teguh., 2015)
XP = XA + ∆tAP
∆tAB ∙ (XB − XA) …………………………….. (I.2)
YP = YA + ∆tAP
∆tAB ∙ (YB − YA) ………………………….….. (I.3)
Ada cara lain untuk mendapatkan posisi pipa yaitu dengan menghitung azimut
dari dua titik yaitu antara titik awal dan akhir kemudian mencari koordinat pipa dari
titik awal. Persamaan tersebut disajikan pada persamaan I.4, I.5 dan I.6.
𝛼𝐴𝐵 = Arc Tg (𝑋𝑏−𝑋𝑎)
(𝑌𝑏−𝑌𝑎). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .(I.4)
XP = XA + D Sin α . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .(I.5)
YP = YA + D Cos α . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .(I.6)
Selanjutnya untuk posisi tinggi (Z) pipa dihitung menggunakan nilai
kedalaman hasil pengukuran GPR dengan bidang acuan Digital Terrain Model
(DTM). Sebelumnya perlu dicari nilai Z pipa pada bidang DTM menggunakan
metode drape. Drape merupakan langkah mencari nilai ketinggian (Z) pada DTM
berdasar posisi planimetrik (X,Y) yang diketahui. Setelah nilai Z pada DTM sudah
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/
22
didapatkan maka nilai Z pipa bawah tanah dapat dihitung menggunakan persamaan
I.7.
ZP = Z DTM – D Pipa ………………………………………….(I.7)
Dalam hal ini :
ZP : tinggi pipa (m)
ZDTM : tinggi pipa pada DTM (m)
D pipa : kedalaman pipa dengan bidang acuan DTM (m)
PEMETAAN UTILITAS PIPA AIR BAWAH TANAH MENGGUNAKAN GROUND PENETRATING RADARDI KAWASAN CANDIPRAMBANANJOSUA SAHALA SILABAN Universitas Gadjah Mada, 2016 | Diunduh dari http://etd.repository.ugm.ac.id/




![[PPT]INTRODUKSI NEURO IMAJING - CARDIO | … · Web viewAbdomen : obstruction--- small, large bowel. perforasi . trauma --- blunt/ penetrating . Extremitas : Atas dan bawah ; Trauma---](https://static.fdokumen.com/doc/165x107/5aee43787f8b9a6625912bcc/pptintroduksi-neuro-imajing-cardio-viewabdomen-obstruction-small.jpg)














