Analisis Kinerja Kapal Selam Autonomous Menggunakan Cmputational Fluid Dynamics_Marine...
2
HULL PROPELLER RUDDER INTERACTION The propeller accelerates the flow at the rear of the vessel modifying the flow around the hull and any control surfaces. Thus to accurately model the in service performance of the vehicle the propu lsi on syste m must be inc lud ed in the calculations. Explicit transient calculation of the propeller is possible in RAN S simula tions but is compu tat ion all y exp ensiv e. A suitable representation of the mean flow can be achieved by co upli ng the RANS si mula ti on wi th an ex ternal Bl ad e El emen t Mo ment um (BEM) code. The inflow into the propeller disc is extracted from the RANS simulation and input into the BEM code which calculates the resultant thrust and torque at a specified rpm. The thrust and torque are then impl emente d as mo me ntum sources wi thin the RANS simulation. This two way coupling allows good prediction of the global forces and moments acting on the vessel BACKGROUND This research aims to develop a methodology capable of as sessi ng var io us as pe cts of the re sis tance an d manoeuvrability of AUVs using steady and unsteady CFD analy sis meth ods, whic h bala nce the trad e-of f betw een computational cost and fluid dynamic fidelity. The results of which can be fed into the hull design of the vehicle, its control and propul sion sy st ems and the missions it undertakes. This re se ar ch wi ll co nc entrat e on runn ing mo de st comput ati ona l meshes wit h the commercial CFD code ANSYS CFX 11. This work concentrates on two aspects:- -Identif ying the ke y components of the fl ow aro und a manoeuvring submarine and ensuring these features are fully resolved. -Inv estig ating the inte ract ion of the hull propell er and rudders. Performance Analysis of Autonomous Under water Vehicles Using Computational Fluid Dynamics Alexander Phillips - [email protected] - School of Engineering Sciences Supervisors – Dr. S.R. Turnock and D r. M. Furlong (NOC) DELPHIN AUV Is the successor to the successful SotonAUV, which won the Student Autonomous Underwater Challenge – Europe 2007. The vehicle was built by 4 th year GDP students, and is now operated by a team of post graduate students who use as a test bed for analysing the manoeuvrability of small AUVs, and to provide validation data for numerical models . FLOW FEATUR E IDENTIFICATION Discrepancies between CFD simulations and experimental results for the forces and moments on a manoeuvring AUV or submarine, observed in this work and by a series of authors, Lee et al.(2005b), Wu et al. (2005), Bellevre et al. (2000) are beloved to be largely a function of poor resolution of hull vortices developed around the hull when operating at an angle of attack. Extensions to the VORTFIND algorithm, Pemberton et al. (2002), and the WakeFind Algorithm, Pashius (2005), are propo sed to locat e the cent re of the vortex and cen tre of the wake structure downstream. Figur e 1 :- Reco verin g Autosub Figure 2 :- Automated identification of the extent of the vortex core and wake downstream of a rudder Figure 3 :- Streamlines representing the flow around Autosub 3 Figure 4 :- DELPHIN AUV
-
Upload
dr-ir-r-didin-kusdian-mt -
Category
Documents
-
view
227 -
download
0
Transcript of Analisis Kinerja Kapal Selam Autonomous Menggunakan Cmputational Fluid Dynamics_Marine...

8/3/2019 Analisis Kinerja Kapal Selam Autonomous Menggunakan Cmputational Fluid Dynamics_Marine Transport_Phillips_Ale…
http://slidepdf.com/reader/full/analisis-kinerja-kapal-selam-autonomous-menggunakan-cmputational-fluid-dynamicsmarine 1/1
HULL PROPELLER RUDDER
INTERACTION
The propeller accelerates the flow at the rear of the vesselmodifying the flow around the hull and any control surfaces.Thus to accurately model the in service performance of the vehicle the propulsion system must be included in thecalculations.
Explicit transient calculation of the propeller is possible inRANS simulations but is computationally expensive. A suitable representation of the mean flow can be achieved by coupling the RANS simulation with an external Blade
Element Momentum (BEM) code. The inflow into thepropeller disc is extracted from the RANS simulation andinput into the BEM code which calculates the resultant thrustand torque at a specified rpm. The thrust and torque are thenimplemented as momentum sources within the RANSsimulation. This two way coupling allows good prediction of the global forces and moments acting on the vessel
BACKGROUND
This research aims to develop a methodology capable of assessing various aspects of the resistance andmanoeuvrability of AUVs using steady and unsteady CFDanalysis methods, which balance the trade-off betweencomputational cost and fluid dynamic fidelity. The resultsof which can be fed into the hull design of the vehicle, itscontrol and propulsion systems and the missions itundertakes.
This research will concentrate on running modestcomputational meshes with the commercial CFD code ANSYS CFX 11. This work concentrates on two aspects:-
-Identifying the key components of the flow around amanoeuvring submarine and ensuring these features arefully resolved.
-Investigating the interaction of the hull propeller andrudders.
Performance Analysis of Autonomous Underwater Vehicles
Using Computational Fluid Dynamics Alexander Phillips - [email protected] - School of Engineering Sciences
Supervisors – Dr. S.R. Turnock and Dr. M. Furlong (NOC)
DELPHIN AUV
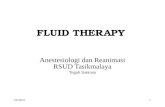
Is the successor to the successful SotonAUV, which won theStudent Autonomous Underwater Challenge – Europe 2007.The vehicle was built by 4th year GDP students, and is now operated by a team of post graduate students who use as atest bed for analysing the manoeuvrability of small AUVs,and to provide validation data for numerical models.
FLOW FEATUR E IDENTIFICATION
Discrepancies between CFD simulations and experimentalresults for the forces and moments on a manoeuvring AUV or submarine, observed in this work and by a series of authors, Lee et al.(2005b), Wu et al. (2005), Bellevre et al.(2000) are beloved to be largely a function of poor
resolution of hull vortices developed around the hull whenoperating at an angle of attack.
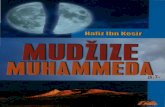
Extensions to the VORTFIND algorithm, Pemberton et al.(2002), and the WakeFind Algorithm, Pashius (2005), areproposed to locate the centre of the vortex and centre of the wake structure downstream.
Figure 1 :- Recovering Autosub
Figure 2 :- Automated identification of the extent of the vortex core and wake downstream of a rudder
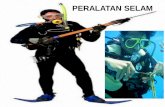
Figure 3 :- Streamlines representing the flow around Autosub 3
Figure 4 :- DELPHIN AUV