5. Pengendalian I pada simulator jaringan (1).doc

of 4
-
Upload
gumilarharsyaputra -
Category
Documents
-
view
44 -
download
3
description
Integral
Transcript of 5. Pengendalian I pada simulator jaringan (1).doc
-
5/23/2018 5. Pengendalian I pada simulator jaringan (1).doc
1/4
PRAKTEK SISTEM KENADLI
2. JARINGAN PENUNDA ORDE 1 DAN ORDE 2
2.1. Tujuan Percobaan
Setelah melakukan percobaan diharapkan praktikan mampu :
1. Merekam sebuah respon kejut dari sebuah jaringan penunda dengan sistem orde 1 dan orde 2.
2. Menerangkan pengaruh konstanta waktu jaringan penunda T1dan T2pada bentuk respon kejut
yang telah direkam.
3. Menentukan konstanta waktu jaringan penunda dari respon kejut yang direkam untuk sistem orde
1.
4. Menentukan lama waktu mati dan waktu kompensasi dari respon kejut jaringan penunda orde 2.
. Menyebutkan istilah waktu kompensasi dan waktu mati !dead time" dari jaringan penundanya.
2.2. Dasar Teori
#aringan penunda orde 1 digunakan pada sistem pengendalian otomatik dalam kapasitas yang
berbeda$beda. Sebagai contoh% jaringan ini dipakai sebagai simulator jaringan yang dikontrol dan
juga digunakan sebagai cabang umpan balik dalam rangkaian pengendalian yang lainnya. #aringan
penunda orde 2 dapat dipakai sebagai satu simulator dari jaringan yang akan dikontrol dengan
pendekatan yang baik dan juga dapat digunakan sebagai penghubung umpan balik.
&engukuran dan pengamatan dalam percobaan ini secara prinsip dapat diterapkan pada jaringan
terkontrol orde tinggi dengan kompensasi non osilasi.
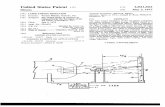
2.3. Gambar Percobaan
2.4. Daftar Alat dan Bahan
a. 'atu daya arus searah !('" )*$ 1 +olt 1 buah
b. &otensio set point 1 buah
c. #aringan penunda% orde 1 dan orde 2 1 buah
d. Saklar on , o-- 1 buah
e. &lotter*sciloscope memori 1 buah
POLBAN_TEKNIK OTOMASI INDUSTRI
/!t"
&ower Supply Set &oint +alue (elay 0ine &loter
-
5/23/2018 5. Pengendalian I pada simulator jaringan (1).doc
2/4
PRAKTEK SISTEM KENADLI
-. abel penghubung
2.5. Lan!ah Percobaan
1. Susun rangkaian seperti terlihat dalam gambar percobaan untuk sistem orde 1 dan keluaran
setpoint +olt.
2. ekamlah respon kejut dari jaringan penunda dengan harga$harga konstanta waktu seperti berikut
1 1 detik% 15 detik% 155 detik.
3. 0akukan perekaman respon kejut dimulai dari titik nol yang sama.
4. 6pa perbedaan yang anda lihat dari kur7a karakteristik yang telah direkam.
. Tentukan besaran konstanta waktu dari masing$masing kur7a yang didapat dan bandingkan
dengan penyetelan pada langkah 2.
8. 9ambarlah kur7a karakteristik respon kejut dari persamaan berikut dengan harga$harga t % 15%25% 35% 45 dan 5 detik pada 15 detik% dan bandingkan dengan hasil langkah 2. &ersamaan :
"1!"! *t
io eUtU
=
. ;bahlah rangkaian terangkai langkah 1 dengan jaringan penunda dirangkai pada sistem orde 2.
yatakanlah istilah waktu mati !Tu" dan waktu kompensasi !Tg" menurut anda.
t 1
h:m in:s
15:3 8:20 15:39 :10
10.00
7.50
5.00
2.50
0.00
R e c o r d e r 0 R e c o r d e r 1
t 15
POLBAN_TEKNIK OTOMASI INDUSTRI 8
-
5/23/2018 5. Pengendalian I pada simulator jaringan (1).doc
3/4
PRAKTEK SISTEM KENADLI
h:m in:s
15:4 4:10 15:4 5:00
10.0 0
7.50
5.00
2.50
0.00
R e c o rd e r 0 R e c o r d e r 1
t 155
h:m in:s
03:51 :10 03:5 1:15 03:51 :20 03:51 :25 03:51 :30 03:51 :35 03:51 :40 03:51 :45 03:51: 50 03:51 :55
10.0
7.5
5.0
2.5
0.0
R e c o r d e r 0 R e c o r d e r 1
a. T1 15 s dan T2 5
h:m in:s
03:53 :40 03:53 :45 03:5 3:50 03:53 :55 03:54 :00 03:54 :05 03:54 :10 03:54 :15 03:54 :20 03:54 :25
10.0
7.5
5.0
2.5
0.0
R e c o r d e r 0 R e c o r d e r 1
b. T1 15 s dan T2 15 s
POLBAN_TEKNIK OTOMASI INDUSTRI
-
5/23/2018 5. Pengendalian I pada simulator jaringan (1).doc
4/4
PRAKTEK SISTEM KENADLI
h:m in:s
03:55 :10 03:55 :15 03:55 :20 03:55 :25 03:55 :30 03:55 :35 03:55 :40 03:55: 45 03:55 :50 03:55 :55
10.0
7.5
5.0
2.5
0.0
R e c o r d e r 0 R e c o r d e r 1
c. T1 15 s dan T2 s
h:m in:s
03:56 :40 03:56 :45 03:5 6:50 03:56 :55 03:57 :00 03:57 :05 03:57: 10 03:57 :15 03:57 :20 03:57 :25
10.0
7.5
5.0
2.5
0.0
R e c o r d e r 0 R e c o rd e r 1
POLBAN_TEKNIK OTOMASI INDUSTRI