repository.ipb.ac.id · ABSTRAK . RINI MAEDIANENGSIH. Analisis Kompleksitas Masalah Optimasi Linear...
31
ANALISIS KOMPLEKSITAS MASALAH OPTIMASI LINEAR MENGGUNAKAN METODE INTERIOR PRIMAL-DUAL DENGAN LANGKAH FULL-NEWTON RINI MAEDIANENGSIH DEPARTEMEN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR BOGOR 2013
Transcript of repository.ipb.ac.id · ABSTRAK . RINI MAEDIANENGSIH. Analisis Kompleksitas Masalah Optimasi Linear...

ANALISIS KOMPLEKSITAS MASALAH OPTIMASI LINEAR
MENGGUNAKAN METODE INTERIOR PRIMAL-DUAL
DENGAN LANGKAH FULL-NEWTON
RINI MAEDIANENGSIH
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
BOGOR
2013

ABSTRAK
RINI MAEDIANENGSIH. Analisis Kompleksitas Masalah Optimasi Linear Menggunakan
Metode Interior Primal-Dual dengan Langkah Full-Newton. Dibimbing oleh BIB PARUHUM
SILALAHI dan MUHAMMAD ILYAS.
Metode interior primal-dual dengan langkah full-Newton adalah salah satu metode untuk menyelesaikan masalah optimasi linear. Metode ini dirancang sedemikian rupa sehingga solusi
optimal diperoleh di dalam interior dari domain. Metode ini memiliki kompleksitas polinomial.
Karya ilmiah ini membahas dan menganalisis kompleksitas algoritme masalah optimasi linear
menggunakan metode interior primal-dual langkah full-Newton. Beberapa masalah optimasi linear
diselesaikan dengan metode ini untuk melihat kesesuainnya dengan kompleksitas algoritme. Dari
studi kasus yang telah dilakukan, dapat disimpulkan bahwa banyaknya iterasi sesuai dengan
kompleksitas algoritme.
Kata Kunci: metode interior, langkah full-Newton, kompleksitas algoritme.

ABSTRACT
RINI MAEDIANENGSIH. Complexity Analysis of Linear Optimization Problems Using Primal-
Dual Interior Methods with Full-Newton Step. Supervised by BIB PARUHUM SILALAHI and
MUHAMMAD ILYAS.
Primal-dual interior method with full-Newton step is a method for solving linear optimization
problems. This method is designed in such a way that an optimal solution is obtained an interior of
the domain. It has polynomial complexity. This paper discusses and analyzes the complexity of
linear optimization problems using primal-dual interior method with full-Newton steps. From the case studies that have been conducted, can be concluded that the number of iterations is in
accordance with the complexity of the algorithm.
Keywords: interior method, full-Newton step, complexity of the algorithm.

ANALISIS KOMPLEKSITAS MASALAH OPTIMASI
LINEAR MENGGUNAKAN METODE INTERIOR PRIMAL-
DUAL DENGAN LANGKAH FULL-NEWTON
RINI MAEDIANENGSIH
Skripsi
sebagai salah satu syarat untuk memperoleh gelar
Sarjana Sains pada
Departemen Matematika
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
BOGOR
2013

Judul Sripsi : Analisis Kompleksitas Masalah Optimasi Linear Menggunakan
Metode Interior Primal-Dual dengan Langkah Full-Newton.
Nama : RINI MAEDIANENGSIH
NIM : G54080044
Menyetujui,
Tanggal Lulus :
Pembimbing I
Dr. Ir. Bib Paruhum Silalahi, M.Kom.
NIP. 19670101 199203 1 004
Pembimbing II
Muhammad Ilyas, S.Si, M.Sc.
Mengetahui:
Ketua Departemen Matematika
Dr. Berlian Setiawaty, M.S.
NIP. 19650505 198903 2 004

KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas segala rahmat dan
karunia-Nya serta shalawat dan salam kepada Nabi Muhammad SAW sehingga karya ilmiah ini
berhasil diselesaikan. Penyusunan karya ilmiah ini juga tidak lepas dari bantuan berbagai pihak.
Untuk itu penulis mengucapkan terima kasih yang sebesar-besarnya kepada:
1. Dr. Ir. Bib Paruhum Silalahi, M.Kom, selaku dosen pembimbing I (terima kasih atas semua
ilmu, kesabaran, motivasi, dan bantuannya selama penulisan skripsi ini).
2. Muhammad Ilyas, S.Si, M.Sc, selaku dosen pembimbing II (terima kasih atas semua ilmu,
saran dan motivasinya).
3. Dr. Ir. I Gusti Putu Purnaba, DEA, selaku dosen penguji (terima kasih atas semua ilmu dan
sarannya).
4. Semua dosen Departemen Matematika (terima kasih atas semua ilmu yang telah diberikan).
5. Staf Departemen Matematika: Pak Yono, Bu Ade, Mas Heri, Bu Susi dan Mas Deni (terima
kasih atas bantuan dan motivasinya).
6. Keluargaku tercinta: Bapak, Mamah, adikku Rena dan Adelia (terima kasih atas doa,
dukungan, kesabaran, kepercayaan dan kasih sayangnya).
7. Teman-teman kosan: Yuli, Sri, Davi, Chacha, Kak Nurul, Kak Tanti, Kak Runi (terima kasih
atas bantuan, doa dan dukungannya).
8. Teman-teman satu bimbingan: Haya, Bram, Irwan (terima kasih atas bantuan dan
dukungannya).
9. Sahabat terdekat: Roni, Nova, Dina, Aisyah (terima kasih atas semangat, doa dan
dukungannya).
10. Teman-teman Math 45: Herlan, Prama, Arbi, Dini, Rahma, Mya, Pipin, Tiwi, Mega, Fuka,
Annisa, Ana, Dimas, Fina dan yang lainnya (terima kasih atas dukungan, bantuan dan doanya).
11. Adik-adik Math 46: Sefira, Fitria, Anne, Mirna, Andri dan yang lainnya (terima kasih atas
dukungan, bantuan, dan doanya).
Semoga karya ilmiah ini dapat bermanfaat bagi dunia ilmu pengetahuan khususnya matematika
dan menjadi inspirasi bagi penelitian-penelitian selanjutnya.
Bogor, April 2013
Rini Maedianengsih

RIWAYAT HIDUP
Penulis dilahirkan di Ciamis pada tanggal 5 Februari 1990 sebagai anak pertama dari tiga
bersaudara. Anak dari pasangan Muhaemin dan Eros Saripah.
Pada tahun 1996 penulis menyelesaikan pendidikan di TK LKMD Kuningan. Tahun 2002
penulis lulus dari SDN Tangkolo 1, Kuningan. Tahun 2005 penulis lulus dari SLTPN 3 Rancah, Ciamis. Tahun 2008 penulis lulus dari SMAN 2 Ciamis dan pada tahun yang sama lulus seleksi
masuk IPB melalui jalur Ujian Saringan Masuk IPB (USMI). Penulis memilih Jurusan
Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam.
Selama mengikuti perkuliahan, penulis menjadi anggota Biro Kewirausahaan GUMATIKA IPB pada tahun 2009-2010. Kegiatan lain yang pernah diikuti oleh penulis yaitu sebagai pengajar
Matematika untuk tingkat SMP di sebuah bimbingan belajar pada tahun 2012.

viii
DAFTAR ISI
Halaman
DAFTAR TABEL ........................................................................................................... ix
DAFTAR LAMPIRAN .................................................................................................... ix
I. PENDAHULUAN ...................................................................................................... 1
1.1 Latar Belakang ................................................................................................... 1
1.2 Tujuan ............................................................................................................... 1
1.3 Sistematika Penulisan ......................................................................................... 1
II. LANDASAN TEORI ................................................................................................. 2
2.1 Sistem Persamaan Linear.................................................................................... 2
2.2 Matriks dan Vektor ............................................................................................ 2
2.3 Optimasi Linear dan Dualitas ............................................................................. 3
2.4 Metode Newton ................................................................................................. 3
2.5 Kompleksitas ..................................................................................................... 4
III. HASIL DAN PEMBAHASAN ................................................................................... 5
3.1 Kondisi Optimal ................................................................................................. 5
3.2 Central Path....................................................................................................... 5
3.3 Langkah Full-Newton ......................................................................................... 5
3.4 Ukuran Kedekatan .............................................................................................. 6
3.5 Kompleksitas Algoritme ..................................................................................... 7
IV. STUDI KASUS .......................................................................................................... 11
V. SIMPULAN DAN SARAN ........................................................................................ 16
5.1 Simpulan ............................................................................................................ 16
5.2 Saran.................................................................................................................. 16
DAFTAR PUSTAKA ...................................................................................................... 16
LAMPIRAN .................................................................................................................... 17

ix
DAFTAR TABEL
Halaman
1 Hasil Iterasi pada Saat 𝑛 = 4, 𝑚 = 2, 𝜇 = 10, dan 휀 = 10−5 ......................................... 11
2 Hasil Iterasi pada Saat 𝑛 = 4, 𝑚 = 2, 𝜇 = 100, dan 휀 = 10−5 ...................................... 12
3 Hasil Iterasi pada Saat 𝑛 = 4, 𝑚 = 2, 𝜇 = 10, dan 휀 = 10−3 ........................................ 12
4 Hasil Iterasi pada Saat 𝑛 = 6, 𝑚 = 3 𝜇 = 10, dan 휀 = 10−5 ......................................... 13
5 Hasil Iterasi pada Saat 𝑛 = 6, 𝑚 = 3 𝜇 = 100, dan 휀 = 10−5 ....................................... 14
6 Hasil Iterasi pada Saat 𝑛 = 6, 𝑚 = 3 𝜇 = 10, dan 휀 = 10−3 ......................................... 15
DAFTAR LAMPIRAN
Halaman
1 Program MATLAB untuk Fungsi Langkah Newton ....................................................... 18
2 Program MATLAB untuk Kasus Dua Dimensi (𝑛 = 4) ................................................. 19
3 Program MATLAB untuk Kasus Tiga Dimensi (𝑛 = 6) ................................................. 21

I PENDAHULUAN
1.1 Latar Belakang
Pengoptimuman merupakan salah satu
cabang matematika terapan yang mempelajari
masalah meminimumkan atau memaksimum-
kan. Dalam kehidupan sehari-hari banyak
permasalahan yang memerlukan optimasi.
Optimasi digunakan secara luas hampir di
setiap aspek kehidupan, seperti di bidang
teknik, ekonomi, manajemen dan industri.
Banyak penelitian yang telah menghasilkan teknologi baru, dan metode baru dalam
optimasi.
Pada tahun 1947, Dantzig mengajukan
penggunaan metode simpleks untuk me-
mecahkan masalah optimasi linear (OL).
Daerah fisibel dari masalah optimasi linear
adalah suatu polihedron. Metode simpleks
bergerak dari verteks ke verteks dari
polihedron untuk memperoleh solusi optimal.
Metode ini dirancang sehingga nilai dari
fungsi tujuan berubah secara monoton ke arah
nilai optimal. Penemuan Dantzig telah menginspirasi begitu banyak penelitian dalam
matematika. Terdapat banyak varian dari
metode simpleks, yang dibedakan oleh aturan
untuk memilih verteks yang akan dikunjungi
(dikenal dengan aturan pivot) (Silalahi 2011).
Pada tahun 1972, Klee dan Minty mem-
berikan suatu masalah dengan metode
simpleks memerlukan 2𝑛 − 1 iterasi untuk
menyelesaikan suatu masalah optimasi linear
dengan 2n pertidaksamaan. Klee-Minty juga
menunjukkan bahwa metode simpleks me-merlukan waktu eksponensial untuk me-
nyelesaikan masalah optimasi linear. Contoh
yang diberikan oleh Klee dan Minty kemudian
dikenal dengan problem Klee-Minty (KM),
yaitu
min 𝑦𝑚
kendala 𝜌𝑦𝑘−1 ≤ 𝑦𝑘 ≤ 1 − 𝜌𝑦𝑘−1 ,
k = 1,...,m
dengan 𝑦0 = 0, (0,1
2) (Silalahi 2011).
Pada tahun 1979, Khachiyan meng-
usulkan metode elipsoid untuk memecahkan
permasalahan optimasi linear secara
polinomial. Walaupun metode elipsoid ini
memiliki kompleksitas polinomial, namun
dalam penerapan secara komputasional
metode ini tidak efisien (Silalahi 2011).
Pada tahun 1984, Karmarkar me-
ngembangkan metode interior dan mem-
presentasikan suatu algoritme (algoritme
Karmarkar) yang memiliki kompleksitas polinomial yang lebih baik dari metode
elipsoid. Sesuai dengan namanya, metode ini
akan melalui daerah dalam (interior) dari
daerah solusi yang mungkin (feasible) dalam
mencari solusi optimal. Hal ini berlawanan
dengan metode simpleks yang bergerak dari
verteks ke verteks (Silalahi 2011).
Dalam perkembangannya, metode ini
telah dikembangkan dengan beberapa
pendekatan. Secara umum metode ini dapat
dikelompokkan menjadi tiga kategori, yaitu
metode affine scaling, metode potential reduction (barrier) dan metode central
trajectory (path-following). Selain itu,
persoalan yang bisa diselesaikan dengan
metode ini juga mengalami perkembangan.
Awalnya metode ini dikembangkan untuk
pemrograman linear dan sekarang sudah
dikembangkan untuk masalah-masalah yang
lain, seperti pemrograman integer,
pemrograman jaringan, pemrograman
semidefinit (Mitchell 1998). Dalam karya ilmiah ini akan digunakan
metode interior primal-dual dengan langkah
full-Newton dalam memecahkan masalah
Klee-Minty tersebut. Selanjutnya akan
dilakukan analisis kompleksitas algoritme dari
masalah Klee-Minty dan menyelesaikan
beberapa masalah optimasi linear untuk
melihat kesesuaiannya dengan kompleksitas
algoritme dengan bantuan software MATLAB
R2008b.
1.2 Tujuan
Berdasarkan latar belakang di atas, maka
tujuan karya ilmiah ini adalah
(i) Membahas metode interior primal-dual
dengan langkah full-Newton.
(ii) Menganalisis kompleksitas algoritme
interior primal-dual dengan langkah
full-Newton.
(iii) Menyelesaikan beberapa masalah Klee-
Minty dan melihat kesesuaiannya dengan kompleksitas algoritme.
1.3 Sistematika Penulisan
Karya ilmiah ini terdiri dari lima bab.
Bab pertama merupakan pendahuluan yang
berisi latar belakang dan tujuan penulisan.
Bab kedua berupa landasan teori yang berisi
konsep. Bab ketiga berisi penjelasan metode
interior primal-dual dengan langkah full-
Newton. Bab keempat merupakan studi kasus
dan bab kelima berisi kesimpulan dan saran.

2
II LANDASAN TEORI
2.1 Sistem Persamaan Linear
Definisi 1 (Sistem Persamaan Linear)
Suatu persamaan linear dalam n peubah
(variable) adalah persamaan dengan bentuk
a1x1 + a2x2 + . . . + anxn = b
di mana a1, a2, . . . , an dan b adalah bilangan-bilangan real dan x1, x2, . . . ,xn adalah peubah.
Dengan demikian maka suatu sistem linear
dari m persamaan dalam n peubah adalah satu
sistem berbentuk:
a11x1 + a12x2 + . . . + a1nxn = b1
a21x1 + a22x2 + . . . + a2nxn = b2
.
.
.
am1x1 + am2x2 + . . . + amnxn = bm
dengan aij dan bi semuanya adalah bilangan-bilangan real. Kita akan menyebut sistem-
sistem di atas sebagai sistem linear 𝑚 × 𝑛.
(Leon 2001)
2.2 Matriks dan Vektor
Definisi 2 (Ortogonal)
Vektor – vektor x dan y di dalam ℝ2 (atau ℝ3)
dikatakan ortogonal jika xTy = 0.
(Leon 2001)
Definisi 3 (Hasil Kali Skalar di ℝ𝒏)
Misalkan x,y ∈ ℝ𝒏 dengan
x=
𝑥1
𝑥2
.
.
.𝑥𝑛
, y=
𝑦1
𝑦2
.
.
.𝑦𝑛
maka hasil kali skalar dari x dan y adalah
𝐱T𝐲 = 𝑥1𝑦1 + 𝑥2𝑦2 + . . . + 𝑥𝑛𝑦𝑛 (Leon 2001)
Definisi 4 (Hadamard product)
Misalkan vektor x, y ∈ ℝ𝑛 , X, Y ∈ ℝ𝑛×𝑛
dengan n menyatakan banyak baris dan
banyak kolom pada matriks. Vektor x dan y
didefinisikan sebagai berikut
x=
𝑥1
𝑥2
⋮𝑥𝑛
, y=
𝑦1
𝑦2
⋮𝑦𝑛
dan notasi diag(x) adalah matriks diagonal
dengan unsur diagonal utama ialah vektor x
𝑿 = 𝑑𝑖𝑎𝑔 𝐱 =
𝑥1 0 ⋯ 00 𝑥2 ⋯ 0⋮ ⋮ ⋱ ⋮0 0 ⋯ 𝑥𝑛
𝒀 = 𝑑𝑖𝑎𝑔 𝐲 =
𝑦1 0 ⋯ 00 𝑦2 ⋯ 0⋮ ⋮ ⋱ ⋮0 0 ⋯ 𝑦𝑛
maka Hadamard product dari x dan y adalah
xy = Xy = Yx = yx
Dengan kata lain, Hadamard product adalah
perkalian antara unsur dengan unsur yang seletak (componentwise) dari dua buah vektor
yang berukuran sama. Componentwise juga
berlaku pada operasi pembagian dan operasi
akar untuk vektor x dan s sebagai berikut
𝐱
𝐬=𝑥i
𝑠𝑖=
𝑥1
𝑥2
⋮𝑥𝑛
𝑠1
𝑠2
⋮𝑠𝑛
𝐱 = 𝑥i =
𝑥1
𝑥2
⋮𝑥𝑛
(Roos et al. 2006)
Definisi 5 (Norm dari Suatu Vektor di ℝ𝒏)
Misalkan x ∈ ℝ𝑛 dengan
x=
𝑥1
𝑥2
⋮𝑥𝑛
,
maka norm dari vektor x di ℝ𝑛 adalah
𝐱 = 𝐱𝑇𝐱 = 𝑥12 + 𝑥2
2 + ⋯+ 𝑥𝑛2
(Leon 2001)

3
Definisi 6 (Ruang Baris dan Ruang Kolom)
Jika A adalah matriks 𝑚 × 𝑛, maka ruang
bagian dari ℝ1×𝑛 yang direntang oleh vektor-
vektor baris dari A disebut ruang baris dari A.
Ruang bagian dari ℝ𝑚 yang direntang oleh
vektor-vektor kolom dari A disebut ruang
kolom dari A.
(Leon 2001)
Definisi 7 (Ruang Nol)
Misalkan A adalah matriks 𝑚 × 𝑛. Misalkan
N(A) menyatakan himpunan semua
penyelesaian dari sistem homogen 𝐀𝐱 = 𝟎.
Jadi
𝑁 𝐀 = {𝐱 ∈ ℝ𝑛 |𝐀𝐱 = 𝟎}
Himpunan semua penyelesaian dari sistem
homogen 𝐀𝐱 = 𝟎 membentuk ruang bagian
dari ℝ𝑛 . Ruang bagian N(A) disebut kernel
(ruang nol atau nullspace) dari A.
(Leon 2001)
2.3 Optimasi Linear dan Dualitas
Masalah optimasi linear dalam bentuk
standar diberikan sebagai berikut
min{𝐜Tx : Ax = b, x ≥ 0} (P)
dengan, c, x ℝ 𝑛, b ℝ 𝑚
dan A ℝ 𝑚𝑥𝑛.
Masalah (P) disebut masalah primal.
Masalah dual dari masalah primal (P)
diberikan sebagai berikut
max {𝐛Ty : 𝐀Ty + s = c, s ≥ 0 } (D)
dengan, s ℝ𝑛 dan y ℝ𝑚 . Masalah (D)
disebut masalah dual.
Daerah fisibel dari (P) dan (D) masing-
masing adalah :
:= {x : Ax = b, x ≥ 0}
:= {(y,s) : 𝐀Ty + s = c, s ≥ 0}
Daerah interior masalah (P) dan (D)
didefinisikan sebagai berikut
0 := {x : Ax = b, x > 0},
0 := {(y,s) : 𝐀Ty + s = c, s > 𝟎} (Silalahi 2011)
Definisi 8 (Daerah Fisibel)
Himpunan titik-titik yang memenuhi semua
kendala dan pembatasan tanda pada optimasi
linear.
(Winston 2004)
Definisi 9 (Solusi Optimal)
Solusi optimal pada masalah maksimisasi adalah suatu titik pada daerah fisibel dengan
nilai fungsi objektif paling besar. Sedangkan
solusi optimal untuk masalah minimisasi
adalah suatu titik pada daerah fisibel dengan
nilai fungsi objektif paling kecil.
(Winston 2004)
Proposisi 1 ( Dualitas Lemah)
Misalkan x dan s masing-masing fisibel untuk
(P) dan (D). Kemudian 𝐜Tx - 𝐛Ty = 𝐱Ts ≥ 0.
Akibatnya, 𝐜Tx terbatas di atas untuk nilai
optimal dari (D), dan 𝐛Ty terbatas di bawah untuk nilai optimal dari (P). Selain itu, jika
kesenjangan dualitas (duality gap) 𝐱Ts bernilai nol maka x adalah solusi optimal
untuk (P) dan (y,s) adalah solusi optimal
untuk (D).
(Roos et al. 2006)
Bukti :lihat Roos
Teorema 1 (Dualitas)
Jika (P) dan (D) fisibel maka kedua masalah
tersebut mempunyai solusi optimal.
Kemudian, x dan (y,s) adalah solusi
optimal jika dan hanya jika 𝐱Ts = 0.
(Roos et al. 2006)
Bukti : lihat Roos
Definisi 10 (Kendala Redundant)
Kendala redundant adalah kendala yang tidak
mengubah daerah fisibel dari masalah
optimasi linear.
(Silalahi 2011)
Definisi 11 (Central Path)
Suatu kurva yang bergerak dari bagian dalam
pada daerah fisibel menuju solusi optimal.
(Silalahi 2011)
2.4 Metode Newton
Metode Newton disebut juga metode
Newton-Raphson. Metode Newton adalah
suatu metode yang digunakan untuk
menyelesaikan persamaan taklinear, yang
dituliskan dalam bentuk :
𝑓𝑖 𝐱 = 𝟎, 𝑖 = 1,2,… ,𝑚
𝐱 = (𝑥1 ,𝑥2 ,… ,𝑥𝑛 )T.
Metode Newton Raphson dapat diturunkan
dengan menggunakan orde pertama dari deret

4
Taylor. Sebagai contoh untuk fungsi satu
peubah atau 𝑖 = 1, dan 𝐱 = 𝑥1 ∈ ℝ, orde
pertama deret Taylor 𝑓1 (𝑥1) sebagai berikut
𝑓1 𝑥1 ≈ 𝑓 𝑥1.0 + 𝑓′ 𝑥1.0 𝑥1 − 𝑥1.0
= 𝔣(𝑥1)
dengan 𝑥1.0 adalah hampiran awal (Munir
2003).
Dengan menggunakan metode Newton,
fungsi taklinear dapat diubah menjadi fungsi
linear. Untuk mencari solusi persamaan
𝑓1 𝑥1 = 0, metode Newton melakukan
pendekatan dengan cara mencari solusi
𝔣 𝑥1 = 0, dengan 𝔣 adalah fungsi linear.
Selain itu, untuk fungsi dua peubah atau
𝑖 = 2, dan 𝐱 = (𝑥1 ,𝑥𝟐)T ∈ ℝ. Deret Taylor orde pertama dapat dituliskan untuk masing-
masing persamaan sebagai berikut
𝑓1 𝑥1 ,𝑥2 ≈ 𝑓1 𝑥1.0 ,𝑥2.0 + 𝑥1 − 𝑥1.0 𝜕𝑓1 𝑥1.0 ,𝑥2.0
𝜕𝑥1
+ 𝑥2 − 𝑥2.0 𝜕𝑓1 𝑥1.0 ,𝑥2.0
𝜕𝑥2
𝑓2 𝑥1 ,𝑥2 ≈ 𝑓2 𝑥1.0 ,𝑥2.0 + 𝑥1 − 𝑥1.0 𝜕𝑓2 𝑥1.0 ,𝑥2.0
𝜕𝑥1
+ 𝑥2 − 𝑥2.0 𝜕𝑓2 𝑥1.0 ,𝑥2.0
𝜕𝑥2
dengan 𝑥1.0 dan 𝑥2.0 adalah hampiran awal
(Munir 2003).
Contoh 1
Diketahui fungsi taklinear f 𝑥1 = 𝑒𝑥1 − 5𝑥1
dengan hampiran awal 𝑥1.0 = 0.
𝑓1 𝑥1 ≈ 𝑓 𝑥1.0 + 𝑓′ 𝑥1.0 𝑥1 − 𝑥1.0 𝑓1 𝑥1 ≈ 𝔣 𝑥1 = 0
𝔣 𝑥1 = 𝑓 0 + 𝑓′ 0 𝑥1 − 0
= 𝑒0 − 5 0 + 𝑒0 − 5 𝑥1 − 0
= 1 + −4 𝑥1
Pada saat 𝔣 𝑥1 = 0 maka
1 + −4 𝑥1 = 0
𝑥1 = 1
4
Contoh 2
Diketahui fungsi taklinear dengan dua
variabel sebagai berikut
𝑓1 𝑥1 ,𝑥2 = 𝑥12 − 𝑥1𝑥2 + 1 (1)
𝑓2 (𝑥1 ,𝑥2) = 𝑥22 − 𝑥1𝑥2 − 2 (2)
dengan hampiran awal 𝑥1.0 = 0, 𝑥2.0 = 1
Pelinearan untuk persamaan (1) 𝑓1 𝑥1 ,𝑥2 ≈ 𝔣 𝑥1 ,𝑥2 = 0
𝑥12 − 𝑥1𝑥2 + 1 = 0
𝑓1 0,1 + −1 0 𝑥1 − 0𝑥2 − 1
= 0
1 + −1 𝑥1 = 0
𝑥1 = 1
Jadi, persamaan baru setelah pelinearan
adalah
−𝑥1 + 1 = 0
Pelinearan untuk persamaan (2)
𝑓2 𝑥1 ,𝑥2 ≈ 𝔣 𝑥1 ,𝑥2 = 0
𝑥22 − 𝑥1𝑥2 − 2
= 0
𝑓2 0,1 + −1 2 𝑥1 − 0𝑥2 − 1
= 0
−1 + −1 𝑥1 + 2 𝑥2 − 1 = 0
−𝑥1 + 2𝑥2 − 3 = 0
Jadi, persamaan baru setelah pelinearan
adalah
−𝑥1 + 2𝑥2 = 3
Solusi dari 𝑥1 dan 𝑥2 dapat diperoleh dengan
mensubstitusikan persamaan (1) ke persamaan
(2) sebagai berikut
− 1 + 2𝑥2 = 3
2𝑥2 = 4
𝑥2 = 2
Jadi, solusi dari 𝑥1 dan 𝑥2 setelah dilakukan
pelinearan adalah 𝑥1 = 1dan 𝑥2 = 2.
2.5 Kompleksitas
Definisi 12 (Kompleksitas)
Fungsi kompleksitas waktu 𝑓(𝑛) adalah fungsi yang mengukur banyak operasi dalam
suatu algoritme yang mempunyai variabel
input n.
(Grimaldi 2004)

III HASIL DAN PEMBAHASAN
3.1 Kondisi Optimal
Berdasarkan teorema dualitas, mencari
solusi optimal dari masalah primal (P) dan
masalah dual (D) sama halnya dengan
menyelesaikan sistem
𝐀𝐱 = 𝐛, 𝐱 ≥ 𝟎
𝐀𝐓𝐲+ 𝐬 = 𝐜, 𝐬 ≥ 𝟎 𝐱𝐬 = 𝟎.
dengan xs adalah Hadamard product.
Sistem (1) merupakan kondisi optimal
untuk masalah optimasi linear. Baris pertama
merupakan kendala fisibel masalah primal
(P) dan baris kedua merupakan kendala
fisibel masalah dual (D). Sedangkan baris
ketiga disebut dengan kondisi pelengkap.
3.2 Central Path
Central path merupakan aspek penting
dari metode interior, yang akan membantu
dalam membangun suatu algoritme umum
untuk metode primal-dual. Secara geometrik,
central path merupakan kurva analitik yang
konvergen menuju solusi optimal.
Untuk menyelesaikan sistem (1) kondisi pelengkap diubah menjadi xs = µe. Dengan,
µ adalah bilangan positif dan e adalah vektor
semua satu. Kendala baru ini disebut kondisi
pemusatan. Sistem yang dihasilkan adalah
𝐀𝐱 = 𝐛, 𝐱 ≥ 𝟎
𝐀T𝐲 + 𝐬 = 𝐜, 𝐬 ≥ 𝟎 𝐱𝐬 = 𝜇𝐞.
Solusi dari sistem (2) dinotasikan dengan
x(µ), y(µ), dan s(µ). x(µ) disebut µ-center
dari (P) dan (y(µ), s(µ)) disebut µ-center dari
(D).
Himpunan semua x(µ) disebut central
path dari (P), demikian pula himpunan semua
(y(µ), s(µ)) disebut central path dari (D).
Ketika µ berjalan menuju nol, maka x(µ),
y(µ), dan s(µ) konvergen ke solusi optimal
dari (P) dan (D).
3.3 Langkah Full-Newton
Langkah full-Newton merupakan metode
yang dapat digunakan untuk mencari solusi pendekatan sistem (2). Diberikan pasangan
fisibel primal-dual (x,(y,s)), kita ingin
mencari ∆𝐱, ∆𝐲, dan ∆𝐬 sehingga
𝐱+ = 𝐱 + ∆𝐱, 𝐲+ = 𝐲 + ∆𝐲, 𝐬+ = 𝐬 + ∆𝐬.
memenuhi sistem (2), dengan kata lain
𝐀 𝐱 + ∆𝐱 = 𝐛,
𝐀T 𝐲 + ∆𝐲 + 𝐬 + ∆𝐬 = 𝐜,
𝐱 + ∆𝐱 𝐬 + ∆𝐬 = 𝜇𝐞.
Dari sistem (3) diperoleh sistem baru sebagai
berikut
𝐀∆𝐱 = 𝐛 – 𝐀𝐱,
𝐀T∆𝐲 + ∆𝐬 = 𝐜 – 𝐀T𝐲 – 𝐬,𝐬∆𝐱+ 𝐱∆𝐬 + ∆𝐱∆𝐬 = 𝜇𝐞− 𝐱𝐬.
karena 𝐀𝐱 = 𝐛 dan 𝐀T𝐲+ 𝐬 = 𝐜, maka sistem berikut setara dengan sistem (4)
𝐀∆𝐱 = 𝟎,
𝐀T∆𝐲 + ∆𝐬 = 𝟎,
𝐬∆𝐱+ 𝐱∆𝐬 + ∆𝐱∆𝐬 = 𝜇𝐞 – 𝐱𝐬.
Untuk mencari solusi sistem (5) digunakan metode Newton. Persamaan pertama dan
persamaan kedua pada sistem (5) merupakan
persamaan linear. Sedangkan, persamaan
ketiga merupakan persamaan taklinear karena
mengandung faktor kuadratik ∆𝐱∆𝐬. Untuk
menyelesaikan sistem (5), persamaan ketiga
dilinearkan dengan menggunakan metode
Newton, sebagai berikut
s∆x + x∆s + ∆𝐱∆𝐬 = µe – xs
𝑠1
𝑠2
⋮𝑠𝑛
∆𝑥1
∆𝑥2
⋮∆𝑥𝑛
+
𝑥1
𝑥2
⋮𝑥𝑛
∆𝑠1
∆𝑠2
⋮∆𝑠𝑛
+
∆𝑥1
∆𝑥2
⋮∆𝑥𝑛
∆𝑠1
∆𝑠2
⋮∆𝑠𝑛
- 𝜇
11⋮1
+
𝑥1
𝑥2
⋮𝑥𝑛
𝑠1
𝑠2
⋮𝑠𝑛
=
00⋮0
(2)
(3)
(4)
(1)
(5)

6
𝑠1∆𝑥1 + 𝑥1∆𝑠1 + ∆𝑥1∆𝑠1 − 𝜇 + 𝑥1𝑠1 = 0
𝑠2∆𝑥2 + 𝑥2∆𝑠2 + ∆𝑥2∆𝑠2 − 𝜇 + 𝑥2𝑠2 = 0
⋮ 𝑠𝑛∆𝑥𝑛 + 𝑥𝑛∆𝑠𝑛 + ∆𝑥𝑛∆𝑠𝑛 − 𝜇 + 𝑥𝑛𝑠𝑛 = 0
Misalnya, dilakukan pelinearan pada persamaan pertama sebagai berikut
𝑓1 ∆𝑥1 ,∆𝑠1 ≈ 𝑓1 ∆𝑥1.0 ,∆𝑠1.0 + 𝜕𝑓1 ∆𝑥1.0 ,∆𝑠1.0
𝜕∆𝑥1 ∆𝑥1 − ∆𝑥1.0 +
𝜕𝑓1 ∆𝑥1.0 ,∆𝑠1.0
𝜕∆𝑠1 ∆𝑠1 − ∆𝑠1.0 = 0,
dengan hampiran awal ∆𝑥1.0 = ∆𝑠1.0 = 0, sehingga diperoleh
𝑓1 0,0 + 𝜕𝑓1 0, 0
𝜕∆𝑥1
∆𝑥1 − 0 +𝜕𝑓1 0,0
𝜕∆𝑠1
∆𝑠1 − 0 = 0
−𝜇 + 𝑥1𝑠1 + 𝑠1∆𝑥1 + 𝑥1∆𝑠1 = 0
𝑠1∆𝑥1 + 𝑥1∆𝑠1 = 𝜇 − 𝑥1𝑠1
Untuk persamaan kedua sampai dengan ke-n dilakukan pelinearan dengan cara yang sama,
sehingga diperoleh
𝑠1∆𝑥1 + 𝑥1∆𝑠1 − 𝜇 + 𝑥1𝑠1 = 0
𝑠2∆𝑥2 + 𝑥2∆𝑠2 − 𝜇 + 𝑥2𝑠2 = 0
⋮ 𝑠𝑛∆𝑥𝑛 + 𝑥𝑛∆𝑠𝑛 − 𝜇 + 𝑥𝑛𝑠𝑛 = 0
Dapat juga ditulis
𝑠1
𝑠2
⋮𝑠𝑛
∆𝑥1
∆𝑥2
⋮∆𝑥𝑛
+
𝑥1
𝑥2
⋮𝑥𝑛
∆𝑠1
∆𝑠2
⋮∆𝑠𝑛
- 𝜇
11⋮1
+
𝑥1
𝑥2
⋮𝑥𝑛
𝑠1
𝑠2
⋮𝑠𝑛
=
00⋮0
s∆𝐱 + 𝐱∆𝐬 − 𝜇𝐞+ 𝐱𝐬 = 𝟎
Sehingga diperoleh persamaan baru yang
merupakan persamaan linear, sebagai berikut
𝐀∆𝐱 = 𝟎𝐀T∆𝐲+ ∆𝐬 = 𝟎
𝐬∆𝐱 + 𝐱∆𝐬 = 𝜇𝐞 – 𝐱𝐬
Sistem (6) dapat dinyatakan dalam bentuk
matriks SPL sebagai berikut
𝐀 0 00 𝐀𝐓 1𝐒 0 𝐗
∆𝐱∆𝐲∆𝐬
= 00
𝜇𝐞 − 𝐱𝐬
Dengan X = diag (x) dan S = diag (s). Solusi
∆𝐱,∆𝐲, dan ∆𝐬 dinamakan primal-dual
langkah Newton. Dengan langkah full-
Newton diperoleh
𝐱+ = 𝐱 + ∆𝐱, 𝐲+ = 𝐲 + ∆𝐲, 𝐬+ = 𝐬 + ∆𝐬.
3.4 Ukuran Kedekatan
Pada proses mengikuti central path
menuju solusi optimal dengan menggunakan
langkah full-Newton, dihasilkan barisan titik-
titik yang berada di sekitar central path.
Diperlukan suatu ukuran untuk mengukur
kedekatan (𝐱, (𝐲, 𝐬)) ke 𝜇-center dan central
path. Sebelum mendefinisikan ukuran
kedekatan, terlebih dahulu merumuskan
sistem linear (6) yang mendefinisikan arah
Newton dalam kasus primal-dual. Untuk tujuan ini, kita definisikan vektor sebagai
berikut
𝐝x = 𝐮 ∆𝐱
𝐱, 𝐝s =
𝐮 ∆𝐬
𝐬, 𝐝y =
∆𝐲
𝜇
dengan
𝐮 := 𝐱𝐬
𝜇
(6)

7
jika didefinisikan 𝑫 = diag 𝐱
𝐬 maka
sistem (6) setara dengan
𝑨𝑫𝐝x = 𝟎
𝑨𝑫 T𝐝y + 𝐝s = 𝟎
𝐝x + 𝐝s = 𝐮−1 − 𝐮
Bukti :
(i) Persamaan pertama AD𝐝x = 0
AD 𝐮 ∆𝐱
𝐱 = 0
AD
𝐱𝐬
𝜇 ∆𝐱
𝐱 = 0
AD
𝐬
𝐱 ∆𝐱
𝜇 = 0
A
𝑥1s 1
0 … 0
0 𝑥2𝑠2
0 ⋮
⋮ … ⋱ ⋮
0 … … 𝑥𝑛𝑠𝑛
𝑠1𝑥1
∆𝑥1
𝑠2𝑥2
∆𝑥2
⋮
𝑠𝑛𝑥𝑛
∆𝑥𝑛
𝜇 = 0
𝐀
∆𝑥1
∆𝑥2
⋮∆𝑥𝑛
𝜇= 𝟎
𝐀 ∆𝐱 = 𝟎
Jadi, persamaan pertama terbukti.∎
(ii) Persamaan kedua
𝐀T∆𝐲+ ∆𝐬 = 𝟎
𝐀T𝐝y 𝜇 + 𝐝s
𝐬
𝐮= 𝟎
𝐀T𝐝y 𝜇 + 𝐝s
𝐬
𝐱𝐬𝜇
= 𝟎
𝐀T𝐝y 𝜇 + 𝐝s 𝐬𝜇
𝐱= 𝟎
𝜇 𝐀T𝐝y + 𝐝s 𝐬
𝐱 = 𝟎
𝑫T 𝐀T𝐝y + 𝐝s 𝐬
𝐱 = 𝑫T𝟎
𝑫T𝐀T𝐝y + 𝐝s = 𝟎
𝐀𝑫 T𝐝y + 𝐝s = 𝟎
Jadi, persamaan kedua terbukti.∎
(iii) Persamaan ketiga
Ruas kiri
𝐬∆𝐱+ 𝐱∆𝐬 = s 𝜇 𝐝x d + x 𝜇 𝐝s 𝐝−1
= 𝜇 (𝐬𝐝𝐝x + x𝐝−1𝐝s)
= 𝜇 (𝐮 𝜇𝐝−1𝐝𝐝x+
𝐮 𝜇𝐝𝐝−1𝐝s)
= 𝜇𝐮 (𝐝x + 𝐝s)
Ruas kanan
𝜇𝐞 − 𝐱𝐬 = 𝜇𝐞 − 𝐮 𝜇 𝐝 (𝐮 𝜇𝐝−1)
= 𝜇𝐞 − 𝐮2𝜇𝐝𝐝−1
= 𝜇𝐞 − 𝐮2𝜇
= 𝜇𝐮𝐮−1 − 𝜇𝐮2
= 𝜇𝐮 𝐮−1 − 𝐮
𝐬∆𝐱+ 𝐱∆𝐬 = 𝜇𝐞 − 𝐱𝐬
𝜇𝐮(𝐝x + 𝐝s) = 𝜇𝐮 𝐮−1 − 𝐮 𝐝x + 𝐝s = 𝐮−1 − 𝐮
Jadi, persamaan ketiga terbukti.∎
Persamaan dari sistem (6) menunjukkan
bahwa vektor 𝐝x dan 𝐝s adalah ruang nol dan
ruang baris dari matriks AD, ini berarti 𝐝x
dan 𝐝s ortogonal. Ortogonalitas dari 𝐝x dan
𝐝s mengimplikasikan bahwa
𝐝x 2 + 𝐝s
2 = 𝐝x + 𝐝s 2
= 𝐮−1 − 𝐮 2
Perhatikan bahwa 𝐝x, 𝐝s dan 𝐝y adalah nol
jika dan hanya jika 𝐮−1 − 𝐮 = 𝟎. Untuk
mengukur jarak (x, (y, s)) ke 𝜇-center, di-
gunakan ukuran 𝛿 𝐱, 𝐬; 𝜇 yang didefinisi-
kan sebagai berikut
𝛿 𝐱, 𝐬;𝜇 := 1
2 𝐮−1 − 𝐮
:= 1
2
𝜇
𝐱 𝐬−
𝐱 𝐬
𝜇
(Roos et al. 2006)
3.5 Kompleksitas Algoritme
Selanjutnya akan dibahas mengenai
kompleksitas algoritme dari metode interior
primal-dual dengan langkah full-Newton.
Berikut ini adalah algoritmenya
Langkah 1. Pilih nilai awal
parameter akurasi 휀 > 0;
parameter pendekatan 𝜏,
0 ≤ 𝜏 < 1;

8
strictly fisibel (𝐱0 ,𝐲0 ,𝐬0) dengan
(𝐱0)T𝐬0 = 𝑛𝜇0dan
𝛿(𝐱0 , 𝐬0; 𝜇0) ≤ 𝜏;
parameter barrier 𝜃, 0 < 𝜃 < 1.
Didefinisikan 𝐱 ≔ 𝐱0; 𝐬 ≔ 𝐬0;
𝐲 ≔ 𝐲0; 𝜇 ≔ 𝜇0;
Dengan penghitung iterasi awal
𝑘 = 0.
Langkah 2. Selama 𝑛𝜇 ≥ 휀 lanjut ke langkah
4
Langkah 3. Selainnya, STOP.
Langkah 4. Lakukan pencarian solusi baru
𝜇𝑘+1 = (1 − 𝜃)𝑘+1𝜇0
𝐱𝑘+1 = 𝐱𝑘 + ∆𝐱
𝐲𝑘+1 = 𝐲𝑘 + ∆𝐲
𝐬𝑘+1 = 𝐬𝑘 + ∆𝐬
Langkah 5. 𝑘 = 𝑘 + 1, kembali ke langkah 2
Lema 1
Jika langkah Newton primal-dual adalah
fisibel maka (𝐱+)T𝐬+ = 𝑛𝜇.
(Roos et al. 2006)
Bukti : lihat Roos
Vektor 𝐱+ dan 𝐬+ merupakan langkah full-
Newton primal-dual dan n adalah banyaknya
pertidaksamaan dari masalah primal-dual.
Lema 2
Metode interior primal-dual dengan langkah full-Newton memiliki jumlah iterasi tidak
lebih dari
1
𝜃ln𝑛𝜇0
휀
dan iterasi akan berhenti pada saat 𝑛𝜇 ≤ 휀.
(Silalahi 2011)
Bukti :
Awalnya duality gap adalah n𝜇0, sehingga dengan menggunakan Lema 1 diperoleh
(𝐱0)T𝐬0 = n𝜇0
Pada saat iterasi bertambah maka nilai 𝜇
dikalikan dengan faktor 1 − 𝜃 sebagai berikut
𝜇+ = (1 − 𝜃)𝜇
Untuk iterasi pertama diperoleh
(𝐱1)T𝐬1 = (1 − 𝜃) n𝜇0 Untuk iterasi ke-k diperoleh
(𝐱𝑘)T𝐬𝑘 = (1 − 𝜃)𝑘 n𝜇0 Oleh karena itu, setelah iterasi ke-k duality
gap lebih kecil dari 휀 jika :
(1 − 𝜃)𝑘 n𝜇0 ≤ 휀 Dengan menggunakan logaritma maka di-
peroleh
𝑘 ln 1 − 𝜃 + ln 𝑛𝜇0 ≤ ln 휀
−𝑘 ln 1 − 𝜃 − ln 𝑛𝜇0 ≥ − ln 휀
𝑘 (−ln 1 − 𝜃 ) − ln 𝑛𝜇0 ≥ − ln 휀
Karena – ln 1 − 𝜃 ≥ 𝜃, maka
pertidaksamaan diatas tetap terpenuhi jika
𝑘𝜃 − ln 𝑛𝜇0 ≥ − ln 휀
𝑘𝜃 ≥ ln 𝑛𝜇0 − ln 휀
𝑘 ≥ 1
𝜃 (ln 𝑛𝜇0 − ln 휀 ) =
1
𝜃ln𝑛𝜇0
휀
Jadi, Lema 2 terbukti.∎
Lema berikut ini memperlihatkan efek dari
langkah Newton primal-dual.
Lema 3
Misal (𝐱, 𝐬) adalah pasangan primal-dual positif dan 𝜇 > 0 sedemikian rupa sehingga 𝐱T𝐬 = 𝑛𝜇. Selanjutnya, jika
𝛿 ∶= 𝛿(𝐱, 𝐬; 𝜇) dan 𝜇+ = (1 − 𝜃)𝜇 maka 𝛿(𝐱, 𝐬;𝜇+)2 = 1 − 𝜃 𝛿2 + 𝜃2𝑛
4(1−𝜃)
(Silalahi 2011)
Bukti :
Didefinisikan 𝛿+ ≔ 𝛿(𝐱, 𝐬; 𝜇+) dan 𝐮 = 𝐱 𝐬
𝜇 , maka dapat dituliskan
(𝛿+)2 = 1
2 (𝐮+)−1 − 𝐮+
2
= 1
4 (𝐮+)−1 − 𝐮+ 2
Karena 𝐮+ = 𝐱 𝐬
𝜇+ , diperoleh

9
𝐮+ = 𝐱 𝐬
𝜇+ = 𝐱 𝐬
(1−𝜃)𝜇=
𝐱 𝐬
𝜇
1
1−𝜃=
𝐮
1−𝜃
(𝐮+)−1 = 1− 𝜃
𝐮
Sehingga diperoleh
𝛿+ 2 = 1
4 1 − 𝜃
𝐮−
𝐮
1− 𝜃
2
=1
4 1 − 𝜃 𝐮−1 −
𝐮
1 − 𝜃
2
=1
4 1 − 𝜃 𝐮−1 −
𝐮
1 − 𝜃−
𝜃𝐮
1− 𝜃+
𝜃𝐮
1 − 𝜃
2
= 1
4 1− 𝜃 𝐮−1 −
𝐮 − 𝜃𝐮
1 − 𝜃+
𝜃𝐮
1− 𝜃
2
= 1
4 1− 𝜃 𝐮−1 −
(1 − 𝜃)𝐮
1− 𝜃+
𝜃𝐮
1 − 𝜃
2
= 1
4 1 − 𝜃 𝐮−1 − (1 − 𝜃)𝐮
1 − 𝜃+
𝜃𝐮
1− 𝜃
2
= 1
4 1 − 𝜃 (𝐮−1 − 𝐮)
1 − 𝜃+
𝜃𝐮
1 − 𝜃
2
= 1
4 1 − 𝜃 (𝐮−1 − 𝐮) +
𝜃𝐮
1 − 𝜃
2
Dari 𝐱T𝐬 = 𝑛𝜇 diperoleh 𝐮 2 = 𝑛, seperti berikut
𝐮 2 = 𝐮T𝐮 2
= 𝐮T𝐮 = 𝑥1 𝑠1
𝜇 𝑥2𝑠2
𝜇…
𝑥𝑛𝑠𝑛𝜇
𝑥1𝑠1
𝜇
𝑥2𝑠2
𝜇
⋮
𝑥𝑛𝑠𝑛𝜇
= 𝑥1𝑠1
𝜇+ 𝑥2𝑠2
𝜇+ ⋯+
𝑥𝑛𝑠𝑛𝜇
= 𝐱T𝐬
𝜇= 𝑛
kemudian,
𝐮T𝐮−1 = 𝑥1𝑠1
𝜇 𝑥2𝑠2
𝜇 ⋯
𝑥𝑛𝑠𝑛𝜇
𝜇
𝑥1𝑠1
𝜇
𝑥2𝑠2
⋮
𝜇
𝑥𝑛𝑠𝑛
= 1 + 1 + ⋯+ 1 = 𝑛. 1 = 𝑛
selanjutnya, 𝐮T 𝐮−1 − 𝐮 = 𝐮T𝐮−1 − 𝐮T𝐮 = 𝑛 − 𝐮 2 = 𝑛 − 𝑛 = 0
Jadi u ortogonal terhadap 𝐮−1 − 𝐮. Akibatnya,
(𝛿+)2 = 1 − 𝜃
4 𝐮−1 − 𝐮 2 +
𝜃2 𝐮 2
4(1 − 𝜃)

10
Karena 𝐮−1 − 𝐮 = 2𝛿 dan 𝐮 2 = 𝑛, diperoleh
(𝛿+)2 = 1 − 𝜃 𝛿2 +𝜃2𝑛
4(1 − 𝜃)
Jadi, Lema 3 terbukti.∎
Untuk menjamin nilai 𝛿 pada Lema 3 maka
diperlukan Lema 4 dan akibat 1 sebagai
berikut
Lema 4
Jika 𝛿 ≔ 𝛿(𝐱, 𝐬; 𝜇) ≤ 1, maka langkah
Newton primal-dual fisibel yaitu 𝐱+ dan 𝐬+
taknegatif. Selain itu, jika 𝛿 < 1 maka 𝐱+ dan
𝐬+ positif dan
𝛿(𝐱+, 𝐬+; 𝜇) ≤𝛿2
2(1 − 𝛿2)
(Roos et al. 2006)
Bukti : lihat Roos
Akibat 1
Jika 𝛿 ∶= 𝛿 𝐱, 𝐬; 𝜇 ≤ 1
2 , maka
𝛿 𝐱+, 𝐬+; 𝜇 ≤ 𝛿2.
(Silalahi 2011)
Teorema berikut ini adalah batas atas iterasi
untuk metode interior primal-dual dengan
langkah full-Newton.
Teorema 2
Jika 𝜏 = 1
2 dan 𝜃 =
1
𝑛+1, maka jumlah
iterasi tidak lebih dari
𝑛 + 1 ln𝑛𝜇0
휀
Output dari primal-dual pasangan (x, s) yaitu
𝐱T𝐬 ≤ 휀.
(Silalahi 2011)
Bukti :
Misalkan dipilih 𝜏 = 1
2. Dengan meng-
gunakan akibat 1 yaitu 𝛿 𝐱, 𝐬; 𝜇 ≤ 1
2, maka
setelah langkah Newton primal-dual diperoleh
𝛿 𝐱+, 𝐬+; 𝜇 ≤1
2. Setelah iterasinya ber-
tambah, nilai 𝜇 menjadi 𝜇+ = (1 − 𝜃)𝜇.
Dengan mengambil nilai 𝜃 = 1
𝑛+1, diperoleh
𝛿 𝐱+, 𝐬+; 𝜇+ 2 sebagai berikut
𝛿 𝐱+, 𝐬+; 𝜇+ 2 ≤ 1 − 𝜃
4+
𝜃2𝑛
4 1 − 𝜃 =
1 − 𝜃 2 + 𝜃2𝑛
4 1 − 𝜃 =
𝜃2 − 2𝜃 + 1 + 𝜃2𝑛
4 1 − 𝜃
=
1𝑛 + 1 −
2
𝑛 + 1+ 1 +
𝑛𝑛 + 1
4 1 −1
𝑛 + 1
=
𝑛 + 1𝑛 + 1 −
2
𝑛 + 1+ 1
4 1 −1
𝑛 + 1
=
1 −2
𝑛 + 1+ 1
4 1 −1
𝑛 + 1
=
2 −2
𝑛 + 1
4 1 −1
𝑛 + 1
=
2 1 −1
𝑛 + 1
4 1 −1
𝑛 + 1
= 2
4=
1
2
Dari penyelesaian di atas diperoleh
𝛿 𝐱+, 𝐬+; 𝜇+ 2 ≤1
2= 𝜏. Ini berarti bahwa
𝛿(𝐱, 𝐬; 𝜇) ≤ 𝜏 tetap dipertahankan pada setiap
iterasi. Dengan menggabungkan penjelasan di
atas dengan Lema 2 maka diperoleh Teorema
2.
Jadi, Teorema 2 terbukti.∎

IV STUDI KASUS
Untuk studi kasus pada metode interior
digunakan masalah Klee-Minty dengan
𝜌 =1
3 dan 𝑦0 = 0 yang diberikan oleh :
Minimumkan 𝑦𝑚 ,
Kendala 1
3𝑦𝑘−1 ≤ 𝑦𝑘 ≤ 1 −
1
3𝑦𝑘−1
𝑘 = 1,… ,𝑚
Dengan 𝑛 menyatakan banyaknya
pertidaksamaan dan 𝑚 menyatakan
banyaknya variabel.
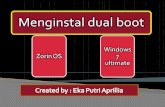
1) Pada saat 𝑛 = 4 dan 𝑚 = 2
Maksimumkan −𝑦2
Dengan kendala 𝑦1 ≤ 1
−𝑦1 ≤ 0
1
3 𝑦1 − 𝑦2 ≤ 0
1
3 𝑦1 + 𝑦2 ≤ 1
Dengan menggunakan software
MATLAB R2008b diperoleh gambar
sebagai berikut
Gambar 1 Masalah Klee-Minty pada saat
𝑛 = 4, 𝜇 = 10, dan 휀 = 10−5.
Tabel 1 Hasil iterasi pada saat 𝜇 = 10, 휀 = 10−5
Iterasi 𝑛𝜇 𝑥1 𝑦1 𝑠1
0 40 31.5518 0.3169 0.3169
1 22.1115 17.4458 0.3169 0.3169
2 12.2229 9.6518 0.3167 0.3167
3 6.7567 5.3499 0.3162 0.3162
4 3.7350 2.9833 0.3144 0.3144
5 2.0647 1.6947 0.3088 0.3088
6 1.1413 1.0117 0.2928 0.2928
7 0.6309 0.6669 0.2557 0.2557
8 0.3488 0.4994 0.1949 0.1949
9 0.1928 0.4189 0.1279 0.1279
10 0.1066 0.3791 0.0758 0.0758
11 0.0589 0.3583 0.0430 0.0430
12 0.0326 0.3470 0.0241 0.0241
13 0.0180 0.3409 0.0134 0.0134
14 0.0100 0.3375 0.0074 0.0074
15 0.0055 0.3356 0.0041 0.0041
16 0.0030 0.3346 0.0023 0.0023
17 0.0017 0.3340 0.0013 0.0013
18 9.2916e-004 0.3337 0.6966e-003 0.0007
19 5.1363e-004 0.3335 0.3851e-003 0.0004
20 2.8393e-004 0.3335 0.2129e-003 0.0002
21 1.5695e-004 0.3334 0.1177e-003 0.0001
22 8.6760e-005 0.3334 0.6507e-004 0.0001
23 4.7960e-005 0.3334 0.3597e-004 0.0000

12
Pada saat 𝜇 = 10, 휀 = 10−5, 𝑛 = 4, dan 𝑚 = 2 maka jumlah iterasinya sebanyak 25 iterasi.
Banyaknya iterasi pada Tabel 1 telah sesuai dengan Teorema 2 yaitu batas atas iterasinya sebanyak
34 iterasi.
Tabel 2 Hasil iterasi pada saat 𝜇 = 100, 휀 = 10−5
Iterasi 𝑛𝜇 𝑥1 𝑦1 𝑠1
0 400 315.4705 0.3170 0.3170
1 221.1146 174.3883 0.3170 0.3170
2 122.2291 96.4003 0.3170 0.3170
3 67.5666 53.2902 0.3170 0.3170
4 37.3499 29.4607 0.3170 0.3170
5 20.6465 16.2903 0.3169 0.3169
6 11.4131 9.0137 0.3167 0.3167
7 6.3090 4.9982 0.3161 0.3161
8 3.4875 2.7907 0.3140 0.3140
9 1.9279 1.5911 0.3077 0.3077 10 1.0657 0.9583 0.2898 0.2898
11 0.5891 0.6407 0.2497 0.2497
12 0.3256 0.4869 0.1870 0.1870
13 0.1800 0.4128 0.1209 0.1209
14 0.0995 0.3760 0.0711 0.0711
15 0.0550 0.3566 0.0402 0.0402
16 0.0304 0.3461 0.0225 0.0225
17 0.0168 0.3404 0.0125 0.0125
18 0.0093 0.3372 0.0069 0.0069
19 0.0051 0.3355 0.0038 0.0038
20 0.0028 0.3345 0.0021 0.0021
21 0.0016 0.3340 0.0012 0.0012 22 8.6760e-004 0.3337 0.6505e-003 0.0007
23 4.7960e-004 0.3335 0.3596e-003 0.0002
24 2.6512e-004 0.3334 0.1988e-003 0.0001
25 1.4655e-004 0.3334 0.1099e-003 0.0001
26 8.1012e-005 0.3334 0.6076e-004 0.0000
27 4.4783e-005 0.3334 0.3359e-004 0.0000
28 2.4755e-005 0.3333 0.1857e-004 0.0000
29 1.3684e-005 0.3333 0.1026e-004 0.0002
Pada saat 𝜇 = 100, 휀 = 10−5, 𝑛 = 4, dan 𝑚 = 2 maka jumlah iterasinya sebanyak 29 iterasi.
Banyaknya iterasi pada Tabel 2 telah sesuai dengan Teorema 2 yaitu batas atas iterasinya sebanyak
39 iterasi.
Tabel 3 Hasil iterasi pada saat 𝜇 = 10, 휀 = 10−3
Iterasi 𝑛𝜇 𝑥1 𝑦1 𝑠1
0 40 31.5518 0.3169 0.3169
1 22.1115 17.4458 0.3169 0.3169 2 12.2229 9.6518 0.3167 0.3167
3 6.7567 5.3499 0.3162 0.3162
4 3.7350 2.9833 0.3144 0.3144
5 2.0647 1.6947 0.3088 0.3088
6 1.1413 1.0117 0.2928 0.2928
7 0.6309 0.6669 0.2557 0.2557
8 0.3488 0.4994 0.1949 0.1949
9 0.1928 0.4189 0.1279 0.1279
24 2.6512e-005 0.3333 0.1988e-004 0.0000
25 1.4655e-005 0.3333 0.1099e-004 0.0000

13
10 0.1066 0.3791 0.0758 0.0758
11 0.0589 0.3583 0.0430 0.0430
12 0.0326 0.3470 0.0241 0.0241
13 0.0180 0.3409 0.0134 0.0134
14 0.0100 0.3375 0.0074 0.0074
15 0.0055 0.3356 0.0041 0.0041
16 0.0030 0.3346 0.0023 0.0023
17 0.0017 0.3340 0.0013 0.0013
Pada saat 𝜇 = 10, 휀 = 10−3, 𝑛 = 4, dan 𝑚 = 2 maka jumlah iterasinya sebanyak 17 iterasi. Banyaknya iterasi pada Tabel 3 telah sesuai dengan Teorema 2 yaitu batas atas iterasinya sebanyak
24 iterasi.
2) Pada saat 𝑛 = 6 dan 𝑚 = 3
Maksimumkan −𝑦3
Dengan kendala 𝑦1 ≤ 1
−𝑦1 ≤ 0
1
3 𝑦1 − 𝑦2 ≤ 0
1
3 𝑦1 + 𝑦2 ≤ 1
1
3 𝑦2 − 𝑦3 ≤ 0
1
3 𝑦2 + 𝑦3 ≤ 1
Tabel 4 Hasil iterasi pada saat 𝜇 = 10, 휀 = 10−5
Iterasi 𝑛𝜇 𝑥1 𝑦1 𝑠1
0 60 32.9543 0.3035 0.3035
1 37.3221 20.4994 0.3034 0.3034
2 23.2157 12.7524 0.3034 0.3034
3 14.4410 7.9342 0.3034 0.3034
4 8.9828 4.9381 0.3033 0.3033 5 5.5876 3.0761 0.3029 0.3029
6 3.4757 1.9205 0.3021 0.3021
7 2.1620 1.2053 0.3001 0.3001
8 1.3448 0.7652 0.2956 0.2956
9 0.8365 0.4969 0.2859 0.2859
10 0.5204 0.3357 0.2673 0.2673
11 0.3237 0.2408 0.2362 0.2362
12 0.2013 0.1862 0.1929 0.1929
13 0.1252 0.1551 0.1443 0.1443
14 0.0779 0.1374 0.1002 0.1002
15 0.0485 0.1270 0.0663 0.0663 16 0.0301 0.1209 0.0428 0.0428
17 0.0188 0.1171 0.0272 0.0272
18 0.0117 0.1148 0.0171 0.0171
19 0.0073 0.1134 0.0107 0.0107
20 0.0045 0.1125 0.0067 0.0067
21 0.0028 0.1120 0.0042 0.0042
22 0.0017 0.1117 0.0026 0.0026
23 0.0011 0.1115 0.0016 0.0016
24 6.7564e-004 0.1113 0.0010 0.0010
25 4.2027e-004 0.1112 0.6299e-003 0.0006
26 2.6142e-004 0.1112 0.3920e-003 0.0004 27 1.6262e-004 0.1112 0.2439e-003 0.0002
28 1.0115e-004 0.1111 0.1517e-003 0.0002
29 6.2920e-005 0.1111 0.9437e-004 0.0001

14
30 3.9139e-005 0.1111 0.5870e-004 0.0001
31 2.4346e-005 0.1111 0.3652e-004 0.0000
32 1.5144e-005 0.1111 0.2272e-004 0.0000
Pada saat 𝜇 = 10, 휀 = 10−5, 𝑛 = 6, dan 𝑚 = 3 maka jumlah iterasinya sebanyak 32 iterasi. Banyaknya iterasi pada Tabel 4 telah sesuai dengan Teorema 2 yaitu batas atas iterasinya sebanyak
41 iterasi.
Tabel 5 Hasil iterasi pada saat 𝜇 = 100, 휀 = 10−5
Iterasi 𝑛𝜇 𝑥1 𝑦1 𝑠1
0 600 329.5349 0.3035 0.3035
1 373.2213 204.9825 0.3035 0.3035
2 232.1569 127.5065 0.3035 0.3035
3 144.4099 79.3137 0.3035 0.3035 4 89.8281 49.3362 0.3035 0.3035
5 55.8762 30.6893 0.3035 0.3035
6 34.7570 19.0906 0.3034 0.3034
7 21.6201 11.8762 0.3034 0.3034
8 13.4485 7.3893 0.3034 0.3034
9 8.3654 4.5994 0.3032 0.3032
10 5.2036 2.8657 0.3029 0.3029
11 3.2368 1.7901 0.3019 0.3019
12 2.0134 1.1248 0.2997 0.2997
13 1.2524 0.7159 0.2945 0.2945
14 0.7790 0.4671 0.2837 0.2837 15 0.4846 0.3180 0.2635 0.2635
16 0.3014 0.2306 0.2304 0.2304
17 0.1875 0.1804 0.1857 0.1857
18 0.1166 0.1518 0.1372 0.1372
19 0.0726 0.1355 0.0944 0.0944
20 0.0451 0.1259 0.0622 0.0622
21 0.0281 0.1202 0.0400 0.0400
22 0.0175 0.1167 0.0254 0.0160
23 0.0109 0.1146 0.0160 0.0100
24 0.0068 0.1133 0.0100 0.0063
25 0.0042 0.1124 0.0063 0.0160 26 0.0026 0.1119 0.0039 0.0039
27 0.0016 0.1116 0.0024 0.0024
28 0.0010 0.1114 0.0015 0.0015
29 6.2920e-004 0.1113 0.9427e-003 0.0009
30 3.9139e-004 0.1112 0.5867e-003 0.0006
31 2.4346e-004 0.1112 0.3650e-003 0.0004
32 1.5144e-004 0.1112 0.2271e-003 0.0002
33 9.4200e-005 0.1111 0.1413e-003 0.0001
34 5.8596e-005 0.1111 0.8788e-004 0.0001
35 3.6449e-005 0.1111 0.5467e-004 0.0001
36 2.2672e-005 0.1111 0.3401e-004 0.0000
37 1.4103e-005 0.1111 0.2115e-004 0.0000
Pada saat 𝜇 = 100, 휀 = 10−5, 𝑛 = 6, dan 𝑚 = 3 maka jumlah iterasinya sebanyak 37 iterasi.
Banyaknya iterasi pada Tabel 5 telah sesuai dengan Teorema 2 yaitu batas atas iterasinya sebanyak
47 iterasi.

15
Tabel 6 Hasil iterasi pada saat 𝜇 = 10, 휀 = 10−3
Iterasi 𝑛𝜇 𝑥1 𝑦1 𝑠1
0 60 32.9543 0.3035 0.3035
1 37.3221 20.4994 0.3034 0.3034
2 23.2157 12.7524 0.3034 0.3034
3 14.4410 7.9342 0.3034 0.3034 4 8.9828 4.9381 0.3033 0.3033
5 5.5876 3.0761 0.3029 0.3029
6 3.4757 1.9205 0.3021 0.3021
7 2.1620 1.2053 0.3001 0.3001
8 1.3448 0.7652 0.2956 0.2956
9 0.8365 0.4969 0.2859 0.2859
10 0.5204 0.3357 0.2673 0.2673
11 0.3237 0.2408 0.2362 0.2362
12 0.2013 0.1862 0.1929 0.1929
13 0.1252 0.1551 0.1443 0.1443
14 0.0779 0.1374 0.1002 0.1002 15 0.0485 0.1270 0.0663 0.0663
16 0.0301 0.1209 0.0428 0.0428
17 0.0188 0.1171 0.0272 0.0272
18 0.0117 0.1148 0.0171 0.0171
19 0.0073 0.1134 0.0107 0.0107
20 0.0045 0.1125 0.0067 0.0067
21 0.0028 0.1120 0.0042 0.0042
22 0.0017 0.1117 0.0026 0.0026
23 0.0011 0.1115 0.0016 0.0016
Pada saat 𝜇 = 10, 휀 = 10−3, 𝑛 = 6, dan 𝑚 = 3 maka jumlah iterasinya sebanyak 23 iterasi. Banyaknya iterasi pada Tabel 6 telah sesuai dengan Teorema 2 yaitu batas atas iterasinya sebanyak
29 iterasi.

2
V SIMPULAN DAN SARAN
5.1 Simpulan
(i) Metode interior primal-dual dengan
langkah full-Newton dapat digunakan
untuk menyelesaikan masalah optimasi
linear.
(ii) Dari hasil analisis kompleksitas algoritme interior primal-dual dengan
langkah full-Newton diketahui bahwa
banyaknya iterasi yang diperoleh tidak
lebih dari 𝑛 + 1 log𝑛𝜇0
휀 .
(iii) Dari hasil pengkajian dapat disimpulkan
bahwa semakin besar nilai n dan 𝜇0 yang diberikan, maka jumlah iterasinya
semakin meningkat. Sedangkan, semakin
besar nilai 휀 maka jumlah iterasinya
semakin sedikit. Banyaknya iterasi yang
diperoleh pada masing-masing nilai n,
𝜇0, dan 휀 tidak lebih dari
𝑛 + 1 log𝑛𝜇0
휀 .
5.2 Saran
Pada karya ilmiah ini telah dilakukakn
analisis banyaknya iterasi untuk masalah
optimasi linear dengan metode titik interior.
Untuk penelitian lanjutan dapat dilakukan perbandingan banyaknya iterasi untuk kasus
taklinear dengan metode titik interior.
DAFTAR PUSTAKA
Grimaldi RP. 2004. Discrete and
Combinatorial Mathematics: An Applied
Introduction. Ed ke-5. New York: Pearson.
Leon SJ. 2001. Aljabar Linear dan
Aplikasinya. Ed ke-5. Bondan A,
Penerjemah; Hardani HW, Editor. Jakarta:
Erlangga. Terjemahan dari Linear Algebra
with Aplications.
Mitchell JE, P.M. Pardalos and M.G.C. Resende. 1998. Interior Point Methods for
Combinatorial Optimization. Kluwer
Academic Publishers.
Munir Rinaldi. 2003. Metode Numerik.
Bandung: Informatika.
Ross C, Terlaky T, and Vial J-Ph. 2006. Interior Point Methods for Linear
Optimization. New York: Springer.
Silalahi BP. 2011. On the Central Path of
Redundant Klee-Minty Problems. PhD
thesis. Roos C (promotor). Delft
University of Technology. The
Netherlands: TU Delft.
Winston WL. 2004. Operation Research:
Applications and Algorithms. Ed ke-4.
New York: Duxbury.

2
LAMPIRAN

18
Lampiran 1 Program untuk Fungsi Langkah Newton
function [x,y,s]= Newton_step(A,b,c,x,y,s,mu);
rb = b - A*x;
rc = c - A'*y - s;
v = sqrt(x.*s/mu);
r = v.^(-1)-v;
D = diag(sqrt(x./s));
AA=A*D;
M=AA*AA';
rhs = rb/sqrt(mu)+AA*(diag(v./s)*rc - r);
dy=M\rhs;
Dy = sqrt(mu)*dy;
ds = diag(v./s)*rc - AA'*dy;
dx = r - ds;
Dx = x.*dx./v;
Ds = s.*ds./v;
alpha = 1;
x = x + alpha*Dx;
y = y + alpha*Dy;
s = s + alpha*Ds;
return

19
Lampiran 2 Program untuk Kasus Dua Dimensi
function [A,b,c,x,y,s,mu,opt] = zigzag_Nematollahi(n)
n=4
A=[-1 1 1/3 1/3;
0 0 -1 1]
c=[0;1;0;1];
b=[0;-1];
figure(3)
clf
y = [0.5 0.5]';
s = c - A'*y
mu = 10
% mu = 100
% hilangkan tanda persen jika digunakan
x = mu./s
figure(3)
axis([0 1 0 1])
line('color',[0 0 0],'linestyle','*','erase','none','xdata',
y(1),'ydata',y(2),'markersize',5);
for i = 1:250,
[x,y,s] = Newton_step(A,b,c,x,y,s,mu);
line('color',[0 0 0], 'linestyle','*','erase','none','xdata',
y(1),'ydata',y(2),'markersize',5);
end
rb = A*x-b;
rc = c - A'*y - s;
[x s]
x
y
x.*s
mu=(x'*s)/(n);
theta = 1/sqrt(5);
% theta = 1/sqrt(n+1)
% nilai theta bergantung pada n
eps = 10^(-3);
% eps = 10^(-5)
% hilangkan tanda persen jika digunakan
figure(3)
line('color',[0 1 0],'linestyle','o','erase','none','xdata',
y(1),'ydata',y(2),'markersize',2);

20
Lanjutan Lampiran 2
it=0
while n*mu>eps,
nmu=n*mu
mu = (1-theta)*mu
x
y
s
[x,y,s] = Newton_step(A,b,c,x,y,s,mu);
line('color',[0 0 1],'linestyle','o','erase','none','xdata',
y(1),'ydata',y(2),'markersize',2);
it=it+1
end
line('color',[1 0 0],'linestyle','*','erase','none','xdata',y(1),
'ydata',y(2),'markersize',4);
axis([-0.3 0.3 0 1])
axis([-0.1 1.1 -0.3 1.4])
xx=[0 1 1 0 0]
yy=[0 1/3 2/3 1 0]
line('color',[1 0 0],'linestyle','-','erase','none','xdata',xx,
'ydata',yy,'markersize',4);
y
return

21
Lampiran 3 Program untuk Kasus Tiga Dimensi
function [A,b,c,x,y,s,mu,opt] = zigzag_Nematollahi(n)
n=6
A=[-1 1 1/3 1/3 0 0;
0 0 -1 1 1/3 1/3;
0 0 0 0 -1 1]
c=[0;1;0;1;0;1];
b=[0;0;-1];
figure(3)
clf
y = [0.5 0.5 0.5]';
s = c - A'*y
mu =10
% mu = 100
% hilangkan tanda persen jika digunakan
x = mu./s
figure(3)
axis([0 1 0 1])
line('color',[0 0 0],'linestyle','*','erase','none','xdata',
y(1),'ydata',y(2),'markersize',5);
for i = 1:250,
[x,y,s] = Newton_step(A,b,c,x,y,s,mu);
line('color',[0 0 0], 'linestyle','*','erase','none','xdata',
y(1),'ydata',y(2),'markersize',5);
end
rb = A*x-b;
rc = c - A'*y - s;
[x s]
x
y
x.*s
mu=(x'*s)/(n);
theta = 1/sqrt(7);
% theta = 1/sqrt(n+1)
% nilai theta bergantung pada n
eps = 10^(-3);
% eps = 10^(-5)
% hilangkan tanda persen jika digunakan
figure(3)
line('color',[0 1 0],'linestyle','o','erase','none','xdata',y(1),
'ydata',y(2),'markersize',2);

22
Lanjutan Lampiran 3
it=0
while n*mu>eps,
nmu=n*mu
mu = (1-theta)*mu
x
y
s
[x,y,s] = Newton_step(A,b,c,x,y,s,mu);
line('color',[0 0 1],'linestyle','o','erase','none','xdata',
y(1),'ydata',y(2),'markersize',2);
it=it+1
%pause(0.2)
%end
end
line('color',[1 0 0],'linestyle','*','erase','none','xdata',y(1),
'ydata',y(2),'markersize',4);
axis([-0.3 0.3 0 1])
axis([-0.1 1.1 -0.3 1.4])
xx=[0 1 1 0 0]
yy=[0 1/3 2/3 1 0]
line('color',[1 0 0],'linestyle','-','erase','none','xdata',xx,
'ydata',yy,'markersize',4);
y
return