







Bahasa
Halaman
Hukum

UNIVERSIDAD DON BOSCO
FACULTAD DE INGENIERIA
ESCUELA DE MECANICA
CÁTEDRA
Teoría de Mecanismos y Maquinas.
DOCENTE
Ing. Oscar Azucena
TEMA
Tarea ex-aula
ESTUDIANTE DEL GT 01
(AM110701) AGUILAR MIRANDA, JOSE ANTONIO
CIUDADELA DON BOSCO, Viernes 05 de abril de 2013
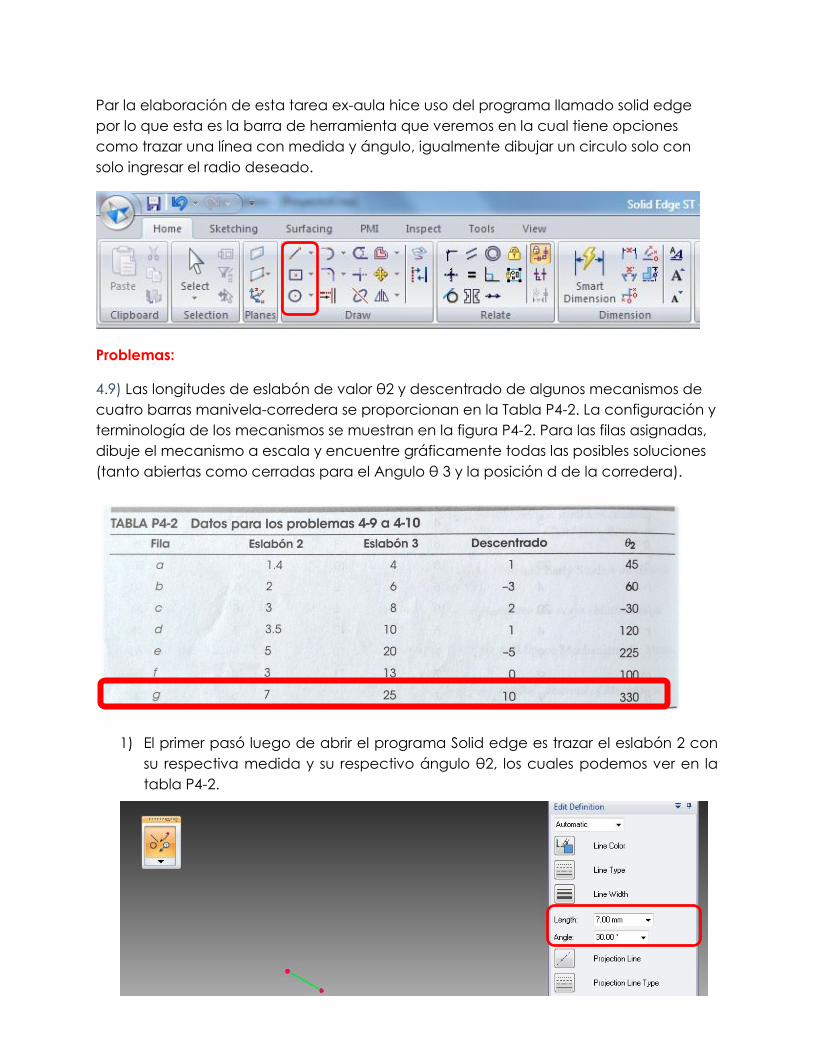
Par la elaboración de esta tarea ex-aula hice uso del programa llamado solid edge
por lo que esta es la barra de herramienta que veremos en la cual tiene opciones
como trazar una línea con medida y ángulo, igualmente dibujar un circulo solo con
solo ingresar el radio deseado.
Problemas:
4.9) Las longitudes de eslabón de valor θ2 y descentrado de algunos mecanismos de
cuatro barras manivela-corredera se proporcionan en la Tabla P4-2. La configuración y
terminología de los mecanismos se muestran en la figura P4-2. Para las filas asignadas,
dibuje el mecanismo a escala y encuentre gráficamente todas las posibles soluciones
(tanto abiertas como cerradas para el Angulo θ 3 y la posición d de la corredera).
1) El primer pasó luego de abrir el programa Solid edge es trazar el eslabón 2 con
su respectiva medida y su respectivo ángulo θ2, los cuales podemos ver en la
tabla P4-2.

2) Como podemos ver en la imagen del paso anterior encerrado en un cuadro
rojo es donde se ingresan los valores del eslabón 2.
Nota: Es importante resaltar que el ángulo ingresado puede ser tanto 330˚ o -30˚.
3) Seguidamente procedemos a dibujar una circunferencia con su radio igual a el
eslabón 3 y su centro en donde termina el eslabón 2.

4) Ahora procedemos a trazar una línea a 90˚ grados y con una longitud igual a la
del descentrado (valor ubicado en la tabla P4-2), en donde se empezó el
eslabón 2.
5) Luego trazamos una recta lo suficientemente larga que toque las dos paredes
de la circunferencia formando los puntos “A” y “B” a 0 ˚ grados donde termina
el descentrado dibujado en el paso anterior.
Nota: Es importante resaltar que de este paso en adelante ya se pueden escoger las
dos posibles soluciones tanto abiertas como cerradas para el Angulo θ 3 y la posición
d de la corredera.
A B

Cerrada.
6) Retomando la figura desde el paso 5, procedemos a trazar una línea, desde el
punto “A” hasta donde termina el eslabón 2, este sería nuestro eslabón 3.
7) Luego trazamos una línea del punto “A” a donde termina el descentrado y
borramos la circunferencia, se procedemos a realizar las medidas necesarias
para obtener el valor del eslabón 1 y del ángulo θ3.
A
A

Abierta.
6) Retomando la figura desde el paso 5, procedemos a trazar una línea, desde el
punto “B” hasta donde termina el eslabón 2, este sería nuestro eslabón 3.
7) Luego trazamos una línea del punto “B” a donde termina el descentrado y
borramos la circunferencia, se procedemos a realizar las medidas necesarias
para obtener el valor del eslabón 1 y del ángulo θ3.
B
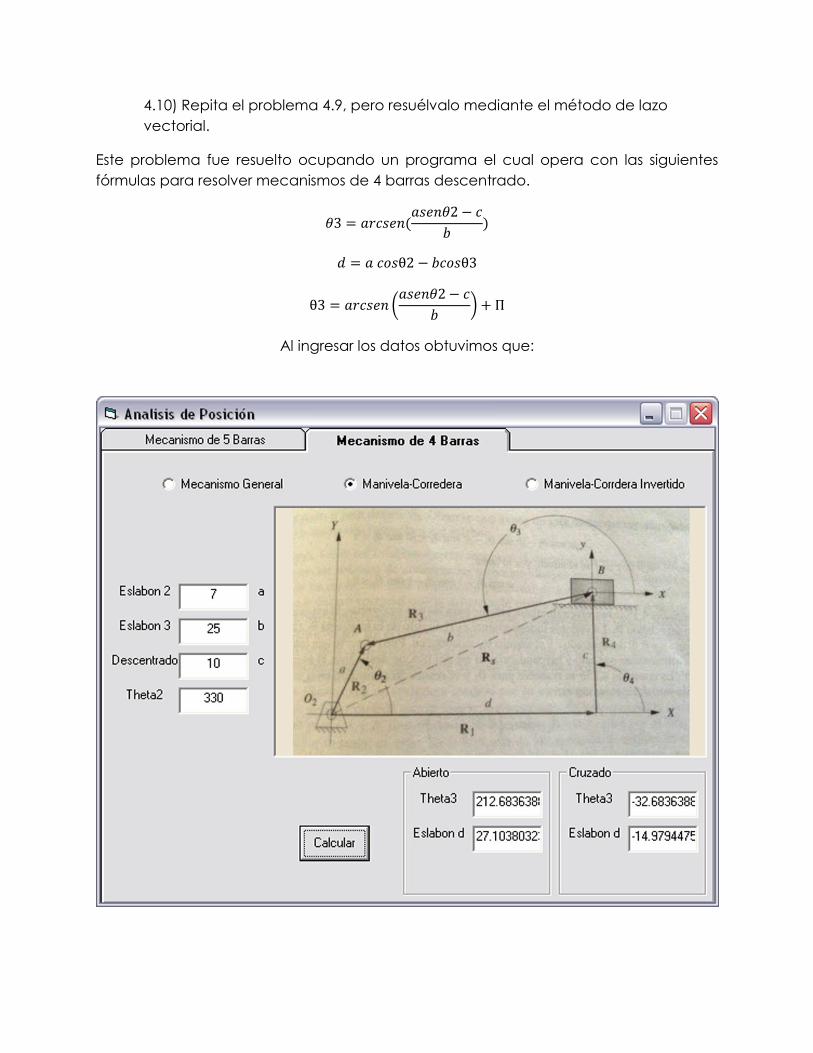
4.10) Repita el problema 4.9, pero resuélvalo mediante el método de lazo
vectorial.
Este problema fue resuelto ocupando un programa el cual opera con las siguientes
fórmulas para resolver mecanismos de 4 barras descentrado.
(
)
Al ingresar los datos obtuvimos que:

6.12) Encuentre todos los puntos instantáneos de los mecanismos mostrados en la
figura P 6-5-a).
1) El primer pasó luego de abrir el programa Solid edge es dibujar el mecanismo,
en este caso con las medidas que se quiera.
2) Luego se cuentan el número de eslabones y se aplica la siguiente formula la
cual no determinara el número de centros instantáneos de rotación.
Donde “n” es el número de eslabones
Existen 6 centros instantáneos de rotación.
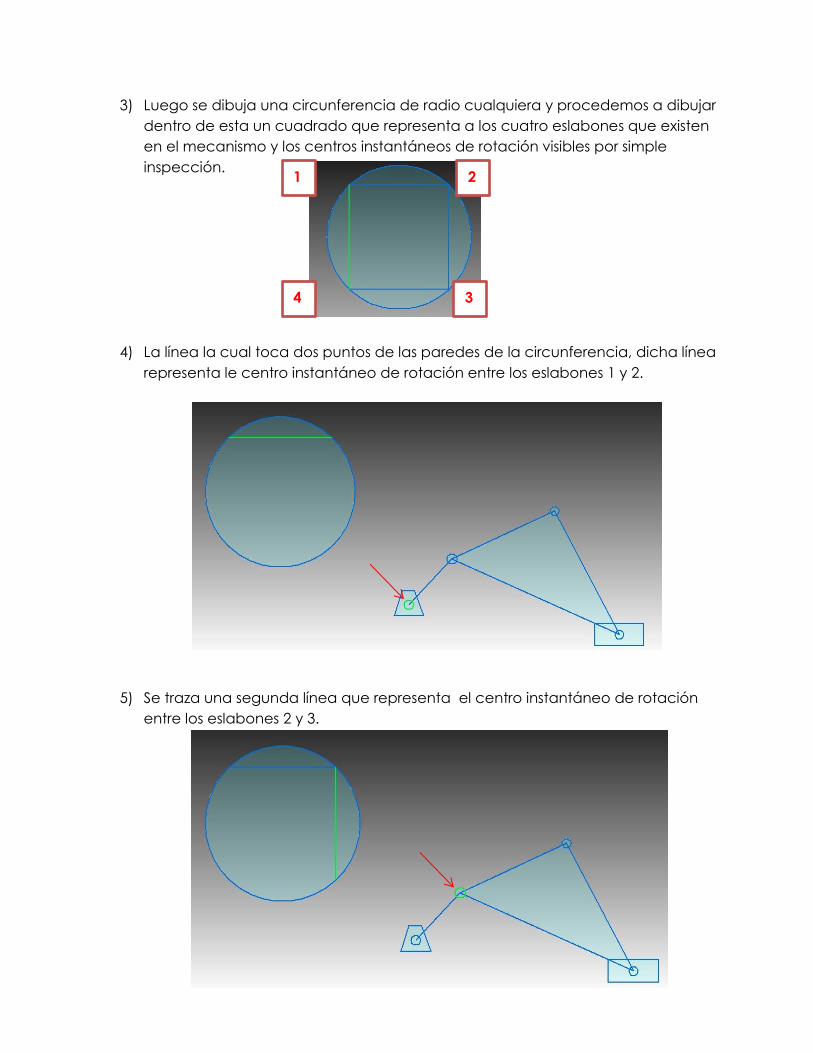
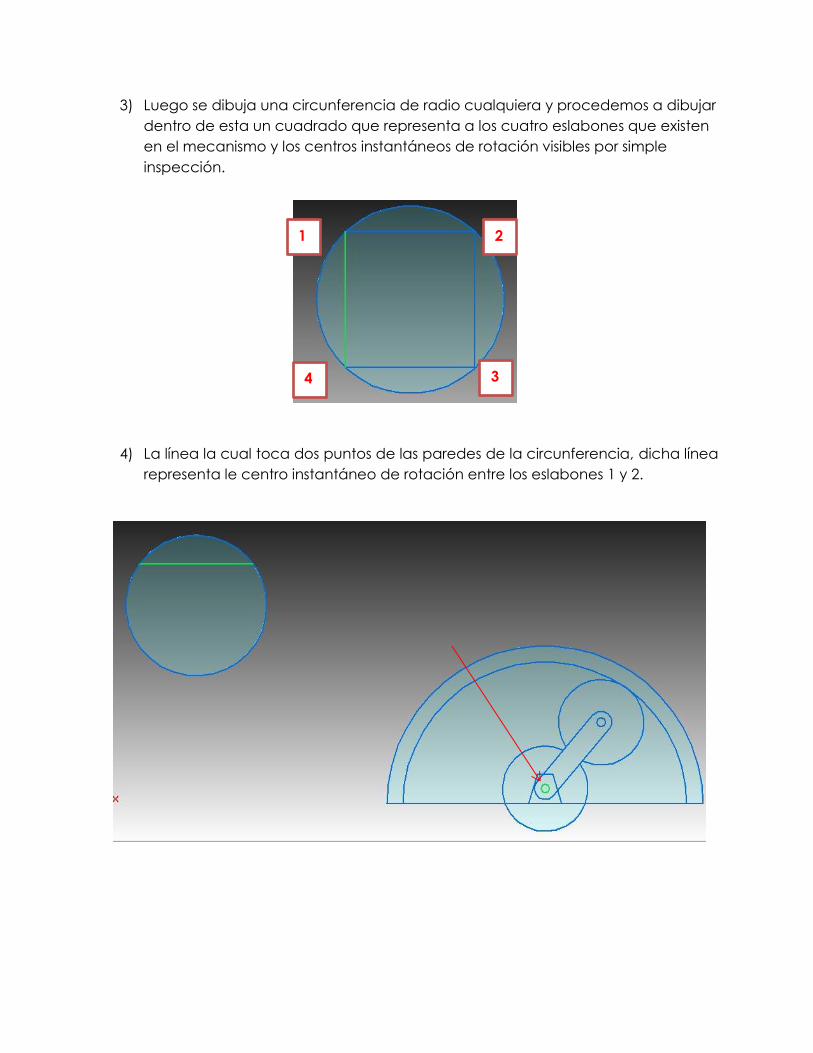
3) Luego se dibuja una circunferencia de radio cualquiera y procedemos a dibujar
dentro de esta un cuadrado que representa a los cuatro eslabones que existen
en el mecanismo y los centros instantáneos de rotación visibles por simple
inspección.
4) La línea la cual toca dos puntos de las paredes de la circunferencia, dicha línea
representa le centro instantáneo de rotación entre los eslabones 1 y 2.
5) Se traza una segunda línea que representa el centro instantáneo de rotación
entre los eslabones 2 y 3.
1 2
3 4
1
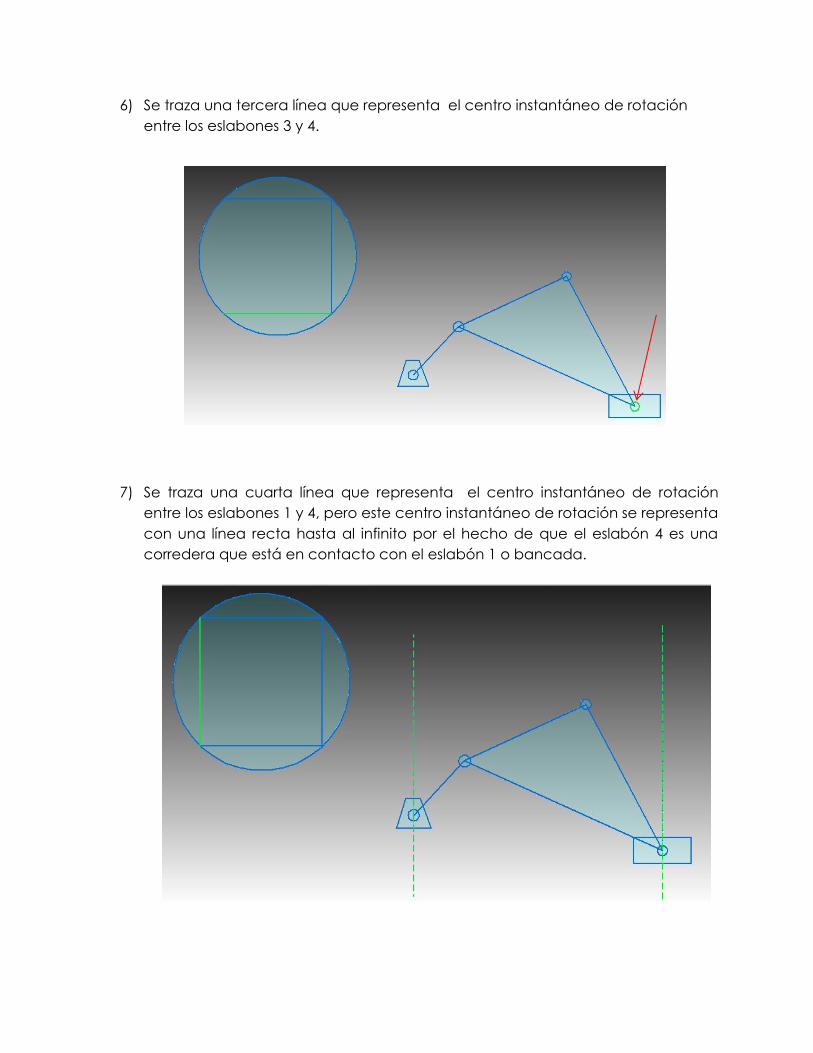
6) Se traza una tercera línea que representa el centro instantáneo de rotación
entre los eslabones 3 y 4.
7) Se traza una cuarta línea que representa el centro instantáneo de rotación
entre los eslabones 1 y 4, pero este centro instantáneo de rotación se representa
con una línea recta hasta al infinito por el hecho de que el eslabón 4 es una
corredera que está en contacto con el eslabón 1 o bancada.

8) Luego se procede a dibujar en el cuadrado una línea cruzada punteada ya
que según la formula hay 6 centros instantáneos de rotación esta sería el 1-3.
9) Luego se continuamos de manera que es necesario encontrar este centro de
rotación para eso es necesario prolongar las líneas de los eslabones que forman
este centro instantáneo de rotación, así como en la siguiente figura.
Aquí está representada la unión de los eslabones 1-2 con 2-3 que representan la
primera prolongación de una de las dos líneas para encontrar el centro instantáneo de
rotación.

10) Luego repetimos nuevamente el paso 9 pero con el otro lado de la unión de los
eslabones que deben ser prolongados para encontrar el centro instantáneo de
rotación.
Aquí está representada la unión de los eslabones 1-4 con 3-4 que representan la
segunda prolongación de una de las dos líneas para encontrar el centro instantáneo
de rotación.
11) Luego de prolongar la línea el centro instantáneo de rotación 1-3 ya es visible.

12) Seguidamente la línea punteada que representa al centro instantáneo de
rotación 1-3 puede ser repintada y podemos proceder a encontrar el centro
instantáneo de rotación 2-4 de la misma manera y trazamos la línea cruzada
punteada.
13) Luego se continuamos de manera que es necesario encontrar este centro de
rotación para eso es necesario prolongar las líneas de los eslabones que forman
este centro instantáneo de rotación, así como en la siguiente figura.
Aquí está representada la unión de los eslabones 1-2 con 1-4 que representan la
primera prolongación de una de las dos líneas para encontrar el centro instantáneo de
rotación.

14) Luego repetimos nuevamente el paso 13 pero con el otro lado de la unión de
los eslabones que deben ser prolongados para encontrar el centro instantáneo
de rotación.
Aquí está representada la unión de los eslabones 2-3 con 3-4 que representan la
segunda prolongación de una de las dos líneas para encontrar el centro instantáneo
de rotación.
15) Luego de prolongar la línea el centro instantáneo de rotación 2-4 ya es visible.
16) Procedemos a repintar la línea cruzada punteada que representa el centro
instantáneo de rotación 2-4 ya que fue encontrado.

6.12) Encuentre todos los puntos instantáneos de los mecanismos mostrados en la
figura P 6-5-b.
1) El primer pasó luego de abrir el programa Solid edge es dibujar el mecanismo,
en este caso con las medidas que se quiera.
2) Luego se cuentan el número de eslabones y se aplica la siguiente formula la
cual no determinara el número de centros instantáneos de rotación.
Donde “n” es el número de eslabones
Existen 6 centros instantáneos de rotación.
3) Luego se dibuja una circunferencia de radio cualquiera y procedemos a dibujar
dentro de esta un cuadrado que representa a los cuatro eslabones que existen
en el mecanismo y los centros instantáneos de rotación visibles por simple
inspección.
4) La línea la cual toca dos puntos de las paredes de la circunferencia, dicha línea
representa le centro instantáneo de rotación entre los eslabones 1 y 2.
1
1
2
1
4
1
3
1

5) Se traza una segunda línea que representa el centro instantáneo de rotación
entre los eslabones 2 y 3.
6) Se traza una tercera línea que representa el centro instantáneo de rotación
entre los eslabones 3 y 4.

7) Se traza una cuarta línea que representa el centro instantáneo de rotación
entre los eslabones 1 y 4.
8) Se traza una quinta línea que representa el centro instantáneo de rotación
entre los eslabones 2 y 4.

9) Se traza una sexta línea que representa el centro instantáneo de rotación entre
los eslabones 1 y 3.
10) Se procede a afirmar que todos los centros instantáneos de rotación eran de
simple inspección como vimos en los pasos anteriores y podemos dibujar en la
circunferencia todas las líneas del cuadrado incluso las cruzadas por completo
estableciendo que todos los centros instantáneos de rotación ya están
encontrados.

6.17) El mecanismo de la figura P6-5c tiene I12A= 0.75 in, AB= 1.5 in y AC= 1.2 in. El
ángulo de manivela efectivo en la posición mostrada es de 77˚ grados y el angulo
BAC= 30˚. Encuentre ω3, ω4, VA ,VB y Vc, para la posición mostrada con ω2 = 15
rad/s en la dirección mostrada.
a) Con el método grafico de diferencia de velocidad.
1) El primer pasó luego de abrir el programa Solid edge es trazar eslabón efectivo
AB a 0˚ con una medida de 1.5 in como dice el problema.
A B

2) Lugo se traza el eslabón AC a 30˚ con una medida de 1.2 in a partir del punto
“A”.
3) Seguidamente trazamos una línea la cual una “C” con ” B”.
4) Luego trazamos un eslabón efectivo de 0.75 in y con ángulo de 77˚ desde el
punto “A” complementando el ángulo para la traza correcta en solid edge.
B
C
B
C
A
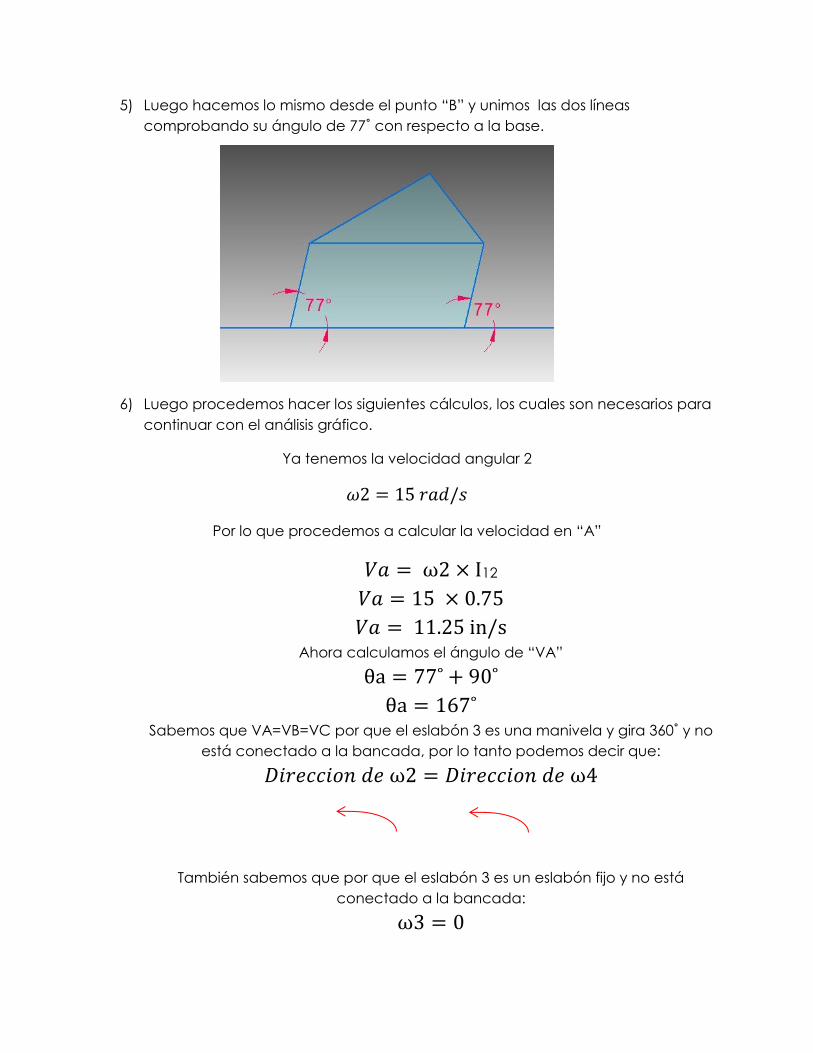
5) Luego hacemos lo mismo desde el punto “B” y unimos las dos líneas
comprobando su ángulo de 77˚ con respecto a la base.
6) Luego procedemos hacer los siguientes cálculos, los cuales son necesarios para
continuar con el análisis gráfico.
Ya tenemos la velocidad angular 2
Por lo que procedemos a calcular la velocidad en “A”
12
Ahora calculamos el ángulo de “VA”
Sabemos que VA=VB=VC por que el eslabón 3 es una manivela y gira 360˚ y no
está conectado a la bancada, por lo tanto podemos decir que:
También sabemos que por que el eslabón 3 es un eslabón fijo y no está
conectado a la bancada:

7) Luego retomando el paso 5 proyectamos el eslabón efectivo que pasa por el
punto “A”.
8) Luego trazamos una línea perpendicular con respecto a la línea proyectada a
partir del punto “A”.
Esta línea representa la magnitud de VA.
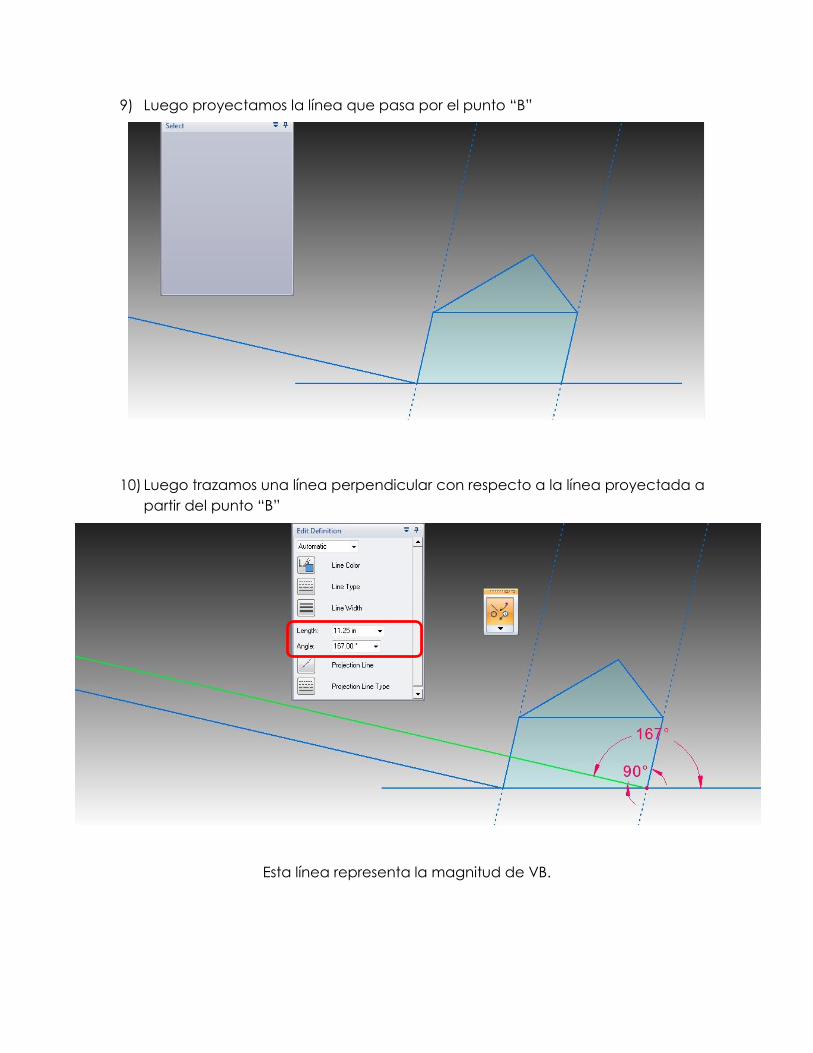
9) Luego proyectamos la línea que pasa por el punto “B”
10) Luego trazamos una línea perpendicular con respecto a la línea proyectada a
partir del punto “B”
Esta línea representa la magnitud de VB.
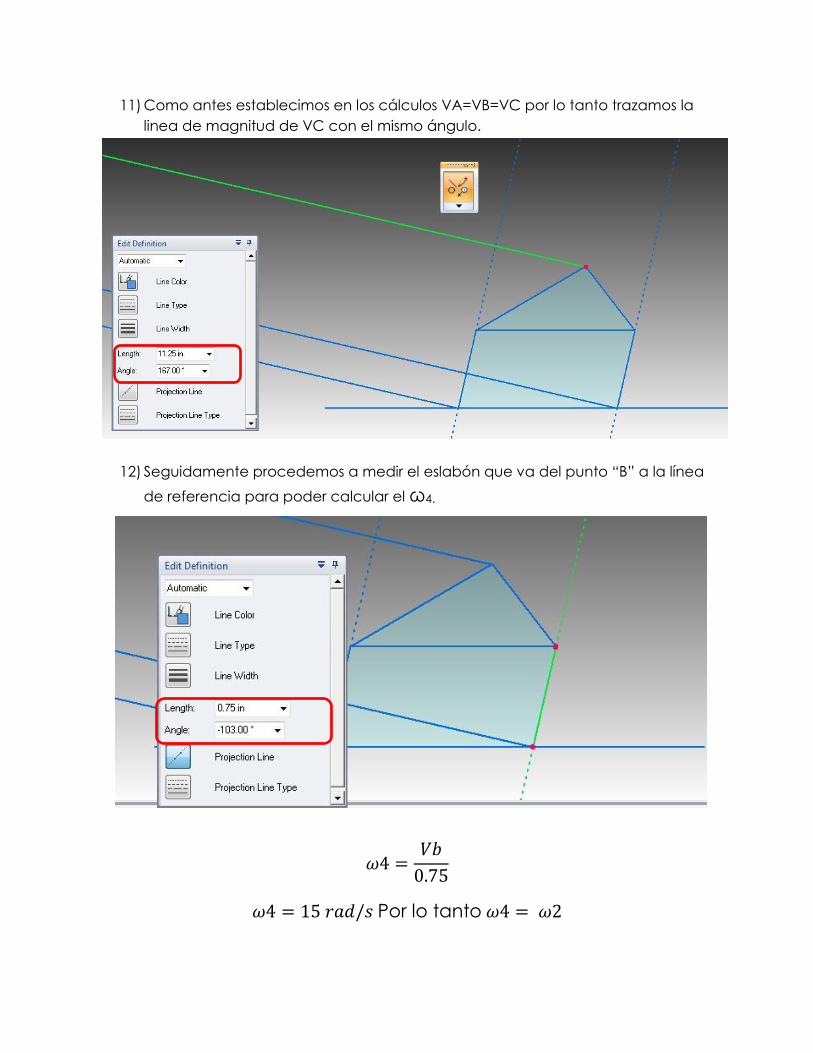
11) Como antes establecimos en los cálculos VA=VB=VC por lo tanto trazamos la
linea de magnitud de VC con el mismo ángulo.
12) Seguidamente procedemos a medir el eslabón que va del punto “B” a la línea
de referencia para poder calcular el ω4.
Por lo tanto
Top Related
Copyright © 2022 FDOKUMEN

