






Bahasa
Halaman
Hukum


ScienceDirect
Available online at www.sciencedirect.comAvailable online at www.sciencedirect.com
ScienceDirect Procedia Manufacturing 00 (2017) 000–000
www.elsevier.com/locate/procedia
* Paulo Afonso. Tel.: +351 253 510 761; fax: +351 253 604 741 E-mail address: [email protected]
2351-9789 © 2017 The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the Manufacturing Engineering Society International Conference 2017.
Manufacturing Engineering Society International Conference 2017, MESIC 2017, 28-30 June 2017, Vigo (Pontevedra), Spain
Costing models for capacity optimization in Industry 4.0: Trade-off between used capacity and operational efficiency
A. Santanaa, P. Afonsoa,*, A. Zaninb, R. Wernkeb
a University of Minho, 4800-058 Guimarães, Portugal bUnochapecó, 89809-000 Chapecó, SC, Brazil
Abstract
Under the concept of "Industry 4.0", production processes will be pushed to be increasingly interconnected, information based on a real time basis and, necessarily, much more efficient. In this context, capacity optimization goes beyond the traditional aim of capacity maximization, contributing also for organization’s profitability and value. Indeed, lean management and continuous improvement approaches suggest capacity optimization instead of maximization. The study of capacity optimization and costing models is an important research topic that deserves contributions from both the practical and theoretical perspectives. This paper presents and discusses a mathematical model for capacity management based on different costing models (ABC and TDABC). A generic model has been developed and it was used to analyze idle capacity and to design strategies towards the maximization of organization’s value. The trade-off capacity maximization vs operational efficiency is highlighted and it is shown that capacity optimization might hide operational inefficiency. © 2017 The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the Manufacturing Engineering Society International Conference 2017.
Keywords: Cost Models; ABC; TDABC; Capacity Management; Idle Capacity; Operational Efficiency
1. Introduction
The cost of idle capacity is a fundamental information for companies and their management of extreme importance in modern production systems. In general, it is defined as unused capacity or production potential and can be measured in several ways: tons of production, available hours of manufacturing, etc. The management of the idle capacity
Procedia Manufacturing 17 (2018) 246–253
2351-9789 © 2018 The Authors. Published by Elsevier B.V.This is an open access article under the CC BY-NC-ND license (http://creativecommons.org/licenses/by-nc-nd/3.0/)Peer-review under responsibility of the scientific committee of the 28th Flexible Automation and Intelligent Manufacturing (FAIM2018) Conference.10.1016/j.promfg.2018.10.043
10.1016/j.promfg.2018.10.043 2351-9789
© 2018 The Authors. Published by Elsevier B.V.This is an open access article under the CC BY-NC-ND license (http://creativecommons.org/licenses/by-nc-nd/3.0/)Peer-review under responsibility of the scientific committee of the 28th Flexible Automation and Intelligent Manufacturing (FAIM2018) Conference.
Available online at www.sciencedirect.com
Procedia Manufacturing 00 (2017) 000–000www.elsevier.com/locate/procedia
28th International Conference on Flexible Automation and Intelligent Manufacturing(FAIM2018), June 11-14, 2018, Columbus, OH, USA
Demonstrators to support research in Industrial safety – AMethodology
Varun Gopinatha,∗, Kerstin Johansena, Micael Derelova
aLinkoping University, Department of Management and Engineering, Division of Machine Design, Linkoping, Sweden
Abstract
Activities to support manufacturing research are carried out with the intention to gain knowledge of industrial problems andprovide solutions that addresses these issues. In order for solution to be viable to the industry, research activities are carried out inclose collaboration with participants from the industry, academia and research institutions. Interactive research approach motivatesparticipants with multi-disciplinary perspective to collaborate and emphasizes joint learning in the change process. This article,presents a methodology, where participants with different expertise can collaborate to develop safety solutions. The concept of ademonstrator, which represents cumulative result of a series of research activities, is presented as a tool to showcase functioningand design intent in a collaborative research environment. The results of a pilot study, where manufacturing professionals evaluateddesign decisions that resulted in a demonstrator, will be presented.
c© 2018 The Authors. Published by Elsevier B.V.This is an open access article under the CC BY-NC-ND license (https://creativecommons.org/licenses/by-nc-nd/4.0/)Peer-review under responsibility of the scientific committee of the 28th Flexible Automation and Intelligent Manufacturing(FAIM2018) Conference.
Keywords: Collaborative robots; Industrial Safety; University-Industry Collaboration; Risk Assessment
1. Introduction
As manufacturing companies strive to deliver customized products, recent advances in key technologies (such assensors & robotics) enables this objective through the development of flexible manufacturing solutions [3, 12]. Tocapitalize on the perceived benefits of these techniques, it is beneficial to understand the limitations as well; failureto do so might result in under-performing and costly investments. To aid in this effort, research takes the form of acollaborative endeavor between participants from the industry and research institutions and is referred to as University-Industry collaboration (UIC). This is seen as an approach to improve innovation by facilitating sharing and transfer oftechnology-related knowledge and experience [1].
∗ Corresponding author. Tel.: +46-013-28 2510E-mail address: [email protected]
2351-9789 c© 2018 The Authors. Published by Elsevier B.V.This is an open access article under the CC BY-NC-ND license (https://creativecommons.org/licenses/by-nc-nd/4.0/)Peer-review under responsibility of the scientific committee of the 28th Flexible Automation and Intelligent Manufacturing (FAIM2018) Confer-ence.
Available online at www.sciencedirect.com
Procedia Manufacturing 00 (2017) 000–000www.elsevier.com/locate/procedia
28th International Conference on Flexible Automation and Intelligent Manufacturing(FAIM2018), June 11-14, 2018, Columbus, OH, USA
Demonstrators to support research in Industrial safety – AMethodology
Varun Gopinatha,∗, Kerstin Johansena, Micael Derelova
aLinkoping University, Department of Management and Engineering, Division of Machine Design, Linkoping, Sweden
Abstract
Activities to support manufacturing research are carried out with the intention to gain knowledge of industrial problems andprovide solutions that addresses these issues. In order for solution to be viable to the industry, research activities are carried out inclose collaboration with participants from the industry, academia and research institutions. Interactive research approach motivatesparticipants with multi-disciplinary perspective to collaborate and emphasizes joint learning in the change process. This article,presents a methodology, where participants with different expertise can collaborate to develop safety solutions. The concept of ademonstrator, which represents cumulative result of a series of research activities, is presented as a tool to showcase functioningand design intent in a collaborative research environment. The results of a pilot study, where manufacturing professionals evaluateddesign decisions that resulted in a demonstrator, will be presented.
c© 2018 The Authors. Published by Elsevier B.V.This is an open access article under the CC BY-NC-ND license (https://creativecommons.org/licenses/by-nc-nd/4.0/)Peer-review under responsibility of the scientific committee of the 28th Flexible Automation and Intelligent Manufacturing(FAIM2018) Conference.
Keywords: Collaborative robots; Industrial Safety; University-Industry Collaboration; Risk Assessment
1. Introduction
As manufacturing companies strive to deliver customized products, recent advances in key technologies (such assensors & robotics) enables this objective through the development of flexible manufacturing solutions [3, 12]. Tocapitalize on the perceived benefits of these techniques, it is beneficial to understand the limitations as well; failureto do so might result in under-performing and costly investments. To aid in this effort, research takes the form of acollaborative endeavor between participants from the industry and research institutions and is referred to as University-Industry collaboration (UIC). This is seen as an approach to improve innovation by facilitating sharing and transfer oftechnology-related knowledge and experience [1].
∗ Corresponding author. Tel.: +46-013-28 2510E-mail address: [email protected]
2351-9789 c© 2018 The Authors. Published by Elsevier B.V.This is an open access article under the CC BY-NC-ND license (https://creativecommons.org/licenses/by-nc-nd/4.0/)Peer-review under responsibility of the scientific committee of the 28th Flexible Automation and Intelligent Manufacturing (FAIM2018) Confer-ence.
2 Gopinath et al. / Procedia Manufacturing 00 (2017) 000–000
Applied research methodologies (such as DSM [2]) allow the researchers to propose solutions to the underlyingresearch questions. However, the researchers are faced with two challenges: 1. acceptance of solution [13] and 2. trans-fer of knowledge to decision makers [13]. Research activities within a UIC context allows researchers to emphasizeon real case studies and to formulate research questions by observing the practices in the industry [19].
In this article, a methodology that was developed to allow participants with different disciplinary perspectives tocollaborate and propose safety solutions will be detailed. To facilitate this collaboration, we propose the concept of ademonstrator as a tool to 1. guide the iterative design process that leads to a solution which is acceptable to the industryand 2. transfer research knowledge to decision makers. The methodology requires development of the demonstratorsat various stages, which allows participants to interact and evaluate it from their perspective. In order to evaluate thenotion of research supported by demonstrators, a pilot study with six personnel from the industry were invited to tryout the hand-guided robotic assembly. They were later interviewed in order to document their experience and insights.In addition to the methodology, the results of the interview will also be presented.
The article is structured as follows: Section 2 briefly details literature, which forms the basis for the demonstrator-based-research methodology presented in section 3. A laboratory demonstrator describing a hand-guided collaborativeoperation with large industrial robots will be presented in section 4. In order to evaluate the demonstrator, engineersand operators were invited to test the demonstrator, and the results of the interview is detailed in section 5 (Appendix Alists the interview questions). Section 6 discusses the results – demonstrator based research methodology & interview– with concluding remarks in section 7.
1.1. Background
Collaborative operation is defined as a state in which a purposely-designed robot system and an operator workwithin a collaborative workspace [27]. Traditional industrial robots – robots that have long reach and large payloadcapacity – can be used in collaborative operations as their physical performance can be utilized to support operators inassembly tasks. Laboratory studies carried out by Karwowski et al. [10, 11] shows that operators who have had severalyears of experience were not able to judge the reach of the robot in a physical environment. Reviewing a fatal accident,Sanderson et al. [20] notes that there are several causal factors that needs to be considered when designing robotworkstation. Therefore, researchers who are attempting to understand the requirements of safety needs to recognizethe views of various stakeholders such as operators, maintenance engineers, line managers, etc.
The case study presented in section 4 was developed in collaboration with members from the automotive industry,academic and researcher institutions. An aim for the research project was to develop a laboratory demonstrator inorder to showcase safety solutions for collaborative operations with large industrial robots [6, 7, 8, 9].
2. Theory
This section describes theoretical aspects of safety, standardized methodology to manage risks, followed by a briefbackground on approaches to collaborative research.
2.1. Industrial Safety – Risk Assessment (RA), Risk Reduction & Human factors
A hazard is defined as a potential source of harm [24] and according to Ericson [5], an accident is an event whichoccurs when a hazard is activated by an initiating mechanism. Leveson [15] states that hazards are designed into asystem, and therefore, the potential of hazards to cause injury needs to be eliminated or minimized to an acceptablelevel. Safety issues associated with collaborative operations are multi-disciplinary and therefore, require expertise indomains [24] such as 1. Machine Safety and Safety Standards [24, 25, 26], 2. ergonomics [4] & 3. Human factors[18].
ISO 12100 [24], the machinery safety standard suggest the practice of conducting risk assessment followed byrisk reduction to manage risks associated with machine operations. Task-based risk assessment [25, 26] developsthe RA by including the sequence of operations that is to be performed in the robot workstation. RA is an iterativeprocess of risk analysis followed byrisk evaluation. Risk analysis is carried out with the aim of identifying hazardsand estimating the effects of these hazards. When the risks are estimated, risk evaluation is carried out to determine
Varun Gopinath et al. / Procedia Manufacturing 17 (2018) 246–253 247Available online at www.sciencedirect.com
Procedia Manufacturing 00 (2017) 000–000www.elsevier.com/locate/procedia
28th International Conference on Flexible Automation and Intelligent Manufacturing(FAIM2018), June 11-14, 2018, Columbus, OH, USA
Demonstrators to support research in Industrial safety – AMethodology
Varun Gopinatha,∗, Kerstin Johansena, Micael Derelova
aLinkoping University, Department of Management and Engineering, Division of Machine Design, Linkoping, Sweden
Abstract
Activities to support manufacturing research are carried out with the intention to gain knowledge of industrial problems andprovide solutions that addresses these issues. In order for solution to be viable to the industry, research activities are carried out inclose collaboration with participants from the industry, academia and research institutions. Interactive research approach motivatesparticipants with multi-disciplinary perspective to collaborate and emphasizes joint learning in the change process. This article,presents a methodology, where participants with different expertise can collaborate to develop safety solutions. The concept of ademonstrator, which represents cumulative result of a series of research activities, is presented as a tool to showcase functioningand design intent in a collaborative research environment. The results of a pilot study, where manufacturing professionals evaluateddesign decisions that resulted in a demonstrator, will be presented.
c© 2018 The Authors. Published by Elsevier B.V.This is an open access article under the CC BY-NC-ND license (https://creativecommons.org/licenses/by-nc-nd/4.0/)Peer-review under responsibility of the scientific committee of the 28th Flexible Automation and Intelligent Manufacturing(FAIM2018) Conference.
Keywords: Collaborative robots; Industrial Safety; University-Industry Collaboration; Risk Assessment
1. Introduction
As manufacturing companies strive to deliver customized products, recent advances in key technologies (such assensors & robotics) enables this objective through the development of flexible manufacturing solutions [3, 12]. Tocapitalize on the perceived benefits of these techniques, it is beneficial to understand the limitations as well; failureto do so might result in under-performing and costly investments. To aid in this effort, research takes the form of acollaborative endeavor between participants from the industry and research institutions and is referred to as University-Industry collaboration (UIC). This is seen as an approach to improve innovation by facilitating sharing and transfer oftechnology-related knowledge and experience [1].
∗ Corresponding author. Tel.: +46-013-28 2510E-mail address: [email protected]
2351-9789 c© 2018 The Authors. Published by Elsevier B.V.This is an open access article under the CC BY-NC-ND license (https://creativecommons.org/licenses/by-nc-nd/4.0/)Peer-review under responsibility of the scientific committee of the 28th Flexible Automation and Intelligent Manufacturing (FAIM2018) Confer-ence.
Available online at www.sciencedirect.com
Procedia Manufacturing 00 (2017) 000–000www.elsevier.com/locate/procedia
28th International Conference on Flexible Automation and Intelligent Manufacturing(FAIM2018), June 11-14, 2018, Columbus, OH, USA
Demonstrators to support research in Industrial safety – AMethodology
Varun Gopinatha,∗, Kerstin Johansena, Micael Derelova
aLinkoping University, Department of Management and Engineering, Division of Machine Design, Linkoping, Sweden
Abstract
Activities to support manufacturing research are carried out with the intention to gain knowledge of industrial problems andprovide solutions that addresses these issues. In order for solution to be viable to the industry, research activities are carried out inclose collaboration with participants from the industry, academia and research institutions. Interactive research approach motivatesparticipants with multi-disciplinary perspective to collaborate and emphasizes joint learning in the change process. This article,presents a methodology, where participants with different expertise can collaborate to develop safety solutions. The concept of ademonstrator, which represents cumulative result of a series of research activities, is presented as a tool to showcase functioningand design intent in a collaborative research environment. The results of a pilot study, where manufacturing professionals evaluateddesign decisions that resulted in a demonstrator, will be presented.
c© 2018 The Authors. Published by Elsevier B.V.This is an open access article under the CC BY-NC-ND license (https://creativecommons.org/licenses/by-nc-nd/4.0/)Peer-review under responsibility of the scientific committee of the 28th Flexible Automation and Intelligent Manufacturing(FAIM2018) Conference.
Keywords: Collaborative robots; Industrial Safety; University-Industry Collaboration; Risk Assessment
1. Introduction
As manufacturing companies strive to deliver customized products, recent advances in key technologies (such assensors & robotics) enables this objective through the development of flexible manufacturing solutions [3, 12]. Tocapitalize on the perceived benefits of these techniques, it is beneficial to understand the limitations as well; failureto do so might result in under-performing and costly investments. To aid in this effort, research takes the form of acollaborative endeavor between participants from the industry and research institutions and is referred to as University-Industry collaboration (UIC). This is seen as an approach to improve innovation by facilitating sharing and transfer oftechnology-related knowledge and experience [1].
∗ Corresponding author. Tel.: +46-013-28 2510E-mail address: [email protected]
2351-9789 c© 2018 The Authors. Published by Elsevier B.V.This is an open access article under the CC BY-NC-ND license (https://creativecommons.org/licenses/by-nc-nd/4.0/)Peer-review under responsibility of the scientific committee of the 28th Flexible Automation and Intelligent Manufacturing (FAIM2018) Confer-ence.
2 Gopinath et al. / Procedia Manufacturing 00 (2017) 000–000
Applied research methodologies (such as DSM [2]) allow the researchers to propose solutions to the underlyingresearch questions. However, the researchers are faced with two challenges: 1. acceptance of solution [13] and 2. trans-fer of knowledge to decision makers [13]. Research activities within a UIC context allows researchers to emphasizeon real case studies and to formulate research questions by observing the practices in the industry [19].
In this article, a methodology that was developed to allow participants with different disciplinary perspectives tocollaborate and propose safety solutions will be detailed. To facilitate this collaboration, we propose the concept of ademonstrator as a tool to 1. guide the iterative design process that leads to a solution which is acceptable to the industryand 2. transfer research knowledge to decision makers. The methodology requires development of the demonstratorsat various stages, which allows participants to interact and evaluate it from their perspective. In order to evaluate thenotion of research supported by demonstrators, a pilot study with six personnel from the industry were invited to tryout the hand-guided robotic assembly. They were later interviewed in order to document their experience and insights.In addition to the methodology, the results of the interview will also be presented.
The article is structured as follows: Section 2 briefly details literature, which forms the basis for the demonstrator-based-research methodology presented in section 3. A laboratory demonstrator describing a hand-guided collaborativeoperation with large industrial robots will be presented in section 4. In order to evaluate the demonstrator, engineersand operators were invited to test the demonstrator, and the results of the interview is detailed in section 5 (Appendix Alists the interview questions). Section 6 discusses the results – demonstrator based research methodology & interview– with concluding remarks in section 7.
1.1. Background
Collaborative operation is defined as a state in which a purposely-designed robot system and an operator workwithin a collaborative workspace [27]. Traditional industrial robots – robots that have long reach and large payloadcapacity – can be used in collaborative operations as their physical performance can be utilized to support operators inassembly tasks. Laboratory studies carried out by Karwowski et al. [10, 11] shows that operators who have had severalyears of experience were not able to judge the reach of the robot in a physical environment. Reviewing a fatal accident,Sanderson et al. [20] notes that there are several causal factors that needs to be considered when designing robotworkstation. Therefore, researchers who are attempting to understand the requirements of safety needs to recognizethe views of various stakeholders such as operators, maintenance engineers, line managers, etc.
The case study presented in section 4 was developed in collaboration with members from the automotive industry,academic and researcher institutions. An aim for the research project was to develop a laboratory demonstrator inorder to showcase safety solutions for collaborative operations with large industrial robots [6, 7, 8, 9].
2. Theory
This section describes theoretical aspects of safety, standardized methodology to manage risks, followed by a briefbackground on approaches to collaborative research.
2.1. Industrial Safety – Risk Assessment (RA), Risk Reduction & Human factors
A hazard is defined as a potential source of harm [24] and according to Ericson [5], an accident is an event whichoccurs when a hazard is activated by an initiating mechanism. Leveson [15] states that hazards are designed into asystem, and therefore, the potential of hazards to cause injury needs to be eliminated or minimized to an acceptablelevel. Safety issues associated with collaborative operations are multi-disciplinary and therefore, require expertise indomains [24] such as 1. Machine Safety and Safety Standards [24, 25, 26], 2. ergonomics [4] & 3. Human factors[18].
ISO 12100 [24], the machinery safety standard suggest the practice of conducting risk assessment followed byrisk reduction to manage risks associated with machine operations. Task-based risk assessment [25, 26] developsthe RA by including the sequence of operations that is to be performed in the robot workstation. RA is an iterativeprocess of risk analysis followed byrisk evaluation. Risk analysis is carried out with the aim of identifying hazardsand estimating the effects of these hazards. When the risks are estimated, risk evaluation is carried out to determine
248 Varun Gopinath et al. / Procedia Manufacturing 17 (2018) 246–253Gopinath et al. / Procedia Manufacturing 00 (2017) 000–000 3
whether the effect of the hazard warrant a risk reduction. To eliminate the risks, the designers can suggest solutionsin the form of: 1. Inherently safe design measures, 2. Safeguarding and/or complementary protective measures &3. Information for use.
Research in human-automation collaboration have highlighted a need to better understand human factors to designsafe systems [4]. Norman notes that automation in itself is not the source of accidents but inappropriate feedback [17].Academic literation points at two kinds of issues that can lead to an accident: 1. An operator looses track of the state atthe machine and is referred to as situational awareness [22]. 2. In complex system with several mode of operations, anoperator may lose track of the mode of operation and continue working with the assumption that state has not changedand this is referred to as mode-error [21].
2.2. Research approaches
Industry-as-laboratory [19], proposes that researchers can formulate questions through case studies of real systemsto gain insights into problems of interest. Within the UIC framework, this approach can benefit researchers who areattempting to generate knowledge by identifying gaps in academic literature.
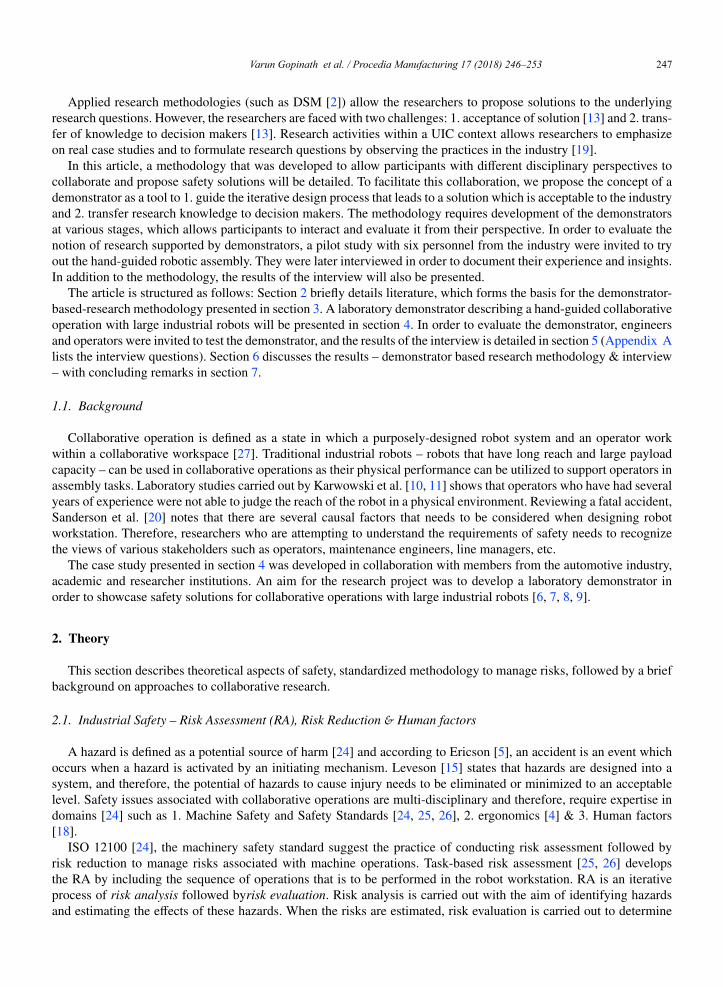
There are well-established research approaches that aims to generate knowledge from the change process itself.Action research (AR) and its variant participatory action research (PAR) [28] supports researchers in the learningprocess where the main agent for change is the researcher. PAR emphasizes collaboration between participants andresearchers. The interactive research (fig 1) approach proposes that research activities such as selection of methods &tools for analysis need to a collaborative endeavor between all participants [16].
As noted by Svensson et al. [23], Interactive research (IR) stresses the joint learning that goes on between the par-ticipants – which include the researchers – throughout the entire research process, from the definition of the problemsto the analysis as well as dissemination. Svensson et al. [23] states key features of IR, which are: 1. Unlike AR, partic-ipants own the change process. 2. Continuous joint learning between the researcher & the participants, 3. Participantswith different perspectives stress on different aspects. 4. Inclusion of the participants in the whole research processcan increase research validity.
Fig. 1: Illustration of roles & interests of the participants and researchers in anInteractive research approach. Adapted from Svensson et al. [23].
Fig. 2: The interative process of Design Reseach Method-ology (DRM) adapted from Blessing and Chakrabarti [2].
Design Research Methodology (DRM), proposed by Blessing and Chakrabarti [2], aims to provide rigor in designresearch. The methodology involves many iterations and parallel execution of the following stages (Fig: 2): 1. Re-search Clarification – The researchers try to formulate research goals based on the current situation based on literaturereview, interviews etc. 2. Descriptive Study I – The researchers attempt to make a detailed description of crucial fac-tors that describes the current situation. 3. Prescriptive Study – The aim is to develop methods to realize the desiredsituation. 4. Descriptive Study II – the main focus is the application and evaluation of the previously selected methods.
3. Demonstrator Based Research – A Methodology for Collaborative Research
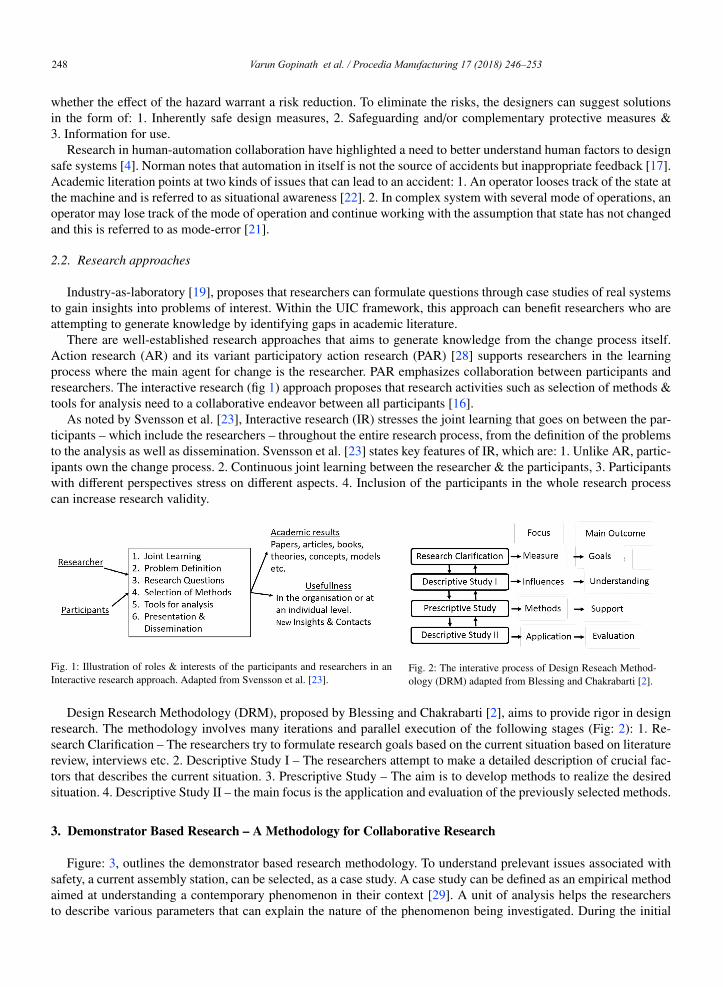
Figure: 3, outlines the demonstrator based research methodology. To understand prelevant issues associated withsafety, a current assembly station, can be selected, as a case study. A case study can be defined as an empirical methodaimed at understanding a contemporary phenomenon in their context [29]. A unit of analysis helps the researchersto describe various parameters that can explain the nature of the phenomenon being investigated. During the initial
4 Gopinath et al. / Procedia Manufacturing 00 (2017) 000–000
Fig. 3: An outline of the demonstrator based research methodology, developed for research in industrial safety within a collaborative environment
phase, various methods can be used by the investigators to determine parameters that describes the current situation.Data can be collected through: 1. interviews [14] 2. observation 3. Academic literature 4. Safety standards as well as5. safety training.
Demonstrators can be defined as a method to showcase design intent within a collaborative environment. Demon-strators can be visualized in many forms such as scaled models, computer aided virtual simulations, prototypes etc.The best-suited method for the application is chosen by the investigators to communicate features and characteristicsof a system or subsystems. Gopinath and Johansen [7] details a functioning mock-up of a hand-guiding tool, wherethe requirements was formulated through the application of risk assessment and risk reduction strategies. That is, riskassessment (RA) coupled with product development strategies can be used to investigate and conceptualize probablesolutions that describes desired outcome. As noted by Blessing and Chakrabarti [2], this process overlaps with theinitial phases in order to reformulate the goals and methods, and establish a clearer picture of the desired situation.
The final demonstrator(s) represents the cumulative result of a series of research activities meant to effectivelycommunicate the design intent of the desired outcome. It should showcase the solutions to the problems that wasidentified through the earlier stages, and allow probable users to evaluate the results by interacting with it.
The following section describe a demonstrator developed to showcase safety solutions of collaboration operationsinvolving large industrial robots.
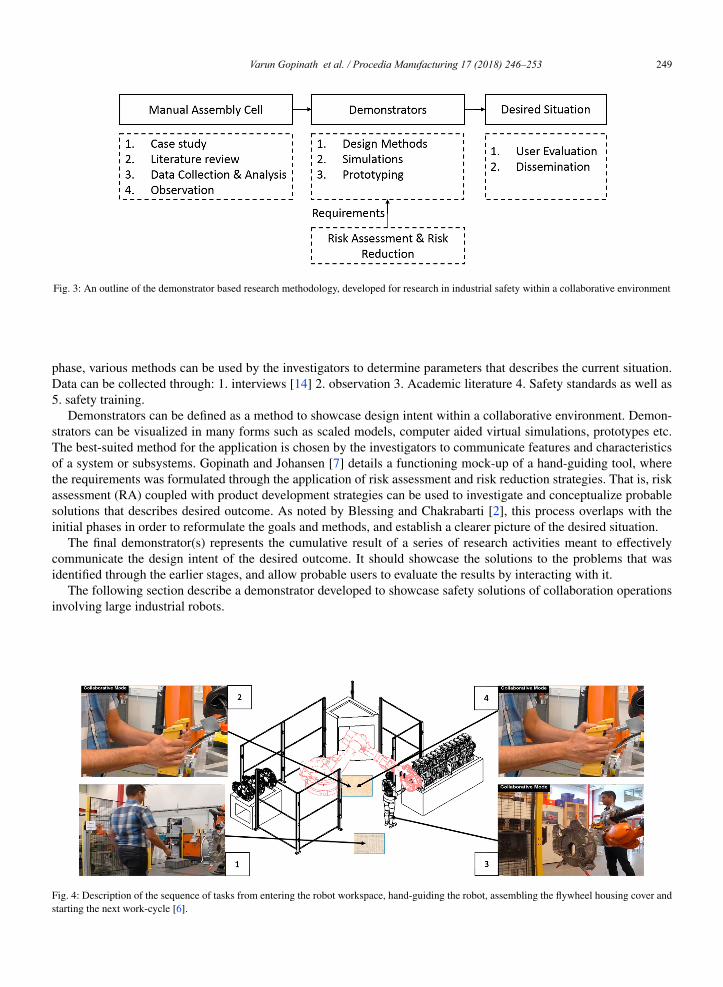
Fig. 4: Description of the sequence of tasks from entering the robot workspace, hand-guiding the robot, assembling the flywheel housing cover andstarting the next work-cycle [6].
Varun Gopinath et al. / Procedia Manufacturing 17 (2018) 246–253 249Gopinath et al. / Procedia Manufacturing 00 (2017) 000–000 3
whether the effect of the hazard warrant a risk reduction. To eliminate the risks, the designers can suggest solutionsin the form of: 1. Inherently safe design measures, 2. Safeguarding and/or complementary protective measures &3. Information for use.
Research in human-automation collaboration have highlighted a need to better understand human factors to designsafe systems [4]. Norman notes that automation in itself is not the source of accidents but inappropriate feedback [17].Academic literation points at two kinds of issues that can lead to an accident: 1. An operator looses track of the state atthe machine and is referred to as situational awareness [22]. 2. In complex system with several mode of operations, anoperator may lose track of the mode of operation and continue working with the assumption that state has not changedand this is referred to as mode-error [21].
2.2. Research approaches
Industry-as-laboratory [19], proposes that researchers can formulate questions through case studies of real systemsto gain insights into problems of interest. Within the UIC framework, this approach can benefit researchers who areattempting to generate knowledge by identifying gaps in academic literature.
There are well-established research approaches that aims to generate knowledge from the change process itself.Action research (AR) and its variant participatory action research (PAR) [28] supports researchers in the learningprocess where the main agent for change is the researcher. PAR emphasizes collaboration between participants andresearchers. The interactive research (fig 1) approach proposes that research activities such as selection of methods &tools for analysis need to a collaborative endeavor between all participants [16].
As noted by Svensson et al. [23], Interactive research (IR) stresses the joint learning that goes on between the par-ticipants – which include the researchers – throughout the entire research process, from the definition of the problemsto the analysis as well as dissemination. Svensson et al. [23] states key features of IR, which are: 1. Unlike AR, partic-ipants own the change process. 2. Continuous joint learning between the researcher & the participants, 3. Participantswith different perspectives stress on different aspects. 4. Inclusion of the participants in the whole research processcan increase research validity.
Fig. 1: Illustration of roles & interests of the participants and researchers in anInteractive research approach. Adapted from Svensson et al. [23].
Fig. 2: The interative process of Design Reseach Method-ology (DRM) adapted from Blessing and Chakrabarti [2].
Design Research Methodology (DRM), proposed by Blessing and Chakrabarti [2], aims to provide rigor in designresearch. The methodology involves many iterations and parallel execution of the following stages (Fig: 2): 1. Re-search Clarification – The researchers try to formulate research goals based on the current situation based on literaturereview, interviews etc. 2. Descriptive Study I – The researchers attempt to make a detailed description of crucial fac-tors that describes the current situation. 3. Prescriptive Study – The aim is to develop methods to realize the desiredsituation. 4. Descriptive Study II – the main focus is the application and evaluation of the previously selected methods.
3. Demonstrator Based Research – A Methodology for Collaborative Research
Figure: 3, outlines the demonstrator based research methodology. To understand prelevant issues associated withsafety, a current assembly station, can be selected, as a case study. A case study can be defined as an empirical methodaimed at understanding a contemporary phenomenon in their context [29]. A unit of analysis helps the researchersto describe various parameters that can explain the nature of the phenomenon being investigated. During the initial
4 Gopinath et al. / Procedia Manufacturing 00 (2017) 000–000
Fig. 3: An outline of the demonstrator based research methodology, developed for research in industrial safety within a collaborative environment
phase, various methods can be used by the investigators to determine parameters that describes the current situation.Data can be collected through: 1. interviews [14] 2. observation 3. Academic literature 4. Safety standards as well as5. safety training.
Demonstrators can be defined as a method to showcase design intent within a collaborative environment. Demon-strators can be visualized in many forms such as scaled models, computer aided virtual simulations, prototypes etc.The best-suited method for the application is chosen by the investigators to communicate features and characteristicsof a system or subsystems. Gopinath and Johansen [7] details a functioning mock-up of a hand-guiding tool, wherethe requirements was formulated through the application of risk assessment and risk reduction strategies. That is, riskassessment (RA) coupled with product development strategies can be used to investigate and conceptualize probablesolutions that describes desired outcome. As noted by Blessing and Chakrabarti [2], this process overlaps with theinitial phases in order to reformulate the goals and methods, and establish a clearer picture of the desired situation.
The final demonstrator(s) represents the cumulative result of a series of research activities meant to effectivelycommunicate the design intent of the desired outcome. It should showcase the solutions to the problems that wasidentified through the earlier stages, and allow probable users to evaluate the results by interacting with it.
The following section describe a demonstrator developed to showcase safety solutions of collaboration operationsinvolving large industrial robots.
Fig. 4: Description of the sequence of tasks from entering the robot workspace, hand-guiding the robot, assembling the flywheel housing cover andstarting the next work-cycle [6].
250 Varun Gopinath et al. / Procedia Manufacturing 17 (2018) 246–253Gopinath et al. / Procedia Manufacturing 00 (2017) 000–000 5
4. Case Study – Hand-guided Assembly of Flywheel Housing Cover (FWC)
Figure 4 shows the assembly process of the FWC on the engine block. The sequence of events are: 1. The robotbegins the cycle in automatic mode and waits at the hand-over position after picking up the FWC. The light curtainis muted. The red light, which signifies that the robot is moving automatically and is not safe to enter, turns green.Green light conveys that hand-guiding motion can be activated. The operator enters the fenced zone to imitate thehand-guiding motion. 2. To begin the hand-guiding motion, the participant needs to engage both the three-positionenabling device. They are integrated into the hand-guiding tool as shown in fig 4 (2) and is in a engaged state in themiddle position (Annex C in [25]). When engaged, the robot can be moved simply by moving the tool. For the purposeof the demonstrator, the motion were restricted to only linear motion in three directions. 3. The operator moves therobot towards the engine block, aligns the two pins (not shown) before mating the two surfaces. After the clamps areremoved, the participant needs to guide the robot back to the hand-over position. 4. The operator engages the threebuttons together to convey that the hand-guiding operation is complete. After exiting the robot workspace, engagesthe auto-contunue button which un-mutes the light curtains. The green light turns red and the robot is in automaticmode and begins the next cycle.
5. Evaluation of hand-guided assembly of Flywheel Housing Cover (FWC)
This section briefly details the results of a pilot study meant to evaluate the hand-guided collaboration workstationfrom the perspective of manufacturing engineers and operators.
5.1. Interview methodology
A pilot study with six personnel (two groups) participated in the study. Each group was scheduled one day andwas encouraged to ask questions to the researchers as well as their colleagues. The participants represented twoorganisation representing the automotive and aerospace industry verticals. The three participants from company Ahad worked in the manufacturing industry with experience ranging from heavy vehicle assembly, robot programmingand managing day-to-day operations of assembly lines. The three from company B represented the aerospace industrywere responsible for design, requirement specification and installation of production cells. None of the participantswere responsible for safety and have not tried to hand-guide an industrial robot.
The agenda for the day is as follows: 1. The researchers presented each group a brief summary of collaborative op-erations, requirements of safety along with information on what they will experience during the day. 2. The researcherdemonstrated the hand-guiding collaboration operation in full as shown in figure 4. The researchers also discussed thesafety equipment such as functioning of the light curtains and the enabling devices. 3. The participants were allowedto try out the hand-guiding operation in order to get accustomed to manipulating a large industrial robot. After theyhave tried out the full sequence, they were interviewed individually and were digitally recorded with their permission.The semi-structured interviews took approximately one hour and participant were encouraged to elaborate on theiranswers.
5.2. Discussion on Safety
Workspaces and safeguarding – The participants agreed that a well-defined workspaces – in terms of robot, collab-orative & operator workspace – is an interesting approach considering the size and reach of the robot. Additionally, theparticipants commented that safeguarding measures (fences & light curtain) seems adequate though two participantscommented on the fences being too tall (standards regulate the safeguarding height). Based on their observation ofthe layout, safeguards and task sequence, the participants commented that 1. the size of the robot is not a significantparameter and 2. the robot was over specified in terms of its payload (payload = 210 kg) as the FWC and the tool hada combined weight less than 50 kg.
Visual Indicators – The participants agreed on the importance of visual indicators to avoid hazardous situations.Floor markings and warning lamps were used to inform operators of the state of the system and its boundary. Threeof the six participants commented on the current choice of warning lamp (One lit area that can change colors) and
6 Gopinath et al. / Procedia Manufacturing 00 (2017) 000–000
suggested 1. stack lights (lights that have separate lit areas with different colors) and 2. floor illuminated solutions.The reasoning was that some people have trouble differentiating colors and prefer to focus on separate regions of alamp post (similar to traffic lights). Therefore, stack lamps can avoid confusion. Also, they mentioned that a red colorsignifies an emergency situation where all operations are stopped and personnel in the plant need to follow emergencyprocedures.
Physical Interfaces – An emergency button and its location is a requirement in the safety standard . When ques-tioned about the location, four participants stated that they did not observe it and needed to confirm its location. Theparticipants agreed with the need for a three step button on the hand-guiding tool to eliminate unintentional robot mo-tion. The participants questioned the need for this measure on both the handles. They commented that one three-stepbutton is adequate to maintain situational-awareness and it was difficult to engage and maintain both the buttons. Afterthe participant returns the robot to the hand-over position, they have to perform two safety-related operations. 1. Thethree button switch to signal that the hand-guiding motion is complete and 2. The auto-continue button to signal thatthe robot can start the next cycle. The participants had mixed views and commented that only the second operationis required. The three button switch is difficult to use and can be avoided by using a safety scanner to monitor theworkspace.
Safety Responsible – The interfaces were designed to give the participants full control of the station but theiruse needs to be complemented by additional safety sensors thereby reducing the responsibility for safety from theparticipants. The participants had different views and understanding on the question of who needs to be responsiblefor safety. For the aerospace industry, where the production rates are significantly lower than the automotive industry,one of the participant commented that it might be acceptable in certain special cases to have an operator responsiblefor certain aspects of the safety system. The participant also mentioned that the designers need to eliminate hazardoussituations and good documentation along with safety-training can also help avoid accident.
5.3. Hand-guiding operation
The participants from the automotive industry were familiar with the current manual station in the assembly plantand agreed that hand-guiding operations can improve ergonomics. Regarding the hand-guiding tool, the participantscommented on the following issues:
1. It should be easier to engage the enabling device as it was easy to lose the grip while moving the robot (thisstopped robot motion). They also commented that they additional training and redesign is required.
2. The handles should be designed to allow clearer view of the assembly point. The current design forced theparticipant to stand behind the housing cover that made it difficult for shorter persons to clearly see the assemblypoint.
3. the requirement to engage two three-step button to move the robot is cumbersome compared to when they triedto move without the three-step button.
Considering these issues, the ease of the system is acceptable for most participants. They commented that it wasinteresting that they can move very heavy or light objects with same force and there were no reactionary forces ontheir body. Five of the six participants commented that in order for this system to be usable, it should be possible toadjust the speed of the hand-guided operation (The maximum speed was limited in the laboratory environment). Twoof the participants, after trying out the demonstrator commented that it allowed them to consider various instanceswithin their organisation that can benefit with hand-guided industrial robots.
6. Discussion
This section discusses the methodological approach to the development of demonstrator and the interviews thatwere carried out to evaluate the design decisions that resulted in the hand-guided robotic system.
Varun Gopinath et al. / Procedia Manufacturing 17 (2018) 246–253 251Gopinath et al. / Procedia Manufacturing 00 (2017) 000–000 5
4. Case Study – Hand-guided Assembly of Flywheel Housing Cover (FWC)
Figure 4 shows the assembly process of the FWC on the engine block. The sequence of events are: 1. The robotbegins the cycle in automatic mode and waits at the hand-over position after picking up the FWC. The light curtainis muted. The red light, which signifies that the robot is moving automatically and is not safe to enter, turns green.Green light conveys that hand-guiding motion can be activated. The operator enters the fenced zone to imitate thehand-guiding motion. 2. To begin the hand-guiding motion, the participant needs to engage both the three-positionenabling device. They are integrated into the hand-guiding tool as shown in fig 4 (2) and is in a engaged state in themiddle position (Annex C in [25]). When engaged, the robot can be moved simply by moving the tool. For the purposeof the demonstrator, the motion were restricted to only linear motion in three directions. 3. The operator moves therobot towards the engine block, aligns the two pins (not shown) before mating the two surfaces. After the clamps areremoved, the participant needs to guide the robot back to the hand-over position. 4. The operator engages the threebuttons together to convey that the hand-guiding operation is complete. After exiting the robot workspace, engagesthe auto-contunue button which un-mutes the light curtains. The green light turns red and the robot is in automaticmode and begins the next cycle.
5. Evaluation of hand-guided assembly of Flywheel Housing Cover (FWC)
This section briefly details the results of a pilot study meant to evaluate the hand-guided collaboration workstationfrom the perspective of manufacturing engineers and operators.
5.1. Interview methodology
A pilot study with six personnel (two groups) participated in the study. Each group was scheduled one day andwas encouraged to ask questions to the researchers as well as their colleagues. The participants represented twoorganisation representing the automotive and aerospace industry verticals. The three participants from company Ahad worked in the manufacturing industry with experience ranging from heavy vehicle assembly, robot programmingand managing day-to-day operations of assembly lines. The three from company B represented the aerospace industrywere responsible for design, requirement specification and installation of production cells. None of the participantswere responsible for safety and have not tried to hand-guide an industrial robot.
The agenda for the day is as follows: 1. The researchers presented each group a brief summary of collaborative op-erations, requirements of safety along with information on what they will experience during the day. 2. The researcherdemonstrated the hand-guiding collaboration operation in full as shown in figure 4. The researchers also discussed thesafety equipment such as functioning of the light curtains and the enabling devices. 3. The participants were allowedto try out the hand-guiding operation in order to get accustomed to manipulating a large industrial robot. After theyhave tried out the full sequence, they were interviewed individually and were digitally recorded with their permission.The semi-structured interviews took approximately one hour and participant were encouraged to elaborate on theiranswers.
5.2. Discussion on Safety
Workspaces and safeguarding – The participants agreed that a well-defined workspaces – in terms of robot, collab-orative & operator workspace – is an interesting approach considering the size and reach of the robot. Additionally, theparticipants commented that safeguarding measures (fences & light curtain) seems adequate though two participantscommented on the fences being too tall (standards regulate the safeguarding height). Based on their observation ofthe layout, safeguards and task sequence, the participants commented that 1. the size of the robot is not a significantparameter and 2. the robot was over specified in terms of its payload (payload = 210 kg) as the FWC and the tool hada combined weight less than 50 kg.
Visual Indicators – The participants agreed on the importance of visual indicators to avoid hazardous situations.Floor markings and warning lamps were used to inform operators of the state of the system and its boundary. Threeof the six participants commented on the current choice of warning lamp (One lit area that can change colors) and
6 Gopinath et al. / Procedia Manufacturing 00 (2017) 000–000
suggested 1. stack lights (lights that have separate lit areas with different colors) and 2. floor illuminated solutions.The reasoning was that some people have trouble differentiating colors and prefer to focus on separate regions of alamp post (similar to traffic lights). Therefore, stack lamps can avoid confusion. Also, they mentioned that a red colorsignifies an emergency situation where all operations are stopped and personnel in the plant need to follow emergencyprocedures.
Physical Interfaces – An emergency button and its location is a requirement in the safety standard . When ques-tioned about the location, four participants stated that they did not observe it and needed to confirm its location. Theparticipants agreed with the need for a three step button on the hand-guiding tool to eliminate unintentional robot mo-tion. The participants questioned the need for this measure on both the handles. They commented that one three-stepbutton is adequate to maintain situational-awareness and it was difficult to engage and maintain both the buttons. Afterthe participant returns the robot to the hand-over position, they have to perform two safety-related operations. 1. Thethree button switch to signal that the hand-guiding motion is complete and 2. The auto-continue button to signal thatthe robot can start the next cycle. The participants had mixed views and commented that only the second operationis required. The three button switch is difficult to use and can be avoided by using a safety scanner to monitor theworkspace.
Safety Responsible – The interfaces were designed to give the participants full control of the station but theiruse needs to be complemented by additional safety sensors thereby reducing the responsibility for safety from theparticipants. The participants had different views and understanding on the question of who needs to be responsiblefor safety. For the aerospace industry, where the production rates are significantly lower than the automotive industry,one of the participant commented that it might be acceptable in certain special cases to have an operator responsiblefor certain aspects of the safety system. The participant also mentioned that the designers need to eliminate hazardoussituations and good documentation along with safety-training can also help avoid accident.
5.3. Hand-guiding operation
The participants from the automotive industry were familiar with the current manual station in the assembly plantand agreed that hand-guiding operations can improve ergonomics. Regarding the hand-guiding tool, the participantscommented on the following issues:
1. It should be easier to engage the enabling device as it was easy to lose the grip while moving the robot (thisstopped robot motion). They also commented that they additional training and redesign is required.
2. The handles should be designed to allow clearer view of the assembly point. The current design forced theparticipant to stand behind the housing cover that made it difficult for shorter persons to clearly see the assemblypoint.
3. the requirement to engage two three-step button to move the robot is cumbersome compared to when they triedto move without the three-step button.
Considering these issues, the ease of the system is acceptable for most participants. They commented that it wasinteresting that they can move very heavy or light objects with same force and there were no reactionary forces ontheir body. Five of the six participants commented that in order for this system to be usable, it should be possible toadjust the speed of the hand-guided operation (The maximum speed was limited in the laboratory environment). Twoof the participants, after trying out the demonstrator commented that it allowed them to consider various instanceswithin their organisation that can benefit with hand-guided industrial robots.
6. Discussion
This section discusses the methodological approach to the development of demonstrator and the interviews thatwere carried out to evaluate the design decisions that resulted in the hand-guided robotic system.
252 Varun Gopinath et al. / Procedia Manufacturing 17 (2018) 246–253Gopinath et al. / Procedia Manufacturing 00 (2017) 000–000 7
6.1. Methodological approach to collaborative research for industrial safety
As noted in section 1.1, the laboratory demonstrator described in section 4 was developed in collaboration withmembers from the industry, academia and research institution. A central principle in the interactive research (IR)approach is the active involvement of participants in the change process. The change process, which in this study, isthe introduction of an industrial robot in a manual assembly station. Several members from the organisation activelyparticipated in realizing this change. Some of the activities were: 1. defining goals and targets, 2. data collection andinterpretation, 3. method selection & 4. requirement analysis. Lack of expertise within the core research group werecomplemented by experts such as those knowledgeable in interpreting regulatory standards. In a traditional way ofconducting research, members of the academic institutions are the main actors (see chapter 2 in Nielsen and Svensson[16]). The activities mentioned above would have been performed by researchers, might result in industrially viablesolutions, but the learning outcomes are limited to the researchers. Therefore, research within a UIC context carriedout through a IR way, joint learning is a natural outcome.
Risk assessment is a methodology that enables standardized reasoning and evaluation of risks and allows theparticipants to document them in a systematic manner. Additionally, it allows for risk reduction measures, as discussedin section 2, to be prescribed, which should result in changes that mitigates the risks associated with known hazards.
6.2. Evaluation of the demonstrator
A qualitative analysis of semi-structured interviews ( Appendix A) is detailed in section 5. The study was designedto evaluate the design decisions taken by the investigators during the research process. One probable outcome of aqualitative study is to gain insights into issues that require a detailed study. The interviewees indicated certain preferredtechniques such as floor illumination and stack lights, which must be evaluated for standard compliance. The feedbackon design changes such as physical design, hand-guiding response etc., needs to be analysed for usability and ensurethat they do not introduce additional hazards.
7. Conclusion
This article presented a methodological approach that was used to develop a physical demonstrator to showcasesafety-solutions of collaborative operations with large industrial robots. The results show that by involving person-nel with multi-disciplinary perspective in the whole research process can result in viable solution relevant for themanufacturing sector. The physical demonstrator represents the cumulative result of a series of research activitiesundertaken with the intention of introducing a robot in a populated work environment in a safe way. In addition to themethodology, results of interviews that were carried to evaluate the demonstrator are also presented. The result of thispilot study, comprising of personnel from the manufacturing industry, indicates that the presented solution is viableand beneficial to their organisation.
Acknowledgements
This work has been primarily funded under the FFI program by Vinnova & the authors would like to graciouslythank them for their support. We would like to thank the members of the research project Collaborative Team of Man& Machine (ToMM 2) for their valuable input & suggestions.
Appendix A. Interview Questions
Questions asked to the participants during the pilot study on 15-February-2017 & 24-April-2017.
Introductory Questions: (a) How long have you been working at your company and do you have experience workingwith industrial robots? (b) What are your reflection on safety based on what you have seen in the lab? (c) Whatare your reflections on the size and speed of the robot? Do you think that the size and speed matters when it isin the automatic or collaborative mode?
8 Gopinath et al. / Procedia Manufacturing 00 (2017) 000–000
Questions on Safety: (a) What are your comments on the layout in terms of robot, collaborative and operatorworkspace? (b) During the demonstration, you had to go inside the robotic workcell and hand-guide the robotout of the cell? Do you think that it is okay for the robot to be coming out the cell? Was the collaborativeworkspace marked adequately? (c) Did you notice the emergency button? Was the location proper? Please com-ment on interfaces (lights, signals)? (d) How much responsibility can operators have? Is it better for the operatorbe responsible or sensor controlled? Or both.
Questions on Hand-guiding and the tool: (a) What are your overall impression of hand-guiding and do you thinkbeing in control is important? (b) Do you think additional training is needed? If so, how much?
References
[1] Ankrah, S., AL-Tabbaa, O., 2015. Universities-industry collaboration: A systematic review. Scandinavian Journal of Management 31, 387–408. URL: http://dx.doi.org/10.1016/j.scaman.2015.02.003, doi:10.1016/j.scaman.2015.02.003.
[2] Blessing, L.T.M., Chakrabarti, A., 2009. DRM, a Design Research Methodology. 1st ed., Springer Publishing Company, Incorporated.[3] Brogardh, T., 2007. Present and future robot control development – An industrial perspective. Annual Reviews in Control 31, 69–79.[4] Eberts, R., Salvendy, G., 1986. The contribution of cognitive engineering to the safe design and operation of cam and robotics. Journal of
Occupational Accidents 8, 49–67.[5] Ericson, C.A., 2015. Hazard analysis techniques for system safety. John Wiley & Sons.[6] Gopinath, V., site accessed – 20-July 2017. Hand guided collaborative assembly with a kuka kr-210 industrial robot. URL: https://youtu.
be/tFl9hGlhnRU.[7] Gopinath, V., Johansen, K., 2016. Risk Assessment Process for Collaborative Assembly – A Job Safety Analysis Approach. Procedia CIRP
44, 199–203.[8] Gopinath, V., Johansen, K., Olvander, J., 2018. Risk Assessment for Collaborative operations: A case study on hand-guided industrial robots.
InTech, Janeza Trdine 9, 51000, Rijeka, Croatia. doi:10.5772/intechopen.68673.[9] Gopinath, V., Ore, F., Johansen, K., 2017. Safe assembly cell layout through risk assessment – an application with hand guided industrial
robot. Procedia CIRP 63, 430 – 435. Manufacturing Systems 4.0 – Proceedings of the 50th {CIRP} Conference on Manufacturing Systems.[10] Karwowski, W., Rahimi, M., Mihaly, T., 1988. Effects of computerized automation and robotics on safety performance of a manufac-
turing plant. Journal of Occupational Accidents 10, 217 – 233. URL: http://www.sciencedirect.com/science/article/pii/0376634988900156, doi:https://doi.org/10.1016/0376-6349(88)90015-6.
[11] Karwowski, W., Rahimi, M., Parsaei, H., Amarnath, B.R., Pongpatanasuegsa, N., 1991. The effect of simulated accident on worker safetybehavior around industrial robots. International Journal of Industrial Ergonomics 7, 229 – 239. URL: http://www.sciencedirect.com/science/article/pii/0169814191900068, doi:https://doi.org/10.1016/0169-8141(91)90006-8.
[12] Kruger, J., Bernhardt, R., Surdilovic, D., 2006. Intelligent Assist Systems for Flexible Assembly. CIRP Annals - Manufacturing Technology55, 29–32.
[13] Lavis, J.N., Robertson, D., Woodside, J.M., McLeod, C.B., Abelson, J., . How can research organizations more effectively transfer researchknowledge to decision makers? The Milbank quarterly , 221–248doi:10.1111/1468-0009.t01-1-00052, arXiv:arXiv:1011.1669v3.
[14] Leedy, P.D., Ormrod, J.E., 2013. Practical Research: Planning and Design. Pearson Education Limited.[15] Leveson, N.G., 2011. Engineering a Safer World: Systems Thinking Applied to Safety. Engineering systems, MIT Press.[16] Nielsen, K.A., Svensson, L. (Eds.), 2006. Action research and interactive research: beyond practice and theory. Shaker Publishing.[17] Norman, D.A., 1990. The ’Problem’ with Automation: Inappropriate Feedback and Interaction, not ’Over-Automation’. Philosophical Trans-
actions of the Royal Society B: Biological Sciences 327, 585–593. doi:10.1098/rstb.1990.0101.[18] Parsons, H.M., 1986. Human factors in industrial robot safety. Journal of Occupational Accidents 8, 25–47.[19] Potts, C., 1993. Software-Engineering Research Revisited. IEEE Software 10, 19–28. doi:10.1109/52.232392.[20] Sanderson, L.M., Collins, J.W., McGlothlin, J.D., 1986. Robot-related fatality involving a U.S. manufacturing plant employee: Case report
and recommendations. Journal of Occupational Accidents 8, 13–23.[21] Sarter, N.B., Woods, D.D., 1995. How in the World Did We Ever Get into That Mode? Mode Error and Awareness in Supervisory Control.
Human Factors: The Journal of the Human Factors and Ergonomics Society 37, 5–19.[22] Sheridan, T.B., Verplanck, W.L., 1978. Human and computer control of undersea teleoperators.[23] Svensson, L., Ellstrom, P.E., Brulin, G., 2007. Introduction - on Interactive Research. International Journal of Action Research 3, 233–249.[24] Swedish Standards Institute, Stockholm, Sweden, 2010. SS-ISO 12100:2010 – Safety of Machinery – General principles of Design – Risk
assessment and risk reduction (ISO 12100:2010) . SS-EN ISO 12100:2010.[25] Swedish Standards Institute, Stockholm, Sweden, 2011a. SS-ISO 10218-1:2011 – Robots and robotic devices – Safety requirements for
industrial robots – Part 1: Robot).[26] Swedish Standards Institute, Stockholm, Sweden, 2011b. SS-ISO 10218-2:2011 – Robots and robotic devices – Safety requirements for
industrial robots – Part 2: Robot systems and integration).[27] The International Organization for Standardization, 2016. ISO/TS 15066 – Robots and robotic devices – Collaborative robots.[28] Whyte, W.F. (Ed.), 1991. Participatory Action Research. SAGE Focus Editions, SAGE Publications.[29] Yin, R., 2014. Case Study Research: Design and Methods. Applied Social Research Methods, SAGE Publications.
Varun Gopinath et al. / Procedia Manufacturing 17 (2018) 246–253 253Gopinath et al. / Procedia Manufacturing 00 (2017) 000–000 7
6.1. Methodological approach to collaborative research for industrial safety
As noted in section 1.1, the laboratory demonstrator described in section 4 was developed in collaboration withmembers from the industry, academia and research institution. A central principle in the interactive research (IR)approach is the active involvement of participants in the change process. The change process, which in this study, isthe introduction of an industrial robot in a manual assembly station. Several members from the organisation activelyparticipated in realizing this change. Some of the activities were: 1. defining goals and targets, 2. data collection andinterpretation, 3. method selection & 4. requirement analysis. Lack of expertise within the core research group werecomplemented by experts such as those knowledgeable in interpreting regulatory standards. In a traditional way ofconducting research, members of the academic institutions are the main actors (see chapter 2 in Nielsen and Svensson[16]). The activities mentioned above would have been performed by researchers, might result in industrially viablesolutions, but the learning outcomes are limited to the researchers. Therefore, research within a UIC context carriedout through a IR way, joint learning is a natural outcome.
Risk assessment is a methodology that enables standardized reasoning and evaluation of risks and allows theparticipants to document them in a systematic manner. Additionally, it allows for risk reduction measures, as discussedin section 2, to be prescribed, which should result in changes that mitigates the risks associated with known hazards.
6.2. Evaluation of the demonstrator
A qualitative analysis of semi-structured interviews ( Appendix A) is detailed in section 5. The study was designedto evaluate the design decisions taken by the investigators during the research process. One probable outcome of aqualitative study is to gain insights into issues that require a detailed study. The interviewees indicated certain preferredtechniques such as floor illumination and stack lights, which must be evaluated for standard compliance. The feedbackon design changes such as physical design, hand-guiding response etc., needs to be analysed for usability and ensurethat they do not introduce additional hazards.
7. Conclusion
This article presented a methodological approach that was used to develop a physical demonstrator to showcasesafety-solutions of collaborative operations with large industrial robots. The results show that by involving person-nel with multi-disciplinary perspective in the whole research process can result in viable solution relevant for themanufacturing sector. The physical demonstrator represents the cumulative result of a series of research activitiesundertaken with the intention of introducing a robot in a populated work environment in a safe way. In addition to themethodology, results of interviews that were carried to evaluate the demonstrator are also presented. The result of thispilot study, comprising of personnel from the manufacturing industry, indicates that the presented solution is viableand beneficial to their organisation.
Acknowledgements
This work has been primarily funded under the FFI program by Vinnova & the authors would like to graciouslythank them for their support. We would like to thank the members of the research project Collaborative Team of Man& Machine (ToMM 2) for their valuable input & suggestions.
Appendix A. Interview Questions
Questions asked to the participants during the pilot study on 15-February-2017 & 24-April-2017.
Introductory Questions: (a) How long have you been working at your company and do you have experience workingwith industrial robots? (b) What are your reflection on safety based on what you have seen in the lab? (c) Whatare your reflections on the size and speed of the robot? Do you think that the size and speed matters when it isin the automatic or collaborative mode?
8 Gopinath et al. / Procedia Manufacturing 00 (2017) 000–000
Questions on Safety: (a) What are your comments on the layout in terms of robot, collaborative and operatorworkspace? (b) During the demonstration, you had to go inside the robotic workcell and hand-guide the robotout of the cell? Do you think that it is okay for the robot to be coming out the cell? Was the collaborativeworkspace marked adequately? (c) Did you notice the emergency button? Was the location proper? Please com-ment on interfaces (lights, signals)? (d) How much responsibility can operators have? Is it better for the operatorbe responsible or sensor controlled? Or both.
Questions on Hand-guiding and the tool: (a) What are your overall impression of hand-guiding and do you thinkbeing in control is important? (b) Do you think additional training is needed? If so, how much?
References
[1] Ankrah, S., AL-Tabbaa, O., 2015. Universities-industry collaboration: A systematic review. Scandinavian Journal of Management 31, 387–408. URL: http://dx.doi.org/10.1016/j.scaman.2015.02.003, doi:10.1016/j.scaman.2015.02.003.
[2] Blessing, L.T.M., Chakrabarti, A., 2009. DRM, a Design Research Methodology. 1st ed., Springer Publishing Company, Incorporated.[3] Brogardh, T., 2007. Present and future robot control development – An industrial perspective. Annual Reviews in Control 31, 69–79.[4] Eberts, R., Salvendy, G., 1986. The contribution of cognitive engineering to the safe design and operation of cam and robotics. Journal of
Occupational Accidents 8, 49–67.[5] Ericson, C.A., 2015. Hazard analysis techniques for system safety. John Wiley & Sons.[6] Gopinath, V., site accessed – 20-July 2017. Hand guided collaborative assembly with a kuka kr-210 industrial robot. URL: https://youtu.
be/tFl9hGlhnRU.[7] Gopinath, V., Johansen, K., 2016. Risk Assessment Process for Collaborative Assembly – A Job Safety Analysis Approach. Procedia CIRP
44, 199–203.[8] Gopinath, V., Johansen, K., Olvander, J., 2018. Risk Assessment for Collaborative operations: A case study on hand-guided industrial robots.
InTech, Janeza Trdine 9, 51000, Rijeka, Croatia. doi:10.5772/intechopen.68673.[9] Gopinath, V., Ore, F., Johansen, K., 2017. Safe assembly cell layout through risk assessment – an application with hand guided industrial
robot. Procedia CIRP 63, 430 – 435. Manufacturing Systems 4.0 – Proceedings of the 50th {CIRP} Conference on Manufacturing Systems.[10] Karwowski, W., Rahimi, M., Mihaly, T., 1988. Effects of computerized automation and robotics on safety performance of a manufac-
turing plant. Journal of Occupational Accidents 10, 217 – 233. URL: http://www.sciencedirect.com/science/article/pii/0376634988900156, doi:https://doi.org/10.1016/0376-6349(88)90015-6.
[11] Karwowski, W., Rahimi, M., Parsaei, H., Amarnath, B.R., Pongpatanasuegsa, N., 1991. The effect of simulated accident on worker safetybehavior around industrial robots. International Journal of Industrial Ergonomics 7, 229 – 239. URL: http://www.sciencedirect.com/science/article/pii/0169814191900068, doi:https://doi.org/10.1016/0169-8141(91)90006-8.
[12] Kruger, J., Bernhardt, R., Surdilovic, D., 2006. Intelligent Assist Systems for Flexible Assembly. CIRP Annals - Manufacturing Technology55, 29–32.
[13] Lavis, J.N., Robertson, D., Woodside, J.M., McLeod, C.B., Abelson, J., . How can research organizations more effectively transfer researchknowledge to decision makers? The Milbank quarterly , 221–248doi:10.1111/1468-0009.t01-1-00052, arXiv:arXiv:1011.1669v3.
[14] Leedy, P.D., Ormrod, J.E., 2013. Practical Research: Planning and Design. Pearson Education Limited.[15] Leveson, N.G., 2011. Engineering a Safer World: Systems Thinking Applied to Safety. Engineering systems, MIT Press.[16] Nielsen, K.A., Svensson, L. (Eds.), 2006. Action research and interactive research: beyond practice and theory. Shaker Publishing.[17] Norman, D.A., 1990. The ’Problem’ with Automation: Inappropriate Feedback and Interaction, not ’Over-Automation’. Philosophical Trans-
actions of the Royal Society B: Biological Sciences 327, 585–593. doi:10.1098/rstb.1990.0101.[18] Parsons, H.M., 1986. Human factors in industrial robot safety. Journal of Occupational Accidents 8, 25–47.[19] Potts, C., 1993. Software-Engineering Research Revisited. IEEE Software 10, 19–28. doi:10.1109/52.232392.[20] Sanderson, L.M., Collins, J.W., McGlothlin, J.D., 1986. Robot-related fatality involving a U.S. manufacturing plant employee: Case report
and recommendations. Journal of Occupational Accidents 8, 13–23.[21] Sarter, N.B., Woods, D.D., 1995. How in the World Did We Ever Get into That Mode? Mode Error and Awareness in Supervisory Control.
Human Factors: The Journal of the Human Factors and Ergonomics Society 37, 5–19.[22] Sheridan, T.B., Verplanck, W.L., 1978. Human and computer control of undersea teleoperators.[23] Svensson, L., Ellstrom, P.E., Brulin, G., 2007. Introduction - on Interactive Research. International Journal of Action Research 3, 233–249.[24] Swedish Standards Institute, Stockholm, Sweden, 2010. SS-ISO 12100:2010 – Safety of Machinery – General principles of Design – Risk
assessment and risk reduction (ISO 12100:2010) . SS-EN ISO 12100:2010.[25] Swedish Standards Institute, Stockholm, Sweden, 2011a. SS-ISO 10218-1:2011 – Robots and robotic devices – Safety requirements for
industrial robots – Part 1: Robot).[26] Swedish Standards Institute, Stockholm, Sweden, 2011b. SS-ISO 10218-2:2011 – Robots and robotic devices – Safety requirements for
industrial robots – Part 2: Robot systems and integration).[27] The International Organization for Standardization, 2016. ISO/TS 15066 – Robots and robotic devices – Collaborative robots.[28] Whyte, W.F. (Ed.), 1991. Participatory Action Research. SAGE Focus Editions, SAGE Publications.[29] Yin, R., 2014. Case Study Research: Design and Methods. Applied Social Research Methods, SAGE Publications.
Copyright © 2022 FDOKUMEN

