







Bahasa
Halaman
Hukum


Icarus 210 (2010) 770–784
Contents lists available at ScienceDirect
Icarus
journal homepage: www.elsevier .com/ locate/ icarus
Constraints on Europa’s rotational dynamics from modelingof tidally-driven fractures
Alyssa Rose Rhoden a,⇑,1, Burkhard Militzer a,b, Eric M. Huff b,c, Terry A. Hurford d, Michael Manga a,Mark A. Richards a
a University of California at Berkeley, Department of Earth & Planetary Science, Berkeley, CA 94720, United Statesb University of California at Berkeley, Department of Astronomy, Berkeley, CA 94720, United Statesc Lawrence Berkeley National Laboratory, Berkeley, CA 94720, United Statesd NASA Goddard Space Flight Center, Code 693, Greenbelt, MD 20771, United States
a r t i c l e i n f o
Article history:Received 12 February 2010Revised 21 July 2010Accepted 22 July 2010Available online 3 August 2010
Keywords:EuropaTectonicsRotational dynamics
0019-1035/$ - see front matter � 2010 Elsevier Inc. Adoi:10.1016/j.icarus.2010.07.018
⇑ Corresponding author. Address: Department ofUniversity of California, Berkeley, 307 McCone HalUnited States.
E-mail address: [email protected] (A.R. Rho1 Previously published under the surname Sarid.
a b s t r a c t
Cycloids, arcuate features observed on Europa’s surface, have been interpreted as tensile cracks that formin response to diurnal tidal stress caused by Europa’s orbital eccentricity. Stress from non-synchronousrotation may also contribute to tidal stress, and its influence on cycloid shapes has been investigatedas well. Obliquity, fast precession, and physical libration would contribute to tidal stress but have oftenbeen neglected because they were expected to be negligibly small. However, more sophisticated analysesthat include the influence of Jupiter’s other large satellites and the state of Europa’s interior indicate thatperhaps these rotational parameters are large enough to alter the tidal stress field and the formation oftidally-driven fractures. We test tidal models that include obliquity, fast precession, stress due to non-synchronous rotation, and physical libration by comparing how well each model reproduces observedcycloids. To do this, we have designed and implemented an automated parameter-searching algorithmthat relies on a quantitative measure of fit quality, which we use to identify the best fits to observed cyc-loids. We then apply statistical techniques to determine the tidal model best supported by the data. Byincorporating obliquity, fits to observed southern hemisphere cycloids improve, and we can reproduceequatorial and equator-crossing cycloids. Furthermore, we find that obliquity plus physical libration isthe tidal model best supported by the data. With this model, the obliquities range from 0.32� to 1.35�.The libration amplitudes are 0.72–2.44�, and the libration phases are �6.04� to 17.72� with one outlierat 84.5�. The variability in obliquity is expected if Europa’s ice shell is mechanically decoupled fromthe interior, and the libration amplitudes are plausible in the presence of a subsurface ocean. Indeed,the presence of a decoupling ocean may result in feedbacks that cause all of these rotational parametersto become time-variable.
� 2010 Elsevier Inc. All rights reserved.
1. Introduction
Cycloids are chains of arcs, with each arc linked by a cusp, oftenflanked by paired ridges (Fig. 1). It has been proposed that theyform as tensile cracks propagating in response to diurnally-varyingtidal stress on Europa (Hoppa et al., 1999a, 2001; Hurford et al.,2007; Marshall and Kattenhorn, 2005), thus recording the stresschanges that occurred during their formation. A physical modelbased on this hypothesis has been developed (Hoppa et al.,1999a, 2001). First, the tidally-induced tension in a region must in-
ll rights reserved.
Earth and Planetary Science,l, Berkeley, CA 94720-4767,
den).
crease enough to initiate tensile failure in the ice shell, forming acrack perpendicular to the direction of maximum tension. As Euro-pa orbits Jupiter, the magnitude and direction of the stress fieldchange causing the crack to propagate along a curved path, follow-ing the maximum tension. Later, the magnitude of the stress at thecrack tip drops below the failure threshold for propagation, com-pleting one arc. The crack then remains dormant as the stress fieldcontinues to change. When the stress at the crack tip increasesabove the initiation threshold, failure reinitiates, although thepropagation direction has changed, resulting in a cusp. Subse-quently, one of several proposed processes (e.g. Greenberg et al.,1998; Head et al., 1999; Nimmo and Gaidos, 2002) creates ridgesadjacent to the crack, perhaps reflecting many cycles of openingand closing along the crack. Since the tidal stresses thought to beresponsible for cycloid formation are governed by Europa’s orbitaland rotational parameters, finding a model stress field that

Fig. 1. Mosaic of Voyager 2 images (PIA00325) showing the three southernhemisphere cycloids in this study: Cilicia, Sidon, and Delphi. Examples of cusps aremarked with white circles.
A.R. Rhoden et al. / Icarus 210 (2010) 770–784 771
reproduces observed cycloids should provide constraints on theseparameters.
An important consideration is whether eccentricity alone con-tributes to tidal stress. Europa may rotate slightly faster than syn-chronous due to tidal torques on the daily-varying bulges(Greenberg and Weidenschilling, 1984). If Europa’s surface isslowly reoriented with respect to Jupiter, elastic stresses can buildup on its surface. The main observational support for such rotationis the mismatch between characteristics of observed tectonic fea-tures and the expected characteristics given the tidal stress fielddue to eccentricity; these inconsistencies can often be eliminatedby shifting features in longitude presumably due to non-synchro-nous rotation of Europa’s surface (for a detailed compilation ofobservational evidence, see Bills et al., 2009). The present-day per-iod of non-synchronous rotation is at least 12,000 years, an obser-vational limit set by the lack of evidence of rotation betweenVoyager and Galileo imagery (Hoppa et al., 1999b). Given this slowrate, stress from the rotation of Europa’s ice shell may be able toviscously relax and not contribute to surface stress. Moreover,Goldreich and Mitchell (2010) conclude that, for non-synchronousrotation of the ice shell to occur, the stress induced by rotationmust be limited to small values. The propensity to rotate is thentied to the relaxation timescale of the induced stress. Since stressfrom non-synchronous rotation may be limited in influencingcrack formation, the disparity between theory and observationmay come from other sources of diurnal tidal stress. Contributionsto diurnal tidal stress from obliquity and physical libration havenow been quantified (Hurford et al., 2009a,b) and may influencecycloid formation.
Europa’s obliquity should be driven toward zero by tidal dissi-pation (e.g. Peale, 1999). However, gravitational interaction among
Jupiter’s largest satellites can force the obliquity of Europa to be�0.1� if Europa acts as a solid body (Bills, 2005). The obliquitycould be many times larger if the surface is mechanically decou-pled from the interior (Bills et al., 2009), as expected from severallines of evidence that indicate a global ocean underlying Europa’sicy shell (Anderson et al., 1998; Carr et al., 1998; Kivelson et al.,2000; Hoppa et al., 1999a; Squyers et al., 1983). The magnitudeof the obliquity is expected to change on timescales of 10–103 years, with larger variations for a decoupled ice shell (Billset al., 2009). The direction of the spin pole can change by 0.2�/day to more than 2�/day depending again on Europa’s internalstructure (Bills, 2005; Bills et al., 2009). Even an obliquity as smallas 0.1� could generate a significant fraction of Europa’s tidal heat(Tyler, 2008), which may contribute to the long-term stability ofthe ocean, and would alter the pattern of Europa’s time-varying ti-dal stress, thus influencing the formation of tidally-driven cracks(Bills, 2005; Bills et al., 2009; Hurford et al., 2009a,b). Despite itspotential importance, there are few observational constraints onEuropa’s obliquity. Theoretical arguments (e.g. Bills, 2005) onlyprovide a lower bound (0.1�). There is no upper bound, but the lackof signal in the gravity measurements requires that Europa’s obliq-uity is small (Anderson et al., 1998).
Gravitational torques from Jupiter on the oblate shape of Europamay force a longitudinal libration of the tidal bulges in addition tothat caused by Europa’s eccentricity. According to the work of Billset al. (2009), if Europa acts as a solid body, physical libration wouldcause a longitudinal displacement amplitude of 133 m at the equa-tor, which corresponds to a libration amplitude of 0.005�. If anocean is present, this value could increase by as much as a factorof 1000 although gravitational coupling between the shell andthe interior likely restricts this amplification somewhat (see also,Van Hoolst et al., 2008).
If cycloids do form in response to tidal stress, we may be able toextract from their shapes information about the rotational dynam-ics of Europa that contribute to tidal stress. We test different tidalmodels by comparing their proficiency at reproducing observedcycloids. This process allows us to identify relevant rotationalparameters, including ones neglected in previous work, and con-strain both the dynamical and mechanical parameters that governcycloid formation. Specifically, we seek to determine whetherobliquity, fast precession, stress or longitude migration due tonon-synchronous rotation, and/or physical libration are indicatedby cycloid shapes, and if so estimate their values. In addition, themechanical parameter values indicated by our cycloid fits may of-fer some insight as to the physical process of cycloid formation.
With each of the tidal models we investigate, we adjust param-eters to identify the best fits to three cycloids in the southernhemisphere and three equatorial cycloids. To accomplish this, wefirst augment the tidal stress equations to include the dynamicalparameters of interest and then apply numerical techniques, whichrely on a quantitative measure of fit quality, to identify the param-eter sets that best fit the observed cycloids. Incorporating onlyobliquity and using our systematic and quantitative approach (de-scribed in Section 3.3), we find better fits to southern hemispherecycloids, in some cases with far fewer free parameters, than in pre-vious work that neglected obliquity (Hoppa et al., 2001; Hurfordet al., 2007). We also successfully reproduce equatorial cycloids,including the cycloid fit by Hurford et al. (2009a,b); our methodol-ogy allows a more precise estimate of the obliquity required forthis feature (Section 5.2). Statistical analysis shows that a tidalmodel including obliquity is heavily favored over models that donot (Section 5.1). When we combine obliquity with other effects,we find that neither fast precession nor non-synchronous rotationstresses make significant contributions in most cases, but physicallibration further improves our fits, sometimes by an order of mag-nitude. In fact, we show that a tidal model that includes both obliq-

772 A.R. Rhoden et al. / Icarus 210 (2010) 770–784
uity and physical libration is favored over all other models (Sec-tion 5.1). We find Europa’s obliquity to be large (for a tidally-damped satellite) and different for each feature, as expected for amechanically decoupled ice shell. Since the predicted timescalefor obliquity change is short compared to Europa’s surface age(Bills et al., 2009), it is reasonable to expect that cycloids, whichmay have formed at different times in Europa’s history, would alsohave formed with different amounts of obliquity. The relativelylarge and varying libration amplitudes we find are also best ex-plained by the presence of a global ocean, which could act todecouple the shell and interior of Europa.
2. Past cycloid modeling
Hoppa et al. (2001) showed that a formation model based on ti-dal stress could account for the general trends of cycloids in thesouthern hemisphere of Europa (Fig. 1) when the calculated stres-ses included the effects of Europa’s forced eccentricity. However, increating these fits, Hoppa et al. (2001) imposed the condition thatthe crack always stops propagating at the end of each Europan or-bit in order to ensure that a cusp is generated when cracking reini-tiates in the next orbit. Hurford et al. (2007) removed thiscondition and was still successful at matching the general shapesof cycloids in the southern hemisphere although they required dif-ferent parameters than were reported by Hoppa et al. (2001). Hur-ford et al. (2007) was able to further improve fits after allowing themechanical parameters (the stress at which the crack will start andstop propagating and the crack propagation speed) to vary arbi-trarily for each arc of a cycloid. Whether this variation reflects realdifferences in the material properties of Europa’s ice shell is un-clear; the improvement in fit may have only been due to the addi-tion of free parameters. Fits from both studies required shifts information longitude from the current locations of the observedcycloids, which was attributed to non-synchronous rotation ofthe ice shell (Hoppa et al., 2001). In fact, Hurford et al. (2007) ob-tained slightly better fits when they added stress from 0.5� of non-synchronous rotation (NSR) into the tidal model used to reproducecycloids. However, their model failed to reproduce observed equa-torial and equator-crossing cycloids even with stress from non-synchronous rotation (Hurford et al., 2007, 2009a).
Hurford et al. (2009a) examined the effects of a hypotheticalobliquity of 0.1� on the global cycloid distribution especially inso-far as it pertained to equatorial and equator-crossing cycloids. Inthe absence of obliquity, the stress field is symmetric across theequator, which restricts the formation of equator-crossing cycloidsto certain longitudes and propagation directions (nearly north–south). In addition, these simulated equatorial cycloids appearboxy and quite distinctive from the arcuate features predicted forother regions of the stress field. These characteristics are inconsis-tent with many observed cycloids. However, boxy cycloids are in-deed observed on Europa and cluster in two regions that lie �180�apart. The better imaged of these regions is referred to as theWedges (Argadnel Regio). The eccentricity-only model predictsthat these regions would both be centered on the equator. Instead,one region lies just north of the equator, and the other is just south.These regions deviate from the predictions in the opposite direc-tion expected from polar wander (Sarid et al., 2002). For certainspin pole directions, an obliquity of at least 0.1� would result inan offset of the Wedges regions by an amount and in a directionthat is consistent with the observations (Hurford et al., 2009a).
At longitudes outside of the regions of boxy cycloids, the stressfield with obliquity would produce arcuate equator-crossing cyc-loids with arcs of consistent concavity, in agreement with observa-tions. However, 0.1� of obliquity was insufficient to reproduce anobserved equator-crossing cycloid informally called Tyrrel (Hur-
ford et al., 2009a). Rather, an obliquity of 0.25� resulted in a qual-itatively good, albeit preliminary, fit. This fit used a different set ofmechanical parameters for each arc (30 free parameters in all) anddid not reproduce the last arc. The 30-dimensional parameterspace was searched by hand and the quality of the fit was deter-mined subjectively, which was the same method used to obtain fitsto cycloids in the southern hemisphere (Hoppa et al., 2001; Hur-ford et al., 2007).
The results presented by Hurford et al. (2009a) indicate that anobliquity of 0.1�, the value expected from interactions between asolid Europa and the other large satellites, would alter the tidalstress field in ways that make global cycloid patterns more consis-tent with observations. However, the value of the obliquity is stillin question as the only fit to an observed, equator-crossing cycloidrequired a larger obliquity. The reliability of the 0.25� result is fur-ther diminished by the use of so many free parameters in achievingthe fit to Tyrrel. Finally, the methods used to identify and evaluatepotential fits were not systematic enough to ensure the best fitwithin parameter space was identified.
Our work is an improvement over previous studies because we(1) include the effects of obliquity, non-synchronous rotation, fastprecession, and physical libration, (2) use numerical methods tocomprehensively explore parameter space, (3) use a quantitativerather than subjective measure of fit quality, and (4) apply statisti-cal analysis to compare tidal models and constrain the values ofthe parameters in each model.
3. Methodology
3.1. Eccentricity, obliquity, and non-synchronous rotation
If Europa maintained a circular orbit, had zero obliquity, and ro-tated synchronously, the tidal bulges raised by Jupiter would be lo-cated on the equator and at the same longitude throughout eachorbit (Peale, 1999). Over time, Europa would permanently adoptthe shape governed by this primary tide. Because Europa’s orbitis eccentric, however, the distance and location of Jupiter varieswith respect to Europa. This causes Europa’s tidal shape to deviatefrom the primary tidal figure in both magnitude and direction,which generates stress on Europa’s surface (Greenberg et al.,1998). Similarly, obliquity and non-synchronous rotation act toreorient Europa’s tidal bulges away from the primary tidal shape.The total tidal stress field imposed on Europa’s surface is the com-bination of the primary tide, eccentricity-driven tide, obliquity-dri-ven tide, and stress induced by non-synchronous rotation.
In order to calculate this field, we assume a thin, elastic, outershell that is mechanically decoupled from the interior. This outerlayer conforms to fit the tidally-controlled shape of Europa’s inte-rior. The surface stress generated by the primary tide is given by(e.g., Melosh, 1977,1980)
rd ¼ Cð5þ 3 cos 2dPÞ ð1aÞra ¼ �Cð1� 9 cos 2dPÞ ð1bÞ
where C = 3h2Ml(1 + m)/8pqa3(5 + m) and h2 is the tidal Love num-ber, M is Jupiter’s mass, l is the shear modulus, m is Poisson’s ratio,q is the average density, a is the distance between Jupiter and Euro-pa, and dP is the angular distance from a point on Europa’s surface tothe primary tidal bulge. The rd stress is directed radially from thetidal bulges and the ra stress is perpendicular to the rd stress. Forthe elastic parameters, we use the values of l = 3.52 � 109 Pa andm = 0.33, which are appropriate for water ice (Gammond et al.,1983). We set h2 = 1.275, which corresponds to a 30 m tidal ampli-tude (Greenberg et al., 1998). These are the same values used in pre-vious modeling studies (Hoppa et al., 2001; Hurford et al., 2007).
A.R. Rhoden et al. / Icarus 210 (2010) 770–784 773
Europa’s eccentricity causes the tidal bulges to oscillate in lon-gitude while obliquity predominantly causes a latitudinal oscilla-tion. Spherical trigonometry is used to calculate the varyinglocation of the tidal bulge, which depends on the spin pole direc-tion (SPD) and the true anomaly. Since the locations of the tidalbulges are changing, the angular distance to the bulge, d, alsochanges. The tidal stress equations can thus be modified to accountfor the eccentricity and obliquity (see also Hurford et al., 2009a).
rd ¼ Cð1� e cos nÞ�3ð5þ 3 cos 2dÞ ð2aÞra ¼ �Cð1� e cos nÞ�3ð1� 9 cos 2dÞ ð2bÞ
and
bulge colatitude ¼ p=2� e sinðnþuÞ ð2cÞbulge longitude ¼ �2e sin n ð2dÞ
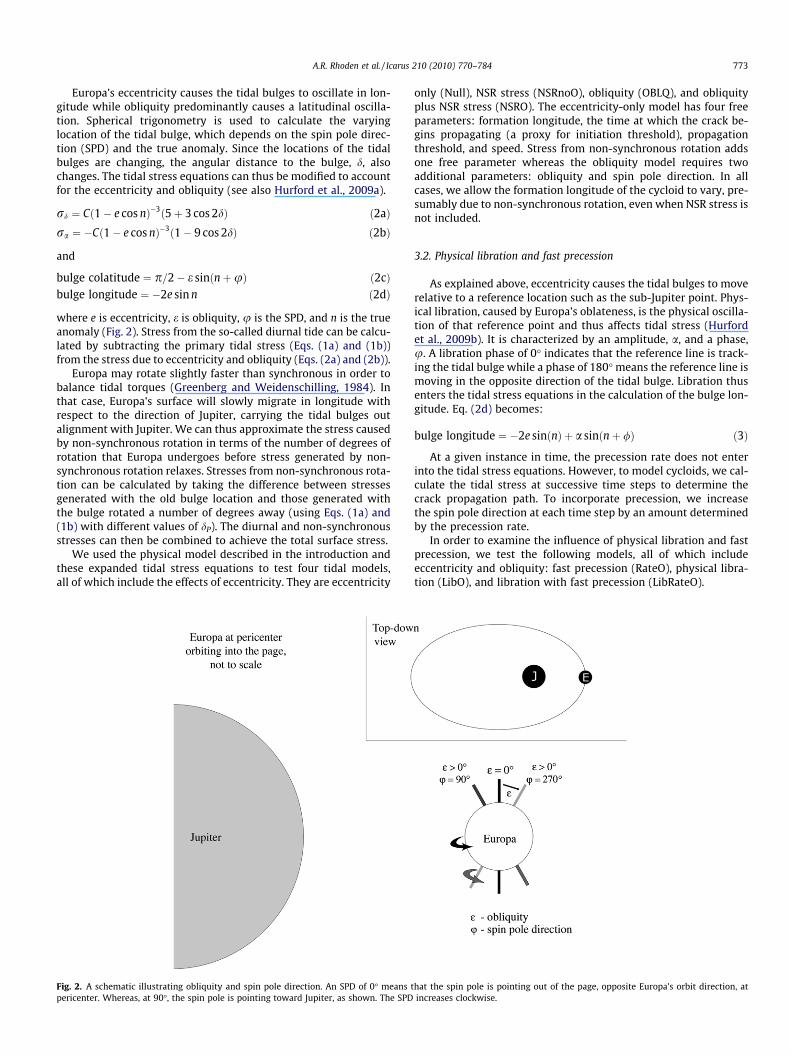
where e is eccentricity, e is obliquity, u is the SPD, and n is the trueanomaly (Fig. 2). Stress from the so-called diurnal tide can be calcu-lated by subtracting the primary tidal stress (Eqs. (1a) and (1b))from the stress due to eccentricity and obliquity (Eqs. (2a) and (2b)).
Europa may rotate slightly faster than synchronous in order tobalance tidal torques (Greenberg and Weidenschilling, 1984). Inthat case, Europa’s surface will slowly migrate in longitude withrespect to the direction of Jupiter, carrying the tidal bulges outalignment with Jupiter. We can thus approximate the stress causedby non-synchronous rotation in terms of the number of degrees ofrotation that Europa undergoes before stress generated by non-synchronous rotation relaxes. Stresses from non-synchronous rota-tion can be calculated by taking the difference between stressesgenerated with the old bulge location and those generated withthe bulge rotated a number of degrees away (using Eqs. (1a) and(1b) with different values of dP). The diurnal and non-synchronousstresses can then be combined to achieve the total surface stress.
We used the physical model described in the introduction andthese expanded tidal stress equations to test four tidal models,all of which include the effects of eccentricity. They are eccentricity
Fig. 2. A schematic illustrating obliquity and spin pole direction. An SPD of 0� means tpericenter. Whereas, at 90�, the spin pole is pointing toward Jupiter, as shown. The SPD
only (Null), NSR stress (NSRnoO), obliquity (OBLQ), and obliquityplus NSR stress (NSRO). The eccentricity-only model has four freeparameters: formation longitude, the time at which the crack be-gins propagating (a proxy for initiation threshold), propagationthreshold, and speed. Stress from non-synchronous rotation addsone free parameter whereas the obliquity model requires twoadditional parameters: obliquity and spin pole direction. In allcases, we allow the formation longitude of the cycloid to vary, pre-sumably due to non-synchronous rotation, even when NSR stress isnot included.
3.2. Physical libration and fast precession
As explained above, eccentricity causes the tidal bulges to moverelative to a reference location such as the sub-Jupiter point. Phys-ical libration, caused by Europa’s oblateness, is the physical oscilla-tion of that reference point and thus affects tidal stress (Hurfordet al., 2009b). It is characterized by an amplitude, a, and a phase,u. A libration phase of 0� indicates that the reference line is track-ing the tidal bulge while a phase of 180� means the reference line ismoving in the opposite direction of the tidal bulge. Libration thusenters the tidal stress equations in the calculation of the bulge lon-gitude. Eq. (2d) becomes:
bulge longitude ¼ �2e sinðnÞ þ a sinðnþ /Þ ð3Þ
At a given instance in time, the precession rate does not enterinto the tidal stress equations. However, to model cycloids, we cal-culate the tidal stress at successive time steps to determine thecrack propagation path. To incorporate precession, we increasethe spin pole direction at each time step by an amount determinedby the precession rate.
In order to examine the influence of physical libration and fastprecession, we test the following models, all of which includeeccentricity and obliquity: fast precession (RateO), physical libra-tion (LibO), and libration with fast precession (LibRateO).
hat the spin pole is pointing out of the page, opposite Europa’s orbit direction, atincreases clockwise.

Fig. 3. Contour plots of the maximum tensile stress magnitudes using various tidal models (columns) to show the influence of obliquity and physical libration on the diurnaltidal stress field at four times during the orbit (rows).
774 A.R. Rhoden et al. / Icarus 210 (2010) 770–784
3.3. Visualizing the diurnal stress field
The first column of Fig. 3 shows contours plots of the maximumtensile stress from the diurnal tide, generated by eccentricity only,at four times in Europa’s orbit. Note that tension is positive in theseplots. At pericenter (t = 0), Europa is at its closest point to Jupiter,so the diurnal tidal amplitude is at a maximum and is aligned withthe primary bulge direction. The net result is an enhancement ofthe primary tidal deformation: tension at the sub- and anti-Jupiterpoints (longitude 0� and 180�, respectively) and compression in aring 90� away. As Europa continues its orbit, the magnitude ofthe eccentricity tide decreases but its direction moves out of align-ment with the primary tidal bulge so it is not completely canceledout when the primary bulge is subtracted. The resultant diurnalbulge is offset from the sub-Jupiter point leading to a concentrationof tension at the bulge longitude and compression 90� away, asshown in the panel marked t = p/2. A similar pattern emerges att = 3p/2 in which the offset is the opposite direction. At apocenter,Europa is farther from Jupiter than average, so the eccentricity tideis smaller than the primary tide with which it aligns. The diurnalstress at t = p thus becomes inverted with compression at thesub- and anti-Jupiter points and tension in a band 90� away.
The influence of obliquity on the diurnal stress field depends onthe spin pole direction (SPD) because it controls when in Europa’s
orbit Jupiter will cross Europa’s equator into the northern or south-ern hemispheres. An SPD of 90� indicates that the pole is pointingtoward Jupiter when Europa is at pericenter (see Fig. 2 for a sche-matic), and spin pole direction increases clockwise. Hurford et al.(2009a,b) represented the same phenomenon with a variablecalled argument of pericenter, x, which is equal to the SPD. Withan SPD of 0�, the obliquity-driven bulge is on the equator at peri-center and apocenter at which times the eccentricity-driven bulgeis at the sub-Jupiter point. Thus, at t = 0 and t = p in column 2 ofFig. 3, the diurnal stresses are the same as in the eccentricity-onlycase. At t = p/2 and t = 3p/2, however, the stress pattern is skewedbecause the obliquity bulge is now off of the equator. When theSPD = 90�, the obliquity tide is at a maximum in magnitude anddistance from the equator at t = 0. When combined with the effectsof eccentricity, the result is still tension at the sub- and anti-Jupiterpoints but now the stresses are offset in latitude: north of theequator at longitude 0� and south at longitude 180�. At t = p/2and t = 3p/2, obliquity does not cause an offset of the bulge latitudeso the stress field is no different from the eccentricity-only case. Att = p, the diurnal stress is inverted and offset yielding compressivestress concentrations north of the equator at longitude 0� andsouth of the equator at longitude 180�.
Physical libration can reduce or enhance the effective longitudi-nal separation between the primary and eccentricity-driven tidal

Table 1Parameters and range of values.
Parameter Range of allowed values
Longitude 0 – 360�Obliquity 0 – 3.0�Spin pole direction 0 – 360�Amount of non-synchronous rotation that
produces stress0 – 3.0�
Start time (proxy for crack initiationthreshold)
Number of steps perorbit (850)
Threshold for crack propagation > 0 and 6 200 kPaApparent propagation speed > 0 and 6 20 m/sLibration amplitude 0 – 3.0�Libration phase 0 – 360�Precession rate 0 – 2.5�/day
A.R. Rhoden et al. / Icarus 210 (2010) 770–784 775
bulges depending on the libration phase. As shown in column 4 ofFig. 3, for a phase of 0�, physical libration has no effect at t = 0 ort = p. However, at t = p/2 and t = 3p/2, the libration reduces thelongitudinal separation between the bulges so the diurnal stressexhibits the same pattern as the eccentricity-only case (column1), but with much lower magnitudes. When the libration phase is90� (column 5), the libration is out of phase with the longitudinalmotion of the eccentricity-driven bulge. At t = 0, the physical libra-tion determines the location of the bulge, and the resulting diurnalstress pattern is thus offset from the sub-Jupiter point. At t = p/2and t = 3p/2, the libration does not alter the location of the eccen-tricity-driven bulge, so the stress is the same as in the eccentricity-only case. When both obliquity and physical libration are non-zero,even more complex patterns arise as the components interfere atdifferent points in the orbit. See Supplementary online materialfor contour plots of the diurnal stresses in these cases.
3.4. Finding and evaluating fits
Latitude and longitude information for Europan cycloids wasobtained from the Galileo data set. Most cycloids appear as typicaldouble ridges, so we recorded the location of the central trough ofthe cycloid as a proxy for the crack propagation path. This methodis limited by the resolution of the images and the clarity of thepath. Younger cycloids tend to have more clearly defined paths,although cycloids that do not have well-developed ridges (thoughtto be a sign of youth) can be difficult to trace especially when theyare parallel to the Sun direction. In addition to the southern hemi-sphere cycloids fit by previous authors, we selected three equato-rial cycloids that each had three or more complete arcs (i.e. cuspson both sides of the arc were visible), were not significantly dis-rupted within those arcs, and had arcs with substantial radius ofcurvature such that a straight line through the arc would be a poorfit. In theory, we could include all cycloids that meet these qualifi-cations in our study. However, the main goal of this work was totest different tidal models to determine if they contain a signal ofrotational parameters that have not been measured directly. Oncea preferred tidal model has been identified, comprehensive map-ping and modeling of cycloids could be a very useful next step.
In order to evaluate a fit, we first translate the observed cycloiddata points in longitude such that the starting point of the ob-served and simulated cycloids are the same, since the differencein starting longitude is attributed to non-synchronous rotationmoving the cycloid rather than model misfit. We then computethe deviation in latitude and longitude by comparing the datapoints to interpolated points on the simulated curve that lie atthe same fractional length as the data points. From this, we obtaina v2 for the model fit and then divide by the number of data pointsto achieve the reduced v2.
The ranges of the model parameters that define our searchspace are listed in Table 1. The starting longitude of the cycloidscan vary a full 360�; with obliquity there is no symmetry acrossthe sub-Jupiter point. The obliquity of Europa is known to below, so we limited the obliquity to 3�. The spin pole directioncan vary from 0� to 360�. Although the stress field with obliquityis not symmetric about the sub-Jupiter point, there is a degeneracybetween longitude and spin pole direction such that, when bothare modulated by 180�, the stress field is identical. The amountof stress that can accumulate due to non-synchronous rotationhas been restricted to less than 3�. The libration amplitude rangesfrom 0� to 3�, and the phase can vary from 0� to 360�. The preces-sion rate ranges from 0� to 2.5�. The number of (Eulerian) timesteps per orbit constrains the possible values of the starting time(the point in the orbit at which the crack begins propagating);we use 850 time steps per orbit. The crack propagation speedcan be up to 20 m/s with this time step.
In our simulations, the threshold for crack initiation is specifiedthrough the selection of a time in the orbit when the crack will be-gin propagating. That way, the initiation stress is restricted to val-ues that exist within the stress field without us having to guess themaximum stress that can be achieved with each tidal model. Thethreshold for crack initiation is also required to be greater thanthe propagation threshold, which determines at what stress thecrack stops moving. Both thresholds must be greater than zero,as we hypothesize these cracks to form and propagate in tension.
In the original cycloid modeling work of Hoppa et al. (2001),only one set of parameters governed the formation of the entire cy-cloid. In more recent studies (e.g. Hurford et al., 2007, 2009a) themechanical parameters were varied for each arc of a cycloid. Itwas thought that the surface could be heterogeneous in ways thatallow arcs to form at different thresholds or propagate at differentspeeds. For this work, we did not vary the cracking parametersover the length of a cycloid. It was our hypothesis that includingthe effects of additional dynamical parameters and using auto-mated parameter searching would allow us to identify parametersets that provide good fits to observed cycloids without addingthese extra degrees of freedom, thus strengthening our results.
When a cycloidal crack first begins propagating, it can go in oneof two directions (e.g. – southwest or northeast). Without obliq-uity, the propagation direction and the concavity of the cycloidalarcs are linked, so the propagation direction of a cycloid can bedetermined by simple observation (Hoppa et al., 2001). However,both obliquity and libration alter the stress patterns such thatcracks can propagate in either direction with the same concavity.To deal with this ambiguity, the initial propagation direction (eastto west or west to east) is specified at the beginning of the simula-tion, and runs in both directions were attempted for each cycloidfor tidal models that included obliquity or libration.
To determine the set of model parameters that best reproducesan observed cycloid, we developed an automated parameter-searching algorithm that combines Broyden–Fletcher–Goldfarb–Shanno (BFGS) conjugate gradient optimization (Dennis and Schn-abel, 1983; Jacobs, 1977), global 1, 2, and 3 dimensional parameterscanning, and local Monte Carlo search methods (Hastings, 1970).The fitting process begins with a random set of parameter values;the cycloid they produce is compared to the data and the initial v2
is determined. Coarse-grid scans of the parameter space are thenperformed, and the parameter set that produces a cycloid withthe lowest v2 is adopted (provided that this value is less thanthe initial v2). Once this initial scan is complete, the BFGS optimi-zation algorithm begins at the parameter set found by the scan andtakes small steps through parameter space reducing the v2. Be-cause the likelihood surface is rough even on small scales, localMonte Carlo is used to further constrain the minimum identifiedusing BFGS. We then perform additional scans, increasing the num-ber of dimensions over which the scanning occurs and decreasing

Fig. 4. Images from a global mosaic showing the three equatorial cycloids included in this study: (a) EQ1, (b) EQ2, and (c) EQ3.
776 A.R. Rhoden et al. / Icarus 210 (2010) 770–784
the grid spacing, in search of another, disconnected region ofparameter space with lower v2. The combination of these searchstrategies allows us to explore the local parameter region and tomake large jumps to reach other basins around other minima.The simulation ends when even the finest scans over three dimen-sions of parameter space fail to identify a lower v2 parameter set.Such a complex approach is required due to the complexity of thefitness landscape. Tiny changes in some model parameters can leadto large changes in the quality of a fit. For example, a small changein a parameter that controls the stress field may reduce the stressjust enough to inhibit crack initiation after a cusp or prevent cy-cloid formation altogether. Despite our multi-pronged approach,the algorithm can still become trapped in local minima, so werun 500 simulations each starting in a different, randomly-chosen,region of parameter space.
This methodology allows us to determine uncertainties in ourfit parameters. We use Markov Chain Monte Carlo (Hastings,1970), beginning at the ending points of our most promising sim-ulations, to create histograms for each parameter. We also identifythe parameter set that produced the lowest chi-squared withineach Markov Chain. To compute the uncertainty for a given param-eter, we apply the expression
db2 ¼ hðbi � b�Þ2ii ð4Þ
where b is any varied parameter of interest, b* is the value corre-sponding to the best fit (lowest v2), i represents each entry in theMarkov Chain, and db is the 1r (68%) uncertainty. Since we varythe time in the orbit at which the crack began propagating as aproxy for the initiation threshold, we do not report uncertaintiesfor initiation threshold.
Our strategy is an improvement over that of previous cycloidmodeling efforts, which relied on manual parameter searchesand subjective evaluation of fits and were thus unable to computeuncertainties (Hoppa et al., 2001; Hurford et al., 2007, 2009a,b).However, the runtime of each simulation, the numerous simula-tions we complete for each model and each cycloid, and thelengthy Markov Chains required for error analysis do make this ap-proach computationally intensive.
4. Results
We reproduced three of the cycloids considered by Hoppa et al.(2001) and Hurford et al. (2007), which lie in the southern hemi-sphere (Fig. 1), and three equatorial cycloids (Fig. 4), includingthe one fit by Hurford et al. (2009a,b). Fig. 5a–c shows our best fitsto the southern hemisphere cycloids using three tidal models: Null,NSRnoO, and OBLQ. Fits for the equatorial cycloids are shown inFig. 6a–c. For each cycloid, the black, dotted line traces out the datapoints we extracted from Galileo imagery and the colored lines areour best fits for each model. The v2, best-fit parameters, and corre-sponding uncertainties are listed in Table 2 (the exact values usedto generate the plots are available in the SOM). The fits are shownat the current longitudes of the observed cycloids, but they wereproduced at different longitudes, implying that these cycloids havemigrated since they formed. In Table 2, we report both the longi-tude at which we obtained the fit (formation longitude) and theamount of eastward migration from the fit longitude to the ob-served longitude (longitude migration), which is consistent withthe hypothesis that eastward non-synchronous rotation is themechanism for longitudinal displacement of the cycloids. The fitswith the OBLQ model are far superior to those using the Null mod-

Fig. 5. Fits to the three southern hemisphere cycloids: (a) Cilicia, (b) Delphi, and (c) Sidon. Data for each cycloid is shown as a black dotted line. The best fit with theeccentricity-only model (Null) is shown in red, the model with stress from non-synchronous rotation (NSRnoO) in blue, and obliquity (OBLQ) in orange.
A.R. Rhoden et al. / Icarus 210 (2010) 770–784 777

Fig. 6. Fits to the three equatorial cycloids: (a) EQ1, (b) EQ2, and (c) EQ3. Data for each cycloid is shown as a black dotted line. The best fit with the eccentricity-only model(Null) is shown in red, the model with stress from non-synchronous rotation (NSRnoO) in blue, and obliquity (OBLQ) in orange.
778 A.R. Rhoden et al. / Icarus 210 (2010) 770–784

Tab
le2
Para
met
erva
lues
,unc
erta
inti
es,a
ndco
rres
pond
ingv
2fo
rth
ebe
stfi
tto
each
cycl
oid
wit
hea
chti
dal
mod
el.
Mod
eln
ame
Rot
atio
nal
para
met
ers
test
edFe
atu
rePr
opdi
r.v
2Fo
rmat
ion
lon
gitu
de(1
)Fo
rmat
ion
lon
gitu
de(2
)Lo
ngi
tude
mig
rati
on(1
)
Lon
gitu
dem
igra
tion
(2)
OB
LQ(�
)Sp
inpo
ledi
rect
ion
(1)
(�)
Spin
pole
dire
ctio
n(2
)(�
)N
SRst
ress
(�)
Libr
atio
nam
plit
ude
(�)
Libr
atio
nph
ase
(�)
Prec
essi
onra
te(�
/day
)In
itia
tion
thre
shol
d(k
Pa)
Prop
agat
ion
thre
shol
d(k
Pa)
Prop
agat
ion
spee
d(k
m/h
)
Nu
ll–
Cil
icia
W2E
1994
9.03
271.
169
±0.
015
91.1
6966
.299
246.
299
––
––
––
–31
31.5
00±
0.01
62.
8836
±0.
0007
NSR
noO
NSR
Cil
icia
W2E
1117
.17
226.
247
±0.
034
46.2
4721
.377
201.
377
––
–0.
8689
±0.
0018
––
–53
15.9
14±
0.13
2.64
16±
0.00
44O
BLQ
OB
LQC
ilic
iaW
2E80
2.40
52.7
61±
0.04
623
2.76
120
7.89
127
.891
0.68
54±
0.00
288.
54±
0.28
188.
54–
––
–96
34.7
6±
0.12
5.59
33±
0.00
75N
SRO
OB
LQ,N
SRC
ilic
iaW
2E80
2.40
*52
.761
±0.
046
232.
761
207.
891
27.8
910.
6854
±0.
0028
8.54
±0.
2818
8.54
0.00
––
–96
34.7
6±
0.12
5.59
33±
0.00
75R
ateO
OB
LQ,P
rece
ssio
nra
teC
ilic
iaW
2E80
1.28
52.2
14±
0.04
623
2.21
420
7.34
427
.344
0.67
16±
0.00
174.
25±
0.36
184.
25–
––
0.72
85±
0.00
4095
34.8
3±
0.13
5.58
3±
0.01
4Li
bOO
BLQ
,Lib
rati
onC
ilic
iaW
2E61
3.85
268.
93±
0.18
88.9
3264
.062
244.
062
0.72
73±
0.00
6227
6.44
±0.
5196
.44
–0.
716
±0.
014
17.3
4±
0.42
–94
27.2
9±
0.81
5.61
3±
0.01
1Li
bRat
eOO
BLQ
,Lib
rati
on,P
rece
ssio
nra
teC
ilic
iaW
2E61
3.74
268.
90±
0.15
88.8
9964
.03
244.
030.
7274
±0.
0015
276.
38±
0.17
96.3
75–
0.71
8±
0.00
117
.23
±0.
160.
0007
±0.
0012
9427
.176
±0.
115.
6170
±0.
0089
Nu
ll–
Del
phi
E2W
3810
.29
36.2
76±
0.01
521
6.27
624
7.64
667
.646
––
––
––
–62
61.6
07±
0.01
35.
2323
±0.
0022
NSR
noO
NSR
Del
phi
E2W
2716
.28
198.
817
±0.
021
18.8
1750
.187
230.
187
––
–0.
0638
±0.
0003
––
–76
75.7
51±
0.01
112
.641
0±
0.00
87O
BLQ
OB
LQD
elph
iE2
W39
6.98
208.
788
±0.
032
28.7
8860
.158
240.
158
0.44
29±
0.00
0718
7.74
±0.
117.
744
––
––
6762
.597
±0.
051
6.60
03±
0.00
91N
SRO
OB
LQ,N
SRD
elph
iE2
W38
5.79
208.
495
±0.
041
28.4
9559
.865
239.
865
0.43
40±
0.00
0918
4.14
±0.
144.
137
0.02
55±
0.00
02–
––
6564
.532
±0.
062
6.53
7±
0.01
1R
ateO
OB
LQ,P
rece
ssio
nra
teD
elph
iE2
W39
6.98
208.
788
±0.
027
28.7
8860
.158
240.
158
0.44
29±
0.00
0618
7.74
±0.
097.
744
––
–0.
0000
±0.
0023
6762
.597
±0.
045
6.60
03±
0.00
76Li
bOO
BLQ
,Lib
rati
onD
elph
iW
2E23
4.75
118.
77±
0.16
298.
7724
8.84
68.8
40.
4833
±0.
0017
175.
03±
0.18
355.
03–
2.13
77±
0.00
1435
7.78
9±
0.06
0–
6251
.72
±0.
196.
3361
±0.
0092
LibR
ateO
OB
LQ,L
ibra
tion
,Pre
cess
ion
rate
Del
phi
W2E
232.
6011
8.79
7±
0.03
129
8.79
724
8.86
768
.867
0.54
59±
0.00
1116
9.48
±0.
0934
9.48
–2.
1070
±0.
0004
357.
486
±0.
027
2.28
46±
0.00
1458
47.5
66±
0.06
66.
0860
±0.
0057
Nu
ll–
Sido
nW
2E51
32.1
328
2.24
6±
0.01
210
2.24
652
.216
232.
216
––
––
––
–48
37.8
56±
0.02
52.
4127
±0.
0003
NSR
noO
NSR
Sido
nW
2E87
4.16
72.5
69±
0.02
025
2.56
920
2.53
922
.539
––
–0.
2804
±0.
0005
––
–71
45.4
75±
0.06
63.
2244
±0.
0022
OB
LQO
BLQ
Sido
nW
2E94
5.11
245.
782
±0.
030
65.7
8215
.752
195.
752
0.58
17±
0.00
1712
0.50
±0.
4930
0.50
––
––
7345
.153
±0.
094
4.43
65±
0.00
87N
SRO
OB
LQ,N
SRSi
don
W2E
594.
2167
.219
±0.
032
247.
219
197.
189
17.1
890.
6585
±0.
0015
204.
02±
0.05
24.0
240.
7785
±0.
0010
––
–64
51.5
2±
0.11
2.58
19±
0.00
13R
ateO
OB
LQ,P
rece
ssio
nra
teSi
don
W2E
939.
9924
5.12
1±
0.01
465
.121
15.0
9119
5.09
10.
6185
±0.
0004
114.
19±
0.23
294.
19–
––
0.22
14±
0.00
1273
46.5
57±
0.03
14.
6336
±0.
0032
LibO
OB
LQ,L
ibra
tion
Sido
nE2
W51
5.94
46.9
15±
0.04
122
6.91
525
2.95
572
.955
0.62
42±
0.00
1321
4.01
±0.
1434
.011
–1.
9254
±0.
0009
12.3
59±
0.04
2–
6133
.744
±0.
049
3.82
83±
0.00
38Li
bRat
eOO
BLQ
,Lib
rati
on,P
rece
ssio
nra
teSi
don
E2W
497.
8637
.739
±0.
050
217.
739
243.
779
63.7
790.
4735
±0.
0008
216.
78±
0.09
36.7
84–
1.77
12±
0.00
058.
254
±0.
051
2.18
32±
0.00
0553
38.9
26±
0.04
63.
9268
±0.
0024
Nu
ll–
EQ1
W2E
7442
.50
99.2
45±
0.02
727
9.24
571
.575
251.
575
––
––
––
–22
21.6
93±
0.02
54.
5677
±0.
0086
NSR
noO
NSR
EQ1
W2E
7430
.11
278.
44±
0.38
98.4
425
0.77
70.7
7–
––
0.17
5±
0.05
4–
––
2423
.86
±0.
624.
543
±0.
038
OB
LQO
BLQ
EQ1
W2E
721.
5128
0.94
±0.
4810
0.94
253.
2773
.27
0.22
78±
0.00
323.
00±
0.56
183.
00–
––
–83
39.0
3±
0.15
6.67
9±
0.03
0N
SRO
OB
LQ,N
SREQ
1W
2E48
9.31
285.
72±
0.50
105.
7225
8.05
78.0
50.
2769
±0.
0036
14.1
2±
1.08
194.
120.
1728
±0.
0026
––
–80
37.6
2±
0.24
5.93
39±
0.00
59R
ateO
OB
LQ,P
rece
ssio
nra
teEQ
1W
2E72
1.16
280.
940
±0.
044
100.
940
253.
2773
.27
0.22
82±
0.00
262.
92±
0.57
182.
92–
––
0.00
00±
0.00
2183
39.0
4±
0.14
6.67
97±
0.01
7Li
bOO
BLQ
,Lib
rati
onEQ
1W
2E52
1.46
103.
87±
0.25
283.
8776
.20
256.
200.
3158
±0.
0027
226.
26±
0.54
46.2
6–
0.99
3±
0.01
384
.50
±0.
50–
5857
.776
±0.
017
7.74
5±
0.04
0Li
bRat
eOO
BLQ
,Lib
rati
on,P
rece
ssio
nra
teEQ
1W
2E50
8.31
258.
66±
0.49
78.6
623
0.99
50.9
90.
1855
±0.
0003
350.
15±
0.97
170.
15–
0.48
25±
0.00
3235
.42
±1.
162.
1637
±0.
0029
5958
.75
±0.
179.
28±
0.10
Nu
ll–
EQ2
E2W
2634
.23
330.
748
±0.
011
150.
748
319.
881
139.
881
––
––
––
–65
56.7
92±
0.00
819
.947
43±
7e�
05N
SRn
oON
SREQ
2E2
W18
11.9
119
5.60
7±
0.01
015
.607
184.
740
4.74
0–
––
1.14
591
±0.
0000
1–
––
134
0.00
00±
0.00
154.
7970
±0.
0020
OB
LQO
BLQ
EQ2
W2E
597.
3230
7.77
±0.
1712
7.76
727
5.65
295
.652
0.83
19±
0.00
0945
.23
±0.
3222
5.23
––
––
8383
.066
±0.
093
9.08
7±
0.01
3N
SRO
OB
LQ,N
SREQ
2W
2E59
7.32
307.
78±
0.12
127.
775
275.
660
95.6
600.
8319
±0.
0007
45.2
5±
0.23
225.
250.
0000
0±
2e�
05–
––
8383
.070
±0.
067
9.08
70±
0.00
94R
ateO
OB
LQ,P
rece
ssio
nra
teEQ
2W
2E59
7.32
307.
768
±0.
098
127.
768
275.
653
95.6
530.
8319
±0.
0006
45.2
3±
0.19
225.
23–
––
0.00
000
±1.
5e�
0483
83.0
67±
0.05
39.
0868
±0.
0073
LibO
OB
LQ,L
ibra
tion
EQ2
W2E
24.7
235
.717
±0.
086
215.
717
3.60
218
3.60
20.
9285
±0.
0022
317.
02±
0.13
137.
02–
1.55
68±
0.00
0717
.72
±0.
10–
7059
.33
±0.
1212
.333
±0.
011
LibR
ateO
OB
LQ,L
ibra
tion
,Pre
cess
ion
rate
EQ2
W2E
24.7
021
5.80
9±
0.07
235
.809
183.
694
3.69
40.
9328
±0.
0020
136.
52±
0.18
316.
52–
1.56
50±
0.00
0817
.581
±0.
079
0.14
49±
0.00
5470
59.5
5±
0.19
12.3
09±
0.01
7
Nu
ll–
EQ3
W2E
5648
.27
119.
69±
0.11
299.
687
249.
0169
.01
––
––
––
–27
27.3
80±
0.08
35.
0363
±0.
0083
NSR
noO
NSR
EQ3
W2E
4143
.35
174.
97±
0.21
354.
9730
4.29
124.
29–
––
0.27
62±
0.00
13–
––
5858
.429
±0.
085
9.34
7±
0.02
4O
BLQ
OB
LQEQ
3W
2E81
5.83
7.78
1±
0.02
518
7.78
113
7.10
317.
100.
5665
±0.
0012
193.
57±
0.12
13.5
7–
––
–64
60.1
85±
0.03
39.
3254
±0.
0092
NSR
OO
BLQ
,NSR
EQ3
W2E
436.
8835
0.08
0±
0.07
017
0.08
011
9.40
299.
400.
2150
±0.
0008
225.
05±
0.22
45.0
50.
4022
±0.
0008
––
–56
51.0
15±
0.06
911
.439
±0.
015
Rat
eOO
BLQ
,Pre
cess
ion
rate
EQ3
W2E
815.
837.
781
±0.
023
187.
781
137.
1031
7.10
0.56
63±
0.00
1019
3.55
±0.
1213
.55
––
–0.
0029
±0.
0013
6460
.186
±0.
026
9.32
53±
0.00
85Li
bOO
BLQ
,Lib
rati
onEQ
3E2
W31
1.02
345.
973
±0.
063
165.
973
144.
7332
4.73
1.34
52±
0.00
2827
3.40
±0.
1293
.40
–2.
4445
±0.
0031
353.
964
±0.
047
–49
28.7
8±
0.11
5.47
0±
0.01
1Li
bRat
eOO
BLQ
,Lib
rati
on,P
rece
ssio
nra
teEQ
3E2
W31
0.97
345.
988
±0.
064
165.
988
144.
7332
4.73
1.34
39±
0.00
2527
3.27
±0.
1093
.27
–2.
4423
±0.
0019
353.
945
±0.
044
0.00
12±
0.00
4149
28.6
6±
0.11
5.46
9±
0.01
0
Sin
ceth
ere
isde
gen
erac
yin
lon
gitu
de(w
ith
out
obli
quit
y)an
dbe
twee
nlo
ngi
tude
and
spin
pole
dire
ctio
n(w
ith
obli
quit
y),w
eli
stbo
thse
tsof
valu
esas
indi
cate
dby
(1)
and
(2).
For
agi
ven
mod
el,p
aram
eter
sth
atw
ere
set
toze
roan
dn
otva
ried
inth
esi
mu
lati
onh
ave
ada
shra
ther
than
an
um
eric
alva
lue.
*W
ew
ere
un
able
tofi
nd
any
set
ofpa
ram
ters
wit
hN
SRst
ress
that
wer
ebe
tter
than
the
Obl
qbe
stfi
tso
we
repo
rtre
sult
sid
enti
cal
toth
eO
blq
mod
el.
A.R. Rhoden et al. / Icarus 210 (2010) 770–784 779

Fig. 7. Fits to the three southern hemisphere cycloids: (a) Cilicia, (b) Delphi, and (c) Sidon. Data for each cycloid is shown as a black dotted line. The solid black line is the bestfit using the libration model (LibO), which also includes obliquity.
780 A.R. Rhoden et al. / Icarus 210 (2010) 770–784

Fig. 8. Fits to the three equatorial cycloids: (a) EQ1, (b) EQ2, and (c) EQ3. Data for each cycloid is shown as a black dotted line. The solid black line is the best fit using thelibration model (LibO), which also includes obliquity.
A.R. Rhoden et al. / Icarus 210 (2010) 770–784 781

782 A.R. Rhoden et al. / Icarus 210 (2010) 770–784
el, and to the NSRnoO model in all but one case, and imply a rangeof obliquity values, from 0.23� to 0.83�, and variable spin poledirections.
After achieving improved fits with obliquity, we fit the same sixcycloids with four models that included obliquity and additionalrotational parameters. As shown in Table 2, adding fast precession(RateO) produced zero to less than 1% improvement in fits. AddingNSR stress (NSRO) produced mixed results. There was no improve-ment in v2 for Cilicia or EQ2 and only a few percent for Delphi, andthe best fits included almost no stress from NSR. On the otherhand, there was substantial improvement (32–46%) in v2 for thefits to EQ1, EQ3, and Sidon, which required 0.1728�, 0.4022�, and0.7785� of NSR stress, respectively. In fact, the fit to EQ1 producedusing the NSRO model is the best EQ1 fit that we achieved.Although fits to these three cycloids improved with stress fromNSR, the required longitude migration was comparable to thatfound using the OBLQ model.
The most significant overall improvements came from theaddition of physical libration (LibO); incorporating fast preces-sion as well (LibRateO) only improved fits by zero to a few per-cent. Fig. 7a–c shows the LibO model fits (solid lines) to each ofthe southern hemisphere cycloids (dotted lines); Fig. 8a–c showsthe equatorial cycloid fits. The fit to EQ2 is quite good, having achi-squared of only 24.72 (a 96% decrease in v2 from the OBLQfit), which corresponds to an average difference in the location ofa model and data point of less than 5 km or five pixels in theimage. The fits to the other cycloids are improved by 23–62%over the OBLQ model fits although the fit to EQ1 is not the bestmodel fit we found and has some troubling characteristics.Although it captures the trend and concavity of the arcs acrossthe equator and fits the two eastern-most arcs quite well, ithas two long arcs rather than four short arcs on the westernportion of the cycloid.
The LibO fits are consistent with our OBLQ fits in that they indi-cate a variable obliquity and spin pole direction and require longi-tude migration. The obliquities are somewhat larger, however,ranging from 0.32� to 1.35�. The libration amplitudes are also var-iable and quite large with values of 0.72–2.44�; the librationphases cluster around 0�, ranging from �6.04� to 17.72� with oneoutlier at 84.5� from the fit to EQ1.
All of our best fits require a shift in longitude from the currentlocations of the observed cycloids. In Table 2, for models withoutobliquity, we list the formation longitude that resulted from our fit-ting procedure (marked as 1) and the longitude 180� away (markedas 2) as either location is equally possible. We also list the corre-sponding amount of eastward longitude migration implied for eachlocation. With obliquity, there is a degeneracy between longitudeand spin pole direction, so we have also listed the corresponding spinpole directions for each of the formation longitudes for each fit. Notethat, in Table 2, the column labeled NSR stress refers to the amount ofstress generated by non-synchronous rotation, not the amount oflongitude migration. It is given in units of degrees, which corre-sponds only to the amount of non-synchronous rotation that stillcontributes to tidal stress and does not include stress that has re-laxed or been accommodated by fracture.
5. Discussion
5.1. Model comparison
In addition to illustrating the precision of our results, the uncer-tainties shown in Table 2 can be used to determine whether animprovement in v2 from one model to the next is statistically sig-nificant. This is especially important when comparing models withdifferent numbers of free parameters. We applied Bayesian statis-
tical analysis (Sivia and Skilling, 2006) to compare the best fits toeach cycloid using the different tidal models. For all cycloids, theOBLQ model is strongly favored over the Null model despite theaddition of two free parameters (obliquity and spin pole direction),strengthening the case for substantial Europan obliquity. Also, forall cycloids, the LibO model is strongly favored over the OBLQ mod-el and, with the exception of EQ1, the LibO model is preferred overevery other model we tested. The RateO model was never favoredover OBLQ, and the LibRateO model was only preferred over LibOfor EQ1, which suggests that precession is too slow to alter cycloidpaths enough for us to detect. Adding NSR stress (NSRO) producedmixed results when compared to the OBLQ model (producing bet-ter fits to EQ1, EQ3, and Sidon) but was only preferred over theLibO model in one case: EQ1. Based on this statistical analysis,we conclude that (1) obliquity is supported and is more effectiveat reproducing observed cycloids than stress from non-synchro-nous rotation, (2) fast precession is not supported, and (3) the pre-ferred tidal model incorporates both obliquity and physicallibration (LibO).
5.2. Parameter values and implications
Fits generated using our preferred model, LibO, require longi-tude migration and indicate a large and variable obliquity, spinpole direction, and libration amplitude. The uncertainties on obliq-uity and libration amplitude are quite small and show that theseparameters are not consistent across all cycloids to very high con-fidence. The high obliquity values we find are compatible with theexpectation for a mechanically decoupled ice shell, and the vari-ability in obliquity is consistent with the prediction of a geologi-cally short timescale for obliquity variation (Bills, 2005; Billset al., 2009). The libration amplitudes required for these fits arealso rather large. The highest is for the EQ1 fit, which may beanomalous (see above), but the next highest libration amplitudeis from the fit to Delphi, 2.14�, and that fit is quite good. These val-ues are plausible in the presence of a global ocean (Bills et al.,2009; Van Hoolst et al., 2008), which could act as a decouplinglayer. If Europa’s current libration amplitude is in the range we findhere, it may be detectable via spacecraft or possibly with Earth-based radar measurements. The values of libration phase clusternear 0�, which implies that the libration is nearly in phase withthe motion of the tidal bulge. Finally, the simultaneous require-ment of longitude migration and lack of need for NSR stress is con-sistent with the conclusion of Goldreich and Mitchell (2010) that,because non-synchronous rotation is limited by the stress it gener-ates, the rotation must be slow enough that much of the stress re-laxes leaving only a very small contribution to the tidal stressesthat control cycloid formation.
The average values for the mechanical parameters found for allfits in Table 2 are 67 kPa for the initiation stress, 47 kPa for thepropagation stress, and 7.0 km/h for the propagation speed. Foronly the LibO fits, the average initiation stress is 66 kPa and thepropagation stress is 43 kPa. These values are similar to those re-ported by previous authors (Hoppa et al., 2001; Hurford et al.,2007). The initiation stress is low compared to the tensile strengthof terrestrial ice: �1 MPa (e.g. Schulson, 2001). If Europa’s ice shellis thickening over time, induced global, uniform, tensile stresses(Nimmo, 2004) may combine with tidal stresses to reach thesehigher values. In that case, the diurnal stress would be a smallmodulation that controls the orientation of the total stress. Thecrack propagation speeds we find are also low; cracks in ice prop-agate at near the Rayleigh wave speed: 2 km/s (Freund, 1990).However, it has been proposed that cycloidal arcs form as a concat-enation of small segments (Lee et al., 2005). In this hypothesis, anindividual fracture segment would propagate quickly but only overa short distance because it is restricted by its penetration depth

A.R. Rhoden et al. / Icarus 210 (2010) 770–784 783
(Lee et al., 2005), which is limited by the tensile strength and rhe-ological parameters of the ice (Rudolph and Manga, 2009). As thestress field changes, a new segment forms at the tip of the previoussegment in order to relieve stress. The speed we find would thenreflect the rate of change of the stress field and represent an aver-age propagation speed. Some crevasses in Antarctic ice sheets andalpine valley glaciers exhibit this type of episodic propagationbehavior, which leads to low average propagation speeds (e.g. Bas-sis et al., 2005).
Marshall and Kattenhorn (2005) point out that the dormant endof a cycloidal arc would experience both normal and shear stressesas the stress field changes in magnitude and direction. They pro-pose that the shear stress initiates a tailcrack at the end of thearc, thereby creating a cusp. Although the perturbed near-tip stressfield thus governs cusp formation and the initiation angle of thesubsequent arc, once the crack propagates away from the cusp,its path is likely dictated by the maximum tensile (tidal) stress.Marshall and Kattenhorn (2005) find that cusps along some cyc-loids appear more consistent with a tailcrack model than the stan-dard cusp formation model of Hoppa et al. (1999a, 2001), althoughMarshall and Kattenhorn (2005) did not attempt to model an entirecycloid. In addition, the influences of obliquity and/or physicallibration on the expected characteristics of cycloids were not con-sidered. In both formation models, the majority of the cycloid isformed in response to the tensile tidal stress so our cycloid fitsshould still offer useful constraints on the nature of the stress fieldeven if cusp formation is shown to be a more complex process thanwe assume here. However, if a new arc is generated via tailcrackformation, we are imposing an unnecessary restriction by requir-ing the initiation angle of the new arc to be perpendicular to themaximum tension.
It is interesting to note that the best fits to a given cycloidproduced with different tidal models can have different propaga-tion directions. Without obliquity, the concavity of the arcs islinked to the propagation direction (Hoppa et al., 2001). Usingthis criteria, Cilicia, Sidon, EQ1, and EQ3 should all have propa-gated west to east (W2E), while Delphi and EQ2 should havepropagated east to west (E2W). With the addition of obliquity,the best fit to EQ2 is actually a W2E-propagating crack. Usingthe LibO model, the best fits to Delphi, EQ3, and Sidon also prop-agate the opposite direction from the original predictions. Giventhat our cycloid fits strongly support both obliquity and physicallibration, we conclude that the propagation direction of a cycloidcannot be determined simply by the concavity of its arcs. Thislikely has important implications for the interpretations of cy-cloid characteristics such as the multiple branches or splays ob-served along some cycloids (Sarid et al., 2004; Marshall andKattenhorn, 2005).
A major difference between our fitting procedure and the workpresented in Hurford et al. (2007, 2009a) is that we do not vary themechanical parameters for different arcs of a cycloid, therebyreducing the number of free parameters. Our OBLQ model pro-duced results comparable in quality to those of Hurford et al.(2007), without obliquity, for the southern hemisphere cycloids.However, we fit five arcs of Delphi using six free parameterswhereas Hurford et al. (2007), who fit only four arcs, used a differ-ent set of mechanical parameters for each arc for a total of 13 freeparameters. Our six-parameter OBLQ fits to Sidon and Cilicia arealso comparable to those of Hurford et al. (2007), which required19 free parameters for Cilicia and 28 for Sidon. Achieving compara-ble fits with far fewer parameters means that our fits are muchmore robust.
Hurford et al. (2009a) presented a preliminary obliquity fit toEQ1 that is qualitatively better than our six-parameter OBLQ fitbut required 30 free parameters. In addition, we are now able toreproduce the ninth arc of EQ1. Using the OBLQ model, the values
we find for obliquity and formation longitude differ from thoseused for the Hurford et al. (2009a) fit by �5%; the spin pole direc-tions differ by�10%. These differences mainly arise because we ob-tained the fit in Hurford et al. (2009a) by manually changingparameters by discrete amounts restricting the possible solutions.While both studies successfully identified the best region ofparameter space for reproducing this cycloid, our improved meth-odology allowed for thorough exploration of the parameter space,and thus, more precise determination of the best-fit parameters.Such differences are important given that small deviations in thevalue of the obliquity, for example, lead to large variations in tidalheating.
6. Conclusions
We have shown that tidal models including obliquity signifi-cantly improve fits to observed cycloids in the southern hemi-sphere and in the equatorial region of Europa. Physical librationcombined with obliquity further improves the fits and is the pre-ferred tidal model based on our statistical analysis. Fits using thismodel indicate large and variable values for obliquity, spin poledirection, and libration amplitude. The values for libration phasecluster near 0� implying that the librational motion tracks the tidalbulge. All fits do require longitude migration, presumably due tonon-synchronous rotation, although stress from non-synchronousrotation is not indicated in most fits. Models including fast preces-sion (RateO and LibRateO) are not supported.
These results lead us to several conclusions: (1) At the timethese cycloids formed, Europa’s obliquity and physical librationwere non-zero, large enough to affect the formation of tidally-dri-ven tectonics, and variable on short geologic timescales. The pre-cession rate of the spin pole was likely slow compared to theformation timescale of a cycloid. (2) The large and variable valueswe find for obliquity and libration are best explained by the pres-ence of an ocean (decoupling the shell from the solid interior) atthe time of cycloid formation. There is also a large independentbody of evidence for an ocean existing at present. (3) These cyc-loids did not form where we currently observe them. Thus, non-synchronous rotation is implied even though stress from NSR doesnot significantly improve fits. (4) When obliquity and physicallibration are included, the formation model initially described byHoppa et al. (1999a, 2001) is successful at reproducing cycloidsin detail, even vertical-trending or equatorial cycloids, withoutarbitrarily varying the mechanical parameters for each arc. How-ever, the formation direction of a cycloid cannot be determinedmerely by the concavity of its arcs when these tidal effects areincluded.
These results may allow more accurate estimates of tidal heat-ing, more complete modeling of the gravitational interactionsamong Jupiter’s large satellites, and better interpretation of thetectonic record. Looking forward, measuring Europa’s currentobliquity and libration via spacecraft or Earth-based techniquescould confirm the results of this study or reveal that Europa’s rota-tion state has changed significantly since cycloid formation. Thelarge and variable values we find for obliquity may have interest-ing implications on Europa’s thermal–orbital history; perhaps theice shell has undergone periods of tidally-induced warming (whenobliquity was high) and cooling (when obliquity was low) thusaltering the stress state of the shell over time. The addition of uni-form tensile stress due to cooling of the ice shell could combinewith the low diurnal stress values indicated by our work to inducecycloid formation. We expect that a better understanding of thefracture processes that produce cycloids will be a key to further ad-vances in our understanding of Europan cycloid formation. Ourwork supports a tidal formation model, but even as we have im-
784 A.R. Rhoden et al. / Icarus 210 (2010) 770–784
proved fits we still find very low values for crack propagationspeed and the stress required to initiate fractures. The coupledproblem of a diurnally-varying tidal stress field and dynamic crackformation and propagation, which would include such effects asstress relief due to cracking, would be a useful albeit formidableundertaking. Adding the vertical dimension to fracture modelingof cycloids may also prove instructive.
Acknowledgments
The authors wish to thank J. Bernstein at Penguin Computingfor use of computational resources, two anonymous reviewers fortheir constructive comments, and the NAI and NESSF programsfor funding this work.
Appendix A. Supplementary data
Supplementary data associated with this article can be found, inthe online version, at doi:10.1016/j.icarus.2010.07.018.
References
Anderson, J.D., Schubert, G., Jacobson, R.A., Lau, E.L., Moore, W.B., Sjogren, W.L.,1998. Europa’s differentiated internal structure: Inferences from four Galileoencounters. Science 281, 2019–2022.
Bassis, J.N., Coleman, R., Fricker, H.A., Minster, J.B., 2005. Episodic propagation of arift on the Amery Ice Shelf, East Antarctica. Geophys. Res. Lett. 32. doi:10.1029/2004GL022048.
Bills, B.G., 2005. Free and forced obliquities of the Galilean satellites of Jupiter.Icarus 175, 233–247.
Bills, B.G., Nimmo, F., Karatekin, O., Van Hoolst, T., Rambaux, N., Levrard, B., Laskar, J.2009. Rotational dynamics of Europa. In: Pappalardo, R., McKinnon, W.,Khurana, K. (Eds.), Europa, Univ. Arizona Press, Tucson, pp. 119-136.
Carr, M.H., and 21 colleagues, 1998. Evidence for a subsurface ocean on Europa.Nature 391, 363–365.
Dennis, J.E., Schnabel, R.B., 1983. Numerical Methods for UnconstrainedOptimization and Nonlinear Equations. Prentice Hall, Englewood Cliffs, NJ.
Freund, L.B., 1990. Dynamic Fracture Mechanics. Cambridge University Press, NewYork.
Gammond, P.H., Klefte, H., Clouter, M.J., 1983. Elastic constants of ice samples byBrillouin spectroscopy. J. Phys. Chem. 87, 4025–4029.
Greenberg, R., Weidenschilling, S.J., 1984. How fast do Galilean satellites spin?Icarus 58, 186–196.
Greenberg, R., Geissler, P., Hoppa, G., Tufts, B.R., Durda, D.D., Pappalardo, R., Head,J.W., Greeley, R., Sullivan, R., Carr, M.H., 1998. Tectonic processes on Europa –Tidal stresses, mechanical response, and visible features. Icarus 135, 64–78.
Goldreich, P.M., Mitchell, J.L., 2010. Elastic shells of synchronously rotating moons:Implications for cracks on Europa and non-synchronous rotation on Titan.Icarus 209, 631–638.
Hastings, W.K., 1970. Monte Carlo sampling methods using Markov chains and theirapplications. Biometika 57, 97–109.
Head, J.W., Pappalardo, R.T., Sullivan, R., 1999. Europa: Morphologicalcharacteristics of ridges and triple bands from Galileo data (E4 and E6) andassessment of a linear diapir model. J. Geophys. Res. – Planets 104, 24223–24236.
Hoppa, G.V., Tufts, B.R., Greenberg, R., Geissler, P.E., 1999a. Formation of cycloidalfeatures on Europa. Science 285, 1899–1902.
Hoppa, G.V., Greenberg, R., Geissler, P., Tufts, B.R., Plassmann, J., Durda, D., 1999b.Rotation of Europa: Constraints from terminator and limb positions. Icarus 137,341–347.
Hoppa, G.V., Tufts, B.R., Greenberg, R., Hurford, T.A., O’Brien, D.P., Geissler, P.E., 2001.Europa’s rate of rotation derived from the tectonic sequence in the Astypalaearegion. Icarus 153, 208–213.
Hurford, T.A., Sarid, A.R., Greenberg, R., 2007. Cycloidal cracks on Europa: Improvedmodeling and non-synchronous rotation implications. Icarus 186, 218–233.
Hurford, T.A., Sarid, A.R., Greenberg, R., Bills, B.G., 2009a. The influence of obliquityon Europan cycloid formation. Icarus 202, 197–215.
Hurford, T.A., Bills, B.G., Helfenstein, P., Greenberg, R., Hoppa, G.V., Hamilton, D.P.,2009b. Geological implications of a physical libration on Enceladus. Icarus 203,541–552.
Jacobs, D.A.H. (Ed.), 1977. The State of the Art in Numerical Analysis. AcademicPress, London.
Kivelson, M.G., Khurana, K.K., Russell, C.T., Volwerk, M., Walker, R.J., Zimmer, C.,2000. Galileo magnetometer measurements: A stronger case for a subsurfaceocean at Europa. Science 289, 1340–1343.
Lee, S., Pappalardo, R.T., Makris, N.C., 2005. Mechanics of tidally driven fractures inEuropa’s ice shell. Icarus 177, 367–379.
Marshall, S.T., Kattenhorn, S.A., 2005. A revised model for cycloid growth mechanicson Europa: Evidence from surface morphologies and geometries. Icarus 177,341–366.
Melosh, H.J., 1977. Global tectonics of a Despun planet. Icarus 31, 221–243.Melosh, H.J., 1980. Tectonic patterns on a tidally distorted planet. Icarus 43, 334–
337.Nimmo, F., 2004. Stresses generated in cooling viscoelastic ice shells: Application to
Europa. J. Geophys. Res. – Planets 109. doi:10.1029/2004JE002347.Nimmo, F., Gaidos, E., 2002. Strike-slip motion and double ridge formation on
Europa. J. Geophys. Res. 107. doi:10.1029/2000JE001476.Peale, S.J., 1999. Origin and evolution of the natural satellites. Annu. Rev. Astron.
Astrophys. 37, 533–602.Rudolph, M.L., Manga, M., 2009. Fracture penetration in planetary ice shells. Icarus
199, 536–541.Sarid, A.R., Greenberg, R., Hoppa, G.V., Hurford, T.A., Tufts, B.R., Geissler, P., 2002.
Polar wander and surface convergence of Europa’s ice shell: Evidence from asurvey of strike-slip displacement. Icarus 158, 24–41.
Sarid, A.R., Hurford, T.A., Greenberg, R., 2004. Branched cusps along Europancycloids. Bull. Am. Astron. Soc. 36, 184.
Schulson, E.M., 2001. Brittle failure of ice. Eng. Fract. Mech. 68, 1839–1887.Sivia, D., Skilling, J., 2006. Data Analysis: A Bayesian Tutorial. Oxford University
Press, USA.Squyers, S.W., Reynolds, R.T., Cassen, P.M., Peale, S.J., 1983. Liquid water and active
resurfacing on Europa. Nature 301, 225–226.Tyler, R.H., 2008. Strong ocean tidal flow and heating on moons of the outer planets.
Nature 456, 770–772.van Hoolst, T., Rambaux, N., Karatekin, O., Dehant, V., Rivoldini, A., 2008. The
librations, shape, and ice shell of Europa. Icarus 195, 386–399.
Top Related
Copyright © 2022 FDOKUMEN

