






Bahasa
Halaman
Hukum

KONTROL GERAKAN MOTORIK
Oleh : Hedison Polii
Bagian Fisiologi Fakultas Kedokteran Unsrat
PENDAHULUAN
Pola tertentu keluaran neuron motorik bertanggung jawab atas berbagai
aktivitas motorik, yang berkisar dari pemeliharaan postur dan keseimbangan
sampai gerakan lokomotor stereotipik, misalnya berjalan, sampai aktivitas motorik
individual dengan keterampilan tinggi, misalnya senam. Kontrol atas setiap gerakan
motorik, seberapapun tingkat kerumitannya, bergantung pada masukan
konvergens ke neuron motorik pada unit motorik spesifik. Neuron-neuron
motorik, pada gilirannya, mencetuskan kontraksi serat-serat otot di dalam unit
motorik masing-masing melalui kejadian-kejadian yang berlangsung di taut
neuromuskulus. Terdapat tiga tingkatan masukan yang mengontrol keluaran unit
motorik:
1. Masukan dari neuron-neuron aferen, biasanya melalui antarneuron yang
terletak di antaranya, setinggi korda spinalis-yaitu, refleks korda spinalis.
2. Masukan dari korteks motorik primer. Serat-serat yang berasal dari badan
sel-sel piramidalis di dalam korteks motorik primer turun secara langsung
tanpa interupsi sinaptik untuk berakhir di neuron motorik (atau di antarneuron
lokal yang berakhir di neuron motorik). Serat-serat ini membentuk sistem
motorik kortikospinalis (atau piramidalis).
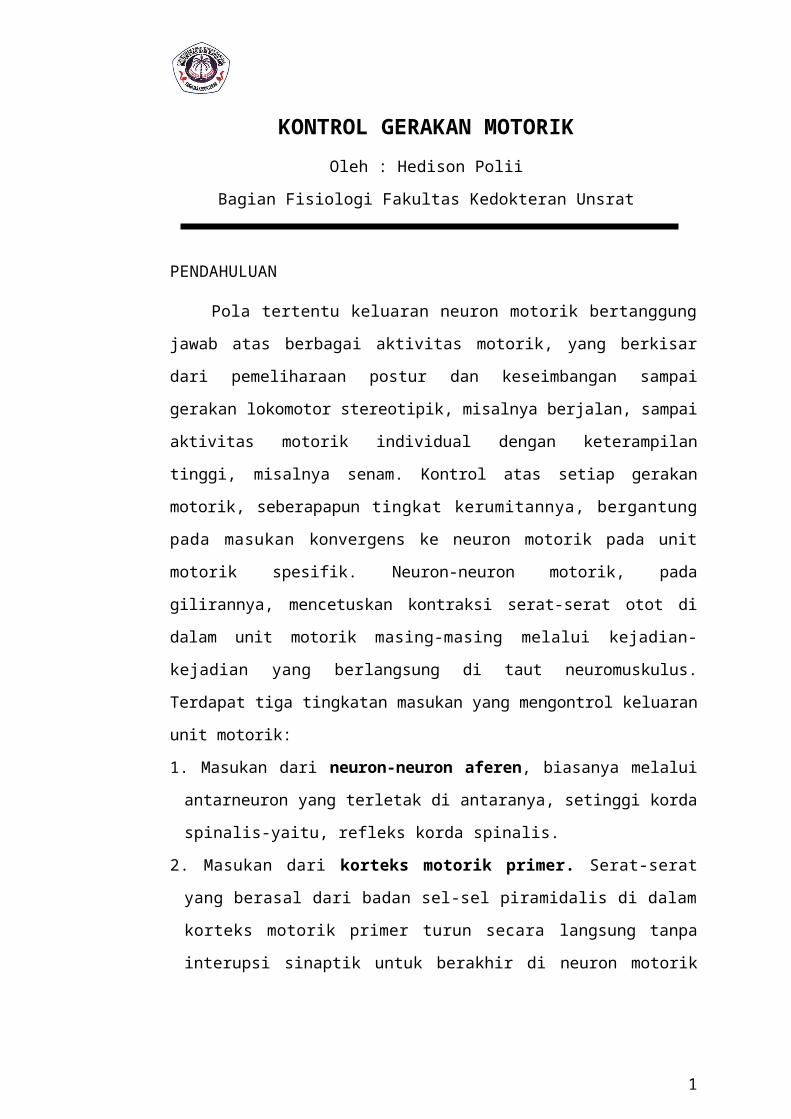
3. Masukan dari sistem motorik multineuron (atau ekstrapiramidalis). Jalur-
jalur yang menyusun sistem ini mencakup sejumlah sinaps yang melibatkan
banyak daerah di otak. Penghubung terakhir di jalur multineuron adalah batang
otak, terutama formasio retikularis, yang pada gilirannya dipengaruhi oleh
daerah-daerah motorik korteks, serebelum, dan nukleus basal. Selain itu,
korteks motorik itu sendiri saling berkaitan dengan talamus serta dengan
daerahdaerah pramotorik dan motorik suplementer. Hanya korteks motorik
primer dan batang otak yang secara langsung mempengaruhi neuron motorik;
daerah otak lain yang terlibat mengatur aktivitas motorik secara tidak langsung
1
dengan menyesuaikan keluaran motorik dari korteks motorik dan batang
otak. Sejumlah interaksi kompleks berlangsung antara berbagai daerah otak ini;
yang terpenting diperlihatkan dalam Gambar 1 .
$
2

GAMBAR 1 Kontrol Motorik SSP secara terus menerus diberitahu mengenai panjang dan ketegangan otot serta kejadian-kejadian perifer lainnya melalui jalur-jalur yang menyalurkan masukan aferen, sehingga SSP dapat memprogramkan aktivitas otot rangka yang terkoordinasi dan bertujuan. Gerakan motorik dikontrol oleh masukan ke neuron motorik dari (1) terminal neuron aferen pada tingkat korda spinalis; (2) korteks motorik primer, melalui sistem motorik kortikospinalis, dan (3) nukleus batang otak, yang berfungsi sebagai penghubung terakhir dalam sistem motorik multineuron kompleks yang melibatkan banyak daerah di otak..
Sistem kortikospinalis terutama memperantarai gerakan-gerakan volunter yang
halus dan berlainan pada tangan dan jari tangan, misalnya gerakan yang diperlu-
kan untuk melakukan pekerjaan jahit menjahit. Daerah motorik suplementer dan
pramotorik, dengan masukan dari serebroserebelum, merencanakan perintah
motorik volunter yang disampaikan ke neuron-neuron motorik yang sesuai oleh
korteks motorik primer melalui sistem desendens ini. Sistem multineuron,
sebaliknya, terutama berperan dalam mengatur postur tubuh keseluruhan yang
melibatkan gerakan involunter kelompok otot-otot besar di badan dan tungkai. Di
antara kedua sistem ini terdapat interaksi yang cukup rumit dan fungsi yang
tumpang tindih. Sebagai contoh, untuk secara sadar menggerakkan jari-jari
Anda untuk melakukan pekerjaan jahit menjahit, Anda secara bawah sadar
mengambil posisi lengan tertentu yang memungkinkan Anda memegang pekerjaan
tersebut.
GELENDONG OTOT DAN ORGAN TENDON GOLGI
Aktivitas otot rangka bertujuan yang terkoordinasi bergantung pada masukan
aferen dari berbagai sumber. Pada tingkat yang sederhana, sinyal-sinyal
aferen yang memberitahu bahwa jari tangan Anda menyentuh kompor panas
mencetuskan aktivitas kontraktil refleks di otot-otot lengan yang sesuai untuk
menarik tangan dari rangsangan yang mencederai. Pada tingkat yang lebih
kompleks, jika Anda hendak menangkap sebuah bola, sistem motorik di otak Anda
harus memprogram serangkaian perintah motorik yang akan menggerakkan dan
menempatkan tubuh Anda secara tepat untuk penangkapan tersebut, dengan
menggunakan perkiraan arah dan kecepatan gerakan bola yang diberikan oleh
masukan penglihatan. Banyak otot yang bekerja secara bersamaan atau bergiliran
pada berbagai sendi berperan untuk metnindahkan lokasi dan posisi tubuh Anda
secara cepat, sekaligus mempertahankan keseimbangan Anda dalam proses
tersebut. Diperlukan masukan yang tents menerus mengenai posisi tubuh Anda
3
dalam kaitannya dengan lingkungan di sekitar, serta posisi berbagai bagian tubuh
dalam hubungannya dengan bagian tubuh lain. Informasi ini diperlukan untuk
membentuk suatu pola aktivitas saraf untuk melakukan gerakan yang diinginkan.
SSP Anda harus mengetahui posisi awal tubuh Anda agar dapat memprogram
aktivitas otot yang sesuai. Selain itu, SSP juga harus secara terus menerus
diberitahu mengenai perkembangan gerakan yang telah dimulai, sehingga ia
dapat membuat penyesuaianpenyesuaian seperlunya. Otak Anda menerima
informasi ini, yang dikenal sebagai masukan propriosepsi, dari reseptor di mata,
sendi, aparatus vestibularis, dan kulit, serta dari otot itu sendiri. Anda dapat
membuktikan kerja reseptor propriosepsi sendi dan otot Anda dengan menutup
mata dan menyatukan kedua ujung telunjuk jari tangan kiri dan kanan di titik
manapun dalam ruang. Anda dapat melakukannya tanpa melihat di mana tangan
Anda karena otak Anda diberitahu mengenai posisi tangan dan bagian tubuh lain
setiap saat oleh masukan aferen dari reseptor sendi dan otot.
Dua jenis reseptor otot-gelendong otot (muscle spindle) dan organ tendon
Golgi-memantau perubahanperubahan panjang dan ketegangan otot. Informasi
ini digunakan dalam dua cara: (1) untuk memberitahu daerah motorik otak
mengenai panjang dan ketegangan otot dan (2) untuk mengontrol panjang dan
ketegangan otot secara umpan balik negatif melalui refleks-refleks spinal lokal.
Panjang otot dipantau oleh gelendong otot, sedangkan perubahan ketegangan otot
dideteksi oleh organ tendon Golgi. Kedua jenis reseptor ini diaktifkan
oleh peregangan otot, tetapi keduanya dirancang untuk menyampaikan jenis
informasi yang berlainan. Marilah kita lihat bagaimana keduanya bekerja.
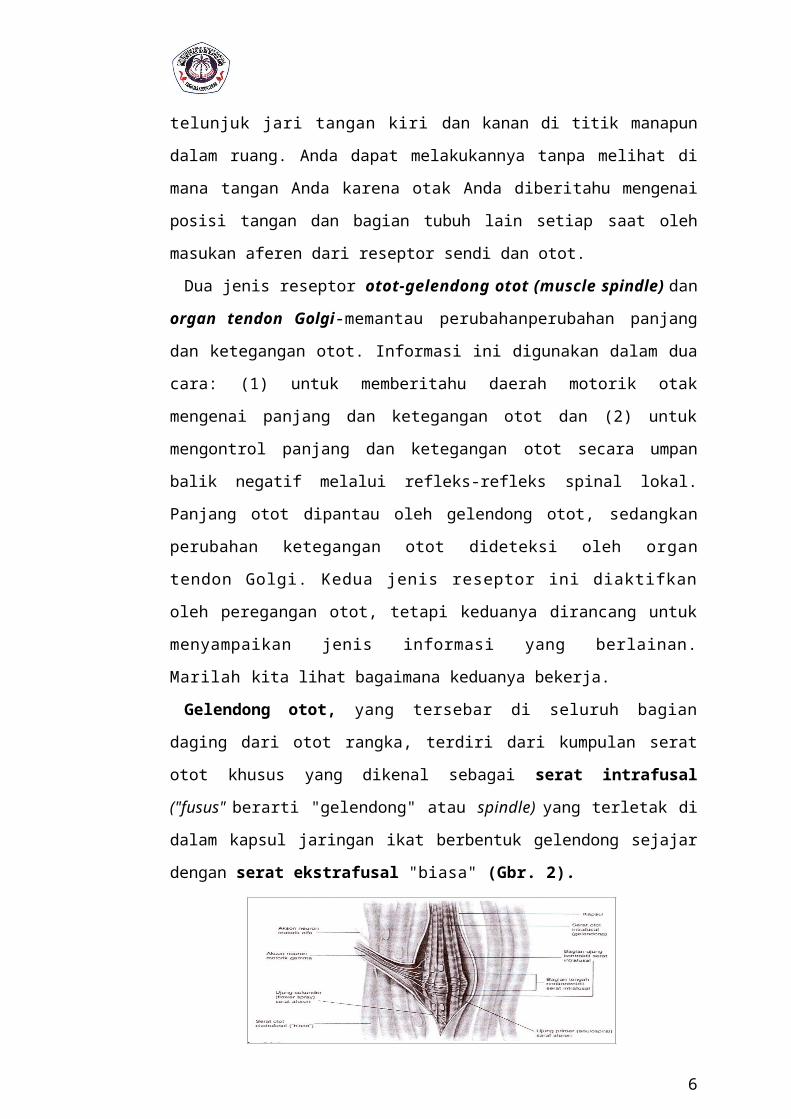
Gelendong otot, yang tersebar di seluruh bagian daging dari otot rangka,
terdiri dari kumpulan serat otot khusus yang dikenal sebagai serat intrafusal
("fusus" berarti "gelendong" atau spindle) yang terletak di dalam kapsul jaringan
ikat berbentuk gelendong sejajar dengan serat ekstrafusal "biasa" (Gbr. 2).
4
GAMBAR 2 Gelendong Otot Sebuah gelendong otot terdiri dari kumpulan serat intrafusal khusus yang terletak di dalam suatu kapsul jaringan ikat yang sejajar dengan serat otot rangka esktrafusal biasa. Gelendong otot dipersarafi oleh neuron motorik gama dan memiliki dua jenis ujung sensorik aferen, ujung primer (anulospiral) dan ujung sekunder (flower-spray), yang keduanya diaktifkan oleh peregangan.
Tidak seperti serat otot rangka biasa, yang memiliki unsur-unsur kontraksi
(miofibril) di seluruh panjangnya, sebuah serat intrafusal memiliki bagian tengah
nonkontraktil, dengan unsur-unsur kontraksi yang membatasi di kedua ujung.
Setiap gelendong otot memiliki persarafan aferen dan eferen tersendiri. Neuron
eferen yang mempersarafi serat intrafusal gelendong otot dikenal sebagai neuron
motorik gamma, sedangkan neuron motorik yang mempersarafi serat
ekstrafusal biasa disebut sebagai neuron motorik alfa. Terdapat dua jenis
ujung sensorik aferen yang berakhir di serat intrafusal dan berfungsi
sebagai reseptor gelendong otot, dan keduanya diaktifkan oleh peregangan.
Ujung primer (anulospiral) membungkus bagian tengah serat intrafusal;
ujung-ujung ini mendeteksi perubahan panjang serat selama peregangan
serta kecepatan perubahan yang terjadi. Ujung sekunder (flower-spray), yang
berkelompok di segmen-segmen ujung pada banyak serat intrafusal, hanya
peka terhadap perubahan panjang.
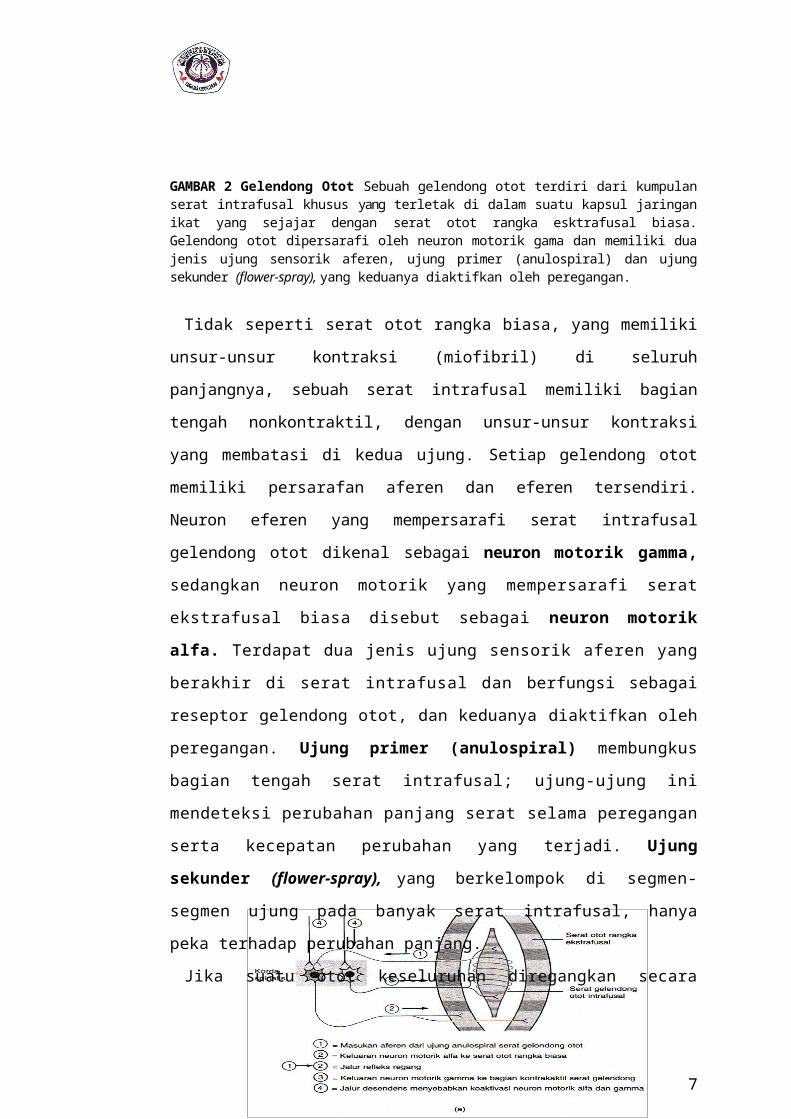
Jika suatu otot keseluruhan diregangkan secara pasif, serat-serat intrafusal di
dalam gelendong-gelendong otot juga teregang, terjadi peningkatan
pembentukan potensial aksi di serat saraf aferen yang ujung-ujung sensorik-
nya berakhir di serat-serat gelendong yang teregang tersebut. Neuron aferen
secara langsung bersinaps dengan neuron motorik alfa yang mempersarafi
seratserat ekstrafusal otot yang sama, sehingga terjadi kontraksi otot itu
(Gbr. 3a, jalur 1 - 2).
5
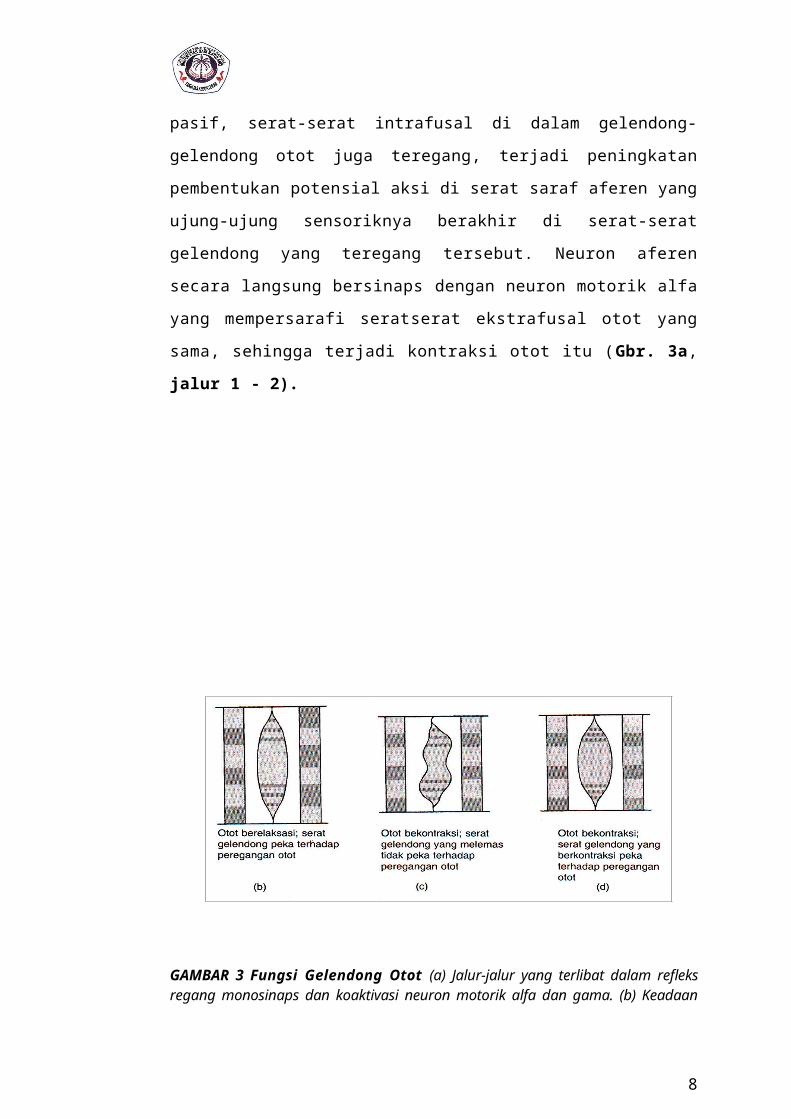
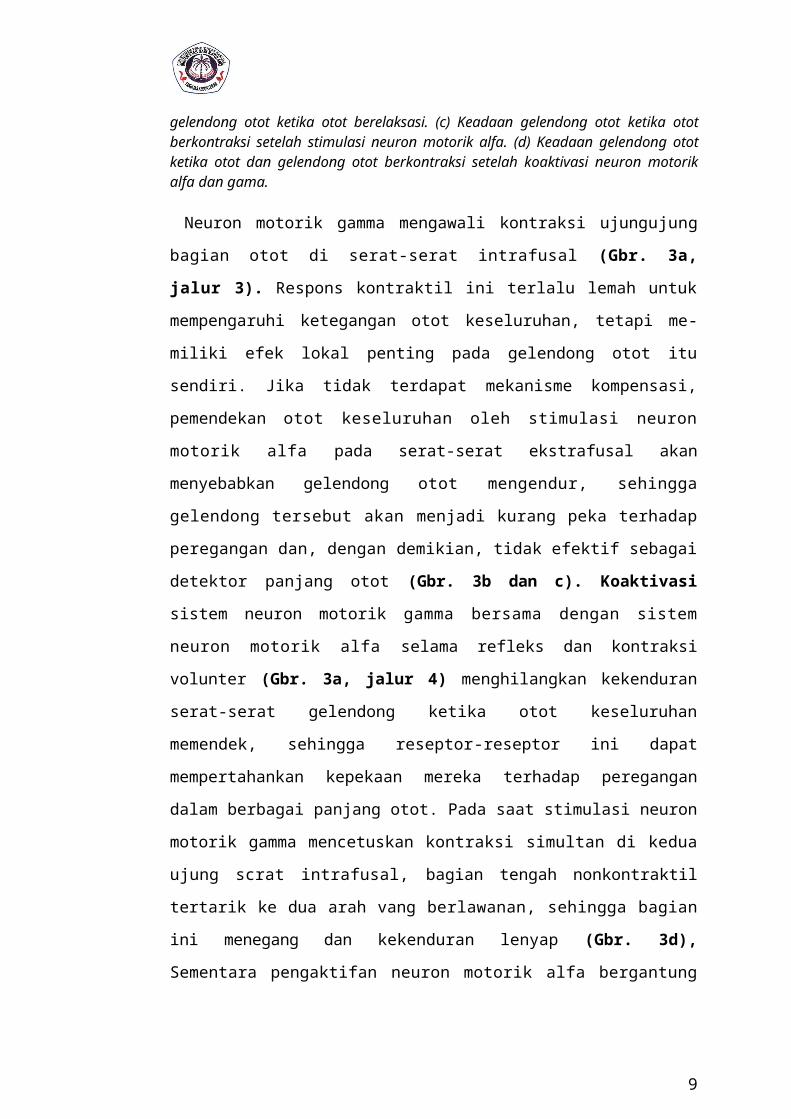
GAMBAR 3 Fungsi Gelendong Otot (a) Jalur-jalur yang terlibat dalam refleks regang monosinaps dan koaktivasi neuron motorik alfa dan gama. (b) Keadaan gelendong otot ketika otot berelaksasi. (c) Keadaan gelendong otot ketika otot berkontraksi setelah stimulasi neuron motorik alfa. (d) Keadaan gelendong otot ketika otot dan gelendong otot berkontraksi setelah koaktivasi neuron motorik alfa dan gama.
Neuron motorik gamma mengawali kontraksi ujungujung bagian otot di serat-
serat intrafusal (Gbr. 3a, jalur 3). Respons kontraktil ini terlalu lemah untuk
mempengaruhi ketegangan otot keseluruhan, tetapi memiliki efek lokal penting
pada gelendong otot itu sendiri. Jika tidak terdapat mekanisme kompensasi,
pemendekan otot keseluruhan oleh stimulasi neuron motorik alfa pada serat-
serat ekstrafusal akan menyebabkan gelendong otot mengendur, sehingga
gelendong tersebut akan menjadi kurang peka terhadap peregangan dan,
dengan demikian, tidak efektif sebagai detektor panjang otot (Gbr. 3b dan c).
Koaktivasi sistem neuron motorik gamma bersama dengan sistem neuron
motorik alfa selama refleks dan kontraksi volunter (Gbr. 3a, jalur 4)
menghilangkan kekenduran serat-serat gelendong ketika otot keseluruhan
memendek, sehingga reseptor-reseptor ini dapat mempertahankan kepekaan
mereka terhadap peregangan dalam berbagai panjang otot. Pada saat stimulasi
neuron motorik gamma mencetuskan kontraksi simultan di kedua ujung scrat
intrafusal, bagian tengah nonkontraktil tertarik ke dua arah vang berlawanan,
sehingga bagian ini menegang dan kekenduran lenyap (Gbr. 3d), Sementara
pengaktifan neuron motorik alfa bergantung pada kekuatan respons motorik
yang diinginkan, tingkat aktivitas neuron metorik gamma ke otot yang sama
bergantung pada ,arak pemendekan yang diantisipasi.
6
Berbeda dengan gelendong otot, yang terletak di dalam daging otot, organ
tendon Golgi terletak di tendon otot, yakni di tempat organ tersebut mampu
berespons terhadap perubahan dalam ketegangan otot yang diterapkan ke
eksternal dan bukan terhadap perubahan panjang otot. Karena sejumlah faktor
menentukan kctegangan yang terjadi di otot keseluruhan selama kontraksi
(sebagai contoh, frekuensi stimulasi atau panjang otot pada permulaan
kontraksi), sistem kontrol motorik perlu diberitahu mengenai ketegangan yang
sebenarnya telah dicapai, sehingga dapat dilakukan penyesuaian-penyesuaian
seperlunya.
Organ tendon Golgi terdiri dan ujung-ujung serat aferen yang terjalin di
dalam berkas serat jaringan ikat yang membentuk tendon. Sewaktu serat otot
ekstrafusal berkontraksi, tarikan pada tendon mengencangkan berkas
jaringan ikat, yang, pada gilirannya, meningkatkan ketegangan yang terjadi di
tulang tempat tendon tersebut melekat. Dalam proses tersebut, ujung reseptor
organ Golgi teregang, sehingga serat-serat aferennya membentuk potensial aksi;
frekuensi pembentukan potensial tersebut berkaitan langsung dengan
ketegangan yang terbentuk.
Informasi aferen dikirim ke otak. Selain itu, cabangcabang lain neuron aferen
yang berasal dari organ tendon Golgi menghambat neuron motorik alfa otot yang
sama melalui suatu antarneuron. Refleks ini tampaknya secara alamiah bersifat
protektif. Apabila ketegangan yang terjadi cukup besar, masukan inhibitorik
dari organ tendon Golgi mengimbangi masukan eksitatorik ke neuron motorik
alfa. Respons inhibitorik ini menghentikan kontraksi lebih lanjut dan
menimbulkan refleks relaksasi, sehingga dapat mencegah kerusakan otot atau
tendon akibat kontraksi otot yang berlebihan.
REFLEKS
Refleks regang (stretch reflex) ini berfungsi sebagai mekanisme umpan
balik negatif untuk menahan setiap perubahan pasif panjang otot, sehingga
panjang optimal dapat dipertahankan.
Contoh klasik refleks regang adalah refleks tendon patela atau knee-jerk
reflex (Gbr. 4).
7
Gambar 4. Refleks Tendon Patela (suatu refleks regang). Pengetukan tendon patela dengan sebuah palu karet akan meregangkan gelendong-gelendong otot di kuadriseps femoris. Terjadi refleks regang monosinaps yang menyebabkan kontraksi otot tersebut, sehingga timbul gerakan menendang yang khas (knee jerk).
Otot-otot ekstensor lutut adalah kuadriseps femoris, yang membentuk bagian
anterior paha dan melekat ke tibia (tulang kering) tepat di bawah lutut melalui
tendon patela. Pengetukan tendon ini dengan sebuah palu karet akan secara
pasif meregangkan otot kuadriseps dan mengaktifkan reseptor-reseptor
gelendongnya. Refleks regang yang terjadi menimbulkan kontraksi pada otot
ekstensor ini, sehingga lutut mengalami ekstensi dan mengangkat tungkai
bawah dengan cara yang khas. Pemeriksaan ini dilakukan secara rutin sebagai
penilaian pendahuluan lungsi sistem saraf. Refleks patela yang normal meng-
indikasikan dokter bahwa sejumlah komponen saraf dan otot-gelendong otot,
masukan aferen, neuron motorik, keluaran eferen, taut neuromuskulus, dan
otot itu sendiri-berfungsi secara normal. Refleks ini juga mengindikasikan
adanya keseimbangan antara masukan eksitatorik dan inhibitorik ke neuron
motorik dari pusat-pusat yang lebih tinggi di otak. Refleks patela mungkin
berkurang atau menghilang akibat hilangnya masukan eksitatorik dari pusat
yang lebih tinggi atau mungkin sangat berlebihan akibat hilangnya masukan
inhibitorik ke neuron motorik dari pusat-pusat yang lebih tinggi di otak.
Tujuan utama refleks regang adalah menahan kecenderungan peregangan
pasif otot-otot ekstensor yang ditimbulkan oleh gava gravitasi ketika
seseorang berdiri tegak. Setiap kali sendi lutut cenderung melengkung akibat
gravitasi, otot kuadriseps teregang. Kontraksi yang terjadi pada otot ekstensor ini
akibat refleks regang dengan cepat meluruskan lutut, menahan tungkai tetap
terekstensi, sehingga orang yang bersangkutan tetap berdiri tegak.
8
9
Top Related
Copyright © 2022 FDOKUMEN

