







Bahasa
Halaman
Hukum


PENGENDALIAN LENGAN ROBOT BERBASIS PC TERKENDALI JARAKJAUH MENGGUNAKAN TEKNIK MODULASI DAN DEMODULASI FSK
Yudha Syaputra
Jurusan Teknik Elektro, Fakultas Teknologi Industri, Universitas Islam IndonesiaJalan Kaliurang km. 14,5 Sleman, Jogjakarta 55501
Telp. (0274) 895007, 895287 Faks. (0274) 895007 Ext. 131E-mail : [email protected]
Abstrak
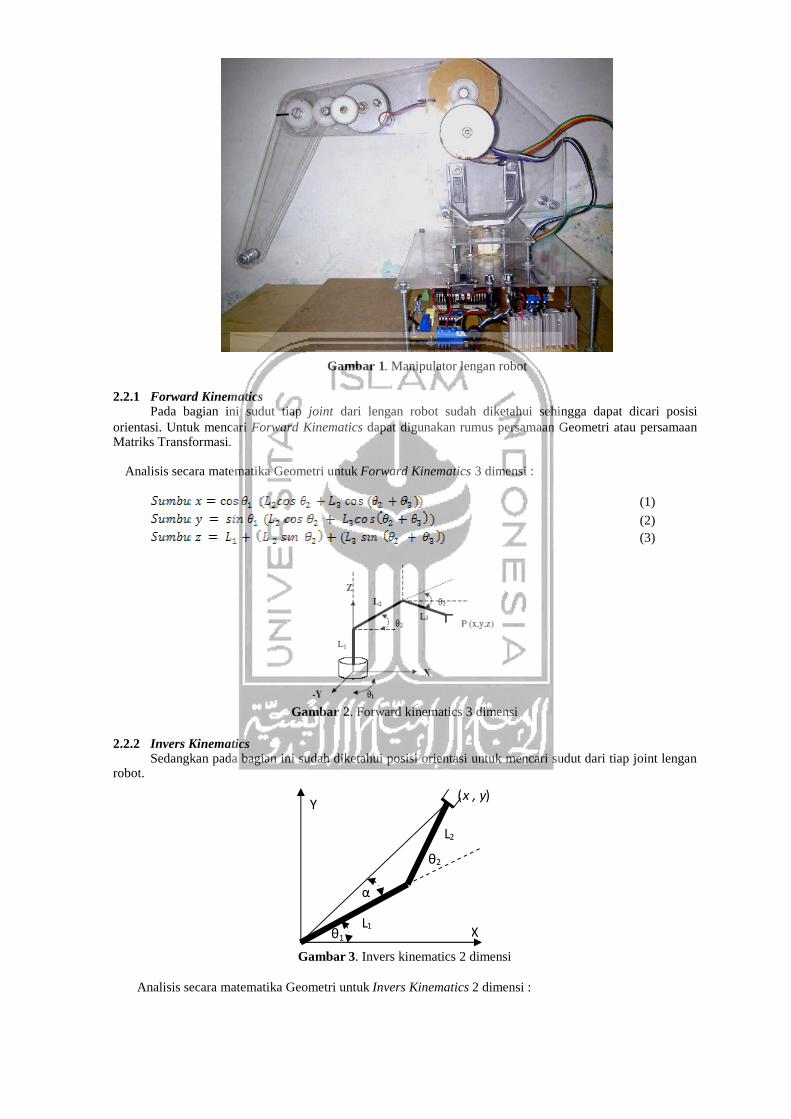
Lengan robot digunakan untuk memindahkan benda berdasarkan perintah dari sistem kontrol.Dalam pengendalian lengan robot ini digunakan GUI (Graphical User Interface) Visual Basic sebagaiantarmuka antara pengguna dengan sistem kendalinya. User Interface Visual Basic ini dirancang untukdapat menggerakkan setiap joint lengan robot melalui beberapa mode control window serta menggunakanperhitungan Forward Kinematics dan Invers Kinematics. Sebagai media transmisi digunakan sistempengendalian jarak jauh dengan teknik modulasi FSK dan Handy Talky (HT) sehingga pengendalianterhadap lengan robot menjadi lebih fleksibel dan efisien. Sebagai modulator yang akan mengkonversi sinyalinformasi dalam bentuk bit-bit digital serial menjadi sinyal analog digunakan IC XR2206 dan Demodulatoryang akan mengembalikan sinyal informasi menjadi sinyal digital digunakan IC XR2211. Untuk levelconverter komunikasi serial RS-232 digunakan IC MAX232. Mikrokontroler AT89S51 akan menerjemahkansinyal informasi yang diterima melalui komunikasi serial menjadi pulsa-pulsa langkah untuk menjalankanmotor stepper. Sebagai penggerak lengan robot digunakan 3 motor stepper pada masing-masing joint.Sehingga lengan robot memiliki 3 derajat kebebasan yang dapat bergerak dalam ruang 3 dimensi. Daripengujian yang dilakukan didapatkan persentase rata-rata error sampai dengan 10 % untuk setiap joint-nyayang disebabkan pembuatan kerangka lengan robot yang kurang presisi, penggunaan gear ratio sertapengiriman perintah secara wireless yang rentan terhadap gangguan. Penggunaan Handy Talky danmodulasi digital FSK sebagai sistem komunikasi wireless cukup efektif akan tetapi jangkauannya bergantungdari besarnya daya pancar Handy Talky.
Kata kunci : lengan robot, modulasi FSK, motor stepper, visual basic
1. PendahuluanDalam dunia industri teknogi robot telah banyak digunakan menggantikan mesin-mesin konvensional
yang masih membutuhkan banyak tenaga manusia untuk menjalankannya. Dengan menggunakan robot dapatmempercepat proses produksi, lebih presisi, efisiensi waktu dan biaya serta masih banyak manfaat lainnya.Penggunaan PC sebagai pengendali robot lebih menguntungkan karena lebih fleksibel , program dan kendaligerakan dapat diatur ulang/dimodifikasi sesuai dengan keinginan sewaktu-waktu.
Dengan semakin luasnya pemakaian robot ini dimana suatu saat penggunaan kabel sebagai mediatransmisi data antara robot dengan pengendalinya (PC atau mikrokontroler) menjadi tidak efisien. Sepertipenggunaan robot pada suatu tempat yang berbahaya dan dibutuhkan pengendalian dari tempat yang lebihaman atau keterbatasan kabel dalam pengendalian jarak jauh dimana semakin panjang kabel maka semakinbesar pula rugi-rugi yang ditimbulkan. Oleh sebab itu digunakan handy talky dan modulasi digital FSKsebagai media transmisi wireless sebagai alternatif
2. Dasar Teori2.1 Robot
Definisi robot secara umum adalah suatu alat multi fungsi otomatis yang dapat diprogram untukmelakukan pekerjaan tertentu.
2.2 Kinematics ManipulatorKinematics manipulator adalah ilmu analisis guna mempelajari gerakan manipulator dengan
mengabaikan gaya yang menyebabkan gerakan tersebut. Sedangkan manipulator adalah sekumpulan linkyang terhubung pada joint.
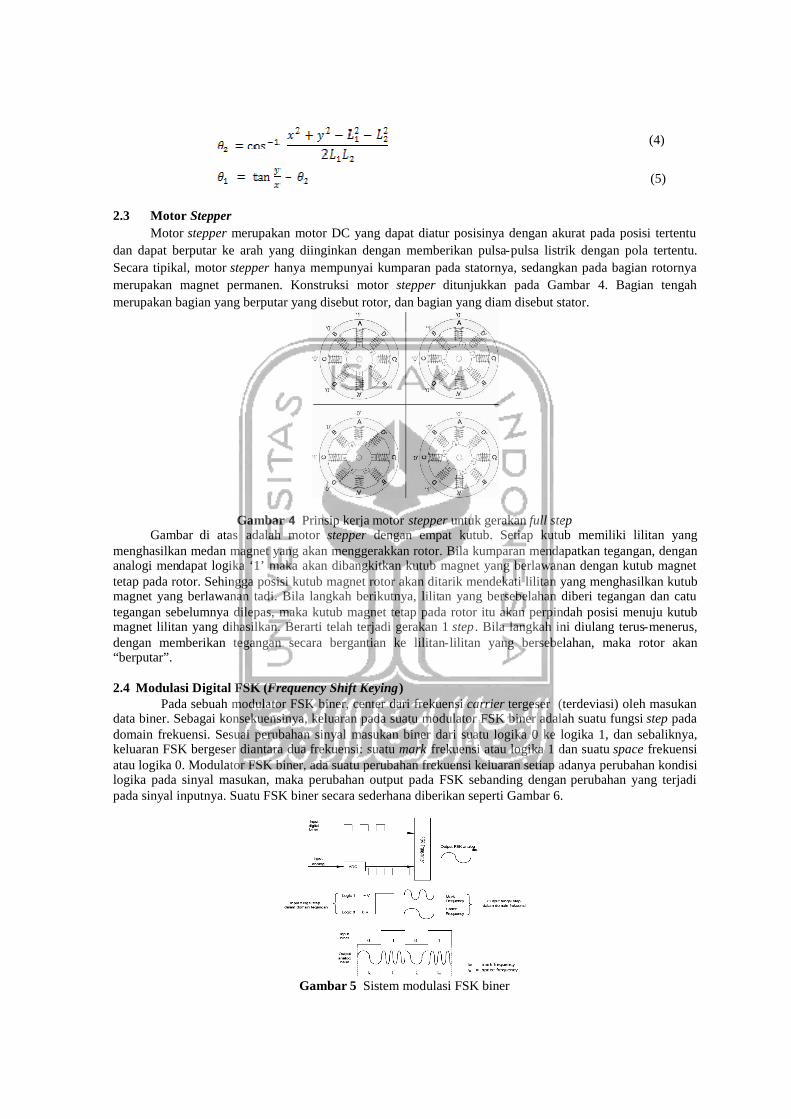
2.2.1 Forward KinematicsPada bagian ini sudut tiap joint dari lengan robot sudah diketahui sehingga dapat dicari posisi
orientasi. Untuk mencari Forward Kinematics dapat digunakan rumus persamaan Geometri atau persamaanMatriks Transformasi.
Analisis secara matematika Geometri untuk Forward Kinematics 3 dimensi :
(1)(2)(3)
Gambar 2. Forward kinematics 3 dimensi
2.2.2 Invers KinematicsSedangkan pada bagian ini sudah diketahui posisi orientasi untuk mencari sudut dari tiap joint lengan
robot.
Gambar 3. Invers kinematics 2 dimensi
Analisis secara matematika Geometri untuk Invers Kinematics 2 dimensi :
Gambar 1. Manipulator lengan robot
θ1
(x , y)
θ2
α
Y
XL1
L2
(5)
2.3 Motor StepperMotor stepper merupakan motor DC yang dapat diatur posisinya dengan akurat pada posisi tertentu
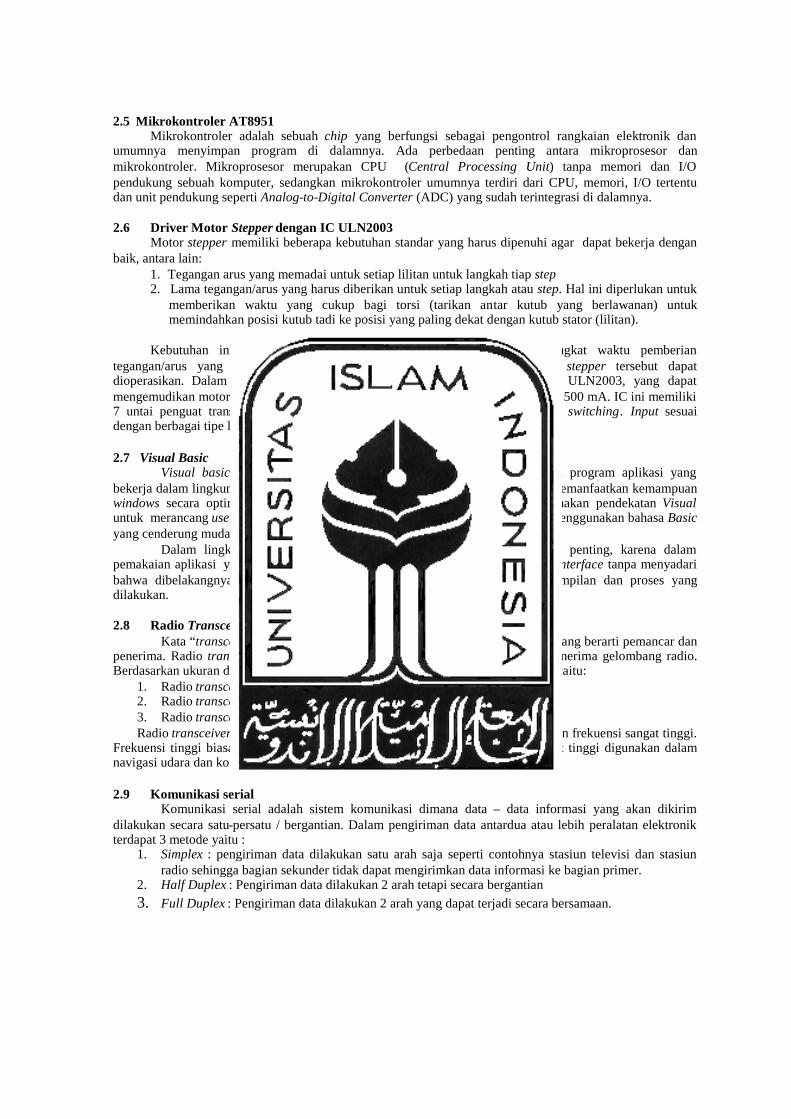
dan dapat berputar ke arah yang diinginkan dengan memberikan pulsa-pulsa listrik dengan pola tertentu.Secara tipikal, motor stepper hanya mempunyai kumparan pada statornya, sedangkan pada bagian rotornyamerupakan magnet permanen. Konstruksi motor stepper ditunjukkan pada Gambar 4. Bagian tengahmerupakan bagian yang berputar yang disebut rotor, dan bagian yang diam disebut stator.
Gambar 4 Prinsip kerja motor stepper untuk gerakan full stepGambar di atas adalah motor stepper dengan empat kutub. Setiap kutub memiliki lilitan yang
menghasilkan medan magnet yang akan menggerakkan rotor. Bila kumparan mendapatkan tegangan, dengananalogi mendapat logika ‘1’ maka akan dibangkitkan kutub magnet yang berlawanan dengan kutub magnettetap pada rotor. Sehingga posisi kutub magnet rotor akan ditarik mendekati lilitan yang menghasilkan kutubmagnet yang berlawanan tadi. Bila langkah berikutnya, lilitan yang bersebelahan diberi tegangan dan catutegangan sebelumnya dilepas, maka kutub magnet tetap pada rotor itu akan perpindah posisi menuju kutubmagnet lilitan yang dihasilkan. Berarti telah terjadi gerakan 1 step . Bila langkah ini diulang terus-menerus,dengan memberikan tegangan secara bergantian ke lilitan-lilitan yang bersebelahan, maka rotor akan“berputar”.
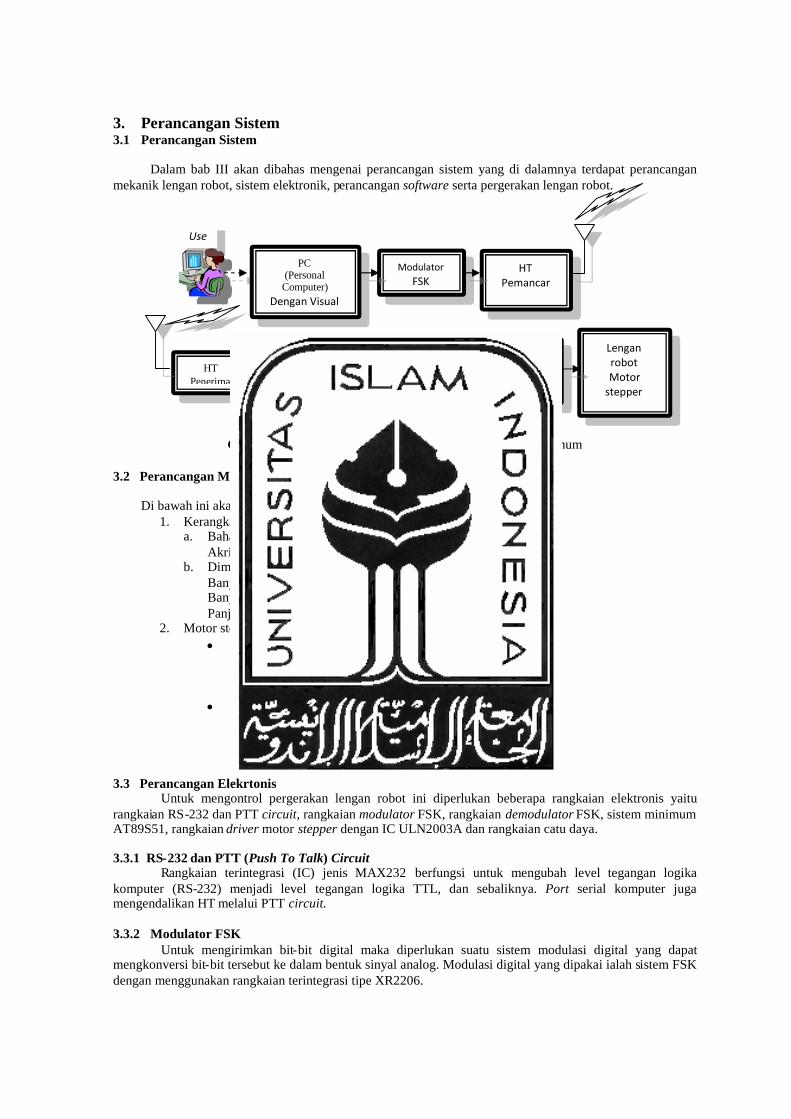
2.4 Modulasi Digital FSK (Frequency Shift Keying)Pada sebuah modulator FSK biner, center dari frekuensi carrier tergeser (terdeviasi) oleh masukan
data biner. Sebagai konsekuensinya, keluaran pada suatu modulator FSK biner adalah suatu fungsi step padadomain frekuensi. Sesuai perubahan sinyal masukan biner dari suatu logika 0 ke logika 1, dan sebaliknya,keluaran FSK bergeser diantara dua frekuensi: suatu mark frekuensi atau logika 1 dan suatu space frekuensiatau logika 0. Modulator FSK biner, ada suatu perubahan frekuensi keluaran setiap adanya perubahan kondisilogika pada sinyal masukan, maka perubahan output pada FSK sebanding dengan perubahan yang terjadipada sinyal inputnya. Suatu FSK biner secara sederhana diberikan seperti Gambar 6.
Gambar 5 Sistem modulasi FSK biner
(4)
2.5 Mikrokontroler AT8951Mikrokontroler adalah sebuah chip yang berfungsi sebagai pengontrol rangkaian elektronik dan
umumnya menyimpan program di dalamnya. Ada perbedaan penting antara mikroprosesor danmikrokontroler. Mikroprosesor merupakan CPU (Central Processing Unit) tanpa memori dan I/Opendukung sebuah komputer, sedangkan mikrokontroler umumnya terdiri dari CPU, memori, I/O tertentudan unit pendukung seperti Analog-to-Digital Converter (ADC) yang sudah terintegrasi di dalamnya.
2.6 Driver Motor Stepper dengan IC ULN2003Motor stepper memiliki beberapa kebutuhan standar yang harus dipenuhi agar dapat bekerja dengan
baik, antara lain:1. Tegangan arus yang memadai untuk setiap lilitan untuk langkah tiap step2. Lama tegangan/arus yang harus diberikan untuk setiap langkah atau step. Hal ini diperlukan untuk
memberikan waktu yang cukup bagi torsi (tarikan antar kutub yang berlawanan) untukmemindahkan posisi kutub tadi ke posisi yang paling dekat dengan kutub stator (lilitan).
Kebutuhan ini berbeda-beda untuk setiap motor stepper. Makin singkat waktu pemberiantegangan/arus yang dibutuhkan, makin tinggi kecepatan maksimum motor stepper tersebut dapatdioperasikan. Dalam perancangan rangkaian motor stepper ini digunakan IC ULN2003, yang dapatmengemudikan motor stepper dengan tegangan maksimum mencapai 50 V dan arus 500 mA. IC ini memiliki7 untai penguat transistor tipe Darlington yang dioperasikan sebagai rangkaian switching. Input sesuaidengan berbagai tipe logika.
2.7 Visual BasicVisual basic merupakan perangkat lunak (software) untuk membangun program aplikasi yang
bekerja dalam lingkungan sistem operasi windows. Dengan visual basic kita bisa memanfaatkan kemampuanwindows secara optimal. Dalam pengembangan aplikasi, Visual Basic menggunakan pendekatan Visualuntuk merancang user interface dalam bentuk form, sedangkan untuk kodingnya menggunakan bahasa Basicyang cenderung mudah dipelajari.
Dalam lingkungan Windows User-interface sangat memegang peranan penting, karena dalampemakaian aplikasi yang kita buat, pemakai senantiasa berinteraksi dengan User-interface tanpa menyadaribahwa dibelakangnya berjalan instruksi-instruksi program yang mendukung tampilan dan proses yangdilakukan.
2.8 Radio TransceiverKata “transceiver” merupakan kependekan dari transmitter dan receiver, yang berarti pemancar dan
penerima. Radio transceiver berarti alat yang berfungsi sebagai pemancar dan penerima gelombang radio.Berdasarkan ukuran dan penempatannya, radio transceiver ini dibagi menjadi tiga, yaitu:
1. Radio transceiver komunikasi tangan (Handy Talky).2. Radio transceiver stasiun tetap.3. Radio transceiver stasiun bergerak (mobile).Radio transceiver pada umumnya menggunakan gelombang frekuensi tinggi dan frekuensi sangat tinggi.
Frekuensi tinggi biasa digunakan dalam navigasi laut, sedangkan frekuensi sangat tinggi digunakan dalamnavigasi udara dan komunikasi jarak dekat.
2.9 Komunikasi serialKomunikasi serial adalah sistem komunikasi dimana data – data informasi yang akan dikirim
dilakukan secara satu-persatu / bergantian. Dalam pengiriman data antardua atau lebih peralatan elektronikterdapat 3 metode yaitu :
1. Simplex : pengiriman data dilakukan satu arah saja seperti contohnya stasiun televisi dan stasiunradio sehingga bagian sekunder tidak dapat mengirimkan data informasi ke bagian primer.
2. Half Duplex : Pengiriman data dilakukan 2 arah tetapi secara bergantian3. Full Duplex : Pengiriman data dilakukan 2 arah yang dapat terjadi secara bersamaan.
3. Perancangan Sistem3.1 Perancangan Sistem
Dalam bab III akan dibahas mengenai perancangan sistem yang di dalamnya terdapat perancanganmekanik lengan robot, sistem elektronik, perancangan software serta pergerakan lengan robot.
Gambar 6 Blok diagram pengendalian lengan robot secara umum
3.2 Perancangan Mekanik
Di bawah ini akan dijelaskan spesifikasi detil lengan robot.1. Kerangka lengan robot
a. Bahan utama robot:Akrilik dengan ketebalan 2mm
b. Dimensi lengan robotBanyak joint : 3 buahBanyak lengan : 3 buahPanjang lengan pertama, lengan kedua dan lengan ketiga : 14 cm
2. Motor stepper Mitsumi M42SP-4NK
Langkah : 96 step/360ºResistansi :12.5ΩTegangan operasi : 5-24V
FDK SMB40-9640 ALangkah : 96 step/360ºResistansi :12.ΩTegangan operasi : 5-24V
3.3 Perancangan ElekrtonisUntuk mengontrol pergerakan lengan robot ini diperlukan beberapa rangkaian elektronis yaitu
rangkaian RS-232 dan PTT circuit, rangkaian modulator FSK, rangkaian demodulator FSK, sistem minimumAT89S51, rangkaian driver motor stepper dengan IC ULN2003A dan rangkaian catu daya.
3.3.1 RS-232 dan PTT (Push To Talk) CircuitRangkaian terintegrasi (IC) jenis MAX232 berfungsi untuk mengubah level tegangan logika
komputer (RS-232) menjadi level tegangan logika TTL, dan sebaliknya. Port serial komputer jugamengendalikan HT melalui PTT circuit.
3.3.2 Modulator FSKUntuk mengirimkan bit-bit digital maka diperlukan suatu sistem modulasi digital yang dapat
mengkonversi bit-bit tersebut ke dalam bentuk sinyal analog. Modulasi digital yang dipakai ialah sistem FSKdengan menggunakan rangkaian terintegrasi tipe XR2206.
Use
PC(PersonalComputer)
Dengan Visual
ModulatorFSK
HTPemancar
HTPenerima
DemodulatorFSK
AT89S51DriverMotorstepper
LenganrobotMotor
stepper
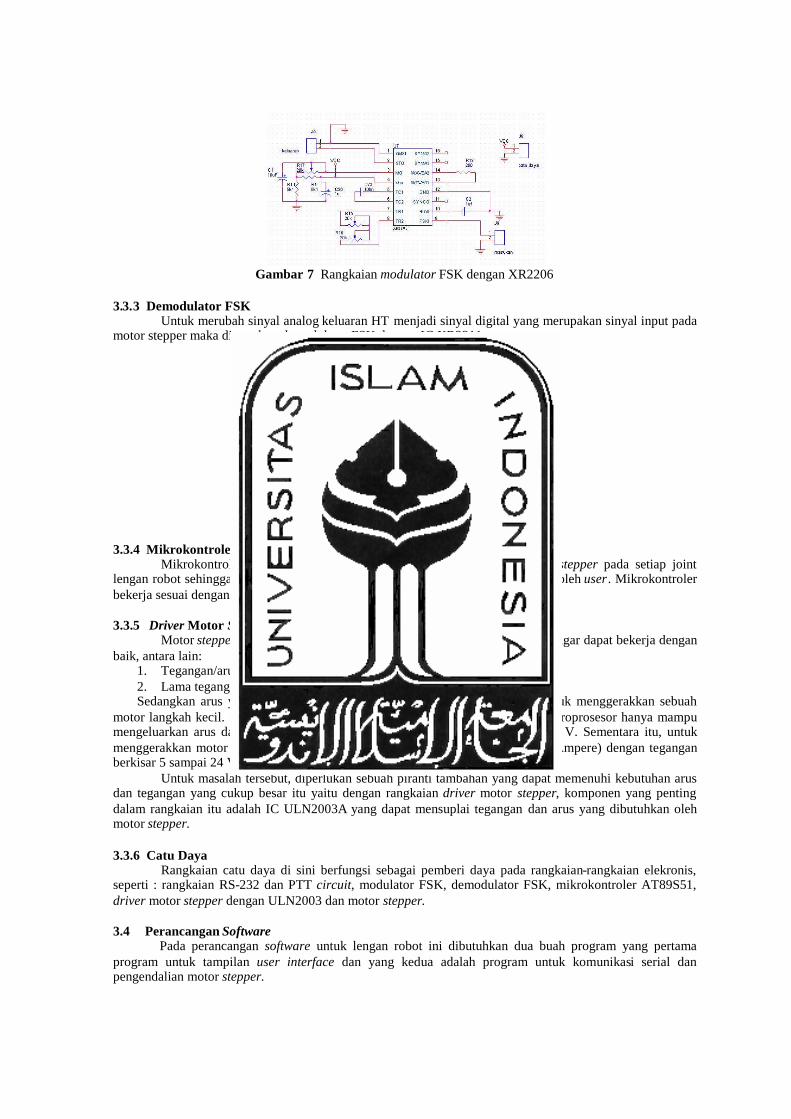
Gambar 7 Rangkaian modulator FSK dengan XR2206
3.3.3 Demodulator FSKUntuk merubah sinyal analog keluaran HT menjadi sinyal digital yang merupakan sinyal input pada
motor stepper maka digunakan demodulator FSK dengan IC XR2211.
Gambar 8 Rangkaian demodulator FSK dengan XR2211
3.3.4 Mikrokontroler AT89S51 dan DownloaderMikrokontroler AT89S51 berfungsi untuk mengatur pergerakan motor stepper pada setiap joint
lengan robot sehingga posisi end effector dapat bergerak seperti yang dikehendali oleh user. Mikrokontrolerbekerja sesuai dengan program yang sudah didownloadkan ke dalamnya.
3.3.5 Driver Motor Stepper dengan IC ULN2003AMotor stepper memiliki beberapa kebutuhan standar yang harus dipenuhi agar dapat bekerja dengan
baik, antara lain:1. Tegangan/arus yang memadai untuk setiap lilitan untuk langkah tiap step2. Lama tegangan/arus yang harus diberikan untuk setiap langkah atau stepSedangkan arus yang dapat dikeluarkan oleh mikroprosesor terlalu kecil untuk menggerakkan sebuah
motor langkah kecil. Sebagai perbandingan, gerbang-gerbang tipe TTL dalam mikroprosesor hanya mampumengeluarkan arus dalam ukuran mili-ampere dan tegangan antara 2 sampai 2,5 V. Sementara itu, untukmenggerakkan motor langkah dibutuhkan arus yang cukup besar (dalam ukuran Ampere) dengan teganganberkisar 5 sampai 24 V.
Untuk masalah tersebut, diperlukan sebuah piranti tambahan yang dapat memenuhi kebutuhan arusdan tegangan yang cukup besar itu yaitu dengan rangkaian driver motor stepper, komponen yang pentingdalam rangkaian itu adalah IC ULN2003A yang dapat mensuplai tegangan dan arus yang dibutuhkan olehmotor stepper.
3.3.6 Catu DayaRangkaian catu daya di sini berfungsi sebagai pemberi daya pada rangkaian-rangkaian elekronis,
seperti : rangkaian RS-232 dan PTT circuit, modulator FSK, demodulator FSK, mikrokontroler AT89S51,driver motor stepper dengan ULN2003 dan motor stepper.
3.4 Perancangan SoftwarePada perancangan software untuk lengan robot ini dibutuhkan dua buah program yang pertama
program untuk tampilan user interface dan yang kedua adalah program untuk komunikasi serial danpengendalian motor stepper.

3.4.1 Perancangan User Interface dengan Visual BasicUntuk memudahkan user dalam mengoperasikan lengan robot dengan program aplikasi maka dibuat
beberapa window yang memiliki fungsi pengiriman perintah sejenis. Window tersebut antara lain adalahslider mode control, button mode control, command mode control dan continous mode control.
3.4.2 Software MikrokontrolerDalam pembuatan program untuk software mikrokontroler menggunakan bahasa C karena bahasa C
relatif lebih mudah dipahami dibandingkan dengan bahasa assembler. Sehingga tidak harus menghafalregister-register dan commands yang ada di dalam mikrokontroler tersebut. Selain itu bahasa C merupakanbahasa yang powerful, fleksibel dan portabel sehingga dapat dijalankan dibeberapa sistem operasi yangberbeda, serta mudah dalam pembuatan interfacing (pembuatan program antar muka) ke perangkat keras(hardware). Program yang akan dimasukkan ke dalam mikrokontroler digunakan untuk penanganankomunikasi serial antara PC dengan mikrokontroler dan membangkitkan pulsa-pulsa langkah (step) untukmenggerakkan motor stepper berdasarkan data yang diterima dari komunikasi serial.
3.5 Pergerakan Lengan RobotSebagai penggerak lengan robot digunakan beberapa motor stepper dan menggunakan
mikrokontroler sebagai driver untuk menerima data dari PC dan selanjutnya mengolah data tersebut agardapat mengendalikan motor stepper sesuai dengan perintah yang diatur pada user interface.
Nilai sudut untuk setiap joint dibatasi, hal ini dikarenakan dimensi ruang kerja kerangka lenganrobot terbatas. Pada joint 1 range motor stepper berkisar antara -135º sampai +135º. Joint 2 mempunyairange antara 0 sampai 90º. Sedangkan joint 3 mempunyai range antara -90º sampai +90º. Agar motor steppertidak bergerak atau berubah posisi ketika sedang menunggu perintah maka pulsa-pulsa posisi terakhir harustetap diberikan/dipertahankan.
4. Pengujian dan PembahasanPada bab ini akan dibahas mengenai keseluruhan pengujian sistem. Materi pengujian sistem
meliputi berapa besarnya pergerakan tiap-tiap joint lengan robot yang dikendalikan oleh user melaluibeberapa mode pengendalian pada user interface visual basic, pengujian forward dan invers kinematics sertapengujian terhadap transmisi data secara wireless menggunakan teknik modulasi dan demodulasi FSK.
4.1 Pengujian Rangkaian Modulator FSKUntuk mengirimkan bit-bit digital maka diperlukan suatu sistem modulasi digital yang dapat
mengkonversi bit-bit tersebut ke dalam bentuk sinyal analog. Modulasi digital yang dipakai ialah sistem FSKdengan menggunakan rangkaian terintegrasi tipe XR2206. Dari hasil pengujian, bit-bit digital yangdikirimkan melalui komunikasi serial yang diinputkan pin 9 akan dikonversi menjadi sinyal analog yangdikeluarkan pada pin 2, seperti yang terlihat pada Gambar 9.
Gambar 9 Output modulator FSK dengan logika ‘1’
Gambar 10 Output modulator FSK dengan logika ‘0’Gambar 9 dan Gambar 10 merupakan hasil pengamatan oscilloscope dengan Volt/div = 1 V dan
Time/div = 0,5 ms. Sehingga didapat tegangan sinyal analog hasil keluaran modulator FSK sekitar 4,36 V.Bit-bit digital dengan logika ‘1’ atau mark diwakilkan oleh frekuensi 1,11 KHz (Gambar 9) dan
logika ‘0’ atau space diwakilkan oleh frekuesi 2,08 KHz (Gambar 10). Frekuensi mark dan space ini dapatdiatur nilainya dari resistor-resistor variabel pada pin 7 dan pin 8 rangkaian terintegrasi XR2206.

4.2 Pengujian HT PenerimaHT penerima dapat berhubungan langsung dengan HT pemancar dengan cara mengatur frekuensi
pembawa berada pada frekuensi yang sama. Sinyal informasi yang dikirimkan oleh HT pemancar diterimaoleh HT penerima yang selanjutnya diinputkan ke rangkaian demodulator.
Gambar 11 Output HT penerima dengan sinyal analog hasil pengiriman PCSinyal analog keluaran HT penerima memiliki tegangan yang tetap sekitar 4,5 V, perubahan
frekuensi sesuai dengan perubahan bit-bit digital yang dikirim dari PC.
4.3 Pengujian Rangkaian Demodulator FSKSinyal analog yang dikirimkan melalui HT untuk dapat diterima dan diproses oleh mikroprosesor
harus dikonversikan kembali menjadi bit-bit digital untuk itu dibutuhkan IC demodulator FSK sepertiXR2211.
Gambar 12 Output rangkaian demodulator FSKGambar 12 merupakan hasil pengamatan pada oscilloscope dengan volt/div = 5V dan time/div =
5ms. Sinyal analog yang diinputkan pada pin 2 akan menghasilkan bit-bit digital dalam bentuk serial kembaliseperti keadaan ketika data dikirimkan oleh PC melalui port serial dengan tegangan sekitar 5 V dan bit rate300 bps.
4.4 Pengujian Rangkaian RS-232 dan PTT CircuitIC MAX232 digunakan untuk membangun komunikasi serial asinkron komputer dengan
mikrokontroler. Pada komunikasi serial standar sinyal serial RS232 memiliki ketentuan level tegangansebagai berikut :
1. logika ‘1’ atau ‘mark’ dikirim sebagai tegangan -3 sampai -25 V2. logika ‘0’ atau ‘space’ dikirim sebagai tegangan +3 sampai +25 V.3. Daerah tengan antara -3 V hingga +3 V adalah invalid level, yaitu daerah tegangan yang tidak
memiliki level logika pasti sehingga harus dihindari. Demikian juga level tegangan lebih negatifdari -25 V atau lebih positif dari +25 V juga harus dihindari karena tegangan tersebut dapatmerusak line driver pada saluran RS232.
Untuk menghubungkan saluran RS232 dengan rangkaian TTL yang beroperasi pada tegangan berkisar 5 Vdigunakan IC MAX232 sebagai pengubah tegangan timbal balik antara RS232-TTL.
Pengujian pada rangkaian ini dilakukan dengan mengamati sinyal komunikasi serial keluaran ICMAX232 menggunakan oscilloscope.
Gambar 13 Keluaran komunikasi serial IC MAX232
4.5 Pengujian Perangkat Lunak User Interface Visual BasicPengujian user interface adalah pengujian dari jalannya program aplikasi yang dibuat. Program
aplikasi yang telah dibuat dijalankan dan dilihat apakah semua window dapat berjalan dengan baik dan sesuaiperancangan.
4.6 Pengujian Sistem Terhadap Pergerakan Setiap JointUntuk pengujian pergerakan setiap joint lengan robot digunakan window slider mode control.
Sebelum dan sesudah pengujian setiap joint diset terlebih dahulu pada titik acuan pengukuran untukmempermudah perhitungan atau dengan mengembalikan posisi joint kembali ke posisi awal.
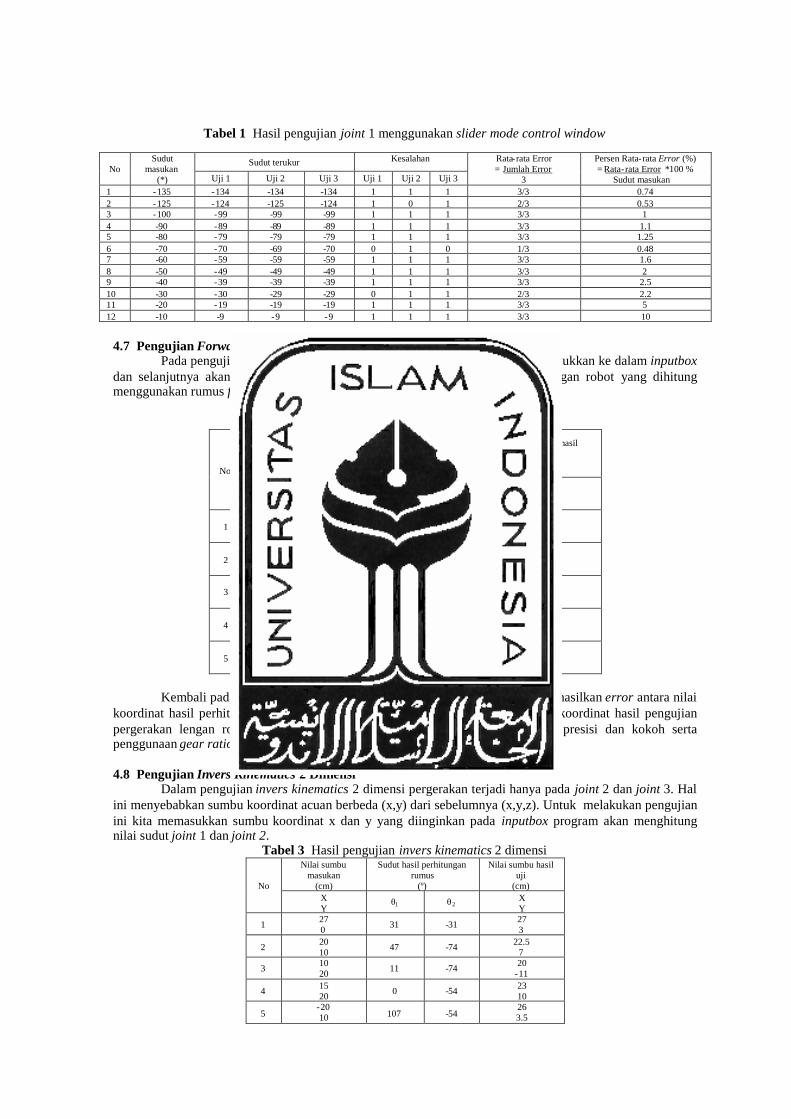
Tabel 1 Hasil pengujian joint 1 menggunakan slider mode control window
NoSudut
masukan(*)
Sudut terukur Kesalahan Rata-rata Error= Jumlah Error
3
Persen Rata-rata Error (%)= Rata-rata Error *100 %
Sudut masukanUji 1 Uji 2 Uji 3 Uji 1 Uji 2 Uji 31 -135 -134 -134 -134 1 1 1 3/3 0.742 -125 -124 -125 -124 1 0 1 2/3 0.533 -100 -99 -99 -99 1 1 1 3/3 14 -90 -89 -89 -89 1 1 1 3/3 1.15 -80 -79 -79 -79 1 1 1 3/3 1.256 -70 -70 -69 -70 0 1 0 1/3 0.487 -60 -59 -59 -59 1 1 1 3/3 1.68 -50 -49 -49 -49 1 1 1 3/3 29 -40 -39 -39 -39 1 1 1 3/3 2.510 -30 -30 -29 -29 0 1 1 2/3 2.211 -20 -19 -19 -19 1 1 1 3/3 512 -10 -9 -9 -9 1 1 1 3/3 10
4.7 Pengujian Forward Kinematics 3 DimesiPada pengujian forward kinematics ini, semua nilai besar sudut joint dimasukkan ke dalam inputbox
dan selanjutnya akan dibandingkan nilai-nilai sumbu koordinat end effector lengan robot yang dihitungmenggunakan rumus forward kinematics.
Tabel 2 Hasil pengujian forward kinematics 3 dimensi
No
Sudut masukan(º)
Nilai koordinat rumus(cm)
Nilai koordinat hasilpengujian
(cm)
θ1 θ2 θ3
XYZ
XYZ
1 0 90 000
42
00
42
2 30 30 3016.59.533
169
32
3 0 45 45100
38
120
37
4 90 90 -900
1428
014.528
5 -30 45 017-1034
19-10
33.5
Kembali pada pengujian dengan perhitungan forward kinematics ini menghasilkan error antara nilaikoordinat hasil perhitungan dengan persamaan Forward kinematics dengan nilai koordinat hasil pengujianpergerakan lengan robot. Ini disebabkan oleh kerangkan lengan yang kurang presisi dan kokoh sertapenggunaan gear ratio.
4.8 Pengujian Invers Kinematics 2 DimensiDalam pengujian invers kinematics 2 dimensi pergerakan terjadi hanya pada joint 2 dan joint 3. Hal
ini menyebabkan sumbu koordinat acuan berbeda (x,y) dari sebelumnya (x,y,z). Untuk melakukan pengujianini kita memasukkan sumbu koordinat x dan y yang diinginkan pada inputbox program akan menghitungnilai sudut joint 1 dan joint 2.
Tabel 3 Hasil pengujian invers kinematics 2 dimensi
No
Nilai sumbumasukan
(cm)
Sudut hasil perhitunganrumus
(º)
Nilai sumbu hasiluji
(cm)XY
θ1 θ2XY
1 270 31 -31 27
3
2 2010 47 -74 22.5
7
3 1020 11 -74 20
-11
4 1520 0 -54 23
10
5-2010 107 -54
263.5
Pengujian dengan invers kinematics 2 Dimensi terdapat banyak kesalahan/error yang disebabkanoleh ketidaksempurnaan program visual basic. Hasil yang didapat tidak sesuai dengan rumus inverskinematics
5. Penutup
5.1 KesimpulanBerdasarkan hasil perancangan dan pengujian lengan robot dapat diambil beberapa kesimpulan sebagai
berikut :1. Secara keseluruhan sistem pengendalian lengan robot bekerja dengan baik.2. Pergerakan lengan robot dengan motor stepper dapat mencapai ketelitian 1º dengan menggunakan
kombinasi gear ratio.3. Penyimpangan posisi end effector lengan robot disebabkan oleh tidak presisi posisi rangka lengan
robot, gear ratio dengan dudukan yang kurang kuat serta pengiriman perintah dari komputermelalui gelombang radio yang mudah terkena gangguan.
5.2 SaranUntuk pengembangan selanjutnya penulis menyarankan :1. Dalam pembuatan kerangka lengan robot ukuran dan posisi harus lebih presisi, untuk memperkecil
error serta menggunakan bahan yang ringan dan kuat terhadap tekanan dan beban.2. Untuk pembuatan lengan robot hendaknya digunakan motor stepper dengan torsi yang lebih besar
dan sudut putar yang lebih kecil sehingga bisa mengurangi penggunaan gear ratio yang dapatmemberikan penyimpangan sudut putaran.
3. Untuk mengurangi kesalahan pengiriman perintah atau perintah yang tidak sampai ke lengan robotdari komputer dan karena komunikasi wireless lebih mudah terkena gangguan, sebaiknya digunakanumpan balik sehingga bila ada kesalahan pada komunikasi wireless tersebut dapat diatasi.
Daftar Pustaka
[1] Budiharto, W., 2004. Interfacing komputer dan mikrokontroler. Jakarta : PT Elex Media Komputindo.
[2] Budiharto, W., 2006. Belajar sendiri membuat robot cerdas. Jakarta : PT Elex Media Komputindo
[3] Franco, S., 2002. Design with operational amplifier and analog integrated circuits. New York :McGraw-Hill Inc.
[4] Joni, I. M., & Raharjo, B., 2006. Pemrograman C dan implementasinya. Bandung: Informatika.
[5] Komputer, W. 2006. Tip dan trik pemrograman visual basic 6. Yogyakarta: Andi Offset.
[6] Miller, G.M., 2002. Modern electronic communication. : Practise-Hall
[7] Peacock, C., 2000. Interfacing the serial / RS232, Available at http://www.beyondlogic.org.
[8] Pitowarno, E., 2006. Robotika disain, control, dan kecerdasan buatan. Yogyakarta: Andi Offset
[9] Prasetia, R., & Widodo, C.E., 2004. Interfacing port paralel dan port serial komputer dengan visualbasic 6.0. Yogyakarta : Andi Offset.
[10] Setiawan, R., 2006. Mikrokontroler MCS-51. Yogyakarta: Graha Ilmu
Top Related
Copyright © 2022 FDOKUMEN

