UNIVERSIDADE EDUARDO MONDLANE FACULDADE DE ENGENHARIA ELECTRÓNICA DE POTÊNCIA
104
UNIVERSIDADE EDUARDO MONDLANE FACULDADE DE ENGENHARIA DEPARTAMENTO DE ELECTROTECNIA ENGENHARIA ELÉCTRICA ELECTRÓNICA DE POTÊNCIA Profesor: M.Sc. Luis Alberto Hernández Lugones Fevereiro de 2014 NB: Material de apoio. Estudante: TOMO, Jonas Brizito João
-
Upload
independent -
Category
Documents
-
view
3 -
download
0
Transcript of UNIVERSIDADE EDUARDO MONDLANE FACULDADE DE ENGENHARIA ELECTRÓNICA DE POTÊNCIA

UNIVERSIDADE EDUARDO MONDLANEFACULDADE DE ENGENHARIA
DEPARTAMENTO DE ELECTROTECNIA
ENGENHARIA ELÉCTRICA
ELECTRÓNICA DE POTÊNCIA
Profesor: M.Sc. Luis Alberto Hernández Lugones
Fevereiro de 2014
NB: Material de apoio. Estudante: TOMO, Jonas Brizito João

2
ÍNDICE:1. Introducción a la Electrónica de Potencia 12. Dispositivos de potencia 5
2.1 Diodos de potencia 52.2 El transistor de potencia 112.3 Tiristores de potencia 25
3. Rectificadores 353.1 Rectificación monofásica no controlada. Generalidades 353.2 Circuitos rectificadores y su clasificación 353.3 Rectificador monofásico de media onda con carga resistiva pura 363.4 Rectificador monofásico de media onda con carga R-L 433.5 Rectificadores monofásicos de onda completa no controlados 463.6 Rectificador monofásico puente con carga resistiva pura 463.7 Rectificador monofásico puente con carga inductiva pura 513.8 Rectificador monofásico con center tap y carga resistiva pura 533.9 Análisis del rectificador monofásico de onda completa considerando
la conmutación 573.10 Rendimiento de los rectificadores 63
4. Inversores 654.1 Introducción 654.2 Inversores PWM 664.3 Inversor de onda cuadrada 684.4 Inversdor monofásico con supresión de tensión 684.5 Inversor tipo C1 69
5. Cicloconvertidores 725.1 Introducción 725.2 Principio de Funcionamiento 725.3 Montajes utilizados 765.4 Estudio de la tensión de salida 795.5 Modos de funcionamiento 80
6. Reguladores e interruptores estáticos de continua 816.1 Introducción 816.2 Funcionamiento básico 816.3 Interruptores estáticos de corriente continúa 836.4 Interruptor de conmutación forzada por condensador en paralelo 836.5 Interruptor estático de bloqueo forzado por inductancia en serie con
la carga 876.6 Reguladores estáticos de corriente continua 896.7 Clasificación de los Troceadores 906.8 Reguladores estáticos de c.c. disipativos 936.9 Reguladores estáticos de c.c. no disipativos 946.10 Regulador de frecuencia variable. Bloqueo por circuito resonante 966.11 Troceador de Morgan de autoconmutación por circuito resonante 996.12 Regulador de c.c. con bloqueo por condensador en paralelo o
Troceador de oscilación 99Bibliografía 102

1
1. Introducción a la Electrónica de Potencia.
La electrónica de potencia o electrónica de las corrientes fuertes es una técnica relativamente nueva que se ha desarrollado a partir de la electrónica y la electrotécnia gracias al avance tecnológico que se ha alcanzado en la producción de dispositivos semiconductores y se define como la técnica de las modificaciones de la presentación de la energía eléctrica.
A diferencia de como ocurre en la electrónica de las corrientes débiles, en que se da prioridad a la ganancia y fidelidad, la característica más importante de la electrotecnia de potencia es el rendimiento. Esta última además se diferencia de la primera, en que en la electrónica de las corrientes débiles, lo más importante es que se ocupa de modular la caída de tensión en los elementos activos a fin de modificar o amplificar la señal de entrada, pero en la que nos ocupa los elementos activos han de trabajar en conmutación todo o nada a fin de minimizar la pérdidas de modo tal que cuando el semiconductor está bloqueado y sometido a una tensión alta es preciso que la corriente de fuga sea despreciable y cuando conduce, ha de ser despreciable su caída de tensión. Esto garantiza que el dispositivo presente características similares a un interruptor mecánico.Planteadas estas características se puede decir que el convertidor de potencia esta formado por dispositivos de potencia (diodos, transistores, tiristores) que se encargan de realizar las funciones de interruptores mecánicos.
Figura 1.1 Convertidor a semiconductores.
El equipo electrónico de potencia cuenta fundamentalmente de dos bloques:
1. Circuito de potencia: Está compuesto por semiconductores de potencia y elementos pasivos como son (transformadores, bobinas, capacitores, etc).que acopla la fuente de alimentación con la carga.

2
2. Un circuito de mando: Este elabora las fases y secuencias conveniente del impulso para ser aplicadas a los diferentes dispositivos de potencia en función de una señal dada al mismo por un operador o por un regulador electrónico. Si se produce una operación a lazo cerrado. Por supuesto que si el convertidor está compuesto por diodos, carece de sentido hablar de la existencia de este bloque funcional.
Un esquema que ilustra lo antes expuesto es el que muestra la figura 1.2.
Figura 1.2 Diagrama en bloques del convertidor de potencia, operando a lazo cerrado.
Por tanto puede concluirse que: El objeto de la electrónica de potencia, es precisamente el estudio del circuito de potencia y la apropiada elección de las señales de excitación que ha de proporcionar el esquema de mando.
Atendiendo a que el convertidor modifica las características eléctricas de entrada, se puede lograr el montaje de diferentes convertidores, atendiendo al proceso de conversión de sus parámetros, los cuales se ilustran en la figura 1.3.
3
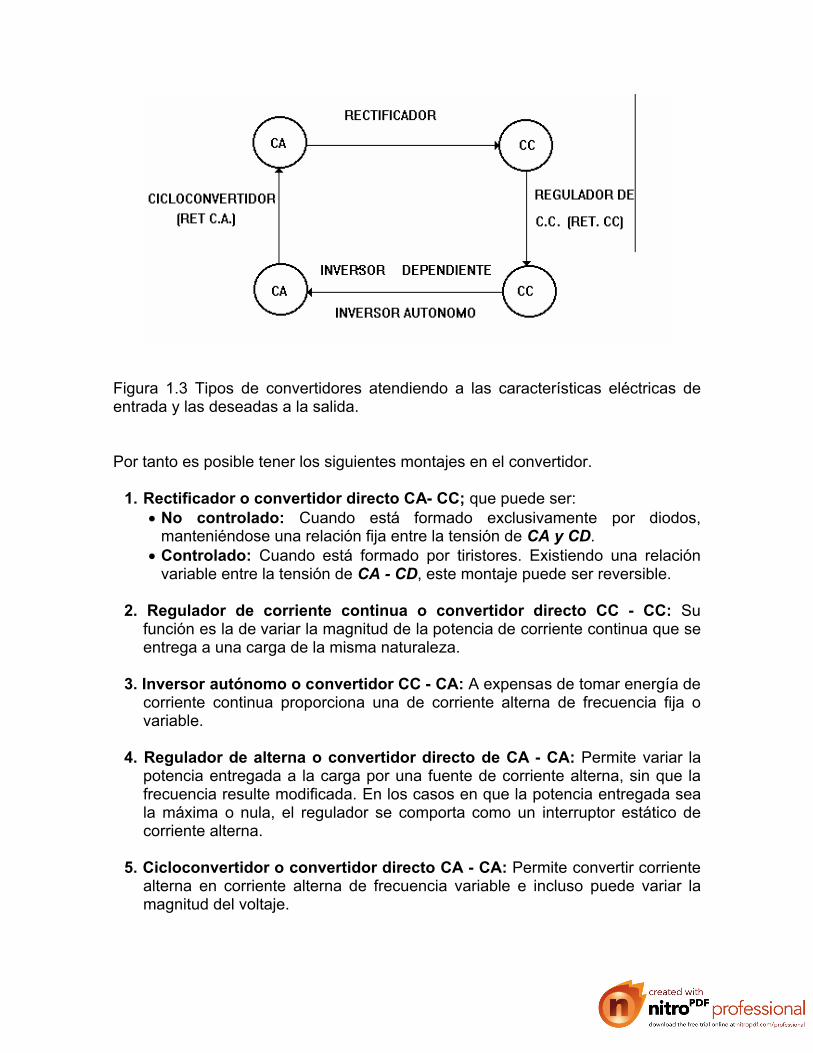
Figura 1.3 Tipos de convertidores atendiendo a las características eléctricas de entrada y las deseadas a la salida.
Por tanto es posible tener los siguientes montajes en el convertidor.
1. Rectificador o convertidor directo CA- CC; que puede ser: No controlado: Cuando está formado exclusivamente por diodos,
manteniéndose una relación fija entre la tensión de CA y CD. Controlado: Cuando está formado por tiristores. Existiendo una relación
variable entre la tensión de CA - CD, este montaje puede ser reversible.
2. Regulador de corriente continua o convertidor directo CC - CC: Su función es la de variar la magnitud de la potencia de corriente continua que se entrega a una carga de la misma naturaleza.
3. Inversor autónomo o convertidor CC - CA: A expensas de tomar energía de corriente continua proporciona una de corriente alterna de frecuencia fija o variable.
4. Regulador de alterna o convertidor directo de CA - CA: Permite variar la potencia entregada a la carga por una fuente de corriente alterna, sin que la frecuencia resulte modificada. En los casos en que la potencia entregada sea la máxima o nula, el regulador se comporta como un interruptor estático de corriente alterna.
5. Cicloconvertidor o convertidor directo CA - CA: Permite convertir corriente alterna en corriente alterna de frecuencia variable e incluso puede variar la magnitud del voltaje.
4
Atendiendo a estos convertidores directos se puede lograr funciones análogas colocando convertidores en cascada como muestra la figura 1.3, por supuesto que la eficiencia de la conversión disminuye.
Como se puede observar la electrónica de potencia, ha logrado resolver, procesos de conversión por medios electrotécnicos que existían y que son sumamente ineficientes ejemplos:
Variación del voltaje mediante cambia taps o autotransformadores; se resuelve con un convertidor directo CA - CA (RET).
La conmutatriz de una máquina dc o conjunto colector escobillas; se resuelve mediante un rectificador.
El conjunto motor asincrónico - generador de corriente directa; se resuelve con el rectificador controlado.
El inversor autónomo sustituye el conjunto motor de corriente continua generador sincrónico.
La electrónica de potencia frente a la electrotecnia proporciona unos equipos con las siguientes ventajas:
Mejores características eléctricas.Mayor fiabilidad y vida.Carencia casi total de mantenimiento.Ausencia de vibraciones.No existe arco eléctrico, evitándose los inconvenientes de desgaste de
contacto por arco eléctrico.Pero también presentan una serie de inconvenientes, siendo los de mayor importancia los siguientes:
Menor capacidad para soportar sobretensiones y sobrecorrientes.Algunos montajes son más caros, aunque este inconveniente se supera
cada vez más con el desarrollo tecnológico que se ha alcanzado en la confección de dispositivos semiconductores.
Por todo lo antes expuesto la electrónica de potencia se ha introducido de lleno en la industria (interruptores estáticos, fuentes de alimentación, cargadores de baterías, máquinas de soldadura, variadores de velocidad de motores), y sigue evolucionando y creciendo constantemente.
5
2. Dispositivos de Potencia.2.1 Diodos de potencia.
Los diodos semiconductores de potencia no se diferencian en cuanto a su principio de funcionamiento a sus homólogos de baja potencia los cuales ustedes ya han estudiado.
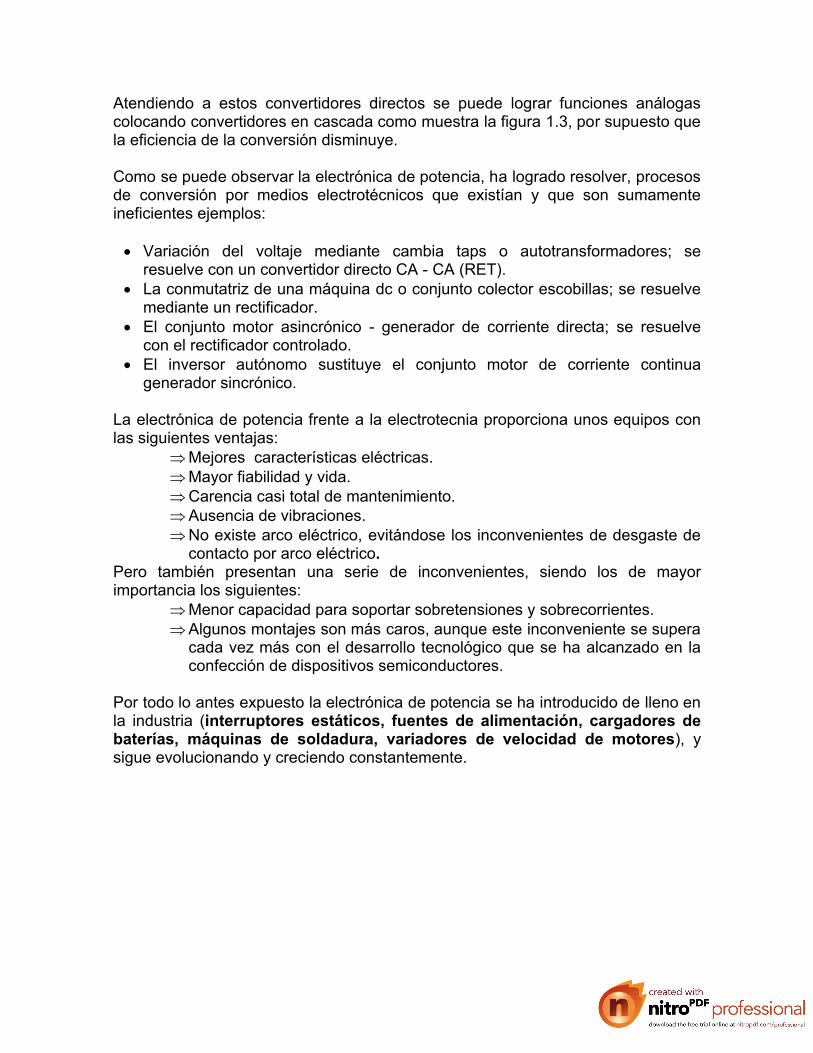
En particular estos poseen algunas características constructivas y eléctricas que le permiten trabajar con altas corrientes. Por tanto en su estructura interna, el diodo de potencia estará formado por la unión P- N una capa de material P y una de material N en una oblea de material semiconductor. La estructura interna del mismo y el símbolo es el siguiente.
Figura 2.1 Diodo semiconductor.
2.1.1 Características constructivas.
Los diodos semiconductores de potencia se fabrican normalmente de silicio para poder aprovechar su mayor temperatura de trabajo (alrededor de 140C), las menores corrientes inversas con relación al Germanio y las mayores tensiones disruptivas. Los diodos de potencia de Germanio, se utilizan solamente en aplicaciones que requieran una alta eficiencia debido a las altas corrientes de trabajo. De esta forma se aprovecha la baja caída de tensión en sentido directo de estos dispositivos (0.4 - 0.5 V).
En la actualidad existen dos formas constructivas del diodo de Silicio. El primer tipo se conoce con el diodo de unión soldada. En este tipo de forma constructiva el cristal se suelda por ambas caras a placas termocompensadoras, con el objetivo de conformar un conjunto que resista el envejecimiento debido a las variaciones de la temperatura. Dicho conjunto se suelda a la base de cobre la cual asegura una alta conductividad térmica y eléctrica y sirve a su vez de terminal (ánodo o cátodo).
El terminal superior es un cordón flexible de cobre soldado al disco y aislado del cuerpo, con vidrio o resina epóxica. El disco se protege de la acción atmosférica mediante la hermetización al vacío o inyectando algún gas inerte.
La segunda generación es conocida con el nombre de unión comprimida mecánicamente, en la cual el cristal de silicio se elabora por separado, cuestión

6
que permite mejorar notablemente sus características y luego se introduce en la cápsula dentro de la cual se mantiene en contacto estrecho gracias a la presión de un poderoso muelle. Con esta técnica se logra aumentar notablemente la capacidad de carga del dispositivo ya que en este se evita el efecto de fatiga térmica que causa la soldadura.
En la actualidad el desarrollo alcanzado en la fabricación de estos dispositivos ha permitido la eliminación del muelle colocándose el disco el disco suelto en la cápsula, garantizándose el contacto eléctrico con la presión ejercida por las placas disipadoras por cada una de las caras. Estos diodos aunque reciben el nombre de unión comprimida mecánicamente también se conocen como tipo disco o botón debido a su forma exterior.
El radiador es utilizado por todos los dispositivos de potencia con el objetivo de extraer el calor generado en la unión y con ello se logra aumentar la capacidad de corriente. Es bueno apuntar que los dispositivos tipo botón al poseer dos disipadores poseen una capacidad de carga aún mayor.
Cuando el calor no se puede extraer en una gran medida mediante radiadores entonces se emplean enfriamientos forzados ya sea por aire, aceite o agua desionizada.
2.1.2 Características tensión corriente o anódicas
La figura 2.2 representa la característica tensión - corriente del diodo en (a) idealizada y en (b) la característica real.
Figura 2.2 Características tensión corriente del diodo.
Esta indica que de forma ideal el diodo debe comportarse como un conductor perfecto cuando está polarizado en sentido directo y como un conductor abierto en sentido inverso.En la práctica el comportamiento difiere en algo del ideal.
En sentido directo la corriente no comienza a circular hasta que no se sobre pasa la barrera de potencial directa de la unión P-N (0.4…..0.7), y el elemento presenta
7
a partir de ahí una zona de resistencia baja al paso de la corriente, la cual debe considerarse aproximadamente constante.
En sentido inverso la barrera de potencial inversa impide la libre circulación de la corriente. En este caso sólo circulará una pequeña corriente de fuga del orden de los miliamperes, debido a la agitación térmica de los portadores minoritarios en el cristal.
Si la tensión inversa crece paulatinamente esto trae como consecuencia la aceleración de los portadores minoritarios, de manera que se llega a un estado en que estos adquieren una energía suficiente como para remover portadores de los átomos del cristal mediante choques, lo cual trae como consecuencia la multiplicación por avalancha con la consiguiente ruptura de la unión.Este proceso acumulativo ocurre a una tensión determinada y recibe el nombre de avalancha o disrupción inversa.
2.1.3 Características de conducción. Capacidad de carga de corriente.
Los cristales de silicio que se utilizan en los diodos de potencia son físicamente pequeños en relación con la potencia que manejan y a pesar de la alta eficiencia que presentan, las inevitables pérdidas de calor que se producen ocurren en un volumen relativamente pequeño. Por ejemplo en un cristal del tamaño de una moneda de un centavo se puede disipar una potencia entre 100....300 W y más.
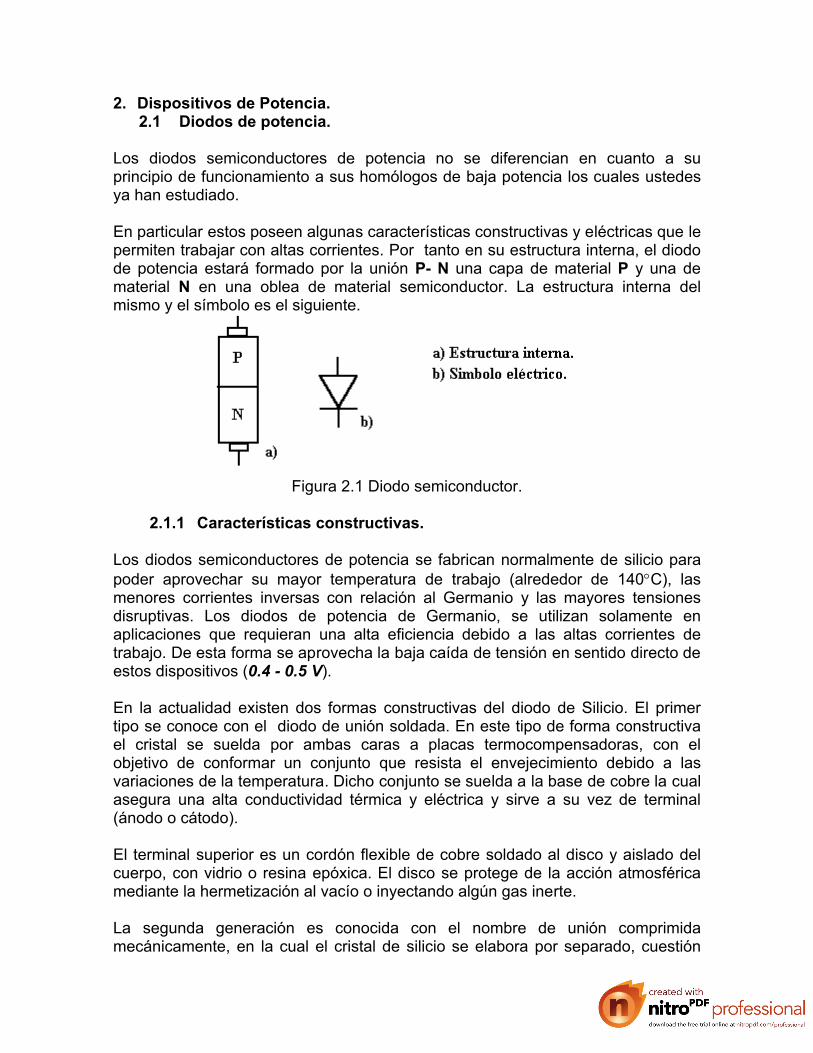
La capacidad de carga del dispositivo está estrechamente ligada con la razón de extracción de calor y este es el factor que se limita. Debido a la importancia de este hecho, a continuación se esbozará la metodología de cálculo para determinar las pérdidas a partir de las características en sentido directo del elemento. Aunque existe un método gráfico analítico exacto, una forma práctica y útil de realizar esto, se basa en la linealización por tramos de la característica directa. I
tg=1/r
U
U
Figura 2.3 Características linealizadas.
de las características linealizadas se puede plantear la siguiente expresión:
U U i r .
8
el valor medio de las pérdidas en un ciclo de trabajo (conducción o corte) en sentido directo será:
drdiUidU i .2.2.2
1 2
0
22
0
2
0
por tanto:
rIeedUP f .Im.2
o también:
P U ed Kf ed r .Im ( .Im ) .2
donde:
U:Tensión umbral.
r: Resistencia dinámica. :Ángulo de conducción.P:Pérdida de potencia en sentido directo.Im :ed Corriente media. Iefe:Corriente efectiva.Kf:Factor de forma de la corriente que atraviesa el diodo (relación entre el valor
efectivo y el medio).
Por ejemplo: Kf.Corriente directa 1.00Corriente sinusoidal de media onda 1.57
Del análisis de la expresión puede inferirse que:a) Las pérdidas crecen con mayor rapidez a medida que lo hace la corriente.b) Las pérdidas crecen en la medida en que empeora el factor de formado, o sea,
en la medida en que la forma de onda se hace más abrupta y se reduce el ángulo de conducción.
Puede considerarse de forma aproximada y para propósitos de estimación que las pérdidas en un diodo de silicio de potencia son de 1.2 W /A de CD nominal.
Si por las condiciones de calentamiento el elemento semiconductor no permite la corriente de carga requerida pueden conectarse varios dispositivos en paralelo. No obstante en la medida en que se desarrollan cada vez más dispositivos de mayor capacidad de corriente, estas conexiones se van utilizando con menor frecuencia.
9
2.1.4 Tensiones admisibles.
La tensión que produce la de fuga se toma como referencia para establecer la tensión de trabajo nominal.
De acuerdo a esto se establecen las siguientes especificaciones:
a) Tensión de pico no repetitiva: Esta no debe excederse ni aún de forma transitoria. Es soportable un número finito de veces durante su vida útil siempre y cuando no exceda la duración fijada por el fabricante.
b) Tensión de pico repetitiva: Esta es aproximadamente el 80% de la anterior, asegura un margen de valores pico que pueden alcanzarse reiteradamente sin peligro.
c) Tensión de pico de trabajo o nominal máximo: Esta se establece con relación a la corriente disruptiva o de avalancha con un factor de seguridad entre 1.5 a 2.
Tensión
Inversa
t
Figura 2.4 Tensiones admisibles.
2.1.5 Parámetros nominales del diodo.
Dentro de estos parámetros se enmarcan los de voltaje y corriente.
Los parámetros de voltajes son los siguientes:
Tensión de ruptura.
Tensión de pico inverso repetitiva.
Tensión de pico inverso no repetitiva.
Tensión de pico inverso de trabajo o recomendada.

10
Caída de tensión en sentido directo.
Los parámetros de corriente son los siguientes:
Corriente de bloqueo en sentido inverso.
Intensidad media nominal: Valor medio de la máxima corriente de impulso sinusoidal de 180º que el diodo puede soportar, cuando se trabaja en un circuito resistivo de media onda y la temperatura del cristal es de alrededor de 110ºC.
Intensidad de pico repetitiva: Puede ser soportada por tiempo indefinido, pero estos valores picos deben alcanzarse con margen de tiempo prudencial (cada 20 ms).
Intensidad de pico único: Es el máximo pico de corriente que puede soportar el dispositivo y se puede alcanzar con márgenes de tiempo de diez minutos o más y un mínimo finito de veces.
2.1.6 Criterios para su selección.
Atendiendo a los parámetros nominales y teniendo en cuenta que el dispositivo por ninguna razón debe ser sometido a condiciones más severas que las anteriormente expuestas; con vistas a que pueda evacuar de forma satisfactoria el calor generado en la unión, cabe parecer que en la selección del mismo también incurren factores que los determina el lugar donde se instalan, como son la temperatura, la velocidad del aire y la forma de onda de corriente que lo atraviesa en régimen de conducción.
Teniendo en cuenta lo antes expuesto se define que:El voltaje nominal del diodo (Unom), oscila entre 1.8 y 2.5 del voltaje inverso máximo (Uinv máx), esto es:
Unom = (1.8�2.5) Uinv máx
La corriente máxima permisible se afecta por los factores antes expuestos y la relación del factor de forma del rectificador de media onda, respecto al factor de forma de la corriente promedio que circula por el dispositivo, esto es:
Imáx perm = KT. Kv.KF.Inom
Donde:
KT - Coeficiente que depende de la temperatura.
Kv - Coeficiente que depende de la velocidad del aire.
KF - Coeficiente de depende de la forma de onda de la corriente que circula por el
dispositivo y se define como:

11
Kf del rectificador de media onda con carga resistiva puraKF = --------------------------------------------------------------------------------------- Kf del rectificador que se diseña.
La corriente máxima permisible tiene que ser mayor que la corriente promedio (Ia), que circula por el dispositivo, multiplicada por un factor de seguridad que oscila entre 1.2 y 1.3, por tanto:
Imáx. Perm. > (1.2 - 1.3) (Ia)
2.2 El transistor de potencia
El funcionamiento y utilización de los transistores de potencia es idéntico al de los transistores normales, teniendo como características especiales las altas tensiones e intensidades que tienen que soportar y, por tanto, las altas potencias a disipar.
Existen tres tipos de transistores de potencia:
bipolar.
unipolar o FET (Transistor de Efecto de Campo).
IGBT.
Parámetros MOS Bipolar
Impedancia de entrada Alta (1010 ohmios) Media (104 ohmios)
Ganancia en corriente Alta (107) Media (10-100)
Resistencia ON (saturación) Media / alta Baja
Resistencia OFF (corte) Alta Alta
Voltaje aplicable Alto (1000 V) Alto (1200 V)
Máxima temperatura de operación Alta (200ºC) Media (150ºC)
Frecuencia de trabajo Alta (100-500 Khz) Baja (10-80 Khz)
Coste Alto Medio
El IGBT ofrece a los usuarios las ventajas de entrada MOS, más la capacidad de carga en corriente de los transistores bipolares:
Trabaja con tensión.
Tiempos de conmutación bajos.

12
Disipación mucho mayor (como los bipolares).
Nos interesa que el transistor se parezca, lo más posible, a un elemento ideal:
Pequeñas fugas.
Alta potencia.
Bajos tiempos de respuesta (ton , toff), para conseguir una alta frecuencia de funcionamiento.
Alta concentración de intensidad por unidad de superficie del semiconductor.
Que el efecto avalancha se produzca a un valor elevado ( VCE máxima elevada).
Que no se produzcan puntos calientes (grandes di/dt ).
Una limitación importante de todos los dispositivos de potencia y concretamente de los transistores bipolares, es que el paso de bloqueo a conducción y viceversa no se hace instantáneamente, sino que siempre hay un retardo (ton , toff). Las causas fundamentales de estos retardos son las capacidades asociadas a las uniones colector - base y base - emisor y los tiempos de difusión y recombinación de los portadores.
2.2.1 Principios básicos de funcionamiento
La diferencia entre un transistor bipolar y un transistor unipolar o FET es el modo de actuación sobre el terminal de control. En el transistor bipolar hay que inyectar una corriente de base para regular la corriente de colector, mientras que en el FET el control se hace mediante la aplicación de una tensión entre puerta y fuente. Esta diferencia viene determinada por la estructura interna de ambos dispositivos, que son substancialmente distintas.
Es una característica común, sin embargo, el hecho de que la potencia que consume el terminal de control (base o puerta) es siempre más pequeña que la potencia manejada en los otros dos terminales.
En resumen, destacamos tres cosas fundamentales:
En un transistor bipolar IB controla la magnitud de IC.
En un FET, la tensión VGS controla la corriente ID.
En ambos casos, con una potencia pequeña puede controlarse otra bastante mayor.
13
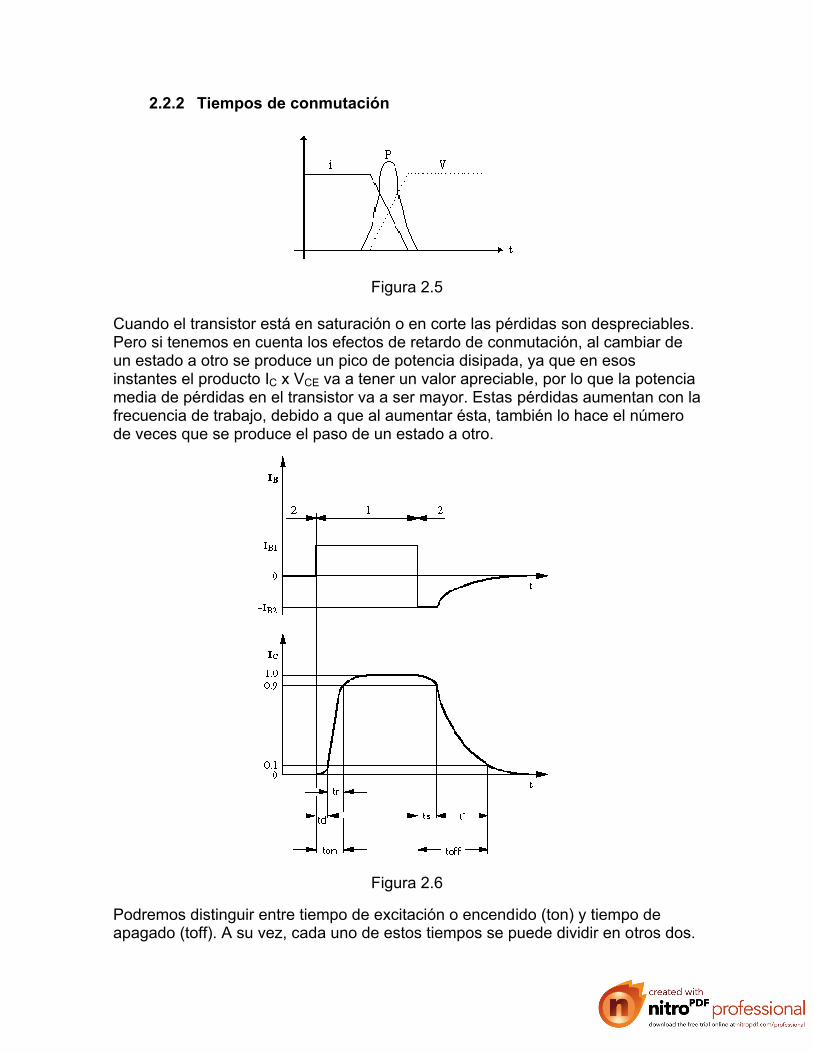
2.2.2 Tiempos de conmutación
Figura 2.5
Cuando el transistor está en saturación o en corte las pérdidas son despreciables. Pero si tenemos en cuenta los efectos de retardo de conmutación, al cambiar de un estado a otro se produce un pico de potencia disipada, ya que en esos instantes el producto IC x VCE va a tener un valor apreciable, por lo que la potencia media de pérdidas en el transistor va a ser mayor. Estas pérdidas aumentan con la frecuencia de trabajo, debido a que al aumentar ésta, también lo hace el número de veces que se produce el paso de un estado a otro.
Figura 2.6
Podremos distinguir entre tiempo de excitación o encendido (ton) y tiempo de apagado (toff). A su vez, cada uno de estos tiempos se puede dividir en otros dos.
14
Tiempo de retardo (Delay Time, td): Es el tiempo que transcurre desde el instante en que se aplica la señal de entrada en el dispositivo conmutador, hasta que la señal de salida alcanza el 10% de su valor final.
Tiempo de subida (Rise time, tr): Tiempo que emplea la señal de salida en evolucionar entre el 10% y el 90% de su valor final.
Tiempo de almacenamiento (Storage time, ts): Tiempo que transcurre desde que se quita la excitación de entrada y el instante en que la señal de salida baja al 90% de su valor final.
Tiempo de caída (Fall time, tf): Tiempo que emplea la señal de salida en evolucionar entre el 90% y el 10% de su valor final.
Por tanto, se pueden definir las siguientes relaciones :
Es de hacer notar el hecho de que el tiempo de apagado (toff) será siempre mayor que el tiempo de encendido (ton).
Los tiempos de encendido (ton) y apagado (toff) limitan la frecuencia máxima a la cual puede conmutar el transistor:
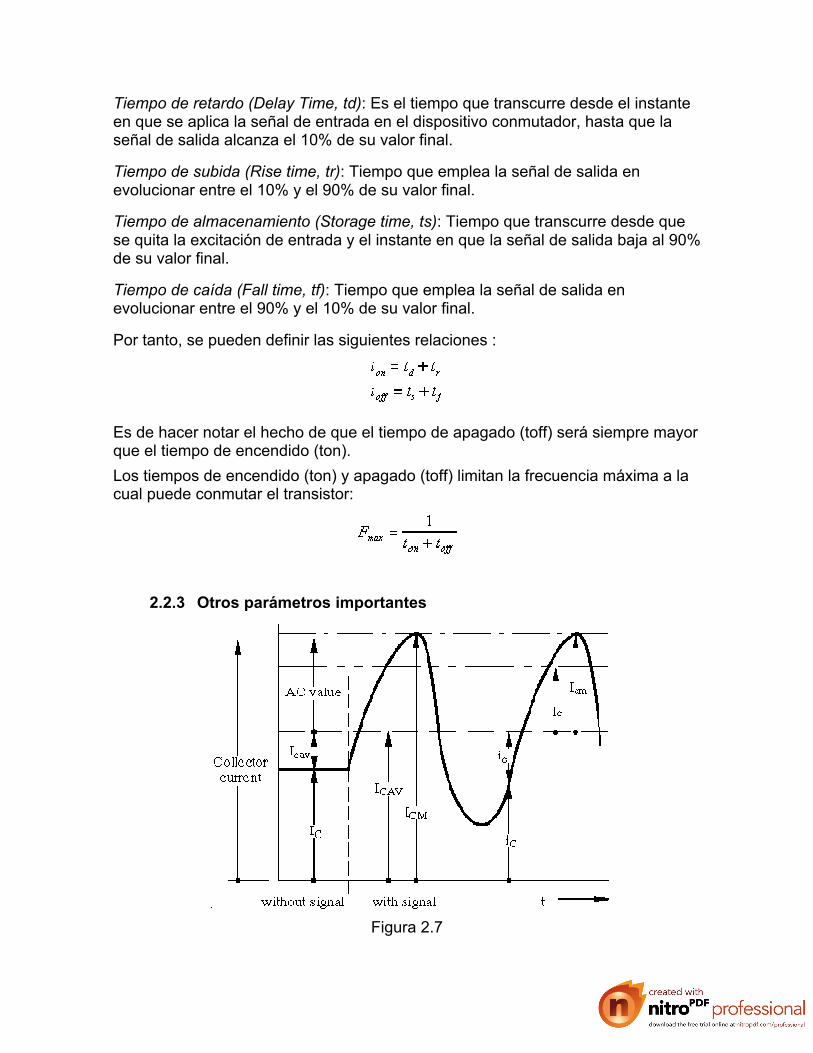
2.2.3 Otros parámetros importantes
Figura 2.7

15
Corriente media: es el valor medio de la corriente que puede circular por un terminal (ej. ICAV, corriente media por el colector).
Corriente máxima: es la máxima corriente admisible de colector (ICM) o de drenador (IDM). Con este valor se determina la máxima disipación de potencia del dispositivo.
VCBO: tensión entre los terminales colector y base cuando el emisor está en circuito abierto. VEBO: tensión entre los terminales emisor y base con el colector en circuito abierto.
Tensión máxima: es la máxima tensión aplicable entre dos terminales del dispositivo (colector y emisor con la base abierta en los bipolares, drenador y fuente en los FET).
Estado de saturación: queda determinado por una caída de tensión prácticamente constante. VCEsat entre colector y emisor en el bipolar y resistencia de conducción RDSon en el FET. Este valor, junto con el de corriente máxima, determina la potencia máxima de disipación en saturación.
Relación corriente de salida - control de entrada: hFE para el transistor bipolar (ganancia estática de corriente) y gds para el FET (transconductancia en directa).
2.2.4 Modos de trabajo
Existen cuatro condiciones de polarización posibles. Dependiendo del sentido o signo de los voltajes de polarización en cada una de las uniones del transistor pueden ser :
Figura 2.8
Región activa directa: Corresponde a una polarización directa de la unión emisor - base y a una polarización inversa de la unión colector - base. Esta es la región de operación normal del transistor para amplificación.
16
Región activa inversa: Corresponde a una polarización inversa de la unión emisor - base y a una polarización directa de la unión colector - base. Esta región es usada raramente.
Región de corte: Corresponde a una polarización inversa de ambas uniones. La operación en ésta región corresponde a aplicaciones de conmutación en el modo apagado, pues el transistor actúa como un interruptor abierto (IC 0).
Región de saturación: Corresponde a una polarización directa de ambas uniones. La operación en esta región corresponde a aplicaciones de conmutación en el modo encendido, pues el transistor actúa como un interruptor cerrado (VCE 0).
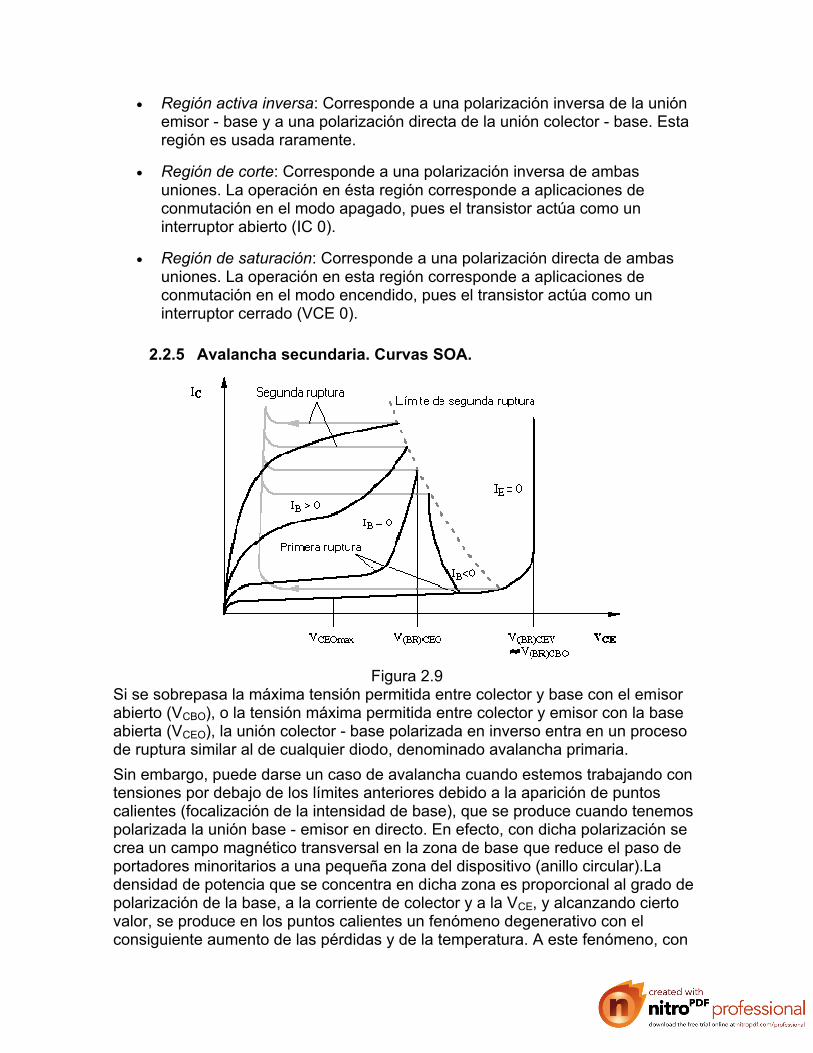
2.2.5 Avalancha secundaria. Curvas SOA.
Figura 2.9Si se sobrepasa la máxima tensión permitida entre colector y base con el emisor abierto (VCBO), o la tensión máxima permitida entre colector y emisor con la base abierta (VCEO), la unión colector - base polarizada en inverso entra en un proceso de ruptura similar al de cualquier diodo, denominado avalancha primaria.
Sin embargo, puede darse un caso de avalancha cuando estemos trabajando con tensiones por debajo de los límites anteriores debido a la aparición de puntos calientes (focalización de la intensidad de base), que se produce cuando tenemos polarizada la unión base - emisor en directo. En efecto, con dicha polarización se crea un campo magnético transversal en la zona de base que reduce el paso de portadores minoritarios a una pequeña zona del dispositivo (anillo circular).La densidad de potencia que se concentra en dicha zona es proporcional al grado de polarización de la base, a la corriente de colector y a la VCE, y alcanzando cierto valor, se produce en los puntos calientes un fenómeno degenerativo con el consiguiente aumento de las pérdidas y de la temperatura. A este fenómeno, con
17
efectos catastróficos en la mayor parte de los casos, se le conoce con el nombre de avalancha secundaria (o también segunda ruptura).
El efecto que produce la avalancha secundaria sobre las curvas de salida del transistor es producir unos codos bruscos que desvían la curva de la situación prevista (ver gráfica anterior).
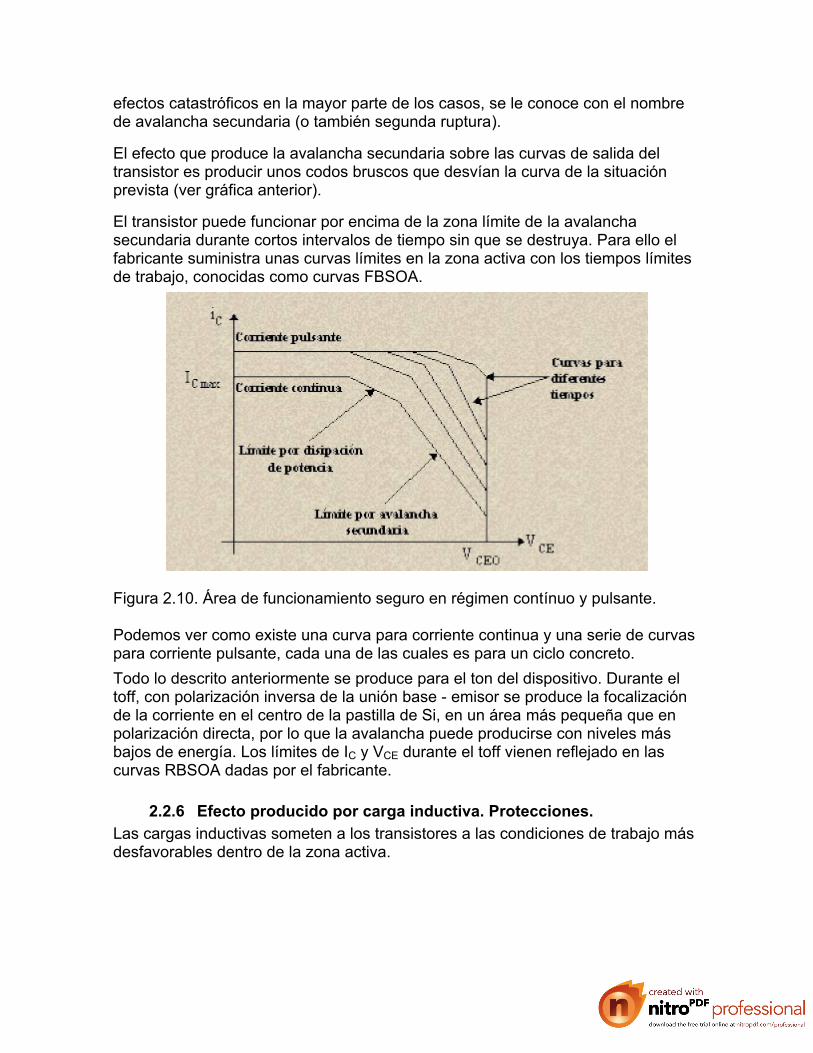
El transistor puede funcionar por encima de la zona límite de la avalancha secundaria durante cortos intervalos de tiempo sin que se destruya. Para ello el fabricante suministra unas curvas límites en la zona activa con los tiempos límites de trabajo, conocidas como curvas FBSOA.
Figura 2.10. Área de funcionamiento seguro en régimen contínuo y pulsante.
Podemos ver como existe una curva para corriente continua y una serie de curvas para corriente pulsante, cada una de las cuales es para un ciclo concreto.
Todo lo descrito anteriormente se produce para el ton del dispositivo. Durante el toff, con polarización inversa de la unión base - emisor se produce la focalización de la corriente en el centro de la pastilla de Si, en un área más pequeña que en polarización directa, por lo que la avalancha puede producirse con niveles más bajos de energía. Los límites de IC y VCE durante el toff vienen reflejado en las curvas RBSOA dadas por el fabricante.
2.2.6 Efecto producido por carga inductiva. Protecciones.
Las cargas inductivas someten a los transistores a las condiciones de trabajo más desfavorables dentro de la zona activa.
18
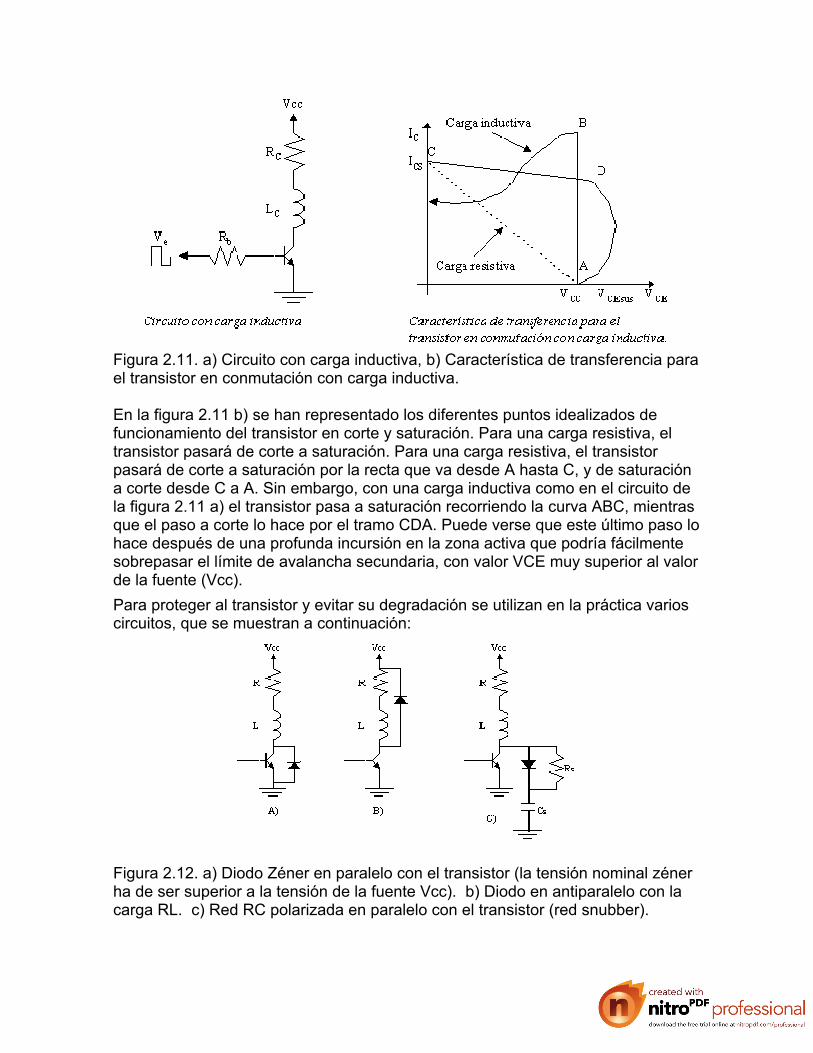
Figura 2.11. a) Circuito con carga inductiva, b) Característica de transferencia para el transistor en conmutación con carga inductiva.
En la figura 2.11 b) se han representado los diferentes puntos idealizados de funcionamiento del transistor en corte y saturación. Para una carga resistiva, el transistor pasará de corte a saturación. Para una carga resistiva, el transistor pasará de corte a saturación por la recta que va desde A hasta C, y de saturación a corte desde C a A. Sin embargo, con una carga inductiva como en el circuito de la figura 2.11 a) el transistor pasa a saturación recorriendo la curva ABC, mientras que el paso a corte lo hace por el tramo CDA. Puede verse que este último paso lo hace después de una profunda incursión en la zona activa que podría fácilmente sobrepasar el límite de avalancha secundaria, con valor VCE muy superior al valor de la fuente (Vcc).
Para proteger al transistor y evitar su degradación se utilizan en la práctica varios circuitos, que se muestran a continuación:
Figura 2.12. a) Diodo Zéner en paralelo con el transistor (la tensión nominal zéner ha de ser superior a la tensión de la fuente Vcc). b) Diodo en antiparalelo con la carga RL. c) Red RC polarizada en paralelo con el transistor (red snubber).
19
Las dos primeras limitan la tensión en el transistor durante el paso de saturación a corte, proporcionando a través de los diodos un camino para la circulación de la intensidad inductiva de la carga.
En la tercera protección, al cortarse el transistor la intensidad inductiva sigue pasando por el diodo y por el condensador CS, el cual tiende a cargarse a una tensión Vcc. Diseñando adecuadamente la red RC se consigue que la tensión en el transistor durante la conmutación sea inferior a la de la fuente, alejándose su funcionamiento de los límites por disipación y por avalancha secundaria. Cuando el transistor pasa a saturación el condensador se descarga a través de RS.
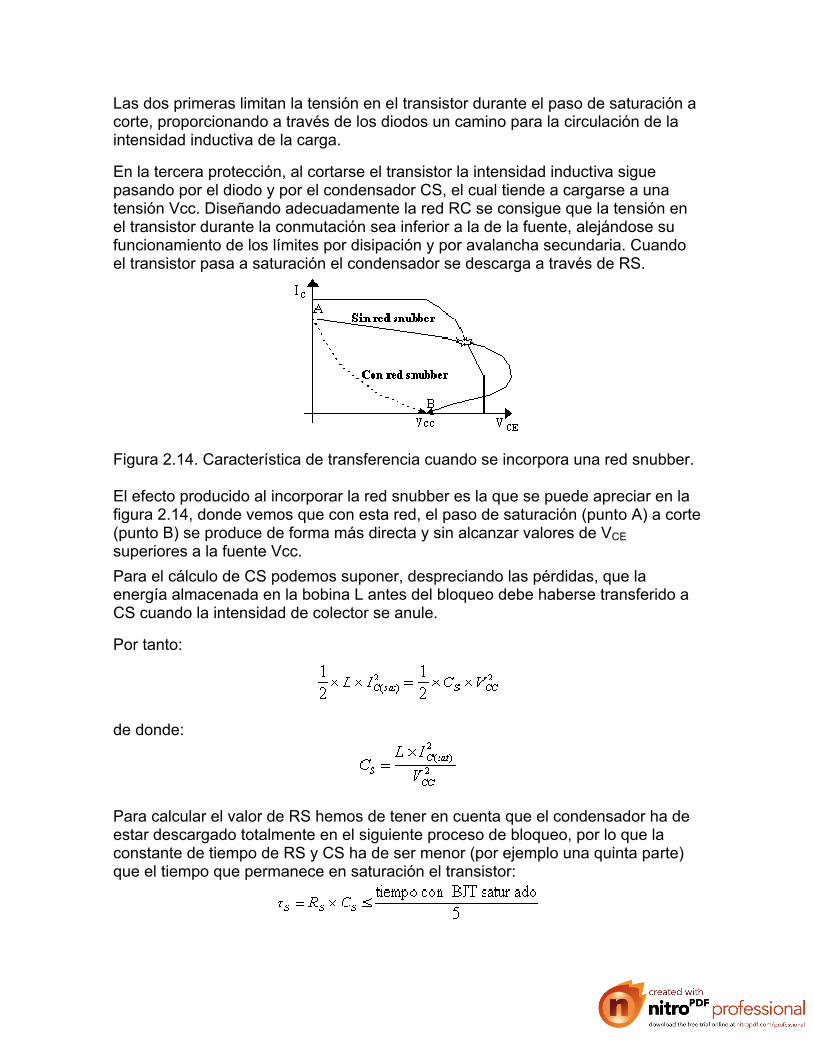
Figura 2.14. Característica de transferencia cuando se incorpora una red snubber.
El efecto producido al incorporar la red snubber es la que se puede apreciar en la figura 2.14, donde vemos que con esta red, el paso de saturación (punto A) a corte (punto B) se produce de forma más directa y sin alcanzar valores de VCE
superiores a la fuente Vcc.
Para el cálculo de CS podemos suponer, despreciando las pérdidas, que la energía almacenada en la bobina L antes del bloqueo debe haberse transferido a CS cuando la intensidad de colector se anule.
Por tanto:
de donde:
Para calcular el valor de RS hemos de tener en cuenta que el condensador ha de estar descargado totalmente en el siguiente proceso de bloqueo, por lo que la constante de tiempo de RS y CS ha de ser menor (por ejemplo una quinta parte) que el tiempo que permanece en saturación el transistor:
20
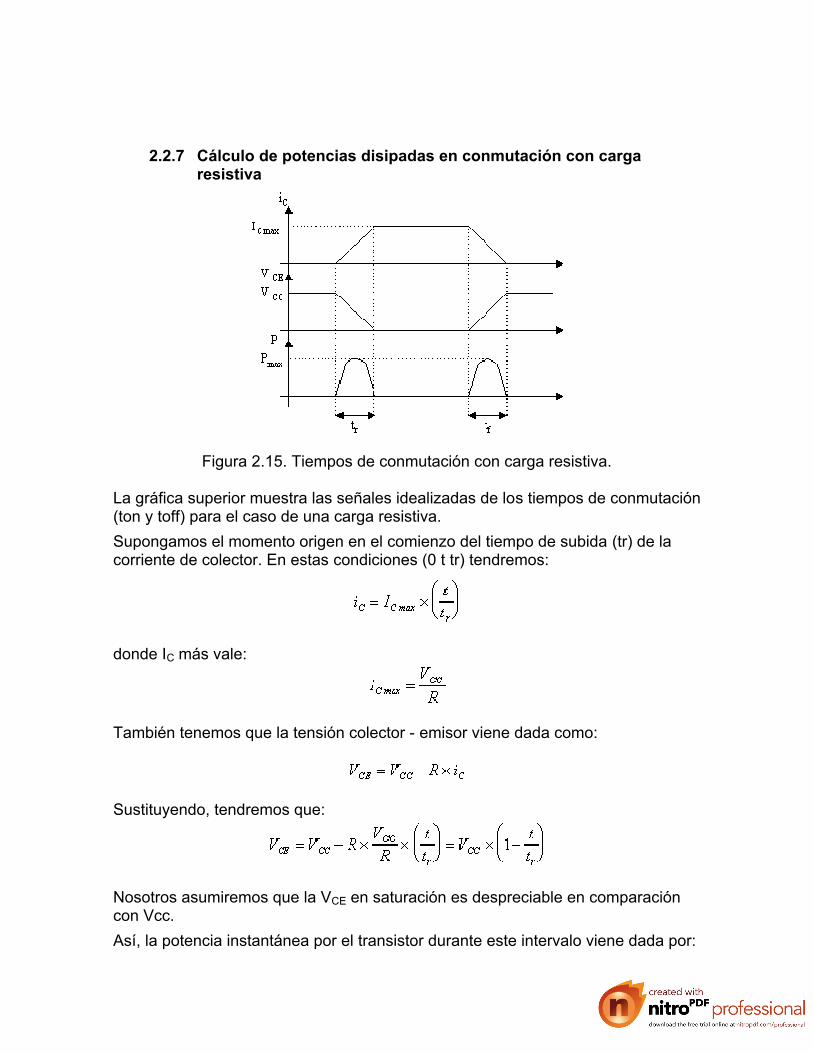
2.2.7 Cálculo de potencias disipadas en conmutación con carga resistiva
Figura 2.15. Tiempos de conmutación con carga resistiva.
La gráfica superior muestra las señales idealizadas de los tiempos de conmutación (ton y toff) para el caso de una carga resistiva.
Supongamos el momento origen en el comienzo del tiempo de subida (tr) de la corriente de colector. En estas condiciones (0 t tr) tendremos:
donde IC más vale:
También tenemos que la tensión colector - emisor viene dada como:
Sustituyendo, tendremos que:
Nosotros asumiremos que la VCE en saturación es despreciable en comparación con Vcc.
Así, la potencia instantánea por el transistor durante este intervalo viene dada por:

21
La energía, Wr, disipada en el transistor durante el tiempo de subida está dada por la integral de la potencia durante el intervalo del tiempo de caída, con el resultado:
De forma similar, la energía (Wf) disipada en el transistor durante el tiempo de caída, viene dado como:
La potencia media resultante dependerá de la frecuencia con que se efectúe la conmutación:
Un último paso es considerar tr despreciable frente a tf, con lo que no cometeríamos un error apreciable si finalmente dejamos la potencia media, tras sustituir, como:
2.2.8 Cálculo de potencias disipadas en conmutación con carga inductiva
Figura 2.16. Tiempos de conmutación con carga inductiva.

22
Arriba podemos ver la gráfica de la iC(t), VCE(t) y p(t) para carga inductiva. La energía perdida durante en ton viene dada por la ecuación:
Durante el tiempo de conducción (t5) la energía perdida es despreciable, puesto que VCE es de un valor ínfimo durante este tramo.
Durante el toff, la energía de pérdidas en el transistor vendrá dada por la ecuación:
La potencia media de pérdidas durante la conmutación será por tanto:
Si lo que queremos es la potencia media total disipada por el transistor en todo el periodo debemos multiplicar la frecuencia con la sumatoria de pérdidas a lo largo del periodo (conmutación + conducción). La energía de pérdidas en conducción viene como:
2.2.9 Ataque y protección del transistor de potencia
Como hemos visto anteriormente, los tiempos de conmutación limitan el funcionamiento del transistor, por lo que nos interesaría reducir su efecto en la medida de lo posible.
Figura 2.17. Señal de base modificada.
Los tiempos de conmutación pueden ser reducidos mediante una modificación en la señal de base, tal y como se muestra en la figura anterior.
Puede verse como el semiciclo positivo está formado por un tramo de mayor amplitud que ayude al transistor a pasar a saturación (y por tanto reduce el ton) y uno de amplitud suficiente para mantener saturado el transistor (de este modo la potencia disipada no será excesiva y el tiempo de almacenamiento no aumentará).
23
El otro semiciclo comienza con un valor negativo que disminuye el toff, y una vez que el transistor está en corte, se hace cero para evitar pérdidas de potencia.
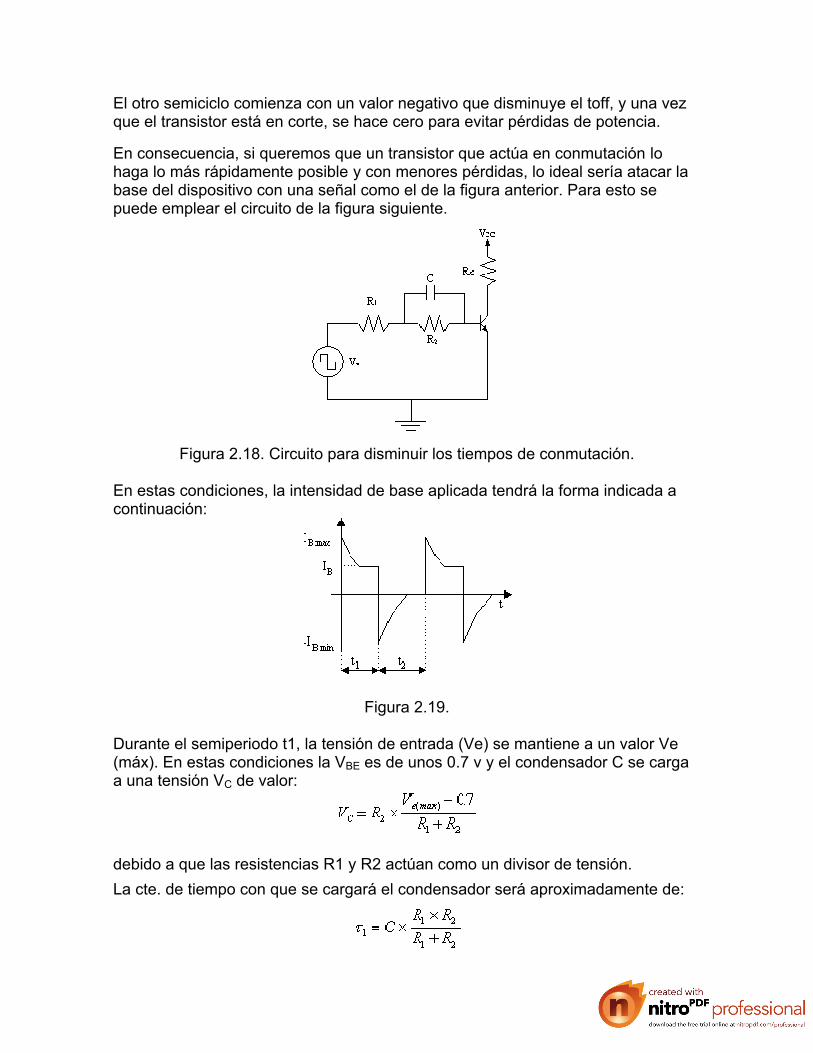
En consecuencia, si queremos que un transistor que actúa en conmutación lo haga lo más rápidamente posible y con menores pérdidas, lo ideal sería atacar la base del dispositivo con una señal como el de la figura anterior. Para esto se puede emplear el circuito de la figura siguiente.
Figura 2.18. Circuito para disminuir los tiempos de conmutación.
En estas condiciones, la intensidad de base aplicada tendrá la forma indicada a continuación:
Figura 2.19.
Durante el semiperiodo t1, la tensión de entrada (Ve) se mantiene a un valor Ve (máx). En estas condiciones la VBE es de unos 0.7 v y el condensador C se carga a una tensión VC de valor:
debido a que las resistencias R1 y R2 actúan como un divisor de tensión.
La cte. de tiempo con que se cargará el condensador será aproximadamente de:
24
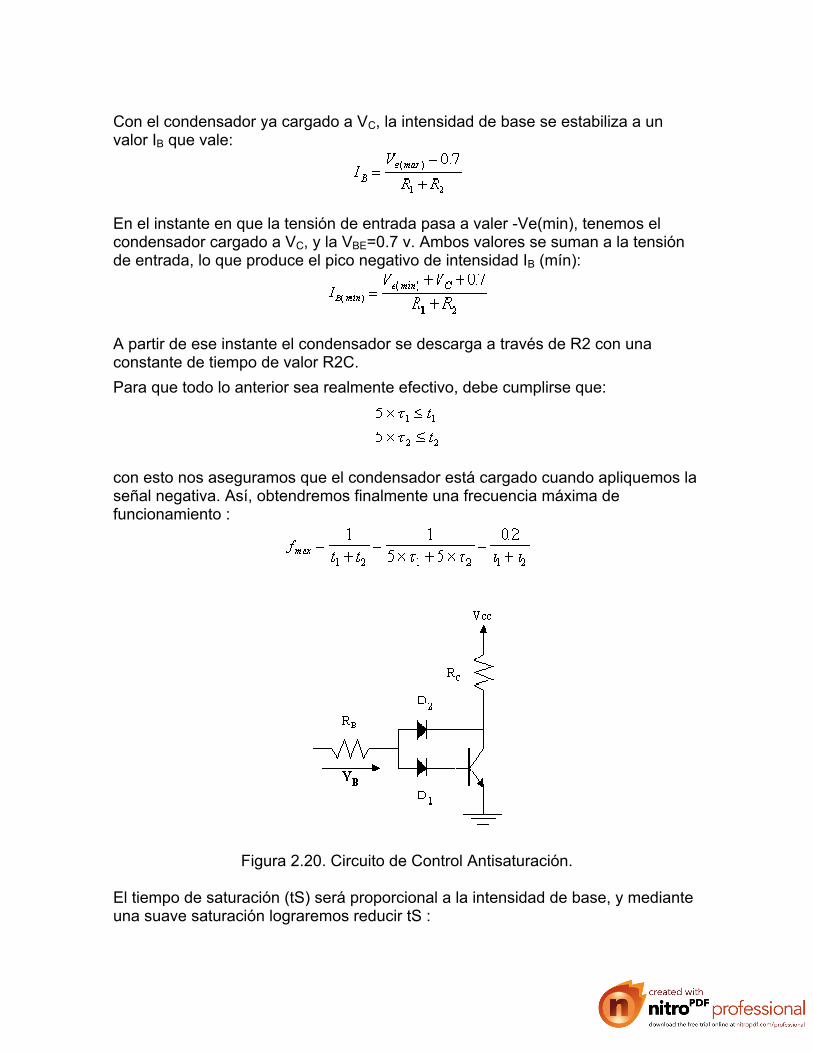
Con el condensador ya cargado a VC, la intensidad de base se estabiliza a un valor IB que vale:
En el instante en que la tensión de entrada pasa a valer -Ve(min), tenemos el condensador cargado a VC, y la VBE=0.7 v. Ambos valores se suman a la tensión de entrada, lo que produce el pico negativo de intensidad IB (mín):
A partir de ese instante el condensador se descarga a través de R2 con una constante de tiempo de valor R2C.
Para que todo lo anterior sea realmente efectivo, debe cumplirse que:
con esto nos aseguramos que el condensador está cargado cuando apliquemos la señal negativa. Así, obtendremos finalmente una frecuencia máxima de funcionamiento :
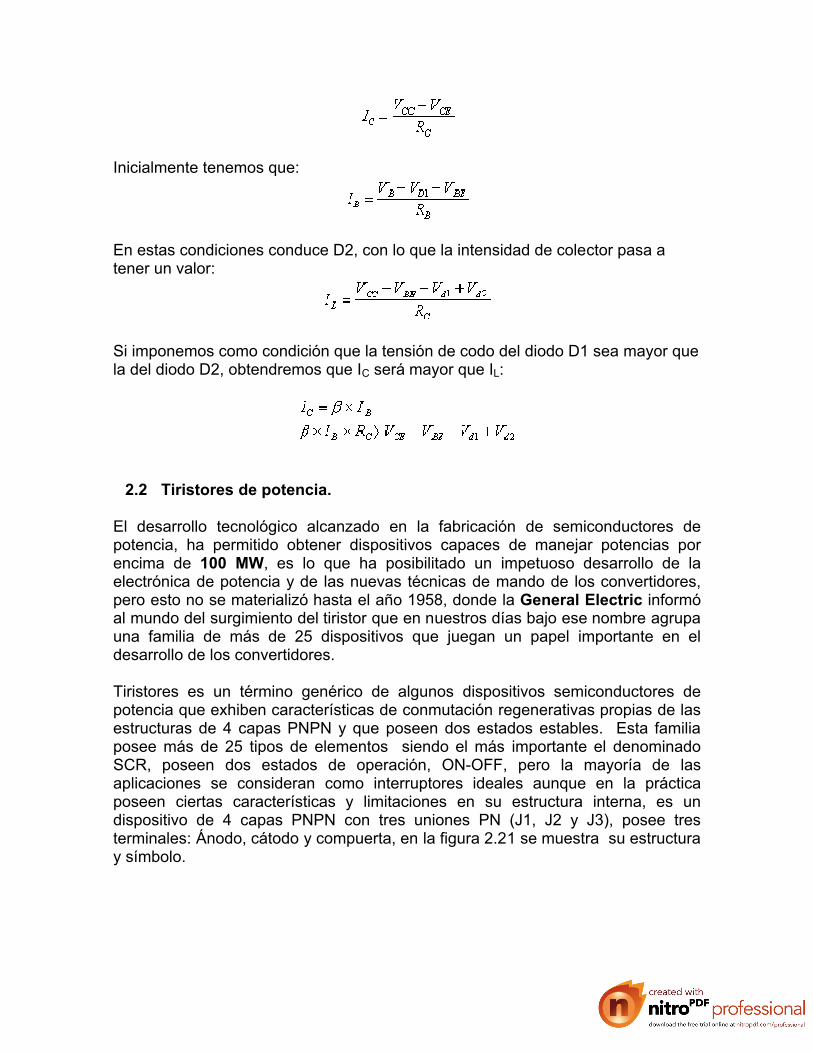
Figura 2.20. Circuito de Control Antisaturación.
El tiempo de saturación (tS) será proporcional a la intensidad de base, y mediante una suave saturación lograremos reducir tS :
25
Inicialmente tenemos que:
En estas condiciones conduce D2, con lo que la intensidad de colector pasa a tener un valor:
Si imponemos como condición que la tensión de codo del diodo D1 sea mayor que la del diodo D2, obtendremos que IC será mayor que IL:
2.2 Tiristores de potencia.
El desarrollo tecnológico alcanzado en la fabricación de semiconductores de potencia, ha permitido obtener dispositivos capaces de manejar potencias por encima de 100 MW, es lo que ha posibilitado un impetuoso desarrollo de la electrónica de potencia y de las nuevas técnicas de mando de los convertidores, pero esto no se materializó hasta el año 1958, donde la General Electric informó al mundo del surgimiento del tiristor que en nuestros días bajo ese nombre agrupa una familia de más de 25 dispositivos que juegan un papel importante en el desarrollo de los convertidores.
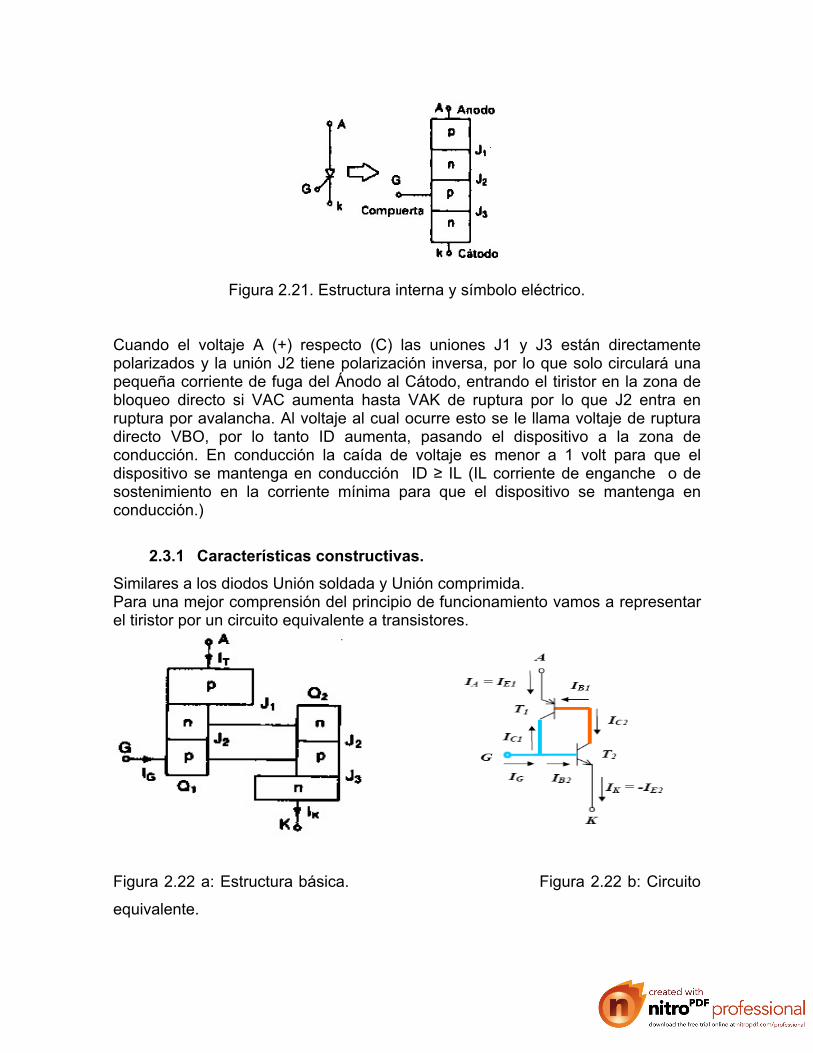
Tiristores es un término genérico de algunos dispositivos semiconductores de potencia que exhiben características de conmutación regenerativas propias de las estructuras de 4 capas PNPN y que poseen dos estados estables. Esta familia posee más de 25 tipos de elementos siendo el más importante el denominado SCR, poseen dos estados de operación, ON-OFF, pero la mayoría de las aplicaciones se consideran como interruptores ideales aunque en la práctica poseen ciertas características y limitaciones en su estructura interna, es un dispositivo de 4 capas PNPN con tres uniones PN (J1, J2 y J3), posee tres terminales: Ánodo, cátodo y compuerta, en la figura 2.21 se muestra su estructura y símbolo.
26
Figura 2.21. Estructura interna y símbolo eléctrico.
Cuando el voltaje A (+) respecto (C) las uniones J1 y J3 están directamente polarizados y la unión J2 tiene polarización inversa, por lo que solo circulará una pequeña corriente de fuga del Ánodo al Cátodo, entrando el tiristor en la zona de bloqueo directo si VAC aumenta hasta VAK de ruptura por lo que J2 entra en ruptura por avalancha. Al voltaje al cual ocurre esto se le llama voltaje de ruptura directo VBO, por lo tanto ID aumenta, pasando el dispositivo a la zona de conducción. En conducción la caída de voltaje es menor a 1 volt para que el dispositivo se mantenga en conducción ID ≥ IL (IL corriente de enganche o de sostenimiento en la corriente mínima para que el dispositivo se mantenga en conducción.)
2.3.1 Características constructivas.
Similares a los diodos Unión soldada y Unión comprimida.Para una mejor comprensión del principio de funcionamiento vamos a representar el tiristor por un circuito equivalente a transistores.
Figura 2.22 a: Estructura básica. Figura 2.22 b: Circuito
equivalente.
27
Para el transistor pnp: IC1 = -α1I + ICO1 ………. (1)
Y para el transistor npn: IC2 = α2I + ICO2 .……… (2)
Donde:
ICO1, ICO2 corriente de saturación inversa.
α1 y α2 ganancia de corriente en sentido directo.
Para transistores PNP - ICO, es negativo.
Para transistores NPN - ICO, es positivo.
ICO2 = - ICO1 = ICO/2
Como la suma de las corrientes que entran y salen a T1 es cero:
I = IC1 - IC2 = 0 ………. (3)
Sustituyendo 1 y 2 en 3.
I + IC1 - IC2 = 0 ………. (4)
I + (-α1I + ICO1 ) – (α2I + ICO2 ) = 0
I - α2I - α1I + ICO1 - ICO2= 0 ………. (5)
I (1 - α1- α2) = ICO2 - ICO1
I = = ……….. (6)
Para voltajes en sentido directo bajo, α1 y α2 pequeño valor de modo que:
ICO2 - ICO1
1 - α1 - α2
ICO
1- (α1 + α2)

28
α1 + α2 < 1 de I es pequeña.
Si Vx se incrementa, (α1+ α2) se incrementan, cuando α1+ α2 = 1, ocurre la ruptura de T2, y la corriente I crece considerablemente. En conducción, todas las uniones están polarizadas en sentido directo y el voltaje a través del transistor será:
2 VBEsat – VCBsat ≈ 1 volt, ya que el voltaje en la unión T2 colector – base este en
dirección opuesta.
Si se inyecta corriente por G.
I colector = βNIg , de (5)
I - α1I – α2I + ICO1 - ICO2 - βNIg = 0
I (1 - α1- α2) = ICO2 - ICO + βNIg = ICO + βNIg
I =
Si βNIg se incrementa, entonces I se incrementa, y por lo tanto, (α1+ α2) se
reduce.
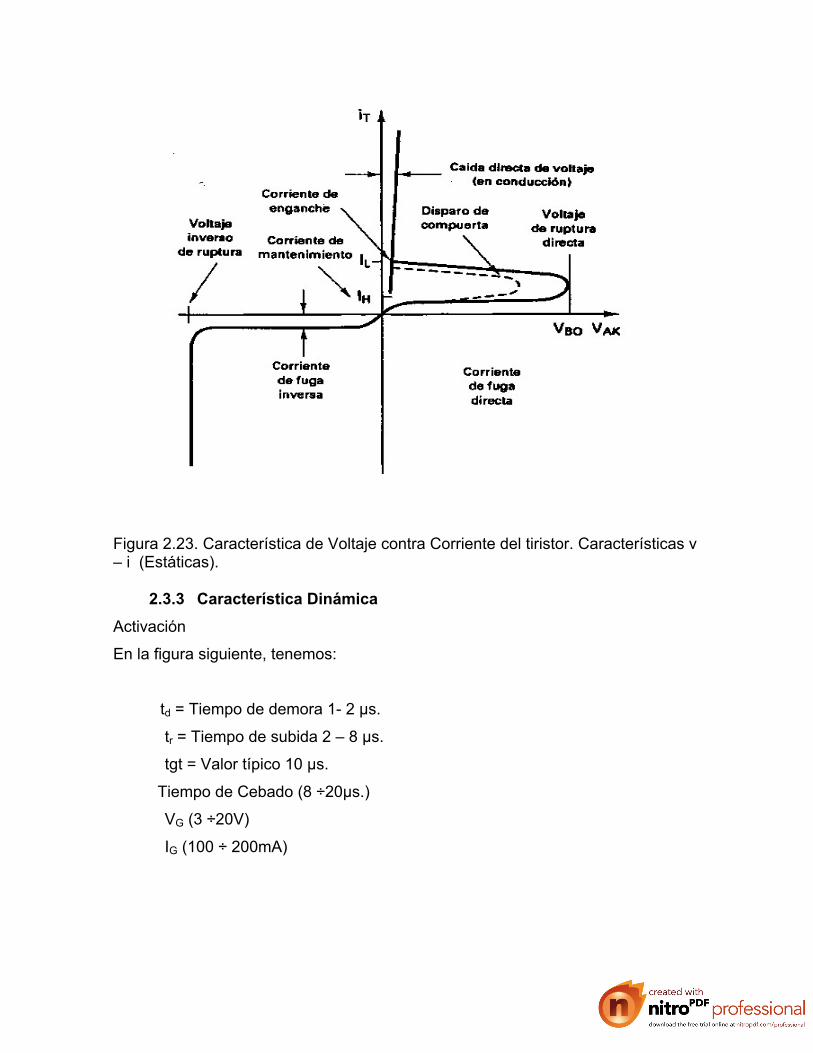
2.3.2 Características estáticas.
En la zona de conducción, el tiristor se comporta como un diodo perdiendo el control sobre el dispositivo.
Pérdidas.VB = (3 ÷ 20Volts)IG = (100 ÷ 200mA)∆P conducción ≈ 1.8 W/A ∆P i de fuga directa.∆P i de fuga inversa.∆P desconexión.∆P conexión.∆P en el Gate
Efecto de la temperatura.
Si la Temperatura aumenta, entonces: Vπ (voltaje de ruptura) decrece, la I de mantenimiento decrece, i de fuga aumenta y ∆Va decrece.
ICO + βNIg 1- (α1 + α2)
29
Figura 2.23. Característica de Voltaje contra Corriente del tiristor. Características v – i (Estáticas).
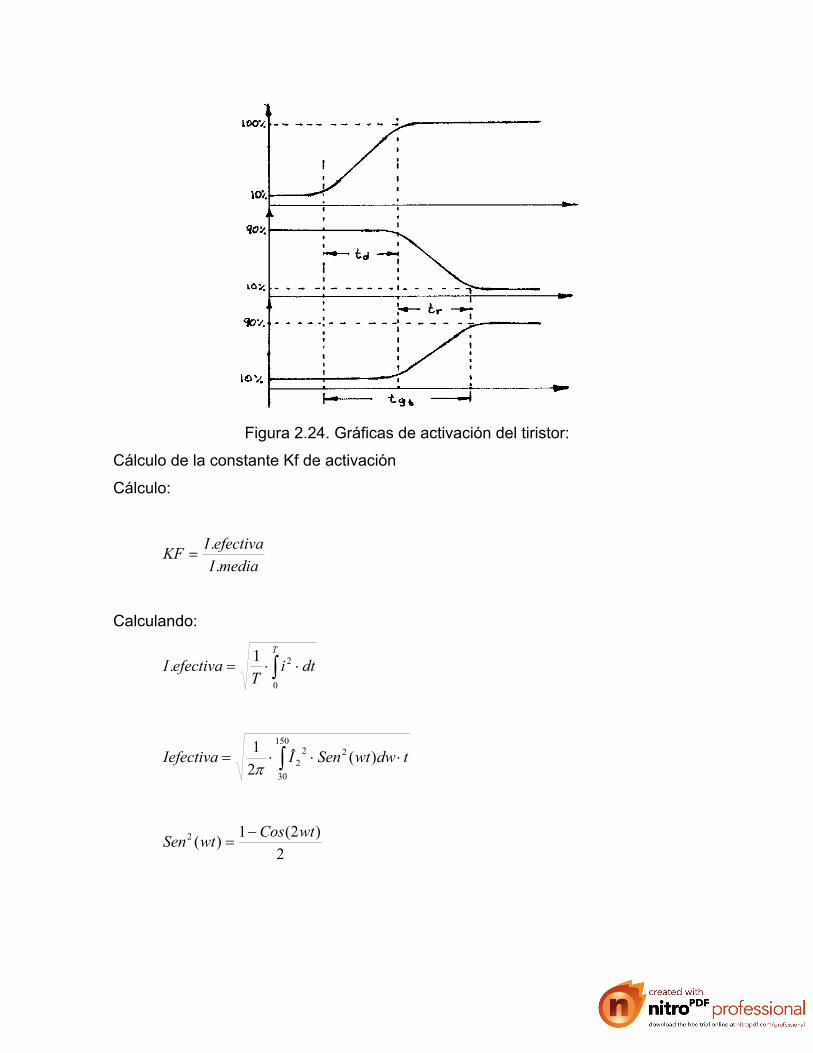
2.3.3 Característica Dinámica
Activación
En la figura siguiente, tenemos:
td = Tiempo de demora 1- 2 µs.
tr = Tiempo de subida 2 – 8 µs.
tgt = Valor típico 10 µs.
Tiempo de Cebado (8 ÷20µs.)
VG (3 ÷20V)
IG (100 ÷ 200mA)
30
Figura 2.24. Gráficas de activación del tiristor:
Cálculo de la constante Kf de activación
Cálculo:
mediaI
efectivaIKF
.
.
Calculando:
T
dtiT
efectivaI0
21.
150
30
222 )(ˆ
2
1tdwwtSenIIefectiva
2
)2(1)(2 wtCos
wtSen

31
150
30
15
30
22 )2(
2
1
22
ˆ. tdwwtCos
tdwIefectivaI
2
150
30
150
30
22 ˆ48.0
2
1
2
ˆ. )2(
2
1
2
1I
IefectivaI twSenwt
2
150
30
2150
30
2ˆ27566.0
2
ˆ)(ˆ
2
1Im. )( I
ItdwwtSenIediaeficazI wtCos
74.1ˆ27566.0
ˆ48.0
2
2 I
IKf
Bloqueo
El tiristor deja de conducir al quitarse el voltaje anódico exterior o al caer la corriente por debajo de la de sostenimiento el tiempo de bloqueo del tiristor tq oscila generalmente entre 25 s y 70 s.
2.3.4 Principales parámetros eléctricos del tiristor
1. Corriente nominal en sentido directo In. Valor medio de la corriente rectificada con frecuencia de (50 o 60Hz) en un circuito monofásico de ½ onda sinusoidal con carga activa en condiciones de enfriamiento normales y a una temperatura de 125 grados C; algunos tiristores contienen el valor In en su nomenclatura, por ejemplo T 160, en el cual la corriente nominal es de 160 A (In 160 A.)
2. Voltaje nominal valor instantáneo máximo directo e inverso que se puede aplicar al tiristor generalmente Vn 0,6 V para V Vo ó Vn 0,6 Vo para Vo V.
3. Magnitudes de las corrientes inversas y de fuga permisibles:
Denominación
Normas establecidas para los tiristores de los tipos
T10 T25 T50 T100 T160 T200 TB200 T320 TB320
Corriente inversa y
de fuga (mA) 5 10 10 10 15 15 15 15 15
32
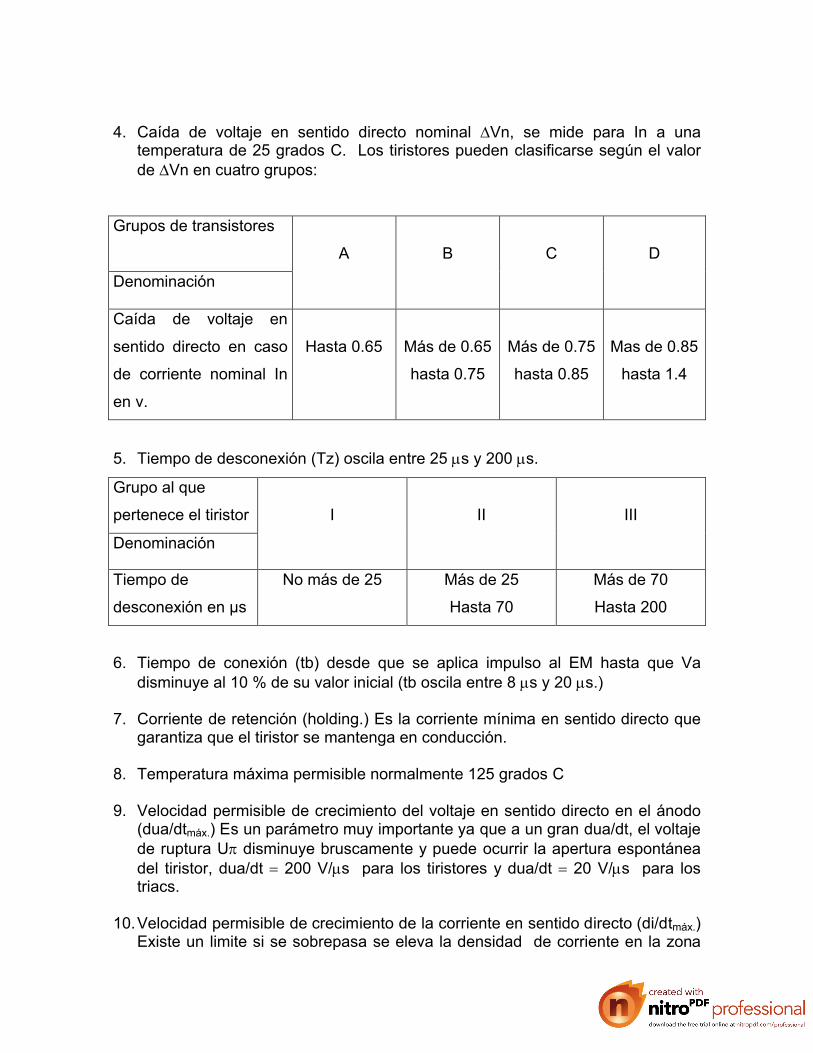
4. Caída de voltaje en sentido directo nominal Vn, se mide para In a una temperatura de 25 grados C. Los tiristores pueden clasificarse según el valor de Vn en cuatro grupos:
Grupos de transistores
A B C D
Denominación
Caída de voltaje en
sentido directo en caso
de corriente nominal In
en v.
Hasta 0.65 Más de 0.65
hasta 0.75
Más de 0.75
hasta 0.85
Mas de 0.85
hasta 1.4
5. Tiempo de desconexión (Tz) oscila entre 25 s y 200 s.
Grupo al que
pertenece el tiristor I II III
Denominación
Tiempo de
desconexión en µs
No más de 25 Más de 25
Hasta 70
Más de 70
Hasta 200
6. Tiempo de conexión (tb) desde que se aplica impulso al EM hasta que Va disminuye al 10 % de su valor inicial (tb oscila entre 8 s y 20 s.)
7. Corriente de retención (holding.) Es la corriente mínima en sentido directo que garantiza que el tiristor se mantenga en conducción.
8. Temperatura máxima permisible normalmente 125 grados C
9. Velocidad permisible de crecimiento del voltaje en sentido directo en el ánodo (dua/dtmáx.) Es un parámetro muy importante ya que a un gran dua/dt, el voltaje de ruptura U disminuye bruscamente y puede ocurrir la apertura espontánea del tiristor, dua/dt 200 V/s para los tiristores y dua/dt 20 V/s para los triacs.
10.Velocidad permisible de crecimiento de la corriente en sentido directo (di/dtmáx.) Existe un limite si se sobrepasa se eleva la densidad de corriente en la zona
33
cercana al Gate, incrementando la temperatura y si se sobrepasa los limites puede dañar la unión.
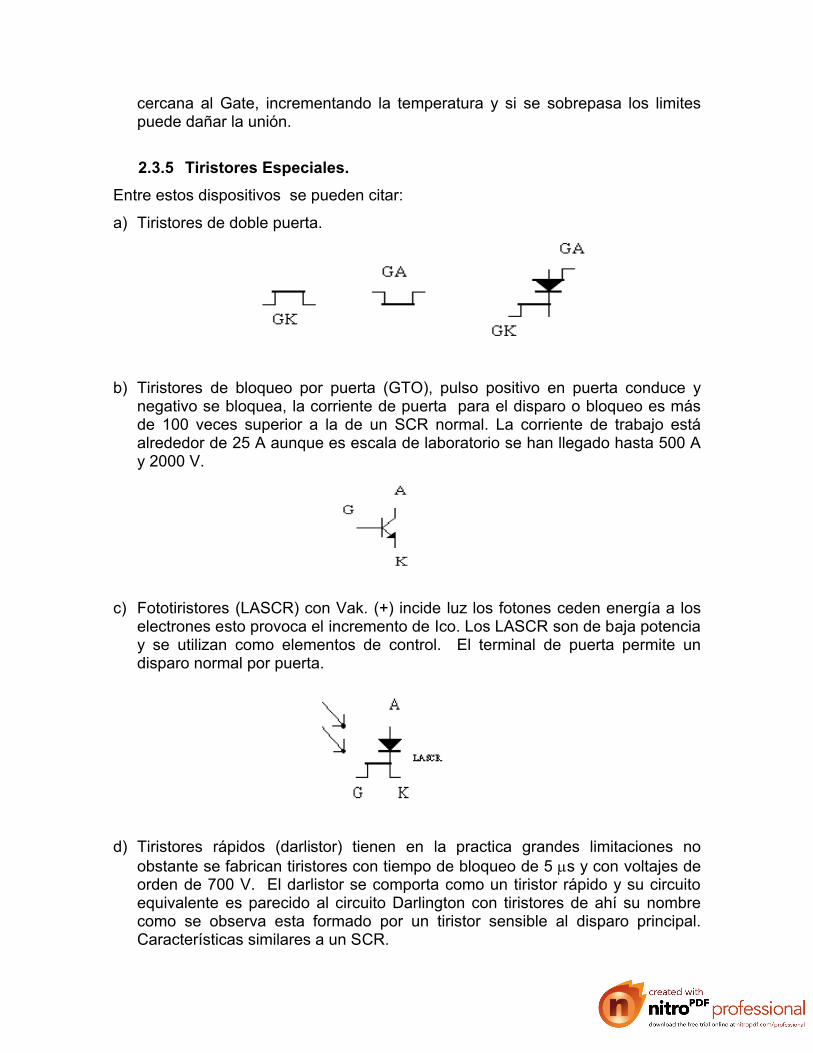
2.3.5 Tiristores Especiales.
Entre estos dispositivos se pueden citar:
a) Tiristores de doble puerta.
b) Tiristores de bloqueo por puerta (GTO), pulso positivo en puerta conduce y negativo se bloquea, la corriente de puerta para el disparo o bloqueo es más de 100 veces superior a la de un SCR normal. La corriente de trabajo está alrededor de 25 A aunque es escala de laboratorio se han llegado hasta 500 A y 2000 V.
c) Fototiristores (LASCR) con Vak. (+) incide luz los fotones ceden energía a los electrones esto provoca el incremento de Ico. Los LASCR son de baja potencia y se utilizan como elementos de control. El terminal de puerta permite un disparo normal por puerta.
d) Tiristores rápidos (darlistor) tienen en la practica grandes limitaciones no obstante se fabrican tiristores con tiempo de bloqueo de 5 s y con voltajes de orden de 700 V. El darlistor se comporta como un tiristor rápido y su circuito equivalente es parecido al circuito Darlington con tiristores de ahí su nombre como se observa esta formado por un tiristor sensible al disparo principal. Características similares a un SCR.

34
e) Triac ó tiristores de C.A. Se comporta como un SCR en ambas direcciones, se ponen en conducción con señales ó de compuerta respecto a uno de los ánodos.
f) Circuitos integradores de potencia integran en un modulo varias componentes están en desarrollo, la limitación fundamental radica en la disipación de potencia.

35
3. Rectificadores
3.1Rectificación monofásica no controlada. Generalidades.
El rectificador, al igual que todos los convertidores esta compuesto de un circuito de potencia (compuesto por dispositivos de potencia), de un circuito de control y de elementos pasivos como pueden ser transformadores para aislar galvánicamente el convertidor de la fuente y por capacitores e inductores que se encargan de filtrar la señal que se rectifica, para dotarla de un menor rizado.
Al igual que los restantes convertidores que vamos a estudiar su teoría y el funcionamiento puede estudiarse con diferentes niveles de rigor. En el primernivel, el más importante para entender los fundamentos, se idealiza completamente la válvula y se considera como un cortocircuito si está en conducción y circuito abierto si está en no conducción. En el segundo nivel se consideran las inductancias presentes en el lado de CA del sistema, debido a la existencia de la reactancia de dispersión de los transformadores, que para el caso que nos ocupa, cuando se consideran transformadores de grandes potencias la reactancia tiene mayor influencia que la resistencia de los devanados, por tal motivo aparecen los importantes procesos de conmutación, que hacen que varias válvulas puedan conducir simultáneamente. Finalmente existe un tercer nivel de análisis que considera todos los detalles del circuito convertidor, incluyendo las características reales de las válvulas, sus redes superioras y los procesos de conmutación, esto trae consigo que las características de funcionamiento del circuito convertidor, solo pueden determinarse usando programas especiales de simulación por computadoras, tal es el caso del CASPOC y el PSPICE.
En nuestro curso profundizaremos en los dos primeros niveles, pues aunque el tercer nivel ofrece los resultados de manera exacta, es imprescindible conocer el funcionamiento basado en los dos primeros niveles, para la interpretación de los resultados.
Otro aspecto a tener en cuenta en el análisis de los convertidores es que el estado estable rara vez se alcanza, por lo que se hace necesario trabajar con ecuaciones diferenciales.
3.2 Circuitos rectificadores y su clasificación.
La rectificación de la corriente alterna en corriente directa es uno de los tipos de
conversión energética más difundida en la industria.
Los rectificadores no controlados están formados exclusivamente por diodos, por
36
tanto la relación entre el voltaje de CA y de CD es constante. Además al no haber en el convertidor dispositivos controlados, este no presenta circuito de mando; por lo que los diodos van entrando y saliendo de una forma natural, obligados por la fuente de alimentación.
La clasificación de los rectificadores puede realizarse siguiendo diferentes criterios, siendo en la práctica el más usado, el que los clasifica atendiendo al número de fases de la corriente rectificada al número de fases de la corrienterectificada. De acuerdo a este criterio se clasifica en:
a) Monofásicos:
De media onda.
De onda completa, existiendo el montaje tipo puente y con center tap
(derivación central)
b) Trifásicos.
De media onda, existiendo el montaje trifásico nulo y estrella zig-zag.
Onda completa, existiendo el montaje trifásico puente.
c) Polifásicos (6, 12,18 y 24 fases), a menudo confeccionados por el
acoplamiento en cascada de varios circuitos hexafásicos.
De estos circuitos los más empleados son los puentes Monofásicos y Trifásicos, sin embargo se comenzará el estudio de la rectificación, por el rectificador monofásico de media onda, el cual tiene poco interés práctico; pero sirve para analizar los fenómenos más comunes que aparecen en los rectificadores de potencia.
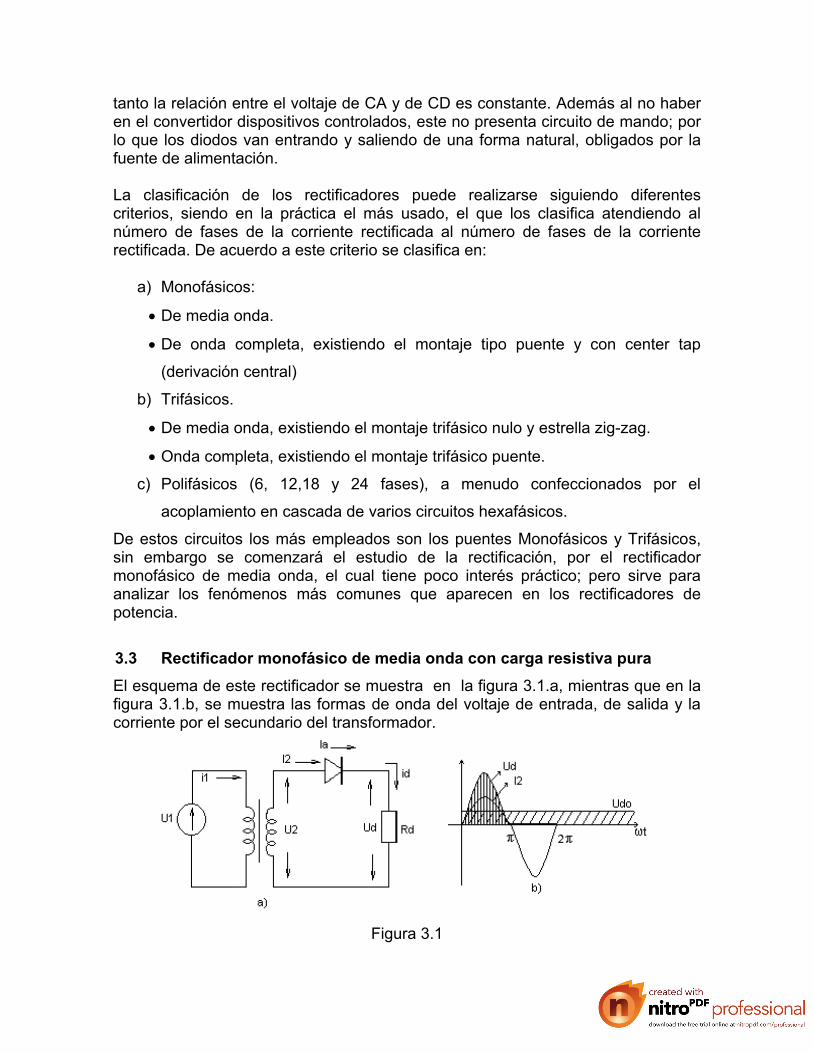
3.3 Rectificador monofásico de media onda con carga resistiva pura
El esquema de este rectificador se muestra en la figura 3.1.a, mientras que en la figura 3.1.b, se muestra las formas de onda del voltaje de entrada, de salida y la corriente por el secundario del transformador.
Figura 3.1
37
Para analizar su funcionamiento se ha considerado, como se observa en la figura, que las formas de onda del voltaje de alimentación del lado primario (U1) es sinusoidal, el que puede ser representado a través de la expresión siguiente:
tsenUU 11ˆ (3.1)
El voltaje inducido en el secundario del transformador tendrá la siguiente
expresión:
tsenUU 22ˆ (3.2)
Considerando el primer nivel de análisis se puede comprender el funcionamiento del rectificador de la figura 3.1.a, cuyas formas de onda se muestran en la figura 3.1.b. Durante el intervalo de tiempo 0<wt< el diodo se encuentra polarizado en sentido directo y por tanto se comporta como un cortocircuito, por lo que el voltaje instantáneo ud aplicado a la carga coincide con la forma de onda del voltaje U2 del secundario del transformador. Durante este intervalo de tiempo circula corriente por la carga (id), la cual presenta la misma forma y fase que el voltaje Ud, por tratarse de una carga resistiva la que se encuentra conectada al rectificador.
Durante el intervalo <wt<2, el diodo se encuentra polarizado en sentido inverso y por lo tanto se comporta como un circuito abierto, por lo que ahora aparece aplicado entre sus terminales en sentido inverso el voltaje U2, como consecuencia de que no se establece circulación de corriente por el circuito. Las formas de onda de voltaje Ud y la corriente id se muestran en la figura 3.1.
En la propia figura se representa el valor del voltaje medio rectificado (Udo), el cual representa la magnitud del voltaje medido en los terminales de la carga con un instrumento magnetoeléctrico y se define como el voltaje de magnitud constante que en el instante de tiempo considerado, garantiza que el área debajo de él, sea igual a la forma de onda real esto se expresa matemáticamente por la siguiente expresión.
T
o
udtT
Udo1
(3.3)
para el caso que nos ocupa la expresión (3.3) asume la siguiente forma
00
22 2
2ˆ2
1tdtsen
UttdsenUUdo
38
0coscos2
2cos
2
2 20
2
Ut
UUdo
22 45.0
2U
UUdo
(3.4)
Del análisis de esta expresión se puede concluir que el voltaje Udo en este rectificador, sólo es 0.45 veces el voltaje efectivo U2 medido a la entrada del rectificador.
El valor medio rectificado de la corriente rectificada (Ido), puede medirse haciendo uso de un instrumento de igual naturaleza y su expresión matemática es la siguiente:
tdtsenR
UIaIdo
0
2ˆ
2
1
R
I
R
UdoiIdo 22 2ˆ
(3.5)
De la expresión 3.5 se puede inferir que la amplitud máxima de la corriente i^2 es Id, la cual coincide con la amplitud máxima de la corriente id.
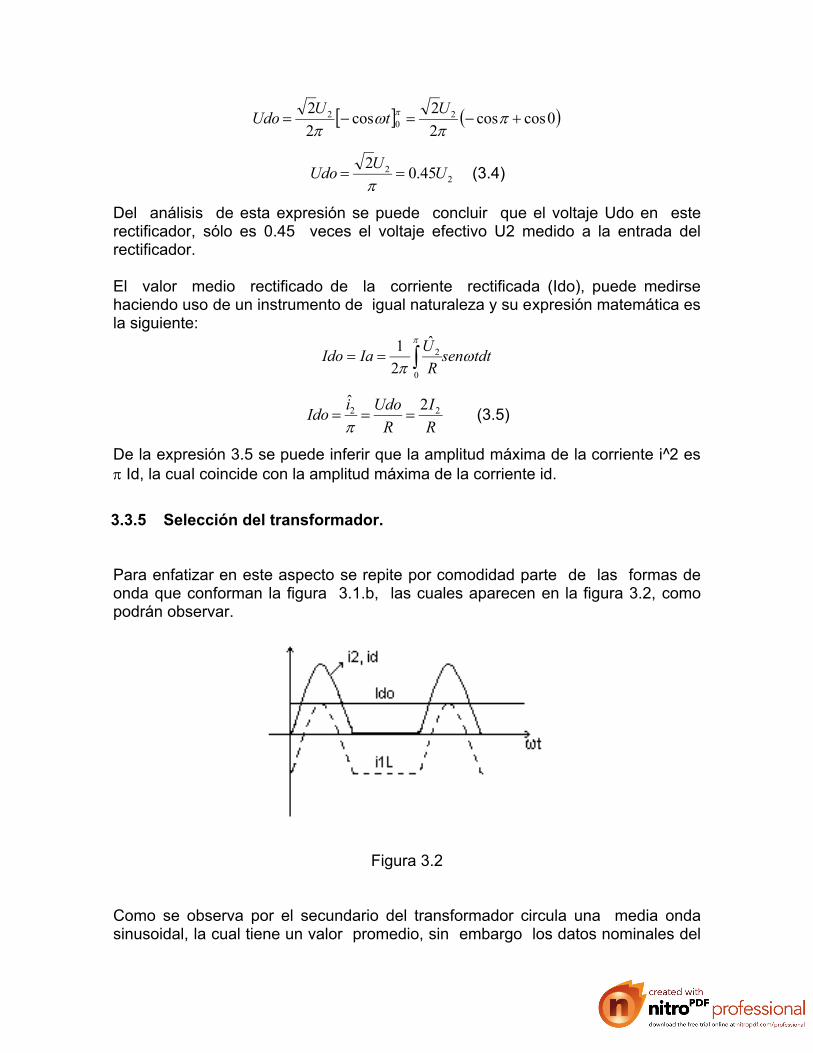
3.3.5 Selección del transformador.
Para enfatizar en este aspecto se repite por comodidad parte de las formas de onda que conforman la figura 3.1.b, las cuales aparecen en la figura 3.2, como podrán observar.
Figura 3.2
Como se observa por el secundario del transformador circula una media onda sinusoidal, la cual tiene un valor promedio, sin embargo los datos nominales del

39
transformador se han establecido atendiendo a que la alimentación es sinusoidal, así como las formas de onda de la corriente por ambos devanados, por lo que la elección del transformador parece ser una tarea compleja.
Ahora toda onda distorsionada que cumple la condición de Distechlet, puede ser representada mediante una serie de Fourier, la que permite expresar dicha onda como una suma de un número finito o infinito de funciones sinusoidales, la cual toma la forma expresada en la ecuación (3.6) y la misma permite obtener la respuesta en circuitos lineales sometidos a excitaciones no sinusoidales aplicando el teorema de la superposición.
tsennbtsenbtnatataa
tf nn 1210 cos2coscos
2 (3.6)
donde:
Para el caso que se esta analizando se puede afirmar que la forma de onda de corriente puede ser descompuesta mediante la serie de Fourier. De la gráfica se observa que estaría compuesta por un valor promedio y una suma de ondas sinusoidales a las cuales se le denominan armónicos.
Para determinar la forma de onda de la corriente i1 es necesario recordar que el transformador basa su funcionamiento en las condiciones de alternancia de la corriente que hace posible la existencia de un flujo variable en el tiempo, capaz de inducir una FEM variable en el tiempo. Por tanto la componente promedio de la corriente en el devanado secundario del transformador produce unos NI que hacen que exista un flujo de magnitud constante que se resta o se suma al flujo principal, pero que no induce FEM en el devanado primario, necesaria para compensar los NI desmagnetizantes que produciría un flujo variable en el tiempo. Por supuesto que esto trae efectos perjudiciales al transformador que de no ser sobredimensionado, acarrea una destrucción prematura del transformador a causa de la saturación. La forma de onda de la corriente por el primario del transformador no cuenta con la componente promedio, y será la que se
dttfdttfT
aT
o
2
00 2
12
ttdntftdtntfT
aT
n
cos2
1cos
2 2
00
tntftntfT
bT
n
sen2
1sen
2 2
00
40
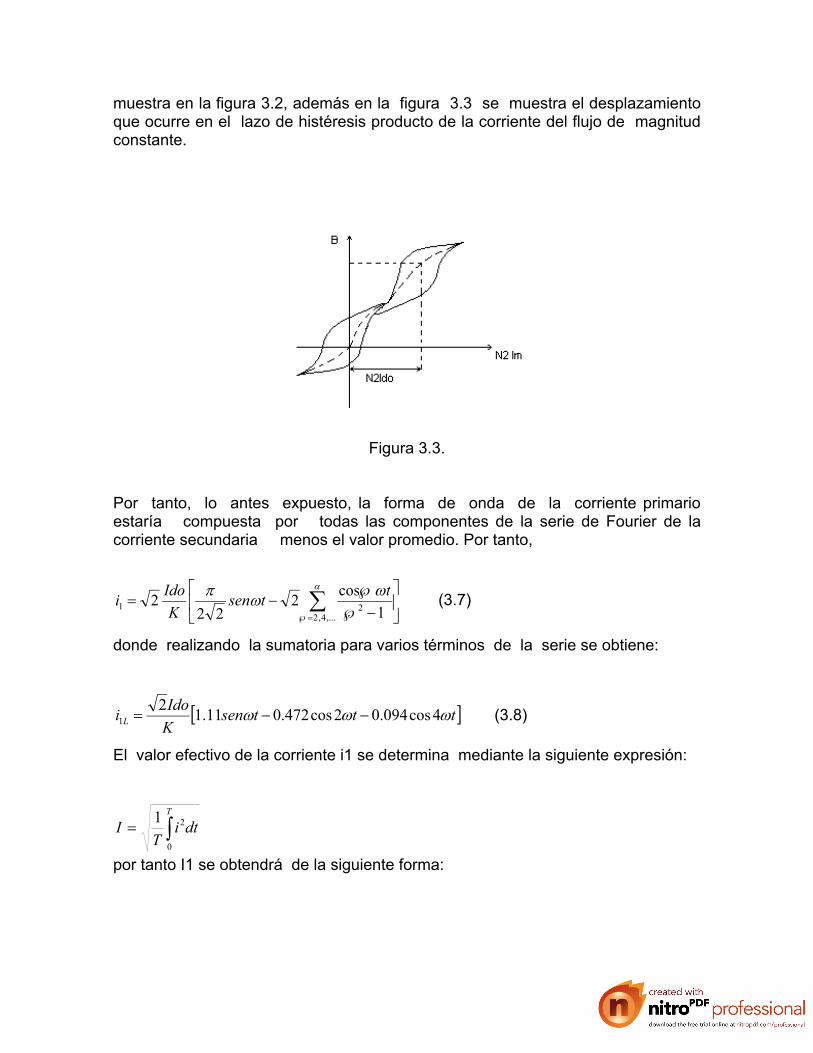
muestra en la figura 3.2, además en la figura 3.3 se muestra el desplazamiento que ocurre en el lazo de histéresis producto de la corriente del flujo de magnitud constante.
Figura 3.3.
Por tanto, lo antes expuesto, la forma de onda de la corriente primario estaría compuesta por todas las componentes de la serie de Fourier de la corriente secundaria menos el valor promedio. Por tanto,
,...4,2
21 1
cos2
222
ttsen
K
Idoi (3.7)
donde realizando la sumatoria para varios términos de la serie se obtiene:
tttsenK
Idoi L 4cos094.02cos472.011.1
21 (3.8)
El valor efectivo de la corriente i1 se determina mediante la siguiente expresión:
por tanto I1 se obtendrá de la siguiente forma:
T
dtiT
I0
21

41
K
IdoI L 21.11 (3.9)
Si se compara la magnitud de la corriente I1L con la corriente I2L=1.57 Ido se puede observar fácilmente que la relación entre ellas no es K, eso se debe a la presencia de la potencia de distorsión armónica existente debido a que la onda de la corriente del secundario no es sinusoidal.
Por otra parte el voltaje primario es sinusoidal, al igual que hemos considerado el voltaje secundario debido a que se está considerando un primer nivel de análisis donde las componentes del convertidor son ideales y por tanto la circulación de esta corriente no sinusoidal no produce caídas de voltaje. Por tanto U1 es igual a:
KUdoKUU 22.221 (3.10)
Atendiendo a estos problemas se define la potencia tipo de un transformador como el valor medio de la suma de las potencias aparentes del primario y el secundario del transformador. Esto se expresa matemáticamente de la siguiente forma:
para este caso:
223
22
211 nL IIIII
K
IdoI L
2221 094.0472.011.1
221 SS
ST
PdK
IdoKUdoIUS 69.2
21.122.2111

42
PdST 09.3 (3.11)
De 3.11 puede concluirse que existe una gran diferencia entre la potencia de cálculo del transformador y la potencia de directa consumida por la carga, lo que da evidencia del mal aprovechamiento del transformador, producto de la existencia de la componente forzada N2Ido.
Se puede obtener ahora el factor de utilización de cada devanado y el del transformador como la relación que existe entre la potencia aparente y la de directa.
7.211
Pd
SC (3.12)
5.322
Pd
SC (3.13)
3.3.2 Selección de las válvulas.
Para la selección de la válvula hay que determinar el factor de la corriente y el voltaje inverso máximo aplicado.
El factor de forma se determina como la relación que existe entre la corriente efectiva y media por la válvula, por lo que Kf es igual a 1.57 que puede ser obtenido de 3.5.El voltaje inverso máximo ser a U^2, el cual es el voltaje máximo en sentido inverso que se aplica a la válvula en estado de no conducción.
Por tanto:
5.28.1ˆ invUU n (3.14)
KfKtKv
permIIn
ˆ (3.15)
PdK
IdoKUdoIUS 49.3
57.122.2222
Pd
PdST 09.3
2
49.369.2

43
3.4 Rectificador monofásico de media onda con carga R-L.
El esquema representativo que permite ilustrar el comportamiento del rectificador con este tipo de carga se muestra en la figura 3.4.a, y en la figura 3.4.b, las formas de onda correspondientes.
Figura 3.4
Como se observa en la figura 3.4.b, se ha considerado que el voltaje de alimentación es sinusoidal y la forma de onda de la corriente obtenida es no sinusoidal debido a la presencia de la reactancia Xd. Si se realiza el análisis de su funcionamiento al igual que en el caso anterior el diodo comienza a conducir corriente tan pronto como el voltaje se hace positivo (wt=0). Como resultado del funcionamiento de la bobina esta se opone a que la corriente crezca y la misma adopta la forma de onda del voltaje Ur representado en la figura y comienza a crecer hasta que obtiene su máximo valor en wt1. Durante el intervalo de tiempo 0<wt<wt1, la bobina se encuentra almacenando energía, pues como L di/dt es positiva también lo será Ul por tanto:
Lr UUU 2 (3.16)
Si se multiplican ambos miembros por la corriente que circula en el circuito se
obtiene:
2222 iUiUiu Lr (3.17)
Ahora bien durante el intervalo entre wt1<wt<+ , la pendiente de la corriente es negativa y por lo tanto la bobina se encuentra entregando energía al circuito. Durante el intervalo wt1<wt< la bobina se encuentra junto con la fuente disipando energía en Rd.
Lr UUU 2 (3.18)

44
2222 iUiUiU rL (3.19)
Durante el intervalo <wt< + la bobina continua devolviendo energía al circuito, gracias a su Fem de autoinducción que hace posible que a pesar de que el voltaje de suministro es negativo el diodo se encuentra polarizado en sentido directo. El proceso de conducción, si se considera la bobina ideal debe culminar cuando la misma devuelva toda la energía que almacena" en su campo magnético, por tanto bajo esta condición en debe manifestarse la igualdad de las áreas rayadas en la figura 3.4.b.
Lr UUU 2 (3.20)
222 iUUiU rL (3.21)
Una vez analizado el funcionamiento, aplicando circuitos obtendremos la expresión que describe el proceso durante el intervalo (+ ), de conducción del diodo
dt
diLRdiU 2
22 (3.22)
Como el voltaje u2 es sinusoidal la expresión 3.22 adopta la siguiente forma:
tsenURdidt
diL 22
2 ˆ (3.23)
La solución de la ecuación diferencial nos permite encontrar el valor de la corriente i la cual es no sinusoidal debido a que existe una componente libre y otra forzada cuya suma daría como resultado la primera.
La solución de esta ecuación se obtiene mediante la suma de la solución general de la ecuación incompleta (3.24), más la solución particular de la ecuación completa (3.25).
0 bxdt
dxa (3.24)
Y
xfbxdt
dya (3.25)
La solución de la ecuación 3.24 es la siguiente:

45
ta
b
Aex
(3.26)
Si llamamos Xf a la solución particular de la ecuación completa entonces la solución de la ecuación diferencial sería igual a:
xfAext
a
b
(3.27)
El valor de A se obtiene de las condiciones iniciales.
Aplicando la ecuación (3.23) a lo antes expuesto obtenemos que la solución a la ecuación incompleta es la siguiente:
.. L
R
eAi
(3.28)
y para este caso particular se sabe que:
tsenZ
Uif 2
ˆ (3.29)
donde:
R
LyLRZ
arctan222
para t=0 ; i =0 e senZ
Uito 2
ˆ
y la corriente i será igual a;
.
2 .ˆ
L
R
esentsenZ
Ui (3.30)
de esta expresión se observa la existencia de la componente forzada y de la componente libre.Para determinar hasta donde se incrementa la conducción es necesario tener presente que la corriente se anula en ese instante y que = + resultando
tan2 .ˆ
0 esensenZ
U (3.31)
por tanto nótese que el valor de depende del valor del ángulo de la impedancia en definitiva de la relación Xd/Rd de la misma.

46
Si bien se ha planteado que el rectificador monofásico de media onda tiene poco interés práctico, no sucede igual con el de onda completa. Por tanto en nuestra próxima conferencia analizaremos el funcionamiento de este convertidor con diferentes tipos de carga y obtendremos las expresiones de más importancia para su diseño.
3.5 Rectificadores monofásicos de onda completa no controlados
En el capítulo anterior se clasifican los rectificadores atendiendo al número de fases de la onda de entrada al rectificador y se analizó que la rectificación monofásica de onda completa puede realizarse de dos modos, ya sea usando un rectificador en configuración puente o un transformador con center tap. Veamos entonces cada uno de estos rectificadores de madera particular.
3.6 Rectificador monofásico puente con carga resistiva pura.
Este convertidor se encuentra compuesto por cuatro diodos en configuración puente y rara vez se deja de utilizar el transformador como parte componente del convertidor. El esquema representativo del mismo se ilustra en la figura 3.5.a, así como las formas de onda del voltaje y la corriente para este tipo de carga.
Para el análisis de su funcionamiento consideraremos el primer nivel de análisis y bajo este criterio se obtienen las formas de onda del voltaje que alimenta al convertidor es sinusoidal, representado por la siguiente expresión:
u2=Û2 sen t (3.32)
Figura 3.5 Rectificador monofásico de onda completa con carga resistiva pura.
47
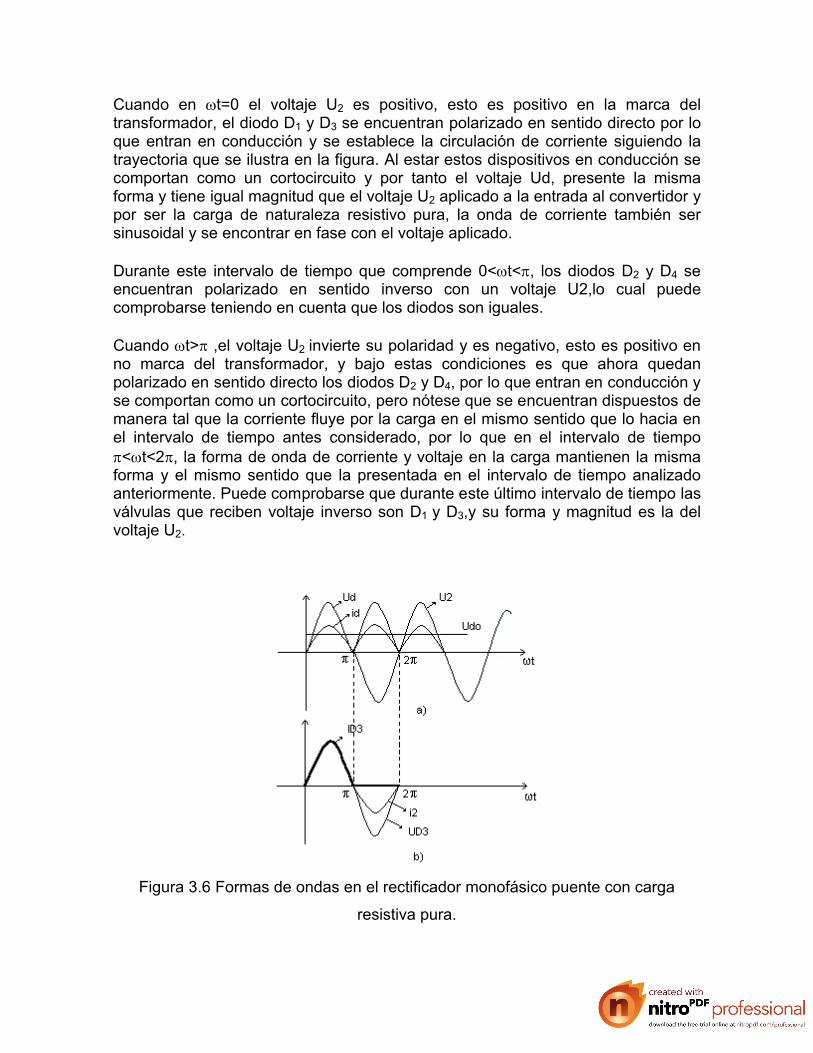
Cuando en t=0 el voltaje U2 es positivo, esto es positivo en la marca del transformador, el diodo D1 y D3 se encuentran polarizado en sentido directo por lo que entran en conducción y se establece la circulación de corriente siguiendo la trayectoria que se ilustra en la figura. Al estar estos dispositivos en conducción se comportan como un cortocircuito y por tanto el voltaje Ud, presente la misma forma y tiene igual magnitud que el voltaje U2 aplicado a la entrada al convertidor y por ser la carga de naturaleza resistivo pura, la onda de corriente también ser sinusoidal y se encontrar en fase con el voltaje aplicado.
Durante este intervalo de tiempo que comprende 0<t<, los diodos D2 y D4 se encuentran polarizado en sentido inverso con un voltaje U2,lo cual puede comprobarse teniendo en cuenta que los diodos son iguales.
Cuando t> ,el voltaje U2 invierte su polaridad y es negativo, esto es positivo en no marca del transformador, y bajo estas condiciones es que ahora quedan polarizado en sentido directo los diodos D2 y D4, por lo que entran en conducción y se comportan como un cortocircuito, pero nótese que se encuentran dispuestos de manera tal que la corriente fluye por la carga en el mismo sentido que lo hacia en el intervalo de tiempo antes considerado, por lo que en el intervalo de tiempo <t<2, la forma de onda de corriente y voltaje en la carga mantienen la misma forma y el mismo sentido que la presentada en el intervalo de tiempo analizado anteriormente. Puede comprobarse que durante este último intervalo de tiempo las válvulas que reciben voltaje inverso son D1 y D3,y su forma y magnitud es la del voltaje U2.
Figura 3.6 Formas de ondas en el rectificador monofásico puente con carga
resistiva pura.
48
Una vez analizado el comportamiento, se pueden determinar las diferentes magnitudes, por lo que nos centraremos en las formas de onda representadas en la figura 3.5.b, las cuales se han reproducido en la figura 3.6.a, y se le ha incorporado el valor Udo que registraría un instrumento magnetoeléctrico que se coloque en los terminales de la carga.
En la figura 3.6.b, se ha representado la forma de onda de la corriente y el voltaje en el diodo D3 y la corriente por el secundario del transformador.De la figura 3.6.a, se puede obtener el valor del voltaje Udo entonces:
ttdsenUUdo
0
2ˆ1
(3.33)
222 9.0
22ˆ2U
UUUdo
(3.34)
La corriente media que circula por la carga es:
tdtsenR
UIdo
0
2ˆ1
(3.35)
22ˆ2ˆ2 i
R
U
R
UdoIdo
L
(3.36)
La corriente media que pasa por el diodo, se calcula aplicando el mismo procedimiento que para el cálculo de Ido, pero nótese que la forma de onda de la corriente en el diodo, presenta la misma forma de onda que en el rectificador de media onda:
tdtsenR
UIa
0
2ˆ
2
1 (3.37)
2̂iIa (3.38)
De la figura 3.6 se aprecia que debido a que el voltaje al cambiar de signo también se invierte el sentido de circulación de la corriente por el devanado secundario del transformador entonces la relación que existe entre el valor máximo y la corriente efectiva que se registraría en ese devanado con un instrumento de hilo calienteseria la siguiente:
22 2ˆ Ii (3.39)
esta expresión adopta esta relación por ser la onda de corriente sinusoidal.

49
Sustituyendo este valor en la expresión (3.38) se obtiene que:
22I
Ia (3.40)
Si se compara la expresión 3.35 y la 3.36 se observa que Ido es el doble de Ia,eso se debe a que Ido está compuesta por dos cúpulas de corriente mientras que Ia contiene sólo una cúpula por tanto.
Ia=Ido/2 (3.41)
El valor de Ia puede ser calculado tanto por la expresión 3.38, 3.40 ó 3.41. La amplitud máxima de la corriente que circula a través de la válvula durante el
semiciclo de conducción es : IdoIdoIR
Ui aa 57.1
2
ˆ2
(3.42)
3.6.1 Selección del transformador.
En la conferencia anterior se había explicado que la capacidad del transformador empleado para alimentar el convertidor se determinaba mediante la semisuma de las potencias aparentes de sus devanados esto es:
221 SS
ST
(3.43)
Para determinar la potencia aparente en función de la potencia de directa suministrada a la carga es necesario expresar los valores efectivos como función de los parámetros de directa por tal motivo el voltaje eficaz U2, expresado como función de Udo, se puede obtener despejando de la expresión 3.34, por tanto:
U2=1.11 Udo (3.44)
El valor eficaz de la corriente secundaria del transformador se puede obtener de la expresión 3.36 y 3.39 por tanto:
I2=1.11 Ido (3.45)
Por consiguiente la potencia aparente del devanado secundario del transformador
será:

50
P2=U2 I2=1.11 Udo 1.11Ido=1.23 Pd (3.46)
El voltaje primario del transformador U1 se determina a partir del voltaje U2 del transformador con
U1=K U2=1.11 K Udo
U1=1.11 K Udo (3.47)
De la figura 3.6b se observa que la corriente I2 es sinusoidal, por lo que el flujo variable en el tiempo que produce los N2I2 , tendrán una respuesta desde el devanado primario a través de la corriente I1, y por tanto producir los N1I1necesarios, para mantener inalterable el flujo en el transformador, por tanto:
I1=1.11 Ido/K (3.48)
Como resultado de estas dos expresiones obtenidas pueden determinarse la potencia aparente del devanado primario:
S1=U1 I1=1.11K Udo 1.11 Ido/K
S1=1.23 Pd (3.49)
Si se sustituye los resultados parciales de 3.46 y 3.49 en la expresión 3.43 se obtiene finalmente la potencia de cálculo del transformador.
ST=1.23 Pd (3.50)
De esta expresión se observa que producto a que la corriente que circula por el transformador es sinusoidal la potencia de cálculo coincide con las potencias de cada uno de los devanados y la misma solo es un 23% superior a la potencia de corriente directa en la carga. Esto ocurre porque no se ha tomado en cuenta toda la potencia que se transfiere a la carga, sino que solo se ha considerado la potencia útil (Pd), aspecto que se comprender mejor cuando se estudie la eficiencia en los convertidores.
3.6.2 Selección de las válvulas
Para la selección de las válvulas se siguen los criterios antes estudiados, solo haremos referencia al voltaje inverso máximo y el factor de forma de la corriente por la válvula.
22ˆ UinvU (3.51)
De la figura 3.6b se puede determinar estos valores. Para el caso del voltaje
51
nótese que: 57.12ˆ
2ˆ
2
2
i
i
Ia
IefKf
Para determinar el factor de forma debe tenerse en cuenta que la corriente que circula por la válvula es una semisinusoide y por tanto la relación I efectiva a Iacoincide con la del rectificador de media onda.
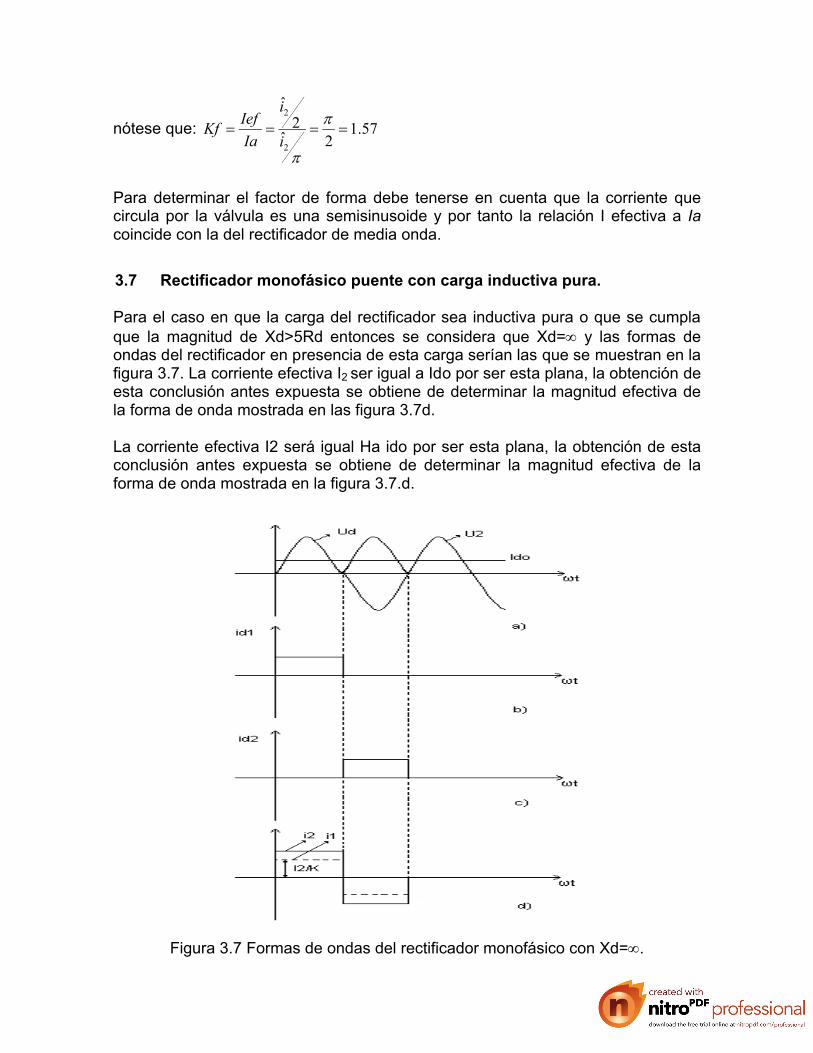
3.7 Rectificador monofásico puente con carga inductiva pura.
Para el caso en que la carga del rectificador sea inductiva pura o que se cumpla que la magnitud de Xd>5Rd entonces se considera que Xd= y las formas de ondas del rectificador en presencia de esta carga serían las que se muestran en la figura 3.7. La corriente efectiva I2 ser igual a Ido por ser esta plana, la obtención de esta conclusión antes expuesta se obtiene de determinar la magnitud efectiva de la forma de onda mostrada en las figura 3.7d.
La corriente efectiva I2 será igual Ha ido por ser esta plana, la obtención de esta conclusión antes expuesta se obtiene de determinar la magnitud efectiva de la forma de onda mostrada en la figura 3.7.d.
Figura 3.7 Formas de ondas del rectificador monofásico con Xd=.
52
2
0
22 2
1tdIdoI (3.52)
I2=Ido (3.53)
y la corriente del primario es:
I1=I2/K=Ido/K
I1=Ido/K (3.54)
Como el voltaje aplicado a la carga la misma forma que en el caso anterior, pues este lo impone la fuente al conducir los diodos y se están considerando los elementos ideales resulta que U2 y U1 se calculan a partir de las expresiones 3.44y 3.47 por tanto:
P2'=U2I2=1.11Pd (3.55)
P1'=U1I1=1.11Pd (3.56)
Con el resultado de las expresiones anteriores se obtiene finalmente la potencia de cálculo del transformador.
St=1.11 Pd (3.57)
Como conclusiones se puede obtener que el convertidor alimentándolo con una carga inductiva sólo se desaprovecha un 11% de la potencia del transformador, pues la corriente es plana.
3.7.1 Selección de las válvulas.
Si se retoman las formas de onda de la figura 3.7.a, puede concluirse que el voltaje inverso máximo de los dispositivos es el mismo que en el caso anterior. Sin embargo no se puede concluir lo mismo del factor de forma de la corriente pues la
forma de onda ha cambiado, por tanto de la figura 3.7.b, se obtiene que:
53
41.12
21
21
0
0
2
tIdod
tdIdo
Kf
De este resultado se observa que el factor de forma de la corriente disminuye, esto es consecuencia de que la corriente es plana por lo que se puede plantear que la corriente máxima permisible del dispositivo incrementa.
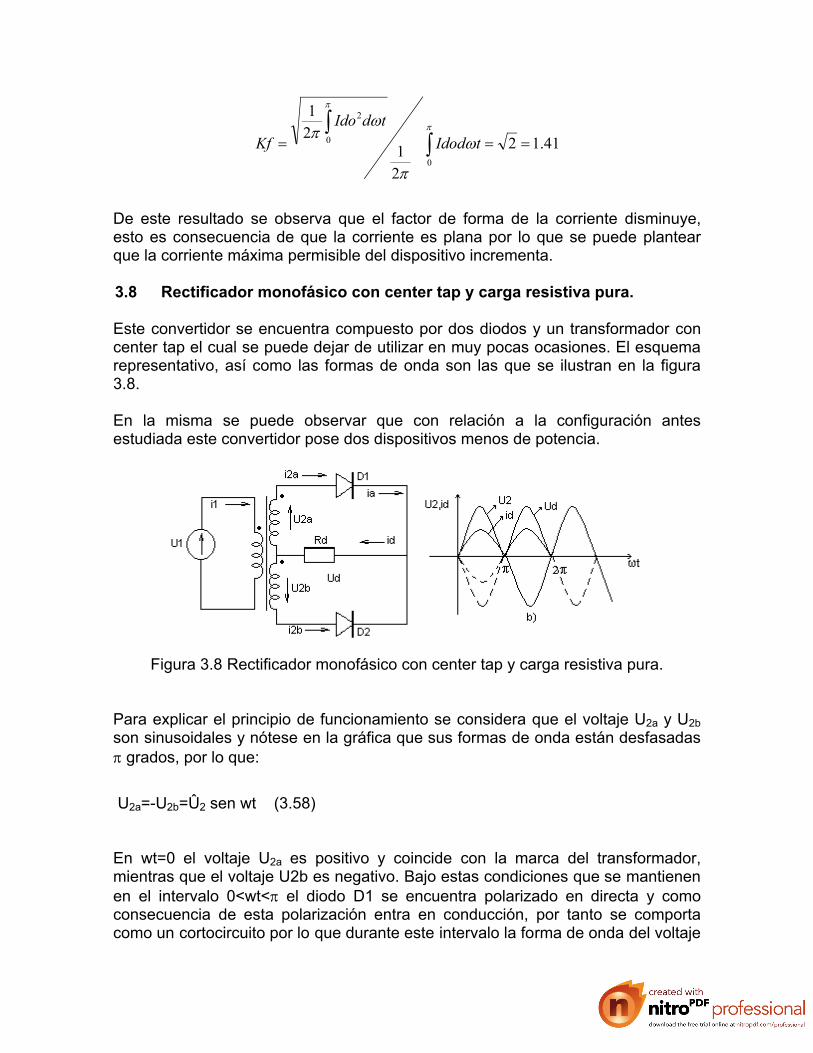
3.8 Rectificador monofásico con center tap y carga resistiva pura.
Este convertidor se encuentra compuesto por dos diodos y un transformador con center tap el cual se puede dejar de utilizar en muy pocas ocasiones. El esquema representativo, así como las formas de onda son las que se ilustran en la figura 3.8.
En la misma se puede observar que con relación a la configuración antes estudiada este convertidor pose dos dispositivos menos de potencia.
Figura 3.8 Rectificador monofásico con center tap y carga resistiva pura.
Para explicar el principio de funcionamiento se considera que el voltaje U2a y U2b
son sinusoidales y nótese en la gráfica que sus formas de onda están desfasadas grados, por lo que:
U2a=-U2b=Û2 sen wt (3.58)
En wt=0 el voltaje U2a es positivo y coincide con la marca del transformador, mientras que el voltaje U2b es negativo. Bajo estas condiciones que se mantienen en el intervalo 0<wt< el diodo D1 se encuentra polarizado en directa y como consecuencia de esta polarización entra en conducción, por tanto se comporta como un cortocircuito por lo que durante este intervalo la forma de onda del voltaje
54
Ud coincide con el voltaje U2a y la corriente tendrá la misma forma de onda y se encontrar en fase con el voltaje Ud. Una vez que t> entonces el voltaje U2a se hace negativo y el dispositivo D1 sale de conducción y comienza a recibir voltaje en sentido inverso.
En el intervalo <t<2 el voltaje U2b se hace positivo y como consecuencia de ello, es entonces el dispositivo D2 quien entra en conducción y por tanto se comportar ahora como un cortocircuito, como resultado de este proceso el voltaje Ud ahora coincide con el voltaje U2b. Nótese que el dispositivo D1 durante este intervalo de tiempo recibe un voltaje inverso de 2U2a.
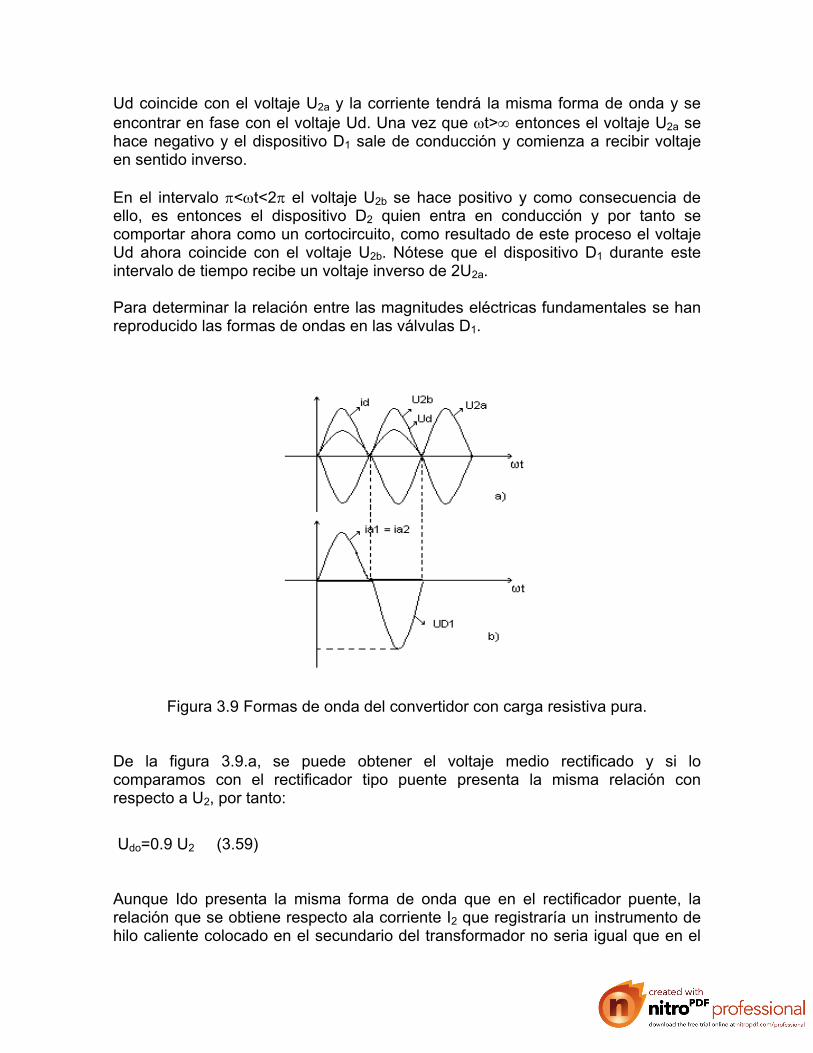
Para determinar la relación entre las magnitudes eléctricas fundamentales se han reproducido las formas de ondas en las válvulas D1.
Figura 3.9 Formas de onda del convertidor con carga resistiva pura.
De la figura 3.9.a, se puede obtener el voltaje medio rectificado y si lo comparamos con el rectificador tipo puente presenta la misma relación con respecto a U2, por tanto:
Udo=0.9 U2 (3.59)
Aunque Ido presenta la misma forma de onda que en el rectificador puente, la relación que se obtiene respecto ala corriente I2 que registraría un instrumento de hilo caliente colocado en el secundario del transformador no seria igual que en el

55
caso del rectificador puente, pues de la figura 3.9.b, se observa que la forma de onda de la corriente i2 es una semionda sinusoidal, por tanto:
22ˆ2ˆ2 i
R
UIdo (3.60)
pero en este caso el valor de i^2 será:
i^2=2 I2 (3.61)
por tanto sustituyendo la expresión 3.61 en 3.58 se obtiene que:
22 27.14
IIIdo
(3.62)
La magnitud de la corriente por la válvula será, al igual que en el caso del convertidor anterior Ido/2,por tal motivo la amplitud máxima de la corriente îa que circula por la válvula durante el semiciclo de conducción sera igual a la que aparece en la expresión 3.42 para el rectificador tipo puente.
3.8.1 Selección del transformador.
Para seleccionar dicho transformador es necesario calcular la potencia aparente de cada devanado del transformador, para lo cual obtendremos las expresiones de voltaje y corriente efectiva en función de Udo e Ido respectivamente.
El valor de U2 se puede obtener de 3.59:
U2=Udo/0.9=1.11 Udo.
U2=1.11 Udo (3.63)
ttdR
UIdo
sen
ˆ1
0
2
0
2 cosˆ1
tR
UIdo

56
y la magnitud de I2,de la expresión (3.62),por tanto:
I2=Ido/1.27=0.78 Ido.
I2=0.78 Ido. (3.64)
Ahora bien como por el secundario del transformador durante un semiciclo circula corriente sinusoidal por un devanado secundario del transformador y durante el otro semiciclo lo hace por el otro con iguales características en sentido contrario no existir magnetización del núcleo y la corriente primaria ser sinusoidal y la corriente primaria ser sinusoidal y la relación que tendrá con la corriente Ido ser igual que en el caso del rectificador monofásico puente:
I1=1.11 Ido/K (3.65)
mientras que el voltaje U1 también es sinusoidal y por consiguiente resulta que:
U1=1.11 K Udo (3.66)
Por tanto la potencia aparente del devanado primario y secundario serán las expresadas en las ecuaciones 3.67 y 3.68.
P1=U1 I1=1.11 K Udo 1.11 Ido/K.
P1=1.23 Pdo (3.67)
P2=U2 I2=1.11 Udo 0.78 Ido=0.8658 Pdo
P2=0.8658 Pdo (3.68)
Esta potencia aparente P2 representaría la potencia entregada por sólo una parte del secundario del transformador ala carga por lo que para obtener la potencia P2
total (P2T) es necesario multiplicar por dos.
P2T=2 P2.
P2T=1.74 Pdo (3.69)

57
finalmente se puede obtener la potencia total del transformador esto es:
ST= (S1+S2)/2= (1.23 Pdo + 1.74 Pdo)/2
ST=1.48 Pdo (3.70)
Nótese en la expresión 3.70 que el coeficiente de utilización ha empeorado respecto al rectificador puente siendo de un 23% a un 48% por encima de la potencia Pdo de la carga esto en gran medida se debe a que cada devanado secundario del transformador sólo se utiliza durante un medio ciclo.
3.8.2 Selección de las válvulas.
Para seleccionar las válvulas se siguen al igual que en los casos anterior, los criterios estudiados. Obsérvese de la figura 3.9.b, que la forma de onda de la corriente por la válvula es igual que en el rectificador puente, por lo que el factor de forma ser el mismo, mientras que el voltaje inverso máximo es dos veces mayor que en el rectificador puente de esto se deriva que para bajos voltajes esta última variante es más usada que la configuración puente, pues empleada menos válvulas se eleva para un mismo valor de Ud producto a la magnitud del voltaje inverso es necesario usar válvulas en serie y dejaría de poseer las ventajas antes mencionadas con respecto al rectificador puente.
3.9 Análisis del rectificador monofásico de onda completa considerando la conmutación.
Para realizar este análisis es necesario entonces considerar las reactancias anódicas, las cuales aparecen debido a que la reactancia de dispersión de los transformadores de potencia es elevada, al tiempo que la influencia de las resistencias ohmicas en tales transformadores tienen un valor despreciable. El esquema elegido para realizar este análisis es el de un rectificador de onda completa con center tap y aparece dibujado en la figura 3.9.a, mientras que en la figura 3.9.b y c, aparecen las formas de onda del voltaje y la corriente en la válvula la que se ha considerado plana debido a que Xd=
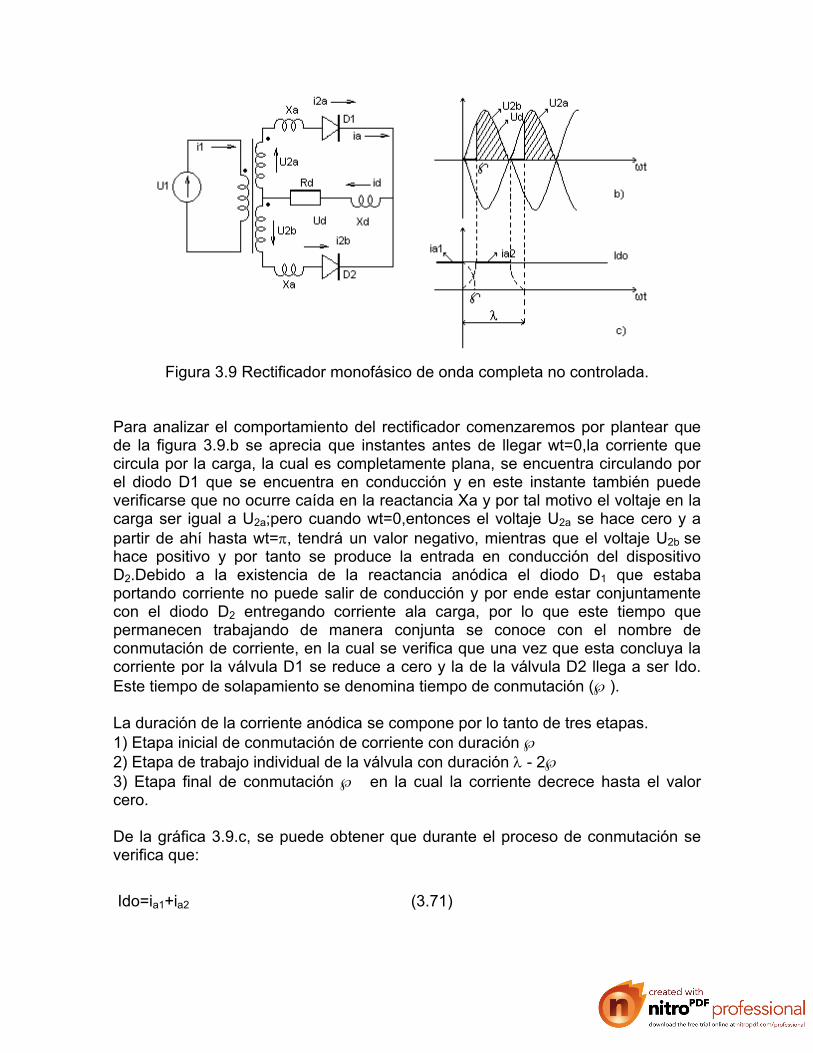
58
Figura 3.9 Rectificador monofásico de onda completa no controlada.
Para analizar el comportamiento del rectificador comenzaremos por plantear que de la figura 3.9.b se aprecia que instantes antes de llegar wt=0,la corriente que circula por la carga, la cual es completamente plana, se encuentra circulando por el diodo D1 que se encuentra en conducción y en este instante también puede verificarse que no ocurre caída en la reactancia Xa y por tal motivo el voltaje en la carga ser igual a U2a;pero cuando wt=0,entonces el voltaje U2a se hace cero y a partir de ahí hasta wt=, tendrá un valor negativo, mientras que el voltaje U2b se hace positivo y por tanto se produce la entrada en conducción del dispositivo D2.Debido a la existencia de la reactancia anódica el diodo D1 que estaba portando corriente no puede salir de conducción y por ende estar conjuntamente con el diodo D2 entregando corriente ala carga, por lo que este tiempo que permanecen trabajando de manera conjunta se conoce con el nombre de conmutación de corriente, en la cual se verifica que una vez que esta concluya la corriente por la válvula D1 se reduce a cero y la de la válvula D2 llega a ser Ido. Este tiempo de solapamiento se denomina tiempo de conmutación ().
La duración de la corriente anódica se compone por lo tanto de tres etapas. 1) Etapa inicial de conmutación de corriente con duración 2) Etapa de trabajo individual de la válvula con duración - 23) Etapa final de conmutación en la cual la corriente decrece hasta el valor cero.
De la gráfica 3.9.c, se puede obtener que durante el proceso de conmutación se verifica que:
Ido=ia1+ia2 (3.71)

59
Como durante este intervalo de tiempo conducen ambas válvulas se verifica que:
Ud=U2a-L dia1/dt=U2b-L dia2/dt (3.72)
de la que se obtiene que:
2 Ud=U2a+U2b-L(dia1/dt+dia2/dt)
y como de 3.71 se puede verificar que:
dia1/dt+dia2/dt=0
se obtiene que:
Ud= (U2a+U2b)/2 (3.73)
de esta expresión 3.73 se obtiene el resultado de que como U2a=-U2b entonces la magnitud del voltaje Ud durante el periodo de conmutación (),es cero, aspecto que aparece señalado en la figura 3.9.b.
Durante el periodo de tiempo que nos encontramos considerando la corriente ia2,se puede calcular tomando como punto de partida la expresión 3.71 y 3.72, donde operando con ambos se pueden plantear las siguientes igualdades.
U2a-L dia1/dt=U2b-L dia2/dt=U2a=L dia2/dt
trabajando con las dos últimas igualdades se obtiene que:
2 L dia2/dt=-U2a+U2b.
por tanto; como U2a=-U2b entonces se obtiene y U2a=-Û2a sen wt
dia2/dt= (Û2a sen wt)/L.

60
integrando esta última expresión, se tiene que:
tL
Ui aa
cos1
ˆ2
2 (3.74)
Con el fin de poder comprender mejor la forma de onda de la corriente por la válvula dos durante el periodo de conmutación, es importante reflexionar acerca de la expresión 3.74. En dicha expresión nótese que la corriente est formada por una cosinusoidal de amplitud máxima U^2a/wL que se encuentra sumada a ella ese mismo valor, lo cual hace que la forma de onda en el periodo de tiempo considerado adopte la forma de onda que se muestra en la figura 3.9.c. Para comprender con más detalle esto que se ha señalado puede verse la figura 3.10.
Figura 3.10 Proceso de conmutación. Forma de onda de la corriente ia2.
De la figura 3.9.c o de la figura 3.10, puede observarse que el proceso de conmutación concluye cuando la corriente ia2 se hace igual a Ido, esto ocurre cuando ha transcurrido el tiempo / ,por tanto evaluando la expresión 3.74para este tiempo se tiene:
tdtUL
dit
a
ai
a senˆ1
02
2
02
taa t
L
Ui 0
22 cos
ˆ0
0coscosˆ22 tUi aa
61
cos1ˆ
2
Xa
UIdo a (3.75)
La caída de voltaje durante el proceso de conmutación puede calcularse integrando la expresión de voltaje Udo durante este intervalo, lo cual puede observarse en la figura 3.9.b y puede expresarse matemáticamente de la siguiente forma:
cos1ˆ
2
aU
Ux (3.76)
La relación entre Ux y la corriente Ido puede hallarse si se despeja (1-cos) de la expresión 3.75 y se sustituye en la expresión 3.76, resultando:
IdoXa
Ux (3.77)
De la expresión 3.77 pude apreciarse que la caída de tensión debido al proceso de conmutación crece con el incremento de la corriente y la reactancia de dispersión Xa.
¿Cómo se explica que durante la conmutación el voltaje Ud sea igual a cero?
Para responder esta pregunta hay que partir de que de hecho la corriente por la carga puede ser absolutamente plana a pesar de que la carga no puede ser absolutamente plana a pesar de que se considera la reactancia muy superior a la resistencia, no obstante a ello se explicar el proceso considerando la corriente plana y además para facilitar su comprensión se dibujan en la figura 3.11, las formas de onda del voltaje y la caída en la resistencia de la carga que por considerar la corriente constante esta también lo será.
0
2 senˆ1ttdUUx a
02 cos
ˆt
UUx a
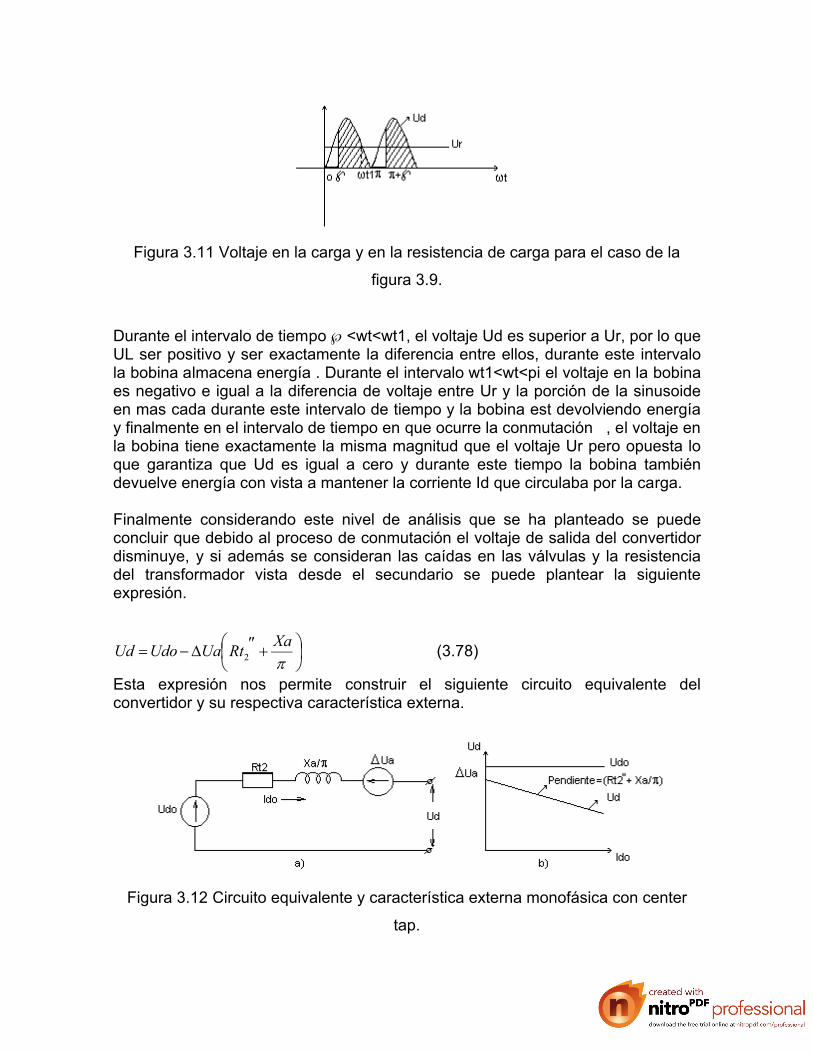
62
Figura 3.11 Voltaje en la carga y en la resistencia de carga para el caso de la
figura 3.9.
Durante el intervalo de tiempo <wt<wt1, el voltaje Ud es superior a Ur, por lo que UL ser positivo y ser exactamente la diferencia entre ellos, durante este intervalo la bobina almacena energía . Durante el intervalo wt1<wt<pi el voltaje en la bobina es negativo e igual a la diferencia de voltaje entre Ur y la porción de la sinusoide en mas cada durante este intervalo de tiempo y la bobina est devolviendo energía y finalmente en el intervalo de tiempo en que ocurre la conmutación , el voltaje en la bobina tiene exactamente la misma magnitud que el voltaje Ur pero opuesta lo que garantiza que Ud es igual a cero y durante este tiempo la bobina también devuelve energía con vista a mantener la corriente Id que circulaba por la carga.
Finalmente considerando este nivel de análisis que se ha planteado se puede concluir que debido al proceso de conmutación el voltaje de salida del convertidor disminuye, y si además se consideran las caídas en las válvulas y la resistencia del transformador vista desde el secundario se puede plantear la siguiente expresión.
Xa
RtUaUdoUd 2 (3.78)
Esta expresión nos permite construir el siguiente circuito equivalente del convertidor y su respectiva característica externa.
Figura 3.12 Circuito equivalente y característica externa monofásica con center
tap.

63
Por supuesto este análisis se ha realizado para el rectificador monofásico de onda completa con center tap y carga R-L que garantiza la conducción continua; pero puede demostrarse que estas expresiones son válvulas para el circuito en puente y el diagrama equivalente y la característica externa sólo se afectan en que hay que considerar que las válvulas que conducen son dos y por tanto hay que considerar 2 Ua.
3.10 Rendimiento de los rectificadores.
Son diversos los puntos de vista de los distintos autores con respecto al problema del rendimiento de los rectificadores.En un primer caso podemos definir el rendimiento ’ de un rectificador como la relación entre el valor medio de la potencia total en el lado de C.D (P´d) y la potencia total consumida de la red de C.A (P’d + P)
’ = (P´d)/ (P’d + P) Esencia energética del proceso.
Donde:
P´d = 1/T Ud id dt
Ud id: valores instantáneos de v son en la carga.
P: Pérdidas de potencia en todos los elementos del rectificador incluso en el transformador.
La potencia media (P´d) solo puede ser consumida por ciertos dispositivos tales como calentadores etc., mientras que la inmensa mayoría de los dispositivos (acumuladores, motores eléctricos, instalaciones de electrólisis, etc.) solo necesitan la componente continua de la corriente rectificada. Mientras que la componente de CA solo provoca pérdidas.
En un segundo caso se expresa el rendimiento del rectificador como la relación entre el valor de la potencia total útil (Pd) y la potencia total de CA consumida de la red.
= (Pd)/ (P’d + P) Efectividad del proceso
La magnitud ´ expresa la esencia energética del proceso de rectificación, es decir la relación entre la potencia total del lado de CD y la potencia consumida de la red de CA. Mientras la magnitud expresa la efectividad del proceso de rectificación, es decir la relación entre la potencia rectificada útil consumida por la carga ej. Eltotal de la potencia consumida por la red de CA.
64
’ ó = kd’
Donde Kd = pd/p’d 1 es el coeficiente de utilización de la potencia rectificada.
En algunos casos se representa
= rectificador. transformador
Donde:
rectificador = pd/(pd + P)
P = Pc demando + P dispositivos + P elementos auxiliares (L, R,C)
El rendimiento de los rectificadores a semiconductores es bastante alto, de 0,25 a 0,98
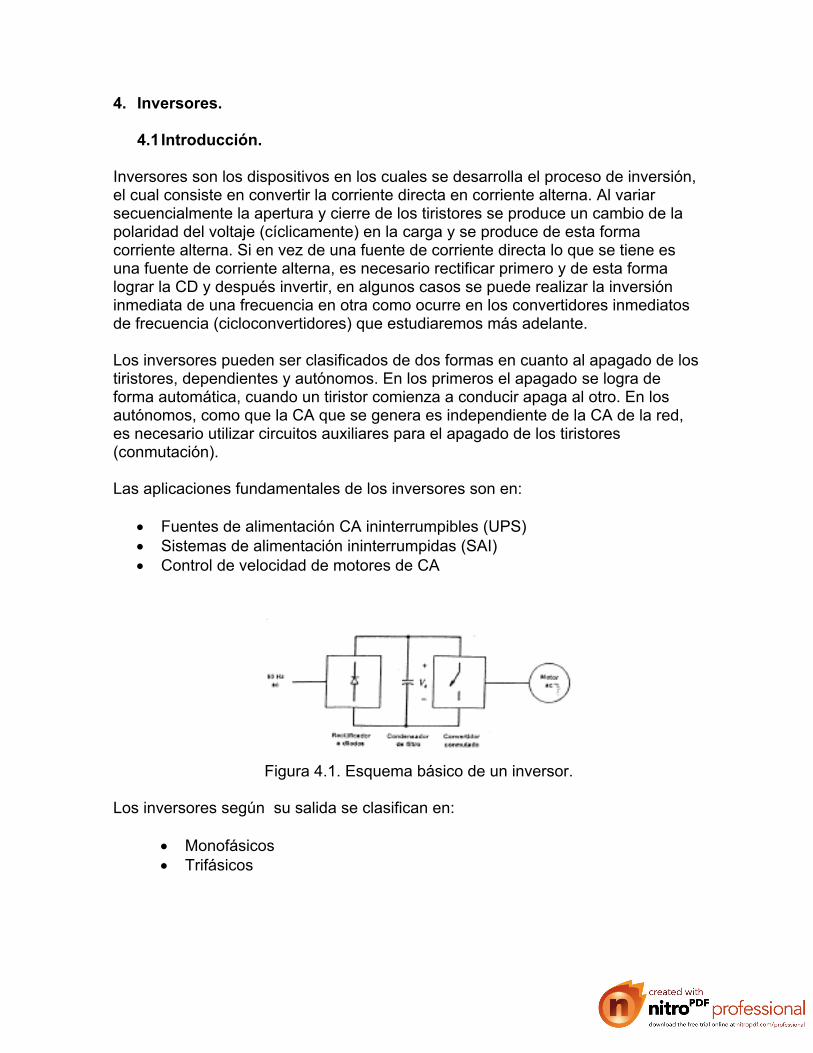
65
4. Inversores.
4.1Introducción.
Inversores son los dispositivos en los cuales se desarrolla el proceso de inversión, el cual consiste en convertir la corriente directa en corriente alterna. Al variar secuencialmente la apertura y cierre de los tiristores se produce un cambio de la polaridad del voltaje (cíclicamente) en la carga y se produce de esta forma corriente alterna. Si en vez de una fuente de corriente directa lo que se tiene es una fuente de corriente alterna, es necesario rectificar primero y de esta forma lograr la CD y después invertir, en algunos casos se puede realizar la inversión inmediata de una frecuencia en otra como ocurre en los convertidores inmediatos de frecuencia (cicloconvertidores) que estudiaremos más adelante.
Los inversores pueden ser clasificados de dos formas en cuanto al apagado de los tiristores, dependientes y autónomos. En los primeros el apagado se logra de forma automática, cuando un tiristor comienza a conducir apaga al otro. En los autónomos, como que la CA que se genera es independiente de la CA de la red, es necesario utilizar circuitos auxiliares para el apagado de los tiristores (conmutación).
Las aplicaciones fundamentales de los inversores son en:
Fuentes de alimentación CA ininterrumpibles (UPS) Sistemas de alimentación ininterrumpidas (SAI) Control de velocidad de motores de CA
Figura 4.1. Esquema básico de un inversor.
Los inversores según su salida se clasifican en:
Monofásicos Trifásicos
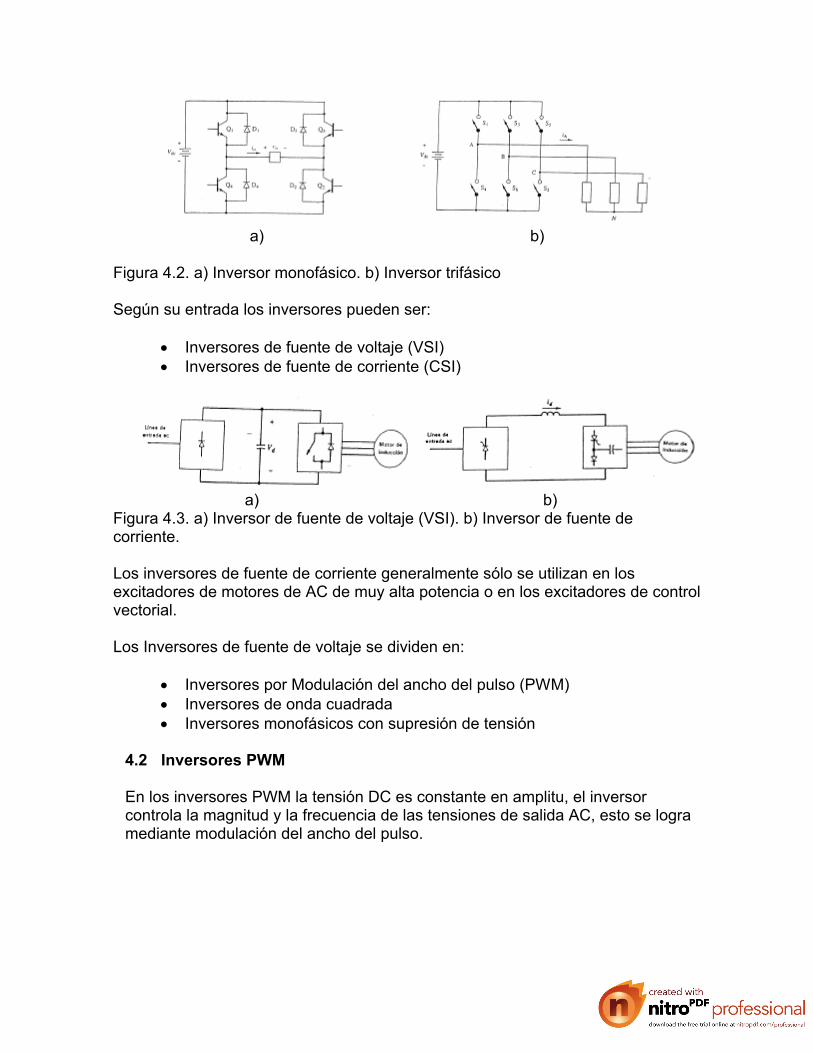
66
a) b)
Figura 4.2. a) Inversor monofásico. b) Inversor trifásico
Según su entrada los inversores pueden ser:
Inversores de fuente de voltaje (VSI) Inversores de fuente de corriente (CSI)
a) b) Figura 4.3. a) Inversor de fuente de voltaje (VSI). b) Inversor de fuente de corriente.
Los inversores de fuente de corriente generalmente sólo se utilizan en los excitadores de motores de AC de muy alta potencia o en los excitadores de control vectorial.
Los Inversores de fuente de voltaje se dividen en:
Inversores por Modulación del ancho del pulso (PWM) Inversores de onda cuadrada Inversores monofásicos con supresión de tensión
4.2 Inversores PWM
En los inversores PWM la tensión DC es constante en amplitu, el inversor controla la magnitud y la frecuencia de las tensiones de salida AC, esto se logra mediante modulación del ancho del pulso.

67
Figura 4.4. Inversor PWM
Figura 4.5. Circuito de mando para inversor PWM
Figura 4.6. Formas de onda en un inversor PWM
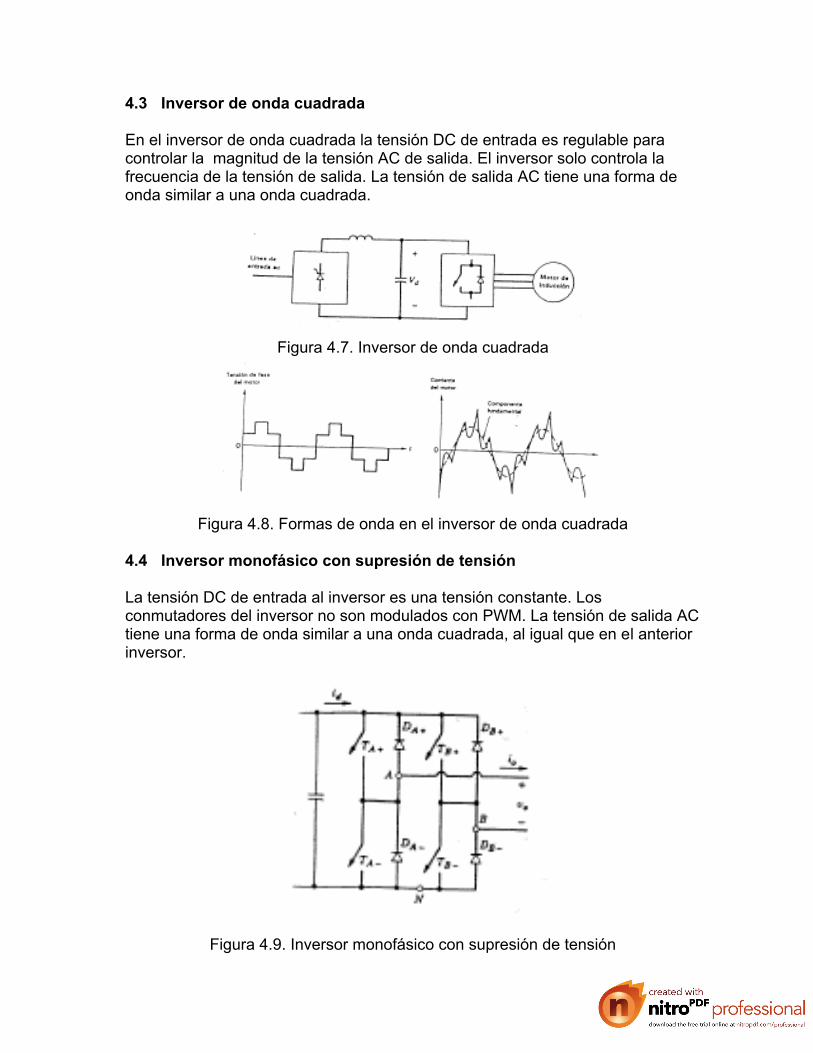
68
4.3 Inversor de onda cuadrada
En el inversor de onda cuadrada la tensión DC de entrada es regulable para controlar la magnitud de la tensión AC de salida. El inversor solo controla la frecuencia de la tensión de salida. La tensión de salida AC tiene una forma de onda similar a una onda cuadrada.
Figura 4.7. Inversor de onda cuadrada
Figura 4.8. Formas de onda en el inversor de onda cuadrada
4.4 Inversor monofásico con supresión de tensión
La tensión DC de entrada al inversor es una tensión constante. Los conmutadores del inversor no son modulados con PWM. La tensión de salida AC tiene una forma de onda similar a una onda cuadrada, al igual que en el anterior inversor.
Figura 4.9. Inversor monofásico con supresión de tensión
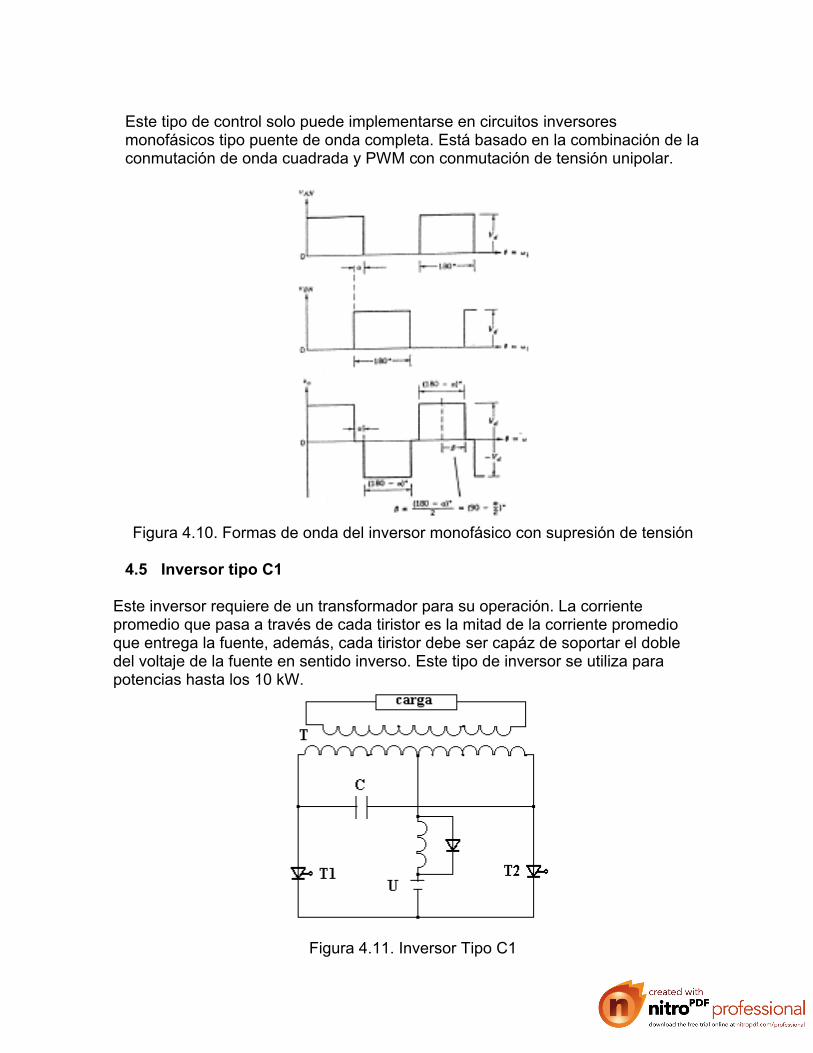
69
Este tipo de control solo puede implementarse en circuitos inversores monofásicos tipo puente de onda completa. Está basado en la combinación de la conmutación de onda cuadrada y PWM con conmutación de tensión unipolar.
Figura 4.10. Formas de onda del inversor monofásico con supresión de tensión
4.5 Inversor tipo C1
Este inversor requiere de un transformador para su operación. La corriente promedio que pasa a través de cada tiristor es la mitad de la corriente promedio que entrega la fuente, además, cada tiristor debe ser capáz de soportar el doble del voltaje de la fuente en sentido inverso. Este tipo de inversor se utiliza para potencias hasta los 10 kW.
Figura 4.11. Inversor Tipo C1
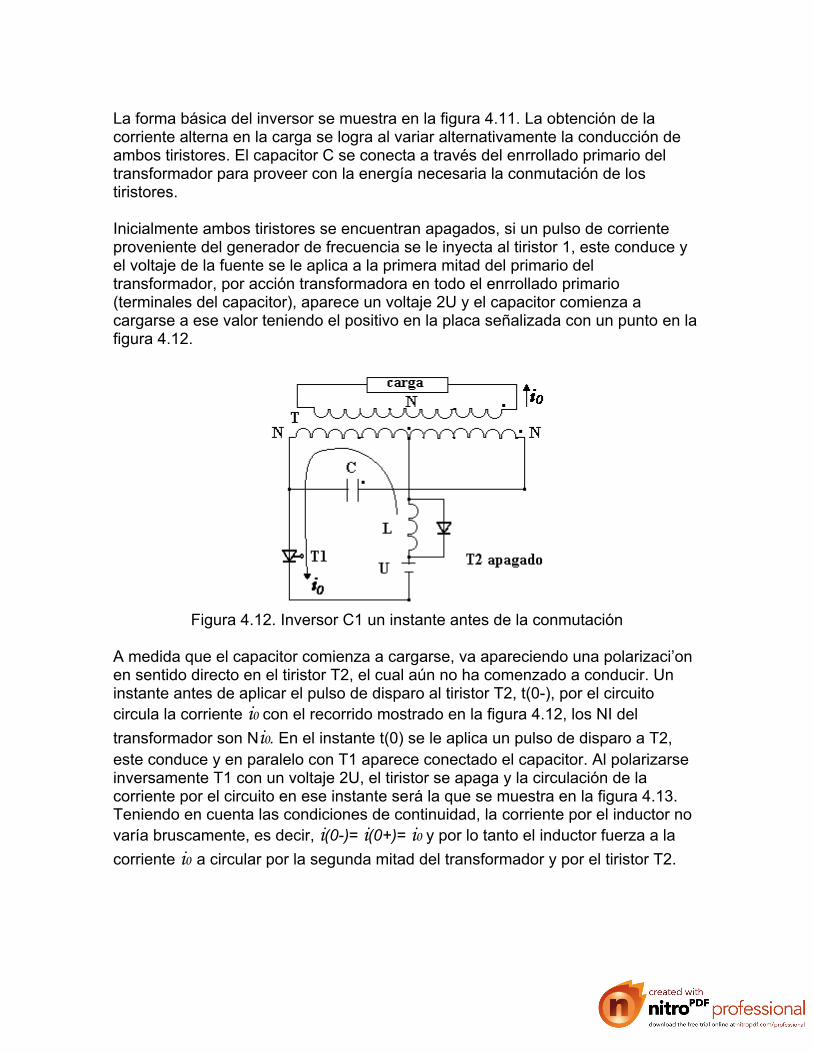
70
La forma básica del inversor se muestra en la figura 4.11. La obtención de la corriente alterna en la carga se logra al variar alternativamente la conducción de ambos tiristores. El capacitor C se conecta a través del enrrollado primario del transformador para proveer con la energía necesaria la conmutación de los tiristores.
Inicialmente ambos tiristores se encuentran apagados, si un pulso de corriente proveniente del generador de frecuencia se le inyecta al tiristor 1, este conduce y el voltaje de la fuente se le aplica a la primera mitad del primario del transformador, por acción transformadora en todo el enrrollado primario (terminales del capacitor), aparece un voltaje 2U y el capacitor comienza a cargarse a ese valor teniendo el positivo en la placa señalizada con un punto en la figura 4.12.
Figura 4.12. Inversor C1 un instante antes de la conmutación
A medida que el capacitor comienza a cargarse, va apareciendo una polarizaci’on en sentido directo en el tiristor T2, el cual aún no ha comenzado a conducir. Un instante antes de aplicar el pulso de disparo al tiristor T2, t(0-), por el circuito circula la corriente i0 con el recorrido mostrado en la figura 4.12, los NI del
transformador son Ni0. En el instante t(0) se le aplica un pulso de disparo a T2, este conduce y en paralelo con T1 aparece conectado el capacitor. Al polarizarse inversamente T1 con un voltaje 2U, el tiristor se apaga y la circulación de la corriente por el circuito en ese instante será la que se muestra en la figura 4.13.Teniendo en cuenta las condiciones de continuidad, la corriente por el inductor no varía bruscamente, es decir, i(0-)= i(0+)= i0 y por lo tanto el inductor fuerza a la
corriente i0 a circular por la segunda mitad del transformador y por el tiristor T2.
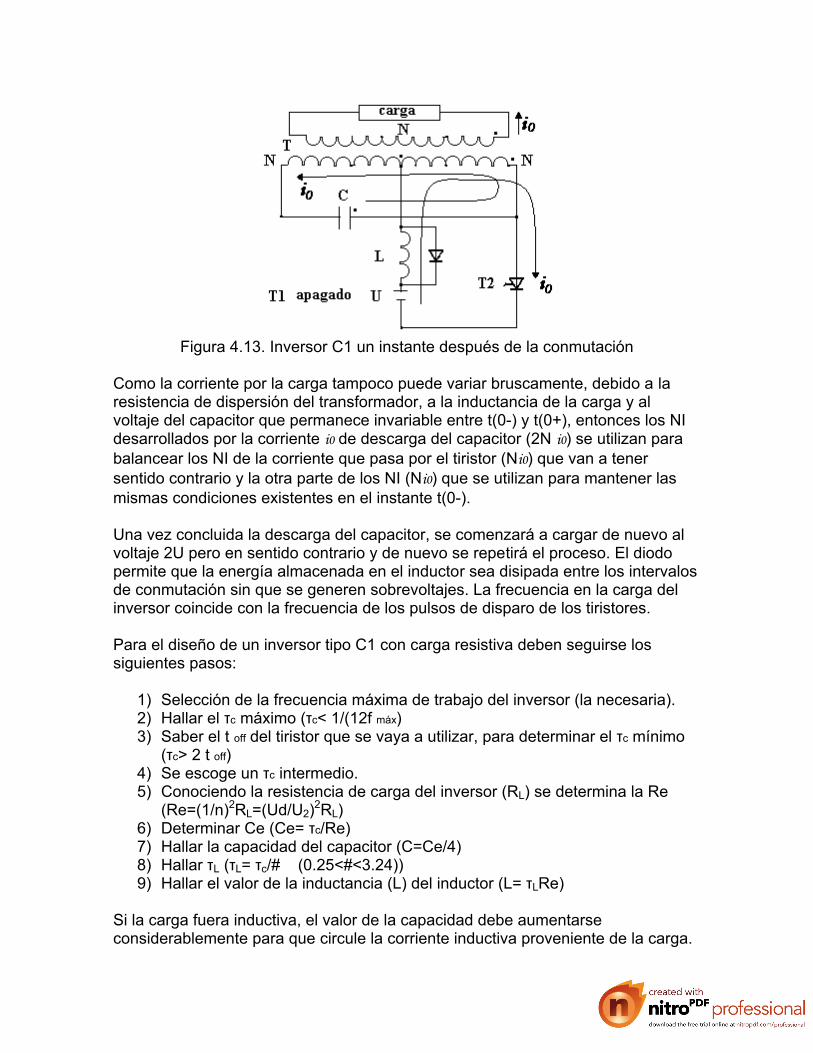
71
Figura 4.13. Inversor C1 un instante después de la conmutación
Como la corriente por la carga tampoco puede variar bruscamente, debido a la resistencia de dispersión del transformador, a la inductancia de la carga y al voltaje del capacitor que permanece invariable entre t(0-) y t(0+), entonces los NI desarrollados por la corriente i0 de descarga del capacitor (2N i0) se utilizan para balancear los NI de la corriente que pasa por el tiristor (Ni0) que van a tener sentido contrario y la otra parte de los NI (Ni0) que se utilizan para mantener las mismas condiciones existentes en el instante t(0-).
Una vez concluida la descarga del capacitor, se comenzará a cargar de nuevo al voltaje 2U pero en sentido contrario y de nuevo se repetirá el proceso. El diodo permite que la energía almacenada en el inductor sea disipada entre los intervalos de conmutación sin que se generen sobrevoltajes. La frecuencia en la carga del inversor coincide con la frecuencia de los pulsos de disparo de los tiristores.
Para el diseño de un inversor tipo C1 con carga resistiva deben seguirse los siguientes pasos:
1) Selección de la frecuencia máxima de trabajo del inversor (la necesaria).2) Hallar el τc máximo (τc< 1/(12f máx)3) Saber el t off del tiristor que se vaya a utilizar, para determinar el τc mínimo
(τc> 2 t off)4) Se escoge un τc intermedio.5) Conociendo la resistencia de carga del inversor (RL) se determina la Re
(Re=(1/n)2RL=(Ud/U2)2RL)
6) Determinar Ce (Ce= τc/Re)7) Hallar la capacidad del capacitor (C=Ce/4)8) Hallar τL (τL= τc/# (0.25<#<3.24))9) Hallar el valor de la inductancia (L) del inductor (L= τLRe)
Si la carga fuera inductiva, el valor de la capacidad debe aumentarse considerablemente para que circule la corriente inductiva proveniente de la carga.

72
5. Cicloconvertidores
5.1Introducción.
En muchas aplicaciones se necesita disponer de potencia eléctrica de frecuencia, fija o variable, pero de distinta característica que la suministrada por el generador que se dispone.
Por tanto deberemos colocar un dispositivo entre la red eléctrica y la carga de forma que se transforme la energía eléctrica cambiando su frecuencia según sea necesario. A los convertidores directos de corriente alterna en corriente alterna de distinta frecuencia se les conoce como cicloconvertidores. Estos sistemas serán capaces de proporcionar una corriente alterna mono o polifásica de amplitud y frecuencia regulables, a partir de un generador de c.a. La misma función que realiza el ciclo conversor, puede ser realizada mediante la conexión en cascada de un rectificador, controlado o no, y un inversor autónomo, pero al ser la potencia transformada por dos conversores, el rendimiento en casos de potencias elevadas será menor. En este tipo de configuración se utiliza un estado intermedio, de unión entre el rectificador y el inversor. Dicho elemento de unión, conocido como “dc link o dc bus” consiste en un condensador o un inductor para almacenar la diferencia instantánea entre la potencia de entrada y la de salida. A este conversor ac-ac con dc-link, se le conoce como “dc link converter”. La principal aplicación de los cicloconvertidores se da en el control a baja velocidad de grandes motores de c.a., donde es preciso variar la amplitud de la tensión proporcionalmente a la frecuencia. Una ventaja importante de los ciclo conversores, reside en su funcionamiento con bloqueo de sus tiristores de forma natural y su carácter reversible, haciendo posible que con cargas regenerativas puedan absorber potencia de la carga y entregarla a la entrada. Su funcionamiento con conmutación natural implica que la entrada en conducción de un tiristor debe provocar automáticamente el bloqueo del que ha entrado en conducción anteriormente. Si se está en el semiciclo positivo de corriente, este bloqueo natural exige que el voltaje que se conecta sea, en el momento de la conexión, más positivo o menos negativo que el voltaje antes conectado. Si por el contrario, se está en un semiciclo negativo, los tiristores que entran sucesivamente en conducción son los del rectificador negativo. Para que al entrar en conducción uno cualquiera se bloquee el que antes estaba en conducción es necesario que la nueva tensión que se conecta sea más negativa o menos positiva.
En cuanto a sus limitaciones, destacar que la frecuencia que pueden suministrar en la salida es aproximadamente inferior en un tercio a la frecuencia de la entrada, si se desea un bajo contenido armónico en la salida.
5.2Principio de Funcionamiento.
Recordando los rectificadores controlados, obtuvimos que un rectificador con tiristores, de índice de pulsación p, suministraba una tensión rectificada u’d

73
formada por p fragmentos idénticos de senoide, por cada período de la tensión de alimentación. El valor medio U’d se expresaba como :
Si se varía el ángulo de conducción α desde cero hasta π-β, donde β es el ángulo de seguridad, la tensión U’d varía entre Udo y un valor próximo a -Udo. Sin embargo la corriente es unidireccional. Para poder conseguir una circulaciónbidireccional de la corriente, se dispondrán dos rectificadores en antiparalelo, tal como se muestra en la siguiente figura.
Con esta configuración, para que la tensión V’ en bornes de la carga tenga el mismo valor medio, sea cual sea el rectificador que la alimenta, se deberá exigir que los dos ángulos de control α1 y α2 sean complementarios, verificando:
El valor medio de la tensión de salida suministrada por el conjunto de los dos rectificadores en antiparalelo puede resultar con una componente alterna distinta de cero, modulando de forma periódica sus ángulos de control. Así para obtener una salida v’ senoidal, de frecuencia angular w’ y de amplitud V’√2, se deben de variar los ángulos de control α1 y α2 para obtener:
Para entender este principio de funcionamiento veamos en la siguiente figura la tensión v’w deseada y la corriente i’ que correspondería a una carga inductiva.
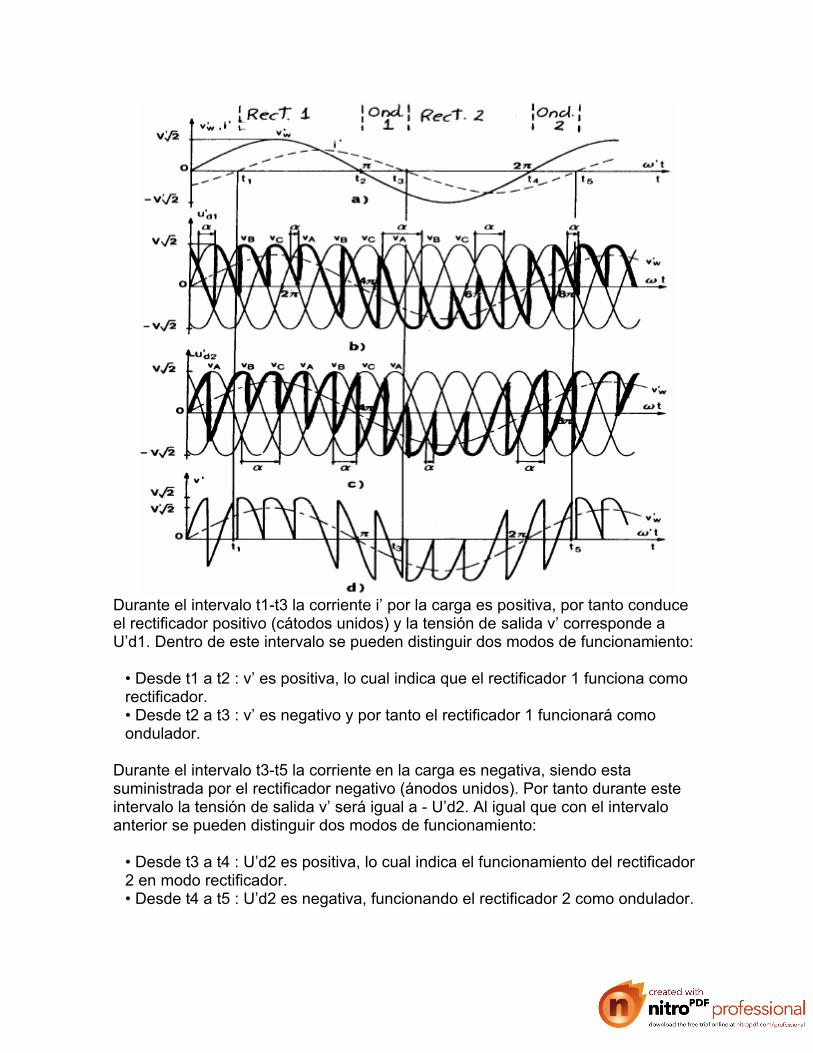
74
Durante el intervalo t1-t3 la corriente i’ por la carga es positiva, por tanto conduce el rectificador positivo (cátodos unidos) y la tensión de salida v’ corresponde a U’d1. Dentro de este intervalo se pueden distinguir dos modos de funcionamiento:
• Desde t1 a t2 : v’ es positiva, lo cual indica que el rectificador 1 funciona como rectificador.• Desde t2 a t3 : v’ es negativo y por tanto el rectificador 1 funcionará como ondulador.
Durante el intervalo t3-t5 la corriente en la carga es negativa, siendo esta suministrada por el rectificador negativo (ánodos unidos). Por tanto durante este intervalo la tensión de salida v’ será igual a - U’d2. Al igual que con el intervalo anterior se pueden distinguir dos modos de funcionamiento:
• Desde t3 a t4 : U’d2 es positiva, lo cual indica el funcionamiento del rectificador 2 en modo rectificador.• Desde t4 a t5 : U’d2 es negativa, funcionando el rectificador 2 como ondulador.
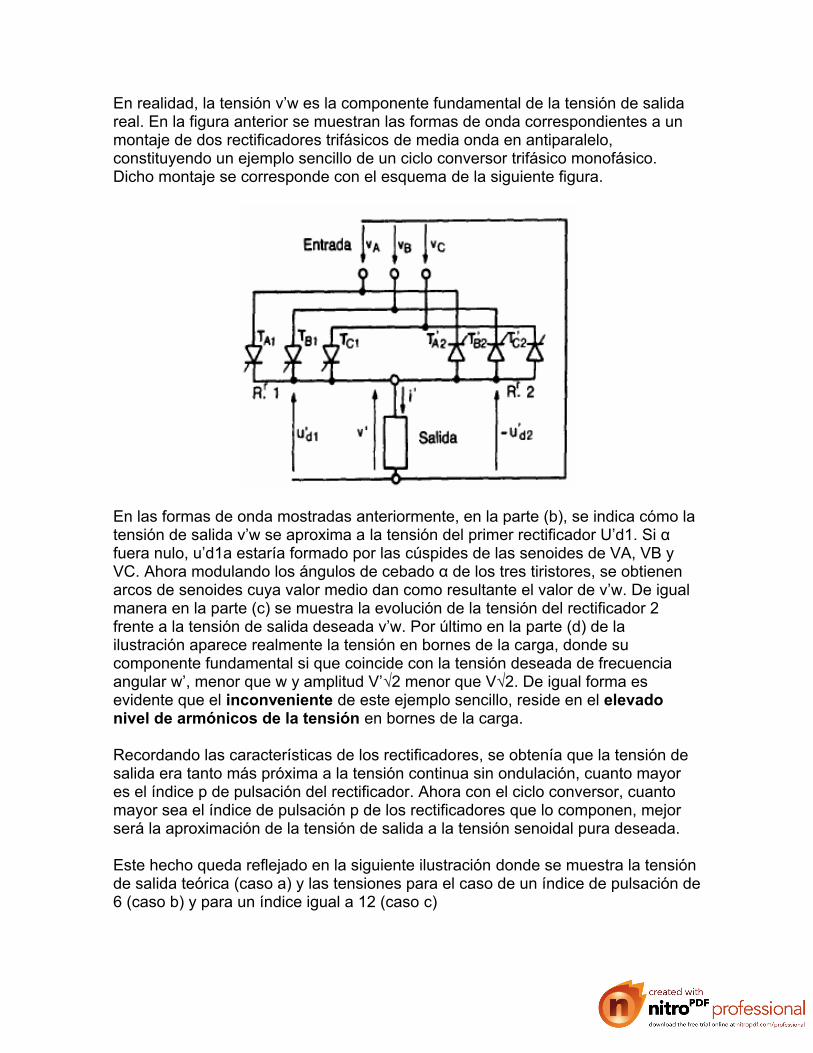
75
En realidad, la tensión v’w es la componente fundamental de la tensión de salida real. En la figura anterior se muestran las formas de onda correspondientes a un montaje de dos rectificadores trifásicos de media onda en antiparalelo, constituyendo un ejemplo sencillo de un ciclo conversor trifásico monofásico.Dicho montaje se corresponde con el esquema de la siguiente figura.
En las formas de onda mostradas anteriormente, en la parte (b), se indica cómo la tensión de salida v’w se aproxima a la tensión del primer rectificador U’d1. Si αfuera nulo, u’d1a estaría formado por las cúspides de las senoides de VA, VB y VC. Ahora modulando los ángulos de cebado α de los tres tiristores, se obtienen arcos de senoides cuya valor medio dan como resultante el valor de v’w. De igual manera en la parte (c) se muestra la evolución de la tensión del rectificador 2 frente a la tensión de salida deseada v’w. Por último en la parte (d) de la ilustración aparece realmente la tensión en bornes de la carga, donde su componente fundamental si que coincide con la tensión deseada de frecuencia angular w’, menor que w y amplitud V’√2 menor que V√2. De igual forma es evidente que el inconveniente de este ejemplo sencillo, reside en el elevado nivel de armónicos de la tensión en bornes de la carga.
Recordando las características de los rectificadores, se obtenía que la tensión de salida era tanto más próxima a la tensión continua sin ondulación, cuanto mayor es el índice p de pulsación del rectificador. Ahora con el ciclo conversor, cuanto mayor sea el índice de pulsación p de los rectificadores que lo componen, mejor será la aproximación de la tensión de salida a la tensión senoidal pura deseada.
Este hecho queda reflejado en la siguiente ilustración donde se muestra la tensión de salida teórica (caso a) y las tensiones para el caso de un índice de pulsación de 6 (caso b) y para un índice igual a 12 (caso c)

76
5.3Montajes utilizados.
Antes de considerar, en la siguiente sección, la parte de control de los ciclo conversores, vamos a exponer las diferentes configuraciones de ciclo conversores. Hay que destacar que cualquier configuración de ciclo conversor es equivalente a dos rectificadores en paralelo, uno de tipo P y otro de tipo N, lo cual extiende las posibles configuraciones a tantos tipos de rectificadores como existan.
Veamos a continuación los esquemas de los más representativos, a tendiendo al número de fases de entrada y salida. En la siguiente figura se muestra dos configuraciones de ciclo conversor monofásico-monofásico en paralelo doble (caso a) y en puente (caso b).

77
En la siguiente figura se ha representado un ciclo conversor trifásico-monofásico (parte a), junto con su representación simbólica (parte b), donde cada símbolo de tiristor recuadrado equivale un conjunto de tres tiristores en configuración estrella.
A continuación se representa el ciclo conversor trifásico-trifásico constituido por tres ciclo conversores trifásicos-monofásicos desfasados 2π/3 entre sí.
Existen otras configuraciones de ciclo conversor trifásico-monofásico con mayor índice de pulsación. Por ejemplo el circuito de la siguiente figura con 12 tiristores,
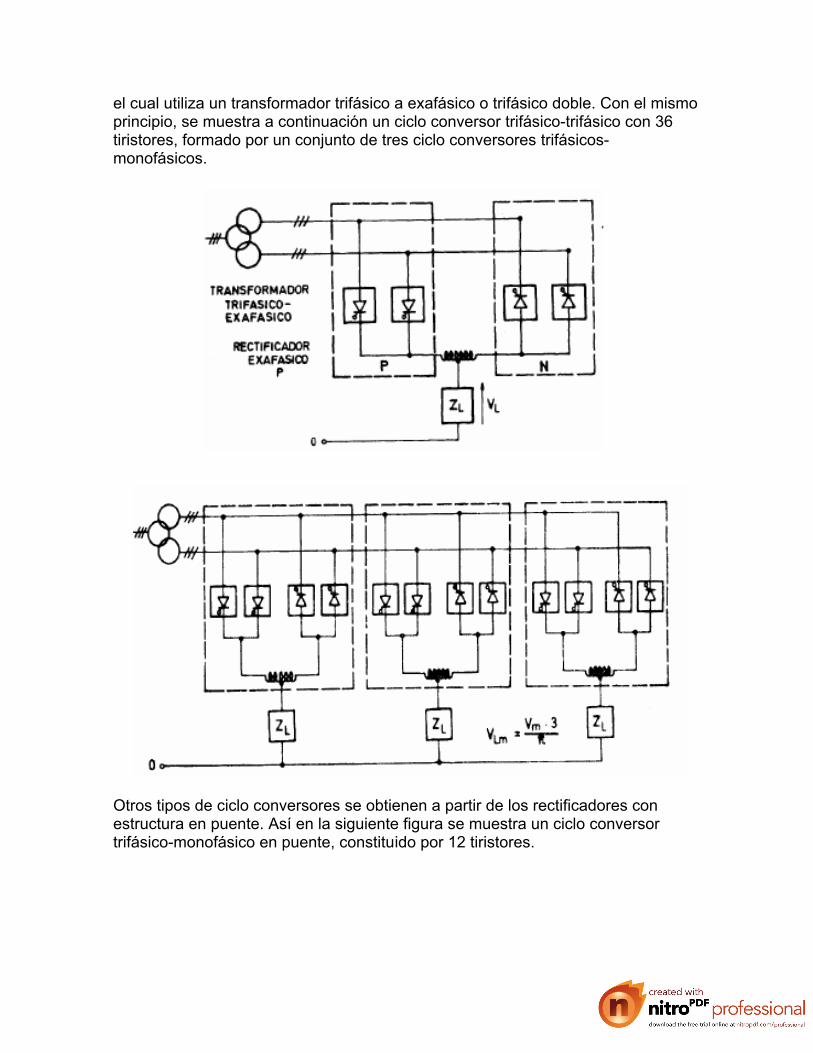
78
el cual utiliza un transformador trifásico a exafásico o trifásico doble. Con el mismo principio, se muestra a continuación un ciclo conversor trifásico-trifásico con 36 tiristores, formado por un conjunto de tres ciclo conversores trifásicos-monofásicos.
Otros tipos de ciclo conversores se obtienen a partir de los rectificadores con estructura en puente. Así en la siguiente figura se muestra un ciclo conversortrifásico-monofásico en puente, constituido por 12 tiristores.

79
5.4Estudio de la tensión de salida.
El valor medio del convertidor es proporcional al coseno del ángulo de retardo. El ángulo de retardo para cada tiristor es el ángulo tal que el valor instantáneo de la tensión deseada sea igual al cos(α), siendo α el ángulo de disparo.
En la figura siguiente se muestra la aplicación de la ley de control a la generación de la tensión de salida senoidal en un ciclo conversor trifásico-monofásico, formado por dos rectificadores controlados de media onda en antiparalelo las semicosenoides de los ondas de modulación de un tiristor empiezan en el instante que conducirían si no hubiera retardo de bloqueo (αi=0).
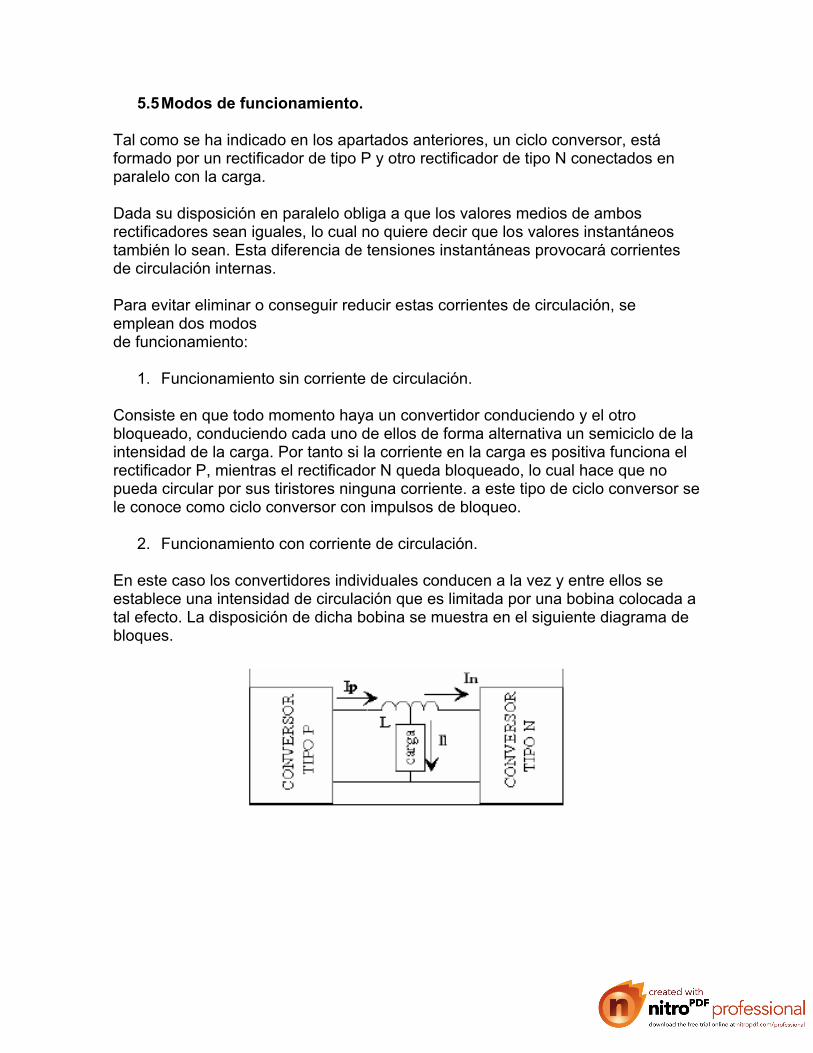
80
5.5Modos de funcionamiento.
Tal como se ha indicado en los apartados anteriores, un ciclo conversor, está formado por un rectificador de tipo P y otro rectificador de tipo N conectados en paralelo con la carga.
Dada su disposición en paralelo obliga a que los valores medios de ambos rectificadores sean iguales, lo cual no quiere decir que los valores instantáneos también lo sean. Esta diferencia de tensiones instantáneas provocará corrientes de circulación internas.
Para evitar eliminar o conseguir reducir estas corrientes de circulación, se emplean dos modosde funcionamiento:
1. Funcionamiento sin corriente de circulación.
Consiste en que todo momento haya un convertidor conduciendo y el otro bloqueado, conduciendo cada uno de ellos de forma alternativa un semiciclo de la intensidad de la carga. Por tanto si la corriente en la carga es positiva funciona el rectificador P, mientras el rectificador N queda bloqueado, lo cual hace que no pueda circular por sus tiristores ninguna corriente. a este tipo de ciclo conversor se le conoce como ciclo conversor con impulsos de bloqueo.
2. Funcionamiento con corriente de circulación.
En este caso los convertidores individuales conducen a la vez y entre ellos se establece una intensidad de circulación que es limitada por una bobina colocada a tal efecto. La disposición de dicha bobina se muestra en el siguiente diagrama de bloques.

81
6. Reguladores e interruptores estáticos de continua
6.1Introducción.
En los temas anteriores, cuando los dispositivos rectificadores estaban unidos a una fuente alterna, los semiconductores tenían un proceso de conmutación a corte de forma natural. Cuando la alimentación sea una fuente de voltaje continuo, el principio de conmutar de forma periódica las conexiones entre la fuente d.c. y la carga proporciona un mecanismo para controlar la potencia en la carga. A estos circuitos se les denomina troceadores ("choppers") o reguladores estáticos de continua. Los reguladores estáticos de continua son sistemas que transforman la corriente continua de tensión constante en corriente continua de tensión variable y de la misma frecuencia. En el límite donde la potencia entregada a la carga sea máxima o nula se obtienen los interruptores estáticos de continua.Por otro lado, las aplicaciones de los convertidores DC/DC recaen fundamentalmente sobre dos campos:
Fuentes de alimentación conmutadas. Son fuentes de alimentación en las que el regulador en vez de ser lineal es conmutado, consiguiéndose un importante aumento del rendimiento y una buena respuesta dinámica.
Alimentación de motores de corriente continua, cuya regulación requiere tensiones continúas variables. Las potencias utilizadas en este caso son considerables
6.2 Funcionamiento básico.
Para introducirnos en el funcionamiento de los convertidores DC/DC, se considerará el circuito que se recoge en la siguiente figura, conformado exclusivamente por un interruptor y una carga resistiva pura.
El interruptor se abre y se cierra siguiendo una señal de periodo “T” denominada periodo de convertidor. El tiempo durante el cual el interruptor está cerrado, y por tanto la carga se encuentra conectada a la fuente primaria de energía, se denominará tiempo de conducción, “TON”. Por otro lado el tiempo que el interruptor permanece abierto, dejando aislada la carga, se llamará tiempo de bloqueo, “TOFF”. La suma de TON y TOFF, como se puede apreciar en la figura, da el periodo de convertidor (T). Cuando el interruptor S está cerrado, 0<� t <�TON, la tensión de la fuente se refleja en la carga, provocando la circulación de corriente a través de ella. Si por el contrario S está abierto, TON < �t <� T, elvínculo entre la fuente y carga se rompe, quedando esta última aislada de la primera. Como la carga es resistiva pura, la corriente circulante por la misma, en estas condiciones, se anula completamente.
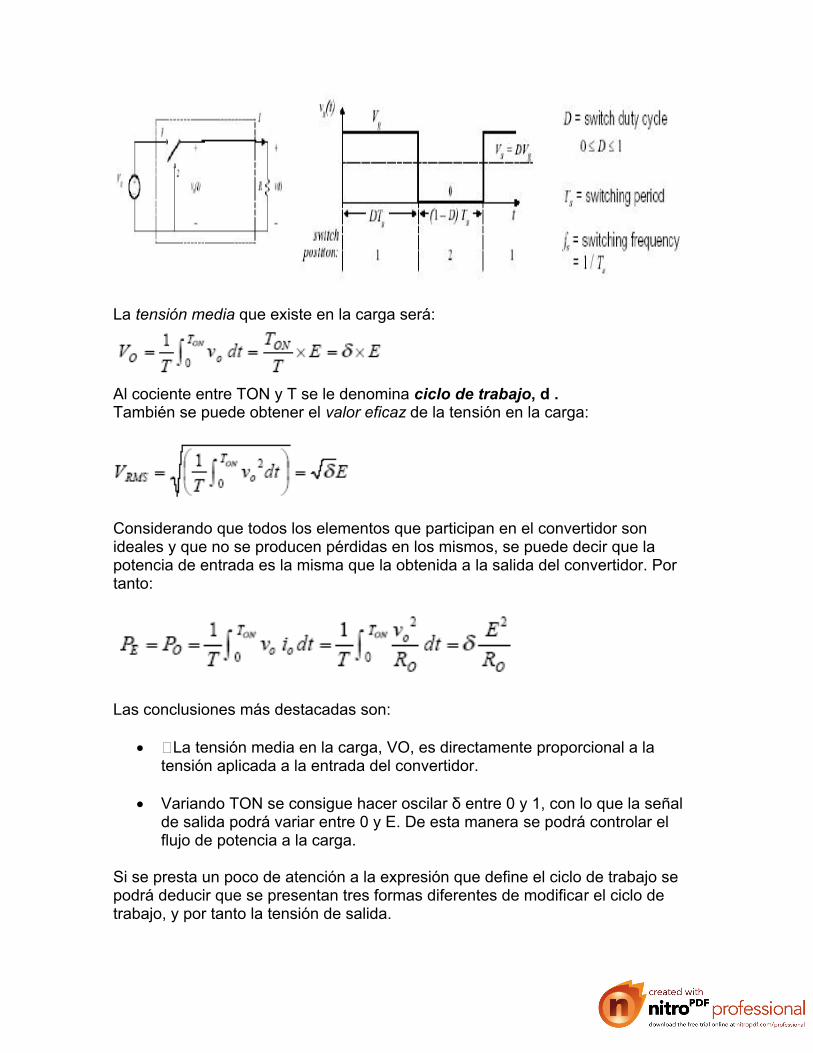
82
La tensión media que existe en la carga será:
Al cociente entre TON y T se le denomina ciclo de trabajo, d .También se puede obtener el valor eficaz de la tensión en la carga:
Considerando que todos los elementos que participan en el convertidor son ideales y que no se producen pérdidas en los mismos, se puede decir que la potencia de entrada es la misma que la obtenida a la salida del convertidor. Por tanto:
Las conclusiones más destacadas son:
�La tensión media en la carga, VO, es directamente proporcional a latensión aplicada a la entrada del convertidor.
Variando TON se consigue hacer oscilar δ entre 0 y 1, con lo que la señal de salida podrá variar entre 0 y E. De esta manera se podrá controlar el flujo de potencia a la carga.
Si se presta un poco de atención a la expresión que define el ciclo de trabajo se podrá deducir que se presentan tres formas diferentes de modificar el ciclo de trabajo, y por tanto la tensión de salida.
83
a) Variando el tiempo de conducción TON, al mismo tiempo que se mantiene T fijo. Llamado también Modulación por Ancho de Pulso (PWM) ya que la frecuencia de la señal del convertidor se mantiene constante mientras que no ocurre así con la anchura del pulso que define el tiempo de conducción del convertidor.
b) Variando T y conservando TON constante. Denominado Modulación de Frecuencia ya que es la frecuencia del convertidor la que varía. El inconveniente más destacado de este método de control se encuentra en la generación indeseada de armónicos a frecuencias impredecibles, por lo que el diseño del consiguiente filtro se revestirá de una complejidad en algunos casos excesiva.
c) Modificando ambos
6.3 Interruptores estáticos de corriente continúa.
Un interruptor estático consta de uno o más elementos semiconductores que constituyen el “contacto”, y un circuito de mando que determina la posición del contacto: abierto (los semiconductores ofrecerán una alta impedancia de entrada al paso de corriente) cerrado (impedancia prácticamente nula). Las características generales vienen dadas por su elemento básico: el semiconductor de potencia.
La principal diferencia entre los interruptores convencionales y los estáticos radica en la forma de efectuar el corte y el restablecimiento del circuito eléctrico. Las ventajas de la inserción de una impedancia alta y no de un corte real del circuito eléctrico ya fueron detalladas en el tema anterior
Veamos a continuación los interruptores estáticos de C.C. con tiristores o triacs. En ellos la intensidad ya no cambia de sentido forzada por la fuente de alimentación, tal como ocurría en los interruptores de C.A., de forma que para poder bloquearlos se necesitará un circuito de bloqueo auxiliar:
6.4Interruptor de conmutación forzada por condensador en paralelo.
Su esquema se representa en la siguiente figura, donde el circuito de potencia esta constituido por la fuente V, el tiristor T1 y la carga Rload y Lload. El resto del circuito, es decir T1’, C1 y R1 constituyen los elementos encargados de bloquear al tiristor principal T1. Además se ha colocado el diodo volante o de libre circulación D1 necesario cuando la carga tiene componente inductiva, y así evitar las sobretensiones en el momento del corte del tiristor principal. Analicemos el funcionamiento suponiendo carga resistiva, para lo cual eliminamos el diodo volante D1.
En el instante t=t0 : se dispara el tiristor principal T1, estableciéndose después del tiempo de cebado una corriente, en la malla V-T1-Rload, igual a V/Rload, la
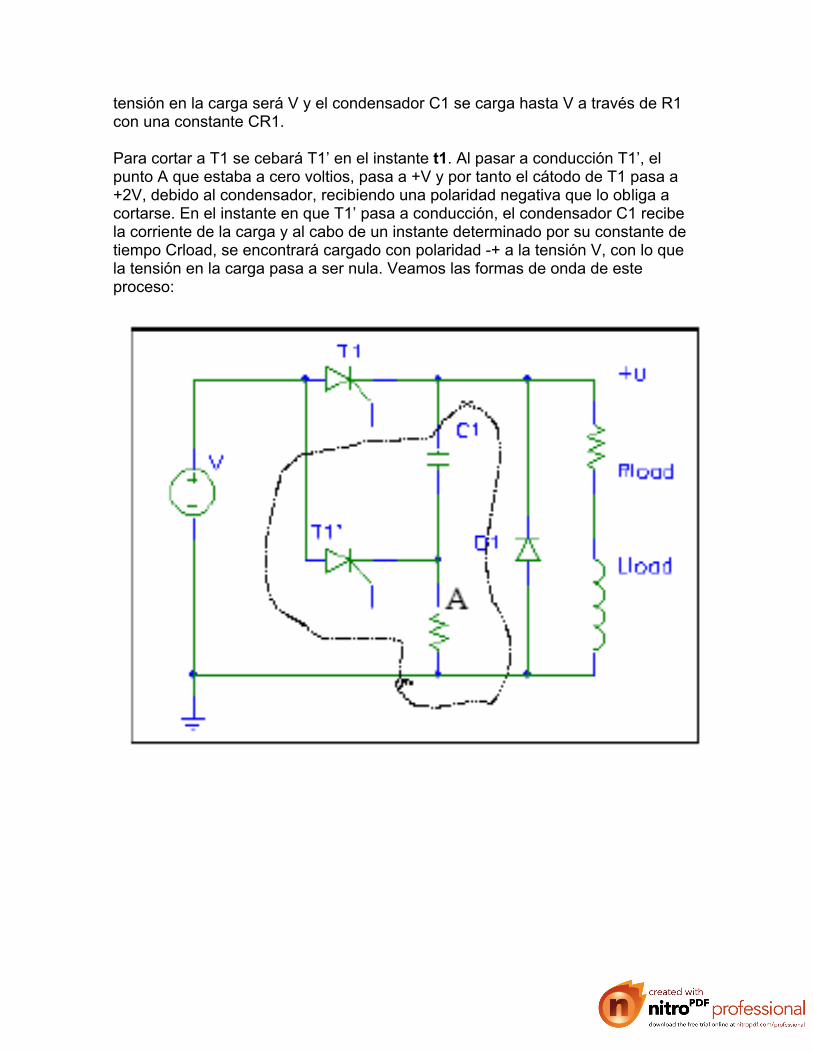
84
tensión en la carga será V y el condensador C1 se carga hasta V a través de R1 con una constante CR1.
Para cortar a T1 se cebará T1’ en el instante t1. Al pasar a conducción T1’, el punto A que estaba a cero voltios, pasa a +V y por tanto el cátodo de T1 pasa a +2V, debido al condensador, recibiendo una polaridad negativa que lo obliga a cortarse. En el instante en que T1’ pasa a conducción, el condensador C1 recibe la corriente de la carga y al cabo de un instante determinado por su constante de tiempo Crload, se encontrará cargado con polaridad -+ a la tensión V, con lo que la tensión en la carga pasa a ser nula. Veamos las formas de onda de este proceso:
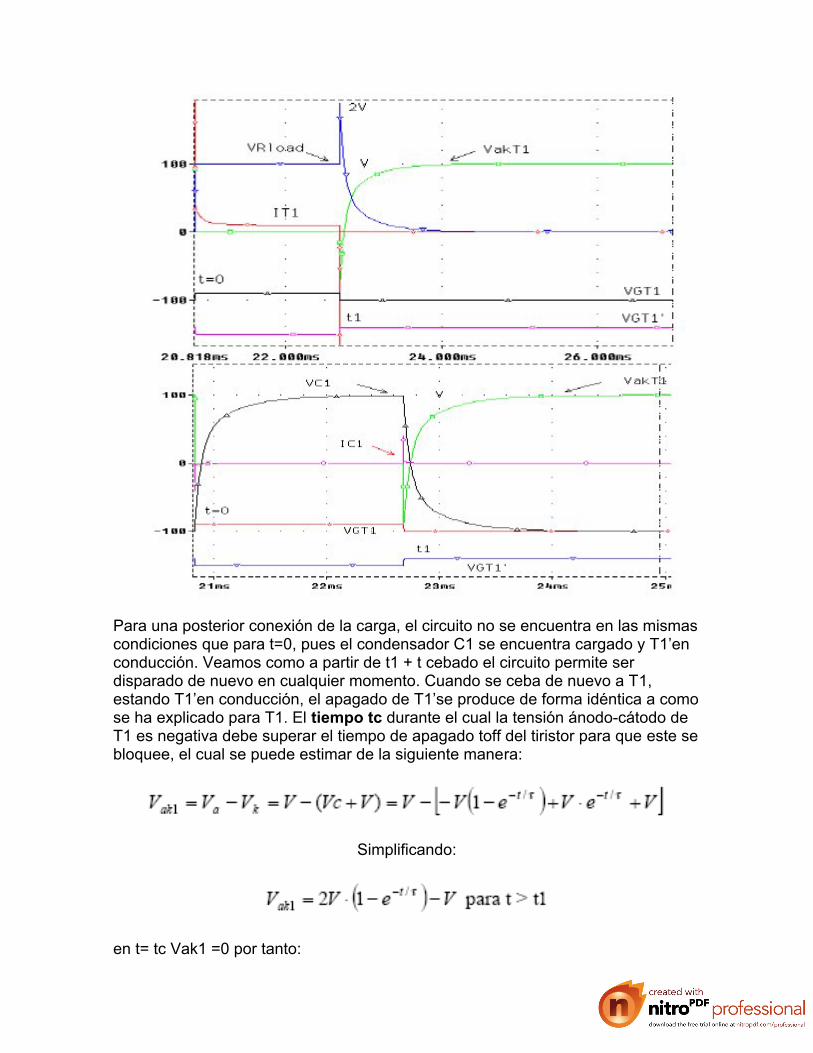
85
Para una posterior conexión de la carga, el circuito no se encuentra en las mismas condiciones que para t=0, pues el condensador C1 se encuentra cargado y T1’en conducción. Veamos como a partir de t1 + t cebado el circuito permite ser disparado de nuevo en cualquier momento. Cuando se ceba de nuevo a T1, estando T1’en conducción, el apagado de T1’se produce de forma idéntica a como se ha explicado para T1. El tiempo tc durante el cual la tensión ánodo-cátodo de T1 es negativa debe superar el tiempo de apagado toff del tiristor para que este se bloquee, el cual se puede estimar de la siguiente manera:
Simplificando:
en t= tc Vak1 =0 por tanto:
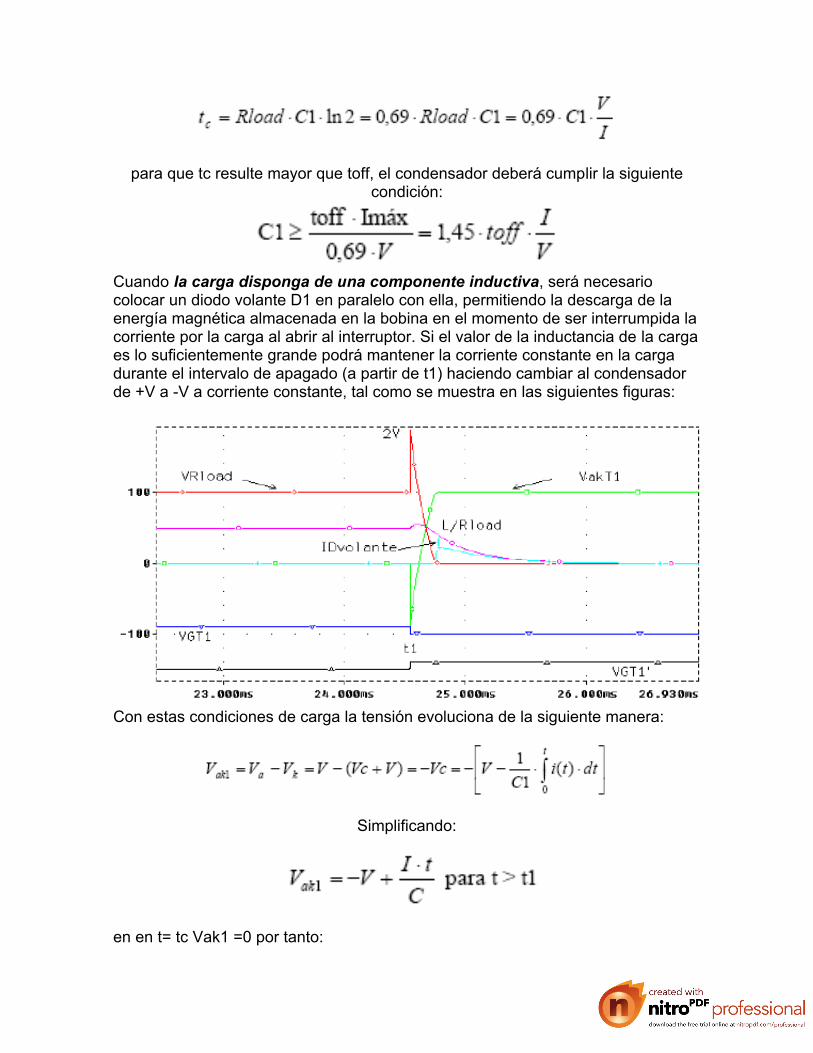
86
para que tc resulte mayor que toff, el condensador deberá cumplir la siguiente condición:
Cuando la carga disponga de una componente inductiva, será necesario colocar un diodo volante D1 en paralelo con ella, permitiendo la descarga de la energía magnética almacenada en la bobina en el momento de ser interrumpida la corriente por la carga al abrir al interruptor. Si el valor de la inductancia de la carga es lo suficientemente grande podrá mantener la corriente constante en la carga durante el intervalo de apagado (a partir de t1) haciendo cambiar al condensador de +V a -V a corriente constante, tal como se muestra en las siguientes figuras:
Con estas condiciones de carga la tensión evoluciona de la siguiente manera:
Simplificando:
en en t= tc Vak1 =0 por tanto:

87
para que tc resulte mayor que toff, el condensador deberá cumplir la siguiente condición:
Como características de este interruptor estático, hay que destacar:
El tiempo de bloqueo tc impuesto al circuito depende de la carga utilizada. La carga, y por tanto del diodo volante, sufre un impulso de tensión de
hasta 2V en el instante de bloqueo. No funciona en vacío.
6.5 Interruptor estático de bloqueo forzado por inductancia en serie con la carga.
Esta configuración que se muestra en la siguiente figura, es como el interruptor anterior, al cual se le añade los componentes L1 y D2.
Este interruptor se cierra disparando T1, de forma que cuando se alcanza el régimen estacionario la corriente por L1 es constante y el condensador C1 se carga a la tensión V a través de R1.
Para la apertura del interruptor se cebará el tiristor T2, de forma que la tensión del condensador C1 se aplique inversamente a T1, dejando de conducir. El condensador C1 se descargará de forma resonante a través de D2, L1 y T2. Cuando D2 deja de conducir, el condensador está cargado a -V y el diodo volante

88
D1 se polariza directamente, haciendo que la tensión en la carga sea cero. La corriente de L1 sigue cargando más negativamente a C1, hasta que esta intensidad se anule, bloqueándose T2.Finalmente la energía almacenada en Lload se disipa en Rload a través de D1. De forma que se eliminará el pico de tensión en la carga al bloquearse T1, tal como ocurría en el circuito anterior.
Veamos las ecuaciones que gobiernan cada intervalo, así como las formas de onda más características.
Una vez establecido el régimen estacionario, la corriente por L1 es constante y la carga ve la tensión V. Es en el instante t=t0 donde se dispara el tiristor T2 y se bloquea T1, las condiciones iniciales de este intervalo son:
VC1(0)=V e IT2(0)=V/Rload
Tal como se muestra en la figura anterior, el circuito resultante es un R-L-C, por tanto aplicando la solución de la ecuación diferencial que lo caracteriza, obtenemos :
El tiempo de bloqueo del circuito viene dado por el instante en que tensión la del tiristor se anula:
El intervalo acaba cuando D2 deja de conducir, de lo cual se obtiene la siguiente condición:
En el siguiente intervalo, la intensidad que consume la carga es V/R, si D1 no conduce pasaría por L1 haciendo que su caída sea nula y cargando más negativamente a C1, de forma que la tensión en la carga sería VC1+V<0, ya que
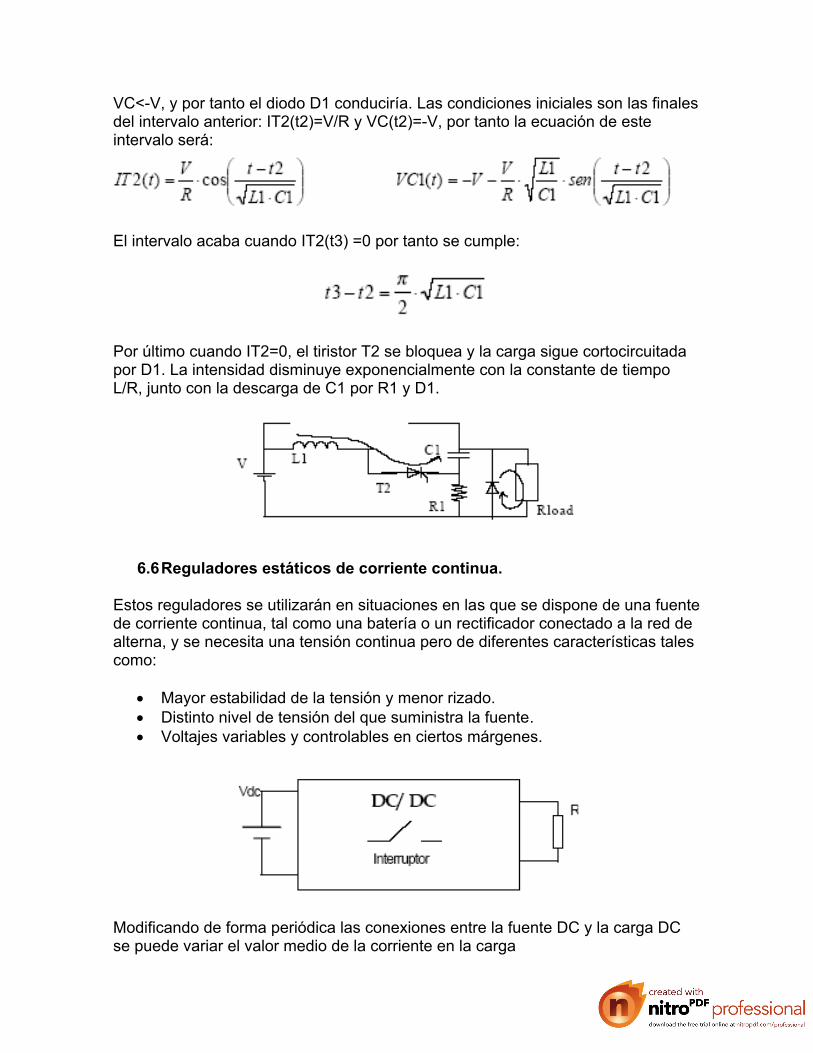
89
VC<-V, y por tanto el diodo D1 conduciría. Las condiciones iniciales son las finales del intervalo anterior: IT2(t2)=V/R y VC(t2)=-V, por tanto la ecuación de este intervalo será:
El intervalo acaba cuando IT2(t3) =0 por tanto se cumple:
Por último cuando IT2=0, el tiristor T2 se bloquea y la carga sigue cortocircuitadapor D1. La intensidad disminuye exponencialmente con la constante de tiempo L/R, junto con la descarga de C1 por R1 y D1.
6.6Reguladores estáticos de corriente continua.
Estos reguladores se utilizarán en situaciones en las que se dispone de una fuentede corriente continua, tal como una batería o un rectificador conectado a la red de alterna, y se necesita una tensión continua pero de diferentes características tales como:
Mayor estabilidad de la tensión y menor rizado. Distinto nivel de tensión del que suministra la fuente. Voltajes variables y controlables en ciertos márgenes.
Modificando de forma periódica las conexiones entre la fuente DC y la carga DC se puede variar el valor medio de la corriente en la carga
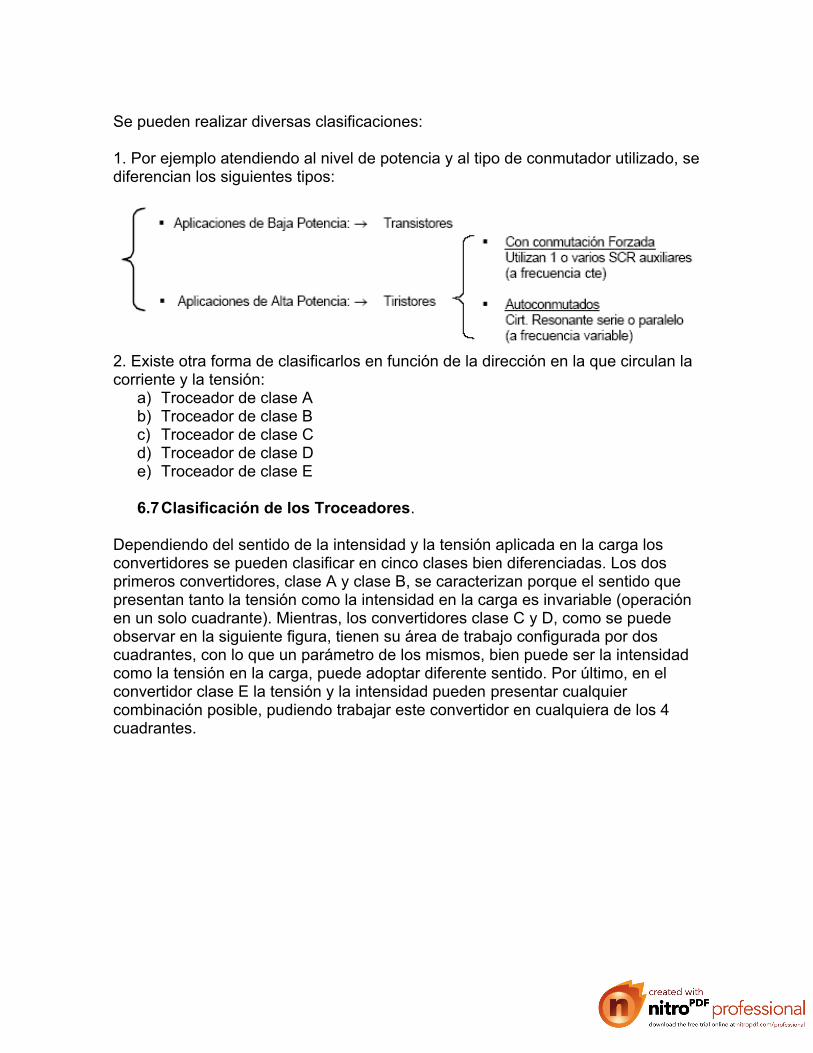
90
Se pueden realizar diversas clasificaciones:
1. Por ejemplo atendiendo al nivel de potencia y al tipo de conmutador utilizado, se diferencian los siguientes tipos:
2. Existe otra forma de clasificarlos en función de la dirección en la que circulan la corriente y la tensión:
a) Troceador de clase Ab) Troceador de clase Bc) Troceador de clase Cd) Troceador de clase De) Troceador de clase E
6.7Clasificación de los Troceadores.
Dependiendo del sentido de la intensidad y la tensión aplicada en la carga los convertidores se pueden clasificar en cinco clases bien diferenciadas. Los dos primeros convertidores, clase A y clase B, se caracterizan porque el sentido que presentan tanto la tensión como la intensidad en la carga es invariable (operación en un solo cuadrante). Mientras, los convertidores clase C y D, como se puede observar en la siguiente figura, tienen su área de trabajo configurada por dos cuadrantes, con lo que un parámetro de los mismos, bien puede ser la intensidad como la tensión en la carga, puede adoptar diferente sentido. Por último, en el convertidor clase E la tensión y la intensidad pueden presentar cualquier combinación posible, pudiendo trabajar este convertidor en cualquiera de los 4 cuadrantes.
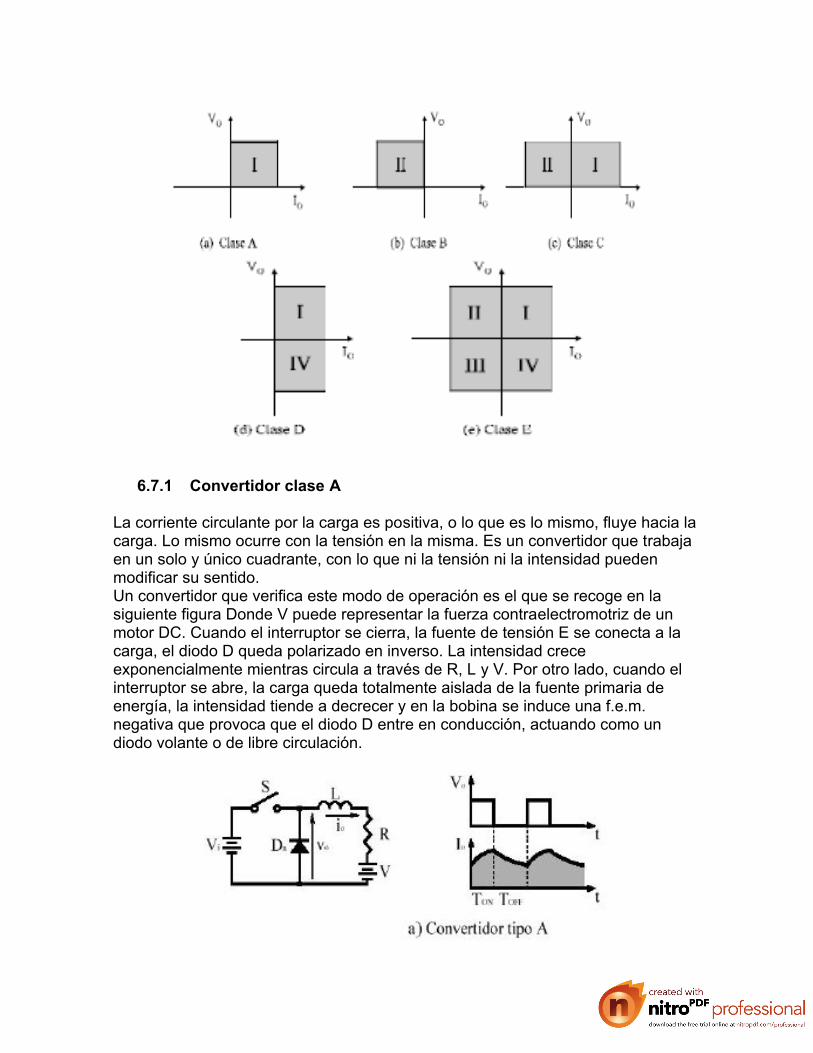
91
6.7.1 Convertidor clase A
La corriente circulante por la carga es positiva, o lo que es lo mismo, fluye hacia la carga. Lo mismo ocurre con la tensión en la misma. Es un convertidor que trabaja en un solo y único cuadrante, con lo que ni la tensión ni la intensidad pueden modificar su sentido.Un convertidor que verifica este modo de operación es el que se recoge en la siguiente figura Donde V puede representar la fuerza contraelectromotriz de un motor DC. Cuando el interruptor se cierra, la fuente de tensión E se conecta a la carga, el diodo D queda polarizado en inverso. La intensidad crece exponencialmente mientras circula a través de R, L y V. Por otro lado, cuando el interruptor se abre, la carga queda totalmente aislada de la fuente primaria de energía, la intensidad tiende a decrecer y en la bobina se induce una f.e.m. negativa que provoca que el diodo D entre en conducción, actuando como un diodo volante o de libre circulación.
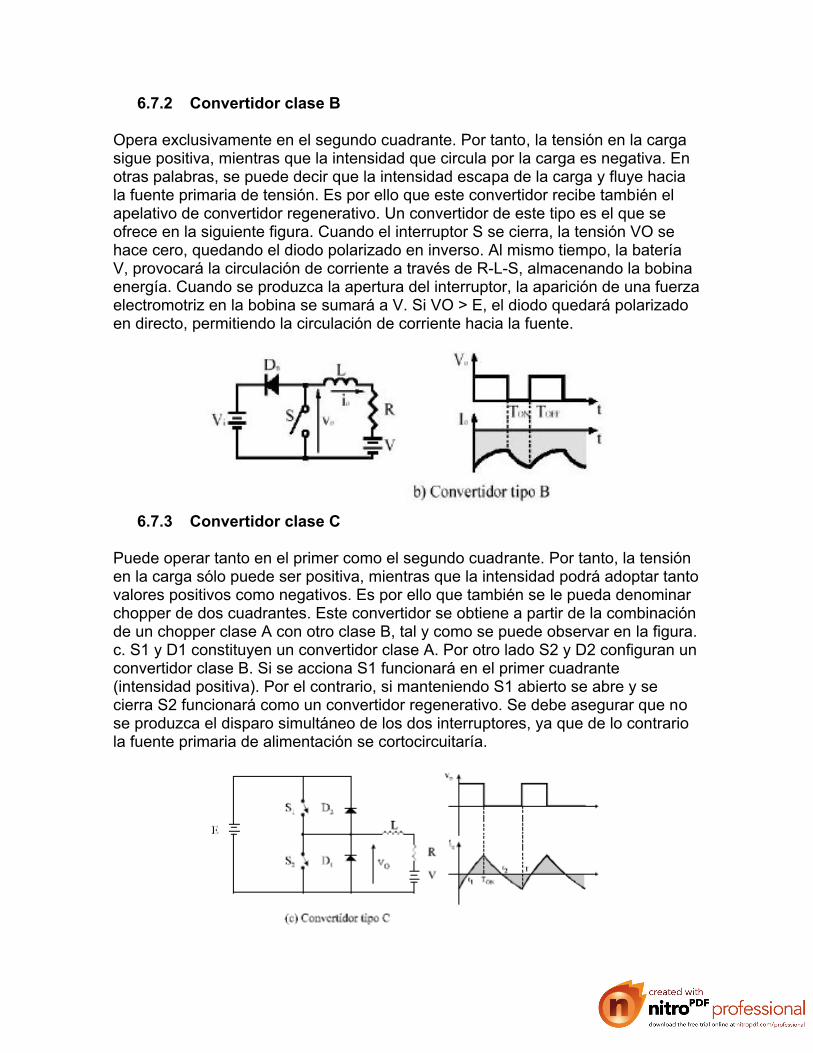
92
6.7.2 Convertidor clase B
Opera exclusivamente en el segundo cuadrante. Por tanto, la tensión en la carga sigue positiva, mientras que la intensidad que circula por la carga es negativa. En otras palabras, se puede decir que la intensidad escapa de la carga y fluye hacia la fuente primaria de tensión. Es por ello que este convertidor recibe también el apelativo de convertidor regenerativo. Un convertidor de este tipo es el que se ofrece en la siguiente figura. Cuando el interruptor S se cierra, la tensión VO se hace cero, quedando el diodo polarizado en inverso. Al mismo tiempo, la batería V, provocará la circulación de corriente a través de R-L-S, almacenando la bobina energía. Cuando se produzca la apertura del interruptor, la aparición de una fuerza electromotriz en la bobina se sumará a V. Si VO > E, el diodo quedará polarizado en directo, permitiendo la circulación de corriente hacia la fuente.
6.7.3 Convertidor clase C
Puede operar tanto en el primer como el segundo cuadrante. Por tanto, la tensión en la carga sólo puede ser positiva, mientras que la intensidad podrá adoptar tanto valores positivos como negativos. Es por ello que también se le pueda denominar chopper de dos cuadrantes. Este convertidor se obtiene a partir de la combinación de un chopper clase A con otro clase B, tal y como se puede observar en la figura. c. S1 y D1 constituyen un convertidor clase A. Por otro lado S2 y D2 configuran un convertidor clase B. Si se acciona S1 funcionará en el primer cuadrante (intensidad positiva). Por el contrario, si manteniendo S1 abierto se abre y se cierra S2 funcionará como un convertidor regenerativo. Se debe asegurar que no se produzca el disparo simultáneo de los dos interruptores, ya que de lo contrario la fuente primaria de alimentación se cortocircuitaría.
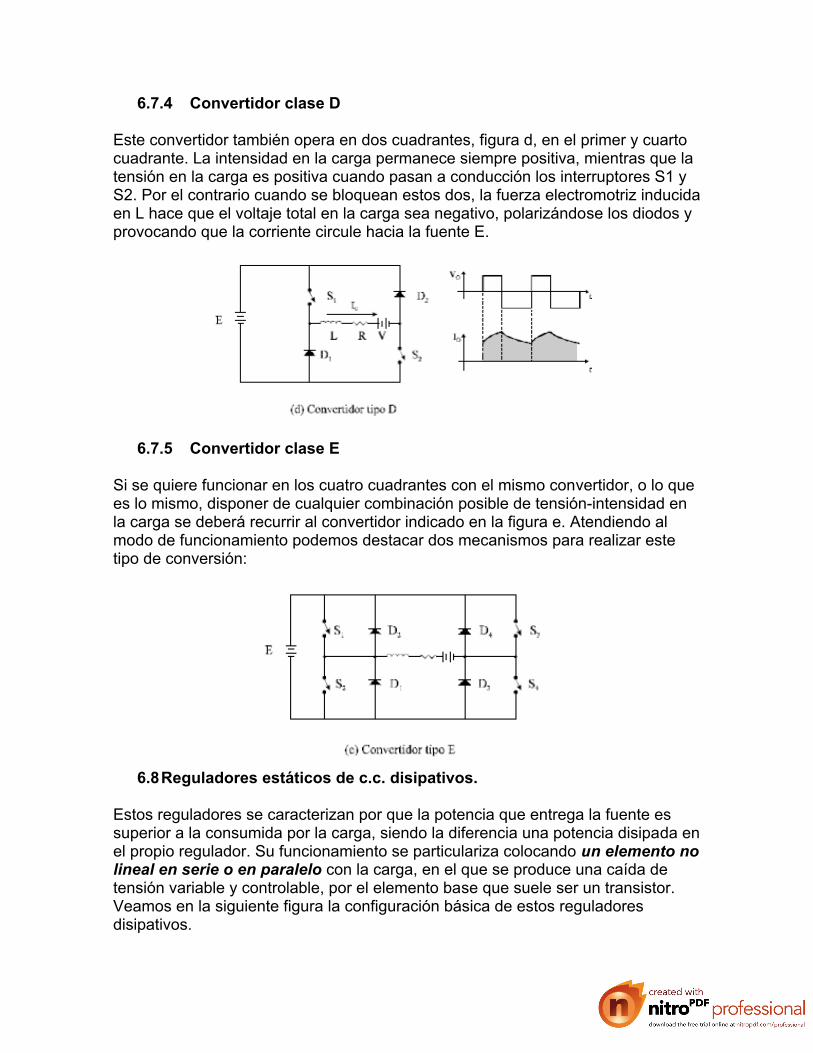
93
6.7.4 Convertidor clase D
Este convertidor también opera en dos cuadrantes, figura d, en el primer y cuarto cuadrante. La intensidad en la carga permanece siempre positiva, mientras que la tensión en la carga es positiva cuando pasan a conducción los interruptores S1 y S2. Por el contrario cuando se bloquean estos dos, la fuerza electromotriz inducida en L hace que el voltaje total en la carga sea negativo, polarizándose los diodos y provocando que la corriente circule hacia la fuente E.
6.7.5 Convertidor clase E
Si se quiere funcionar en los cuatro cuadrantes con el mismo convertidor, o lo que es lo mismo, disponer de cualquier combinación posible de tensión-intensidad en la carga se deberá recurrir al convertidor indicado en la figura e. Atendiendo al modo de funcionamiento podemos destacar dos mecanismos para realizar este tipo de conversión:
6.8Reguladores estáticos de c.c. disipativos.
Estos reguladores se caracterizan por que la potencia que entrega la fuente es superior a la consumida por la carga, siendo la diferencia una potencia disipada en el propio regulador. Su funcionamiento se particulariza colocando un elemento no lineal en serie o en paralelo con la carga, en el que se produce una caída de tensión variable y controlable, por el elemento base que suele ser un transistor. Veamos en la siguiente figura la configuración básica de estos reguladores disipativos.

94
En el regulador serie la tensión a la salida y su rendimiento tienen la siguiente expresión:
De la expresión anterior se observa como el rendimiento es tanto menor cuanto menor es la tensión de salida.
En el regulador paralelo se obtienen las siguientes expresiones para la tensión de salida y para su rendimiento:
con el serie hagamos que i= u/R siendo R la resistencia de carga y R= Rg, obteniendo para compararlo
Si α>1 el rendimiento del regulador serie es mayor, para α =1son iguales y para α <1 es mejor el paralelo. Normalmente Rg tiene poco valor ohmico, por lo que se utiliza más a menudo el regulador serie.
Sin embargo el regulador paralelo tiene como propiedad inherente su protección ante sobrecargas. En general y para ambos tipos de reguladores otro inconveniente es que la tensión a la salida es siempre menor que la de la entrada, siendo el margen de variación no muy grande si se quiere un rendimiento aceptable. También destacar como ventaja su excelente estabilidad y la ausencia de rizado en la tensión de salida.
6.9Reguladores estáticos de c.c. no disipativos.
Su importancia radica en el elevado rendimiento que se extrae. Su estructura, tal como se muestra en la siguiente figura, consta de un interruptor conectando y desconectando la fuente a la carga, de manera que el valor medio de la tensión a la salida sea función del ritmo de cierre y apertura de ese interruptor controlable.
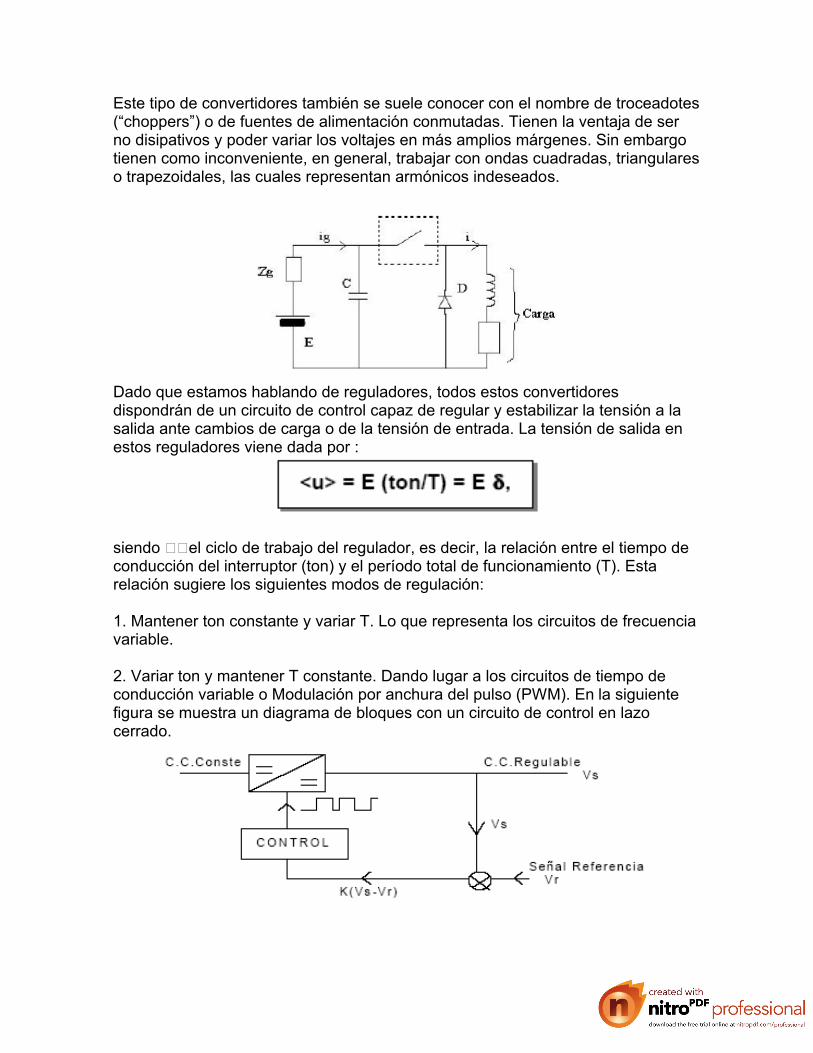
95
Este tipo de convertidores también se suele conocer con el nombre de troceadotes (“choppers”) o de fuentes de alimentación conmutadas. Tienen la ventaja de ser no disipativos y poder variar los voltajes en más amplios márgenes. Sin embargo tienen como inconveniente, en general, trabajar con ondas cuadradas, triangulares o trapezoidales, las cuales representan armónicos indeseados.
Dado que estamos hablando de reguladores, todos estos convertidores dispondrán de un circuito de control capaz de regular y estabilizar la tensión a la salida ante cambios de carga o de la tensión de entrada. La tensión de salida en estos reguladores viene dada por :
siendo ��el ciclo de trabajo del regulador, es decir, la relación entre el tiempo deconducción del interruptor (ton) y el período total de funcionamiento (T). Esta relación sugiere los siguientes modos de regulación:
1. Mantener ton constante y variar T. Lo que representa los circuitos de frecuencia variable.
2. Variar ton y mantener T constante. Dando lugar a los circuitos de tiempo de conducción variable o Modulación por anchura del pulso (PWM). En la siguiente figura se muestra un diagrama de bloques con un circuito de control en lazo cerrado.
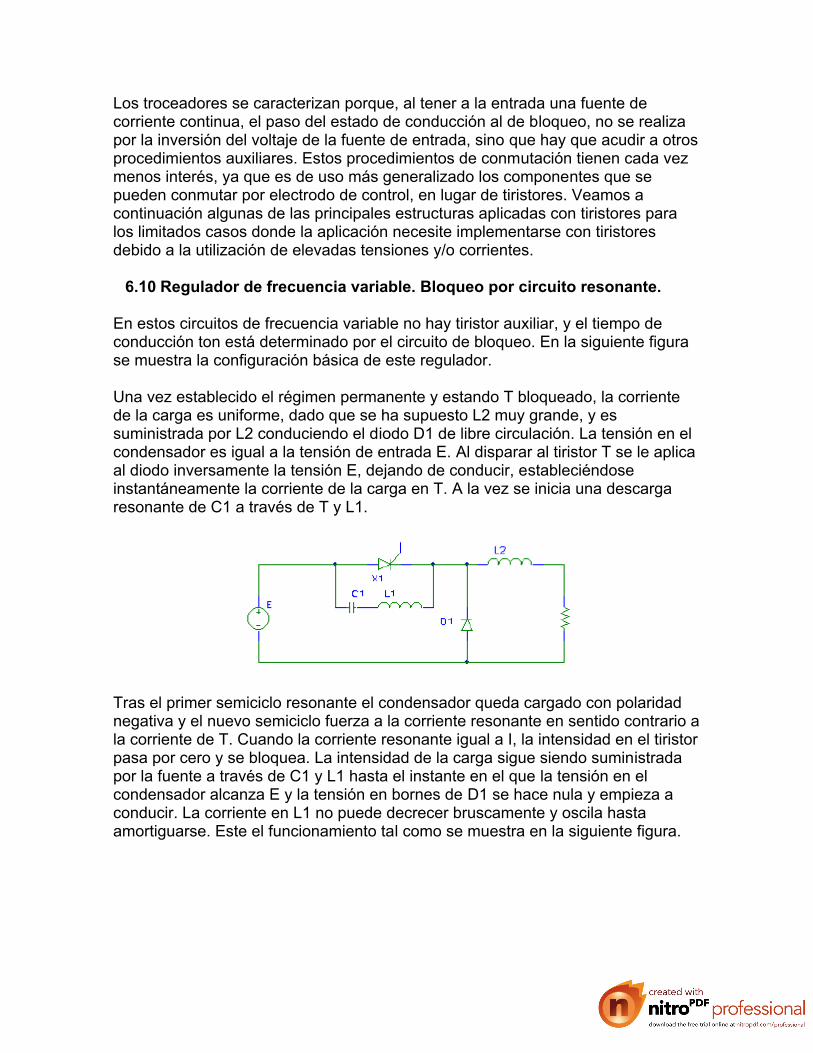
96
Los troceadores se caracterizan porque, al tener a la entrada una fuente de corriente continua, el paso del estado de conducción al de bloqueo, no se realiza por la inversión del voltaje de la fuente de entrada, sino que hay que acudir a otros procedimientos auxiliares. Estos procedimientos de conmutación tienen cada vez menos interés, ya que es de uso más generalizado los componentes que se pueden conmutar por electrodo de control, en lugar de tiristores. Veamos a continuación algunas de las principales estructuras aplicadas con tiristores para los limitados casos donde la aplicación necesite implementarse con tiristores debido a la utilización de elevadas tensiones y/o corrientes.
6.10 Regulador de frecuencia variable. Bloqueo por circuito resonante.
En estos circuitos de frecuencia variable no hay tiristor auxiliar, y el tiempo de conducción ton está determinado por el circuito de bloqueo. En la siguiente figura se muestra la configuración básica de este regulador.
Una vez establecido el régimen permanente y estando T bloqueado, la corriente de la carga es uniforme, dado que se ha supuesto L2 muy grande, y es suministrada por L2 conduciendo el diodo D1 de libre circulación. La tensión en el condensador es igual a la tensión de entrada E. Al disparar al tiristor T se le aplica al diodo inversamente la tensión E, dejando de conducir, estableciéndose instantáneamente la corriente de la carga en T. A la vez se inicia una descarga resonante de C1 a través de T y L1.
Tras el primer semiciclo resonante el condensador queda cargado con polaridad negativa y el nuevo semiciclo fuerza a la corriente resonante en sentido contrario a la corriente de T. Cuando la corriente resonante igual a I, la intensidad en el tiristor pasa por cero y se bloquea. La intensidad de la carga sigue siendo suministrada por la fuente a través de C1 y L1 hasta el instante en el que la tensión en el condensador alcanza E y la tensión en bornes de D1 se hace nula y empieza a conducir. La corriente en L1 no puede decrecer bruscamente y oscila hasta amortiguarse. Este el funcionamiento tal como se muestra en la siguiente figura.

97
Intervalo 1: t0<t<t2
En el instante t0 el tiristor recibe el impulso de puerta. La duración del semiciclo resonante está dada por :
El instante t2 se deduce de la condición iL1(t2) = I, de donde obtenemos:
Intervalo 2: t2<t<t4
El tiristor se ha bloqueado y la corriente de la carga pasa por C1 y L1. Como es una corriente constante, la caída de tensión en L1 es nula y la tensión cátodo-ánodo en D1 es E-VC1. Al ser VC1<E y el diodo sigue polarizado inversamente. El condensador se sigue cargando linealmente:

98
El tiempo de bloqueo del tiristor viene dado por el instante en el cual se anula su tensión VT=0, por tanto:
teniendo que ser el tiempo de off o de apagado igual a:
El intervalo se acaba cuando la tensión en el condensador alcanza a la tensión de la fuente (E):
Intervalo 3: t4<t<t6
En t4 el diodo se polariza directamente y conduce, de forma que el circuito equivalente es un circuito LC serie con D1 conduciendo, por tanto si las condiciones iniciales son: VC1(t4)=E y IL1(t4)=I, la ecuación que gobierna este intervalo será:
Una forma de diseñar el circuito LC de bloqueo consiste en fijar el valor de la corriente de pico por el tiristor. Así, si fijamos:
sustituyendo en la ecuación de tensión la de C1:
se obtiene:
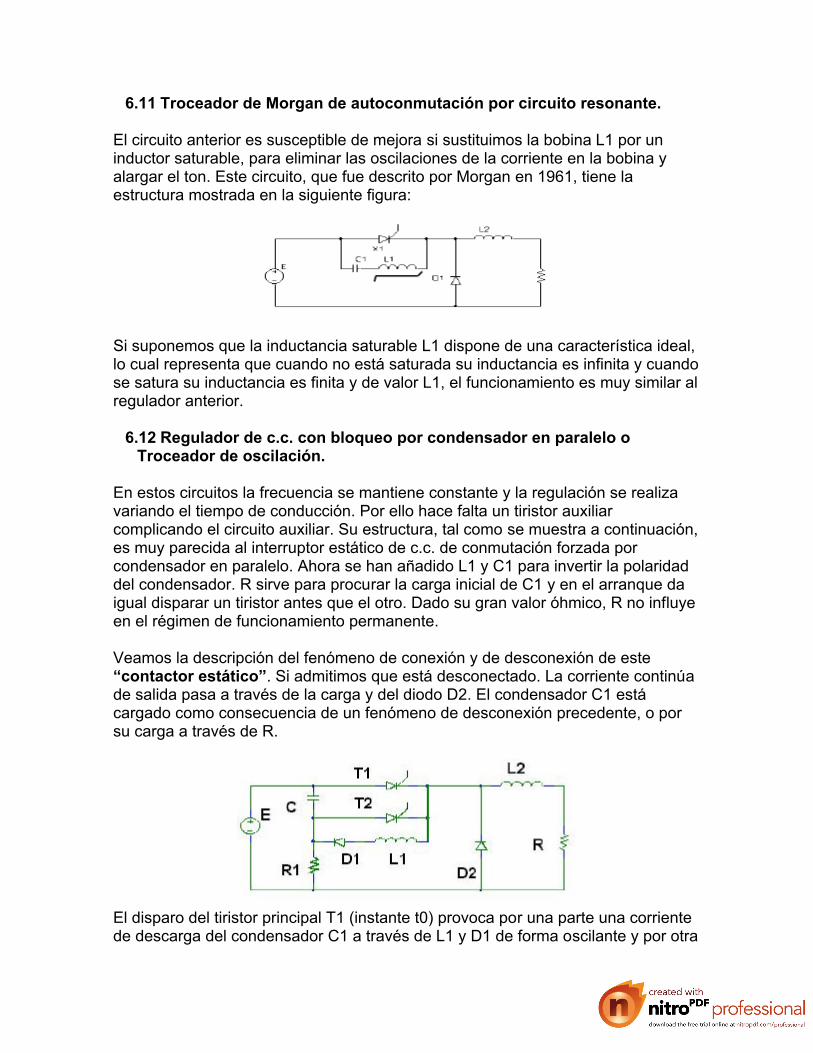
99
6.11 Troceador de Morgan de autoconmutación por circuito resonante.
El circuito anterior es susceptible de mejora si sustituimos la bobina L1 por un inductor saturable, para eliminar las oscilaciones de la corriente en la bobina y alargar el ton. Este circuito, que fue descrito por Morgan en 1961, tiene la estructura mostrada en la siguiente figura:
Si suponemos que la inductancia saturable L1 dispone de una característica ideal, lo cual representa que cuando no está saturada su inductancia es infinita y cuando se satura su inductancia es finita y de valor L1, el funcionamiento es muy similar al regulador anterior.
6.12 Regulador de c.c. con bloqueo por condensador en paralelo o Troceador de oscilación.
En estos circuitos la frecuencia se mantiene constante y la regulación se realiza variando el tiempo de conducción. Por ello hace falta un tiristor auxiliar complicando el circuito auxiliar. Su estructura, tal como se muestra a continuación, es muy parecida al interruptor estático de c.c. de conmutación forzada por condensador en paralelo. Ahora se han añadido L1 y C1 para invertir la polaridad del condensador. R sirve para procurar la carga inicial de C1 y en el arranque da igual disparar un tiristor antes que el otro. Dado su gran valor óhmico, R no influye en el régimen de funcionamiento permanente.
Veamos la descripción del fenómeno de conexión y de desconexión de este “contactor estático”. Si admitimos que está desconectado. La corriente continúa de salida pasa a través de la carga y del diodo D2. El condensador C1 está cargado como consecuencia de un fenómeno de desconexión precedente, o por su carga a través de R.
El disparo del tiristor principal T1 (instante t0) provoca por una parte una corriente de descarga del condensador C1 a través de L1 y D1 de forma oscilante y por otra

100
parte una corriente que pasa por la carga, eliminando la corriente de D2 el cual se cortará. La descarga de C1 por D1 será con una corriente que crece sinusoidalmente desde 0 hasta alcanzar su valor de pico en el instante t1 igual a Ip= E�(C1/L1), anulándose en t2 ya que el diodo D1 impide la circulación decorriente en sentido inverso. Durante este intervalo la tensión en el condensador cambia de polaridad alcanzando el valor -E en t2. Al mismo tiempo, desde su cebado, el tiristor T1 aplica la tensión E en la carga, siendo la corriente máxima del tiristor igual a I+Ip en el instante t1.
Pasado t2, la corriente por T1 será la de la carga mientras la tensión VakT2 habrá pasado de -E en t0 a +E en t2 polarizando adecuadamente a T2 para su cebado en el instante de apertura próximo. La conexión del regulador se ha terminado, circulando la corriente por la carga desde la fuente de alimentación. Para “abrir” el circuito, se dispara a T2 en el instante t3. Con ello el condensador aplica un impulso negativo en el ánodo de T1, alcanzando la tensión ánodo-cátodo de T1 el valor -E y cortándose. El condensador C1 se descarga a través de T1 y T2. La corriente resultante por T1 se anula rápidamente, provocando el bloqueo de T1. La corriente de carga circulará ahora por C1 y T2. Dado que la corriente de la carga es constante, El condensador C1 se descarga y se recarga con la polaridad opuesta, haciendo que la tensión en bornes de la carga decrezca, y cuando pasa por cero el diodo D2 vuelve a conducir (instante t4).

101
La carga de C1 termina y T2 se bloquea, terminando la desconexión del contactor estático.
El tiempo tc durante el cual la tensión VakT1 es negativa debe superar el tiempo de apagado del tiristor T1, para que este se bloquee. Su cálculo resulta igual al realizado para el interruptor de conmutación forzada por condensador en paralelo, obteniéndose:para carga resistiva
Por otra parte, para su funcionamiento correcto, es necesario que el condensador pase de -E a +E, lo cual exige que la conducción de T1 coincida, como valor mínimo, con la mitad del período de resonancia de la red C1-L1-D1, es decir, el intervalo de t0 a t2, por tanto:
Indicar como inconveniente de este circuito, la dependencia de la carga en el tiempo de bloqueo, junto con el no-funcionamiento en vacío, pues la tensión del condensador deja de conmutar. Por último destacar como en el instante de bloqueo, aparece un impulso de tensión en la carga hasta 2E.

102
Bibliografía
Convertidores a semiconductores. Esteban Amador. UCLV, Departamento de Electroenergética. 1980.
Electrónica de potencia. Circuitos, dispositivos y aplicaciones. M.H. Rashid. Editor: Prentice-Hall, 1995
Electrónica de Potencia. Daniel W. Hart. Prentice Hall, 2001. Electrónica de Potencia. Seguier G y otros. Editorial Gustavo Gili, 1985 Electrónica Industrial I y II. G. Herranz Acero. Servicio de Publicaciones
E.T.S.I. Telecomunicación. Electrónica Industrial Técnicas de Potencia. J. A. Gualda y otros. Marcombo
Boixerau Ed. Electrónica Industrial. Bühler H. Editorial Gustavo Gili, 1985 Electrónica Industrial. Componentes, circuitos y sistemas de potencia G Herranz
Acero Electrónica Industrial. Kagonov Elementos semiconductores de potencia: diodos. Hamdi Habib-Allah, Antonio
Gallo Torres, J.D. Aguilar Peña. E.U. Politécnica de Jaén, departamento de electrónica.
Elementos semiconductores de potencia: transistores. Hamdi Habib-Allah, Antonio Gallo Torres, J.D. Aguilar Peña. E.U. Politécnica de Jaén, departamento de electrónica.
Fundamentos del accionamiento electrónico de motores. J.J. Rodríguez. UCLV, Departamento de Electroenergética. 1984.
Introduction to Power Electronics. Daniel W. Hart. 1ª Edición, 1997. Ed. Prentice-Hall.
Power Electronics. Lander C.W. McGrawHill, 1993.