UNDER-GRADUATE PROGRAMME B.Sc. Mathematics
141
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of UNDER-GRADUATE PROGRAMME B.Sc. Mathematics

UNDER-GRADUATE PROGRAMME
B.Sc. Mathematics
Fifth Semester
DYNAMICS

B.Sc. Mathematics Core Paper XII
Third Year - Fifth Semester Dynamics
COURSE CONTENT DEVELOPED BY
Dr. G. PALANIAssistant Professor
Department of Mathematics
Dr. Ambedkar Government Arts College
Vysarpadi, Chennai � 600 039

KINEMATICS Page 1
CHAPTER 1KINEMATICS-I
1 Motion in a straight line under uniform ac-
celeration
Definition 1.1 (Displacement) A particle changes its position from a pointP to a point Q, then PQ is called a displacement and it’s denoted by s, i.e., PQ =s.
P Q
Definition 1.2 (Velocity) The rate of change of displacement is called avelocity and it is denoted by v.
i.e., v =ds
dt
Definition 1.3 (Acceleration) The rate of change of velocity is called anacceleration and it is denoted by a.
i.e., a =dv
dt=
d
dt
(ds
dt
)=d2s
dt2
Bookwork 1.4 A particle moving along a straight line starting with velocityu and having a constant acceleration a in its direction of motion. If v is thevelocity after time t and s is the distance described by it during that time, then
v = u+ at (1.1)
s = ut+1
2at2 (1.2)
v2 = u2 + 2as (1.3)
Proof.
A B
u v
a, t
A particle moves in a straight line from a point A to a point B with velocityu and moves with a constant acceleration a and acquired velocity v in time t.
We know thatds
dtand
d2s
dt2are respectively the formula for velocity and accel-
eration in time t.Given that Acceleration is constant
i.e.,d2s
dt2= a (constant) (1.4)
Dr G.PALANI

KINEMATICS Page 2
Integrating (1.4) on both sides with respect to time t, we get
v =ds
dt= at+ c
Where c is a constant of integration.Initially, When t = 0, we have v = u. Thus, we get c = u
Hence, v = u+ at (1.5)
Integrating (1.5) on both sides with respect to time t, we get
s = = ut+1
2at2 + c1
Where c1 is a constant of integration.Initially, When t = 0, we have s = 0. Thus, we get c1 = 0
Hence, s = ut+1
2at2 (1.6)
Squaring both sides of (1.5), we get
v2 = (u+ at)2
= u2 + a2t2 + 2uat
= u2 + 2a
[ut+
1
2at2]
v2 = u2 + 2as
Note 1.5 1. Average Velocity:
Average velocity =Initial velocity+Final velocity
2
=u+ v
2=u+ u+ at
2= u+
1
2at
Dr G.PALANI

KINEMATICS Page 3
2. Distance described by particles in any particular second:
Space described by nth second = Space described by n seconds
− Space described by (n− 1) seconds
=
[un+
1
2an2
]−[u(n− 1) +
1
2a(n− 1)2
]= u+
1
2a[n2 − (n− 1)2
]= u+
1
2a(2t− 1) (1.7)
Example 1 A point moves with uniform acceleration and v1, v2, v3 denote theaverage velocities in three successive intervals of time t1, t2, t3. Prove thatv1 − v2 : v2 − v3 = t1 + t2 : t2 + t3
Solution: Let a be the constant acceleration.
Figure 1
Motion Along AB:Initial velocity= U; Final velocity= U1; Average velocity= v1;Time taken= t1
We Know that v = u+ at
⇒ U1 = U + at1 (1.8)
Ww Know that Average velocity =Initial velocity+Final velocity
2
i.e., v1 =U + U1
2=U + U + at1
2(By using (1.8))
i, e, , v1 = U +1
2at21 (1.9)
Motion Along BC:Initial velocity= U1; Final velocity= U2; Average velocity= v2;Time taken= t2
We Know that v = u+ at
⇒ U2 = U1 + at2 (1.10)
Dr G.PALANI

KINEMATICS Page 4
Average velocity =Initial velocity+Final velocity
2
i.e., v2 =U1 + U2
2=U + at1 + U1 + at2
2(By using (1.8), (1.10))
i, e, , =U + at1 + U + at1 + at2
2(By using (1.8))
i.e., v2 = U + at1 +1
2at2 (1.11)
Motion Along CD:Initial velocity= U2; Final velocity= U3; Average velocity= v3;time taken= t3
We Know that v = u+ at
⇒ U3 = U2 + at3 (1.12)
Average velocity =Initial velocity+Final velocity
2
i.e., v3 =U2 + U3
2=U1 + at2 + U2 + at3
2(By using (1.10), (1.12))
i, e, , =U + at1 + at2 + U1 + at2 + at3
2(By using (1.8)), (1.10)
i, e, , =U + at1 + at2 + U + at1 + at2 + at3
2(By using (1.8))
i.e., v3 = U + at1 + at2 +1
2at3 (1.13)
Subtract (1.11) from (1.9), we get
v1 − v2 = −1
2at1 −
1
2at2 = −1
2a (t1 + t2) (1.14)
Similarly, Subtract (1.13) from (1.11), we get
v2 − v3 = −1
2at2 −
1
2at3 = −1
2a (t2 + t3) (1.15)
Divide (1.14) by (1.15), we get
v1 − v2v2 − v3
=−1
2a (t1 + t2)
−1
2a (t2 + t3)
(1.16)
=t1 + t2t2 + t3
(1.17)
Thus, we get the required results.
Dr G.PALANI

KINEMATICS Page 5
Example 2 A body starts with velocity u and moves with uniform acceleration;If a , b and c be the spaces described in the pth, qth and rth seconds respectively,show that a(q − r) + b(r − p) + c(p− q) = 0
Solution: We know that a particles travelled in nth second is given by
Distrance travelled in nth second = u+1
2f (2t− 1) (By using (1.7))
a = u+1
2f (2p− 1) (1.18)
b = u+1
2f (2q − 1) (1.19)
c = u+1
2f (2r − 1) (1.20)
Using (1.18), (1.19), (1.20), we get
a(q − r) + b(r − p) + c(p− q) =
[u+
1
2f (2p− 1)
](q − r) +
[u+
1
2f (2q − 1)
](r − p)
+
[u+
1
2f (2r − 1)
](p− q)
= 0
Example 3 A train travels from station A to station B, with an accelerationf1 during the first part of the journey and a retardation f2 during the secondpart. The train starts from rest at A and comes to rest at B. If T be the
time taken to travel from A to B, show that T 2 =2a (f1 + f2)
f1f2where a is the
distance between the two stations.
Solution: Let a be the distance between the two stations and T be the timetaken to travel from station A to station B.
Figure 2
Motion along AC:Initial velocity= 0; Final velocity= u; Acceleration= f1;
Dr G.PALANI

KINEMATICS Page 6
Time taken= t1, Distance=AC
v = u+ at ⇒ u = 0 + f1t1 ⇒ u = f1t1
⇒ t1 =u
f1(1.21)
s = ut+1
2at2
⇒ AC = 0(t1) +1
2f1t
21
=1
2f1t
21
=1
2f1u2
f 21
(By using (1.21))
AC =u2
2f1(1.22)
Motion along CB:Initial velocity= u; Final velocity= 0; Acceleration= −f2;Time taken= t2, Distance=CB
v = u+ at ⇒ 0 = u− f2t2 ⇒ u = f2t2
⇒ t2 =u
f2(1.23)
s = ut+1
2at2
⇒ CB = u(t2)−1
2f2t
22
= uu
f2− 1
2f2u2
f 22
(By using (1.21))
CB =u2
2f2(1.24)
Total distance = AC + CB
a =u2
2f1+
u2
2f2(By using (1.22), (1.24))
a =u2
2
(1
f1+
1
f2
)(1.25)
Also, total time = t1 + t2
T =u
f1+u
f2(By using (1.21), (1.23))
i.e., T 2 = u2(
1
f1+
1
f2
)2
(1.26)
Dr G.PALANI
KINEMATICS Page 7
Divide (1.26) by (1.25), we get
T 2
a= 2
(1
f1+
1
f2
)(1.27)
i.e., T 2 = 2a
(f1 + f2f1f2
)(1.28)
Thus, we get the required results.
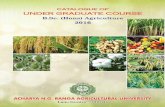
Example 4 The speed of a train increases at a constant rate α from 0 to v andthen remains constant for an interval and finally decreases to 0 at a constantrate β. If l be the total distance described, prove that the time total occupied
isl
v+v
2
(1
α+
1
β
).
Solution: Let l be the total distance described by the train. and T be thetotal time occupied by the train.
Figure 3
Motion along AB:Initial velocity= 0; Final velocity= v; Acceleration= α;Time taken= t1, Distance=AB
v = u+ at ⇒ v = 0 + αt1 ⇒ v = αt1
⇒ t1 =v
α(1.29)
s = ut+1
2at2
⇒ AB = 0(t1) +1
2αt21
=1
2αt21
=1
2αv2
α2(By using (1.29))
AB =v2
2α(1.30)
Dr G.PALANI

KINEMATICS Page 8
Motion along BC:
Distance = velocity × timeBC = vt2 (1.31)
Motion along CD:Initial velocity= v; Final velocity= 0; Acceleration= −β;Time taken: t3, Distance=CD
v = u+ at ⇒ 0 = v − βt3 ⇒ v = βt3
⇒ t3 =v
β(1.32)
s = ut+1
2at2
⇒ CD = v(t3)−1
2βt23
= v
(v
β
)− 1
2βv2
β2(By using (1.32))
CD =v2
2β(1.33)
Total distance = AB +BC + CD
l =v2
2α+ vt2 +
v2
2β
⇒ l
v=
v
2α+ t2 +
v
2β
⇒ t2 =l
v− v
2α− v
2β(1.34)
Also, total time = t1 + t2 + t3
T =v
α+ t2 +
v
β(By using (1.29), (1.32))
Using (1.35) in (1.34), we get
T =v
α+v
β+l
v− v
2α− v
2β
T =l
v+v
2
(1
α+
1
β
)Thus, we get the required results.
Dr G.PALANI
KINEMATICS Page 9
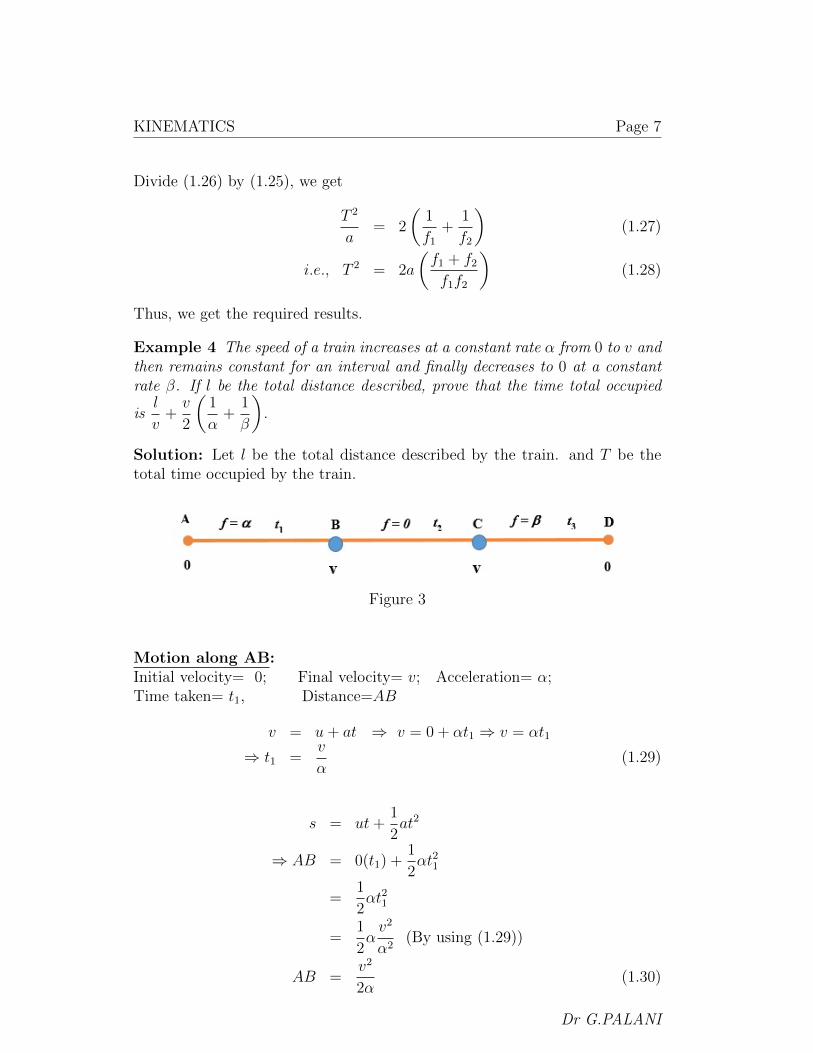
Example 5 A particle moving in a straight line with uniform accelerationdescribes distances a and b in successive intervals of t1 and t2 seconds. Findthe acceleration.
Solution: Let f be the uniform acceleration. Motion along AB:
Figure 4
Initial velocity= u; Final velocity= u1; Acceleration= f ;Time taken= t1, Distance=a
v = u+ at ⇒ u1 = u+ ft1 (1.35)
s = ut+1
2at2
⇒ a = ut1 +1
2ft21 (1.36)
Motion along BC:Initial velocity= u1; Final velocity= u2; Acceleration= f ;Time taken= t2, Distance=b
v = u+ at ⇒ u2 = u1 + ft2
⇒ u2 = u+ ft1 + ft2 (By using (1.35)) (1.37)
s = ut+1
2at2
⇒ b = u1t2 +1
2ft22
⇒ b = (u+ ft1)(t2) +1
2ft22
⇒ b = ut2 + ft1t2 +1
2ft22 (1.38)
Dr G.PALANI

KINEMATICS Page 10
Multiply (1.38) by t1 and (1.36) by t2 and then subtract we get
bt1 − at2 = ut1t2 + ft21t2 +1
2ft1t
22 − ut1t2 −
1
2ft21t2
=1
2ft21t2 +
1
2ft1t
22
=1
2ft1t2 (t1 + t2)
⇒ f =2 (bt1 − at2)t1t2 (t1 + t2)
(1.39)
This is the required result
Example 6 A train moves in a straight line with a uniform acceleration anddescribes equal distances s in two successive intervals of durations t1 and t2.
Show that its acceleration is2s (t1 − t2)t1t2 (t1 + t2)
.
Solution: Let f be the uniform acceleration.
Figure 5
Motion along AB:Initial velocity= u; Final velocity= u1; Acceleration= f ;Time taken= t1, Distance=s
v = u+ at ⇒ u1 = u+ ft1 (1.40)
s = ut+1
2at2
⇒ s = ut1 +1
2ft21 (1.41)
Motion along BC:Initial velocity= u1; Final velocity= u2; Acceleration= f ;Time taken= t2, Distance=s
v = u+ at ⇒ u2 = u1 + ft2
⇒ u2 = u+ ft1 + ft2 (By using (1.40)) (1.42)
Dr G.PALANI

KINEMATICS Page 11
s = ut+1
2at2
⇒ s = u1t2 +1
2ft22
⇒ s = (u+ ft1)(t2) +1
2ft22
⇒ s = ut2 + ft1t2 +1
2ft22 (1.43)
Multiply (1.43) by t1 and (1.41) by t2 and then subtract we get
st1 − st2 = ut1t2 + ft21t2 +1
2ft1t
22 − ut1t2 −
1
2ft21t2
=1
2ft21t2 +
1
2ft1t
22
=1
2ft1t2 (t1 + t2)
⇒ f =2s (t1 − t2)t1t2 (t1 + t2)
(1.44)
This is the required result.
Example 7 A lift ascends with a constant acceleration f , then with a constantvelocity and finally stops with a constant retardation f . If the total distancetraveled is s and the total time occupied is t, show that the time for which the
lift is ascending with constant velocity is
√t2 − 4s
f.
Solution: Let f be the uniform acceleration.Motion along AB:Initial velocity= 0; Final velocity= v; Acceleration= f ;Time taken= t1, Distance=a
v = u+ at ⇒ v = 0 + ft1
⇒ v = ft1
⇒ t1 =v
f(1.45)
s = ut+1
2at2
⇒ a = (0)t1 +1
2ft21
⇒ a =1
2ft21
⇒ a =1
2fv2
f 2(By using (1.45))
⇒ a =v2
2f(1.46)
Dr G.PALANI

KINEMATICS Page 12
Figure 6
Motion along BC:
Distance = velocity× time
b = vt2 (1.47)
Motion along CD:Initial velocity= v; Final velocity= 0; Acceleration= −f ;Time taken= t3, Distance=c
v = u+ at ⇒ 0 = v − ft3⇒ v = ft3
⇒ t3 =v
f(1.48)
Dr G.PALANI

KINEMATICS Page 13
s = ut+1
2at2
⇒ c = (v)t3 −1
2ft23
⇒ c = (v)v
f− 1
2fv2
f 2(By using (1.48))
⇒ c =v2
f− v2
2f
⇒ c =v2
2f(1.49)
Total distance = a+ b+ c
s =v2
2f+ vt2 +
v2
2f(By using (1.46), (1.47),(1.49))
s =v2
f+ vt2 (1.50)
Total time = t1 + t2 + t3
t =v
f+ t2 +
v
f(By using (1.45), (1.48))
=2v
f+ t2
⇒ f (t− t2)2
= v (1.51)
Substitute the value of v in (1.50), we get
s =f 2 (t− t2)2
4× 1
f+f (t− t2)
2t2
4s
f= (t− t2) [t− t2 + 2t2]
4s
f= (t− t2) [t+ t2]
4s
f=
(t2 − t22
)⇒ t22 = t2 − 4s
f
⇒ t2 =
√t2 − 4s
f
This is the required result.
Dr G.PALANI

KINEMATICS Page 14
Example 8 Two cars start off to race with velocities v1 and v2 and travel ina straight line with uniform accelerations f1 and f2. If the race ends in a dead
heat, prove that the length of the track is2 (v1 − v2) (v1f2 − v2f1)
(f1 − f2)2.
Solution: Let the length of the track be s.The race ends in a dead heat means the cars reach the destinationat the same time.For the first car:Initial velocity= v1; Acceleration= f1;Time taken= t, Distance=s
s = ut+1
2at2
⇒ s = v1t+1
2f1t
2 (1.52)
For the second car:Initial velocity= v2; Acceleration= f2;Time taken= t, Distance=s
s = ut+1
2at2
⇒ s = v2t+1
2f2t
2 (1.53)
Subtracting (1.53) from (1.52), we get
0 = (v1 − v2) t+1
2(f1 − f2) t2
t
[1
2(f1 − f2) t+ (v1 − v2)
]= 0
Thus, t = 0, −2 (v1 − v2)f1 − f2
(1.54)
t = 0 corresponds to the initial position, hence we reject it and hence, we have
t = −2 (v1 − v2)f1 − f2
. Substitute this value of t in (1.52), we get
s = −2v1 (v1 − v2)f1 − f2
+1
2× 4 (v1 − v2)2
(f1 − f2)2
=2 (v1 − v2)f1 − f2
[−v1 +
f1 (v1 − v2)f1 − f2
]=
2 (v1 − v2)f1 − f2
[v1f2 − v2f1f1 − f2
]s =
2 (v1 − v2) (v1f2 − v2f1)(f1 − f2)2
Dr G.PALANI
KINEMATICS Page 15
Thus we proved the result.
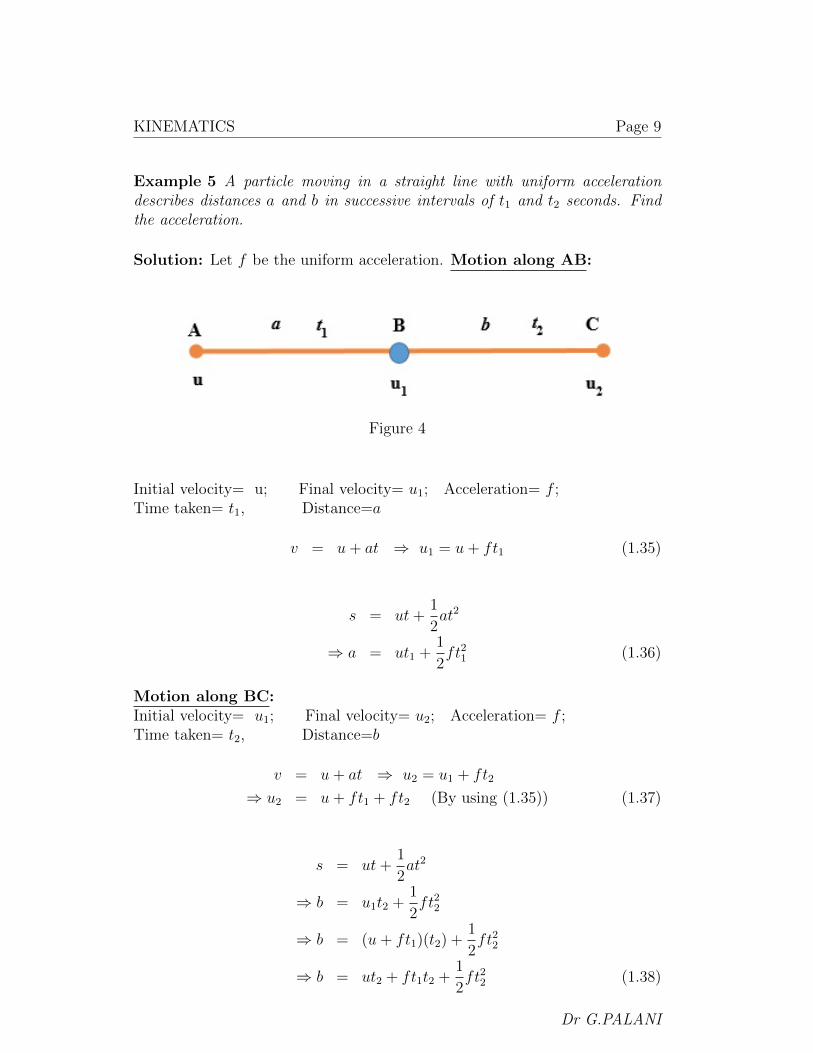
Example 9 If a point moves in a straight line with uniform acceleration andcovers successive equal distances in times t1, t2, t3, then show that1
t1− 1
t2+
1
t3=
3
t1 + t2 + t3.
Solution:Motion along AB:Initial velocity= v1; Final velocity= v2; ;
Time taken= t1, Distance=s Mean Velocity =v1 + v2
2.
Distance = velocity× time
s =1
2(v1 + v2) t1
⇒ s
t1=
(v1 + v2)
2(1.55)
Motion along BC:Initial velocity= v2; Final velocity= v3; ;
Time taken= t2, Distance=s Mean Velocity =v2 + v3
2.
Distance = velocity× time
s =1
2(v2 + v3) t2
⇒ s
t2=
(v2 + v3)
2(1.56)
Motion along CD:Initial velocity= v3; Final velocity= v4; ;
Time taken= t3, Distance=s Mean Velocity =v3 + v4
2.
Distance = velocity× time
s =1
2(v3 + v4) t3
⇒ s
t3=
(v3 + v4)
2(1.57)
Motion along AD:Initial velocity= v1; Final velocity= v4; ;
Time taken= t1 + t2 + t3, Distance=3s Mean Velocity =v1 + v4
2.
Distance = velocity× time
3s =1
2(v1 + v4) (t1 + t2 + t3)
⇒ 3s
t1 + t2 + t3=
(v1 + v4)
2(1.58)
Dr G.PALANI

KINEMATICS Page 16
(1.55)-(1.56)+(1.57), we get
s
t1− s
t2+s
t3=
1
2(v1 + v4)
s
[1
t1− 1
t2+
1
t3
]=
3s
t1 + t2 + t3(By using (1.58))
i.e.,1
t1− 1
t2+
1
t3=
3
t1 + t2 + t3
Thus, we proved the required result.
Exercises:
1. The two ends of a train moving with a constant acceleration pass a certainpoint with velocities u and v respectively. Show that the velocity with
which the middle of the train passes the same point is
√1
2(u2 + v2).
2. A body travels a distance s in t seconds. It starts from rest and endsat rest. In the first of the journey, it moves with a constant accelerationa, and in the second part with a constant retardation a′. Show thataa′t2 = 2s (a+ a′).
3. For1
mof the distance between two stations a train is uniformly acceler-
ated and for1
nof the distance it is uniformly retarded. It starts from rest
at one station and comes to rest at the other. Prove that the greatest
velocity is 1 +1
m+
1
ntimes its average velocity.
4. A train goes from one station to another being uniformly acceleratedfrom rest in the first quarter of the distance and being brought to restby uniform retardation during the last quarter. The middle half of thejourney is performed at a uniform speed. Show that the average speedof the train is two-thirds of the full speed.
Dr G.PALANI

KINEMATICS Page 17
Kinematics-II
Bookwork 1.6 (Parallelogram law of velocities)If a point has simultaneously two velocities represented, in magnitude and di-rection, by the two adjacent sides of a parallelogram through the point, then thediagonal of the parallelogram drawn through the point represents in magnitudeand direction by the resultant of the two velocities.Let ~v1 and ~v2 be the two velocities at the point O and let these be represented inmagnitude and direction by OA and OB. Complete the parallelogram OACB.The resultant of ~v1 and ~v2 is ~v1 + ~v2.
Figure 7
Let the angle between ~v1 and ~v2 be α. Then the magnitude of the resultant~v1 + ~v2 is
|~v1 + ~v2|2 = (~v1 + ~v2) · (~v1 + ~v2)
|~v1 + ~v2| =√
(~v1 + ~v2) · (~v1 + ~v2)
=√~v1 · ~v1 + ~v2 · ~v2 + 2~v1 · ~v2
=√v21 + v22 + 2v1v2 cosα where |~v1| = v1, |~v2| = v2.
Dr G.PALANI
KINEMATICS Page 18
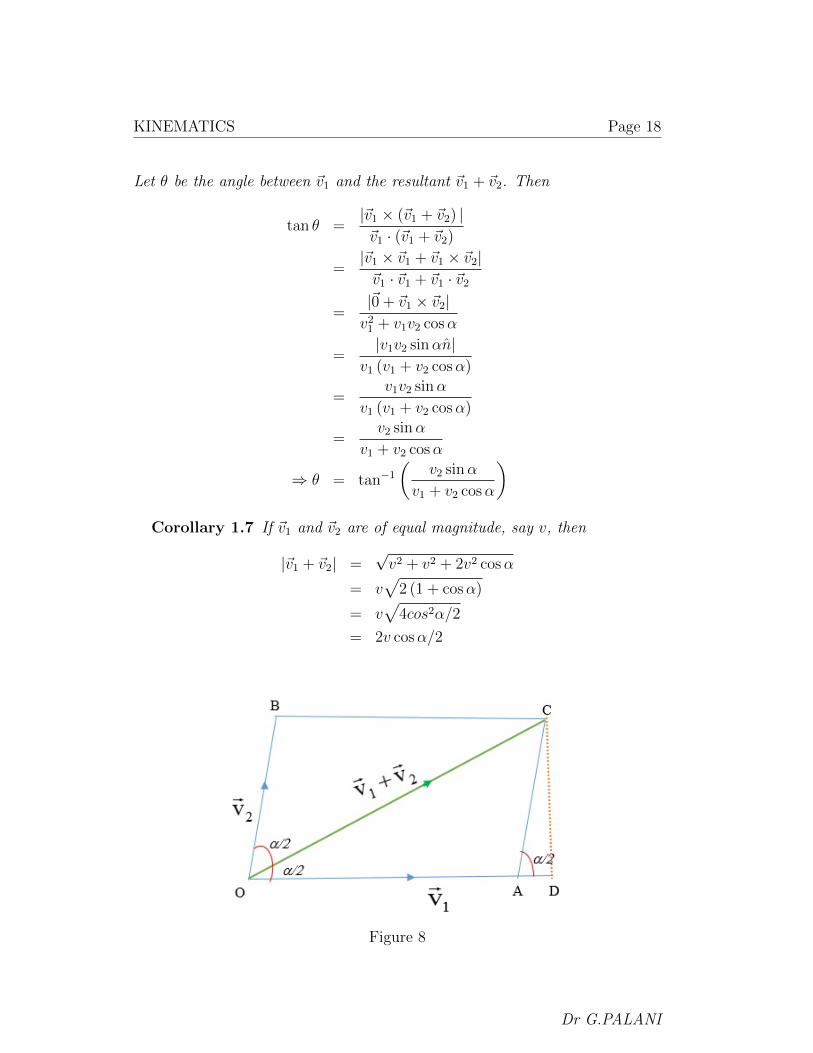
Let θ be the angle between ~v1 and the resultant ~v1 + ~v2. Then
tan θ =|~v1 × (~v1 + ~v2) |~v1 · (~v1 + ~v2)
=|~v1 × ~v1 + ~v1 × ~v2|~v1 · ~v1 + ~v1 · ~v2
=|~0 + ~v1 × ~v2|v21 + v1v2 cosα
=|v1v2 sinαn|
v1 (v1 + v2 cosα)
=v1v2 sinα
v1 (v1 + v2 cosα)
=v2 sinα
v1 + v2 cosα
⇒ θ = tan−1(
v2 sinα
v1 + v2 cosα
)Corollary 1.7 If ~v1 and ~v2 are of equal magnitude, say v, then
|~v1 + ~v2| =√v2 + v2 + 2v2 cosα
= v√
2 (1 + cosα)
= v√
4cos2α/2
= 2v cosα/2
Figure 8
Dr G.PALANI

KINEMATICS Page 19
Corollary 1.8 If ~v1 and ~v2 are perpendicular to each other, then choosing~i and ~j in their directions.~v1 = v1~i, ~v2 = v2~j
|~v1 + ~v2| = |v1~i+ v2~j|
=√v21 + v22.
tan θ =v2v1
⇒ θ = tan−1v2v1
Figure 9
Resolution of velocity into its components.Given the velocities ~v1 and ~v2, we have the resultant as ~v1 + ~v2.
Conversely if ~v1+~v2 is given, the quantities ~v1 and ~v2 are said to be compo-nents of ~v1 + ~v2. Since infinite number of parallelogram can be formed with agiven diagonal a given velocity can be resolved into two components in infinitenumber of different ways.
Bookwork 1.9 Resolve a velocity ~v into components in two given directions.
Let e1, e2 be the unit vectors in the given directions. Let them make anglesα, β with ~v. Now ~v can be expressed as a linear combination of e1, e2 as
~v = ae1 + be2 (1.59)
Dr G.PALANI

KINEMATICS Page 20
Figure 10
Multiply (1.59) vectorially by e1, we get
e1 × ~v = a (e1 × e1) + b (e1 × e2)i.e., v sinαn = ~0 + b sin (α + β) n
where n is the unit vector perpendicular to both e1, e2 such that e1, e2, n formsa right handed triad.
b =v sinα
sin (α + β)(1.60)
Multiply (1.59) vectorially by e2, we get
e2 × ~v = a (e2 × e1) + b (e2 × e2)i.e., v sin β
(−n)
= a sin (α + β)(−n)
a =v sin β
sin (α + β)(1.61)
~v =v sin β
sin (α + β)e1 +
v sinα
sin (α + β)e2 (1.62)
Bookwork 1.10 Express the velocity ~v in terms of its components in twoperpendicular directions.
Dr G.PALANI

KINEMATICS Page 21
Let ~i,~j be the unit vectors along theperpendicular directions. Then we have
~v =(~v ·~i
)~i+
(~v ·~j
)~i
If ~v makes an angle α, 90o−α with~i and~j respectively, then
~v ·~i = v · 1 · cosα
~v ·~j = v · 1 · cos (90o − α) = v sinα
~v = v cosα~i+ v sinα~j
Example 10 A particle has two velocities ~v1 and ~v2. Its resultant velocity isequal to ~v1 in magntitude. Show that, when the velocity is ~v1 is doubled, thenew resultant is perpendicular to ~v2.
Solution: Given that the magnitude of resultant of two velocities ~v1 and ~v2is ~v1.
|~v1 + ~v2| = |~v1||~v1 + ~v2|2 = |~v1|2
⇒ (~v1 + ~v2) · (~v1 + ~v2) = ~v1 · ~v1⇒ ~v1 · ~v1 + ~v1 · ~v2 + ~v2 · ~v1 + ~v2 · ~v2 = ~v1 · ~v1
⇒ 2~v1 · ~v2 + ~v1 · ~v2 = 0
⇒ (2~v1 + ~v2) · ~v2 = 0
Thus, the resultant of 2~v1 and ~v2 is perpendicular to ~v2.
Example 11 A particle has two velocities of equal magnitudes inclined to eachother at an angle θ. If one of them is halved, the angle between the other and theoriginal resultant velocity is bisected by the new resultant. Show that θ = 120o.
Solution: Let# »
OA and# »
OB be the given two velocities with equal magnitudes.i.e., OA = OB.Complete the parallelogram OACB. OC bisects ∠AOB, since OA = OB.
If one of the velocities is halved, i.e.,1
2
# »
OB = OB′.
Also, given that the angle between the velocities# »
OA and# »
OC is bisected bythe new resultant. Let it be OC ′. Thus, C ′ is the mid-point of CC ′, since OC ′
is the bisector of ∠AOC.
OA
OC=
AC ′
CC ′= 1
⇒ OA = OC
Dr G.PALANI

KINEMATICS Page 22
Figure 11
Hence 4OCA is an equilateral triangle and ∠AOC = 60o.Therefore, ∠AOB = 120o.
Example 12 The boat capable of moving in still water with a speed of 10 km.p.h.crosses a river, 2 km. broad, flowing with a speed of 6 km.p.h. Find (i) thetime of crossing by the shortest route and (ii) the minimum time of crossing.
Solution:
Figure 12
(i) Let A be the position of the boat on one bank and E the directlyopposite point on the other bank. Hence, OE is the shortest route. To cross
Dr G.PALANI

KINEMATICS Page 23
by the shortest route, the resultant velocity of the boat and the stream mustbe along AE.
let# »
AB = velocity of the stream = 6# »
AC = velocity of the boat = 10
Thus, the resultant velocity is# »
OC, the diagonal of the parallelogram ABDCand it is perpendicular to AD.From rightangled 4ABD
AD2 + AB2 = BD2
⇒ AD2 = BD2 − AB2
⇒ AD2 = 1002 − 62 = 64
⇒ AD = 8
i.e., The resultant velocity of the boat is 6 km.h.. Hence the time of crossing
by the shortest route , =Distance
speed=
2
8=
1
4hour = 15 minutes.
(ii) The time of crossing is minimum when the component of the resultantvelocity of the boat in the perpendicular of the stream is maximum.The time taken to cross the stream is
displacement perpendicular to the stream
speed in the direction=
2
10hour = 12 minutes.
Exercises:
1. A man who can row a boat 10 km.p.h. in still water wishes to cross ariver, 1 kmbroad, flowing at 6 km.p.h.Find
(i) the time of crossing by the shortest route and
(ii) the minimum time of crossing.
2. A boat which can steam in still water with a velocity of 48 km.p.h. issteaming with its bow pointed due east when it is carried by a currentwhich flows northward with a speed of 14 km.p.h.Find the actual distanceit would travel in 12 minutes.
Dr G.PALANI

KINEMATICS Page 24
2 Relative Velocity:
Definition 2.1 (Relative Velocity)Let two particles A and B moves along a straight line and at time t theirdisplacements measured from O are SA and SB respectively. The velocities ofA and B are vA and vB respectively.
Figure 13
Displacement of B relative to A = SB − SA
Velocity of B relative to A =d
dt(SB − SA)
=dSB
dt− dSA
dt= vB − vA
Example 13 A ship sails north-east at 15 km.p.h. and to a passenger onboard, the wind appears to blow from north with a velocity of 15
√2 km.p.h.
Find the true velocity of the wind.
Solution: Let ~i and ~j be the unit vectors towards east and north direc-tions respectively.Let w1
~i + w2~j be the true velocity of the wind and the velocity of the ship is
15(
cos 45o~i+ sin 45o~j)
.
Dr G.PALANI

KINEMATICS Page 25
Figure 14
Relative velocity of wind with respect to ship = velocity of wind− velocity of ship
−15√
2~j =(w1~i+ w2
~j)−(
15(
cos 45o~i+ sin 45o~j))
= (w1 − 15 cos 45o)~i+ (w2 − 15 sin 45o)~j
−15√
2~j =
(w1 −
15√2
)~i+
(w2 −
15√2
)~j
Equating the like-wise components, we get
w1 −15√
2= 0; w2 −
15√2
= −15√
2
w1 =15√
2; w2 =
15√2− 15√
2
w1 =15√
2; w2 = − 15√
2
Hence, the true velocity of the wind is15√
2~i− 15√
2~j.
Direction of the wind is south-east and magnitude is
√152(√
2)2 +
152(√2)2 = 15.
Dr G.PALANI

KINEMATICS Page 26
Example 14 To a cyclist riding due west at 10 km.p.h. the wind appears toblow from south. When he doubles his speed, it appears to him to blow fromsouth-west. Show that the speed of the wind is 10
√2 km.p.h. and it is from
south-east.
Solution: Let w1~i+ w2
~j be the true velocity of the wind.
Figure 15
Case 1: The velocity of cyclist is 10 km.p.h. due west and the relativevelocity of wind appears from south.
Relative velocity of wind with respect to cyclist = velocity of wind− velocity of cyclist
µ~j =(w1~i+ w2
~j)
+ 10~i
= (w1 + 10)~i+ w2~j
Equating like-wise components, we get
w1 + 10 = 0; w2 = µ
w1 = −10; w2 = µ (2.1)
Case 2: The velocity of cyclist is 20 km.p.h. due west and the relativevelocity of wind appears from south-west.
Relative velocity of wind with respect to cyclist = velocity of wind− velocity of cyclist
λ(
cos 45o~i+ sin 45o~j)
=(w1~i+ w2
~j)
+ 20~i+
= (w1 + 20)~i+ w2~j
Dr G.PALANI

KINEMATICS Page 27
Equating like-wise components, we get
w1 + 20 =λ√2
; w2 =λ√2
−10 + 20 =λ√2
; w2 =λ√2
10√
2 = λ; w2 =10√
2√2
Thus, w2 = 10 (2.2)
Therefore, the true velocity of the wind is w1 = −10~i+ 10~j
Direction of the wind is from south-east and magnitude is√
102 + 102 =10√
2.
Example 15 A person traveling eastward finds the wind to blow from north.On doubling his speed he finds it to come from north-east. Show that if hetrebles his speed, the wind appear to him to come from a direction making an
angle θ = tan−1(
1
2
)north of east.
Solution: Let w1~i+ w2
~j be the true velocity of the wind.
Figure 16
Dr G.PALANI

KINEMATICS Page 28
Case 1: The velocity of person is λ~i due eastwards and the relative velocityof wind appears from north.
Relative velocity of wind with respect to person = velocity of wind− velocity of person
−µ~j =(w1~i+ w2
~j)− λ~i
= (w1 − λ)~i+ w2~j
Equating like-wise components, we get
w1 − λ = 0; w2 = −µw1 = λ; w2 = −µ (2.3)
Case 2: The velocity of person is 2λ~i due eastwards and the relativevelocity of wind appears from north-east.
Relative velocity of wind with respect to person = velocity of wind− velocity of person
−α(
1√2~i+
1√2~j
)=
(w1~i+ w2
~j)− 2λ~i
= (w1 − 2λ)~i+ w2~j
Equating like-wise components, we get
w1 − 2λ =−α√
2; w2 =
−α√2√
2λ = α; w2 = −λ (2.4)
Case 3: The velocity of person is 3λ~i due eastwards and the relativevelocity of wind makes an angle θ north-east.
Relative velocity of wind with respect to person = velocity of wind− velocity of person
−γ(
cos θ~i+ sin θ~j)
=(w1~i+ w2
~j)− 3λ~i
= (w1 − 3λ)~i+ w2~j
Equating like-wise components, we get
w1 − 3λ = −γ cos θ; w2 = −γ sin θ−γ sin θ
−γ cos θ=
w2
w1 − 3λ
tan θ =−λ
λ− 3λ=−λ−2λ
tan θ =1
2
⇒ θ = tan−1(
1
2
)
Dr G.PALANI

KINEMATICS Page 29
Exercises
1. To a man walking at 4 km.p.h. along a road running due west, the windappears to blow from south, while to a cyclist travelling in the samedirection at 8 km.p.h. it appears to come from south-west. What is thetrue direction and speed of the wind?
2. To a man travelling towards north-east the wind appears to come fromnorth. But, when he doubles his speed, the wind appears to him to comefrom a direction inclined at an angle θ = cot−1(2) east of north. Findthe true velocity of the wind.
Dr G.PALANI

KINEMATICS Page 30
3 (Relative Angular Velocity)
Definition 3.1 (Angular velocity)If a particle P be moving along any path in a plane. If O be a fixed point inthe plane and OA a fixed straight line throughO, the rate at which the ∠AOPincreases is called the angular velocity of P about O.
ω =dθ
dt= θ
Figure 17
Definition 3.2 Relative Angular VelocityLet A1 and A2 be two particles moving in a plane. If their velocities are v1 andv2 making angles α1 and α2 with A1A2, then the components in the directionperpendicular to A1A2 of the velocity of A2 relative to A1 is v2 sinα2−v1 sinα2
because the velocity components of A1 and A2 in this directions are v1 sinα2
and v2 sinα2.
Figure 18
Dr G.PALANI

KINEMATICS Page 31
Angular velocity of A2 relative to angular velocity A1 is =v2 sinα2 − v1 sinα1
A1A2
Note 3.3If v2 sinα2 = v1 sinα1, the relative angular velocity of A2 with respect to A1
becomes zero. In this case, the line A1A2 moves parallel to itself and the linearvelocity of A2 with respect to A1 is along A1A2 only.
Example 16 The line joining two points A,B is of constant length a and thevelocities of A,B are in directions which makes angles α and β respectively
with AB. Prove that the angular velocity of AB isu sin (α− β)
a cos βwhere u is the
velocity of A.
Solution:
Figure 19
Relative angular velocity of B with respect to A is =u sinα− v sin β
AB(3.1)
Given that AB is of constant length a, thus we have
u cosα = v cos β
⇒ v =u cosα
cos β(3.2)
Substitute (3.2) in (3.1), we get
Relative angular velocity of B with respect to A =
u sinα− u cosα
cos βsin β
AB
=u sinα cos β − u cosα sin β
a cos β
=u sin (α− β)
a cos β
Dr G.PALANI

KINEMATICS Page 32
Example 17 A and B describe concentric circles of radii a and b with uniformspeeds u, v the motion being the same way round. Prove that the angularvelocity of either with respect to the other is zero when the line joining them
subtends at the centre an angle whose cosine isau+ bv
bu+ av.
Solution:
(a) (b)
Figure 20
The velocities u and v makes an angle α and β with AB respectively,∠AOB = θ where O is the common centre.
The angular velocity of A with respect to B is zero, then
v sin β = u sinα (3.3)
In, 4OAB, ∠OAB = 90o + α, ∠OBA = 90o − β
By Projection Formula, OA = OB cos θ − AB cos (90o − α)
i.e., a = b cos θ − AB sinα (3.4)
Similarly, b = a cos θ + AB sin β (3.5)
(3.4)× u+ (3.5)× v ⇒ (au+ bv) = [−u sinα + v sin β]AB + (bu+ av) cos θ
i.e., cos θ =au+ bv
bu+ av(By using (3.3)) (3.6)
Example 18 Two planets describe circles of radii a and b round the sun ascentre, with speeds varying inversely as the square roots of the radii, showthat their relative velocity vanishes when the angle θ betwen the radii to those
planets is given by cos θ =
√ab
a−√ab+ b
.
Dr G.PALANI

KINEMATICS Page 33
Solution:By the above example, we have cos θ =
au+ bv
bu+ av.
Given that u ∝ 1√a
; v ∝ 1√b
i.e., u =k√a
; v =k√b
using (3) in(18), we get
cos θ =
a
(k√a
)+ b
(k√b
)b
(k√a
)+ a
(k√b
)
=
√ab(√
a+√b)
b√b+ a
√a
=
√ab(√
a+√b)
(a1/2)3
+ (b1/2)3
=
√ab(√
a+√b)
(√a+√b)(
a−√ab+ b
) By using(a3 + b3
)= (a+ b)
(a2 − ab+ b2
)=
√ab
a−√ab+ b
.
Example 19 Two points A and B move with speeds v and 2v in two concen-tric circles, centre O and radii 2r and r respectively. If both the points moveround the circles in the same sense, and if ∠OAB = α, when the relativemotion is along AB, show that cotα = 2.
Solution: Given OA = r, OB = 2r. Since the relative motion is alongAB, it follows that the relative velocity perpendicular to AB is zero.
If ∠ABO = β, then u cosα− 2u cos β = 0
i.e., cos β =1
2cosα (3.7)
Applying sine formula to 4OAB,
OA
sin β=
OB
sinα
Therefore, sin β = 2 sinα (3.8)
Dr G.PALANI

KINEMATICS Page 34
(a) (b)
Figure 21
To eliminate β, use cos2 β + sin2 β = 1.
using (3.7), (3.8),1
4cos2 α + 4 sin2 α = 1
Multiplying throughout by 4 and dividing by sin2 α, we get
4cosec2α = cot2 α + 16
i.e., 4(1 + cot2 α
)= cot2 α + 16
⇒ 3 cot2 α = 12
i.e., cotα = 2
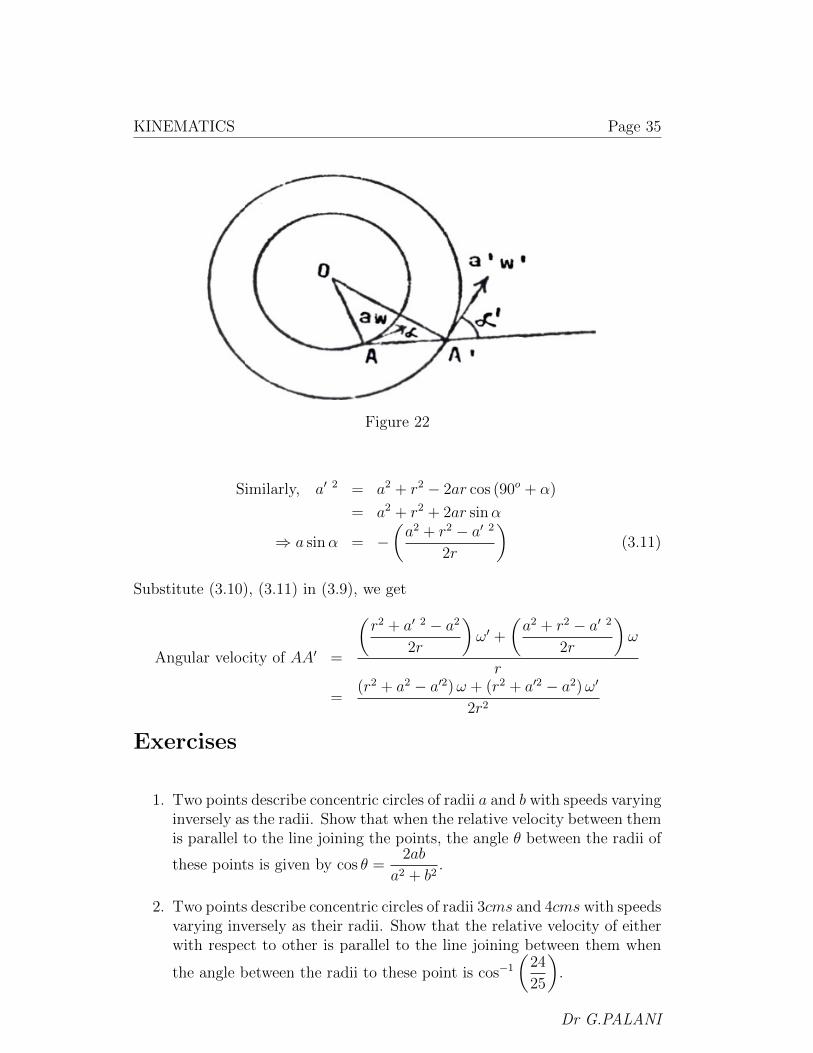
Example 20 Two points A and A′ describe concentric circles of radii a and a′
with angular velocities ω and ω′ respectively. Show that angular velocity of one
about the other is(r2 + a2 − a′2)ω + (r2 + a′2 − a2)ω′
2r2where r is the distance
between them.
Solutions:
Angular velocity of AA′ =a′ω′ sinα′ − aω sinα
r(3.9)
In 4OAA′, ∠OAA′ = 90o + α, ∠OA′A = 90o − α
By Cosine rule, a2 = a′2 + r2 − 2a′r cos (90o − α′)= a′2 + r2 − 2a′r sinα′
⇒ a′ sinα′ =r2 + a′ 2 − a2
2r(3.10)
Dr G.PALANI
KINEMATICS Page 35
Figure 22
Similarly, a′ 2 = a2 + r2 − 2ar cos (90o + α)
= a2 + r2 + 2ar sinα
⇒ a sinα = −(a2 + r2 − a′ 2
2r
)(3.11)
Substitute (3.10), (3.11) in (3.9), we get
Angular velocity of AA′ =
(r2 + a′ 2 − a2
2r
)ω′ +
(a2 + r2 − a′ 2
2r
)ω
r
=(r2 + a2 − a′2)ω + (r2 + a′2 − a2)ω′
2r2
Exercises
1. Two points describe concentric circles of radii a and b with speeds varyinginversely as the radii. Show that when the relative velocity between themis parallel to the line joining the points, the angle θ between the radii of
these points is given by cos θ =2ab
a2 + b2.
2. Two points describe concentric circles of radii 3cms and 4cms with speedsvarying inversely as their radii. Show that the relative velocity of eitherwith respect to other is parallel to the line joining between them when
the angle between the radii to these point is cos−1(
24
25
).
Dr G.PALANI

KINEMATICS Page 36
3. Two particles A,B describe concentric circles of radii a and b with an-gular speeds ω1 ,ω2 about the common centre O. Show that whenthe relative angular velocity of one particle about the other vanishes,
cos∠AOB =a2ω1 + b2ω
ab (ω1 + ω2).
4 Coplanar Motion
Definition 4.1 When a particle moves in a plane, its motion is said to becoplanar motion.
Bookwork 4.2 Find the components in two fixed perpendicular directions.
LetOx andOy be two fixed perpendiculardirections. If P (x, y) is the position of theparticle, then the position vector of P withrespect to O is
~r = ~OP = x~i+ y~j
Now, we get the velocity and acceleration ofthe particle to be
~v = ~r = x~i+ y~j
~a = x~i+ y~j
Thus, the components of velocity are x and y. Similarly, the components ofacceleration are x and y.
Bookwork 4.3 Find the components of the acceleration of a particle in thetangential and normal directions.
Let PQ be the directions tangential to the path of the particle in the sensein which the arcual distance s of the particle measured from a fixed pointAincreases. Let PR be the inward-drawn normal. If T and N are the unitvectors in these directions, then we know that the velocity of the particle is~v = sT .Here the unit vector T is not a constant vector since it varies in direction withtime t.The acceleration of the particle is
~a =d~v
dt=
d
dt
(sT)
= sT + sdT
dt
Dr G.PALANI

KINEMATICS Page 37
Figure 23
Suppose T makes an angle ψ with the x axis, then we have
T = cosψ~i+ sinψ~j (4.1)
But N makes an angle 90o + ψ with Ox. Then
N = cos (90o + ψ)~i+ sin (90o + ψ)~j = − sinψ~i+ cosψ~j (4.2)
Now, differentiate (4.1) with respect to t, we get
dT
dt= − sinψ
dψ
dt~i+ cosψ
dψ
dt~j =
dψ
dtN (By using (4.2))
=dψ
ds
ds
dtN =
s
ρN (4.3)
where ρ is the radius of curvature of the path at P .
~a = sT + s
(sN
ρ
)= sT +
s2
ρN
Thus, the components of acceleration of the particle in tangential and normal
directions are s ands2
ρ.
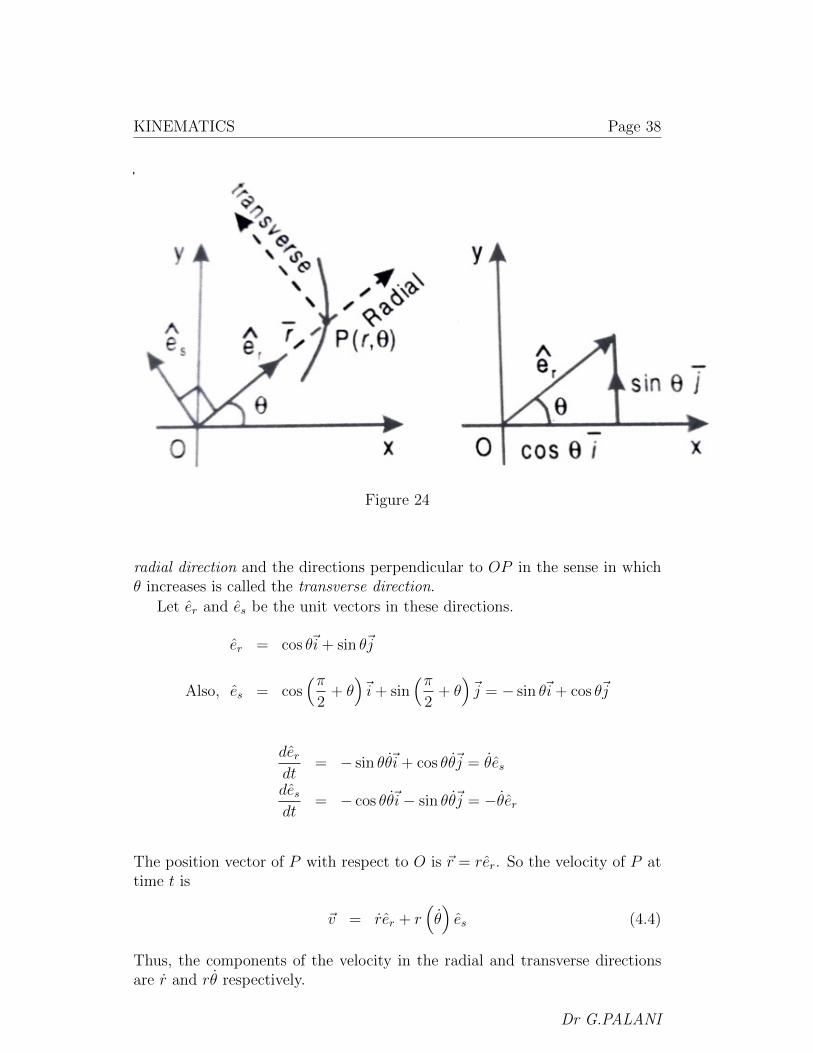
Bookwork 4.4 Find the components of velocity and accelerations of a particlein the radial and transverse directions.
Let Oxy be a fixed rectangular frame and ~j and ~j be unit vectors in the x andy directions. Choose O as the pole and Ox as the initial line and let P be(r, θ). Then the direction of OP in the sense in which r increases is called the
Dr G.PALANI
KINEMATICS Page 38
Figure 24
radial direction and the directions perpendicular to OP in the sense in whichθ increases is called the transverse direction.
Let er and es be the unit vectors in these directions.
er = cos θ~i+ sin θ~j
Also, es = cos(π
2+ θ)~i+ sin
(π2
+ θ)~j = − sin θ~i+ cos θ~j
derdt
= − sin θθ~i+ cos θθ~j = θes
desdt
= − cos θθ~i− sin θθ~j = −θer
The position vector of P with respect to O is ~r = rer. So the velocity of P attime t is
~v = rer + r(θ)es (4.4)
Thus, the components of the velocity in the radial and transverse directionsare r and rθ respectively.
Dr G.PALANI

KINEMATICS Page 39
The acceleration of the particle at any time t is given by
~a =d~v
dt
=
(rer + r
derdt
)+
(rθes + rθes + rθ
desdt
)=
(rer + rθes
)+(rθes + rθes − rθθer
)=
(r − rθ2
)er +
(2rθ + rθ
)es
=(r − rθ2
)er +
1
r
d
dt
(r2θ)es (4.5)
The components of acceleration in the radial and transverse directions are
r − rθ2 and1
r
d
dt
(r2θ)
respectively.
5 Exercises
1. If the angular velocity of a point moving on a plane curve is constantabout a fixed origin, show that its transverse acceleration is proportionalto its radial velocity.
2. A particle moves so that the radial and transverse components of itsvelocity are ar and bθ. Show that the radial and transverse components
of its acceleration are a2r − b2θ2
r, abθ +
b2θ
r.
Dr G.PALANI

CHAPTER 2SIMPLE HARMONIC MOTION
1 Simple Harmonic Motion in a straight line
Definition 1.1 (Simple Harmonic Motion) If a particle moves along astraight line in such a manner that its acceleration is always directed towardsa fixed point on the line and varies as the distance from the fixed point, theparticle is said to execute a simple harmonic motion.
By defintion, x ∝ x (1.1)
⇒ x = −n2x (1.2)
This is the equation of motion of the particle.
Figure 1
Bookwork 1.2 To find the solution of the equation of Simple Harmonic Mo-tion.
Let O be the fixed point on the straight line A′OA and P , the position ofthe particle at time t so that OP = x. As the acceleration of the particle atP is proportional to OP in the direction PO, thus we have
x = −n2x (where n2 is a constant)(D2 + n2
)x = 0
This is a second order linear differential equation with constant coefficent.Hence the solution of the equation is
x = A cosnt+B sinnt (1.3)

2
Differentiate (1.3) with respect to t, we get
x = −nA sinnt+ nB cosnt (1.4)
Suppose the particle starts from rest at A where OA = ai.e., initially x = a, x = 0 when t = 0. Thus, we get
(1.4)⇒ 0 = +nB cos(0)
⇒ B = 0 (1.5)
Similarly from (1.3), we get 0 = A cos(0)
⇒ A = a (1.6)
Using (1.5) and (1.6) in (1.3), we get
x = a cosnt (1.7)
This will gives the displacement of particle at any time t. Using (1.5) and(1.6) in (1.4), we get
x = −na sinnt
⇒ x2 = n2a2 sin2 nt = n2a2(1− cos2 nt
)= n2
(a2 − a2 cos2 nt
)
⇒ v2 = n2(a2 − x2
)( By using (1.7)) (1.8)
This will gives the velocity of particle at any time t.
Definition 1.3 (Maximum speed) As t increases from zero, x decreasesfrom a and the speed increases from zero. The speed is maximum when x = 0.Hence the maximum speed is na. (By using (1.8))
Definition 1.4 (Oscillation) One complete motion of the particle from apoint on its path to one extremity of its path, then to the other extremity andback to the point, is called an oscillation.
Definition 1.5 (Vibration) The motion of the particle from one extremityto the other extremity of its path, is called a vibration.
Definition 1.6 (Amplitude) The maximum distance through which the par-ticle moves on either side of the mean position of the motion, is called theamplitude of the motion (OA = a is the amplitude). In an oscillation theparticle travels along a distance equal to 4 times amplitude.

3
Definition 1.7 (Period) The time taken by the particle to make one oscil-lation is called the period of the motion.
Let to be the time taken by the particle to move from A to O and T be theperiod of oscillation. Then T = 4× to.
At O, x = 0, t = t0
x = a cosnt⇒ 0 = a cosnt0
⇒ nto =π
2
⇒ to =π
2n
∴ T = 4× to = 4× π
2n=
2π
n(1.9)
Definition 1.8 (Frequency) The number of oscillations per second is calledthe frequency of the motion, that is the frequency is the reciprocal of the period.So it is
f =1
Tor f =
n
2π
Definition 1.9 (Phase and epoch) The general form of the displacement xof the particle is
x = a cos (nt+ ε)
Here nt + ε is called the phase at time t. The initial phase, that is, the phasewhen t = 0 is called epoch. So ε is the epoch.
2 Composition of two simple harmonic mo-
tions of same period
Bookwork 2.1 Show that the resultant of two simple harmonic motions ofsame period along the same straight line is also simple harmonic with the sameperiod.

4
Let the displacements in the two motions be
x1 = a1 cos (nt+ ε1)
x2 = a2 cos (nt+ ε2)
Then the resultant displacement is given by
x = x1 + x2 = a1 cos (nt+ ε1) + a2 cos (nt+ ε2)
= a1 (cosnt cos ε1 − sinnt sin ε1) + a2 (cosnt cos ε2 − sinnt sin ε2)
= (a1 cos ε1 + a2 cos ε2) cosnt− (a1 sin ε1 + a2 sin ε2) sinnt
= (a cos ε) cosnt− (a sin ε) sinnt
= a cos (nt+ ε)
where
a cos ε = a1 cos ε1 + a2 cos ε2
a sin ε = a1 sin ε1 + a2 sin ε2
a =
√(a1 cos ε1 + a2 cos ε2)
2 + (a1 sin ε1 + a2 sin ε2)2
=√a21 + a22 + 2a1a2 cos2 (ε1 − ε2)
and ε = tan−1(a1 sin ε1 + a2 sin ε2a1 cos ε1 + a2 cos ε2
)
Bookwork 2.2 Show that the resultant motion of two simple harmonic mo-tions of same period along two perpendicular lines, is along an ellipse.
Choose the line of motions be x and y axes.The displacement of first particle is x = a cosnt and the displacement of
second particle is y = b cos (nt+ ε).Eliminate t between these two equations, we get
y = b (cosnt cos ε− sinnt sin ε)
= b
(x
acos ε±
√1− x2
a2sin ε
)y
b=
x
acos ε±
√1− x2
a2sin ε
y
b− x
acos ε = ±
√1− x2
a2sin ε(y
b− x
acos ε
)2=
(1− x2
a2
)sin2 ε

5
y2
b2+x2
a2cos2 ε− 2xy
abcos ε = sin2 ε− x2
a2sin2 ε
x2
a2(cos2ε+ sin2 ε
)− 2xy
abcos ε+
y2
b2= sin2 ε
x2
a2− 2xy
abcos ε+
y2
b2= sin2 ε
This is of the form Ax2 + 2Hxy +By2 = 0.
Where A =1
a2; B =
1
b2; H = −cos ε
ab.
H2 − AB =cos2 ε
a2b2− 1
a2b2
= − 1
a2b2(1− cos2 ε
)= − 1
a2b2sin2 ε < 0
Hence the resultant displacement equation represents an ellipse.
3 Examples
Example 1 A particle moves in a straight line. If v is its velocity, when ata distance x from a fixed point in the line and if v2 = α − βx2, where α andβ are constants. Show that the motion is simple harmonic and determine itsperiod and amplitude.
Solution: Given that v2 = α− βx2. i.e., x2 = α− βx2.Differentiate with respect to time t, we get
2xx = 0− β2xx
2xx = −β2xx
⇒ x = −βx
Thus, the motion is simple harmonic.
To find period and amplitude:
Amplitude of simple harmonic is given by the value of x when velocity is

6
zero. i.e., v = x = 0.
v = 0
⇒ α− βx2 = 0
⇒ βx2 = α
⇒ x2 =α
β
⇒ x =
√α
β
Thus the amplitude is
√α
βand the period is given by T =
2π
n=
2π√β.
Example 2 The displacement x of a particle moving along a straight line isgiven by x = a cosnt+ b sinnt. Show that the motion is simple harmonic with
amplitude√a2 + b2 and period
2π
n.
Solution:The displacement of a particle at any time t is given by
x = a cosnt+ b sinnt (3.1)
Differentiate (3.1) with respect to time t twice, we get
x = −na sinnt+ nb cosnt (3.2)
Also, x = −n2a cosnt− n2b sinnt
= −n2 (a cosnt+ b sinnt)
⇒ x = −n2x
Thus, the motion is simple harmonic.
Figure 2
To find period and amplitude:Amplitude of simple harmonic is given by thevalue of x when velocity is zero. i.e., v =x = 0.
x = 0
⇒ − na sinnt+ nb cosnt = 0
⇒ na sinnt = nb cosnt
⇒ tannt =b
a

7
From the Figure 2, we see that
sinnt =b√
a2 + b2(3.3)
cosnt =a√
a2 + b2(3.4)
Substitute (3.3) and (3.4) in (3.1), we get
x = a
(a√
a2 + b2
)+ b
(b√
a2 + b2
)=
a2√a2 + b2
+b2√
a2 + b2
=a2 + b2√a2 + b2
=√a2 + b2
Thus, the amplitude of the motion is√a2 + b2 and the period is T =
2π
n.
Example 3 A body moving with a simple harmonic motion has an amplitudea and period T . Show that the velocity v at a distance x from the mean positionis given by v2T 2 = 4π2 (a2 − x2) .
Solution: The velocity of a particle at any time t and period is given by
x2 = v2 = n2(a2 − x2
)(3.5)
T =2π
n(3.6)
Eliminate n between (3.5) and (3.6), we get
v2 =
(2π
T
)2 (a2 − x2
)⇒ v2T 2 = 4π2
(a2 − x2
)
Example 4 If T be the period of the S.H.M., f its acceleration and v, velocityat any position, show that the expression f 2T 2 + 4π2v2 is a constant.

8
Solution:
f = x = −n2x
T =2π
nv2 = n2
(a2 − x2
)f 2T 2 + 4π2v2 = n4x2
(2π
n
)2
+ 4π2n2(a2 − x2
)= 4n2x2π2 + 4π2n2
(a2 − x2
)= 4n2π2
(x2 + a2 − x2
)= 4n2π2a2 (a constant)
Example 5 Show that a particle executing S.H.M. requires one sixth of itsperiod to move from the position of maximum displacement to one in whichthe displacement is half the amplitude.
Solution:
Figure 3
Let a be the amplitude and T be the period of the S.H.M. Let t1 be the timetaken by the particle to move from its maximum displacement (A) to its halfof the amplitude (P ). Then
x = a cosnt
⇒ a
2= a cosnt1
⇒ 1
2= cosnt1
⇒ nt1 = cos−1(
1
2
)=π
3
⇒ t1 =π
3n
=1
6
(2π
n
)=
1
6T

9
Example 6 A particle is moving with S.H.M. and while moving from the meanposition to one extreme position its distances at three consecutive seconds are
x1, x2, x3. Show that its period is2π
cos−1(x1 + x3
2x2
) .
Solution: Let three consecutive seconds be t− 1, t, t+ 1 seconds.
x1 = a cosn (t− 1)
x2 = a cosnt
x3 = a cosn (t+ 1)
x1 + x3 = a cosn (t− 1) + a cosn (t+ 1)
= a [cos (nt− n) + cos (nt+ n)]
= a [cosnt cosn+ sinnt sinn+ cosnt cosn− sinnt sinn]
= 2a cosnt cosn
= 2x2 cosn
⇒ x1 + x32x2
= cosn
⇒ n = cos−1(x1 + x3
2x2
)Thus, period is T =
2π
n=
2π
cos−1(x1 + x3
2x2
)
Example 7 A particle is executing a S.H.M. of period T with O as the meanposition. The particle passes through a point P in the direction of OP . Show
that the time which lapses before its return to P isT
πtan−1
[V T
2π ·OP
].
Figure 4

10
Solution:Let the particle take a time t1 to reach the end A from P . Thenthe time is taken to reach from A to P is also t1.Thus required time is 2t1.Let OP = b and OA = a. Consider the motion from A to P .
v2 = n2(a2 − x2
)⇒ V 2 = n2
(a2 − b2
)x = a cosnt ⇒ b = a cosnt1
i.e., cosnt1 =b
a⇒ tannt1 =
√a2 − b2b
=V
nb
Now, period T =2π
n⇒ 1
n=
T
2π
Thus, tannt1 =V T
2πb
⇒ nt1 = tan−1[V T
2πb
]i.e., t1 =
1
ntan−1
[V T
2πb
]=
T
2πtan−1
[V T
2πb
]Thus, required time = 2t1 =
T
πtan−1
[V T
2π ·OP
]
Example 8 A particle moves in a S.H.M. in a straight line. In the firstsecond, after starting from rest, it travels a distance a and in the next second,it travels a distance b in the same direction. Prove that the amplitude of the
motion is2a2
3a− b.
Figure 5
Solution: Let α be the amplitude.
At t = 1, x = a cosnt⇒ α− a = α cosn
At t = 2, x = a cosnt⇒ α− a− b = α cos 2n

11
α− a− b = α cos 2n
⇒ α− a− b = α[2 cos2 n− 1
]= α
[2
(α− aα
)2
− 1
]
= α
[2 (α− a)2
α2− 1
]
= α
[2 (α− a)2 − α2
α2
]⇒ α2 − bα− aα = 2 (α− a)2 − α2
α2 − bα− aα = 2(α2 − 2aα + a2
)− α2
⇒ 4aα− bα− aα = 2a2
⇒ (3a− b)α = 2a2
⇒ α =2a2
3a− b
Example 9 A particle is executing a S.H.M. with O as the mean positionand a as the amplitude. When it is at a distance a/2 from O, its velocity isquadrapled by a blow. Show that its new amplitude is 7a/2.
Figure 6
Solution: Let v and 4v be the velocities before and after the blow. Leta1 be the new amplitude.Before Blow:
v2 = n2(a2 − x2
)⇒ v2 = n2
(a2 − a2
4
)= n2
(3a2
4
)

12
After Blow:
v2 = n2(a2 − x2
)⇒ 16v2 = n2
(a21 −
a2
4
)⇒ 16n2
(3a2
4
)= n2
(a21 −
a2
4
)48a2
4+a2
4= a21
a21 =49a2
4
⇒ a1 =7a
2
4 Exercises
1. If the distance x of a point on a straight line measured from a fixed pointon it and its velocity v are connected by the relation 4v2 = 25−x2, showthat the motion is simple harmonic. Find the period and amplitude ofthe motion.
2. The velocity of a particle moving in a straight line, at a distance x froma fixed point on the line, is given by v = k
√a2 − x2 where k and a are
constants. Show the motion is simple harmonic and find the amplitudeand periodic time.
3. The displacement x of a particle moving along a straight line is given byx = A cosnt + B sinnt, where A, B, n are constants. Show that themotion is simple harmonic. If A = 3, B = 4, n = 2, find its period,amplitude, maximum velocity and maximum acceleration.
4. A particle is executing a S.H.M. with O as the mean position,2π
nas the
period and a as the amplitude. When it is at a distancea√
3
2from O,
it receives a blow which increases its velocity by na. Show that the newamplitude is a
√3.

CHAPTER 3
PROJECTILES
1 Definitions
Definition 1.1 (Projectile) A particle or body projected is called a projec-tile.
Definition 1.2 (Trajectory) The path pursued by a projectile is called thetrajectory of the projectile.
Definition 1.3 (Angle of projection) The angle of projection is the an-gle that the direction in which the particle is initially projected makes with thehorizontal plane through the point of projection.
Definition 1.4 (Velocity of projection) The velocity of projection isthe velocity with which the particle is projected.
Definition 1.5 (Horizontal range) If O is the point of projection and If Bis the point at which the projectile hits the horizontal plane through O is calledthe horizontal range.
Definition 1.6 (Range on an inclined plane) Suppose OA is a line of great-est slope on an inclined plane, If a particle projected from O hits on OA at Bis the range on the inclined plane.
Definition 1.7 (Time of flight) The time of flight is the interval of timethat elapsed from the instant of projection till the instant where the particleagain meets the horizontal plane through the point of projection.
Bookwork 1.8 Show that the path of a projectile is a parabola.
Let a particle be projected from a point O with velocity u makes an angle θwith the horizontal and the particle hit the horizontal plane at B through thepoint of projection.
The velocity u has two components u cos θ horizontally which remains con-stants and u sin θ vertically which is subjected to an acceleration.
x = horizontal distance travelled in time t
i.e., x = u cos θt (1.1)
y = vertical distance travelled in time t
i.e., y = u sin θt− 1
2gt2 (1.2)

2
Figure 1
Eliminate time t between (1.1) and (1.2), we get
(1.1)⇒ t =x
u cos θ(1.3)
Substitute (1.3) in (1.2), we get
y = u sin θ( x
u cos θ
)− 1
2g( x
u cos θ
)2
⇒ y = x tan θ − gx2
2u2 cos2 θ
This is the equation of projectile.
Multiplying both sides by 2u2 cos2 θ, we get
2u2 cos2 θy = xsin θ
cos θ× 2u2 cos2 θ − gx2
gx2 − 2u2 sin θ cos θx = −2u2 cos2 θy
⇒ x2 − 2u2 sin θ cos θx
g= −2u2 cos2 θy
g

3
Adding both sides byu4 sin2 θ cos2 θ
g2, we get
x2 − 2u2 sin θ cos θx
g+u4 sin2 θ cos2 θ
g2= −2u2 cos2 θy
g+u4 sin2 θ cos2 θ
g2
⇒(x− u2 sin θ cos θ
g
)2
= −2u2 cos2 θ
g
(y − u2 sin2 θ
2g
)⇒ X2 = −4aY (1.4)
where X = x− u2 sin θ cos θ
g
4a =2u2 cos2 θ
g
Y = y − u2 sin2 θ
2g
The equation (1.4) represents a parabola with vertex upwards.
Vertex is
(u2 sin θ cos θ
g,u2 sin2 θ
2g
).
Latus rectum is2u2 cos2 θ
g=
2
g(u cos θ)2 .
2 Some Important results on the motion of a
projectile
In this section, we shall derive some important results like angle of projection,time of flight horizontal range and greatest height.
Time of flight: Let T be the time taken by the particle to movefrom O to B. At B, vertical distance travelled by the particle is zero. Considerthe vertical motion.
Intial velocity = u sin θ
Final velocity = 0
Time = T
Acceleration = −g
s = ut+1
2ft2 ⇒ 0 = u sin θT − 1
2gT 2
T =2u sin θ
g

4
Horizontal range: The distance between the point of pro-jection and where the particle strikes the horizontal plane through the pointof projection is horizontal range (=OB = R). At B, the horizontal distancetravelled is OB.
horizontal distance = horizontal component velocity× time
OB = u cos θ
(2u sin θ
g
)=u2 sin 2θ
g
R =u2 sin 2θ
g
Greatest height:At the greatest height, the particle moves hor-izontally. Let h be the greatest height. Consider the vertical motion.
Intial velocity = u sin θ
Final velocity = 0
Acceleration = −gv2 = u2 + 2fs ⇒ 0 = (u sin θ)2 − 2gh
⇒ h =u2 sin2 θ
2g
h (Greatest height) =u2 sin2 θ
2g
Time taken by the particle to reach great-est height: Let T1 be the time taken by the particle to reach greatestheight. At the greatest height,the particle moves horizontally. Consider thevertical motion.
Intial velocity = u sin θ
Final velocity = 0
Time = T1
Acceleration = −gv = u+ ft ⇒ 0 = u sin θ − gT1
⇒ T1 =u sin θ
g

5
T1 =u sin θ
g
3 Examples
Example 1 If the greatest height attained by the particle is a quarter of itsrange on the horizontal plane through the point of projection, find the angle ofprojection.
Solution: Given that
Greatest height =1
4× Horizontal range
⇒ u2 sin2 θ
2g=
1
4× u2 sin 2θ
g=
1
4× u2 (2 sin θ cos θ)
g
⇒ sin2 θ = sin θ cos θ
⇒ sin θ (sin θ − cos θ) = 0
Either sin θ = 0 or sin θ − cos θ = 0
But sin θ 6= 0
∴ sin θ − cos θ = 0
⇒ sin θ = cos θ
⇒ sin θ
cos θ= 1
⇒ tan θ = 1
⇒ θ = 45o
Example 2 If the time of flight of a shot is T seconds over a range of x
metres, show that the elevation is tan−1(gT 2
2x
)and determine the maximum
height and the velocity of projection.
Solution:

6
T =2u sin θ
g
x =u2 sin 2θ
g
gT 2
2x=
g
(2u sin θ
g
)2
2
(u2 sin 2θ
g
)
= g
(2u sin θ
g
)2
× g
2u2 sin 2θ
= g
(4u2 sin2 θ
g2
)× g
2u22 sin θ cos θ
=sin θ
cos θgT 2
2x= tan θ
⇒ θ = tan−1(gT 2
2x
)
Greatest Height =u2 sin2 θ
2g
=(u sin θ)2
2g
=
(gT
2
)2
2g
=g2T 2
4× 1
2g=gT 2
8
Now, x =u2 sin 2θ
g=u22 sin θ cos θ
g
=(2u sin θ)u cos θ
g⇒ x = Tu cos θ

7
⇒ u cos θ =x
T
velocity = u =√u2 =
√u2 cos2 θ + u2 sin2 θ
=
√( xT
)2+
(gT
2
)2
=
√x2
T 2+g2T 2
4
=
√g2T 4 + 4x2
4T 2
⇒ u =
√g2T 4 + 4x2
2T
Example 3 If T is the time of flight, R the horizontal range and α, the angleof projection. Show that gT 2 = 2R tanα. If α = 60o, find in terms of R, theheight of the particle when it has moved through horizontal distance equal to3R
4.
Solution:
T =2u sinα
g(3.1)
R =u2 sin 2α
g(3.2)
gT 2 = g
(2u sinα
g
)2
= g4u2 sin2 α
g2
gT 2 =4u2 sin2 α
g(3.3)
2R tanα = 2u2 sin 2α
g× tanα
=4u2 sinα cosα
g× sinα
cosα
2R tanα =4u2 sin2 α
g(3.4)
From (3.3) and (3.5), we get
gT 2 = 2R tanα

8
Equation of projectile is
y = x tan θ − gx2
2u2 cos2 θ
Since
(3R
4, h
)is a point lies on the trajectory and θ = 60o.
h =3R
4tan 60o −
g
(3R
4
)2
2u2 cos2 60o
=3R√
3
4−g
(9R2
16
)2u2
1
4
h =3R√
3
4− 9gR2
8u2(3.5)
But R =u2 sin 2α
g
=u2 sin 120o
g
⇒ gR
u2=
√3
2(3.6)
Substitute (3.6) in (3.5), we get
h =3R√
3
4− 9R
8×√
3
2
=3R√
3
4− 9R
√3
16=
3R√
3
16
Example 4 A particle is projected under gravity in a vertical plane with avelocity u at an angle α to the horizontal. If the range on the horizontal be R
and the greatest height attained be h, show thatu2
2g= h+
R2
16hand tanα =
4h
R.

9
Solution:
R =u2 sin 2α
g
h =u2 sin2 α
2g
h+R2
16h=
u2 sin2 α
2g+u4 sin2 2α
g2× 2g
16u2 sin2 α
=u2 sin2 α
2g+u44 sin2 α cos2 α
g2× 2g
16u2 sin2 α
=u2 sin2 α
2g+u2 cos2 α
2g
=u2
2g
Now,4h
R= 4× u2 sin2 α
2g× g
u2 sin 2α
=2 sin2 α
2 sinα cosα= tanα
Example 5 A particle projected from a given point on the ground, just clearsa wall of height h at a distance a from the point of projection. If the particlemoves in a vertical plane perpendicular to the wall and if the horizontal range
is R, show that the elevation of projection is given by tanα =Rh
a (R− a).
Solution:
Equation of projectile is
y = x tanα− gx2
2u2 cos2 α
Since (a, h) and (R, 0) is a point lies on the trajectory.
h = a tanα− ga2
2u2 cos2 α(3.7)
0 = R tanα− gR2
2u2 cos2 α(3.8)
(3.8)⇒ R tanα =gR2
2u2 cos2 α
⇒ tanα =gR
2u2 cos2 α
⇒ tanα
R=
g
2u2 cos2 α(3.9)

10
Figure 2
Substitute (3.9) in (3.7), we get
h = a tanα− a2 tanα
R
⇒ h = a tanα(
1− a
R
)⇒ h = a tanα
(R− aR
)⇒ tanα =
Rh
a (R− a)
Example 6 A particle is thrown over a triangle from one end of a horizontalbase and grazing the vertex falls on the other end of the base. If A,B are thebase angles, and α the angle of projection, show that tanα = tanA+ tanB.
Solution:
From the previous example, we have
tanα =Rh
a (R− a)(3.10)
From 4AOC, we have
tanA =h
a(3.11)

11
Figure 3
Similarly, from 4ABC, we have
tan b =h
R− a(3.12)
Adding (3.10) and (3.12), we get
tanA+ tanB =h
a+
h
R− a
=Rh
a (R− a)(3.13)
From (3.10) and (3.13), we get
tanα = tanA+ tanB
Example 7 Two particles are projected from the same point O with the samevelocity at angles α and β aimed at a target on the horizontal plane throughO. One falls a metres too short and the other b metres too far from the target.If θ is the correct angle of projection so as to hit the target, show that(a+ b) sin θ = a sin 2β + b sin 2α.
Solution:

12
Figure 4
Case 1: R− a =u2 sin 2α
g(3.14)
Case 2: R + b =u2 sin 2β
g(3.15)
Case 3: R =u2 sin 2θ
g(3.16)
(3.14)× b+ (3.16)× a, we get
bR + aR =bu2 sin 2α
g+au2 sin 2β
g
(a+ b)R =u2
g[b sin 2α + a sin 2β]
(a+ b)u2 sin 2θ
g=
u2
g[b sin 2α + a sin 2β]
⇒ (a+ b) sin θ = a sin 2β + b sin 2α
Example 8 A ball is projected so as to just clear two parallel walls, the firstof height a at a distance b from the point of projection and the second of heightb at a distance a from the point of projection. Supposing the path of the ball tolie in a plane perpendicular to the walls, find the range on the horizontal planeand show that the angle of projection exceeds tan−1 3.
Solution:

13
Figure 5
Equation of projectile is
y = x tanα− gx2
2u2 cos2 α
Since (b, a), (a, b) and (R, 0) is a point lies on the trajectory.
a = b tanα− gb2
2u2 cos2 α(3.17)
b = a tanα− ga2
2u2 cos2 α(3.18)
0 = R tanα− gR2
2u2 cos2 α(3.19)
Eliminate tanα, − g
2u2 cos2 αfrom (3.17), (3.18) and (3.19), we get∣∣∣∣∣∣
a b b2
b a a2
0 R R2
∣∣∣∣∣∣ = 0⇒
∣∣∣∣∣∣a b b2
b a a2
0 1 R
∣∣∣∣∣∣ = 0
Expanding the determinant along third row, we get
−1(a3 − b3
)+R
(a2 − b2
)= 0
⇒ R =a3 − b3
a2 − b2
R =(a− b) (a2 + ab+ b2)
(a− b) (a+ b)
i.e., R =a2 + ab+ b2
a+ b

14
To find Angle of Projection: For this, a2 × (3.17)− b2 × (3.18), we get
a3 − b3 = a2b tanα− b2a tanα
(a− b)(a2 + ab+ b2
)= (a− b) ab tanα
⇒ tanα =a2 + ab+ b2
ab
=a2 − 2ab+ b2 + 3ab
ab
=(a− b)2 + 3ab
ab
=(a− b)2
ab+ 3
⇒ tanα > 3
i.e., α > tan−1(3).
Example 9 A particle is projected from a point O so as to pass through twogiven points in the same vertical plane with O, at heights h and k above Oand at distances a andb from it on the same side. Show that the square of
the horizontal component of the velocity of projection must beab (b− a)
2 (bh− ak)g
and that the direction of projection must make with the horizontal an angle
tan−1(b2h− a2kab (b− a)
).
Solution:
Equation of projectile is
y = x tanα− gx2
2u2 cos2 α
Since (a, h)and(b, k) is a point lies on the trajectory.
h = a tanα− ga2
2u2 cos2 α(3.20)
k = b tanα− gb2
2u2 cos2 α(3.21)
(3.20)× b2 − (3.21)× a2, we get
b2h− a2k = b2a tanα− ga2b2
2u2 cos2 α− a2b tanα +
ga2b2
2u2 cos2 α= ab (b− a) tanα

15
Figure 6
⇒ tanα =b2h− a2kab (b− a)
i.e., α = tan−1[b2h− a2kab (b− a)
](3.20)× b− (3.21)× a, we get
bh− ak = ab tanα− ga2b
2u2 cos2 α− ab tanα +
gab2
2u2 cos2 α
=gab
2u2 cos2 α(b− a)
2 (bh− ak)
ab (b− a)=
g
u2 cos2 α
⇒ u2 cos2 α
g=
ab (b− a)
2 (bh− ak)
i.e., (u cosα)2 =ab (b− a)
2 (bh− ak)g
square of the horizontal component velocity =ab (b− a)
2 (bh− ak)g
Example 10 A particle is projected with a velocity 2√ag so that it just clears
two walls of equal height a which are at a distance 2a apart. Find the latusrectum of the path and the time of passing between the two walls.
Solution:

16
Figure 7
Equation of projectile is
y = x tanα− gx2
2u2 cos2 α
Since (x, a) is a point lie on the trajectory and u = 2√ag is the velocity of
projection.
a = x tanα− gx2
2(2√ag)2
cos2 α
i.e., a = x tanα− gx2 sec2 α
8ag
Multiply both sides by 8a, we get
8a2 = 8ax tanα− x2 sec2 α
i.e., x2 sec2 α− 8ax tanα + 8a2 = 0
This is a quadratic equation in x having two roots say x1 and x2.
sum of roots = x1 + x2 =8a tanα
sec2 α=
8a sinα
cosα× cos2 α = 8a sinα cosα
Product of roots = x1x2 =8a2
sec2 α= 8a2 cos2 α

17
But x2 − x1 = 2a. Hence,
(x2 − x1)2 = (x2 + x1)2 − 4x1x2
(2a)2 = (8a sinα cosα)2 − 4(8a2 cos2 α
)i.e., 64a2 cos2 α sin2 α− 32a2 cos2 α− 4a2 = 0
Divide through out by 4a2, we get
16 cos2 α sin2 α− 8 cos2 α− 1 = 0
i.e., 16 cos2 α(1− cos2 α
)− 8 cos2 α− 1 = 0
i.e., 16 cos4 α− 8 cos2 α + 1 = 0
i.e.,(4 cos2 α− 1
)2= 0
⇒ 4 cos2 α− 1 = 0
⇒ 4 cos2 α = 1
i.e., cos2 α =1
4
i.e, cosα =1
2∴ α = 60o
Latus Rectum =2u2 cos2 α
g=
2
g× 4ag × 1
4= 2a.
Time passing between two parallel walls =Horizontal distance between two walls
Horizontal velocity
=2a
u cosα=
2a
2√ag
(1
2
) = 2
√a
g.
Example 11 A body is projected at an angle α to the horizon so as to justclear 2 walls of equal height at a distance 2a from each other. Show that the
range is equal to 2a cotα
2.
Solution:
Equation of projectile is
y = x tanα− gx2
2u2 cos2 α

18
Figure 8
Since (x, a) is a point lie on the trajectory.
a = x tanα− gx2
2u2 cos2 α
Multiply both sides by 2u2 cos2 α, we get
2au2 cos2 α = xsinα
cosα× 2u2 cos2 α− gx2
i.e., gx2 − 2u2 cosα sinαx+ 2au2 cos2 α = 0
This is a quadratic equation in x having two roots say x1 and x2.
sum of roots = x1 + x2 =2u2 cosα sinα
g=u2 sin 2α
g= R (range)
Product of roots = x1x2 =2au2 cos2 α
g=
2a cos2 α
g× gR
sin 2α
=2a cos2 α
g× gR
2 sinα cosα= aR cotα
But x2 − x1 = 2a. Hence,
(x2 − x1)2 = (x2 + x1)2 − 4x1x2
(2a)2 = R2 − 4aR cotα
i.e., R2 − 4aR cotα− 4a2 = 0

19
This is a quadratic equation in R having two roots.
R =4a cotα±
√16a2 cot2 α + 16a2
2
=4a cotα± 4acosecα
2= 2a [cotα + cosecα] (neglecting negative sign)
= 2a
[cosα
sinα+
1
sinα
]= 2a
[1 + cosα
sinα
]
= 2a×2 cos2
α
2
2 sinα
2cos
α
2
= 2a cotα
2
Example 12 Show that the greatest height reached by a particle whose initialvelocity is V and angle of projection α is unaltered if V is increased to kV andα is decreased by λ where cosecλ = k [cotλ− cotα].
Solution:
Case 1: Greatest Height =V 2 sin2 α
2g.
Case 2: Greatest Height =k2V 2 sin2 (α− λ)
2g.
Given that the greatest height are unaltered. Thus, we have
V 2 sin2 α
2g=
k2V 2 sin2 (α− λ)
2g
⇒ sinα = k sin (α− λ)
= k (sinα cosλ− cosα sinλ)
Divide both sides by sinα sinλ, we get
sinα
sinα sinλ=
k (sinα cosλ− cosα sinλ)
sinα sinλ⇒ cosecλ = k (cotλ− cotα)
Example 13 A particle reaches a point P of its path in time t and t′ is thetime it takes to travel from P to the horizontal plane through the point of
projection. Show that the height of P above the plane is1
2gtt′.
Solution:

20
Figure 9
Let h be the height of P above OA.Equation of trajectory is
x = u cosαt
h = u sinαt− 1
2gt2
i.e., gt2 − u sinαt+ 2h = 0
This is a quadratic equation in t having two roots say t and t′.
product of roots =2h
g
⇒ tt′ =2h
g
i.e., h =gtt′
2
Example 14 Two particles are projected in two different directions with samespeed so that they have equal horizontal ranges R. If the greatest heights at-tained by them are h1 and h2, show that R = 4
√h1h2.
Note 3.1 If two particles are projected with the same velocity and same hor-izontal range in two different directions , then sum of two angles is 90o.
i.e., If α is the angle of projection of one particle, then the angle of projec-tion of second particle is 90o − α.

21
Solution:
R =u2 sin 2α
g
h1 =u2 sin2 α
2g
h2 =u2 sin2 (900 − α)
2g=u2 cos2 α
2g
h1h2 =u2 sin2 α
2g× u2 cos2 α
2g√h1h2 =
u2 sinα cosα
2g
4√h1h2 =
2u2 sinα cosα
g=u2 sin 2α
g= R
Example 15 A particle is projected with a velocity u at an angle α to thehorizontal. If after time t it is moving in a direction making an angle β to thehorizontal, show that gt cos β = u sin (α− β).
Solution: Equation of trajectory is
x = u cosαt
y = u sinαt− 1
2gt2
The direction of a particle at any time t is given by
β = tan−1
dy
dtdx
dt
= tan−1
(u sinα− gtu cosα
)tan β =
u sinα− gtu cosα
i.e.,sin β
cos β=
u sinα− gtu cosα
⇒ u sin β cosα = u sinα cos β − gt cos β
⇒ gt cos β = u (sinα cos β − sin β cosα) = u sin (α− β)

22
4 Exercises
1. If the range on the horizontal plane of a projectile is equal to the heightdue to the velocity of projection, show that the angel of projection iseither 15o or 75o.
2. If the range on the horizontal plane of a projectile and the greatestheightabove the point of projection are R and H respectively, show that
the velocity of projection is
√2gH +
gR2
8H.
3. A shot projected with a velocity V at an inclination 45o reaches a pointA on the horizontal plane through the point of projection. Show that,to hit a mark at a height h above A projecting the shot at the same
elevation, the velocity of projection must be increased toV 2√
V 2 − gh.
4. ABC is a triangle in a vertical plane with AB horizontal and A =45o, B = 60o. A particle projected from A passes through C and fallsat B. Show that the angle of projection is given by tan θ =
√3 + 1.
5. A particle is projected from a point P with a velocity of 32m per secondat an angle of 30o with the horizontal. If PQ be its horizontal range andif the angles of elevation from P and Q at any instant of its flight be α
and β respectively, show that tanα + tan β =1√3.
6. Two particles projected from a point with the same speed u at twodifferent directions, have equal horizontal ranges R. If T1, T2 are their
times of flight, show that R =1
2gT1T2.
23
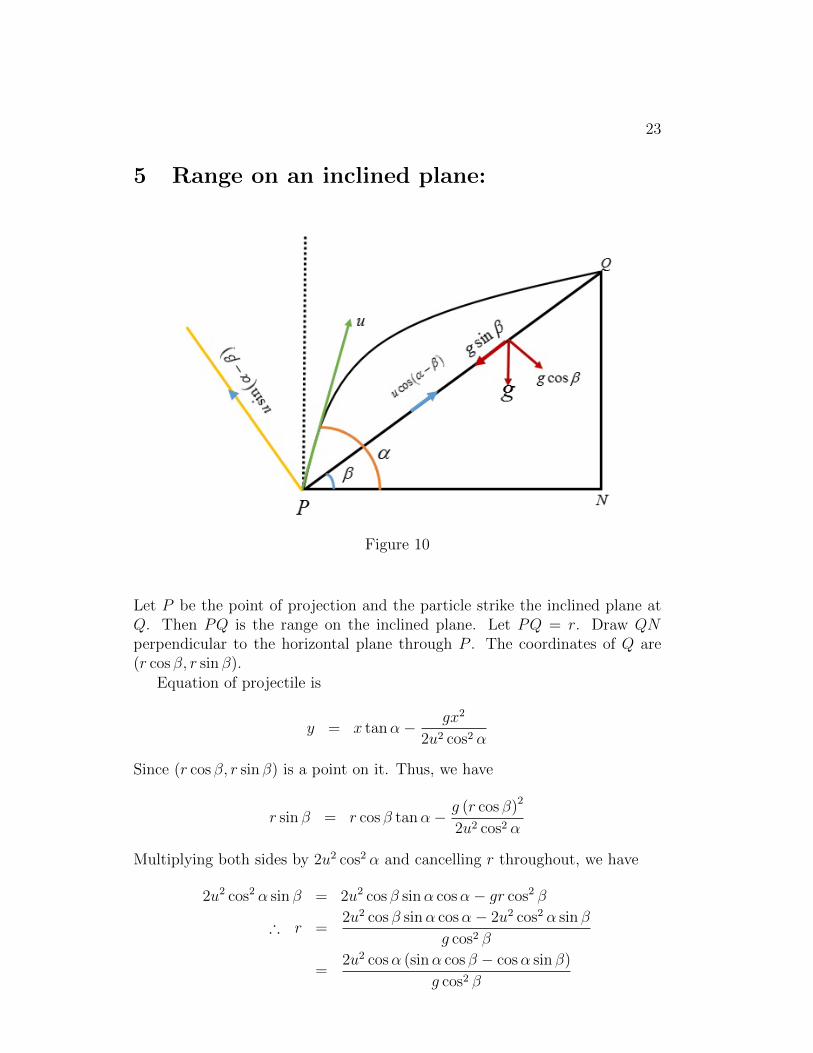
5 Range on an inclined plane:
Figure 10
Let P be the point of projection and the particle strike the inclined plane atQ. Then PQ is the range on the inclined plane. Let PQ = r. Draw QNperpendicular to the horizontal plane through P . The coordinates of Q are(r cos β, r sin β).
Equation of projectile is
y = x tanα− gx2
2u2 cos2 α
Since (r cos β, r sin β) is a point on it. Thus, we have
r sin β = r cos β tanα− g (r cos β)2
2u2 cos2 α
Multiplying both sides by 2u2 cos2 α and cancelling r throughout, we have
2u2 cos2 α sin β = 2u2 cos β sinα cosα− gr cos2 β
∴ r =2u2 cos β sinα cosα− 2u2 cos2 α sin β
g cos2 β
=2u2 cosα (sinα cos β − cosα sin β)
g cos2 β

24
i.e., r =2u2 cosα sin (α− β)
g cos2 β
The initial velocity u can be resolved into two components (i)u cos (α− β)along PQ, the inclined plane and (ii)u sin (α− β) perpendicular to the inclinedplane. The acceleration g can be resolved into two components (i)g cos β per-pendicular to the inclined plane in the downward direction and (ii)g sin β alongthe inclined plane towards P . Let T be the time taken by the particle to travelfrom P to Q. After time T , the particle is on the inclined plane and so duringtime T , the distance travelled perpendicular to the inclined plane is zero.
Consider the vertical motion
Initial velocity = u sin (α− β)
Final velocity = 0
Time = T
Acceleration = −g cos β
Distance = 0
s = ut+1
2ft2
⇒ 0 = u sin (α− β)T − 1
2g cos βT 2
T =2u sin (α− β)
g cos β
Note 5.1 Determine when the range on the inclined plane is maximum, giventhe magnitude u of the velocity of projection.
The range r on the inclined plane is given by
r =2u2 cosα sin (α− β)
g cos2 β
=u2
g cos2 β[sin (2α− β)− sin β]
Now u and β are given. r is maximum, when sin (2α− β) is maximum.
i.e., sin (2α− β) = 1
⇒ 2α− β =π
2
i.e., α =π
4+β
2

25
If the angle of projection is α =π
4+β
2, then we get the maximum range.
Thus the maximum range is
maximum range r =u2
g cos2 β(1− sin β)
=u2 (1− sin β)
g(1− sin2 β
)=
u2 (1− sin β)
g (1− sin β) (1 + sin β)
=u2
g (1 + sin β)
Example 16 A particle is projected at an angle α with a velocity u and itstrikes up an inclined plane of inclination β at right angles to the plane. provethat
(i) cot β = 2 tan (α− β)
(ii) cot β = tanα− 2 tan β
If the plane is struck horizontally, show that tanα = 2 tan β.
Solution:Time of flight is
T =2u sin (α− β)
g cos β(5.1)
Since the particle strikes the inclined plate at right angles i.e., normal to theplane, its velocity parallel to the inclined plate at the end of time T is zero.
Consider horizontal motion.
Initial horizontal component velocity = u cos (α− β)
Final velocity = 0
Acceleration = −g sin β
Time = T
v = u+ ft ⇒ 0 = u cos (α− β)− g sin βT
i.e., T =u cos (α− β)
g sin β(5.2)
From (5.1) and (5.2), we get
2u sin (α− β)
g cos β=
u cos (α− β)
g sin β
⇒ cot β = 2 tan (α− β) · · · (i)
i.e., cot β = 2(tanα− tan β)
1 + tanα tan β

26
Cross-multiplying, we get
cot β (1 + tanα tan β) = 2 tanα− 2 tan β
i.e., cot β + tanα = 2 tanα− 2 tan β
i.e., cot β = tanα− 2 tan β · · · (ii)
If the plane is struck horizontally, the vertical velocity of the projectile at theend of time T is zero. Consider the vertical velocity.
Initial vertical component velocity = u sinα
Final velocity = 0
Acceleration = g
Time = T
v = u+ ft ⇒ 0 = u sinα− gT
i.e., T =u sinα
g(5.3)
From (5.1) and (5.3), we get
2u sin (α− β)
g cos β=
u sinα
g
i.e., 2 sin (α− β) = sinα cos β
i.e., 2 (sinα cos β − cosα sin β) = sinα cos β
i.e., 2 sinα cos β − 2 cosα sin β = sinα cos β
ie., sinα cos β = 2 cosα sin β
i.e., tanα = 2 tan β
Example 17 A particle projected with velocity u strikes at right angles a planethrough the point of projection inclined at angles β to the horizon. Show that(i) the height of the point struck above the horizontal plane through the point
of projection is2u2 sin2 β
g(1 + 3 sin2 β
) and that the time of flight is2u
g√(
1 + 3 sin2 β) .
(ii) the range of the particle on the inclined plane is2u2 sin2 β
g(1 + 3 sin2 β
) .
Solution:The condition that the particle strike the inclined plane at right
27
angles is cot β = 2 tan (α− β).
cos β
sin β=
2 sin (α− β)
cos (α− β)
i.e.,sin (α− β)
cos β=
cos (α− β)
2 sin β=
√sin2 (α− β) + cos2 (α− β)√
cos2 β + 4 sin2 β=
1√1 + 3 sin2 β
∴ sin (α− β) =cos β√
1 + 3 sin2 β; cos (α− β) =
2 sin β√1 + 3 sin2 β
Time of flight =2u sin (α− β)
g cos β
=2u
g cos β× cos β√
1 + 3 sin2 β=
2u
g√(
1 + 3 sin2 β)
Range on the inclined plane =2u2 sin (α− β) cosα
g cos2 β
=2u2 sin (α− β)
g cos2 βcos [(α− β) + β]
=2u2 sin (α− β)
g cos2 β[cos (α− β) cos β − sin (α− β) sin β]
=2u2
g cos2 β
cos β√1 + 3 sin2 β
[2 sin β√
1 + 3 sin2 βcos β − cos β√
1 + 3 sin2 βsin β
]
=2u2 sin β
g(1 + 3 sin2 β
)vertical height of a point struck above the horizontal
plane through the point of projection = r sin β
=2u2
g
sin β(1 + 3 sin2 β
) sin β
=2u2 sin2 β
g(1 + 3 sin2 β
)
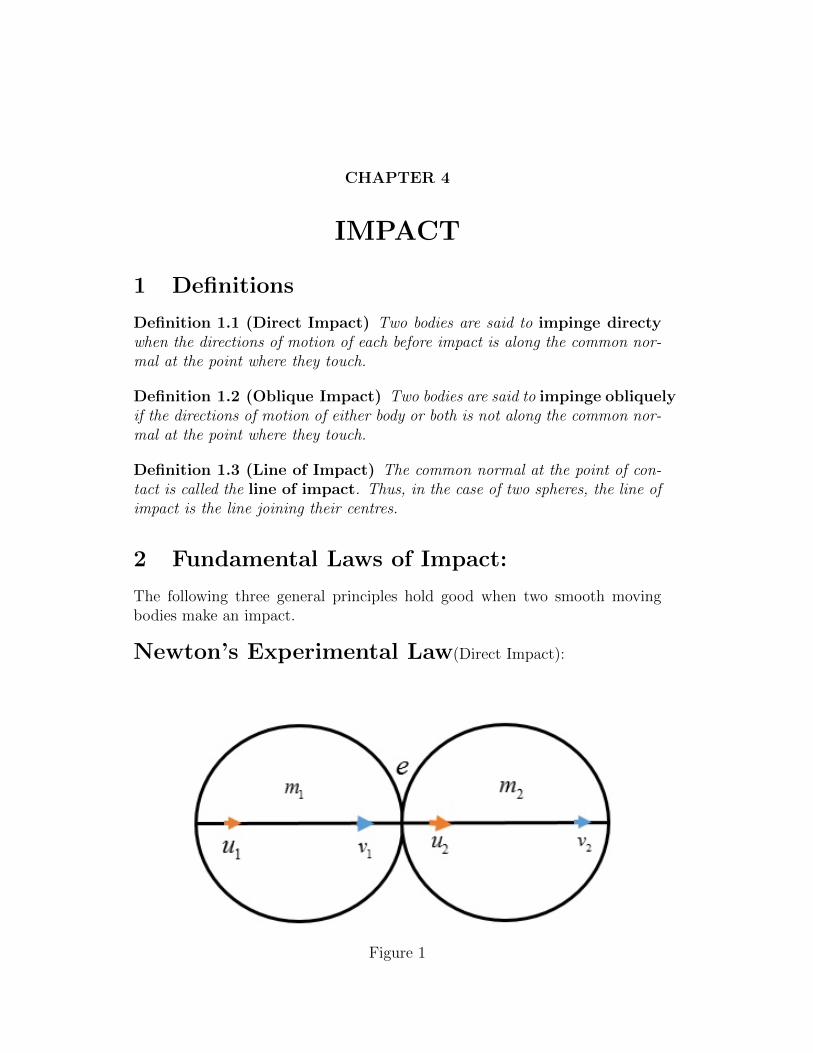
CHAPTER 4
IMPACT
1 Definitions
Definition 1.1 (Direct Impact) Two bodies are said to impinge directywhen the directions of motion of each before impact is along the common nor-mal at the point where they touch.
Definition 1.2 (Oblique Impact) Two bodies are said to impinge obliquelyif the directions of motion of either body or both is not along the common nor-mal at the point where they touch.
Definition 1.3 (Line of Impact) The common normal at the point of con-tact is called the line of impact. Thus, in the case of two spheres, the line ofimpact is the line joining their centres.
2 Fundamental Laws of Impact:
The following three general principles hold good when two smooth movingbodies make an impact.
Newton’s Experimental Law(Direct Impact):
Figure 1

2
When two bodies impinge directly, their relative velocity after impact bears aconstant ratio to their relative velocity before impact and is in the oppositedirection.
v2 − v1 = −e (u2 − u1)
Newton’s Experimental Law(Oblique Impact):
Figure 2
When two bodies impinge obliquely, their relative velocity resolved velocityresolved along their common normal after impact bears a constant ratio totheir relative velocity before impact resolved in the same direction and is ofopposite sign.
v2 cos θ2 − v1 cos θ1 = −e (u2 cosα2 − u1 cosα1)
The constant ratio depends on the material of which the bodies are mode andis independent of their masses. It is generally denoted by e, and is called thecoefficient (or modulus) of elasticity (or resitution)
Note 2.1 The quantity e, which is a positive number, is never greater thanunity. It lies between 0 and 1. i.e., 0 ≤ e ≤ 1.
When e = 0, bodies are said to be perfectly inelastic.When e = 1, bodies are said to be perfectly elastic.

3
Principle of Conservation of Momentum:
The algebraic sum of the momenta of the impinging bodies after impact isequal to the algebraic sum of their momenta before impact, all momenta beingmeasured along the common normal.
m1v1 +m2v2 = m1u1 +m2u2 (Direct Impact)
m1v1 cos θ1 +m2v2 cos θ2 = m1u1 cosα1 +m2u2 cosα2 (Oblique Impact)
Motion of two smooth bodies perpendicular to the lineof Impacts:
When two smooth bodies impinge, the only force between them at the timeof impact is the mutual reaction which acts along the common normal. Thereis no force acting along the common tangent and hence there is no changeof velocity in that direction. Hence the velocity of either body resolved in adirection perpendicular to the line of impact is not altered by impact.
Figure 3
v sin θ = u sinα
Bookwork 2.2 (Direct Impact of two smooth spheres:)A smooth sphere of mass m1 impinge directly with velocity u1 on another
smooth sphere of mass m2 moving in the same direction with velocity u2, if thecoefficent of resitution is e, to find their velocities after the impact.

4
Let v1 and v2 be their velocities after impact.
Figure 4
By Newton’s experimental law, we have
v2 − v1 = −e (u2 − u1) (2.1)
By the principle of conservation of linear momentum, we have
m1v1 +m2v2 = m1u1 +m2u2 (2.2)
(2.2)-(2.1)×m2 gives
v1 (m1 +m2) = m1u1 +m2u2 + em2 (u2 − u1)= m2u2 (1 + e) + (m1 − em2)u1
∴ v1 =m2u2 (1 + e) + (m1 − em2)u1
m1 +m2
(2.3)
(2.1)×m1+(2.2) gives
v2 (m1 +m2) = em1 (u2 − u1) +m1u1 +m2u2 +
= m1u1 (1 + e) + (m2 − em1)u2
∴ v2 =m1u1 (1 + e) + (m2 − em1)u2
m1 +m2
(2.4)
Equations (2.3) and (2.4) give the velocities of the spheres after impact.
Note 2.3 If the two spheres are perfectly elastic and of equal mass then e = 1and m1 = m2. Then from (2.3) and (2.4), we get
v1 =m1u2 × 2 + 0
2m1
= u2
v2 =m1u1 × 2 + 0
2m1
= u1

5
i.e., If two equal perfectly spheres impinge directly, they interchange theirvelocities.
Bookwork 2.4 (Loss of kinetic energy due to direct impact of two smooth spheres)
Two spheres of given masses with given velocities impinge directly. Showthat there is a loss of kinetic energy and to find the amount.
Let m1,m2 be the masses of the spheres, u1 and u2, v1 and v2 be their velocitiesbefore and after impact and e be the coefficient of resitutuion.
By Newton’s experimental law, we have
v2 − v1 = −e (u2 − u1) (2.5)
By the principle of conservartion of momentum,
m1v1 +m2v2 = m1u1 +m2u2 (2.6)
m1 (v1 − u1) = m2 (u2 − v2) (2.7)
Total kinetic energy before impact =1
2m1u
21 +
1
2m2u
22
Total kinetic energy after impact =1
2m1v
21 +
1
2m2v
22
Change in K.E = initial K.E− final K.E
=1
2m1u
21 +
1
2m2u
22 −
1
2m1v
21 −
1
2m2v
22
=1
2m1
(u21 − v21
)+
1
2m2
(u22 − v22
)=
1
2m1 (u1 − v1) (u1 + v1) +
1
2m2 (u2 − v2) (u2 + v2)
=1
2m1 (u1 − v1) (u1 + v1) +
1
2m1 (v1 − u1) (u2 + v2) from (??)
=1
2m1 (u1 − v1) [u1 + v1 − (u2 + v2)]
=1
2m1 (u1 − v1) [u1 − u2 − (v2 − v1)]
=1
2m1 (u1 − v1) [u1 − u2 + e (u2 − u1)] using (2.5)
=1
2m1 (u1 − v1) (u1 − u2) (1− e)

6
Now, from (2.6), m1 (u1 − v1) = m2 (v2 − u2)
∴u1 − v1m2
=v2 − u2m1
=u1 − v1 + v2 − u2
m1 +m2
i.e., each =(u1 − u2) + (v2 − v1)
m1 +m2
=(u1 − u2)− e (u2 − u1)
m1 +m2
=(u1 − u2) (1 + e)
m1 +m2
∴ u1 − v1 =m2 (u1 − u2) (1 + e)
m1 +m2
Change in K.E. =1
2
m1m2 (u1 − u2) (1 + e) (u1 − u2) (1− e)m1 +m2
=1
2
m1m2 (u1 − u2)2 (1− e2)m1 +m2
As e < 1, the above expression is always positive and so the initial kineticenergy is greater than final kinetic energy. Hence there will be a loss in thekinetic energy.
When e = 1, i.e., only when the bodies are perfect elastic, then the aboveexpression becomes zero. Hence, in this case intial kinetic energy is equal tofinal kinetic energy. Therefore, the total kinetic energy is unchanged by directimpact.
3 Examples
Example 1 Two balls impinge directly and interchange their velocities afterimpact. Prove that they are perfectly elastic and are of equal masses.
Solution:
By Newton’s experimental law, we have
v2 − v1 = −e (u2 − u1)⇒ u1 − u2 = −e (u2 − u1)
i.e., e = 1

7
Figure 5
By the principle of conservartion of momentum,
m1v1 +m2v2 = m1u1 +m2u2
⇒ m1u2 +m2u1 = m1u1 +m2u2
i.e., m1 (u2 − u1) = m2 (u2 − u1)i.e., m1 = m2
Example 2 A ball of mass m impinges on another of mass 2m which is mov-ing in the same direction as the first but with one-seventh of its velocity. Ife = 3/4, show that the first ball is reduced to rest after impact.
Solution:
Figure 6

8
By Newton’s experimental law, we have
v2 − v1 = −e (u2 − u1)
⇒ v2 − v1 = −3
4
(1
7u1 − u1
)i.e., v2 − v1 =
9
14u1 (3.1)
By the principle of conservartion of momentum,
m1v1 +m2v2 = m1u1 +m2u2
⇒ mv1 + 2mv2 = mu1 + 2m
(1
7u2
)i.e., v1 + 2v2 = u1 + 2
(1
7u1
)i.e., v1 + 2v2 =
9
7u1 (3.2)
(3.1)×2−(3.2) gives
2v2 − 2v1 − v1 − 2v2 =9
7u1 −
9
7u1
i.e., − 3v1 = 0⇒ v1 = 0
Thus, the first ball comes to rest after impact with the second ball.
Example 3 A ball of 2m impinges directly on a ball of mass m which is atrest. If the velocity after impact of the latter ball is equal to that of the former
before impact, show that the coefficient of resitution is1
2.
Solution:
By Newton’s experimental law, we have
v2 − v1 = −e (u2 − u1)⇒ u1 − v1 = −e (0− u1)
i.e., u1 − v1 = eu1 (3.3)
By the principle of conservartion of momentum,
m1v1 +m2v2 = m1u1 +m2u2
⇒ 2mv1 +mu1 = 2mu1 +m (0)
i.e., 2v1 + u1 = 2u1
i.e., 2v1 = u1
ie., v1 =1
2u1 (3.4)

9
Figure 7
substitute (3.4) in (3.3), we get
u1 −1
2u1 = eu1
i.e.,1
2u1 = eu1 ⇒ e =
1
2.
Example 4 A ball A impinges directly on an exactly equal and similar ball Blying on a horizontal plane. If the coefficient of resitution is e, prove that afterimpact, the velocity of B will be to that of A is as 1 + e : 1− e.
Solution:
By Newton’s experimental law, we have
v2 − v1 = −e (u2 − u1)⇒ v2 − v1 = −e (0− u1)
i.e., v2 − v1 = eu1 (3.5)
By the principle of conservartion of momentum,
m1v1 +m2v2 = m1u1 +m2u2
⇒ mv1 +mv2 = mu1 +m (0)
i.e., v1 + v2 = u1 (3.6)
Adding (3.5) and (3.6), we get
2v2 = (1 + e)u1
i.e., v2 =1 + e
2u1 (3.7)

10
Figure 8
Substitute (3.7) in (3.5), we get
1 + e
2u1 − eu1 = v1
v1 =1− e
2u1 (3.8)
Divide (3.7) by (3.8), we get
v2v1
=
1 + e
2u1
1− e2
u1
=1 + e
1− ei.e., v2 : v1 = 1 + e : 1− e
Example 5 A ball impinges directly on another ball, m times its mass, which
is moving with1
ntimes its velocity in the same direction. If the impact reduces
the first ball to rest, prove that
(i) e =m+ n
m(n− 1).
(ii) m must be greater thann
n− 2.
Solution:
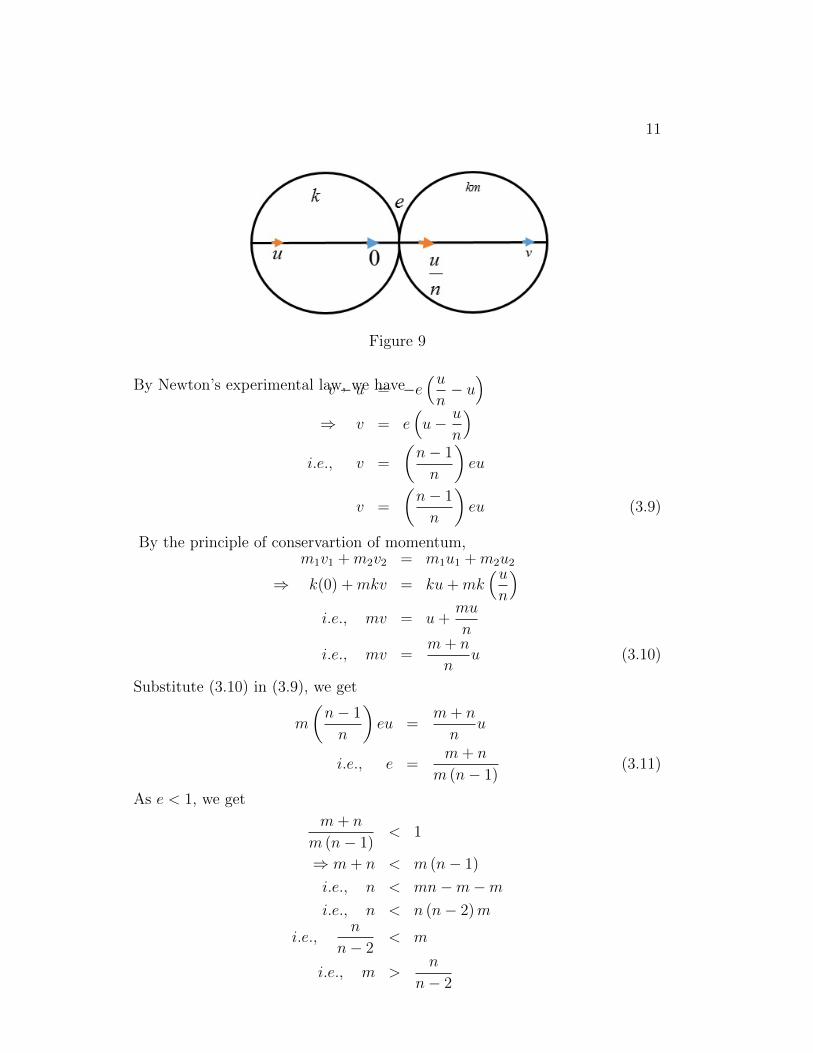
11
Figure 9
By Newton’s experimental law, we havev − u = −e(un− u)
⇒ v = e(u− u
n
)i.e., v =
(n− 1
n
)eu
v =
(n− 1
n
)eu (3.9)
By the principle of conservartion of momentum,m1v1 +m2v2 = m1u1 +m2u2
⇒ k(0) +mkv = ku+mk(un
)i.e., mv = u+
mu
n
i.e., mv =m+ n
nu (3.10)
Substitute (3.10) in (3.9), we get
m
(n− 1
n
)eu =
m+ n
nu
i.e., e =m+ n
m (n− 1)(3.11)
As e < 1, we get
m+ n
m (n− 1)< 1
⇒ m+ n < m (n− 1)
i.e., n < mn−m−mi.e., n < n (n− 2)m
i.e.,n
n− 2< m
i.e., m >n
n− 2
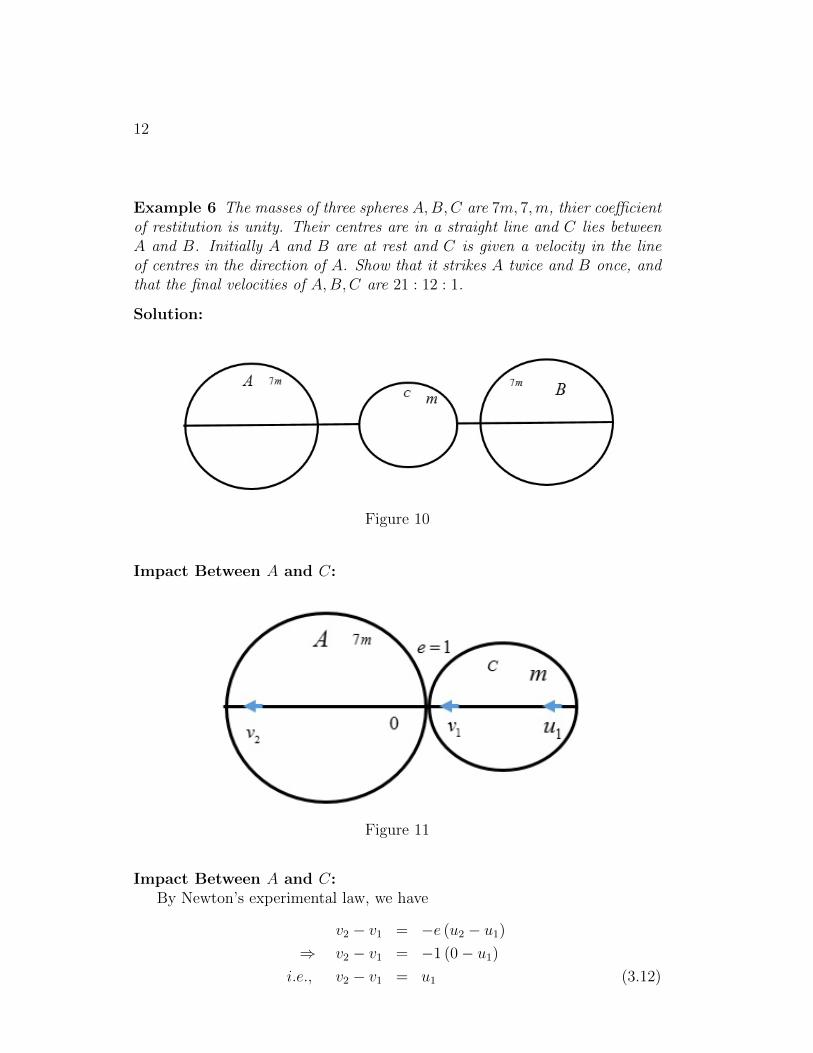
12
Example 6 The masses of three spheres A,B,C are 7m, 7,m, thier coefficientof restitution is unity. Their centres are in a straight line and C lies betweenA and B. Initially A and B are at rest and C is given a velocity in the lineof centres in the direction of A. Show that it strikes A twice and B once, andthat the final velocities of A,B,C are 21 : 12 : 1.
Solution:
Figure 10
Impact Between A and C:
Figure 11
Impact Between A and C:By Newton’s experimental law, we have
v2 − v1 = −e (u2 − u1)⇒ v2 − v1 = −1 (0− u1)
i.e., v2 − v1 = u1 (3.12)

13
By the principle of conservartion of momentum,
m1v1 +m2v2 = m1u1 +m2u2
⇒ mv1 + 7mv2 = mu1 +m (0)
i.e., v1 + 7v2 = u1 (3.13)
Adding (3.12) and (3.13), we get
8v2 = 2u1 ⇒ v2 =u14
Substitute the value of v2 in (3.12), we get
u14− v1 = u1
⇒ v1 =u14− u1
i.e., v1 = −3u14
The negative value of v1 shows that after impact with A the ball C movestowards B.Impact Between C and B:
Figure 12
By Newton’s experimental law, we have
v2 − v1 = −e (u2 − u1)
⇒ w2 − w1 = −1
(3u14− 0
)i.e., w2 − w1 = −3u1
4(3.14)
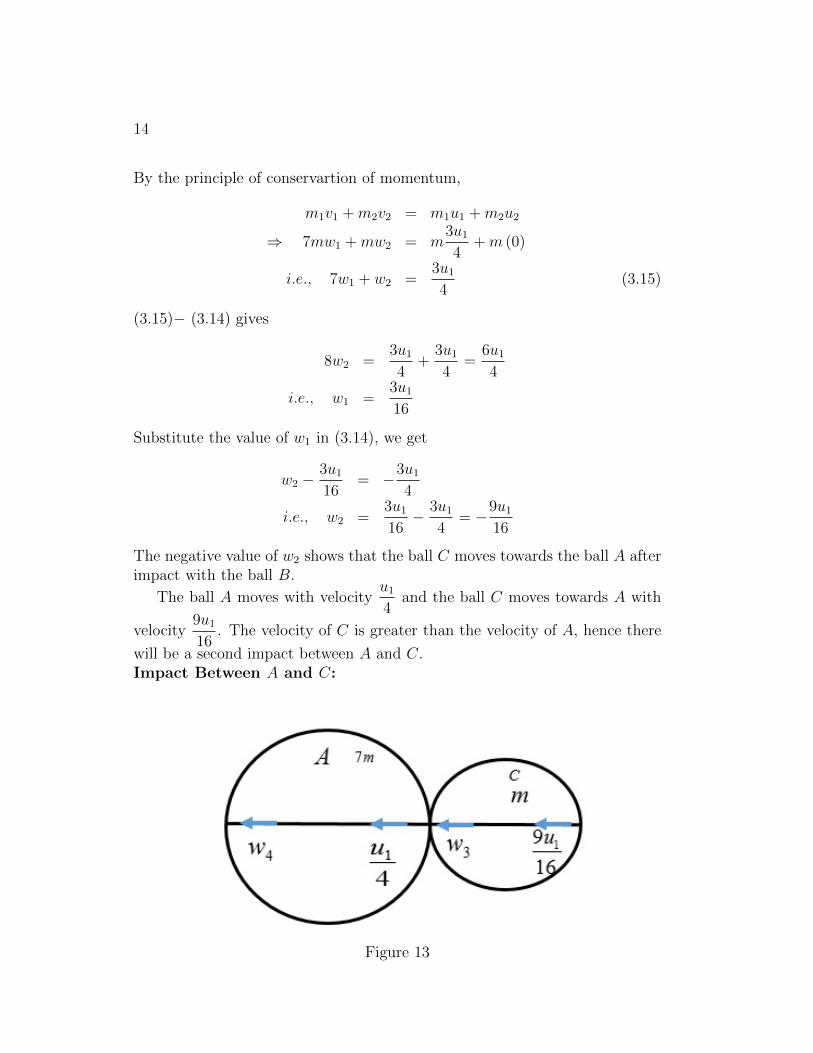
14
By the principle of conservartion of momentum,
m1v1 +m2v2 = m1u1 +m2u2
⇒ 7mw1 +mw2 = m3u14
+m (0)
i.e., 7w1 + w2 =3u14
(3.15)
(3.15)− (3.14) gives
8w2 =3u14
+3u14
=6u14
i.e., w1 =3u116
Substitute the value of w1 in (3.14), we get
w2 −3u116
= −3u14
i.e., w2 =3u116− 3u1
4= −9u1
16
The negative value of w2 shows that the ball C moves towards the ball A afterimpact with the ball B.
The ball A moves with velocityu14
and the ball C moves towards A with
velocity9u116
. The velocity of C is greater than the velocity of A, hence there
will be a second impact between A and C.Impact Between A and C:
Figure 13

15
By Newton’s experimental law, we have
v2 − v1 = −e (u2 − u1)
⇒ w4 − w3 = −1
(u14− 9u1
16
)i.e., w4 − w3 =
5u116
(3.16)
By the principle of conservartion of momentum,
m1v1 +m2v2 = m1u1 +m2u2
⇒ 7mw4 +mw3 = m9u116
+ 7mu14
i.e., 7w4 + w3 =37u116
(3.17)
Adding (3.16) and (3.17), we get
8w4 =5u116
+37u116
=42u116
i.e., w4 =21u164
Substitute the value of w4 in (3.16), we get
21u164− w3 =
5u116
i.e., w3 =21u164− 5u1
16=u164
Now the velocity of A is greater than C, therefore therewill be no chance forfurther impact between A and C.
Thus the final velocities of A,B,C after impact are21u164
,3u116
,u164
respec-
tively.Thus the ratio of final velocities of A,B,C is 21 : 12 : 1.
Example 7 A smooth sphere of mass m impinges obliquely on a smooth sphereof mass M which is at rest. Show that if m = eM , the directions of motionafter impact are at right angles, where e is the coefficient of restitution.
Solution:
By Newton’s experimental law, we have
v2 cos θ2 − v1 cos θ1 = −e (u2 cosα2 − u1 cosα1)
v2 − v1 cos θ = −e (0− u1 cosα)
v2 − v1 cos θ = eu1 cosα (3.18)
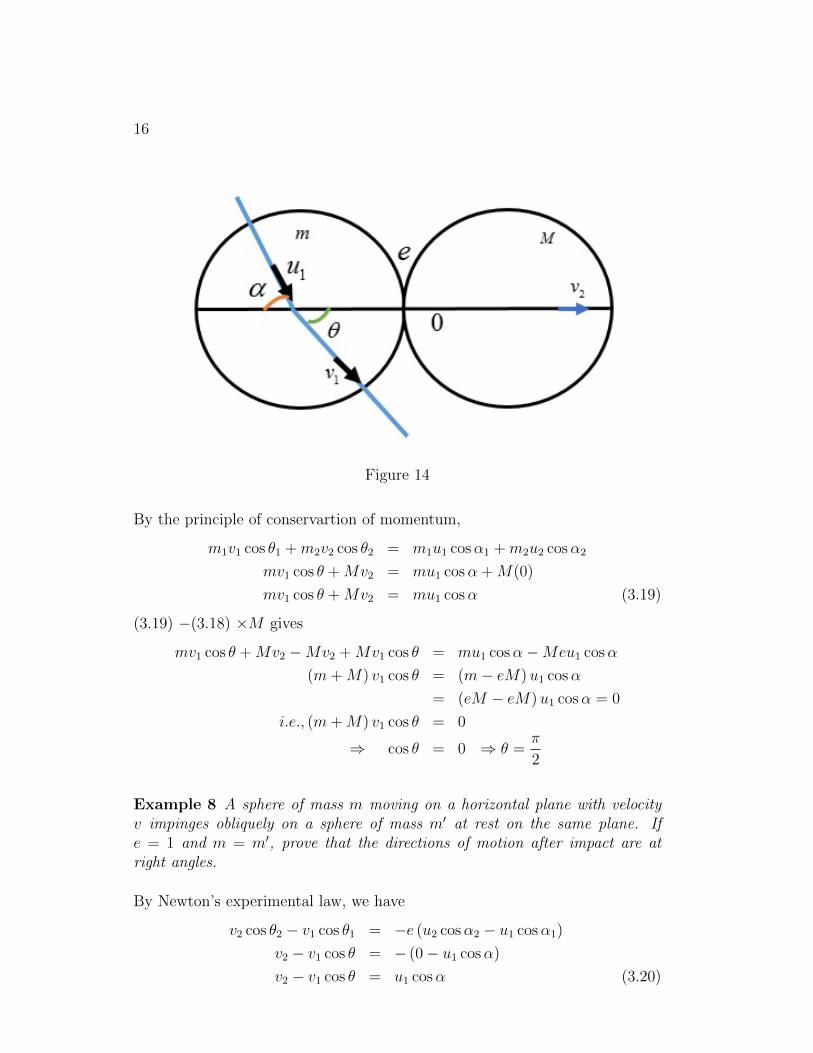
16
Figure 14
By the principle of conservartion of momentum,
m1v1 cos θ1 +m2v2 cos θ2 = m1u1 cosα1 +m2u2 cosα2
mv1 cos θ +Mv2 = mu1 cosα +M(0)
mv1 cos θ +Mv2 = mu1 cosα (3.19)
(3.19) −(3.18) ×M gives
mv1 cos θ +Mv2 −Mv2 +Mv1 cos θ = mu1 cosα−Meu1 cosα
(m+M) v1 cos θ = (m− eM)u1 cosα
= (eM − eM)u1 cosα = 0
i.e., (m+M) v1 cos θ = 0
⇒ cos θ = 0 ⇒ θ =π
2
Example 8 A sphere of mass m moving on a horizontal plane with velocityv impinges obliquely on a sphere of mass m′ at rest on the same plane. Ife = 1 and m = m′, prove that the directions of motion after impact are atright angles.
By Newton’s experimental law, we have
v2 cos θ2 − v1 cos θ1 = −e (u2 cosα2 − u1 cosα1)
v2 − v1 cos θ = − (0− u1 cosα)
v2 − v1 cos θ = u1 cosα (3.20)

17
Figure 15
By the principle of conservartion of momentum,
m1v1 cos θ1 +m2v2 cos θ2 = m1u1 cosα1 +m2u2 cosα2
mv1 cos θ +m′v2 = mu1 cosα +m′(0)
mv1 cos θ +m′v2 = mu1 cosα (3.21)
(3.21) −(3.20) ×m′ gives
mv1 cos θ +m′v2 −m′v2 +m′v1 cos θ = mu1 cosα−m′u1 cosα
(m+m′) v1 cos θ = (m−m′)u1 cosα
= 0
i.e., (m+m′) v1 cos θ = 0
⇒ cos θ = 0 ⇒ θ =π
2
Example 9 A smooth sphere impinges on another one at rest. After collison,their directions of motion are at right angles. Show that if they are assumedperfectly elastic their masses must be equal.
By Newton’s experimental law, we have
v2 cos θ2 − v1 cos θ1 = −e (u2 cosα2 − u1 cosα1)
v2 − v1 cos θ = − (0− u1 cosα)
v2 − v1 cosπ
2= u1 cosα
i.e., v2 = u1 cosα (3.22)

18
Figure 16
By the principle of conservartion of momentum,
m1v1 cos θ1 +m2v2 cos θ2 = m1u1 cosα1 +m2u2 cosα2
mv1 cosπ
2+m2v2 = m1u1 cosα +m2(0)
mv1(0) +m2v2 = m1u1 cosα
i.e., m2v2 = m1u1 cosα (3.23)
From (3.22) and (3.23) we have,
m2u1 cosα = m1u1 cosα
i.e., m1 = m2
Therefore, their masses must be equal.
Example 10 A sphere of mass m collides with a sphere of mass m1 at rest,both spheres being smooth. After collision, their paths are at right angles. If eis the coefficient of restitution, prove that m = em1.
By Newton’s experimental law, we have
v2 cos θ2 − v1 cos θ1 = −e (u2 cosα2 − u1 cosα1)
v2 − v1 cos θ = −e (0− u1 cosα)
v2 − v1 cosπ
2= u1 cosα
i.e., v2 = eu1 cosα (3.24)
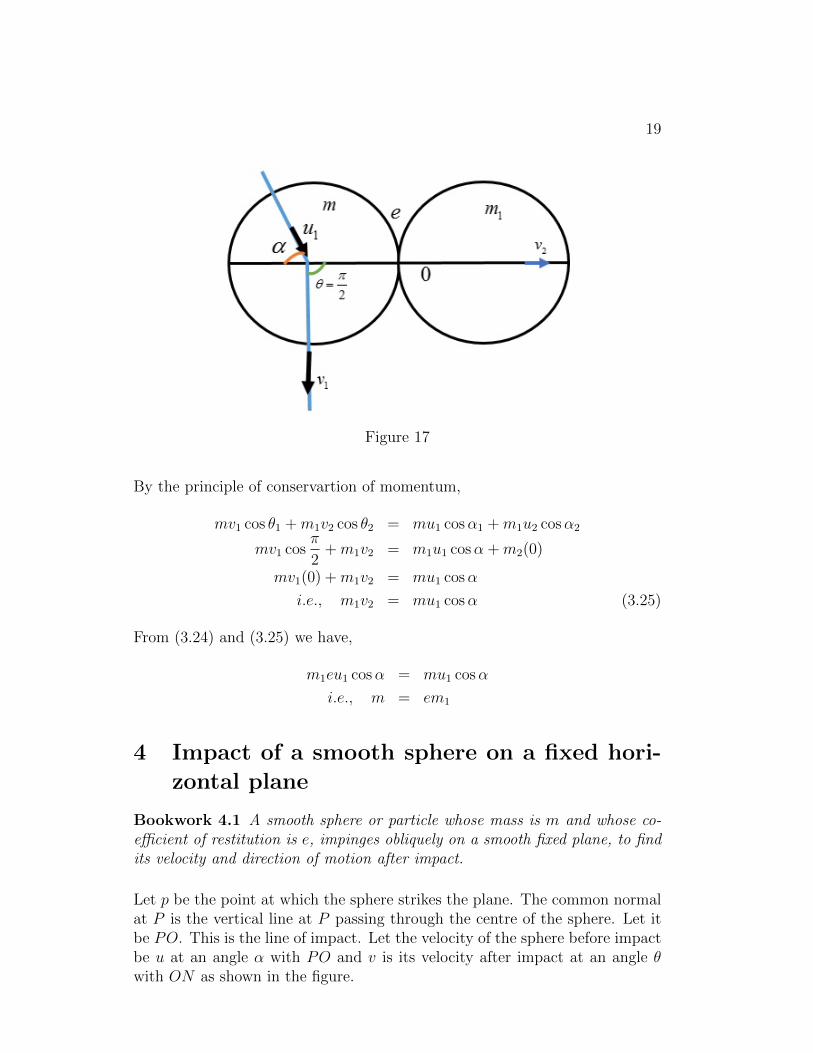
19
Figure 17
By the principle of conservartion of momentum,
mv1 cos θ1 +m1v2 cos θ2 = mu1 cosα1 +m1u2 cosα2
mv1 cosπ
2+m1v2 = m1u1 cosα +m2(0)
mv1(0) +m1v2 = mu1 cosα
i.e., m1v2 = mu1 cosα (3.25)
From (3.24) and (3.25) we have,
m1eu1 cosα = mu1 cosα
i.e., m = em1
4 Impact of a smooth sphere on a fixed hori-
zontal plane
Bookwork 4.1 A smooth sphere or particle whose mass is m and whose co-efficient of restitution is e, impinges obliquely on a smooth fixed plane, to findits velocity and direction of motion after impact.
Let p be the point at which the sphere strikes the plane. The common normalat P is the vertical line at P passing through the centre of the sphere. Let itbe PO. This is the line of impact. Let the velocity of the sphere before impactbe u at an angle α with PO and v is its velocity after impact at an angle θwith ON as shown in the figure.
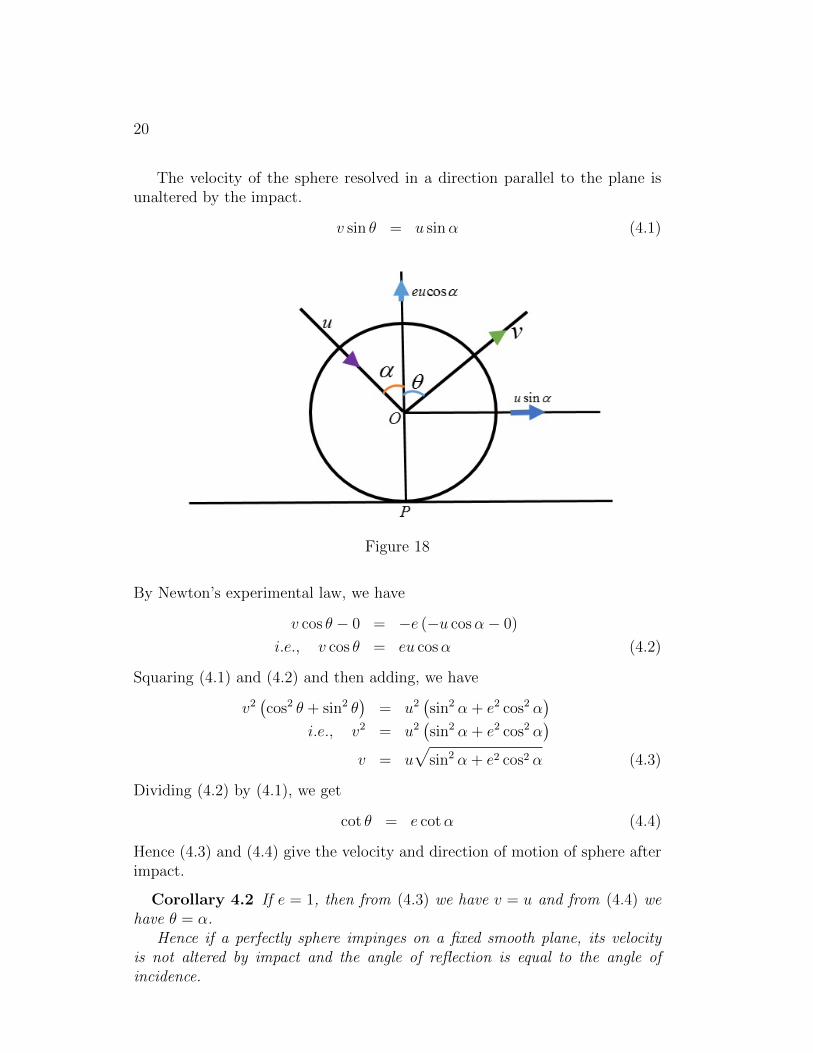
20
The velocity of the sphere resolved in a direction parallel to the plane isunaltered by the impact.
v sin θ = u sinα (4.1)
Figure 18
By Newton’s experimental law, we have
v cos θ − 0 = −e (−u cosα− 0)
i.e., v cos θ = eu cosα (4.2)
Squaring (4.1) and (4.2) and then adding, we have
v2(cos2 θ + sin2 θ
)= u2
(sin2 α + e2 cos2 α
)i.e., v2 = u2
(sin2 α + e2 cos2 α
)v = u
√sin2 α + e2 cos2 α (4.3)
Dividing (4.2) by (4.1), we get
cot θ = e cotα (4.4)
Hence (4.3) and (4.4) give the velocity and direction of motion of sphere afterimpact.
Corollary 4.2 If e = 1, then from (4.3) we have v = u and from (4.4) wehave θ = α.
Hence if a perfectly sphere impinges on a fixed smooth plane, its velocityis not altered by impact and the angle of reflection is equal to the angle ofincidence.

21
Corollary 4.3 If the impact is direct, we have α = 0. Then θ = 0 andfrom (4.3), v = eu. Hence if an elastic sphere strikes a plane normally withvelocity u, it will rebound in the same direction with velocity eu.
Example 11 A particle falls from a height h upon a fixed horizontal plane. Ife be the coefficient of restitution, show that the whole distance described before
the particle has finished rebound is h
(1 + e2
1− e2
). Show also that the whole time
taken is1 + e
1− e
√2h
g.
Solution:
Figure 19
Let a particle falls freely from a height h in time t. The velocity of the particleon reaching the horizontal plane be v.
v2 = u2 + 2fs ⇒ v2 = 0 + 2gh
i.e., v2 = 2gh ⇒ h =v2
2g=
(velocity)2
2g(4.5)
v = u+ ft ⇒ v = 0 + gt
v = gt ⇒ t =v
g=
velocity
g(4.6)
The particle hitting the horizontal plane with velocity v and rebounds with

22
velocity ev. If h1 is the maximum height reached by the particle.
v2 = u2 + 2fs ⇒ 0 = (ev)2 − 2gh1
i.e., e2v2 = 2gh1 ⇒ h1 =e2v2
2g= e2h
v = u+ ft ⇒ 0 = ev − gt1i.e., t1 =
ev
g= et
Thus the time taken to fall for the first time = t.Time taken between the first and second rebounds = 2t1 = 2etSimilarly time taken between the second and third rebounds = 2t2 = 2e2t andso on.
∴ total time taken = t+ 2et+ 2e2t+ . . .
= t+ 2et(1 + e+ e2 + . . .
)= t+ 2et (1− e)−1 = t+
2et
1− e
= t
[1− e+ 2e
1− e
]= t
(1 + e
1− e
)=
(1 + e
1− e
)v
g(By using (4.5))
=
(1 + e
1− e
) √2gh
g
=
(1 + e
1− e
)√2h
g
Total distance described by the
particle before ceases to rebound = h+ 2h1 + 2h2 + · · ·= h+ 2e2h+ 2e4h+ . . .
= h+ 2e2h[1 + e2 + e4 + . . .
]= h+ 2e2h
(1− e2
)−1= h+
2e2h
1− e2
= h
[1 +
2e2
1− e2
]

23
= h
[1− e2 + 2e2
1− e2
]= h
[1 + e2
1− e2
]
Example 12 A ball is thrown from a point on a smooth horizontal ground witha speed u at an angle α to the horizon. If e be the coefficient of restitution,
show that the total time for which the ball rebounds on the ground is2u sinα
g (1− e)
and the horizontal distance travelled by it isu2 sin 2α
g (1− e).
Solution:
Figure 20
Let a particle be projected from a point O with velocity u at an angle α to thehorizon. The particle strike the horizontal plane at A1 with velocity u sinαand rebounds with velocity eu sinα. Again the particle strikes the horizontalplane at A2 with velocity eu sinα and rebounds with velocity e2u sinα and so

24
on.,
Total time of flight fromO to A1 =2u sinα
g
Total time of flight fromA1 to A2 =2eu sinα
getc.,
∴ Total time taken =2u sinα
g+
2eu sinα
g+ . . .
=2u sinα
g
[1 + e+ e2 + . . .
]=
2u sinα
g(1− e)−1
=2u sinα
g (1− e)
Total horizontal distance = horizontal component velocity× total time
= u cosα× 2u sinα
g (1− e)
=2u2 sinα cosα
g (1− e)
=u2 sin 2α
g (1− e)
Example 13 An elastic sphere is projected from a given point O with givenvelocity v at an inclination α to the horizontal and after hitting a smooth
vertical wall at a distance d from O returns to O. Prove that d =v2 sin 2α
g
e
1 + ewhere e is the coefficient of restitution.
Solution:
Let an elastic sphere strike the wall at A with v cosα. The spheres starts fromO and returns to O after hitting the vertical wall at A. Let t1 be the timetaken by the sphere to travel from O to A. Then
distance = velocity× time
d = v cosα · t1 (4.7)
After hitting the sphere at A and rebounds with velocity ev cosα. Let t2 bethe time taken by the sphere to move from A to O.
distance = velocity× time
d = ev cosα · t2 (4.8)

25
Figure 21
But the vertical motion is not affected by impact and throughout the intervalt1 + t2.Consider the vertical motion.Initial velocity = v sinαAcceleration = −gTime = t1 + t2 Distance = 0
s = ut+1
2ft2 ⇒ 0 = v sinα (t1 + t2)−
1
2g (t1 + t2)
2
i.e., t1 + t2 =2v sinα
g
⇒ d
v cosα+
d
ev cosα=
2v sinα
g
d
v cosα
(1 +
1
e
)=
2v sinα
g
d =2v2 sinα cosα
g
e
1 + e=v2 sin 2α
g
e
1 + e
Example 14 A particle falls from a height h in time t upon a fixed horizontalplane. Prove that it rebounds and reaches a maximum height e2h in time et.
Solution: Let a particle falls freely from a height h in time t. The velocity of

26
the particle on reaching the horizontal plane be v.
v2 = u2 + 2fs ⇒ v2 = 0 + 2gh
i.e., v2 = 2gh ⇒ h =v2
2g(4.9)
v = u+ ft ⇒ v = 0 + gt
v = gt ⇒ t =v
g(4.10)
The particle hitting the horizontal plane with velocity v and rebounds withvelocity ev. If h1 is the maximum height reached by the particle.
v2 = u2 + 2fs ⇒ 0 = (ev)2 − 2gh1
i.e., e2v2 = 2gh1 ⇒ h1 =e2v2
2g= e2h
v = u+ ft ⇒ 0 = ev − gt1i.e., t1 =
ev
g= et
Example 15 A heavey ball drops from the ceiling of a room and after rebound-ing twice from the floor reaches a height equal to one half that of the ceiling.
Show that the coefficient of restitution is
(1
2
)1/4
.
Solution:Let h be the height of ceiling.
Therefore, height ascends after second rebound ish
2.
Let v be the velocity of the particle on reaching the floor for first rebound.
v2 = u2 + 2fs ⇒ v2 = 0 + 2gh
i.e., v2 = 2gh ⇒ v =√
2gh
Thus the velocity of particle after first rebound is e√
2gh.When the ball strikes the floor a second time, its velocity is e
√2gh and rebound
with velocity e2√
2gh.

27
Thus the motion for the second rebound is
v2 = u2 + 2fs ⇒ 0 =(e2√
2gh)2− 2g
(h
2
)i.e.,
(e2√
2gh)2
= 2g
(h
2
)i.e., e4 (2gh) = gh
i.e., e4 =1
2
i.e., e =
(1
2
)1/4
5 Exercises
1. Two perfectly elastic spheres of masses m and 3m are moving with equalmomentum in the same straight line and in the same direction. Showthat the smaller sphere is reduced to rest after it strikes the other.
2. A,B,C are three smooth spheres of same size and of masses m, 2m, andm respectively lying in a straight line on a smooth horizonal table. Ais projected along the line ABC with a velocity u. If the coefficient ofrestitution is 0.5, show that after B strikes C, the velocities of A,B,Care in the ratio 0 : 1 : 2 and that there are no further impacts.
3. There are two equal perfectly elastic balls. One is at rest and a struckobliquely by the other. Show that, after impact, their directions of mo-tion are at right angles.
4. A particle is projected at an elevation α with velocity v from a point in ahorizontal plane and impinges on a smooth vertical wall at a distance dfrom the point of projection. If e is the coefficient of resitituion betweenthe wall and the particle. Provve that the particle rebounds to a point
distant e
(v2 sin 2α
g− d)
from the wall.
5. An elastic ball of mass m falls from a height h on a fixed horizontal planeand rebounds. Show that the loss of K.E. by the impact is mgh (1− e2).

CHAPTER 5
CENTRAL ORBITS
1 Definitions
Definition 1.1 (Central force) When a particle is subject to the action ofa force which is always either towards or away from a fixed point, the particleis said to be under the action of a central force. That is, a central force is aforce whose line of action always passes through a fixed point.
Definition 1.2 (Centre of force) A central force is a force whose line ofaction always passes through a fixed point. The fixed point is called the centreof force.
Definition 1.3 (Central Orbit) The path described by a particle under acentral force is called a central orbit.
Bookwork 1.4 Show that a central orbit is a plane curve
Figure 1
Let O be the centre of force and P be the position of the particle at time t.Let ~r = ~OP and r be the unit vector along OP , m be the mass of the particleandφ(r)r be the central force per unit mass.
Equation of motion is
m~r = mφ(r)r
⇒ ~r = φ(r)r
Let us now consider
d
dt
(~r × ~r
)= ~r × ~r + ~r × ~r
= ~0 + ~r × φ(r)r = ~0 +~0 = ~0

2
This implies that ~r × ~r is a constant vector say ~c. Then ~r is always per-pendicular to ~c. So P is always in the plane through O and perpendicular to~c. Hence the motion of P is coplanar and the orbit is a plane curve.
Bookwork 1.5 Derive the differential equation of a central orbit in polar co-ordinates.
Figure 2
Let F be the acceleration towards the fixed point O of a moving particle P atthe end of time t. Let the polar coordinates of P be (r, θ) with respect to Oas pole and OX as the initial line.
Thus, the equations of motion along the radial direction:
m(r − rθ2
)= −mF
i.e., r − rθ2 = −F (1.1)
Equation of motion along the transverse direction:
m · 1
r
d
dt
(r2θ)
= 0
i.e.,1
r
d
dt
(r2θ)
= 0 (1.2)
(1.4) implies that r2θ = constant. i.e, r2θ = h (constant).
∴ θ =h
r2= hu2 put u =
1
r
u =1
r⇒ r =
1
u
r =1
u
r = − 1
u2du
dt= − 1
u2du
dθ
dθ
dt= − 1
u2du
dθhu2 = −hdu
dθ
r = −h ddt
(du
dθ
)= −h d
dθ
(du
dθ
)dθ
dt= −hd
2u
dθ2θ = −h2u2d
2u
dθ2

3
Substitute the value of r and r in equation (1.3), we get
−h2u2d2u
dθ2− 1
u
(hu2)2
= −F
−h2u2d2u
dθ2− 1
uh2u4 = −F
−h2u2[d2u
dθ2+ u
]= −F
u+d2u
dθ2=
F
h2u2
u+d2u
dθ2=
F
h2u2
This is the differential equation of central orbit in polar coordinates.
Bookwork 1.6 Derive pedal equation (or) p-r equation of a central orbit.
Figure 3
Let F be the acceleration towards the centre of force O of the particle Pdescribing the central orbit. Draw OL perpendicular to the tangent at P tothe curve. Let OL = p.
From the differential calculus, we know that
1
p2=
1
r2+
1
r4
(dr
dθ
)2
Putting r =1
u, then the above equation becomes
1
p2= u2 + u4
(− 1
u2du
dθ
)2
= u2 +
(du
dθ
)2

4
1
p2= u2 +
(du
dθ
)2
This is the pedal equation (or) p-r equation of central orbit.
Definition 1.7 (Apse:) An apse is a point on the central orbit at which thenormal to the curve passes through the centre of force. i.e., the tangent to thecurve at the point is perpendicular to the radius vectgor through the point. Sop = r.
So at an apse,du
dθ= 0.
Thus, the line segment joining the apse and the centre of force is called theapsidal distance.
Type I: Given the orbit, find the law of force.
Example 1 A particle describe the orbit r = aeθ cotα under a central force,the pole being the centre. Find the law of force.
Solution:Given that r = aeθ cotα .
Put r =1
u, we get
1
u= aeθ cotα
Differentiating both sides with respect to θ, we get
− 1
u2du
dθ= a cotαeθ cotα =
1
ucotα
∴du
dθ= −u cotα
Again differentiating with respect to θ, we get
d2u
dθ2= − cotα
du
dθ= u cot2 α
u+d2u
dθ2= u+ u cot2 α
F
h2u2= u
(1 + cot2 α
)F = h2u3cosec2α
=h2cosec2α
r3
i.e., F ∝1
r3

5
Example 2 Show that the force towards the pole under which a particle de-scribes the curve rn = an cosnθ varies inversely as the (2n+ 3)th power of thedistance fof the particle from the pole.
Solution:Given that rn = an cosnθ .
Put r =1
u, we get
1
un= an cosnθ
u−n = an cosnθ
Taking logarithm and then differeniating with respect to θ, we get
−nu
du
dθ= − 1
cosnθ(n sinnθ)
i.e.,du
dθ= u tannθ
Again differentiating with respect to θ, we get
d2u
dθ=
du
dθ(tannθ) + u
(n sec2 nθ
)= u tan2 nθ + nu sec2 nθ
u+d2u
dθ= u+ u tan2 nθ + nu sec2 nθ
F
h2u2= u
(1 + tan2 nθ
)+ nu sec2 nθ
= u sec2 nθ + nu sec2 nθ
= u (1 + n) sec2 nθ
i.e., F = h2u3 (1 + n)a2n
r2n=h2 (1 + n) a2n
r2n+3
i.e., F ∝1
r2n+3
Example 3 A particle describe the orbit rn = A cosnθ − B sinnθ under acentral force, the pole being the centre. Find the law of force.
Solution:Given that rn = A cosnθ −B sinnθ .

6
Put A = an cosα, B = an sinα
∴, A2 +B2 = a2n; tanα =B
A.
rn = an cosα− an sinα sinnθ
= an cos (nθ + α)
Put r =1
u, we get
1
un= an cos (nθ + α)
u−n = an cos (nθ + α)
Taking logarithm on both sides, we get
−n log u = n log a+ log cos (nθ + α)
Differentiate both sides with respect to θ, we get
−n1
u
du
dθ= −n 1
cos (nθ + α)sin (nθ + α)
i.e.,du
dθ= u tan (nθ + α)
Again differentiating with respect to θ, we get
d2u
dθ=
du
dθ(tan (nθ + α)) + u
(n sec2 (nθ + α)
)= u tan2 (nθ + α) + nu sec2 (nθ + α)
u+d2u
dθ= u+ u tan2 (nθ + α) + nu sec2 (nθ + α)
F
h2u2= u
(1 + tan2 (nθ + α)
)+ nu sec2 (nθ + α)
= u sec2 (nθ + α) + nu sec2 (nθ + α)
= u (1 + n) sec2 (nθ + α)
i.e., F = h2u3 (1 + n)a2n
r2n=h2 (1 + n) a2n
r2n+3
i.e., F ∝1
r2n+3
Example 4 A particle describe the orbitl
r= 1 + e cos θ under a central force,
the pole being the centre. Find the law of force.

7
Solution:
Given thatl
r= 1 + e cos θ .
Put r =1
u, we get
lu = 1 + e cos θ
Differentiate both sides with respect to θ, we get
ldu
dθ= −e sin θ
i.e.,du
dθ= −e
lsin θ
Again differentiating with respect to θ, we get
d2u
dθ2= −e
lcos θ
u+d2u
dθ2= u− e
lcos θ
u+d2u
dθ2=
1 + e cos θ
l− e
lcos θ
=1 + e cos θ − e cos θ
l=
1
l
i.e.,F
h2u2=
1
l
i.e., F =h2u2
l=h2
lr2
i.e., F ∝1
r2
Type II: Given the law of force, find the orbit.
Example 5 The law of force is µu5 and a particle is projected from an apse
at a distance a. Find the orbit when the velocity of projection is
õ
√2a2
.
Solution:Given that F = µu5
∴ u+d2u
dθ2=
F
h2u2=
µu5
h2u2=µu3
h2
Multiplying both sides by 2du
dθ, we get
2udu
dθ+ 2
du
dθ
d2u
dθ2=
2µu3
h2du
dθ

8
Integrating on both sides with respect to θ, we get
u2 +
(du
dθ
)2
=2µ
h2
∫u3du
=2µ
h2u4
4+ A
Initially h = pv = povo = a
õ
√2a2
=
õ
√2a
⇒ h2 =µ
2a2
i.e., 2a2 =µ
h2
Also, u =1
r=
1
aand
du
dθ= 0
∴1
a2+ 0 = 2
(2a2) 1
4a4+ A
i.e.,1
a2= 4a2 · 1
4a4+ A
i.e.,1
a2=
1
a2+ A
⇒ A = 0
∴ u2 +
(du
dθ
)2
= 2(2a2) u4
4= a2u4
i.e.,
(du
dθ
)2
= a2u4 − u2 = u2(a2u2 − 1
)i.e.,
du
dθ= u
√a2u2 − 1
put u =1
r; then
du
dθ= − 1
r2dr
dθ
− 1
r2dr
dθ=
1
r
√a2
r2− 1 =
√a2 − r2r2
i.e., − dr√a2 − r2
= dθ
Integrating on both sides with respect to θ, we get
cos−1 r
a= θ +B

9
If θ is measured from an apse r = a and θ = 0, we get
cos−1 a
a= 0 +B = B
i.e., cos−1 (1) = B
i.e., B = 0
∴ cos−1 r
a= θ
i.e.,r
a= cos θ
i.e, r = a cos θ
This is the required equation of orbit.
Example 6 If the law of acceleration is 5µu3 +8µc2u5 and the particle is pro-
jected from an apse at a distance c with velocity3õ
c, prove that the equation
of the orbit is r = c cos2θ
3.
Solution:
Given that F = 5µu3 + 8µc2u5
∴ u+d2u
dθ2=
F
h2u2=
5µu3 + 8µc2u5
h2u2=
µ
h2[5u+ 8c2u3
]
Multiplying both sides by 2du
dθ, we get
2udu
dθ+ 2
du
dθ
d2u
dθ2=
2µ
h2[5u+ 8c2u3
] dudθ
Integrating on both sides with respect to θ, we get
u2 +
(du
dθ
)2
=2µ
h2
∫ [5u+ 8c2u3
]du
=2µ
h2
(5u2
2+
8c2u4
4
)+ A
=µ
h2(5u2 + 4c2u4
)+ A (1.3)

10
Initially h = pv = povo = c3õ
c= 3õ
⇒ h2 = 9µ
i.e.,µ
h2=
1
9
Also, u =1
r=
1
cand
du
dθ= 0
∴1
c2+ 0 =
1
9
(5
c2+ 4c2
1
c4
)+ A
i.e.,1
c2=
1
9
(5
c2+
4
c2
)+ A
i.e.,1
c2=
1
c2+ A ⇒ A = 0
∴ u2 +
(du
dθ
)2
=1
9
(5u2 + 4c2u4
)i.e.,
(du
dθ
)2
=1
9
(5u2 + 4c2u4
)− u2 =
5u2 + 4c2u4 − 9u2
9
=4c2u4 − 4u2
9=
4u2
9
(c2u2 − 1
)i.e.,
du
dθ=
2u
3
√c2u2 − 1
put u =1
r; then
du
dθ= − 1
r2dr
dθ
− 1
r2dr
dθ=
2
3r
√c2
r2− 1 =
2√c2 − r23r2
i.e., − dr√c2 − r2
=2
3dθ
Integrating on both sides with respect to θ, we get
cos−1 r
c=
2
3θ +B
If θ is measured from an apse r = a and θ = 0, we get
cos−1 c
c= 0 +B = B
i.e., cos−1 (1) = B
i.e., B = 0
∴ cos−1 r
c=
2θ
3
i.e.,r
c= cos
2θ
3⇒ r = c cos
2θ
3

11
This is the required equation of orbit.
Example 7 A particle moves with an acceleration µ [3au4 − 2 (a2 − b2)u5] is
projected from an apse at a distance (a+ b) with velocity
õ
a+ b. Show that the
equation of the orbit is r = a+ b cos θ.
Solution:Given that F = µ [3au4 − 2 (a2 − b2)u5]
∴ u+d2u
dθ2=
F
h2u2=µ [3au4 − 2 (a2 − b2)u5]
h2u2=
µ
h2[3au2 − 2
(a2 − b2
)u3]
Multiplying both sides by 2du
dθ, we get
2udu
dθ+ 2
du
dθ
d2u
dθ2=
2µ
h2[3au2 − 2
(a2 − b2
)u3] dudθ
Integrating on both sides with respect to θ, we get
u2 +
(du
dθ
)2
=2µ
h2
∫ [3au2 − 2
(a2 − b2
)u3]du
=2µ
h2
[3au3
3− 2
(a2 − b2
) u44
]+ A
=µ
h2[2au3 −
(a2 − b2
)u4]
+ A (1.4)
Initially h = pv = povo = (a+ b)
õ
a+ b=õ
⇒ h2 = µ
i.e.,µ
h2= 1
Also, u =1
r=
1
a+ band
du
dθ= 0
∴1
(a+ b)2+ 0 =
2a
(a+ b)3− (a2 − b2)
(a+ b)4+ A
i.e.,1
(a+ b)2=
2a
(a+ b)3− (a− b) (a+ b)
(a+ b)4+ A
i.e.,1
(a+ b)2=
2a
(a+ b)3− a− b
(a+ b)3+ A
=2a− a+ b
(a+ b)3+ A
i.e.,1
(a+ b)2=
1
(a+ b)2+ A ⇒ A = 0

12
∴ u2 +
(du
dθ
)2
=[2au3 −
(a2 − b2
)u4]
i.e.,
(du
dθ
)2
=[2au3 −
(a2 − b2
)u4]− u2 = u2
[2au−
(a2 − b2
)u2 − 1
]i.e.,
du
dθ= u
√[2au− (a2 − b2)u2 − 1]
put u =1
r; then
du
dθ= − 1
r2dr
dθ
− 1
r2dr
dθ=
1
r
√2a
r− (a2 − b2)
r2− 1 =
√2ar − (a2 − b2)− r2
r2
=
√2ar − a2 + b2 − r2
r2=
√b2 − (r2 + a2 − 2ar)
r2
=
√b2 − (r − a)2
r2
i.e., − dr√b2 − (r − a)2
= dθ
Integrating on both sides with respect to θ, we get
cos−1 r − ab
= θ +B
If θ is measured from an apse r = a+ b and θ = 0, we get
cos−1 a+ b− ab
= 0 +B = B
i.e., cos−1 (1) = B
i.e., B = 0
∴ cos−1 r − ab
= θ
i.e.,r − ab
= cos θ ⇒ r = a+ b cos θ
This is the required equation of orbit.
Example 8 A particle moves an acceleration µ (r5 − c4r) being projected from
an apse at a distance c with a velocity
√2µ
3c3. Show that the path of the curve
is x4 + y4 = c4.
Solution:

13
Given that F = µ (r5 − c4r) = µ
(1
u5− c4
u
)=µ (1− c4u4)
u5
∴ u+d2u
dθ2=
F
h2u2=µ (1− c4u4)
h2u7
Multiplying both sides by 2du
dθ, we get
2udu
dθ+ 2
du
dθ
d2u
dθ2=
2µ
h2(1− c4u4)
u7=
2µ
h2(u−7 − c4u−3
) dudθ
Integrating on both sides with respect to θ, we get
u2 +
(du
dθ
)2
=2µ
h2
∫ (u−7 − c4u−3
)du
=2µ
h2
[u−6
−6− c4u
−2
−2
]+ A
=µ
h2
[− 1
3u6+ c4
1
u2
]+ A (1.5)
Initially h = pv = povo = c
√2µ
3c3 =
√2µ
3c4
⇒ h2 =2µ
3c8
i.e.,µ
h2=
3
2c8
Also, u =1
r=
1
cand
du
dθ= 0
∴1
c2+ 0 =
3
2c8
[−c
6
3+ c4 · c2
]+ A
i.e.,1
c2=
3
2c8
[2c6
3
]+ A
i.e.,1
c2=
1
c2+ A ⇒ A = 0
∴ u2 +
(du
dθ
)2
=µ
h2
[− 1
3u6+ c4
1
u2
]=
3
2c8
[− 1
3u6+ c4
1
u2
]i.e.,
(du
dθ
)2
=3
2c8
[−1 + 3c4u4
3u6
]− u2
=−1 + 3c4u4 − 2c8u8
2c8u6=
(1− c4u4) (2c4u4 − 1)
2c8u6
i.e.,du
dθ=
√(1− c4u4) (2c4u4 − 1)
2c8u6

14
√2c4u3du√
(1− c4u4) (2c4u4 − 1)= dθ (1.6)
put 1− c4u4 = t2
−4c4u3du = 2tdt
i.e., c4u3du = − t2dt
Also c4u4 = 1− t2
i.e., 2c4u4 = 2− 2t2
i.e., 2c4u4 − 1 = 2− 2t2 − 1 = 1− 2t2
Thus the (1.6) can be written as
−
√2t
2dt√
(1− 2t2) (t2)= dθ
− tdt√2t√
1− 2t2= dθ
i.e., − dt
√2 ·√
2
√1
2− t2
= dθ
i.e., − dt√(1√2
)2
− t2= 2dθ
Integrating on both sides with respect to θ, we get
−∫
dt√(1√2
)2
− t2= 2dθ
i.e., − sin−1√
2t = 2θ +B
i.e., − sin−1√
2 (1− c4u4) = 2θ +B
If θ is measured from an apse, r = c and θ = 0, we get
− sin−1
√2
(1− c4 1
c4
)= 0 +B
i.e., − sin−1(0) = 0 +B ⇒ B = 0

15
− sin−1√
2 (1− c4u4) = 2θ
i.e., sin−1√
2 (1− c4u4) = −2θ
i.e.,√
2 (1− c4u4) = sin (−2θ) = − sin 2θ
Squaring both sides, we get
2(1− c4u4
)= sin2 2θ
i.e., 2
(1− c4
r4
)= (2 sin θ cos θ)2 = 4 sin2 cos2 θ
2(r4 − c4
)= 4r4 sin2 cos2 θ
i.e., r4 − c4 = 2r4 sin2 θ cos2 θ
put x = r cos θ; y = r sin θ
i.e.,(x2 + y2
)2 − c4 = 2 (xy)2 = 2x2y2
i.e., x4 + y4 + 2x2y2 − c4 = 2x2y2
x4 + y4 = c4
This is the required equation of orbit.
Example 9 A particle subject to an acceleration µ [2 (a2 + b2)u5 − 3a2b2u7] is
projected at a distance a with velocity
õ
ain a direction at right angles to the
initial distance. Show that the equation of the path is r2 = a2 cos2 θ+ b2 sin2 θ.
Solution:Given that F = µ [2 (a2 + b2)u5 − 3a2b2u7]
∴ u+d2u
dθ2=
F
h2u2=µ [2 (a2 + b2)u5 − 3a2b2u7]
h2u2
=µ
h2[2(a2 + b2
)u3 − 3a2b2u5
]Multiplying both sides by 2
du
dθ, we get
2udu
dθ+ 2
du
dθ
d2u
dθ2=
2µ
h2[2(a2 + b2
)u3 − 3a2b2u5
] dudθ
Integrating on both sides with respect to θ, we get
u2 +
(du
dθ
)2
=2µ
h2
∫ [2(a2 + b2
)u3 − 3a2b2u5
]du
=2µ
h2
[2(a2 + b2
) u44− 3a2b2
u6
6
]+ A
=µ
h2[(a2 + b2
)u4 − a2b2u6
]+ A (1.7)

16
Initially h = pv = povo = a
õ
a=õ
⇒ h2 = µ
i.e.,µ
h2= 1
Also, u =1
r=
1
aand
du
dθ= 0
∴1
a2+ 0 =
(a2 + b2)
a4− a2b2
a6+ A
i.e.,1
a2=
(a2 + b2)
a4− b2
a4+ A
i.e.,1
a2=
a2 + b2 − b2
a4+ A ⇒ A = 0
∴ u2 +
(du
dθ
)2
=µ
h2[(a2 + b2
)u4 − a2b2u6
]i.e.,
(du
dθ
)2
=[(a2 + b2
)u4 − a2b2u6
]− u2 = u2
[(a2 + b2
)u2 − a2b2u4 − 1
]i.e., = u2
[(1− b2u2
) (a2u2 − 1
)]∴
du
dθ= u
√[(1− b2u2) (a2u2 − 1)]
i.e.,du
u [(1− b2u2) (a2u2 − 1)]= dθ
put u =1
r; ∴ du = − 1
r2dr
−1
r2dr
1
r
√(a2
r2− 1
)(1− b2
r2
) = dθ
i.e.,−rdr√
(a2 − r2) (r2 − b2)= dθ
put r2 = a2 cos2 φ+ b2 sin2 φ;
2rdr = −2a2 cosφ sinφ+ 2b2 sinφ cosφ
=(b2 − a2
)2 sinφ cosφdφ
i.e., − rdr =(a2 − b2
)sinφ cosφdφ

17
a2 − r2 = a2 − a2 cos2 φ− b2 sin2 φ
= a2(1− cos2 φ
)− b2 sin2 φ
= a2 sin2 φ− b2 sin2 φ
=(a2 − b2
)sin2 φ
similarly, r2 − b2 =(a2 − b2
)cos2 φ
∴(a2 − b2) sinφ cosφdφ
(a2 − b2) sinφ cosφ= dθ
i.e., dφ = dθ
Integrating both sides , we get∫dφ =
∫dθ
i.e, φ = θ +B
∴ r2 = a2 cos2 (θ +B) + b2 sin2 (θ +B)
If θ is measured from an apse, r = a and θ = 0, we get
a2 = a2 cos2B + b2 sin2B
i.e., a2(1− cos2B
)= b2 sin2B
i.e., a2 sin2B = b2 sin2B
i.e.,(a2 − b2
)sin2B = 0
i.e., sin2B = 0 ∵ a2 − b2 6= 0
i.e, B = 0
∴ r2 = a2 cos2 θ + b2 sin2 θ
Example 10 A particle acted on by a central attractive force µu3 is projected
with a velocity
õ
aat an angle
π
4with its initial distance a from the centre of
force. Show that the path is the equiangular spiral r = ae−θ.
Solution:Given that F = µu3
∴ u+d2u
dθ2=
F
h2u2=
µu3
h2u2
=µu
h2
Multiplying both sides by 2du
dθ, we get
2udu
dθ+ 2
du
dθ
d2u
dθ2=
2µu
h2du
dθ

18
Integrating on both sides with respect to θ, we get
u2 +
(du
dθ
)2
=2µ
h2
∫udu
=2µ
h2u2
2+ A
=µ
h2u2 + A (1.8)
Initially p = r sinφ ⇒ po = ro sinφo = a sinπ
4=
a√2
h = pv = povo =a√2·√µ
a⇒ h2 =
µ
2
i.e.,µ
h2= 2
1
p2= u2 +
(du
dθ
)2
= 2u2 + A
2
a=
2
a2+ A ⇒ A = 0
∴ u2 +
(du
dθ
)2
= 2u2(du
dθ
)2
= u2
du
dθ= u
i.e.,du
u= dθ
Integrating both sides, we get
log u = θ + logB
i.e., log u− logB + θ
i.e., logu
B= θ
i.e.,u
B= eθ
i.e, u = Beθ
If θ is measured from an apse, r = a and θ = 0, we get
1
a= B
i.e., u =1
aeθ
i.e.,1
r=
1
aeθ ⇒ r = ae−θ

19
2 Exercises
1. A particle describes a circular orbit under an attractive central forcedirected towards a point on the circle. Show that the force varies as theinverse fifth power of the distance.
[Hint: The polar equation of the circle is r = 2a cos θ.]

CHAPTER 6
MOMENT OF INERTIA
1 Definitions
Definition 1.1 (Moment of Inertia) If m is the mass of a particle and ris its perpendicular distance from a given line, the quantity mr2 is called themoment of inertia of the particle about the line.
Figure 1
If a series of particles of masses m1,m2, · · · etc., are arranged at pointswhose perpendicular distances from a given straight line are r1, r2, · · · respec-tively, then the quantity m1r
21 + m2r
22 + · · · is defined to be the moment of
inertia of the system of particles about the line and it is usually written as∑mir
2i .
If we write moment of inertia of a body of mass M about an axis as Mk2,then k is called the radius of gryation of the body about the line.
Bookwork 1.2 (Parallel Axes Theorem:)If I is the moment of inertia of a body about any axis and IG is its moment
of inertia about a parallel axis through G, the C.G. of body then I = IG+Mh2,where M is the mass of the body and h is the distance between the two parallelaxes.
Let us consider the case of a plane lamina. Let I denote theM.I. of a planelamina about the line Ox. Draw Oy perpendicular to Ox in the same plane.Let G be the C.G. of the laminat with Coordinate (x, y) referred to Ox,Oy.Consider an elementary mass m at the point P whose coordinates are (x, y)referred to Ox,Oy. Let P be (X, Y ) referred to GX and GY a set of axesparallel to Ox and Oy.

2
Figure 2
x = ON = OK +KN = OK +GM = x+X
y = NP = NM +MP = KG+MP = y + Y
I = M.I. of the lamina about Ox
=∑
m.PN2 =∑
m.y2 =∑
m (y + Y )2
=∑
m.(y2 + 2y.Y + Y 2
)= y2
∑m+ 2y
∑mY +
∑mY 2 (1.1)
Now
∑mY∑m
will the y-coordinate of the C.G. of the lamina with respect
to axes GX and GY . But it must be equal to zero, as G itself is the origin inthe system. Hence the second term in (1.1) is zero. Also
∑m = M .∑
mY 2 =∑
m.PM2 = M.I. about GX = IG
y = GK = distance between the parallel axes Ox and Gx = h
Therefore, the equation (1.1) gives I = Mh2 + IG
Bookwork 1.3 (Perpendicular Axes Theorem:) If Ix and Iy denote themoments of inertia of a plane lamina about two rectangular axes Ox and Oyin the plane, then Ix + Iy will be its moment of inertia about an axis throughO perpendicular to its plane.
Let Ox and Oy be two rectangular axes in the plane lamina and Oz be theaxis through O (not shown in the figure) perpendicular to the plane xOy.
Consider an elementary mass m at P .

3
Figure 3
Draw PM pernedicular to Ox.
Ix = M.I. of the lamina about Ox =∑
m.PM2
Iy = M.I. of the lamina about Oy =∑
m.OM2
Iz = M.I. of the lamina about Oy =∑
m.OP 2
=∑
m.(PM2 +OM2
)=∑
m.PM2 +∑
m.OM2 = Ix + Iy
2 Moments of Inertia in some particular cases:
1. A thin uniform rodLet AB be a thin uniform rod of length 2a. O is the midpoint and OY is
perpendicular to AB. Let us find the M.I. of the rod about OY .
Figure 4
Consider an elementary section PQ of the rod, of length 4x at a distance xfrom O.

4
Let ρ be the mass per unit length of the rod.Mass of the section PQ = ρ · 4x.M.I. of elementary section PQ about OY = ρ · 4x · x2.
Hence M.I. of rod AB about OY =x=a∑x=−a
ρ · 4x · x2
=
∫ x=a
x=−aρx2dx = ρ
[x3
3
]a−a
= ρ
[a3
3−(−a
3
3
)]= ρ · 2a3
3
=M
2a· 2a3
3
(∵ ρ =
M
2a
)=
Ma2
3
Note 2.1 M.I. of the rod AB about the line passing through A perpendicularto the rod AB=M.I. of rod about OY+M.(OA)2 (By using parallel axestheorem)
=Ma2
3+Ma2 =
4Ma2
3
2. Uniform Circular Ring(a). About an axis through the centre perpendicular to its plane.
Figure 5
Let a be the radius of the ring. Then each particle of the ring is at the samedistance a from the axis perpendicular to the plane through the centre.

5
Hence M.I. of the elementary mass = mass× a2.Thus M.I. of the ring =
∑(mass× a2
)= Ma2 where M is the mass of
the ring.(b) About a diameter.
Figure 6
Let I be the M.I of ring about a diameter.By symmetry, I is also the M.I. of ring about any other diameter.Take any two perpendicular diameters. Then by perpendicular axes theo-
rem,
I + I = M.I. of the ring about an axis through the centre perpendicular to the plane
= Ma2
2I = Ma2
i.e., I =Ma2
2
(c) About a tangent line.
Figure 7

6
By parallel axes theorem,
M.I.of the circular ring about a tangent line = M.I.about a parallel diameter +Ma2
=Ma2
2+Ma2 =
3Ma2
2
3. Uniform Circular Disc
Figure 8
Let O be the centre , a be the radius of circular disc and ρ be the mass perunit area.
Divide the circular disc into a concentric rings of radii x and x + 4x,breadth is 4x.
Thus the area contained between two concentric rings of radii x and x+4xis 2πx · 4x.
Mass of the elementary area is 2πρx · 4x.
M.I. of the circular ring about a diameter = 2πρx · 4x · x2
2= πρx3 · 4x.
Hence, M.I. of circular disc about a diameter x = a is
=x=a∑x=0
πρx34x
= πρ
∫ x=a
x=0
x3dx
= πρ
[x4
4
]a0
= πρ · a4
4
= π · Mπa2· a
4
4
(∵ M = πa2ρ
)=
Ma2
4

7
By symmetry, M.I. of the disc about a perpendicular diameters is alsoMa2
4.
Hence by perpendicular axes theorem, M.I. of a circular disc about an axis
through the centre perpendicular to the disc =Ma2
4+Ma2
4=Ma2
2.
Note 2.2 M.I. of circular disc about a tangent line = M.I. of circular discabout a parallel diameter+Ma2.
=Ma2
4+Ma2 =
5Ma2
4.
4. Uniform elliptic lamina:(a). About its Major axes:
Figure 9
Let P (x, y) be any point on the ellipse.Divide the area into a elementary rectangular strips perpendicular to major
axis.Area of elementary section of length 2y and breadth 4x is = 2y4x.If ρ is the mass per unit area, then mass of the elementary section is 2yρ4x.M.I. of elementary section about a line through the centre is
2yρ4x · y2
3= 2ρ
y3
34x.
M.I. of ellipse about a major axis is = 2x=a∑x=0
2ρy3
34x =
4ρ
3
∫ x=a
x=0
y3dx
Put x = a cos θ and y = b sin θ
M.I. =4ρ
3
∫ 0
π/2
b3 sin3 θ · (−a sin θdθ)
=4ρab3
3
∫ π/2
0
sin4 θdθ
=4ρab3
3· 3
4· 1
2· π
2=πρab3
4

8
=πab3
4· Mπab
(∵ M = πρab)
=Mb2
4
(b). About its Minor axes:
Figure 10
Let P (x, y) be any point on the ellipse.Divide the area into a elementary rectangular strips perpendicular to minor
axis.Area of elementary section of length 2x and breadth 4y is = 2x4y.If ρ is the mass per unit area, then mass of the elementary section is 2xρ4y.M.I. of elementary section about a line through the centre is
2xρ4y · x2
3= 2ρ
x3
34y.
M.I. of ellipse about a minor axis is = 2
y=b∑y=0
2ρx3
34y =
4ρ
3
∫ y=b
y=0
x3dy
Put x = a cos θ and y = b sin θ
M.I. =4ρ
3
∫ π/2
0
a3 cos3 θ · (b cos θdθ)
=4ρba3
3
∫ π/2
0
cos4 θdθ
=4ρba3
3· 3
4· 1
2· π
2=πρba3
4
=πba3
4· Mπab
(∵ M = πρab)
=Ma2
4

9
Note 2.3 M.I. of elliptic lamina about a line through the centre perpendicular
to the plane =Ma2
4+Mb2
4= M
(a2 + b2
4
).
5. A Solid Sphere about its diameter:
Figure 11
Let a be the radius of the sphere.
Divide the solid sphere into a circular disc of radius y.
Consider the elementary section at a distance x from the centre of thesphere.
Volume of typical circular disc of radius y and thickness 4x is πy24x.
Let ρ be the mass per unit volume.
Thus, Elementary mass of the typical circular disc is ρπy24x.
M.I. of a circular disc about a line passing through the centre is
= ρπy24x · y2
2
Hence, M.I. of a solid sphere about its diameter is
=x=a∑x=−a
ρπy24x · y2
2
=
∫ x=a
x=−aρπy2 · y
2
2dx
= πρ
∫ a
0
y4dx
= πρ
∫ a
0
(a2 − x2
)2dx
(on the circle x2 + y2 = a2
)

10
Put x = a cos θ; dx = −a sin θ, we get
M.I. = πρ
∫ 0
π/2
(a2 − a2 cos2 θ
)2(−a sin θ) dθ
= πρ
∫ π/2
0
a5 sin5 θdθ
= πρa5 · 4
5· 2
3=πρ
15· 8a5
=π
15· 8a5 M
4
3πa3
(∵M =
4
3ρπa3
)
=π
15· 8a5 3M
4πa3=
2Ma2
5
Note 2.4M.I. of the sphere about a tangent line
= M.I. about a parallel diameter +Ma2
=2Ma2
5+Ma2 =
7Ma2
5
6. A Hollow Sphere about its diameter:
Figure 12
Divide the hollow sphere into a thin circular rings by planes perpendicular toaxis.
Consider a typical ring of radius y and arcual width 4s, at a distance xfrom O.
Elementary surface area of typical ring = 2πy · 4s.Let ρ be the mass per unit area of the surface.

11
Elementary Mass = ρ · 2πy · 4s.M.I. of circular ring about OX = ρ× 2πy4s · y2 = 2πρy34s.
M.I. of hollow sphere about OX
=x=a∑x=−a
2π · ρy34s
=
∫ x=a
x=−a2π · ρy3ds
=
∫ a
0
4πρy3ds
But x2 + y2 = a2 ⇒ 2x+ 2ydy
dx= 0
i.e.,dy
dx= −x
y
ds
dx=
√1 +
(dy
dx
)2
=
√1 +
x2
y2
=
√x2 + y2
y2=
√a2
y2=a
y
∴ ds =a
ydx
Hence, M.I. of hollow sphere about OX =
∫ a
0
4πρy3a
ydx
=
∫ a
0
4aπρy2dx
=
∫ a
0
4πρa(a2 − x2
)dx
= 4aπρ
[a2x− x3
3
]a0
= 4aπρ
[a3 − a3
3
]= 4aπρ
2a3
3=
8a4πρ
3
=8a4π
3· M
4πa2(∵ M = 4πa2ρ
)=
2Ma2
3

12
7. A Solid right circular cone about its axis:
Figure 13
Let h be the height of the cone, r be the base radius, V be the vertex ofthe cone.
Divide the solid right circular cone into a circular discs.Consider an elementary section, PP ′ be a circular section at a distant x
from the vertex, y be the radius of the circular section and thickness 4x.Volume of elementary section = πy24x.Let ρ be the mass per unit volume.Mass of the elementary section = ρπy24x.M.I. of elementary section about a line passing through the centre perpen-
dicular to the plane = ρπ · y2 · 4x · y2
2.
Hence, M.I. of solid cone about VM is
=x=h∑x=0
ρπ · y2 · 4x · y2
2
=ρπ
2
∫ h
0
y4dx
Triangles V LP and VMB are similar.
HenceLP
MB=
V L
VMi.e,
y
r=x
h⇒ y =
rx
h
M.I. of solid cone =ρπ
2
∫ h
0
r4x4
h4dx
=ρπr4
2h4· h
5
5

13
=πr4h
10· M
1
3πr2h
(∵ M =
1
3πr2hρ
)
=πr4h
10· 3M
πr2h=
3Mr2
10
8. A hollow right circular cone about its axis:
Figure 14
Let h be the height, r be the base radius and V be the vertex of the hollowright circular cone.
Divide the hollow cone into a circular rings.
Consider the typical section at a distance x from the vertex and arcualwidth = 4s.
Surface Area of the elementary section = 2πy · 4s.Let ρ be the mass per surface density.
M.I. of elementary section about the line through the centre perpendicularto the plane = ρ · 2πy4s · y2 = 2πρy34s.
Hence, the M.I. of hollow cone
=x=h∑x=0
2πρy34s = 2πρ
∫ h
0
y3ds
By Similar trianglesy
r=x
h⇒ y =
rx
hds
dx=
√1 +
r2
h2=
√r2 + h2
h=l
h, where l is the slant height of the cone.

14
Hence, the required M.I. of required cone is
= 2πρ
∫ h
0
r3x3
h3· lhdx = 2πρ · r
3l
h4
∫ h
0
x3dx
= 2πρ · r3l
h4
[x4
4
]h0
=πρ
2r3l
=π
2r3l · M
πrl(∵ M = πrlρ)
=Mr2
2
Example 1 Show that the M.I. of a triangular lamina of mass M about a side
isMh2
6where h is the altitude from the opposite vertex.
Solution:
Figure 15
Let ABC be a triangular lamina.Divide the lamina into strips parallel to BC. Let PQ be the elementary
strip at a distance x from A and its widths is 4x.Thus, area of the strip = PQ · 4x.
By similar triangles,PQ
BC=AL
AD=x
h⇒ PQ =
ax
h, where BC = a.
Let ρ be the areal denisty.
Mass of the strip PQ=ρax
h4x.
M.I. of strip PQ about BC = M.I. of PQ about a line through the midpointof PQ parallel to BC+(mass of PQ)(LD)2

15
=M.I. of PQ about itself +(mass of PQ)(LD)2
= 0 + ρax
h4x (h− x)2
Hence the M.I. of 4ABC about its base BC
=x=h∑x=0
ρax
h(h− x)24x
=ρa
h
∫ h
0
x(h2 − 2hx+ x2
)dx
=ρa
h
[h2x2
2− 2h
x3
3+x4
4
]h0
=ρa
h
[h4
2− 2h4
3+h4
4
]=
ρa
h· h
4
12=ρah3
12
=ah3
12· M
1
2ah
(∵ M =
1
2ρah
)
=ah3
12· 2M
ah=Mh2
6