
The visual control of behaviour in fiddler crabs
13
J Comp Physiol A (1995) 177:91 103 Springer-Verlag 1995 Michael Land ' John Layne The visual control of behaviour in fiddler crabs II. Tracking control systems in courtship and defence Accepted: 30 November 1994 Abstract Male fiddler crabs (Uca pugilator Bosc) have visual control systems that enable them to track other crabs in front or behind, and to keep potential pred- ators to the side, where escape is easiest. The system for tracking conspecifics appears to be double, with a low- gain velocity-sensitive mechanism operating over about a 90 ~ range, backed up by a position-sensitive mechanism at the ends of this range which is respon- sible for recentring the target. This system has separate front and rear ranges, with a gap in the direction of the claw. The crabs separately fixate the burrow entrance, keeping it in the direction opposite the claw. Predator evasion employs two systems simultaneously. An open- loop mechanism directs the crab's translatory move- ments directly away from the stimulus, and a rotational mechanism using continuous feedback turns the crab so that the stimulus is kept at near 90 ~ to the body axis. Both systems are sensitive to the angular position of the stimulus, not its velocity. Eye movements have little or no role in object tracking. An attempt is made to list Uca's known visual control systems. Key words Crustacea Uca Vision Orientation Control systems Introduction Many of the different behaviours of the fiddler crab Uca pugilator take place on open sand and mud flats, and are very easy to observe. The crabs themselves use M. Land (~)1 . j. Layne Duke University Marine Laboratory, Pivers Island, Beaufort, NC 28516, USA Present address: 1School of Biological Sciences, University of Sussex, Brighton BN1 9QG, UK vision as the main modality for initiating and guiding behaviour, and the most noticeable behaviour of the crabs - the claw-waving of the males - is an obvious visual advertisement. Not surprisingly, this behaviour has attracted much research (reviewed in Crane 1957, 1975), and the fact that the waving pattern varies be- tween species has proved of particular interest to those concerned with animal signalling (Salmon and Atsa- ides, 1968; Salmon and Hyatt 1983). Claw-waving, in its capacity as both 'innate releaser mechanism' and 'fixed action pattern', has thus been well studied. There is, however, another aspect to behaviour, clearly recog- nised by ethologists (e.g. Tinbergen 1951, p. 81), and that is orientation. It is not enough to simply perform a behaviour, the action must take place in the right location, and be properly directed in relation to the environment and to the other animals involved. Thus claw-waving is directed towards females as soon as they are detected, and escape is directed away from pred- ators. These components of behaviour imply relations between vision and action just as complex and interest- ing as those associated with the 'releasing' stimuli themselves. Ideas from control theory, introduced into orienta- tion studies particularly by von Holst (1954) and by Mittelstaedt (1964), have proved to be of great value. General accounts are provided by Hinde (1970, Chap- ter 7), Hassenstein (1971) and Sch6ne (1984). Orienta- tional control systems are of many kinds, and a proper description of their performance requires several sorts of information (see Fig 1). Does the system normally use feedback, or does it operate without it? Is the guiding signal the position of a stimulus on the retina, or the velocity across it? Is the system continuously open to incoming information, or only at particular times? Over what part of the visual field does a particu- lar system operate? We try to answer some of these questions for a variety of orienting behaviours in Uca. Past studies have concentrated on the optomotor response of crabs, responsible for stabilizing the eyes
Transcript of The visual control of behaviour in fiddler crabs

J Comp Physiol A (1995) 177:91 103 �9 Springer-Verlag 1995
Michael Land ' John Layne
The visual control of behaviour in fiddler crabs II. Tracking control systems in courtship and defence
Accepted: 30 November 1994
Abstract Male fiddler crabs (Uca pugilator Bosc) have visual control systems that enable them to track other crabs in front or behind, and to keep potential pred- ators to the side, where escape is easiest. The system for tracking conspecifics appears to be double, with a low- gain velocity-sensitive mechanism operating over about a 90 ~ range, backed up by a position-sensitive mechanism at the ends of this range which is respon- sible for recentring the target. This system has separate front and rear ranges, with a gap in the direction of the claw. The crabs separately fixate the burrow entrance, keeping it in the direction opposite the claw. Predator evasion employs two systems simultaneously. An open- loop mechanism directs the crab's translatory move- ments directly away from the stimulus, and a rotational mechanism using continuous feedback turns the crab so that the stimulus is kept at near 90 ~ to the body axis. Both systems are sensitive to the angular position of the stimulus, not its velocity. Eye movements have little or no role in object tracking. An attempt is made to list Uca's known visual control systems.
Key words Crustacea �9 Uca �9 Vision �9 Orientation �9 Control systems
Introduction
Many of the different behaviours of the fiddler crab Uca pugilator take place on open sand and mud flats, and are very easy to observe. The crabs themselves use
M. Land ( ~ ) 1 . j. Layne Duke University Marine Laboratory, Pivers Island, Beaufort, NC 28516, USA
Present address: 1School of Biological Sciences, University of Sussex, Brighton BN1 9QG, UK
vision as the main modality for initiating and guiding behaviour, and the most noticeable behaviour of the crabs - the claw-waving of the males - is an obvious visual advertisement. Not surprisingly, this behaviour has attracted much research (reviewed in Crane 1957, 1975), and the fact that the waving pattern varies be- tween species has proved of particular interest to those concerned with animal signalling (Salmon and Atsa- ides, 1968; Salmon and Hyatt 1983). Claw-waving, in its capacity as both 'innate releaser mechanism' and 'fixed action pattern', has thus been well studied. There is, however, another aspect to behaviour, clearly recog- nised by ethologists (e.g. Tinbergen 1951, p. 81), and that is orientation. It is not enough to simply perform a behaviour, the action must take place in the right location, and be properly directed in relation to the environment and to the other animals involved. Thus claw-waving is directed towards females as soon as they are detected, and escape is directed away from pred- ators. These components of behaviour imply relations between vision and action just as complex and interest- ing as those associated with the 'releasing' stimuli themselves.
Ideas from control theory, introduced into orienta- tion studies particularly by von Holst (1954) and by Mittelstaedt (1964), have proved to be of great value. General accounts are provided by Hinde (1970, Chap- ter 7), Hassenstein (1971) and Sch6ne (1984). Orienta- tional control systems are of many kinds, and a proper description of their performance requires several sorts of information (see Fig 1). Does the system normally use feedback, or does it operate without it? Is the guiding signal the position of a stimulus on the retina, or the velocity across it? Is the system continuously open to incoming information, or only at particular times? Over what part of the visual field does a particu- lar system operate? We try to answer some of these questions for a variety of orienting behaviours in Uca.
Past studies have concentrated on the optomotor response of crabs, responsible for stabilizing the eyes

a
M. Land, J. Layne: Visual control systems in Uca
and to a lesser extent the course direction (review Barnes and Nalbach 1993). Escape behaviour has also been examined recently (Nalbach 1990a, b), and navi- gation in relation to stationary aspects of the surroun- dings has been studied in Uca and other crabs (Herrnkind 1968, 1983). The mechanisms by which one crab tracks another have not been studied, however, and in this paper we examine this type of tracking, and contrast it with another type of behaviour, namely predator avoidance, which also involves tracking. The sensory cues by which a crab establishes whether an object should be approached or avoided are discussed in the preceding paper (Land and Layne 1995), and here we examine the associated patterns of sensori- motor control. It turns out that these two types of behaviour both involve more than one type of con- trol system, but that they differ from each other in almost all other respects. We discuss why this should be, and at the end of the paper attempt to summarize these, and other types of orientation behaviour in Uca (Table 1).
Methods
Uca pugilator are present in huge numbers on sand flats in the vicinity of Beaufort, North Carolina, USA, where these studies were conducted in July and August 1993. To study the behaviour of one crab to another, Video films were made from directly above a part of the beach where males had burrows and females passed through. SONY 8 mm NTSC and Panasonic S-VHSc PAL camcorders were both used, usually with the zoom lenses at their widest settings. A field of view about 1.5 m square gave a good compromise between coverage and detail. A clock signal was added to the video-films, which were analysed frame by frame, either by hand directly on the moni tor screen, or with the help of a computer-generated cursor that was merged with the video signal using a time-base corrector. The basic measurements were the absolute direction of the tracking crab's body axis and the direction of the tracked crab relative to that axis. From these measurements, made either every 0.1 s or 0.5 s, angular velocities were determined. The aim of these measurements was always to find out the position or velocity of the tracked crab as seen from the viewpoint (literally) of the tracking crab. Essentially the same method was used to study the responses of crabs to artificial predators. The absolute accuracy of the angular measurements is hard to assess because of the different shadow patterns and claw positions, but it is probably no better than + 5'. However, within a single sequence, measurements are repeatable to _+ 2 ~, and orientation changes greater than 2 ~ are reliably detectable.
Escape responses were also studied in an 'open-loop' situation in which a fixed crab held a light foam-plastic ball between its legs, which it could manipulate as though this was a real substrate. Further details are given in the Results section.
Definitions
Tracking systems usually take the form of feedback loops in which some stimulus variable controls the tracking animal's behaviour. Two such examples are given in Fig. la, b, where the speed of rotation of the crab (4~) is proportional to stimulus angular position (0 in a) or angular velocity (0 in b). 'Tracking' is
0
b \
r d 0 o
�9 ~ ~0] -~
92
Fig. la, b Tracking systems with position and velocity inputs. In a the crab's rotational velocity (~) is proportional to the error angle (0) of the stimulus (large dot) from the crab's preferred fixation direction. In b (~ is driven by the relative angular velocity stimulus (i)). c, d Position tracking system conceived as a feedback loop. The crab converts the error angle (0) into angular velocity ~ as in a. This integrates over time to give the crab's absolute spatial angle (q~, in world-based coordinates) which is subtracted geometrically from the absolute angle of the stimulus (~) to give the error the crab sees (0)
sometimes used only for angular position systems, but here it is taken to mean any system or combination that facilitates the visual pursuit of a small target. Notice that the response in Fig. lb is in the opposite direction to la, even though the stimulus is at the same location; this response difference provides a useful test of the type of input the system uses. If there are no significant tracking eye move- ments as seems to be the case in crabs (Barnes and Nalbach 1993) - these input variables can be regarded as positions and velocities on the crabs's retina. In a feedback loop the eye sees not only the stimulus movement, but the consequences of the crab's own move- ments. This is shown in the feedback diagram in Fig ld, in which the position error (0) actually seen by the crab is the differnce between the absolute direction of the target (0) and the crab's absolute direction (~b), which changes as the crab turns (Fig. lc). In the simplest kind of tracking system (la) the crab's input-output rela- tionship, or transfer function, can be though., t of as simply a multipli- cation factor (k in Fig. ld). In this case, 0 = k. 0. There is always some delay (d) in feedback loops, so that a more accurate equation describing Fig. la would be: ~b(t) = k-0 (t - d), where t is time. An example of a system fitting this description is shown in Fig. 6. When presented with a step change in target position @ the system in Fig. ld will respond with an exponential change in ~b. With a delay it has the potential for output oscillation if the amplification (k) is high (see Hassenstein, 1971, Land, 1992).
Some orientation systems operate without feedback. Pointing a finger when the hand is not visible is one example (Mittelstaedt 1964). Such systems are referred to as open systems (feedback loops are closed). Translational control of the crab's escape direction (Fig. 8a) is a good example of open orientation where feedback is not involved. For a useful general text on feedback and control systems see DiStefano et al, (1976).

M. Land , J. Layne: Visual control sys tems in Uca 93
Results
Tracking conspecifics
Geometry of trackin9
Male Uca court females in the region around their burrows (for general references to Uca behaviour see Land and Layne 1995). This involves detecting wander- ing crabs at a distance of about 30 cm, and directing waves to them while they remain in the vicinity. At distances greater than about 15 cm the wave is appar- ently attention seeking, with the claw raised high and lowered in a characteristic circular arc. When the fe- male gets closer the male lowers the claw, and makes short scuttling runs in the direction of his burrow. The function of these seem to be to indicate the direction of the burrow to the female, and she may, at this stage, follow the male to the burrow. During courtship the male tracks the female so as to keep her in front or behind (Fig. 2a), but not at either lateral pole (Fig. 2b). This may be because a female at 90 ~ cannot see the direction of movement of the male's claw, or of his run.
Males usually confine their activity to one side of the burrow entrance, and generally maintain a stance in
C
angle of 9 relative to d angle of burrow
Fig. 2 a Pos i t ions adop ted by two males when cour t ing one female, f rom a single video frame. Lines on males indicate directions of the body axes, open arrow by female indicates direct ion of movemen t . No te tha t waving and scut t le - runs can occur with the female in front or behind. The bu r row (filled circle) is a lmos t always in the direct ion oppos i te to the claw (see e) b Circular h i s t og ra m of the pos i t ions of the female relative to the cour t ing male. D a t a f rom 4 males over a ha l f -hour period. M e a s u r e m e n t s m a d e every t ime a male waved to a female or began a run to the bur row, i.e. roughly every half-second dur ing active cour tship . No t e b road peaks in front a r o u n d - 20 ~ and beh ind a r o u n d - 130 'J and the gap at - 90 c'. e The direct ion of the bu r row dur ing cour tship , f rom the same da ta set as b)
which the large claw is directed at 180 ~ from the bur- row (Fig. 2c). In the event of danger, this gives a clear lateral run to the burrow which is entered large claw last. When courting this pattern is disturbed, because the male tracks the female and this tends to make him rotate away from the line of the burrow (Fig. 3a). He thus has quite a complicated geometrical problem to solve: to keep the female in front or behind, and the burrow at 90 ~ . The only way to do this perfectly would be for the male to move in a circle around the burrow as he tracked the female, but he only does this if he is very close to the burrow entrance. Usually he moves
a 0 3 8 12 20
* x 0 , �9 �9 �9 �9
b
C
P ,�9
/
/
s
/ �9 s ( ~
0 2
/ J
i
Fig. 3 a Five f rames f rom an episode where a male t racks a m o v in g female, whose direct ion is shown, bu t no t pos i t ion because the dis tance is too great. T imes by bu r row are in seconds. See text. b Ins tance where a male tu rns left (anti-clockwise) to relocate a r ight- ward m o v i n g female f rom the back to the front, e Converse ins tance where the male tu rns r ight as the female move s left. C o n v e n t i o n s as in Fig. 2a

94
along a shallow arc while tracking the female (Fig. 3a), allowing the direction of the burrow entrance to drift relative to his body axis. He then realigns the body axis when he stops tracking female. An important realign- ment strategy is shown in Fig. 3b, c. As the female nears the lateral pole on the claw side the male makes a turn of about 20 ~ in the direction opposite to her motion; this has the effect of transferring the direction of the female 'over the shoulder' from back-to-front in Fig. 3b and front-to-back in Fig. 3c. It also realigns the burrow into a direction where further tracking will decrease the angle with the male's lateral pole, rather than letting it increase further.
Mechanism of tracking
A complete example of a tracking episode is illustrated in Fig. 3a. The first action by the male is an 8 ~ turn towards the female (0-3 s); this is followed by a long turn in the direction of her motion (3-12 s), after which the male disengages and returns to the burrow en- trance, rotating back as he does so and thus realigning with the burrow. It is evident that this simple piece of tracking requires control systems of both the position and velocity types (see Fig. 1). The first turn (0-3 s) is directed towards the position of the female but is in the opposite sense to her direction of motion across his retina. It thus uses position but not velocity informa- tion. However, in the first part of the long turn (3 8 s) the female is still to the right of the male's midline, but he is turning left, in the direction of the female's motion across his retina. This can be accounted for best by a velocity driven system, in which position information is not used. In tracking situations where the female approaches closer to the male's lateral pole than in Fig. 3a he frequently makes an 'over the shoulder' turn (Fig. 3b, c). Since these turns are in the opposite sense to her relative motion they cannot be velocity driven, but seem to have the function of transferring her from one position system to another, i.e. from a rear-centred system to a front-centred one in the case of Fig. 3b, and front-to-rear in Fig. 3c.
The dual nature of the tracking control system is supported by a quantitative analysis of all the tracking episodes recorded. Figure 4a shows the relation be- tween error angle (angle of the female relative to the male's midline in the anterior direction) and the male's speed of rotation during the following half second. If it is the retinal position of the female that drives the male's turning, one would expect these to be closely related, as in Fig. la. Taking all the data in the figure (dots and circles) together, there is essentially no rela- tionship. However, it is clear that these are actually two separate populations, those associated with keeping the female behind (circles) and in front (dots) as indicated in the legend to Fig. 4a. The crucial turning velocities are those relating to error angles between - 4 Y ~ and
M. Land, J. Layne: Visual control sys tems in Uca
- 120 ~ (around the lateral pole of the claw), which can be strongly positive or negative. Here the positive values are mostly components of turns transferring the female from front-to-back (Fig. 3c), and so belong to the rear-centred system, whereas the negative values are back-to-front transfers. Separating the front and rear systems on this basis results in distributions whose regression lines cross the zero velocity axis at error angles around 0 ~ and - 150 ~ These values are quite close to the peaks of the histogram of female locations in Fig. 2b, and it is thus tempting to suppose that this
a 100
50
O o
> 0
t ~
- 5 0
- 1 0 0 -270
O 0
o �9 o . .
o . . ' "
~ 1 7 6 " ' " ' " = 'o * ~ 1 7 6 - ' " " . 8 � 9 e e = e * . - - ' " ' " "
. ~ ,Oo ~ ..... .~.. "~1~'o. o 6 o ... g .o
o o �9 o �9 �9
o �9 �9
J i I I t I I i I i , I
-180 - 90 0 90
e r r o r ang le (~
i , I
180
b 100
50
O O III
> 0
-50 .s
U
- 1 0 0 -180
/ i I I i [ i i I
- 9 0 0 90
e r r o r ang le {~
I
180
C
0 o
b
30
20
10
0
- 1 0
- 2 0
- 3 0 - 30
�9 . . . . . "
�9 . . . l " ~ # .
I I i I I , I
- 2 0 - 1 0 0 10 20
e r r o r angular ve loc i ty ( ' .s -1)
I
3O

M. Land, J. Layne: Visual control systems in Uca 95
position-driven system enables the male to keep the female roughly centred in front or behind. However, there is a great deal of scatter in Fig. 4a, especially around the centres of each distribution, and it is not clear whether small departures of the target female from either centre position will actually cause the males to turn. To test this, the data from the two distributions were combined around a common centre position, and averaged over 20 ~ ranges. The result, in Fig. 4b, was unexpected but quite clear. There is no relation at all between error angle and turning velocity in the central 90 ~ of the range, but outside this there is a strong tendency for the crab to turn towards the target. In other words, the position systems appears to be operat- ing as back-stops that keep the female within wide 'dead zones', and do not operate when she is within _+ 45 ~ of either centre position. However, the position
system cannot explain a great deal of the tracking actually seen, for example the turns made between seconds 3 and 12 in Fig. 3a, and many other such cases.
To account for tracking within this dead zone, the most plausible alternative is a system driven by target velocity, and the existence of such an input is shown in Fig. 4c. The abscissa is the velocity of the female across the male's retina, measured over periods from 1.5 to 3 s depending on the duration of each tracking episode; turning velocities were measured over the same peri- ods. Shorter intervals were not used because of the small differences of angle involved. Measurements were confined to central tracking, within _+ 45 ~ of each centre position, and this excluded all 'over the shoulder' turns (Fig. 3 b,c); these would have given large and spurious turn velocities in the opposite direction to those of the central regions. These exclusions limited the number of observations to 29, but these show a significant correlation in the expected direction (see legend to Fig. 4c). The slope of the regression line is 0.48, implying that typically the male crab turns about half as fast as the image of the female moves across his retina. This agrees well with the amount the male turns in Fig. 3c. Figure 4c also shows considerable scatter. Possible reasons are measurement error, which is not
4 Fig. 4 a Relation between male's rate of turning (~, Fig. la) and the direction of the female relative to the male's body axis (error angle 0, Fig. la), for 22 instances of courtship tracking by 4 male crabs. Dots, tracking in front or turns into the frontal hemisphere; circles track- ing behind, or turns into the rear hemisphere. Positions of male and female measured every 0.5 s; angular velocity was determined over the interval between each error angle measurement. The correlations are weak (r = 0.37, 0.56), but both are significant (P < 0.001). b Data from a combined about means and divided into 20 ~ ranges. Bars are 1 s.e. There is no relation between error angle and angular velocity over most of the tracking range, but a strong one near the limits of the ranges, e Relation between error angular velocity (see Fig. lb) and male's angular velocity for the same tracking episodes as a and b. Velocities measured over longer periods (1.5 to 3.5 s) to give adequate accuracy. Slope of regression line (crab's open loop gain) is 0.48. Correlation r is 0.56 (P ~ 0.001)
negligible with the small angles involved here, and error due to the rather jerky nature of the turns them- selves.
In conclusion, the male's tracking behaviour is com- plex, and has been difficult to characterise. It appears to involve a low-gain velocity-driven system that operates near the centres of the front and rear regions, coupled with a position-dependent system that comes to bear when the target strays outside these wide central re- gions. Viewed as continuous control systems, neither is entirely convincing because the scatter of the results is high (Fig. 4a, c). It is very likely that the systems are not continuous, either by design, like the human saccadic system (Carpenter 1988), or simply because crabs can- not wave and orient at the same time. There are many issues raised by this initial analysis that await further study.
Defence against conspecifics
In addition to the females, a similar number of males wander through the parts of the beach inhabited by burrow-holding males. These wandering males often try to dispossess the burrow holders, either by slipping into the burrow while the resident is at some distance from it, or occasionally by physically extracting a smaller male using the large claw. Males determine the sex of an intruder at 10 to 15 cm (Land and Layne 1995) and this can be seen from the differences in behaviour. At this distance the residents court females by making scuttling runs towards the burrow; to rival males, however, they respond with postures that in- volve interposing the claw between the intruder and the burrow. Three examples are shown in Fig. 5a. In the first the resident male faces toward the intruder, with the claw flexed in front. In the other two cases the intruder is kept behind, with the claw deployed in more extended positions. As in courtship, the defending male tends to keep the other crab in one of two preferred directions with respect to his body axis. These are similar but not identical to those in courtship (Figs. 2b and 5b); both have a region in front and one behind with a narrow but distinct gap at the lateral pole occupied by the claw, and a much larger one on the side of the burrow. The differences are that the front (Fig. 5a, first case) is used relatively infrequently in defence, and the rear relatively more often. Although there appear to be differences in the modal positions of the peaks in Fig. 2b compared with Fig. 5b, the differ- ences of the corresponding means of the distributions did not reach significance on a t-test. As in courtship tracking, defence involves both turning so that the body is facing in the right general direction, and track- ing to maintain this direction as the intruder moves round the burrow. Preliminary observations indicate that the mechanisms involved are quite similar to those that guide courtship. They are, however, obviously

96 M. Land, J. Layne: Visual control systems in Uca
a
b
Escape from predators
Types of escape response
Escape behaviour is quite different from the kind of defence just discussed. If an object moves above the crabs' horizon this means that it is larger than crab size, and so a potential threat (Land and Layne 1995). The crabs' response is usually in two phases. For burrow holders a small movement evokes a freeze, or a move- ment towards but not into the burrow. If nothing else happens the crab will recommence normal activity in a few seconds. A larger movement, or a repeated move- ment, will send the crab down its burrow, where it may remain for a minute or more (yon Hagen 1962; Nalbach 1990a). Crabs in the open, without burrows, walk dir- ectly away from a threatening object (Fig. 6). If the object moves faster they seem to change gear and run at full speed. This enables them to keep at a distance of one or two metres from a walking gull, for example, out of range of the beak. In this study we have looked at the nature of the mechanism that orients the crabs' running direction directly away from the predator.
Fig. 5 a Three examples of burrow defence, showing the different positioning of the claw to ward off intruding males coming from different directions. Conventions as Fig. 2a. b Circular histogram showing direction of intruding male relative to the midline of the defender, every 0.5 s during a total of 10 episodes of defence by 4 crabs. Compare courtship directions in Fig. 2b; the main difference lies in the relative sizes of the forward and backward pointing distributions, rather than their average directions
adjusted slightly differently, and it would be interesting to explore these differences further.
From a consideration of tracking in courtship and defence, one might expect the latter to be more precise. During courtship the male does not chase or try to apprehend the female, and the only requirement is that he must offer her a partial view of his front or back, so that the direction of movement of his claw and body is visible to her, to guide her to his burrow. In defence, however, the mechanics of engaging the claw with the intruder's claw imply a need for much more directional accuracy. However, the distribution of target directions in Fig. 5b does not suggest that tracking is particularly accurate. The answer to this apparent paradox prob- ably lies in that fact that the claw is independently steerable. There is a hint of this in Fig. 5a, which shows that the claw can move through an arc of nearly 180 ~ relative to the body. We will show later that the claw can be directed to targets and can follow them reasonably accurately (Fig. 10). This facility pre- sumably makes accurate alignment of the body less necessary.
Mechanism of evasion
There are two ways that a crab might direct its course away from a potential predator (see inserts to Fig. 8a, b). It could maintain a constant direction of its body axis in space, but vary the direction of locomotion relative to the body axis so as to keep it at 180 ~ to the seen position of the threatening target. Alternatively, it could turn so that its preferred running direction, usu- ally one or other lateral pole, is directed away from the target; thereafter the course direction would be ad- justed while running so as to keep the target in line with the opposite pole. The first mechanism involves cha- nges in the direction of translation relative to the body, the latter involves only rotation. Direct observation and studies of video-tapes suggested that the more common method of escape was rotation coupled with sideways running, but there were also occasions when crabs backed away from a threatening target whilst facing it frontally. The movements involved appeared to be smooth and continuous and we saw no evidence of the kind of large-angle discontinuous turning found by Nalbach (1990b) in the soldier crab Mictyris.
On one occasion some crabs were chased for several seconds in the field of view of a downward pointing video-camera, so that the body axes were visible on the films (Fig. 6a). A pole was used to give a well-defined vertical target. The longest continuous record is given in Fig. 6b, and it shows that the crab's turning velocity very closely follows the angle of the stimulus from the front. This is what would be expected for a simple position-sensitive feedback loop (Fig. la). Figure6c shows that the direction at which no turning occurred

M. Land, J. Layne: Visual control systems in Uca
a
b
e
0 x_
E 0
e9
e-
0
150
90
30
i 300 o
. D
0 o 0 >
a n g l e f r o m
~urn in
u n i t t i
3OO
-300
, , i i I n n n i I I I I I I I I I I ~ I I I I I
1 2 3 4 5
time (s}
C
m
~
A k .
r
O ~
L--
O O
d 1
7 o
O O
>
O ~ r
- 3 0 0 , , , , , ' , , T i I I 3 0 9 0 1 5 0 -- I 0
angle from front (~ delay (s)
Fig. 6 a Diagram of a crab escaping from a threatening object, showing how the error angle from the crab's axis, and the instan- taneous angular velocity are measured, b Five s record of a crab running away from the end of an irregularly moving stick, showing the similarity between the time course of the angular position of the stimulus relative to the crab, and the crab's turning velocity, e Plot derived from b showing the close relationship between angular position of the stick and turning velocity 0.1 s later (r = 0.80, P < 0.001). The line intersects the zero velocity axis at 73 ~ from the front, which is where the crab endeavours to keep the stimulus in this instance. This is a straightforward position feedback loop (Fig. 1) with a non-zero set point or fixation center, d Correlation between turning velocity and stimulus direction, as a function of time between the two measurements. The maximum correlation occurs when there is a lag of between 0.1 and 0.2 s, which represents the total delay in the crab's feedback loop
(the set point of the loop) was at 73 ~ from the front, not 90 ~ as might have been expected. This angle seems to vary somewhat between crabs, and the same crab will, from time to time, rotate through ~ 180 ~ to put the set point on the other side. Unlike the system for maintain- ing burrow direction (Fig. 2c), in the evasion system it does not matter which side the claw is on. The slope of the regression line in Fig. 6c gives the value of the
97
constant k in Fig. ld, and it is about 35. s - 1 per degree of error. To put this in perspective, chasing flies on the wing have values for k of about 30"s- 1 and walking flies 15-s -~ (Land 1993) so this is not a particularly 'high gain' system in Uca. The delay in the system
how long it takes for the crab to register the stimulus position and change angular velocity appropriately - can be obtained approximately by looking for the maximum correlation beween turning velocity and er- ror angle, as a function of the time between the two sets of measurements. Figure 6d shows that this occurs after a delay of between 100-200 ms. Although this is quite short enough to be effective, it is still long compared with loop delays of 15-20 ms seen in fly chases (Land 1993). The evidence of Fig. 6 indicates that the rotational component of evasion is a very straight- forward position-sensitive continuous feedback loop (Fig. la, d).
To sort out the relative contributions rotational and translational mechanisms to evasion we tried a vari- ation of a method used previously by Buchner (1976) and Dahmen (1980), which makes it possible to stimu- late the crab without it receiving feedback from its own actions. A crab was suspended by a rod attached with super-glue to its dorsal carapace. It was given a light ball (3.6 g, the same as the crab) made of expanded plastic, 6 cm in diameter, to hold with its feet. It turned out that with Uca the ball needed no support; the crab grasped the ball and turned it vigorously as though running, and clearly accepted this unusual substrate as the 'real world'. The crab was surrounded on three sides with white card, and a threatening stimulus was introduced in the form of a single black stripe (14 ~ wide by 32 ~ high at the crab, above the horizon) which could be moved around the crab by hand at a distance of 8 cm. The crab and stimulus were videotaped from
Fig. 7 Fixed crab manoeuvring a foam plastic ball (large circle) with its feet. Open arrows show movement of the ball, and the construc- tion shows how this can be determined from the movement of spots on the bali's surface. R and T are the rotation and translation velocities that the crab is imparting to the ball. Solid arrows show the directions of these velocities if the crab itself were free to move on a stationary substrate. See text for further details

98 M. Land, J. Layne: Visual control systems in Uca
a
g--.
180
90
0
- 9 0
- 1 8 0
- 2 7 0
- 3 6 0
- 4 5 0
~ = , ~ o " ~ ' , ~ e , ~ ~
�9 �9 q e e �9 �9 �9 e e e e e o e �9 �9 �9 e e e �9 �9
" � 9 Oo--'~ " .'-, , ~ �9 o
T
~ * . �9 �9 �9 �9 � 9 �9 . . %~ �9 ~ � 9 �9 �9 �9 �9 �9 . ~ ' � 9 5 "~
~. �9 ....- . . , . "- . : .- . **,o . . . . .. .**...~ ...,"
o 0 I I I ; '1'0 '210 30 40 50 60
180 ~ ~ , , ~
, '! g - 9 o [ - - - - t - - 4 . . . . 4 - - - ~ z ~ . z , , ~ . . . . . r . . . . . . l . . . .
i i i .. -6 . . . . . ; ' ; . . . . ~=_:" _ . . " L - ~
~, - 5 0 r " . " ". " " : " ' : : " " " " "~ - 1 0 0 I- . -
- 1 5 0 L ~;~ L t I I ..... I I I
0 10 20 30 40 50 60
t i m e (s]
m A
~
i'8
i A .%
-. B I A
. " . . , "
~ . . . -
11"6
Fig. 8 a Translational movements (dots) made by a fixed crab re- sponding to a black stripe moving around it (circles). Dots on upper figure show the crab's translation direction, which is kept at close to 180 ~ from the stripe's direction (see insert), even though the stripe moves through an arc of 240 ~ during the 60s record. Lower fioure gives translation speed, which shows a slight elevation when the stripe is near • 90% b Rotational velocity of fixed crab during the same experiment as in a. The arrows indicate where the stimulus crosses the crab's midline and transverse axis. Positive angles are to the right, and positive angular velocities are rightward (the crab is trying to turn clockwise). Notice that the angular velocity is mostly positive when the stimulus is beyond + 90 ~, and between 0 and - 9 0 ~ and negative when the stimulus is beyond - 9 0 ~ and be-
tween 0 and + 90'. This is consistent with system that attempts to turn the crab to keep the stimulus at around ___ 90 ~ (see insert)
above, and the movements of the ball were made visible by a pentagonal pattern of 12 spots joined by lines.
Translatory and rotatory locomotion were extracted by the method shown in Fig. 7. The movements that
the crab would have taken, if moving freely on a flat surface, were reconstructed from the movements of the bail. In the case of pure translation the path of the ball beneath the crab is a straight line, whose direction is opposite to that of the crab's intended locomotion. Pure rotation by the crab cause rotation of the ball about a vertical axis through the crab, again in the opposite direction to the crab's intention. Combina- tions of translation and rotation result in circular movements by the ball, where the centre of rotation is at a distance from the crab itself. The translational component is given by the direction and speed of move- ment of the ball immediately beneath the crab, and the angular rotation speed is simply the angular velocity of the ball about its temporary centre of rotation. Measurements were made by plotting the positions of the three dots nearest to the crab on the balrs surface at

M. Land, J. Layne: Visual control systems in Uca 99
0.5s intervals. The movements of the dots between samples define arcs, and normals to these locate the centre of rotation on the ball's surface. The lengths of the arcs enable the speed of rotation to be measured, and from this both the speed and direction of ball beneath the crab itself can be determined; these give the speed and direction of translation.
The method worked remarkably well, considering the oddness of the crab's sensory and mechanical envi- ronment. The most complete series of results is given in Fig. 8. Figure 8a shows a crab's translatory locomotion over a 1 min. period in which the stimulus (circles) was moved from the front to a point about 120 ~ to the right, then moved back across the front to a similar point on the left, and back to the right again. The dots in the upper part of the figure show the crab's reconstructed translation direction, and the impressive feature of the graph is the way that this direction keeps close to 180 ~ from the stimulus throughout the period. In other words, the crab walks directly away from the stimulus, wherever it is located in the field of view. In fact the mean difference between the two records was 193 ~ (s.d. 36~ The crab is probably considerably more accurate than the latter figure implies, because that contains both measurement errors and errors resulting from the crab's occasional difficulty in manipulating the ball. The lower graph shows translation speed, which does vary slightly with stimulus direction, being greatest when the target is at _+ 90 ~ and least when it is in front. Later in the experiment, when the crab was habituated or fatigued, it only walked when the target was near one of the lateral poles - the preferred running direction.
The same crab's rotational velocity is shown in the lower part of Fig. 8b, with the target direction above. The record varies with time in a way that looks messy until one considers its relation with the target direction. It can be seen that the crab turns anti-clockwise when the target is on the right ( + ) between 0 and 90 ~ and on the left ( - ) beyond 90 ~ The crab turns either clock- wise or not at all when the target is on the left between 0 and 90 ~ and beyond 90 ~ on the right. This result has a simple meaning; the crab is trying to turn so as to place the target close to 90 ~ to the left or right, whichever is nearest. This is the rotation mechanism discussed earlier, and is the open-loop counterpart of the closed- loop behaviour in Fig. 6, and it serves to place the threatening stimulus opposite the prefered running direction.
The data in Fig. 8b have an overall anti-clockwise bias, due probably either to asymmetries in the crab's posture or to the uneven light distribution around the crab. To examine in more detail the strength of the turning tendency in different parts of the field, whilst removing this bias, records from left and right were combined, by inverting the sign of the left-stimulus responses and averaging the results over 10 ~ ranges. The results are shown in Fig. 9. They indicate that
between 15 and 65 ~ from the midline the response is essentially constant, and then it rises to invert its sign at about 80 ~ before becoming more or less constant again at - 95 ~ Apart from the regions around _+ 80 ~ 0 ~ and by inference 180 ~ the crab is turning either clockwise or anticlockwise at about 25 ~ s-1. In real life the result will be that the image of a predator appearing in front will be rotated to the side in 3-4 s, and a 10 ~ movement by the predator will be compensated for in less than half a second. More impressive still, this rotational mechanism operates simultaneously and in parallel with the translatory mechanism shown in Fig. 8a. There is no suggestion that the two mechanisms 'time share' or interact with each other in any other way. The combined effect of translation and rotation will be that the crab backs directly away from the threat, whilst turning at the same time.
Visual control of the claw
Tracking with the claw
The enlarged claw can be used as a defensive and offensive weapon both against rival males and, if the crab is cornered, as a last resort defence against poten- tial predators (reviews by Sch6ne, 1968, Wright 1968). The claw can be used flexed or extended (Fig. 5), and between these two extremes it can be positioned rela- tive to the body to oppose the enemy appropriately. This usually means tracking the target with either the back or the tip of the claw.
Figure 10 shows an example of this kind of tracking in a suspended crab holding a ball. The crab was threatened with a finger moved around it at a distance of 5-10 cm. Measurements of the angle of the finger and the claw tip, relative to a point between the eyes, were made from video-films taken from above. It is clear that the crab is tracking the target with its claw, over a range of about 50 ~ In this instance the system seems to have 'back-stops' at about + 25 ~ and when the claw reaches one of these it halts with very obvious overshoots, presumably a result of the claw's inertia. These limits are probably not themselves mechanical, because the claw can be flexed and extended well be- yond them on other occasions, as in the strike around second 9 where the claw moves out to 60 ~ (see also Fig. 5a). No formal attempt was made to work out the exact nature of the input to the system. However, the absence of obvious velocity slip in the central 50 ~ re- gion (contrast Fig. 3a), and an additional observation that the claw is initially directed towards the finger independent of its direction of movement, both suggest that the input to the system is target position rather than velocity. Target position is probably converted to muscle action without further visual feedback; it is possible that the crab monitors the claw-to-target error rather than just target position, but this seems

100
unnecessarily complicated. An obvious experiment would be to see what would happen with crabs lacking the distal part of the claw.
Eye movements durin9 trackin9
In the claw tracking experiment one eye was provided with a small stiff flag at tached with super-glue but not obscuring the eye surface. This was used to measure eye rotation, and the result is given in the top line of Fig. 10. The record shows two pairs of saccades in opposite directions, with amplitudes between 6 and 18 ~ The smaller movements are probably all result from mechanical disturbance and measurement error. These saccades are not related in any obvious way to the tracking itself, and they are typical of the kinds of eye movements used to shift the image position during locomotory turning (Barnes and Nalbach 1993). The
=._..
'U 0
t3) E
50
- 5 O
I
- 3 0
I I I I t I I I I I I I I I I
0 30 60 90 120
a n g l e ( ' )
I I 150
Fig. 9 The same data as in Fig. 8b, but left and right stimuli com- bined by reversing the sign of the response to stimuli on the right, and pooling the results in 10 ~ ranges. Bars are 1 standard error. The sign of the response reverses at 80 ~ , which is where the stimulus would be held in a freely moving crab. In the region around this reversal point the crab is trying to do the same kind of tracking as in the real closed loop behaviour shown in Fig. 6, and the slope of the line here (2.5~ -1 per degree) is almost the same as in Fig. 6c (3"- s- 1 per degree)
M. Land, J. Layne: Visual control systems in Uca
crab was, in fact, walking more or less backwards on the ball, away from the finger, th roughout the period of observation. It is thus clear that the eyes do not track the target. This means that for practical purposes they can be regarded as sensors that are stat ionary relative to the body, and not as mobile components in the tracking loop, separately guided by visual feedback, as they would be in humans. Similar observations made during escape behaviour experiments (like those in Figs 8 and 9) showed that again there were no eye move- ments systematically linked to target position, only small saccades associated with locomotion. It seems probable that the lack of involvement of eye move- ments in tracking behaviour is general (see Barnes and Nalbach 1993), al though we have no direct observa- tions on the tracking of conspecifics in the natural environment. Whether or not the saccades have a dis- turbing effect on other behaviours remains to be seen. They might be expected to interfere to some extent with the accuracy with which the eyes can extract velocity and position information.
Discuss ion
Types of control system
We have shown that fiddler crabs use tracking systems of several kinds, in many aspects of their lives. Here we try to draw the different systems together into a classificatory scheme that reflects, to some extent at least, the different kinds of task that each requires of the
Fig. 10 Tracking with the claw. Circles show the position of a finger tip relative to the crab's midline, and joined dots show the angle between the tip of the claw and the midline, both measured from a point between the eyes. The claw evidently tracks the threatening finger, though imperfectly, and at one point strikes it. The upper trace shows the movements of the left eye during the claw tracking. There are two pairs of small saccades, unrelated to the claw move- ment, but no trace of tracking movements
| 20
| 0
"~ 6o
'~ 0
~_- -60
_ ~ , I strike g % o o
% o~ % o ~ o %, ~ ~ o
Z d �9
% o
I I I , l , l , l l l l l I I I
0 1 2 3 4 5 6 7 8 9 10
t i m e (s]
M. Land, J. Layne: Visual control systems in Uca 101
nervous system. Control systems have historically been classified in at least four different ways.
1. By their function; e.g. tracking conspecifics, stabilizing the retinal image etc. This indicates what they are for, but gives no insight into how they work.
2. By the nature of the controlling input variable (Fig. la). For example in Uca stimulus position relative to the body determines the direction of escape, but it is mainly stimulus angular velocity that drives the track- ing response to females. This distinction has been particularly important in the study of human eye move- ments, where the fast saccadic system is driven prim- arily by position input, and the smooth tracking system by target velocity (Carpenter 1988).
3. By the extent to which feedback is involved. Gen- erally speaking, visually driven actions such as eye and body movements have visual consequences - they shift the image on the retina. Thus these actions in turn become inputs to the system. Such systems are often referred to as closed-loop as opposed to open-loop systems where feedback is not involved (Mittelstaedt 1964). This distinction is apparent in Uca escape behav- iour, where the rotational response (Figs. 8a, 9) requires feedback in the form of the crab's rotation to bring it to a conclusion, whereas the translational response (Fig. 8a) does not need feedback for its accurate execution.
4. By the way the input is a sampled. The human saccadic eye movement system is a discontinuous or 'sampled data' system, which is only open to new input before each saccade and towards its end, and is effec- tively blind during the movement itself (Becket 1991). Human smooth tracking, however, is a continuous system, in which the input (which includes the conse- quences of eye movements) continuously influences the output. Discontinuous systems are faster because they do not wait for feedback, and they avoid some of the instabilities inherent in continuous control, but at some
cost to accuracy (see Land 1992). A problem with this classification is that a system with a single function may employ both modes. Fast tracking in humans, for example is part smooth (continuous) and part saccadic, the mixture depending on target speed. A similar dual- ity occurs in tracking by hoverflies (Collett and Land 1975). In Uca we know in only a few cases how the image is sampled, and it is quite likely that hybrid systems will be present here, as they are elsewhere.
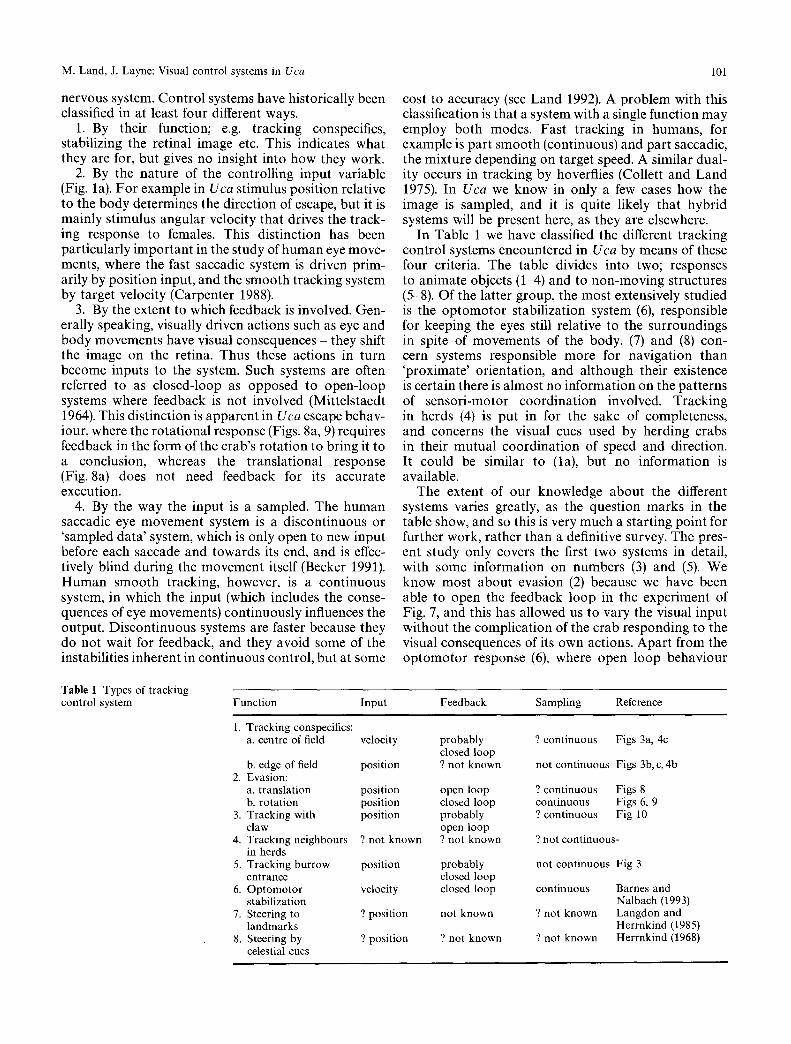
In Table 1 we have classified the different tracking control systems encountered in Uca by means of these four criteria. The table divides into two; responses to animate objects (1-4) and to non-moving structures (5-8). Of the latter group, the most extensively studied is the optomotor stabilization system (6), responsible for keeping the eyes still relative to the surroundings in spite of movements of the body. (7) and (8) con- cern systems responsible more for navigation than 'proximate' orientation, and although their existence is certain there is almost no information on the patterns of sensori-motor coordination involved. Tracking in herds (4) is put in for the sake of completeness, and concerns the visual cues used by herding crabs in their mutual coordination of speed and direction. It could be similar to (la), but no information is available.
The extent of our knowledge about the different systems varies greatly, as the question marks in the table show, and so this is very much a starting point for further work, rather than a definitive survey. The pres- ent study only covers the first two systems in detail, with some information on numbers (3) and (5). We know most about evasion (2) because we have been able to open the feedback loop in the experiment of Fig. 7, and this has allowed us to vary the visual input without the complication of the crab responding to the visual consequences of its own actions. Apart from the optomotor response (6), where open loop behaviour
Table 1 Types of tracking control system Function Input Feedback Sampling Reference
1. Tracking conspecifics: a. centre of field velocity probably ? continuous Figs 3a, 4c
closed loop position ? not known not continuous Figs 3b, c, 4b
position ? continuous Figs 8 position continuous Figs 6, 9 position ? continuous Fig 10
? not known ? not continuous-
position not continuous Fig 3
velocity continuous Barnes and Nalbach (1993)
? position ? not known Langdon and Herrnkind (1985)
? position ? not known Herrnkind (1968)
b. edge of field 2. Evasion:
a. translation b. rotation
3. Tracking with claw
4. Tracking neighbours in herds
5. Tracking burrow entrance
6. Optomotor stabilization
7. Steering to landmarks
8. Steering by celestial cues
open loop closed loop probably open loop ? not known
probably closed loop closed loop
notknown
? not known

102 M. Land, J. Layne: Visual control systems in Uca
was studied 30 years ago (see Horridge 1966), it has not so far been possible to examine any of the other control systems in this way. It is easy to frighten a crab in an artificial situation, but much harder to persuade it to mate!
Tracking crabs and tracking predators: some comparisons
The tasks of the control systems that orient male crabs to conspecifics or to heterospecific threats are, in prin- ciple, similar. That is, they are both concerned with turning the crab until the target is in the appropriate direction, and then keeping it there. However, the two systems differ in many other respects. The most obvi- ous difference is the direction in which the crab seeks to maintain the target. In dealing with other crabs, a male places them either broadly in front, or behind on the side of the claw (Figs. 2b and 5b). The position at 90 ~ in each direction is avoided. For escape, however, the tracking system positions the threatening target close to this 90 ~ position (Fig. 6). The reasons for keeping other crabs in front or behind are probably not to do with having better eyesight or better manoeuvrability in these directions, but rather the need to show the face of the claw - in display to females or defence to other males. During courtship the claw is waved principally in the transverse plane, so that from 90 ~ neither the claw itself nor its motion are very visible. More impor- tant, the direction of the wave and the direction of the scuttling runs to the burrow are both difficult for a fe- male crab in this position to discern. The female gets a better and more informative view if the male faces towards her or away from her. A similar argument can be made for the use of the claw in defence, but here there seems to be less reason to avoid the 90 ~ position on the claw side, because there is nothing to stop the claw being used defensively in this position (Fig. 5a). This position is avoided, however, (Fig. 5b), and it may be that the crab simply has one 'conspecific tracking' mechanism that has to do for both tasks. Other possible reasons for the taboo on the 90 ~ posi- tion include - in addition to predator fixation the fact that it is used for optomotor stabilization (Kunze 1963; Nalbach and Nalbach, 1987), and for imaging the bur- row, almost always on the side opposite the claw (Fig. 2c).
The use of the 90 c' direction for predators (Figs. 6 and 9b) is easier to explain on the basis that it is the crab's preferred running direction. They can run in any direc- tion (Fig. 8a) but they undoubtedly run fastest at right angles to the longitudinal body axis. It is interesting that under pressure they can turn through 180 ~ and use the other 90 ~ position. The control of escape behaviour has not been much studied in other animals. Escape in the forward-walking crab Mictyris is clearly very differ- ent, with large (57 ~ ) separated turns being made in the
direction of motion of a threatening object, but not its position (Nalbach 1990b). The bug Triatoma infestans is more like Uca in that it maintains a preferred escape direction of about 120 ~ to a moving stimulus (Lazzari and Varjfl, 1990), presumably by a position-sensitive tracking system like that involved here (Fig. 6). Inter- estingly, Triatoma keeps stationary targets in front and walks towards them. Thus, like Uca, it has separate control systems - or at least separate set points - for different classes of object.
The control systems involved in the two types of behaviour also differ in their formal properties (see Table 1). For tracking conspecifics, the crabs use a somewhat imprecise, low-gain velocity-sensitive sys- tem with position-sensitive backstops that prevent the target slipping too far to the side (Fig. 4). This combina- tion keeps the target within wide position limits, but does not seem intended to provide precise directional tracking (Figs. 2b and 5b). The response of the crab is more or less jerky throughout the whole tracking range, implying that neither component employs con- tinuous control.
By contrast, the systems concerned with predators are much more precise, and both are position sensitive. The rotation mechanism is a classic position-sensitive feedback loop (see Fig. la) that turns the crab continu- ously at a velocity proportional, within limits, to the error angle between the target and a position set-point - at 73 ~ from the front in example in Fig. 6c. This system resembles continuous position tracking seen in the chasing behaviour of some flies (Collett and Land 1975; Land, 1993) although in these cases the set-point is usually the forward direction. Interestingly, smooth tracking systems in both humans and praying mantids use target velocity as their main input (Rossel 1980; Land 1992), and so resemble more closely the tracking of conspecifics in Uca, and indeed the optomotor re- sponse itself. The translational system that lets the crab back away from a hostile target is perhaps the most interesting mechanism to emerge from this study, for two reasons. First, it does not require feedback. Where- as the rotation mechanism will continue to turn the crab until the position error signal is cancelled, the translational mechanism converts each target direction into an appropriate walking direction. This is not a feedback loop because it has no single set point, and because it is not intrinsically self-correcting: if the crab does not walk at exactly 180 ~ from a distant predator, but at say 160 ~ there will be no change in the retinal image. In the terminology of Di Stefano et al (1976) this is an open-loop system, and relies for its accuracy on its intrinsic calibration. We do not know of any other biological system quite like it. Human eye saccades, and open-loop turns made by jumping spiders (Land 1971) are similar in that they convert position to a movement pattern without further visual feedback, but they are not continuous systems; each movement is completed before the next is set up, and there are clear

M. Land, J. Layne: Visual control systems in Uca
gaps between individual movements. This is not the case for translational evasion in Uca, where walking direction changes continuously as the target shifts posi- tion. Or at least it appears to do so with the time resolution available here; there may be a sub-second microstructure to the response that is not resolved in Fig. 8a. The second feature of interest is that this system provides a particularly convincing example of a func- tional map of position in an arthropod brain. As Fig. 8a shows, each retinal location is indexed to one walking direction, implying a unique mapping of sens- ory array to motor pattern. Evidently this mapping is complete within the range studied ( _+ 120 ~ and, judged from the observed output, it is reasonably accurate. A system somewhat similar to this is found in hovering guard bees (Trigona) which respond to a suddenly expanding (equivalent to approaching) pattern with a brief flight at 180 ~ to the centre of expansion, inde- pendent of the direction that the bee is facing intially (Kelber and Zeil 1990).
Acknowledgements We are grateful to Jeremy Jones and Karen McComb (Sussex) and Jochen Zeil (Kuwait) for helpful discus- sions of the manuscript. This work was supported in part by a COCOS fellowship to MFL from Duke University, and in part from a grant from the Science and Engineering Research Council of the U.K.
References
Barnes WJP, Nalbach H-O (1993) Eye movements in freely moving crabs: their sensory basis and possible role in flow-field analysis. Comp Biochem Physiol 104A: 675 693
Becker W (1991) Saccades. In: Carpenter RHS, (ed) Vision and visual dysfunction vol 8. Macmillan Basingstoke, pp 95-137
Buchner E (1976) Elementary movement detectors in an insect visual system. Biol Cybern 24:85-101
Carpenter RHS (1988) Movements of the eyes (2nd ed). Pion, London
Collett TS, Land MF (1975) Visual control of flight behaviour in the hoverfly Syritta pipiens L. J Comp Physiol 99:1-66
Crane J (1957) Basic pattern of display in fiddler crabs (Ocypodidae, Genus Uca). Zoologica 42:69-82
Crane J (1975) Fiddler crabs of the world. Princeton, New Jersey Dahmen HJ (1980) A simple apparatus to investigate the orientation
of walking insects. Experientia 36:685-687 DiStefano JJ, Stubberud AR, Williams IJ (1976) Feedback and
control systems (metric ed). Schaum Outline Series. McGraw- Hill, New York
Hagen H von (1962) Freidlandstudien zur Sexual- und Fortpflan- zungsbioiogie von Uca tangeri in Andalusien. Z Morphol Okol Tiere 51:611 725
103
Hassenstein B (1971) Information and control in the living organ- ism. Chapman & Hall, London
Herrnkind WF (1968) Adaptive visually directed orientation in Uca pugilator. Am Zoo 8:585 598
Herrnkind WF (1983) Movement patterns and orientation. In: Vernberg JF, Vernberg WB (eds), The biology of Crustacea. vol 7. Academic, New York pp 41 105
Hinde RA (1970) Animal Behaviour (2nd ed). McGraw-Hill, New York
Hoist E von (1954) Relations between the central nervous system and the peripheral organs. Brit J Anim Behav 2:89-94
Horridge GA (1966) Study of a system, as illustrated by the op- tokinetic response. Symp Soc Exp Biol 20:179 198
Kelber A, Zeil J (1990) A robust procedure for visual stabilisation of hovering flight position in guard bees of Trigona (Tetragonisca) angustifolia (Apidae, Meliponinae). J Comp Physiol A 167: 569-577
Kunze P (1963) Der Einfluss der Grrsse bewegter Felder auf den optokinetischen Augenstielnystagmus der Winkerkrabbe. Erg Biol 26:55-62
Land MF (1971) Orientation by jumping spiders in the absence of visual feedback. J Exp Biol 54:119-139
Land MF (1992) Visual tracking and pursuit: humans and arthro- pods compared. J Insect Physiol 38:939-951
Land MF (1993) Chasing and pursuit in the Dolichopodid fly Poecilobothrus nobilitatus. J Comp Physiol A 173:605-613
Land MF, Layne J (1995) The visual control of behaviour in fiddler crabs. I. Resolution, thresholds and the role of the horizon. J Comp Physiol A 177:81 90
Langdon JW, Herrnkind WF (1985) Visual shape discrimination in the fiddler crab, Uca pugilator. Mar Behav Physiol 11:313-325
Lazzari C, Varjfi D (1990) Visual lateral fixation and tracking in the haematophagous bug Triatoma infestans. J Comp Physiol A 167: 527 531
Mittelstaedt H (1964) Basic control patterns of orientational homeo- stasis. Symp Soc Exp Biol 18:365 385
Nalbach H-O (1990a) Visually elicited escape in crabs. In: Wiese K et al. (eds) Frontiers in crustacean neurobiology Birkh~iuser Basel, pp 165 172.
Nalbach H-O (1990b) Discontinuous turning reaction during escape in soldier crabs. J Exp Biol 148:483~487
Nalbach H-O, Nalbach G (1987) Distribution of optokinetic sensi- tivity over the eyes of crabs: its relation to habitat and possible role in flow-field analysis. J Comp Physiol A 160:127 135
Rossel S (1980) Foveal fixation and tracking in the praying mantis. J Comp Physiol 139:307-331
Salmon M, Atsaides S (1968) Visual and acoustical signalling during courtship by fiddler crabs (Genus Uca). Am Zoologist 8:623-639
Salmon M, Hyatt GW (1983) Movement patterns and orientation. In: Vernberg JF, Vernberg WB (eds) The Biology of Crustacea. vol 7. Academic, New York pp 1-40
Schrne H (1968) Agonistic and sexual display in aquatic and semi- terrestrial brachyuran crabs. Am Zoologist 8:641-654
Schrne H (1984) Spatial orientation. Princeton University Press, Princeton, NJ
Tinbergen N (1951) The study of instinct. Clarendon, Oxford Wright HO (1968) Visual displays in brachyuran crabs: field and
laboratory studies. Am Zool 8:655-665




















