The Double-Edged Sword of Decentralized Planning in Multiteam Systems
23
THE DOUBLE-EDGED SWORD OF DECENTRALIZED PLANNING IN MULTITEAM SYSTEMS KLODIANA LANAJ JOHN R. HOLLENBECK DANIEL R. ILGEN Michigan State University CHRISTOPHER M. BARNES Virginia Polytechnic Institute and State University STEPHEN J. HARMON United States Air Force Academy The literature on small stand-alone teams has suggested that decentralization has predominantly positive features. However, in multiteam systems, the presence of other highly interdependent teams adds a level of complexity that may preclude generalizing from teams to multiteam systems. We studied the effects of decentralized planning in 210 multiteam systems, each composed of three six-person, functionally specialized component teams. As has previous research, we find that decentralized planning has positive effects on multiteam system performance, attributable to enhanced proactivity and aspiration levels. However, we also find that the positive effects associated with decentralized planning are offset by the even stronger negative effects attributable to excessive risk seeking and coordination failures. We discuss the implications for theories of intrateam and interteam dynamics, along with the applied implications for designing empowerment interventions in team and multiteam contexts. Many organizations strive to remain competitive in markets that are increasingly volatile, competi- tive, and dynamic. To adapt to changing environ- ments, many organizations have shifted from indi- vidual-based work toward team-based structures (Kozlowski & Bell, 2003; Lawler, Mohrman, & Led- ford, 1995). Teams enable organizations to be adap- tive, because they are dynamic and flexible systems comprised of individuals who possess diverse skills and experiences (Hoffman & Maier, 1961; McGrath, Arrow, & Berdahl, 2000). This shift in the nature of organizational structures has, in turn, led to a growing interest in determinants of team effec- tiveness (LePine, Piccolo, Jackson, Mathieu, & Saul, 2008). Much of the research on team effectiveness, however, has studied team processes within stand- alone teams, despite the well-acknowledged fact that work teams are typically integrated into larger organizational units (Ilgen, Hollenbeck, Johnson, & Jundt, 2005). As a result, even though interteam dynamics play an important role in team-based structures, there is a notable imbalance between studies focused on intrateam processes relative to studies on interteam processes (Alderfer & Smith, 1982; Ancona & Caldwell, 1992). Research addressing this imbal- ance is critical, because many of the factors that contribute to effective processes within teams may create difficulties in coordination between teams. For example, strong intragroup cohesiveness along with feelings of potency and personal identifica- tion within groups can create competition and conflict between groups (Tajfel, 1982). In addition, effective within group processes often aim to pro- We gratefully acknowledge the generous support pro- vided by the faculty, staff, and students of the U.S. Air Force Squadron (USAF) Officers College, Maxwell Air Force Base, Montgomery, Alabama. In particular, we thank Gen. Donald Cook, USAF, Retired; Col. Michael Tanous, USAF; Maj. Caroline Knutson-Vacarro, USAF, Retired; Maj. Kenneth Hanson, USAF, Retired; and Dr. Fil Arenas and Dr. Matthew Stafford. Special thanks go to Dr. Hank Dasinger for his vision and leadership in man- aging the multiteam system that was required to accom- plish this research. We are also thankful for the help provided by John Karasinski and Benjamin Thomas Jac- quier during the data-coding process. 735 Academy of Management Journal 2013, Vol. 56, No. 3, 735–757. http://dx.doi.org/10.5465/amj.2011.0350 Copyright of the Academy of Management, all rights reserved. Contents may not be copied, emailed, posted to a listserv, or otherwise transmitted without the copyright holder’s express written permission. Users may print, download, or email articles for individual use only.
-
Upload
washington -
Category
Documents
-
view
3 -
download
0
Transcript of The Double-Edged Sword of Decentralized Planning in Multiteam Systems

THE DOUBLE-EDGED SWORD OF DECENTRALIZEDPLANNING IN MULTITEAM SYSTEMS
KLODIANA LANAJJOHN R. HOLLENBECK
DANIEL R. ILGENMichigan State University
CHRISTOPHER M. BARNESVirginia Polytechnic Institute and State University
STEPHEN J. HARMONUnited States Air Force Academy
The literature on small stand-alone teams has suggested that decentralization haspredominantly positive features. However, in multiteam systems, the presence of otherhighly interdependent teams adds a level of complexity that may preclude generalizingfrom teams to multiteam systems. We studied the effects of decentralized planning in210 multiteam systems, each composed of three six-person, functionally specializedcomponent teams. As has previous research, we find that decentralized planning haspositive effects on multiteam system performance, attributable to enhanced proactivityand aspiration levels. However, we also find that the positive effects associated withdecentralized planning are offset by the even stronger negative effects attributable toexcessive risk seeking and coordination failures. We discuss the implications fortheories of intrateam and interteam dynamics, along with the applied implications fordesigning empowerment interventions in team and multiteam contexts.
Many organizations strive to remain competitivein markets that are increasingly volatile, competi-tive, and dynamic. To adapt to changing environ-ments, many organizations have shifted from indi-vidual-based work toward team-based structures(Kozlowski & Bell, 2003; Lawler, Mohrman, & Led-ford, 1995). Teams enable organizations to be adap-tive, because they are dynamic and flexible systemscomprised of individuals who possess diverseskills and experiences (Hoffman & Maier, 1961;
McGrath, Arrow, & Berdahl, 2000). This shift in thenature of organizational structures has, in turn, ledto a growing interest in determinants of team effec-tiveness (LePine, Piccolo, Jackson, Mathieu, & Saul,2008). Much of the research on team effectiveness,however, has studied team processes within stand-alone teams, despite the well-acknowledged factthat work teams are typically integrated into largerorganizational units (Ilgen, Hollenbeck, Johnson, &Jundt, 2005).
As a result, even though interteam dynamics playan important role in team-based structures, there isa notable imbalance between studies focused onintrateam processes relative to studies on interteamprocesses (Alderfer & Smith, 1982; Ancona &Caldwell, 1992). Research addressing this imbal-ance is critical, because many of the factors thatcontribute to effective processes within teams maycreate difficulties in coordination between teams.For example, strong intragroup cohesiveness alongwith feelings of potency and personal identifica-tion within groups can create competition andconflict between groups (Tajfel, 1982). In addition,effective within group processes often aim to pro-
We gratefully acknowledge the generous support pro-vided by the faculty, staff, and students of the U.S. AirForce Squadron (USAF) Officers College, Maxwell AirForce Base, Montgomery, Alabama. In particular, wethank Gen. Donald Cook, USAF, Retired; Col. MichaelTanous, USAF; Maj. Caroline Knutson-Vacarro, USAF,Retired; Maj. Kenneth Hanson, USAF, Retired; and Dr.Fil Arenas and Dr. Matthew Stafford. Special thanks go toDr. Hank Dasinger for his vision and leadership in man-aging the multiteam system that was required to accom-plish this research. We are also thankful for the helpprovided by John Karasinski and Benjamin Thomas Jac-quier during the data-coding process.
735
� Academy of Management Journal2013, Vol. 56, No. 3, 735–757.http://dx.doi.org/10.5465/amj.2011.0350
Copyright of the Academy of Management, all rights reserved. Contents may not be copied, emailed, posted to a listserv, or otherwise transmitted without the copyright holder’s expresswritten permission. Users may print, download, or email articles for individual use only.

mote role expansion and flexibility, which enhancethe effectiveness of small stand-alone teams. How-ever, in tightly coupled systems of teams, flexibilityon the part of one team can become unpredictabil-ity for other teams that need to coordinate theirefforts with the focal team. The relative imbalancebetween the amount of research on within-teamversus between-team behavior has led to manycalls for more research focused on “teams of teams”(Hoegl, Weinkauf, & Gemuenden, 2004) or multi-team systems (Mathieu, Marks, & Zaccaro, 2001).
Multiteam systems are unique organizational ar-rangements composed of two or more teams (here-after referred to as “component teams”), whichshare input, process, and outcome interdependen-cies as they pursue a common goal (Mathieu et al.,2001; Zaccaro, Marks, & DeChurch, 2012). The suc-cess of multiteam systems is tightly dependent onboth within- and between-team processes (Marks,DeChurch, Mathieu, Panzer, & Alonso, 2005). How-ever, unlike in small stand-alone teams, the largesize of multiteam systems, along with the special-ized nature of different members’ skills, makes di-rect, face-to-face, real-time communication amongall team members difficult, if not impossible. Inaddition, due to inherent interdependencies andtight coupling associated with multiteam systems,failure on the part of any one component teamusually leads to failure at the whole multiteamsystem level. Illustrating this point, the relief mul-titeam system that was formed by the Red Crossand Federal Emergency Management Agency(FEMA) to help Hurricane Katrina victims was crit-icized for not meeting its goals efficiently. Govern-mental auditing reports noted that the Red Crosswas unclear about the coordinating role and re-sponsibilities of FEMA. Both teams spent time try-ing to establish operations and procedures, ratherthan focusing on services (U.S. Government Ac-countability Office, 2006).
To advance theory and research on teams andmultiteam systems, it is critical to test the degree towhich well-accepted theories derived for stand-alone teams generalize to multiteam systems, giventhe potential boundary conditions associated withlarger size, higher specialization, and tighter inter-dependence between teams in such systems (Davi-son, Hollenbeck, Barnes, Sleesman, & Ilgen, 2012).Thus, multiteam systems may present an importantboundary condition to widely accepted theories ofsmall teams. We explore this possibility for decen-tralization, which is generally recognized as a pos-itive design feature for small stand-alone teams
(e.g., Boone & Hendriks, 2009; Hirst, Van Knippen-berg, Chen, & Sacramento, 2011). We take a generalapproach to multiteam systems and propose that,unlike in small stand-alone teams, decentralizationdoes not have only positive outcomes in multiteamsystems. We integrate theories of decentralization,goal setting, and proactivity and examine theoreti-cally and empirically the consequences of decen-tralized planning in a multiteam system context.
Decentralized planning gives lower-level teamsand individuals within organizations a voice intactical directions and operations of their units(Mintzberg, 1979). It provides lower level unitswith more power and control over important deci-sions and puts leadership in an advisory role(Burke, 1986; Kanter, 1993; Mintzberg, 1979, 1983;Tannenbaum, 1968). The study of decentralizedplanning in multiteam systems has important prac-tical implications, because decentralization is re-garded primarily as a positive feature for smallstand-alone teams (e.g., Boone & Hendriks, 2009;Hirst et al., 2011; Ling, Simsek, Lubatkin, Lyon, &Veiga, 2008; Mehra, Smith, Dixon, & Robertson,2006) and serves as a core design element in em-powerment interventions (e.g., Aryee, Walumbwa,Seidu, & Otaye, 2012; Bartunek & Spreitzer, 2006;Seibert, Wang, & Courtright, 2011; Spreitzer &Doneson, 2007). In addition, literature on sharedleadership in small teams suggests that decentral-ized structures that promote participative decisionmaking benefit overall team performance (e.g., Car-son, Tesluk, & Marrone, 2007; Pearce & Sims,2002).
Whereas the literature on stand-alone teams sup-ports the use of decentralizing interventions thatshift responsibility and authority from leadershipto team members (e.g., Chen, Sharma, Edinger, Sha-piro, & Farh, 2011; Cordery, Morrison, Wright, &Wall, 2010; DeJoy, Wilson, Vandenberg, McGrath-Higgins, & Griffin-Blake, 2010; Gibson, Porath, Ben-son, & Lawler, 2007), the literature on large-scaleorganizations suggests that there are both virtuesand liabilities to decentralized structures. More-over, because multiteam systems lie at the nexusbetween small teams and large organizations, wemay not be able to generalize the prescriptionsassociated with decentralizing interventions instand-alone teams to larger and more specializedsystems of teams (Drazin & Van de Ven, 1985;Thompson, 1967). Indeed, the possibility that thepositive effects of decentralized planning at thecomponent team level might be more than offset atthe higher multiteam system level, while plausible,
736 JuneAcademy of Management Journal

has never been tested. Our current work addressesthis possibility and argues that although there arelikely to be positive influences of decentralizedplanning on multiteam system performance attrib-utable to increased proactivity and aspiration lev-els, there are also likely to be negative influencesattributable to excessive risk seeking and coordina-tion problems that might negate or even reverse thetraditional effects.
This study contributes to literature and theory onteams and multiteam systems in three importantways. First, we argue theoretically and then showempirically that decentralization, which is viewedas a predominantly beneficial practice in the smallteams’ literature, may actually harm performancein multiteam systems, thus establishing an impor-tant boundary condition for well-accepted theoriesin the teams’ literature (e.g., empowerment, auton-omous work designs, self-management). Second,we identify the mediating mechanisms throughwhich decentralized planning is likely to benefit aswell as to harm multiteam system performance.Third, we utilize a situated experiment to test theseideas in a naturalistic environment that combinesthe beneficial elements of both laboratory and fieldresearch.
THEORIES OF DECENTRALIZATION ANDGOAL SETTING: AN INTEGRATIVE
APPROACH TO MULTITEAM SYSTEMS
Multiteam systems are becoming increasinglypopular in organizational contexts, because theyare large enough to address very complex problemsbut flexible enough to respond to problems or op-portunities in real time (Zaccaro et al., 2012). Mul-titeam systems may or may not cross organizationalboundaries but, in all cases, consist of highly inter-dependent component teams that typically cometogether to respond to a unique organizational need(Mathieu et al., 2001). They tend to be larger andmore specialized than traditional stand-aloneteams but smaller and less formalized than large-scale organizations. For example, Nissan Motor Co.recently put together a multiteam system to designand manufacture its newest all electric zero-emis-sion vehicle Nissan Leaf (Nissan Design Newslet-ter). As an illustration of interdependence sharedamong component teams, the ability of the Leafmultiteam system to meet a new market demand fora longer-lasting battery depended on the engineer-ing team’s ability to produce a larger lithium bat-tery as well as on the design team’s ability to alter
the design of the car’s trunk to accommodate thebigger battery (Murray, 2010; Nissan, 2011). Thistype of functional interdependence, in which com-ponent teams share vested interests and influenceeach other’s work, is a critical feature of multiteamsystems (Mathieu et al., 2001).
Research on stand-alone teams suggests that ef-fective planning is an important determinant ofteam performance (Mathieu & Rapp, 2009; Mathieu& Schulze, 2006; Smith, Locke, & Barry, 1990;Stout, Cannon-Bowers, Salas, & Milanovich, 1999;Weingart, 1992; Weldon, Jehn, & Pradhan, 1991),but planning is likely to be even more critical in amultiteam system context in which collective goalsand tactics serve as critical coordination mecha-nisms (Mathieu et al., 2001). Because multiteamsystems are too large to support mutual adjustmentamong all team members (Davison & Hollenbeck,2012), planning and goal setting needs to take placewithin the smaller component teams in which mu-tual adjustment is possible. In fact, Davison et al.(2012) found that direct mutual adjustment be-tween lower-level members of component teamswas actually detrimental to performance in multi-team systems and only served to convert themultiteam system into an overly large, undifferen-tiated, and unwieldy team. However, simply recog-nizing the distributed nature of planning in multi-team systems and the limitations of mutualadjustment across all team members does not an-swer all the procedural questions associated withthe planning process. In particular, a questionarises as to where the original nexus of planningshould be—in the leadership team or the compo-nent teams. Multiteam systems could be either cen-tralized or decentralized (Mathieu et al., 2001), yettheory on multiteam systems does not make formalprescriptions about whether centralized or decen-tralized planning is most appropriate in a norma-tive sense.
Planning is centralized when the formal author-ity for decision making rests with a leadershipteam, and planning is decentralized when deci-sion-making authority rests with lower levels of ahierarchy, such as component teams (Mintzberg,1983). Organizational design literature suggeststhat planning helps units define a systematic tran-sition from their present state to a desired futurestate (Galbraith, Downey, & Kates, 2002; Kanter,1993). Direction of behavior toward the future isattainable through goal setting, which is one of thefirst steps of planning (Grant & King, 1982; Lorange& Vancil, 1977; Steiner, 1979). In fact, it has been
2013 737Lanaj, Hollenbeck, Ilgen, Barnes, and Harmon

argued that the planning process is closely inter-twined with goal setting in various organizationalstructures (Galbraith, 1995, 2008; Kanter, 1993;Kates & Galbraith, 2007; Mills & Ungson, 2003).Since design is concerned with creating structuresthat facilitate goal attainment (Simon, 1981), a the-oretically integrative approach to design and goalsetting is appropriate when investigating decentral-ized planning in multiteam systems.
Whereas the literature on small stand-aloneteams views decentralizing practices as predomi-nantly positive, theoretical work on large-scale or-ganizations suggests that these practices have bothpositive and negative features. On one hand, decen-tralization is considered a solution for problemsassociated with cognitive limitations, allowing formore planned approaches to decision making, aswell as increased motivation levels (Miller, 1987;Mintzberg, 1983; Richardson, Vandenberg, Blum, &Roman, 2002). More specifically, theories of decen-tralization (Dutton & Duncan, 1987; Miller, 1987;Mintzberg, 1979, 1983; Singh, 1986) suggest thatdecentralized planning is expected to increase as-piration levels (Kanter, 1993) and proactivity(Bindl & Parker, 2010; Dutton & Duncan, 1987;Parker, Williams, & Turner, 2006).
On the other hand, decentralization may createproblems for risk management and knowledgesharing (Mintzberg, 1983). More specifically, re-searchers have cautioned that decentralizing prac-
tices may induce excessive risk seeking and coor-dination problems (e.g., Kanter, 1993; Miller, 1987;Mills & Ungson, 2003; Mintzberg, 1983; Singh,1986), but these negative effects have not receivedmuch attention in the multiteam system literature.This current study integrates theories of decentral-ization and goal setting and examines the effects ofdecentralized planning on proactivity, aspirations,risk seeking, and coordination in multiteam sys-tems. Figure 1 portrays our hypothesized model.
HYPOTHESES
Positive Effects of Decentralized Planning viaProactivity and Aspirations
Proactivity. Proactivity has been defined as an-ticipatory, self-directed, and future-focused actionaimed to bring about change (Bindl & Parker, 2010;Grant & Ashford, 2008). It is a way of behaving thatinvolves thinking ahead and taking charge of asituation (Bindl & Parker, 2010) “through scanningfor opportunities, showing initiative, taking action”(Kirkman & Rosen, 1997: 152). Structural barriersassociated with centralized planning often impedediscretion, latitude, and accountability, whereasdecentralizing practices create more empoweredand autonomous work units that promote flexibil-ity, accountability, and proactivity in fluid and dy-namic environments (Kanter, 1993). Research sug-
FIGURE 1Hypothesized Model
Decentralized Planning
Planned Proactivity
Planned Aspirations
Planned Risk Seeking
Actual Proactivity
Actual Aspirations
Actual Risk Seeking
Coordination Failures
MultiteamSystems
Performance
H1a
H1b
H1c
H2a
H2b
H2c
H4a
H5bH5a
H3
H4b H4c
738 JuneAcademy of Management Journal

gests that job-enriching interventions that givepeople more autonomy for planning their ownwork increase their self-efficacy for engaging inmore proactive sets of tasks (Parker, 1998).
Multiteam systems that engage in decentralizedplanning are likely to set higher goals for proactivebehavior and subsequently be more proactive, be-cause they have more control over future events(Zimmerman, 1990), and because they are likely tohave higher collective efficacy (Jung & Sosik, 2002).Research has offered some support for these argu-ments. Williams, Parker, and Turner (2010) studiedseveral self-managed teams that set their own long-term goals and found that self-management waspositively related to team proactive performance.Similarly, Kirkman and Rosen (1999) found thatorganizational policies that gave teams more re-sponsibilities increased their empowerment andsubsequently their proactivity. These findings sug-gest that, relative to more centralized plans, decen-tralized planning should encourage componentteams to have a positive orientation toward theirtasks and to be motivated to engage in a broader setof task-relevant behaviors (Kirkman & Rosen, 1997:1999).
Because component teams are the locus of deci-sion making in decentralized structures, they as-sume collective responsibility for both goals andmultiteam system performance. This collective re-sponsibility is likely to motivate multiteam systemsto be more proactive (Fuller, Marler, & Hester,2006). In keeping with these arguments, we antici-pate that when multiteam systems engage in decen-tralized planning, they will plan to be more proac-tive and subsequently will behave more proactivelyby showing more initiative, and by scanning theenvironment for opportunities that will benefittheir performance. Furthermore, proactivity is ex-pected to enhance team performance, because pro-active behaviors enable teams to expand theirknowledge and to develop skills that contribute toa better understanding of their task environment,allowing them to develop more effective task strat-egies (Bindl & Parker, 2010; Grant, Gino, & Hof-mann, 2011; Grant & Parker, 2009). We summarizeour predictions in the following hypotheses:
Hypothesis 1a. Decentralized planning in-creases planned proactivity.
Hypothesis 1b. Planned proactivity is posi-tively associated with actual proactivity.
Hypothesis 1c. Actual proactivity is positivelyassociated with multiteam system performance.
Hypothesis 1d. Planned productivity mediatesthe positive effect of decentralized planning onperformance.
Hypothesis 1e. Actual proactivity mediates thepositive effect of decentralized planning onperformance.
Aspiration levels. Theoretical work on decen-tralized structures suggests that decentralized plan-ning is likely to encourage teams to develop highaspiration levels and set more difficult goals(Kanter, 1993). In contrast, centralized goals set bya leadership team within a multiteam system arelikely to reflect lower aspiration levels for two spe-cific reasons. First, Hinsz (1995) has argued thatgoal setting becomes more and more conservativeas groups become larger, due to the effects of antic-ipated social comparison processes caused by theuncertainty associated with the potential contribu-tions of individual group members. Thus, to pro-vide a “buffer” that would allow for successful goalaccomplishment, given the uncertainty caused bytheir interdependence, groups tend to “discount”their goals. Hinsz (1995) suggested that the largerthe group, the larger the uncertainty, and hence thelarger the amount of discounting. Because the en-tire multiteam system is more salient to its leader-ship team than to its component teams, this dis-counting effect is likely to be larger for theleadership team, whose members are likely to showlower aspirations if they set and anchor planningand goal setting.
Second, research on goals suggests that commit-ment to difficult self-set goals tends to be higherthan that associated with externally set goals(Latham, Mitchell, & Dossett, 1978). A series ofstudies by Erez and colleagues (Erez, 1986; Erez &Arad, 1986; Erez & Early, 1987; Erez, Earley, &Hulin, 1985) suggested that people respond betterin terms of commitment and implementation toself-set goals than to those set by hierarchical su-pervisors, and that externally assigned goals haveto be “aggressively sold” for them to achieve thesame level of acceptance as self-set goals (Latham,Erez, & Locke, 1988). Owing to the lower probabil-ity associated with higher goal levels, groups orindividuals may perceive difficult goals assignedby others as unfair, and then react by failing toshow acceptance or commitment to those goals(Hollenbeck & Klein, 1987).
2013 739Lanaj, Hollenbeck, Ilgen, Barnes, and Harmon

Thus, there are theoretical and empirical reasonsto believe that decentralized planning is likely toimpact aspiration levels. In addition, theory andresearch have suggested that aspiration levels are aprimary driver of performance through directingattention, increasing effort and persistence, andleading to use of task-relevant knowledge and strat-egies (Chesney & Locke, 1991; Latham & Locke,1991; Locke & Latham, 2002; O’Leary-Kelly, Mar-tocchio, & Frink, 1994; Weingart, 1992). As a result,we posit:
Hypothesis 2a. Decentralized planning in-creases planned aspirations.
Hypothesis 2b. Planned aspirations relate pos-itively to actual aspirational behavior.
Hypothesis 2c. Actual aspirational behavior ispositively associated with multiteam systemperformance.
Hypothesis 2d. Planned aspirations mediatethe positive effect of decentralized planning onperformance.
Hypothesis 2e. Actual aspirations mediate thepositive effect of decentralized planning onperformance.
Negative Effects of Decentralized Planning viaRisk Seeking and Coordination Failures
Excessive risk seeking. Multiteam systems ex-hibit risk-seeking behavior whenever they pursuedesired outcomes that are associated with rela-tively high probabilities of suffering harm or loss.Decentralized planning is likely to have both directand indirect effects on risk seeking in multiteamsystems. First, with respect to indirect effects, re-search on goal setting theory suggests that whenindividuals and groups pursue difficult goals, theyare more likely to engage in risk-seeking behavior(Heath, Larrick, & Wu, 1999; Larrick, Heath, & Wu,2009). Although no prior research has studied theeffect of difficult goals on risk-seeking behavior in amultiteam system context, studies on stand-aloneteams have suggested that this is a possibility.Knight, Durham, and Locke (2001) were the firstto study the relationship between goal levels andrisk in small teams. They argued that, given anarray of strategies with differing risks, teams withhigh performance goals are most likely to takegreater risk, because riskier tactics facilitate therealization of desired performance outcomes. Diffi-
cult goals consistently motivated teams to chooseriskier strategies.
Indeed, although difficult goals are traditionallyassociated with positive outcomes, recent researchon the “dark side of goals” has suggested that undercertain conditions, high aspiration levels may re-sult in negative side effects. For example, Ordóñez,Schweitzer, Galinsky, and Bazerman (2009) arguedthat goal difficulty is associated with excessive riskseeking. They posited that difficult goals narrowindividuals’ focus and cause them to overlookother issues that are important to success. Larrick etal. (2009) found empirically that challenging goalsled to riskier strategies in negotiation contexts.They argued that challenging goals motivate strat-egies that have higher variance but lower expectedvalues than more cautious strategies. Mishina,Dykes, Block, and Pollock (2010) also documentedthe link between goal difficulty and risk-seekingbehavior but took this general idea one step for-ward by showing how high goals even promotedillegal activity in several organizations. Thus, goalsthat are too ambitious may create larger negativediscrepancies between multiteam systems’ actualperformance and their aspiration levels. Prospecttheory (Kahneman & Tversky, 1979) suggests thatthese negative discrepancies will further exacer-bate risk-seeking behavior. As a result, multiteamsystems that seek higher aspiration levels are likelyto also exhibit excessive risk-seeking behavior. Inkeeping with these arguments, we hypothesize:
Hypothesis 3. Pursuing higher aspirations hasa positive influence on risk-seeking behavior.
In addition to indirectly affecting risk throughaspirations, decentralized planning might directlyaffect multiteam systems’ risk-seeking behavior.Organizational design research has suggested thatdecentralizing practices that provide employeeswith more opportunity and authority are also risk-inducing (Hoskisson, Hitt, & Hill, 1991; Kanter,1993; March & Weil, 2005; Miller, 1987; Singh,1986). This research suggests that decentralizedstructures have relatively permissive control sys-tems that favor exploration and risk but overlookcosts (Hoskisson et al., 1991; March & Weil, 2005).Decentralized planning, therefore, is likely to en-courage higher goals for risk and consequentiallyexcessive risk seeking.
More importantly, this general tendency of de-centralizing practices to promote risk seeking islikely to be exacerbated by interteam dynamics in amultiteam system for two reasons. First, group po-
740 JuneAcademy of Management Journal

larization effects can take this individual predilec-tion toward risk to a much higher level when peo-ple are part of a large group (Cheng & Chiou, 2008;Kameda & Davis, 1990; Myers & Kaplan, 1976).Research has shown that group contexts tend topolarize or shift team attitudes in the directiontoward which members are already leaning; hence,the risk-seeking attitude engendered by difficultgoals is likely to shift a large group or multiteamsystem even further in that direction (Buehler,Messervey, & Griffin, 2005; Klein, Dansereau, &Hall, 1994). In addition, the potential for interteamcompetition between the various component teamsin a multiteam system that might not share thesame skills and cultures can also produce interteamdynamics that result in enhanced risk seeking dueto perceived rivalry (Kilduff, Elfenbein, & Staw,2010; Malhotra, Ku & Murnighan, 2008).
Second, the tightly coupled nature of multiteamsystems has implications for the combined level ofrisk seeking, which takes on nonadditive propertiesin multiteam systems. For example, one commondecision-making error, referred to as the conjunc-tive fallacy, is based on the mistaken assumptionby naïve decision makers that the combined levelof probability for two events most closely resem-bles the average of those probabilities rather thantheir product (Tversky & Kahneman, 1983).Costello (2009) has shown how this error results ingrossly overoptimistic prediction and planning atthe individual level, and the potential for this prob-lem to be exacerbated at the multiteam system levelcannot be discounted. Thus, if one componentteam is pursuing a risky strategy that has only a20 percent chance of success, and another compo-nent team is also pursuing a risky strategy withonly a 20 percent change of success, the overallcombined probability of success is less than 5 per-cent. For all these reasons, we expect multiteamsystems that engage in decentralized planning toset higher goals for risk seeking and exhibit exces-sive risk-seeking behavior that will hurt multiteamsystem performance (Bromiley, 1991; Wiseman &Bromiley, 1996). Thus, we posit:
Hypothesis 4a. Decentralized planning in-creases planned risk seeking.
Hypothesis 4b. Planned risk seeking is posi-tively associated with actual risk seeking.
Hypothesis 4c. Actual risk seeking is negativelyassociated with multiteam system performance.
Hypothesis 4d. Planned risk seeking mediatesthe negative effect of decentralized planningon performance.
Hypothesis 4e. Actual risk seeking mediatesthe negative effect of decentralized planningon performance.
Coordination failures. Coordination betweenteams is critical to multiteam systems’ success, be-cause component teams are functionally interde-pendent, depending on each other for accomplish-ing a common objective too large to be achieved bya single team (Hoegl et al., 2004; Marks, DeChurch,Mathieu, Panzer, & Alonso, 2005). In centralizedplanning, their leadership team decides on multi-team systems’ strategies, their timing of activities,and the synchronicity of component team actions(DeChurch & Marks, 2006). In decentralized plan-ning, however, leaders take a more passive role bycoordinating decisions made by component teams.Because of the different component teams involvedin decision making and their specialized functions,decentralized planning is likely to introduce coor-dination complexities for a multiteam system.Whereas ineffective coordination may not harm theeffectiveness of within-team dynamics in the com-ponent teams, it could harm the success of thelarger multiteam system because the large size ofthe multiteam system and skill-based differencesbetween component teams may preclude effective,direct interteam communication and coordination(e.g., DeChurch & Marks, 2006).
The potential for decentralization to create sys-tem-level coordination problems (redundanciesand cannibalization) has been documented in theorganizational theory literature on large-scale or-ganizations in which centralization is often consid-ered a source of efficiency (Drazin & Van de Ven,1985; Leavitt, 2005; Magee & Galinsky, 2008; March& Simon, 1958; Thompson, 1967). These findingsfrom studies of large-scale organizations may not berelevant to traditional teams, because the small sizeof these teams allows for direct, face-to-face mutualcoordination in real time; however, they are verygermane to larger multiteam systems, in which di-rect mutual coordination in real time between allteam members actually harms performance (e.g.,Davison et al., 2012). Thus, plans and goals setindependently by decentralized component teamsmay result in plans and goals that are less wellcoordinated than what might result from central-ized plans and goals set by a leadership team,which could create coordination failures in which
2013 741Lanaj, Hollenbeck, Ilgen, Barnes, and Harmon

the actions of the component teams are neutralizedor counteracted by the leadership team or other com-ponent teams. Given these arguments, we propose:
Hypothesis 5a. Decentralized planning in-creases coordination failures.
Hypothesis 5b. Coordination failures nega-tively affect performance.
Hypothesis 5c. Coordination failures mediatethe negative effect of decentralized planningon performance.
Although it is possible to leverage existing theoryand data to generate specific positive and negativepaths by which decentralized planning might affectmultiteam system performance, the lack of directdata on multiteam systems makes it difficult tospeculate on whether the two different sets of ef-fects are likely to neutralize each other or whetherone set of effects will dominate. For this reason, wemake no direct prediction about the overall impactof these effects and instead state this research ques-tion: Will the combined set of positive and negativeeffects associated with decentralized planning re-sult in an overall positive effect, neutral effect, ornegative effect in multiteam systems?
METHODS
Our study sample consisted of 2,940 UnitedStates Air Force officers from a broad array of jobcategories, who participated in a five-week leader-ship development course. As part of the course anda larger program of research,1 the participants wereassigned to one of 210 14-person multiteam sys-tems that engaged in a computer-based simulation.Each multiteam system engaged in the same task,received the same training, and had the same timelimitations. The teams were comparably composedin terms of age, experience, gender, occupationalcategory, and Armed Services Vocational AptitudeBattery (ASVAB) scores to ensure that they hadequal opportunity to perform well on the simula-tion. The participants were motivated to take thetask seriously, because performance on the simula-tion was part of an overall evaluation that affected
their future advancement and opportunities forpromotion.
Our research design represents a situated exper-iment that optimizes both the traditional strengthsassociated with laboratory research and field re-search (Greenberg & Tomlinson, 2004). The settingwas lablike in terms of standardization, control,and manipulation of conditions. At the same time,the context was fieldlike because research partici-pants were experienced decision makers workingat a task that was similar to what they did or sup-ported in their real jobs in a context in whichperformance had important career consequences.
Task
We used the Leadership Development Simula-tion (LDS), a computer-based simulation, as an ex-perimental platform for this study. The LDS wasjointly developed by the United States Air Forceand a large research-oriented university and hasbeen used in other studies on multiteam systems(see Davison et al., 2012). The simulation, althoughlaboratory-like, had face validity for this sample,because it involved the management of remotelypiloted aircraft (RPAs), which are assets used tosearch and engage enemy targets in a dynamic en-vironment and reflect an innovation that was beingincorporated by this organization. The simulationwas a relatively unstructured task that presented aninitially unknown dynamic environment to teamsthat had to discover and engage hidden targets. Thegame grid consisted of a 16 by 16 matrix and con-tained different types of hidden targets (see Figure2). The goal of the multiteam system in this simu-lation was to employ operational and intelligenceassets to find and engage all types of hidden targets.More information about the targets is contained inthe Appendix.
Multiteam System Structure and Team Roles
As depicted in Figure 3, each multiteam systemwas composed of three component teams labeledthe Point Team (operations), Support Team (intel-ligence), and the Leadership Team. All teams werecomposed of six members, but because the direc-tors and assistant directors were boundary span-ners who were part of both their multiteam sys-tem’s leadership team and one of its componentteam, the overall size of each multiteam system was14 persons. The Point Team was responsible forfinding and engaging targets in the game board by
1 Fifty-nine percent of the teams that made up theDavison et al. (2012) sample also participated in thissample. Whereas there is no overlap in independent ormediating variables across these two studies, futuremeta-analyses should recognize the nonindependent na-ture of the performance measure in these samples.
742 JuneAcademy of Management Journal

FIGURE 3Structure of Multiteam Systemsa
a The circle outlined solid (——) represents the six-member Leadership Team, including the directors and assistant directors, who wereboundary spanners between the Leadership Team and each of the component teams. The circle outlined with dots and dashes (— · · —)represents the Point (Operations) (Component) Team, and the circle outlined with dots only (······) represents the Support (Intelligence)(Component) Team.
FIGURE 2Screenshot of the LDS Grid
2013 743Lanaj, Hollenbeck, Ilgen, Barnes, and Harmon

using four different types of RPAs that had specificand unique capacities. The Support Team was incharge of four different types of intelligence assets,and its main function was to provide informationabout the location of hidden targets. The Leader-ship Team provided overall guidance for the mul-titeam system. The Appendix contains more infor-mation about the component teams and their roles.
Role enactment. The simulation scenario lastedapproximately three hours, not counting training.Lower-level staff members, directors, and the mis-sion commander had “rolling access” to the simu-lation, which allowed us to time-stamp and capturespecific decisions made at specific times. Theteams made anywhere between 1,500 and 2,000decisions over the course of the whole simulation,depending upon how they approached this un-structured task. All of these decisions were cap-tured, coded, and time-stamped by the simulationfor members of the 210 14-person multiteam sys-tems that participated in this research. All 14 teamplayers could see the results of operational mis-sions on a large master screen in the room, and theresults of intelligence assets in printouts producedby the simulation.
Training
Training on the functionalities of the simulationconsisted of two parts. In part one, team memberswatched a 45-minute video training that explainedthe basic functionalities of the simulation, such asits purpose, the nature of the targets, roles andresponsibilities, and other simulation-pertinentfunctionalities. In part two, multiteam systems par-ticipated in a 15-minute hands-on training session,during which team members interacted with a shorterversion of the actual simulation. The hands-on train-ing session simulated different scenarios that multi-team systems could face during the real simulation(such as sending the wrong asset to the wrong tar-gets). Team members were instructed to move tar-gets on the board and encouraged to ask questions.The hands-on training session was followed by anextensive practice session for all teams. Multiteamsystems played the simulation in a functionalstructure (Hollenbeck et al., 2002) in which eachplayer was responsible for one type of asset.
Manipulation and Measures
Decentralized planning. As we noted earlier,the large size and specialized nature of component
teams makes it neither feasible nor desirable for allmembers of the multiteam system to meet face-to-face in real time to plan and make decisions. In-stead, planning and goal setting in multiteam sys-tems needs to be distributed and thus take placewithin the smaller teams (i.e., the component teamsor the leadership team) where mutual adjustment isfeasible. However, because the directors and assis-tant directors cannot be in two places at once, theresult is a sequential planning process in whichsome teams go first and others go second.
We manipulated decentralized planning througha presimulation planning and goal-setting sessionthat gave initial planning authority to componentteams in the decentralized planning condition or tothe leadership team in the centralized planningcondition. In the decentralized condition, the di-rectors and assistant directors worked first withtheir lower-level staffs (operations or intelligence)to come up with an initial plan that was then pre-sented to the leadership team by the boundary-spanning directors and assistant directors. In con-trast, in the centralized condition, the directors andassistant directors worked first with the leadershipteam to come up with an initial plan that was thenpresented to the component teams by the boundaryspanning directors and assistant directors. As partof the planning process, the multiteam systems setgoals for proactivity, aspiration levels, and riskseeking.
Planned and actual proactivity. Multiteam sys-tems sent their intelligence assets out in attempts todiscover targets hidden in any of the 256 squares ofthe game grid, which could be probed by sendingeither a single-sourced mission (e.g., only one typeof query was made within that space) or a double-sourced mission (e.g., two different queries weremade within the same space). During planning,multiteam systems set goals for the percentage ofsingle-sourced missions that they would send outon the game board during the simulation. The in-tent to send out more single-sourced missions re-flected multiteam systems’ desire to emphasize thescope of activity in order to find and destroy moretargets. Hence, we operationalized planned proac-tivity as the percentage of single-sourced missionsthat multiteam systems planned to send out on thegame board. To facilitate the decision-making pro-cess for the teams, we converted the percentage ofplanned single-sourced missions into a Likert scale(1 � 0%, 5 � 100%). Teams discussed the fivedifferent strategies and then selected one; this mea-sure was used to operationalize planned proactiv-
744 JuneAcademy of Management Journal

ity. When multiteam systems sent out a large num-ber of intelligence missions, the measure showedthat they proactively covered more space on thegame board to find targets and score higher points.Hence, we operationalized actual proactivity as thetotal number of intelligence missions sent outthroughout the game. Both planned and actual pro-activity represent multiteam systems’ desires tocontribute to multiteam system performance by ac-tively exploring and engaging the game grid toscore more points. These intentions and subse-quent behaviors capture the anticipatory andchange-oriented nature of proactivity (Grant & Ash-ford, 2008).
Planned and actual aspirations. Each multi-team system was provided with an inventory ofpossible targets and a summary of the total numberof points available if all of the targets were de-stroyed. They were also given normative informa-tion about how various raw scores from targetsdestroyed translated into percentiles of perfor-mance. The multiteam system then set a goal for thenumber of points they were going to try and accom-plish. We operationalized planned aspiration lev-els as the degree to which the goals set were highversus low in terms of normative probabilities. Thenormative probabilities varied along a range inwhich 1 corresponded to the top 10th percentileand 5 to the bottom 10th percentile. Multiteamsystems referred to these normative scores to de-cide on an overall aspiration score; this measurewas used to operationalize planned aspirationlevels.
Participants were also told within the pregamedebriefing that most of the high-value opportuni-ties were within well-protected spaces in the north-ern region of the task environment but that theycould expect base attacks launched in the southernregion. Because more points were associated withprosecuting high-value targets than with havingbases hit, teams that had high aspirations had tosend more missions to the northern region of thetask space to score more points. In addition, pros-ecuting well-protected high-value opportunities inthe northern region required a large, coordinatedpackage of RPA missions that had to include“strikes,” “escorts,” and “refuelers,” and thus lim-ited the number of missions that could take place inother regions. Thus, we operationalized actual as-pirational behavior as the number of missions thatwere actually flown to the northern region of thetask space in pursuit of high-value targets.
Planned and actual risk seeking. Escort RPAscould protect other RPAs from being destroyed.Thus, any mission that was double-escorted wastotally safe and risk-free, and any mission that wasunescorted or single-escorted was at risk. The mul-titeam systems set goals for how risk seeking theywere going to be in terms of what percentage ofmissions was going to be double-escorted. If a mul-titeam system planned on conducting 100 percent,double-escorted missions, this was very risk averse.In contrast, a multiteam system’s planning on con-ducting 0 percent double-escorted missions wasvery risk seeking. To facilitate the decision-makingprocess for the teams, we converted the differentpossible double-escorted strategies into a Likertscale where 1 corresponded to 100 percent of dou-ble-escorted missions (resulting in 20 overall dou-ble escorted missions) and 6 corresponded to 0 per-cent of double-escorted missions (resulting in 160total missions not double-escorted). Teams dis-cussed the different strategies and then selectedone; this measure was used to operationalizeplanned risk seeking.
In terms of actual behavior, any mission thatwas not escorted entailed some risk, but this riskwas small if the team knew what was in the spacefrom prior missions or validated intelligence re-ports. In contrast, risk seeking was only high whena multiteam system sent an unescorted missioninto blind space, that is, a space into which theteam had never gone before with either an opera-tional or intelligence asset. Thus, the actual num-ber of unescorted missions sent into blind spacewas then used as the operationalization of actualrisk seeking.
Coordination failures. Obviously, no multiteamsystem plans on being poorly coordinated, so wedid not have multiteam systems set goals for howpoorly they were going to be coordinated. We didmeasure the actual level of coordination failures,however, in terms of (a) the frequency of editingbehavior on the part of the leadership team thatresulted in negative outcomes for the multiteamsystem (vertical coordination) and (b) the fre-quency of missions conducted by the operationsteam that were not based upon the multiteam sys-tem’s shared understanding of the task environ-ment or common operational picture (COP) (hori-zontal coordination). Vertical coordination failuresoccurred whenever a leadership team (a) moved anRPA that was going to a space where it would havebeen safe to a space where it was instead destroyedor (b) edited a revealing intelligence query by de-
2013 745Lanaj, Hollenbeck, Ilgen, Barnes, and Harmon

leting it or moving it to an empty space. In eachcase, these actions were an indication that theLeadership team’s understanding of the situationwas not well aligned with that of the componentteams in ways that degraded the overall perfor-mance of the multiteam system.
Horizontal coordination failures occurred when-ever component teams conducted operations thatwere not based upon information that resided onthe COP, an up-to-date mental picture of the battlespace projected on a large screen for all team mem-bers to see. A large number of COP-based missionsmeant that the point team and the support teamwere well coordinated, but a large number of non-COP-based missions reflected the fact that the pointteam and the support team were not working to-gether. Teams that were poorly horizontally coor-dinated were characterized by (a) point teams thatbased their decisions on their own experience andignored the COP and (b) support teams that wereonly concerned with placing valid information onthe COP but ignored whether that information wasever used for actual mission targeting. These coor-dination failures indicated that the componentteams were more preoccupied with local issuesassociated with their own component team perfor-mance than with the performance of the multiteamsystem as a whole. The simulation recorded thesefailures, and we standardized variables because ofdiffering measurement units and then took theiraverage as the overall index of coordinationfailures.
Multiteam system performance. This was anoverall objective measure equal to the sum ofpoints that multiteam systems gained by destroying
targets minus points lost from destroyed assets andhits registered on their bases.
RESULTS
The descriptive statistics, including means, stan-dard deviations, correlations, and sample size arepresented in Table 1. We had missing data for someteams because goals were derived from the plan-ning worksheets, and these were not always filledout completely. We tested the degree to whichmissing data were random or systematic by exam-ining means and standard deviations for measuresof teams with complete data with the means andstandard deviations of teams that had missing data.No statistical differences were found betweensamples.
To test the proposed model, we used structuralequation modeling using maximum likelihood es-timation in MPLUS 4.2 (Muthén & Muthén, 2006).MPLUS uses full information maximum likelihoodas a default that deals with missing data whileusing all available data points to estimate modelparameters. We used the following criteria to assessmodel fit: chi-square with probability greater than.05; comparative fit (CFI) and Tucker-Lewis index(TLI) values greater than .90, a root-mean-squareerror of approximation (RMSEA) of less than .06,and a standardized root-mean-square residual(SRMR) of less than .08 (Hu & Bentler, 1999). Theoverall model had good fit to the data (�2[24, n �210] � 33, p � .11; CFI � .94, TLI � .92, RMSEA �.04, SRMR � .055). Path coefficients are presentedin Figure 4.
TABLE 1Descriptive Statistics and Correlationsa
Variable Mean s.d. 1 2 3 4 5 6 7 8
1. Decentralized planning 0.60 0.502. Planned proactivity 3.10 1.09 .133. Actual proactivity 166 69.4 .20* .30**4. Planned aspiration levels 180 28.0 .24** .05 .135. Actual aspiration levels 25.5 5.48 .06 .04 .07 .15*6. Planned risk seeking 2.80 1.18 .32** .20* .05 .12 .16*7. Actual risk seeking 28.8 13.8 .13 .06 .01 .02 .30** .32**8. Coordination failures 0.00 2.30 .23* .08 �.05 .12 �.15* .02 .029. Multiteam system performance 151 43.4 �.14* �.11 .14* �.01 .16* �.05 �.21** �.43**
a Standardized regression coefficients are reported. The sample size for the multiteam systems with no missing data on any one of theplanned goals varied from 167 to 210.
* p � .05** p � .01
Two-tailed tests.
746 JuneAcademy of Management Journal
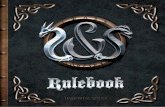
Since we propose a three-stage mediated model,we used procedures developed by Taylor, MacKin-non, and Tein (2008) to examine our meditationhypotheses. We performed a bias-corrected boot-strap analysis to calculate the confidence intervals(CIs) for the mediated (indirect) effects. We foundpartial support for Hypothesis 1. Specifically, wefound that multiteam systems that engaged in de-centralized planning planned for higher proactivity(Hypothesis 1a) (� � .18, p � .05), which in turnwas associated with higher actual proactive behav-ior in the simulation (Hypothesis 1b) (� � .33, p �.05). However, performance of proactive behaviorwas only marginally related to performance (Hy-pothesis 1c) (� � .11, p � .10). The indirect effect ofdecentralized planning on performance throughgoals for proactivity and subsequently proactivebehavior was significantly different from zero(95% CI: lower bound � 0.01; upper bound � 1.69),thus providing evidence for mediation (Taylor etal., 2008) and support for Hypotheses 1d and 1e.
Supporting Hypothesis 2, decentralized planningpredicted higher planned aspiration levels (Hy-pothesis 2a) (� � .25, p � .05), which in turn wasassociated with more aspirational behavior (Hy-pothesis 2b) (� � .15, p � .05), which then waspositively related to multiteam system performance(Hypothesis 2c) (� � .17, p � .05). The mediational
expectations (Hypotheses 2d and 2e) were also sup-ported, as the indirect effect of decentralized plan-ning on multiteam system performance via aspira-tions was significant (95% CI: lower bound � 0.05;upper bound � 1.8). Thus, in line with our inte-grated theoretical perspective (Kanter, 1993;Latham & Locke, 1991; Locke & Latham, 2002;Mintzberg, 1983), we found that decentralizedplanning had positive effects on multiteam systemprocesses (higher levels of planned and actual pro-activity and aspirations), which in turn had posi-tive effects on multiteam system performance.
In contrast to the positive effects of decentralizedplanning on multiteam system performance viaproactivity and aspirations, however, we foundthat decentralized planning had negative effects onmultiteam system performance attributable to riskseeking. Thus, pursuit of higher aspirations waspositively associated with more risk-seeking behav-ior (� � .27; p � .05), in support of Hypothesis 3.Consistently with Hypothesis 4, decentralizedplanning also resulted in higher planned risk seek-ing (Hypothesis 4a) (� � .32; p � .05), which wasthen associated with higher levels of actual risk-seeking behavior (Hypothesis 4b) (� � .26; p � .05),which in turn negatively related to multiteam sys-tem performance (Hypothesis 4c) (� � �.26; p �.05). Mediational analyses were supported—
FIGURE 4Tested Modela
Decentralized Planning
Planned Proactivity
Planned Aspirations
Planned Risk Seeking
Actual Proactivity
Actual Aspirations
Actual Risk Seeking
Coordination Failures
MultiteamSystems
Performance
.18*
.33*
11†
.25*
15*
.17*
.32* .26* –.26*
.27*
.23* –.39*
a Results of tests of the hypothesized model; n � 210.* p � .05† p � .10
2013 747Lanaj, Hollenbeck, Ilgen, Barnes, and Harmon

planned and actual risk-seeking behavior mediatedthe effect of decentralized planning on multiteamsystem performance (Hypotheses 4d and 4e;95% CI: lower bound � �4.2; upper bound � �.7).
In keeping with Hypothesis 5, we also found thatdecentralized planning had negative effects on per-formance attributable to coordination failures. De-centralized planning resulted in greater frequencyof coordination failures among teams (Hypothesis5a) (� � .23; p � .05), which in turn was negativelyassociated with multiteam system performance(Hypothesis 5b) (� � �.39; p � .05). Mediation wasalso present, as the indirect effect of decentralizedplanning on performance via coordination failureswas significantly different from zero (Hypothesis5c: 95% CI: lower bound � �14; upper bound ��3). This finding is particularly relevant in light ofrecent work suggesting that horizontal and verticalcoordination contributes positively to multiteamsystem performance (Davison et al., 2012).
Finally, with regard to our research question, wefound that the overall effect of decentralized plan-ning on multiteam system performance was nega-tive. The zero-order correlation between decentral-ized planning and overall multiteam systemperformance was statistically significant (r � �.14,p � .05). This effect was mediated by the positiveand negative effects of decentralized planning onmultiteam system performance, and the direct ef-fect of decentralized planning on multiteam systemperformance was reduced to nonsignificance (� ��.06; n.s.) when the hypothesized paths were in-cluded in the path model. The total effect of decen-tralized planning on multiteam system perfor-mance through planned and actual behaviors was�.10 (p � .05), and the hypothesized model ex-plained 24 percent of the variance in performance.
DISCUSSION
This study challenges the degree to which pasttheories and findings regarding traditional teams,with their emphasis on within-team dynamics, gen-eralize to multiteam systems that instead place a pri-ority on between-team dynamics. We investigate thispossibility for decentralized planning in multiteamsystems by utilizing an integrative framework of the-ories of decentralization, goal setting, and proactivity.
Theoretical Contributions
Traditional team-based theories suggest that de-centralized structures have predominantly positive
effects for stand-alone teams. Our present workchallenges these theories. In keeping with researchon decentralizing interventions in small stand-alone and empowered teams (e.g., Chen et al., 2011;Cordery et al., 2010; DeJoy et al., 2010), we foundthat decentralized planning had positive effects onmultiteam system performance due to higher pro-activity and higher aspiration levels. However, incontrast to past research that has only examinedresults at the team level, we found that decentral-ized planning also had negative effects attributableto between-team dynamics, especially as these aremanifested in enhanced risk seeking and interteamcoordination failures. Although we made no formalprediction regarding the overall effects of decen-tralized planning, we found that its negative effectson performance were actually stronger than thepositive effects. This could be because performancein multiteam systems is nonadditive in nature.Thus, performance of each component team is lim-ited by the performance of other component teamsdue to the conjunctive properties of multiteam sys-tem activities. Although our findings do not refutethe validity of theories that promote decentraliza-tion, they do place an important boundary condi-tion on their application to multiteam systems,which are an increasing occurrence in organiza-tions (Haas, 2010; Zaccaro et al., 2012).
Furthermore, our work advances present knowl-edge and theory about multiteam systems. Recentwork on multiteam systems has shown that, in gen-eral, coordination through unbridled mutual ad-justment among all team members is detrimental tomultiteam system performance (Davison et al.,2012). Research has indicated that horizontal andvertical coordination enacted by boundary span-ners is critical to multiteam system performance,and that team members need to channel their inputthrough the boundary spanners instead of commu-nicating directly outside the formal structure. Thecurrent study did not focus on communication dur-ing the task, but rather on planning prior to taskengagement, and specifically, on whether the plan-ning process should be decentralized (driven bycomponent teams and their boundary spannersworking together first) or centralized (driven byleadership team and boundary spanners workingtogether first). In addition, it examined variablesthat resulted from the planning manipulation suchas aspirations, risk, proactivity, and coordinationfailures; these variables have never been studiedbefore in a multiteam system context. This work,therefore, extends previous research (e.g., Davison
748 JuneAcademy of Management Journal

et al., 2012) by testing whether knowledge aboutdecentralization—a well-researched practice in thesmall-team literature—ought to be generalized tomultiteam systems.
Our research also advances knowledge on proac-tivity and goal-setting processes in teams. To ourbest understanding, this is the first study that hastaken a process view of both proactivity (e.g., Grant& Ashford, 2008) and goal setting (e.g., Gollwitzer,1999) in an interdependent team setting. Grant andAshford (2008) argued that proactivity is a goal-driven process and that planning and action aretwo important phases in the process. We capturedthese phases by differentiating between goals forproactivity and actual proactive behavior in multi-team systems. This differentiation allowed us to gobeyond simply explaining variance in performanceto clarifying how proactivity unfolds as a process inmultiteam systems (e.g., Grant & Ashford, 2008).Similar to proactivity, goal setting is also a processin which goals activate task knowledge that in turnenables better performance (Locke, 2000). The goal-setting process has two main phases: goal settingand goal striving (Gollwitzer, 1999). We portrayedthis process by capturing both planned activitiesand actual behavior, which map conceptually intogoal setting and goal striving, respectively. We be-lieve that distinguishing between the interrelatedplanned and actual constructs is particularly rele-vant when implementing process theories of man-agement and organizations such as goal setting andproactivity (e.g., Suddaby, 2010).
Empirical and Practical Contributions
Empirically, our study contributes to literatureon teams and multiteam systems in two ways. First,it is unique because we manipulated decentralizedplanning and then measured its effects on multi-team systems’ dynamics and performance via ob-jective measures of real behavior in a standardizedtask environment. In addition, we separated mea-sures in time and source, thus minimizing prob-lems of common source and method biases (Podsa-koff, MacKenzie, Lee, & Podsakoff, 2003), as well aseliminating the possibility of reverse causality.
Second, this study employed a large number ofrelatively large multiteam systems. To date, thegeneral tendency in studies examining multiteamsystems in laboratory contexts has been to studymultiteam systems that are so small (four to sixmembers) that they begin to look and behave likestand-alone teams. DeChurch and Marks (2006) al-
luded to this problem and encouraged more re-search on larger, more specialized multiteam sys-tems. At the same time, the tendency in fieldstudies of multiteam systems has been to study avery small number of idiosyncratic and noncompa-rable multiteam systems (e.g., Hoegl et al., 2004). Incontrast, we studied a large number of large multi-team systems using a situated experimental re-search design in which all multiteam systems hadthe same standardized task, resources, personneltypes, and time constraints. Moreover, in thisstudy’s context, participants were experienced de-cision makers working on a task that was represen-tative of the mission of their organization and forwhich in-role performance had personal careerconsequences. This is a unique configuration withno real parallel in the multiteam systems literature;hence, the empirical evidence we provide in thisstudy is also unique.
Our study also has several practical implications.With respect to planning in component teams,leaders of component teams need to recognize thatthe probability of goal accomplishment at the mul-titeam system level may be a nonadditive functionof the probabilities associated with componentteam goals, and hence they need to guard againstoverly optimistic planning. With respect to plan-ning in the leadership team, our research showsthat centralized planning processes reduced thenumber of coordination failures between compo-nent teams. Thus, multiteam systems may need toplace more emphasis on a priori planning, becausethe large number of people in a system may pre-clude real-time communication between all mem-bers. In addition, language or cultural differencesbetween members of different specialized teamsmay make effective communication difficult—es-pecially if component teams become preoccupiedwith their own proximal goals.
This study may also have implications for ap-plied organizational interventions based on theo-ries of empowerment because decentralization isoften described as a critical element of empoweringinterventions (e.g., Aryee et al., 2012; Biron & Bam-berger, 2010; Mathieu, Gilson, & Ruddy, 2006; Sei-bert et al., 2011). The typical recommendation inthis literature to decentralize teams (e.g., Hooker &Csikszentmihalyi, 2003; Pearce & Sims, 2002)may not be warranted when these teams are embed-ded in larger, interdependent multiteam systems.As our results indicate, functional interdependen-cies and complexities in multiteam systems mayoffset some of the virtues of decentralized struc-
2013 749Lanaj, Hollenbeck, Ilgen, Barnes, and Harmon

tures that have been documented in traditionalstand-alone teams.
Limitations and Directions for Future Research
While there are liabilities associated with retro-spective self-reports and virtues associated withobjective measures, no measure is a perfect repre-sentation of its underlying construct. This multi-team system context limited the nature of the mea-surement in some ways; thus, there is a need foradditional research using other measures to repli-cate and extend the findings reported here. Forexample, although we directly assessed goals andactual behaviors related to proactivity, risk seeking,and coordination failures, we were unable to mea-sure any of the cognitive or emotional variables thatcould be driving those behaviors. In addition, thewide scope and sheer size of a research effort withthis many large multiteam systems precluded di-rect observation or extensive surveying of teams,because 15–20 of the 14-person multiteam systemswere typically run simultaneously.
In addition, because this study was conductedwith a simulation that was run in a single organi-zational context, there are the traditional concernsregarding the generalizability of these findings toother organizational contexts. Although this studymeets the evaluation criteria often suggested forlaboratory studies (e.g., use of behavioral measures,task psychological realism, and theoretical contri-bution [Colquitt, 2008]), future research should in-vestigate the effect of decentralized planning inother contexts and with other multiteam systems.Our sample consisted of Air Force officers, whomay have been trained to be more responsive tocentralized planning processes. The generalizabil-ity of the findings reported here, therefore, willbecome more evident as other researchers, perhapsinterested in these findings, replicate this studywith other experiments employing different sam-ples and tasks conducted at different times.
Our research suggests several possibilities for fu-ture empirical studies on multiteam systems. Forexample, we employed a relatively strict functionalstructure (Hollenbeck et al., 2002); however, thereis a continuum of organizational designs that fallbetween highly interdependent functional struc-tures and less interdependent structures (Galbraith,1971). Thus, it may be the case that the negativeeffects attributable to decentralized planning heremay be reduced or reversed in more divisionalstructures. For instance, in this context, rather than
creating two highly differentiated and specializedcomponent teams (operations and intelligence), theorganizational structure could have created easternand western divisions, each with its own indepen-dent operations and intelligence units. Such a di-visional structure might create less interdepen-dence and reduce some of the negative effects ofdecentralization. Of course, at the extreme, oncethe level of interdependence between componentteams becomes zero, the teams are by definition nolonger part of a multiteam system and revert tostand-alone teams with the traditional expectationsregarding the virtues of decentralized planning.
Future research is also needed to test if the neg-ative effects associated with decentralized plan-ning might dissipate over time. For example, mul-titeam systems that utilize decentralized planningmay learn from their past mistakes and may, inturn, engage in better coordination and becomemore risk-averse as they accumulate trial-and-errorexperience. This issue is somewhat complex, be-cause whereas some evidence supports this possi-bility (e.g., Haleblian, Kim, & Rajagopalan, 2006),theory and research also suggest that poor initialperformance may promote even greater risk seek-ing. Indeed, a large body of research utilizing pros-pect theory (Kahneman & Tversky, 1979) and thebehavioral theory of the firm (Argote & Greve, 2007;Cyert & March, 1963) has shown that when organ-izations perform below their aspiration levels, theyrespond by taking more risk in the future and oftenperform even worse as a result (e.g., Bromiley,1991; Fiegenbaum & Thomas, 1988; Kim, Haleb-lian, & Finkelstein, 2011; Miller & Chen, 2004). It isplausible, therefore, that subpar performance maypersist in decentralized multiteam systems. Futureresearch ought to investigate these possibilities.
There are theoretical reasons to suspect that theadverse consequences of decentralized planningmay be amplified in settings where multiteam sys-tems’ tasks are complex or inherently risky. Com-plex tasks require more coordination among teammembers, because each person needs to processmore informational cues and resolve more depen-dency issues (Espinosa, Slaughter, Kraut, & Herbs-leb, 2007). A priori planning is necessary for com-plex tasks; hence, any detrimental effects that areattributable to planning failures caused by poorlyintegrated decentralized decision making are likelyto manifest more clearly for complex tasks. Simi-larly, decentralized planning could have strongernegative effects in uncertain and riskier contexts
750 JuneAcademy of Management Journal

than in contexts in which it is easy to predict out-comes. This potential might be especially relevantin multiteam system contexts, because decisionsand behaviors of a large number of people canimpact the outcomes associated with one’s owndecisions and behaviors. Future research shouldexplore if the findings reported here are moderatedby task complexity, as well as uncertainty and riskseeking associated with decision-making outcomes.
Team factors such as size, diversity, history andexpertise, and physical distance may also moderatesome of our findings. For example, decentralizedplanning may become even less effective for largemultiteam systems that are dispersed geographi-cally, since this intensifies coordination and com-munication complexities. Similarly, functional andcultural diversity may also hinder the understand-ing of goals and plans and their effective commu-nication across different component teams. Con-versely, decentralized planning may work better forteams that have a long history together, and thathave developed routines and trust. Exploration ofsuch possibilities would enrich our understandingof multiteam systems and the way they plan.
Clearly, both expanded theory building and em-pirical research are needed to more fully elucidatethe knowledge base regarding multiteam systems.Multiteam systems are neither traditional teamsnor standard large-scale organizations; thus, theo-ries and empirical findings from these traditionalliteratures may not generalize to multiteam systemcontexts. Multiteam systems are larger and morespecialized than traditional teams but smaller andless formalized than large-scale organizations, cre-ating a potential organizational form that can man-age a great deal of complexity, yet remain respon-sive in real time. Realization of this potential,however, is not guaranteed, and we hope that theresearch reported here will serve as a catalyst forothers to explore the dynamics of multiteam sys-tems. Such exploration is clearly needed, becausethere is a dearth of research on multiteam systems,and as our study suggests, one simply cannot as-sume that what is true for traditional small stand-alone teams is true for multiteam systems.
REFERENCES
Alderfer, C. P., & Smith, K. K. 1982. Studying intergrouprelations embedded in organizations. Administra-tive Science Quarterly, 27: 35–65.
Ancona, D. G., & Caldwell, D. F. 1992. Bridging theboundary: External activity and performance in or-
ganizational teams. Administrative Science Quar-terly, 37: 634–665.
Argote, L., & Greve, H. R. 2007. A behavioral theory of thefirm—40 years and counting: Introduction and im-pact. Organization Science, 18: 337–349.
Aryee, S., Walumbwa, F. O., Seidu, E. Y., & Otaye, L. E.2012. Impact of high-performance work systems onindividual- and branch-level performance: Test of amultilevel model of intermediate linkages. Journalof Applied Psychology, 97: 287–300.
Bartunek, J. M., & Spreitzer, G. M. 2006. The interdisci-plinary career of a popular construct used in man-agement: Empowerment in the late 20th century.Journal of Management Inquiry, 15: 255–273.
Bindl, U. K., & Parker, S. K. 2010. Proactive work behav-ior: Forward-thinking and change-oriented action inorganizations. In S. Zedeck (Ed.), APA handbook ofindustrial and organizational psychology: 567–598. Washington, DC: American Psychological Asso-ciation.
Biron, M., & Bamberger, P. 2010. The impact of structuralempowerment on individual well-being and perfor-mance: Taking agent preferences, self-efficacy andoperational constraints into account. Human Rela-tions, 63: 163–191.
Boone, C., & Hendriks, W. 2009. Top management teamsdiversity and firm performance: Moderators of func-tional-background and locus-of-control diversity.Management Science, 55: 165–180.
Bromiley, P. 1991. Testing a causal model of corporaterisk taking and performance. Academy of Manage-ment Journal, 34: 37–59.
Buehler, R., Messervey, D., & Griffin, D. 2005. Collabor-ative planning and prediction: Does group discus-sion affect optimistic biases in time estimation? Or-ganizational Behavior and Human DecisionProcesses, 97: 47–63.
Burke, W. W. 1986. Leadership as empowering others. InS. Srivastra (Ed.), Executive power: 51–77. SanFrancisco: Jossey-Bass.
Carson, J. B., Tesluk, P. E., & Marrone, J. A. 2007. Sharedleadership in teams: An investigation of antecedentconditions and performance. Academy of Manage-ment Journal, 50: 1217–1234.
Chen, G., Sharma, P. N., Edinger, S. K., Shapiro, D. L., &Farh, J. L. 2011. Motivating and de-motivating forcesin teams: Cross-level influences of empowering lead-ership and relationship conflict. Journal of AppliedPsychology, 96: 541–557.
2013 751Lanaj, Hollenbeck, Ilgen, Barnes, and Harmon

Cheng, P. Y., & Chiou, W. B. 2008. Framing effects ingroup investment decision making: Role of grouppolarization. Psychological Reports, 102: 283–292.
Chesney, A. A., & Locke, E. A. 1991. Relationships amonggoal difficulty, business strategies, and performanceon a complex management simulation task. Acad-emy of Management Journal, 34: 400–424.
Colquitt, J. A. 2008. From the editors: Publishing labora-tory research in AMJ: A question of when, not if.Academy of Management Journal, 51: 616–620.
Cordery, J. L., Morrison, D., Wright, B. M., & Wall, T. D.2010. The impact of autonomy and task uncertaintyon team performance: A longitudinal field study.Journal of Organizational Behavior, 31: 240–258.
Costello, F. J. 2009. How probability theory explains theconjunction fallacy. Journal of Behavioral DecisionMaking, 22: 213–234.
Cyert, R. M., & March, J. G. 1963. A behavioral theory ofthe firm. Englewood Cliffs, NJ: Prentice Hall.
Davison, R. B., & Hollenbeck, J. R. 2012. Boundary span-ning in the domain of multi-team systems. In S. J.Zaccaro, M. A. Marks, & L. A. DeChurch (Eds.), Mul-titeam systems: An organization form for dynamicand complex environments. New York: Routledge,Taylor & Francis.
Davison, R. B., Hollenbeck, J. R., Barnes, C. M., Sleesman,D. J., & Ilgen, D. R. 2012. Coordinated action inmultiteam systems. Journal of Applied Psychology,97: 808–824.
DeChurch, L. A., & Marks, M. A. 2006. Leadership inmultiteam systems. Journal of Applied Psychology,91: 311–329.
DeJoy, D. M., Wilson, M. G., Vandenberg, R. J., McGrath-Higgins, A. L., & Griffin-Blake, C. S. 2010. Assessingthe impact of healthy work organization interven-tion. Journal of Occupational and OrganizationalPsychology, 83: 139–165.
Drazin, R., & Van de Ven, A. H. 1985. Alternative forms offit in contingency theory. Administrative ScienceQuarterly, 30: 514–539.
Dutton, J. E., & Duncan, R. B. 1987. The influence of thestrategic planning process on strategic change. Stra-tegic Management Journal, 8: 103–116.
Erez, M. 1986. The congruence of goal setting strategieswith socio-cultural values, and its effect on perfor-mance. Journal of Management, 12: 83–90.
Erez, M., & Arad, R. 1986. Participative goal-setting: So-cial, motivational, and cognitive factors. Journal ofApplied Psychology, 71: 591–597.
Erez, M., Earley, P. C., & Hulin, C. L. 1985. The impact ofparticipation on goal acceptance and performance: Atwo-step model. Academy of Management Journal,28: 50–66.
Erez, M., & Early, P. C. 1987. Comparative analysis ofgoal-setting strategies across cultures. Journal of Ap-plied Psychology, 72: 658–665.
Espinosa, J. A., Slaughter, S. A., Kraut, R. E., & Herbsleb,J. D. 2007. Familiarity, complexity, and team perfor-mance in geographically distributed software devel-opment. Organization Science, 18: 613–630.
Fiegenbaum, A., & Thomas, H. 1988. Attitudes towardsrisk and the risk-return paradox: Prospect theoryexplanations. Academy of Management Journal,31: 85–106.
Fuller, J. B., Marler, L. E., & Hester, K. 2006. Promotingfelt responsibility for constructive change and pro-active behavior: Exploring aspects of an elaboratedmodel of work design. Journal of OrganizationalBehavior, 27: 1089–1120.
Galbraith, J. R. 1971. Matrix organization designs: How tocombine functional and project forms. Business Ho-rizons, 14(1): 29–40.
Galbraith, J. R. 1995. Designing organizations. San Fran-cisco: Jossey-Bass.
Galbraith, J. R. 2008. Designing matrix organizationsthat actually work: How IBM, Procter & Gamble andothers design for success. San Francisco: Jossey-Bass.
Galbraith, J. R., Downey, D., & Kates, A. 2002. Designingdynamic organizations. New York: AMACOM.
Gibson, C. B., Porath, C. L., Benson, G. S., & Lawler, E. E.III. 2007. What results when firms implement prac-tices: The differential relationship between specificpractices, firm financial performance, customer ser-vice, and quality. Journal of Applied Psychology,92: 1467–1480.
Gollwitzer, P. M. 1999. Implementation intentions:Strong effects of simple plans. American Psycholo-gist, 54: 493–503.
Grant, A. M., & Ashford, S. J. 2008. The dynamics ofproactivity at work. In B. M. Staw (Ed.), Research inorganizational behavior, vol. 28: 3–34. Greenwich,CT: JAI.
Grant, A. M., Gino, F., & Hofmann, D. A. 2011. Reversingthe extraverted leadership advantage: The role ofcollective employee proactivity. Academy of Man-agement Journal, 54: 528–550.
Grant, A. M., & Parker, S. K. 2009. Redesigning workdesign theories: The rise of relational and proactiveperspectives. In J. P. Walsh & A. P. Brief (Eds.),
752 JuneAcademy of Management Journal

Academy of Management annals, vol. 3: 273–331.Essex, UK: Routledge.
Grant, J. H., & King, W. R. 1982. The logic of strategicplanning. Boston: Little Brown, & Co.
Greenberg, J., & Tomlinson, E. C. 2004. Situated experi-ments in organizations: Transplanting the lab to thefield. Journal of Management, 30: 703–724.
Haas, M. R. 2010. The double-edged swords of autonomyand external knowledge: Analyzing team effective-ness in a multinational organization. Academy ofManagement Journal, 53: 989–1008.
Haleblian, J., Kim, J.-Y., & Rajagopalan. 2006. The influ-ence of acquisition experience and performance onacquisition behavior: Evidence from the U.S. com-mercial banking industry. Academy of Manage-ment Journal, 2: 357–370.
Heath, C., Larrick, R. P., & Wu, G. 1999. Goals as refer-ence points. Cognitive Psychology, 38: 79–109.
Hinsz, V. B. 1995. Goal setting by groups performing anadditive task: A comparison with individual goalsetting. Journal of Applied Social Psychology, 21:965–990.
Hirst, G., Van Knippenberg, D., Chen, C.-H., & Sacra-mento, C. A. 2011. How does bureaucracy impactindividual creativity? A cross-level investigation ofteam, contextual influences on goal orientation-creativity relationships. Academy of ManagementJournal, 54: 624–641.
Hoegl, M., Weinkauf, K., & Gemuenden, H. G. 2004.Interteam coordination, project commitment, andteamwork in multiteam R&D projects: A longitudinalstudy. Organization Science, 15: 38–55.
Hoffman, L. R., & Maier, N. R. 1961. Quality and accep-tance of problem solutions by members of homoge-neous and heterogeneous groups. Journal of Abnor-mal and Social Psychology, 62: 401–407.
Hollenbeck, J. R., & Klein, H. J. 1987. Goal commitmentand the goal-setting process: Problems, prospects,and proposals for future research. Journal of Ap-plied Psychology, 72: 212–220.
Hollenbeck, J. R., Moon, H., Ellis, A. P., West, B. J., Ilgen,D. R., Sheppard, L., Porter, C. O., & Wagner, J. A. III.2002. Structural contingency theory and individualdifferences: Examination of external and internalperson-team fit. Journal of Applied Psychology, 87:599–606.
Hooker, C., & Csikszentmihalyi, M. 2003. Flow, creativ-ity, and shared leadership: Rethinking the motiva-tion and structuring of knowledge work In C. L.Pearce & J. A. Conger (Eds.), Shared leadership:
Reframing the hows and whys of leadership:. 217–234. Thousand Oaks, CA: Sage.
Hoskisson, R. E., Hitt, M. A., & Hill, C. W. L. 1991.Managerial risk taking in diversified firms: An evo-lutionary perspective. Organization Science, 2:296–314.
Hu, L. T., & Bentler, P. M. 1999. Cutoff criteria for fitindexes in covariance structure analysis: Conven-tional criteria versus new alternatives. StructuralEquation Modeling, 6: 1–55.
Ilgen, D. R., Hollenbeck, J. R., Johnson, M., & Jundt, D.2005. Teams in organizations: From input-process-output models to IMOI models. In S. T. Fiske, A. E.Kazdin, & D. L. Schacter (Eds.), Annual review ofpsychology, vol. 56: 517–544. Palo Alto, CA: AnnualReviews.
Jung, D. I., & Sosik, J. J. 2002. Transformational leader-ship in work groups: The role of empowerment, co-hesiveness, and collective-efficacy on perceived groupperformance. Small Group Research, 33: 313–336.
Kahneman, D., & Tversky, A. 1979. Prospect theory: Ananalysis of decision under risk. Econometrica, 47:263–291.
Kameda, T., & Davis, J. H. 1990. The function of thereference point in individual and group risk decisionmaking. Organizational Behavior and Human De-cision Processes, 46: 55–76.
Kanter, R. M. 1993. Men and women of the corporation.New York: Basic Books.
Kates, A., & Galbraith, J. R. 2007. Designing your organ-ization—Using the star model to solve 5 criticaldesign challenges. San Francisco: Jossey-Bass.
Kilduff, G. J., Elfenbein, H. A., & Staw, B. M. 2010. Thepsychology of rivalry: A relationally dependent anal-ysis of competition. Academy of Management Jour-nal, 53: 943–969.
Kim, J.-Y., Haleblian, J., & Finkelstein, S. 2011. Whenfirms are desperate to grow via acquisition: The ef-fect of growth patterns and acquisition experienceon acquisition premiums. Administrative ScienceQuarterly, 56: 26–60.
Kirkman, B. L., & Rosen, B. 1997. A model of work teamempowerment. In R. W. Woodman & W. A. Pasmore(Eds.), Research in organizational change and de-velopment, vol. 10: 131–167. Greenwich, CT: JAI.
Kirkman, B. L., & Rosen, B. 1999. Beyond self-manage-ment: Antecedents and consequences of team em-powerment. Academy of Management Journal, 42:58–74.
2013 753Lanaj, Hollenbeck, Ilgen, Barnes, and Harmon

Klein, K. J., Dansereau, F., & Hall, R. J. 1994. Levels issuesin theory development, data collection, and analysis.Academy of Management Review, 19: 195–229.
Knight, D., Durham, C. C., & Locke, E. A. 2001. Therelationship of team goals, incentives, and efficacy tostrategic risk, tactical implementation, and perfor-mance. Academy of Management Journal, 44: 326–338.
Kozlowski, S. W. J., & Bell, B. S. 2003. Work groups andteams in organizations. In W. C. Borman, D. R. Ilgen,& R. J. Klimoski (Eds.), Handbook of psychology:Industrial and organizational psychology, vol. 12:333–375. London: Wiley.
Larrick, R. P., Heath, C., & Wu, G. 2009. Goal-inducedrisk taking in negotiation and decision making. So-cial Cognition, 27: 342–364.
Latham, G. P., Erez, M., & Locke, E. A. 1988. Resolvingscientific disputes by the joint design of crucial ex-periments by the antagonists: Application to theErez-Latham dispute regarding participation in goalsetting. Journal of Applied Psychology, 73: 753–772.
Latham, G. P., & Locke, E. A. 1991. Self-regulationthrough goal setting. Organizational Behavior andHuman Decision Processes, 50: 212–247.
Latham, G. P., Mitchell, T. R., & Dossett, D. L. 1978.Importance of participative goal setting and antici-pated rewards on goal difficulty and job performance.Journal of Applied Psychology, 63: 163–171.
Lawler, E. E. III, Mohrman, S. A., & Ledford, G. E., Jr..1995. Creating high performance organizations:Practices and results of employee involvement andtotal quality management in Fortune 1000 compa-nies. San Francisco: Jossey-Bass.
Leavitt, H. J. 2005. Top town: Why hierarchies are hereto stay and how to manage them more effectively.Boston: Harvard Business School Press.
LePine, J. A., Piccolo, R. F., Jackson, C. L., Mathieu, J. E.,& Saul, J. R. 2008. A meta-analysis of teamworkprocesses: Tests of a multidimensional model andrelationships with team effectiveness criteria. Per-sonnel Psychology, 61: 273–307.
Ling, Y., Simsek, Z., Lubatkin, M. H., Lyon, E., & Veiga,J. F. 2008. Transformational leadership’s role in pro-moting corporate entrepreneurship: Examining theCEO-TMT interface. Academy of ManagementJournal, 51: 557–576.
Locke, E. A. 2000. Motivation, cognition, and action: Ananalysis of studies of task goals and knowledge. Ap-plied Psychology: An International Review, 49:408–429.
Locke, E. A., & Latham, G. P. 2002. Building a practicallyuseful theory of goal setting and task motivation: A35-year odyssey. American Psychologist, 57: 705–717.
Lorange, P., & Vancil, R. V. 1977. Strategic planningsystems. Englewood Cliffs, NJ: Prentice Hall.
Magee, J. C., & Galinksy, A. D. 2008. Social hierarchy:The self-reinforcing nature of power and status. InJ. P. Walsh & A. P. Brief (Eds.), Academy of Man-agement annals, vol. 2: 351–398. Essex, UK: Rout-ledge.
Malhotra, D., Ku, G., & Murnighan, J. K. 2008. Whenwinning is everything. Harvard Business Review,86(5): 78–86, 129.
March, J. G., & Weil, T. 2005. On leadership. Malden,MA: Blackwell.
March, J., & Simon, H. A. 1958. Organizations. NewYork: Wiley.
Marks, M. A., DeChurch, L. A., Mathieu, J. E., Panzer,F. J., & Alonso, A. 2005. Teamwork in multiteamsystems. Journal of Applied Psychology, 90: 964–971.
Mathieu, J. E., Gilson, L. L., & Ruddy, T. M. 2006. Em-powerment and team effectiveness: An empiricaltest of an integrated model. Journal of Applied Psy-chology, 91: 97–108.
Mathieu, J. E., Marks, M. A., & Zaccaro, S. J. 2001. Multi-team systems. In N. Anderson, D. Ones, H. K. Si-nangil, & C. Wiswesvaran (Eds.), Internationalhandbook of work and organizational psychology:289–313. London: Sage.
Mathieu, J. E., & Rapp, T. L. 2009. Laying the foundationfor successful team performance trajectories: Theroles of team charters and performance strategies.Journal of Applied Psychology, 94: 90–103.
Mathieu, J. E., & Schulze, W. 2006. The influence of teamknowledge and formal plans on episodic team pro-cess—Performance relationships. Academy of Man-agement Journal, 49: 605–619.
McGrath, J. E., Arrow, H., & Berdahl, J. L. 2000. The studyof groups: Past, present, and future. Personality andSocial Psychology Review, 4: 95–105.
Mehra, A., Smith, B. R., Dixon, A. L., & Robertson, B.2006. Distributed leadership in teams: The networkof leadership perceptions and team performance.Leadership Quarterly, 17: 232–245.
Miller, D. 1987. Strategy making and structure: Analysisand implications for performance. Academy ofManagement Journal, 30: 7–32.
754 JuneAcademy of Management Journal

Miller, K. D., & Chen, W.-R. 2004. Variable organizationalrisk preferences: Tests of the March-Shapira model.Academy of Management Journal, 47: 105–115.
Mills, P. K., & Ungson, G. R. 2003. Reassessing the limitsof structural empowerment: Organizational constitu-tion and trust as controls. Academy of ManagementReview, 28: 143–153.
Mintzberg, H. 1979. The structuring of organizations: Asynthesis of the research. Englewood Cliffs, NJ:Prentice Hall.
Mintzberg, H. 1983. Structures in fives: Designing ef-fective organizations. Englewood Cliffs, NJ: Pren-tice Hall.
Mishina, Y., Dykes, B. J., Block, E. S., & Pollock, T. G.2010. Why “good” firms do bad things: The effects ofhigh aspirations, high expectations, and prominenceon the incidence of corporate illegality. Academy ofManagement Journal, 53: 701–722.
Murray, C. J. 2010. Nissan bets on the electric car. NissanDesign News. http://www.designnews.com/article/509514-Nissan_Bets_on_the_Electric_Car.php. Ac-cessed February 23, 2011.
Muthén, L. K., & Muthén, B. 2006. MPLUS user’s guide(4th ed.). Los Angeles: Muthén & Muthén.
Myers, D. G., & Kaplan, M. F. 1976. Group-induced po-larization in simulated juries. Personality and So-cial Psychology Bulletin, 2: 63–66.
Nissan. 2011. Nissan design newsletter, vol. 13. http://www.nissan-global.com/EN/DESIGN/NEWSLETTER/vol13.pdf. Accessed February 8.
O’Leary-Kelly, A. M., Martocchio, J. J., & Frink, D. D.1994. A review of the influence of group goals ongroup performance. Academy of Management Jour-nal, 37: 1285–1301.
Ordóñez, L. D., Schweitzer, M. E., Galinsky, A. D., &Bazerman, M. H. 2009. Goals gone wild: The system-atic side effects of overprescribing goal setting.Academy of Management Perspectives, 23(1):6–16.
Parker, S. K. 1998. Enhancing role breadth self-efficacy:The roles of job enrichment and other organizationalinterventions. Journal of Applied Psychology, 83:835–852.
Parker, S. K., Williams, H. M., & Turner, N. 2006. Mod-eling the antecedents of proactive behavior at work.Journal of Applied Psychology, 91: 636–652.
Pearce, C. L., & Sims, H. P., Jr. 2002. Vertical versusshared leadership as predictors of the effectivenessof change management teams: An examination ofaversive, directive, transactional, transformational,
and empowering leader behaviors. Group Dynam-ics: Theory, Research, and Practice, 6: 172–197.
Podsakoff, P. M., MacKenzie, S. B., Lee, J. Y., & Podsa-koff, N. P. 2003. Common method biases in behav-ioral research: A critical review of the literature andrecommended remedies. Journal of Applied Psy-chology, 88: 879–903.
Richardson, H. A., Vandenberg, R. J., Blum, T. C., &Roman, P. M. 2002. Does decentralization make adifference for the organization? An examination ofthe boundary conditions circumscribing decentral-ized decision-making and organizational financialperformance. Journal of Management, 28: 217–244.
Seibert, S. E., Wang, G., & Courtright, S. H. 2011. Ante-cedents and consequences of psychological andteam empowerment in organizations: A meta-ana-lytic review. Journal of Applied Psychology, 96:981–1003.
Simon, H. A. 1981. The science of the artificial. Cam-bridge, MA: MIT Press.
Singh, J. V. 1986. Performance, slack, and risk taking inorganizational decision making. Academy of Man-agement Journal, 29: 562–585.
Smith, K. G., Locke, E. A., & Barry, D. 1990. Goal setting,planning, and organizational performance: An ex-perimental simulation. Organizational Behaviorand Human Decision Processes, 46: 118–134.
Spreitzer, G. M., & Doneson, D. 2007. Musings on the pastand future of employee empowerment. In T. Cum-mings (Ed.), Handbook of organizational develop-ment: 311–324. Thousand Oaks, CA: Sage.
Steiner, G. A. 1979. Strategic planning: What everymanager must know. New York: Free Press.
Stout, R. J., Cannon-Bowers, J. A., Salas, E., & Milano-vich, D. M. 1999. Planning, shared mental models,and coordinated performance: An empirical link isestablished. Human Factors, 41: 61–71.
Suddaby, R. 2010. Construct clarity in theories of organ-izations. Academy of Management Review, 35:346–357.
Tajfel, H. 1982. Social psychology of intergroup rela-tions. In M. R. Rosenzweig & L. W. Porter (Eds.),Annual review of psychology, vol. 33: 1–39. PaloAlto, CA: Annual Reviews.
Tannenbaum, A. S. 1968. Control in organizations. NewYork: McGraw-Hill.
Taylor, A. B., MacKinnon, D. P., & Tein, J. 2008. Tests ofthe three-path mediated model. Organizational Re-search Methods, 11: 241–269.
2013 755Lanaj, Hollenbeck, Ilgen, Barnes, and Harmon

Thompson, J. D. 1967. Organizations in action. NewYork: McGraw-Hill.
Tversky, A., & Kahneman, D. 1983. Extensional versusintuitive reasoning: The conjunction fallacy in prob-ability judgments. Psychological Review, 91: 293–315.
U.S. Government Accountability Office. 2006. Report tocongressional committees. Hurricanes Katrina andRita: Coordination between FEMA and the RedCross should be improved for the 2006 hurricaneseason. http://www.gao.gov/new.items/d06712.pdf.Accessed on February 23, 2011.
Weingart, L. R. 1992. Impact of group goals, task compo-nent complexity, effort, and planning on group per-formance. Journal of Applied Psychology, 77: 682–693.
Weldon, E., Jehn, K. A., & Pradhan, P. 1991. Processesthat mediate the relationship between a group goaland improved group performance. Journal of Per-sonality and Social Psychology, 61: 555–569.
Williams, H. M., Parker, S. K., & Turner, N. 2010. Proac-tively performing teams: The role of work design,transformational leadership, and team composition.Journal of Occupational and Organizational Psy-chology, 83: 301–324.
Wiseman, R. M., & Bromiley, P. 1996. Toward a model ofrisk in declining organizations: An empirical exam-ination of risk, performance and decline. Organiza-tion Science, 7: 524–543.
Zaccaro, S. J., Marks, M. A., & DeChurch, L. A. 2012.Multiteam systems, an organizational form for dy-namic and complex environments. New York: Rout-ledge, Taylor & Francis.
Zimmerman, M. A. 1990. Toward a theory of learnedhopefulness: A structural model analysis of partici-pation and empowerment. Journal of Research inPersonality, 24: 71–86.
APPENDIX
Target Set in LDS
Operations assets. There were two types of targetshidden in the game grid—threats and opportunities. Inaddition, targets could be fixed or mobile. Threats weredangerous because sending the wrong assets to threatsresulted in destroyed assets and lost points. In addition,mobile threats could move toward the base of the simu-lation, attack the base, and cost points to the multiteamsystem. Sending the wrong assets to opportunities, on theother hand, limited the range of missions that the multi-team system could perform, but it did not result in lostpoints. Opportunities were harmless in terms of losing
points but were the major source for gaining points. Thevalue of targets varied such that destroying large oppor-tunities was worth more performance points than de-stroying other types of targets. Successful performanceon the simulation required multiteam systems to be effi-cient in utilizing their assets to locate and destroy targetson the game board, to closely monitor their bases, and toavoid base attacks.
Intelligence assets. There were four different intelli-gence assets: human intelligence, allied intelligence, vi-sual imagery, and communication intercepts. Prior to thesimulation, teams in both conditions were told that oneintelligence asset would be accurate in the north region(rows 9–16), one would be accurate in the south region(1–8), one would be accurate in the central region (5–12),and one would be accurate in the border regions (1–4 and13–16). The goal of the intelligence team was to findwhich asset was accurate in which region, and then coverthat region with queries that would support future oper-ations. Each asset had a 95 percent accuracy probabilityin their “sweet spot” (game-grid area where they wereaccurate) and a 5 percent accuracy rate in non–sweetspots (other sections in the game grid). If assets were sentto non–sweet spots they would report back inaccurateinformation 95 percent of the time.
Multiteam systems could verify sweet spots in manydifferent ways. They could use operation assets to testideas generated by past intelligence missions. For exam-ple, if a nonvalidated intelligence source suggested thatthere was a large fixed threat in a specific cell, the oper-ations unit could send a pair of escorts to that cell to seeif that was true. In addition, Operations and Intelligenceteam players could each send an asset to the exact sameplace, and the Intelligence Team player could check theaccuracy of his or her source against what the operationsperson saw. In addition, two Intelligence Team playerscould send different sources to the exact same place inthe same round (or adjacent rounds) to see if they couldget two confirmations of the same finding. Also, theOperations Team could identify fixed targets and leavethem up (as opposed to engaging them right away) so thatintelligence staff could test the accuracy of alternativesources with respect to known targets. This requiressome degree of patience of the Operations Team, in thesense that members need to forego the potential for im-mediate points in order to validate intelligence sources,which might pay off in the longer run. There are probablyother means for doing this well, but this was a relativelycomplex task, in the sense that with four sources and fourregions, 16 different hypotheses had to be tested by theteam, and the more the team worked together, the morelikely they were to deduce the best source-region match.
Component Teams and Their Roles
The Point Team (Operations). Each of the four lower-level members of this component team had the ability to
756 JuneAcademy of Management Journal

launch one specific type of RPA that included (a) infor-mation RPAs, (b) refueling RPAs, (c) strike RPAs, and (d)escort RPAs. Information RPAs were used to discoverhidden targets on the game grid; refueling RPAs wereused to enable missions sent to the northern half of thegame grid; strike RPAs destroyed opportunity targets;and escort RPAs destroyed threat targets. Each member ofthe operations team controlled four RPAs; hence, themultiteam system as a whole could utilize a total of up to16 operations assets per game round (four per asset type).The director of operations and assistant director of oper-ations evaluated the missions of their component teamsand could assist their component team by making addi-tional moves. All six members of this component teamsat at a table in proximity to each other and could freelycommunicate and interact during the simulation.
The Support Team (Intelligence). Each of the fourlower-level members of this component team had theability to generate queries about any one space from onespecific source: human intelligence, allied intelligence,visual imagery, and communication intercepts. Thesedifferent types of assets had different accuracy probabil-ities, and each had a 95 percent probability to be accuratein a predetermined area of the game grid (northern,southern, central, or border region). An important task ofthe multiteam system was to find where the intelligenceassets were accurate; these areas were their sweet spot.This information had important performance implica-tions for the multiteam system, because intelligence as-sets could deliver misleading information when theywere sent to non–sweet spots. Each member of the intel-ligence team could generate eight queries per round fromone of the four different sources; thus, the multiteamsystem as a whole could utilize a total of up to 32 intel-ligence assets per game round. The director of intelli-gence and assistant director of intelligence evaluatedthese missions and could assist their component team bymaking additional moves. All six team members sat at atable in proximity to each other and could freely com-municate and interact during the simulation.
The Leadership Team. The Leadership Team con-sisted of six individuals that included both pairs of di-rectors and assistant directors, in addition to the missioncommander and vice-commander. As described earlier,the directors and assistant directors were boundary span-ners who linked the leadership team to the two differentcomponent teams. The commander provided overallguidance for the multiteam system. The vice-commanderwas responsible for maintaining an up-to-date mentalpicture of the battle space on the COP, the central focalpoint for integrating information obtained from all threecomponent teams that was supposed to represent theteam’s shared understanding of the task environment atany one moment. Within the overall leadership team, the
mission commander and directors were primarily re-sponsible for overseeing future operations, whereas thevice commander and assistant directors were responsiblefor recording the results and findings of past operations.All four team members sat at a table in proximity to eachother and could freely communicate and interact duringthe simulation, however, the directors and assistant di-rectors moved back and forth from the Leadership Teamto their component team as part of their boundary-span-ning role.
The simulation required reciprocal interdependence,in the sense that missions conducted by componentteams were the input for the activities of the LeadershipTeam (who could edit decisions), but the decisions of theLeadership Team also served as inputs for the compo-nent teams.
Klodiana Lanaj ([email protected]) is a doctoral can-didate in organizational behavior and human resourcemanagement at the Eli Broad Graduate School of Man-agement at Michigan State University. Klodiana con-ducts research on teams, leadership, and self-regulation.
John R. Hollenbeck ([email protected]) is University Distin-guished Professor at Michigan State University and theEli Broad Professor of Management at the Eli Broad Grad-uate School of Business Administration. He received hisPh.D. in management from New York University. Heconducts research in the areas of team structure and workmotivation.
Daniel R. Ilgen ([email protected]) is John A. Hannah Pro-fessor Emeritus of psychology and management at Mich-igan State University. Dr. Ilgen received his Ph.D. fromthe University of Illinois. Over his career, his researchinterests and publications have addressed issues of thepsychology of work from the perspective of individualmotivation and teamwork.
Christopher M. Barnes ([email protected]) is an assistant professor of management inthe Pamplin College of Business of Virginia Tech. Hereceived his Ph.D. from Michigan State University. Hisprimary research interests include sleep and fatigue inorganizations, team performance and decision making,and emotional labor.
Stephen J. Harmon ([email protected]) direc-tor of research and assistant professor of management atthe U.S. Air Force Academy. His research interests areteam performance, crew resource management, threat-error management, and aviation.
2013 757Lanaj, Hollenbeck, Ilgen, Barnes, and Harmon