
Supervisory control design based on hybrid systems and fuzzy events detection. Application to an...
15
Supervisory control design based on hybrid systems and fuzzy events detection. Application to an oxichlorination reactor Edmary Altamiranda, a, * Horacio Torres, b,² Eliezer Colina, c,‡ Edgar Chaco ´ n d,§ a Gerencia Te ´cnica, Automatizacio ´n, PDVSA PEQUIVEN, El Tablazo, Zulia, Venezuela b Gerencia de Produccio ´n, Planta de MVC, PDVSA PEQUIVEN, El Tablazo, Zulia, Venezuela c GIC– Departamento de Control, Escuela de Ingenierı ´a de Sistemas, Universidad de Los Andes, Me ´rida, Venezuela d LaSDAI – Departamento de Computacio ´n, Escuela de Ingenierı ´a de Sistemas, Universidad de Los Andes, Me ´rida, Venezuela ~Received 19 February 2001; accepted 13 January 2002! Abstract This paper presents a supervisory control scheme based on hybrid systems theory and fuzzy events detection. The fuzzy event detector is a linguistic model, which synthesizes complex relations between process variables and process events incorporating experts’ knowledge about the process operation. This kind of detection allows the anticipation of appropriate control actions, which depend upon the selected membership functions used to characterize the process under scrutiny. The proposed supervisory control scheme was successfully implemented for an oxichlorination reactor in a vinyl monomer plant. This implementation has allowed improvement of reactor stability and reduction of raw material consumption. © 2002 ISA—The Instrumentation, Systems, and Automation Society. Keywords: Discrete events systems; Reactive systems; Finite state machines; Hybrid systems; Fuzzy logic; Supervisory control systems implementation 1. Introduction Some difficulties associated with the automation of complex dynamic systems are usually related to multiple operational domains due to the presence of nonlinear phenomena and unpredictable or par- tially known disturbances, which affect the con- trollers’ performance. In order to alleviate such difficulties, it is important to incorporate control strategies, for different operational domains, in- clude an adaptive control capacity to deal with un- certain situations, and be able to coordinate the distributed controllers for a satisfactory task as- signment. A large number of industrial processes operate on continuous time bases, and they are usually described in terms of differential equa- tions. Other types of processes, of a discrete time nature, may be represented using transition sys- tems, for example, the sequential operation in au- tomobile manufacturing and chemical processes where batch operation is involved; changes among operational regions related to a continuous process are usually described as discrete systems. In tran- sition systems-based models, the process under scrutiny is described in terms of discrete events. The dynamic systems whose behaviors depend on the interaction between continuous time processes and discrete controllers are called hybrid systems @1–3#. Other approaches for hybrid systems can be *Corresponding author. Puertos de Altagracia PDVSA PEQUIVEN, Automatizacio ´n, Gerencia Te ´cnica. E-mail addresses: [email protected] and [email protected] ² E-mail address: [email protected] ‡ E-mail address: [email protected] § E-mail address: [email protected] ISA TRANSACTIONS ® ISA Transactions 41 ~2002! 485–499 0019-0578/2002/$ - see front matter © 2002 ISA—The Instrumentation, Systems, and Automation Society.
Transcript of Supervisory control design based on hybrid systems and fuzzy events detection. Application to an...

uzzy
tion. Theprocess
ation ofprocess
reactorf raw
l systems
ISATRANSACTIONS®
ISA Transactions 41~2002! 485–499
Supervisory control design based on hybrid systems and fevents detection. Application to an oxichlorination reactor
Edmary Altamiranda,a,* Horacio Torres,b,† Eliezer Colina,c,‡ Edgar Chaco´nd,§
aGerencia Te´cnica, Automatizacio´n, PDVSA PEQUIVEN, El Tablazo, Zulia, VenezuelabGerencia de Produccio´n, Planta de MVC, PDVSA PEQUIVEN, El Tablazo, Zulia, Venezuela
cGIC–Departamento de Control, Escuela de Ingenierı´a de Sistemas, Universidad de Los Andes, Me´rida, VenezueladLaSDAI–Departamento de Computacio´n, Escuela de Ingenierı´a de Sistemas, Universidad de Los Andes, Me´rida, Venezuela
~Received 19 February 2001; accepted 13 January 2002!
Abstract
This paper presents a supervisory control scheme based on hybrid systems theory and fuzzy events detecfuzzy event detector is a linguistic model, which synthesizes complex relations between process variables andevents incorporating experts’ knowledge about the process operation. This kind of detection allows the anticipappropriate control actions, which depend upon the selected membership functions used to characterize theunder scrutiny. The proposed supervisory control scheme was successfully implemented for an oxichlorinationin a vinyl monomer plant. This implementation has allowed improvement of reactor stability and reduction omaterial consumption. © 2002 ISA—The Instrumentation, Systems, and Automation Society.
Keywords: Discrete events systems; Reactive systems; Finite state machines; Hybrid systems; Fuzzy logic; Supervisory controimplementation
ontocear-n-hl
in-
n-thes-esarea-meys-u-esngessan-derts.on
sesmsbe
SA
1. Introduction
Some difficulties associated with the automatiof complex dynamic systems are usually relatedmultiple operational domains due to the presenof nonlinear phenomena and unpredictable or ptially known disturbances, which affect the cotrollers’ performance. In order to alleviate sucdifficulties, it is important to incorporate controstrategies, for different operational domains,
*Corresponding author. Puertos de Altagracia PDVPEQUIVEN, Automatizacio´n, Gerencia Te´cnica.E-mail addresses: [email protected] [email protected]
†E-mail address: [email protected]‡E-mail address: [email protected]§E-mail address: [email protected]
0019-0578/2002/$ - see front matter © 2002 ISA—The Instru
clude an adaptive control capacity to deal with ucertain situations, and be able to coordinatedistributed controllers for a satisfactory task asignment. A large number of industrial processoperate on continuous time bases, and theyusually described in terms of differential equtions. Other types of processes, of a discrete tinature, may be represented using transition stems, for example, the sequential operation in atomobile manufacturing and chemical processwhere batch operation is involved; changes amooperational regions related to a continuous procare usually described as discrete systems. In trsition systems-based models, the process unscrutiny is described in terms of discrete evenThe dynamic systems whose behaviors dependthe interaction between continuous time procesand discrete controllers are called hybrid syste@1–3#. Other approaches for hybrid systems can
mentation, Systems, and Automation Society.
sinurs.onuniesingben-re-elf,m,
r-in
ertoary
essn
ty
hi-ted
esb-
nalur-s,ry-oftosors
sfy-ouviohatifi-
essandar-
themri-
ers.inte
s-ofs,on-
ys-n-hehep-n-
hy-actde-ndntayalte/eenpro-in-o-
ndichrol
nt
cs
486 Edmary Altamiranda et al. / ISA Transactions 41 (2002) 485–499
found on literature.@4# establishes hybrid systemas hierarchical systems where the system contous evolution is controlled by discrete superviso@5# uses an approach where a logical system ctrols the change of state of continuous systemsder a set of constraints. Implementation strategto observe the continuous system, transformthe operational condition in discrete state, canfound in @6#. In the process control area, the cotinuous time process of a hybrid system corsponds to the physical or chemical process itswhich must be controlled. A discrete event systeon the other hand, represents a supervisor~au-tomaton!, which reacts in the presence of geneated events from the continuous time processorder to fulfill system specifications. This pappresents concepts and formulations relatedmodeling and control of hybrid systems usingfuzzy logic-based events detector. A supervisocontrol scheme based on this theory was succfully implemented in an oxichlorination reactor ia vinyl monomer~VCM! plant. This implementa-tion has allowed improvement of reactor stabiliand reduction of raw material consumption.
2. Supervisory control system
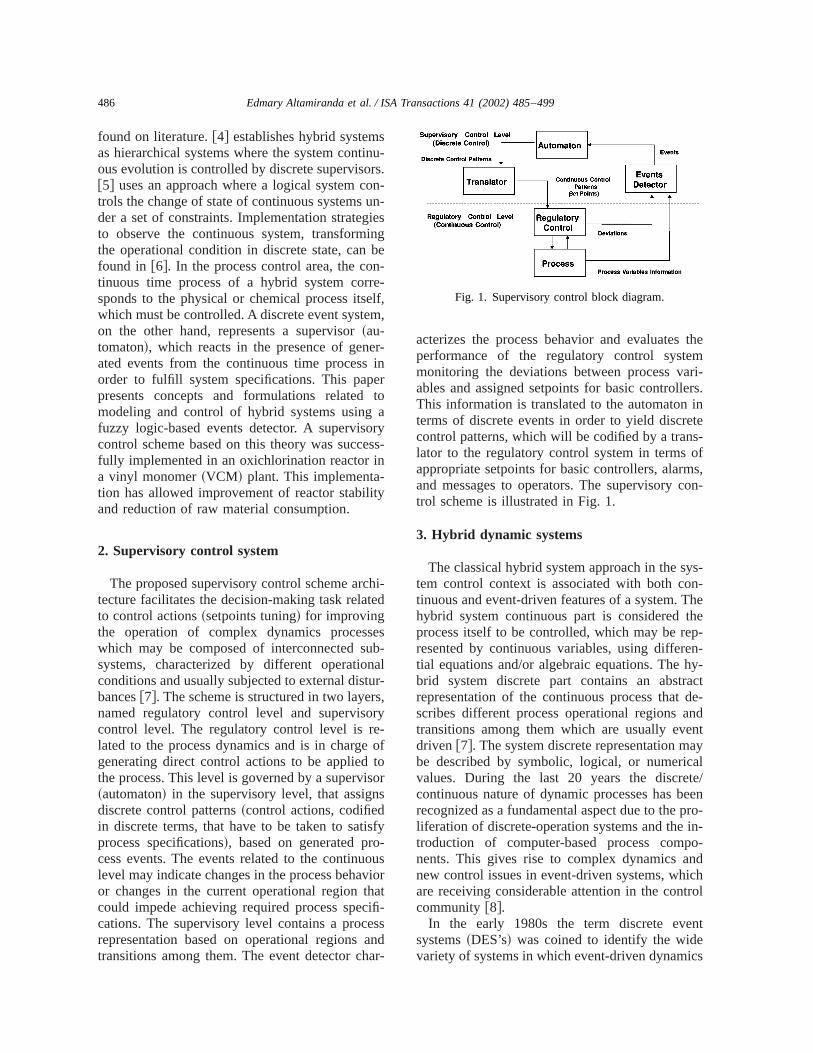
The proposed supervisory control scheme arctecture facilitates the decision-making task relato control actions~setpoints tuning! for improvingthe operation of complex dynamics processwhich may be composed of interconnected susystems, characterized by different operatioconditions and usually subjected to external distbances@7#. The scheme is structured in two layernamed regulatory control level and supervisocontrol level. The regulatory control level is related to the process dynamics and is in chargegenerating direct control actions to be appliedthe process. This level is governed by a supervi~automaton! in the supervisory level, that assigndiscrete control patterns~control actions, codifiedin discrete terms, that have to be taken to satiprocess specifications!, based on generated process events. The events related to the continulevel may indicate changes in the process behaor changes in the current operational region tcould impede achieving required process speccations. The supervisory level contains a procrepresentation based on operational regionstransitions among them. The event detector ch
-
--
-
sr
acterizes the process behavior and evaluatesperformance of the regulatory control systemonitoring the deviations between process vaables and assigned setpoints for basic controllThis information is translated to the automatonterms of discrete events in order to yield discrecontrol patterns, which will be codified by a tranlator to the regulatory control system in termsappropriate setpoints for basic controllers, alarmand messages to operators. The supervisory ctrol scheme is illustrated in Fig. 1.
3. Hybrid dynamic systems
The classical hybrid system approach in the stem control context is associated with both cotinuous and event-driven features of a system. Thybrid system continuous part is considered tprocess itself to be controlled, which may be reresented by continuous variables, using differetial equations and/or algebraic equations. Thebrid system discrete part contains an abstrrepresentation of the continuous process thatscribes different process operational regions atransitions among them which are usually evedriven@7#. The system discrete representation mbe described by symbolic, logical, or numericvalues. During the last 20 years the discrecontinuous nature of dynamic processes has brecognized as a fundamental aspect due to theliferation of discrete-operation systems and thetroduction of computer-based process compnents. This gives rise to complex dynamics anew control issues in event-driven systems, whare receiving considerable attention in the contcommunity@8#.
In the early 1980s the term discrete evesystems~DES’s! was coined to identify the widevariety of systems in which event-driven dynami
Fig. 1. Supervisory control block diagram.

sech-esreasse
on
ati-s
rininu-
olntoreeer-bects
elf a
deione-
esssn-folhe
er-ec-
act
n
n
oficha-at-redndot
487Edmary Altamiranda et al. / ISA Transactions 41 (2002) 485–499
are of main relevance. Disciplines to study thesystems have emerged, borrowing at first teniques and tools mainly from computing sciencand operation research. Nowadays, some asuch as parametric analysis of stochastic proce@9,10# and supervisory control theory@11# are wellestablished. Good introductory discussionsDESs can be found in@12–14# and specifically inchemical process control@15#.
In this section, some theoretical and mathemcal formulations related to the Hybrid Systemdefinition will be given, which will be used fomodeling the event-driven system presentedthis paper. These formulations allow descriptionan abstract manner of the hybrid system continous part~process to be controlled!, the hybrid sys-tem discrete part~automaton or supervisor!, andinterconnections between both control levels.
3.1. Automaton
Engineering design of contemporary contrstrategies for complex dynamic systems takes iaccount state-of-the-art approaches, like thoselated to intelligent control, in order to achievhigher systems performance without human intvention. These types of control strategies mayrepresented in terms of an automaton that interawith the regulatory control level via a higher levinterface, for example, the application module odistributed control system~DCS!. A finite state au-tomaton may be defined as a mathematical mosynthesized using process variables informatfrom the continuous process in order to yield rsponses based on discrete time inputs@16#. An au-tomaton has a finite number of states and evolvfrom one state into another, as a result of proceing a present state input. In terms of formal laguages and automata theory it is described aslows: The set of inputs processed by tautomaton constitutes the input alphabet~set ofsymbols! and all the input sequences that detmined the automaton transitions represent its rognized language~set of all finite strings that mayoccur within a string set! @17#.
3.2. Dynamic systems
A dynamic system is a physical system abstrmodel that considers external variables~input/
ss
-
l
,-
-
output!, internal variables~states!, and a transfor-mation which represent the states’ evolutio@18,19#.
The triplet (X,S,F) denotes a dynamic system~DS!, whereX is its state space vector,xi repre-sents thei th component ofX, S is a semigroup,and F:X3S→X is its transition function, whichsatisfies the following properties:
~i! Fu(x)5F(x,u) is a state spaceX trans-formation ~morphism! for all uPS andxPX.
~ii ! Fuv5Fu+Fv ~covariant! or Fuv5Fv+Fu ~contravariant!.
If S is a monoid ande is a neutral element, theFe5I (x), whereI (x) is an identity function.
In continuous time dynamic systemsS isequivalent toR1 ~positive real values! and thevariables time evolution is modeled by a setdifferential equations. Discrete events dynamsystems may be modeled as a DS over an alpbet, where its dynamics is defined as the concenation of the alphabet elements and is considein a discrete time domain. Both in continuous adiscrete time dynamics the action semigroup is nalways defined over the setX3S. That is why theaction of a partially defined applicationF over asubset ofX3S is considered.
3.3. Pseudodynamic systems
A pseudodynamic system~PsDS! is a DS(X,S,F), whereF is the subset,
F5øxPX$x%3Sx,X3S, ~1!
whereSx5$uPS/F(x,u)% is defined.
3.4. Preserving dynamics map
Consider a pair of PsDS’s(X1 ,S1 ,F1) and(X2 ,S2 ,F2), and then the pair of maps( f ,h),
f :X1→X2, h:S1→S2, ~2!
preserve their dynamics if
~i! h is a semigroup~monoid! with homeo-morphism, and
s
ridis-
ses
dy-
esy-
nal
m
rewhew.
re
mn
-
rial
aln
a-for
488 Edmary Altamiranda et al. / ISA Transactions 41 (2002) 485–499
~iii ! the following commutes:
X13S1→F1
X1,
~ f ,h!↓ ↓ f
X23S2→F2
X2. ~3!
The commutativity implies the conditionh(S1(x)),S2 f (x) .
3.5. General definition for hybrid systems
A dynamic hybrid system is a triplet(X1,X2,F)where
X15~X1,S1,F1!, X25~X2,S2,F2! ~4!
are PsDS’s andF5( f ,h) is a preserving dynamicmap such thatf (x0)5e, wherex0PX1 is the ini-tial point in X0
1 and ePX2 is the initial point inX0
2. Note that the systemsX01 andX0
2 may be con-sidered as continuous or discrete PsDS’s. A hybdynamic system with output application(X1,X2,F), equipped with a pair of output applications (w1,w2),w1:X1→Y1 and w2:X2→Y2,whereY1 and Y2 are two output sets. As it wamentioned before, the following diagram describthe preserving dynamics(F,g)5( f ,h,g) betweenX1 andX2 and the output maps:
X13S1→F1
X1→w1
Y1,
~ f ,h!↓ ↓ f ↓g
X23S2→F2
X2→w2
Y2. ~5!
Models used to represent hybrid systems asnamic systems consider continuous dynamicsw1
to describe the evolution of continuous variablin different operational regions and discrete dnamicsw2 to describe changes among operatioregions.
3.6. Hybrid system example
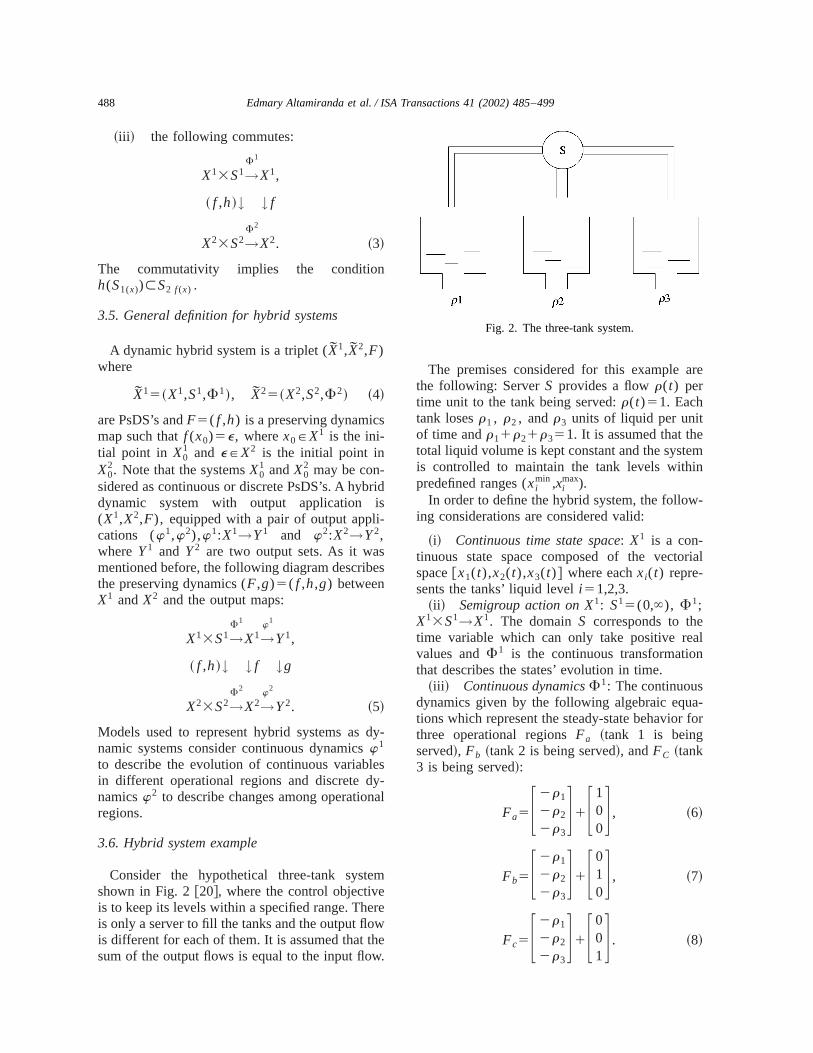
Consider the hypothetical three-tank systeshown in Fig. 2@20#, where the control objectiveis to keep its levels within a specified range. Theis only a server to fill the tanks and the output flois different for each of them. It is assumed that tsum of the output flows is equal to the input flo
The premises considered for this example athe following: ServerS provides a flowr(t) pertime unit to the tank being served:r(t)51. Eachtank losesr1 , r2 , andr3 units of liquid per unitof time andr11r21r351. It is assumed that thetotal liquid volume is kept constant and the systeis controlled to maintain the tank levels withipredefined ranges(xi
min ,ximax).
In order to define the hybrid system, the following considerations are considered valid:
~i! Continuous time state space: X1 is a con-tinuous state space composed of the vectospace@x1(t),x2(t),x3(t)# where eachxi(t) repre-sents the tanks’ liquid leveli 51,2,3.
~ii ! Semigroup action onX1: S15(0, ), F1;X13S1→X1. The domainS corresponds to thetime variable which can only take positive revalues andF1 is the continuous transformatiothat describes the states’ evolution in time.
~iii ! Continuous dynamicsF1: The continuousdynamics given by the following algebraic equtions which represent the steady-state behaviorthree operational regionsFa ~tank 1 is beingserved!, Fb ~tank 2 is being served!, andFC ~tank3 is being served!:
Fa5F2r1
2r2
2r3
G1F 100G , ~6!
Fb5F2r1
2r2
2r3
G1F 010G , ~7!
Fc5F2r1
2r2
2r3
G1F 001G . ~8!
Fig. 2. The three-tank system.
489Edmary Altamiranda et al. / ISA Transactions 41 (2002) 485–499
Table 1Desphande and Varaiya automaton in@21#.
x2Operation
region X1Continuous
event x28
x2(t)<x2min~ 1 b
x1(t)>x1max
x1(t),x1max`
a Fa x2(t).x2min` e a
x3(t).x3min
x3(t)<x3min 2 c
x1(t)<x1min~ 3 a
x2(t)>x2max
x1(t).x1min`
b Fb x2(t),x2max` e b
x3(t).x3min
x3(t)<x3min 4 c
x1(t)<x1min~ 5 a
x3(t)>x3max
x1(t).x1min`
c Fc x2(t).x2min` e a
x3(t),x3max
x2(t)<x2min 6 b
or
nent
rentsings-ts
o-of
e-ni
gtheei
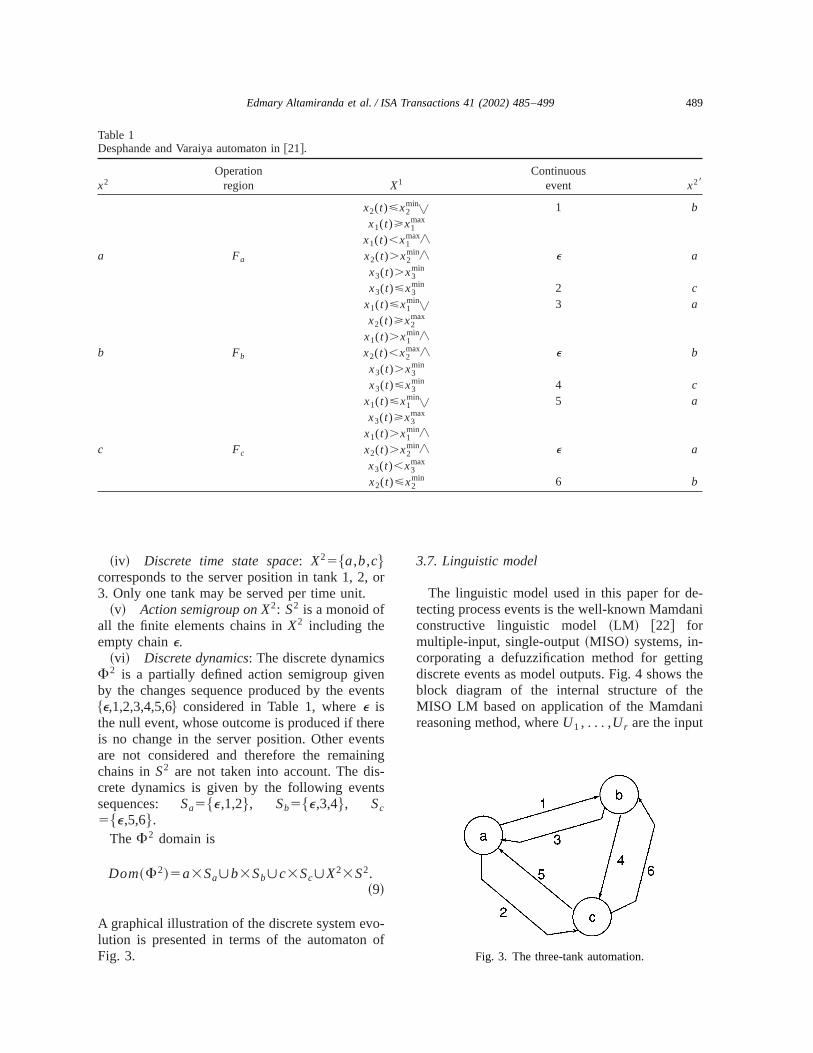
~iv! Discrete time state space: X25$a,b,c%corresponds to the server position in tank 1, 2,3. Only one tank may be served per time unit.
~v! Action semigroup onX2: S2 is a monoid ofall the finite elements chains inX2 including theempty chaine.
~vi! Discrete dynamics: The discrete dynamicsF2 is a partially defined action semigroup giveby the changes sequence produced by the ev$e,1,2,3,4,5,6% considered in Table 1, wheree isthe null event, whose outcome is produced if theis no change in the server position. Other eveare not considered and therefore the remainchains inS2 are not taken into account. The dicrete dynamics is given by the following evensequences: Sa5$e,1,2%, Sb5$e,3,4%, Sc
5$e,5,6%.The F2 domain is
Dom~F2!5a3Saøb3Sbøc3ScøX23S2.~9!
A graphical illustration of the discrete system evlution is presented in terms of the automatonFig. 3.
s
3.7. Linguistic model
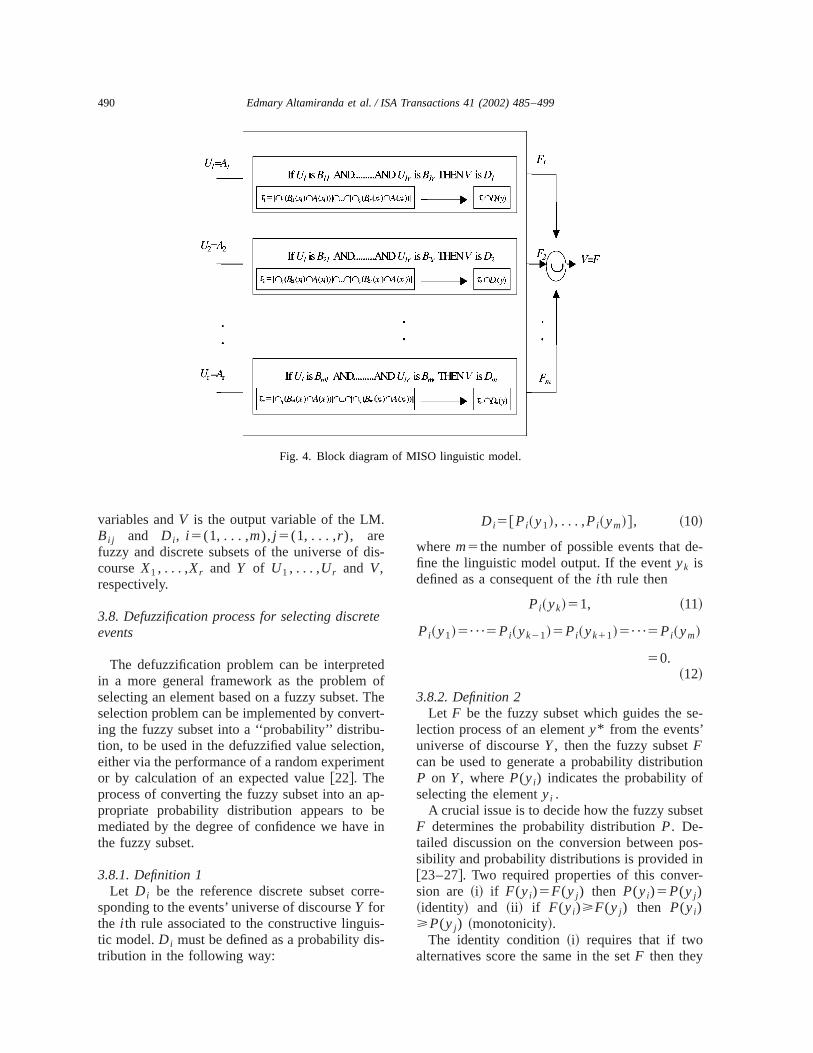
The linguistic model used in this paper for dtecting process events is the well-known Mamdaconstructive linguistic model~LM ! @22# formultiple-input, single-output~MISO! systems, in-corporating a defuzzification method for gettindiscrete events as model outputs. Fig. 4 showsblock diagram of the internal structure of thMISO LM based on application of the Mamdanreasoning method, whereU1 , . . . ,Ur are the input
Fig. 3. The three-tank automation.
490 Edmary Altamiranda et al. / ISA Transactions 41 (2002) 485–499
Fig. 4. Block diagram of MISO linguistic model.
.
is-
te
edofThrt-
-n,
ent
ap-ein
re-
is-s-
e-
e-
ion
et
os-
r-
variables andV is the output variable of the LMBi j and Di , i 5(1, . . . ,m), j 5(1, . . . ,r ), arefuzzy and discrete subsets of the universe of dcourseX1 , . . . ,Xr and Y of U1 , . . . ,Ur and V,respectively.
3.8. Defuzzification process for selecting discreevents
The defuzzification problem can be interpretin a more general framework as the problemselecting an element based on a fuzzy subset.selection problem can be implemented by conveing the fuzzy subset into a ‘‘probability’’ distribution, to be used in the defuzzified value selectioeither via the performance of a random experimor by calculation of an expected value@22#. Theprocess of converting the fuzzy subset into anpropriate probability distribution appears to bmediated by the degree of confidence we havethe fuzzy subset.
3.8.1. Definition 1Let Di be the reference discrete subset cor
sponding to the events’ universe of discourseY forthe i th rule associated to the constructive lingutic model.Di must be defined as a probability ditribution in the following way:
e
Di5@Pi~y1!, . . . ,Pi~ym!#, ~10!
wherem5the number of possible events that dfine the linguistic model output. If the eventyk isdefined as a consequent of thei th rule then
Pi~yk!51, ~11!
Pi~y1!5¯5Pi~yk21!5Pi~yk11!5¯5Pi~ym!
50.~12!
3.8.2. Definition 2Let F be the fuzzy subset which guides the s
lection process of an elementy* from the events’universe of discourseY, then the fuzzy subsetFcan be used to generate a probability distributP on Y, whereP(yi) indicates the probability ofselecting the elementyi .
A crucial issue is to decide how the fuzzy subsF determines the probability distributionP. De-tailed discussion on the conversion between psibility and probability distributions is provided in@23–27#. Two required properties of this convesion are~i! if F(yi)5F(yj) then P(yi)5P(yj)~identity! and ~ii ! if F(yi)>F(yj) then P(yi)>P(yj) ~monotonicity!.
The identity condition~i! requires that if twoalternatives score the same in the setF then they

he
ffor
-
s
the
-d-ter-eithut-f
on
o-ic
i-
r-
sedasss
u-yln
-
on-eene
aedesn.
hehets
491Edmary Altamiranda et al. / ISA Transactions 41 (2002) 485–499
must have the same probability of selection. Tsecond condition indicates that ifyi scores betterthan yj in F then yi has a higher probability oselection. Next, three procedures are givengenerating the probability distributionP that sat-isfy conditions~i! and ~ii !.
3.8.3. Procedure T1
P~yi !51/n, ~13!
if yi5arg$maxyPV@F(y)#%, wheren is the numberof elements ofY which attain the maximum membership grade inF, and
P~yj !50 ~14!
if yjÞarg$maxyPV@F(y)#%.
3.8.4. Procedure T2
P~yi !5F~yi !
(j
F~yj !
, ~15!
3.8.5. Procedure T3
P~yi !51/m, ~16!
wherem is the cardinality ofy.It can be proved that procedureT1 corresponds
to a uniform probability distribution, which hathe lowest entropy~@22#, see p. 318!. We recallthat entropy H(P)52($P(yi)ln@P(yi)#% mea-sures the degree of uncertainty manifested byprobability distributionP; the more uncertainP,the largerH(P).
In this paper, procedureT1 is used to select process events. It is very important to define aequately the membership functions that characize input variables in order to minimize thpossibility of events overlapping, associated wthe existence of more than one element in the oput set which attain the maximum probability ooccurrence.
3.9. Fuzzy algorithm for discrete events detecti
According to the foregoing arguments, the algrithm for events calculation, using the linguistmodel, is the following:
~i! Find the degree~level! of firing of each rule
t i5$ùx1@Bi1ùA1~x1!#%ù¯
ù$ùxr@Bir ùAr~xr !#%, ~17!
if inputs are fuzzy setsA1 , A2 , andAr , and
t i5Bi1~x1* !ù¯ùBir ~xr* !, ~18!
if inputs are crisp numbersx1* , . . . ,xr* .~ii ! Find the fuzzy setsFi inferred by thei th
rule,
Fi~y!5t iùDi~y!. ~19!
~iii ! Aggregate the inferred fuzzy setsFi ,
F~y!5 øi 51, . . . ,m
Fi~y!. ~20!
~iv! Select the event which attains the maxmum membership grade in the fuzzy subsetF.This event has the highest probability of occurence.
y5arg$maxyPV@F~y!#%. ~21!
4. Industrial application
The presented supervisory control scheme baon hybrid systems and fuzzy events detection wsuccessfully implemented to improve the proceoperation of an oxichlorination reactor in a VCMplant.
4.1. General description of the oxichlorinationprocess
The oxichlorination process takes place in a flidized catalytic reactor which produces 1,2 ethdichloride~EDC! as a result of a chemical reactiobetween ethyleneC2H4, hydrogen chloride~HCl!,and oxygenO2, according to the following equation:
C2H41~ 12!O212HCl→EDC1H2O. ~22!
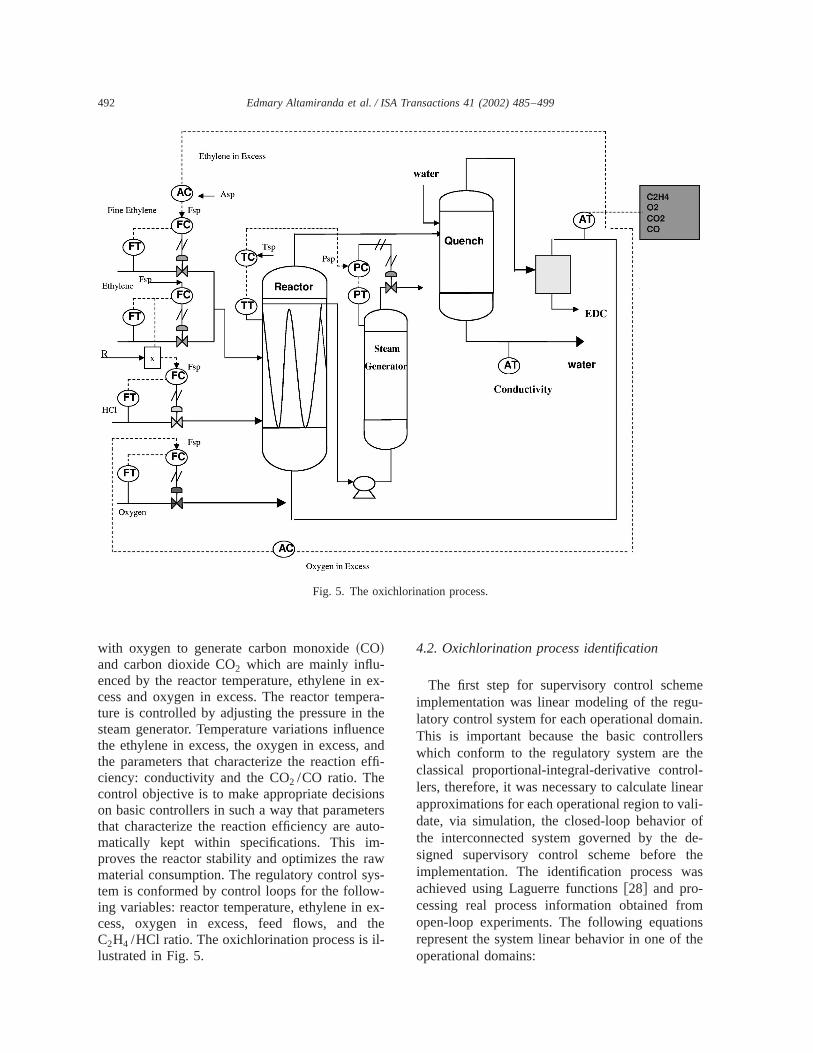
The heat generated in the reaction must be ctrolled by circulating water through tubes in thfluidized bed. The reactant substances, ethyland hydrogen chloride, are to be fed satisfyingpredetermined relationship. This is accomplishusing a ratio control strategy. The reaction takplace with a little excess of ethylene and oxygeThe HCl that does not react is monitored by tconductivity parameter, which is measured in tquench column. A fraction of the ethylene reac
492 Edmary Altamiranda et al. / ISA Transactions 41 (2002) 485–499
Fig. 5. The oxichlorination process.
ex-erahenceandffi
nsersto--aws--
ex-thel-
eu-in.rs
hel-earli-ofde-heas
mnsthe
with oxygen to generate carbon monoxide~CO!and carbon dioxideCO2 which are mainly influ-enced by the reactor temperature, ethylene incess and oxygen in excess. The reactor tempture is controlled by adjusting the pressure in tsteam generator. Temperature variations influethe ethylene in excess, the oxygen in excess,the parameters that characterize the reaction eciency: conductivity and theCO2 /CO ratio. Thecontrol objective is to make appropriate decisioon basic controllers in such a way that parametthat characterize the reaction efficiency are aumatically kept within specifications. This improves the reactor stability and optimizes the rmaterial consumption. The regulatory control sytem is conformed by control loops for the following variables: reactor temperature, ethylene incess, oxygen in excess, feed flows, andC2H4 /HCl ratio. The oxichlorination process is ilustrated in Fig. 5.
-
-
4.2. Oxichlorination process identification
The first step for supervisory control schemimplementation was linear modeling of the reglatory control system for each operational domaThis is important because the basic controllewhich conform to the regulatory system are tclassical proportional-integral-derivative controlers, therefore, it was necessary to calculate linapproximations for each operational region to vadate, via simulation, the closed-loop behaviorthe interconnected system governed by thesigned supervisory control scheme before timplementation. The identification process wachieved using Laguerre functions@28# and pro-cessing real process information obtained froopen-loop experiments. The following equatiorepresent the system linear behavior in one ofoperational domains:
493Edmary Altamiranda et al. / ISA Transactions 41 (2002) 485–499
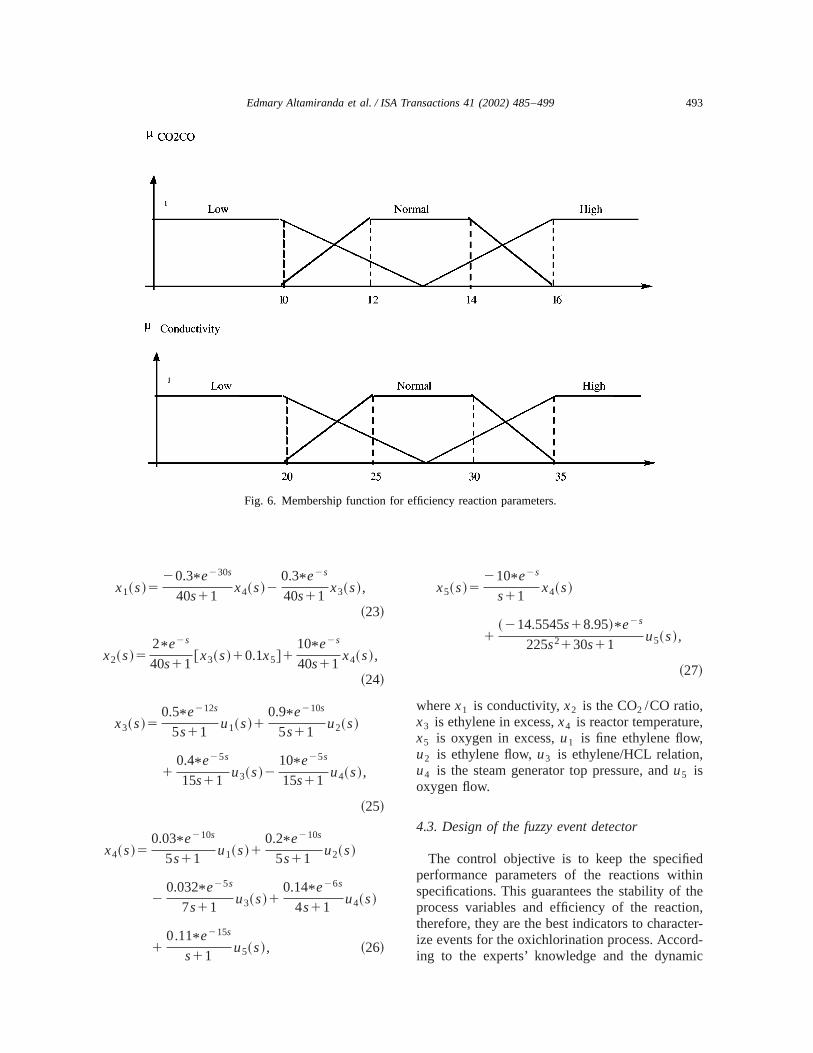
Fig. 6. Membership function for efficiency reaction parameters.
,
din
hen,
ter-d-ic
x1~s!520.3* e230s
40s11x4~s!2
0.3* e2s
40s11x3~s!,
~23!
x2~s!52* e2s
40s11@x3~s!10.1x5#1
10* e2s
40s11x4~s!,
~24!
x3~s!50.5* e212s
5s11u1~s!1
0.9* e210s
5s11u2~s!
10.4* e25s
15s11u3~s!2
10* e25s
15s11u4~s!,
~25!
x4~s!50.03* e210s
5s11u1~s!1
0.2* e210s
5s11u2~s!
20.032* e25s
7s11u3~s!1
0.14* e26s
4s11u4~s!
10.11* e215s
s11u5~s!, ~26!
x5~s!5210* e2s
s11x4~s!
1~214.5545s18.95!* e2s
225s2130s11u5~s!,
~27!
wherex1 is conductivity,x2 is theCO2 /CO ratio,x3 is ethylene in excess,x4 is reactor temperaturex5 is oxygen in excess,u1 is fine ethylene flow,u2 is ethylene flow,u3 is ethylene/HCL relation,u4 is the steam generator top pressure, andu5 isoxygen flow.
4.3. Design of the fuzzy event detector
The control objective is to keep the specifieperformance parameters of the reactions withspecifications. This guarantees the stability of tprocess variables and efficiency of the reactiotherefore, they are the best indicators to characize events for the oxichlorination process. Accoring to the experts’ knowledge and the dynam

c-. 6.acre
to. Ifngorer-rsl-
ithn-n-
on-s-them
re-heg
ec
aln
ra-ns
theantheing
ine
w-
do-hatin-ceari-
494 Edmary Altamiranda et al. / ISA Transactions 41 (2002) 485–499
identification, the appropriate membership funtions for these parameters are illustrated in Fig
The possible events associated with the charterization defined for efficiency parameters wegrouped into three kinds of eventsa, b, and e,according to the type of control action that hasbe applied and the current operational conditionan a or b event occurs, changes in the settipoints of basic controllers must be performed,else if ane event occurs no changes must be pformed to maintain the efficiency parametespecification. Table 2 illustrates the fuzzy knowedge base.
4.4. Definition of the hybrid system
The supervisory control problem associated wthe oxichlorination reactor is oriented to maintaiing the efficiency parameter of the reaction coductivity @x1(t)# and theCO2 /CO ratio @x2(t)#within a predefined limit. This guarantees reactistability and optimization of raw material consumption. In order to achieve this goal it is necesary to make appropriate setpoint changes forbasic controllers of the regulatory control systedepending on the stability conditions and thequired specifications. The hybrid system for toxichlorination reactor is defined in the followinway:
~i! Continuous time state space: X1 is consid-ered the continuous state space formed by the vtorial space@x1(t),x2(t)#, where @x1(t)# repre-sents the conductivity and@x2(t)# is theCO2 /COratio.
~ii ! Action semigroup onX1: S15(0, ), w1 ;X13S1→X1. The domainS corresponds to thetime variable which can only take positive revalues andF1 is the continuous transformatiothat describes the states’ evolution in time.
~iii ! Continuous dynamicsF1 : The dynamicsgiven by the equation related to conductivityx1(t)
Table 2Fuzzy knowledge base.
CO2 /COConductivity Low Normal High
Low b a aNormal b e aHigh b b a
-
-
and to theCO2 /CO ratio x2(t). There are a pair ofequations, like Eqs.~22! and~23!, for each opera-tional domain.
~iv! Discrete time state: X25@ x3 ,x4 ,x5#,where x3 , x3 , and x5 correspond to the settingpoints for the ethylene in excess, reactor tempeture, and oxygen in excess, respectively. Regiogenerated by the different variables determinedifferent operational domains. Each domain hasassociated reference value for each setpoint;reference values are related among them accordto the following steady-state equations:
xR3520.05* xR4111.625,
xR5520.5* xR41116.25, ~28!
where xR3 is the reference value for ethyleneexcess setpoint,xR4 is the reference value for threactor temperature setpoint, andxR5 is the refer-ence value for oxygen in excess.
These reference values are subject to the folloing constraints:
224 °C< xR4<230 °C,
0.25%< xR3<0.45%,
2.5%< xR5<5%. ~29!
Each domain has associated different submains which represent operational subregions tdefine the discrete variables set of values attaable in a neighborhood of the domain referenvalues. There are three possible values per vable in each domain:
xR35a,b,c,
xR45d,e, f ,
xR55g,h,i , ~30!
where a5 xR32D xR3 , b5 xR3 , c5 xR31D xR3 ;d5 xR42D xR4 , e5 xR4 , f 5 xR41D xR4 ; g5 xR52D xR5 , e5 xR5 , f 5 xR51D xR5 ; and D xR350.05%,D xR450.5 °C, D xR550.5%.
~v! Action semigroup overX2: The followingare the finite element chains ofX2, including theempty chain:
S25aeh, a f i, bdg, beh,
b f i, cdg, ceh, c f i, adg. ~31!
insheinsics.di-do-th
pery-
tein
th-ake
isth
-orthencex-se
nse
is-in
dsege
emra-
he
ed
ase-
495Edmary Altamiranda et al. / ISA Transactions 41 (2002) 485–499
These triplets of setpoints define the subdomaassociated with each operational domain. Tmentioned finite chains are the admissible chaper domain according to the process dynamSometimes, according to the operational contions, it is necessary to change the operationalmain. In these cases, appropriate changes inreactor temperature reference value must beformed to modify the ethylene in excess and oxgen in excess reference values using Eq.~27!. Werecall that each operational domain has associaspecific reference values and specific rangeswhich the manipulated variables, temperature, eylene in excess, and oxygen in excess can ttheir values generating different subdomains.
~vi! Discrete dynamics: The discrete dynamicsF2 is a partially defined action semigroup andgiven by the sequence of changes generated byevents$a, b, e%, which were previously considered, with the fuzzy event detector design. Fpractical purposes, the label for each state, indiscrete time space, is defined in correspondeto the triplets of setting points for ethylene in ecess, temperature, and oxygen in excess,Table 3.
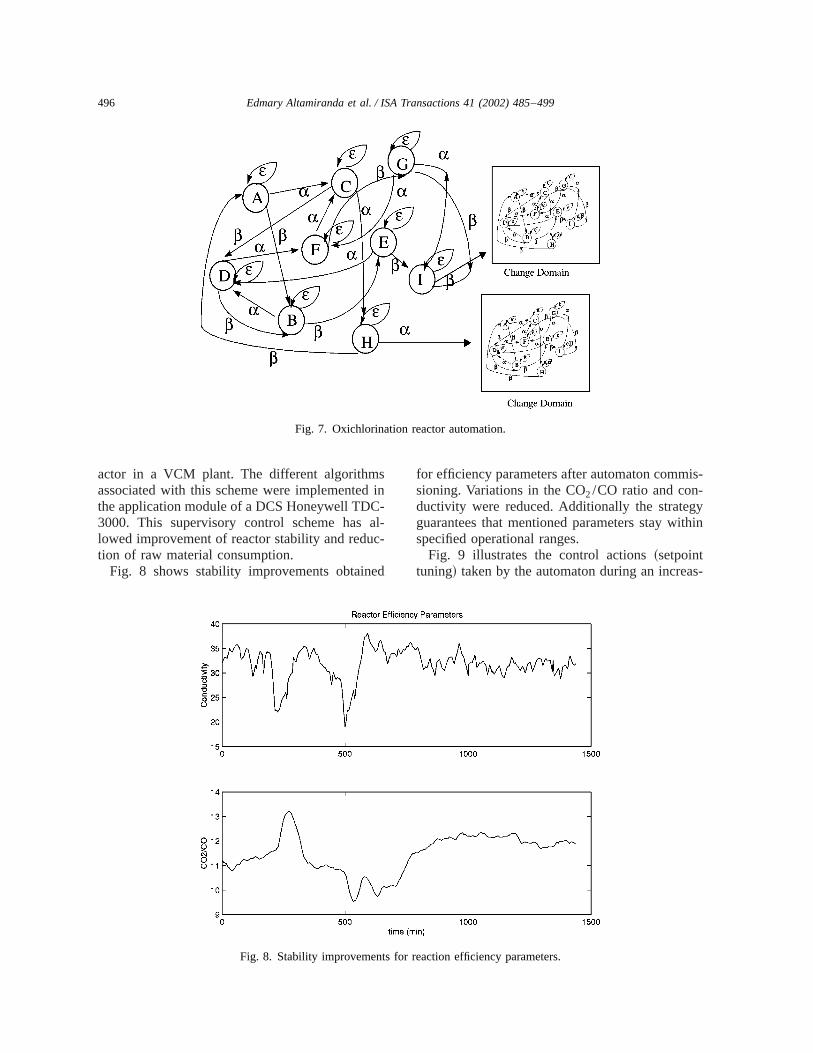
Table 4 characterizes the automaton transitiofor controlling the reaction performance in thoxichlorination Reactor. The corresponding dcrete time evolution is graphically representedFig. 7.
Note that if the current subdomain corresponto nodesH or I , it could be necessary to changthe operational domain. In these cases messaand alarms are sent to operators to inform ththat the automaton is going to change the opetional domain to solve the situation causing tcurrent event.
Table 3Automaton states definition.
State label Triplets of setting points
A aehB a f iC bdgD behE b f iF cdgG cehH c f iI adg
e-
d
e
e
s
According to the automaton transitions exposin Table 4, it is possible to define
SA5SB5SC5SD5SE5SF
SG5SH5SI5S5$a,b,e%. ~32!The F2 domain is
Dom~F2!5@$A%ø$B%ø$C%ø$D%ø$E%
ø$F%ø$G%ø$H%ø$I %#
3S,X23S2. ~33!
5. Implementation results
The described supervisory control scheme hbeen implemented on site for a oxichorination r
Table 4System behavior.
X2 Operationregion
Event X28
A FA a CA FA b BA FA e AB FB a DB FB b BB FB e EC FC a HC FC b DC FC e CD FD a FD FD b BD FD e DE FE a DE FE b IE FE e EF FF a CF FF b GF FF e FG FG a FG FG b IG FG e GH FH a Change
domainH FH b AH FH e HI F I a GI F I b Change
domainI F I e I
496 Edmary Altamiranda et al. / ISA Transactions 41 (2002) 485–499
Fig. 7. Oxichlorination reactor automation.
sin-
al-c-
d
is-
ythin
s-
actor in a VCM plant. The different algorithmassociated with this scheme were implementedthe application module of a DCS Honeywell TDC3000. This supervisory control scheme haslowed improvement of reactor stability and redution of raw material consumption.
Fig. 8 shows stability improvements obtaine
for efficiency parameters after automaton commsioning. Variations in theCO2/CO ratio and con-ductivity were reduced. Additionally the strategguarantees that mentioned parameters stay wispecified operational ranges.
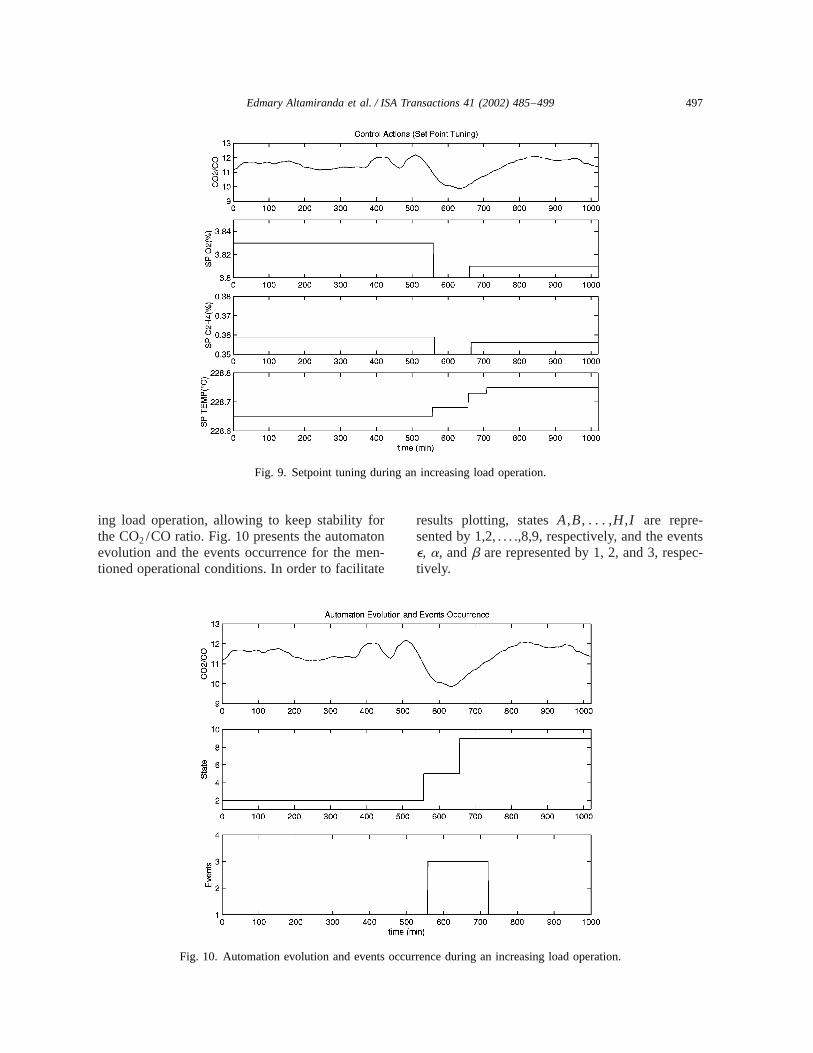
Fig. 9 illustrates the control actions~setpointtuning! taken by the automaton during an increa
Fig. 8. Stability improvements for reaction efficiency parameters.
497Edmary Altamiranda et al. / ISA Transactions 41 (2002) 485–499
Fig. 9. Setpoint tuning during an increasing load operation.
rn
en-te
tsec-
ing load operation, allowing to keep stability fotheCO2/CO ratio. Fig. 10 presents the automatoevolution and the events occurrence for the mtioned operational conditions. In order to facilita
results plotting, statesA,B, . . . ,H,I are repre-sented by 1,2, . . ..,8,9, respectively, and the evene, a, andb are represented by 1, 2, and 3, resptively.
Fig. 10. Automation evolution and events occurrence during an increasing load operation.
498 Edmary Altamiranda et al. / ISA Transactions 41 (2002) 485–499
Fig. 11. Supervisory control scheme implementation results.
--lesthesedi-p-
d
r,n-a-he-rto
im-n-aned
i-eson-e15
ntsut-per
trolzzywsss
go-ede-ano-rd-p-ullya-then-
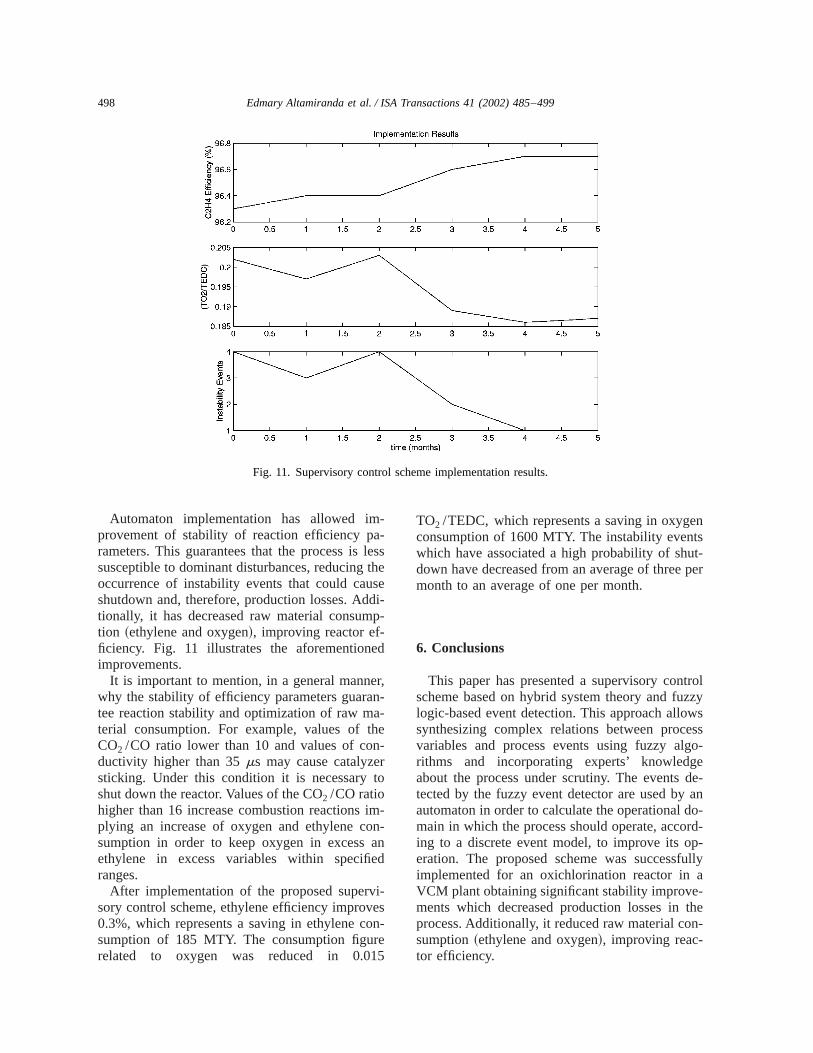
Automaton implementation has allowed improvement of stability of reaction efficiency parameters. This guarantees that the process issusceptible to dominant disturbances, reducingoccurrence of instability events that could caushutdown and, therefore, production losses. Adtionally, it has decreased raw material consumtion ~ethylene and oxygen!, improving reactor ef-ficiency. Fig. 11 illustrates the aforementioneimprovements.
It is important to mention, in a general mannewhy the stability of efficiency parameters guaratee reaction stability and optimization of raw mterial consumption. For example, values of tCO2 /CO ratio lower than 10 and values of conductivity higher than 35ms may cause catalyzesticking. Under this condition it is necessaryshut down the reactor. Values of theCO2 /CO ratiohigher than 16 increase combustion reactionsplying an increase of oxygen and ethylene cosumption in order to keep oxygen in excessethylene in excess variables within specifiranges.
After implementation of the proposed supervsory control scheme, ethylene efficiency improv0.3%, which represents a saving in ethylene csumption of 185 MTY. The consumption figurrelated to oxygen was reduced in 0.0
s
TO2 /TEDC, which represents a saving in oxygeconsumption of 1600 MTY. The instability evenwhich have associated a high probability of shdown have decreased from an average of threemonth to an average of one per month.
6. Conclusions
This paper has presented a supervisory conscheme based on hybrid system theory and fulogic-based event detection. This approach allosynthesizing complex relations between procevariables and process events using fuzzy alrithms and incorporating experts’ knowledgabout the process under scrutiny. The eventstected by the fuzzy event detector are used byautomaton in order to calculate the operational dmain in which the process should operate, accoing to a discrete event model, to improve its oeration. The proposed scheme was successfimplemented for an oxichlorination reactor inVCM plant obtaining significant stability improvements which decreased production losses inprocess. Additionally, it reduced raw material cosumption~ethylene and oxygen!, improving reac-tor efficiency.
ntent
g,In-
s-E
D.,l
-ica
n,rol
u-ys-
of, ins.
ten,
ys-on,
s-er,ol.
n,
on-J.
is-dis-
is-99.alut.
ss,
taes-
o-ry,
dar
gl
3–
y-er
g
n-
cal
-89,
ity:of
zy
f.
499Edmary Altamiranda et al. / ISA Transactions 41 (2002) 485–499
References
@1# Sreenivas, R. S. and Krogh, B. H., On condition/evesystems with discrete state realizations. Discrete EvDyn. Syst.1 ~2!, 209–236~1991!.
@2# Branicky, M. S., Studies in hybrid systems: ModellinAnalysis, and Control. Ph.D. thesis, Massachusettsstitute of Technology, 1995.
@3# Garcıa, H. and Ray, A., A reconfigurable hybrid sytem and its application to power plant control. IEETrans. Control Syst. Technol.3 ~2!, 157–170~1995!.
@4# Sastry, S., Meyer, G., Lygeros, J., and Godbole,Hybrid system in air traffic control, in IEEE Controand Decision Conference, 1995, pp. 1478–1483.
@5# Bemporad, A. and Morari, M., Control of systems integrating logic, dynamics, and constraints. Automat35 ~3!, 407–427~1999!.
@6# Lennartson, B., Tittus, M., Egardt, B., and PettersoS., Hybrid systems in process control. IEEE ContSyst. Mag.16 ~5!, 45–56~1996!.
@7# Chacon, E., Szigeti, F., and Camacho, O., Integral atomation of industrial complexes based on hybrid stems. ISA Trans.35 ~4!, 305–319~1996!.
@8# Sanchez, A., Formal specification and synthesisprocedural controllers for process systems, No. 212Lecture Notes in Control and Information ScienceSpringer-Verlag, New York, 1996.
@9# Ho, Y. and Cao, X., Perturbation Analysis of DiscreEvent Dynamic Systems. Kluwer Academic, Bosto1992.
@10# Rubenstein, Y. and Shapiro, A., Discrete Event Stems: Sensitivity Analysis and Stochastic Optimizatiby the Score Function Method. Wiley, New York1992.
@11# Wonham, W., On the control of discrete-event sytems, edited by H. Nijmeijer and J. M. SchumachThree decades of mathematical system thoery, V135, in Lecture Notes in Control and InformatioSpringer-Verlag, New York, 1989, pp. 542–562.
@12# Ramadge, P. J. and Wonham, W. M., Supervisory ctrol of a class of discrete-event processes. SIAMControl Optim.25 ~5!, 206–230~1987!.
@13# Ramadge, P. and Wonham, W. M., The control of dcrete event systems. Proc. IEEE: Special issue on
crete event systems.77 ~1!, 81–97~1989!.@14# Cassandras, C. and Lafortune, S., Introduction to D
crete Event Systems. Kluwer Academic, Boston, 19@15# Yamalidou, C. and Kantor, J., Modeling and optim
control of discrete event chemical processes. CompChem. Eng.15 ~7!, 503–519~1991!.
@16# Salomaa, A., Formal Languages. Academic PreNew York, 1973.
@17# Hopcroft, J. and Ullman, J., Introduction to AutomaTheory, Languages, and Computation. Addison Wley, Reading, MA, 1977.
@18# Chacon, E., Sarrazin, G. D., and Szigeti, F., Pseuddynamics hybrid systems. Nonlinear Anal., TheoMethods Appl.30 ~4!, 2533–2537~1997!.
@19# Chacon, E., Sarrazin, G. D., and Khodr, Y., Coupledynamics for industrial complex system. NonlineAnal., Theory, Methods Appl.47, 1561–1570~2001!.
@20# Labinaz, G., Bayoumi, M., and Rudie, K., Modelinand control of hybrid systems: A survey, in TrieniaWorld Congress IFAC, San Francisco, 1996, pp. 29303.
@21# Desphande, A. and Varaiya, P., Viable Control in Hbrid Systems, Vol. 999 of Lecture Notes in ComputScience. Springer-Verlag, New York, 1995.
@22# Yager, R. and Filev, D., Essential of Fuzzy Modelinand Control. Wiley, New York, 1994.
@23# Moral, S., Construction of a probability distributiofrom fuzzy information, in Fuzzy Sets Theory and Applications. Reidel, Dordrecht, 1986, pp. 51–60.
@24# Dubois, D. and Prade, H., Fuzzy sets and statistidata. Eur. J. Oper. Res.25, 345–356~1986!.
@25# Klir, G., Probability-possibility conversion, in Proceedings of the Third IFSA Congress, Seattle, 19pp. 408–411.
@26# Klir, G., A principle of uncertainty and informationinvariance. Int. J. Gen. Syst.17, 249–275~1990!.
@27# Dubois, D. and Prade, H., Fuzzy sets and probabilMisunderstanding bridges and gaps, in Procedingsthe Second International IEEE Conference on FuzSystems, San Francisco, 1993, pp. 1059–1068.
@28# Ljung, L. and So¨derstrom, T., Theory and Practice oRecursive Identification. MIT, Cambridge, MA, 1986




















