
Ritualized Chipped-Stone Production at Piedras Negras, Guatemala
Upload
independentCategory
view
0download
0
Modelos climáticos de balance de energía yresultados de control para modelos discretizados
Víctor José García Garrido
19 de septiembre de 2007

2

Índice general
1. Modelos climáticos de balance de energía 51.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2. Modelos climáticos de balance de energía . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.3. Cálculo en variedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.4. Existencia y unicidad de soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.5. El problema de von Neumann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2. Conexión de estados estacionarios 232.1. Estados estacionaros de los modelos de Balance de Energía . . . . . . . . . . . . . . . . . 232.2. Nuevos resultados para el modelo de clima discretizado . . . . . . . . . . . . . . . . . . . 35
3. Teoría de Control 473.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.2. Algunos resultados de controlabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.2.1. Controlabilidad de sistemas lineales de dimensión finita . . . . . . . . . . . . . . 483.2.2. Controlabilidad de sistemas no lineales de dimensión finita . . . . . . . . . . . . . 52
3.3. Controlabilidad en modelos de Balance de Energía: Obstrucción . . . . . . . . . . . . . . 583.4. Nuevos resultados para el modelo de clima discretizado . . . . . . . . . . . . . . . . . . . 62
3

4 ÍNDICE GENERAL

Capítulo 1
Modelos climáticos de balance de energía
1.1. Introducción
Desde la más remota antigüedad el ser humano ha intentado por todos los medios predecir el tiempoatmosférico con el fin de librarse de sus efectos perniciosos y aprovecharse de sus beneficios. De esteinterés surgieron dos ramas de la ciencia de gran importancia en la actualidad como son la Meteorologíay la Climatología. Aunque a simple vista estas dos disciplinas parezcan ser la misma, pues en el fondosu principal objetivo es predecir el tiempo atmosférico, la principal característica que las diferencia esla escala de tiempo empleada para llevar a cabo dichas predicciones. A grandes rasgos, las principalescaracterísticas de estas dos ramas científicas son:
Climatología:
En Climatología la escala de tiempo empleada a la hora de llevar a cabo las predicciones esmuy amplia, teniéndose en cuenta únicamente predicciones a lo largo de periodos de tiempo muygrandes (décadas, milenios, etc...).
Los métodos utilizados son principalmente cualitativos y de diagnóstico.
Utiliza modelos simplificados que permitan un diagnóstico rápido de la evolución del clima. Entreestos modelos podemos encontrar los Modelos de Balance de Energía, los cuales describiremos ytrataremos en este trabajo de investigación.
Meteorología:
Los modelos en Meteorología se caracterizan por proporcionar una predicción del tiempo atmos-férico con gran exactitud durante periodos de tiempo pequeños (días, semanas, etc...).
Los métodos utilizados para dichas predicciones son principalmente computacionales y predictivos.
Utiliza modelos muy realistas que permiten una predicción precisa del tiempo atmosférico. Unejemplo de estos modelos lo constituyen los denominados Modelos de Circulación General.
A lo largo de este trabajo de investigación trataremos diversos problemas relcionados con ModelosClimáticos de Balance de Energía. Para ello es fundamental introducir lo antes posible el concepto declima. Se denomina sistema climático al conjunto formado por la atmósfera, la hidrosfera, la criosfera,la geosfera y la biosfera. Estos componentes se encuentran unidos mediante flujos de materia y energíay las interacciones mútuas entre éstos se consideran procesos internos del sistema climático y afectanal clima de nuestro planeta. Además de los procesos internos existen influencias exteriores que actúansólo en una dirección. Así, la radiación solar o las erupciones volcánicas influyen en los componentesdel sistema climático, pero no se ven influidos por ellos, y en consecuencia no forman parte del sistemaclimático. Éstos reciben el nombre de influencias externas.
5
6 CAPÍTULO 1. MODELOS CLIMÁTICOS DE BALANCE DE ENERGÍA
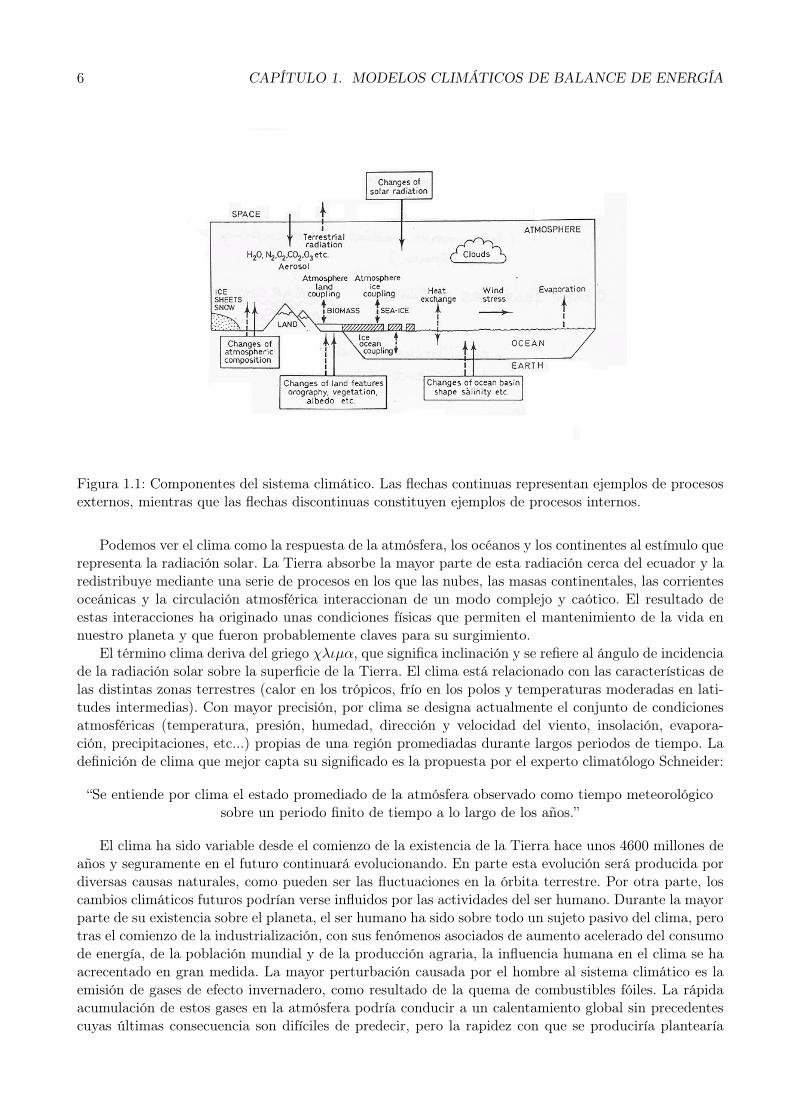
Figura 1.1: Componentes del sistema climático. Las flechas continuas representan ejemplos de procesosexternos, mientras que las flechas discontinuas constituyen ejemplos de procesos internos.
Podemos ver el clima como la respuesta de la atmósfera, los océanos y los continentes al estímulo querepresenta la radiación solar. La Tierra absorbe la mayor parte de esta radiación cerca del ecuador y laredistribuye mediante una serie de procesos en los que las nubes, las masas continentales, las corrientesoceánicas y la circulación atmosférica interaccionan de un modo complejo y caótico. El resultado deestas interacciones ha originado unas condiciones físicas que permiten el mantenimiento de la vida ennuestro planeta y que fueron probablemente claves para su surgimiento.
El término clima deriva del griego χλιµα, que significa inclinación y se refiere al ángulo de incidenciade la radiación solar sobre la superficie de la Tierra. El clima está relacionado con las características delas distintas zonas terrestres (calor en los trópicos, frío en los polos y temperaturas moderadas en lati-tudes intermedias). Con mayor precisión, por clima se designa actualmente el conjunto de condicionesatmosféricas (temperatura, presión, humedad, dirección y velocidad del viento, insolación, evapora-ción, precipitaciones, etc...) propias de una región promediadas durante largos periodos de tiempo. Ladefinición de clima que mejor capta su significado es la propuesta por el experto climatólogo Schneider:
“Se entiende por clima el estado promediado de la atmósfera observado como tiempo meteorológicosobre un periodo finito de tiempo a lo largo de los años.”
El clima ha sido variable desde el comienzo de la existencia de la Tierra hace unos 4600 millones deaños y seguramente en el futuro continuará evolucionando. En parte esta evolución será producida pordiversas causas naturales, como pueden ser las fluctuaciones en la órbita terrestre. Por otra parte, loscambios climáticos futuros podrían verse influidos por las actividades del ser humano. Durante la mayorparte de su existencia sobre el planeta, el ser humano ha sido sobre todo un sujeto pasivo del clima, perotras el comienzo de la industrialización, con sus fenómenos asociados de aumento acelerado del consumode energía, de la población mundial y de la producción agraria, la influencia humana en el clima se haacrecentado en gran medida. La mayor perturbación causada por el hombre al sistema climático es laemisión de gases de efecto invernadero, como resultado de la quema de combustibles fóiles. La rápidaacumulación de estos gases en la atmósfera podría conducir a un calentamiento global sin precedentescuyas últimas consecuencia son difíciles de predecir, pero la rapidez con que se produciría plantearía

1.2. MODELOS CLIMÁTICOS DE BALANCE DE ENERGÍA 7
sin duda muy graves problemas de adaptación. En la actualidad, dichos efectos climáticos adversosproducidos por la contaminación de la atmósfera mediante la emisión de distintos tipos de gases, comopuedan ser el dióxido de carbono, los clorofluorometanos, los aerosoles o el óxido nitroso, empiezan aparecer patentes.
Las consecuencias de un cambio brusco para la actual civilización serían seguramente muy graves yes fácil comprender pues el gran interés que tiene desarrollar tratamientos científicos capaces de predecirla evolución climática y la evaluación cuantitativa del posible impacto potencial de las actividades delser humano sobre el cambio global. Desgraciadamente la complejidad del sistema climático, con múlti-ples acoplamientos no lineales entre sus componentes, y la imposibilidad de determinar con suficienteprecisión las condiciones físicas iniciales para la resolución de las ecuaciones matemáticas relevantes,limitan mucho la capacidad de predicción. A pesar de ello, en las últimas décadas se han realizado gran-des progresos en la recogida de datos, en la identificación y cuantificación de muchas de las principalescausas de cambio climático y en la fiabilidad de los modelos teóricos desarrollados. Los resultados apor-tados por estos estudios no prevén para el próximo futuro ningún cambio abrupto debido a las causasnaturales predecibles, pero sí apuntan a un posible cambio climático acelerado debido a la actividadhumana.
Componente Sup (106km2) / % Masa (1018kg) Densidad (kgm−3)Atmósfera 510 / 100 5 1,3Océano 361 / 70,8 1350 1000
Criosfera(*)1) Hielo marino 26 / 5,1 0,04 8002) Hielo terrestre 14,5 / 2,8 28 900
Biosfera 103 / 20,2 0.002 100-800Tierra, capa superficial 149 / 29,2 · · · 2000
Tabla 1.1: Componentes del sistema climático. (*) No se incluye la superficie cubierta de nieve (aprox20 · 106km2).
Gas Aumento de la temperatura natural (en oC) % de efecto invernaderoVapor de agua 20,6 62
Dióxido de carbono 7,2 22Ozono troposférico 2,4 7Óxido de nitrógeno 1,4 4
Metano 0,8 2,5Otros (Nubes, aerosoles,...) 0,6 2,5
Suma 33 100
Tabla 1.2: Contribuciones al efecto invernadero. Estas contribucines aumentan 33oC la temperatura dela superficie terrestre. La ausencia de este efecto implicaría una temperatura superficial de -18oC.
1.2. Modelos climáticos de balance de energía
Los intentos de modelizar matemáticamente la atmósfera terrestre y sus respuestas a perturbacionesexternas e internas se remontan al menos un siglo. Uno de los modelos climáticos más pioneros fuedescrito por Arrhenius en 1896 (ver [3]). Arrhenius utilizó un modelo de balance de energía superficialcon el cual predijo un calentamiento de la superficie terrestre de 2oC en el caso de que se doblara el

8 CAPÍTULO 1. MODELOS CLIMÁTICOS DE BALANCE DE ENERGÍA
dióxido de carbono atmosférico. Este interés por el clima del planeta impulsó gran parte de los trabajose investigaciones que se realizaron a partir de las publicaciones de Arrhenius. En 1904 Bjerknes escribiópor primera vez las ecuaciones matemáticas para la modelización de la atmósfera. Las ecuaciones delmodelo fueron abordadas entonces por un gran número de científicos, pero los modelos matemáticos máscomprensibles de la atmósfera aparecieron con el advenimiento de los ordenadores. Alrededor de 1950von Neumann consiguió en Princeton la resolución numérica de una versión simplificada de las ecuacionesdel movimiento de la atmósfera. Estos resultados motivaron en gran medida a la comunidad científica,que se vió impulsada definitivamente por los trabajos de Budyko [6] (1969) y Sellers [29] (1969). Lo másremarcable de los artículos publicados por Budyko y Sellers fue la utilización de una formulación muysimple para modelizar el clima, y lo más sorprendente, conseguir a partir de esta formulación sencillaunos resultados muy aproximados al clima actual de la Tierra. Además, estos modelos fueron utilizadospor ejemplo para el estudio de la Teoría de Milankovitch sobre las glaciaciones. Ha de prestarse especialatención a estos modelos, pues muestran una marcada sensibilidad del clima a perturbaciones externas.En especial, esta sensibilidad aparecía en relación al valor de la constante solar, probándose que uncambio en dicha constante de alrededor de un −3 % de su valor actual (σ ≈ 1368 W
m2 ) sería suficientepara causar una transición catastrófica hacia un planeta Tierra totalmente cubierto de hielo. Estasensibilidad del modelo constuituyó evidencia suficiente de la frágil habitabilidad de nuestro planeta yde la importancia y necesidad de una profunda investigación.
El éxito de la aproximación mediante modelos de balance de energía radica en utilizar procesos depromedio sobre las ecuaciones primitivas de la atmósfera (en particular sobre la ecuación de conservaciónde la energía interna), los cuales conducen a un desacoplamiento efectivo de dichas ecuaciones. Este hecholleva a pensar que, en el fondo, bajo este proceso de promedios subyace la belleza de las Matemáticas.Los promedios que se llevan a cabo para desacoplar las ecuaciones pueden ser de diversos tipos (paramás detalle véase [24]):
Promedios en altitud de la atmósfera:
ξ =∫ ∞
0ξ(z, λ, φ, t)ρ dz =
1g
∫ ps
0ξ(p, λ, φ, t) dp,
donde ps es la presión en la superficie de la Tierra.
Promedios en longitud (λ):
[ξ] =12π
∫ 2π
0ξ(z, λ, φ, t) dλ.
Promedios tanto en latitud (φ) como en longitud (λ):
〈ξ〉 =12π
∫ π2
0
∫ 2π
0ξ(z, λ, φ, t) cos φ dλ dφ,
donde el factor cos φ es un peso para promedios de áreas.
Promedios temporales:
ξ =1τ
∫ τ
0ξ(z, λ, φ, t) dt.
Los Modelos Climáticos de Balance de Energía descritos por Budyko y Sellers en 1969 vienenformulados mediante un balance energético entre la energía solar absorbida y la emitida por la Tierra.En este balance han de tenerse también en cuenta los procesos de difusión térmica que se producensobre la superficie terrestre. Denotemos la superficie de la Tierra por M y consideraremos y(t, x) comola temperatura anual (o estacional) promedio sobre el punto x ∈ M en el instante t. Consideraremosademás la siguiente hipótesis:

1.2. MODELOS CLIMÁTICOS DE BALANCE DE ENERGÍA 9
(M, g) es una variedad Riemanniana bidimensional de clase C∞, compacta, sin borde, conexa yorientada (donde g representa la métrica en la variedad).
La temperatura promedio viene expresada por
y(t, x) =1
2τvol(B(x))
∫ t+τ
t−τ
∫B(x)
T (a, s) dads,
donde B(x) es un pequeño entorno de x y (t− τ, t+ τ) el intervalo de tiempo considerado para elpromedio. La función T representa la temperatura puntual e instantánea de la superficie terrestreobtenida a partir de la ecuación termodinámica de las ecuaciones primitivas de la atmósfera. El balanceenergético que describe nuestro modelo es
c∂y
∂t= Ra −Re +D,
dondeRa representa la radiación solar absorbida por la superficie terrestre,Re es la cantidad de radiaciónemitida por la Tierra (como cuerpo caliente) al espacio yD es el término de difusión térmica, que describeel proceso de redistribución de temperaturas en la superficie terrestre y viene dado por
D = div(kgrad y) = div(Fc + Fa),
donde k > 0 representa el coeficiente de difusión, Fc = kcgrad y es el flujo de conducción de calor yFa = kagrad y el flujo de advección de calor (k = kc + ka). El parámetro c representa la capacidadcalorífica o calor específico de la superficie terrestre. En nuestro caso, la capacidad calorífica de lasuperficie terrestre viene principalmente determinada por los océanos (pues constituyen el 70 % delplaneta). Tiene un valor aproximado de c ≈ 1, 05 · 1023Jm−2K−1.Obtenemos pues el problema parabólico semilineal
c(x)yt − div(k(t, x)grad y) = Ra(t, x, y)−Re(t, x, y), (t, x) ∈ (0,∞)×M,
y(0, x) = y0(x), x ∈M.(1.1)
Observación 1.2.1 Se define la capacidad calorífica o calor específico de una sustancia como lacantidad de energía necesaria para aumentar 1oC su temperatura. Es una medida de la dificultad quepresenta dicha sustancia para experimentar cambios de temperatura bajo el suministro de calor. Puedeinterpretarse como una medida de almacenamiento de calor.Observación 1.2.2 Stone propuso en [32] un coeficiente de difusión de la forma k = b |grad y| (o másen general k = b |grad y|p−2, con p ≥ 2) con la finalidad de incluir en el modelo los efectos negativosprovocados por las corrientes atmosféricas de gran escala. Tenemos entonces
c(x)yt − div(b(x) |grad y|p−2 grad y) = Ra(t, x, y)−Re(t, x, y), (t, x) ∈ (0,∞)×M,
y(0, x) = y0(x), x ∈M.(1.2)
Observación 1.2.3 Un modelo climático se dice cero-dimensional si despreciamos en dicho modelo eltérmino de difusión (hacemosD = 0). Estos modelos sencillos, aunque bastante imprecisos, proporcionanuna gran cantidad de información útil para el estudio de modelos de mayor complejidad.
El término del balance Ra, que representa la energia solar absorbida por la superficie terrestre, dependede dos parámetros de gran relevancia en Climatología como son la constante solar y el albedo planetario:
La constante solar representa la cantidad de energía recibida en forma de radiación solar porunidad de tiempo y unidad de superficie, medida en la parte externa de la atmósfera del planetaen un plano perpendicular a los rayos solares. La constante solar incluye no sólo la luz visible

10 CAPÍTULO 1. MODELOS CLIMÁTICOS DE BALANCE DE ENERGÍA
sino todos los tipos de radiación solar. Los resultados de su medición vía satélite indican un valorpromedio de 1368 W
m2 , y aunque recibe el nombre de constante su valor fluctúa un 6, 9 % de suvalor durante un año. Para calcular la constante solar de un planeta del sistema solar basta condividir el flujo energético que sale del Sol por la relación de áreas entre la superficie del Sol y elárea de una esfera de radio la distancia del planeta al Sol. Para obtener este valor se debe usarun valor de la temperatura superficial del Sol de TSol = 5776 K. Se tiene entonces que por la leyde Stefan-Boltzmann la constante solar viene determinada por
σ = σT 4Sol
r2Sol
a2p
,
donde σ representa la emisitividad (o constante de Stefan-Boltzmann) cuyo valor aproximado esσ ≈ 5, 67 ·10−8Wm−2K−4, rSol es el radio del Sol y ap es la distancia del planeta al Sol. La Tierrarecibe del Sol una cantidad total de radiación determinada por su sección transversal πRT , peroteniéndo en cuenta la rotación de nuestro planeta esta energía se distribuye a lo largo de toda susuperficie 4πR2
T . Por tanto, el promedio de radiación incidente sobre nuestro planeta es
Q =σ4≈ 342
W
m2.
El término albedo proviene del latín albus que significa luz blanca. Puede definirse el albedo deuna superficie como la relación entre la radiación solar reflejada y la radiación solar incidentesobre dicha superficie. Constituye pues una medida de la fracción de radiación solar incidente quees reflejada y dispersada por un cuerpo. Si representamos el albedo por α entonces se verifica
α =radiación solar reflejadaradiación solar incidente
∈ [0, 1] .
Observación 1.2.4 La dependencia del albedo de la temperatura introduce en el modelo un efecto deretroalimentción (o “feedback”). El mecanismo al que nos referimos es el siguiente: si una perturbaciónexterna o interna hace descender la temperatura global, favorece la formación de nuevas zonas de hielo,aumentando por tanto el albedo de dicha zona. El hielo que encontramos en los polos es blanco ybrillante, y refleja casi toda la radiación solar que incide sobre él. Ésto provoca un aumento de laradiación reflejada y por tanto un descenso de la temperatura. La nieve y el hielo aumentan y el procesocontinúa. Analogamente se argumenta el caso en el que las perturbaciones provocan un aumento de lastemperaturas, derritiéndose las zonas de nieve y hielo y disminuyendo consecuentemente el albedo dela región.
Otro parámetro estrechamente relacionado con el albedo es el coalbedo de una superficie, que se definecomo la fracción de radiación solar incidente que es absorbida por el cuerpo. Si representamos el coalbedopor β entonces tenemos que
β = 1− α =radiación solar absorbidaradiación solar incidente
∈ [0, 1] .
Observación 1.2.5 Puede comprobarse experimentalmente que los valores del coalbedo sufren uncambio brusco en un entorno de la temperatura crítica ycrit = −10oC, temperatura en la que el hielopasa de ser transparente a blanco. Existen discrepancias acerca de como se produce esta transiciónbrusca en los valores del coalbedo cercanos a la temperatura crítica, que da lugar a distintas versionespara la función coalbedo (discontínuas en los modelos de Budyko y Lipschitz contínuas en los modelosde Sellers).

1.2. MODELOS CLIMÁTICOS DE BALANCE DE ENERGÍA 11
Superficie % Superficie %Nieve fresca 75-90 Cultivos 10Nieve vieja 35-70 Arena 20-45
Hielo 60 Granito 12-18Agua profunda 5-20 Edificios 9Arcilla húmeda 16 Bosque 5-15
Arcilla seca 23 Piedras 20-30Nubes gruesas 70-95 Océanos 5-10Nubes finas 20-65 Prado verde 15
Tabla 1.3: Albedos típicos de varias superficies.
La energía solar absorbida por la superficie terrestre viene descrita por
Ra(x, y) = Qβ(y)S(x), x ∈M,
donde S recibe el nombre de función de insolación y representa la cantidad de energia solar que alcanza elpunto x ∈ M de la superficie terrestre. Supondremos β una función no decreciente de la temperatura.Existen numerosas alternativas para la función coalbedo pero centraremos nuestra atención en lasconsideradas por Budyko y Sellers en [6] y [29] respectivamente. La función coalbedo de tipo Budykoviene dada por
β(y) =
βi, y < −10oC,
βw, y > −10oC,
donde βw ≈ 0, 71 representa el coalbedo de la zona sin hielo y βi ≈ 0, 38 corresponde al coalbedo de lazona con hielo. Tenemos pues que el coalbedo de tipo Budyko es una función discontínua, lo que puedegenerar problemas a la hora de probar la existencia de soluciones de nuestro modelo. Para resolver esteproblema resulta muy útil considerar β como un grafo maximal monótono acotado. Recordemos queun grafo maximal monótono de R2 viene determinado por el grafo de una función creciente de R en Ral que se completa con los intervalos de posibles discontinuidades (véase [5]). Aplicado a nuestro caso,consideraremos el coalbedo asociado a la temperatura crítica ycrit = −10oC como cualquier valor delintervalo [βi, βw]. Por tanto
β(y) =
βi, y < −10oC,
[βi, βw] , y = −10oC,
βw, y > −10oC,
(1.3)
Figura 1.2: Coalbedo de tipo Budyko.

12 CAPÍTULO 1. MODELOS CLIMÁTICOS DE BALANCE DE ENERGÍA
Observación 1.2.6 En el caso de ecuaciones diferenciales ordinarias, el problema de la existencia desoluciones para funciones discontínuas no presenta ninguna dificultad pues puede salvarse fácilmenteasignándole a la función discontínua un valor en el punto de discontinuidad. Esta manera de proceder enEDP’s puede conducirnos a que nuestro problema no tenga solución para determinados valores asignadosen el punto de discontinuidad (véase por ejemplo [35]). Sin embargo, si utilizamos para EDP’s la teoríade grafos maximales introducida por Brèzis en [5], sustituyendo la función discontínua por su grafomultivaluado, podemos asegurar la existencia de soluciones.
Sellers consideró la función coalbedo como una función regular (al menos Lipschitz continua) del tipo
β(y) =
βi, y < ui,
βi +(
y−ui
uw−ui
)(βw − βi) , ui ≤ y ≤ uw,
βw, y > uw,
(1.4)
donde ui < ycrit = −10 < uw son dos temperaturas muy próximas a la temperatura crítica.
Figura 1.3: Coalbedo de tipo Sellers.
Observación 1.2.7 Otra elección considerada por Sellers para describir el coalbedo es:
β(y) = βi +12(βw − βi)(1 + tanh γy), γ ∈ (0, 1) .
Para terminar analicemos la radiación emitida por la Tierra como cuerpo caliente. Esta energía emitidase determina empíricamente y depende en gran medida de los gases de efecto invernadero, de las nubesy del vapor de agua en la atmósfera. Es natural suponer que la radiación emitida Re es una funcióncreciete de la temperatura, aunque la tasa de crecimiento provoca cierta controversia. Sellers propusopara esta emisión de radiación la utilización de la ley de Stefan-Boltzmann
Re(y) = σy4(1−mtanh(19y6
106 )),
donde la temperatura y viene expresada en grados Kelvin (luego y > 0), m > 0 es la opacidad de laatmósfera y σ > 0 la emisitividad. Por el contrario, Budyko propuso para la emisión de radiación la leyde enfriamiento de Newton
Re(y) = Ay +B, (1.5)
que puede verse como una linealización de la ley de Stefan-Boltzmann propuesta por Sellers en torno a latemperatura y = 15oC (que es la temperatura media actual de la superficie terrestre, teniendo en cuentael efecto invernadero atmosférico). Los coeficientes A y B dependen por tanto del efecto invernaderoy se obtienen mediante observación por satélite. Sus valores actuales aproximados son A ≈ 1, 9 W
m2oCy
B ≈ 210 Wm2 .

1.2. MODELOS CLIMÁTICOS DE BALANCE DE ENERGÍA 13
Observación 1.2.8 Las expresiones utilizadas para determinar la radiación emitida por la Tierra Re
tienen en cuenta los efectos producidos por los gases de efecto invernadero.
Observación 1.2.9 La ley de Stefan-Boltzmann simplificada que nosotros consideraremos suponeuna opacidad nula de la atmósfera, obteniéndose Re = σy4 con y > 0 en grados Kelvin. Si queremostrabajar con temperaturas en grados centígrados, consideraremos entonces Re = σ |y|3 y ya que ykelvin =273 + ycent. En efecto
Re(ykelvin) = σy4kelvin =
σ(ycent + 273)4, ycent ≥ −273−σ(ycent + 273)4, ycent ≤ −273
= σ(ycent + 273)3 |ycent + 273| .
Observación 1.2.10 En nuestro modelo consideraremos la emisitividad como una variable de control,reflejando así la posibilidad de modificar el clima actuando sobre la emisión de gases de efecto inverna-dero. Nos planteamos pues un problema de control que analizaremos en más profundidad a lo largo decapítulos posteriores.
Figura 1.4: Balance de radiación del sistema climático.
El problema (1.1) que hemos descrito constituye un claro ejemplo de modelo climático bidimensional,pues está planteado sobre la superficie de la Tierra, M, considerada como variedad bidimensional. Sinembargo, nuestro objetivo es tratar de dar respuestas acerca de la controlabilidad de un modelo climáticounidimensional que se obtiene a partir de (1.1) admitiendo la hipótesis adicional siguiente: supongamosque la temperatura de la superficie de la Tierra varía únicamente con la latitud (y por tanto todos lospuntos de un mismo paralelo tienen la misma temperatura). Esta suposición ha sido confirmada a partirde las observaciones, pues éstas muestran que la convección meridional es considerablemente pequeñafrente a la longitudinal. Sea pues ϕ la latitud de un punto x sobre la superficie terrestre. Si hacemos elcambio de variable x = senϕ, muy utilizado en mecánica celeste, y consideramos la hipótesis de Stone

14 CAPÍTULO 1. MODELOS CLIMÁTICOS DE BALANCE DE ENERGÍA
sobre el coeficiente de difusión, nuestro modelo (1.2) se expresa ahora comoc(x)yt − (b(x)(1− x2)
p2 |yx|p−2 yx)x = Ra(t, x, y)−Re(t, x, y), (t, x) ∈ (0,∞)× (−1, 1) ,
y(0, x) = y0(x), x ∈ (−1, 1) .
donde p ≥ 2 (recordemos que Stone consideró el caso p = 3). Nosotros trabajaremos con p = 2(propuesto inicialmente por Budyko y Sellers) obteniéndose el problema parabólico semilineal siguiente(véase la sección 1.3)
c(x)yt − (b(x)(1− x2)yx)x = Ra(t, x, y)−Re(t, x, y), (t, x) ∈ (0,∞)× (−1, 1) ,y(0, x) = y0(x), x ∈ (−1, 1) .
(1.6)
Observación 1.2.11 El problema (1.6) se dice semilineal pues el término no lineal no afecta a lasderivadas de la incógnita. Sin embargo, si p > 2 el problema se dice cuasilineal, pues ahora el términono lineal sí involucra a las derivadas de la incógnita.
Considerando tanto la capacidad calorífica c como el coeficiente de difusión b del modelo constantes,puede construirse un cambio de escala adecuado y suponerse pues sin pérdida de generalidad quec = b = 1, obteniéndose así el problema parabólico semilineal que ocupará nuestros esfuerzos a lo largode este trabajo:
yt − ((1− x2)yx)x = Ra(t, x, y)−Re(t, x, y), (t, x) ∈ (0,∞)× (−1, 1) ,y(0, x) = y0(x), x ∈ (−1, 1) .
(1.7)
Observación 1.2.12 Este modelo unidimensional (que depende únicamente de la latitud) introduce enla formulación singularidades en los polos (correspondientes a x = ±1), obteniéndose pues una ecuacióndegenerada en los extremos del intervalo [−1, 1] que esconde de una manera implícita la condición decontorno de tipo Neumann
(1− x2)yx(t, x) = 0, ∀t > 0, ∀x ∈ −1, 1
Estas singularidades provienen de la degeneración del flujo de nuestra EDP, determinado por F =b(1− x2)yx. En nuestro caso F es degenerado (F = 0) si y sólo si x = ±1.
1.3. Cálculo en variedades
El origen físico del modelo de Balance de Energía bidimensional dado por (1.1) sugiere considerardominios espaciales que no sean subconjuntos abiertos de R3. Este es el caso de la superficie de laTierra, que es tratada usualmente como la esfera unidad S2. Esta simplificación facilita bastante elestudio pero la realidad es algo distinta, pues la Tierra no es exactamente una esfera. Por esta razón, elmarco matemático más adecuado para formular más correctamente los modelos de Balance de Energíabidimensionales es el de las variedades diferenciables. Para ello consideramos la superficie de la Tierracomo una variedad M verificando:
(M, g) es una variedad Riemanniana bidimensional de clase C∞, compacta, sin borde, conexa yorientada (donde g representa la métrica en la variedad).
Bajo esta hipótesis los términos grad y div que aparecen en las ecuaciones de nuestro modelo bidi-mensional tienen ahora perfecto sentido pues han de ser considerados sobre la variedad M en cuestión,que en nuestro caso representa la superficie terrestre. Para describir estos términos definiremos antesalgunos conceptos básicos:

1.3. CÁLCULO EN VARIEDADES 15
Definición 1.3.1 Sea M un espacio topológico de Rn y m, r ∈ N. Una familia A = (Uλ, ϕλ)λ∈Λ sedice un atlas sobre M si:
Uλ ⊂ Rm es un abierto y ϕλ : Uλ ⊂ Rm →M es una parametrización de M para todo λ ∈ Λ ,⋃λ∈Λ ϕλ (Uλ) ,
dados α, β ∈ Λ distintos tales que ϕα (Uα) ∩ ϕβ (Uβ) = W 6= ∅ ha de ocurrir que ϕ−1α (W ) y
ϕ−1β (W ) sean abiertos de Rm y además
ϕα−1 ϕβ ∈ Cr(ϕ−1β (W ))
ϕ−1β ϕα ∈ Cr(ϕ−1
α (W )).
Además, dado p ∈ M, el par (Uλ, ϕλ) tal que p ∈ ϕλ (Uλ) recibe el nombre de carta local o sistema decoordenadas de M en p, Uλ se denomina entorno coordenado de p y ϕλ se llama parametrización deM en p.
Definición 1.3.2 En las condiciones de la definición anterior el par (M,A) constituye una variedadde dimensión m y de clase Cr.
De esta forma hemos dotado aM de una estructura diferenciable que permite trasladar aM las nocionesdel Cálculo Diferencial de Rm. Nosotros fijaremos nuestra atención en las variedades bidimensionales,ésto es m = 2, en el espacio n = 3. Sea p ∈M y (Uλ, ϕλ) una carta local en p. El par (ϕ−1
λ,1(p), ϕ−1λ,2(p)) =
(θλ, φλ) recibe el nombre de coordenadas de p en la carta considerada.
Definición 1.3.3 Una función f : M → R se dice diferenciable de clase Cr(M) si para todo p ∈ Mexiste una carta (Uλ, ϕλ) en p tal que f ϕλ está definida en un entorno E ⊂ R2 de ϕ−1
λ (p) y esde clase Cr(E,R). Además, toda función f : M → R tiene una representación local de la formaf(θ, φ) = (f ϕλ)(θ, φ) (donde hemos suprimido los subíndices λ para simplificar la notación). Enocasiones para una mayor simplificación suele identificarse la representación local, f , por la propia f .
Tenemos pues que, dada una carta (Uλ, ϕλ) en p ∈M, y considerando las coordenadas de p como el par(θ, φ), entonces el conjunto
∂∂θ |p,
∂∂φ |p
es una base del espacio tangente a M en p que se representa
por Tp M. Por tanto dim Tp M = 2, y si tenemos f : M→ R entonces:
∂f
∂θ|p =
∂(f ϕλ)∂θ
|ϕ−1λ (p)
∂f
∂φ|p =
∂(f ϕλ)∂φ
|ϕ−1λ (p) .
Consideramos ahora una métrica Riemanniana en M dada por g.
Definición 1.3.4 El par (M, g) donde M es una variedad y g una métrica Riemanniana recibe elnombre de variedad Riemanniana.
Dado p ∈M, la métrica g induce un producto escalar en Tp M dado por
gp : Tp M× Tp M→ R ,
que es una función diferenciable en p. Denotemos por gij a los coeficientes de la matriz asociada a gp.Estos coeficientes suelen expresarse en función de las coordenadas (θ, φ). Entonces se verifica
g11 = gp(∂
∂θ|p,
∂
∂θ|p) g22 = gp(
∂
∂φ|p,
∂
∂φ|p) g12 = g21 = gp(
∂
∂θ|p,
∂
∂φ|p)

16 CAPÍTULO 1. MODELOS CLIMÁTICOS DE BALANCE DE ENERGÍA
donde
∂∂θ |p,
∂∂φ |p
es base de Tp M y por tanto, si v ∈ Tp M es tal que v = v1
∂∂θ |p + v2
∂∂φ |p, entonces
gp(v, v) = (v1, v2)(g11 g12g12 g22
)(v1v2
)con gp ≡
(g11 g12g12 g22
)Todo este material nos permite dar una definición consistente de los operadores gradiente y divergenciasobre una variedad. Antes definiremos el concepto de derivada covariante:
Definición 1.3.5 Dada
∂∂y1|p, ∂
∂y2|p
base de Tp M asociada al sistema de coordenadas (y1, y2) en p
se define la derivada covariante de ∂∂yj|p respecto de ∂
∂yi|p como
D ∂∂yi|p
(∂
∂yj|p)
=2∑
k=1
Γkij
∂
∂yk|p ,
donde Γkij son los símbolos de Christoffel, que vienen definidos por
Γkij =
2∑s=1
12
(∂gsj
∂yi+∂gsi
∂yj− ∂gij
∂ys
)gks ,
y gij representan los elementos de la matriz inversa g−1p .
Definición 1.3.6 Sea f : M → R una función diferenciable. El gradiente de f sobre M viene dadopor el campo de vectores:
gradMf(p) = ∇Mf(p) =2∑
i,j=1
gij ∂f
∂yj|p∂
∂yi|p ∈ Tp M para todo p ∈M ,
donde gij son los coeficientes de la matriz inversa g−1p y
∂
∂y1|p, ∂
∂y2|p
es la base de Tp M asociada alsistema de coordenadas (y1, y2) en p.
Definición 1.3.7 Sea X = h1∂
∂y1|p + y2
∂∂y2|p un campo de vectores de Tp M. Se define la divergencia
de X como el campo escalar:
divMX(p) =1√det gp
(∂
∂y1
(h1
√det gp
)+
∂
∂y2
(h2
√det gp
))∈ R para todo p ∈M ,
donde
∂∂y1|p, ∂
∂y2|p
es la base de Tp M asociada al sistema de coordenadas (y1, y2) en p. Además, si
escojo la base ortonormaley1 |p = 1√
g11
∂∂y1|p , ey2 |p = 1√
g22
∂∂y2|p
en Tp M entonces:
divMX(p) =2∑
i=1
gp(Deyi |p(X), eyi |p) ,
Estamos pues en condiciones de evaluar el término de difusión que aparece en el modelo climáticode balance de energía bidimensional descrito en la sección anterior. Para una mayor simplificaciónsupondremos el coeficiente de difusión constante, teniendo pues el sguiente campo de vectores tangentes

1.3. CÁLCULO EN VARIEDADES 17
a la variedad M, X = |gradM y|p−2 gradM y. Tomando además la base ortonormal de Tp M dada por1√g11
∂∂θ |p ,
1√g22
∂∂φ |p
se obtiene
divM(|∇M y|p−2∇M y) =yθ
g11
p− 22
(y2
θ
g11+y2
φ
g22
) p−42 (
2yθyθθ
g11+ y2
θ
∂
∂θ
(1g11
)+
2yφyφθ
g22+ y2
φ
∂
∂θ
(1g22
))+
+yφ
g22
p− 22
(y2
θ
g11+y2
φ
g22
) p−42 (
2yθyθφ
g11+ y2
θ
∂
∂φ
(1g11
)+
2yφyφφ
g22+ y2
φ
∂
∂φ
(1g22
))+
+1
√g11
(y2
θ
g11+y2
φ
g22
) p−22 (
yθθ√g11
+ 2yθ∂
∂θ
(1
√g11
)+
yθ√g11
Γ111 +
yφ√g11
g22Γ1
12
)+
+1
√g22
(y2
θ
g11+y2
φ
g22
) p−22 (
yφφ√g22
+ 2yφ∂
∂φ
(1
√g22
)+
yφ√g22
Γ222 +
yθ√g22
g11Γ2
21
)donde
yθ =∂y
∂θ, yφ =
∂y
∂φ, yθθ =
∂2y
∂θ2, yφφ =
∂2y
∂φ2, yθφ =
∂2y
∂θ∂φ, yφθ =
∂2y
∂φ∂θ
Si hacemos p = 2 obtenemos la expresión del operador de Laplace-Beltrami (laplaciano) sobre M
∆My =yθθ
g11+yφφ
g22+ 2yθ
1√g11
∂
∂θ
(1
√g11
)+ 2yφ
1√g22
∂
∂φ
(1
√g22
)+yθ
g11
(Γ1
11 + Γ221
)+yφ
g22
(Γ1
12 + Γ222
).
Observación 1.3.1 En el caso en que M = S2R (esfera de radio R) se verifica que, si describimos M
mediante coordenadas esféricasx = Rcosθsenφ
y = Rsenθsenφ , θ = longitud ∈ (0, 2π) , φ = colatitud ∈ (0, π) .z = Rcosφ
(1.8)
entonces
∂
∂θ= (−Rsenθsenφ , Rcosθsenφ , 0) ,
∂
∂φ= (Rcosθcosφ , Rsenθcosφ , −Rsenφ)
luegog11 = R2sen2φ , g12 = g21 = 0 , g22 = R2
y por tanto el operador de difusión que aparece en nuestro modelo climático puede escribirse como
divM(|∇M y|p−2∇M y) =yθ
R2sen2φ
p− 22
(y2
θ
R2sen2φ+y2
φ
R2
) p−42 (
2yθyθθ
R2sen2φ+
2yφyφθ
R2
)+
+yφ
R2
p− 22
(y2
θ
R2sen2φ+y2
φ
R2
) p−42 (
2yθyθφ
R2sen2φ−
2y2θcotφ
R2sen2φ+
2yφyφφ
R2
)+
+1
Rsenφ
(y2
θ
R2sen2φ+y2
φ
R2
) p−22 (
yθθ
Rsenφ+yφcosφ
R
)+
+1R
(y2
θ
R2sen2φ+y2
φ
R2
) p−22 (yφφ
R
)

18 CAPÍTULO 1. MODELOS CLIMÁTICOS DE BALANCE DE ENERGÍA
Si hacemos p = 2 obtenemos la expresión para el operador de Laplace-Beltrami sobre la esfera
∆My =yθθ
R2sen2φ+yφcotφ
R2+yφφ
R2=
1R2senφ
∂
∂φ(yφsenφ) +
yθθ
R2sen2φ.
Observación 1.3.2 También podemos describir S2R utilizando la latitud en lugar de la colatitud. En
este caso, basta considerar φ = ϕ− π2 en (1.8), obteniéndose
x = Rcosθcosϕ
y = Rsenθcosϕ , θ = longitud ∈ (0, 2π) , ϕ = latitud ∈(−π
2 ,π2
).
z = Rsenϕ
En este caso, el operador de divergencia resulta
divM(|∇M y|p−2∇M y) =yθ
R2cos2ϕ
p− 22
(y2
θ
R2cos2ϕ+y2
ϕ
R2
) p−42 (
2yθyθθ
R2cos2ϕ+
2yϕyϕθ
R2
)+
+yϕ
R2
p− 22
(y2
θ
R2cos2ϕ+y2
ϕ
R2
) p−42 (
2yθyθϕ
R2cos2ϕ+
2y2θ tgϕ
R2cos2ϕ+
2yϕyϕϕ
R2
)+
+1
Rcosϕ
(y2
θ
R2cos2ϕ+y2
ϕ
R2
) p−22 (
− yθθ
Rcosϕ+yϕsenϕ
R
)+
+1R
(y2
θ
R2cos2ϕ+y2
ϕ
R2
) p−22 (yϕϕ
R
)y el operador de Laplace-Beltrami
∆My =yθθ
R2cos2ϕ− yϕ tgϕ
R2+yϕϕ
R2= − 1
R2cosϕ
∂
∂ϕ(−yϕcosϕ) +
yθθ
R2cos2ϕ.
Identificando pues la superficie de la Tierra con S2 (ésto es, R = 1) y suponiendo que la temperatura ydepende únicamente de la latitud ϕ sobre la superficie terrestre (es decir, que todos los puntos situadosen un mismo paralelo poseen la misma temperatura) entonces
∆S2y = −yϕ tgϕ+ yϕϕ = − 1cosϕ
∂
∂ϕ(−yϕcosϕ) .
Como x = senϕ, entonces ∂x∂ϕ = cosϕ, y por tanto
∆S2y = − 1cosϕ
∂
∂ϕ(−yϕcosϕ) = −∂ϕ
∂x
∂
∂ϕ
(−yx
∂x
∂ϕ
∂x
∂ϕ
)=
1cosϕ
∂
∂ϕ
(yxcos
2ϕ)
=
=1
cosϕ
∂
∂ϕ
(yx(1− x2)
)=(yx(1− x2)
)x
,
que representa el operador de difusión utilizado en nuestro modelo climático de balance de energíaunidimensional (1.6).
1.4. Existencia y unicidad de soluciones
La posible naturaleza multívoca de la función coalbedo (como en el modelo de Budyko) presentadiversos problemas a la hora del estudio de la existencia y unicidad de soluciones para los modelos

1.4. EXISTENCIA Y UNICIDAD DE SOLUCIONES 19
climáticos considerados. De hecho, la consideración de este tipo de cuestiones conduce a reformular elproblema (1.2) como un problema de tipo multívoco. En efecto, el valor de la función Ra(y) en el puntode discontinuidad y = −10 no puede ser definido con precisión por lo que es conveniente suponer quea ese punto se le asigna todo el intervalo, ésto es, β(−10) = [βi, βw]. Por esta razón suele considerarseβ como un grafo maximal monótono acotado (ver [5]) y el problema (1.2) debería ser escrito máspropiamente como:
c(x)∂y∂t − divM(k(x) |gradM y|p−2 gradM y) + g(y) ∈ QS(x)β(y) + f(t, x) , en (0, T )×M,
y(0, x) = y0(x) , en M,
con p ≥ 2. El término Ra = QS(x)β(y) (Q > 0) describe la cantidad de energía solar absorbida por laTierra yRe = g(y)−f(t, x) representa la energía emitida por la Tierra. Esta nueva escritura del problemaha de ser entendida en el sentido siguiente: existen un par de funciones y, b con b(t, x) ∈ β(y(t, x)) paracasi todo t ∈ (0,∞) tales que:
c(x)∂y∂t − divM(k(x) |gradM y|p−2 gradM y) + g(y) = QS(x)b(t, x) + f(t, x) , en (0, T )×M,
y(0, x) = y0(x) , en M.
Para una mayor simplificación supondremos que c = k = 1 (en modelos más generales c ∈ L∞(M) conc(x) ≥ c0 > 0 y k ∈ C∞(M) con k(x) ≥ k0 > 0). Se tiene pues el problema:
∂y∂t − divM(|gradM y|p−2 gradM y) + g(y) ∈ QS(x)β(y) + f(t, x) , en (0, T )×M,
y(0, x) = y0(x) , en M.(1.9)
Cabe destacar que la posible discontinuidad de la función coalbedo hace que el modelo no tenga engeneral soluciones clásicas. Introduciremos por ello el concepto de solución débil acotada, para lo cualdefinimos el espacio de energía
V =v ∈ L2(M) | grad v ∈ Lp(TM)
que es un espacio de Banach reflexivo (para 1 < p <∞) con la norma
‖v‖V = ‖v‖L2(M) + ‖∇v‖Lp(M) .
Observación 1.4.1 T M =⋃
p∈M Tp M recibe el nombre de recubrimiento tangente.
Definición 1.4.1 Diremos que y es una “solución débil acotada” de (1.9) si y ∈ C([0, T ] ;L2(M)) ∩L∞((0, T ) × M) ∩ Lp(0, T ;V) y existe z ∈ L∞((0, T ) × M) con z(t, x) ∈ β(y(t, x)) casi para todo(t, x) ∈ (0, T )×M tal que:∫
My(T, x)v(T, x)−
∫ T
0
∫Myvt +
∫ T
0
∫M|∇y|p−2∇y · ∇v +
∫ T
0
∫MRe(y)v =
=∫My0(x)v(0, x) +
∫ T
0
∫MQz(t, x)S(x)v(t, x)
para toda v ∈ Lp(0, T ;V) ∪ L∞((0, T )×M) tal que vt ∈ Lp′(0, T ;V ′).
Se tiene ahora el siguiente teorema de existencia:
Teorema 1.4.1 (Existencia de soluciones). Supongamos que se verifican las siguientes propiedades:
β es un grafo maximal monótono acotado de R2 con 0 < m ≤ b ≤M para cualquier b ∈ β(y) cony ∈ R (en ocasiones β se considera multivaluada en y = −10 como en el modelo de Budyko [6], óβ localmente lipschitz en el modelo de Sellers [29]) ,

20 CAPÍTULO 1. MODELOS CLIMÁTICOS DE BALANCE DE ENERGÍA
Re es una función no decreciente en y ,
g : R → R es una función continua y estrictamente creciente tal que |g(y)| ≥ C |y|r para algúnr ≥ 1 y g(0) = 0 (por ejemplo, g(y) = Cy para el modelo propuesto por Budyko [6], y g(y) =C |y|3 y para el modelo de Sellers [29]) ,
S : M→ R verifica S ∈ L∞(M) con s1 ≥ S(x) ≥ s0 > 0 casi para todo x ∈M ,
f ∈ L∞((0,∞)×M) (Budyko y Sellers propusieron f constante) .
entonces el problema (1.9) tiene al menos una solución débil acotada para cualquier dato inicial y0 ∈L∞(M). Además, esta solución y puede prolongarse a [0,∞) de manera que:
y ∈ C([0,∞) ;L2(M)) ∩ L∞((0,∞)×M) ∩ Lploc(0,∞;V) .
Finalmente, si y0 ∈ L∞(M) ∩ V y f ∈ L∞((0,∞)×M) ∩W 1,1loc (0,∞;L1(M)) con:∫ t+1
t
∥∥∥∥∂f∂t (s, ·)∥∥∥∥
L1(M)
ds ≤ C0 ∀t > 0
con C0 independiente de t entonces se obtiene la regularidad adicional:y ∈ L∞(0,∞;V) ,yt ∈ L2(0,∞;L2(M)) .
(1.10)
La demostración de este teorema sobrepasa con creces los objetivos fijados de este trabajo. Para unademostración detallada puede consultarse [16].Observación 1.4.2 Acabaremos esta sección apuntando los resultados más relevantes que conciernen alproblema de la unicidad de la solución del problema (1.9). Primeramente, cabe destacar que si la funcióncoalbedo es Lipschitz continua como en el modelo de Sellers, entonces puede probarse la unicidad de lasolución para cualquier dato inicial y0 ∈ L2(M) mediante procesos más o menos estándar. Por otro lado,si la función coalbedo sigue el modelo de Budyko (es decir, es discontinua ó multivaluada), entoncespueden encontrarse datos iniciales para los cuales nuestro problema presenta varias soluciones (ver[12]). Como ejemplo, si consideramos el problema unidimensional (1.6) bajo las hipótesis del teoremade existencia de soluciones y suponemos f constante, dado y0 dato inicial verificando:
y0 ∈ C∞(−1, 1), y0(x) = y0(−x) ∀x ∈ [0, 1],y
(k)0 (0) = 0 con k = 1, 2 , y0(0) = −10,y′0(x) < 0 ∀x ∈ (0, 1), y
′0(1) = 0,
se tiene que nuestro problema unidimensional tiene infinitas soluciones. Nótese que esta clase de datosiniciales y0 son muy “planos” cuando llegan al nivel crítico −10. Este resultado puede extenderse al casobidimensional cuando M = S2 pues toda solución del problema unidimensional genera una solución delproblema bidimensional mediante una rotación respecto al eje que une los polos. Para una descripcióncompleta de los resultados de unicidad puede consultarse [16].
1.5. El problema de von Neumann
Terminaremos este capítulo planteando un interesante problema de control conocido como el pro-blema de von Neumann, que motiva e introduce el Capítulo 3 de este trabajo de investigación. Esteproblema fue planteado en 1955 por John von Neumann en [34]. En este artículo von Neumann escribió:

1.5. EL PROBLEMA DE VON NEUMANN 21
Microscopic layers of colored matter spread on an icy surface, or in the atmosphere aboveone, could inhibit the reflection-radiation process, melt the ice and change the local climate.Probably intervention in atmospheric and climate matters will come in a few decades, andwill unfold on a scale difficult to imagine at present .
La idea de von Neumann consistía en actuar sobre el clima mediante la modificación del albedo pla-netario de diversas zonas o regiones de la superficie terrestre, utilizando para ello superficies blancasque simularan el hielo blanco y reflejaran la mayor parte de la radiación solar recibida. Podríamos asíalargar artificialmente la extensión de los casquetes polares, obteniendo un problema de control inverso,cuyo interés se centra en alcanzar un estado (temperatura) deseado del sistema, yd, en tiempo T > 0 apartir del estado inicial y0. Hoy en día una de las aplicaciones más relevantes de este problema es casiun sueño hecho realidad, pues las investigacíones iniciadas por I. Langmuir acerca de la generación delluvia artificial han dado lugar a resultados satisfactorios (ver [9]).
El problema de von Neumann viene planteado en términos de los modelos de balance de energíapropuestos por Budyko y Sellers (1.1) y viene descrito por:
cyt − k∆y +Ay +B = QS(x)(β(y) + v(x)H(y)), en (0, T )× (M−I) ,y(0, ·) = y0(·), en M−I ,y = ui, en (0, T )× ∂I ,
donde se ha supuesto que el coeficiente de difusión k es constante y que la radiación emitida por lasuperficie de la Tierra viene descrita por la ley de enfriamiento de Newton (1.5). Además, β es la funcióncoalbedo de tipo Sellers (1.4), v es la variable de control, que representa la influencia sobre el albedoterrestre, y H es una función definida por:
H(y) =
0 , y < ui ,
y−ui
uw−ui, ui ≤ y ≤ uw ,
1 , y > uw ,
donde ui < ycrit < uw son dos temperaturas próximas a la temperatura crítica ycrit = −10oC querepresenta la temperatura para la cual se produce un cambio brusco en el albedo al cambiar el hielo detransparente a blanco. Se tiene pues que el nuevo albedo del modelo viene determinado por β(x, y; v) =β(y) + v(x)χω(x)H(y) donde χω es la función característica de la región ω = M− I para la que seproduce la modificación en el albedo, ésto es:
χω(x) =
1 , x ∈ ω ,0 , x /∈ ω ,
donde M representa la superficie de la Tierra e I = x ∈M | y(0, x) ≤ ui representa la regióncubierta por los hielos polares y perpetuos. El nuevo albedo tiene la expresión:
β(x, y; v) =
βi , y < ui,
βi +(
y−ui
uw−ui
)(βw + v(x)χω(x)− βi) , ui ≤ y ≤ uw,
βw + v(x)χω(x) , y > uw.
Aunque la resolución del problema de von Neumann está fuera de los objetivos de este texto, puedeprobarse que, mediante argumentos del Teorema del punto fijo, dicho problema resulta ser controlable,obteniéndose pues una respuesta satisfactoria que nos permite poner esperanzas en la posibilidad demodificar el clima de una región mediante la actuación sobre el albedo de la misma (para una detalladademostración consúltese [17]).

22 CAPÍTULO 1. MODELOS CLIMÁTICOS DE BALANCE DE ENERGÍA

Capítulo 2
Conexión de estados estacionarios
2.1. Estados estacionaros de los modelos de Balance de Energía
En el Capítulo 1 destacamos la marcada sensibilidad que presentan los modelos de Balance deEnergía con respecto a la constante solar. Dicha constante viene incluida en estos modelos en el valordel parámetro Q, y es por tanto imprescindible llevar a cabo un profundo estudio cualitativo acerca delcomportamiento asintótico y la estabilidad de las soluciones de nuestros modelos de Balance de Energíaatendiendo a los valores de Q. A lo largo de esta sección estudiaremos pues la estructura del conjuntode estados estacionarios ó puntos de equlibrio del problema de evolución:
(P )
∂y∂t −∆py + g(y) ∈ QS(x)β(y) + f(t, x) , en (0,∞)×M ,
y(0, x) = y0(x) , en M ,
según los posibles valores de la constante solar. Veremos además que en este estudio los términos nolineales juegan un papel fundamental. Este estudio tiene un gran interés desde el punto de vista físicopues Q puede sufrir pequeñas variaciones dependiendo de parámetros tales como la oblicuidad del ejede rotación terrestre.Observación 2.1.1 El término ∆py = divM(|gradM y|p−2 gradM y) recibe el nombre de p-laplaciano.
Comenzaremos nuestro estudio analizando la estabilización de las soluciones de (P ) a soluciones delproblema estacionario asociado descrito por:
(Pe) −∆py + g(y) ∈ QS(x)β(y) + f∞(x) , en M .
Para ello necesitamos describir el conjunto ω-límite:
Definición 2.1.1 Se define el conjunto ω-límite de y como:
ω(y) =y∞ ∈ V ∩ L∞(M) : ∃ tn → +∞ con y(tn, ·) → y∞ en L2(M)
,
donde y es una solución débil acotada de (P ) verificando (1.10).
El resultado siguiente prueba (ver [14]) la estabilización de soluciones:
Teorema 2.1.1 Sea y0 ∈ L∞(M)∩V un dato inicial e y una solución débil acotada de (P ) verificando(1.10). Entonces:
1. ω(y) 6= ∅ ,
2. Si y∞ ∈ ω(y) entonces ∃ tn → +∞ tal que y(tn + s, ·) → y∞ en L2(−1, 1;L2(M)) donde y∞ ∈ Ves solución de (Pe) ,
23

24 CAPÍTULO 2. CONEXIÓN DE ESTADOS ESTACIONARIOS
3. De hecho, si y∞ ∈ ω(y) entonces ∃ tn → +∞ tal que y(tn, ·) → y∞ fuertemente en V .
Observación 2.1.2 Si y∞ es un punto aislado de ω(y) puede probarse que las convergencias dadaspor el teoema se verifican cuando t→ +∞ (y no simplemente para una sucesión tn → +∞).
Centraremos nuestra atención a lo largo de esta sección en el estudio de la multiplicidad de las solu-ciones de equilibrio del problema estacionario (Pe). Consideremos para ello las hipótesis y la definiciónsiguientes:
(HS) S : M→ R , S ∈ L∞(M) con s1 ≥ S(x) ≥ s0 > 0.
(Hf∞) f∞ ∈ L∞(M) y existe Cf > 0 tal que − ‖f∞‖L∞(M) ≤ f∞(x) ≤ −Cf c∀x ∈M.
(Hg) g : R → R continua y estrictamente creciente tal que g(0) = 0 y lım|s|→+∞ |g(s)| = +∞.
(Hβ) β es un grafo maximal monótono acotado de R2 tal que existen 0 < m < M y ε > 0 con:
β(r) =
m , r ∈ (−∞,−10− ε)M , r ∈ (−10 + ε,+∞)
.
(HCf) g(−10− ε) + Cf > 0 con:
g(−10 + ε) + ‖f∞‖L∞(M)
g(−10− ε) + Cf≤ s0M
s1m.
Definición 2.1.2 Una función y ∈ L∞(M) ∩ V se dice solución débil acotada de (Pe) si existe z ∈L∞(M) con z(x) ∈ β(y(x)) c∀x ∈M tal que:∫
M|∇y|p−2∇y · ∇v dA+
∫Mg(y)v dA =
∫MQSzv dA+
∫Mf∞v dA ,
para toda v ∈ V.
Necesitaremos unos lemas previos para probar el teorema de multiplicidad de soluciones:
Lema 2.1.1 (véase [1]). Sea X un retracto de un cierto espacio de Banach E y sea F : X → X unaaplicación compacta. Supongamos además que X1 y X2 son retractos disjuntos de X, y consideremosY1, Y2 subconjuntos abiertos de X tales que Yk ⊂ Xk para k = 1, 2. Si F (Xk) ⊂ Xk y F no tiene puntosfijos en Xk − Yk para k = 1, 2 entonces F tiene al menos tres puntos fijos x1, x2 y x3 con xk ∈ Xk parak = 1, 2 y x3 ∈ X − (X1 ∪X2).
Lema 2.1.2 (véae [10]). Existe C > 0 tal que si p ≥ 2 entonces:
(|ξ|p−2 ξ − |η|p−2 η) · (ξ − η) ≥ C |ξ − η|p , ∀ ξ, η ∈ Rn .
Lema 2.1.3 (Principio de comparación). Sean F1, F2 ∈ L∞(M) y consideremos yi solución de
(Pi) −∆pyi + g(yi) = Fi(x) , x ∈M ,
para i = 1, 2. Entonces, si F1(x) ≤ F2(x) c∀x ∈M se tiene que y1(x) ≤ y2(x) c∀x ∈M.

2.1. ESTADOS ESTACIONAROS DE LOS MODELOS DE BALANCE DE ENERGÍA 25
Demostración Probar y1 ≤ y2 es equivalente a ver que (y1 − y2)+ = 0. Consideremos la función testv = (y1 − y2)+. Restando las formulaciones débiles de (P1) y (P2) obtenemos∫
M(|∇y1|p−2∇y1 − |∇y2|p−2∇y2) · ∇v dA+
∫M
(g(y1)− g(y2))v dA =∫M
(F1(x)− F2(x))v dA .
Como F1 ≤ F2 y v ≥ 0 tenemos que ∫M
(F1(x)− F2(x))v dA ≤ 0 .
Además, por el Lema 2.1.2 se verifica∫M
(|∇y1|p−2∇y1 − |∇y2|p−2∇y2) · ∇v dA ≥ C
∫M|∇v|p dA ≥ 0 .
Luego ∇v = ∇(y1 − y2)+ ≡ 0 y por tanto (y1 − y2)+ = K ≥ 0. Si fuera K > 0, como g es una funcióncreciente entonces ∫
M(g(y1)− g(y2))(y1 − y2)+ dA > 0 ,
y por tanto
0 ≤∫M
(|∇y1|p−2∇y1 − |∇y2|p−2∇y2) · ∇v dA < 0
lo que es una contradicción. Luego K = 0 y queda probado el lema.
Teorema 2.1.2 Supongamos que se satisfacen las hipótesis (HS), (Hf∞), (Hg) y (Hβ) y sean ym e yM
las únicas soluciónes de:
(Pm) −∆py + g(y) = QS(x)m+ f∞(x) , en M
(PM ) −∆py + g(y) = QS(x)M + f∞(x) , en M
respectivamente. Entonces:
1. Para todo valor Q > 0 existe una solución minimal y (resp. una solución maximal y) de (Pe).Además, cualquier otra solución y de (Pe) debe verificar:
ym ≤ y ≤ y ≤ y ≤ yM (2.1)
cong−1(Qs0m− ‖f∞‖L∞(M)) ≤ ym ≤ g−1(Qs1m− Cf ) (2.2)
g−1(Qs0M − ‖f∞‖L∞(M)) ≤ yM ≤ g−1(Qs1M − Cf ) (2.3)
2. Para todo Q existe al menos una solución y de (Pe) mínimo global del funcional:
J(w) =1p
∫M|∇w|p dA+
∫MG(w) dA−
∫Mf∞w dA−
∫MQSj(w)dA ,
en el conjunto K =w ∈ V , G(w) ∈ L1(M)
, donde β = ∂j y G(s) =
∫ s0 g(τ) dτ . Además, si
se verifica (HCf) y definimos:
Q1 =g(−10− ε) + Cf
s1M, Q2 =
g(−10 + ε) + ‖f∞‖L∞(M)
s0M,
Q3 =g(−10− ε) + Cf
s1m, Q4 =
g(−10 + ε) + ‖f∞‖L∞(M)
s0m,
entonces:

26 CAPÍTULO 2. CONEXIÓN DE ESTADOS ESTACIONARIOS
3. Si 0 < Q < Q1 el problema (Pe) tiene solución única, y = ym < −10, que es mínimo del funcionalJ sobre K. Además:
g−1(−‖f∞‖L∞(M)) ≤ lım infQ0
‖y‖L∞(M) ≤ lım supQ0
‖y‖L∞(M) ≤ g−1(−Cf ) .
4. Si Q2 < Q < Q3 el problema (Pe) tiene al menos tres soluciones verificando:
y1 = yM > −10 , y2 = ym < −10 , y1 ≥ y3 ≥ y2 .
Además y1, y2 son mínimos locales de J en K ∩ L∞(M) y, si p > 2, en K.
5. Si Q4 < Q el problema (Pe) tiene solución única, y = yM > −10, que es mínimo del funcional Jsobre K. Además:
lımQ→+∞
‖y‖L∞(M) = +∞.
Demostración1. Sea y una solución débil acotada de (Pe). Como g es estrictamente creciente y tenemos
QS(x)m+ f∞(x) ≤ −∆py + g(y) ≤ QS(x)M + f∞(x) , ∀x ∈M ,
entonces se cumple el principio de comparación para los problemas (Pm) y (PM ). Luego
ym ≤ y ≤ yM en M .
Por otra parte, como ym (resp. yM ) es una subsolución (resp. una supersolución) de (Pe) pues
−∆pym + g(ym) = QS(x)m+ f∞(x) ≤ QS(x)β(ym) + f∞(x)−∆pyM + g(yM ) = QS(x)M + f∞(x) ≥ QS(x)β(yM ) + f∞(x)
entonces por el método de sub y supersoluciones de Amann (ver [1]) se concluye que
ym ≤ y ≤ y ≤ y ≤ yM .
Finalmente, es fácil ver que
y1 = g−1(Qs1M − Cf ) es supersolución de (PM ) ,
y2 = g−1(Qs1m− Cf ) es supersolución de (Pm) ,
y1
= g−1(Qs0M − ‖f∞‖L∞(M)) es subsolución de (PM ) ,
y2
= g−1(Qs0m− ‖f∞‖L∞(M)) es subsolución de (Pm) .
En efecto
−∆py1 + g(y1) = Qs1M − Cf ≥ QS(x)M + f∞(x) ,−∆py2 + g(y2) = Qs1m− Cf ≥ QS(x)m+ f∞(x) ,−∆py1
+ g(y1) = Qs0M − ‖f∞‖L∞(M) ≤ QS(x)M + f∞(x) ,
−∆py2+ g(y
2) = Qs0m− ‖f∞‖L∞(M) ≤ QS(x)m+ f∞(x) ,
y como g es estrictamente creciente entonces y1≤ yM ≤ y1 e y
2≤ ym ≤ y2.
2. Como β es un grafo maximal monótono acotado de R2, su primitiva j es una función real conti-nua. Por tanto, el funcional J es semicontinuo inferiormente para la topología débil de V y además

2.1. ESTADOS ESTACIONAROS DE LOS MODELOS DE BALANCE DE ENERGÍA 27
lım‖w‖V→+∞ J(w) = +∞. Utilizando pues un argumento de Weierstrass basado en el teorema de con-vergencia de Lebesgue concluimos el resultado.
3. De la hipótesis (HCf) y suponiendo 0 < Q < Q1 se obtiene
y1 = g−1(Qs1M − Cf ) < g−1(s1Mg(−10− ε) + Cf
s1M− Cf ) = −10− ε ,
y2 = g−1(Qs1m− Cf ) < g−1(s1mg(−10− ε) + Cf
s1M− Cf ) < −10− ε ,
y de la comparación ym ≤ y ≤ yM concluimos que toda solución débil acotada y de (Pe) es menor que−10− ε. Por tanto y verifica
−∆py + g(y) = QS(x)m+ f∞(x) en M ,
y consecuentemente ha de coincidir con la única solución ym de este problema que, por 2, es el únicomínimo global de J en K. Para concluir, de (2.1) y (2.2) se obtiene
g−1(−‖f∞‖L∞(M)) ≤ lım infQ0
‖y‖L∞(M) ≤ lım supQ0
‖y‖L∞(M) ≤ g−1(−Cf ).
4. Dividiremos la prueba de este apartado en varios pasos. Primero construiremos super y subsolucio-nes de (Pe) probando así la existencia de al menos dos soluciones del problema (Pe). Posteriormente,probaremos la existencia de una solución de un problema aproximado (P λ
e ) mediante un argumentotopológico del punto fijo. Y para terminar, probaremos la convergencia de la solución de (P λ
e ) a unatercera solución de (Pe).Paso 1: Construcción de sub y supersoluciones de (Pe)Fijaremos nuestra atención en sub y supersoluciones constantes de (Pe). Consideremos para ello losproblemas auxiliares:
(P1) g(U) ∈ Qs1β(U)− Cf
(P2) g(V ) ∈ Qs0β(V )− ‖f∞‖L∞(M)
Es inmediato que toda solución de (P1) es supersolución de (Pe) pues S(x) ≤ s1 y f∞(x) ≤ −Cf .Análogamente, es evidente que toda solución de (P2) es subsolución de (Pe) pues S(x) ≥ s0 y f∞(x) ≥−‖f∞‖L∞(M). Como Q2 < Q < Q3 y s0 < s1 deducimos que
U1 = g−1(Qs1M − Cf ) > g−1(s1Mg(−10 + ε) + ‖f∞‖L∞(M)
s0M− Cf ) ≥
≥ g−1(g(−10 + ε) + (‖f∞‖L∞(M) − Cf )) > −10 + ε
U2 = g−1(Qs1m− Cf ) < g−1(s1mg(−10− ε) + Cf
s1m− Cf ) = −10− ε
son soluciones de (P1) (y consecuentemente supersoluciones de (Pe)). También
V1 = g−1(Qs0M − ‖f∞‖L∞(M)) > g−1(s0Mg(−10 + ε) + ‖f∞‖L∞(M)
s0M− ‖f∞‖L∞(M)) = −10 + ε
V2 = g−1(Qs0m− ‖f∞‖L∞(M)) < g−1(s0mg(−10− ε) + Cf
s1m− ‖f∞‖L∞(M)) ≤
≤ g−1(g(−10− ε) + (Cf − ‖f∞‖L∞(M))) < −10− ε
son soluciones de (P2) (y consecuentemente subsoluciones de (Pe)). Hemos construido así dos superso-luciones y dos subsoluciones constantes de (Pe) que verifican U1 > U2 y V1 > V2. Además:
V2 ≤ U2 < −10− ε < −10 + ε < V1 ≤ U1. (2.4)

28 CAPÍTULO 2. CONEXIÓN DE ESTADOS ESTACIONARIOS
Paso 2: Existencia de soluciones de (Pe) que no cruzan el nivel y = −10Sabemos por el método de las sub y supersoluciones que existen dos soluciones y1, y2 de (Pe) verificando
Vi ≤ yi(x) ≤ Ui , en M , para i = 1, 2 .
Como y1 > −10 + ε en M, entonces y1 verifica (PM ), que recordemos tiene solución única. De hecho,toda solución débil de (Pe) mayor que −10 + ε es también solución de (PM ) y por tanto y1 es la únicasolución de (Pe) mayor que −10 + ε. Análogamente, como y2 < −10 − ε en M, entonces y2 verifica(Pm), que recordemos tiene solución única. De hecho, toda solución débil de (Pe) menor que −10− ε estambién solución de (Pm) y por tanto y2 es la única solución de (Pe) menor que −10− ε.Paso 3: Construcción del problema aproximado (P λ
e )Al no haber definido el comportamiento de la función coalbedo β en el intervalo (−10−ε,−10+ε) podríaresultar que ésta fuera multivaluada en dicho intervalo. Definimos para ello la familia de problemas
(P λe ) −∆py + g(y) = QS(x)βλ(y) + f∞(x) , en M ,
dondeβλ =
1λ
(I − (I − λβ)−1) ,
con λ > 0 es una función Lipschitz (recibe el nombre de aproximación de Yosida de β, véase[35]). Comoβ verifica (Hβ) se tiene que
βλ es una función acotada y no decreciente para todo λ > 0 ,
βλ(s) = β(s) para todo s /∈ [−10− ε,−10 + ε+ λM ] para todo λ > 0 ,
βλ(s) → β(s) cuando λ→ 0 en el sentido de grafos monótonos acotados (ver [5]) .
En el caso de que β sea una función Lipschitz basta tomar βλ = β. De (2.4) se deduce que existeλ0 = λ0(Q) tal que
V2 < U2 < −10− ε < −10 + ε+ λ0M < V1 < U1.
Si λ < λ0, entonces βλ(Ui) = β(Ui) y βλ(Vi) = β(Vi) para i = 1, 2. Por tanto, U1, U2 son supersolucionesy V1, V2 son subsoluciones de (P λ
e ). Argumentando ahora como en el paso 2, obtenemos dos familias desoluciones
yλ1
,yλ2
de (P λ
e ) para λ < λ0 tal que
V2 ≤ yλ2 ≤ U2 < −10− ε < −10 + ε+ λ0M < V1 ≤ yλ
1 ≤ U1.
Además, como λ < λ0 entonces yλ1 > −10 + ε + λ0M > −10 + ε + λM y βλ(yλ
1 ) = β(yλ1 ) y por tanto
deducimos que yλ1 = y1. Análogamente se concluye que yλ
2 = y2. Para probar que (P λe ) tiene una tercera
solución yλ3 usaremos el Lema 2.1.1. En nuestro caso, toda solución y de (P λ
e ) es un punto fijo de laecuación
y = (−∆p + g)−1(QS(·)βλ(y) + f∞(·)) .
Sea pues E = L∞(M) espacio de Banach ordenado (con respecto al orden natural) cuyo cono positivoverifica
L∞+ (M) = v ∈ L∞(M) : v(x) ≥ 0 c∀x ∈M 6= ∅ .
Definamos los intervalos
X = [V2 − δ, U1 + δ] , X1 = [V1 − δ, U1 + δ] y X2 = [V2 − δ, U2 + δ] ,
donde hemos tomado δ > λ0M de tal forma que V1 > −10 + ε + δ y U2 > −10 − ε − δ. Existen puesdos subconjuntos abiertos de L∞(M), Y1 e Y2, tales que yλ
k ∈ Yk ⊂ Xk para k = 1, 2 y si consideramosel operador
F (v) = (−∆p + g)−1(QS(·)βλ(v) + f∞(·)) ,

2.1. ESTADOS ESTACIONAROS DE LOS MODELOS DE BALANCE DE ENERGÍA 29
con v ∈ L∞(M), puede probarse que F,X,X1 y X2 están en las condiciones del Lema 2.1.1 (véase [14]).Por tanto F tiene al menos tres puntos fijos, o equivalentemente, (P λ
e ) tiene al menos tres solucionescon yλ
k ∈ Xk para k = 1, 2 e yλ3 ∈ X − (X1 ∪X2).
Paso 4: ConvergenciaNuestro objetivo es obtener estimaciones a priori que nos permitan probar la convergencia de unasubsucesión de
yλ3
a una solución de (Pe). Consideremos yλ una funcion test en la formulación débil
de (P λe ) obteniendo∫
M|∇yλ|p dA+
∫Mg(yλ)yλ dA =
∫MQSβλ(yλ)yλ dA+
∫Mf∞yλ dA .
Utilizando las desigualdades de Hölder y Young podemos estimar la parte derecha de la ecuación anteriorobteniendo ∫
MQSβλ(yλ)yλ dA+
∫Mf∞yλ dA ≤ C1 ,
para cierta C1 > 0, pues por el principio del máximo yλ están uniformemente acotadas. Además, por lamonotonía de g se tiene que ∫
M|∇yλ|p dA ≤ C1 ,
y esto conduce a la estimación‖yλ‖V ≤ C2 .
Como V es un espacio de Banach reflexivo podemos extraer una subsucesión de yλ (que denotaremostambién yλ para simplificar notación) tal que
∃ y ∈ V con yλ y en V .
Como la inclusión V ⊂ L2(M) es compacta entonces
yλ → y en L2(M) .
Tomando pues límites en la formulación débil de (P λe ) se concluye que y es solución de (Pe). En efecto,
pues de la convergencia fuerte en L2(M) probada anteriormente se deduce que∫Mg(yλ)v dA→
∫Mg(y)v dA ,
y como ‖βλ(yλ)‖2L2(M) ≤ M2 |M| obtenemos que βλ(yλ) está acotada en L2(M), existiendo pues
z ∈ L2(M) tal queβλ(yλ) z en L2(M) .
Como además βλ → β en la clase de grafos maximales monótonos se tiene que necesariamente z ∈ β(y).Finalmente, para probar que
|∇yλ|p−2∇yλ |∇y|p−2∇y , en Lp′(TM) ,
consideremos la estimación∥∥∥|∇yλ|p−2∇yλ
∥∥∥2
Lp′ (TM)=(∫
M(|∇yλ|p−1)
pp−1 dA
) p−1p(∫
M|∇yλ|p dA
) p−1p
≤ C3 .
Se tiene entonces que existe una subsucesión de yλ que llamaremos también yλ tal que
|∇yλ|p−2∇yλ Y en Lp′(TM) .

30 CAPÍTULO 2. CONEXIÓN DE ESTADOS ESTACIONARIOS
Argumentando como en [14] se concluye que Y = |∇y|p−2∇y probándose así la convergencia deseada.Paso 5: Existencia de una tercera solución de (Pe) si β no es LipschitzEn el paso anterior construimos tres familias de soluciones de (P λ
e ) verificando
yλi → yi , en L2(M) , para i = 1, 2, 3 ,
donde yi son soluciones de (Pe). Recordemos además que y1 > −10 > y2. Probaremos a continuación quela convergencia anterior es de hecho uniforme. Sea z como en el paso anterior tal que βλ(yλ) z ∈ β(y)y consideremos yλ − y como una función test en las formulaciones débiles de (Pe) y (P λ
e ).Tenemos que∫M
(|∇yλ|p−2∇yλ−|∇y|p−2∇y)·∇(yλ−y)dA+∫M
(g(yλ)−g(y))(yλ−y)dA =∫MQS(βλ(yλ)−z)(yλ−y)dA.
Utilizando la desigualdad de Hölder y el Lema 2.1.2 obtenemos que∫M|∇yλ −∇y|p dA+
∫M
(g(yλ)− g(y))(yλ − y) dA ≤ Qs1 ‖βλ(yλ)− z‖L2(M) ‖yλ − y‖L2(M) ,
y tomando límites cuando λ→ 0 en la desigualdad anterior se tiene
lımλ→0
‖∇yλ −∇y‖Lp(TM) = 0 ,
pues yλ → y en L2(M) y al ser βλ(yλ)− z débilmente convergente en L2(M) su norma está uniforme-mente acotada.
Si p > 2, la inclusión V ⊂ C(M) es contínua y además
lımλ→0
‖yλ − y‖L∞(M) = 0.
Si p = 2 la inclusión V ⊂ Lq(M) es continua para q < +∞ y
lımλ→0
‖yλ − y‖Lq(M) = 0.
Sin embargo, aún podemos conseguir la convergencia uniforme en este caso, pues por regularidady, yλ ∈ H2(M). Por tanto, usando la inclusión continua H2(M) ⊂ C(M) obtenemos
lımλ→0
‖yλ − y‖L∞(M) = 0.
Luegolımλ→0
‖yλ − y‖L∞(M) = 0 para p ≥ 2 ,
y por tantoyλ
i → yi en L∞(M) , para i = 1, 2, 3 .
Tenemos además que para todo λ < λ0 existe un abierto Ωλ ⊂M tal que
yλ3 (x) ∈ [−10− ε,−10 + ε+ λ0M ] , ∀x ∈ Ωλ ⊂M. (2.5)
En efecto, pues supongamos por el contrario que y1 = y3. Entonces, como yλ3 → y3 uniformemente e
y1 > −10 + ε, existiría ε0 tal que para todo s < ε0 se verificaría ys3 > −10 + ε que es una contradicción
con (2.13). Análogamente se prueba que y2 6= y3. En particular, se tiene que y3 cruza el nivel −10.

2.1. ESTADOS ESTACIONAROS DE LOS MODELOS DE BALANCE DE ENERGÍA 31
Probaremos por último que tanto y1 > −10 como y2 < −10 son mínimos locales del funcional J .Tomemos primero p > 2. Como V ⊂ L∞(M) existe pues δ > 0 tal que si w ∈ V se verifica:
‖w − y1‖W 1,p(M) < δ ⇒ ‖w − y1‖L∞(M) < Cδ ⇒ w(x) < −10 , c∀x ∈M ,
para alguna C > 0 (que depende sólo de M). En tal caso, de la hipótesis (Hβ) se tiene que y1 es laúnica solución de (PM ) y por tanto es el único mínimo del funcional convexo
J1(w) =1p
∫M|∇w|p dA+
∫MG(w) dA−
∫M
(f∞ +QSM)w dA
en V. PeroJ1(w) = J(w) ∀w ∈ Bδ(y1) ,
donde Bδ(y1) denota la bola en V de centro y1 y radio δ. Luego y1 es el único mínimo de J en Bδ(y1)y por tanto mínimo local de J . Análogamente se prueba para y2 cuado p > 2.Supongamos ahora que p = 2. Entonces el resultado se sigue de tomar en K ∩ L∞(M) una bolasuficientemente pequeña centrada en yi para i = 1, 2 con la norma
‖w‖ = ‖∇w‖Lp(TM) + ‖w‖L∞(M) .
5. Es análoga a la prueba de 1. De (2.1) y (2.3) se obtiene
lımQ→+∞
‖y‖L∞(M) = +∞.
Observación 2.1.3 Hemos visto como este teorema muestra la sensibilidad de los modelos climáticosque estamos estudiando con respecto a la constante solar. Hemos de remarcar además que físicamenteQ > 0, y aunque carezca de algún sentido físico, es inmediato que si Q ≤ 0, el operador que define elproblema (Pe) es monótono en L2(M) y por tanto dicho problema tiene solución única.
Terminaremos esta sección llevando a cabo una descripción precisa del diagrama de bifurcación delproblema (Pe) asociado a los valores de Q. Para ello consideraremos f∞ ≡ −C < 0 constante y poba-remos que la rama principal de dicho diagrama de bifurcación, que arranca del punto (0, g−1(−C)) ∈R+ × L∞(M), tiene forma de S, ésto es, contiene al menos un punto de retorno a la izquierda y otro ala derecha. Definimos para ello:
Definición 2.1.3 Σ = (Q, y) ∈ R+ × V | Q ≥ 0 , y solución de (Pe) .
Nuestro objetivo es describir cualitativamente el conjunto de soluciones Σ de (Pe) en el espacio R+ ×L∞(M) (rama principal de Σ). Supongamos que p ≥ 2 y que se verifican (HS), (Hf∞), (Hg), (Hβ) y (HCf
).Definimos además:
Definición 2.1.4 Un punto de retorno a la izquierda (resp. derecha) es un par (Q∗, y∗) de la ramaprincipal tal que existe un entorno suyo en R+ × L∞(M) en el cual la rama principal está contenidaen (Q, y) ∈ R+ × L∞(M) | Q ≤ Q∗ (resp. en (Q, y) ∈ R+ × L∞(M) | Q ≥ Q∗).
Nos limitaremos a probar en este trabajo el resultado de bifurcación cuando β es una función Lipschitzcontínua. Para el caso β multivaluada podemos consultar [2] y [33]. Enunciaremos previamente un lemadebido a Rabinowitz:
Lema 2.1.4 (véase [27]). Sea E un espacio de Banach. Si F : R× E → E es compacta y F (0, u) ≡ 0entonces Σ = (Q, u) | F (Q, u) = u contiene un par de componentes no acotadas C+ ⊂ R+ × E yC− ⊂ R− × E tales que C+ ∩ C− = (0, 0).

32 CAPÍTULO 2. CONEXIÓN DE ESTADOS ESTACIONARIOS
Teorema 2.1.3 Bajo las hipótesis anteriores, si β es una función Lipschitz contínua entonces Σ con-tiene una componente conexa no acotada en forma de S (rama principal) a la que pertenece el par(0, g−1(−C)) y que presenta al menos un punto de retorno a la derecha en la región (Q1, Q2)×L∞(M)y otro punto de retorno a la izquierda en (Q3, Q4)× L∞(M).
Demostración Dividiremos la prueba de este teorema en tres pasos. En el primero, probaremos queΣ tiene una componente conexa no acotada (rama principal) que contiene al punto (0, g−1(−C)). En elsegundo paso analizaremos los diagramas de bifurcación de dos modelos cero-dimensionales asociados(P1) y (P2). Continuaremos aplicando el principio de comparación y mostrando que un subconjuntode Σ está delimitado por los diagramas de bifurcación de (P1) y (P2) para algunos intervalos de Q.Terminaremos probando que necesariamente la rama principal de Σ ha de tener forma de S.Paso 1: Σ tiene una componente conexa no acotada que contiene al punto (0, g−1(−C))Para poder aplicar el Lema 2.1.4 en nuestro caso consideraremos la traslación de y dada por u =y − g−1(−C). Claramente u es solución de
(Pe) −∆pu+ g(u) = QS(x)β(u) , en M ,
donde g(v) = g(v + g−1(−C)) + C
β(v) = β(v + g−1(−C)).
Definimos pues Σ como
Σ =
(Q, u) ∈ R+ × V | Q ≥ 0 , u solución de (Pe).
Veamos que se cumplen las hipótesis del Lema. Consideremos para ello E = L∞(M) y definamos
F (Q, u) = (−∆p + g)−1(QS(x)β(u)).
Tenemos pues que F es composición de un operador continuo y un operador compacto y por tantoF es compacto en L∞(M). Además, si Q = 0 el problema (Pe) tiene solución única, u = 0, luegoF (0, u) = 0. Por el teorema de Rabinowitz se tiene que existen dos componentes no acotadas C+ ⊂R+ × L∞(M) y C− ⊂ R− × L∞(M) tales que C+ ∩ C− = (0, 0). Y como Σ es una traslción de Σentonces Σ contiene dos componentes no acotadas C+ ⊂ R+ × L∞(M) y C− ⊂ R− × L∞(M) talesque C+ ∩ C− =
(0, g−1(−C))
. Nosotros estamos interesados en la componente C+ pues en nuestro
modelo Q ≥ 0. Para establecer el comportamiento de C+ destacamos que para cada q > 0 existe unaconstante L = L(q) tal que si 0 ≤ Q ≤ q entonces toda solución y de (Pe) verifica ‖y‖L∞(M) ≤ L(q).Tenemos además que como la componente principal C+ es no acotada, su proyección sobre el eje Qes [0,+∞). Por otro lado sabemos que si Q es suficientemente grande el problema (Pe) tiene soluciónúnica mayor que g−1(Qs0M − C), y como lım|s|→+∞ |g(s)| = +∞ entonces C+ va a (+∞,+∞).Paso 2: Diagrama de bifurcación para dos problemas auxiliaresConsideremos los modelos cero-dimensionales auxiliares
(P1) g(y) + C = Qs1β(y) , y ∈ R .
(P2) g(y) + C = Qs0β(y) , y ∈ R .
Com ya se mostró anteriormente, el número de soluciones de estos problemas depende claramente delos valores de Q. De hecho, es fácil obtener soluciones explícitas para (P1) y (P2). Denotaremos por Σi
el diagrama de bifurcación de (Pi) para i = 1, 2. Puede comprobarse fácilmente que bajo las hipótesis(Hg), (Hβ) y (HCf
) las ramas principales de Σ1 y Σ2 tienen forma de S. Además los conjuntos:
Ki1 =
(Q, y) ∈ R2 | 0 ≤ Q ≤ g(−10− ε) + C
sim, y = g−1(Qsim− C)
,
2.1. ESTADOS ESTACIONAROS DE LOS MODELOS DE BALANCE DE ENERGÍA 33
Ki2 =
(Q, y) ∈ R2 | Q ≥ g(−10 + ε) + C
siM, y = g−1(QsiM − C)
,
verifican Ki1,K
i2 ⊂ Σi+1 para i = 0, 1 (nótese que existen valores de Q que están en ambos conjuntos
K1 y K2 simultáneamente).Paso 3: Argumento de comparaciónSabemos que si Q < Q3 existe y solución de (Pe) tal que y < −10− ε. Esta solución verifica pues
−∆py + g(y) + C = QS(x)m , en M ,
y por tantoQs0m ≤ −∆py + g(y) + C ≤ Qs1m , en M .
Sean y0, y1 soluciones de−∆py + g(y) + C = Qs0m , en M ,
−∆py + g(y) + C = Qs1m , en M ,
respectivamente. Por tanto (Q, y0) ∈ Σ2 y (Q, y1) ∈ Σ1. Además como
−∆py0 + g(y0) ≤ −∆py + g(y) ≤ −∆py1 + g(y1)
por el principio de comparación para el operador monótono −∆pv + g(v) ∈ L2(M) tenemos que
y0 ≤ y ≤ y1.
Asi pues la rama principal de Σ que comienza en (0, g−1(−C)) vive entre Σ1 y Σ2 alcanzando el punto(Q3, yQ3) donde yQ3 es la solución minimal de (Pe) para Q = Q3. Análogamente, si denotamos por yQ2
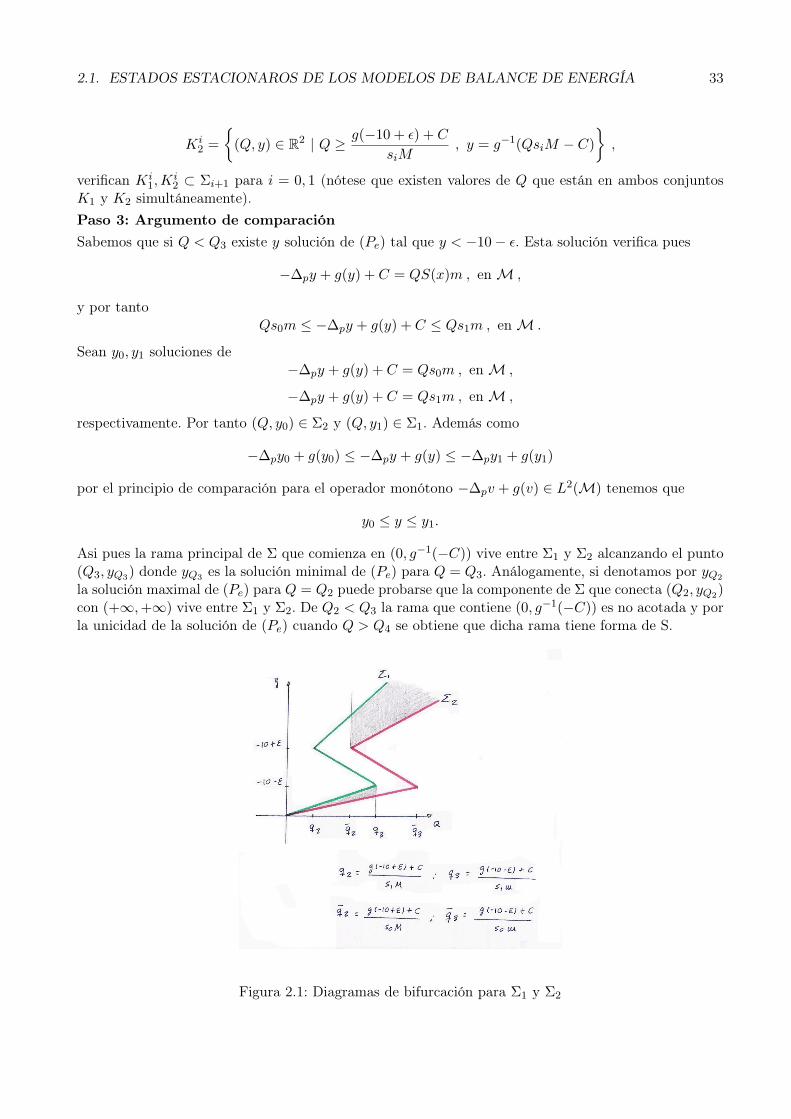
la solución maximal de (Pe) para Q = Q2 puede probarse que la componente de Σ que conecta (Q2, yQ2)con (+∞,+∞) vive entre Σ1 y Σ2. De Q2 < Q3 la rama que contiene (0, g−1(−C)) es no acotada y porla unicidad de la solución de (Pe) cuando Q > Q4 se obtiene que dicha rama tiene forma de S.
Figura 2.1: Diagramas de bifurcación para Σ1 y Σ2
34 CAPÍTULO 2. CONEXIÓN DE ESTADOS ESTACIONARIOS
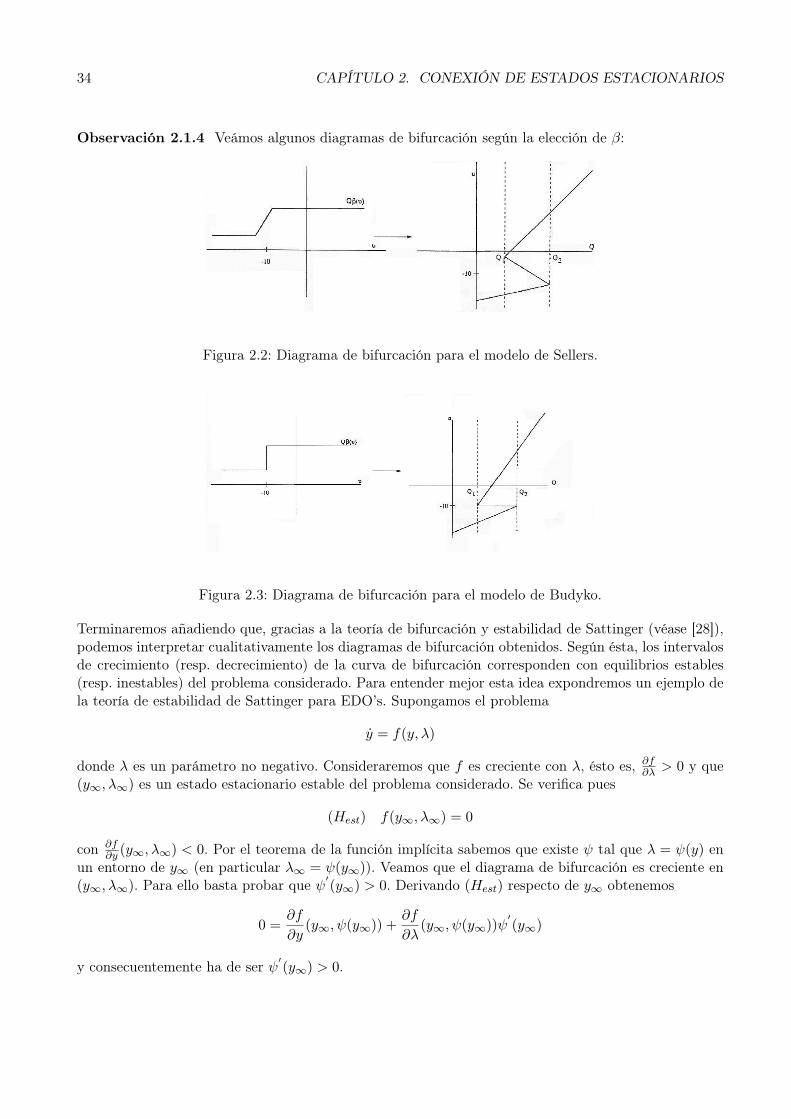
Observación 2.1.4 Veámos algunos diagramas de bifurcación según la elección de β:
Figura 2.2: Diagrama de bifurcación para el modelo de Sellers.
Figura 2.3: Diagrama de bifurcación para el modelo de Budyko.
Terminaremos añadiendo que, gracias a la teoría de bifurcación y estabilidad de Sattinger (véase [28]),podemos interpretar cualitativamente los diagramas de bifurcación obtenidos. Según ésta, los intervalosde crecimiento (resp. decrecimiento) de la curva de bifurcación corresponden con equilibrios estables(resp. inestables) del problema considerado. Para entender mejor esta idea expondremos un ejemplo dela teoría de estabilidad de Sattinger para EDO’s. Supongamos el problema
y = f(y, λ)
donde λ es un parámetro no negativo. Consideraremos que f es creciente con λ, ésto es, ∂f∂λ > 0 y que
(y∞, λ∞) es un estado estacionario estable del problema considerado. Se verifica pues
(Hest) f(y∞, λ∞) = 0
con ∂f∂y (y∞, λ∞) < 0. Por el teorema de la función implícita sabemos que existe ψ tal que λ = ψ(y) en
un entorno de y∞ (en particular λ∞ = ψ(y∞)). Veamos que el diagrama de bifurcación es creciente en(y∞, λ∞). Para ello basta probar que ψ′(y∞) > 0. Derivando (Hest) respecto de y∞ obtenemos
0 =∂f
∂y(y∞, ψ(y∞)) +
∂f
∂λ(y∞, ψ(y∞))ψ
′(y∞)
y consecuentemente ha de ser ψ′(y∞) > 0.

2.2. NUEVOS RESULTADOS PARA EL MODELO DE CLIMA DISCRETIZADO 35
2.2. Nuevos resultados para el modelo de clima discretizado
Nuestro objetivo a lo largo de esta sección consistirá en presentar nuevos resultados relativos aun modelo climático discreto unidimensional obtenido a partir de un esquema de diferencias finitas.Consideremos para ello el modelo climático unidimensional descrito por
(P )
yt − (k(1− x2)yx)x = Ra(x, y, v)−Re(x, y, u), (t, x) ∈ (0,∞)× (−1, 1) ,y(0, x) = y0(x), x ∈ (−1, 1) .
que introdujimos en el Capítulo 1. Recordemos que este modelo (que depende únicamente de la latitud)introduce en la formulación singularidades en los polos (correspondientes a x = ±1), obteniéndose puesuna ecuación degenerada en los extremos del intervalo [−1, 1] que esconde de una manera implícita lacondición de contorno de tipo Neumann
k(1− x2)yx(t, x) = 0 , ∀t > 0 , ∀x ∈ −1, 1
Observación 2.2.1 Estas singularidades provienen de la degeneración del flujo de nuestra EDP,F = k(1− x2)yx. En nuestro caso F es degenerado (F = 0) si y sólo si x = ±1.
Nótese que hemos introducido dos nuevas variables en nuestro modelo, u y v, que consideraremosvariables de control. Estos controles reflejan nuestra influencia sobre el sistema y se encargan de regularlos balances energéticos de absorción y emisión de radiación. Resulta de gran utilidad asumir la presenciade dichos controles en cierto intervalo de latitudes (l1, l2) ⊂ (−1, 1), que representa la región de lasuperficie terrestre que influye sobre el modelo. Tenemos pues u(t)χ(l1,l2) y v(t)χ(l1,l2).Supondremos que Ra(x, y, v) viene descrita por el modelo propuesto por Sellers y por tanto Ra =v(t)χ(l1,l2)QS(x)β(y) con β una función Lipschitz contínua dada por
β(y) =
βi , y < yi ,
βi +(
y−ui
uw−ui
)(βw − βi) , yi ≤ y ≤ yw ,
βw , y > yw ,
donde yi < ycrit = −10 < yw son dos temperaturas muy próximas a la temperatura crítica y m = βi yM = βw representan el coalbedo de la región cubierta de hielo y de la región sin hielo respectivamente(0 < βi < βw < 1). S(x) recibe el nombre de funcion de insolación y describe la distribucióon de la luzsolar sobre la superficie terrestre, y Q es la constante solar. Consideraremos
S : [−1, 1] → R , S ∈ C0([−1, 1]) , s1 ≥ S(x) ≥ s0 > 0 , ∀x ∈ [−1, 1] .
Por otro lado, Re = u(t)χ(l1,l2)g(y)− f(x), donde
g : R → R es una función contínua estríctamente creciente con g(0) = 0 y lım|s|→∞ |g(s)| = +∞ ,
f ∈ C0([−1, 1]) .
Nos planteamos el problema de transferir el sistema descrito por (P ) de un estado estacionario aotro en un periodo de tiempo suficientemente grande T > 0. Este tipo de problemas fue consideradopor primera vez por J. von Neumann en un contexto general (véase [17] y [34]). Nuestro estudio estarádividido en dos partes. En la primera, que resolveremos en esta sección, obtendremos un resultado quedescribe la rama principal de soluciones estacionarias asociada al diagrama de bifurcación del problemaestacionario (según los valores del parámetro Q y en ausencia de variables de control, ésto es, tal que(l1, l2) = (−1, 1) y u(t) = v(t) ≡ 1). En la segunda parte, que trataremos en el Capítulo 3, utilizaremosdiversas técnicas de controlabilidad de sistemas de ecuaciones diferenciales no lineales para analizar lacuestión de transferibilidad mediante controles adecuados.

36 CAPÍTULO 2. CONEXIÓN DE ESTADOS ESTACIONARIOS
Figura 2.4: Cambio de variable x = senϕ
Centraremos nuestro objetivo en una versión simplificada del problema (P ) obtenida por discretiza-ción espacial mediante un esquema de diferencias finitas (para una discretización utilizando elementosfinitos puede consultarse [4]). Existen varias versiones discretas del problema (P ). Para evitar cuestionestécnicas relativas al término de difusión degenerado que presenta nuestro problema sustituiremos dichooperador lineal degenerado por el operador de difusión uniforme y añadiremos condiciones de contornode tipo Neumann
(Pu)
yt − kyxx = Ra(x, y, v)−Re(x, y, u) , x ∈ (−1, 1) , t > 0 ,yx(t,−1) = yx(t, 1) = 0 , t > 0 ,y(x, 0) = y0(x) , x ∈ (−1, 1) .
Consideremos un esquema en diferencias finitas con N > 1 nodos para el problema (Pu). Para ello,dado N > 1 definimos una partición equiespaciada del intervalo [−1, 1] (h = 2
N−1 es el paso) donde losnodos vienen determinados por xi = −1 + (i− 1)h para i = 1, . . . , N . Denotaremos además
yi(t) ≈ y(t, xi) , i = 1, . . . , N
como los valores aproximados que toma la solución en los nodos de la partición. Utilizando una apro-ximación de segundo órden para la derivada segunda como
yxx(t, xi) ≈yi+1(t)− 2yi(t) + yi−1(t)
h2
obtenemos el siguiente esquema numérico ·yi − k yi+1−2yi+yi−1
h2 = Ra(xi, yi, v)−Re(xi, yi, u) , i = 2, . . . , N − 1 ,yi(0) = y(0, xi) , i = 1, . . . , N .
Para terminar el esquema debemos estudiar el comportamiento en los extremos. Para ello utilizaremoslas condiciones de contorno de tipo Neumann. Si hacemos i = 1 ó i = N el esquema propuesto nosproporciona dos nuevas incógnitas, y0 e yN+1. Tendríamos así N + 2 incógnitas y N ecuaciones y portanto un sistema incompatible. Pero utilizando una aproximación progresiva de la derivada primera enxN = 1 y la condición de Neumann obtenemos que
yx(t, xN = 1) ≈ yN+1(t)− yN (t)h
= 0 ⇒ yN+1 = yN .
De la misma forma, si aplicamos una aproximación retrógrada de la derivada primera en x1 = −1 yutilizamos la condición de tipo Neumann obtenemos
yx(t, x1 = −1) ≈ y1(t)− y0(t)h
= 0 ⇒ y1 = y0 ,

2.2. NUEVOS RESULTADOS PARA EL MODELO DE CLIMA DISCRETIZADO 37
reduciendo el número de incógnitas de nuestro esquema a N . En resumen, tenemos las N ecuacionessiguientes
·y1 − k y2−y1
h2 = Ra(−1, y1, v)−Re(−1, yi, u) , i = 1 ,·yi − k yi+1−2yi+yi−1
h2 = Ra(xi, yi, v)−Re(xi, yi, u) , i = 2, . . . , N − 1 ,·yN − k
yN−1−yN
h2 = Ra(1, yi, v)−Re(1, yi, u) , i = N .
Ademásyi(0) = y(0, xi) , i = 1, . . . , N .
Si llamamos y(t) = (y1(t), . . . , yN (t)) T ∈ RN y consideramos u(t), v(t) ∈ R entonces el sistema de Necuaciones anterior puede escribirse matricialmente como
(Ph)
·y(t) +ANy(t) = Ra(y(t), v(t))−Re(y(t), u(t)) , t > 0 ,y(0) = y0 ,
donde AN es una matriz simétrica definida positiva dada por
AN =k
h2
1 −1 0 ... 0−1 2 −1 0 ...0 −1 2 −1 0... 0 −1 2 −10 ... 0 −1 1
∈MN×N ,
y los controles u, v están localizados en m ∈ N nodos con 1 ≤ m < N−1 (el intervalo (l1, l2) discretizadolo hemos representado por un intervalo de longitud (m− 1)h). Tenemos además que
Ra(x1, . . . , xN , y1, . . . , yN , v1, . . . , vN ) = (Ra(x1, y1, v1(t)), . . . , Ra(xN , yN , vN (t))) T ,
Re(x1, . . . , xN , y1, . . . , yN , u1, . . . , uN ) = (Re(x1, y1, u1(t)), . . . , Re(xN , yN , uN (t))) T ,
donde hemos utilizado la notación siguiente: uj(t) ≡ u(t) si j es uno de los m nodos donde el controlestá localizado y uj(t) ≡ 1 en caso contrario (análogamente para vj(t)).
Observación 2.2.2 Una aproximación discreta del problema (P ) que mantiene el carácter degeneradodel operador de difusión nos conduce también al problema (Ph) pero con una matriz distinta
AD =k
h2
0 0 0 ... 0
−(1− x22) 2(1− x2
2) −(1− x22) 0 ...
0 ... ... ... 0... 0 −(1− x2
N−1) 2(1− x2N−1) −(1− x2
N−1)0 ... 0 0 0
∈MN×N ,
que resulta de la identidad (k(1−x2)yx)x = k(1−x2)yxx−2kxyx al despreciar el término de transporte2kxyx. Nótese que en este caso la primera y última ecuación de (Ph) están desacopladas.
Aunque los resultados que probaremos a continuación son válidos para cualquier valor de N ∈ N,consideraremos el caso ilustrativo N = 3 y m = 1 (luego h = 1). Esto nos conduce a la formulaciónvectorial siguiente
(PQ)
·y(t) = f(y(t), u(t), v(t), Q) ,y(0) = y0 ,
donde f : R3 × R× R× R → R3 viene dada por (cuando A = AN )
f(y, u, v,Q) = k
−1 1 01 −2 10 1 −1
y1
y2
y3
+Q
S(−1)β(y1) 0 00 S(0)β(y2) 00 0 S(1)β(y3)
1v1
−

38 CAPÍTULO 2. CONEXIÓN DE ESTADOS ESTACIONARIOS
−
g(y1) 0 00 g(y2) 00 0 g(y3)
1u1
+
f(−1)f(0)f(1)
y (cuando A = AD)
f(y, u, v,Q) = k
0 0 01 −2 10 0 0
y1
y2
y3
+Q
S(−1)β(y1) 0 00 S(0)β(y2) 00 0 S(1)β(y3)
1v1
−−
g(y1) 0 00 g(y2) 00 0 g(y3)
1u1
+
f(−1)f(0)f(1)
.
Definición 2.2.1 Dados y,w ∈ R3 diremos que
y =
y1
y2
y3
≤ w =
w1
w2
w3
⇔ yi ≤ wi para todo i = 1, 2, 3 .
y de forma análoga se definen las desigualdades estrictas. Además, si α ∈ R, la notación α ≤ y cony ∈ R3 implica que α ≤ yi para todo i = 1, 2, 3.
Antes de plantear los teoremas clave de esta sección analizaremos en profundidad un resultado necesariopara la demostración de los mismos, conocido como Principio de Comparación. Este principio ya fueutilizado en su versión contínua en la sección anterior de este trabajo y ahora expondremos con detallesu versión discreta. Consideremos el problema
(P ) f(x,y) = 0 , x ∈ R , y = (y1, . . . , yn) ∈ Rn ,
donde f = (f1, · · · , fn) o equivalentemente
(P ) fi(x, y1, . . . , yn) = 0 para i = 1, . . . , n .
Escribamos y comoy = (yi, [y]ai , [y]bi
)
donde ai, bi son dos enteros no negativos tales que ai + bi = n − 1 e [y]ai , [y]birepresentan las ai-
componentes y bi-componentes del vector y respectivamente. Reescribamos las fi como
fi(x,y) = fi(x, yi, [y]ai , [y]bi) , i = 1, . . . , n ,
entonces:
Definición 2.2.2 Diremos que f = (f1, · · · , fn) verifica la propiedad de cuasi-monotonía si para todoi = 1, . . . , n existen enteros no negativos ai, bi con ai +bi = n−1 tal que fi(·, yi, [y]ai , [y]bi
) es monótonano decreciente en [y]ai (para cada componente de [y]ai) y monótona no creciente en [y]bi
(para cadacomponente de [y]bi
).
Definición 2.2.3 Un par de funciones y = (y1, . . . , yn), y = (y1, . . . , yn) de (C(R))n reciben el nombrede sub y supersoluciones acopladas de
(P ) fi(x, yi, [y]ai , [y]bi) = 0 , i = 1, . . . , n
si y ≥ y y además fi(x, yi, [y]ai , [y]bi
) ≤ 0fi(x, yi, [y]ai , [y]bi
) ≥ 0en R , i = 1, . . . , n .

2.2. NUEVOS RESULTADOS PARA EL MODELO DE CLIMA DISCRETIZADO 39
Observación 2.2.3 De la definición anterior las sub y supersoluciones del problema (P ) están engeneral acopladas, a menos de que f sea cuasi-monótona no decreciente.
Sea ahora (y, y) un par de sub y supersoluciones acopladas de (P ). Definimos el sector
〈y, y〉 = y ∈ (C(R))n | y ≤ y ≤ y ,
y supondremos que para cada i = 1, . . . , n existe una función ci ∈ C(R) tal que
fi(x, yi, [y]ai , [y]bi)− fi(x,wi, [y]ai , [y]bi
) ≥ −ci(yi − wi) , yi ≤ wi ≤ yi ≤ yi . (2.6)
y además que las fi son Lipschitz, ésto es
|fi(x,y)− fi(x,w)| ≤ Ki(x) ‖y −w‖ , ∀y,w ∈ 〈y, y〉 ,
donde Ki ∈ L∞(R). Se verifica:
Lema 2.2.1 Si definimos
Fi(x, yi, [y]ai , [y]bi) = ciyi + fi(x, yi, [y]ai , [y]bi
) ,
para todo i = 1, . . . , n y suponemos las fi Hölder contínuas en x y Lipschitz contínuas en y ∈ 〈y, y〉entonces para cada y ∈ (Cα(R))n la función F = (F1, . . . , Fn) es Hölder contínua. Además, si suponemosque f es cuasi-monótona en 〈y, y〉 y verifica (2.6) entonces para cada y,w ∈ 〈y, y〉 con y ≥ w se verifica
Fi(x, yi, [y]ai , [w]bi)− Fi(x,wi, [w]ai , [y]bi
) ≥ 0 , i = 1, . . . , n .
Para probar el lema anterior puede consultarse [26]. Construyamos las sucesionesy(k)
≡y
(k)1 , . . . , y
(k)n
,
y(k)≡y
(k)1 , . . . , y(k)
n
mediante el proceso iterativo
ciy(k)i = Fi(x, y
(k−1)i , [y(k−1)]ai , [y
(k−1)]bi)
ciy(k)i = Fi(x, y
(k−1)i , [y(k−1)]ai , [y
(k−1)]bi)
, i = 1, . . . , n
donde las iteraciones iniciales se toman y(0) = y e y(0) = y. Se verifica el siguiente lema (véase [26]):
Lema 2.2.2 Las sucesionesy(k)
,y(k)
verifica la propiedad de monotonía siguiente
y ≤ y(k) ≤ y(k+1) ≤ y(k+1) ≤ y(k) ≤ y , en R , (2.7)
y para todo k, y(k) e y(k) son sub y supersoluciones acopladas de (P ) respectivamente.
De la propiedad de monotonía (2.7) se sigue que los límites puntuales
lımk→+∞
y(k)(x) = y(x) , lımk→+∞
y(k)(x) = y(x)
existen y verifican la relación
y ≤ y(k) ≤ y ≤ y ≤ y(k) ≤ y , en R .
Además y ≡ (y1, . . . , yn) e y ≡ (y1, . . . , y
n) son super y subsoluciones acopladas de (P ) y verifican la
relación fi(x, yi, [y]ai , [y]bi
) = 0fi(x, yi
, [y]ai , [y]bi) = 0
, en R , i = 1, . . . , n .
Observación 2.2.4 Es claro que si f es cuasi-monótona no decreciente en 〈y, y〉, ésto es, ai = n− 1 ybi = 0, entonces y e y son soluciones de (P ). En el caso de que f no sea cuasi-monótona no decrecienteentonces los límites y, y no son necesariamente soluciones de (P ) y reciben el nombre de cuasi-solucionesde (P ).

40 CAPÍTULO 2. CONEXIÓN DE ESTADOS ESTACIONARIOS
Teorema 2.2.1 (véase [26] Teoremas 10.1, 10.2 y 10.3) Bajo las condiciones establecidas anteriormen-te toda solución y de (P ) en 〈y, y〉 está contenida en
⟨y,y
⟩.
Ahora estamos en condiciones de probar los resultados clave de esta sección. Supondremos para ello laausencia de controles sobre nuestro sistema, ésto es, (l1, l2) = (−1, 1) y u(t) = v(t) ≡ 1. Adaptaremoslos resultados de [14] y [2] que estudiamos en profundidad en la sección anterior. Mostraremos que elconjunto de estados estacionarios (y∞, Q) ∈ R3 × R del problema (PQ) verificando
(P∞Q ) f(y∞, 1, 1, Q) = 0
es suficientemente grande (dependiendo de los valores del parámetro Q) y, nos conduce a un dagramade bifurcación con una rama principal en forma de S que contiene al menos un punto de retorno a laderecha y otro a la izquierda.
Observación 2.2.5 Nótese que como la matriz AN es simétrica y definida positiva, la estricta mo-notonía y coercividad supuesta sobre g implica la existencia de una única solución ym (resp. yM ) delproblema (P∞Q )m (resp. (P∞Q )M ) que vienen dados por
(P∞Q )m fm(y, 1, 1, Q) = k
−1 1 01 −2 10 1 −1
y1
y2
y3
+Qm
S(−1)S(0)S(1)
−
g(y1)g(y2)g(y3)
+
f(−1)f(0)f(1)
=
000
(P∞Q )M fM (y, 1, 1, Q) = k
−1 1 01 −2 10 1 −1
y1
y2
y3
+QM
S(−1)S(0)S(1)
−
g(y1)g(y2)g(y3)
+
f(−1)f(0)f(1)
=
000
Teorema 2.2.2 Supongamos que se verifican las hipótesis adicionales
(Hf∞) Existe Cf > 0 tal que mın f ≤ f(xi) ≤ −Cf ,
(Hβ) β es una función Lipschitz creciente y existen 0 < m < M y ε > 0 con
β(r) =
m , r ∈ (−∞,−10− ε) ,M , r ∈ (−10 + ε,+∞) ,
y sean ym (resp. yM ) las únicas soluciones del problema (P∞Q )m (resp. (P∞Q )M ). Entonces:
1. para cada Q > 0 existe una solución minimal y (resp. una solución maximal y) de (P∞Q ). Además,cualquier otra solución y debe satisfacer
ym ≤ y ≤ y ≤ y ≤ yM , (2.8)
g−1(Qs0m+ mın f) ≤ (ym)i ≤ g−1(Qs1m− Cf ) , (2.9)
g−1(Qs0M + mın f) ≤ (yM )i ≤ g−1(Qs1M − Cf ) , (2.10)
para todo i = 1, 2, 3. Si asumimos además la hipótesis
(HCf) g(−10− ε) + Cf > 0 y
g(−10 + ε)−mın fg(−10− ε) + Cf
≤ s0M
s1m,
y definimos
Q1 =g(−10− ε) + Cf
s1M, Q2 =
g(−10 + ε)−mın fs0M
,
Q3 =g(−10− ε) + Cf
s1m, Q4 =
g(−10 + ε)−mın fs0m
,
entonces

2.2. NUEVOS RESULTADOS PARA EL MODELO DE CLIMA DISCRETIZADO 41
2. si 0 < Q < Q1 (resp. Q > Q4) se tiene que (P∞Q ) tiene una única solución y = ym con (ym)i <−10 (resp. y = yM , con (yM )i > −10) para todo i = 1, 2, 3 y
g−1(mın f) ≤ lım infQ0
‖y‖∞ ≤ lım supQ0
‖y‖∞ ≤ g−1(−Cf ) ,
3. si Q2 < Q < Q3 entonces (P∞Q ) tiene al menos tres soluciones, yi con i = 1, 2, 3, tales quey1 = yM ≥ y3 ≥ y2 = ym.
DemostraciónAntes de probar el resultado, introduciremos la siguiente notación
S = (S(−1), S(0), S(1)) T , g(y) = (g(y1), g(y2), g(y3) T , e = (1, 1, 1) T
f = (f(−1), f(0), f(1)) T , β(y) =
β(y1) 0 00 β(y2) 00 0 β(y3)
, A =
−1 1 01 −2 10 1 −1
.
1. Sea y una solución débil acotada de (P∞Q ). Como g es estrictamente creciente y tenemos
QmS + f ≤ kAy + g(y) ≤ QMS + f
entonces se cumple el principio de comparación para los problemas (P∞Q )m y (P∞Q )M (pues los términosno lineales son Lipschitz). Tenemos así
ym ≤ y ≤ yM .
Por otra parte, como ym (resp. yM ) es una subsolución (resp. una supersolución) de (P∞Q ) pues
Aym + g(ym) = QSm+ f ≤ Qβ(ym)S + f
AyM + g(yM ) = QSM + f ≥ Qβ(yM )S + f
entonces por el método de sub y supersoluciones de Amann (ver [1]) se concluye que
ym ≤ y ≤ y ≤ y ≤ yM .
Finalmente, es fácil ver que
y1 = g−1((Qs1M − Cf )e) es supersolución de (P∞Q )M ,
y2 = g−1((Qs1m− Cf )e) es supersolución de (P∞Q )m ,
y1
= g−1((Qs0M + mın f)e) es subsolución de (P∞Q )M ,
y2
= g−1((Qs0m+ mın f)e) es subsolución de (P∞Q )m .
En efecto
Ay1 + g(y1) = (Qs1M − Cf )e ≥ QSM + f ,
Ay2 + g(y2) = (Qs1m− Cf )e ≥ QSm+ f ,
Ay1+ g(y
1) = (Qs0M + mın f)e ≤ QSM + f ,
Ay2+ g(y
2) = (Qs0m+ mın f)e ≤ QSm+ f ,
y como g es estrictamente creciente entonces y1≤ yM ≤ y1 e y
2≤ ym ≤ y2. Luego
g−1(Qs0m+ mın f) ≤ (ym)i ≤ g−1(Qs1m− Cf ) ,
g−1(Qs0M + mın f) ≤ (yM )i ≤ g−1(Qs1M − Cf ) ,

42 CAPÍTULO 2. CONEXIÓN DE ESTADOS ESTACIONARIOS
para todo i = 1, 2, 3.
2. De la hipótesis (HCf) y suponiendo 0 < Q < Q1 se obtiene
y1 = g−1((Qs1M − Cf )e) < g−1((s1Mg(−10− ε) + Cf
s1M− Cf )e) = −10− ε ,
y2 = g−1((Qs1m− Cf )e) < g−1((s1mg(−10− ε) + Cf
s1M− Cf )e) < −10− ε ,
y de la comparación ym ≤ y ≤ yM concluimos que toda solución débil acotada y de (P∞Q ) verificay < −10− ε. Por tanto
Ay + g(y) = QSm+ f ,
y consecuentemente ha de coincidir con la única solución ym de este problema ( y = ym ). Para concluir,de (2.8) y (2.9) se obtiene
g−1(mın f) ≤ lım infQ0
‖y‖∞ ≤ lım supQ0
‖y‖∞ ≤ g−1(−Cf ).
Análogamente, sea Q > Q4 entonces
y1
= g−1((Qs0M + mın f)e) > g−1((s0Mg(−10 + ε)−mın f
s0m+ mın f)e) > −10 + ε ,
y2
= g−1((Qs0m+ mın f)e) > g−1((s0mg(−10 + ε)−mın f
s0m+ mın f)e) = −10 + ε ,
y de la comparación ym ≤ y ≤ yM concluimos que toda solución débil acotada y de (P∞Q ) verificay > −10 + ε. Por tanto
Ay + g(y) = QSM + f ,
y consecuentemente ha de coincidir con la única solución yM de este problema ( y = yM ). Paraconcluir, de (2.8) y (2.10) se obtiene
g−1(mın f) ≤ lım infQ0
‖y‖∞ ≤ lım supQ0
‖y‖∞ ≤ g−1(−Cf ).
3. Dividiremos la prueba de este apartado en varios pasos. Primero construiremos super y subsolucio-nes de (P∞Q ) probando la existencia de al menos dos soluciones del problema (P∞Q ). Posteriormente,probaremos la existencia de una solución de un problema aproximado (P∞Q )λ mediante un argumentotopológico del punto fijo. Y para terminar, probaremos la convergencia de la solución de (P∞Q )λ a unatercera solución de (P∞Q ).Paso 1: Construcción de sub y supersoluciones de (P∞Q )Fijaremos nuestra atención en sub y supersoluciones constantes de (P∞Q ). Consideremos para ello losproblemas auxiliares:
(P1) g(U) = Qs1β(U)e− Cfe
(P2) g(V) = Qs0β(V)e + mın fe
Es inmediato que toda solución de (P1) es supersolución de (P∞Q ) pues S ≤ s1 y f ≤ −Cf . Análogamente,toda solución de (P2) es subsolución de (P∞Q ) pues S ≥ s0 y f ≥ mın f . Como Q2 < Q < Q3 y s0 < s1deducimos que
U1 = g−1((Qs1M − Cf )e) > g−1((s1Mg(−10 + ε)−mın f
s0M− Cf )e) ≥
≥ g−1((g(−10 + ε)− (mın f + Cf ))e) > −10 + ε

2.2. NUEVOS RESULTADOS PARA EL MODELO DE CLIMA DISCRETIZADO 43
U2 = g−1((Qs1m− Cf )e) < g−1((s1mg(−10− ε) + Cf
s1m− Cf )e) = −10− ε
son soluciones de (P1) (y consecuentemente supersoluciones de (P∞Q )). También
V1 = g−1((Qs0M + mın f)e) > g−1((s0Mg(−10 + ε)−mın f
s0M+ mın f)e) = −10 + ε
V2 = g−1((Qs0m+ mın f)e) < g−1((s0mg(−10− ε) + Cf
s1m+ mın f)e) ≤
≤ g−1((g(−10− ε) + (Cf + mın f))e) < −10− ε
son soluciones de (P2) (y consecuentemente subsoluciones de (P∞Q )). Hemos construido así dos super-soluciones y dos subsoluciones constantes de (P∞Q ) que verifican U1 > U2 y V1 > V2. Además:
V2 ≤ U2 < −10− ε < −10 + ε < V1 ≤ U1. (2.11)
Paso 2: Existencia de soluciones de (P∞Q )Sabemos por el método de las sub y supersoluciones que existen dos soluciones y1,y2 de (P∞Q ) verificando
Vi ≤ yi ≤ Ui , para i = 1, 2 .
Como y1 > −10 + ε, entonces y1 verifica (P∞Q )M , que recordemos tiene solución única. De hecho, todasolución débil de (P∞Q ) mayor que −10 + ε es también solución de (P∞Q )M y por tanto y1 = yM es laúnica solución de (P∞Q ) mayor que −10+ ε. Análogamente, como y2 < −10− ε, y2 verifica (P∞Q )m, querecordemos tiene solución única. De hecho, toda solución débil de (P∞Q ) menor que −10− ε es tambiénsolución de (P∞Q )m y por tanto y2 = ym es la única solución de (P∞Q ) menor que −10− ε.
Paso 3: Construcción del problema aproximado (P∞Q )λ
Al no haber definido el comportamiento de la función coalbedo β en el intervalo (−10−ε,−10+ε) podríaresultar que ésta fuera multivaluada en dicho intervalo. Definimos para ello la familia de problemas
(P∞Q )λ Ay + g(y) = Qβλ(y)S + f ,
dondeβλ =
1λ
(I − (I − λβ)−1) ,
con λ > 0 es una función Lipschitz (recibe el nombre de aproximación de Yosida de β, véase[35]). Comoβ verifica (Hβ) se tiene que
βλ es una función acotada y no decreciente para todo λ > 0 ,
βλ(s) = β(s) para todo s /∈ [−10− ε,−10 + ε+ λM ] para todo λ > 0 ,
βλ(s) → β(s) cuando λ→ 0 en el sentido de grafos monótonos acotados (ver [5]) .
En el caso de que β sea una función Lipschitz basta tomar βλ = β. De (2.4) se deduce que existeλ0 = λ0(Q) tal que
V2 < U2 < −10− ε < −10 + ε+ λ0M < V1 < U1.
Si λ < λ0, entonces βλ(Ui) = β(Ui) y βλ(Vi) = β(Vi) para i = 1, 2. Por tanto, U1,U2 son supersolu-ciones y V1,V2 son subsoluciones de (P∞Q )λ. Argumentando ahora como en el paso 2, obtenemos dosfamilias de soluciones
yλ
1
,yλ
2
de (P∞Q )λ para λ < λ0 tal que
V2 ≤ yλ2 ≤ U2 < −10− ε < −10 + ε+ λ0M < V1 ≤ yλ
1 ≤ U1.

44 CAPÍTULO 2. CONEXIÓN DE ESTADOS ESTACIONARIOS
Además, como λ < λ0 entonces yλ1 > −10 + ε + λ0M > −10 + ε + λM y βλ(yλ
1 ) = β(yλ1 ) y por tanto
deducimos que yλ1 = y1. Análogamente se concluye que yλ
2 = y2. Para probar que (P∞Q )λ tiene unatercera solución yλ
3 usaremos el Lema 2.1.1. En nuestro caso, toda solución y de (P∞Q )λ es un punto fijode la ecuación
y = (A+ g)−1(Qβλ(y)S + f) .
Sea pues E = R3 espacio de Banach ordenado (con respecto al orden natural) cuyo cono positivo verifica
R3+ =
v ∈ R3 : vi ≥ 0 para i = 1, 2, 3
6= ∅ .
Definamos los entornos
X = [V2 − δe,U1 + δe] , X1 = [V1 − δe,U1 + δe] y X2 = [V2 − δe,U2 + δe] ,
donde hemos tomado δ > λ0M de tal forma que V1 > −10 + ε+ δ y U2 > −10− ε− δ. Existen puesdos subconjuntos abiertos de R3, Y1 e Y2, tales que yλ
k ∈ Yk ⊂ Xk para k = 1, 2 y si consideramos eloperador compacto en R3
F(v) = (A+ g)−1(Qβλ(v)S + f) ,
con v ∈ R3, puede probarse que F, X,X1 y X2 están en las condiciones del Lema 2.1.1 (véase [14]). Portanto F tiene al menos tres puntos fijos, o equivalentemente, (P∞Q )λ tiene al menos tres soluciones conyλ
k ∈ Xk para k = 1, 2 e yλ3 ∈ X − (X1 ∪X2).
Paso 4: ConvergenciaNuestro objetivo es obtener estimaciones a priori que nos permitan probar la convergencia de unasubsucesión de
yλ
3
a una solución de (P∞Q ). Multiplicando la ecuación i-èsima del sistema por yλ
i ysumando las tres ecuaciones reslutantes obtenemos
2∑i=1
(yλi+1 − yλ
i )2 +3∑
i=1
g(yλi )yλ
i =3∑
i=1
QS(xi)β(yλi )yλ
i +3∑
i=1
f(xi)yλi . (2.12)
Utilizando la desigualdad de Hölder podemos estimar la parte derecha de la ecuación anterior obteniendo
3∑i=1
QS(xi)β(yλi )yλ
i +3∑
i=1
f(xi)yλi ≤ (
√3Qs1M + ‖f‖2)
∥∥∥yλ∥∥∥2
2
Además, como g(y) = σ |y|3 y se tiene que
3∑i=1
g(yλi )yλ
i = σ3∑
i=1
∣∣∣yλi
∣∣∣5 = σ∥∥∥yλ
∥∥∥5
5≥ C
∥∥∥yλ∥∥∥5
2,
considerando que en R3 todas las normas son equivalentes. Ésto conduce a la estimación∥∥∥yλ∥∥∥
2≤ C
′,
y como R3 es un espacio de Banach reflexivo podemos extraer una subsucesión deyλ
(que denotaremostambién
yλ
para simplificar notación) tal que
∃ y ∈ R3 con yλ → y en R3 .
Tomando pues límites en (2.12) se concluye que y es solución de (P∞Q ).Tenemos entonces que
yλi → yi para todo i = 1, 2, 3

2.2. NUEVOS RESULTADOS PARA EL MODELO DE CLIMA DISCRETIZADO 45
soluciones de (P∞Q ). Recordemos que y1 > −10 > y2. Tenemos además que para todo λ < λ0
yλ3 ∈ [(−10− ε)e, (−10 + ε+ λ0M) e] . (2.13)
En efecto, pues supongamos por el contrario que y1 = y3. Entonces, como yλ3 → y3 e y1 > −10 + ε,
existiría ε0 tal que para todo s < ε0 se verificaría ys3 > −10 + ε que es una contradicción con (2.13).
Luego y1 6= y3. Análogamente se prueba que y2 6= y3.
Probaremos a continuación que es posible asociar a nuestro problema un diagrama de bifurcación enforma de S. Para ello supondremos que f ≡ −C y que se verifica (HCf
):
Teorema 2.2.3 Si denotamos por Σ al conjunto de pares (Q,y) ∈ R+×R3 donde y es solución de (P∞Q )entonces Σ contiene una componente conexa no acotada que comienza en (0,g−1(−Ce)) (presenta almenos un punto de retorno a la derecha en la región (Q1, Q2)×R3 y otro punto de retorno a la izquierdaen (Q3, Q4)× R3).
Demostración Dividiremos la prueba de este teorema en tres pasos. En el primero, probaremos queΣ tiene una componente conexa no acotada (rama principal) que contiene al punto (0,g−1(−Ce)). Enel segundo paso analizaremos los diagramas de bifurcación de dos modelos cero-dimensionales asociados(P1) y (P2). Continuaremos aplicando el principio de comparación y mostrando que un subconjuntode Σ está delimitado por los diagramas de bifurcación de (P1) y (P2) para algunos intervalos de Q.Terminaremos probando que necesariamente la rama principal de Σ ha de tener forma de S.Paso 1: Σ tiene una componente conexa no acotada que contiene al punto (0,g−1(−Ce))Para aplicar el Lema 2.1.4 debido a Rabinowitz a nuestro caso consideraremos la traslación de y dadapor z = y − g−1(−Ce). Obviamente, z es una solución de (P∞Q ) con
g(σ) = g(σ + g−1(−Ce)) + Ce ,β(σ) = β(σ + g−1(−Ce)) .
Definimos Σ análogamente a Σ. Sea E = R3, entonces el operador
F(Q, z) := (A+ g)−1(Qβ(z)S + f)
es compacto en R3. Por otra parte, si Q = 0 entonces el problema (P∞Q ) tiene una única soluciónz = 0, luego F (0,0) = 0. Como conclusión, Σ contiene dos componentes no acotadas C+ y C−
en R+ × R3 y R− × R3 respectivamente con C+ ∩ C− = (0,0). Como Σ es una traslación de Σentonces Σ contiene dos componentes no acotadas C+ y C− en R+ × R3 y R− × R3 respectivamentecon C+ ∩ C− =
(0,g−1(−Ce))
. Como en nuestro modelo Q ≥ 0, nos centraremos en C+. Para
establecer el comportamiento de C+ recordemos que si q > 0 existe una constante L = L(q) tal que si0 ≤ Q ≤ q entonces toda solución yQ de (P∞Q ) verifica ‖yQ‖∞ ≤ L(q). Al ser la componente principal noacotada, su proyección sobre el eje Q es [0,∞). Por otro lado, si Q es suficientemente grande el problema(P∞Q ) tiene solución única yQ (pues Q > Q4) y esta solución es mayor que g−1((Qs0M − C)e). Comolım|s|→∞ |g(s)| = +∞, entonces la rama no acotada C+ que contiene a (0,g−1(−Ce)) va a (∞,∞).Paso 2: Diagrama de bifurcación para dos problemas auxiliaresConsideremos los modelos cero-dimensionales auxiliares
(P1) g(y) + Ce = Qs1β(y)e .
(P2) g(y) + Ce = Qs0β(y)e .
Com ya se mostró anteriormente, el número de soluciones de estos problemas depende claramente delos valores de Q. De hecho, es fácil obtener soluciones explícitas para (P1) y (P2). Denotaremos por Σi

46 CAPÍTULO 2. CONEXIÓN DE ESTADOS ESTACIONARIOS
el diagrama de bifurcación de (Pi) para i = 1, 2. Puede comprobarse fácilmente que bajo las hipótesis(Hg), (Hβ) y (HCf
) las ramas principales de Σ1 y Σ2 tienen forma de S.Paso 3: Argumento de comparaciónSabemos que si Q < Q3 existe y solución de (P∞Q ) tal que y < −10− ε. Esta solución verifica pues
Ay + g(y) + Ce = QmS ,
y por tantoQs0me ≤ Ay + g(y) + Ce ≤ Qs1me .
Sean y0,y1 soluciones deAy + g(y) + Ce = Qs0me ,
Ay + g(y) + Ce = Qs1me ,
respectivamente. Por tanto (Q,y0) ∈ Σ2 y (Q,y1) ∈ Σ1. Además como
Ay0 + g(y0) ≤ Ay + g(y) ≤ Ay1 + g(y1)
por el principio de comparación para el operador monótono Av + g(v) tenemos que
y0 ≤ y ≤ y1.
Asi pues la rama principal de Σ que comienza en (0,g−1(−Ce)) vive entre Σ1 y Σ2 alcanzando el punto(Q3,yQ3) donde yQ3 es la solución minimal de (P∞Q ) para Q = Q3. Análogamente, si denotamos poryQ2 la solución maximal de (P∞Q ) para Q = Q2 puede probarse que la componente de Σ que conecta(Q2,yQ2) con (+∞,+∞) vive entre Σ1 y Σ2. De Q2 < Q3 la rama que contiene (0,g−1(−Ce)) es noacotada y por la unicidad de la solución de (P∞Q ) cuando Q > Q4 se obtiene que dicha rama tiene formade S.
Figura 2.5: Diagramas de bifurcación para Σ1 y Σ2
Observación 2.2.6 Es fácil probar que bajo condiciones de simetría sobre S(x) y f(x) la rama C+
está formada por soluciones estacionarias simétricas en las que y1 = y3.

Capítulo 3
Teoría de Control
3.1. Introducción
La palabra control tiene un doble significado. Primero: controlar un sistema puede entenderse sim-plemente como una comprobación de que el comportamiento de dicho sistema es satisfactorio. En susentido más profundo, controlar es también actuar sobre un sistema, de tal forma que podamos ga-rantizar que el sistema se comporta tal y como deseamos. Las preguntas que nos planteamos en estoscasos son ¿podremos controlar nuestro sistema en cuestión? y ¿dependerá este control del sistema queestemos manejando? La respuesta a esta segunda pregunta es afirmativa, teniéndose pues en estos casosuna problemática mayor ¿hay alguna forma de influir sobre un sistema no controlable de tal forma quepodamos sacar de éste el mayor rendimiento y partido posible? Estas cuestiones y muchas otras de granimportancia son las que dieron origen a la Teoría de Control y Optimización Matemática.
Empecemos por indicar cómo se formulan actualmente en términos matemáticos estos problemasde control. Para fijar ideas supongamos que queremos obtener un buen comportamiento de un sistemafísico gobernado por una ecuación de estado
A(y) = f(u)
Aquí, y representa el estado del sistema (es la incógnita del sistema cuyo comportamiento deseamoscontrolar). Este estado pertenece a un cierto espacio vectorial Y . Por otra parte, u es el control (variablede control) y pertenece a un conjunto de controles admisibles U (a definir en cada sistema concreto).Esta es la variable que podemos escoger libremente para actuar sobre nuestro sistema. A representa eloperador que determina la ecuación que debe satisfacer y de acuerdo a las leyes físicas del modelo. Lafunción f indica la manera en la que el control u actúa sobre el sistema considerado. Tenemos pues quesi para cada u ∈ U la ecuación de estado tiene exactamente una única solución y = y(u) entonces, agrandes rasgos, podemos decir que controlar nuestro sistema es encontrar u ∈ U tal que la solución yde la ecuación de estado está próxima a un cierto estado deseado. El “mejor” entre todos los controlesexistentes que alcanzan el objetivo deseado recibe comúnmente el nombre de control óptimo.
Cabe reseñar que a la hora de controlar un determinado sistema físico no es necesario actuar sindescanso sobre éste, conduciéndolo al estado deseado de un modo directo e inmediato. Usualmente, esmucho más eficaz para controlar el sistema dejar que éste fluctúe, tratando de encontrar cierta dinámicaarmónica dentro del sistema que sin duda ayudará a conseguir el estado deseado sin forzarlo demasiado.Un exceso de control sobre el sistema podría por supuesto producir no sólo un coste inadmisible ala hora de actuar sobre el mismo, sino que además podría provocar daños irreversibles en el sistemaconsiderado, cosa que acabaría definitivamente con nuestra posibilidad de sacar el mayor partido deéste.
47

48 CAPÍTULO 3. TEORÍA DE CONTROL
3.2. Algunos resultados de controlabilidad
Esta sección está dedicada a recordar algunos de los más importantes resultados en Teoría deControl de sistemas de dimensión finita que nos permiten asegurar cuándo un sistema modelizado porun conjunto de ecuaciones diferenciales es controlable, y hasta qué punto lo es. Para ello comenzaremosprimero con los modelos definidos a partir de ecuaciones lineales, y posteriormente pasaremos a enunciarlos resultados relevantes para sistemas gobernados por ecuaciones no lineales. Los problemas en los quevamos a centrar nuestra atención pueden describirse de forma general como
dydt (t) = f(y(t),u(t)), t > 0,y(0) = y0,
(3.1)
donde u(t) = (u1(t), . . . , um(t))T ∈ Rm representa el control aplicado sobre el sistema e y(t) =(y1(t), . . . , yn(t))T ∈ Rn denota el estado del sistema, que depende claramente de u y suele escribirsey(· ;u) ó también y u(·). Además las dimensiones verifican (n ≥ m ≥ 1) y la función f es la encargadade describir la dinámica de nuestro sistema y de ella dependerá la linealidad o no linealidad del mismo.Supondremos que f es tan regular como queramos para asegurar la existencia y unicidad de solucionesde (3.1) (bastaría pedir que f sea Lipschitz contínua para que se verifique el Teorema de existencia yunicidad de Picard-Lindelöf). Como hemos descrito más arriba, uno de los problemas más clásicos enTeoría de Control es probar la existencia de un control u ∈ U de tal forma que nuestro sistema (3.1)alcance un cierto estado deseado yd = y(T ;u(T )) para un instante T > 0. Recordemos para comenzaralgunas definiciones básicas en Teoría de Control:
Definición 3.2.1 Dada y(· ;u) solución de (3.1) en [0, T ], el par (y,u) recibe el nombre de trayectoriadel sistema y los puntos y(0) = y0 e y(T ) = y1 son denominados respectivamente estado inicial y finalde la trayectoria.
Definición 3.2.2 Se dice que un control u ∈ U = L∞ (0,∞; Rm) transfiere un estado a ∈ Rn a unestado b ∈ Rn en tiempo finito T > 0 si y(0;u(0)) = a e y(T ;u(T )) = b. También decimos que apuede llevarse hasta b en tiempo T > 0 o que el estado b puede alcanzarse desde a en tiempo T > 0.
Definición 3.2.3 Dado un subconjunto U ⊆ Rm y un tiempo T > 0 se define un control elemental (ó detipo bang-bang) como una aplicación u : [0, T ] → U para la cual existe una partición t0 = 0, . . . , tk = Ty unos vectores constantes uj ∈ U para todo j ∈ 1, . . . , k − 1 tales que:
u(t) =
u1 , t ∈ [0, t1] ,u2 , t ∈ (t1, t2] ,
· · ·uk−2 , t ∈ (tk−2, tk−1] ,uk−1 , t ∈ (tk−1, T ] .
Observación 3.2.1 Obviamente todos los controles elementales son controles admisibles, es decir,están contenidos en U . Nótese que como u(t) no tiene por qué ser comtínua ni estar definida en todopunto (pues es de L∞) hay de tener en cuenta que el término f(y(t),u(t)) de la ecuación diferencialpuede ser discontínuo, y entonces hemos de utilizar la noción de existencia de soluciones para ecuacionesdiferenciales con datos en L1
loc (véase por ejemplo [30] y [36]).
3.2.1. Controlabilidad de sistemas lineales de dimensión finita
Comenzaremos por recordar los resultados más relevantes sobe controlabilidad de sistemas linealesde ecuaciones diferenciales. Tal y como mencionamos anteriormente, la Teoría de Control contiene una

3.2. ALGUNOS RESULTADOS DE CONTROLABILIDAD 49
gran cantidad de resultados matemáticos que han tenido un tremendo impacto en el mundo de lasaplicaciones. Uno de estos resultados cruciales, a la vez que sencillos, es un teorema de Rudolph E.Kalman de 1960 que caractertiza los sistemas lineales que son controlables. Consideremos el sistemalineal:
dydt (t) = Ay(t) +Bu(t), t > 0 ,y(0) = y0 ,
(3.2)
donde u(t) = (u1(t), . . . , um(t))T ∈ Rm representa el control aplicado sobre el sistema e y(t) =(y1(t), . . . , yn(t))T ∈ Rn denota el estado del sistema. A y B son matrices de coeficientes constan-tes y de dimensiones A ∈ Mn×n y B ∈ Mn×m respectivamente, con n ≥ m ≥ 1. En la práctica loscasos más significativos se obtienen cuando n >> m ≥ 1.
Definición 3.2.4 El sistema (3.2) se dice “controlable en tiempo T ” si, para cada estado inicial y0 ∈ Rn
y cada estado deseado yd = y(T ) ∈ Rn existe al menos un control u ∈ U de tal forma que la soluciónde (3.2) verifica y(T ;u(T )) = yd.
Pasemos ahora a enunciar y probar el resultado de Kalman sobre controlabilidad de sistemas lineales.Para ello enunciaremos antes un teorema previo de gran utilidad como es el Teorema de Cayley-Hamiltony recordaremos la definición de matriz fundamental de un sistema de ecuaciones diferenciales:
Definición 3.2.5 Sea A ∈ Mn×n. La (única) función matricial X ∈ C1 (R;Mn×n) que verifica elproblema:
dXdt (t) = AX(t), t ∈ R ,
X(0) = Idn ,
(donde Idn es la matriz identidad) recibe el nombre de “matriz fundamental del sistema”. Por los resul-tados conocidos sobre ecuaciones lineales suele escribirse:
X(t) = e tA :=∞∑
k=0
tkAk
k!
Es un resultado clásico de Teoría de Ecuaciones Diferenciales Ordinarias que la matriz fundamental esinvertible para todo t ∈ R y que la inversa viene dada por X−1(t) = X(−t) (véase [21]).
Teorema 3.2.1 (de Cayley-Hamilton). Dada A ∈Mn×n de polinomio característico
χA(λ) = det(A− λIdn) = λn +n−1∑i=0
αi λi ,
entonces se verifica que
χA(A) = An +n−1∑i=0
αi Ai = 0 .
Teorema 3.2.2 (de Kalman). El sistema (3.2) es controlable para cierto tiempo T > 0 si y sólo si lamatriz de controlabilidad (o de Kalman) del sistema
K =[B,AB, . . . , An−1B
]∈Mn×nm
verifica que rg(K) = n (condición de Kalman). Además, sí ésto se verifica, el sistema es controlablepara todo T > 0. Sin embargo, si n− 1 ≥ rg(K) = r ≥ 1 entonces para todo y0 ∈ Rn y para cada T > 0el conjunto de soluciones de (3.2), a tiempo T > 0, recubre un subespacio afín de dimensión r de Rn.

50 CAPÍTULO 3. TEORÍA DE CONTROL
Demostración Supongamos que rg (K) < n. Se tiene pues que existe q ∈ Rn−0 tal que q TK = 0 ypor tanto q TAiB = ~0 para todo i ∈ 0, . . . , n− 1. Utilizando la “fórmula de variación de las constantes”(véase [30]), la solución de (3.2) viene dada por:
y(t) = e tAy0 +∫ t
0e (t−s)ABu(s) ds .
Supongamos que yd = 0 y fijemos T > 0. Entonces
yd = y(T ) = 0 = e TA
(y0 +
∫ T
0e −sABu(s) ds
).
Se tiene pues que como e TA es invertible entonces
y0 = −∫ T
0e −sABu(s) ds ,
y multiplicando en la igualdad anterior escalarmente por q
q Ty0 = −∫ T
0q Te −sABu(s) ds .
Sea
χA(λ) = det(A− λIdn) = λn +n−1∑i=0
αi λi .
Entonces por el teorema de Cayley-Hamilton
χA(A) = An +n−1∑i=0
αi Ai = 0 ,
y por tanto
An = −
(n−1∑i=0
αi Ai
).
Luego:
q TAnB = −
(n−1∑i=0
αi q TAiB
)= 0 pues q TAiB = 0 ∀i ∈ 0, . . . , n− 1 .
Además
An+1 = −
(n∑
i=0
αi Ai
).
Luego
q TAn+1B = −
(n∑
i=0
αi q TAiB
)= 0 ,
y por tanto si procedemos de manera recursiva tendremos que q TAiB = 0 para todo i ∈ N ∪ 0.Podemos concluir entonces que
q Te −sABu(s) = q T
( ∞∑k=0
(−s)k Ak
k!Bu(s)
)=
∞∑k=0
(−s)k (q TAkB)
k!u(s) = 0 ,

3.2. ALGUNOS RESULTADOS DE CONTROLABILIDAD 51
y se sigue que
q Ty0 = 0 para cualquier y0 ∈ Rn ⇒ q = 0 que es una contradicción.
Supongamos ahora que rg(K) = n. fijamos T > 0, y definimos ahora la matriz
M =∫ T
0e −sABBT e −sAT
ds ∈Mn×n .
Veamos que M es una matriz invertible y que el control definido por
u(t) = −BT e (T−t)ATM−1(e TAT
y0 − yd), para todo t ∈ [0, T ] ,
lleva el sistema desde su estado inicial y0 = y(0) hasta el estado deseado yd = y(T ) en el tiempo T > 0.Por la “fórmula de variación de las constantes”
y(T ) = yd = e TAy0 −(∫ T
0e (T−s)ABBT e (T−s)AT
ds
)M−1
(e TAy0 − yd
)=
= e TAy0 −MM−1(e TAy0 − yd
)= yd .
Para terminar comprobaremos que M es invertible. Para ello probaremos que es definida positiva. Porresultados conocidos ésto es equivalente a ver que si para todo α ∈ Rn tal que αTMα = 0 entoncesα = 0. Se tiene que
αTMα =∫ T
0αT e −sABBT e −sAT
α ds =∫ T
0ΨT (s)Ψ(s) ds =
∫ T
0‖Ψ(s)‖2
2 ds = 0 ,
donde ΨT (s) = αT e −sAB. Luego
Ψ(s) = ΨT (s) = 0 para todo s ∈ [0, T ] ,
y por tanto αT e −sAB = 0. Derivando k ∈ 0, . . . , n− 1 veces la expresión αT e −sAB = 0 respecto as y particularizando en s = 0 se obtiene el sistema
αTB = 0 ,αTAB = 0 ,
· · ·αTAn−1B = 0 ,
y como rg(K) = rg([B,AB, . . . , An−1B
])= n entonces ha de ser αT = α = 0, luego M es definida
positiva y por tanto invertible, lo que concluye la demostración.
Observación 3.2.2 El control definido en la demostración del Teorema de Kalman
u(t) = −BT e (T−t)ATM−1(e TAT
y0 − yd)
minimiza la integral ∫ T
0‖u(s)‖2
2 ds
entre todos los controles u ∈ U que llevan y0 a yd en tiempo T > 0 (véase por ejemplo [36]: Proposición1.1).
Observación 3.2.3 Cuando el sistema (3.2) cumple las condiciones del teorema de Kalman sueledecirse que el par (A,B) es controlable. Además el conjunto de pares controlables (A,B) es abierto y

52 CAPÍTULO 3. TEORÍA DE CONTROL
denso. Ésto significa que la mayoría de sistemas lineales son controlables. Además la propiedad de con-trolabilidad es robusta, ésto es, es invariante frente a pequeñas perturbaciones de A y/o B. Obsérveseque una elección estratégica de B, incluso si representa un único control (m = 1), puede permitir con-trolar un número arbitrariamente grande de componentes del sistema (n tan grande como queramos).
Observación 3.2.4 El grado de controlabilidad de un sistema como (3.2) está completamente determi-nado por el rango de su correspondiente matriz de Kalman K. Este rango indica cuántas componentesdel sistema son sensibles a la acción del control.
Observación 3.2.5 K ∈ Mn×nm y por tanto cuando sólo tenemos una variable de control a nuestradisposición (i.e M = 1) entonces K ∈Mn×n. Es en este caso cuando es más complicado que el rango deK sea igual a n. Ésto es coherente con nuestro sentido común pues el sistema deberia ser más fácilmentecontrolable conforme el número de variables de control que actúan sobre el mismo sea mayor.
Observación 3.2.6 Nuestro sistema es controlable en cierto instante de tiempo si y sólo si es con-trolable para cualquier tiempo. En cierto sentido, ésto significa que en (3.2) la información se propagatemporalmente de alguna forma, a velocidad infinita. Por supuesto, esta propiedad no es cierta engeneral en el contexto de ecuaciones en derivadas parciales.
3.2.2. Controlabilidad de sistemas no lineales de dimensión finita
Pasemos ahora a recordar los resultados más relevantes sobre controlabilidad de sistemas no lineales.En este campo las técnicas más utilizadas a la hora de estudiar la controlabilidad de un sistema sontanto la linealización del sistema considerado alrededor de un punto de equilibrio como la utilización detécnicas de Geometría Diferencial (en particular los “corchetes de Lie”).Consideremos el sistema no lineal:
dydt (t) = f(y(t),u(t)) , t > 0 ,y(0) = y0 ,
(3.3)
donde u(t) = (u1(t), . . . , um(t))T ∈ Rm representa el control aplicado sobre el sistema e y(t) =(y1(t), . . . , yn(t))T ∈ Rn denota el estado del sistema (n ≥ m ≥ 1). Aquí y0 es el estado incial delsistema y f : Rn×Rm → Rn la función no lineal que lo determina. Antes de enunciar los resultados másimportantes recordemos algunos conceptos relevantes de Ecuaciones Diferenciales y Teoría de Control:
Definición 3.2.6 Se dice que y∞ ∈ Rn es un “estado estacionario ó punto de equilibrio” de (3.3) siverifica
f(y∞,u∞) = 0
para algún u∞ ∈ Rm.
Definición 3.2.7 Sea Br(x) la bola de centro x y radio r en Rn. Se dice que el sistema (3.3) es“localmente controlable en y∗ ∈ Rn en un tiempo T ” si para todo ε > 0 existe δ ∈ (0, ε) tal que paracualesquiera y0,yd ∈ Bδ(y∗) existe un control u ∈ U verificando:
1. y(T ;u(T )) = yd ,
2. y(t;u(t)) ∈ Bε(y∗) para todo t ∈ [0, T ] .
Controlabilidad vía linealización
Definición 3.2.8 Sea f una función diferenciable en (y∗,u∗) ∈ Rn × Rm. Al sistema lineal:dydt = Ay(t) +Bu(t) , t > 0 ,y(0) = y0 ,

3.2. ALGUNOS RESULTADOS DE CONTROLABILIDAD 53
con
A = Dyf (y∗,u∗) =(∂fi
∂yj(y∗,u∗)
)i,j=1...n
y B = Duf (y∗,u∗) =(∂fi
∂uj(y∗,u∗)
)n,m
i,j=1
,
se le denomina “linealización de (3.3) en el punto (y∗,u∗)”.
Veamos un lema previo al resultado principal de controlabilidad vía linealización:
Lema 3.2.1 Sea y(· ;u) solución de (3.3) con y0 = 0 y supongamos que el sistema linealizado cumplela condición de Kalman. Entonces, para todo ε > 0 existe δ > 0 tal que para cualquier yd ∈ Bδ(0) existeun control u ∈ U tal que
1. y(T ;u(T )) = yd ,
2. y(t;u(t)) ∈ Bε(0) para todo t ∈ [0, T ] .
Demostración Sea (y∞,u∞) un punto de equilibrio de (3.3) (es fácil ver que podemos suponer sinpérdida de generalidad que y∞ = 0 y u∞ = 0) y sea y0 = 0. Consideremos la linealización de (3.3) entorno a dicho punto de equilibrio
dydt (t) = Ay(t) +Bu(t) , t > 0 ,y(0) = 0 ,
con:
A = Dyf (y∞,u∞) =(∂fi
∂yj(y∞,u∞)
)i,j=1...n
y B = Duf (y∞,u∞) =(∂fi
∂uj(y∞,u∞)
)n,m
i,j=1
.
Sabemos que este sistema linealizado verifica la condición de controlabilidad de Kalman, ésto es,rg(K) =
[B,AB, . . . , An−1B
]= n. Sean yd,i = ei estados deseados para todo i = 1, . . . , n (donde
ei representan los vectores de la base canónica). Como se verifica rg(K) = n, existen ui ∈ U parai = 1, . . . , n tales que
yd,i = y(T ;ui(T )) .
Denotemos por yi(·) = y(·;ui(·)) para cada i = 1, . . . , n , a las soluciones de los n problemas de controllineales:
dydt (t) = Ay(t) +Bu(t) , t > 0 ,y(0) = 0 ,y(T ) = yd,i = ei , i = 1, . . . , n ,
y dado γ = (γ1, . . . , γn) ∈ Rm arbitrario defino el control
u(t; γ) =n∑
i=1
γiui(t) .
Consideremos el sistema no lineal auxiliar dado pordydt = f(y(t),u(t; γ)) = F(y(t), γ) , t > 0 , x ∈ Rn ,
y(0) = 0 ,

54 CAPÍTULO 3. TEORÍA DE CONTROL
cuya solución representaremos por y(t; γ). Si γ = 0 entonces u = 0, y por tanto y(t; γ) = 0 para todot ∈ [0, T ], por lo que dy
dt = 0 para todo t. Consideremos D γ y(t; γ) ∈Mn×n. Entonces se verifica que
d
dt(D γ y(t; γ)) | γ=0 = D γ (
dydt
(t; γ)) | γ=0 = D γ f(y(t; γ),u(t; γ)) | γ=0 = AD γ y(t; γ) | γ=0 +BU(t) ,
donde U(t) = [u1(t), . . . ,un(t)] ∈Mm×n e Y (t) = D γ y(t; γ) | γ=0. Hemos probado pues que se verificala siguiente ecuación diferencial matricial:
dYdt = AY (t) +BU(t) , t > 0 ,Y (0) = 0 ,Y (T ) = Idn .
Luego, por la unicidad de soluciones ha de ser Y (t) = [y1(t), . . . ,yn(t)] ∈Mn×n. Como detY (T ) = 1 6= 0entonces por resultados conocidos para ecuaciones lineales det Y (t) 6= 0 para todo t ∈ [0, T ] y por tantoD γ y(t; γ) | γ=0 = D γ y(t;0) es no singular para todo t. Luego para t = 0 la matriz D γ F(~0,~0) es nosingular y además F(0,0) = 0. Por el teorema de la función implícita (véase por ejemplo [36]) existenBε(y0 = 0) y Bδ(γ = 0) tales que, para todo yd ∈ Bε(y0 = 0), existe γ∗ ∈ Bδ(γ = 0) (y tambiénu∗(·) = u(·; γ∗) un control contínuo) con
1. y(T ;u∗(T )) = yd ,
2. y(t;u∗(t)) ∈ Bε(0) para todo t ∈ [0, T ] .
lo que prueba el lema.
Teorema 3.2.3 (Controlabilidad vía linealización). Supomgamos que f es continuamente diferenciableen un entorno de un punto de equilibrio (y∞,u∞), y que por tanto
f (y∞,u∞) = 0 .
Entonces, si la linealización de (3.3) en torno a (y∞,u∞) es controlable, (3.3) es localmente controlableen el punto y∞ para cualquier T > 0.
Demostración Sea (y∞,u∞) un punto de equilibrio de (3.3). Podemos suponer sin pérdida de gene-ralidad que (y∞,u∞) = (0,0) pues basta hacer el cambio
Y(t) = y(t)− y∞ ,
U(t) = u(t)− u∞ ,
donde la trayectoria (y,u) es solución de (3.3). Veamos que (3.3) es localmente controlable en y∞ = 0.Sean ε > 0, T > 0. Por el lema anterior existe δ > 0 (consideramos y0,yd ∈ Bδ(0) arbitrarios) y u1(t)control tal que la solución y(· ;u1) de (3.3) verifica:
y(T2 ;u1(T
2 )) = 0 ,
y(T ;u1(T )) = yd ,
y(t;u1(t)) ∈ Bε(0) para todo t ∈[
T2 , T
].
Definimos ahoraz(t) = y(
T
2− t) .
entonces se verifica dzdt (t) = −dy
dt (t) = −f(y(t),u(t)) , t ∈[0, T
2
],
z(0) = y(T2 ) = 0 .
(3.4)
Aplicando otra vez el lema anterior a este nuevo sistema se obtiene que existe un control u2(t) tal quela solución z(· ;u2) de (3.4) verifica:

3.2. ALGUNOS RESULTADOS DE CONTROLABILIDAD 55
z(0;u2(0)) = y(T2 ;u2(T
2 )) = 0 ,
z(T2 ;u2(T
2 )) = y(0 ;u2(0)) = y0 ,
z(t;u2(t)) = y(t ;u2(t)) ∈ Bε(0) para todo t ∈[0, T
2
].
Por tanto, si definimos el control:
u(t) =
u1(t) , t ∈
[T2 , T
],
u2(t) , t ∈[0, T
2
],
entonces
y(0;u(0)) = y0 ,
y(T ;u(T )) = yd ,
y(t;u(t)) ∈ Bε(0) para todo t ∈ [0, T ] .
Consecuentemente (3.3) es localmente controlable en y∞ = 0.
El corolario siguiente es consecuencia del teorema anterior (la demostración puede consultarse en [36]):
Corolario 3.2.1 El sistema (3.2) es localmente controlable en y∗ ∈ Rn para cualquier T > 0 si y sólosi el par (A,B) es controlable y se verifica Ay∗ +Bu∗ = 0 para algún u∗ ∈ Rm.
Existen sistemas no lineales localmente controlables que no verifican la condición de Kalman (rg(K) =n) (véase p.e [36]). Para tratar dichos sistemas hemos de utilizar diversas técnicas de Geometría Dife-rencial basadas en los corchetes de Lie.
Controlabilidad vía corchetes de Lie
Una segunda técnica útil para analizar la controlabilidad de un sistema no lineal proviene de laGeometría Diferencial, y en particular utiliza los “corchetes de Lie” (Sophus Lie, 1842-1899). Comen-cemos por recordar algunas nociones de Geometría Diferencial y la definición de los corchetes de Lie yposteriormente pasaremos a enunciar los resultados más relevantes que aporta esta técnica:
Definición 3.2.9 Dado un conjunto abierto D ⊆ Rn, un campo de vectores de clase Ck sobre D es unaaplicación f : D → Rn cuyas coordenadas son k veces continuamente diferenciables en D.
Definición 3.2.10 Un subconjunto S ⊂ Rn se dice una superficie (ó variedad) de dimensión k (k ≤ n)si existe un subconjunto abierto V ⊂ Rk y un homeomorfismo q : V → S verificando:
q es sobre, o lo que es lo mismo q(V) = S ,
q es de clase C1 ,
la familia de vectores
∂q∂vi
(v)
i=1,...,kson linealmente independientes en Rk .
En este caso q recibe el nombre de parametrización de la superficie S y el subespacio vectorialspan
∂q∂v1
(v), . . . , ∂q∂vk
(v)
se denomina espacio tangente a la superficie S en el punto q(v), y se denotapor Tq(v) S.

56 CAPÍTULO 3. TEORÍA DE CONTROL
Definición 3.2.11 (corchetes de Lie). Sean f(x) = (f1(x), . . . , fn(x)) y g(x) = (g1(x), . . . , gn(x)) conx ∈ D campos de vectores de clase C1 definidos en un abierto D ⊆ Rn. El “corchete de Lie de f y g” esun campo de vectores denotado por [ f ,g ] que viene dado por:
[ f ,g ](x) = D x f(x)g(x)−D x g(x)f(x) , x ∈ D
donde la i-ésima coordenada del corchete de Lie viene dada por:
[ f ,g ] i (x) =n∑
k=1
(∂fi
∂xk(x)gk(x)− ∂gi
∂xk(x)fk(x)
), x ∈ D
Observación 3.2.7 De la definición de los corchetes de Lie se sigue que [ f ,g ](x) = −[ g, f ](x) paratodo x ∈ D, y en particular [ f , f ](x) = 0 para todo x ∈ D.
Pasaremos ahora a enunciar dos resultados de gran relevancia para nuestro estudio cuya demostración seomitirá (pueden consultarse dichas demostraciones en [36], págs 81-84: véase Proposición 1.1 y Teorema1.8):
Proposición 3.2.1 Si q : V ⊂ Rk → E es de clase C1 (con E espacio de Banach y V abierto) tal que:
Dv q (v∗) : Rk → E
es inyectiva, entonces existe un entorno W de v∗ tal que q |W es un homeomorfismo. Además, si E = Rk,entonces q(W) contiene una bola con centro en q (v∗) para cualquier W entorno de v∗.
Teorema 3.2.4 Sea q : V ⊂ Rk → S ⊂ Rn una parametrización de clase C2 de S y sean f ,g camposde clase C1 en un entorno de S. Si dado v ∈ V se verifica que f(q(v)),g(q(v)) ∈ Tq(v) S entonces
[ f ,g ](q(v)) ∈ Tq(v) S .
Ahora ya estamos en condiciones de enunciar y probar los resultados más relevantes relativos a con-trolabilidad vía los corchetes de Lie. Dado U ⊆ Rm y supondremos siempre las aplicaciones definidaspor
f (·,u) : Rn → Rn con u ∈ U ,
que caracterizan el sistema no lineal (3.3) son de clase Ck.
Definición 3.2.12 Se define el conjunto de campos de vectores en Rn dado por:
L0 = f (·,u) | u ∈ U ,
y para cada j = 1, 2, . . . definimos el conjunto Lj de campos de vectores en Rn que se obtienen a partirde campos de vectores de L0 por aplicación de los corchetes de Lie a lo sumo j veces, ésto es:
Lj = Lj−1 ∪ [ f ,g ](·) | f(·) ∈ Lj−1 , g(·) ∈ L0 ó f(·) ∈ L0 , g(·) ∈ Lj−1 .
Además, para cada y ∈ Rn y cada j ∈ 0, 1, 2, . . . definimos
Lj(y) = g(y) | g ∈ Lj ,
con dim Lj(y) el máximo número de vectores linealmente independientes de Lj(y).
Definición 3.2.13 Sean y0 ∈ Rn, T > 0 dados. Se define el “conjunto de alcanzabilidad desde y0 ∈ Rn
a tiempo T ” mediante:
A T (y0) = w ∈ Rn | ∃ u ∈ U con y(T ;u(T )) = w , y(0;u(0)) = y0 ,
donde y es solución de (3.3).

3.2. ALGUNOS RESULTADOS DE CONTROLABILIDAD 57
El teorema principal sobre controlabilidad vía corchetes de Lie puede enunciarse de la siguiente manera:
Teorema 3.2.5 (Controlabilidad vía corchetes de Lie). Supongamos que los campos de vectores de Rn
dados por f(·,u), u ∈ U , son de clase Ck para algún k ≥ 2 y que para algún y∗ ∈ Rn se verifica:
dim Lj(y∗) = n , (3.5)
para algún j ≤ k. Entonces el conjunto de alcanzabilidad desde y∗ por controles elementales, que man-tienen el sistema en un entorno D de y∗ dado, tiene interior no vacío.
Demostración Como hemos supuesto que los campos f(·,u), u ∈ U , son de clase Ck para algún k ≥ 2entonces podemos asumir que la condición (3.5) se satisface para todo y∗ ∈ D. Sean u1, . . . ,ul ∈ Uarbitrarios y u∗ ∈ U fijo. Para v1, . . . , vl > 0 definimos el control
u(t) =
u1 , t ∈ [0, v1) ,ur , t ∈ [v1 + . . .+ vr−1, v1 + . . .+ vr) , r = 2, . . . , l ,u∗ , t ∈ [v1 + . . .+ vl,+∞) .
Sea además para y∗ ∈ D
q (v1, . . . , vl) = y (v1 + . . .+ vl, y∗ ;u) := y u (v1 + . . .+ vl, y∗) ,
donde y u (t,y∗) repesenta la solución de (3.3) con y(0) = y∗. Nótese que se verifica
q (v1, . . . , vl) = z ul (vl, z ul−1 (vl−1, z ul−2 (. . . , z ul (v1, y∗) . . .))) (3.6)
siendo z u (t,x) la solución de (3.3) con z(0) = x. Sea l ≤ n el mayor número natural para el cualexisten parámetros de control u1, . . . ,ul ∈ U y números positivos α1 < β1, . . . , αl < βl tales que (3.6)define una representación paramétrica
V =
(v1, . . . , vl) ∈ Rl | αi < vi < βi para i = 1, 2, . . . , l,
de una superficie de clase Ck contenida en D. Para ello probaremos primero que l ≥ 1. Nótese que hade existir u1 ∈ U tal que f(y∗,u1) 6= 0, pues si fuera f(y∗,u) para todo u ∈ U , entonces la definición delos corchetes de Lie implicaría que g(y∗) = 0 para cualquier g ∈ Lj con j = 1, 2, . . ., lo que contradicela hipótesis de que dim Lj(y∗) = n. Por la Proposición 3.2.1, para α1 > 0 pequeño la función
z u1 (·,y∗) : (0, α1) → Rn ,
es una representación paramétrica de una superficie unidimensional contenida en D. Asumiremos quel < n y sea S la superficie definida por (3.6). Existen ~v ′ , ~u ′ ∈ V × U tales que
f(q (v′),u
′) /∈ Tq (v ′ ) S ,
(basta usar el Teorema 3.2.4 y que dim Lj(q(v)) = n > l para cualquier v ∈ V). Como la funciónf(·,u ′
) es continua, existe δ > 0 tal que si vj ∈ (α′j − δ, α
′j + δ) para j = 1, . . . , l (con v = (v1, . . . , vl))
entoncesf(q (v),u
′) /∈ Tq (v) S .
Se sigue de la Proposición 3.2.1 que para algunos valores positivos αl+1 < βl+1 la transformación
q′(v1, . . . , vl, vl+1) = z u
′(vl+1,q(v1, . . . , vl))
convj ∈ (α
′j − δ, α
′j + δ) , j = 1, . . . , l , αl+1 < vl+1 < βl+1 ,

58 CAPÍTULO 3. TEORÍA DE CONTROL
es una representación paramétrica de una superficie (l+1)-dimensional incluida en D. Por dependenciacontinua de las soluciones de una ecuación diferencial respecto de las condiciones iniciales (véase p.e[36]) la transformación q
′ presenta la misma regularidad que q, y consecuentemente la misma que lade f(·,u), ésto es, de clase Ck. Ésto contradice la definición del número l, luego l = n. Para terminar,aplicando la Proposición 3.2.1 deducimos que la imágen q(v) tiene interior no vacío y ésto concluye lademostración.
Observación 3.2.8 Si escogemos f(y,u) = Ay +Bu entonces:
[f(·,u), f(·,v)] = AB(v − u)
y aplicando el corchete de Lie hasta n− 1 veces obtenemos que para y ∈ Rn se tiene
L0(y) = Ay +Bu | u ∈ Rm ,
Lk(y) = L0(y) ∪AjBuj | u ∈ Rm , j = 1, . . . , k
, k = 1, . . . , n− 1 .
Por tanto, se tiene que:
dim Ln−1(0) = rg([B,AB, . . . , An−1B
])= n ⇔ el par (A,B) es controlable.
Además:(A,B) es controlable ⇔ dim Ln−1(y) = n para todo y ∈ Rn .
Observación 3.2.9 En general la condición (3.5) no implica controlabilidad local. Pero sí bajo hipótesisadicionales:
Definición 3.2.14 Se dice que el sistema (3.3) con U ⊂ Rm es simétrico si para cualquier u ∈ U existeu′ ∈ U tal que:
f(y,u) = −f(y,u′) para todo y ∈ Rn.
Se verifica el siguiente resultado cuya demostración omitiremos (puede consultarse [36], pág 87, Teorema1.10):
Teorema 3.2.6 Si el sistema (3.3) es simétrico y estamos en las condiciones del Teorema 3.2.5 entoncesel sistema (3.3) es localmente controlable en y∗.
3.3. Controlabilidad en modelos de Balance de Energía: Obstrucción
En el Capítulo 1 vimos como el problema de von Neumann puede reformularse como un problemade la Teoría de Control. Las similitudes entre dicho problema y el tratado en este trabajo son muchas.Mientras que en el problema de von Neumann se actúa sobre el modelo modificando el coalbedo de unaregión, en nuestro problema se estudia la posibilidad de influir en el clima mediante el uso de controlesartificiales sobre la emisitividad del modelo (que tiene en cuenta la emisión de gases de efecto invernaderoa la atmósfera) tal y como se trata conseguir en la actualidad con los protocolos internacionales sobreemisión de gases de efecto invernadero.
El objetivo de esta sección se centra en presentar los resultados más relevantes relacionados con lacontrolabilidad de modelos climáticos de balance de energía, modelizando la posible interacción de lasociedad humana con el clima. Estamos pues interesados en saber si es posible actuar sobre el sistemaclimático de tal forma que se comporte como deseemos y ser capaces de alcanzar una distribución deseadade temperaturas sobre la superficie terrestre yd a partir de una distribución inicial de temperaturas y0
en un periodo de tiempo T > 0.

3.3. CONTROLABILIDAD EN MODELOS DE BALANCE DE ENERGÍA: OBSTRUCCIÓN 59
Matemáticamente, consideraremos ω una subvariedad abierta de M que representa la región sobrela que se realizará el control, y0 : M → R una distribución inicial de temperaturas, yd : M → Rla temperatura deseada y T > 0 el periodo de tiempo utilizado para alcanzar yd desde y0. Queremosencontrar pues un control:
u : (0, T )× ω → R
tal que y(T, · ;u) = yd(·), donde la función y(·;u) es solución del problema (1.9) con p = 2 y tomandof(t, x) como f(t, x) + uχω. Se tiene pues el problema de control:
∂y∂t −∆My + g(y) ∈ QS(x)β(y) + f(t, x) + uχω , en (0, T )×M ,
y(0, x) = y0(x) , en M ,(3.7)
donde χω es la función característica de la región ω. Si podemos encontrar un control u verificandoy(T, · ;u) = yd(·) con y solución de (3.7) diremos que nuestro problema es controlable. Sin embargo,el carácter parabólico de la ecuación (3.7) conlleva ciertos efectos regularizantes que hacen imposibleencontrar el control u excepto para una clase determinada de estados deseados yd. Ha de considerarsepues una versión relajada de controlabilidad que recibe el nombre de controlabilidad aproximada:
Definición 3.3.1 Sea yd ∈ L2(M). Se dice que (3.7) es “aproximadamente controlable” si para todoε > 0 existe uε ∈ L2((0, T )× ω) tal que:
‖y(T, · ;uε)− yd(·)‖L2(M) ≤ ε .
Observación 3.3.1 Esta definición puede plantearse sobre espacios funcionales Lp(M) con 1 ≤ p ≤ ∞.
La naturaleza de nuestro dominio espacial M aporta algunas dificultades adicionales. Una formulaciónmás sencilla que conserva dichas dificultades corresponde al problema obtenido al sustituir M por unabierto acotado Ω de R2. Conviene entonces tomar una condición de contorno de tipo Neumann sobre(0, T ) × ∂Ω, pues en este caso las funciones test asociadas a la formulación débil son similares a lascorrespondientes al caso en el que se considera M. Supondremos además que f ≡ 0. Así, la nuevaformulación de (3.7) es
∂y∂t −∆y + g(y) ∈ QS(x)β(y) + uχω , en (0, T )× Ω ,
∂y∂~n = 0 , en (0, T )× ∂Ω ,
y(0, ·) = y0(·) , en Ω ,
(3.8)
donde ~n representa el vector normal unitario exterior a ∂Ω.Dado pues ω abierto acotado de Ω y dados y0, yd : Ω → R y ε > 0 nuestro problema de controlabilidad
aproximada consiste en hallar uε : (0, T ) × ω → R tal que d(y(T, · ;uε), yd) ≤ ε, donde d representa ladistancia en un espacio funcional normado (usualmente L2(M)) con y(T, · ;uε) la solución del problema:
∂y∂t −∆y + g(y) ∈ QS(x)β(y) + uεχω , en (0, T )× Ω ,
∂y∂~n = 0 , en (0, T )× ∂Ω ,
y(0, ·) = y0(·) , en Ω .
Resulta sorprendente (véase [13]) que la controlabilidad aproximada de (3.8) dependa de manera esencialdel comportamiento asintótico de los términos no lineales y no de su regularidad. Podemos destacar lossiguientes resultados:
Teorema 3.3.1 Supongamos que y0, yd ∈ L2(Ω), β es un grafo maximal monótono acotado y g es unafunción no decreciente tal que:
|g(s)| ≤ C1 + C2 |s| , ∀s ∈ R con |s| > M ( g es sublineal )

60 CAPÍTULO 3. TEORÍA DE CONTROL
para algunas constantes C1, C2,M ≥ 0. Entonces el problema (3.8) es aproximadamente controlable enL2(Ω), ésto es, existe uε ∈ L2((0, T )× Ω) con:
‖y(T, · ;uε)− yd(·)‖L2(Ω) ≤ ε .
Observación 3.3.2 El teorema anterior puede extenderse fácilmente al caso en el cual se reemplazaL2(M) por Lp(M), con 1 ≤ p <∞ o por C(Ω).
La idea clave para probar el teorema anterior es utilizar el teorema del punto fijo de Kakutani similaral trabajo publicado por Fabré, Puel y Zuazua en [18].
Corolario 3.3.1 Si tomamos g(y) = Ay (como en el modelo de Budyko al considerar la ley de enfria-miento de Newton) el problema (3.8) es aproximablemente controlable.
Sin embargo, en el modelo de Sellers g(y) = σy4, y por tanto no se verifica la condición de sublinealidadde g. Esto implica en particular que el problema (3.8) no es aproximablemente controlable. De hecho,puede probarse (véase [13]) que si asumimos la hipótesis sobre g:
g(y) = λ |y|p−1 y , y ∈ R , λ > 0 , p > 1 (3.9)
entonces aparece un fenómeno de obstrucción (para el modelo de Sellers p = 4). Se tiene el resultado:
Teorema 3.3.2 Sea β un grafo maximal monótono acotado y supongamos que g verifica (3.9). Si ∂ωverifica la condición de la esfera tangente exterior e interior (con ω ⊂ Ω abierto acotado) entonces dadoy0 ∈ L∞(Ω) existe una función Y∞ ∈ C([0, T ] × (Ω − ω)) tal que para todo u ∈ L2((0, T ) × ω) y todasolución y(t, x;u) de (3.8) se verifica:
|y(t, x : u)| ≤ Y∞(t, x) , ∀(t, x) ∈ (0, T ]× (Ω− ω) . (3.10)
Observación 3.3.3 La función de obstrucción Y∞ se construye en [13] verificandoY∞(t, x) = +∞ , ∀(t, x) ∈ (0, T )× ∂ω ,∂Y∞∂~n (t, x) = 0 , ∀(t, x) ∈ (0, T )× ∂Ω .
Como consecuencia inmediata del teorema anterior se tiene que si g verifica (3.9) entonces (3.8) no esaproximadamente controlable (en particular para el modelo de Sellers) pues tomando yd ∈ L2(Ω) talque
|yd(x)| > Y∞(T, x) , ∀x ∈ D ,
donde D ⊂ Ω − ω es un subconjunto de medida positiva, se tiene que para cualquier control u ∈L2((0, T )× ω) se verifica
‖y(T, · ;u)− yd‖L2(Ω) ≥ ‖Y∞(T, ·)− yd‖L2(Ω) ,
y por tanto, si ε > 0 es tan pequeño como queramos es imposible encontrar u verificando las propiedadesrequeridas.
Debido a la relevancia del modelo de Sellers surge de forma natural la cuestión siguiente: ¿Resultaráser (3.8) aproximadamente controlable en una clase más pequeña de estados deseados yd? La respuestaa esta pregunta es afirmativa y puede consultarse con completo detalle en [11]. Nosotros nos limitaremosa destacar los resultados más relevantes relativos a esta controlabilidad aproximada restringida. Paraexplicitar los resultados es cómodo simplificar (3.8) limitándonos al problema:
∂y∂t −∆y + λ |y|p−2 y = uχω , en (0, T )× Ω ,
∂y∂~n = 0 , en (0, T )× ∂Ω ,
y(0, ·) = y0(·) , en Ω .
(3.11)

3.3. CONTROLABILIDAD EN MODELOS DE BALANCE DE ENERGÍA: OBSTRUCCIÓN 61
La extensión de los resultdos aquí descritos al problema (3.8) asumiendo (3.9) puede adaptarse de [13].El punto de partida de estos resultados consiste en mejorar la estimación (3.10). Para ello convieneintroducir las funciones de obstrucción mejoradas Y∞, Y ∞ ∈ C((0, T ]× (Ω− ω)) que verifican:
Teorema 3.3.3 Dado y0 ∈ L1(Ω) existen Y∞, Y ∞ ∈ C((0, T ] × (Ω − ω)) tal que Y ∞ (resp. Y∞) esuna solución débil de:
∂Y∂t −∆Y + λ |Y |p−2 Y = 0 , en (0, T )× (Ω− ω) ,Y = −∞ (resp. Y = +∞) , en (0, T )× ∂ω ,∂Y∂~n = 0 , en (0, T )× ∂Ω ,
y(0, ·) = y0(·) , en Ω .
El resultado clave que resuelve el problema de controlabilidad aproximada restringida planteado puedeenunciarse así:
Teorema 3.3.4 Supongamos y0 ∈ C(Ω) y considérese yd ∈ C(Ω) tal que:
Y ∞(T, x) < yd(x) < Y∞(T, x) , ∀x ∈ Ω− ω .
Entonces, para todo ε > 0 existe un control uε ∈ C([0, T ] × ω) tal que si y(T, · ;uε) es la solución de(3.11) se verifica
‖y(T, · ;uε)− yd‖C(Ω) ≤ ε , (3.12)
y por tanto el problema (3.11) es aproximadamente controlable en la clase funcional C(Ω).
El teorema anterior puede verse como una consecuencia del resultado general siguiente (cuya demostra-ción puede consultarse en [11]):
Teorema 3.3.5 Supongamos y0 ∈ C(Ω) y sea ε > 0 fijo. Dado yd ∈ C(Ω) tal que:
Y ∞(T, x)− ε < yd(x) < Y∞(T, x) + ε , ∀x ∈ Ω− ω , (3.13)
existe uε ∈ C([0, T ]× ω) verificando (3.12).
Observación 3.3.4 La hipótesis (3.13) es óptima. En efecto, pues supongamos que existe uε verificando(3.12). Por el principio de comparación
Y ∞(t, x) < y(t, x;uε) < Y∞(t, x) , ∀(t, x) ∈ [0, T ]× (Ω− ω)
y por tanto
Y ∞(T, x)− ε < y(T, x;uε)− ε ≤ yd(x) ≤ y(T, x;uε) + ε < Y∞(T, x) + ε , ∀x ∈ Ω− ω .
Haciendo ε→ 0 se obtiene el resultado de optimalidad buscado:
Y ∞(T, x) < yd(x) < Y∞(T, x) , ∀x ∈ Ω− ω .
Observación 3.3.6 La controlabilidad del problema en el modelo de Budyko y su condición deaproximadamente controlable (fenómeno de obstrucción) en el modelo de Sellers es debida en granparte a que el modelos de Budyko pueden verse como una linealización del modelos de Sellers en tornoa la temperatura media de la superficie terrestre.Observación 3.3.6 Puede hacerse un análisis similar del problema de controlabilidad en el caso
∂y∂t −∆y + g(y) ∈ uχωQS(x)β(y) + f(t, x) , en (0, T )× Ω ,
∂y∂~n = 0 , en (0, T )× ∂Ω ,
y(0, ·) = y0(·) , en Ω ,

62 CAPÍTULO 3. TEORÍA DE CONTROL
donde
uχω(x) =
u , si x ∈ ω1 , si x /∈ ω
.
Se obtienen los mismos resultados de obstrucción en el modelo de Sellers y podemos asegurar la con-trolabilidad en el modelo de Budyko.
3.4. Nuevos resultados para el modelo de clima discretizado
Nuestro objetivo en esta sección se centrará en estudiar el problema de transferir el sistema
(PQ)u.v
·y(t) +ANy(t) = Ra(y(t), v(t))−Re(y(t), u(t)) , t > 0 ,y(0) = y0 ,
presentado en el Capítulo 2 (paraN = 3,m = 1) desde un estado estacionario a otro cualquiera medianteuna elección adecuada de las variables de control u y v. Para ello, sea Q = Q0 fijo y consideraremos elcaso de un único control v(t) (luego u(t) ≡ 1). Supondremos además que ambas soluciones estacionariaspertenecen a la misma componente conexa (la rama C+). Entonces:
Teorema 3.4.1 Sea u(t) ≡ 1 y supongamos que los controles u(t) y v(t) actúan globalmente en elespacio, ésto es, (l1, l2) = (−1, 1). Sea además (vfQ0,yf ) un estado estacionario estable de (PQ0)
1,v.Entonces
1. Para cualquier otro estado estacionario (v0Q0,y0) existe un instante de tiempo T > 0 y un controlcontínuo a trozos v ∈ L∞(0, T ) con v(0) = v0 y v(T ) = vf tal que la solución y(t) de (PQ0)
1,v
con dato inicial y(0) = y0 verifica y(T ) = yf .
2. En el caso de que v(t) esté localizado en (l1, l2) ⊂ (−1, 1) se obtiene el mismo resultado simpre ycuando (v0Q0,y0) y (vfQ0,yf ) estén suficientemente próximos.
DemostraciónDados u(t) y v(t) que actúan globalmente en (−1, 1) con u(t) ≡ 1 considérese el problema estacionarioasociado a (PQ0)
1,v que viene descrito por
(P∞Q0)1,v
k(y2 − y1) +Q0S(−1)β(y1)− g(y1) + f(−1) = 0k(y3 − 2y2 + y1) + vQ0S(0)β(y2)− g(y2) + f(0) = 0k(y2 − y3) +Q0S(1)β(y3)− g(y3) + f(1) = 0
,
donde v ∈ R. Sean (v0Q0,y0), (vfQ0,yf ) ∈ C+ dos soluciones de (P∞Q0)1,v y supongamos que (vfQ0,yf )
es estable.
1. Dividiremos la demostración en dos pasos:
Paso 1 Conectaremos (v0Q0,y0) con (vfQ0,yf ) a lo largo de la rama de soluciones estacionarias C+.Para ello, construyamos un camino C1 parametrizado por (Q(τ) = v(τ)Q0,y∗(τ)) donde
Q(τ) = (1− τ)v0Q0 + τvfQ0 = v(τ)Q0 , τ ∈ [0, 1] ,
y∗(τ) es solución de (P∞Q0)1,v(τ) , τ ∈ [0, 1] .
Claramente, esta órbita no tiene por qué ser una solución de (PQ0)1,v(τ) pero, dado ε > 0 suficientemente
pequeño podemos construir la función [0, 1/ε] → R× R3 dada por
(Qε(t),yε(t)) = (Q(εt),y∗(εt))

3.4. NUEVOS RESULTADOS PARA EL MODELO DE CLIMA DISCRETIZADO 63
que es “casi” una solución de (PQ0)1,v(εt) pues∥∥∥∥ ·
yε(t) = f(yε(t), 1, v(εt), Q0)∥∥∥∥ = O(ε).
Además, como (vfQ0,yf ) es estable podemos asumir que yε(Tε) (con Tε = 1/ε) está próximo a yf .
Paso 2 Conectaremos ahora yε(Tε) con yf mediante un control v(t) definido en [Tε, T ] para algúnT > Tε. Ésto puede conseguirse utilizando las técnicas de controlabilidad descritas en este Capítulo.Consideremos para ello el problema (PQ0)
1,v y supondremos además que sin pérdida de generalidadf ≡ 0. Supongamos que la distribución de temperaturas es simétrica respecto del ecuador, ésto es,y1 = y3 entonces obtenemos los resultados siguientes:
(P )·y(t) =
(k(y2 − y1) + v(t)Ra(y1)− g(y1)2k(y1 − y2) + v(t)Ra(y2)− g(y2)
)donde Ra(yi) = Q0S(xi)β(yi) para todo i = 1, 2. Linealizando (P ) en torno a (vfQ0,yf ) donde yf =(y1
f , y2f ) T obtenemos
·y(t) = Cy(t) +Bv(t) ,
con
C = ∇yf(yf , 1, vf , Q0) =(−k + avf − d k
2k −2k + bvf − e
)y
B = ∇vf(yf , 1, vf , Q0) =(a
b
)donde
a = R′a(y
1f ) , b = R
′a(y
2f ) , d = g
′(y1
f ) ,e = g
′(y2
f ) , a = Ra(y1f ) , b = Ra(y2
f ) .
y para que se cumpla la condición de Kalman (el sistema (P ) es localmente controlable en (yfQ0,yf ))
rg [B,CB] = 2 ⇔ det( [B,CB] ) 6= 0
luegoab(vf (b− a) + (d− e)) + (a− b)k(2a+ b) 6= 0
Como la matriz de controlabilidad de Kalman tiene rango máximo, tenemos que nuestro problema (P )es localmente controlable en (yfQ0,yf ), existiendo así un T > Tε y un control v(t) definido en [Tε, T ]tal que conecta yε(Tε) con yf concluyendo la demostración.
2. Linealizando (P ) en torno a (v0Q0,y0) donde y0 = (y10, y
20)
T obtenemos
·y(t) = Cy(t) +Bv(t) ,
con
C = ∇yf(y0, 1, v0, Q0) =(−k + a− d k
2k −2k + bv0 − e
)y
B = ∇vf(y0, 1, v0, Q0) =(
0a
)y para que se cumpla la condición de Kalman
rg [B,CB] = 2 ⇔ det( [B,CB] ) 6= 0 ⇔ ka2 6= 0

64 CAPÍTULO 3. TEORÍA DE CONTROL
ha de sera = Ra(y2
f ) 6= 0
condición que se cumple pues la energía absorbida en el ecuador es no nula.
Observación 3.4.1 El caso en el que v(t) ≡ 1 y el único control es u(t) sigue los mismos argumentos.
Observación 3.4.2 Resulta de gran interés el hecho de que, considerando el sistema de tres ecuacionespara (PQ0)
1,v, la condición necesaria y suficiente que ha de cumplirse para que se verifique la condiciónde Kalman para el sistema linealizado permite ver que existen otras soluciones (no necesariamentesimétricas) para las cuales la condición de Kalman falla.
Concluiremos esta sección considerando el caso degenerado A = AD. Tal y como vimos en el Capítulo 2,la primera y tercera ecuaciones de (PQ0)
1,v están pues desacopladas y por tanto el problema (y ningunade sus linealizaciones) es localmente controlable. Sin embargo, podemos establecer un nuevo resultadoconsiderando una nueva noción de controlabilidad dada en términos del conjunto de alcanzabilidad:
Teorema 3.4.2 Sean A = AD y u(t) ≡ 1 y supongamos que los controles u(t) y v(t) actúan globalmente,ésto es, (l1, l2) = (−1, 1). Sea además (vfQ0,yf ) ∈ C+ un estado estacionario estable de (PQ0)
1,v.Entonces:
1. Para cualquier otra solución estacionaria (v0Q0,y0) ∈ C+ y para cualquier ε > 0 existe un instantede tiempo Tε > 0 y un control contínuo a trozos v ∈ L∞(0, Tε) con v(0) = v0 y v(Tε) = vf tal quela solución y(t) del problema (PQ0)
1,v con dato inicial y0 verifica
‖y(Tε)− yf‖ ≤ ε .
2. En el caso de que v(t) esté localizado en (l1, l2) ⊂ (−1, 1) obtenemos la mima conclusión cuando(v0Q0,y0) y (vfQ0,yf ) están suficientemente próximos.
Demostración Es suficiente aplicar los argumentos utilizados para el terema anterior reemplazandola condición de controlabilidad local para (PQ0) por el hecho de que el conjunto de alcanzabilidad esabierto pues la condición de los corchetes de Lie se satisface.

Bibliografía
[1] H. Amann. Fixed point equations and nonlinear eigenvalue problems in ordered Banach spaces,SIAM Review, 18, No. 4 (1976), 620-709.
[2] D. Arcoya, J.I. Díaz, L. Tello. S-shaped bifurcation branch in a quasilinear multivalued modelarising in Climatology, Journal of Differential Equations, 150, (1998), 215-225.
[3] S. Arrhenius. On the influence of carbonic acid in the air upon the temperature in the ground, enPhilisoph. Mag, 41, 1896, págs. 237-275.
[4] R. Bermejo, J. Carpio, J.I. Díaz, L. Tello. Mathematical and Numerical Analysis of a NonlinearDiffusive Climate Energy Balance Model, enviada su publicación.
[5] H. Brezis, Operateurs maximaux monotones et semigroupes de contractions dans les espaces deHilbert, North-Holland, Amsterdam, 1973.
[6] M.I. Budyko. The effects of solar radiation variations on the climate of the Earth, en Tellus, 21,1969, págs. 611-619.
[7] J.M. Coron. Linearisez control systems and applications to smooth stabilization, SIAM J. Controland Optim., 32, 1994, págs. 358-386.
[8] J.M. Coron and E. Trélat. Global steady-state controllability of 1-D semilinear heat equations,SIAM J. Control Optim. 43 (2004), no. 2, 549–569.
[9] A.S. Dennis. Weather Modifications by Cloud Seeding, Academic Press, 1980.
[10] J.I. Díaz. Nonlinear Partial Differential Equations and Free Boundaries, Pitman, Londres, 1985.
[11] J.I. Díaz. Controllability and obstruction for some non linear parabolic problems in Climatology,en Modelado de Sistemas en Oceanografía, Climatología y Ciencias Medio-Ambientales, C. Paresy A. Valle (eds.), Universidad de Málaga, 1994, págs. 43-58.
[12] J.I. Díaz. Mathematical analysis of some diffusive energy balance climate models, en Mathematics,Climate and Environment, (J.I. Díaz and J.L. Lions, eds.) Masson, Paris, (1993), 28-56.
[13] J.I. Díaz. On the controllability of some simple climate models, en Environment, Economics andtheir Mathematical Models, J.I. Díaz, J.L. Lions (eds.), Masson, (1994), 29-44.
[14] J.I. Díaz, J. Hernández, L. Tello. On the multiplicity of equilibrium solutions to a nonlineardiffusion equation on a manifold arising in Climatology, J. Math. An. Appl., 216, (1997), 593-613.
[15] J.I. Díaz, L. Tello. Infinitely many stationary solutions for a simple climate model via a shootingmethod, Mathematical Methods in the Applied Sciences, 25, 327-334, 2002
65

66 BIBLIOGRAFÍA
[16] J.I. Díaz, L. Tello. “A nonlinear parabolic problem on a Riemannian manifold without boundaryarising in Climatology”, Collect. Math., 50, (1999), 19-51.
[17] J.I. Díaz. On the von Neumann problem and the approximate controllability of Stackelberg-Nashstrategies for some environmental problems, Rev. R. Acad. Cien.Serie A Matem, 96, n o 3, 2002,343-356.
[18] C. Fabré, J.P. Puel y E. Zuazua. Approximate controllability for semilinear heat equation. Proc.Royal Soc. Edinbourgh, 125A, 1995, págs. 31-61.
[19] G. Hetzer. The structure of the principal component for semilinear diffusion equations from energybalance climate models, Houston Journal of Math. 16, (1990), 203-216.
[20] G. Hetzer. S-shapedness for Energy Balance Climate Models of Sellers-Type, en The Mathematicsof Models for Climatology and Environment, NATO ASI Series, Springer Verlag, 1997, págs. 253-288.
[21] W. Hirsch, Smale, L. Devaney. Differential Equations, Dynamical Systems and an introduction toChaos. Elsevier Academic Press, San Diego, 2004.
[22] A. Isidori. Nonlinear Control Systems: An Introduction, Lectures Notes in Control and InformationSciences, Springer-Verlag, Berlin, 1985.
[23] H.K. Khalil, Nonlinear Systems, Macmillan Publishing Company, New York, 1992.
[24] J.T. Kiehl. Atmospheric general circulation modeling, en Climate System Modeling, K.E. Tren-berth, Cambridge University Press, 1992, págs. 319-370.
[25] G.R. North. Introduction to simple climate modeling, en Mathematics, Climate and Environment,J.I. Díaz y J.L. Lions (eds.), Masson, Paris, 1993, págs. 139-159.
[26] C.V. Pao. Nonlinear Parabolic and Elliptic Equations, Plenum, New York, 1992.
[27] P.H. Rabinowitz. A Global Theorem for Nonlinear Eigenvalue Problems and Applications, enContributions to Nonlinear Functional Analisis, (E.H. Zarantonello ed.) Academic Press, NewYork, (1971), 11-36.
[28] D.H. Sattinger. Topics in stability and bifurcation theory. Springer, Berlin, 1973.
[29] W.D. Sellers. A global climatic model based on the balance of the earth-atmosphere system, enJ. Appl. Meteorol, 8, 1969, págs. 392-400.
[30] D. Sontag. Mathematical control theory: deterministic finite dimensional systems. Texts in appliedmathematics: Springer, New York, 1998.
[31] D. Sontag. Finite dimensional open-loop control generator for nonlinear systems, Int. J. Control,47, 1988, 537-556.
[32] P.H. Stone. A simplified radiative-dynamical model for the static stability of rotating atmospheres,en J. Atmos. Sci, 29, 1972, págs. 405-418.
[33] L. Tello, Tratamiento matemático de algunos modelos no lineales en Climatología, Tesis Doctoral,Universidad Complutense de Madrid, 1996.
[34] J. von Neumann. Can we survive Technology?, Nature, 1955. (Also in Collected Works. Vol VI,Pergamon, 1966.)

BIBLIOGRAFÍA 67
[35] K. Yosida, Functional analysis, Publicac. Berlin, Springer 6a. ed, 1980.
[36] Zabczyk. Mathematical control theory: an introduction. Birkhäuser, Boston, 1995
Copyright © 2022 FDOKUMEN




















