
Software de identificación de sistemas y ajuste óptimo de controladores PID
13
Grupo de Estudio de Sistemas de Control Universidad Tecnológica Nacional Facultad Regional San Nicolás Software de identificación de sistemas y ajuste óptimo de controladores PID Matías L. Silvestrini Mayo del 2004
-
Upload
independent -
Category
Documents
-
view
1 -
download
0
Transcript of Software de identificación de sistemas y ajuste óptimo de controladores PID

Grupo de Estudio de Sistemas de Control
Universidad Tecnológica Nacional
Facultad Regional San Nicolás
Software de identificación de sistemas y
ajuste óptimo de controladores PID
Matías L. Silvestrini
Mayo del 2004

Grupo de Estudio de Sistemas de Control
Universidad Tecnológica Nacional
Facultad Regional San Nicolás
Titulo del documento
Software de identificación de sistemas y ajuste óptimo de controladores PID
Autores
Matías L. Silvestrini
Resumen
Se describe la realización de una herramienta de software para resolver las tareas de identificar
sistemas lineales invariantes en el tiempo (LTI) de una entrada y una salida (SISO) a partir de
registros de entradas y salidas de los mismos y de diseñar controladores PID mediante la
optimización criterios que involucran integrales de funciones del error.
Fecha de publicación
Mayo del 2004

1 Introducción La identificación de sistemas se presenta como una herramienta útil a la hora de tratar con sistemas
cuya dinámica es difícil de modelar a partir de leyes físicas o cuando se pretende trabajar con
métodos de control basados en modelo matemático (MPC, LQG, Control Robusto, etc).Sus
aplicaciones abarcan áreas tan diversas como: Sistemas de Control , Biología y Biotecnología,
Ciencias del Medio Ambiente, Economía, etc.
El control automático de sistemas requiere del adecuado ajuste del controlador que ejecuta esta
tarea. El diseño de controladores abarca este problema que puede resolverse empíricamente,
mediante tablas, etc. Este procedimiento puede a veces ser tedioso y difícil de realizar,
encontrándose soluciones que no son las mejores. Aquí se propone ajustar los parámetros del
controlador para optimizar un criterio que defina su bondad buscando automatizar y simplificar esta
tarea.
El trabajo consta de las siguiente etapas:
Identificación de sistemas
Criterios de diseño de controladores
Resultados
Conclusiones
Futuros trabajos
2 Identificación Identificar un sistema consiste en obtener un modelo a partir de registros de entrada y salida del
mismo. La identificación de un sistema se compone de las siguientes etapas(1):
• Registro de datos
• Selección de la estructura del modelo
• Estimación de los parámetros
• Validación
Se formularon dos enfoques de identificación, el primero mediante un algoritmo de búsqueda
directa empleando un modelo de tiempo continuo y el segundo mediante un algoritmo de mínimos
cuadrados utilizando modelos expresados
en tiempo discreto.
2.1 Identificación de sistemas mediante algoritmos de optimización de búsqueda directa
Como se vio en el punto anterior para la identificación es necesario seleccionar una estructura para
el modelo del sistema. Las estructuras propuestas fueron las siguientes
Primer
Orden 1s . B
e .A s -td.
Primer
Orden +
Integrador ) 1s . B ( . s
eA s -td.
Segundo
Orden 1s . Cs . B
e .A 2
s . -td
Segundo
Orden + Cero 1s . Ds . C
e . B)(A.S2
s . -td

Con ellas se pretende disponer de las estructuras más comunes para la representación de procesos
reales utilizados en control.
Siguiendo los pasos del proceso de identificación se planteo un criterio a fin de realizar la posterior
estimación de los parámetros. El criterio elegido fue el error medio cuadrático definido como (1)
N
i
iN
EMC1
2
)(.1
donde N es él numero de muestras disponibles en los registros y el error e es expresado como
)()(^
iyiy
siendo
modelo del salida:)(
sistema del salida :)(
^
iy
iy
Habiendo definido el criterio se selecciono un método que halle los valores de los parámetros que lo
minimizan, este proceso es conocido como optimización.
2.1.1 Algoritmo de optimización La optimización se empleara como forma de resolver la estimación de los parámetros para la
identificación de sistemas y más adelante como herramienta en el diseño de controladores.
Cualquier problema de optimización bien formulado consta de las siguientes tres
características(2)
:
Una función de criterio J() que expresa el objetivo
Los parámetros que optimizan el criterio J()
La restricción del espacio de los parámetros h() que confinan los valores de la
solución a una región permitida
Un esquema de este procedimiento aplicado a la identificación es el de la figura 2:
Figura 1
Existen varios métodos no lineales de optimización como ser: métodos de búsqueda directa,
métodos de gradiente, métodos de gradiente-conjugado.
Los métodos de búsqueda directa incluyen
Búsqueda perpendicular
método de Powell
método Simplex (Nelder y Mead)
Matlab implementa en la función fminsearch el método de búsqueda directa de Nelder y Mead
como un método de optimización sin restricciones. El método es especialmente apto para funciones
de criterio que no son suaves con pocos parámetros (n<10). Si más parámetros deben ser
optimizados los métodos de Powell y del gradiente dan un mejor resultado(2)
. Empleando la
mencionada función de Matlab se implemento la optimización del EMC como medio de hallar los
parámetros.

)1z(
)1z(.
T
2S
2.2 Identificación de sistemas mediante mínimos cuadrados
Los sistemas en la práctica son de naturaleza continua, sin embargo, los datos de los que
disponemos al realizar los registros de sus respuestas mediante los sistemas de adquisición son de
naturaleza discreta. Así, una señal continua en el tiempo se reemplaza por una secuencia de valores
discretos separados entre sí por un intervalo igual al periodo de muestreo.
Si bien el sistema real es continuo enfocar el problema de esta manera simplifica en gran
medida el trabajo para el análisis por medio de computadores.
Los modelos de sistemas que se emplearon en el software son los presentados en la tabla 1.
Estos son sistemas de tiempo continuo expresados mediante la transformada de Laplace y sus
correspondientes en tiempo discreto mediante transformada Z.
Para obtener la función de transferencia en tiempo discreto a partir de las de tiempo continuo se
empleo la aproximación de Tustin o Bilineal ya que posee la ventaja de que un sistema continuo
estable seguirá siendo estable luego de la transformación si se aplica la aproximación de Tustin
mientras que puede aproximarse por un sistema discreto inestable si se aplica el método de Euler(1)
Esta aproximación consiste en realizar la siguiente substitución:
Desarrollando los sistemas seleccionados se obtuvieron las equivalencias de la tabla 2 donde AD,
BD, CD, DD Y ED son funciones de A, B, C, D y E
Continuo Discreto
1s . B
A
D
DD
BZ
A Z. A
ss . B
A
2
DD
2
DD
2
D
C Z.BZ
A.Z2A Z. A
1s . Cs . B
A
2
DD
2
DD
2
D
C Z. BZ
A.Z.2 Z. A
A
1s . Ds . C
BA.S
2
DD
2
DD
2
D
E Z. DZ
C.ZB Z. A
Tabla 1
Estas estructuras son las que se emplearon en el proceso de identificación, es interesante notar que
la discretización de los sistemas de primer orden con integrador y de segundo orden tienen la misma
estructura diferenciándose en las expresiones de los coeficientes de los polinomios.
Como se mencionó la identificación ajusta la función de transferencia de tiempo discreto del
sistema, esa estructura es convertida luego en tiempo continuo, que es como se presenta en pantalla.
Para esto se emplearon las expresiones halladas durante el proceso de discretización
Por ejemplo, para un sistema de segundo orden
)1()..2..2().4.4(.0)T 2.C.TB . (4
)T 2.C.TB . (4
..2...2).8.4(.0)T 2.C.TB . (4
8.B2.T
....2..4.)T 2.C.TB . (4
A.T
C Z. BZ
A.Z.2 Z. A)(
)T 2.C.TB . (4
)T 2.C.TB . (4.Z
)T 2.C.TB . (4
8.B2.T Z
)T 2.C.TB . (4
A.T Z.
)T 2.C.TB . (4
2.A.T.Z
)T 2.C.TB . (4
A.T
H(z)
2
2
2
2
2
2
22
2
2
DD
2
DD
2
D
2
2
2
22
2
2
2
22
2
2
DDDD
DDDD
DDDD
CTCTCTBCAC
BTTCBTBBAB
ATCATBAATA
AzH

Queda determinado un sistema de 3 ecuaciones con tres incógnitas que puede ser resuelto por
cualquier método. De forma similar se desarrollo para el resto de los modelos
2.2.1 Mínimos cuadrados(2)
El método de identificación propuesto en este punto fue el método de mínimos cuadrados.
Dadas los registros de {u(k),y(k)} de longitud N y la estructura de un modelo con parámetros
desconocidos, este método busca minimizar la suma del error al cuadrado entre los datos de salida
del sistema registrados y los obtenidos del modelo ante la entrada registrada.
N
k
kk yyN
J1
2
)θ|(
^
)()( ]¨[1
donde
parametros deVector
modelo del Salida .θ y (k)T
θ)|(k
^
Se puede observar que este criterio es el mismo que el empleado en la identificación en tiempo
continuo (EMC).
El vector de parámetros estimados se encuentra para
)(
^
minarg JMD
donde DM es el dominio de valores posibles o validos de los parámetros
para la solución óptima el gradiente de J() respecto de es cero:
0)(
^
J
en álgebra lineal esto es expresado como
].Φ.[y2.Φ
].Φ].[y.[Φθ
2.].θΦ[yθ
(k)T
(k)(k)
(k)T
(k)(k)T2
(k)T
(k)
entonces
N
1k
(k)T
(k)(k))(
0].Φ.[y2.Φ1
^ N
J
la solución óptima se obtiene resolviendo el set de ecuaciones llamado Ecuaciones Normales que se
obtienen al plantear la expresión anterior. Podemos expresar el sistema definiendo la matriz de
entrada y el vector Y de salidas
(N)
(2)
(1)
)()(
)2()2(
)1()1(
y
...
y
y
Y ...
NNT
T
T
u
u
u
con lo cual la función criterio se vuelve
euclideana norma la es donde2
2
2)( YJ
las ecuaciones normales quedan entonces
YTT ^
de donde la solución se obtiene como
YTT 1^
Aplicando la expresión anterior a los sistemas de la tabla 2 se obtienen los parámetros AD BD ED DD

Por ejemplo para el sistema de primer orden
2
1
2
)(
))1(.)1(.)(.)((.1
))()((.1
)1(.)1(.)(.)(
)(
)(
kyBkuAkuAkyN
kykyN
J
kyBkuAkuAky
zU
zYH
DDD
N
k
DDD
z
D
DD
BZ
AZ . A
Las incógnitas son los parámetros AD y BD.
Planteando 01))1).).y(k.y(kB1).u(kA.u(k)A
01))-u(k(k)1).(-1).(u.y(kB1).u(kA.u(k)A
DDD
DDD
)((.1
2
)((.1
2
1
1
kyN
JB
kyN
JA
N
kD
N
kD
llamando u1 a (u(k)+u(k-1)) el sistema de ecuaciones quedo de la siguiente forma
1
1
1
.
.
N
1k
2N
1k
N
1k
N
k01
2
N
1k
N
D
D
N
1k
N
D
D
N
1k
2N
1k
N
1k
N
k01
2
1)y(k.1).u1y(k
1).u1y(ku1
1)y(k).(y(k
y(k).u1
B
A
1)y(k).(y(k
y(k).u1
B
A
1)y(k.1).u1y(k
1).u1y(ku1
k
k
2.3 Experiencias de Identificación
2.3.1 Simulaciones Los registros empleados en este punto fueron generados mediante simulación. La pantalla de
presentada al usuario se muestra en la figura 3, en ella se puede seleccionar el algoritmo a emplear y
el modelo a ajustar, los resultados son presentados en la misma pantalla.
Figura 3
Sistema
Sin ruidos
Mínimos Cuadrados Búsqueda directa
2.015
------------ tiempo de muestreo 10 mseg
3.04 s + 0.5

Con ruidos
Mínimos Cuadrados Búsqueda directa
Sistema
Sin Ruidos
Mínimos Cuadrados Búsqueda Directa
Con ruidos
Mínimos Cuadrados Búsqueda directa
Se vio como en presencia de ruido, el algoritmo de mínimos cuadrados no se desempeña
adecuadamente, esto es debido a la correlación entre el ruido C*(z1).e(k) y los datos del registro de
entrada y salida.(1)
. Esto ocurre cuando el sistema a identificar responde a la ecuación en diferencias
)().()().()().( kezCkuzBkyzA
siendo n el orden de A, se lograra la identificación si C(z=z, mientras que si C(zz las estimaciones
de los parámetros no serán buenas.
5
----------- ---- 1.2 s2 + 0.4 s + 1
Tiempo de muestreo 10 mseg
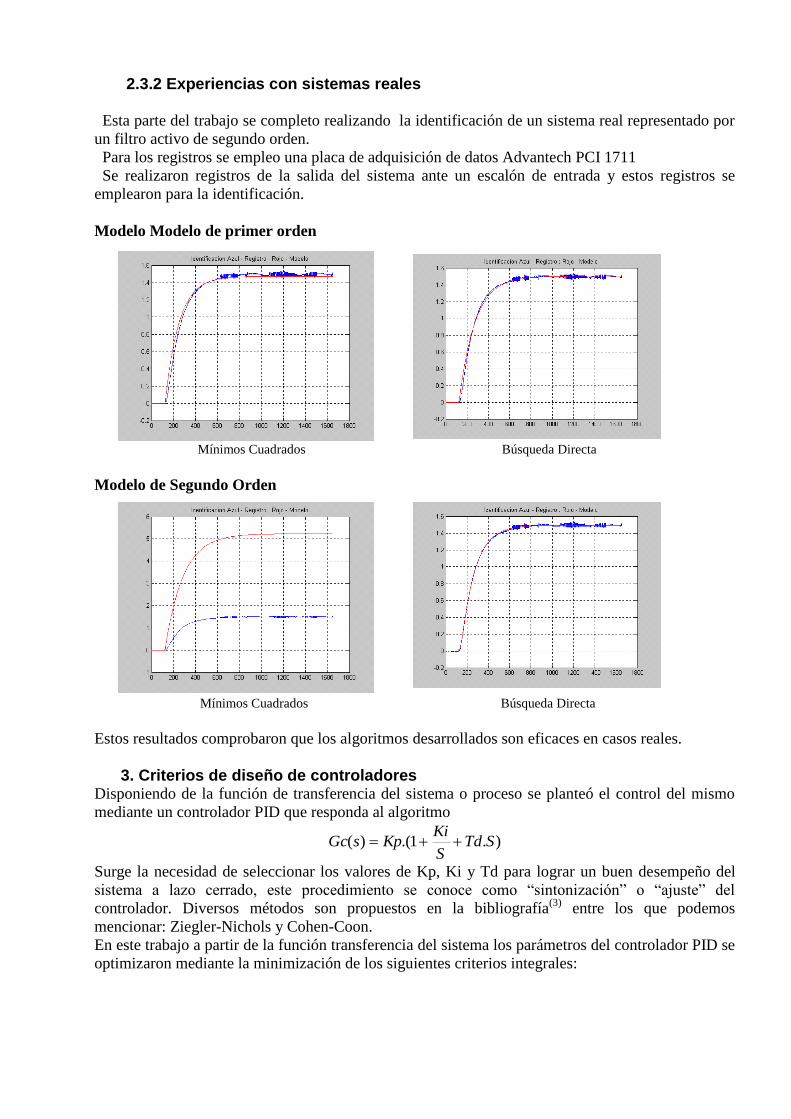
2.3.2 Experiencias con sistemas reales
Esta parte del trabajo se completo realizando la identificación de un sistema real representado por
un filtro activo de segundo orden.
Para los registros se empleo una placa de adquisición de datos Advantech PCI 1711
Se realizaron registros de la salida del sistema ante un escalón de entrada y estos registros se
emplearon para la identificación.
Modelo Modelo de primer orden
Mínimos Cuadrados Búsqueda Directa
Modelo de Segundo Orden
Mínimos Cuadrados Búsqueda Directa
Estos resultados comprobaron que los algoritmos desarrollados son eficaces en casos reales.
3. Criterios de diseño de controladores
Disponiendo de la función de transferencia del sistema o proceso se planteó el control del mismo
mediante un controlador PID que responda al algoritmo
).1.()( STdS
KiKpsGc
Surge la necesidad de seleccionar los valores de Kp, Ki y Td para lograr un buen desempeño del
sistema a lazo cerrado, este procedimiento se conoce como “sintonización” o “ajuste” del
controlador. Diversos métodos son propuestos en la bibliografía(3)
entre los que podemos
mencionar: Ziegler-Nichols y Cohen-Coon.
En este trabajo a partir de la función transferencia del sistema los parámetros del controlador PID se
optimizaron mediante la minimización de los siguientes criterios integrales:

Integral del error al cuadrado (ISE)
0
)(2
t
t dtISE
Integral del valor absoluto del error
(IAE)
0
)(
t
t dtIAE
Integral del valor absoluto del error
ponderado por el tiempo (ITAE)
0
)(.t
t dttITAE
Donde (t) = ysp(t) – y(t) es la desviación de la salida del sistema del set point deseado.
En la figura 4 se aprecia el esquema del procedimiento descrito.
Figura 4
Cual de los tres criterios integrales emplear dependerá de las características del sistema a
controlar y de los requerimientos adicionales que se le impongan. Debe tenerse en cuenta que
diferentes criterios llevan a diferentes controladores y para el mismo criterio integral, diferentes
cambios en la entrada llevan a diferentes diseños.
Se empleo el algoritmo de optimización presentado en el apartado 2.1.1 para la minimización de los
criterios integrales. La figura 4 muestra la pantalla de selección de criterios y tipo de controlador.
3.1Experiencias Empleando el modelo de segundo orden obtenido en el punto anterior, se propuso el diseño del
controlador para el mismo.
El controlador empleado para el filtro fue un controlador PID digital desarrollado por el GESIC,
este controlador implementa el algoritmo incremental:
2n1nn1nn1nnn ee2e
Tm
TdeeKi
2
TmeeKpΔm
El controlador cuenta con funciones como Antireset WindUp y la opción de calcular la parte
derivada sobre la variable del proceso o sobre la señal de error. El tiempo de muestro de este
controlador es de 100 mseg.
El controlador diseñado fue un PI, se obtuvieron los parámetros teniendo en cuenta el tiempo antes
mencionado simulando durante un lapso de 15 segundos de modo que el sistema alcanzara su
estado de reposo. Se corrieron los algoritmos de optimización de los tres criterios empleando un
límite de 20. La pantalla de diseño en la cual el usuario selecciona las opciones y las graficas de
diseño para un escalón unitario son las siguientes
Figura 4
Los parámetros obtenidos del diseño se cargaron en:
Una simulación de Simulink del sistema identificado con un controlador ideal
El controlador digital desarrollado por el GESIC empleado para controlar el filtro activo
identificado
Los resultados de ambas experiencias se presentan en conjunto en la siguiente serie de graficas

-6
-1
4
9
14
1
19 37 55 73 91
109
127
145
163
181
199
217
235
253
271
289
307
325
343
361
379
397
415
433
451
469
487
505
523
-1.5
-0.5
0.5
1.5
2.5
3.5
4.5
5.5
6.5
7.5
8.5
1
22
43
64
85
10
6
12
7
14
8
16
9
19
0
21
1
23
2
25
3
27
4
29
5
31
6
33
7
35
8
37
9
40
0
42
1
44
2
46
3
48
4
50
5
Muestras
[V]
ISE
IAE
ITAE
Se nota que no hay una correspondencia entre la simulación y la realidad, el análisis de esto hecho
trajo a tener en cuenta el hecho de que en un controlador real la salida del mismo esta limitada, al
saturarse la salida del controlador en cinco o cero volts la integración se detiene, mientras que
durante el proceso de diseño y la simulación esto no es tenido en cuenta. Para notar este hecho
solo debemos ver las salidas del controlador en la simulación y en la realidad. En un controlador
ideal la salida varia de 15 a –6 volts mientras que en el real lo hace de 5 a 0 volts y hay que tener
en cuenta que también esta presente el efecto de wind-up.
Se encontró entonces una limitación práctica en el diseño de los parámetros, como solución para
tratar con este hecho se recurrió a agregar una opción en el diseño del controlador para obtener
los mejores parámetros que minimicen el criterio deseado y que no produzcan la saturación de la
salida del controlador ideal. Con esta consideración se obtienen los siguiente resultados.
0
0.5
1
1.5
2
2.5
3
1
33 65 97
129
161
193
225
257
289
321
353
385
417
449
481
513
545
577
609
641
673
705
737
769
801
833
865
1
1.2
1.4
1.6
1.8
2
2.2
2.4
1
22
43
64
85
10
6
12
7
14
8
16
9
19
0
21
1
23
2
25
3
27
4
29
5
31
6
33
7
35
8
37
9
40
0
42
1
44
2
46
3
48
4
50
5
Muestras
[V]
1
1.2
1.4
1.6
1.8
2
2.2
2.4
1
36
71
10
6
14
1
17
6
21
1
24
6
28
1
31
6
35
1
38
6
42
1
45
6
49
1
52
6
56
1
59
6
63
1
66
6
70
1
73
6
77
1
80
6
84
1
87
6
1.00E+00
1.20E+00
1.40E+00
1.60E+00
1.80E+00
2.00E+00
2.20E+00
2.40E+00
2.60E+00
2.80E+00
3.00E+00
1
21 41 61 81
101
121
141
161
181
201
221
241
261
281
301
321
341
361
381
401
421
441
461
481
501
521
541

Registros
ISE
En este caso se observa que si bien la salida del controlador en simulación no satura, si lo hace en
la realidad al llegar a 0 volts, las razones de esto se pueden atribuir a:
El filtro empleado como sistema a controlar presenta componentes no ideales que contiene
offset y alinealidades
El controlador digital emplea aproximaciones en la implementación de su algoritmo lo que
produce que no sea idéntico al empleado en el proceso de diseño.
El controlador digital realiza operaciones de división que llevan a truncamientos de los
resultados.
A pesar de esto se evidencio una notable mejoría entre los resultados respecto de las experiencias
sin la restricción del diseño.
IAE
En este caso las salidas de simulación y del sistema presentaron una muy buena coincidencia, y
las salidas del controlador en simulación y el real mostraron que ninguna satura y se aproximaron
bastante.
ITAE
Para el criterio ITAE se obtuvieron los mismos resultados anteriores ya que estos no producían la
saturación del controlador.
-1
0
1
2
3
4
5
6
1
20
39
58
77
96
115
134
153
172
191
210
229
248
267
286
305
324
343
362
381
400
419
438
457
476
495
514
533
552
571
590
609
628
647
-1
0
1
2
3
4
5
6
1
20
39
58
77
96
11
5
13
4
15
3
17
2
19
1
21
0
22
9
24
8
26
7
28
6
30
5
32
4
34
3
36
2
38
1
40
0
41
9
43
8
45
7
47
6
49
5
51
4
53
3
55
2
Simulación Salida
0
0.5
1
1.5
2
2.5
3
1
31
61
91
12
1
15
1
18
1
21
1
24
1
27
1
30
1
33
1
36
1
39
1
42
1
45
1
48
1
51
1
54
1
57
1
60
1
63
1
66
1
69
1
72
1
75
1
78
1
81
1
84
1
87
1
1
1.2
1.4
1.6
1.8
2
2.2
2.4
1
32
63
94
12
5
15
6
18
7
21
8
24
9
28
0
31
1
34
2
37
3
40
4
43
5
46
6
49
7
52
8
55
9
59
0
62
1
65
2
68
3
71
4
74
5
77
6
80
7
83
8
86
9
1
1.2
1.4
1.6
1.8
2
2.2
2.4
1
20
39
58
77
96
11
5
13
4
15
3
17
2
19
1
21
0
22
9
24
8
26
7
28
6
30
5
32
4
34
3
36
2
38
1
40
0
41
9
43
8
45
7
47
6
49
5
51
4
53
3
55
2
Simulación Salida
0
0.5
1
1.5
2
2.5
3
1
23 45 67 89
111
133
155
177
199
221
243
265
287
309
331
353
375
397
419
441
463
485
507
529
551
573
595
617
639

4. Conclusiones Se logro un software para realizar la identificación paramétrica de sistemas mediante dos métodos
Un método de identificación empleando mínimos cuadrados
Un método de identificación empleando un algoritmo de optimización de búsqueda
directa.
El método de mínimos cuadrados resultó ser más rápido y simple pero menos preciso y robusto que
el de búsqueda directa.
Se logro un software para diseñar un controlador PID de acuerdo a tres posibles criterios integrales
ISE
IAE
ITAE
Obteniéndose buenos resultados en la practica al implementar los controladores diseñados sobre
un sistema real.
5. Futuros trabajos
Queda planteada la posibilidad de emplear un criterio de optimización que incluya la
restricción de la salida del controlador para evitar su saturación.
Dado que no todos los controladores comerciales emplean el mismo algoritmo que el
controlador empleado para el diseño de los parámetros, se podría agregar la opción de
seleccionar el algoritmo del controlador a diseñar.
Es posible implementar otros algoritmos para la identificación de los sistemas así como
para la optimización de los criterios de diseño de controladores, de forma tal que donde
falle un método (ya sea por ruido excesivo, persistencia de excitación insuficiente, etc.)
pueda aplicarse otro que otorgue un mejor desempeño para el caso particular.
6. Bibliografía
(1)Sistemas Controlados por Computador – Karl Astrom – Paraninfo
(2)Modeling, Identification and Simulation of Dynamical Systems – P.P.J. van der Bosch –
CRC Press
(3)Chemical Process Control – George Stephanopoulos – Prentice Hall
Análisis Numérico y Visualización Grafica con MatLab – Shoichiro Nakamura – Prentice
Hall




















