
SIAM 2003 lub
21
SIAM REVIEW c 2003 Society for Industrial and Applied Mathematics Vol. 45, No. 1, pp. 95–115 Instabilities in Gravity Driven Flow of Thin Fluid Films ∗ L. Kondic † Abstract. This paper presents theoretical, computational, and experimental aspects of the instability development in the flow of thin fluid films. The theoretical part involves basic fluid me- chanics and presents derivation of the thin film equation using lubrication approximation. A simplified version of this equation is then analyzed analytically using linear stability analysis, and also numerically. The results are then compared directly to experiments. The experimental part outlines the setup, as well as data acquisition and analysis. This immediate comparison to experiments is very useful for gaining better insight into the interpretation of various theoretical and computational results. Key words. nonlinear partial differential equations, perturbation theory, finite difference methods, fluid dynamics AMS subject classifications. 76D08, 35G30, 65M06 PII. S0036144502401358 1. Introduction. Most traditional programs in applied mathematics, engineer- ing, or physics include classes such as ordinary and partial differential equations, at least one class in programming and numerical methods, and introductory physics, to name just a few. Very often, however, there is no time for students to develop deeper understanding of some particular problem that would allow them to apply their ac- quired knowledge. Further, most of the typical classwork is individual, while the skills that are needed in “real-life” surroundings include group work and a significant amount of interaction between the members of a team. One way to help students bridge the gap between their common classwork and more involved problems, as well as to round off their undergraduate education, is to offer a class that (i) is interdisciplinary, (ii) is related to some problem of practical relevance and/or close to the forefront of current scientific research, and (iii) unifies many different (and often disjoint) aspects of the classes they have already taken. Satisfying all these requirements is not easy. At the same time, formulating an appro- priate project is extremely gratifying, since working on a new and not yet completely understood problem provides significant motivation and interest. The project presented here was carried out at the Department of Mathematical Sciences of NJIT during the Spring 2001 semester. It contains theoretical, computa- tional, and experimental components, and includes some aspects of data analysis and image processing, as well as more classical methods related to ordinary and partial ∗ Received by the editors January 21, 2002; accepted for publication (in revised form) July 19, 2002; published electronically February 3, 2003. This work was partially supported by NSF grant INT-0122911 and NJIT grant 421210. http://www.siam.org/journals/sirev/45-1/40135.html † Department of Mathematical Sciences and Center for Applied Mathematics and Statistics, New Jersey Institute of Technology, Newark, NJ 07102 ([email protected]). 95
Transcript of SIAM 2003 lub

SIAM REVIEW c© 2003 Society for Industrial and Applied MathematicsVol. 45, No. 1, pp. 95–115
Instabilities in Gravity DrivenFlow of Thin Fluid Films∗
L. Kondic†
Abstract. This paper presents theoretical, computational, and experimental aspects of the instabilitydevelopment in the flow of thin fluid films. The theoretical part involves basic fluid me-chanics and presents derivation of the thin film equation using lubrication approximation.A simplified version of this equation is then analyzed analytically using linear stabilityanalysis, and also numerically. The results are then compared directly to experiments.The experimental part outlines the setup, as well as data acquisition and analysis. Thisimmediate comparison to experiments is very useful for gaining better insight into theinterpretation of various theoretical and computational results.
Key words. nonlinear partial differential equations, perturbation theory, finite difference methods,fluid dynamics
AMS subject classifications. 76D08, 35G30, 65M06
PII. S0036144502401358
1. Introduction. Most traditional programs in applied mathematics, engineer-ing, or physics include classes such as ordinary and partial differential equations, atleast one class in programming and numerical methods, and introductory physics, toname just a few. Very often, however, there is no time for students to develop deeperunderstanding of some particular problem that would allow them to apply their ac-quired knowledge. Further, most of the typical classwork is individual, while theskills that are needed in “real-life” surroundings include group work and a significantamount of interaction between the members of a team.
One way to help students bridge the gap between their common classwork andmore involved problems, as well as to round off their undergraduate education, is tooffer a class that (i) is interdisciplinary, (ii) is related to some problem of practicalrelevance and/or close to the forefront of current scientific research, and (iii) unifiesmany different (and often disjoint) aspects of the classes they have already taken.Satisfying all these requirements is not easy. At the same time, formulating an appro-priate project is extremely gratifying, since working on a new and not yet completelyunderstood problem provides significant motivation and interest.
The project presented here was carried out at the Department of MathematicalSciences of NJIT during the Spring 2001 semester. It contains theoretical, computa-tional, and experimental components, and includes some aspects of data analysis andimage processing, as well as more classical methods related to ordinary and partial
∗Received by the editors January 21, 2002; accepted for publication (in revised form) July 19,2002; published electronically February 3, 2003. This work was partially supported by NSF grantINT-0122911 and NJIT grant 421210.
http://www.siam.org/journals/sirev/45-1/40135.html†Department of Mathematical Sciences and Center for Applied Mathematics and Statistics, New
Jersey Institute of Technology, Newark, NJ 07102 ([email protected]).
95

96 L. KONDIC
differential equations, such as linear stability and numerical analysis. On the theoret-ical side it requires an introduction to basic fluid mechanics, and on the experimentalone, the building of a (simple) apparatus. Since these different aspects are time con-suming, the whole semester was dedicated to a single project. It is possible to modifythe problem so that it is completed faster, assuming that the students are familiarwith some fluid mechanics and that an experimental setup already exists.
The presentation assumes familiarity with basic ordinary and partial differentialequations (ODEs and PDEs), some knowledge of finite difference schemes, and notmuch more. Depending on the level of a given class, and on the time frame, variousaspects of the problem can be included or not. In particular, more advanced topics,such as implicit schemes in Appendix B or similarity solutions in Appendix D, canbe omitted if appropriate. In the opposite direction, a number of suggestions for ap-proaching more complex issues (such as numerical solution to the eigenvalue problem,(36), or understanding of its eigenfunctions) have been provided. The addition ofsome of these topics would make this problem appropriate as a project for graduatestudents.
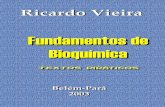
On either level, the flow of thin fluid films is very convenient as a class/module.The experiment itself does not require too much space, and it is safe and easy toperform. The results can be obtained with the needed degree of precision using a stillpicture camera or a camcorder. Finally, instabilities of any sort are always interesting,and this problem is not an exception; the experimental results (see Figure 1) areintriguing and strongly motivate the students and the instructor.
This paper is organized as follows. In section 2, I give an outline of the under-lying mathematical model and provide references that are both informative and alsoappropriate for advanced undergraduate students. Section 3 provides an overviewof the experimental setup, as well as of the data collection and analysis. Significantmaterial is contained in the appendices, which include description of the numericalmethods, lubrication approximation, an outline of the linear stability analysis, andthe self-similar solution. Exercise problems at the ends of the sections often providemore detailed information needed for deriving some of the important equations.
2. Theoretical Modeling. The starting point for modeling flow of thin filmsare the Navier–Stokes (N–S) equations. These PDEs are essentially an applicationof Newton’s second law to the flow of fluids; see, e.g., the book by Acheson [2] for asimple derivation and interpretation of various terms. Assuming also incompressibilityof the fluid film, which leads to the divergence-free condition
∇ · u = 0 ,(1)
these equations are as follows:
∂u∂t
+ (u · ∇)u = −1ρ∇p+ µ
ρ∇2u + g sinαi− g cosαk ,(2)
where u is the fluid velocity, ρ is the density, and µ is the viscosity, which effectivelyintroduces “friction” into the problem. The last term is due to the normal componentof gravity, and the next to last stands for the downhill component. The coordinateframe is as shown in Figure 2. In section 2.3.1 and Appendix D, I discuss two impor-tant aspects of the typical fluid profile, namely, the formation of a ridge just behindthe front and thinning of the fluid far behind.
The N–S equations are to be coupled with the appropriate initial and boundaryconditions (BCs). Initial conditions are relatively simple: one just needs to prescribe

FLOW OF THIN FILMS 97
Fig. 1 Photos of the fluid flowing down an inclined plane at times = 0.5, 4, 8, 84 sec after release(increasing from top left to bottom right). The inclination angle is α = 60◦; other fluid andflow parameters are given in section 3. The distance between the solid lines is 5 cm in thetransverse, and 2 cm in the downhill direction.
Fig. 2 Sketch of the fluid in two-dimensional geometry. The capillary ridge, which forms just behindthe fluid front, can easily be seen in experiments as a drop that forms as the fluid flows downan incline. In most of this work we will neglect thinning of the fluid far behind the front.
an initial fluid shape. BCs are more involved, since they reflect the interaction of thefluid film with the solid, and also with the air at the free surface (see Figure 2). Atthe fluid–solid interface, one usually uses the so-called no-slip BC, that specifies that

98 L. KONDIC
the tangential component of the fluid velocity vanishes there [2]. The BC at the freesurface is that there is a jump of pressure across the interface. The size of this jumpis proportional to surface tension. This is a material parameter that is responsible,e.g., for keeping liquid drops together; essentially it tends to decrease the surface tovolume ratio. If the interface is flat, the jump in the pressure is zero. If the interfaceis curved, this jump is a linear function of the curvature, κ, of the free surface [2].
2.1. Reduction of Navier–Stokes to Thin Film Equations. Equations (2), com-bined with the outlined BCs, are very complicated and difficult to address by eitheranalytical or numerical means. There is, however, one property of all thin film flowsthat can be used for significant simplification. The film is thin; hence, the ratio of thefilm thickness, h, and any in-plane length-scale, L, becomes a small parameter, ε. InAppendix A we show how the smallness of ε simplifies the formulation. In particular,by averaging over the fluid thickness, we effectively reduce the number of relevantspatial dimensions. This helps tremendously in both theoretical and computationalanalysis.
The reduction of N–S equations (often called lubrication, or long-wave approxi-mation) leads to the following PDE for the fluid thickness, h(x, y, t) (see Appendix A),
∂h
∂t= − 1
3µ∇ · [γh3∇∇2h− ρgh3∇h cosα+ ρgh3 sinα i] ,(3)
where now ∇ = (∂x, ∂y). The fourth-order term results from surface tension (whichtends to flatten the free surface), and the last two terms are due to gravity. Note that(3) is strongly nonlinear, requiring care in finding the solution(s) and understandingof their properties.
Considering only the highest order term, (3) is a fourth-order diffusion equationand has a number of interesting properties. One of them is the lack of maximumprinciple, satisfied by the (usual) second-order diffusion. A consequence is that thesolutions of (3) are not bounded from either above or below. Therefore, even if theinitial condition is nonzero everywhere (i.e., the fluid completely covers the domain),there is no guarantee that a solution will satisfy this property for all times. Closerinspection of (3) reveals also that it is degenerate, meaning that the coefficient of thehighest order terms (h3) vanishes as h→ 0. This and other properties of the equationssuch as (3) are outlined in accessible manner in [4]. An alternative derivation of thelubrication approximation, as well as an overview of a variety of problems involvingthin films, can be found in [14].
2.2. Nondimensionalization and Basic Properties of Thin Film Equations.The first step in solving (3) is to put it in a nondimensional form. To do this, we scalethe fluid height, h, by the thickness far behind the front, hc. Next, we rescale thein-plane coordinates, and time, by defining (x, y, t) = (x/xc, y/xc, t/tc). Balancingthe capillary (surface tension) term with the gravity ones specifies the appropriatechoice for xc. The requirement that the time derivative term is of the same order asthe terms on the right-hand side (RHS) of (3) yields the time scale, tc:
xc =(a2hcsinα
)1/3
, tc =3µγ
a2xch2c sinα
.(4)
The quantity a =√γ/ρg is called the capillary length; this is the length-scale at which
the capillary effects become important relative to gravitational ones. The velocity

FLOW OF THIN FILMS 99
scale is chosen naturally as U = xc/tc. It is also appropriate to define the capillarynumber Ca = µU/γ; this quantity measures the importance of the viscous forcesrelative to those resulting from surface tension. Using this nondimensionalization, weobtain that (3), for h = h/hc, is given by (dropping the bars)
∂h
∂t= −∇ ·
[h3∇∇2h
]+D(α)∇ ·
[h3∇h
]− ∂h3
∂x,(5)
where the single dimensionless parameter D(α) = (3Ca)1/3 cot(α) measures the sizeof the normal component of gravity.
It should be noted that the lubrication approximation requires not only that thedirection normal to the plane be much shorter than any in-plane dimension, but alsothat the slope of the free surface be small. The reader may want to check that thisrequirement leads to [(hc/a)
√sinα)]2/3 � 1 (assuming slopes of O(1) expressed in
terms of the nondimensional quantities). Therefore, the maximum thickness of thefilm that still satisfies the assumptions of lubrication approximation depends on α; forsmall α’s, this condition is always fulfilled; however, for large α’s, it is valid only forvery thin films. By specifying the parameters defining the fluid, it is easy to determinewhether lubrication approximation is appropriate for a given hc. Furthermore, afterwe obtain a solution of (5), we need to check that the gradients of the solution arenot too large (see Exercise 2.2).
Before we proceed any further, we need to clarify one more point. There is anobvious contradiction between the use of a no-slip boundary condition that requiresthe parallel component of fluid velocity at the fluid–solid interface to vanish, andthe motion of the fluid front. In the literature this is called “contact line paradox.”Although one can find a number of ways (some outlined below) around this issue, it isworth emphasizing that this problem is not yet resolved; i.e., the fluid behavior closeto the contact line is not completely understood. Some of the possible approachesare (i) inclusion of intermolecular (van der Waals) forces explicitly into the governingequations, (ii) allowing for a fluid to slip at the boundary, or (iii) assuming that thesurface is already prewetted by a very thin fluid layer, called precursor film. This lastapproach (used in this paper) is appropriate even when the surface itself is dry but thefluid is completely wetting, such as silicon oil spreading on glass shown in Figure 1.The interested reader can find a more complete description of the contact line problemin, e.g., [7] and the references therein; in particular, [8] provides a detailed overviewof this issue.
2.3. Two-Dimensional Equation and Traveling Waves. Equation (5) is muchsimpler than the original N–S formulation (2). However, it is still a strongly nonlinearPDE. To gain basic understanding of some of its solutions, it is useful to simplify iteven further. One simplification is to assume that h is y-independent, meaning thatthe film flows without developing any structure in the transverse direction. Thisassumption reduces (5) to the following PDE with one space variable:
∂h
∂t= −
[h3hxxx
]x+D(α)
[h3hx
]x− (h3)x .(6)
One possible choice for the BCs is
h(0, t) = 1, h(Lx, t) = b, hx(0, t) = hx(Lx, t) = 0 ,(7)
where Lx is the domain size and b is the precursor film thickness, b � 1. The ideabehind (7) is that both far behind and far in front of the contact line, h does not change

100 L. KONDIC
(the fluid is flat) and the thickness is fixed. This assumption is not exactly satisfiedwhenever we have a fixed volume of fluid spreading, since the film thins with time.However, both experiments and theory show that this thinning typically happenson a much longer time scale than the development of instability (see Appendix D).Correspondingly, it is a reasonably good approximation to assume that h is fixed atx = 0, Lx. These BCs lead to a traveling wave solution for h(x, t). That is, one candefine a function h0(ξ) = h(x, t), where ξ = x − Ut, that satisfies (6) and the BCs(7). Plug h0(ξ) into (6) and integrate once to obtain this ODE:
−Uh0 + h30h0ξξξ −D(α)h3
0h0ξ + h30 = d .(8)
The BCs (7) yield d = −b(1+ b), U = 1+ b+ b2. In the limit b→ 0 we obtain U → 1,independently of α; this is one of the reasons for choosing the scaling (4). One canthink of (8) as an equation for the fluid profile in the reference frame moving withvelocity U down an incline; in that frame the fluid profile does not change with time.
To summarize, we have significantly simplified the problem from a system ofnonlinear PDEs (2) to a single ODE (8). This ODE is, of course, not sufficient tocompletely understand the instability problem we are set to explore; it is, however,a very good starting point. This equation can be solved numerically using, i.e., thenonlinear shooting method. However, it turns out that it is actually easier to solvethe PDE (6) directly. The numerical solution of that equation is outlined below.
2.3.1. Numerical Results. The computational codes needed for efficient and ac-curate solutions of high-order PDEs in more than one space dimension (such as (5))are often very elaborate. However, simple equations of the form (6) are relativelyeasy to solve. Appendix B presents the details of an appropriate numerical proce-dure; some results are given below. Use of commercial software, such as MATLAB,may be also appropriate.
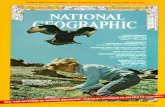
Figure 3 shows the evolution of the fluid profile where the initial condition isa smooth curve connecting two flat regions via a transitional part about the initialfront position, chosen at xf = 5. The results that follow are independent of Lx, orof the details of the initial condition. The snapshots of the fluid profiles show that,after initial transients, the flow develops a traveling wave profile, as outlined above,traveling with the speed equal to vf = 1+ b+ b2. Note that computations can also beperformed in the traveling frame, moving with vf (i.e., in terms of the ξ coordinateinstead of x). In that frame, the film profile is steady after initial transients.
The main feature of the profile h(x, t) is the presence of a bump (capillary ridge)near the contact line. This bump is much larger for D = 0, shown in Figure 3a, thanfor D = 1, Figure 3b. In what follows, we will see that the height of the bump isimportant in order to understand the stability of the flow with respect to perturbationsin the transverse direction. This bump can be seen by the naked eye in the physicalexperiments outlined in section 3 (or simply by observing the flow of paint down awall).
Remark. In experiments, the BCs are typically slightly different, since there isa fixed volume of the fluid supplied, and therefore the BC h(0) = 1 is not satisfied.The numerical simulation can be easily modified to account for this difference byreplacing h(0) = 1 with hxxx(0) = 0. The resulting profile can then be compared tothe similarity solution outlined in Appendix D.
2.4. Three-Dimensional Flow and Linear Stability Analysis. The main ques-tion that we want to answer is whether the contact line is stable (straight) or not.

FLOW OF THIN FILMS 101
x
h
0 10 20 300
0.5
1
1.5D = 0 a)
x
h
0 10 20 300
0.5
1
1.5D = 1 b)
q
σ
0 0.2 0.4 0.6 0.8
-0.1
0
0.1
D = 0
D = 1
c)
qm qc
Fig. 3 Parts (a) and (b) show snapshots of the fluid profile at δt = 2 intervals, obtained as anumerical solution of (6), using Lx = 40, b = 0.1, and ∆x = 0.05; the computational methodis outlined in Appendix B. Part (c) shows the results of linear stability analysis (34) (seesection 2.4 and Appendix C). Here, q = 2π/λ is the wavenumber and σ is the growth rate ofa small disturbance. The mode of the maximum growth, qm, is the one expected to appearin physical experiments and should be compared to the distance between the patterns; seeFigure 1 and Table 1.
If not, can we understand the mechanism which governs the characteristics of theemerging patterns, such as their growth, or the distance between them? In order toreach the answers, it is necessary to include the third, transverse, direction.
Before proceeding to three-dimensional (3D) geometry, it is useful to recall thetypical experimental results (see section 3). After the fluid is released, for some timeit flows down uniformly, without developing any structure in the y direction (seeFigure 1a). During this initial time period, the solution of (8) (or, equivalently, of(6)), describes realistically the dynamics of the fluid film. For longer times, patternsstart growing on top of this “base” solution. This scenario suggests that some insightinto instability can be obtained by superimposing a small perturbation on the basesolution, and following its time evolution. More precisely, consider (5) in the movingframe defined by (ξ, y), and assume a solution in the form
h(ξ, y, t) = h0(ξ) + εh1(ξ, y, t) ,(9)
where ε � 1 and h1 (in some norm) is of O(1). Next, plug this ansatz into (5) andkeep only terms to O(ε). This approach reduces the original problem (5) to a linearproblem for the correction, h1. Since linear problems are much easier to solve, weexpect to obtain h1 with less effort than the full solution, h. The time evolution of

102 L. KONDIC
h1 will give us some insight into the initial development of instability. If h1 becomeslarge, this approach is no longer valid, since εh1 could become comparable to h0. Thefull derivation of the equation for the correction, h1, is given in Appendix C.
To simplify the problem, use the fact that the y-dependence of the solution,h1(ξ, y, t), can be expressed as a continuous superposition of Fourier modes,
h1(ξ, y, t) =∫ 0
−∞g(ξ, t)eıqydq .(10)
Here q is a wavenumber, which is related to the spatial period of the perturbation, λ,by q = 2π/λ. For convenience, consider a semi-infinite domain, −∞ ≤ ξ ≤ 0. Thefunction g satisfies the linear equation (34), given in Appendix C (for simplicity ofnotation, the dependence of g (and of σ below) on q is not stated). The next step isto realize that the explicit time dependence of g has to be exponential due to the factthat it satisfies the homogeneous equation (34). Hence
g(ξ, t) = φ(ξ) eσt .(11)
The quantity σ, called the growth rate, determines the time evolution: if σ is posi-tive, any small perturbation (possibly due to microscopic noise) grows and developspatterns; if σ is negative, a perturbation disappears.
Equation (34), while linear, involves the solution, h0, of the base problem (8),which is not known analytically. Then (34) has to be solved numerically as well.Some insight, however, can be reached without resorting to numerics.
Let us consider the limit of small q, i.e., of very long wavelengths. Simple butrather tedious computation shows (see Appendix C) that, for small q (and lettingb→ 0),
σ(q) ≈ q2∫ 0
−∞h0(h2
0 − 1)dξ .(12)
For larger q’s, there is an additional term proportional to q4. That term produces anegative contribution to σ(q), since it involves surface tension, which always stabi-lizes short wavelengths. Therefore, the only possibility for σ to be positive is if theintegrand in (12) is positive. Hence, h0 has to be larger than 1 for a considerable partof the domain if the flow is to be unstable.
Now we can understand why the capillary ridge of the solution is important.According to the just presented results, only the fluid film that develops a suffi-ciently large capillary ridge can become unstable. Therefore, if we can solve thetwo-dimensional (2D) problem and obtain h0, we can then calculate the integral,(12), and obtain σ. This gives the answer to one of the questions, regarding stabilityof the flow.
What we still do not know is, if the flow is unstable, how to determine the distancebetween the emerging patterns. To answer that question, we need to determine σ(q)for all q’s. There are many ways to achieve this goal. One of them is to solve thelinear PDE (34); an alternative is to use (11) to formulate (and solve) an eigenvalueproblem for φ(ξ) (see Appendix C). The results presented here are obtained usingthe first approach (see Appendix C.2); the second method is explained in some detailin [17].
Figure 3c is typical: for small q’s, the resulting σ is positive, but for large q’s, itis always negative. Within the band of unstable modes, there are some q’s which are

FLOW OF THIN FILMS 103
Fig. 4 Plan of the apparatus used in the experiments. The glass is fixed to the upper platform, andthe rising mechanism allows for easy change of the inclination angle.
characterized by the largest growth rates (about q ≈ 0.5 in Figure 3c). Recalling nowthat large positive σ implies exponential growth with time, we immediately concludethat these modes are the ones that grow in physical experiments. Hence, we canproceed to make a meaningful comparison between theoretical, computational, andexperimental results, and test the validity of our theory.
The procedure outlined here is called linear stability analysis (LSA). It is verycommonly used in a variety of problems. Its most important aspect is that it reducesnonlinear problems to linear ones and allows for the use of the superposition principleand other methods appropriate to linear problems. This approach is valid as long asthe size of the perturbation is O(1), as assumed above; if the perturbation itself islarge, then LSA is not valid any more. In that case, one needs to resort to full numer-ical solution of the corresponding nonlinear problem. However, even in that case, theresults of LSA are indispensable for the purpose of verifying the computational results.
Exercise 2.1. Use (3) and the definition of scales, (4), to derive the nondimensionalthin film equation, (5).
Exercise 2.2. Recall that the lubrication approximation requires that the gradientsof the solution be small. Estimate the maximum gradients shown in Figures 3a and 3b,and find the relation between the dimensional fluid variables and the angle α necessaryfor the lubrication approximation to hold (see also the discussion in section 2.1 andAppendix A).
3. Experimental Techniques. Immediate comparison of theoretical and experi-mental results is a very attractive feature of the presented problem. In this section, wewill first overview the experimental apparatus, and then review the data acquisitiontechniques and the comparison to theoretical results.
3.1. Experimental Apparatus. Figure 4 shows a simple setup which is used atNJIT. It consists of a wooden frame of dimensions of 100 × 50 cm, arranged in sucha way that the angle of the plane can easily be modified. A piece of glass of the samedimension as the frame is attached, and the fluid is released close to the top of the

104 L. KONDIC
plane using a simple mechanical “dam” consisting of a piece of rubber fixed to a metalframe. After the release, the fluid flow is recorded using a digital camcorder. Themovie is then stored on a computer and later used for data analysis.
The fluid itself is polydimethylsiloxane (PDMS) (AlfaAesar Ward Hill, MA), alsoknown as silicon oil (viscosity: 50 cSt; surface tension: 21 dyn/cm; density: 0.96g/cm3). The fluid is cleaned off after an experiment is performed using soap andwater. The goal of the cleaning is not to take off the oil, but to achieve a reproducibleexperimental environment by removing macroscopic sources of noise, such as pieces ofdust. Typically, 25 grams of PDMS are used per experiment. I note that a squeegeeis useful for demonstration purposes; one can use it to push the fluid up, and let itflow down again.
Before proceeding with data analysis, it should be noted that experiments canbe performed using other, commonly available fluids such as vegetable oil or glycerin,or using other surfaces, such as plexiglas. Different fluid/solid combinations, how-ever, have different wetting properties, which are known to influence the shape of theemerging patterns (see, e.g., [11]). The issue of the pattern shape is, however, com-plicated by the fact that the inclination angle also influences the shape, as can easilybe verified in experiments; see also [1] for computational results. On a more relaxednote, readers can perform a simple experiment in their free time by gently shakingsome red wine in a glass. A rim forms above the surface, which then becomes unstablein a similar manner to the flow analyzed here. Interestingly enough, this setup leadsto a secondary instability of evaporative origins; details can be found in [9] and thereferences therein.
3.2. Data Analysis and Comparison to Theoretical Results. There are a num-ber of experimental results that can be measured and compared to theoretical ones.The most obvious one is the distance between the developing patterns (see Figure 1),which should be comparable to the wavelength of maximum growth obtained fromLSA (see Figure 3c), when expressed in terms of physical units. Careful inspection of(4) shows that the needed scales involve the unknown film thickness far behind thecontact line, hc (the other quantities are material parameters). We recall that the the-oretical analysis assumes constant thickness of the fluid, while in the experiments thefluid thins far behind the front. One common approximation is to use the fluid thick-ness at the time when instability first starts developing. To determine this quantity,assume for a moment that the fluid of volume V is of rectangular solid shape character-ized by width, W , length, xf , and thickness, hc. Take W = 50 cm, and approximatethe distance the fluid spreads before it becomes unstable by xf . This distance is typ-ically about 5–10 cm, depending on the value of α. Then, hc = V/(Wxf ) ≈ 0.5 − 1mm. A more precise approach is outlined in Appendix D, where the approximateshape of the fluid before the onset of instability is derived. That approach giveshc = 3V/(2Wxf ), which is the value used to determine the scales in what follows.
Table 1 shows the experimental and theoretical/computational distances betweenthe patterns. The theoretical results are obtained from the plots similar to Figure 3ccalculated for different α’s. We see that the experimental and theoretical resultsfollow the same trend as α is changed, although there is a relatively large scatter ofthe results. Exercise 3.1 mentions some sources of error.
Figure 5 shows the lengths of typical patterns, obtained from the experimentalmovies. First, still photos (such as those shown in Figure 1) are extracted. Then thepositions of a few representative tips and roots are recorded at selected time intervals.This procedure is rather time consuming, and it can be avoided by using one of the

FLOW OF THIN FILMS 105
Table 1 The table shows the inclination angle α, theoretical value of the wavelength of maximumgrowth λt, corresponding experimental value λexp, the growth rate of the mode of maximumgrowth σt, and the experimentally measured σexp.
α λt (cm) λexp (cm) σt (sec−1) σexp (sec−1)
30◦ 3.7 2.7 0.2 0.1660◦ 2.3 2.5 0.3 0.2082◦ 1.9 1.7 0.4 0.26
Time (sec)
Leng
th(c
m)
0 10 20 30 40 50 60
10
20
30
40
50
Fig. 5 Experimental results for the length of four typical patterns from Figure 1, measured from tipto root. Note that the y scale is logarithmic. The straight line is to emphasize exponentialgrowth for early times.
available commercial software packages, if so desired. However, working directly withdata provides very useful experience with movie and image analysis, extraction ofinformation through both mechanical and automated means, and processing of largequantities of data.
Figure 5 shows that for very early times, the length versus time curve can be verywell fitted by a straight line, as predicted by LSA. The slope of this line can then becompared directly to the theoretical values for the growth rate. These values, givenin Table 1, are extracted from results such as those shown in Figure 3c. Similarlyto the distance between the patterns, the precise comparison between theory andexperiments is difficult. Both theory and experiment, however, consistently predictan increase of the growth rates as the inclination angle is increased.
For late times the growth of the pattern length is not exponential any more. Inorder to compare experiment and theory, we note that for long times the surfacetension is relevant only in a small part of the domain (close to the fronts). Therefore,it is reasonable to ignore the surface tension altogether. This approximation allowsfor the formulation of an asymptotic solution, presented in Appendix D, valid for verylong times. The asymptotic approach concentrates on 2D situations, hence it does notinclude instability and neglects the surface tension, as well as the normal componentof gravity. With all these simplifications, one obtains that the position of the fluidfront should vary with time according to xf (t) ∝ t1/3.

106 L. KONDIC
Time (sec)
Leng
th(c
m)
20 40 60
20
40
60TIPS
ROOTS
Fig. 6 Position of the tips and of the roots in the experiment shown in Figure 1. The slope of thelines can be directly related to the exponents governing the evolution for late times (see text).
Figure 6 shows the data for the positions of the tips and the roots on a log-log plot; these are the same data as in Figure 5. In order to make a comparisonwith experimental results, let us assume that in the experiments xf (t) ∝ tβ , andcompare the value of β to 1/3. In experiments, the fluid becomes unstable and thetips and the roots propagate according to different β’s (different slopes of the solidlines in Figure 6). In general, one expects that for the tips, β is slightly larger, andfor the roots, it is slightly smaller than 1/3. By simply estimating the slope of theexperimental lines in Figure 6, one can obtain the exponents and readily verify thatthe prediction of the asymptotic solution is correct.
Exercise 3.1. Discuss possible sources of error responsible for the differences be-tween theoretical and experimental results for the distance between the patterns.Consider both theoretical and experimental sources of inaccuracy. In particular, dis-cuss the influence of the (unknown) precursor film thickness.
Exercise 3.2. Verify the degree to which the assumption [(hc/a)√sinα)]2/3 � 1
from section 2.2 is satisfied by the experimental data presented in this section. Com-bine your result with the estimate of the maximum slope of the solution from Figure 3(see Exercise 2.2) to decide whether the use of lubrication approximation is justified.
4. Conclusion. At NJIT, the project outlined here was carried out during onesemester by a group of six, mostly senior students. The students built the experimen-tal apparatus and then spent some time learning how to perform the experiment andobtain reproducible results. In parallel, about three weeks were dedicated to learningthe basics of fluid mechanics, as well as the reduction of N–S to the thin film equa-tion. After this period, the students were ready to address the issues related to linearstability analysis and performed this analysis in the limit of the small wavenumber ofa perturbation. The computational effort consisted of developing a C++ code thatsolved the governing equation (6) in two space dimensions, mostly following the ap-proach outlined in Appendix B. My experience was that use of a (simpler) explicitmethod was appropriate, taking into account the computational difficulties involvedin implicit schemes.
Generally, the project was very well accepted by the students. While some aspects(e.g., linear stability analysis) were rather difficult, and some other ones (e.g., the data

FLOW OF THIN FILMS 107
analysis) rather time consuming, everybody, including the instructor, was curious andinterested to reach a good agreement between the experiment and the theory. Most ofthe work was done in groups, each of which concentrated on one aspect of the problem(theory, numerics, data analysis), with everybody participating in performing theexperiment. These groups were encouraged to communicate and discuss their results,with the main goal for all of them being to develop a complete picture of the problem.At the end of the semester, the students presented their results at a public seminar,and also submitted a joint report [1].
Appendix A. Lubrication Approximation. Let us start from the N–S equations(2). Denote the fluid velocity as u = (v, w), where w stands for the z component andv for the in-plane components. Define L and hc as the x− y and z direction length-scales, respectively. Also, use U as a velocity scale (to be specified later), and let thetime scale be defined by L/U . Next, define the Reynolds number which measures therelative importance of the inertial forces (left-hand side of (2)) and the viscous forcesby Re = ULρ/µ. It is easy to show that if Re � 1, then the inertial terms can beignored. Later we will need to verify that this assumption holds.
Next, define ε = hc/L, and x = x/L, y = y/L, z = z/hc. The second derivativesof the in-plane velocity components are rewritten as
∂2|v|∂x2 ≈
∂2|v|∂y2 =
1L2
∂2|v|∂y2 �
∂2|v|∂z2 =
1h2c
∂2|v|∂z2 ,
where � holds since hc � L. Therefore, the in-plane derivatives can be ignored.Next, based on the incompressibility relation, ∇ · u = 0, we can also safely neglectthe normal component of velocity, w � |v|. These simplifications reduce (2) to
∇2p = µ∂2v∂z2 + ρg sinαi ,(13)
∂p
∂z= −ρg cosα ,(14)
where ∇2 = (∂x, ∂y). The last equation can be trivially integrated, and p calculatedup to some function of (x, y). This function follows from the so-called Laplace–Youngboundary condition, which states that at the interface, z = h(x, y), the pressure isp(h) = −γκ+ p0, where κ is the curvature of the boundary, γ is the surface tension,and p0 is the atmospheric pressure in the air phase. We obtain
p = −ρg(z − h) cosα− γκ+ p0 .(15)
Next, integrate (13) twice with respect to z, and use (15). Define P = ρgh cosα− γκto obtain
v =1µ∇2P
z2
2+ Az + B− ρg
µsinα
z2
2i ,(16)
where A and B are vector constants.To proceed, we need BCs. At z = 0, specify the no-slip BC, |v| = 0, yielding B =
0. At the fluid–air boundary, z = h(x, y), the requirement that stresses are continuousleads to ∂v/∂z|z=h(x,y) = 0 (since the air phase is assumed to be inviscid [2]). Thiscondition allows us to calculate A, reducing (16) to
v =[1µ∇2P −
ρg
µsinαi
] [z2
2− hz
].(17)

108 L. KONDIC
The next step is crucial. Average over the short direction to remove the z-dependenceof v, which would be difficult to measure anyway. Define this average by
〈v〉 = 1h
∫ h
0vdz = −h
2
3µ(∇2P − ρg sinαi) ,(18)
where (17) is used. From this point on, write ∇ for ∇2. Conservation of mass requires
∂h
∂t+∇ · (hv) = 0 .(19)
Instead of the v in (19), use 〈v〉. Also recall the definition of P , and approximate thecurvature κ ≈ ∇2h (see Exercise A.2). The resulting form of (19) is
∂h
∂t=
13µ∇ · [h3(ρg cosα∇h− γ∇κ− ρg sinαi)] .(20)
This is the so-called thin film equation (also given in section 2) that is used insteadof the N–S equations to analyze the behavior of thin fluid films.
Exercise A.1. Show that the Reynolds number is indeed a small quantity. Usethe definition of scales (4) to obtain U , the typical experimental distance betweenpatterns to estimate L (see Figure 1), and the fluid parameters as given in section 3.
Exercise A.2. Derive the exact expression for the surface curvature. Find theconditions under which the approximation κ ≈ ∇2h holds.
Appendix B. Numerical Methods. In order to obtain complete solution of thegoverning equations, one has to resort to numerical techniques. In this appendix, Ioutline a finite-difference-based computational technique that can be used to solve thebase problem (6). Some directions for solving the more complicated linearized problem(34) are given later in Appendix C.2. The full 3D problem can be approached bysimilar computational techniques as well; the interested reader can find some detailsin [12], plots and animations in [1], and a general introduction to numerical methodsfor PDEs in, e.g., [13].
B.1. SpaceDiscretization. The computational domain is defined by 0 ≤ x ≤ Lx,and discretized by the node points xi = i∆x, i = 0, . . . , Nx, where ∆x = Lx/Nx.Let yi(t) denote a discrete approximation to h(xi, t), specified by (6). We need toformulate ODEs for dyi/dt at each i. These equations can be written in the form
dyidt
= fi, i = 1, . . . , Nx − 1 ,(21)
where fi is a discretization of the RHS of (6). The BCs give y0 = 1, yNx = b.The values of fi involve yj at the grid points adjacent to the point i and de-
pend on how we calculate the required derivatives. Special care is needed due tothe high order of the governing equation. It is easy to check that a naive use of,e.g., central differences can lead to a large computational stencil (i.e., there wouldbe many neighbor points involved in calculating f at a given node i). The readercan easily check that the fourth-order term would lead to a seven-point stencil, withj = i− 3, i− 2, i− 1, i, i+1, i+2, i+3 involved (see Exercise B.1). Below I present asimpler discretization, involving only five points, but still second-order correct. Usinga smaller stencil is important not only due to computational simplicity and perfor-mance, but also since a larger stencil would involve a number of extra points at theboundaries.

FLOW OF THIN FILMS 109
B.1.1. Discretization of the Fourth-Order Term. Consider the general equa-tion
ht = (g(h)hxxx)x ;(22)
in our case g(h) = h3. Define forward and backward differences by
yx,i =yi+1 − yi
∆x, yx,i =
yi − yi−1
∆x.(23)
Equation (22) can be now discretized as
yi,t = (a(yi−1, yi)yxxx,i)x ,(24)
where a(s1, s2) is some approximation to g(h). It can easily be verified that (i) thisscheme leads to a five-point stencil; i.e., two neighbor points on each side of the givenpoint i are used; and (ii) the scheme is second-order correct, as long as a is a second-order correct approximation to g. The only remaining question is the choice of a.One could use, for example,
a(s1, s2) =12[g(s1) + g(s2)] or a(s1, s2) = g
[12(s1 + s2)
].(25)
Remark. Some recent works have shown that there are particular a’s that havesome special properties. For example, there is a choice that leads to the so-calledpositivity-preserving scheme, meaning that if one starts from strictly positive datafor h, the scheme will help preserving this property. The interested reader is referedto [4] and the references therein concerning the details.
B.1.2. Discretization of Lower Order Terms. The performance of a scheme isusually determined by the discretization of the highest order term, so that discretiza-tion of the lower order terms is not so important, as long as it is second-order correct.The reader may want to experiment with different kinds of discretizations and com-pare the convergence properties of the resulting schemes. One simple possibility is todiscretize the second term in the RHS of (6) as
(∂
∂xh3hx
)i
≈ 1(∆x)2
(a(yi+1, yi)yx,i)x ,(26)
while the last term can be discretized as(∂h3
∂x
)i
≈ 12∆x
(y3i+1 − y3
i−1) .(27)
B.2. Time Discretization. There are different schemes that can be used to solvethe system of coupled ODEs (21). The simpler ones are explicit schemes, whichuse the values of fi in (21) at time t to calculate the time derivative. The simplestpossibility is the forward Euler scheme, where one discretizes as
yi(t+∆t)− yi(t)∆t
= fi(t) , i = 1, . . . , Nx − 1 ,(28)
and then solves this system of equations for yi(t+∆t), i = 1, . . . , Nx − 1.This scheme, while simplest to use, suffers from two problems. One is lack of
accuracy; as one could easily check, it is only first order in time. This problem can

110 L. KONDIC
be removed by using more accurate schemes, such as second- or fourth-order Runge–Kutta methods. A more problematic issue is the well-known fact that explicit schemesmay become unstable if a time step is too large. For (21), the stability requirementis that ∆t < C[∆x]4, where C is a constant (the fourth power is related to the fourthorder of (6)). For reasonably small ∆x, this requires rather small ∆t. This issue canbe remedied by using implicit schemes, outlined below.
Remark. It is worth noticing that, despite their shortcomings, explicit methodshave been successfully used for the problem [1]. Therefore, it is not necessary to invokemore elaborate implicit methods for the 2D problem, which we address here. For 3Dproblems, on the other hand, implicit schemes are much more relevant; see [6, 12].
B.2.1. Implicit Schemes. Implicit schemes use the values of f in (21) not onlyat time t, but also at time t+∆t (there are also so-called multilevel schemes that usethe values from other time levels; see [13]). A rather standard method is the θ-scheme,which is formulated as follows:
yi(t+∆t)− yi(∆t)∆t
= θfi(t) + (1− θ)fi(t+∆t), i = 1, . . . , Nx − 1 ,(29)
where 0 ≤ θ ≤ 1. Here, θ = 0 leads to the forward Euler scheme, θ = 1 to the (implicit)backward Euler scheme, and θ = 1/2 to the implicit second-order Crank–Nicholsonscheme. Any θ �= 0 specifies a system of Nx − 1 nonlinear algebraic equations foryi(t + ∆t), i = 1, . . . , Nx − 1. One commonly used approach to solving this kind ofequation is a variation of Newton’s method. Basically, one linearizes (29) about aguess for the solution, and then solves the resulting linear system for the correction.The guess is then updated and this iterative procedure repeated until the convergencecriterion is met. More precisely, the solution of (29) at time tn+1 is written as
yn+1i = y∗i + qi, i = 1, . . . , Nx − 1 ,
where y∗i is a guess and qi is the correction. As a guess, one can use, e.g., thesolution from the previous time step, yni . To linearize the equations, we expressfn+1i (= fi(tn+1)) using the Taylor expansion of fni about y∗i :
fn+1i = f∗i +
∂fi∂qj
∣∣∣∣∗qj , i = 1, . . . , Nx − 1 ,
where the superscript ∗ indicates that fi is calculated using y∗j . Equations (29) become(δi,j + θ∆tF ∗i,j
)qj = Ri, i = 1, . . . , Nx − 1 ,(30)
where δi,j is the Kronecker delta, and Fi,j = ∂fi/∂qj is the Jacobian matrix. TheRHS of this linear system is
Ri = yni − y∗i + θ∆tf∗i + (1− θ)∆tfni , i = 1, . . . , Nx − 1 .
The correction qi is then obtained by solving the linear algebraic system (30); thiscompletes one Newton iteration. Next, one checks whether qi is sufficiently small (insome norm). If yes, the procedure is finished, and y∗i + qi, i = 1, . . . , Nx− 1, becomesthe solution at time tn+1. If not, one uses y∗i + qi as a new guess and repeats theprocedure until the norm of qi is sufficiently small. The linear system itself can besolved using any standard method, such as Gaussian elimination. Of course, use ofiterative methods, such as SOR or biconjugate gradient, is appropriate as well [13].

FLOW OF THIN FILMS 111
Exercise B.1. Apply central difference formulae directly to (22), without usingforward/backward difference formulae (23). Show that you obtain a seven-point for-mula; i.e., three points on each side of a given point (plus the point itself) are neededto calculate the fourth derivative. Then, show that the discretization defined by (24)leads to a five-point computational stencil. Next, use Taylor series to show that if ais a second-order correct approximation to g, then the scheme (24) is itself of secondorder.
Exercise B.2. Use (24), (26), and (27) to reduce the continuous equation (6) to itscontinuous time, discrete space version, (21). Write down explicitly the expressionsfor f in (21) that result if either of the interpolations specified by (25) is used.
Appendix C. Linear Stability Analysis (LSA). The basic ideas behind LSA areintroduced in section 2. Here I provide some details; the reader should also consult[3, 5, 15, 16, 18], where this problem is presented in complementary ways, includingan introduction to various concepts, such as the superposition principle, normal modeexpansion, eigenvalue problems, etc. The presentation here is simplified considerablyin order to concentrate only on the most relevant questions. One simplification isto let b → 0. Furthermore, the origin of the coordinate system is positioned at theunperturbed contact line, and for convenience we will assume a semi-infinite [−∞, 0]domain.
In section 2, I explained the motivation for expanding the solution in the movingreference frame, traveling with velocity U . In this reference frame, we have
∂h
∂t+∇ ·
[h3∇∇2h
]−D(α)∇ ·
[h3∇h
]+∂h3
∂ξ− Uhξ = 0 ,(31)
where ξ = x− Ut and ∇ = (∂ξ, ∂y). Write down a solution in the form
h(ξ, y, t) = h0(ξ) + εh1(ξ, y, t) ,(32)
where ε� 1, and substitute this expansion into (31). The leading order terms (O(ε0))give the 2D equation (8). The first-order terms (O(ε1)) yield
∂h1
∂t=−∇ ·
[h3
0∇∇2h1 + 3h20h1∇∇2h0
](33)
+D(α)∇ ·[h3
0∇h1 + 3h20h1∇h0
]− (h2
0h1)ξ + Uhξ ,
where fξ stands for ∂f/∂ξ. The next step is to replace the solution, h1, by its Fourierintegral in y; see (10). The superposition principle tells us that we can consider eachq separately, due to linearity of (33). Therefore, for a given q, we substitute (10) into(33) to obtain the following equation for g (see Exercise C.1):
∂g
∂t= −Lg ,(34)
where the linear operator, L, is given by
L =h30d4
dξ4 + (h30)ξ
d3
dξ3 −(D(α) + 2q2)h3
0d2
dξ2(35)
+(2− (h3
0)ξ(D(α) + q2)) d
dξ+ h3
0q2(D(α) + q2) .

112 L. KONDIC
The homogeneity of (34) implies exponential time dependence of g = φ(ξ)eσt (11).The growth rate, σ, determines the temporal evolution of h1. Using (11), (34) can berewritten as
Lφ = −σφ .(36)
The last equation is an eigenvalue problem for the linear operator L; the values of σsatisfying this equation are eigenvalues, and the corresponding φ’s are eigenfunctions.Since σ = σ(q), the perturbations characterized by different wavelengths λ = 2π/qbehave differently. Figure 3c shows an example where there is a range of q’s for whichσ is positive; these perturbations grow with time. Outside of this range, σ is negative,and these perturbations decay exponentially.
To obtain the results shown in Figure 3c, one needs to solve (36). In general, thiscan be done only numerically (see Appendix C.2). However, an analytic solution canbe obtained in the limiting case of very small q’s, as explained below.
C.1. Limit of Small Wavenumber. Note that (36) contains only even powersof q, up to q4. Then the solution should depend only on even powers of q as well:
φ = φ0 + q2φ1 + q4φ2 , σ = σ0 + q2σ1 + q4σ2 .(37)
If q is small, the terms O(q4) are not relevant. I concentrate on this limit, andproceed to derive the equations for φ0 and φ1. (Note that (36) has to be valid for allq’s. Correspondingly, each power of q can be considered separately.)
C.1.1. O(q0). Substituting expansion (37) into (36), we obtain[2φ0 −D(α)h3
0φ0ξ + h30φ0ξξξ
]ξ= −σ0φ0 .(38)
To proceed, consider the BC at the contact line. The perturbation, g, modifies theposition of the contact line from ξ = 0 to ξ = ξb, where ξb(y, t) = −εeıqy+σt. The BCat the contact line, h(ξb, y, t) = 0, needs to be linearized:
0 = h(ξb, y, t)= h0(ξb) + εh1(0, y, t) +O(ε2)
= h0(0)− εeıqy+σth0(0)ξ + εg(0, t)eıqy +O(ε2)(39)
= εeıqy+σt (−h0(0)ξ + φ0(0)) +O(ε2) ,
where h(0) = 0 follows from b = 0; (11) and (32) were used. Note that we firstexpand the solution h itself to O(ε) and then calculate the base solution, h0, at themodified boundary. This requires the Taylor expansion of h0, which explains the terminvolving h0ξ above. The obvious conclusion is that φ0(0) = h0ξ(0), giving the BCfor φ0. Going back to (38), we see that it is reasonable to try with φ0(ξ) = h0ξ(ξ) asa candidate for the solution. Plugging this ansatz into (38) leads to
[2h0ξ −D(α)h3
0h0ξξ + h30h0ξξξξ
]ξ= −σ0h0ξ .(40)
In Exercise C.2 below one shows that the term in the square brackets vanishes, lead-ing to σ0 = 0. Therefore, the Fourier mode characterized by the zero wavenumber(translation) is “marginally stable”; it does not evolve in time. This is a consequenceof the translational invariance in the ξ direction: we can always move the film up ordown the incline without changing its properties.

FLOW OF THIN FILMS 113
C.1.2. O(q2). To this order, (36) leads to the following equation that now in-volves φ0 and φ1:
h30φ1ξξξξ + (h3
0)ξφ1ξξξ −D(α)h30φξξ − 2h3
0φ0ξξ + (2− (h30)ξD(α))φ1ξ
− (h30)ξφ0ξ + h3
0D(α)φ0 = −σ1φ0 .
Simplifying this equation leads to
−h30φ0ξξ +
[h3
0(φ1ξξξ −D(α)φ1ξ − φ0ξ)]ξ + h3
0D(α)φ0 = −σ1φ0 .(41)
Now, integrate (41) over the domain and use φ0 = h0ξ to obtain
∫ 0
−∞σ1h0ξdx =
∫ 0
−∞h3
0h0ξξξ dx−D(α)∫ 0
−∞h3
0φ0dx .(42)
Note that the term inside the square brackets in (41) does not contribute, due to theBCs. Finally, use (8) to perform the integration in (42), yielding
σ1 =∫ 0
−∞h0(h2
0 − 1)dx .(43)
Following the same approach, one can also derive the result for nonzero b [5, 16]:
σ1 =1
1− b
∫ 0
−∞(h0 − 1)(h0 − b)(h0 + b+ 1)dx .
C.2. LSA for Arbitrary Wavenumber. If q is not small, one needs to solveeither (36) or (34) numerically and extract the growth rate for all q’s. It turns outthat solving (36) is a nontrivial task; the interested reader is refered to [17]. Solving(34) is, however, easier, and the results can be obtained by the following procedure(an alternative approach can be found in [3]):
1. Obtain a discrete approximation to h0(ξ), as outlined in Appendix B. Notethat Appendix B concentrates on solving (6), while here we need a solutionof (8). The simplest approach is to calculate the solution of (6) for late times;that solution is steady in the moving reference frame (see Figure 3).
2. Fix q, and solve (34) (again for late times).3. Assume that the solution depends exponentially on time (as prescribed by
(11)), and extract the growth rate, σ(q).4. Repeat for other values of q; i.e., return to step 2 above.
Exercise C.1. Derive (34). Note that for a given q, integral (10) reduces to geıqy.Each y derivative in (33) then produces a factor of q.
Exercise C.2. Using the original ODE, (8), and its derivative, show that the terminside the square brackets of (40) identically vanishes.
Appendix D. Self-Similar Solution. Let us concentrate on (6), applied to theflow down a vertical plane. Throughout this work, I have assumed that the fluidthickness is constant far behind the front. This assumption is, of course, only approx-imately correct, since the fluid eventually thins out there. In this appendix, I apply atechnique, called the similarity method, to explore how this thinning process evolvesin time [10]. This approach is quite general, and a very powerful method for reducingPDEs to ODEs.

114 L. KONDIC
First, note that far behind the front, surface tension is not important and can besafely ignored (since hxxx is small). Therefore, in that region, (6) reduces to
∂h
∂t+ (h3)x = 0 .(44)
Assume a solution in the form
h(x, t) = h0(t)H(η) ,
where η is our self-similar variable which measures distance to the front, η = x/xf (t),0 ≤ η ≤ 1 (xf (t) is the front position). The idea is that, after we isolate the explicittime dependence, the shape of the film will depend only on η. Before we proceed, it isto be noted that this approach does not apply close to the “real” front (contact line),since surface tension is not included.
The next step is to require that h0(t) = Atα, xf (t) = Btβ , where α, β are self-similar exponents. After simple algebraic manipulation, (44) reduces to
h0xfh0xf
H − ηH ′ +h2
0
xfH2H ′ = 0 ,(45)
where ˙ = d/dt and ′ = d/dη. Now, recall that the total volume of the fluid is constant;therefore, the volume per unit width of the domain, v, is constant as well:
v = h0xf
∫ 1
0H(η)dη = const.,
giving h0xf = −h0xf and β = −α. In (45), the first two terms do not depend ex-plicitly on time; therefore, the last term shall not depend on time either, yieldingα = −1/3. Therefore, we obtain that the fluid is thinning far behind the front ac-cording to h0 ∝ t−1/3, while the front itself propagates according to xf ∝ t1/3.
We can now easily solve the ODE (45). Integrate it once, and use H(0) = 0 asa BC. The result is H(η) =
√Bη/A. Using (44), we obtain A = 1/3 and h(x, t) =√
x/3t. It is now easy to show that B = (27v2/4)1/3. To summarize, the domain ofthe self-similar solution ends abruptly at
xf (t) =(274v2t
)1/3
,
and the thickness at xf is given by
h(xf ) = hf =( v2t
)1/3.
This approach allows us to determine (approximately) the fluid thickness of theplateau behind the capillary ridge (see Figure 2). Combine the last two results aboveto obtain that the fluid thickness at xf is given by
hf =3v2xf
.(46)
This expression is used in section 3 to estimate the scales needed to compare theo-retical and experimental results. Exercise D.2 discusses under what conditions thechange of the plateau thickness with time can be ignored.
Exercise D.1. By replacing the self-similar solution in the neglected terms in (6),show that it is valid if these two conditions are satisfied: 1� (48x5t)1/2, D � (3xt)1/2.

FLOW OF THIN FILMS 115
Exercise D.2. Compare the following two time scales: (1) 1/σM , where σM isthe maximum growth rate, given in Table 1, and (2) T , on which hf specified by(46) changes significantly. Show that for the parameters as specified in section 3,1/σM � T . Based on this result, conclude that the time dependence of hf can besafely ignored for early times of instability development.
Exercise D.3. Consider the problem of a spreading drop on a horizontal surface,∂h
∂t=
∂
∂x
(h3 ∂h
∂x
).
Following the similarity method, assume h(x, t) = h0(t)H(η), η(t) = x/xf (t). Use thefollowing BCs: H(0) = 1, H(1) = 0, H ′(0) = 0. Show that the shape of a drop isgiven by (1− η2)1/3. Find how this profile evolves in time.
Acknowledgments. The author wishes to thank the group of students who per-formed the original experiments: Jeremy P. Carlo, Pritam O. Dodeja, Jeffrey Fernan-dez, Rupen Patel, Mark Timonera, and Rafal Turek (who actually built the exper-imental setup), and to Drs. Anna Georgieva and Greg Kriegsmann for useful com-ments. This paper is a byproduct of the research with Dr. Javier Diez of UniversidadNacional del Centro, Tandil, Argentina, who also helped with the original studentproject at NJIT.
REFERENCES
[1] For pictures, animations, experimental results, and the student report, see http://math.njit.edu/˜kondic/thin films/thin films.html.
[2] D. J. Acheson, Elementary Fluid Dynamics, Clarendon Press, Oxford, 2000.[3] A. J. Bernoff, A. L. Bertozzi, and T. P. Witelski, Axisymmetric surface diffusion: Dy-
namics and stability of self-similar pinchoff, J. Statist. Phys., 93 (1998), pp. 725–776.[4] A. L. Bertozzi, The mathematics of moving contact lines in thin liquid films, Notices Amer.
Math. Soc., 45 (1998), pp. 689–697.[5] A. L. Bertozzi and M. P. Brenner, Linear stability and transient growth in driven contact
lines, Phys. Fluids, 9 (1997), pp. 530–539.[6] J. Diez and L. Kondic, Contact line instabilities of thin liquid films, Phys. Rev. Lett., 86
(2001), pp. 632–635.[7] J. Diez, L. Kondic, and A. L. Bertozzi, Global models for moving contact lines, Phys. Rev.
E, 63 (2001), pp. 011208.[8] E. B. Dussan V., On the spreading of liquids on solid surfaces: Static and dynamic contact
lines, Ann. Rev. Fluid Mech., 11 (1979), pp. 371–400.[9] A. E. Hosoi and J. W. M. Bush, Evaporative instabilities in climbing films, J. Fluid. Mech.,
442 (2001), pp. 217–239.[10] H. Huppert, Flow and instability of a viscous current down a slope, Nature, 300 (1982),
pp. 427–429.[11] J. M. Jerrett and J. R. de Bruyn, Finger instability of a gravitationally driven contact line,
Phys. Fluids A, 4 (1992), pp. 234–242.[12] L. Kondic and J. Diez, Contact line instabilities of thin film flows: Constant flux configura-
tion, Phys. Fluids, 13 (2001), pp. 3168–3184.[13] K. W. Morton and D. F. Meyers, Numerical Solution of Partial Differential Equations,
Cambridge University Press, Cambridge, 1994.[14] T. G. Myers, Thin films with high surface tension, SIAM Rev., 40 (1998), pp. 441–462.[15] M. A. Spaid and G. M. Homsy, Stability of Newtonian and viscoelastic dynamic contact lines,
Phys. Fluids, 8 (1996), pp. 460–478.[16] S. M. Troian, E. Herbolzheimer, S. A. Safran, and J. F. Joanny, Fingering instabilities
of driven spreading films, Europhys. Lett., 10 (1989), pp. 25–30.[17] E. O. Tuck and L. W. Schwartz, A numerical and asymptotic study of some third-order or-
dinary differential equations relevant to draining and coating flows, SIAM Rev., 32 (1990),pp. 453–469.
[18] Y. Ye and H. Chang, A spectral theory for fingering on a prewetted plane, Phys. Fluids, 11(1999), pp. 2494–2515.















![Finale 2003 - [Untitled3]](https://static.fdokumen.com/doc/165x107/63186635cf65c6358f01f7b4/finale-2003-untitled3.jpg)

