Rules and Algorithms for Phonetic Transcription of Standard Malay
13
IEICE TRANS. ??, VOL.Exx–??, NO.xx XXXX 200x 1 PAPER Special Issue on CyberWorlds A Protocol for Peer-to-peer Multi-Player Networked Virtual Ball Game Tatsuhiro YONEKURA † , Member and Yoshihiro KAWANO †† , Nonmember SUMMARY This paper reports our study of how to gain consistency of states in a ball-game typed Distributed Virtual Environment (DVE) with lag, in peer-to-peer (P2P) architec- ture. That is, we are studying how to reduce in real-time the difference of states between the participating terminals in a vir- tual ball game caused by transmission lag or update interval. We are also studying how to control shared objects in real-time in a server-less network architecture. Specifically, a priority field called Allocated Topographical Zone (AtoZ) is used in P2P for DVE. By implementing this function, each terminal can compute which avatar holds the ownership of a shared object by calculat- ing mutually the state of the local avatar predicted by the remote terminals. The region for ownership determined by AtoZ allows an avatar to access and control an object dominantly, so that a geometrical property is dynamically changed depending upon the relative arrangement between the object and avatars. Moreover considering the critical case, defined as inconsistent phenomena between the peers, caused by the network latency, a stricter own- ership determination algorithm, called dead zone is introduced. By using these protocols in combination, a robust and effective scheme is achieved for a virtual ball game. As an example of the application, a real-time networked doubles air-hockey is im- plemented for evaluation of the influence of these protocols on interactivity and on consistency. key words: DVE (Distributed Virtual Environment), P2P (peer-to-peer), mutual prediction protocol, priority field, AtoZ (Allocated Topographical Zone), the critical cases, the dead zone 1. Introduction Recently, applications featuring interaction via the In- ternet have become popular; this is the result of a rapid increase of users due to the rapid growth of the Internet. Accordingly, the problem of communication latency has been remarkable in applications with a requirement of high interactivity such as the real-time remote control robotics and the real-time network game program [4], [5], [7]. In general, a client-server type of architecture may be employed in such a fields, namely a Distributed Virtual Environment (DVE) [4]. Although this type of DVE that offers the advan- tage of consistent states of objects in a virtual space, its drawbacks are well known; e.g., server overload and re- Manuscript received January 1, 2003. Manuscript revised January 1, 2003. Final manuscript received January 1, 2003. † The author is with the Department of Computer and Information Sciences, Ibaraki University, Hitachi-shi, 316- 8511, Japan †† The author is with the Graduate school of Science and Engineering, Ibaraki University, Hitachi-shi, 316-8511, Japan duction of system throughputs [1]. On the other hand, various peer-to-peer (P2P hereafter) architectures are available for designing DVEs. Using P2P-type DVE can decentralize computing load of a server and de- crease latency of turnarounds since each peer commu- nicates directly with all of the other nodes in the net- work except itself [6]. However, synchronization be- tween nodes is not easily available because such a net- work has no server for synchronization management, as does a client-server network. This issue is the so-called consistency-throughput trade-offs [1]. That is, while the information about a local avatar (virtual player in the DVE) can be quickly available at a local host in a P2P network, a remote avatar’s infor- mation cannot be simultaneously displayed because of latency. Consequently, shared objects cannot be con- trolled jointly by all the users because of the temporal difference between the local and the remote avatars in terms of their status in reference to each other [4], [5]. To deal with this limitation, some researchers have re- ported protocols design for sharing the information up- dates in simultaneous ways on large scale P2P networks [6], [12]. These reports, however, have dealt with the evaluation only by computer simulation and they have not referred to actual evaluation with actual communi- cation for constructing the actual DVE. They have not discussed either the way to deal with the shared object for management of the consistency in the DVE, or the way to design the concrete protocol for the P2P type DVE. On the other hand, a few reports have been made about P2P protocol for the DVE of multiplayer game [9], [10] and the field game [3]. In [9], less considera- tion was made about dealing with the shared object. And in [9] the synchronizer always has to synchronize the ownership of the object. The algorithm, however, has to have exclusive control in order to synchronize the state of the shared object so that the throughput is rather sacrificed. Some other research, study how to reduce the network traffic based on geometric relation- ship between avatars without sacrificing smooth inter- action between peers [19]. However it doesn’t focus on a solution to consistency throughput trade-offs. Thus, this paper reports our study of how to gain consistency for all states, including those of the avatars and shared objects in a DVE in which the shared field is equally accessible to and controllable by each peer, without sacrificing throughput. To construct a DVE
Transcript of Rules and Algorithms for Phonetic Transcription of Standard Malay

IEICE TRANS. ??, VOL.Exx–??, NO.xx XXXX 200x1
PAPER Special Issue on CyberWorlds
A Protocol for Peer-to-peer Multi-Player Networked
Virtual Ball Game
Tatsuhiro YONEKURA†, Member and Yoshihiro KAWANO††, Nonmember
SUMMARY This paper reports our study of how to gainconsistency of states in a ball-game typed Distributed VirtualEnvironment (DVE) with lag, in peer-to-peer (P2P) architec-ture. That is, we are studying how to reduce in real-time thedifference of states between the participating terminals in a vir-tual ball game caused by transmission lag or update interval. Weare also studying how to control shared objects in real-time ina server-less network architecture. Specifically, a priority fieldcalled Allocated Topographical Zone (AtoZ) is used in P2P forDVE. By implementing this function, each terminal can computewhich avatar holds the ownership of a shared object by calculat-ing mutually the state of the local avatar predicted by the remoteterminals. The region for ownership determined by AtoZ allowsan avatar to access and control an object dominantly, so that ageometrical property is dynamically changed depending upon therelative arrangement between the object and avatars. Moreoverconsidering the critical case, defined as inconsistent phenomenabetween the peers, caused by the network latency, a stricter own-ership determination algorithm, called dead zone is introduced.By using these protocols in combination, a robust and effectivescheme is achieved for a virtual ball game. As an example ofthe application, a real-time networked doubles air-hockey is im-plemented for evaluation of the influence of these protocols oninteractivity and on consistency.key words: DVE (Distributed Virtual Environment), P2P(peer-to-peer), mutual prediction protocol, priority field, AtoZ(Allocated Topographical Zone), the critical cases, the dead zone
1. Introduction
Recently, applications featuring interaction via the In-ternet have become popular; this is the result of a rapidincrease of users due to the rapid growth of the Internet.Accordingly, the problem of communication latency hasbeen remarkable in applications with a requirement ofhigh interactivity such as the real-time remote controlrobotics and the real-time network game program [4],[5], [7]. In general, a client-server type of architecturemay be employed in such a fields, namely a DistributedVirtual Environment (DVE) [4].
Although this type of DVE that offers the advan-tage of consistent states of objects in a virtual space, itsdrawbacks are well known; e.g., server overload and re-
Manuscript received January 1, 2003.Manuscript revised January 1, 2003.Final manuscript received January 1, 2003.†The author is with the Department of Computer and
Information Sciences, Ibaraki University, Hitachi-shi, 316-8511, Japan
††The author is with the Graduate school of Scienceand Engineering, Ibaraki University, Hitachi-shi, 316-8511,Japan
duction of system throughputs [1]. On the other hand,various peer-to-peer (P2P hereafter) architectures areavailable for designing DVEs. Using P2P-type DVEcan decentralize computing load of a server and de-crease latency of turnarounds since each peer commu-nicates directly with all of the other nodes in the net-work except itself [6]. However, synchronization be-tween nodes is not easily available because such a net-work has no server for synchronization management, asdoes a client-server network. This issue is the so-calledconsistency-throughput trade-offs [1].
That is, while the information about a local avatar(virtual player in the DVE) can be quickly available ata local host in a P2P network, a remote avatar’s infor-mation cannot be simultaneously displayed because oflatency. Consequently, shared objects cannot be con-trolled jointly by all the users because of the temporaldifference between the local and the remote avatars interms of their status in reference to each other [4], [5].To deal with this limitation, some researchers have re-ported protocols design for sharing the information up-dates in simultaneous ways on large scale P2P networks[6], [12]. These reports, however, have dealt with theevaluation only by computer simulation and they havenot referred to actual evaluation with actual communi-cation for constructing the actual DVE. They have notdiscussed either the way to deal with the shared objectfor management of the consistency in the DVE, or theway to design the concrete protocol for the P2P typeDVE. On the other hand, a few reports have been madeabout P2P protocol for the DVE of multiplayer game[9], [10] and the field game [3]. In [9], less considera-tion was made about dealing with the shared object.And in [9] the synchronizer always has to synchronizethe ownership of the object. The algorithm, however,has to have exclusive control in order to synchronizethe state of the shared object so that the throughputis rather sacrificed. Some other research, study how toreduce the network traffic based on geometric relation-ship between avatars without sacrificing smooth inter-action between peers [19]. However it doesn’t focus ona solution to consistency throughput trade-offs.
Thus, this paper reports our study of how to gainconsistency for all states, including those of the avatarsand shared objects in a DVE in which the shared fieldis equally accessible to and controllable by each peer,without sacrificing throughput. To construct a DVE

2IEICE TRANS. ??, VOL.Exx–??, NO.xx XXXX 200x
ballgame, in which the objects shared by the playershave the physical attributes of location, orientation andvelocity, a significant issue is that of how the owner-ship (decision of which peer owns the key to control anobject) and the attributes for all avatars and objectsshould be kept consistent among peers.
The following four criteria should be considered:
1) Guarantee of the consistency for the ownership(i.e., all peers should have a common understand-ing as to who has ownership)
2) Reasonable and effective decision making regard-ing ownership (i.e., for quick and smooth opera-tion, the avatar closest to the object should haveownership)
3) Guarantee of the consistency for the attributes ofavatars (i.e., all peers must have the same under-standing about all avatars)
4) Reduction of the inconsistency of 1) and 3) abovecaused by network latency
Thus, we consider distributed processing protocolscalled Allocated Topographical Zone (AtoZ hereafter) toachieve those criteria in Section 2 below. Then, in Sec-tion 3, we give a concrete algorithm for computing theabove protocol and discuss several of their properties.Next, we introduce a critical case in which conflicts ofownership occur, and examine a protocol for eliminat-ing such cases, and give algorithms for two peers’ caseand n peers’ case in Section 4. Finally in Section 5, weexamine the performance of the proposed method ex-perimentally by prototyping a networked ”Doubles AirHockey” game implemented with P2P architecture.
2. AtoZ and Mutual Prediction Protocol
Most importantly, we first confirm the conditions of dis-tributed DVE processing. A player, or peer, can manip-ulate exclusively the avatar dedicated to that peer (noother player can manipulate that avatar). Each of theshared objects can always be continuously under thecontrol of any avatar that is manipulated by a player.In other words, only one avatar exclusively owns eachof the shared objects at any one time. The decision-making regarding ownership is constantly computed,and the ownership is dynamically transferred from oneavatar to another.
Under such conditions, we propose the followingdistributed cooperative protocols among the peers, re-garding the ownership of a shared object.
At first, let’s presume that each avatar has a prior-ity field in which the ownership is given to that avatarwhile the shared object remains within that field. Thepriority field is defined as a set of spatial points in or-der to decide which avatar can gain access to the sharedobject in the shortest time, and this must be uniquelyselected among the avatars. Hence the priority field isdecided dynamically, considering the relationship be-
Fig. 1 Overview of AtoZ
tween the associated avatars in terms of their position,velocity, acceleration and orientation. In this paper,the priority field is referred to as the Allocated Topo-graphical Zone (AtoZ hereafter) formulated as
AtoZ(pi) = {x|xεZ, Access(x, pi)= min
jεN(Access(x, pj))} (1)
Here pi denotes the i’th avatar (i = 1,2,…,N).In the formula above, AtoZ(pi) is the AtoZ of
avatar pi,x and Z denote a spatial point and the wholespace in the DVE, and Access(x, pj) denotes the esti-mated elapsed time for avatar pi , to reach x. Thus,the AtoZ(pi) indicates the set of points that avatar pi
can reach faster than any other avatar. The diagram ofthe AtoZ is shown in Fig.1.
If we assume that every peer uniquely determinesthe attributes of each avatar (by criterion 3), every peeralso commonly computes the AtoZs for all avatars, be-cause they use the same algorithm to determine theAtoZ (i.e., priority field) with the same calculation ac-curacy. This scheme satisfies criterion 2). Thus, everypeer may, though independently, select the same avataras having ownership of the shared object because all thepeers’ decision making rule regarding ownership is thesame. Then, this satisfies criterion 1).
Here, we can satisfy criterion 3) in the follow-ing way. That is, every peer periodically sends itsown avatar’s attributes data to all other peers and re-ceives periodically the attributes data of all of the otheravatars from the associated peers. We summarize theabove schemes as follows.
〈 Distributed protocol by AtoZ for P2P 〉Step (1). Every peer periodically sends (in frame up-
date cycle) its own avatar’s attributes data toall other peers, and receives periodically the at-tributes data of all the other avatars from the as-sociated peers
Step (2). Every peer independently computes allAtoZs (by using Eq. 1) from the attributes datareceived.

YONEKURA and KAWANO: A PROTOCOL FOR PEER-TO-PEER MULTI-PLAYER NETWORKED VIRTUAL BALL GAME3
Step (3). As a result of the computation above, if theshared object O belongs to the local avatar’s AtoZ,go to step 3-1), otherwise go to Step 3-2)
3-1). Since the ownership of the object belongsto the local avatar, compute the interaction(e.g., collision, manipulation) between the ob-ject and the local avatar, update the status ofthe object and send the updated data to allof the other peers in the DVE.
3-2). Since the ownership of the object belongsto a remote avatar, try to receive from theowner peer, the updated data about the ob-ject in the DVE. Besides, while waiting, cal-culate the object’s attributes locally and tem-porarily from the obtained data, just in casethe owner is absent (no peer has the owner-ship).
By performing the algorithm above for each peer,states of the avatars and the shared objects in the DVEare maintained consistently by means of distributedparallel processing. We should note that in steps (1)and (3) the consistency may be corrupted by networklatency or the frame update interval. This issue relatesto criterion 4) in the previous section. We propose asolution to the issue by means of a simple prediction inthe following section.
Though we only examine the easiest case, that ofonly having two peers with one shared object in theDVE, this discussion can be easily extended to the casefor more than three peers or more than two objects.In the two-peers model (i.e., two-avatars model), com-munication takes place only between peer A and peerB. Then, in peer A (peer B) the attributes of locallycontrolled avatar A (avatar B), and of the remotelycontrolled avatar B (avatar A) and the shared objectO should be displayed in real-time. In the P2P typeof DVE, however, a difference of appearance exists be-tween the peers because of the temporal gap caused bynetwork latency (Fig.2). At a given moment, the com-munication from peer A (peer B) to peer B (peer A)may experience latency 4ta ( 4tb) and the object Omay be under the control of a certain avatar (let’s sayavatar A) from the result of the AtoZ calculation. InFig.2, the latest attributes of avatar B (avatar A) ob-served at peer A(peer B) are of the moment: t − 4tb(t−4ta) and the latest attributes of the object O is ofthe moment t (t−4ta) at peer A (peer B).
Thus, the status of both avatars and the objectdisplayed at time t at both peers are represented asfollows.
(Displayed at peer A)
AA(t) = A(t) BA(t) = B(t−4tb) OA(t) = O(t) (2)
(Displayed at peer B)
AB(t)=A(t−4ta) BA(t)=B(t) OA(t)=O(t−4ta) (3)
Fig. 2 Gap between displayed information of two peers
Here, the left side of each equation represents thestatus of the avatars and the object, their suffixes rep-resents the peer in which they are displayed. Addi-tionally, the right side of each equation represents theactual status of the objects under the control of the as-sociated peer at that time period. This describes thatthere exists the temporal gap between peers caused bylatency, and that is the major reason for inconsistencyin the DVE [4].
In our work, we employ a mutual prediction proto-col so that each peer predicts the current status of theremote avatar and predicts the current status of the lo-cal avatar as predicted by the remote peer [11]. In thefollowing section of this paper, we describe how AtoZcalculation uses the results of these mutual predictionprotocols to reduce the temporal gap between the peers.In the next, we provide the specific algorithm for AtoZcalculation.
3. Protocols
3.1 Computation of AtoZ
In this section, we explain the actual method for com-puting of the AtoZ. The general idea of dominant re-gion for the field segmentation scheme used to processa unique object (for example, a ball) competitively orexclusively by multiple field players in a game, was pro-posed by Taki and Hasegawa [13]. In their article, adominant region is defined as a region where one playercan arrive earlier than any other and that can be formu-lated by replacing the distance function in the Voronoiregion with a time function.
That is, the idea formulates the zone or space, aterm in ball games, and the Voronoi region by usinga time variable for calculation that is taken from anactual sports scene. The Voronoi region is calculatedby using the position, velocity and acceleration vectorsof each player in a sequence of scene images and drawingboundaries between the players in terms of accessiblearea within a unit of time.
In the DVE, however, a desirable condition is that

4IEICE TRANS. ??, VOL.Exx–??, NO.xx XXXX 200x
the associated peer with the avatar who has ownershipof the object can be analytically discriminated by allpeers with a rather simple equation. By this strategy,the attributes of all avatars are the keys to calculate inreal-time the AtoZs and the ownership discriminationbased on those AtoZs. Hence, the idea of the priorityfield in which an avatar can obtain access quicker thanany other should define the AtoZ.
At first, a priority field is considered as a set ofpoints, which each avatar can reach within a certainamount of time. Assume that the existence probabil-ity density of an avatar in the next frame may be wellapproximated by the normal distribution [2]. The anal-ogy of Mahalanobis distance in the domain of quadraticdiscriminant analysis [15] can be used. Specifically, ourplaying field is taken as a feature vector space repre-senting the position vectors so that the avatars’ prior-ity field (i.e., AtoZ) is determined by the amount of theMahalanobis distance from the position of each avatar.Mahalanobis distance is interpreted as a distance func-tion in random variable space where the variance of avariable is taken into account. Provided that we have atwo-dimensionally featured space where two categories(i.e., two avatars) exist, the vector space is divided intotwo classes by using the existence probability densityfunction fA of the avatar A,
fA(x, y) =1
2π√
V (z1)√
V (z2)× exp (−z1
2 + z22
2) , (4)
and the function fB of the avatar B, at the moment ofthe next frame;
fB(x, y) =1
2π√
V (z3)√
V (z4)× exp (−z3
2 + z42
2) (5)
Here x and y are the variables of probability fA andfB , z1 and z2 are, respectively, the first and the secondprincipal components of fA , and z3 and z4 are thoseof fB , in a process of Principal Component Analysis.Moreover V (z1), V (z2) are the variance of fA in termsof z1 and z2 , V (z3), V (z4) are those of fB in terms ofz3 and z4. By taking the logarithm of Eq. 4 and 5, thesquared Mahalanobis distance of a point p = p(x, y)from the avatar A: DA
2 and the avatar B: DB2 (by
neglecting constant terms) are given as follows.
DA2 =
z12
V (z1)+
z22
V (z2)(6)
DB2 =
z32
V (z3)+
z42
V (z4)(7)
In the above, a set of points p(x, y) satisfyingDA
2(x, y) = DB2(x, y) is the boundary between the
two priority fields. Hence, we may employ a decisionrule that a set of points p(x, y) is defined as AtoZ(A)if DA
2(x, y) < DB2(x, y), and is defined as AtoZ(B) if
Fig. 3 The marching range of avatar A
DA2(x, y) > DB
2(x, y). The boundary formed by Eq.6 and 7 becomes a general quadratic equation [14].
Assume that the Access function in Eq. 1 is pro-portional to the Mahalanobis distance of a point fromeach avatar, so the ownership of the object at a certainpoint x belongs to the avatar p where minimum Ma-halanobis distance Dp
2(x) is given. The parameters ofthe ellipse Eq. 4 and 5 are specified as follows.
The reachable range or the marching range of anavatar at the next frame T = t1 may be approximatedas the inside area of the ellipse the two foci of which arethe current point of the avatar: A(t0) and its predictedpoint at the next frame time t1 : A(t0)+v0(t0) · (t1−t0), provided that the avatar’s current velocity is v0.This comes from the idea that the marching range mayexpand in the direction of the current velocity vector,and the existence probability may be a maximum valueat the center of the ellipse and be a numerical zerooutside the ellipse. The length of the longer axis isset to a certain positive coefficient a by considering thevelocity of the avatar.
a = Speed · Scale (8)
Scale above denotes a constant that converts themeasurement of the length in a virtual space into thatof a real space, and Speed [m/frame] denotes the ab-solute value of the current velocity, which can be com-puted by using the position of the two focus points ofthe ellipse defined above. In addition, the length ofthe shorter axis b can be calculated by using a and thedistance between the two foci c as follows (see Fig.3).
b =
√a2 −
(c
2
)2
(9)
By setting a suitable value of Scale above, the posi-tion of the avatar at the next frame may fall in betweenthe center and the other focus of the ellipse in mostcases. For this reason, we can find a well-estimatedmarching range in one frame.

YONEKURA and KAWANO: A PROTOCOL FOR PEER-TO-PEER MULTI-PLAYER NETWORKED VIRTUAL BALL GAME5
Fig. 4 Both avatars displayed at peer A
3.2 Computation of Mutual prediction protocol
We have proposed in previous reports the mutual pre-diction protocols [8], [11] in which the DVE can displaythe predicted status of the remote avatar as well asthat of the local avatar being predicted from the remotepeer, provided that the prediction algorithm being usedby the remote peer is available at the local peer. Theprotocol is useful in when having two or more playersin the DVE share knowledge of the current attributesof their opponent avatars is desirable for a certain kindof collaboration [1].
In this paper we introduce a simple mathematicalmodel as an example of the prediction of the avatars.That is, a dynamical model with the assumption thatacceleration of an avatar’s attributes may not vary ina short temporal interval, which is shown in Fig.4. InFig.4, where being displayed at peer A, the current po-sition attribute of avatar B at time t4 : B(t4) is pre-dicted as
B(t4) = B(t′3)+ (B(t′3)−B(t′2))(t4−t′3)(t
′3−t′1)/(t
′3−t′2)(t
′2−t′1)
− (B(t′2)−B(t′1))(t4−t′3)(t′3−t′2)/(t
′2−t′1)
2 (10)
By employing the same equation for applying the localavatar A (substituting B with A in Eq. 10), we candisplay the current illusion of local avatar A : A(t4)being predicted by the remote peer B. At that moment,each peer has to know the latest attribute of the localavatar that is known to the other peer.
Thus, at current time ti the estimation is done asfor the period of the latest attribute of local avatar re-ceived at the remote peer B in a time chart (see Fig.5).The elapsed time 4ta from sending packet from peerA to receiving it at peer B is calculated by using syn-chronized clock adjusted by Networked Time Protocol[17]. We get
tn ≤ ti −4ta (n = 0, 1, ..., i− 1) (11)
the largest integer number n satisfying Eq. 11 gives the
Fig. 5 time-chart of each peer
index for the latest received packet, which implies thelatest attributes of local avatar A(tn) have arrived topeer B.
By computing the above for both peers in the samemanner with the same accuracy, we may be able toreduce the temporal gap caused by the latency and theinterval between the peers so that the consistency ofthe virtual space is maintained.
4. Critical cases
4.1 Resource accounting of the ownership
We have mentioned, so far, the algorithm of thedecision-making rule of ownership and that of a schemefor reducing the temporal gap caused by latency. Inthe AtoZ protocol, however, we still have an ambigu-ity in regard to unpredictable events during latency.Even if we use AtoZ and the mutual prediction proto-col, we may still have a chance to lose the consistencyof the common AtoZs or the consistency of the own-ership when a certain competition happens betweenthe avatars during latency. That is, when the twoavatars simultaneously access a shared object, the at-tributes of both avatars possessed by the two peers maybecome slightly different because of latency, which inturn may cause misunderstanding of the object’s own-ership. Consequently, this may introduce a contradic-tion of event occurrence between the two peers becausethis misunderstanding means both avatars may own thesame object or no avatar may own it.
This kind of contradiction of event occurrence thatmay appear to the players is referred to as a criticalcase. In other words, critical cases mean that the con-sistency of computational results of the DVE derivedby player’s action breaks down between the peers dueto the network latency.
4.2 Dead Zone
The critical cases take place when the two avatars aregathering into the area close to the border between

6IEICE TRANS. ??, VOL.Exx–??, NO.xx XXXX 200x
them two because then which avatar should have ob-ject’s ownership is not obvious in those cases. Hence,the area near the border of the AtoZs where the exis-tence probabilities of the two avatars are comparable iscalled the dead zone, and here ownership is calculateddifferently than in the case when the object is definitelyin the AtoZs. More concretely, the area in which theownership of the object is ambiguous because of the lossof information caused by latency, including the trans-mission time lag and the update interval, is referred toas the dead zone. Thus, the decision-making rule forownership in the dead zone must be stricter. Consider-ing this, the area of dead zone is defined as follows.
DZ(pi, pj) = {x|xεZ,|Access(x, pi)−Access(x, pj)|
4t
< ([d/4t] + 1) (12)
Where DZ(pi, pj) denotes the dead zone betweenthe avatar pi and pj , d[ms] and 4t[ms] denotes thetransmission lag and update interval respectively. Thesymbol [ ] is the Gaussian symbol indicating the max-imum integer less than or equal to the number inside.Then, ([d/4t] + 1) calculates the number of elapsedframes from sending the data to receiving the data.Eq. 12 implies that the width of the dead zone dependsupon the relative arrangement and maximum speed ofboth avatar, transmission lag, and the update interval.Therefore, only the area in which a critical case doesn’toccur, even if the local avatar marches in maximumspeed before remote peer receives the data transmittedfrom the local peer, is redefine as the AtoZ. Moreover,an area that does not belong to any AtoZ is defined asa dead zone. The width of the dead zone is defined as
Border = MaxSpeed× ([d/4t] + 1)× Scale (13)
In the above, MaxSpeed[cm/frame] and Scaledenote, respectively, the maximum speed of the avatarand a scaling factor from the virtual space to the realspace. The equation calculates the maximum distancethat each avatar can march during latency. By usingthe Border calculated numerically above as a thresh-old value for a discriminant function of Mahalanobisdistance, we can have an adaptive and suitable borderwidth for the dead zone.
Hence the decision-making scheme of ownershipdepends upon whether the object is supposed to bein the AtoZ or in the dead zone (called territory typehereafter). The next subsection describes a reasonableway to handle this.
4.3 Handling of the dead zone resident object
When a shared object resides in the dead zone, own-ership obviously cannot be decided by the definition ofAtoZ from Eq. 1. On the other hand, sending and re-ceiving messages every time the owner changes between
the two peers if ownership is transferred frequently isnot desirable, since we always have the risk of the net-work latency and should avoid degrading throughputs.Thus, the owner of an object in the dead zone shouldbe that avatar most likely to access the object soonerthan any other, and every peer must obey this rule.
4.3.1 Two peers’ case
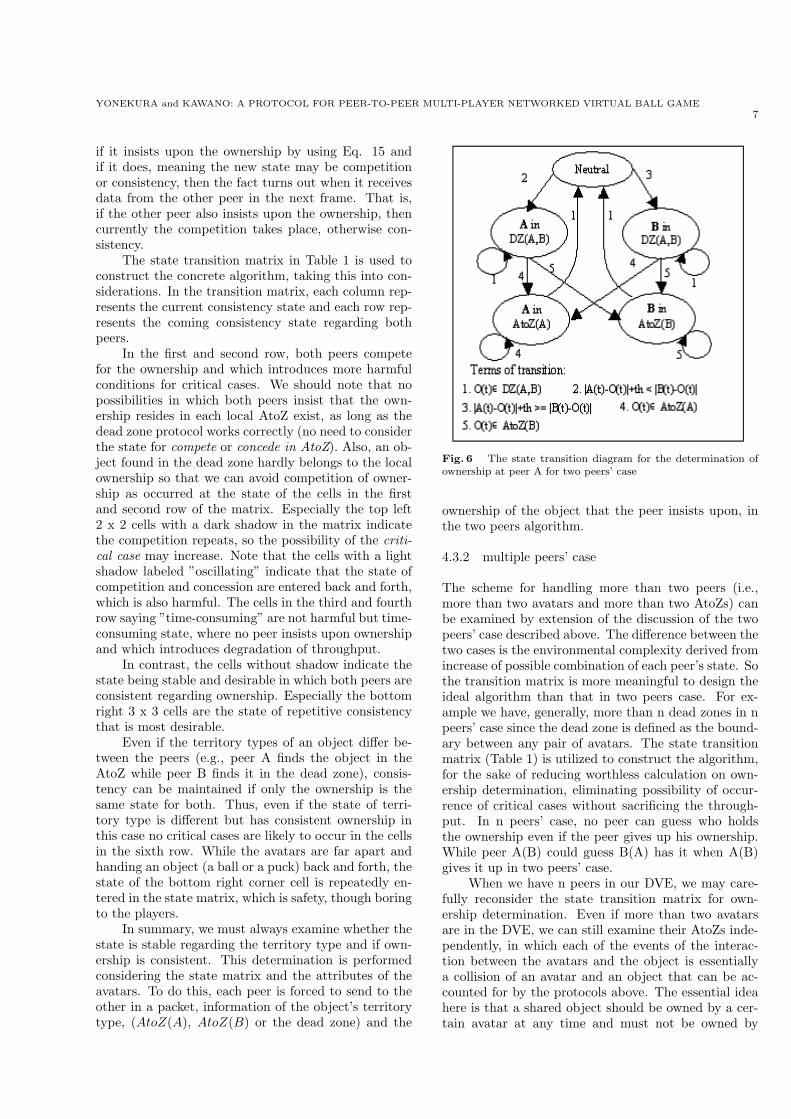
In this paper we utilize the state transition diagramfor two peers (Fig.6) and the state transition matrix(Table 1) to design the algorithm for every peer to de-cide the owner of an object. The state transition di-agram depicts, from a certain peer’s local viewpoint,how the ownership is transferred between the local andthe remote peer as well as the condition of each tran-sition. Whereas the state transition matrix shows howthe transition of environmental state (i.e. consistent,competing or conceding) looks like. Suppose we havetwo peers (say peer A and B) in our DVE. Fig.6 demon-strates the internal state transition regarding the own-ership from peer A’s viewpoint. From peer B’s view-point, all the symbols A and B in the diagram are re-versed.
In Fig.6, when an object is found in the dead zone,the state variable Neutral (where the decision of owner-ship is beyond AtoZs) is entered. Then, the ownershipis determined by the inequality in the figure.
It belongs to A · · · if |A(t)−O(t)| < |B(t)−O(t)|,B · · · otherwise. (14)
In this way the inconsistency of ownership is un-likely since the rule is similar to the AtoZ calculation,and we can smoothly transit from/to the AtoZ ruleto/from the dead zone rule. For more safety, we mayhave some small positive threshold value, th, that wouldgive room to avoid the possibility of critical cases suchthat
ownership belongs to
local avatar A· · · if |A(t)−O(t)|+th< |B(t)−O(t)|,remote avatar B · · · otherwise. (15)
where the threshold th above gives a handicap forthe local ownership so that competition for the owner-ship is unlikely to take place while concession may belikely even in the worst case. In this sense Eq. 15 shouldbe a reasonable handling scheme for critical cases. Intwo peers’ case, the manner of ownership determinationis symmetrical between peer A and B so all the sym-bols A and B in the equation are reversed at peer B.More concretely, for example, transition 1 takes placewhen O(t) resides in DZ(A,B), then we calculate Eq.15 to decide who to hand over the ownership. Whilewe can easily decide the ownership belongs to A, (orB), in case we find O(t) in AtoZ(A), (or AtoZ(B)), be-ing referred to as transition 4 and 5. Each peer tests
YONEKURA and KAWANO: A PROTOCOL FOR PEER-TO-PEER MULTI-PLAYER NETWORKED VIRTUAL BALL GAME7
if it insists upon the ownership by using Eq. 15 andif it does, meaning the new state may be competitionor consistency, then the fact turns out when it receivesdata from the other peer in the next frame. That is,if the other peer also insists upon the ownership, thencurrently the competition takes place, otherwise con-sistency.
The state transition matrix in Table 1 is used toconstruct the concrete algorithm, taking this into con-siderations. In the transition matrix, each column rep-resents the current consistency state and each row rep-resents the coming consistency state regarding bothpeers.
In the first and second row, both peers competefor the ownership and which introduces more harmfulconditions for critical cases. We should note that nopossibilities in which both peers insist that the own-ership resides in each local AtoZ exist, as long as thedead zone protocol works correctly (no need to considerthe state for compete or concede in AtoZ). Also, an ob-ject found in the dead zone hardly belongs to the localownership so that we can avoid competition of owner-ship as occurred at the state of the cells in the firstand second row of the matrix. Especially the top left2 x 2 cells with a dark shadow in the matrix indicatethe competition repeats, so the possibility of the criti-cal case may increase. Note that the cells with a lightshadow labeled ”oscillating” indicate that the state ofcompetition and concession are entered back and forth,which is also harmful. The cells in the third and fourthrow saying ”time-consuming” are not harmful but time-consuming state, where no peer insists upon ownershipand which introduces degradation of throughput.
In contrast, the cells without shadow indicate thestate being stable and desirable in which both peers areconsistent regarding ownership. Especially the bottomright 3 x 3 cells are the state of repetitive consistencythat is most desirable.
Even if the territory types of an object differ be-tween the peers (e.g., peer A finds the object in theAtoZ while peer B finds it in the dead zone), consis-tency can be maintained if only the ownership is thesame state for both. Thus, even if the state of terri-tory type is different but has consistent ownership inthis case no critical cases are likely to occur in the cellsin the sixth row. While the avatars are far apart andhanding an object (a ball or a puck) back and forth, thestate of the bottom right corner cell is repeatedly en-tered in the state matrix, which is safety, though boringto the players.
In summary, we must always examine whether thestate is stable regarding the territory type and if own-ership is consistent. This determination is performedconsidering the state matrix and the attributes of theavatars. To do this, each peer is forced to send to theother in a packet, information of the object’s territorytype, (AtoZ(A), AtoZ(B) or the dead zone) and the
Fig. 6 The state transition diagram for the determination ofownership at peer A for two peers’ case
ownership of the object that the peer insists upon, inthe two peers algorithm.
4.3.2 multiple peers’ case
The scheme for handling more than two peers (i.e.,more than two avatars and more than two AtoZs) canbe examined by extension of the discussion of the twopeers’ case described above. The difference between thetwo cases is the environmental complexity derived fromincrease of possible combination of each peer’s state. Sothe transition matrix is more meaningful to design theideal algorithm than that in two peers case. For ex-ample we have, generally, more than n dead zones in npeers’ case since the dead zone is defined as the bound-ary between any pair of avatars. The state transitionmatrix (Table 1) is utilized to construct the algorithm,for the sake of reducing worthless calculation on own-ership determination, eliminating possibility of occur-rence of critical cases without sacrificing the through-put. In n peers’ case, no peer can guess who holdsthe ownership even if the peer gives up his ownership.While peer A(B) could guess B(A) has it when A(B)gives it up in two peers’ case.
When we have n peers in our DVE, we may care-fully reconsider the state transition matrix for own-ership determination. Even if more than two avatarsare in the DVE, we can still examine their AtoZs inde-pendently, in which each of the events of the interac-tion between the avatars and the object is essentiallya collision of an avatar and an object that can be ac-counted for by the protocols above. The essential ideahere is that a shared object should be owned by a cer-tain avatar at any time and must not be owned by

8IEICE TRANS. ??, VOL.Exx–??, NO.xx XXXX 200x
Table 1 Environmental state transition matrix for the ownership determination in n-peers case
more than one avatar at same time. To guarantee thiscriterion, the state transition matrix is utilized againso as to find quickly the inconsistency of the territorytype and the ownership, so that the concessive man-ner is more appreciated than the competitive manner,even if inconsistency of ownership occurs (see Table 1).Again, we must always examine whether the state isstable regarding the territory type and whether owner-ship is consistent. Simultaneously, each peer is forcedto send a packet, containing information regarding ob-ject’s territory type and the object ownership that thepeer insists upon, to all the other peers. If the own-ership is contested among a set of peers in which thelocal peer is included, Eq. 15 is computed against theopposing peers who compete for ownership, to deter-mine which should be the owner. If the ownership isnot contested or it is contested but the local peer isnot included among the contesting peers, the local peershould listen until the packet is received containing in-formation of the peer insisting on ownership.
In Table 1, at the upper left corner cell, sincetwo or more avatars continue to insist on ownershipof an object in the Dead Zone, this may bring abouta critical case in which more than two nearby avatarscan pretend to control the shared object at the sametime, only to create a collision of contradictory events.This is the case that we may have to eliminate first.The cells labeled ”time-consuming” again represent thetime-consuming state in which concession keeps occur-ring such that no peer is claiming ownership. The cellswithout shadow are in stable transition so that at leastthe ownership is consistent. This is the case that guar-antees consistency.
When we design the distributed algorithm, the
concept above should be employed in a form of thresh-old th in Eq. 15 as a handicap for the transition path.Thus, taking the matrix into account, the complete al-gorithm for multiple players is as follows.
〈 Distributed protocol by AtoZ for P2P multi-playerball game 〉
Step (1). Every peer (let us focus on the i’th peer)periodically receives each avatar’s attribute datafrom the corresponding peers. Each incomingpacket includes the territory type and a flag in-dicating if it held the ownership at the last frame.
Step (2). The peer computes only its own AtoZ fromthe attributes data received above,( for (j=0; j 〈 Num of avatars; j++) calculate Ma-halanobis distance from the avatar pj to the sharedobject by Eq. 6),7) and decide the AtoZ of pi.Next, compute the Dead Zone between the avatarpi and the all of other avatars( for (j=0; j 〈 Num of avatars, j 6= i; j++) calculateDZ(pi, pj) by Eq. 12)
Step (3). Perform the ownership determination de-scribed below; calculate territory type where own-ership resides and then decide if the associatedavatar holds ownership.(Ownership determination algorithm)
(a) Check to see if the shared object is in the as-sociated AtoZ(pi) and if that is the case thenset the ownership flag and the territory typeto TRUE and ATOZ respectively; go to step3-1) below, otherwise go to (b).
(b) Check to see if the shared object is in the as-sociated Dead Zone of i’th peer; DZ(pi, pj)

YONEKURA and KAWANO: A PROTOCOL FOR PEER-TO-PEER MULTI-PLAYER NETWORKED VIRTUAL BALL GAME9
j 6= i, and if that is the case then go to (c),otherwise set the flag and the type to FALSEand UNKNOWN respectively; go to (3-2) be-low. UNKNOWN means that it doesn’t careabout territory type since ownership of theobject belongs to a remote avatar.
(c) Being sure that the object resides in the asso-ciated Dead Zone, DZ(pi, pj) j 6= i; use Eq.15’ below for the ownership decision in criti-cal cases and if it belongs to the local avatarthen set the flag and the type to TRUE andDEADZONE; go to step 3-1), otherwise setthem to FALSE and DEADZONE, and go tostep 3-2).
The ownership belongs to the,
local avatar · · · if |local(t)−O(t)|+ th(t)< |remotej(t)−O(t)|∀j,
remote avatar · · · otherwise. (15)′
where local(t) and remotej(t) denote respectivelythe local avatar’s attribute and the j’th remote re-ceived at time t, and th(t) denotes the thresholdfor the current time t, evaluating the degree of con-cession of the ownership. That is, the more likelyto have a chance of the critical case the larger thevalue is set to th(t), which is determined statisti-cally or empirically. More concretely, if we oftenhave an opportunity for more than two avatarshold the ownership, then increase th(t). Con-versely, if we often see no avatar holds the own-ership, then decrease th(t).
Step 3-1). Since the ownership of the object be-longs to the local avatar, compute the inter-action (e.g., collision, manipulation) betweenthe object and the local avatar, update theobject’s state to send with the territory type,ownership flag, attributes of local avatar toall other peers in the DVE.
Step 3-2). Since the ownership of the object be-longs to a remote avatar, send just the terri-tory type, ownership flag, attributes of localavatar to all other peers and try to receivefrom the owner peer the updated data aboutthe object in the DVE. Besides, while wait-ing, calculate the object’s attributes locallyand temporarily from the obtained data, forjust in case the owner is absent (state of theconcession).
Step 3-3). When the frame update time comes,acquire the arrived data from all peers to de-cide environmental state regarding the statetransition table, and display all avatars andthe object, then go back to the beginning ofloop.
Every peer sends periodically at frame update, its
associated avatar’s attributes data to all other peers,and update the position of the shared object where onlythe collision between the shared object and the staticobject (wall, pole or goal) is calculated.
The Eq. 15’ above for the ownership determinationin the dead zone is an extension for multiple peers ofEq. 15 so as to examine whether the local avatar iscloser to the object than any other remote avatars.
Note that step 3) (b) in n peers algorithm, eachpeer doesn’t have to determine the territory type, liketwo peers algorithm does, if it turns out that thepeer obviously retires from the competing race for theownership. This eliminates the unnecessary calcula-tion. Thus regarding the computing load, the proposedmethod has the well-known advantage. That is, model-ing in a Model-View-Control loop [1] of each peer costsO(n) because it computes only the interaction betweenthe local and (n-1) remote avatars, while the server in aclient-server system requires O(n2) because of consid-ering combination of all possible pairs’ interaction. Wealso examine the idea in the following experiment.
5. Experiment for prototype
In this section the behavior of the above protocols isexamined in a subject experiment using a prototypeimplementing the three functions namely, AtoZ, mutualprediction protocol, and dead zone handling.
5.1 Task specification
As a prototype system, we implemented a virtual dou-bles air-hockey game (Fig. 7). On this game screen, theleft side window display the actual game field and theright side window displays how the AtoZs look like at agiven moment of play. The small white circle representsthe puck as a shared object, and other circles respec-tively represents the opponent’s mallet as a remotelycontrolled avatar and the local mallet as a locally con-trolled avatar on the AtoZ window. The black belt onthe center of the AtoZ window represents the dead zonethat separates the avatar’s AtoZ from the other avatars’AtoZs. To examine the three types of protocols, everymallet is allowed to move freely all over the game field.
The parameter set of the game field and the com-putational environment are as follows.
(i) Game field-Dimensions of table: 289 cm in depth, 148 cm inwidth-Dynamic friction: 3.00× 10−5
-Radius: 4.1 cm (puck), 8.5 cm (mallet)-Maximum speed: 300 cm/sec (puck), 300 cm/sec(mallet)
(ii) System environment-Four PCs for four players ((1) Intel Pentium4

10IEICE TRANS. ??, VOL.Exx–??, NO.xx XXXX 200x
Fig. 7 The game screen of the virtual air-hockey
2.53 GHz with ATI Radeon 9550,(2) Pentium4 2.53GHz with Radeon 9000,(3) Pentium4 1.7 GHz withRadeon 9000, (4) Athlon64 2.2 GHz with Radeon9600, where (1) and (2), and (3) and (4) maketeams respectively)-Microsoft Direct X 8.0 [20] is used to handle themouse events (for moving mallets) and to display3D graphics.-100Mbps Ethernet LAN-Transmission of clock for synchronization: TCP/IP-Transmission of game information (sending/receivingterritory type, ownership of the object, attributesof local mallet): UDP/IP unicast-Update interval: 25 msec (i.e., update frequency:40Hz)-th(t) of Eq. 15’ : initial value is 4 cm between op-ponent avatars, and 0 cm between co-avatars. In-crease or decrease th(t) between opponent avatarsas follows,
th(t)= th(t−1)+(4×Competition repeats) · · · if
ownership competition occurred(no more than 40)th(t)= th(t−1)+(4×Concession repeats) · · · if
ownership concession occurred(no less than 4)th(t)= th(t−1) · · · if ownership is consistent (16)
In the above, Competition repeats and Conces-sion repeats are the number of repetitions it encountersthe competition and concession of ownership respec-tively. The th(t) value between co-avatars is always 0cm.
5.2 Specification of experiment
The purpose of the experiment is to evaluate the pro-posed protocol for multiple players. Concretely,
i) how is the consistency of ownership maintained byall peers?
ii) are the attributes of all avatars and the shared ob-ject consistent in all peers?
iii) how frequently critical cases occur?
Here, i) will be estimated by transition probabil-ity based on the transition matrix. Then, the proposedprocedure by the transition matrix is examined. In cri-terion ii), we examined the difference of mallets andpuck position among the peers. The difference of mal-lets’ position has a great influence on overview of AtoZrecognized by each peer, and the difference of puck po-sition is concerned with ownership decision using AtoZ.In criterion iii), we examine occurrence probability ofcritical cases. In this experiment, the simulated net-work latency is set by NistNet [16] in the environment.
Six groups of examinees are employed for the ex-periment. A group consists of four players being sep-arated into two teams, and solicited to play doublesair-hockey game. And as a premise, supposing thatnetwork distances between the co-players are near, andthat between the two opponents-players is far, the con-ditions of latency are set as follows.
1) latency between co-players: 0 msec2) latency between the opponents-players: average
57.0 msec, standard deviation 8.1msec, simulatingthe transcontinental Internet (refer to [1]).
Note that even if no latency exists between the co-player peers, both peers are one frame behind to eachother because of an update interval (Fig.5).
The result of state transition probability and thestatistics of inconsistency are shown in the Table 2 and3, respectively.
5.3 Discussions
As shown in Table 2, the total percentage of the owner-ship competition is about 2.0(%), that of the ownershipconcession is about 17.4%, and that of the ownershipconsistency is about 80.6%, during the game. Fromthis, it is confirmed that the ownership consistency ismostly maintained throughout the game, and besidethis the chance of the ownership concession is consid-erably higher than that of the ownership competition.This is because in the protocol, described in section 4.4,each peer does not rather assert its ownership muchin Dead Zone. Additionally, the percentage of the re-peated transitions into ”Compete in Dead Zone”, thecase that is most avoidable, is less than 0.3% (stateprobability is 1.1%). And the most frequent transitionfrom ”Compete in Dead Zone” is the state of consis-tency. This is because of our aim that we rather avoidthe competition and lead to the concession in Table 1,by adjusting th(t), being set temporarily by Eq. 16 inthe experiments. Actually, at the frame after the stateof ”Compete in Dead Zone”, we mostly encounter thestate of concession or consistency.
The state of ”Compete in AtoZ” is recorded in Ta-ble 2 that should not have existed. We mentioned thatno consideration is required for the state ”Compete orConcede in AtoZs” in the previous section. However,

YONEKURA and KAWANO: A PROTOCOL FOR PEER-TO-PEER MULTI-PLAYER NETWORKED VIRTUAL BALL GAME11
this accidentally occurs only after a critical case takesplace, a collision of contradictory events that should nothappen. This state lasts until the consistent frame forall the four peers is realized. Thus, it is confirmed thatthe critical case actually occurs, though very unusually.This is because that our prediction scheme may producesome error in this experiment. In Table 3, the positionof each mallet is different between the opponents-peersabout 16.7 cm in average. This causes the differenceof the outlook of screen at each side. And the positionof the puck is 8.6 cm different in average between theopponents, and then we sometimes see the ownershipdecision does not match so as to produce a conditionwhere the AtoZs slightly blur and the competitions arelikely to occur.
Table 4 shows comparison of the elapsed time forcomputing, between the two-peers case and the four-peers case, for the ownership determination (i.e., step3. from (a) to (c) in the algorithm) per peer in a game.Obviously the latter takes just twice than the former,in average, of the computing time for modeling stage.This may indicate our assumption of O(n) per peer iscorrect.
The behavior of threshold th(t) and the numberof the owners along time t, in a game, are shown inFig.8 and Fig.9. About 12 seconds (500 frames) of se-vere competition for a puck is recorded and analyzedin these figures. In Fig.9 the competition occurs farless than the concession since the number of ownersmarks 2 in only 7 frames (while more than 40 frames ofconcession occurs) out of 500 frames. This implies thethreshold-handling scheme may contribute decrease ofcritical cases as mentioned below. On the other handFig. 8 indicates that a couple of peers mark almost 40cm of th(t) for dozens of frames and this may intro-duce increase of unnecessary concession state as shownin Fig.9. This implies necessities of improvements foradjusting way of th(t). We may have to re-considermore efficient tuning method of Eq. 16.
Critical cases occur about 14 times in total of30000 frames. Therefore, the critical case may occurroughly once in 54 sec. From the requirement that theoccurrence of the critical case should be avoided as thehighest priority issue, 0.047% (14/30000) may be moreor less satisfying. The reason for this occurrence isthat compared with two players game’s case (singlesair-hockey as shown in our article [18], the critical caseoccurs 4 times in 90000 frames), the four players’ caseis likely to increase the Model-View-Control computingload then there might be cases where the calculation re-sult of AtoZ may differ among peers or some peer can’tfinish its computation in a frame, since the number ofthe avatars increases from two to four, then the calcu-lation of AtoZs becomes more complicated.
Although we may be able to decrease a chanceof the ownership competition by raising the thresh-old th(t), we should encounter the concession more,
Fig. 8 The behavior of th(t) along time
Fig. 9 The behavior of number of owners along time
where degradation of throughput would happen (i.e.,no player can control the puck). Thus, more efficientway of adjusting the threshold is essentially the solu-tion for problem of consistency-throughput trade offs,and must be studied soon.
6. Conclusions
This paper proposed the real-time peer-to-peer protocolfor the networked field-type DVE, based on considera-tion of consistency for the attributes of the avatars andthe ownership of the object. Concretely, we proposeda distributed algorithm using a set of protocols. Thatis, the priority field called AtoZ to determine the own-
Table 3 The difference in mallets and puck position betweentwo opponents-peers (10cm)
mallets puckaverage 1.668705 0.859001
standard deviation 1.231773 1.492255
Table 4 Elapsed time for computing of ownership determina-tion per peer (msec)
2 peers 4 peersaverage 0.000113 0.000234
standard deviation 0.007501 0.016137

12IEICE TRANS. ??, VOL.Exx–??, NO.xx XXXX 200x
Table 2 The average transition probability of each state in 30000 frames (%)
ership, the mutual prediction protocol for consistentoutlook of the avatars, and the dead zone handling forrestraint of the ambiguity of the AtoZ ownership deci-sion result caused by the network latency. As a result,validity for proposed algorithm is experimentally con-firmed by using the prototype of the networked dou-bles air-hockey game. The proposed method may suf-ficiently expand to the various types of the networkedfield game, such as ice hockey, basketball, soccer, base-ball etc. in the peer-to-peer type of topology.
Our future works include, prototyping the multi-user and multi-object type of virtual field sports con-tents for evaluation of the above protocols. We alsomay have to study the optimal adjusting scheme ofthe threshold setting in Eq. 15’ considering the ter-ritory type, suitable prediction scheme including thedead reckoning [2], and the convergence algorithm ofthe avatars and the objects.
References
[1] S.K. Singhal, M.J. Zyda, Networked Virtual Environ-ments: Design and Implementation, Addison-Wesley, Mas-sachusetts, 1999.
[2] S.K. Singhal, ”Effective remote modeling in large-scale dis-tributed simulation and visualization environments”, Ph.D.Dissertation, Department of Computer Science, StanfordUniversity, Palo Alto, August 1996.
[3] J. M.Linebarger, G. Drew Kessler, ”Concurrency ControlMechanisms for Closely Coupled Collaboration in Mul-tithreaded Peer-to-Peer Virtual Environments”, PRES-ENCE, Vol. 13, No. 3, pp.296-314, June 2004.
[4] H.Takemura, Journal of the Virtual Reality Society ofJapan, vol.4, no.1, pp.59-63, 1999 (in Japanese).
[5] T. Hashimoto, T.B.Sheridan, M.V.Noyes, ” Effects of pre-dicted information in teleoperation with time delay, ”JapanErgonomics Society, vol.22, no.2, pp.91-92, Mar.1986(in
Japanese).[6] JXTA Project’s URL, http://www.jxta.org/[7] K. Hatano, Y. Yamamoto, R. Takamatsu, M. Sato, ”Time
Delay Compensation of Remote Collaborative Virtual WorkSpace with Predictive Motion Display”, Proc. of the VirtualReality Society of Japan, the 1st Annual Conference, vol.1,pp.155-158, 1996(in Japanese).
[8] Li.Sam Hor, T.Yonekura: ”Pseudo-real-time Phenomenonin an Augmented Distributed Virtual Environment(ADVE) with Lag”, IEEE Proc. IVR ’99, pp.328-333,(1999.7).
[9] E. Cronin, B. Filstrup, and Sugih Jamin. Cheat-proofingdead reckoned multiplayer games. In Proc. of 2nd Interna-tional Conference on Application and Development of Com-puter Games, Jan 2003.
[10] E. Cronin, B. Filstrup, A.R.Kurc and S. Jamin. An Effi-cient Synchronization Mechanism for Mirrored Game Ar-chitectures. In Proc. of Net Games 2002, pp.67-73, 2002.
[11] T.Yonekura, D..Hanawa, ”A proposal of an adaptive pre-diction filter for multiuser on a distributed virtual envi-ronment with lag”, The Institute of Electronics, Informa-tion and Communication Engineers Transactions on Fun-damentals of Electronics, Communications and computersciences, Vol.J86-A, No.11, pp.1231-1234, Novemver 2003(in Japanese).
[12] Y.Kawahara, N. Matsumoto, H. Morikawa, T. Aoyama,”A Distributed Communication Architecture for NetworkedVirtual Environments”, Technical report of the Instituteof Electronics, Information and Communication Engineers,IN2001-229,March 2002(in Japanese).
[13] T. Taki, J. Hasegawa, ”Visualization of Dominant Re-gion in Team Games and Its Application to TeamworkAnalysis”, IEEE proc. Computer Graphics International(CGI’00) Switzerland, pp.227-238, Jun 2000.
[14] I.N.Bronshtein, K.A.Semendyayev, Handbook of Mathe-matics 4th ed. Cap.3.5 Vector Algebra and Analytical Ge-ometry, New York: Springer-Verlag, 2003.
[15] T.W. Anderson An introduction to multivariate statisticalanalysis 2nd Edition, John Wiley & Sons, New York, 1984.
[16] NISTnet,http://snad.ncsl.nist.gov/itg/nistnet/
YONEKURA and KAWANO: A PROTOCOL FOR PEER-TO-PEER MULTI-PLAYER NETWORKED VIRTUAL BALL GAME13
[17] D. Mills, ”Internet Time Synchronization: The NetworkTime Protocol”, IEEE Trans. on Communication, vol.39,no.10, pp.1482-1493, Oct 1991.
[18] Y. Kawano, D. Hanawa, T. Yonekura, ”An Approach tothe P2P Type Real-time Network Virtual Ball-game withthe Mutual Prediction Protocol and AtoZ”, VRSJ Trans.Vol.9, No.2. pp.141-150, Jun. 2004 (in Japanese). - whichis translated into ”Peer-to-peer Networked Field-type Vir-tual Environment by Using AtoZ”, IEEE Proc. 2004 Inter-national Conference on Cyberworlds (Tokyo), pp.241-248,(2004.11).
[19] A. Goldin, C. Gotsman, ”Geometric Message-Filtering Pro-tocols for Distributed Multiagent Environments”, PRES-ENCE, Vol. 13, Issue 3, The MIT Press, June 2004.
[20] http://www.microsoft.com/windows/directx/ : CurrentlyDirectX9.0 is available
Tatsuhiro YONEKURA was bornin 1954 in Japan. He received the B.S.and M.S. from Nagoya University in 1979and 1981, respectively. He then joinedYamatake Honeywell, working on devel-opment of industrial computer system till1990. He received the Ph.D. Degree inInformation Science from Nagoya Univer-sity in 1991. From 1993 he was an As-sociate Professor, and from 2005 he is aProfessor in the Department of Computer
and Information Sciences at Ibaraki University. His research in-terests are in the area of Human Communication, especially Vir-tual Reality and Distributed Virtual Environment.
Yoshihiro KAWANO was horn in1981 in Japan. He received the B.S. inDepartment of Computer and Informa-tion Sciences from Ibaraki University in2004. He is currently a M.S. student ofthe Graduate school of Science and Engi-neering Major of Computer and Informa-tion Science at Ibaraki University. His re-search interests are in the area of HumanCommunication, especially the Game Ap-plications with Distributed Virtual Envi-
ronment.