
Recomendaciones e Informes del CCIR (Dubrovnik, 1986)
211
This electronic version (PDF) was scanned by the International Telecommunication Union (ITU) Library & Archives Service from an original paper document in the ITU Library & Archives collections. La présente version électronique (PDF) a été numérisée par le Service de la bibliothèque et des archives de l'Union internationale des télécommunications (UIT) à partir d'un document papier original des collections de ce service. Esta versión electrónica (PDF) ha sido escaneada por el Servicio de Biblioteca y Archivos de la Unión Internacional de Telecomunicaciones (UIT) a partir de un documento impreso original de las colecciones del Servicio de Biblioteca y Archivos de la UIT. ﻫﺬﻩ ﺍﻹﻟﻜﺘﺮﻭﻧﻴﺔ ﺍﻟﻨﺴﺨﺔ(PDF) ﻧﺘﺎﺝ ﺗﺼﻮﻳﺮ ﺑﺎﻟﻤﺴﺢ ﻗﺴﻢ ﺃﺟﺮﺍﻩ ﺍﻟﻀﻮﺋﻲ ﻭﺍﻟﻤﺤﻔﻮﻇﺎﺕ ﺍﻟﻤﻜﺘﺒﺔ ﻓﻲ ﺍﻟﺪﻭﻟﻲ ﺍﻻﺗﺤﺎﺩ ﻟﻼﺗﺼﺎﻻﺕ(ITU) ً ﻧﻘﻼ◌ ﻭﺛﻴﻘﺔ ﻣﻦ ﻭﺭﻗﻴﺔ ﺿﻤﻦ ﺃﺻﻠﻴﺔ ﻓﻲ ﺍﻟﻤﺘﻮﻓﺮﺓ ﺍﻟﻮﺛﺎﺋﻖ ﻗﺴﻢﻭﺍﻟﻤﺤﻔﻮﻇﺎﺕ ﺍﻟﻤﻜﺘﺒﺔ. 此电子版(PDF版本)由国际电信联盟(ITU)图书馆和档案室利用存于该处的纸质文件扫描提供。 Настоящий электронный вариант (PDF) был подготовлен в библиотечно-архивной службе Международного союза электросвязи путем сканирования исходного документа в бумажной форме из библиотечно-архивной службы МСЭ. © International Telecommunication Union
-
Upload
khangminh22 -
Category
Documents
-
view
4 -
download
0
Transcript of Recomendaciones e Informes del CCIR (Dubrovnik, 1986)

This electronic version (PDF) was scanned by the International Telecommunication Union (ITU) Library & Archives Service from an original paper document in the ITU Library & Archives collections.
La présente version électronique (PDF) a été numérisée par le Service de la bibliothèque et des archives de l'Union internationale des télécommunications (UIT) à partir d'un document papier original des collections de ce service.
Esta versión electrónica (PDF) ha sido escaneada por el Servicio de Biblioteca y Archivos de la Unión Internacional de Telecomunicaciones (UIT) a partir de un documento impreso original de las colecciones del Servicio de Biblioteca y Archivos de la UIT.
(ITU) لالتصاالت الدولي االتحاد في والمحفوظات المكتبة قسم أجراه الضوئي بالمسح تصوير نتاج (PDF) اإللكترونية النسخة هذه .والمحفوظات المكتبة قسم في المتوفرة الوثائق ضمن أصلية ورقية وثيقة من نقال◌
此电子版(PDF版本)由国际电信联盟(ITU)图书馆和档案室利用存于该处的纸质文件扫描提供。
Настоящий электронный вариант (PDF) был подготовлен в библиотечно-архивной службе Международного союза электросвязи путем сканирования исходного документа в бумажной форме из библиотечно-архивной службы МСЭ.
© International Telecommunication Union

UNIÓN INTERNACIONAL DE TELECOMUNICACIONES
CCIRCOMITÉ CONSULTIVOINTERNACIONALDE RADIOCOMUNICACIONES
RECOMENDACIONES E INFORMES DEL CCIR, 1986(ASÍ COMO CUESTIONES, PROGRAMAS DE ESTUDIOS, RESOLUCIONES, RUEGOS Y DECISIONES)
XVI ASAMBLEA PLENARIA DUBROVNIK, 1986
VOLUMEN VII
FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
Ginebra, 1986

CCIR
1. El Comité Consultivo Internacional de Radiocomunicaciones (CCIR) es el órgano permanente de la Unión Internacional de Telecomunicaciones responsable, según el Convenio Internacional de Telecomunicaciones, que «...realizará estudios y formulará Recomendaciones sobre las cuestiones técnicas y de explotación relativas específicamente a las radiocomunicaciones sin limitación de la gama de frecuencias...» (Convenio Internacional de Telecomunicaciones, Nairobi, 1982, primera parte, capítulo I, art. 11, número 83).
2. Los objetivos del CCIR son, en particular:
a) proporcionar las bases técnicas para uso de las diversas conferencias administrativas de radiocomunicaciones y servicios de radiocomunicaciones, para la eficaz utilización del espectro de frecuencias radioeléctricas y la órbita de los satélites geoestacionarios, teniendo en cuenta las necesidades de los diversos servicios radioeléctricos;
b) recomendar normas de funcionamiento para los sistemas de radiocomunicaciones y disposiciones técnicas que garanticen su interfuncionamiento eficaz y compatible en las telecomunicaciones internacionales;
c) recopilar, intercambiar, analizar, publicar y difundir la información técnica resultante de los estudios del CCIR, así como cualquier otra información disponible, para el desarrollo, planificación y explotación de los servicios radio- eléctricos, incluidas todas las medidas especiales necesarias para facilitar la utilización de esta información en los países en desarrollo.
UNIÓN INTERNACIONAL DE TELECOMUNICACIONES
CCIRCOMITÉ CONSULTIVOINTERNACIONALDE RADIOCOMUNICACIONES
RECOMENDACIONES E INFORMES DEL CCIR, 1986(ASÍ COMO CUESTIONES, PROGRAMAS DE ESTUDIOS, RESOLUCIONES, RUEGOS Y DECISIONES)
XVI ASAMBLEA PLENARIA DUBROVNIK, 1986
VOLUMEN VII
FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
Ginebra, 1986
ISBN 92-61-02763-6

II
PLAN DE LOS VOLÚMENES I A XIV DE LA XVI ASAMBLEA PLENARIA DEL CCIR
(Dubrovnik, 1986)
VOLUM EN I Utilización del espectro y comprobación técnica de las emisiones.
VOLUM EN II Investigación espacial y radioastronomía.
VOLUM EN III Servicio fijo en frecuencias inferiores a unos 30 MHz.
VOLUM EN IV-1 Servicio fijo por satélite.
VOLÚM ENES IV/IX-2 Compartición de frecuencias y coordinación entre sistemas del servicio satélite y de relevadores radioeléctricos.
fijo por
VOLUM EN V Propagación en medios no ionizados.
VOLUM EN VI Propagación en medios ionizados.
VOLUM EN VII Frecuencias patrón y señales horarias.
VOLUM EN VIII-1 Servicio móvil terrestre.Servicio de aficionados.Servicio de aficionados por satélite.
VOLUM EN VIII-2 Servicio móvil marítimo.
VOLUM EN VIII-3 Servicios móviles por satélite (aeronáutico, terrestre, marítimo, móvil y radiodetermi- nación).Servicio móvil aeronáutico.
VOLUM EN IX-1 Servicio fijo: sistemas de relevadores radioeléctricos.
VOLUM EN X-l Servicio de radiodifusión (sonora).
VOLÚM ENES X /X I-2 Servicio de radiodifusión por satélite (sonora y de televisión).
VOLÚM ENES X /X I-3 Grabación sonora y de televisión.
VOLUM EN XI-1 Servicio de radiodifusión (televisión).
VOLUM EN XII Transmisión a larga distancia de señales de radiodifusión sonora y visión (CMTT).
de tele-
VOLUM EN X III Vocabulario (CMV).
VOLUM EN XIV-1 Informaciones relativas a la XVI Asamblea Plenaria: Actas de las sesiones plenarias.Textos administrativos.Estructura del CCIR.Listas de los textos del CCIR.
VOLUM EN XIV-2 índice alfabético de los términos técnicos que figuran en los Volúmenes I a XIII.
Las referencias en el interior de los textos de las Recomendaciones, Informes, Resoluciones, Ruegos, Decisiones, Cuestiones y Programas de Estudios del CCIR se refieren a la edición de 1986 a menos que se indique lo contrario, es decir que sólo se menciona el número base.
© UIT
Impreso en Italia

III
DISTRIBUCIÓN DE LOS TEXTOS DE LA XVI ASAMBLEA PLENARIA DEL CCIR ENTRE LOS VOLÚMENES I A XIV
Todos los textos del CCIR vigentes en la actualidad están contenidos en los Volúmenes I a XIV de la XVI Asamblea Plenaria. Sustituyen a los de la edición anterior, XV Asamblea Plenaria, Ginebra, 1982.
1. Recomendaciones, Informes, Resoluciones, Ruegos y Decisiones
1.1 Indicaciones sobre la numeración de estos textos
Las Recomendaciones, los Informes, las Resoluciones y los Ruegos están numerados de acuerdo con la serie en vigencia desde la X Asamblea Plenaria.
De conformidad con las decisiones de la XI Asamblea Plenaria, los textos revisados conservan su número original al que se agrega un guión y una cifra que indica el número de revisiones. Por ejemplo: Recomendación 253, para la versión original; Recomendación 253-1, para la primera revisión; Recomendación 253-2, para la segunda revisión, y así sucesivamente. No obstante, en el interior de los textos de las Recomendaciones e Informes se menciona únicamente el número original (por ejemplo, Recomendación 253), en el entendido que la referencia debe aplicarse a la última versión del texto, a menos que se indique lo contrario.
Los números de los textos antes mencionados aparecen en los cuadros que siguen; en ellos no se menciona la cifra que indica el número de revisiones sucesivas. Para mayores detalles sobre la numeración véase el Volumen XIV-1.
1.2 Recomendaciones
Número Volumen Número Volumen Número Volumen
48 X-l 367 II 478 V III-180 X-l 368-370 V 479 II106 III 371-373 VI 480 III139 X-l 374-376 VII 481-484 IV-1162 III 377, 378 I 485, 486 VII182 I 380-393 IX-1 487-493 VIII-2205 X-l 395-405 IX-1 494 VIII-1
215, 216 X-l 406 IV/IX-2 496 VIII-3218, 219 VIII-2 407, 408 X/XI-3 497 IX-1
239 í 410-412 X-l 498 X-l240 III 414, 415 X-l 500 XI-1246 ÍII 417 XI-1 501 X /X I-3257 VIII-2- 419 X I-1 502, 503 XII265 X/X I-3 428 VIII-2 505 XII266 XI-1 430, 431 X III 508 I268 IX-1 433 I 509, 510 II270 IX-1 434, 435 VI 513-517 II
275, 276 IX-1 436 III 518-520 III283 IX-1 439 VIII-2 521-524 IV-1290 IX-1 441 VIII-3 525-530 V302 IX-1 443 I 531-534 VI
305, 306 IX-1 444 IX-1 535-538 VII310, 311 V 446 IV-1 539 VIII-1
313 VI 450 X-l 540-542 VIII-2314 II 452, 453 V 546-550 VIII-3326 I 454-456 III 552, 553 VIII-3
328, 329 I 457, 458 VII 555-557 IX-1331, 332 I 460 VII 558 IV/IX-2335, 336 III 461 X III 559-562 X-l
337 I . 463 IX-1 564 X /X I-3338, 339 III 464-466 IV-1 565 XI-1
341 V 467, 468 X-l 566 X /X I-2342-349 III 469 X /X I-3 567-572 XII352-354 IV-1 470-472 XI-1 573, 574 X III355-359 IV/IX-2 473, 474 XII 575 I362-364 II 475, 476 VIII-2 576-578 II

IV
1.2 Recomendaciones (cont.)
Número Volumen Número Volumen Número Volumen
579-580 IV-1 607, 608 X III 642 X-l + XII581 V 609-611 II 643-644 X-l
582, 583 VII 612, 613 III 645 X -l + XII584 VIII-1 614 IV-1 646-647 X-l589 VIII-2 615. IV/IX-2 648, 649 X /X I-3591 VIII-3 616-620 V 650-652 X /X I-2
592-596 IX-1 621 VI 653-656 XI-1597-599 X-l 622-624 VIII-1 657 X/X I-3
600 X /X I-2 . 625-631 VIII-2 658-661 XII601 XI-1 632-633 VIII-3 662-666 X III602 X /X I-3 634-637 IX
603-606 XII 638-641 X-l
1.3 Informes
Número Volumen Número Volumen Número Volumen
19 III 319 VIII-1 491 XII32 X-l 322 v i O 493 XII109 III 324 i 496, 497 XII111 III 327 m 499 VIII-1122 XI-1 336 V 500-501 VIII-2137 IX-1 338 V 509 VIII-3
176, 177 III 340 VI ( ’) 516 X-l181 I 342 VI 518 VII183 III 345 III 519-522 I184 I 347 III 524-526 I195 III 349 III 528 I197 III 354-357 III 530 I200 III 358 VIII-1 533, 534 I203 III 363, 364 VII 535, 536 II
204, 205 IV-1 371, 372 I 536-541 II208 IV-1 374-376 IX-1 542 VIII-1209 -*«=■- IV/IX-2 378-380 IX-1 543 II212 IV-1 382 IV/IX-2 546 II214 IV-1 383-385 IV-1 548 II215 X /X I-2 386-388 IV/IX-2 549-551 III222 II 390, 391 IV-1 552-561 IV-1224 II 393 IV/IX-2 562-565 V226 II 395, 396 II 567 V
227-229 V 401 X-l 569 V236 V 404, 405 XI-1 571 VI
238, 239 V 409 XI-1 574, 575 VI249-251 VI 411, 412 XII 576-580 VII
252 V I0) 420 I 584, 585 VIII-2253-255 VI 430-432 VI 588 VIII-2258-260 VI 434-437 III 607 IX-1262, 263 VI 439 VII 610 IX-1265, 266 VI 443-445 IX-1 612-615 IX-1
267 VII 448, 449 IV/IX-2 616, 617 X-l270, 271 VII 451 IV-1 619 X-l272, 273 I 453-455 IV-1 622 X /X I-3275-277 I 456 II 624-626 XI-1
279 I 458 X-l 628, 629 XI-1284, 285 IX-1 461 X-l 630 X /X I-3287-289 IX-1 463-465 X-l 631-634 X /X I-2
292 X-l 468, 469 X /X I-3 635-637 XII294 t X /X I-3 472 X-l 639 XII300 X-l 473 X /X I-2 642, 643 XII
302-304 X-l 476-478 XI-1 646-648 XII311-313 XI-1 481-485 XI-1 651 I
314 XII 488 XII 653-657 I.
(') Publicados por separado.

V
1.3 Informes (cont.)
Número Volumen Número Volumen Número Volumen
659-668 I 795 X-l 943-947 X-l670, 671 I 797-799 X-l 950 X /X I-3672-685 II 800 X /XI-3 951-955 X /X I-2
687 II 801, 802 XI-1 956 XI-1692-697 II 803 X /X I-3 958, 959 XI-1699, 700 II 804, 805 XI-1 961, 962 XI-1701-704 III 807-812 X /X I-2 963, 964 X /X I-3706, 707 IV-1 814 X /X I-2 965-970 XII710-713 IV-1 815-823 XII 972-979 I714-724 V 826-842 I 980-988 II725-729 VI 843-854 II 989-996 III730-732 VII 857 III 997-1004 IV-1735, 736 VII 859-865 III 1005-1006 . IV /IX-2
738 VII 867-875 IV-1 1007-1010 V739-742 VIII-1 876, 877 IV/IX-2 1011-1015 VI743, 744 VIII-2 879-880 V 1016, 1017 VII747-749 VIII-2 .882-885 V 1018-1025 VIII
751 VIII-3 886-895 VI 1026-1044 VIII-2760-766 VIII-3 896-898 VII 1045-1051 VIII-3
768 VIII-3 899-906 VIII-1 1052-1057 IX-1770-773 VIII-3 908-915 VIII-2 1058-1072 X-l774, 775 VIII-2 917-923 VIII-3 1073-1076 X /X I-2
778 VIII-1 925-929 VIII-3 1077-1089 XI-1779-789 IX-1 930-934 IX-1 1090-1096 XII790-793 IV/IX-2 936-942 IX-1
1.3.1 Nota relativa a los Informes
En los diferentes Informes se ha suprimido la mención «adoptado por unanim idad». Se considera que los Informes contenidos en este Volumen han sido adoptados por unanim idad, excepto en aquellos casos en los que en una nota a pie de página se indiquen las reservas correspondientes.
1.4 Resoluciones
Número Volumen Número Volumen Número Volumen
4 VI 61 XIV-1 76 X-l14 VII 62 I 78 X III15 I 63 VI 79-83 XIV-120 VIII-1 64 X-l 86, 87 XIV-123 X III 66 X III 88 I24 XIV-1 71 I 89 X III
26, 27 XIV-1 72, 73 V 90-95 XIV-133 X IV-1 74 VI 96 XI-139 XIV-1
1.5 Ruegos
Número Volumen Número Volumen Número Volumen
2 I 43 VIII-2 70-72 VII11 I 45, 46 VI 73 VIII-114 IX-1 49 VIII-1 74 X-l15 X-l 50 IX-1 75 XI-116 X /X I-3 51 X-l 77 XIV-1
22, 23 VI 56 IV-1 79-81 XIV-126-28 VII 59 X-l 82 VI
32 I 63 XIV-1 83 XI-135 I 64 I 84 XIV-138 XI-1 65 XIV-1 85 VI40 XI-1 66 III 86 X III42 VIII-1 67-69 VI

VI
1.6 Decisiones
Número Volumen Número Volumen Número Volumen
2 IV-1 45 III 61 II3-5 V 50 V 63 III6 VI 51 X /X I-2 64 IV-1
9-11 VI 52 X-l 65 VII18 XII 53, 54 I 66 XI-119 X III 56 I 67, 68 XII27 I 57 VI 69 VIII-132 VIII-3 58 XI-1 70 IV-142 XI-1 59 X /X I-3 71 VIII-3 + X-l43 . X /X I-2 60 XI-1 72 X-l + XI-1
1.6.1 Nota relativa a las Decisiones
Dado que las Decisiones son adoptadas por las Comisiones de Estudio, se ha utilizado la expresión: «la Comisión de Estudio . . . considerando», y se ha suprimido la indicación «por unanimidad».
2. Cuestiones y Programas de Estudios
2.1 Indicaciones sobre la numeración de estos textos
2.1.1 Cuestiones
Las Cuestiones están numeradas en series distintas para cada Comisión de Estudio; en su caso, el número de orden está seguido de un guión y una cifra indica, el número de revisiones a que se ha sometido el texto. El número de una Cuestión está seguido de una cifra árabe indicando la Comisión de Estudio. Por ejemplo:— Cuestión 1/10 para la versión original;— Cuestión 1-1/10 para la primera revisión; Cuestión 1-2/10 para la segunda revisión.
2.1.2 Programas de Estudios
Los Programas de Estudios se numeran de modo que indiquen, si ha lugar, de qué Cuestión se derivan; el número se completa con una letra mayúscula que permite distinguir varios Programas de Estudios derivados de una misma Cuestión. La parte de la designación del Programa de Estudios reservada al número de la Cuestión de la que se deriva no menciona el índice de revisión eventual de ésta y se refiere al texto en vigor que figura en el Volumen. Así, por ejemplo:— Programa de Estudios 1A/10, para la versión original del primer Programa que se deriva de la
Cuestión 1/10.— Programa de Estudios 1C/10, para la versión original del tercer Programa que se deriva de la
Cuestión 1/10.— Programa de Estudios lA -1/10, para la primera revisión del primer Programa que se deriva de la
Cuestión 1/10.Se observará que un Programa de Estudios puede no derivarse de Cuestión alguna; en este caso
lleva el número de orden análogo al de los demás Programas de Estudios de la Comisión de que se trate con la diferencia que, si se consulta la lista pertinente de Cuestiones, ne se hallará ninguna Cuestión que corresponda a dicho número.
Como en los otros textos del CCIR, en las referencias a las Cuestiones y Programas de Estudios en el interior de los textos, se indica sólo el número base.
2.2 Clasificación dé Cuestiones y Programas de Estudios
El plan que figura en la página II indica el Volumen que contiene los textos de cada Comisión de Estudio, lo que permite determinar en qué Volumen se encuentra una Cuestión o un Programa de Estudios determinado.

VII
VOLUMEN VII
FRECU EN CIA S PATRÓN Y SEÑALES HORARIAS
(Comisión de Estudio 7)
CUADRO DE MATERIAS
Página
Plan de los Volúmenes I a XIV de la XVI Asamblea Plenaria del C C I R .............................................................. IIDistribución de los textos de la XVI Asamblea Plenaria del CCIR entre los Volúmenes I a X I V .................. IIICuadro de m a te r ia s .............................................................................................................................................................. VIIíndice de los textos suprimidos ........................................................................................................................................ XIíndice numérico de los textos ........................................................................................................................................... X IIIíndice de los textos publicados en otros volúmenes pero que contienen inform ación de interés para las frecuencias patrón y señales h o r a r ia s ........................................................................................ XVM andato de la Comisión de Estudio 7 e Introducción por el Relator Principal de la Comisión de Estudio 7 ....................................................................................................................... XVII
Sección 7A — Glosario
Informe 730-1 G lo s a r io ............................................................................................................................................... 1
Sección 7B — Especificaciones para los servicios de frecuencias patrón y de señales horarias
Re. 374-3 Emisiones de frecuencias patrón y de señales h o r a r i a s .......................................................... 9Re. 375-2 Emisiones de frecuencias patrón y de señales horarias en nuevas bandas de frecuen
cias 9Re. 376-1 Supresión de las interferencias de origen externo causadas a las emisiones del servicio
de frecuencias patrón en las bandas atribuidas a este s e rv ic io ............................................. 10Re. 457-1 Utilización de la fecha juliana modificada en los servicios de frecuencias patrón y de
señales h o r a r ia s ....................................................................................................................... 11Re. 458-1 Comparaciones internacionales de escalas de tiempo a tó m ic o ................................... 11Re. 460-4 Emisiones de frecuencias patrón y señales h o r a r i a s ...................................................... 12Re. 485-1 Utilización de escalas de tiempo en los servicios de frecuencias patrón y de señales
h o ra ria s .............................................................................................................................. ................... 16Re. 486-1 Referencia de los generadores y emisiones con control preciso de frecuencia a la
escala de tiempo atómico in te rn a c io n a l........................................................................... 16Re. 535-1 Utilización del término U T C ............................................................................................... 17Re. 536 Notación de las escalas de t i e m p o ...................................................................................... 17
Sección 7C — Sistemas de difusión y comparación
Informe 267-6 Frecuencias patrón y señales horarias . .................................................................................... 19
Informe 270-3 Utilización óptim a del espectro de frecuencias para las señales horarias de granprecisión ..................................................................................................................................... 45
Informe 271-7 Estabilidad y precisión en la recepción de frecuencias patrón y de señales horarias enondas miriamétricas y k ilom étricas..................................................................................... 47
Informe 363-6 Métodos aplicados para la transferencia y difusión de señales horarias y frecuenciaspatrón .................................................................................................................................................. 52
Re. 582 Difusión y coordinación de señales de referencia de tiempo y frecuencia por satélite . 59

VIII
Informe 518-4 Difusión y coordinación de frecuencias patrón y señales horarias por sa té lite .................Inform e 576-3 Difusión de frecuencias patrón por estabilización de la frecuencia portadora de una
estación de radiodifusión . ........................................................................................................Inform e 577-2 Difusión de señales horarias por superposición de una modulación de fase a la
modulación de amplitud de las emisiones de radiodifusión s o n o r a ...................................
Re. 583 Códigos de t i e m p o ........................................................................................... ...............................Inform e 578-2 Códigos h o ra rio s ................................................................................................................................Inform e 731-1 Encuesta realizada entre usuarios de emisiones de frecuencias patrón y señales
h o ra ria s .................................................................................................................................................Re. 537 Reducción de la interferencia m utua entre las emisiones de los servicios de frecuen
cias patrón y de señales horarias en las frecuencias atribuidas en las bandas 6 y 7 . . .Inform e 732-2 Propuesta de reducción de la interferencia mutua entre las emisiones de frecuencias
patrón y de señales horarias en las bandas 6 y 7 ............................................................ ...Inform e 735-1 Importancia de las emisiones de frecuencias patrón y de señales horarias en la
banda 5 .................................................................................................................................................Inform e 736-1 Compartición de frecuencias entre el servicio de emisión de señales horarias, el
servicio de radiolocalización, el servicio fijo por satélite y los servicios fijo y móvil que funcionan en 14, 21, 26 y 31 GHz aproximadamente ..................................................
Inform e 896-1 Documentación de las modificaciones de las señales horarias transmitidas ....................Inform e 897-1 Métodos para la transferencia de señales horarias de precisión en el caso de distancias
c o r ta s ....................................................................................................................................................Inform e 1016 Métodos que utilizan las señales de televisión para la transferencia y difusión de
señales horarias y frecuencias patrón ........................................................................................Inform e 1017 Caracterización de los retardos causados por las a n te n a s ......................................................
Sección 7D — Caracterización de las fuentes y formación de escalas de tiempo
Re. 538 Mediciones de la estabilidad de frecuencia y de f a s e ........................................Informe 364-5 Comportamiento de los generadores de frecuencias p a tró n ...................................................Inform e 439-4 Efectos relativistas en un sistema de tiempo-coordenada te r re s tre .......................... ...Inform e 579-3 Algoritmos de escalas de tiempo y problemas relativos a la obtención de los valores
medios a so c ia d o s ..............................................................................................................................Inform e 580-2 Caracterización del ruido de frecuencia y de f a s e ...................................................................Inform e 738-2 Generadores de frecuencias patrón en las gamas submilimétrica, infrarroja y visible
del espectro e lectrom agnético ........................................................................................................Inform e 898-1 Calidad de funcionamiento y fiabilidad de los relojes de referencia ....................................
Cuestiones y Programas de Estudios, Resoluciones, Ruegos, y Decisiones
Cuestión 1/7 Emisiones de frecuencias patrón y de señales h o r a r i a s ..........................................................Programa de Estudios 1A-1/7 Mejora de la eficacia del servicio de frecuencias patrón y señales
h o r a r i a s ........................................................................ ..................................Cuestión 2 /7 Emisiones de frecuencias patrón y de señales horarias en nuevas bandas de frecuen
cias .......................................................................................................................................................Program a de Estudios 2A-2/7 Emisiones de frecuencias patrón y de señales horarias por satélite .Program a de Estudios 2B/7 Métodos de explotación para las emisiones de frecuencias patrón y
de señales horarias en las bandas de ondas miriamétricas y k ilo m é trica s .....................................................................................................
Cuestión 3-1/7 Estabilidad en la recepción de las emisiones de frecuencias patrón y de señalesh o ra ria s .................................................................................................................................................
Program a de Estudios 3 A-1/7 Utilización óptima del espectro de frecuencias para las señaleshorarias de gran p recisión ............................................................................
Program a de Estudios 3C-3/7 Comparación entre diferentes métodos de transferencia y difusiónde señales horarias y frecuencias p a t r ó n ................................................
Program a de Estudios 3D-2/7 Métodos para las comparaciones' fiables de la fase en ondasm iriam é trica s ..................................................................................................
Página
60
84
848586
89
96
96
101
102109
110
113117
119120 134
138142
150159
169
169
170170
171
171
172
172
173

IX
Página
Cuestión 4-1/7 Difusión de frecuencias patrón y de señales h o r a r ia s ............................................................. 173Programa de Estudios 4A /7 Difusión de frecuencias patrón por estabilización de la frecuencia
portadora de una estación de radiodifusión ......................................... 173Programa de Estudios 4B/7 Difusión de señales horarias por superposición de señales con
modulación de fase en transmisores de radiodifusión sonora de modulación de am p litu d ................................................................................ 174
Cuestión 5-1/7 Necesidad de transferir señales horarias de alta precisión . . .............................................. 175Programa de Estudios 5A/7 Necesidad de señales horarias de gran precisión . . .............................. 175Programa de Estudios 5B-1/7 M antenimiento del tiempo y sincronización a niveles inferiores a
1 n a n o se g u n d o ............................................................................................... 175Cuestión 7 /7 Códigos h o r a r io s ............................................ 176
Programa de Estudios 7A/7 Características de los códigos horarios . . ........................................... 176Cuestión 8/7 Disponibilidad y precisión de las señales horarias y de las frecuencias patrón .............. 177Cuestión 9/7 Retardos de la señal causados por las antenas y otros circuitos en la transferencia de
señales horarias de elevada precisión ......................................................................................... 177Programa de Estudios 9A /7 Caracterización del retardo de la señal originado en las antenas . . 177
Cuestión 10/7 Calidad de los patrones de frecuencia y de tiempo ................................................................ 178Programa de Estudios 10A/7 Calidad y caracterización de los patrones de frecuencia y de
t i e m p o .................................................. 178Programa de Estudios 10B/7 Algoritmos de las escalas de tiempo y problemas estadísticos . . . . 179
Resolución 14-4 Emisiones de frecuencias patrón y señales h o r a r i a s ................................................................ 179Ruego 26-2 Estudios y experimentos relativos a las emisiones de señales horarias .............................. 180Ruego 27 Emisiones de frecuencias patrón y de señales horarias en nuevas bandas de frecuen
cias 180Ruego 28 Programas especiales de la IFRB para la comprobación técnica de las emisiones, con
miras a liberar las bandas de frecuencias atribuidas exclusivamente al servicio de frecuencias patrón ........................................................................................................................... 180
Ruego 70 El sistema UTC y la función del Bureau international de l’h e u r e ........................................ 181Ruego 71-1 Documentación de transmisiones de señales h o r a r ia s .............................................................. 181Ruego 72 Difusión de señales horarias utilizando satélites meteorológicos .............................. 182Decisión 65 M anual sobre el uso de la difusión de señales horarias y frecuencias patrón por
s a t é l i t e .................................................................................................................................................. 183
índice alfabético de términos (palabras clave) del Volumen V I I ............................................................. 185

PAGE INTENTIONALLY LEFT BLANK
PAGE LAISSEE EN BLANC INTENTIONNELLEMENT

XI
ÍNDICE DE LOS TEXTOS SU PRIM IDOS AL FINAL DEL PERIO D O DE ESTUDIOS 1982-1986
(Para facilitar la localización de un determinado texto, el número de la página del Volumen VII, de la XV Asamblea Plenaria (Ginebra, 1982) se indica a continuación.)
Texto TítuloPágina N.°
Vol. VII G inebra, 1982
Informe 737-1* Fiabilidad de los patrones de tiempo y frecu en c ia ......................................................... 129
Programa de Estudios IB -1/7
Emisiones de banda lateral única en los servicios de frecuencias patrón y de señales h o r a r i a s ............................................ ............................................................................ 148
Programa de Estudios 1D-1/7**
Ponderaciones estadísticas de relojes que intervienen en una escala de tiempo — Problemas relativos a la obtención de m ed ias................................................................... 148
Programa de Estudios 3B/7.
Inestabilidad de los generadores de frecuencias p a t r ó n ................................................ 151
Decisión 28 Difusión mundial de señales horarias por satélite ................................ ......................... 160
Decisión 29-1 Calidad de funcionamiento y fiabilidad de las frecuencias patrón y de los relojes de re fe re n c ia .............................................................................................................................. 161
* El Informe 737 ha sido incorporado al Informe 898.** Este Programa de Estudios se ha convertido en el nuevo Programa de Estudios 10B/7.

PAGE INTENTIONALLY LEFT BLANK
PAGE LAISSEE EN BLANC INTENTIONNELLEMENT

XIII
ÍNDICE NUMÉRICO DE LOS TEXTOS
RECOM ENDACIONES Página
Recomendación 374-3 9Recomendación 375-2 9Recomendación 376-1 10Recomendación 457-1 11Recomendación‘458-1 11Recomendación 460-4 12Recomendación 485-1 16Recomendación 486-1 16Recomendación 535-1 17Recomendación 536 17Recomendación 537 96Recomendación 538 119Recomendación 582 59Recomendación 583 85
INFORM ES
Informe 267-6 19Informe 270-3 45Informe 271-7 47Informe 363-6 52Informe 364-5 120Informe 439-4 134Informe 518-4 60Informe 576-3 84Informe 577-2 84Informe 578-2 86Informe 579-3 138Informe 580-2 142Informe 730-1 1Informe 731-1 89Informe 732-2 96Informe 735-1 101Informe 736-1 102Informe 738-2 150Informe 896-1 109Informe 897-1 110Informe 898-1 159Informe 1016 113Informe 1017 117
Nota. — Las Cuestiones, Programas de Estudios, Resoluciones, Ruegos y Decisiones que figuran ya en orden numérico en el cuadro de materias, no se repiten en el presente índice.

PAGE INTENTIONALLY LEFT BLANK
PAGE LAISSEE EN BLANC INTENTIONNELLEMENT

XV
ÍNDICE DE LOS TEXTOS PUBLICADOS EN OTROS VOLÚMENES PERO QUE CONTIENEN INFORMACIÓN DE INTERÉS PARA
LOS SERVICIOS DE FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
Texto Título Volumen
Recomendación 328 Espectros y anchuras de banda de las em isiones.........................................................
Recomendación 329 Emisiones no e se n c ia le s .................................................................................................... I
Recomendación 331 Ruido y sensibilidad de los recep to res ........................................................................... I
Recomendación 332 Selectividad de los re cep to re s ........................................................................................... I
Informe 181 Tolerancias de frecuencia de los transm isores............................................................... I
Informe 657 Modelo estadístico para la determinación de criterios de compartición de bandas ................................................................................................................................... I
Informe 670 Niveles mínimos mundiales de ruido externo, de 0,1 Hz a 100 G H z ................... I
Informe 829 Cálculo de la probabilidad de in terfe rencia .................................................................. I
Informe 841 Gestión del espectro de frecuencias y técnicas de asistencia mediante computador ................................................................. .................................................................... I
Cuestión 18/1 Diseño de sistemas para aumentar al máximo la eficacia de utilización y el aprovechamiento del espectro radioeléctrico ............................................................... I
Cuestión 44/1 Modelos de sistemas para la evaluación de la compatibilidad en la utilización del espectro ........................................................... ... ......................................................... I
Cuestión 45/1 Criterios técnicos para la compartición de frecuencias............................................... I
Decisión 56 Transferencia de te c n o lo g ía .............................................................................................. I
Recomendación 364 Anchuras de banda y frecuencias preferidas para satélites de investigación espacial próximos a la Tierra, tripulados o no tr ip u lad o s ......................................... II
Recomendación 517 Protección del servicio de radioastronomía contra los transmisores que trabajan en las bandas adyacentes................................................. ... . . ...................................... II
Informe 396 Telemedida de mantenimiento, seguimiento y telemando de los satélites experimentales y de explotación. Posibilidades de compartición de frecuencias entre los servicios terrenales y los enlaces de telemedida y telemando de los satélites . II
Informe 546 Tecnología de los . sistemas espaciales utilizados en el servicio de investigación espacial: tecnología de control de a c t i tu d ..................................................................... II
Programa de Estudios 15C/2
Protección del equipo de telecomunicaciones contra las radiaciones de radiofrecuencia de las estaciones terrenas de investigación espacia l...................................... II
Cuestión 19/2 Emisiones no esenciales producidas por estaciones de servicios espaciales o recibidas por éstas ................................................................................................................. II
Cuestión 25/4 Emisiones no deseadas radiadas y recibidas por las estaciones terrenas y espaciales del servicio fijo por s a té li te ......................................: .................................. IV-1
Cuestión 30/4 Provisión de enlaces de conexión entre estaciones terrenas fijas y estaciones espaciales de diversos servicios en bandas de frecuencias atribuidas al servicio fijo por satélite .................................................................................................................... IV-1
Recomendación 452 Datos de propagación para evaluar la interferencia entre estaciones situadas en la superficie de la T ie r r a .................................................................................................... V
Recomendación 581 Noción de «mes más d e sfav o rab le» .............................................................................. V
Recomendación 618 Datos de propagación necesarios para el diseño de sistemas de telecomunicación T ierra-espacio .......................................................................................................... V
Recomendación 619 Datos de propagación para evaluar la interferencia entre estaciones en el espacio y estaciones en la superficie de la T ie rra ......................................................... V
Recomendación 620 Datos de propagación para calcular las distancias de co o rd in ac ió n ...................... V
Informe 564 Datos de propagación y métodos de predicción requeridos para los sistemas de telecomunicación tie rra -espacio ........................................................................................ V
Informe 569 Evaluación de los factores de propagación que intervienen en los problemas de interferencia entre estaciones en la superficie de la Tierra en frecuencias superiores a unos 0,5 G H z ................................................................................................. V

XVI
Texto Título Volumen
Informe 719 Atenuación producida por los gases de la atmósfera . . . . ...................................... V
Inform e 720 Emisión radioeléctrica de fuentes naturales en la gama de frecuencias superiores a unos 50 MHz ........................................................................................................ V
Informe 721 Atenuación producida por hidrometeoros, en particular en forma de lluvia, y por otras partículas a tm o sfé r ic a s ..................................................................................... V
Informe 722 Transpolarización debida a la a tm ósfera......................................................................... V
Inform e 723 Estadísticas del mes más d e sfav o rab le ............................................................................ V
Inform e 724 Datos de propagación para la evaluación de la distancia de coordinación en la gama de frecuencias comprendida entre 1 y 40 G H z .................................................. V
Inform e 885 Datos de propagación necesarios para la evaluación de la interferencia entre estaciones en el espacio y estaciones en la superficie de la T ie r r a ......................... V
Inform e 1007 Distribuciones estadisticas en la propagación de las ondas radioeléctricas . . . . V
Inform e 1010 Datos de propagación para la coordinación bidireccional entre estaciones te r re n a s .................................................................................................................................... V
Recomendación 373 Definición de las frecuencias máximas de transmisión ............................................ VI
Inform e 895 Propagación de la onda ionosférica y calidad de funcionamiento a frecuencias por debajo de unos 30 k H z .............................................................................................. VI
Programa de Estudios 28D /6
Factores de propagación que influyen en la compartición del espectro de frecuencias radioeléctricas entre sistemas terrenales que hacen intervenir la propagación io n o s fé r ic a ..................................................................................................... VI
Ruego 85 Mediciones de las características del ruido radioeléctrico atm osférico ................... VI
Recomendación 589 Interferencia causada a los servicios de radionavegación por otros servicios en las bandas comprendidas entre 70 y 130 k H z ............................................................... VIII-2
Informe 915 Interferencia causada a los servicios de radionavegación por los servicios fijo y móvil marítimo en las bandas comprendidas entre 70 y 130 k H z ......................... VIII-2
Programa de Estudios 2E/10-11
Radiación de emisiones no deseadas por estaciones espaciales del servicio de radiodifusión por satélite (sonora y de te le v is ió n ) ..................................................... X /X I-2
Informe 1078 Radiodifusión de información codificada de hora y f e c h a ...................................... XI-1
Recomendación 431 N omenclatura de las bandas de frecuencias y de las longitudes de onda empleadas en telecom unicaciones..................................................................................... X III
Recomendación 573 Vocabulario de radiocom unicaciones............................................................................... X III
Recomendación 574 Uso del decibelio y del neperio en te lecom un icac iones............................................ X III
Recomendación 607 Términos y símbolos relacionados con cantidades de información en telecomunicaciones .................................................. .................................................................. X III
Recomendación 662 Términos y d e f in ic io n e s ..................................................................................................... X III
Recomendación 666 Abreviaturas y siglas utilizadas en telecomunicaciones ............................................ X III
Resolución 66 Términos y d e f in ic io n e s ..................................................................................................... X III
Resolución 78 Presentación de los textos relativos a la te rm in o lo g ía ............................................... X III
Resolución 89 Directrices para la selección de términos y elaboración de definiciones................ X III
Decisión 19 Términos y d e f in ic io n e s ..................................................................................................... X III

XVII
FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
CO M ISIÓN DE ESTUDIO 7
Mandato:
1. Coordinar los servicios de difusión de frecuencias patrón y de señales horarias a escala mundial.
2. Estudiar los aspectos técnicos de la emisión y recepción en estos servicios, incluida la aplicación de técnicas espaciales y los medios para mejorar la precisión de las mediciones.
1982-1986-1990 Relator Principal: J. McA. STEELE (Reino Unido)Relator Principal Adjunto: S. LESCHIUTTA (Italia)
IN TRO DU CCIÓN POR EL RELATOR PRIN CIPAL DE LA COM ISIÓ N DE ESTUDIO 7
1. Generalidades
En su Reunión Final celebrada en Ginebra en 1985, la Comisión de Estudio examinó el orden y la presentación de sus textos. Se decidió que éstos se agruparían en tres capítulos principales que pondrían de relieve las principales subdivisiones de la documentación, con lo cual el lector dispondría de una secuencia de información más ordenada. Tras el Informe 730, dedicado al glosario de términos utilizados por la Comisión de Estudio 7, los distintos Informes y Recomendaciones están reunidos ahora bajo los siguientes epígrafres:— especificación del servicio de frecuencias patrón y señales horarias;— métodos disponibles para la difusión y comparación de señales; y—. características de los generadores de frecuencias patrón y empleo de éstos para el establecimiento de escalas
de tiempo.Los textos restantes, incluidos las Cuestiones, los Programas de Estudios, las Resoluciones y los Ruegos
figuran al final del Volumen. Resultará práctico seguir en la presente introducción las líneas generales de demarcación adoptadas para la documentación de la Comisión de Estudio en general.
2. Especificación del servicio de frecuencias patrón y señales horarias
2.1 Sistema de Tiempo Universal Coordinado (UTC)
El hecho de que no se haya estimado necesario introducir ninguna modificación im portante en los últimos años, representa un tributo a la concepción inicial del sistema UTC que se incluye en la Recomendación 460. En el periodo que siguió a la introducción del sistema en 1972, la Tierra se com portó con gran regularidad y se efectuaron ajustes con segundos intercalares en el último día de diciembre de cada año para com pensar la diferencia entre el tiempo astronómico derivado de la rotación de la Tierra y la referencia atómica. N o obstante, a partir de 1979, aproximadamente, la Tierra presentó un comportamiento menos previsible, y la disposición de la Recomendación 460 que permite introducir segundos intercalares el último día de junio se aplicó por prim era vez en 1981 y siguió aplicándose en los años sucesivos hasta 1985, con excepción de 1984, en que no se necesitó un segundo intercalar, dado que la velocidad de rotación de la Tierra había aum entado en medida apreciable con respecto a la de los años inmediatamente anteriores.
En el periodo de alrededor de 15 años en que se ha venido aplicando, el sistema UTC, con los segundos intercalares correspondientes, ha ganado una amplia aceptación y hoy se comprende bien la necesidad de incluir el ajuste de segundos en todo sistema operacional de medición de tiempo. Es quizás desafortunado que en el caso de ciertas transmisiones destinadas a la navegación no sea posible aceptar la pérdida de coherencia que entrañaría la introducción de un segundo intercalar, especialmente cuando las estaciones están ampliamente distribuidas en la Tierra o en el espacio. El sistema Omega y el sistema global de determinación de la posición (GPS — «Global Positioning System») son dos ejemplos de casos en que no se aplican los segundos intercalares pero en los cuales, no obstante, siempre se proporciona la diferencia entre el UTC y el marco tem poral del sistema de navagación en cada momento. En el caso del sistema Omega, la diferencia referida se indica, para una época determ inada, en el Informe 267. En el mismo Informe se aclara que la red Loran-C, que no experimenta ningún cambio temporal al introducirse un segundo intercalar, registra en realidad el efecto de ese cambio mediante una redefinición de los «tiempos de coincidencia» publicados por el Observatorio Naval de los Estados Unidos de América.

XVIII
Antes de introducirse el sistema UTC, se utilizaban diversos métodos de ajuste de las señales horarias emitidas. Es importante seguir disponiendo de los detalles de tales cambios en los archivos. Inicialmente se tenía el propósito de incluirlos en el Informe 896 sobre la documentación de tales modificaciones, pero en la reunión interm edia se convino en que era más apropiado que, en arm onía con el Ruego 71, tal información se depositase en el Bureau international de l’heure (BIH) y en los Centros Mundiales de Datos A, B y C. Las Administraciones de Francia, la República Federal de Alemania, Japón, el Reino Unido y los Estados Unidos de América han comunicado ya los detalles pertinentes al BIH.
2.2 Bureau international de l ’heure (BIH)
Ya se han mencionado algunas de las funciones que desempeña el BIH en la supervisión del funcionamiento del sistema UTC: el papel fundamental del BIH en relación con el UTC se reconoce en el Ruego 70, donde se destaca la necesidad de secundar las actividades del BIH para el establecimiento y mantenimiento de las escalas de tiempo atómico. La necesidad de tal apoyo no será menor en lo sucesivo, ahora que las funciones del BIH se han separado en dos partes: una relacionada con el tiempo atómico, que se cumplirá en el Bureau international des poids et mesures (BIPM) de Sévres, Francia, y otra dedicada a estudios de la rotación de la Tierra y que se proseguirá en el Observatorio de París. Se prevé la participación del CCIR en un Grupo de Trabajo que se ocupará de supervisar el Tiempo Atómico Internacional (TAI) y que entrará en funciones cuando todas las uniones científicas interesadas hayan dado su conformidad a las nuevas disposiciones. La responsabilidad del TAI pasará entonces a ser de la competencia del Comité international des poids et mesures (CIPM). Con respecto al UTC, se necesitaría aún una información adicional procedente de las observaciones de la rotación de la Tierra para decidir acerca de la incidencia de los segundos intercalares.
3. Difusión y comparación de tiempos y frecuencias
3.1 Bandas atribuidas
En el cuadro I del Informe 267 se indica la situación actual en lo que se refiere a las estaciones que funcionan en las bandas (terrenales) atribuidas, es decir, a frecuencias centrales de 20 kHz, 2,5, 5, 10, 15, 20 y 25 MHz. Ni la frecuencia más baja (20 kHz) ni, desde 1977, la más alta (25 MHz) son utilizadas por las administraciones. En los últimos años han tenido lugar diversos cambios en los servicios disponibles y es digno de destacarse que, a pesar del desarrollo de otros métodos de difusión, el número de adiciones al cuadro supera al núm ero de supresiones. La transmisión de la estación FFH (París) a 2,5 MHz cesó en mayo de 1982; en cambio, se añadió una nueva transmisión en esta frecuencia, limitada a las horas del día, al program a de la estación BPM (Pusheng). La estación RCH (Tashkent), limitada antes a la frecuencia de 2,5 MHz, ha añadido las de 5 y 10 MHz a sus emisiones, mientras que en el Lejano Oriente, la República de Corea ha introducido la nueva estación HLA (Taedok) que funciona en 5 MHz durante un total de siete horas todos los días lobarables. Estos servicios adicionales aumentan indudablemente las posibilidades de interferencia mutua (véase la Recomendación 537) y afectan a los posibles remedios examinados en el Informe 732. La situación ha mejorado algo con la decisión de la CAMR-79 de permitir el uso de las frecuencias de 4, 8 y 16 MHz para la difusión de señales horarias y frecuencias patrón en la Región 3, y es satisfactorio advertir que se ha añadido la frecuencia de 8 MHz a las emisiones de la estación de JJY a 2,5, 5, 10 y 15 MHz.
3.2 Bandas de frecuencias adicionales
En la Recomendación 375 se insta a utilizar los servicios existentes en las bandas 4, 5, 6, 8 y 9 para la difusión de una referencia de tiempo y de frecuencia. En los cuadros II a V del Informe 267 se indican las características de tales estaciones, que abarcan transmisores de comunicaciones destinadas a la navegación, transmisores de radiodifusión, a los que se refiere especialmente el Informe 576, y cierto número de estaciones especialmente destinadas a la transmisión de señales horarias y de frecuencias patrón. Con respecto a la mayoría de las fuentes de gran potencia en ondas miriamétricas se ha añadido una nota de advertencia en la que se destaca el uso extendido de la modulación por desplazamiento mínimo (M DM) que conduce a la pérdida de la coherencia de fase. Esta puede recuperarse, pero sólo a costa de un tratam iento adicional en un receptor apropiado.
El espectro disponible para la difusión de señales horarias y frecuencias patrón es necesariamente limitado y en el Informe 270 se hace hincapié en la necesidad de su utilización óptim a para la transmisión de señales horarias de gran precisión. Varias estaciones están utilizando ahora la modulación de fase como modo de alcanzar una mayor precisión combinada con una mayor inm unidad a la interferencia. Como se describe en el Inform e 577, el transmisor de Allouis (162 kHz) emplea una modulación de fase triangular de amplitud ± 1 rad en un intervalo de 0,1 s para realizar tanto una referencia de tiempo como una distribución de código horario, aplicando la modulación de fase simultáneamente con la modulación de amplitud normal de la radiodifusión sonora. En la URSS también se ha estudiado la modulación de fase en la estación RBU (66 2/3 kHz) utilizando señales de banda estrecha en frecuencias subportadoras de 100 y 312,5 Hz y una excursión de fase de 0,7 rad, para identificar las marcas de segundos y minutos. Otra técnica posible, que emplea la modulación de fase por una secuencia seudoaleatoria ha sido objeto de experimentos en la estación DCF77 (77,5 kHz) desde 1983. Los resultados iniciales indican que el tiempo obtenido por correlación de la secuencia seudoaleatoria es más reproductible que el derivado de las marcas de segundos, moduladas en amplitud.

XIX
3.3 Transmisión de señales horarias de gran precisión
Con la creciente capacidad para efectuar comparaciones de tiempo de gran precisión (< 1 ns) por diversos medios, surge la necesidad de determinar las limitaciones derivadas de la inestabilidad de los instrumentos y de las variaciones de la propagación, lo que se reconoce en el nuevo Programa de Estudios 5B/7. Un problem a conexo radica en determinar los retardos originados en las antenas utilizadas para emitir señales de gran precisión y se ha elaborado un primer Informe sobre esta materia (Informe 1017). El Inform e 897 sobre la transferencia de señales horarias de precisión en distancias cortas se ha ampliado a fin de incluir los resultados obtenidos por medio de cables, incluidas las fibras ópticas, así como de radioenlaces con visibilidad directa m ediante transmisores láser.
3.4 Métodos para la transferencia y difusión de señales horarias y frecuencias patrón
Después de un examen en la Reunión Intermedia, se convino en que el texto original del Inform e 363 sobre la comparación de los métodos aplicados para la transferencia y difusión de señales horarias y frecuencias patrón se había convertido ya en un texto de difícil manejo y convenía asignar a un Relator Especial la tarea de revisar su contenido y procurar identificar los aspectos del Informe que sería preferible exam inar en forma más detallada en un contexto separado, ya sea en el marco de un Informe existente o como base de un nuevo texto. La Comisión de Estudio contó afortunadam ente con los servicios del Dr. G. M. R. W inkler (Estados Unidos de América) para esta labor que condujo, tras el correspondiente examen en la Reunión Final, a la versión revisada del Informe 363 de que ahora disponemos. Este es esencialmente un texto comparativo de muchos métodos diferentes de tranferencia y difusión de señales horarias, cuyos detalles se proporcionan en textos separados, como el Informe 518 sobre la difusión y coordinación de frecuencias patrón y señales horarias por satélite.
Una consecuencia de esta revisión fue que los métodos de televisión para esa transferencia y difusión surgieron como un tema de amplitud e im portancia suficiente como para justificar la inclusión por separado del nuevo Informe 1016.
3.5 Códigos horarios
La emisión de un código horario sigue siendo una valiosa característica de cierto número de servicios que funcionan tanto en las bandas atribuidas como en las bandas adicionales. En el Informe 578 se proporcionan detalles de los formatos de codificación utilizados: no existe un código único común para todos los servicios de señales horarias y de frecuencias patrón, aunque en la Recomendación 583 se aconseja que sólo se utilice un conjunto limitado de códigos y que cualquier nuevo sistema se ajuste a uno de los códigos ya en uso. En la Reunión Final se tomó nota también de la Recomendación sobre los formatos de los códigos horarios form ulada en junio de 1985 por el Comité Consultivo para los Sistemas de Datos Espaciales (CCSDS — «Consultative Committee for Space Data Systems»). En esta Recomendación se establece un formato básico común para los datos de los códigos horarios, destinado a ser empleado por los siete organismos espaciales miembros.
4. Caracterización de las fuentes y formación de escalas de tiempo
La calidad de las fuentes de frecuencias patrón y los métodos disponibles para caracterizarla son conceptos fundamentales en la labor de la Comisión de Estudio 7. En la Reunión Final se adoptó una nueva estructura, más lógica, para los textos que autorizan los estudios sobre esta materia. Se aprobó la nueva Cuestión 10/7 sobre la calidad de los patrones de frecuencia y de tiempo junto con el nuevo Programa de Estudios 10B/7 «Algoritmos de las escalas de tiempo y problemas estadísticos» (antiguo Program a de Estudios ID -1/7 al que sólo se le ha cambiado el título), así como el nuevo Program a de Estudios 10A/7 sobre la calidad y caracterización de los patrones de frecuencia y de tiempo. Se han introducido ligeras correcciones en varios Informes conexos, entre ellos el Informe 364 sobre el comportamiento de los generadores de frecuencias patrón, el Informe 439 sobre efectos relativistas, el Informe 579 sobre algoritmos de escalas de tiempo y el Informe 580 sobre caracterización del ruido de frecuencia y de fase. Se incorporaron al Inform e 738 nuevos resultados relativos a las frecuencias de los patrones en las regiones submilimétrica y visible del espectro.
5. Grupos Interinos de Trabajo
Tras haber realizado su labor activa y eficazmente a lo largo de dos periodos de estudios, los Grupos Interinos de Trabajo (GIT) 7 /4 y 7 /5 han cumplido esencialmente los cometidos que se les habían asignado y han concluido por tanto sus actividades en la Reunión Final; por consiguiente, se han suprimido las Decisiones 28 y 29. La Comisión de Estudio dejó constancia de su agradecimiento a los respectivos Presidentes, Sr. R. E. Beehler (Estados Unidos de América) y Dr. P. Kartaschoff (Suiza) por su sostenida dedicación, durante casi ocho años, a la realización de estos importantes estudios. También debe agradecerse a los miembros de ambos G rupos de Trabajo y sus administraciones por sus aportaciones al éxito de esa labor.
5.1 Grupo Interino de Trabajo 7/4
Este GIT se estableció con un amplio m andato a fin de que examinase los requisitos, posibilidades técnicas y métodos para alcanzar la difusión mundial de señales horarias por satélite. Como es habitual, el G IT desarrolló sus actividades en gran parte por correspondencia, acum ulando así un volumen considerable de material. No obstante, también contribuyeron al progreso de los trabajos los debates directos que tuvieron lugar durante las Reuniones Intermedia y Final de 1980, 1981 y 1983.

XX
Después de haber reunido amplios antecedentes sobre los métodos de transmisión por satélite, incluidos resultados experimentales y estimaciones comparativas de las ventajas e inconvenientes de distintos sistemas, el G IT 7 /4 preparó resúmenes apropiados para su inclusión en una versión revisada del documento básico de la Comisión de Estudio, relativo al uso de satélites, el Informe 518. Este Informe general incluye también material sobre transmisión por satélite procedente de otros Informes y en particular del Informe 363 ya mencionado en el § 3.4, y una parte de la actividad del G IT consistió en m antener actualizado este documento general sobre el uso de satélites mediante revisiones apropiadas en cada Reunión Intermedia y Final. Otros textos de la Comisión de Estudio que derivan directamente de la labor del G IT 7 /4 comprenden la Recomendación 582, en la que se exhorta a las administraciones a tener en cuenta las ventajas de las técnicas basadas en el uso de satélites en la planificación futura de servicios de difusión de señales horarias, así como el Ruego 72, en el que se señalan las ventajas de combinar la difusión de señales y códigos horarios con el funcionamiento de satélites meteorológicos geoestacionarios. El G IT también tuvo a su cargo la elaboración de la contribución de la Comisión de Estudio a la Reunión Preparatoria de Conferencia (RPC, 1984) de la CAM R ORB-85 sobre la utilización de la órbita de los satélites geoestacionarios.
Dado el número y la variedad de los sistemas de satélite, existentes y proyectados, destinados al mejoramiento de la difusión y transferencia de señales horarias, no es de sorprender que el G IT 7 /4 no haya podido recomendar un sistema o técnica única como la opción preferida. No obstante, el G IT pudo cumplir una útil función al proporcionar información objetiva sobre los sistemas más prometedores, y alentar a las administraciones miembros a conceder una alta prioridad al desarrollo de nuevas tecnologías de transmisión de señales horarias por satélite y nuevos servicios operacionales para tal fin y señalar las oportunidades en que los interesados en la medición del tiempo y las frecuencias podían influir en el desarrollo de sistemas determinados de satélite acordes con sus necesidades. Algunas de estas actividades del G IT 7 /4 seguirán teniendo un efecto útil en la labor que ha de emprenderse para la preparación de un manual sobre la difusión de señales horarias y frecuencias patrón por satélite (véase el § 6).
5.2 Grupo Interino de Trabajo 7/5
Se recordará que el G IT 7/5 se creó inicialmente en respuesta a una petición de asesoramiento e inform ación formulada por la Comisión de Estudio XVIII del CCITT con respecto al tema de los relojes de referencia que suministran sincronización en las redes digitales, y en particular a su fiabilidad, su inestabilidad y las técnicas de medición para determinar esta última. Al procurar responder a la cuestión de fiabilidad de los patrones de frecuencia y los relojes, el G IT llevó a cabo un amplio estudio de los dispositivos atómicos y no atómicos de todo el mundo. Este ha sido un trabajo de la mayor utilidad, en el que participaron eficazmente los miembros del GIT, y los resultados se presentan ahora en los distintos cuadros del Informe 898 que pueden considerarse una respuesta completa a las preguntas de la Comisión de Estudio XVIII. El informe también incluye el anterior Informe 737 sobre la fiabilidad de los patrones de tiempo y frecuencia, con lo cual este último no existe ya en forma independiente.
Es muy satisfactorio señalar que los datos de fiabilidad obtenidos y analizados por el G IT 7/5 se han incluido ahora en un anexo a la Recomendación G.811 del CCITT. Esta Recomendación especifica también la temporización que ha de asociarse con los nodos en que terminan los enlaces internacionales, en forma de un error de intervalo de tiempo (EIT) admisible para los relojes de referencia en distintos periodos de observación. Uno de los rasgos del Informe 898 es que proporciona una interpretación del EIT en términos utilizados normalmente por la Comisión de Estudio 7, como la integral del desajuste de frecuencia normalizado.
Los contactos entre la Comisión de Estudio 7 y la Comisión de Estudio XVIII del CCITT siguen siendo muy útiles para ambas partes y es satisfactorio que el Dr. Kartaschoff haya tenido la amabilidad de aceptar las funciones de Relator Especial para promover las relaciones entre ambas Comisiones de Estudio.
6. Decisión 65: Manual sobre el uso de la difusión de señales horarias y frecuencias patrón por satélite
El mandato de la Comisión de Estudio 7 incluye la utilización de sistemas de satélite para el logro de una difusión mundial de frecuencias patrón y señales horarias, y por su propia naturaleza los satélites pueden superar muchas de las limitaciones de los sistemas terrenales equivalentes de distribución de esas señales y frecuencias. Los estudios realizados por el G IT 7 /4 han demostrado las posibilidades técnicas existentes en el campo de los satélites sobre la base de la experiencia operacional de diversos sistemas de difusión o comparación de señales horarias que utilizan satélites geoestacionarios. La posibilidad de un futuro sistema mundial no se pone en tela de juicio, teniendo en cuenta especialmente el establecimiento del sistema GPS que tendrá lugar durante el próximo periodo de estudios.
Sobre la base de estas consideraciones, la Comisión de Estudio convino en la Reunión Final en que el momento era oportuno para establecer un Grupo de Trabajo ad hoc encargado de preparar un manual sobre servicios para la difusión de señales horarias y frecuencias por satélite. El texto se inspirará inicialmente en los documentos de la Comisión de Estudio 7 y especialmente en el Informe 518 y en la documentación reunida por el G IT 7 /4 : se inspirará también en los documentos pertinentes de otras Comisiones de Estudio y en el amplio material publicado sobre el uso de sistemas de satélites para la determinación de la posición. Es alentador poder señalar que, tras el envío de la Decisión a las administraciones, han indicado su deseo de participar en el Grupo de Trabajo las Administraciones de Canadá, Francia, India, Japón, el Reino Unido y la República Socialista Federativa de Yugoslavia, así como el Bureau international de l’heure.
I. 730-1 1
SECCIÓN 7A: GLOSARIO
Informe
INFORM E 730-1 *
GLOSARIO(1978-1986)
1. Introducción
La presente lista de términos constituye un glosario para uso de la Comisión de Estudio 7 y de losusuarios de los servicios de frecuencias patrón y señales horarias. Con frecuencia, en las mediciones de tiempoprecisas pueden influir efectos relativistas. Los términos y definiciones siguientes no suponen que se hayan tenido en cuenta estos efectos en todos los casos, ni que sea necesario hacerlo. Se presentan dos tipos de términos: los que se utilizan sobre todo en los servicios de frecuencias patrón y señales horarias, y los de empleo más general, pero relacionados específicamente con este campo. Para los últimos, se ha tratado de hacerlos concordar lo más posible con las definiciones del Vocabulario Electrotécnico Internacional (VEI). Se ha sometido la lista al examen de la Comisión Mixta C C IR /C C ITT para el Vocabulario (CMV). Se indican también los términos equivalentes en inglés y francés (figuran en letra cursiva).
2. Definiciones
La numeración de las definiciones sigue el orden señalado por el Grupo Interino de Trabajo 7/2. Los términos que faltan se definirán posteriormente.
3.25 Tiempo, Time, Temps (explicación)
Siendo el tiempo un concepto general, la definición de este término no puede expresarse sin ambigüedad.Nota. — Este término se utiliza con distinto significado en cada idioma.
3. índice (por orden alfabético)
Calibración 0.9 Inestabilidad de frecuencia 0.5Código horario 4.8 Instante 4.3Coherencia de fase 2.3 Intervalo de tiempo 4.9Coherencia de frecuencia 2.4 Lectura de una escala de tiempo 3.13Comparación de tiempo 3.16 Marca de tiempo 3.15Deriva de frecuencia 1.10 Número de día juliano 4.11Deriva normalizada de frecuencia 1.11 Patrón de frecuencia 1.14Desajuste de frecuencia 1.7 Patrón de tiempo 3.23Desajuste de frecuencia Patrón de tiempo primario 3.23A
normalizada 1.8 Patrón de tiempo secundario 3.23BDesplazamiento de fase 2.7 Patrón primario de frecuencia 1.15Desplazamiento de frecuencia 1.9 Patrón secundario deDiferencia entre escalas de frecuencia 1.16
tiempo 3.14 Precisión 0.2Diferencia de frecuencia 1.12 Reloj ■ 3.23CDiferencia de frecuencia Reloj coordinado 4.2
normalizada 1.13 Reposicionabilidad 0.8Diferencia de tiempo de reloj 4.1 Reproductibilidad 0.7DUT1 3.21 Salto de tiempo 3.20Emisión de frecuencias patrón 1.5 Segundo intercalar 4.4Emisión de señales horarias 1.5 A Separación 0.11Error 0.4 Separación normalizada 0.12Escala de tiempo atómico 3.2 Servicio de frecuenciasEscala de tiempo cooordinada 3.5 patrón por satélite 1.6AEscalas de tiempo en sincronismo 3.17 Servicio de señales horariasEstación de frecuencias patrón por satélite 1.6B
y /o de señales horarias 1.6 Sincronismo 4.15Exactitud 0.1 Tiempo 3.25Fase 2.1 Tiempo Atómico InternacionalFecha 3.12 (TAI) 3.3Fecha juliana (FJ) 4.10 Tiempo-coordenada 3.6Fecha Modificada del Calendario Tiempo propio 3.7
Juliano (FMCJ) 4.13 Tiempo Universal (UT) 3.9Frecuencia 1.1 Tiempo Universal CoordinadoFrecuencia normalizada 1.3 (UTC) 3.4Frecuencia patrón 1.4 Unidad de escala de tiempo 3.18Frecuencia portadora 1.2 Valor nominal 0.10Incertidumbre 0.3
Este Informe debe señalarse a la atención de la CMV.

2 I. 730-1
0.1 Exactitud, Accuracy, Exactitude
Generalmente equivalente a incertidumbre sistemática de un valor medido. (Véase también Incerti- dum bre (0.3).)
0.2 Precisión, Precisión, Précision
Incertidumbre aleatoria de un valor medido, expresado por la desviación típica o por un múltiplo de ésta. (Véase también Incertidumbre (0.3).)
0.3 Incertidumbre, Uncertainty, Incertitude
La incertidumbre de un valor medido expresa la magnitud de la posible desviación de este valor con respecto al valor real.
Frecuentemente es posible distinguir dos componentes: la incertidumbre sistemática y la incertidumbre aleatoria.
La incertidumbre aleatoria se expresa por la desviación típica o por un múltiplo de ésta. La incertidumbre sistemática se estima generalmente sobre la base de las características del parámetro.
El término «exactitud» equivale generalmente a «incertidumbre sistemática», mientras que el término «precisión» equivale a «incertidumbre aleatoria». Análogamente, la exactitud «total» de una medición equivale a una incertidumbre «global», que comprende ambas partes, la sistemática y la aleatoria.
0.4 Error*, Error, Erreur
Diferencia no intencional entre el valor medido y el valor real.
0.5 Inestabilidad de frecuencia, Frequency instability, lnstabilité de fréquence
Se expresa por el cambio de frecuencia dentro de un intervalo de tiempo t dado. Se distingue generalmente entre el efecto de deriva de frecuencia (véase 1.10) y las fluctuaciones de frecuencia estocásticas. Se handesarrollado varianzas especiales para la caracterización de estas fluctuaciones.
En muchos contextos se utiliza la expresión «estabilidad de frecuencia» en vez de inestabilidad de frecuencia, y es aceptable.
0.7 Reproductibilidad, Reproducibility, Reproductibiliíé
a) Con respecto a un conjunto de dispositivos independientes de igual diseño, es la desviación típica de los valores producidos por estos dispositivos.
b) Con respecto a un dispositivo único que se pone en funcionamiento repetidamente, es la desviación típica de los valores producidos por este dispositivo.
0.8 Reposicionabilidad ('), Resettability, Défaut de fidélité
Es la desviación inevitable entre los valores producidos por un dispositivo cuando los parámetros especificados se ajustan independientemente en condiciones de utilización especificadas.Nota. — Está dada por la estimación de los límites de confianza (es decir, la .incertidumbre de los valoresobservados).(’) Este término reemplaza el término anterior «repetibilidad», que no se considera aplicable a los generadores
de frecuencias, sino a los procedimientos de medida.
0.9 Calibración*, Calibration, Etalonnage
Acción de identificar y medir los errores en los instrumentos y /o en los métodos.Nota. — En numerosos casos como, por ejemplo, en un generador de frecuencias, la calibración está relacionada con la estabilidad del aparato y, por consiguiente, su resultado es función del tiempo.
0.10 Valor nominal *, Nominal valué, Valeur nomínale
Valor especificado o que se quiere obtener, con independencia de toda incertidumbre en cuanto a su obtención.Nota. — Para un dispositivo con el que se obtiene una cantidad física, el valor nominal es el valor de esta cantidad especificado por el fabricante. Como se trata de un valor ideal, no comprende tolerancias.
0.11 Separación*, Offset, Décalage
Diferencia intencional entre el valor obtenido y el valor nominal. (Véase también separación normalizada.)
* Estas definiciones difieren de las del VEI, pero la Comisión de Estudio 7 las considera más adecuadas para el servicio defrecuencias patrón y señales horarias.

I. 730-1 3
0.12 Separación normalizada, Normalized offset, Décalage normé
Separación dividida por el valor nominal.Nota. — También se llama a menudo «separación relativa». Debe evitarse el empleo del término «separación fraccionaria».
1.1 Frecuencia*, Frequency, Fréquence
Si T es el periodo de un fenómeno iterativo, la frecuencia será / = Í /T . En las unidades del SI, el periodo se expresa en segundos y la frecuencia en hertzios.
1.2 Frecuencia portadora, Carrier frequency, Fréquence porteuse
Frecuencia de la onda portadora.Nota. — Se hace observar que el término «portadora» no está definido satisfactoriamente en el VEI.
1.3 Frecuencia normalizada, Normalized frequency, Fréquence normée
Relación entre el valor real de la frecuencia y su valor nominal.
1.4 Frecuencia patrón, Standard frequency, Fréquence étalon
Frecuencia que guarda una relación conocida con la de un patrón de frecuencia.Nota. — A menudo se llama frecuencia patrón a la señal cuya frecuencia es una frecuencia patrón.
1.5 Emisión de frecuencias patrón, Standard frequency emission, Emission de fréquences étalon
Emisión que con una exactitud de frecuencia especificada, según una media diaria, difunde a intervalos regulares una o varias frecuencias patrón.Nota. — En la Recomendación 460, el CCIR aconseja una desviación norm alizada inferior a 1 x 10-10.
1.5 A Emisión de señales horarias, Standard time-signal emission, Emission de signaux horaires
Emisión que con una exactitud especificada difunde a intervalos regulares una secuencia de señales horarias.Nota. — En la Recomendación 460, el CCIR recomienda emitir las señales horarias a menos de 1 ms con relación al UTC, y que contengan información DUT1 según un código especificado.
1.6 Estación de frecuencias patrón y/o de señales horarias, Standard frequency and/or time-signal station,Station de fréquence étalon et/ou de signaux horaires
Estación cuya finalidad esencial es proporcionar una frecuencia patrón y /o emitir señales horarias.
1.6A Servicio de frecuencias patrón por satélite, Standard frequency satellite Service, Service des fréquences étalonpar satellite
Servicio de radiocomunicación que utiliza estaciones espaciales situadas en satélites de la Tierra para el mismo fin que el servicio de frecuencias patrón.
1.6B Servicio de señales horarias por satélite, Time-signal satellite Service, Service des signaux horaires par satellite
Servicio de radiocomunicación en el que se utilizan estaciones espaciales situadas en satélites de la Tierrapara el mismo fin que el servicio de señales horarias.
1.7 Desajuste de frecuencia, Frequency departure, Ecart de fréquence
Diferencia, no intencionada, con relación al valor nominal de la frecuencia.Nota. — Conviene evitar el empleo del término «desviación de frecuencia», porque se utiliza en relación con la m odulación de frecuencia.
1.8 Desajuste de frecuencia normalizado, Normalized frequency departure, Ecart de fréquence normé
Desajuste de frecuencia dividida por el valor nominal de la frecuencia.Nota. — A menudo se llama también «desajuste relativo de frecuencia». Debe evitarse el empleo del térm ino «desajuste de frecuencia fraccionario».
1.9 Desplazamiento de frecuencia, Frequency shift, Déplacement de fréquence
Cambio intencionado de frecuencia con fines de modulación o no intencionado y debido a leyes físicas.Nota. — Dado que la expresión «desplazamiento de frecuencia» se utiliza en otras Comisiones de Estudio del C C IR sólo para los cambios de frecuencia intencionales relacionados con la modulación, se recomienda evitar el uso de esa expresión para indicar cambios de frecuencia no intencionales.
* Estas definiciones difieren de las del VEI, pero la Comisión de Estudio 7 las considera más adecuadas para el servicio defrecuencias patrón y señales horarias.

4 I. 730-1
1.10 Deriva de frecuencia*, Frequency drift, Dérive de fréquence
Cambio progresivo (no deseado) de la frecuencia con el tiempo.
1.11 Deriva normalizada de frecuencia, Normalized frequency drift, Dérive de fréquence normée
Deriva de la frecuencia dividida por el valor nominal de la frecuencia.Nota. — Se llama también a menudo «deriva relativa de frecuencia». Debe evitarse el empleo del término «deriva fraccionaria de frecuencia».
1.12 Diferencia de frecuencia, Frequency difference, Différence de fréquence
Diferencia algebraica entre dos frecuencias que pueden tener valores nominales idénticos o distintos.
1.13 Diferencia de frecuencia normalizada, Normalized frequency difference, Différence de fréquence normée
Diferencia algebraica entre dos frecuencias normalizadas. Los dos valores nominales pueden ser idénticos o distintos.Nota. — A menudo se llama también «diferencia relativa de frecuencia». Debe evitarse el empleo del término «diferencia de frecuencia fraccionaria».
1.14 Patrón de frecuencia, Frequency standard, Etalon de fréquence
Aparato que genera una referencia de frecuencia precisa.
1.15 Patrón primario de frecuencia, Primary frequency standard, Etalon primaire de fréquence
Patrón cuya frecuencia corresponde a la definición adoptada para el segundo y cuya exactitud especificada se obtiene sin calibrado referido a otro dispositivo.Nota. — La autoridad metrológica internacional reconocida es la Conferencia General de Pesos y Medidas y, en la actualidad, la referencia adoptada, es una transición específica del átomo de cesio 133.
1.16 Patrón secundario de frecuencia, Secondary frequency standard, Etalon secondaire de fréquence
Patrón de frecuencia calibrado con relación a un patrón de frecuencia primario. El término «secundario» indica así la posición jerárquica del patrón, la cual no está necesariamente relacionada con su calidad.
2.1 Fase, Phase, Phase
Por lo general, en un fenómeno periódico descrito analíticamente por una función de tiempo (o espacio), la fase es cualquier estado posible y distinguible de ese fenómeno.
Puede indentificarse por medio del tiempo que transcurre hasta que se produce, a partir de una referencia especificada, y cuya denominación correcta es «tiempo de fase» (abreviado a menudo en «fase»). En particular, si el fenómeno es sinusoidal se puede identificar la fase ya sea por el ángulo o a base del tiempo, medidos ambos a partir de una referencia asignada, según las dimensiones asignadas al periodo de referencia (a saber, 2n o T ).
En el servicio de frecuencias patrón y señales horarias se trata principalmente de diferencias de tiempo defase, o sea de diferencias de tiempo entre dos fases identificadas de un mismo fenómeno o de dos fenómenosdiferentes.
2.3 Coherencia de fase, Coherence o f phase, Cohérence de phase
Condición de dós frecuencias M y N para que exista la misma diferencia de fase después de M ciclos de la prim era y N ciclos de la segunda, siendo M /N un número racional obtenido por multiplicación y /o división a partir de la misma frecuencia fundamental.
2.4 Coherencia de frecuencia, Coherence o f frequency, Cohérence de fréquence
La misma definición que para coherencia de fase.
2.7 Desplazamiento de fase, Phase shift, Déphasage
Cambio intencionado o no intencionado de fase.
3.2 Escala de tiempo atómico, Atomic time scale, Echelle de temps atomique
Escala de tiempo basada en la periodicidad de fenómenos atómicos o moleculares.
Estas definiciones difieren de las del VEI, pero la Comisión de Estudio 7 las considera más adecuadas para el servicio defrecuencias patrón y señales horarias.

I. 730-1 5
3.3 Tiempo Atómico Internacional (TAI), International Atomic Time, Temps atomique international
Escala de tiempo establecida por el Bureau international de l’heure (BIH) sobre la base de los datos de relojes atómicos que funcionan según diferentes principios conformes a la definición del segundo, unidad detiempo del sistema internacional de unidades (SI).
3.4 Tiempo Universal Coordinado (UTC), Coordinated Universal Time, Temps universel coordonné
Escala de tiempo, m antenida por el BIH, que constituye la base de una difusión coordinada de frecuenciaspatrón y señales horarias. Su ritmo corresponde exactamente al del TAI, pero difiere de éste en un número enterode segundos.
La escala UTC se ajusta mediante la inserción o supresión de segundos (segundos intercalares positivos o negativos) para asegurar su concordancia aproximada con el UT1.
3.5 Escala de tiempo coordinada, Coordinated time scale, Echelle de temps coordonnée
Una escala de tiempo sincronizada, dentro de límites dados, con una escala de tiempo de referencia.
3.6 Tiempo-coordenada, Coordínate time, Temps-coordonnée
El concepto de tiempo en un sistema de coordenadas determinado, válido en una región espacial con potencial gravitacional variable.Nota. — Si se realiza una escala de tiempo de acuerdo con el concepto de tiem po-coordenada, ésta se denom ina «escala de tiempo-coordenada».
Ejemplo:TAI es una escala de tiempo-coordenada. Su referencia es la superficie de la Tierra a nivel del mar.
3.7 Tiempo propio, Proper Time, Temps propre
El concepto de tiempo inherente a un lugar dado.Si se realiza una escala de tiempo de acuerdo con el concepto de tiempo propio, ésta se denom ina escala
de tiempo propio.Ejemplos:
a) del tiempo propio: el segundo está definido en el tiempo propio del átomo de cesio;b) de la escala de tiempo propio: una escala de tiempo producida en un laboratorio y no transm itida al exterior
del mismo.
3.9 Tiempo Universal (UT), Universal Time (UT), Temps universel (UT)
Tiempo Universal (UT) es la designación general de las escalas de tiempo basadas en la rotación de laTierra.
En las aplicaciones en las que no se puede tolerar una imprecisión de unas centésimas de segundo, es necesario especificar las formas de UT que deben utilizarse:
UTO es el tiempo solar medio, del meridiano origen, obtenido a partir de observaciones astronómicas directas;
UT1 es el UTO con correcciones de los ligeros movimientos de la Tierra con relación al eje de rotación (variación polar);
UT2 es el UT1 con corrección de los efectos de las pequeñas fluctuaciones estacionales en la velocidad de rotación de la Tierra;
UT1 se utiliza en este texto ya que corresponde directamente a la posición angular de la Tierra en torno a su eje de rotación diurna. (El TM G (o GMT) puede considerarse equivalente general del UT).)
Definiciones abreviadas de los términos citados más arriba, se encuentran en el glosario de la publicación anual «The Astronomical Almanac» (US Government Printing Office, W ashington DC and H. M. Stationery Office, London).
3.12 Fecha, Date, Date
Sinónimo de «lectura de escala de tiempo», pero empleado usualmente con referencia a un calendario. Nota. — La fecha puede expresarse en años, meses, días, horas, minutos, segundos y fracciones de éstos.
3.13 Lectura de una escala de tiempo, Time scale reading, Lecture d ’une échelle de temps
Valor que se lee en una escala de tiempo en un instante dado. La lectura de una escala de tiempo se identificará indicando el nombre de la escala de tiempo, seguido, entre paréntesis, del nombre del reloj, de la estación transmisora, del observatorio astronómico o del laboratorio de normas, por ejemplo: UTC ( ...) .

6 I. 730-1
3.14 Diferencia entre escalas de tiempo, Time scale difference, Différence entre échelles de temps
Diferencia entre las lecturas de dos escalas de tiempo en el mismo instante.Nota. — A fin de evitar confusiones en cuanto al signo, las cantidades algebraicas deben indicarse de acuerdo con la convención siguiente: si en un instante T de una escala de tiempo de referencia, a es la lectura de unaescala de tiempo A, y b la lectura de una escala de tiempo B, la diferencia de escala de tiempo se expresa por:
A — B = a — b e n el instante T.El mismo convenio se aplica al caso en que A y B sean relojes.
3.15 M arca de tiempo, Time marker, Repére de temps
Señal de referencia, que a menudo se repite periódicamente, y permite asignar valores numéricos para la especificación de sucesos en una escala de tiempo.
3.16 Comparación de tiempo, Time comparison, Comparaison de temps
Determinación de la diferencia entre escalas de tiempo.
3.17 Escalas de tiempo en sincronismo, Time scale in synchronism, Echelles de temps en synchronisme
Dos escalas de tiempo están en sincronismo cuando asignan la misma fecha a un acontecimiento.Nota. — Si la escala de tiempo se produce en lugares separados espacialmente, deben tenerse en cuenta el tiempo de propagación de las señales horarias transmitidas y los efectos relativistas.
3.18 Unidad de escala de tiempo, Time scale unit, Unité d ’une échelle de temps
Intervalo de tiempo básico en una escala de tiempo.
3.20 Salto de tiempo, Time step, Saut de temps
Discontinuidad introducida intencionadamente en una escala de tiempo en una fecha especificada. Un salto de tiempo es positivo ( + ) si se aumenta la lectura de la escala de tiempo al producirse, y negativo ( —) si se disminuye esa lectura.
3.21 DUT1, DUT1, DUT1
Valor de la diferencia prevista UT1 — UTC, anunciada con las señales horarias. El DUT1 puedeconsiderarse como una corrección que ha de agregarse al UTC para obtener una mejor aproximación del UT1.
El BIH da los valores de DUT1 en múltiplos enteros de 0,1 s.
3.23 Patrón de tiempo, Time standard, Etalon de temps
a) Dispositivo utilizado para la realización de la unidad de tiempo.b) Dispositivo de funcionamiento continuo utilizado para realizar una escala de tiempo de acuerdo con la
descripción de segundo.
3.23 A Patrón de tiempo primario, Primary time standard, Etalon primaire de temps
Patrón de tiempo que funciona de conformidad con la definición adoptada de segundo, sin calibración del dispositivo.
3.23B Patrón de tiempo secundario, Secondary time standard, Etalon secondaire de temps
Patrón de tiempo que requiere una calibración.
3.23C Reloj, Clock, Horloge
Un dispositivo para la medición y presentación del tiempo, generalmente mediante la utilización de fenómenos periódicos.
3.25 Tiempo, Time, Temps
Véase la explicación al principio del punto 2, Definiciones.
4.1 Diferencia de tiempo de reloj, Clock time difference, Difference entre temps d'horloge
Véase «Diferencia de escala de tiempo».
4.2 Reloj coordinado, Coordínate clock, Horloge coordonnée
Reloj perteneciente a una serie de relojes distribuidos en una región espacial, que producen escalas de tiempo sincronizadas con la escala de tiempo de un reloj de referencia en un lugar especificado (véase definición 3.17).

I. 730-1 7
4.3 Instante, Instant, Instant
Punto en el tiempo, que no se refiere necesariamente a una escala de tiempo.
4.4 Segundo intercalar, Leap second, Seconde intercalaire
Salto de tiempo de un segundo que se emplea para ajustar el UTC a fin de que concuerde aproxim adamente con el UT1.
Un segundo agregado se denomina segundo intercalar positivo, y un segundo omitido se denom ina segundo intercalar negativo.
4.8 Código horario, Time code, Code horaire
Formato utilizado para transm itir información horaria.
4.9 Intervalo de tiempo, Time interval, Intervalle de temps
La duración entre los dos instantes leídos en la misma escala de tiempo.
4.10 Fecha juliana (FJ), Julián date (JD), Date julienne (DJ)
Número del día juliano seguido de la fracción de día transcurrida desde el m ediodía precedente (12 horas UT).
Ejemplo:La fecha 1900 enero 0,5 d UT corresponde a FJ = 2 415 020,0.
4.11 Número de día juliano, Julián day number, Numéro de jour julien
Número de un día específico de una cuenta continua de días con origen inicial a las 12 horas UT del1.° de enero de 4713 A.C. del calendario juliano (comienzo del día juliano cero).
Ejemplo:El día que va de 1900 enero 0,5 d UT a 1900 enero 1,5 d UT lleva el número 2 415 020.
4.13 Fecha Modificada del Calendario Juliano (FM CJ), Modifted Julián Date (MJD), Date julienne modijiée (DJM)
Fecha del calendario juliano menos 2 400 000,5 días.
4.15 Sincronismo, Synchronism, Synchronisme
(Véase Escala de tiempo en sincronismo).

PAGE INTENTIONALLY LEFT BLANK
PAGE LAISSEE EN BLANC INTENTIONNELLEMENT

Re. 374-3, 375-2 9
SECCIÓN 7B: ESPECIFICACIONES PARA LOS SERVICIOS DE FRECUENCIAS PATRÓNY DE SEÑALES HORARIAS
Recomendaciones e Informes
RECOM ENDACIÓN 374-3
EM ISIONES DE FRECUENCIAS PATRÓN Y DE SEÑALES HORARIAS
(Cuestión 1/7)(1951-1953-1956-1959-1963-1966-1970-1974)
El CCIR,
CONSIDERANDO
a) que la Conferencia Administrativa Mundial de Radiocomunicaciones, Ginebra, 1979, ha atribuido lasfrecuencias de 20 kHz ± 0,05 kHz, 2,5 MHz ± 5 kHz (2,5 MHz ± 2 kHz en la Región 1), 5 MHz ± 5 kHz,10 MHz ± 5 kHz, 15 MHz ± 10 kHz, 20 MHz ± 10 kHz y 25 MHz ± 10 kHz, al servicio m undial de frecuencias patrón y de señales horarias;b) que esta misma Conferencia ha atribuido las frecuencias siguientes a los servicios de frecuencias patrón y señales horarias por satélite:
400,1 MHz ± 25 kHz,4202 MHz ± 2 MHz (espacio-Tierra),6427 MHz ± 2 MHz (Tierra-espacio)
13,4 a 14 GHz (Tierra-espacio),20,2 a 21,2 GHz (espacio-Tierra),25,25 a 27,0 GHz (Tierra-espacio),30,0 a 31,3 GHz (espacio-Tierra);
c) que se emiten frecuencias patrón y señales horarias suplementarias en otras bandas de frecuencias;d) que es necesario tener en cuenta las disposiciones del articulo 33, del Reglamento de Radiocom unicaciones;e) que es necesario que se prosiga una colaboración estrecha entre la Comisión de Estudio 7 y la Organización M arítima Internacional (OMI), la Organización de Aviación Civil Internacional (OACI), la Conferencia General de Pesos y Medidas (CGPM), del Bureau international de l’heure (BIH) y las uniones interesadas del Congreso Internacional de Uniones Científicas (CIUC),
RECOM IENDA, POR U N A NIM ID AD :
1. Que la Comisión de Estudio 7 prosiga sus estudios sobre un servicio mundial de frecuencias patrón y señales horarias y examine la aplicación de nuevas técnicas con este fin.
2. Que se exploten los actuales servicios de frecuencias patrón y señales horarias de conform idad con las Recomendaciones detalladas del CCIR.
3. Que se intensifiquen los esfuerzos para reducir la interferencia mutua entre emisores en las bandas atribuidas según el punto a).
4. Que todas las administraciones estudien métodos alternativos para difundir frecuencias patrón y señales horarias antes de efectuar emisiones suplementarias en las bandas 6 y 7.
RECOM ENDACIÓN 375-2
EM ISIONES DE FRECUENCIAS PATRÓN Y DE SEÑALES HORARIAS EN NUEVAS BANDAS DE FRECUENCIAS
(Cuestión 2/7)(1959-1963-1966-1982)
El CCIR,
CONSIDERANDO
a) que para numerosas aplicaciones se requiere una sincronización mundial del tiempo con una incertidumbre inferior a 1 ms;b) que se han realizado comparaciones de frecuencia de gran precisión, a escala intercontinental, mediante la utilización de emisiones de una frecuencia estable en la banda 4;

10 Re. 375-2, 376-1
c) que son posibles las comparaciones del tiempo con una precisión de 1 ps aproximadamente a distancias de más de 2000 km empleando señales de impulsos transmitidas por la onda de superficie;d) que las transmisiones con visibilidad directa en las bandas 8 y 9 y las señales transmitidas principalmente por la onda de superficie en la banda 5, constituyen un medio de difusión de las señales horarias y de las frecuencias patrón;e) que se han logrado comparaciones precisas continentales e intercontinentales de la frecuencia y del tiempo mediante la utilización de satélites;f ) que pueden desarrollarse nuevos métodos para las comparaciones del tiempo y de la frecuencia mediante la utilización de las técnicas láser,
RECOM IENDA, POR U NA NIM ID AD :
1. Que se publiquen los resultados y los métodos de medida sobre la inestabilidad de fase a lo largo de los trayectos en las bandas 4 y 5.
2. Que se aprovechen las posibilidades que ofrecen los sistemas de navegación mediante emisiones de impulsos propagados por la onda de superficie, con objeto de conseguir una sincronización de tiempo intercontinental y si es posible, mundial.
3. Que se utilicen lo más posible las estaciones adecuadas existentes en las bandas 5 y 6 para la difusión de las frecuencias patrón, estabilizándose sus frecuencias portadoras con suma precisión.
4. Que se usen en la mayor medida posible las estaciones de radiodifusión sonora de modulación de frecuencia y las estaciones de televisión existentes en las bandas 8 y 9 para la difusión de las frecuencias patrón y de las señales horarias que puedan agregarse a la modulación actual o que puedan utilizar esta misma (incluyendo la modulación de la subportadora), sin perturbar el program a normal.
5. Que los sistemas por satélite no dedicados específicamente al servicio de frecuencias patrón y de señales horarias se diseñen de tal manera que comprendan, en la medida de lo posible, información sobre las frecuencias patrón y las señales horarias o que permitan la transmisión de señales horarias.
RECOM ENDACIÓN 376-1
SUPRESIÓN DE LAS INTERFERENCIAS DE ORIGEN EXTERNO CAUSADAS A LAS EM ISIONES DEL SERVICIO DE FRECUENCIAS PATRÓN
EN LAS BANDAS ATRIBUIDAS A ESTE SERVICIO
(Cuestión 1/7)(1959-1963-1966)
El CCIR,
CONSIDERANDO
a) la importancia y el uso creciente de las emisiones de frecuencias patrón y de señales horarias en las bandas atribuidas a este servicio;b) que las interferencias disminuyen considerablemente la eficacia del servicio de frecuencias patrón y de señales horarias;c) que, pese a los esfuerzos realizados por las administraciones y por la IFRB para liberar las bandasatribuidas al servicio de frecuencias patrón, subsisten aún en estas bandas algunos usuarios registrados y numerosas emisiones no notificadas que continúan causando interferencias a los servicios de frecuencias patrón,
RECOM IENDA, POR U NA NIM ID AD :
1. Que las administraciones y la IFRB perseveren en sus esfuerzos para liberar las bandas atribuidas alservicio de frecuencias patrón, a fin de evitar interferencias de origen externo.
2. Que cada administración haga cuanto le sea posible en el territorio de su jurisdicción por impedir que losusuarios del espectro radioeléctrico exploten en las bandas de frecuencias patrón estaciones que no sean de frecuencias patrón y puedan provocar interferencias perjudiciales a ese servicio.
3. Que las estaciones nacionales de comprobación técnica de las emisiones se dediquen sistemáticamente a buscar las estaciones extrañas que ocasionen interferencias en las bandas de frecuencias patrón y hagan cuanto les sea posible por identificarlas, recurriendo, en caso necesario, a la cooperación internacional.

Re. 376-1, 457-1, 458-1 11
4. Que los usuarios de las emisiones de frecuencias patrón pidan al servicio de com probación técnica de supaís que identifique la estación perturbadora cada vez que se produzcan interferencias de origen externo.
5. Que las administraciones apliquen las disposiciones de los artículos 18, 19, 21 y 22 del Reglamento deRadiocomunicaciones en todos aquellos casos en que el servicio de frecuencias patrón sufra interferencias de origen externo, y que, en caso necesario, envíen a la IFRB copia de la correspondencia cursada al respecto.
6. Que si se observan interferencias, incluso si su origen es dudoso, los representantes de las administracionesen la Comisión de Estudio 7 se comuniquen mutuamente la información procedente de los usuarios de las emisiones de frecuencias patrón y de señales horarias, así como la del servicio de comprobación técnica, a fin de permitir la identificación ulterior de la estación perturbadora.
RECOM ENDACIÓN 457-1
UTILIZACIÓN DE LA FECHA JULIANA MODIFICADA EN LOS SERVICIOS DE FRECUENCIAS PATRÓN Y DE SEÑALES HORARIAS
(Cuestión 1/7)(1970-1974)
El CCIR,
CONSIDERANDO
a) que, a los efectos de indicar las fechas convendría emplear un cómputo decimal de los días en la utilización de las señales horarias y de los códigos de tiempo;b) que hace ya largo tiempo que se utiliza en astronomía, en cronología y en las ciencias afines un sistema de cómputo decimal de los días con referencia al Tiempo Universal, es decir, la Fecha Juliana (FJ);c) que es necesario un cómputo decimal de los días, según el cual el comienzo del día se defina en las OOhOOy no en las 12h00, como sucede con la Fecha Juliana;d) que resulta necesario un sistema de cómputo decimal de los días, especialmente para asociarlo a las escalasde tiempo UTC y TAI;e) que hay que evitar la proliferación de sistemas diferentes para indicar las fechas;f ) que sería ventajoso tener una fórmula simple para pasar de la Fecha Juliana antes indicada a un sistemamoderno para el cómputo decimal de los días;g) que debe mantenerse sin interrupción el sistema actual y aceptado de la Fecha Juliana, según la cual el comienzo del día se ha fijado en el mediodía del meridiano de Greenwich;h) que ya está háciendo uso de una Fecha Juliana M odificada (M JD) que responde a las condiciones arriba mencionadas,
RECO M IEN DA , POR U NA N IM ID A D :
1. Que para las indicaciones de tiempo y de fechas se utilice siempre que sea necesario un sistema de cómputo decimal de los días; que el día del calendario comience a contarse desde l'as OOhOO TAI, UTC o UT y que se especifique con cinco decimales.
2. Que esta «Fecha Juliana M odificada» (MJD) sea igual al día juliano menos 2 400 000,5; y que, por consiguiente tenga su origen a las OOhOO UT del 17 de noviembre de 1858, en el caso del UT.
RECOM ENDACIÓN 458-1
COM PARACIONES INTERNACIONALES DE ESCALAS DE TIEM PO ATÓM ICO
(Cuestión 1/7)(1970-1978)
El CCIR,
CON SID ERA ND O
a) la necesidad de com parar entre sí las escalas locales independientes de tiempo atómico, de los distintos laboratorios y observatorios;b) la necesidad de comunicar los datos con claridad, precisión y un retardo mínimo, a fin de facilitar la tarea del Bureau international de l’heure (BIH) en la formación del Tiempo Atómico Internacional,

12 Re. 458-1, 460-4
RECOM IENDA, POR U NA NIM ID AD :
1. Que, cuando un laboratorio u observatorio «i» conserve, a la vez, el tiempo atómico local independiente y una aproximación del tiempo universal coordinado, designados aquí por TA(i) y UTC(i), ese laboratorio u observatorio publique la expresión numérica de la diferencia TA(i) — UTC(i) para cada periodo de validez.
2. Que las marcas de tiempo, cuya desviación con relación a UTC(i) sea despreciable, puedan conocerse inmediatamente.
3. Que las comparaciones de tiempo publicadas se refieran a UTC(i).
4. Que las comparaciones de fase publicadas se refieran a UTC(i).
5. Que la publicación de los tiempos de emisión de señales horarias, emitidos de conformidad con el sistema UTC, se refieran a UTC(i):5.1 En el caso de una emisión de señales horarias generadas directamente por el laboratorio u observatorio «i», debe publicarse el retardo medido entre las señales horarias y UTC(i).5.2 En el caso de señales horarias generadas por un reloj en la estación transmisora, y medidas en el laboratorio u observatorio «i», debe indicarse explícitamente si los tiempos publicados con relación a UTC(i) se refieren a la emisión o a la recepción, así como las correcciones de los retardos debidos a la propagación y al receptor que hayan de aplicarse o que se hayan aplicado.
6. Que todos los laboratorios u observatorios que no se ajusten al sistema UTC, pero que deseen participar en las comparaciones internacionales y en la elaboración del Tiempo Atómico Internacional, publiquen detalles compatibles, en la medida de lo posible, con los principios enunciados en los puntos 1 a 5.
RECOM ENDACIÓN 460-4
EM ISIONES DE FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
. (Cuestión 1/7)(1970-1974-1978-1982-1986)
El CCIR,
CONSIDERANDO
a) que la Conferencia Administrativa Mundial de Radiocomunicaciones, Ginebra, 1979, ha atribuido a los servicios de frecuencias patrón y de señales horarias las frecuencias 20 kHz ± 0,05 kHz, 2,5 MHz ± 5 kHz (2,5 MHz ± 2 kHz en la Región 1), 5 MHz ± 5 kHz, 10 MHz ± 5 kHz, 15 MHz ± 10 kHz, 20 MHz ± 10 kHz y 25 MHz ± 10 kHz;b) que se emiten frecuencias patrón y señales horarias suplementarias en otras bandas de frecuencias;c) las disposiciones del artículo 33 del Reglamento de Radiocomunicaciones;
V
d) la constante necesidad de una estrecha colaboración entre la Comisión de Estudio 7 y la Organización M arítima Internacional (OMI), la Organización de Aviación Civil Internacional (OACI), la Conferencia General de Pesos y Medidas (CGPM) y el Bureau international de l’heure (BIH), así como con los miembros interesados del Consejo Internacional de Uniones Científicas (CIUC);e) que conviene mantener la coordinación mundial de las emisiones de frecuencias patrón y de señaleshorarias;f ) que es necesario difundir las frecuencias patrón y las señales horarias de conformidad con la definicióndel segundo de la 13.a Conferencia General de Pesos y Medidas (1967);g) que sigue siendo necesario poder disponer inmediatamente del Tiempo Universal (UT) con una precisiónde una décima de segundo,
RECOM IENDA, POR UNA NIM ID AD :
1. Que todas las emisiones de frecuencias patrón y de señales horarias se ajusten lo más posible al TiempoUniversal Coordinado (UTC) (véase el anexo I); que las señales horarias no difieran del UTC en más de un milisegundo; que en las frecuencias patrón no haya una desviación superior a 1 x 10~10 y que las señales horarias emitidas por cada estación transmisora tengan una relación conocida con la fase de la portadora.
2. Que las emisiones de señales horarias y frecuencias patrón y otras emisiones de señales horarias destinadasa aplicaciones científicas (con la posible excepción de las dedicadas a sistemas especiales) contengan información sobre la diferencia entre UT1 y UTC (véanse los anexos I y II).

Re. 460-4 13
3. Que el Director del CCIR ponga la presente Recomendación en conocimiento de todas las adm inistraciones Miembros de la UIT, de la Unión Astronómica Internacional (UAI), Unión Internacional Geodésica y Geofísica (UIGG), Unión Radiocientífica Internacional (URSI), BIH, CGPM , OACI y OMI.
4. Que, desde el 1.° de enero de 1975, las emisiones de frecuencias patrón y de señales horarias se ajusten a los puntos 1 y 2 que preceden.
ANEXO I
ESCALAS DE TIEMPO
A. Tiempo Universal (UT)
El Tiempo Universal (UT) es la designación general de las escalas de tiempo basadas en la rotación de laTierra.
En las aplicaciones en las que no se puede tolerar una imprecisión de unas centésimas de segundo, es necesario especificar las formas de UT que deben utilizarse:
UTO es el tiempo solar medio, del meridiano origen, obtenido a partir de observaciones astronómicas directas;
UT1 es el UTO con correcciones de los ligeros movimientos de la Tierra con relación al eje de rotación (variación polar);
UT2 es el UT1 con corrección de los efectos de. las pequeñas fluctuaciones estacionales en la velocidad de rotación de la Tierra;
UT1 se utiliza en este texto ya que corresponde directamente a la posición angular de la Tierra en torno a su eje de rotación diurna. (El TM G (o GMT) puede considerarse equivalente general del UT.)
Definiciones abreviadas de los términos citados más arriba, se encuentran en el glosario de la publicación anual «The Astronomical Alm anac» (US Government Printing Office, W ashington DC and H. M. Stationery Office, London).
B. Tiempo Atómico Internacional (TAI)
La escala internacional de referencia de Tiempo Atómico (TAI), basada en el segundo (SI), como se obtiene a nivel del mar, la forma el Bureau international de l’heure (BIH) con la información de reloj facilitada por establecimientos colaboradores. Tiene forma de escala continua, es decir, en días, horas, m inutos y segundos,desde el 1.° de enero de 1958, y fue aprobada por el CGPM (1971).
C. Tiempo Universal Coordinado (UTC)
El UTC es la escala de tiempos mantenida por el BIH y constituye la base de una difusión coordinada de frecuencias patrón y señales horarias. Corresponde exactamente en cuanto al régimen de transcurso con el Tiempo Atómico Internacional (TAI) aunque difiere de él en un número entero de segundos.
La escala de UTC se ajusta mediante inserción u omisión de segundos (segundos intercalares positivos o negativos) necesarios para asegurar una concordancia aproxim ada con UT1.
D. DUT1
El valor de la diferencia prevista UT1 — UTC, conforme se difunde con las señales horarias sedesigna DUT1; con lo que: DUT1 « UT1 — UTC. DUT1 puede considerarse como una corrección que ha dehacerse a UTC para obtener una aproximación mejor a UT1.
Los valores de DUT1 los da el BIH en múltiplos enteros de 0,1 s.Se aplican las siguientes normas de explotación:
1. . Tolerancias
1.1 La magnitud de DUT1 no debe exceder de 0,8 s.1.2 La diferencia entre UTC y UT1 no debe exceder de ± 0,9 s (véase la nota).1.3 La desviación de (UTC + DUT1) de UT1 no debe exceder de ± 0 ,1 s.
Nota. — La diferencia entre los valores máximos de DUT1 y la máxima diferencia entre UTC y UT1 representa la desviación admisible de (UTC + DUT1) de UT1 y constituye una protección del BIH contra variaciones imprevisibles en la velocidad de rotación de la Tierra.

14 Re. 460-4
2. Segundos intercalares
2.1 Un segundo intercalar positivo o negativo debe ser el último segundo de un mes UTC, pero hay que darpreferencia en primer lugar al final de diciembre y de junio, y en segundo lugar al final de marzo y septiembre.
2.2 Un segundo intercalar positivo comienza a las 23h 59m 60s y termina a las Oh Om Os del primer día del mes siguiente. En el caso de un segundo intercalar negativo, 23h 59m 58s irá seguido, un segundo después, por Oh Om Os del primer día del mes siguiente (véase el anexo III).2.3 El BIH debe tom ar la decisión de insertar un segundo intercalar, y anunciarla con una antelación de porlo menos 8 semanas.
3. Valor de DUT1
3.1 Se pide al BIH que determine el valor de DUT1 y su fecha de introducción y dé a conocer estos datos conun mes de antelación. En casos excepcionales de variaciones bruscas de la velocidad de rotación de la Tierra, el BIH puede anunciar una corrección con una antelación de dos semanas, como mínimo.
3.2 Las administraciones y organizaciones utilizarán el valor de DUT1 indicado por el BIH para las emisionesde frecuencias patrón y de señales horarias, y se les encarece que den a la información la mayor difusión posible a través de publicaciones periódicas, boletines, etc.3.3 Cuando el DUT1 se difunda en código, el código debe ajustarse a los siguientes principios (a reserva de lo indicado en el punto 3.5):
— la magnitud de DUT1 la especifica el número de marcas acentuadas de segundos, y el signo de DUT1 lo especifica la posición de las marcas acentuadas de segundos con relación a la marca de minuto. La ausencia de estas señales acentuadas indica DUT1 = 0;
— la información codificada debe emitirse después de cada minuto identificado si ello es compatible con elformato de la emisión. En caso contrario la información codificada debe emitirse, como mínimo absoluto,después de cada uno de los cinco primeros minutos identificados de cada hora.
En el anexo II figuran todos los detalles del código.
3.4 Alternativamente, el DUT1 podrá anunciarse oralmente o en código Morse.3.5 La información de DUT1, concebida primordialmente para el equipo de decodificación automática yutilizada con él, puede ir seguida de un código distinto, pero debe emitirse después de cada minuto identificado si ello es compatible con el formato de la emisión. En caso contrario la información codificada debe emitirse, como mínimo absoluto, después de cada uno de los cinco primeros minutos identificados de cada hora.
3.6 Cualquier otra información que pueda emitirse en la parte de la emisión de las señales horarias indicada en los puntos 3.3 y 3.5 para la información codificada de DUT1 debería ser de un formato lo bastante diferente para que no se confunda con DUT1.
3.7 Además, las indicaciones de UT1 — UTC podrán darse con igual o mayor precisión por otros medios, porejemplo, mediante anuncios en código Morse u orales, mediante mensajes asociados a los boletines marítimos o alas previsiones meteorológicas, etc.; los anuncios de futuros segundos a intercalar pueden hacerse también porestos medios.
3.8 Se ruega al BIH que siga publicando los valores definitivos de las diferencias: UT1 — UTC y UT2 - UTC.
ANEXO II
CÓDIGO PARA LA TRANSM ISIÓN DUT1
Los valores positivos de DUT1 se indicarán acentuando un número (n) de marcas de segundo consecutivas que siguen a la m arca de minuto, a partir de la marca del primer segundo hasta la marca del n s,mo segundo inclusive; («) es un número entero comprendido entre 1 y 8, ambos inclusive.
DUT1 = (« x 0,1) s
Los valores negativos de DUT1 se indicarán acentuando un número (m) de las marcas de segundo consecutivas que siguen a la m arca de minutos a partir de la marca del noveno segundo hasta la marca del segundo (8 + m) inclusive; siendo m un número entero comprendido entre 1 y 8, ambos inclusive.
DUT1 = ~ (m x 0,1) s
La ausencia de marcas acentuadas de segundo, indicará el valor 0 para DUT1.
Las marcas de segundo pueden acentuarse, por ejemplo, alargando, duplicando, separando en dos o modulando mediante un tono las marcas normales de segundo.

Re. 460-4
Ejemplos:
Maica Marcasde minuto acentuadas de segundo
0 1 2 3 4 S 6 7 8 9 10 11 12 13 14 15 16 | 17
Límite de la secuencia codificada *h
Marca de minuto
FIGURA 1
DUT1 = + 0,5 s
Marcas acentuadas de segundo
r u r n i r Lo 1 2 3 4 5 6 7 . 8 9 10 11 12 13 14 15 16
Límite de la secuencia codificada -------■
17
FIGURA 2
DUT1 = -0 ,2 s
ANEXO III
ASIGNACIÓN DE FECHAS A LOS SUCESOS PRÓXIMOS A UN SEGU ND O INTERCALAR
La asignación de fechas a los sucesos próximos a un segundo intercalar se hará de la m anera siguiente
Evento
Segundointercalar
56 57 58 59 60 0 1 2 3 4
30 de junio, 23h 59m
Indicación de la fecha del evento
30 de junio, 23h 59m 60,6S UTC
1.° de julio, 0h 0m
FIGURA 3 - Segundo intercalar positivo
Evento
1l
I I I I I I I I I I56 57 58 0 1 2 3 4 5 6
30 de junio,
23h 59m
Indicación de la fecha del evento
30 de junio, 23h 59m 58,9S UTC
l.° de julio,0*1 0m
FIGURA 4 — Segundo intercalar negativo

16 Re. 485-1, 486-1
RECOM ENDACIÓN 485-1
UTILIZACIÓN DE ESCALAS DE TIEM PO EN LOS SERVICIOS DE FRECUENCIAS PATRÓN Y DE SEÑALES HORARIAS
(Cuestión 1/7)(1974-1982)
El CCIR,
-CO NSID ERA ND O
a) que la Conferencia General de Pesos y Medidas de 1971 ha definido la escala del Tiempo Atómico Internacional;b) que, de conformidad con la Recomendación 460 desde 1972 ha sido generalmente aceptada la escala de tiempo UTC;c) que la Conferencia Administrativa Mundial de Radiocomunicaciones (Ginebra, 1979) ha decidido que se emplee el UTC en las actividades internacionales de radiocomunicaciones;d) que existe una estrecha relación entre el UTC y el TAI, que sólo difieren en un número entero conocidode segundos;e) que, de conformidad con la Recomendación 458, los laboratorios del servicio de tiempo refieran las fechas a sus propias escalas de tiempo UTC(i),
RECOM IENDA, POR U NA N IM ID A D :
Que los datos relativos al tiempo se publiquen siempre que sea posible bien con referencia al TiempoUniversal Coordinado (UTC) o al Tiempo Atómico Internacional (TAI).
RECOM ENDACIÓN 486-1 *
REFERENCIA DE LOS GENERADORES Y EM ISIO N ES CON CONTROL PRECISO DE FRECUENCIA A LA ESCALA DE TIEM PO ATÓM ICO INTERNACIONAL
(Cuestión 3/7)(1974-1978)
El CCIR,
CONSIDERANDO
a) que los datos relativos al error de una emisión de frecuencias patrón y de señales horarias son sumamente im portantes para el usuario;b) que la escala de Tiempo Atómico Internacional (TAI) tiene considerable importancia como referencia paralas comparaciones de tiempo y de frecuencia;c) que en muchos casos es técnicamente posible ajustar cuidadosamente una frecuencia patrón radiada, dem anera que las variaciones de fase con respecto al TAI (o al Tiempo Universal Coordinado, UTC) permanezcan dentro de los límites de una tolerancia estrecha ± A t, que es reducida en comparación con el periodo de la frecuencia portadora;d) que la frecuencia asociada al TAI y la frecuencia asociada al UTC son idénticas;e) que se dispone de equipo que puede recibir varias emisiones casi sincrónicas, el cual, por consiguiente,permite la explotación alternativa en caso de interrupción de un transmisor;f ) que los sistemas electrónicos deben disponer de frecuencias de referencia universalmente aceptadas;g) que es cada vez más necesario disponer de frecuencias muy estables, en particular en lo que se refiere a latransmisión de datos;h) que se están poniendo en servicio muchos nuevos sistemas electrónicos dotados de control preciso, como,por ejemplo, los controlados por generadores atómicos de frecuencia;j ) que estos sistemas pueden coordinarse de forma más satisfactoria si utilizan una frecuencia común dereferencia,
* Se ruega al Director del CCIR que señale esta Recomendación a la atención del CCITT.

Re. 486-1, 535-1, 536 17
RECOM IENDA, POR U N A NIM ID AD :
1. Que se utilice una frecuencia asociada al UTC como referencia para las emisiones de frecuencias patrón.
2. Que los datos relativos a la precisión de la frecuencia patrón con respecto a la frecuencia asociada al UTCsean la media de la diferencia relativa de frecuencias en 10 días o más.
3. Que el intervalo ± A /, en que la fase de la frecuencia patrón puede variar con relación al UTC, deberáespecificarse para cada emisión en ondas miriamétricas y kilométricas y que las administraciones responsables de los servicios de señales horarias y frecuencias patrón deberán publicar los valores de dicho intervalo.
4. Que la frecuencia del Tiempo Universal Coordinado (UTC) se utilice tam bién como referencia para otrossistemas electrónicos.
RECOM ENDACIÓN 535-1 *
UTILIZACIÓN DEL TÉRM INO UTC
(Cuestión 1/7)(1978-1982)
El CCIR,
CONSIDERANDO
a) que, de acuerdo con la Recomendación 460 todas las emisiones de frecuencias patrón y señales horarias deberían ajustarse al Tiempo Universal Coordinado (UTC);b) que desde 1972 se dispone del UTC como referencia horaria a escala m undial;c) que en 1975 la Conferencia General de Pesos y Medidas recomendó el empleo del UTC como base de lahora legal;d) que otras organizaciones científicas, especialmente la Unión Astronómica Internacional (UAI) y la Unión Radiocientífica Internacional (URSI) han recomendado el uso general del UTC;e) que el UTC permite determinar el momento en que ocurren los eventos, con una incertidumbre de 1 ps;f ) que, de acuerdo con la Recomendación 536 y de conformidad con lo recomendado por la Conferencia General de Pesos y Medidas, debe emplearse la designación UTC en todos los idiomas;g) que la Conferencia Administrativa Mundial de Radiocomunicaciones (Ginebra, 1979) ha decidido que se utilice el UTC en las actividades internacionales de radiocomunicaciones,
RECOM IENDA, POR UNA NIM ID AD :
Que se emplee el UTC para designar el tiempo en todas las otras actividades internacionales de telecomunicación y en todos los documentos oficiales de la Unión Internacional de Telecomunicaciones.
RECOM ENDACIÓN 536
NOTACIÓN DE LAS ESCALAS DE TIEM PO
(Cuestión 1/7)(1978)
El CCIR,
CONSIDERANDO
a) que es conveniente introducir una notación independiente del idioma para las escalas de tiem po;b) que la XIV Conferencia General de Pesos y Medidas (CGPM) ha definido en octubre de 1971 la escala deTiempo Atómico Internacional, utilizando la designación TAI;
Se ruega al Director del CCIR que señale esta Recomendación a la atención del Grupo Consultivo Mixto del Instituto de Navegación (JA G /IO N ), de la Organización de Aviación Civil Internacional (OACI), de la Organización M arítima Internacional (OMI), de la Unión Astronómica Internacional (UAI) y de la Organización Meteorológica M undial (OMM).

18 Re. 536
c) que la XV Conferencia General de Pesos y Medidas, celebrada en mayo de 1975, ha recomendado que seutilice el Tiempo Universal Coordinado, con la designación UTC,
RECOM IENDA, POR U NA NIM ID AD :
1. Que para todas las formas del tiempo atómico se utilicen en todos los idiomas las notaciones siguientes en consonancia con el TAI:
TAI: Tiempo Atómico Internacional, tal como ha sido fijado por el Bureau international del’heure (BIH),
TA: Tiempo Atómico; designación genérica de una variable de tiempo que puede realizarse sobre labase de una transición atómica o molecular,
TA(i): Escala de tiempo atómico, realizada por el instituto «i»;
2. Que para todas las formas del Tiempo Universal, se utilicen en todos los idiomas las notaciones siguientes en consonancia con el UTC:
UT: Tiempo Universal,UTC: Tiempo Universal Coordinado; la BIH mantiene esta escala de tiempo de conformidad con la
Recomendación 460,UTC(i): Escala de tiempo realizada por el instituto «i» que se conserva en estrecha concordancia con
el UTC,DUT1: Diferencia prevista UT1 — UTC, conforme se difunde con las señales horarias.
Nota. — Se pide al Director del CCIR que transmita esta Recomendación a la Conferencia General de Pesos y Medidas (CGPM), a la Unión Radiocientífica Internacional (URSI), a la Unión Astronómica Internacional (UAI), a la Unión Internacional de Geodesia y Geofísica (UIGG), a la Unión Internacional de Física Pura y Aplicada (IUPAP), a la Organización Internacional de Normalización (ISO), al Bureau international de l’heure (BIH), a la Organización de Aviación Civil Internacional (OACI), a la Organización M arítima Internacional (OMI) y a la Asociación Internacional de Institutos de Navegación (IAIN).
ANEXO I
1. Si hubiera riesgo de confusión, en lugar de UTC podrá utilizarse UTC (BIH).
2. En el anexo I a la Recomendación 460 se enumeran las diferentes formas del UT.
3. Salvo para el TA que se fundamenta en un principio y no en una escala de tiempo específica, las notaciones podrán utilizarse también para caracterizar los instantes y las diferencias entre escalas de tiempo.
Ejemplos:1) 1975 enero 1, Oh UTC2) TAI - UTC = 14 s, 1975 julio 1, Oh UTC3) UTC(i) - UTC = 1 ps, 1976 febrero 24, Oh UTC
4. El TAI y el UTC se determinan a posteriori y sólo pueden conocerse a base de correcciones (publicadaspor el BIH) aplicadas a las escalas de tiempo existentes (realizadas), como el TA(i) o el UTC(i), con extrapolación.
5. Según la Recomendación 458, el UTC(i) debe ser una escala de tiempo realizada.

SECCIÓN 7C: SISTEMAS DE DIFUSIÓN Y COMPARACIÓN
Recomendaciones e Informes
I. 267-6 19
INFORM E 267-6
FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
Características de las emisiones del servicio de frecuencias patrón y de señales horarias en las bandas atribuidas,
y características de las estaciones que efectúan un servicio regular en frecuencias estabilizadas fuera de dichas bandas
(Cuestión 1/7)
(1956-1959-1963-1966-1970-1974-1978-1982-1986)
Las características de las estaciones que aparecen en los siguientes cuadros son válidas a partir del 1.° de noviembre de 1985. Para obtener información sobre los cambios que puedan haberse introducido, deberá consultarse el Informe anual del Bureau international de l’heure (BIH) o dirigirse directamente a las autoridades de los servicios que figuran en el anexo I.

CUADRO I — Características de las emisiones de frecuencias patrón y de señales horarias en las bandas atribuidas, válidas desde el 1° de noviembre de 1985
Estación
Tipo de antenas
Potencia de la onda portadora (kW)
Número de emisiones
simultáneas
Tiempo de funcionamiento
Frecuencias patrón utilizadas
Duración de la emisión
Ince
rtidu
mbr
e de
la
frec
uenc
ia
y de
los
inte
rval
os
de tie
mpo
(p
arte
s en
1012)
(')
Método de indicación DUT1
Distintivo Ubicación LatitudLongitud
D ías/semana
H oras/día
Portadora
(MHz)
M odulación(Hz)
Duración de transmisión
de las señales
horarias (min)
Duración de la
modulación audible (min)
ATA Nueva Delhi, India
28° 34' N 77° 19' E
Dipolohorizontal
plegado
8 (en la cresta)
3 7 24 (2) 5, 10, 15 1, 1000 continua 4/15 ± 10
BPM (3) Pucheng,China
35° 00' N 109° 31' E
Omni-direccional
10-20 2 7 24 (4) 2,5, 5, 10, 15
1, 1000 20/30 (UTC)
4/30 (UT1)
ninguna ± 10 Emisión directa de UT1 señales horarias
HLA Taedok Science Town, República de
Corea
36° 23' N 127° 22' E
Vertical(monopolo
cónico)
2 1 5 7 5 1 continua ninguna ± 10 Código del CCIR por impulso doble
IAM (5) Roma, Italia 41° 47' N 12° 27' E
Vertical \ /A 1 1 6 2 5 1 continua ninguna ± 10 Código del CCIR por impulso doble
IBF (5) Turin, Italia 45° 02' N 07° 46' E
Vertical k/A 5 1 7 2 V a 5 1 continua ninguna ± 10 Código del CCIR por impulso doble
JJY (5) Sanwa, Sashima,
Ibaraki, Japón
36° 1 1 'N 139° 51' E
. (6) 2 5 7 24 O 2,5, 5, 8, 10, 15
1 (8)1000(9)
continua 30/60 ± 10 Código del CCIR por prolongación
LOL (5) Buenos Aires, Argentina
34° 37' S 58° 21' W
Dipolo horizontal
plegado de tres hilos
2 3 7 5 5, 10, 15 1, 440, 1000
continua 3/5 ± 20 Código del CCIR por prolongación
MSF (5) Rugby, Reino Unido
52° 22' N 01° 11' W
Dipolos cuadro
horizontales (2,5 MHz:
unipolo vertical)
5 3 7 24 2,5, 5, 10
1 5/10 ninguna ± 2 Código del CCIR por impulso doble
267-6

CUADRO I (Continuación)
EstaciónPotencia Número
de emisiones
simultáneas
Tiempo de funcionamiento
Frecuencias patrón utilizadas Duración de la emisión S „ o
— OJ i £ w
Distintivo Ubicación LatitudLongitud
Tipo de antenas
de la onda
portadora (kW)
D ías/semana
H oras/día
Portadora
(MHz)
Modulación(Hz)
Duración de transmisión
de las señales
horarias (min)
Duración de la
modulación audible (min)
£ 13 ~ o¿ JO -S w e 5 o g «
T> G 2. O)‘2 41 Cd Wtí 3 > tí
g s a^ .5 w
Método de indicación DUT1
OMA (5) Praga, R.S. Checoslovaca
50° 0 7 'N 14° 3 5 'E
T 1 1 7 24 2,5 1, 1000 ( 10) 15/30 4/15 ± 1000
RCH (5) Tashkent,URSS
41° 1 9 'N 69° 15' E
Dipolohorizontal
1 2 7 21 2,5, 5, 10
1, 10 40/60 ninguna ± 50 Código del CCIR por impulso doble. Información suplementaria dU Tl (n )
RID (5) Irkutsk, URSS 52° 2 6 'N 104° 02' E
Dipolohorizontal
111
3 7 24 5,00410.00415.004
1, 10 40/60 ninguna ± 50 Código del CCIR por impulso doble. Información suplementaria dU Tl ( " )
RIM (5) Tashkent,URSS
41° 19' N 69° 15' E
Dipolohorizontal
1 1 7 20/2 5, 10 1, 10 39/60 ninguna ± 50 Código del CCIR por impulso doble. Información suplementaria dU Tl
RTA (5) Novosibirsk,URSS
55° 04' N82° 58' E
Dipolohorizontal
5 1 7 20/2 10, 15 1, 10 40/60 ninguna ± 50 Código del CCIR por impulso doble. Información suplementaria dU Tl ( ,1)
RWM (5) Moscú, URSS 55° 48' N 38° 18' E
Dipolohorizontal
558
3 7 24 4.9969.996
14,996
1, 10 40/60 ninguna ± 50 Código del CCIR por impulso doble. Información suplementaria dU Tl (” )
267-6

CUADRO I (Continuación)
Estación
Tipo de antenas
Potencia de la onda
portadora (kW)
Número de emisiones
simultáneas
Tiempo de funcionamiento
Frecuencias patrón utilizadas Duración de la emisión
Ince
rtidu
mbr
e de
la
frec
uenc
ia
y de
los
inte
rval
os
de tie
mpo
(p
arte
s en
1012)
(')
Método de indicación DUTl
Distintivo Ubicación LatitudLongitud
D ías/semana
H oras/día
Portadora
(MHz)
M odulación(Hz)
Duración de transmisión
de la s • señales
horarias (min)
Duración de la
modulación audible (min)
WWV (5) Fort Collins, Colorado,
Estados Unidos de América
40° 41' N 105° 0 2 'W
Dipolos verticales k /2
2,5-10 5 7 24 2,5, 5, 10, 15, 20 O2)
1, 440, 500, 600
continuaO3)
continuan
± 10 Código del CCIR por impulso doble. Información suplementaria sobre las correcciones de UT1
WWVH (5) Kekaha, Kauai, Hawai,
Estados Unidos de América
21° 59' N 159° 46' W
Sistema de dipolos
verticales X/2
2,5-10 4 7 24 2,5, 5, 10,
15 O2)
1, 440, 500, 600
continua(’3) -
continua(.4)
± 10 Código del CCIR por impulso doble. Información suplementaria sobre las correcciones de UT1
ZLFS Lower Hutt, Nueva
Zelandia
41° 1 4 'S 174° 5 5 'E
0,3 1 1 3 2,5 ninguna ninguna ninguna ± 100
ZUO (5) Olifantsfon- tein, República
Sudafricana
24° 58' S 28° 14' E
Monopolovertical
4 1 7 24(,S)
2,5, 5 1 continua ninguna ± 10 Código del CCIR por prolongación
267-6

Notas relativas al cuadro I:
El horario de las emisiones diarias y de las modulaciones para cada hora se indican en las figs. 1 y 2 completadas por las notas siguientes:
( ') Este valor es aplicable al transmisor; para llegar a la incertidumbre indicada en el extremo receptor se necesitaría observar la fase de la señal de tiempo/frecuencia recibida durante unperiodo de tiempo suficientemente largo como para eliminar los efectos aleatorios y de ruido.
(2) 5 MHz: 1800 a 0900 h UTC; 10 MHz: 24 horas; 15MHz: 0900 a 1800 h UTC.
(3) Distintivo de llamada en Morse y lenguaje.
(4) 15 MHz: de 0000 a 1400 h UTC; 5 MHz: 1400 a 2400 h UTC; 10 MHz: emisión continua.
(5) Estas estaciones han comunicado que siguen el sistema UTC, conforme se especifica en la Recomendación 460. El 1° de enero de 1972 quedó eliminado el desplazamiento de frecuencia, y las señales horarias se mantienen dentro de unos 0,8 s de UT1, mediante saltos ocasionales de 1 s según indique el BIH.
(6) Vertical X/4 en 2,5 MHz; dipolo horizontal X/2 en 5 MHz y 8 MHz y dipolos verticales \ / 2 en 10 y 15 MHz.
(7) Con interrupción entre los minutos 35 y 39 de cada hora.
(8) Un impulso se compone de 8 ciclos de tono a 1600 Hz. El primer impulso de cada minuto va precedido de 655 ms de un tono de 600 Hz.
(9) M odulación a 1000 Hz entre los minutos 0-5, 10-15, 20-25, 30-35, 40-45, 50-55, excepto 40 ms antes y después de cada impulso de segundo.
(10) De 1800 a 0600 h UTC la modulación por audiofrecuencia se sustituye por señales horarias.
(" ) La información adicional sobre el valor de la diferencia UT1/UTC se transmite conforme al código dU Tl. Esto especifica con mayor precisión la diferencia UT1/UTC, hasta múltiplos de 0,02 s. El valor total de la corrección es D U Tl + dU T l. Los valores positivos de dU Tl se transmiten marcando p impulsos de segundo entre el 21.° y el 24.° segundo del minuto, de modo que dU Tl = + 0,02 s x p. Los valores negativos de dU Tl se transmiten marcando q impulsos de segundo entre el 31.° y el 34.° segundo del minuto, de modo que dU Tl = —0,02 s x q.
(,2) Desde el 1.° de febrero de 1977 WWV dejó de transm itir en 25 MHz y WWVH en 20 MHz; pero podrán restablecerse esas emisiones ulteriormente.
O3) Además de las otras señales y anuncios horarios, se produce un código de tiempo IRIG-H modificado, a la velocidad de un impulso por segundo e impulsos de código radiados continuamente en una subportadora de 100 Hz en todas las frecuencias. Un código completo es de 1 min. La subportadora de 100 Hz está sincronizada con los impulsos de código, con loque se obtiene una resolución de 10 ms. El código comprende valores D U Tl e indica el tiempo UTC en minutos, horas y días del año.
( ,4) Excepto para los periodos de anuncio vocal y el periodo de semisilencio de 5 minutos cada hora.
(15) 2,5 MHz: 1800 a 0400 h UTC; 5 MHz: continua.
NiUi
. 267-6

24 I. 267-6
ATA NUEVA DELHI
BPMPUCHENG
IAMROMA
IBF,TURIN
G 2 4 61 I I I I I — T T
10 12 14 16 18l "I I" I I T“ I T l 'l
20 22 241 I I I
I I I I I I I I I I I
UTC
5 MHz 10 MHz 15 MHz
2,5 MHz 5 MHz
10 MHz 15 MHz5 MHz: excep tu an d o el dom ingo.En verano, el ho rario se adelan ta una ho ra
5 MHz: em isión del m inu to 45 al 60. En verano, el h o rario se adelan ta una hora.
JJYTOKYO
LOL BUENOS AIRES
2,5; 5; 10; 15 MHz
5; 10; 15 MHz: no se transm ite los dom ingos. En verano, el ho rario se adelan ta u na hora.
MSFRUGBY
2,5; 5; 10 MHz
OMAPRAGA
2,5 MHz
RCHTASHKENT
R1DIRKUTSK
I I I . I Z Z I 5; 10 MHz
2,5 MHz
5 ,004 MHz10.004 MHz15.004 MHz
RIMTASHKENT ■
5 MHz 10 MHz
RTANOVOSIBIRSK
RWMM OSCÚ
wwvFORT COLLINS
COLORADO
WWVHHAW AI
I ■ r ~ ~ r 10; 15 MHz
4 .996 MHz9 .996 MHz
14,996 MHz
2,5; 5; 10; 15; 20 MHz
2,5; 5; 10; 15 MHz
ZLFS LOWER HUTT
ZUOOLIFANTS-FONTE1N
JOHANNESBURGI ...I . . i - I. i I I I 1 I I 1 1 1 I 1 ■ L 1-1 I 1
10 12 14 16 18 20 22
2,5 MHz: m artes: p o rtad o ra solam ente
2,5 MHz 5 MHz
24UTC
□ Km¡stó„ B l S t1-------- 1 1-------- 1 de 5 minutos
FIGURA 1 - Horario diario de las emisiones,

I. 267-6 25
Hora 0 5 10 15 20 25 30 35 40 45 50 55 60
r 11 • 1111111, , , pn i t ] i i i"i | i i ii I n i I I i II 1 I I I I I n i i | , i m | ii i ,
ATA ■1000 100Ó' ¡1000 1000
A A A A
BPM S í Y ? > S :- S ¿ X t x Y i T x xm í M m S í : ' í \ 1' . V : - S :‘ ( í Y
A A A A A A
MinutosForma de las señales de segundo y de minutos, código Morse y anuncios hablados (A).
Impulso de 5 ciclos de modulación a 1000 Hz, prolongado hasta 100 ms al principio del minuto. Distintivo y tiempo (UTC) en Morse.
(1) Impulso de 10 ciclos de un tono de 1000 Hz (señal horaria UTC); el primer impulso de cada minuto consiste en un impulso de 300 ms de un tono de 1000 Hz. Para evitar interferencias mutuas, el segundo impulso de la señal horaria UTC del BPM precede a la señal horaria UTC del BIH en 20 ms.
(2) Impulso de 100 ms de un tono de 1000 Hz (señal horaria UT1); el primer impulso de cada minuto consiste en un impulso de 300 ms de un tono de 1000 Hz.
Impulso de 5 ciclos de modulación a 1000 H z: al principio del minuto, impulso de 20 ciclos de modulación en 1000 Hz. Distintivo y hora (UTC) en Morse e identificación por anuncio oral.
Impulso de 5 ciclos de modulación a 1000 Hz, repetido siete veces al principio del minuto. Distintivo y hora (UTC) en M orse; identificación por anuncio oral al principio y al final de cada emisión.
Impulso de 8 ciclos de modulación a 1600 Hz. El impulso de minuto va precedido por un tono de 600 Hz de una duración de 655 ms. Distintivo y hora (JST) en código Morse y por anuncio oral. Avisos de propagación radioeléctrica comunicados por medio de un código alfabético : N (normal), U (inestable) y W (perturbada). El DUTl se indica m ediante el núm ero y la posición de los impulsos prolongados de segundo con una duración de 45 ms, en lugar de los 5 ms del impulso normal de segundo.
Impulso de 5 ciclos de modulación a 1000 Hz, se omite el 59.° impulso. Distintivo en Morse : identificación y hora (UTC —3 horas) por anuncio oral.
Impulso de 5 ciclos de modulación a 1000 Hz : impulso de 100 ms al principio del minuto. Distintivo en Morse y anuncio oral.

26 I. 267-6
OMA 1000
Impulso de 5 ciclos de modulación a 1000 Hz, con un impulso de 100 ms al principio del minuto y un impulso de 500 ms cada quinto minuto. La duración de los cinco últimos impulsos de cada cuarto de hora es de 100 ms. Cada 3 horas, emisión de impulsos, de 100 ms entre los minutos 55 y 60, prolongados hasta 500 ms al principio de los minutos. Distintivo en Morse.
RWM
RID
u n
RTA, RCH I
Se omiten las señales de los segundos 56, 57, 58 y 59 cada4.°, 9.°, 14.°, 19.° 24.° 29.°, 34.°, 39.°, 44.°, 49.°, 54.° y 59.° minutos.
WWV, WWVH
Z U O
Hora 0
M M M M M M en código Morse.i I i i i i L i i i i I i i i i I m i i I i i í i I i m i I m i i . I i j i i I i i i i I i i i i I 10 15 20 25 30 35 40 45 50 55 60 M in u to s
Véase la nota
Impulso de 5 ciclos de modulación a 1000 Hz prolongado hasta 0,5 segundos al principio del minuto. Anuncios
FIGURA 2_ — Programa horario de modulaciones
N ota — Impulso de 5 ciclos de modulación a 1000 Hz (WWV) o de 6 ciclos a 1200 Hz (WWVH) prolongado a 0,8 s al principio de cada minuto. Cada hora comienza en ambas estaciones un impulso de 0,8 s a 1500 Hz. Se omiten los impulsos 29.° y 59.° cada minuto. Preceden a cada minuto anuncios orales. Tonos de 45 s alternando entre 500 y 600 Hz cada minuto, excepto cuando se comunican en forma oral anuncios especiales o mensajes de identificación de estación. Cada hora, en 1 minuto (WWVH) o 2 minutos (WWV), pasada la hora, se introduce un segmento de 45 segundos a 440 Hz. En una subportadora de 100 Hz se difunde continuamente un código de tiempo IRIG-H modificado, indicando el día, la hora, el minuto y dando información UT1. La información DUTl se facilita mediante el número y la posición de dobles impulsos de segundo cada minuto. Interrupción en todas las modulaciones de 40 ms en torno a cada impulso de segundo.
□ Portadora tmmsi solamente
Impulsos de I segundo 440
,Tono de audiofrecuencia, Hz
[Interrupción Ide emisión
Impulsos de segundo e información sobre la diferencia de escalas de tiempo
rvct‘ . ' , n ■ r n Información Morse sobre la uisuntivo [— u diferencia de escalas de tiempo Impulsos a 10 Hz A = Anuncios orales

CUADRO II — Características de las emisiones de frecuencias patrón y de señales horarias en las bandas adicionales, válidas desde el l.° de noviembre de 1985
Estación
Tipo de antenas
Potencia de la onda portadora (kW)
Número de emisiones
simultáneas
Tiempo de funcionamiento
Frecuencias patrón utilizadas Duración de la emisión
Ince
rtidu
mbr
e de
la
frec
uenc
ia
y de
los
inte
rval
os
de tie
mpo
(p
arte
s en
1012)
(’)
Método de indicación DUTl
Distintivo Ubicación LatitudLongitud
D ías/semana
H oras/día
Portadora
(MHz)
Modulación(Hz)
Duración de transmisión
de las señales
horarias (min)
Duración de la
modulación audible (min)
Allouis,Francia
47° 10' N02° 12' E
Omni-direccional
1000 a 2000
1 7 24 162 K 2) continua continuaA3E
(radiodifusión)
± 2 Sin emisión DUTl
CHU(3) Ottawa,Canadá
45° 18' N 75° 45' W
Omni-direccional
3, 10, 3 3' 7 24 3330, 7335, 14 670
i ( 4) continua ninguna ± 5 Código del CCIR por impulso dividido
Donebach, R.F. de
Alemania
49° 34' N 09° 11' E
Omni-direccional
250 1 7 24 153 ninguna ninguna continuaA3E
(radiodifusión)
± 2
DCF77 (3) Mainflingen, R.F. de
Alemania
50° 0 1 'N 09° 00' E
Omni-direccional
20 (5) 1 7 24 77,5 1 continua (6) continua (7) ± 0,5 Sin emisión DUTl
Droitwich, Reino Unido
52° 16' N 02° 09' W
T 400 1 7 22 200 (8) O
ninguna ninguna continuaA3E
(radiodifusión)
± 20
Westerglen, Reino Unido
55° 58' N 03° 50' W
T 50 1 7 22 200 (8) O
ninguna ninguna continuaA3E
(radiodifusión)
± 20
Burghead, Reino Unido
57° 42' N 03° 28' W
T 50 1 7 22 200(8) O
ninguna ninguna continuaA3E
(radiodifusión)
± 20
GBR (3) (,0) Rugby, Reino Unido
52° 22' N 01° 11' W
Omni-direccional
750 60 (5)
1 7 22 (" ) 15,9516,00
1(12) 4 x 5 al día (13)
ninguna ± 2 Código del CCIR por impulso doble
H B G ('4) Prangins,Suiza
46° 24' N 06° 15' E
Omni-direccional
20 1 7 24 75 K 15) continua ninguna ± 1 Sin emisión DUTl
. 267-6

CUADRO II (Continuación)
Estación
Tipo de antenas
Potencia de la onda portadora (kW)
Número de emisiones
simultáneas
Tiempo de funcionamiento
Frecuencias patrón utilizadas Duración de la emisión
Ince
rtidu
mbr
e de
la
frec
uenc
ia
y de
los
inte
rval
os
de tie
mpo
(p
arte
s en
1012)
(')
Método de indicación DUTl
Distintivo Ubicación LatitudLongitud
D ías/semana
H oras/día
Portadora
(MHz)
M odulación(Hz)
Duración de transmisión
de las señales
horariás (min)
Duración de la
modulación audible (min)
JJF-2 (3) JG2AS
Sanwa, Sashima,
Ibaraki, Japón
36° 1 1 'N 139° 51' E
Omni-direccional
10 1 7 24 (16) 40 1 (17) continuaO8)
ninguna ± 10
MSF Rugby, Reino Unido
52° 22' N01° 1 1 'w
Omni-direccional
25 (5) 1 7 24 (19) 60 1 (20) continua ninguna ± 2 Código del CCIR por impulso doble.
Milán, Italia 45° 20' N 09° 12' E
Omni-direccional
600 1 7 24 900 ninguna ninguna continuaA3E
(radiodifusión)
± 2
NAA (3) (21) (22) Cutler, Maine, Estados
Unidos de América
44° 39' N 67° 17 'W
Omni-direccional
1000 (5) 1 7 24 (23) 24,0 (24) ninguna ninguna ninguna ± 10
NCA (3) (2I) (22) Aguada, Puerto Rico
18° 21' N 67° 11' W
Omni-direccional
100 (25) 1 7 24 28,5 ninguna ninguna ninguna ± 10
NTD (3) (21) (22) Yosami, Japón 34° 58' N . 137° 01' E
Omni-direccional
50 (5) 1 7 24 (26) 17,4 ninguna ninguna ninguna ± 10
NLK (3) (2,) ( 22) Jim Creek, Washington,
Estados Unidos de América
48° 12' N 121° 55' W
Omni-direccional
125 (5) 1 7 24 (27) 24,8 ninguna ninguna ninguna ± 10
NPM (3)(2,) ( 22)
Lualualei, Hawai, Estados
Unidos de América
21° 25' N 158° 09' W
Omni-direccional
600 (5) 1 7 24 (28) 23,4 ninguna ninguna ninguna ± 10
NSS (3) (21) ( 22) Annapolis, Maryland,
Estados Unidos de América
38° 59' N 76° 2 7 'W
Omni-direccional
400 (5) 1 7 24 (29) 21,4 ninguna ninguna ninguna ± 10
267-6

CUADRO II (Continuación)
EstaciónPotencia Número
de emisiones
simultáneas
Tiempo de funcionamiento
Frecuencias patrón utilizadas Duración de la emisión
— o — s 7/
Distintivo Ubicación LatitudLongitud
Tipo de antenas
de la onda portadora (kW)
D ías/semana
H oras/dia
Portadora
(MHz)
Modulación(Hz)
Duración de transmisión
de las señales
horarias (min)
Duración de la
modulación audible (min)
13 ~ O X) ^ ~E e■g'i i »* ~ <D 03tí ¡3 > t¡(J U m U ^ £ O,~ ^ .E w
Método de indicación DUTl
NWC (3)(2,) ( 22)
North West Cape,
Australia
21° 49' S 114° 10' E
Omni-direccional
1000 (5) 1 7 24 (30) 22,3 ninguna ninguna ninguna ± 10
OMA Podebrady,R.S.
Checoslovaca
50° 08' N 15° 0 8 'E
T 5 1 7 24 50 K 12) 23 horas al día (3I)
ninguna ± 1000 Sin emisión DUTl
RBU (3) Moscú, URSS 55° 48' N 3.8° 18' E
Omni-direccional
10 1 7 24 662/ 3 1, 10 6/60 (32) ninguna ± 5 Código del CCIR por impulso doble (33)
RTZ (3) Irkutsk, URSS 52° 2 6 'N 104° 02' E
Omni-direccional
10 1 7 23 50 1, 10 6/60 ninguna ± 5 Código del CCIR por impulso doble (33)
RW-166 Irkutsk, URSS 52° 18' N 104° 18' E
Omni-direccional
40 1 7 23 200 ninguna continuaA3E
(radiodifusión)
± 5
RW-76 Novosibirsk,URSS
55° 04' N 82° 58' E
Omni-direccional
150 1 7 22 272 ninguna continuaA3E
(radiodifusión)
± 5
SAJ Estocolmo,Suecia
59° 15' N 18° 06' E
Omni-direccional
0,02(PRA)
1 3 (34) 2 (35) 150 000 ninguna 10(36) ± 2
UNW3 Molodetchno,URSS
54° 26' N 26° 48' E
Omni-direccional
1 7 2 25.5 25,1 25,0 23,0-20.5
1, 10,40 (37)
40 min2 veces al
día (3íi)
ninguna ± 10
267-6

CUADRO II (Continuación)
Estación
Tipo de antenas
Potencia de la onda portadora (kW)
Número de emisiones
simultáneas
Tiempo de funcionamiento
Frecuencias patrón utilizadas Duración de la emisión
Ince
rtidu
mbr
e de
la
frec
uenc
ia
y de
los
inte
rval
os
de tie
mpo
(p
arte
s en
1012)
(’)
Método de indicación DUTl
Distintivo Ubicación LatitudLongitud
D ías/semana
H oras/día
Portadora
(MHz)
M odulación(Hz)
Duración de transmisión
de las señales horarias
(min)
Duración de la
modulación audible (min)
UPD8 Arkhangelsk,URSS
64° 24' N 41° 32' E
Omni-direccional
'
1 7 2 25.5 25,125.023.020.5
1, 10, 40 (37)
40 min 2 veces al
día (39)
ninguna ± 10
UQC3 Khabarovsk,URSS
48° 30' N 134° 51' E
Omni-direccional
300 1 7 2 25.025.125.5 23,020.5
1, 10, 40 (37)
40 min 3 veces al
dia (40)
ninguna ± 10
USB2 Frunze, URSS 43° 0 4 'N 73° 3 9 'E
Omni-direccional
1 7 3 25.5 25,125.023.020.5
1, 10, 40 (37)
40 min 3 veces al
día (4t)
ninguna ± 10
UTR3 Gorky, URSS 56° 1 1 'N 43° 5 8 'E
Omni-direccional
300 1 7 2 25.025.125.5 23,020.5
1, 10, 40 (37)
40 min 3 veces al
día (42)
ninguna ± 10
VNG (3) Lyndhurst,Victoria,Australia
38° 03' S 145° 16' E
Omni-direccional
10 2 7 24 (43) 4500 7500
12 000
1, 1000 O continua ninguna ± 100 Código del CCIR en 45 ciclos de 900 Hz siguiendo inmediatamente las señales de segundos normales
WWVB (3) Fort Collins, Colorado,
Estados Unidos de América
40° 40' N 105° 03' W
Antena vertical cargada
13(5) 1 7 24 60 1(45) continua ninguna ± 10 Sin código del CCIR
. 267-6

CUÁDRO II (Continuación)
Estación
Tipo de antenas
Potencia de la onda portadora (kW)
Número de emisiones
simultáneas
Tiempo de funcionamiento
Frecuencias patrón utilizadas Duración de la emisión
Ince
rtidu
mbr
e de
la
frec
uenc
ia
y de
los
inte
rval
os
de tie
mpo
(p
arte
s en
1012)
(’)
Método de indicación DUTl
Distintivo Ubicación LatitudLongitud
D ías/semana
H oras/día
Portadora
(MHz)
Modulación(Hz)
Duración de transmisión
de las señales
horarias (min)
Duración de la
modulación audible (min)
Y3S Ñauen, Rep. Democ.
Alemana
52° 39' N 12° 55' E
Omni-direccional
5 1 7 24 4525 ninguna continua(46)
continua (8) Código del CCIR por impulso dividido
ZUO (47) Olifantsfon- tein, República
Sudafricana
24° 58' S 28° 14' E
Omni-direccional
0,08 1 7 24 100 000 1 continua ninguna ± 10 Código del CCIR por prolongación
Mótala,Suecia
58° 26' N 14° 59' E
Omni-direccional
300 1 7 17 191 (9) ninguna 21 s una vez por día (48)
continuaA3E
(radiodifusión)
± 50 (8) Código del CCIR por reducción de la frecuencia de modulación audible
EBC San Fernando, Cádiz, España
36° 28' N 06° 1 2 'W
Omni-direccional
1 1 7 1 12 008 6840
(49) 10 (5°) ± 100 Código del CCIR por impulso doble
í. 267-6

Notas relativas al cuadro II:(1) Este valor es aplicable al transmisor: para llegar a la incertidumbre indicada en el extremo receptor se necesitaría observar la fase de la señal de tiem po/frecuencia recibida durante un
periodo de tiempo suficientemente largo como para eliminar los efectos aleatorios y de ruido.(2) M odulación de la fase de la portadora de +1 y — 1 radian durante 0,1 s cada segundo, salvo en el segundo 59.° de cada minuto. Esta modulación se repite para indicar un «1 binario». Los
números de minuto, hora, día del mes, día de la semana, mes y año se transmiten cada minuto a partir del 21.° segundo hasta el segundo 58.°, de conformidad con la escala de tiempo legal francesa. Además, un «1 binario» en el segundo 17.°, indica un avance de 2 horas de la hora local con respecto al UTC (hora de verano), y un «1 binario» en el segundo 18.°, indica unavance de una hora de la hora local con respecto al UTC (hora de invierno); un «1 binario» en el segundo 14°, indica que el día en curso es fiesta (Navidades, 14 de julio, etc. .. .) .
(3) Estas estaciones han comunicado que aplican uno de los sistemas de la Recomendación 460.(4) Impulsos de 300 ciclos de modulación a 1000 Hz: se prolonga el primer impulso de cada minuto.(5) Estos valores representan la potencia radiada evaluada.(6) Al comienzo de cada segundo (excepto en el segundo 59.°) la amplitud de la portadora se reduce a 25% de su valor durante 0,1 ó 0,2 s correspondiendo al «1 binario» respectivamente. Los
números del minuto, la hora, el día del mes, el día de la semana, el mes y el año se transmiten en código BCD desde el segundo 21.° al 58 °. Las señales horarias las genera la Physikalisch-Technische Bundesanstalt (PTB) de acuerdo a la hora legal de la República Federal de Alemania que es UTC (PTB) + lh (Hora de Europa Central, CET) o UTC (PTB) + 2h (Hora de verano de Europa Central, CEST). Además, las CET y CEST se indican por un 1 binario en los segundos 18.° ó 17.° respectivamente.
(7) La señal distintiva se transmite tres veces por hora, en los minutos 19.°, 39.° y 59.°, con un tono de 250 Hz que modula la portadora sin interrupción de la secuencia de señales horarias.(*) Sin coherencia entre la frecuencia portadora y las señales horarias.(9) La frecuencia portadora de estas estaciones se reducirá en 2 kHz el 1.° de febrero de 1988 de acuerdo con la Resolución N.° 500 de la Conferencia Administrativa Mundial de
Radiocomunicaciones, Ginebra, 1979.(10) Se emplea modulación por desplazamiento de frecuencia en alternancia con las ondas entretenidas; estabilización de frecuencia en ambas portadoras.(11) Periodo de mantenimiento: todos los martes de 1000 a 1400 h UTC.(12) Señales telegráficas A1A.(13) De 0255 a 0300 h, de 0855 a 0900 h, de 1455 a 1500 h y de 2055 a 2100 h UTC.(14) Señales horarias coordinadas.(15) Supresión de la portadora durante 100 ms al principio de cada segundo; impulso doble al principio de cada minuto; impulso triple al principio de cada hora; impulso cuádruple al
principio de cada periodo de 12 h.(16) JJF2: telegrafía, JG2AS, en ausencia de señales telegráficas.(17) Emisión de la portadora con una duración de 500 ms al principio de cada segundo, omitiéndose cada minuto el impulso 59°.(18) En ausencia de emisiones telegráficas.(19) El primer martes de cada mes se interrumpen las emisiones para el mantenimiento, de 1000 a 1400 h UTC.(20) Portadora interrum pida durante 100 ms cada segundo y durante 500 ms cada minuto, código horario rápido a 100 b it/s BCD NRZ, emitido durante la interrupción de cada minuto, que
indica el mes, el día del mes, la hora y el minuto. Código horario lento a 1 b it/s BCD PWM, emitido desde los segundos 17 al 51, que indica el año, el mes, el día del mes, el día de lasemana, la hora y el minuto, junto con un identifícador de 8 bits entre los segundos 52 y 59. Código DUTl del CCIR por impulso doble.
(21) Se emplea modulación por desplazamiento mínimo (MDM): una portadora de fase estable puede ser recuperada tras adecuada multiplicación y mezcla en el receptor.(22) La estación está destinada en primer lugar a las comunicaciones; estos datos pueden modificarse, pero el Observatorio Naval de Estados Unidos, W ashington, DC, Estados Unidos de
América, anuncia por anticipado a los usuarios todo cambio.(23) De 1200 a 2000 h UTC todos los domingos mientras NSS no emite (hasta el 15 de julio).(24) Desde 2000 h UT del 23 de enero 1984 hasta nueva indicación.(25) Se puso en funcionamiento el 14 de agosto de 1984 con 74 kW.(26) Primer jueves y viernes: 2300 a 0900 h UTC; todos los demás jueves y viernes: 2300 a 0700 h UTC. A mitad de potencia de 2200 a 0200 h UTC todos los lunes y viernes.(27) Salvo entre las 1600 y las 2400 h UTC los jueves de cada mes. Durante el horario de verano, todos los jueves entre las 1500 y las 2300 h UTC.
267-6

(28) 2,5 MHz: 000-1000 h UTC; 5 MHz: 0900-0100 h UTC; 10 MHz: continuo; 15 MHz: 0100-0900 h UTC.(29) No emite hasta las 2100 h UTC el 15 de julio, salvo catorce horas cada domingo para cubrir el periodo en que NAA no emite.(30) De 0000 a 0800 h todos los lunes habitualmente.(31) De 1000 a 1100 h UTC, transmisiones sin modulación, salvo para el distintivo OMA al comienzo de cada cuarto de hora.(32) Funcionamiento posible según program a experimental, que prevé la emisión continua de señales horarias.(33) La información adicional sobre el valor de la diferencia UT1 — UTC se transmite conforme al código dU Tl. Esto especifica con mayor precisión la diferencia UT1 — UTC, hasta
múltiplos de 0,02 s. El valor total de la corrección es DUTl + dU Tl. Los valores positivos de dU Tl se transmiten marcando p impulsos de segundo entre el 21.° y el 24.° segundo del minuto, de modo que dU Tl = + 0,02 s x p. Los valores negativos de dU Tl se transmiten marcando q impulsos de segundo entre el 31.° y el 34.°, segundo del minuto, de modo que dU Tl = -0 ,0 2 s x q. •
(34) Todos los lunes, miércoles y viernes.(35) De 0930 a 1130 h UTC. Cuando esté en vigor la hora de verano, añádase una hora a los instantes indicados.(36) Impulsos de segundos de 8 ciclos de modulación a 1 kHz durante 5 minutos empezando a las 1100 h UTC y a las 1125 h UTC. Cuando esté en vigor la hora de verano, añádase una hora a
los instantes indicados.(37) Durante un periodo de servicio se transmiten dos tipos de señales:
a) Señales Al A con frecuencia de la portadora de 25 kHz y duración de 0,0125; 0,025; 0,1; 1 y 10 s, con periodos de repetición de 0,025; 0,1; 1; 10 y 60 s respectivamente.b) Señales NON con frecuencias de la portadora de 25,0; 25,1; 25,5; 23,0 y 20,5 kHz. Se adaptan las fases de estas señales a las señales marcadoras horarias de la escala transmitida.
(38) De 0736 a 1817 h y de 1936 a 2017 h UTC del 1° de octubre al 31 de marzo.De 0736 a 1817 h y de 2036 a 2117 h UTC del 1.° de abril al 30 de septiembre.
(39) De 0836 a 0917 h y de 1136 a 1217 h UTC.(40) De 0036 a 0117 h, 0636 a 0717 h, 1736 a 1817 h UTC del 1.° de octubre al 31 de marzo.
De 0136 a 0217 h, 0536 a 0617 h, 1736 a 1813 h UTC del 1.° de abril al 30 de septiembre.C*1) De 0436 a 0517 h, 0936 a 1017 h y de 2136 a 2217 h UTC del 1.° de octubre al 31 de marzo.
De 0436 a 0517 h, 1036 a 1117 h y de 2236 a 2317 h UTC del 1.° de abril al 30 de septiembre.(42) De 0536 a 0617 h, 1336 a 1417 h y 1836 a 1917 h UTC del 1.° de octubre al 31 de marzo.
De 0636 a 0717 h, 1336 a 1417 h y 1837 a 1917 h UTC del 1.° de abril al 30 de septiembre.(43) 4500 kHz, de 0945 a 2130 h UTC, 12 000 kHz, de 2145 a 0930 h UTC; 7500 kHz, servicio continuo, con una interrupción técnica de 2230 a 2245 h UTC.(44) Impulsos de 50 ciclos de modulación a 1000 Hz, reducidos a 5 ciclos entre el 55.° y el 58.° segundo: se suprime el 59.° impulso. En los minutos 5, 10, 15, etc., los impulsos comprendidos
entre el 50.° y el 58.° segundos se reducen a 5 ciclos: identificación mediante anuncio oral entre el impulso 20 y el impulso 50 de los minutos 15, 30, 45 y 60.(45) Código de tiempo utilizado que reduce la portadora 10 dB al principio de cada segundo.(46) Señales horarias A1A de duración 0,1 s (marca de minuto de duración 0,5 s) seguidas de impulsos de código desde 0,25 a 0,3 s para dar información sobre D U T l, dU Tl y momento del día
(minuto, hora) en UTC.(47) Transmisor modulado en fase: señales horarias y anuncios como para ZUO 2,5 y 5 MHz (véase el cuadro I).(48) Señales horarias A3E de 0,1 s de duración entre Ilh58m55s y Ilh59m l6s UTC. La señal marcadora de minuto dura 0,5 s. Cuando esté en vigor la hora de verano, añádase una hora a los
instantes indicados.(49) Pulsos de segundos de 0,1 s de duración, modulado a 100 Hz.
Pulsos de minutos de 0,5 s de duración, modulado a 1250 Hz.(50) Minutos 00 a 10, 12 008 kHz, A2A.
15 a 25, 12 008 kHz, J3E.30 a 40, 6 840 kHz, A2A.45 a 55, 6 840 kHz, J3E.
Durante el minuto inmediatamente anterior a cada uno de los periodos indicados, emisión de indicativo, en Morse lento, dos veces.
Notas relativas al cuadro I I (continuación):

CUADRO III — Características de ciertos sistemas de ayuda a la navegación, válidas desde el 1° de noviembre de 1983
Estación
Tipo de antenas
Potencia de la onda
portadora (kW)
Número de emisiones
simultáneas
Tiempo de funcionamiento
Frecuencias patrón utilizadas Duración de la emisión Incertidumbre
de la frecuencia y de los intervalos
de tiempo (partes en
1012)(>)Distintivo Ubicación
aproximadaLatitud
LongitudD ías/
semanaH oras/
día
Portadora(kHz)
Periodo de repetición de
impulso (ps)
Duración de transmisión de
las señales horarias
Duración de la modulación
audible
Loran-C (2) (7980-Z, 9960-Y)
Carolina Beach, NC,
Estados Unidos de América
34° 03,8' N 77° 54,8' W
Omni-direccional
550 (3) 1 7 24 100 99 600 79 800 (4)
continua (5) ninguna ± 1
Loran-C (7980-Y)
Júpiter, Florida, Estados
Unidos de América
27° 02,0' N 80° 06,9' W
Omni-direccional
275 1 7 24 100 79 800 (4) continua (5) ninguna ± 1
Loran-C (2) (5930-Y, 7930-W)
Cape Race, Newfoundland
46° 46,5' N 53° 10 ,5 'W
Omni-direccional
1500 (3) 1 7 24 100 79 300 59 300 (4)
continua (5) ninguna ± 1
Loran-C(8970-Z)
Gordon Lake, Ontario, Canadá
46° 24,5' N 83° 52,0' W
Omni-direccional
1000 (3) 1 7 24 100 89 700 continua (5) ninguna ± 1
Loran-C (2) (5930-X, 9960-X)
Isla de Nantucket,
Estados Unidos de América
41° 15,2' N 69° 58,6' W
Omni-direccional
275 (3) 1 7 24 100 59 300 (4) 99 600
continua (s) ninguna ± 1
Loran-C (2) (8970-M, 9960-Z)
Dana, Indiana, Estados
Unidos de América
39° 51,1' N 87° 29,2' W
Omni-direccional
400 (3) 1 7 24 100 89 700 (4) 99 600
continua (s) ninguna ± 1
Loran-C (2) (7930-X, 9980-W)
Angissog,Groenlandia
59° 59,3' N 45° 10,5 'W
Omni-direccional
760 (3) 1 7 24 100 79 300 (4) continua (5) ninguna ± 1
267-6
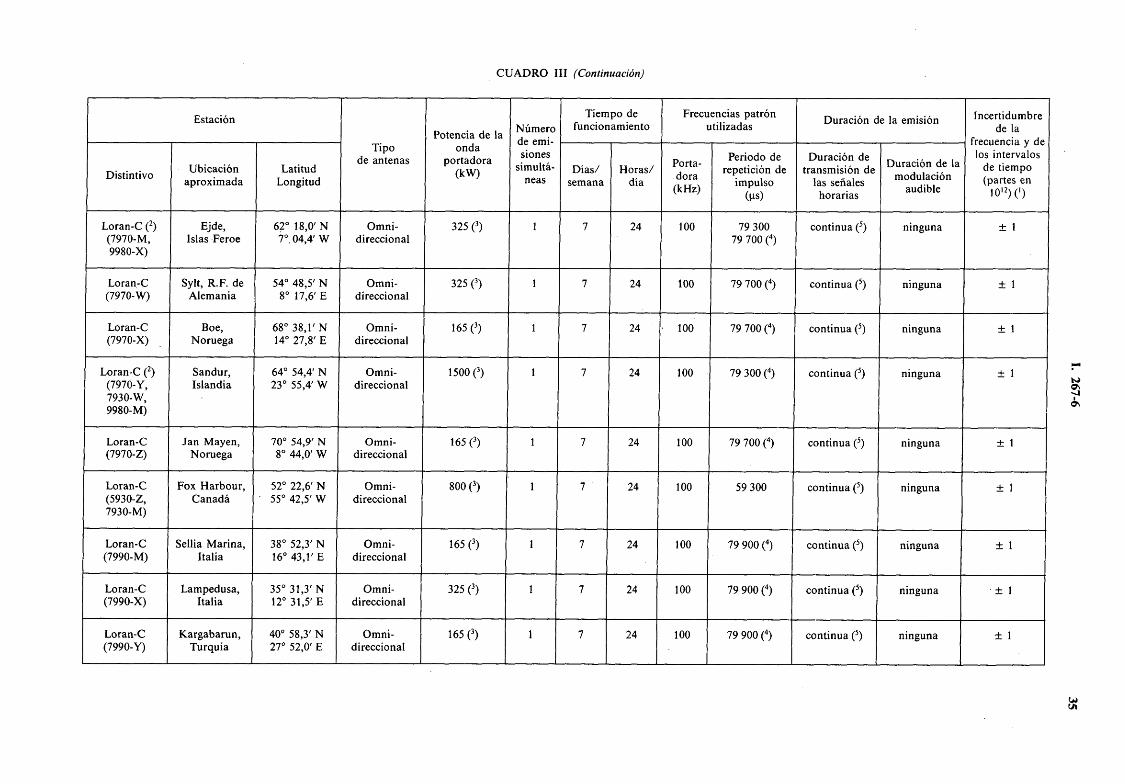
CUADRO III (Continuación)
EstaciónPotencia de la Número
de emisiones
simultáneas
Tiempo de funcionamiento
Frecuencias patrón utilizadas Duración de la emisión Incertidumbre
de la
Distintivo Ubicaciónaproxim ada
LatitudLongitud
Tipo de antenas
ondaportadora
(kW) D ías/semana
H oras/día
Portadora(kHz)
Periodo de repetición de
impulso (ps)
Duración de transmisión de
las señales horarias
Duración de la modulación
audible
los intervalos de tiempo (partes en
io ,2) 0
Loran-C (2) (7970-M, 9980-X)
Ejde, Islas Feroe
62° 18,0' N 7° 04,4' W
Omni-direccional
325 (3) 1 7 24 100 79 300 79 700 (4)
continua (5) ninguna ± 1
Loran-C (7970-W)
Sylt, R.F. de Alemania
54° 48,5' N 8o 17,6' E
Omni-direccional
325 (3) 1 7 24 100 79 700 (4) continua (5) ninguna ± 1
Loran-C(7970-X)
Boe,Noruega
68° 3 8 ,1 'N 14° 27,8' E
Omni-direccional
165 (3) 1 7 24 • 100 79 700 (4) continua (5) ninguna ± 1
Loran-C (2) (7970-Y, 7930-W, 9980-M)
Sandur,Islandia
64° 54,4' N 23° 55,4' W
Omni-direccional
1500 (3) 1 7 24 100 79 300 (4) continua (5) ninguna ± 1
Loran-C(7970-Z)
Jan Mayen, Noruega
70° 54,9' N 8o 44,0' W
Omni-direccional
165 (3) 1 7 24 100 79 700 (4) continua (5) ninguna ± 1
Loran-C(5930-Z,7930-M)
Fox Harbour, Canadá
52° 22,6' N • 55° 42 ,5 'W
Omni-direccional
800 (3) 1 7 24 100 59 300 continua (5) ninguna ± 1
Loran-C(7990-M)
Sellia Marina, Italia
38° 52,3' N 16° 43,1' E
Omni-direccional
165 (3) 1 7 24 100 79 900 (4) continua (5) ninguna ± 1
Loran-C(7990-X)
Lampedusa,Italia
35° 3 1 ,3 'N 12° 31,5' E
Omni-direccional
325 (3) 1 7 24 100 79 900 (4) continua (5) ninguna ± 1
Loran-C (7990-Y)
K argabarun,Turquía
40° 58,3' N 27° 52,0' E
Omni-direccional
165 (3) 1 7 24 100 79 900 (4) continua (5) ninguna ± 1
u>(SI
. 267-6

CUADRO III (Continuación)
Estación
Tipo de antenas
Potencia de la onda
portadora (kW)
Número de emisiones
simultáneas
Tiempo de funcionamiento
Frecuencias patrón utilizadas
Duración de la emisión Incertidumbre de la
frecuencia y de los intervalos
de tiempo (partes en
1012) ( ‘)Distintivo Ubicación
aproximadaLatitud
LongitudD ías/
semanaH oras/
día
Portadora
(kHz)
Periodo de repetición de
impulso (ps)
Duración de transmisión de
las señales horarias
Duración de la modulación
audible
Loran-C(7990-Z)
Estartit,España
42° 03,6' N 3o 12,3' E
Omni-direccional
165 (3) 1 7 24 100 79 900 (4) continua (5) ninguna ± 1
Loran-C(4990-M)
Islas Johnston 16° 44,7' N 169° 30,5' W
Omni-direccional
275 (3) 1 7 24 100 49 900 (4) continua (5) ninguna ± 1
Loran-C(4990-X)
Upolu Point, Hawai, Estados
Unidos de América
20° 14,8 'N 155° 5 3 ,1 'W
Omni-direccional
275 (3) 1 7 24 100 49 900 (4) continua (5) ninguna ± 1
Loran-C (4990-Y)
Kure, Hawai, Estados
Unidos de América
28° 23,7' N 178° 17,5 'W
Omni-direccional
275 (3) 1 7 24 100 49 900 (4) continua (5) ninguna ± 1
Loran-C(9970-M)
Iwo Jima, Japón
24° 48,1' N 141° 19,5' E
Omni-direccional
1800 (3) 1 7 24 100 99 700 (4) continua (5) ninguna ± 1
Loran-C (9970-W)
Islas Marcus, Japón
24° 17,1' N 153° 58,9' E
Omni-direccional
1800 (3) 1 7 24 100 99 700 (4) continua (5) ninguna ± 1
Loran-C(9970-X)
Hokkaido,Japón
42° 44,6' N 143° 43,2' E
Omni-direccional
1000 (3) 1 7 24 100 99 700 (4) continua (5) ninguna ± 1
Loran-C (9970-Y)
Gesashi,Okinawa,
Japón
26° 36,4' N 128° 08,9' E
Omni-direccional
1000 (3) 1 7 24 100 99 700 (4) continua (5) ninguna ± 1
Loran-C(9970-Z)
Yap, Islas Carolinas
9o 32,8' N 138° 0 9 ,9 'E
Omni-direccional
1000 (3) 1 7 24 100 99 700 (4) continua (5) ninguna ± 1
. 267-6

CUADRO III (Continuación)
EstaciónPotencia de la Número
de emisiones
simultáneas
Tiempo de funcionamiento
Frecuencias patrón utilizadas Duración de la emisión Incertidumbre
de la
Distintivo Ubicaciónaproximada
LatitudLongitud
Tipo de antenas
ondaportadora
(kW) D ías/semana
H oras/día
Portadora
(kHz)
Periodo de repetición de
impulso Gis)
Duración de transmisión de
las señales horarias
Duración de la modulación
audible
los intervalos de tiempo (partes en
i o l2) 0 )
Loran-C(9990-M)
St. Paul, Islas Pribiloff, Alaska
59° 09,2' N 170° 15,0' W
Omni-direccional
275 (3) 1 7 24 100 99 900 (4) continua (5) ninguna ± i
Loran-C(9990-X)
Attu,Alaska
52° 49,7' N 173° 10,8' E
Omni-direccional
275 (3) 1 7 24 100 99 900 (4) continua (5) ninguna ± i
Loran-C (2) (9960-M, 8970-X)
Seneca, NY, Estados
Unidos de América
42° 42,8' N 76° 49,6' W
Omni-direccional
800 (3) 1 7 24 100 99 600 (4) 89 700 (4)
continua (5) ninguna ± i
Loran-C (2) (9960-W, 5930-M)
Caribou, ME, Estados
Unidos de América
46° 48,5' N 67° 55,6' W
Omni-direccional
350 (3) 1 7 24 100 59 300 (4) 99 600 (4)
continua (5) ninguna ± i
Loran-C (2) (8970-W, 7980-M)
Malone, FL, Estados
Unidos de América
30° 59,6' N 85° 10,2' W
Omni-direccional
800 (3) 1 7 24 100 89 700 (4) 79 800 (4)
continua (5) ninguna ± i
Loran-C (8970-Y)
Baudette, MN, Estados
Unidos de América
48° 36,8' N 94° 33,3' W
Omni-direccional
800 (3) 1 7 24 100 89 700 (4) continua (5) ninguna ± i
Loran-C (7980-W)
Grangeville, LA, Estados Unidos de América
30° 43,6' N 90° 49,7' W
Omni-direccional
800 (3) 1 7 24 100 79 800 (4) continua (5) ninguna ± i
Loran-C(7980-X)
Raymondville, TX, Estados
Unidos de América
26° 31,9' N 97° 50,0' W
Omni-direccional
400 (3) 1 7 24 100 79 800 (4) continua (5) ninguna ± i
267-6

CUADRO III (Continuación)
Estación
Tipo de antenas
Potencia de la onda
portadora (kW)
Número de emisiones
simultáneas
Tiempo de funcionamiento
Frecuencias patrón utilizadas Duración de la emisión Incertidumbre
de la frecuencia y de los intervalos
de tiempo (partes en
10,2)C )Distintivo Ubicación
aproximadaLatitud
LongitudD ías/
semanaH oras/
dia
Portadora
(kHz)
Periodo de repetición de
impulso Gis)
Duración de transmisión de
las señales horarias
Duración de la modulación
audible
Loran-C (9990-Y)
Pt. Clarence, Alaska
65° 14,7' N 166° 53 ,2 'W
Omni-direccional
1000 (3) 1 7 24 100 99 900 (4) continua (5) ninguna ± 1
Loran-C (2) (9990-Z, 7960-X)
Narrow Cape, Alaska
57° 26,3' N 152° 22 ,2 'W
Omni-direccional
400 (3) 1 7 24 100 99 900 79 600 (4)
continua (5) ninguna ± 1
Loran-C(7960-M)
Tok,Alaska
63° 19,7' N 142° 48,5' W
Omni-direccional
540 (3) 1 7 24 100 79 600 (4) continua (5) ninguna ± 1
Loran-C (2) (7960-Y, 5990-X)
Shoal Cove, Alaska
55° 26,4' N 131° 15,3' W
Omni-direccional
540 (3) 1 7 24 100 79 600 59 900 (4)
continua (5) ninguna ± 1
Loran-C(5990-M)
Williams Lake, BC, Canadá
51° 58,0' N 122° 22,0' W
Omni-direccional
400 (3) 1 7 24 100 59 900 (4) continua (5) ninguna ± 1
Loran-C (2) (5990-Y, 9940-W)
George Washington,
Estados Unidos de América
47° 03,8' N 119° 44,7' W
Omni-direccional
1600 (3) 1 7 24 100 59 900 99 400 (4)
continua (5) ninguna ± 1
Loran-C(9940-M)
Fallón, Nevada, Estados
Unidos de América
39° 33,1' N 118° 4 9 ,9 'W
Omni-direccional
400 (3) 1 7 24 100 99 400 (4) continua (5) ninguna ± 1
Loran-C(9940-X)
Middletown, California,
Estados Unidos de América
38° 46,9' N 122° 29,7' W
Omni-direccional
400 (3) 1 7 24 100 99 400 (4) continua (5) ninguna ± 1
. 267-6

CUADRO III (Continuación)
Estación
Tipo de antenas
Potencia de la onda
portadora (kW)
Número de emisiones
simultáneas ‘
Tiempo de funcionamiento
Frecuencias patrón utilizadas Duración de la emisión Incertidumbre
de la frecuencia y de los intervalos
de tiempo (partes en
io ,2)C )
Distintivo Ubicaciónaproximada
.LatitudLongitud
D ías/semana
H oras/día
Portadora
(kHz)
Periodo de repetición de
impulso Gis)
Duración de transmisión de
las señales horarias
Duración de la modulación
audible
Loran-C (9940-Y)
Searchlight, Nevada, Estados
Unidos de América
35° 19,3' N 114° 4 8 ,3 'W
Omni-direccional
540 (3) 1 7 24 100 99 400 (4) continua (5) ninguna ± i
Loran-C (5990-Z)
Port Hardy, BC, C anadá
50° 36,5' N 127° 21,5' W
Omni-direccional
400 (3) 1 7 24 100 59 900 (4) continua ninguna ± i
RNS-E(A) Briansk, URSS 53° 1 3 'N 34° 24' E
Omni-direccional
800 (3) 1 7 (6) 10 O 100 80 000 (8) continua ninguna ± 5
RNS-E(D) Syzran, URSS 53° 11' N 49° 46' E
Omni-direccional
800 (3) 1 6 (6) 10 O 100 80 000 (8) O ninguna ± 5
RNS-W(A) Aleksandrovsk,Sakhalinsky
50° 56' N 142° 38' E
Omni-direccional
400 (3) 1 7 0 12 0°) 100 50 000 (8) continua ninguna ± 5
OmegaQ /N
Aldra,Noruega
66° 25' N 13° 08' E
Omni-direccional
10 (" ) 1 7 24 11.05-F 10,2-A
O2)l l ’/3-C13.6-B
ninguna O2) ninguna ■ ± 5
OmegaQ /N D
Lamoure, N orth Dakota,
Estados Unidos de América
46° 22' N 98° 20' W
Omni-direccional
10 (") 1 7 24 11.05-A 10,2-D
O2)ll'/j-F13.6-E
ninguna e 2) ninguna ± 1
267-6

CUADRO III (Continuación)
Estación
Tipo de antenas
Potencia de la onda
portadora (kW)
Número de emisiones
simultáneas
Tiempo de funcionamiento
Frecuencias patrón utilizadas Duración de la emisión Incertidumbre
de la frecuencia y de los intervalos
de tiempo (partes en
io '2) ODistintivo Ubicación
aproximadaLatitud
LongitudD ías/
semanaH oras/
día
Portadora
(kHz)
Periodo de repetición de
impulso (ps)
Duración de transmisión de
las señales horarias
Duración de la modulación
audible
OmegaQ /H
Haiku, Hawai, Estados
Unidos de América
21° 24' N 157° 50' W
Omni-direccional
10 (" ) 1 7 24 ■ 11.05-H 10,2-C
O2)ÍVÁ-E13.6-D
ninguna (,2) ninguna ± i
OmegaQ /J
Islas Tsushima, Japón
34° 37' N 129° 27' E
Omni-direccional
10 (" ) 1 7 24 11.05-E 10,2-H
O2)1 lí/a-B13.6-A
ninguna (,2) ninguna ± i
OmegaQ /L
Monrovia,Liberia
06° 18' N 10° 40' W
Omni-direccional
10 (") 1 7 24 11.05-G 10,2-B
O2)ll'/j-D13.6-C
ninguna ( ,2) ninguna ± i
OmegaO /L R
La Reunión 20° 58' S 55° 17' E
Omni-direccional
10 (») 1 7 24 11.05-B 10,2-E
(,2)1 l'/j-G13.6-F
ninguna O2) ninguna ± i
OmegaO /A
Golfo Nuevo, Argentina
43° 03' S 65° 1 1 'W
Omni-direccional
10 (u ) 1 7 24 11.05-C 10,2-F
(,2)1 lló-H13.6-G
ninguna (,2) ninguna ± i
267-6

Notas relativas al cuadro III(') No emite los días 20 y 21 de cada mes.
(2) Estaciones con dos velocidades.
(3) Potencia radiada de cresta.
(4) Los impulsos se transmiten por grupos de 9 para la estación primaria (M) y por grupos de 8 para las estaciones secundarias (W, X, Y, Z).
(5) M antenida dentro de ± 5 ps de UTC. El tiempo de coincidencia (TOC) con el segundo de UTC cambia cuando hay segundos intercalares, y se designa en los cuadros TOC publicados por el Observatorio Naval de los Estados Unidos, Washington, DC, Estados Unidos de América.
(6) No emite los días 10 y 11 de cada mes.
O De 0400 a 1000 h y de 1400 a 1800 h UTC.
(8) Las señales de las estaciones primarias (A) se distinguen por la transmisión de un noveno impulso adicional en cada grupo. Cada grupo de impulsos que coincide con la señal marcadora d$ segundos UTC se señala mediante la transmisión de un impulso (décimo) adicional. En caso de coincidencia con la señal marcadora de minutos, los diez grupos subsiguientes se señalan adicionalmente; en caso de coincidencia con la señal marcadora del quinto minuto después de doce segundos, también se señalan los 11 grupos subsiguientes. Las señales marcadoras de segundos UTC van acompañadas de puntos característicos situados en los bordes anteriores de los ocho impulsos, con un nivel igual a 0,6 del valor máximo de la señal.
(9) Suele funcionar sin señal marcadora de segundos. En casos aislados, funciona con una señal marcadora de segundos desplazada en relación con el UTC.
(10) De 2300 a 2400 h y de 0000 a 1100 h UTC.
(” ) Estos valores representan la potencia radiada estimada.
( ,2) Véase el cuadro IV. 267-6

42 I. 267-6
CUADRO IV - Forma de la señal OMEGA
0 1 2 3 4 > 6 7 8 9 10Til 1J 111 | l i l i ] I I I I | 1111111111111111111111111111 111 1 j 1ITI | 111111 11111.11 ] 11111111 j J 111111 111 i 11 II
Segmento A B C D e F G H
Duración 0,9 1,0 1,1 1,2 1,1 0,9 1,2 1,0
kHz:
10,2 Noruega i Liberia i Hawai I NorthDakota 1La Reunión i Argentina I Australia I Japón I
llV s Australia Japón Noruega Liberia Hawai NorthDakota La Reunión Argentina
13,6 Japón Noruega Liberia Hawai NorthDakota
LaReunión Argentina Australia
11,05 NorthDakota La Reunión Argentina Australia Japón Noruega 1 Liberia Hawai
Nota 1. — El comienzo del segmento A no corresponde a 0,0 s UTC. La época de los segmentos cambia con los saltos de segundos. El comienzo del segmento A correspondió al 47.° segundo en enero de 1986.Nota 2. — Las estaciones OMEGA están destinadas a la navegación en general: estos datos pueden modificarse, pero el United States Coast Guard Commandant*, anuncia por anticipado a los usuarios todo cambio.Nota 3. — Además de las frecuencias para fines de navegación de 10,2 kHz, 13,6 kHz y MVi kHz, transmitidas por todas las estaciones, éstas transmiten “ frecuencias únicas” . Estas estaciones y sus frecuencias/segmentos se indican en el cuadro V.
* United States Coast Guard Commandant (G-WAN-3/73), 400 Seventh Street, S.W. Washington, D.C. 20590.

CUADRO V — Formato de transmisión de la señal del sistema de radionavegación Omega
EstaciónSegmento
Noruega (A)
Liberia
Hawai
(B)
(C)
Dakota del Norte (D)
La Reunión (E)
Argentina (F)
Australia (G)
Japón (H)
Intervalo de transmisión
10.2
11,80
11,05
12,30
12,90
11 1/3
13,6
13.6 11 1/3 12,10 12,10 11,05 12,10 12,10
10,2 13,6 11 1/3 12,00 12,00 11,05 12,00
11.80 10,2 13,6 11 1/3 11.80 11.80 11,05
13,10 13,10 10,2 13,6 111/3 13,10 13,K')1— — —
11,05 12,30 12,30 10,2 13,6 11 1/3 12,30
12,90 11,05 12,9(') 12.90 10,2 13,6 11 1/3
13.00 13,00 11,05 13,00 13.00 10,2 13,6
11 1/3 12,8(') 12,80 11,05 12,80 12,8(‘) 10,2
0,2H
1,0«----------------H
0,2— f4—
1,1-------------N
0.2—
1,24--------------------H
0.2—
1,1k----------------- M
0,2 0,94--------------N
0.2— 1
1.2H-------------- ►!
0,2— 1
1,04----------------*
10 segundos
Frecuencias en kHz.
(') Es la única frecuencia para la estación respectiva.

44 I. 267-6
ANEXO I
ORGANISM OS RESPONSABLES DE LAS ESTACIONES QUE FIG URA N EN LOS CUADROS I Y II
Estación Organismo
ALLOUIS
ATA
BPM
CHU
DCF77
EBC
GBR
HBG
HLA
IAM
IBF
JJY,JG2AS
LOL
MSF
NAA, NDT, NLK, NPM, NSS, NWC, NMO, NPN
Centre national d ’Etudes des TélécommunicationsDépartement FRE196, rué de París92220 Bagneux — Francia
Time and Frequency Section National Physical Laboratory Hillside Road New Delhi-110012 India
Time and Frequency División Shaanxi Astronomical Observatory Chínese Academy of Sciences Lington, Xian, China
N ational Research Council Time and Frequency Section Physics División (m-36)Ottawa K1A OS1, Ontario, Canadá
Physikalish-Technische Bundesanstalt Laboratorium 1.21 3300 BraunschweigBundesallee 100, República Federal de Alemania
Instituto y Observatorio de M arina San Fernando (Cádiz), España
National Physical Laboratory Electrical Science División Teddington, Middlesex TW11 OLW Reino Unido
Service horaire HBG Observatoire cantonal CH-2000 — Neuchátel, Suiza
Korea Standards Research Institute P.O. Box 3Taejon, Ch’ungnam 300-31 República de Corea
Istituto Superiore Poste e TelecomunicazioniViale Europa00100 — Roma, Italia
Istituto Elettrotecnico Nazionale Galileo Ferraris Corso Massimo d’Azeglio, 42 10125 — Torino, Italia
Standards and Measurements The Radio Research Laboratories Ministry of Posts and Télécommunications Nukui-Kitamachi, Koganei, Tokyo 184, Japón
DirectorObservatorio NavalAv. Costanera Sur, 2099Buenos Aires, República Argentina
National Physical Laboratory Electrical Science División Teddington, Middlesex, TW11 OLW Reino Unido
Superintendent US Naval Observatory W ashington, DC 20390 Estados Unidos de América

I. 267-6, 270-3 45
OMA
RAT, RCH, RID, RIM, RWMSAJM ótala
VNG
WWV, WWVH WWVB
Y3S
zuo
1. Time informationAstronomicky ústav CSAV, Budecská 6 12023 Praha 2,Vinohrady, R.S. Checoslovaca
2. Standard frequency informationÚstav radiotechniky a elektroniky CSAV,Lumumbova 118088 Praha 8, Kobylisy, R.S. Checoslovaca
Comité d’Etat des Normes Conseil des Ministres de l’URSS Moscou, URSS Leninski prosp.,9Swedish Télécommunications AdministrationRadio ServicesS-123 86 Farsta, SueciaSection Head(Time and Frequency Standards)A.P.O. Research Laboratories - -59 Little Collins Street Melbourne, Victoria 3000, AustraliaTime and Frequency Services Group Time and Frequency División National Bureau of Standards Boulder, Colorado 80303,Estados Unidos de AméricaAmt für Standardisierung, Messwesen und W arenprüfungFachgebiet Zeit und FrequenzDDR-1162 BerlínFürstenwalder Damm 388República Democrática AlemanaTime Standards Section Precise Physical Measurements División National Physical Research Laboratory P.O. Box 3950001 — Pretoria, República Sudafricana
IN FO RM E 270-3
UTILIZACIÓN ÓPTIMA DEL ESPECTRO DE FRECUENCIAS PARA LAS SEÑALES HORARIAS DE GRAN PRECISIÓN
(Programa de Estudios 3A/7)(1963-1966-1970-1978)
Cada vez es mayor el número de aplicaciones que requieren el empleo de una referencia de gran precisión para la sincronización de las señales horarias. Para lograr una mayor precisión, conviene utilizar una anchura de banda adecuada, dentro de los límites que imponen:— la banda atribuida,— las inestabilidades de la propagación,— las consideraciones relativas a los ruidos y a las interferencias.
Hay también posibilidades de difusión y comparación de señales horarias mediante el empleo de señales que se transmiten con otros propósitos, como por ejemplo las comunicaciones en la gama de las ondas miriamétricas, la radiodifusión de sonido y de televisión o las ayudas a la navegación. El empleo de estas señales, cuando ello resulta posible, representa una economía de recursos, tanto por lo que se refiere al espectro de frecuencias como al equipo, razón por la cual debe fomentarse; sin embargo en el presente Informe sólo se mencionarán dichas posibilidades cuando las características especiales de las emisiones perm itan lograr incerti- dumbres de sincronización considerablemente más reducidas que las que se obtendrían corrientemente dentro de la misma anchura de banda.
El sistema de navegación LORAN-C, que funciona en la banda de 100 kHz ± 1 0 kHz, se utiliza ampliamente en la actualidad y proporciona incertidumbres de sincronización inferiores a 1 ps en distancias de hasta 2000 km. La modulación por impulsos y codificación de fase brinda una discriminación contra las señales recibidas a través de la ionosfera, permitiendo así las mediciones en que predom ina la señal propagada por onda de superficie. La utilización de distintas velocidades de modulación permite el funcionamiento de varias cadenas separadas de transmisores dentro de la misma banda de frecuencias [Potts y Wieder, 1972].

46 I. 270-3
En ondas decamétricas, en las que la transmisión a larga distancia se realiza enteramente por propagación ionosférica, las características del medio de propagación limitan la precisión con que pueden recibirse las señales horarias. Las anchuras de banda utilizadas se han determinado, principalmente, partiendo de consideraciones de tipo administrativo, más bien que técnicas o científicas. El Informe 267 permite comprobar que muchas estaciones utilizan como señal horaria una modulación de audiofrecuencia. Esta modulación tiene la forma recomendada precedentemente por el CCIR y consiste en n ciclos de una modulación de audiofrecuencia en 200 n Hz, de suerte que todas las señales tienen una duración de 5 ms. Puede elegirse n ad libitum para poder distinguir las diversas emisiones.
Así, varias estaciones, entre ellas WWV, han tomado n = 5, en tanto que WWVH emite con n = 6 y que JJY ha adoptado n = 8. El empleo de esta forma de impulso no permite separar las diversas componentes de una señal recibida después de su propagación por trayectos múltiples. No obstante, con este sistema se logra una economía razonable, de anchura de banda. Por otro lado, las perturbaciones de la propagación dan lugar a distorsiones de la forma de la señal fácilmente identificables.
Se ha estudiado un método de difusión del tiempo que no exige el empleo de anchuras de banda excesivas y que puede aplicarse a la navegación [Casselmann y Tibbals, 1958] y a la indicación del tiempo [Morgan y Baltzer, 1964]. En este método se utilizan las interferencias entre dos portadoras muy próximas y de fases coherentes para obtener una referencia imprecisa. Cuando esta referencia puede obtenerse en los receptores con suficiente estabilidad de fase, sirve para identificar un ciclo particular de las frecuencias portadoras precisas, y la observación de la fase precisa de estas portadoras permite entonces obtener una referencia de intervalo de tiempo.
Las primeras experiencias realizadas en 19,9 y 20 kHz, en un trayecto de 1400 km, se revelaron alentadoras desde el punto de vista de la identificación del ciclo. Se dispone actualmente de informaciones sobre estudios experimentales más recientes, en especial sobre un método que permite obtener señales de tiempo con receptores clásicos de ondas miriamétricas, con el que se han logrado resultados en un trayecto de 2400 km durante un periodo de varios meses [Fey y Looney, 1966]. Se han descrito también otros estudios para los que se utilizaron diferentes separaciones de frecuencias y distintas longitudes de trayecto [Raúles y Burgess, 1967]. Se ha construido un receptor experimental de dos frecuencias para determinar el tiempo, que puede utilizarse con las emisiones de WWVL en 20,0 y 19,9 kHz [Chi y Witt, 1966]. Los resultados de todos estos estudios hacen pensar que una diferencia de 100 Hz entre las frecuencias portadoras es demasiado pequeña para la identificación cotidiana segura del ciclo en trayectos arbitrarios, y en nuevos experimentos, a las emisiones de WWVL se ha añadido una nueva portadora para obtener diferencias de frecuencias de 500 y 600 Hz. Los resultados obtenidos en estas condiciones, indican que, calculando de forma adecuada el valor medio se puede llegar a identificar un ciclo en distancias de hasta 8000 km. Un estudio analítico con métodos derivados de la teoría de la información, ha demostrado que un sistema que utilice varias ondas continuas puede ser óptimo desde el punto de vista de la economía del espectro [Jespersen, 1967]. En la referencia [Morgan, 1967] figura una útil bibliografía sobre el conjunto de esta cuestión.
Se han hecho estudios teóricos sobre un sistema análogo, con una anchura de banda muy pequeña, en la gama de las ondas miriamétricas [Egidi, 1969]. Estos estudios se refieren a dos métodos. En el primero, se considera una forma de onda particular, que puede interpretarse como el producto de dos señales sinusoidales de igual amplitud, cuyas frecuencias son múltiplo una de otra y se hallan en una relación de fase adecuada. Este método aprovecha la indicación de tiempo dada por la modulación de fase de la frecuencia portadora [Egidi y Oberto, 1964a y b] (y no dentro de la envolvente). El segundo método se basa en inversiones periódicas de la fase de la portadora; los casos en que las inversiones se producen en las fases 0 y n /2 se han tratado en detalle [Egidi, 1968]. En el mismo artículo, figuran los resultados de cálculos que dan la relación entre la discriminación en el tiempo y la anchura de banda del sistema.
Se ha propuesto también un sistema de portadoras múltiples en ondas miriamétricas [CCIR, 1966-69], que permite transmitir simultáneamente señales horarias de 1 s y de 10 ms, sin interrum pir el servicio de telecomunicación. En las referencias, se hallará una descripción teórica de este sistema de tres frecuencias y de los dispositivos de recepción.
La precisión que puede lograrse utilizando varias señales muy próximas unas de otras es limitada. Esta limitación se debe a que el retardo de grupo T de la señal compuesta viene dado por la expresión:
T = (q>2 - <Pi) /2tcUS - f )
en donde cpi y <p2 designan, respectivamente, los retardos de fase sufridos por las dos frecuencias f\ y f 2 ■ Puede considerarse que la variación de los retardos de fase debidos a la propagación tiende hacia cero cuando ( f2 — f ) tiende también hacia cero. No obstante, los efectos del ruido aditivo son esencialmente independientes de la separación de frecuencia. En estas condiciones, la desviación típica del retardo de grupo, <j t , la da [Morgan y Baltzer, 1964]:
— ( i /2 a < p ) /2 7 i:{f2 - f )

I. 270-3, 271-7 47
en donde a<p = designa la desviación típica de los retardos de fase imputables al ruido aditivo. Porejemplo, se obtiene o t = 20 000 ps si cfy = 1 ps, f = 20 kHz y f 2 = 20 001 Hz; por el contrario, si f 2 = 20 100 Hz, o r = 200 ps. Dicho de otro modo, cuando la separación de frecuencia disminuye, se observa un aumento del error introducido por las fluctuaciones de fase no correlacionadas.
REFERENCIAS BIBLIOGRÁFICAS
CASSELMANN, C. J. y TIBBALS, M. L. [1958] The Radux-Omega long range navigation system. Proc. Second N ational Convention on Military Electronics, 385-389.
CHI, A. R. y WITT, S. N. [1966] Time synchronization of remóte docks using dual VLF transmission. Telemetering Conference Proceedings.
EGIDI, C. [mayo de 1968] Narrow-band time signáis. Edición inglesa de Alta Frequenza, 37, 459-469.
EG ID I, C. [1969] Narrow-band time signáis for VLF and LF standard transmissions. Mem. Acc. Sci. di Torino, Classe Se. Trs., Mat. e Nat, Series 4, 8.
EGIDI, C. y OBERTO, P. [1964a] Modulazione d’ampiezza con le tre righe spettrali aventi ampiezza e fasi qualunque (M odulación de amplitud con tres rayas espectrales de amplitud y de fase cualesquiera). Alta Frequenza, 334d, 144-156, en particular fig 11.
EG ID I, C. y OBERTO, P. [1964b] General distorted three spectral lines amplitude modulation. AEÜ, 18, H.9, 525-526, en particular fig 10.
FEY, R. L. y LOONEY, Jr. C. H. [diciembre de 1966] A dual frequency VLF timing system. IE E E Trans. Instr. and Meas., Vol. IM-15, 190.
JESPERSEN, J. L. [noviembre de 1967] Signal design for time dissemination and some aspeets. NBS Tech. Note 357, Boulder, Co., Estados Unidos de América.
M ORGAN, A. H. [junio de 1967] Distribution of a standard frequency and time signáis. Proc. IEEE, Vol, 55, 6, 827-836.
MORGAN, A. H. y BALTZER, O. J. [noviembre de 1964] A VLF timing experiment. Radio Sci. J. Res. N B S/U SN C -U R SI, 68D, Vol. 2, 11, 1219-1222.
POTTS, C. E. y W IEDER, B. [mayo de 1972] Precise Time and Frequency Dissemination via the LORAN-C system. Proc. IEEE, Vol. 60, 5, 530-539.
RAULES, A. T. y BURGESS, B. [noviembre de 1967] Results of the two-frequeney VLF transmission experiments from Criggion GBZ. Radio Sci., Vol. 2, 11, 1295-1301.
Documentos del CCIR
[1966-69]: V II/34 (Japón).
IN FO RM E 271-7
ESTABILIDAD Y PRECISIÓN EN LA RECEPCIÓN DE FRECUENCIAS PATRÓN Y DE SEÑALES HORARIAS EN ONDAS MIRIAMÉTRICAS Y KILOMÉTRICAS
(Cuestión 3/7)
(1963-1966-1970-1971-1974-1978-1982-1986)
El tiempo de propagación (retardos de fase) de las señales de ondas miriamétricas desde un transm isor hasta ubicaciones a miles de kilómetros de distancia, varía poco de un día para otro, pero presenta un ciclo fundamentalmente diurno y anual que obedece a los cambios ionosféricos relacionados con el ángulo cenital solar [Azuma, 1966; Iijima y otros, 1968; Decaux y Gabry, 1964]. Consideraciones empíricas y teóricas han perm itido establecer predicciones precisas del tiempo de propagación, teniendo en cuenta no solamente el ciclo diurno y anual sino también el número de manchas solares y la conductividad del límite inferior del guía de ondas soporte de las transmisiones en ondas miriamétricas. El tiempo de propagación sufre alteraciones esporádicas debido a perturbaciones ionosféricas súbitas (PIS), generalmente imprevisibles, que modifican de una m anera típica la ionosfera durante 20 ó 30 minutos y por los fenómenos de absorción del casquete polar (ACP) que alteran las ionosferas polares durante periodos de hasta una semana [Pierce, 1955; Reder y otros, 1964; Becker y otros, 1973a].

48 I. 271-7
Se ha comprobado que el desplazamiento de fase acumulado en el curso de 24 horas puede, en determinados casos, no ser nulo sino alcanzar ± 2n o un múltiplo de esta cantidad. La «pérdida de ciclo» puede producirse en circunstancias diversas; por ejemplo, para grandes distancias, cuando la relación entre la amplitud del prim er modo de propagación del guiaondas y la amplitud del modo de segundo orden es inferior a la unidad durante la noche y superior a la unidad durante el día [Walker, 1967]. Puede también producirse a consecuencia de una «conversión de modo» excesiva en el punto de recepción situado en la dirección de la salida del Sol [Ries, 1967]. Además, si el receptor se halla muy distante del transmisor (distancias superiores a 10 000 km), las señales pueden recibirse, en ciertos momentos de la jornada, no por el trayecto corto del plano del círculo máximo, sino por el trayecto largo [Thompson y otros, 1963]. Esta circunstancia se puede advertir y tener en cuenta si la estabilidad del patrón local es suficiente. Se han comprobado tales efectos en las emisiones de GBR, NBA y NPM, en Australia, de NBA y NPM , en Francia, y de WWVL en Gran Bretaña.
No hay que olvidar tampoco la variación cíclica en periodos de 27 días, 29,53 días y 14,765 días. El periodo de 27 días está relacionado con la velocidad media de rotación solar y ha sido observado en los datos ionosféricos [Ratcliff, 1960]. Los periodos de 29,53 y 14,765 días corresponden, respectivamente, a las mareas sinódicolunares y semisinódicas cuya existencia se ha observado en la baja atmósfera [Appleton y Beynon, 1949; Brady y Crombie, 1963; Rastogi, 1969; Chakravarty y Rastogi, 1970].
En los sistemas de indicación del tiempo, hay que tener en cuenta la influencia de la dispersión, que provoca variaciones del valor de las velocidades de fase y de propagación de grupo de las ondas miriamétricas y kilométricas. En la banda de ondas kilométricas, la onda de superficie experimenta una dispersión notable cuando se propaga por encima de un terreno de conductividad finita. En la banda de ondas miriamétricas, existen dos causas importantes de dispersión. La primera está ligada a efectos de corte del guía de ondas Tierra-ionosfera [Crombie, 1966]. La segunda fuente de dispersión [Burgess, 1967], menos fácil de prever, resulta de las interferencias nocturnas entre varios modos de propagación del guía de ondas que dan lugar a variaciones periódicas de la velocidad de grupo en el espacio.
El servicio de señales horarias del transmisor HBG (75 kHz), situado cerca de Ginebra (véase el Inform e 267, cuadro II), se extiende a gran parte de Europa central. Los experimentos realizados han demostrado que las señales horarias de HBG pueden captarse con receptores simples, con una precisión superior a ± 50 ps, a distancias medias (100 a 1000 km). La fase de la portadora presenta fluctuaciones típicas inferiores a ± 2 ps a 500 km de distancia en la recepción diurna.
El transmisor DCF77 de frecuencias patrón y de señales horarias que trabaja en 77,5 kHz y emite las señales horarias y frecuencias patrón oficiales del Physikalish-Technische Bundesanstalt (PTB) en la República Federal de Alemania, se modula de la siguiente manera: al comienzo de cada segundo se reduce la amplitud de la portadora al 25%, aproximadamente, de su amplitud normal y al final de las marcas de segundo, cuya duración es de 0,1 s o 0,2 s, se establece la amplitud de la portadora a su valor normal.
Estudios efectuados en el PTB y por algunos fabricantes que se interesan por este problema, han demostrado que la sincronización de los osciladores simples es más segura con la portadora acom pañada de una am plitud residual de la portadora durante las marcas de tiempo que cuando se utilizan métodos de modulación que reducen a cero la amplitud de la portadora durante dichas marcas.
- La técnica de modulación usada por el PTB evita la reducción de la pendiente del borde de caída en el caso de una portadora residual. Esta técnica es la siguiente: al comienzo de cada segundo, se anula la señal de excitación del transmisor hasta que la amplitud en la antena haya alcanzado el 25% de la amplitud máxima. Seguidamente, la señal de excitación se aumenta hasta que se alcance el 25% de amplitud de la portadora durante la marca de tiempo.
Además de la modulación de amplitud con marcas en cada segundo, la frecuencia portadora de DCF77 se ha m odulado en fase con ruido seudoaleatorio desde 1983, para lograr una mayor precisión y una mejora en la protección contra las perturbaciones que puede sufrir la transmisión de señales horarias. El ruido de fase seudoaleatorio corresponde a una secuencia aleatoria binaria síncrona en fase con relación a la portadora y a las marcas de segundo. Los primeros resultados [Hetzel, 1984], indican que a una distancia de 300 km del transmisor, las señales horarias obtenidas mediante correlación están menos perturbadas que las obtenidas de la pendiente de las marcas de segundo moduladas. En los meses de verano, el valor de la dispersión de los pasos por cero durante el día es menos de la mitad del periodo de la portadora (< 6,5 ps).
Una investigación indica [Becker y otros, 1973b] que el transmisor de señales horarias y frecuencias patrón DCF77 (77,5 kHz) se recibe bien en Europa central y Escandinavia. Durante el día la fase de la portadora recibida a 300 km de distancia de la ubicación del transmisor (Mainflingen, cerca de Darmstadt, República Federal de Alemania) se desvía solamente unas décimas de microsegundo del valor medio como consecuencia de los cambios de propagación. Ello se traduce en un promedio de desviación relativa de la frecuencia de la portadora, diariamente, de 2,1 x 10~12, y una desviación promedio semanal de 0,4 x 10~12, a 300 km de distancia. La dispersión de las señales horarias del DCF77 recibidas diariamente al mediodía, tuvo un valor prom edio de 37,5 ps en tres años [Becker, 1972; Becker y Hetzel, 1973].
En la Universidad Libre de Bruselas se ha empleado una técnica digital para estudiar la estabilidad de las señales horarias MSF, en 60 kHz, recibidas a 420 km del transmisor. El perfil del impulso recibido se muestrea en 250 puntos, aplicándose pruebas de calidad; los valores medios basados en unos 200 impulsos sucesivos son producidos por un pequeño computador.

I. 271-7 49
Como tiempo de llegada, puede considerarse aquél en que la envolvente de la señal alcanza un porcentaje claramente definido de la amplitud media de la portadora (Am). Estudios teóricos y experimentales han mostrado que el error es mínimo en un punto característico elegido entre 0,75 Am y 0,9 Am [Andrews y otros, 1970]. Para el presente estudio, se ha elegido el valor de 0,85 Am. En el caso de mediciones efectuadas hacia la mitad del día (entre las 09h00 y 13h00 UTC), la desviación típica fue normalmente de 5 a 10 ps. Por otro lado, las fluctuaciones observadas durante largos periodos (varios meses) pueden alcanzar 25 ps, teniendo en cuenta el factor de corrección de forma aplicado [Liévin y otros, 1975].
Se han llevado a cabo en la URSS estudios acerca de una nueva forma de modulación de la señal horaria, a fin de mejorar la fiabilidad de la sincronización de los generadores utilizando como referencia la frecuencia portadora de la estación RBU (66 y 2 /3 kHz).
Com parada con las señales anteriores, la duración de la pausa se ha reducido a 5 ms y la frecuencia de repetición de la pausa se ha aumentado hasta 10 Hz. Los impulsos de marca y de codificación con una duración de 80 ms, se utilizan para la identificación de las marcas de segundo y de minuto, y se generan mediante una m odulación de fase de banda estrecha, con un índice de 0,698, sobre las dos subportadoras separadas 100 Hz y 312,5 Hz. Se ha aumentado la banda de protección [Cherenkov, 1984a] hasta un valor de 50 Hz, lo que hace posible sincronizar los generadores de señal con un filtro paso banda equivalente del circuito de control automático de fase, hasta 20 Hz. La fluctuación de fase de la señal de salida del generador que se va a sincronizar (o de la señal a la salida del receptor con el mismo filtro pasobanda) producida por la modulación de fase de las ondas portadoras, no supera el valor de 20 ns.
La utilización de la modulación de fase permitió emplear la potencia total del transm isor y se obtuvieron niveles de potencia más altos, tanto para los impulsos de marca como de información, es decir de 0,735 y 0,215, respectivamente, con relación a la potencia máxima de la emisión sin modular [Cherenkov, 1984b].
Al generar los impulsos de información y marca sobre las frecuencias de la subportadora, se incrementa la capacidad de la información que se transmite mediante la modulación de frecuencia o de fase de las ondas subportadoras, durante los otros intervalos de 80 ms, que en la actualidad no se utilizan. El aumento en lafrecuencia de repetición (10 Hz) de las marcas de tiempo se traduce en una determinación más exacta de suposición en el tiempo, promediando un número mayor de los resultados para el mismo intervalo de medición.
Japón ha informado sobre experimentos de propagación de señales (40 kHz) a una distancia de 400 km.La desviación típica de las fluctuaciones diarias de fase resultó ser de 1 ps en verano y de 2 ps en invierno; lavariación estacional de la fase de las señales recibidas a mediodía fue de 3,3 ps.
Los efectos de una perturbación atmosférica repentina de la capa D en la frecuencia de calibración ytemporización Loran-C han sido estudiados en China por el Observatorio Astronómico de Shaanxi (CSAO). Durante el periodo de la perturbación, las señales de onda ionosférica se adelantan, mejoran y mezclan con las señales muestreadas de la onda de superficie y se producen desviaciones de fase de aproxim adam ente 0,1 a 2 ps en las señales de onda de superficie [Miao y Yang, 1981].
Ciertos datos experimentales [Noonkester, 1972] indican que el tiempo de propagación de las ondas miriamétricas está sujeto a variaciones semilunares que influyen en la difusión de información sobre la hora y la frecuencia mediante ondas miriamétricas. Se ha observado que la amplitud media del periodo semisinódico lunares de 0,18 ps a mediodía y de 0,52 ps a medianoche para un trayecto en ondas miriamétricas Norte-Sur, a10,2 kHz. Se ha observado también que la amplitud máxima es de 1,3 ps durante los meses centrales del invierno, a medianoche. Convendría poner las componentes periódicas conocidas en conocimiento de los usuarios de transmisiones en ondas miriamétricas destinadas a información horaria y de frecuencia, con objeto de que puedan prever un determinado margen de error.
En lo que atañe a la integración a largo plazo de la fase recibida, la precisión que puede obtenerse depende en gran parte de la complejidad del equipo receptor y de los métodos de medida. Se ha indicado [Leschiutta, 1968] que cuando en la estación receptora se utilizan osciladores con cristal de cuarzo, el error total acumulado para trayectos de 1000 a 5000 km es de 25 y 50 ps por año, en el caso de emisiones en las bandas 4 y 5. No obstante, cuando la fase recibida se compara con un patrón atómico y se utiliza un receptor que se puede calibrar y que no ha perdido su referencia de fase [Becker y otros, 1969], se logran resultados mucho mejores. Así, las señales de NSS recibidas a 5000 km de distancia y registradas en un periodo de más de 450 días sufrenvariaciones de ± 10 ps como máximo, y, en general, son inferiores a ± 3 ps con relación a la fase media. Esteúltimo valor corresponde a una incertidumbre de frecuencia de 1 x 10-13 aproxim adam ente, durante un año. En la recepción se puede obtener una fase más estable aún combinando linealmente la fase de dos emisiones en frecuencias distintas, a fin de reducir considerablemente la influencia del efecto solar; la mayor mejora se obtieneefectuando simultáneamente las comparaciones en los dos sentidos de transmisión de un mismo trayecto confrecuencias portadoras no muy separadas en la banda 4. Puede lograrse una exactitud aún mayor en la referencia de fase mediante técnicas basadas en la naturaleza estadística de las fluctuaciones de fase [Becker y otros, 1969; Guetrot y otros, 1969], pero esta técnica sólo es eficaz en periodos bastante cortos en los que se supone el comportamiento estadístico como representativo del proceso.
Cuando se dispuso del Loran-C para efectuar comparaciones precisas de tiempo, resultó más fácil medir las variaciones de los tiempos de propagación, y por consiguiente, la com paración de tiempo utilizando la fase de la portadora de ondas miriamétricas (para los valores de fases de Loran-C, véase United States Naval Observatory (USNO) Time Service Announcements, serie 4). Durante varios años se efectuaron dichas mediciones en un

50 I. 271-7
trayecto de unos 5000 km de longitud, entre América del Norte y Europa. Se utilizaron tres transmisores en ondas miriamétricas (NAA, 17,8 kHz; GBR, 16 kHz; Omega-Trinidad, 12,0 kHz). Los resultados característicos se expresan en el cuadro I donde a A,(x) es el valor medio de la variación (dividida por j/2) de la diferencia de tiempo medida en A í, que se produce durante el tiempo de medición x. Este procedimiento estadístico se debe a Kolmogorov, [1941], Malakhov [1966a y b] y Alian [1966], a^(x) es la incertidumbre relativa de una comparación de frecuencia en el tiempo de medición x.
CUADRO I - Fluctuaciones características de los tiempos de propagación de las señales transmitidas en ondas miriamétricas
en tre A mérica del Norte y Europa
T(días) ' « ¿ r)
Oy (r)(IT)-12)
1 1,9 3110 2,6 4,2
100 3,7 0,61
1000 5,3 0,09
Análogamente, se han determinado las influencias estacionales de oA,(x) y las correlaciones anuales y semestrales de las fluctuaciones de propagación. Como consecuencia de la correlación entre valores adyacentes, se ve limitada la posibilidad de mejorar la precisión de las mediciones utilizando los valores medios: en el caso más favorable, el error de medición se reduce a la mitad (de 2,2 ps a 1,1 ps) promediando un centenar de valores diarios, con relación al uso de un solo valor diario.
En experimentos más recientes llevados a cabo en NPL (India), los resultados de la integración a largo plazo de la portadora GBR se compararon, indirectamente con mediciones Loran-C y directamente a través de un enlace por satélite geosíncrono. A lo largo de un año se obtuvieron precisiones de algunas unidades en 1014 en frecuencia y de 1 a 2 ps en tiempo [Sen Gupta y otros, 1980; M athur y otros, 1980].
Para el restablecimiento de una relación de fase en ondas miriamétricas se han desarrollado técnicas específicas de medición y una técnica de calibración para medir el retardo debido a la antena y al receptor [Becker y otros, 1973a; Becker, 1973]. En esta técnica se utiliza una señal de prueba que se controla por una cadena divisora paralela desde la que se genera la escala de tiempo. Si se utiliza este método para restablecer la relación de fase perdida se produce un error medio de, por ejemplo, 1,1 ps si la interrupción es breve y los valores anteriores y posteriores a la interrupción están correlacionados. Si la interrupción es larga (por ejemplo, superior a 60 días) los valores medidos antes y después de la misma no están correlacionados y se produce un error medio de 4,7 ps.
Se dispone de otras técnicas de identificación del ciclo. El empleo de dos señales coherentes de ondas miriamétricas para la transmisión de señales horarias fue propuesto por primera vez en 1962 [Morgan, 1962] y demostrado en 1966 [Chi y Witt, 1966; Fey y Looney, 1966]. Se trata de una técnica de restablecimiento del tiempo en dos etapas. Se utilizan las mediciones de fase de las señales de ondas miriamétricas para determinar la diferencia de tiempo inferior a un ciclo entre relojes ubicados en los lugares transmisor y receptor (tiempo preciso); la diferencia de fase entre los datos de la señal recibida y de la señal generada localmente en el caso de dos señales transmitidas coherentemente sirve para determinar el ciclo de la portadora de una de las señales recibidas (tiempo aproximado). De 1964 a 1968 se utilizó la estación experimental WWVL del National Bureau of Standards de los Estados Unidos de América, situada en Fort Collins, Colorado, para realizar las pruebas de viabilidad. Las frecuencias de las señales fueron de 19,9 y 20 kHz. Se ensayaron separaciones de frecuencia más amplias, hasta de 700 Hz. Con separaciones de frecuencias superiores a 500 Hz, la identificación del ciclo se degradó debido al mayor efecto de dispersión de frecuencia producido por el medio de propagación.
El sistema Omega de navegación en ondas miriamétricas utiliza las transmisiones multifrecuencias en ondas miriamétricas para la difusión de señales horarias y de frecuencias patrón. Las ventajas de esta técnica son innegables [Swanson y Kugel, 1972]. Estas transmisiones constituyen una fuente útil de frecuencias patrón y de señales horarias precisas, y contribuyen también a m ejorar considerablemente el papel de las ondas miriamétricas en materia de señales horarias y de frecuencias patrón. Se han establecido un total de ocho estaciones que aseguran un servicio universal, continuo y redundante. Cada estación deriva su fase radiada de un conjunto de 4 patrones de frecuencias de cesio, y transmite frecuencias primarias cada 10 s por compartición en el tiempo. Las cuatro frecuencias primarias son 10,2, 11,05 y 13,6 kHz. Cada estación puede también transmitir una frecuencia adicional en la gama de 11,8-13,1 kHz, de la que puede obtenerse información precisa de tiempo o frecuencia. Estas transmisiones adicionales se enumeran en el cuadro III del Informe 267.

I. 271-7 51
Se han realizado ya los trabajos conducentes al desarrollo de receptores de precisión de señales horarias de dos frecuencias [Chi y otros, 1972]. Las pruebas efectuadas en 1973 y 1974 con señales de 13,10 y 12,85 kHz, para la transmisión de señales horarias desde la estación Omega en Dakota del Norte, revelaron una identificación del ciclo fidedigna en trayectos de hasta 7000 km [Chi y W ardrip, 1973 y 1974], Se han efectuado nuevas pruebas para enlaces de hasta 15 000 km mediante transmisiones experimentales de las estaciones Omega de D akota del Norte y Hawai.
Las transmisiones de gran alcance y fase estable, en ondas miriamétricas, ofrecen la posibilidad de obtener señales horarias de referencia para la comparación internacional de tiempo con una precisión de ± 1 ps.
REFERENCIAS BIBLIOGRÁFICAS
ALLAN, D. W. [febrero de 1966] Statistics of atomic frequency standards, Proc. IEEE, Vol. 54, 2, 221-230.ANDREW S, D. H., CHASLAIN, C. y DE PRINS, J. [1970] Reception of low frequency time signáis. Phase and Frequency
Instabilities in Electromagnetic Wave Propagation. (Ed. by Davies-Technivision Services), 198-218.APPLETON, E. V. y BEYNON, W. J. G. [1949] Lunar oscillations in the D-layer of the ionosphere. Nature, Vol. 164, 308.AZUMA, Y. [enero de 1966] Results of the phase measurement of VLF radio waves received from N PG /N L K . J. Radio Res.
Lab. (Japón), Vol. 13, 13-23.BECKER, G. [1972] Aussendung und Empfang des Zeitmarken-und Normal-Frequenzsenders DCF77 (Emisión y recepción del
transmisor de frecuencias patrón y señales horarias DCF77). PTB-Mitt., 82, 224.BECKER, G. [1973] Lángstwellenausbreitung wáhrend der Sonnenaktivitát im August 1972 (Propagación por ondas
miriamétricas durante el periodo de alta actividad solar en agosto de 1972). PTB-Mitt., 83, 147.BECKER, G., FISHER, B. y KRAM ER, G. [1969] Methoden und Ergebnisse im internationalen Zeitvergleich mit Lángstwellen
(M étodos y resultados de la comparación horaria internacional en frecuencias muy bajas). Actes du Colloque international de chronométrie, A-22 Série A, París.
BECKER, G., FISCHER, B. y HETZEL, P. [1973a] Langzeituntersuchungen über die Unsicherheit von Zeit- und Frequenzver- gleichen mittels Lángstwellen (Investigaciones a largo plazo sobre los errores en las comparaciones de frecuencias patrón y señales horarias mediante ondas miriamétricas). PTB-Mitt., 83, 222.
BECKER, G., FISCHER, B. y HETZEL, P. [1973b] Methoden zum Vergleich und zur Verbreitung von Zeitskalen (Métodospara com parar y difundir escalas de tiempo). Kleinheubacher Berichte, 16, 5-38.
BECKER, G. y HETZEL, P. [1973] PTB-Jahresbericht 1972 (PTB Annual Report 1972), 107, Braunschweig.BRADY, A. H. y CROM BIE, D. D. [octubre de 1963] Studying the lunar tidal variations in the D-region of the ionosphere by
means of very low frequency phase variations. J. Geophys. Res., Vol. 68-4, 19, 5437-5442.BURGESS, B. [noviembre de 1967] On the propagation delay of modulated VLF waves transmitted over great distances.
IEE Conf. Publ., 36, 164-168.CROM BIE, D. D. [marzo de 1966] The effect of waveguide dispersión on VLF timing systems. IE E E Trans. Ant. Prop.,
Vol. AP-15, 322-323.CHAKRAVARTY, S. C. y RASTOGI, R. G. [mayo de 1970] Lunar tide in D-region o f the ionosphere near the magnetic
equator. J. Atmos. Terr. Phys., Vol. 32, I, 945-948.CHERENKOV, G. T. [1984a] Kharakteristiki etalonnykh signalov chastoty i vremeni, peredavaemykh cherez spetsializirovannye
radiostantsii (Características de las frecuencias patrón y las señales horarias transmitidas por estaciones especializadas de radio). Izm. Tekhn., 1, 22.
CHERENKOV, G. T. [1984b] Ispolzovanie fazovoi modulyatsii dlya peredachi etalonykh signalov (Empleo de la modulación en fase para la transmisión de señales patrón). Izm. Tekhn., 1, 24.
CHI, A. R., FLETCHER, L. A., y CASSELMANN, C. J. [octubre de 1972] Omega time transmissions and receiver design. Proc. N ational Electronics Conference, Vol. 27, 268-273.
CHI, A. R. y W ARDRIP, S. C. [diciembre de 1973] Clock synchronization experiments using Omega transmissions. Proc. 5th Annual Precise Time and Time Interval (PTTI) Planning Meeting (NASA, G oddard Space Flight Center, Greenbelt, Md 20771, Estados Unidos de América), 369-392.
CHI, A. R. y W ARDRIP, S. C. [diciembre de 1974] Recent field test results using Omega transmissions for clock synchronization. Proc. 6th Annual Precise Time and Time Interval (PTTI) Planning Meeting (US Naval Research Laboratory, Washington, DC, Estados Unidos de América), 187-197.
CHI, A. R. y WITT, S. M. [abril de 1966] Time synchronization of remóte docks using dual VLF transmissions. Proc. 20th Annual Symposium on Frequency Control (US Army Electronics Comm and, Ft. M onm outh, NJ 07703), 588-611 (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
DECAUX, B. y GABRY, A. [enero de 1964] Some particular observations on diurnal phase variations o f VLF transmissions received in París. Radio Sci. J. Res. N B S/U SN C -U R SI, Vol. 68D, 1, 21-25.
FEY, R. L. y LOONEY, C. H., Jr. [diciembre de 1966] A dual frequency VLF timing system. IE E E Trans. Instr. and Meas., Vol. IM-15, 4, 190-195.
GUETROT, A., H IGBIE, L. S., LAVANCEAU, J. y ALLAN, D. W. [mayo de 1969] Proc. 23rd Annual Symposium on Frequency Control, Atlantic City (US Army Electronics Command, Ft. M onm outh, N J 07703) (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
HETZEL, P. [1984] Zeitübertragung über den Sender DCF77 durch pseudozufálliges Phasenrauschen des Trágers (Transmisión de información horaria por el transmisor DCF77 mediante la modulación de fase de la portadora por ruido suedoaleatorio). Proc. l l th International Congress of Chronometry, Besan?on, Francia, IA, 6.
IIJIM A , S., TORAO, M. y FUJIW ARA, K. [1968] Phase variations o f VLF waves, GBR and GBZ, as received. Tokyo Astr. Ovs. Annals, Vol. 11, 1-28.

52 I. 271-7, 363-6
KOLMOGOROV, A. N. [1941] D AN SSSR , Vol. 32, 19, y Vol. 30, 299.LESCHIUTTA, S. [1968] Conservazione a lungo termine di scale di tempo. Proc. Colloquium on problems of the time
determ inaron, keeping and synchronization, Milán-Brera, 111-132.
LIEVIN, J. C., GUILLAUM E, F. y DE PRINS, J. [1975] Méthode digitale de mesure des signaux horaires á B.F. et T.B.F. Laboratoire des Etalons de Fréquence (U.L.B.). R apport interne N.° 64.
MALAKHOV, A. N. [1966a] Spectral-correlational analysis o f signáis with non integrable spectra. Radiofizika, Vol. 9, 595.
MALAKHOV, A. N. [1966b] Shape and width of the spectral Une o f oscillations in the presence of non-stationary frequency fluctuations. Radiofizika, Vol. 9, 625.
MATHUR, B. S., BANERJEE, P., SOOD, P. C., SAXENA, M., KUMAR, N. y SURI, A. K. [1980] Precise T&F intercompa- rison between NPL, India and PTB, Federal Republic of Germany via Satellite Symphonie-I. Proc. 12th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting (NASA, G oddard Space Flight Center, Greenbelt, Md., Estados Unidos de América).
MIAO, Y. y YANG, K. [1981] The effect of the solar X-ray burst on the timing and calibrating frequency of long wave. Publication of the Shaanxi Astronomical Observatory, 1, 35-42.
M ORGAN, A. H. [julio de 1962] A new method of time signal modulation and demodulation of VLF carriers. US National Bureau of Standards, Report 7286.
NOONKESTER, V. R. [noviembre de 1972] D-region lunar variations deducted from long path 10,2 kilohertz phase measure- ments. J. Geophys. Res., Vol. 77, 33, 6592-6598.
PIERCE, J. A. [1955] The diurnal carrier phase variations of a 16 kc/s transatlantic signal. Proc. IRE, 43, 584-588.
RASTOGI, R. G. [mayo de 1969] Lunar tidal oscillations in ionospheric absorption at Colombo. J. Atmos. Terr. Phys., Vol. 31, 759-761.
RATCLIFF, J. A. [1960] Physics o f the Upper Atmosphere. Academic Press, Nueva York, NY, Estados Unidos de América.
RED ER, F. H., ABOM, C. J. y W INKLER, G. M. R. [marzo de 1964] Precise phase and amplitude measurements onVLF signáis propagated through the arctic zone. Radio Sci. J. Res. N B S/U SN C -U R SI, Vol. 68D, 3, 275-281.
RIES, G. [junio de 1967] Results concerning the sunrise effects of VLF signáis propagated over long paths. Radio Sci., Vol. 2(nueva serie), 531-538.
SEN GUPTA, A., GOEL, G. K. y MATHUR, B. S. [1980] Precise T&F intercomparison via VLF phase measurements. Proc. 12th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting (NASA, G oddard Space Flight Center, Greenbelt, Md., Estados Unidos de América).
SWANSON, E. R. y KUGEL, C. P. [mayo de 1972] VLF timing: conventional and modera techniques including Omega.Proc. IEEE., Vol. 60, 540-551.
THOM PSON, A. M., ARCHER, R. W. y HARVEY, I. K. [noviembre de 1963] Some observations on VLF standard-frequencytransmissions as received at Sydney N.S.W. Special International Issue o f IEEE, Vol. 51, 11.
W ALKER, D. [noviembre de 1967] Cycle slipping of VLF signáis sunrise and sunset. IEE Conf. Publ., 36, 169-173.
IN FO RM E 363-6
MÉTODOS APLICADOS PARA LA TRANSFERENCIA Y DIFUSIÓN DE SEÑALES HORARIAS Y FRECUENCIAS PATRÓN
(Programa de Estudios 3C/7)
(1966-1970-1974-1978-1982-1986)
1. Introducción
Se están utilizando nuevos métodos para la transferencia y difusión de señales horarias y frecuencias patrón que resultan especialmente adecuados para la comparación de relojes atómicos en el seno de un sistema internacional de señales horarias coordinadas. Estas aplicaciones, sin embargo, van más allá de la utilización más tradicional de un servicio de Frecuencias Patrón y Señales Horarias (FP y SH), como la existente cuando empezaron a utilizarse con profusión los relojes atómicos. En contraste con una capacidad para proporcionar una señalización horaria con una exactitud de un milisegundo, que corresponde a las necesidades típicas de la mayoría de los usuarios del servicio de FP y SH, la utilización de patrones atómicos exige que las incertidumbres en las mediciones sean lo más pequeñas posibles. El mejor resultado obtenido hasta el momento en comparaciones de larga distancia corresponde a una incertidumbre en la medición que se aproxim a a un nanosegundo.
Este Informe hace una revisión de los principios generales involucrados y ofrece una visión de las diferentes características y de la experiencia acumulada con la utilización de estos métodos tanto en experimentos como en explotación.

I. 363-6 53
2. Antecedentes
2.1 Requisitos para el funcionamiento del tiempo coordinado
Contrariamente a la necesidad de disponer de un acceso inmediato a una fuente de señales horarias fiable, que corresponde a las necesidades típicas de la mayoría de los usuarios de un servicio de frecuencias patrón y señales horarias, las mediciones necesarias para la difusión de un tiempo coordinado internacional exigen unos medios de transferencia de señales horarias muy precisos, que se utilizan sólo ocasionalmente. El coste de la instrumentación es de menor importancia que el objetivo fundamental de precisión y de repetibilidad de las mediciones. Debido a estas razones, muchos procedimientos se han utilizado aun cuando no podrían aceptarse como métodos operativos en un sentido convencional. Como ejemplo puede citarse el Sistema Global de Posicionamiento (SGP) que se utilizó en la transferencia de señales horarias, mucho antes de que pudiera ser aceptado como sistema operativo de navegación. Otros ejemplos podrían ser la utilización de la Radiointerfero- metría con Línea de Base muy Larga (RILBL) para la comparación de señales horarias o la técnica de «visión común» que puede utilizarse con cualquier fuente de señales, temporizadas o no.
2.2 Corrección de los efectos relativistas para la transferencia de señales horarias de muy alta precisión
El Informe 439 examina los principios y proporciona las fórmulas para las correcciones relativistas que deben aplicarse en todos aquellos casos en que se necesita una exactitud del orden de 100 ns o mejor.
2.3 Anchura de banda y relación señal/ruido en la transferencia de señales horarias de muy alta precisión
Las mediciones del tiempo de llegada con baja incertidumbre necesitan una anchura de banda comensura- blemente larga. Esto se debe a dos razones: primero debe reducirse al mínimo el tiempo de subida para disminuir la incertidumbre del disparo y segundo deben reducirse al mínimo las variaciones del retardo de grupo a través de los circuitos. Estas variaciones podrían representar un pequeño porcentaje del propio retardo de grupo. Por lo tanto, la anchura de banda de predetección debe ser tan grande como resulte práctico. La relación señal/ruido disponible impone únicamente el tiempo de integración (anchura de banda de post-detección) necesario para realizar la medición con una determinada incertidumbre. En la práctica esto ha conducido a una im portancia cada vez mayor de las técnicas de espectro ensanchado en los sistemas de transferencia de tiempo. Igualmente debe distinguirse entre la anchura de banda necesaria para un determinado flujo de información y la anchura de banda efectiva de la señal utilizada. En el caso antes del SGP la anchura de banda efectiva del código C /A es de 1 MHz mientras que la transferencia real de información (el mensaje de navegación) tiene lugar a la modesta velocidad de 50 Bd. Sin embargo, la medición del tiempo se realiza utilizando las rápidas transiciones de la modulación de espectro ensanchado y aprovecha, por tanto, toda la anchura de banda disponible del código. En el caso de Loran-C, que es un sistema de navegación en ondas kilométricas ampliamente utilizado para la transferencia de tiempo, la anchura de banda efectiva de la señal es de 20 kHz (la señal está m odulada por impulsos), y no existe transmisión de información. La incertidumbre de la señalización horaria es en este caso de unas pocas décimas de microsegundo (1% de 50 ps es 0,5ps, demostrando una vez más la regla práctica de que la incertidumbre viene limitada a aproximadamente el 1% del inverso de la anchura de banda efectiva). Para un análisis general de las técnicas de espectro ensanchado véase [Dixon, 1976]. Las ventajas adicionales de utilizar las técnicas de espectro ensanchado consisten en una reducción sustancial de la susceptibilidad a la recepción de interferencia en las zonas urbanas (los armónicos de la TV pueden suponer un serio problema) y una menor variación del retardo del trayecto como consecuencia de los cambios en la ocupación de la anchura de banda de la señal. Este último efecto es una de las fuentes principales de error en la recepción normal en ondas decamétricas de las señales de FP y SH. Por otro lado, una anchura de banda grande puede igualmente crear problemas si en el canal existen dispersión o trayectos múltiples.
2.4 La transferencia unidireccional de señales horarias frente a la bidireccional
El método unidireccional, es decir únicamente recepción, puede utilizarse con una precisión elevada si el retardo del trayecto puede suponerse fijo (en cuyo caso necesita medirse solo una vez), o si puede determinarse el retardo de alguna otra forma. Esto explica la factibilidad intrínseca de utilizar los sistemas de navegación electrónicos para la difusión de señales horarias, puesto que estos sistemas fueron concebidos para sum inistrar la posición, es decir en esencia el retardo del trayecto. En estos sistemas, el usuario no tiene que transm itir, lo cual es un requisito adicional en los sistemas bidireccionales. Por otro lado, mediante un intercambio bidireccional casi simultáneo de señales, puede determinarse fácilmente el retardo del trayecto, suponiendo que existe reciprocidad. Esta suposición debe, no obstante comprobarse de alguna manera antes de que pueda utilizarse con confianza el método bidireccional de transferencia de señales horarias. El método bidireccional permite obtener la incertidumbre más baja.
2.5 Efectos de la elección de la frecuencia (ondas miriamétricas - frecuencias ópticas)
Aunque las frecuencias inferiores, ondas decamétricas inclusive, han constituido en el pasado, la espina dorsal de las transferencias de señales horarias, todos los métodos de muy alta precisión exigen que la influencia de la ionosfera se mantenga lo más baja posible. Esta es la razón por la cual cada vez se utilizan más las ondas métricas y superiores. Sin embargo, al aumentar la frecuencia, y disminuir por tanto la influencia de la ionosfera,

54 I. 363-6
la troposfera se convierte muy pronto en un factor importante. Especialmente el vapor de agua constituye un problem a mayor de lo esperado, debido a las variaciones rápidas e irregulares del contenido de vapor de agua en la línea de visibilidad directa, según se ha podido medir por diferentes procedimientos. Esto constituye un poderoso argumento a favor de la utilización de las frecuencias ópticas (Láseres) para efectuar una transferencia sumamente precisa de señales horarias (para más detalles véase el Informe 271).
2.6 Comparación entre los enlaces por satélite y las conexiones terrestres (enlaces de microondas)
La gran ventaja de los enlaces por satélite es la gran anchura de banda disponible y las conexiones con visibilidad directa a frecuencias donde la influencia ionosférica puede reducirse al mínimo. Presenta el inconveniente de que el retardo del trayecto es muy largo y debe determinarse continuamente, en contraste con los enlaces terrestres de microondas. Es de esperar que la tecnología de los enlaces por fibra óptica reemplace a los enlaces de microondas y encuentre una utilización masiva durante esta década. Queda por ver hasta qué punto puede obtenerse una difusión de señales horarias de alta precisión a través de los cables de fibra óptica de muy larga distancia. Las posibilidades en este momento en materia de transferencia de señales horarias de alta precisión, depende enteramente de la tecnología de los satélites de comunicaciones y de los sistemas de navegación por satélite.
2.7 Mediciones de señales horarias controladas por un computador distante utilizando el método de visión comúny múltiples fuentes de señales horarias
El bajo precio de los mini y microcomputadores ha introducido otra nueva dimensión en las técnicas de medición y comparación de señales horarias a larga distancia. Se han introducido estaciones de señales horarias distantes, completamente automatizadas, que efectúan con regularidad mediciones de señales de visión común, o de todas las señales de tiempo disponibles en el emplazamiento en cuestión. Un computador central recoge los datos, filtra las mediciones y halla su correlación con mediciones obtenidas en otros lugares. El resultado se devuelve a continuación a la estación para su utilización e impresión locales. Algunos de estos sistemas han sido objeto de informes por el USNO (Observatorio Nacional de los Estados Unidos) [Wheeler, 1983] y por el NBS [Alian y Weiss, 1980; Stein y otros, 1983]. Un sistema del NBS utilizaba un receptor SGP de diseño propio mientras que otro se basaba en la recepción del Loran-C o de las emisiones de la WWVB. El sistema del USNO utilizaba únicamente equipo comercial de elevada calidad como receptores automáticos del Loran-C o unidades comerciales de transferencia de señales horarias de SGP. Tales sistemas pueden adaptarse a las necesidades particulares del emplazamiento distante [Wheeler, 1983]. En el caso de instalarse un receptor de SGP en el emplazamiento distante, se ha señalado una incertidumbre del orden de 10 ns y una precisión de unos pocos nanosegundos [Alian y otros, 1985].
3. Panorama de los métodos utilizados de transferencia de señales horarias y frecuencias
3.1 Comparación utilizando señales en las bandas 4 a 7 y mediante relojes portátiles
Se han estado utilizando de forma rutinaria métodos con funcionamiento en las bandas 4 a 7 y medianterelojes portátiles durante más de veinte años, pero en la actualidad debe considerarse que su importancia está en declive con las excepciones que se mencionan a continuación.— Ondas miriamétricas: en las zonas alejadas las transmisiones de frecuencia estabilizada procedentes de la red
de navegación Omega y procedentes también de ciertas estaciones de comunicaciones de alta potencia, pueden servir como referencia de fase sin costó alguno. De hecho se utilizan para la navegación eérea en pequeñas aeronaves. Las posibilidades para la difusión horaria han sido documentadas por [Guinot, 1968 y 1969] (véase también el Informe 271).
— Las transmisiones de frecuencias estabilizadas en ondas kilométricas, tales como WWVB, DCF77, HBG, MSF, y otras, son utilizadas por un gran número de receptores del código de señal horaria, que permanecen sincronizados automáticamente con exactitudes de milisegundos. El seguimiento de fase ha sido ampliamente abandonado, debido a los problemas de la ambigüedad del ciclo y la interferencia entre algunas de estas estaciones.
— El sistema Loran-C ha permitido la introducción de receptores completamente automáticos que eliminan el problema de la identificación del ciclo. El Loran-C se encuentra todavía ampliamente disponible y continúa siendo la mejor comparación rutinaria para aquéllas aplicaciones donde resultan tolerables incertidumbres del orden de unas pocas décimas de microsegundo debido a, entre otros efectos, variaciones estacionales [De Jong, 1984] y donde existe cobertura por onda de superficie (la mayor parte del hemisferio Norte; véase [Potts y Wieder, 1972]) (véase también el Informe 271).
— El servicio de FP y SH en ondas decamétricas sigue siendo la fuente principal de señales horarias para losbarcos, los radioaficionados y otros usuarios que aprecian su coste muy bajo y que están satisfechos conincertidumbres de unos pocos milisegundos [Ogawa, 1958]; véase también Iijima y otros [1978].
— Los relojes portátiles, que han demostrado exactitudes de decenas de nanosegundos en experimentosalrededor del mundo [Hafele y Keating, 1972], se utilizarán probablemente mucho menos en el futuro debido a la aparición de los métodos de alta precisión por satélite, tales como el SGP o de los enlaces comerciales por satélite con radiocanales de banda ancha.

I. 363-6 55
3.2 Televisión
La televisión es un sistema electrónico temporizado y como tal puede utilizarse para la com paración de señales horarias. Debido a la existencia de diferentes sistemas tales como el NTSC, el PAL, el SECAM, etc., así. como a las dificultades para establecer el retardo exacto del trayecto en cada com paración, especialmente para largas distancias, este método ha encontrado su mayor aplicación en la recepción simultánea de un transm isor dentro de su zona de cobertura local. Un nuevo método más prometedor consiste en la recepción de programas de TV por satélite, a condición de que pueda obtenerse con suficiente precisión la posición del satélite por algún otro procedimiento, como por ejemplo a partir de las autoridades de explotación. Estas comprobaciones ampliadas se han llevado a cabo entre estaciones de Austria, Países Bajos, Reino Unido y República Federal de Alemania [De Jong, 1984]. En los Estados Unidos de América el extenso uso de los sincronizadores de tram a ha determinado de hecho la utilización a larga distancia de la televisión para la difusión horaria, ya que estos dispositivos almacenan una tram a completa y la entregan para su transmisión con el reloj local como referencia de tiempo. Para una información más detallada véanse los Informes 1016 y 897.
3.3 Sincronización intercontinental de relojes por radiointerferometría con línea de base muy larga (R ILBL)
Klemperer [1972] ha descrito ya los principios de la RILBL y en un reciente trabajo incluye una amplia lista de referencias y expone las precisiones y limitaciones básicas. Clark [1972] también ha analizado dichos principios y señalado varios programas experimentales de RILBL en curso. Según parece, pueden obtenerse, precisiones de 10“ 13 a 10~14 en la comparación de frecuencias y de 1 ns en la sincronización de relojes.
Las anchuras de banda de 10 a 100 MHz que se requieren para la sincronización de relojes con una resolución de 1 a 10 ns se obtienen utilizando las técnicas de síntesis de anchura de banda descritas por Hinteregger y otros [1972], así como por Rogers [1970].
En principio, para la sincronización de relojes no se requiere la estabilidad del maser de hidrógeno; dehecho, en las demostraciones con el sistema prototipo se emplearon osciladores de rubidio. Se realizó una serie de tres experimentos entre las estaciones de que dispone la NASA en Goldstone (California) y M adrid (España)[Hurd, 1972]. Aunque las mediciones revelaron poderes de resolución de 50 a 500 ns (1 a), según la cantidad dedatos empleados, la exactitud de las diferencias entre los relojes obtenidas sólo pudo verificarse con una precisión de unos 10 ps.
Cuando se dispone de datos suficientes y puede obtenerse una anchura de banda suficientemente grande (50 MHz), la precisión del método de sincronización RILBL parece estar lim itada principalm ente por las dificultades para determinar el tiempo de propagación global del sistema y especialmente el tiempo de propagación atmosférica (ionosférica).
3.4 Satélites
Desde 1962 vienen realizándose con éxito compáraciones experimentales de tiempo a grandes distancias por medio de satélites artificiales. Se utilizan tanto técnicas unidireccionales como bidireccionales y cada una de ellas presenta unas ciertas ventajas. En el modo unidireccional, el usuario recibe simplemente la señal horaria originada ya sea en un reloj a bordo o de un reloj situado en tierra que se retransmite a través de un transpónder de satélite. Como no tiene que transmitir señales puede utilizar un equipo sencillo, y se puede dar servicio a numerosos usuarios_en _un modo de explotación por difusión. Pero como es menester determ inar el retardo del trayecto de propagación mediante un cálculo o calibración por otra técnica, las transmisiones unidireccionales de señales horarias suelen presentar una incertidumbre mayor que los métodos bidireccionales. Según el método y los gastos que se realicen, pueden obtenerse precisiones que van de algunos ps hasta algunos ns.
Las técnicas bidireccionales consisten en intercambiar señales horarias entre dos emplazamientos en tierra, utilizando un transpónder de satélite para retransmitirlas en forma casi simultánea. Requieren equipos más complejos pues el usuario debe también poder transm itir, pero la transferencia de señales horarias está sujeta por lo general a una incertidumbre menor ya que es posible medir y compensar directamente el retardo del trayecto. Las técnicas bidireccionales permiten transferir señales horarias con una precisión acorde con el estado actual de la técnica a un número más pequeño de usuarios dotados de equipos perfeccionados que requieren este nivel de calidad. Pueden servir de ejemplo los numerosos experimentos efectuados en el satélite Symphonie.
En el Informe 518, figuran descripciones más completas, comparaciones y referencias correspondientes a éstas y otras técnicas y sistemas por satélite.
3.5 Otros métodos
Pueden combinarse distintos métodos de comparación del tiempo. En la República Federal de Alemania, se han utilizado impulsos de televisión en combinación con el transmisor de frecuencias patrón y de señales horarias en la banda de ondas kilométricas DCF77. La indicación del segundo en ondas kilométricas permite identificar un impulso de televisión, el cual a su vez, sirve para identificar un ciclo de portadora de DCF77 [Becker y otros, 1973]. Análogamente, pueden utilizarse señales de ondas kilométricas y miriamétricas si se transmiten en sincronismo.

56 I. 363-6
Se ha sugerido, como medio de sincronización, las líneas de transporte de energía. Varias pruebas realizadas en la Physikalisch-Technische Bundesanstalt (PTB) y en Italia han demostrado que la precisión es normalmente de 0,25 a 0,5 ms a una distancia de 200 km, con posibilidad de variaciones de fase debidas a la conmutación de líneas [Becker y Enslin, 1973; Angelotti y Cordare, 1974]. En Estados Unidos de América se han obtenido resultados similares, incluso en trayectos superiores a 2000 km [Alian y otros, 1972].
Se han efectuado experimentos [Norton y otros, 1962] sobre la inestabilidad producida por la propagación en un enlace de microondas con visibilidad directa (banda 10) de 50 km. La disminución de la estabilidad de la onda transmitida debida a la propagación es menos importante que las fluctuaciones inherentes a la señal, causadas por el ruido del oscilador. Para un intervalo de tiempo de medición de 1 s, la fluctuación debida a la propagación fue del orden de 3 x 10-12, y pasó a 1 x 10“ 14 para un tiempo medio de 106 s.
En la URSS se han realizado experimentos de sincronización bidireccional en un trayecto de 750 km entre Moscú y Kharkov observando la señal de 72 MHz reflejada en estelas meteóricas [Dudnik y otros, 1971 y 1973]. Con una potencia de transmisión de 40 kW se realizaron con éxito 5620 mediciones de sincronización por hora. Una vez compensados los retardos medidos del trayecto se obtuvieron precisiones de sincronización del orden de 0,1 a 0,2 ps. Se considera que la principal fuente de errores es actualmente la falta de uniformidad del retardo de los equipos de los canales de ida y retorno.
En 1974 se efectuaron experimentos en Francia para determinar con qué precisión podrían sincronizarse dos relojes separados 6 km, mediante el intercambio bidireccional de impulsos láser para compensar el retardo de propagación. En una serie de experimentos, la diferencia del reloj se determinó con una incertidumbre de 4 ns. Utilizando detectores láser mejorados en un trayecto de 300 m, las incertidumbres se redujeron a menos de 1 ns [Sannier, 1974; Besson, 1974; Besson y Parcelier, 1974]. Se ha mejorado aún más el equipo de control de los impulsos de sincronización, lo que se traduce en una resolución potencial de 100 ps para un sistema completo de transmisión y recepción [Moreau, 1977].
En 1977 se llevó a cabo una experiencia conjunta entre Francia y España, consistente en la comparación de las escalas de tiempo de los Observatorios de París (OP) y San Fernando (OMSF) mediante el sobrevuelo de ambos observatorios por un avión provisto de retrorreflector, un emisor láser y de la cronometría adecuada. La diferencia UTC(OP) — UTC(OMSF) se determinó con una precisión de ± 20 ns [Benavente y otros, 1979].
CUADRO I — Comparación de los métodos de transferencia de señales horarias(Situación en 1985)
Sistema/M étodo Cobertura
Coste del equipo en miles de dólares de los Estados Unidos
de América
Características Notas
Omega(Banda Mam) Mundial 5-25 2 ps/d ía Referencia de frecuencia
Loran-C (Banda km)
Regional, hemisferio norte
31
10
1 ps 100 ns-2 ps (')
100 ns O
Automático, código horarioManualAutomático
Señal horaria (Banda dam) Mundial 0,2 1 ms Adiestramiento de operadores
GOES América 4 50 ps Automático, código
TRANSIT Mundial 14 10-25 ps Automático, código
GPS Mundial 25 10 ns Automático, código
Satélite de comunicaciones Punto a punto 100 1 ns Transmisión/recepción
bidireccional
(') Sin tener en cuenta los trayectos de onda ionosférica y terrestre.

I. 363-6 57
REFERENCIAS BIBLIOGRÁFICAS
ALLAN, D .W ., DAVIS, D. D., WEISS, M., CLEMENTS, A., GUINOT, B., GRANVEAUD, M., D ORENW END T, K., FISCHER, B., HETZEL, P., AOKI, S., FUJIM OTO, M. K., CHARRON, L. y ASHBY, N. [junio de 1985] Accuracy of international time and frequency comparisons via global positioning system satellites in common-view. IE E E Trans. Instr. Meas., Vol. IM-34, 2, 118-125.
ALLAN, D. W., M ACHLAN, H. E. y MARSHALL, J. [6-8 de junio de 1972] Time transfer using nearly simultaneous reception times of a common transmission. Proc. 26th Annual Symposium on Frequency Control (US Army Electronics Command, Ft. M onmouth, NJ 07703), 309-316 (Electronic Industries Association, W ashington, DC 20006, Estados Unidos de América).
ALLAN, D. W. y WEISS, M. A. [mayo de 1980] Accurate time and frequency transfer during common-view of a GPS satellite. Proc. 34th Annual Symposium on Frequency Control, Philadelphia, PA, USA, (US Army Electronics Comm and, Ft. Monmouth, NJ 07703), 334-347 (Electronic Industries Association, W ashington, DC 20006.
ANGELOTTI, E. y CORDARE, F. [1974] IEN time and frequency dissemination. Proc. Time D eterm ination, Instrum entation and Synchronization, Cagliari, 207-233.
BECKER, G. y ENSLIN, H. [1973] Zeitübertragung mit dem Wechselstromnetz (Transmisión de señales horarias utilizando la red de suministro de energía). PTB Jahresbericht, 135.
BECKER, G., FISCHER, B y HETZEL, P. [1973] Methoden zum Vergleich und zur Verbreitung von Zeitskalen (M étodos de comparación y de difusión de señales horarias). Kleinheubacher Berichte, 16, 5.
BENAVENTE, J., BESSON, J. y PARCELIER, P. [1979] Clock comparison by láser in the nanosecond range. Radio Sci., Vol. 14, 4, 701-706.
BESSON, J. [1974] Synchronisation d ’horloges á quelques nanosecondes par PONERA. C.R. Acad. Sci. (París), Vol. 279-B., 147-150.
BESSON, J. y PARCELIER, P. [16-20 de septiembre de 1974] Synchronisation dans le domaine de la nanoseconde d ’horloges éloignées. IXa Congrés International de Chronométrie, Stuttgart, República Federal de Alemania. Edición provisional, TP ONERA No. 1397.
CLARK, T. A. [14-16 de noviembre de 1972] Precisión timing and very long baseline interferometry (VLBI) Proc. 4th Annual NASA and Dept. of Defense Precise Time and Time Interval (PTTI) Planning Meeting, GSFC Rep. X-814-73-72, 74-89, Goddard Space Flight Center, Greenbelt, Md., Estados Unidos de América.
DE JO NG [1984] Results of several years of comparison of European times scales by means of receive only satellite methods. CPEM Digest Delft Library of Congress, Card N.° 75-23855, y IEEE Cat. N.° 84ch 2057-8.
DIXON, R. C [1976] Spread Spectrum Systems. John Wiley and Sons Inc., Nueva York, NY, Estados Unidos de América.
D U D N IK , B. S., KASHCHEYEV, B. L., LEYKIN, A. Y., SMIRNOV, A. N. y SOPELNIKOV, M. D. [1971] Ispolzovanie meteornogo rasprostraneniya radiovoln dlya privyazki chasov punktov sluzhby vremeni i chastoty (Use of meteoric radio wave propagation for synchronization of cloks at measuring points of the time and frequency Service). Izm. Tekhn., 12.
D U D N IK , B. S., KASHCHEYEV, B. L. y SMIRNOV, A. N. [1973] Ispolzovanie otrazhennykh radiovoln dlya kalibrovki kanalov privyazki shkal vremeni (Use of reflected radio waves for calibration of time scale synchronization channels). Izm. Tekhn., 6.
GUIN OT, B. [1968] Bureau international de l’heure (BIH), R apport annuel.
GUINOT, B. [1969] An application of statistical smoothing techniques on VLF signáis for comparison of time between USNO and NBS. Formation de l’échelle de temps coordonnée par le Bureau international de l’heure. Actes du Colloque international de chronométrie, Série A.
HAFELE, J. C. y KEATING, R. E. [julio de 1972] Around the world atomic docks: observed relativistic time gains. Science, Vol. 177, 166-170.
H INTEREG GER, H. F., SHAPIRO, 1.1., ROBERTSON, D. S., K N IG H T, C. A., ERGAS, R. A., W H ITNEY, A. R., ROGERS, A. E. E., MORAN, J. M., CLARK, T. A. y BURKE, B. F. [27 de octubre de 1972] Precisión geodesy via radio interferometry. Science, Vol. 178, 396-398.
H URD, W. J. [14-16 de noviembre de 1972] An analysis and demonstration of clock synchronization by VLBI. Proc. 4th Annual NASA and Dept. of Defense Precise Time and Time Interval (PTTI) Planning Meeting, GSFC Rep. X-814-73-72, 100-122. G oddard Space Flight Center, Greenbelt, Md., Estados Unidos de América.
IIJIM A, S., SHIBUTANI, G. y SAKAI, T. [1978] Travel time and accuracy of reception of remóte time signáis on short waves, WWV and WWVH as received in Tokyo. Tokyo Astron. Bull., 2.a series, Vol. 253, 2917-2923.
KLEM PERER, W. K. [mayo de 1972] Long-baseline radio interferometry with independent. frequency standards. Proc. IEEE, Vol. 60, 602-609.
MOREAU, J. P. [1977] Mesure de décalages entre horloges éloignées á haut pouvoir de résolution. Mesures, 1977.
NORTON, K. A., BARROWS, E., THOMPSON, Jr. M. C. y JAMES, H. B. [diciembre de 1962] Variance of radio frequency caused by turbulence on line-of-sigth transmissions. IR E Trans. P.G.I.
OGAWA, T. [diciembre de 1958] Frequency variations in short-wave propagation. Proc. IRE, Vol. 46, 12, 1934-1939.

58 I. 363-6
POTTS, C. E. y W IEDER, B. [mayo de 1972] Precise time and frequency dissemination via the LORAN-C system. Proc. IEEE, Vol. 60, 5, 530-539.
ROGERS, A. E. E. [octubre de 1970] Very long baseline interferometry with large effective bandwidth for phase delay measurements. Radio Sci., Vol. 5, 1239-1248.
SA NN IER, P. [1974] Synchronisation d ’oscillateurs ultrastables au moyen d ’un faisceau láser. Note technique ONERA No. 226.
STEIN, S. R., KAMAS, G. y ALLAN, D. W. [diciembre de 1983] New time and frequency Services at the N ational Bureau of Standards. Proc. 15th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Washington, DC, Estados Unidos de América, 17-29.
W H EELER [1983] Automation of precise time reference stations (PTRS). Proc. 15th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos de América, 41-52.
BIBLIOGRAFÍA
BAKER, D. M. y DAVIES, K. [enero de 1968] Waves in the ionosphere produced by nuclear explosions. J. Geophys. Res., Vol. 73, 448.
BARNES, J. A. [junio de 1967] The development of an international atomic time scale. Proc. IEEE, Vol. 55, 822-826.
BECKER, G., FISCHER, B. y KRAM ER, G. [1969] Methoden und Ergebnisse im internationalen Zeitvergleich mit Lángstwellen (Métodos y resultados en la comparación internacional del tiempo con frecuencias muy bajas). Actes du Colloque international de chronométrie, Serie A.
BEEHLER, R. E., MOCKLER, R. C. y RICHARDSON, J. M. [julio de 1965] Caesium beam atomic frequency standards. Metrología, Vol. 1, 114-131.
BESSON, J. y CUM ER, J. [1969] Synchronisation précise de base par simple survol (Accurate basic synchronization by simple overflying). Actes du Colloque international de chronométrie, Serie D.
BLAIR, B. E. [abril de 1973] Time and frequency dissemination: an overview of principies and techniques. US N ational Bureauof Standards Monograph 140, Chapter 10, 223-313.
BLAIR, B. E., CROW, E. L. y M ORGAN, A. H. [junio de 1967] Five years of VLF worldwide comparison of atomic frequency standards. Radio Sci., Vol. 2 (nueva serie) 627-636.
BONANOM I, J., KARTASCHOFF, P., NEW M AN, J., BARNES, J. A. y ATKINSON, W. R. [abril de 1964] A comparison of TAI and NBS-A atomic time scales. Proc. IEEE, Vol 42, 4, 439.
CHAN, K. L., KANELLAKOS, D. P. y VILLARD, O. G., Jr. [mayo de 1962] Correlation of short-period fluctuations of the earth’s magnetic field and instantaneous frequency measurements. J. Geophys. Res., Vol. 67, 1975.
DAVIES, K. y BAKER, D. M. [1965] Ionospheric effects observed around the time of the Alaskan Earthquake of March 28,1964. J. Geophys. Res., Vol 70, 2251.
DAVIES, K., WATTS, J. M. y ZACHARISEN, D. H. [1962] A study of F2-layer effects as observed with a D oppler technique. J. Geophys. Res., Vol. 67, 601.
FUJIM OTO, M. K. y FUJIW ARA, K. [1981] Measurements on phase delay of a LORAN-C antenna. Tokyo Astron. Bull,2.a serie, 265, 3015-3020.
GEORGES, T. M. [1968] H F Doppler studies of traveling Ionospheric disturbances. J. Atmos. Terr. Phys., Vol. 30, 735.
GUETROT, A., H IGBIE, L. S., LAVANCEAU, J. y ALLAN, D. W. [mayo de 1969] Proc. 23rd Annual Symposium on Frequency Control, Atlantic City, NJ, Estados Unidos de América (US Army Electronics Command, Ft. Monmouth, NJ 07703) (Electronic Industries Association, Washington DC 20006, Estados Unidos de América).
HELLW IG, H. y W AINW RIGHT, A. E. [diciembre de 1975] A portable rubidium clock for precisión time transport. Proc. 7th Annual Precise Time and Time for precisión time transport. Proc. 7th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Washington DC, Estados Unidos de América. 143-159.
ICH IN O SE, T. y OGAWA, T. [mayo de 1976] Internal gravity waves deduced from the H F Doppler data during the April 19, 1958, solar eclipse. J. Geophys. Res., Vol. 81, 2401.
KALAU, M. [1980] The GDR atomic time scale. Conf. Precisión Electromagnetic Measurements (CPEM), Braunschweig, República Federal de Alemania. IEEE Catalogue No. 80CHI497-7IM, 11-14.
KOBAYASHI, S., SATOH, T. y TANAKA, M. [julio de 1977] Accuracy of time comparison by the reception of JJY signáis propagating via E región. J. Radio Res. Labs. (Japón), Vol. 24, 114.
LESCHIUTTA, S., ORLANDO, A. y PORRECA, A. [1968] Sincronizzazione di orologi campione tramite segnali de tempo radiodiffusi. Proc. Colloquium on the Problems of the Time D eterm inaron, Keeping and Synchronization, Milano, 321-329.
M ORGAN, A. H., CROW, E. L. y BLAIR, B. E. [julio de 1965] International comparison of atomic frequency standards via VLF radio signáis. Radio Sci. J. Res. N BS/U SN C -U R SI, Vol. 69D, 7, 905-914.
M UNGALL, A., DAAMS, H. y BAILEY, R. [julio de 1969] Note on atomic time-keeping at the N ational Research Council. Metrología, Vol. 5, 3, 73-76.
OGAWA, T. [1960] Ionosphere obseryations by Doppler effect. Rep. Ion. and Space Res. Japan, Vol. 14, 133.
TSUTSUI, M. y OGAWA, T. [1973] H F Doppler observation of ionospheric effects due to typhoons. Ion. Space Res. (Japón), Vol. 27, 121.

I. 363-6, Re. 582 59
W INKLER, G. M. R. [1972] Recent experiments with flying atomic docks, LORAN-C etc. for clock synchronization. Report to XVII General Assembly, URSI, Varsovia, República Popular de Polonia.
YASUDA, Y., OKAZAWA, H., AKATSUKA, K. y MATSUURA, T. [1977] International time and frequency comparison for long term via VLF and Loran-C. Proc. 9th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Greenbelt, Md., Estados Unidos de América.
Documentos del CCIR
[1974-78]: a. 7/137 (China (República Popular de)); b. 7/125 (Suiza); c. 7/106 (Reino Unido).[1978-82]: 7/91 (Japón).
RECOM ENDACIÓN 582
DIFUSIÓN Y COORDINACIÓN DE SEÑALES DE REFERENCIA DE TIEMPO Y FRECUENCIA POR SATÉLITE
(Cuestión 2/7)
(1982)El CCIR,
C O N SID E R A N D O
a) que las aplicaciones de señales de referencia de tiempo y frecuencia en ciertas esferas, como la navegación, las comunicaciones y la exploración espacial, exigen servicios de mejor cobertura, precisión y fiabilidad en la recepción;
b) que en muchos casos resulta imposible, por razones técnicas o económicas, introducir mejoras sustanciales en los servicios terrenales existentes de difusión y coordinación de señales de referencia de tiempo y frecuencia;c) que a causa de esas limitaciones se han suprimido algunos servicios en ondas decamétricas;d) que los experimentos de difusión y sincronización de tales señales realizados hasta la fecha empleandotécnicas de satélite han demostrado que se obtiene una mejora apreciable en la exactitud, precisión, cobertura,fiabilidad y facilidad de explotación;
e) que el número de sistemas por satélite y vehículos espaciales de que se dispone potencialmente paratransmitir señales de referencia de tiempo y frecuencia está aumentando rápidam ente;f ) que durante los próximos años se procederá a la evaluación de diversos e interesantes sistemas o técnicas de telecomunicación por satélite que podrían ser aptos para la difusión y coordinación de señales de referencia de tiempo y frecuencia, entre ellos el sistema LASSO, satélites de radiodifusión de televisión, satélites de telecomunicaciones y meteorológicos, el sistema mundial de determinación de posición (GPS) y el sistema TRANSIT, ofreciendo muchas oportunidades de participación a los laboratorios de señales de referencia de tiempo y frecuencia;
g) que muchos experimentos en esta materia realizados con satélites han indicado la conveniencia de disponer de medios de recepción localizados en los propios laboratorios de señales de referencia de tiempo y frecuencia, a fin de suprimir las incertidumbres adicionales que traen consigo los enlaces auxiliares de transferencia de tiempo,
REC O M IEN DA, POR U N A N IM ID A D :
1. Que las organizaciones interesadas en la difusión y coordinación de señales de referencia de tiempo yfrecuencia o las organizaciones responsables de las mismas, participen en la mayor medida posible en experimentos destinados a evaluar las ventajas relativas de las diversas técnicas de satélite para la transferencia de tales señales.
2. Que los laboratorios que se ocupan de señales de referencia de tiempo y frecuencia establezcan, en lamayor medida posible, medios locales para recibir señales de satélites (y para transmitirlas en caso necesario).
3. Que se preste gran atención a las técnicas de satélite en el desarrollo de cualquier servicio nuevo dedifusión y /o coordinación de señales de referencia de tiempo y frecuencia.
60 I. 518-4
INFORM E 518-4
DIFUSIÓN Y COORDINACIÓN DE FRECUENCIAS PATRÓN Y SEÑALES HORARIAS POR SATÉLITE
(Cuestión 2/7)
(1971-1974-1978-1982-1986)
1. Introducción
Los actuales usuarios de la información de señales de tiem po/frecuencia (T /F) tienen acceso a una variedad de servicios y técnicas para la difusión de esa información. Entre ellos se cuentan los conocidísimos servicios de difusión por ondas decamétricas, kilométricas y miriamétricas explotados por numerosas y diversas administraciones del mundo entero; los métodos de relojes portátiles; el uso de las transmisiones de televisión y de las señales de radionavegación para la transferencia de las frecuencias patrón y de las señales horarias; los servicios accesibles por teléfono; y las técnicas por satélite. La precisión disponible se sitúa en la gama que va del milisegundo hasta submúltiplos del microsegundo, en función de factores tales como la técnica particular empleada, las ubicaciones geográficas abarcadas, las condiciones de propagación encontradas, etc. (Informes 267, 271, y 363).
Si bien es cierto que los servicios disponibles pueden satisfacer muchas de las necesidades actuales de los usuarios en materia de esa información T /F , se está desarrollando ya un creciente número de aplicaciones, con fines de medición, que requieren o pueden aprovechar señales de referencia T /F cuya precisión, cobertura y fiabilidad sea mejor. Por ejemplo, el crecimiento acelerado de la tecnología aplicada en sectores tales como la ubicación precisa de la posición en la navegación, las comunicaciones digitales, la verificación de datos científicos y las aplicaciones espaciales han determinado la aparición de exigencias, en cuanto a la sincronización y a las intercomparaciones horarias en extensas zonas geográficas, que se sitúan al nivel del nanosegundo o intervalos aún menores. A esto se agrega el hecho de que un análisis de las tendencias históricas a largo plazo de la cronom etría y esferas conexas de aplicación revela claramente que en los próximos 20 años las necesidades en cuanto a los niveles de difusión de las señales horarias serán mucho mayores todavía.
Aunque es indudable que pueden mejorarse más los actuales servicios de información de T /F , la experiencia hasta el momento indica que las técnicas por satélite son las que ofrecen la mayor probabilidad de lograr una mejora sustancial de los servicios de coordinación y difusión en el futuro. Existen distintas técnicas y sistemas posibles de difusión por satélite, cada una con sus ventajas e inconvenientes según las necesidades y aplicaciones específicas que se trate de satisfacer.
En el punto 2 de este Informe se examinan algunas de las necesidades actuales y de nueva aparición respecto a mejores capacidades de difusión y coordinación. En el punto 3 se esbozan algunas de las ventajas generales de utilizar técnicas basadas en satélites. En el punto 4 se examinan las posibilidades de aplicaciones más prometedoras que ofrecen los satélites y se las com para habida cuenta de los métodos de utilización, de su estado actual-, de su cobertura, de la exactitud que permiten lograr, del coste para el usuario, de la viabilidad de su empleo sobre el terreno, del grado de desarrollo (operacional o experimental), así como de sus principales ventajas e inconvenientes. Además, se incluye un resumen de la experiencia obtenida hasta la fecha y algunas indicaciones de los planes futuros para cada técnica o sistema.
2. Algunas aplicaciones actuales y previstas que pueden beneficiarse de una mejor difusión T/F
Diversos laboratorios en el mundo han desarrollado ya patrones atómicos de frecuencia con niveles de incertidumbre bien demostrados de, aproximadamente, 1 x 1 0"13 y estabilidades a largo plazo superiores a 1 x 10“ 14 (Informe 364). Las escalas de tiempo atómico basadas en esos patrones de referencia muestran diferencias diarias inferiores a 10 ns. A fin de que estas escalas de tiempo empleadas por diversos laboratorios nacionales sean aprovechadas al máximo para un número considerable de aplicaciones T /F , es necesario que se apliquen técnicas destinadas a com parar entre si las escalas de tiempo con una precisión superior al nanosegundo y a difundir las señales de referencia correspondientes a la comunidad de usuarios.
Las comunicaciones digitales constituyen otro sector que podría eventualmente beneficiarse de un mejor servicio T /F . Hay una tendencia acentuada en favor de las redes sincronizadas e íntegramente digitales y cabe prever que en algunos casos éstas se instalarán utilizando numerosos patrones atómicos de frecuencia a fin de obtener la estabilidad de temporización necesaria para mantener la sincronización de los bits en toda la red de comunicaciones. Por ejemplo, una red que funcione a 1,5 M bit/s y mantenga la sincronización de los bits a un nivel de 1 b it/d ía tendrá necesidad de frecuencias de referencia cuya estabilidad sea de 1 x 10“ ". A medida que vaya aumentando la velocidad típica de las comunicaciones en el futuro, los requisitos relativos a la referencia T /F serán también cada vez más estrictos. Otros sistemas utilizan los enlaces por satélite en un modo de acceso múltiple por distribución en el tiempo (AMDT) y requieren que la precisión de sincronización de tiempos en el sistema sea del orden de 10 ns.

I. 518-4 61
El sector general de los transportes y, en particular, las aplicaciones para la radiolocalización en navegación, están creando ya la necesidad de una precisión de tiempo superior, la cual se sitúa al nivel de los 10 ns y, en algunos casos, supera el nivel de 1 ns. Por ejemplo, los sistemas de navegación por satélite de gran alcance destinados a obtener la posición con una precisión de unos pocos metros mediante el empleo de patrones atómicos de frecuencia con estabilidades de 1 x 10~13 y niveles de precisión de 10 ns se encuentran ya en una etapa avanzada de planificación. Los requisitos de navegación de las futuras sondas interplanetarias exigirán una temporización con precisión mejor de 1 ns. Las diversas aplicaciones marítimas especializadas destinadas a la localización precisa, como por ejemplo, en el caso del dragado, tendido de tuberías y cables, operaciones de salvamento, prospección petrolera, geofísica e hidrografía requieren, en todos los casos, una temporización cuya precisión puede llegar a ser del orden de 1 ns en algunos casos. Otras necesidades de una mejor difusión T /F están surgiendo con el desarrollo continuo de sistemas y técnicas de control del tráfico aéreo para establecer un orden en el tiempo. Es probable que haya otros sistemas que empleen enlaces digitales de datos en la dirección aire/T ierra para el control integrado de la navegación, comunicaciones, separación y control del tráfico de las aeronaves.
Las aplicaciones espaciales [Cooper y Chi, 1979] están suscitando necesidades de ampliación de los medios T /F , a la vez que se desarrollan y aplican técnicas mejores para el seguimiento de los satélites y la realización de mediciones geodésicas a través de los mismos. Actualmente el seguimiento de los satélites puede realizarse ya con una incertidumbre total que no excede de unos pocos metros a escala mundial. Los sistemas de medición de distancias por láseres funcionan con incertidumbres de escasamente unos cuantos centímetros, lo que supone que pueden lograrse resoluciones de temporización a niveles inferiores al nanosegundo.
Algunas de las aplicaciones con mayores exigencias que se espera ver desarrollarse durante el decenio de 1980 en materia de geodesia aplicada por satélite, necesitarán temporizaciones del orden de 0,1 a 1 ns.
Hay una gran variedad de aplicaciones científicas que pueden beneficiarse de mejores medios T /F . Para lograr mejor precisión en los experimentos sobre relatividad, por ejemplo, habrá necesidad de frecuencias de referencia cuya estabilidad durante varias horas sea de 1 x 10~16, mientras que los trabajos de interferometría de línea de base muy larga se facilitarían si se dispusiera de manera general de frecuencias con estabilidades superiores a 1 x 10“ 14 durante periodos de hasta 1 día. De modo similar, las mediciones de los esfuerzos en la corteza terrestre y de la deriva continental requieren estabilidades de tiempo de 1 ps durante 1000 s. Como último ejemplo, la disponibilidad de mejores señales de referencia T /F debiera permitir un mejor modelado de la troposfera y de la ionosfera, lo que a su vez incidirá favorablemente en muchas otras aplicaciones en que las incertidumbres de propagación limitan actualmente los resultados.
Muchas otras aplicaciones que no requieren necesariamente la exactitud o precisión logradas por los progresos de la técnica actual pueden, no obstante, beneficiarse de las mejoras en otros aspectos de las posibilidades de los servicios de difusión T /F , tales como una cobertura más amplia, recepción más fiable, menor interferencia, mayor facilidad de utilización por no especialistas y coste inferior. Dos ejemplos son los sistemas de recogida de datos con fines científicos que necesitan correlacionar la información proveniente de distintos emplazamientos dispersos, y las redes de transporte de energía eléctrica, que necesitan referencias de T /F para coordinar y controlar el flujo de potencia en la red, para sincronizar operaciones y localizar y analizar averías.
Muchos de los requisitos específicos enumerados en el presente Informe son requisitos de explotación en cuanto a las frecuencias patrón y a las señales horarias, cuyos valores se determinan de modo que esta fuente de error no tenga un carácter limitativo en la proporción global de errores del sistema. Quizá proceda señalar, asimismo, que generalmente conviene que los medios tecnológicos permitan emitir señales de T /F que superen los requisitos de explotación en un factor de 10 aproximadamente.
3. Ventajas generales de las técnicas de satélite
Los métodos actuales para la difusión de la información T /F a disposición general de la mayor parte de los usuarios no parecen capaces de satisfacer el tipo de necesidades mencionados anteriormente. Los servicios por ondas decamétricas, kilométricas y miriamétricas están limitados por los efectos de la propagación y el acervo de muchos años de experiencia no permite esperar razonablemente que estén en condiciones de ofrecer transferencias de señales horarias mucho más precisas que las actuales. Se han realizado transferencias de señales horarias a través de señales de TV con una precisión de 10 ns, pero éstas se han limitado a zonas locales en que los dos puntos de temporización son visibles directamente en una zona de recepción común de la misma estación de TV. Las comparaciones efectuadas entre las transferencias por TV a distancias más largas, utilizando redes de televisión interconectadas, muestran un deterioro considerable (hasta unos pocos microsegundos) debido a las incertidumbres adicionales del trayecto de propagación. Las técnicas de reloj portátil pueden brindar resultados muy superiores (50 ns) si se tom an las debidas precauciones, pero tam poco parecen constituir una solución práctica tratándose de problemas más generales.
Por otra parte, los métodos basados en técnicas de satélite para la transferencia de información T /F , parecen ser capaces de satisfacer las necesidades futuras de mayor exactitud y las otras mejoras indicadas anteriormente. Las incertidumbres introducidas por el trayecto de propagación de la señal se reducen considerablemente en la mayoría de las técnicas de satélite, puesto que los trayectos Tierra-satélite y /o satélite/T ierra utilizados están principalmente en el espacio libre y sufren por tanto perturbaciones mínimas procedentes de la ionosfera y la troposfera. La utilización de frecuencias más altas, superiores, por ejemplo, a 1 GHz, como es corriente en muchos sistemas de satélite, reduce también las incertidumbres ionosféricas en el retardo de

62 I. 518-4
propagación total del trayecto. En el caso de técnicas de temporización bidireccionales por satélite, cuando dos emplazamientos intercambian señales horarias simultáneamente (o casi) a través del satélite, en principio no es necesario determinar los retardos del trayecto de propagación, que no contribuyen directamente a la incertidumbre de la transferencia de señales horarias.
Los satélites ofrecen también ventajas importantes en cuanto a la cobertura en virtud de su altura sobre la Tierra. Por ejemplo, un solo satélite en la órbita geoestacionaria puede difundir o retransmitir continuamente una señal horaria a casi un tercio de la superficie terrestre. De la misma manera, un solo satélite en órbita polar baja puede proporcionar cobertura global total, aunque no continuamente en un punto dado de la Tierra. En general, la fiabilidad de recepción es muy alta para las señales de satélites en cualquier parte de la zona de cobertura, pues las perturbaciones del medio de propagación revisten mucha menor importancia que en el caso de las señales terrenales de T /F .
Sobre la base de una gran variedad de experimentos y evaluaciones realizados utilizando muchos sistemas de satélite diferentes, puede desarrollarse un equipo receptor relativamente económico, altamente automático y fácil de utilizar por los no especialistas. Sin embargo, para lograr las exactitudes máximas posibles, puede ser necesario utilizar un equipo más costoso y más perfeccionado, que requiere operadores más capacitados.
Desde 1962 varias organizaciones han realizado satisfactoriamente en todo el mundo experimentos de transferencia de señales horarias por satélite. Aunque actualmente no se dispone de satélites dedicados exclusivamente a aplicaciones T /F , ni es probable que los haya en el futuro, los experimentadores han podido utilizar eficazmente sistemas de satélite diseñados primordialmente para otras funciones. Entre éstos cabe citar sistemas de satélite para la navegación, las telecomunicáciones, la radiodifusión de televisión, la meteorología, las aplicaciones científicas y experimentales. En el anexo I se presenta un cuadro de algunos de estos experimentos efectuados con satélites desde 1962.
La Conferencia Administrativa Mundial de Radiocomunicaciones, Ginebra, 1979, reconociendo estas necesidades de mejores servicios y las posibilidades de satisfacerlas mediante técnicas de satélite, atribuyó las siguientes bandas de frecuencias para la difusión de información T /F por satélite:
400,1 ± 0,025 MHz (Tierra-espacio);4202 ± 2 MHz (espacio-Tierra);6427 ± 2 MHz (Tierra-espacio);13,4 a 14 GHz (Tierra-espacio);20,2 a 21,2 GHz (espacio-Tierra);25,25 a 27 GHz (Tierra-espacio);30 a 31,3 GHz (espacio-Tierra).
4. Posibilidades de utilización de satélites para la difusión/coordinación mejorada de información T/F
Al analizar las diversas posibilidades de aplicación de satélites capaces de ofrecer una mejor transferencia operacional de información T /F en el futuro, se harán frecuentes referencias a las técnicas unidireccional y bidireccional. En este Informe la explotación unidireccional supone que el usuario sólo emplea equipo receptor para la recepción de una transmisión originada o retransmitida por un satélite. Las transmisiones unidireccionales funcionan generalmente en el modo difusión con el propósito de servir a un gran número de usuarios. Ofrecen zonas de servicio amplias, buenas exactitudes de temporización, métodos y equipos sencillos para la reconstitución de la información de tiempo y entrañan un coste moderado para el usuario. La explotación bidireccional supone el empleo por los usuarios de equipo tanto transmisor como receptor, normalmente en el modo de comunicaciones punto a punto. En general, las técnicas bidireccionales ofrecen una posibilidad de exactitud mayor debido a que son relativamente independientes del trayecto de propagación que conecta los emplazamientos de usuario.
Las diversas aplicaciones de satélite se dividen, por conveniencia, en tres grupos:
— principalmente destinadas a la transferencia de señales horarias de alta precisión;— destinadas a la difusión general de información T /F a numerosos usuarios, y— sistemas o técnicas que permiten mejores difusión y transferencia de información T /F de alta precisión.
Para cada posibilidad considerada se facilita, en primer lugar, cierta información general, que describe el sistema o técnica y su estado actual. También se acompaña, en el cuadro I, un resumen comparativo sobre cada sistema o técnica, incluidas la cobertura, la exactitud alcanzable, el coste para los usuarios, una evaluación de la viabilidad del empleo sobre el terreno y la naturaleza experimental u operacional del sistema. En el cuadro II se resumen algunas de las principales ventajas e inconvenientes de cada una de las alternativas consideradas. Se indican asimismo, para cada alternativa, los resultados de la explotación o experimentación obtenidos hasta la fecha, y los proyectos futuros.

CUADRO I — Información escogida a efectos de comparación entre posibles sistemas por satélites
Posible sistema por satélite Cobertura Exactitud alcanzable
Costos de usuario estimados (dólares
de USA, 1981)
Viabilidad de utilización
en el emplazamiento
Sistema por satélite operacional
o experimental
1. Satélites detelecomunicaciones
Regional o global (redes)
< 10 ns 25 000-100 000 $ para el terminal en el emplazamiento, + tiempo del transpondedor
Depende del sistema de satélite y del emplazamiento de que se trate
Operacional
2. GPS: Modo normal Global; continua Posiblemente « 100 ns si no se degrada
Receptor actual de señales horarias > 25 000 $. Debiera disminuir con el desarrollo
Sí Actualmente 6 satélites en órbita. Totalmente operacional en fecha posterior a 1987
Modo general Intercontinental Depende de la geometría específica del enlace. Posiblemente « 10 ns si no se degrada
> 25 000 $ Sí Véase la observación precedente
3. LASSO Europa, África.Depende de la ubicación del satélite
< 1 ns proyectada Costos muy elevados, estaciones de láser completas « 1 millón de $. Usualmente requiere enlaces de temporización auxiliares hasta las estaciones de láser
En general no. Requiere estación láser
Quizás en 1986 (METEOSAT-P2). Más adelante podría desarrollarse un equipo accesorio operacional con una resolución interna de < 10 ps
4. Experimento empleando el transbordador espacial
Depende del vuelo específico. Quizá ± 57° en latitud
< 1 ns (tiempo) y 1 x 10-14 (frecuencia), prevista
Requiere una estación terrena de microondas con tres frecuencias; enlaces bidireccionales con el transbordador. Es costoso
El ulterior desarrollo de equipos para su utilización operacional quizá lo permita más adelante
Experimento propuesto; no hay planes para establecer un sistema operacional
5. Utilización de nuevas atribuciones 13-31 GHz
Depende del sistema de satélite utilizado
Precisión: < 1 ns Exactitud: limitada por las incertidumbres de retardo
Costoso hasta ulterior desarrollo
Probable Actualmente no existen planes de utilización operacional o experimental
6. Recepción simultánea de señales de determinación de distancia
Regional 10 ns < 30 000 $ Sí Los satélites GOES, GMS y Meteosat son operacionales

CUADRO I (Continuación)
Posible sistema por satélite Cobertura Exactitud alcanzable
Costos de usuario estimados (dólares
de USA, 1981)
Viabilidad de utilización
en el emplazamiento
Sistema por satélite operacional
o experimental
7. Satélites meteorológicos Depende del sistema. Hemisférico para el código horario del GOES de Estados Unidos. Posible extensión a Europa y Japón
± 16 ms (no corregida)± 0,5 ms (corregida para tener en cuenta el tiempo medio de propagación)± 50 ps (totalmente corregida)
3500 S (exactitud de 1 ms) 4500 $ (exactitud de 50 ps) Antenas incluidas
Sí El sistema de satélites GOES es operacional.Código horario en los satélites de Estados Unidos de América desde 1975
8. Utilización de la atribución en 400,1 MHz
Depende del sistema de satélite utilizado
Nivel básico: « 1 ms. Probablemente podría lograrse < 1 ps empleando CRP
Nivel básico: < 500 $ Con CRP: < 300 $
Sí Existe la atribución pero no se conocen planes para su utilización
9. Transpondedor en ondas métricas o canal especializado de 10 kHz en satélites de telecomunicación
Regional « 1 ps posible. Podría también difundir códigos menos exactos o telefonía
Debiera ser bastante bajo Sí India proyectó utilizar un canal de 10 kHz en INSAT hacia 1984
10. TRANSITSistemaoperacional
Global, incluidas altas latitudes, intermitente
« 30 ps (un solo satélite) s» 10 ps (conjunto de satélites)
« 12 000 $ incluyendo un receptor totalmente automático y antena omnidireccional
Sí Operacional
TRANSIT(Nova)Perfeccionado
Igual que en el caso precedente, excepto que sólo hay 2 satélites en órbita actualmente
< 100 ns 15 000 a 50 000 $ una vez realizado el receptor
Sí Experimental
11. TDRS: Modobidireccional
Casi mundial, salvo para 30°-120° de longitud Este
Probablem ente « 10 ns No se han determinado, pero probablemente > 25 000 $
Sí Operacional en 1984
Modounidireccional
Igual que en el caso precedente
~ 1-10 ps No se han determinado, pero se considera relativamente económico
Sí, en la mayoría de los casos
Igual que en el caso precedente
12. Satélite de radiodifusión de televisión:
Modo de alta precisión
Regional (OTS-2) o global Depende de la calidad de las efemérides.300 ns y quizá < 50 ns
Actualmente: « 3300 $. Debiera reducirse mucho en caso de fabricación en serie
Sí. Pueden utilizarse antenas de 1 m
Experimental actualmente, pero están proyectados muchos satélites operacionales
Modo dedifusióngeneral
Como en el caso anterior Depende del grado en que pueda corregirse en función del trayecto.Posible código horario para uso general
Igual que en el caso anterior. Menor exigencia desde el punto de vista de los usuarios de tratar tener en cuenta los tiempos de propagación
Sí Igual que en el caso anterior

CUADRO II — Principales ventajas e inconvenientes de los posibles sistemas por satélite.
Sistema Principales ventajas Principales inconvenientes
1. Satélites de telecomunicaciones Actualmente se dispone de tecnología y sistemas operacionales. Se ha acumulado gran experiencia. Está asegurada la continuidad a largo plazo. La técnica bidireccional proporciona una alta precisión. Están disminuyendo los costos y el tamaño de la antena necesaria. Alta fiabilidad regional y cobertura internacional. En muchos casos es factible la explotación en el emplazamiento. Puede disponerse de una gran anchura de banda. Muchos gobiernos participan ya directamente en sistemas operacionales
Los costos actuales, aunque están disminuyendo, son relativamente altos. En algunos casos se necesitan grandes antenas, especialmente para los enlaces de INTELSAT. El usuario debe poder transmitir. En algunos casos, se necesitan enlaces auxiliares entre las estaciones terrenas y los laboratorios T /F . La precisión más alta exige una calibración difícil de los tiempos de propagación de la estación terrena. La demanda actual de canales disponibles es elevada
2. GPS: Modo normal Gran exactitud. Cobertura mundial continua. Amplia redundancia e importante infraestructura. Técnica unidireccional. Continuidad del sistema a largo plazo. Es probable que suscite gran interés el desarrollo de receptores si no se restringe indebidamente el acceso y la exactitud. Permitiría utilizar antenas pequeñas. Explotación en el emplazamiento
Puede haber limitación en la exactitud de la temporización para usuarios civiles a 250 ns (2 sigma). Costos actuales del receptor > 25 000 $. Formato de señal complejo. El método bidireccional requiere la determinación del tiempo de propagación por los usuarios
Modo general Existe la posibilidad de reducir los costos del receptor. Alta precisión de sincronización para distancias de varios miles de kilómetros. De cómoda explotación en el emplazamiento. Tolerancia a los errores de efemérides por compensación parcial. Requiere sólo el conocimiento del retardo diferencial del trayecto
Utilizable para distancias regionales más intercontinentales. Puede haber restricciones en el acceso y exactitud disponibles para usuarios civiles. Requiere cierta coordinación y programación entre los laboratorios
3. LASSO Posiblemente es uno de los sistemas más exactos. Puede permitir transferencias de tiempo con errores menores de 1 ns. La sincronización requiere solamente algunos minutos. En el futuro los equipos LASSO normalizados podrían incorporarse en otros satélites
Altos costos de usuario para los equipos. La mayoría de las estaciones de láser no coinciden con los laboratorios T /F . Las operaciones con láser están sujetas a las condiciones meteorológicas. No existen planes operacionales. Falta de experiencia en la utilización de láseres
4. Experimento con el transbordador espacial
Posiblemente uno de los sistemas más exactos. La utilización de frecuencias múltiples reduce las incertidumbres. Insensible a las condiciones meteorológicas. Utiliza máseres H para lograr alta estabilidad. Permite comparaciones directas de frecuencias
Actualmente sólo hay una propuesta; no existen planes para el modo operacional. Requiere un equipo complejo y costoso. La utilización del transbordador para el experimento limita el tiempo de observación durante cada paso
5. Utilización de nuevas atribuciones en 13-31 GHz
Las frecuencias están atribuidas internacionalmente para utilización T /F . Las grandes anchuras de banda permitirían precisiones de medición de < 100 ps. No está limitado a un sistema de satélite particular
La tecnología en esta gama de frecuencias requiere ulterior desarrollo y reducción de los costos. Las atribuciones se han hecho a título secundario con compartición. Probablemente no será viable durante 5 a 10 años

CUADRO II (Continuación)
Sistema Principales ventajas Principales inconvenientes
6. Recepción simultánea de señales de determinación de distancia
Algunos satélites adecuados son ya operacionales. Posibilidad de alta precisión. Posibilidad de utilización con coordinación global. Pueden utilizarse equipos relativamente económicos en el emplazamiento. Efemérides exactas simultáneas con la transferencia de señales horarias. Cómoda técnica unidireccional
Se necesita acceso a las efemérides del satélite. Requiere varios puntos especiales de recepción para enlazar sistemas regionales en caso de transferencia global de señales horarias. Hay que desarrollar equipo de usuario
7. Satélites meteorológicos Bajo costo de usuario. Ya se dispone de algunos receptores comerciales. Servicio continuo disponible desde satélites en la órbita geoestacionaria. El código horario funciona ya en los satélites GOES. El código horario GOES contiene información completa de la época del año referida al UTC. Continuidad relativamente segura a largo plazo para la misión principal del satélite. Utilización en el emplazamiento
La cobertura del actual código horario del GOES está limitada al hemisferio occidental. Con el GOES son posibles desviaciones horarias ocasionales mayores de 100 p,s. La frecuencia de 468 MHz utilizada no es una atribución específica para T /F . El título secundario de la atribución puede dar lugar a que se reciba interferencia del servicio móvil terrestre en algunas zonas. Debe establecerse cooperación con organizaciones no relacionadas con la información de T /F
8. Utilización de la atribución en 400,1 MHz
La frecuencia está ya atribuida internacionalmente para utilización T /F a título primario (con excepciones de menor importancia en algunas zonas). Resulta compatible con equipo de usuario muy económico. La anchura de banda utilizable podría permitir un servicio en dos niveles. Es compatible con transpondedores de satélite fuera de la plataforma. Podría utilizar un transpondedor en 400,1 MHz como equipo incorporado en cualquier satélite destinado a otros fines. Los costos de explotación del servicio serían mucho más bajos que para los actuales servicios en ondas decamétricas. Podría mitigar los problemas de interferencia en ondas decamétricas. Flexibilidad del diseño de la señal. Podría proporcionar fácilmente cobertura global, o al menos internacional, con capacidad multilingüe. Permitiría la utilización en el emplazamiento
No se conocen planes actualmente para su explotación. Es necesario identificar los satélites adecuados y establecer arreglos de cooperación. Puede ser difícil convencer a numerosos usuarios sobre la conversión al servicio por satélite, aunque éste sea técnicamente superior. Como sustitución a los servicios en ondas decamétricas, se necesitaría un largo periodo de superposición de ambos servicios a fin de permitir la amortización de los equipos y la capacitación de los usuarios
9. Transpondedor en ondas métricas o canal especializado de 10 kHz en satélites de telecomunicación
Los transpondedores en ondas métricas se utilizan principalmente durante la inserción en órbita y pueden estar disponibles posteriormente para utilización T /F . Frecuencias adecuadas. Continuidad a largo plazo de la misión primaria del satélite. Podría reducirse el costo. El canal de 10 kHz permite difundir información horaria completa. India puede aplicar el sistema operacionalmente a través de INSAT. Permitiría la utilización en el emplazamiento
Es incierta la disponibilidad de transpondedores. Se necesitan acuerdos y cooperación con organizaciones no relacionadas con la información T /F . Es probable que los canales especializados no estén disponibles generalmente para las organizaciones de T /F , salvo en situaciones especiales. Precisión posible limitada con el canal de 10 kHz
518-4

CUADRO II (Continuación)
Sistema Principales ventajás Principales inconvenientes
10. TRANSITSistema operacional
Totalmente operacional, satisfactoriamente apoyado con cinco satélites. Cobertura global. Se dispone de receptores comerciales. Señales horarias referidas al UTC. Permite la utilización en el emplazamiento. Los receptores automáticos pueden promediar pasos y seleccionar satélites específicos para mejorar la exactitud. Es probable la explotación de TRANSIT a largo plazo
Debido a las órbitas polares las señales horarias sólo están disponibles periódicamente en una ubicación determinada. La información horaria tiene una ambigüedad de 30 min. Los receptores deben corregir los corrimientos Doppler
TRANSIT(Nova)Perfeccionado
Es posible una alta precisión con técnica unidireccional. Cobertura global, incluidas las regiones en latitudes altas. Antenas sencillas; explotación en el emplazamiento. Debiera ofrecer mejores resultados con los actuales receptores. Dos satélites Nova en órbita
Las mejoras del NOVA para la transferencia de señales horarias tienen aún un carácter únicamente experimental. Se dispone de señales horarias intermitentemente. Puede limitarse la disponibilidad de información horaria más precisa a los usuarios generales
11. TDRS: Modobidireccional
Cobertura de casi todos los principales centros de señales horarias a través de dos satélites geoestacionarios. Posibilidad de alta precisión ( « 10 ns). Sistema totalmente aprobado. Tiene como mínimo una vida útil prevista de 10 años. Espacio en órbita
La técnica bidireccional requiere la calibración cuidadosa de los equipos en tierra. Costos de usuario relativamente altos. El acceso al TDRS requeriría autorización de la NASA. Dos laboratorios pueden comparar las señales horarias sólo indirectamente a través de una tercera estación
Modounidireccional
El acceso al TDRS es mucho más fácil en el modo unidireccional. ■ Equipo más sencillo y más económico. Amplia cobertura. Puede incluir código horario
No se sabe si está disponible para otros usuarios que la NASA. Precisión posible limitada. Por el momento los costos de usuario son inciertos
12. Satélite de radiodifusión de televisión:
Modo de alta precisión
Ya se han desarrollado algunas versiones de equipo de usuario para mediciones de señales horarias por televisión. Están proyectados muchos satélites de televisión en todo el mundo. El equipo de usuario puede ser bastante sencillo con pequeñas antenas. La exactitud puede ser excelente si se conoce la posición del satélite a través de mediciones auxiliares en algunos puntos seleccionados. Se dispone de grandes relaciones señal/ruido y anchuras de banda. Permitiría la explotación en el emplazamiento. La continuidad a largo plazo está asegurada por la misión primaria dél satélite
Se requieren instalaciones y técnicas auxiliares para determinar la posición del satélite y distribuir estos datos a los usuarios con las correcciones de trayecto. La cobertura está confinada generalmente a regiones o, en algunos casos, al nivel nacional
Modo de difusión general Ya se han desarrollado tipos para utilizar impulsos de sincronización de televisión. El código horario podría añadirse al intervalo vertical. Son factibles pequeñas antenas, receptores sencillos y técnicas de medición simples. Es probable que estén en funcionamiento numerosos sistemas de satélites de televisión a largo plazo. Recepción en la ubicación. Gran relación señal/ruido y anchura de banda
Se necesita algún conocimiento de los retardos del trayecto de propagación. La cobertura es principalmente regional o nacional. Requiere la cooperación con organizaciones no relacionadas con la información T /F para insertar el código horario en el intervalo vertical

68 I. 518-4
4.1 Soluciones principalmente destinadas a la transferencia de información T /F de alta precisión
4.1.1 Satélites de telecomunicación
Está aumentando espectacularmente la disponibilidad y utilización de canales de telecomunicación establecidos en sistemas operacionales de telecomunicaciones por satélite explotados por numerosas empresas, países y grupos regionales de países. A los efectos de realizar comparaciones horarias punto a punto con gran exactitud entre dos estaciones, se puede acordar, por ejemplo, el intercambio simultáneo de las señales horarias adecuadas a través del enlace por satélite. En cada emplazamiento se obtienen así diferencias horarias entre las marcas de tiempo transmitidas y recibidas. Suponiendo que los retardos de las señales al atravesar el medio de propagación, el transpondedor del satélite y el equipo receptor/trans- misor sean simétricos, la diferencia horaria entre las dos ubicaciones puede deducirse sencillamente a partir de las diferencias medidas en cada ubicación sin necesidad de conocer ni la ubicación del satélite ni la de los usuarios. Por lo general, las mediciones se realizan durante periodos de sólo 10 a 60 minutos a la vez, y una o dos veces por semana. Son posibles también otras variantes de la técnica, que no requieren el intercambio simultáneo de señales. Los satélites de telecomunicaciones actualmente disponibles funcionan en las bandas atribuidas de 4 /6 GHz o 11/12/14 GHz. El usuario dispone de una gran libertad para escoger el formato de las señales y, en algunos casos, la anchura de banda de canal. Algunos sistemas necesitan el arriendo de todos los canales del transpondedor en una banda de 36 MHz; en otros, es posible subdividir cada canal. En los sistemas digitales se dispone a menudo de un canal normalizado con una velocidad binaria de datos de 56 kbit/s, aunque se dispone también frecuentemente de velocidades binarias de 1,5 M bit/s y superiores.
En algunos casos (por ejemplo, en Estados Unidos de América), los enlaces de comparación internacional a través de satélites de telecomunicaciones pueden suponer dos tramos, uno desde el laboratorio de señales horarias a una estación terrena INTELSAT a través del satélite nacional y otro desde dicha estación al segundo país a través del sistema INTELSAT. Como actualmente están en explotación muchos sistemas de satélites comerciales que emplean una tecnología confirmada, la realización de enlaces operacionales para señales horarias entre los laboratorios más importantes no plantearía mayores dificultades.
La experiencia obtenida en la utilización de satélites de telecomunicación para la transferencia precisa de señales horarias data de 1962 cuando se compararon relojes entre el Observatorio Naval de Estados Unidos de América (USNO), el National Physical Laboratory (NPL) y el Royal Greenwich Observatory (RGO), estos dos últimos de Inglaterra, con una exactitud de 1 ps utilizando un intercambio bidireccional de impulsos de 5 ps de duración, repetidos al ritmo de 10 Hz. Se utilizó el satélite experimental de telecomunicaciones Telstar [Steele y otros, 1964], Aproximadamente tres años después se utilizó el satélite Relay para transferencias horarias similares entre el USNO y el laboratorio Radio Research Laboratories (RRL) de Japón, lográndose una precisión indicada de 0,1 ps [Markowitz y otros, 1966]. En estos experimentos iniciales las frecuencias de los enlaces ascendente y descendente estaban en la gama de 1,7 a 6,4 GHz.
Entre 1974 y 1975 diferentes organizaciones utilizaron el satélite experimental de telecomunicaciones de Estados Unidos de América ATS-1 para experimentos de transferencia bidireccional de señales horarias utilizando señales más complejas en forma de códigos de ruido pseudoaleatorio (CRP). La detección de correlación de estas transmisiones CRP permitieron lograr exactitudes y precisiones muy altas en las transferencias horarias. En la primera serie de experimentos, en los que una estación principal en la parte occidental de Estados Unidos de América sincronizaba una estación subordinada en la parte oriental de dicho país, la NASA pudo demostrar una exactitud de 50 ns y una resolución de medición superior a 1 ns [Chi y Byron, 1975]. También en 1975 se efectuaron transferencias horarias similares utilizando un sistema perfeccionado de comunicación de acceso directo y ensanchamiento de espectro a distancias intercontinentales entre el RRL en Japón y el USNO y la NASA en Estados Unidos de América con una exactitud de unos 10 ns después de aplicar las correcciones relativistas [Saburi y otros, 1976]. Para todos los experimentos con el ATS-1 se utilizaron las bandas 4 /6 GHz. Desde 1970 se han efectuado transferencias de señales horarias análogas con un nivel de precisión de 100 ns, sobre una base operacional, entre más de 20 estaciones, utilizando los satélites del Sistema de Telecomunicaciones de Defensa de los Estados Unidos de América. Las transferencias de señales horarias utilizan señales de código de ruido pseudoaleatorio de bajo nivel que no interfieren en las funciones normales de comunicaciones [Easton y otros, 1976].
Entre 1976 y 1982 se llevaron a cabo otras transferencias bidireccionales de señales horarias utilizando las bandas 4 /6 GHz mediante la serie de satélites experimentales europeos Symphonie. Se lograron transferencias bidireccionales horarias satisfactorias con exactitudes de unos 50 ns o mejores, precisiones de medición de algunos nanosegundos entre Raisting (República Federal de Alemania) y Pleumeur-Boudou (Francia) [Brunet, 1979]; NCR en Canadá, Pleumeur-Boudou y LPTF en Francia [Costain y otros, 1979]; NRC en Canadá y PTB en la República Federal de Alemania a través de Raisting; Shanghai, Beijing y Nanjing en China; el Instituto Chino de Metrología en Nanjing y PTB en la República Federal de Alemania; los Observatorios de Shaanxi y de Shanghai en China y LPTF en Francia; NPL en la India y PTB en la República Federal de Alemania [Mathur y otros, 1980].

I. 518-4 69
En el caso de NRC-LPTF se han realizado comparaciones regulares de las transferencias de señales horarias durante cuatro años, desde junio de 1978 a julio de 1982. En febrero de 1980, la PTB comenzó a participar en estas comparaciones regulares vía un satélite Symphonie. El BIH ha utilizado enlaces transatlánticos de señales horarias en lugar de los enlaces Loran-C. En la mayoría de estas transferencias de señales horarias se han empleado formatos de señales relativamente simples que comprenden señales de 1 impulso por segundo. Las principales contribuciones a las incertidumbres generales de la transferencia de señales horarias estaban habitualmente relacionadas con los problemas que plantea la determinación exacta del retraso causado por el equipo terminal terreno del satélite; también intervenían las incertidum bres asociadas a los enlaces necesarios de señales horarias que conectan las instalaciones de recepción del satélite y los laboratorios de señales horarias. La introducción de una nueva técnica de modulación a 1 MHz (módems elaborados por NCR) redujo la incertidumbre aleatoria asociada al enlace espacial a unas pocas décimas de nanosegundos. La inclusión de PTB en las comparaciones permitió efectuar tres pares distintos de mediciones en cada momento y evaluar el error de cierre resultante A como una indicación de la incertidumbre. El empleo exclusivo de la modulación a 1 MHz dio A = — 42 ± 8 ns, mientras que el sistema de 1 MHz dio A = — 8 ± 6 ns.
Entre 1978 y 1979 el satélite construido en común por Estados Unidos y Canadá CTS/H erm es permitió a los laboratorios USNO y NBS de Estados Unidos y NRC de Canadá efectuar experimentos con algunas variantes en las transferencias bidireccionales antes realizadas [Costain y otros, 1979]. En primer lugar, se emplearon, con ventaja, frecuencias más altas en los enlaces ascendente y descendente en las bandas 12/14 GHz. En segundo lugar, como en la técnica citada más arriba, se intercambiaron señales de 1 MHz en parte del experimento además de las señales habituales de 1 impulso por segundo. Esto permitió obtener una precisión de medición mejorada de unos 0,2 ns ( la ) y efectuar comparaciones horarias exactas con sólo algunos minutos, o incluso segundos, de mediciones reales. En tercer lugar, pudieron utilizarse en el propio emplazamiento terminales receptores pequeños con antenas parabólicas de sólo 2,4 m de diámetro, durante parte del tiempo, en dos de los tres lugares. Las escalas de tiempo UTC se compararon con una incertidumbre de aproximadamente, 1 x 10“ l4. Ocasionalmente se pudo efectuar el enlace de NBS con la estación terrena de Pleumeur-Boudou (Francia) a través de un doble salto de satélite, enlazando NBS y NRC vía el satélite CTS/Hermes y a continuación NRC y Francia vía el satélite Symphonie. La precisión de la medición para la modalidad de doble salto fue inferior a 10 ns (la ).
El laboratorio del Istituto Elettrotecnico Nazionale (IEN) de Italia utilizó el satélite experimental de telecomunicaciones Sirio-1 en las bandas 12/17 GHz para evaluar aun otra variante de la técnica de transferencia bidireccional de señales horarias [Detoma y Leschiutta, 1980]. En este caso, se tuvo en cuenta continuamente el movimiento del satélite de modo que sólo se necesitó utilizar un enlace de telecomunicación compartido en el tiempo entre las dos estaciones. El efecto del movimiento del satélite sobre la exactitud de la transferencia horaria fue de sólo algunos nanosegundos para tiempos de medición de hasta 20 s. La precisión de las mediciones estuvo comprendida entre 1 y 5 ns.
En los laboratorios NRC de Ottawa se han llevado a cabo experimentos sobre transferencias bidireccionales de señales horarias a través de satélites geoestacionarios comerciales en 6 /4 GHz, utilizando pares de señales de onda continua de baja potencia. Se han instalado dos estaciones terrenas experimentales para satélites con antenas de 3 m y 1 W de potencia, a nivel del suelo, a 100 m del laboratorio de señales horarias y con cables triaxiales que las conectan al laboratorio [Costain y otros, 1982].
En 1983, se transmitieron señales de ± 0,5 MHz mediante el satélite Anik-A3 y se recuperó directamente la frecuencia de 1 MHz [Costain y otros, 1983]. La desviación típica de las mediciones fue de 0,4 ns. Los experimentos mostraron que se puede realizar la transferencia de señales horarias utilizando señales de onda continua o señales con códigos de ruido seudoaleatorio (PRN), con terminales de bajo costo.
Una de las estaciones terminales del NRC que funciona en las bandas 6 /4 GHz con antenas de 3 m de diámetro se ha reorganizado para su explotación en las bandas 14/12 GHz, y se ha adquirido un módem de código PRN recomendado por el Grupo Interino de Trabajo 7/4. Se está introduciendo una red experimental que utiliza un satélite geoestacionario en las bandas 14/12 GHz para la transferencia de señales horarias en ambos sentidos entre el NRC, el USNO y el NBS. Esto debería proporcionar una comprobación valiosa sobre el método de transferencia de señales horarias del sistema GPS que se encuentra en servicio actualmente.
Los laboratorios japoneses RRL están desarrollando un sistema nacional de comparación de señales horarias preciso utilizando el satélite geoestacionario de comunicaciones japonés CS (satélite de comunicaciones de mediana capacidad con fines experimentales), equipos de acceso múltiple aleatorio por espectro ensanchado y estaciones terrenas en 30/20 GHz, tales como la estación principal de Kashima y dos estaciones móviles pequeñas. En 1981 y 1982 se llevaron a cabo experimentos de transferencia bidireccionales de señales horarias entre la estación principal y una estación pequeña situada en la sede central y entre dos estaciones pequeñas, situadas ambas en el mismo emplazamiento. Para cada caso se obtuvo un valor eficaz de la fluctuación de tiempo de aproximadamente 1 ns y una estabilidad de frecuencia inferior a 1 x 10“ 13, para un tiempo de promedio de 100-200 min. Se estimó que la exactitud de los experimentos era aproximadamente de 13 ns para la comparación de señales horarias entre la estación principal y la de la sede central, utilizando como referencia una señal horaria transferida

70 I. 518-4
bidireccionalmente mediante un enlace terrenal de microondas, y de aproximadamente 0,74 ns para la realizada utilizando dos estaciones terrenas pequeñas mediante el método de un experimento de transferencia bidireccional de señales horarias en el mismo lugar con un reloj común. Se midió el retardo detiempo de cada estación insertando una señal modulada por un impulso en cada uno de los trayectos del enlace ascendente y del enlace descendente de la estación y detectándolo en el otro extremo del trayecto para su comparación con el impulso de entrada. Para la estación principal se calculó el retardo con una exactitud aproximadamente de 7,7 ns, y para las estaciones pequeñas se midió con una exactitud de aproximadamente 3,6 ns [Imae y otros, 1983] (véase el cuadro III).
CUADRO III — Resultados de las mediciciones de los retardos en las dos estaciones pequeñas
Retardo de tiempo (ns)
Retardo del enlace ascendente de la estación con antena de 1 m de diámetro ( U\) 329,6
Retardo del enlace descendente de la estación con antena de 1 m de diámetro (D ,) 372,0
Retardo del enlace ascendente de la estación con antena de 2 m de diámetro (U 2) 361,3
Retardo del enlace descendente de la estación con antena de 2 m de diámetro (D 2) 401,0
K = ( U i - D\) - (U 2 - D2) (* ,) - 2 ,7
K mediante el método del reloj común (K2) -6 ,3
K , - K 2 3,6
Durante el verano de 1983, se efectuaron experimentos de transferencia intercontinental de señales horarias, en cooperación entre el observatorio naval USNO, la compañía COMSAT, la Universidad Técnica de Berlín y la DFVLR (Agencia Espacial de la República Federal de Alemania), utilizando canales de telecomunicación del satélite Intelsat-V entre estaciones situadas en Washington, DC y en Oberpfaffenhofen (República Federal de Alemania).
Se insertó la señal horaria en la estación terrena, bajo forma de una secuencia de ruidoseudoaleatorio con una frecuencia de segmentos de 2 MHz, en el interfaz de frecuencia intermedia delenlace de comunicación, y se retransmite al extremo receptor. Se mide la precisión de la transferencia de la señal horaria haciendo corresponder la detección de la secuencia de ruido aleatorio original con su réplica recibida.
Se efectuaron experimentos de transferencia de señales horarias fiables con estaciones terrenas con valores de G /T de 20 dB (K _1) y 26 dB(K _1) (correspondientes a diámetros de antenas de 2,2 m y 4,5 m) y potencias de los transmisores de tan sólo 170 y 80 mW, respectivamente, y se obtuvo una fluctuación eficaz de la señal horaria inferior a 1 ns. Con las características del enlace escogidas, la señal horaria transferida, que se distribuye en una anchura de banda de 2 MHz, se recibe con una relación señal/ruido de —9 dB, valor que cae muy por debajo del nivel del ruido térmico.
4.1.2 Sistema global de determinación de la posición (GPS)
El Departamento de Defensa de los Estados Unidos de América ha desarrollado el sistema GPS(denominado también NAVSTAR) como un sistema de navegación/localización de posición constantemente disponible, de alta precisión [Milliken y Zoller, 1978]. El sistema está proyectado para que incluya un total de 18 satélites operacionales, dispuestos en seis planos orbitales. Al estar los 18 satélites colocados en órbitas de 12 horas, varios resultan visibles desde un punto determinado cualquiera en un instante cualquiera. Cada satélite contiene relojes atómicos (se están estudiando dispositivos de cesio, rubidio e hidrógeno) para generar señales horarias extremadamente bien caracterizadas como parte del formato del mensaje de navegación. El sistema dispone de una infraestructura constituida por una amplia red de

I. 518-4 71
estaciones de comprobación y control que actualizarán los relojes atómicos a bordo. Aunque la escala de tiempo del sistema GPS no sigue necesariamente el UTC con precisión, su relación con el UTC es conocida exactamente en todo instante. El formato complejo de la señal del GPS se transmite a los usuarios en las frecuencias de 1575 y 1228 MHz y puede recibirse con pequeñas antenas omnidireccionales. Se proporciona información codificada indicando las correcciones de reloj, correcciones ionosféricas y efemérides del satélite para calcular el retardo de propagación unidireccional. La señal del GPS está concebida de manera que su aplicación a la navegación y a la transferencia de señales horarias pueda hacerse con dos niveles de precisión diferentes.
En 1985, el Departamento de Defensa de los Estados Unidos de América comunicó que el código GPS C /A , con inclusión de los datos horarios y de posición del satélite, seguiría poniéndose a disposición de los usuarios civiles, sin percepción de tasas de usuario. Señaló, además, que las imprecisiones horarias dos-sigma y de posición de las señales puestas a disposición de los usuarios civiles no serian superiores a 250 ns (referidas a la señal horaria del GPS), a 100 m (para la posición horizontal) y a 156 m (para la posición vertical).
Actualmente están en órbita seis satélites GPS que están siendo evaluados. Todos tienen patrones de rubidio y algunos también patrones de cesio. La realización total del sistema (18 satélites) está proyectada para fines del decenio de 1980. Se están estudiando diversos receptores para distintas aplicaciones a la navegación y a la difusión de señales horarias del GPS.
Las señales horarias del GPS podrían utilizarse de diferentes maneras para realizar transferencias y comparaciones horarias de alta precisión. En el modo «normal», las señales transmitidas se reciben en el emplazamiento de usuario, donde son decodificadas, corregidas para tener en cuenta los errores de reloj del GPS, los efectos ionosféricos y las efemérides del satélite utilizando datos codificados en la transmisión y después comparadas con las salidas de los relojes locales. La exactitud realizable dependerá mucho de la información específica de corrección a disposición de los usuarios.
En el modo de «visión común», la misma señal del GPS es recibida simultáneamente en dos (o más) emplazamientos [Alian y Weiss, 1980], Como todos los errores de reloj y algunas de las correcciones de efemérides e incertidumbres de trayecto son comunes a las observaciones de cada emplazamiento, se compensan en cierto grado dichas incertidumbres, siendo posible lograr una exactitud de sincronización relativamente buena. Las dilatadas comparaciones de frecuencias patrón y de señales horarias a través del GPS, llevadas a cabo por diferentes laboratorios de forma global, han puesto de manifiesto que pueden conseguirse comparaciones de señales horarias con precisiones inferiores a 10 ns y comparaciones de frecuencias patrón con incertidumbres inferiores a 1 x 10-14 de forma esencialmente operativa [Alian y otros, 1985]. Una variante de esta técnica, que supone la observación secuencial del mismo satélite con un intervalo de tiempo entre observaciones, puede resultar útil para transferencias intercontinentales de señales de tiempo en razón del comportamiento extremadamente estable de los relojes de los satélites del GPS durante periodos de muchas horas.
Puesto que se demostró que las comparaciones a través del GPS eran del orden de 10 a 100 veces mejores que los datos correspondientes del Loran-C, se han detectado y eliminado al formular el TAI y el UTC ciertas incoherencias y errores del orden de 1 ps. Se han com parado en algunos casos los resultados del GPS con los datos de relojes portátiles, y la concordancia se encontraba normalmente dentro de las incertidumbres combinadas (unas decenas de nanosegundos) de las técnicas utilizadas. En el caso de los patrones primarios de cesio de laboratorio, como los que funcionan en el NBS, el NRC y el PTB, las comparaciones de visión común con el GPS permiten actualmente com parar estos dispositivos con contribuciones de incertidumbre inferiores a 1 x 10“ 14 procedentes del propio procedimiento de com paración. En [Alian y otros, 1985; USNO, 1985] se incluye un cierto número de comparaciones concretas de escalas de tiempo y patrones primarios de frecuencia utilizando el GPS.
Cierto número de laboratorios han dado información sobre sus experiencias específicas utilizando la técnica GPS. Algunos de esos resultados se resumen a continuación.
El USNO ha efectuado comprobaciones de las transmisiones del GPS desde noviembre de 1979utilizando un receptor GPS disponible comercialmente. Se dispone de los datos del GPS obtenidos por esta unidad en forma legible por máquina desde el 10 de octubre dé 1980 (M JD = 44 522). La mayor parte de los datos actuales está disponible en tiempo real a través del servicio de datos automáticos del USNO, y se publica en el «Time Service Announcement», serie 4 de USNO. Desde el 1.° de diciembre de 1982, el tiempo del sistema GPS se ha mantenido en menos de 1 ps con respecto al UTC (USNO) y las correcciones transmitidas permiten la sincronización dentro de un margen de 100 ns del UTC (USNO).
El National Bureau of Standards (NBS) de los Estados Unidos, ha desarrollado su propia versión de un receptor de temporización GPS destinado, en principio, para su utilización en el modo de recepción de visión común. Las estabilidades internas del receptor están dentro del nivel de 1 ns y se observan rutinariamente las estabilidades de la señal del satélite al nivel de 5 ns para promedios de 15 s [Davis y otros, 1981a].
Las comprobaciones rutinarias de tiempo efectuadas en el USNO y en el NBS, durante varios meses utilizando estos receptores de diferentes diseño, mostraron que el GPS es capaz de efectuartransferencias de señales horarias con una precisión superior a 100 ns [Putkovich, 1980; Davis y otros, 1981b]. Una serie de comparaciones efectuadas en estos laboratorios durante un periodo de 14 días, permitió comparar sus dos escalas de tiempo UTC con una precisión de aproxim adam ente 2 x 10“ 15.

72 I. 518-4
Una comparación internacional de frecuencias entre la Agencia Espacial de la República Federal de Alemania (DFVLR) y USNO de Washington, DC (Estados Unidos de América) utilizando un receptor experimental mostró una exactitud de 2 x 10“ 14 durante un periodo de medición de 12 días [Starker y otros, 1982].
M ediante un receptor experimental de señales horarias GPS del Naval Research Laboratory (NRL) ha sido posible comparar máseres de hidrógeno situados en los Estados Unidos de América y Francia [Wardrip y otros, 1983]. El Jet Propulsión Laboratory (JPL) en los Estados Unidos de América utiliza el GPS para el tiempo coordinado y la frecuencia entre tres relojes con máser de hidrógeno situados de forma aproximadamente equidistante alrededor de la Tierra. Utilizando los receptores de las señales de tiempo del GPS pueden caracterizarse los relojes de máser de hidrógeno dentro de una desviación temporal de 50 ns y una desviación de frecuencia de 1 x 10~15 [Clements y otros, 1984].
En 1982 se introdujo en el Tokyo Astronomical Observatory (TAO) el sistema de transferencia de señales horarias GPS [Fujimoto y otros, 1983] y se han llevado a cabo mediciones regulares con la cooperación mundial. Se comprobó mediante tres experimentos con relojes portátiles el enlace de visión común a través del Pacífico entre el TAO y el USNO [Alian y Weiss, 1980; Klepczynski, 1982; Alian y otros, 1985] y las dos técnicas concordaron dentro de los errores experimentales [Aoki y otros, 1984]. Se evaluó que la precisión de la transferencia de señales horarias GPS de este enlace, eran 4 x 10-13 para un promedio de un día y de 3 x 10“ 14 para un promedio de 10 días.
Los laboratorios RRL de Japón han efectuado una comparación internacional de señales horarias desde agosto de 1984 utilizando dos receptores de transferencia de señales horarias del GPS, uno de los cuales había sido fabricado por RRL y el otro, independientemente, por una firma japonesa de equipo eléctrico. Los receptores tenían una precisión de 6 a 20 ns para la comparación de señales horarias, y los retrasos de recepción se midieron, utilizando un simulador de señales del GPS, con una precisión de 15 ns [Yoshimura y otros, 1986; Imae y otros, 1985].
El NBS de los Estados Unidos de América inició en 1983 un nuevo servicio de calibración basado en la técnica de visión común con el GPS. El NBS suministra, en cada uno de los emplazamientos de los usuarios, un sistema de recepción del GPS completamente automatizado y llave en mano, que incluye un receptor, un controlador del sistema, posibilidades para análisis y almacenamiento de datos, acceso telefónico y un soporte para el sistema y la capacitación del personal. El receptor que se sitúa en las instalaciones del usuario comunica sus datos automáticamente a un computador del NBS que almacena los datos sin tratarlos, determina qué elementos de los datos resultan convenientes para los cálculos de transferencias de señales horarias y proporciona un valor filtrado de forma óptima para la frecuencia y la señal horaria del reloj del usuario con respecto a las escalas de tiempo atómicas del NBS. Al usuario se le proporciona una cuenta en uno de los computadores del NBS a través de la cual puede acceder a los datos sin procesar y a los resultados de análisis del NBS.
La utilización creciente de la técnica de visión común con el GPS ha sido facilitada por diversos acontecimientos. Muchos laboratorios suelen proporcionar de forma rutinaria sus datos de comparación del GPS registrando sus resultados en el sistema de información del GE Mark 3. Este intercambio de datos se simplifica mediante un acuerdo consistente en utilizar un formato de datos «normalizado». Además, para ayudar a los laboratorios a determinar cuándo deben realizar mediciones con el GPSsimultáneamente con los otros laboratorios seleccionados, el NBS elabora y distribuye regularmente este tipo de información de programación basada en ciertas regiones geográficas. El número de suministradores de receptores adecuados de señales de tiempo del GPS parece estar creciendo de forma significativa. Mientras que algunos laboratorios siguen desarrollando sus propias versiones, han aparecido también varios productos comerciales distintos.
4.1.3 L A SSO (sincronización por láser desde la órbita de los satélites geoestacionarios)
En este proyecto, propuesto a la Agencia Espacial Europea (ESA) por el Bureau international del’heure (BIH), intervienen un retrorreflector láser a bordo de un satélite geoestacionario'adecuado y las estaciones en tierra provistas de telescopios láser, cuyos relojes se busca sincronizar [Serene yAlbertinoli, 1979]. Cada estación transmite impulsos de láser al vehículo espacial, detecta los impulsos devueltos, y mide el tiempo de ida y retorno. En el vehículo espacial los impulsos recibidos desde las estaciones en tierra son también detectados y sus instantes de llegada medidos por el reloj del vehículo espacial para determinar la diferencia de los instantes de llegada. Estas diferencias medidas en el vehículo espacial se combinan después con los tiempos de ida y retorno medidos desde cada estación terrenal y la relación de tiempo conocida entre los impulsos de láser emitidos y el reloj local en cada estación, para proporcionar las diferencias de tiempo entre los relojes de las estaciones en tierra. Los datos de temporización obtenidos en el vehículo espacial pueden transmitirse a las estaciones en tierra por canales normales de telemedida y las estaciones en tierra pueden intercambiar sus datos por teleimpresor u otros enlaces terrenales. .
Aunque el concepto LASSO no ha sido sometido a prueba aún, en 1986 se lanzó el satélite METEOSAT-P2 que tiene previsto incorporar unidades de instrumentos LASSO. Se prevé que resultaría fácil y económico añadir un equipo espacial LASSO normalizado a futuros satélites.

I. 518-4 73
4.1.4 Experimentos de transferencia de información T /F del transbordador espacial de Estados Unidos deAmérica
La NASA de Estados Unidos de América propone realizar un experimento de transferencia de tiempo utilizando uno de los transbordadores espaciales con el propósito de demostrar la viabilidad de transferencias de tiempo de 1 ns y comparaciones de frecuencia de 1 x 10-14 a nivel mundial [Decher y otros, 1980]. La técnica prevista haría intervenir relojes de máser de hidrógeno en el vehículo espacial y en tierra, necesitaría la utilización de tres señales separadas de onda continua en microondas (enlaces bidireccionales y unidireccionales) para anulación del efecto Doppler y transferencia de información T /F , así como un enlace láser para calibración de los enlaces en microondas y comparaciones de diferentes técnicas.
Se ha propuesto realizar el experimento inicial en uno de los vuelos del transbordador espacial en órbita baja, pero no se ha logrado aún entera aprobación. En caso de lograrse resultados satisfactorios con esta técnica empleando el transbordador espacial, podría resultar factible la adaptación de la técnica y los equipos básicos para ulteriores misiones operacionales, probablemente utilizando órbitas más altas que permitan un tiempo de observación más largo en cada paso sobre una estación terrena participante.
La República Federal de Alemania planea la realización de un experimento de transferencia de señales horarias, utilizando el transbordador espacial de Estados Unidos de América, que comprenderá la utilización de enlaces por microondas de doble frecuencia y de relojes atómicos a bordo [Starker y Rother, 1979].
4.1.5 Utilización de las atribuciones efectuadas por la CAMR-79 en la gama de 13 a 31 GHz
La Conferencia Administrativa Mundial de Radiocomunicaciones de 1979 efectuó las siguientes atribuciones adicionales para la transferencia de información T /F utilizando satélites:
13,4-14,0 GHz (Tierra-espacio),20,2-21,2 GHz (espacio-Tierra),25,25-27,0 GHz (Tierra-espacio), y30,0-31,3 GHz (espacio-Tierra).
En cada caso las atribuciones T /F son a título secundario, de modo que se necesitará elaborar considerables disposiciones de coordinación y de compartición con los servicios primarios y otros servicios secundarios a fin de asegurar que no se cause interferencia perjudicial a los demás servicios. Sin embargo, la gran anchura de banda disponible puede hacer que este esfuerzo sea válido, particularmente en el futuro, cuando puedan necesitarse y sean técnicamente factibles exactitudes máximas de transferencia de señales horarias (< 1 ns).
Actualmente no se han utilizado estas frecuencias para transferencias de información T /F ni se sabe de experimento alguno que se encuentre en una etapa de planificación definida. Habrá que esperar el desarrollo de la tecnología necesaria en esta gama de frecuencias para que esta aplicación resulte eficaz desde el punto de vista económico.
4.1.6 Recepción simultánea de señales de determinación de distancia
La técnica propuesta consiste en la recepción simultánea de señales de determinación de distancia provenientes de los correspondientes sistemas de satélite, en dos o más emplazamientos y en la comparación de la fase de las señales recibidas con las salidas del reloj local. Si estas mediciones se realizan simultáneamente con el empleo de las señales de medición de distancia para determinar exactamente la posición del satélite, las incertidumbres debidas a las diferencias entre los trayectos de propagación pueden ser muy bajas, dando como resultado comparaciones de tiempo muy exactas de los dos relojes.
El sistema mundial de satélites meteorológicos, que incluye los satélites GOES de los Estados Unidos de América, los satélites europeos METEOSAT y los satélites japoneses GMS, ofrece algunas oportunidades para el uso de esta técnica en comparaciones de tiempo regionales. Aunque el sistema de satélites GOES de Estados Unidos de América no incorpora en la actualidad señales de medición de distancia adecuadas, los sistemas GMS y METEOSAT emplean una técnica de triangulación que incluye la transmisión de señales de microondas de medición a distancia, varias veces al día. Puede disponerse también, ahora o en el futuro, de otros sistemas de satélites que permitirían aplicar esta técnica de transferencia del tiempo.
En 1970 el NBS de Estados Unidos de América realizó un experimento para evaluar dicha técnica, utilizando las señales de determinación de distancia de los satélites LES-6 y Tacsat de Estados Unidos de América para sincronizar relojes en América del Norte y América del Sur [Hanson y Hamilton, 1971]. Aunque las mediciones de distancia de baja resolución limitaron las exactitudes de sincronización a unas decenas de microsegundos, quedó demostrada la viabilidad del principio. Estudios de esta técnica efectuados en la República Federal de Alemania, indican que la utilización de antenas parabólicas de dos metros con las señales de medición de distancia del Meteosat, que están disponibles cada tres horas, debieran permitir exactitudes de sincronización de tiempo de 30 ns [Nottarp y otros, 1979],

74 I. 518-4
4.2 Soluciones principalmente destinadas a la difusión general de información de T /F
4.2.1 Señales horarias desde satélites meteorológicos
Actualmente están funcionando cuatro satélites en la órbita geoestacionaria para observar las condiciones meteorológicas y ambientales a nivel mundial, los dos satélites americanos GOES colocados sobre los Estados Unidos de América a 75° y 135° de longitud Oeste, el satélite europeo Meteosat colocado a 0o de longitud, y el satélite japonés GMS a 140° longitud Este. Los dos satélites GOES son los únicos que ofrecen la posibilidad de transmitir códigos horarios que se describen a continuación, pero debido a su semejanza con los otros dos, pudiera ser también posible incorporarla en los vehículos espaciales europeo y japonés en algún momento en el futuro. Durante el funcionamiento normal del sistema GOES, se transmite continuamente un mensaje de interrogación de datos a 100 b it/s desde la estación de control principal GOES en la Isla Wallops, Virginia, a través de dos satélites operacionales de los Estados Unidos de América, a numerosas plataformas de recogida de datos. Este mensaje de interrogación de datos es transmitido por el enlace descendente a las plataformas en dos frecuencias cercanas a 468 MHz y contiene un código horario entrelazado proporcionado por el National Bureau of Standards (NBS) de Estados Unidos de América y referido a él [Hanson y otros, 1979]. Dicho código contiene información del día del año, la hora, minuto y segundo, así como de datos de la posición del satélite actualizados cada cuatro minutos. Se dispone de equipos receptores comerciales que permiten, o bien, sólo decodificar e indicar la información de la hora del día con una precisión de ± 10 ms (± 1 ms si el usuario aplica a los datos recibidos una corrección para tener en cuenta su emplazamiento en la Tierra), o bien, decodifican también los datos de posición del satélite, calculan automáticamente el tiempo de propagación de la señal, y ajustan la señal de salida de 1 im pulso/s para que resulte «a tiempo» con una variación de aproximadamente 50 ps. Las señales horarias transmitidas por los satélites provienen de patrones de frecuencia atómicos mantenidos por el NBS en la estación de la Isla Wallops [Beehler y otros, 1979].
El código horario descrito ha sido transmitido a través de los dos satélites GOES de Estados Unidos de América desde 1975. Como se han añadido al sistema satélites de sustitución, se prevé que todos los futuros satélites GOES de Estados Unidos de América continuarán transmitiendo este código. La experiencia adquirida durante este periodo indica que:— el código de señales horarias según se transmite puede mantenerse indefinidamente dentro de 10 ps
del UTC (NBS) y,— el código de señales horarias según se recibe (cuando se ha corregido el retardo de propagación)
muestra generalmente variaciones de unas décimas de microsegundo al cabo del día e inferior a 100 ps sobre todos los periodos mayores, salvo variaciones mayores ocasionales debidas a elementos orbitales del satélite de mediocre calidad utilizados para generar las predicciones de posición [Beehler, 1982].
En el Hemisferio Occidental se está utilizando ampliamente el código horario del GOES para controlar y comprobar operaciones en redes de distribución de energía, la correlación de registros en redes de observación de datos sísmicos y científicos, sincronización de sistemas de comunicación, mediciones de fase en redes de transporte de energía y calibraciones generales de relojes.
4.2.2 Utilización de transpondedores en 400,1 M Hz a bordo de satélites destinados a otros fines
La Conferencia Administrativa Mundial de Telecomunicaciones Espaciales de 1971 (Ginebra) atribuyó la frecuencia de 400,1 ± 0,05 MHz para uso exclusivo de la difusión de información T /F por satélite. Muchas necesidades generales de temporización que sólo requieren niveles de exactitud modestos podrían satisfacerse eficazmente mediante transmisiones de señales horarias unidireccionales a través de un transpondedor a 400,1 MHz añadido en uno o más satélites destinados en principio a otros fines. Con la anchura de banda utilizable atribuida de ± 25 kHz, habría considerable flexibilidad para diseñar la señal horaria. Naturalmente, se podrían incluir anuncios vocales, «tics», tonos y códigos horarios, tal como se hace actualmente en los servicios por ondas decamétricas. Por otra parte, sería también posible incluir algún tipo de señal CRP de bajo nivel, que podría decodificarse facultativamente a un costo más alto para el usuario a fin de proporcionar una precisión mucho mayor, tal vez a nivel inferior al microsegundo. Como la señal horaria del satélite es internacional por su propia naturaleza, podría considerarse también * la posibilidad de transmitir sólo un código horario sencillo a través del transpondedor de satélite que podría luego transformarse fácilmente en el receptor del usuario en anuncios horarios orales en cualquier idioma deseado mediante circuitos integrados de síntesis digital de la palabra. El desarrollo y realización de tales servicios permitiría eliminar gradualmente muchos de los actuales servicios terrenales de señales horarias en ondas decamétricas y brindaría una posible solución a los actuales problemas de interferencia en estas gamas.
Aunque no se han efectuado experimentos en la difusión horaria utilizando esta frecuencia específica, se ha demostrado previamente la viabilidad de proporcionar dicho servicio por satélite para usuarios generales de información T /F . En agosto de 1973, el National Bureau of Standards (NBS) dio fin a su experimento de dos años, consistente en la emisión, en un solo sentido, de señales de tipo WWV, por medio del satélite de aplicaciones tecnológicas ATS-3 de la Administración Nacional de Aeronáutica y del Espacio (NASA) de Estados Unidos de América [Hanson y Hamilton, 1974]. Incluso con la frecuencia

I. 518-4 75
relativamente baja de 135 MHz, utilizada en el sentido espacio-Tierra, se lograron precisiones de transferencia de señales horarias de 25 ps en el modo de explotación unidireccional. Se pudieron calcular los tiempos de propagación, con este grado de precisión, mediante una simple regla de cálculo construida especialmente para este fin. El experimento demostró que pueden lograrse tales resultados con personal relativamente profano que haya recibido una capacitación de unas horas. Com parada con el empleo de emisiones en ondas decamétricas, la recepción de las señales del satélite se reveló mucho más confiable y sólo requirió técnicas de recepción simples y equipos de un costo y una complejidad comparables. Aunque las señales horarias del ATS-3 eran experimentales y de duración limitada a dos periodos de 15 min diarios, la NBS recibió miles de solicitudes de información que prueban el interés suscitado por esta técnica.
Actualmente no se conoce la existencia de planes para utilizar la atribución en 400,1 MHz.
4.2.3 Posibilidades especiales con satélites de telecomunicación
Anteriormente se ha examinado el método directo de utilizar canales arrendados en satélites de telecomunicación para transm itir señales horarias en relación con las soluciones punto a punto de alta precisión, en las que se requiere una gran anchura de banda disponible para la más alta calidad de funcionamiento. Sin embargo, en circunstancias especiales, puede haber otras maneras en que puedan usarse estos satélites universales para la difusión general de información T /F . Una de las sugerencias formuladas consiste en utilizar en dichos satélites los transpondedores de ondas métricas para la difusión de señales horarias. Estos transpondedores se utilizan principalmente durante las m aniobras iniciales de inserción en órbita y, por tanto, pueden estar disponibles para otras aplicaciones auxiliares una vez que el satélite está bien colocado en su órbita operacional.
El Istituto Elettrotecnico Nazionale (IEN) utilizó uno de esos transpondedores en el satélite experimental de telecomunicaciones Sirio-1, funcionando a 136 MHz [Detoma y otros, 1981]. El experimento incluyó también el empleo del transpondedor de ondas centimétricas que funcionaba en una frecuencia de enlace ascendente en la banda de 17 GHz y una frecuencia de enlace descendente en la banda de 14 GHz. Las pruebas se realizaron utilizando una señal horaria codificada [Detoma y otros, 1983]. La anchura de banda disponible en ambos casos (ondas métricas y ondas centimétricas) era de unos pocos kilohertzios. En el experimento en ondas métricas la desviación típica fue de 1,5 ms, y en el experimento en ondas centimétricas fue de 30 ps.
En 1977-1979, India pudo aprovechar la disponibilidad del satélite Symphonie-I para efectuar experiencias de difusión de señales horarias. Entre los tipos de información difundida y las desviaciones típicas medidas asociadas figuraron:
— un formato de radiodifusión por ondas decamétricas típico análogo al de ATA, 50 ns;— un código de señales horarias; y— señales horarias en radiodifusión de televisión directa, 70 ns. En el caso de la televisión se confirmó
una precisión de 0,25 ps.
En un caso específico (India), se ha elaborado un acuerdo para dar al NPL acceso a una porción del espectro de comunicación del satélite nacional indio de telecomunicaciones Insat con el propósito específico de difundir información horaria con carácter operacional. Se ha puesto a disposición un canal de 10 kHz en la banda S (2 GHz aproximadamente) y se está proyectando proporcionar una señal horaria completa, incluida la información de posición en el satélite para la corrección del tiempo de propagación unidireccional por los usuarios.
4.3 Soluciones que se prestan tanto para la difusión general como para las aplicaciones de alta precisión
4.3.1 Sistema de navegación T R A N SIT
El sistema de navegación TRANSIT de Estados Unidos de América utiliza actualmente cinco satélites operacionales en órbita polar que transmiten continuamente señales de navegación y horarias en las frecuencias de 150 y 400 MHz. Las señales horarias referidas al USNO pueden extraerse a partir de marcas de tiempo fiduciales transmitidas cada dos minutos y determ inando el tiempo de propagación a partir de la efemérides del satélite incluida en el formato de la señal del TRANSIT. Las señales horarias se obtienen en el satélite a partir de los osciladores de cuarzo corregidos en caso necesario desde las estaciones terrenas de comprobación para mantener la sincronización dentro de ± 100ps del UTC (USNO). Se dispone de receptores comerciales que pueden prom ediar automáticamente las señales provenientes de satélites Transít seleccionados y de un número seleccionado de pasos del satélite. Seleccionando cuidadosamente el satélite y el promedio de pasos del satélite sobre un emplazamiento determinado, resulta posible para los usuarios en general disponer de una referencia horaria que normalmente sólo difiere en ± 10 ps del UTC (USNO).
El sistema TRANSIT está funcionando plenamente con cinco satélites y debe continuar prestando servicio aún durante muchos años. Recibe el apoyo de la M arina de los Estados Unidos de América, que publica también correcciones relativas al tiempo de cada satélite TRA N SIT con respecto al UTC (USNO).

76 I. 518-4
Los experimentos de comparación de tiempo realizados con un satélite TRANSIT (Nova) perfeccionado han indicado que pueden obtenerse exactitudes que representan una incertidumbre inferior a 100 ns [Rueger y Bates, 1978]. .Estos resultados mejores que los obtenidos con el satélite TRANSIT operacional se deben principalmente a la utilización de señales de satélite CRP y de espectro ensanchado, así como a receptores perfeccionados. Están actualmente en órbita dos satélites TRANSIT (Nova) mejorados.
Como el sistema TRANSIT ha estado funcionando desde 1965, se ha acumulado una gran experiencia. Ha quedado así demostrado que la recepción unidireccional de las señales del TRANSIT proporciona una referencia horaria que generalmente difiere menos de ± 20 ps del UTC (USNO), proporcionando así una información T /F extremadamente útil para las necesidades generales de difusión [Laidet, 1972; Beehler y otros, 1979].
Además, las mejoras incorporadas en la serie Nova más reciente de satélites Transit puede ofrecer en el futuro posibilidades de precisión más alta (por debajo del microsegundo). El Laboratorio de Física Aplicada de la Universidad Johns Hopkins, de Estados Unidos de América, ha realizado amplias pruebas de temporización utilizando un reciente satélite experimental Nova [Taylor, 1974], El satélite lleva un reloj de cuarzo y genera una señal CRP a la velocidad binaria de 1,67 M bit/s que modula una portadora de 400 MHz. Se emplea también una portadora de 150 MHz para efectuar las correcciones correspondientes a los efectos de la refracción ionosférica. Se han llevado a cabo dos tipos de experimentos. En el primero (sincronización de relojes regionales), se observaron simultáneamente las transmisiones del satélite desde dos ubicaciones, en las cuales pudieron sincronizarse relojes locales con una precisión de ± 50 ns. El segundo (sincronización global de relojes) se refirió a la sincronización de relojes situados en diferentes continentes. En una operación de este tipo, se piensa que las dos limitaciones principales para la transferencia de señales horarias son la incertidumbre acerca de la posición del satélite y la inestabilidad de su oscilador. Se efectuaron experimentos midiendo el tiempo de llegada de las señales horarias de ruido pseudoaleatorio durante un paso del satélite, utilizando los datos obtenidos para predecir el instante de llegada para el paso siguiente del satélite, y comparando después los resultados de las mediciones con los resultados que se habían predicho. Se llegó a la conclusión de que los errores de sincronización resultantes, al emplear el modo global, son inferiores a 75 ns para predicciones de 100 min. Utilizando las dos portadoras para determinar las correcciones ionosféricas, se evaluó en menos de 30 ns el error debido a esta fuente.
Actualmente no hay una necesidad operacional aprobada para añadir el CRP al sistema TRANSIT operacional y no se sabe a ciencia cierta si se dispondrá de dichas señales mejoradas (para temporización) a largo plazo.
4.3.2 Sistemas de satélites de seguimiento y retransmisión de datos (TDRS)
Se está implantando el sistema TDRS para proporcionar la retransmisión bidireccional de datos de seguimiento y de otro tipo entre instalaciones terrenas de la NASA y satélites en órbita baja en el decenio de 1980 [Chi, 1979]. El sistema comprenderá dos satélites operacionales en la órbita geoestacionaria a 41° y 171° de longitud Oeste y un satélite de reserva en órbita especializado con el centro de control principal en White Sands, Nuevo México. Con estas ubicaciones el sistema TDRS podría proporcionar enlaces de señales horarias a laboratorios ubicados desde Japón y Australia a través de América del Norte hasta la totalidad de Europa. Si bien el sistema TDRS está destinado principalmente a comunicar con vehículos espaciales en órbita, algunas estaciones de seguimiento de la NASA participarán asimismo en el sistema. Puede existir la posibilidad de que participen también como usuarios, organizaciones de señales horarias. En un posible modo bidireccional de alta precisión, cada usuario de señales horarias podría tener un transpondedor en la banda S (2 GHz aproximadamente) con sistemas auxiliares adecuados en el emplazamiento. Podría transmitirse en la banda K (18-26 GHz) una señal horaria, consistente en un punto identificado en una secuencia de código seudoaleatorio, desde la estación principal de control al satélite TDRS y después al usuario de señales horarias en la banda S. Este usuario podría entonces medir el instante de llegada en su reloj local, codificar esta información en la señal del TDRS y devolverla a la estación de control a través del satélite. El usuario podría también generar una señal horaria local y transmitirla a la estación de control. Los tiempos de propagación pueden establecerse con precisión y debieran poder lograrse exactitudes de transferencias de tiempo de unos 10 ns. Para uso operacional podría preverse una secuencia periódica de mediciones que comparen cada laboratorio de señales horarias por turno con la referencia del reloj maestro de Nuevo México. Tales comparaciones regulares podrían quizás ser programadas y coordinadas por la NASA, el BIH, o alguna otra organización interesada.
Los usuarios en emplazamientos fijos en la Tierra tendrían la posibilidad de utilizar las señales del TDRS en un modo unidireccional de menor precisión efectuando los cálculos y correcciones adecuados para tener en cuenta el tiempo de propagación. Existe la posibilidad de que pueda añadirse un código horario (hora del día) a las posibilidades del TDRS.
El sistema TDRS está en pleno proceso de realización, pero aún no se han llevado a cabo experimentos a fin de evaluar las capacidades del sistema para la transferencia de tiempo. Por el momento se desconoce el grado de acceso al sistema TDRS, de haberlo, que los usuarios de las informaciones T /F tendrán en el futuro.

I. 518-4 77
4.3.3 Satélites de radiodifusión de televisión
En muchos países se realizan periódicamente comparaciones horarias terrenales, tanto dentro de zonas locales como a distancias mucho mayores, observando simultáneamente en dos ubicaciones un impulso de sincronización identificado dentro de la señal normal de transmisión de televisión. Cuando ambas ubicaciones están dentro de la misma zona de servicio de un transmisor de televisión, las diferencias de tiempo de los relojes pueden medirse con exactitudes de aproxim adam ente 100 ns o superiores suponiendo que pueda determinarse también el retardo diferencial del trayecto de propagación. El método es útil también para distancias mayores cuando pueden observarse dos transmisores de televisión que están interconectados en una red de televisión. Gracias a la actual tendencia a incluir la transmisión de televisión desde satélites especializados, puede ser factible aplicar los mismos métodos de sincronización de tiempo por televisión al caso de la televisión por satélite [Kovacevic y otros, 1979 y 1981]. Los impulsos de televisión transmitidos por satélite pueden recibirse ciertamente en zonas más amplias y compararse con relojes locales logrando una alta resolución (algunos nanosegundos). Sin embargo, la exactitud con que pueden compararse los dos relojes depende del conocimiento del retardo de propagación diferencial. Una idea interesante es medir exactamente la distancia del satélite de televisión mediante algunas estaciones de determinación de distancia por láser y utilizar después esta información para calcular los retardos del trayecto. Otra variante, propuesta por el Bureau international de l’heure, sería utilizar la técnica LASSO para calibrar el tiempo de emisión del impulso de televisión por satélite, que se utilizaría después para transferir el tiempo a usuarios individuales a través de la recepción unidireccional del impulso. Una tercera posibilidad sería determinar con gran exactitud la posición del satélite por un método bilateral, aplicando éste desde como mínimo tres estaciones transmisoras terrestres [Kovacevic y otros, 1981; Hartl y otros, 1983]. Otro método para utilizar satélites de radiodifusión de televisión, en este caso más bien para la difusión general de información horaria, comprende la codificación de información horaria (hora del día) en el intervalo de supresión de tram a vertical de la señal de televisión, que puede recibirse y decodificarse en amplias zonas de recepción con exactitud modesta, suficiente para muchas necesidades cronométricas.
Algunos satélites experimentales de radiodifusión de televisión están siendo evaluados y, en algunos casos, se han utilizado también para estudios de difusión de la información T /F . En Japón se han efectuado experimentos preliminares de difusión de frecuencias patrón utilizando el satélite de radiodifusión de mediana escala para fines experimentales (BSE), con enlace descendente en 12 GHz y enlace ascendente en 14 GHz. La estabilidad a corto plazo medida de la frecuencia subportadora de televisión recibida era tan buena como en la televisión terrenal, es decir, 0^(10 s) = 3 x 10"11. Para determinar la técnica de anulación del efecto del desplazamiento Doppler, se efectuaron pruebas utilizando el servoco- mando de fase (incluido en el enlace de satélite) y el control de frecuencia por compensación previa, valiéndose de los valores medidos de los datos de la órbita del satélite. La magnitud del desplazamiento Doppler residual en la estación de control puede reducirse hasta un orden de 1 parte en 1012 o menos empleando el primer método y el segundo. Se prevé que con el método que utiliza los datos de la órbita se obtendrá una precisión de algunas partes en 1011. De este modo, el valor máximo del desplazamiento Doppler en el punto más alejado del país que está a unos 1500 km de la estación transm isora del BSE, se estima en ± 2 x 10~10, sin corrección alguna [Ishida y otros, 1979; Saburi y otros, 1979].
Como resultado de nuevos experimentos realizados utilizando el BSE, se obtuvo una precisión de difusión de frecuencias de 5 x 10-12 (lo ) en un punto situado a unos 1000 km de distancia de la estación transmisora cuando se aplicó al valor medido la corrección calculada basada en los datos de la órbita. Otro resultado de esos experimentos fue la obtención de una precisión de 0,2 ps ( la ) y de una precisión de 0,12 ps ( la ) en la comparación de tiempos realizada para un periodo de cinco meses, entre dos relojes de cesio distantes aproximadamente el uno del otro 400 km, a través del impulso de sincronismo de televisión. En un experimento de difusión de señales horarias mediante la inserción de un código horario en el intervalo de supresión de trama, se obtuvo una precisión de 10 ps en todo el país aplicando el control de corrección Doppler en la estación transmisora [Saburi y otros, 1980],
Durante los últimos años desde 1980, se ha llevado a cabo en Europa un experimento de comparación de tiempo en el que han participado VSL, NPL, IEN , DFVLR, TUG y PTB, utilizando las señales de televisión retransmitidas, a una frecuencia de 11,682 GHz, por el satélite de comunicaciones experimental Europeo, OTS-2; estos experimentos terminaron a finales de 1983. En octubre de 1983, y durante un periodo de una semana, fue posible comparar los resultados obtenidos por el IEN y el TUG en las medidas de transmisión de señales horarias y frecuencias patrón a través del OTS-2 y el NAVSTAR/GPS. La variación de las diferencias de frecuencia relativa obtenidas por medidas utilizando el OTS-2 y el GPS fue inferior a 3 x 10“ 14 y la desviación típica de ambos tipos de medidas fue de un valor inferior a 20 ns [Kirchner y otros, 1985].
Las medidas realizadas con el OTS-2 han demostrado que será posible establecer enlaces de alta calidad para las comparaciones de tiempo y frecuencia utilizando satélites de radiodifusión (TV) directa. Desde luego, para establecer comparaciones de tiempo de gran exactitud, será necesario efectuar una calibración de los retardos que introducen los equipos de recepción [De Jong y otros, 1981 y De Jong y Kaarls, 1983].

78 I. 518-4
Si los laboratorios que participan en estos experimentos se encuentran a corta distancia para el cálculo de los retardos de propagación, será suficiente emplear los procedimientos normalizados de determinación de la órbita que se utilizan para los satélites de comunicaciones. Si la distancia es grande, debe determinarse la posición del satélite lo más exactamente posible; esto se puede realizar mediante medidas de distancia precisas llevadas a cabo por los propios laboratorios de señales horarias patrón, tal como han demostrado las medidas realizadas en el Instituto de Graz y que han obtenido una calidad comparable a las de las estaciones de seguimiento que trabajan en las bandas de ondas centimétricas (SHF) [Kirchner y otros, 1984].
4.4 Comparación de las posibles aplicaciones
En el cuadro I se proporciona información adicional comparativa de las posibles aplicaciones, incluida la cobertura, exactitud alcanzable, algunas consideraciones relativas al coste para el usuario, y viabilidad de la solución para su empleo en el emplazamiento o necesidad de enlaces de temporización auxiliares a facilidades receptoras fuera del emplazamiento, así como el estado del sistema o de la técnica, es decir si está disponible sólo a título experimental o si será operacional a más largo plazo. En el cuadro II se resumen concisamente algunas de las principales ventajas e inconvenientes de las diversas soluciones que ofrecen los sistemas por satélite.

ANEXO I
COM PARACIONES DE TIEM PO /FR EC U EN C IA POR SATÉLITE
I. 518-4 79
Año Organizaciones y referencias Satélite Técnica/
descripciónExactitud (E) o
precisión (P) anunciadas
1962 USNO/USA, N PL/Reino Unido, R G O /R eino Unido [Steele y otros, 1964]
Telstar 6390 MHz
Ambos sentidos 1 ps (E); enlace por satélite solamente 20 ps (E); enlace total
1965 USNO/USA,R RL/Japón[Markowitz y otros, 1966]
Relay-I I1723 MHz (ascendente) 4175 MHz (descendente)
Ambos sentidos 0,1 ps (E) 0,01 ps (P)
1967 NBS/USA[Gatterer y otros, 1968]
ATS-1 136 MHz
Un solo sentido 10-60 ps (E)
1967 NBS/USA[Jespersen y otros, 1968]
ATS-1149 MHz (ascendente) 136 MHz (descendente)
Ambos sentidos < 5 ps (E)
1968 NASA/USA [Laios, 1972]
GEOS-2 136 MHz
Un solo sentido; reloj de cuarzo en el vehículo espacial
20 ps (E)
1969 C N ES/Francia [Laidet, 1972]
Transit 400 MHz
Un solo sentido; reloj de cuarzo en el vehículo espacial
20 ps (E)
1970 N RL/U SA[Murray y otros, 1971]
Satélite de comunicaciones del Dept. de Defensa de los Estados Unidos de América — Banda X
Ambos sentidos 0,1-0,2 ps (E)
1970 NBS/USA[Hanson y Hamilton, 1971]
Tacsat/LES-6 Señales de determinación de dist. por tonos laterales en una portadora de 250 MHz
Utilización en un solo sentido de señales de medición de distancia de baja resolución
40 ps (E)
1971 NASA/USA [Mazur, 1972]
ATS-36212 MHz (ascendente) 4119 MHz (descendente)
Ambos sentidos 50-70 ns (E)
1971 NBS/USA[Hanson y Hamilton, 1974]
ATS-3 136 MHz
Transmisión en un solo sentido de señales WWV por el transpondedor del satélite
25 ps (E) 10 ps (P)
1974 A PL/JH U /U SA [Taylor, 1974]
Transit perfeccionado 150 MHz 400 MHz
Un solo sentido: reloj en el vehículo espacial; señal CRP
< 75 ns (E) 10 ns (P)
1974 NASA/USA,FAA/USA[Chi y Byron, 1975]
ATS-16301 MHz (ascendente) 4178 MHz (descendente)
Ambos sentidos; señal CRP
50 ns (E) 20 ns (P)
1975 NRL/U SA , USNO/USA, RG O /Reino Unido, D N M /A ustralia
NTS-1 335 MHz
Un solo sentido; reloj en el vehículo espacial
< 500 ns (E) 50 ns (P)
1975 R RL/Japón, NASA/USA, USNO/USA [Saburi y otros, 1976]
ATS-16 GHz (ascendente)4 GHz (descendente)
Ambos sentidos con espectro ensanchado, sistema de comunicaciones con acceso directo
10 ns (E) 1 ns (P)

80 I. 518-4
AN E X O I (Continuación)
Año Organizaciones y referencias Satélite
Técnica/descripción
Exactitud (E) o precisión (P) anunciadas
1975 N BS/USA[Beehler y otros, 1979]
GOES 468 MHz
Un solo sentido < 100 ps (E)
1976 C N E S/Francia, LPTF/Francia, PTB/República Federal de Alemania [Brunet, 1979]
Symphonie 6 GHz (ascendente)4 GHz (descendente)
Ambos sentidos 50 ns (E)< 10 ns (P)
1978 D N M /A ustralia, N R C /C anadá, R G O /R eino Unido, BIH, IFA G/República Federal de Alemania, NASA/USA, N BS/USA,N RL/U SA , USNO /U SA [Buisson y otros, 1978]
NTS-1 NTS-2
335 MHz 1580 MHz
Un solo sentido; relojes en el vehiculo espacial
< 1 ps (E)
1979 N R C /C anadá, N BS/USA, U SNO/USA, LPTF/Francia [Costain y otros, 1979]
CTS/Hermes Symphonie 4 /6 GHz 12/14 GHz
Ambos sentidos 50 ns (E) 0,2 ns (P)
1979 N PL/India, PTB/República Federal de Alemania [Mathur y otros, 1980]
Symphonie 4 /6 GHz
Ambos sentidos < 100 ns (E)< 10 ns (P)
1979 IE N /Italia[Detoma y Leschiutta, 1980]
Sirio-1 12/17 GHz
Ambos sentidos; un solo canal compartido en el tiempo
50-100 ns (E) 1-5 ns (P)
1979 N IM /R epública Popular de China,PTB/República Federal de Alemania
Symphonie Ambos sentidos < 80 ns (E)< 10 ns (P)
SO y CSAO/República Popular de China, LPTF/Francia
Symphonie Ambos sentidos < 100 ns. (E)< 10 ns (P)
Desde1980
NBS/USA, USNO/USA, B IH /Francia, LPTF/Francia, PTB/República Federal de Alemania, NRL/U SA , VSL/Países Bajos,TU G /A ustria, TA O /Japón, JPL/U SA , R R L/Japón
GPS General < 100 ns (E) 10-30 ns (P)
1980 R R L/Japón [Saburi y otros, 1980]
BSE Un solo sentido 5 x 10~12 (1000 km) (E) 0,2 ps (E)0,12 p s(P )
1978-1982
N R C /C anadá,LPTF/Francia,C N E S/Francia
Symphonie Ambos sentidos 0,5 ns (P)
1980-1982
PTB/República Federal de Alemania
Symphonie Ambos sentidos 0,5 ns (P)

I. 518-4 81
ANEXO I (Continuación)
Año Organizaciones y referencias Satélite Técnica/
descripciónExactitud (E) o
precisión (P) anunciadas
Desde1981
R R L /Japón [Imae y otros, 1983]
CS30/20 GHz
Ambos sentidos, antena de 1,3 m-2 m con SSRA Ambos sentidos, antena de 1 m-2 m con SSRA
1 ns (P) 13 ns (E)
1 ns (P) 0,7 ns (E)
1982 VSL/Países-Bajos, N PL/Reino Unido, IE N /Ita lia ,DFVLR, PTB/República Federal de Alemania, TU G /A ustria [De Jong y otros, 1981; De Jong y Kaarls, 1983]
OTS-2 Un solo sentido 300 ns (E) 20 ns (P)
1983 U SNO/USA, COM SAT/USA, D FVLR/República Federal de Alemania
Intelsat-V Ambos sentidos 300-500 ps (P)
REFERENCIAS BIBLIOGRÁFICAS
ALLAN, D. W., DAVIS, D. D., WEISS, M., CLEMENTS, A., GUINOT, B., GRANVEAUD, M., D ORENW END T, K., FISCHER, B„ HETZEL, P., AOKI, S., FUJIMOTO, M. K., CHARRON, L. y ASHBY, N. [junio de 1985] Accuracy of international time and frequency comparisons via global positioning system satellites in common-view. IE E E Trans. Instr. Meas., Vol. IM-34, 2, 118-125.
ALLAN, D. W. y WEISS, M. A. [mayo de 1980] Accurate time and frequency transfer during common-view o f a GPS satellite. Proc. 34th Annual Symposium on Frequency Control, FiladelFia, Pa., Estados Unidos de América (US Army Electronics Command, Ft. M onmouth, NJ 07703), 334-347 (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
AOKI, S., FUJIWARA, K. y YANAZAKI, T. [1984] Loran-C versus GPS. Time and Latitude Bull., Tokyo Astronomical Observatory, Vol. 58, 25.
BEEHLER, R. E. [diciembre de 1982] GOES satellite time code dissemination. Proc. 14th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Washington, DC, Estados Unidos de América.
BEEHLER, R. E., DAVIS, D. D., CATEORA, J. V., CLEMENTS, A. J., BARNES, J. A. y M EN DEZ-QU IN ON ES [noviembre de 1979] Time recovery measurements using operational GOES and TRANSIT satellites, Proc. l l th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos de América, 283-315.
BRUNET, M. [julio-agosto de 1979] Synchronization of atomic docks through the “Symphonie” satellite. Radio Sci., Vol. 14, 4, 721-730.
BUISSON, J., McCASKILL, T., OAKS, J., LYNCH, D., W ARDRIP, C. y W HITW ORTH, G. [noviembre de 1978] Submicro- second comparisons of time standards via the Navigation Technology Satellites (NTS). Proc. lOth Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos de América, 601-629.
CLEM ENTS, P., BORUTZKI, S. y K IRK, A. [1984] Maintenance of timé and frequency in the Jet Propulsión Lab's deep space network using the global positioning system. Proc. 16th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos de América.
COOPER, R. S y CHI, A. R. [julio-agosto de 1979] A review of satellite transfer technology: accomplishments and future applications. Radio Sci., Vol. 14, 4, 605-619.
COSTAIN, C. C. y otros [1979] Two-way time transfer via geostationary satellites N R C /N B S, N R C /U SN O and N BS/U SN O via Hermes and N R C /L PT F (Francia) via Symphonie, Proc. l l th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Washington, DC, Estados Unidos de América, 499-520.
COSTAIN, C. C., DAAMS H. y BOULANGER, J. S. [1982] Two-way satellite time transfer using low power CW tones. Proc. 14th Annual Precise Time and Interval (PTTI) Applications and Planning Meeting, Washington, DC, Estados Unidos de América, 31-37.

82 I. 518-4
COSTAIN, C .C ., DAAMS, H., BOULANGER, J. S. y DOUGLAS, R. [1983] Time dissemination from the National Research Council of Cañada. Proc. 37th Annual Symposium on Frequency Control (US Army Electronics Command, Ft. Monmouth, NJ 07703) (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
CH I, A. R. [noviembre de 1979] Satellite time transfer via TDRSS and applications. Proc. l l th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Washington, DC, Estados Unidos de América, 45-65.
CHI, A. R. y BYRON, E. [diciembre de 1975] Two-way time transfer experiment using a synchronous satellite. Proc. 7th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Washington, DC, Estados Unidos de América, 357-377.
DAVIS, D. D., WEISS, M., CLEM ENTS, A. y ALLAN, D. W. [diciembre de 1981a] Unprecedented syntonization and synchronization accuracy via simultaneous viewing with GPS receivers and construction characteristics of an NBS/GPS receiver. Proc. 13th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Washington, DC, Estados Unidos de América 527-547.
DAVIS, D. D., WEISS, M., CLEM ENTS, A. y ALLAN, D. W. [mayo de 1981b] Construction and performance characteristics of a prototype NBS/GPS receiver. Proc. 35th Annual Symposium on Frequency Control, Filadelfia, Pa., Estados Unidos de América (US Army Electronics Command, Ft. M onmouth, NJ 07703) (Electronic Industries Association, W ashington, DC 20006, Estados Unidos de América).
D ECH ER, R., ALLAN, D., ALLEY, C., VESSOT, R. y W INKLER, G. [diciembre de 1980] A space system for high-accuracy global time and frequency comparison of docks. Proc. 12th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos de América, 99-115.
DE JO N G , G. y KAARLS, R. [abril de 1983] Report on time syncronization via OTS-2. EEC, Bureau of Reference, Bruselas, Bélgica.
DE JO N G , G., KAARLS, R., K IR CH N ER , D. y RESSLER, H. [diciembre de 1981] Time comparison via OTS-2. Proc. 13th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Washington, DC, Estados Unidos de América, 347-367.
DETOMA, E. y LESCHIUTTA, S. [diciembre de 1980] Two-way sequential time synchronization: preliminary results from the SIRIO-1 experiment. Proc. 12th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos de América, 329-351.
DETOM A, E. y otros [1981] Time code dissemination experiment via the SIRIO-1. NASA Conf. Publ. 2220, 469-488. Proc.13th Annual Precise Time and. Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, EstadosUnidos de América.
DETOMA, E., LESCHIUTTA, S. y PETTITI, V. [1983] Disseminazione di segnali di tempo via satellite geoestazionario, Elettronica e Telecommunicazioni, Vol. 32, 4, 163-169.
EASTON, R. L., FISHER, L. C., HANSON, D. W., HELLWIG, H. W. y RUEGER, L .J. [octubre de 1976] Dissemination of time and frequency by satellite. Proc. IEEE , Vol. 64, 1482-1493.
FUJIM OTO, M. K., FUJIWARA, K. y AOKI, S. [1983] International time comparison by a GPS time receiver. Proc.15th Annual Precise Time and Time In terval(P T T I) Applications and Planning Meeting, Washington, DC, EstadosUnidos de América, 71.
G ATTERER, L. E., BOTTONE, P. W. y MORGAN, A. H. [diciembre de 1968] Worldwide clock synchronization using a synchronous satellite. IEEE Trans. lnstr. Meas., Vol. IM-17, 4, 372-378.
HANSON, D. W. y HAMILTON, W. F. [septiembre de 1971] Clock synchronization from satellite tracking. IE E E Trans. Aerospace Electron. Systems, Vol. AES-7, 5, 895-899.
HANSON, D. W. y HAMILTON, W. F. [septiembre de 1974] Satellite broadcasting of WWV signáis. IEEE Trans. Aerospace Electron. Systems, Vol. AES-10, 5, 562-573.
HANSON, D. W., DAVIS, D. D. y CATEORA, J. V. [ j u l i o - a g o s t o de 1979] NBS time to the western hemisphere by satellite.Radio Sci., Vol. 14, 4, 731-740.
HARTL, Ph., GIESCHEN, N., M ÜSSENER, K. M. y SHAFER, W. [1983] High-accuracy global time transfer via geosynchro-nous télécommunications satellites with Mitrex. Z. Flugwiss. Weltraumforsch., Vol. 5, 7, 335-342.
IM AE, M„ OKAZAWA, H., SATO, T., URAZUKA, M., YOSH1MURA, K. y YASUDA, Y. [1983] Time comparisonexperiments with small K-band antennas and SSRA equipments via a domestic geostationary satellite. IE E E Trans. Inst.Meas., Vol. 32, I, 199-203.
IM AE, M., URATSUKA, M., M IKI, C., MORIKAWA, T., AKATSUKA, K. y YOSHIM URA, K. [1985] Development of aGPS time transfer receiver and time comparison results. Proc 39th Annual Symposium on Frequency Control (US ArmyElectronics Command, Ft. Monmouth, NJ 07703) (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
ISHIDA, T., SOEJIMA, S. e ICHIKAW A, Y. [diciembre de 1979] Present situation of Japanese satellite broadcasting for experimental purpose. IEEE Trans. Broadcasting, Vol. BC-25, 4, 105-112.
JESPERSEN , J., KAMAS, G., GATTERER, L. y M acDORAN, P. [julio de 1968] Satellite VHF transpónder time synchronization. Proc. IEEE, Vol. 56, 7, 1202-1206.
K IR C H N ER , D., KOUDELKA, O. y RIEDLER, W. [1984] Range measurements to the OTS-2 satellite by means of a STELLA terminal. ESA J., 8, 133-142.
K IR CH N ER , D., RESSLER, H., CORDARA, F., GALLIANO, P. G. y PETTINI, V. [junio de 1985] A comparison of time and frequency measurements via OTS-2 with results obtained by NAVSTAR/GPS and LORAN-C. IEEE Trans. Instr. Meas., Vol. IM-34, 2, 126-129.

I. 518-4 83
KLEPCZYNSKI, W. J. [1982] Systematic effects in GPS time transfer. Proc. 14th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos de América, 491.
KOVACEVIC, B., DIM ITRIJEVIC, B„ ARSIC, M. y GOLUBOBIC, L. [octubre de 1981] Precise international T /F com parisons via ground and satellite TV systems. J. Inst. Electron. Telecomm. Engrs., Vol. 27, 10, 450-456.
KOVACEVIC, B., DIM ITRIJEVIC, B., ARSIC, M. y KOVACEVIC, N. [1979] Precise real-time signal dissemination over theTV broadcasting satellite. Radio Sci., Vol. 14, 4, 685-694.
LAIDET, L. M. [mayo de 1972] Worldwide synchronization using the TRANSIT satellite system. Proc. IE E E (Lett.), Vol. 60, 5, 630-632.
LAIOS, S. C. [mayo de 1972] Satellite time synchronization of a NASA network. Proc. IE E E (Lett.), Vol. 60, 5, 632-633.
MARKOW ITZ, W., LIDBACK, C. A., UYEDA, H. y MURAMATSU, K. [diciembre de 1966] Clock synchronization via Relay II satellite. IEEE Trans. Instr. Meas., Vol. IM-15, 4, 177-184.
MATHUR, B. S., BANERJEE, P., SOOD, P. C., SAXENA, M., KUMAR, N. y SURI, A. K. [diciembre de 1980] Precise time and frequency intercomparison between NPL, India and PTB, Federal Republic of Germany via satellite Symphonie-1. Proc. 12th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos de América, 863-875.
MAZUR, W. E., Jr. [mayo de 1972] Dual transpónder time synchronization at C band using ATS-3. Proc. IE E E (Lett.), Vol. 60, 5, 633-634.
M ILLIK EN, R. J. y ZOLLER, D. J. [verano de 1978] Principie of operation NAVSTAR and system characteristics. Navigation, Vol. 25, 2, 95-106.
MURRAY, J. A., PRITT, D. L., BLOCKER, L. W., LEAVITT, W. E., HOOTEN, P. M. y G O R IN G , W. D. [abril de 1971] Time transfer by Defense Communications Satellite. Proc. 25th Annual Symposium on Frequency Control, Atlantic City, NJ, Estados Unidos de América, (US Army Electronics Command, Ft. M onm outh, NJ 07703), 186-193 (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
NOTTARP, K., SCHLÜTER, W. y H ÜBNER, U. [noviembre de 1979] One-way time transfer via METEOSAT capable of 30 ns accuracy. Proc. l l th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Washington, DC, Estados Unidos de América, 329-343.
PUTKOVICH, K. [diciembre de 1980] USNO GPS program. Proc. 12th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Washington, DC, Estados Unidos de América.
RUEGER, L. J. y BATES, A. [1978] NOVA satellite experiment. Radio Sci., Vol. 14, 707-714.
SABURI, Y., YAMAMOTO, M. y HARADA, K. [diciembre de 1976] High-precision time comparison via satellite and observed discrepancy of synchronization. IEEE Trans. Instr. Meas., Vol. IM-25, 4, 473-477.
SABURI, Y., YASUDA, Y., KOBAYASHI, S. y SATO, T. [noviembre de 1979] T&F comparison via broadcasting satellite and Navigation Technology Satellite. Proc. l l th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Washington, DC, Estados Unidos de América, 315-329.
SABURI, Y., YASUDA, Y., KOBAYASHI, S., SATO, T. e IM AE, M. [1980] Experiment o f standard frequency and time signal dissemination via the BSE. 3 ls t Congress International Astronautical Federation (IAF).
SERENE, B. y ALBERTINOLI, P. [noviembre de 1979] The LASSO experiment. Proc. l l th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Washington, DC, Estados Unidos de América, 145-171.
STARKER, S., ÑAU, H., HAM M ESFAHR, J. y TSCHIESCHE, H. [1982] NAVEX - a space shuttle experiment with atomic docks. Proc. 14th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos de América, 181-202.
STARKER, S. y ROTHER, D. [1979] A spacelab experiment on clock synchronization and one-way ranging, Ortung und Navigation 1/79 Vierteljahresmitteilung der Deutsche Gesellschaft für Ortung und Navigation (D GO N), 35-53.
STEELE, J. McA., MARKOWITZ, W. y LIDBACK, C. A. [diciembre de 1964] Telstar time synchronization. IE E E Trans. Instr. Meas., Vol. IM-13, 4, 164-170.
TAYLOR, R. J. [29-31 de mayo de 1974] Satellite-to-ground timing experiments. Proc. 28th Annual Symposium on Frequency Control (US Army Electronics Command, Ft. M onmouth, NJ 07703), 384-388 (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
USNO [1985] United States Naval Observatory. Time Service Announcement, Series 16.
W ARDRIP, C., BUISSON, J., OAKS, O., LITER, M„ STEBRINS, S. G UIN OT, B., GRANVEAUD, M., FREO N , G., DUBOUIS, B., SCHLÜTER, W., NOTTARP, K., REINHARDT, V., KRU GER, R., DACHEL, P. y DETOMA, E. [1983] An international time transfer experiment via the Global Positioning System (GPS). Proc 37th Annual Symposium on Frequency Control (US Army Electronics Comm and, Ft. M onmouth, NJ 07703), (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
YOSHIM URA, K., IMAE, M., URAZUCA, M., MORIKAWA, T., YOSHINO, T., KOBAYASHI, S. e IG ARA SHI, T. [enero de 1986] Research activities on time and frequency transfer using space links. Proc. IEEE, Vol. 74, 1, 157-160.
BIBLIOGRAFÍA
Documentos del CCIR
[1978-82]: 7/131 (Italia).

84 I. 576-3, 577-2
IN FO RM E 576-3
DIFUSIÓN DE FRECUENCIAS PATRÓN POR ESTABILIZACIÓN DE LA FRECUENCIA PORTADORA DE UNA ESTACIÓN DE RADIODIFUSIÓN
(Programa de Estudios 4A/7)(1974-1978-1982-1986)
Numerosos usuarios del servicio de frecuencias patrón y de señales horarias, especialmente las industrias radioeléctricas y electrónicas, necesitan sólo una referencia de frecuencia de precisión media. Los usuarios están a menudo en un medio de influencia electromagnética en el que graves interferencias pueden reducir considerablemente la utilidad de las emisiones de frecuencias patrón y de señales horarias, en las bandas atribuidas y en las demás bandas. Por otra parte, conviene que un equipo sencillo y poco costoso permita efectuar estas com paraciones de frecuencia.
En Europa, varios transmisores de frecuencias patrón y de señales horarias en la banda 5 reúnen estos requisitos, así como varias estaciones de radiodifusión, que trabajan con estabilización de la portadora: Allouis, 162 kHz; Donebach, 153 kHz; Droitwich, Westerglen, Burghead, 200 kHz (véase la nota 1); M ótala, 189 kHz y M ilán I, 900 kHz. Las frecuencias portadoras de estas últimas estaciones se obtienen a base de patrones atómicos. Para más detalles sobre algunas de estas estaciones, véase el Informe 267.
Habida cuenta de las características de propagación de las ondas kilométricas y en función de la potencia emitida, la zona de servicio principal de esas estaciones puede ser muy vasta (por ejemplo, un radio de varios centenares de kilómetros durante el día). En esta zona, son posibles las comparaciones de frecuencia con una incertidumbre comprendida entre 1 x 10“ 11 y 1 x 10-9, a condición de efectuar las mediciones de día, y con una suficiente duración.
En Estados Unidos de América se han efectuado transmisiones experimentales en la banda 6, con portadora estabilizada, en una estación de radiodifusión de 650 kHz, que funcionaba con una potencia radiada de 50 kW. Se obtuvo una incertidumbre en las comparaciones de frecuencia de 1 x 10-10, a una distancia de 800 km, durante el día.
En la República Federal de Alemania, más de 160 transmisores de televisión funcionan en la banda 9 con portadoras controladas a distancia, por medio de una frecuencia patrón de 10 MHz transmitida por las líneas de distribución del programa de televisión establecidas con enlaces de relevadores radioeléctricos. Se ha observado un desajuste medio normalizado de la frecuencia portadora de 3 x 10” 12 con una desviación típica de 3 x 10~" (véase el Informe 363). Con portadoras estabilizadas, pueden hacerse en menos de un minuto comparaciones de frecuencia con una incertidumbre en algunas partes de 10'°.
En la URSS se transmiten las frecuencias patrón mediante portadoras estabilizadas a partir de las estaciones de radiodifusión RV-166 (Irkutsk), que funciona en 200 kHz (véase la nota 1) con una potencia portadora de 40 kW, y RV-76 (Novosibirsk) en 272 kHz (véase la nota 2) que emite en la clase de emisión A3EGN (doble banda lateral, un solo canal, modulación de amplitud con sonido de calidad radiofónica (monofonía)).
Las señales emitidas tienen un error de frecuencia de 5 x 10“ n .El interés de la estabilización de la portadora de las estaciones de radiodifusión es aún mayor si se tiene
en cuenta que se emplean frecuencias atribuidas y transmisores ya existentes, sin perturbar su función original. Además, estas estaciones suelen generar un campo de intensidad suficiente para garantizar una buena relación señal/ruido.Nota L — 198 kHz después del 1.° de febrero de 1988 (véase la Resolución N.° 500 de la Conferencia Administrativa Mundial de Radiocomunicaciones, Ginebra, 1979).Nota 2. — 270 kHz después del 1.° de febrero de 1990 (véase la Resolución N.° 500 de la Conferencia Administrativa M undial de Radiocomunicfaciones, Ginebra, 1979).
INFORM E 577-2
DIFUSIÓN DE SEÑALES HORARIAS POR SUPERPOSICIÓN DE UNA MODULACIÓN DE FASE A LA MODULACIÓN DE AMPLITUD
DE LAS EMISIONES DE RADIODIFUSIÓN SONORA
(Programa de Estudios 4B/7)(1974-1978-1982)
Es posible difundir señales horarias con una precisión que satisfaga las necesidades de muchos usuarios sin aum entar la congestión de las bandas de frecuencias atribuidas a las emisiones de frecuencias patrón y de señales horarias, utilizando transmisores destinados para otros servicios. Se puede, en particular, superponer a la modulación convencional en amplitud de una estación de radiodifusión, una modulación de fase transmitiendo simultáneamente, en forma codificada, señales de segundos y de fecha (minuto, hora, día, mes, año).

I. 577-2, Re. 583 85
Un receptor adecuado puede funcionar como un aparato de presentación visual de las señales horarias con control remoto, cuya exactitud depende únicamente de la precisión de la escala horaria transmitida.
Esta técnica se experimenta en Francia m odulando un transmisor de radiodifusión en la banda 5 (transmisor de Allouis, de 162 kHz, cuya potencia es de 2 MW).
La transmisión de la información codificada se efectúa mediante un «código lento», a razón de un bit porsegundo, y el ciclo completo dura 1 minuto.
El código utilizado es el del emisor DCF77 con algunas particularidades (véase el Inform e 578 y lanota (2) del cuadro II del Informe 267).
La modulación de fase presenta el modelo siguiente:
+ 1 radián
Señal de 1/10 de segundo equivalente a un bit « cero »
La señal de tiempo obtenida (en el territorio francés) tiene una precisión de 1 ms y una desviación típica del orden de 0,2 ms.
BIBLIOGRAFÍA
GABRY, A. [16-20 de septiembre de 1974] Diffusion de fréquences étalon et de signaux horaires á partir d ’émetteurs de radiodiffusion á modulation d’amplitude. IXe Congrés international de chronométrie, Stuttgart, República Federal de Alemania.
GABRY, A. [1980] Diffusion de l’heure par codage de la phase d’un émetteur de radiodiffusion á m odulation d ’amplitude. Onde Electrique, Vol. 60, 10, 51-54.
RECOM ENDACIÓN 583
CÓDIGOS DE TIEMPO *
(Cuestión 7/7)
(1982)El CCIR,
CONSIDERANDO
a) que en muchas ramas de la ciencia y la tecnología es indispensable fechar los eventos que requieren unconocimiento de la fecha (año, mes y día) y de la hora;b) que esta información puede transmitirse en forma codificada con una velocidad binaria de 1 por segundo(«código lento») durante un minuto aproximadamente;
c) que estas transmisiones codificadas de la hora requieren anchuras de banda muy pequeñas, con laconsiguiente utilización económica del espectro, y dan a la información recibida una gran fiabilidad;
Se pueden encontrar informaciones suplementarias en el Informe 578.

86 Re. 583, I. 578-2
d) que los «códigos lentos» son de uso general y pueden ser transmitidos por las estaciones normales de radiodifusión MA, sin entorpecer el servicio principal, mediante la modulación de fase de la portadora;e) que el código horario inicialmente utilizado por el transmisor de frecuencias patrón y señales horariasDCF77 se emplea en varios países europeos y se ha revelado de gran utilidad;f ) que es aconsejable utilizar el mismo código horario en zonas geográficas extensas;g) que en algunas regiones del mundo, por ejemplo, en muchos países en desarrollo, no se han introducidotodavía los códigos horarios,
RECOMIENDA, POR U NA NIM IDAD:
1. Que se estimule la introducción de esos códigos horarios.
2. Que, si un servicio horario de la Región 1 propone un código horario, éste corresponda a uno de loscódigos que ya sea objeto de aceptación, por ejemplo, el utilizado por DCF77.
3. Que los servicios de señales horarias de otras Regiones que se propongan introducir un código horarioestudien las ventajas de adoptar la práctica seguida en la Región 1.
INFORM E 578-2
CÓDIGOS HORARIOS
(Cuestión 7/7)(1974-1978-1982)
La evolución de estos últimos años ha puesto de relieve la necesidad de transmitir una información horaria más completa que la que proporcionan las señales normales de segundos y minutos dentro del servicio de frecuencias patrón y de señales horarias. Esta información más completa, que puede incluir la indicación codificada del minuto, la hora y el día del año, puede ser necesaria desde distintos puntos de vista, por ejemplo, para proporcionar una base horaria común a sistemas de comprobación técnica, geográficamente muy dispersos, que utilizan equipos no atendidos. Se prevé un número creciente de aplicaciones en los campos científico e industrial y en las administraciones.
Gracias al esfuerzo común de varios grupos de usuarios de Estados Unidos, se normalizó y adoptó una serie de códigos horarios. Se ha dado a estos códigos la designación de códigos horarios «decimales serie» (SD), «decimales binarios» (BCD) y códigos horarios binarios agrupados en paralelo (PB) [IRIG, 1970 y 1980; N ASA/GSFC, 1970-81; NBS, 1979].
El código horario binario agrupado en paralelo (PB) se ha concebido para facilitar el proceso automático de datos. Se han considerado principalmente las aplicaciones de transferencia de señales horarias Tierra-satélite y satélite-satélite [Chi, 1979a, b]. Por estos motivos, no se han adoptado en todos los casos las unidades de tiempo clásicas, si bien se ha aplicado estrictamente el concepto del sistema internacional (SI) de unidades.
El código horario binario agrupado en paralelo, como se desprende de su designación, está constituido por grupos de números binarios, a cada uno de los cuales corresponde una unidad de tiempo. Se ha elegido el agrupamiento de números binarios (de preferencia a un solo grupo) para incluir no solamente las unidades de tiempo SI, sino también las necesidades de los usuarios en diferentes grados de precisión y exactitud. Este concepto queda ilustrado por el código PB5, que se representa en la fig. 1.
La fig. 2 representa un código horario BCD típico constituido por una escala horaria que comprende una secuencia de ondas o impulsos cuadrados. La secuencia de impulsos está dispuesta en un cuadro de forma tal que sus posiciones se utilizan para designar una unidad de tiempo. Dentro de cada unidad de tiempo o línea, se utiliza un grupo de cuatro impulsos como contador. La anchura de cada impulso se utiliza para designar un estado binario. A los cuatro impulsos de la línea se les asigna los pesos binarios de 1, 2, 4 y 8 para codificar un dígito de 0 a 9. Cada línea está separada de la siguiente por un marcador de referencia de subescala, y cada cuadro principal está separado de la otra por un marcador de referencia de cuadro al final de cada cuadro principal.
La estación de frecuencias patrón y de señales horarias WWV fue la primera que incluyó en 1960 en su program a de modulación, informaciones completas de tiempo codificadas. Posteriormente se incluyeron códigos horarios en las emisiones de las estaciones WWVH y WWVB (60 kHz). En las emisiones en ondas decamétricas, las señales codificadas se emiten en una subportadora a la frecuencia de 100 Hz. En la estación WWVB, el nivel de la portadora se reduce en 10 dB para cada elemento binario.

Opción Resolución |Opcional
| Código ID I
B
C
D
Nota I. Nota 2. Nota 3.
Nota 4.
as
0
213 2o Binario TJD (14)
216 20 Binario S del día (17)
. . . .0 1 0 •
1^— Indicador 1
11
1 1 - Nota 4 1 1 1 1
I1 Relleno
1 1 1 i | Código IDi 1I H
213 20 216 20 29 2 1 1Binario TJD (14) Binario S del dia (17) Binario ms de s (10) 1 1 0 110* * * *
^— Indicador 1 'I 1 1 | 11 1 1 1 1 Relleno ' ^ Código ID
1 1 1 1 —* ------- 1213 20 216 2 2 9 2 29 2° 1
Binario TJD (14) Binario S del dia (17) Binario ms de s (10) Binario |is de ms (10). . . . 0 1 1 10 0 0 0
r Indicador II I ' I Rellenol
,13Binario TJD (14)
216 2C Binario S del dia (17)
2 2 Binario ms de s (10)
2 2 Binario de ms (10)
,9Binario ns de jxs (10)
00
- Indicador |1 1 2 4 ‘ 5
Bytes
Código ID
• • • • I 0 0 0
l l 1 Byte
FIGURA 1 — Código horario binario de grupos paralelos PB5 y opciones de resolución
- Los puntos representan las posiciones de los bits.- Los números entre paréntesis representan los bits de cada grupo.- En las opciones B, C o D pueden agregarse bits de relleno al grupo de subsegundos menos significativos, como muestra el esquema, para mantener
íntegros los límites de los bytes.- Los grupos del día del calendario juliano truncado (TJD) y del segundo del día se ajustan a la derecha de dicho lím ite; los grupos remanentes se
ajustan a la izquierda de dicho limite.
TJD = MJD —40000 (véase la Recomendación 457).
oo
578-2

88 I. 578-2
r ■íEscala horaria I min
Cómputo del índice (1 s)10 20 30 40 50 0
< ■ ■ ■ | ■ < ■ ■ I ■ ■ i i I ■ 1 1 1 | ■ 1 1 ■ | ■ ■ ■ > | ■ ■ ■ > | ■ ■ ■ « | ■ > ‘ ■ | * ■ * i . j - i i . . i i | i i i j - |
Hora en el punto A = 21 : 10 57= 21 h 10 min 57 s del día 173
FIGURA 2 — Formato típico de código horario BCD
Se incluye un código horario M DF (manipulación por desplazamiento de frecuencia) en los impulsos de los segundos 31° a 39° del CHU que indica el día, la hora, el minuto y el segundo. Se eligió el sistema M DF de 300 baudios, por haberse demostrado su utilidad en la transmisión de datos comerciales y por la fácil disponibilidad de equipo comercial. En condiciones de intenso ruido, la decodificación ha resultado ser mucho más segura que la de códigos equivalentes con modulación de amplitud.
Varias estaciones europeas, comenzando por DCF77 en 1973 [Becker y Hetzel, 1973], que transmiten frecuencias patrón y señales horarias en la banda 5 han añadido información de código horario en sus emisiones.
Se utilizan dos métodos, según la anchura de banda disponible y el grado de inmunidad contra el ruido del decodificador.
Para obtener una seguridad máxima, en primer lugar DCF77 y luego MSF (60 kHz) han adoptado el así llamado «código lento» con una velocidad de 1 b it/s . Con este código, la información completa ocupa casi un minuto.
' Se considera que este método de codificación tiene dos ventajas esenciales la anchura de banda necesaria es pequeña (menos de 30 Hz) y la reducida velocidad de transmisión permite la decodificación por medio de aparatos decodificadores sencillos. Estas características son particularmente oportunas en el caso de las estaciones aisladas sin vigilancia. El equipo de recepción y decodificación de D CF ha sido descrito por [Hetzel y Rohbeck, 1974], y el de MSF (60 kHz) por [Cross, 1976],
Si en el transmisor se dispone de una mayor anchura de banda se puede emplear el así llamado «código rápido», cuya velocidad binaria se elige de m anera que la información completa ocupe aproximadamente 0,5 segundos. MSF (60 kHz) y OMA (50 kHz) transmiten este código rápido.
La RAI de Italia utiliza también un código rápido similar en las emisiones que efectúa en sus redes de MA y M F unas 25 veces por día.
Los formatos de código generalmente utilizados pueden incluir información sobre el segundo, minuto, hora, día del calendario, día de la semana, mes, año, día del calendario juliano modificado, y, en algunos casos D U T l y una indicación si la hora radiada difiere de la del huso horario local.
Características comunes de los servicios DCF77, MSF 60 kHz y Allouis 162 kHz, es que utilizan códigos BCD; la misma forma de modulación de la anchura del pulso y que los ceros binarios están representados por marcas de segundo de 0,1 s de duración y los unos binarios por marcas de 0,2 s de duración.
N o todos los códigos utilizados son idénticos. Desde septiembre de 1981, los indicadores de los segundos 17 y 18 de DCF77 indican si la hora emitida es la UTC o la UTC más 1, 2 ó 3 horas [Becker y Hetzel, 1981]. La emisión francesa Allouis 162 kHz tiene el mismo código que DCF77 con la información suplementaria de que el día en curso es un día feriado o no, indicada en el segundo 14 [Gabry, 1980] (véase el Inform e 577).
N o se considera que todos estos códigos tengan ya su forma definitiva, y la información pertinente en cualquier momento debe solicitarse a las autoridades responsables indicadas en el anexo I al Informe 267.

I. 578-2, 731-1 89
REFERENCIAS BIBLIOGRÁFICAS
BECKER, G. y HETZEL, P. [1973] Kodierte Zeitinformation über den Zeitmarken und N ormalfrequenzsender DCF77 (Información de tiempo codificada del transmisor de frecuencias patrón y de señales horarias DCF77). PTB-Mitt., Vol. 83, 163.
BECKER, G. y HETZEL, P. [junio de 1981] Informationen über DCF77: Status der Ausstrahlung, Zeitcode, Zonenzeitkodierung (Información relativa a DCF77: características de transmisión, código horario, codificación de la hora de la zona horaria). PTB-Mitt.
CHI, A. R. [19-21 de noviembre de 1979a] A grouped binary time code for telemetry and space applications. International Telemetering Conference, San Diego, Ca., Estados Unidos de América.
CHI, A. R. [1979b] Satellite time transfer via TDRSS and applications Proc. l l th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Washington DC, Estados Unidos de América, 45-64.
CROSS, A. F. [febrero de 1976] Time-code receiver clock-1. Wireless World, Vol. 82, 1482, 30-35.GABRY [1980] Diffusion de l’heure par codage de la phase d’un émetteur de radio-diffusion á modulation d ’amplitude. Onde
Electrique, Vol. 60, 10, 51-54.HETZEL, P. y ROHBECK [abril de 1974] Digitale Anzeige der vom Sender DCF77 verbreiteten amtlichen Zeit (Inform ación
digital de la hora oficial difundida por DCF77). Funkschau, Vol. 46.IRIG [1970 y 1980] Department of Defense Inter-range Instrumentation Group (IRIG ) Documents 104-70 and 128-77. Defense
Documentation Center (DDC). Attention: DDC-IRA, Cameron Station, Alexandria, Va. 22314, Estados Unidos de América.
N ASA /G SFC [1970-81] Aerospace data systems standards, part 5: Clock and time code standards. Director, G oddard Space Flight Center. Attention: Aerospace Data Standards Office, Code 730.4, Greenbelt, Md. 20771, Estados Unidos de América.
NBS [1979] National Bureau of Standards, Special Publication 432, Boulder, Co. 80302, Estados Unidos de América.
BIBLIOGRAFÍA
CCSDS [1985] Consultative Committee for Space Data Systems. Recommendation for time code formats. Red Book INUC-3, Secretariat of the CCSDS.
INFORM E 731-1
ENCUESTA REALIZADA ENTRE USUARIOS DE EMISIONES DE FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
(Cuestión 1/7)(1978-1982)
1. Introducción
Durante los meses de enero a julio de 1975, el N ational Bureau of Standards de Estados Unidos de América realizó una encuesta entre usuarios de sus estaciones radioeléctricas WWV y WWVH [NBS, 1975].
Se distribuyeron cuestionarios por diversos medios tales como: el envío a las personas y organismos que figuraban en las listas de direcciones de la División de Frecuencias Patrón y Señales Horarias de la NBS (1500); las listas de direcciones entregadas a la NBS por otras organizaciones, por ejemplo, la IEEE (9000), el Servicio Meteorológico Nacional de los Estados Unidos de América (lista de 2600 barcos), así como varios grupos de propietarios de embarcaciones (11 000); la reproducción directa en 10 publicaciones, por lo menos, con una circulación combinada superior a 250 000 ejemplares; respuesta a las solicitudes estimuladas por avisos orales de las propias estaciones WWV y WWVH; respuestas a las solicitudes suscitadas por editoriales o avisos sobre la encuesta aparecida en 13 publicaciones, por lo menos (con una circulación com binada de 380 000 ejemplares, aproximadamente); y por otros medios diversos.
En resumen, el 1.° de mayo de 1975 se había recibido un total de 9359 respuestas al cuestionario,procedentes de todos los continentes del mundo.
Quizás es importante hacer notar que el 23% de las respuestas al cuestionario señalaban una utilización más bien « oficial» que personal de los servicios. La mayor parte de estos participantes simplemente indicaban que ellos representaban los intereses de la compañía para la cual trabajaban. En algunos casos se sum inistraban cifras concretas de los representados oficialmente. Si se supone que estos números son representativos del 23% total que indicaba la representación «oficial», se obtiene una cifra muchas veces mayor al número de 9359 de respuestas alcuestionario. Pero en el análisis de las respuestas, cada cuestionario se contó como una contestación.

90 I. 731-1
En 1977, el Centro Meteorológico Principal del Servicio Nacional de Tiempo y Frecuencias de la URSS realizó una encuesta entre los usuarios de frecuencias patrón y señales horarias con el fin de obtener información sobre su utilización por las actuales estaciones de ondas kilométricas, hectométricas y decamétricas, y sobre las exigencias de los usuarios en cuanto a la exactitud de las mediciones y a las características técnicas y de información de las señales.
En 1979-1980, en uno de sus estudios periódicos, el National Physical Laboratory (NPL) hizo una encuesta sobre los usuarios de los servicios de la estación MSF, refiriéndose específicamente a sus emisiones en ondas decamétricas. Durante el mismo periodo se efectuó un estudio similar en Italia, con objeto de conocer las necesidades de los usuarios, en relación con la introducción de un código horario por medio de las estaciones de radiodifusión.
2. Resumen de los resultados del cuestionario
2.1 Clasificación de los usuarios
Se pidió a cada participante en la encuesta hecha en Estados Unidos de América que se clasificase a símismo en una de las 14 categorías. Un examen retrospectivo permite ahora com probar que se pasaron por altotres categorías importantes:— particulares,— relojeros/joyeros,— radioaficionados.
Lamentablemente, la mayoría de éstos han sido agrupados bajo el epígrafe «otros».
En la fig. 1 se muestra la clasificación que los usuarios han hecho de sí mismos. Debe observarse que varios participantes marcaron más de una categoría y, en consecuencia, la suma de las clasificaciones es mayor que el número de respuestas.
0 1000 2000 3000
Otros (punto 2.1)
Navegación
Industria de las comunicaciones
Embarcaciones de recreo
G obierno : civiles
G ob ierno : fuerzas armadas
Laboratorios de normas
Aviación/aeroespacial
Universidades
Barcos/embarcacionescomerciales
Fabricación de equipos
Sismología/geofísica
Industria telefónica
Industria de energía eléctrica
mmmmú« P i l
• M
FIGURA 1 — Número de respuestas por cada categoría de usuario según una encuesta efectuada en los Estados Unidos de América

I. 731-1 91
2.2 Utilización relativa de las distintas frecuencias de difusión
En la fig. 2 se muestra que, en lo que respecta a la encuesta hecha en Estados Unidos las difusiones en 5, 10 y 15 MHz son las más utilizadas. Esto puede justificarse por las tres razones siguientes:— durante la presente fase de baja actividad solar, la propagación en estas frecuencias es más confiable;— en estas frecuencias las estaciones transmiten con mayor potencia;— muchos receptores comerciales captan sólo estas frecuencias.
3 ___________________________________________________________________ Frecuentemente
2 -------------------- f.X.-.Xj— ■— - Algunas veces
1 — -------—— xx-x-X; — xx-’: — x /x -xX --------------------------- Pocas veces
0 L. —•• J Ly.YiYi-I ’-J r.v .v .v .l Iyy .yy*J Nunca2,5 5 10 15 20 25
Frecuencia (MHz)
FIGURA 2 — Recepción de las frecuencias según una encuesta efectuada en los Estados Unidos de América
En la fig. 3, se muestra la utilización relativa de señales portadoras de las estaciones de frecuencias patrón de la URSS que trabajan en las bandas 2,5, 5, 10 y 15 MHz. Más del 70% de los usuarios de señales patrón reciben señales en las que las frecuencias portadoras se hallan desplazadas ± 4 kHz de los valores normales.
En el estudio efectuado por el Reino Unido, sólo el 21% del número total de respuestas recibidas indicaba que no se hacía ningún uso del servicio en ondas decamétricas. Era obvio que en el Reino Unido se disponía de muchas fuentes alternativas de referencias horarias y de frecuencias, ya sea de otras estaciones en ondas decamétricas o de las diferentes emisiones en ondas kilométricas, por ejemplo, la propia M SF en 60 kHz, la DCF77 y la HBG.
Los resultados de este estudio más reciente confirman que el servicio de la MSF en ondas decamétricas desempeña sólo un papel secundario para la diseminación de referencias horarias y de frecuencias en el Reino Unido y zonas marítimas adyacentes. La labor principal para este fin la realiza ahora la M SF en 60 kHz, con mayor grado de precisión y fiabilidad, con independencia relativa frente a los efectos de propagación y con la inclusión de un código horario concebido para la indicación automática de la fecha y la hora.
2.3 Interferencia
Se pidió a los usuarios de los servicios de la NBS que indicaran con qué frecuencia experim entaban «interferencia perjudicial entre las emisiones de la NBS y otras emisiones de frecuencias patrón y señales horarias». Del total de respuestas a esta pregunta (unas 8700), alrededor del 3% marcó «frecuentemente» y aproximadamente el 9% marcó «algunas veces». Según se esperaba, los problem as son mucho menos graves dentro de los Estados Unidos de América, aunque el 14% de los usuarios en la zona horaria oriental se quejó de interferencia perjudicial, ya sea «frecuentemente» o «algunas veces». Esto se com para con el 19% al 25% para los usuarios que indican su posición geográfica en todo el mundo o en todos los océanos. Por las observaciones hechas en muchos cuestionarios, se vio claramente que las condiciones son particularm ente malas en el Atlántico oriental, en la zona mediterránea y en el Pacífico occidental, lo cual cabía esperarse, por otra parte, dado que WWV y WWVH no constituyen los principales servicios en estos casos. De algunas observaciones tam bién se desprende que al menos algunos usuarios interpretaron «interferencia perjudicial» de manera mucho más am plia que la resultante de otras emisiones de frecuencias patrón y señales horarias. No hay forma de determ inar hasta qué punto tales interpretaciones erróneas pueden haber influido en los resultados.

92 I. 731-1
100
80
60
I 40
20
J O2,5 5 10
Frecuencia (MHz)15
FIGURA 3 — Utilización de frecuencias según una encuesta efectuada en la URSS
(La lista de los transmisores de la URSS figura en el cuadro I del Informe 267.)
♦ 4 kHz
t 0 kHz
2.4 Utilización de los distintos servicios por categorías específicas de usuarios
En el cuadro I relativo a la encuesta hecha en Estados Unidos, se muestra la evaluación del uso (en una escala de 0 a 3) para cada una de las 14 categorías de usuarios y para cada uno de los ocho servicios prestados por WWV y WWVH. También se muestran en la figura la evaluación global y el número de respuestas en cada una de las categorías de usuarios. Las evaluaciones numéricas de 0 a 3 en el cuadro I representan el consenso de una población dada (por ejemplo, un grupo específico de usuarios) con respecto a uno de los ocho servicios de WWV y WWVH. El número específico es un promedio ponderado de las respuestas individuales a la pregunta: «¿En qué medida utiliza usted la siguiente información? (seguida por una lista de los ocho servicios)» donde las respuestas se ponderaron 3 (frecuentemente), 2 (algunas veces), 1 (pocas veces), y 0 (nunca). En la misma escala de 0 a 3, las evaluaciones globales dadas en la columna de «Servicios» indican valores compuestos para cada servicio basados en las respuestas de todos los usuarios, sin tener en cuenta la categoría particular de usuario. Las características más sobresalientes que se desprenden de la encuesta son que, de los servicios que prestan estas estaciones, el anuncio hablado de la hora es el más uniformemente utilizado, y el del DU Tl el menos utilizado. De hecho, la mayor utilización de la información de los valores del D U Tl resulta aún inferior a la menor utilización de cualquiera de los otros servicios por cualquier otra categoría de usuarios.

CUADRO I — Evaluación de los servicios por distintas categorías de usuarios (según una encuesta efectuada en los Estados Unidos de América)
(La evaluación se ha realizado sobre el margen de escala de 0 a 3 (« 0 »): nunca, 3 : frecuentemente, punto 2.4); los valores medios están ponderados.)
/£L
< /
C o
/S
.§-
/O'
/3
/<J0
_ /
O /
cr
/—
/
/ C
ateg
oría
s de
usua
rios
/
(Núm
ero
de re
spue
stas
)
Otro
s (2
870)
Nav
egac
ión
(142
5)
Indu
stria
de
las
com
unic
acio
nes
(127
4)
Emba
rcac
ione
s de
recr
eo
(102
0)
Gob
iern
o: c
ivile
s (8
94)
Gob
iern
o: f
uerz
as
arm
adas
(8
40)
Labo
rato
rios
de no
rmas
(7
32)
Avi
ació
n/ae
roes
paci
al(6
14)
Uni
vers
idad
es
(489
)
Bar
cos/
emba
rcac
ione
s co
mer
cial
es
(463
)__
____ Fa
bric
ació
n de
equi
pos
(353
)
Sism
olog
ía/g
eofís
ica
(195
)
Indu
stria
te
lefó
nica
(1
57)
Indu
stria
de
la en
ergí
a el
éctri
ca
(135
)
Hora, anuncio hablado (2,80) 2,84 2,82 2,79 2,84 2,76 2,68 2,59 2,85 2,85 2,80 2,75 2,86 2,67 2,58
Señales marcadoras de segundo (1,99) 1,96 2,11 2,12 1,97 2,14 2,00 2,27 2,22 2,32 2,31 2,25 2,49 1,90 2,06
Frecuencias patrón (1,88) 1,88 1,30 2,52 1,36 1,95 1,51 2,34 1,69 1,94 1,52 2,34 1,68 2,45 2,12
Previsiones de la propagación (1,54) 1,61 1,19 1,93 1,21 1,39 1,28 1,47 1,47 1,53 1,29 1,59 1,55 1,68 1,32
Información meteorológica (1,37) 1,27 1,86 1,41 2,00 1,13 1,07 1,16 1,52 1,30 1,92 1,27 1,48 1,18 1,14
Alertas geofísicas (1,01) 1,08 0,87 1,23 0,93 0,93 0,87 0,97 1,01 1,24 0,79 1,04 1,68 1,03 0,83
Hora, BCD (0,66) 0,56 0,83 0,79 0,63 0,81 0,85 0,76 0,89 0,801
0,98 0,74 1,10 0,64 0,77
Valores DUTl (0,30) . 0,26 0,27 0,41 0,25 0,36 0,38 0,48 0,41 0,47 0,251
0,40 0,46 0,31 0,40

94 I. 731-1
3. Anuncio hablado de la hora
Quizá resulte interesante observar en la experiencia estadounidense que las categorías de sismología, universidades, aviación y embarcaciones de recreo, clasifican el servicio de anuncio hablado de la hora como el más utilizado por cualesquiera de las categorías de usuarios. Sin embargo, los laboratorios de normas y la industria de energía eléctrica utilizan relativamente poco este servicio. Esto se debe probablemente a que las referencias de frecuencias patrón resultan más importantes para gran parte de su trabajo que las señales horarias, y la mayoría de ellos utiliza para sus tareas de calibrado, más bien las emisiones de WWVB (60 kHz) que las de WWV o WWVH.
4. Valores DUTl
Cuando el CCIR propuso la inclusión de los valores del DUTl en el sistema UTC de difusión de señales horarias, se insistió mucho en la necesidad de efectuar correcciones en tiempo real para obtener la escala de tiem po UT1. Concretamente, se pensó que las correcciones disponibles cada minuto de la transmisión, que perm iten determinar el UT1 a 0,1 s, eran esenciales a los fines de la navegación. Por este motivo se hizo un esfuerzo especial para conocer las necesidades de los navegantes, utilizándose al efecto las distintas listas de direcciones y recurriendo a las publicaciones y avisos anteriormente mencionados.
Como se ve en el cuadro I, los navegantes, propietarios de embarcaciones y buques emplean muy poco el D U T l. Igualmente, las respuestas a otra pregunta de la encuesta sobre la importancia de los ocho servicios, indican que el interés de los navegantes en el DUTl es también muy escaso. En realidad, cabe señalar que un resultado de 0 sólo puede obtenerse si cada persona que responde marca la casilla «nunca», y hay que reconocer que siempre habrán omisiones o respuestas esporádicas a las preguntas. En consecuencia, podría plantearse la pregunta de si un total de 0,3 está tan próximo a cero como puede obtenerse con el cuestionario.
Para intentar responder a esta pregunta podría señalarse que la industria telefónica, la industria de la energía eléctrica y los laboratorios de normas probablemente no tienen un interés real en los valores del D U Tl, toda vez qué, para ellos, el conocimiento de la posición de la Tierra no es fundamental. Sin embargo, sus respuestas son aproximadamente las mismas (realmente ligeramente mayores) que las de las categorías relacionadas con la navegación.
Lamentablemente, el tam año de la muestra no es muy grande y queda alguna incertidumbre. Sin embargo, puede decirse con certeza que la información relativa al DUTl es el servicio menos importante y menos utilizado que prestan WWV y WWVH.
Por supuesto, algunos participantes marcaron su uso «frecuente» de los valores DUTl o lo clasificaron como «muy importantes». Es interesante investigar esto más cuidadosamente y comprobar si existe alguna correlación con la utilización principal del servicio (el cuestionario contenía 13 elecciones para «utilización principal»). No es extraño, pues, que la «astronomía» se encuentre con un 6%, a la cabeza de quienes consideraron los valores DUTl como muy importantes y que el «seguimiento de satélites/cohetes» ocupe el segundo lugar con un 5%. Todos los demás representaron un 4% o menos, correspondiendo un 2% a «navegación/determ inación de la posición». En consecuencia, puede concluirse que el poco uso que se hace de los valores DUTl está destinado a los trabajos relacionados con el espacio y la astronomía y que no son especialmente utilizados o necesarios para la navegación (terrestre).
En la URSS, entre todos los usuarios que utilizan señales patrón para sincronizar escalas de tiempo, el 60% necesitan la escala de tiempo UT1, por lo cual utilizan información UT1 — UTC. Un 80% de éstos utilizan adicionalmente la información D U Tl. Para la recepción de información sobre las diferencias entre escalas UT1 — UTC, más del 90% de los usuarios utilizan el código de posición, y sólo menos del 10% prefieren el código Morse. Por esta razón, se suprimieron a partir de 1978 las transmisiones de información UT1 — UTC en código Morse.
5. Frecuencias patrón
Los resultados demuestran que las frecuencias patrón emitidas por WWV y WWVH constituyen el tercer servicio de mayor aceptación que ofrecen estas estaciones. El cuadro I muestra que la utilización de frecuencias patrón por el sector de comunicaciones (que incluye muchos radioaficionados), los laboratorios de normas, los constructores de equipos y la industria telefónica, es mayor que el promedio. Se observa una utilización particularmente reducida, como es lógico, por parte de las categorías relacionadas con la navegación, para las que la determinación de la hora exacta es el servicio más importante. Puesto que los efectos de la propagación limitan la precisión útil de la mayoría de las frecuencias recibidas en ondas decamétricas a l x 10-7 aproximadamente, las respuestas a esta encuesta no incluyen la mayoría de las aplicaciones que requieren una precisión mayor.
En la URSS, el 75% de los usuarios utilizan frecuencias patrón y señales horarias transmitidas por estaciones radioeléctricas para mediciones de frecuencia. En este aspecto gozan de la máxima popularidad las señales en ondas kilométricas de las estaciones. La exactitud exigida en las mediciones por los usuarios puede dividirse en tres clases: baja incertidumbre de medición (a > 10~7), media (10-7 > o > 10“ 10) y elevada (a < 10-10). Más del 90% de los usuarios pertenecen a las clases de exactitud baja y media.

I. 731-1 95
Este servicio se reveló como el segundo de mayor aceptación de los ofrecidos por WWV y WWVH, siendo aventajado solamente por el anuncio hablado de la hora. La mayor utilización corresponde a las categorías desismología/geofísica, universidades, navegación y construcción naval (distintas de las de recreo), laboratorios denormas y aviación/aeroespacial.
En la URSS, alrededor del 50% de los usuarios de señales patrón utilizan éstas para mediciones de tiempo. Los usuarios se dividen en tres clases según que la exactitud por ellos exigida sea baja ( A t > 0,1 s), media (0,1 s > A t > 0,01 ms) y elevada (A t < 10 ps). La inmensa mayoría de los usuarios (más del 90%) necesitan exactitudes de 1 s a 0,1 ms. Entre los usuarios gozan de la máxima popularidad las señales horarias emitidas porlas estaciones RWM y RID en ondas decamétricas.
6. Señales horarias
7. Códigos horarios BCD (Decimal codificado en binario)
El interés en el código horario BCD fue una completa sorpresa. Podría suponerse que esto pudiera deberse a una confusión con los servicios de difusión de WWVB en 60 kHz, pero de acuerdo con algunas observaciones, parece existir un interés real en el código que transmiten WWV y WWVH. Sin embargo, lo más sorprendente de todo, es el gran interés de los sismólogos y geofísicos en el código horario BCD. Se pensó que este grupo dependía mucho de la estación WWVB y no de las estaciones WWV y WWVH.
La encuesta hecha en Italia reveló un pronunciado interés por el código horario completo que se brinda, siendo una demanda particular de los usuarios de tipo general la información sobre el día de la semana.
8. Información adicional en las estaciones WWV/WWVH
8.1 Información meteorológica marítima
La información meteorológica se transmite desde las estaciones WWV y WWVH, regularmente, cada hora. El Servicio Meteorológico Nacional de los Estados Unidos de América proporciona esta inform ación meteorológica y sus zonas de cobertura incluyen partes de los océanos Atlántico y Pacífico. Esta inform ación está principalmente destinada a los navegantes en los citados océanos que utilizan el servicio de frecuencias patrón y señales horarias. En el cuadro I es fácil ver que esa información meteorológica es bien recibida por aquellos a quienes va dirigida. El análisis reveló que el 34% de los participantes, que utilizan los servicios de WWV y WWVH para fines de navegación, consideran la información meteorológica como «muy im portante». Al menos para los navegantes, esta información meteorológica es sin duda el tercer servicio por orden de im portancia entre los que se difunden.
8.2 Previsiones de propagación
Como podía esperarse, la categoría «industria de las comunicaciones» utiliza las previsiones de p ropagación más que cualquier otra categoría de usuarios. De los análisis, se desprende que el 35% de los radioaficionados considera esta información «muy importante». De hecho los radioaficionados constituyeron sin duda el grupo mayor numéricamente que estimó que estas previsiones eran «importantes» o «muy im portantes».
8.3 Alertas geofísicas
En el cuadro I puede verse fácilmente que las alertas geofísicas las utilizan principalm ente los sismólogos y los geofísicos.
REFERENCIAS BIBLIOGRÁFICAS
NBS [1975] US National Bureau of Standards. Technical Note 674.
BIBLIOGRAFÍA
CHERENKOV, G. T. [1978] Utilización en la economía nacional de frecuencias patrón y señales horarias transm itidas por estaciones generadoras de señales en ondas decamétricas en la URSS. Trabajos de Investigación en el campo de las emisiones de señales horarias y frecuencias patrón del Instituto de Investigación Científica de la U nión Soviética (en ruso). Vol. 37, 67, 15.
Documentos del CCIR[1978-82]: 7/111 (Reino Unido); 7/130 (Italia).

96 Re. 537, I. 732-2
RECOM ENDACIÓN 537
REDUCCIÓN DE LA INTERFERENCIA MUTUA ENTRE LAS EMISIONES DE LOS SERVICIOS DE FRECUENCIAS PATRÓN Y DE SEÑALES HORARIAS EN
LAS FRECUENCIAS ATRIBUIDAS EN LAS BANDAS 6 y 7
(Programa de Estudios 1A/7)(1978)
El C CIR ,
CONSIDERANDO
a) lo dispuesto en el artículo 33, del Reglamento de Radiocomunicaciones;b) que la interferencia m utua entre emisiones del servicio de frecuencias patrón y de señales horarias es objeto de incesantes estudios;c) que serán probablemente necesarias nuevas estaciones de frecuencias patrón y de señales horarias en lasbandas 6 y 7, en zonas del m undo que no están todavía adecuadamente atendidas;d) que puede establecerse un modelo satisfactorio de las características principales de la ionosfera,
RECOM IENDA, POR U NA N IM ID A D :
1. Que se aplique lo dispuesto en el artículo 33, del Reglamento de Radiocomunicaciones, con objeto de m ejorar la coordinación y de eliminar posibles casos de interferencia.
2. Que, de existir actualmente interferencia mutua, la IFRB, a instancias de las administraciones interesadas, lleve a cabo estudios en condiciones simuladas para determinar la posibilidad de llegar a una solución compatible por compartición de frecuencias y de tiempo.
3. Que, para realizar dichos estudios, se pongan a disposición de la IFRB los detalles de todas las emisionesde frecuencias patrón y de señales horarias, con inclusión de la potencia entregada a la antena, configuración y orientación de la antena, altura de ésta sobre el terreno, constantes del suelo, etc.
INFORM E 732-2
PROPUESTA DE REDUCCIÓN DE LA INTERFERENCIA MUTUA ENTRE LAS EMISIONES DE FRECUENCIAS PATRÓN Y DE SEÑALES HORARIAS EN LAS BANDAS 6 Y 7
(Programa de Estudios 1A/7)(1978-1982-1986)
1. Procedimientos de explotación
El presente Informe se basa parcialmente en las conclusiones del Grupo Interino de Trabajo 7/3, creado para estudiar la manera de reducir la interferencia mutua en los servicios de frecuencias patrón y señales horarias. Se distinguen en él los siguientes procedimientos para ayudar a paliar los problemas de la interferencia mutua.
1.1 Compartición en el tiempo (multiplexación en el tiempo)
Esta compartición es un medio práctico, aunque parcial, contra las interferencias mutuas. No requiere modificación alguna de los métodos de recepción; basta con conocer los horarios de funcionamiento de las estaciones si se necesita corrección para tener en cuenta el tiempo de propagación, y, en una situación ideal, podría aplicarse en el ámbito mundial abarcando cierto número de transmisiones por multiplaje en explotación compatible. Tal sistema fue concebido hace ya unos 20 años por quien a la sazón era Relator Principal de la Comisión de Estudio 7, como un medio para resolver los problemas de interferencia mutua entre WWV, que emitía entonces desde Beltsville (Maryland), y varios transmisores europeos de frecuencias patrón y señales horarias.
La compartición en el tiempo sigue aplicándose en una pequeña zona de Europa occidental para las transmisiones de las estaciones IAM, IBF y MSF, en 5 MHz, MSF y OMA (sólo modulación) en 2,5 MHz. Si bien se admite la utilidad de esas medidas de carácter local, no se considera óptima esta solución para resolver las dificultades actuales. Debido a las variaciones diurnas y estacionales de la propagación, no es posible garantizar la continuidad de recepción en cualquier frecuencia, lo que debe considerarse como un importante inconveniente de este sistema para algunos usuarios. También crea dificultades el aumento del tiempo de acceso a la transmisión deseada, pudiendo ser difícil identificar las señales de diferentes estaciones.

I. 732-2 97
Puede concebirse un método alternativo de multiplexación en el tiem po, empleando un ciclo más corto de alternación en el cual, por ejemplo, se atribuyen a cada una de seis estaciones que pueden causar interferencia segmentos sucesivos y únicos de 10 segundos para cada minuto de funcionamiento individual sin interferencia de las otras cinco estaciones. Semejante método requeriría, por supuesto, la coordinación entre las estaciones participantes, pero no sería difícil establecerla puesto que todas adoptan el UTC con precisión de 1 ms.
Se ha considerado también el concepto de la compartición en el tiempo, de modo que dos estaciones potencialmente interferentes transm itirían su portadora de forma continua, pero suprimiendo, respectivamente, los impulsos pares e impares, ofreciendo así la posibilidad de intercalar sus señales horarias. Pero, para que el método sea eficaz, parece que se necesitan condiciones bastante excepcionales de continuidad y estabilidad de la propagación.
Otra posible forma de asegurar la compartición en el tiempo consiste en prever un valor apropiado para eldesplazamiento de las emisiones de los segundos impulsos; la estación BPM en la República Popular de Chinasigue ese procedimiento en le caso de los impulsos UTC.
1.2 Modulación por tono de audiofrecuencia
Con esta forma de modulación, excepto en la medida limitada necesaria para identificar la estación, sepierde una valiosa parte del espectro disponible, y debería tenderse a elim inar esta pérdida en los servicios defrecuencias patrón y señales horarias.
1.3 Discriminación de frecuencia
1.3.1 Impulso de subportadora
Actualmente, la mayor parte de las estaciones que funcionan en las bandas 6 y 7 transm iten sus señales horarias en la clase de emisión A2X. Hay estaciones, como WWV, WWVH, JJY y otras, que transmiten sus marcas de segundos en distintas frecuencias subportadoras elegidas utilizando la siguiente fórmula:
fc (n ) = 0,2 n kHz (1)
donde n es un número entero, cuyo valor se ha escogido de form a que: n = 5 para WWV, n = 6 paraWWVH y n = 8 para JJY.
El uso de emisiones de clase A2X para la transmisión de señales horarias simplifica relativamente la discriminación de posibles señales interferentes en la misma frecuencia portadora por medio de filtros de audiofrecuencia adecuados a expensas, no obstante, de un mayor retardo en el receptor.
1.3.2 Explotación en banda lateral única (BLU) con portadora completa
Las ventajas que ofrece la explotación en BLU son evidentes, pues permite reducir los efectos de la interferencia, economizar algo de espectro y asegurar cierta protección contra el desvanecimiento. Se ha observado al mismo tiempo que hay administraciones que no están de acuerdo en efectuar las necesarias inversiones de capital para modificar las estaciones transmisoras existentes a fin de que puedan funcionar en BLU, cuando puede preverse un plazo límite de 15 a 20 años, por ejemplo, para la explotación de los servicios de frecuencias patrón y señales horarias en las bandas 6 y 7.
Las mismas consideraciones se aplican a la introducción de un sistema más elaborado de modulación de fase o de frecuencia, que pudiera permitir la coexistencia de varias estaciones con interferencias mutuas reducidas, aunque a costa de una complejidad adicional de los transmisores y receptores. Para que sea aceptable, toda modificación de las actuales redes de estaciones de frecuencias patrón y de señales horarias ha de ser de aplicación sencilla y requerir pequeños cambios, o ninguno, de los equipos de transmisión y recepción actualmente disponibles.
1.3.3 B LU con portadora completa y /o suprimida, funcionando con separación intencional de las frecuencias
Se considera que este es un método prometedor de que coexistan satisfactoriamente las transm isiones actuales y las futuras en las bandas de ondas hectométricas y decamétricas atribuidas. El método implica que las frecuencias portadoras no sólo dejen de limitarse a los valores de 2,5; 5; 10; 15; 20 y 25 MHz, sino que, además, puedan utilizarse las obtenidas por la siguiente fórmula:
f ( N ) = (X + 4 N) kHz (2)
donde el valor de X puede ser 2500, 5000, 10 000, 15 000 y 20 000, y N puede adoptar los valores 0 o ± 1 para 2500 < X < 20 000.

98 I. 732-2
Esta técnica de desplazamiento de la portadora se aplica ya con resultados satisfactorios en la URSS, en la gama de frecuencias de hasta 15 MHz, para valores de N iguales a 0 o ± 1. La fig. 1 muestra la disposición de las estaciones de frecuencias patrón y de señales horarias en la Unión Soviética, con las correspondientes frecuencias de explotación (basadas en el Informe 267). También se indican las ubicaciones de estaciones de otros países que funcionan simultáneamente en tres frecuencias, por lo menos (es decir, ATA, BPV, LOL, MSF, WWV y WWVH), en la gama de frecuencias de 2,5 a 15 MHz. Las estaciones soviéticas RWM y RID, que funcionan con separaciones de ± 4 kHz, respectivamente, se utilizan muy extensamente [Cherenkov, 1978], como se indica en el Informe 731, debido al alto grado de protección que ofrecen contra perturbaciones de otras estaciones de frecuencias patrón y señales horarias que funcionan en el centro de las bandas atribuidas. Sus señales pueden recibirse de dos modos: bien como señales J2X por heterodinación con una portadora de 5, 10 ó 15 MHz generada localmente, seguida de detección lineal o no lineal y de filtrado; o bien del modo usual, como una señal A1X, con supresión de las frecuencias portadoras respecto a sus valores patrón.
Dadas las ventajas considerables de la explotación en banda lateral única para solventar los problemas de interferencias de señales, es apropiado recomendar que se considere el uso de emisiones de clases H2X (BLU portadora completa) y J2X (BLU portadora suprimida), que contienen únicamente las portadoras de las frecuencias patrón en las bandas asignadas. Con objeto de simplificar el receptor y mejorar su inmunidad al ruido, pueden escogerse los valores superiores (f sc + ) e inferior ( f sc—) de las frecuencias subportadoras basándose en las siguientes relaciones:
/ „ + = 0,4 (n + Vi) kHz
f s c - = 0,4 (n + 1) kHz(3)
Para emisiones de clase H2X, se proponen los siguientes valores de n : n = 1,2, . . . 5; y para emisiones de clase J2X, n = 6, 7, . . . 11; por ejetnplo, n = 9 corresponde a una separación de la frecuencia superior de 4- 3,8 kHz y a una separación de la frecuencia inferior de —4 kHz (véase la ecuación (3)).
1.3.4 Anchura de banda total requerida para el servicio de frecuencias patrón y de señales horarias
Con objeto de abarcar las bandas laterales de modulación con el nuevo sistema de atribución defrecuencias portadoras, se requiere cierta extensión de la anchura de banda total disponible para el servicio de frecuencias patrón y de señales horarias.
En 2,5, 5 y 10 MHz, la anchura de banda total disponible deberá ser de ± 8 kHz para abarcar tres transmisiones posibles, correspondientes a valores de N de —1,0 y + 1 . Actualmente, las denominadas «bandas de guarda» son de ± 5 kHz, excepto en 2,5 MHz y en la Región 1, donde son sólo de ± 2 kHz.
En 15 y 20 MHz, la anchura de banda total disponible deberá ser de ± 12 kHz, correspondiente a valores de AT de — 2, — 1,0, + 1 y -I- 2. En vista de la remota posibilidad de que vuelva a emplearse la frecuencia de 25 MHz en el servicio de frecuencias patrón y señales horarias se propone que se renuncie a esa frecuencia en futuras operaciones del mencionado servicio.
1.3.5 Utilización de las nuevas frecuencias atribuidas
En virtud de la decisión tom ada por la Conferencia Administrativa Mundial de Radiocomunicaciones (Ginebra, 1979), las frecuencias patrón y las señales horarias pueden transmitirse en tres bandas,en 4, 8 y 16 MHz, en la Región 3, Esta decisión puede atenuar el problema de la interferencia mutua en las demás frecuencias para la Región 3. La estación JJY en Japón ha empezado a funcionar en 8 MHz.
1.4 Concepto de vecindad más próxima
El plan de frecuencias que se describe en los párrafos precedentes permitiría la coexistencia de cierto número de emisiones de frecuencias patrón y de señales horarias con un grado mínimo de interferencia mutua. La forma en que debería aplicarse el plan y utilizarse las frecuencias disponibles con el máximo provecho dependerá de la disposición geográfica relativa de las estaciones potencialmente interferentes. Se propugna que, cuando dos estaciones se hallan muy próximas, separadas menos de 3000 km, debe ser obligatorio que sus frecuencias portadoras respectivas difieran en ± 4 kHz, por lo menos; la disposición exacta de las frecuencias dependerá también de la ubicación de la estación inmediata a la más próxima; se trata esencialmente de un problema bilateral que ha de solventarse entre pares de estaciones vecinas.
A título ilustrativo, se considera una posible aplicación del plan de frecuencias propuesto sobre la base de la fig. 1. Se aceptan como base del plan las separaciones relativas de las estaciones ubicadas en la URSS, y se indican los valores apropiados de N. Los valores correspondientes de N para ATA, BPV, LOL, MSF, WWV y WWH, pueden elegirse de conform idad con el plan de frecuencias, para reducir al mínimo el grado de interferencia mutua, si bien debe subrayarse que los ejemplos que siguen no pretenden en modo alguno limitar las posibilidades de las administraciones sobre la forma de llegar a elegir valores adecuados de N en discusiones bipartitas o tripartitas.

FIGURA 1 - Separaciones de las frecuencias portadoras de las estaciones de frecuencias patrón y señales horarias

100 I. 732-2
En Europa, MSF, Rugby (TV = 0) está actualmente separada intencionadamente de RWM, Moscú ( TV = —1), su estación vecina mas próxima; las fuentes de interferencia inmediatas son: R C H /R IM , Tashkent, la más próxima, a unos 5000 km de distancia, o RTA, Novosibirsk (en 10 MHz) todavía más distante. En caso necesario, MSF podría funcionar con TV = +1 para eliminar todo peligro residual de interferencia proveniente de las estaciones soviéticas, exceptuada RID, Irkutsk ubicada en la parte más oriental de la URSS. Al examinar la fig. 1, se observa que, sobre la base de estas propuestas, sería aconsejable que ATA funcionase con TV = +1 o — 1 para eliminar las interferencias mutuas con R C H /R IM , Tashkent.
Examinando ahora la parte del Pacífico occidental, es evidente que existe un grave conflicto entre las emisiones de BPM, JJY y WWVH en 2,5, 5, 10 y 15 MHz. Podria reducirse mucho esa incompatibilidad si JJY funcionase con TV = —1, teniendo en cuenta que RID, Irkutsk, tiene TV = +1. Constituiría una solución alternativa el que WWVH aceptase TV = + 1 , JJY, TV = 0 y BPM, TV = - 1 . Una refundición más completa de la explotación mundial de estas estaciones de base que operan al menos en dos frecuencias sería posible si se efectuara cierta re-atribución de valores de TV en la URSS. De la fig. 1 se deduce que el intercambio de valores de TV entre RTA y RID resultaría ventajoso y satisfaría, además, el principio de la vecindad más próxima que afecta a la estación R C H /R IM , de Tashkent. Tal intercambio permitiría adoptar una mayor diferencia de frecuencias entre BPM y JJY, que se hallan relativamente próximas con TV = — 1 para BPM y TV = +1 para JJY. En América la estación LOL está suficientemente alejada de WWV y de otras emisoras para que pueda continuar probablemente con TV = 0, si bien el sistema propuesto también podría funcionar bien, escogiendo TV = ± 1 para LOL.
Se observará que la aplicación del plan de frecuencias propuesto es en gran medida, automático, y que una vez elegido un valor de TV para una estación determinada, no puede modificarse fácilmente sin afectar a otras partes de la red de estaciones de frecuencias patrón y señales horarias. No obstante, tom ando como punto de partida los valores de frecuencia adoptados en la URSS, es posible concebir una red coherente y compatible de estaciones de frecuencias patrón y señales horarias con un grado mínimo de interferencia mutua y la menor variación posible del uso normal de tales estaciones.
1.5 Control de los diagramas de radiación vertical y horizontal
Aunque se ha sugerido que debe lograrse el control principal de la interferencia mutua escogiendo adecuadamente la separación relativa de frecuencia, ello no debe excluir la necesidad de examinar la distribución de la radiación en los planos horizontal y vertical desde el transmisor. En particular, en pequeñas zonas geográficas, puede ser necesario limitar el diagrama polar vertical a ángulos de elevación superiores a 30° con preponderancia de la radiación para los ángulos de elevación grandes. Ello se logra fácilmente mediante dipolos horizontales; el Informe 301 de la Comisión de Estudio 10, indica las características de sistemas de ese tipo diseñados para la radiodifusión en la zona tropical. También figura información al respecto en el Manual de Antenas Directivas del CCIR [UIT, 1966].
2. Medidas administrativas
2.1 Se propone también que este Informe se transmita al Relator Principal de la Comisión de Estudio 2, dado que las actuales bandas atribuidas de frecuencias patrón se comparten parcialmente con los servicios de radioastronom ía y de investigación espacial.
2.2 Además, aunque el Informe 731 ha demostrado que continúa existiendo una m arcada necesidad de transmisiones en las bandas 6 y 7, se sugiere a las administraciones que revisen periódicamente la necesidad de tales servicios con vistas a lograr una deseable economía en materia de potencia y espectro que resultaría de la reducción de los servicios.
De acuerdo con los resultados de una encuesta realizada en 1979-1980 entre los usuarios del servicio de M SF en ondas decamétricas resulta evidente que este servicio sólo desempeña una parte limitada en la difusión de una referencia de tiempo y frecuencia dentro del Reino Unido y regiones adyacentes de Europa Occidental. Por consiguiente, el Reino Unido tiene el propósito de suprimir las transmisiones del servicio MSF en las tres frecuencias de ondas decamétricas hacia el final del presente decenio, probablemente en el primer semestre de 1988.
REFERENCIAS BIBLIOGRÁFICAS
CHEREN K OV , G. T. [1978] The use in the national economy of standard frequency and time signáis transmitted by USSR HF signal generator stations. Studies by the All-Union Scientific Research Institute of Physical and Radio Measurements. Studies on time and frequency measurement (en ruso). Vol. 37, 67, 15.
U IT [1966] Manual de antenas directivas para ondas decamétricas. UIT, Ginebra.
I. 735-1 101
IMPORTANCIA DE LAS EM ISIONES DE FRECUENCIAS PATRÓN Y DE SEÑALES HORARIAS EN LA BANDA 5
(Programa de Estudios 2B/7)
(1978-1982)
1. Cierto número de estaciones emiten en régimen permanente frecuencias patrón y señales horarias en la banda 5; algunas radian un código de tiempo con información completa que incluye el m inuto, la hora, el día de la semana y del mes y el año.
Este servicio está particularmente bien representado en Europa, donde las emisiones en la banda 5 se utilizan por lo general más que los servicios existentes en las bandas atribuidas a las emisiones de frecuencias patrón y de señales horarias.
2. El segmento de la banda 5 se presta especialmente a la difusión de señales horarias y de frecuencias patrón por las razones siguientes:
— la onda de superficie cubre una gran distancia y tiene mayor potencia que la onda ionosférica para distancias de hasta varios centenares de kilómetros;
— la onda ionosférica se propaga por la capa D de una manera estable, especialmente durante el día;— la eficacia de radiación de las antenas en la banda 5 es considerablemente superior a la eficacia que puede
obtenerse en la banda 4 y se pueden conseguir valores de la anchura de banda relativamente grandes.Como consecuencia de todos estos factores técnicos y de propagación cabe resaltar las características
siguientes:
— para comparaciones de frecuencia, la fase de la portadora se reproduce con precisión adecuada en la estaciónreceptora, por ejemplo, con una desviación típica inferior a 1 ps durante el día, a una distancia de 700 km. Auna distancia de 300 km de la estación transmisora, se encontró que la desviación típica de la fase registrada de la portadora respecto del valor medio a largo plazo era < 0,2 ps durante el día. Esto permite transm itir frecuencias patrón a una vasta zona geográfica de servicio, con una incertidumbre relativa inferior a 1,10— 12, si se emplean procedimientos idóneos de promediación. Así utilizando las técnicas oportunas es posible ensanchar patrones secundarios de frecuencias como los patrones de vapor de rubidio, a estas emisiones de frecuencias patrón para mejorar su estabilidad de frecuencia a largo plazo;
— en cuanto a las comparaciones de tiempo, se puede conseguir una incertidumbre inferior a 0,1 ms durante el día en distancias de varios centenares de kilométros utilizando equipo sencillo y económico. Si se acepta cierta degradación de la precisión se pueden utilizar relojes subordinados en distancias de hasta unos 2000 km.
INFORME 735-1
3. Se han identificado las siguientes aplicaciones y clases de usuarios de este tipo de servicios en la banda 5:
3.1 Frecuencias patrón
Laboratorios industriales; centros de investigación científica; comparaciones de tiempo entre servicioshorarios de países vecinos; ayuda a servicios horarios de países que no disponen de instalaciones técnicas avanzadas; control de la frecuencia portadora de los transmisores utilizados por diversos servicios de radiocom unicaciones; redes de telecomunicaciones (por ejemplo, para redes digitales, síncronas o semisíncronas); calibrado de cronómetros y de relojes.
3.2 Señales horarias
Relojes públicos; servicio de relojes parlantes; servicios públicos como la televisión y la radiodifusión; servicios postales; ferrocarriles y otros medios de transporte, comprendido el control del tráfico aéreo; relojes centrales para empresas industriales e instituciones públicas.
Fechado de acontecimientos: tráfico; geociencia (por ejemplo, para mediciones sísmicas e investigaciones sísmicas); medicina (para la cronología de exámenes médicos).
Referencia de tiempo común para sistemas de tratamiento electrónico de datos (por ejemplo, procesadores) y para controladores de procesos de fabricación en factorías.
Referencia de tiempo para el suministro de energía eléctrica, por ejemplo tarifas en función del tiem po; y estudios sobre el comportamiento dinámico de la red de energía eléctrica.

102 1. 736-1
INFORME 736-1
COMPARTICIÓN DE FRECUENCIAS ENTRE EL SERVICIO DE EMISIÓN DE SEÑALES HORARIAS, EL SERVICIO DE RADIOLOCALIZACIÓN, EL SERVICIO FIJO
POR SATÉLITE Y LOS SERVICIOS FIJO Y MÓVIL QUE FUNCIONAN EN 14, 21, 26 y 31 GHz APROXIMADAMENTE
(Programa de Estudios 2A/7)
(1978-1982)
1. Introducción
Este Informe trata de los problemas de compartición de frecuencias entre un sistema propuesto de difusión de señales horarias por satélite y los servicios de radiolocalización, fijo por satélite, fijo y móvil, que funcionan en 14, 21, 26 y 31 GHz aproximadamente (véase el cuadro I). Se hace un análisis de la explotación cocanal de un sistema de difusión de señales horarias por satélite, un sistema de radiolocalización, un equipo de telecomunicación del servicio fijo por satélite y un equipo de relevadores radioeléctricos terrenales de los servicios fijo y móvil. Se han utilizado parámetros típicos de las clases generales de equipos para poder efectuar un análisis completo.
2. Sistema de difusión de señales horarias por satélite
La fig. 1 ilustra un sistema propuesto de difusión de señales horarias por satélite destinado a facilitar un medio de comparación de alta precisión entre señales horarias y frecuencias patrón en puntos muy distantes de la Tierra. Desde un transmisor situado en tierra se transmite al receptor de un vehículo espacial una señal codificada con ruido seudoaleatorio (RSA). El receptor del satélite decodifica la señal transmitida, y la compara con un reloj de precisión instalado a bordo para determinar la hora de recepción referida a la hora patrón del satélite. Luego, un,transm isor del satélite utiliza una señal m odulada por RSA para retransmitir datos sobre la efeméride y época de recepción de la señal proveniente de tierra a la estación terrena. El receptor de la estación terrena decodifica esa señal, pudiendo efectuar entonces una comparación entre el patrón horario del satélite y el reloj de tierra. Pueden utilizarse dos estaciones terrenas con el satélite, de forma que las estaciones 1 y 2 puedan efectuar comparaciones de sus relojes. El reloj del satélite puede compararse también con un patrón horario de calibración situado en una estación terrena, dada, para determinar su precisión. En el cuadro I, se enumeran las bandas de frecuencias propuestas para explotar este sistema de difusión de señales horarias por satélite. En el cuadro II se resumen sus características de explotación. La codificación de RSA está destinada a garantizar una relación S / N satisfactoria y un mínimo de potencia interferente recibida por otras estaciones que comparten las mismas bandas.
3. Compartición con el servicio de radiolocalización
La banda de radiofrecuencia propuesta para el enlace ascendente del servicio de lifusión de señales horarias, en 14 GHz aproximadamente, debe compartirse con el servicio de radiolocalización. En el cuadro III, se indican las características típicas de explotación de un sistema de radiolocalización que pudiera funcionar en esta parte del espectro. Puede evitarse la interferencia entre una estación terrena de un sistema de difusión de señales horarias y un sistema de radiolocalización coordinando las ubicaciones, la orientación de las antenas, su altura, etc., entre ambas instalaciones. Por ejemplo, si la distancia entre las dos estaciones es, en kilómetros:
d < ]¡\1 h\ + j/17 h2
siendo,
h] : altura de la antena 1, en metros,
h2 : altura de la antena 2, en metros,
cada estación estará situada por debajo del horizonte radioeléctrico de la otra, y no habrá acoplamiento entre sus haces principales, sea cual fuere su orientación. Por ejemplo, si ambas antenas tienen 15 metros de altura, será suficiente que las dos estaciones se hallen aproximadamente a 32 km una de otra para que cada una de ellas esté situada por debajo del horizonte radioeléctrico de la otra. Por otra parte, puede recurrirse también a la directividad de la antena transmisora del sistema de difusión de señales horarias para reducir todavía más el flujo interferente en el punto de ubicación de la antena del sistema de radiolocalización.

L 736-1 103
El Reglamento de Radiocomunicaciones (números 2540 a 2548) estipula que la potencia isótropa radiadaequivalente emitida en cualquier dirección hacia el horizonte por una estación terrena que trabaje en bandas defrecuencias comprendidas entre 1 y 15 GHz no deberá exceder los siguientes límites:
+ 40 dBW en cualquier banda de 4 kHz para 0 < 0o,+ 40 + 3 0 dBW en cualquier banda de 4 kHz de anchura para 0o < 0 < 5o,
siendo 0 el ángulo de elevación (en grados) del horizonte visto desde el centro de radiación de la antena de laestación terrena. Este ángulo se considera positivo por encima del plano horizontal y negativo por debajo dedicho plano. Para el sistema propuesto:
p.i.r.e. = P, + G, + B= 20 + 53 — 48 = 25 dB(W /4 kHz) como máximo,
siendo,P ,: potencia del transmisor, en dBW,G, : ganancia de la antena del transmisor, en dB,B : coeficiente de corrección de anchura de banda
« , I 4 x 10M10 l0* \250 x~W ¡
B
\/ \
/ \
A : TierraB : Satélite de difusión de señales horariasC : Estación terrena N.° 1D : Estación terrena N.°21 : Enlace Tierra-espacio2 : Enlace espacio-Tierra3 : Trayecto terrenal

o
CUA DRO I - Frecuencias propuestas para un sistem a de difusión de señales horarias p o r satélite
Frecuencia central p ro p u esta de la
banda de exp lo tac ión (GHz)
A nchura de banda
R F p rop u esta (GHz)
O tras atribuciones (ex isten tes y posibles)
L im itaciones de exp lo tac ión (R eglam ento de R adiocom unicaciones de la U IT)
13,4-14,0 (enlace ascendente)
± 0,125 (0 ,25) RadiolocalizaciónSatélites de exploración de la T ierra (sensor activo)
Investigación espacial (Tierra-espacio)
p.i.r.e . + 40dB (W /4 kH z) 0 < O ° p.i.r.e . (+4O + 3 0 )d B (W /4 k H z ) 0 o < d < 5 ° Sin lím ites para la radio localización
20,2-21,2 (enlace descenden te)
± 0,125 (0 ,25) Servicio fijo por satélite(espacio-T ierra)
Servicio móvil por satélite(espacio-T ierra)
Lím ites sin especificar {
25,27-27,5 (enlace ascendente)
± 0 ,6 (1,2) Servicios fijo y móvil Satélites de exploración de la Tierra(espacio-T ierra)
p .i.r .e . < + 6 4 dB(W /M Hz) 0 < O ° p .i.r.e . < ( + 6 4 + 30) dB(W /M Hz) 0 ° < 6 < 5 °
30,0-31,3 (enlace descenden te)
± 0,6 (1 ,2) Servicio fijo por satélite (Tierra-espacio)Servicios fijo y móvil Investigación espacial Servicio móvil por satélite (Tierra-espacio)
N o especificadas todav ía
\

I. 736-1 105
CU A D RO II - Sistem a de difusión de señales horarias p o r sa té lite R esum en de sus características
Estación terrena
Potencia del transm isor
G anancia de la an ten a (h ipo té tica )
T ipo de m odulación
T em peratu ra de ru ido del recep to r
A nchura de banda an tes de la detección
A nchura de b an d a después de la d e tección
G anancia de p roceso
R elación S /N después de la de tección
100 W
53 dB
Código de R SA
1000 K (fac to r de ru id o ~ 6 dB)
2 50 MHz, 1,2 G H z
1 MHz
24 dB, 30,8 dB
18 dB
Satélite
Potencia del transm isor
G anancia de la an ten a
T ipo de m odulación
T em peratu ra de ru ido del recep to r
A nchura de ban d a an tes de la detección
A nchura de ban d a después de la detección
G anancia de proceso
R elación S /N después d e la d e tección
50 W
4 dB (co b ertu ra te rres tre )
Código de RSA
1000 K
250 MHz, 1,2 GHz
1 MHz
24 dB, 30,8 dB
18 dB
CUA DRO III - Características típ icas de explo tación d e un sistem a de radiolocalización
P o tencia de cresta de los im pulsos 25 kW
A nchura de un im pulso 32 ns
T iem po de es tab lecim ien to de un im pulso 12 ns
F recuencia de repetic ión de los im pulsos 15 kH z
Potencia m edia 12 W
F recuencia (po rtad o ra) ~ 1 4 GHz
Sensibilidad del recep to r - 8 5 dB (m )
Nivel de ru ido del recep tor 11 dB ( Ts ~ 3 400 K)
R elación señal/ru ido (necesaria para la exp lo tac ión ) 12 dB
A nchura de ban d a F I del recep to r 40 MHz
G anancia de la an ten a con relación a la isó tropa 35 dB
L óbulos laterales 25 dB p o r debajo del lóbu lo p rincipal
Inclinación de la an tena 0 grados
V elocidad de exp lo ración de la an tena 135 r.p .m .
Diagram a de la an ten a 10 grados de ab e rtu ra vertical
0,34 grados de a b e r tu ra angular ho rizon ta l

106 I. 736-1
Es posible que, ocasionalmente, las emisiones del haz principal del transmisor del sistema de radiolocalización sean captadas directamente por la antena receptora del satélite cuando el satélite de difusión de señales horarias sea visible y se halle a menos de 10 grados por encima del horizonte del sistema de radiolocalización (debido a la hipótesis de una abertura angular vertical de 10 grados del haz). En tal caso, la densidad de potencia interferente en el receptor del satélite es la siguiente:
Dr : — 179dB(W /Hz)
siendo,Dr : densidad de potencia interferente, en dB(W /Hz),P, : potencia media del transmisor, en dBW,
G, : ganancia de la antena transmisora, en dB,
B, : anchura de banda del transmisor, en dB(l Hz),R : distancia, en metros, entre las antenas transmisora y receptora (37 09 x 103 en caso de un satélite a
1000 km de altitud),
Gr : ganancia de la antena receptora, en dB,
X : longitud de onda, en metros.
La densidad de potencia calculada de la señal (a partir de la misma relación más la ganancia de proceso,de 24 dB) es de -1 6 9 dB(W /Hz), que da lugar a una relación portadora/interferencia (C /7 ) de 10 dB, en el caso más desfavorable. Esta relación C / I es suficiente para proteger el sistema de difusión de señales horarias durante todas las operaciones.
4. Compartición con el servicio fijo por satélite (trayecto espacio-Tierra)
El trayecto descendente propuesto en unos 21 GHz para la difusión de señales horarias por satélite deberá com partir una banda con los enlaces descendentes (espacio-Tierra) de los servicios fijo por satélite y móvil por satélite. Para que pueda permitirse la compartición en esa banda, es necesario que la densidad le flujo de potencia en la superficie de la Tierra sea inferior a los límites especificados en el Reglamento de Radiocomunicaciones(números 2577 a 2585) (véase el cuadro I). Por otra parte, la discriminación angular debida a la directividad de laantena de la estación del servicio fijo por satélite puede servir para obtener un aislamiento adicional limitando las emisiones del satélite a un ángulo mínimo a partir del eje de la antena de la estación terrena del servicio fijo por satélite.
La densidad de flujo de potencia en la estación terrena del servicio fijo por satélite viene dada por la
DFP = P, + G, — B, — 10 log (AtíR 2)
= -1 4 5 dB(W /(m2 MHz))
Según los criterios de interferencia especificados por la CAMR-RS-77, para la protección de los sistemas de telecomunicación del servicio fijo por satélite, se requiere una relación máxima de —35 dB entre la interferencia debida a una sola fuente y la portadora. El Informe 561 prevé una DFP (en la superficie de la Tierra de la portadora del enlace descendente de una estación fija por satélite del orden de —124,0 dB(W /(m 2 Mz)). Este valor de DFP da lugar a una relación portadora/interferencia de 21 dB. Los 14 dB de protección adicional (en el supuesto de una ganancia de antena de la estación fija por satélite de 60 dB y de una envolvente de lóbulos laterales según las normas de la UIT) pueden obtenerse evitando las emisiones de un ángulo de 0,3 grados a partir del eje de la antena de la estación terrena del servicio fijo por satélite. Se obtiene esta separación angular a partir de:
expresión:
G = 32 — 25 log 0
siendo,
G = ganancia máxima de la antena, en un ángulo 0 a partir del eje.
Por tanto:
(60 - 14) = 32 - 25 log 0
0 = 0,3 grados.

I. 736-1 107
Existe la posibilidad de poner en servicio estaciones terrenas del servicio fijo por satélite de m ayor sensibilidad que las descritas en el Informe 561. Por ejemplo, en una estación terrena dei servicio fijo por satélite de las siguientes características:
— potencia de ruido de la estación terrenareferida a la entrada del receptor: —143,6 dB(W /M H z)
— relación portadora deseada/ruido en el trayecto descendente: 15 dB
— ganancia de antena de la estación terrena: 65 dBi
la DFP en la superficie de la Tierra de la señal procedente del satélite del servicio fijo por satélite sería de —146 dB(W /m 2 • MHz). Este valor es aproximadamente igual al del sistema de difusión de señales horarias por satélite. Para dotar de protección a este sensible sistema del servicio fijo por satélite (es decir, una relación portadora/interferencia de 35 dB), el enlace descedente de difusión de señales horarias por satélite se vería obligado a no funcionar cuando se halle aproximadamente a 1,2° del haz principal de la estación terrena.
La anchura de haz de una estación terrena sensible del tipo mencionado sería del orden de 0,048°. En las condiciones del caso más desfavorable, en que fallase el sistema de control del satélite de difusión de señales horarias, pero que siguiese transmitiendo, la estación terrena sensible del servicio fijo por satélite podría recibir interferencia procedente del haz principal durante aproximadamente 1,7 x 10_7% del tiempo, o sea, alrededor de 5 s al año. El máximo tiempo en que puede darse en este caso un acoplamiento de haz principal en un solo paso es del orden de 0,4 s. Suponiendo un cono completo de 1,2° alrededor del eje de puntería de la estación terrena, podría obtenerse posiblemente una relación portadora/interferencia menor que 35 dB durante alrededor del 0,01% del tiempo hasta que pudiese remediarse el fallo del satélite de difusión de señales horarias.
5. Compartición con el servicio fijo por satélite (trayecto Tierra-espacio)
Para el trayecto descendente del sistema de difusión de señales horarias por satélite propuesto, en unos 31 GHz, deberá compartirse parte de una banda atribuida para los trayectos ascendentes del servicio fijo por satélite. Puede evitarse la interferencia entre las emisiones de la estación terrena del servicio fijo por satélite y los receptores de la estación terrena de difusión de señales horarias, coordinando los parámetros de las estaciones, las ubicaciones de éstas, la orientación de las antenas, etc. Es muy poco probable que se produzca interferencia entre el transmisor de difusión de señales horarias instalado en el satélite y el receptor del satélite del servicio fijo por satélite, dada la p.i.r.e. relativamente baja y las distancias relativamente largas que intervienen. Por ejemplo, la densidad de flujo de potencia interferente (D FPi) en el receptor del satélite del servicio fijo viene dada por:
DFP, = Pt + Gt — Bt — 10 log (471*2)< 17 + 0 - 84 - 11 - 151 = -2 2 9 dB(W /(m 2 Hz)).
De modo semejante, la densidad de flujo de potencia de la portadora (D FPC) es igual a:
DFPC = Pt + G, - Bt - 10 log (4 ti* 2)< 8,3 - 11 - 152 = -1 5 5 dB(W /(m2 Hz))
(para una densidad de p.i.r.e. = 8,3 dB(W /Hz) y * 41 500 km).
Por consiguiente, la relación portadora/interferencia sería aproximadamente de + 74 dB.
6. Compartición con los servicios fijo y móvil
Será posible la compártición entre el enlace ascendente del servicio de difusión de señales horarias por satélite (26 GHz aproximadamente) y los servicios fijo y móvil si se cumplen los dos requisitos siguientes: que la p.i.r.e: del transmisor de difusión de señales horarias esté comprendida dentro de los límites especificados en el Reglamento de Radiocomunicaciones (número 2542); y que haya un margen suficiente de relación po rtado ra / interferencia para excluir toda interferencia perjudicial entre uno y otro servicio.
La densidad de p.i.r.e. de las estaciones terrenas que funcionan por encima de 15 GHz ha de ser:
64 dB (W /l MHz) 0 < 0°
64 + 3 0 dB (W /l MHz) 0° < 6 < 5°.
La p.i.r.e. de la estación terrena de difusión de señales horarias es:
< 20 + 71 - 24 = 67 dB(W /M Hz).
Por consiguiente, si 0 > 1,0°, se satisface la primera limitación.

108 I. 736-1
La segunda, es decir, el margen de C / /, puede lograrse coordinando los parámetros de la estación (v.g., ganancia, potencia, etc.) la ubicación, la altura de la antena, su orientación, etc. Por ejemplo, si dos estaciones que comparten una banda tienen antenas de 15 m de altura, para:
d > ]/l7 x 15 + ]/l7 x 15 > 32 km
estarán situadas una por debajo del horizonte radioeléctrico de la otra, respectivamente.La compartición en unos 31 GHz entre el enlace descendente del servicio de difusión de señales horarias y
los servicios fijo y móvil dependerá de un cierto compromiso entre el nivel de interferencia y el porcentaje de tiempo de explotación durante el cual se produce esa interferencia.
En el paso de entrada al receptor, la densidad de potencia interferente es:
P¡ = E j + Gr — E
siendo
E t : densidad de p.i.r.e. del transmisor = PT + Gr — B T,= 17 + 4 - 84 = - 6 3 dB(W /Hz),
L : atenuación debida a la propagación = 92,5 + 20 log / + 20 log R,f : frecuencia utilizada, en GHz,R : distancia, en km.
Para R = 3709 km (L = 193,7 dB) y GR = 60 dBi, P, = -1 9 6 ,7 dB(W /Hz).Según el Informe 686 para una red de relevadores radioeléctricos de 5 estaciones:
= - 1 9 6 . 2 + , 0 log ( ¡ ^ )
siendo X = interferencia permisible, ponderada sofométricamente, (pWOp).Despejando su valor para P¡ = —196,7,
se obtiene:
X = 1114 pWOp o —59,5 dBmOp.
De conformidad con la Recomendación 357 un sistema analógico de relevadores radioeléctricos con modulación angular, puede tolerar este nivel de potencia interferente durante el 20% aproximadamente del tiempo de explotación. El Informe 684, que hace un estudio estadístico sobre la visibilidad de los satélites de órbita baja, muestra que una estación considerada aisladamente abarcaría un satélite de órbita baja dentro de su haz principal durante menos del 1,0% del tiempo. Por tanto, el sistema de difusión de señales horarias tiene la posibilidad de com partir frecuencias con los sistemas de relevadores ridioeléctricos de los servicios fijo y móvil, sin ocasionar interferencia perjudicial. Puede evitarse la interferencia de los transmisores de los servicios fijo y móvil sobre los receptores le estaciones terrenas de difusión de señales horarias mediante coordinación de los parámetros de las estaciones, las ubicaciones, la orientación de las antenas, etc.
7. Conclusiones
Es posible la compartición entre un sistema de difusión de señales horarias por satélite y el servicio de radiolocalización en la frecuencia de 14 GHz, aproximadamente. Puede evitarse la interferencia de una estación terrena de difusión de señales horarias al servicio de radiolocalización mediante coordinación entre las dos instalaciones. La potencia isótropa radiada equivalente de las estaciones terrenas del sistema de difusión de señales horarias deberá ajustarse a las limitaciones prescritas en el número 2541 del Reglamento de Radiocomunicaciones. La potencia de radiofrecuencia emitida por los transmisores del sistema de radiolocalización no producirá interferencia al servicio de difusión de señales horarias.
También es posible la compartición en enlaces descendentes próximos de 21 GHz, entre un sistema de difusión de señales horarias y el servicio fijo por satélite. El transmisor del satélite de difusión de señales horarias debe conformarse a las disposiciones del número 2578 del Reglamento de Radiocomunicaciones, donde se fijan límites de la densidad de flujo de potencia en la superficie de la Tierra. Por otra parte, deberá programarse el satélite de difusión de señales horarias para evitar que transmita en frecuencias próximas de 21 GHz cuando se halle dentro de un ángulo de 0,3 grados con respecto del eje principal de la antena receptora de una estación terrena del servicio fijo por satélite que funcione en una frecuencia próxima de 21 GHz.

I. 736-1, 896-1 109
Para los parámetros del sistema de difusión de señales horarias indicados en este Informe, es posible la compartición entre el enlace descendente de dicho sistema y los enlaces ascendentes del servicio fijo por satélite en 31 GHz, aproximadamente. Será necesaria la coordinación entre las estaciones terrenas del servicio fijo por satélite y las del servicio de difusión de señales horarias para proteger este último servicio contra las interferencias perjudiciales.
Es posible la compartición de frecuencias entre el enlace ascendente de un sistema de difusión de señales horarias y los servicios fijo y móvil, en 26 GHz, aproximadamente, a condición de que la potencia del transm isor no sea superior a 100 W cuando se utiliza una antena de 71 dB de ganancia como máximo y un ángulo de elevación mínimo de un grado por encima del plano horizontal. Será necesaria la coordinación entre las instalaciones de la estación terrena y de la estación de radioenlaces.
Es posible la compartición entre el enlace descendente de un sistema de difusión de señales horarias y los servicios fijo y móvil, en unos 31 GHz, a condición de que la potencia del transm isor del satélite no sea superior a 50 W y que la ganancia de la antena del satélite no rebase 4 dB. Deberá utilizarse una codificación de RSA para mejorar las relaciones señal/ruido sin aumentar los niveles de potencia interferente.
INFORM E 896-1
DOCUM ENTACIÓN DE LAS M ODIFICACIONES DE LAS SEÑALES HORARIAS TRANSM ITIDAS
(Cuestión 1/7)
(1982-1986)
1. Introducción
Las señales horarias transmitidas por las diferentes estaciones del servicio se han m antenido 'próxim as al tiempo determinado a partir de la rotación de la Tierra mediante saltos o modiñcaciones del régimen de lasseñales horarias. Actualmente la mayoría de los países transmiten el UTC.
2. Señales horarias de Estados Unidos de América
Se han comunicado [CCIR, 1978-82] los saltos de tiempo y frecuencia empleados por la estación WWV delNational Bureau of Standards (NBS) y el reloj maestro del Observatorio Naval de los Estados Unidos de América (USNO) durante los años 1956-1971. Las correcciones del UTC se efectúan desde 1972.
3. Señales horarias del JJY
En [CCIR, 1982-86] se inform a sobre las señales horarias y los saltos de frecuecia del JJY en los Radio Research Laboratories (RRL) del Japón. Desde enero de 1955 a agosto de 1961, la señal horaria y la frecuencia del JJY se mantuvieron prácticamente en concordancia con el UT2 que determ inaba el Observatorio Astronómico de Tokio (TAO). El sistema UTC se introdujo el 1.° de septiembre de 1961.
4. Antes de la introducción del actual sistema UTC (según la Recomendación 460) se utilizaban diversos métodos de ajuste de las señales horarias. Los detalles de esos ajustes deben seguir siendo accesibles para fines de archivo. Las Administraciones de la República Federal de Alemania, Francia, Japón, Reino U nido y Estados Unidos de América han enviado esta información al Bureau international de l’heure (BIH) que, atendiendo a la sugerencia formulada en el Ruego 71, ha aceptado conservar en sus archivos esa información. Además, los centros mundiales de datos respectivos serían también una posible fuente de esta clase de información.
REFERENCIAS BIBLIOGRÁFICAS
Documentos del CCIR[1978-82]: 7/103 (Estadós Unidos de América).
[1982-86]: 7 /4 (Japón).

110 I. 897-1
INFORM E 897-1
MÉTODOS PARA LA TRANSFERENCIA DE SEÑALES HORARIAS DE PRECISIÓN EN EL CASO DE DISTANCIAS CORTAS
(Programa de Estudios 3C/7)
(1982-1986)
1. Introducción
Existe la necesidad de efectuar comparaciones entre las escalas de tiempo mantenidas en diferentes lugares situados a corta distancia uno de otro, normalmente inferior a 100 km. Este Informe se refiere a los distintos emplazamientos que se consideran locales en el sentido de que comparten un medio ambiente o de propagación común. Pueden ser puntos geográficos con visibilidad directa entre sí, al alcance de cables coaxiales o de fibras ópticas, o que pueden alcanzarse convenientemente con relojes portátiles.
2. Método de la observación común
Un método ampliamente utilizado para la sincronización de frecuencias y señales horarias (véase el Informe 363) consiste en la observación común de una señal radioeléctrica que puede recibirse desde los dos puntos (Loran-C, línea de televisión, portadora de televisión, portadora estabilizada de ondas decamétricas, kilométricas y miriamétricas, Omega) y com parar las diferencias observadas entre la señal exterior y una señal generada interiormente en cada uno de los puntos. La observación simultánea de señales provenientes de un satélite por receptores en tierra independientes es uno de los ejemplos más prometedores [Taylor, 1974]. Sin embargo, el método presenta el inconveniente de que debe calibrarse la diferencia debida al trayecto de propagación.
3. Cables, incluidas las fibras ópticas
Para distancias entre emplazamientos que permiten el enlace por cable coaxial, la propagación bidireccional de señales ofrece un medio para calibrar la longitud del trayecto y comparar directamente las señales para la sincronización de las frecuencias patrón y señales horarias [Rueger y Bates, 1979].
La comparación de señales horarias mediante líneas telefónicas es un método sencillo y económico. Los Radio Research Laboratories (RRL) (Jápón) efectuaron experimentos de este tipo utilizando acopladores acústicos, a través de circuitos telefónicos locales de larga distancia de 800 km. Se efectuaron mediciones del tiempo de recepción y del tiempo de ida y vuelta para distintas frecuencias portadoras empleadas para los modos de llam ada y respuesta de los acopladores, promediándose los resultados. Se obtuvo una exactitud comprendida dentro de un intervalo de ± 0 ,1 ms, tanto en el caso de líneas locales como en el de líneas de larga distancia [CCIR, 1982-86]. Este método sólo puede aplicarse si los dos trayectos son iguales, pero en algunas adm inistraciones el encaminamiento de las llamadas se produce de manera asimétrica. En Estados Unidos de América, por ejemplo, las llamadas de larga distancia frecuentemente se dividen entre una ruta por satélite y otra por enlace terrenal. Se reduce así el tiempo de ida y vuelta global respecto a cuando se utilizan sólo satélites. Sin embargo, si el retardo medido es inferior a 100 ms o superior a 500 ms, hay una elevada probabilidad de que el encaminamiento sea idéntico y pueda aplicarse el método descrito para la compensación del retardo.
En el Jet Propulsión Laboratory (JPL) de Estados Unidos de América, se comprobó un enlace de transferencia tiempo/frecuencia experimental que utilizaba fibras ópticas en 850 nm con una modulación de 100 MHz. Se lograron inestabilidades de 3 x 10“ 15 para 100 s y 1 x 10~16 para 1000 s, sobre un trayecto de 3 km. El enlace funcionaba por medición continua del retardo de ida y vuelta en una sola fibra corrigiendo la fase de entrada para compensar las variaciones del retardo, lográndose así una fase constante en el extremo receptor. En Goldstone, California, Estados Unidos de América, se está instalando un sistema de fibras m onom odo a 1300 nm del que se espera una mejor calidad de funcionamiento, para enlazar dos antenas de la red del espacio lejano [Lutes, 1982].
En la Universidad Técnica de Graz se ha desarrollado un sistema de distribución de señales horarias y frecuencias patrón por fibra óptica multimodo para distancias de hasta varios centenares de metros, construido con componentes que se pueden adquirir sueltos en el mercado. El sistema es comparable en precio y calidad al equipo normalizado que se utiliza en los laboratorios de patrones horarios. La fluctuación de fase (salida en com paración con la entrada con una desviación típica de 100 muestras) está muy por debajo de 50 ps y los cambios provocados por la temperatura en el retardo de las señales del transm isor y del receptor son inferiores a 30 y 50 ps/°C , respectivamente. Las variaciones de la señal de retardo de los cables utilizados se sitúan entre 5 y 17 p s /°C para cables de 100 m de longitud [Kirchner y Ressler, 1984].

I. 897-1 111
4. Enlace con visibilidad directa
Una opción económica para ciertas distancias está facilitada por la utilización de enlaces de propagación de ondas radioeléctricas, incluidas microondas o haces láser, entre dos puntos con visibilidad directa, para obtener señales que puedan transferirse por trayectos de propagación unidireccionales o bidireccionales reflejados. El método bidireccional permite controlar las variables resultantes del trayecto de propagación, como la tem peratura, las nubes, el humo o la lluvia, pero se halla sujeto a problemas de propagación multitrayecto que dependerán de los parámetros de diseño de las antenas de emisión y de recepción y de su ubicación con respecto a obstáculos o superficies de reflexión próximas al trayecto entre los dos puntos.
Se ha establecido un radioenlace horizontal bidireccional para com parar escalas de tiempo a través del aire, entre el equipo de transferencia de señales horarias y nedición de distancia por láser de la Universidad deMaryland situado en el telescopio de 1,2 m del G oddard Optical Research Facility (GORF) y la División de losservicios de tiempo del Observatorio Naval de los Estados Unidos de América (USNO). El trayecto quebrado tenía una distancia unilateral de 26 km. Dos reflectores ópticos angulares situados en la USNO e idénticos a los colocados en la Luna con ocasión del programa Apolo, reflejaban los impulsos de láser hacia el GORF. Se enviaron impulsos luminosos de 100 ps de duración con energía de varios cientos de microjulios, desde un láser de neodimio-YAG de frecuencia doble con una longitud de onda de 532 nm (verde) a una velocidad de 10 impulsos por segundo. En el USNO se efectúa la detección mediante un fotodiodo de avalancha y latemporización se consigue con un contador de cómputos y un com putador con respecto al tren de impulsos de10 impulsos por segundo enviado por el reloj maestro. La desviación típica para 100 com paraciones varia habitualmente entre 200 y 400 ps. La desviación típica correspondiente de la media es de 20 a 40 ps. Actualmente la exactitud de calibración es de 1 a 2 ns, establecida por el desplazamiento de un reloj portátil [Alley y otros, 1982].
Utilizando técnicas similares, en 1982 se efectuó un experimento de comparación de escalas de tiempo mediante impulsos láser entre dos secciones del Observatorio de Shanghai, Zi-Ka-Wei y Zo-Se separadas entre sí25,2 km. Las fluctuaciones temporales de la diferencia de relojes entre las dos secciones son aproxim adam ente de ± 8,0 ns (valor medio cuadrático) para una sola medición y de ± 1,3 ns aproximadamente para el promedio de mediciones durante 2 min, respectivamente [Yang y otros, 1983].
5. Observaciones generales
Las señales de temporización para fines de sincronización se caracterizan por el tiempo de subida de la señal, la anchura de banda disponible y la estabilidad del retardo de fase cuando la señal atraviesa el medio de propagación y los instrumentos de medición.
Ha sido práctica común calibrar las diferencias de longitud en los trayectos de propagación trasladando un reloj de precisión entre dos puntos, suponiendo que pueden efectuarse correcciones de la m archa del reloj portátil en función del envejecimiento, velocidad y correcciones gravitacionales [Alian y Ashby, 1979].
En el cuadro I se muestra una serie de posibilidades de tranferencia de tiempo para una elevada calidad de funcionamiento obtenida por varios métodos para, una distancia de 100 km o menos.

112 I. 897-1
CUADRO I — Incertidumbre de la transferencia de tiempo a distancias cortas
Método de transferencia de tiempoIncertidumbre
de transferencia de tiempo
Naturaleza de su empleo
Calibración0
Reloj portátil [Rogers y otros, 1977] 2 ns Servicio ordinario
Línea de TV [Lavanceau y Shephard, 1978] 10 ns Servicio ordinario X
Portadora de TV [Lavanceau y Shephard, 1978] 0,1 ns Servicio ordinario X
Radioenlace de microondas
[MacConnell y otros, 1977 ; Norton y otros, 1962]
2 ps 2-50 ps
Experimental X 0
Cable coaxial [Ruegery Bates, 1979] 0,2 ns Servicio ordinario x 0
Loran-C [Winkler, 1972] 0,1 ps Servicio ordinario X
O ndas miriamétricas (Omega)
[Cooper y Chi, 1979] 1,5 ps Experimental X
Señales horarias, B. dam 1 ms Servicio ordinario X
Telefonía de 10 kHz 10-100 ps X
M edios ópticos
Fibras ópticas 10 ps Experimental x 0
Láser [Besson, 1970] 0,1 ns Experimental X
Geodímetro [Levine, 1978;Faller y Faller, 1977]
2 ps Experimental
Enlaces por satélite
GOES [Beehler y otros, 1979] 1 ps Servicio ordinario
Transit [Laidet, 1972;Beehler y otros, 1979]
1-5 ps Servicio ordinario
Programa Transit mejorado
[Taylor, 1974;Rueger y Bates, 1979]
10 ns Experimental
Sistema mundial de determinación de la posición
[Schuchman y Spilker, 1977] 10 ns Diseño potencial
Radiodifusión [CCIR, 1970-74 a] 6 ps Servicio ordinario X
Línea de transporte de energía de 50-60 Hz
[CCIR, 1970-74 b y c] 0,25 ms Servicio ordinario X
(') La calibración tanto de los instrumentos como de las instalaciones es necesaria para lograr la incertidumbre de transferencia de tiem po indicada. Los métodos marcados con una « X » exigen una calibración independiente del trayecto de propagación.
(2) No es necesaria la calibración externa en el modo de operación bidireccional.
REFERENCIA S BIBLIOGRÁFICAS
ALLAN, D. y ASHBY, N. [1979] Practical applications of relativity for a global coordínate time scale. Radio Sci., Vol 14, 649-669.
ALLEY, C. O., RAYNER, J. D., STEGGERDA, C. A., M ULLENDORF, J. V., SMALL, L. y W AGNER, S. [1982] Time transfer between the Goddard optical research facility and the US Naval Observatory using 100 picosecond láser pulses. Proc. 14th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos de América, 244.

I. 897-1, 1016 113
BEEHLER, R. E., DAVIS, D. D„ CATEORA, J. V., CLEM ENTS, A. J., BARNES, J. A. y M EN D EZ-Q U IN O N ES [noviembre de 1979] Time recovery measurements using operational GOES and TRANSIT satellites. Proc. l l th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Washington DC, Estados Unidos de América, 283-315.
BESSON, R. J. [1970] Comparison of national time standards by simple overflight. IE E E Trans. Instr. and Meas., Vol. IM-19, 4, 227-232.
COOPER, R. S. y CHI, A. R. [1979] A review of satellite time transfer technology: Accomplishments and future applications, Radio Sci., Vol. 14, 605-619.
FALLER, J. E. y FALLER, J. L. [1977] Measurement of the position of points on the earth surface using absolute gravimeter and a multi-wavelength geodimeter as complements of extra-terrestrial techniques. Ed. J. D. M ulholland, Scientific Application o f Lunar Láser Ranging, 277-283.
K IRCH N ER, D. y RESSLER, H. [diciembre de 1984] A fibre optic time and frequency distribution system. CSTG Bull., 7, 171-175.
LAIDET, L. M. [mayo de 1972] Worldwide synchronization using the TRANSIT Satellite System. Proc. IE E E (Lett.), Vol. 60, 630-632.
LAVANCEAU, J. D. y SHEPHARD, L. F. [1978] Real time distribution via passive TV networks, Proc. 9th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Greenbelt, Md., Estados Unidos de América, 249-276.
LEVINE, J. [1978] Múltiple wavelength geodesy. Proceedings of the 9th GEOP Conference, Columbus, Ohio, Estados Unidos de América.
LUTES, G. [septiembre de 1982] Optical fiber applications in the NASA deep space network. Láser Focus, Vol. 18, 9, 115-121.MacCONNELL, J. W., SYDNOR, R. L. y HINSHAW , J. T. [1977] A precisión microwave frequency and time distribution
system. Proc. 9th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Greenbelt, Md., Estados Unidos de América.
NORTON, K. A., BARROWS, E., THOM PSON, M. C., Hijo y JAMES, H. B. [diciembre de 1962] Variance o f Radio frequencycaused by turbulence on line-of-sight transmission. IR E Trans. P.G.I.
ROGERS, A. E. E. y otros [1977] Clock synchronization via very long baseline interferometry. Proc. 9th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Greenbelt, Md., Estados Unidos de América, 127-134.
RUEG ER, L. J. y BATES, A. G. [julio-agosto de 1979] NOVA satellite time experiment. Radio Sci., Vol. 14, 4, 707-714.SCHUCHM AN, L. y SPILKER, J. [1977] Time transfer via GPS. Proc. 9th Annual Precise Time and Time Interval (PTTI)
Application and Planning Meeting, Greenbelt, Md., Estados Unidos de América.TAYLOR, R. J. [29-31 de mayo de 1974] Satellite Transit to ground timing experiments. Proc. 28th Annual Symposium on
Frequency Control (US Army Electronics Command, Ft. M onmouth, NJ 07703), 384-388. (Electronic Industries Association, Washington DC, 20006, Estados Unidos de América).
W IN KLER, G. M. R. [1972] Recent experiments with flying atomic docks, LORAN-C (etc.) for clock synchronization. Report to XVII General Assembly, URSI, Varsovia, República Popular de Polonia.
YANG, F., ZHUANG, Q., SU, J., TAN, D., LI, Zh. y CAI, J. [1983] Time comparison experiment via láser pulses. KexueTongbao, Vol. 12, 746-757.
Documentos del CCIR[1970-74]: a. 7 /2 (Japón); b. 7/57 (Alemania (República Federal de)); c. 7/82 (Italia).[1982-86]: 7 /2 (Japón).
INFORM E 1016
MÉTODOS QUE UTILIZAN LAS SEÑALES DE TELEVISIÓN PARA LA TRANSFERENCIA Y DIFUSIÓN DE SEÑALES HORARIAS Y FRECUENCIAS PATRÓN
(Programa de Estudios 3C/7)(1986)
Las señales de televisión se prestan para la difusión de señales horarias y frecuencias patrón con varios niveles de precisión y para la comparación de escalas de tiempo; entre sus ventajas pueden citarse:— su amplísima disponibilidad, con una buena intensidad de la señal;— su estructura temporal y su gran anchura de banda en atribuciones de frecuencia ya existentes;— el bajo precio del equipo receptor necesario;— la predictibilidad de su propagación.
Se han elaborado varios métodos de comparación de tiempo por televisión. El método original de Tolman y otros [1967] prevé la medición simultánea de los instantes de llegada de impulsos de sincronismo seleccionados. Este sistema está muy generalizado en la República Popular de China [CCIR, 1974-78a], en Europa [Rovera, 1972; Alian y otros, 1970; Parcelier, 1976; Parcelier y Fréon, 1977; Becker y Enslin, 1972], en Japón [Saburi y otros, 1978] y en los Estados Unidos de América [Alian y otros, 1972; Davis y otros, 1971], donde se conoce con el nombre de «Línea 10».

114 I. 1016
Los impulsos de sincronismo de televisión sirven de marcadores comunes de referencia en muchas comparaciones de tiempo nacionales y, a veces, internacionales. El tiempo de propagación se determina con relojes portátiles u otros métodos apropiados. En las comparaciones con visibilidad directa utilizando el mismo transm isor de televisión, la incertidumbre de cualquier medición de diferencia de tiempo puede ser del orden de 10 ns, o menos.
Las señales de televisión de diferentes transmisores sólo pueden utilizarse para efectuar comparaciones de tiempo o frecuencia si el retardo introducido por los enlaces entre los transmisores permanece constante o se limita a un pequeño número de valores constantes y distinguibles. También es necesario que no se usen sincronizadores de trama. Tales sincronizadores almacenan una trama de imagen completa en forma digital y le dan salida en sincronismo con un reloj local. La incertidumbre introducida por los enlaces entre transmisores es normalmente inferior a 1 ps si éstos siguen el mismo itinerario, pero puede llegar a ser de varios microsegundos. El uso de diferentes rutas a través de la red de enlace puede dar lugar a variaciones mucho mayores.
En el Observatorio de Beijing en la República Popular de China se ha empleado un método que permite medir los retardos, sección por sección, para obtener el retardo total de propagación. El método sólo emplea aparatos sencillos y equipos de tipo clásico. Los resultados se han comprobado y comparado con la temporización m ediante relojes portátiles y Loran-C, siendo las desviaciones sistemáticas de los diferentes métodos no superiores a 1 ps.
Los enlaces que comprenden satélites o almacenamientos de la trama cuyas entradas y salidas están controlados por relojes diferentes pueden introducir retardos variables e indefinidamente grandes. Tal ocurre, por ejemplo, con los sincronizadores de tram a y los convertidores de normas, cuyo empleo se prevé ha de aumentar. Si bien esto podría limitar la utilidad de las grandes redes de televisión para la distribución de señales horarias y frecuencias patrón, podrían también simplificar esta utilización en el plano local al permitir un control activo e independiente de la temporización de las señales dentro de una red secundaria o después del paso de las mismas por un enlace por satélite.
Experimentos con relojes portátiles, efectuados de forma rutinaria durante 7 años por los Observatorios de Shaanxi, Shanghai y Beijing, indicaron que la técnica que utiliza los impulsos de sincronismo de la línea 6 de televisión alcanzó una exactitud de 2 ps, o incluso mejor, y una precisión de la calibración diaria de frecuencia de aproximadamente (2 — 20) x 10“ 13 sobre una distancia de 2000 km.
En Japón se ha conseguido mejorar la estabilidad del equipo de medición empleado con este método, estabilizando la frecuencia del oscilador local en el sintonizador del aparato de televisión y utilizando un ajuste fijo del control automático de ganancia del amplificador de frecuencia intermedia con la tensión de control más alta posible. Se ha obtenido una mejor estabilidad a corto y largo plazo de unos 10 ns y 30 ns, respectivamente [Inouye y Nara, 1978; CCIR, 1974-78b]. Además, experimentos recientes han mostrado que pueden obtenerse mejoras considerables de la estabilidad midiendo el flanco posterior del impulso de sincronización en lugar del flanco anterior. En efecto, en mediciones meramente diferenciales empleando el mismo impulso de sincronización, la utilización del flanco posterior da excelentes resultados, ya que su mayor pendiente permite una medición más precisa [Saburi y otros, 1978],
Hay que señalar, sin embargo, que el tiempo de aparición del flanco anterior del impulso, con respecto auna referencia de tiempo conocida, se controla generalmente mejor que en el caso del flanco posterior., Por lotanto, en las mediciones de tiempo entre los impulsos de un reloj local y un impulso determinado de televisión sincronizado, pueden obtenerse mejores resultados con el flanco anterior.
En Francia se han utilizado varias generaciones de receptores especialmente construidos para la com paración diaria de los 15 relojes muy dispersos que contribuyen a la realización del TA(F) [Parcelier, 1976]. Lasmediciones se refieren a un impulso bien caracterizado en una línea de prueba y son iniciadas automáticamente por el reloj local. Se ajusta la sintonía a fin de que el impulso recibido tenga la forma óptima, y unos controles automáticos de ganancia y nivel aseguran que el contenido de la imagen no influya en los resultados. Las mediciones simultáneas efectuadas durante 30 minutos por dos equipos adyacentes dan una dispersión 1 a de ± 5 ns en torno a la media; en funcionamiento normal se obtiene una precisión de 40 a 50 ns en una serie de 15 a 30 mediciones consecutivas, sobre distancias de varios cientos de kilómetros.
Se han realizado experimentos en la URSS en los que se han insertado impulsos de marcas de segundos en la sexta línea de la señal de video, con la posibilidad de un control remoto relativo al UTC (S). Además, también se ha insertado un código de tiempo [Borisockin y Fedoton, 1982].
Se han comparado durante un mes, a base de mediciones diarias de televisión y de experimentos de relojes transportables, dos relojes de cesio situados, respectivamente, en Bretaña y París [Parcelier y Fréon, 1977], La desviación típica de las diferencias entre los dos medios de comparación en ese periodo fue de unos 15 ns. Un último experimento de reloj transportable efectuado dos meses y medio después, dio un resultado superior en 28 ns al de la televisión.
Tres laboratorios de Tokio, situados todos ellos en un radio de unos 20 km del transmisor de televisión, han efectuado comparaciones regulares de relojes con señales de televisión y ocho mediciones con relojes portátiles en un periodo de siete años. La desviación típica de la diferencia entre los dos métodos fue de unos 50 ns. Se han tenido en cuenta las variaciones de retardo del receptor determinadas por medio de calibrados locales.

I. 1016 115
Un receptor desarrollado en Suiza mide el flanco anterior del impulso de sincronización de línea y comprende un control automático de frecuencia y una estabilización precisa de los niveles de la señal inmediatamente antes y después del flanco. Las mediciones de las señales de un mismo transm isor efectuadas por receptores instalados en un mismo sitio indican valores de 1 a inferiores a 1 ns para tiempos medios de 10 s y más, mientras que para las señales de transmisores diferentes el valor de 1 o aum enta de aproxim adam ente 1 ns a 3 ns cuando el tiempo medio aumenta de 50 s a 500 s [CCIR, 1974-78c].
Lavanceau y Carroll [1971] del USNO (Observatorio Naval de Estados Unidos de América), inform aron acerca de un método conexo, que entraña la estabilización de la subportadora de color con referencia a un patrón de frecuencia de cesio en el estudio de televisión. El impulso de sincronismo en la línea 10 se controla y mantiene también en sincronismo mediante la referencia a un «cuadro de coincidencias» (TOC), publicado por el USNO para usarlo con el sistema NTSC, similar al Loran-C TOC.
En contraste con una referencia coherente TOC, conforme a la utilizada en los informes semanales del USNO (Time Service Announcements, serie 4), se ha propuesto en Japón [Saburi y otros, 1978] emplear la misma referencia TOC diariamente.
El NBS (Estados Unidos de América) ha desarrollado y probado un método para la difusión por televisión de señales horarias, codificando datos en determinadas líneas de la señal video. Primero se utilizaron las líneas 13 a 16, y luego, las líneas 1 y 21. En este sistema se incluyó una señal de referencia de 1 M Hz [Davis y otros, 1970; Howe, 1972].
Los sistemas de televisión utilizados en Europa tienen una frecuencia nominal de tram a de 25 Hz y permiten en principio insertar marcadores de segundo UTC en una posición fija en la trama.
Se utiliza de esta manera la red nacional de televisión de Yugoslavia para difundir señales horarias y frecuencias patrón a partir de un reloj de cesio situado en el estudio de radiodifusión de Belgrado. Se insertan impulsos de segundos en la escala UTC (YU), con indicaciones de hora y minuto en la segunda mitad de la línea 19, mientras que la línea 332 transmite un código que da la hora, el minuto y el segundo e indica el origen y el estado de la información de tiempo. La primera mitad de ambas líneas contiene una ráfaga estabilizada de 1 MHz [Kovacevic, 1973 y 1977]. Los estudios de televisión de Belgrado emiten estas señales sobre sus dos programas y durante toda la duración de la emisión desde 1975.
En el Reino Unido, los impulsos de sincronización de línea y tram a transmitidos por la British Broadcasting Corporation (BBC) en la banda 9 los controla por lo general un patrón de rubidio. Su deriva con respecto al UTC suele ser de unos pocos microsegundos por día, pero hay también pasos de tiempo reversibles que dependen del programa. Las señales transmitidas por varios transmisores, que dan servicio a numerosos centros poblados e industriales, son verificadas cada día laborable con una precisión de 0,1 ps. Las mediciones vinculan las escalas UTC que mantiene el National Physical Laboratory (NPL) y el emplazamiento del transm isor M SF/G BR en Rugby [CCIR, 1974-78d].
Se han elaborado también diversos métodos para utilizar transmisiones de televisión como referencias muy estables de frecuencia. En la República Federal de Alemania, el control preciso de frecuencia se ha hecho extensivo a unos 160 transmisores de televisión en 82 ubicaciones y con frecuencias comprendidas entre 471,24 y 783,26 MHz. Las frecuencias de emisión se controlan a distancia mediante un patrón de cesio que se ajusta con relación a un grupo central de patrones de cesio comerciales de alta calidad. Las estaciones observadas mostraron un desajuste medio de frecuencia normalizada de 3 x 10-12. La desviación típica calculada es de 3 x 10“ " . Se ha comprobado que las señales recibidas a distancia del transmisor comprendidas entre 46 y 125 km, durante un intervalo de 30 s, presentaban fluctuaciones de fase correspondientes a variaciones de frecuencia del orden de 1 x 10- u , en el caso más desfavorable.
En la República Democrática Alemana, los impulsos de sincornización de línea y de tram a transm itidos por la red de televisión están controlados directamente por el servicio nacional de hora y frecuencia con una incertidumbre de 6 ns, y se utilizan para la difusión de frecuencias en el país y para comparaciones de tiempo con los servicios horarios de los países vecinos. El efecto de saltos de tiempo superiores a 200 ns debidos a variaciones de los tiempos de retardo en los enlaces de la red de televisión pueden eliminarse mediante la aplicación de correcciones calculadas que conducen a una reducción de la incertidumbre de las comparaciones de tiempo a menos de 50 ns [Kalau, 1979].
En Francia se ha utilizado una portadora de televisión de 182,25 MHz como referencia común para com parar frecuencias entre máseres de hidrógeno instalados en dos laboratorios distantes 16 km entre sí. Unos sintetizadores excitados por los máseres generaban batidos de audiofrecuencia con la portadora, y se com paraba la fase de los batidos por conducto de un enlace telefónico. Se han obtenido resoluciones de 4 x 10_ n x_1 para 1 s < x < 300 s, y 6 x 1 0"14 para x = 1 hora [Gabry y otros, 1977].
En Japón y Estados Unidos de América se ha demostrado la estabilidad de frecuencia que asegura la subportadora de color en televisión. Esta elevada estabilidad se debe al uso de patrones atómicos de frecuencia por las redes de televisión para generar las frecuencias subportadoras.

116 1. 1016
Se han realizado comparaciones de frecuencias entre Tokio y Mizusawa (Japón) [Saburi y otros, 1978]. La fase de la subportadora de color se comparó con una señal de subportadora de color generada localmente. Se obtuvo una precisión de 6,5 x 10~12, 4 x 10~12 y 2,2 x 10-12, para tiempos medios de 10, 30 y 60 min, respectivamente.
En 1979, el Instituto Nacional de Metrología de la República Popular de China llevó a cabo com paraciones de frecuencias. Los resultados muestran que utilizando una subportadora de color en una distancia de 2000 km, la precisión del calibrado de frecuencia durante 30 min es superior a ± 5 x 10 -12. En la misma época, se obtuvieron resultados similares en los Observatorios de Beijing y Shaanxi.
En el Observatorio de Shanghai se ha ensayado un método bastante sencillo que utiliza directamente el impulso de la subportadora de color. La precisión del calibrado de frecuencia durante 15 min es de 1 a 2 x 1 0 -" .
El National Bureau of Standards (Estados Unidos de América), basándose en anteriores demostraciones de la excelente estabilidad a largo plazo de las transmisiones sobre la subportadora de color de 3,58 MHz de las principales redes de televisión de Estados Unidos de América [Davis y otros, 1971], ha iniciado recientemente un servicio nacional mejorado de calibración de frecuencias. Actualmente, casi todos los usuarios de Estados Unidos de América pueden calibrar fácil y económicamente su oscilador, con una precisión de 1 x 10~M, en unos 15 min, sirviéndose del patrón de frecuencia primario de la NBS. Esta precisión es posible por la gran estabilidad de los patrones atómicos de frecuencia de la red que genera las señales de subportadora, y por la disponibilidad de mediciones regulares NBS de las frecuencias subportadoras.
El usuario debe medir en primer lugar la diferencia de frecuencia entre su oscilador y una de las subportadoras de la red principal de televisión en un momento en que esté recibiendo una emisión en directo de la red. Puede obtenerse fácilmente la necesaria señal de la subportadora con un receptor de televisión en color ligeramente modificado. La NBS ha diseñado y construido diferentes versiones de equipo de usuario adecuado [Davis, 1975], En su forma más simple, denom inada comparador de barras de color, la medición se realiza ajustando manualmente el periodo requerido para que una barra de color en la pantalla de televisión pase por un ciclo completo de cambios de color.
En una versión más perfeccionada de equipo de usuario, la diferencia de frecuencia entre el oscilador local y la subportadora de la red es automáticamente medida, calculada y presentada directamente en múltiplos de 10- n sobre la pantalla de televisión. El tiempo total requerido para esta medición automática es de unos 15 min y la precisión de 1 x 10-11.
La NBS ha desarrollado también un sistema versátil de registro diario de datos basado en un microprocesador, que automatiza las mediciones necesarias para la comparación del impulso de sincronismo de la línea 10 y de la frecuencia de la subportadora de color para formar un solo paquete, relativamente económico. Normalmente se obtienen comparaciones de tiempo a 10 ns y comparaciones de frecuencia a 1 x 10-12 (media de un día) de unidades distantes, no atendidas, situadas en varios puntos de Estados Unidos de América [Davis, 1976].
Actualmente una de las principales redes de Estados Unidos de América utiliza patrones de frecuencia de cesio para generar las frecuencias de la subportadora de color de 3,58 MHz, que se distribuyen después a toda la nación. El patrón de cesio elimina virtualmente cualquier deriva a largo plazo en la frecuencia de la subportadora.
REFERENCIAS BIBLIOGRÁFICAS
ALLAN, D. W., BLAIR, B. E., DAVIS, D. D. y MACHLAN, H. E. [abril de 1972] Precisión and accuracy of remóte synchronization via network televisión broadcasts, LORAN-C, and portable docks. Metrología, Vol. 8, 64-72.
ALLAN, D. W., LESCHIUTTA, S. y ROVERA, G. [1970] TV frame pulses used for precisión time synchronization and their noise distribution. Alta Frequenza, Vol. XXXIX, 452.
BECKER, G. y ENSLIN, H. [1972] Genaue Zeit- und Frequenzvergleiche mittels Fernsehbildimpulsen (Comparación de señales horarias y frecuencias precisas mediante los impulsos de sincronismo de televisión). Frequenz, Vol. 26, 332.
BORISOCKIN, V. V. y FEDOTON, Y. A. [1982] Transmission T /F signáis via TV system. Izm. Tekhn., 2.
DAVIS, D. D. [20 de marzo de 1975] Calibrating osciliators with TV colour-reference signáis. Electronics, Vol. 48, 107-114.
DAVIS, D. D. [diciembre de 1976] A microprocessor data logging system for utilizing TV as a time-frequency transfer standard. Proc. 8th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, (US Naval Research Laboratory, Washington, DC), 167-183.
DAVIS, D. D., BLAIR, B. E. y BARNABA, J. F. [agosto de 1971] Long-term continental US timing system via televisión networks. IEEE Spectrum, Vol. 8, 41-52.
DAVIS, D. D., JESPERSEN, J. L. y KAMAS, G. [junio de 1970] The use of televisión signáis from time and frequency dissemination. Proc. IEEE (Lett.), Vol. 58, 931-933.
GABRY, A., FAUCHERON, G., DUBOUIS, B. (CNET) y PETIT, P. (CNRS) [1-3 de junio de 1977] Distant comparison of stable frequency standards by means of the transmission of a beat note between the carrier of a TV broadcast signal and a frequency synthesized from the frequency standards. Proc. 31 st Annual Symposium on Frequency Control, Atlantic City, NJ, Estados Unidos de América (US Army Electronics Command, Ft. Monmouth, NJ 07703) (Electronic Industries Association, Washington DC 20006, Estados Unidos de América).

I. 1016, 1017 117
HOWE, D. A. [agosto de 1972] Nationwide precise time and frequency distribution utilizing an active code within network televisión broadcasts. IE E E Trans. Instr. and Meas., Vol. IM-21, 263-276.
INOUYE, T. y NARA, M. [abril de 1978] The stability of time comparison by TV signal of common emission. Bull. Nat. Res. Lab. Metrology, 36.
KALAU, M. [1979] Experiences with time comparisons by the TV method. Proc. lOth International Congress o f Chronometry, Ginebra, Vol. 2, 83-89.
KOVACEVIC, Z. B. [1973] Primeros resultados experimentales de difusión de señales horarias y frecuencias patrón mediante la red de TV. JU KEM Proc. XXV/13, Belgrado (en serbocroata).
KOVACEVIC, Z. B. [1977] New possibilities for time and standard frequency dissemination over TV networks. Proc. 9th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Greenbelt, Md., Estados Unidos de América.
LAVANCEAU, J. D. y CARROLL, D. [1971] Real time synchronization via passive televisión transmission. Proc. 3rd Annual Precise Time and Time Interval (PTTI) Strategic Planning Meeting, 331-366.
PARCELIER, P. [23 de enero de 1976] Comparaison d’horloges atomiques par réception de signaux de télévision. Bull. d ’Information du Bureau Nat. de Métrologie, 23, 32-39.
PARCELIER, P. y FREON, G. [3-7 de octubre de 1977] Utilisation de la télévision dans la métrologie temps-fréquence. Actes du Colloque international sur la mesure en télécommunications organisé par l’URSI, Lannion, Francia.
ROVERA, G. [1972] On the accuracy of the TV timing method. Alta Frequenza, 41, 822-824.SABURI, Y., YASUDA, Y., KOBAYASHI, S. y SATO, T. [1978] Precisión comparison of time and frequency by means o f TV
signáis. Rev. Radio Res. Labs. (Japón), Vol. 18, 433-444.TOLMAN, J., PTACEK, V., SOUCEK, A. y STECHER, R. [diciembre de 1967] Microsecond clock comparison by means of TV
synchronizing pulses. IE E E Trans. Instr. and Meas., Vol. IM-16, 3, 247-254.
Documentos del CCIR[1974-78]: a. 7/137 (China (República Popular de)); b. 7/6 (Japón); c. 7/125 (Suiza); d. 7/106 (Reino Unido).
INFORM E 1017
CARACTERIZACIÓN DE LOS RETARDOS CAUSADOS POR LAS ANTENAS
(Cuestión 9/7)(1986)
1. Introducción
A medida que se va consiguiendo una mayor resolución en las transferencias de señales horarias, gracias al empleo de generadores perfeccionados de señales horarias y de frecuencias con mayor estabilidad a corto plazo, los medios de calibración y medición de retardos en los circuitos entre las señales patrón que han de compararse pueden convertirse en una causa dominante de error. Entre las causas que contribuyen a esta situación figuran los retardos causados por las antenas utilizadas para emitir y recibir ondas electromagnéticas propagadas a través del trayecto que separa a los generadores de señales horarias de precisión. Este Informe se basa en las obras publicadas en relación con la cuestión y es un primer intento de presentar la tecnología más m oderna existente en esta esfera. Como las administraciones no han normalizado medios para efectuar estas calibraciones, es apropiado someter a estudio directrices que puedan llevar a la adopción de procedimientos aceptables para las mencionadas mediciones.
2. Antecedentes
Actualmente existen generadores de señales horarias que pueden m antener escalas de tiempo con desviaciones de menos de 1 ns durante periodos que van desde varias horas hasta varios días. Los retardos en circuitos electrónicos se pueden medir y calibrar en laboratorio con una resolución del orden de centenas de femtosegundos. La susceptibilidad de estos circuitos a los cambios ambientales como la tem peratura, los campos magnéticos y la aceleración se puede medir, y se pueden tomar medidas para determinar y com pensar dichos trastornos o para tomarlos en consideración. Se puede considerar que las antenas no son más que una subinstalación de los circuitos eléctricos que pueden conectarse en serie, pero su medición y calibración puede exigir un tratamiento más complejo.
Las grandes antenas utilizadas para emitir señales Loran-C necesitan 60 ps o más para que la energía establezca campos de radiación a 100 kHz [Fujimoto y Fujiwara, 1981]. De igual manera, las antenas pequeñas de cuadro inductivas que se utilizan para recibir dichas señales presentan retardos asociados con el establecimiento de la señal recibida. Las señales como las utilizadas en el sistema Omega en la banda de frecuencias de 11 a 15 kHz necesitan varias decenas de milisegundos para establecerse [Watt, 1967].

118 I. 1017
En menor grado, las antenas utilizadas en satélites para emitir señales de 150 MHz y de 400 MHz ofrecen retardos del orden de 25 a 50 ns. Como estos retardos dependen de factores tales como la anchura de banda, la frecuencia, la longitud física y la directividad, las señales horarias derivadas de una escala de tiempos común pueden desarrollar desplazamientos de señales horarias o retardos que se manifiestan como errores en las transferencias de señales horarias.
3. Mediciones
Se han realizado experimentos para medir los retardos de la señal causados por la antena mediante un procedimiento de sustitución. Se selecciona una sección de cable de longitud comparable a la distancia de radiación del campo lejano, 2D 2/ \ , de antenas eléctricamente pequeñas, y se calcula el retardo de fase total. Se divide el cable en dos partes: una que alimenta una señal en una antena, y la otra que recibe la señal de una antena similar. Seguidamente, se calcula el retardo de fase total de esta combinación. La diferencia entre las dos mediciones del retardo, menos el retardo de propagación calculable en el medio dieléctrico del aire entre los centros de fase de las dos antenas, representará el doble del retardo correspondiente a una sola antena.
Si se trata de una situación en la que la antena utilizada es de abertura muy grande, quizás no sea posible disponer de dos antenas casi idénticas suficientemente separadas para poder efectuar la medición antes indicada. En este caso la medición del retardo se puede efectuar entre dos antenas casi idénticas más pequeñas, y el valor obtenido se compara luego con el retardo, cuando una de las pequeñas antenas se reemplaza por la antena mayor. Este tipo de mediciones se han efectuado en el Jet Propulsión Laboratory (JPL), Pasadena, California [Otoshi, 1975; Cha y otros, 1978; Otoshi y otros, 1985],
En experimentos con sondas espaciales se han medido pequeñas variaciones del retardo de las señales de microondas a fin de obtener datos sobre atmósferas planetarias y la distribución de materia gaseosa en el espacio. Esos trabajos han conducido a las investigaciones del efecto de discontinuidad en el retardo de grupo en las líneas de transmisión por microondas [Beatty y Otoshi, 1975] y, también, han llevado al desarrollo de un conjunto de normas para los retardos de grupo [Otoshi y Beatty, 1976] para 15, 30 y 60 ns. Estas normas para los retardos de grupo se han calibrado a 2113, 2295 y 8415 MHz a ± 0,1 ns.
4. Conclusiones
En el caso de las antenas que se utilizan para la difusión de señales horarias de precisión, la calibración del retardo de la señal representa un nuevo parámetro o una nueva característica que no suele especificarse o calcularse en el diseño inicial de una antena de servicio. Anteriores experimentadores realizaron mediciones por el procedimiento de sustitución para determinar empíricamente el retardo causado por las antenas, pero no proporcionaron ni un formato organizado ni un conjunto común de datos que abarcara todo el espectro radioeléctrico. Las familias de antenas que se emplean para medir la intensidad de campo están bien desarrolladas y podrían representar un conjunto de diseños de antenas perfectamente adaptables para la normalización de este parám etro.
R EFERENCIAS BIBLIOGRÁFICAS
BEATTY, R. W. y OTOSHI, T. Y. [noviembre de 1975] Effect of discontinuities on the group delay of a microwave transmission line. IEEE Trans. Microwave Theory Tech., Vol. MTT-23, 11, 919-923.
CHA, A. G., RUSCH, W. V. T. y OTOSHI, T. Y. [noviembre de 1978] Microwave delay characteristics of Cassegrainianantennas. IE E E Trans. Ant. Prop., Vol. AP-26, 6, 860-865.
FUJIM OTO, M. K. y FIJIWARA, K. [1981] Measurements on phase delay of a Loran-C antenna. Tokyo Astron. Bull., Segunda serie, 265, 3015-3020.
OTOSHI, T. Y. [noviembre de 1975] A collection of articles on S /X -band experiment zero delay ranging tests. Technical memorándum 33-747, Vol. 1. Jet Propulsión Laboratory, Pasadena, CA, Estados Unidos de América. Disponible actualmente en los National Technical Information Services (NTIS), Informe N.° N67-14432, Springfield, VA 22161, Estados Unidos de América.
OTOSHI, T. Y. y BEATTY, R. W. [diciembre de 1976] Development and evaluation of a set o f group delay standards. IE E E Trans. Instr. Meas., Vol. IM-25, 4, 335-342.
OTOSHI, T. Y., RUSCH, W. V. T. y YOUNG, L. E. [mayo de 1985] VLBI collim ation-tower technique for time-delay studies o fa large ground-station Communications antenna. IEEE Trans. Ant. Prop., Vol. AP-33, 5, 549-555.
WATT. A. D. [1967] VLF Radio Engineering. Pergamon Press.

SECCIÓN 7D: CARACTERIZACIÓN DE LAS FUENTES Y FORM ACIÓN DE ESCALAS DE TIEM PO
Recomendaciones e Informes
Re. 538 119
RECO M EN D A CIÓ N 538*
MEDICIONES DE LA ESTABILIDAD DE FRECUENCIA Y DE FASE
(Programa de Estudios 3B/7)
(1978)El CCIR,
CONSIDERANDO
a) que conviene utilizar un lenguaje apropiado para expresar las características de estabilidad de losgeneradores de frecuencias patrón;
b) que los principales laboratorios, observatorios, industrias y usuarios han adoptado ya determ inadasrecomendaciones del Subcomité sobre estabilidad de frecuencias del Comité Técnico sobre frecuencia y señales horarias del IEEE respecto a instrumentación y medición;
c) que las mediciones de estabilidad de frecuencia deben basarse en principios teóricos sólidos, fáciles deaplicar y de interpretar;
d) que es conveniente disponer de medidas de estabilidad que puedan obtenerse con equipos sencillos,
RECOM IENDA, POR U N A NIM ID AD :
1. Que las inestabilidades aleatorias de las señales de frecuencias patrón se caractericen por las medidas estadísticas Sy( f ) , S y ( f ) 0 o Sx( f ) , y <x,,(x) que se definen a continuación:
1.1 La medida de las inestabilidades de frecuencia normalizadas y ( t ) en el dominio de la frecuencia es Sy( f ) , es decir, la densidad espectral unilateral (0 < / < oo) de las inestabilidades de frecuencia norm alizadas y ( 0 siendo y{ t ) = (v(r) — v0)/v 0 ; v ( í) es la frecuencia portadora instantánea y v0 la frecuencia portadora nominal.
1.2 La medida de las inestabilidades de fase (p(í) en el dominio de la frecuencia es S ^ i f ) , es decir, la densidad espectral unilateral (0 < / < oo) de las inestabilidades de fase tp(/) para una frecuencia de Fourier f .
1.3 La medida de las inestabilidades de fase-tiempo * (/) en el dominio de la frecuencia es Sx( f ) \ es decir, la densidad espectral unilateral (0, < / < oo) de las inestabilidades de fase-tiempo x (r), donde x( t ) = (p(í)/2nv0 ; x ( t ) e y{t ) están relacionadas mediante la expresión y ( t ) = d x (í) = d x( t ) /dt .
1.4 Las relaciones entre estas densidades espectrales se dan a continuación:
s,(f) - = 4n2/ 2Sx(f) ( 1)V o 2
Las dimensiones de Sy( f ) , S(p( f ) y Sx( f ) son respectivamente: H z-1, R ad2H z_1 y s2H z_1.
1.5 La medida de las inestabilidades de frecuencia normalizadas y( t ) en el dominio del tiempo es la desviación típica de dos muestras, a^(x), definida en el anexo I.
2. Que, al establecer las medidas estadísticas de inestabilidad de frecuencia deben reconocerce los fenómenos no aleatorios, por ejemplo:
2.1 Debe consignarse toda dependencia del tiempo observada en las mediciones estadísticas.
2.2 Debe especificarse el método de medición de las variaciones sistemáticas (por ejemplo: se ha obtenido una evaluación de la deriva de frecuencia lineal a partir de los coeficientes de una regresión lineal según el método de mínimos cuadrados, con M mediciones de frecuencia, efectuándose cada una durante el intervalo x y con una anchura de banda especificada, f h).
2.3 Deben indicarse las sensibilidades de las condiciones ambientales (por ejemplo: la variación de la frecuencia y /o de la fase en función de la temperatura, del campo magnético, de la presión atmosférica, etc.).
Para una información más detallada y completa, véase el Informe 580.

120 Re. 538, I. 364-5
3. Que, al presentar las mediciones de estabilidad de frecuencia, deben especificarse todos los parámetros pertinentes:3.1 método de medición;3.2 características de la señal de referencia;33 frecuencia nominal v0 de la señal;3.4 anchura de banda //, del sistema de medición y la correspondiente respuesta del filtro de paso bajo;3.5 duración total de la medición o el número de mediciones M ;3.6 Técnicas de cálculo (por ejemplo, detalles sobre las ventanas de retardo para los cálculos de las densidadesespectrales de potencia a partir de los datos en el dominio del tiempo, o la estimación del efecto del tiempo muerto en la evaluación de la desviación típica de dos muestras ay(t));3.7 la confianza de las estimaciones.
4. Que se proporcione una ilustración gráfica o una expresión analítica de las medidas de las inestabilidadesde frecuencia y se incluyan los intervalos de confianza (es decir, Sy( f ) , S ^ i f ) y Sx( f ) en función de / y /o o ^x ) en función de x).
ANEXO I
D EFIN IC IÓ N DE LA M ED IDA EN EL DOM INIO DEL TIEMPO
La desviación típica de dos muestras* Oy(x) se define como:
( t ) = *+1 (2)
donde
I 4+1y k = - f y{ t ) át (3)
x J4
x es el tiempo de promediación con tiempo muerto nulo entre dos mediciones sucesivas;k es un número índice tal que h + 1 — k + x, y< > denota un promedio tomado en un intervalo infinito.Para un número finito M de mediciones de y *, una estimación de la desviación típica de dos muestras
viene dada por:
M x ) ' “ Íj 2(4)
IN FO RM E 364-5
COM PORTAM IENTO DE LOS GENERADORES DE FRECUENCIAS PATRÓN
(Programa de Estudios 3B/7)(1966-1970-1974-1978-1982-1986)
1. Introducción
Durante estos últimos años se han publicado los resultados de numerosos estudios sobre la inestabilidad de los generadores de frecuencias patrón. Se han examinado ampliamente las soluciones teóricas del problema, así como las definiciones y los procedimientos experimentales de medición (véase el Informe 580, en particular para las notaciones).
* El cuadrado de la desviación típica de dos muestras es las varianza de dos muestras (conocida también por varianza de par, o varianza Alian de dos muestras).

I. 364-5 121
Se ha demostrado [IEEE, 1966; Yasuda y Yoshimura, 1964] que el tipo de ruido presente en un generador de frecuencias patrón puede clasificarse según la forma de la densidad espectral de frecuencia o de fase que produce. Dichas densidades son las transformadas de Fourier, relacionadas con las funciones de autocorrelación y se han elaborado métodos matemáticos adecuados para utilizar estas funciones [Blackman y Tukey, 1959; Davenport y Root, 1958]. El efecto del ruido llamado de «centelleo», cuya variación espectral es inversamente proporcional a la frecuencia, tiene especial importancia en la explotación a largo plazo de todos los tipos de patrones de frecuencia; este aspecto de la cuestión ha sido objeto de estudios especiales [NBS, 1974]. Se ha puesto igualmente de manifiesto que un espectro en l / / 2 resulta importante en los generadores de frecuencia [Jones y Tryon, 1983].
En los patrones atómicos y en los osciladores de cristal de cuarzo, el ruido térmico y el ruido de granalla contribuyen a la inestabilidad a corto plazo; según el mecanismo generador, estos ruidos tienen una densidad espectral de frecuencia constante o una variación de / 2. La importancia relativa de estos efectos con relación a la inestabilidad debida al ruido de centelleo y otras perturbaciones de frecuencia depende de los fines a que se destine el generador de frecuencia patrón.
Merced a la creciente disponibilidad y utilización de patrones comerciales atómicos de frecuencia para generar escalas de tiempo muy estables en numerosos laboratorios de todo el mundo, se ha reunido un gran volumen de datos sobre las características de estabilidad. Una conclusión es que los patrones comerciales de frecuencia de haz de cesio presentan a menudo desplazamientos de frecuencia sistemáticos pequeños pero significativos.
La forma de estos desplazamientos demuestra que los fenómenos de fluctuación de estos patrones no pueden describirse completamente por la medida de estabilidad o ^ x ) de acuerdo con Kolmogorov [1941], Malakhov [1966] y Alian [1966]; aun en el caso de que pueda disponerse del valor (^(x) para cada reloj de un grupo, es posible que carezca de interés, desde un punto de vista estadístico, dar ct x) para el promedio de ese grupo. Esto es cierto en particular en largos intervalos de tiempo (superiores a seis meses). Se cree que ello se debe a las características no estacionarias de algunos fenómenos del reloj durante intervalos de tiempo que representan una fracción apreciable de la vida útil de éste.
Asimismo, se ha puesto de manifiesto que el modelo de la mayoría de estos pasos de frecuencia puede obtenerse a partir de un proceso aleatorio de modulación de frecuencia, y que cr^x) puede utilizarse para identificar el proceso de x1/2 y su magnitud [Percival, 1976; Barnes y otros, 1982; Jones y Tryon, 1983].
2. Patrones de frecuencias de haz de cesio
En varios laboratorios se han investigado los efectos sistemáticos de los patrones de frecuencia de haz de cesio comerciales (PTB [Becker y Hetzel, 1973], BIH [Guinot, 1974], USNO [Winkler y otros, 1970]). No existe evidencia de que los patrones comerciales de cesio presenten, en conjunto, una deriva de frecuencia unidireccional al nivel de 10~14. Se han desarrollado procedimientos [Becker y Hetzel, 1973] para supervisar y ajustar periódicamente los campos magnéticos de estos patrones comerciales. Parece que estos procedimientos consiguen mejorar la estabilidad, en especial durante los seis primeros meses de la vida útil del reloj. Se desarrolló una técnica de evaluación de la exactitud de un tubo de haz de cesio que resulta aplicable a los patrones tanto comerciales como de laboratorio [Hellwig y otros, 1973].
Patrones primarios de laboratorio de frecuencia de haz de cesio funcionan en el PTB de la República Federal de Alemania [Becker, 1976], en el NRC de C anadá [Mungall y otros, 1976], en el NBS de Estados Unidos de América [Wineland y otros, 1976], en el VNIIFTRC, URSS [Iljin y otros, 1976], en el NRLM y RRL, Japón [Nakadan y Koga, 1985; Nakagiri y otros, 1984], y en NIM , República Popular de China. Estos patrones se han evaluado con respecto a la mayoría de los parámetros que influyen en su frecuencia de salida; es decir, que se están realizando experimentos y estudios teóricos que permiten conocer las distorsiones que hacen diferir la frecuencia de salida de la frecuencia de resonancia atómica no perturbada. La precisión obtenida entonces según el análisis de los datos es de 1 x 10“ 13 para los tres patrones de laboratorio. Comparaciones internacionales de los tres dispositivos, mediante el TAI como referencia común, demuestran que concuerdan con una precisión de 2 x 10~13 (variación cresta a cresta). Las mediciones indican también (1976) que la frecuencia del TAI presenta un exceso con respecto a la definición del segundo, de 1 x 10“ 12 aproximadamente. Un ajuste en el TAI del 1 x 10“ 12 corrigió esta diferencia el 1.° de enero de 1977. La diferencia se debió a que el BIH form aba el TAI de m anera que tuviera la máxima uniform idad, manteniendo así razonablemente la m archa adoptada para el TAI el 1.° de enero de 1969 a base de un número limitado de relojes. Se hicieron otros estudios de la estabilidad a largo plazo de la escala del TAI, construida en gran medida a partir de patrones comerciales de cesio, utilizando normas primarias como referencia. En el periodo de 1969 a 1973, las mediciones del PTB dem ostraron que la frecuencia del TAI disminuyó por término medio 1 x 10~13 aproximadamente cada año [Becker, 1973]. M ediciones posteriores han mostrado que esta deriva ha continuado en todo el año 1977.
Están funcionando actualmente en el NRC cuatro relojes primarios de haz largo de cesio. El prim ero de ellos, el CsV, empezó a funcionar en mayo de 1975. Las evaluaciones de la exactitud, efectuadas con intervalos dé 6 a 12 meses, introducen errores despreciables de la escala de tiempo e indican constantemente estimaciones de exactitud mejores que 1 x 10“ 13 [Mungall y Costain, 1977; Mungall, 1978]. A comienzos de diciembre de 1979, empezaron a funcionar como relojes primarios tres nuevos relojes más pequeños, CsVI A, B y C, construidos en 1977 y 1978 y utilizados como relojes secundarios en 1979 [Mungall y otros, 1980, 1981; M ungall y

122 I. 364-5
Costain, 1983]. Estos relojes tienen un límite de exactidud de cerca de 1,5 x 10~13, y precisan evaluaciones de exactitud más frecuentes para mantener este límite. Las correcciones sistemáticas para el efecto de inversión del campo magnético y la diferencia de fase en la cavidad tienden a ser menos estables que para el CsV, pero las reevaluaciones, realizadas cuando es necesario, han mantenido una concordancia con el CsV mejor que 1 x 10-13. La inestabilidad de frecuencia a largo plazo de los cuatro relojes es, aproximadamente, de 1 x 10-14 para periodos de unas 24 horas y ha alcanzado valores de varias veces 1 x 10-15 para periodos de varias semanas o meses. Los informes periódicos al BIH sobre estos relojes empezaron en enero de 1980.
La diferencia entre las escalas de tiempo TA(NRC) y TA(PTB) se ha mantenido constante dentro de ± 1,2 ps para el periodo 1977-1983. Las frecuencias de los patrones primarios CsV de NRC y Csl de PTB, de las cuales se derivan directamente las escalas de tiempo respectivas, han coincidido hasta en 3 x 10“ 14 (en valor medio anual).
Se ha reexaminado el efecto Millman en el reloj de haz de cesio tanto teóricamente como experimentalmente. Se ha demostrado que el efecto no tiene lugar para transiciones AM F = 0. Cuando se emplean estas transiciones para determinar la intensidad del campo magnético estático en c.c. en el reloj resulta una incertidumbre de la frecuencia del reloj inferior a 2 x 10-14 [Vanier y otros, 1984].
Se ha puesto en ejecución un método nuevo para determinar la distribución de la velocidad del átomo de cesio que se basa en la variación de la altura de la forma de Ramsey con la potencia de interrogación en RF. El método permite determinar el desplazamiento D oppler de segundo orden con una incertidumbre inferior a 10“ 14. [Boulanger y otros, 1984].
El patrón de tiempo y de frecuencia de haz de cesio Csl del PTB está en funcionamiento como reloj prim ario desde mediados de 1978. Mientras que hasta esa época se ponía en funcionamiento el Csl aproxim adamente cada tres meses para verificar la frecuencia de la escala de tiempo atómico del PTB generada por relojes atómicos industriales de haz de cesio, en la actualidad el Csl funciona de modo permanente. El reloj primario Csl contribuye directamente a la formación de la escala del Tiempo Atómico Internacional (TAI) [Becker, 1979]. El valor medio cuadrático de las incertidumbres causadas por las distintas correcciones arroja para el Csl una incertidumbre relativa de 1 x 10“ 14 para valores de frecuencia promediados durante 80 días [Becker, 1974; Becker, 1979]. La inestabilidad relativa del patrón de frecuencia, para valores promediados durante 80 días, se estima en 6,4 x 10“ 15.
El NBS ha utilizado desde 1960 una serie de patrones primarios de cesio de laboratorio como su referencia básica de frecuencia. Las actuales versiones, denominadas NBS-6 y NBS-4, presentan regiones de interacción de hasta 3,6 m, haces reversibles, y otras características concebidas para permitir una nueva evaluación completa de los límites de precisión regularmente. Las evaluaciones anuales de la precisión consiguen reiteradamente incertidumbres inferiores a 1 x 10-13 [Wineland y otros, 1976].
En la República Popular de China, dos patrones primarios de cesio de laboratorio de 3,8 m con haces reversibles, el Cs2 y Cs3 se evaluaron y midieron repetidas veces desde 1977 a 1980. Las incertidumbres totales (valores medios cuadráticos) son, respectivamente, de 4,1 x 10“ 13 y 4,5 x 10-13, pero a la vista de ciertas limitaciones en las condiciones de funcionamiento, se prefiere dar una precisión de 8 x 10“ 13 para ambos patrones.
El patrón nacional de frecuencia y de señales horarias de la URSS tiene dos patrones de frecuencia prim arios de cesio el (MTs-1 y el MTs-2) de longitudes 63 y 100 cm respectivamente. El MTs-1 está funcionando desde 1975 [Iljin y otros, 1976] y el MTs-2 desde 1980 [Abashev y otros, 1980]. Las recientes mejoras de estos patrones permiten obtener precisiones de 1 x 10~13 con una incertidumbre de frecuencia de 1,5 x 10~í3 para el MTs-1 y de 1 x 10-13 para el MTs-2. La concordancia de frecuencia entre los dos es de 1,5 x 10-13 [Elkin y otros, 1983].
El patrón haz de cesio de laboratorio NRLM viene funcionando desde 1976. Su precisión se estimó en2,2 x 10-13 [Nakadan y Koga, 1985]. Durante los experimentos, se propuso un método perfeccionado de medición del desplazamiento Zeeman utilizando un par de transiciones sigma de igual valor absoluto que el número cuántico [Koga, 1984]. El patrón de haz de cesio de laboratorio Csl del RRL está provisto de un sistema de enfoque tipo imán hexapolo y de una cavidad Ramsey de 55 cm con una línea coaxial que va hasta el transductor del guía ondas, situado en el interior de la pantalla magnética [Kobayashi y otros, 1978]. El RRL ha venido comunicando los datos de la evaluación de precisión al BIH. La incertidumbre total es de 1,1 x 10-13 [Nakagiri y otros, 1984].
En un patrón experimental se incorporaron el bombeo óptico con un láser monomodo sintonizable y la detección de la resonancia en microondas mediante la fluorescencia inducida por el propio láser [Arditi y Picque, 1980]. Se sincronizó un oscilador con este dispositivo para conseguir una exactitud de algunas partes en 1011.
Se han llevado a cabo trabajos teóricos sobre los problemas del bombeo óptico en los patrones de cesio. Se estudiaron los desplazamientos de frecuencia causados por la luz [Brillet, 1981; De Clercq y Cérez, 1983]. Se estudió la utilización eficaz de todos los niveles hiperfinos bajo ciertas condiciones de bombeo óptico [Avila y otros, 1985]. Se ha construido una pequeña versión de laboratorio del patrón de cesio bombeado ópticamente. Los resultados preliminares muestran que la inestabilidad de a / t ) = 1 x 10“ 11 x ~ 1/2. Se está construyendo un gran modelo de laboratorio [Derbyshire y otros, 1985].

I. 364-5 123
3. Patrones de frecuencia de hidrógeno
En la gama de duraciones medias de hasta aproximadamente 105 s, la calidad de los máseres activos es mucho mejor que la de los dispositivos de cesio. Un máser pasivo puede conseguir una estabilidad de frecuencia mejor que un dispositivo de cesio para duraciones medias entre 1000 y 100 000 s [Walls y Persson, 1984]. Los máseres de hidrógeno no son patrones primarios debido al efecto incontrolado de la pared [Vanier y otros, 1975; Vanier y Larouche, 1978].
En un cierto número de laboratorios se están llevando a cabo trabajos sobre la reducción o medición del efecto de pared para mejorar la exactitud del máser. La frecuencia de los máseres en el NRC medida frente al TAI ha decrecido desde 1971; las mediciones más exactas, tomadas durante el periodo de 1975 a 1979, m ostraron una variación de aproximadamente 4 x 10“ 13 por año, con una variación total durante este periodo de1,7 x Í0~ 12 [Morris, 1978]. Sin embargo, este efecto no ha sido confirmado por otros laboratorios. La utilización de una ampolla de volumen de almacenamiento variable [Brenner, 1969 y 1970; Debely, 1970; Uzgiris y Ramsey, 1970; Reinhardt, 1973; Vanier y otros 1975; Vessot y otros, 1971], y la selección de la tem peratura de funcionamiento en un punto donde el efecto de pared sea nulo (aproximadamente 100° C) [Vessot y otros 1971; Zitzewitz y Ramsey 1971]; Vessot y Levine, 1970] son las posibilidades que se han considerado. El descrubrimiento de un cambio de rotación anómalo y de un efecto de inhomogeneidad magnética [Crampton y Wang, 1974] y el desarrollo de los medios para corregir tales efectos [Crampton y Wang, 1974; Reinhardt y Peters, 1975] han corroborado la posibilidad de conseguir una precisión de 1 x 10“ 14. Se han estudiado detalladamente [Petit y otros, 1974] las propiedades metrológicas de dos máseres de hidrógeno. Se ha logrado una estabilidad de frecuencia de 3 x 10“ 13 para t 103 s y de 2 x 10“ 14 para x = 5 días [Petit y otros, 1975]. Se ha medido el efecto conjugado de las inhomogeneidades del campo magnético estático y del campo de microondas [Petit y otros, 1974], Se ha verificado la anulación del desfasaje medio por colisión en un revestimiento de FEP 120 a una temperatura de unos 90 °C [Petit y otros, 1975]. Se ha confirmado experimentalmente la evaluación teórica del desplazamiento de frecuencia por modificación de las rotaciones [Desaintfuscien y otros, 1975]. Este método es útil para determinar con precisión los desplazamientos de la frecuencia residual, recientemente descubiertos por Crampton [Crampton y otros, 1976]. Se ha obtenido una exactitud de 6 x 10~13 con un máser de hidrógeno equipado de una ampolla de almacenamiento constituida por dos compartimientos coaxiales revestidos de teflón [Petit y otros, 1980].
La variación de la frecuencia en la cavidad es probablemente la causa más importante de las inestabilidades a largo plazo (1 día y más) de los máseres de hidrógeno. Se han concebido y empleado sistemas para la sintonización de las cavidades [Peters y otros, 1968; Vessot y Levine, 1970], así como máseres de funcionamiento pasivo [Hellwig y Bell, 1972; Walls y Hellwig, 1976]. Hay resultados recientes que muestran que los pares de máseres de hidrógeno autosintonizados recíprocamente son capaces de mantener estabilidades de 1 a 2 x 10“ 14 durante un periodo de hasta 7 días [Petit y otros, 1975; Morris y Nakagiri, 1976].
Se evaluó la estabilidad de mantenimiento del tiempo del prototipo de un pequeño máser pasivo de hidrógeno desarrollado en NBS [Walls y Hellwig, 1976] comparándola con el UTC (NBS). Las mediciones indicaron una estabilidad conjunta de mantenimiento del tiempo de aproximadamente 1,2 ns/d ía.
Se midió la inestabilidad de frecuencia del pequeño máser pasivo encontrándose el valor cr,(x) = 1,4 x 10-12 x_1/2 para x = 1 día y 5 x 10“ 15 x -1/2 para x = 16 días basándose en 64 días consecutivos de datos. No se encontró ninguna deriva en comparación con el patrón NBS de cesio dentro de una incertidumbre de ± 3 x I0 _16/d ía . Asimismo no se registró ningún indicio de parpadeo [Walls y Persson, 198]. Las mediciones preliminares de estabilidad indican las grandes posibilidades de los máseres pasivos como relojes. Un pequeño máser pasivo de hidrógeno contribuye ahora a la escala de tiempos del NBS. Este trabajo demostró que el efecto de pared es constante dentro de una incertidumbre de 3 x 10“ 16 por día, promediado sobre 64 días, y la deriva de la cavidad puede controlarse a este mismo nivel.
Se ha analizado experimentalmente el ruido de amplitud de los máseres de hidrógeno y rubidio [Lesage y otros, 1980]. Se ha determinado la estabilidad de frecuencia última de los máseres de hidrógeno que funcionan en medio pasivo y que depende principalmente de la ausencia de ruido de amplitud [Lesage y otros, 1979]. Se ha estudiado teórica y experimentalmente el efecto sobre la estabilidad de frecuencia de una reacción electrónica que incrementa el factor de calidad de la cavidad resonante de un máser de hidrógeno [Tetu y otros, 1981]. Se ha demostrado que la estabilidad de frecuencia de los máseres de hidrógeno compactos que funcionan en el modo activo debería ser ligeramente mejor que en el modo pasivo [Audoin y otros, 1981].
En el Jet Propulsión Laboratory (JPL), bajo la supervisión de la NASA, se ha desarrollado un program a de evaluación [NASA, 1983] para determinar las características de máseres de dos tipos distintos. Las mediciones dieron como resultado para la sensibilidad magnética de los máseres de 8 a 30 x 10-to/T , sensibilidad térmica de7.5 a 15 x 10_15/K y de 1,5 a 3 x 10“ 10/kP a para la sensibilidad a la presión. La inestabilidad de frecuencia era de 2,0 x 10~14 a 10 s, de 9 a 21 x 10“ 16 a 4000 s y de 7 a 8 x 10“ 15 a 106 s. La deriva de frecuencia de los máseres era de 5 a 10 x 10“ 15 por día. Máseres VLG-11 posteriores suministrados al USNO han empleado métodos de solapamiento óptico de las juntas en la cavidad del máser que producen una deriva de menos de2.5 x 10“ 15 por día [Vessot y otros, 1984],
Las últimas comprobaciones del máser N R de la NASA efectuadas en el Applied Physics Laboratory (APL) de la Universidad de Johns Hopkins mostraron una inestabilidad de 4 x 10-15 en un periodo de 105 s cuando se hubo compensado la deriva. Se demostró que la velocidad de la deriva era constante a lo largo de un año con una incertidumbre de ± 5 x 1 0 '16/d ía [Rueger, 1981].
124 I. 364-5
Los trabajos sobre máseres de hidrógeno desarrollados en la URSS han estado encaminados a mejorar la inestabilidad de frecuencia a largo plazo hasta 1 x 10“ 14 y aumentar su fiabilidad. Invirtiendo las densidades de población de los subestados Zeeman de los átomos que penetran en la ampolla [Zhestkova y Elkin, 1979], se redujo el desplazamiento debido a la inhomogeneidad del campo magnético permanente en la zona de ampolla de almacenamiento por un factor de varias decenas hasta un valor de (1 a 3) x 10-14 [Elkin y otros, 1980]. Una determinación del desplazamiento en frecuencia del máser de hidrógeno, sintonizado mediante procedimiento de intercam bio de rotación [Elkin y Zhestkova, 1979], mostró que una mejora adicional en la estabilidad de frecuencia del máser de hidrógeno a largo plazo implica un control estricto de la estabilidad del tiempo de relajación de los átomos que radian en la ampolla. Un obstáculo más serio al aumento ulterior de la estabilidad de frecuencia para tiempos promediados largos es el cambio de frecuencia del máser de hidrógeno debido a la variación del desplazamiento de la pared. Se considera característico un cambio de frecuencia del máser de hidrógeno continuamente sintonizado de 1 x 10“ 14 por mes [Gaygerov y otros, 1982], y puede deberse a varias razones relacionadas con los cambios en el recubrimiento de la ampolla, incluyendo cristalizaciones o contam inaciones. Se están llevando a cabo investigaciones sobre la mejora en la posibilidad de reproducción del desplazamiento de la pared en dos direcciones: la utilización de una ampolla de almacenamiento flexible con selección de temperatura sin desplazamiento y búsqueda de nuevos materiales para el recubrimiento de la ampolla [Demidov y otros, 1978]. Actualmente, en la URSS, los patrones de frecuencia de hidrógeno son los medios principales para mantener el patrón nacional de escala de tiempo, así como varios de los patrones secundarios de frecuencia y de señales horarias.
En los Radio Research Laboratories (RRL) del Japón se han llevado a cabo desde 1966 trabajos sobre los máseres de hidrógeno [Saburi y otros 1974; Ohta y otros, 1974]. Se ha mejorado la calidad de los máseres de hidrógeno mediante el método de selección de un único estado (método de M ajorana). En esta selección de estados se utilizaron el método del campo magnético reversible y el del doble enfoque. Se eliminaron del orden del 90% de los átomos indeseables en el subestado de Zeeman, y se redujo el efecto de heterogeneidad magnética aproximadamente en una décima del desplazamiento observado en la selección convencional de estados [Urabe y otros, 1984]. En la actualidad se prosiguen los trabajos sobre los máseres autosintonizados con el nuevo selector de estados para su utilización como relojes. El RRL ha desarrollado igualmente dos máseres de hidrógeno, que pueden funcionar en el campo [Morikawa y otros, 1984] como patrones de tiempo y de frecuencia del sistema de VLBI K-3, que se proyectó para el experimento conjunto de VLBI entre la NASA y el RRL [VLBI Research Development Group, RRL, 1984]. La estabilidad de frecuencia medida es 2,4 x 10“ 15 para el tiempo de muestreo de 830 s y 1,4 x 10“ 14 para 105 s. La sensibilidad a la temperatura de la sala es 2,3 x 10_I4/K y la sensibilidad al campo magnético externo es 2,5 x 10_9/T , que es suficientemente buena para las circunstancias geomagnéticas habituales. En las estaciones de VLBI sin embargo, el seguimiento de la antena puede producir importantes perturbaciones del campo magnético externo, lo que pone de manifiesto la necesidad de controlar cuidadosamente el campo magnético estático.
4. Osciladores de cavidad supraconductora
Los datos sobre el oscilador de cavidad supraconductora tal vez merezcan especial atención, ya que este dispositivo es, por lo general, mucho menos conocido que otros tipos de osciladores de gran estabilidad. Este concepto de oscilador ha demostrado tener unas características de estabilidad que superan las de cualquier otro oscilador conocido [Jiménez y Septier, 1973; Turneaure y Stein, 1975, 1975]. Se han observado inestabilidades de 6 x 10“ 16 en tiempos promediados de centenares de segundos en condiciones particularmente favorables [Stein, 1975]. El oscilador de cavidad supraconductora parece adaptable a fines comerciales, si se dispone de criostatos fiables de baja temperatura, y sería el mejor oscilador para estabilidades a mediano y corto plazo (tiempos promediados de hasta millares de segundos). Podría ser interesante para usos especiales, tales como la interferometría de línea de base muy larga y la generación de microondas de alta pureza espectral y de frecuencias más elevadas. Si bien los primeros diseños presentaban una excesiva sensibilidad en condiciones de medio ambiente, lo que desaconsejaría su utilización generalizada a pesar de su aspereza y de ser de tam año pequeño, los nuevos diseños prometen reducir considerablemente los efectos ambientales [Dicks y Strayer, 1984],
Desde 1976, los laboratorios (RRL) estudian un oscilador estabilizado de cavidad supra conductora (SCO) que funciona en la frecuencia de 9,2 GHz. Se calculó una estabilidad de 1,1 x 10-14 x~1/2 a partir de la S / N m edida de un SCO y de la cavidad Q de 2,9 x 108. Sin embargo, la fluctuación de frecuencia del SCO debida a la deformación mecánica de la cavidad causada por la inclinación y la vibración del contenedor «dewar», parece ser importante. La sensibilidad a la aceleración de la cavidad supraconductora medida fue de 6,5 x 10_8/g para frecuencias de vibración inferiores a 80 Hz [Komiyama, 1985].
5. Dispositivo de almacenamiento de iones
Un dispositivo de iones atrapados de 199Hg+ ha demostrado una inestabilidad de frecuencia dea y (x) = 3,6 x 1 0 '11 x_t/2 para 10 s < x < 3500 s [Jardino y otros, 1980]. Algunos de estos dispositivos se hanconstruido y presentan una inestabilidad de a y (x) = 1,2 x 10~12 x-1/2 [Cutler y otros 1981]. Un patrón de ionesatrapados de 9Be+ utilizando enfriamiento por láser y bombeo óptico y doble resonancia presentaba unaestabilidad igual a la de un patrón comercial de cesio [Bollinger y otros, 1984]. Los estudios efectuadosdemuestran que la principal limitación de esta técnica es la incertidumbre del efecto Doppler de segurido orden,debida a la rotación de la nube de iones, que no resulta afectada por el enfriamiento.

I. 364-5 125
Se está estudiando, teórica y experimentalmente, un nuevo concepto de un patrón de frecuencia basado en el «enfriamiento simpático». En el coeficiente simpático, una especie de ion es enfriada por acoplamiento de Coulomb con otra especie de ion enfriada por láser. Esto se propuso y demostró (con los isótopos M g+) hace algunos años en el NBS y actualmente se está considerando su empleo en el patrón de mercurio. La ventaja que ofrece es que los iones «reloj» pueden enfriarse de manera continua, dado que los desplazamientos Stark de c.a. de la radiación de enfriamiento pueden reducirse a valores insignificantes.
6. Características de los distintos dispositivos
El tipo particular de patrón de frecuencia óptimo para una aplicación determ inada depende, al menos en parte, del periodo promediado de medición considerado. En la fig. 1 se presentan algunos datos de la inestabilidad medida en función del periodo de medición promediado para varios tipos distintos de patrones de frecuencia. En estos gráficos se ha eliminado la deriva de frecuencia. No se ha tratado de am pliar los gráficos de estabilidad a periodos promediados más largos porque no existen suficientes datos a largo plazo bien docum entados para la mayoría de los dispositivos.
FIGURA 1 - Inestabilidades típicas medidas entre varios tipos de patrones probados. Los datos se basan en publicaciones y especificaciones
A : Haz de cesio tipo comercial B : Células de gas de rubidio comercial C : Haz de cesio comercial de gran calidad D : Haz de cesio de laboratorio E : Máser de hidrógeno (/^ = 10 Hz)
F : Máser de Rb, oscilador de cuarzo = 1 kHz)G : Oscilador controlado por cristal de cuarzo H : Máser de RbJ : Oscilador de cavidad supraconductora (/j, = 10 kHz) K : Célula de cesio gaseoso
En la fig. 1 puede verse que los osciladores de cristal de cuarzo y los de cavidad superconductora o máseres de rubidio, ofrecen la mejor estabilidad para periodos de muestreo cortos (x < 1 s). Para la estabilidad a plazo medio (1 s < x <10 000 s), el máser de hidrógeno y el oscilador de cavidad superconductora son superiores a cualquier otro patrón de que se dispone hoy día. En la fig. 2 se ilustran las representaciones de las mediciones de inestabilidad para varios patrones atómicos de frecuencia diferentes, disponibles actualmente, en lo que respecta al tiempo, y en la fig. 3 por lo que se refiere a la frecuencia. Todas las curvas de Sy( f ) están normalizadas a v0 = 5 MHz, f h = 10 kHz, con excepción del máser de hidrógeno, para el cual f h = 10 Hz. Eloscilador controlado por cristal de cuarzo es una unidad seleccionada entre las más perfeccionadas que seconstruyen actualmente. Los patrones atómicos de frecuencia pasivos se usan para demostrar el efecto de las constantes de tiempo del bucle de autorregulación comprendidas entre 60 s y 300 ms. Los patrones de haz de cesio ofrecen actualmente la mejor estabilidad a largo plazo (x > 10 000 s). Los patrones de células de gas de rubidio y de cesio no son nunca superiores, cualquiera que sea la duración durante la cual se calcula el valor medio. Sin embargo, como se muestra en el cuadro I, ofrecen una buena combinación de estabilidad de frecuencia, costo ytam año [Rovera y otros, 1976; Rovera y Beverini, 1977].

i-ZH) (/)
126 I. 364-5
FIGURA 2 - Mediciones de la inestabilidad de frecuencia, en función del tiempo, de patrones atómicos de frecuencia típicos y de un oscilador controlado por
cristal de cuarzo seleccionadoConstante de tiempo
Oscilador del bucle de f^ (kHz)autorregulación (s)
Cs 1: haz de cesio (constante de tiempo larga) 60 10Cs 2 : haz de cesio (constante de tiempo corta) 2 10Cs 3: haz de cesio (constante de tiempo gran calidad) 2 10Rb: máser de rubidio 0,3 10Qz: oscilador de cuarzo ' 10HM: máser de hidrógeno 0,01
FIGURA 3 - Mediciones de la inestabilidad de frecuencia, en función de la frecuencia, de patrones atómicos de frecuencia típicos y de
un oscilador controlado por cristal de cuarzo seleccionado
Oscilador f^ (Hz)
Cs 1: haz de cesio (constante de tiempo larga) 104C s2: haz de cesio (constante de tiempo corta) 104Cs 3: haz de cesio (constante de tiempo gran calidad) 104Rb: máser de rubidio 104Qz: oscilador de cuarzo , 104HM: máser de hidrógeno 10

I. 364-5 127
Se ha obtenido una inestabilidad de frecuencia de 6 x 10“ 14 durante 128 s con un cristal de cuarzo con electrodos no adherentes en modo pasivo [Stein y otros, 1978; Besson y Peier, 1980].
En el Istituto Elettrotecnico Nazionale (IEN) de Italia se han realizado investigaciones durante varios años sobre haces milimétricos utilizando átomos de magnesio [Strumia, 1972]. Este trabajo puede dar como resultado un posible patrón primario con una precisión del orden de 10-13 [De M archi y otros, 1983]. A principios de 1983 se observó la resonancia [Godone y otros, 1983; Bava y otros, 1983] en las frecuencias de 601 277 160 kHz y 601 278 866 kHz para 24Mg y 26Mg, respectivamente. La incertidumbre en la determ inación de frecuencia lograda hasta ahora es del orden de ± 4 kHz (7 x 10~9); prosigue el trabajo a fin de evaluar la viabilidad de un patrón de frecuencia de laboratorio basada en este dispositivo.
7. Aplicaciones del sistema
En el cuadro II se combinan los datos sobre estabilidad con los datos sobre explotación y otras características de los dispositivos. Para cada uno de los dispositivos enumerados en el cuadro II los datos pueden considerarse compatibles, es decir, realizables en el propio dispositivo. Los valores que figuran en el cuadro II son ejemplos de combinaciones disponibles actualmente; sin embargo, otras combinaciones son también posibles. Los valores se han escogido con miras a una aplicación particular: la utilización de patrones en aeronaves y vehículos espaciales.
En los cuadros I y II y en la fig. 1 se muestra que en la elección de patrones atómicos de frecuencia hay que considerar atentamente las alternativas técnicas, costo, tamaño, etc., y las necesidades reales. Para la aplicación de sistemas que emplean osciladores de precisión, es importante determ inar primero las características de estabilidad necesarias de los dispositivos; en segundo lugar, considerar las condiciones ambientales en las que el patrón ha de funcionar; y, por último, determinar las características de disponibilidad, tam año, peso, costo y rendimiento del patrón. En algunas ocasiones, un diseñador de sistemas hallará que un patrón con todas las características necesarias no existe en el mercado. En este caso, el diseñador tiene tres alternativas: o ajustar los parámetros de su sistema a uno de los patrones disponibles, o elegir una combinación de estos patrones que satisfaga su necesidad, o iniciar un program a de investigación para desarrollar el patrón necesario. Es im portante comprender que una combinación de los patrones disponibles puede satisfacer sus necesidades; por ejemplo, supóngase que un sistema requiere muy buenas características de estabilidad y de precisión a largo plazo, pero al mismo tiempo alta pureza espectral, es decir, muy buena estabilidad a corto plazo. Además, no se impone ninguna restricción en materia de costo, peso o tamaño. Una combinación óptim a en este caso podría ser un oscilador de cristal combinado con un haz de cesio o un patrón de frecuencia de hidrógeno. La utilización del concepto de sistemas como solución de un problema de diseño es una poderosa ayuda dado que puede realizarse técnicamente sin sacrificar ninguna de las características de cada elemento. Las únicas restricciones reales podrían ser el tam año físico y el costo. Puede suceder que, dado que la mayoría de los patrones de frecuencia resultan ya de combinaciones de diferentes tecnologías (es decir, el patrón de cesio incorpora un oscilador de cristal de cuarzo, al igual que el máser de hidrógeno), una modificación insignificante de uno de estos dispositivos, mediante la sustitución de un oscilador de cristal de cuarzo de superior calidad, por ejemplo, y una pequeña modificación de las constantes de tiempo del sistema, pueden satisfacer sus necesidades de diseño.

128 I. 364-5
CUADRO I* - Rendimiento típico y características físicas prácticas de los principales patrones atómicos de frecuencia
Frecuenciapatrón
Repro-ducibili-
dadintrín
seca
Incerti-dumbre
Estabilidad
Volumen(dm3)
Masadel
instrumento
(kg)
Potenciaexigida
(W)
Disponibilidad •en el
comercio
Estimación del
costo relativo
en 1977 (millares
de dólares)
A corto plazo (ls)
Nivel de fluctuación
Deriva por año
Máser de NH3 5X lO’11 5 X 10 '" lO"12 IO'12 10-1° 50 50 50 No 40
Máser de H de laboratorio io-12 lO"12 X o 2 -5 X 10'1S <1(T13 1000 250 100 No 250
Máser de H (equipo pequeño) io-‘2 io-‘2 5 X 10"13 5X IO"15 100 45 30 No 250
Máser de H (pasivo) io-12 io-12 2X IO'12 <2 X IO’15 <2 X 10'13* 1000 250 100 No 250
Máser de Rb 87 C ) O io-13 io-13 30 30 50 No 100
Haz de Cs (laboratorio) io-13 l x IO '13 10-‘2 IO'14 < 1 0 '13 2000 500 100 No 500
Haz de Cs(2) (equipo comercial) 5X lO '12 7X IO’12 5x IO'12 en X O < 1 0 '12 20 30 30 Sí 25
Célula de Rb (de gran calidad) 0 ) C) 7X IO'12 4 X IO*13 10-1° 20 30 30 Sí 5 -1 0
Célula de Rb (simplificada) C ) ( ‘) io-" 5X IO'13 IO'9 2 2 15 Sí 4
Oscilador de cavidad supraconductora
O C) 10‘M 6X IO'16 (3) 2000 250 1000 No 100
Láser estabilizado de I2 127 lO’11 io-n ío-11 io-12 30 40 50 No 200
Láser estabilizado de CH4 io-“ io-" 3X IO'13 3X 10 '14 30 40 50 No 100
Láser estabilizado de C02 lO '10 10-10 5 X 10*13 IO '13 60 100 200 No 100
* Basado en la referencia: Audoin y Vanier [1976]. ( ') No se aplica esta especificación.(2) “Unidad de alta calidad de funcionamiento” .( 3) No hay información disponible.

CUADRO II - Gama de dispositivos disponibles. Se dispone también de otras combinaciones de valores. Los valores se han escogido con miras a su posible empleo enaeronaves y vehículos espaciales
Característica
Dispositivo s.
Costorelativo
Voiumen(4)
(dm3)
Peso
(kg)
Consumode
potencia
(W)
EstabilidadRetorno a las
frecuencia anterior(2)
Ambiente
Un segundof
Nivel Deriva por día Temp.
(K)
Acel.
(g)
Presión
(mbar)
Campomagn.(A/m)
Cristal 0,1 1 0,5 3 io -" IO '" i o -" 10-i° 10— IO’9 - -
Rb (elemento de gas) 0,5 1 1,0 15 10-" 10"2 IO "2
(*)io -" io -" 10—
(3)IO "3 8 X IO'6
Cesio (tubo) 1,0 10 20,0 30 i o -" , 10— IO'14( ’ )
IO'12 10— IO -3 10-25 8 X IO'7
H (máser) 8,0 100 40,0 20 10— 10-'4 IO "4( ')
IO "2 ío;-’3 10—(3)
10-'5 8 X IO'7
( ') Estos valores se han observado con algunas unidades, pero en la mayoría de los casos puede esperarse que las derivas de frecuencia sean menores que las aquí indicadas.(2) Cambio típico sin reajuste.(3) Estimación.(4) Volumen de las unidades sin batería.

130 I. 364-5
REFERENCIAS BIBLIOGRÁFICAS
ABASHEV, Yu. G., ELKIN, G. A., PURTOV, V. I. y FILONOV, N. N. [1980] Konstruktivnye osobennosti i resultaty predvaritelnych issledovanii tsexievoy atomno-luchevoy ustanovki MTs-2. Issledovaniya v oblasti izmerenii vremeni i chastoty (Design features and results of preliminary investigations of the caesium atomic radiation device MTs-2. Studies of time and frequency measurements). Sbornik Nauchnikh Trudov (Collection of scientifíc works), VNIIFTRJ, 3-5.
ALLAN, D. W. [febrero de 1966] Statistics of atomic frequency standards. Proc. IEEE, Vol. 54, 2, 221-230.
A RD ITI, M. y PICQUE, J. L. [1980]. A caesium beam atomic clock using láser optical pumping. Preliminary tests. J. de Phys. (Lett.), Vol. 41, L-381.
AU D O IN , C. y VANIER, J. [1976] Atomic frequency standards and clocks. J. Phys. E. Sci. Instr., Vol. 9, 697-720.
A U D O IN , C., VIENNET, J. y LESAGE, P. [1981] Hydrogen maser: active or pasive? J. de Phys, Vol. 42, Suplemento C-8. 159-170.
AVILA, G., DE CLERQ, E., DE LABACHELLERIE, M. y CEREZ, P. [junio de 1985] Microwave Ramsey resonances from a láser diode optically pumped cesium resonator. IE E E Trans. Instr. Meas. Vol. IM-34, 2, 139-143.
BARNES, J. A., JONES, R. H., TRYON, P. V. y ALLAN. D. W. [diciembre de 1982] Noise models for atomic clocks. Proc. 14th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos de América, 295-307.
BAVA, E., DE M ARCHI, A., G ODONE, A., ROVERA, G. D. y G IUSFREDI. G. [1983] Isotopic shift measurement of the 3P, — 3P0 fine structure transition of 24Mg and 26Mg. Optics Comm., Vol. 47, 3, 193-195.
BECKER, G. [1973] Frequenzvergleiche mit dem primaren Zeit- und Frequenznormal Csl der Physikalisch-Technischen Bundesanstalt zwischen 1969 und 1973 (Comparaciones de frecuencia con el patrón primario de tiempo y de frecuencia C sl del PTB, entre 1969 y 1973). PTB-Mitt., Vol. 83, 319.
BECKER, G. [1974] Das primare Zeit- und Frequenznormal Csl der Physikalisch-Technischen Bundesanstalt (El patrón primario de tiempo y de frecuencia Csl del PTB). Proc. International Congress of Chronometry, CIC 74-A 1.1.
BECKER, G. [diciembre de 1976] Recent progress in primary Cs beam frequency standards at the PTB. IE E E Trans. Instr. Meas., Vol. IM-25, 4, 458.
BECKER, G. [1979] Das Cásium-, Zeit- und Frequenznormal der PTB ais primare Uhr (El patrón de tiempo y de frecuencia de haz de cesio del PTB como reloj primario). Proc. International Congress of Chronometry, CIC 79-A 1.5.
BECKER, G. y HETZEL, P. [1973] PTB Jahresbericht 1972 (Informe del año 1972), 124.
BESSON, R. y PEIER, U. R. [1980] Further advances on BVA quartz resonators. Proc. 34th Annual Symposium on Frequency Control, Philadelphia, Pa., Estados Unidos de América (US Army Electronics Command, Ft. M onmouth, NJ 07703), 175 (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
BLACKMAN, R. B. y TUKEY, J. W. [1959] The Measurement o f Power Spectra. Dover Publications Inc., New York, NY, Estados Unidos de América.
BOLLINGER, J. J., W INELAND, D. J., ITANO, W. M., BERGQUIST, J. C., y PRESTAGE, J. D. [noviembre de 1984] Frequency and time standards based on stored ions. Proc. 16th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting (NASA, Goddard Space Flight Center, Greenbelt, MD, Estados Unidos de América).
BOULANGER, J.-S., DOUGLAS, R. J., VANIER, J., MUNGALL, A. G., LI, Y. S y JACQUES, C. [1984] On the accuracy of cesium beam primary frequency standards. Proc. 16th Annual Precise Time and Time Interval PTTI Applications and Planning Meeting (NASA, G oddard Space Flight Center, Greenbelt, MD 20771, Estados Unidos de América).
B REN N ER , D. [1969] Flexible bulb method of measuring wall shift of the hydrogen láser. Bull. Amer. Phys. Soc., Vol. 14, 943, § 006.
BREN N ER D. [1970] Absolute frequency o f the hydrogen maser using a flexible storage bulb. J. Appl. Phys., Vol. 41, 2942.
BRILLET, A. [1981] Evaluation of light shifts in an optically pumped cesium beam frequency standard. Metrología, 17, 147-150.
CRAM PTON, S. B. y W ANG, H. T. M. [29-31 de mayo de 1974] Density-dependent shifts of hydrogen maser standards. Proc. 28th Annual Symposium on Frequency Control (US Army Electronics Comm and, Ft. M onmouth, NJ 07703), 355-361 (Electronic Industries Association, W ashington, DC 20006, Estados Unidos de América).
CRAM PTON, S. B., WANG, H. T. M. y BARRET, J. L. [diciembre de 1976] Problems in hydrogen maser design and suggested improvements. Proc. 8th Annual Precise Time and Interval (PTTI) Applications and Planning Meeting (US Naval Research Laboratory, Washington DC), 351-354.
CUTLER, L. S., GIFFARD. R. P. y M cGUIRE, M. D. [diciembre de 1981] A trapped mercury 199 ion frequency standard. Proc.13th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos de América, 563-578.
DAVENPORT, W. B. y ROOT, W. L. [1958] An Introduction to the Theory o f Random Signáis and Noise. McGraw-Hill Book Co., Inc., Nueva York, NY, Estados Unidos de América.
DEBELY, P. E. [1970] Hydrogen masers with deformable bulb. Rev. Sci. Instr., Vol. 41, 1290.
DE CLERCQ, E. y CÉREZ, P. [1983] Evaluation of the light shifts in a frequency standard based on Raman induced Ramsey resonance. Optics Comm., Vol. 45, 91-94.
DE M ARCHI, A., BAVA, E., G OD ON E, A. y G IU SFR ED I, G. [marzo de 1983] Merits and limitations of submillimeter wavelength frequency standards based on a Mg (Ca) metastable beam. IE E E Trans. Instr. Meas., Vol IM-32, 1, 191-197.

I. 364-5 131
DEM IDOV, N. A., EZLOV, E. M., FEDOROV, V. A. y ULYANOV. A. A. [1978] Issledovanie stenochnogo sdviga chastoty v vodorodnom generatore dlya novykh materialov. Issledovaniya v oblasti vremeny i chastoty (Study o f wall frequency shift in a hydrogen frequency generator for new materials. Time and Frequency studies). Sbornik Trudov (Collection o f Works) VNIIFTRI. 37(67), 81-85.
DERBYSHIRE, A., D RULLINGER, R. E., FELDMAN, M., GLAZE, D. J. HILLARD, D., HOWE, D. A., LEWIS, L. L., PASCARU, I. y STANCIULESCU, D. [mayo de 1985] Láser requirements for optically pumped cesium standards. Proc. 39th Annual Symposium on Frequency Control (US Army Electronics Com m and, Ft. M onmouth, NJ 07703) (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
DESAINTFUSCIEN, M., VIENNET, J., AUDOIN, C. y VANIER, J. [1975] Temperature dependence o f spin exchange frequency shifts in H-H collisions. J. de Phys. (Lett.), Vol. 36, 281-284.
DICKS, J. G. y STRAYER, D. M. [1984] Development of the super-conducting cavity maser as a stable frequency sourse. Proc. 38th Annual Symposium on Frequency Control (US Army Electronics Comm and, Ft. M onm outh, NJ 07703), 435 (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
ELKIN, G. A, ABASHEV, Yu. G., BARYSHEV, V. N. y PURTOV, V. I. [1983] Tsezievye atomno-luchevye repery chastot (Caesium atomic radiation frequency standards). Izm. Tekhn., 6.
ELKIN, G. A y ZHESTKOVA, N. D [1979] Smeshchenie chastoty vodorodnogo generatora iz-za stolknovenii atomov mezhdu saboy (Frequency shift of a hydrogen generator owing to mutual collisions o f atoms). Izm. Tekhn., 9, 36-37.
ELKIN, G. A., ZHESTKOVA, N. D y YAKOVLEV, Yu. N. [1980] Vosproizvodimost chastoty vodorodnykh generatorov na dlitelnykh intervalakh vremeny. Issledovaniya v oblasti izmereny vremeny i chastoty (Reproducibility of the frequency of hydrogen frequency generators at long time intervals. Studies on time and frequency measurements). Sbornik Nauchnykh Trudov (Collection o f scientific works), VNIIFTRI, 6-8.
GAYGEROV, B. A., ELKINA. L. P. y PUSHKIN, S. B. [1982] Issledovanie metrologicheskikh kharakteristik gruppy vodorodnykh standartov (Study of the metrological characteritics of the group of hydrogen standards). Izm. Tekhn., 27-28.
G OD ON E, A., DE MARCHI, A., ROVERA, G. D., BAVA, E. y G IU SFRED I, G. [1983] Frequency measurement of the 3Pt — 3P0 fine structure transition of 24Mg. Phys. Rev. A, Vol. 28, 4, 2562-2564.
G UINOT, B. [1974] Informe anual del Bureau international de l’heure (BIH).
HELLW IG, H. y BELL, H. [1972] Some experimental results with an atomic hydrogen storage beam frequency standard. Metrología, Vol. 8, 96-98.
HELLW IG, H., JARVIS, S., Jr., HALFORD, D. y BELL, H. E. [junio de 1973] Evaluation and operation of atomic frequency standards using time domain velocity selection modulation. Metrología, Vol. 9, 107-112.
IEEE [febrero de 1966] Special issue on frequency stability. Proc. IEEE, Vol. 54, 2, 101-338.
ILJIN , V. G., ELKIN, G. A., ABASHEV, Yu. G. y PURTOV, V. I. [1976] Metrologichesky tsezievy reper chastoty M T s-1 (Metrological caesium frequency standard M Ts—1). Izm. Tekhn., 10, 43-47.
JA R D IN O , M., D ESAINTFUSCIEN, M., BARILLET, R., VIENNET, J., PETIT, P. y A UDOIN, C. [1980] Mercury ion frequency standard: preliminary results. Proc. 34th Annual Symposium on Frequency Control, Philadelphia, Pa. Estados Unidos de América (US Army Electronics Command, Ft. M onmouth, NJ 07703), 353 (Electronic Industries Association, Washington DC 20006, Estados Unidos de América).
JIM ÉN EZ, J. J. y SEPTIER, A. [12-14 de junio de 1973] S and X band superconducting cavity stabilized oscillators. Proc. 27th Annual Symposium on Frequency Control (U.S. Army Electronics Comm and, Ft. M onmouth, N J 07703), 406-413 (Electronic Industries Association, W ashington, DC 20006, Estados Unidos de América).
JONES, R. H. y TRYON, P. V., [enero-febrero de 1983] Estimating time from atomic clocks. N B S J. Res., Vol. 88, 1, 17-24.
KOBAYASHI, M., NAKAGIRI, K., URABE, S., SHIBUKI, M. y SABURI, Y. [diciembre de 1978] Design of and preliminary results on a cesium-beam standard at the Radio Research Laboratories. IE E E Trans. Instr. Meas., Vol. IM-27, 4, 343-348.
KOGA, Y. [1984] An improved method of measuring the Zeeman shift in cesium beam frequency standards. Japan J. Appl. Phys., Vol. 23, 1, 97-100.
KOLMOGOROV, A. N. [1941] ZX4ASSSR, Vol. 32, 19. Véase también el Vol. 30, 299 (1941).
KOMIYAMA, B. [1985] A 9.2 GHz superconducting cavity stabilized oscillator. Proc. 39th Annual Symposium on Frequency Control (US Army Electronics Command, Ft. M onmouth, NJ 07703) (Electronic Industries Association, W ashington, DC 20006, Estados Unidos de América).
LESAGE, P., AUDOIN, C. y TETU. M. [1979] Amplitude noise in passively and actively operated masers. Proc. 33rd Annual Symposium on Frequency Control, Atlantic City NJ (US Army Electronics Comm and, Ft. M onm outh, NJ 07703), 515-535 (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
LESAGE, P., AUDOIN, C. y TETU. M. [1980] Measurement o f the effect of thermal noise on the amplitude o f oscillation of a maser oscillator. IE E E Trans. Instr. Meas., Vol. IM-29, 311-315.
MALAKHOV, A. N. [1966] Spectral-correlational analysis of signáis with nonintegrable spectra. Radiofizika, Vol. 9, 595.
M ORIKAW A, T., OHTA, Y. y K IU C H I, H. [1984] Development o f hydrogen masers for K-3 VLBI system. Proc. 16th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting (NASA, G oddard Space Flight Center, Greenbelt, MD 20771, Estados Unidos de América).
MORRIS, D. [diciembre de 1978] Time-dependent frequency shifts in the hidrogen maser. IE E E Trans. Instr. Meas., Vol. IM-27, 4, 339-343.

132 I. 364-5
M ORRIS, D. y NAK AG IRI, K. [1976] The frequency stability of a pair of auto-tuned hydrogen masers. Metrología, Vol. 12, 1-6.
M UNGALL, A. G. [1978] A new concept in atomic time keeping: The continuously operating long-beam primary cesium clock. IE E E Trans. Instr. Meas., Vol. IM-27, 330.
M UNGALL, A. G. y COSTAIN, C. C. [1977] NRC CsV primary clock performance. Metrología, Vol. 13, 105-107.
M UNGALL, A. G. y COSTAIN, C. C. [1983] Perfomence of the four NRC long-beam primary cesium clocks CsV, CsVIA, CsVIB and CsVIC. IE E E Trans. Instr. Meas., Vol. IM-32, 1, 224-227.
M UNGALL, A. G., DAAMS, H. y BOULANGER, J.-S. [1980] Design and performance of the new 1 m NRC primary cesium clocks. IE E E Trans. Instr. Meas., Vol. IM-29, 4, 291-297.
MUNGALL, A. G., DAAMS, H. y BOULANGER, J. S. [1981] Design construction and performance of the NRC CsVI primary cesium clocks. Metrología, Vol. 17, 123-145.
M UNGALL, A., DAAMS, H., MORRIS, D. y COSTAIN, C. C. [1976] Performance and operation of the NRC primary cesium clock, CsV. Metrología, Vol. 12, 129-139.
NAK AD AN , Y. y KOGA, Y. [junio de 1985] Recent progress in Cs beam frequency standards at the NRLM. IE E E Trans. Instr. Meas., Vol. IM-34, 2, 133-135.
N A K A G IR I, K., SHIBUKI, M., URABE, S., ISH IZU, M., OHTA, Y., MORIKAWA, T. y SABURI, Y. [1984] Accuracy evaluation of the RRL primary cesium beam frequency standard. Proc. 38th Annual Symposium on Frequency Control Philadelphia, PA, (US Army Electronics Command, Ft. Monmouth, NJ 07703), 447-451 (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
NASA [1983] Hydrogen maser comparison test, Vol. 1. Executive Summary, Jet Propulsión Laboratory. California Institute of Technology, Pasadena, CA 91109, Estados Unidos de América.
NBS [1974] NBS Monograph 140: Time and Frequency: Theory and Fundamentáis. (Available from Superintendent of Documents, Catalog N.° C13.140, Stock No. 0303-01202) US Govt. Printing Office, W ashington, DC 20402, Estados Unidos de América.
OHTA, Y., YOSHIMURA, K., SHIBUKI, M., N A K AG IRI, K., MORIKAWA, T., KOBAYASHI, M. y SABURI, Y. [1974] On an automatic cavity tuner for hydrogen frequency standard. Rev. Radio Res. Labs., Japón, Vol. 20, 39-58.
PERCIVAL, D. B. [1876] A heuristic model of atomic clock behavior. Proc. 30th Annual Symposium on Frequency Control (US Army Electronics Command, Ft. M onmouth, NJ 07703), 414-419 (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
PETERS, H. E., M cGUNIGAL, T. E., y JO HNSON, E. H. [22-24 de abril de 1968] Hydrogen standard work at G oddard Space Flight Center. Proc. 22nd Annual Symposium on Frequency Control (US Army Electronics Command, Ft. M onmouth, N J 07703), 464-493 (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
PETIT, P., DESAINTFUSCIEN, M. y AUDOIN, C. [1980] Temperature dependance of the hydrogen maser wall shift in the temperature range 295-395 k. Metrología, Vol. 16, 7.
PETIT, P., VIENNET, J., BARILLET, R., D ESAINTFUSCIEN, M. y A UDOIN, C. [1974] Development of hydrogen masers as frequency standards at the Laboratoire de l’Horloge Atomique. Metrología, Vol. 10, 61-67.
PETIT, P., VIENNET, J., BARILLET, R., D ESAINTFUSCIEN, M. y A UDOIN, C. [26-30 de mayo de 1975] Etalons de fréquence á hydrogéne atomique. Colloque International sur l’Electronique et la Mesure. París, Francia 111-119.
REIN H A RD T, V. [1973] Flexible bulb — large storage box hydrogen maser. Proc. 5th Annual Precise Time and Time Interval (PTTI) Planning Meeting (NASA, G oddard Space Flight Center, Greenbelt, MD 20771, Estados Unidos de América).
REIN H A RD T, V. y PETERS, H. [28-30 de mayo de 1975] An improved method for measuring the magnetic inhomogeneity shift in hydrogen masers. Proc. 29th Annual Symposium on Frequency Control (US Army Electronics Command, Ft. Monmouth NJ 07703) (Electronic Industries Association, W ashington, DC 20006, Estados Unidos de América).
ROVERA, G. y BEVERINI, N. [5-9 de septiembre de 1977] Frequency stability of the optically pumped passive caesium frequency standard. Proc. EUROMEAS '11, Sussex University, 83.
ROVERA, G., DE MARCHI, A. y VANIER, J. [1976] The optically pumped passive caesium frequency standard: Basic theory and experimental results on buffer gas frequency shifts. IE E E Trans. Instr. Meas., Vol. IM-25, 3, 203-210.
RU EG ER , L. J [noviembre de 1981] Characteristics o f the NASA research hydrogen maser. J. Inst. Electron. Telecomm. Engrs., Vol. 27, 11, 493-500.
SABURI, Y., KOBAYASHI, M. y YOSHIMURA, K. [9-11 de julio de 1974] Travaux récents sur le maser á hydrogéne aux RRL (Japón). Comité Consultatif pour la Définition de la Seconde (CCDS), 7e Session, S87-S91. Bureau international des poids et mesures, Sévres, Francia.
STEIN, S. R. [28-30 de mayo de 1975] Application o f superconductivity to precisión oscillators. Proc. 29th Annual Symposium on Frequency Control (US Army Electronics Command, Ft. Monmouth, NJ 07703), 321-328 (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
STEIN, S. R., M ANNEY, C. M., WALLS, F. L., GRAY, J. E. y BESSON, R. [1978] A system approach to high performance oscillators. Proc. 32nd Annual Symposium on Frequency Control. Atlantic City, NJ, Estados Unidos de América (US Army Electronics Command, Ft. Monmouth, NJ 07703), 527 (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
STRUM IA, F. [1972] A proposal for a new absolute frequency standard, using a Mg or Ca atomic beam. Metrología, Vol. 8, 85-90.
TETU, M., TREMBLAY, P., LESAGE, P., PETIT, P. y AUDOIN, C. [1981] Frequency stability o maser oscillators operated with enhanced cavity Q. Proc. 13th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting. Washington, DC, Estados Unidos de América, 667-684.

I. 364-5 133
TURNEAURE, J. P. y STEIN, S. R. [2-6 de junio de 1975] An experimental limit on the time variation of the fine structure constant. Proc. 5th International Conference on Atomic Masses and Fundam ental Constants, París, Francia.
URABE, S., OHTA, Y. y SABURI, Y. [1984] Improvement in a hydrogen maser by a new State selection. IE E E Trans. Inst. Meas., Vol. IM-33, 2, 117-121.
UZGIRIS, C. E. y RAMSEY, N. F. [1970] Multiple-dash hydrogen maser with reduced wall shift. Phys. Rev. A, Vol. 1, 429.
VANIER, J., BOULANGER, J.-S. y MUNGALL, A. G [1984] The Millman effect in cesium beam atomic frequency standards: further considerations. Metrología, Vol. 20, 101-105.
VANIER, J. y LAROUCHE, R. [1978] A comparison of the wall shift of TFE and FEP teflon coatings in the hydrogen maser. Metrología, Vol. 14, 31.
VANIER, J., LAROUCHE, R., y A U D O IN , C. [28-30 de mayo de 1975] The hydrogen maser wall shift problem. Proc. 29th Annual Symposium on Frequency Control (US Army Electronics Com m and, Ft. M onmouth, N J 07703), 371-383 (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
VESSOT, R. y LEVINE, M. [octubre de 1970] A method for eliminating the wall shift in the hydrogen maser. Metrología, Vol. 6, IV, 116-117.
VESSOT, R. y otros [agosto de 1971] Recent developments affecting the hydrogen maser as frequency standard. NBS Special Publication 343. Precisión measurements and fundam ental constants, 22-37.
VESSOT, R. F. C., MATTISON, E. M., IM BIER y ZHA1, Z. C. [1984] Performance data o f US Naval observatory VLG-11 hydrogen masers since September 1983. Proc. 16th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting (NASA, G oddard Space Flight Center, Greenbelt, M D 20771, Estados Unidos de América).
VLBI RESEARCH DEVELOPM ENT GROUP, RRL [1984] The first US-JAPAN VLBI test observation by use o f K-3 system of the Radio Research Laboratories. J. Radio Res. Labs., Vol. 31, 132, 31-37.
WALLS, F. L. y HELLW IG, H. [2-4 de junio de 1976] A new kind o f passively operating hydrogen frequency standard. Proc. 30th Annual Symposium on Frequency Control (US Army Electronics Comm and, Ft. M onmouth, N J 07703), 473-481 (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
WALLS, F. L y PERSSON, K. B. [junio de 1984] A new miniaturized passive hydrogen maser. Proc. 38th Annual Symposium on Frequency Control (US Army Electronics Command, Ft. Monmouth, NJ 07703), 416-420 (Electronic Industries Association, W ashington, DC 20006, Estados Unidos de América).
W INELAND, D .J., ALLAN, D. W., GLAZE, D. Y., HELLW IG, H. W., y JARVIS, S. Hijo [diciembre de 1976] Results on limitations in primary caesium standard operation. IE E E Trans. Instr. Meas., Vol. IM-25, 4, 453-458.
W IN KLER, G. M. R., HALL, R. G., y PERCIVAL, D. B. [octubre de 1970] The US Naval Observatory clock time reference and the performance of a sample o f atomic clocks. Metrología, Vol. 6, IV, 126-134.
YASUDA, Y. y YOSHIMURA, K. [noviembre de 1964] Measurement of short term frequency instability and frequency spectra o f highly stable oscillators. J. Radio Res. Labs. (Japón), Vol. 11, 58.
ZHESTKOVA, N. D. y ELKIN, G. A. [1979] Vliyanie neodnorodnogo magnitnogo polya na chastotu vodorodnogo generatora (The influence of an inhomogeneous magnetic field on the frequency o f a hydrogen frequency generator). Izm. Tekhn., 9, 37-38.
ZITZEW ITZ, P. W. y RAMSEY, N. F. [1971] Studies of the wall shift in the hydrogen maser. Phys. Rev. A, Vol. III, 51.
BIBLIOGRAFÍA
A UD OIN , C., VIENNET, J., CYR, N. y VANIER, J. [1982] Influence of modulation frequency in rubidium cell frequency standards. Proc. 14th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos de América, 87-110.
BOLLINGER, J. J., ITANO, W. M. y W INELAND, D. J. [1983] Láser cooled 9Be+ accurate clock. Proc. 37th Annual Symposium on Frequency Control, Filadelfia, PA, Estados Unidos de América (US Army Electronics Comm and, Ft. Monmouth, NJ 07703) (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
C H IU , M., BATES, A. B., RUEG ER, L. J., REINH ARD T, V. S., DACHEL, P., K UN SKI, R., K RU EG ER , R. y W ARDRIP, S. C. [1982] The N ASA /G SFC hydrogen maser program: a review o f recent data. Proc. 14th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Washington, DC, Estados Unidos de América.
CUTLER, L. S., GIFFARD, R. P. y M cG UIRE, M. D. [1983] Mercury — 199 trapped ion frequency standard: Recent theoretical progress and experimental results. Proc. 37th Annual Symposium on Frequency Control. Filadelfia, PA, Estados Unidos de América (US Army Electronics Command, Ft. Monmouth, N J 07703) (Electronic Industries Association, W ashington, DC 20006, Estados Unidos de América).
DIALS, M. et WERT, L. [diciembre de 1982] A commercial hydrogen maser, progress report. Proc. 14th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos de América.
ITANO, W. M. et W INELAND, D. J. [septiembre de 1981] Precisión measurement o f the ground-state hyperfine constant of 25Mg+. Phys. Rev. A., Vol. 24. 1364-1373.
JA R D IN O , M., DESAINTFUSCIEN, M. y PLUMELLE, F. [1981] J. de Phys., Vol. 42, Suplemento C-8, 327-338.
PETERS, H. E. [4-6 juin 1972] Hydrogen as an atomic beam standard. Proc. 26th Annual Symposium on Frequency Control (US Army Electronics Command, Ft. M onmouth, NJ 07703) 230-241 (Electronic Industries Association, W ashington, DC 20006, Estados Unidos de América).

134 I. 364-5, 439-4
VAN IER, J., RACINE, G., K UNSKI, R. y PICARD, M. [1980] Progress Report on hydrogen maser development at Laval University. Proc. 12th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting (NASA, Goddard Space Flight Center, Greenbelt, MD 20771, Estados Unidos de América) 807-824.
WALLS, F. L. [1976] Design and results from a prototype passive hydrogen maser frequency standard. Proc. 8th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting (US Naval Research Laboratory, Washington, DC).
IN FO RM E 439-4
EFECTOS RELATIVISTAS EN UN SISTEMA DE TIEMPO-COORDENADA TERRESTRE
(Programa de Estudios 3C/7)(1970-1974-1978-1982-1986)
1. Introducción
Los adelantos en la exactitud de las comparaciones de tiempo requieren la adopción de una serie de principios convencionales y de un sistema de coordenadas de referencia para tener en cuenta los efectos relativistas de una manera coherente. El uso de transpondedores o de relojes atómicos en los satélites y en las aeronaves a reacción dará pronto como resultado una red de patrones de tiempo dispersos por todo el m undo; las grandes distancias correspondientes aumentan también la necesidad de unos procedimientos bien definidos para tener en cuenta los efectos relativistas en las comparaciones de tiempo. El presente Informe propone la adopción de sistemas de coordenadas de referencia geocéntricas locales para uso en esas comparaciones de tiempo.
El Comité Consultivo para la Definición del Segundo (CCDS) reconoció esta necesidad en su 9.a reunión (23-25 de septiembre de 1980) y propuso al Comité Internacional de Pesos y Medidas (CIPM):— que el TAI es una escala de tiempo-coordenada definida en un punto de referencia geocéntrico que tiene
como unidad el segundo del sistema internacional de unidades (SI) tal como se realiza en el geoide en rotación, y
— que, en consecuencia, en el estado actual de los conocimientos técnicos, puede extenderse con una exactitud suficiente a un punto cualquiera, fijo o móvil, en la proximidad del geoide aplicando las correcciones de prim er orden de la relatividad general, es decir, las correcciones para las diferencias de potencial de la gravedad y las diferencias de velocidad así como para la rotación de la Tierra.
El presente Informe concuerda con la declaración del CCDS pero extiende los procedimientos propuestos a altitudes que comprenden la órbita de los satélites geoestacionarios. Las siguientes ecuaciones representan la frecuencia de reloj con una exactitud mejor que 1 parte “en 1014.
Cuando se transfiere el tiempo del punto P al punto Q, el proceso puede observarse desde un sistema de referencia giratorio fijo en tierra y geocéntrico (caso R), o desde un sistema no giratorio sometido a inercia local y geocéntrico (caso N).
2. Transporte de relojes
2.1 Caso R
Cuando se transfiere el tiempo del punto P al punto Q por medio de un reloj portátil, el tiempo-coordenada acumulado durante el transporte es
Ai =Qds
A U( r ) v1 O
2c2+
2cu(1)
donde c es la velocidad de la luz, co es la velocidad angular de rotación de la Tierra; v es la velocidad del reloj con relación al suelo, T es un vector cuyo origen está en el centro de la Tierra y cuyo extremo se desplaza con el reloj de P a Q; A E es la proyección ecuatorial de la zona barrida durante la transferencia de tiempo por el vector r a medida que su extremo se desplaza de P a Q; A í / ( r ) es la diferencia de potencia entre la ubicación del reloj en r y el geoide, visto desde un sistema de coordenadas fijo en tierra, aceptando que A U ( r ) es positivo cuando el reloj está por encima del geoide; y d i es el incremento de tiempo propio acumulado en el reloj portátil. El incremento de tiempo propio es el tiempo acumulado en el reloj patrón portátil medido en el «sistema de reposo»

I. 439-4 135
del reloj, es decir, en el sistema de referencia que se desplaza con el reloj. A E se mide en un sistema de coordenadas fijo en tierra. Al barrer el área A E, este valor se considera positivo cuando la proyección del trayecto del reloj sobre el plano del Ecuador lleva dirección Este. Cuando la altura h del reloj es inferior a 24 km sobre el geoide, A U( j ) puede calcularse aproximadamente por medio de gh, siendo g la aceleración total debida a la gravedad (incluida la aceleración de la rotación de la Tierra) evaluada en el geoide. Esta aproximación se aplica a todas las transferencias aerodinámicas y terrestres. Cuando h es mayor de 24 km, la diferencia de potencial A U( r ) ha de calcularse para mayor exactitud del modo que sigue:
A V (7) - -G M , ( ---------— ) - 4 - ü )V sen2 6 - a, 2) +\ r di I L 2a !
donde ai es el radio ecuatorial de la Tierra; r es la magnitud del vector T ; 0 es la colatitud; GMe es el producto de la masa de la Tierra por la constante gravitacional; y J2 es el coeficiente de momento cuadripolar de la Tierra, J2 = + 1,083 x 1 0 -3.
1 + (3 eos2 0 — 1) (2)
2.2 Caso N
Cuando se transfiere el tiempo del punto P al punto Q por medio de un reloj, el tiem po-coordenada que transcurre durante el desplazamiento del reloj es:
Ai =Qds 1 -
U { r ) - U g+
2c2(3)
donde U(r ) es el potencial en la ubicación del reloj y v es la velocidad del reloj, vistos ambos —en contraste con la ecuación (1)— desde un sistema de referencia no giratorio geocéntrico, y Ug es el potencial en el geoide, incluido el efecto en el potencial del movimiento giratorio de la Tierra. Obsérvese que A U (r ) # U(r*) — Ug, puesto que U (r ) no comprende el efecto de la rotación de la Tierra. Esta ecuación se aplica a relojes en órbita geoestacionaria, pero no debe usarse para distancias superiores a 50 000 km medidas desde el centro de la Tierra.
3. Señales electromagnéticas
3.1 Caso R
Desde el punto de vista de un sistema giratorio fijo en tierra y geocéntrico, el tiem po-coordenada que transcurre entre la emisión y la recepción de una señal electromagnética es:
A t1 Q
7 Í dop
i -A U( r )
+2<*)
(4)
donde do es el incremento de longitud normalizada, o longitud propia, a lo largo del trayecto de transm isión; A í/(7 ) es el potencial en el punto, ~r, del trayecto de transmisión menos el potencial en el geoide (véase la ecuación (3)) visto desde un sistema de coordenadas fijo en tierra y A E es el área circunscrita por la proyección ecuatorial del triángulo cuyos vértices están:— en el centro de la Tierra;— en el punto de transmisión de la señal, P;— en el punto de recepción de la señal, Q.
El área, A E, es positiva cuando el trayecto de la señal tiene un componente de dirección hacia el Este. Elsegundo término alcanza el valor de un nanosegundo aproximadamente para una trayectoria Tierra-satélite geoestacionario-Tierra. En el tercer término, 2co/ c 2 = 1,6227 x 10-6 n s/k m 2; este término puede contribuir con centenares de nanosegundos para valores prácticos de A E. El incremento de longitud propia, d a , puede tomarse como la longitud medida utilizando barras rígidas normalizadas en reposo en el sistema giratorio; ello equivale a la medición de la longitud tom ando c / 2 veces el tiempo (normalizado al vacío) de una señal electromagnética de dos direcciones enviada desde P a Q y viceversa a lo largo del trayecto de transmisión.

136 I. 439-4
Desde el punto de vista de un sistema no giratorio (inercial local) geocéntrico, el tiempo-coordenada que transcurre entre la emisión y recepción de una señal electromagnética es:
3.2 Caso N
i f QAi = — j do
P
U ( r ) - U g(5)
donde U ( r ) y Ug corresponden a la definición dada en la ecuación (3) y d a es el incremento de la longitud norm alizada, o longitud propia, a lo largo del trayecto de transmisión. Las magnitudes de da que figuran en las ecuaciones (4) y (5) difieren ligeramente porque cada uno de los sistemas (de coordenadas) de referencia en los que se miden gira con relación al otro.
4. Ejemplos
Debido a los efectos relativistas, un reloj en una ubicación elevada parecerá tener una frecuencia mayor y diferirá del TAI en la siguiente frecuencia normalizada:
A UT
donde A U t ^s la diferencia de potencial positivo total (potenciales de gravitación y centrífugo) y c es la velocidad de la luz. Cerca del nivel del mar esto se expresa por:
* m (6)c¿
donde g(cp) = (9,780 + 0,052 sen2 cp) m /s2, cp es la latitud geográfica y g(cp) es la aceleración total en el nivel del mar (de gravitación y centrífuga) y donde h es la distancia sobre el nivel del mar. La ecuación (6) debe usarse para com parar las fuentes primarias del segundo SI con el TAI y mutuamente. Por ejemplo, a una latitud de 40° la m archa de un reloj cambiará en +1,091 x 10~13 para cada km por encima del nivel del mar.
Si un reloj se desplaza en relación con la superficie de la Tierra con una velocidad v que puede tener lacom ponente vE en dirección del Este, la diferencia normalizada de la frecuencia entre el reloj que se mueve y otro reloj en reposo al nivel del mar es:
1 v2 g((p)h 1- - — + — r----------- • co • r • eos (p • vE (7)
2 c2 c c
siendo co la velocidad de rotación angular de la Tierra (to = 7,292 x 10~5 rad /s), r í a distancia del reloj al centro de la Tierra (radio de la Tierra = 6378,140 km), c es la velocidad de la luz (c = 2,99792458 x 105 km /s) y cp la latitud geográfica.
Por ejemplo si un reloj se mueve a 270 m /s hacia el Este a 40° de latitud y a una altura de 9 km, la desviación normalizada de frecuencia del reloj que se desplaza con respecto a un reloj en reposo al nivel del mar es por este efecto:
-4 ,0 6 x IO "13 + 9,82 x 10"13 - 1,072 x IO "12 = -4 ,9 6 x 10-13
La elección de un sistema de coordenadas es puramente discrecional, pero para definir el tiempo-coordenada debe elegirse un sistema específico. Se recomienda utilizar un sistema topocéntrico para uso terrestre. En este sistema, cuando un reloj B está sincronizado con un reloj A (ambos estacionarios sobre la superficie de la Tierra) por medio de una señal radioeléctrica que se propaga de A a B, estos dos relojes difieren en tiempo-coordenada en:
B — A J * r 2 eos2 cp dX (8)

I. 439-4 137
donde (p es la latitud, X la longitud (positiva en la dirección del Este) y P es el trayecto que recorre la señal radioeléctrica de A a B. Si los dos relojes se sincronizan por medio de un reloj portátil, diferirán en tiem po-coordenada en:
B - A = J d t ------- A r ) - ¡ r 2 eos2 <p dX (9)2 c
donde v es la velocidad en tierra del reloj portátil y P es el trayecto recorrido por el reloj portátil desde A a B.
Esta diferencia también puede alcanzar varias décimas de microsegundo. Se recomienda utilizar las ecuaciones (8 ) y (9) como ecuaciones de corrección para la sincronización de relojes a larga distancia. Puesto que las ecuaciones (8 ) y (9) dependen del trayecto, deben tomarse en consideración en todo sistema coherente de tiempo-coordenada.
Si un reloj es transportado desde un punto A a un punto B y traído de nuevo a A por un trayecto diferente a velocidad infinitesimal y con h = 0, su hora diferirá de la del reloj que permaneció en A en:
. 2(üA eA< = -------- ^ ( 1 0 )
C
siendo A E el área definida por la proyección del trayecto de ida y vuelta en el plano del ecuador de la Tierra, A E se considera positivo si el trayecto es recorrido en el sentido de las agujas del reloj visto desde el polo Sur.
Por ejemplo, como:
2 (0 / c2 = 1,6227 x IO" 6 n s/km 2
la hora de un reloj transportado hacia el Este alrededor de la Tierra por el ecuador a velocidad infinitesimal y con h = 0, diferirá de la de un reloj en reposo en —207,4 ns.
BIBLIOGRAFÍA
ASHBY, N. [1975] An Earth-based coordínate clock network. NBS Tech. Note 659, 34, SD Catalogue No. 03 .45 :659 . US Govt. Printing Office, W ashington, DC 20402, Estados Unidos de América.
ASHBY, N. y ALLAN, D. [1979] Practical applications of relativity for a global coordínate time scale. Radio Sci., Vol. 14, 649-669.
BECKER, G. [1974] Time scales relativity. Informe del Physikalisch-Technische Bundesanstalt Braunschweig y Actas de la segunda Reunión de Cagliari on Time Determination, Dissemination and Synchronization. Ed.: Astron. Inst. of Cagliari, Italia.
BECKER, G., FISCHER, B., KRAM ER, G. y MÜLLER, E. K. [1967] Die Definition der Sekunde und die allgemeine Relativitátstheorie (La definición del segundo y la teoría de relatividad general). PTB-Mitt., 77, 111.
BESSON, J. [1970] Comparison of national time standards by simple overflight. IE E E Trans. Instr. and Meas., Vol. IM-19,4, 227-232.
BIH [1973] Informes anuales del Bureau international de l’heure, París, Francia.
BIH Circular D. Bureau international de l’heure, París, Francia.
CCDS [18-19 de junio de 1970] Comité Consultatif pour la Définition de la Seconde (Comité Consultivo para la definición del segundo). 5.a reunión. Bureau International des poids et mesures, Sévres, Francia.
CO H EN , J. M., MOSES, H. E. y ROSENBLUM, A. [1983] Clock transport synchronisation in noninertial frames andgravitational fields. Phys. Rev. Lett., Vol. 51, 17, 1501-1502.
FARLEY, F. J. M., BAILEY, J. y PICASSO, E. [ 6 de enero de 1968] Experimental verifications of the theory of relativity.Nature, Vol. 217, 17-18.
FRISCH, D. H. y SMITH, J. H. [1963] Measurement of the relativistic time dilation using p-mesons. Amer. J. Phys., Vol. 31, 342.
GRANVEAUD, D. M. y GUINOT, B. [1972] Atomic time scales. IE E E Trans. Instr. Meas., Vol. IM-21, 4, 396.
G UIN OT, B. [1969] Formation de l’échelle de temps coordonnée par le Bureau international de l’heure. Actes du Colloqueinternational de chronométrie, A-20, série A, París, Francia.
HAFELE, J. C. y KEATING, R. E. [1972] Around-the-world atomic clocks: predicted relativistic time gains. Science, Vol. 177, 4044, 166-170.

138 I. 439-4, 579-3
H UD SON , G. E. [1964] Spacetime coordínate Systems. Actes du Congrés international de chronométrie, Lausana, Suiza.
H UD SON , G. E., ALLAN, D. W., BARNES, J. A., HALL, R. G., LAVANCEAU, J. D. y W INKLER, G. M. R. [mayo de 1969] A coordínate frequency and time system. Proc. 23rd Annual Symposium on Frequency Control, Com. E, Atlantic City, N J, (US Army Electronics Command, Ft. M onmouth, NJ 07703) (Electronic Industries Association, W ashington, DC 20006, Estados Unidos de América).
IVES, H. y STILLWELL, G. J. [1938] Opt. Soc. Am., 28, 215.
K IN G -H ELE, D. G. [1980] The gravity fíeld of the Earth. Phil. Trans. Roy. Soc., Londres, Vol. A294, 317-328.
M ISNER, C., THORNE, K. y W HEELER, J. [1973] Gravitation. Freeman and Company, San Francisco, Estados Unidos de América.
POUND, R. V. y REBKA, G. A. Jr. [1960] Apparent weight o f photons. Phys. Rev. Lett., Vol. 4, 337.
PO UN D, R. V. y SN IDER, J. L. [1964] Effect o f gravity on nuclear resonance. Phys. Rev. Lett., Vol. 13, 539.
RAPP, R. H. [1974] Current estimates o f mean Earth ellipsoid parameters. Geophys. Res. Lett., Vol. 1 ,1 , 35-48.
R EIN H A R D T, V. [3-5 de diciembre de 1974] Relativistic effects o f the rotation of the Earth on remóte clock synchronization. Proc. 6 th Annual Precise Time and Time Interval (PTTI) Planning Meeting N A SA /D O D (US Naval Research Laboratory, Washington, DC).
R EIN H A R D T, V. S., PREMO, D. A., FITZM AURICE, M. W., W ARDRIP, S. C. y ARVENKA, P. O. [1978] Nanosecond time transfer via shuttle láser ranging experiment. Proc. 9th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, Greenbelt, Md., Estados Unidos de América, 319-342.
R UEG ER, L. J. y BATES, A. G. [julio-agosto de 1979] Nova satellite experiment. Radio Sci., Vol. 14, 4, 707-714.
RUTM AN, J. [16-21 de enero de 1978] Application o f space techniques to time and frequency dissemination and synchronization. Proc. European Workshop on Space Oceanography, Navigation, and Geodynamics (SONG), Schloss-Elmau, República Federal de Alemania, ESAPS-137.
SABURI, Y. [1976] Observed time discontinuity of clock synchronization in rotating frame of the Earth. J. Radio Res. Labs., Vol. 23, 112, 255-265.
SABURI, Y., YAMAMOTO, M. y HARADA, K. [1976] High-precision time comparison via satellite and observed discrepancy o f synchronization. IE E E Trans. Instr. Meas., Vol. IM-25, 4, 473.
UAI [1973] 15th General Assembly Report of Commission 31. Unión Astronómica Internacional, Sydney, Australia.
VESSOT, R. F. C. [1974] Lectures on frequency stability o f clocks in the gravitational redshift experiment. Experimental Gravitation, 111-162. Ed., B. Bertotti, School of Physics Enrico Fermi, Academic Press, Nueva York, NY, Estados Unidos de América.
VESSOT, R. F. C. y LEVINE, M. W. [1979] A test of the equivalence principie using a space-borne clock. General Relativity and Gravitation, Vol. 10, 3, 181-204.
IN FO RM E 579-3
ALGORITMOS DE ESCALAS DE TIEMPO Y PROBLEMAS RELATIVOS A LA OBTENCIÓN DE LOS VALORES MEDIOS ASOCIADOS
(Programa de Estudios 1D /7)(1974-1978-1982-1986)
1. Uniformidad
En la mayor parte de los laboratorios, la escala de tiempo atómico local independiente se obtiene a partir de conjuntos de patrones de cesio comerciales y se mantiene uniforme sin recurrir a calibraciones con relación a patrones primarios de laboratorio. Para conseguir una uniformidad elevada se aplican a cada patrón las correcciones previstas y los factores de ponderación.
La forma más sencilla y generalizada de predecir la cadencia es observar la cadencia media durante un intervalo pasado de tiempo (predicción lineal) con relación al conjunto de los relojes. Sin embargo, desde un punto de vista teórico, sólo se justifica en el caso de la modulación de frecuencia por ruido blanco; en especial, no constituye una predicción óptima para la modulación de frecuencia por ruido de centelleo, que puede ser predom inante en el caso de evaluación de la escala de tiempo. El National Bureau of Standards (NBS) de Estados Unidos de América [Alian y Grey, 1971; Alian y otros, 1973] ha elaborado un método de predicción recurrente casi óptimo para un modelo realista de fluctuaciones de frecuencia.

I. 579-3 139
El NBS [Alian y Grey, 1971; Alian y otros, 1973] y la Commission N ationale de l’Heure, en Francia, utilizan métodos perfeccionados de ponderación. En algunos casos se juzga satisfactorio un procedimiento de ponderación más sencillo, todo reloj se considera de «ponderación 1 » salvo en caso de funcionam iento no satisfactorio, y se le atribuye una «ponderación 0 ».
Se utilizan asimismo sistemas para obtener el promedio de los relojes partiendo de distintas hipótesis sobre el comportamiento de éstos y el concepto de escala de tiempo uniforme [Winkler y otros, 1970]. Estos métodos emplean procedimientos iterativos con correcciones que compensan las contribuciones de los relojes cuyo funcionamiento difiere excesivamente del esperado.
Las investigaciones efectuadas en el «Physikalisch-Technische Bundesanstalt» (PTB) de la República Federal de Alemania y en otros laboratorios mostraron que los modelos aleatorios pueden no ser suficientes para caracterizar plenamente la calidad de funcionamiento a largo plazo. Pueden producirse derivas sistemáticas de frecuencia y saltos de frecuencia. Los esfuerzos se han centrado en el reconocimiento de esos efectos determ inantes [Ganter, 1973]. Llevan a insistir en la necesidad de calibrados precisos de los relojes.
En el Reino Unido se tiene el propósito de poner en servicio una escala de tiempo com binando las posibilidades de varios establecimientos, inicialmente el National Physical Laboratory (NPL) y el Royal Green- wich Observatory (RGO). El sistema representaría un compromiso entre los dos casos extremos de un sistema central y un sistema distribuido y reuniría las ventajas de ambos en cuanto a disponibilidad y fiabilidad. La centralización de los cálculos de la escala de tiempo y las mejoras adecuadas en los enlaces necesarios satisfarían los requisitos de exactitud [Gibbs, 1980].
La Radio Research Laboratories (RRL) de Japón ha introducido un método mejorado para calcular la escala de tiempo con las contribuciones de relojes ponderados [Imae, 1979; RRL, 1978]. U tilizando un factor de ponderación para cada reloj, derivado de las varianzás a largo plazo (x > 1 0 días) y a corto plazo (x < 1 día), es posible mejorar la estabilidad de la escala de tiempo en ambos casos, a largo plazo y a corto plazo. M ediante simulación por com putador se ha demostrado que el cálculo de la escala de tiempo puede mejorar considerablemente si se compensa el error sistemático de las varianzas del reloj antes de utilizar estas varianzas para determinar los factores de ponderación individuales [Yoshimura, 1980].
La estabilidad de una escala de tiempo utilizando factores de ponderación compensados para tener en cuenta el sesgo de las varianzas del reloj que corresponden a la estabilidad a largo plazo y a corto plazo resultó ser del orden de 2 x 10“ 13 para los promedios de tiempos de 10 a 300 días con referencia a TAI vía Loran-C (9970-M) de cuatro patrones de frecuencia de haz de cesio (Cs 2 y Cs 3).
En 1978 y 1979 se establecieron las escalas de tiempo atómico del Observatorio de Shanghai y del Observatorio de Shaanxi respectivamente utilizando un conjunto de relojes de rubidio. Las referencias de calibración para la escala de tiempo atómico son un patrón de haz de cesio y tres máseres de hidrógeno en el Observatorio de Shangai y dos máseres de hidrógeno en el Observatorio de Shaanxi. Todos los relojes atómicos utilizados en esos dos Observatorios fueron desarrollados y construidos en la República Popular de China [Chuang y Jair, 1980 y 1981; Shaanxi Observatory, 1979].
Las escalas de tiempo atómico de los Observatorios de Shanghai y Shaanxi se com paran entre sí y con otras escalas de tiempo atómico de China por medio de enlaces de televisión y relojes portátiles y con escalas de tiempo UTC en el extranjero con transmisiones por satélite y por ondas kilométricas (Loran-C) y miriamétricas. La inestabilidad a largo plazo en un tiempo de muestra de 30 días de la escala de tiempo atómico del Observatorio de Shangai es (3 a 4) x 10“ 13 en relación con el UTC (Observatorio Naval de los Estados Unidos de América) en un periodo de dos años que comienza en 1978. La escala de tiempo atómico del Observatorio de Shaanxi tiene una estabilidad a largo plazo comparable con la del Observatorio de Shangai.
La escala de tiempo atómico del Instituto Nacional de Metrología de China se estableció en 1980. Esta escala de tiempo atómico está basada en un conjunto de 4 patrones de frecuencia de haz de cesio comerciales (HP-5061A) y se calibra por comparación con dos patrones primarios de laboratorio, (Cs 2 y Cs 3) de haz de cesio. Se ha determinado a lo largo de más de un año de funcionamiento continuo, la exactitud de TA(NIM ) y es de ± 1 x 10“ 1 2(la ). La uniform idad de TA(NIM ) es de a^(x = 10 días) < 1,0 x 10“ 13 (este valor se obtuvo a través de comparaciones internas).
En Francia, un método de comparación por televisión que está en funcionamiento desde 1968 permite utilizar los datos de una docena de relojes de cesio repartidos entre diferentes laboratorios para calcular la escala de tiempo atómica francesa, TA(F). Un método de ponderación estadística que utiliza como criterio la estabilidad a largo plazo de cada uña de las muestras se utiliza para formar la escala media, cuya ponderación puede variar de 0 a l . El peso medio se ha mejorado de 0,4-0,5 en 1972-1973 a 0,8-0,98 en 1981-1982. La estabilidad de la escala de tiempos atómica francesa con relación al TAI es del orden de ± 3 x 10“ 13 desde 1972. En enero de 1977 se disminuyó la frecuencia de la TA(F) en 15 x 10“ 13, de m anera a asegurar una coincidencia lo mejor posible con el segundo del Sistema Internacional (SI), con lo que fluctuó en 1983 entre —3 y —5 x 10“ 13. Puesto que no se deriva de un patrón primario de laboratorio, la TA(F) tiene una exactitud determ inada por la repartición en frecuencia de los relojes comerciales utilizados.

140 I. 579-3
En junio de 1982, el NBS y el BIH copatrocinaron el 2.° Simposio internacional sobre los algoritmos de las escalas de tiempo atómico celebrado en Boulder (Colorado, Estados Unidos de América). Entre los asuntos debatidos estaban:
— procesos de mantenimiento de señales horarias;
— sistema automático de medición de fase de elevada exactitud [Stein y otros, 1982];
— historia y estructura del ALGOS;
— método de máxima verosimilitud para estimar los parámetros de reloj y el desarrollo de un algoritmo basadoen un filtro de Kalman aplicable a estos parámetros, para obtener la mínima dispersión temporal en conjunto [Jones y Tryon, 1983];
— utilización de estadísticas robustas al constituir escalas de tiempos;
— comparaciones internacionales de relojes con un nivel de exactitud de 1 0 ns utilizando visión común de los satélites GPS [Davis y otros, 1981];
— sistema de conjunto de relojes en tiempo real en el NBS; e
— informes relativos a la vigilancia de las señales horarias en varios laboratorios internacionales.
2. Exactitud
Los métodos mencionados pueden producir importantes desviaciones de frecuencia a largo plazo. Deben aplicarse correcciones de frecuencia para mantener la relación entre la unidad de la escala de tiempo y el segundo.
Entre otros problemas figura la corrección de frecuencia cuando se dispone de diversos calibrados de la frecuencia de la escala de tiempo con relación a los patrones primarios. Yoshimura [1972], Azoubib y otros [1977] dedujeron las fórmulas que dan las ponderaciones de los calibrados para los modelos usuales de ruidos aleatorios en las escalas de tiempo.
En el National Research Council (NRC) de Canadá, los relojes comerciales de cesio se calibraron dos veces por semana con el CsIII [Mungall, 1971] hasta el 28 de diciembre de 1975. A partir de esa fecha, se ha derivado el TA(NRC) de la salida del patrón prim ario de tiempo y frecuencia (CsV), con una corrección gravitacional diaria de sólo 0,97 ns. Durante 8 años la evaluación anual ha mostrado que el reloj ha mentenido su exactitud estimada de 5 x 10“ 1 4 En 1979, se pusieron en funcionamiento como relojes tres patrones primarios más pequeños, CsVIA, B y C. Al comprobarlos, los relojes CsVI estuvieron generalmente a 5 x 10“ 1 4 de CsV, con el límite exterior de 1 x 10~13. Sin embargo, sus campos magnéticos y diferencias de fase en la cavidad tienden a ser menos estables que en CsV, y ha sido necesario efectuar comprobaciones a intervalos de unos seis meses para mantener su límite de exactitud de 1,5 x 10“ 13 [Mungall y Costain, 1983]. Con estas comprobaciones más frecuentes, no se puede considerar que el conjunto se comporte de una manera estadística y no se han utilizado algoritmos para combinar sus salidas. Se realizan informes periódicos al BIH sobre cada reloj por separado. La NBS efectúa una evaluación completa de su patrón primario una vez al año aproximadamente, y los resultados se emplean en un algoritmo que gobierna el control del TA(NBS) [Alian y otros, 1975]. Este algoritmo de gobierno presenta dos ventajas; incorporar la estabilidad a corto plazo (días a semanas) del conjunto de relojes del NBS y el que su estabilidad a largo plazo está determinada por la precisión del patrón primario. En consecuencia, la velocidad de variación del TA(NBS) está siempre gobernada hacia el control SI.
Hasta julio de 1978, la escala de tiempo atómica TA(PTB) del PTB de Braunschweing (República Federal de Alemania) se derivaba a partir de la media ponderada de un conjunto de relojes comerciales [Hübner, 1979]. Con la ayuda del patrón primario Csl se efectuó una calibración de frecuencias del TA(PTB) por término medio cuatro veces al año. Desde el funcionamiento continuo del Csl que se inició en aquel momento, se ha derivado directamente el TA(PTB) a partir del patrón primario. A intervalos regulares se miden los parám etros operacionales más importantes del Csl. Se produce una inversión del haz cada cinco o seis semanas [Becker, 1979]. Desde 1978, la diferencia de frecuencia relativa de la escala de tiempo atómica TA(NRC) del NRC de Canadá y la escala de tiempo atómica TA(PTB), derivadas ambas de los mismos patrones primarios, ha permanecido inferior a 7 x 10_ 1 4 en un promedio de 80 días.
3. Tiempo Atómico Internacional (TAI)
Hasta agosto de 1973, TAI era la media de 7 tiempos atómicos locales independientes. Becker y Hubner [1973] estudiaron la ponderación de esas escalas y ensayaron varios procedimientos de ponderación; también se efectuaron pruebas de este tipo en el BIH [Granveaud y Guinot, 1972]. Como consecuencia de dificultades para asignar ponderaciones a las escalas de tiempo, el BIH empezó en junio de 1973 a utilizar directamente los datos de los mismos relojes según el procedimiento de predicción y ponderación descrito en el Inform e anual de dicho BIH para 1973. Desde el 1.° de enero de 1977, se ha aplicado un procedimiento de pilotaje con objeto de m antener la unidad de escala de tiempo TAI de conformidad con las realizaciones del segundo SI al nivel del mar (véase el Informe anual del BIH para 1977).

I. 579-3 141
A principios de 1981, el BIH decidió modificar las reglas de ponderación de los relojes que participan en el TAI; se introdujo una selección más severa de los relojes. En el Informe anual del BIH para 1981 se incluyen los detalles de esta nueva ponderación.
El BIH ha estudiado, para el tipo de algoritmo del TAI, el problema de las entradas/salidas de los relojes y ha demostrado que introduce un ruido débil pero no despreciable, del orden de 1 x 1 0 " 1 4 para un periodo de muestreo de 50 días [Granveaud, 1982].
REFERENCIAS BIBLIOGRÁFICAS
ALLAN, D. W., GLAZE, D. J., MACHLAN, H. E., W AINW RIGHT, A. E., HELLW IG, H., BARNES, J. A. y GREY, J. E. [12-14 de junio de 1973] Proc. 27th Annual Symposium on Frequency Control. (US Army Electronics Comm and, Ft. Monmouth, NJ 07703, Estados Unidos de América), 334. (Electronic Industries Association, W ashington DC 20006, Estados Unidos de América).
ALLAN, D. W. y GREY, J. E. [1971] Comments on the October 1970 Metrología paper «The US Naval Observatory clock time reference and the performance of sample atomic clocks». Metrología, Vol. 7, 79.
ALLAN, D., HELLW IG, H. y GLAZE, D. [1975] An accuracy algorithm for an atomic time scale. Metrología, Vol. 11, 133-138.
AZOUBIB, J., GRANVEAUD, M. y GUINOT, B. [1977] Estimation of the scale unit duration of time scales. Metrología, Vol. 13, 87.
BECKER, G. [1979] Das Cásium-Zeit-und Frequenznormal CS1 der PTB ais prim are Uhr (The caesium time and frequency standard CS1 of the PTB as primary clock) lOth International Congress o f Chronometry, Ginebra, Vol. 2, 33-40.
BECKER, G. y HUBNER, U. [1973] PTB Annual Report for 1972, 125.
CHUANG, C-H. y JAIR, T-C. [1980 y 1981] Atomic time and frequency standards development at Shangai Observatory, China.IEEE Trans. Instr. Meas., Vol. IM-29, 3, 158-162 y Vol. IM-30, 1, 80.
DAVIS, D., WEISS, M., CLEMENTS, A. y ALLAN, D. [diciembre de 1981] Unprecedented syntonization and synchronizationaccuracy via simultaneous viewing with GPS receivers and construction characteristics of an N B S/G PS receiver. Proc. 13th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos de América, 527-547.
GANTER, W. [1973] NBS Tech. Note No. 636, Boulder, CO, Estados Unidos de América.
GIBBS, J. E. [1980] Towards a United Kingdom atomic time scale. DES Memorándum No. 33, N ational Physical Laboratory, Teddington, Middlesex, TW 11 OLW, Inglaterra.
GRANVEAUD, M. [24-25 de junio de 1982] Response of TAI-like algorithms to random and non-random variations. Proc. 2nd Symp. on Atomic Time Scale Algorithms, Boulder CO, Estados Unidos de América.
GRANVEAUD, D. M. y GUINOT, B. [1972] atomic time scales. IE E E Trans. Instr. Meas., Vol. IM-21, 4, 396.
HÜBNER, U. [1979] Der Algorithmus zur Berechnung der gesetzlichen Zeitskala der Bundesrepublik Deutschland (The algorithm used for the calculation of the legal time scale of the Federal Republic of Germany); lOth Internacional Congress of Chronometry, G inebra, Vol. 2, 71-75.
IMAE, M. [1979] A technique of mean atomic time scale generation by caesium clocks. Rev. Radio Res. Labs., Japan, Vol. 25, 49-57.
JONES, R. y TRYON, P. V. [enero-febrero de 1983] Estimating time from atomic clocks. N B S J. Res., Vol. 80, 1, 17-24.
MUNGALL, A. G. [1971] Atomic time scales. Metrología, Vol. 7, 146.
M UNGALL, A. G. y COSTAIN, C. C. [1983] Performance of the four NRC long-beam primary cesium clocks CsV, CsVIA,CsVIB and CsVIC. IE E E Trans. Instr. Meas., Vol. IM-32, 1, 224-227.
RRL [1978] Radio Research Laboratories (Japón). Standards frecuency and time service bulletin. Annual Report for 1978.
SHAANXI OBSERVATORY [octubre de 1979] Standard frequency and time service bulletin.
STEIN, S., GLAZE, D., LEVINE, J., GRAY, J., HILLIARD, D., HOWE, D. y ERB, L. [junio de 1982] Performance of an automated high accuracy phase measurement system. Proc. 36th Annual Symposium on Frequency Control, (US Army Electronics Command, Ft. Monmouth, NJ 07703), 314-321 (Electronic Industries Association, W ashington, DC 20006, Estados Unidos de América).
W INKLER, G. M. R., HALL, R. G. y PERCIVAL, D. B. [octubre de 1970] The US Naval Observatory clock time reference and the performance of sample atomic clocks. Metrología, Vol. 6 , 126.
YOSHIM URA, K. [1972] NBS Tech. Note No. 626, Boulder, CO, Estados Unidos de América.
YOSHIMURA, K. [1980] Calculation of unbiased clock-variances in uncalibrated atomic time scale algorithms. Metrología,Vol. 16, 133-139.

142 I. 580-2
INFORM E 580-2
CARACTERIZACIÓN DEL RUIDO DE FRECUENCIA Y DE FASE
(Programa de Estudios 3B/7)
(1974-1978-1986)
1. Introducción
Las técnicas para la caracterización y la medición de las inestabilidades de frecuencia y de fase en generadores de frecuencia y en señales radioeléctricas recibidas son de capital importancia para los usuarios de frecuencias patrón y señales horarias.
En 1964 se creó el Subcomité «Estabilidad de Frecuencia» en el seno del 14.° Comité de Normas del IEEE y más tarde, en 1966, .fue situado dentro del Comité técnico sobre patrones de frecuencia y tiempo de la Sociedad de Instrumentación y Medición (SIM), a fin de preparar una norm a del IEEE sobre la estabilidad de frecuencia. En 1969 este Subcomité publicó un documento en el que se proponen definiciones para las medidas de las inestabilidades de frecuencia y de fase. Estas medidas recomendadas de las inestabilidades de los generadores de frecuencias han sido adoptadas por la mayoría de los usuarios de frecuencias patrón y señales horarias del m undo entero. Algunos de los principales fabricantes indican actualmente la inestabilidad de los patrones utilizando los parámetros recomendados.
Los modelos de las inestabilidades pueden incluir procesos aleatorios estacionarios y no estacionarios, así como procesos sistemáticos. En cuanto a los procesos aparentemente aleatorios, se ha realizado un trabajo considerable [IEEE-NASA, 1964; IEEE, 1972] para caracterizarlos mediante modelos estadísticos. En cambio, la presencia de cambios sistemáticos de frecuencias, tales como derivas, no debiera reflejarse en modelos estadísticos, sino que debieran describirse de una forma analítica razonable, medidos con respecto a un patrón de referencia adecuado, por ejemplo, la regresión lineal para determinar un modelo para la deriva de frecuencia lineal. Sin embargo, no es siempre fácil o evidente la separación entre componentes sistemáticas y aleatorias. Por lo general, los efectos sistemáticos se hacen predominantes a largo plazo y, por consiguiente, es extremadamente importante especificarlos para definir las características completas de estabilidad de la señal. Este Informe presenta algunos métodos para caracterizar el proceso aleatorio y algunos'tipos importantes de procesos sistemáticos.
Desde entonces se han realizado otros trabajos importantes. Por ejemplo, Baugh [1971] ha ilustrado las propiedades de la varianza de H adam ard — método de evaluación en el tiempo de bandas laterales discretas de m odulación de frecuencia — especialmente adecuado para las frecuencias de Fourier inferiores a unos 10 Hz; Sauvage y Rutman [1973] han hecho un análisis matemático de esta técnica; Rutman [1972] ha sugerido otras posibles mediciones en el tiempo, si bien apoya en general las recomendaciones del Subcomité; De Prins y otros [1969] y De Prins y Cornelissen [1971] han propuesto otras mediciones de las inestabilidades de frecuencia en función de la frecuencia, haciendo hincapié en promedios de muestras de espectros discretos. Una monografía del N ational Bureau of Standards consagra el capítulo 8 a los aspectos estadísticos del análisis de la información de frecuencia y tiempo [Blair, 1974]. Dicho capítulo contiene algunos conceptos, métodos de medida y aplicaciones para la medición en frecuencia y en tiempo de las inestabilidades de frecuencia y de fase de los generadores de frecuencia. También describe métodos de conversión entre varias mediciones en el tiempo de inestabilidad de frecuencia, así como relaciones de conversión de las mediciones en frecuencia a mediciones en el tiempo e inversamente. Se ha determinado el efecto de un número finito de mediciones en la precisión de determinación de la varianza de dos muestras [Lesage y Audoin, 1973, 1974 y 1976; Yoshimura, 1978]. Se han aplicado [Barnes, 1976; Percival, 1976] modelos del tipo Box-Jenkins para la interpretación de las mediciones de estabilidad de frecuencia y otros autores los han analizado [Winkler, 1976].
Lindsey y Chie [1976] han generalizado la utilización del valor r.m.s. (raíz cuadrada de la media cuadrática) de la desviación de frecuencia normalizada y la «varianza de dos muestras» con miras a extender la categoría de medidas de estabilidad de los osciladores en el tiempo, y han ideado medidas que definen las características de la inestabilidad de fase aleatoria en el tiempo y de la estabilidad de frecuencia de la señal de un oscilador utilizando las funciones de estructura de Kolmogorov. Estas medidas se relacionan con la medida de estabilidad en frecuencia Sy( f ) mediante la transform ada de Mellin. En esta teoría se tienen en cuenta derivas polinómicas y se allanan algunas dificultades de convergencia teórica debidas a los espectros de ley exponencial. Asimismo, han demostrado la estrecha relación de estas mediciones con el valor r.m.s. de la desviación norm alizada de Cutler y Searle [Cutler y Searle, 1966] y con la varianza de dos muestras [Alian, 1966] y, por último, han demostrado que otros miembros del conjunto de medida de estabilidad elaboradas son importantes para determinar los objetivos de calidad y redactar las especificaciones de sistemas para aplicaciones tales como radar, telecomunicaciones, y para las actividades tecnológicas en materia de sistemas de seguimiento.
Se ha discutido otras formas de varianzas con un número limitado de muestras [Baugh, 1971; Lesage y Audoin, 1975; Boileau y Picinbono, 1976] y se ha publicado una reseña de métodos clásicos y nuevos [Rutman, 1978].

I. 580-2 143
Las inestabilidades de frecuencia pueden caracterizarse por procesos que pueden representarse estadísticamente en frecuencia» mediante el desarrollo de Fourier, o en tiempo [Blackman y Tukey, 1959]. La desviacióninstantánea normalizada de frecuencia y (t) respecto de la frecuencia nominal v0 está relacionada con la fluctuación instantánea de fase cp(í) en torno a la fase nominal 2 tivoí por:
= . ( I )2nVo di 2 7iv0
= 27iv0
donde x (t) es la variación de fase expresada en unidades de tiempo.
2. Dominio de la frecuencia (desarrollo de Fourier)
En un desarrollo de Fourier en el dominio de la frecuencia, la estabilidad de frecuencia puede definirse por varias densidades espectrales unilaterales (la frecuencia de Fourier varía de 0 a oo), tales como:
Sy( f ) de y (t) , S9( f ) de cp(/), Sv ( f ) de (¡>(í), Sx( f ) de x ( í ), etc.
Estas densidades espectrales se relacionan entre sí mediante las ecuaciones:
« ,< /) = 4 ■ W ) (2)Vo
W ) = 4712/ 2 W ) (3)
^ ( / ) = 7 7 - t í W ) (4)(27tv0)
Como modelos razonables de fluctuaciones aleatorias en osciladores de precisión suelen emplearse densidades espectrales cuya suma se efectúa según una ley exponencial. En la práctica se ha observado que estas fluctuaciones aleatorias están constituidas por la suma de cinco procesos de ruido independientes y, por tanto:
donde los ha son constantes, los a son enteros, y //, es la frecuencia de corte en alta frecuencia de un filtro de paso bajo. Las ecuaciones (2), (3) y (4) son correctas y coherentes en caso de ruidos estacionarios, incluido el ruido de fase. La divergencia en alta frecuencia se suprime por el filtrado introducido en la ecuación (5). Los cinco procesos de ruido están caracterizados en el cuadro I y se representan en la fig. 1. En la práctica, solamente dos o tres procesos de ruido son suficientes para describir las fluctuaciones aleatorias de frecuencia de un oscilador determinado, los otros pueden despreciarse.
{+ 2 I
a = - 2
h f a para 0 < f < f h
para f > f h
(5)
3. Dominio del tiempo
La inestabilidad de frecuencia aleatoria en el dominio del tiempo puede medirse a través de la varianza de muestras. La medida recomendada es la desviación típica de dos muestras, que es la raíz cuadrada de la varianza de dos muestras cuando el tiempo entre mediciones sucesivas es cero oy2(x) [von Neumann y otros, 1941; Alian, 1966; Barnes y otros, 1971]. La varianza de dos muestras se define por:
g 2 (T) = / & +J - * > 2\ (6)donde: \ ¿ /
1 f ‘k + Z x - xyk ~ \ / y { t ) d t = k + 1------ y tk + j = tk -1- t (muestras adyacentes)
k< > denota un promedio tomado en un intervalo infinito x* y xk+l son los valores de las mediciones residuales de tiempo realizadas en los tiempos tk y tk + \ = tk + t , con k = 0 , 1 , 2 , . . . , y siendo 1 /x la frecuencia de muestreo fijada que asegura un tiempo muerto nulo entre las mediciones de frecuencia. Por mediciones «residuales» se entiende que se han eliminado los efectos sistemáticos conocidos.

144 I. 580-2
Si la frecuencia de muestreo inicial se especifica como l /x 0, entonces se ha demostrado [Howe y otros, 1981] que en general se puede obtener una estimación más eficaz de oy(x) utilizando lo que se denomina «estimaciones con solape». Esta estimación se obtiene calculando la ecuación (7).
I N - 2 m
= m 2 (*« + 2 m - 2xi+m + X ¡ ) 2 (7)y 2(N — 2m) x¿ ¡=í
donde N es el número de mediciones de los comienzos de las señales de tiempo espaciadas t 0 (N = M + 1, donde M es el número de mediciones de frecuencia correspondientes al tiempo de muestreo xo), y x = mx0. Los correspondientes intervalos de confianza [Howe y otros, 1981] que se examinan en el § 6 son inferiores a los obtenidos utilizando la ecuación ( 1 2 ) y la estimación no presenta aún ninguna desviación sistemática.
Si existe un tiempo muerto entre las mediciones de comienzo de la frecuencia y éste se ignora al calcular la ecuación (6 ) se ha demostrado que los valores de estabilidad resultante (que ya no serán las varianzas de Alian), presentarán una desviación sistemática (excepto para el ruido blanco de frecuencia) puesto que las mediciones de la frecuencia se reagrupan para calcular la estabilidad para mx0 (m > 1). Esta desviación se ha estudiado y se han publicado algunas tablas para su corrección [Barnes, 1969; Lesage, 1983].
U na curva de ct>,(x ) en función de x para una desviación típica presentaría la forma indicada en la fig. 1. La prim era componente, en que a y(x) ~ x ~ 1 / 2 (ruido de frecuencia «blanco») y /o a^(x) ~ x - 1 (ruido de fase «blanco» o de «parpadeo») reflejan las características de ruido fundamentales del patrón de frecuencia. En el caso en que Oy(x) ~ x-1, no resulta práctico decidir si el oscilador es perturbado por el ruido de fase blanco o por el ruido de parpadeo. Se sugieren algunas técnicas alternativas a continuación. Consiste en una limitación de la utilidad de Oy(x) para el estudio de la naturaleza de las fuentes de ruido existentes en el oscilador. Un análisis en el dominio de la frecuencia es más adecuado cuando se trata de frecuencias de Fourier mayores que 1 Hz. Esta ley x - 1 y /o x ~ 1 / 2 continúa, a medida que se aumenta el tiempo de promediación, hasta que se alcanza el denom inado «nivel de parpadeo» (flicker «floor»), donde o>,(x) es independiente del tiempo de promediación x. Este comportamiento se observa en casi todos los patrones de frecuencia; dicho comportamiento depende del patrón de frecuencia de que se trate, y su significado físico no es plenamente comprendido. Ejemplos de causas probables para el «nivel» de parpadeo son las fluctuaciones de la fuente de alimentación, las fluctuaciones del campo magnético, los cambios en los componentes del generador de la frecuencia patrón, y variaciones en la potencia de microondas. Por último, la curva muestra una degradación de la estabilidad con el aumento del tiempo de promediación. Esto ocurre típicamente para tiempos de horas o días, según la clase particular del patrón de frecuencia.
Se ha desarrollado una «varianza de Alian modificada», MOD a 2 (x) [Alian y Barnes, 1981] que tiene la propiedad de establecer una dependencia diferente de x para el ruido blanco de fase y para el ruido de parpadeo de fase. La dependencia para M OD a y(x) es x - 3 / 2 y x - 1 respectivamente. Las relaciones entre a^(x) y MOD a y(x) se explican igualmente en [Alian y Barnes, 1981; IEEE, 1983; Lesage y Ayi, 1984]. El valor de MOD ay(x) se calcula utilizando la siguiente ecuación:
, N — 3 m + l - m + j - 1 « 2
M OD o 2 (x) = — — ——-------------- -- 2 I (xi+2 m - 2xi+m + X i ) \ (8 )y 2x2 m 2 (N — 3m + 1) , = 1 l 1¡=j
donde N es el número original de mediciones de tiempo separadas por xo, y x = m x0 el tiempo de muestreo elegido. Las propiedades y la confianza de la estimación se analizan en [Lesage y Ayi, 1984]. Jones y Tryon [1983] y Barnes y otros [1982] han desarrollado métodos de máxima verosimilitud para la estimación de ay(x) para los modelos concretos del ruido blanco de frecuencia y el ruido aleatorio de frecuencia, que según se ha demostrado constituye un buen modelo para la observación de tiempos para los patrones de frecuencia de haz de cesio durante algo más de unos pocos segundos.
4. Conversión entre los dominios de la frecuencia y del tiempo
En general, si se conoce la densidad espectral de la fluctuación de la frecuencia normalizada Sy( f ) , puede calcularse la varianza de dos muestras [Barnes y otros, 1971; Rutman, 1972]:
V « = 2 \ Ih Sy ( / ) S p / d/ (9)

I. 580-2 145
F recuencia de F o u rie r
°v
T iem po de m uestreo
FIG U R A 1 - Características de pen dien te d e los cinco procesos d e ruido independien tes con densidades espectrales qu e siguen la ley
exponencial (exa la s logarítm icas)
Concretamente, para el modelo de ley exponencial dado para la ecuación (5), la medida en el dom inio del tiempo sigue también esta ley exponencial derivada por Cutler de las ecuaciones (5) y (9).
V , , (27t)2 h 1 I h 1,038 + 3 loge I hV M - A_, — t + A-, 2 loge 2 + h - + A, ----------- ^ ----------- + h2 ( 10)
Nota. — El factor 1,038 en el cuarto término de la ecuación (10) es diferente del valor que se da en la m ayoría de las publicaciones anteriores.

146 I. 580-2
Los valores de ha son característicos de la inestabilidad de frecuencia del oscilador. Se puede señalar que, para valores enteros (lo que, según parece, es el caso más frecuente), p = — a — 1 , para —3 ^ a ^ l , y n a — 2
para a ^ 1 , donde oj, (x) ~ x
Esas conversiones han sido verificadas experimentalmente [Brandenberger y otros, 1971], así como por cálculo [Chi, 1977]. En el cuadro II figuran los coeficientes de la conversión entre mediciones de estabilidad de frecuencia en el dominio del tiempo a mediciones en el dominio de la frecuencia e inversamente.
En la fig. 1 (escalas logarítmicas para ambas coordenadas) se indican las características de pendiente de los cinco procesos de ruido independientes.
5. Técnicas de medición
La densidad espectral de las fluctuaciones de fase, puede medirse aproximadamente mediante undispositivo que utiliza un bucle de enganche de fase y un analizador de ondas de baja frecuencia [Meyer, 1970; Walls y otros, 1976]. Se utiliza un mezclador simétrico doble como detector de fase en un bucle de enganche de fase de acoplamiento débil. El sistema de medición utiliza los componentes electrónicos disponibles más recientes, así como un oscilador de muy alta calidad. Para muy bajas frecuencias de Fourier (muy por debajo de 1 Hz), se han aplicado técnicas digitales [Atkinson y otros, 1963; De Prins y otros, 1969; Babitch y Oliverio, 1974]. Se han elaborado nuevos métodos de medición de las inestabilidades en el tiempo (fase) y de frecuencia con precisiones de picosegundos [Alian y Daams, 1975], así como de medición de la densidad espectral del ruido de fase con una sensibilidad superior en 30 dB a la que permitían las técnicas anteriores [Walls y otros, 1976].
Se han utilizado varios sistemas de medición que emplean un contador de frecuencia para determinar la inestabilidad en el dominio del tiempo con o sin tiempo muerto entre las mediciones [Alian, 1974; Alian y Daams, 1975]. Se ha desarrollado también un sistema sin contador alguno [Rutman, 1974; Rutman y Sauvage, 1974]. Pueden efectuarse mediciones de frecuencias sin tiempo muerto muestreando intervalos de tiempo en vez de medir la frecuencia directamente. También se han examinado los problemas que se plantean cuando hay tiempo muerto entre mediciones de frecuencias adyacentes y se han recomendado soluciones [Blair, 1974; Alian y Daams, 1975; Ricci y Peregrino, 1976]. Groslambert y otros [1974] han medido espectros discretos.
6. Límites de confianza de mediciones en el dominio del tiempo
Un método de adquisición de datos consiste en medir variaciones de tiempo Xj a intervalos x0. Entonces cr^x) puede calcularse para cualquier x = nx 0 (n es cualquier número entero positivo), puesto que se pueden utilizar dichos valores Xj para los cuales j es igual a n k Puede efectuarse un cálculo para c y(x) utilizando un conjunto de datos con mediciones M de y j como sigue:
,/2
y = i
o, en una forma equivalente:
( 11)
(x) =1 M ~ l 2 I V 2
2xH m - i) 2 (jt; + 2 - 2V + i + * ; > j 2 (12)j ~ 1
Así, se puede establecer de una manera muy sencilla, a partir de un solo conjunto de medidas, la variaciónde ay(x) en función de x. Para un conjunto dado de medidas, es evidente que M disminuye a medida que naumenta.
Para un ruido de tipo gaussiano, el intervalo de confianza (o límite de error) de un valor determinado de o,,(x) obtenido a partir de un número finito de muestras viene dado por [Lesage y Audoin, 1973]:
Intervalo de confianza Ia =: cjy(x) • Ka • M ~U2 para M > 10 (13)
donde:
M : número total de mediciones utilizadas en el cálculo,
a : definida en el punto anterior,
k 2 = Kj = 0,99,
k0 = 0,87,
k_, - 0,77,
k _ 2 = 0,75.

I. 580-2 147
Como ejemplo, para un modelo gaussiano con M = 100, a = — 1 (ruido de frecuencia de centelleo) yGy(x = 1 segundo) = 1 0 , puede expresarse:
J0 * oy (t ) • Ka • M ~ xn = oy (t ) • (0,77) • (100) - 1 / 2 = CTj,(T) • (0,077), (14)
que da:
oy {x = 1 segundo) = ( 1 ± 0,08) x 1 0 ' (15)
Se ha definido también [Yoshimura, 1978] otro procedimiento de estimación que incluye el establecimiento de un límite entre pares de mediciones y que muestra la influencia de la autocorrelación de las fluctuaciones de frecuencias.
7. Conclusiones
Los métodos estadísticos para describir la inestabilidad de frecuencia y de fase y el correspondiente modelo de densidad espectral de ley exponencial son suficientes para describir la inestabilidad de los osciladores a corto plazo. La ecuación (9) muestra que la densidad espectral puede transform arse unívocamente en una medición en el dominio del tiempo. La formulación inversa no es cierta en todos los casos, aunque sí lo es para los espectros de ley exponencial que se utilizan a menudo para establecer modelos de los osciladores de precisión.
Las variaciones no aleatorias no están cubiertas por el modelo descrito. Éstas pueden ser periódicas o monótonas. Las variaciones periódicas deberán analizarse mediante métodos conocidos de análisis afmónico. Las variaciones monótonas se describen en términos de derivas lineales o de un orden superior.
CU ADR O I — Características funcionales de cinco procesos de ruido independientes para inestabilidad de frecuencia de los osciladores
Descripción del proceso de ruido
Características de pendiente de la curva log log
En el dom inio de la frecuencia En el dom inio del tiem po
S y (f) S v ( f) o Sx( f) CT2 (T) a (x)
a p S a - 2 V ¡x/2
Ruido de frecuencia de marcha aleatoria - 2 - 4 1 Vi
Ruido de centelleo de frecuencia - 1 - 3 0 0
Ruido blanco de frecuencia 0 - 2 - 1 - * / 2
Ruido de centelleo de fase 1 - 1 - 2 - 1
Ruido blanco de fase 2 0 - 2 - 1
Sy{f) = K f *■Scp ( /) = V02 haf* ~ 2 = Vo2 K f ( p s a —2)
S A f ) = ^ K f * ' 1 = A K f*4n 4nz
a 2 (T) ~ I T r
a ( t ) ~ | x | ^ 2

148 I. 580-2
CUADRO II — Conversión de medidas de estabilidad de frecuencia entre las densidades espectrales en el dominio de la frecuencia y la varianza en el dominio del tiempo y viceversa (para 2nfhT > 1)
Descripción del proceso de ruido CO = 5, ( /) = S V(J) =
Ruido de frecuencia de marcha aleatoria
Ruido de centelleo de frecuencia
Ruido blanco de frecuencia
Ruido de centelleo de fase
Ruido blanco de fase
A \ f Sy ( / ) ] t >
5 [ fS y (/)] T0
c [ f° S y (f)\T -'
D \ f S y ( / ) ] t -2
5 [ / - 2M / ) ] t- 2
^ [ t- X w ] / - 2
lB V olM r x
[ t 1 a 2 ( t ) ] / °
^ [ ^ ( T ) ] / 1
^ [t2 a 2 ( T ) ] / 2
[x-1 a j e o ] / - 4
T
^ [ x ! a j ( t ) ] / - 2
[ t 2 c r j ( t ) ] / 1
^ [t2 a 2 ( t ) ] / °
4 ti2 1,038 + 3 loge (2%fhx)6 4n2
5 = 2 l o g e 2 F 3 / ,
£ “ i ?
C = 1/2
REFERENCIAS BIBLIOGRÁFICAS
ALLAN, D. W. [febrero de 1966] Statistics of atomic frequency standards. Proc. IEEE, Vol. 54, 221-230.
ALLAN, D. W. [diciembre de 1974] The measurement of frequency and frequency stability of precisión oscillators. Proc. 6 th Annual Precise Time and Time Interval (PTTI) Planning Meeting. N A SA /D O D (US Naval Research Laboratory, Washington, DC) 109-142.
ALLAN, D. W. y BARNES, J. A. [mayo de 1981] A modified “Alian Variance” with increased oscillator characterization ability. Proc. 35th Annual Symposium on Frequency Control, Filadelfia, PA, Estados Unidos de América (US Army Electronics Command, Ft. M onmouth, NJ 07703), 470-476 (Electronic Industries Association, Washington, JOC 20006, Estados Unidos de América).
ALLAN, D. W. y DAAMS, H. [mayo de 1975] Picosecond time difference measurement system. Proc. of the 29th Annual Symposium on Frequency Control, 404-411.
A TK IN SON , W. K., FEY, L. y NEW M AN, J. [febrero de 1963] Spectrum analysis of extremely low-frequency variations of quartz oscillators. Proc. IEEE, Vol. 51 ,2 , 379.
BABITCH, D. y OLIVERIO, J. [1974] Phase noise of various oscillators at very low Fourier frequencies. Proc. of the 28th Annual Symposium on Frequency Control, 150-159.
BARNES, J. A. [enero de 1969] Tables of bias functions, B] and B2, for variances based on finite samples o f processes with power law spectral densities. Tech. Note No. 375. National Bureau of Standards, Washington, DC, Estados Unidos de América.
BARNES, J. A. [agosto de 1976] Models for the interpretation of frequency stability measurements. NBS Technical Note 683.
BARNES, J. A., CHI, A. R., CUTLER, L. S., HE ALE Y, D. J., LEESON, D. B., M cGUNIGAL, T. E., MULLEN, J. A., SMITH, W. L., SYDNOR, R., VESSOT, R .F . y W INKLER, G. M. R. [mayo de 1971] Characterization of frequency stability. IE E E Trans. Instr. Meas., Vol. IM-20, 105-120.
BARNES, J. A., JONES, R. H., TRYON, P. V. y ALLAN, D. W. [diciembre de 1982] Noise models for atomic clocks. Proc. 14th Annual Precise Time and Time Interval (PTTI) Appications and Planning Meeting, W ashington, DC, Estados Unidos de América, 295-307.
BAUGH, R. A. [1971] Frequency modulation analysis with the H adam ard variance. Proc. 25th Annual Symposium on Frequency Control, 222-225.
BLACKM AN, R. B. y TUKEY, J. M. [1959] The measurement of power spectra (Dover Publication, Inc., New York, NY).

I. 580-2 149
BLAIR, B. E. (Ed.) [mayo de 1974] Time and frequency: theory and fundamentáis. NBS M onograph No. 140. (US G overnm ent Printing Office, Washington, DC 20402).
BOILEAU, E. y PICINBONO, B. [marzo de 1976] Statistical study of phase fluctuations and oscillator stability. IE E E Trans. Instr. Meas., Vol. 25, 1, 66-75.
BRANDENBERGER, H., HADORN, F., HALFORD, D. y SHOAF, J. H. [1971] High quality quartz crystal oscillators: frequency-domain and time-domain stability. Proc. 25th Annual Symposium on Frequency Control, 226-230.
CUTLER, L. S. y SEARLE, C. L. [febrero de 1966] Some aspects of the theory and measurement o f frequency fluctuations infrequency standards. Proc. IEEE, Vol. 54, 136-154.
C HI, A. R. [diciembre de 1977] The mechanics of translation of frequency stability measures between frequency and time domain measurements. Proc. 9th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, G reenbelt, MD, Estados Unidos de América.
DE PRINS, J. y CORNELISSEN, G. [octubre de 1971] Analyse spectrale discréte. Eurocon (Lausana, Suiza).
DE PRINS, J., DESCORNET, G., G ORSKI, M. y TAM INE, J. [diciembre de 1969] Frequency-domain interpretation ofoscillator phase stability. IE E E Trans. Instr. Meas., Vol. IM-18, 251-261.
GROSLAMBERT, J., OLIVIER, M. y UEBERSFELD, J. [diciembre de 1974] Spectral and short term stability measurements.IE E E Trans. Instr. Meas., Vol. IM-23, 4, 518-521.
HOWE, D. A., ALLAN, D. W. y BARNES, J. A. [mayo de 1981] Properties of signal sources and measurement methods. Proc.35th Annual Symposium on Frequency Control, Filadelfia, PA, Estados Unidos de América (US Army Electronics Command, Ft. Monmouth, NJ 07703), 669-717 (Electronic Industries Association, W ashington, DC 20006, Estados Unidos de América).
IEEE [mayo de 1972] Special issue on time and frequency. Proc. IEEE, Vol. 60, 5.
IEEE [1983] Frequency Stability: Fundamentáis and Measurement, 77-80. Ed. V. F. Kroupa. IEEE Press Books.
IEEE-NASA [noviembre de 1964] Proceedings of Symposium on short-term frequency stability. Publicación SP 80 de la NASA.
JONES, R. H. y TRYON, P. V. [enero-febrero de 1983] Estimating time from atomic clocks. N B S J. Res., Vol. 8 8 , 1, 17-24.
LESAGE, P. [1983] Characterization of frequency stability: Bias due to the juxtaposition of time interval measurements. IE E E Trans. Instr. Meas., Vol. IM-32, 1, 204-207.
LESAGE, P. y AUDOIN, F. [junio de 1973] Characterization of frequency stability: uncertainty due to the finite num ber of measurements. IE E E Trans. Instr. Meas., Vol. IM-22, 1, 103.
LESAGE, P. y AUDOIN, C. [marzo de 1974] Corrección a: Characterization of frequency stability: uncertainty due to finite number of measurements. IE E E Trans. Instr. Meas., Vol. IM-23, 1, 103.
LESAGE, P. y AUDOIN, F. [mayo de 1975] A time domain method for measurement of the spectral density of frequency fluctuations at low Fourier frequencies. Proc. of the 29th Annual Symposium on Frequency Control, 394-403.
LESAGE, P. y AUDOIN, C. [septiembre de 1976] Corrección a: characterization of frequency stability: uncertainty due to the finite number of measurements. IE E E Trans. Instr. Meas., Vol. IM-25, 3.
LESAGE, P. y AYI, T. [diciembre de 1984] Characterization of frequency stability: analysis o f modified Alian variance andproperties of its estimate. IE E E Trans. Intr. Meas, Vol. IM-33, 4, 332-336.
LINDSEY, W. C. y CHIE, C. M. [diciembre de 1976] Theory of oscillator instability based upon structure functions. Proc. IEEE, Vol. 64, 1662-1666.
M EYER, D. G. [noviembre de 1970] A test set for the accurate measurements of phase noise on high-quality signal sources. IE E E Trans. Instr. Meas., Vol. IM-19, 215-227.
PERCIVAL, D. B. [junio de 1976] A heuristic model of long-term atomic clock behavior. Proc. of the 30th Annual Symposium on Frequency Control.
RICCI, D. W. y PEREGRINO, L. [junio de 1976] Phase noise measurement using a high resolution counter with on-line data Processing. Proc. of the 30th Annual Symposium on Frequency Control.
RUTM AN, J. [febrero de 1972] Comment on characterization of frequency stability. IE E E Trans. Instr. Meas., Vol. IM-21, 2, 85.
RUTM AN, J. [marzo de 1974] Characterization of frequency stability: a transfer function approach and its application to measurements via filtering of phase noise. IE E E Trans. Instr. Meas., Vol. IM-23, 1, 40-48.
RUTM AN, J. [septiembre de 1978] Characterization of phase and frequency instabilities in precisión frequency sources: fifteen years of progress. Proc. IEEE, Vol 6 6 , 9, 1048-1075.
RUTM AN, J. y SAUVAGE, G. [diciembre de 1974] Measurement of frequency stability in the time and frequency domains via filtering of phase noise. IE E E Trans. Instr. Meas., Vol. IM-23, 4, 515, 518.
SAUVAGE, G. y RUTMAN, J. [julio-agosto de 1973] Analyse spectrale du bruit de fréquence des oscillateurs par la variance de H adamard. Ann. des Telecom., Vol. 28, 7-8, 304-314.
VON NEU M A NN , J., KENT, R. H., BELLINSON, H. R. y HART, B. I. [1941] The mean square successive difference. Ann. Math. Stat., 12, 153-162.
WALLS, F. L., STEIN, S. R., GRAY, J. E. y GLAZE, D. J. [junio de 1976] Design considerations in state-of-the-art signal Processing and phase noise measurement systems. Proc. of the 30th Annual Symposium on Frequency Control.
W IN KLER, G. M. R. [diciembre de 1976] A brief review of frequency stability measures. Proc. 8 th Annual Precise Time and Time Interval (PTTI) Application and Planning Meeting (US Naval Research Laboratory, W ashington, DC), 489-528.
YOSHIM URA, K. [marzo de 1978] Characterization of frequency stability: Uncertainty due to the autocorrelation of the frequency fluctuations. IEEE Trans. Instr. Meas., Vol. IM-27, 1, 1-7.
150 I. 580-2, 738-2
BIBLIOGRAFÍA
ALLAN, D. W. y otros [1973] Performance, modeling, and simulation of some cesium beam clocks. Proc. 27th Annual Symposium on Frequency Control, 334-346.
FISCH ER, M. C. [diciembre de 1976] Frequency stability measurement procedures. Proc. 8 th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting (US Naval Research Laboratory, Washington, DC), 575-618.
HALFORD, D. [marzo de 1968] A general mechanical model for | / | a spectral density noise with special reference to flicker noise 1 / | / | . Proc. IE E E (Corres.), Vol. 56, 3, 251-258.
M ANDELBROT, B. [abril de 1967] Some noises with 1 / / spectrum, a bridge between direct current and white noise. IEEETrans. Inf. Theory, Vol. IT -13, 2, 289-298.
RUTM AN, J. y UEBERSFELD, J. [febrero de 1972] A model for flicker frequency noise of oscillators. Proc. IEEE, vol. 60, 2, 233-235.
VAN IER, J. y TETU, M. [1978] Time domain measurement of frequency stability: a tutorial approach. Proc. lOth AnnualPrecise Time and Time Interval (PTTI) Applications and Planning Meeting, W ashington, DC, Estados Unidos deAmérica, 247-291.
VESSOT, R. [1976] Frequency and time standards. Cap. 5.4. Methods of Experimental Physics, Academic Press, 198-227.
VESSOT, R., MUELLER, L. y VANIER, J. [febrero de 1966] The specification of oscillator characteristics from measurements made in the frequency domain. Proc. IEEE, Vol. 54, 2, 199-207.
W IN K LER , G. M. R., HALL, R. G. y PERCIVAL, D. B. [octubre de 1970] The US Naval Observatory clock time reference and the performance of a sample of atomic clocks. Metrología, Vol. 6 , 4, 126-134.
IN FO RM E 738-2
GENERADORES DE FRECUENCIAS PATRÓN EN LAS GAMAS SUBMILIMÉTRICA, INFRARROJA Y VISIBLE DEL ESPECTRO
ELECTROMAGNÉTICO
(Cuestión 53/1)(1978-1982-1986)
1. Introducción
En enero de 1976, un nuevo texto sobre la utilización del espectro por encima de 40 GHz y, en particular, en las regiones submilimétrica, infrarroja y visible fue aprobado por correspondencia, y pasó a ser la Cuestión 53/1 del CCIR asignada a la Comisión de Estudio 1. Sin embargo, esta nueva Cuestión fue señalada a la atención de las demás Comisiones.
La Comisión de Estudio 7 está directamente interesada en tanto en cuanto que los sistemas de telecomunicación y radiodeterminación que se desarrollen en el futuro en dichas zonas del espectro electromagnético habrán de necesitar generadores ultraestables en esas frecuencias ópticas. Además, como ya sucede con las frecuencias más bajas, las normas técnicas internacionales que se definan para el mantenimiento de esos sistemas tendrán repercusiones directas sobre la calidad de las fuentes de frecuencias patrón que haya que utilizar.
Habida cuenta de estas observaciones generales sobre los problemas que se han de estudiar en el CCIR y de los progresos realizados en la metrología de las frecuencias ópticas la Comisión de Estudio 7, durante su Reunión Intermedia de febrero de 1976, estimó oportuno preparar un nuevo Informe sobre generadores de frecuencias patrón en la gama óptica de espectro. En este Informe, el término «óptico» designa toda frecuencia superior a unos 300 GHz (A, <, 1 milímetro). Se utiliza mucho el término Terahertzio (THz): 1 THz = 1012 Hz.
Se ha despertado un interés especial en las mediciones de frecuencia en el espectro visible como resultado
de la nueva definición del metro, que se define como la distancia recorrida por la luz en el vacío en ---------------- s299 792 458
(Actas de las sesiones de la 17.a Conférence Générale des poids et mesures, París [1983]). Así pues, la medición absoluta de la frecuencia permite calcular la longitud de onda mediante la ecuación A = c / f sin niguna incertidumbre adicional (velocidad de la luz c = 299 792 458 m /s).
Este Informe es un complemento del Informe 364, que trata del comportamiento de los generadores de frecuencias patrón radioeléctricas y de microondas. Se recordará que en el Informe 580 se abordan los parámetros utilizados para describir la inestabilidad de frecuencia y de fase de los generadores de frecuencias patrón.

I. 738-2 151
2. La metrología de las frecuencias ópticas
Los progresos considerables logrados en este campo desde hace unos doce años se deben al desarrollo de técnicas que permiten:a) estabilizar muy eficazmente la frecuencia transm itida por algunos láseres que funcionan en régimen
continuo (CW);b) medir con precisión el valor absoluto de las frecuencias ópticas; las medidas están referidas al segundo,
unidad de tiempo del Sistema Internacional (SI) de unidades.Este Informe presenta los principales resultados obtenidos en estas dos esferas; habida cuenta del gran
número de publicaciones, sólo se citará, por lo general, una referencia reciente para cada laboratorio y problem a examinado.
Aunque la medición absoluta de las frecuencias ópticas se ha efectuado únicamente en algunos laboratorios, muchos laboratorios caracterizan la inestabilidad de frecuencia de los láseres midiendo, sobre un batido obtenido entre dos láseres, a y(t), raíz cuadrada de la varianza de dos muestras sin tiempo muerto (véase el Informe 580). En la fig. 1 se presentan las curvas típicas de o^(t) para los principales láseres estabilizados.
3. Estabilización en frecuencia de los láseres
Ha sido preciso elaborar métodos de estabilización en frecuencia muy eficaces antes de poder considerar el láser como generador de frecuencias patrón [Giacomo, 1970]. Entre ellos, se ha utilizado mucho, sobre todo con los láseres CO 2 (hacia 30 THz; A, = 10 ¡am) y He-Ne ( 8 8 THz; X = 3,39 pm y 474 THz; X = 0,633 pm), el enganche de la frecuencia del láser con una referencia constituida por una cresta de absorción saturada, obtenida gracias a una coincidencia entre la frecuencia láser y una frecuencia de absorción molecular [Lee y Skolnick, 1967].
De manera general, las estabilidades obtenidas son comparables a las de los patrones atómicos clásicos (véase la fig. 1 de este Informe y la fig. 1 del Informe 364), pero ningún láser estabilizado posee hoy una exactitud comparable a la del patrón prim ario de haz de cesio ( 1 0 -13).
FIGURA 1 - Inestabilidad de frecuencia típica de los principales láseres de gas estabilizados
3.1 Láseres C 02
Se ha estudiado la estabilización del láser C 0 2 por absorción saturada en una cubeta exterior utilizando como referencia moléculas de SF6 [Clairon y Henry, 1974; Ouhayoun y Bordé, 1976; Gusev y otros, 1975] y de O s0 4 [Kompanets y otros, 1976]. Con el SF6 se obtuvo una estabilidad de 3 x 10~ 13 para x = 1 s y una reproductibilidad de 3 x 10-11. Esta técnica sólo permite la estabilización sobre un número muy limitado de rayas del láser en coincidencia con una raya de absorción molecular.
Se han realizado estudios teóricos y experimentales detallados de las moléculas pesadas SFé y O s0 4, de interés metrológico, con ayuda de un espectrómetro de alta resolución [Bordé y otros, 1980].
Se ha elaborado [Freed y Javan, 1970] y después mejorado [Freed, 1975 y 1977] una técnica que utiliza la fluorescencia saturada en la propia molécula de C 0 2. Esta técnica permite obtener una estabilidad aproxim ada de 7 x 10“ 12 para x = 1 s, y una reproductibilidad de 2 x 10"10. Pese a sus resultados más limitados, esta técnica se ha utilizado en muchos laboratorios, pues permite estabilizar la frecuencia de cualquier raya del láser C 0 2 (más de cien rayas entre unos 28 y 32 THz). El láser N 2 0 , en la misma región del espectro, puede estabilizarse con una técnica análoga [Whitford y otros, 1976].
152 I. 738-2
Además de las rayas regulares del láser 1 2C 1 60 2, pueden obtenerse muchas otras rayas, ya sea con otros isótopos [Freed y otros, 1976], o utilizando niveles de energía superiores [Siemsen y W hitford, 1977].
Debido a sus múltiples cualidades (potencia, estabilidad, multitud de rayas), el láser C 0 2 es un instrumento fundamental en la casi totalidad de las experiencias de síntesis de frecuencias infrarrojas.
3.2 Láseres He-Ne
La estabilización de los láseres He-Ne se ha estudiado en numerosos laboratorios utilizando el metano (CH 4) o el iodo (I2) como moléculas de referencia para estabilizar las rayas de 8 8 THz y de 474 THz (raya roja), respectivamente.
El láser He-Ne (CH4) posee una estabilidad de 3 x 10~ 13 para x = 1 segundo y una reproducibilidad de 10 - 1 1 aproximadamente [Barger y Hall, 1969; Hellwig y otros, 1972; Shimoda, 1973; Brillet y otros, 1974; Baird y Hanes, 1974; Bagaev y Chebotayev, 1975; Kramer y otros, 1975; Ohi y Akimoto, 1976].
El láser He-Ne (CH4) estabilizado sobre la componente E de la transición v3 P(7) del metano, tiene una reproductividad de frecuencia aproximadamente igual a 5 x 10“ 13 [Malyshev y otros, 1980].
Con el láser He-Ne (I2) se obtiene una estabilidad de 10” 11 para x = 1 s, y una reproducibilidad aproxim ada de 2 x 10“ 11 [Hanes y otros, 1973; Helmcke y Bayer-Helms, 1974; Cérez y otros, 1974; W allard, 1974; Bertinetto y otros, 1976; Shimoda y Tako, 1976; Tanaka y otros, 1977]. Para 0,1 s < x < 100 s, la estabilidad de este láser ha sido m ejorada recientemente en un factor 10 [Cérez y otros, 1977]. También se han empleado señales de absorción saturada en una célula de absorción externa 1 2 7 I2 para estabilización de láseres mediante un modulador óptico externo [Tanaka y Morinaga, 1979]; se ha conseguido una reproductibilidad de 2 x 10“ 1 2 utilizando una célula de absorción externa de iodo [Cérez y otros, 1980],
En el marco de la metrología de las longitudes, se han elaborado y estudiado también láseres análogos en el Bureau international des poids et mesures (BIPM).
La raya de 260 THz ha sido estabilizada doblando la radiación en la cavidad y detectando la absorción saturada en yodo de la luz amarilla de 520 THz (Hanes, 1979].
Se ha estudiado la limitación de la reproducibilidad de los láseres He-Ne estabilizados por absorción saturada, que resulta de las pérdidas por difracción dependientes de la frecuencia y se han propuesto soluciones para minimizar este efecto [Le Floch y otros, 1982; Cérez y Felder, 1983].
3.3 Oíros láseres
El láser con argón ionizado (582 THz; X = 0,514 pm) se ha estabilizado por absorción saturada en el iodo en cubeta externa (o,,(l s) « 10“ 13) [Camy y otros, 1976; Spieweck y otros, 1980], así como utilizando un haz molecular de iodo: 0 ^ , ( 1 s) « 10-11, reproducibilidad 1,5 x 10_ i 2 [Hackel y otros, 1976].
El láser He-Xe (X = 3,51 pm) ha sido estabilizado por absorción saturada en formaldehído (H 2 CO) con a,, (100 s) = 1 x IO- 1 4 [Ohtsu y otros, 1981] y la medición de la longitud de onda en el vacío de este láser arrojó el valor de 3 507 979,48 ± 0,39 pm [Tako y otros, 1980].
La estabilización de los láseres con tintes se estudia también en varios laboratorios [Barger y otros, 1976; M an y otros, 1977]. La posibilidad de sintonizar la frecuencia de estos láseres permite escoger una molécula de referencia por sus propiedades metrológicas y no por la coincidencia accidental entre una frecuencia de absorción y una frecuencia láser. En particular podrían ser utilizados para la medida de una frecuencia visible.
Los láseres moleculares de bombeo óptico por láser de C 0 2 permiten obtener centenares de rayas en el infrarrojo lejano y se prestan a aplicaciones importantes en metrología de frecuencias [Petersen y otros, 1975; Weiss y Kramer, 1976; Bava y otros, 1977a], sobre todo cuando su frecuencia se haya estabilizado eficazmente. Con láseres libres se han obtenido las inestabilidades siguientes: a y(0,05 s) « 2 x 10- 1 2 para la raya de 70 pm y o,, (0,05 s) « 4 x 10~ ] 2 para la raya de 118 pm de láser CH 3OH [Plainchamp, 1979] y a y(l s) « 1,8 x 10- 9 para la raya de 394 pm del láser HCOOH [Godone y otros, 1978]. La utilización del efecto Stark da a estos láseres^ mayores posibilidades de sintonización y de modulación de frecuencia [Stein y Van de Stadt, 1977; Benedetti y otros, 1977] y permite también enganchar en fase dichos láseres [Dahmani y Clairon, 1983a]. Se han estudiado las limitaciones de estabilidad en frecuencia debidas a la inestabilidad del láser de bombeo [Dahmani y Clairon, 1983b].
La estabilización de frecuencias se ha conseguido también con un diodo láser de PbSnTe sobre una raya del metano en la banda de 7,7 pm, habiéndose obtenido una estabilidad de 4,3 x 10“ 11 para una duración de 15 s [Ohi, 1980].
Algunos láseres de frecuencia suficientemente baja, tales como el láser HCN a 890 GHz, pueden estabilizarse con referencia a un armónico de un patrón de frecuencias radioeléctricas [Wells, 1973] con 0 , ( 1 s) « 1 0 -12.
Mediante sincronización de fase respecto a un armónico del patrón primario de frecuencia HCN (890 GHz) y D20 (3,6 THz), se lograron sincronizar láseres con un patrón que tenía una exactitud aproxim adamente igual a 10- 1 3 [Domnin y otros, 1980].
Se han observado numerosas rayas de emisión láser nuevas por moléculas diatómicas de sodio y litio [Man-Pichot y Brillet, 1980]. Éstas ofrecen una estabilidad de frecuencia intrínseca que resulta útil para la realización de patrones secundarios de frecuencia y de longitudes de onda en el espectro visible.

I. 738-2 153
4. Medición de las frecuencias ópticas
La realización de diodos no lineales capaces de generar armónicos y efectuar batidos de frecuencias en la gama óptica del espectro ha permitido ampliar el límite superior de las frecuencias directamente mensurables a unos 520 THz (A, = 0,58 p,m). Se han publicado estudios comparativos sobre los diferentes diodos utilizables [Pyée y Auvray, 1975; Knight y Woods, 1976]. En el cuadro I se recuerdan algunas etapas importantes de la medición de las frecuencias ópticas. En el cuadro II se dan los valores de frecuencias láser recomendados por el Comité international des poids et mesures (CIPM), en 1983 para la realización del metro. En el cuadro III se resumen las principales propiedades de los diodos de punta utilizables en multiplicadores de frecuencia en el infrarrojo.
La medición de una frecuencia óptica desconocida se efectúa con una técnica heterodina: el diodo recibe simultáneamente la señal que se ha de medir y señales de frecuencias ya medidas; por no ser lineal, genera una frecuencia de batido suficientemente baja como para medirla directamente; entonces es posible calcular la frecuencia desconocida.
Tras el trabajo de investigación efectuado en el M IT sobre la medición de frecuencias láser y sobre los diodos de punta de metal-aislante-metal (MIM) [Hocker y otros, 1967 y 1968] la introducción de cadenas de láser, ha hecho posible medir sucesivamente la frecuencia de los láseres HCN (890 GHz), H20 (10 THz), C 0 2 (30 THz) y He-Ne (CH4) a 8 8 THz, basando cada medición en la precedente, merced a una relación arm ónica entre las frecuencias [Evenson y otros, 1973; Blaney y otros, 1977; Clairon y otros, 1980; Domnin y otros, 1980].
En todo caso, la precisión y exactitud de la medición de una frecuencia óptica están limitadas, respectivamente, por la estabilidad y exactitud de las dos fuentes que se encuentran en los extremos de la cadena de multiplicación, por ejemplo, el patrón primario de cesio y el láser He-Ne (CH4) en el caso de la medición a 8 8 THz.
CUADRO I — Principales mediciones de frecuencias ópticas (Lista no exhaustiva que muestra el progreso realizado desde 1967)
Año Láser (A en p.m)
Frecuencia (en THz)
Precisión (Valor relativo)
1967 HCN (337) 0,890 759 5 ± 1 0 ~ 7
1968 H20 (118) 2,527 954
1969 D20 (84) 3,557 143 ± 6 x 1 0 - 7
1970 H20 (28) C 0 2 (10,6)
10,718 073 28,306 251
± 2 x 1 0 ~ 7
± 9 x IO' 7
1972 He-Ne (3,39) 88,376 245 ± 5 x 10- 7
1973C 0 2 (10,18)C 0 2 (9,33)He-Ne (CH4) (3,39)
29,442 483 315 32,134 266 891 88,376 181 627
± 9 x 10- 10
± 8 x 1 0 - ’° ± 6 x 1 0 - '°
1974 CO (5,3) 56,168 515 ± 7 x IO' 8
1975 Xe (2,03) 147,915 850 ± í o - 7
1977 Ne (1,52) 196,780 269 ± 1,3 x 10- 7
1979 C 0 2 (O s04) (10,53) 28,464 676 938 5 ± 3 x 1 0 -”
1980 He-Ne (CH4) (3,39) 88,376 181 618 ± 1,6 x IO' 10
1981 He-Ne (CH 4-F7) (3,39) 88,376 181 603 4 ± 1 , 6 x IO" 11
1981 He-Ne (CH 4-E) (3,39) 88,373 149 033 0 ± 2 x 1 0 - ”
1982 Dye (I2) (0,576) 520,206 808 547 1 , 6 x 1 0 - 10

154 I. 738-2
CUADRO II — Valores de frecuencia láser recomendados por el CIPM, en 1983 para la nueva realización del metro
LáserFrecuencia
(THz)Incertidumbre relativa
(3a)
Láser He-Ne estabilizado mediante absorción saturada en CH 4 (transición v3, P (7), componente F2) 88,376 181 608 ± 1,3 x 10- 10
Láser Dye (o láser He-Ne con duplicación de frecuencia), estabilizado mediante absorción saturada en ,27I2 (transición 17-1, P (62), componente o)
520,206 808 51 ± 6 x IO" 10
Láser He-Ne estabilizado mediante absorción saturada en 127I2 (transición 11-5, R (127), componente i) 473,612 214 8 ± 1 0 x 1 0 ~ 10
Láser He-Ne estabilizado mediante absorción saturada en 127I2 (transición 9-2, R (47), componente o) 489,880 355 1 ± 1 1 x 1 0 ~ 10
Láser A r+ estabilizado mediante absorción saturada en 127I2 (transición 43-0, P (13), componente a3) 582,490 603 6 ± 1 3 x IO" 10
CUADRO III — Principales propiedades de los diodos de punta utilizables en multiplicadores de frecuencia
Naturaleza del diodo de punta
Frecuencia máxima alcanzada por generación
de armónicos
Orden de multiplicación correspondiente y fuente
de salidaOrden máximo de
multiplicación
Frecuencia superior alcanzada y fuente
correspondiente
Metal-semiconductor(tungsteno-silicio)
3,56 THz láser D20
4láser HCN 23 1,58 THz
láser DCN
Schottky (As-Ga tipo n)
2,52 THz láser CHjOH
33fuente-microonda 33 2,52 THz
láser CHjOH
Metal-aislante-metal(tungsteno-nickel)
88,4 THz(‘) láser He-Ne
3láser C 0 2
1 210,7 THz láser HjO
Josephson(2)(niobio-niobio)
3,8 THz láser H 2 O
401fuente-microonda 825
0,89 THz láser HCN
(') Puede alcanzarse una frecuencia próxima a 520 THz por adición de frecuencias sin generación de armónicos. (J) Funciona a la temperatura del helio líquido.
La utilización de láseres de bombeo óptico como osciladores de transferencia ha permitido mejorar la precisión inicial de las mediciones a 8 8 THz de 6 x 10- , ° hasta aproximadamente 3 x 10- n a 10~]0.
Una cadena enganchada en fase y que incluye 2 láseres de bombeo óptico de HCOOH y C H 3OH como osciladores de transferencia, ha permitido una nueva medida sobre el láser de C 0 2 ( 0 s 0 4) en torno a 29 THz con una precisión aproximadamente de 1,5 x 10~12.
Hacia las frecuencias más elevadas, se ha medido una raya de láser de Xe a 148 THz, mediante un diodo M IM por adiciones y batido de frecuencias sin generación de armónicos, así como una raya de 197 THz del neón [Evenson y otros, 1977]. Los diodos existentes no han permitido todavía (a mediados de 1977) medir una frecuencia visible. Ha sido necesario utilizar cristales no lineales para alcanzar el dominio visible.
I. 738-2 155
Por otra parte, las múltiples rayas del láser C 0 2 permiten, utilizando dos de esos láseres y un diodo MIM, sintetizar cómodamente una gama de frecuencias muy estrecha entre las microondas y casi 100 THz, lo que permite medir toda frecuencia situada en esa gama con relación a las rayas del láser C 0 2, considerado entonces como patrón secundario [Petersen y otros, 1975].
Se ha comenzado la medición del valor absoluto de la frecuencia de diversas transiciones de 0 s 0 4 en las proximidades de 28 THz [Clairon y otros, 1981].
En el N ational Bureau of Standards (NBS) de los Estados Unidos de América se midió el componente hiperfino de la transición 17-1, P(62), del 1 2 7I2 a 520 THz (576 nm) en yodo con respecto al láser de He-Ne a 8 8 THz estabilizado por CH4. Como osciladores de transferencia se utilizaron un láser de C 0 2 a 26 THz, un láser de color central a 130 THz y un láser de He-Ne. La frecuencia de I2 medida fue 520,206 808 547 THz con una incertidumbre total de 1,6 x 10“ 10. La medición con láser estabilizado por inclinación de Lamb de 1,15 nm 20Ne dió 260,103 249 26 THz, con una incertidumbre total de 3,1 x 10-10.
Mediante una sincronización mutua de fase con un patrón prim ario de láseres de cadena multiplicadora, se produjo una gama de frecuencias patrón hasta la región de los 30 THz y se efectuaron mediciones de frecuencia de gran exactitud en las componentes F j y E de patrones ópticos C 0 2 (O s04) y He-Ne (CH 4). Para el láser C 0 2 (O s04) la exactitud de medición fue de 3 x 10~u aproximadamente [Domnin y otros, 1980] y para el láser He-Ne (CH4) del orden de 1,6 x 10- n (componente F2) y aproxim adam ente igual a 2 x 10- 1 1 (com ponente E) [Domnin y otros, 1981a, b].
Se hizo la demostración de un nuevo método para ampliar una cadena de frecuencias del patrón Cs hasta 30 THz, utilizando únicamente láseres C 0 2 y se utilizó para obtener mediciones absolutas de frecuencia de cinco rayas C 0 2 [Whitford, 1980]. La cadena se ha enganchado en fase a la frecuencia del cesio durante intervalos de tiempo de hasta 20 min [Whitford, 1984a, b].
Las frecuencias de láser de las bandas calientes del ]2 C 1 60 2 y del 1 3C ,6 0 2 y de las bandas de secuencia del 1 3C ,6 0 2 y del 1 2C 1 80 2 se han medido por heterodinaje respecto de las frecuencias láser regulares conocidas del C 0 2
[Petersen y otros, 1981 y 1984; Siemsen, 1980, 1981].
Se ha construido un láser N H 3 de onda continua bombeado con un láser de C 0 2 y se midieron porheterodinaje 30 frecuencias estabilizadas por error de Lamb del 1 4 NH 3 y del 1 5 N H 3 respecto de las frecuencias láser conocidas del C 0 2 [Siemsen y Reid, 1985].
La primera medición de frecuencia directa presentada de una transición visible [Baird y otros, 1979] fue de componentes hiperfinos de yodo en el amarillo (520 THz), al doble de la frecuencia conocida de un láser He-Ne de 260 THz.
En el marco de los objetivos principales mencionados anteriormente (mejora de la precisión, mediciones de frecuencias cada vez más elevadas, mayor comodidad de síntesis de las frecuencias en la gam a de los rayos infrarrojos), muchos laboratorios trabajan para desarrollar algún aspecto concreto. Citemos, por ejemplo, el detenido estudio de las cadenas de multiplicación de frecuencia entre 5 MHz y el infrarrojo lejano [Bava y otros, 1977b]; la utilización de diodos Schottky [Fetterman y otros, 1974; Pyée y Auvray, 1975]; la utilización deempalmes Josephson [McDonald y otros, 1972; Blaney y Knight, 1974; Lourtioz y otros, 1977]; el desarrollo dediodos MIM de capas delgadas [Davis y otros, 1977]; la propuesta de un método original para medir la raya roja del láser He-Ne mezclando radiaciones infrarrojas en un gas [Chebotayev y otros, 1976],
Para concluir, recordemos que, si los láseres estabilizados constituyen excelentes patrones secundarios de frecuencia, su utilización como reloj depende del desarrollo de nuevos dispositivos capaces de generar, fácilmente señales de segundo a partir de frecuencias del orden de los terahertzios.
REFERENCIAS BIBLIOGRÁFICAS
BAGAEV, S. N. y CHEBOTAYEV, V. P. [1975] Frequency stability and reproducibility o f the 3.39 pm He-Ne láser stabilized on the methane line. Appl. Phys., Vol. 7, 71-76.
BAIRD, K. M., EVENSON, K. M., HANES, G. R., JEN N IN G S, D. A. y PETERSEN, F. R. [1979] Extensión of absolute- frequency measurements to the visible: frequencies of ten hyperfine components of iodine. Optics Lett., Vol. 4, 263-264.
BAIRD, K. M. y HANES, G. R. [1974] Stabilization of wavelengths from gas lasers Rep. Prog. Phys., Vol. 37, 927-950.
BARGER, R. L. y HALL, J. L. [1969] Pressure shift and broadening of methane line at 3.39 pm studied by laser-saturated molecular absorption. Phys. Rev. Lett., Vol. 22, 4-8.
BARGER, R. L., WEST, J. B. y ENG LISH, T. C. [5-7 de julio de 1976] Láser frequency stabilization using saturated absorption o f the 6573 A line of calcium. Proc. 2nd Frequency Standards and Metrology Symposium, 83-106, C opper M ountain, CO., Estados Unidos de América.
BAVA, E., DE MARCHI, A. y G ODONE, A. [1-3 de junio de 1977a] A narrow output linewidth multiplier chain for precisión frequency measurements in the 1 THz región. Proc. 31st Annual Symposium on Frequency Control, Atlantic City, N J (US Army Electronics Comm and, Fort Monmouth, NJ 07703) (Electronic Industries Association, W ashington, DC 20006, Estados Unidos de América).

156 I. 738-2
BAVA, E., DE M ARCHI, A., G OD ON E, A., BENEDETTI, R., INGUSCIO, M., M ING UZZI, P., STRUMIA, F. y TONELLI, M. [1977b] Frequency measurement on the 496 pm line of a CH 3F FIR láser. Optics Comm., Vol. 21, 1, 46-48.
BEN EDETTI, R., D I LIETO, A., INGUSCIO, M., M ING UZZI, P., STRUMIA, F. y TONELLI, M. [1-3 de junio de 1977] Frequency modulation of a far infraréd CH3F láser by Stark effect. Proc. 31 st Annual Symposium on Frequency Control, Atlantic City NY (US Army Electronics Command, Fort M onmouth, NJ 07703) (Electronic Industries Association, W ashington, DC 20006, Estados Unidos de América).
BERTINETTO, F., REBAGLIA, B., LIVERANI, M. y GUALINI, S. [1976] Present development of iodine-stabilized He-Ne lasers at the IM GC. Alta Frequenza, Vol. XLIV, 10, 569.
BLANEY, T. G., BRADLEY, C. C., EDW ARDS, G. J., JOLLIFFE, B. W., K N IG H T, D. J. E., ROWLEY, W. R. C., SHOTTON, K. C. y WOODS, P. T. [1977] Measurement of the speed of light: I. Introduction and frequency measurement o f a carbón dioxide láser. Proc. Roy. Soc., A 355, 61-88.
BLANEY, T. G. y K NIG HT, D. J. E. [1974] Direct 825th harmonic mixing of a 1 GHz source with an HCN láser in a Josephson junction. J. Phys. D., 1882.
BORDÉ, C., OUHAYOUN, M., VAN LERBERGHE, A., SALOMON, C., AVRILLIER, S., CANTREL, C. D. y BORDE, J. [1980] High resolution saturation spectroscopy with CO 2 lasers. Application to the bands of SF6 and O s04. Láser Spectroscopy IV. Proc. 4th International Conference, Rottach Egern, República Federal de Alemania. Editado porH. Walter y K. W. Rothe, Springer-Verlag, Nueva York, NY, Estados Unidos de América.
BRILLET, A., CÉREZ, P. y CLERGEOT, H. [1974] Frequency stabilization of He-Ne lasers by saturated absorption. IEEE J. Quant. Electron., Vol. QE-10, 526-528.
CAMY, G., DECOMPS, B., GARDISSAT, J. y BORDÉ, C. [5-7 de julio de 1976] Frequency stabilization o f Argón lasers at 582,49 THz using saturated absorption in 127l 2- Proc. 2nd Frequency Standards and Metrology Symposium, 153-166, Copper M ountain, Co., Estados Unidos de América. Publicado también en Metrología, 1977, Vol. 13, 3, 145-148.)
CÉREZ, P., BRILLET, A., HAJDUCOVIC, S. y MAN, C. [junio de 1977] Iodine stabilized He-Ne lasers with a hot wall iodine cell. Optics Comm., Vol. 21, 3, 332-336.
CÉREZ, P., BRILLET, A. y HARTM ANN, F. [1974] Metrological properties o f the R(127) line of iodine studied by láser satúrate absorption. IEEE Trans. Instr. Meas., Vol. IM-23, 4, 526.
CÉREZ, P., BRILLET, A., M AN-PICHOT, C. y FELDER, R. [1980] He-Ne lasers stabilized by saturated absorption in iodine at 612 nm. IE E E Trans. Instr. Meas., Vol. IM-29, 4, 352-354.
CÉREZ, P. y FELDER, R. [mayo de 1983] Gas-lens effect and cavity design of source frequency-stabilized He-Ne lasers. Appl. Opt., Vol. 22, 8 , 1251-1256.
CHEBOTAYEV, V. P., KLEMENTYEV, V. M. y MATYUGIN, A. [1976] Frequency synthesis of the 0.63 pm radiation by mixing of three IR radiation frequencies in a gas. Appl. Phys., 11, 163-165.
CLA IRO N, A., DAHM ANI, B. y RUTM AN, J. [1980] Accurate absolute frequency measurements on stabilized C 0 2 and He-Ne infrared lasers. IE E E Trans. Instr. Meas., Vol. IM-29, 4, 268-272.
CLA IRO N, A. y HENRY, L. [1974] Stabilisation des lasers C 0 2 par l’absorption saturée. C. R. Acad. Sci. (París), Vol. 279, Série B, 419.
CLA IRO N, A., VAN LERBERGHE, A., BREANT, C., CAMY, G. y BORDE, C. [diciembre de 1981] A new absolute frequency reference grid in the 28 THz range. J. de Phys., Colloque C-8 , Suplemento al N.° 12, Vol. 42, 127-135.
C O N FÉREN CE GÉNÉRALE DES POIDS ET MESURES [octubre de 1983] Comptes rendus ‘de la 17e Conférence, Paris, Francia.
D A H M A N I, B. y CLAIRON, A. [28 de junio-1 de julio de 1983a] Optically pumped FIR lasers phase-locked by Stark effect applied to precise optical frequency measurements. Documento presentado a la Conference on Precisión Electromag- netic Measurements (CPEM ’83), Boulder, CO, Estados Unidos de América. Publicado también en IE E E Trans. Inst. Meas., Vol. IM-32, 1, 150-154.
D H A M A N I, B. y CLAIRON, A. [14-18 de febrero de 1983b] Frequency stability limitations of optically pumped lasers due to pum p láser instability through dispersión effect. Paper read at the Seventh International Conference on Infra-red and Millimetre Waves, Marsella, Francia. Se publicará también en Infra-red and Millimetre Waves. Ed. K. J. Button, Academic Press, Nueva York, NY, Estados Unidos de América.
DAVIS, C. F., ELCH IN GER, G., SÁNCHEZ, A., LIU, G. y JAVAN, A. [1-3 de junio de 1977] Optical electronics, extensión of microwave techniques into the optical región. Proc. 31 st Annual Symposium on Frequency Control, Atlantic City, NJ. (US Army Electronics Command, Fort M onmouth, NJ 07703) (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
D O M N IN , Yu. S., KOSHELYAEVSKY, N. B., TATARENKOV, V. M., y SHUMYATSKY, P. S. [1980] Precise frequency measurements in submillimetre and infra-red región. IEEE Trans. Instr. Meas., Vol. IM-29, 4, 264-267.
D O M N IN , Yu. S., KOSHELIAEVSKY, N. B., TATARENKOV, V. M., y SHUMYATSKY, P. S. [1981a] Izmerenie chastoty He-Ne (CH4) lazera. (He-Ne (CH4) láser frequency measurements). JETP Lett., Vol. 34, 2, 175-178.
D O M N IN , Yu. S., KOSHELYAEVSKY, N. B. MALYSHEV, Yu. M., TATARENKOV, V. M. y TITOV, A. N. [22-24 de septiembre de 1981b] Izmerenie raznostnoi chastoty mezhdu He-Ne lazerami, stabilizirovannymi po F 2 i E-kompo- nentam m etana perekhoda v3 P(7). (Measurements of frequency difference between He-Ne lasers stabilized on F^-and E-components of v3 P(7) methane transition). Sbornik tezisov Vsesoyuznoi Konferentsii «Metrología v radioelektronike» (Proc. Vth All-Union Conference on Metrology in Radioelectronics) Moscú, URSS.
EVENSON, K. M., JEN N IN G S, D. A., PETERSEN, F. R. y WELLS, J. S. [1977] Láser frequency measurements: a review, limitations, extensión to 197 THz. Láser Spectroscopy III. Springer-Verlag, Nueva York, NY, Estados Unidos de América.

I. 738-2 157
EVENSON, K. M., WELLS, J. S., PETERSEN, F. R., DANIELSON, B. L. y DA Y, G. W. [1973] Accurate frequencies ofmolecular transitions used in láser stabilisation: the 3.39 pin transition in CH 4 and the 9.33 and 10.18 pm transitions inC 0 2. Appl. Phys. Lett., Vol. 22, 192-195.
FETTERM AN, H. R., CLIFTON, B. J., TANNENW ALD, P. E. y PARKER, C. D. [1974] Submillimeter detection and mixing using Schottky diodes. Appl. Phys. Lett., Vol. 24, 70-72.
FREED, C. [28-30 de mayo de 1975] Frequency stabilization of C 0 2 lasers. Proc. 29th Annual Symposium on Frequency Control (US Army Electronics Command, Ft. Monmouth, NJ 07703), 330-337 (Electronic Industries Association,Washington, DC 20006, Estados Unidos de América).
FREED, C. [1-3 de junio de 1977] Progress in C 0 2 láser stabilization. Proc. 3 ls t Annual Symposium on Frequency Control Atlantic City, NJ (US Army Electronics Command, Ft. Monmouth, NJ 07703) (Electronic Industries Association, Washington, DC 20006, Estados Unidos de América).
FREED, C. y JAVAN, A. [1970] Standing wave saturation resonances in the C 0 2 10.6 pm transitions in a low-pressureroom-temperature absorber gas. Appl. Phys. Lett., Vol. 17, 2, 53-56.
FREED, C., OT)ONNELL, R. G. y ROSS, A. H. M. [1976] Absolute frequency calibration of the C 0 2 isotope láser transitions. IE E E Trans. Instr. Meas., Vol. IM-25, 4, 431-437.
GIACOM O, P. [1970] Láser et métrologie. Bull. d ’information du Bureau national de métrologie, Fase. 1, 7-9.
GODONE, A., WEISS, C. O. y KRAM ER, G. [mayo de 1978] FM noise measurements on an optically pum ped FIR láser. IE E E J. Quant. Electron., Vol. QE-14, 5, 339-342.
GUSEV, V. M., KOMPANETS, O. N., KUKUDZHANOV, A. R., LETOKHOV, V. S. y MIKHAILOV, E. L. [mayo de 1975] Stabilization of the emission frequency of a C 0 2 láser to within 10-12 with the aid of narrow SFó and O s0 4 resonances. Soviet J. Quant. Electron., Vol. 4, 11, 1370-1372.
HACKEL, L., HACKEL, R. y EZEKIEL, S. [5-7 de julio de 1976] Molecular beam stabilized multiwatt Argón lasers. Proc. 2nd Frequency Standards and Metrology Symposium, 107-113, Copper M ountain, CO, Estados Unidos de América.
HANES, G. R. [1979] Doubly resonant intracavity generation of second harmonic of 1153-nm radiation with stabilization on hyperfine structure components of 127I2. Appl. Opt., Vol. 18, 3970-3974.
HANES, G. R., BAIRD, K. M. y DE REM IGIS, J. [1973] Stability, reproducibility and absolute wavelength o f a 633 nm He-Ne láser stabilized to an iodine hyperfine component. Appl. Opt., Vol. 12, 1600-1605.
HELLW IG, H., BELL, H. E., KARTASCHOFF, P. y BERGQUIST, J. C. [1972] Frequency stability of methane-stabilized He-Ne lasers. J. Appl. Phys., Vol. 43, 2, 450-452.
HELM CKE, J. y BAYER-HELMS, F. [1974] He-Ne láser stabilized by saturated absorption in I2. IEEE. Trans. Instr. Meas., Vol. IM-23, 4, 529.
HOCKER, L. O., JAVAN, A., RAM ACHANDRA RAO, D., FRENKEL, L. y SULLIVAN, T. [1967] Absolute frequency measurement and spectroscopy of gas láser transitions in the far infrared. Appl. Phys. Lett., Vol. 10, 5, 147-149.
HOCKER, L. O., SOKOLOFF, D. R., DANEU, V., SKOZE, A. y JAVAN, A. [1968] Frequency mixing in the infrared and far-infrared using a metal-to-metal point contact diode. Appl. Phys. Lett., Vol. 12, 12, 401-402.
K N IG H T, D. J. y WOODS, P. T. [1976] Application of nonlinear devices to optical frequency measurement. J. Phys. E. Sci. Instr., Vol. 9, 898-916.
KOMPANETS, O. N., KUKUDZHANOV, A. R., LETOKHOV, V. S. y M IKHAILOV, E. L. [5-7 de julio de 1976] Frequency stabilized C 0 2-Laser using O s0 4 saturation resonances. Proc. 2nd Frequency Standards and Metrology Symposium, 167-181, Copper M ountain, CO, Estados Unidos de América.
KRAM ER, G., WEISS, C. O. y HELM CKE, J. [1975] Láser frequency stabilization by means of saturation dispersión. Z. Nat. Forsch., 30 a 1128.
LEE, P. L. y SKOLNICK, M. L. [1967] Situated neón absorption inside a 6238A láser. Appl. Phys. Lett., Vol. 10, 303.LE FLOCH, A., LENORM AND, Y. M., LE NAOUR, R. y TACHE, J. P. [1982] A critical geometry for lasers with internal
lenslike effects. J. de Phys., (Lettres), Vol. 43, 1-493-498.
LOURTIOZ, J. M., ADDE, R., VERNET, G. y HENAUX, J. C. [1977] Harmonic mixing with Josephson point contacts. Rev. de Phys. Appl., Vol. 12, 487.
MALYSHEV, Yu. M., OVCHINNIKOV, S. N., RASTORGUEV, Yu. G., TATARENKOV, V. M y TITOV, A. N. [1980] O vosproizvodimosti tchastoty kvantovogo repera na E-komponente molekuly metana (Reproductibilidad de la frecuencia de referencia del cuanto en la componente E de la molécula del metano). Kvantovaya Elektronika, Vol. 7, 3, 655-657.
MAN, C. N., CÉREZ, P., BRILLET, A. y HARTM ANN, F. [15 de julio de 1977] A frequency stabilized CW dye láser forspectroscopic and metrological applications. J. de Phys. (Letters), Vol. 38, L.287-289.
M AN-PICHOT, C. N. y BRILLET, A. [1980] Precise measurement and assignment of CW láser emission lines from opticallypumped N a2 and Li2 molecules. IE E E J. Quant. Electron. Vol. QE-16, 1103-1108.
M c D o n a l d , D. G., RISLEY, A. S., CUPP, J. D., EVENSON, K. M. y ASHLEY, J. E. [1972] Four-hundredth-order harm onic mixing of microwave and infrared láser radiation using a Josephson junction and a maser. Appl. Phys. Lett., Vol. 20, 296-299.
OHI, M. [1980] Frequency stabilization of a PbSnTe láser on a methane line in the v4 band. Japan J. Appl. Phys., Vol. 19, L541.O HI, M. y AKIM OTO, Y. [1976] Improvements in Methane-stabilized lasers. Japan J. Appl. Phys., Vol. 15, 9, 1853-1854.
OHTSU, M., KATSURAGI, S. y TAKO, T. [junio de 1981] Performances of frequency-offset-locked He-Xe láser at 3.51 pm. IE E E J. Quant. Electron., Vol. QE-17, 6 , 1100-1106.
OUHAYOUN, M. y BORDÉ, C. [5-7 de julio de 1976] Frequency stabilization of C 0 2 lasers through saturated absorption in SF6. Proc. 2nd Frequency Standards and Metrology Symposium, 145-151, Copper M ountain, CO, Estados Unidos de América. Publicado también en Metrología, 1977, Vol. 13, 3, 149-150.

158 I. 738-2
PETERSEN, F. R., EVENSON, K. M., JE N N IN G S, D. A., WELLS, J. S., GOTO, K. y JIM ÉNEZ, J. J. [1975] Far-infrared frequency synthesis with stabilized CO 2 lasers: accurate measurement of the water vapor and methyl alcohol láser frequencies. IE E E J. Quant. Electron., Vol. QE-11, 838-843.
PETERSEN, F. R., WELLS, J. S. MAKI, A. G. y SIEM SEN, K. J. [1981] Heterodyne frequency measurements of ,3C 0 2 láser hotband transitions. Appl. Opt., Vol. 20, 3635-3640.
PETERSEN, F. R. y WELLS, J. S., SIEM SEN, K. J., ROBINSON, A. M. y MAKI, A. G. [1984] Heterodyne frequency measurements and analysis of C 0 2 láser hot band transitions. J. Molecular Spectroscopy, Vol. 105, 324-330.
PLAINCHAM P, P. M. [septiembre de 1979] Frequency instability measurements of the CH3OH optically pumped láser at 70.5 and 118 pm. IEEE J. Quant. Electron., Vol. QE-15, 9, 860-864.
PYÉE, M. y AUVRAY, J. [1975] Génération et comparaison des fréquences dans le domaine submillimétrique et infrarouge.Bull. d ’information du Bureau national de métrologie, Vol. 6 , 19, 11-22.
SHIM ODA, K. [1973] Frequency shifts in methane-stabilized lasers. J. Appl. Phys., Vol. 12, 1393.
SHIM ODA, K. y TAKO, T. [5-7 de julio de 1976] Recent results on láser frequency stabilization in Japanese institutes. Proc. 2nd Frequency Standards and Metrology Symposium, 187-203, Copper Mountain, CO, Estados Unidos de América.
SIEM SEN, K. J. [1980] The sequence bands of the carbon-13 isotope CÓ 2 láser. Optics Comm., Vol. 34, 3, 447-450.
SIEM SEN, K. J. [1981] Sequence bands o f the isotope 12C ,80 2 láser. Optics Lett., Vol. 6 , 114-116.
SIEM SEN, K. J. y REID, J. [diciembre de 1985] Heterodyne frequency measurements of 14N H 3 and 15N H 3 v2 band transitions. Optics Lett., Vol. 10, 12, 594-596.
SIEM SEN, K. J. y W HITFORD, B. G. [1977] Heterodyne frequency measurements of C 0 2 láser sequence-band transitions. Optics Comm., Vol. 22, 1, 11-16.
SPIEW ECK, F., CAMY, G. y GILL, P. [1980] Beat frequency inter-comparisons o f ,27I2 stabilized ion lasers at 514.5 nm. Appl. Phys., Vol. 22, 111.
STEIN, S. R. y VAN DE STADT, H. [1-3 de junio de 1977] Electronic tuning and phase-lock techniques for far-infrared lasers. Proc. 31 st Annual Symposium on Frequency Control, Atlantic City, NJ (US Army Electronics Command,Fort M onmouth, NJ 07703) (Electronic Industries Association, W ashington, DC 20006, Estados Unidos de América).
TAKO, T., OHTSU, M., KATSURAGI, S., OHI, M. y AKIM OTO, Y. [1980] Wavelength measurement of an H 2CO-stabilized He-Xe láser at 3.51 pm. Japan J. Appl. Phys., Vol. 19, 1683-1688.
TANAKA, K. y M ORINAGA, A. [1979] Preliminary experiment for stabilizing unmodulated He-Ne láser to an iodine hyperfine component. J. Appl. Phys., Vol. 50, 38.
TANAKA, K., SAKURAI, T. y KUROSAWA, T. [1977] Frequency stability and reproducibility of an iodine stabilized He-Ne láser. Japan J. Appl. Phys., Vol. 16, 11, 2071-2072.
W ALLARD, A. J. [1974] The reproducibility of 633 nm lasers stabilized by 127I2. IE E E Trans. Instr. Meas., Vol. IM-23, 4, 532.
WEISS, C. O. y KRAM ER, G. [1976] A submillimeter láser for infrared frequency measurements. Conference on Atomic Masses and Fundamental Constants (AMCO 5), París. Ed.: J. H. Sanders and A. H. W apstra. Plenum Press, Nueva York- Londres.
WELLS, J. S. [1973] A stabilized HCN láser for infrared frequency synthesis. IEEE Trans. Instr. Meas., Vol. IM-22, 2, 113-118.
W H ITFORD, B. G. [1980] Measurement of the absolute frequencies of C 0 2 láser transitions by multiplication of C 0 2 láser difference frequencies. IE E E Trans. Instr. Meas., Vol. IM-29, 3, 168-176.
W H ITFO RD , B. G. [20-24 de agosto de 1984a] Phase-lock of a C 0 2 láser to a frequency standard. Conf. Digest 3B4, 126-127. Conference on Precisión Electromagnetic Measurements, Delft, Países Bajos.
W H ITFORD, B. G. [1984b] Simultaneous phase-lock of five C 0 2 lasers to a primary Cs frequency standard. Appl. Phys. B, Vol. 35, 119-122.
W H ITFORD, B. G., SIEM SEN, K. J. y RICCIUS, H. D. [1976] Saturated-absorption-stabilized N 20 láser for new frequency standards. Conference on Atomic Masses and Fundamental Constants (AMCO 5), París. Ed.; J. H. Sanders and A. H. W apstra. Plenum Press, Nueva York —Londres.
Nota. — Los «Proceedings of the Second Frequency Standards and Metrology Symposium» pueden obtenerse en: NBS,Frequency and Time Standards Section, Boulder, CO 80302, Estados Unidos de América.
BIBLIOGRAFÍA
CÉREZ, P., BENNETT, S. J. y AUD OIN , C. [1977] Stabilité de fréquence du láser He-Ne com portant une cuve d ’iode á parois chaudes. C. R. Acad. Sci., París, sesión del 12 de diciembre de 1977.
JE N N IN G S, D. A., PETERSEN, F. R. y EVENSON, K. M. [1975] Extensión of absolute frequency measurements to 148 THz:frequencies of the 2.0 and 3.5 pm Xe-laser. Appl. Phys. Lett., Vol. 26, 510-511.
SCHW EITZER, W. G., KESSLER, E. G., DESLATTES, R. D., LAYER, H. P. y W HETSTONE, J. R. [1973] Description,performance and wavelengths of iodine stabilized lasers. Appl. Opt., Vol. 12, 2927-2938.

I. 898-1 159
CALIDAD DE FUNCIONAMIENTO Y FIABILIDAD DE LOS RELOJES DE REFERENCIA
(Cuestión 8/7 y Decisión 29)
(1982-1986)
1. Introducción
Este Informe constituye una respuesta preliminar a las preguntas formuladas por la Comisión de Estudio XVIII del CCITT a la Comisión dé Estudio 7 del CCIR sobre la calidad de funcionamiento y la Fiabilidad de losrelojes de referencia destinados a sistemas de conmutación digital. También se hacen algunos comentarios sobre laRecomendación G.811 del CCITT.
El punto 2 de este Informe trata de garantizar que se han comprendido bien las preguntas y se han contestado correctamente, y de crear, en la medida de lo posible, un lenguaje común en materia de temporización y sincronización.
En el punto 3, se indican los datos actualmente disponibles sobre la fiabilidad de algunos tipos de relojes utilizados en servicios como los de señales horarias y frecuencias patrón, navegación y comunicaciones.
En el punto 4 se hace referencia a los Informes del CCIR relativos a las técnicas de medición disponibles que deben emplearse para com parar un reloj con la escala horaria común de referencia UTC.
2. Términos y definiciones relativos a las características de calidad de funcionamiento de un reloj
Con objeto de facilitar la comprensión de sus textos, la Comisión de Estudio 7 del CCIR ha compilado un glosario de términos en un Informe 730, en el que se enumeran, definen y explican la m ayoría de términos actualmente utilizados para las mediciones de tiempo y de frecuencia.
El desajuste de frecuencia a largo plazo de ± 1 x 10~n previsto en la Recomendación G.811 es, aproximadamente, dos veces mayor que la incertidumbre del UTC determ inada por el Bureau international de l’heure (BIH). En el contexto presente, el UTC constituye, por tanto, una aproximación satisfactoria de un reloj ideal.
Como el error de intervalo de tiempo (TIE «Time Interval Error») de los relojes actuales no es de carácter estacionario para largos periodos de observación (T > 10 días), la Comisión de Estudio 7 ha basado la mayor parte de su labor en conceptos de inestabilidad de frecuencia como fenómeno básico.
El TIE referido en la Recomendación G.811 puede interpretarse como la integral del desajuste de frecuencia normalizado, calculado durante el intervalo de tiempo S. Si denominamos to a la hora inicial del intervalo S, tendremos:
h + Sy( Odt , (1)
h
empleando la notación del Informe 580. La pendiente de la línea de trazo discontinuo de la fig. 1 de la Recomendación G.811 del CCITT representa, pues, el desajuste medio de frecuencia.
i r ‘0 + syo(*o>.S) = — / y ( t ) d t (2 )
h
Evidentemente, ocasiona ese desajuste la inestabilidad de frecuencia del reloj, mientras que la pendiente media a largo plazo se debe a un error de sintonía inicial de la frecuencia del reloj con respecto a su valor nominal. El error de sintonía inicial de la frecuencia depende de las técnicas de medición utilizadas para com parar el reloj con una fuente de referencia externa, como el Loran-C o los servicios nacionales de hora y frecuencia. En el Informe 364 figuran las características del comportamiento de los relojes, así como otras indicaciones tales como dimensiones, peso, consumo, etc. Las inestabilidades aleatorias se describen empleando las mediciones estadísticas prescritas en la Recomendación 538 y explicadas en el Informe 580. En esos textos se designa el tiempo de muestreo, equivalente al periodo de observación de S segundos, por la letra griega minúscula x.
INFORM E 898-1 *
Se ruega al Director del CCIR que señale este Informe a la atención del CCITT. Este Informe sustituye la versión precedente del Informe 898 y el Informe 737, que por tanto se suprime.
TIE = x{to + S ) ~ x(to)-

160 I. 898-1
Puede utilizarse el siguiente cálculo de la desviación típica del TIE, basado en simulaciones por com putador [Kartaschoff, 1979] del modelo estadístico de reloj, para predecir un probable error de intervalo de tiempo de un reloj ajustado y sincronizado en t = 0 y que se ha dejado luego funcionar libremente:
( T IE )est = ^ t2 + t ■ (cj^ 2 + oy2(x = 0 ) 1 / 2 (3)
donde:
a : deriva lineal normalizada de frecuencia por unidad de tiempo transcurrido (envejecimiento);
o yo : desviación típica de dos muestras de la sintonía inicial de frecuencia; y
aj,(x) : desviación típica de dos muestras que describen la inestabilidad aleatoria de la frecuencia del reloj.
Se parte de la hipótesis de que los parámetros que caracterizan el reloj no varían con el tiempo y de que el error de sintonía inicial y las subsiguientes fluctuaciones aleatorias de frecuencia son estadísticamente independientes; como puede verse en la fórmula anterior, en la mayoría de los casos predom ina el error de sintonía inicial de la frecuencia.
3. Fiabilidad de los relojes
3.1 Consideraciones generales
La fiabilidad de un aparato es la probabilidad matemática de que funcione dentro de determinadas especificaciones hasta un tiempo t. La medida clásica de la fiabilidad de aparatos electrónicos ha sido la expresión estadística de la media del tiempo antes de que se produzca una avería o entre averías (MTBF — «Mean Time Before (or between) Failure»).
Para la estimación del MTBF se necesitan muchos años-reloj de datos, si se quiere elaborar una estadística útil. Esos datos pueden obtenerse de un gran número de relojes én funcionamiento, según se indica en el § 3.3. Sin embargo, la estadística del MTBF ignora la dependencia del tiempo característica de la fiabilidad de los relojes atómicos. En el § 3.2 se muestra que estos relojes de cesio de un conjunto de relojes utilizados cuidadosamente y que funcionan desde hace más de un año parecen ser más fiables que las nuevas unidades. Esto puede deberse al envejecimiento o al agotamiento de algunas partes, como los tubos de potencia o los haces de los conjuntos ópticos. En el § 3.3 se considera por qué no se ha encontrado esta característica en numerosos relojes que funcionan normalmente.
Dos características de la fiabilidad de los relojes atómicos son la vida útil media (ML — «Mean Life») y la mitad de la vida útil (HL — «H alf Life») [Percival y Winkler 1975]. Para determinar la estadística de la vida útil media es preciso que fallen todas las unidades de un conjunto de prueba y por tanto, su utilidad para caracterizar la fiabilidad de los relojes atómicos es muy limitada. Sin embargo, si a partir de los datos disponibles puede establecerse una función hipotética de la proporción de fallos es posible calcular la estadística de la vida útil media. La estadística de la mitad de la vida útil es de más utilidad para caracterizar la fiabilidad de los relojes atómicos. Esta estadística tiene una interpretación de probabilidad sencilla: la probabilidad de que un reloj sobreviva después de la mitad de la vida útil es del 50%. Se dispone de una estimación de este tiempo cuando la mitad de los relojes de un conjunto de prueba han experimentado averías.
La mejor estadística para calcular los factores de fiabilidad es la probabilidad de que un reloj, que ha sobrevivido un tiempo t, falle en el tiempo t + A t. Si se suprimen los relojes de la nueva evaluación de fiabilidad después de su primer fallo, la función de la proporción de fallos condicional puede definirse del modo siguiente:
Z ( /) A t = -N (t + A t ) - N ( t )
N (/) (4)
donde N ( t) representa el número de relojes que se espera que estén funcionando en un tiempo t, y N(0) representa el número inicial de relojes en un conjunto determinado.
En las mismas condiciones, puede calcularse Z {t) mediante la expresión:
Z ( /) = —A N ' (t)
N ' (/) At (5)
donde N '( t ) representa el número de relojes que estaban funcionando en el tiempo t y fallaron en el intervalo de í a / + A t, o estaban todavía funcionando en el tiempo t + A t, y A N ' = N '( t + A t) — N '(t).

I. 898-1 161
Si los relojes averiados se reparan y se ponen de nuevo en funcionamiento, Z f t ) puede estimarse como:
z«) - | (6)
donde:F : número de fallos durante un intervalo de tiempo dado, yU : número de unidades en funcionamiento durante el mismo intervalo de tiempo.Se estima que la ligera diferencia conceptual existente entre las dos Zf t ) definidas anteriormente carecen
de importancia.Puede establecerse un modelo de Z ( t ) empleando funciones relativamente sencillas para intervalos
limitados de t.Zf t ) = c, donde c es una constante, corresponde a la ley exponencial de probabilidad. Se utiliza para
describir fenómenos tales como la vida útil de un tubo electrónico, etc. Supone que las causas de los fallos son accidentes puramente aleatorios y por consiguiente independientes de la edad. En este caso, el MTBF puede estimarse igual a la mitad de la vida útil tHL.
Z( t ) = kt, donde k es una constante, supone que la proporción condicional de fallos aumenta con eltiempo. Este modelo parece caracterizar el índice de fallos de los relojes comerciales de haz de cesio cuando han estado en funcionamiento durante varios años, pero no en el curso de toda su vida útil.
3.2 Observaciones de un conjunto de relojes de cesio utilizados cuidadosamenteLa proporción condicional de fallos (en enero de 1970) y en conjunto de relojes del Observatorio Naval de
Estados Unidos de América (USNO) se describió aproximadamente mediante Zf t ) = kt, donde k = 0,1. La mayoría de esos relojes eran unidades de producción que ya habían estado funcionando durante más de uno o dos años. En el cuadro I se muestra la vida útil media y la mitad de la vida útil para varios modelos de Zf t ) .
En el cuadro II se presenta una estimación de Zf t ) para un conjunto de relojes del Observatorio Naval deEstados Unidos de América compuesto de dos modelos comerciales distintos, algunos de los cuales eran unidades de las primeras producciones industriales.
CUADRO I - Vida útil media y mitad de la vida útil para varios modelos de Z(t)
(Para un valor de Z (t) por año)
Z ft) - c z (t) = k t
c = 0 , 1 c = 0,3 k = 0 , 1
tHL (años) 6,93 2,31 3,72
tML (años) 1 0 , 0 0 3,33 3,96
CUADRO II - Estimación de Z(t) obtenida para un conjunto de relojes del Observatorio Naval de los Estados Unidos de América
(Probabilidad, Z(t) At para At = 1 año, de que el reloj falle en el próximo año tras funcionar durante t años)
t Zft) At para At = 1 año
0 , 0 0,31 ± 0,030,5 0,24 ± 0,041 , 0 0,19 ± 0,041,5 0,20 ± 0,042 , 0 0,21 ± 0,052,5 0,20 ± 0,053,0 0,36 ± 0,073,5 0,46 ± 0,084,0 0,47 ± 0,11

162 I. 898-1
3.3 Fiabilidad de funcionamiento de los relojes
Se presentan los datos sobre la fiabilidad de funcionamiento de los siguientes dispositivos:— relojes de cesio,— relojes de rubidio,— osciladores de cristal de cuarzo.
Se dejan aparte otros dispositivos también enumerados en el Informe 364, por diferentes motivos, como estudios en curso, población muy reducida, falta de datos sobre fiabilidad, etc., que actualmente limitan su idoneidad para aplicaciones a sistemas en gran escala.
Basándose en los límites de calidad especificados en la Recomendación G.811 del CCITT, se distinguen dos clases de criterios de fallo que han de aplicarse:
Los relojes de cristal de cuarzo y de rubidio requieren una sintonía inicial de la frecuencia y un control subsiguiente de ésta por comparación con una fuente externa, a fin de compensar la deriva inherente de frecuencia. Los errores de sintonía y la ausencia de control que infringen la especificación no pueden considerarse como fallos de los dispositivos.
Los relojes de cesio tienen una incertidumbre sistemática inferior al límite de ± 1 x 10“ 11 especificado en la Recomendación G.811 del CCITT y, en general, su deriva de frecuencia es despreciable. Una infracción de dicho límite puede, pues, considerarse como un fallo.
Exceptuada esta distinción, otros fallos, como la degradación o la pérdida de la señal de salida, son comunes a todos los dispositivos.
En enero de 1981 se comenzó un estudio sobre la fiabilidad por medio de cuestionarios enviados a los usuarios y fabricantes de los países participantes a través de los delegados de las respectivas administraciones, que se encargaron también de recoger los cuestionarios rellenados, verificarlos y corregirlos, en caso necesario, y enviarlos al Presidente del GIT 7/5 para su tratamiento ulterior. Los resultados presentados en este Informe se basan en datos recibidos hasta octubre de 1983. En dicha fecha se habían recibido Informes de los siguientes países: República Popular de China, República Federal de Alemania, Francia, Italia, Japón, Países Bajos, Suiza, Suecia, el Reino Unido y Estados Unidos de América. El número total de unidades comunicado fue de 4125, comprendidos 1230 relojes de cesio, 225 relojes de rubidio y 2670 osciladores de cristal de cuarzo.
La mayoría de los datos correspondían a duraciones de 11 años, de 1970 a 1980.
Se aplicó el siguiente procedimiento general para el proceso:
Se agruparon las hojas correspondientes a cada modelo, sobre la base de la designación de los fabricantes; por ejemplo, HP 5061A (Cs); R&S XSRM (Rb); B 5400 (Xtal), etc.
Se separaron los informes de los fabricantes de los informes de los usuarios.
Para cada modelo, se definieron y computaron los siguientes valores:
I U : la suma, sobre todas las unidades, del número de años de funcionamiento de cada unidad.
E F : suma total de los fallos observados en dichas unidades.
Por consiguiente, se calculó la relación E t / /E F = M TBF {tiempo medio entre fallos) en años como una estimación que supone una tasa constante de fallos durante el .periodo de observación de 1 1 años.
Hay varios motivos por los cuales las funciones condicionales de tasa de fallos definidas en el § 3.1 nopueden calcularse con una incertidumbre menor que la estimación de MTBF mencionada anteriormente. Existeuna gran variación en la generación y diseño del modelo; además, para obtener una gran muestra estadística, los datos se tomaron de todas las fuentes disponibles en el periodo de 1 1 años, incluidos los relojes que fallaron, fueron reparados y después han podido haber fallado de nuevo una o más veces.
También hay una amplia variación de las cifras indicadas para MTTR (tiempo medio de reparación deuna unidad averiada, incluido el tiempo de envío). Dado que las cifras medias varían entre 80 y 140 días y,teniendo en cuenta la gran influencia de la ubicación geográfica de la unidad, la media general de unos 90 días deMTTR para los relojes de Cs y Rb constituye la mejor indicación. No se indican cifras de MTTR para relojes de cristal de cuarzo.
En los cuadros III, IV y V se indican las estimaciones resultantes de MTBF, basadas en los datos actualmente disponibles.

I. 898-1 163
CUADRO III — Relojes de cesio
Modelo (año) I U EF MTBF(años)
MTTR(días)
N.° de unidades en estudio
Informe de los usuarios
HP5061A (1968) 3347 823 4 , 0 7 + ^ 90 492
OSA 3200 (1975/76) 96 32 3.° ! o!4 90 25
HP5061A-004 (1973) 118 44 2 .6 8 + 90 24
HP5060A (') (1965) 133 42 3,17 90 2 1
OSA 3000 (1976) 29 1 0 2 9 +0 ,9 ’ - 0 , 6
90 14
HP5062 (') (1973) 1648 319 (2) 5 2 + 1 ’° -0 ,7 408
Informe de los fabricantes (véase el punto 3.3)
OSA 3000 (1976) 285 30 9,6 35 97
OSA 3200 (1975) 679 161 4,22 50 149
(') Antiguo modelo que ya no se fabrica.
(2) Para este tipo particular de reloj, sólo se incluyen los fallos del tubo de haz de cesio y otros fallos asociados con los fallos del tubo de haz.
CUADRO IV — Relojes de rubidio
Modelo (año) 1 U 1 F MTBF(años)
MTTR(días)
N.° de unidades en estudio
HP5065A (1970) 159 2 1 7,6 1 2 0 31
FR T /FR K (1973) 584 52 1 1 , 2 90 159
XSRM (1972) 71 13 5,5 90 15
P01 (1976) 44 41 1,08 - 2 0

164 I. 898-1
CUADRO V — Relojes de cuarzo
Modelo l.er año I t / 1 F MTBF(años)
N.° de unidades en estudio Notas
Informe de los usuarios
B5400 1974 48 1 48 1 1
B1250 . 1973 8 1 8 1 0 )
B1010 1965 926 25 37 132 0 )
HP104/105 1970 46 4 11,5 5 (2)
R&S XSC/D/S 1970 136 13 10,5 15 oC60MCS 1972 223 1 2 0 0 52
CP12MCS 1970 6316 33 191 1288
MT 1975 834 13 64 139
K 1975 1353 2 2 0 0 235
Informe de los fabricante
OSA B5400
•s
1974 1352 27 50 318
OSA B1250 1970 214 3 71 2 0 (’)H CD H CD 50 1970 4383 104 42 587
(') Modelo antiguo que ya no se fabrica.
(2) Unidades integradas en un solo estudio por su gran similitud de diseño, sin divergencia aparente.
En el cuadro III se indican márgenes de confianza ( la ) de una señal para las estimaciones de MTBF. Se han computado estos márgenes como sigue:
Se utilizaron los datos sobre la población más amplia (HP5061A, 492 unidades en el estudio). Sumando las columnas correspondientes a cada año, se obtuvieron series de números de unidades en funcionamiento (LU¡) y de fallos (LF¡). Luego, se calculó una serie de relaciones:
para cada año (1970-1980), como muestra el cuadro VI que sigue. Z, es una estimación de la tasa anual de fallos en la población mezclada de dispositivos de diferentes antigüedades, población que crece en la medida en que se ponen en servicio mayor número de dispositivos nuevos que se retiran de él los antiguos. Se ha demostrado experimentalmente que esos valores de Z, tienen una distribución normal. El valor medio es Z m = 0,22 y su desviación típica a z = ± 0,094. El error relativo probable de la media es, pues, de ± 6 % aproximadamente. La inversa del valor medio, Z ” 1 = 4 años, se aproxima mucho a la estimación del MBTF de 4,07 años indicada en el cuadro III, en el que los márgenes de confianza indicados han sido calculados sobre la base de la mencionada estimación de error probable de 12,5% de la tasa media de fallos de 1/4,07 = 0,246.
Los márgenes de confianza de los demás modelos han sido computados basándose en forma análoga. Los datos correspondientes al modelo HP5060A revisten un interés histórico únicamente. No se ha procedido todavía a estimaciones de este tipo sobre los datos resumidos en los cuadros IV y V. En lo que respecta al cuadro IV, las poblaciones son demasiado reducidas; y en cuanto al cuadro V, hay mucha diversidad de unidades, algunas de las cuales tienen un MTBF muy alto y homogéneo.
En el cuadro VII se indican las distribuciones de los fallos entre los diferentes subconjuntos de relojes de cesio, basadas en los Informes de usuarios y fabricantes. Los datos sobre las unidades HP proceden de Johnson y otros [1980].

I. 898-1 165
Se ha formulado un comentario al respecto de la divergencia que se observa entre los informes de los usuarios y de los fabricantes, especialmente en el cuadro III. Se tiene la seguridad de que los fabricantes han tratado por todos los medios de comunicar cifras reales y correctas. No obstante, hay siempre algunos usuarios que reparan algunos pequeños fallos por sus propios medios sin informar de ello al fabricante. De ahí que alguna divergencia sea prácticamente inevitable. Convendría mejorar los informes sobre fallos y reparaciones, tanto en interés de los fabricantes como en el de los usuarios.
Los datos reunidos hasta ahora abarcan sólo una proporción de la población m undial de relojes de precisión. No se ha observado ninguna cresta en el primer año de funcionamiento de los relojes de cesio, es decir, que parece se hayan eliminado los «fallos iniciales» por el proceso de pruebas de funcionamiento en condiciones de explotación efectuado por los fabricantes.
CUADRO VI
Año 1970 1971 1972 “ 1973 1974 1975 1976 1977 1978" 1979 1980
XUi 51 70 104 162 204 255 291 328 349 370 386ZF, 7 24 19 16 32 36 48 54 67 95 118Zi 0,137 0,343 0,183 0,099 0,157 0,141 0,165 0,165 0,192 0,257 0,306
CUADRO VII — Relojes de haz de cesio
Modelo: HP5061A - OSA B3200 - HP5061A-004 - HP5062A - OSA 3000
Modelo Resonadoratómico
Oscilador de cuarzo
Circuitos de acondicio
namiento de frecuencia
Servocircuitos
Circuitos de salida
Acondicionamiento interno de
energía
Otroscom ponentes
ZU (ZF) (’)
Informe de los usuarios
HP5061AFi 175 72 97 50 12 68 28 3347% 35 14 19 10 2 14 6 (502)
OSA B3200Fi 38 4 0 0 8 40 15 96% 36 4 0 0 8 38 14 (105)
HP5061A-004Ft 16 9 4 4 1 2 4 118% 40 23 10 10 3 5 10 (40)
HP5062AFi 213 46 41 88 69 228 102 1648% 27 6 5 11 9 29 13 (787)
Informe de los fabricantes
HP5061 (2)5061-004 F¡ 62 17 44 21 40 6 4 (194)5062C % 32 9 23 11 20 3 2OSA 3200 Fi 20 21 15 15 9 83 1 679
% 12 13 9 9 5 51 1 (164)
OSA 3000 F¡ 8 8 1 3 1 3 6 289% 27 27 3 10 3 10 20 (30)
(') Normalmente mayor que el E F del cuadro III, debido a varios defectos simultáneos. (2) No se dispone del número de unidades.

166 I. 898-1
3.4 Pruebas de calificación y aceptación
Debiera establecerse una prueba de calificación del diseño específica para cada reloj y tipo de patrón que determine los márgenes de funcionamiento en condiciones ambientales iguales a las condiciones extremas que se encuentran en el servicio. Debiera determinarse asimismo el margen de funcionamiento correspondiente a una situación en que concurrieron simultáneamente todos los límites. Las pruebas ambientales debieran comprender los siguientes factores sin que esta enumeración pueda considerarse exhaustiva:
TemperaturaVibraciónChoqueCampos magnéticos alternativos Campos magnéticos estáticosInterferencia en radiofrecuencia (r.f.) por conducción Interferencia en r.f. por radiación Presión atmosférica Humedad.
Se midió la influencia de las condiciones ambientales en la marcha de un reloj comercial de cesio utilizando una cámara de vacío especialmente concebida para ello. Las variaciones de marcha debidas a variaciones de temperatura (por °C entre 24 y 31 °C), humedad absoluta (por gm - 3 entre 7 y 18 gm -3), presión atmosférica (por 100 mbar entre 673 y 1007 m bar (100 m bar = 104 Pa)) y campo geomagnético (por 100 mOe entre —135 y 135 mOe (100 mOe = 8 A m -1)) fueron menores que ± 2 x 10- 1 4 con incertidumbre media estimada del orden de 10-15. Estos resultados para un reloj de cesio indican que el efecto de las mencionadas influencias ambientales no son despreciables y que deberán controlarse cuidadosamente las condiciones ambientales para mantener el funcionamiento de los relojes atómicos en condiciones tan uniformes como sea posible [Iijima y otros, 1978].
Conviene observar, sin embargo, que los valores específicos no pueden generalizarse en el sentido de coeficientes de sensibilidad. Esos valores no son iguales de un reloj a otro y ni siquiera son fijos para un reloj en concreto porque dependen de la gama y de la velocidad de variación de los parámetros.
U na vez que se han establecido estas limitaciones para un tipo determinado, debieran especificarse niveles de prueba de aceptación, para garantizar que cada unidad entregada ha sido medida y que los resultados corresponden a los márgenes de funcionamiento establecidos.
Antes de la entrega y para suprimir defectos de fabricación, cada unidad debiera someterse a un ensayo de vibración aleatoria triaxial de dos minutos de duración, como mínimo, en cada eje. A continuación, la unidad debiera someterse a cinco ciclos de temperaturas extremas permaneciendo como mínimo cuatro horas a cada tem peratura extrema. Debiera luego observarse durante una semana de funcionamiento para com probar que no se han deteriorado los márgenes.
3.5 Continuidad de funcionamiento
En la mayoría de las aplicaciones de las señales horarias y de las frecuencias patrón, particularmente en la esfera de las comunicaciones, es preciso satisfacer severos requisitos en lo que respecta a la continuidad de la explotación, lo que requiere multiplicar las fuentes a fin de evitar interrupciones del servicio. Un prom ediador de frecuencia desarrollado en el National Physical Laboratory se basa en una extensión de trabajos anteriores [McLeod y Wise, 1975]. El equipo produce una frecuencia de salida que representa la media ponderada de hasta cinco frecuencias de entrada y el factor de ponderación de cada fuente de frecuencia puede variar de 0 a 5, en saltos de unidad. Hay una compensación automática en el caso de cualquier variación en los factores de ponderación y de la adición o supresión de las frecuencias de entrada. Se trata, pues, de un sistema muy redundante y sería consiguientemente una fuente extremadamente fiable para un canal de comunicaciones. Además, el hecho de que la frecuencia media de salida sea más estable que cualquiera de las frecuencias de entrada podría resultar muy útil en el caso de algunas aplicaciones.
Existen otras posibilidades de asegurar continuidad de funcionamiento, como el uso de osciladores subordinados sincronizados con una memoria en el sistema de control.
3.6 Conclusiones
La investigación sobre la fiabilidad de los relojes de referencia expuesta en el § 3.3 ha arrojado ya algunos resultados interesantes. Las estimaciones del tiempo medio entre fallos de los relojes de cesio, rubidio y cristal confirm an la antigua regla de que el tiempo medio entre fallos es inversamente proporcional a la complejidad del dispositivo. Sin embargo, el dispositivo más complejo presenta también la estabilidad de frecuencia más alta y podría necesitar, por tanto, menos trabajo de supervisión y mantenimiento (como los ajustes de frecuencia) en la explotación de un sistema. Debe comprenderse igualmente que toda estadística basada en fuentes y condiciones de funcionamiento muy distintas tiene limitaciones y está sometida a posibles sesgos.

I. 898-1 167
Los cuadros III y IV reflejan asimismo la importancia que tiene la experiencia en la fabricación para mejorar la fiabilidad. El apantallamiento de ciertas partes y la estabilización de la frecuencia de averías constituyen medidas satisfactorias para minimizar los fallos «iniciales». Algunas debilidades insidiosas ocultas sólo se ponen de manifiesto tras varias semanas de fabricación y funcionamiento práctico. Siendo así, el nivel de fiabilidad alcanzado por los patrones de haz de cesio es notable.
4. Técnicas de medición
Las mediciones son el único medio de garantizar la conform idad con las especificaciones. Los Informes 363 y 518 tratan de la comparación de los métodos practicados actualmente para la transmisión y difusión de señales horarias y frecuencias patrón.
Los relojes de cristal, rubidio y cesio requieren comprobaciones para garantizar su funcionamiento adecuado. En cuanto a los relojes de cristal y de rubidio, es necesario calibrar y reajustar periódicamente la frecuencia, mientras que los relojes de cesio no requieren tales ajustes para cum plir las tolerancias de frecuencia indicadas en la Recomendación G.811 del CCITT. No obstante, la comparación a largo plazo con otra referencia constituye un factor de seguridad importante para detectar fallos.
El problema más importante que plantea la medición de la hora de un reloj a cierta distancia es la incertidumbre del retardo del trayecto de transmisión, que suele determinar la elección del método de com paración. Si bien el sincronismo en una red ampliada es factible y conveniente, el hecho de que no sean perfectamente estables los retardos de transmisión plantea la cuestión del nivel de precisión que debe proporcionarse. El efecto de las variaciones en el retardo de transmisión puede suprimirse en gran medida mediante comparaciones de tiempo bidireccionales. Esas comparaciones pueden hacerse con relativa facilidad utilizando impulsos de sincronización normal de enlaces de comunicaciones digitales dúplex, es decir, los que proporcionan la comunicación simultánea en ambas direcciones. Esto permite realizar mediciones muy precisas de errores de tiempo para utilizarlas en la operación de redes de comunicaciones digitales.
El proyectista de sistemas de comunicaciones digitales tiene ante sí varias posibilidades. Los relojes del sistema pueden estar referidos a un solo reloj maestro, que a su vez está referido al UTC. Un sistema extendido puede estar subdividido en regiones, cada una de las cuales tiene su reloj maestro individualmente referido al UTC. En Canadá se han experimentado estas dos alternativas con resultados satisfactorios. En el primer caso, el reloj maestro de la red se comparó con el patrón nacional de frecuencia del NRC (N ational Research Center). En el segundo caso, varios relojes maestros fueron alineados en fase con las señales del sistema de navegación Loran-C.
Un factor muy importante del diseño es el grado de confianza en los relojes, es decir, la constante de tiempo en el bucle de control de frecuencia en función de la calidad de los relojes [Kartaschoff, 1980].
En el futuro, los métodos de comparación por satélite ofrecen grandes posibilidades, especialmente en zonas en las que no se dispone de otras señales horarias de alta estabilidad (Inform e 518).
R EFERENCIA S BIBLIOGRÁFICAS
IIJIM A, S. FUJIWARA, K., KOBAYASHI, H. y KATO, T. [1978] Effect of environmental conditions on the rate of a caesium clock. Ann. Tokyo Astron. Observatory, Universidad de Tokio, 2.a serie, Vol. 17, 1, 50-67.
JO HN SON , A., FORCE, M. y OSTERDOCK, T. [1980] Longevity performance of cesium clocks. Proc. 34th Annual Symposium on Frequency Control, Philadelphia, Pa., Estados Unidos de América. US Army Electronics Comm and, Ft. M onm outh, NJ 07703 (Electronic Industries Association, Washington DC 20006, Estados Unidos de América).
KARTASCHOFF, P. [septiembre de 1979] Computer simulation of the conventional clock model. IE E E Trans. Instr. and Meas., Vol. IM-28, 3, 193-197.
KARTASCHOFF, P. [diciembre de 1980] Reference clock parameters for digital Communications systems applications. Proc. 12th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting (NASA, G oddard Space Flight Center, Greenbelt, Md., Estados Unidos de América). NASA CP 2175, 515-548.
McLEOD, N. W. y WISE, J. [1975] Clock averaging circuit. Electron. Lett., Vol. 11, 18, 428-429.
PERCIVAL, D. B. y W INKLER, G. M. R. [1975] Timekeeping and the reliability problem. Proc. 29th Annual Symposium on Frequency Control (US Army Electronics Command, Ft. Monmouth, NJ 07703) (Electronics Industries Association, W ashington, DC, 20006 Estados Unidos de América).
BIBLIOGRAFÍA
ZHU AN G QI XIANG [1980] Reliability research of rubidium clock. Ann. Shanghai Observatory. Academia Sínica, Vol. 2.

PAGE INTENTIONALLY LEFT BLANK
PAGE LAISSEE EN BLANC INTENTIONNELLEMENT

CUESTIONES Y PROGRAMAS DE ESTUDIOS, RESOLUCIONES, RUEGOS, Y DECISIO N ES
C. 1/7, P.E. 1A-1/7 169
CUESTIÓN 1/7
EM ISIONES DE FRECUENCIAS PATRÓN Y DE SEÑALES HORARIAS
(1948-1951-1953-1956-1963)El CCIR,
CONSIDERANDO
a) que la Conferencia Administrativa M undial de Radiocomunicaciones, Ginebra, 1979, pidió que se coordinara el establecimiento y funcionamiento de un servicio de frecuencias patrón y de señales horarias a nivel m undial;b) que ya son varias las estaciones que transmiten regularmente frecuencias patrón y señales horarias en las bandas atribuidas por esta Conferencia;c) que ciertas regiones del m undo no disponen todavía de un servicio eficaz;d) que el empleo de mayor número de estaciones que el técnicamente necesario daría lugar a interferencias que reducirían la eficacia del servicio,
DECID E, POR U NA NIM ID AD , poner a estudio la siguiente Cuestión:
1 . ¿Qué medidas pueden recomendarse para aum entar la eficacia del actual servicio de frecuencias patrón y de señales horarias en las bandas atribuidas por esta Conferencia?
2. ¿Qué medidas pueden recomendarse para reducir las interferencias mutuas entre las estaciones de frecuencias patrón y de señales horarias que funcionan en la misma frecuencia y cuyas respectivas zonas de servicio se superponen?Nota. — Véanse los Informes 267, 731 y 896, y las Recomendaciones 374, 376, 457, 458, 460, 485, 535 y 536, la Resolución 14 y los Ruegos 26, 28 y 71.
PROGRAM A DE ESTUDIOS lA -1/7
M EJORA DE LA EFICACIA DEL SERVICIO DE FRECUENCIAS PATRÓNY SEÑALES HORARIAS
(1965-1970)El CCIR,
CON SID ERA ND O
a) que en la Cuestión 1/7 y en la Recomendación 374 se pide inform ación acerca de los métodos adecuados para mejorar la eficacia del actual servicio de emisiones de frecuencias patrón y de señales horarias;b) que hay estaciones de frecuencias patrón que trabajan simultáneamente en la misma frecuencia portadora,
D ECID E, POR U NA NIM ID AD , que se efectúen los siguientes estudios:
1. Investigar la posibilidad de reducir las interferencias mutuas entre las emisiones del servicio de frecuencias patrón y de señales horarias:1.1 Reduciendo la duración del program a de modulación continua de audiofrecuencia y de los avisos.1.2 Utilizando una modulación que proporcione la información y la precisión necesaria con la m ínim a anchura de banda.1.3 Escalonando las frecuencias emitidas en las bandas atribuidas y utilizando un método conveniente de modulación.1.4 Adoptando un sistema adecuado y coordinado de compartición en el tiempo entre las emisiones de frecuencias patrón en las regiones donde existen interferencias mutuas.1.5 Evitando toda emisión sin modulación de la portadora que no sea necesaria para la explotación del servicio.
2. Compilar información acerca de la forma en que pueden coordinarse las emisiones de frecuencias patrón en las bandas 6 y 7 con las emisiones en otras bandas, para lograr en todo el m undo el mejor servicio global posible.Nota. — Véanse la Recomendación 537 y el Informe 732.

170 C. 2/7, P.E. 2A-2/7
CUESTIÓN 2/7
EM ISIONES DE FRECUENCIAS PATRÓN Y DE SEÑALES HORARIAS EN NUEVAS BANDAS DE FRECUENCIAS
(1956-1963)El CCIR,
C O N SID E R A N D O
a) que con los actuales servicios de frecuencias patrón y de señales horarias no siempre se puede obtener en ciertas zonas, en particular en los centros industriales, una relación adecuada entre la señal deseada y el nivel del ruido;b) que las bandas atribuidas a las emisiones de frecuencias patrón y de señales horarias son más útiles para la difusión a larga distancia que para la difusión local;c) que en algunas zonas se necesita un servicio de mejor calidad y que este servicio puede lograrse mediantela utilización de frecuencias de la banda 8 o de frecuencias más elevadas;d) que el empleo de frecuencias de las bandas 4 y 5 permite hacer comparaciones de frecuencia y de tiempo de gran precisión,
D EC ID E, POR U N A N IM ID A D , p o n er a e stu d io la sig u ien te C u estió n :
¿Qué recomendaciones pueden formularse para la difusión de frecuencias patrón y de señales horarias porencima de 30 MHz y por debajo de 100 kHz, aproximadamente?Nota. — Véanse las Recomendaciones 375, 582, el Informe 518 y los Ruegos 27 y 72.
PROGRAMA DE ESTUDIOS 2A-2/7
EM ISIO N ES DE FRECUENCIAS PATRÓN Y DE SEÑALES HORARIAS POR SATÉLITE
(1963-1970-1982)El CCIR,
C O N SID E R A N D O
a) que los constantes progresos de la ciencia y la tecnología han acrecentado la exigencia de precisión yalcance de servicio de las emisiones de frecuencias patrón y señales horarias;b) que en los trabajos de varias Comisiones de Estudio del CCIR se describen sistemas de radiocomunicaciones por satélite que cubren una extensa zona de servicio con una estabilidad satisfactoria de las señales en toda la superficie de la Tierra;c) que las técnicas de satélite proporcionan la base de los sistemas actuales y futuros de comparación ydifusión de frecuencias patrón y señales horarias;d) que diversos servicios por satélite (por ejemplo, de navegación, meteorología, ciencias de la tierra,televisión) podrían utilizarse también a los efectos de la comparación y difusión de frecuencias patrón y señales horarias,
D EC IDE, POR U N A N IM ID A D , que se efectúen los siguientes estudios:
1. Factores de orden técnico y mediciones cuantitativas que han de tenerse en cuenta al recomendar frecuencias y al especificar las técnicas de transmisión, modulación y recepción que son de im portancia para la realización de emisiones de frecuencias patrón y de señales horarias por medio de satélites.
2. Exigencias técnicas y de explotación que se deben considerar al incorporar a los satélites anfitriones las emisiones o retransmisiones de frecuencias patrón y señales horarias.Nota. — Véanse los Informes 518, 736 y la Decisión 28.

P.E. 2B/7, C. 3-1/7 171
PROGRAMA DE ESTUDIOS 2B/7
MÉTODOS DE EXPLOTACIÓN PARA LAS EMISIONES DE FRECUENCIAS PATRÓN Y DE SEÑALES HORARIAS EN LAS BANDAS DE ONDAS
MIRIAMÉTRICAS Y KILOMÉTRICAS
(1976)El CCIR,
CONSIDERANDO
que la utilidad de las emisiones de frecuencias patrón y de señales horarias en las bandas de ondas miriamétricas y kilométricas depende de las características de explotación de los transmisores, de los métodos de modulación y formatos utilizados,
DECIDE POR UNANIMIDAD, que se efectúen los siguientes estudios:
Métodos técnicos y de explotación para los transmisores y ias antenas y métodos de modulación y formatos de las señales que pueden recomendarse para la difusión de frecuencias patrón y señales horarias, utilizando frecuencias inferiores a unos 100 kHz.Nota. — Véase el Informe 735,
CUESTIÓN 3-1/7
ESTABILIDAD EN LA RECEPCIÓN DE LAS EMISIONES DE FRECUENCIAS PATRÓN Y DE SEÑALES HORARIAS
(1956-1959-1963-1986)El CCIR,
CON SID ERA ND O
a) que las emisiones de frecuencias patrón y de señales horarias son menos estables en la recepción que en su origen debido a los fenómenos que se producen en la propagación de las ondas radioeléctricas en cualquier medio, por ejemplo, el efecto Doppler, la variación diurna y las interferencias por trayectos múltiples;b) que los errores que se producen durante la propagación dependen de la ubicación geográfica del transm isor y del receptor, y de la naturaleza y condiciones del medio, y son, por lo general, diferentes en las diversas regiones del espectro radioeléctrico;c) que mediante técnicas especiales es posible mejorar la precisión con que pueden recibirse las emisiones de frecuencias patrón y de señales horarias;d) que la precisión con que pueden recibirse las emisiones de frecuencias patrón y de señales horarias puede depender del diseño del equipo receptor,
D ECÍD E, POR UNA NIM ID AD , poner a estudio la siguiente Cuestión:
1. Causas de la degradación de la estabilidad y de la precisión de las frecuencias patrón y de las señales horarias, tal como las reciben los usuarios.
2. Distribución estadística de los valores de la inestabilidad producida por estas causas.
3. Técnicas de emisión y de recepción de frecuencias patrón y de señales horarias que permiten obtener los mejores resultados en la recepción:— de las frecuencias patrón y de las señales horarias utilizadas por usuarios que sólo necesitan una precisión
media;— de las frecuencias patrón y de las señales horarias utilizadas por usuarios que necesitan la máxima precisión
posible.Nota. — Véanse la Recomendación 486 y el Informe 271.

172 P.E. 3A-1/7, 3C-3/7
PROGRAM A DE ESTUDIOS 3A-1/7
UTILIZACIÓN ÓPTIM A DEL ESPECTRO DE FRECUENCIAS PARA LAS SEÑALES HORARIAS DE GRAN PRECISIÓN
(1959-1970)El CCIR,
CONSIDERANDO
a) que, con las técnicas actuales, una precisión más elevada en la transmisión de las señales horarias entraña un aumento de la anchura de banda;b) que, sin embargo, con las técnicas desarrolladas últimamente, se puede conseguir una considerable economía de anchura de banda para una precisión dada;
c) los efectos de los ruidos de toda índole en el rendimiento de los sistemas,
DECIDE, POR UNANIMIDAD, que se efectúen los siguientes estudios:
1. Relación entre las anchuras de banda necesarias y la precisión que puede obtenerse actualmente para lasdiversas relaciones señal/ruido que se presentan en la práctica.
2. Técnicas de banda estrecha para producir y transmitir referencias de tiempo de gran precisión.
3. Características de los trayectos radioeléctricos que limitan la exactitud de las señales horarias en larecepción, e influencia de los parám etros de estos trayectos en la elección del método óptimo.
Nota. — Véase el Informe 270.
PROGRAM A DE ESTUDIOS 3C-3/7
COM PARACIÓN ENTRE DIFERENTES M ÉTODOS DE TRANSFERENCIA Y DIFUSIÓN DE SEÑALES HORARIAS Y FRECUENCIAS PATRÓN
(1978)El CCIR ,
CONSIDERANDO
a) que de acuerdo con la Recomendación 460 es preciso coordinar las emisiones de frecuencias patrón y de señales horarias;b) que las comparaciones de emisiones de frecuencias patrón y de señales horarias difundidas por diversos métodos proporcionan datos importantes sobre la capacidad de dichos métodos,
DECIDE, POR UNANIMIDAD, que se efectúen los siguientes estudios:
1. Comparación de las emisiones de frecuencias patrón y de señales horarias por diversos métodos.
2. Análisis de las diferencias y fluctuaciones observadas a fin de determinar las posibilidades ofrecidas por los diversos métodos.
Nota. — Véanse los Informes 363, 439 y 897.

P.E. 3D-2/7, C. 4-1/7, P.E. 4A/7 173
PROGRAMA DE ESTUDIOS 3D-2/7
M ÉTODOS PARA LAS COM PARACIONES FIABLES DE LA FASE EN ONDAS MIRIAMÉTRICAS
(1970-1978)El CCIR,
CONSIDERANDO
a) que a menudo hay que tom ar un valor medio basado en escalas de tiempo de relojes o de grupos de relojes lejanos y que con este ñn se hace amplio uso de las comparaciones de las fases en ondas miriamétricas;b) que en el caso de comparaciones de fase en ondas miriamétricas se corre actualmente el riesgo de perder ocasionalmente la continuidad de fase en la recepción y que cada pérdida de la continuidad de fase puede causar un error que no es despreciable;c) que el empleo de dispositivos de medida calibrados es una condición previa para el estudio fundam ental de los problemas de la propagación de las ondas miriamétricas;d) que también convendría medir los valores de fase de las ondas miriamétricas a la hora más favorable del día desde el punto de vista de la fiabilidad de fase de la señal recibida,
DECIDE, POR UNANIMIDAD, que se efectúen los siguientes estudios:
1. Fomento del desarrollo y utilización de aparatos que puedan calibrarse para la com paración de fase en ondas miriamétricas.
2. Investigación de la propagación de las ondas miriamétricas con objeto de determinar las condiciones de recepción más favorables para efectuar comparaciones diarias de fase.
CUESTIÓN 4-1/7
DIFUSIÓN DE FRECUENCIAS PATRÓN Y DE SEÑALES HORARIAS(1965-1970)
El CCIR,
CONSIDERANDO
a) que es necesario aumentar la precisión de las emisiones de frecuencias patrón y de señales horarias;b) que el grado de precisión en la recepción de las actuales emisiones de frecuencias patrón y de señales horarias disminuye debido a que la propagación de las ondas radioeléctricas está sujeta a ciertos fenómenos, como las variaciones diurnas y el efecto Doppler,
DECIDE, POR UNANIMIDAD, poner a estudio la siguiente Cuestión:
¿Qué técnicas nuevas pueden utilizarse para mejorar la precisión de las difusiones de frecuencias patrón y de señales horarias?Nota. — Véase el Informe 736.
PROGRAM A DE ESTUDIOS 4A /7
DIFUSIÓN DE FRECUENCIAS PATRÓN POR ESTABILIZACIÓN DE LA FRECUENCIA PORTADORA DE UNA ESTACIÓN DE RADIODIFUSIÓN
(1966-1970)El CCIR,
CONSIDERANDO
a) que es necesario estudiar nuevos métodos de difusión de frecuencias patrón y de señales horarias;b) que, en ciertos países, algunas estaciones que funcionan en las bandas de radiodifusión transm iten señalesde frecuencias patrón;

174 P.E. 4A/7, 4B/7
c) que de la estabilización de las frecuencias portadoras de las estaciones de radiodifusión pueden derivarse ciertas ventajas, a saber:— posibilidad de asegurar a centros urbanos e industriales un buen servicio por la onda de superficie exenta de
errores debidos al efecto Doppler;— posibilidad de efectuar una rápida comparación de frecuencias en los puntos receptores gracias al empleo de
frecuencias portadoras suficientemente elevadas;— utilización de equipo receptor relativamente sencillo,
DECIDE, POR UNANIMIDAD, que se efectúen los siguientes estudios:
1. Determinación de la precisión y de la estabilidad en la recepción de las señales procedentes de talesemisiones.
2. Influencia de la ubicación de las estaciones transmisoras en la conveniencia de empleo de las señales y en sus características de propagación.
3. Interés que puede tener establecer un servicio de esta naturaleza.
4. Ventajas relativas de la modulación de amplitud y de la modulación de frecuencia en la difusión de lasseñales horarias, y del empleo de las bandas de radiodifusión para la difusión de frecuencias patrón por estabilización de una frecuencia portadora.Nota. — Véase el Informe 576.
PROGRAM A DE ESTUDIOS 4B/7
DIFUSIÓN DE SEÑALES HORARIAS PO R SU PERPO SICIÓ N DE SEÑALES CON M ODULACIÓN DE FASE EN TRANSMISORES DE RADIODIFUSIÓN
SONORA DE M ODULACIÓN DE AMPLITUD(1.974)
El CCIR,
CONSIDERANDO
a) que es necesaria una amplia difusión de las señales horarias, sin aum entar el número de los transmisoresque funcionan en frecuencias atribuidas a los servicios de frecuencias patrón y de señales horarias;b) que es conveniente investigar nuevas técnicas de difusión de señales horarias;c) que corresponde tener en cuenta la Recomendación 1.3 adoptada por la Unión Radiocientífica Internacional (URSI) en su XVII Asamblea General (Varsovia, 1972);d) que la zona de servicio de los transmisores de radiodifusión de modulación de amplitud que funcionan en las bandas 5 y 6 es muy extensa,
DECIDE, POR UNANIMIDAD, que se efectúen los siguientes estudios:
1. Posibilidad de superponer señales horarias con modulación de fase en la portadora de un transmisor ordinario de radiodifusión de modulación de amplitud, sin perturbar la escucha del programa.
2. Posibilidad de aplicar estas técnicas a los transmisores de radiodifusión de modulación de amplitud que funcionan en las bandas 5 y 6 .Nota. — Véase el Informe 577.
C. 5-1/7, P.E. 5A/7, 5B-1/7 175
CUESTIÓN 5-1/7
NECESIDAD DE TRANSFERIR SEÑALES HORARIAS DE ALTA PRECISIÓN(1978)
El CCIR,
CONSIDERANDO
a) que existe una creciente necesidad a escala m undial de efectuar transferencias de señales horarias con precisión superior a la que se puede alcanzar actualm ente;b) que puede lograrse satisfacer esta necesidad en form a económ ica, u tilizando las posibilidades inherentes de tem porización que ofrecen sistemas destinados prim ordialm ente a otros fines,
DECIDE, POR UNANIMIDAD, poner a estudio la siguiente C uestión:
¿Qué técnicas pueden desarrollarse, independientem ente o ju n to con los actuales sistem as m undiales o intercontinentales, a fin de satisfacer los requisitos que cabe prever p ara lograr un alto grado de precisión en la transferencia de señales horarias?
PROGRAMA DE ESTUDIOS 5A/7
NECESIDAD DE SEÑALES HORARIAS DE GRAN PRECISIÓN(1976)
El CCIR,
CONSIDERANDO
a) que en muchas zonas se dispone, de manera continua, de transferencia de señales horarias mediantesistemas LORAN-C, con una desviación típica de un día para otro de 100 ns;b) que se han notificado comparaciones entre señales horarias efectuadas por enlaces por satélite en ambossentidos con incertidumbre de 10 a 50 ns;c) que perfeccionando las técnicas de satélite y utilizando láser parece posible reducir esta incertidumbre enun orden de magnitud;d) que esos perfeccionamientos son onerosos y conviene desarrollarlos en función de las necesidades,
DECIDE, POR UNANIMIDAD, que se efectúen los siguientes estudios:
Evaluación de las necesidades actuales y previstas en materia de señales horarias de gran precisión para aplicaciones tales como: sistemas de navegación, redes para datos de gran velocidad, radiointerferometría de línea de base muy larga (VLBI).
PROGRAMA DE ESTUDIOS 5B-1/7
MANTENIMIENTO DEL TIEM PO Y SINCRONIZACIÓN A NIVELES INFERIORES A 1 NANOSEGUNDO
(1983-1985)El CCIR,
CONSIDERANDO
a) que las frecuencias patrón y señales horarias de referencia se generan en puntos situados a gran distanciaentre sí y que actualmente no pueden mantenerse en sincronización a niveles del nanosegundo,
DECIDE, POR UNANIMIDAD, que se efectúen los siguientes estudios:
1. Posibilidad de mejorar la capacidad de efectuar comparaciones entre patrones de frecuencia a nivelesinferiores a 1 ns.
2. Determinación de las limitaciones temporales basadas en las inestabilidades de la instrumentación,inestabilidades de propagación y otras correcciones, incluidos los efectos relativistas causados por la influencia de los cuerpos celestes cercanos.

176 C. 7/7, P.E. 7A/7
CUESTIÓN 7/7
CÓD IG O S HORARIOS(1974)
El CCIR,
CONSIDERANDO
a) la necesidad de proporcionar una indicación horaria completa y segura para diversas aplicaciones científicas e industriales;b) que diversas estaciones emiten actualmente códigos horarios con indicación, como mínimo, del minuto, la hora y el día del año;c) que es sumamente conveniente que estos códigos sean compatibles entre sí y con los equipos comerciales de tipo corriente,
DECIDE, POR UNANIMIDAD, poner a estudio la siguiente Cuestión:
1. ¿Qué formatos pueden recomendarse para la transmisión de códigos horarios?
2. ¿Cuáles son las características óptimas de modulación desde el punto de vista de la confiabilidad de la decodificación en presencia de ruido y de señales interferentes?Nota. — Véanse la Recomendación 583 y el Informe 578.
PROGRAM A DE ESTUDIOS 7A/7
CARACTERÍSTICAS DE LOS CÓDIGOS HORARIOS(1978)
El CCIR,
CONSIDERANDO
a) la necesidad de información codificada de DU Tl en algunas emisiones de señales horarias para asegurar la inmediata disponibilidad de U T1;b) que algunos transmisores de frecuencias patrón y señales horarias emiten actualmente códigos horarios que dan el minuto, la hora y la fecha, y que es conveniente que tales códigos sean compatibles entre sí y con el equipo normalmente disponible en el mercado;c) que no es fácil disponer de detalles sobre los diversos códigos horarios que se han desarrollado para aplicaciones a sistemas, y que no es conveniente la innecesaria proliferación de aquéllos,
DECIDE, POR UNANIMIDAD, que se efectúen los siguientes estudios:
1. Métodos más convenientes de difusión de D U Tl.
2. Tipos y formatos más adecuados de información horaria codificada para las emisiones de frecuencias patrón y señales horarias.
3. Compilación y publicación de un índice de códigos horarios, con indicación detallada de las fuentes de inform ación y de los criterios para facilitar la elección de los códigos más adecuados para cada una de las aplicaciones a sistemas.

C. 8/7, 9/7, P.E. 9A/7 177
CUESTIÓN 8/7
DISPONIBILIDAD Y PRECISIÓN DE LAS SEÑALES HORARIAS Y DE LAS FRECUENCIAS PATRÓN
(1976)El CCIR,
CONSIDERANDO
que, para muchas aplicaciones, reviste gran importancia la disponibilidad y precisión de las señales horarias y frecuencias patrón,
DECIDE POR UNANIMIDAD, poner a estudio la siguiente Cuestión:
1. ¿Qué mediciones han de utilizarse para caracterizar, de manera más clara, la disponibilidad y precisión de los relojes y de las frecuencias patrón?
2. ¿Qué grado de disponibilidad y precisión en la explotación ofrecen las actuales señales horarias y frecuencias patrón?
3. ¿Qué medidas pueden tomarse para aumentar la disponibilidad y precisión de los generadores de señales horarias y frecuencias patrón?Nota. — Véanse el Informe 898 y la Decisión 29.
CUESTIÓN 9/7
RETARDOS DE LA SEÑAL CAUSADOS POR LAS ANTENAS Y OTROS CIRCUITOS EN LA TRANSFERENCIA DE SEÑALES HORARIAS DE ELEVADA PRECISIÓ N
(1986)El CCIR,
CONSIDERANDO
a) que es necesario que la precisión de la transferencia de señales horarias sea superior a la precisión disponible actualmente;b) que las antenas y otros circuitos eléctricos son elementos críticos en el trayecto de la señal radioeléctrica en los puntos de transmisión, retransmisión y recepción, respecto a las precisiones deseadas,
DECIDE, POR UNANIMIDAD, poner a estudio la siguiente Cuestión:
¿Qué métodos pueden recomendarse para determinar y caracterizar el retardo introducido por las antenas y circuitos asociados, utilizados para la transferencia de señales de precisión a través del trayecto de una señal radioeléctrica?
PROGRAM A DE ESTUDIOS 9A /7
CARACTERIZACIÓN DEL RETARDO DE LA SEÑAL ORIGINADO EN LAS ANTENAS(1986)
El CCIR,
CONSIDERANDO
a) la necesidad de tener en cuenta el retardo de la antena en los trayectos radioeléctricos, para la transferencia precisa de señales horarias;b) la conveniencia de disponer de diseños de antenas normalizadas con características de retardo conocidas;c) la conveniencia de disponer de acuerdos internacionales en cuanto a la tecnología de medición,

178 P.E. 9A/7, C. 10/7, P.E. 10A/7
DECIDE, POR UNANIMIDAD, que se efectúen los siguientes estudios:
1. Investigación de los parám etros de las antenas que cuantifican las características que influyen sobre el retardo durante el tránsito de las señales horarias, tales como la longitud de onda, abertura, anchura de banda, impedancia, polarización, directividad, efectos dieléctricos, factores de los sistemas de antenas, efectos de las ondas progresivas, efectos de las lentes, y efectos de medios anisótropos e inhomogéneos.
2. Investigación de los circuitos eléctricos conexos en cuanto afectan al retardo total de la señal.
3. Investigación del retardo en los dipolos normalizados, bocinas o antenas largas adecuadas para cubrir el espectro radioeléctrico.
4. Investigación de los efectos ambientales que podrían afectar al retardo, tales como, temperatura, presión, humedad, campo magnético, aceleración, movimiento relativo y los efectos relativistas.
5. Investigación de la tecnología de medición que permita obtener exactitudes en las gamas de microse- gundos, nanosegundos y picosegundos.
CUESTIÓN 10/7
CALIDAD DE LOS PATRONES DE FRECUENCIA Y DE TIEM PO(1986)
El CCIR,
CONSIDERANDO
a) que la Conferencia Administrativa Mundial de Radiocomunicaciones (Ginebra, 1979) reafirmó la necesidad de coordinar el establecimiento y la explotación del servicio de señales horarias y frecuencias patrón en el plano mundial;b) que la exactitud con que se pueden transmitir las señales horarias y frecuencias patrón dependefundamentalmente de la calidad de los patrones de frecuencia y de tiempo;c) que existe la necesidad de mejorar la exactitud de las señales horarias y frecuencias patrón a fin demejorar la coordinación mundial de dichas emisiones;d) que para muchas aplicaciones la calidad de los patrones de frecuencia y de tiempo es de importanciaprim ordial,
DECIDE, POR UNANIMIDAD, poner a estudio la siguiente Cuestión:
1. ¿Cuáles son las limitaciones de la calidad de los patrones de frecuencia y de tiempo?
2. ¿Cuáles son los parámetros aplicables para la caracterización de la calidad de los patrones de frecuencia yde tiempo?
3. ¿Qué se puede hacer para mejorar la calidad de los patrones de frecuencia y de tiempo?
PROGRAMA DE ESTUDIOS 10A/7
CALIDAD Y CARACTERIZACIÓN DE LOS PATRONES DE FRECUENCIA Y DE TIEM PO(1986)
El CCIR,
CONSIDERANDO
a) que hay necesidad de mejorar la caracterización de los patrones de frecuencia y de tiempo;b) que hay necesidad de mejorar la exactitud de las señales horarias y de los patrones de frecuencia y detiempo,
DECIDE, POR UNANIMIDAD, que se efectúen los siguientes estudios:
1. Investigación de la caracterización de los patrones de frecuencia y de tiempo.
2. Investigación de las técnicas para efectuar la medición y evaluación de la calidad de los patrones defrecuencia y de tiempo.
3. Investigación de la tecnología que pueda ayudar a mejorar la calidad de los patrones de frecuencia y de tiempo.
P.E. 10B/7, Rs. 14-4 179
PROGRAMA DE ESTUDIOS 10B/7*
ALGORITMOS DE LAS ESCALAS DE TIEM PO Y PROBLEMAS ESTADÍSTICOS(1986)
El CCIR,
CONSIDERANDO
a) que las escalas de tiempo atómico se obtienen a menudo estableciendo medias de escalas de tiempo individuales de gran número de relojes o de grupos de relojes alejados unos de otros;b) que es importante para muchas aplicaciones utilizar una escala de tiempo lo más uniforme posible;c) que, además, convendría que la subdivisión de las escalas de tiempo coincidiese con el valor reconocidodel segundo,
DECIDE, POR UNANIMIDAD, que se efectúen los siguientes estudios:
1. Procedimientos de obtención de medias, incluida la determinación de las ponderaciones estadísticas atribuidas a los relojes o grupos de relojes que intervienen en las escalas de tiempo, qe se pueden recomendar.
Hay que considerar que la exactitud y la estabilidad de dichos relojes pueden ser diferentes, que es preciso tener en cuenta relojes de tipo comercial y modelos de laboratorio y que su lectura se conoce con precisión diferente por quienes se ocupan de la obtención de medias.
2. Procedimientos que pueden recomendarse para el caso de que varíen el número, la exactitud y laestabilidad de los relojes que intervienen en una escala de tiempo, o ambas cosas a la vez.Nota. — Véase el Informe 579.
RESOLUCIÓN 14-4
EM ISIONES DE FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
(Cuestión 1/7)(1963-1966-1970-1974-1986)
El CCIR,
CONSIDERANDO
lo dispuesto en el artículo 33 del Reglamento de Radiocomunicaciones,
RESUELVE, POR UNANIMIDAD:
1. Que tan pronto como se ponga en servicio una asignación de frecuencia hecha a una estación defrecuencias patrón, la administración interesada notifique tal asignación a la IFRB, en cumplimiento del artículo 12 del Reglamento de Radiocomunicaciones; sin embargo, no se dirigirá ninguna notificación a la IFRB sin haber terminado las pruebas y la coordinación de conformidad con el artículo 33 del citado Reglamento.
2. Que todas las administraciones envíen además todo género de datos útiles sobre las estaciones defrecuencias patrón (estabilidad de frecuencia, cambio de fase de los impulsos de señales horarias, modificación de los horarios de emisión) al Relator Principal de la Comisión de Estudio 7, al Director del CCIR y, con miras a la publicación oficial de esos datos, al Director del BIH.
3. Que la Comisión de Estudio 7 coopere con la Unión Astronómica Internacional (UAI), la UniónRadiocientífica Internacional (URSI), la Unión Internacional de Geodesia y Geofísica (UIGG), la Unión Internacional de Física Pura y Aplicada (IUPAP), el Bureau international de l’heure (BIH), y el Comité Internacional de Pesas y Medidas (CIPM).
* Antiguo Programa de Estudios ID -1/7.

180 Ru. 26-2, 27, 28
RUEGO 26-2
ESTUDIOS Y EXPERIM ENTOS RELATIVOS A LAS EM ISIONES DESEÑALES HORARIAS
(Cuestión 1/7)(1966-1970-1974)
El CCIR ,
CONSIDERANDO
a) que las emisiones de frecuencias patrón y de señales horarias se utilizan en muchas esferas de las ciencias puras y aplicadas;b) que la Comisión de Estudio 7 necesita frecuentemente consultar a las uniones y organizaciones científicas,
FORMULA, POR UNANIMIDAD, EL SIGUIENTE RUEGO:
1. Que se invite a la Conferencia General de Pesos y Medidas (CGPM), al Bureau international de l’heure (BIH), a la Unión Radiocientífíca Internacional (URSI), a la Unión Astronómica Internacional (UAI), a la Unión Internacional de Geodesia y Geofísica (UIGG), y a la Unión Internacional de Física Pura y Aplicada (IUPAP) a que cooperen con la Comisión de Estudio 7 del CCIR.
2. Que eh Relator Principal de la Comisión de Estudio 7 se ponga en contacto con el Director del BIH y con los Presidentes de las Comisiones adecuadas de la URSI, UAI, UIGG, CGPM , e IUPAP, y que se informe de ello al Director del CCIR.
RUEGO 27
EM ISIONES DE FRECUENCIAS PATRÓN Y DE SEÑALES HORARIAS EN NUEVAS BANDAS DE FRECUENCIAS
(Cuestión 2/7)(1966)
El CCIR,
CONSIDERANDO
a) que con los actuales servicios de emisión de frecuencias patrón y de señales horarias no siempre se puede obtener en ciertas zonas, en particular en los centros industriales, una relación señal/ruido adecuada;b) que en algunas zonas se necesita un servicio de mejor calidad y que este servicio puede lograrse mediante la utilización de frecuencias de la banda 8 y de frecuencias más elevadas,
FORMULA, POR UNANIMIDAD, EL SIGUIENTE RUEGO:
Que, en la medida de lo posible, cada administración reserve para lá difusión local de frecuencias patrón y de señales horarias, dos bandas de 100 kHz de anchura tomadas, respectivamente, en las bandas 8 y 9, y que sus frecuencias centrales sean múltiplos enteros de 5 MHz.
RUEGO 28
PROGRAMAS ESPECIALES DE LA IFRB PARA LA COM PROBACIÓN TÉCNICA DE LAS EM ISIONES, CON MIRAS A LIBERAR LAS BANDAS
DE FRECUENCIAS ATRIBUIDAS EXCLUSIVAMENTE AL SERVICIO DE FRECUENCIAS PATRÓN
(1966)El CCIR,
CONSIDERANDO
a) los resultados de los programas especiales de comprobación técnica de las emisiones organizados por la IFRB con el fin de liberar las bandas de frecuencias atribuidas exclusivamente al servicio de frecuencias patrón;b) la necesidad de liberar más completamente dichas bandas;c) las dificultades experimentadas por la IFRB para identificar ciertas estaciones de servicios distintos del de frecuencias patrón, pero que emiten en bandas atribuidas a éste,

Ru. 28, 70, 71-1 181
FORMULA, POR U NA N IM ID A D , EL SIG UIEN TE RUEGO:
1. Que se pida a la IFRB que aumente, en la medida de lo posible, el número de programas especiales anuales de comprobación técnica en las bandas atribuidas exclusivamente al servicio de frecuencias patrón.
2. Que la IFRB ruegue encarecidamente a las administraciones de los países que disponen de instalaciones radiogoniométricas que efectúen marcaciones con el fin de determinar la posición de las estaciones cuyas emisiones han sido observadas.
RUEGO 70
EL SISTEMA UTC Y LA FUNCIÓN DEL BUREAU INTERNATIONAL DE L’HEURE
(1982)El CCIR,
CONSIDERANDO
a) que el sistema de Tiempo Universal Coordinado (UTC) está ahora aceptado en el m undo entero comoreferencia de tiempo para casi todas las aplicaciones científicas y técnicas;b) que el funcionamiento del sistema UTC depende del apoyo del Bureau international de l’heure (BIH), queproporciona la base fundamental para el UTC en forma del Tiempo Atómico Internacional (TAI) así como la necesaria relación con el tiempo astronómico;c) que desde hace muchos años, existe una cooperación activa y fructífera entre la Comisión de Estudio 7 delC C IR y el BIH; yd) que el BIH recibe apoyo de diversas organizaciones, tanto nacionales como internacionales,
FORMULA, POR U NA NIM ID AD , EL SIG UIEN TE RUEGO:
1. Que, el Director del C C IR transmita al Director del BIH su vivo agradecimiento por el grado én que el BIH ha colaborado en la promoción del sistema UTC.
2. Que se informe a todas las administraciones de la necesidad de secundar las actividades del BIH para laformación y el mantenimiento del TAI y del UTC.
3. Que se haga una comunicación análoga al Consejo Internacional de Uniones Científicas (CIUC) y a losorganismos más inmediatamente interesados, incluidas la Conferencia General de Pesos y M edidas (CGPM), la Unión Astronómica Internacional (UAI), la Unión Radiocientífica Internacional (URSI), la Unión Internacional de Geodesia y Geofísica (IUGG) y la Unión Internacional de Física Pura y Aplicada (IUPAP).
RUEGO 71-1*
DOCUM ENTACIÓN DE TRANSM ISIONES DE SEÑALES HORARIAS
(Cuestión 1/7)(1982-1986)
El CCIR,
CONSIDERANDO
a) que las señales horarias transmitidas se han mantenido dentro de diversos límites de precisión mediante la introducción de saltos o la modificación de la marcha durante los últimos 25 años;b) que cada administración facilita información actual sobre los reajustes de las señales horarias y de las frecuencias, conforme al número 2771 del artículo 33, del Reglamento de Radiocomunicaciones y a la Resolución 14 del CCIR;c) que ha habido valores distintos de los saltos y de las modificaciones de la marcha en los distintos países en el periodo 1955-1972; y que los detalles correspondientes no están fácilmente disponibles;d) que estos datos serán necesarios para el análisis de los fenómenos a largo plazo,
* Se ruega al Director del C CIR que transmita este Ruego a las autoridades responsables de emisiones de frecuencias patrón y señales horarias, según aparecen en el Informe 267.

182 Ru. 71-1, 72
FORMULA, POR U N A N IM ID AD , EL SIG U IEN TE RUEGO:
Que todas las administraciones que explotan un servicio de señales horarias y frecuencias patrón registren los detalles de los reajustes de las frecuencias y las escalas de tiempo efectuados en el periodo 1955-1972 y concretamente publiquen la cuantía y la fecha de los saltos de tiempo y y de los cambios de frecuencia efectuados en sus emisiones, y asimismo comuniquen estos datos al Bureau international de l’heure (BIH) y a los Centros M undiales de Datos A, B y C.
ANEXO I
D IRECCIO NES DE LOS CENTROS M UNDIALES DE DATOS
Centro M undial de Datos A: WDC-A, Rotation of the Earthc /o US Naval Observatory 34th Massachusetts Avenue NW W ASHINGTON, DC 20390 Estados Unidos de América
Centro M undial de Datos B: State Time and Frequency CommissionG osstandart Leninsky Prospect 9 MOSCÚ 117049 URSS
Centro M undial de Datos C: Rutherford Appleton LaboratoryChilton DIDCOT Oxon 0X11 OQX Reino Unido
RUEGO 72*
DIFUSIÓN DE SEÑALES HORARIAS UTILIZANDO SATÉLITES METEOROLÓGICOS
(Cuestión 2/7)(1982)
El CCIR,
CONSIDERANDO
a) que en muchas esferas de aplicación, como la geodesia, la geofísica, la coordinación internacional deseñales horarias y otros muchos tipos de observaciones científicas coordinadas, cada vez son mayores las necesidades de señales de referencia de tiempo muy fidedignas, disponibles a escala m undial;
b) que desde 1975 se viene difundiendo con éxito un código horario exacto referido al UTC mediante dossatélites meteorológicos GOES de los Estados Unidos, servicio que goza de una aceptación y utilización crecientes en el hemisferio occidental;c) que los satélites europeos Meteosat y los satélites japoneses GMS forman parte dél mismo sistema mundial de meteorología por satélite que los satélites GOES de los Estados Unidos y tienen formatos de datos similares, incluidos ciertos bits de código apropiados reservados para un posible código horario;
d) que podrían utilizarse receptores económicos indistintamente con los satélites GOES y los satélitesM eteosat y GMS, con pocas modificaciones o ninguna;
e) que las organizaciones de difusión de señales horarias y frecuencias patrón de Europa y Japón han expresado interés en la aplicación de códigos horarios en los satélites Meteosat y GMS.
* Se invita al Director del CCIR a que señale este Ruego a la atención de la Unión Internacional de Geodesia y Geofísica (IU G G ) y de la Comisión de Estudio 2 del CCIR.

Ru. 72, D, 65 183
FORMULA, POR UNANIMIDAD, EL SIGUIENTE RUEGO:
1. Que la introducción de un código horario compatible con el de los satélites GOES en los satélites Meteosat y GMS permitiría establecer un valioso servicio mundial de difusión de señales horarias y frecuencias patrón que resultaría útil para muchas aplicaciones y que no exigiría modificaciones im portantes del formato de las señales de los satélites, del equipo a bordo de los mismos o del equipo en tierra.
2. Que se pida a la Organización Meteorológica M undial que dé a conocer el presente Ruego a sus organizaciones nacionales en los países pertinentes.
3. Que se pida a la Agencia Espacial Europea que ponga el presente Ruego en conocimiento de las organizaciones pertinentes de Europa que se interesen por el programa METEOSAT.
DECISIÓN 65
MANUAL SOBRE EL USO DE LA DIFUSIÓN DE SEÑALES HORARIAS Y FRECUENCIAS PATRÓN POR SATÉLITE
(1985)La Comisión de Estudio 7 del CCIR,
CONSIDERANDO
a) la amplitud y profundidad de los estudios realizados por el G rupo Interino de Trabajo (GIT) 7 /4 durante dos periodos de estudios sobre las posibilidades técnicas de la difusión y la transferencia de señales horarias por satélite;b) que la utilidad y la economía de los métodos de difusión de señales horarias por satélite pueden tener aplicación en varios países en desarrollo deseosos de establecer una referencia nacional de señales horarias y frecuencias patrón;
c) que los métodos de difusión por satélite pueden completar y desplazar cada vez más a algunos de los servicios terrenales existentes de difusión de señales horarias y frecuencias patrón;d) _ que durante muchos años se ha acumulado experiencia práctica con un servicio de señales horarias y frecuencias patrón vinculado a los satélites meteorológicos GOES;e) que la utilización de la órbita de los satélites geoestacionarios para sistemas de telecomunicación regional, tales como ARABSAT, BRAZILSAT, INSAT, PALAPA, etc., ofrece posibilidades técnicas para añadir un canal de señales horarias y frecuencias patrón de pequeña anchura de banda;f ) que la introducción de la televisión directa por satélite ampliará de igual modo las posibilides de insertar una referencia horaria en un sistema ya estructurado en al ámbito del tiempo;
g) que la Resolución 33 relativa a la cooperación técnica alienta la publicación de manuales especializados,
DECIDE:
1. Que se constituya un G rupo de Trabajo ad hoc encargado de preparar un manual sobre los servicios de difusión de señales horarias y frecuencias patrón por satélite.
2. Que el manual se inspire inicialmente en los téxtos de la Comisión de Estudio 7 y que incluya también ladocumentación pertinente del G IT 7/4 , de las Comisiones de Estudio 2, 4, 8 y 9, así como de las abundantespublicaciones que versan sobre los sistemas de navegación y determinación de la posición por satélite.
3. Que se aliente a las administraciones para que contribuyan a la elaboración del m anual en los sectores en que tengan conocimientos o una experiencia especiales.
4. Que se nombre un coordinador que supervise la compilación e integración generales de las diversas contribuciones.
5. Que el coordinador y sus colaboradores se fijen como objetivo ultim ar el texto del m anual antes de la XVII Asamblea Plenaria.

184 D. 65
ANEXO I
Al término de la XVI Asamblea Plenaria de 1986, las siguientes Administraciones y organizaciones internacionales manifestaron su deseo de participar en la labor del Grupo de Trabajo ad hoc:
A dmin istraciones:
AustriaCanadáEstados Unidos de AméricaFranciaIndiaJapónReino UnidoYugoslavia (República Socialista Federativa de) BIPM (BIH)
Coordinador del Grupo de Trabajo ad hoc:
Sr. J. McA. Steele N ational Physical Laboratory TED D IN G TO N Middlesex TW11 OLW Reino Unido
Teléfono: + 44 1 977 3222 Télex: 262 344 NPL G
185
ÍNDICE ALFABETICO DE TÉRM INOS (PALABRAS CLAVE) DEL VOLUMEN VII
AAcceso múltiple por distribución en el tiempo (AMDT), difusión de señales por satélite (1.518)
Alertas geofísicas (1.731)
Antenas, caracterización de los retardos (1.1017)
Antenas directivas, reducción de interferencias (1.732)
Asociación Internacional de Institutos de Navegación (IAIN - International Association of Institutes of Navigation) (Rc.536)
ATS-3, satélite de Estados Unidos de América (1.518)
BBanda 5, consideraciones operacionales (1.271)
Bandas de frecuencias atribuidas y nuevas (Rc.374, Rc.375)
Bureau International de l’Heure (BIH) (Rc.374, Rc.458, Rc.460, Rc.536, 1.267, 1.363, 1.439, 1.579)
CCadencia de los relojes, predicción (1.579)
Calibración (defn) (1.730)
Calidad de diseño, relojes de referencia (1.898)
Calidad de funcionamiento y fiabilidad de los relojes de referencia (1.898)
CCITT (Comité Consultivo Internacional Telegráfico y Telefónico) (Rc.486, 1.898)
Código horario (defn) (1.730)
Códigos horarios (Rc.583, 1.578, 1.731)
Códigos para señales horarias (1.578)
Coherencia de fase (defn) (1.730)
Coherencia de frecuencia (defn) (1.730)
Comité Consultivo para la Definición del Segundo (CCDS)(1.439, 1.897)
Comparación de los métodos de difusión y transmisión (1.363)
Comparación de señales horarias mediante satélite (1.578)
Comparación de tiempo (defn) (1.730)
Comparaciones de fase, banda de ondas miriamétricas (1.363)
Compartición de frecuencias, servicio de señales horarias con otros servicios (1.736)
Compartición en el tiempo (1.732)
Conferencia General de Pesos y Medidas (CGPM) (Rc.374, Rc.460, Rc.485, Rc.535, Rc.536, 1.439)
Consejo Internacional de Uniones Científicas (CIUC) (Rc.374, Rc.460)
DDeriva de frecuencia (defn) (1.730)
Deriva normalizada de frecuencia (defn) (1.730)
Desajuste de frecuencia (defn) (1.730)
Desajuste de frecuencia normalizado (defn) (1.730)
Desplazamiento de fase (defn) (1.730)
Desplazamiento de frecuencia (defn) (1.730)
Diagrama de radiación, control (1.732)
Diferencia de frecuencia (defn) (1.730)
Diferencia de frecuencia normalizada (defn) (1.730)
Diferencia de tiempo de reloj (defn) (1.730)
Diferencia entre escalas de tiempo (defn) (1.730)
Difusión por satélite, señales de referencia (Rc.582, 1.518)
Difusión y coordinación de frecuencias patrón y señales horarias (1.518)
Difusión y transferencia de señales, métodos (1.363)
Discriminación de frecuencias, reducción de la interferencia(1.732)
Dispersión, B.Mam y B.km (1.271)
DUTl (defn) (1.730)
DUTl (Rc.460, 1.267)
EEfectos relativistas, sistema de tiempo-coordenada terrestre(1.439)
Emisión de frecuencia patrón (defn) (1.730)
Emisión de señales horarias (defn) (1.730)
Emisiones, banda 5 (1.735)
Emisiones, características (1.267)
Emisiones, comparación (1.363)
Emisiones, condiciones de funcionamiento (Rc.460)
Emisiones de banda lateral única (1.362, 1.732)
Emisiones de gran precisión (1.270)
Error (defn) (1.730)
Error de intervalo de tiempo (1.898)
Error en la sintonía inicial de frecuencia del reloj (1.898)
Escala de tiempo (1.363)
Escala de tiempo atómico (defn) (1.439, 1.730)
Escala de tiempo atómico internacional (TAI) (Rc.486)
Escala de tiempo coordinada (defn) (1.730)
Escalas de tiempo, algoritmos (1.579)
Escalas de tiempo, comparación (Rc.458, 1.363, 1.897)
Escalas de tiempo en sincronismo (defn) (1.730)
Escalas de tiempo, obtención de medidas (1.579)
Escalas de tiempo, referencia al UTC y al TAI (Rc.485)
Estabilidad de frecuencia (1.364, 1.580)
Estabilidad de frecuencia y de fase, mediciones (Rc.538)
Estabilidad y precisión, emisiones en ondas kilométricas y miriamétricas (1.271)
Estación de frecuencias patrón y/o señales horarias (defn)(1.730)
Estaciones, características (1.267)
Exactitud (defn) (1.730)
Exactitud de las emisiones (1.267, 1.271)

186 In d ic e
fFase (defn) (1.730)
Fase de las señales, banda de ondas miriamétricas (B.Mam)(1.271)
Fecha (defn) (1.730)
Fecha juliana (1.730)
Fecha modificada del calendario juliano (defn) (Rc.457)
Fecha modificada del calendario juliano (FMCJ) (Rc.457)
Fiabilidad de los patrones de tiempo y de frecuencia (1.898)
Fiabilidad de los relojes atómicos, vida útil (1.898)
Fiabilidad de los relojes de referencia (1.898)
Fibras ópticas, transferencia de señales horarias de precisión en distancias cortas (1.897)
Frecuencia (defn) (1.730)
Frecuencia normalizada (1.730)
Frecuencia patrón (defn) (1.730)
Frecuencia portadora (defn) (1.730)
GGeneradores de frecuencia patrón, comportamiento (1.364)
Generadores en las regiones submilimétrica, infrarroja y visible (1.738)
Generadores, inestabilidad (1.364, 1.738)
GMS, satélite meteorológico japonés (1.518)
GOES - Geostationary Operational Environmental Satellites (satélites de Estados Unidos de América para investigación del medio ambiente) (1.518)
GPS - Global Positioning System (sistema global de determinación de la posición) (1.518)
HHidrógeno, patrones de frecuencia (1.364)
IIFRB (Junta Internacional de Registro de Frecuencias)(Rc.376)
Incertidumbre (defn) (1.730)
Inestabilidad de frecuencia (defn) (1.730)
Inestabilidad de frecuencia (1.898)
Información meteorológica para la navegación marítima(1.731)
Instante (defn) (1.730)
Instituto de Navegación, Grupo Mixto Consultivo (JAG/ION - Joint Advisory Group/Institute of Navigation) (Rc.535)
Interferencia de origen externo (Rc.375, Rc.376)
Interferencia mutua, reducción (Rc.537, 1.732)
Intervalo de tiempo (defn) (1.730)
Iones, dispositivos de almacenamiento (1.364)
LLáser estabilizado de CH4 (1.364)
Láser estabilizado de C 0 2 (1.364)
Láseres, estabilidad de frecuencia (1.738)
Láseres, generadores de frecuencias patrón (1.364)Láseres, transferencia de señales horarias (1.897)LASSO - Láser Synchronization from Geostationary Orbit (sincronización de láseres desde la órbita de los satélites geoestacionarios) (1.518)Lectura de una escala de tiempo (defn) (1.730)LORAN-C, sistema de ayuda a la navegación (1.267, 1.271, 1.363, 1.518)
MMarca de tiempo (defn) (1.730)Máser de hidrógeno (H) (1.364)Máser de NH3 (1.364)Máseres de rubidio (1.364)Mediciones de tiempo controladas por computador (1.363)METEOSAT, satélite meteorológico de la Agencia Espacial Europea (1.518)Métodos para la transferencia de señales horarias de precisión en distancias cortas (1.897)Modulación de fase (1.577)Modulación de la subportadora, estaciones de radiodifusión sonora (Rc.375)Modulación, frecuencias patrón y señales horarias (1.267)Multiplexación en el tiempo, reducción de la interferencia(1.732)
NNAYSTAR, sistema de determinación de la posición (1.518)NTS - Navigation Technology Satellites (satélites tecnológicos para la navegación) (1.518)Número de día juliano (defn) (1.730)
OOficina Internacional de Pesos y Medidas (BIPM - Bureau international des poids et mesures) (Rc.430)OMEGA, sistema de radionavegación (1.267, 1.271)Organización Internacional de Unificación de Normas (ISO)(Rc.536)Organización Marítima Internacional (O M l) (Rc.374, Rc.460, Rc.535, Rc.536)Organización Meteorológica Mundial (OMM) (Rc.535) Oscilador estabilizado de cavidad supraconductora (1.364) Osciladores de cristal de cuarzo (1.364, 1.898)
PPatrón de frecuencia (defn) (1.730)Patrón de tiempo (defn) (1.730)Patrón primario de frecuencia (defn) (1.730)Patrón primario de tiempo (defn) (1.730)Patrón secundario de frecuencia (defn) (1.730)Patrón secundario de tiempo (defn) (1.730)Patrones de frecuencia (1.364)Patrones de frecuencia de haz de cesio (1.364)Patrones de tiempo y frecuencia, fiabilidad (1.898) Ponderaciones estadísticas de relojes, escalas de tiempo (1.579) Precisión (defn) (1.730)Propagación, efectos (1.270, 1.271)Propagación, previsiones (1.731)

ÍNDICE 187
RRadiodifusión, difusión de señales horarias (1.576, 1.577)
Radiointerferometría con línea de base muy larga (1.518)
Reloj (defn) (1.730)
Reloj coordinado (defn) (1.730)
Relojes, calidad de funcionamiento (1.898)
Relojes de cesio (1.898)
Relojes de rubidio (1.898)
Relojes, fiabilidad (1.898)
Relojes portátiles, comparación de escalas de tiempo (1.363)
Relojes, sincronización (1.363, 1.439)
Reposicionabilidad (defn) (1.730)
Reproductibilidad (defn) (1.730)
Retardos causados por las antenas, caracterización (1.1017)
Ruido de centelleo (1.364)
Ruido, generadores de frecuencia (1.364, 1.580)
SSalto de tiempo (defn) (1.730)
Saltos de tiempo y frecuencia (Estados Unidos de América), años 1956-1971 (1.899)
Satélites de comunicaciones, difusión de frecuencias patrón y señales horarias (1.518)
Satélites de radiodifusión de TV, difusión de frecuencias patrón y señales horarias (1.518)
Satélites meteorológicos, difusión de señales horarias (1.518)
Satélites para difusión de frecuencias patrón y señales horarias(1.363, 1.518, 1.736)
Satélites para seguimiento y retransmisión de datos (TDRS - Tracking and Data Relay Satellite) (1.518)
Segundo intercalar (defn) (Rc.460)
Señales horarias de gran precisión, economía del espectro(1.270)
Separación (defn) (1.730)
Separación intencional de la frecuencia (1.732)
Separación normalizada (defn) (1.730)
Servicio de frecuencia patrón por satélite (defn) (1.730)
Servicio de señales horarias por satélite (defn) (1.730)
Sincronismo (defn) (1.730)
Sincronización internacional de relojes, radiointerferometría con línea de base muy larga (1.363)
SIRIO-1, satélite italiano (1.518)
Subportadora, impulsos (1.732)
Symphonie-I, satélite franco-alemán (1.518)
TTécnicas infrarrojo, generadores de frecuencia patrón (1.738) (véase también bajo Láser)
Técnicas ópticas, generadores de frecuencia patrón (1.738)
Televisión, difusión de señales horarias y frecuencias patrón(1.363, 1.1016)Tiempo atómico internacional (defn) (Rc.460)
Tiempo atómico internacional (TAI) (Rc.458, Rc.486, Rc.536,1.579)
Tiempo-coordenada (defn) (1.730)
Tiempo (explicación) (1.730)Tiempo medio de reparación (1.898)
Tiempo medio entre fallos, estadísticas (1.898)Tiempo propio (defn) (1.730)Tiempo universal (UT) (defn) (Rc.460, 1.730)
Tiempo Universal Coordinado (defn) (Rc.460)
Tiempo Universal Coordinado (UTC) (Rc.486, Rc.535) Tiempo-coordenada (defn) (1.730)
Tiempo-coordenada terrestre, efectos relativistas en el sistema(1.439)
Transbordador espacial, experimentos de transferencia de información T/F (1.518)
Transferencia de señales horarias de precisión, cables coaxiales (1.897)
TRANSIT, sistema de radionavegación por satélite (1.518)
Transmisores de radiodifusión sonora con modulación de amplitud, difusión de señales horarias (1.577)
UUnidad de escala de tiempo (defn) (1.730)
Unión Astronómica Internacional (UAI) (Rc.374, Rc.460, Rc.535, Rc.536)
Unión Internacional de Física Pura y Aplicada (IUPAP - International Union of Puré and Applied Physics) (Rc.536)Unión Internacional de Geodesia y Geofísica (IUGG - International Union of Geodesy and Geophysics) (Rc.460, Rc.536)Unión Radiocientífica Internacional (URSI) (Rc.374, Rc.460, Rc.535, Rc.536)Usuarios, encuesta (1.731)
UTO (defn) (Rc.460, 1.730)UTI (defn) (Rc.460, 1.730)
UT2 (defn) (Rc.460, 1.730)
UTC (véase bajo Tiempo Universal Coordinado)
V 'Valor nominal (defn) (1.730)Vida media, fiabilidad de los relojes atómicos (1.898)

ISBN 9 2 -6 1 -0 2 7 6 3 -6




















