
Programowanie liniowe
133
Programowanie liniowe Tadeusz Trzaskalik
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of Programowanie liniowe

Programowanie liniowe
Tadeusz Trzaskalik
1. P
rogr
amow
anie
lini
owe
• Model matematyczny
• Cel, środki, ograniczenia
• Funkcja celu – funkcja kryterium
• Zmienne decyzyjne
1.1. Wprowadzenie
Słowa kluczowe
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 2
• Zmienne decyzyjne
• Model optymalizacyjny
• Układ warunków ograniczających
• Decyzje dopuszczalne
• Zadanie programowania liniowego
• Decyzje optymalna
1. P
rogr
amow
anie
lini
owe
• Metoda geometryczna
• Metoda simpleks
• Zmienne bilansujące
• Postać bazowa
• Zmienne bazowe
Słowa kluczowe (c.d.)
1.1. Wprowadzenie
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 3
• Zmienne bazowe
• Zmienne niebazowe
• Kryterium optymalno ści
• Kryterium wej ścia
• Kryterium wyj ścia
• Zmienna sztuczna
• Analiza wrażliwości
1. P
rogr
amow
anie
lini
owe
• Zadanie prymalne
• Zadanie dualne
• Prymalna metoda simpleks
Słowa kluczowe (c.d.)
1.1. Wprowadzenie
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 4
• Dualna metoda simpleks
• Parametryczne programowanie liniowe
• Wektor funkcji celu zależny od parametru
• Wektor wyrazów wolnych zależny od parametru
1. P
rogr
amow
anie
lini
owe
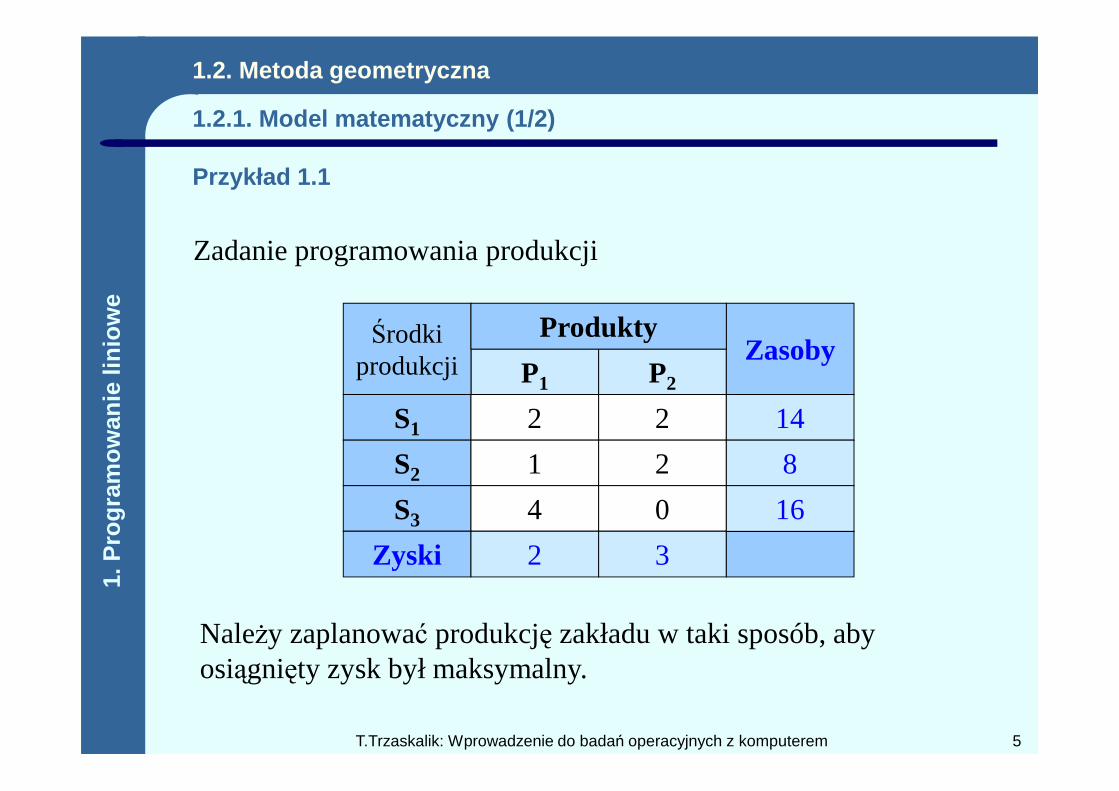
P1 P2
Zasoby
Zadanie programowania produkcji
Środki produkcji
Produkty
1.2. Metoda geometryczna
1.2.1. Model matematyczny (1/2)
Przykład 1.1
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 5
Należy zaplanować produkcję zakładu w taki sposób, aby osiągnięty zysk był maksymalny.
S1
S2
S3
2
1
4
2
2
0
Zyski 2 3
14
8
16
1. P
rogr
amow
anie
lini
owe
Zmienne decyzyjne
x1 - planowany rozmiar produkcji produktu P1,
x2 - planowany rozmiar produkcji produktu P2.
Funkcja celu
1.2. Metoda geometryczna
1.2.1. Model matematyczny (2/2)
Składowe modelu
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 6
Funkcja celu
f(x1,x2)
2x1 + 2x2 ≤ 14
x1 + 2x2 ≤ 8
4x1 ≤ 16
x1 ≥ 0, x2 ≥ 0,
Warunki ograniczające
2x1= + 3x2 → max
1. P
rogr
amow
anie
lini
owe
2x + 2x > 14
(0,7)
x2
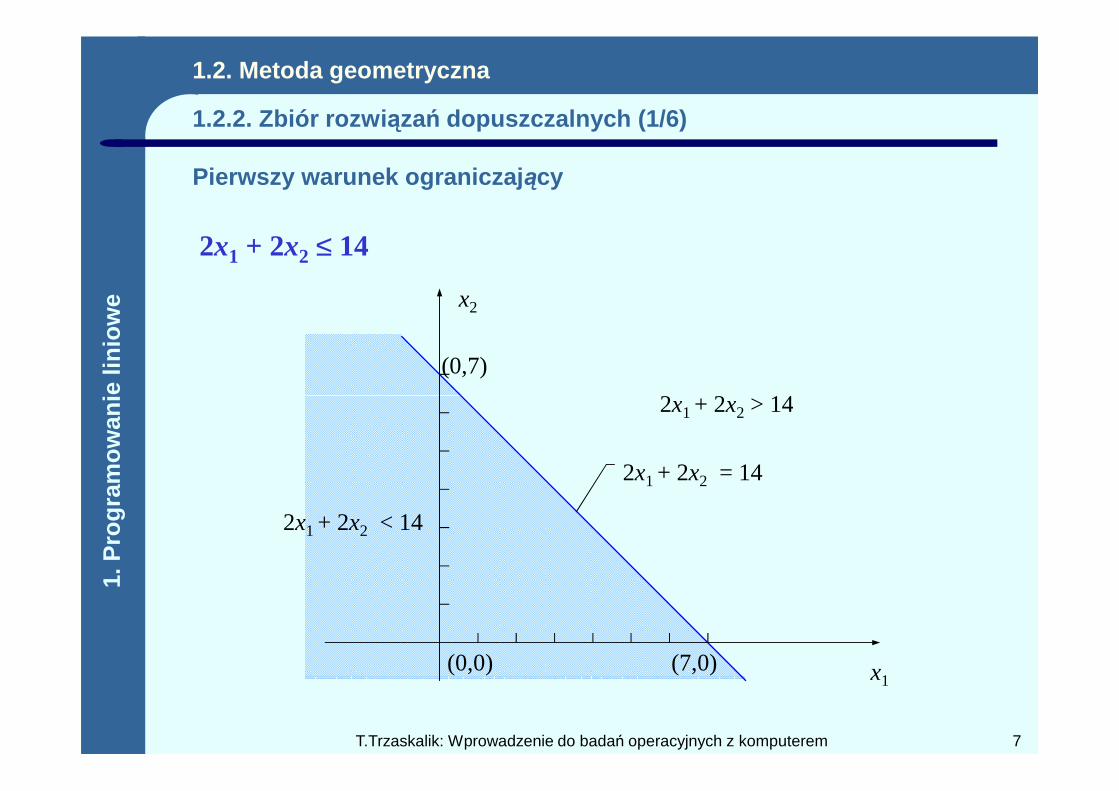
2x1 + 2x2 ≤ 14
1.2. Metoda geometryczna
1.2.2. Zbiór rozwi ązań dopuszczalnych (1/6)
Pierwszy warunek ograniczaj ący
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 7
2x1 + 2x2 > 14
2x1 + 2x2 < 14
2x1 + 2x2 = 14
x1(0,0) (7,0)
1. P
rogr
amow
anie
lini
owe
x2
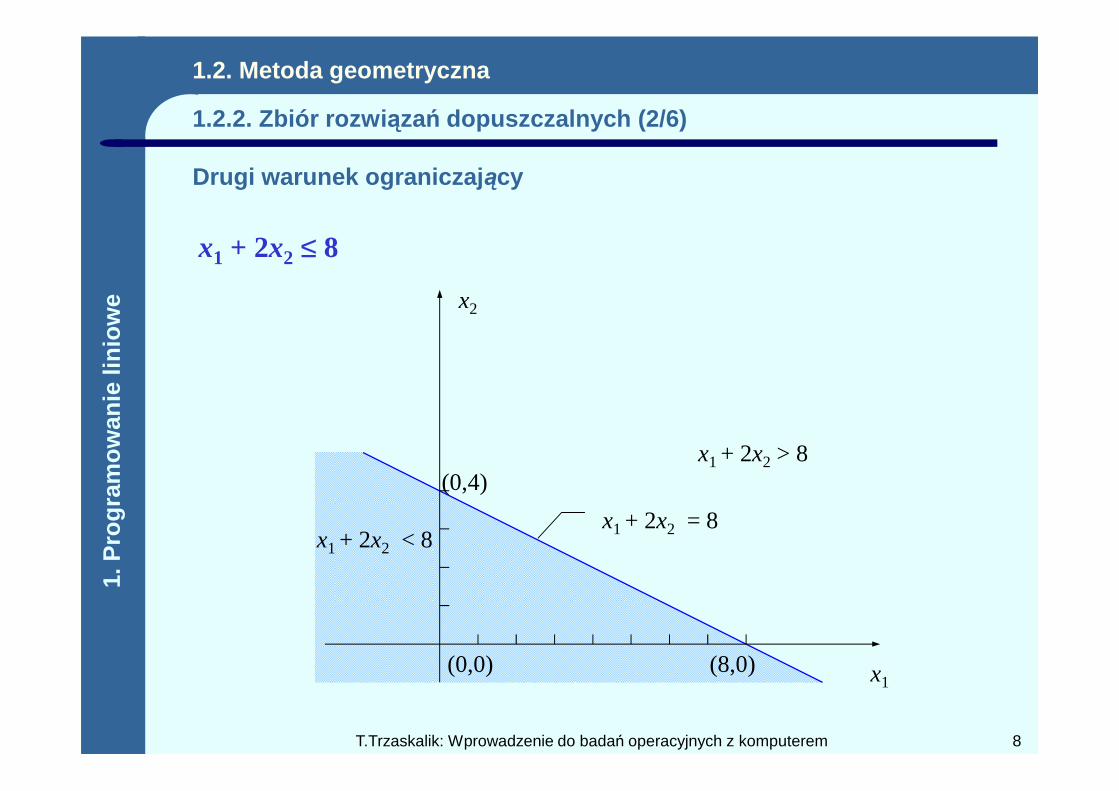
x1 + 2x2 ≤ 8
1.2. Metoda geometryczna
1.2.2. Zbiór rozwi ązań dopuszczalnych (2/6)
Drugi warunek ograniczaj ący
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 8
x1 + 2x2 > 8
x1 + 2x2 < 8
x1(0,0) (8,0)
(0,4)
x1 + 2x2 = 8
1. P
rogr
amow
anie
lini
owe
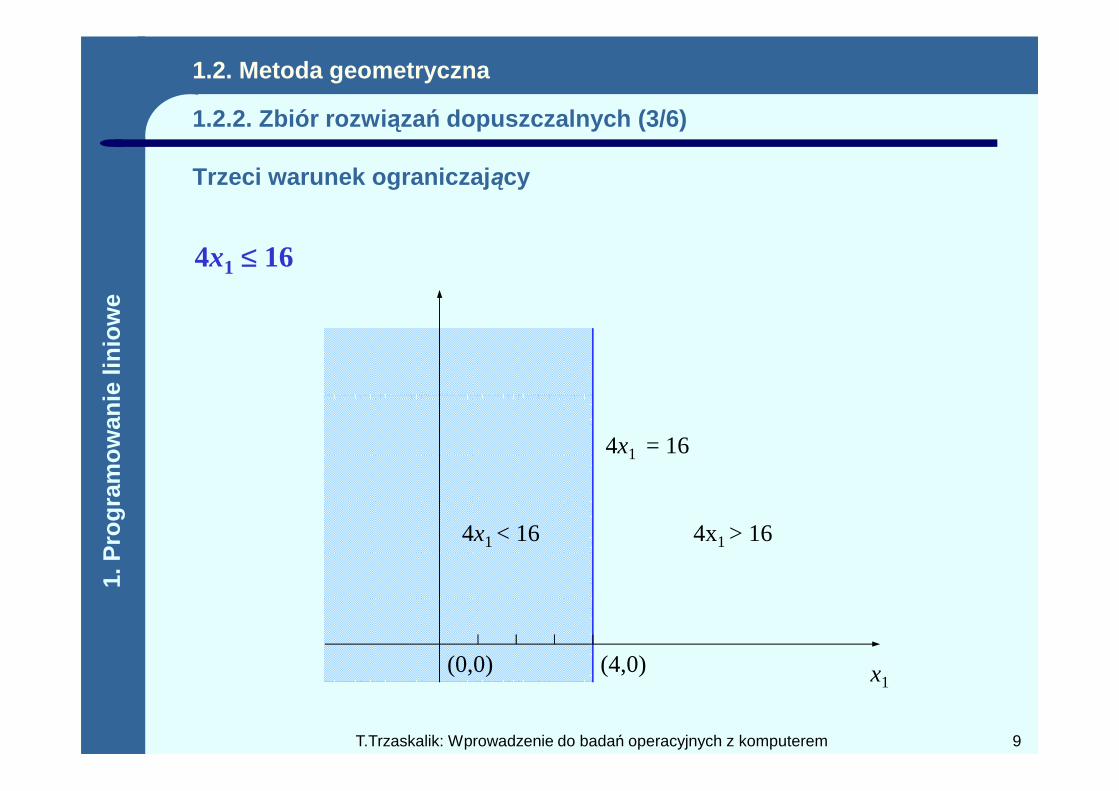
4x1 ≤ 16
1.2. Metoda geometryczna
1.2.2. Zbiór rozwi ązań dopuszczalnych (3/6)
Trzeci warunek ograniczaj ący
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 9
4x1 > 164x1 < 16
4x1 = 16
x1(0,0) (4,0)
1. P
rogr
amow
anie
lini
owe
x2
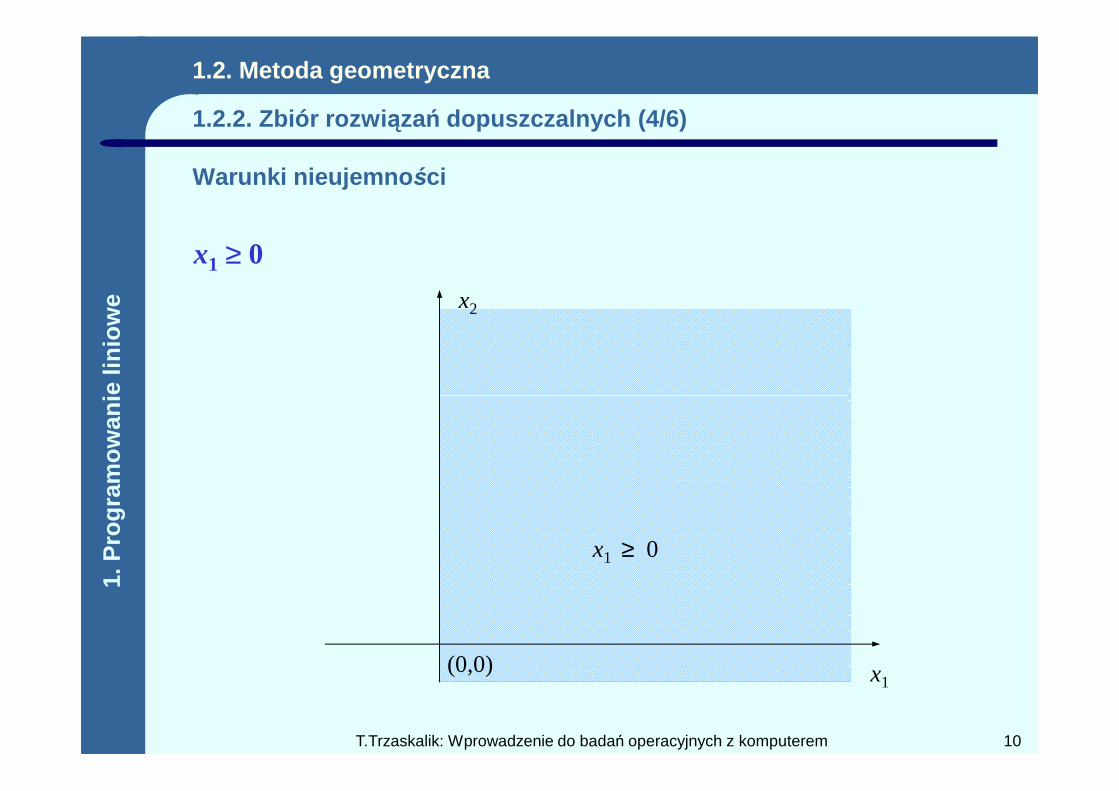
x1 ≥ 0
1.2. Metoda geometryczna
1.2.2. Zbiór rozwi ązań dopuszczalnych (4/6)
Warunki nieujemno ści
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 10
x1 ≥ 0
x1(0,0)
1. P
rogr
amow
anie
lini
owe
x2
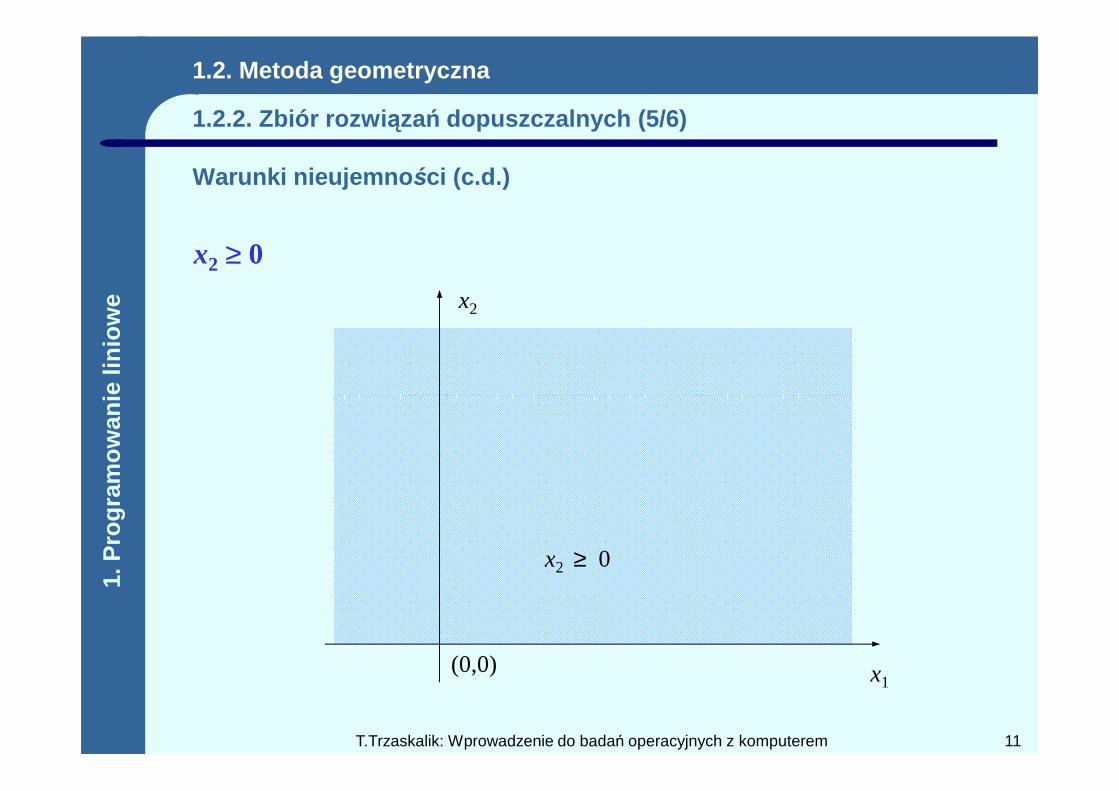
x2 ≥ 0
1.2. Metoda geometryczna
1.2.2. Zbiór rozwi ązań dopuszczalnych (5/6)
Warunki nieujemno ści (c.d.)
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 11
x2 ≥ 0
x1(0,0)
1. P
rogr
amow
anie
lini
owe
x2
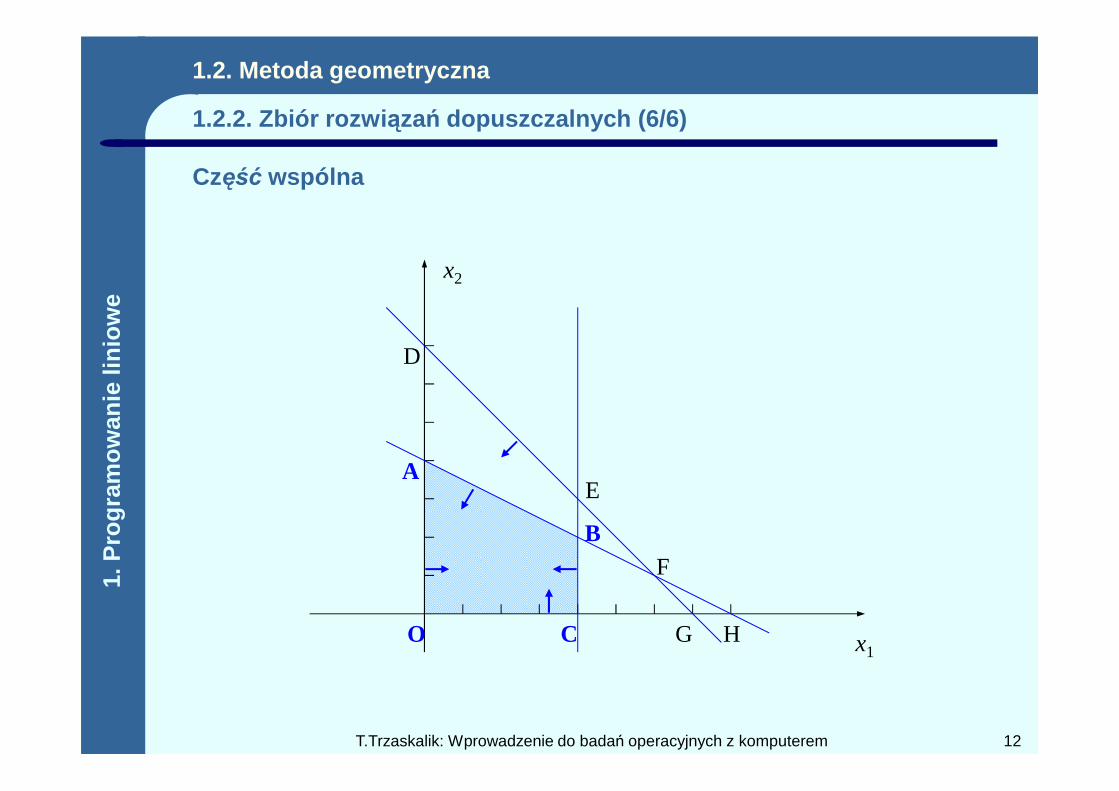
D
1.2. Metoda geometryczna
1.2.2. Zbiór rozwi ązań dopuszczalnych (6/6)
Część wspólna
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 12
x1
E
BF
A
C G HO
1. P
rogr
amow
anie
lini
owe
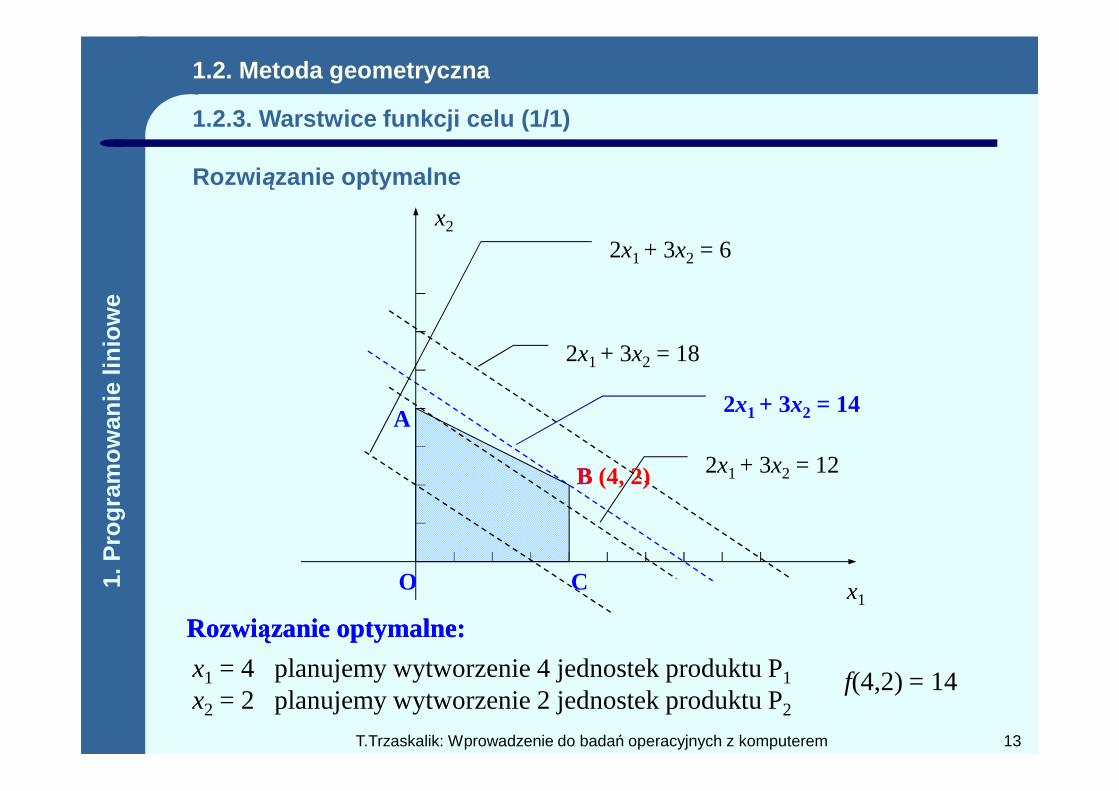
x2
2x1 + 3x2 = 18
2x + 3x = 14
2x1 + 3x2 = 6
1.2. Metoda geometryczna
1.2.3. Warstwice funkcji celu (1/1)
Rozwi ązanie optymalne
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 13
x1O
A
B
C
2x1 + 3x2 = 12
2x1 + 3x2 = 14
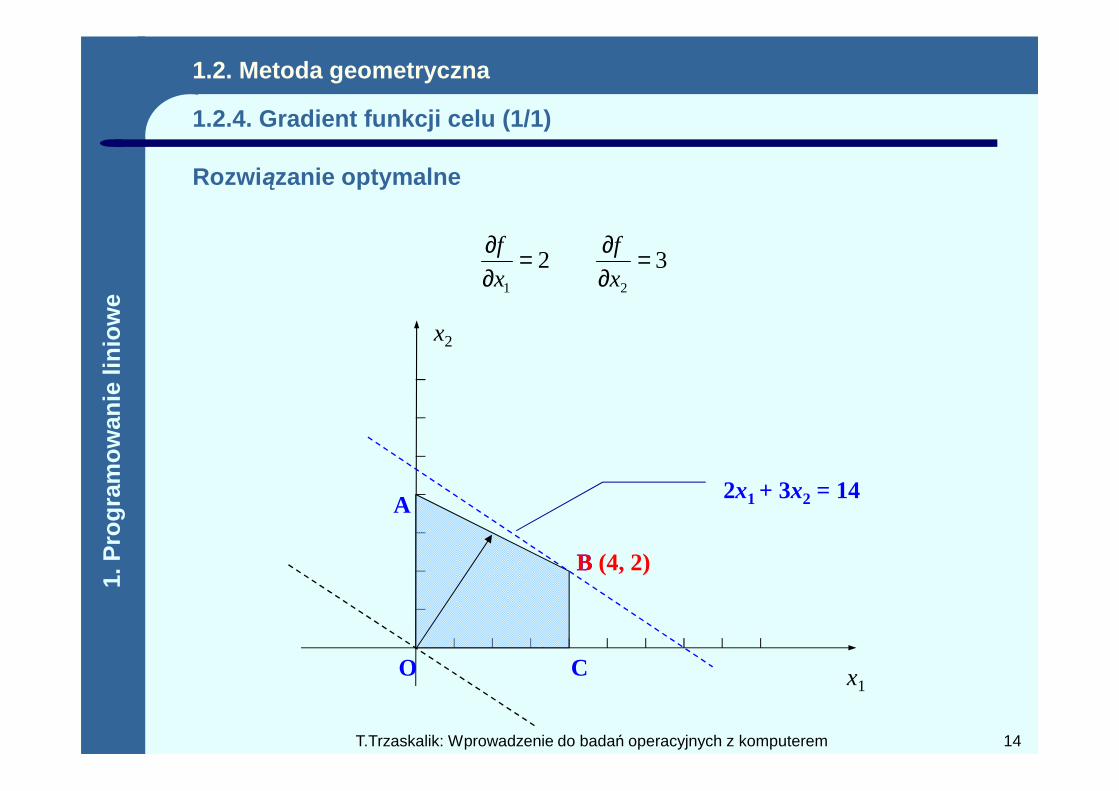
B (4, 2)
Rozwiązanie optymalne:Rozwiązanie optymalne:
x1 = 4 planujemy wytworzenie 4 jednostek produktu P1
x2 = 2 planujemy wytworzenie 2 jednostek produktu P2
f(4,2) = 14
1. P
rogr
amow
anie
lini
owe
Rozwi ązanie optymalne
1.2. Metoda geometryczna
1.2.4. Gradient funkcji celu (1/1)
x2
3221
=∂∂=
∂∂
x
f
x
f
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 14
x1O
A
B
C
2x1 + 3x2 = 14
B (4, 2)
1. P
rogr
amow
anie
lini
owe
2x1 + 2x2 ≤ 14
Środek SŚrodek S11
1.3. Metoda simpleks
1.3.1. Postać bazowa (1/7)
Zmienne bilansuj ące
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 15
2x1 + 2x2 + x3 = 14
x3 = 14 – 2x1 – 2x2 ≥ 0
x3 - niewykorzystana ilość środka S1
1. P
rogr
amow
anie
lini
owe
x1 + 2x2 ≤ 8
Środek SŚrodek S22
1.3. Metoda simpleks
1.3.1. Postać bazowa (2/7)
Zmienne bilansuj ące (c.d.)
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 16
x1 + 2x2 + x4 = 8
x4 = 8 –x1 – 2x2 ≥ 0
x4 - niewykorzystana ilość środka S2
1. P
rogr
amow
anie
lini
owe
4x1 ≤ 16
Środek SŚrodek S33
1.3. Metoda simpleks
Zmienne bilansuj ące (c.d.)
1.3.1. Postać bazowa (3/7)1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 17
4x1 + x5 = 16
x5 = 16 – 4x1 ≥ 0
x5 - niewykorzystana ilość środka S3
1. P
rogr
amow
anie
lini
owe
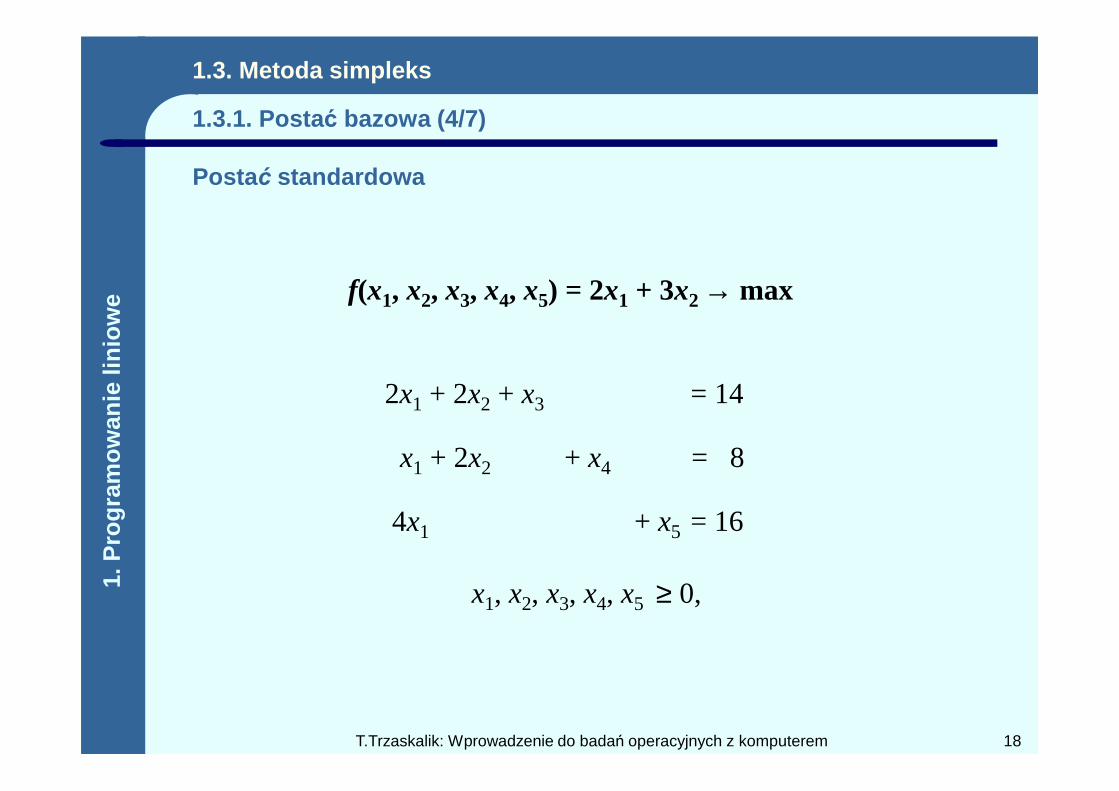
f(x1, x2, x3, x4, x5) = 2x1 + 3x2 → max
2x1 + 2x2 + x3 = 14
1.3. Metoda simpleks
Postać standardowa
1.3.1. Postać bazowa (4/7)1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 18
2x1 + 2x2 + x3 = 14
x1 + 2x2 + x4 = 8
4x1 + x5 = 16
x1, x2, x3, x4, x5 ≥ 0,
1. P
rogr
amow
anie
lini
owe
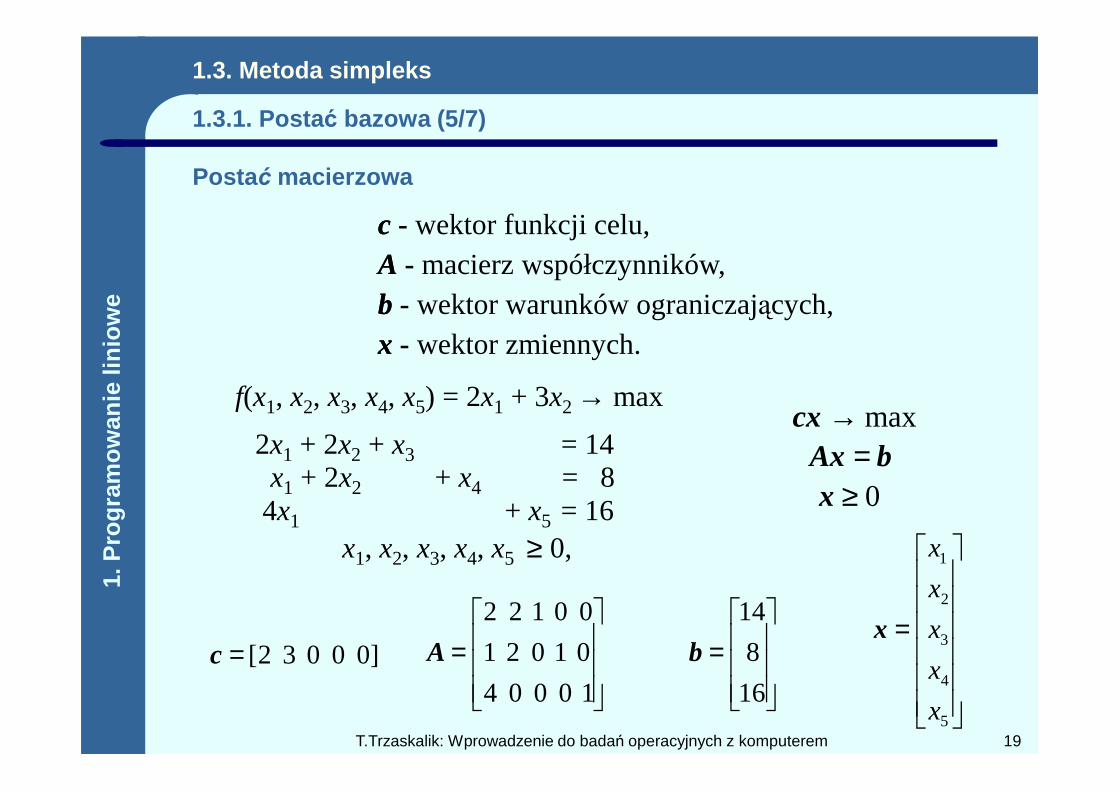
cc - wektor funkcji celu,AA - macierz współczynników,bb - wektor warunków ograniczających,xx - wektor zmiennych.
f(x , x , x , x , x ) = 2x + 3x → max
1.3. Metoda simpleks
Postać macierzowa
1.3.1. Postać bazowa (5/7)1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 19
max→cxbAx =
0≥x
0] 0 0 3 2[=c
=1 0 0 0 4
0 1 0 2 1
0 0 1 2 2
A
=16
8
14
b
=
5
4
3
2
1
x
x
x
x
x
x
f(x1, x2, x3, x4, x5) = 2x1 + 3x2 → max
2x1 + 2x2 + x3 = 14x1 + 2x2 + x4 = 84x1 + x5 = 16
x1, x2, x3, x4, x5 ≥ 0,
1. P
rogr
amow
anie
lini
owe
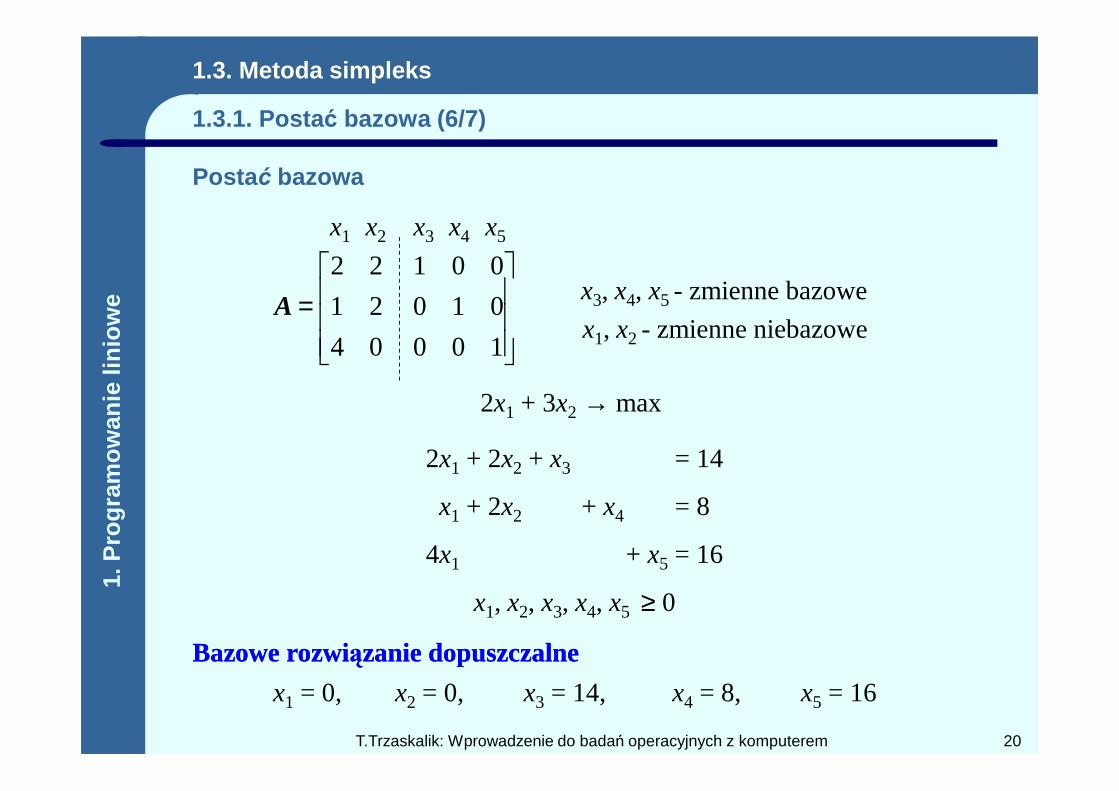
x3, x4, x5 - zmienne bazowe
x1, x2 - zmienne niebazowe
=04
21
22
A
x1 x2
100
010
001
x3 x4 x5
2x + 3x → max
1.3. Metoda simpleks
Postać bazowa
1.3.1. Postać bazowa (6/7)1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 20
Bazowe rozwiązanie dopuszczalneBazowe rozwiązanie dopuszczalne
x1 = 0, x2 = 0, x3 = 14, x4 = 8, x5 = 16
2x1 + 3x2 → max
x1 + 2x2 + x4 = 8
4x1 + x5 = 16
2x1 + 2x2 + x3 = 14
x1, x2, x3, x4, x5 ≥ 0
1. P
rogr
amow
anie
lini
owe
cx → max
Ax = b
x ≥ 0
1.3. Metoda simpleks
1.3.1. Postać bazowa (7/7)
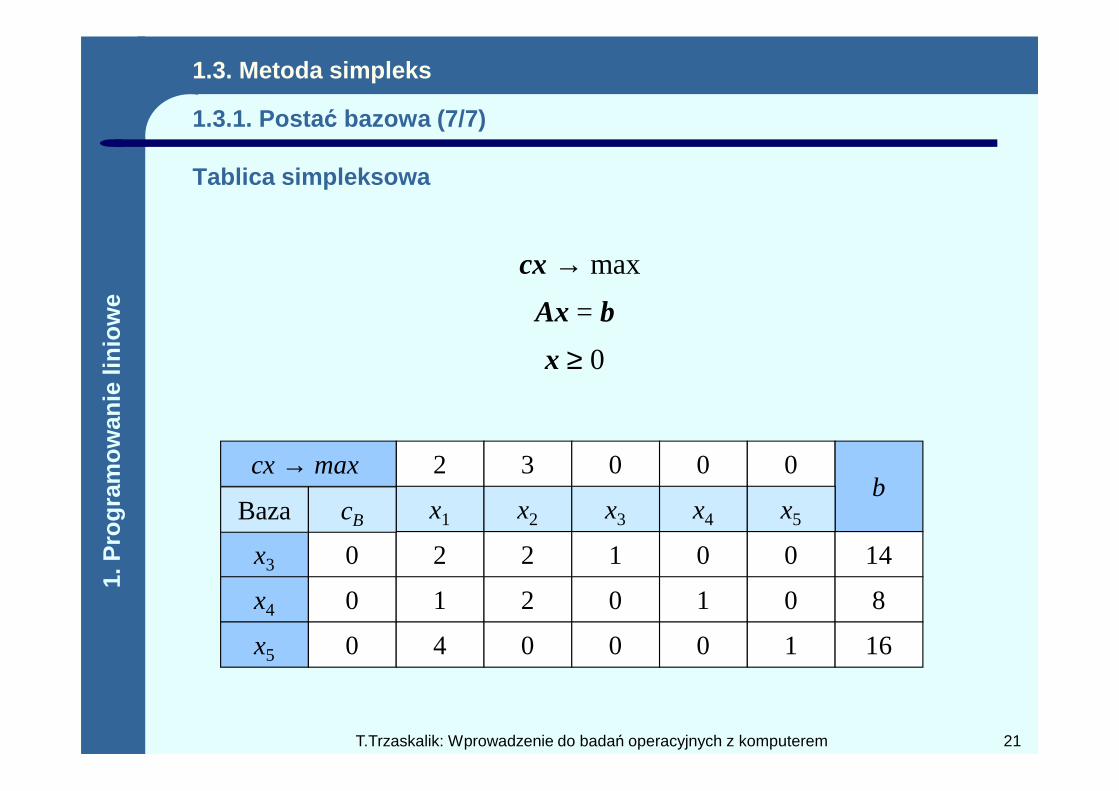
Tablica simpleksowa
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 21
2 3 0 0 0b
cx → max
x1 x2 x3 x4 x5
x3 0
x4 0
x5 0
2 2 1 0 0
1 2 0 1 0
4 0 0 0 1
14
8
16
Baza cB
1. P
rogr
amow
anie
lini
owe
Jeden krok algorytmu metody simpleks
1.3. Metoda simpleks
1.3.2. Badanie optymalno ści rozwi ązania (1/7)
Należy: • stwierdzić, czy rozpatrywane rozwiązanie bazowe jest optymalne,
czy też nie, • w przypadku, gdy nie jest optymalne, wyznaczyć nową bazę sąsiednią,
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 22
• w przypadku, gdy nie jest optymalne, wyznaczyć nową bazę sąsiednią, • przekształcić za pomocą przekształceń elementarnych macierz
warunków ograniczających do postaci bazowej względem bazy sąsiedniej,
• jeżeli rozpatrywane rozwiązanie jest optymalne, zakończyć postępowanie.
1. P
rogr
amow
anie
lini
owe
2x1 + 2x2 + x3 = 14
Ponieważ x1 = 1 oraz x2 = 0, mamy:
x1: 0 → 1
1.3. Metoda simpleks
Pierwszy warunek ograniczaj ący
1.3.2. Badanie optymalno ści rozwi ązania (2/7)1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 23
2 + x3 = 14
x3 = 12
stąd
Każdej dodanej jednostce zmiennejx1 odpowiada spadek wartościzmiennej bazowejx3 i zmianę tą opisuje wartość współczynnikaa11 = 2.
1. P
rogr
amow
anie
lini
owe
x1 + 2x2 + x4 = 8
Ponieważ x1 = 1 oraz x2 = 0, mamy:
x1: 0 → 1
1.3. Metoda simpleks
Drugi warunek ograniczaj ący
1.3.2. Badanie optymalno ści rozwi ązania (3/7)1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 24
1 + x4 = 8
x4 = 7
stąd
Każdej dodanej jednostce zmiennejx1 odpowiada spadek wartościzmiennej bazowejx4 i zmianę tą opisuje wartość współczynnikaa21 = 1.
1. P
rogr
amow
anie
lini
owe
4x1 + x5 = 16
Ponieważ x1 = 1 oraz x2 = 0, mamy:
x1: 0 → 1
1.3. Metoda simpleks
Trzeci warunek ograniczaj ący
1.3.2. Badanie optymalno ści rozwi ązania (4/7)1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 25
4 + x5 = 16
x5 = 12
stąd
Każdej dodanej jednostce zmiennejx1 odpowiada spadek wartościzmiennej bazowejx5 i zmianę tą opisuje wartość współczynnikaa31 = 4.
1. P
rogr
amow
anie
lini
owe
Wzrost wartości funkcji celuWzrost wartości funkcji celu
c1 = 2
Spadek wartości funkcji celuSpadek wartości funkcji celu związany z obniżeniem dotychczasowych wartości przez zmienne bazowe
1.3. Metoda simpleks
Zmiany warto ści funkcji celu
1.3.2. Badanie optymalno ści rozwi ązania (5/7)1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 26
dotychczasowych wartości przez zmienne bazowe
c3 · a11 = 0 · 2 = 0
c4 · a21 = 0 · 1 = 0
c5 · a31 = 0 · 4 = 0
zmienna x3:
zmienna x4:
zmienna x5:
czyli z1 = 0 · 2 + 0 · 1 + 0 · 4 = 0
Zmiana nettoZmiana netto:
c1 – z1 = 2 – 0 = 2
1. P
rogr
amow
anie
lini
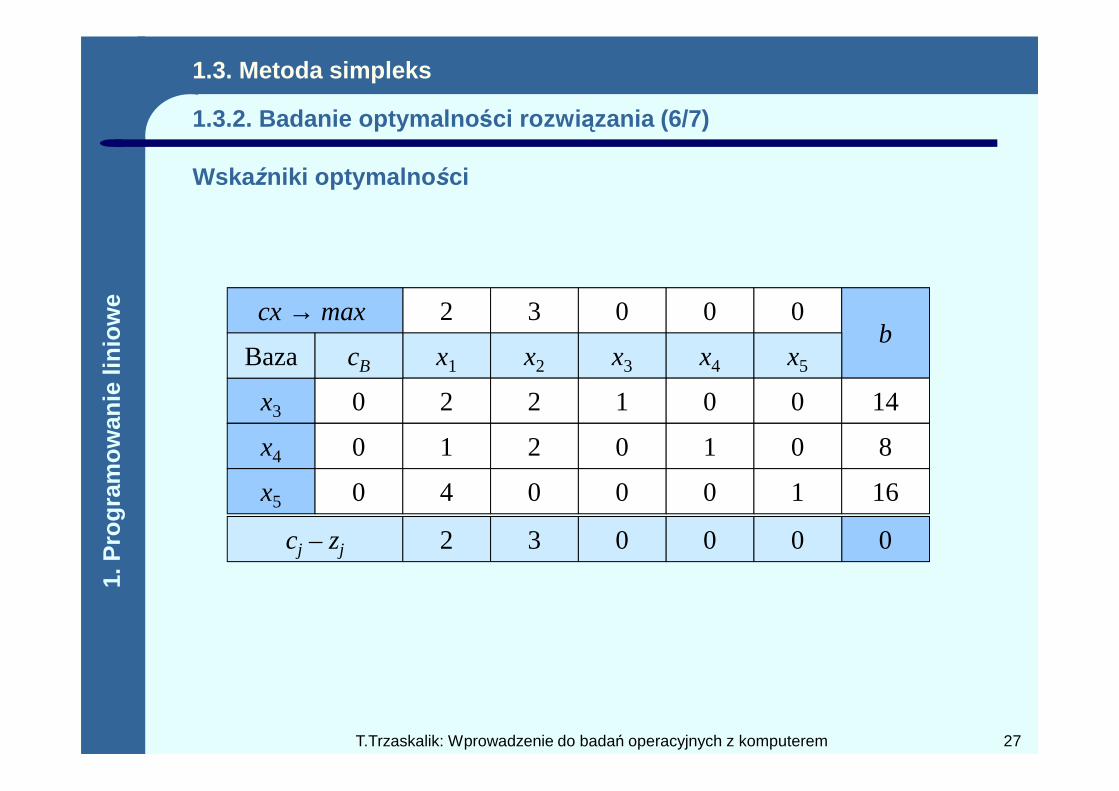
owe 2 3 0 0 0
bcx → max
x1 x2 x3 x4 x5
x 0 2 2 1 0 0 14
Baza cB
1.3. Metoda simpleks
Wskaźniki optymalno ści
1.3.2. Badanie optymalno ści rozwi ązania (6/7)1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 27
x3 0
x4 0
x5 0
2 2 1 0 0
1 2 0 1 0
4 0 0 0 1
14
8
16
cj – zj 02 3 0 0 0
1. P
rogr
amow
anie
lini
owe Jeżeli w zadaniu maksymalizacji wartości
wszystkich wskaźników optymalności sąniedodatnie, wtedy rozpatrywane
1.3. Metoda simpleks
Kryterium optymalno ści
1.3.2. Badanie optymalno ści rozwi ązania (7/7)1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 28
niedodatnie, wtedy rozpatrywanerozwiązanie jest optymalne.
Jeżeli choć jeden ze wskaźnikówoptymalności jest dodatni, wtedy istniejemożliwość poprawy tego rozwiązania.
1. P
rogr
amow
anie
lini
owe Wybieramy największą wartość wskaźnika
optymalności. Odpowiadającą mu zmiennąwprowadzamydonowejbazy.
1.3. Metoda simpleks
1.3.3. Wybór zmiennej wprowadzanej do bazy (1/1)
Kryterium wej ścia
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 29
wprowadzamydonowejbazy.
Jeżeli największej wartości wskaźnikaoptymalności odpowiada więcej niż jednazmienna, do nowej bazy wprowadzamyzmienną o najniższymnumerze.
1. P
rogr
amow
anie
lini
owe 2x1 + 2x2 + x3 = 14
Zmienna x1 jako niebazowa jest równa 0, czyli:
Do nowej bazy wprowadzamy zmienną x2
1.3. Metoda simpleks
1.3.4. Wybór zmiennej opuszczaj ącej bazę (1/5)
Pierwszy warunek ograniczaj ący
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 30
Zmienna x1 jako niebazowa jest równa 0, czyli:
2x2 + x3 = 14
2x2 = 14, czyli x2 = 7
Kiedy zmienna x3 przyjmuje wartość 0?
Największa dopuszczalna wartość zmiennej x2 dla pierwszegowarunku ograniczającego jest równa 7.
(b1: a21 = 7)
1. P
rogr
amow
anie
lini
owe x1 + 2x2 + x4 = 8
Zmienna x1 jako niebazowa jest równa 0, czyli:
Do nowej bazy wprowadzamy zmienną x2
1.3. Metoda simpleks
1.3.4. Wybór zmiennej opuszczaj ącej bazę (2/5)
Drugi warunek ograniczaj ący
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 31
Zmienna x1 jako niebazowa jest równa 0, czyli:
2x2 + x4 = 8
2x2 = 8, czyli x2 = 4
Kiedy zmienna x4 przyjmuje wartość 0?
Największa dopuszczalna wartość zmiennej x2 dla drugiegowarunku ograniczającego jest równa 4.
(b2: a22 = 4)
1. P
rogr
amow
anie
lini
owe 4x1 + 0x2 + x5 = 16
Do nowej bazy wprowadzamy zmienną x2
Zmienna x1 jako niebazowa jest równa 0, czyli:
1.3. Metoda simpleks
1.3.4. Wybór zmiennej opuszczaj ącej bazę (3/5)
Trzeci warunek ograniczaj ący
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 32
Ponieważ współczynnik przyx2 jest równy 0 zmiennejx5 nie możnawyprowadzić z bazy przez wprowadzenie do bazy zmiennejx2.
Zmienna x1 jako niebazowa jest równa 0, czyli:
0x2 + x5 = 16
Kiedy zmienna x5 przyjmuje wartość 0?
1. P
rogr
amow
anie
lini
owe
Obliczamy ilorazy kolejnych wyrazów wolnychprzez odpowiadające im elementy kolumnywchodzącej do bazy dla tych elementów kolumnywprowadzanejdobazy,któresą dodatnie.
1.3. Metoda simpleks
1.3.4. Wybór zmiennej opuszczaj ącej bazę (4/5)
Kryterium wyj ścia
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 33
wprowadzanejdobazy,któresą dodatnie.
Bazę opuszcza zmienna, dla którejodpowiadający iloraz jest najmniejszy.
Jeżeli minimum jest przyjmowane więcej niżjeden raz, wtedy jako zmienną opuszczającą bazęwybieramy zmienną o najniższymnumerze.
1. P
rogr
amow
anie
lini
owe
1.3. Metoda simpleks
1.3.4. Wybór zmiennej opuszczaj ącej bazę (5/5)
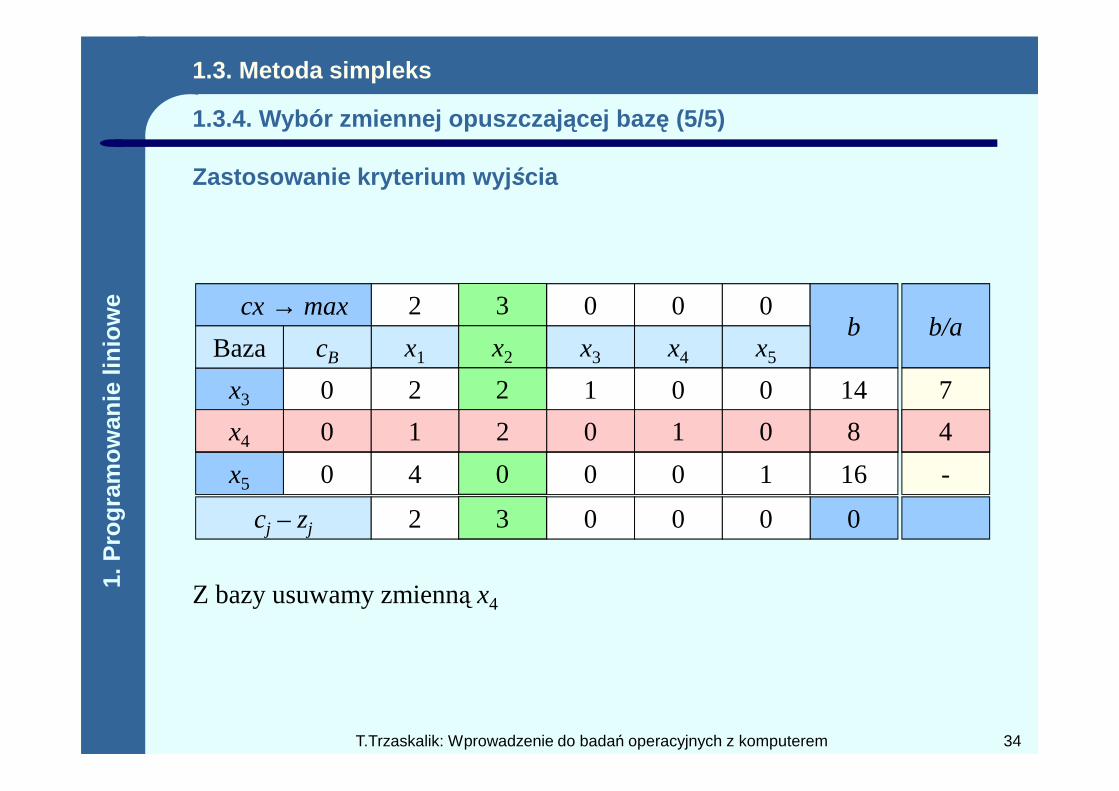
Zastosowanie kryterium wyj ścia
2 3 0 0 0b
cx → max
x1 x2 x3 x4 x5
x3 0 2 2 1 0 0 14
b/a
7
Baza cB
3
x2
2
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 34
x3 0
x4 0
x5 0
2 2 1 0 0
1 2 0 1 0
4 0 0 0 1
14
8
16
cj – zj 02 3 0 0 0
7
4
-
2
2
0
3
x4 0 1 2 0 1 0 8 4
Z bazy usuwamy zmienną x4
1. P
rogr
amow
anie
lini
owe
Przekształcenia elementarne
Podzielenie obydwu stron dowolnie wybranego warunkuograniczającego przez dowolną liczbę różną od zera.
1.
Dodanie stronami do dowolnie wybranego warunku2.
1.3. Metoda simpleks
1.3.5. Przejście do rozwi ązania bazowego s ąsiedniego (1/2) 1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 35
Przekształcenia elementarne stosujemy dla warunkówograniczających w postaci równości.
Dodanie stronami do dowolnie wybranego warunkuograniczającego pomnożonego przez dowolną liczbęróżną od zera innego warunku pomnożonego przezdowolną liczbę różną od zera.
2.
1. P
rogr
amow
anie
lini
owe
2 3 0 0 0b
cx → max
x1 x2 x3 x4 x5
x3 0
x4 0
x 0
2 2 1 0 0
1 2 0 1 0
4 0 0 0 1
14
8
16
Baza cB
3
x2
2
2
0
x4 0 1 2 0 1 0 8
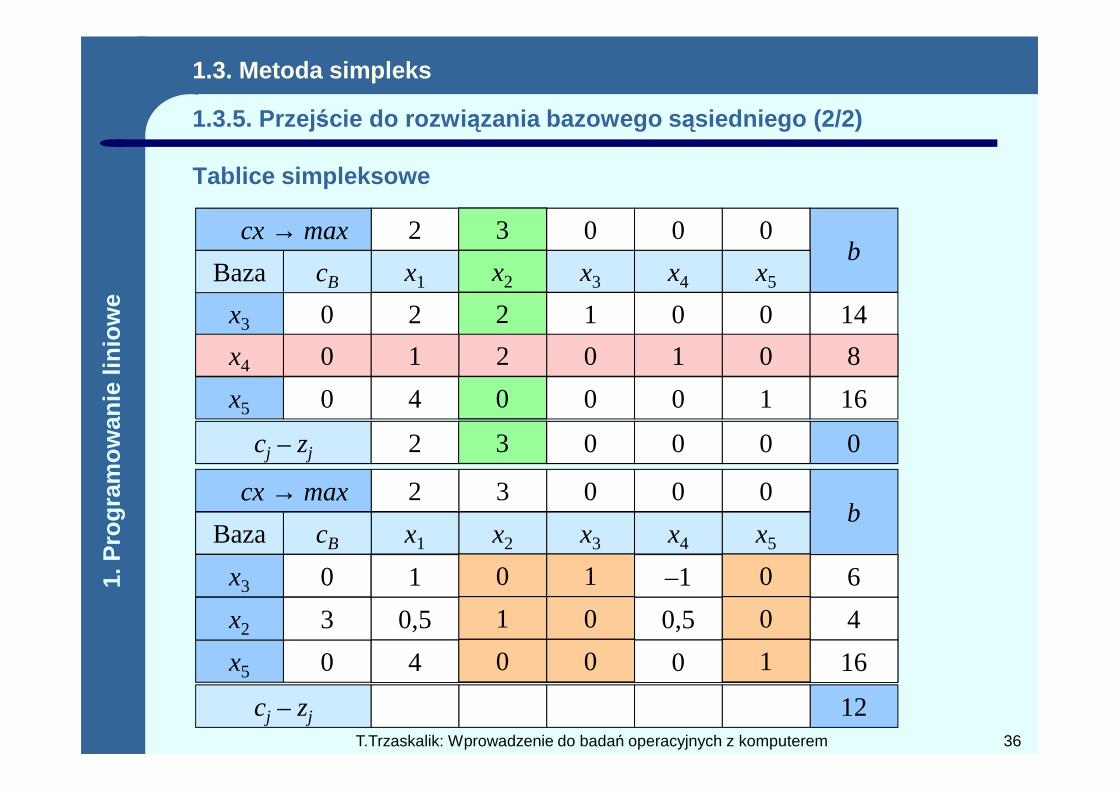
1.3. Metoda simpleks
1.3.5. Przejście do rozwi ązania bazowego s ąsiedniego (2/2)
Tablice simpleksowe
1. P
rogr
amow
anie
lini
owe
Bazab
x3 0
x5 0
cj – zj
x1 x2 x3 x4 x5Baza cB
2 3 0 0 0cx → max
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 36
x2 3
0 1 –1 0
1 0 0,5 0
1
0,5
4 0 0 0 1
6
4
16
x5 0 4 0 0 0 1 16
cj – zj 02 3 0 0 0
0
1
0
1
0
0
0
0
1
0
3
12
1. P
rogr
amow
anie
lini
owe
1
x1 x2 x3 x4 x5
bcx → max
x 0 0 1 –1 0
3 0 0 02
6
b/a
6
Baza cB x1
2
1
1.3. Metoda simpleks
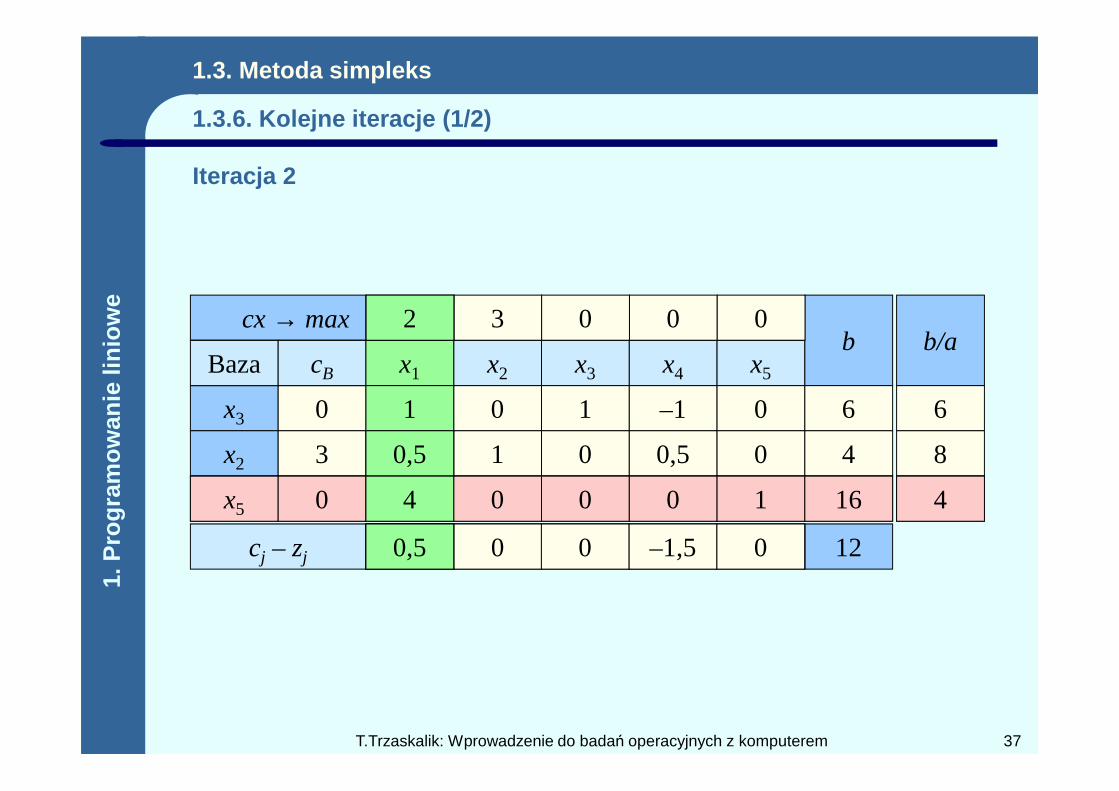
1.3.6. Kolejne iteracje (1/2)
Iteracja 2
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 37
1x3 0
x2 3
x5 0
0 1 –1 0
1 0 0,5 00,5
4 0 0 0 1
6
4
16
cj – zj 120,5 0 0 –1,5 0
6
8
4x5 0 4 0 0 0 1 16 4
1
0,5
4
0,5
1. P
rogr
amow
anie
lini
owe
x3 0
x2 3
0 1 –1 –0,25
1 0 0,5 –0,125
0
0
2
2
x1 x2 x3 x4 x5
cx → max 3 0 0 02
Baza cB
b
1.3. Metoda simpleks
1.3.6. Kolejne iteracje (2/2)
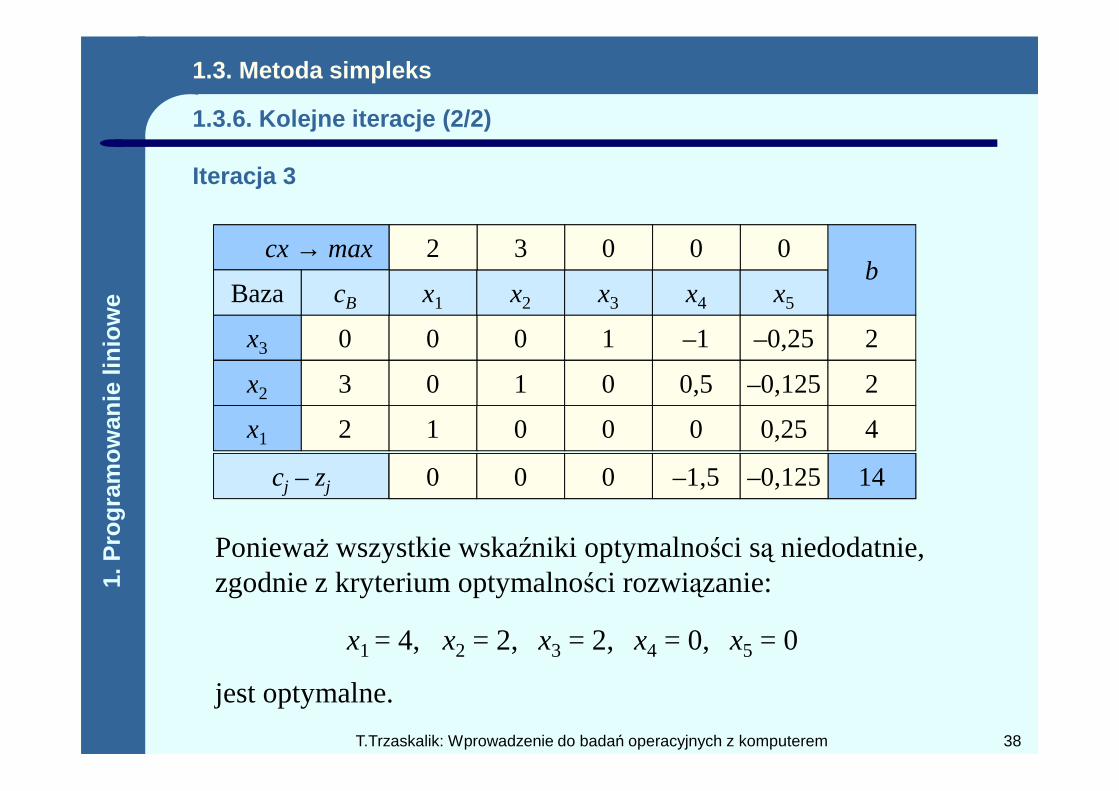
Iteracja 3
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 38
x2 3
x1 2
1 0 0,5 –0,1250
1 0 0 0 0,25
2
4
cj – zj
Ponieważ wszystkie wskaźniki optymalności są niedodatnie, zgodnie z kryterium optymalności rozwiązanie:
x1 = 4, x2 = 2, x3 = 2, x4 = 0, x5 = 0
jest optymalne.
140 0 0 –1,5 –0,125
1. P
rogr
amow
anie
lini
owe
x2
D
1.3. Metoda simpleks
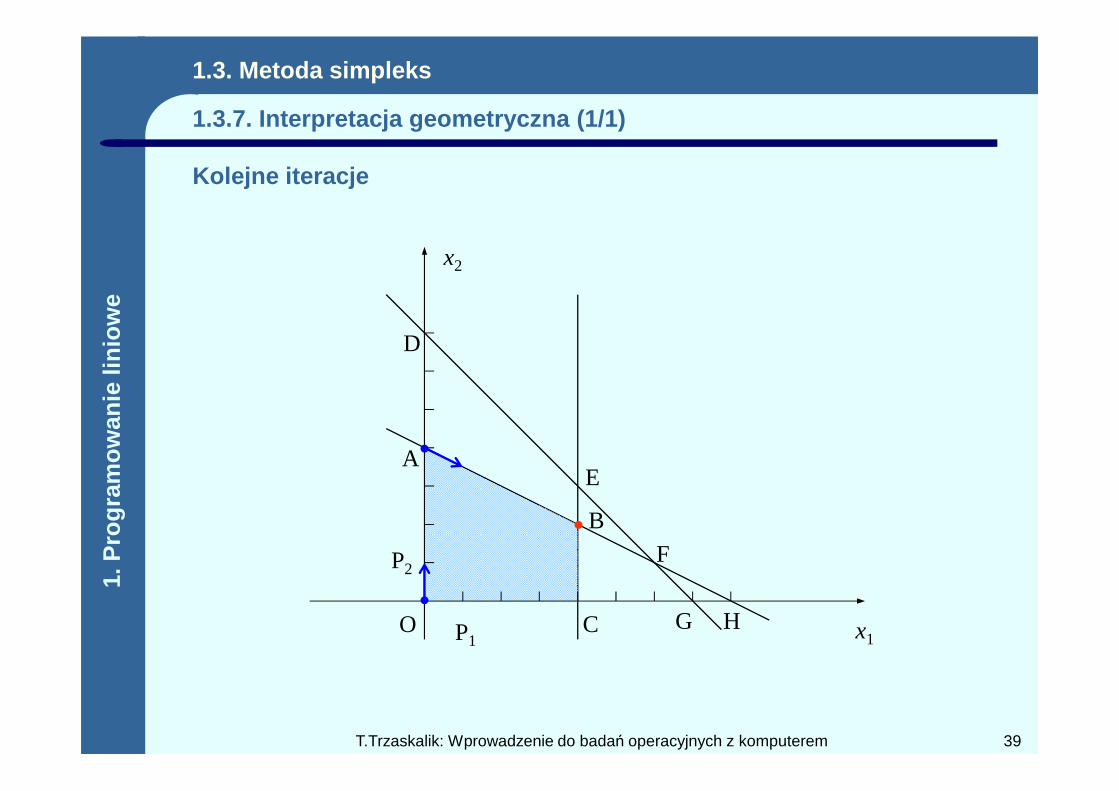
1.3.7. Interpretacja geometryczna (1/1)
Kolejne iteracje
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 39
AE
B
F
x1C G H
P2
P1O
1. P
rogr
amow
anie
lini
owe
1.3. Metoda simpleks
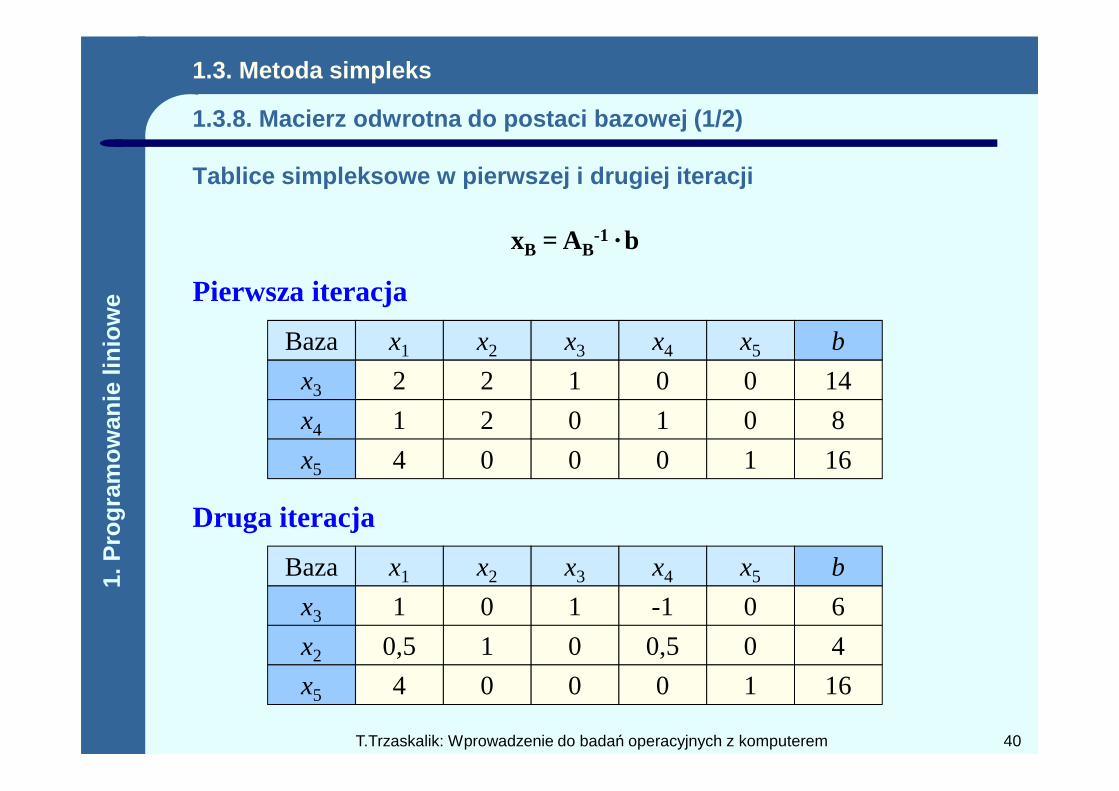
1.3.8. Macierz odwrotna do postaci bazowej (1/2)
Tablice simpleksowe w pierwszej i drugiej iteracji
x3 2 1 0 02 14
x1 x2 x3 x4 x5Baza b
xB = AB-1 · b
Pierwsza iteracja
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 40
3
x4
x5
2 0 1 01
4 0 0 0 1
8
16
x3
x2
x5
0 1 -1 0
1 0 0,5 0
1
0,5
4 0 0 0 1
6
4
16
x1 x2 x3 x4 x5Baza b
Druga iteracja
1. P
rogr
amow
anie
lini
owe
1.3. Metoda simpleks
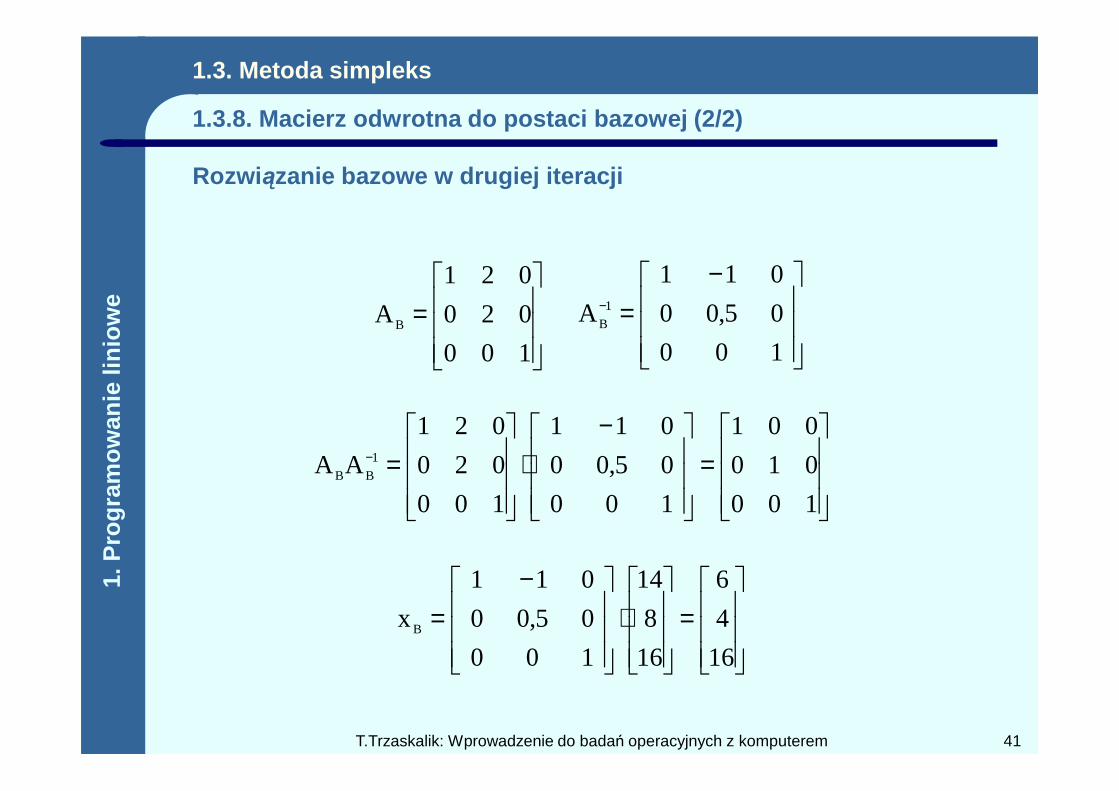
1.3.8. Macierz odwrotna do postaci bazowej (2/2)
Rozwi ązanie bazowe w drugiej iteracji
=100
020
021
A B
−=−
100
05,00
011
A 1
B
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 41
=
−⋅
=−
100
010
001
100
05,00
011
100
020
021
AA 1
BB
=
⋅
−=
16
4
6
16
8
14
100
05,00
011
xB
1. P
rogr
amow
anie
lini
owe
Model matematyczny:
Funkcja celu
W rozpatrywanym w przykładzie 1.1 zadaniu programowania produkcji łączny rozmiar produkcji ma być nie mniejszy niż 3 jednostki
1.3. Metoda simpleks
1.3.9. Pierwsza dopuszczalna posta ć bazowa (1/5)
Przykład 1.2
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 42
Funkcja celu
f(x1,x2) = 2x1 + 3x2
Warunki ograniczające
2x1 + 2x2 ≤ 14
x1 + 2x2 ≤ 8
4x1 ≤ 16
x1 ≥ 0, x2 ≥ 0, x1 + x2 ≥ 3
1. P
rogr
amow
anie
lini
owe
x2
1.3. Metoda simpleks
1.3.9. Pierwsza dopuszczalna posta ć bazowa (2/5)
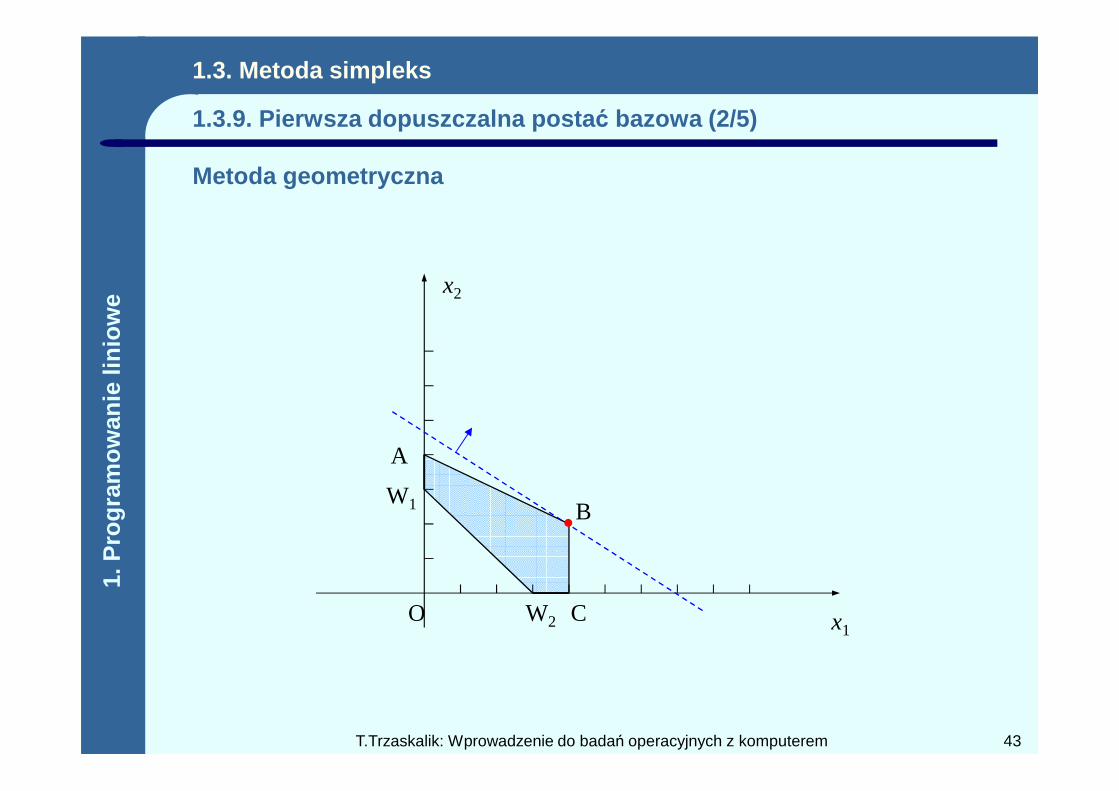
Metoda geometryczna
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 43
x1O
A
B
CW2
W1
1. P
rogr
amow
anie
lini
owe
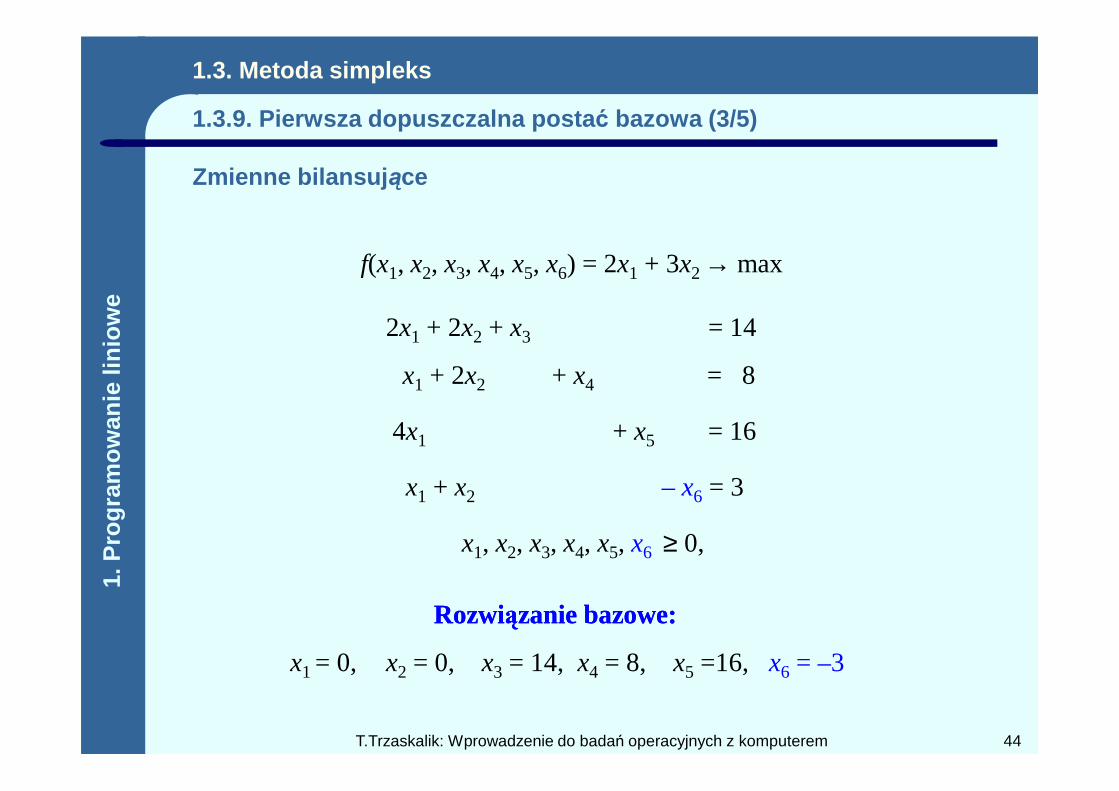
f(x1, x2, x3, x4, x5, x6) = 2x1 + 3x2 → max
2x1 + 2x2 + x3 = 14
x1 + 2x2 + x4 = 8
1.3. Metoda simpleks
1.3.9. Pierwsza dopuszczalna posta ć bazowa (3/5)
Zmienne bilansuj ące
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 44
4x1 + x5 = 16
x1, x2, x3, x4, x5, x6 ≥ 0,
x1 + x2 – x6 = 3
Rozwiązanie bazowe:Rozwiązanie bazowe:
x1 = 0, x2 = 0, x3 = 14, x4 = 8, x5 =16, x6 = –3
1. P
rogr
amow
anie
lini
owe
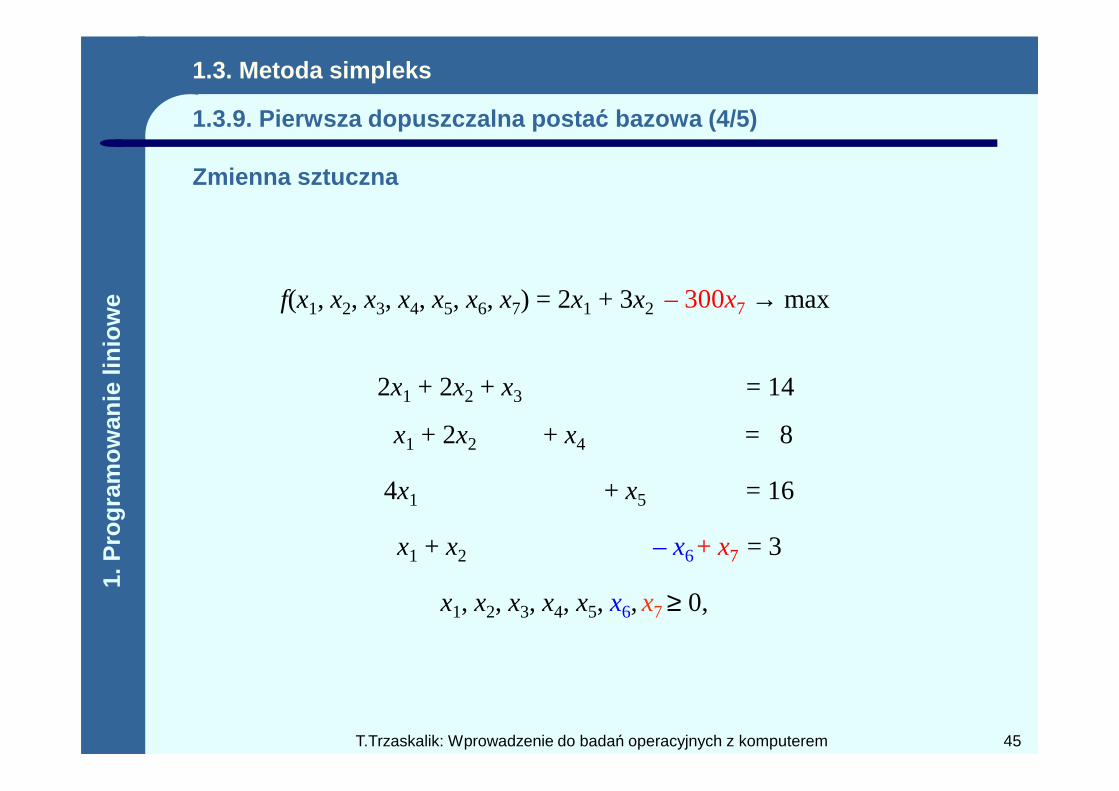
f(x1, x2, x3, x4, x5, x6, x7) = 2x1 + 3x2 → max
2x1 + 2x2 + x3 = 14
– 300x7
1.3. Metoda simpleks
1.3.9. Pierwsza dopuszczalna posta ć bazowa (4/5)
Zmienna sztuczna
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 45
2x1 + 2x2 + x3 = 14
x1 + 2x2 + x4 = 8
4x1 + x5 = 16
x1 + x2 – x6 = 3
x1, x2, x3, x4, x5, x6,x7 ≥ 0,
+ x7
1. P
rogr
amow
anie
lini
owe
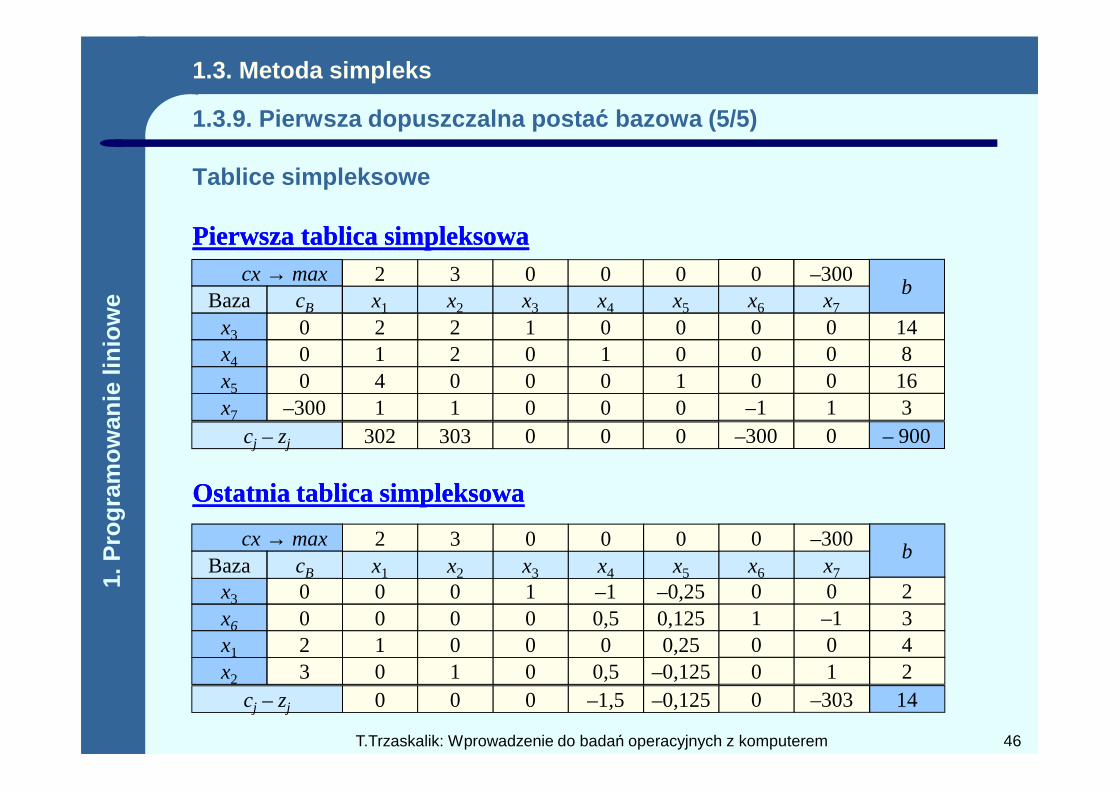
Pierwsza tablica simpleksowaPierwsza tablica simpleksowacx → max
x3 0x4 0x5 0
2 1 0 02 0 1 0
214 0 0 0 1
b
148163
000–1
3 0 0 02 0 –300
0001
Baza cB x1 x2 x3 x4 x5 x6 x7
1.3. Metoda simpleks
1.3.9. Pierwsza dopuszczalna posta ć bazowa (5/5)
Tablice simpleksowe
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 46
cj – zj 302 303 0 0 0x7 –300 1 1 0 0 0
– 9003
–300–1
01
Ostatnia tablica simpleksowaOstatnia tablica simpleksowa
x3 0x6 0x1 2
0 1 –1 –0,250 0 0,5 0,125
001 0 0 0 0,25
cj – zj 0 0 0 –1,5 –0,125x2 3 0 1 0 0,5 –0,125
b
234
142
010
00
0–10
–3031
cx → max 3 0 0 02 0 –300Baza cB x1 x2 x3 x4 x5 x6 x7
1. P
rogr
amow
anie
lini
owe
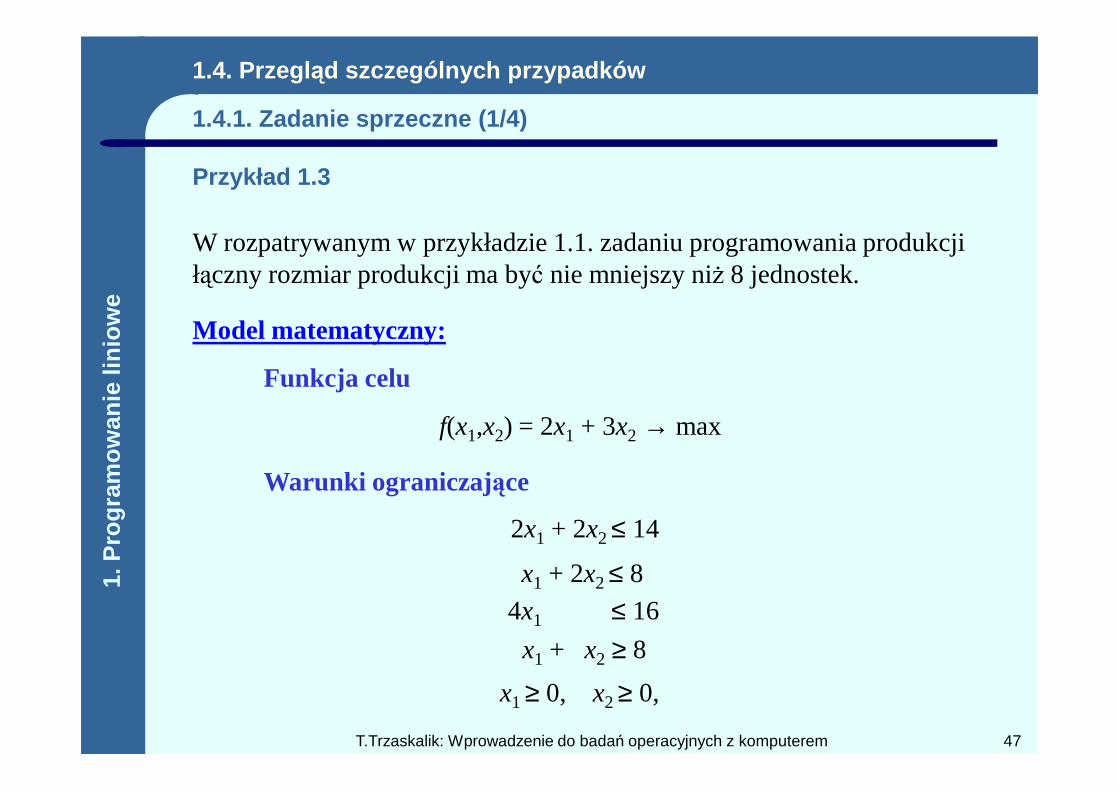
W rozpatrywanym w przykładzie 1.1. zadaniu programowania produkcji łączny rozmiar produkcji ma być nie mniejszy niż 8 jednostek.
Model matematyczny:
Funkcja celu
1.4. Przegl ąd szczególnych przypadków
1.4.1. Zadanie sprzeczne (1/4)
Przykład 1.3
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 47
f(x1,x2) = 2x1 + 3x2 → max
Warunki ograniczające
2x1 + 2x2 ≤ 14
x1 + 2x2 ≤ 8
4x1 ≤ 16
x1 ≥ 0, x2 ≥ 0,
x1 + x2 ≥ 8
1. P
rogr
amow
anie
lini
owe
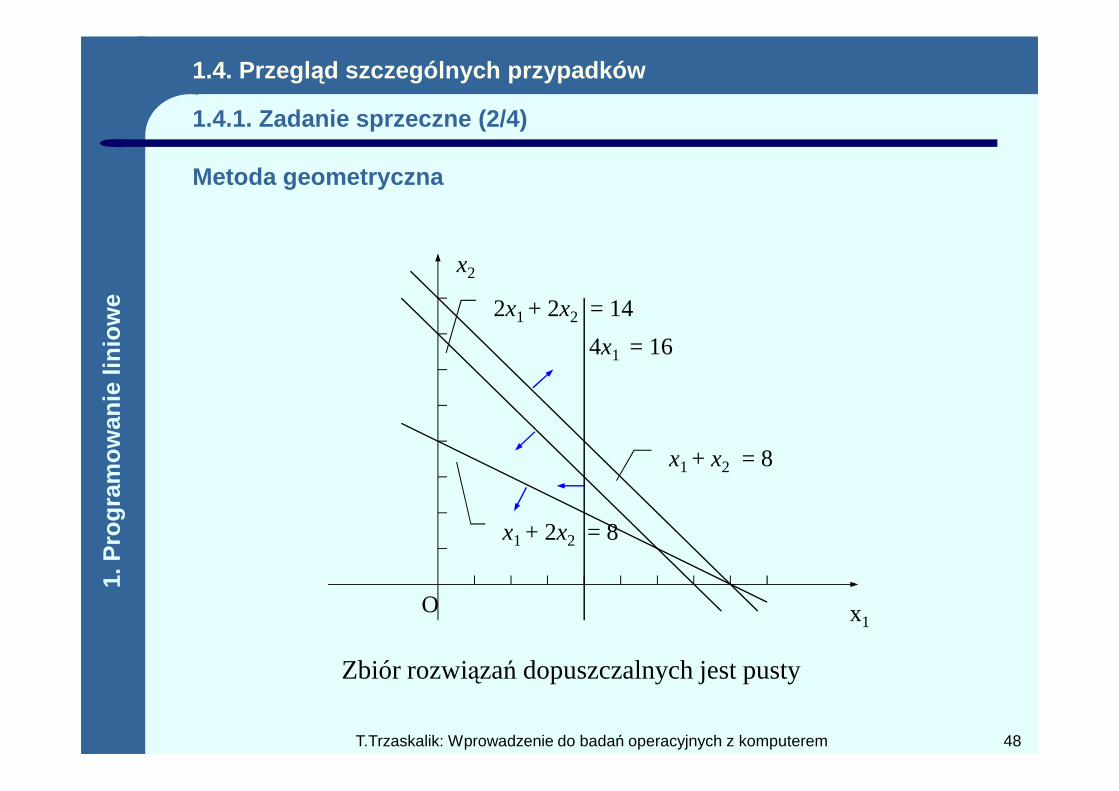
x2
4x1 = 16
2x1 + 2x2 = 14
1.4. Przegl ąd szczególnych przypadków
1.4.1. Zadanie sprzeczne (2/4)
Metoda geometryczna
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 48
x1O
x1 + x2 = 8
x1 + 2x2 = 8
Zbiór rozwiązań dopuszczalnych jest pusty
1. P
rogr
amow
anie
lini
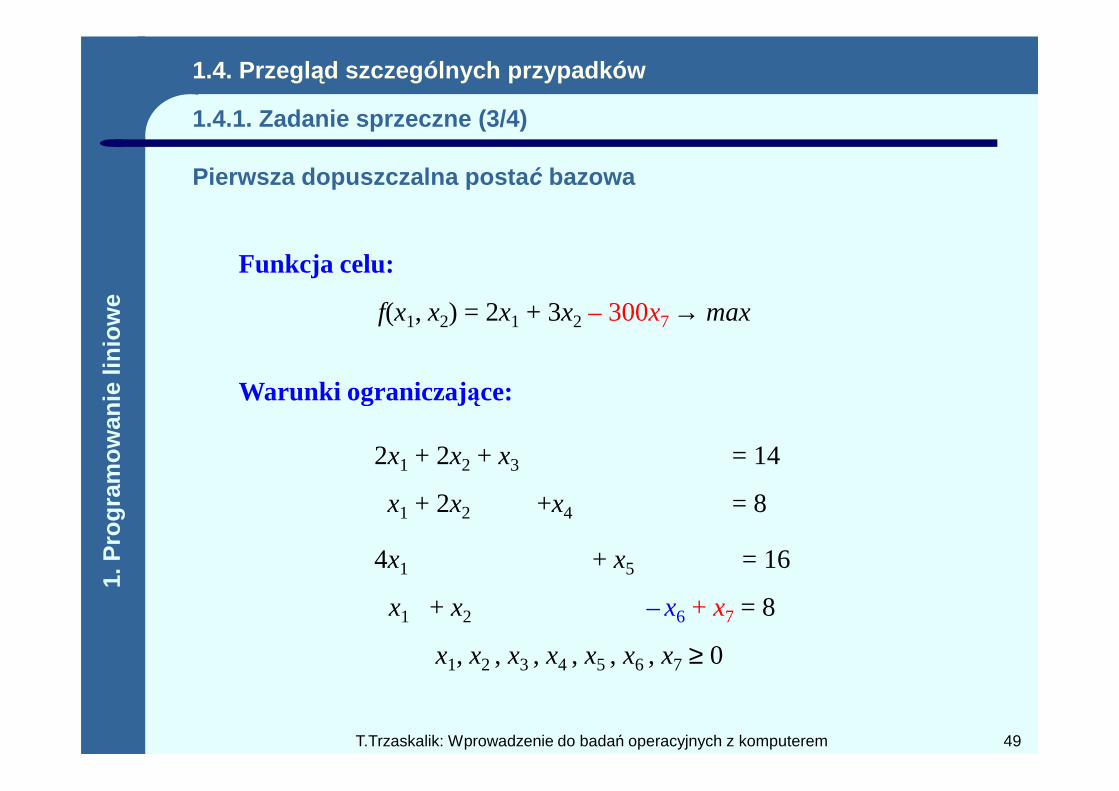
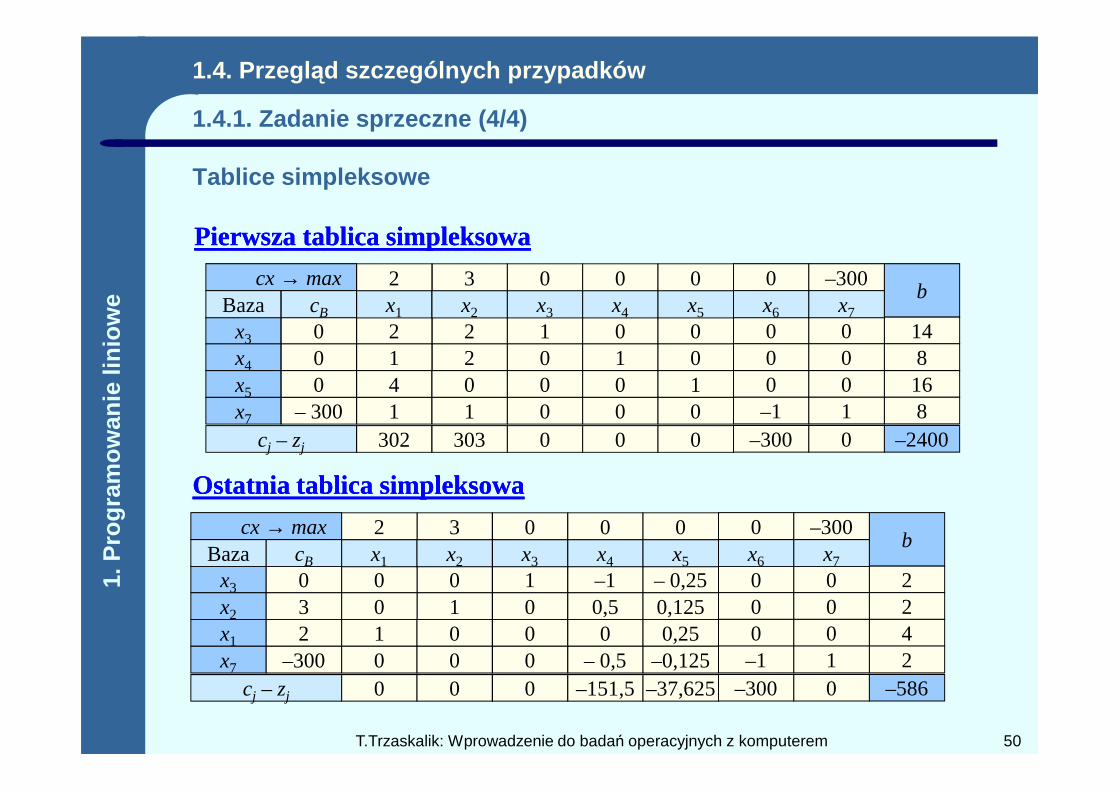
owe f(x1, x2) = 2x1 + 3x2 – 300x7 → max
Funkcja celu:
Warunki ograniczające:
1.4. Przegl ąd szczególnych przypadków
1.4.1. Zadanie sprzeczne (3/4)
Pierwsza dopuszczalna posta ć bazowa
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 49
Warunki ograniczające:
x1, x2 , x3 , x4 , x5 , x6 , x7 ≥ 0
x1 + 2x2 +x4 = 8
4x1 + x5 = 16
x1 + x2 –x6 + x7 = 8
2x1 + 2x2 + x3 = 14
1. P
rogr
amow
anie
lini
owe
Pierwsza tablica simpleksowaPierwsza tablica simpleksowa
x3 0x4 0x5 0
2 1 0 02 0 1 0
214 0 0 0 1
b
14816
000
000
cx → max 3 0 0 02 0 –300Baza cB x1 x2 x3 x4 x5 x6 x7
1.4. Przegl ąd szczególnych przypadków
1.4.1. Zadanie sprzeczne (4/4)
Tablice simpleksowe
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 50
x5 0 4 0 0 0 1
cj – zj 302 303 0 0 0x7 – 300 1 1 0 0 0
16
–24008
0
–300–1
0
01
Ostatnia tablica simpleksowaOstatnia tablica simpleksowa
x3 0x2 3x1 2
0 1 –1 – 0,251 0 0,5 0,125
001 0 0 0 0,25
cj – zj 0 0 0 –151,5 –37,625x7 –300 0 0 0 – 0,5 –0,125
b
224
–5862
000
–300–1
000
01
cx → max 3 0 0 02 0 –300Baza cB x1 x2 x3 x4 x5 x6 x7
1. P
rogr
amow
anie
lini
owe
W rozpatrywanym przykładzie 1.1 zadaniu programowania produkcji zysk jednostkowy dla produktu P2 zwiększa się z 3 do 4 jednostek.
Model matematyczny:
Funkcja celu
1.4. Przegl ąd szczególnych przypadków
1.4.2. Alternatywne rozwi ązania optymalne (1/4)
Przykład 1.4
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 51
Funkcja celu
f(x1,x2) = 2x1 + 4x2 → max
Warunki ograniczające
2x1 + 2x2 ≤ 14
x1 + 2x2 ≤ 8
4x1 ≤ 16
x1 ≥ 0, x2 ≥ 0,
1. P
rogr
amow
anie
lini
owe
x2
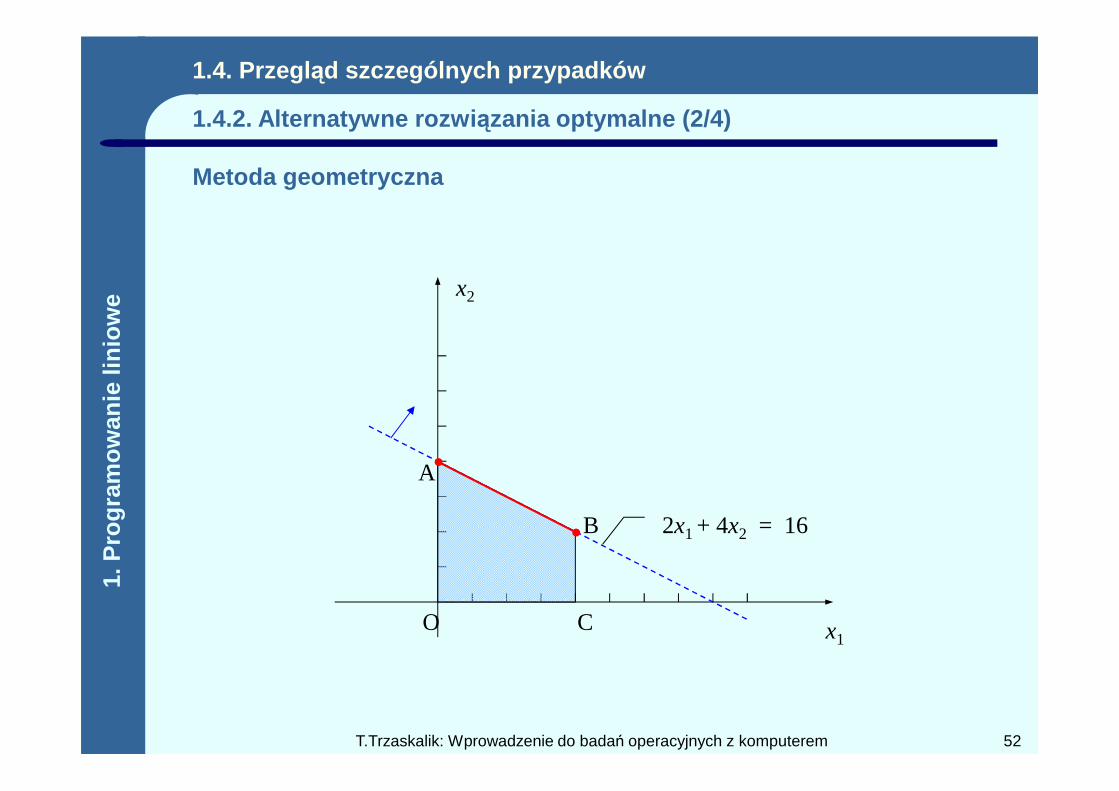
1.4. Przegl ąd szczególnych przypadków
1.4.2. Alternatywne rozwi ązania optymalne (2/4)
Metoda geometryczna
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 52
x1O
A
B
C
2x1 + 4x2 = 16
1. P
rogr
amow
anie
lini
owe
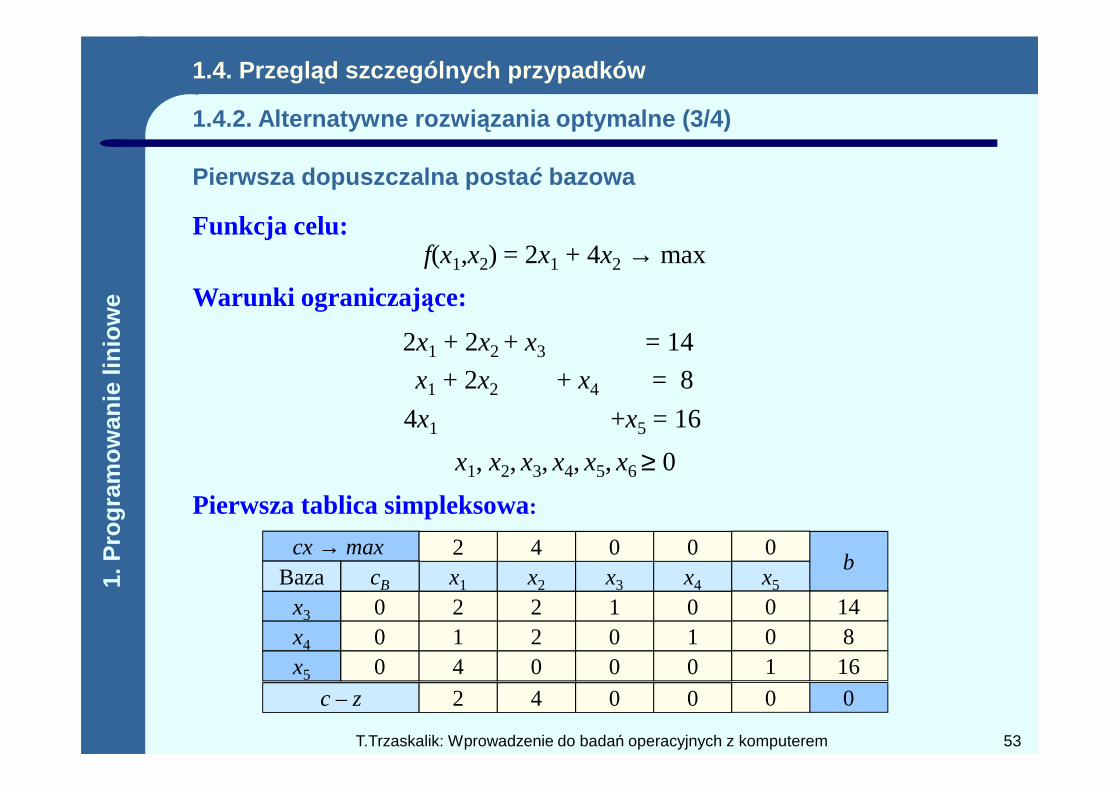
Funkcja celu:f(x1,x2) = 2x1 + 4x2 → max
2x1 + 2x2 + x3 = 14
x1 + 2x2 + x4 = 8
Warunki ograniczające:
1.4. Przegl ąd szczególnych przypadków
1.4.2. Alternatywne rozwi ązania optymalne (3/4)
Pierwsza dopuszczalna posta ć bazowa
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 53
4x1 +x5 = 16
x1, x2,x3,x4,x5,x6 ≥ 0
cx → max
x3 0x4 0x5 0
2 12 0
214 0 0
c – z 2 4 0
0100
b
148160
x1 x2 x3 x4 x5
0010
4 02 0 0
Pierwsza tablica simpleksowa:
Baza cB
1. P
rogr
amow
anie
lini
owe
cx → max
x3 0x2 4x 0
0 11 0
10,54 0 0
–10,50
b
6416
x1 x2 x3 x4 x5
001
4 02 0 0
Ostatnia tablica simpleksowa
b/a
684
Baza cB
10,54
x1
2
x5 0 4 0 0 0 161 4
1.4. Przegl ąd szczególnych przypadków
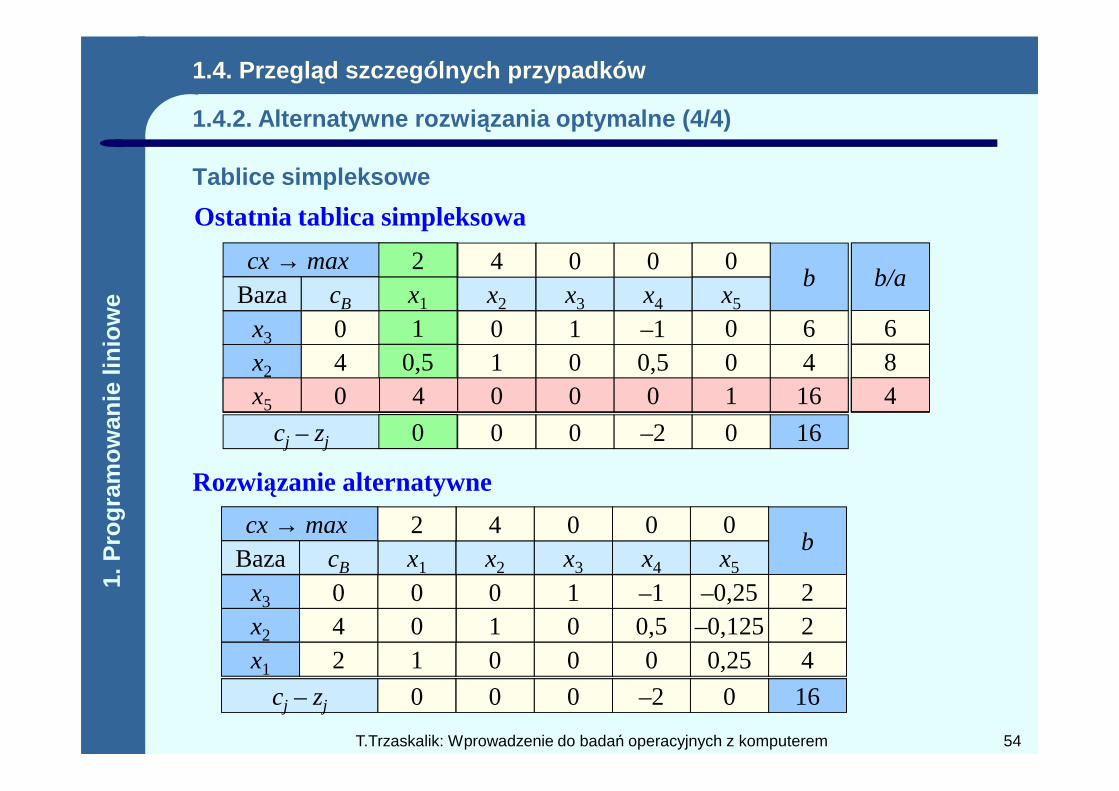
1.4.2. Alternatywne rozwi ązania optymalne (4/4)
Tablice simpleksowe
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 54
x5 0 4 0 0 0 161
cj – zj 0 0 0 –2 160
4
x3 0x2 4x1 2
0 11 0
001 0 0
–10,50
b
224
–0,25–0,1250,25
cj – zj 0 0 0 –2 160
Rozwiązanie alternatywne
cx → maxx1 x2 x3 x4 x5
4 02 0 0Baza cB
4
0
x5 0 4 0 0 0 161 4
1. P
rogr
amow
anie
lini
owe
W rozpatrywanym w przykładzie 1.1 zadaniu programowania produkcjiwystępują jedynie ograniczenia dotyczące środka S3. Całkowity rozmiarprodukcji nie może byćmniejszy niż 3 jednostki.
Model matematyczny:
1.4. Przegl ąd szczególnych przypadków
1.4.3. Nieograniczony zbiór rozwi ązań dopuszczalnych (1/10)
Przykład 1.5
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 55
Funkcja celu
f(x1,x2) = 2x1 + 3x2 → max
Warunki ograniczające
4x1 ≤ 16
x1 ≥ 0, x2 ≥ 0,
x1 + x2 ≥ 3
1. P
rogr
amow
anie
lini
owe
x2
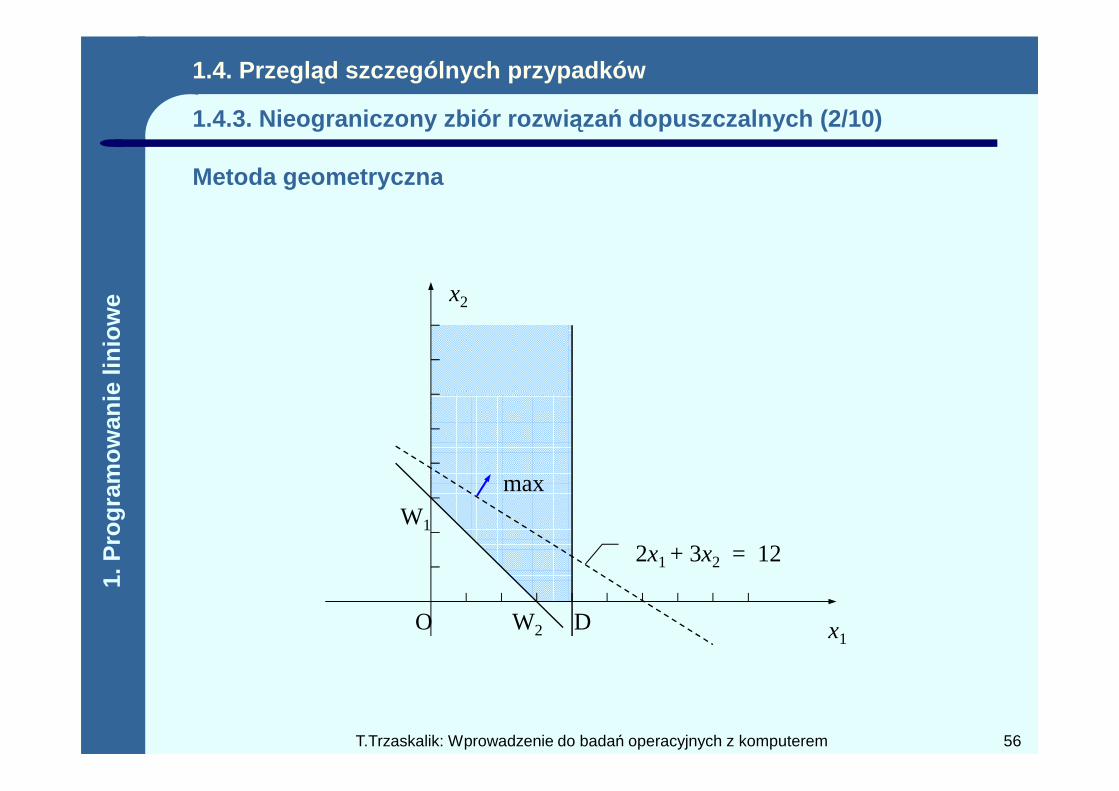
1.4. Przegl ąd szczególnych przypadków
1.4.3. Nieograniczony zbiór rozwi ązań dopuszczalnych (2/10)
Metoda geometryczna
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 56
x1O W2
W1
D
max
2x1 + 3x2 = 12
1. P
rogr
amow
anie
lini
owe
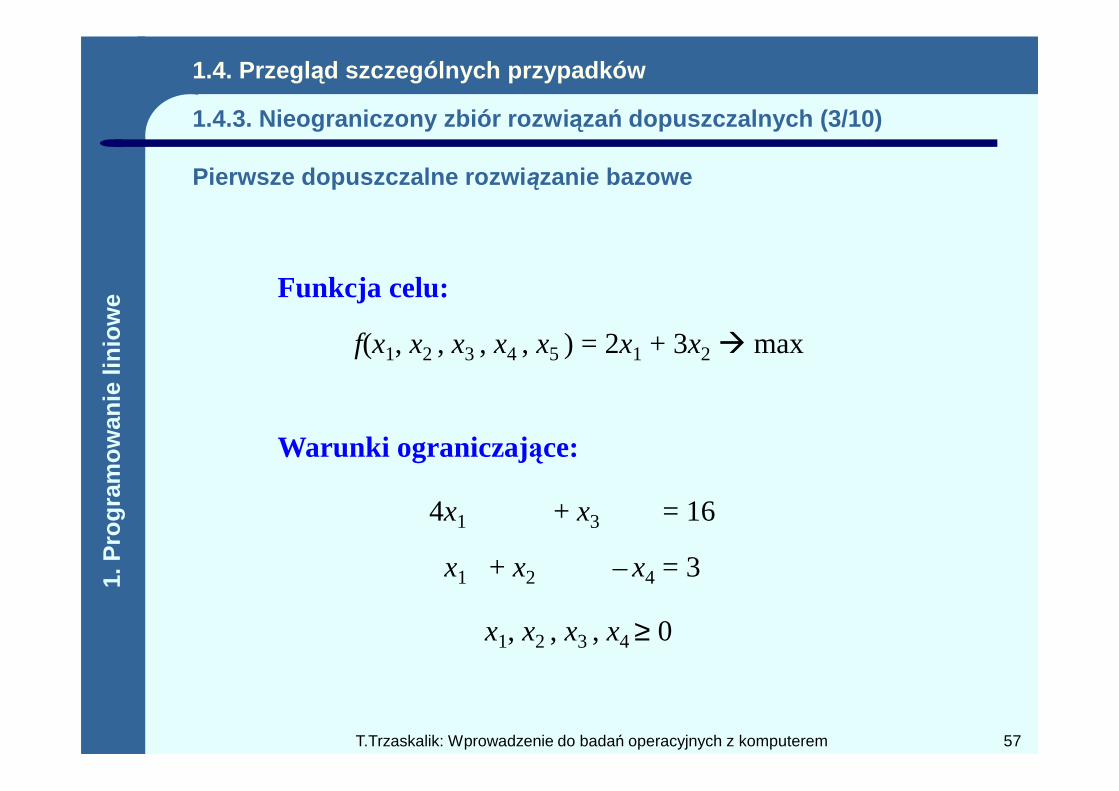
f(x1, x2 , x3 , x4 , x5 ) = 2x1 + 3x2 � max
Funkcja celu:
1.4. Przegl ąd szczególnych przypadków
1.4.3. Nieograniczony zbiór rozwi ązań dopuszczalnych (3/10)
Pierwsze dopuszczalne rozwi ązanie bazowe
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 57
Warunki ograniczające:
x1, x2 , x3 , x4 ≥ 0
4x1 + x3 = 16
x1 + x2 –x4 = 3
1. P
rogr
amow
anie
lini
owe cx → max
x1 x2 x3 x4
3 02 0b
Baza cB
1.4. Przegl ąd szczególnych przypadków
1.4.3. Nieograniczony zbiór rozwi ązań dopuszczalnych (4/10)
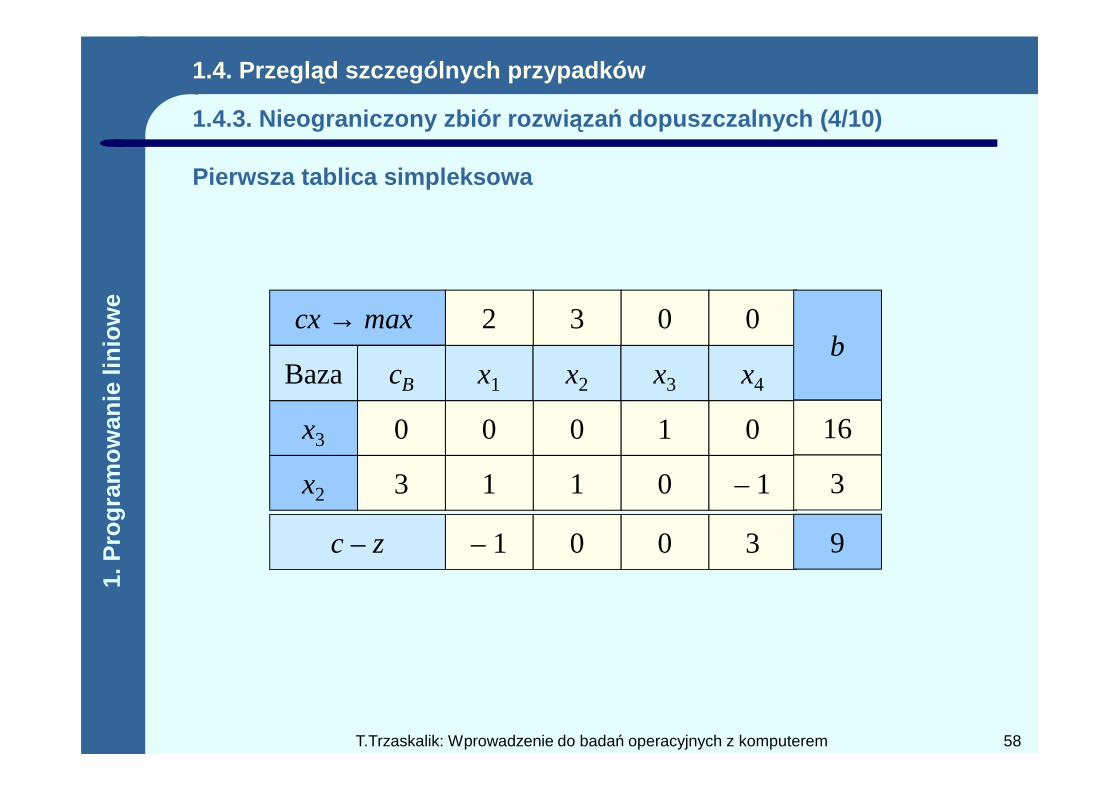
Pierwsza tablica simpleksowa
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 58
x3 0
x2 3
0 1
1 0
0
1
0
– 1
c – z – 1 0 0 3
16
3
9
1. P
rogr
amow
anie
lini
owe
x2
1.4. Przegl ąd szczególnych przypadków
1.4.3. Nieograniczony zbiór rozwi ązań dopuszczalnych (5/10)
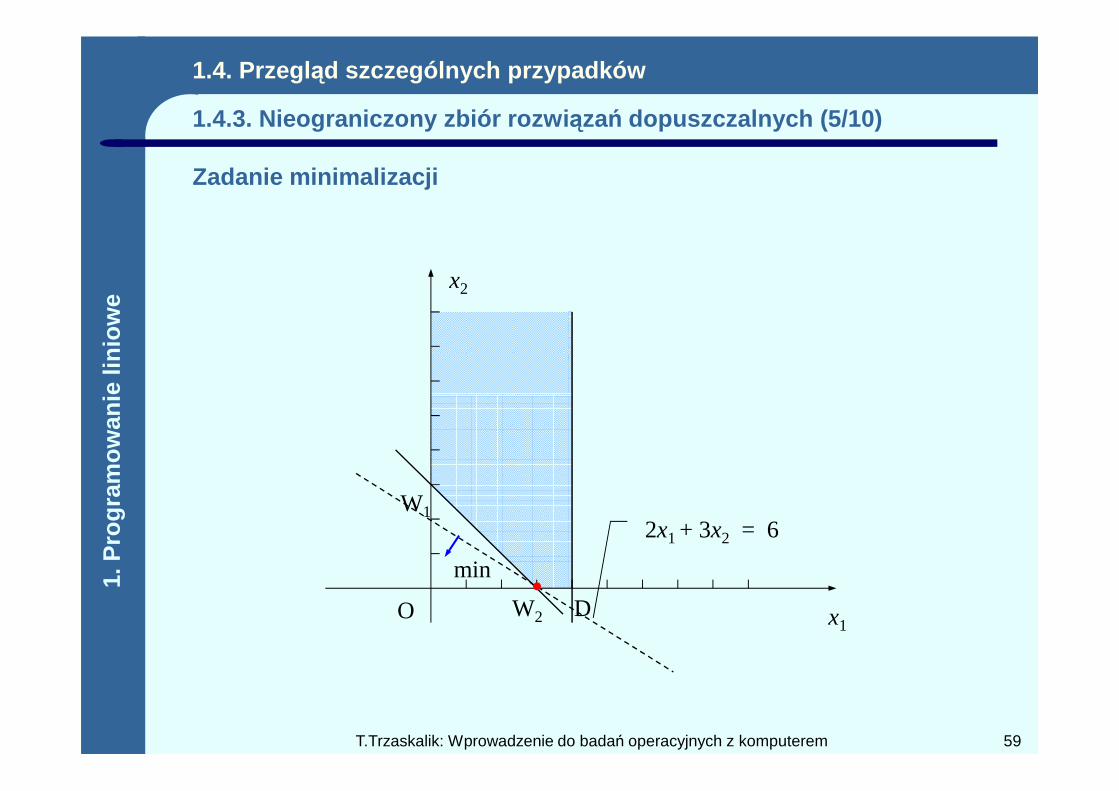
Zadanie minimalizacji
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 59
x1O W2
W1
D
min
2x1 + 3x2 = 6
1. P
rogr
amow
anie
lini
owe
Przykład 1.6
Zużycie środka S3 nie może przekraczać 16 jednostek, łączna wielkość
produkcji nie może być mniejsza od 3 jednostek. Koszty jednostkowe,
związane z wytwarzanie zarówno produktu P1, jak i P2 wynoszą 2.
Znaleźć plan produkcji, minimalizujący koszty.
1.4. Przegl ąd szczególnych przypadków
1.4.3. Nieograniczony zbiór rozwi ązań dopuszczalnych (6/10)1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 60
Znaleźć plan produkcji, minimalizujący koszty.
2x1 + 2x2 → min
4x1 ≤ 16
x1 + x2 ≥ 3
x1 ≥ 0, x2 ≥ 0
1. P
rogr
amow
anie
lini
owe
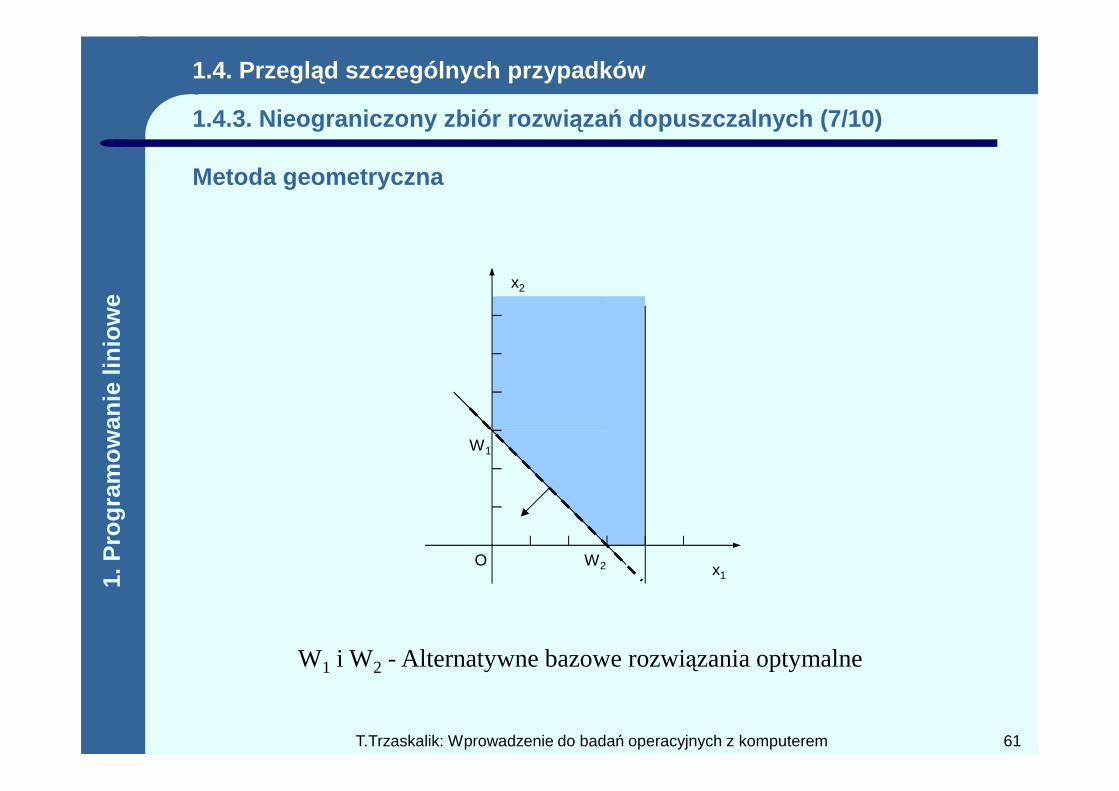
Metoda geometryczna
1.4. Przegl ąd szczególnych przypadków
1.4.3. Nieograniczony zbiór rozwi ązań dopuszczalnych (7/10)
x2
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 61
x1O
W1
W2
W1 i W2 - Alternatywne bazowe rozwiązania optymalne
1. P
rogr
amow
anie
lini
owe
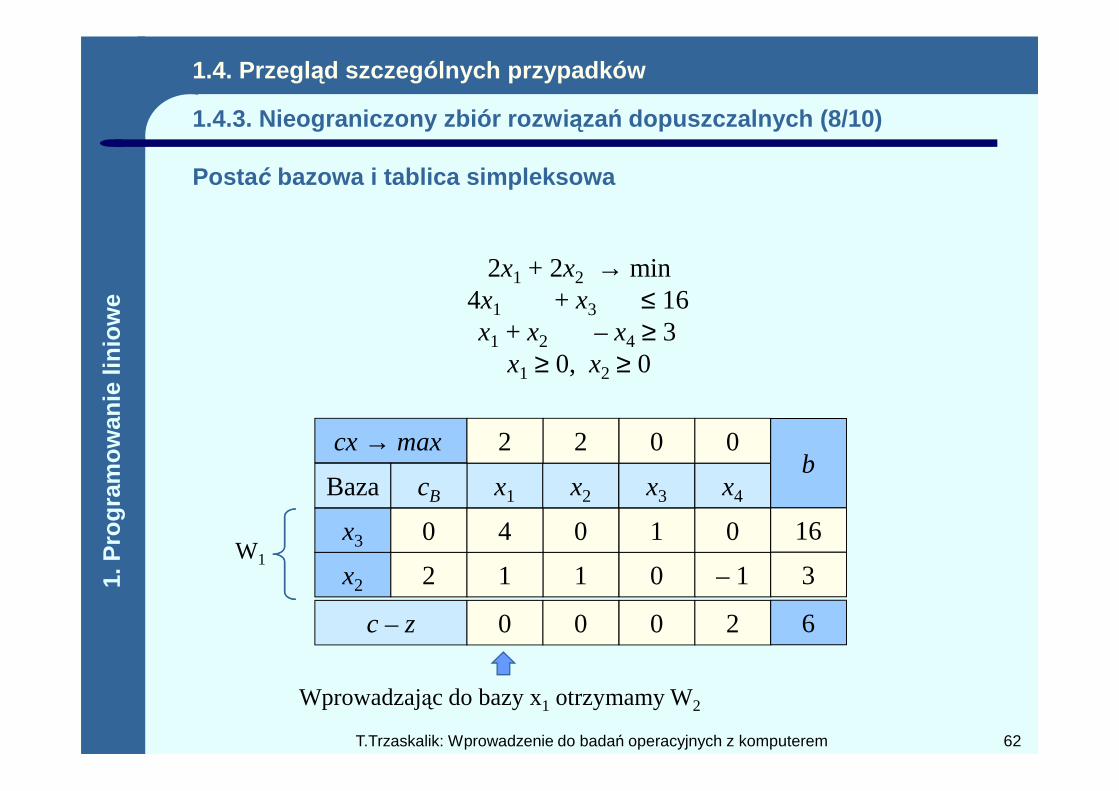
Postać bazowa i tablica simpleksowa
2x1 + 2x2 → min 4x1 + x3 ≤ 16 x1 + x2 – x4 ≥ 3
x1 ≥ 0, x2 ≥ 0
1.4. Przegl ąd szczególnych przypadków
1.4.3. Nieograniczony zbiór rozwi ązań dopuszczalnych (8/10)1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 62
cx → max
x3 0
x2 2
0 1
1 0
4
1
x1 x2 x3 x4
2 02 0
0
– 1
c – z 0 0 0 2
b
16
3
6
Baza cB
Wprowadzając do bazy x1 otrzymamy W2
W1
1. P
rogr
amow
anie
lini
owe
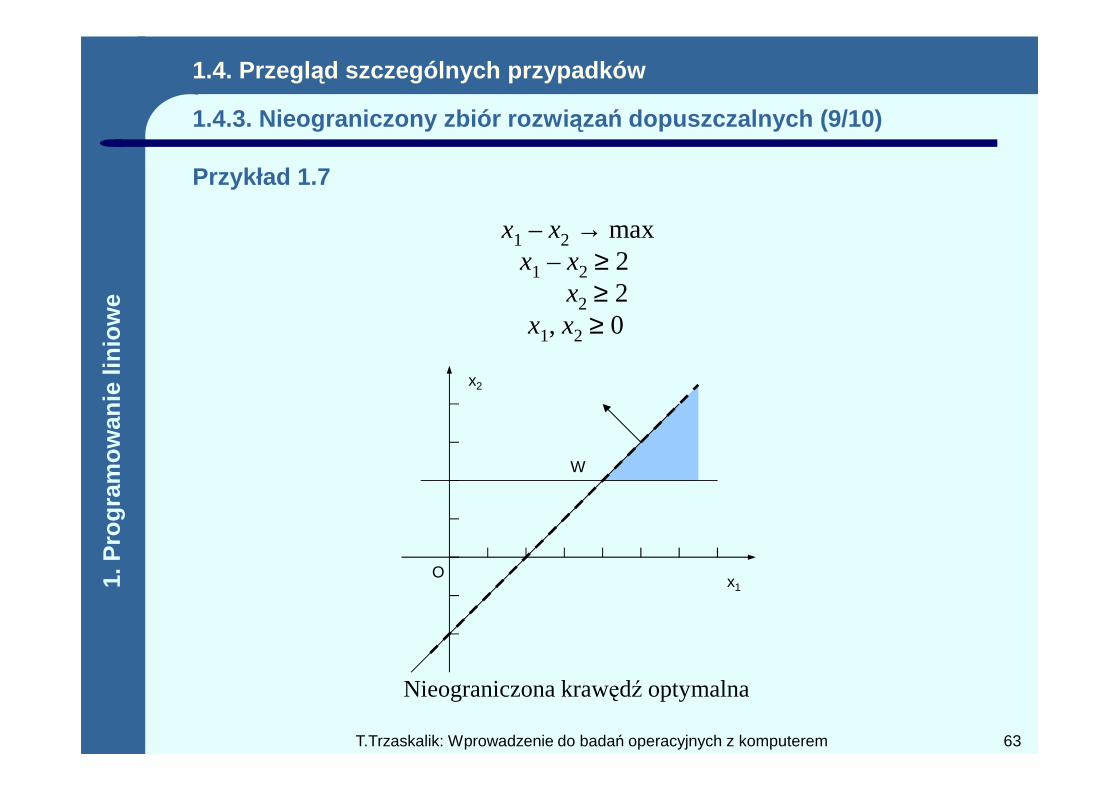
Przykład 1.7
1.4. Przegl ąd szczególnych przypadków
1.4.3. Nieograniczony zbiór rozwi ązań dopuszczalnych (9/10)
x1 – x2 → max x1 – x2 ≥ 2
x2 ≥ 2x1, x2 ≥ 0
x2
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 63
x1O
W
Nieograniczona krawędź optymalna
1. P
rogr
amow
anie
lini
owe
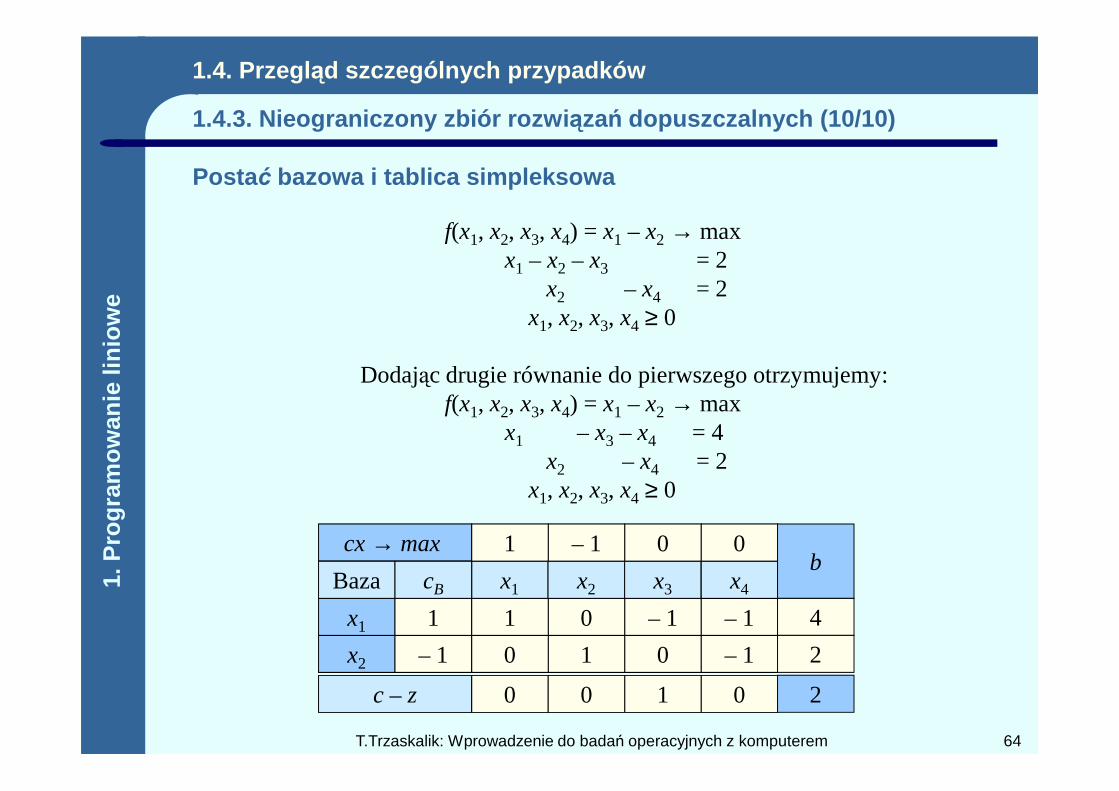
Postać bazowa i tablica simpleksowa
1.4. Przegl ąd szczególnych przypadków
1.4.3. Nieograniczony zbiór rozwi ązań dopuszczalnych (10/10)
f(x1, x2, x3, x4) = x1 – x2 → max x1 – x2 – x3 = 2
x2 – x4 = 2x1, x2, x3, x4 ≥ 0
Dodając drugie równanie do pierwszego otrzymujemy: f(x , x , x , x ) = x – x → max
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 64
f(x1, x2, x3, x4) = x1 – x2 → max x1 – x3 – x4 = 4
x2 – x4 = 2x1, x2, x3, x4 ≥ 0
cx → max
x1 1
x2 – 1
0 – 1
1 0
1
0
x1 x2 x3 x4
– 1 01 0
– 1
– 1
c – z 0 0 1 0
b
4
2
2
Baza cB
1. P
rogr
amow
anie
lini
owe
Algorytm
1. Uzyskanie pierwszego rozwiązania bazowego.
2. Ocena optymalności rozwiązania.
3. Badanie niesprzeczności zadania.
4. Identyfikacjarozwiązań alternatywnych.
1.4. Przegl ąd szczególnych przypadków
1.4.4. Reguły post ępowania w metodzie simpleks (1/1)1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 65
4. Identyfikacjarozwiązań alternatywnych.
5. Wybór zmiennej wprowadzanej do bazy.
6. Badanie nieograniczoności funkcji celu i istnienia krawędzi sprawnej.
7. Wybór zmiennej usuwanej z bazy.
8. Sprowadzenie warunków ograniczających do postaci bazowej względem
nowej bazy.
1. P
rogr
amow
anie
lini
owe
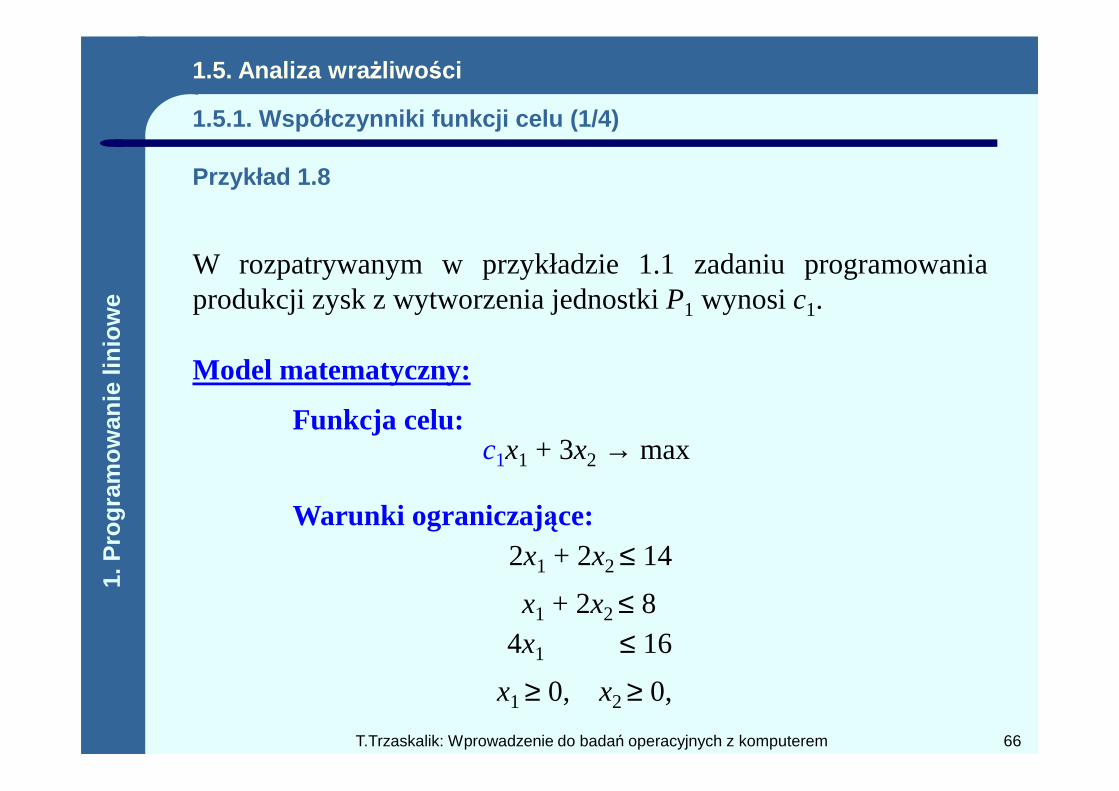
W rozpatrywanym w przykładzie 1.1 zadaniu programowaniaprodukcji zysk z wytworzenia jednostkiP1 wynosic1.
Model matematyczny:
1.5. Analiza wra żliwo ści
1.5.1. Współczynniki funkcji celu (1/4)
Przykład 1.8
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 66
2x1 + 2x2 ≤ 14
x1 + 2x2 ≤ 8 4x1 ≤ 16
x1 ≥ 0, x2 ≥ 0,
Warunki ograniczające:
Funkcja celu:c1x1 + 3x2 → max
1. P
rogr
amow
anie
lini
owe
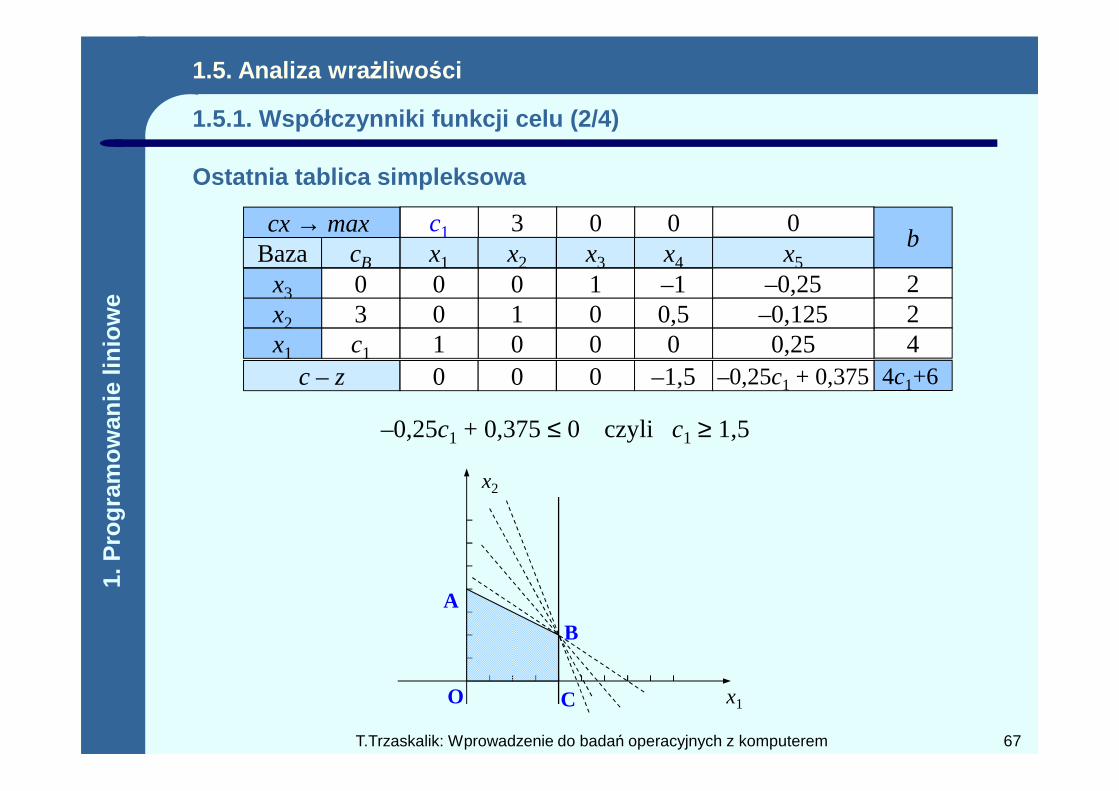
22
4c1+6 4
cx → max
x3 0x2 3
0 11 0
00
–10,5
c – z 0 0 0 –1,5x1 c1 0 01 0
x1 x2 x3 x4 x5
–0,25–0,125
–0,25c1 + 0,375
3 0c1 0 0
0,25
Baza cBb
1.5. Analiza wra żliwo ści
1.5.1. Współczynniki funkcji celu (2/4)
Ostatnia tablica simpleksowa
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 67
czyli c1 ≥ 1,5
x2
x1O
A
B
C
–0,25c1 + 0,375 ≤ 0
1. P
rogr
amow
anie
lini
owe
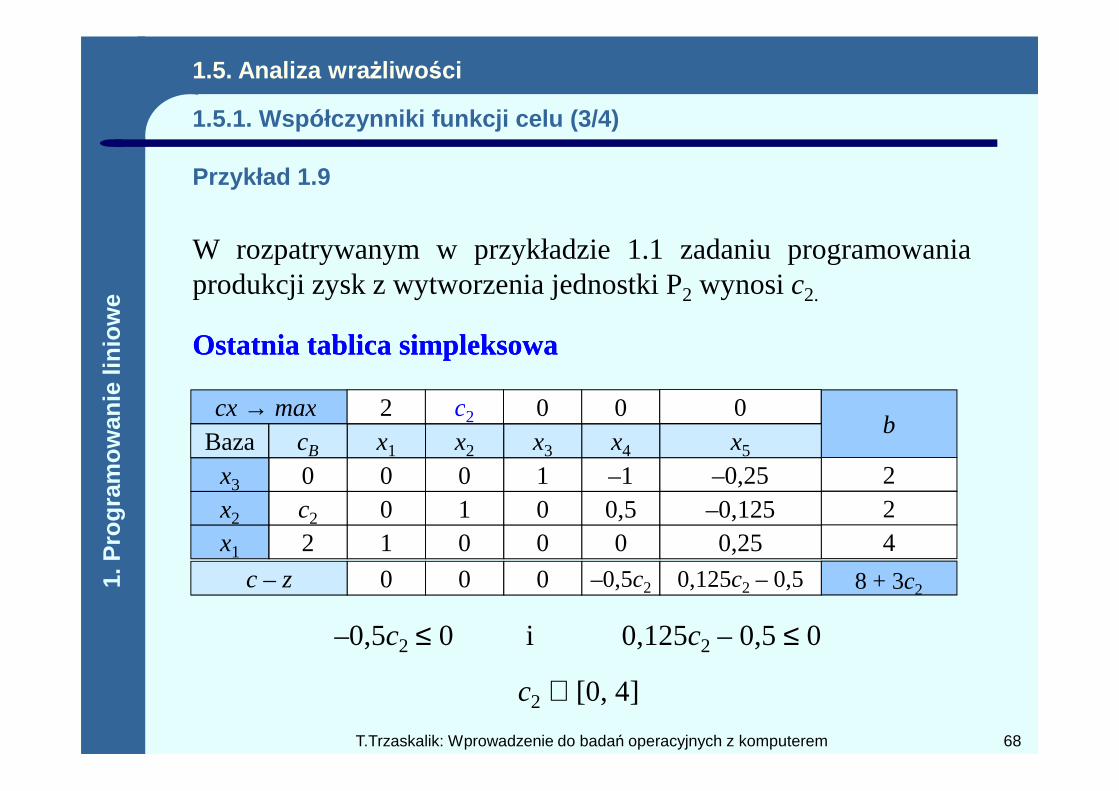
W rozpatrywanymw przykładzie 1.1 zadaniu programowaniaprodukcji zysk z wytworzenia jednostki P2 wynosic2.
cx → max c 02 0 0
Ostatnia tablica simpleksowaOstatnia tablica simpleksowa
1.5. Analiza wra żliwo ści
1.5.1. Współczynniki funkcji celu (3/4)
Przykład 1.9
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 68
c2 ∈ [0, 4]
–0,5c2 ≤ 0 i 0,125c2 – 0,5 ≤ 0
b
224
8 + 3c2
cx → max
x3 0x2 c2
0 11 0
00
–10,5
c – z 0 0 0 –0,5c2
x1 2 0 01 0
x1 x2 x3 x4 x5
–0,25–0,125
0,125c2 – 0,5
c2 02 0 0
0,25
Baza cB
1. P
rogr
amow
anie
lini
owe
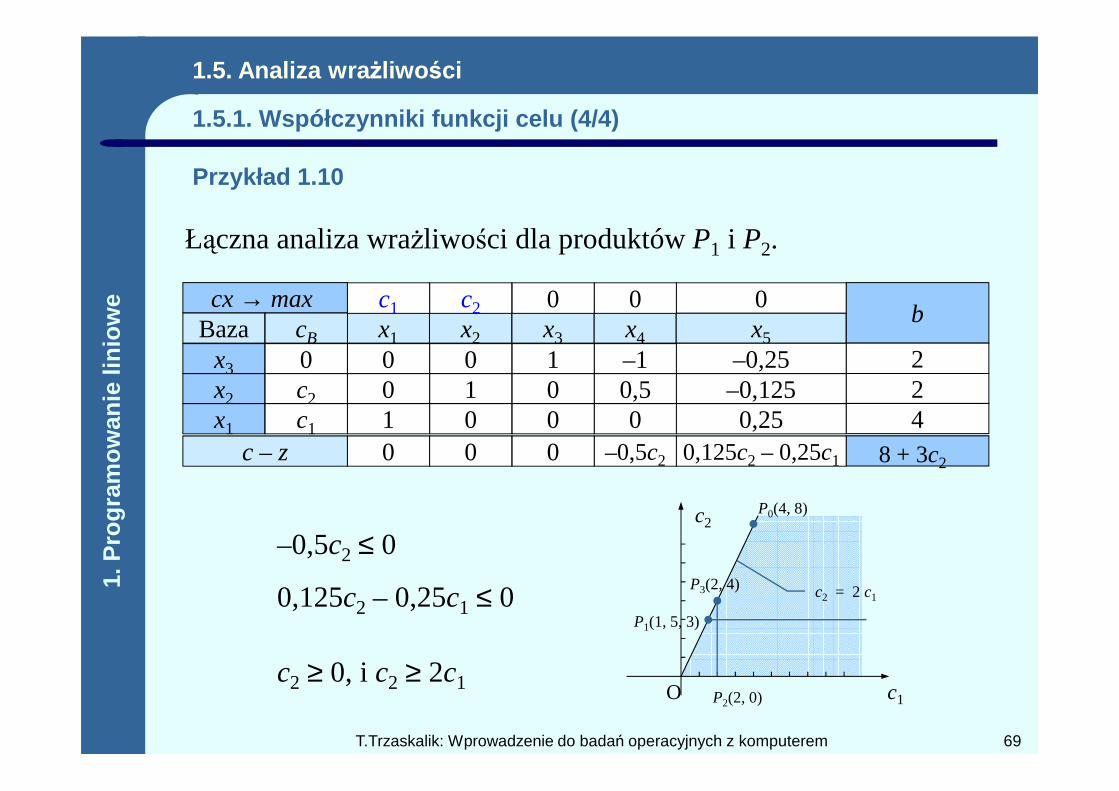
Łączna analiza wrażliwości dla produktów P1 i P2.
b
22
cx → max
x3 0x2 c2
0 11 0
00
–10,5
x1 x2 x3 x4 x5
–0,25–0,125
c2 0c1 0 0Baza cB
1.5. Analiza wra żliwo ści
1.5.1. Współczynniki funkcji celu (4/4)
Przykład 1.10
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 69
c2 ≥ 0, i c2 ≥ 2c1
–0,5c2 ≤ 0
0,125c2 – 0,25c1 ≤ 0
24
x2 c2 1 00 0,5
c – z 0 0 0 –0,5c2
x1 c1 0 01 0–0,125
0,125c2 – 0,25c1
0,258 + 3c2
c2
c1O
c2 = 2 c1
P2(2, 0)
P1(1, 5, 3)
P3(2, 4)
P0(4, 8)
1. P
rogr
amow
anie
lini
owe
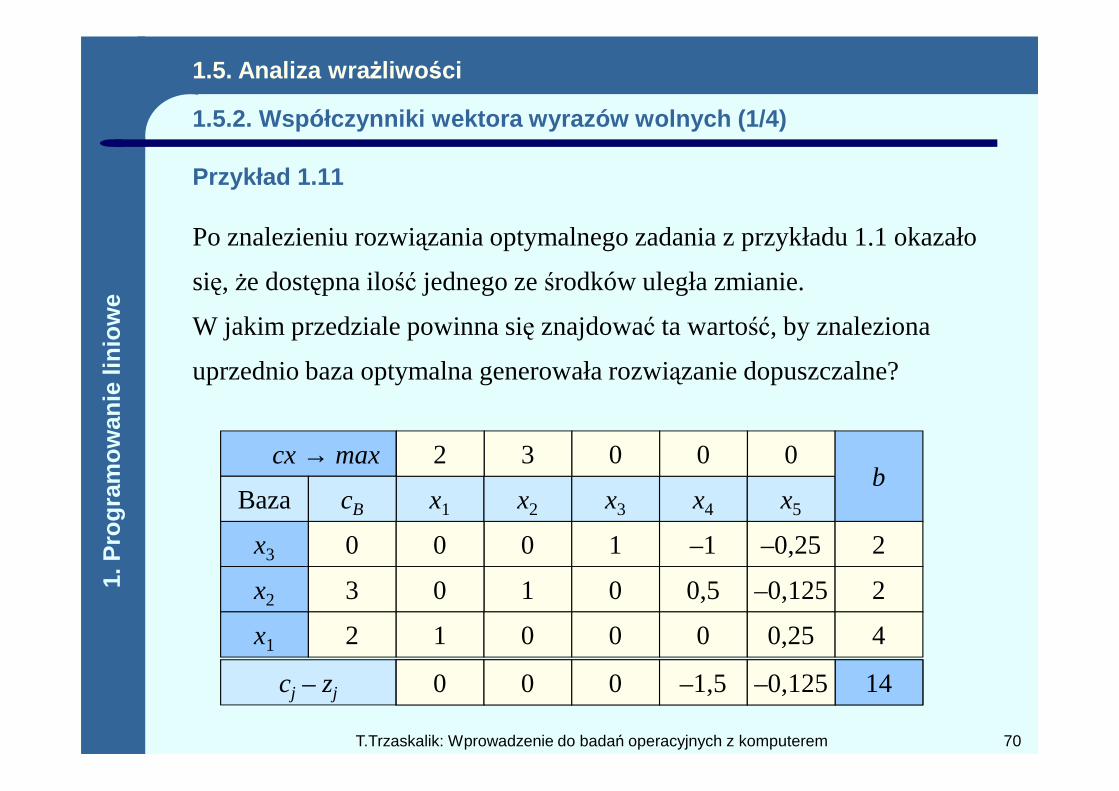
Przykład 1.11
Po znalezieniu rozwiązania optymalnego zadania z przykładu 1.1 okazało
się, że dostępna ilość jednego ze środków uległa zmianie.
W jakim przedziale powinna się znajdować ta wartość, by znaleziona
uprzednio baza optymalna generowała rozwiązanie dopuszczalne?
1.5. Analiza wra żliwo ści
1.5.2. Współczynniki wektora wyrazów wolnych (1/4)1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 70
x3 0
x2 3
x1 2
0 1 –1 –0,25
1 0 0,5 –0,125
0
0
1 0 0 0 0,25
2
2
4
cj – zj 140 0 0 –1,5 –0,125
x1 x2 x3 x4 x5
cx → max 3 0 0 02
Baza cB
b
1. P
rogr
amow
anie
lini
owe
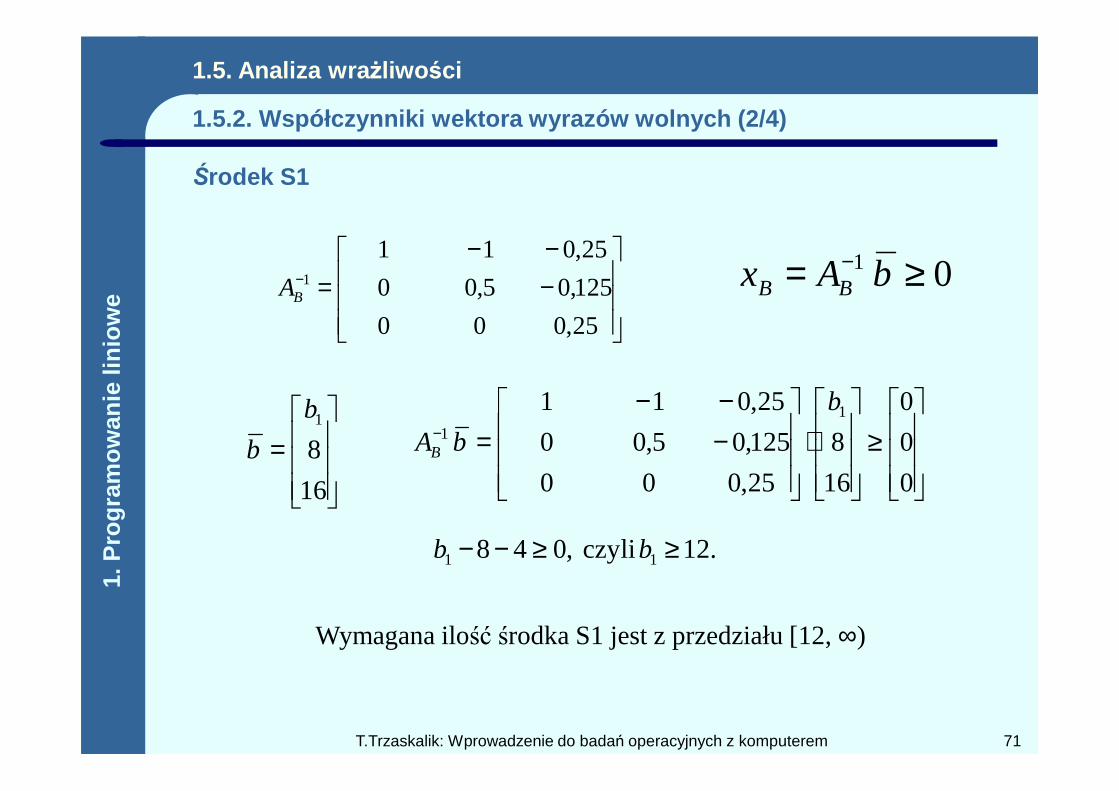
Środek S1
0 1 ≥= − bAx BB
1.5. Analiza wra żliwo ści
1.5.2. Współczynniki wektora wyrazów wolnych (2/4)
b −− 025,011 b
−−−
=−
25,000
125,05,00
25,0111
BA
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 71
=16
81b
b
≥
⋅
−−−
=−
0
0
0
16
8
25,000
125,05,00
25,011 11
b
bAB
12. czyli ,048 11 ≥≥−− bb
Wymagana ilość środka S1 jest z przedziału [12, ∞)
1. P
rogr
amow
anie
lini
owe
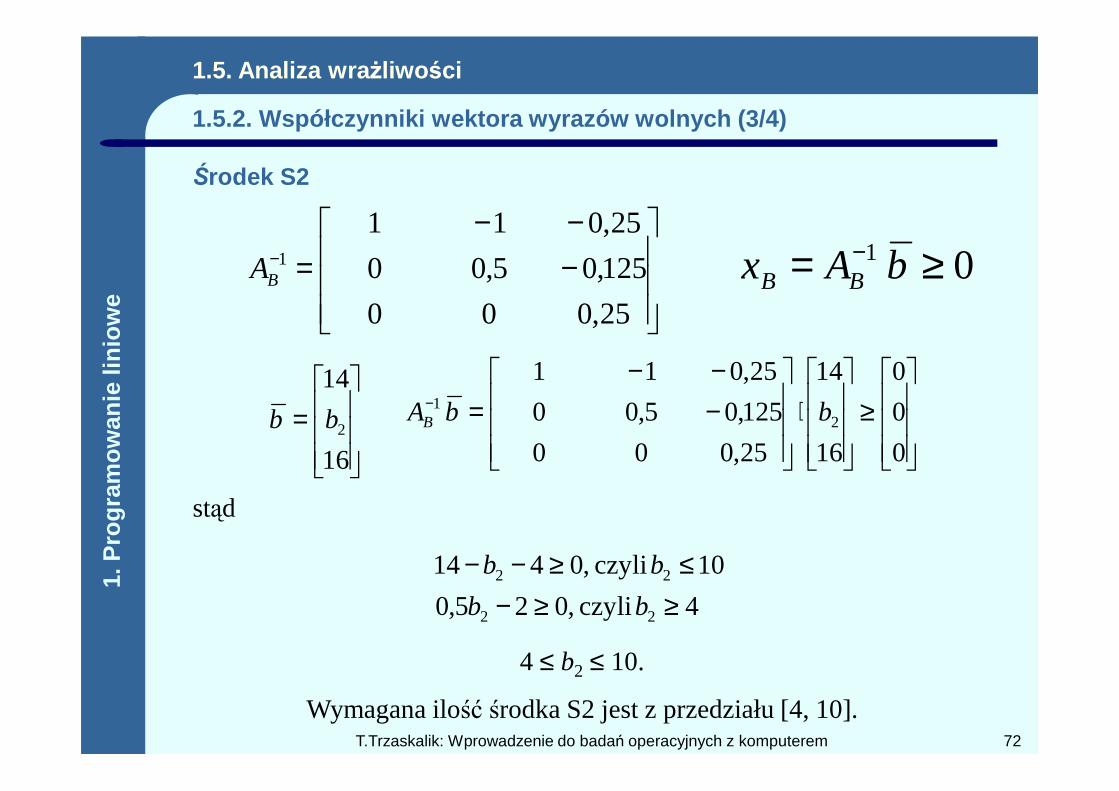
Środek S2
−−−
=−
25,000
125,05,00
25,0111
BA
14
≥
⋅
−−−
=−
01425,0111
1.5. Analiza wra żliwo ści
1.5.2. Współczynniki wektora wyrazów wolnych (3/4)
0 1 ≥= − bAx BB
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 72
=16
2bb
≥
⋅
−=−
0
0
1625,000
125,05,00 21 bbAB
stąd
4 czyli ,025,0
10 czyli ,0414
22
22
≥≥−≤≥−−
bb
bb
4 ≤ b2 ≤ 10.
Wymagana ilość środka S2 jest z przedziału [4, 10].
1. P
rogr
amow
anie
lini
owe
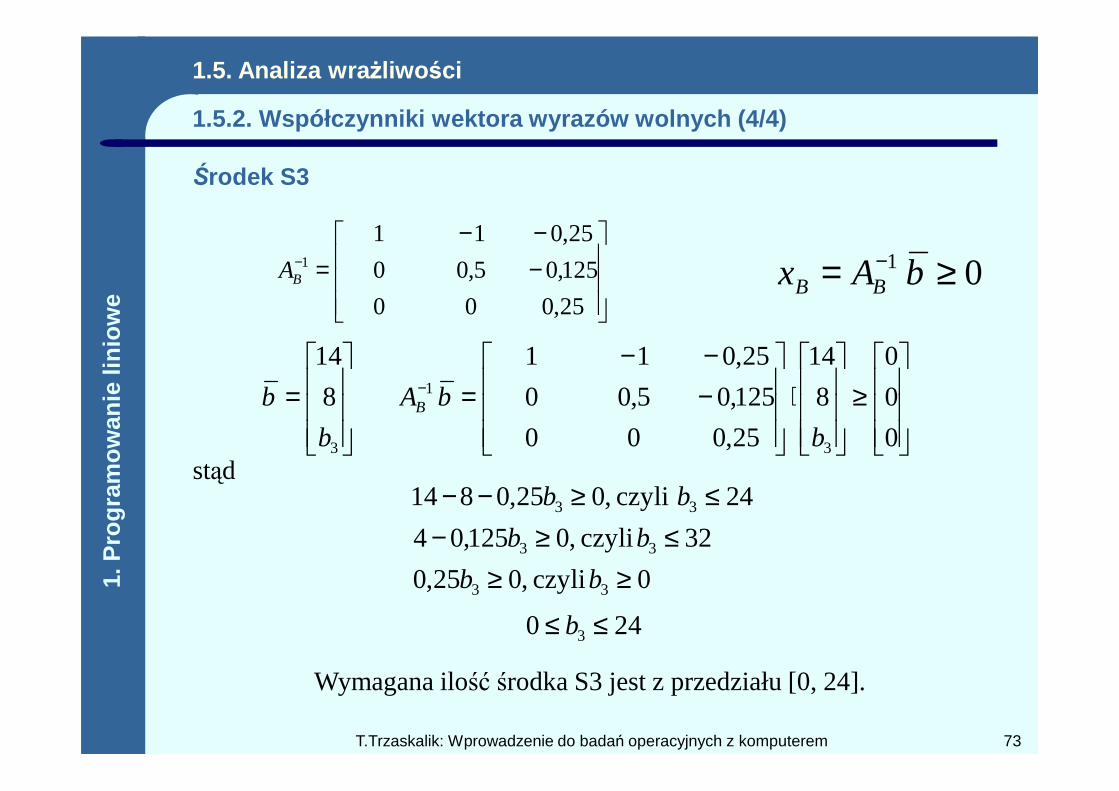
Środek S3
−−−
=−
25,000
125,05,00
25,0111
BA
1.5. Analiza wra żliwo ści
1.5.2. Współczynniki wektora wyrazów wolnych (4/4)
= 8
14
b
≥
⋅
−−−
=− 0
0
8
14
125,05,00
25,0111 bA
0 1 ≥= − bAx BB
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 73
=
3
8
b
b
≥
⋅
−=−
0
08
25,000
125,05,00
3
1
b
bAB
stąd
0 czyli ,025,0
32 czyli ,0125,04
24 czyli ,025,0814
33
33
33
≥≥≤≥−
≤≥−−
bb
bb
bb
240 3 ≤≤ b
Wymagana ilość środka S3 jest z przedziału [0, 24].
1. P
rogr
amow
anie
lini
owe P1 P2
Zasoby
S1
S
2
1
2
2
14
8
Środki produkcji
Produkty
1.6. Dualizm w programowaniu liniowym
1.6.1. Zadanie dualne i jego własno ści (1/10)
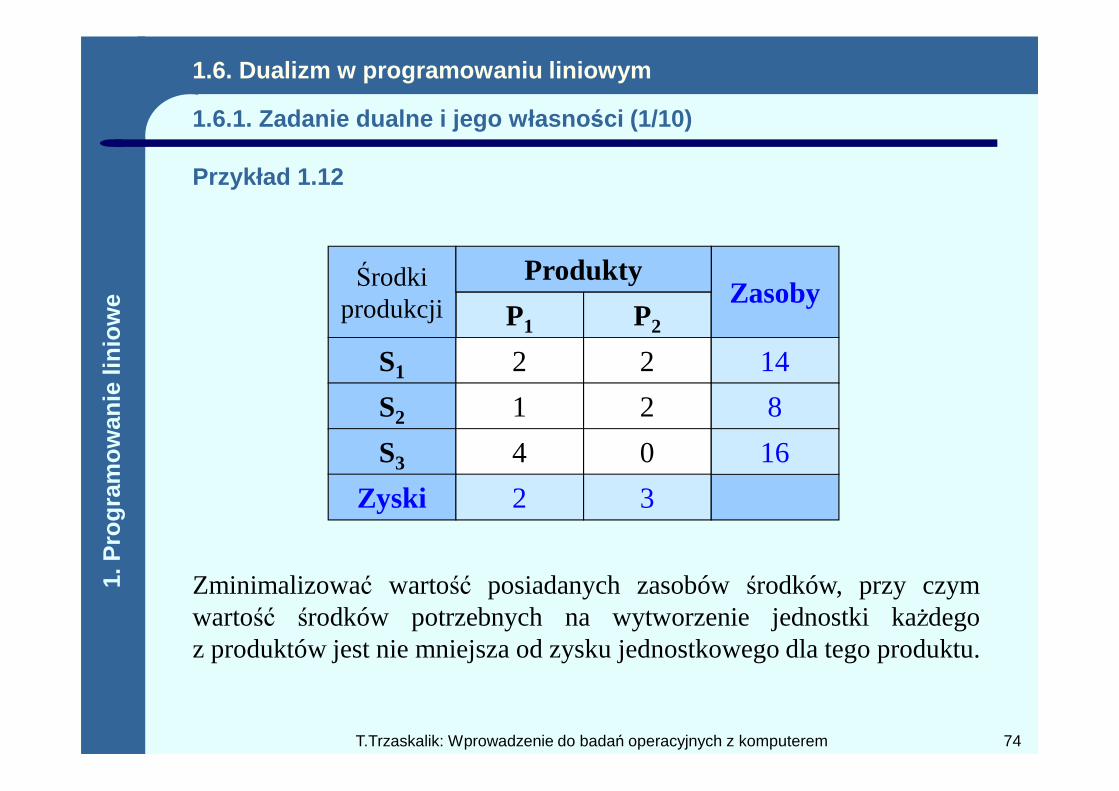
Przykład 1.12
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 74
S2
S3
1
4
2
0
Zyski 2 3
8
16
Zminimalizować wartość posiadanych zasobówśrodków, przy czymwartość środków potrzebnych na wytworzenie jednostki każdegoz produktów jest nie mniejsza od zysku jednostkowego dla tego produktu.
1. P
rogr
amow
anie
lini
owe
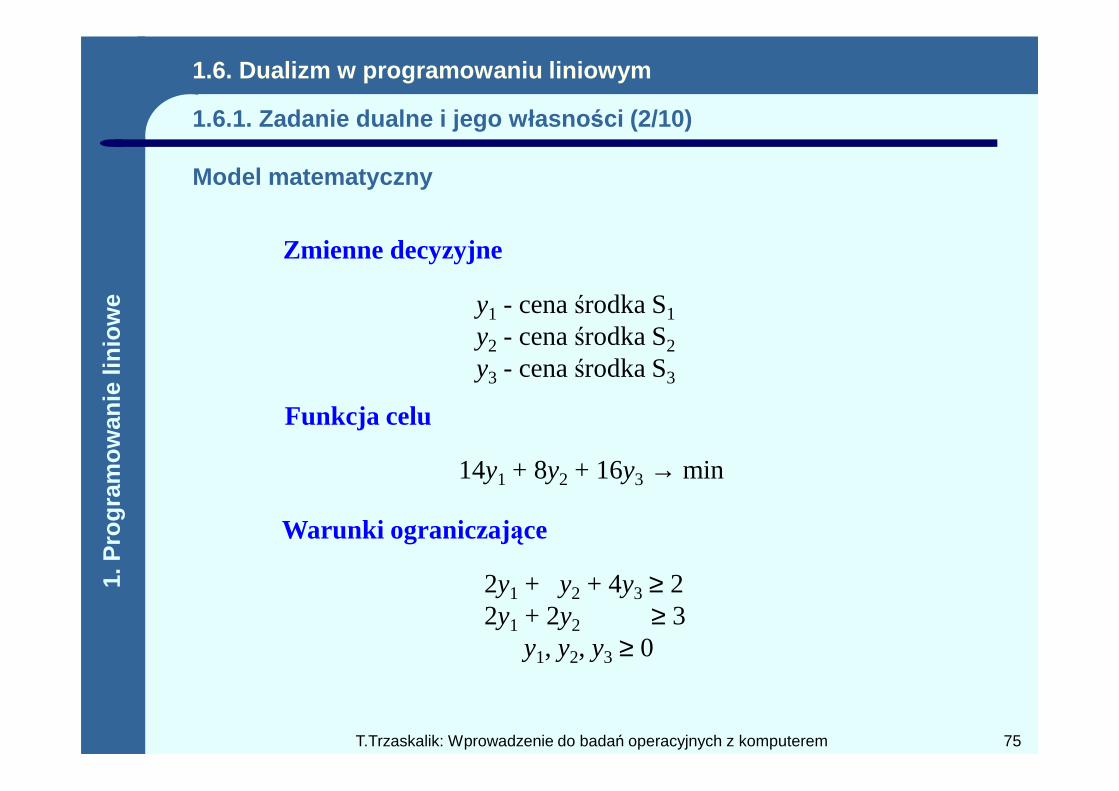
Zmienne decyzyjne
y1 - cena środka S1
y2 - cena środka S2
y3 - cena środka S3
1.6. Dualizm w programowaniu liniowym
1.6.1. Zadanie dualne i jego własno ści (2/10)
Model matematyczny
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 75
Funkcja celu
14y1 + 8y2 + 16y3 → min
Warunki ograniczające
2y1 + y2 + 4y3 ≥ 22y1 + 2y2 ≥ 3
y1, y2, y3 ≥ 0
1. P
rogr
amow
anie
lini
owe
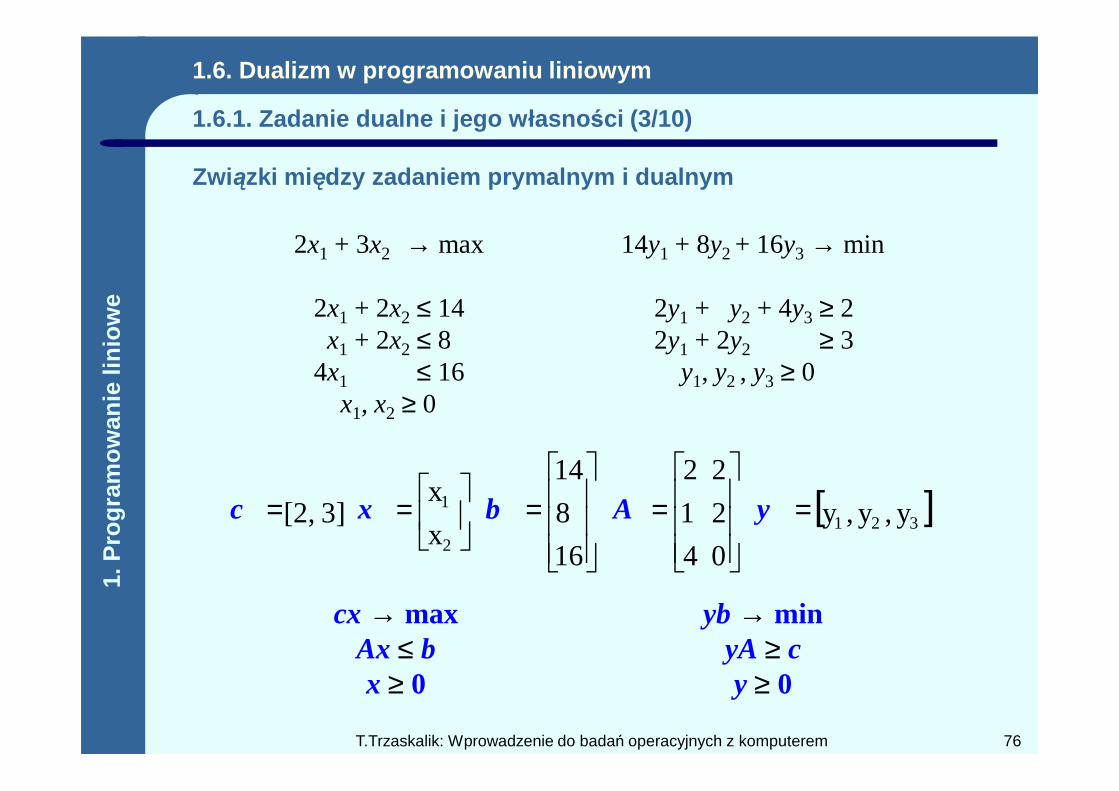
2x1 + 3x2 → max
2x1 + 2x2 ≤ 14x1 + 2x2 ≤ 8
4x1 ≤ 16x , x ≥ 0
14y1 + 8y2 + 16y3 → min
2y1 + y2 + 4y3 ≥ 22y1 + 2y2 ≥ 3
y1, y2 , y3 ≥ 0
1.6. Dualizm w programowaniu liniowym
1.6.1. Zadanie dualne i jego własno ści (3/10)
Związki mi ędzy zadaniem prymalnym i dualnym
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 76
x1, x2 ≥ 0
cx → maxAx ≤ bx ≥ 0
yb → minyA ≥ cy ≥ 0
[ ]321
2
1 y,y,y
04
21
22
16
8
14
x
x3][2, =
=
=
==c x b A y
1. P
rogr
amow
anie
lini
owe
Każdemu warunkowi ograniczającemu jednego z problemów odpowiadazmienna decyzyjna drugiego. Zmienną tę nazwiemy zmiennązmiennąkomplementarnąkomplementarną do danego warunku ograniczającego.
1.1.
Każdej nieujemnej zmiennej decyzyjnej jednego z problemów odpowiadawarunek ograniczający drugiego. Warunek ten nazwiemywarunkiemwarunkiemkomplementarnymkomplementarnym dodanejzmiennejdecyzyjnej.
2.2.
1.6. Dualizm w programowaniu liniowym
1.6.1. Zadanie dualne i jego własno ści (4/10)
Związki mi ędzy zadaniem prymalnym i dualnym (c.d.)
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 77
komplementarnymkomplementarnym dodanejzmiennejdecyzyjnej.
WektorWektor współczynnikówwspółczynników funkcjifunkcji celucelu w jednym zadaniu staje sięwektoremwektorem wyrazówwyrazów wolnychwolnych w drugim i odwrotnie, wektor wyrazówwolnych w jednym zadaniu jest wektorem współczynników funkcji celu wdrugim z nich.
3.3.
KierunkiKierunki optymalizacjioptymalizacji dla zadań: prymalnego i dualnego są przeciwne. Oile zadanie prymalne jest zadaniem maksymalizacji, to w zadaniu dualnymfunkcję celu minimalizujemy.
4.4.
ZwrotyZwroty nierównościnierówności w warunkach ograniczających zadania prymalnego sąprzeciwne do zwrotów nierówności warunków ograniczających zadaniadualnego.
5.5.
1. P
rogr
amow
anie
lini
owe
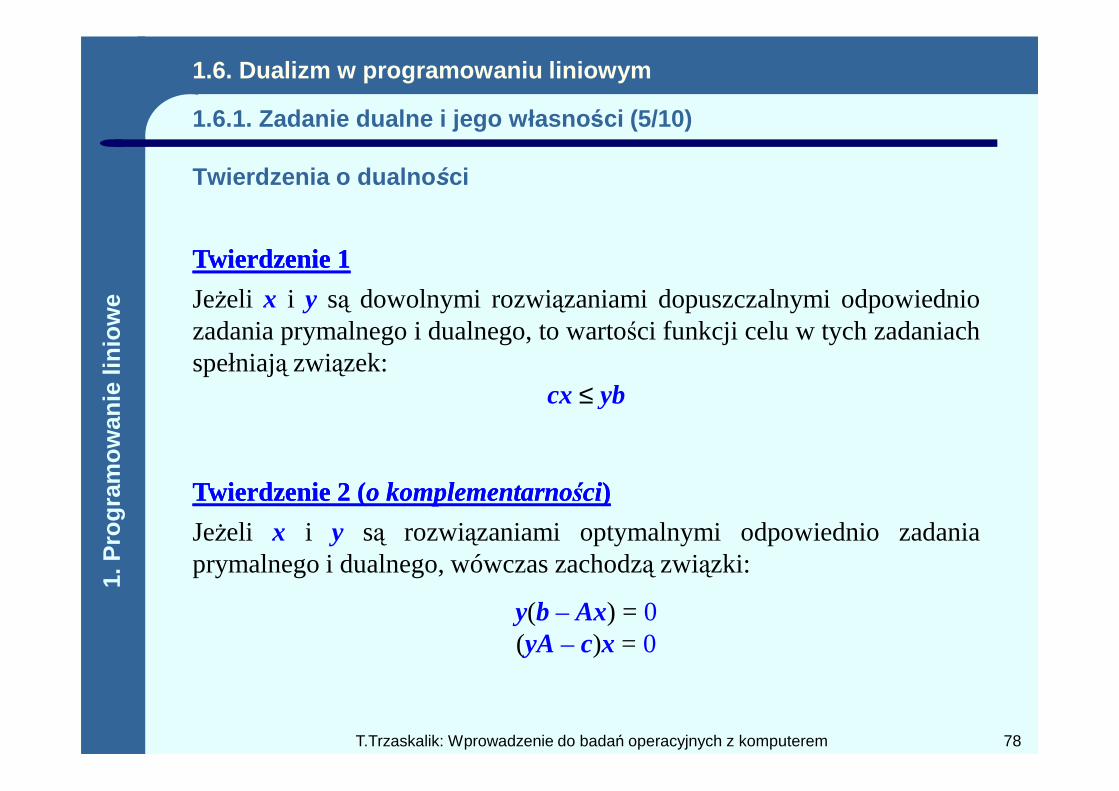
Twierdzenie 1Twierdzenie 1
Jeżeli x i y są dowolnymi rozwiązaniami dopuszczalnymi odpowiedniozadania prymalnego i dualnego, to wartości funkcji celu w tych zadaniachspełniają związek:
cx ≤ yb
1.6. Dualizm w programowaniu liniowym
1.6.1. Zadanie dualne i jego własno ści (5/10)
Twierdzenia o dualno ści
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 78
Jeżeli x i y są rozwiązaniami optymalnymi odpowiednio zadaniaprymalnego i dualnego, wówczas zachodzą związki:
y(b – Ax) = 0(yA – c)x = 0
Twierdzenie 2 (Twierdzenie 2 (o komplementarnościo komplementarności))
cx ≤ yb
1. P
rogr
amow
anie
lini
owe
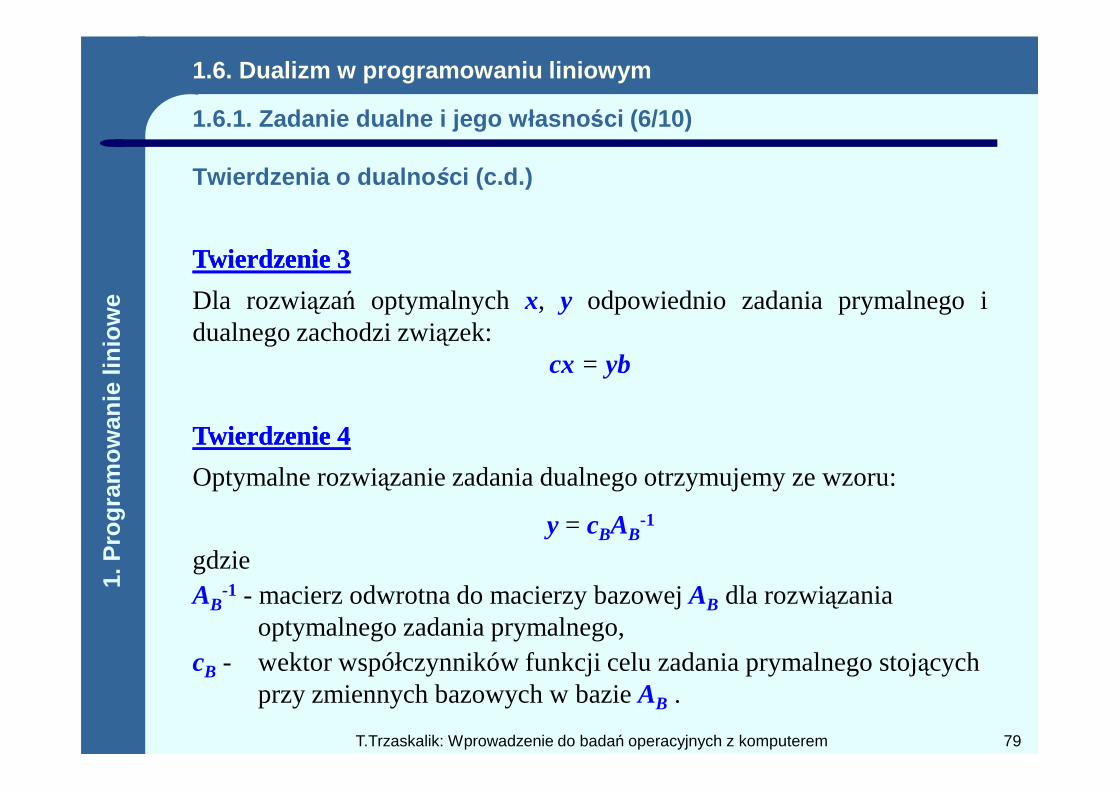
Dla rozwiązań optymalnych x, y odpowiednio zadania prymalnego idualnego zachodzi związek:
cx = yb
Twierdzenie 3Twierdzenie 3
1.6. Dualizm w programowaniu liniowym
1.6.1. Zadanie dualne i jego własno ści (6/10)
Twierdzenia o dualno ści (c.d.)
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 79
Optymalne rozwiązanie zadania dualnego otrzymujemy ze wzoru:
y = cBAB-1
gdzie AB
-1 - macierz odwrotna do macierzy bazowej AB dla rozwiązania optymalnego zadania prymalnego,
cB - wektor współczynników funkcji celu zadania prymalnego stojących przy zmiennych bazowych w bazie AB .
Twierdzenie 4Twierdzenie 4
1. P
rogr
amow
anie
lini
owe
[ ]
−
=2
1321
04
21
22
16
8
14
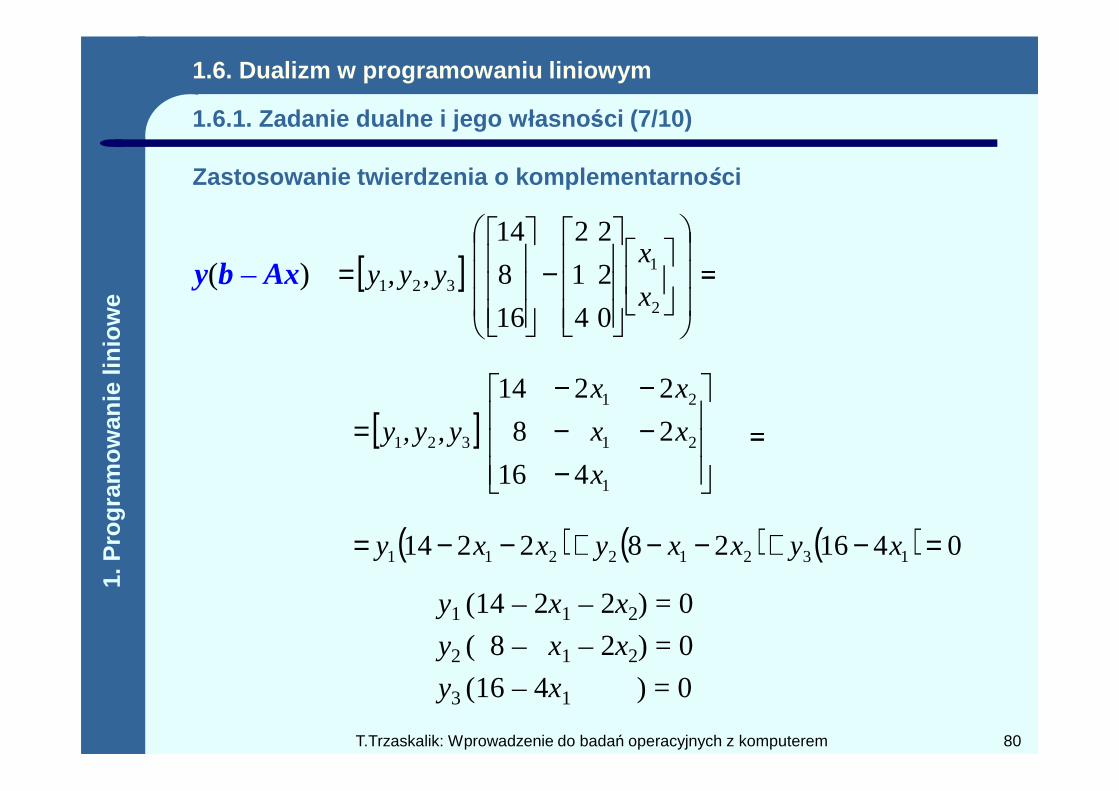
x
xy,y,yy(b – Ax)
−− 21 2214 xx
==
1.6. Dualizm w programowaniu liniowym
1.6.1. Zadanie dualne i jego własno ści (7/10)
Zastosowanie twierdzenia o komplementarno ści
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 80
y1 (14 – 2x1 – 2x2) = 0
y2 ( 8 – x1 – 2x2) = 0
y3 (16 – 4x1 ) = 0
[ ]
−−−−−
=
1
21
21
321
416
28
2214
x
xx
xx
y,y,y
( ) ( ) ( ) 0416282214 13212211 =−+−−+−−= xyxxyxxy
==
1. P
rogr
amow
anie
lini
owe
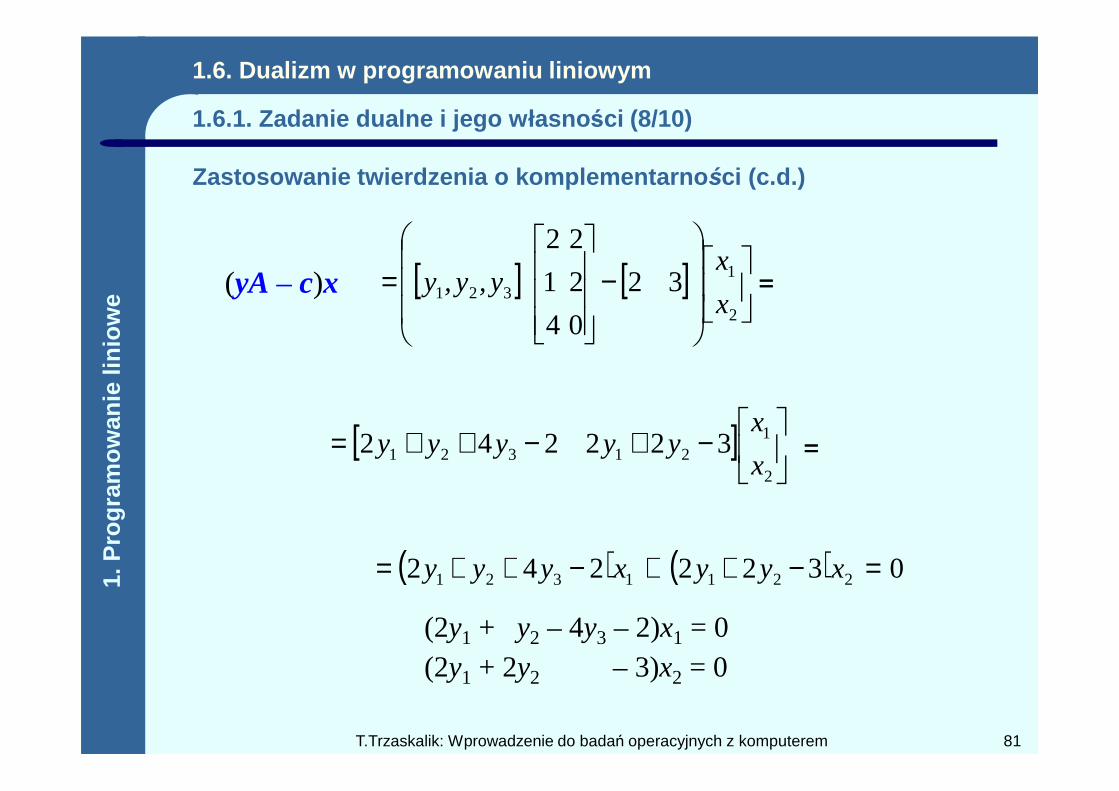
[ ] [ ]
−
=2
1321 32
04
21
22
x
xy,y,y(yA – c)x ==
1.6. Dualizm w programowaniu liniowym
1.6.1. Zadanie dualne i jego własno ści (8/10)
Zastosowanie twierdzenia o komplementarno ści (c.d.)
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 81
(2y1 + y2 – 4y3 – 2)x1 = 0 (2y1 + 2y2 – 3)x2 = 0
[ ]
−+−++=
2
121321 322242
x
xyyyyy
( ) ( ) 0322242 2211321 =−++−++= xyyxyyy
==
1. P
rogr
amow
anie
lini
owe
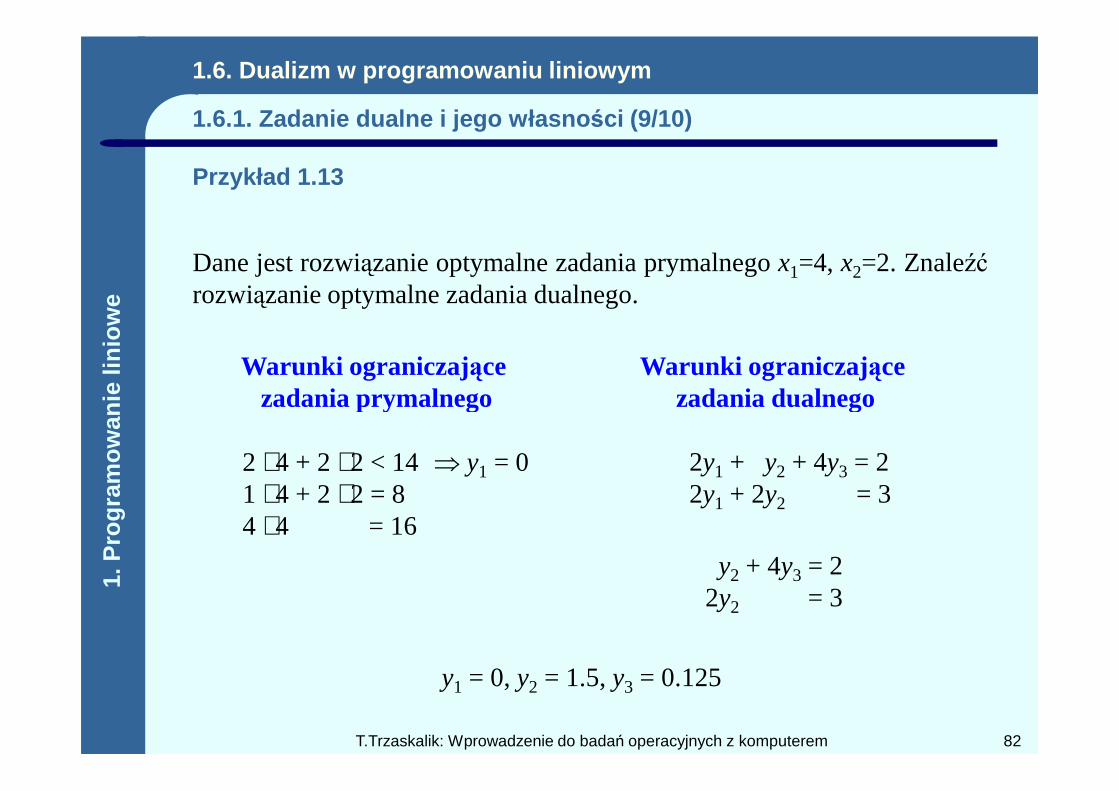
Dane jest rozwiązanie optymalne zadania prymalnegox1=4, x2=2. Znaleźćrozwiązanie optymalne zadania dualnego.
Warunki ograniczające zadania prymalnego
Warunki ograniczające zadania dualnego
1.6. Dualizm w programowaniu liniowym
1.6.1. Zadanie dualne i jego własno ści (9/10)
Przykład 1.13
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 82
y2 + 4y3 = 2 2y2 = 3
y1 = 0, y2 = 1.5, y3 = 0.125
2 ⋅ 4 + 2 ⋅ 2 < 14 1 ⋅ 4 + 2 ⋅ 2 = 84 ⋅ 4 = 16
zadania prymalnego
2y1 + y2 + 4y3 = 2 2y1 + 2y2 = 3
zadania dualnego
⇒ y1 = 0
1. P
rogr
amow
anie
lini
owe
1.6. Dualizm w programowaniu liniowym
1.6.1. Zadanie dualne i jego własno ści (10/10)
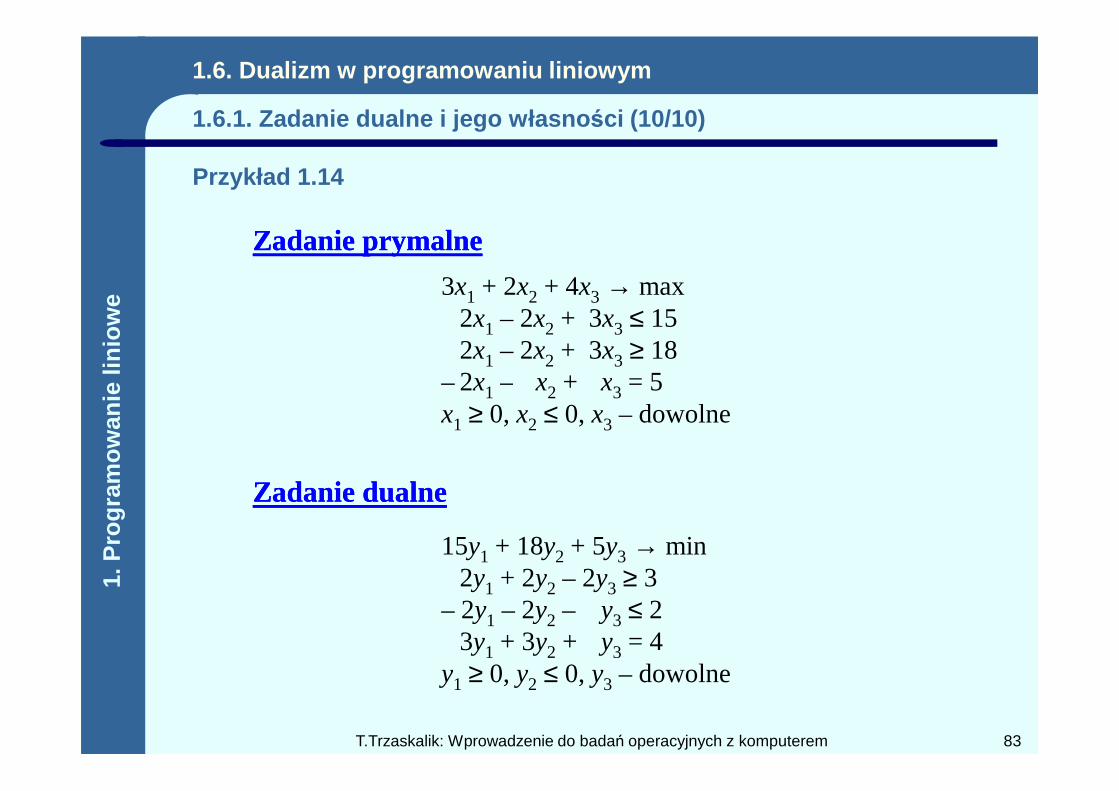
Przykład 1.14
Zadanie prymalneZadanie prymalne
3x1 + 2x2 + 4x3 → max 2x1 – 2x2 + 3x3 ≤ 152x1 – 2x2 + 3x3 ≥ 18
–2x1 – x2 + x3 = 5
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 83
–2x1 – x2 + x3 = 5 x1 ≥ 0, x2 ≤ 0, x3 – dowolne
Zadanie dualneZadanie dualne
15y1 + 18y2 + 5y3 → min2y1 + 2y2 – 2y3 ≥ 3
– 2y1 – 2y2 – y3 ≤ 23y1 + 3y2 + y3 = 4
y1 ≥ 0, y2 ≤ 0, y3 – dowolne
1. P
rogr
amow
anie
lini
owe
Przykład 1.15
Zaistniały możliwości zwiększenia dostępności jednego ze środków produkcji: S1, S2 lub S3. Która z nich jest najkorzystniejsza przy założeniu, że będziemy wytwarzać zarówno produkt P1, jak i P2?
1.6. Dualizm w programowaniu liniowym
1.6.2. Ceny dualne i analiza wra żliwo ści w kształtowaniu optymalnych planów produkcji (1 /2) 1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 84
Dla rozwiązania bazowego o zmiennych bazowych x1, x2 i x3zwiększenie limitu środka S1 nie wpływa na wielkość zysku.
Maksymalne możliwe, wynikające z analizy wrażliwości zwiększenie limitu środka S2 lub S3 pozwoli na zwiększenie zysku odpowiednio o 3 jednostki lub 1 jednostkę.
Korzystniejsze jest zwiększenie limitu środka S2 do poziomu 10 jednostek.
1. P
rogr
amow
anie
lini
owe
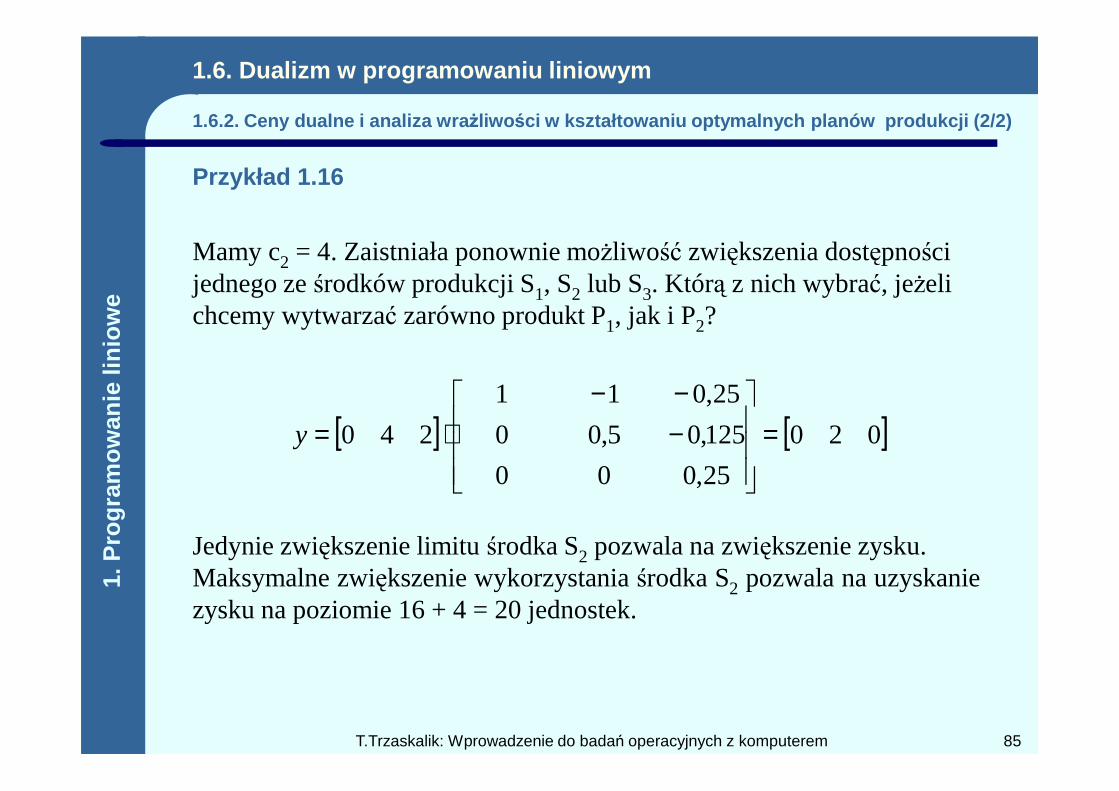
Przykład 1.16
Mamy c2 = 4. Zaistniała ponownie możliwość zwiększenia dostępności jednego ze środków produkcji S1, S2 lub S3. Którą z nich wybrać, jeżeli chcemy wytwarzać zarówno produkt P1, jak i P2?
1.6. Dualizm w programowaniu liniowym
1.6.2. Ceny dualne i analiza wra żliwo ści w kształtowaniu optymalnych planów produkcji (2 /2)
25,011 −−
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 85
[ ] [ ]020
25,000
125,05,00
25,011
240 =
−−−
⋅=y
Jedynie zwiększenie limituśrodka S2 pozwala na zwiększenie zysku.Maksymalne zwiększenie wykorzystaniaśrodka S2 pozwala na uzyskaniezysku na poziomie 16 + 4 = 20 jednostek.
1. P
rogr
amow
anie
lini
owe
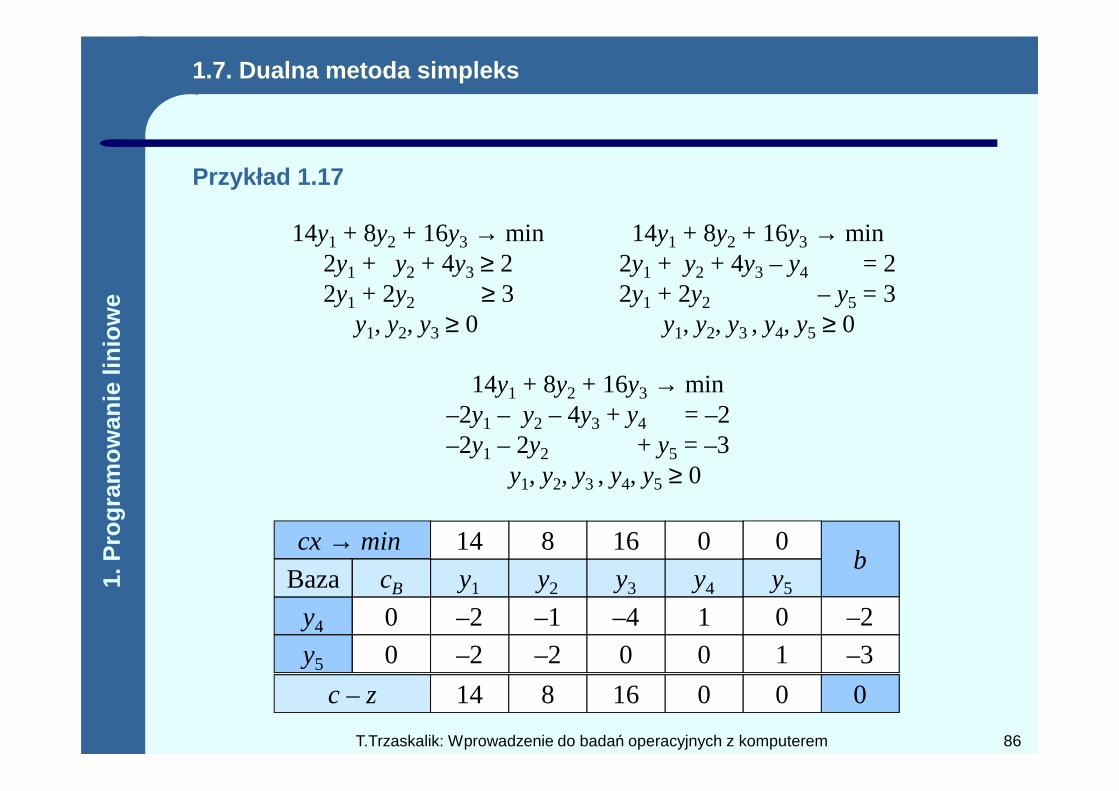
14y1 + 8y2 + 16y3 → min2y1 + y2 + 4y3 – y4 = 22y1 + 2y2 – y5 = 3
y1, y2, y3 , y4, y5 ≥ 0
14y1 + 8y2 + 16y3 → min2y1 + y2 + 4y3 ≥ 22y1 + 2y2 ≥ 3
y1, y2, y3 ≥ 0
1.7. Dualna metoda simpleks
Przykład 1.17
14y1 + 8y2 + 16y3 → min
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 86
cx → min
y4 0
y5 0
–1 –4
–2 0
–2
–2
1
0
b
–2
–3
y1 y2 y3 y4 y5
0
1
c – z 14 8 16 0 00
8 1614 0 0
Baza cB
14y1 + 8y2 + 16y3 → min–2y1 – y2 – 4y3 + y4 = –2–2y1 – 2y2 + y5 = –3
y1, y2, y3 , y4, y5 ≥ 0
1. P
rogr
amow
anie
lini
owe
Jeżeli wartości wszystkich wyrazów wolnych są nieujemne, wtedy rozpatrywane rozwiązanie jest
1.7. Dualna metoda simpleks
1.7.1. Przebieg oblicze ń (1/8)
Kryterium dopuszczalno ści
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 87
nieujemne, wtedy rozpatrywane rozwiązanie jest dopuszczalne.
1. P
rogr
amow
anie
lini
owe
Ze wszystkich wyrazów wolnychwybieramy najmniejszy. Odpowiadającamu zmienna jest zmienną opuszczającą
1.7. Dualna metoda simpleks
1.7.1. Przebieg oblicze ń (2/8)
Kryterium wyj ścia
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 88
bazę.
Jeżeli jest więcej niż jedna najmniejszawartość, wtedy wybieramy zmienną onajniższymnumerze.
1. P
rogr
amow
anie
lini
owe
Obliczamy ilorazy wartości wskaźnikówoptymalności przez odpowiadające imelementy wiersza dla zmiennej opuszczającejbazę ((cj – zj) : aij) dla tych elementówrozpatrywanegowiersza,któresą ujemne.
1.7. Dualna metoda simpleks
1.7.1. Przebieg oblicze ń (3/8)
Kryterium wej ścia
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 89
rozpatrywanegowiersza,któresą ujemne.
Do bazy wchodzi ta zmienna, dla której wartośćbezwzględna odpowiadającego jej ilorazu jestnajmniejsza.
Jeżeli jest więcej niż jedna najmniejsza wartośćtego ilorazu, wtedy wybieramy zmienną onajniższymnumerze.
1. P
rogr
amow
anie
lini
owe
cx → min
y4 0
y5 0
–1 –4
–2 0
–2
–2
1
0
b
–2
–3
y1 y2 y3 y4 y5
0
1
8 1614 0 0
Baza cB
y5 0 –2 0–2 0 –31
–1
–2
y2
8
1.7. Dualna metoda simpleks
1.7.1. Przebieg oblicze ń (4/8)
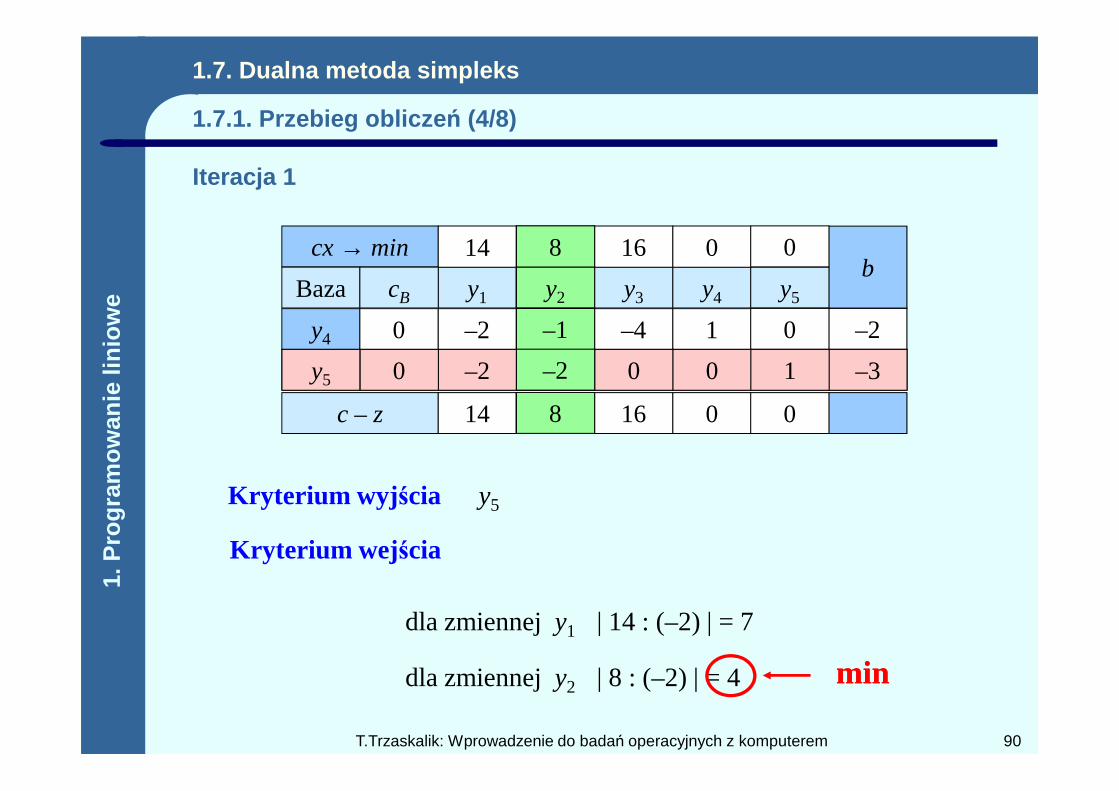
Iteracja 1
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 90
Kryterium wyj ścia y5
Kryterium wej ścia
dla zmiennej y1 | 14 : (–2) | = 7
dla zmiennej y2 | 8 : (–2) | = 4 minmin
c – z 14 8 16 0 08
1. P
rogr
amow
anie
lini
owe
cx → min
y4 0
y2 8
0 –4
1 0
–1
1
1
0
b
–0,5
1,5
y1 y2 y3 y4 y5
–0,5
–0,5
8 1614 0 0
Baza cB
y4 0 0 –4–1 1 –0,5–0,5–4
0
y3
16
1.7. Dualna metoda simpleks
1.7.1. Przebieg oblicze ń (5/8)
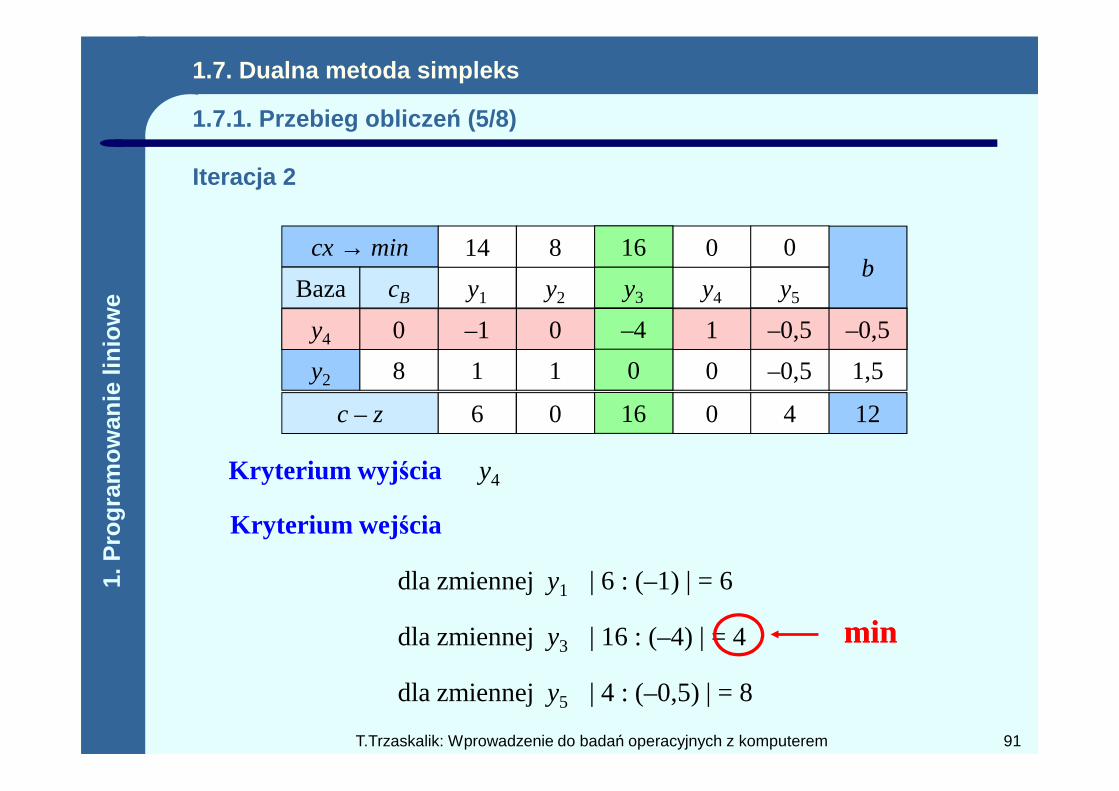
Iteracja 2
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 91
c – z 6 0 16 0 124
Kryterium wyj ścia y4
Kryterium wej ścia
dla zmiennej y1 | 6 : (–1) | = 6
dla zmiennej y3 | 16 : (–4) | = 4
dla zmiennej y5 | 4 : (–0,5) | = 8
16
minmin
1. P
rogr
amow
anie
lini
owe y3 16
y2 8
0 1
1 0
0
1
–0,25
0
b
0,125
1,5
0,125
–0,5
cx → min
Baza cB y1 y2 y3 y4 y5
8 1614 0 0
1.7. Dualna metoda simpleks
1.7.1. Przebieg oblicze ń (6/8)
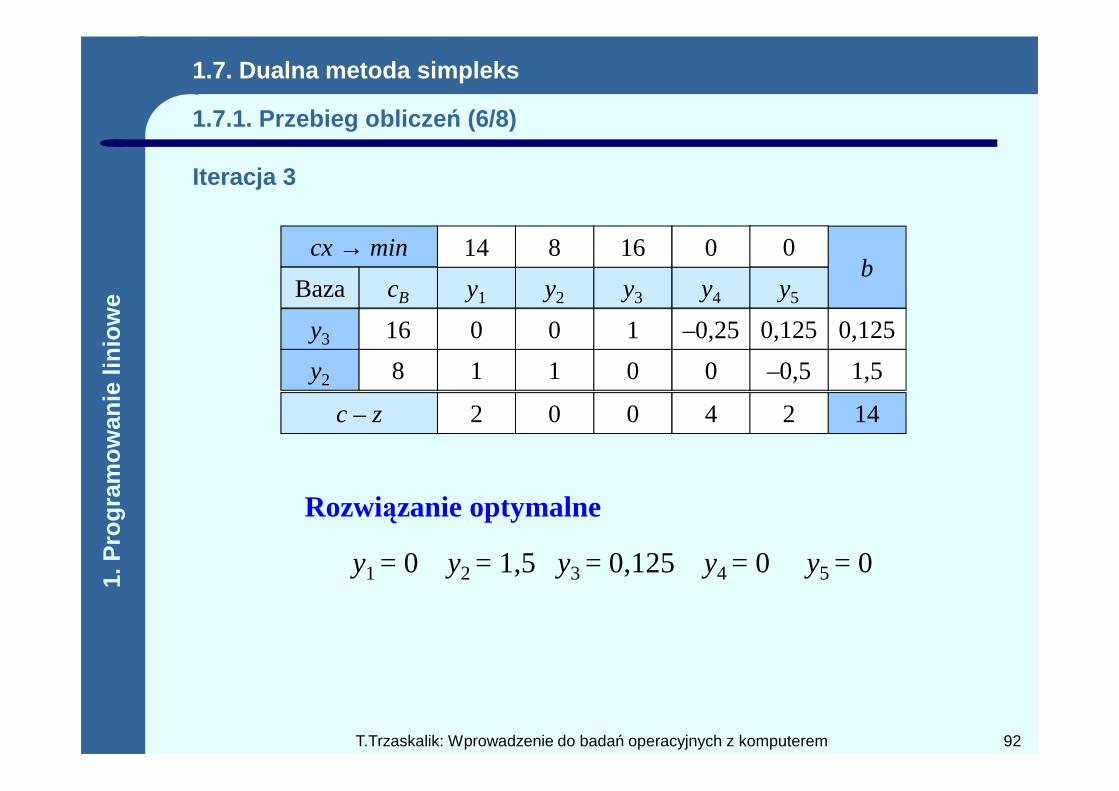
Iteracja 3
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 92
Rozwiązanie optymalne
y1 = 0 y2 = 1,5 y3 = 0,125 y4 = 0 y5 = 0
c – z 2 0 0 4 142
1. P
rogr
amow
anie
lini
owe
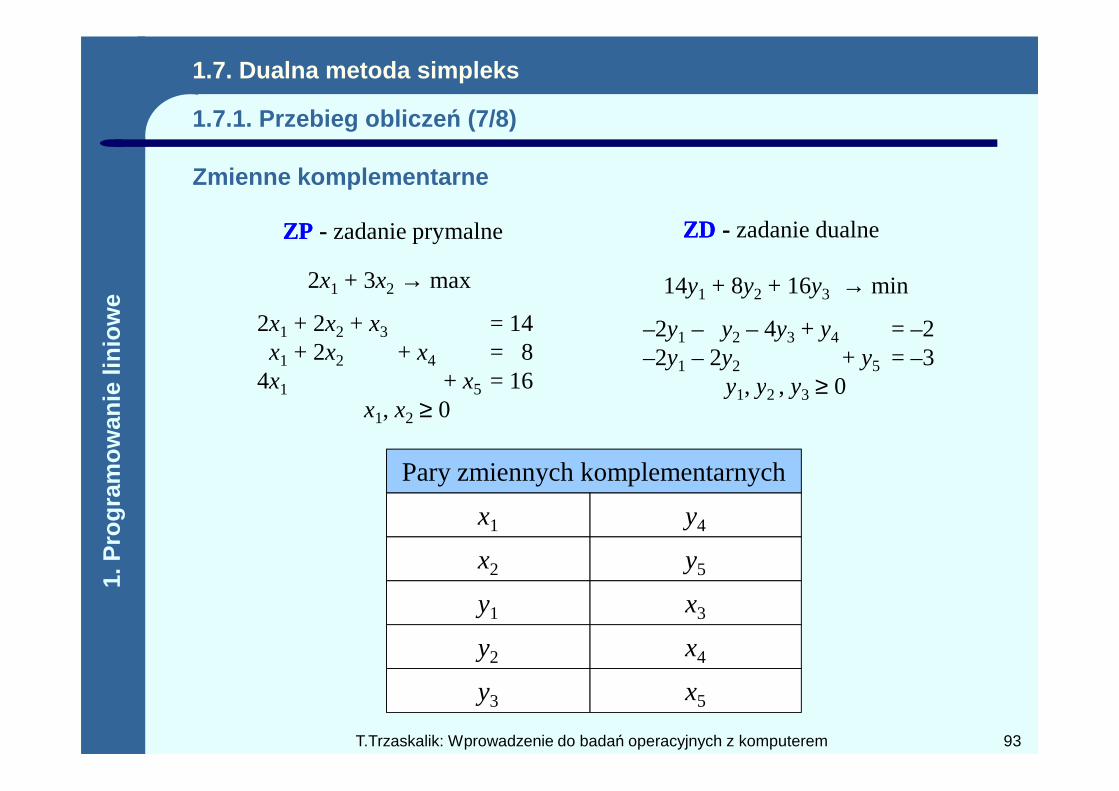
ZPZP -- zadanie prymalne
2x1 + 3x2 → max
2x1 + 2x2 + x3 = 14x1 + 2x2 + x4 = 8
4x1 + x5 = 16≥
ZDZD -- zadanie dualne
14y1 + 8y2 + 16y3 → min
–2y1 – y2 – 4y3 + y4 = –2–2y1 – 2y2 + y5 = –3
y1, y2 , y3 ≥ 0
1.7. Dualna metoda simpleks
1.7.1. Przebieg oblicze ń (7/8)
Zmienne komplementarne
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 93
1 5
x1, x2 ≥ 0y1, y2 , y3 ≥ 0
Pary zmiennych komplementarnych
x1 y4
x2 y5
y1 x3
y2 x4
y3 x5
1. P
rogr
amow
anie
lini
owe
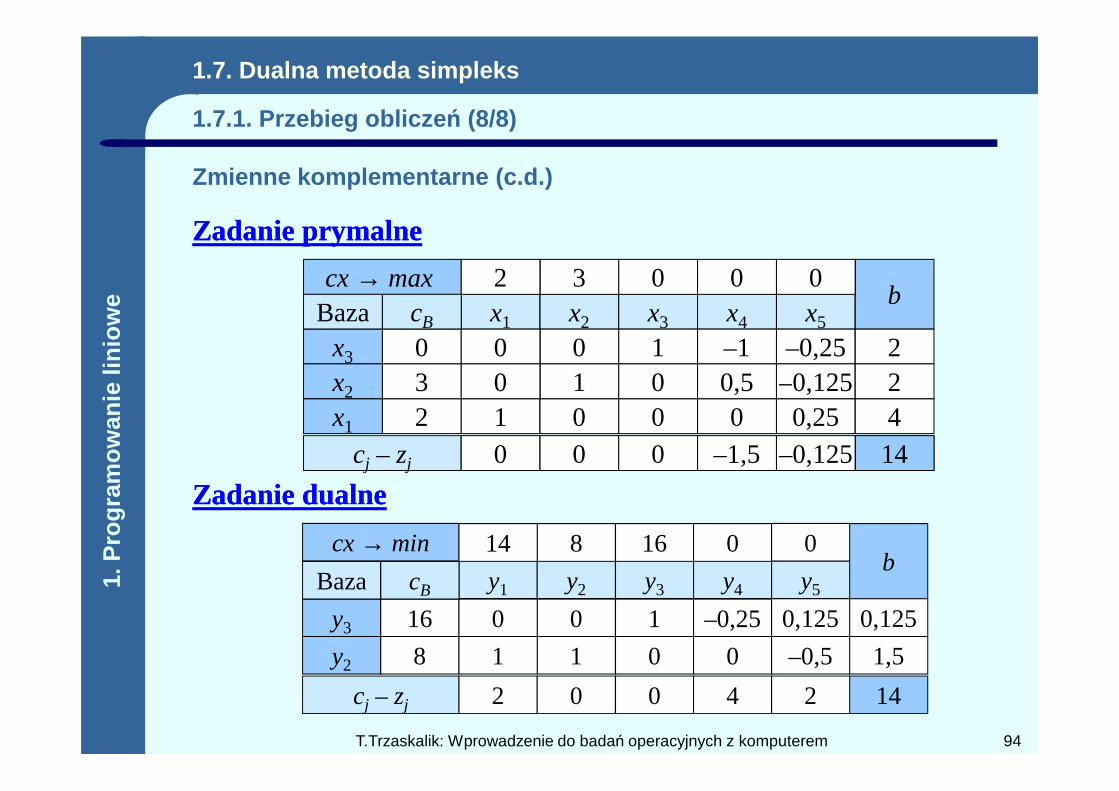
Zadanie prymalneZadanie prymalne
x1 x2 x3 x4 x5b
cx → max
x3 0x2 3
0 1 –1 –0,251 0 0,5 –0,125
3 0 0 02
00
22
Baza cB
1.7. Dualna metoda simpleks
1.7.1. Przebieg oblicze ń (8/8)
Zmienne komplementarne (c.d.)
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 94
x2 3x1 2
1 0 0,5 –0,12501 0 0 0 0,25
24
cj – zj 140 0 0 –1,5 –0,125
Zadanie dualneZadanie dualne
cx → min
y3 16
y2 8
0 1
1 0
0
1
–0,25
0
b
0,125
1,5
y1 y2 y3 y4 y5
0,125
–0,5
cj – zj 2 0 0 4 142
8 1614 0 0
Baza cB
1. P
rogr
amow
anie
lini
owe
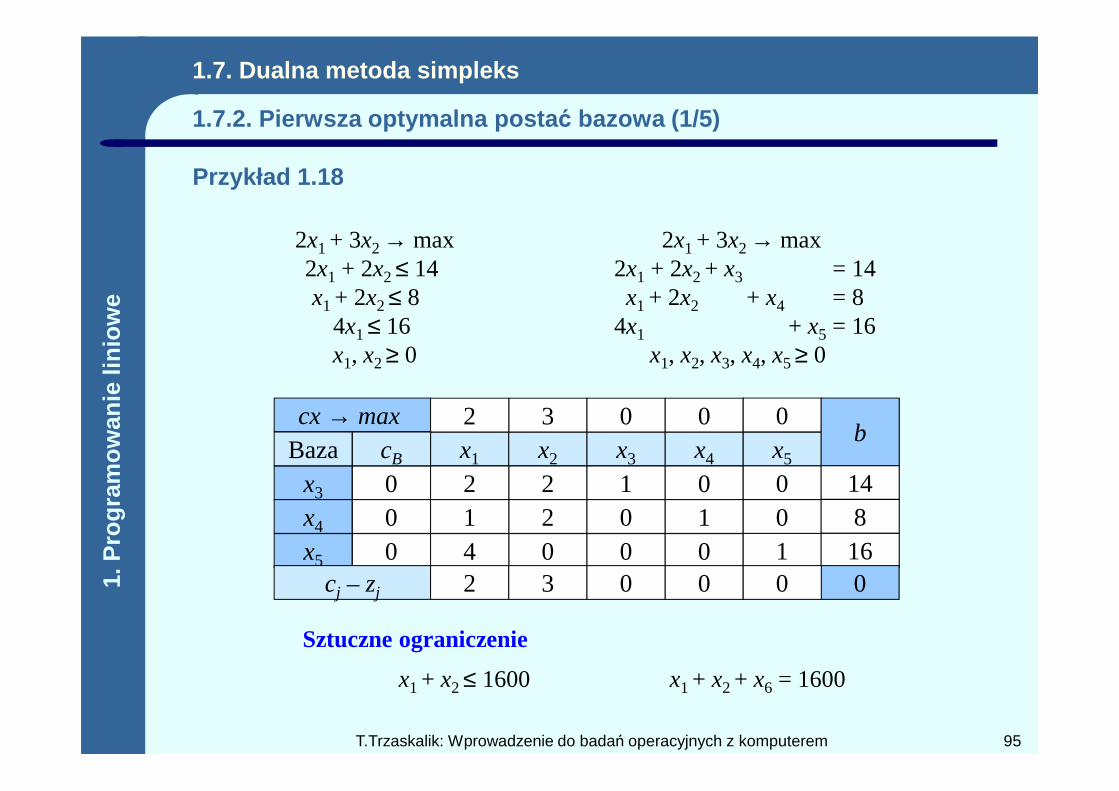
2x1 + 3x2 → max2x1 + 2x2 ≤ 14 x1 + 2x2 ≤ 8
4x1 ≤ 16x1, x2 ≥ 0
2x1 + 3x2 → max2x1 + 2x2 + x3 = 14 x1 + 2x2 + x4 = 8
4x1 + x5 = 16x1, x2, x3, x4, x5 ≥ 0
1.7. Dualna metoda simpleks
1.7.2. Pierwsza optymalna posta ć bazowa (1/5)
Przykład 1.18
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 95
Sztuczne ograniczenie
x1 + x2 ≤ 1600 x1 + x2 + x6 = 1600
cx → maxx1 x2 x3 x4 x5
3 02 0 0
x3 0x4 0
2 12 0
21
01
00
x5 0 0 04 0 1cj – zj 2 3 0 0
b
1481600
Baza cB
1. P
rogr
amow
anie
lini
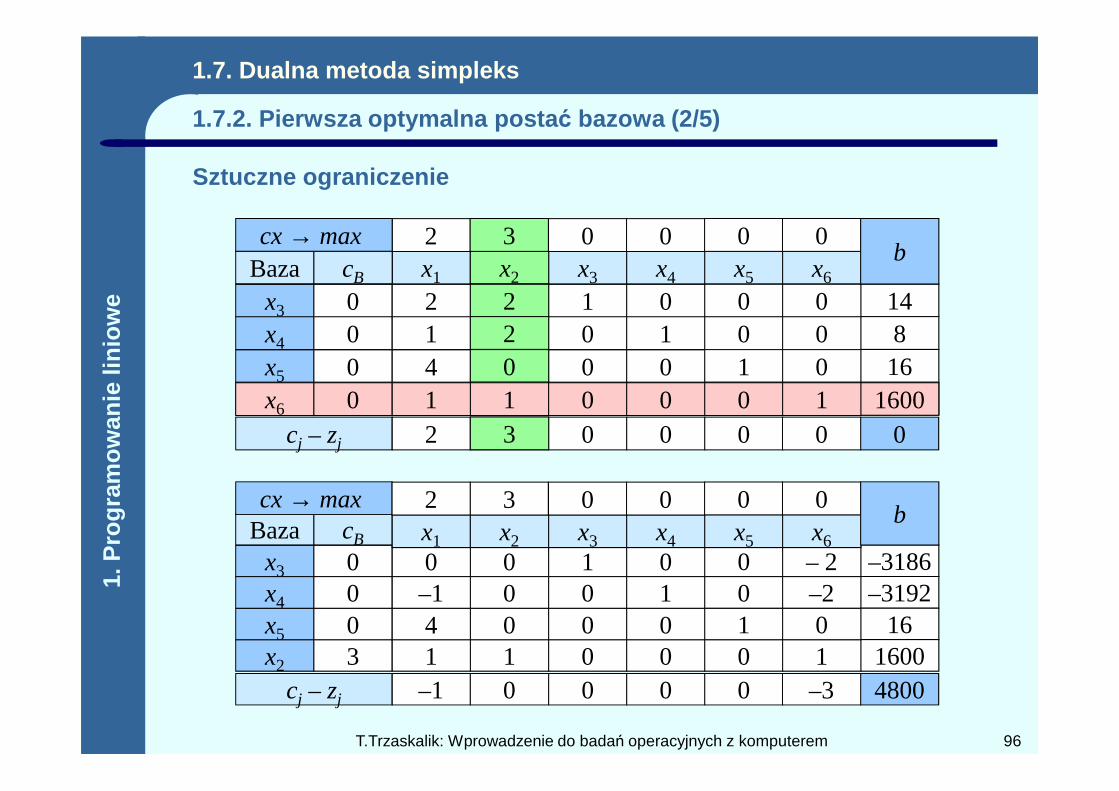
owe
x1 x2 x3 x4 x5 x6
x3 0x4 0
2 12 0
21
01
148
00
00
3 02 0 0 0
x5 0x 0
0 01 0
41
00
161600
10
01
Baza cB
cx → maxb
x2
22
3
01x 0 1 01 0 16000 1
1.7. Dualna metoda simpleks
1.7.2. Pierwsza optymalna posta ć bazowa (2/5)
Sztuczne ograniczenie
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 96
cj – zj 2 3 0 0 00x6 0 1 01 0 16000 1
0
Baza cB
cj – zj –1 0 0 0 48000
x3 0x4 0
0 10 0
0–1
01
–3186–3192
00
– 2–2
x5 0x2 3
0 01 0
41
00
161600
10
01–3
cx → maxx1 x2 x3 x4 x5 x6
3 02 0 0 0b
31x6 0 1 01 0 16000 1
1. P
rogr
amow
anie
lini
owe
cx → maxb
x3 0x4 0
0 10 0
0–1
01
–3186–3192
00
– 2–2
x1 x2 x3 x4 x5 x6
3 02 0 0 0
x5 0x 3
0 01 0
41
00
161600
10
01
Baza cB
x4 0 0 0–1 1 –31920 –20–1
x1
2
41
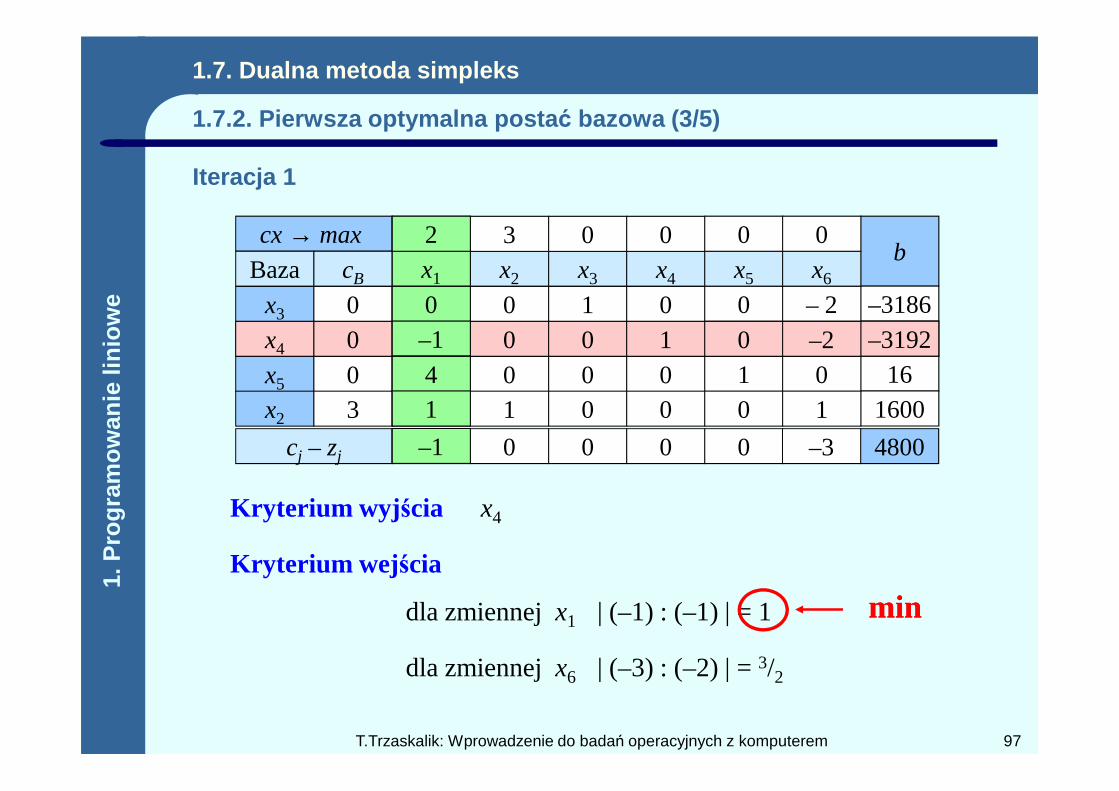
1.7. Dualna metoda simpleks
1.7.2. Pierwsza optymalna posta ć bazowa (3/5)
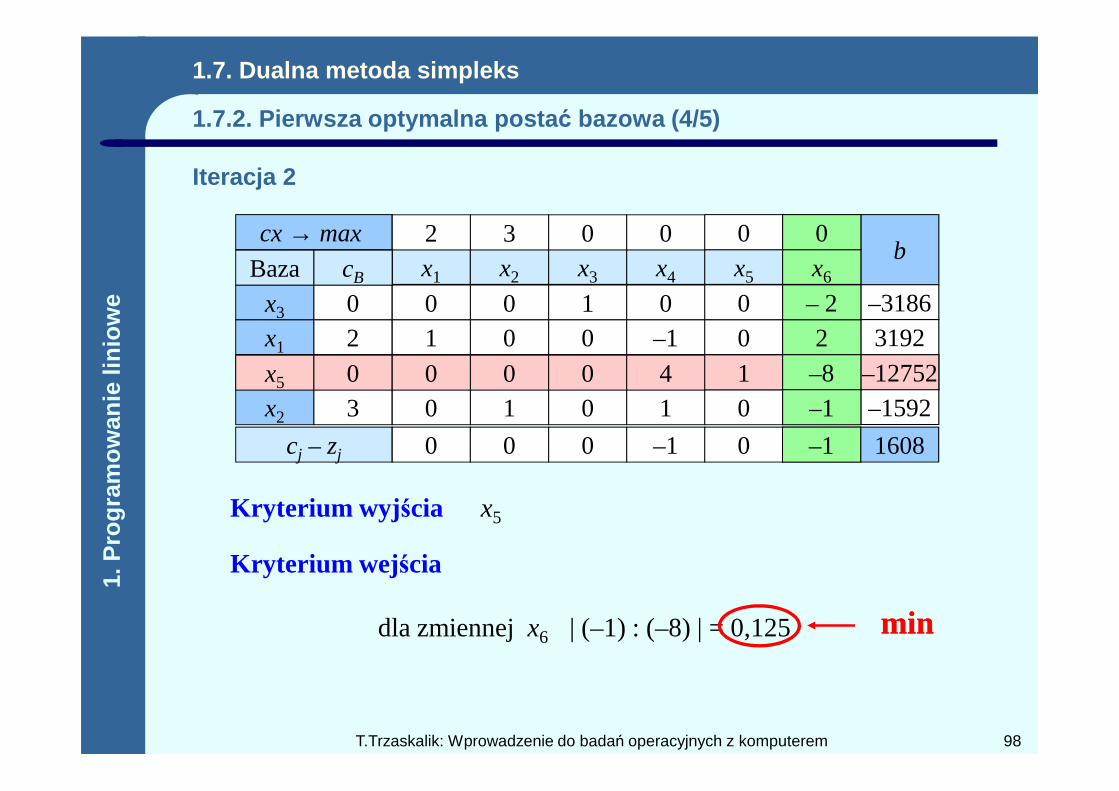
Iteracja 1
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 97
cj – zj –1 0 0 0 48000
x2 3 1 01 0 16000 1
–3–1
1
Kryterium wyj ścia x4
Kryterium wej ścia
dla zmiennej x1 | (–1) : (–1) | = 1
dla zmiennej x6 | (–3) : (–2) | = 3/2
minmin
1. P
rogr
amow
anie
lini
owe
cx → maxb
x3 0x1 2
0 10 0
01
0–1
–31863192
00
– 22
x1 x2 x3 x4 x5 x6
3 02 0 0 0
x5 0x 3
0 01 0
00
41
–12752–1592
10
–8–1
Baza cB
x5 0 0 00 4 –127521 –8
– 22
x6
0
–8–1
1.7. Dualna metoda simpleks
1.7.2. Pierwsza optymalna posta ć bazowa (4/5)
Iteracja 2
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 98
cj – zj 0 0 0 –1 16080
x2 3 1 00 1 –15920 –1
–1
Kryterium wyj ścia x5
Kryterium wej ścia
dla zmiennej x6 | (–1) : (–8) | = 0,125 minmin
–1
–1
1. P
rogr
amow
anie
lini
owe
cx → maxb
x1 x2 x3 x4 x5 x6
x3 0x1 2
0 10 0
01
–10
24
–0,250,25
00
3 02 0 0 0
x6 0x 3
0 01 0
00
–0,50,5
15942
–0,13–0,13
10
Baza cB
1.7. Dualna metoda simpleks
1.7.2. Pierwsza optymalna posta ć bazowa (5/5)
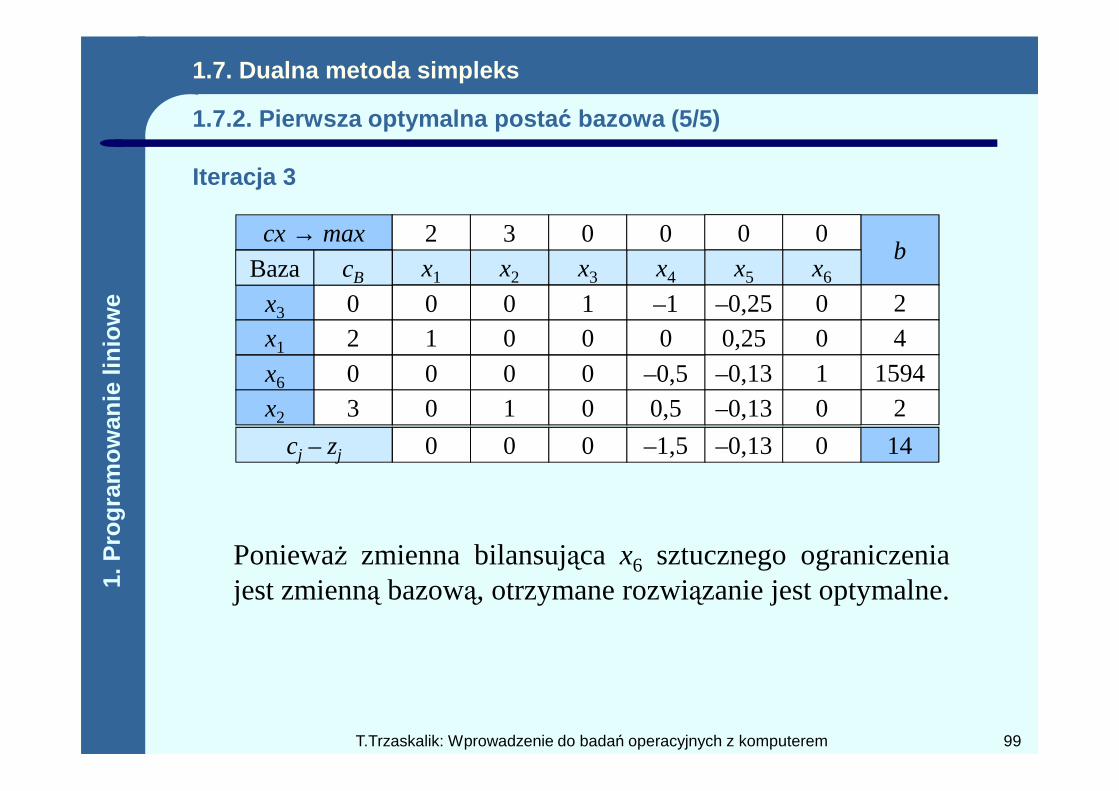
Iteracja 3
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 99
Ponieważ zmienna bilansująca x6 sztucznego ograniczeniajest zmienną bazową, otrzymane rozwiązanie jest optymalne.
cj – zj 0 0 0 –1,5 14–0,13
x2 3 1 00 0,5 2–0,13 0
0
1. P
rogr
amow
anie
lini
owe
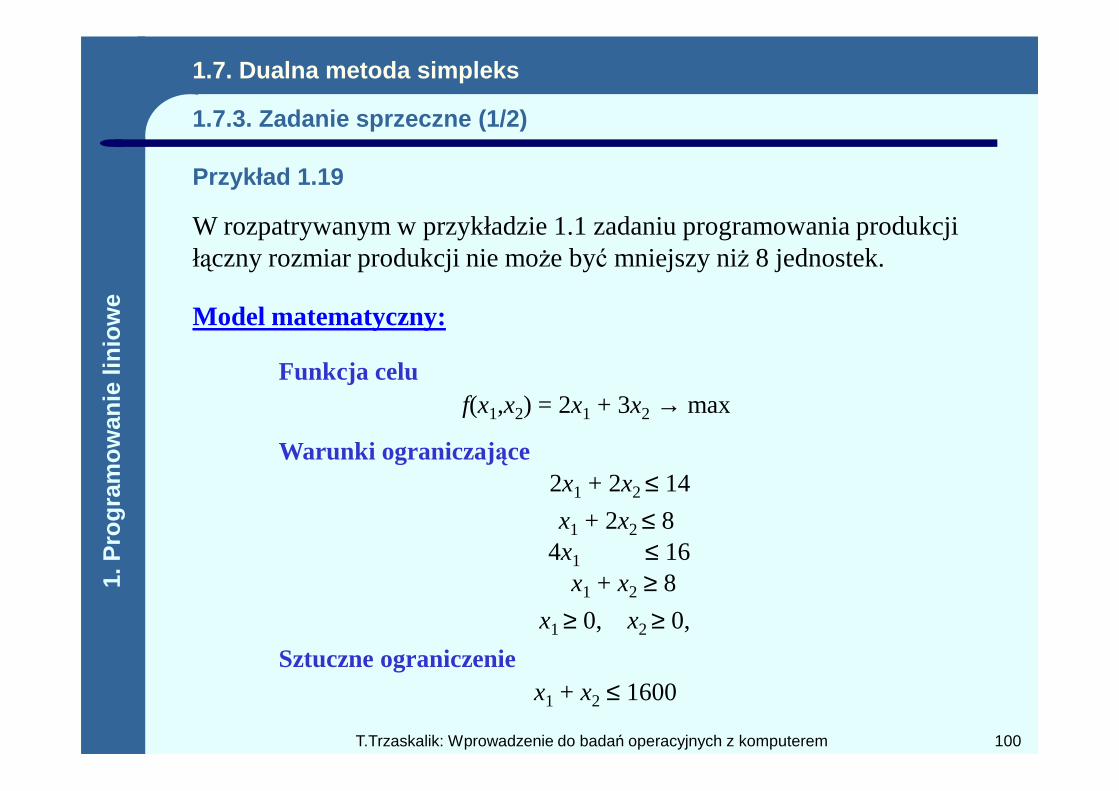
W rozpatrywanym w przykładzie 1.1 zadaniu programowania produkcji łączny rozmiar produkcji nie może być mniejszy niż 8 jednostek.
Model matematyczny:
Funkcja celuf(x ,x ) = 2x + 3x → max
1.7. Dualna metoda simpleks
1.7.3. Zadanie sprzeczne (1/2)
Przykład 1.19
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 100
f(x1,x2) = 2x1 + 3x2 → max
Warunki ograniczające2x1 + 2x2 ≤ 14
x1 + 2x2 ≤ 8 4x1 ≤ 16
x1 ≥ 0, x2 ≥ 0,
x1 + x2 ≥ 8
Sztuczne ograniczeniex1 + x2 ≤ 1600
1. P
rogr
amow
anie
lini
owe
Pierwsza tablica simpleksowaPierwsza tablica simpleksowacx → max
x3 0x4 0
0 10 0
0–1
01
00
00
x5 0x6 0
0 00 0
40
00
b
–3186–3192
161592
10
01
x1 x2 x3 x4 x5 x6 x7–2–2
3 02 0 0 0 0
01
x 3 1 01 0 16000 0 1
Baza cB
1.7. Dualna metoda simpleks
1.7.3. Zadanie sprzeczne (2/2)
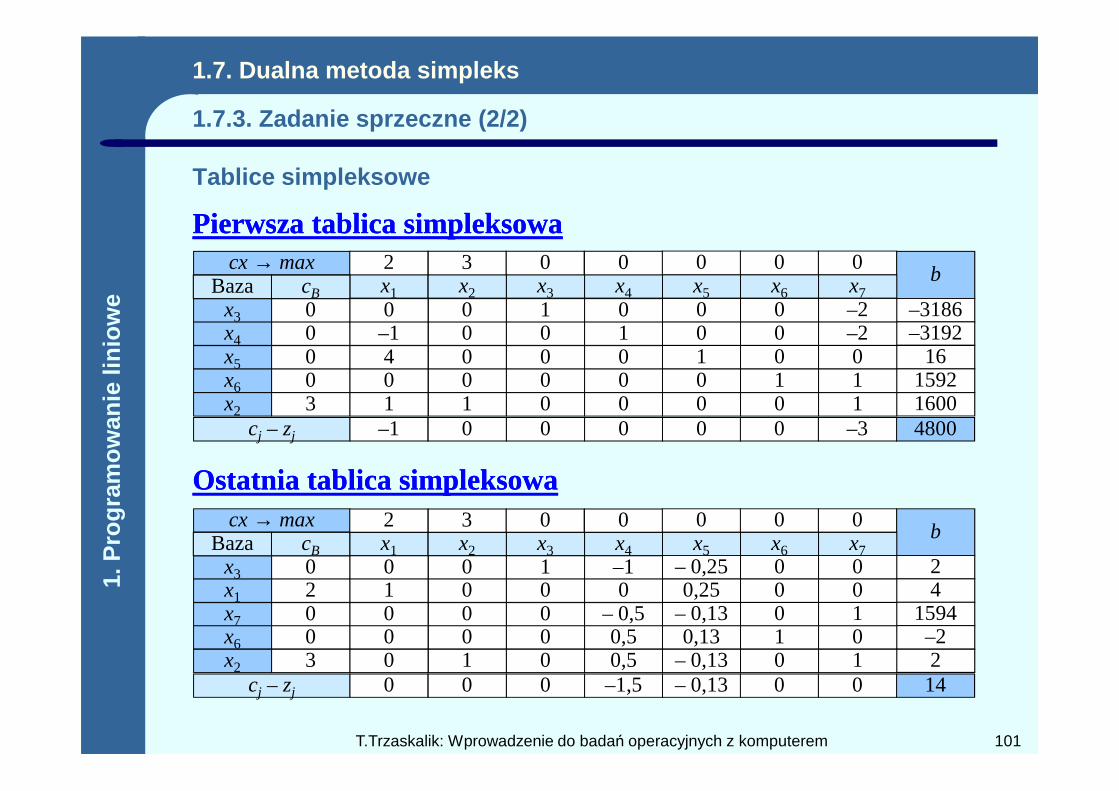
Tablice simpleksowe
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 101
cj – zj –1 0 0 0 0 48000 –3x2 3 1 01 0 16000 0 1
Ostatnia tablica simpleksowaOstatnia tablica simpleksowa
x3 0x1 2
0 10 0
01
–10
– 0,250,25
00
x7 0x6 0
0 00 0
00
– 0,50,5
b
24
1594–2
– 0,130,13
01
0010
cj – zj 0 0 0 –1,5 – 0,13 140 0x2 3 1 00 0,5 2– 0,13 0 1
cx → maxBaza cB x1 x2 x3 x4 x5 x6 x7
3 02 0 0 0 0
1. P
rogr
amow
anie
lini
owe
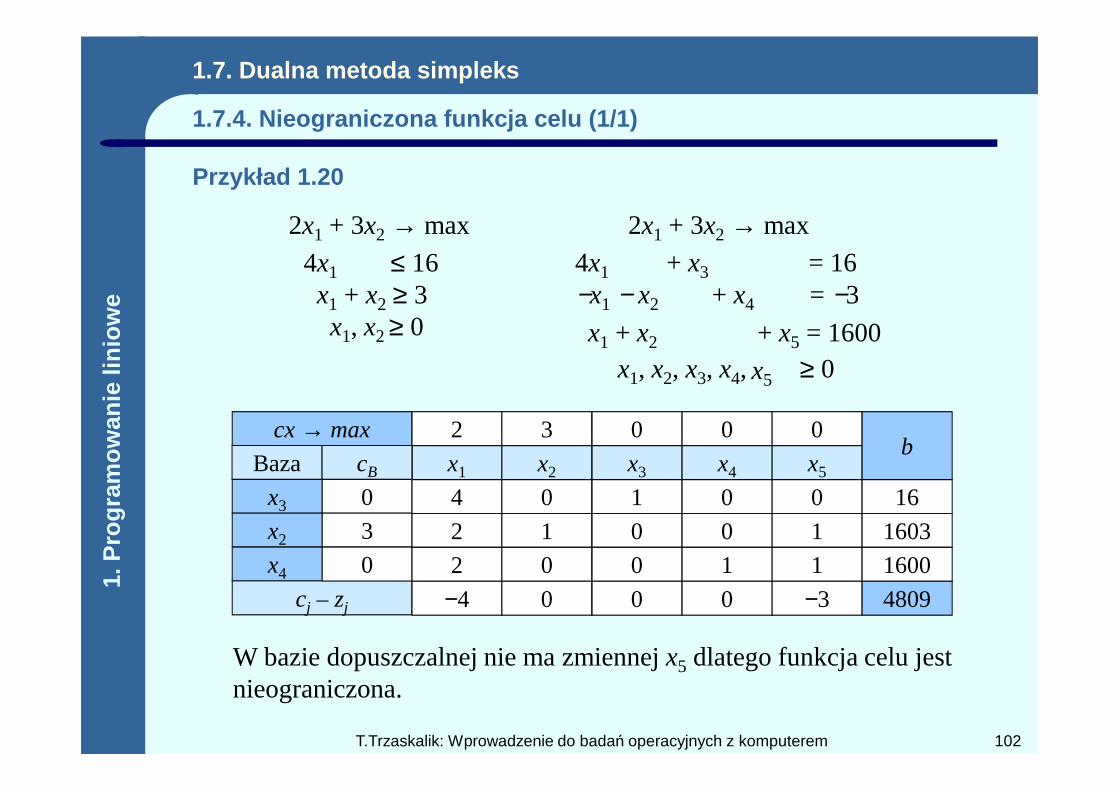
2x1 + 3x2 → max
4x1 ≤ 16x1 + x2 ≥ 3x1, x2 ≥ 0
2x1 + 3x2 → max
4x1 + x3 = 16−x1 − x2 + x4 = −3
x1, x2, x3, x4, ≥ 0x1 + x2 + x5 = 1600
x5
1.7. Dualna metoda simpleks
1.7.4. Nieograniczona funkcja celu (1/1)
Przykład 1.20
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 102
W bazie dopuszczalnej nie ma zmiennej x5 dlatego funkcja celu jest nieograniczona.
cx → max
x3
x2
x4
cj – zj
0
3
0
4
2
2
x1
2
−4
0
1
0
x2
3
0
1
0
0
x3
0
0
0
0
1
x4
0
0
0
1
1
x5
0
−3
16
1603
1600
b
4809
Baza cB
1. P
rogr
amow
anie
lini
owe
Algorytm
1. Uzyskanie pierwszego rozwiązania bazowego.
2. Badanie dopuszczalności rozwiązania.
3. Badanie nieograniczoności funkcji celu.
4. Identyfikacjarozwiązań alternatywnych.
1.7. Dualna metoda simpleks
1.7.5. Reguły post ępowania w dualnej metodzie simpleks (1/1) 1.
Pro
gram
owan
ie li
niow
e
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 103
4. Identyfikacjarozwiązań alternatywnych.
5. Wybór zmiennej usuwanej z bazy.
6. Badanie niesprzeczności zadania.
7. Wybór zmiennej wprowadzanej do bazy.
8. Sprowadzenie warunków ograniczających do postaci bazowej
względem nowej bazy.
1. P
rogr
amow
anie
lini
owe
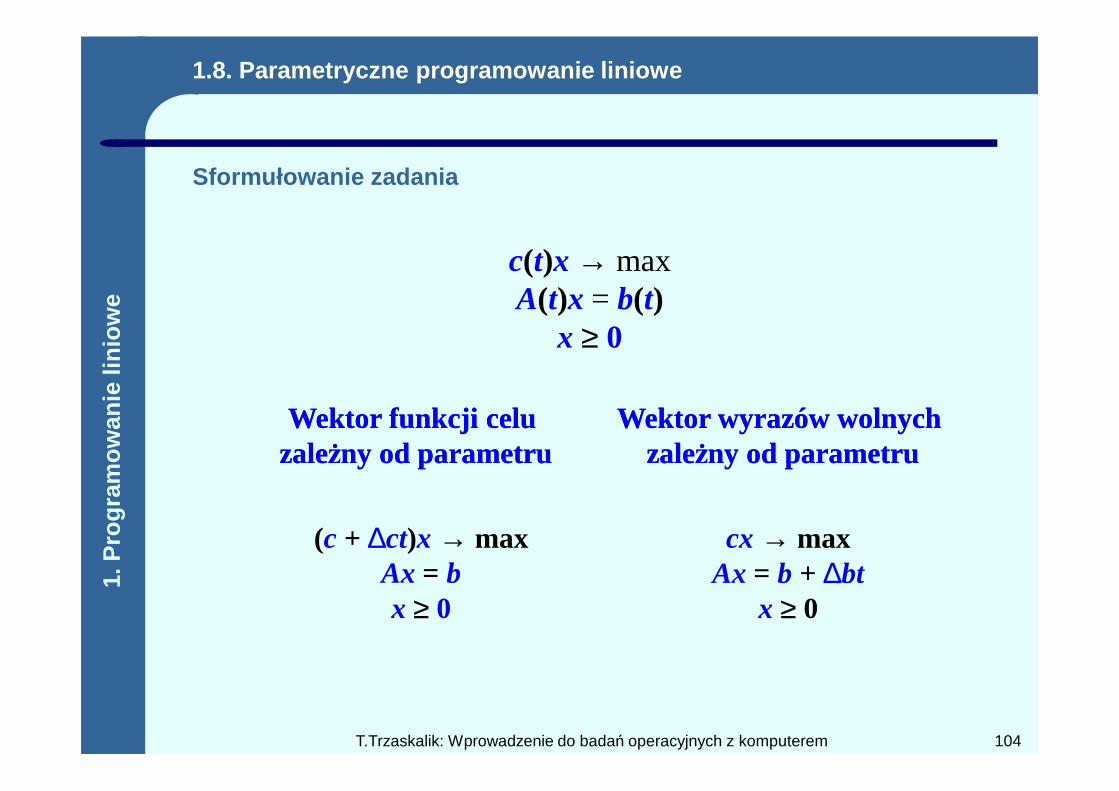
c(t)x → maxA(t)x = b(t)
x ≥ 0
1.8. Parametryczne programowanie liniowe
Sformułowanie zadania
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 104
Wektor funkcji celu Wektor funkcji celu zależny od parametruzależny od parametru
(c + ∆ct)x → maxAx = bx ≥ 0
Wektor wyrazów wolnych Wektor wyrazów wolnych zależny od parametruzależny od parametru
cx → maxAx = b + ∆bt
x ≥ 0
1. P
rogr
amow
anie
lini
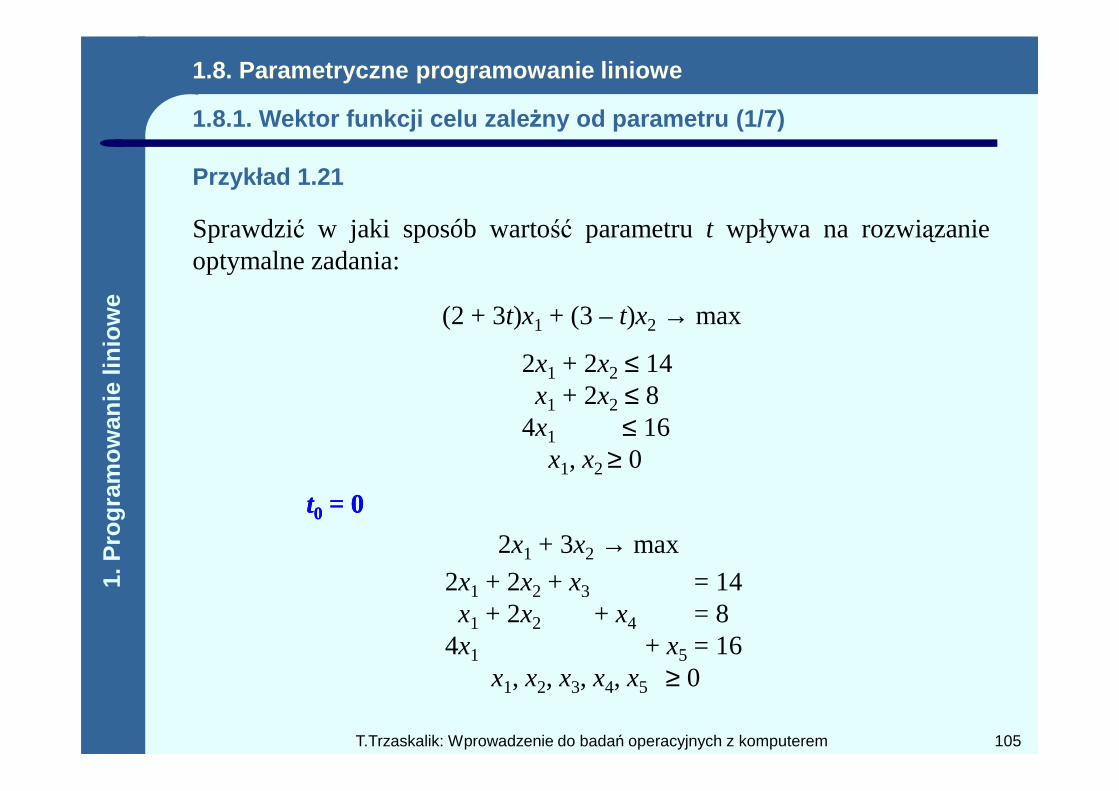
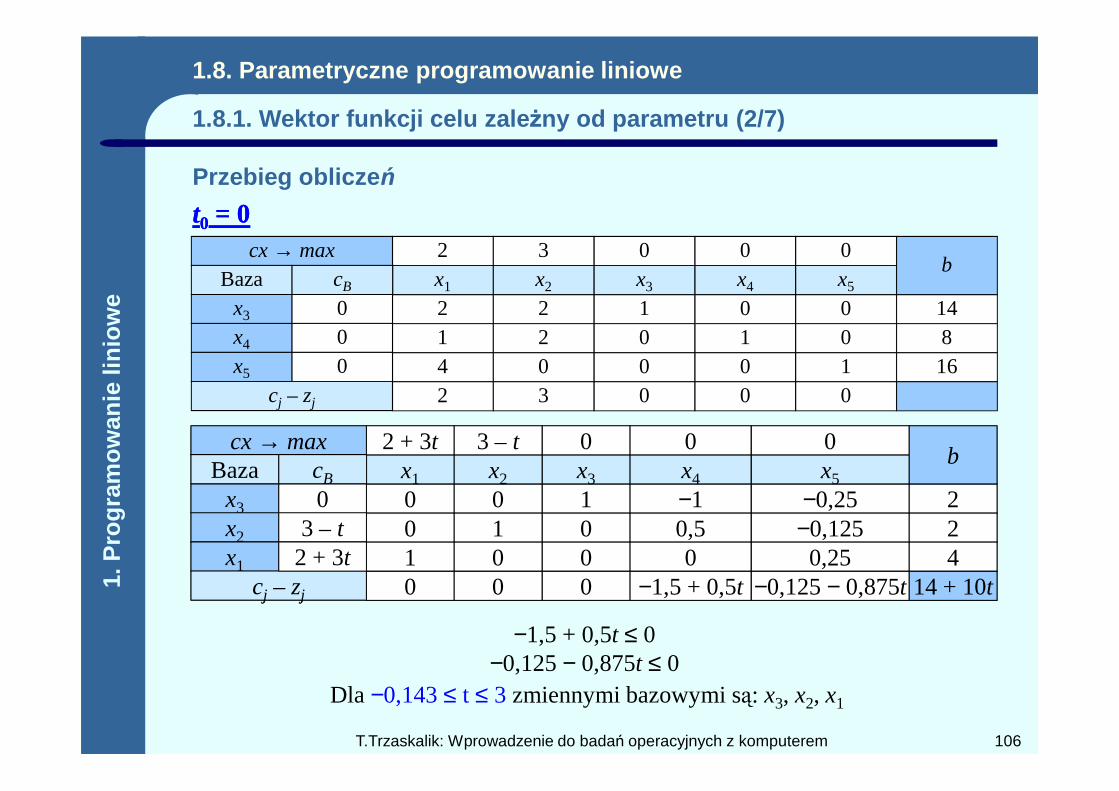
owe (2 + 3t)x1 + (3 –t)x2 → max
2x1 + 2x2 ≤ 14x1 + 2x2 ≤ 8
1.8. Parametryczne programowanie liniowe
1.8.1. Wektor funkcji celu zale żny od parametru (1/7)
Przykład 1.21
Sprawdzić w jaki sposób wartość parametrut wpływa na rozwiązanieoptymalne zadania:
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 105
x1 + 2x2 ≤ 84x1 ≤ 16
x1, x2 ≥ 0
2x1 + 3x2 → max
2x1 + 2x2 + x3 = 14x1 + 2x2 + x4 = 8
4x1 + x5 = 16x1, x2, x3, x4, x5 ≥ 0
tt00 = 0= 0
1. P
rogr
amow
anie
lini
owe
tt00 = 0= 0cx → max
x3
x4
x5
cj – zj
000
214
x1
2
2
220
x2
3
3
100
x3
0
0
010
x4
0
0
001
x5
0
0
14816
bBaza cB
1.8. Parametryczne programowanie liniowe
1.8.1. Wektor funkcji celu zale żny od parametru (2/7)
Przebieg oblicze ń
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 106
x3
x2
x1
cj – zj
032
001
x1
2
0
010
x2
3
0
100
x3
0
0
−10,50
x4
0
−1,5
−0,25−0,1250,25
x5
0
−0,125
224
b
14
cx → maxBaza cB
−1,5 + 0,5t ≤ 0−0,125 − 0,875t ≤ 0
Dla −0,143 ≤ t ≤ 3 zmiennymi bazowymi są: x3, x2, x1
cj – zj 2 3 0 0 0
cx → max
x3
x2
x1
cj – zj
03 – t
2 + 3t
001
x1
2 + 3t
0
010
x2
3 – t
0
100
x3
0
0
−10,50
x4
0
−1,5 + 0,5t
−0,25−0,1250,25
x5
0
−0,125 − 0,875t
224
b
14 + 10t
Baza cB
1. P
rogr
amow
anie
lini
owe
tt = 3= 3cx → max
x3
x2
x1
cj – zj
0011
001
x1
11
0
010
x2
0
0
100
x3
0
0
−10,50
x4
0
0
−0,25−0,1250,25
x5
0
− 2,75
224
b
44
−10,50
x4
0
0
x2 0 0 1 0 0,5 −0,125 2
Baza cB
1.8. Parametryczne programowanie liniowe
1.8.1. Wektor funkcji celu zale żny od parametru (3/7)
Przebieg oblicze ń (c.d.)
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 107
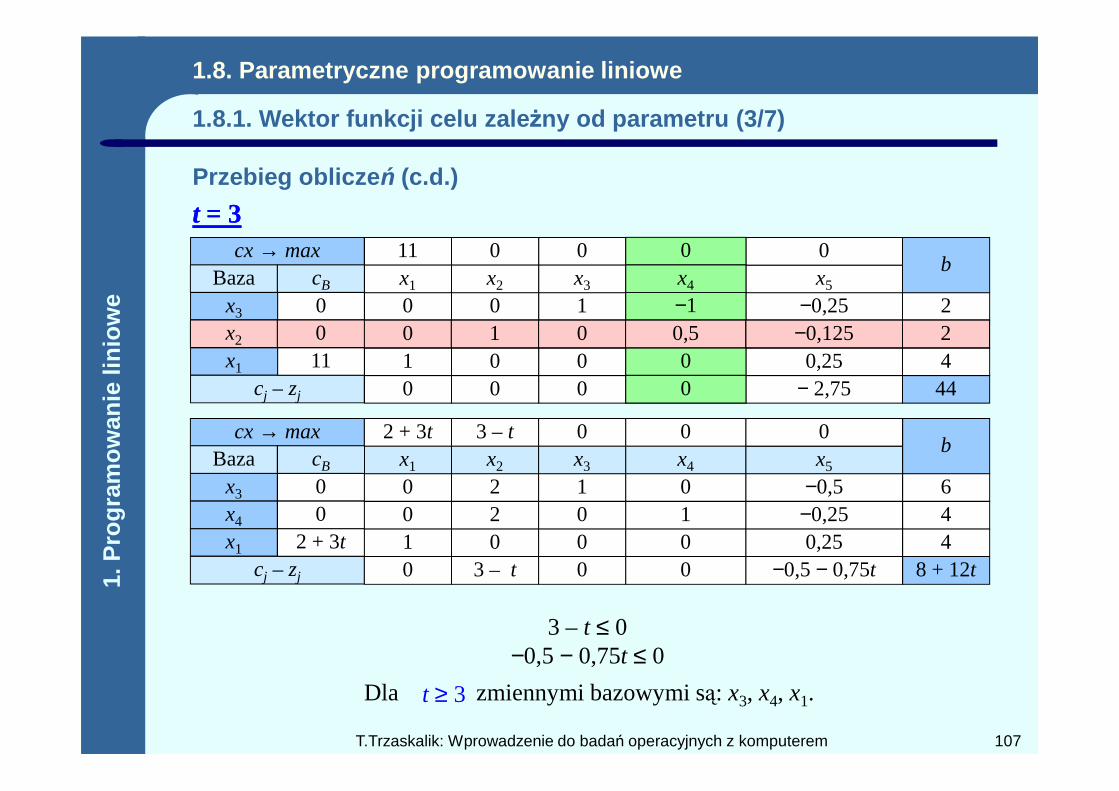
3 – t ≤ 0−0,5 − 0,75t ≤ 0
Dla zmiennymi bazowymi są: x3, x4, x1.t ≥ 3
cj – zj 0 0 0 0 − 2,75 440
cx → max
x3
x4
x1
cj – zj
00
2 + 3t
001
x1
2 + 3t
0
220
x2
3 – t
3 – t
100
x3
0
0
010
x4
0
0
−0,5−0,250,25
x5
0
−0,5 − 0,75t
644
b
8 + 12t
Baza cB
1. P
rogr
amow
anie
lini
owe
tt = = ––0,1430,143cx → max
x3
x2
x1
cj – zj
03,1431,571
001
x1
1,5712
0
010
x2
3,143
0
100
x3
0
0
−10,50
x4
0
−1,571
−0,25−0,1250,25
x5
0
0
224
b
12,57
−0,25−0,1250,25
x5
0
0
Baza cB
x1 1,571 1 0 0 0 0,25 4
1.8. Parametryczne programowanie liniowe
1.8.1. Wektor funkcji celu zale żny od parametru (4/7)
Przebieg oblicze ń (c.d.)
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 108
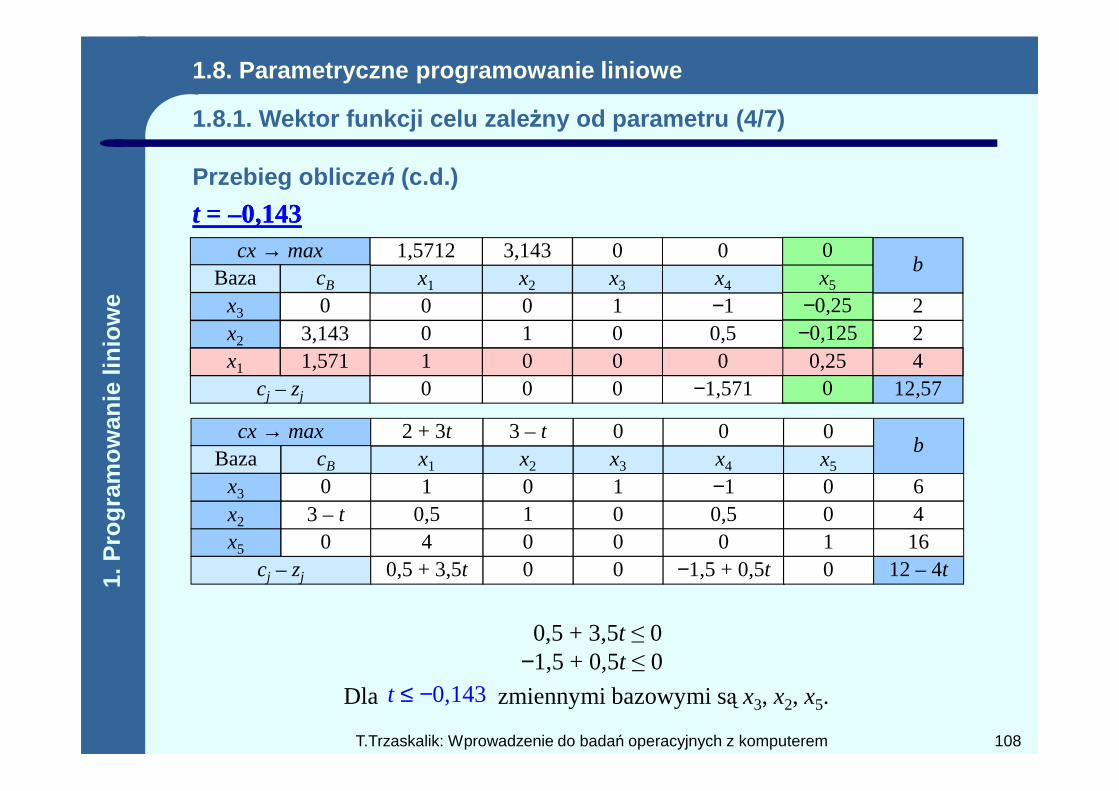
Dla zmiennymi bazowymi są x3, x2, x5.
0,5 + 3,5t ≤ 0−1,5 + 0,5t ≤ 0
t ≤ −0,143
cx → max
x3
x2
x5
cj – zj
03 – t
0
10,54
x1
2 + 3t
0,5 + 3,5t
010
x2
3 – t
0
100
x3
0
0
−10,50
x4
0
−1,5 + 0,5t
001
x5
0
0
6416
b
12 – 4t
Baza cB
cj – zj 0 0 0 −1,571 0 12,570
1. P
rogr
amow
anie
lini
owe
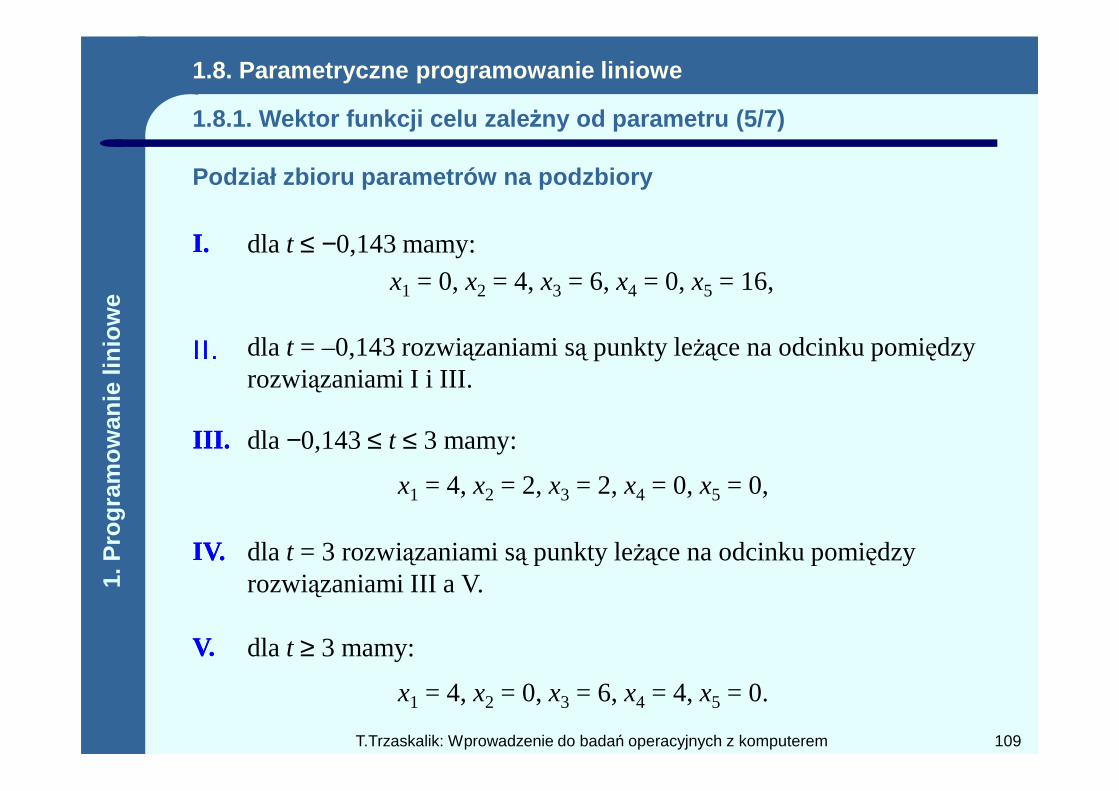
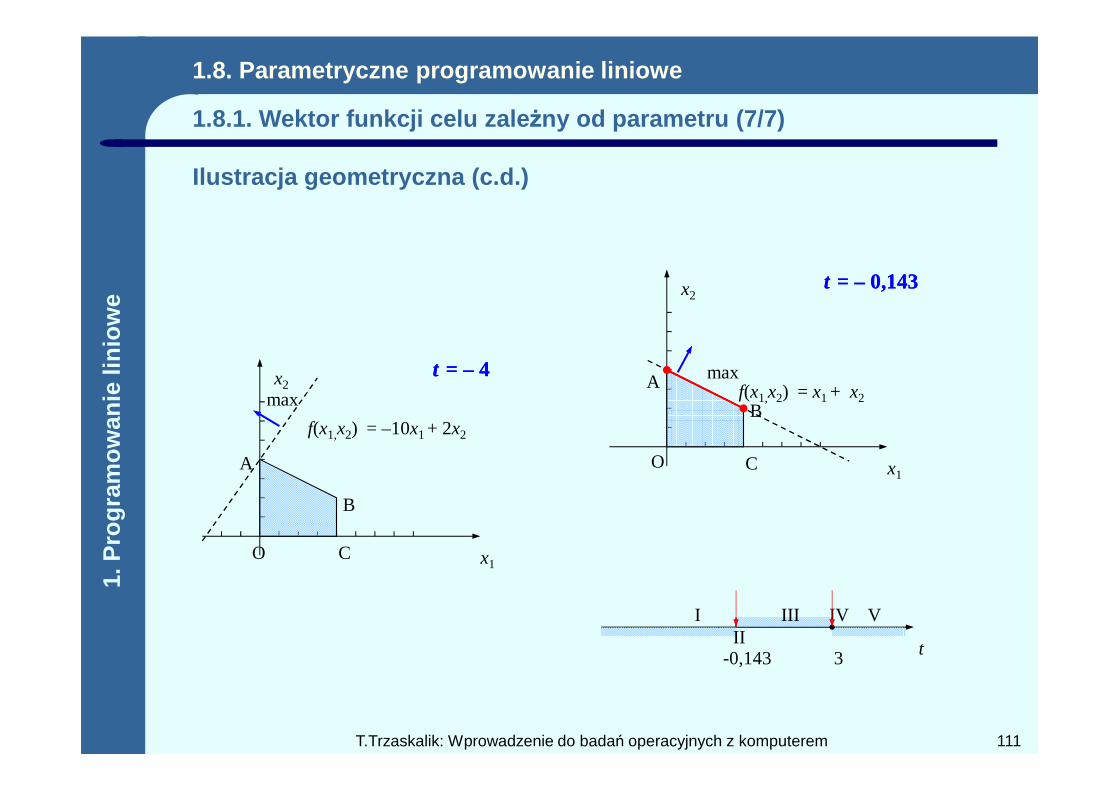
I.I. dla t ≤ −0,143 mamy:
x1 = 0, x2 = 4, x3 = 6, x4 = 0, x5 = 16,
ΙΙ.ΙΙ. dla t = –0,143 rozwiązaniami są punkty leżące na odcinku pomiędzy rozwiązaniami I i III.
1.8. Parametryczne programowanie liniowe
1.8.1. Wektor funkcji celu zale żny od parametru (5/7)
Podział zbioru parametrów na podzbiory
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 109
x1 = 4, x2 = 2, x3 = 2, x4 = 0, x5 = 0,
III.III. dla −0,143 ≤ t ≤ 3 mamy:
IV.IV. dla t = 3 rozwiązaniami są punkty leżące na odcinku pomiędzy rozwiązaniami III a V.
V.V. dla t ≥ 3 mamy:
x1 = 4, x2 = 0, x3 = 6, x4 = 4, x5 = 0.
1. P
rogr
amow
anie
lini
owe
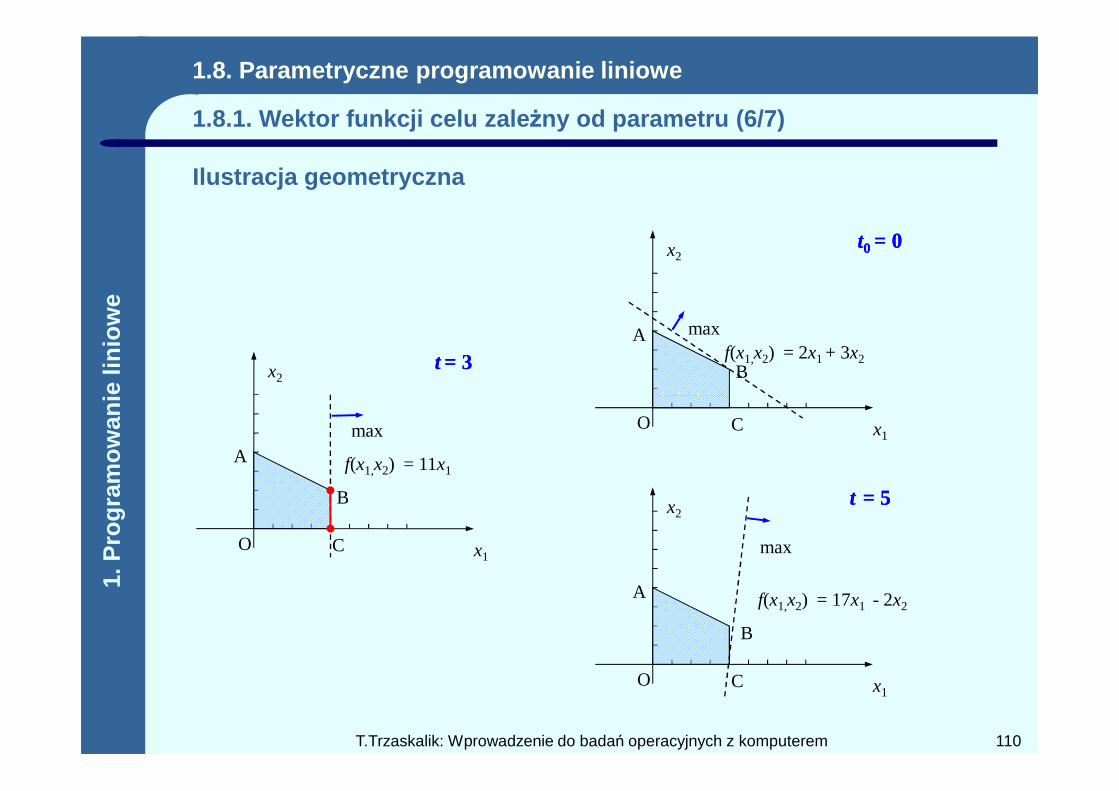
x2
A
Bf(x1,x2) = 2x1 + 3x2
max
tt0 0 = 0= 0
x2tt = 3= 3
1.8. Parametryczne programowanie liniowe
1.8.1. Wektor funkcji celu zale żny od parametru (6/7)
Ilustracja geometryczna
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 110
x1O C
x1O
A
B
C
f(x1,x2) = 11x1
max
x2
x1O
A
B
C
f(x1,x2) = 17x1 - 2x2
max
tt = 5= 5
1. P
rogr
amow
anie
lini
owe
x2
A f(x1,x2) = x1 + x2
max
tt = = –– 0,1430,143
x2max
tt = = –– 4 4
1.8. Parametryczne programowanie liniowe
1.8.1. Wektor funkcji celu zale żny od parametru (7/7)
Ilustracja geometryczna (c.d.)
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 111
x1O
B
C
f(x1,x2) = x1 + x2
x1O
A
B
C
f(x1,x2) = –10x1 + 2x2
max
3 t-0,143
VIVIIIII
I
1. P
rogr
amow
anie
lini
owe
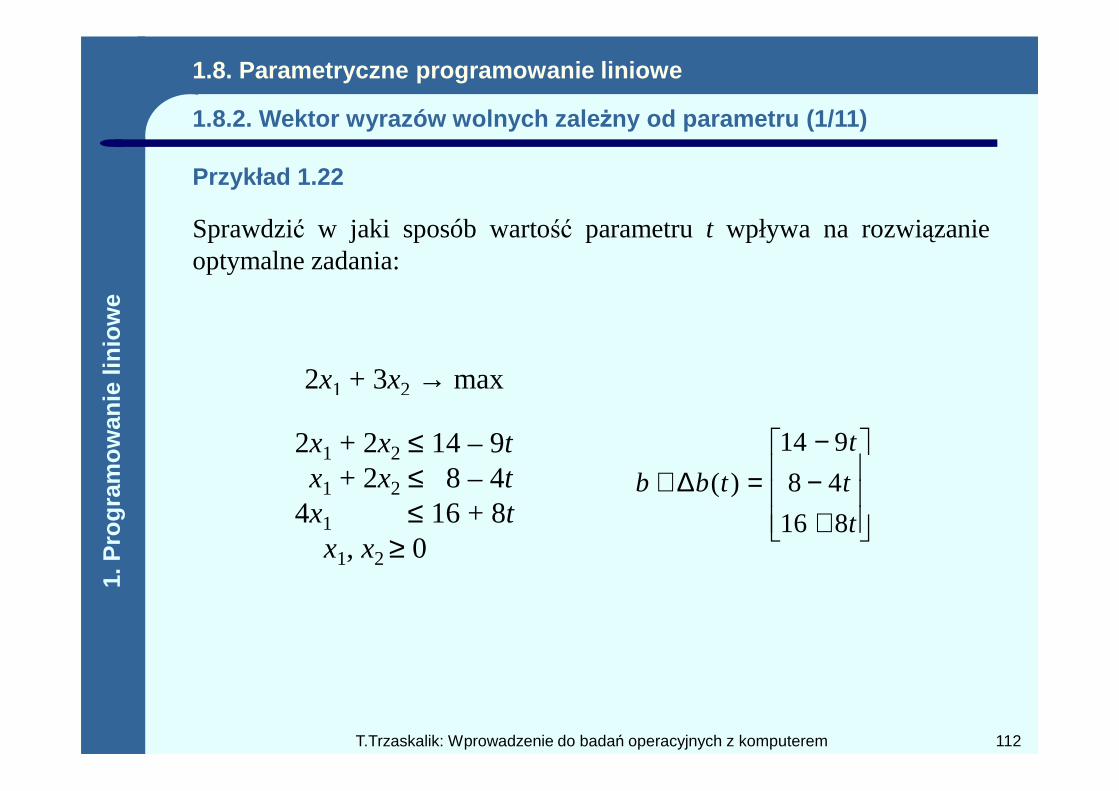
2x1 + 3x2 → max
1.8. Parametryczne programowanie liniowe
1.8.2. Wektor wyrazów wolnych zale żny od parametru (1/11)
Przykład 1.22
Sprawdzić w jaki sposób wartość parametrut wpływa na rozwiązanieoptymalne zadania:
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 112
2x1 + 2x2 ≤ 14 – 9tx1 + 2x2 ≤ 8 – 4t
4x1 ≤ 16 + 8tx1, x2 ≥ 0
+−−
=∆+t
t
t
tbb
816
48
914
)(
1. P
rogr
amow
anie
lini
owe
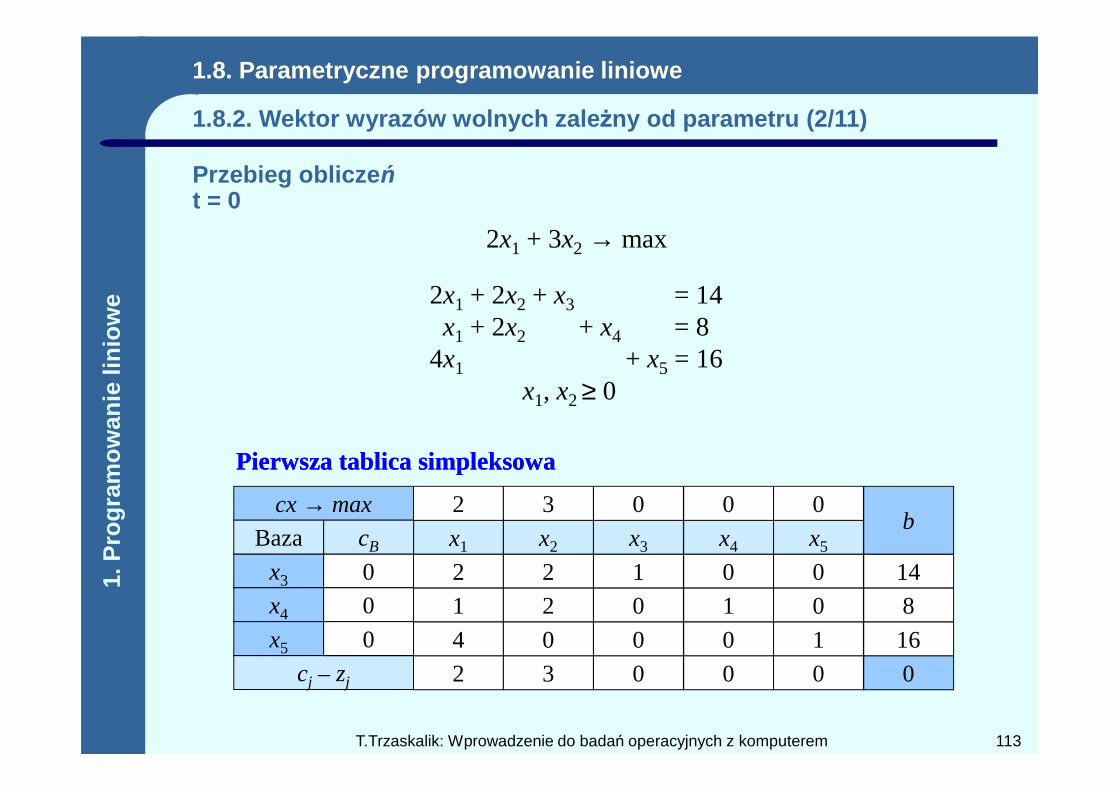
2x1 + 3x2 → max
2x1 + 2x2 + x3 = 14x1 + 2x2 + x4 = 8
4x1 + x5 = 16x1, x2 ≥ 0
1.8. Parametryczne programowanie liniowe
1.8.2. Wektor wyrazów wolnych zale żny od parametru (2/11)
Przebieg oblicze ń t = 0
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 113
x1, x2 ≥ 0
cx → max
x3
x4
x5
cj – zj
0
0
0
2
1
4
x1
2
2
2
2
0
x2
3
3
1
0
0
x3
0
0
0
1
0
x4
0
0
0
0
1
x5
0
0
14
8
16
b
0
Pierwsza tablica simpleksowaPierwsza tablica simpleksowa
Baza cB
1. P
rogr
amow
anie
lini
owe
cx → max
x3
x2
0
3
0
0
x1
2
0
1
x2
3
1
0
x3
0
–1
0,5
x4
0
–0,25
–0,125
x5
0
2
2
b
Ostatnia tablica simpleksowa Ostatnia tablica simpleksowa
Baza cB
1.8. Parametryczne programowanie liniowe
1.8.2. Wektor wyrazów wolnych zale żny od parametru (3/11)
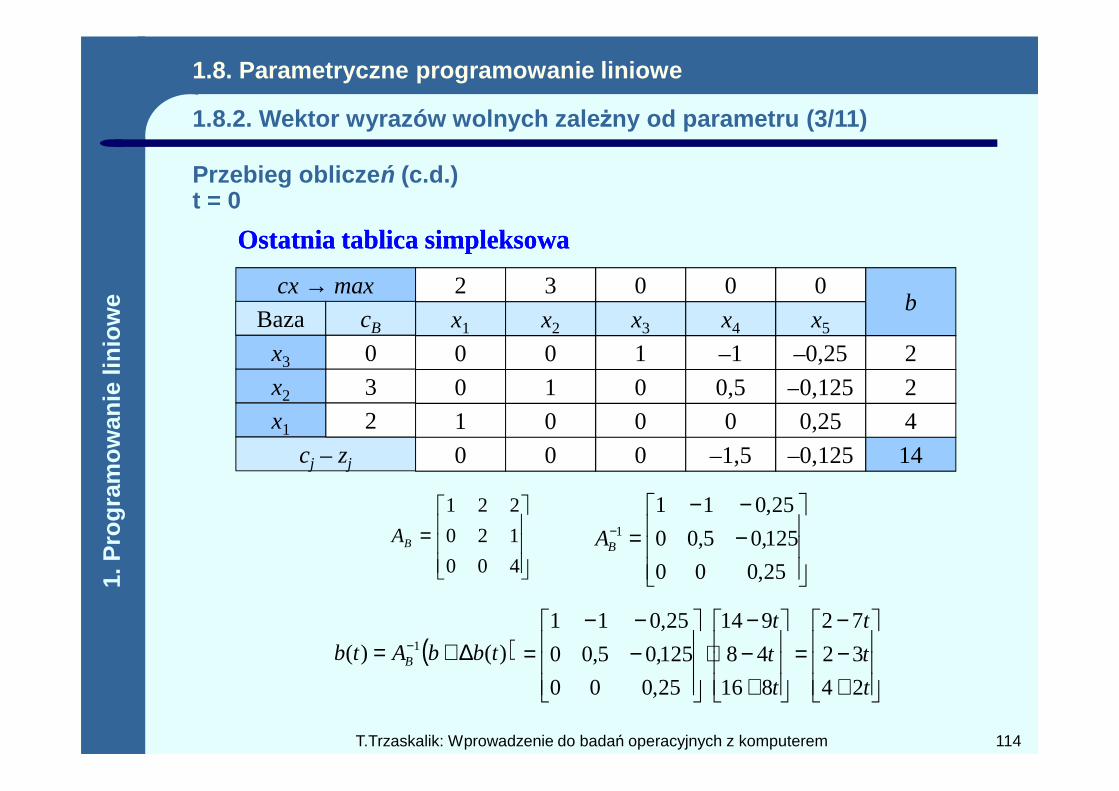
Przebieg oblicze ń (c.d.) t = 0
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 114
x2
x1
cj – zj
3
2
0
1
0
1
0
0
0
0
0
0,5
0
–1,5
–0,125
0,25
–0,125
2
4
14
=400
120
221
BA
−−−
=−
25,000
125,05,00
25,0111
BA
( ))()( 1 tbbAtb B ∆+= −
+−−
=t
t
t
24
32
72
+−−
⋅
−−−
=t
t
t
816
48
914
25,000
125,05,00
25,011
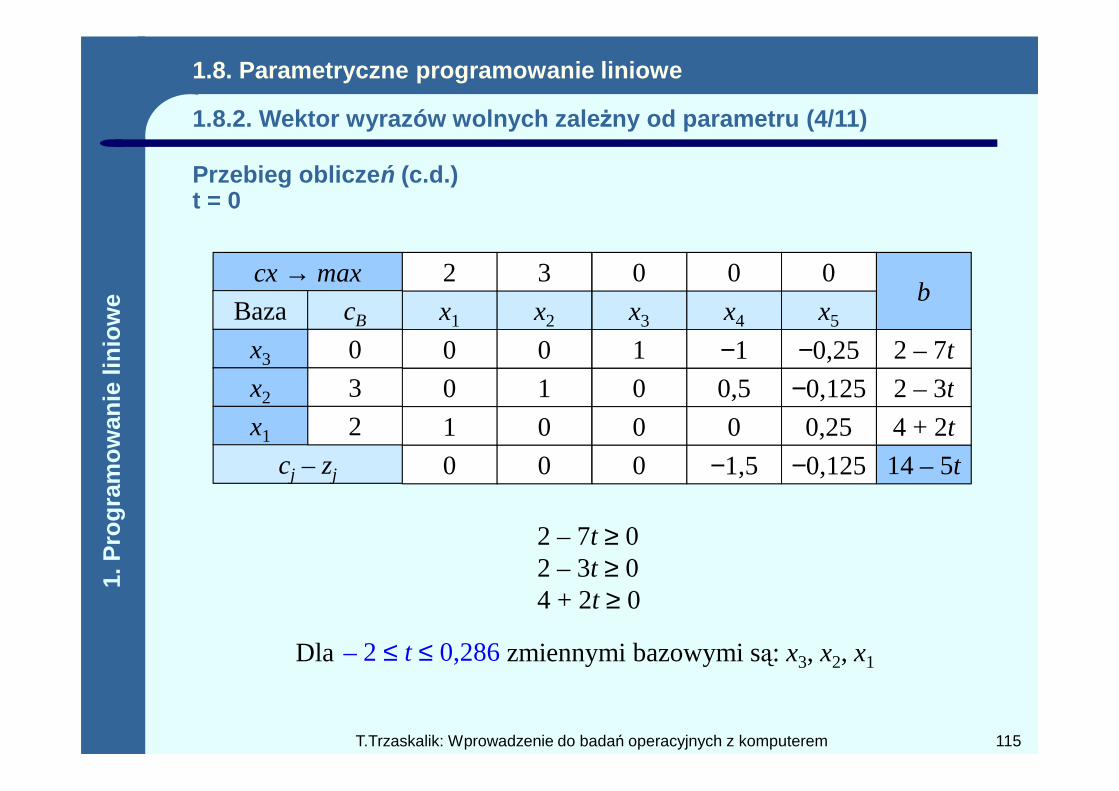
1. P
rogr
amow
anie
lini
owe
cx → max
x3
x2
0
3
0
0
x1
2
0
1
x2
3
1
0
x3
0
−1
0,5
x4
0
−0,25
−0,125
x5
0
2 – 7t
2 – 3t
bBaza cB
1.8. Parametryczne programowanie liniowe
1.8.2. Wektor wyrazów wolnych zale żny od parametru (4/11)
Przebieg oblicze ń (c.d.) t = 0
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 115
x2
x1
cj – zj
3
2
0
1
0
1
0
0
0
0
0
0,5
0
−1,5
−0,125
0,25
−0,125
2 – 3t
4 + 2t
14 – 5t
2 – 7t ≥ 02 – 3t ≥ 04 + 2t ≥ 0
Dla zmiennymi bazowymi są: x3, x2, x1– 2 ≤ t ≤ 0,286
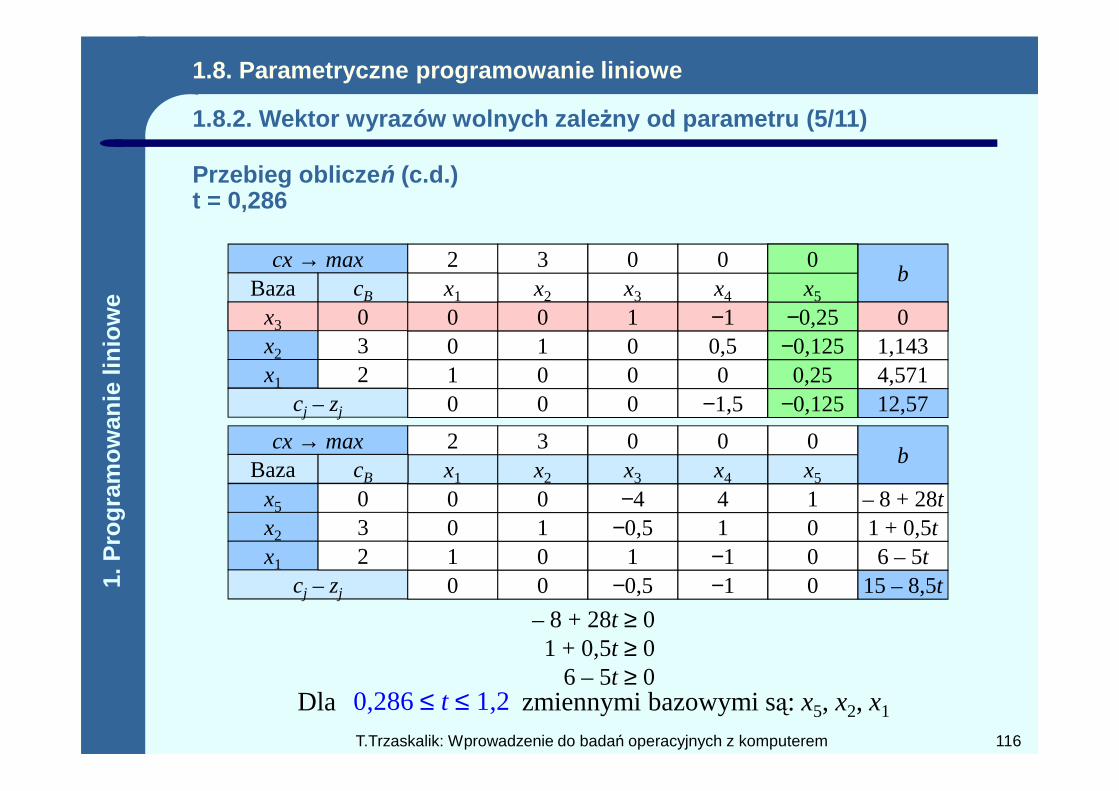
1. P
rogr
amow
anie
lini
owe
cx → max
x3
x2
x1
c – z
032
001
2
0
010
x2
3
0
100
x3
0
0
−10,50
x4
0
−1,5
−0,25−0,1250,25
x5
0
−0,125
01,1434,571
b
12,57
x3 0 0 0 1 −1 −0,25 0−0,25−0,1250,25
x5
0
−0,125
Baza cB x1
1.8. Parametryczne programowanie liniowe
1.8.2. Wektor wyrazów wolnych zale żny od parametru (5/11)
Przebieg oblicze ń (c.d.) t = 0,286
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 116
– 8 + 28t ≥ 01 + 0,5t ≥ 0
6 – 5t ≥ 0
cj – zj 0 0 0 −1,5 −0,125 12,57
Dla zmiennymi bazowymi są: x5, x2, x1
−0,125
0,286 ≤ t ≤ 1,2
cx → max
x5
x2
x1
cj – zj
032
001
x1
2
0
010
x2
3
0
−4−0,5
1
x3
0
−0,5
41
−1
x4
0
−1
100
x5
0
0
– 8 + 28t1 + 0,5t6 – 5t
b
15 – 8,5t
Baza cB
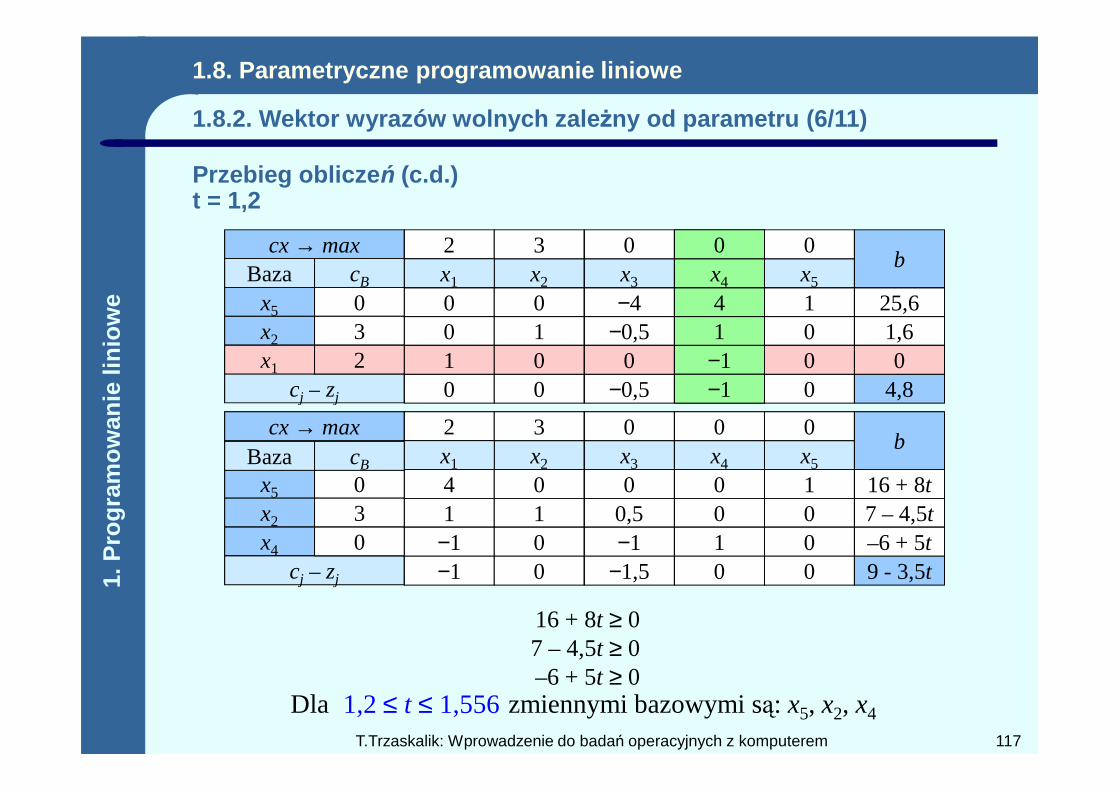
1. P
rogr
amow
anie
lini
owe
cx → max
x5
x2
x1
cj – zj
032
001
2
0
010
x2
3
0
−4−0,5
0
x3
0
−0,5
41
−1
x4
0
−1
100
x5
0
0
25,61,60
b
4,8x1 2 1 0 0 −1 0 0
41
−1
x4
0
−1
Baza cB x1
1.8. Parametryczne programowanie liniowe
1.8.2. Wektor wyrazów wolnych zale żny od parametru (6/11)
Przebieg oblicze ń (c.d.) t = 1,2
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 117
16 + 8t ≥ 07 – 4,5t ≥ 0–6 + 5t ≥ 0
cj – zj 0 0 −0,5 −1 0 4,8
Dla zmiennymi bazowymi są: x5, x2, x4
−1
1,2 ≤ t ≤ 1,556
cx → max
x5
x2
x4
cj – zj
030
41
−1
2
−1
010
x2
3
0
00,5−1
x3
0
−1,5
001
x4
0
0
100
x5
0
0
16 + 8t7 – 4,5t–6 + 5t
b
9 - 3,5t
Baza cB x1
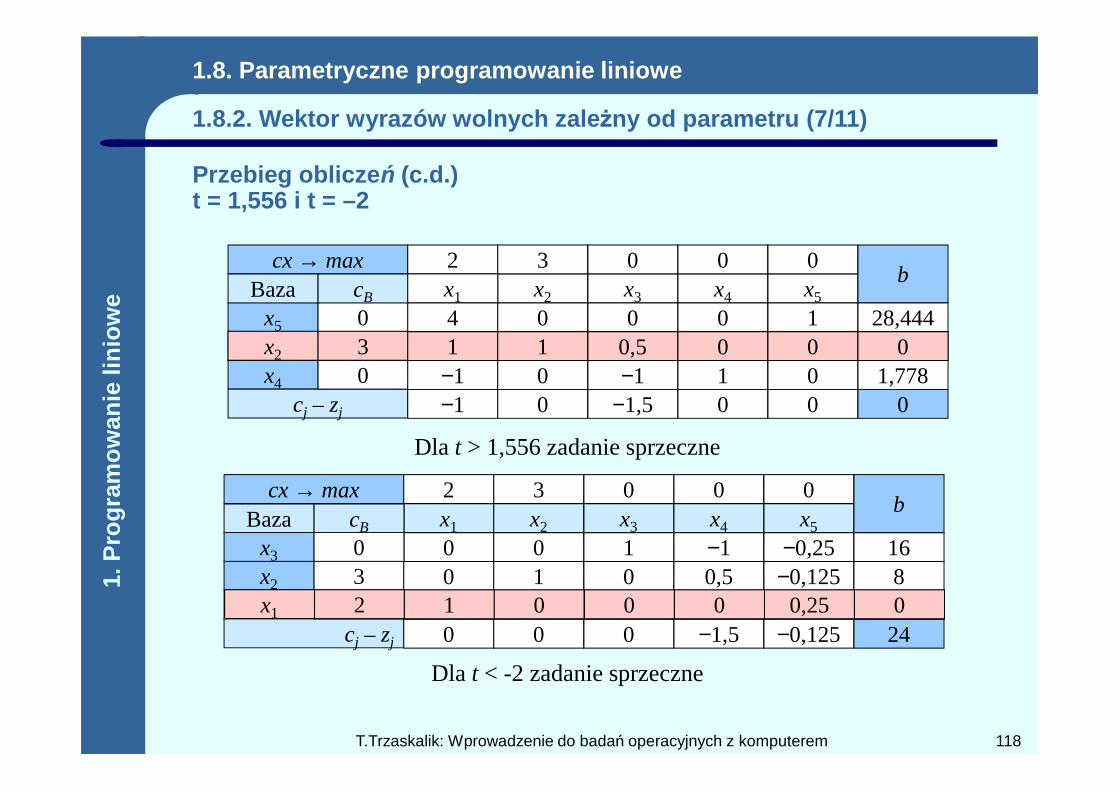
1. P
rogr
amow
anie
lini
owe
cx → max
x5
x2
x4
c – z
030
41
−1
2
−1
010
x2
3
0
00,5−1
x3
0
−1,5
001
x4
0
0
100
x5
0
0
28,4440
1,778
b
0
x2 3 1 1 0,5 0 0 0
Baza cB x1
1.8. Parametryczne programowanie liniowe
1.8.2. Wektor wyrazów wolnych zale żny od parametru (7/11)
Przebieg oblicze ń (c.d.) t = 1,556 i t = –2
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 118
cx → max
x2
x1
cj – zj
32
001
x1
2
0
010
x2
3
0
100
x3
0
0
−10,50
x4
0
−1,5
−0,25−0,1250,25
x5
0
−0,125
1680
b
24
Baza cB
x3 0
cj – zj −1 0 −1,5 0 0 0
Dla t > 1,556 zadanie sprzeczne
Dla t < -2 zadanie sprzeczne
x1 2 1 0 0 0 0,25 0
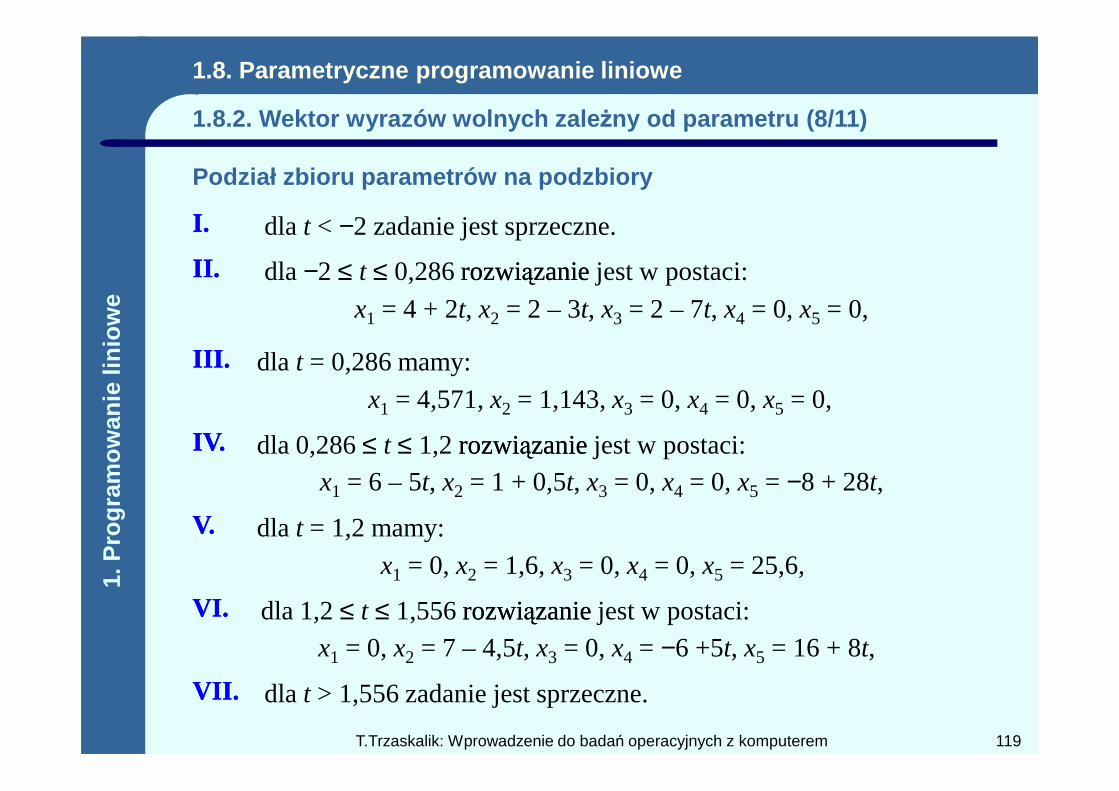
1. P
rogr
amow
anie
lini
owe
I.I. dla t < −2 zadanie jest sprzeczne.
x = 4,571, x = 1,143, x = 0, x = 0, x = 0,
III.III. dla t = 0,286 mamy:
II.II. dla −2 ≤ t ≤ 0,286 rozwiązanierozwiązanie jest w postaci:
x1 = 4 + 2t, x2 = 2 – 3t, x3 = 2 – 7t, x4 = 0, x5 = 0,
1.8. Parametryczne programowanie liniowe
1.8.2. Wektor wyrazów wolnych zale żny od parametru (8/11)
Podział zbioru parametrów na podzbiory
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 119
x1 = 4,571, x2 = 1,143, x3 = 0, x4 = 0, x5 = 0,
V.V. dla t = 1,2 mamy:
x1 = 0, x2 = 1,6, x3 = 0, x4 = 0, x5 = 25,6,
IV.IV. dla 0,286 ≤ t ≤ 1,2 rozwiązanierozwiązanie jest w postaci:x1 = 6 – 5t, x2 = 1 + 0,5t, x3 = 0, x4 = 0, x5 = −8 + 28t,
VI.VI. dla 1,2 ≤ t ≤ 1,556 rozwiązanierozwiązanie jest w postaci:x1 = 0, x2 = 7 – 4,5t, x3 = 0, x4 = −6 +5t, x5 = 16 + 8t,
VII.VII. dla t > 1,556 zadanie jest sprzeczne.
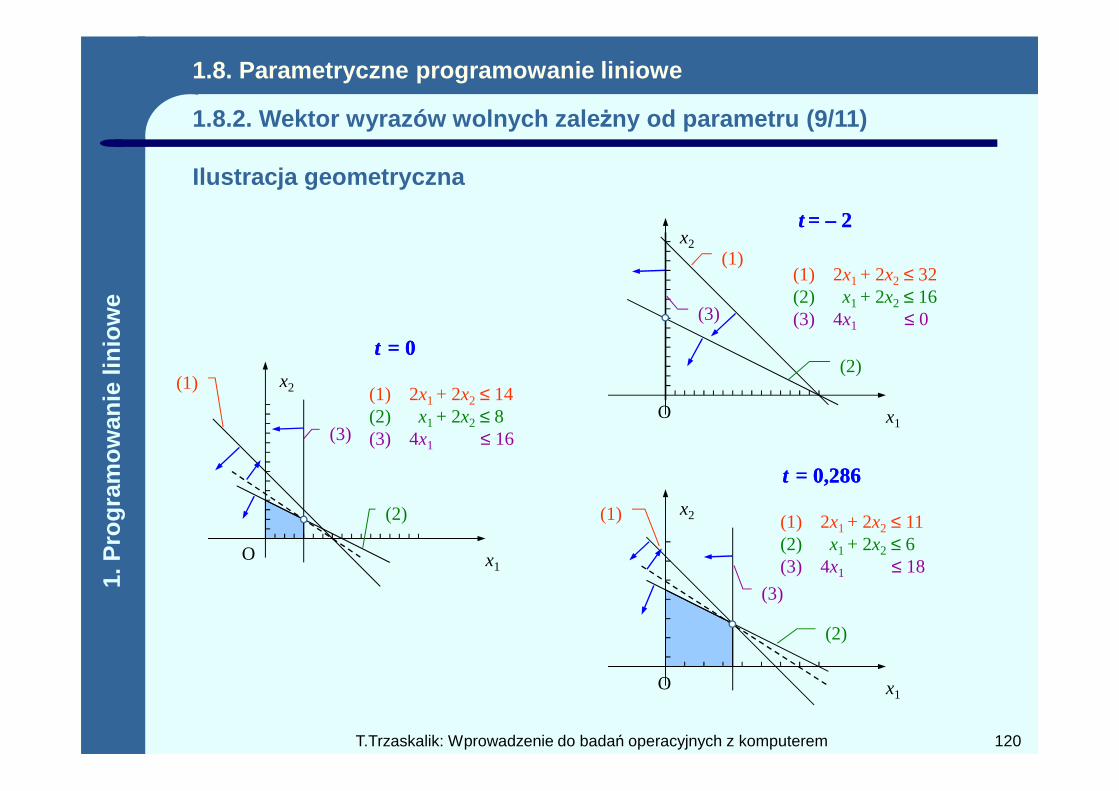
1. P
rogr
amow
anie
lini
owe
1.8. Parametryczne programowanie liniowe
1.8.2. Wektor wyrazów wolnych zale żny od parametru (9/11)
Ilustracja geometryczna
x2 (1) 2x1 + 2x2 ≤ 14
tt = 0= 0
(1)
tt = = –– 22x2
(1) 2x1 + 2x2 ≤ 32(2) x1 + 2x2 ≤ 16(3) 4x1 ≤ 0
(2)
(3)
(1)
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 120
x1O
(1) 2x1 + 2x2 ≤ 14(2) x1 + 2x2 ≤ 8 (3) 4x1 ≤ 16(3)
(2)
x1O
(1) x2
x1O
(1) 2x1 + 2x2 ≤ 11 (2) x1 + 2x2 ≤ 6 (3) 4x1 ≤ 18
tt = 0,286 = 0,286
(3)
(2)
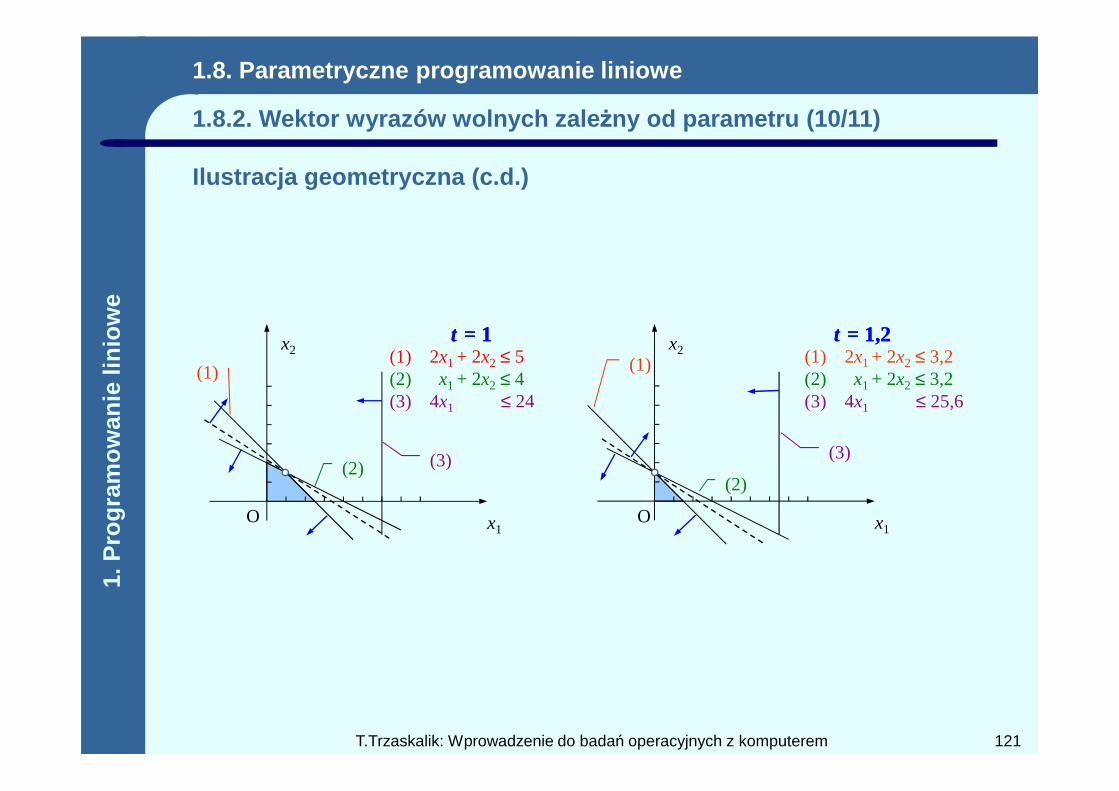
1. P
rogr
amow
anie
lini
owe
x2 (1) 2x1 + 2x2 ≤ 5(2) x1 + 2x2 ≤ 4(3) 4x ≤ 24
tt = 1= 1
(1)
1.8. Parametryczne programowanie liniowe
1.8.2. Wektor wyrazów wolnych zale żny od parametru (10/11)
Ilustracja geometryczna (c.d.)
(1) 2x1 + 2x2 ≤ 3,2(2) x1 + 2x2 ≤ 3,2(3) 4x ≤ 25,6
x2tt = 1,2= 1,2
(1)
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 121
x1O
(3) 4x1 ≤ 24
(3)(2)
(3) 4x1 ≤ 25,6
x1O
(2)
(3)
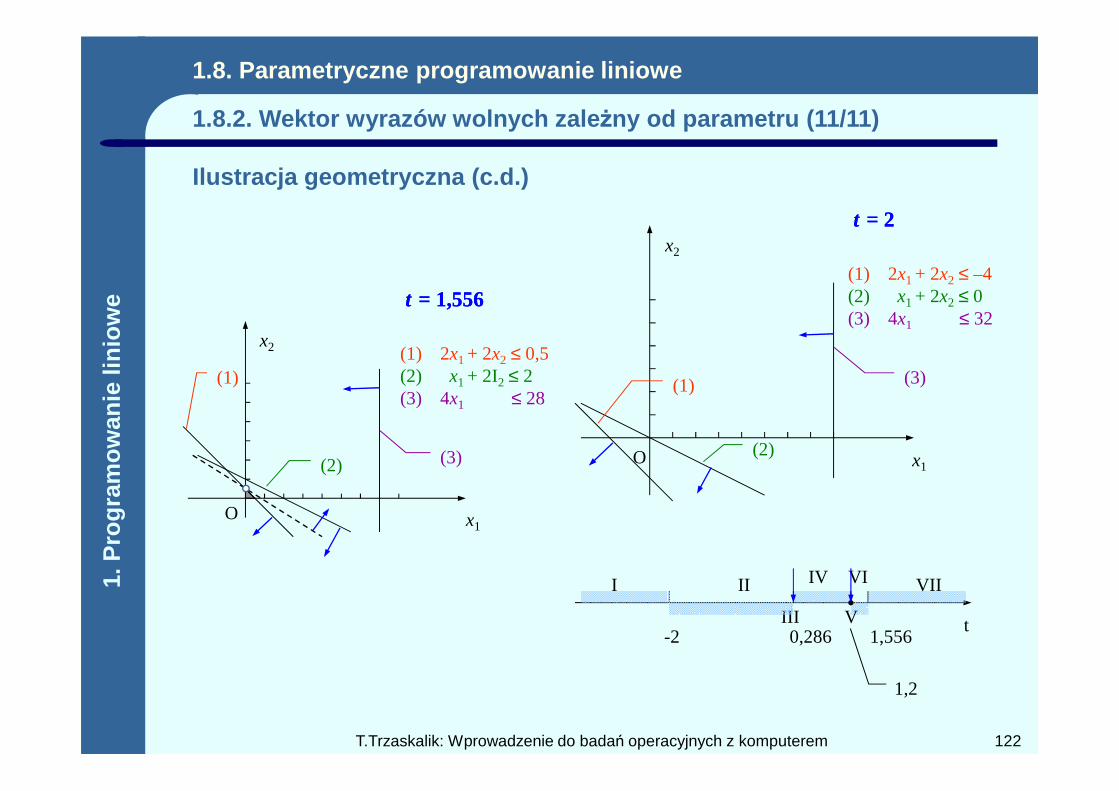
1. P
rogr
amow
anie
lini
owe
(3)
x2
(1) 2x1 + 2x2 ≤ –4(2) x1 + 2x2 ≤ 0 (3) 4x1 ≤ 32
tt = 2= 2
(1)
x2 (1) 2x1 + 2x2 ≤ 0,5(2) x1 + 2I2 ≤ 2(3) 4x ≤ 28
tt = 1,556= 1,556
(1)
1.8. Parametryczne programowanie liniowe
1.8.2. Wektor wyrazów wolnych zale żny od parametru (11/11)
Ilustracja geometryczna (c.d.)
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 122
x1O (2)
t-2
V
IV
III
III
0,286
VI VII
1,556
1,2
x1O
(3) 4x1 ≤ 28
(3)(2)
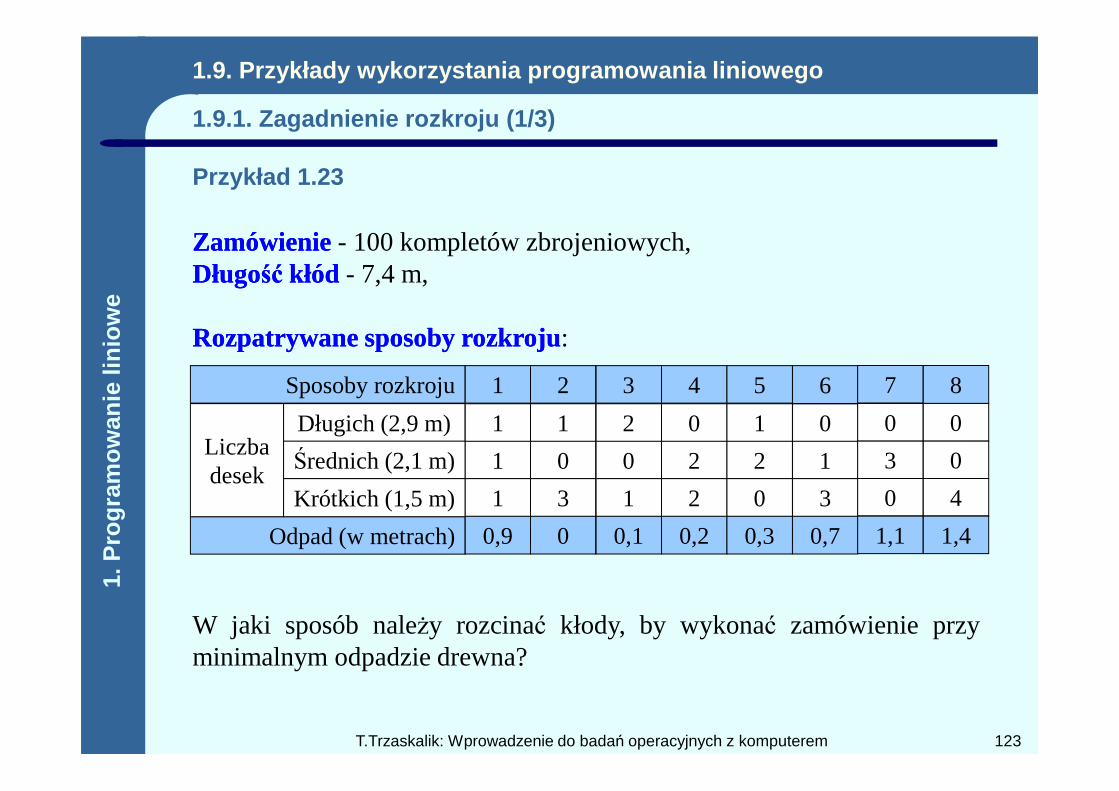
1. P
rogr
amow
anie
lini
owe
ZamówienieZamówienie- 100 kompletów zbrojeniowych,Długość kłódDługość kłód - 7,4 m,
Rozpatrywane sposoby rozkrojuRozpatrywane sposoby rozkroju:
1.9. Przykłady wykorzystania programowania liniowego
1.9.1. Zagadnienie rozkroju (1/3)
Przykład 1.23
Sposoby rozkroju 1 2 3 4 5 6 7 8
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 123
W jaki sposób należy rozcinać kłody, by wykonać zamówienie przyminimalnym odpadzie drewna?
Sposoby rozkroju
Odpad (w metrach)
Liczba desek
Długich (2,9 m)
Średnich (2,1 m)
Krótkich (1,5 m)
1
1
1
0,9
1
0
3
0
2
0
1
0,1
0
2
2
0,2
1
2
0
0,3
0
1
3
1 2 3 4 5 6
0,7
0
3
0
1,1
0
0
4
7 8
1,4
1. P
rogr
amow
anie
lini
owe
CelCelZnalezienie takiego sposobu rozkroju, który minimalizuje odpad.
Zmienne decyzyjneZmienne decyzyjne
x1 – liczba kłód pociętych sposobem 1,
x – liczba kłód pociętych sposobem 2,
1.9. Przykłady wykorzystania programowania liniowego
1.9.1. Zagadnienie rozkroju (2/3)
Model matematyczny
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 124
x2 – liczba kłód pociętych sposobem 2,
x3 – liczba kłód pociętych sposobem 3,
x4 – liczba kłód pociętych sposobem 4,
x5 – liczba kłód pociętych sposobem 5,
x6 – liczba kłód pociętych sposobem 6,
x7 – liczba kłód pociętych sposobem 7,
x8 – liczba kłód pociętych sposobem 8,
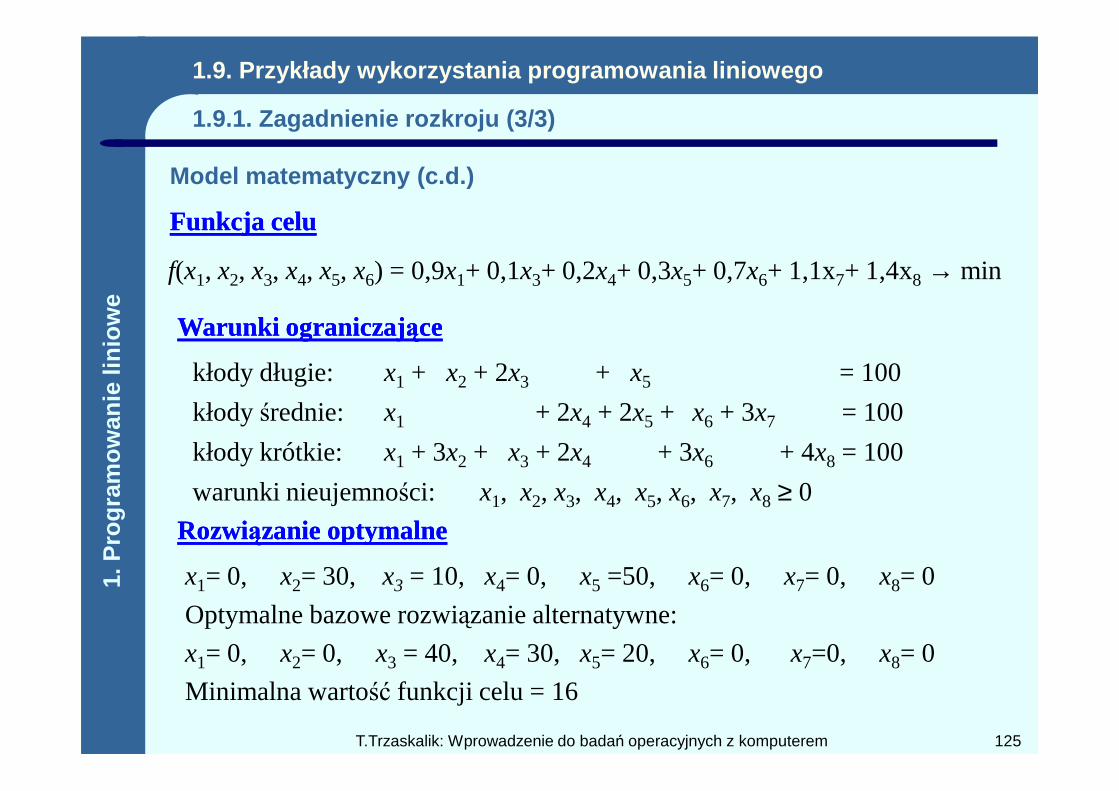
1. P
rogr
amow
anie
lini
owe
Funkcja celuFunkcja celu
f(x1, x2, x3, x4, x5, x6) = 0,9x1+ 0,1x3+ 0,2x4+ 0,3x5+ 0,7x6+ 1,1x7+ 1,4x8 → min
Warunki ograniczająceWarunki ograniczające
kłody długie: x1 + x2 + 2x3 + x5 = 100
1.9. Przykłady wykorzystania programowania liniowego
1.9.1. Zagadnienie rozkroju (3/3)
Model matematyczny (c.d.)
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 125
kłody średnie: x1 + 2x4 + 2x5 + x6 + 3x7 = 100
kłody krótkie: x1 + 3x2 + x3 + 2x4 + 3x6 + 4x8 = 100
warunki nieujemności: x1, x2, x3, x4, x5, x6, x7, x8 ≥ 0
Rozwiązanie optymalneRozwiązanie optymalne
x1= 0, x2= 30, x3 = 10, x4= 0, x5 =50, x6= 0, x7= 0, x8= 0
Optymalne bazowe rozwiązanie alternatywne:
x1= 0, x2= 0, x3 = 40, x4= 30, x5= 20, x6= 0, x7=0, x8= 0
Minimalna wartość funkcji celu = 16
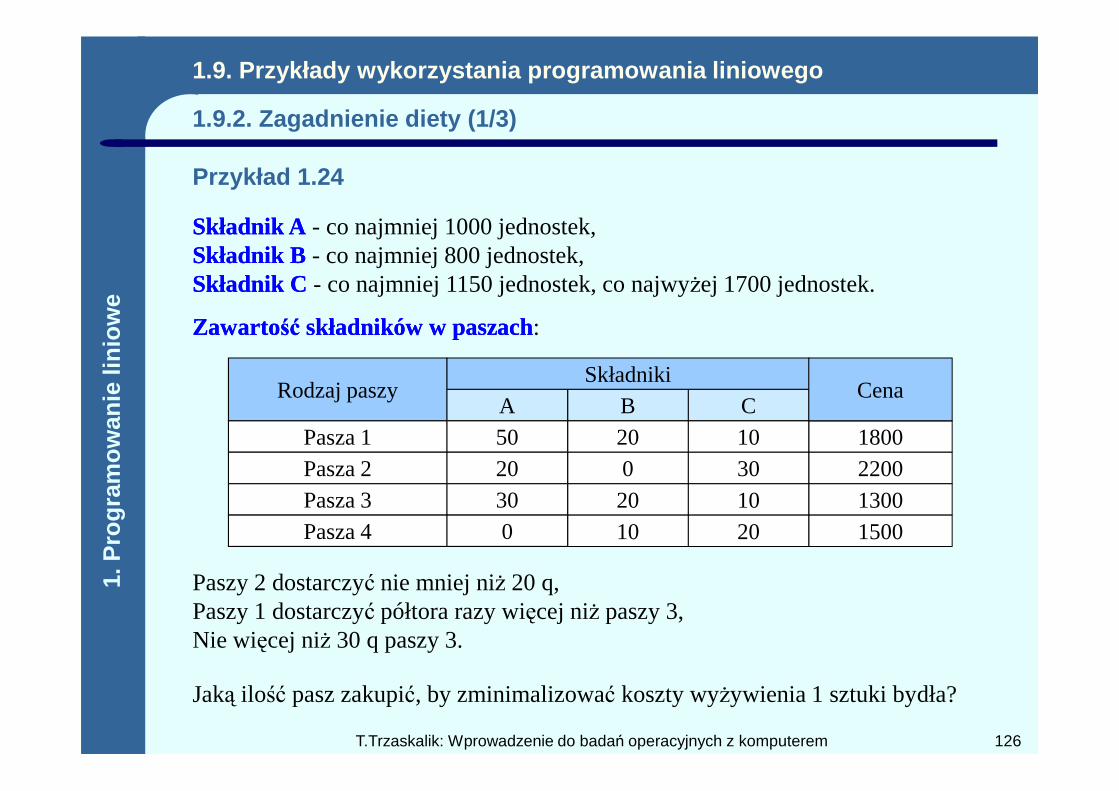
1. P
rogr
amow
anie
lini
owe
Rodzaj paszyA B C
SkładnikiCena
Składnik ASkładnik A - co najmniej 1000 jednostek,Składnik BSkładnik B - co najmniej 800 jednostek,Składnik CSkładnik C - co najmniej 1150 jednostek, co najwyżej 1700 jednostek.
ZawartośćZawartość składnikówskładników ww paszachpaszach:
1.9. Przykłady wykorzystania programowania liniowego
1.9.2. Zagadnienie diety (1/3)
Przykład 1.24
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 126
Rodzaj paszyA B C
Pasza 1 50 20 10 1800
Cena
Pasza 2 20 0 30 2200Pasza 3 30 20 10 1300Pasza 4 0 10 20 1500
Paszy 2 dostarczyć nie mniej niż 20 q,Paszy 1 dostarczyć półtora razy więcej niż paszy 3,Nie więcej niż 30 q paszy 3.
Jaką ilość pasz zakupić, by zminimalizować koszty wyżywienia 1 sztuki bydła?
1. P
rogr
amow
anie
lini
owe
CelCel
Minimalizacja kosztów wyżywienia 1 sztuki bydła rocznie.
1.9. Przykłady wykorzystania programowania liniowego
1.9.2. Zagadnienie diety (2/3)
Model matematyczny
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 127
Zmienne decyzyjneZmienne decyzyjne
x1 – planowana ilość zakupionej paszy 1,
x2 – planowana ilość zakupionej paszy 2,
x3 – planowana ilość zakupionej paszy 3,
x4 – planowana ilość zakupionej paszy 4,
1. P
rogr
amow
anie
lini
owe
Funkcja celuFunkcja celuf(x1, x2, x3, x4) = 1800x1 + 2200x2 + 1300x3 + 1500x4 → min
Warunki ograniczająceWarunki ograniczające
Składnik A: 50x1 + 20x2 + 30x3 ≥ 1000Składnik B: 20x1 + + 20x3 + 10x4 ≥ 800Składnik C: 10x + 30x + 10x + 20x ≥ 1150
1.9. Przykłady wykorzystania programowania liniowego
1.9.2. Zagadnienie diety (3/3)
Model matematyczny (c.d.)
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 128
Rozwiązanie optymalneRozwiązanie optymalne
x1 = 20, x2 = 18,33, x3 = 13,33, x4 = 13,33.
Optymalna wartość funkcji celu jest równa 113666,67
Składnik C: 10x1 + 30x2 + 10x3 + 20x4 ≥ 115010x1 + 30x2 + 10x3 + 20x4 ≤ 1700
Pasza 2: x2 ≥ 20Pasza 1 i 3: x1 = 1,5x3
Pasza 3: x3 ≤ 30
Warunki nieujemności: x1, x2, x3, x4 ≥ 0
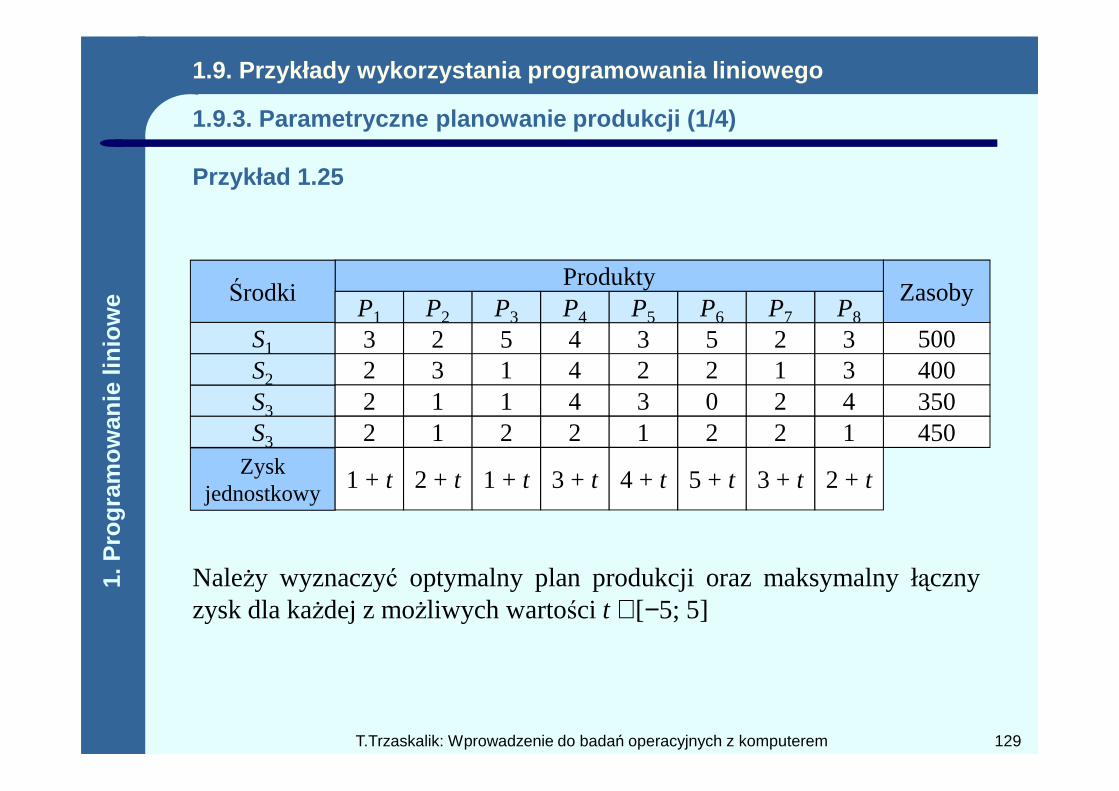
1. P
rogr
amow
anie
lini
owe
Produkty
500
Zasoby
400350
Środki
S1
S2
S
P1
322
P2
231
P3
511
P4
444
P5
323
P6
520
P7
212
P8
334
1.9. Przykłady wykorzystania programowania liniowego
1.9.3. Parametryczne planowanie produkcji (1/4)
Przykład 1.25
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 129
Należy wyznaczyć optymalny plan produkcji oraz maksymalny łącznyzysk dla każdej z możliwych wartości t ∈[−5; 5]
350450
S3
Zysk jednostkowy
S3
22
1 + t
11
2 + t
12
1 + t
42
3 + t
31
4 + t
02
5 + t
22
3 + t
41
2 + t
1. P
rogr
amow
anie
lini
owe
CelCel
Wyznaczenie optymalnego planu produkcji maksymalizującego łącznyzysk.
Zmienne decyzyjneZmienne decyzyjne
1.9. Przykłady wykorzystania programowania liniowego
1.9.3. Parametryczne planowanie produkcji (2/4)
Model matematyczny
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 130
x1 – planowane rozmiary produkcji produktu P1,x2 – planowane rozmiary produkcji produktu P2,x3 – planowane rozmiary produkcji produktu P3,x4 – planowane rozmiary produkcji produktu P4,x5 – planowane rozmiary produkcji produktu P5,x6 – planowane rozmiary produkcji produktu P6,x7 – planowane rozmiary produkcji produktu P7,
x8 – planowane rozmiary produkcji produktu P8,
1. P
rogr
amow
anie
lini
owe
Funkcja celuFunkcja celu
f(x1, x2, x3, x4, x5, x6 , x7, x8, t) = (1 + t)x1 + (2 + t)x2 + (1 + t)x3 + (3 + t)x4 + (4 + t)x5 + (5 + t)x6 + (3 + t)x7 + (2 + t)x8 → min
Warunki ograniczająceWarunki ograniczające
1.9. Przykłady wykorzystania programowania liniowego
1.9.3. Parametryczne planowanie produkcji (3/4)
Model matematyczny (c.d.)
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 131
Warunki ograniczająceWarunki ograniczające
Środek S1: 3x1 + 2x2 + 5x3 + 4x4 + 3x5 + 5x6 + 2x7 + 3x8 ≤ 500
Środek S2: 2x1 + 3x2 + x3 + 4x4 + 2x5 + 2x6 + x7 + 3x8 ≤ 400
Środek S3: 2x1 + x2 + x3 + 4x4 + 3x5 + + 2x7 + 4x8 ≤ 350
Warunki nieujemności: x1, x2, x3, x4, x5, x6, x7, x8 ≥ 0
Środek S4: 2x1 + x2 + 2x3 + 2x4 + x5 + 2x6 + 2x7 + x8 ≤ 450
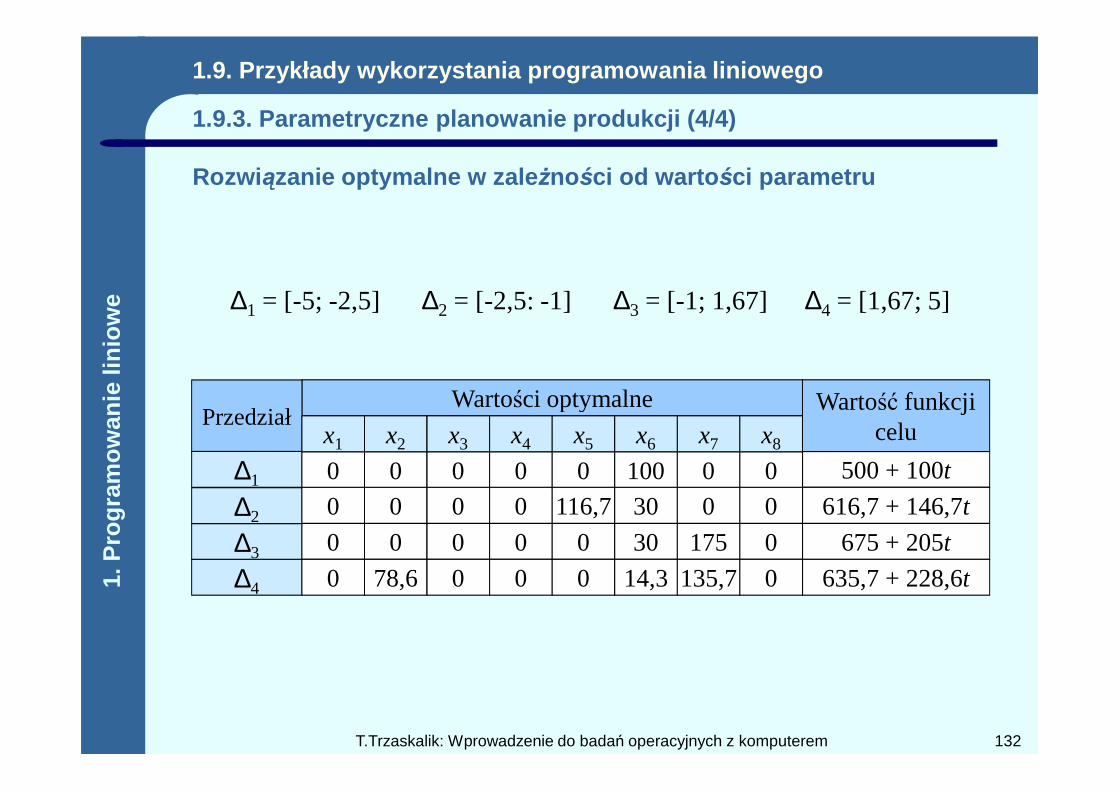
1. P
rogr
amow
anie
lini
owe
∆1 = [-5; -2,5] ∆2 = [-2,5: -1] ∆3 = [-1; 1,67] ∆4 = [1,67; 5]
Wartości optymalne Wartość funkcji
1.9. Przykłady wykorzystania programowania liniowego
1.9.3. Parametryczne planowanie produkcji (4/4)
Rozwi ązanie optymalne w zale żności od warto ści parametru
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 132
Wartości optymalne
500 + 100t
Wartość funkcji celu
616,7 + 146,7t
675 + 205t
635,7 + 228,6t
Przedział
∆1
∆2
∆3
∆4
x1
0
0
0
0
x2
0
0
0
78,6
x3
0
0
0
0
x4
0
0
0
0
x5
0
116,7
0
0
x6
100
30
30
14,3
x7
0
0
175
135,7
x8
0
0
0
0
1. P
rogr
amow
anie
lini
owe Pora na relaksPora na relaks
1. P
rogr
amow
anie
lini
owe
T.Trzaskalik: Wprowadzenie do badań operacyjnych z komputerem 133




