
Phương pháp phần tử hữu hạn
89
Phương pháp phần tử hữu hạn NGUYỄN TIẾN DŨNG Bộ môn Cơ học kết cấu - Đại học Xây dựng Hà nội Hà nội 06-2009
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of Phương pháp phần tử hữu hạn
Phương pháp
phần tử hữu hạn
NGUYỄN TIẾN DŨNGBộ môn Cơ học kết cấu - Đại học Xây dựng Hà nội
Hà nội 06-2009


Mục lục
1 Mở đầu 11.1 Phương pháp phần tử hữu hạn . . . . . . . . . . . . . . . . . . . . . 11.2 Cơ sở ten sơ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Chuyển trục toạ độ . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4 Giải tích véc tơ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.5 Đại số tuyến tính . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.6 Cơ sở lý thuyết đàn hồi . . . . . . . . . . . . . . . . . . . . . . . . . 91.7 Bài tập . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Phương trình cơ sở và phương trình biến thiên 132.1 Phương trình cơ sở . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1.1 Thanh chịu kéo nén . . . . . . . . . . . . . . . . . . . . . . . 132.1.2 Thanh chịu uốn ngang phẳng . . . . . . . . . . . . . . . . . 142.1.3 Vật thể đàn hồi . . . . . . . . . . . . . . . . . . . . . . . . . . 152.1.4 Tấm chịu uốn . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2 Thiết lập phương trình biến thiên từ nguyên lý công khả dĩ . . . . 182.2.1 Nguyên lý công khả dĩ . . . . . . . . . . . . . . . . . . . . . . 182.2.2 Thanh chịu kéo nén . . . . . . . . . . . . . . . . . . . . . . . 192.2.3 Thanh chịu uốn ngang phẳng . . . . . . . . . . . . . . . . . 192.2.4 Vật thể đàn hồi . . . . . . . . . . . . . . . . . . . . . . . . . . 192.2.5 Tấm chịu uốn . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.3 Thiết lập phương trình biến thiên từ phương pháp hàm thử . . . . 192.3.1 Thanh chịu kéo nén . . . . . . . . . . . . . . . . . . . . . . . 202.3.2 Thanh chịu uốn ngang phẳng . . . . . . . . . . . . . . . . . 202.3.3 Vật thể đàn hồi . . . . . . . . . . . . . . . . . . . . . . . . . . 212.3.4 Tấm chịu uốn . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4 Bài tập . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
i
ii Mục lục
3 Hệ thanh 233.1 Hàm chuyển vị . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.1.1 Thanh chịu kéo nén dọc trục . . . . . . . . . . . . . . . . . . 233.1.2 Thanh chịu uốn ngang phẳng . . . . . . . . . . . . . . . . . 253.1.3 Thanh chịu xoắn thuần tuý . . . . . . . . . . . . . . . . . . . 29
3.2 Dạng ma trận của các bài toán cơ bản . . . . . . . . . . . . . . . . . 303.2.1 Thanh chịu kéo nén dọc trục . . . . . . . . . . . . . . . . . . 313.2.2 Thanh chịu uốn ngang phẳng . . . . . . . . . . . . . . . . . 323.2.3 Thanh chịu xoắn thuần tuý . . . . . . . . . . . . . . . . . . . 35
3.3 Dàn phẳng . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.4 Khung phẳng . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.4.1 Thanh hai đầu nút cứng (N-N) . . . . . . . . . . . . . . . . . 393.4.2 Thanh đầu trái là khớp, đầu phải là nút cứng (K-N) . . . . . 403.4.3 Thanh đầu trái là nút cứng, đầu phải là khớp (N-K) . . . . 41
3.5 Khung không gian . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.6 Ma trận độ cứng và véc tơ lực nút của hệ kết cấu . . . . . . . . . . 443.7 Xác định chuyển vị và nội lực . . . . . . . . . . . . . . . . . . . . . . 453.8 Bài tập . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4 Bài toán phẳng của lý thuyết đàn hồi 494.1 Hàm chuyển vị . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.1.1 Phần tử tam giác ba điểm nút . . . . . . . . . . . . . . . . . 504.1.2 Phần tử tứ giác bốn điểm nút . . . . . . . . . . . . . . . . . . 524.1.3 Phần tử hữu hạn bậc cao . . . . . . . . . . . . . . . . . . . . 53
4.2 Phần tử cơ sở và hoán chuyển đẳng hướng . . . . . . . . . . . . . . 544.2.1 Phần tử cơ sở tứ giác . . . . . . . . . . . . . . . . . . . . . . . 574.2.2 Phần tử cơ sở tam giác . . . . . . . . . . . . . . . . . . . . . . 58
4.3 Ma trận độ cứng và véc tơ lực nút . . . . . . . . . . . . . . . . . . . 594.4 Tích phân số . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 604.5 Bài tập . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5 Tấm và vỏ 635.1 Tấm chịu uốn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.1.1 Hàm chuyển vị . . . . . . . . . . . . . . . . . . . . . . . . . . 645.1.2 Biến dạng . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 655.1.3 Ma trận độ cứng và véc tơ lực nút . . . . . . . . . . . . . . . 66

Mục lục iii
5.1.4 Ví dụ phân tích tấm uốn . . . . . . . . . . . . . . . . . . . . . 665.2 Vỏ mỏng . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.2.1 Phần tử vỏ phẳng . . . . . . . . . . . . . . . . . . . . . . . . . 685.2.2 Phần tử vỏ cong . . . . . . . . . . . . . . . . . . . . . . . . . 685.2.3 Phần tử vỏ nội suy . . . . . . . . . . . . . . . . . . . . . . . . 69
5.3 Bài tập . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
6 Bài toán động lực học 756.1 Phương trình động lực học . . . . . . . . . . . . . . . . . . . . . . . 756.2 Dạng ma trận . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 766.3 Dao động tự do không có lực cản . . . . . . . . . . . . . . . . . . . . 786.4 Bài tập . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Tài liệu tham khảo 81


Chương 1
Mở đầu
Chương này giới thiệu một số khái niệm mở đầu, các ký hiệu, quy uớc, cơ sởtoán học và cơ học được sử dụng trong tài liệu.
1.1 Phương pháp phần tử hữu hạn
Phương pháp phần tử hữu hạn (the Finite Element Method - FEM) là mộtphương pháp số để phân tích những phương trình vi phân đạo hàm riêng đượcsử dụng để mô tả các bài toán trong cơ học. Quá trình tính theo phương phápphần tử hữu hạn thường thường dẫn đến việc giải một hệ phương trình đại sốtuyến tính, được biểu diễn theo ngôn ngữ ma trận, và có thể được tự động hoátrên máy tính. Để biết thêm về lịch sử, cơ sở lý thuyết và ứng dụng của phươngpháp phần tử hữu hạn, người đọc có thể tham khảo thêm các tài liệu của cáctác giả Zienkiewicz (1971), Bathe (1996), Bernadou (1996), Hughes (2000), Engelet al. (2002), Chapelle and Bathe (2003) và Wells (2006).
Trong phân tích kết cấu bằng Phương pháp phần tử hữu hạn, vật thể liêntục được xấp xỉ bằng tổ hợp của các phần tử hữu hạn. Các phần tử này có kíchthước hữu hạn và được liên kết với nhau bằng một số hữu hạn các điểm nút.Sau khi mối quan hệ ứng suất - biến dạng của các phần tử hữu hạn được thiếtlập và lắp ghép với nhau, trạng thái ứng suất - biến dạng của hệ kết cấu có thểđược xác định.
Các công thức cơ bản của phương pháp phần tử hữu hạn thường được thiếtlập trên nền tảng của các nguyên lý năng lượng hoặc các công thức biến thiên.Khi thiết lập công thức, có thể chọn trường biến dạng hay trường ứng suấtlàm ẩn số chính, và tương ứng với nó phương pháp phần tử hữu hạn mô hình
1
2 Mở đầu
chuyển vị và mô hình ứng suất được sử dụng. Trong thực hành, phương phápphần tử hữu hạn mô hình chuyển vị thường được sử dụng.
Việc phân tích kết cấu bằng phương pháp phần tử hữu hạn theo mô hìnhchuyển vị thường gồm các bước sau:
• Rời rạc hoá kết cấu thành các phần tử hữu hạn;
• Chọn các hàm chuyển vị mô tả chuyển vị của phần tử hữu hạn;
• Lập ma trận độ cứng và véc tơ lực nút của các phần tử hữu hạn trong hệtoa độ địa phương;
• Lập ma trận độ cứng và véc tơ lực nút của các phần tử hữu hạn trong hệtoạ độ chung;
• Lập ma trận độ cứng và véc tơ lực nút của hệ kết cấu;
• Thi hành các điều kiện biên;
• Giải hệ phương trình cân bằng để tìm véc tơ chuyển vị nút trong hệ toạ độchung;
• Tìm véc tơ chuyển vị nút trong hệ toạ độ địa phương;
• Tính nội lực, biến dạng, ứng suất trong các phần tử.
Độ chính xác của kết quả tính phụ thuộc vào độ mịn của lưới chia, bậc củacác hàm xấp xỉ sử dụng để mô tả các phần tử hữu hạn và độ chính xác của việcgiải hệ phương trình đại số.
1.2 Cơ sở ten sơ
Trong phân tích kết cấu thường gặp các đại lượng véc tơ và ten sơ. Ví dụ chuyểnvị hay ngoại lực tại một điểm là một đại lượng véc tơ, ứng suất hay biến dạngtại một điểm là một đại lượng ten sơ. Một đại lượng véc tơ hoặc ten sơ có thểđưọc biểu diễn trong các hệ toạ độ (hay hệ cơ sở) khác nhau. Trong phần lớn nộidung tài liệu này, hệ toạ độ đề các (Cartesian), trực chuẩn (orthonormal) đượcsử dụng. Điều này làm đơn giản hoá các triển khai. Một đại lượng véc tơ và tensơ do đó có thể được biểu diễn đầy đủ qua các thành phần của chúng, với cácvéc tơ cơ sở có chiều dài bằng đơn vị.

1.2. Cơ sở ten sơ 3
e1(1, 0, 0)
e2(0, 1, 0)
e3(0, 0, 1)a
a1
a2
a3
x1
x2
x3
Hình 1.1: Hệ cơ sở trực chuẩn.
Trong tài liệu, các đại lượng vô hướng được ký hiệu bằng các ký tự in thường(l, a, E ...), các đại lượng véc tơ, ten sơ và ma trận được ký hiệu bằng các ký tựin đậm (u, σ, M, ...).
Một véc tơ a trong không gian thực d chiều Rd thường được biểu diễn qua
các thành phần véc tơ ai, i = 1 → d, như sau:
a =
a1
a2
...
ad
. (1.1)
Nhân vô hướng hai véc tơ a và b có cùng chiều d được định nghĩa là một đạilượng vô hướng:
s = a · b =d
∑i=1
aibi, (1.2)
trong đó (·) ký hiệu phép nhân vô hướng.Einstein (1916) đã đề xuất ký hiệu phép tổng (Einstein summation) để biểu
diễn rút gọn các phép tính véc tơ và ten sơ dưới dạng chỉ số, xem thêm Hughes(2000). Để biểu diễn số hạng sau cùng của biểu thức trên, ký hiệu phép tổngđược bỏ qua. Khi các chỉ số của các thừa số trong phép tính trùng nhau (chỉ sối), phép tổng được thực hiện lặp lại theo chỉ số đó (i = 1 → d). Ví dụ, khi d = 3:
s = aibi = a1b1 + a2b2 + a3b3. (1.3)
4 Mở đầu
Chiều dài của một véc tơ được định nghĩa từ kết quả phép nhân vô hướng củavéc tơ với chính nó:
a = ‖a‖ =√
a · a =√
aiai. (1.4)
Tương tự như các véc tơ, một ten sơ bậc hai A trong không gian thực d chiềuR
d thường được biểu diễn qua các thành phần véc tơ Aij, i, j = 1 → d, như sau:
A = Aij =
A11 A12 ... A1d
A21 A22 ... A2d
... ... ... ...
Ad1 Ad2 ... Add
. (1.5)
Véc tơ và ten sơ có thể liên hệ với nhau như sau:
a = ai = Ab = Aijbj, (1.6)
C = Cik = AB = Aijbjk. (1.7)
Một ten sơ bậc hai A có chuyển vị đưọc ký hiệu bởi AT và được định nghĩabởi:
b · Ac = Ac · b = c · ATb, (1.8)
Hay ký hiệu dưới dạng chỉ số:
bi(Aijcj) = (Aijcj)bi = cj(Ajibi). (1.9)
Dạng tường minh:AT
ij = Aji. (1.10)
Phép tính sau hay được sử dụng, liên quan tới chuyển vị ten sơ:
(AB)T = BT AT. (1.11)
Một ten sơ bậc hai có thể nhận được từ phép nhân ten sơ của hai véc tơ:
A = a ⊗ b, (1.12)
hayAij = aibj. (1.13)
Vết của một ten sơ bậc hai được định nghĩa là tổng của các số hạng trênđường chéo chính:
tr (A) = Aii, (1.14)

1.3. Chuyển trục toạ độ 5
Tích vô hướng của hai ten sơ bậc hai có thể định nghĩa bởi:
s = A : B = tr(
ATB)
= AijBij. (1.15)
Ten sơ bậc hai đơn vị I đưọc định nghĩa bởi:
a = I · a, (1.16)
và có thể xác định bởi:I = δijei ⊗ ej, (1.17)
trong đó δij là Kronecker-delta, δij = 1 khi i = j và δij = 0 khi i 6= j.Nhân hữu hướng (nhân véc tơ) giữa hai véc tơ trong không gian R
3 đượcđịnh nghĩa bởi:
c = a × b =
a2b3 − a3b2
a3b1 − a1b3
a1b2 − a2b1
. (1.18)
Một ten sơ bậc ba có thể định nghĩa từ phép nhân ten sơ của một ten sơ bậchai và một véc tơ. Ten sơ bậc ba hay được sử dụng là ten sơ hoán vị vòng quanh(permutation) E :
E = Eijk = ei ·(ej × ek
). (1.19)
Ten sơ này có đặc điểm: khi các chỉ số lặp lại, Eijk = 0; nếu sự hoán vị (i, j, k) làchẵn (thuận), Eijk = 1; nếu sự hoán vị (i, j, k) là lẻ (nghịch), Eijk = −1. Sử dụngten sơ hoán vị vòng quanh, phép nhân có hướng hai véc tơ có thể định nghĩabởi:
c = a × b = E : (a ⊗ b) (1.20)
Ten sơ bậc bốn thường gặp là ten sơ đàn hồi của vật liệu:
C = Cijkl. (1.21)
1.3 Chuyển trục toạ độ
Trong tính toán thực hành, ngoài hệ trục toạ độ chung (tổng thể) cho toàn hệkết cấu, mỗi phần tử hữu hạn được gắn với một hệ toạ độ riêng (địa phương).Mối quan hệ giữa các đại lượng trong hệ toạ độ chung và riêng được thực hiệnqua một ma trận chuyển trục toạ độ. Xét hai hệ toạ độ ei và e′j, i = 1 → d. Matrận chuyển trục T giữa hai hệ toạ độ được định nghĩa:
Tij = ei · e′j. (1.22)

6 Mở đầu
e′1(1, 0, 0)
e′2(0, 1, 0)
e′3(0, 0, 1)
e1(cosα, sinα, 0)e2(−sinα, cosα, 0)
e3(0, 0, 1)
x1
x2
x3
x′1
x′2
x′3
α
Hình 1.2: Chuyển trục toạ độ.
Trong phạm vi bài toán phẳng, ma trận chuyển trục có dạng:
T =
e1 · e′1 e1 · e′2 e1 · e′3e2 · e′1 e2 · e′2 e2 · e′3e3 · e′1 e3 · e′2 e3 · e′3
=
cosα sinα 0
−sinα cosα 0
0 0 1
. (1.23)
Chú ý là ma trận T là ma trận trực giao:
TTT = TTT = I, (1.24)
hayTT = T−1. (1.25)
Một đại lượng véc tơ được biểu diễn trong hai hệ toạ độ ei và e′j qua hai véc tơa và a′ có mối quan hệ sau:
a = Ta′ = Tija′j, (1.26)
vàa′ = TTa = Tjiaj. (1.27)
Một đại lượng ten sơ bậc hai được biểu diễn trong hai hệ toạ độ qua hai tensơ A và A′ có mối quan hệ sau:
A = TA′TT = Aij = Tik A′kmTjm, (1.28)
vàA′ = TT AT = A′
ij = Tki AkmTmj. (1.29)
1.4. Giải tích véc tơ 7
1.4 Giải tích véc tơ
Ký hiệu đạo hàm riêng
u,x =∂u
∂x, (1.30)
u,xx =∂2u
∂x2, (1.31)
u,xxxx =∂4u
∂x4, (1.32)
u,xy =∂2u
∂x∂y. (1.33)
Toán tử Laplace, ký hiệu bởi ∇, được định nghĩa bởi
∇ =∂
∂xi. (1.34)
Trong không gian R3, ∇ được triển khai:
∇ =
∂∂x1∂
∂x2∂
∂x3
. (1.35)
Một triển khai quan trọng là vi phân của một hàm. Vi phân của một trườngvéc tơ a là một đại lượng vô hướng, được ký hiệu bởi ∇ · a:
∇ · a =∂ai
∂xi= ai,i. (1.36)
Trong không gian R3,
∇ · a =∂a1
∂x1+
∂a2
∂x2+
∂a3
∂x3. (1.37)
Vi phân của một trường ten sơ bậc hai là một đại lượng véc tơ:
∇ · A =∂Aij
∂xj= Aij,j. (1.38)
Trong không gian R2,
∇ · A =
[∂A11∂x1
+ ∂A12∂x2
∂A11∂x1
+ ∂A12∂x2
]
. (1.39)

8 Mở đầu
Một triển khai quan trọng khác là gradient của một hàm. Gradient của mộtđại lượng vô hướng là một véc tơ:
∇a =∂a
∂xi= a,i. (1.40)
Trong không gian R3,
∇a =
∂a∂x1∂a
∂x2∂a
∂x3
. (1.41)
Gradient của một véc tơ là một đại lượng ten sơ bậc hai:
∇a =∂ai
∂xj= ai,j. (1.42)
Trong không gian R2,
∇a =
[∂a1∂x1
∂a1∂x2
∂a2∂x1
∂a2∂x2
]
. (1.43)
Các công thức cơ bản của phương pháp phần tử hữu hạn được xây dựng trênlý thuyết vi phân (lý thuyết Gauss). Lý thuyết này chuyển đổi một tích phân trênthể tích về tích phân trên bề mặt. Xét một vật thể có thể tích Ω và biên ∂Ω. Mộtđiểm trên biên có véc tơ pháp tuyến n. Lý thuyết vi phân chỉ ra rằng, cho mộttrường véc tơ a,
∫
Ω∇ · a dΩ =
∫
∂Ωa · n dΓ. (1.44)
Với một trường ten sơ A,∫
Ω∇ · A dΩ =
∫
∂ΩAn dΓ. (1.45)
Công thức tích phân từng phần thường xuyên được sử dụng trong thiết lậpcông thức phần tử hữu hạn. Cho một trường véc tơ a và một trường ten sơ B, tacó: ∫
Ωa · (∇ · B) dΩ = −
∫
Ω∇a : B dΩ +
∫
∂Ωa · Bn dΓ. (1.46)
Tương tự, cho một trường vô hướng a và một trường véc tơ b,∫
Ωa (∇ · b) dΩ = −
∫
Ω∇a · b dΩ +
∫
∂Ωa (b · n) dΓ, (1.47)

1.5. Đại số tuyến tính 9
1.5 Đại số tuyến tính
Các giá trị riếng và véc tơ riêng của một ma trận là các tính chất của nó. Cho matrận A và véc tơ b, đại lượng vô hướng λ được gọi là trị riêng của ma trận nếu:
(A − λI) b = 0, (1.48)
véc tơ b tưong ứng với λ gọi là véc tơ riêng. Phương trình trên tương đương vớiphương trình sau:
det (A − λI) = 0, (1.49)
Hệ phương trình đại số tuyến tính n ẩn số có thể biểu diễn bởi:
Ku = f . (1.50)
Trong phương pháp phần tử hữu hạn, K là ma trận độ cứng của hệ kết cấu, f làvéc tơ lực nút. Véc tơ chuyển vị nút tìm đuợc:
u = K−1 f . (1.51)
1.6 Cơ sở lý thuyết đàn hồi
Phương trình cân bằng (Navier-Cauchy):
∇ · σ + f = 0, (1.52)
hayσij,j + fi = 0. (1.53)
Phương trình cân bằng trên bề mặt:
σn = t, (1.54)
hayσijnj = ti, (1.55)
trong đó t là véc tơ lực bề mặtLiên hệ biến dạng chuyển vị (công thức Cauchy):
ǫ = ∇Su, (1.56)

10 Mở đầu
hayǫij =
1
2
(ui,j + uj,i
), (1.57)
là một ten sơ bậc hai đối xứng.Phương trình vật lý (định luật Hooke):
σ = Cǫ, (1.58)
hayσij = Cijklǫkl , (1.59)
trong đó C là ten sơ đàn hồi bậc bốn của vật liệu,
Cijkl = µ(δikδjl + δilδjk
)+ λδijδkl, (1.60)
trong đóλ =
νE
(1 + ν) (1 − 2ν), (1.61)
vൠ=
E
2 (1 + ν). (1.62)
E là mô đun Young, ν là hệ số Poisson, λ và µ là các hệ số Lamé.Trong thực hành, các ten sơ biến dạng ǫ và ứng suất σ thường được viết lại
dưới dạng véc tơ. Do tính chất đối xứng của các ten sơ này, các véc tơ biến dạngvà ứng suất chỉ có 6 số hạng độc lập:
ǫ =
ǫ11
ǫ22
ǫ33
2ǫ12
2ǫ23
2ǫ31
=
ǫ11
ǫ22
ǫ33
γ12
γ23
γ31
=
u1,1
u2,2
u3,3
u1,2 + u2,1
u2,3 + u3,2
u3,1 + u1,3
, (1.63)
và
σ =
σ11
σ22
σ33
σ12
σ23
σ31
. (1.64)
1.7. Bài tập 11
Phương trình vật lý được viết lại dưới dạng ma trận:
σ = Dǫ, (1.65)
trong đó ma trận đàn hồi D:
D =
λ + 2µ λ λ 0 0 0
λ λ + 2µ λ 0 0 0
λ λ λ + 2µ 0 0 0
0 0 0 µ 0 0
0 0 0 0 µ 0
0 0 0 0 0 µ
. (1.66)
Trong thực hành, thường gặp các bài toán phẳng: ứng suất phẳng, biến dạngphẳng và đối xứng trục.
1.7 Bài tập
Bài 1: Lập một sơ đồ tính tấm phẳng tuỳ chọn và phân tích kết cấu đã chọnbằng một chương trình phần tử hữu hạn thông dụng (Sap2000, Etabs ...). Khảosát sự hội tụ của kết quả khi thay đổi lưới chia các phần tử hữu hạn theo thứ tựsau:
• Chọn một lưới chia mịn nhất có thể, phân tích kết cấu, xác định chuyểnvị tại một điểm tuỳ chọn trên kết cấu và sử dụng làm kết quả để so sánhure f ;
• Thay đổi lưới chia, tính chuyển vị tại điểm đã ấn định ui, tính sai sốe = ure f − ui;
• Vẽ đồ thị liên hệ giữa số lượng phần tử n và sai số e;
• Vẽ đồ thị liên hệ giữa log(n) và log(e);
• Nhận xét kết quả.
Bài 2: Trong không gian 3 chiều (d = 3), triển khai các biểu thức sau:a) aibi
b) aibj

12 Mở đầu
c) AijBij
d) AijBjk
e) Aijbi
f) Aijbj
g) ∇ · a
h) ∇a
i) A : B
j) (∇a) : B
Bài 3: Chứng minh công thức tích phân từng phần (1.46).
Bài 4: Áp dụng công thức tích phân từng phần cho biểu thức sau:∫
Ωu · (∇ · σ) dΩ (1.67)
và viết lại kết quả dưới dạng chỉ số.
Bài 5: Viết ma trận đàn hồi D cho các bài toán ứng suất phẳng σ33 = 0 và biếndạng phẳng ǫ33 = 0.
Chương 2
Phương trình cơ sở và phương trìnhbiến thiên
Bước quan trọng trước khi thiết lập các công thức cơ bản của phương pháp phầntử hữu hạn là biến đổi các phương trình cơ sở (strong form) mô tả các vấn đề cơhọc về các phương trình biến thiên (weak form). Việc sử dụng các phương trìnhbiến thiên cho phép giảm bậc của các phương trình cơ sở, và để thuận tiện choviệc triển khai phương pháp số trong các bước tiếp sau.
Chương này trình bày các phương trình cơ sở của một số bài toán cơ họcthường gặp, và hai phương pháp để xây dựng các phương trình biến thiên: sửdụng nguyên lý công khả dĩ và sử dụng hàm thử (hàm trọng số).
2.1 Phương trình cơ sở
Các phương trình cơ sở (phương trình gốc) mô tả các điều kiện cân bằng lực,cân bằng động học, điều kiện vật lý và các điều kiện biên của các bài toán cơhọc. Phần này giới thiệu lại các phương trình cơ sở của các vấn đề thanh chịukéo nén, thanh chịu uốn, vật thể đàn hồi chịu tải trọng và tấm chịu uốn.
2.1.1 Thanh chịu kéo nén
Xét thanh thẳng đàn hồi tuyến tính có tiết diện ngang A, chiều dài l, xemHình 2.1. Ký hiệu E là mô đun đàn hồi kéo nén của vật liệu. Chọn trục toạđộ x trùng với trục thanh. Một đầu thanh (x = 0) được cố định và đầu còn lại(x = l) được tác dụng một lực F. Thanh chịu tải trọng phân bố theo phương
13

14 Phương trình biến thiên
x
f F
l
EA
Hình 2.1: Thanh chịu kéo nén
trục thanh có cường độ f . Phương trình cân bằng và các điều kiện biên của hệcó thể viết:
Aσ,x + f = 0 x = 0 ÷ l, (2.1)u = 0 x = 0, (2.2)
Aσn = F x = l. (2.3)
Khi hệ thanh đàn hồi tuyến tính, định luật Hooke được sử dung, σ = Eǫ = Eu,x .Bài toán kéo thanh có thể viết: tìm trường chuyển vị u thoả mãn
EAu,xx + f = 0 x = 0 ÷ l, (2.4)u = 0 x = 0, (2.5)
EAu,x = F x = l. (2.6)
2.1.2 Thanh chịu uốn ngang phẳng
Xét thanh thẳng đàn hồi tuyến tính chiều dài l, xem Hình 2.2. Tiết diện ngangcủa thanh có độ cứng chống uốn EI. Chọn trục toạ độ x trùng với trục thanhvà trục y vuông góc với trục thanh. Một đầu thanh (x = 0) được cố định vàđầu còn lại (x = l) được tác dụng lực F vuông góc với trục thanh và mô menM. Thanh chịu tải trọng vuông góc với trục thanh có cường độ f . Ký hiệu u làchuyển vị theo phương y và φ là góc xoay, m và q là mô men uốn và lực cắt tạitiết diện. Phương trình cân bằng và các điều kiện biên của hệ có thể viết:
m,x − q = 0 x = 0 ÷ l, (2.7)q,x − f = 0 x = 0 ÷ l, (2.8)
u = 0 x = 0, (2.9)φ = 0 x = 0, (2.10)m = M x = l, (2.11)q = −F x = l. (2.12)
2.1. Phương trình cơ sở 15
x
y
f
F
M
l
EI
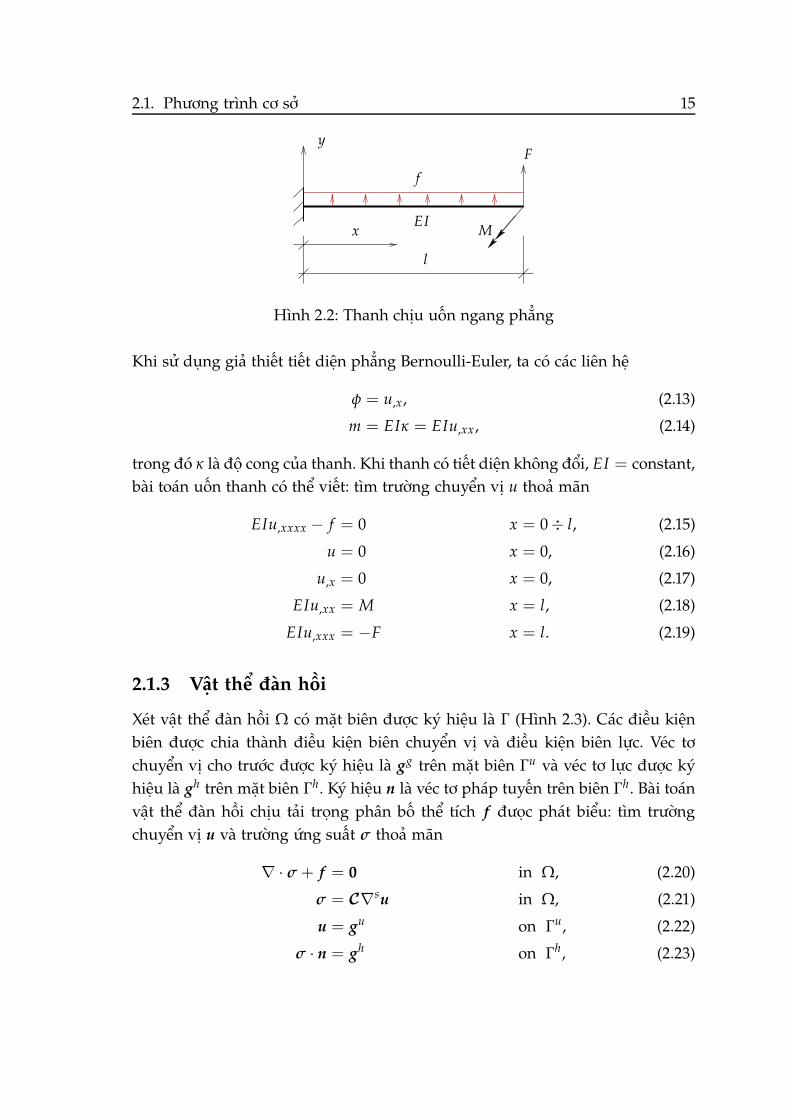
Hình 2.2: Thanh chịu uốn ngang phẳng
Khi sử dụng giả thiết tiết diện phẳng Bernoulli-Euler, ta có các liên hệ
φ = u,x, (2.13)m = EIκ = EIu,xx , (2.14)
trong đó κ là độ cong của thanh. Khi thanh có tiết diện không đổi, EI = constant,bài toán uốn thanh có thể viết: tìm trường chuyển vị u thoả mãn
EIu,xxxx − f = 0 x = 0 ÷ l, (2.15)u = 0 x = 0, (2.16)
u,x = 0 x = 0, (2.17)EIu,xx = M x = l, (2.18)
EIu,xxx = −F x = l. (2.19)
2.1.3 Vật thể đàn hồi
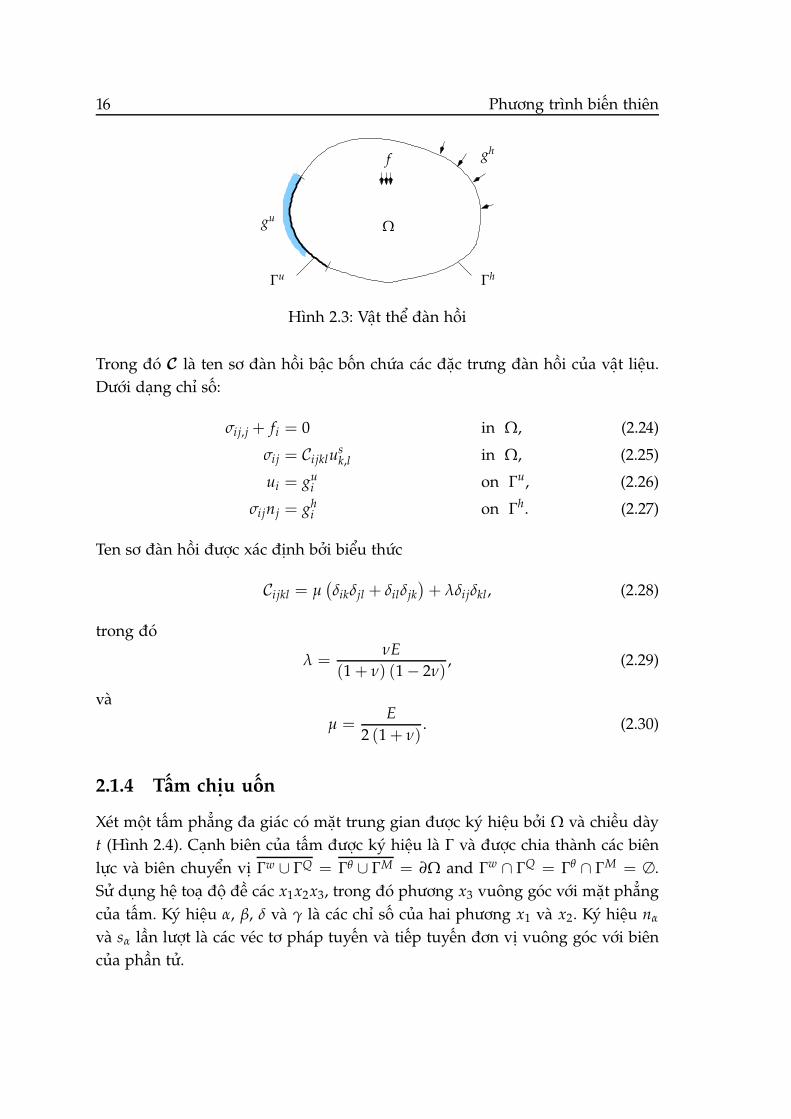
Xét vật thể đàn hồi Ω có mặt biên được ký hiệu là Γ (Hình 2.3). Các điều kiệnbiên được chia thành điều kiện biên chuyển vị và điều kiện biên lực. Véc tơchuyển vị cho trước được ký hiệu là gg trên mặt biên Γu và véc tơ lực được kýhiệu là gh trên mặt biên Γh. Ký hiệu n là véc tơ pháp tuyến trên biên Γh. Bài toánvật thể đàn hồi chịu tải trọng phân bố thể tích f đưọc phát biểu: tìm trườngchuyển vị u và trường ứng suất σ thoả mãn
∇ · σ + f = 0 in Ω, (2.20)σ = C∇su in Ω, (2.21)u = gu on Γu, (2.22)
σ · n = gh on Γh, (2.23)
16 Phương trình biến thiên
Ω
Γu
gu
Γh
ghf
Hình 2.3: Vật thể đàn hồi
Trong đó C là ten sơ đàn hồi bậc bốn chứa các đặc trưng đàn hồi của vật liệu.Dưới dạng chỉ số:
σij,j + fi = 0 in Ω, (2.24)σij = Cijklu
sk,l in Ω, (2.25)
ui = gui on Γu, (2.26)
σijnj = ghi on Γh. (2.27)
Ten sơ đàn hồi được xác định bởi biểu thức
Cijkl = µ(δikδjl + δilδjk
)+ λδijδkl, (2.28)
trong đó
λ =νE
(1 + ν) (1 − 2ν), (2.29)
vൠ=
E
2 (1 + ν). (2.30)
2.1.4 Tấm chịu uốn
Xét một tấm phẳng đa giác có mặt trung gian được ký hiệu bởi Ω và chiều dàyt (Hình 2.4). Cạnh biên của tấm được ký hiệu là Γ và được chia thành các biênlực và biên chuyển vị Γw ∪ ΓQ = Γθ ∪ ΓM = ∂Ω and Γw ∩ ΓQ = Γθ ∩ ΓM = ∅.Sử dụng hệ toạ độ đề các x1x2x3, trong đó phương x3 vuông góc với mặt phẳngcủa tấm. Ký hiệu α, β, δ và γ là các chỉ số của hai phương x1 và x2. Ký hiệu nα
và sα lần lượt là các véc tơ pháp tuyến và tiếp tuyến đơn vị vuông góc với biêncủa phần tử.

2.1. Phương trình cơ sở 17
x1
x2
x3Γu F
t
M Q
Γθ
ΓQ ΓM
Mt
Hình 2.4: Tấm chịu uốn.
Bài toán uốn tấm có thể được phát biểu là: cho tải trọng phân bố F vuông gócvới mặt phẳng tấm, và cho các chuyển vị thẳng, góc xoay, mô men uốn pháptuyến, và lực tác dụng trên các biên, ký hiệu lần lượt là gu, gθ, M, và Q; tìmtrường chuyển vị u thoả mãn
mαβ,αβ = F in Ω, (2.31)u = gu on Γu, (2.32)
u,αnα = gθ on Γθ , (2.33)mαβnαnβ = M on ΓM, (2.34)
−mαβ,βnα −(mαβnβsα
)
,s= Q on ΓQ, (2.35)
mαβnβsα|c+ − mαβnβsα|c− = 0 ∀ c ∈ ΓQ, (2.36)
trong đó c+ và c− là các điểm lân cận của điểm góc c trên đường biên lực cắt ΓQ.Phương trình cuối cùng biểu thị phương trình cân bằng của lực góc tấm. Tronghệ phương trình trên, ten sơ mô men mαβ liên hệ với chuyển vị thẳng của tấmqua liên hệ
mαβ = cαβγδ u,γδ, (2.37)
trong đó cαβγδ là ten sơ đàn hồi bậc bốn biểu thị các đặ trưng vật liệu. Khi vậtliệu là đàn hồi đẳng hướng,
cαβγδ =t3
12
µ
(δαγδβδ + δαδδβγ
)+ λδαβδγδ
, (2.38)
trong đó δαβ là Kronecker delta và các hệ số Lamé định nghĩa từ mô đun đànhồi Young E và hệ số Poisson ν,
λ =Eν
1 − ν2, (2.39)
µ =E
2 (1 + ν). (2.40)

18 Phương trình biến thiên
Người đọc có thể tham khảo thêm về bài toán uốn tấm trong các tài liệu về tấmvỏ, ví dụ Hughes (2000) và Hughes and Garikipati (2004).
2.2 Thiết lập phương trình biến thiên từ nguyên lýcông khả dĩ
2.2.1 Nguyên lý công khả dĩ
Công khả dĩ là công sinh ra bởi các lực trên những chuyển vị và biến dạng vôcùng bé do nguyên nhân bất kỳ nào đó gây ra. Các chuyển vị và biến dạng vôcùng bé thoả mãn các điều kiện động học của hệ gọi là chuyển vị khả dĩ và biếndạng khả dĩ.
Theo nguyên lý công khả dĩ, điều kiện cần và đủ để vật thể biến dạng ởtrạng thái cân bằng là công khả dĩ của các ngoại lực bằng năng lượng biến dạngkhả dĩ,
δT = δU, (2.41)
trong đó δT ký hiệu công khả dĩ của ngoại lực và δU ký hiệu thế năng biếndạng.
Xét một hệ đàn hồi cân bằng dưới tác dụng của trưòng lực phân bố thể tíchpV , trường lực phân bố bề mặt pS, các lực tập trung Pk, k = 1 → n. Ký hiệu σ làtrường ứng suất xuất hiện trên hệ. Gọi δu là trường chuyển vị khả dĩ, và δǫ làtrưòng biến dạng khả dĩ bất kỳ. Công khả dĩ của các ngoại lực trên các chuyểnvị khả dĩ xác định bởi biểu thức
δT =n
∑k=1
δuk · Pk +∫
Vδu · pV dV +
∫
Sδu · pSdS, (2.42)
và thế năng biến dạng khả dĩ tưong ứng
δU =∫
Vδǫ · σdV. (2.43)
Nguyên lý công khả dĩ viết dưới dạng chỉ số có dạng:
n
∑k=1
δuki Pk
i +∫
Vδui p
Vi dV +
∫
Sδui · pS
i dS =∫
VδǫijσijdV. (2.44)

2.3. Thiết lập phương trình biến thiên từ phương pháp hàm thử 19
2.2.2 Thanh chịu kéo nén
Áp dụng nguyên lý công khả dĩ cho thanh chịu kéo nén:
δu F +∫ l
0δu f dx = A
∫ l
0δǫxxσxx dx ∀δǫxx . (2.45)
Lưu ý đến các phương trình vật lý, bài toán thanh chịu kéo nén có thể viết: tìmtrường chuyển vị u thoả mãn
δu F +∫ l
0δu f dx = EA
∫ l
0δu,xu,x dx ∀δu. (2.46)
2.2.3 Thanh chịu uốn ngang phẳng
Phương trình biến thiên cho bài toán uốn thanh: tìm trường chuyển vị u thoảmãn
δu,x M + δuF +∫ l
0δu f dx =
∫ l
0δu,xxEIu,xxdx ∀δu. (2.47)
(2.48)
2.2.4 Vật thể đàn hồi
Phương trình biến thiên cho bài toán vật thể đàn hồi: tìm trường chuyển vị u
thoả mãn∫
Ωδui fidΩ +
∫
Γhδuig
hi dΓ =
∫
Ωδui,jσijdΩ ∀δu. (2.49)
2.2.5 Tấm chịu uốn
Tìm trường chuyển vị u thoả mãn∫
ΓM
δu,n MdΓ +∫
ΓQ
δuQdΓ +∫
Ωδu f dΩ =
∫
Ωδu,αβCαβγδu,γδdΩ ∀δu. (2.50)
2.3 Thiết lập phương trình biến thiên từ phươngpháp hàm thử
Phương pháp hàm thử là phương pháp tổng quát hơn cho phép biến đổi cácphương trình cơ sở thành các phương trình biến thiên. Phương pháp hàm thửsử dụng một hàm thử được định nghĩa trong một không gian khả tích phù hợp,và áp dụng tích phân từng phần để giảm bậc của các phương trình cơ sở.

20 Phương trình biến thiên
2.3.1 Thanh chịu kéo nén
Giả sử trường chuyển vị u là nghiệm của các phương trình (2.4) đến (2.6). Xéthàm thử w ∈ V , trong đó V là không gian của các hàm khả tích phù hợp địnhnghĩa trên miền đang xét. Chú ý là hàm w phải thoả mãn điều kiện w = 0 tạix = 0. Nhân hai vế của phương trình (2.4) với w và tích phân trên toàn hệ, ta có
∫ l
0wEAu,xxdx +
∫ l
0w f dx = 0 ∀w ∈ V . (2.51)
Tích phân từng phần cho số hạng thứ nhất, ta được
−∫ l
0w,xEAu,xdx + wEAu,x |l0 +
∫ l
0w f dx = 0 ∀w ∈ V . (2.52)
Lưu ý w = 0 tại x = 0 và EAu,x = F tại x = l; bài toán thanh chịu kéo nén đượcđịnh nghĩa: tìm trường chuyển vị u thoả mãn
∫ l
0w,xEAu,xdx =
∫ l
0w f dx + wF|x=l ∀w ∈ V . (2.53)
2.3.2 Thanh chịu uốn ngang phẳng
Tương tự như với trường hợp thanh chịu kéo nén, xét hàm thử w ∈ V . Nhân haivế của phương trình (2.15) với hàm thử w và tích phân trên toàn hệ ta đưọc:
∫ l
0wEIu,xxxxdx −
∫ l
0w f = 0 ∀w ∈ V . (2.54)
Tích phân từng phần số hạng thứ nhất của phương trình trên hai lần liên tiếp,ta được:
∫ l
0w,xxEIu,xxdx + wEIu,xxx|l0 − w,xEIu,xx|l0 −
∫ l
0w f = 0 ∀w ∈ V , (2.55)
Lưu ý w = 0 tại x = 0, EIu,xx = M tại x = l và EIu,xxx = −F tại x = l. Bàitoán thanh chịu uốn ngang phẳng được định nghĩa: tìm trường chuyển vị u thoảmãn:
∫ l
0w,xxEIu,xxdx =
∫ l
0w f dx + w,xM|x=l + wF|x=l ∀w ∈ V . (2.56)

2.3. Thiết lập phương trình biến thiên từ phương pháp hàm thử 21
2.3.3 Vật thể đàn hồi
Nhân vô hướng cả hai vế của phương trình (2.20) với véc tơ hàm thử wi ∈ V vàtích phân trên toàn miền Ω, ta có
∫
Ωwiσij,jdΩ +
∫
Ωwi fidΩ = 0 ∀wi ∈ V . (2.57)
Tích phân từng phần số hạng thứ nhất, ta được:∫
Ωwi,jσijdΩ =
∫
Ωwi fidΩ +
∫
ΓwiσijnjdΓ ∀wi ∈ V . (2.58)
Lưu ý wi = 0 trên biên chuyển vị Γu và σijnj = ghi trên biên lực Γh, và liên hệ
ứng suất biến dạng. Phương trình biến thiên cho bài toán vật thể đàn hồi: tìmtrường chuyển vị u thoả mãn
∫
Ωwi,jCijklu
sk,ldΩ =
∫
Ωwi fidΩ +
∫
Γhwig
hi dΓ ∀wi ∈ V . (2.59)
2.3.4 Tấm chịu uốn
Nhân cả hai vế của phương trình (2.31) với véc tơ hàm thử w ∈ V và tích phântrên toàn miền Ω, ta có
∫
Ωwmαβ,αβdΩ =
∫
ΩwFdΩ ∀w ∈ V , (2.60)
Tích phân từng phần số hạng thứ nhất hai lần liên tiếp, ta được∫
Ωw,αβmαβdΩ =
∫
ΩwFdΩ −
∫
Γwmαβ,βnαdΓ +
∫
Γw,αmαβ nβdΓ ∀w ∈ V .
(2.61)
Tiếp tục biến đổi số hạng cuối cùng của phương trình trên∫
Γw,αmαβ nβdΓ =
∫
Γw,αnαmαβ nβnαdΓ +
∫
Γw,αsαmαβ nβsαdΓ, (2.62)
hay∫
Γw,αmαβ nβdΓ =
∫
Γw,nmαβ nβnαdΓ +
∫
Γw,smαβ nβsαdΓ. (2.63)
Sau khi tích phân từng phần số hạng cuối cùng của biểu thức trên, ta được∫
Γw,αmαβ nβdΓ =
∫
Γw,nmαβ nβnαdΓ −
∫
Γw
(mαβ nβsα
)
,sdΓ + w
(mαβ nβsα
)|BA.
(2.64)

22 Phương trình biến thiên
Thay thế phương trình (2.64) vào phương trình (2.61), ta có∫
Ωw,αβmαβdΩ =
∫
ΩwFdΩ +
∫
Γw,nmαβ nβnαdΓ −
∫
Γwmαβ,βnαdΓ
−∫
Γw
(mαβ nβsα
)
,sdΓ + w
(mαβ nβsα
)|BA. (2.65)
Lưu ý định nghĩa w = 0 trên biên chuyển vị Γu và w,n = 0 trên biên gócxoay Γθ . Sử dụng liên hệ vật lý và các điều kiện biên mαβnαnβ = M trên ΓM
và −mαβ,βnα −(mαβnβsα
)
,s= Q trên ΓQ, mαβnβsα|c+ − mαβnβsα|c− = 0 trên ΓQ.
Phương trình biến thiên cho bài toán uốn tấm được định nghĩa: tìm trườngchuyển vị u thoả mãn
∫
Ωw,αβCαβγδu,γδdΩ =
∫
ΩwFdΩ +
∫
ΓM
w,nMdΓ +∫
ΓQ
wQdΓ ∀w ∈ V . (2.66)
2.4 Bài tập
Bài 1: So sánh các phương trình biến thiên lập từ nguyên lý công khả dĩ và từphương pháp hàm thử.
Bài 2: Lập phương trình biến thiên cho phương trình Poisson (bài toán truyềnnhiệt, dòng thấm...): tìm trường vô hướng u thoả mãn
∇ · q + f = 0 in Ω, (2.67)q = −κ∇u in Ω, (2.68)u = g on Γu, (2.69)
q · n = h on Γh, (2.70)
hay dưới dạng chỉ số:
qi,i + f = 0 in Ω, (2.71)qi = −κiju,j in Ω, (2.72)u = g on Γu, (2.73)
qini = h on Γh, (2.74)
trong đó κij là ten sơ bậc hai cho trước.
Bài 3: Cho σ là ten sơ bậc hai có chiều bằng 3. Chứng minh rằng nếu σ là đốixứng thì ∇w : σ = ∇Sw : σ.

Chương 3
Hệ thanh
Khi áp dụng phương pháp phần tử hữu hạn mô hình chuyển vị cho bài toán hệthanh, kết cấu được rời rạc hoá thành các phần tử thanh thẳng, các thanh liênkết với nhau tại nút. Các chuyển vị nút của hệ là các ẩn số chính; biến dạng vànội lực trong các thanh sẽ được xác định được từ chuyển vị tại đầu thanh.
Trên cơ sở các phương trình biến thiên cho thanh chịu kéo nén, chịu uốnngang phẳng và chịu xoắn thuần tuý, các công thức cơ bản của phương phápphần tử hữu hạn mô hình chuyển vị áp dụng cho bài toán hệ thanh được thiếtlập. Các kết quả cho các bài toán cơ bản này được áp dụng để phân tích các hệkết cấu thường gặp như hệ dàn khớp, hệ khung phẳng và hệ khung không gian.
3.1 Hàm chuyển vị
Hàm chuyển vị được sử dụng để mô tả liên hệ giữa chuyển vị tại một điểm trêntrục thanh (hay chuyển vị của tiết diện) và các chuyển vị tại các nút đầu thanh.Liên hệ giữa véc tơ chuyển vị nút δe và véc tơ chuyển vị tại một tiết diện trêntrục thanh được viết dưới dạng
u = Nδe, (3.1)
trong đó N là ma trận chứa các hàm hình dạng (hay hàm chuyển vị) của phầntử.
3.1.1 Thanh chịu kéo nén dọc trục
Xét phần tử thanh có chiều dài bằng l, diện tích tiết diện A, các nút đầu thanhđược ký hiệu là i và j. Sử dụng trục toạ độ x có phương trùng với trục thanh,
23

24 Hệ thanh
xi jui uj
l
E, A
Hình 3.1: Phần tử thanh chịu kéo nén
chiều từ i đến j và gốc toạ độ tại i (Hình 3.1). Khi thanh chịu kéo nén dọc trục,véc tơ chuyển vị tại một tiết diện trên thanh có dạng
u =
u(x)
, (3.2)
và véc tơ chuyển vị nút có dạng
δe =
[
ui
uj
]
. (3.3)
Giả thiết hàm chuyển vị u (x) tại các tiết diện là hàm bậc nhất,
u (x) = α1 + α2x, (3.4)
trong đó α1 và α2 là các hệ số, sẽ được xác định từ điều kiện chuyển vị nút củahệ. Tại x = 0 và x = l, chuyển vị tại các nút i và j là
ui = α1,
uj = α1 + α2l, (3.5)
hay
α1 = ui,
α2 =uj − ui
l. (3.6)
Do vậy, hàm chuyển vị của thanh chịu kéo nén là
u (x) = ui +uj − ui
lx. (3.7)
So sánh biểu thức trên với phương trình (3.1), ma trận hàm chuyển vị N củaphần tử thanh chịu kéo nén là
N =[
N1 N2
]
, (3.8)
trong đó
N1 = 1 − x
l, (3.9)
N2 =x
l. (3.10)

3.1. Hàm chuyển vị 25
x
y
z
i j
vi vj
φi φj
l
E, I
Hình 3.2: Phần tử thanh chịu uốn ngang phẳng
3.1.2 Thanh chịu uốn ngang phẳng
Xét phần tử thanh có chiều dài l, diện tích tiết diện A, mô men quán tính I, hainút đầu thanh được ký hiệu là i và j. Sử dụng hệ trục toạ độ x0y, gốc toạ độ tạii (Hình 3.2). Khi thanh chịu uốn ngang phẳng, véc tơ chuyển vị tại một tiết diệntrên thanh có dạng
u =
v(x)
, (3.11)
và véc tơ chuyển vị nút của phần tử
δe =
vi
φi
vj
φj
. (3.12)
Véc tơ chuyển vị nút bao gồm 4 thành phần độc lập, do vậy hàm chuyển vị làmột đa thức bậc ba chứa 4 hệ số chưa biết
v (x) = α1 + α2x + α3x2 + α4x3. (3.13)
Các hệ số αi được xác định từ điều kiện liên kết và các chuyển vị tại hai đầuthanh.
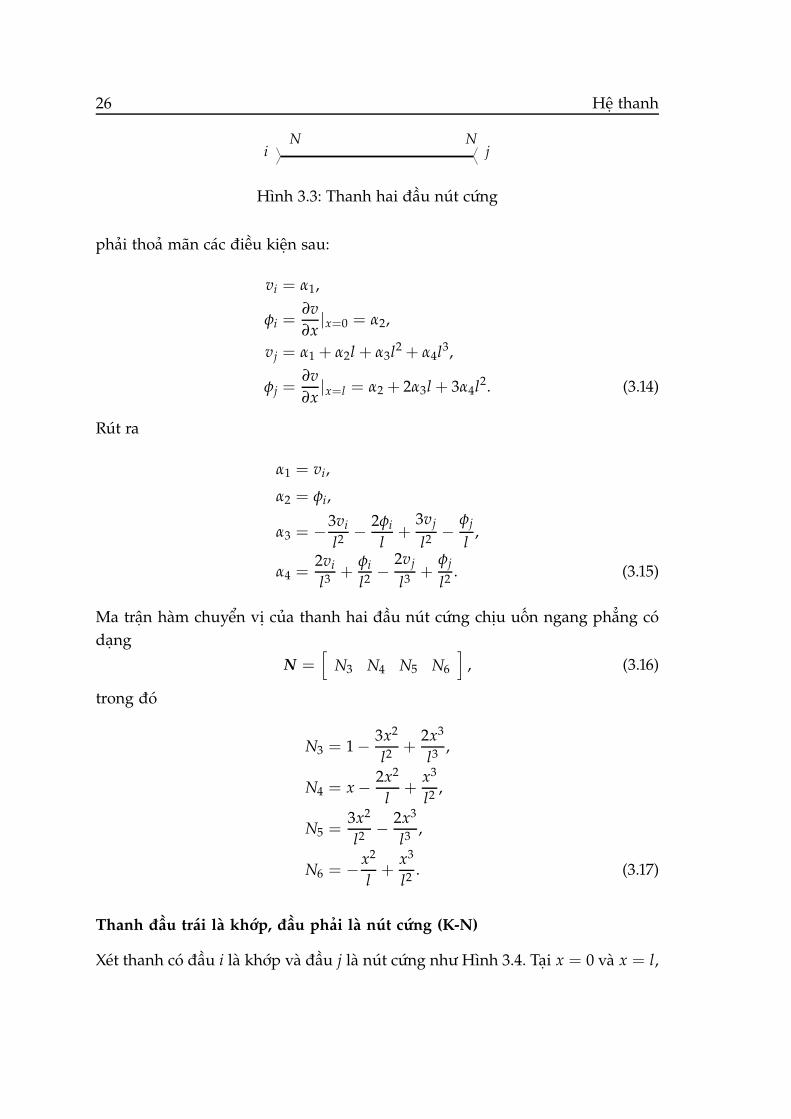
Thanh hai đầu nút cứng (N-N)
Xét thanh hai đầu nút cứng như Hình 3.3. Tại x = 0 và x = l, hàm chuyển vị
26 Hệ thanh
i jNN
Hình 3.3: Thanh hai đầu nút cứng
phải thoả mãn các điều kiện sau:
vi = α1,
φi =∂v
∂x|x=0 = α2,
vj = α1 + α2l + α3l2 + α4l3,
φj =∂v
∂x|x=l = α2 + 2α3l + 3α4l2. (3.14)
Rút ra
α1 = vi,
α2 = φi,
α3 = −3vi
l2− 2φi
l+
3vj
l2−
φj
l,
α4 =2vi
l3+
φi
l2−
2vj
l3+
φj
l2. (3.15)
Ma trận hàm chuyển vị của thanh hai đầu nút cứng chịu uốn ngang phẳng códạng
N =[
N3 N4 N5 N6
]
, (3.16)
trong đó
N3 = 1 − 3x2
l2+
2x3
l3,
N4 = x − 2x2
l+
x3
l2,
N5 =3x2
l2− 2x3
l3,
N6 = −x2
l+
x3
l2. (3.17)
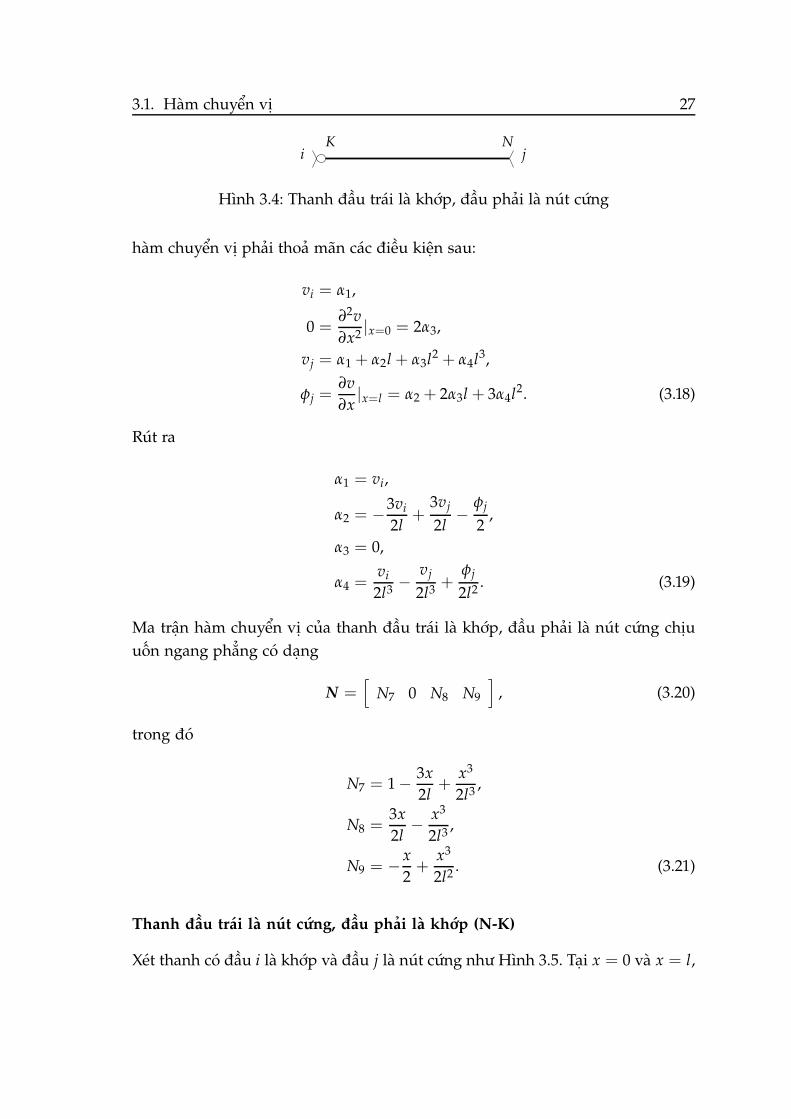
Thanh đầu trái là khớp, đầu phải là nút cứng (K-N)
Xét thanh có đầu i là khớp và đầu j là nút cứng như Hình 3.4. Tại x = 0 và x = l,
3.1. Hàm chuyển vị 27
i jK N
Hình 3.4: Thanh đầu trái là khớp, đầu phải là nút cứng
hàm chuyển vị phải thoả mãn các điều kiện sau:
vi = α1,
0 =∂2v
∂x2|x=0 = 2α3,
vj = α1 + α2l + α3l2 + α4l3,
φj =∂v
∂x|x=l = α2 + 2α3l + 3α4l2. (3.18)
Rút ra
α1 = vi,
α2 = −3vi
2l+
3vj
2l−
φj
2,
α3 = 0,
α4 =vi
2l3−
vj
2l3+
φj
2l2. (3.19)
Ma trận hàm chuyển vị của thanh đầu trái là khớp, đầu phải là nút cứng chịuuốn ngang phẳng có dạng
N =[
N7 0 N8 N9
]
, (3.20)
trong đó
N7 = 1 − 3x
2l+
x3
2l3,
N8 =3x
2l− x3
2l3,
N9 = −x
2+
x3
2l2. (3.21)
Thanh đầu trái là nút cứng, đầu phải là khớp (N-K)
Xét thanh có đầu i là khớp và đầu j là nút cứng như Hình 3.5. Tại x = 0 và x = l,

28 Hệ thanh
i jKN
Hình 3.5: Thanh đầu trái là nút cứng, đầu phải là khớp
hàm chuyển vị phải thoả mãn các điều kiện sau:
vi = α1,
φi =∂v
∂x|x=0 = α2,
vj = α1 + α2l + α3l2 + α4l3,
0 =∂2v
∂x2|x=l = 2α3 + 6α4l. (3.22)
Rút ra
α1 = vi,
α2 = φi,
α3 = −3vi
2l2− 3φi
2l+
3vj
2l2,
α4 =vi
2l3+
φi
2l2−
vj
2l3. (3.23)
Ma trận hàm chuyển vị của thanh đầu trái là nút cứng, đầu phải là khớp chịuuốn ngang phẳng có dạng
N =[
N10 N11 N12 0]
, (3.24)
trong đó
N10 = 1 − 3x2
2l2+
x3
2l3,
N11 = x − 3x2
2l+
x3
2l2,
N12 =3x2
2l2− x3
2l3.
(3.25)
Các hàm chuyển vị N3 → N12 là các hàm đa giác Hermite bậc ba.

3.1. Hàm chuyển vị 29
i jK K
Hình 3.6: Thanh hai đầu khớp
Thanh hai đầu khớp (K-K)
Xét thanh có hai đầu i và j là khớp như Hình 3.6. Tại x = 0 và x = l, hàm chuyểnvị phải thoả mãn các điều kiện sau:
vi = α1,
0 =∂2v
∂x2|x=0 = 2α3,
vj = α1 + α2l + α3l2 + α4l3,
0 =∂2v
∂x2|x=l = 2α3 + 6α4l. (3.26)
Rút ra
α1 = vi,
α2 =vj − vi
l,
α3 = 0,
α4 = 0. (3.27)
Ma trận hàm chuyển vị của thanh hai đầu khớp chịu uốn ngang phẳng có dạng
N =[
N1 0 N2 0]
. (3.28)
3.1.3 Thanh chịu xoắn thuần tuý
Xét phần tử thanh có chiều dài của thanh bằng l, diện tích tiết diện A, hai nútđầu thanh được ký hiệu là i và j. Sử dụng trục toạ độ x có phương trùng vớitrục thanh, chiều từ i đến j và gốc toạ độ tại i (Hình 3.7). Khi thanh chịu kéonén dọc trục, véc tơ chuyển vị tại một tiết diện trên thanh có dạng
u =
θ(x)
, (3.29)
và véc tơ chuyển vị nút có dạng
δe =
[
θi
θj
]
. (3.30)

30 Hệ thanh
xi jθi θj
l
G, A
Hình 3.7: Phần tử thanh chịu xoắn thuần tuý
Giả thiết hàm chuyển vị u (x) tại tiết diện là bậc nhất:
θ (x) = α1 + α2x. (3.31)
Tại x = 0 và x = l, chuyển vị tại các nút i và j là:
θi = α1
θj = α1 + α2l, (3.32)
rút ra
α1 = θi
α2 =θj − θi
l. (3.33)
Hàm chuyển vị của thanh chịu kéo nén là:
θ (x) = θi +θj − θi
lx. (3.34)
Dưới dạng ma trậnθ (x) = Nδe, (3.35)
trong đóN =
[
N1 N2
]
. (3.36)
3.2 Dạng ma trận của các bài toán cơ bản
Trên cơ sở các phương trình biến thiên đã trình bày trong Chương 2, các phươngtrình cân bằng cho các bài toán cơ bản được thiết lập dưới dạng ma trận.

3.2. Dạng ma trận của các bài toán cơ bản 31
3.2.1 Thanh chịu kéo nén dọc trục
Hàm chuyển vị u và hàm thử w được viết dưới dạng
u = Nδe, (3.37)w = Nγe, (3.38)
trong đóN =
[
N1 N2
]
. (3.39)
Các đạo hàm bậc nhất của chuyển vị theo toạ độ x, u,x và w,x, do vậy có thể viếtdưới dạng
u,x = Bδe, (3.40)w,x = Bγe, (3.41)
trong đóB =
[
B1 B2
]
, (3.42)
và
B1 = −1
l,
B2 =1
l. (3.43)
Phương trình biến thiên cho thanh chịu kéo nén viết lại dưới dạng ma trận
γTe
∫ l
0BT EA B dx δe = γT
e
∫ l
0NT f dx + γT
e NT F|x=l ∀γTe . (3.44)
Do phương trình trên đúng cho ∀γTe , ta có
∫ l
0BT EA B dx δe =
∫ l
0NT f dx + NTF|x=l , (3.45)
hayKe δe = Fe, (3.46)
trong đó
Ke =∫ l
0BTEABdx, (3.47)
vàFe = F f + FN =
∫ l
0NT f dx + NTF|x=l . (3.48)

32 Hệ thanh
Trong phương trình trên, Ke là ma trận độ cứng của thanh chịu kéo nén đúngtâm, F f là véc tơ lực nút quy đổi, FN là véc tơ lực đặt tại nút và Fe là véc tơ lựcnút tổng cộng của phần tử. Sau khi thực hiện tích phân, ta có
Ke =
[EA
l −EAl
−EAl
EAl
]
, (3.49)
và
Fe =
[f l2
f l2 + F
]
. (3.50)
3.2.2 Thanh chịu uốn ngang phẳng
Hàm chuyển vị v và hàm thử w được viết dưới dạng
v = Nδe, (3.51)w = Nγe, (3.52)
trong đó N là ma trận hàm chuyển vị. Các đạo hàm bậc nhất và bậc hai củachuyển vị theo toạ độ x, w,x, v,xx và w,xx, do vậy có thể viết dưới dạng
w,x = Bδe, (3.53)v,xx = Dδe, (3.54)w,xx = Dγe, (3.55)
trong đó B và D là các ma trận chứa các đạo hàm bậc nhất và bậc hai của chuyểnvị. Phương trình biến thiên cho thanh chịu uốn ngang phẳng viết lại dưới dạngma trận
γTe
∫ l
0DT EI D dx δe = γT
e
∫ l
0NT f dx + γT
e BT M|x=l + γTe NT F|x=l ∀γT
e .
(3.56)
Do phương trình trên đúng cho ∀γTe , ta có
∫ l
0DT EI D dx δe =
∫ l
0NT f dx + BT M|x=l + NTF|x=l , (3.57)
hayKe δe = Fe, (3.58)

3.2. Dạng ma trận của các bài toán cơ bản 33
trong đó
Ke =∫ l
0DTEIDdx, (3.59)
vàFe = F f + FN , (3.60)
với
F f =∫ l
0NT f dx,
FN = BT M|x=l + NTF|x=l .
Trong phương trình trên, Ke là ma trận độ cứng của thanh chịu uốn ngangphẳng, F f là véc tơ lực nút quy đổi, FN là véc tơ lực đặt tại nút và Fe là véc tơlực nút tổng cộng của phần tử. Dưới đây là các ma trận B,D, Ke và véc tơ Fe chocác trường hợp thanh có liên kết hai đầu khác nhau chịu uốn ngang phẳng.
Thanh hai đầu nút cứng (N-N)
B =[
B3 B4 B5 B6
]
, (3.61)
trong đó
B3 = −6x
l2+
6x2
l3,
B4 = 1 − 4x
l+
3x2
l2,
B5 =6x
l2− 6x2
l3,
B6 = −2x
l+
3x2
l2. (3.62)
D =[
D3 D4 D5 D6
]
, (3.63)
trong đó
D3 = − 6
l2+
12x
l3,
D4 = −4
l+
6x
l2,
D5 =6
l2− 12x
l3,
D6 = −2
l+
6x
l2. (3.64)
34 Hệ thanh
Ke =
12EIl3
6EIl2 − 12EI
l36EIl2
6EIl2
4EIl − 6EI
l22EI
l
− 12EIl3 − 6EI
l212EI
l3 − 6EIl2
6EIl2
2EIl − 6EI
l24EI
l
. (3.65)
Fe =
f l2
f l2
12f l2 + F
− f l2
12+ M
. (3.66)
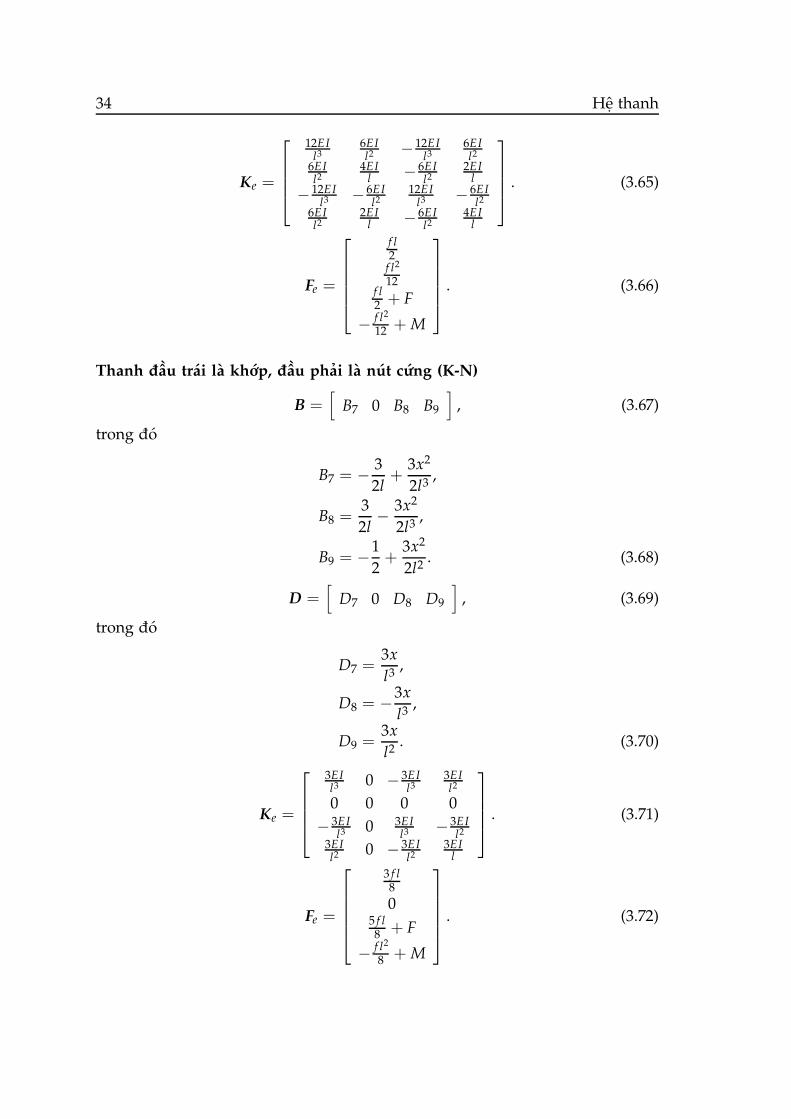
Thanh đầu trái là khớp, đầu phải là nút cứng (K-N)
B =[
B7 0 B8 B9
]
, (3.67)
trong đó
B7 = − 3
2l+
3x2
2l3,
B8 =3
2l− 3x2
2l3,
B9 = −1
2+
3x2
2l2. (3.68)
D =[
D7 0 D8 D9
]
, (3.69)
trong đó
D7 =3x
l3,
D8 = −3x
l3,
D9 =3x
l2. (3.70)
Ke =
3EIl3 0 − 3EI
l33EIl2
0 0 0 0
− 3EIl3 0 3EI
l3 − 3EIl2
3EIl2 0 − 3EI
l23EI
l
. (3.71)
Fe =
3 f l8
05 f l8
+ F
− f l2
8+ M
. (3.72)

3.2. Dạng ma trận của các bài toán cơ bản 35
Thanh đầu trái là nút cứng, đầu phải là khớp (N-K)
B =[
B10 B11 B12 0]
, (3.73)
trong đó
B10 = −3x
l2+
3x2
2l3,
B11 = 1 − 3x
l+
3x2
2l2,
B12 =3x
l2− 3x2
2l3.
(3.74)
D =[
D10 D11 D12 0]
, (3.75)
trong đó
D10 = − 3
l2+
3x
l3,
D11 = −3
l+
3x
l2,
D12 =3
l2− 3x
l3.
(3.76)
Ke =
3EIl3
3EIl2 − 3EI
l3 03EIl2
3EIl − 3EI
l2 0
− 3EIl3 − 3EI
l23EIl3 0
0 0 0 0
. (3.77)
Fe =
5 f l8
f l2
83 f l8 + F
M
. (3.78)
3.2.3 Thanh chịu xoắn thuần tuý
Hàm chuyển vị θ và hàm thử w được viết dưới dạng
θ = Nδe, (3.79)w = Nγe, (3.80)

36 Hệ thanh
trong đóN =
[
N1 N2
]
. (3.81)
Các đạo hàm bậc nhất của chuyển vị theo toạ độ x, θ,x và w,x, do vậy có thể viếtdưới dạng
θ,x = Bδe, (3.82)w,x = Bγe, (3.83)
trong đóB =
[
B1 B2
]
, (3.84)
và
B1 = −1
l,
B2 =1
l. (3.85)
Phương trình biến thiên cho thanh chịu xoắn thuần tuý dưới dạng ma trậncó dạng
γTe
∫ l
0BT GJ B dx δe = γT
e
∫ l
0NT m dx ∀γT
e , (3.86)
trong đó J là mô men quán tính cực đối với trọng tâm của tiết diện ngang và m
là mô men xoắn phân bố trên thanh. Do phương trình trên đúng cho ∀γTe , ta có
∫ l
0BT GJ B dx δe =
∫ l
0NTmdx, (3.87)
hayKe δe = Fe, (3.88)
trong đó
Ke =∫ l
0BTGJBdx, (3.89)
vàFe =
∫ l
0NTmdx. (3.90)
Trong phương trình trên, Ke là ma trận độ cứng của thanh chịu xoắn thuần tuývà Fe là véc tơ lực nút tương đương của phần tử. Sau khi thực hiện tích phân, tacó
Ke =
[GJl −GJ
l
−GJl
GJl
]
, (3.91)

3.3. Dàn phẳng 37
và
Fe =
[ml2
ml2
]
. (3.92)
3.3 Dàn phẳng
Xét phần tử thanh dàn phẳng như Hình 3.8.
x
y
i jui uj
vivj
l
EA
Hình 3.8: Phần tử thanh dàn phẳng
Véc tơ chuyển vị nút có dạng
δe =
ui
vi
uj
vj
. (3.93)
Ma trận độ cứng và véc tơ lực nút trong hệ toạ độ địa phương xy của phầntử được thiết lập từ bài toán thanh chịu kéo nén dọc trục
Ke =
EAl 0 −EA
l 0
0 0 0 0
−EAl 0 EA
l 0
0 0 0 0
. (3.94)
Ma trận độ cứng của phần tử trong hệ toạ độ chung x′y′ được thiết lập dựa trênma trận chuyển trục toạ độ T:
K′e = TT Ke T, (3.95)

38 Hệ thanh
trong đó
T =
cos α sin α 0 0
−sin α cos α 0 0
0 0 cos α sin α
0 0 −sin α cos α
. (3.96)
Véc tơ lực nút trong hệ toạ độ chung:
F ′e = TT
e Fe. (3.97)
3.4 Khung phẳng
Xét phần tử thanh dàn phẳng như Hình 3.9.
z
x
y
i jui uj
vivj
φi φj
l
EA, EI
Hình 3.9: Phần tử khung phẳng
Véc tơ chuyển vị nút có dạng
δe =
ui
vi
φi
uj
vj
φj
. (3.98)
Ma trận độ cứng của phần tử trong hệ toạ độ địa phương xy được thiết lập từbài toán thanh chịu kéo nén dọc trục và thanh chịu uốn ngang phẳng.
3.4. Khung phẳng 39
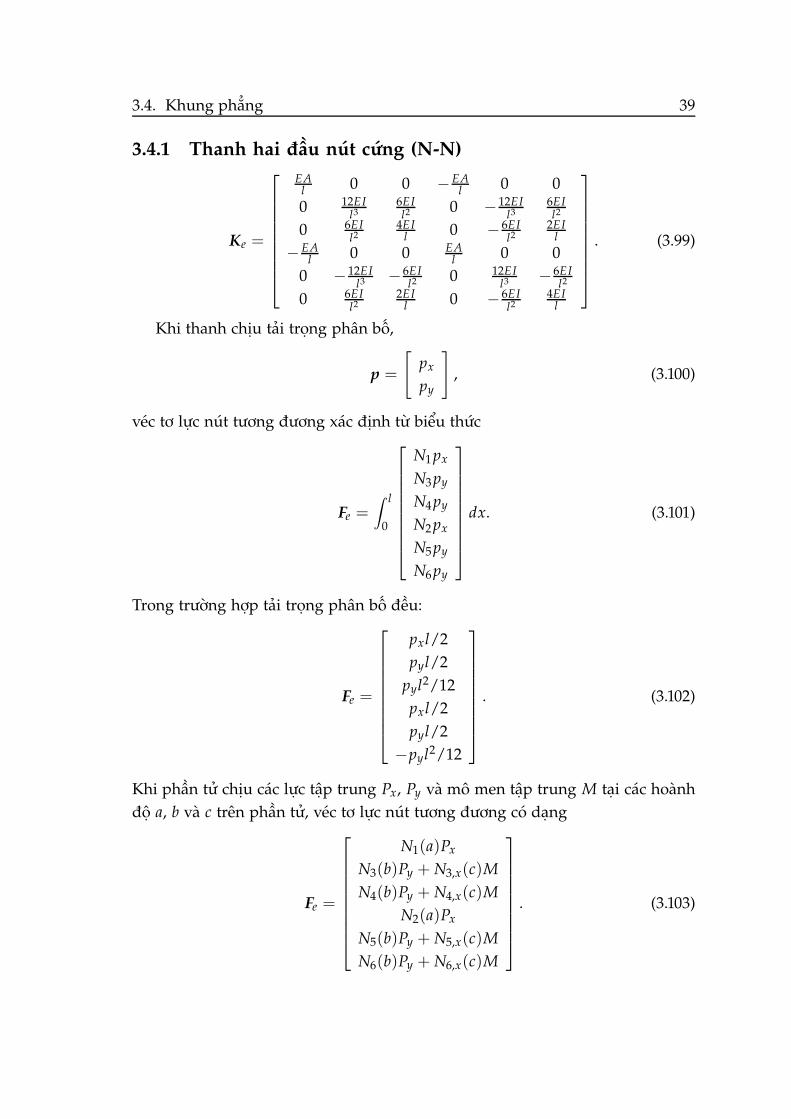
3.4.1 Thanh hai đầu nút cứng (N-N)
Ke =
EAl 0 0 −EA
l 0 0
0 12EIl3
6EIl2 0 − 12EI
l36EIl2
0 6EIl2
4EIl 0 − 6EI
l22EI
l
−EAl 0 0 EA
l 0 0
0 − 12EIl3 − 6EI
l2 0 12EIl3 − 6EI
l2
0 6EIl2
2EIl 0 − 6EI
l24EI
l
. (3.99)
Khi thanh chịu tải trọng phân bố,
p =
[
px
py
]
, (3.100)
véc tơ lực nút tương đương xác định từ biểu thức
Fe =∫ l
0
N1px
N3py
N4py
N2px
N5py
N6py
dx. (3.101)
Trong trường hợp tải trọng phân bố đều:
Fe =
pxl/2
pyl/2
pyl2/12
pxl/2
pyl/2
−pyl2/12
. (3.102)
Khi phần tử chịu các lực tập trung Px, Py và mô men tập trung M tại các hoànhđộ a, b và c trên phần tử, véc tơ lực nút tương đương có dạng
Fe =
N1(a)Px
N3(b)Py + N3,x(c)M
N4(b)Py + N4,x(c)M
N2(a)Px
N5(b)Py + N5,x(c)M
N6(b)Py + N6,x(c)M
. (3.103)

40 Hệ thanh
Khi a = b = c = l/2:
Fe =
Px/2
Py/2 − 3M/2l
Pyl/8 − M/4
Px/2
Py/2 + 3M/2l
−Pyl/8 − M/4
. (3.104)
3.4.2 Thanh đầu trái là khớp, đầu phải là nút cứng (K-N)
Ke =
EAl 0 0 −EA
l 0 0
0 3EIl3 0 0 − 3EI
l33EIl2
0 0 0 0 0 0
−EAl 0 0 EA
l 0 0
0 − 3EIl3 0 0 3EI
l3 − 3EIl2
0 3EIl2 0 0 − 3EI
l23EI
l
. (3.105)
Khi tải trọng phân bố trên thanh, véc tơ lực nút tương đương có dạng
Fe =∫ l
0
N1px
N7py
0
N2px
N8py
N9py
dx. (3.106)
Trong trường hợp tải trọng phân bố đều:
Fe =
pxl/2
3pyl/8
0
pxl/2
5pyl/8
−pyl2/8
. (3.107)
3.4. Khung phẳng 41
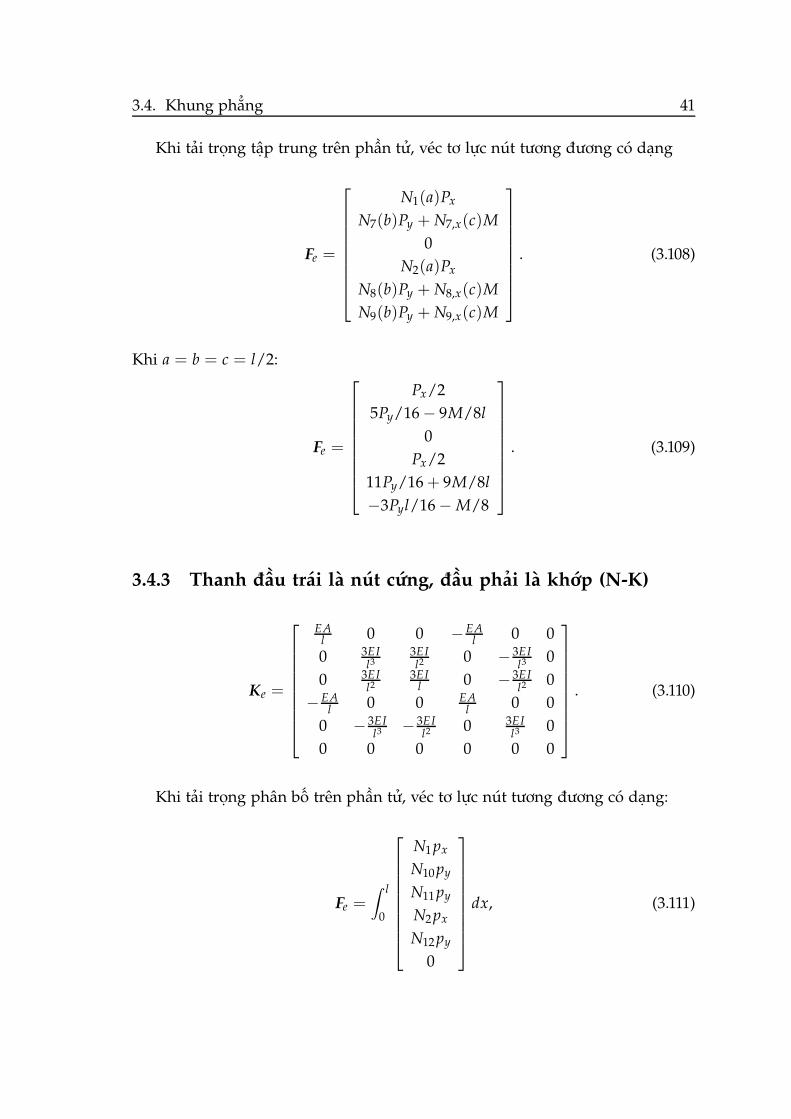
Khi tải trọng tập trung trên phần tử, véc tơ lực nút tương đương có dạng
Fe =
N1(a)Px
N7(b)Py + N7,x(c)M
0
N2(a)Px
N8(b)Py + N8,x(c)M
N9(b)Py + N9,x(c)M
. (3.108)
Khi a = b = c = l/2:
Fe =
Px/2
5Py/16 − 9M/8l
0
Px/2
11Py/16 + 9M/8l
−3Pyl/16 − M/8
. (3.109)
3.4.3 Thanh đầu trái là nút cứng, đầu phải là khớp (N-K)
Ke =
EAl 0 0 −EA
l 0 0
0 3EIl3
3EIl2 0 − 3EI
l3 0
0 3EIl2
3EIl 0 − 3EI
l2 0
−EAl 0 0 EA
l 0 0
0 − 3EIl3 − 3EI
l2 0 3EIl3 0
0 0 0 0 0 0
. (3.110)
Khi tải trọng phân bố trên phần tử, véc tơ lực nút tương đương có dạng:
Fe =∫ l
0
N1px
N10py
N11py
N2px
N12py
0
dx, (3.111)

42 Hệ thanh
Trong trường hợp tải trọng phân bố đều:
Fe =
pxl/2
5pyl/8
pyl2/8
pxl/2
3pyl/8
0
, (3.112)
Khi tải trọng tập trung, véc tơ lực nút tương đương có dạng
Fe =
N1(a)Px
N10(b)Py + N10,x(c)M
N11(b)Py + N11,x(c)M
N2(a)Px
N12(b)Py + N12,x(c)M
0
. (3.113)
Khi a = b = c = l/2:
Fe =
Px/2
11Py/16 − 9M/8l
3Pyl/16 − M/8
Px/2
5Py/16 + 9M/8l
0
. (3.114)
Ma trận chuyển trục cho hệ khung phẳng có dạng
T =
cos α sin α 0 0 0 0
−sin α cos α 0 0 0 0
0 0 1 0 0 0
0 0 0 cos α sin α 0
0 0 0 −sin α cos α 0
0 0 0 0 0 1
. (3.115)
3.5 Khung không gian
Xét phần tử thanh không gian có hai nút là i và j, chiều dài bằng l. Sử dụng mộthệ trục toạ độ địa phương xyz như Hình 3.10. Theo hệ toạ độ địa phương, tạimột điểm trên trục thanh có véc tơ chuyển vị

3.5. Khung không gian 43
x
y
z
i jui uj
vivj
wi wj
φiφi
θi θj
ϕi ϕj
l
EA, GJ, EIy, GJz
Hình 3.10: Phần tử khung không gian
ue =
u(x)
v(x)
w(x)
, (3.116)
và một phần tử thanh có 12 thành phần chuyển vị nút, bao gồm 6 thành phầnchuyển vị thẳng và 6 thành phần chuyển vị xoay
δe =
ui
vi
wi
θi
ϕi
φi
uj
vj
wj
θj
ϕj
φj
. (3.117)
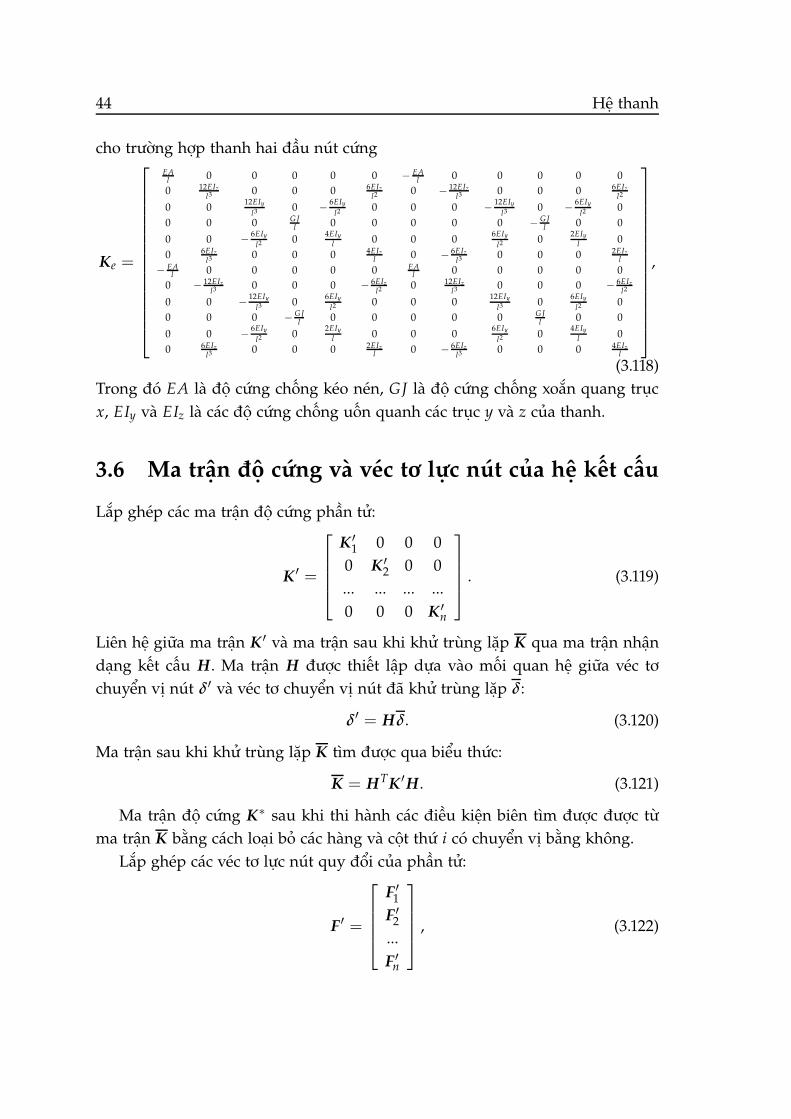
Ma trận độ cứng và véc tơ lực nút của phần tử khung không gian trong hệtoạ độ địa phương được lập trên cơ sở tổ hợp các kết quả của bài toán thanh chịukéo nén, thanh chịu uốn ngang phẳng và thanh chịu xoắn thuần tuý. Chẳng hạn
44 Hệ thanh
cho trường hợp thanh hai đầu nút cứng
Ke =
EAl 0 0 0 0 0 − EA
l 0 0 0 0 0
0 12EIzl3 0 0 0 6EIz
l2 0 − 12EIzl3 0 0 0 6EIz
l2
0 012EIy
l3 0 − 6EIy
l2 0 0 0 − 12EIy
l3 0 − 6EIy
l2 0
0 0 0GJl 0 0 0 0 0 − GJ
l 0 0
0 0 − 6EIy
l2 04EIy
l 0 0 06EIy
l2 02EIy
l 0
0 6EIzl3 0 0 0 4EIz
l 0 − 6EIzl3 0 0 0 2EIz
l
− EAl 0 0 0 0 0 EA
l 0 0 0 0 0
0 − 12EIzl3 0 0 0 − 6EIz
l2 0 12EIzl3 0 0 0 − 6EIz
l2
0 0 − 12EIy
l3 06EIy
l2 0 0 012EIy
l3 06EIy
l2 0
0 0 0 − GJl 0 0 0 0 0
GJl 0 0
0 0 − 6EIy
l2 02EIy
l 0 0 06EIy
l2 04EIy
l 0
0 6EIzl3 0 0 0 2EIz
l 0 − 6EIzl3 0 0 0 4EIz
l
,
(3.118)Trong đó EA là độ cứng chống kéo nén, GJ là độ cứng chống xoắn quang trụcx, EIy và EIz là các độ cứng chống uốn quanh các trục y và z của thanh.
3.6 Ma trận độ cứng và véc tơ lực nút của hệ kết cấu
Lắp ghép các ma trận độ cứng phần tử:
K′ =
K′1 0 0 0
0 K′2 0 0
... ... ... ...
0 0 0 K′n
. (3.119)
Liên hệ giữa ma trận K′ và ma trận sau khi khử trùng lặp K qua ma trận nhậndạng kết cấu H . Ma trận H được thiết lập dựa vào mối quan hệ giữa véc tơchuyển vị nút δ′ và véc tơ chuyển vị nút đã khử trùng lặp δ:
δ′ = Hδ. (3.120)
Ma trận sau khi khử trùng lặp K tìm được qua biểu thức:
K = HTK′H . (3.121)
Ma trận độ cứng K∗ sau khi thi hành các điều kiện biên tìm được được từma trận K bằng cách loại bỏ các hàng và cột thứ i có chuyển vị bằng không.
Lắp ghép các véc tơ lực nút quy đổi của phần tử:
F ′ =
F ′1
F ′2
...
F ′n
, (3.122)

3.7. Xác định chuyển vị và nội lực 45
và véc tơ lực nút sau khi khử trùng lặp:
F = HTF ′, (3.123)
Véc tơ lực nút quy đổi F∗ sau khi thi hành các điều kiện biên tìm được được từvéc tơ F bằng cách loại bỏ các hàng thứ i có chuyển vị bằng không.
Véc tơ lực nút của hệ kết cấu bao gồm véc tơ lực nút quy đổi và véc tơ lựcđặt tại nút
F∗ = F f ∗ + FN∗. (3.124)
3.7 Xác định chuyển vị và nội lực
Véc tơ chuyển vị nút tìm được từ việc giải hệ phương trình:
δ∗ = K∗−1F∗ (3.125)
Lưu ý tới các điều kiện biên, tìm được các véc tơ chuyển vị nút δ, δ′ và δ′e trong
hệ toạ độ chung. Véc tơ chuyển vị trong hệ toạ độ địa phương tìm được qua liênhệ:
δe = Tδ′e. (3.126)
Nội lực đầu thanh của các phần tử xác định bởi biểu thức:
Re = Keδe − Fe, (3.127)
trong đó Fe là véc tơ lực nút quy đổi trên phần tử e.
3.8 Bài tập
Bài 1: Lập véc tơ lực nút tương đương cho phần tử thanh chịu uốn ngangphẳng, có các liên kết đầu thanh khác nhau, chịu tại trọng phân bố dạng tamgiác.
Bài 2: Xác định lực dọc trong các thanh của hệ dàn khớp chịu tải trọng nhưHình 3.11. Các thanh có tiết diện tròn đặc đường kính d.
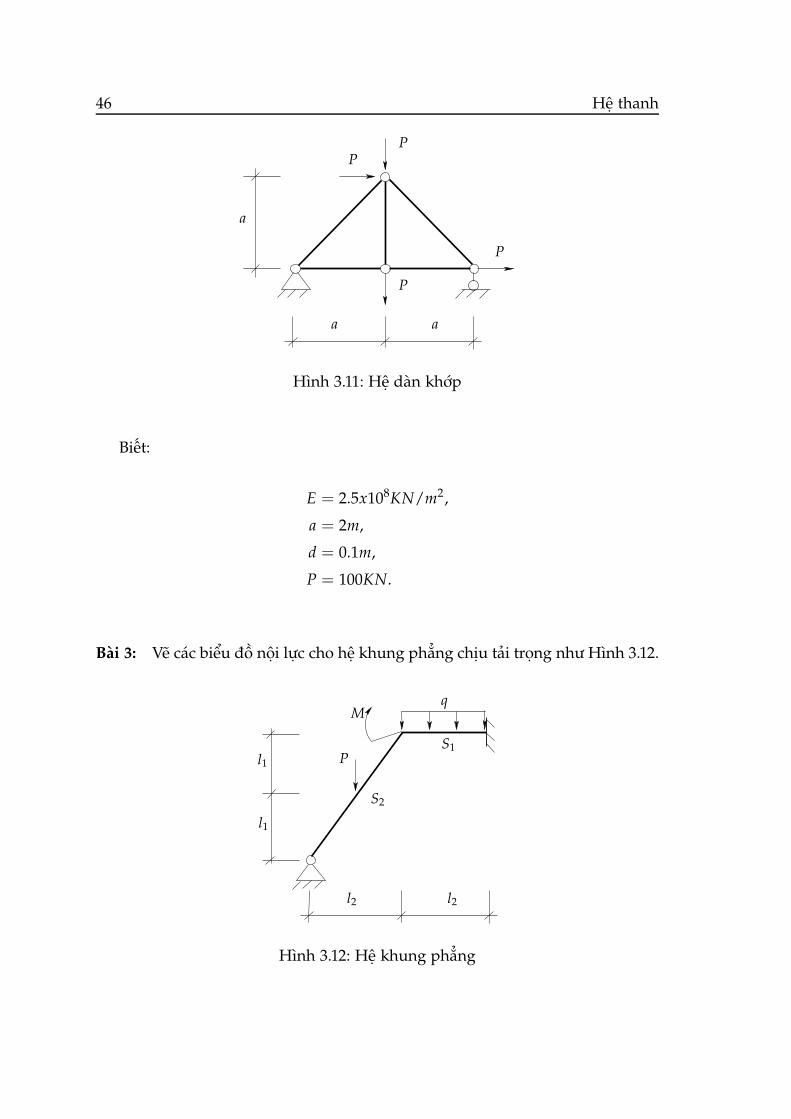
46 Hệ thanh
P
PP
P
a
aa
Hình 3.11: Hệ dàn khớp
Biết:
E = 2.5x108KN/m2,
a = 2m,
d = 0.1m,
P = 100KN.
Bài 3: Vẽ các biểu đồ nội lực cho hệ khung phẳng chịu tải trọng như Hình 3.12.
M
P
q
l1
l1
l2l2
S1
S2
Hình 3.12: Hệ khung phẳng

3.8. Bài tập 47
Biết:
E = 2x107KN/m2,
l1 = 2m,
l2 = 3m,
S1 = b1xh1 = 0.2mx0.2m,
S2 = b2xh2 = 0.2mx0.3m,
P = 50KN,
q = 10KN/m,
M = 100KNm.

Chương 4
Bài toán phẳng của lý thuyết đànhồi
Khi ứng suất hoặc biến dạng theo một phương nào đó trong vật thể đàn hồi làduy nhất bằng không, trạng thái ứng suất hay biến dạng của vật thể là phẳng. Vídụ, trong trường hợp của tấm tường mỏng chịu tải trọng trong mặt phẳng củatấm, các thành phần ứng suất ngoài mặt phẳng của tấm bằng không. Trườnghợp của đê chắn nước có chiều dài lớn, chịu tải trọng phân bố ngang thân đê,các thành phần biến dạng theo phương dọc thân đê bằng không. Trong thực tế,hai bài toán phẳng của lý thuyết đàn hồi thường gặp là bài toán ứng suất phẳngvà bài toán biến dạng phẳng. Trong hai ví dụ trên, trường hợp thứ nhất là bàitoán ứng suất phẳng, trường hợp thứ hai là bài toán biến dạng phẳng.
4.1 Hàm chuyển vị
Sử dụng pháp chuyển vị, hệ kết cấu liên tục sẽ được rời rạc hoá thành các phầntử hữu hạn, các phần tử liên kết với nhau tại chỉ tại các điểm nút. Khác vớitrường hợp hệ thanh có các phần tử tiếp xúc với nhau tại nút, các phần tử hữuhạn lân cận trong bài toán phẳng của lý thuyết đàn hồi tiếp xúc với nhau tạiđường biên phần tử. Do vậy, các hàm chuyển vị cần được thiết lập sao cho thoảmãn điều kiện liên tục chuyển vị không chỉ tại các nút mà còn trên các đườngbiên chung của phần tử.
Các loại phần tử hữu hạn hay gặp trong bài toán phẳng là phần tử hữu hạntam giác và tứ giác, trong đó phần tử dạng tam giác đơn giản hơn và thườngđược sử dụng nhiều hơn.
49
50 Bài toán phẳng của lý thuyết đàn hồi
u(x, y)
v(x, y)
uiuj
uk
vi vj
vk
x
y
(xi, yi)(xj, yj)
(xk, yk)
ij
k
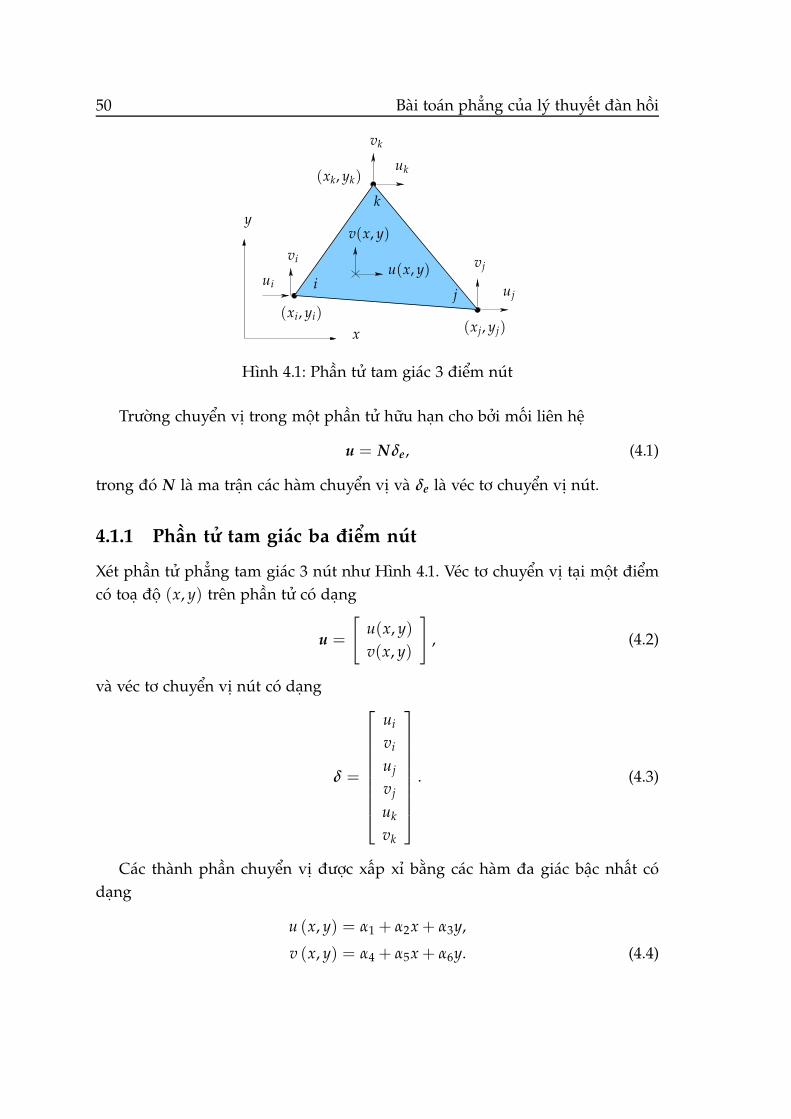
Hình 4.1: Phần tử tam giác 3 điểm nút
Trường chuyển vị trong một phần tử hữu hạn cho bởi mối liên hệ
u = Nδe, (4.1)
trong đó N là ma trận các hàm chuyển vị và δe là véc tơ chuyển vị nút.
4.1.1 Phần tử tam giác ba điểm nút
Xét phần tử phẳng tam giác 3 nút như Hình 4.1. Véc tơ chuyển vị tại một điểmcó toạ độ (x, y) trên phần tử có dạng
u =
[
u(x, y)
v(x, y)
]
, (4.2)
và véc tơ chuyển vị nút có dạng
δ =
ui
vi
uj
vj
uk
vk
. (4.3)
Các thành phần chuyển vị được xấp xỉ bằng các hàm đa giác bậc nhất códạng
u (x, y) = α1 + α2x + α3y,
v (x, y) = α4 + α5x + α6y. (4.4)

4.1. Hàm chuyển vị 51
trong đó αi là các hệ số được xác định từ các điều kiện:
ui = α1 + α2xi + α3yi,
uj = α1 + α2xj + α3yj,
uk = α1 + α2xk + α3yk, (4.5)
và
vi = α4 + α5xi + α6yi,
vj = α4 + α5xj + α6yj,
vk = α4 + α5xk + α6yk. (4.6)
Sau khi giải hệ phương trình trên, tìm được
u (x, y) = Niui + Njuj + Nkuk,
v (x, y) = Nivi + Njvj + Nkvk, (4.7)
trong đó Ni, Nj và Nk là các hàm chuyển vị tương ứng với các nút i, j và k. Hàmchuyển vị Ni có dạng:
Ni = ai + bix + ciy, (4.8)
với
ai =xjyk − xkyj
2A,
bi =yj − yk
2A= yjk,
ci =xk − xj
2A= xkj, (4.9)
và A là diện tích của phần tử tam giác:
A =1
2
∣∣∣∣∣∣∣
1 xi yi
1 xj yj
1 xk yk
∣∣∣∣∣∣∣
. (4.10)
Các hàm chuyển vị Nj và Nk có thể tìm được một cách tương tự bằng cách hoánvị vòng quanh các chỉ số i, j, k. Ma trận các hàm chuyển vị N có dạng
N =
[
Ni 0 Nj 0 Nk 0
0 Ni 0 Nj 0 Nk
]
. (4.11)
52 Bài toán phẳng của lý thuyết đàn hồi
Kết quả trên có thể nhận được từ việc nhận xét tính chất của hàm chuyển vịtại một điểm nút i nào đó: Ni = 1 tại (xi, yi), và Ni = 0 tại (xj, yj) và tại (xk, yk).Dưới dạng ma trận:
Ni(xi, yi) = ai + bixi + ciyi = 1,
Ni(xj, yj) = ai + bixj + ciyj = 0,
Ni(xk, yk) = ai + bixk + ciyk = 0, (4.12)
hay
1 xi yi
1 xj yj
1 xk yk
ai
bi
ci
=
1
0
0
, (4.13)
do đó
ai
bi
ci
=
1 xi yi
1 xj yj
1 xk yk
−1
1
0
0
. (4.14)
Tương tự, ta có:
aj
bj
cj
=
1 xi yi
1 xj yj
1 xk yk
−1
0
1
0
, (4.15)
và
ak
bk
ck
=
1 xi yi
1 xj yj
1 xk yk
−1
0
0
1
. (4.16)
4.1.2 Phần tử tứ giác bốn điểm nút
Xét phần tử phẳng tứ giác 4 nút như Hình 4.2. Véc tơ chuyển vị nút có dạng
δ =
ui
vi
uj
vj
uk
vk
ul
vl
. (4.17)

4.1. Hàm chuyển vị 53
ij
k
l
u(x, y)
v(x, y)
uiuj
uk
ul
vi vj
vk
vl
x
y
(xi, yi)(xj, yj)
(xk, yk)
(xl, yl)
Hình 4.2: Phần tử tứ giác 4 nút
Các thành phần chuyển vị được xấp xỉ bằng các hàm đa giác bán bậc nhất códạng
u (x, y) = α1 + α2x + α3y + α4xy,
v (x, y) = α5 + α6x + α7y + α8xy. (4.18)
Ma trận các hàm chuyển vị N có dạng
N =
[
Ni 0 Nj 0 Nk 0 Nl 0
0 Ni 0 Nj 0 Nk 0 Nl
]
. (4.19)
Hàm chuyển vị Nm có dạng
Nm = am + bmx + cmy + dmxy, (4.20)
trong đó các hệ số am, bm, cm và dm xác định từ phương trình
am
bm
cm
dm
=
1 xi yi xiyi
1 xj yj xjyj
1 xk yk xkyk
1 xl yl xlyl
−1
δmi
δmj
δmk
δml
, (4.21)
với δmk là Kronecker delta.
4.1.3 Phần tử hữu hạn bậc cao
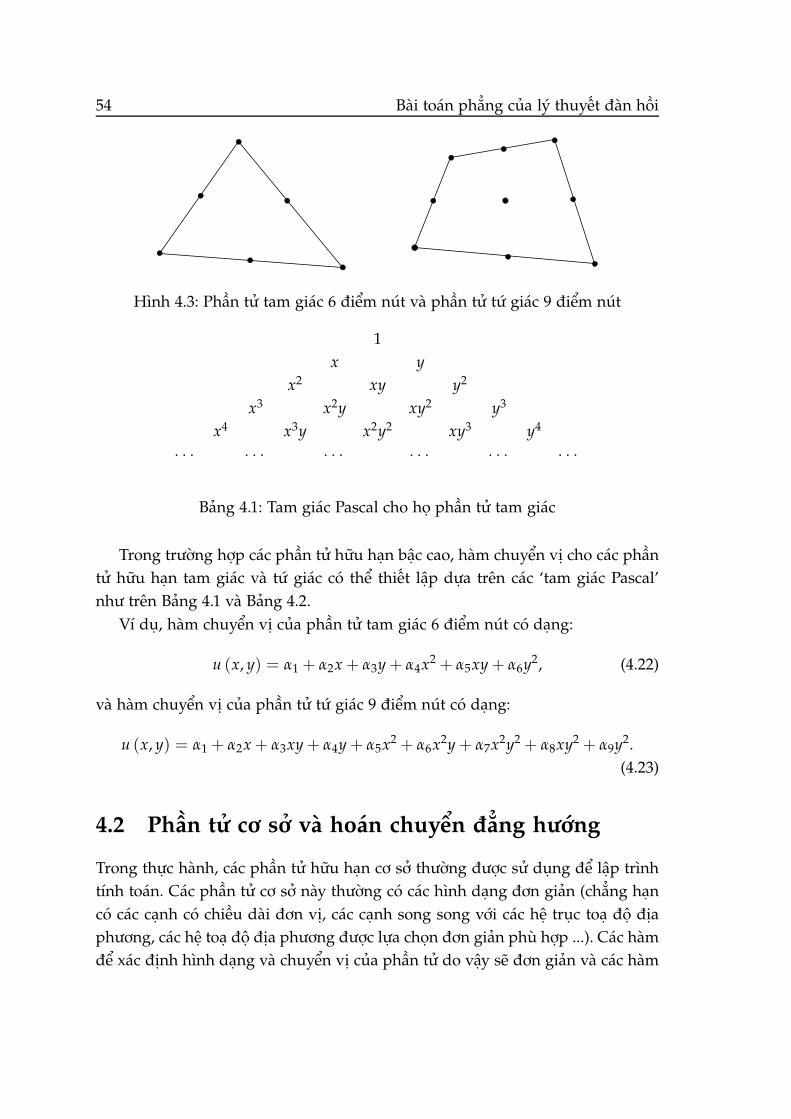
Ngoài các phần tử bậc nhất, các phần tử tam giác và tứ giác bậc cao thườngđược sử dụng trung thực tế. Hình 4.3 ví dụ các phần tử tam giác 6 điểm nút vàphần tử tứ giác 9 điểm nút.
54 Bài toán phẳng của lý thuyết đàn hồi
Hình 4.3: Phần tử tam giác 6 điểm nút và phần tử tứ giác 9 điểm nút
1
x y
x2 xy y2
x3 x2y xy2 y3
x4 x3y x2y2 xy3 y4
· · · · · · · · · · · · · · · · · ·
Bảng 4.1: Tam giác Pascal cho họ phần tử tam giác
Trong trường hợp các phần tử hữu hạn bậc cao, hàm chuyển vị cho các phầntử hữu hạn tam giác và tứ giác có thể thiết lập dựa trên các ‘tam giác Pascal’như trên Bảng 4.1 và Bảng 4.2.
Ví dụ, hàm chuyển vị của phần tử tam giác 6 điểm nút có dạng:
u (x, y) = α1 + α2x + α3y + α4x2 + α5xy + α6y2, (4.22)
và hàm chuyển vị của phần tử tứ giác 9 điểm nút có dạng:
u (x, y) = α1 + α2x + α3xy + α4y + α5x2 + α6x2y + α7x2y2 + α8xy2 + α9y2.
(4.23)
4.2 Phần tử cơ sở và hoán chuyển đẳng hướng
Trong thực hành, các phần tử hữu hạn cơ sở thường được sử dụng để lập trìnhtính toán. Các phần tử cơ sở này thường có các hình dạng đơn giản (chẳng hạncó các cạnh có chiều dài đơn vị, các cạnh song song với các hệ trục toạ độ địaphương, các hệ toạ độ địa phương được lựa chọn đơn giản phù hợp ...). Các hàmđể xác định hình dạng và chuyển vị của phần tử do vậy sẽ đơn giản và các hàm

4.2. Phần tử cơ sở và hoán chuyển đẳng hướng 55
1
x y
x2 xy y2
x3 x2y xy2 y3
x4 x3y x2y2 xy3 y4
· · · x4y x3y2 x2y3 xy4 · · ·· · · x4y2 x3y3 x2y4 · · ·
· · · x4y3 x3y4 · · ·· · · x4y4 · · ·
· · · · · ·· · ·
Bảng 4.2: Tam giác Pascal cho họ phần tử tứ giác
này có thể được thi hành chung cho các phần tử hữu hạn khác nhau của hệ kếtcấu. Ngoài ra, việc sử dụng các phần tử cơ sở còn cho phép đơn giản hoá việctính toán các tích phân số, cũng như cho phép tính toán các đường biên congbậc cao.
Xét phần tử cơ sở và phần tử hữu hạn tứ giác như Hình 4.4. Cần thiết lậpmối quan hệ chuyển đổi toạ độ để hoán chuyển các toạ độ của phần tử hữu hạntứ giác và phần tử sơ sở đơn vị, và ngược lại. Một điểm trong phần tử cơ sở cótoạ độ
ξ =
ξ
η
(4.24)
tương ứng với một điểm có toạ độ
x =
x
y
(4.25)
trong phần tử hữu hạn thực qua mối quan hệ hoán chuyển đẳng hướng có dạng
x (ξ, η) =n
∑i=1
Ni (ξ, η) xi (4.26)
y (ξ, η) =n
∑i=1
Ni (ξ, η) yi (4.27)
trong đó n là số điểm nút của phần tử hữu hạn (n = 4 cho phần tử tứ giác),(xi, yi) là toạ độ của điểm nút thứ i, (ξ, η) là các toạ độ tự nhiên của phần tử

56 Bài toán phẳng của lý thuyết đàn hồi
(x, y)
ξ
η
(−1,−1)
(−1, 1)
(1,−1)
(1, 1)
x
y
(xi, yi)
(xj, yj)
(xk, yk)
(xl, yl)
x(x, y)
ξ(ξ, η)
(ξ, η) ij
k
l
Hình 4.4: Phần tử tứ giác: phần tử cơ sở và phần tử hữu hạn thực
cơ sở, và Ni (ξ, η) là các hàm chuyển vị xây dựng trên phần tử cơ sở. Một thànhphần chuyển vị tại một điểm trên phần tử hữu hạn có thể được viết dưới dạngtương tự
u =n
∑i=1
Ni (ξ, η) ai (4.28)
trong đó ai là giá trị chuyển vị tại nút i của phần tử hữu hạn.Một vấn đề nảy sinh khi sử dụng phép hoán chuyển đẳng hướng là việc tính
các đạo hàm của một hàm theo hệ toạ độ thực (x, y) trong khi hàm chuyển vịNi là hàm số của hệ toạ độ tự nhiên (ξ, η). Xét một hàm số f tuỳ ý, lý thuyết đạohàm chỉ ra rằng
∂ f
∂ξ=
∂ f
∂x
∂x
∂ξ+
∂ f
∂y
∂y
∂ξ, (4.29)
∂ f
∂η=
∂ f
∂x
∂x
∂η+
∂ f
∂y
∂y
∂η(4.30)
hay
∂ f∂ξ∂ f∂η
=
[∂x∂ξ
∂y∂ξ
∂x∂η
∂y∂η
]
︸ ︷︷ ︸
J
∂ f∂x∂ f∂y
, (4.31)
trong đó J được biết như ma trận jacobian. Nghich đảo ma trận jacobian, ta có
4.2. Phần tử cơ sở và hoán chuyển đẳng hướng 57
mốt quan hệ ngược
∂ f∂x∂ f∂y
=1
j
[∂y∂η − ∂x
∂η
− ∂y∂ξ
∂x∂ξ
]
︸ ︷︷ ︸
J−1
∂ f∂ξ∂ f∂η
, (4.32)
trong đó j là định thức của ma trận jacobian, j = det(J).Từ các phương trình (4.26) và (4.27), ta có
∂x
∂ξ=
n
∑i=1
∂Ni
∂ξxi =
n
∑i=1
Ni,ξ xi, (4.33)
∂x
∂η=
n
∑i=1
∂Ni
∂ηxi =
n
∑i=1
Ni,ηxi, (4.34)
∂y
∂ξ=
n
∑i=1
∂Ni
∂ξyi =
n
∑i=1
Ni,ξyi, (4.35)
∂y
∂η=
n
∑i=1
∂Ni
∂ηyi =
n
∑i=1
Ni,ηyi. (4.36)
Từ phương trình (4.37), đạo hàm riêng của các hàm chuyển vị Nj theo các toạ độthực x, y có dạng
∂Nj
∂x∂Nj
∂y
=
[
∑ni=1 Ni,ξ xi ∑
ni=1 Ni,ξyi
∑ni=1 Ni,ηxi ∑
ni=1 Ni,ηyi
]−1
∂Nj
∂ξ∂Nj
∂η
. (4.37)
Mặc dù các công thức dựa trên phép hoán chuyển đẳng hướng nêu trên dườngnhư là phức tạp, phương pháp này cho phép thi hành các thuật toán phần tửhữu hạn rất đơn giản và tiện lợi.
4.2.1 Phần tử cơ sở tứ giác
Hàm chuyển vị tại nút thứ i cho phần tử tứ giác trên Hình 4.4 có dạng
Ni (ξ, η) =1
4(1 + ξiξ) (1 + ηiη) (4.38)
Hàm chuyển vị cho các phần tử tứ giác bậc cao có thể xem Hughes (2000).
58 Bài toán phẳng của lý thuyết đàn hồi
(x, y)
r
s
(0, 0) (1, 0)
(0, 1)
x
y
(xi, yi)
(xj, yj)
(xk, yk)
x(x, y)
(r, s)
(r, s)
12
3
ij
k
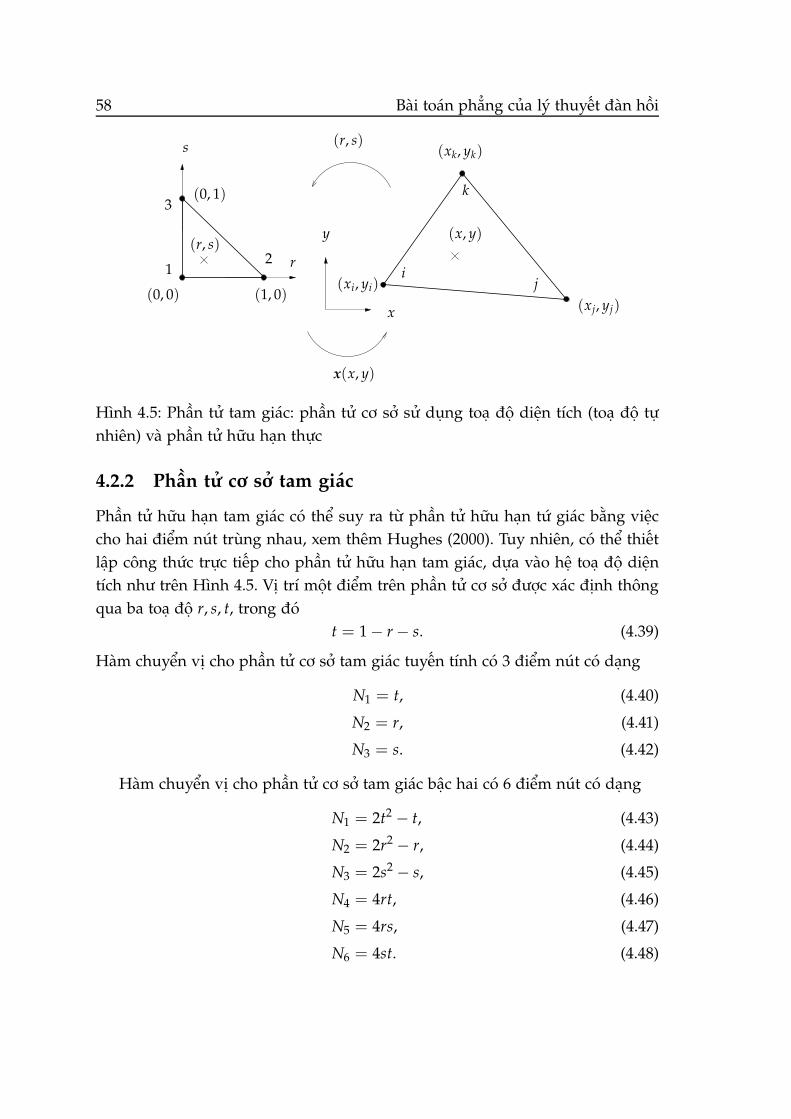
Hình 4.5: Phần tử tam giác: phần tử cơ sở sử dụng toạ độ diện tích (toạ độ tựnhiên) và phần tử hữu hạn thực
4.2.2 Phần tử cơ sở tam giác
Phần tử hữu hạn tam giác có thể suy ra từ phần tử hữu hạn tứ giác bằng việccho hai điểm nút trùng nhau, xem thêm Hughes (2000). Tuy nhiên, có thể thiếtlập công thức trực tiếp cho phần tử hữu hạn tam giác, dựa vào hệ toạ độ diệntích như trên Hình 4.5. Vị trí một điểm trên phần tử cơ sở được xác định thôngqua ba toạ độ r, s, t, trong đó
t = 1 − r − s. (4.39)
Hàm chuyển vị cho phần tử cơ sở tam giác tuyến tính có 3 điểm nút có dạng
N1 = t, (4.40)N2 = r, (4.41)N3 = s. (4.42)
Hàm chuyển vị cho phần tử cơ sở tam giác bậc hai có 6 điểm nút có dạng
N1 = 2t2 − t, (4.43)N2 = 2r2 − r, (4.44)N3 = 2s2 − s, (4.45)N4 = 4rt, (4.46)N5 = 4rs, (4.47)N6 = 4st. (4.48)
4.3. Ma trận độ cứng và véc tơ lực nút 59
Công thức tương tự cho các phần tử tam giác bậc bất kỳ có thể xem Hughes(2000).
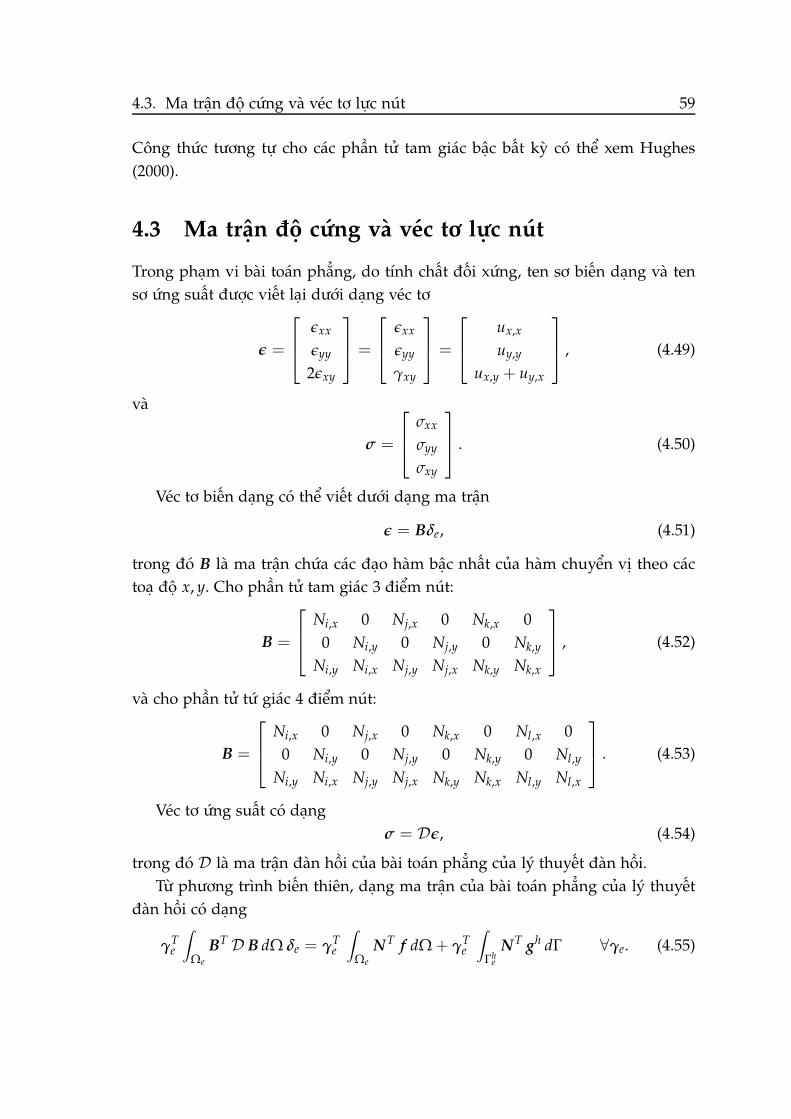
4.3 Ma trận độ cứng và véc tơ lực nút
Trong phạm vi bài toán phẳng, do tính chất đối xứng, ten sơ biến dạng và tensơ ứng suất được viết lại dưới dạng véc tơ
ǫ =
ǫxx
ǫyy
2ǫxy
=
ǫxx
ǫyy
γxy
=
ux,x
uy,y
ux,y + uy,x
, (4.49)
và
σ =
σxx
σyy
σxy
. (4.50)
Véc tơ biến dạng có thể viết dưới dạng ma trận
ǫ = Bδe, (4.51)
trong đó B là ma trận chứa các đạo hàm bậc nhất của hàm chuyển vị theo cáctoạ độ x, y. Cho phần tử tam giác 3 điểm nút:
B =
Ni,x 0 Nj,x 0 Nk,x 0
0 Ni,y 0 Nj,y 0 Nk,y
Ni,y Ni,x Nj,y Nj,x Nk,y Nk,x
, (4.52)
và cho phần tử tứ giác 4 điểm nút:
B =
Ni,x 0 Nj,x 0 Nk,x 0 Nl,x 0
0 Ni,y 0 Nj,y 0 Nk,y 0 Nl,y
Ni,y Ni,x Nj,y Nj,x Nk,y Nk,x Nl,y Nl,x
. (4.53)
Véc tơ ứng suất có dạngσ = Dǫ, (4.54)
trong đó D là ma trận đàn hồi của bài toán phẳng của lý thuyết đàn hồi.Từ phương trình biến thiên, dạng ma trận của bài toán phẳng của lý thuyết
đàn hồi có dạng
γTe
∫
Ωe
BT D B dΩ δe = γTe
∫
Ωe
NT f dΩ + γTe
∫
Γhe
NT gh dΓ ∀γe. (4.55)

60 Bài toán phẳng của lý thuyết đàn hồi
Do phương trình trên đúng cho ∀γe, ta có∫
Ωe
BT D B dΩ δe =∫
Ωe
NT f dΩ +∫
Γhe
NT gh dΓ. (4.56)
hayKe δe = Fe, (4.57)
trong đóKe =
∫
Ωe
BT D B dΩ, (4.58)
vàFe = F
fe + F
ge =
∫
Ωe
NT f dΩ +∫
Γhe
NT gh dΓ. (4.59)
Trong phương trình trên, Ke là ma trận độ cứng, Ff
e là véc tơ lực nút quy đổicho tải trọng phân bố thể tích, F
ge là véc tơ lực nút quy đổi cho tải trọng phân
bố trên biên, và Fe là véc tơ lực nút tổng cộng của phần tử. Trong tinh toán thựchành, các tích phân số được sử dụng để thực hiện các tích phân trên.
4.4 Tích phân số
Trong thực hành tính toán, tích phân số được áp dụng để tính tích phân của cáchàm đa giác định nghĩa trên phần tử hữu hạn. Xét phần tử hữu hạn thanh thẳngtrong trường hợp bài toán một chiều. Giả sử, cần tính tích phân I có dạng
I =∫ 1
−1f (ξ)dξ. (4.60)
Tích phân I sẽ được tính toán theo tích phân số qua biểu thức
I =Nint
∑i=1
f (ξi)wi, (4.61)
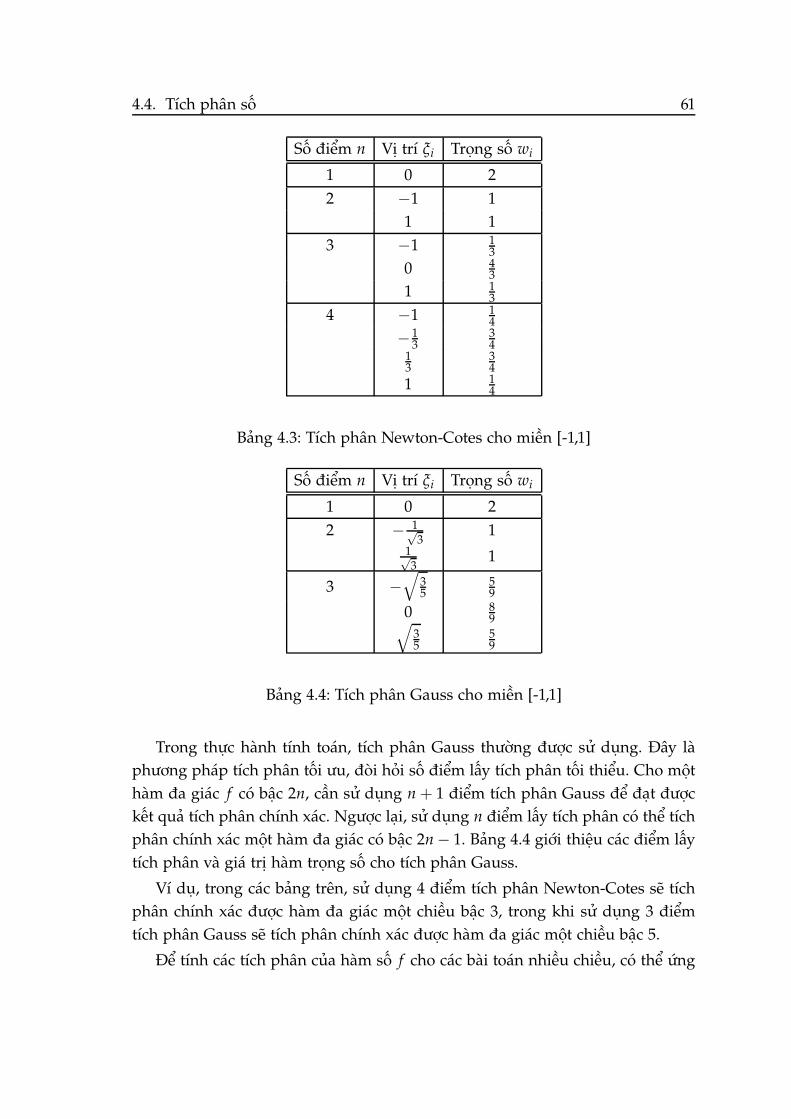
trong đó ξi là các điểm chia trên miền đang xét, Nint là số điểm chia (số điểmlấy tích phân), wi là trọng số tại điểm chia thứ i. Chú ý là số điểm lấy tích phânNint tuỳ thuộc vào bậc của hàm f (ξ) và phương pháp tích phân. Dưới đây trìnhbày hai phương pháp tích phân số: tích phân Newton-Cotes và tích phân Gauss.
Tích phân Newton-Cotes sử dụng các điểm tích phân có khoảng cách đềunhau trên miền đang xét. Để tích phân chính xác một hàm đa giác f có bậc n,cần sử dụng n + 1 điểm lấy tích phân Newton-Cotes. Bảng 4.3 giới thiệu cácđiểm lấy tích phân và giá trị hàm trọng số cho tích phân Newton-Cotes.
4.4. Tích phân số 61
Số điểm n Vị trí ξi Trọng số wi
1 0 22 −1 1
1 13 −1 1
3
0 43
1 13
4 −1 14
− 13
34
13
34
1 14
Bảng 4.3: Tích phân Newton-Cotes cho miền [-1,1]
Số điểm n Vị trí ξi Trọng số wi
1 0 22 − 1√
31
1√3
1
3 −√
35
59
0 89√
35
59
Bảng 4.4: Tích phân Gauss cho miền [-1,1]
Trong thực hành tính toán, tích phân Gauss thường được sử dụng. Đây làphương pháp tích phân tối ưu, đòi hỏi số điểm lấy tích phân tối thiểu. Cho mộthàm đa giác f có bậc 2n, cần sử dụng n + 1 điểm tích phân Gauss để đạt đượckết quả tích phân chính xác. Ngược lại, sử dụng n điểm lấy tích phân có thể tíchphân chính xác một hàm đa giác có bậc 2n − 1. Bảng 4.4 giới thiệu các điểm lấytích phân và giá trị hàm trọng số cho tích phân Gauss.
Ví dụ, trong các bảng trên, sử dụng 4 điểm tích phân Newton-Cotes sẽ tíchphân chính xác được hàm đa giác một chiều bậc 3, trong khi sử dụng 3 điểmtích phân Gauss sẽ tích phân chính xác được hàm đa giác một chiều bậc 5.
Để tính các tích phân của hàm số f cho các bài toán nhiều chiều, có thể ứng

62 Bài toán phẳng của lý thuyết đàn hồi
dụng tích phân số theo từng chiều riêng lẻ. Cho trường hợp phần tử tam giác,các điểm tích phân và hàm trọng có thể tra bảng, xem thêm Hughes (2000).
Để thiết lập ma trận độ cứng và véc tơ lực nút của một phần tử hữu hạn,việc sử dụng phần tử cơ sở với hệ toạ độ ξ, η cho phép thực hiện tích phân sốmột cách đơn giản. Ma trận độ cứng của phần tử sau khi đổi biến có dạng
Ke =∫
Ωe
BT D B dΩ =∫ 1
−1
∫ 1
−1BT D B j dξ dη, (4.62)
Trong đó j là định thức của ma trận jacobian. Lưu ý rằng j = dΩ/ (dξ dη).Tương tự, véc tơ lực nút quy đổi sau khi đổi biến có thể viết dưới dạng
Ff
e =∫
Ωe
NT f dΩ =∫ 1
−1
∫ 1
−1NT f j dξ dη. (4.63)
Thực hiện tích phân số, ma trận độ cứng và véc tơ lực nút của phần tử được xácđịnh theo biểu thức
Ke =Nint
∑i=1
B (ξi, ηi)T D B (ξi, ηi) j (ξi, ηi) wi, (4.64)
và
Ff
e =Nint
∑i=1
N (ξi, ηi)T f (ξi, ηi) j (ξi, ηi) wi, (4.65)
trong đó (ξi, ηi) là toạ độ điểm lấy tích phân thứ i và wi là trọng số tại điểm lấytích phân i.
4.5 Bài tập
Bài 1: Cho phần tử hữu hạn hình vuông có toạ độ các điểm nút là i(−1,−1),j(1,−1) , k(1, 1), l(−1, 1). Triển khai các công thức (4.20) và (4.21) để thiết lậpcác hàm chuyển vị Ni, Nj, Nk và Nl của phần tử.
Bài 2: Sử dụng các tam giác Pascal, viết hàm chuyển vị tổng quát cho phần tửhữu hạn tam giác 10 điểm nút và phần tử hữu hạn tứ giác 16 điểm nút.
Bài 3: Chọn một hàm đa giác bậc hai f (x) tuỳ ý xác định trong khoảng [-1,1].Hãy tính chính xác tích phân trên và tính lại theo các phương pháp tích phân sốNewton-Cotes và Gauss. So sánh và nhận xét kết quả.
Chương 5
Tấm và vỏ
Tấm chịu uốn là kết cấu phẳng có kích thước theo một phương (phương chiềudày) rất nhỏ hơn kích thước theo hai phương còn lại (các phương trong mặtphẳng) và tải trọng tác dụng theo phương vuông góc với mặt phẳng của tấm.Tuỳ thuộc vào chiều dày của tấm, lý thuyết tấm mỏng hoặc tấm dày được sửdụng để tính toán.
Trong bài toán tấm mỏng, giả thiết mặt cắt phẳng và vuông góc với mặttrung gian thường được sử dụng (giả thiết Kirchhoff), các thành phần biến dạngtrượt do đó đã được bỏ qua; đại lượng duy nhất cần xác định là chuyển vị theophương vuông góc với mặt phẳng của tấm. Khi các thành phần biến dạng trượtđược xét tới, giả thiết Mindlin được sử dụng; ngoài thành phần chuyển vị thẳngtheo phương vuông góc với mặt phẳng của tấm, góc xoay tại các tiết diện là cácẩn số độc lập.
Trên cơ sở các lý thuyết tính tấm uốn, nhiều loại phần tử hừu hạn đã đượcđề xuất, ví dụ phần tử tương thích C1 (Clough and Tocher, 1965; Zlámal, 1968;Zienkiewicz, 1971; Ciarlet and Raviart, 1972), phần tử không tương thích (Baze-ley et al., 1965; Babuska and Zlámal, 1973), phần tử C0 sử dụng phương pháphỗn hợp (Mindlin and Cooper, 1960; Brezzi et al., 1989; Arnold and Falk, 1989),phần tử C1 sử dụng các hàm cơ sở có cấu trúc đặc biệt (Krysl and Belytschko,1995; Cirak et al., 2000; Onate and Zarate, 2000; Hughes et al., 2005) hay gần đâylà phần tử không tương thích C0 sử dụng phương pháp Galerkin không liên tục(Engel et al., 2002; Hughes and Garikipati, 2004).
Khác với phần tử tấm có mặt trung gian là phẳng và chỉ có các thành phầnnội lực mô men uốn ngoài mặt phẳng (bending forces), phần tử vỏ có mặt trunggian là cong và tồn tại cả các thành phần nội lực uốn và kéo nén (membrane
63

64 Tấm và vỏ
forces). Một cách đơn giản khi xây dựng phần tử hữu hạn cho kết cấu vỏ mỏnglà kết hợp bài toán toán phẳng của lý thuyết đàn hồi và bài toán uốn tấm.
Chương này trình bày một số khía cạnh cần lưu ý khi tính tấm và vỏ mỏngtrong phạm vi sử dụng giả thiết Kirchhoff.
5.1 Tấm chịu uốn
5.1.1 Hàm chuyển vị
Phần tử tam giác 3 điểm nút
Tại mỗi nút có 3 thành phần chuyển vị: một chuyển vị thẳng và hai chuyển vịxoay. Véc tơ chuyển vị nút có dạng:
δ =
ui
φ1i
φ2i
uj
φ1j
φ2j
uk
φ1k
φ2k
. (5.1)
Hàm chuyển vị cần thiết phải là hàm bậc ba với 10 hệ số có dạng:
u (x, y) = α1 + α2x + α3y + α4x2 + α5xy + α6y2 + α7x3 + α8x2y + α9xy2 + α10y3.
(5.2)
Tuy nhiên, với 9 chuyển vị nút không thể xác định duy nhất 10 hệ số αi, ngườita thường sử dụng hàm chuyển vị có dạng sau:
u (x, y) = α1 + α2x + α3y + α4x2 + α5xy + α6y2 + α7x3 + α8
(
x2y + xy2)
+ α9y3.
(5.3)
Hệ toạ độ diện tích thường được sử dụng để thiết lập hàm chuyển vị cho phầntử tam giác.

5.1. Tấm chịu uốn 65
Phần tử tứ giác 4 điểm nút
Véc tơ chuyển vị nút có dạng
δ =
ui
φ1i
φ2i
uj
φ1j
φ2j
uk
φ1k
φ2k
ul
φ1l
φ2l
. (5.4)
Cần chọn một đa thức bậc bốn cho hàm chuyển vị. Do chỉ có 12 chuyển vị nút,hàm chuyển vị được chọn có dạng
u (x, y) = α1 + α2x + α3y + α4x2 + α5xy + α6y2 + α7x3 + α8x2y + α9xy2
+ α10y3 + α11x3y + α12xy3. (5.5)
Sử dụng các hàm chuyển vị trên, chuyển vị thẳng là liên tục qua biên phầntử. Tuy nhiên, điều kiện liên tục về góc xoay không thoả mãn, do vậy phần tử làliên tục C0 và là phần tử không tương thích.
5.1.2 Biến dạng
Biến dạng của mặt trung bình của tấm được biểu diễn qua véc tơ độ cong nhưsau:
κ =
u,xx
u,yy
2u,xy
. (5.6)
Độ cong của tấm liên hệ với véc tơ lực nút theo mối quan hệ
κ = Dδe. (5.7)
66 Tấm và vỏ
Mô men trên một đơn vị chiều dài của tấm được xác định qua liên hệ
M =
Mxx
Myy
Mxy
= Dκ, (5.8)
trong đó ma trận đàn hồi D cho tấm đẳng hướng có dạng
D =Et3
12 (1 − ν2)
1 ν 0
ν 1 0
0 0 1−ν2
, (5.9)
trong t là chiều dày của tấm.
5.1.3 Ma trận độ cứng và véc tơ lực nút
Ma trận độ cứng:Ke =
∫
Ωe
DT D D dΩ, (5.10)
và véc tơ lực nút quy đổiF
fe =
∫
Ωe
NT f dΩ. (5.11)
5.1.4 Ví dụ phân tích tấm uốn
Xét tấm hình vuông có cạnh L = 2 m, chiều dày t = 0.01 m, kê bốn cạnh. Vậtliệu tấm có mô đun đàn hồi E = 2 × 108 N/m2 và hệ số Poisson ν = 0.3. Dotấm kê 4 cạnh, Γu = ΓM = ∂Ω, gu = 0 và M = 0. Tải trọng phân bố đều F = 10
N/m2 tác dụng vuông góc với mặt phẳng của tấm. Sử dụng các phần tử hữuhạn tam giác, luới chia phần tử như trên Hình 5.1.
Biến dạng của tấm được minh hoạ như trên Hình 5.2.
5.2 Vỏ mỏng
Kết cấu vỏ thường có mặt trung gian là cong. Để tính kết cấu vỏ, có thể sử dụngphần tử hữu hạn vỏ phẳng, phần tử hữu hạn vỏ cong hoặc phần tử hữu hạn vỏnội suy.

5.2. Vỏ mỏng 67
L
L
Hình 5.1: Lưới chia phần tử hữu hạn của tấm kê bốn cạnh
Hình 5.2: Biến dạng của tấm chịu uốn.

68 Tấm và vỏ
X1
X2
X3
E1
E2
E3
ξ1
ξ2
ξ3
A1A2
A3
i
j
k
Hình 5.3: Phần tử vỏ phẳng.
5.2.1 Phần tử vỏ phẳng
Hình 5.3 mô tả phần tử vỏ phẳng tam giác. Hệ toạ độ địa phương được xác địnhbởi:
A1 =~ij
∥∥∥~ij
∥∥∥
, (5.12)
A3 =~ij × ~ik
∥∥∥~ij × ~ik
∥∥∥
. (5.13)
và
A2 = A3 × A1. (5.14)
5.2.2 Phần tử vỏ cong
Hình 5.4 minh hoạ phần tử vỏ cong. Các toạ độ liên hệ với nhau qua các biểuthức:
ξ1 = X1 0 ≤ X1 ≤ L, (5.15)ξ2 = R φ − θ ≤ φ ≤ θ, (5.16)

5.2. Vỏ mỏng 69
(1, 0)
(0, 1)
s1
s2θθ
θR
θR
φφR
ξ1
ξ1ξ2
ξ2
(0, 0)
L L
X1
X2
X3
ωΩ
Hình 5.4: Phần tử vỏ cong.
trong đó φ = arcsin (X2/R). Ngược lại,
X1 = ξ1 0 ≤ ξ1 ≤ L, (5.17)
X2 = R sin
(ξ2
R
)
− θ R ≤ ξ2 ≤ θ R, (5.18)
X3 = R cos
(ξ2
R
)
− θ R ≤ ξ2 ≤ θ R. (5.19)
Hình 5.5 là ví dụ việc xác định miền tích phân cho các vỏ cong.
5.2.3 Phần tử vỏ nội suy
Các toạ độ nút và chuyển vị nút có thể được nội suy như sau:
Xi
(
ξ1, ξ2)
= Xi (s1, s2, s3) =n
∑j=1
Nj (s1, s2, s3) Xji , (5.20)
ui
(
ξ1, ξ2)
= ui (s1, s2, s3) =n
∑j=1
Nj (s1, s2, s3) uji , (5.21)
trong đó Nj ký hiệu hàm hình dạng tại nút j. Hình 5.6 minh hoạ một phần tửvỏ nội suy.
Hình 5.7, Hình 5.8 và Hình 5.9 là kết quả tính một số kết cấu vỏ trong trạngthái phi tuyến hình học (Dung, 2008). Các sơ đồ tính này được biết như các sơ

70 Tấm và vỏ
(a) (b)
Hình 5.5: Ví dụ tính vỏ cong: (a) Vỏ trụ; (b) Bán cầu. Mặt cong là các miền vậtlý và miền phẳng là các miền tham số.
(0, 0) (1, 0)
(0, 1)
s1, ξ1
s2, ξ2
A1
A2
A3
ss′
n
n′
X
n
s
l
L
s = 0
s = lωE
ΩE
Hình 5.6: Phần tử vỏ nội suy.

5.3. Bài tập 71
đồ kiểm tra tiêu chuẩn, thường được sử dụng để kiểm tra, đánh giá khả năngcủa thích dụng các phần tử vỏ được đề xuất.
Hình 5.7: Vành tròn khía cạnh.
5.3 Bài tập
Bài 1: Viết phương trình biến thiên cho bài toán vỏ phẳng chịu tải trọng phânbố trong và ngoài mặt phẳng của vỏ.
Bài 2: Sử dụng một chương trình phần tử hữu hạn thông dụng (Sap2000,Etabs ...), phân tích vỏ mái Scordelis-Lo (Hình 5.10). Vỏ có gối tựa cứng (rigidlysupported) tại hai biên cong và tự do tại hai biên thẳng. Các kích thước của vỏ:cạnh L = 50 m, bán kính R = 25 m, chiều dày t = 0.25 m, góc φ = 2/9π rad,Mô đun đàn hồi E = 4.32 × 108 N/m2 và hệ số Poisson ν = 0. Tải trọng phânbố trên mái cường độ F = −90 N/m2 theo phương đứng (hướng xuống).
Thay đổi lưới chia phần tử hữu hạn, lập đồ thị liên hệ giữa sai số của chuyểnvị đứng e = ure f − u tại điểm giữa cạnh biên thẳng của vỏ và số phần tử n.
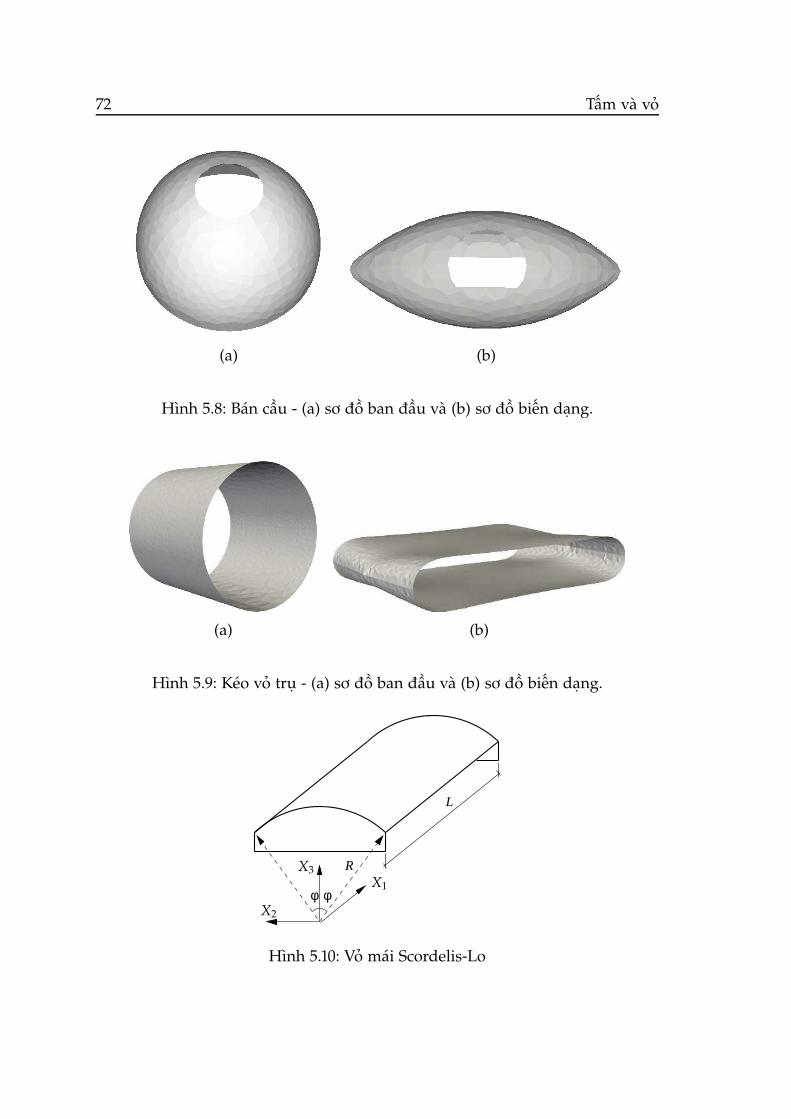
72 Tấm và vỏ
(a) (b)
Hình 5.8: Bán cầu - (a) sơ đồ ban đầu và (b) sơ đồ biến dạng.
(a) (b)
Hình 5.9: Kéo vỏ trụ - (a) sơ đồ ban đầu và (b) sơ đồ biến dạng.
L
R
φφX1
X2
X3
Hình 5.10: Vỏ mái Scordelis-Lo

5.3. Bài tập 73
Lập đồ thị liên hệ giữa log(n) và log(e). Chuyển vị để so sánh ure f = 0.3024 m
(Belytschko et al., 1985).


Chương 6
Bài toán động lực học
Trong bài toán động lực học, bên cạnh việc xét tới các tải trọng tác dụng tĩnh,các lực quán tính và lực cản tác dụng lên kết cấu cũng cần phải kể đến.
6.1 Phương trình động lực học
Xét bài toán vật thể đàn hồi chịu tải trọng tĩnh và động. Phương trình chuyểnđộng tại một chất điểm có dạng
ρu + cu = ∇ · σ + f in Ω, (6.1)u = g on Γu, (6.2)
σ · n = h on Γh, (6.3)u (x, 0) = u0 (x) in Ω, (6.4)u (x, 0) = v0 (x) in Ω, (6.5)
trong đó ρ là mật độ khối lượng, c là hệ số cản, u và u là các đạo hàm bậc nhấtvà bậc hai của chuyển vị theo thời gian,
u =∂u
∂t, (6.6)
u =∂2u
∂t2, (6.7)
75

76 Bài toán động lực học
u0 và v0 là các chuyển vị tại thời điểm ban đầu t = 0. Viết lại dưới dạng chỉ số,ta có
ρui + cui = σij,j + fi in Ω, (6.8)ui = gi on Γu, (6.9)
σijnj = hi on Γh, (6.10)ui (xi, 0) = ui|0 (xi) in Ω, (6.11)ui (xi, 0) = vi|0 (xi) in Ω. (6.12)
Các phương trình trên là phương trình cơ sở cho bài toán động lực học của vậtthể đàn hồi.
Phương trình biến thiên được thiết lập bằng cách nhân cả hai vế của phươngtrình cân bằng (6.8) với hàm thử wi độc lập thời gian và tích phân trên miền Ω,ta có
∫
Ωwi ρui dΩ +
∫
Ωwi cui dΩ =
∫
Ωwiσij,j dΩ +
∫
Ωwi fi dΩ ∀wi ∈ V . (6.13)
Sau khi tích phân từng phần số hạng thứ ba của phương trình trên và thi hànhđiều kiện biên, ta có phương trình biến thiên cho bài toán động lực học như sau:tìm trường chuyển vị ui và trường ứng suất σij thoả mãn:
∫
Ωwi ρui dΩ +
∫
Ωwi cui dΩ +
∫
Ωws
i,jσij dΩ
=∫
Γhwi hi dΓ +
∫
Ωwi fi dΩ ∀wi ∈ V . (6.14)
6.2 Dạng ma trận
Sử dụng phương pháp phần tử hữu hạn, các hàm chuyển vị, hàm thử và cácđạo hàm của chúng được thay thế như sau
u = Nδe, (6.15)u = N δe, (6.16)u = N δe, (6.17)
σ = DBδe, (6.18)
và
w = Nγe, (6.19)∇s · w = Bγe, (6.20)

6.2. Dạng ma trận 77
trong đó N và B là ma trận chứa các hàm chuyển vị và các đạo hàm bậc nhấtcủa chúng theo không gian, δe là véc tơ chuyển vị tại nút và γe là véc tơ các giátrị hàm thử tại nút của phần tử hữu hạn. Thay thế các liên hệ trên vào phươngtrình biến thiên, xét phần tử e, ta có
γTe
∫
Ωe
NT ρ N dΩ δe + γTe
∫
Ωe
NT c N dΩ δe + γTe
∫
Ωe
BT D B dΩ δe
= γTe
∫
Ωe
NT f dΩ + γTe
∫
Γhe
NT gh dΓ ∀γe. (6.21)
Do phương trình trên đúng cho ∀γe, ta có∫
Ωe
NT ρ N dΩ δe +∫
Ωe
NT c N dΩ δe +∫
Ωe
BT D B dΩ δe
=∫
Ωe
NT f dΩ +∫
Γhe
NT gh dΓ. (6.22)
Xét cho toàn hệ kết cấu, ta có∫
ΩNT ρ N dΩ δe +
∫
ΩNT c N dΩ δe +
∫
ΩBT D B dΩ δe
=∫
ΩNT f dΩ +
∫
ΓhNT gh dΓ, (6.23)
hayM δ + C δ + K δ = F, (6.24)
trong đó
M = ∑e
∫
Ωe
NT ρ N dΩ, (6.25)
C = ∑e
∫
Ωe
NT c N dΩ, (6.26)
K = ∑e
∫
Ωe
BT D B dΩ, (6.27)
vàF = ∑
e
∫
Ωe
NT f dΩ +∫
ΓhNT gh dΓ. (6.28)
Trong phương trình trên, M là ma trận khối lượng, C là ma trận cản, K là matrận độ cứng, và F là véc tơ lực nút tổng cộng của hệ kết cấu.

78 Bài toán động lực học
Một phương pháp đơn giản để thiết lập ma trận cản là tổ hợp từ ma trậnkhối lượng và ma trân độ cứng,
C = τM + ψK, (6.29)
trong đó τ và ψ là các hệ số tuỳ thuộc vào các đặc trưng của vật liệu và kếtcấu. Phương pháp xác định ma trận cản này được biết đến như phương phápRayleigh.
6.3 Dao động tự do không có lực cản
Khi dao động của hệ kết cấu là tự do và không có lực cản, chuyển động của hệlà điều hoà. Chuyển vị tại các nút của hệ có thể mô tả như sau:
δ = δ0 cos (ωt + α) , (6.30)
trong đó ω là tần số góc và δ0 là biên độ dao động của dao động tự do. Gia tốcchuyển động tại nút được xác định bởi biểu thức
δ = −ω2 δ0 cos (ωt + α) . (6.31)
Thay các phương trình trên vào phương trình (6.24) và rút gọn, ta được(
K − ω2M)
δ0 = 0, (6.32)
Khi dao động tự do, vì biên độ dao động tại các nút không đồng thời bằngkhông, rút ra
det(
K − ω2M)
= 0. (6.33)
Phương trình trên là phương trình để xác định tần số của dao động tự do củahệ kết cấu.
Khi hệ có n bậc tự do, phương trình (6.33) dẫn tới việc giải một hệ phươngtrình đại số gồm n phương trình để xác định n tần số dao động riêng ω. Mỗigiá trị của tần số dao động riêng tương ứng với một véc tơ chứa các biên độ daođộng tại các nút.
Phương trình (6.32) có thể viết dưới dạng
ω2M δ0 = Kδ0; (6.34)

6.4. Bài tập 79
và nhân cả hai vế của phương trình trên vớ K−1, ta có
K−1M δ0 =1
ω2K−1Kδ0 = λδ0, (6.35)
trong đó λ = 1/ω2. Phương trình trên có dạng phương trình trị riêng thườnggặp
Hx = λx. (6.36)
Nhìn chung, K−1M không phải ma trận đối xứng, do vậy việc tìm các trị riêngλ là khá phức tạp. Người ta thường biến đổi phương trình trên về dạng chứacác ma trận đối xứng (Lựu, 2000). Ma trận độ cứng K (đối xứng) có thể đượcphân tích như sau
K = L LT, (6.37)
trong đó L là ma trận tam giác dưới K. Do vậy
K−1 =(
LT)−1
L−1. (6.38)
Nhân cả hai vế của phương trình (6.35) với LT, lưu ý tới phương trình (6.38), tacó
L−1Mδ0 = λLTδ0. (6.39)
Đặt LTδ0 = x và thay vào phương trình trên, ta được phương trình (6.36), trongđó
H = L−1M(
LT)−1
(6.40)
là ma trận đối xứng. Phương pháp biến đổi trên cho phép xác định được các trịriêng λ, các dạng dao động riêng x và δ0 một cách dễ dàng hơn.
Các phương trình đã nêu trên được áp dụng cho bài toán động lực học củavật thể đàn hồi. Khi xét những hệ kết cấu khác, chẳng hạn như hệ thanh, hệ tấmvỏ ..., việc thiết lập các phương trình động lực học và dạng ma trận theo phươngpháp phần tử hữu hạn có thể được thực hiện một cách tương tự.
6.4 Bài tập
Bài 1: Cho các phần tử tam giác 3 điểm nút và tứ giác 4 điểm nút có các toạđộ nút tuỳ chọn. Cho mật độ khối lượng là ρ, lập ma trận khối lượng cho cácphần tử sử dụng trong bài toán phẳng của lý thuyết đàn hồi.

80 Bài toán động lực học
Bài 2: Sử dụng một chương trình phần tử hữu hạn thông dụng (Sap2000, Etabs...), phân tích dao động riêng của tấm uốn đã đề cập trong mục 5.1.4. Cho mậtđộ khối luợng ρ = 1 × 104Ns2/m4.
Tài liệu tham khảo
Arnold, D. N. and Falk, R. S. (1989). A uniformly accurate finite element methodfor the reissner-mindlin plate. SIAM Journal on Numerical Analysis, 26(6):1276–1290.
Babuska, I. and Zlámal, M. (1973). Nonconforming elements in finite-elementmethod with penalty. SIAM Journal on Numerical Analysis, 10(5):863–875.
Bathe, K. J. (1996). Finite Element Procedures. Prentice-Hall, Inc., EnglewoodCliffs, New Jersey 07632, USA.
Bazeley, G. P., Cheung, Y. K., Irons, B. M., and Zienkiewicz, O. C. (1965). Tri-angular elements in bending-conforming and nonconforming solutions. InConference on Matrix Methods in Structural Mechanics, Wright Patterson A. F. B.,Ohio.
Belytschko, T., Stolarski, H., Liu, W. K., Carpenter, N., and Ong, J. S. J. (1985).Stress projection for membrane and shear locking in shell finite elements.Computer Methods in Applied Mechanics and Engineering, 51(1–3):221–258.
Bernadou, M. (1996). Finite element methods for thin shell problems. John Wiley &Sons, New York.
Brezzi, F., Bathe, K., and Fortin, M. (1989). Mixed-interpolated elements forReissner-Mindlin plates. International Journal for Numerical Methods in Engi-neering, 28:1787–1801.
Chapelle, D. and Bathe, K. J. (2003). The Finite Element Analysis of Shells - Funda-mentals. Springer-Verlag, Berlin.
Ciarlet, P. G. and Raviart, P. A. (1972). General lagrange nd hermite interpola-tion in Rn with applications to finite element methods. Archive for RationalMechanics and Analysis, 46:177–199.
81

82 Tài liệu tham khảo
Cirak, F., Ortiz, M., and Schroder, P. (2000). Subdivision surfaces: a newparadigm for thin-shell finite-element analysis. International Journal for Nu-merical Methods in Engineering, 47(12):2039–2072.
Clough, R. W. and Tocher, J. L. (1965). Finite element stiffness matrices foranalysis of plates in bending. In Conference on Matrix Methods in StructuralMechanics, Wright Patterson A. F. B., Ohio.
Dung, N. T. (2008). Discontinuous Galerkin formulations for thin bending problems.PhD thesis, Delft University of Technology, Delft.
Engel, G., Garikipati, K., Hughes, T. J. R., Larson, M. G., and Taylor, R. L. (2002).Continuous/discontinuous finite element approximations of fourth-order el-liptic problems in structural and continuum mechanics with applications tothin beams and plates, and strain gradient elasticity. Computer Methods in Ap-plied Mechanics and Engineering, 191(34):3669–3750.
Hughes, T. J. R. (2000). The finite element method - Linear and dynamic finite elementanalysis. Dover Publications, Inc., Mineola, New York.
Hughes, T. J. R., Cottrell, J. A., and Bazilevs, Y. (2005). Isogeometric analysis:CAD, finite elements, NURBS, exact geometry and mesh refinement. ComputerMethods in Applied Mechanics and Engineering, 194(39–41):4135–4195.
Hughes, T. J. R. and Garikipati, K. (2004). On the continuous/discontinuousGalerkin (CDG) formulation of Poisson-Kirchhoff plate theory. In Mathisen,K. M., Kvamsdal, T., and Okstad, K. M., editors, Computational Mechanics -Theory and Practice. CIMNE, Barcelona.
Krysl, P. and Belytschko, T. (1995). Analysis of thin plates by the element-freeGalerkin method. Computational Mechanics, 17:26–35.
Lựu, N. X. (2000). Phương pháp phần tử hữu hạn. Trường Đại học Giao thông vậntải, Hà nội.
Mindlin, R. D. and Cooper, H. L. (1960). On the equation of extensional motionof crystal plates. Technical Report 36, Columbia University, New York.
Onate, E. and Zarate, F. (2000). Rotation-free triangular plate and shell elements.International Journal for Numerical Methods in Engineering, 47(1–3):557–603.

Tài liệu tham khảo 83
Wells, G. N. (2006). The Finite Element Method: An introduction (CT5123). DelftUniversity of Technology.
Zienkiewicz, O. C. (1971). The finite element method in engineering science. McGraw-Hill, London.
Zlámal, M. (1968). On the finite element method. Numerische Mathematik, 12:394–409.




















