Model Mathematic
29
КРЕМЕНЧУГСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ ИМЕНИ МИХАИЛА ОСТРОГРАДСКОГО КОНТРОЛЬНАЯ РАБОТА ПО ДИСЦИПЛИНЕ «МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ» Исполнил: студент группы МБ 11-1з Кобелякскький Е.О. №121187 Преподаватель: Харьков А.А.
Transcript of Model Mathematic
КРЕМЕНЧУГСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ ИМЕНИ МИХАИЛА ОСТРОГРАДСКОГО
КОНТРОЛЬНАЯ РАБОТА
ПО ДИСЦИПЛИНЕ «МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ»
Исполнил: студент группы МБ 11-1з Кобелякскький Е.О. №121187 Преподаватель: Харьков А.А.
Кременчуг 2015
ПЛАН
Введение
1.Структура и составные части автоматизированного
проектирования.
2.Аналогии топологических уравнений ММ.
3.Графики скоростей ВАЗ – 2107.
4.Построение математической модели разгона ведущего колеса
автомобиля.
Список литературы
Введение
Автоматизация проектирования занимает особое место
среди информационных технологий. Во-первых, автоматизация
проектирования — синтетическая дисциплина, ее составными
частями являются многие другие современные информационные
технологии. Так, техническое обеспечение систем
автоматизированного проектирования (САПР) основано на
использовании вычислительных сетей и телекоммуникационных
технологий, в САПР используются персональные компьютеры и
рабочие станции, есть примеры применения мейнфреймов.
Математическое обеспечение САПР отличается богатством и
разнообразием используемых методов вычислительной
математики, статистики, математического программирования,
дискретной математики, искусственного интеллекта.
Программные комплексы САПР относятся к числу наиболее
сложных современных программных систем, основанных на
операционных системах Unix, Windows-95/NT, языках
программирования С, C++, Java и других, современных CALS-
технологиях, реляционных и объектно-ориентированных
системах управления базами данных (СУБД), стандартах
открытых систем и обмена данными в компьютерных средах.
Во-вторых, знание основ автоматизации проектирования и
умение работать со средствами САПР требуется практически
любому инженеру-разработчику. Компьютерами насыщены
проектные подразделения, конструкторские бюро и офисы.
Работа конструктора за обычным кульманом, расчеты с помощью
логарифмической линейки или оформление отчета на пишущей
машинке стали анахронизмом. Предприятия, ведущие разработки
без САПР или лишь с малой степенью их использования, ока-
зываются неконкурентоспособными как вследствие больших
материальных и временных затрат на проектирование, так и
из-за невысокого качества проектов.
Появление первых программ для автоматизации
проектирования за рубежом и в СССР относится к началу 60-х
гг. Тогда были созданы программы для решения задач
строительной механики, анализа электронных схем,
проектирования печатных плат. Дальнейшее развитие САПР шло
по пути создания аппаратных и программных средств машинной
графики, повышения вычислительной эффективности программ
моделирования и анализа, расширения областей применения
САПР, упрощения пользовательского интерфейса, внедрения в
САПР элементов искусственного интеллекта.
К настоящему времени создано большое число программно-
методических комплексов для САПР с различными степенью
специализации и прикладной ориентацией. В результате
автоматизация проектирования стала необходимой составной
частью подготовки инженеров разных специальностей; инженер,
не владеющий знаниями и не умеющий работать в САПР, не
может считаться полноценным специалистом.
Подготовка инженеров разных специальностей в области
САПР включает в себя базовую и специальную компоненты.
Наиболее общие положения, модели и методики
автоматизированного проектирования входят в программу
курса, посвященного основам САПР, детальное изучение тех
методов и программ, которые специфичны для конкретных
специальностей, предусматривается в профильных дисциплинах.
1.Структура и составные части автоматизированного
проектирования.
Составными структурными частями САПР, жестко связанными
с организационной структурой проектной организации,
являются подсистемы, в которых при помощи
специализированных комплексов средств решается
функционально законченная последовательность задач САПР.
По назначению подсистемы разделяют на проектирующие и
обслуживающие.
Проектирующие подсистемы имеют объектную ориентацию и
реализуют определенный этап (стадию) проектирования или
группу непосредственно связанных проектных задач.
Примеры проектирующих подсистем:
- подсистема эскизного проектирования;
- подсистема проектирования корпусных деталей;
- подсистема проектирования технологических процессов
механической обработки.
Обслуживающие подсистемы имеют общесистемное применение и
обеспечивают поддержку функционирования проектирующих
подсистем, а также оформление, передачу и выдачу полученных
в них результатов. Примеры обслуживающих подсистем:
- автоматизированный банк данных;
- подсистема документирования;
- подсистема графического ввода/вывода.
Системное единство САПР обеспечивается наличием комплекса
взаимосвязанных моделей, определяющих объект проектирования
в целом, а также комплексом системных интерфейсов,
обеспечивающих указанную взаимосвязь.
Системное единство внутри проектирующих подсистем
обеспечивается наличием единой информационной модели той
части объекта, проектное решение по которой должно быть
получено в данной подсистеме.
Формирование и использование моделей объекта проектирования
в прикладных задачах осуществляется КСАП системы или
подсистемы.
Структурными частями КСАП в процессе его функционирования
являются программно-методические (ПМК.) и программно-
технические (ПТК) комплексы (далее — комплексы средств), а
также компоненты организационного обеспечения.
Комплексы средств могут объединять свои вычислительные и
информационные ресурсы, образуя локальные вычислительные
сети подсистем или систем в целом.
Структурными частями комплексов средств являются компоненты
следующих видов обеспечения: программного, информационного,
методического, математического, лингвистического «
технического.
Компоненты видов обеспечения выполняют в комплексах средств
заданную функцию и представляют наименьший (неделимый)
самостоятельно разрабатываемый (или покупной) элемент САПР
(например: программа, инструкция, дисплей и т. д.).
Эффективное функционирование КСАП и взаимодействие
структурных частей САПР всех уровней должно достигаться за
счет ориентации на стандартные интерфейсы и протоколы
связи, обеспечивающие взаимодействие комплексов средств.
Эффективное функционирование комплексов средств должно
достигаться за счет взаимосогласованной разработки
(согласования с покупными) компонентов, входящих в состав
комплексов средств.
КСАП обслуживающих подсистем, а также отдельные ПТК этих
подсистем могут использоваться при функционировании всех
подсистем.
При использовании блочно-иерархического подхода к
проектированию представления о проектируемой системе
расчленяют на иерархические уровни. На верхнем уровне
используют наименее детализированное представление,
отражающее только самые общие черты и особенности
проектируемой системы. На следующих уровнях степень
подробности описания возрастает, при этом рассматривают уже
отдельные блоки системы, но с учетом воздействий на каждый
из них его соседей. Такой подход позволяет на каждом
иерархическом уровне формулировать задачи приемлемой
сложности, поддающиеся решению с помощью имеющихся средств
проектирования. Разбиение на уровни должно быть таким,
чтобы документация на блок любого уровня была обозрима и
воспринимаема одним человеком.
Другими словами, блочно-иерархический подход есть
декомпозиционный подход, который основан на разбиении
сложной задачи большой размерности на последовательно и
(или) параллельно решаемые группы задач малой размерности,
что существенно сокращает требования к используемым
вычислительным ресурсам и время решения задач.
Список иерархических уровней может быть специфичным, но
в большинстве характерно следующее выделение уровней:
• системный уровень, на котором решают наиболее общие
задачи проектирования систем, машин и процессов; результаты
проектирования представляют в виде структурных схем,
генеральных планов, схем размещения оборудования, диаграмм
потоков данных и т. п.;
• макроуровень, на котором проектируют отдельные
устройства, узлы машин и приборов; результаты представляют
в виде функциональных, принципиальных и кинематических
схем, сборочных чертежей и т. п.;
• микроуровень, на котором проектируют отдельные
детали и элементы машин и приборов.
В зависимости от последовательности решения задач
иерархических уровней различают следующие стили
проектирования: нисходящее, восходящее и смешанное
проектирование. Последовательность решения задач от нижних
уровней к верхним характеризует восходящее проектирование,
обратная последовательность приводит к нисходящему
проектированию, в смешанном стиле имеются элементы как
восходящего, так и нисходящего проектирования. В
большинстве случаев для сложных систем предпочитают
нисходящее проектирование. При наличии заранее
спроектированных составных блоков (устройств) можно
говорить о смешанном проектировании.
Неопределенность и нечеткость исходных данных при
нисходящем проектировании (так как еще не спроектированы
компоненты) или исходных требований при восходящем
проектировании (поскольку ТЗ имеется на всю систему, а не
на ее части) обусловливают необходимость прогнозирования
недостающих данных с последующим их уточнением, т. е.
последовательного приближения к окончательному решению
(итерационность проектирования).
Наряду с делением на иерархические уровни применяют
разделение представлений о проектируемых объектах на
аспекты.
Аспект описания (страта) — описание системы или ёе
части с некоторой оговоренной точки зрения, определяемой
функциональными, физическими или иного типа отношениями
между свойствами и элементами.
Различают аспекты функциональный, информационный,
структурный и поведенческий (процессный).
Функциональное описание относят к функциям системы и
чаще всего представляют его функциональными схемами.
Информационное описание включает в себя основные
понятия предметной области (сущности), словесное пояснение
или числовые значения характеристик (атрибутов)
используемых объектов, а также описание связей между этими
понятиями и характеристиками. Информационные модели можно
представлять графически (графы, диаграммы сущность-
отношение), в виде таблиц или списков.
Структурное описание относится к морфологии системы,
характеризует составные части системы и их межсоединения и
может быть представлено структурными схемами, а также
различного рода конструкторской документацией.
Поведенческое описание характеризует процессы
функционирования (алгоритмы) системы и (или)
технологические процессы создания системы. Иногда аспекты
описаний связывают с подсистемами, функционирование которых
основано на различных физических процессах.
2.Анологии топологических уравнений ММ.
Топологические уравнения в большинстве физических
подсистем базируются на уравнениях равновесия и уравнениях
непрерывности. Рассмотрим аналогии топологических уравнений
в различных физических подсистемах по отношению к
электрической подсистеме.
Электрическая подсистема
Связи между отдельными элементами этой подсистемы
устанавливаются на основе законов Кирхгофа.
Уравнение первого закона Кирхгофа устанавливает
равенство нулю суммы токов в узлах схемы (уравнение
равновесия), т.е.:
Σ kp∈ Ik =0,
где Ik – ток k-й ветви; р – здесь и далее – множество
номеров ветвей, инцидентных рассматриваемому узлу.
Из уравнения второго закона Кирхгофа видно, что сумма
падений напряжений на элементах схемы при их обходе по
произвольному контуру равна нулю (уравнение непрерывности),
т.е.:
Σ jq∈ Uj=0
где j – номер ветви; Uj – падение напряжения на j-й ветви
схемы, входящей в контур; q –здесь и далее – множество
номеров ветвей, входящих в рассматриваемый контур.
Механическая поступательная подсистема
Аналогом уравнения первого закона Кирхгофа является
уравнение принципа Да-ламбера: сумма сил, действующих на
тело, включая инерционные, равна нулю, т. е.:
Σpk∈ Fk=0, где Fk – сила, приложенная к телу.
Аналогом уравнения второго закона Кирхгофа будет
уравнение принципа сложения скоростей: абсолютная скорость
является суммой относительной и переносных скоростей, или
же сумма этих трех скоростей равна нулю (переносных
скоростей может быть несколько: с первого тела на второе,
со второго на третье и т. д.), т.е.:
Σqj∈ Vj=0.
Для механических плоскостных и пространственных систем
рассмотренные прин-ципы применимы, если Fk и Vj представить
в виде векторных величин, тогда приведенные выше уравнения
справедливы для каждой координатной оси.
Механическая вращательная подсистема
Аналогом уравнения первого закона Кирхгофа является
уравнение принципа Даламбера для вращательных подсистем,
т.е.:
Σpk∈ Mk=0,
где Mk — момент силы, действующий относительно оси
вращения, включая момент, вызванный моментом инерции.
Аналогом уравнения второго закона Кирхгофа является
уравнение принципа сложения угловых скоростей вдоль оси
вращения, т.е.:
Σqj∈ ω j=0.
Гидравлическая (пневматическая) подсистема
Аналогом уравнения первого закона Кирхгофа является
уравнение равновесия в узлах подсистемы, т.е.:
Σpkm∈ Qk=0,
где Qmk – поток, подтекающий или оттекающий от узла.

Аналогом уравнения второго закона Кирхгофа является
уравнение неразрывности подсистемы, т.е. сумма падений
давлений при обходе по контуру равна нулю:
Σqj∈ Pj=0,
где Pj – падение давления на ветви, входящей в контур.
Тепловая подсистема
Аналогом уравнения первого закона Кирхгофа является
уравнение равновесия в узлах подсистемы, т.е. сумма
тепловых потоков в узлах подсистемы равна нулю:
Σpkm∈ Фk=0,
где Фk – тепловой поток, подтекающий или оттекающий от
узла.
Аналогом уравнения второго закона Кирхгофа является
уравнение непрерывности, т. е. сумма разностей температур
при обходе по замкнутому контуру равна нулю:
Σqj∈ Tj=0
где Tj – разность температур на участке, входящем в контур.
Таким образом, во всех рассмотренных подсистемах можно
установить аналогии переменных типа потока и типа
потенциала. Эти аналогии сведены в табл.
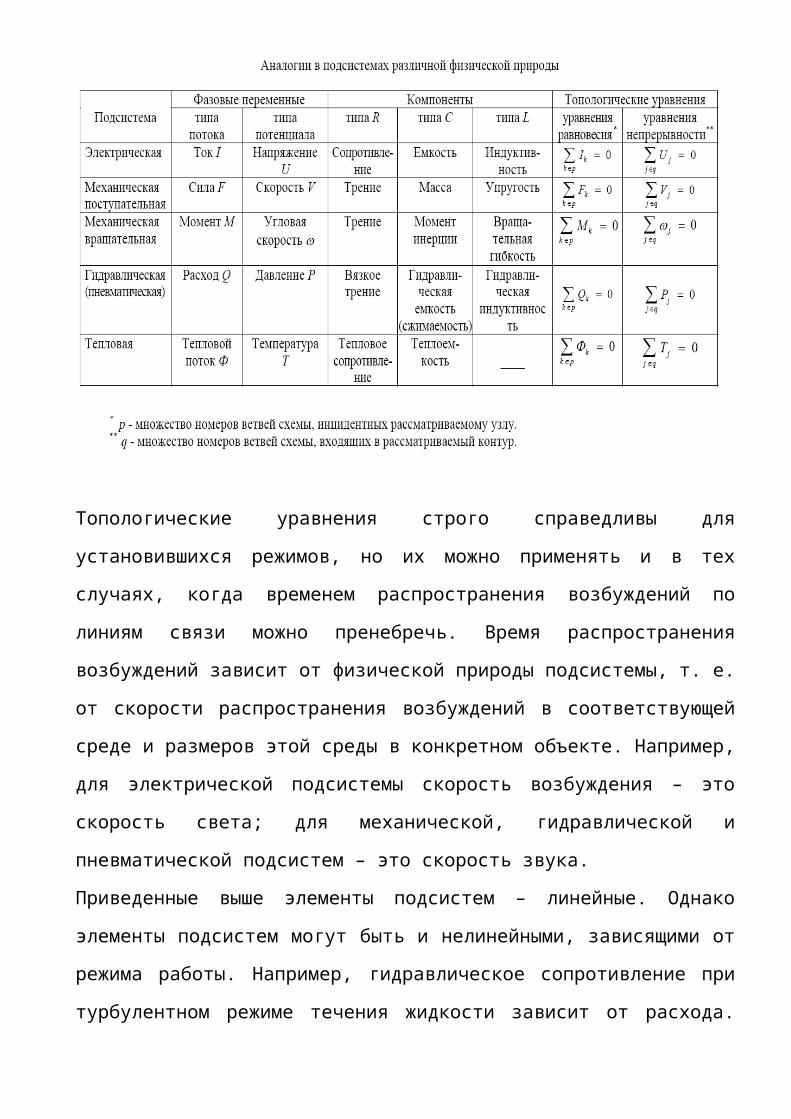
Топологические уравнения строго справедливы для
установившихся режимов, но их можно применять и в тех
случаях, когда временем распространения возбуждений по
линиям связи можно пренебречь. Время распространения
возбуждений зависит от физической природы подсистемы, т. е.
от скорости распространения возбуждений в соответствующей
среде и размеров этой среды в конкретном объекте. Например,
для электрической подсистемы скорость возбуждения – это
скорость света; для механической, гидравлической и
пневматической подсистем – это скорость звука.
Приведенные выше элементы подсистем – линейные. Однако
элементы подсистем могут быть и нелинейными, зависящими от
режима работы. Например, гидравлическое сопротивление при
турбулентном режиме течения жидкости зависит от расхода.
Если набор линейных и нелинейных элементов дополнить
зависимыми и независимыми источниками переменных типа
потока и типа разности потенциалов, то будем иметь базовые
совокупности двухполюсников, на основе которых можно
получать математические модели практически любых
технических объектов.
Независимые источники используются для моделирования
постоянных воздействий на объект, например, сила тяжести
может быть отражена постоянным источником силы.
Зависимые источники можно разделить на группы: 1)источники,
зависимые от времени; 2)источники, зависимые от фазовых
переменных. Источники, зависимые от времени, используются
для моделирования внешних воздействий на объект, например,
тра-пецеидальным источником расхода может быть отражено
функционирование идеального
гидронасоса в режимах включения, работы и выключения.
Источники, зависимые от фазовых переменных, используются
для отражения нелинейных свойств объектов, а также для
установления взаимосвязей между подсистемами различной
физической природы.
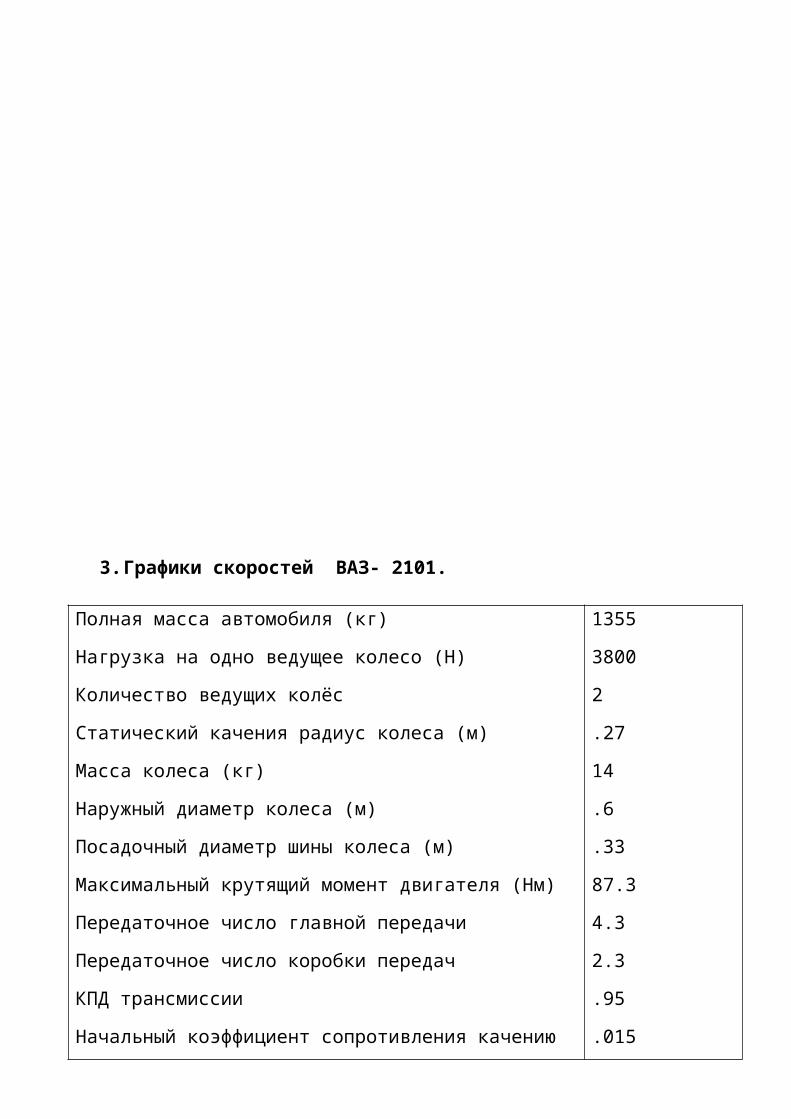
3.Графики скоростей ВАЗ- 2101.
Полная масса автомобиля (кг)
Нагрузка на одно ведущее колесо (H)
Количество ведущих колёс
Статический качения радиус колеса (м)
Масса колеса (кг)
Наружный диаметр колеса (м)
Посадочный диаметр шины колеса (м)
Максимальный крутящий момент двигателя (Нм)
Передаточное число главной передачи
Передаточное число коробки передач
КПД трансмиссии
Начальный коэффициент сопротивления качению
1355
3800
2
.27
14
.6
.33
87.3
4.3
2.3
.95
.015
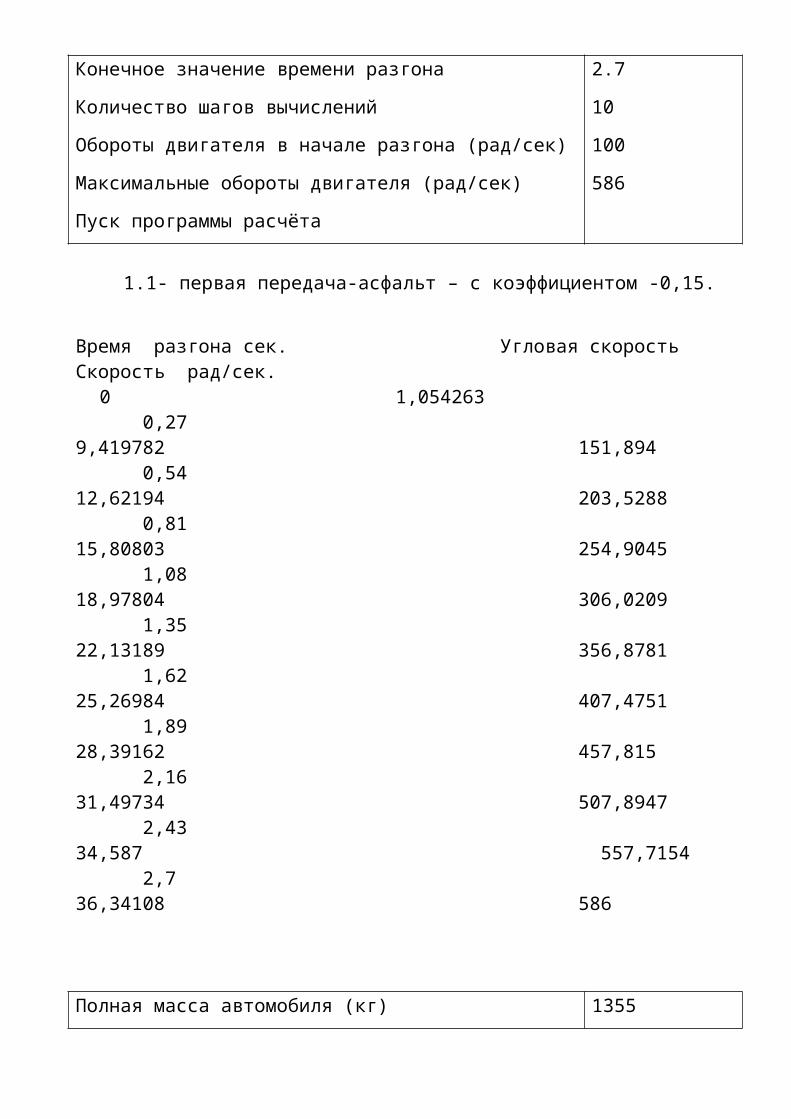
Конечное значение времени разгона
Количество шагов вычислений
Обороты двигателя в начале разгона (рад/сек)
Максимальные обороты двигателя (рад/сек)
Пуск программы расчёта
2.7
10
100
586
1.1- первая передача-асфальт – с коэффициентом -0,15.
Время разгона сек. Угловая скорость Скорость рад/сек.
0 1,054263 0,27 9,419782 151,894 0,54 12,62194 203,5288 0,81 15,80803 254,9045 1,08 18,97804 306,0209 1,35 22,13189 356,8781 1,62 25,26984 407,4751 1,89 28,39162 457,815 2,16 31,49734 507,8947 2,43 34,587 557,7154 2,7 36,34108 586
Полная масса автомобиля (кг) 1355
Нагрузка на одно ведущее колесо (H)
Количество ведущих колёс
Статический качения радиус колеса (м)
Масса колеса (кг)
Наружный диаметр колеса (м)
Посадочный диаметр шины колеса (м)
Максимальный крутящий момент двигателя (Нм)
Передаточное число главной передачи
Передаточное число коробки передач
КПД трансмиссии
Начальный коэффициент сопротивления качению
Конечное значение времени разгона
Количество шагов вычислений
Обороты двигателя в начале разгона (рад/сек)
Максимальные обороты двигателя (рад/сек)
Пуск программы расчёта
3800
2
.27
14
.6
.33
87.3
4.3
2.3
.95
.015
6.9
10
100
586
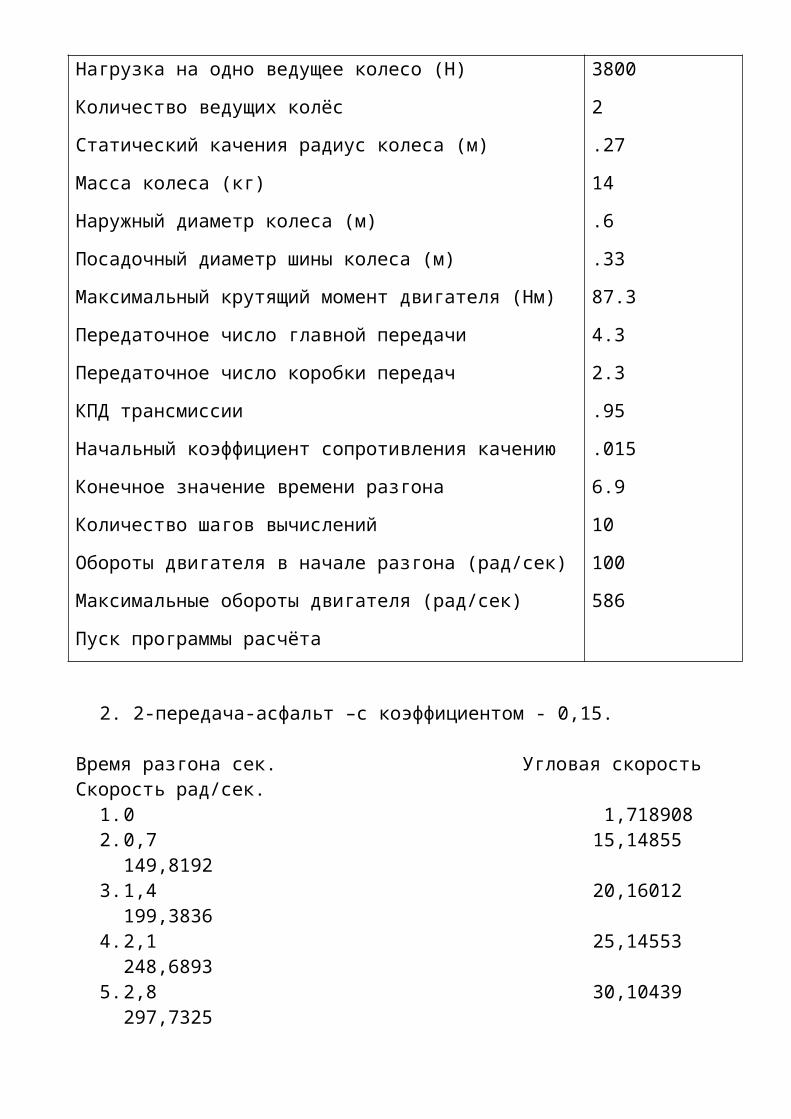
2. 2-передача-асфальт –с коэффициентом - 0,15.
Время разгона сек. Угловая скорость Скорость рад/сек.
1.0 1,7189082.0,7 15,14855
149,81923.1,4 20,16012
199,38364.2,1 25,14553
248,68935.2,8 30,10439
297,7325
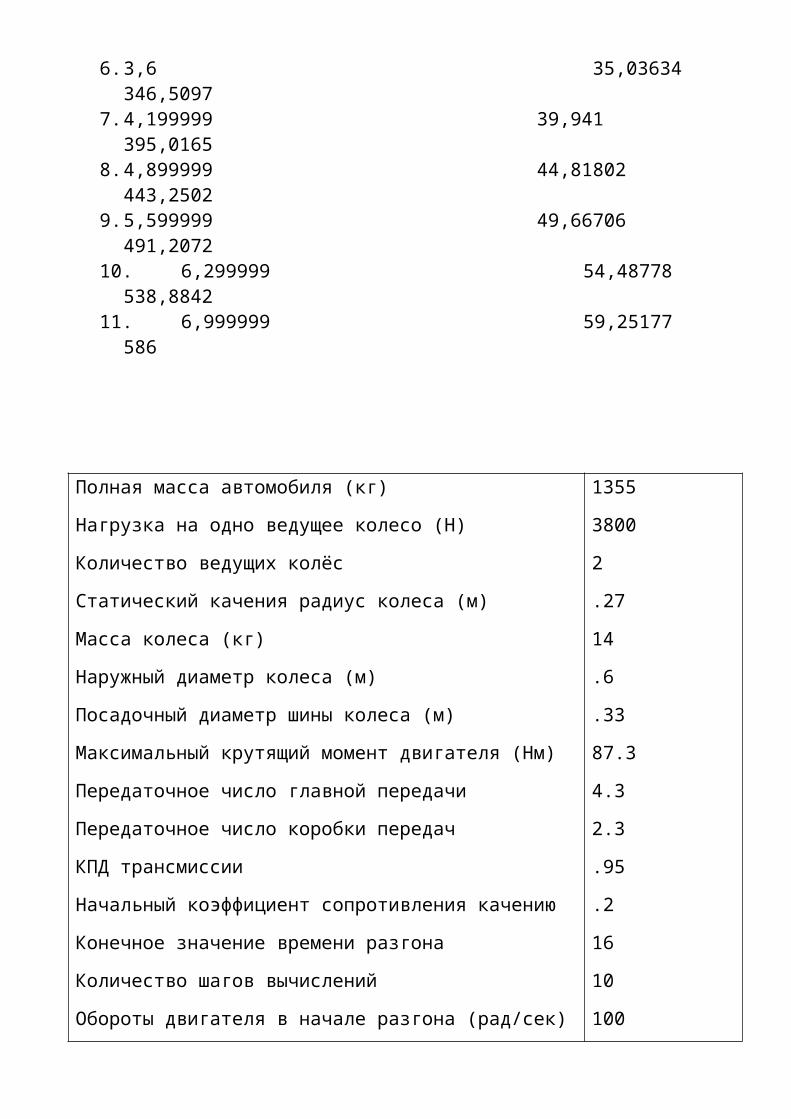
6.3,6 35,03634 346,5097
7.4,199999 39,941 395,0165
8.4,899999 44,81802 443,2502
9.5,599999 49,66706 491,2072
10. 6,299999 54,48778 538,8842
11. 6,999999 59,25177 586
Полная масса автомобиля (кг)
Нагрузка на одно ведущее колесо (H)
Количество ведущих колёс
Статический качения радиус колеса (м)
Масса колеса (кг)
Наружный диаметр колеса (м)
Посадочный диаметр шины колеса (м)
Максимальный крутящий момент двигателя (Нм)
Передаточное число главной передачи
Передаточное число коробки передач
КПД трансмиссии
Начальный коэффициент сопротивления качению
Конечное значение времени разгона
Количество шагов вычислений
Обороты двигателя в начале разгона (рад/сек)
1355
3800
2
.27
14
.6
.33
87.3
4.3
2.3
.95
.2
16
10
100
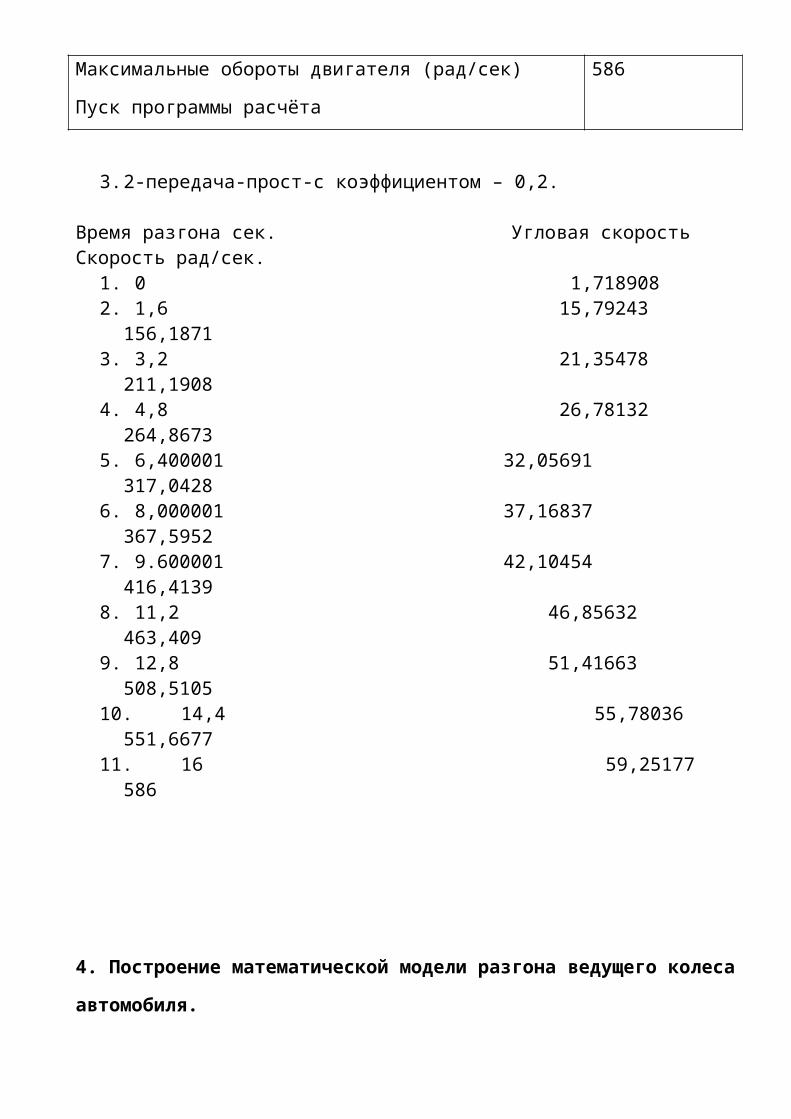
Максимальные обороты двигателя (рад/сек)
Пуск программы расчёта
586
3.2-передача-прост-с коэффициентом – 0,2.
Время разгона сек. Угловая скорость Скорость рад/сек.
1. 0 1,718908 2. 1,6 15,79243
156,18713. 3,2 21,35478
211,19084. 4,8 26,78132
264,86735. 6,400001 32,05691
317,04286. 8,000001 37,16837
367,59527. 9.600001 42,10454
416,41398. 11,2 46,85632
463,4099. 12,8 51,41663
508,510510. 14,4 55,78036
551,667711. 16 59,25177
586
4. Построение математической модели разгона ведущего колеса
автомобиля.
Математическая модель – это совокупность математических
объектов (чисел, символов, функций и т.д.) и связей между
ними, которые отображают самые важные для проектировщика
особенности технического объекта. В математической модели
отображают не все особенности технического объекта, а
только те из них, которые есть важными для проектировщика.
Если рассматривать задачу разгона ведущего колеса
автомобиля, то прежде всего, нас будет интересовать
особенность колеса преобразовывать вращательное движение
вокруг оси на поступательное движение оси. Другие
особенности колеса как технического объекта в данном случае
для нас будут несущественными. Для упрощения построения
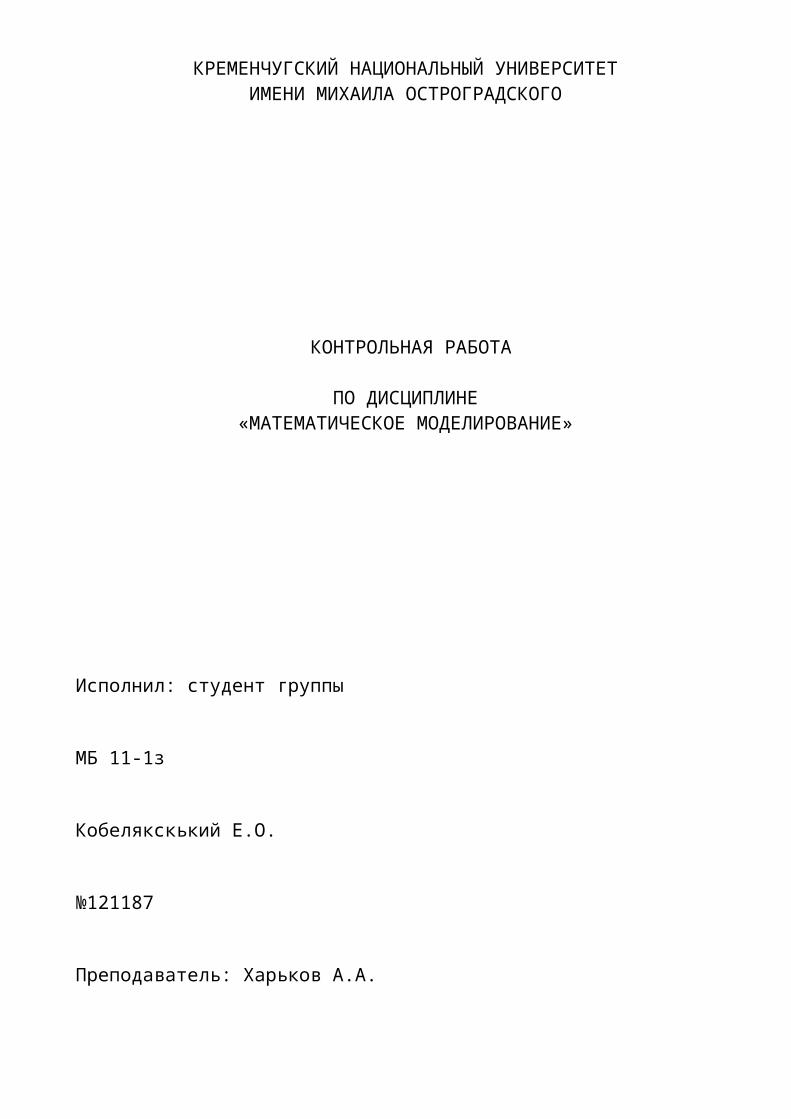
математической модели рекомендуется создать расчётную
схему, которая для ведущего колеса имеет вид, изображённый
на рис.1.1.
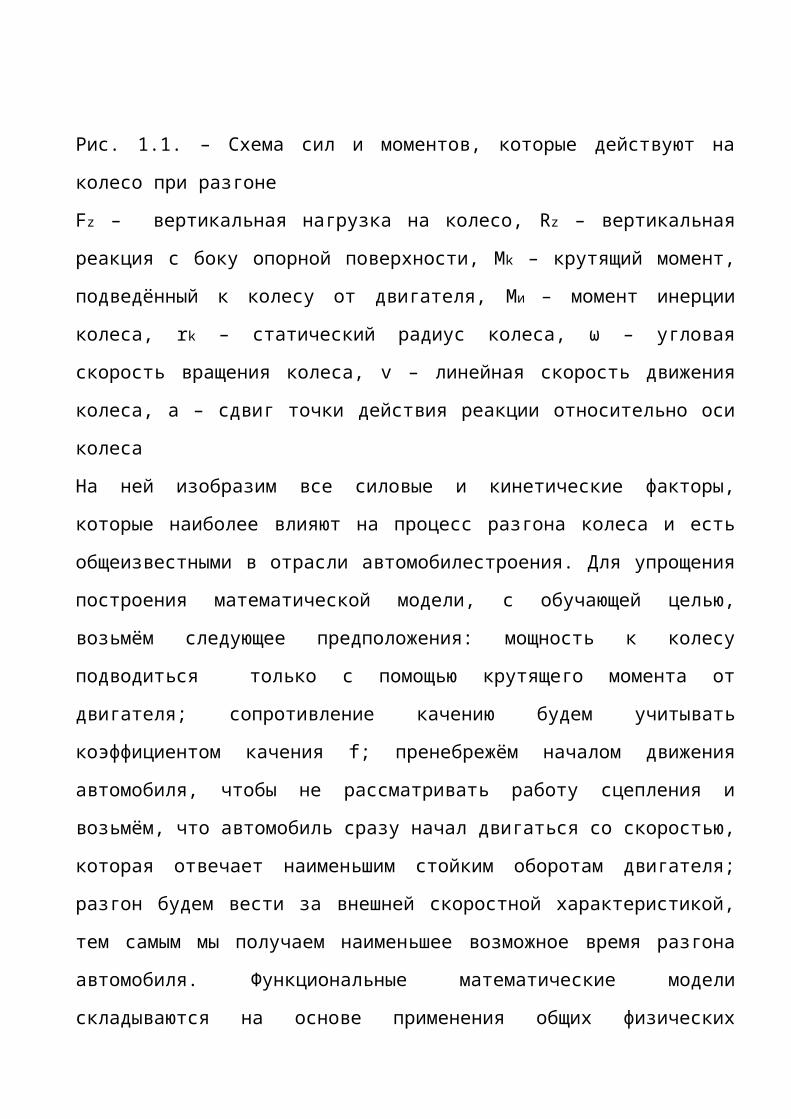
Рис. 1.1. – Схема сил и моментов, которые действуют на
колесо при разгоне
Fz – вертикальная нагрузка на колесо, Rz – вертикальная
реакция с боку опорной поверхности, Mk – крутящий момент,
подведённый к колесу от двигателя, Mи – момент инерции
колеса, rk – статический радиус колеса, ω – угловая
скорость вращения колеса, v – линейная скорость движения
колеса, a – сдвиг точки действия реакции относительно оси
колеса
На ней изобразим все силовые и кинетические факторы,
которые наиболее влияют на процесс разгона колеса и есть
общеизвестными в отрасли автомобилестроения. Для упрощения
построения математической модели, с обучающей целью,
возьмём следующее предположения: мощность к колесу
подводиться только с помощью крутящего момента от
двигателя; сопротивление качению будем учитывать
коэффициентом качения f; пренебрежём началом движения
автомобиля, чтобы не рассматривать работу сцепления и
возьмём, что автомобиль сразу начал двигаться со скоростью,
которая отвечает наименьшим стойким оборотам двигателя;
разгон будем вести за внешней скоростной характеристикой,
тем самым мы получаем наименьшее возможное время разгона
автомобиля. Функциональные математические модели
складываются на основе применения общих физических
принципов и законов. Применим принцип Даламбера к нашей
системе, из которого следует, что сумма активных сил или
моментов, реакций и сил или моментов инерции равняется
нулю. В нашем случае уравнение Даламбера будет иметь
следующий вид
Mk –a • Rz – Mu= 0,
где Mk – крутящий момент, который подводиться к колесу от
двигателя;
a • Rz - момент сопротивления движению колеса;
Mu – момент сил инерции, приведённый к колесу.
Крутящий момент, который подводиться к колесу зависит от
момента созданный двигателем, а также от параметров
трансмиссии. Выразим его через максимальный момент
двигателя и параметры трансмиссии на прямой передачи КП:
Mk=Mдв−i0•iкп•ηтрzk ,
где i0 - передаточное число главной передачи; iкп -
передаточное число коробки передач; ηтр - к.п.д.
трансмиссии; zk - число ведущих колёс автомобиля.
В свою очередь, максимальный момент, созданный двигателем,
зависит от оборотов двигателя, и его на участке от
максимального момента к моменту при максимальных оборотах
можно аппроксимировать следующей линейной зависимостью (на
самом деле она близкая к параболе, но очень полога)
Mдв = (M t max – k • ωдв ) = (M t max – k • io • iкп ω ),
где k - коэффициент, который учитывает замену момента
двигателя от круговой скорости; ωдв - круговая скорость
вращения двигателя. Выражаем её через угловую скорость
колеса ω и передаточное число главной передачи io и коробки
передач iкп.
Подставляем эту зависимость к предыдущей формуле и
окончательно получаем выражение для определения крутящего
момента Mk:
Mk = (Mtmax−k•io•iкпω)•io•iкп•ηтрzk ,
Момент сопротивления движения колеса в автомобилестроении
принято выражать следующей формулой
Mf = a • Rz = f • rk • Rz,
где f - коэффициент сопротивления качению;
rk - радиус качения колеса;
a - сдвиг точки приложения равнодействующей вперед;
Rz - вертикальная реакция, которая действует на колесо с
боку опорной поверхности.
Коэффициент сопротивления качения колеса, в свою очередь,
зависит от линейной скорости движения колеса. Выбираем одну
из известных зависимостей, которая моделирует этот процесс
f = fo • (1 + ν²1500 ),
где fo - коэффициент сопротивления качению при малых
скоростях;
ν - линейная скорость движения автомобиля.
Если не учитывать скольжение шины (с образовательной целью
это можно сделать), то ν = rk • ωk , и формула для
определения зависимости коэффициента сопротивления от
круговой скорости колеса приобретёт следующий вид:
f = fo • (1 + rk²•ωk²1500 )
Тогда момент сопротивления движения колеса определяется
так:
Mf = fo • (1 + rk²•ωk²1500 )• rk • Rz
Рассмотрим третью составляющую принципа Даламбера – момент
от сил инерции. Он должен учитывать не только инерцию
колеса, но и инерцию поступательного движения массы
автомобиля. Инерцию поступательного движения частей
двигателя и трансмиссии учитывать в силу их незначительной
величины не будем.
Mu = (Ik + Ia ) • dωdt ,
где Ik - момент инерции колеса;
Ia - приведённый к колесу момент инерции масс автомобиля,
которые двигаются поступательно.
Приведённый момент инерции поступательного движения
автомобиля, который приходится на одно ведущее колесо,
определим из следующего выражения
Ia = ma•rk²io²•iкп²•Zk ,
где ma полная масса автомобиля;
Zk - количество колёс автомобиля.
Если нет числового значения момента инерции колеса в сборе,
то его можно приблизительно определить по следующей
формуле:
Ik = 12 mk (D² - d² ),
где D - внешний диаметр колеса;
d - посадочный диаметр колеса;
mk - масса колеса в сборе.
Подставим полученные выше моменты сил к уравнению 1.1., и
разрешим его относительно круговой скорости колеса ωk и
получим следующее выражение:
dωkdt =
(Memax−k•io•iкпω)•io•iкп•ηтрzk
−fo•(1+ro²•ωk²1500
)•rk•Rz
12mk (D2−d2 )+ ma•rk²
io²•iкп²•Zk
Для разрешения этого дифференциального уравнения необходимо
учитывать начальные условия – угловая скорость колеса в
начале разгона, то есть на момент времени t=0, равняется
минимально возможной стадии скорости движения автомобиля.
Список
литературы
1.1-Том серия САПР. Новиков « Принцыпы построения и
структура».
2. 4-Том серия САПР. Пивоваров «Математические модели
технических
систем».
3.Корячко Курейчик Нориков. «Теоретические основы
САПР».