
ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD...
14
25 BAB 3 PERANCANGAN SISTEM 3.1 Desain Sistem Dalam menyelesaikan tugas akhir ini penulis menggunakan sebuah metode tracking objek dengan mengikuti perubahan posisi titik berat (centroid) objek yang terdapat pada setiap frame. Tahapan – tahapan dari metode yang diusulkan ditunjukkan dalam gambar 3.1 Gambar 3.1 Tahapan Metode File video adalah video yang telah digunakan untuk melakukan penelitian ini. Video ini didapatkan dengan merekam larva nyamuk dengan menggunakan webcam. Dari file video tersebut akan diolah, sehingga harus diambil menjadi frame. Selanjutnya frame tersebut dianalisa untuk membedakan tiap framenya. Dari gambar 3.1 dapat diketahui bahwa dari file video yang telah didapatkan akan melalui 2 tahapan, yaitu preprosesing dan prosesing. Pada tahap preprosesing frame yang telah didapatkan akan diolah sehingga akan didapatkan suatu citra biner, sedangkan pada tahap prosesing citra biner yang telah didapatkan akan
-
Upload
independent -
Category
Documents
-
view
4 -
download
0
Transcript of ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD ITD...

25
BAB 3
PERANCANGAN SISTEM
3.1 Desain Sistem
Dalam menyelesaikan tugas akhir ini penulis menggunakan
sebuah metode tracking objek dengan mengikuti perubahan posisi
titik berat (centroid) objek yang terdapat pada setiap frame. Tahapan
– tahapan dari metode yang diusulkan ditunjukkan dalam gambar
3.1
Gambar 3.1 Tahapan Metode
File video adalah video yang telah digunakan untuk melakukan
penelitian ini. Video ini didapatkan dengan merekam larva nyamuk
dengan menggunakan webcam. Dari file video tersebut akan diolah,
sehingga harus diambil menjadi frame. Selanjutnya frame tersebut
dianalisa untuk membedakan tiap framenya.
Dari gambar 3.1 dapat diketahui bahwa dari file video yang telah
didapatkan akan melalui 2 tahapan, yaitu preprosesing dan
prosesing. Pada tahap preprosesing frame yang telah didapatkan
akan diolah sehingga akan didapatkan suatu citra biner, sedangkan
pada tahap prosesing citra biner yang telah didapatkan akan

26
digunakan untuk melakukan object tracking dengan memanfaatkan
nilai centroid dari objek.
3.2 Data Yang Digunakan
Video larva yang digunakan sebagai data masukan pada
penelitian adalah larva yang didapatkan dari lembaga yang meneliti
tentang nyamuk yaitu dari Institute Trophical Disease Universitas
Airlangga. Pada video tersebut terdapat dua ekor larva dari jenis
yang berbeda yang akan diamati pergerakan dan perpindahannya.
File video tersebut berformat *.avi dan jika sudah menjadi frame
harus berformat *.tiff.
Tabel 3.1 Video sumber Aedes Aegypti
No Sumber Jenis Larva Durasi(detik) Jumlah Frame
1 ITD Aedes A. 30 751
2 ITD Aedes A. 30 751 3 ITD Aedes A. 30 751 4 ITD Aedes A. 30 751 5 ITD Aedes A. 30 751 6 ITD Aedes A. 30 751 7 ITD Aedes A. 30 751 8 ITD Aedes A. 30 751 9 ITD Aedes A. 30 751
10 ITD Aedes A. 30 751 11 ITD Aedes A. 30 751
12 ITD Aedes A. 30 751 13 ITD Aedes A. 30 751 14 ITD Aedes A. 30 751 15 ITD Aedes A. 30 751 16 ITD Aedes A. 30 751 17 ITD Aedes A. 30 751 18 ITD Aedes A. 30 751 19 ITD Aedes A. 30 751 20 ITD Aedes A. 30 751 21 ITD Aedes A. 30 751
22 ITD Aedes A. 30 751 23 ITD Aedes A. 30 751

27
No Sumber Jenis Larva Durasi(detik) Jumlah Frame
24 ITD Aedes A. 30 751 25 ITD Aedes A. 30 751 26 ITD Aedes A. 30 751 27 ITD Aedes A. 30 751 28 ITD Aedes A. 30 751 29 ITD Aedes A. 30 751 30 ITD Aedes A. 30 751 31 ITD Aedes A. 30 751
32 ITD Aedes A. 30 751 33 ITD Aedes A. 30 751 34 ITD Aedes A. 30 751 35 ITD Aedes A. 30 751 36 ITD Aedes A. 30 751 37 ITD Aedes A. 30 751 38 ITD Aedes A. 30 751 39 ITD Aedes A. 30 751 40 ITD Aedes A. 30 751 41 ITD Aedes A. 30 751
42 ITD Aedes A. 30 751 43 ITD Aedes A. 30 751 44 ITD Aedes A. 30 751 45 ITD Aedes A. 30 751 46 ITD Aedes A. 30 751 47 ITD Aedes A. 30 751 48 ITD Aedes A. 30 751 49 ITD Aedes A. 30 751 50 ITD Aedes A. 30 751
Tabel 3.2 Video sumber Cullex
No Sumber Jenis Larva Durasi(detik) Jumlah Frame
1 ITD Cullex 30 751
2 ITD Cullex 30 751
3 ITD Cullex 30 751
4 ITD Cullex 30 751
5 ITD Cullex 30 751

28
No Sumber Jenis Larva Durasi(detik) Jumlah Frame
6 ITD Cullex 30 751
7 ITD Cullex 30 751
8 ITD Cullex 30 751
9 ITD Cullex 30 751
10 ITD Cullex 30 751
11 ITD Cullex 30 751
12 ITD Cullex 30 751
13 ITD Cullex 30 751
14 ITD Cullex 30 751
15 ITD Cullex 30 751
16 ITD Cullex 30 751
17 ITD Cullex 30 751
18 ITD Cullex 30 751
19 ITD Cullex 30 751
20 ITD Cullex 30 751
21 ITD Cullex 30 751
22 ITD Cullex 30 751
23 ITD Cullex 30 751
24 ITD Cullex 30 751
25 ITD Cullex 30 751
26 ITD Cullex 30 751
27 ITD Cullex 30 751
28 ITD Cullex 30 751
29 ITD Cullex 30 751
30 ITD Cullex 30 751
31 ITD Cullex 30 751
32 ITD Cullex 30 751
33 ITD Cullex 30 751
34 ITD Cullex 30 751
35 ITD Cullex 30 751
36 ITD Cullex 30 751
37 ITD Cullex 30 751
38 ITD Cullex 30 751
39 ITD Cullex 30 751
40 ITD Cullex 30 751
41 ITD Cullex 30 751

29
No Sumber Jenis Larva Durasi(detik) Jumlah Frame
42 ITD Cullex 30 751
43 ITD Cullex 30 751
44 ITD Cullex 30 751
45 ITD Cullex 30 751
46 ITD Cullex 30 751
47 ITD Cullex 30 751
48 ITD Cullex 30 751
49 ITD Cullex 30 751
50 ITD Cullex 30 751
Pada tabel 3.1 dan tabel 3.2 dapat diketahui bahwa jumlah
larva yang digunakan pada tugas akhir ini adalah 50 buah larva jenis
Aedes Aegypti dan 50 buah larva jenis Cullex
3.3 Preprosesing
Gambar 3.2 Tahap Preprosesing
Tipe data gambar grayscale ialah gambar yang hanya memiliki
gradasi warna yang dimulai dari hitam sampai putih. Di dalam tipe

30
gambar grayscale, tidak terdapat pengaruh warna - warna yang lain
seperti merah ataupun hijau.
Untuk melakukan perubahan suatu gambar full color menjadi
suatu gambar grayscale atau skala keabuan, terdapat beberapa
metode yang umum digunakan. Metode yang paling sederhana [7]
yaitu dengan mengambil ketiga nilai unsur warna dasar, yang
kemudian dirata-ratakan. Metode ini dapat dilihat pada persamaan
berikut :
𝑅+𝐺+𝐵
3 ............................................................... (3.1)
Keterangan
R : Unsur warna merah pada basis warna RGB
G : Unsur warna hijau pada basis warna RGB
B : Unsur warna biru pada basis warna RGB
Dari hasil persamaan tersebut, akan didapatkan suatu nilai yang
kemudian di inputkan ke masing-masing unsur warna dasar.
Gambar 3.3 Contoh Hasil Perubahan Gambar Full Color ke
Grayscale
Thresholding adalah proses mengubah citra berderajat keabuan
menjadi citra biner atau hitam putih sehingga dapat diketahui daerah
mana yang termasuk obyek dan background dari citra secara
jelas [8]. Citra hasil thresholding biasanya digunakan lebih lanjut
untuk proses pengenalan obyek serta ekstraksi fitur.
31
Metode thresholding secara umum dibagi menjadi dua, yaitu :
1. Thresholding global
Thresholding dilakukan dengan mempartisi histogram dengan
menggunakan sebuahthreshold (batas ambang) global T, yang
berlaku untuk seluruh bagian pada citra.
2. Thresholding adaptif
Thesholding dilakukan dengan membagi citra menggunakan
beberapa sub citra. Lalu pada setiap sub citra, segmentasi
dilakukan dengan menggunakan threshold yang berbeda.
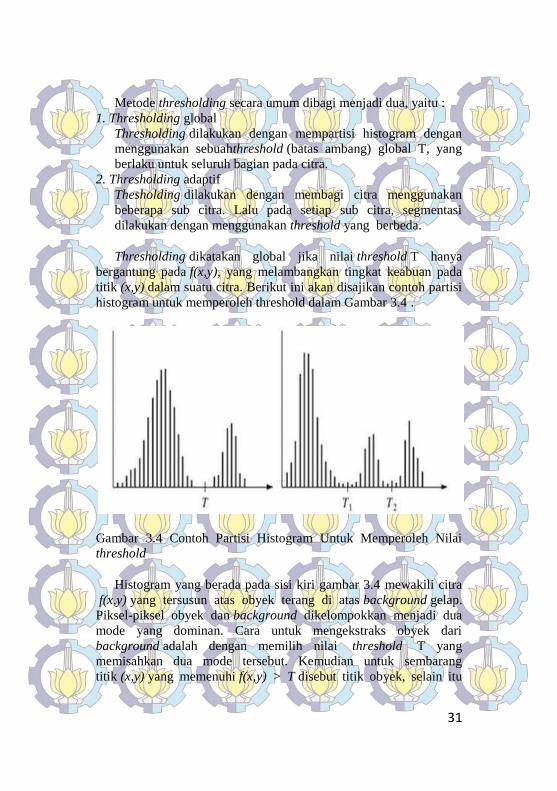
Thresholding dikatakan global jika nilai threshold T hanya
bergantung pada f(x,y), yang melambangkan tingkat keabuan pada
titik (x,y) dalam suatu citra. Berikut ini akan disajikan contoh partisi
histogram untuk memperoleh threshold dalam Gambar 3.4 .
Gambar 3.4 Contoh Partisi Histogram Untuk Memperoleh Nilai
threshold
Histogram yang berada pada sisi kiri gambar 3.4 mewakili citra
f(x,y) yang tersusun atas obyek terang di atas background gelap.
Piksel-piksel obyek dan background dikelompokkan menjadi dua
mode yang dominan. Cara untuk mengekstraks obyek dari
background adalah dengan memilih nilai threshold T yang
memisahkan dua mode tersebut. Kemudian untuk sembarang
titik (x,y) yang memenuhi f(x,y) > T disebut titik obyek, selain itu

32
disebut titik background. Kesuksesan metode ini bergantung pada
seberapa bagus teknik partisi histogram. Citra hasil thresholding
dapat didefinisikan sebagaimana persamaan 3.2.
𝑔(𝑥, 𝑦) = 1 𝑖𝑓 𝑓 𝑥, 𝑦 > 𝑇
0 𝑖𝑓 𝑓 𝑥, 𝑦 ≤ 𝑇 ................... (3.2)
Untuk memilih nilai ambang batas secara otomatis, Gonzalez
dan Woods [2][3] menggambarkan prosedur iterasi sebagai berikut :
1. Dipilih dahulu perkiraan awal untuk T.(disarankan estimasi awal
adalah titik tengah antara nilai-nilai intensitas minimum dan
maksimum citra).
2. Bagi citra menggunakan T. ini akan menghasilkan dua kelompok
piksel G1, yang terdiri dari semua piksel dengan nilai-nilai
intensitas ≥ T, dan G2 yang terdiri dari piksel dengan nilai-nilai
< T.
3. Menghitung nilai rata-rata intensitas µ1 dan µ2 untuk piksel di
daerah G1 dan G2.
4. Menghitung nilai ambang baru dengan persamaan 3.3
𝑇 =1
2 µ1 + µ2 .....................................................(3.3)
5. Ulangi langkah 2 hingga 4 sampai perbedaan T diiterasi berturut-
turut lebih kecil dari T parameter standar
Pada proses selanjutnya akan dilakukan proses binerisasi.
binerisasi yaitu mengubah citra dari grayscale menjadi citra biner.
Intensitas citra grayscale yang mempunyai nilai lebih besar dari T
akan diberi nilai 1 dan jika nilainya kurang dari T maka akan diberi
nilai 0. Selanjutnya citra ini harus di invers untuk mendapatkan
gambar objek yang berwarna putih dan latar belakang berwarna
hitam. Proses yang dilakukan adalah dengan menukar nilai pada
gambar tersebut. Yang mempunyai nilai 0 akan menjadi nilai 1 dan
sebaliknya
Binerisasi citra adalah salah satu proses penting yang biasanya
dilakukan dalam pemrosesan citra [9]. Namun nilai ambang batas
intensitas harus diketahui terlebih dahulu. Pada penelitian ini kami
mencari nilai ambang batas dengan membagi histogram citra gray
level kedalam dua daerah yang berbeda secara otomatis tanpa
membutuhkan bantuan user untuk memasukkan nilai ambang.

33
Pendekatan yang dilakukan adalah dengan melakukan analisis
diskriminan yaitu menentukan suatu variabel yang dapat
membedakan antara dua atau lebih kelompok yang muncul secara
alami. Analisis diskriminan akan memaksimumkan variable tersebut
agar dapat membagi objek latar depan (foreground) dan latar
belakang (background).
Pada citra biner ini juga terdapat suatu noise. Noise ini dapat
dihilangkan dengan menggunakan proses noise removal. Cara kerja
noise removal dapat dilihat pada gambar 3.5
1 0 0
0 0 0
0 1 0
1 1 1
0 1 0
0 0 0
0 1 0
(a) Citra
dengan
noise
Gambar 3.5 Proses Noise Removal
Pada gambar (a) merupakan suatu representasi citra dengan
beberapa noise. Setelah melalui proses noise removal maka noise
akan hilang dan akan didapatkan citra objek yang diinginkan (b).
0 0 0
0 0 0
0 1 0
1 1 1
0 1 0
0 0 0
0 0 0
(b) Citra
tanpa
noise

34
3.4 Pengolahan (Prosesing)
Gambar 3.6 Tahap Prosesing
Tahapan prosesing dapat dilihat pada gambar 3.6. Objek yang
telah didapatkan dari proses preprosesing akan di beri label
(labeling). Untuk melakukan proses labeling citra biner bisa dilihat
pada gambar 3.7
0 1 1 0 1 0
0 1 1 0 1 1
0 0 0 0 0 0
1 1 0 0 0 1
1 0 0 0 0 1
0 0 0 0 1 1
(a) Citra biner

35
0 2 2 0 3 0
0 2 2 0 3 3
0 0 0 0 0 0
1 1 0 0 0 4
1 0 0 0 0 4
0 0 0 0 4 4
(b) Citra Biner setelah proses labeling
Gambar 3.7 Proses Pemberian Label (Labeling)
Pada gambar 3.7 dapat diketahui bahwa citra biner tersebut
mempunyai 4 buah objek. Setelah diketahui jumlah objek dari citra
biner, maka langkah selanjutnya adalah mencari centroid (titik berat
objek)[2]. Centroid ini yang nantinya akan digunakan untuk men-
tracking gerakan objek dari frame ke frame. Untuk proses pencarian
centroid dapat dilihat pada gambar 3.8
0 0 0 0 0 0 0 0
0 1 0 0 3 3 3 0
1 1 1 0 3 3 0 0
0 1 0 0 0 0 0 0
0 0 0 0 0 4 4 0
0 0 2 0 0 4 4 0
0 0 2 2 0 0 0 0
0 0 2 0 0 0 0 0
Gambar 3.8 Citra Biner Dengan 4 Buah Objek
Untuk mencari koordinat centroid setiap objek dibutuhkan
koordinat (baris dan kolom) tiap piksel dari objek[2][3]. Setelah
koordinat dari setiap piksel diketahui, maka nilainya harus dirata-
rata. Nilai rata-rata dari baris akan menjadi nilai koordinat baris
centroid dan nilai rata-rata dari kolom akan menjadi koordinat
kolom centroid. Dari gambar 3.8 dapat diketahui koordinat centroid
dari tiap objek adalah sebagai berikut :

36
1) Objek 1
Tabel 3.3 Koordinat Objek 1
Piksel ke- Baris Kolom
1 3 1
2 2 2
3 3 2
4 4 2
5 3 3
𝑅𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 𝑏𝑎𝑟𝑖𝑠 =3 + 2 + 3 + 4 + 3
5= 3
𝑅𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 𝑘𝑜𝑙𝑜𝑚 =1 + 2 + 2 + 2 + 3
5= 2
Centroid = (rata-rata baris,rata-rata kolom) = (3,2)
2) Objek 2
Tabel 3.4 Koordinat Objek 2
Piksel ke- Baris Kolom
1 6 3
2 7 3
3 8 3
4 7 4
𝑅𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 𝑏𝑎𝑟𝑖𝑠 =6 + 7 + 8 + 7
4= 7
𝑅𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 𝑘𝑜𝑙𝑜𝑚 =3 + 3 + 3 + 4
4= 3.25
Centroid = (rata-rata baris,rata-rata kolom) = (7,3.25)

37
3) Objek 3
Tabel 3.5 Koordinat Objek 3
Piksel ke- Baris Kolom
1 2 5
2 3 5
3 2 6
4 3 6
5 2 7
𝑅𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 𝑏𝑎𝑟𝑖𝑠 =2 + 3 + 2 + 3 + 2
5= 2.4
𝑅𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 𝑘𝑜𝑙𝑜𝑚 =5 + 5 + 6 + 6 + 7
5= 5.8
Centroid = (rata-rata baris,rata-rata kolom) = (2.4,5.8)
4) Objek 4
Tabel 3.6 Koordinat Objek 4
Piksel ke- Baris Kolom
1 5 6
2 6 6
3 5 7
4 6 7
𝑅𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 𝑏𝑎𝑟𝑖𝑠 =5 + 6 + 5 + 6
4= 5.5
𝑅𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 𝑘𝑜𝑙𝑜𝑚 =6 + 6 + 7 + 7
4= 6.5
Centroid = (rata-rata baris,rata-rata kolom) = (5.5,6.5)

38
3.5 Perhitungan Jarak Antar Frame
Untuk menentukan jarak tempuh yang telah dicapai oleh objek
tertentu pada suatu frame yang digunakan sebagai acuan adalah
centroid pada frame yang berbeda dan objek yang sama. Untuk
mengetahui jaraknya dapat dihitung dengan persamaan 3.4
𝑟 = 𝑥2 − 𝑥1 2 + 𝑦2 − 𝑦1
2 ..................... (3.4)
r adalah jarak yang telah ditempuh oleh objek dan dalam satuan
piksel. Sedangkan 𝑥1 , 𝑦1 adalah posisi centroid objek pada frame
sekarang dan 𝑥2, 𝑦2 adalah posisi centroid objek pada frame
berikutnya.
3.6 Perhitungan Kecepatan Objek
Perhitungan kecepatan objek adalah kecepatan yang dilakukan
suatu objek untuk menempuh jarak tertentu dalam waktu yang
tertentu pula. Untuk mengetahui kecepatan objek ini digunakan
suatu persamaan
𝑉 =𝑠
𝑡 .................................................................. (3.5)
V adalah kecepatan objek dengan satuan piksel/detik.
s adalah jarak yang telah ditempuh objek dengan satuan piksel.
t adalah waktu yang dibutuhkan objek untuk berpindah dari frame
ke frame selanjutnya.




