Integrating GPS and Pseudolite Signals for Position and Attitude Determination: Theoretical Analysis...
10
Integrating GPS and Pseudolite Signals for Position and Attitude Determination: Theoretical Analysis and Experiment Results Jinling Wang, Toshiaki Tsujii, Chris Rizos, Liwen Dai and Michael Moore School of Geomatic Engineering, University of New South Wales Sydney, NSW 2052, Australia BIOGRAPHIES Jinling Wang is an Australian Research Council Postdoctoral Fellow in the School of Geomatic Engineering at the University of New South Wales (UNSW). His current research interests are in modeling, quality control, algorithm and software development for precise positioning using GPS, Glonass, pseudolites and INS. He holds a Ph.D. from the Curtin University of Technology, Australia, and has authored around 80 refereed journal and conference publications, two widely- used commercial software packages, and has received over 10 academic awards. He is a member of the Editorial Advisory Board of the journal GPS Solutions and is also a member of the International Association of Geodesy (IAG) Special Study Group (SSG) 4.190 "Non- probabilistic Assessment in Geodetic Data Analysis", and SSG 1.179 "Wide Area Modeling for Precise Satellite Positioning". Toshiaki Tsujii is a senior researcher of the Flight Systems Research Center, National Aerospace Laboratory (NAL), Japan, where he has been investigating aspects of satellite navigation and positioning for ten years. In Feb. 2000 he commenced a two year visit within the Satellite Navigation and Positioning (SNAP) Group, at the School of Geomatic Engineering, UNSW, as a JST postdoctoral research fellow. Toshiaki holds a Ph.D. in applied mathematics and physics from Kyoto University. His current research interest is kinematic GNSS positioning of airborne vehicles. Chris Rizos is an Associate Professor at the School of Geomatic Engineering, UNSW, and leader of the Satellite Navigation and Positioning (SNAP) group, which specialises in addressing precise static and kinematic applications of GPS. Chris holds a B.Surv.(Hons.) and Ph.D., both from UNSW and has published over 100 papers, as well as having authored and co-authored several books relating to GPS and positioning technologies. Liwen Dai received a B.Sc. and M.Sc. in Geodesy in 1995 and 1998, respectively, from the Wuhan Technical University of Surveying and Mapping, P.R. China, and joined the School of Geomatic Engineering, UNSW, as a Visiting Fellow in November 1998. Since the start of 2000 he has been a full-time Ph.D. student within the SNAP group. His current research interests are software and algorithm development for rapid static and kinematic positioning (and attitude determination) using integrated GPS, GLONASS and pseudolite systems. Michael Moore graduated with a B.Geomatics (Hons) & B.Sc. from the University of Melbourne in 1998. He is currently a Ph.D. student within the SNAP group at UNSW. His research interest is integration of GPS with other sensors for position and attitude determination. ABSTRACT The Global Positioning System (GPS) has been widely used in positioning and attitude (orientation) determination (PAD) for a variety of sensor platforms. It is well known that for such satellite-based PAD systems, the accuracy, availability and reliability of the positioning and attitude determination results is heavily dependent on the number and geometric distribution of satellites being tracked. However, in some situations, such as in urban canyons and in deep open-cut mines, the number and geometry of visible satellites may not be sufficient to reliably determine the position and attitude parameters of a platform. Therefore, in order to improve the performance of satellited-based PAD systems, the integration of GPS with other technologies has been extensively investigated. In this paper the authors present details of both theoretical and experimental investigations into the potential integration of GPS and pseudolite technologies for positioning and attitude determination applications. Initial experiments indicate that positioning and attitude determination of a platform using a combination of GPS and pseudolite signals is feasible. The accuracy and reliability of GPS-only position and attitude determination results can be improved.
-
Upload
independent -
Category
Documents
-
view
3 -
download
0
Transcript of Integrating GPS and Pseudolite Signals for Position and Attitude Determination: Theoretical Analysis...
Integrating GPS and Pseudolite Signals forPosition and Attitude Determination:
Theoretical Analysis and Experiment Results
Jinling Wang, Toshiaki Tsujii, Chris Rizos, Liwen Dai and Michael Moore
School of Geomatic Engineering, University of New South WalesSydney, NSW 2052, Australia
BIOGRAPHIES
Jinling Wang is an Australian Research CouncilPostdoctoral Fellow in the School of GeomaticEngineering at the University of New South Wales(UNSW). His current research interests are in modeling,quality control, algorithm and software development forprecise positioning using GPS, Glonass, pseudolites andINS. He holds a Ph.D. from the Curtin University ofTechnology, Australia, and has authored around 80refereed journal and conference publications, two widely-used commercial software packages, and has receivedover 10 academic awards. He is a member of the EditorialAdvisory Board of the journal GPS Solutions and is also amember of the International Association of Geodesy(IAG) Special Study Group (SSG) 4.190 "Non-probabilistic Assessment in Geodetic Data Analysis", andSSG 1.179 "Wide Area Modeling for Precise SatellitePositioning".
Toshiaki Tsujii is a senior researcher of the FlightSystems Research Center, National Aerospace Laboratory(NAL), Japan, where he has been investigating aspects ofsatellite navigation and positioning for ten years. In Feb.2000 he commenced a two year visit within the SatelliteNavigation and Positioning (SNAP) Group, at the Schoolof Geomatic Engineering, UNSW, as a JST postdoctoralresearch fellow. Toshiaki holds a Ph.D. in appliedmathematics and physics from Kyoto University. Hiscurrent research interest is kinematic GNSS positioning ofairborne vehicles.
Chris Rizos is an Associate Professor at the School ofGeomatic Engineering, UNSW, and leader of the SatelliteNavigation and Positioning (SNAP) group, whichspecialises in addressing precise static and kinematicapplications of GPS. Chris holds a B.Surv.(Hons.) andPh.D., both from UNSW and has published over 100papers, as well as having authored and co-authored severalbooks relating to GPS and positioning technologies.
Liwen Dai received a B.Sc. and M.Sc. in Geodesy in1995 and 1998, respectively, from the Wuhan Technical
University of Surveying and Mapping, P.R. China, andjoined the School of Geomatic Engineering, UNSW, as aVisiting Fellow in November 1998. Since the start of2000 he has been a full-time Ph.D. student within theSNAP group. His current research interests are softwareand algorithm development for rapid static and kinematicpositioning (and attitude determination) using integratedGPS, GLONASS and pseudolite systems.
Michael Moore graduated with a B.Geomatics (Hons) &B.Sc. from the University of Melbourne in 1998. He iscurrently a Ph.D. student within the SNAP group atUNSW. His research interest is integration of GPS withother sensors for position and attitude determination.
ABSTRACT
The Global Positioning System (GPS) has been widelyused in positioning and attitude (orientation)determination (PAD) for a variety of sensor platforms. Itis well known that for such satellite-based PAD systems,the accuracy, availability and reliability of the positioningand attitude determination results is heavily dependent onthe number and geometric distribution of satellites beingtracked. However, in some situations, such as in urbancanyons and in deep open-cut mines, the number andgeometry of visible satellites may not be sufficient toreliably determine the position and attitude parameters ofa platform. Therefore, in order to improve theperformance of satellited-based PAD systems, theintegration of GPS with other technologies has beenextensively investigated.
In this paper the authors present details of both theoreticaland experimental investigations into the potentialintegration of GPS and pseudolite technologies forpositioning and attitude determination applications. Initialexperiments indicate that positioning and attitudedetermination of a platform using a combination of GPSand pseudolite signals is feasible. The accuracy andreliability of GPS-only position and attitude determinationresults can be improved.

INTRODUCTION
Attitude determination is an important component innavigation, guidance and control systems used for a widerange of moving platforms such as spacecraft, air planes,robotics, land vehicles, and vessels. The potential of GPSfor addressing attitude determination applications wasrecognized even before the launch of the GPS satellites(Spinney, 1976). In a GPS-based attitude determinationsystem two or more antennas are mounted on a platform.The precise relative positions between these antennas aredetermined using the carrier phase measurements. Withboth the relative positions of these antennas in both thebody and local-level coordinate systems, the attitudeparameters of the platform can then be estimated. Duringthe past two decades, various hardware designs and dataprocessing algorithms for GPS attitude determination havebeen extensively investigated (for example, Brown et al.,1982; Cohen, 1992; Kruczynski et al., 1989; Lu, 1995;Van Graas & Braasch, 1991; Tsujii, 1998).
For attitude determination, if the known baseline lengthsare used, the minimum number of satellites can be threewhen conventional GPS receivers are used (Van Grass &Braasch, 1991; Euler & Hill, 1995), or even as few as twowhen special receivers are used (Cohen 1996). It has beendemonstrated that even tracking the minimum number ofsatellites, instantaneous ambiguity resolution and attitudedetermination are possible (Van Graas & Dutton, 1997).However, in such circumstances, the approximatecoordinates of the antennas have to be provided by othersensors. In addition, there are two valid solutions whichsatisfy the baseline length constraint. To identify thecorrect solution, the information regarding whether aspecific baseline component has a positive or negativevalue is necessary. When four or more satellites aretracked, these additional requirements will not have to befulfilled. In general, the more satellites that are tracked,the more reliable the attitude solutions.
On the other hand, the geometric distribution of thesatellites being tracked will have a significant impact onthe accuracy of the estimated attitude parameters. It iswell known that the horizontal components of the baselinesolutions are much better determined than the heightcomponent, which may result in a less accurate attitudesolution. The reason for this is that there usually are nolow elevation satellites to track. Even when some lowelevation satellites can be tracked, the measurements fromthese satellites are not of high quality.
Therefore, similar to the problem of carrier phase-basedGPS kinematic positioning, the dominant factors in GPSattitude determination are the number and geometricdistribution of the satellites tracked by the receivers. Toimprove the reliability and accuracy of the attitudesolutions in poor operational environments, integration ofGPS with another satellite system such as GLONASS, orother sensors including gyros and INS, has beeninvestigated. Examples in this regard are Cannon et al.
(1992); Han & Rizos (1999); Harvey (1998); Keong &Lachapelle (1999); Lu (1995); Mathes & Groten (1997);Phillips et al. (1998). Another potential technique foraugmenting GPS for attitude determination is through theuse of ground-based 'pseudo-satellites' (or pseudolites).
The use of pseudolites can be traced back as early as 1976during the initial GPS user equipment tests at the U.S.Army Yuma Proving Ground, Arizona (Harrington &Dolloff, 1976). In the mid 1980s, the RTCM committeeSC-104 ('Recommended Standards for DifferentialNavstar GPS Service') designated the Type 8 Message forthe pseudolite almanac, containing the location, code andhealth information of pseudolites (Kalafus et al., 1986).During the last decade, pseudolites have been tested foraviation, marine and land navigation and positioningapplications (for example, Bartone, 1996; Choi et al.,2000; Dai et al., 2000; Cobb et al., 1995; Ford et al., 1996;Hein et al., 1997; Morley, 1997; Stone & Powell, 1998Zimmerman & Cannon, 1996). The use of pseudolites forattitude determination is discussed in this paper.
Unlike the situation with GPS-only attitude determination,an integrated GPS/pseudolite attitude determinationsystem is sensitive to the initial coordinates of both endsof the moving baselines. The reason for this is that,compared with the GPS satellites, the pseudolites are veryclose to the platform. Thus, biases in the initialcoordinates may lead to model errors. To develop anintegrated GPS/pseudolite attitude determination system,all these and other potential problems need to beaddressed.
This paper is organised as follows. The next sectionbriefly summarizes the attitude determination principles.A theoretical analysis of the model errors caused bylinearizing the measurement equations is then presented.An expression has been derived to describe the impact ofthe (satellite and pseudolite) orbital errors. Next, someresults from integrated GPS/pseudolite attitudedetermination experiments are presented. Finally, severalremaining issues will be discussed.
ATTITUDE DETERMINATION
The attitude of a rigid body platform is defined by arotation transformation between the body-fixed coordinatesystem and the earth-fixed local-level coordinate system(North-East-Down). The ration matrix is expressed as
Rbe =
c θ( )c ψ( ) s φ( )s θ( )c ψ( )− c φ( )s ψ( ) c φ( )s θ( )c ψ( )+ s φ( )s ψ( )c θ( )s ψ( ) s φ( )s θ( )s ψ( )+ c φ( )c ψ( ) c φ( )s θ( )s ψ( )− s φ( )c ψ( )
− s θ( ) s φ( )c θ( ) c φ( )c θ( )
(1)
where c() is a cosine function and s() is a sine function;θφ, and ψ are roll, pitch and yaw (heading) parameters
respectively. If the relative positions of (baseline vectorsbetween) the antennas mounted on the platform aredescribed as ib in the body system, and as ie in the local-

level system, mi ,..2,1= where m is the number ofantennas minus one, for each pair of antennas, thefollowing relationship is obtained:
iebi bRe = , mi ,..2,1= (2)
If only two antennas are amounted on the platform, onebaseline vector is available to estimate two-dimensionalattitude, pitch and yaw or roll and yaw, depending on thearrangement of the antennas. If two or more baselinevectors are available, three-dimensional attitudeparameters can be determined, and there are also morethan three redundant measurements. In all scenarios, aleast-squares procedure can be used to estimate theparameters.
Linearizing equation (2) with respect to the attitudeparameters ( θφ, and ψ ), the design matrix H isobtained, in which all the components are the partialderivatives calculated using the initial values for theattitude parameters. Furthermore, if the covariance matrixfor the GPS-derived baseline vectors ( ie ) is given asσ⋅Q , where σ is the standard deviation of the GPSmeasurements and Q is the cofactor matrix, thecovariance matrix for the estimated attitude parameters is
C = σ ⋅(H TQ − 1H )− 1 (3)
The accuracy of the estimated attitude parameters can beobtained from the diagonal elements of the matrix C .Similar to the DOP values for GPS single-point pointing,the DOP values for the attitude parameters ( θφ, and ψ ),i.e., DOP( φ), DOP( θ ) and DOP( ψ ), can be calculatedusing equation (3).
From the above discussion it is clear that reliability andaccuracy of the estimated attitude parameters is heavilydependent on the quality of the GPS-derived baselinevectors, which can be improved by adding the pseudolitemeasurements into the solution.
THEORETICAL ANALYSIS
From the positioning point of view, a pseudolite can beconsidered to be a ‘satellite-on-the ground’ (Hein et al.,1997). The pseudolites can also transmit GPS-likesignals. Therefore, the fundamental principles in preciseGPS positioning, such as interferometry, can be applied tointegrated GPS-pseudolite positioning. However, the useof ground-based pseudolites does have differentimplications for some aspects of positioning operations.For example, for short baselines as used in attitudedetermination, the effects of nonlinearity and orbital errorson the measurement models are negligible for thesatellites, but could be significant in the case ofpseudolites. The reason for this is that pseudolites are
much closer to user receivers than the satellites are. Acloser investigation of these issues has been made.
Effects of Nonlinearity
In positioning and navigation applications, the keygeometric information from the measurements is 'distance'or 'range' between two points, which are generallyrepresented through 'coordinates' defined in somereference frame. The relationship between themeasurements (distances) and the unknown parameters(coordinates) is of course nonlinear. Because theestimation techniques for the linear models have nicestatistical properties, the nonlinear measurement modelsare usually linearized using a Taylor series expansion.
A function )(xF is expanded into a Taylor series up tothe first order as
RxAxFxF +δ+= )()( 0 (4)
where 0x is the approximate values for the parameters x ;)( 0xFA x∂= is the vector of first order partial
derivatives evaluated at 0x , which is also called the line-of-sight (LOS) vector; 0xxx −=δ ; and R is the secondorder remainder term expressed as
R = 12
δxT ∂xx2 F(x 0 + t⋅δx)δx , 10 << t (5)
where )(2 xFxx∂ is the Hessian matrix constructed usingthe second order partial derivatives.
In standard data processing, the remainder term R isignored, resulting in a nonlinearity error in themeasurement model. The bounds of this error term aregiven as (Teunissen, 1987):
12
λmin ⋅⋅δx 2 ≤R ≤12
λmax ⋅ δx 2 (6)
where minλ and maxλ are the minimum and maximum
eigenvalues of the Hessian matrix )(2 xFxx∂ . For thedistance model:
222ijijijij zyxd ++= , (7)
where ijijij zyx ,, are the differences between the
coordinates for the two points ( ji, ) associated with themeasurement, the Hessian matrix is
∂xx2 dij = 1
dij3
yij2 + zij
2 − x ijyij − xijz ij
− xijy ij xij2 + zij
2 − yijz ij
− x ijzij − yijz ij xij2 + yij
2
(8)
with the extreme eigenvalues being 0min =λ and
ijd/1max =λ . From equation (6), the bounds for the
nonliearity error caused by ignoring the remainder termR are:
0 ≤R ≤δx 2
2dij
=δx ij
2 + δyij
2 + δzij
2( )2dij
(9)
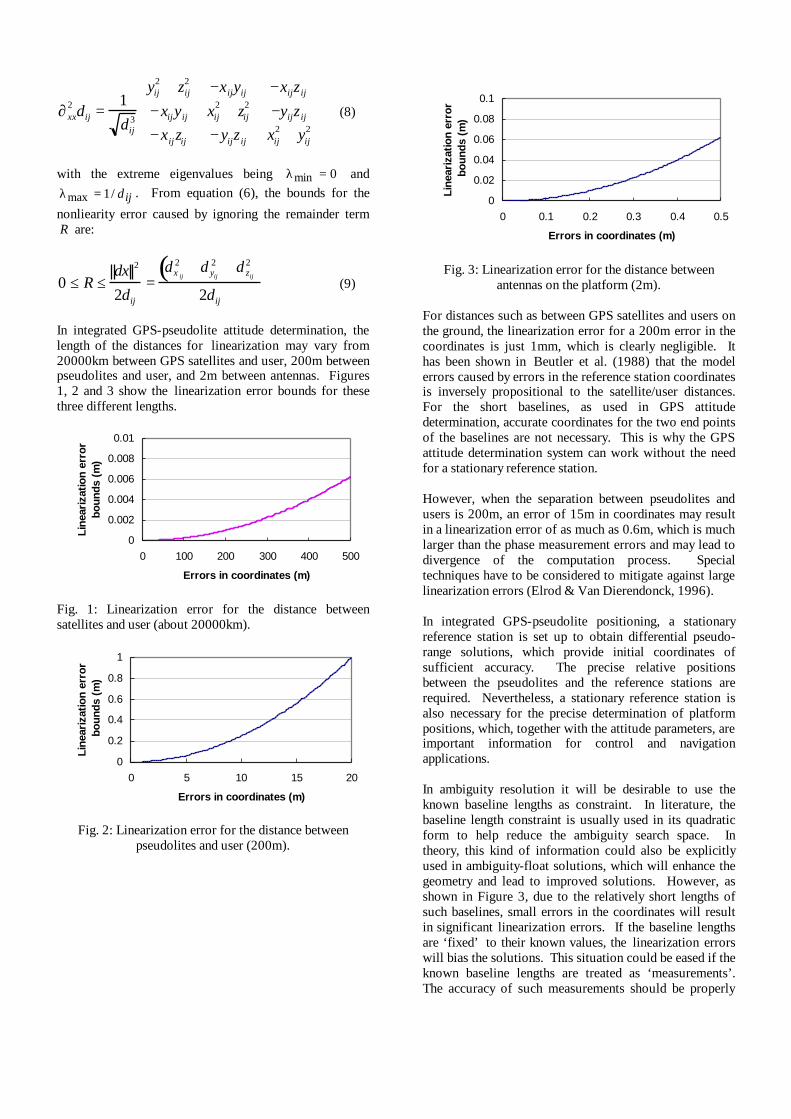
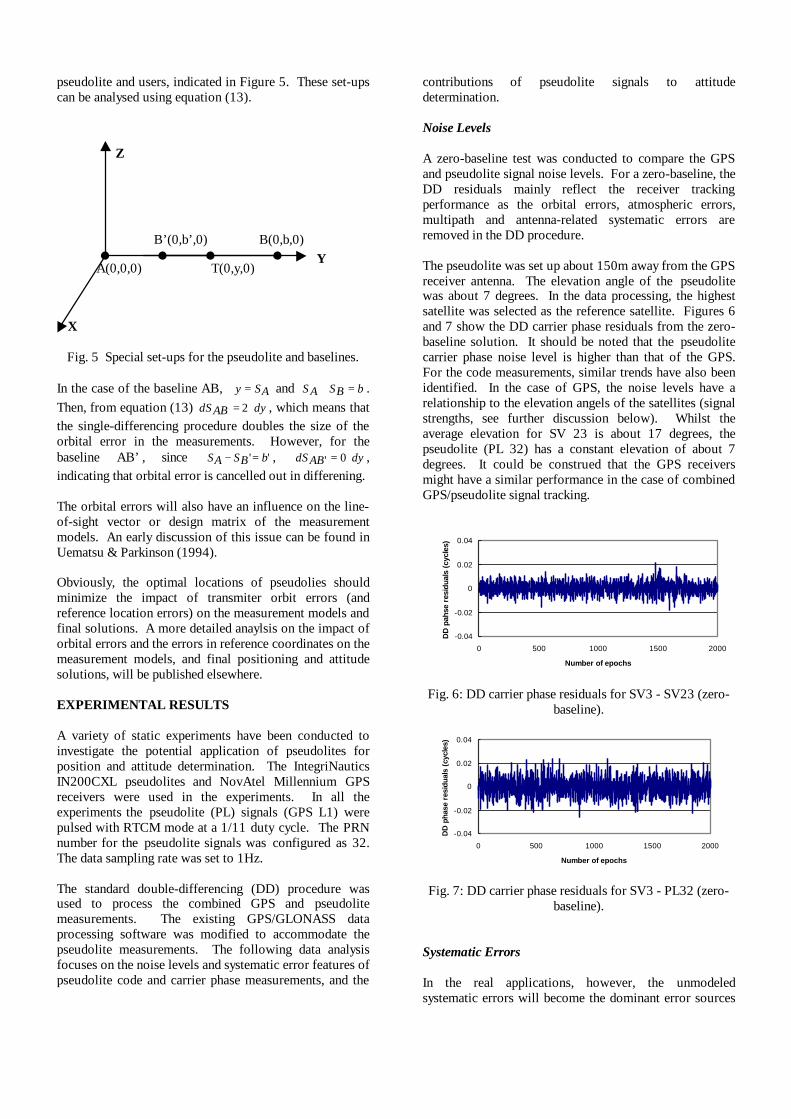
In integrated GPS-pseudolite attitude determination, thelength of the distances for linearization may vary from20000km between GPS satellites and user, 200m betweenpseudolites and user, and 2m between antennas. Figures1, 2 and 3 show the linearization error bounds for thesethree different lengths.
0
0.002
0.004
0.006
0.008
0.01
0 100 200 300 400 500
Errors in coordinates (m)
Line
ariz
atio
n er
ror
boun
ds (
m)
Fig. 1: Linearization error for the distance betweensatellites and user (about 20000km).
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20
Errors in coordinates (m)
Line
ariz
atio
n er
ror
bou
nds
(m)
Fig. 2: Linearization error for the distance betweenpseudolites and user (200m).
0
0.02
0.04
0.06
0.08
0.1
0 0.1 0.2 0.3 0.4 0.5
Errors in coordinates (m)
Line
ariz
atio
n er
ror
bou
nds
(m)
Fig. 3: Linearization error for the distance betweenantennas on the platform (2m).
For distances such as between GPS satellites and users onthe ground, the linearization error for a 200m error in thecoordinates is just 1mm, which is clearly negligible. Ithas been shown in Beutler et al. (1988) that the modelerrors caused by errors in the reference station coordinatesis inversely propositional to the satellite/user distances.For the short baselines, as used in GPS attitudedetermination, accurate coordinates for the two end pointsof the baselines are not necessary. This is why the GPSattitude determination system can work without the needfor a stationary reference station.
However, when the separation between pseudolites andusers is 200m, an error of 15m in coordinates may resultin a linearization error of as much as 0.6m, which is muchlarger than the phase measurement errors and may lead todivergence of the computation process. Specialtechniques have to be considered to mitigate against largelinearization errors (Elrod & Van Dierendonck, 1996).
In integrated GPS-pseudolite positioning, a stationaryreference station is set up to obtain differential pseudo-range solutions, which provide initial coordinates ofsufficient accuracy. The precise relative positionsbetween the pseudolites and the reference stations arerequired. Nevertheless, a stationary reference station isalso necessary for the precise determination of platformpositions, which, together with the attitude parameters, areimportant information for control and navigationapplications.
In ambiguity resolution it will be desirable to use theknown baseline lengths as constraint. In literature, thebaseline length constraint is usually used in its quadraticform to help reduce the ambiguity search space. Intheory, this kind of information could also be explicitlyused in ambiguity-float solutions, which will enhance thegeometry and lead to improved solutions. However, asshown in Figure 3, due to the relatively short lengths ofsuch baselines, small errors in the coordinates will resultin significant linearization errors. If the baseline lengthsare ‘fixed’ to their known values, the linearization errorswill bias the solutions. This situation could be eased if theknown baseline lengths are treated as ‘measurements’.The accuracy of such measurements should be properly

defined in data processing, in which the possible size ofthe liearization errors must be taken into account.
The above analysis of linearization errors is based on‘one-way’ measurements. Further analysis may considerthe situation of differenced measurements. On the otherhand, the coordinate errors will also result in an incorrectline-of-sight vector A , which represents the geometry.The errors in the elements of A are inversely proportionalto the distance. The impact of linearization errors on thepositioning/attitude solutions will need furtherinvestigation.
Effects of Orbital Errors
The orbit errors, or errors in the coordinates of the phasecentres of the transmitter antennas, are one of the majorbiases in satellite/pseudolite-based positioning. In GPSrelative positioning applications, the impact of the orbitalerrors on baseline length was approximately estimatedusing the following ‘rule-of-thumb’ formula (Bauersima,1983):
rdr
bdb = (10)
where
db is the baseline error;dr is the orbital error;b is the baseline length; andr is the distance between satellite and user(s).
Equation (10) indicates that, in the case of short rangeGPS relative positioning, satellite orbit errors have littleimpact on the solutions. However, as pseudolites areclose to users, the impact of the orbital errors needs moredetailed analysis (Hein et al., 1997; Morley, 1997).
Without loss of generality, the relationship between abaseline (AB) and a transmiter antenna (T) can berepresented schematically as in Figure 4.
The distances between T, A and B, are then expressed as
222 zyxAS ++= (11)
2)(2)(2 hzbyxBS −+−+= (12)
If dx , dy and dz are the errors in the coordinates x , yand z , respectively, the impact of these errors on thesingle-differenced (SD) measurement between A and B is
)()()( zABdSyABdSxABdSABdS ++= (13)
Fig. 4: Set-up of the baseline (AB)and the transmitter (T).
where
dxBSAS
xxABdS ⋅−⋅= )11
()( , (14)
dyBS
by
ASy
yABdS ⋅−−= )()( , (15)
dzBS
hz
ASz
zABdS ⋅−−= )()( (16)
are the model errors caused by the orbital errors dx , dyand dz , repsecitvely. It is noted from equations (14), (15)and (16) that these model errors are geometry-dependent.For instance, when SBSAS ==
0)( =xABdS ; (17)
dySb
yABdS ⋅=)( ; (18)
dzSh
zABdS ⋅=)( . (19)
In this situation, whilst the term dx causes no modelerrors, the impact of terms dy and dz on themeasurement model are inversely propotional to S (theseparation between the transmiter and the user), and areproportional to b (horizontal baseline distance) and h(the baseline height difference). If the baseline heightdifference is equal to zero ( 0=h ), then 0)( =zABdS . Insuch an event the ‘rule-of-thumb’ equation (10), isidentical to equation (18). Therefore, equation (10) is aspecial case of equation (13), which provides a generealtool for analysing the impacts of orbital errors on the (SD)measurement models.
In some situations, the geometric relationship betweenpseudolite transmitter and users is quite different from thatfor the satellite transmitters and users. Hein et al. (1997)and Morely (1997) discuss two special set-ups for the
Z
B(0,b,h)
A(0,0,0)
T(x,y,z)
Y
X
pseudolite and users, indicated in Figure 5. These set-upscan be analysed using equation (13).
Fig. 5 Special set-ups for the pseudolite and baselines.
In the case of the baseline AB, ASy = and bBSAS =+ .Then, from equation (13) dyABdS ⋅= 2 , which means thatthe single-differencing procedure doubles the size of theorbital error in the measurements. However, for thebaseline AB’, since '' bBSAS =− , dyABdS ⋅= 0' ,indicating that orbital error is cancelled out in differening.
The orbital errors will also have an influence on the line-of-sight vector or design matrix of the measurementmodels. An early discussion of this issue can be found inUematsu & Parkinson (1994).
Obviously, the optimal locations of pseudolies shouldminimize the impact of transmiter orbit errors (andreference location errors) on the measurement models andfinal solutions. A more detailed anaylsis on the impact oforbital errors and the errors in reference coordinates on themeasurement models, and final positioning and attitudesolutions, will be published elsewhere.
EXPERIMENTAL RESULTS
A variety of static experiments have been conducted toinvestigate the potential application of pseudolites forposition and attitude determination. The IntegriNauticsIN200CXL pseudolites and NovAtel Millennium GPSreceivers were used in the experiments. In all theexperiments the pseudolite (PL) signals (GPS L1) werepulsed with RTCM mode at a 1/11 duty cycle. The PRNnumber for the pseudolite signals was configured as 32.The data sampling rate was set to 1Hz.
The standard double-differencing (DD) procedure wasused to process the combined GPS and pseudolitemeasurements. The existing GPS/GLONASS dataprocessing software was modified to accommodate thepseudolite measurements. The following data analysisfocuses on the noise levels and systematic error features ofpseudolite code and carrier phase measurements, and the
contributions of pseudolite signals to attitudedetermination.
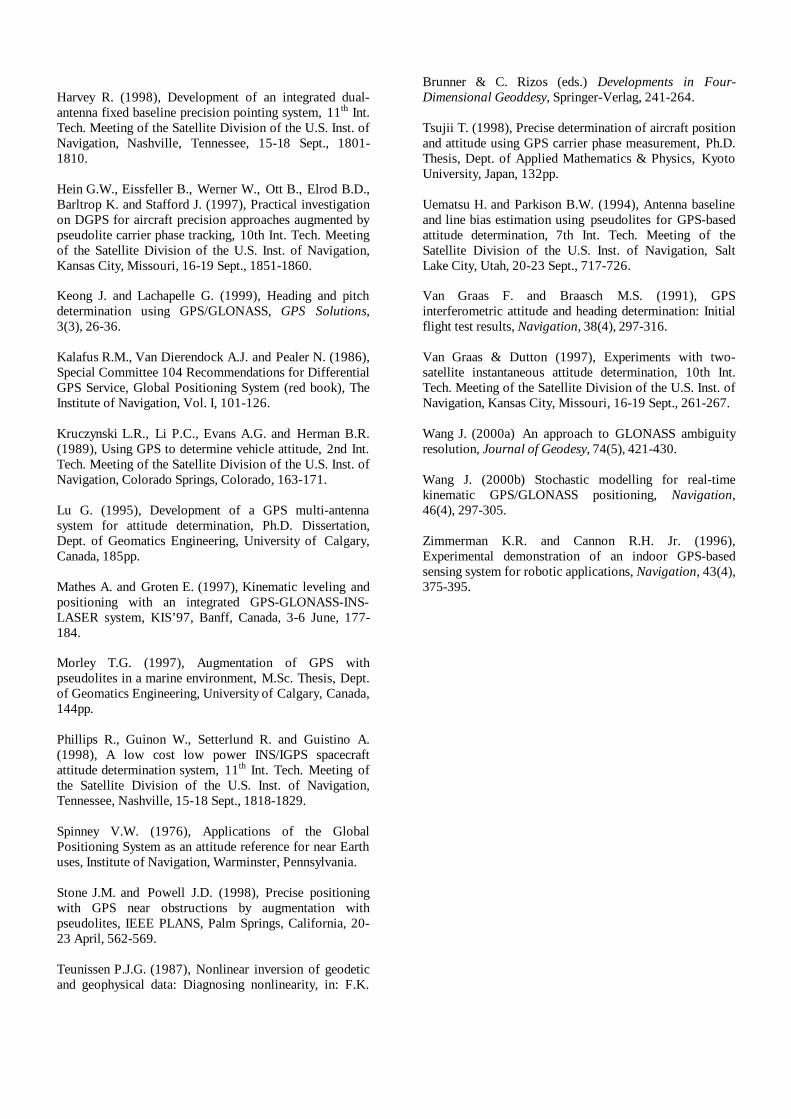
Noise Levels
A zero-baseline test was conducted to compare the GPSand pseudolite signal noise levels. For a zero-baseline, theDD residuals mainly reflect the receiver trackingperformance as the orbital errors, atmospheric errors,multipath and antenna-related systematic errors areremoved in the DD procedure.
The pseudolite was set up about 150m away from the GPSreceiver antenna. The elevation angle of the pseudolitewas about 7 degrees. In the data processing, the highestsatellite was selected as the reference satellite. Figures 6and 7 show the DD carrier phase residuals from the zero-baseline solution. It should be noted that the pseudolitecarrier phase noise level is higher than that of the GPS.For the code measurements, similar trends have also beenidentified. In the case of GPS, the noise levels have arelationship to the elevation angels of the satellites (signalstrengths, see further discussion below). Whilst theaverage elevation for SV 23 is about 17 degrees, thepseudolite (PL 32) has a constant elevation of about 7degrees. It could be construed that the GPS receiversmight have a similar performance in the case of combinedGPS/pseudolite signal tracking.
-0.04
-0.02
0
0.02
0.04
0 500 1000 1500 2000
Number of epochs
DD
pah
se r
esid
uals
(cy
cles
)
Fig. 6: DD carrier phase residuals for SV3 - SV23 (zero-baseline).
-0.04
-0.02
0
0.02
0.04
0 500 1000 1500 2000
Number of epochs
DD
pha
se r
esid
uals
(cy
cles
)
Fig. 7: DD carrier phase residuals for SV3 - PL32 (zero-baseline).
Systematic Errors
In the real applications, however, the unmodeledsystematic errors will become the dominant error sources
B(0,b,0)
A(0,0,0) T(0,y,0)
B’(0,b’,0)
X
Z
Y

in GPS and pseudolite measurements. To investigatethese error features, a static experiment was conducted onthe lower portion of roof of a building on the UNSWcampus (see Figure 10). The baseline length was 3m.The separation between the pseudolite and the baselinewas about 10m. There are 20 concrete pillars and severalmetal structures on this portion of the roof. The observingsite is considered to be subject to multipath reflections.The elevation angle of the pseudolite was about 6 degrees,whilst the elevation angles for all 5 tracked satellites weregreater than 40 degrees.
Figures 8 and 9 show the DD carrier phase residuals fromthe ambiguity-fixed baseline solutions (the highestsatellite SV2 was used as the reference satellite). Theseresiduals indicate that the measurements werecontaminated by systematic errors, which are most likelydue to multipath. Naturally, due to the satellite geometrychanges, the remaining systematic errors in the satellitemeasurements vary with time.
Fig. 8: DD carrier phase residuals for SV2 – SV7 (3mbaseline).
Fig. 9: DD carrier phase residuals for SV2 – PL32 (3mbaseline).
If there is no geometry change, the systematic errorscaused, for instance, multipath and pseudolite-locationerror will exhibit a constant characteristic (Dai et al.,2000). Such constant biases in pseudolite measurementshave also been discussed in other investigations (forexample, Choi et al., 2000; Ford et al., 1996; Hein et al.,1997). The evaluation of such a constant bias may not bejust based on the residuals of the ambiguity-fixed
solutions. The reason is that the pseudolite measurementswill have a significant influence in the solutions,particularly for the height components. The bias in thepseudolite measurements may be ‘absorbed’ by the GPSmeasurements.
Assuming the pseudolite measurements are expected to fitthe GPS measurements, the constant bias in the pseudolitemeasurements could be estimated and removed using asearch algorithm such as proposed by Wang (2000a). Forthis application of the algorithm, the search step could beselected as 0.005 cycles (noise level of the carrier phases).For this 3m baseline, the constant bias was estimated as0.115cycles.
In contrast to the zero-baseline test, in this case of a shortbaseline, the noise level (which might contain some of the'randomized' systematic errors) of the pseudolite carrierphase measurements is much lower than that of the GPScarrier phase measurements. On the other hand, the noiselevel of the pseudolite measurements from this shortbaseline is even better than that from the zero-baselinetest, although in both experiments the pseudolite elevationangles are almost identical. The different noise levels ofthe measurements might be caused by varying pseudolitesignal strength. It is noted that, in the RINEX files, thepseudolite signal strengths were scaled at 5 and 9, for thezero and 3m baselines respectively.
These experiments demonstrate that the quality of thepseudolite carrier measurements could be at the samelevel as, or even better than, that of the GPSmeasurements. However, the challenging issue is theefficient mitigation of the biases in both the carrier phasesand pseudo-ranges, which may reach several meters ormore (Choi et al., 2000; Hein et al., 1997).
Once the biases are negligible or properly accounted for,the valuable contribution of pseudolite measurements inthe positioning and attitude determination solutionsbecomes clear.
Attitude Determination Results
A static GPS/pseudolite position and attitudedetermination experiment was conducted on the lowerroof of a UNSW building (see Figure 10). Antenna 0 wasselected as the reference station, while antennas 1 and 2are considered to be mounted on the platform. Thebaseline length between antenna 1 and antenna 2 is about3 meters. As all the antennas are stationary, theperformance of an integrated GPS-pseudolite position andattitude determination system can be evaluated.
During the experiment on 16 April 2000, four satelliteswere tracked. The elevation angles to these satellites wereabove 30 degrees (30, 48, 55, 60). The elevations of thepseudolite transmitter at these three antennas were about4.5, 5.0 and 6.0 degrees, respectively.
-0.04
-0.02
0
0.02
0.04
0 500 1000 1500 2000
Number of epochs
DD
pha
se r
esid
uals
(c
ycle
s)
-0.04
-0.02
0
0.02
0.04
0 500 1000 1500 2000
Number of epochs
DD
pha
se r
esid
uals
(c
ycle
s)

Fig. 10: Set-up of static GPS/PL attitude determinationexperiment.
As the first step in the data analysis, the GPS-onlysolution was obtained using the conventional two-antennamethod. The baseline vector between antenna 1 andantenna 2 was used for the attitude computations. For theintegrated GPS-PL attitude determination, the baselinesbetween antenna 0 (reference) and the antennas 1 and 2were processed first, from which the baseline vector forthe attitude computation was derived. As with theprevious short baseline test, pseudolite carrier phasebiases could also be identified in these two baselines.Several solutions were obtained, based on the followingtreatment of the biases:
A) Biases are ignored.B) Biases are estimated using the whole data set, and
then are used to correct the PL phases for everyepoch.
C) Biases are estimated using the measurements in oneepoch, and then used to correct the PL phases in thecurrent epoch.
The statistics regarding both pitch and heading parametersare listed in Table 1. Figures 11, 12 and 13 show the pitchvalues from the four different solutions.
Table 1: Statistics for the pitch and heading solutions.
Pitch (Deg.) Heading (Deg.)SolutionTypes Mean Std Dev. Mean Std Dev.
GPS-only 1.63 0.28 197.68 0.10GPS/PL A 1.33 0.06 197.57 0.06GPS/PL B 1.63 0.05 197.67 0.06GPS/PL C 1.62 0.30 197.67 0.08
Fig. 11: Pitch values from the GPS-only solutions.
Fig.12: Pitch values from the GPS/PL solutions A and B.
Fig. 13: Pitch values from the GPS/PL solution C.
From these Figures and the Table, the contribution of thepseudolite measurements to the attitude solutions isclearly significant, especially for the pitch parameter. It isinteresting to note that, even without calibrating the biasesin the PL carrier phases, the pitch parameter could beprecisely estimated, although a shift of 0.3 degree fromGPS-only solution exists. This shift could be removed ifthe bias in the PL measurements is estimated reliably, andthen corrected for. However, GPS/PL solution C indicatesthat the reliable estimation of the bias requires stronggeometric strength and a single epoch of data is notsufficient for this purpose.
In the above solutions all the GPS and PL measurementswere equally weighted. A more realistic stochasticmodeling procedure (for example, Wang, 2000b) could beimplemented to improve the solutions.
PL Transmitter
Ant1Ant0
UpperRoof
(3mhigher)
LowerRoof
N
Ant2
0
1
2
3
0 500 1000 1500 2000
Number of epochs
Pic
th (
degr
ees)
0
1
2
3
0 500 1000 1500 2000
Number of epochs
Pitc
h (D
egre
es)
0
1
2
3
0 500 1000 1500 2000
Number of epochsP
icth
(de
gree
s) GPS/PL (A) GPS/PL (B)

CONCLUDING REMARKS
The reliability and accuracy of the position and attitudesolutions are highly dependent on both the number ofvisible satellites and their geometric distribution. Theintegration of pseudolite and GPS signals is one of theoptions for improving the system performance,particularly in poor operational environments. Thepotential of such an option has been demonstrated in thispaper.
The effects of nonlinearity and orbital errors have beentheoretically analysed. The formulas derived in this paperdemonstrate that special attention has to be given to theseerror sources in pseudolite positioning and attitudedetermination applications. Equation (13) can be used fora thorough analysis of the potential effects of orbit errorsfor any specific applications.
The experimental results have shown that the noise levelof the PL carrier phase measurements is comparable with,or even lower than, that of GPS measurements. Theattitude solution can be significantly improved by addingPL measurements with low elevation angle. However, themitigation of the (unmodeled) systematic errors identifiedin the PL measurements is a challenging issue for furtherinvestigation.
ACKNOWLEDGEMENTS
The authors would like to thank their colleagues JiqingWang and Jun Zhang for their valuable assistance incollecting and decoding data.
REFERENCES
Bartone C.G. (1996), Advanced pseudolite for dual-useprecision approach applications, 9th Int. Tech. Meeting ofthe Satellite Division of the U.S. Inst. of Navigation,Kansas City, Missouri, 17-20 Sept., 95-105.
Bauersima, I. (1983), NAVSTAR/Global PositioningSytems (GPS), II, Mitteilungen derSatellitenbeobatungsstation Zimmerwald, Nr.10,Astronomical Institute, University of Berne, Switzerland.
Beutler G., Bauersima I, Gurtner W., Rothacher M.Schildknecht T. and Geiger A. (1988), Atmosphericrefraction and other important biases in GPS carrier phaseobservations, in F.K. Brunner (ed.) Atmospheric effects ongeodetic sapce measurements, Monograph 12, School ofGeomatic Engineering, UNSW, 15-43.
Brown A.K., Bowles W.M. and Thorvaldsen T.P. (1982),Interferometric attitude determination using the GlobalPositioning System: A new gyrotheodlite, 3rd Int.Geodetic Symp. on Satellite Positioning, Las Cruces, NewMexico, 1289-1302.
Cannon M.E., Shleppe J.B. and McLellan J.F. (1992),Real-time heading determination using an integrated GPS-dead reckoning system, 5th Int. Tech. Meeting of theSatellite Division of the U.S. Inst. of Navigation,Albuquerque, New Mexico, 16-18 Sept., 767-773.
Choi I.K., Wang J., Han S. and Rizos C. (2000),Pseudolites: A new tool for surveyors? 2nd Trans TasmanSurvey Congress, Queenstown, New Zealand, 20-26August, 141-149
Cobb H.S., Lawrence D, Pervan B., Cohen C., Powell J.D.and Parkinson B.W. (1995), Precision landing tests withimproved integrity beacon pseudolites, 8th Int. Tech.Meeting of the Satellite Division of the U.S. Inst. ofNavigation, Palm Springs, California, 12-15 Sept., 827-833.
Cohen C.E. (1992), Attitude determination using GPS,Ph.D. Dissertation, Standford University, USA, 184pp.
Cohen C.E. (1996), Attitude determination, in: B.W.Parkinson & J.J. Spilker (eds.), Global PositioningSystem: Theory and Applications (Vol. II), AmericanInstitute of Astronautics, Washington D.C., 519-538.
Dai L., Zhang J., Rizos C., Han S. and Wang J. (2000),GPS and pseudolite integration for deformationmonitoring applications, to be pres. 13th Int. Tech.Meeting of the Satellite Division of the U.S. Inst. ofNavigation, 19-22 Sept., Salt Lake City, Utah.
Elrod B.D. & Van Dierendonck A.J. (1996), Pseudolites,in: B.W. Parkinson & J.J. Spilker (eds.), GlobalPositioning System: Theory and Applications (Vol. II),American Institute of Astronautics, Washington D.C.,51-79.
Euler H.-J. & Hill C. (1995), Attitude determination,exploring all information for optimal ambiguityresolution, 8th Int. Tech. Meeting of the Satellite Divisionof the U.S. Inst. of Navigation, Palm Springs, California,12-15 Sept., 1751-1757.
Ford T., Neumann J., Toso N., Petersen W., Anderson C.,Fenton P., Holden T. and Barltrop K. (1996), HAPPI – AHigh Accuracy Pseudolite/GPS Positioning Integration,9th Int. Tech. Meeting of the Satellite Division of the U.S.Inst. of Navigation, Kansas City, Missouri, 17-20 Sept.,1719-1728.
Han S. and Rizos C. (1999), Single-epoch ambiguityresolution for real time GPS attitude determination withthe aid of one-dimensional optical fiber gyro, GPSSolutions, 3(1), 5-12.
Harrington R.L. and Dolloff J.T. (1976), The invertedrange: GPS user test facility, IEEE PLANS’76, SanDiego, California, 1-3 Nov., 204-211.
Harvey R. (1998), Development of an integrated dual-antenna fixed baseline precision pointing system, 11th Int.Tech. Meeting of the Satellite Division of the U.S. Inst. ofNavigation, Nashville, Tennessee, 15-18 Sept., 1801-1810.
Hein G.W., Eissfeller B., Werner W., Ott B., Elrod B.D.,Barltrop K. and Stafford J. (1997), Practical investigationon DGPS for aircraft precision approaches augmented bypseudolite carrier phase tracking, 10th Int. Tech. Meetingof the Satellite Division of the U.S. Inst. of Navigation,Kansas City, Missouri, 16-19 Sept., 1851-1860.
Keong J. and Lachapelle G. (1999), Heading and pitchdetermination using GPS/GLONASS, GPS Solutions,3(3), 26-36.
Kalafus R.M., Van Dierendock A.J. and Pealer N. (1986),Special Committee 104 Recommendations for DifferentialGPS Service, Global Positioning System (red book), TheInstitute of Navigation, Vol. I, 101-126.
Kruczynski L.R., Li P.C., Evans A.G. and Herman B.R.(1989), Using GPS to determine vehicle attitude, 2nd Int.Tech. Meeting of the Satellite Division of the U.S. Inst. ofNavigation, Colorado Springs, Colorado, 163-171.
Lu G. (1995), Development of a GPS multi-antennasystem for attitude determination, Ph.D. Dissertation,Dept. of Geomatics Engineering, University of Calgary,Canada, 185pp.
Mathes A. and Groten E. (1997), Kinematic leveling andpositioning with an integrated GPS-GLONASS-INS-LASER system, KIS’97, Banff, Canada, 3-6 June, 177-184.
Morley T.G. (1997), Augmentation of GPS withpseudolites in a marine environment, M.Sc. Thesis, Dept.of Geomatics Engineering, University of Calgary, Canada,144pp.
Phillips R., Guinon W., Setterlund R. and Guistino A.(1998), A low cost low power INS/IGPS spacecraftattitude determination system, 11th Int. Tech. Meeting ofthe Satellite Division of the U.S. Inst. of Navigation,Tennessee, Nashville, 15-18 Sept., 1818-1829.
Spinney V.W. (1976), Applications of the GlobalPositioning System as an attitude reference for near Earthuses, Institute of Navigation, Warminster, Pennsylvania.
Stone J.M. and Powell J.D. (1998), Precise positioningwith GPS near obstructions by augmentation withpseudolites, IEEE PLANS, Palm Springs, California, 20-23 April, 562-569.
Teunissen P.J.G. (1987), Nonlinear inversion of geodeticand geophysical data: Diagnosing nonlinearity, in: F.K.
Brunner & C. Rizos (eds.) Developments in Four-Dimensional Geoddesy, Springer-Verlag, 241-264.
Tsujii T. (1998), Precise determination of aircraft positionand attitude using GPS carrier phase measurement, Ph.D.Thesis, Dept. of Applied Mathematics & Physics, KyotoUniversity, Japan, 132pp.
Uematsu H. and Parkison B.W. (1994), Antenna baselineand line bias estimation using pseudolites for GPS-basedattitude determination, 7th Int. Tech. Meeting of theSatellite Division of the U.S. Inst. of Navigation, SaltLake City, Utah, 20-23 Sept., 717-726.
Van Graas F. and Braasch M.S. (1991), GPSinterferometric attitude and heading determination: Initialflight test results, Navigation, 38(4), 297-316.
Van Graas & Dutton (1997), Experiments with two-satellite instantaneous attitude determination, 10th Int.Tech. Meeting of the Satellite Division of the U.S. Inst. ofNavigation, Kansas City, Missouri, 16-19 Sept., 261-267.
Wang J. (2000a) An approach to GLONASS ambiguityresolution, Journal of Geodesy, 74(5), 421-430.
Wang J. (2000b) Stochastic modelling for real-timekinematic GPS/GLONASS positioning, Navigation,46(4), 297-305.
Zimmerman K.R. and Cannon R.H. Jr. (1996),Experimental demonstration of an indoor GPS-basedsensing system for robotic applications, Navigation, 43(4),375-395.