Guia de Operação VLT Midi Drive FC 280 - Danfoss
90
ENGINEERING TOMORROW Guia de Operação VLT ® Midi Drive FC 280 vlt-drives.danfoss.com
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Guia de Operação VLT Midi Drive FC 280 - Danfoss

ENGINEERING TOMORROW
Guia de OperaçãoVLT® Midi Drive FC 280
vlt-drives.danfoss.com




Índice
1 Introdução 4
1.1 Objetivo do Manual 4
1.2 Recursos adicionais 4
1.3 Versão do Software e do Documento 4
1.4 Visão Geral do Produto 4
1.5 Aprovações e certificações 6
1.6 Descarte 6
2 Segurança 7
2.1 Símbolos de Segurança 7
2.2 Pessoal qualificado 7
2.3 Segurança e Precauções 7
3 Instalação Mecânica 9
3.1 Desembalagem 9
3.2 Ambiente de instalação 10
3.3 Montagem 10
4 Instalação Elétrica 13
4.1 Instruções de Segurança 13
4.2 Instalação compatível com EMC 13
4.3 Aterramento 13
4.4 Esquemático de fiação 15
4.5 Acesso 17
4.6 Conexão do Motor 17
4.7 Ligação da Rede Elétrica CA 18
4.8 Fiação de Controle 19
4.8.1 Tipos de Terminal de Controle 19
4.8.2 Fiação para os Terminais de Controle 20
4.8.3 Ativando a operação do motor (Terminal 27) 20
4.8.4 Controle do Freio Mecânico 21
4.8.5 Comunicação de dados USB 22
4.9 Lista de Verificação da Instalação 23
5 Colocação em funcionamento 24
5.1 Instruções de Segurança 24
5.2 Aplicando Potência 24
5.3 Operação do painel de controle local 24
5.3.1 Painel de Controle Local Numérico (NLCP) 24
5.3.2 Função da tecla direita no NLCP 26
Índice Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 1

5.3.3 Quick Menu no NLCP 26
5.3.4 Menu principal no NLCP 28
5.3.5 Painel de Controle Local Gráfico (GLCP) 30
5.3.6 Programações dos Parâmetros 31
5.3.7 Alterando a programação do parâmetro com GLCP 31
5.3.8 Fazer upload/download de dados de/para o LCP 32
5.3.9 Restaurando as configurações padrão com o LCP 32
5.4 Programação Básica 33
5.4.1 Setup de Motor Assíncrono 33
5.4.2 Setup do motor PM em VVC+ 33
5.4.3 Adaptação Automática do Motor (AMA) 34
5.5 Verificando a rotação do motor 35
5.6 Verificando a Rotação do Encoder 35
5.7 Teste de controle local 35
5.8 Partida do Sistema 35
5.9 Módulo de memória 36
5.9.1 Sincronizando dados do conversor de frequência para um novo módulo de me-mória (criar backup do conversor) 36
5.9.2 Copiando dados para outro conversor de frequência 37
5.9.3 Copiando dados para vários conversores de frequência 37
5.9.4 Transferência das Informações do Firmware 37
5.9.5 Fazendo backup de alterações de parâmetro no módulo de memória 38
5.9.6 Apagando Dados 38
5.9.7 Desempenho e Indicações de Transferência 38
5.9.8 Ativando o Conversor PROFIBUS 38
6 Safe Torque Off (STO) 40
6.1 Precauções de segurança para STO 41
6.2 Instalação do Safe Torque Off 41
6.3 Colocação em funcionamento do STO 42
6.3.1 Ativação do Safe Torque Off 42
6.3.2 Desativação do Safe Torque Off 42
6.3.3 Teste de colocação em funcionamento do STO 43
6.3.4 Teste para aplicações de STO em modo de reinicialização manual 43
6.3.5 Teste para aplicações de STO em modo nova partida automática 43
6.4 Manutenção e serviço de STO 44
6.5 Dados Técnicos STO 45
7 Exemplos de Aplicações 46
7.1 Introdução 46
7.2 Exemplos de Aplicações 46
Índice VLT® Midi Drive FC 280
2 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528

7.2.1 AMA 46
7.2.2 Velocidade 46
7.2.3 Partida/Parada 47
7.2.4 Reset do Alarme Externo 48
7.2.5 Termistor do motor 48
7.2.6 SLC 48
8 Manutenção, diagnósticos e resolução de problemas 49
8.1 Manutenção e serviço 49
8.2 Tipos de Advertência e Alarme 49
8.3 Display de advertência e alarme 50
8.4 Lista das advertências e alarmes 51
8.4.1 Lista de Códigos de Advertência e Alarme 51
8.5 Resolução de Problemas 56
9 Especificações 58
9.1 Dados Elétricos 58
9.2 Alimentação de Rede Elétrica 60
9.3 Saída do Motor e dados do motor 61
9.4 Condições ambiente 61
9.5 Especificações de Cabo 62
9.6 Entrada/Saída de controle e dados de controle 62
9.7 Torques de Aperto de Conexão 65
9.8 Fusíveis e Disjuntores 65
9.9 Tamanhos do gabinete metálico, valor nominal da potência e dimensões 68
10 Apêndice 71
10.1 Símbolos, abreviações e convenções 71
10.2 Estrutura de Menu dos Parâmetros 71
Índice 83
Índice Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 3

1 Introdução
1.1 Objetivo do Manual
Este guia de operação oferece informações para ainstalação segura e a colocação em funcionamento doconversor de frequência VLT® Midi Drive FC 280.
O guia de operação destina-se a ser utilizado por pessoalqualificado.
Para usar o conversor de frequência de maneira profis-sional e segura, leia e siga o guia de operação. Tenhaparticular atenção às instruções de segurança eadvertências gerais. Sempre mantenha este guia deoperação junto ao conversor de frequência.
VLT® é uma marca registrada.
1.2 Recursos adicionais
Há recursos disponíveis para entender a programação, amanutenção e as funções avançadas do conversor defrequência:
• O Guia de Design VLT® Midi Drive FC 280 forneceinformações detalhadas sobre o projeto e asaplicações do conversor de frequência.
• O Guia de Programação do VLT® Midi Drive FC 280fornece informações sobre como programar einclui descrições completas dos parâmetros.
Publicações e manuais complementares estão disponíveisna Danfoss. Consulte drives.danfoss.com/knowledge-center/technical-documentation/ para listagens.
1.3 Versão do Software e do Documento
Este manual é revisado e atualizado regularmente. Todas assugestões para melhorias são bem-vindas. Tabela 1.1mostra a versão do documento com a respectiva versão desoftware.
Edição ObservaçõesVersão dosoftware
MG07A5Atualização de software e suporte domódulo de memória.
1.5
Tabela 1.1 Documento e versão de software
1.4 Visão Geral do Produto
1.4.1 Uso Pretendido
O conversor de frequência é um controlador eletrônico demotor destinado para:
• regulagem de velocidade do motor em respostaao sistema de feedback ou a comandos remotosde controladores externos. Um Power DriveSystem consiste em conversor de frequência,motor e equipamento acionado pelo motor.
• Vigilância do status do motor e do sistema.
O conversor de frequência também pode ser usado paraproteção de sobrecarga do motor.
Dependendo da configuração, o conversor de frequênciapode ser usado em aplicações independentes ou fazerparte de uma grande aplicação ou instalação.
O conversor de frequência é permitido para uso emambientes residenciais, comerciais e industriais de acordocom as leis e normas locais.
AVISO!Em um ambiente residencial este produto pode causarinterferência nas frequências de rádio e, nesse caso,podem ser necessárias medidas de atenuação comple-mentares.
Má utilização previsívelNão utilize o conversor de frequência em aplicações quenão são compatíveis com ambientes e condições deoperação especificados. Garanta estar em conformidadecom as condições especificadas em capétulo 9 Especifi-cações.
Introdução VLT® Midi Drive FC 280
4 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
11

1.4.2 Diagrama de blocos do conversor defrequência
Ilustração 1.1 é um diagrama de blocos dos componentesinternos do conversor de frequência.
M
763
4
5
21
8
10
130B
E200
.12
M
7
63
4 5
21
8
9
T2/T4
S2
Área Componente Funções
1Entrada da redeelétrica
• Alimentação de rede elétricaCA para o conversor defrequência.
2 Retificador
• A ponte retificadora convertea entrada CA para corrente CCpara alimentação do inversor.
3 Barramento CC
• O circuito do barramento CCintermediário processa acorrente CC.
4 Reator CC
• Filtra a corrente do circuito CCintermediário.
• Fornece proteção a transientede rede elétrica.
• Reduz a corrente de raizquadrada média (RMS).
• Aumenta o fator de potênciarefletido de volta para a linha.
• Reduz harmônicas na entradaCA.
5Banco decapacitores
• Armazena a alimentação CC.
• Fornece proteção ride-throughpara perdas de energia curtas.
Área Componente Funções
6 Inversor
• Converte a CC em uma formade onda CA PWM para umasaída variável controlada parao motor.
7 Saída para o motor• Regula a potência de saída
trifásica para o motor.
8 Circuito de controle
• Potência de entrada, proces-samento interno, saída ecorrente do motor sãomonitorados para forneceroperação e controle eficientes.
• A interface do usuário e oscomandos externos sãomonitorados e executados.
• A saída e o controle do statuspodem ser fornecidos.
9 PFC
• A correção do fator depotência altera a forma deonda da corrente que éextraída pelo conversor defrequência para melhorar ofator de potência.
10Circuito defrenagem
• O circuito de frenagem éusado no circuito interme-diário CC para controlar atensão CC quando a cargaalimenta de volta a energia.
Ilustração 1.1 Exemplo do diagrama de blocos para umconversor de frequência
1.4.3 Tamanhos de gabinetes e valoresnominais da potência
Para os tamanhos de gabinete metálico e os valoresnominais da potência dos conversores de frequência,consulte capétulo 9.9 Tamanhos do gabinete metálico, valornominal da potência e dimensões.
1.4.4 Safe Torque Off (STO)
O conversor de frequência VLT® Midi Drive FC 280 suportaSafe Torque Off (STO). Consulte capétulo 6 Safe Torque Off(STO) para obter detalhes sobre a instalação, colocação emfuncionamento, manutenção e dados técnicos de STO.
Introdução Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 5
1 1

1.5 Aprovações e certificações
089
Para conformidade com o Acordo Europeu relativo aoTransporte Internacional de Mercadorias Perigosas por ViasNavegáveis Internas (ADN), consulte o capítulo Instalaçãoem conformidade com o ADN no VLT® Midi Drive FC 280Guia de Design.
O conversor de frequência atende os requisitos deretenção de memória térmica UL 508C. Para obter maisinformações, consulte o capítulo Proteção Térmica do Motorno VLT® Midi Drive FC 280 Guia de Design.
Normas e conformidades aplicadas para STOO uso do STO nos terminais 37 e 38 exige o atendimentode todas as determinações de segurança, incluindo as leis,regulamentações e diretrizes relevantes. A função STOintegrada atende às normas a seguir:
• IEC/EN 61508:2010, SIL2
• IEC/EN 61800-5-2:2007, SIL2
• IEC/EN 62061:2015, SILCL de SIL2
• EN ISO 13849-1:2015, Categoria 3 PL d
1.6 Descarte
Não descarte equipamentos quecontenham componentes elétricos juntocom o lixo doméstico.Colete-os separadamente em confor-midade com a legislação local e vigente.
Introdução VLT® Midi Drive FC 280
6 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
11

2 Segurança
2.1 Símbolos de Segurança
Os seguintes símbolos são usados neste documento:
ADVERTÊNCIAIndica uma situação potencialmente perigosa quepoderia resultar em morte ou ferimentos graves.
CUIDADOIndica uma situação potencialmente perigosa quepoderia resultar em ferimentos leves ou moderados.Também pode ser usado para alertar contra práticasinseguras.
AVISO!Indica informações importantes, incluindo situações quepossam resultar em danos ao equipamento ou àpropriedade.
2.2 Pessoal qualificado
São necessários transporte, armazenagem, instalação,operação e manutenção corretos e confiáveis para aoperação sem problemas e segura do conversor defrequência. Somente pessoal qualificado tem permissãopara instalar ou operar este equipamento.
O pessoal qualificado é definido como pessoal treinado, oqual está autorizado a instalar, comissionar e manterequipamentos, sistemas e circuitos de acordo com as leis eregulamentos pertinentes. Além disso, o pessoal deve estarfamiliarizado com as instruções e medidas de segurançadescritas neste guia.
2.3 Segurança e Precauções
ADVERTÊNCIAALTA TENSÃOOs conversores de frequência contêm alta tensão quandoestão conectados à entrada da rede elétrica CA,alimentação CC ou Load Sharing. Negligenciar emrealizar a instalação, partida e manutenção por pessoalqualificado pode resultar em ferimentos graves ou fatais.
• Somente pessoal qualificado deverá realizar ainstalação, partida e manutenção.
• Antes de realizar qualquer serviço demanutenção ou outro serviço, use umdispositivo de medição de tensão apropriadopara assegurar que não há tensão restante noconversor de frequência.
ADVERTÊNCIAPARTIDA ACIDENTALQuando o conversor de frequência estiver conectado àrede elétrica CA, alimentação CC ou load sharing, omotor poderá dar partida a qualquer momento. Partidaacidental durante a programação, serviço ou serviço demanutenção pode resultar em morte, ferimentos gravesou danos à propriedade. O motor pode dar partida pormeio de interruptor externo, comando do fieldbus, sinalde referência de entrada do LCP, via operação remotausando o Software de Setup MCT 10 ou após umacondição de falha resolvida.
Para impedir a partida do motor:• Desconecte o conversor de frequência da rede
elétrica.
• Pressione [Off/Reset] no LCP, antes deprogramar parâmetros.
• Conecte toda a fiação e monte completamenteo conversor de frequência, o motor e qualquerequipamento acionado antes de o conversor defrequência ser conectado à rede elétrica CA,fonte de alimentação CC ou load sharing.
Segurança Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 7
2 2

ADVERTÊNCIATEMPO DE DESCARGAO conversor de frequência contém capacitores debarramento CC que podem permanecer carregadosmesmo quando o conversor de frequência não estiverligado. Pode haver alta tensão presente mesmo quandoos indicadores luminosos de LED de advertênciaestiverem apagados. Se não for aguardado o tempoespecificado após a energia ter sido removida paraexecutar serviço de manutenção, o resultado poderá serferimentos graves ou morte.
• Pare o motor.
• Desconecte a rede elétrica CA e as alimentaçõesdo barramento CC remoto, incluindo bateria debackup, UPS e conexões do barramento CC paraoutros conversores de frequência.
• Desconecte ou trave o motor PM.
• Aguarde a descarga total dos capacitores. Otempo de espera mínimo é especificado emTabela 2.1.
• Antes de realizar qualquer serviço demanutenção ou reparo, use um dispositivo demedição da tensão apropriado para garantirque os capacitores estão completamentedescarregados.
Tensão [V]Faixa de potência
[kW (hp)]
Tempo de esperamínimo
(minutos)
200–240 0,37–3,7 (0,5–5) 4
380–4800,37–7,5 (0,5–10) 4
11–22 (15–30) 15
Tabela 2.1 Tempo de Descarga
ADVERTÊNCIARISCO DE CORRENTE DE FUGAAs correntes de fuga excedem 3,5 mA. Falha em aterrar oconversor corretamente pode resultar em morte ouferimentos graves.
• Assegure o aterramento correto doequipamento por um eletricista certificado.
ADVERTÊNCIAPERIGO PARA O EQUIPAMENTOContato com eixos rotativos e equipamentos elétricospode resultar em morte ou ferimentos graves.
• Garanta que apenas pessoal treinado equalificado realize a instalação, inicialização emanutenção.
• Garanta que o trabalho elétrico esteja emconformidade com os códigos elétricosnacionais e locais.
• Siga os procedimentos deste guia.
CUIDADORISCO DE FALHA INTERNAUma falha interna no conversor de frequência poderesultar em lesões graves quando o conversor defrequência não estiver fechado corretamente.
• Assegure que todas as tampas de segurançaestão no lugar e bem presas antes de aplicarenergia.
Segurança VLT® Midi Drive FC 280
8 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
22

3 Instalação Mecânica
3.1 Desembalagem
3.1.1 Itens fornecidos
Os itens fornecidos podem variar de acordo com aconfiguração do produto.
• Certifique-se de que os itens fornecidos e asinformações na plaqueta de identificação corres-pondem à confirmação do pedido.
• Inspecione visualmente a embalagem e oconversor de frequência quanto a danos causadospor manuseio inadequado durante o envio.Preencha uma reivindicação por danos com atransportadora. Guarde as peças danificadas paramaior esclarecimento.
130B
E616
.14
VLT
MADE INDENMARK
T/C: FC-280PK37T4E20H1BXCXXXSXXXXAX
0.37kW 0.5HPIN: 3x380-480V 50/60Hz, 1.2/1.0AOUT: 3x0-Vin 0-500Hz, 1.2/1.1AIP20
P/N: 134U2184 S/N: 000000G000
Midi Drivewww.danfoss.com
CAUTION / ATTENTION:
WARNING / AVERTISSEMENT:
See manual for special condition/mains fuseVoir manual de conditions speciales/fusibles
Enclosure: See manual5AF3 E358502 IND.CONT.EQ.
Stored charge, wait 4 min. Charge résiduelle, attendez 4 min.
21
12
4
3
5
11
20
19
18
16
15
14
13
10
8
9
6
17
R US LISTED
www.tuv.comID 0600000000
Danfoss A/S, 6430 Nordborg, Denmark
12
7
1 Logotipo do produto
2 Nome do produto
3 Descarte
4 Marcação CE
5 Número de série
6 Logotipo TÜV
7 Logotipo UkrSEPRO
8 Código de barras
9 País de origem
10 Referência ao tipo de gabinete metálico
11 Logotipo EAC
12 Logotipo RCM
13 Referência UL
14 Especificações de advertência
15 Logotipo UL
16 Características nominais de IP
17Tensão de saída, frequência e corrente (em baixa/altatensão)
18Tensão de entrada, frequência e corrente (em baixa/altatensão)
19 Valor nominal da potência
20 Código de compra
21 Código de tipo
Ilustração 3.1 Plaqueta de identificação do produto (Exemplo)
AVISO!Não remova a plaqueta de identificação do conversor defrequência (perda de garantia).Para obter mais informações sobre o código de tipo,consulte o capítulo Código de Tipo no VLT® Midi Drive FC280 Guia de Design.
Instalação Mecânica Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 9
3 3

3.1.2 Armazenagem
Certifique-se de que os requisitos para armazenagemsejam atendidos. Consultar o capétulo 9.4 Condiçõesambiente, para detalhes adicionais.
3.2 Ambiente de instalação
AVISO!Em ambientes com gotículas, partículas ou gasescorrosivos em suspensão no ar, garanta que as caracte-rísticas nominais de IP/tipo do equipamento écompatível com a instalação ambiente. Deixar de atenderàs exigências em relação às condições ambiente podereduzir o tempo de vida do conversor de frequência.Certifique-se de que os requisitos de umidade do ar,temperatura e altitude são atendidos.
Vibração e choqueO conversor de frequência está em conformidade com osrequisitos para unidades montadas em paredes e pisos deinstalações de produção, bem como em painéisaparafusados em paredes ou pisos.
Para obter especificações detalhadas das condiçõesambiente, consulte capétulo 9.4 Condições ambiente.
3.3 Montagem
AVISO!Montagem inadequada pode resultar em superaque-cimento e desempenho reduzido.
Refrigeração
• Assegurar 100 mm (3,9 pol.) de espaço paraventilação acima e abaixo.
Elevação
• Para determinar um método de elevação seguro,verifique o peso da unidade, consultecapétulo 9.9 Tamanhos do gabinete metálico, valornominal da potência e dimensões.
• Garanta que o dispositivo de elevação éapropriado para a tarefa.
• Se necessário, planeje um guincho, guindaste ouempilhadeira com as características nominaisapropriadas para mover a unidade.
• Para içamento, use anéis de guincho na unidade,quando fornecidos.
MontagemPara adaptar a furação de montagem do VLT® Midi DriveFC 280, entre em contato com o fornecedor Danfoss localpara encomendar uma placa traseira separada.
Para montar o conversor de frequência:1. Certifique-se de que o local de montagem é forte
o suficiente suportar o peso da unidade. Oconversor de frequência permite instalação lado alado.
2. Posicione a unidade o mais perto possível domotor. Mantenha o cabo de motor o mais curtopossível.
3. Monte a unidade na posição vertical em umasuperfície plana sólida ou na placa traseiraopcional para fornecer fluxo de ar deresfriamento.
4. Use a furação de montagem com slot na unidadepara montagem em parede, quando fornecida.
AVISO!Para saber as dimensões da furação de montagem,consulte capétulo 9.9 Tamanhos do gabinete metálico,valor nominal da potência e dimensões.
3.3.1 Instalação lado a lado
Instalação lado a ladoTodas as unidades VLT® Midi Drive FC 280 podem serinstaladas lado a lado na posição vertical ou horizontal. Asunidades não exigem ventilação adicional na lateral.
130B
E615
.12
Ilustração 3.2 Instalação lado a lado
Instalação Mecânica VLT® Midi Drive FC 280
10 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
33

AVISO!RISCO DE SUPERAQUECIMENTOSe for usado o kit de conversão IP21, a montagem dasunidades lado a lado pode resultar em superaque-cimento e danos à unidade.
• São necessários pelo menos 30 mm (1,2 pol.)entre as bordas da tampa superior do kit deconversão IP21.
3.3.2 Montagem Horizontal
130B
F642
.10
G
Ilustração 3.3 Maneira certa da montagem horizontal(lado esquerdo para baixo)
130B
F643
.10
G
Ilustração 3.4 Maneira errada da montagem horizontal(lado direito para baixo)
3.3.3 Kit de desacoplamento dobarramento
O kit de desacoplamento do barramento garante a fixaçãomecânica e a filtragem elétrica dos cabos para as seguintesvariantes de cassete de controle:
• Cassete de controle com PROFIBUS.
• Cassete de controle com PROFINET.
• Cassete de controle com CANopen.
• Cassete de controle com Ethernet.
• Cassete de controle com POWERLINK
Cada kit de desacoplamento do barramento contém 1placa de desacoplamento horizontal e 1 placa de desaco-plamento vertical. A montagem da placa dedesacoplamento vertical é opcional. A placa de desaco-plamento vertical fornece melhor suporte mecânico paraconectores e cabos PROFINET, Ethernet e POWERLINK.
3.3.4 Montagem
Para montar o kit de desacoplamento do barramento:1. Coloque a placa de desacoplamento horizontal
sobre o cassete de controle que está montado noconversor de frequência, e fixe a placa usando 2parafusos, como mostrado em Ilustração 3.5. Otorque de aperto é 0,7–1,0 Nm (6,2–8,9 pol-lb).
2. Opcional: Monte a placa de desacoplamentovertical da seguinte maneira:
2a Remova as duas molas mecânicas eduas braçadeira de metal da placahorizontal.
2b Monte as molas mecânicas e braçadeirasde metal na placa vertical.
2c Fixe a placa com 2 parafusos, comomostrado em Ilustração 3.6. O torque deaperto é 0,7–1,0 Nm (6,2–8,9 pol-lb).
AVISO!Se a tampa superior IP21 for utilizada, não monte aplaca de desacoplamento vertical, porque sua alturaafeta a instalação correta da tampa superior IP21.
Instalação Mecânica Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 11
3 3

1
2
3
130B
E480
.10
1 Molas mecânicas
2 Braçadeiras metálicas
3 Parafusos
Ilustração 3.5 Fixe a placa de desacoplamento horizontal comparafusos
130B
E481
.10
1
2
1 Placa de desacoplamento vertical
2 Parafusos
Ilustração 3.6 Fixe a placa de desacoplamento vertical comparafusos
Ilustração 3.5 e Ilustração 3.6 mostram conectores baseadosem Ethernet (RJ45). O tipo de conector real depende davariante de fieldbus selecionada do conversor defrequência.
3. Garanta a fiação correta dos cabos de fieldbus(PROFIBUS/CANopen) ou empurre os conectoresdo cabo (RJ45 para PROFINET/POWERLINK/Ethernet/IP) nos soquetes no cassete de controle.
4. 4a Coloque os cabos PROFIBUS/CANopenentre as braçadeiras metálicas acionadaspor mola para estabelecer fixaçãomecânica e contato elétrico entre asseções blindadas dos cabos e asbraçadeiras.
4b Posicione os cabos PROFINET/POWERLINK/Ethernet/IP entre asbraçadeiras metálicas acionadas pormola para estabelecer fixação mecânicaentre os cabos e as braçadeiras.
Instalação Mecânica VLT® Midi Drive FC 280
12 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
33

4 Instalação Elétrica
4.1 Instruções de Segurança
Ver capétulo 2 Segurança para instruções de segurançagerais.
ADVERTÊNCIATENSÃO INDUZIDAA tensão induzida dos cabos de motor de saída deconversores de frequência diferentes em operaçãoconjunta pode carregar capacitores do equipamentomesmo com o equipamento desligado e travado. Se oscabos de motor de saída não forem estendidos separa-damente ou não forem utilizados cabos blindados, oresultado poderá ser morte ou lesões graves.
• Estenda os cabos de motor de saída separa-damente.
• Use cabos blindados.
• Trave todos os conversores de frequênciasimultaneamente.
ADVERTÊNCIAPERIGO DE CHOQUEO conversor de frequência pode causar uma corrente CCno condutor PE e resultar em morte ou lesão grave.
• Quando um dispositivo de proteção operadopor corrente residual (RCD) for usado paraproteção contra choque elétrico, somente umRCD do Tipo B é permitido no lado daalimentação.
A falha em seguir as recomendações significa que o RCDpode não fornecer a proteção pretendida.
Proteção de sobrecorrente• Equipamento de proteção adicional como
proteção contra curto-circuito ou proteçãotérmica do motor entre o motor e o conversor defrequência é necessário para aplicações comvários motores.
• É necessário um fusível de entrada para fornecerproteção contra curto-circuito e sobrecorrente. Seos fusíveis não forem fornecidos de fábrica,devem ser fornecidos pelo instalador. Consulte ascaracterísticas nominais máximas dos fusíveis emcapétulo 9.8 Fusíveis e Disjuntores.
Tipos e características nominais dos fios• Toda a fiação deverá estar em conformidade com
as regulamentações locais e nacionais comrelação à seção transversal e aos requisitos detemperatura ambiente.
• Recomendação de fio de conexão de energia: Fiode cobre com classificação mínima de 75 °C(167 °F).
Consulte capétulo 9.5 Especificações de Cabo para obtertamanhos e tipos de fio recomendados.
4.2 Instalação compatível com EMC
Para obter uma instalação compatível com EMC, siga asinstruções fornecidas em capétulo 4.3 Aterramento, capétulo 4.4 Esquemático de fiação, capétulo 4.6 Conexão doMotor, e capétulo 4.8 Fiação de Controle.
4.3 Aterramento
ADVERTÊNCIARISCO DE CORRENTE DE FUGAAs correntes de fuga excedem 3,5 mA. Não aterrar oconversor de frequência corretamente poderá resultarem morte ou lesões graves.
• Assegure o aterramento correto doequipamento por um eletricista certificado.
Para segurança elétrica• Aterre o conversor de frequência de acordo com
os padrões e diretivas aplicáveis.
• Use um fio terra dedicado para potência deentrada, potência do motor e fiação de controle.
• Não aterre um conversor de frequência ao outroem modo encadeado (consulte Ilustração 4.1).
• Mantenha as conexões do fio terra tão curtasquanto possível.
• Atenda aos requisitos de fiação do fabricante domotor.
• Seção transversal mínima do cabo de fios terra:10 mm2 (7 AWG).
• Termine os fios terra individuais separadamente,seguindo em ambos os requisitos de dimensãode cabo.
Instalação Elétrica Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 13
4 4

130B
C500
.10
FC 1
FC 1
FC 2
FC 2
FC 3
FC 3
PE
PE
Ilustração 4.1 Princípio de aterramento
Para instalação compatível com EMC• Estabeleça um contato elétrico entre a blindagem
do cabo e o gabinete do conversor de frequênciausando buchas de cabo metálicas ou asbraçadeiras fornecidas com o equipamento(consulte capétulo 4.6 Conexão do Motor).
• Use fio de cabo resistente para reduzir transientede ruptura.
• Não use rabichos.
AVISO!EQUALIZAÇÃO DO POTENCIALRisco de transiente de ruptura quando o potencial doponto de aterramento entre o conversor de frequência eo sistema de controle for diferente. Instale cabos deequalização entre os componentes do sistema.Recomenda-se a seção transversal do cabo: 16 mm2
(6 AWG).
Instalação Elétrica VLT® Midi Drive FC 280
14 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
44

4.4 Esquemático de fiação
Esta seção descreve como instalar a fiação do conversor de frequência.
Powerinput
Switch modepower supply
Motor
Analog output
interface
(PNP) = Source (NPN) = Sink
ON = TerminatedOFF = Open
Brakeresistor
91 (L1/N)92 (L2/L)93 (L3)
PE
50 (+10 V OUT)
53 (A IN) 2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC15 mA 100 mA
+ - + -
(U) 96(V) 97
(W) 98(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN) 0 V (PNP)
0 V (PNP)24 V (NPN)
19 (D IN)
24 V (NPN) 0 V (PNP)
17 V
0 V
0 V (PNP)24 V (NPN)
29 (D IN)
24 V (NPN) 0 V (PNP)
0 V (PNP)24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)4)
37 (STO1)4)
95
P 5-00
21 O
N(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
5)
5)
130B
E202
.19
27 (D IN/OUT)6)
Ilustração 4.2 Desenho Esquemático de Fiação Básica
A = analógica, D = digital1) O circuito de frenagem está disponível apenas em unidades trifásicas.2) O Terminal 53 também pode ser usado como entrada digital.3) O interruptor S801 (terminais de comunicação serial) pode ser usado para ativar a terminação na porta RS485 (terminais 68 e69).4) Consulte capétulo 6 Safe Torque Off (STO) para obter a fiação correta de STO.5) O conversor de frequência S2 (monofásico de 200 a 240 V) não suporta a aplicação de load sharing.6) A tensão máxima é de 17 V para o terminal 27 como saída analógica.
Instalação Elétrica Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 15
4 4

e30b
f228
.11
L1L2L3PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
6
15
90
4
1 PLC 10 Cabo de rede elétrica (não blindado)
2 Cabo de equalização com diâmetro mínimo de 16 mm2
(6 AWG).
11 Contator de saída e mais.
3 Cabos de controle 12 Isolamento do cabo descascado
4 Mínimo de 200 mm (7,87 pol.) entre os cabos de controle, oscabos de motor e os cabos de rede elétrica.
13 Barramento do ponto de aterramento comum Siga asexigências locais e nacionais para o aterramento do gabinete.
5 Alimentação de rede elétrica 14 Resistor do freio
6 Superfície exposta (não pintada) 15 Caixa metálica
7 Arruelas tipo estrela 16 Conexão para o motor
8 Cabo do freio (blindado) 17 Motor
9 Cabo de motor (blindado) 18 Bucha de cabo de EMC
Ilustração 4.3 Conexão Elétrica Típica
Instalação Elétrica VLT® Midi Drive FC 280
16 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
44

4.5 Acesso
• Remova a placa de cobertura com uma chave defenda. Consulte Ilustração 4.4.
130B
C504
.11
Ilustração 4.4 Acesso à Fiação de Controle
4.6 Conexão do Motor
ADVERTÊNCIATENSÃO INDUZIDAA tensão induzida dos cabos de motor de saídaestendidos juntos pode carregar capacitores doequipamento, mesmo com o equipamento desligado etravado. Se os cabos de motor de saída não foremestendidos separadamente ou não forem utilizadoscabos blindados, o resultado poderá ser morte ou lesõesgraves.
• Estenda os cabos de motor de saída separa-damente.
• Use cabos blindados.
• Atenda os códigos elétricos locais e nacionaispara tamanhos do cabo. Para obter os tamanhosmáximos dos cabos, consulte capétulo 9.1 DadosElétricos.
• Atenda aos requisitos de fiação do fabricante domotor.
• Extratores da fiação do motor ou painéis deacesso são fornecidos na base das unidades IP21/Tipo 1.
• Não conecte um dispositivo de partida ou detroca de polo (por exemplo, motor Dahlander oumotor de indução de anel de deslizamento) entreo conversor de frequência e o motor.
Procedimento1. Descasque um pedaço do isolamento do cabo
externo.
2. Posicione o cabo descascado sob a braçadeira decabo para estabelecer fixação mecânica e contatoelétrico entre a blindagem do cabo e o terra.
3. Conecte o fio terra ao terminal de aterramentomais próximo de acordo com as instruções deaterramento fornecidas emcapétulo 4.3 Aterramento. Consulte Ilustração 4.5.
4. Conecte a fiação do motor trifásico nos terminais96 (U), 97 (V) e 98 (W), conforme mostrado emIlustração 4.5.
5. Aperte os terminais de acordo com asinformações fornecidas em capétulo 9.7 Torques deAperto de Conexão.
130B
D53
1.10
UV
W
9697
98
Ilustração 4.5 Conexão do Motor
As conexões do terra, da rede elétrica e do motor paraconversores de frequência monofásicos e trifásicos sãomostradas em Ilustração 4.6, Ilustração 4.7 e Ilustração 4.8,respectivamente. As configurações reais variam com ostipos de unidade e equipamentos opcionais.
Instalação Elétrica Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 17
4 4

130B
E232
.11
Ilustração 4.6 Conexões do terra, da rede elétrica e domotor para Unidades monofásicas
130B
E231
.11
Ilustração 4.7 Rede elétrica, motor e conexão do terrapara unidades trifásicas (K1, K2, K3)
130B
E804
.10
Ilustração 4.8 Rede elétrica, motor e conexões do terrapara unidades trifásicas (K4, K5)
4.7 Ligação da Rede Elétrica CA
• Dimensione a fiação com base na corrente deentrada do conversor de frequência. Para obter ostamanhos máximos dos cabos, consultecapétulo 9.1 Dados Elétricos.
• Atenda os códigos elétricos locais e nacionaispara tamanhos do cabo.
Procedimento1. Conecte os cabos de energia CA de entrada aos
terminais N e L para unidades monofásicas(consulte Ilustração 4.6) ou aos terminais L1, L2 eL3 para unidades trifásicas (consulteIlustração 4.7).
2. Dependendo da configuração do equipamento,conecte a potência de entrada nos terminais deentrada da rede elétrica ou na desconexão deentrada.
3. Aterre o cabo de acordo com as instruções deaterramento em capétulo 4.3 Aterramento.
4. Quando alimentado por uma fonte de redeelétrica isolada (rede elétrica IT ou deltaflutuante) ou rede elétrica TT/TN-S com umaperna aterrada (delta aterrado), certifique-se deque o parafuso do filtro de RFI foi removido. Aremoção do parafuso RFI evita danos nobarramento CC e reduz as correntes de
Instalação Elétrica VLT® Midi Drive FC 280
18 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
44

capacidade do terra de acordo com a IEC 61800-3(consulte Ilustração 9.2, o parafuso RFI está nalateral do conversor de frequência).
4.8 Fiação de Controle
4.8.1 Tipos de Terminal de Controle
Ilustração 4.9 mostra os conectores do conversor defrequência removíveis. As funções de terminal e aconfiguração padrão estão resumidas em Tabela 4.1 eTabela 4.2.
130B
E212
.10
1 2
3
Ilustração 4.9 Locais do Terminal de Controle
130B
E214
.10
37 38 12 13 18 19 27 29 32 33 61
42 53 54 50 55
68 69
1
3
2
Ilustração 4.10 Números dos Terminais
Consulte capétulo 9.6 Entrada/Saída de controle e dados decontrole para saber detalhes das características nominaisdos terminais.
Terminalnúmero
ParâmetroConfiguraçã
o padrãoDescrição
E/S digital, E/S pulso, encoder
12, 13 – +24 V CC
Tensão dealimentação de 24V CC. A correntede saída máxima éde 100 mA paratodas as cargas de24 V.
Terminalnúmero
ParâmetroConfiguraçã
o padrãoDescrição
18Parâmetro 5-10
Terminal 18Entrada Digital
[8] Partida
Entradas digitais.
19Parâmetro 5-11
Terminal 19,Entrada Digital
[10] Reversão
27
Parâmetro 5-01 Modo do
Terminal 27Parâmetro 5-12
Terminal 27,Entrada Digital
Parâmetro 5-30 Terminal 27
Saída Digital
DI [2] Paradp/inérc,reversoDO [0] Semoperação
Selecionável paraentrada digital,saída digital ousaída de pulso. Aconfiguraçãopadrão é entradadigital.
29Parâmetro 5-13
Terminal 29,Entrada Digital
[14] Jog Entrada digital.
32Parâmetro 5-14
Terminal 32,Entrada Digital
[0] Semoperação
Entrada digital,encoder de 24 V.O terminal 33pode ser usadopara entrada depulso.
33Parâmetro 5-15
Terminal 33Entrada Digital
[0] Semoperação
37, 38 – STOEntradas desegurançafuncional
Entradas/saídas analógicas
42Parâmetro 6-91
Terminal 42Saída Analógica
[0] Fora defuncionament
Saída analógicaprogramável. Osinal analógico éde 0-20 mA ou4-20 mA a um
máximo de 500 Ω.Também pode serconfigurado comosaídas digitais.
50 – +10 V CC
Tensão dealimentaçãoanalógica de 10 VCC. Máximo de15 mAcomumente usadoparapotenciômetro outermistor.
53
Grupo doparâmetro 6-1*
EntradaAnalógica 53
–
Entrada analógica.Somente modo detensão ésuportado.Também pode serusado comoentrada digital.
Instalação Elétrica Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 19
4 4

Terminalnúmero
ParâmetroConfiguraçã
o padrãoDescrição
54
Grupo doparâmetro 6-2*
Entradaanalógica 54
–
Entrada analógica.Selecionável entremodo de tensãoou de corrente.
55 – –Comum paraentradas digital eanalógica.
Tabela 4.1 Descrições do terminal - Entradas/saídas digitais,Entradas/Saídas Analógicas
Terminalnúmero
ParâmetroConfiguração padrão
Descrição
Comunicação serial
61 – –
Filtro de RCintegrado parablindagem docabo. SOMENTEpara conectar ablindagem quandohouver problemasde EMC.
68 (+)
Grupo doparâmetro 8-3*
Definições daporta do FC
–Interface RS485.Um interruptor docartão de controleé fornecido pararesistência determinação.
69 (-)
Grupo doparâmetro 8-3*
Definições daporta do FC
–
Relés
01, 02, 03Parâmetro 5-40 Função do Relé
[1] Placa dCntrl Pronta
Saída do relé deforma C. Essesrelés estão emdiferentes locais,dependendo dotamanho e daconfiguração doconversor defrequência.Utilizável paratensão CC ou CA ecarga indutiva ouresistiva.
Tabela 4.2 Descrições dos terminais - Comunicação Serial
4.8.2 Fiação para os Terminais de Controle
Os conectores do terminal de controle podem serdesconectados do conversor de frequência para facilitar ainstalação, como mostrado em Ilustração 4.9.
Para obter detalhes sobre fiação de STO, consultecapétulo 6 Safe Torque Off (STO).
AVISO!Mantenha os cabos de controle o mais curto possível esepare-os dos cabos de alta energia para minimizar ainterferência.
1. Solte os parafusos dos terminais.
2. Insira cabos de controle com luva nos slots.
3. Aperte os parafusos dos terminais.
4. Certifique-se de que o contato está estabelecidobem firme e não está frouxo. Fiação de controlefrouxa pode ser a fonte de falhas doequipamento ou de operação não ideal.
Consulte capétulo 9.5 Especificações de Cabo para obtertamanhos do cabo do terminal de controle ecapétulo 7 Exemplos de Aplicações para obter conexões decabos de controle típicas.
4.8.3 Ativando a operação do motor(Terminal 27)
Um fio de jumper pode ser necessário entre o terminal 12(ou 13) e o terminal 27 para o conversor de frequênciaoperar quando usar valores de programação padrão defábrica.
• O terminal de entrada digital 27 é projetado parareceber comando de bloqueio externo de 24 VCC.
• Quando não for usado um dispositivo debloqueio, instale um jumper entre o terminal decontrole 12 (recomendado) ou 13 e o terminal 27.O jumper fornece um sinal interno de 24 V CC noterminal 27.
• Somente para GLCP: Quando a linha de status naparte inferior do LCP indicar PARADA POR INÉRCIAREMOTA AUTOMÁTICA, indica que a unidade estápronta para operar, mas há um sinal de entradaausente no terminal 27.
AVISO!IMPOSSÍVEL INICIARO conversor de frequência não pode operar sem umsinal no terminal 27, a menos que o terminal 27 sejareprogramado.
Instalação Elétrica VLT® Midi Drive FC 280
20 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
44

4.8.4 Controle do Freio Mecânico
Nas aplicações de elevação/abaixamento é necessário controlar um freio eletromecânico.• Controle o freio usando qualquer saída do relé ou saída digital (terminal 27).
• A saída deve ser mantida fechada (sem tensão) durante o período em que o conversor de frequência não pudermanter o motor parado, por exemplo, ao fato de a carga ser excessivamente pesada.
• Selecione [32] Controle do freio mecânico no grupo do parâmetro 5-4* Relés para aplicações com freio eletrome-cânico.
• O freio é liberado quando a corrente do motor exceder o valor predefinido no parâmetro 2-20 Corrente de Liberaçãodo Freio.
• O freio é acionado quando a frequência de saída for menor que a frequência programada noparâmetro 2-22 Velocidade de Ativação do Freio [Hz] e somente se o conversor de frequência estiver executando umcomando de parada.
Se o conversor de frequência estiver em 1 das seguintes situações, o freio mecânico é fechado imediatamente.
• Em modo alarme.
• Em uma situação de sobretensão.
• O STO é ativado.
• O comando de parada por inércia é dado.
Start Current
2) Only support in some products.
1) DC injection current during “Active Brake Delay” after MAV reduced to “0” . Only support in some products.
Off
On
OffRelay / DO Status
Active Brake Delay
Active Brake Delay
MAV
Start Speed
Active Brake Speed
0 t
Start Delay
Off
On
OffStart Command
Released
Activated
Reaction time of mech. brake
Reaction time of mech. brake
Mech . Brake Status
Release Brake CurrentOutput Current
DC Injection Current1)
0 t
130B
F687
.10
Activated
Note:
2)
Ilustração 4.11 Freio Mecânico
Instalação Elétrica Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 21
4 4

O conversor de frequência não é um dispositivo desegurança. É responsabilidade de quem projetou o sistemaintegrar dispositivos de segurança de acordo com asnormas nacionais de elevação pertinentes.
130B
E201
.11
L1(N) L2(L) L3
U V W02 01
A1
A2
Frequency converterOutput
relay
Command circuit220 V AC
Mechanicalbrake
ShaftMotor
Freewheelingdiode
Brake power circuit380 V AC
Outputcontactorinput
Ilustração 4.12 Conectando o Freio Mecânico ao Conversor deFrequência
4.8.5 Comunicação de dados USB
e30b
t623
.11
Ilustração 4.13 Lista de barramentos de rede
Quando o cabo USB é desconectado, o conversor defrequência conectada por meio da porta USB é removidoda Lista de barramentos de rede.
AVISO!Um barramento USB não tem capacidade deconfiguração de endereço e nenhum nome debarramento para configurar. Se conectar mais de umconversor de frequência por meio do USB, o nome dobarramento é incrementado automaticamente na Listade barramentos de rede Software de Setup MCT 10.Conectar mais de um conversor de frequência por meiode um cabo USB geralmente faz com que computadoresinstalado com Windows XP lancem uma exceção etravem. Por isso é aconselhável conectar apenas umconversor de frequência ao PC por meio do USB.
4.8.6 Comunicação serial RS485
Conecte a fiação de comunicação serial RS485 aosterminais (+)68 e (-)69.
• É recomendável cabo de comunicação serialblindado.
• Consulte capétulo 4.3 Aterramento para saber oaterramento correto.
61
68
69
+
130B
B489
.10
RS485
Ilustração 4.14 Diagrama da Fiação de Comunicação Serial
Para setup de comunicação serial básica, selecione oseguinte
1. Tipo de protocolo em parâmetro 8-30 Protocolo.
2. Endereço do conversor de frequência emparâmetro 8-31 Endereço.
3. Baud rate em parâmetro 8-32 Baud Rate da Portado FC.
Dois protocolos de comunicação são internos ao conversorde frequência. Atenda aos requisitos de fiação dofabricante do motor.
• Danfoss FC.
• Modbus RTU.
As funções podem ser programadas remotamente usandoo software do protocolo e a conexão RS485 ou no grupodo parâmetro 8-** Comunicações e opcionais.
Instalação Elétrica VLT® Midi Drive FC 280
22 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
44

A seleção de um protocolo de comunicação específico altera várias programações dos parâmetros padrão para corresponderàs especificações do protocolo e disponibiliza parâmetros adicionais específicos do protocolo.
4.9 Lista de Verificação da Instalação
Antes de concluir a instalação da unidade, inspecione a instalação por completo, como está detalhado na Tabela 4.3.Verifique e marque esses itens quando concluídos.
Inspecionar Descrição Equipamentoauxiliar
• Procure equipamento auxiliar, interruptores, desconectores ou fusíveis/disjuntores de entrada que possamresidir no lado da potência de entrada do conversor de frequência ou no lado de saída para o motor.Certifique-se de que estão prontos para operação em velocidade total.
• Verifique a função e a instalação dos sensores usados para feedback para o conversor de frequência.
• Remova qualquer capacitor de correção do fator de potência do(s) motor(es).
• Ajuste qualquer capacitor de correção do fator de potência no lado da rede elétrica e certifique-se de queestão amortecidos.
Disposição doscabos
• Assegure que a fiação do motor e a fiação de controle estão separadas ou blindadas ou em três conduítesmetálicos separados para isolamento de interferência de alta frequência.
Fiação de controle • Verifique se há fios partidos ou danificados e conexões soltas.
• Verifique se a fiação de controle está isolada da fiação do motor e de potência para imunidade de ruído.
• Verifique a fonte de tensão dos sinais, caso necessário.
Recomenda-se o uso de cabo blindado ou de par trançado. Garanta que a blindagem esteja com terminaçãocorreta.
Espaço paraventilação
• Certifique-se de que o espaço livre superior e inferior é adequado para garantir o fluxo de ar necessáriopara resfriamento, consulte capétulo 3.3 Montagem.
Condições ambiente • Verifique se os requisitos para as condições ambiente foram atendidos.
Fusíveis edisjuntores
• Verifique se os fusíveis e os disjuntores estão corretos.
• Verifique se todos os fusíveis estão firmemente encaixados e em condição operacional e se todos osdisjuntores estão na posição aberto.
Aterramento • Verifique se as conexões do terra são suficientes e se estão firmes e sem oxidação.
• Não aterre no condutor nem monte o painel traseiro em uma superfície metálica.
Fiação da energiade entrada e desaída
• Verifique se há conexões soltas.
• Verifique se o motor e os cabos de rede elétrica estão em conduítes separados ou em cabos blindadosseparados.
Interior do painel • Inspecione se o interior da unidade está isento de sujeira, lascas metálicas, umidade e corrosão.
• Verifique se a unidade está montada em uma superfície metálica não pintada.
Chaves • Garanta que todas as chaves e configurações de desconexão estão nas posições corretas.
Vibração • Verifique se a unidade está montada de maneira sólida e se estão sendo usadas montagens de choque, senecessário.
• Verifique se há volume incomum de vibração.
Tabela 4.3 Lista de Verificação de Instalação
CUIDADORISCO POTENCIAL NO CASO DE FALHA INTERNARisco de ferimentos pessoais se o conversor de frequência não estiver corretamente fechado.
• Antes de aplicar potência, assegure que todas as tampas de segurança estão no lugar e bem presas.
Instalação Elétrica Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 23
4 4

5 Colocação em funcionamento
5.1 Instruções de Segurança
Consulte capétulo 2 Segurança para instruções desegurança gerais.
ADVERTÊNCIAALTA TENSÃOOs conversores de frequência contêm alta tensão quandoconectados à entrada de energia da rede elétrica CA.Instalação, partida e manutenção realizadas por pessoalnão qualificado poderá resultar em morte ou lesõesgraves.
• A instalação, partida e manutenção deverão serexecutadas somente por pessoal qualificado.
Antes de aplicar potência:1. Feche a tampa corretamente.
2. Verifique se todas as buchas de cabo estãoapertadas firmemente.
3. Assegure que a potência de entrada da unidadeesteja desligada e bloqueada. Não confie nachave de desconexão do conversor de frequênciapara isolamento da potência de entrada.
4. Verifique se não há tensão nos terminais deentrada L1 (91), L2 (92) e L3 (93), de fase parafase ou de fase para o terra.
5. Verifique se não há tensão nos terminais de saída96 (U), 97 (V) e 98 (W), de fase para fase e defase para o terra.
6. Confirme a continuidade do motor medindo osvalores de Ω em U–V (96–97), V–W (97–98) e W–U (98–96).
7. Verifique o aterramento correto do conversor defrequência e do motor.
8. Inspecione se há conexões frouxas nos terminaisdo conversor de frequência.
9. Confirme se a tensão de alimentação correspondeà tensão do conversor de frequência e do motor.
5.2 Aplicando Potência
Alimente o conversor de frequência usando as etapas aseguir:
1. Verifique se a tensão de entrada está balanceadadentro dos 3%. Se não estiver, corrija o desbalan-ceamento da tensão de entrada antes deprosseguir. Repita este procedimento após acorreção da tensão.
2. Certifique-se de que toda fiação de equipamentosopcionais corresponda à aplicação de instalação.
3. Certifique-se de que todos os dispositivos dooperador estejam desligados. As portas de paineldevem ser fechadas e as tampas bem presas.
4. Aplique energia à unidade. Não ligue o conversorde frequência agora. Nas unidades com umachave de desconexão, coloque-a na posição ON(Ligar) para alimentar o conversor de frequência.
5.3 Operação do painel de controle local
O conversor de frequência suporta o painel de controlelocal (NLCP) numérico, o painel de controle local gráfico(GLCP) e a tampa cega. Esta seção descreve as operaçõescom NLCP e GLCP.
AVISO!O conversor de frequência também pode serprogramado no Software de Setup MCT 10 no PC viaporta de comunicação RS485 ou porta USB. Estesoftware pode ser encomendado usando o número depedido 130B1000 ou baixado do site Danfoss:drives.danfoss.com/downloads/pc-tools/#/.
5.3.1 Painel de Controle Local Numérico(NLCP)
O painel de controle local numérico (NLCP) é dividido em4 seções funcionais.
A. Display numérico.
B. Chave do menu.
C. Teclas de navegação e luzes indicadoras(LEDs).
D. Teclas de operação e luzes indicadoras (LEDs).
Colocação em funcionamento VLT® Midi Drive FC 280
24 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
55

130B
C506
.10
Setup 1A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status QuickMenu
MainMenu
HandOn
OReset
AutoOn
Back
OKOn
Warn
Alarm
Ilustração 5.1 Vista do NLCP
A. Display NuméricoA tela de LCD é iluminada por trás com uma linhanumérica. Todos os dados são mostrados no NLCP.
1
O número do setup exibe a configuração ativa e o setupde edição. Caso o mesmo setup atue tanto como setupativo e como setup de edição, somente esse setup émostrado (configuração de fábrica). Quando as configu-rações ativa e de edição forem diferentes, os dois númerossão exibidos no display (por ex., setup 12). O númeropiscando indica o setup de edição.
2 Número do parâmetro.
3 Valor do parâmetro.
4O sentido do motor é mostrado no canto inferior esquerdodo display. Uma pequena seta indica o sentido de rotação.
5O triângulo indica se o LCP está no menu de Status, noQuick Menu ou no Menu Principal.
Tabela 5.1 Legenda de Ilustração 5.1, seção A
130B
D13
5.10
Setup 12
INDEX
AHPVkWsrpmHz%n2n1 n3
p5 p4p3 p2 p1
Ilustração 5.2 Informações da tela
B. Tecla do menuPara selecionar entre Status, Quick Menu ou MenuPrincipal. pressione [Menu].
C. Luzes indicadoras (LEDs) e teclas de navegação
Indicador Luz Função
6 On Verde
A luz indicadora ON é ativadaquando o conversor de frequênciareceber energia da tensão de rede,dos terminais de comunicação serialCC ou de uma fonte de alimentaçãode 24 V externa.
7Advertênci
aAmarel
o
Quando as condições de advertênciasão atendidas, o LED WARN amareloacende e o texto aparece na área deexibição identificando o problema.
8 AlarmeVermel
ho
Uma condição de falha faz com queo alarme LED vermelho pisque e umtexto de alarme seja mostrado.
Tabela 5.2 Legenda para Ilustração 5.1, Luzes indicadoras(LEDs)
Tecla Função
9 [Back]Para retornar à etapa ou camada anterior,na estrutura de navegação.
10 [] []
Para alternar entre os grupos doparâmetro, nos parâmetros e dentro dosparâmetros ou aumentar/diminuir valoresdos parâmetros. Setas também podemser usadas para programar a referêncialocal.
11 [OK]Pressione para acessar grupos doparâmetro ou para ativar uma seleção.
12 []
Pressione para se mover da esquerdapara a direita dentro do valor doparâmetro para alterar cada dígito indivi-dualmente.
Tabela 5.3 Legenda para Ilustração 5.1, Teclas de navegação
Colocação em funcionamento Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 25
5 5

D. Teclas de operação e luzes indicadoras (LEDs)
Tecla Função
13Hand On(ManualLigado)
Inicia o conversor de frequência no controlelocal.
• Um sinal de parada externo por entrada decontrole ou comunicação serial substitui omanual ligado local.
14 Off/Reset
Faz parar o motor, mas não remove a energiapara o conversor de frequência ou reinicializao conversor de frequência manualmente apósuma falha ser eliminada. Se estiver no modode alarme, o alarme é reinicializado se acondição de alarme for removida.
15Auto On
(Automático Ligado)
Coloca o sistema em modo operacionalremoto.
• Responde a um comando de partidaexterno por terminais de controle oucomunicação serial.
Tabela 5.4 Legenda de Ilustração 5.1, seção D
ADVERTÊNCIARISCO ELÉTRICOMesmo após pressionar a tecla [Off/Reset], existe tensãopresente nos terminais do conversor de frequência.Pressionar a chave [Off/Reset] não desconecta oconversor de frequência da rede elétrica. Tocar em peçasenergizadas poderá resultar em morte ou ferimentosgraves.
• Não toque em qualquer peça energizada.
5.3.2 Função da tecla direita no NLCP
Pressione [] para editar individualmente qualquer dos 4dígitos na tela. Ao pressionar [] uma vez, o cursor movepara o primeiro dígito e o dígito começa a piscar,conforme mostrado em Ilustração 5.3. Pressione [] []para alterar o valor. Pressionar [] não altera o valor dosdígitos e não move a casa decimal.
130B
C440
.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Ilustração 5.3 Função da tecla direita
[] também pode ser usado para se mover entre os gruposdo parâmetro. No Menu Principal, pressione [] para ir parao primeiro parâmetro no próximo grupo do parâmetro (porexemplo, para ir de parâmetro 0-03 Definições Regionais [0]Internacional para parâmetro 1-00 Modo Configuração [0]Malha aberta).
AVISO!Durante a inicialização, o LCP mostra a mensagem INICIA-LIZANDO. Quando esta mensagem não aparecer mais, oconversor de frequência está pronto para operação.Adicionar ou remover opcionais pode prolongar aduração da inicialização.
5.3.3 Quick Menu no NLCP
O Quick Menu dá acesso fácil aos parâmetros utilizadoscom mais frequência.
1. Para entrar no Quick Menu, pressione [Menu] atéo indicador no display ficar posicionado sobreQuick Menu.
2. Pressione [] [] para selecionar QM1 ou QM2, eem seguida pressione [OK].
3. Pressione [] [] para navegar pelos parâmetrosno Quick Menu.
4. Pressione [OK] para selecionar um parâmetro.
5. Pressione [] [] para alterar o valor de umaprogramação do parâmetro.
Colocação em funcionamento VLT® Midi Drive FC 280
26 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
55

6. Pressione [OK] para aceitar a modificação.
7. Para sair, pressione [Back] duas vezes (ou 3 vezes se estiver em QM2 e QM3) para entrar em Status ou pressione[Menu] uma vez para entrar no Menu Principal.
130BC445.13
1-22
XXX
X V
Mot
or
nom
inal
sp
eed
QM
1
0-01
[0]
1-10
[0]
1-24
XXX
X A
Lang
uage
Mot
or Ty
pe
1-20
XXX
X kW
Mot
or p
ower
Mot
or v
olta
ge
1-26
XXX
X1-
23 X
XXX
Stat
or
Mot
or fr
eque
ncy
1-25
XXX
X
1-30
XXX
X
1-39
XXX
X
1-40
XXX
X
1-37
XXX
X
1-25
XXX
X
1-24
XXX
X A
3-02
XXX
X
3-03
XXX
X
3-41
XXX
X S
3-42
XXX
X S
5-12
[2]
1-29
[1]
AMA
Back
EM
F at
10
00 R
PM
d-ax
is
QM
2
BMS
AMS
ES
5-70
XXX
X
5-71
[0]
1-30
XXX
X
1-39
XXX
X
1-90
[0]
2-10
[0]
4-16
XXX
X %
4-17
XXX
X %
4-18
XXX
X %
1-00
[0]
1-01
[1]
1-10
[0]
1-24
XXX
X A
1-20
XXX
X kW
1-22
XXX
X V
Mot
or
nom
inal
sp
eed
Mot
or p
ower
Mot
or v
olta
ge
1-26
XXX
X1-
23 X
XXX
Mot
or fr
eque
ncy
1-25
XXX
X
1-30
XXX
X
1-40
XXX
X
1-37
XXX
X
1-25
XXX
X
1-24
XXX
X A
Back
EM
F at
10
00 R
PM
d-ax
is
1-39
XXX
X 4-14
XXX
X
4-19
XXX
X
Stat
or
QM 3
QM
4Q
M 5
L10C
SFS
TBD
Mot
or
nom
inal
sp
eed
Mot
or
nom
inal
sp
eed
Mot
or cu
rrent
Mot
or co
nt.
rate
d to
rque
Resis
tanc
e (R
s)
Mot
or p
oles
indu
ctan
ce (L
d)
Asyn
chro
nous
mot
or
Mot
or cu
rrent
Min
imum
refe
renc
e
Max
imum
refe
renc
e
Ram
p 1
ram
p-up
tim
e
Ram
p 1
ram
p-do
wn
time
Term
inal
27
digi
tal i
nput
Basic
mot
or se
t-up
mod
e
Mot
or co
ntro
lpr
inci
ple
Mot
or ty
pe
PM m
otor
PM m
otor
Mot
orcu
rrent
Mot
or co
nt.
rate
d to
rque
Stat
or
Resis
tanc
e (R
s)
Mot
or p
oles
indu
ctan
ce (L
d)
Mot
or sp
eed
high
lim
it [H
z]
Max
imum
out
put f
requ
ency
Asyn
chro
nous
mot
or
Mot
or cu
rrent
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv.
mot
or se
t-up
Resis
tanc
e (R
s)
Mot
or p
oles
Mot
or th
erm
alpr
otec
tion
Brak
e fu
nctio
n
Torq
ue li
mit
mot
or m
ode
Torq
ue li
mit
gene
rato
r mod
e
Curre
nt li
mit
Enco
der s
et-u
p
Term
inal
32/
33pu
lses p
er re
volu
tion
Term
inal
32/
33en
code
r dire
ctio
n
Chan
ges m
ade
Last
10
chan
ges
Sinc
e fa
ctor
y se
ttingAlar
m lo
g
Ilust
raçã
o 5
.4 E
stru
tura
do
Qui
ck M
enu
Colocação em funcionamento Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 27
5 5

5.3.4 Menu principal no NLCP
O Menu Principal dá acesso a todos os parâmetros.
1. Para entrar no Menu Principal, pressione a tecla[Menu] até o indicador na tela ficar posicionadosobre Menu Principal.
2. [] []: Navegando pelos grupos do parâmetro.
3. Pressione [OK] para selecionar um grupo doparâmetro.
4. [] []: Navegando pelos parâmetros do grupoespecífico.
5. Pressione [OK] para selecionar o parâmetro.
6. [] e []/ []: Definir/alterar o valor do parâmetro.
7. Pressione [OK] para aceitar o valor.
8. Para sair, pressione [Back] duas vezes (ou 3 vezespara parâmetros de matriz) para entrar no MenuPrincipal ou pressione [Menu] uma vez para entrarem Status.
Consulte Ilustração 5.5, Ilustração 5.6 e Ilustração 5.7 paraobter informações sobre os princípios de alterar o valor deparâmetros contínuos, parâmetros enumerados eparâmetro de matriz, respectivamente. As ações nasilustrações estão descritas em Tabela 5.5, Tabela 5.6 eTabela 5.7.
130B
C446
.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+ OK
9
OK
Ilustração 5.5 Interações do menu principal - Parâmetroscontínuos
Colocação em funcionamento VLT® Midi Drive FC 280
28 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
55

1 [OK]: O primeiro parâmetro do grupo é mostrado.
2 Pressione [] repetidamente para ir até o parâmetro.
3 Pressione [OK] para iniciar a edição.
4 []: Primeiro dígito piscando (pode ser editado).
5 []: Segundo dígito piscando (pode ser editado).
6 []: Terceiro dígito piscando (pode ser editado).
7 []: Diminui o valor do parâmetro, a casa decimal muda
automaticamente.
8 []: Aumenta o valor do parâmetro.
9 [Back] Cancelar alterações, voltar a 2.[OK]: Aceitar alterações, voltar a 2.
10 [][]: Selecione o parâmetro dentro do grupo.
11 [Back] Remove o valor e mostra o grupo do parâmetro.
12 [][]: Selecionar grupo.
Tabela 5.5 Alterando valores de parâmetros contínuos
Para parâmetros enumerados, a interação é semelhante,mas o valor do parâmetro é mostrado entre parêntesesdevido à limitação de dígitos do NLCP (4 dígitos grandes) eo enum pode ser maior que 99. Quando o valor enum formaior que 99, o LCP pode mostrar somente a primeiraparte do colchete.
130B
C447
.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6OK
OK
Back
7
OKBack
Ilustração 5.6 Interações do menu principal - Parâmetrosenumerados
1 [OK]: O primeiro parâmetro do grupo é mostrado.
2 Pressione [OK] para iniciar a edição.
3 [][]: Alterar valor do parâmetro (piscando).
4 Pressione [Back] para cancelar as alterações ou [OK] paraaceitar as alterações (retornar à tela 2).
5 [][]: Selecione um parâmetro dentro do grupo.
6 [Back] Remove o valor e mostra o grupo do parâmetro.
7 [][]: Selecione um grupo.
Tabela 5.6 Alterando valores de parâmetros enumerados
Os parâmetros de matriz funcionam da seguinte maneira:
130B
C448
.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%INDEX
%INDEX
%INDEX
Setup 1
INDEX%
OK
OK
OK
Ilustração 5.7 Interações do menu principal - Parâmetros dematriz
1 [OK]: Mostra os números do parâmetro e o valor doprimeiro índice.
2 [OK]: O índice pode ser selecionado.
3 [][]: Selecione o índice.
4 [OK]: O valor pode ser editado.
5 [][]: Alterar valor do parâmetro (piscando).
6 [Back] Cancelar alterações.[OK]: Aceitar alterações.
7 [Back] Cancelar a edição do índice, selecionar um novoparâmetro.
8 [][]: Selecione o parâmetro dentro do grupo.
9 [Back] Remove o valor do índice do parâmetro e mostra ogrupo do parâmetro.
10 [][]: Selecionar grupo.
Tabela 5.7 Alterando valores dos parâmetros de matriz
Colocação em funcionamento Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 29
5 5

5.3.5 Painel de Controle Local Gráfico(GLCP)
O GLCP é dividido em quatro grupos funcionais (verIlustração 5.8).
A. Área do display
B. Teclas do menu do display.
C. Teclas de navegação e luzes indicadoras(LEDs).
D. Teclas de operação e reinicializar.
130B
D59
8.10
AutoOn
ResetHandOn
O
Status QuickMenu
MainMenu
AlarmLog
Back
CancelInfoOK
Status 1(1)36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
78
9
10
11
12
13
14
15
16
17
18 19 20 21
Ilustração 5.8 Painel de Controle Local Gráfico (GLCP)
A. Área do displayA área do display é ativada quando o conversor defrequência recebe energia da tensão de rede, de terminaisde comunicação serial CC ou de alimentação de 24 V CCexterna.
As informações mostradas no LCP podem ser customizadaspara as aplicações do usuário. Selecione as opções noQuick Menu Q3-13 Configuração do Display.
Display. Número do parâmetro Configuração padrão
1 0-20 [1602] Referência [%]
2 0-21[1614] Corrente do
Motor
3 0-22 [1610] Potência [kW]
4 0-23 [1613] Freqüência
5 0-24 [1502] Medidor de kWh
Tabela 5.8 Legenda para Ilustração 5.8, Área do display
B. Teclas do menu do displayAs teclas de menu são usadas para acesso ao menu paraconfiguração de parâmetros, articulação entre modosdisplay de status durante a operação normal e visualizaçãode dados do registro de falhas.
Tecla Função
6 Status Mostra informações operacionais.
7QuickMenu
Permite acesso aos parâmetros deprogramação para obter instruções de setupiniciais e muitas instruções detalhadas daaplicação.
8Main Menu
(MenuPrincipal)
Permite acesso a todos os parâmetros deprogramação.
9Registro de
AlarmesMostra uma lista das advertências atuais, osúltimos 10 alarmes e o log de manutenção.
Tabela 5.9 Legenda para Ilustração 5.8, Teclas do menu dodisplay
C. Teclas de navegação e luzes indicadoras (LEDs)As teclas de navegação são usadas para programar funçõese mover o cursor no display. As teclas de navegaçãotambém fornecem controle da velocidade na operaçãolocal. Há também três luzes indicadoras de status doconversor de frequência nessa área.
Tecla Função
10Back
(Anterior)Retorna à etapa ou lista anterior na estruturade menu.
11Cancel
(Cancelar)Cancela a última alteração ou comandoenquanto o modo display não for alterado.
12Info
(Informações)
Pressione para obter uma definição dafunção exibida.
13Teclas de
navegaçãoPara mover entre os itens do menu, use as 4teclas de navegação.
14 OKPressione para acessar grupos do parâmetroou para ativar uma seleção.
Tabela 5.10 Legenda para Ilustração 5.8, Teclas de navegação
Colocação em funcionamento VLT® Midi Drive FC 280
30 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
55

Indicador Luz Função
15 On Verde
A luz indicadora ON é ativadaquando o conversor de frequênciareceber energia da tensão de rede,dos terminais de comunicaçãoserial CC ou de uma fonte dealimentação de 24 V externa.
16Advertênc
iaAmarelo
Quando as condições deadvertência são atendidas, o LEDWARN amarelo acende e o textoaparece na área de exibição identi-ficando o problema.
17 Alarme Vermelho
Uma condição de falha faz comque o alarme LED vermelho pisquee um texto de alarme sejamostrado.
Tabela 5.11 Legenda para Ilustração 5.8, Luzes indicadoras(LEDs)
D. Teclas de operação e reinicializarAs teclas de operação estão na parte inferior do LCP.
Tecla Função
18Hand On(ManualLigado)
Inicia o conversor de frequência no modoManual ligado.
• Um sinal de parada externo porentrada de controle oucomunicação serial substitui omanual ligado local.
19Off
(Desligado)Para o motor, mas não remove a energiapara o conversor de frequência.
20Auto On
(AutomáticoLigado)
Coloca o sistema em modo operacionalremoto.
• Responde a um comando de partidaexterno por terminais de controle oucomunicação serial.
21Reset
(Reinicializar)
Reinicializa o conversor de frequênciamanualmente após uma falha ser eliminada.
Tabela 5.12 Legenda para Ilustração 5.8, Teclas de operaçãoe reinicializar
AVISO!Para ajustar o contraste do display, pressione [Status] eas teclas []/[].
5.3.6 Programações dos Parâmetros
Para estabelecer a programação correta da aplicaçãogeralmente é necessário programar funções em váriosparâmetros relacionados. Os detalhes dos parâmetros sãofornecidos em capétulo 10.2 Estrutura de Menu dosParâmetros.
Os dados de programação são armazenados internamenteno conversor de frequência.
• Para backup, transfira dados por upload para amemória do LCP.
• Para fazer download de dados em outroconversor de frequência, conecte o LCP a essaunidade e faça o download das configuraçõesarmazenadas.
• Restaurar a configuração padrão de fábrica nãoaltera os dados armazenados na memória do LCP.
5.3.7 Alterando a programação doparâmetro com GLCP
Acesse e altere a programação do parâmetro no QuickMenu (Menu Rápido) ou no Main Menu (Menu Principal). OQuick Menu dá acesso somente a um número limitado deparâmetros.
1. Pressione [Quick Menu] ou [Main Menu] no LCP.
2. Pressione [] [] para navegar pelos grupos doparâmetro, pressione [OK] para selecionar grupode parâmetros.
3. Pressione [] [] para navegar pelos parâmetros,pressione [OK] para selecionar um parâmetro.
4. Pressione [] [] para alterar o valor de umaprogramação do parâmetro.
5. Press [] [] para alterar o dígito quando umparâmetro decimal estiver no estado de edição.
6. Pressione [OK] para aceitar a modificação.
7. Pressione [Back] duas vezes para entrar em Statusou pressione [Main Menu] uma vez para entrar noMain Menu (Menu Principal).
Visualizar alteraçõesQuick Menu Q5 - Alterações Efetuadas indica todos osparâmetros alterados em relação à configuração padrão.
• A lista mostra somente os parâmetros que foramalterados no setup de edição atual.
• Os parâmetros que foram reinicializados paravalores padrão não são indicados.
• A mensagem Empty (vazio) indica que nenhumparâmetro foi alterado.
Colocação em funcionamento Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 31
5 5

5.3.8 Fazer upload/download de dados de/para o LCP
1. Pressione [Off] para parar o motor antes detransferir dados por upload ou download.
2. Pressione [Main Menu] parâmetro 0-50 Cópia doLCP e pressione [OK].
3. Selecione [1] Todos para o LCP para transferirdados por upload para o LCP ou selecione [2]Todos a partir d LCP para fazer download dedados do LCP.
4. Pressione [OK]. Uma barra de progresso mostra oandamento do download ou do upload.
5. Pressione [Hand On] ou [Auto On] para retornar àoperação normal.
5.3.9 Restaurando as configurações padrãocom o LCP
AVISO!Risco de perder programação, dados do motor,localização e registros de monitoramento ao realizar arestauração da configuração padrão. Para fornecer umbackup, transfira os dados por upload para o LCP antesda inicialização.
A restauração da programação do parâmetro padrão érealizada pela inicialização do conversor de frequência.Inicialização é executada por meio doparâmetro 14-22 Modo Operação (recomendado) oumanualmente. A inicialização não reinicializa as configu-rações para parâmetro 1-06 Sentido Horário eparâmetro 0-03 Definições Regionais.
• A inicialização usando parâmetro 14-22 ModoOperação não reinicializa configurações doconversor de frequência como as horas de funcio-namento, seleções da comunicação serial, registrode falhas, registro de alarme e outras funções demonitoramento.
• A inicialização manual apaga todos os dados domotor, de programação, de localização e demonitoramento e restaura as configuração padrãode fábrica.
Procedimento de inicialização recomendado, viaparâmetro 14-22 Modo Operação
1. Selecione parâmetro 14-22 Modo Operação epressione [OK].
2. Selecione [2] Inicialização e pressione [OK].
3. Remova a energia da unidade e aguarde até queo display seja desligado.
4. Aplique energia à unidade.
As programações do parâmetro padrão são restauradasdurante a partida. Isso poderá demorar ligeiramente maisque o normal.
5. Alarme 80, Drive inicializado no valor padrão émostrado.
6. Pressione [Reset] para retornar ao modo deoperação.
Procedimento de inicialização manual1. Remova a energia da unidade e aguarde até que
o display seja desligado.
2. Pressione e mantenha pressionado [Status], [MainMenu] e [OK] ao mesmo tempo no GLCP, oupressione [Menu] e [OK] ao mesmo tempo noNLCP enquanto estiver energizando a unidade(aproximadamente 5 segundos ou até que umclique seja ouvido e o ventilador inicie).
As programações do parâmetro padrão de fábrica sãorestauradas durante a partida. Isso poderá demorarligeiramente mais que o normal.
A inicialização manual não reinicializa as seguintesinformações do conversor de frequência:
• Parâmetro 15-00 Horas de funcionamento.
• Parâmetro 15-03 Energizações.
• Parâmetro 15-04 Superaquecimentos.
• Parâmetro 15-05 Sobretensões.
Colocação em funcionamento VLT® Midi Drive FC 280
32 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
55
5.4 Programação Básica
5.4.1 Setup de Motor Assíncrono
Insira os dados do motor a seguir na ordem indicada. Essasinformações são encontradas na plaqueta de identificaçãodo motor.
1. Parâmetro 1-20 Potência do Motor.
2. Parâmetro 1-22 Tensão do Motor.
3. Parâmetro 1-23 Freqüência do Motor.
4. Parâmetro 1-24 Corrente do Motor.
5. Parâmetro 1-25 Velocidade nominal do motor.
Para desempenho ideal no modo VVC+, dados adicionaisdo motor são necessários para configurar os parâmetros aseguir.
6. Parâmetro 1-30 Resistência do Estator (Rs).
7. Parâmetro 1-31 Resistência do Rotor (Rr).
8. Parâmetro 1-33 Reatância Parasita do Estator (X1).
9. Parâmetro 1-35 Reatância Principal (Xh).
Os dados podem ser encontrados na folha de dados domotor (esses dados tipicamente não estão disponíveis naplaqueta de identificação do motor). Execute a AMAcompleta usando parâmetro 1-29 Adaptação Automática doMotor (AMA) [1] Ativar AMA completa ou insira osparâmetros manualmente.
Ajuste específico da aplicação ao executar VVC+
VVC+ é o modo de controle mais robusto. Na maioria dassituações ele fornece desempenho ideal sem ajustesposteriores. Execute uma AMA completa para obter omelhor desempenho.
5.4.2 Setup do motor PM em VVC+
Etapas iniciais de programação1. Ajuste parâmetro 1-10 Construção do Motor com
as opções a seguir para ativar a operação domotor PM:
1a [1] PM, SPM não saliente
1b [3] PM, IPM saliente, Sat
2. Selecione [0] Malha aberta emparâmetro 1-00 Modo Configuração.
AVISO!O feedback do encoder não é suportado para motoresPM.
Programando os dados do motorApós selecionar uma das opções do motor PM emparâmetro 1-10 Construção do Motor, os parâmetrosrelacionados ao motor PM nos grupos do parâmetro 1-2*Dados do Motor, 1-3* Dados Avanç. do Motor I e 1-4* DadosAvanç. do Motor estão ativos.Obtenha a informação na plaqueta de identificação domotor e na folha de dados do motor.
Programe os parâmetros a seguir na ordem indicada:1. Parâmetro 1-24 Corrente do Motor.
2. Parâmetro 1-26 Torque nominal do Motor.
3. Parâmetro 1-25 Velocidade nominal do motor.
4. Parâmetro 1-39 Pólos do Motor.
5. Parâmetro 1-30 Resistência do Estator (Rs).Insira linha para resistência de enrolamento doestator comum (Rs). Se houver apenas dadoslinha-linha disponíveis, divida o valor de linha--linha por 2 para obter o valor linha-a-comum(starpoint) da linha.Também é possível medir o valor com umohmímetro, que leva em conta a resistência docabo. Divida o valor medido por 2 e insira oresultado.
6. Parâmetro 1-37 Indutância do eixo-d (Ld).Insira a linha à indutância direta do eixo comumdo motor PM.Se houver somente dados de linha para linhadisponíveis, divida o valor de linha para linha por2 para obter o valor comum da linha (starpoint).Também é possível medir o valor com ummedidor de indutância, que leva em conta aindutância do cabo. Divida o valor medido por 2e insira o resultado.
7. Parâmetro 1-40 Força Contra Eletromotriz em1000RPM.Insira a Força Contra Eletromotriz linha-linha domotor PM a uma velocidade mecânica de 1.000rpm (valor RMS). Força Contra Eletro Motriz é atensão gerada por um motor PM quando nãohouver um conversor de frequência conectado eo eixo for girado externamente. A Força ContraEletro Motriz é normalmente especificada pelavelocidade nominal do motor ou a 1,000 RPMmedida entre duas linhas. Se o valor não estiverdisponível para uma velocidade do motor de1000 RPM, calcule o valor correto da seguintemaneira: Por exemplo, se a Força Contra EletroMotriz a 1800 RPM for de 320 V, a Força ContraEletro Motriz a 1000 RPM será:Força Contra Eletro Motriz = (Tensão/RPM) x 1000= (320/1800) x 1000 = 178.Programe esse valor para parâmetro 1-40 ForçaContra Eletromotriz em 1000RPM.
Colocação em funcionamento Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 33
5 5

Operação do motor de teste1. Dê partida no motor em baixa velocidade (100 a
200 RPM). Se o motor não funcionar, verifique ainstalação, programação geral e os dados domotor.
EstacionamentoEsta função é a opção recomendada para aplicações emque o motor gira a baixa velocidade (por exemplo,moagem a vento em aplicações de ventiladores).Parâmetro 2-06 Corrente de Estacionamento eparâmetro 2-07 Tempo de Estacionamento são ajustáveis.Aumentar a configuração de fábrica desses parâmetrospara aplicações com alta inércia.
Dar partida na velocidade nominal. Caso a aplicação nãofuncione bem, verifique as configurações de VVC+ PM.Tabela 5.13 mostra recomendações em diferentesaplicações.
Aplicação Configurações
Aplicações de baixa inérciaICarga/IMotor <5
• Aumente o valor deparâmetro 1-17 Const. de tempodo filtro de tensão por um fatorde 5 a 10.
• Reduza o valor deparâmetro 1-14 Fator de Ganho deAmortecimento.
• Reduza o valor (<100%) deparâmetro 1-66 Corrente Mín. emBaixa Velocidade.
Aplicações de médiainércia50>ICarga/IMotor >5
Mantenha valores calculados.
Aplicações de alta inérciaICarga/IMotor >50
Aumente os valores deparâmetro 1-14 Fator de Ganho deAmortecimento,parâmetro 1-15 Const. de Tempo doFiltro de Baixa Veloc eparâmetro 1-16 Const. de Tempo doFiltro de Alta Veloc.
Alta carga em baixavelocidade<30% (velocidadenominal)
Aumente o valor deparâmetro 1-17 Const. de tempo dofiltro de tensãoAumente o valor deparâmetro 1-66 Corrente Mín. emBaixa Velocidade (>100% durantemais tempo pode superaquecer omotor).
Tabela 5.13 Recomendações em diferentes aplicações
Se o motor começar a oscilar a uma certa velocidade,aumente parâmetro 1-14 Fator de Ganho de Amortecimento.Aumente o valor em pequenas etapas.
O torque de partida pode ser ajustado emparâmetro 1-66 Corrente Mín. em Baixa Velocidade. 100%fornece torque nominal como torque de partida.
5.4.3 Adaptação Automática do Motor(AMA)
Para otimizar a compatibilidade entre o conversor defrequência e o motor em modo VVC+, execute a AMA.
• O conversor de frequência constrói um modelomatemático do motor para regular a corrente domotor de saída, melhorando assim seudesempenho.
• Alguns motores poderão não conseguir executara versão completa do teste. Nesse caso, selecione[2] Ativar AMA reduzida emparâmetro 1-29 Adaptação Automática do Motor(AMA).
• Se ocorrerem advertências ou alarmes, consultecapétulo 8.4 Lista das advertências e alarmes.
• Para melhor resultados execute esseprocedimento em um motor frio.
Para executar AMA usando o LCP1. Por programação do parâmetro padrão, conecte
os terminais 13 e 27 antes de executar a AMA.
2. Acesse o Menu Principal.
3. Acesse o grupo do parâmetro 1-** Carga e Motor.
4. Pressione [OK].
5. Programe os parâmetros do motor usando osdados da plaqueta de identificação do grupo doparâmetro 1-2* Dados do Motor.
6. Defina o comprimento de cabo de motor emparâmetro 1-42 Comprimento do Cabo do Motor.
7. Ir para parâmetro 1-29 Adaptação Automática doMotor (AMA).
8. Pressione [OK].
9. Selecione [1] Ativar AMA completa.
10. Pressione [OK].
11. O teste executará automaticamente e indicaráquando estiver concluído.
Dependendo da potência, a AMA leva de 3–10 minutospara concluir.
AVISO!A função AMA em não faz o motor funcionar e nãoprejudica o motor.
Colocação em funcionamento VLT® Midi Drive FC 280
34 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
55

5.5 Verificando a rotação do motor
Antes de funcionar o conversor de frequência, verifique arotação do motor.
1. Pressione [Hand On].
2. Pressione [] para obter referência de velocidadepositiva.
3. Verifique se a velocidade mostrada é positiva.
4. Verifique se a fiação entre o conversor defrequência e o motor está correta.
5. Verifique se o sentido de funcionamento domotor corresponde à configuração emparâmetro 1-06 Sentido Horário.
5a Quando parâmetro 1-06 Sentido Horárioestiver programado para [0] Normal(sentido horário padrão):
a. Verifique se o motor gira nosentido horário.
b. Verifique se a seta de direçãodo LCP está no sentido horário
5b Quando parâmetro 1-06 Sentido Horárioestiver programado para [1] Inversão(sentido anti-horário):
a. Verifique se o motor gira nosentido anti-horário.
b. Verifique se a seta de direçãodo LCP está no sentido anti--horário.
5.6 Verificando a Rotação do Encoder
Somente verifique a rotação do encoder se o feedback doencoder for utilizado.
1. Selecione [0] Malha aberta emparâmetro 1-00 Modo Configuração.
2. Selecione [1] Encoder de 24V emparâmetro 7-00 Fonte do Feedback do PID deVelocidade.
3. Pressione [Hand On].
4. Pressione [] para referência de velocidadepositiva (parâmetro 1-06 Sentido Horário em [0]Normal).
5. Verifique em parâmetro 16-57 Feedback [rpm] se ofeedback é positivo.
AVISO!FEEDBACK NEGATIVOSe o feedback for negativo, a conexão do encoder estáerrada. Use parâmetro 5-71 Term 32/33 Sentido doEncoder para inversão do sentido ou inverta os cabos doencoder.
5.7 Teste de controle local
1. Pressione [Hand On] (Manual) para fornecer umcomando de partida local para o conversor defrequência.
2. Acelere o conversor de frequência pressionando[] para obter a velocidade total. Mover o cursorpara a esquerda do ponto decimal agiliza asmudanças de entrada.
3. Observe se há qualquer problema de aceleração.
4. Pressione [Off] (Desligado). Observe se háqualquer problema de desaceleração.
Se ocorrerem problemas de aceleração ou desaceleração,consulte capétulo 8.5 Resolução de Problemas. Consultecapétulo 8.2 Tipos de Advertência e Alarme para reinicializaro conversor de frequência após um desarme.
5.8 Partida do Sistema
O procedimento nesta seção exige que a fiação do usuárioe a programação da aplicação estejam concluídos. Oprocedimento a seguir é recomendado após o setup daaplicação estar concluído.
1. Pressione [Auto On] (Automático ligado).
2. Aplique um comando de execução externo.
3. Ajuste a referência de velocidade em todo ointervalo de velocidade.
4. Remova o comando de execução externo.
5. Verifique os níveis de som e vibração do motorpara assegurar que o sistema está funcionandocomo previsto.
Se ocorrerem advertências ou alarmes, consulte capétulo 8.2 Tipos de Advertência e Alarme para reinicia-lização do conversor de frequência após um desarme.
Colocação em funcionamento Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 35
5 5

5.9 Módulo de memória
O VLT® Memory Module MCM é um pequeno dispositivode memória que contém dados como:
• Firmware para o conversor de frequência (nãoincluindo o firmware para comunicação no cartãode controle).
• Arquivo PUD.
• Arquivo SIVP.
• Arquivo parâmetro.
O VLT® Memory Module MCM é um acessório. O conversorde frequência vem sem o módulo de memória instalado defábrica. Um novo módulo de memória pode serencomendado usando os seguintes números de pedido.
Descrição Código de compra
VLT® Memory Module MCM 102 132B0359
VLT® Memory Module MCM 103 132B0466
Tabela 5.14 Código de Compra
Cada módulo de memória possui um número de sérieexclusivo que não pode ser modificado.
AVISO!O VLT® Memory Module MCM pode ser usado noconversor de frequência junto com o firmware 1.5 esuperior.
Selecione as opções corretas para parâmetro 31-40 MemoryModule Function antes de configurar com o módulo dememória.
Parâmetro 31-40 MemoryModule Function
Descrição
[0] Disabled A função de download ou uploadde dados está desativada.
*[1] Only Allow Download Permita somente download dedados do módulo de memória parao conversor de frequência. Esta é aconfiguração padrão deparâmetro 31-40 Memory ModuleFunction.
[2] Only Allow Upload Permita somente upload de dadosdo conversor de frequência para omódulo de memória.
Parâmetro 31-40 MemoryModule Function
Descrição
[3] Allow Both Downloadand Upload
Se esta opção for selecionada, oconversor de frequência faz odownload dos dados do módulo dememória primeiro e depois faz oupload dos dados do conversor defrequência para o módulo dememória.
Tabela 5.15 Descrição deParâmetro 31-40 Memory Module Function
AVISO!EVITAR SUBSTITUIÇÃO NÃO INTENCIONALA configuração padrão do parâmetro 31-40 MemoryModule Function é [1] Only Allow Download (PermitirSomente Download). Se houver alguma atualização, comofirmware atualizado pelo MCT 10 usando o arquivo OSS,parâmetro atualizado pelo LCP ou barramento,parâmetros redefinidos via parâmetro 14-22 ModoOperação ou reinicialização com 3 dedos do conversor defrequência, os dados atualizados serão perdidos após umnovo ciclo de energia, porque o conversor de frequênciabaixa os dados do módulo de memória novamente.
• Após o download dos dados do módulo dememória para o conversor de frequência,selecione [0] Disabled (Desativado) ou [2] OnlyAllow Upload (Permitir Somente Upload) emparâmetro 31-40 Memory Module Function antesdo novo ciclo de energia.
5.9.1 Sincronizando dados do conversor defrequência para um novo módulo dememória (criar backup do conversor)
1. Conecte um novo módulo de memória vazio noconversor de frequência.
2. Selecione [2] Only Allow Upload (Permitir SomenteUpload) ou [3] Allow Both Download and Upload(Permitir Download e Upload) emparâmetro 31-40 Memory Module Function.
3. Ligue o conversor de frequência.
4. Aguarde até que a sincronização esteja concluída,consulte capétulo 5.9.7 Desempenho e Indicaçõesde Transferência para verificar as indicações detransferência no conversor de frequência.
AVISO!Para evitar a substituição inadvertida dos dados nomódulo de memória, considere ajustar as configuraçõesparâmetro 31-40 Memory Module Function antes dopróximo ciclo de energia, de acordo com o propósito deoperação diferente.
Colocação em funcionamento VLT® Midi Drive FC 280
36 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
55
5.9.2 Copiando dados para outro conversorde frequência
1. Certifique-se de que os dados necessários sejamenviados para o módulo de memória, consultecapétulo 5.9.1 Sincronizando dados do conversor defrequência para um novo módulo de memória (criarbackup do conversor).
2. Desconecte o módulo de memória e conecte-o aum novo conversor de frequência.
3. Certifique-se de que [1] Only Allow Download(Permitir Somente Download) ou [3] Allow BothDownload and Upload (Permitir Download eUpload) esteja selecionadoparâmetro 31-40 Memory Module Function no novoconversor de frequência.
4. Ligue o novo conversor de frequência.
5. Aguarde até que o download esteja concluído eos dados estejam transferidos, consultecapétulo 5.9.7 Desempenho e Indicações de Transfe-rência para verificar as indicações de transferênciano conversor de frequência.
AVISO!Para evitar a substituição inadvertida dos dados nomódulo de memória, considere ajustar as configuraçõesparâmetro 31-40 Memory Module Function antes dopróximo ciclo de energia, de acordo com o propósito deoperação diferente.
5.9.3 Copiando dados para váriosconversores de frequência
Se vários conversores de frequência tiverem a mesmatensão/potência, as informações de 1 conversor defrequência podem ser transferidas para os outros atravésde 1 módulo de memória.
1. Siga as etapas em capétulo 5.9.1 Sincronizandodados do conversor de frequência para um novomódulo de memória (criar backup do conversor)para fazer o upload dos dados de 1 conversor defrequência para um módulo de memória.
2. Para evitar o upload não intencional de dadospara o módulo de memória mestre, certifique-sede que [1] Only Allow Download (Permitir SomenteDownload) esteja selecionado emparâmetro 31-40 Memory Module Function nosoutros conversores de frequência.
3. Desconecte o módulo de memória e conecte-o aum novo conversor de frequência.
4. Ligue o novo conversor de frequência.
5. Aguarde até que o download esteja concluído eos dados estejam transferidos, consultecapétulo 5.9.7 Desempenho e Indicações de Transfe-rência para verificar as indicações de transferênciano conversor de frequência.
6. Repita as etapas 3 a 5 para o próximo conversorde frequência.
AVISO!Os dados também podem ser baixados para o módulode memória de um PC via VLT® Memory ModuleProgrammer.
AVISO!Em qualquer um dos conversores de frequência, se ummódulo de memória vazio estiver conectado para fazer obackup de dados, ajuste as configurações paraparâmetro 31-40 Memory Module Function para [2] OnlyAllow Upload (Permitir Somente Upload) ou [3] Allow BothDownload and Upload (Permitir Download e Upload) antesdo próximo ciclo de energia.
5.9.4 Transferência das Informações doFirmware
Se 2 conversores de frequência tiverem a mesma tensão epotência, as informações do firmware podem sertransferidas de 1 conversor de frequência para outro.
1. Siga as etapas em capétulo 5.9.1 Sincronizandodados do conversor de frequência para um novomódulo de memória (criar backup do conversor)para fazer o upload das informações do firmwarede 1 conversor de frequência para um módulo dememória.
2. Siga as etapas em capétulo 5.9.2 Copiando dadospara outro conversor de frequência para transferiras informações do firmware para outro conversorde frequência com a mesma voltagem e potência.
AVISO!As informações do firmware também podem serbaixadas para o módulo de memória de um PC atravésdo VLT® Memory Module Programmer.
Colocação em funcionamento Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 37
5 5

5.9.5 Fazendo backup de alterações deparâmetro no módulo de memória
1. Conecte um módulo de memória novo ouapagado no conversor de frequência.
2. Selecione [2] Only Allow Upload (Permitir SomenteUpload) ou [3] Allow Both Download and Upload(Permitir Download e Upload) emparâmetro 31-40 Memory Module Function.
3. Ligue o conversor de frequência.
4. Aguarde até que a sincronização esteja concluída,consulte capétulo 5.9.7 Desempenho e Indicaçõesde Transferência para verificar as indicações detransferência no conversor de frequência.
5. Qualquer alteração nas programações dosparâmetros é automaticamente sincronizada como módulo de memória.
5.9.6 Apagando Dados
O módulo de memória pode ser apagado através daconfiguração parâmetro 31-43 Erase_MM sem um novociclo de energia.
1. Certifique-se de que o módulo de memória estejamontado no conversor de frequência.
2. Selecione [1] Erase MM emparâmetro 31-43 Erase_MM.
3. Todos os arquivos no módulo de memória sãoapagados.
4. A configuração Parâmetro 31-43 Erase_MM retornapara [0] No function.
5.9.7 Desempenho e Indicações deTransferência
O tempo para transferir dados diferentes entre o conversorde frequência e o módulo de memória é diferente,consulte Tabela 5.16.
Arquivo de dados Hora
Arquivo de firmware
• Leva cerca de 2 minutos para fazer oupload dos dados do conversor defrequência para o módulo de memória.
• Leva cerca de 6 minutos para transferirdados do módulo de memória para oconversor de frequência.
Arquivo SIVP Cerca de 10 segundos.
Arquivo de
parâmetro1)Cerca de 5 segundos.
Tabela 5.16 Desempenho de Transferência
1) Se um parâmetro for alterado no conversor de frequência, pararealizar o upload do parâmetro atualizado, aguarde pelo menos 5segundos antes de desligar.
Arquivode dados
Indicações
GLCP NLCP No LED1)
Arquivodefirmware
A “Sincronizaçãocom Módulo deMemória” émostrada durante atransferência.
Semindicaçãode texto.
O LED piscalentamentedurante a transfe-rência.
ArquivoSIVP
Arquivodeparâmetro
Sem indicação detexto.
O LED não pisca.
Tabela 5.17 Indicações de Transferência
1) O On LED está no LCP. Consulte capétulo 5.3.1 Painel de ControleLocal Numérico (NLCP) e capétulo 5.3.5 Painel de Controle LocalGráfico (GLCP) para a posição e as funções do On LED.
5.9.8 Ativando o Conversor PROFIBUS
VLT® Memory Module MCM 103 atua como umacombinação do módulo de memória e do módulo deativação para ativar a função do conversor PROFIBUS nofirmware. VLT® Memory Module MCM 103 contém umarquivo PBconver.MME, que é combinado com o númerode série do módulo de memória individual. OPBconver.MME é a chave para a função do conversorPROFIBUS.
Colocação em funcionamento VLT® Midi Drive FC 280
38 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
55

Para ativar o conversor PROFIBUS, escolha a versão emparâmetro 14-70 Compatibility Selections.
Parâmetro 14-70 CompatibilitySelections
Descrição
*[0] No Function A seleção da função decompatibilidade estádesativada.
[12] VLT2800 3M Selecione o modo de compati-bilidade do VLT2800 3M para oconversor de frequência.
[13] VLT2800 3M incl. MAV Selecione o modo de compati-bilidade do VLT2800 3M incl.MAV para o conversor defrequência.
[14] VLT2800 12M Selecione o modo de compati-bilidade do VLT2800 12M parao conversor de frequência.
[15] VLT2800 12M incl. MAV Selecione o modo de compati-bilidade do VLT2800 12M incl.MAV para o conversor defrequência.
Tabela 5.18 Descrição deparâmetro 14-70 Compatibility Selections
Ative o conversor PROFIBUS via VLT® Memory ModuleMCM 103
1. Conecte o módulo de memória no conversor defrequência.
2. Selecione [12] VLT 2800 3M ou [14] VLT 2800 12Mem parâmetro 14-70 Compatibility Selections.
3. Faça um ciclo de energia para iniciar o conversorde frequência como o número de identificação emodo do VLT® 2800 PROFIBUS.
AVISO!Para o VLT® Memory Module MCM 103 funcionar comoconversor PROFIBUS, o parâmetro 31-40 Memory ModuleFunction não deve ser programado para [0] Disabled.
É possível ativar o conversor PROFIBUS sem o VLT®
Memory Module MCM 103 por um tempo limitado. Antesdeste tempo, conecte um VLT® Memory Module MCM 103para manter a função do conversor PROFIBUS.
Ative o conversor PROFIBUS por meio da programaçãodo parâmetro
1. Selecione [1] Enabled em parâmetro 31-47 TimeLimit Function.
2. Selecione [12] VLT 2800 3M ou [14] VLT 2800 12Mem parâmetro 14-70 Compatibility Selections.
3. Faça um ciclo de energia para iniciar o conversorde frequência como o número de identificação emodo do VLT® 2800 PROFIBUS.
4. Parâmetro 31-48 Time Limit Remaining Timecomeça a contagem regressiva após o ciclo deenergia e mostra o tempo restante para uso.
Após 720 horas de funcionamento, o conversor defrequência relata uma advertência. O conversor PROFIBUSainda funciona. Quando o contador de tempo noparâmetro 31-48 Time Limit Remaining Time alcançar 0, oconversor de frequência reporta um alarme de bloqueiopor desarme no próximo comando de partida.
Colocação em funcionamento Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 39
5 5
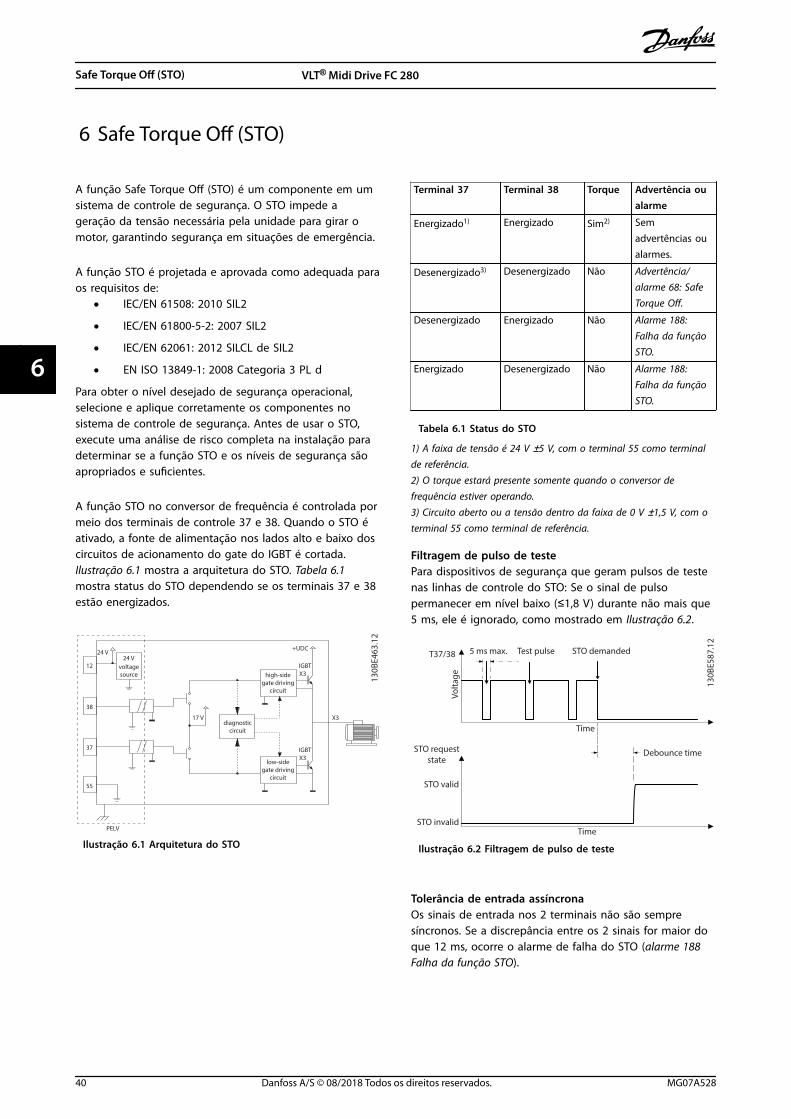
6 Safe Torque Off (STO)
A função Safe Torque Off (STO) é um componente em umsistema de controle de segurança. O STO impede ageração da tensão necessária pela unidade para girar omotor, garantindo segurança em situações de emergência.
A função STO é projetada e aprovada como adequada paraos requisitos de:
• IEC/EN 61508: 2010 SIL2
• IEC/EN 61800-5-2: 2007 SIL2
• IEC/EN 62061: 2012 SILCL de SIL2
• EN ISO 13849-1: 2008 Categoria 3 PL d
Para obter o nível desejado de segurança operacional,selecione e aplique corretamente os componentes nosistema de controle de segurança. Antes de usar o STO,execute uma análise de risco completa na instalação paradeterminar se a função STO e os níveis de segurança sãoapropriados e suficientes.
A função STO no conversor de frequência é controlada pormeio dos terminais de controle 37 e 38. Quando o STO éativado, a fonte de alimentação nos lados alto e baixo doscircuitos de acionamento do gate do IGBT é cortada.Ilustração 6.1 mostra a arquitetura do STO. Tabela 6.1mostra status do STO dependendo se os terminais 37 e 38estão energizados.
24 V
17 V
IGBT
+UDC
X3
IGBT
PELV
X3
X3
24 Vvoltagesource high-side
gate drivingcircuit
diagnosticcircuit
low-sidegate driving
circuit
12
38
37
55
130B
E463
.12
Ilustração 6.1 Arquitetura do STO
Terminal 37 Terminal 38 Torque Advertência oualarme
Energizado1) Energizado Sim2) Semadvertências oualarmes.
Desenergizado3) Desenergizado Não Advertência/alarme 68: SafeTorque Off.
Desenergizado Energizado Não Alarme 188:Falha da funçãoSTO.
Energizado Desenergizado Não Alarme 188:Falha da funçãoSTO.
Tabela 6.1 Status do STO
1) A faixa de tensão é 24 V ±5 V, com o terminal 55 como terminalde referência.2) O torque estará presente somente quando o conversor defrequência estiver operando.
3) Circuito aberto ou a tensão dentro da faixa de 0 V ±1,5 V, com oterminal 55 como terminal de referência.
Filtragem de pulso de testePara dispositivos de segurança que geram pulsos de testenas linhas de controle do STO: Se o sinal de pulsopermanecer em nível baixo (≤1,8 V) durante não mais que5 ms, ele é ignorado, como mostrado em Ilustração 6.2.
Time
5 ms max.
Debounce time
Time
STO valid
STO invalid
Volta
ge
T37/38 Test pulse STO demanded
STO requeststate
130B
E587
.12
Ilustração 6.2 Filtragem de pulso de teste
Tolerância de entrada assíncronaOs sinais de entrada nos 2 terminais não são sempresíncronos. Se a discrepância entre os 2 sinais for maior doque 12 ms, ocorre o alarme de falha do STO (alarme 188Falha da função STO).
Safe Torque Off (STO) VLT® Midi Drive FC 280
40 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
66

Sinais válidosPara ativar o STO, os 2 sinais devem estar em nível baixodurante pelo menos 80 ms. Para finalizar o STO, os 2 sinaisdevem estar em nível alto durante no mínimo 20 ms.Consulte capétulo 9.6 Entrada/Saída de controle e dados decontrole para obter os níveis de tensão e corrente deentrada de terminais de STO.
6.1 Precauções de segurança para STO
Pessoal qualificadoSomente pessoal qualificado tem permissão de instalar ouoperar este equipamento.
Pessoal qualificado é definido como pessoal treinado,autorizado a instalar, colocar em funcionamento e mantero equipamento, os sistemas e circuitos em conformidadecom as leis e normas pertinentes. Adicionalmente, opessoal deve estar familiarizado com as instruções e asmedidas de segurança descritas neste manual.
AVISO!Após a instalação do STO, realize um teste de colocaçãoem funcionamento conforme especificado emcapétulo 6.3.3 Teste de colocação em funcionamento doSTO. Um teste de colocação em funcionamento bemsucedido é obrigatório após a primeira instalação e aapós cada mudança na instalação de segurança.
ADVERTÊNCIARISCO DE CHOQUE ELÉTRICOA função STO NÃO isola a tensão de rede para oconversor de frequência ou circuitos auxiliares e,portanto, não fornece segurança elétrica. Se aalimentação de tensão de rede da unidade não forisolada e o tempo de espera especificado não forrespeitado, o resultado poderá ser de morte ouferimentos graves.
• Execute trabalho em peças elétricas doconversor de frequência ou do motor somenteapós isolar a alimentação de tensão de rede eaguardar o intervalo de tempo especificado emcapétulo 2.3.1 Tempo de Descarga.
AVISO!Ao projetar a aplicação da máquina, a sincronização e adistância devem ser consideradas para uma parada porinércia (STO). Para obter mais informações sobre ascategorias de parada, consulte EN 60204-1.
6.2 Instalação do Safe Torque Off
Para a conexão do motor, conexão de rede elétrica CA efiação de controle, siga as instruções para instalação seguraem capétulo 4 Instalação Elétrica.
Ative o STO integrado da seguinte maneira:1. Remova o jumper entre os terminais de controle
12 (24 V) 37 e 38. Cortar ou interromper ojumper não é suficiente para evitar curto circuito.Veja o jumper em Ilustração 6.3.
130B
E213
.10
Ilustração 6.3 Jumper entre Terminal 12 (24 V), 37 e 38
2. Conecte um dispositivo de segurança de canalduplo (por exemplo, PLC de segurança, cortina deluz, relé de segurança ou botão de parada deemergência) nos terminais 37 e 38 para formaruma aplicação de segurança. O dispositivo deveatender o nível de segurança desejado com basena avaliação de risco. Ilustração 6.4 mostra oesquema da fiação de aplicações de STO em queo conversor de frequência e o dispositivo desegurança estão no mesmo gabinete.Ilustração 6.5 mostra o esquema da fiação deaplicações de STO em que é usada alimentaçãoexterna.
AVISO!O sinal do STO deve ser fornecido pelo PELV.
Safe Torque Off (STO) Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 41
6 6
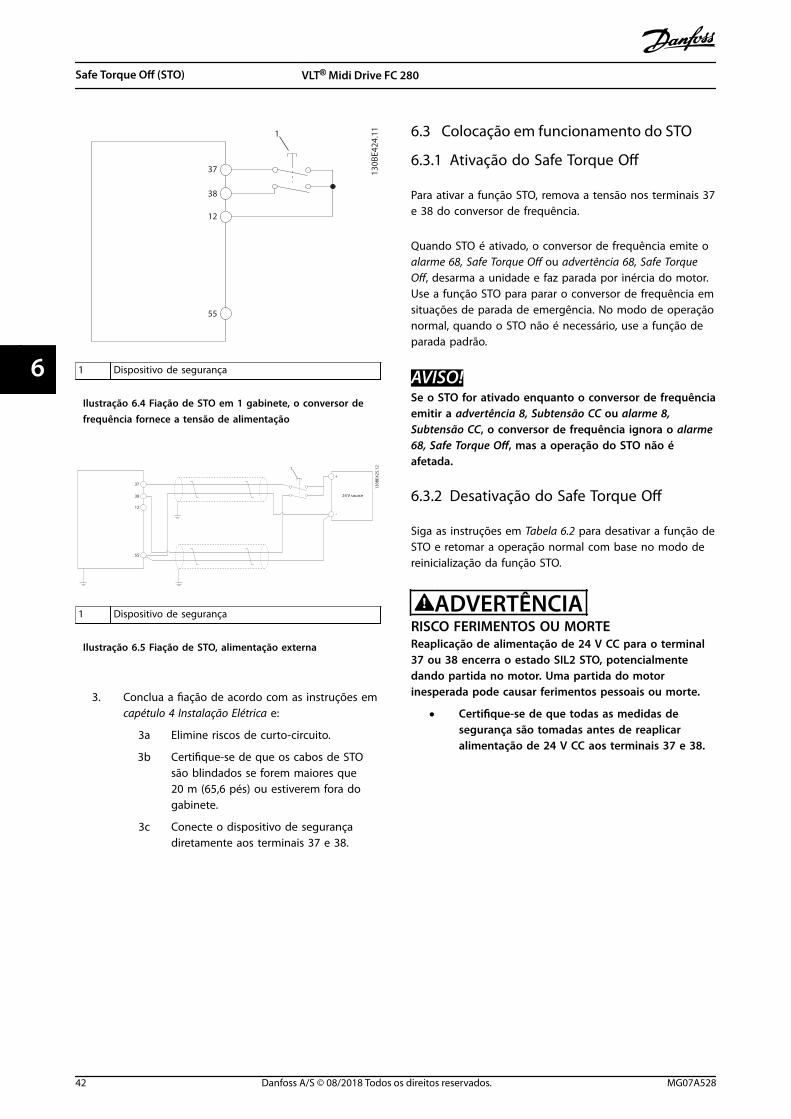
130B
E424
.11
37
38
12
55
1
1 Dispositivo de segurança
Ilustração 6.4 Fiação de STO em 1 gabinete, o conversor defrequência fornece a tensão de alimentação
130B
E425
.12
24 V source
37
38
+
-12
55
1
1 Dispositivo de segurança
Ilustração 6.5 Fiação de STO, alimentação externa
3. Conclua a fiação de acordo com as instruções emcapétulo 4 Instalação Elétrica e:
3a Elimine riscos de curto-circuito.
3b Certifique-se de que os cabos de STOsão blindados se forem maiores que20 m (65,6 pés) ou estiverem fora dogabinete.
3c Conecte o dispositivo de segurançadiretamente aos terminais 37 e 38.
6.3 Colocação em funcionamento do STO
6.3.1 Ativação do Safe Torque Off
Para ativar a função STO, remova a tensão nos terminais 37e 38 do conversor de frequência.
Quando STO é ativado, o conversor de frequência emite oalarme 68, Safe Torque Off ou advertência 68, Safe TorqueOff, desarma a unidade e faz parada por inércia do motor.Use a função STO para parar o conversor de frequência emsituações de parada de emergência. No modo de operaçãonormal, quando o STO não é necessário, use a função deparada padrão.
AVISO!Se o STO for ativado enquanto o conversor de frequênciaemitir a advertência 8, Subtensão CC ou alarme 8,Subtensão CC, o conversor de frequência ignora o alarme68, Safe Torque Off, mas a operação do STO não éafetada.
6.3.2 Desativação do Safe Torque Off
Siga as instruções em Tabela 6.2 para desativar a função deSTO e retomar a operação normal com base no modo dereinicialização da função STO.
ADVERTÊNCIARISCO FERIMENTOS OU MORTEReaplicação de alimentação de 24 V CC para o terminal37 ou 38 encerra o estado SIL2 STO, potencialmentedando partida no motor. Uma partida do motorinesperada pode causar ferimentos pessoais ou morte.
• Certifique-se de que todas as medidas desegurança são tomadas antes de reaplicaralimentação de 24 V CC aos terminais 37 e 38.
Safe Torque Off (STO) VLT® Midi Drive FC 280
42 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
66

Modo dereinicia-lização
Etapas para desativar oSTO e retomar aoperação normal
Configuração do modode reinicialização
Reinicia-lizaçãomanual
1. Reapliquealimentação de 24 VCC nos terminais 37 e38.
2. Inicie um sinal dereset (via fieldbus, E/Sdigital ou tecla[Reset]/[Off Reset] noLCP).
Configuração padrão.Parâmetro 5-19 Terminal37/38 Safe Torque Off=[1]Alarme de Safe TorqueOff
Novapartidaautomática
Reaplique alimentação de24 V CC nos terminais 37e 38.
Parâmetro 5-19 Terminal37/38 Safe Torque Off=[3] Advertência de SafeTorque Off.
Tabela 6.2 Desativação do STO
6.3.3 Teste de colocação emfuncionamento do STO
Após a instalação e antes da primeira operação, realize umteste de colocação em funcionamento da instalaçãousando STO.Execute o teste novamente após cada modificação dainstalação ou aplicação que envolva o STO.
AVISO!É necessário um teste de colocação em funcionamentobem sucedido após a instalação inicial e após cadamodificação subsequente da instalação.
Para realizar um teste de colocação em funcionamento:• Siga as instruções em capétulo 6.3.4 Teste para
aplicações de STO em modo de reinicializaçãomanual se o STO estiver programado no modo dereinicialização manual.
• Siga as instruções em capétulo 6.3.5 Teste paraaplicações de STO em modo nova partidaautomática se o STO estiver programado nomodo de nova partida automática.
6.3.4 Teste para aplicações de STO emmodo de reinicialização manual
Para aplicações em que o parâmetro 5-19 Terminal 37/38Safe Torque Off estiver programado para o valor padrão [1]Alarme do Safe Torque Off, conduza o teste de colocaçãoem funcionamento da seguinte forma:
1. Programe parâmetro 5-40 Função do Relé para[190] Função STO ativa.
2. Remova a alimentação de tensão de 24 V CC dosterminais 37 e 38 por meio do dispositivo desegurança enquanto o motor é acionado peloconversor de frequência (isto é, a alimentação derede elétrica não é interrompida).
3. Verifique se:
3a O motor faz parada por inércia. Podelevar um longo tempo até o motorparar.
3b Se o LCP estiver montado, alarme 68,Safe Torque Off é mostrado no LCP. Se oLCP não estiver montado, alarme 68,Safe Torque Off é acessado emparâmetro 15-30 Log Alarme: Cód Falha.
4. Reaplique alimentação de 24 V CC nos terminais37 e 38.
5. Certifique-se de que o motor permanece noestado de parada por inércia e o relé do cliente(se conectado) permanece ativado.
6. Enviar sinal de reset (via fieldbus, E/S digital outecla [Reset]/[Off Reset] no LCP).
7. Certifique-se de que o motor fique operacional efuncione dentro da faixa de velocidade original.
O teste de colocação em funcionamento é completadocom sucesso quando todas as etapas acima são aprovadas.
6.3.5 Teste para aplicações de STO emmodo nova partida automática
Para aplicações em que parâmetro 5-19 Terminal 37/38 SafeTorque Off é programado para [3] Advertência de SafeTorque Off, execute o teste de colocação em funcio-namento da seguinte maneira:
1. Remova a alimentação de tensão de 24 V CC dosterminais 37 e 38 por meio do dispositivo desegurança enquanto o motor é acionado peloconversor de frequência (isto é, a alimentação derede elétrica não é interrompida).
2. Verifique se:
Safe Torque Off (STO) Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 43
6 6

2a O motor faz parada por inércia. Podelevar um longo tempo até o motorparar.
2b Se o LCP estiver montado, Advertência68, Safe Torque Off W68 é mostrado noLCP. Se o LCP não estiver montado,Advertência 68, Safe Torque Off W68 éacessado no bit 30 deparâmetro 16-92 Warning Word.
3. Reaplique alimentação de 24 V CC nos terminais37 e 38.
4. Certifique-se de que o motor fique operacional efuncione dentro da faixa de velocidade original.
O teste de colocação em funcionamento é completadocom sucesso quando todas as etapas acima são aprovadas.
AVISO!Consulte a advertência sobre o comportamento da novapartida em capétulo 6.1 Precauções de segurança paraSTO.
6.4 Manutenção e serviço de STO
• O usuário é responsável por medidas desegurança.
• Os parâmetros do conversor de frequênciapodem ser protegidos por senha.
O teste funcional consiste em 2 partes:• Teste funcional básico.
• Teste funcional de diagnóstico.
Quando todas as etapas forem concluídas com êxito, oteste funcional será bem sucedido.
Teste funcional básicoSe a função STO não for usada durante 1 ano, conduza umteste funcional básico para detectar qualquer falha ou maufuncionamento do STO.
1. Certifique-se de que parâmetro 5-19 Terminal37/38 Safe Torque Off está programado para *[1]Alarme de Safe Torque Off.
2. Remova a fonte de tensão de 24 V CC dosterminais 37 e 38.
3. Verifique se o LCP mostra o alarme 68, SafeTorque Off.
4. Verifique se o conversor de frequência desarma aunidade.
5. Verifique se o motor faz parada por inércia e paracompletamente.
6. Inicie um sinal de partida (via fieldbus, E/S digitalou LCP) e verifique se o motor não dá partida.
7. Reconecte a alimentação de tensão de 24 V CCnos terminais 37 e 38.
8. Verifique se o motor não dá partida automati-camente e se reinicia apenas ao dar um sinal dereinicialização (via fieldbus, E/S digital ou tecla[Reset]/[Off] no LCP).
Teste funcional de diagnóstico1. Verifique se advertência 68, Safe Torque Off e
alarme 68, Safe Torque Off não ocorrem quando aalimentação de 24 V estiver conectada aosterminais 37 e 38.
2. Remova a alimentação de 24 V do terminal 37 everifique se o LCP mostra alarme 188, Falha dafunção STO se o LCP estiver montado. Se o LCPnão estiver montado, verifique se alarme 188,Falha da função STO é registrada emparâmetro 15-30 Log Alarme: Cód Falha.
3. Reaplique a alimentação de 24 V no terminal 37 everifique se a reinicialização do alarme é bemsucedida.
4. Remova a alimentação de 24 V do terminal 38 everifique se o LCP mostra alarme 188, Falha dafunção STO se o LCP estiver montado. Se o LCPnão estiver montado, verifique se alarme 188,Falha da função STO é registrada emparâmetro 15-30 Log Alarme: Cód Falha.
5. Reaplique a alimentação de 24 V no terminal 38 everifique se a reinicialização do alarme é bemsucedida.
Safe Torque Off (STO) VLT® Midi Drive FC 280
44 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
66

6.5 Dados Técnicos STO
Os modos de falha, Efeitos, e Análise de diagnóstico (FMEDA) são executados com base nas seguintes suposições:• VLT® Midi Drive FC 280 leva 10% do orçamento total de falha para uma malha de segurança SIL2.
• Taxas de falha são baseadas no banco de dados Siemens SN29500.
• Taxas de falha são constantes; mecanismos de desgaste não estão incluídos.
• Para cada canal, os componentes relacionados a segurança são considerados de tipo A com uma tolerância defalha de hardware de 0.
• Os níveis de tensão são médios para um ambiente industrial e a temperatura operacional dos componentes é deaté 85 °C (185 °F).
• Um erro seguro (por exemplo, saída em estado seguro) é reparado dentro de 8 horas.
• Sem saída de torque é o estado seguro.
Normas de segurançaSegurança da maquinaria ISO 13849-1, IEC 62061
Segurança funcional IEC 61508
Função de segurança Safe Torque Off IEC 61800-5-2
Desempenho de segurança
ISO 13849-1
Categoria Cat. 3
Cobertura do diagnóstico (CD) 60% (Baixo)
Tempo médio para falha perigosa(MTTFd)
2400 anos (Alta)
Nível de desempenho PL d
IEC 61508/IEC 61800-5-2/IEC 62061
Nível da Integridade de Segurança SIL2
Probabilidade de falha perigosa porhora (PFH) (modo de alta demanda)
7,54E-9 (1/h)
Probabilidade de falha perigosa sobdemanda (PFDavg para PTI = 20anos) (modo de baixa demanda)
6.05E-4
Fração de falha segura (SFF)Para peças de canal duplo: >84%
Para peças de canal único: >99%
Tolerância da falha de hardware(HFT)
Para peças de canal duplo: HFT = 1
Para peças de canal único: HFT = 0
Intervalo de teste de prova2) 20 anos
Falha de causa comum (CCF) β = 5%; βD = 5%
Intervalo de teste de diagnóstico(DTI)
160 ms
Capacidade sistemática SC 2
Tempo de reação1) Tempo de resposta da entrada àsaída
Gabinete metálico tamanhos K1–K3: Máximo 50 msGabinete metálico tamanhos K4–K5: Máximo 30 ms
Tabela 6.3 Dados técnicos do STO
1) O tempo de reação é o tempo de uma condição de sinal de entrada que aciona o STO até o torque ser desligado no motor.2) Para saber o procedimento de teste de prova, consulte capétulo 6.4 Manutenção e serviço de STO.
Safe Torque Off (STO) Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 45
6 6

7 Exemplos de Aplicações
7.1 Introdução
Os exemplos nesta seção têm a finalidade de referênciarápida para aplicações comuns.
• A programação do parâmetro são os valorespadrão regionais, a menos que indicado de outromodo (selecionados em parâmetro 0-03 DefiniçõesRegionais).
• Os parâmetros associados aos terminais e suasconfigurações estão mostrados ao lado dosdesenhos
• As configurações de chaveamento necessáriaspara os terminais analógicos 53 ou 54 tambémsão mostrados.
AVISO!Quando o recurso STO não for usado, um fio de jumperé necessário entre os terminais 12, 37 e 38 para oconversor de frequência operar com valores deprogramação padrão de fábrica.
7.2 Exemplos de Aplicações
7.2.1 AMA
Parâmetros
130B
F096
.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
12
13
18
19
27
29
32
33
50
53
54
55
42A OUT
D IN
+24 V
FunçãoConfigur–
ação
Parâmetro 1-29 Adaptação Automáticado Motor (AMA)
[1] AtivarAMAcompleta
Parâmetro 5-12 Terminal 27, EntradaDigital
*[2]Paradp/inérc,reverso
* = Valor padrão
Notas/comentários: Programe ogrupo do parâmetro 1-2* Dadosdo motor de acordo com asespecificações do motor.
AVISO!Se os terminais 13 e 27 nãoestiverem conectados,programe oparâmetro 5-12 Terminal 27,Entrada Digital para [0] Semoperação.
Tabela 7.1 AMA com T27 conectado
7.2.2 Velocidade
Parâmetros
130B
E204
.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
420 ~10 V
+
-
FC
+24 V
Função Configuração
Parâmetro 6-10 Terminal 53Tensão Baixa
0,07 V*
Parâmetro 6-11 Terminal 53Tensão Alta
10 V*
Parâmetro 6-14 Terminal 53 Ref./Feedb. ValorBaixo
0
Parâmetro 6-15 Terminal 53 Ref./Feedb. ValorAlto
50
Parâmetro 6-19 Modo doterminal 53
[1] Modo detensão
* = Valor padrão
Notas/comentários:
Tabela 7.2 Referência de Velocidade Analógica (Tensão)
Parâmetros
130B
F097
.10
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
424 - 20mA
+
-
FC
+24 V
Função Configuração
Parâmetro 6-22 Terminal 54Corrente Baixa
4 mA*
Parâmetro 6-23 Terminal 54Corrente Alta
20 mA*
Parâmetro 6-24 Terminal 54 Ref./Feedb. ValorBaixo
0
Parâmetro 6-25 Terminal 54 Ref./Feedb. Valor Alto
50
Parâmetro 6-29 Modo doterminal 54
[0] Modo decorrente
* = Valor padrão
Notas/comentários:
Tabela 7.3 Referência de Velocidade Analógica (Corrente)
Exemplos de Aplicações VLT® Midi Drive FC 280
46 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
77

Parâmetros
130B
E208
.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
≈ 5kΩ
FC
+24 V
Função Configuração
Parâmetro 6-10 Terminal 53Tensão Baixa
0,07 V*
Parâmetro 6-11 Terminal 53Tensão Alta
10 V*
Parâmetro 6-14 Terminal 53Ref./Feedb. ValorBaixo
0
Parâmetro 6-15 Terminal 53Ref./Feedb. ValorAlto
50
Parâmetro 6-19 Terminal 53mode
[1] Modo detensão
* = Valor padrão
Notas/comentários:
Tabela 7.4 Referência de Velocidade (utilizando umPotenciômetro Manual)
Parâmetros
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130B
F100
.10
+24 V
Função Configuração
Parâmetro 5-10 Terminal 18Entrada Digital
*[8] Partida
Parâmetro 5-12 Terminal 27,Entrada Digital
[19] Congelarreferência
Parâmetro 5-13 Terminal 29,Entrada Digital
[21] Acelerar
Parâmetro 5-14 Terminal 32,Entrada Digital
[22]Desacelerar
* = Valor padrão
Notas/comentários:
Tabela 7.5 Aceleração/desaceleração
130B
B840
.12Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
Ilustração 7.1 Aceleração/desaceleração
7.2.3 Partida/Parada
Parâmetros
130B
F098
.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
12
19
18
27
29
32
33
50
53
54
55
42
+24 V 13
FunçãoConfigur–
ação
Parâmetro 5-10 Terminal 18 Entrada
Digital[8] Partida
Parâmetro 5-11 Terminal 19, EntradaDigital
*[10]Reversão
Parâmetro 5-12 Terminal 27, EntradaDigital
[0] Semoperação
Parâmetro 5-14 Terminal 32, EntradaDigital
[16] Refpredefinidabit 0
Parâmetro 5-15 Terminal 33 EntradaDigital
[17] Ref.predefinidabit 1
Parâmetro 3-10 Referência Predefinida
Ref. predefinida 0Ref. predefinida 1Ref. predefinida 2Ref. predefinida 3
25%50%75%100%
* = Valor padrão
Notas/comentários:
Tabela 7.6 Partida/parada com reversão e 4 velocidadespré-programadas
Exemplos de Aplicações Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 47
7 7
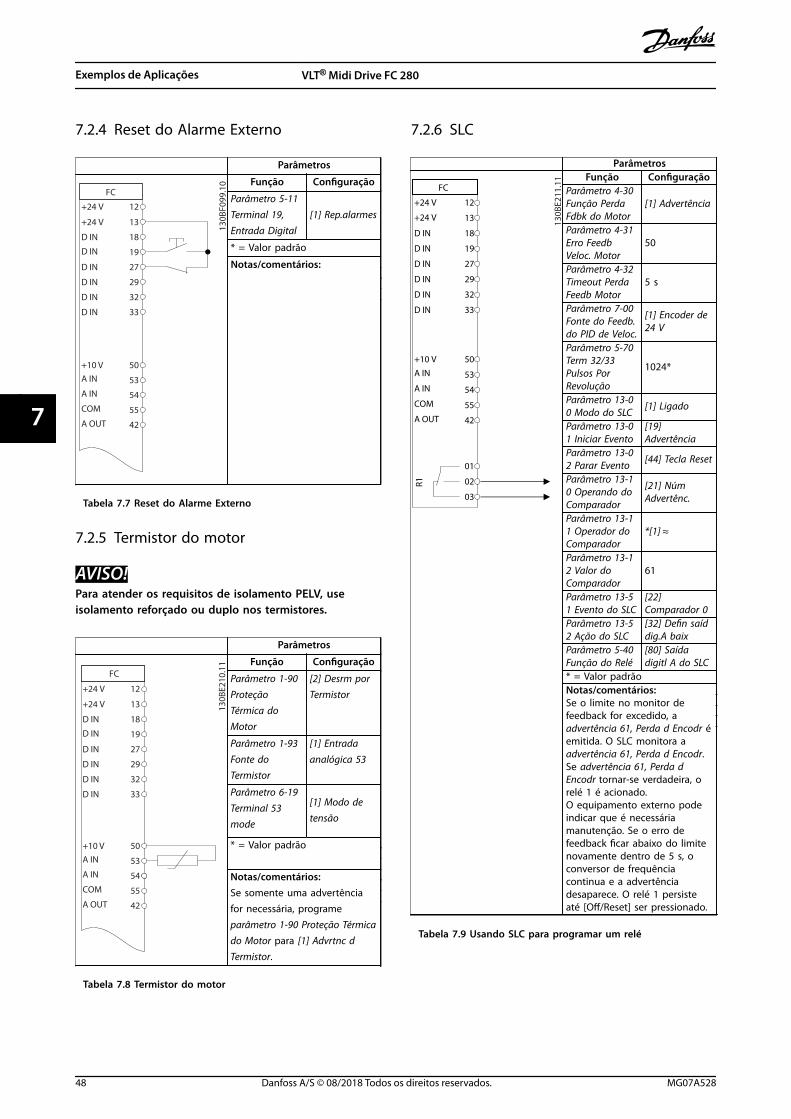
7.2.4 Reset do Alarme Externo
Parâmetros
130B
F099
.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
+24 V
Função Configuração
Parâmetro 5-11 Terminal 19,Entrada Digital
[1] Rep.alarmes
* = Valor padrão
Notas/comentários:
Tabela 7.7 Reset do Alarme Externo
7.2.5 Termistor do motor
AVISO!Para atender os requisitos de isolamento PELV, useisolamento reforçado ou duplo nos termistores.
Parâmetros
130B
E210
.11
+24 V
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
FC
D IN
+24 V
Função Configuração
Parâmetro 1-90 ProteçãoTérmica doMotor
[2] Desrm porTermistor
Parâmetro 1-93 Fonte doTermistor
[1] Entradaanalógica 53
Parâmetro 6-19 Terminal 53mode
[1] Modo detensão
* = Valor padrão
Notas/comentários:Se somente uma advertênciafor necessária, programeparâmetro 1-90 Proteção Térmicado Motor para [1] Advrtnc dTermistor.
Tabela 7.8 Termistor do motor
7.2.6 SLC
Parâmetros
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUTR1
12
13
18
19
27
29
32
33
50
53
54
55
42
01
02
03
130B
E211
.11
+24 V
Função ConfiguraçãoParâmetro 4-30 Função PerdaFdbk do Motor
[1] Advertência
Parâmetro 4-31 Erro FeedbVeloc. Motor
50
Parâmetro 4-32 Timeout PerdaFeedb Motor
5 s
Parâmetro 7-00 Fonte do Feedb.do PID de Veloc.
[1] Encoder de24 V
Parâmetro 5-70 Term 32/33Pulsos PorRevolução
1024*
Parâmetro 13-00 Modo do SLC [1] Ligado
Parâmetro 13-01 Iniciar Evento
[19]Advertência
Parâmetro 13-02 Parar Evento [44] Tecla Reset
Parâmetro 13-10 Operando doComparador
[21] NúmAdvertênc.
Parâmetro 13-11 Operador doComparador
*[1] ≈
Parâmetro 13-12 Valor doComparador
61
Parâmetro 13-51 Evento do SLC
[22]Comparador 0
Parâmetro 13-52 Ação do SLC
[32] Defin saíddig.A baix
Parâmetro 5-40 Função do Relé
[80] Saídadigitl A do SLC
* = Valor padrãoNotas/comentários:Se o limite no monitor defeedback for excedido, aadvertência 61, Perda d Encodr éemitida. O SLC monitora aadvertência 61, Perda d Encodr.Se advertência 61, Perda dEncodr tornar-se verdadeira, orelé 1 é acionado.O equipamento externo podeindicar que é necessáriamanutenção. Se o erro defeedback ficar abaixo do limitenovamente dentro de 5 s, oconversor de frequênciacontinua e a advertênciadesaparece. O relé 1 persisteaté [Off/Reset] ser pressionado.
Tabela 7.9 Usando SLC para programar um relé
Exemplos de Aplicações VLT® Midi Drive FC 280
48 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
77

8 Manutenção, diagnósticos e resolução de problemas
8.1 Manutenção e serviço
Em condições de operação e perfis de carga normais, oconversor de frequência é isento de manutenção durantetoda a vida útil projetada. Para evitar panes, perigos edanos, examine o conversor de frequência quanto aoaperto das conexões dos terminais, à entrada de poeira eassim por diante, regularmente, dependendo dascondições de operação. Substitua as peças desgastadas oudanificadas por peças de reposição originais ou peçaspadrão. Para serviço e suporte, entre em contato com ofornecedor Danfoss local.
ADVERTÊNCIAPARTIDA ACIDENTALQuando o conversor de frequência estiver conectado àrede elétrica CA, alimentação CC ou load sharing, omotor poderá dar partida a qualquer momento. Partidaacidental durante a programação, serviço ou serviço demanutenção pode resultar em morte, ferimentos gravesou danos à propriedade. O motor pode dar partida pormeio de interruptor externo, comando do fieldbus, sinalde referência de entrada do LCP, via operação remotausando o Software de Setup MCT 10 ou após umacondição de falha resolvida.
Para impedir a partida do motor:• Desconecte o conversor de frequência da rede
elétrica.
• Pressione [Off/Reset] no LCP, antes deprogramar parâmetros.
• Conecte toda a fiação e monte completamenteo conversor de frequência, o motor e qualquerequipamento acionado antes de o conversor defrequência ser conectado à rede elétrica CA,fonte de alimentação CC ou load sharing.
8.2 Tipos de Advertência e Alarme
Tipo deadvertência/alarme
Descrição
Advertência Uma advertência indica uma condição deoperação anormal que leva a um alarme. Aadvertência para quando a condição anormal éremovida.
Alarme O alarme indica uma falha que exige atençãoimediata. A falha sempre dispara um desarme oubloqueio por desarme. Reinicialize o conversorapós um alarme.Reinicialize o conversor em qualquer dessas 4maneiras:
• Pressione [Reset]/[Off/Reset].
• Comando de entrada de reinicialização digital.
• Comando de entrada de reinicialização decomunicação serial.
• Reinicialização automática.
DesarmeAo disparar, o conversor suspende a operação para evitardanos ao conversor e a outros equipamentos. Quandoocorre um desarme, ocorre parada por inércia do motor. Alógica do conversor continua a operar e monitorar seustatus. Após a condição de falha ser corrigida, o conversorestá pronto para uma reinicialização.
Bloqueio por desarmeAo ocorrer um bloqueio por desarme, o conversorsuspende a operação para evitar danos ao conversor e aoutros equipamentos. Quando ocorre um bloqueio pordesarme, ocorre parada por inércia do motor. A lógica doconversor continua a operar e monitorar seu status. Oconversor inicia um bloqueio por desarme somentequando ocorrem falhas graves que podem danificar oconversor ou outro equipamento. Após as falhas seremcorrigidas, desligue e ligue a energia de entrada antes dereinicializar o conversor.
Manutenção, diagnósticos e ... Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 49
8 8

8.3 Display de advertência e alarme
Setup 1
Status Quick Menu
MainMenu
130B
D11
1.10
Ilustração 8.1 Display da Advertência
Um alarme ou alarme de bloqueio por desarme é exibidono display junto com o número do alarme.
Setup 1
Status Quick Menu
MainMenu
130B
D11
2.10
Ilustração 8.2 Alarme/Alarme de Bloqueio por Desarme
Além do texto e código de alarme no display do conversorde frequência, existem 3 luzes indicadoras de status. A luzindicadora de advertência fica amarela durante umaadvertência. A luz indicadora de alarme fica vermelha episca durante um alarme.
130B
D06
2.10
D HandOn Reset
AutoOn
OKOn
Warn
Alarm
Ilustração 8.3 Luzes indicadoras de status
Manutenção, diagnósticos e ... VLT® Midi Drive FC 280
50 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
88

8.4 Lista das advertências e alarmes
8.4.1 Lista de Códigos de Advertência e Alarme
Um (X) marcado em Tabela 8.1 indica que ocorreu advertência ou alarme.
Nº DescriçãoAdvertência Alarme Bloqueio
pordesarme
Causa
2 Erro de live zero X X –
O sinal no terminal 53 ou 54 é menos que 50% dovalor programado em parâmetro 6-10 Terminal 53Tensão Baixa, parâmetro 6-20 Terminal 54 Tensão Baixae parâmetro 6-22 Terminal 54 Corrente Baixa.
3 Sem Motor X – –Não há nenhum motor conectado na saída doconversor de frequência.
4 Perda de fases de rede elétrica1) X X XFase ausente no lado da alimentação ou desbalance-amento muito grande da alta tensão. Verifique atensão de alimentação.
7 Sobretensão CC1) X X – A tensão do barramento CC excede o limite.
8 Subtensão CC1) X X –A tensão do barramento CC cai abaixo do limiteinferior de advertência de tensão.
9 Inversor sobrecarregado X X –Mais de 100% de carga durante tempo demasia-damente longo.
10Superaquecimento do ETR domotor
X X –O motor está muito quente devido a mais de 100% decarga durante tempo demasiadamente longo.
11Superaquecimento do termistordo motor
X X –O termistor ou a conexão do termistor foidesconectada ou o motor está muito quente.
12 Limite de torque X X –O torque excede o valor programado emparâmetro 4-16 Limite de Torque do Modo Motor ouparâmetro 4-17 Limite de Torque do Modo Gerador.
13 Sobrecarga de corrente X X X
Limite de corrente de pico do inversor foi excedido. Seeste alarme ocorre na energização, verifique se oscabos de energia estão conectados incorretamente nosterminais do motor.
14 Falha de aterramento – X X Descarga das fases de saída para terra.
16 Curto circuito – X X Curto-circuito no motor ou nos terminais do motor.
17 Timeout da control word X X – Sem comunicação com o conversor de frequência.
25Resistor do freio em curto--circuito
– X XO resistor do freio está em curto-circuito, por isso afunção de frenagem está desconectada.
26 Sobrecarga do freio X X –
A energia transmitida ao resistor do freio nos últimos120 s excede o limite. Correções possíveis: Diminuir aenergia de frenagem reduzindo a velocidade ouaumentando o tempo de rampa.
27IGBT do freio/circuito defrenagem em curto-circuito
– X XO transistor do freio está em curto-circuito, por isso afunção de frenagem está desconectada.
28 Verificação do freio – X – Resistor do freio não conectado/funcionando.
30 Perda de fase U – X X Perda de fase U do motor. Verifique a fase.
31 Perda de fase V – X X Perda de fase V do motor Verifique a fase.
32 Perda de fase W – X X Perda de fase W do motor. Verifique a fase.
34 Falha de fieldbus X X – Ocorreu um problema de comunicação do PROFIBUS.
35 Falha do opcional – X – O Fieldbus detecta defeitos internos.
Manutenção, diagnósticos e ... Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 51
8 8

Nº DescriçãoAdvertência Alarme Bloqueio
pordesarme
Causa
36 Falha de rede elétrica X X –
Essa advertência/alarme estará ativa somente se atensão de alimentação do conversor de frequência formenor que o valor programado emparâmetro 14-11 Tensã Red na FalhaRed.Elétr., e separâmetro 14-10 Falh red elétr NÃO estiver programadopara [0] Sem função.
38 Defeito interno – X X Entre em contato com seu fornecedor Danfoss local.
40 Sobrecarga T27 X – –Verifique a carga conectada ao terminal 27 ou removaa conexão de curto-circuito.
46Falha na tensão do drive daporta
– X X–
47 Alimentação 24 V baixa X X X A fonte de 24 V CC pode estar sobrecarregada.
49 Limite de velocidade – X –A velocidade do motor está abaixo do limite especi-ficado em parâmetro 1-87 Velocidade de Desarme Baixa[Hz].
50 Calibração AMA – X – Ocorreu um erro de calibração.
51 Verificação AMA Unom e Inom – X –Configuração incorreta da tensão do motor e/ou dacorrente do motor.
52 AMA Inom baixa – X –Corrente do motor está muito baixa. Verifique asconfigurações.
53 Motor grande para AMA – X –A potência do motor é muito grande para a AMAoperar.
54 AMA motor pequeno – X –A potência do motor é muito pequena para a AMAoperar.
55 Faixa de parâmetros AMA – X –Os valores de parâmetro do motor estão fora da faixaaceitável. AMA não funciona.
56 Interrupção da AMA – X – A AMA é interrompida.
57 Timeout da AMA – X – –
58 AMA interna – X – Contato Danfoss.
59 Limite de Corrente X X – Sobrecarga do conversor de frequência.
60 Bloqueio externo – X – O bloqueio externo foi ativado.
61 Perda do Encoder X X – –
63 Freio mecânico baixo – X –A corrente do motor real não excedeu a corrente deliberação do freio dentro da janela do tempo deretardo de partida.
65Temperatura do cartão decontrole
X X XA temperatura de desativação do cartão de controleexcedeu o limite superior.
67 Mudança de opcional – X –Um novo opcional foi detectado ou um opcionalmontado foi removido.
68 Safe Torque Off2) X X –
O STO é ativado. Se o STO estiver no modo de reinicia-lização manual, para retomar a operação normal,aplique 24 V CC aos terminais 37 e 38 e inicie um sinalde reset (via fieldbus, E/S digital ou tecla [Reset]/[OffReset]. Se o STO estiver no modo nova partidaautomática, aplicar 24 V CC aos terminais 37 e 38automaticamente retoma o conversor de frequênciapara operação normal.
69Temperatura do Cartão dePotência
X X XA temperatura de desativação do cartão de potênciaexcedeu o limite superior.
80Drive inicializado no valorpadrão
– X –Todas as programações dos parâmetros serão inicia-lizadas com a configuração padrão.
Manutenção, diagnósticos e ... VLT® Midi Drive FC 280
52 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
88

Nº DescriçãoAdvertência Alarme Bloqueio
pordesarme
Causa
87 Frenagem CC automática X – –
Ocorre em rede elétrica IT quando o conversor defrequência fizer parada por inércia e a tensão CC formaior que 830 V para unidades de 400 V e maior doque 425 V para unidades de 200 V. O motor consomea energia no barramento CC. Esta função pode serativada/desativada no parâmetro 0-07 TI de FrenagemCC Automática.
88 Detecção de opcionais – X X Opcional removido com êxito.
95 Correia Partida X X – –
99 Rotor bloqueado – X –O rotor está bloqueado.
120 Falha no controle de posição – X – –
126 Motor em rotação – X – O motor PM está girando quando a AMA é executada.
127Força Contra Eletro Motriz muitoalta
X – –A Força Contra Eletro Motriz do motor PM está muitoalta antes da partida.
188 Defeito interno do STO2) – X –
A alimentação de 24 V CC é conectada somente a 1dos 2 terminais de STO (37 e 38) ou uma falha noscanais de STO foi detectada. Certifique-se de queambos os terminais sejam alimentados por umaalimentação de 24 V CC e que a discrepância entre ossinais nos 2 terminais seja menor que 12 ms. Se afalha ainda ocorrer, entre em contato com ofornecedor local Danfoss.
nwrun
Não durante o funcionamento – – –Os parâmetros só podem ser alterados quando omotor está parado.
Err.Uma senha incorreta foifornecida
– – –Ocorre quando é usada uma senha incorreta aomodificar um parâmetro protegido por senha.
Tabela 8.1 Lista de Códigos de Advertências e Alarmes
1) Distorções na rede elétrica podem causar essas falhas. A instalação de um filtro de linha Danfoss pode corrigir esse problema.2) Este alarme não pode ser reprogramado automaticamente por meio de parâmetro 14-20 Modo Reset.
Para diagnóstico, leia as alarm words, warning words e status words estendidas.
Bit Hex Dec
Alarm word(parâmetro 1
6-90 AlarmWord)
Alarm word2
(parâmetro 16-91 Alarm
Word 2)
Alarm word3
(parâmetro 16-97 Alarm
Word 3)
Warning word(parâmetro 16-
92 WarningWord)
Warning word2
(parâmetro 16-93 Warning
Word 2)
Statusword
estendida(parâmetro 16-94 Status Word
Estendida)
Statusword 2 estendida
(parâmetro 16-95 Est. Status Word 2)
0000000
011
Verificaçãodo freio
ReservadoFalha da
função STOReservado Reservado Rampa Desligado
1000000
022
Temperaturado cartão de
potência
Falha natensão dodrive da
porta
Alarme MMTemperaturado cartão de
potênciaReservado Ajuste de AMA Manual / Automático
2000000
044
Defeito doterra
Reservado Reservado Reservado ReservadoPartida
CW/CCWOFF1 do Profibus
ativo
3000000
088
Temperaturado cartão de
controleReservado Reservado
Temperaturado cartão de
controleReservado Slowdown
OFF2 do Profibusativo
Manutenção, diagnósticos e ... Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 53
8 8

Bit Hex Dec
Alarm word(parâmetro 1
6-90 AlarmWord)
Alarm word2
(parâmetro 16-91 Alarm
Word 2)
Alarm word3
(parâmetro 16-97 Alarm
Word 3)
Warning word(parâmetro 16-
92 WarningWord)
Warning word2
(parâmetro 16-93 Warning
Word 2)
Statusword
estendida(parâmetro 16-94 Status Word
Estendida)
Statusword 2 estendida
(parâmetro 16-95 Est. Status Word 2)
4000000
1016
Ctrl. wordT.O.
Reservado Reservado Ctrl. word T.O. Reservado CatchupOFF3 do Profibus
ativo
5000000
2032
Sobrecargade corrente
Reservado ReservadoSobrecarga de
correnteReservado Feedback alto Reservado
6000000
4064
Limite detorque
Reservado ReservadoLimite de
torqueReservado Feedback baixo Reservado
7000000
80128
Sup. t. domotor
Reservado ReservadoSup. t. do
motorReservado
Corrente desaída alta
Controle pronto
8000001
00256
ETR domotor
finalizado
CorreiaPartida
ReservadoETR do motor
finalizadoCorreia Partida
Corrente desaída baixa
O conversor defrequência está
pronto
9000002
00512
Sobrecargdo inversor.
Reservado ReservadoSobrecarg do
inversor.Reservado
Freq. de saídaalta.
Parada rápida
10000004
001024
SubtensãoCC.
Partidafalhou
Reservado Subtensão CC. ReservadoFreq. de saída
baixaFreio CC
11000008
002048
SobretensãoCC.
Limite develocidade
ReservadoSobretensão
CC.Reservado
A verificaçãodo freio está
OKParada
12000010
004096
Curtocircuito
Bloqueioexterno
Reservado Reservado Reservado Frenagem Máx Reservado
13000020
008192 Reservado Reservado Reservado Reservado Reservado Frenagem
Solicitação deCongelar frequência
de saída
14000040
0016384
Perda defase da rede
elétricaReservado Reservado
Perda de faseda redeelétrica
Reservado ReservadoCongelar frequência
de saída
15000080
0032768 AMA não OK Reservado Reservado Sem Motor
Frenagem CCautomática
OVC ativa Solicitação de Jog
16000100
0065536
Erro de livezero
Reservado ReservadoErro de live
zeroReservado Freio CA Jog
17000200
00131072
Defeitointerno
Reservado Reservado Reservado Reservado Reservado Pedido de partida
18000400
00262144
Sobrecargado freio
Reservado Reservado
Limite decarga do
resistor dofreio
Reservado Reservado Partida
19000800
00524288
Perda defase U
Reservado Reservado Reservado Reservado Referência alta Reservado
20001000
001048576
Perda defase V
Detecção deopcionais
Reservado ReservadoSobrecarga
T27Referência
baixaRetardo de partida
21002000
002097152
Perda defase W
Falha doopcional
Reservado Reservado Reservado Reservado Sleep
22004000
004194304
Falha defieldbus
Rotorbloqueado
ReservadoFalha defieldbus
Módulo dememória
Reservado Boost do sleep
23008000
008388608
Alimentação24 V baixa
Falha nocontrole de
posiçãoReservado
Alimentação24 V baixa
Reservado Reservado Em funcionamento
Manutenção, diagnósticos e ... VLT® Midi Drive FC 280
54 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
88

Bit Hex Dec
Alarm word(parâmetro 1
6-90 AlarmWord)
Alarm word2
(parâmetro 16-91 Alarm
Word 2)
Alarm word3
(parâmetro 16-97 Alarm
Word 3)
Warning word(parâmetro 16-
92 WarningWord)
Warning word2
(parâmetro 16-93 Warning
Word 2)
Statusword
estendida(parâmetro 16-94 Status Word
Estendida)
Statusword 2 estendida
(parâmetro 16-95 Est. Status Word 2)
24010000
0016777216
Falha derede elétrica
Reservado ReservadoFalha de rede
elétricaReservado Reservado Bypass
25020000
0033554432 Reservado
Limite deCorrente
ReservadoLimite deCorrente
Reservado Reservado Reservado
26040000
0067108864
Resistor dofreio
Reservado Reservado Reservado Reservado Reservado Bloqueio externo
27080000
0013421772
8IGBT do freio Reservado Reservado Reservado Reservado Reservado Reservado
28100000
0026843545
6Mudança de
opcionalReservado Reservado
Perda doEncoder
Reservado Reservado FlyStart ativo
29200000
0053687091
2
Conversor defrequênciainicializado
Perda doEncoder
Reservado ReservadoForça ContraEletro Motriz
muito altaReservado
Advertência delimpeza do
dissipador de calor
30400000
0010737418
24Safe Torque
OffReservado Reservado
Safe TorqueOff
Reservado Reservado Reservado
31800000
0021474836
48
Freiomecânico
baixoReservado Reservado Reservado Reservado
Banco dedados ocupado
Reservado
Tabela 8.2 Descrição da Alarm Word, Warning Word e Status Word Estendida
Manutenção, diagnósticos e ... Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 55
8 8

8.5 Resolução de Problemas
Sintoma Causas prováveis Teste Solução
Motor nãofuncionando
Parada do LCPVerifique se a tecla [Off] foipressionada.
Pressione [Auto On] ou [Hand On](dependendo do modo de operação)para funcionar o motor.
Sinal de partida ausente (prontidão)
Verifique parâmetro 5-10 Terminal 18Entrada Digital para corrigir aconfiguração do terminal 18 (use aconfiguração padrão).
Aplique um sinal de partida válidopara dar partida no motor.
Sinal ativo de parada por inércia domotor (parada por inércia)
Verifique parâmetro 5-12 Terminal 27,Entrada Digital para corrigir aconfiguração do terminal 27 (use aconfiguração padrão).
Aplique 24 V no terminal 27 ouprograme esse terminal para [0] Semoperação.
Origem do sinal de referência errada
Verifique o seguinte:
• O sinal de referência é dareferência local, remota ou dobarramento?
• Referência predefinida ativa?
• Conexão do terminal correta?
• Escala dos terminais correta?
• Sinal de referência disponível?
Programe as configurações corretas.Configure a referência predefinidaativa no grupo do parâmetro 3-1*Referências. Verifique a fiação correta.Verifique a escala dos terminais.Verifique o sinal de referência.
Motor girando nosentido errado
Limite de rotação do motorVerifique se parâmetro 4-10 Sentido deRotação do Motor está programadocorretamente.
Programe as configurações corretas.
Sinal de reversão ativo
Verifique se há um comando dereversão programado para o terminalno grupo do parâmetro 5-1* EntradasDigitais.
Desative o sinal de reversão.
Conexão errada das fases do motor Alterar parâmetro 1-06 Sentido Horário.
O motor não estáalcançando avelocidade máxima.
Limites de frequência configuradosincorretamente
Verifique os limites de saída emparâmetro 4-14 Lim. Superior da Velocdo Motor [Hz] eparâmetro 4-19 Freqüência Máx. deSaída.
Programe os limites corretos.
Sinal de entrada de referência nãoescalonado corretamente
Verifique a escala do sinal de entradade referência no grupo do parâmetro6-** Modo E/S analógica e no grupo doparâmetro 3-1* Referências.
Programe as configurações corretas.
Velocidade domotor instável
Possíveis programações doparâmetro incorretas:
Verifique as configurações de todos osparâmetros do motor, inclusive todasas configurações de compensação domotor. Para operação em malhafechada, verifique as configurações doPID.
Verifique as configurações no grupodo parâmetro 6-** Modo E/S analógica.
Motor funcionairregularmente
Possível sobremangnetizaçãoVerifique se há configuraçõesincorretas do motor em todos osparâmetros do motor.
Verifique as configurações do motorno grupo do parâmetro 1-2* Dados doMotor, 1-3* Dados Avanç d Motr e 1-5*Carregar configuração indep.
Motor não freia
Possíveis configurações incorretasdos parâmetros do freio. Tempos dedesaceleração possivelmente muitocurtos.
Verifique os parâmetros do freio.Verifique as configurações do tempode rampa.
Verifique os grupos do parâmetro2-0* Freio CC e 3-0* Limits de Referênc.
Manutenção, diagnósticos e ... VLT® Midi Drive FC 280
56 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
88

Sintoma Causas prováveis Teste Solução
Fusíveis de energiaem aberto oudesarme dodisjuntor
Curto entre fases
O motor ou o painel ter curto-circuitoentre fases. Verifique se há curto--circuito nas fases do motor e dopainel.
Elimine qualquer curto-circuitodetectado.
Sobrecarga do motorO motor está sobrecarregado paraesta aplicação.
Execute o teste de partida e verifiquese a corrente do motor está dentrodas especificações. Se a corrente domotor exceder a corrente de cargatotal indicada na plaqueta de identi-ficação, o motor pode funcionarapenas com carga reduzida. Revise asespecificações da aplicação.
Conexões soltasFaça uma verificação de pré--energização e procure conexõessoltas.
Aperte as conexões soltas.
Desbalanceamentoda corrente de redeelétrica maior que3%
Problema com energia da redeelétrica (consulte a descrição alarme4 Perda de fases de rede elétrica).
Gire os cabos de energia de entradano conversor de frequência umaposição: A para B, B para C, C para A.
Se a perna desbalanceada seguir ofio, é um problema de energia.Verifique a alimentação de redeelétrica.
Problema com a unidade doconversor de frequência
Gire os cabos de energia de entradano conversor de frequência umaposição: A para B, B para C, C para A.
Se a perna desbalanceadapermanecer no mesmo terminal deentrada, trata-se de um problemacom a unidade. Entre em contatocom o fornecedor.
Desbalanceamentoda corrente domotor maior que3%
Problema com o motor ou com afiação do motor.
Gire os cabos de saída do motor umaposição: U para V, V para W, W para U.
Se a perna desbalanceadaacompanhar o fio, o problema estáno motor ou na fiação do motor.Verifique o motor e a fiação domotor.
Problema com a unidade doconversor de frequência
Gire os cabos de saída do motor umaposição: U para V, V para W, W para U.
Se a perna desbalanceadapermanecer no mesmo terminal desaída, o problema está na unidade.Entre em contato com o fornecedor.
Ruído acústico ouvibração (porexemplo, umalâmina do ventiladorestá fazendo ruídoou vibrações emdeterminadasfrequências)
Ressonâncias, por exemplo, nosistema motor/ventilador
Ignore frequências críticas usandoparâmetros do grupo do parâmetro4-6* Bypass de velocidade.
Verifique se o ruído e/ou a vibraçãoforam reduzidos até um limiteaceitável.
Desligue a sobre modulação emparâmetro 14-03 Sobremodulação.
Aumente o amortecimento deressonância emparâmetro 1-64 Amortecimento daRessonância.
Tabela 8.3 Resolução de Problemas
Manutenção, diagnósticos e ... Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 57
8 8

9 Especificações
9.1 Dados Elétricos
Potência no eixo típica doconversor de frequência [kW (hp)]
PK370,37(0,5)
PK550,55
(0,75)
PK750,75(1,0)
P1K11,1
(1,5)
P1K51,5
(2,0)
P2K22,2
(3,0)
P3K03,0
(4,0)
Características nominais de proteção dogabinete IP20 (IP21/Tipo 1 como opção)
K1 K1 K1 K1 K1 K1 K2
Corrente de saída
Potência no eixo [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3
Contínua (3x380–440 V) [A] 1,2 1,7 2,2 3 3,7 5,3 7,2
Contínua (3 x 441-480 V) [A] 1,1 1,6 2,1 2,8 3,4 4,8 6,3
Intermitente (sobrecarga 60 s) [A] 1,9 2,7 3,5 4,8 5,9 8,5 11,5
Contínua kVA (400 V CA) [kVA] 0,9 1,2 1,5 2,1 2,6 3,7 5,0
Contínua kVA (480 V CA) [kVA] 0,9 1,3 1,7 2,5 2,8 4,0 5,2
Corrente de entrada máxima
Contínua (3x380–440 V) [A] 1,2 1,6 2,1 2,6 3,5 4,7 6,3
Contínua (3 x 441-480 V) [A] 1,0 1,2 1,8 2,0 2,9 3,9 4,3
Intermitente (sobrecarga 60 s) [A] 1,9 2,6 3,4 4,2 5,6 7,5 10,1
Mais especificações
Máxima seção transversal do cabo (rede
elétrica, motor, freio e load sharing) [mm2
(AWG)]
4 (12)
Perda de energia estimada em carga nominal
máxima [W]1)20,9 25,2 30 40 52,9 74 94,8
Peso, características nominais de proteção dogabinete metálico IP20 [kg (lb)]
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
Peso, características nominais de proteção dogabinete IP21 [kg (lb)]
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
Eficiência [%]2) 96,0 96,6 96,8 97,2 97,0 97,5 98,0
Tabela 9.1 Alimentação de rede elétrica 3x380-480 V CA
Especificações VLT® Midi Drive FC 280
58 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
99

Potência no eixo típica doconversor de frequência [kW (hp)]
P4K04
(5,5)
P5K55,5
(7,5)
P7K57,5(10)
P11K11
(15)
P15K15
(20)
P18K18,5(25)
P22K22
(30)
Características nominais de proteção dogabinete IP20 (IP21/Tipo 1 como opção)
K2 K2 K3 K4 K4 K5 K5
Corrente de saída
Potência no eixo 4 5,5 7,5 11 15 18,5 22
Contínua (3x380–440 V) [A] 9 12 15,5 23 31 37 42,5
Contínua (3 x 441-480 V) [A] 8,2 11 14 21 27 34 40
Intermitente (sobrecarga 60 s) [A] 14,4 19,2 24,8 34,5 46,5 55,5 63,8
Contínua kVA (400 V CA) [kVA] 6,2 8,3 10,7 15,9 21,5 25,6 29,5
Contínua kVA (480 V CA) [kVA] 6,8 9,1 11,6 17,5 22,4 28,3 33,3
Corrente de entrada máxima
Contínua (3x380–440 V) [A] 8,3 11,2 15,1 22,1 29,9 35,2 41,5
Contínua (3 x 441-480 V) [A] 6,8 9,4 12,6 18,4 24,7 29,3 34,6
Intermitente (sobrecarga 60 s) [A] 13,3 17,9 24,2 33,2 44,9 52,8 62,3
Mais especificações
Máxima seção transversal do cabo (rede
elétrica, motor, freio e load sharing) [mm2
(AWG)]
4 (12) 16 (6)
Perda de energia estimada em carga nominal
máxima [W]1)115,5 157,5 192,8 289,5 393,4 402,8 467,5
Peso, características nominais de proteção dogabinete metálico IP20 [kg (lb)]
3,6 (7,9) 3,6 (7,9) 4,1 (9,0) 9,4 (20,7) 9,5 (20,9) 12,3 (27,1) 12,5 (27,6)
Características nominais do peso de proteçãodo gabinete IP21 [kg (lb)]
5,5 (12,1) 5,5 (12,1) 6,5 (14,3) 10,5 (23,1) 10,5 (23,1) 14,0 (30,9) 14,0 (30,9)
Eficiência [%]2) 98,0 97,8 97,7 98,0 98,1 98,0 98,0
Tabela 9.2 Alimentação de rede elétrica 3x380-480 V CA
Potência no eixo típica doconversor de frequência [kW (hp)]
PK370,37(0,5)
PK550,55
(0,75)
PK750,75(1,0)
P1K11,1
(1,5)
P1K51,5
(2,0)
P2K22,2
(3,0)
P3K73,7
(5,0)
Características nominais de proteção dogabinete IP20 (IP21/Tipo 1 como opção)
K1 K1 K1 K1 K1 K2 K3
Corrente de saída
Contínua (3x200–240 V) [A] 2,2 3,2 4,2 6 6,8 9,6 15,2
Intermitente (sobrecarga 60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4 24,3
Contínua kVA (230 V CA) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 6,1
Corrente de entrada máxima
Contínua (3x200–240 V) [A] 1,8 2,7 3,4 4,7 6,3 8,8 14,3
Intermitente (sobrecarga 60 s) [A] 2,9 4,3 5,4 7,5 10,1 14,1 22,9
Mais especificações
Máxima seção transversal do cabo (rede
elétrica, motor, freio e load sharing) [mm2
(AWG)]
4 (12)
Perda de energia estimada em carga nominal
máxima [W]1)29,4 38,5 51,1 60,7 76,1 96,1 147,5
Peso, características nominais de proteção dogabinete metálico IP20 [kg (lb)]
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
Características nominais do peso de proteçãodo gabinete IP21 [kg (lb)]
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1) 6,5 (14,3)
Eficiência [%]2) 96,4 96,6 96,3 96,6 96,5 96,7 96,7
Tabela 9.3 Alimentação de rede elétrica 3x200-240 V CA
Especificações Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 59
9 9

Potência no eixo típica doconversor de frequência [kW (hp)]
PK370,37(0,5)
PK550,55
(0,75)
PK750,75(1,0)
P1K11,1
(1,5)
P1K51,5
(2,0)
P2K22,2
(3,0)
Características nominais de proteção do gabineteIP20 (IP21/Tipo 1 como opção)
K1 K1 K1 K1 K1 K2
Corrente de saída
Contínua (3x200–240 V) [A] 2,2 3,2 4,2 6 6,8 9,6
Intermitente (sobrecarga 60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4
Contínua kVA (230 V CA) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8
Corrente de entrada máxima
Contínua (1x200–240 V CA) [A] 2,9 4,4 5,5 7,7 10,4 14,4
Intermitente (sobrecarga 60 s) [A] 4,6 7,0 8,8 12,3 16,6 23,0
Mais especificações
Máxima seção transversal do cabo (rede elétrica e
motor) [mm2 (AWG)]4 (12)
Perda de energia estimada em carga nominal
máxima [W]1)37,7 46,2 56,2 76,8 97,5 121,6
Peso, características nominais de proteção dogabinete metálico IP20 [kg (lb)]
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5)
Características nominais do peso de proteção dogabinete IP21 [kg (lb)]
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
Eficiência [%]2) 94,4 95,1 95,1 95,3 95,0 95,4
Tabela 9.4 Alimentação de rede elétrica 1x200-240 V CA
1) A perda de energia típica é em condições de carga nominais e espera-se que esteja dentro de ±15% (a tolerância está relacionada à variedadede condições de tensão e cabo).Os valores são baseados em uma eficiência de motor típica (linha divisória de IE2/IE3). Os motores com eficiência mais baixa aumentam a perdade energia no conversor de frequência, e motores com eficiência mais alta reduzem a perda.Aplica-se ao dimensionamento do resfriamento do conversor de frequência. Se a frequência de chaveamento for mais alta que a configuraçãopadrão, as perdas de energia algumas vezes aumentam. O consumo de energia típico do LCP e do cartão de controle estão incluídos. Outrosopcionais e carga do cliente podem acrescentar até 30 W às perdas (embora normalmente apenas 4 W extras para cartão de controle totalmentecarregado ou fieldbus).Para sabe os dados de perda de energia de acordo com EN 50598-2, consulte www.danfoss.com/vltenergyefficiency.2) Medido usando 50 m (164 pés) de cabos de motor blindados com carga nominal e frequência nominal. Para saber a classe de eficiênciaenergética, consulte capétulo 9.4 Condições ambiente. Para saber as perdas de carga parcial, consulte www.danfoss.com/vltenergyefficiency.
9.2 Alimentação de Rede Elétrica
Alimentação de rede elétrica (L1/N, L2/L, L3)Terminais de alimentação (L1/N, L2/L, L3)Tensão de alimentação 380–480 V: -15% (-25%)1) a +10%Tensão de alimentação 200–240 V: -15% (-25%)1) a +10%
1) O conversor de frequência pode funcionar a -25% da tensão de entrada com desempenho reduzido. A potência máxima desaída do conversor de frequência é de 75% se a tensão de entrada for -25% e 85% se a tensão de entrada for -15%.O torque total não pode ser esperado em tensão de rede menor que 10% abaixo da tensão de alimentação nominal mais baixado conversor de frequência.
Frequência de alimentação 50/60 Hz ±5%Desbalanceamento máximo temporário entre fases de rede elétrica 3,0% da tensão de alimentação nominalFator de potência real (λ) ≥0,9 nominal com carga nominalFator de potência de deslocamento (cos ϕ) Unidade próxima (>0,98)Chaveamento na alimentação de entrada (L1/N, L2/L, L3) (energizações) ≤7.5 kW (10 hp) Máximo 2 vezes/minutoChaveamento na alimentação de entrada (L1/N, L2/L, L3) (energizações) 11-22 kW (15-30 hp) Máximo de 1 vez/minuto
Especificações VLT® Midi Drive FC 280
60 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
99

9.3 Saída do Motor e dados do motor
Saída do Motor (U, V, W)Tensão de saída 0–100% da tensão de alimentaçãoFrequência de saída 0–500 HzFrequência de saída no modo VVC+ 0–200 HzChaveamento na saída IlimitadoTempo de rampa 0,01–3600 s
Características do torqueTorque de partida (torque constante) Máximo 160% durante 60 s1)
Torque de sobrecarga (torque constante) Máximo 160% durante 60 s1)
Corrente de partida Máximo 200% durante 1 sTempo de subida do torque em VVC+ (independente de fsw) Máximo 50 ms
1) A porcentagem está relacionada ao torque nominal. São 150% para conversores de frequência de 11–22 kW (15–30 hp).
9.4 Condições ambiente
Condições ambienteCaracterísticas nominais de proteção do gabinete metálico, conversor de frequência IP20 (IP21/Tipo 1 como opção)Características nominais de proteção do gabinete metálico, kit de conversão IP21/Tipo 1Teste de vibração, todos os tamanhos de gabinete 1,14 gUmidade relativa 5–95% (IEC 721-3-3; Classe 3K3 (não condensante) durante operação)Temperatura ambiente (no modo de chaveamento DPWM)- com derating Máximo de 55 °C (131 °F)1)2)3)
- na corrente de saída constante total Máximo de 45 °C (113 °F)4)
Temperatura ambiente mínima, durante operação plena 0 °C (32 °F)Temperatura ambiente mínima em desempenho reduzido -10 °C (14 °F)Temperatura durante a armazenagem/transporte -25 para +65/70 °C (-13 para +149/158 °F)Altitude máxima acima do nível do mar, sem derating 1000 m (3280 pés)Altitude máxima acima do nível do mar, sem derating 3000 m (9243 pés)
Normas de EMC, emissãoEN 61800-3, EN 61000-3-2, EN 61000-3-3, EN 61000-3-11,
EN 61000-3-12, EN 61000-6-3/4, EN 55011, IEC 61800-3
Normas de EMC, imunidadeEN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3EN 61000-4-4, EN 61000-4-5, EN 61000-4-6, EN 61326-3-1
Classe de eficiência energética5) IE2
1) Consulte as Condições Especiais no Guia de design para:
• Derating para temperatura ambiente elevada.
• Derating para alta altitude.
2) Para evitar a sobretemperatura do cartão de controle em variantes de PROFIBUS, PROFINET, EtherNet/IP e POWERLINK do VLT®
Midi Drive FC 280, evite carga completa de E/S digital/analógica em temperatura ambiente superior a 45 °C (113 °F).3) A temperatura ambiente para K1S2 com derating é no máximo 50 °C (122 °F).4) A temperatura ambiente para K1S2 em plena corrente de saída constante é no máximo 40 °C (104 °F).5) Determinada de acordo com EN50598-2 em:
• Carga nominal.
• 90% frequência nominal.
• Configuração de fábrica da frequência de chaveamento.
• Configuração de fábrica do padrão de chaveamento.
• Tipo aberto: Temperatura do ar adjacente 45 °C (113 °F).
• Tipo 1 (kit NEMA): Temperatura ambiente 45 °C (113 °F).
Especificações Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 61
9 9

9.5 Especificações de Cabo
Comprimentos de cabo e seções transversais1)
Comprimento de cabo de motor máximo, blindado 50 m (164 pés)Comprimento de cabo de motor máximo, não blindado 75 m (246 pés)Seção transversal máxima de terminais de controle, fio flexível/rígido 2,5 mm2/14 AWGSeção transversal mínima de terminais de controle 0,55 mm2/30 AWGComprimento de cabo máximo da entrada de STO, não blindado 20 m (66 pés)
1) Para as seções transversais dos cabos de energia, consulte Tabela 9.1, Tabela 9.2, Tabela 9.3 e Tabela 9.4.Ao cumprir as normas EN 55011 1A e EN 55011 1B, o cabo do motor deve ser reduzido, em alguns casos. Veja o capítulo 2.6.2Emissão EMC no Guia de Design VLT® Midi Drive FC 280 para obter mais detalhes.
9.6 Entrada/Saída de controle e dados de controle
Entradas digitaisNúmero do terminal 18, 19, 271), 29, 32, 33Lógica PNP ou NPNNível de tensão 0–24 V CCNível de tensão, lógica 0 PNP <5 V CCNível de tensão, lógica 1 PNP >10 V CCNível de tensão, lógica 0 NPN >19 V CCNível de tensão, lógica 1 NPN <14 V CCTensão máxima na entrada 28 V CCFaixa de frequência de pulso 4–32 kHzLargura de pulso mínima (ciclo útil) 4,5 msResistência de entrada, Ri Aproximadamente 4 kΩ
1) O terminal 27 também pode ser programado como saída.
Entradas de STO1)
Número do terminal 37, 38Nível de tensão 0–30 V CCNível de tensão, baixo <1.8 V CCNível de tensão, alto >20 V CCTensão máxima na entrada 30 V CCCorrente de entrada mínima (cada pino) 6 mA
1) Consulte capétulo 6 Safe Torque Off (STO) para obter mais detalhes sobre as entradas de STO.
Entradas AnalógicasNúmero de entradas analógicas 2Número do terminal 531), 54Modos Tensão ou correnteSeleção do modo SoftwareNível de tensão 0–10 VResistência de entrada, Ri Aproximadamente 10 kΩTensão máxima -15 V a +20 VNível de corrente 0/4 a 20 mA (escalonável)Resistência de entrada, Ri Aproximadamente 200 ΩCorrente máxima 30 mAResolução das entradas analógicas 11 bitPrecisão das entradas analógicas Erro máx. 0,5% do fundo de escalaLargura de banda 100 Hz
As entradas analógicas são isoladas galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.1) O terminal 53 suporta somente o modo de tensão e também pode ser usado como entrada digital.
Especificações VLT® Midi Drive FC 280
62 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
99

Mains
Functionalisolation
PELV isolation
Motor
DC bus
Highvoltage
Control37
RS485
38
33
130B
E837
.10
Ilustração 9.1 Isolação Galvânica
AVISO!ALTITUDES ELEVADASPara instalação em altitudes acima de 2.000 m (6562 pés), entre em contato com a linha direta da Danfoss com relaçãoà PELV.
Entradas de pulsoEntradas de pulso programáveis 2Número do terminal do pulso 29, 33Frequência máxima no terminais 29, 33 32 kHz (acionado por push-pull)Frequência máxima no terminais 29, 33 5 kHz (coletor aberto)Frequência mínima nos terminais 29, 33 4 HzNível de tensão Consulte a seção sobre entrada digitalTensão máxima na entrada 28 V CCResistência de entrada, Ri Aproximadamente 4 kΩPrecisão da entrada de pulso Erro máximo: 0,1% do fundo de escala
Saídas digitaisSaída digital/pulso programável 2Número do terminal 271)
Nível de tensão na saída de frequência/digital 0–24 VCorrente de saída máxima (dissipador ou fonte) 40 mACarga máxima na saída de frequência 1 kΩCarga capacitiva máxima na saída de frequência 10 nFFrequência de saída mínima na saída de frequência 4 HzFrequência de saída máxima na saída de frequência 32 kHzPrecisão da saída de frequência Erro máximo: 0,1% do fundo de escalaResolução da saída de frequência 10 bitsNúmero do terminal (consulte os dados em saídas analógicas) 422)
Nível de tensão na saída digital 0–17 V
1) O terminal 27 também pode ser programado como entrada.2) O terminal 42 também pode ser programado como saída analógica.
A saída digital está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Saídas analógicasNúmero de saídas analógicas programáveis 1Número do terminal 421)
Faixa atual na saída analógica 0/4–20 mACarga máxima do resistor em relação ao comum na saída analógica 500 ΩTensão máxima na saída analógica 17 VPrecisão na saída analógica Erro máximo: 0,8% do fundo de escalaResolução na saída analógica 10 bits
1) O terminal 42 também pode ser programado como saída digital.
Especificações Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 63
9 9

A saída analógica está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Cartão de controle, saída 24 V CCNúmero do terminal 12, 13Carga máxima 100 mA
A alimentação de 24 V CC está isolada galvanicamente da tensão de alimentação (PELV). No entanto, a alimentação tem omesmo potencial que as entradas e saídas analógicas e digitais.
Cartão de controle, saída +10 V CCNúmero do terminal 50Tensão de saída 10,5 V ±0,5 VCarga máxima 15 mA
A alimentação de 10 V CC está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Cartão de controle, comunicação serial RS485Número do terminal 68 (P,TX+, RX+), 69 (N,TX-, RX-)Terminal número 61 Ponto comum dos terminais 68 e 69
O circuito de comunicação serial RS485 é isolado galvanicamente da tensão de alimentação (PELV).
Cartão de controle, comunicação serial USBPadrão USB 1,1 (velocidade total)Plugue USB Plugue USB tipo B
A conexão ao PC é realizada por meio de um cabo de USB host/dispositivo.A conexão USB está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.A conexão do terra do USB não está isolada galvanicamente do ponto de aterramento de proteção. Utilize somente laptopisolado para ligar-se ao conector USB do conversor de frequência.
Saídas do reléSaídas do relé programáveis 1Relé 01 01–03 (NC), 01–02 (NO)Carga do terminal máxima (CA-1)1) em 01–02 (NO) (carga resistiva) 250 V CA, 3 ACarga do terminal máxima (CA-15)1) em 01-02 (NO) (carga indutiva @ cosφ 0,4) 250 V CA,0,2 ACarga do terminal máxima (CC-1)1) em 01-02 (NO) (carga resistiva) 30 V CC, 2 ACarga do terminal máxima (CC-13)1) em 01-02 (NA) (carga indutiva) 24 V CC, 0,1 ACarga do terminal máxima (CA-1)1) em 01-03 (NC) (carga resistiva) 250 V CA, 3 ACarga do terminal máxima (CA-15)1) em 01-03 (NC) (carga indutiva @ cosφ 0,4) 250 V CA,0,2 ACarga do terminal máxima (CC-1)1) em 01-03 (NC) (carga resistiva) 30 V CC, 2 ACarga do terminal mínima em 01-03 (NC), 01-02 (NO) 24 V CC 10 mA, 24 V CA 20 mA
1) Partes 4 e 5 do IEC 60947.Os contatos do relé são isolados galvanicamente do resto do circuito por isolação reforçada.
Desempenho do cartão de controleIntervalo de varredura 1 ms
Características de controleResolução da frequência de saída a 0-500 Hz ±0,003 HzTempo de resposta do sistema (terminais 18, 19, 27, 29, 32 e 33) ≤2 msFaixa de controle da velocidade (malha aberta) 1:100 da velocidade síncronaPrecisão da velocidade (malha aberta) ±0,5% da velocidade nominalPrecisão da velocidade (malha fechada) ±0,1% da velocidade nominal
Todas as características de controle são baseadas em um motor assíncrono de 4 polos.
Especificações VLT® Midi Drive FC 280
64 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
99

9.7 Torques de Aperto de Conexão
Certifique-se de usar os torques certos ao apertar todas as conexões elétricas. Torque de aperto muito baixo ou muito altoàs vezes causa problemas de conexão elétrica. Para garantir que os torques corretos sejam aplicados, use um torquímetro. Otipo de chave de fenda recomendável é SZS 0,6x3,5 mm.
Torque [Nm (pol-lb)]
Tipo degabinete
Potência[kW (hp)]
Rede elétrica Motor Conexão CC Freio Terra Controle Relé
K10,37–2,2(0,5–3,0)
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
K23,0–5,5
(4,0–7,5)0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
K3 7,5 (10) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
K411–15
(15–20)1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
K518,5–22(25–30)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
Tabela 9.5 Torques de Aperto
9.8 Fusíveis e Disjuntores
Use fusíveis e/ou disjuntores no lado da alimentação para proteger a equipe de manutenção de ferimentos e oequipamento de danos, caso haja falha do componente dentro do conversor de frequência (primeira falha).
Proteção do circuito de derivaçãoProteja todos os circuitos de derivação em uma instalação (incluindo engrenagem de chaveamento e máquinas) contracurto-circuito e sobrecorrente de acordo com as regulamentações nacionais/internacionais.
AVISO!A proteção contra curto-circuito de estado sólido integrado não fornece proteção do circuito de derivação. Forneçaproteção do circuito de derivação de acordo com as normas e regulamentações nacionais e locais aplicáveis.
Tabela 9.6 indica os fusíveis e disjuntores recomendados que foram testados.
CUIDADORISCO DE FERIMENTOS PESSOAIS E DANOS AO EQUIPAMENTOMau funcionamento ou falha em seguir as recomendações pode resultar em risco pessoal e danos ao conversor defrequência e a outros equipamentos.
• Selecione os fusíveis de acordo com as recomendações. Possíveis danos podem ser limitados a estar dentro doconversor de frequência.
AVISO!DANOS NO EQUIPAMENTOO uso de fusíveis e/ou disjuntores é obrigatório para garantir estar em conformidade com a IEC 60364 da CE. A falhaem seguir as recomendações de proteção pode resultar em danos no conversor de frequência.
Danfoss recomenda usar os fusíveis e disjuntores em Tabela 9.6 e Tabela 9.7 para garantir a conformidade com a UL 508C oua IEC 61800-5-1. Para aplicações que não sejam UL, projete disjuntores para proteção em um circuito capaz de fornecer ummáximo de 50.000 Arms (simétrico), máximo de 240 V/400 V. As características nominais da corrente em curto-circuito doconversor de frequência (SCCR) são adequadas para uso em um circuito capaz de fornecer não mais do que 100.000 Arms, nomáximo 240 V/480 V quando protegido por fusíveis Classe T.
Especificações Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 65
9 9

Tamanho do gabinete metálico Potência [kW (hp)] Fusível não ULDisjuntor não UL
(Eaton)
Trifásico de 380-480 V
K1
0,37 (0,5)
gG-10
PKZM0-16
0,55–0,75(0,75–1,0)
1,1–1,5(1,5–2,0) gG-20
2,2 (3,0)
K23,0–5,5
(4,0–7,5) gG-25PKZM0-20
K3 7,5 (10) PKZM0-25
K411–15
(15–20)gG-50 –
K518,5–22(25–30)
gG-80 –
Trifásico de 200-240 V
K1
0,37 (0,5) gG-10
PKZM0-16
0,55 (0,75)
gG-200,75 (1,0)
1,1 (1,5)
1,5 (2,0)
K2 2,2 (3,0)gG-25
PKZM0-20
K3 3,7 (5,0) PKZM0-25
Monofásico de 200-240 VK1
0,37 (0,5) gG-10
PKZM0-16
0,55 (0,75)
gG-200,75 (1,0)
1,1 (1,5)
1,5 (2,0)
K2 2,2 (3,0) gG-25 PKZM0-20
Tabela 9.6 Disjuntor e fusível não UL
Especificações VLT® Midi Drive FC 280
66 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
99

Tamanho dogabinete metálico
Potência[kW (hp)]
Bussmann E4273Littelfuse
E81895
MERSENE163267/
E2137
MERSENE163267/
E2138
ClasseRK1
Classe J Classe TClasse
CCClasse CC
ClasseCC
ClasseRK1
Classe CC Classe RK1
Trifásico380–480 V
K1
0,37–0,75(0,5–1,0)
KTS-R-6 JKS-6 JJS-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLSR-6 ATM-R6 A6K-6R
1,1–1,5(1,5–2,0)
KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLSR-10 ATM-R10 A6K-10R
2,2 (3,0) KTS-R-15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLSR-15 ATM-R15 A6K-15R
K2–K33,0–7,5(4,0–10)
KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25 KLSR-25 ATM-R25 A6K-25R
K411–15
(15–20)KTS-R-50 JKS-50 JJS-50 – – – KLSR-50 – A6K-50R
K518,5–22(25–30)
– JKS-80 JJS-80 – – – – – –
Trifásico200–240 V
K1
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)KTN--R-10
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
0,75 (1,0)KTN--R-15
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
1,1–1,5(1,5–2,0)
KTN--R-20
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
K2–K32,2–3,7
(3,0–5,0)KTN--R-25
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
Monofásicode 200-240
V
K1
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)KTN--R-10
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
0,75 (1,0)KTN--R-15
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
1,1–1,5(1,5–2,0)
KTN--R-20
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
K2 2,2 (3,0)KTN--R-25
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
Tabela 9.7 Fusível UL
Especificações Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 67
9 9

9.9 Tamanhos do gabinete metálico, valor nominal da potência e dimensões
Tamanho do
gabinetemetálico
K1 K2 K3 K4 K5
Tamanho dapotência [kW
(hp)]
Monofásico200–240 V
0,37(0,5)
0,55(0,75)
0,75(1,0)
1,1(1,5)
1,5(2,0)
2,2(3,0)
– – –
Trifásico200–240 V
0,37(0,5)
0,55(0,75)
0,75(1,0)
1,1(1,5)
1,5(2,0)
2,2(3,0)
3,7(5,0)
– –
Trifásico380–480 V
0,37(0,5)
0,55(0,75)
0,75(1,0)
1,1(1,5)
1,5(2,0)
2,2(3,0)
3(4,0
)
4(5,5)
5,5(7,5)
7,5(10)
11(15)
15(20)
18,5(25)
22(30)
Dimensões[mm (pol)]
FC 280 IP20
Altura A1 210 (8,3) 272,5 (10,7)272,5(10,7)
317,5(12,5)
410 (16,1)
Altura A2 278 (10,9) 340 (13,4)341,5(13,4)
379,5(14,9)
474 (18,7)
Largura B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Profundidade C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
FC 280 com kit IP21/UL/Tipo 1
Altura A 338,5 (13,3) 395 (15,6)395
(15,6)425 (16,7) 520 (20,5)
Largura B 100 (3,9) 115 (4,5) 130 (5,1) 153 (6,0) 170 (6,7)
Profundidade C 183 (7,2) 183 (7,2) 183 (7,2) 260 (10,2) 260 (10,2)
FC 280 com tampa de entrada do cabo inferior (sem tampa superior)
Altura A 294 (11,6) 356 (14)357
(14,1)391 (15,4) 486 (19,1)
Largura B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Profundidade C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
Peso[kg (lb)]
IP20 2,5 (5,5) 3,6 (7,9)4,6
(10,1)8,2 (18,1) 11,5 (25,4)
IP21 4,0 (8,8) 5,5 (12,1)6,5
(14,3)10,5 (23,1) 14,0 (30,9)
Furação demontagem[mm (pol)]
a 198 (7,8) 260 (10,2)260
(10,2)297,5(11,7)
390 (15,4)
b 60 (2,4) 70 (2,8) 90 (3,5) 105 (4,1) 120 (4,7)
c 5 (0,2) 6,4 (0,25)6,5
(0,26)8 (0,32) 7,8 (0,31)
d 9 (0,35) 11 (0,43) 11 (0,43) 12,4 (0,49) 12,6 (0,5)
e 4,5 (0,18) 5,5 (0,22)5,5
(0,22)6,8 (0,27) 7 (0,28)
f 7,3 (0,29) 8,1 (0,32)9,2
(0,36)11 (0,43) 11,2 (0,44)
Tabela 9.8 Tamanhos do gabinete metálico, valor nominal da potência e dimensões
Especificações VLT® Midi Drive FC 280
68 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
99

130B
E844
.11
B C
A1
A2
Ilustração 9.2 Padrão com placa de desacoplamento
130B
E846
.10
B
A
C
Ilustração 9.3 Padrão com tampa de entrada do cabo inferior (sem tampa superior)
Especificações Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 69
9 9

B C
A
130B
E845
.10
Ilustração 9.4 Padrão com kit IP21/UL/Tipo 1
C
a
b
130B
A64
8.12
f
e
B
A
a
d
e
b
c
Ilustração 9.5 Furação de montagem na parte superior einferior.
Especificações VLT® Midi Drive FC 280
70 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
99
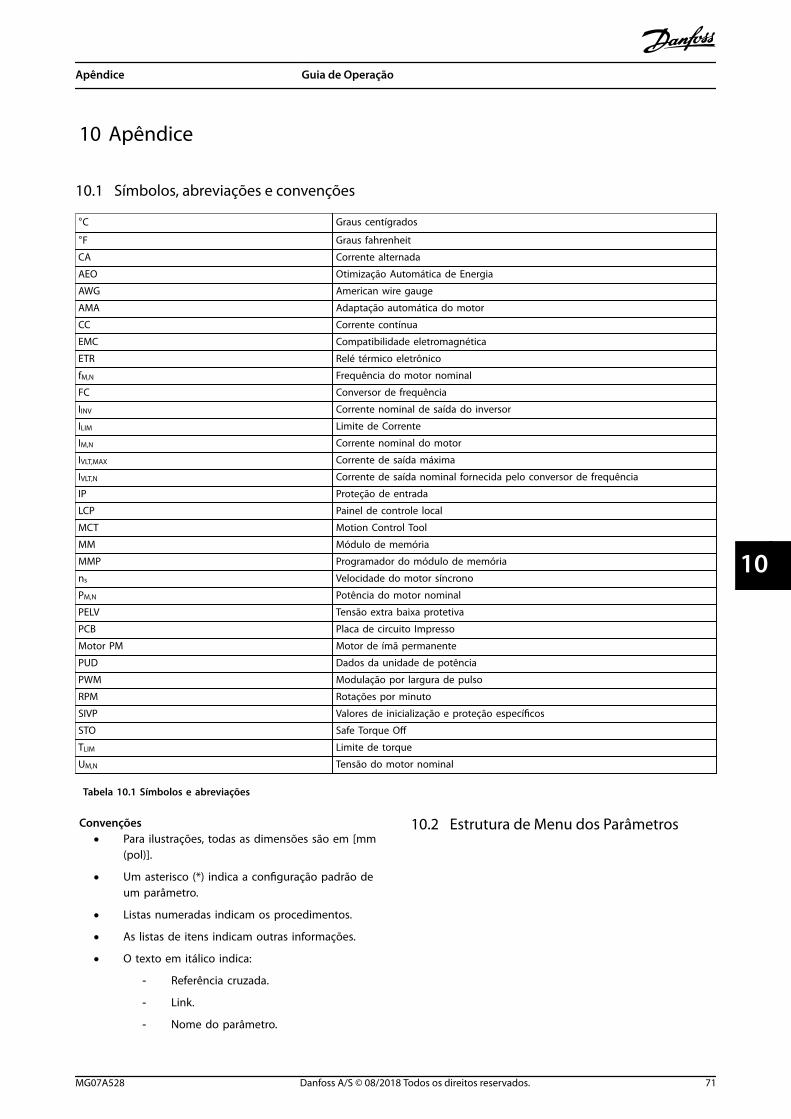
10 Apêndice
10.1 Símbolos, abreviações e convenções
°C Graus centígrados
°F Graus fahrenheit
CA Corrente alternada
AEO Otimização Automática de Energia
AWG American wire gauge
AMA Adaptação automática do motor
CC Corrente contínua
EMC Compatibilidade eletromagnética
ETR Relé térmico eletrônico
fM,N Frequência do motor nominal
FC Conversor de frequência
IINV Corrente nominal de saída do inversor
ILIM Limite de Corrente
IM,N Corrente nominal do motor
IVLT,MAX Corrente de saída máxima
IVLT,N Corrente de saída nominal fornecida pelo conversor de frequência
IP Proteção de entrada
LCP Painel de controle local
MCT Motion Control Tool
MM Módulo de memória
MMP Programador do módulo de memória
ns Velocidade do motor síncrono
PM,N Potência do motor nominal
PELV Tensão extra baixa protetiva
PCB Placa de circuito Impresso
Motor PM Motor de ímã permanente
PUD Dados da unidade de potência
PWM Modulação por largura de pulso
RPM Rotações por minuto
SIVP Valores de inicialização e proteção específicos
STO Safe Torque Off
TLIM Limite de torque
UM,N Tensão do motor nominal
Tabela 10.1 Símbolos e abreviações
Convenções• Para ilustrações, todas as dimensões são em [mm
(pol)].
• Um asterisco (*) indica a configuração padrão deum parâmetro.
• Listas numeradas indicam os procedimentos.
• As listas de itens indicam outras informações.
• O texto em itálico indica:
- Referência cruzada.
- Link.
- Nome do parâmetro.
10.2 Estrutura de Menu dos Parâmetros
Apêndice Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 71
10 10

0-**
Ope
raçã
o/D
ispl
ay0-
0*Co
nfigu
raçõ
es B
ásic
as0-
01Id
iom
a*[
0]In
glês
[1]
Ale
mão
[2]
Fran
cês
[3]
Din
amar
quês
[4]
Espa
nhol
[5]
Italia
no[2
8]Po
rtug
uês
bras
ileiro
0-02
Uni
dade
de
velo
cida
de d
o m
otor
[0]
RPM
*[1]
Hz
0-03
Confi
gura
ções
Reg
iona
is[0
]In
tern
acio
nal
[1]
Am
éric
a do
Nor
te0-
04Es
tado
Ope
raci
onal
na
Ener
giza
ção
[0]
Reto
mar
*[1]
Para
d fo
rçd,
ref=
ant.
[2]
Para
da fo
rçad
a, r
ef=0
0-06
Tipo
de
Gra
de[0
]20
0-24
0 V/
50 H
z/gr
ade
de T
I[1
]20
0-24
0 V/
50 H
z/D
elta
[2]
200-
240
V/50
Hz
[10]
380-
440
V/50
Hz/
grad
e de
TI
[11]
380-
440
V/50
Hz/
Del
ta[1
2]38
0-44
0 V/
50 H
z[2
0]44
0-48
0 V/
50 H
z/gr
ade
de T
I[2
1]44
0-48
0 V/
50 H
z/D
elta
[22]
440-
480
V/50
Hz
[100
]20
0-24
0 V/
60 H
z/gr
ade
de T
I[1
01]
200-
240
V/60
Hz/
Del
ta[1
02]
200-
240
V/60
Hz
[110
]38
0-44
0 V/
60 H
z/gr
ade
de T
I[1
11]
380-
440
V/60
Hz/
Del
ta[1
12]
380-
440
V/60
Hz
[120
]44
0-48
0 V/
60 H
z/gr
ade
de T
I[1
21]
440-
480
V/60
Hz/
Del
ta[1
22]
440-
480
V/60
Hz
0-07
Fren
agem
CC
aut
omát
ica
[0]
Off
(Des
ligad
o)*[
1]O
n0-
1*O
pera
ções
de
Setu
p0-
10Co
nfigu
raçã
o A
tiva
*[1]
Setu
p 1
[2]
Setu
p 2
[3]
Setu
p 3
[4]
Setu
p 4
[9]
Setu
p M
últip
lo0-
11Se
tup
de
Prog
ram
ação
[1]
Setu
p 1
[2]
Setu
p 2
[3]
Setu
p 3
[4]
Setu
p 4
*[9]
Confi
gura
ção
Ativ
a0-
12Se
tups
de
cone
xão
[0]
Não
con
ecta
do*[
20]
Cone
ctad
o0-
14Le
itura
: Edi
tar
Setu
ps /
Can
al
-214
7483
647
- 21
4748
3647
*0
0-16
Sele
ção
da
Apl
icaç
ão*[
0]N
enhu
m[1
]M
alha
fech
ada
de p
roce
sso
sim
ples
[2]
Loca
l/Rem
oto
[3]
Mal
ha A
bert
a Ve
loc.
[4]
Mal
ha fe
chad
a de
vel
ocid
ade
sim
ples
[5]
Vária
s ve
loci
dade
s[6
]O
GD
LA
10[7
]O
GD
V21
0[8
]G
uinc
ho0-
2*D
ispl
ay d
o L
CP0-
20Li
nha
de D
ispl
ay 1
,1 P
eque
no[0
]N
enhu
m[3
7]Te
xto
do
Dis
play
1[3
8]Te
xto
do
Dis
play
2[3
9]Te
xto
do
Dis
play
3[7
48]
Feed
For
war
d d
o P
CD[9
53]
War
ning
Wor
d d
o P
rofib
us[1
005]
Leitu
ra d
o C
onta
dor
de E
rros
de
Tran
smis
são
[100
6]Le
itura
do
Con
tado
r de
Err
os d
eRe
cepç
ão[1
230]
Parâ
met
ro d
e Ad
vert
ênci
a[1
501]
Hor
as d
e Fu
ncio
nam
ento
[150
2]M
edid
or d
e kW
h[1
600]
Cont
rol W
ord
[160
1]Re
ferê
ncia
[Uni
dade
]*[
1602
]Ref
erên
cia
[%]
[160
3]St
atus
Wor
d[1
605]
Valo
r Re
al P
rinci
pal [
%]
[160
9]Le
itura
Per
sona
lizad
a[1
610]
Potê
ncia
[kW
][1
611]
Potê
ncia
[hp]
[161
2]Te
nsão
do
Mot
or[1
613]
Freq
üênc
ia[1
614]
Corr
ente
do
Mot
or[1
615]
Freq
uênc
ia [%
][1
616]
Torq
ue [N
m]
[161
7]Ve
loci
dade
[RPM
][1
618]
Térm
ico
Cal
cula
do d
o M
otor
[162
0]Â
ngul
o d
o M
otor
[162
2]To
rque
[%]
[163
0]Te
nsão
do
Bar
ram
ento
CC
[163
3]En
ergi
a do
Fre
io /
2 m
in[1
634]
Tem
pera
tura
do
Dis
sipa
dor
de C
alor
[163
5]Té
rmic
o d
o In
vers
or[1
636]
Inv.
Nom
. Cor
rent
e[1
637]
Inv.
Cor
rent
e m
áx.
[163
8]Es
tado
do
Con
trol
ador
do
SL
[163
9]Te
mpe
ratu
ra d
o C
artã
o d
e Co
ntro
le[1
650]
Refe
rênc
ia E
xter
na[1
652]
Feed
back
[Uni
dade
][1
653]
Refe
rênc
ia d
o D
igiP
ot[1
657]
Feed
back
[rpm
][1
660]
Entr
ada
digi
tal
[166
1]Pr
ogra
maç
ão d
o T
erm
inal
53
[166
2]En
trad
a an
alóg
ica
53[1
663]
Prog
ram
ação
do
Ter
min
al 5
4
[166
4]En
trad
a an
alóg
ica
54[1
665]
Saíd
a an
alóg
ica
42 [m
A]
[166
6]Sa
ída
Dig
ital
[166
7]En
trad
a de
pul
so 2
9 [H
z][1
668]
Entr
ada
de p
ulso
33
[Hz]
[166
9]Sa
ída
de p
ulso
27
[Hz]
[167
1]Sa
ída
do re
lé[1
672]
Cont
ador
A[1
673]
Cont
ador
B[1
674]
Prec
. Par
ar C
onta
dor
[168
0]C
TW 1
do
Fie
ldbu
s[1
682]
REF
1 do
Fie
ldbu
s[1
684]
Com
unic
ação
Opc
iona
l STW
[168
5]C
TW 1
da
Port
a do
FC
[168
6]RE
F 1
da P
orta
do
FC
[169
0]A
larm
Wor
d[1
691]
Ala
rm W
ord
2[1
692]
War
ning
Wor
d[1
693]
War
ning
Wor
d 2
[169
4]Ex
t. S
tatu
s W
ord
[169
5]Ex
t. S
tatu
s W
ord
2[1
697]
Ala
rm W
ord
3[1
698]
War
ning
Wor
d 3
[189
0]Er
ro d
o P
ID d
e Pr
oces
so[1
891]
Saíd
a do
PID
de
Proc
esso
[189
2]Sa
ída
Pres
a do
PID
de
Proc
esso
[189
3]G
anho
esc
alon
ado
de
Saíd
a do
PID
de
Proc
esso
[211
7]Re
ferê
ncia
Ext
. 1[U
nida
de]
[211
8]Fe
edba
ck E
xt. 1
[Uni
dade
][2
119]
Saíd
a Ex
t. 1
[%]
[340
1]PC
D 1
gra
var
para
apl
icaç
ão[3
402]
PCD
2 g
rava
r pa
ra a
plic
ação
[340
3]PC
D 3
gra
var
para
apl
icaç
ão[3
404]
PCD
4 g
rava
r pa
ra a
plic
ação
[340
5]PC
D 5
gra
var
para
apl
icaç
ão[3
406]
PCD
6 g
rava
r pa
ra a
plic
ação
[340
7]PC
D 7
gra
var
para
apl
icaç
ão[3
408]
PCD
8 g
rava
r pa
ra a
plic
ação
[340
9]PC
D 9
gra
var
para
apl
icaç
ão[3
410]
PCD
10
grav
ar p
ara
aplic
ação
[342
1]PC
D 1
ler
para
apl
icaç
ão[3
422]
PCD
2 le
r pa
ra a
plic
ação
[342
3]PC
D 3
ler
para
apl
icaç
ão[3
424]
PCD
4 le
r pa
ra a
plic
ação
[342
5]PC
D 5
ler
para
apl
icaç
ão[3
426]
PCD
6 le
r pa
ra a
plic
ação
[342
7]PC
D 7
ler
para
apl
icaç
ão[3
428]
PCD
8 le
r pa
ra a
plic
ação
[342
9]PC
D 9
ler
para
apl
icaç
ão[3
430]
PCD
10
ler
para
apl
icaç
ão[3
450]
Posi
ção
Rea
l[3
456]
Erro
de
Trac
k0-
21Li
nha
de D
ispl
ay 1
,2 P
eque
noM
esm
as e
scol
has
com
0-2
00-
22Li
nha
de D
ispl
ay 1
,3 P
eque
noM
esm
as e
scol
has
com
0-2
00-
23Li
nha
de D
ispl
ay 2
Gra
nde
Mes
mas
esc
olha
s co
m 0
-20
0-24
Linh
a de
Dis
play
3 G
rand
eM
esm
as e
scol
has
com
0-2
00-
3*Le
itura
Per
sona
lizad
a LC
P0-
30U
nida
de d
e Le
itura
Per
sona
lizad
a[0
]N
enhu
m*[
1]%
[5]
PPM
[10]
1/m
in[1
1]RP
M[1
2]Pu
lsos
/s[2
0]l/s
[21]
l/min
[22]
l/h[2
3]m
³/s
[24]
m³/
min
[25]
m³/
h[3
0]kg
/s[3
1]kg
/min
[32]
kg/h
[33]
t/m
in[3
4]t/
h[4
0]m
/s[4
1]m
/min
[45]
m[6
0]°C
[70]
mba
r[7
1]ba
r[7
2]Pa
[73]
kPa
[74]
m W
G[8
0]kW
[120
]G
PM[1
21]
galã
o/s
[122
]ga
lão/
min
[123
]ga
lão/
h[1
24]
CFM
[127
]pé
cúb
ico/
h[1
40]
pés/
s[1
41]
pés/
min
[160
]°F
[170
]ps
i[1
71]
lb/p
ol2
[172
]po
l WG
[173
]pé
s W
G[1
80]
HP
0-31
Valo
r M
ín. L
eitu
ra P
erso
naliz
ada
0 -
9999
99.9
9 Cu
stom
Read
outU
nit
*0Cu
stom
Read
outU
nit
0-32
Valo
r M
áx. L
eitu
ra P
erso
naliz
ada
0.0
- 99
9999
.99
Cust
omRe
adou
tUni
t*1
00 C
usto
mRe
adou
tUni
t0-
37Te
xto
do
Dis
play
10
- 0
*0-
38Te
xto
do
Dis
play
20
- 0
*0-
39Te
xto
do
Dis
play
30
- 0
*0-
4*Te
clad
o d
o L
CP
0-40
Tecl
a [H
and
on]
(Man
ual l
igad
o) d
oLC
P[0
]D
isab
led
(Des
ativ
ado)
*[1]
Ativ
ado
0-42
Tecl
a [A
uto
on]
(Aut
omát
ico
Lig
ado)
do
LCP
[0]
Dis
able
d (D
esat
ivad
o)*[
1]A
tivad
o0-
44Te
cla
[Off/
Rese
t] d
o L
CP[0
]D
isab
led
(Des
ativ
ado)
*[1]
Ativ
ado
[7]
Ativ
ar s
omen
te R
eset
0-5*
Copi
ar/S
alva
r0-
50Có
pia
via
LCP
*[0]
Sem
cóp
ia[1
]To
dos
para
o L
CP[2
]To
dos
do L
CP[3
]In
depe
nden
te d
e ta
man
ho d
e LC
P0-
51Có
pia
do S
etup
*[0]
Sem
cóp
ia[1
]Co
piar
de
setu
p 1
[2]
Copi
ar d
e se
tup
2[3
]Co
piar
de
setu
p 3
[4]
Copi
ar d
e se
tup
4[9
]Co
piar
do
Set
up d
e fá
bric
a0-
6*Se
nha
0-60
Senh
a do
Men
u P
rinci
pal
0 -
999
*01-
**Ca
rga
e M
otor
1-0*
Confi
gura
ções
Ger
ais
1-00
Mod
o C
onfig
uraç
ão*[
0]M
alha
Abe
rta
[1]
Velo
cida
de d
a m
alha
fech
ada
[2]
Mal
ha fe
chad
a de
tor
que
[3]
Mal
ha F
echa
da d
e Pr
oces
so[4
]To
rque
, mal
ha a
bert
a[7
]Ve
loci
dade
do
PID
est
endi
do O
L1-
01Pr
incí
pio
de
Cont
role
do
Mot
or[0
]U
/f*[
1]VV
C+1-
03Ca
ract
erís
ticas
do
Tor
que
*[0]
Torq
ue c
onst
ante
[1]
Torq
ue v
ariá
vel
[2]
Otim
. Aut
om. E
nerg
ia T
C1-
06Se
ntid
o H
orár
io*[
0]N
orm
al[1
]In
vers
o1-
08La
rgur
a de
ban
da d
o c
ontr
ole
dom
otor
[0]
Alto
[1]
Méd
io[2
]Ba
ixo
[3]
Adap
tativ
o 1
[4]
Adap
tativ
o 2
1-1*
Sele
ção
do
mot
or1-
10Co
nstr
ução
do
Mot
or*[
0]A
ssín
cron
o[1
]PM
, SPM
não
sal
ient
e[3
]PM
, IPM
sal
ient
e, S
at
Apêndice VLT® Midi Drive FC 280
72 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
1010
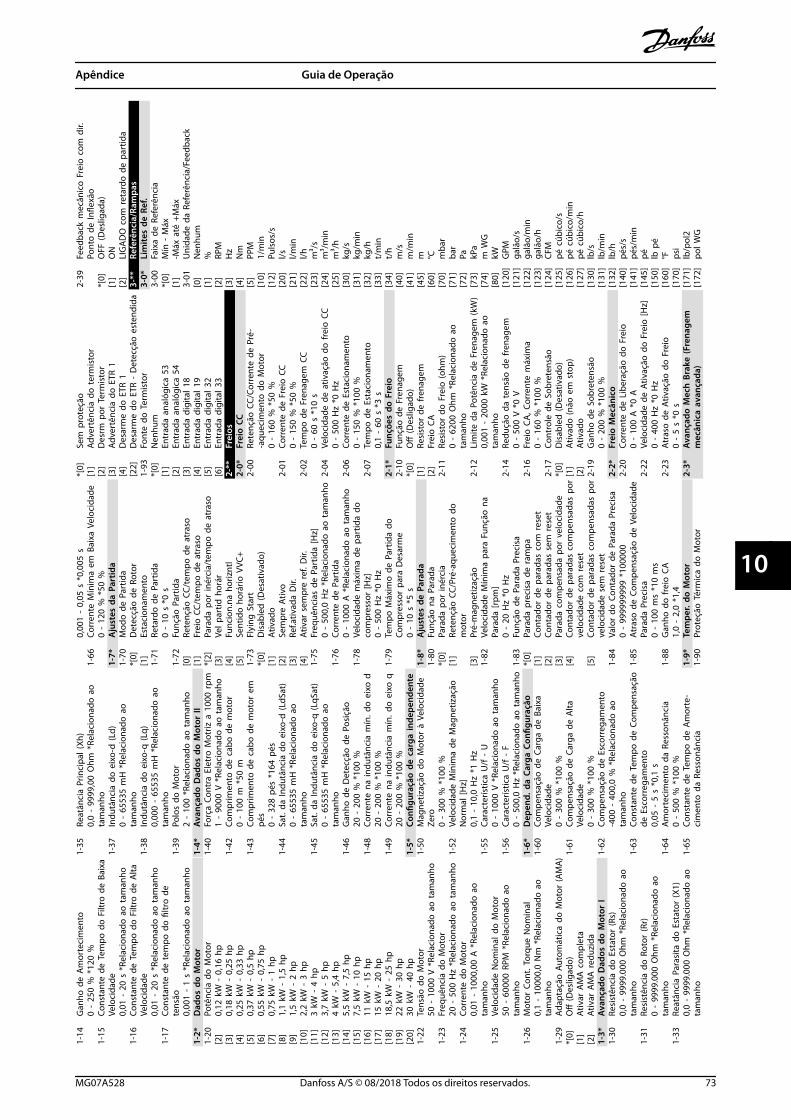
1-14
Gan
ho d
e A
mor
teci
men
to0
- 25
0 %
*12
0 %
1-15
Cons
tant
e de
Tem
po d
o F
iltro
de
Baix
aVe
loci
dade
0,01
- 2
0 s
*Rel
acio
nado
ao
tam
anho
1-16
Cons
tant
e de
Tem
po d
o F
iltro
de
Alta
Velo
cida
de0,
01 -
20
s *R
elac
iona
do a
o t
aman
ho1-
17Co
nsta
nte
de t
empo
do
filtr
o d
ete
nsão
0,00
1 -
1 s
*Rel
acio
nado
ao
tam
anho
1-2*
Dad
os d
o M
otor
1-20
Potê
ncia
do
Mot
or[2
]0,
12 k
W -
0,1
6 hp
[3]
0,18
kW
- 0
,25
hp[4
]0,
25 k
W -
0,3
3 hp
[5]
0,37
kW
- 0
,5 h
p[6
]0,
55 k
W -
0,7
5 hp
[7]
0,75
kW
- 1
hp
[8]
1,1
kW -
1,5
hp
[9]
1,5
kW -
2 h
p[1
0]2,
2 kW
- 3
hp
[11]
3 kW
- 4
hp
[12]
3,7
kW -
5 h
p[1
3]4
kW -
5,4
hp
[14]
5,5
kW -
7,5
hp
[15]
7,5
kW -
10
hp[1
6]11
kW
- 1
5 hp
[17]
15 k
W -
20
hp[1
8]18
,5 k
W -
25
hp[1
9]22
kW
- 3
0 hp
[20]
30 k
W -
40
hp1-
22Te
nsão
do
Mot
or50
- 1
000
V *
Rela
cion
ado
ao
tam
anho
1-23
Freq
uênc
ia d
o M
otor
20 -
500
Hz
*Rel
acio
nado
ao
tam
anho
1-24
Corr
ente
do
Mot
or0,
01 -
100
0,00
A *
Rela
cion
ado
ao
tam
anho
1-25
Velo
cida
de N
omin
al d
o M
otor
50 -
600
00 R
PM *
Rela
cion
ado
ao
tam
anho
1-26
Mot
or C
ont.
Tor
que
Nom
inal
0,1
- 10
000,
0 N
m *
Rela
cion
ado
ao
tam
anho
1-29
Adap
taçã
o A
utom
átic
a do
Mot
or (A
MA
)*[
0]O
ff (D
eslig
ado)
[1]
Ativ
ar A
MA
com
plet
a[2
]A
tivar
AM
A r
eduz
ida
1-3*
Avan
çado
Dad
os d
o M
otor
I1-
30Re
sist
ênci
a do
Est
ator
(Rs)
0,0
- 99
99.0
00 O
hm *
Rela
cion
ado
ao
tam
anho
1-31
Resi
stên
cia
do R
otor
(Rr)
0 -
9999
.000
Ohm
*Re
laci
onad
o a
ota
man
ho1-
33Re
atân
cia
Para
sita
do
Est
ator
(X1)
0,0
- 99
99.0
00 O
hm *
Rela
cion
ado
ao
tam
anho
1-35
Reat
ânci
a Pr
inci
pal (
Xh)
0,0
- 99
99,0
0 O
hm *
Rela
cion
ado
ao
tam
anho
1-37
Indu
tânc
ia d
o e
ixo-
d (L
d)0
- 65
535
mH
*Re
laci
onad
o a
ota
man
ho1-
38In
dutâ
ncia
do
eix
o-q
(Lq)
0,00
0 -
6553
5 m
H *
Rela
cion
ado
ao
tam
anho
1-39
Polo
s do
Mot
or2
- 10
0 *R
elac
iona
do a
o t
aman
ho1-
4*Av
ança
do D
ados
do
Mot
or II
1-40
Forç
a Co
ntra
Ele
tro
Mot
riz a
100
0 rp
m1
- 90
00 V
*Re
laci
onad
o a
o t
aman
ho1-
42Co
mpr
imen
to d
e ca
bo d
e m
otor
0 -
100
m *
50 m
1-43
Com
prim
ento
de
cabo
de
mot
or e
mpé
s0
- 32
8 pé
s *1
64 p
és1-
44Sa
t. d
a In
dutâ
ncia
do
eix
o-d
(LdS
at)
0 -
6553
5 m
H *
Rela
cion
ado
ao
tam
anho
1-45
Sat.
da
Indu
tânc
ia d
o e
ixo-
q (L
qSat
)0
- 65
535
mH
*Re
laci
onad
o a
ota
man
ho1-
46G
anho
de
Det
ecçã
o d
e Po
siçã
o20
- 2
00 %
*10
0 %
1-48
Corr
ente
na
indu
tânc
ia m
ín. d
o e
ixo
d20
- 2
00 %
*10
0 %
1-49
Corr
ente
na
indu
tânc
ia m
ín. d
o e
ixo
q20
- 2
00 %
*10
0 %
1-5*
Confi
gura
ção
de
carg
a in
depe
nden
te1-
50M
agne
tizaç
ão d
o M
otor
à V
eloc
idad
eZe
ro0
- 30
0 %
*10
0 %
1-52
Velo
cida
de M
ínim
a de
Mag
netiz
ação
Nor
mal
[Hz]
0,1
- 10
,0 H
z *1
Hz
1-55
Cara
cter
ístic
a U
/f -
U0
- 10
00 V
*Re
laci
onad
o a
o t
aman
ho1-
56Ca
ract
erís
tica
U/f
- F
0 -
500,
0 H
z *R
elac
iona
do a
o t
aman
ho1-
6*D
epen
d. d
a Ca
rga
Confi
gura
ção
1-60
Com
pens
ação
de
Carg
a de
Bai
xaVe
loci
dade
0 -
300
% *
100
%1-
61Co
mpe
nsaç
ão d
e Ca
rga
de A
ltaVe
loci
dade
0 -
300
% *
100
%1-
62Co
mpe
nsaç
ão d
e Es
corr
egam
ento
-400
- 4
00,0
% *
Rela
cion
ado
ao
tam
anho
1-63
Cons
tant
e de
Tem
po d
e Co
mpe
nsaç
ãode
Esc
orre
gam
ento
0,05
- 5
s *
0,1
s1-
64A
mor
teci
men
to d
a Re
sson
ânci
a0
- 50
0 %
*10
0 %
1-65
Cons
tant
e de
Tem
po d
e A
mor
te-
cim
ento
da
Ress
onân
cia
0,00
1 -
0,05
s *
0,00
5 s
1-66
Corr
ente
Mín
ima
em B
aixa
Vel
ocid
ade
0 -
120
% *
50 %
1-7*
Aju
stes
da
Part
ida
1-70
Mod
o d
e Pa
rtid
a*[
0]D
etec
ção
de
Roto
r[1
]Es
taci
onam
ento
1-71
Reta
rdo
de
Part
ida
0 -
10 s
*0
s1-
72Fu
nção
Par
tida
[0]
Rete
nção
CC/
tem
po d
e at
raso
[1]
Frei
o C
C/te
mpo
de
atra
so*[
2]Pa
rada
por
inér
cia/
tem
po d
e at
raso
[3]
Vel p
artid
hor
ár[4
]Fu
ncio
n.na
hor
iznt
l[5
]Se
ntid
o h
orár
io V
VC+
1-73
Flyi
ng S
tart
*[0]
Dis
able
d (D
esat
ivad
o)[1
]A
tivad
o[2
]Se
mpr
e A
tivo
[3]
Ref.a
tivad
a D
ir.[4
]A
tivar
sem
pre
ref.
Dir.
1-75
Freq
uênc
ias
de P
artid
a [H
z]0
- 50
0,0
Hz
*Rel
acio
nado
ao
tam
anho
1-76
Corr
ente
de
Part
ida
0 -
1000
A *
Rela
cion
ado
ao
tam
anho
1-78
Velo
cida
de m
áxim
a de
par
tida
doco
mpr
esso
r [H
z]0
- 50
0 H
z *0
Hz
1-79
Tem
po M
áxim
o d
e Pa
rtid
a do
Com
pres
sor
para
Des
arm
e0
- 10
s *
5 s
1-8*
Aju
stes
de
Para
da1-
80Fu
nção
na
Para
da*[
0]Pa
rada
por
inér
cia
[1]
Rete
nção
CC/
Pré-
aque
cim
ento
do
mot
or[3
]Pr
é-m
agne
tizaç
ão1-
82Ve
loci
dade
Mín
ima
para
Fun
ção
na
Para
da [r
pm]
0 -
20 H
z *0
Hz
1-83
Funç
ão d
e Pa
rada
Pre
cisa
*[0]
Para
da p
reci
sa d
e ra
mpa
[1]
Cont
ador
de
para
das
com
rese
t[2
]Co
ntad
or d
e pa
rada
s se
m re
set
[3]
Para
da c
ompe
nsad
a po
r ve
loci
dade
[4]
Cont
ador
de
para
das
com
pens
adas
por
velo
cida
de c
om re
set
[5]
Cont
ador
de
para
das
com
pens
adas
por
velo
cida
de s
em re
set
1-84
Valo
r do
Con
tado
r de
Par
ada
Prec
isa
0 -
9999
9999
9 *1
0000
01-
85A
tras
o d
e Co
mpe
nsaç
ão d
e Ve
loci
dade
Para
da P
reci
sa0
- 10
0 m
s *1
0 m
s1-
88G
anho
do
frei
o C
A1,
0 -
2,0
*1,4
1-9*
Tem
per.
do M
otor
1-90
Prot
eção
Tér
mic
a do
Mot
or
*[0]
Sem
pro
teçã
o[1
]Ad
vert
ênci
a do
ter
mis
tor
[2]
Des
rm p
or T
erm
isto
r[3
]Ad
vert
ênci
a do
ETR
1[4
]D
esar
me
do E
TR 1
[22]
Des
arm
e do
ETR
- D
etec
ção
est
endi
da1-
93Fo
nte
do T
erm
isto
r*[
0]N
enhu
m[1
]En
trad
a an
alóg
ica
53[2
]En
trad
a an
alóg
ica
54[3
]En
trad
a di
gita
l 18
[4]
Entr
ada
digi
tal 1
9[5
]En
trad
a di
gita
l 32
[6]
Entr
ada
digi
tal 3
32-
**Fr
eios
2-0*
Frei
o C
C2-
00Re
tenç
ão C
C/Co
rren
te d
e Pr
é--a
quec
imen
to d
o M
otor
0 -
160
% *
50 %
2-01
Corr
ente
de
Frei
o C
C0
- 15
0 %
*50
%2-
02Te
mpo
de
Fren
agem
CC
0 -
60 s
*10
s2-
04Ve
loci
dade
de
ativ
ação
do
frei
o C
C0
- 50
0 H
z *0
Hz
2-06
Corr
ente
de
Esta
cion
amen
to0
- 15
0 %
*10
0 %
2-07
Tem
po d
e Es
taci
onam
ento
0,1
- 60
s *
3 s
2-1*
Funç
ões
do F
reio
2-10
Funç
ão d
e Fr
enag
em*[
0]O
ff (D
eslig
ado)
[1]
Resi
stor
de
fren
agem
[2]
Frei
o C
A2-
11Re
sist
or d
o F
reio
(ohm
)0
- 62
00 O
hm *
Rela
cion
ado
ao
tam
anho
2-12
Lim
ite d
a Po
tênc
ia d
e Fr
enag
em (k
W)
0,00
1 -
2000
kW
*Re
laci
onad
o a
ota
man
ho2-
14Re
duçã
o d
a te
nsão
de
fren
agem
0 -
500
V *
0 V
2-16
Frei
o C
A, C
orre
nte
máx
ima
0 -
160
% *
100
%2-
17Co
ntro
le d
e So
bret
ensã
o*[
0]D
isab
led
(Des
ativ
ado)
[1]
Ativ
ado
(não
em
sto
p)[2
]A
tivad
o2-
19G
anho
de
Sobr
eten
são
0 -
200
% *
100
%2-
2*Fr
eio
Mec
ânic
o2-
20Co
rren
te d
e Li
bera
ção
do
Fre
io0
- 10
0 A
*0
A2-
22Ve
loci
dade
de
Ativ
ação
do
Fre
io [H
z]0
- 40
0 H
z *0
Hz
2-23
Atr
aso
de
Ativ
ação
do
Fre
io0
- 5
s *0
s2-
3*Av
ança
do M
ech
Bra
ke (F
rena
gem
mec
ânic
a av
ança
da)
2-39
Feed
back
mec
ânic
o F
reio
com
dir.
Pont
o d
e In
flexã
o*[
0]O
FF (D
eslig
ada)
[1]
ON
[2]
LIG
AD
O c
om re
tard
o d
e pa
rtid
a3-
**Re
ferê
ncia
/Ram
pas
3-0*
Lim
ites
de R
ef.
3-00
Faix
a de
Ref
erên
cia
*[0]
Mín
- M
áx[1
]-M
áx a
té +
Máx
3-01
Uni
dade
da
Refe
rênc
ia/F
eedb
ack
[0]
Nen
hum
[1]
%[2
]RP
M[3
]H
z[4
]N
m[5
]PP
M[1
0]1/
min
[12]
Puls
os/s
[20]
l/s[2
1]l/m
in[2
2]l/h
[23]
m³/
s[2
4]m
³/m
in[2
5]m
³/h
[30]
kg/s
[31]
kg/m
in[3
2]kg
/h[3
3]t/
min
[34]
t/h
[40]
m/s
[41]
m/m
in[4
5]m
[60]
°C[7
0]m
bar
[71]
bar
[72]
Pa[7
3]kP
a[7
4]m
WG
[80]
kW[1
20]
GPM
[121
]ga
lão/
s[1
22]
galã
o/m
in[1
23]
galã
o/h
[124
]CF
M[1
25]
pé c
úbic
o/s
[126
]pé
cúb
ico/
min
[127
]pé
cúb
ico/
h[1
30]
lb/s
[131
]lb
/min
[132
]lb
/h[1
40]
pés/
s[1
41]
pés/
min
[145
]pé
[150
]lb
pé
[160
]°F
[170
]ps
i[1
71]
lb/p
ol2
[172
]po
l WG
Apêndice Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 73
10 10

[173
]pé
s W
G[1
80]
HP
3-02
Refe
rênc
ia M
ínim
a-4
999,
0 -
4999
Ref
eren
ceFe
edba
ckU
nit
*0 R
efer
ence
Feed
back
Uni
t3-
03Re
ferê
ncia
Máx
ima
-499
9,0
- 49
99 R
efer
ence
Feed
back
Uni
t*T
aman
ho r
elac
iona
do3-
04Fu
nção
de
Refe
rênc
ia*[
0]So
ma
[1]
Exte
rna/
Pred
efini
da3-
1*Re
ferê
ncia
s3-
10Re
ferê
ncia
Pre
defin
ida
-100
- 1
00 %
*0
%3-
11Ve
loci
dade
de
Jog
[Hz]
0 -
500,
0 H
z *5
Hz
3-12
Valo
r de
cat
ch-u
p/sl
ow d
own
0 -
100
% *
0 %
3-14
Refe
rênc
ia R
elat
iva
Pred
efini
da-1
00 -
100
% *
0 %
3-15
Font
e da
Ref
erên
cia
1[0
]Se
m fu
nção
*[1]
Entr
ada
anal
ógic
a 53
[2]
Entr
ada
anal
ógic
a 54
[7]
Entr
ada
de fr
equê
ncia
29
[8]
Entr
ada
de fr
equê
ncia
33
[11]
Refe
rênc
ia d
o b
arra
men
to lo
cal
[20]
Pote
nciô
met
ro d
igita
l[3
2]Ba
rram
ento
PCD
3-16
Font
e da
Ref
erên
cia
2M
esm
as e
scol
has
com
3-1
53-
17Fo
nte
da R
efer
ênci
a 3
Mes
mas
esc
olha
s co
m 3
-15
3-18
Recu
rso
de
Refe
rênc
ia d
e Es
cala
Rela
tiva
*[0]
Sem
funç
ão[1
]En
trad
a an
alóg
ica
53[2
]En
trad
a an
alóg
ica
54[7
]En
trad
a de
freq
uênc
ia 2
9[8
]En
trad
a de
freq
uênc
ia 3
3[1
1]Re
ferê
ncia
do
bar
ram
ento
loca
l3-
3*Co
nfigu
raçõ
es G
erai
s de
Ram
pa3-
31D
esac
eler
ação
com
dir.
Pon
to d
eIn
flexã
o*[
0]O
ff (D
eslig
ado)
[1]
Tem
po d
e D
esac
eler
ação
da
Ram
pa 1
[2]
Tem
po d
e D
esac
eler
ação
da
Ram
pa 2
[3]
Tem
po d
e D
esac
eler
ação
da
Ram
pa 3
[4]
Tem
po d
e D
esac
eler
ação
da
Ram
pa 4
[9]
Tem
po d
e Ra
mpa
da
Para
da R
ápid
a3-
4*Ra
mpa
13-
40Ti
po d
e Ra
mpa
1*[
0]Li
near
[1]
Ram
pa s
inoi
dal
[2]
Ram
pa s
inoi
dal 2
3-41
Tem
po d
e Ac
eler
ação
da
Ram
pa 1
0,01
- 3
600
s *R
elac
iona
do a
o t
aman
ho3-
42Te
mpo
de
Des
acel
eraç
ão d
a Ra
mpa
10,
01 -
360
0 s
*Rel
acio
nado
ao
tam
anho
3-5*
Ram
pa 2
Mes
mas
esc
olha
s co
m 3
-4*
3-6*
Ram
pa 3
Mes
mas
esc
olha
s co
m 3
-4*
3-7*
Ram
pa 4
Mes
mas
esc
olha
s co
m 3
-4*
3-8*
Out
ras
Ram
pas
3-80
Tem
po d
e Ra
mpa
do
Jog
0,01
- 3
600
s *R
elac
iona
do a
o t
aman
ho3-
81Te
mpo
de
Ram
pa d
a Pa
rada
Ráp
ida
0,01
- 3
600
s *R
elac
iona
do a
o t
aman
ho3-
9*Po
tenc
iôm
etro
Dig
ital
3-90
Tam
anho
do
Pas
so0,
01 -
200
% *
0,10
%3-
92Re
stau
raçã
o d
a En
ergi
a*[
0]O
ff (D
eslig
ado)
[1]
On
3-93
Lim
ite M
áxim
o-2
00 -
200
% *
100
%3-
94Li
mite
Mín
imo
-200
- 2
00 %
*-1
00 %
3-95
Atr
aso
de
Ram
pa0
- 36
0000
0 m
s *1
.000
ms
3-96
Refe
rênc
ia m
áxim
a da
cha
ve d
e fim
de
curs
o0
- 20
0 %
*25
%4-
**Li
mite
s/A
dver
tênc
ias
4-1*
Lim
ites
do M
otor
4-10
Sent
ido
da
Rota
ção
do
Mot
or*[
0]Se
ntid
o h
orár
io[2
]N
os d
ois
sent
idos
4-11
Lim
ite in
ferio
r da
vel
ocid
ade
do m
otor
[RPM
]0
- 15
00 R
PM *
Rela
cion
ado
ao
tam
anho
4-12
Lim
ite In
ferio
r da
Vel
ocid
ade
do M
otor
[Hz]
0 -
400,
0 H
z *0
Hz
4-13
Lim
ite s
uper
ior
da v
eloc
idad
e do
mot
or [R
PM]
0 -
6000
0 RP
M *
Rela
cion
ado
ao
tam
anho
4-14
Lim
ite S
uper
ior
da V
eloc
idad
e do
Mot
or [H
z]0,
1 -
500
Hz
*65
Hz
4-16
Lim
ite d
e To
rque
do
Mod
o M
otor
0 -
1000
% *
Rela
cion
ado
ao
tam
anho
4-17
Lim
ite d
e To
rque
do
Mod
o G
erad
or0
- 10
00 %
*10
0 %
4-18
Lim
ite d
e Co
rren
te0
- 10
00 %
*Re
laci
onad
o a
o t
aman
ho4-
19Fr
equê
ncia
de
Saíd
a M
áx.
0 -
500
Hz
*Rel
acio
nado
ao
tam
anho
4-2*
Fato
res
de L
imite
4-20
Font
e Fa
tor
do L
imite
de
Torq
ue*[
0]Se
m fu
nção
[2]
Ent.a
naló
g53
[4]
Ent.a
nalg
.53
inv
[6]
Ent.a
naló
g54
[8]
Ent.a
nalg
.54
inv
4-21
Font
e Fa
tor
do L
imite
de
Velo
cida
de*[
0]Se
m fu
nção
[2]
Ent.a
naló
g53
[4]
Ent.a
nalg
.53
inv
[6]
Ent.a
naló
g54
[8]
Ent.a
nalg
.54
inv
4-22
Impu
lso
de
arra
nque
*[0]
Off
(Des
ligad
o)[1
]O
n4-
3*M
onito
r de
Fb
do
Mot
or4-
30Fu
nção
Per
da d
e Fe
edba
ck d
e M
otor
[0]
Dis
able
d (D
esat
ivad
o)[1
]Ad
vert
ênci
a*[
2]D
esar
me
[3]
Jog
[4]
Cong
elar
freq
uênc
ia d
e sa
ída
[5]
Velo
cida
de M
áx[6
]A
ltern
ar p
ara
Mal
ha A
bert
a4-
31Er
ro d
e Ve
loci
dade
de
Feed
back
de
Mot
or0
- 50
Hz
*20
Hz
4-32
Tim
eout
Per
da d
e Fe
edba
ck d
e M
otor
0 -
60 s
*0,
05 s
4-4*
Aj.
Adv
ertê
ncia
s 2
4-40
Adve
rtên
cia
de F
req.
Bai
xo0
- 50
0 H
z *R
elac
iona
do a
o t
aman
ho4-
41Ad
vert
ênci
a de
Fre
q. A
lto0
- 50
0 H
z *R
elac
iona
do a
o t
aman
ho4-
42Av
iso
de
tem
pera
tura
aju
stáv
el0
- 20
0 *0
4-5*
Aj.
Adv
ertê
ncia
s4-
50Ad
vert
ênci
a de
Cor
rent
e Ba
ixa
0 -
500
A *
0 A
4-51
Adve
rtên
cia
de C
orre
nte
Alta
0 -
500,
00 A
*Re
laci
onad
o a
o t
aman
ho4-
54Ad
vert
ênci
a de
Ref
erên
cia
Baix
a-4
999
- 49
99 *
-499
94-
55Ad
vert
ênci
a de
Ref
erên
cia
Alta
-499
9 -
4999
*49
994-
56Ad
vert
ênci
a de
Fee
dbac
k Ba
ixo
-499
9 -
4999
Uni
dCon
trPr
oces
*-4
999
Uni
dCon
trPr
oces
4-57
Adve
rtên
cia
de F
eedb
ack
Alto
-499
9 -
4999
Uni
dCon
trPr
oces
*49
99U
nidC
ontr
Proc
es4-
58Fu
nção
Fas
e Au
sent
e de
Mot
or[0
]O
ff (D
eslig
ado)
*[1]
On
4-6*
Bypa
ss d
e Ve
loci
dade
4-61
Bypa
ss d
e Ve
loci
dade
De
[Hz]
0 -
500
Hz
*0 H
z4-
63By
pass
de
Velo
cida
de A
té [H
z]0
- 50
0 H
z *0
Hz
5-**
Entr
ada/
Saíd
a D
igita
l5-
0*M
odo
E/S
Dig
ital
5-00
Mod
o E
ntra
da D
igita
l*[
0]PN
P[1
]N
PN
5-01
Mod
o d
o T
erm
inal
27
*[0]
Entr
ada
[1]
Saíd
a5-
1*En
trad
as D
igita
is5-
10Te
rmin
al 1
8 En
trad
a D
igita
l[0
]Se
m o
pera
ção
[1]
Rein
icia
lizar
[2]
Para
dp/in
érc,
reve
rso
[3]
Para
da p
or in
érci
a e
rein
icio
, inv
erso
[4]
Para
da r
ápid
a po
r in
érci
a in
vers
a[5
]Fr
eio
CC,
inve
rsão
[6]
Para
da p
or in
érci
a in
vers
a*[
8]Pa
rtid
a[9
]Pa
rtid
a po
r pu
lso
[10]
Reve
rsão
[11]
Part
ida
em re
vers
ão[1
2]A
tivar
par
tida
dire
ta[1
3]A
tivar
par
tida
reve
rsa
[14]
Jog
[15]
Refe
rênc
ia p
rede
finid
a on
(lig
ada)
[16]
Ref
pred
efini
da b
it 0
[17]
Ref.
pred
efini
da b
it 1
[18]
Refe
rênc
ia p
rede
finid
a bi
t 2
[19]
Cong
elar
refe
rênc
ia[2
0]Co
ngel
ar fr
equê
ncia
de
saíd
a[2
1]Ac
eler
ação
[22]
Des
acel
eraç
ão[2
3]Se
leçã
o d
o s
etup
bit
0[2
4]Se
leçã
o d
o s
etup
bit
1[2
6]Pa
rada
por
inér
cia
inve
rsa
prec
isa
[27]
Part
ida
prec
isa,
par
ada
[28]
Catc
h-up
[29]
Redu
ção
de
velo
cida
de[3
4]Bi
t 0
da r
ampa
[35]
Bit
1 da
ram
pa[4
0]Pa
rtid
a pr
ecis
a tr
avad
a[4
1]Pa
rad
inv
prec
pul
s[4
5]Pa
rtid
a re
vers
a po
r pu
lso
[51]
Bloq
ueio
ext
erno
[55]
Aum
ento
do
Dig
iPot
[56]
Dim
inui
ção
do
Dig
ipot
[57]
Lim
par
digi
pot
[58]
Içam
. Dig
iPot
[60]
Cont
ador
A (c
resc
)[6
1]Co
ntad
or A
(dec
resc
)[6
2]Re
set
Cont
ador
A[6
3]Co
ntad
or B
(cre
sc)
[64]
Cont
ador
B (d
ecre
sc)
[65]
Rein
icia
lizar
o c
onta
dor
B[7
2]Er
ro d
o P
ID in
v.[7
3]Re
inic
ializ
ação
do
PID
par
te-I
[74]
Ativ
o P
ID[1
50]
Vá p
ara
o in
ício
[151
]Re
f. do
iníc
io In
terr
upto
r[1
55]
Lim
ite P
ositi
vo H
W In
vers
o[1
56]
Lim
ite N
egat
ivo
HW
Inve
rso
[157
]Po
s. P
arad
a Rá
pida
Inve
rsa
[160
]Vá
par
a Po
siçã
o d
e D
estin
o[1
62]
Pos.
Idx
Bit0
[163
]Po
s. Id
x Bi
t1[1
64]
Pos.
Idx
Bit2
[171
]Li
mite
do
inte
rrup
tor
sent
ido
hor
ário
inve
rso
[172
]Li
mite
do
inte
rrup
tor
sent
ido
ant
i--h
orár
io in
vers
o5-
11Te
rmin
al 1
9 En
trad
a D
igita
lM
esm
as e
scol
has
com
5-1
05-
12Te
rmin
al 2
7 En
trad
a D
igita
l[0
]Se
m o
pera
ção
[1]
Rein
icia
lizar
[2]
Para
dp/in
érc,
reve
rso
[3]
Para
da p
or in
érci
a e
rein
icio
, inv
erso
[4]
Para
da r
ápid
a po
r in
érci
a in
vers
a[5
]Fr
eio
CC,
inve
rsão
[6]
Para
da p
or in
érci
a in
vers
a[8
]Pa
rtid
a[9
]Pa
rtid
a po
r pu
lso
[10]
Reve
rsão
[11]
Part
ida
em r
ever
são
[12]
Ativ
ar p
artid
a di
reta
[13]
Ativ
ar p
artid
a re
vers
a[1
4]Jo
g[1
5]Re
ferê
ncia
pre
defin
ida
on (l
igad
a)[1
6]Re
f pr
edefi
nida
bit
0[1
7]Re
f. pr
edefi
nida
bit
1[1
8]Re
ferê
ncia
pre
defin
ida
bit
2[1
9]Co
ngel
ar r
efer
ênci
a[2
0]Co
ngel
ar fr
equê
ncia
de
saíd
a[2
1]Ac
eler
ação
[22]
Des
acel
eraç
ão[2
3]Se
leçã
o d
o s
etup
bit
0[2
4]Se
leçã
o d
o s
etup
bit
1[2
8]Ca
tch-
up[2
9]Re
duçã
o d
e ve
loci
dade
[34]
Bit
0 da
ram
pa[3
5]Bi
t 1
da r
ampa
[45]
Part
ida
reve
rsa
por
puls
o[5
1]Bl
oque
io e
xter
no[5
5]Au
men
to d
o D
igiP
ot[5
6]D
imin
uiçã
o d
o D
igip
ot[5
7]Li
mpa
r di
gipo
t[5
8]Iç
am. D
igiP
ot[6
0]Co
ntad
or A
(cre
sc)
[61]
Cont
ador
A (d
ecre
sc)
[62]
Rese
t Co
ntad
or A
[63]
Cont
ador
B (c
resc
)[6
4]Co
ntad
or B
(dec
resc
)[6
5]Re
inic
ializ
ar o
con
tado
r B
[72]
Erro
do
PID
inv.
[73]
Rein
icia
lizaç
ão d
o P
ID p
arte
-I[7
4]A
tivo
PID
[150
]Vá
par
a o
iníc
io[1
51]
Ref.
do in
ício
Inte
rrup
tor
[155
]Li
mite
Pos
itivo
HW
Inve
rso
[156
]Li
mite
Neg
ativ
o H
W In
vers
o[1
57]
Pos.
Par
ada
Rápi
da In
vers
a[1
60]
Vá p
ara
Posi
ção
de
Des
tino
[162
]Po
s. Id
x Bi
t0
Apêndice VLT® Midi Drive FC 280
74 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
1010

[163
]Po
s. Id
x Bi
t1[1
64]
Pos.
Idx
Bit2
[171
]Li
mite
do
inte
rrup
tor
sent
ido
hor
ário
inve
rso
[172
]Li
mite
do
inte
rrup
tor
sent
ido
ant
i--h
orár
io in
vers
o5-
13Te
rmin
al 2
9 En
trad
a D
igita
lM
esm
as e
scol
has
com
5-1
2[3
0]En
trad
a do
con
tado
r[3
2]En
trad
a de
pul
so[8
3]En
trad
a do
enc
oder
Z5-
14Te
rmin
al 3
2 En
trad
a D
igita
lM
esm
as e
scol
has
com
5-1
2[8
2]En
trad
a do
enc
oder
B5-
15Te
rmin
al 3
3 En
trad
a D
igita
lM
esm
as e
scol
has
com
5-1
2[3
0]En
trad
a do
con
tado
r[3
2]En
trad
a de
pul
so[8
1]En
trad
a do
enc
oder
A5-
19Te
rmin
al 3
7/38
Saf
e To
rque
Off
*[1]
Ala
rme
de S
afe
Torq
ue O
ff[3
]Ad
vert
ênci
a de
Saf
e To
rque
Off
5-3*
Saíd
as D
igita
is5-
30Te
rmin
al 2
7 Sa
ída
Dig
ital
*[0]
Sem
ope
raçã
o[1
]Pl
aca
d C
ntrl
Pro
nta
[2]
Driv
e pr
onto
[3]
Conv
erso
r pr
onto
/con
trol
e re
m.
[4]
Em e
sper
a /
sem
adv
ertê
ncia
[5]
Em fu
ncio
nam
ento
[6]
Em fu
ncio
nam
ento
/ se
m a
dver
tênc
ia[7
]Fu
ncio
nam
ento
na
faix
a/se
mad
vert
ênci
a[8
]Fu
ncio
nam
ento
na
refe
rênc
ia/s
emad
vert
ênci
a[9
]A
larm
e[1
0]A
larm
e ou
adv
ertê
ncia
[11]
No
lim
ite d
e to
rque
[12]
Fora
da
faix
a de
cor
rent
e[1
3]A
baix
o d
a co
rren
te, b
aixa
[14]
Acim
a da
cor
rent
e, a
lta[1
5]Fo
ra d
a fa
ixa
de fr
equê
ncia
[16]
Aba
ixo
da
freq
uênc
ia, b
aixo
[17]
Acim
a da
freq
uênc
ia, a
lto[1
8]Fo
ra d
a fa
ixa
de fe
edba
ck[1
9]A
baix
o d
o fe
edba
ck, b
aixo
[20]
Acim
a do
feed
back
, alto
[21]
Adve
rtên
cia
térm
ica
[22]
Pron
to, s
em a
dver
tênc
ia t
érm
ica
[23]
Rem
oto,
pro
nto,
sem
adv
ertê
ncia
térm
ica
[24]
Pron
to, s
/ so
bre/
subt
ensã
o[2
5]Re
vers
ão[2
6]Ba
rram
ento
OK
[27]
Lim
ite d
e to
rque
e p
arad
a[2
8]Fr
eio,
sem
adv
ertê
ncia
de
frei
o[2
9]Fr
eio
pro
nto,
sem
falh
as[3
0]Fa
lha
de fr
eio
(IG
BT)
[31]
Relé
123
[32]
Cont
role
do
frei
o m
ecân
ico
[36]
Cont
rol w
ord
bit
11
[37]
Cont
rol w
ord
bit
12
[40]
Fora
da
faix
a de
refe
rênc
ia[4
1]A
baix
o d
a re
ferê
ncia
, bai
xa[4
2]Ac
ima
da re
ferê
ncia
, alta
[43]
Lim
ite E
sten
dido
do
PID
[45]
Cont
role
do
bar
ram
ento
[46]
Cont
role
do
bus
, tim
eout
: On
[47]
Cont
role
do
bus
, tim
eout
: Off
(Des
ligad
o)[5
5]Sa
ída
de p
ulso
[56]
Adve
rtên
cia
de li
mpe
za d
o d
issi
pado
rde
cal
or, a
lto[6
0]Co
mpa
rado
r 0
[61]
Com
para
dor
1[6
2]Co
mpa
rado
r 2
[63]
Com
para
dor
3[6
4]Co
mpa
rado
r 4
[65]
Com
para
dor
5[7
0]Re
gra
lógi
ca 0
[71]
Regr
a ló
gica
1[7
2]Re
gra
lógi
ca 2
[73]
Regr
a ló
gica
3[7
4]Re
gra
lógi
ca 4
[75]
Regr
a ló
gica
5[8
0]Sa
ída
digi
tl A
do
SLC
[81]
Saíd
a di
gita
l do
SL
B[8
2]Sa
ída
digi
tal d
o S
L C
[83]
Saíd
a di
gita
l do
SL
D[9
1]En
code
r si
mul
a sa
ída
A[1
60]
Sem
ala
rme
[161
]Ro
dand
o e
m re
vers
ão[1
65]
Refe
rênc
ia lo
cal a
tiva
[166
]Re
ferê
ncia
rem
ota
ativ
a[1
67]
Com
ando
de
part
ida
ativ
o[1
68]
Conv
erso
r em
mod
o m
anua
l[1
69]
Conv
erso
r em
mod
o a
utom
átic
o[1
70]
Hom
ing
con
cluí
do[1
71]
Posi
ção
do
des
tino
atin
gida
[172
]Fa
lha
do c
ontr
ole
de p
osiç
ão[1
73]
Posi
cion
e o
frei
o m
ecân
ico
[190
]Fu
nção
do
STO
ativ
a[1
93]
Slee
p M
ode
[194
]Fu
nção
Cor
reia
Par
tida
[239
]Fa
lha
da fu
nção
STO
5-34
On
Del
ay, S
aída
Dig
ital
0 -
600
s *0
,01
s5-
35O
ff D
elay
, Saí
da D
igita
l0
- 60
0 s
*0,0
1 s
5-4*
Relé
s5-
40Re
lé d
e Fu
nção
[0]
Sem
ope
raçã
o*[
1]Pl
aca
d C
ntrl
Pro
nta
[2]
Driv
e pr
onto
[3]
Conv
erso
r pr
onto
/con
trol
e re
m.
[4]
Em e
sper
a /
sem
adv
ertê
ncia
[5]
Em fu
ncio
nam
ento
[6]
Em fu
ncio
nam
ento
/ se
m a
dver
tênc
ia
[7]
Func
iona
men
to n
a fa
ixa/
sem
adve
rtên
cia
[8]
Func
iona
men
to n
a re
ferê
ncia
/sem
adve
rtên
cia
[9]
Ala
rme
[10]
Ala
rme
ou a
dver
tênc
ia[1
1]N
o li
mite
de
torq
ue[1
2]Fo
ra d
a fa
ixa
de c
orre
nte
[13]
Aba
ixo
da
corr
ente
, bai
xa[1
4]Ac
ima
da c
orre
nte,
alta
[15]
Fora
da
faix
a de
freq
uênc
ia[1
6]A
baix
o d
a fr
equê
ncia
, bai
xo[1
7]Ac
ima
da fr
equê
ncia
, alto
[18]
Fora
da
faix
a de
feed
back
[19]
Aba
ixo
do
feed
back
, bai
xo[2
0]Ac
ima
do fe
edba
ck, a
lto[2
1]Ad
vert
ênci
a té
rmic
a[2
2]Pr
onto
, sem
adv
ertê
ncia
tér
mic
a[2
3]Re
mot
o, p
ront
o, s
em a
dver
tênc
iaté
rmic
a[2
4]Pr
onto
, s/
sobr
e/su
bten
são
[25]
Reve
rsão
[26]
Barr
amen
to O
K[2
7]Li
mite
de
torq
ue e
par
ada
[28]
Frei
o, s
em a
dver
tênc
ia d
e fr
eio
[29]
Frei
o p
ront
o, s
em fa
lhas
[30]
Falh
a de
frei
o (I
GBT
)[3
1]Re
lé 1
23[3
2]Co
ntro
le d
o fr
eio
mec
ânic
o[3
6]Co
ntro
l wor
d b
it 1
1[3
7]Co
ntro
l wor
d b
it 1
2[4
0]Fo
ra d
a fa
ixa
de re
ferê
ncia
[41]
Aba
ixo
da
refe
rênc
ia, b
aixa
[42]
Acim
a da
refe
rênc
ia, a
lta[4
5]Co
ntro
le d
o b
arra
men
to[4
6]Co
ntro
le d
o b
us, t
imeo
ut: O
n[4
7]Co
ntro
le d
o b
us, t
imeo
ut: O
ff(D
eslig
ado)
[56]
Adve
rtên
cia
de li
mpe
za d
o d
issi
pado
rde
cal
or, a
lto[6
0]Co
mpa
rado
r 0
[61]
Com
para
dor
1[6
2]Co
mpa
rado
r 2
[63]
Com
para
dor
3[6
4]Co
mpa
rado
r 4
[65]
Com
para
dor
5[7
0]Re
gra
lógi
ca 0
[71]
Regr
a ló
gica
1[7
2]Re
gra
lógi
ca 2
[73]
Regr
a ló
gica
3[7
4]Re
gra
lógi
ca 4
[75]
Regr
a ló
gica
5[8
0]Sa
ída
digi
tl A
do
SLC
[81]
Saíd
a di
gita
l do
SL
B[8
2]Sa
ída
digi
tal d
o S
L C
[83]
Saíd
a di
gita
l do
SL
D[1
60]
Sem
ala
rme
[161
]Ro
dand
o e
m re
vers
ão[1
65]
Refe
rênc
ia lo
cal a
tiva
[166
]Re
ferê
ncia
rem
ota
ativ
a[1
67]
Com
ando
de
part
ida
ativ
o[1
68]
Conv
erso
r em
mod
o m
anua
l[1
69]
Conv
erso
r em
mod
o a
utom
átic
o[1
70]
Hom
ing
con
cluí
do[1
71]
Posi
ção
do
des
tino
atin
gida
[172
]Fa
lha
do c
ontr
ole
de p
osiç
ão[1
73]
Posi
cion
e o
frei
o m
ecân
ico
[190
]Fu
nção
do
STO
ativ
a[1
93]
Slee
p M
ode
[194
]Fu
nção
Cor
reia
Par
tida
[239
]Fa
lha
da fu
nção
STO
5-41
Atr
aso
de
Ativ
ação
do
Rel
é0
- 60
0 s
*0,0
1 s
5-42
Atr
aso
de
desl
igam
ento
, rel
é0
- 60
0 s
*0,0
1 s
5-5*
Entr
ada
de P
ulso
5-50
Term
. 29
Baix
a Fr
equê
ncia
0 -
3199
9 H
z *4
Hz
5-51
Term
. 29
Alta
Fre
quên
cia
1 -
3200
0 H
z *3
2000
Hz
5-52
Term
. 29
Ref./
Feed
back
Bai
xo V
alor
-499
9 -
4999
*0
5-53
Term
. 29
Ref./
Feed
back
Alto
Val
or-4
999
- 49
99 *
Rela
cion
ado
ao
tam
anho
5-55
Term
. 33
Baix
a Fr
equê
ncia
0 -
3199
9 H
z *4
Hz
5-56
Term
. 33
Alta
Fre
quên
cia
1 -
3200
0 H
z *3
2000
Hz
5-57
Term
. 33
Ref./
Feed
back
Bai
xo V
alor
-499
9 -
4999
*0
5-58
Term
. 33
Ref./
Feed
back
Alto
Val
or-4
999
- 49
99 *
Rela
cion
ado
ao
tam
anho
5-6*
Saíd
a de
Pul
so5-
60Te
rmin
al 2
7 Va
riáve
l da
Saíd
a de
Pul
so*[
0]Se
m o
pera
ção
[45]
Cont
role
do
bar
ram
ento
[48]
Cont
role
do
bar
ram
ento
, tim
eout
[100
]Fr
equê
ncia
de
saíd
a[1
01]
Refe
rênc
ia[1
02]
Feed
back
do
pro
cess
o[1
03]
Corr
ente
do
Mot
or[1
04]
Torq
ue re
lativ
o a
o li
mite
[105
]To
rque
rela
tivo
ao
nom
inal
[106
]Po
tênc
ia[1
07]
Velo
cida
de[1
09]
Freq
uênc
ia m
áxim
a de
saí
da[1
13]
Saíd
a da
bra
çade
ira d
o P
ID5-
62Fr
eq M
áx d
a Sa
ída
de P
ulso
nº
274
- 32
000
Hz
*500
0 H
z5-
7*En
trad
a do
Enc
oder
24
V5-
70Te
rm 3
2/33
Pul
sos
Por
Revo
luçã
o1
- 40
96 *
1024
5-71
Term
32/
33 S
entid
o d
o E
ncod
er*[
0]Se
ntid
o h
orár
io[1
]Se
ntid
o a
nti-h
orár
io5-
9*Co
ntro
lado
por
Bus
5-90
Cont
role
do
bus
dig
ital e
do
relé
0 -
0xFF
FFFF
FF *
0
5-93
Cont
role
do
Bus
da
Saíd
a de
Pul
so 2
70
- 10
0 %
*0
%5-
94Ti
meo
ut P
rede
finid
o d
a Sa
ída
de P
ulso
nº 2
70
- 10
0 %
*0
%6-
**En
trad
a/Sa
ída
Ana
lógi
ca6-
0*M
odo
E/S
Ana
lógi
ca6-
00Ti
meo
ut d
o L
ive
Zero
1 -
99 s
*10
s6-
01Fu
nção
Tim
eout
do
Liv
e Ze
ro*[
0]O
ff (D
eslig
ado)
[1]
Cong
elar
freq
uênc
ia d
e sa
ída
[2]
Para
da[3
]Jo
ggin
g[4
]Ve
loci
dade
máx
ima
[5]
Para
da e
des
arm
e6-
1*En
trad
a an
alóg
ica
536-
10Te
rmin
al 5
3 Ba
ixa
Tens
ão0
- 10
V *
0,07
V6-
11Te
rmin
al 5
3 A
lta T
ensã
o0
- 10
V *
10 V
6-14
Term
inal
53
Ref./
Feed
back
Bai
xo V
alor
-499
9 -
4999
*0
6-15
Term
inal
53
Ref./
Feed
back
Alto
Val
or-4
999
- 49
99 *
Rela
cion
ado
ao
tam
anho
6-16
Term
inal
53
Cons
tant
e de
Tem
po d
oFi
ltro
0,01
- 1
0 s
*0,0
1 s
6-18
Term
inal
53
Entr
ada
Dig
ital
*[0]
Sem
ope
raçã
o[1
]Re
inic
ializ
ar[2
]Pa
radp
/inér
c,re
vers
o[3
]Pa
rada
por
inér
cia
e re
inic
io, i
nver
so[4
]Pa
rada
ráp
ida
por
inér
cia
inve
rsa
[5]
Frei
o C
C, in
vers
ão[6
]Pa
rada
por
inér
cia
inve
rsa
[8]
Part
ida
[10]
Reve
rsão
[11]
Part
ida
em re
vers
ão[1
2]A
tivar
par
tida
dire
ta[1
3]A
tivar
par
tida
reve
rsa
[14]
Jog
[15]
Refe
rênc
ia p
rede
finid
a on
(lig
ada)
[16]
Ref
pred
efini
da b
it 0
[17]
Ref.
pred
efini
da b
it 1
[18]
Refe
rênc
ia p
rede
finid
a bi
t 2
[19]
Cong
elar
refe
rênc
ia[2
0]Co
ngel
ar fr
equê
ncia
de
saíd
a[2
1]Ac
eler
ação
[22]
Des
acel
eraç
ão[2
3]Se
leçã
o d
o s
etup
bit
0[2
4]Se
leçã
o d
o s
etup
bit
1[2
8]Ca
tch-
up[2
9]Re
duçã
o d
e ve
loci
dade
[34]
Bit
0 da
ram
pa[3
5]Bi
t 1
da r
ampa
[51]
Bloq
ueio
ext
erno
[55]
Aum
ento
do
Dig
iPot
[56]
Dim
inui
ção
do
Dig
ipot
Apêndice Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 75
10 10

[57]
Lim
par
digi
pot
[58]
Içam
. Dig
iPot
[72]
Erro
do
PID
inv.
[73]
Rein
icia
lizaç
ão d
o P
ID p
arte
-I[7
4]A
tivo
PID
[150
]Vá
par
a o
iníc
io[1
51]
Ref.
do in
ício
Inte
rrup
tor
[155
]Li
mite
Pos
itivo
HW
Inve
rso
[156
]Li
mite
Neg
ativ
o H
W In
vers
o[1
57]
Pos.
Par
ada
Rápi
da In
vers
a[1
60]
Vá p
ara
Posi
ção
de
Des
tino
[162
]Po
s. Id
x Bi
t0[1
63]
Pos.
Idx
Bit1
[164
]Po
s. Id
x Bi
t2[1
71]
Lim
ite d
o in
terr
upto
r se
ntid
o h
orár
ioin
vers
o[1
72]
Lim
ite d
o in
terr
upto
r se
ntid
o a
nti-
-hor
ário
inve
rso
6-19
Mod
o d
o t
erm
inal
53
*[1]
Mod
o d
e te
nsão
[6]
Entr
ada
digi
tal
6-2*
Entr
ada
anal
ógic
a 54
6-20
Term
inal
54
Baix
a Te
nsão
0 -
10 V
*0,
07 V
6-21
Term
inal
54
Alta
Ten
são
0 -
10 V
*10
V6-
22Te
rmin
al 5
4 Co
rren
te B
aixa
0 -
20 m
A *
4 m
A6-
23Te
rmin
al 5
4 Co
rren
te A
lta0
- 20
mA
*20
mA
6-24
Term
inal
54
Ref./
Feed
back
Bai
xo V
alor
-499
9 -
4999
*0
6-25
Term
inal
54
Ref./
Feed
back
Alto
Val
or-4
999
- 49
99 *
Rela
cion
ado
ao
tam
anho
6-26
Term
inal
54
Cons
tant
e de
Tem
po d
oFi
ltro
0,01
- 1
0 s
*0,0
1 s
6-29
Mod
o d
o t
erm
inal
54
[0]
Mod
o d
e co
rren
te*[
1]M
odo
de
tens
ão6-
9*Sa
ída
Ana
lógi
ca/D
igita
l 42
6-90
Mod
o d
o T
erm
inal
42
*[0]
0-20
mA
[1]
4-20
mA
[2]
Saíd
a D
igita
l6-
91Te
rmin
al 4
2 Sa
ída
Ana
lógi
ca*[
0]Se
m o
pera
ção
[100
]Fr
equê
ncia
de
saíd
a[1
01]
Refe
rênc
ia[1
02]
Feed
back
do
Pro
cess
o[1
03]
Corr
ente
do
Mot
or[1
04]
Torq
ue r
elat
ivo
ao
lim
ite[1
05]
Torq
ue r
elat
ivo
ao
nom
inal
[106
]Po
tênc
ia[1
07]
Velo
cida
de[1
11]
Feed
back
de
Velo
cida
de[1
13]
Saíd
a da
bra
çade
ira d
o P
ID[1
39]
Ctrl.
bus
[143
]Ex
t. C
L 1
[254
]Te
nsão
do
Bar
ram
ento
CC
6-92
Term
inal
42
Saíd
a D
igita
l*[
0]Se
m o
pera
ção
[1]
Plac
a d
Cnt
rl P
ront
a[2
]D
rive
pron
to[3
]Co
nver
sor
pron
to/c
ontr
ole
rem
.[4
]Em
esp
era
/ se
m a
dver
tênc
ia[5
]Em
func
iona
men
to[6
]Em
func
iona
men
to/
sem
adv
ertê
ncia
[7]
Func
iona
men
to n
a fa
ixa/
sem
adve
rtên
cia
[8]
Func
iona
men
to n
a re
ferê
ncia
/sem
adve
rtên
cia
[9]
Ala
rme
[10]
Ala
rme
ou a
dver
tênc
ia[1
1]N
o li
mite
de
torq
ue[1
2]Fo
ra d
a fa
ixa
de c
orre
nte
[13]
Aba
ixo
da
corr
ente
, bai
xa[1
4]Ac
ima
da c
orre
nte,
alta
[15]
Fora
da
faix
a de
freq
uênc
ia[1
6]A
baix
o d
a fr
equê
ncia
, bai
xo[1
7]Ac
ima
da fr
equê
ncia
, alto
[18]
Fora
da
faix
a de
feed
back
[19]
Aba
ixo
do
feed
back
, bai
xo[2
0]Ac
ima
do fe
edba
ck, a
lto[2
1]Ad
vert
ênci
a té
rmic
a[2
2]Pr
onto
, sem
adv
ertê
ncia
tér
mic
a[2
3]Re
mot
o, p
ront
o, s
em a
dver
tênc
iaté
rmic
a[2
4]Pr
onto
, s/
sobr
e/su
bten
são
[25]
Reve
rsão
[26]
Barr
amen
to O
K[2
7]Li
mite
de
torq
ue e
par
ada
[28]
Frei
o, s
em a
dver
tênc
ia d
e fr
eio
[29]
Frei
o p
ront
o, s
em fa
lhas
[30]
Falh
a de
frei
o (I
GBT
)[3
1]Re
lé 1
23[3
2]Co
ntro
le d
o fr
eio
mec
ânic
o[3
6]Co
ntro
l wor
d b
it 1
1[3
7]Co
ntro
l wor
d b
it 1
2[4
0]Fo
ra d
a fa
ixa
de re
ferê
ncia
[41]
Aba
ixo
da
refe
rênc
ia, b
aixa
[42]
Acim
a da
refe
rênc
ia, a
lta[4
5]Co
ntro
le d
o b
arra
men
to[4
6]Co
ntro
le d
o b
us, t
imeo
ut: O
n[4
7]Co
ntro
le d
o b
us, t
imeo
ut: O
ff(D
eslig
ado)
[56]
Adve
rtên
cia
de li
mpe
za d
o d
issi
pado
rde
cal
or, a
lto[6
0]Co
mpa
rado
r 0
[61]
Com
para
dor
1[6
2]Co
mpa
rado
r 2
[63]
Com
para
dor
3[6
4]Co
mpa
rado
r 4
[65]
Com
para
dor
5[7
0]Re
gra
lógi
ca 0
[71]
Regr
a ló
gica
1[7
2]Re
gra
lógi
ca 2
[73]
Regr
a ló
gica
3
[74]
Regr
a ló
gica
4[7
5]Re
gra
lógi
ca 5
[80]
Saíd
a di
gitl
A d
o S
LC[8
1]Sa
ída
digi
tal d
o S
L B
[82]
Saíd
a di
gita
l do
SL
C[8
3]Sa
ída
digi
tal d
o S
L D
[160
]Se
m a
larm
e[1
61]
Roda
ndo
em
reve
rsão
[165
]Re
ferê
ncia
loca
l ativ
a[1
66]
Refe
rênc
ia r
emot
a at
iva
[167
]Co
man
do d
e pa
rtid
a at
ivo
[168
]Co
nver
sor
em m
odo
man
ual
[169
]Co
nver
sor
em m
odo
aut
omát
ico
[170
]H
omin
g c
oncl
uído
[171
]Po
siçã
o d
o d
estin
o a
tingi
da[1
72]
Falh
a do
con
trol
e de
pos
ição
[173
]Po
sici
one
o fr
eio
mec
ânic
o[1
93]
Slee
p M
ode
[194
]Fu
nção
Cor
reia
Par
tida
[198
]By
pass
do
Driv
e6-
93Te
rmin
al 4
2 Es
cala
Mín
ima
de S
aída
0 -
200
% *
0 %
6-94
Term
inal
42
Esca
la M
áxim
a de
Saí
da0
- 20
0 %
*10
0 %
6-96
Term
inal
42
Cont
role
de
Saíd
a do
Bus
0 -
1638
4 *0
7-**
Cont
rola
dore
s7-
0*Ct
rl. d
o P
ID d
e Ve
loci
dade
7-00
Font
e do
Fee
dbac
k do
PID
de
Velo
cida
de[1
]En
code
r de
24
V[6
]En
trad
a an
alóg
ica
53[7
]En
trad
a an
alóg
ica
54[8
]En
trad
a de
freq
uênc
ia 2
9[9
]En
trad
a de
freq
uênc
ia 3
3*[
20]
Nen
hum
7-02
Gan
ho P
ropo
rcio
nal n
o P
ID d
eVe
loci
dade
0 -
1 *0
,015
7-03
Tem
po In
tegr
ado
do
PID
de
Velo
cida
de2
- 20
000
ms
*8 m
s7-
04Te
mpo
de
Dife
renc
iaçã
o d
o P
ID d
eVe
loci
dade
0 -
200
ms
*30
ms
7-05
Dife
renc
iaçã
o d
o P
ID d
e ve
loci
dade
Lim
ite d
e G
anho
1 -
20 *
57-
06Pe
ríodo
do
Filt
ro P
assa
Bai
xa d
o P
IDde
Vel
ocid
ade
1 -
6000
ms
*10
ms
7-07
Rela
ção
de
Engr
enag
em d
o F
eedb
ack
do P
ID d
e Ve
loci
dade
0,00
01 -
32
*17-
08Fa
tor
de fe
ed fo
rwar
d d
o P
ID d
eve
loci
dade
0 -
500
% *
0 %
7-1*
Ctrl.
do
PID
de
Torq
ue7-
12G
anho
Pro
porc
iona
l do
PID
de
Torq
ue0
- 50
0 %
*10
0 %
7-13
Tem
po d
e In
tegr
ação
do
PID
de
Torq
ue0,
002
- 2
s *0
,020
s7-
2*Pr
oces
s Ct
rl. F
eedb
7-20
Recu
rso
de
Feed
back
do
CL
dePr
oces
so 1
*[0]
Sem
funç
ão[1
]En
trad
a an
alóg
ica
53[2
]En
trad
a an
alóg
ica
54[3
]En
trad
a de
freq
uênc
ia 2
9[4
]En
trad
a de
freq
uênc
ia 3
37-
22Re
curs
o d
e Fe
edba
ck d
o C
L de
Proc
esso
2*[
0]Se
m fu
nção
[1]
Entr
ada
anal
ógic
a 53
[2]
Entr
ada
anal
ógic
a 54
[3]
Entr
ada
de fr
equê
ncia
29
[4]
Entr
ada
de fr
equê
ncia
33
7-3*
Cont
role
PID
de
proc
esso
7-30
Cont
role
Nor
mal
/Inve
rsão
do
PID
de
Proc
esso
*[0]
Nor
mal
[1]
Inve
rso
7-31
Ant
i Win
dup
do
PID
do
Pro
cess
o[0
]O
ff (D
eslig
ado)
*[1]
On
7-32
Velo
cida
de In
icia
l do
PID
do
Pro
cess
o0
- 60
00 R
PM *
0 RP
M7-
33G
anho
Pro
porc
iona
l do
PID
de
Proc
esso
0 -
10 *
0,01
7-34
Tem
po d
e In
tegr
ação
do
PID
de
Proc
esso
0,10
- 9
999
s *9
999
s7-
35Te
mpo
do
Dife
renc
ial d
o P
ID d
ePr
oces
so0
- 20
s *
0 s
7-36
Dif.
do
PID
de
Proc
esso
Lim
ite d
eG
anho
1 -
50 *
57-
38Fa
tor
de F
eed
For
war
d d
o P
ID d
ePr
oces
so0
- 20
0 %
*0
%7-
39La
rgur
a de
ban
da n
a re
ferê
ncia
0 -
200
% *
5 %
7-4*
Avan
çado
PID
de
proc
esso
I7-
40Re
inic
ializ
ar a
par
te I
do P
ID d
epr
oces
so*[
0]N
ão[1
]Si
m7-
41PI
D d
e Pr
oces
so S
aída
Neg
. Bra
çade
ira-1
00 -
100
% *
-100
%7-
42PI
D d
e pr
oces
so S
aída
Pos
. Bra
çade
ira-1
00 -
100
% *
100
%7-
43Es
cala
de
Gan
ho d
o P
ID d
e Pr
oces
soem
Ref
. Mín
ima
0 -
100
% *
100
%7-
44Es
cala
de
Gan
ho d
o P
ID d
e Pr
oces
soem
Ref
. Máx
.
0 -
100
% *
100
%7-
45Pr
oces
s PI
D F
eed
Fw
d R
esou
rce
*[0]
Sem
funç
ão[1
]En
trad
a an
alóg
ica
53[2
]En
trad
a an
alóg
ica
54[7
]En
trad
a de
freq
uênc
ia 2
9[8
]En
trad
a de
freq
uênc
ia 3
3[1
1]Re
ferê
ncia
do
bar
ram
ento
loca
l[3
2]Ba
rram
ento
PCD
7-46
Proc
ess
PID
Fee
d F
wd
Nor
mal
/ In
v.Ct
rl.*[
0]N
orm
al[1
]In
vers
o7-
48Fe
ed F
orw
ard
do
PCD
0 -
6553
5 *0
7-49
Saíd
a N
orm
al/In
v. d
o P
ID d
e Pr
oces
soCt
rl.*[
0]N
orm
al[1
]In
vers
o7-
5*Av
ança
do P
ID d
e pr
oces
so II
7-50
PID
est
endi
do d
o P
ID d
e pr
oces
so[0
]D
isab
led
(Des
ativ
ado)
*[1]
Ativ
ado
7-51
Proc
ess
PID
Fee
d F
wd
Gai
n0
- 10
0 *1
7-52
Acel
eraç
ão d
o P
roce
ss P
ID F
eed
Fw
d0,
01 -
100
s *
0,01
s7-
53D
esac
eler
ação
do
Pro
cess
PID
Fee
dFw
d0,
01 -
100
s *
0,01
s7-
56Re
f. do
PID
de
Proc
esso
Tem
po d
oFi
ltro
0,00
1 -
1 s
*0,0
01 s
7-57
Fb. d
o P
ID d
e Pr
oces
so T
empo
do
Filtr
o0,
001
- 1
s *0
,001
s7-
6*Co
nver
são
de
Feed
back
7-60
Conv
ersã
o d
e Fe
edba
ck 1
*[0]
Line
ar[1
]Ra
iz q
uadr
ada
7-62
Conv
ersã
o d
e Fe
edba
ck 2
*[0]
Line
ar[1
]Ra
iz q
uadr
ada
8-**
Com
. e O
pcio
nais
8-0*
Confi
gura
ções
Ger
ais
8-01
Tipo
de
Cont
role
*[0]
Dig
ital e
con
trol
wrd
[1]
Som
ente
dig
ital
[2]
Som
ente
con
trol
wor
d8-
02O
rigem
do
Con
trol
e[0
]N
enhu
m[1
]Po
rta
FC[2
]U
SB d
o F
C[3
]O
pcio
nal A
8-03
Tem
po d
e Ti
meo
ut d
e Co
ntro
le0,
5 -
6000
s *
1 s
8-04
Funç
ão T
imeo
ut d
e Co
ntro
le*[
0]O
ff (D
eslig
ado)
[1]
Cong
elar
freq
uênc
ia d
e sa
ída
Apêndice VLT® Midi Drive FC 280
76 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
1010

[2]
Para
da[3
]Jo
ggin
g[4
]Ve
loci
dade
máx
ima
[5]
Para
da e
des
arm
e8-
07Ac
iona
dor
de D
iagn
óstic
o*[
0]In
ativ
o[1
]D
ispa
rar
em a
larm
es[2
]D
ispa
rar
alar
me/
adve
rtên
cia
8-1*
Ctrl.
Con
figur
açõe
s da
Wor
d8-
10Pe
rfil d
a Co
ntro
l Wor
d*[
0]Pe
rfil d
o F
C[1
]Pe
rfil d
o P
ROFI
driv
e[5
]O
DVA
[7]
CAN
open
DSP
402
8-13
Stat
us w
ord
STW
con
figur
ável
[0]
Sem
funç
ão*[
1]Pa
drão
do
per
fil[2
]So
men
te A
larm
e 68
[3]
Des
arm
e ex
cl. A
larm
e 68
[10]
T18
Stat
us d
a D
I[1
1]T1
9 St
atus
da
DI
[12]
T27
Stat
us d
a D
I[1
3]T2
9 St
atus
da
DI
[14]
T32
Stat
us d
a D
I[1
5]T3
3 St
atus
da
DI
[21]
Adve
rtên
cia
térm
ica
[30]
Falh
a de
frei
o (I
GBT
)[4
0]Fo
ra d
a fa
ixa
de re
ferê
ncia
[60]
Com
para
dor
0[6
1]Co
mpa
rado
r 1
[62]
Com
para
dor
2[6
3]Co
mpa
rado
r 3
[64]
Com
para
dor
4[6
5]Co
mpa
rado
r 5
[70]
Regr
a ló
gica
0[7
1]Re
gra
lógi
ca 1
[72]
Regr
a ló
gica
2[7
3]Re
gra
lógi
ca 3
[74]
Regr
a ló
gica
4[7
5]Re
gra
lógi
ca 5
[80]
Saíd
a di
gita
l A d
o S
L[8
1]Sa
ída
digi
tal B
do
SL
[82]
Saíd
a di
gita
l C d
o S
L[8
3]Sa
ída
digi
tal D
do
SL
[93]
Ala
rme6
8 ou
Ala
rme1
888-
14C
TW C
onfig
uráv
el d
a Co
ntro
l Wor
d[0
]N
enhu
m*[
1]Pa
drão
do
per
fil[2
]C
TW v
álid
a, a
tiva
baix
a[4
]Er
ro d
o P
ID in
v.[5
]Re
inic
ializ
ação
do
PID
par
te-I
[6]
Ativ
o P
ID8-
19Có
digo
do
Pro
duto
0 -
2147
4836
47 *
Rela
cion
ado
ao
tam
anho
8-3*
Confi
gura
ções
da
Port
a do
FC
8-30
Prot
ocol
o*[
0]FC
[2]
Mod
bus
RTU
8-31
Ende
reço
0,0
- 24
7 *1
8-32
Baud
Rat
e[0
]24
00 B
aud
[1]
4800
Bau
d[2
]96
00 B
aud
[3]
1920
0 Ba
ud[4
]38
400
Baud
[5]
5760
0 Ba
ud[6
]76
800
Baud
[7]
1152
00 B
aud
8-33
Bits
de
Para
da /
Par
idad
e[0
]Pa
ridad
e Pa
r, 1
Bit
de P
arad
a[1
]Pa
ridad
e Ím
par,
1 Bi
t de
Par
ada
[2]
Sem
Par
idad
e, 1
Bit
de
Para
da[3
]Se
m P
arid
ade,
2 B
its d
e Pa
rada
8-35
Atr
aso
de
Resp
osta
Mín
imo
0,00
10 -
0,5
s *
0,01
s8-
36A
tras
o d
e Re
spos
ta M
ínim
o0,
1 -
10,0
s *
Rela
cion
ado
ao
tam
anho
8-4*
Defi
niçã
o d
e pr
otoc
olo
FC
MC
8-42
Confi
gura
ção
de
Gra
vaçã
o d
o P
CD[0
]N
enhu
m[1
][3
02]
Refe
rênc
ia M
ínim
a[2
][3
03]
Refe
rênc
ia M
áxim
a[3
][3
41]
Tem
po d
e ac
eler
ação
da
Ram
pa1
[4]
[342
] Te
mpo
de
desa
cele
raçã
o d
aRa
mpa
1[5
][3
51]
Tem
po d
e ac
eler
ação
da
Ram
pa2
[6]
[352
] Te
mpo
de
desa
cele
raçã
o d
aRa
mpa
2[7
][3
80]
Tem
po d
e Ra
mpa
do
Jog
[8]
[381
] Te
mpo
de
Para
da R
ápid
a[9
][4
12]
Lim
ite In
ferio
r da
Vel
ocid
ade
doM
otor
[Hz]
[10]
[414
] Li
mite
Sup
erio
r da
Vel
ocid
ade
doM
otor
[Hz]
[11]
[590
] Co
ntro
le d
o b
us d
igita
l e d
o re
lé[1
2][6
76]
Term
inal
45
Cont
role
do
barr
amen
to d
e sa
ída
[13]
[696
] Te
rmin
al 4
2 Co
ntro
le d
e Sa
ída
doBu
s[1
5]C
TW d
a Po
rta
do F
C[1
6]RE
F da
Por
ta d
o F
C8-
43Co
nfigu
raçã
o d
e Le
itura
do
PCD
[0]
Nen
hum
[1]
[150
0] H
oras
de
oper
ação
[2]
[150
1] H
oras
de
Func
iona
men
to[3
][1
502]
Med
idor
de
kWh
[4]
[160
0] C
ontr
ol W
ord
[5]
[160
1] R
efer
ênci
a [U
nida
de]
[6]
[160
2] R
efer
ênci
a %
[7]
[160
3] S
tatu
s W
ord
[8]
[160
5] V
alor
Rea
l Prin
cipa
l [%
][9
][1
609]
Lei
tura
Per
sona
lizad
a[1
0][1
610]
Pot
ênci
a [k
W]
[11]
[161
1] P
otên
cia
[hp]
[12]
[161
2] T
ensã
o d
o M
otor
[13]
[161
3] F
reqü
ênci
a[1
4][1
614]
Cor
rent
e do
Mot
or[1
5][1
615]
Fre
quên
cia
[%]
[16]
[161
6] T
orqu
e [N
m]
[17]
[161
8] T
érm
ico
Cal
cula
do d
o M
otor
[18]
[163
0] T
ensã
o d
o B
arra
men
to C
C[1
9][1
634]
Tem
pera
tura
do
Dis
sipa
dor
deCa
lor
[20]
[163
5] T
érm
ico
do
Inve
rsor
[21]
[163
8] E
stad
o d
o C
ontr
olad
or d
o S
L[2
2][1
650]
Ref
erên
cia
Exte
rna
[23]
[165
2] F
eedb
ack
[Uni
t][2
4][1
660]
Ent
rada
Dig
ital 1
8,19
, 27,
33[2
5][1
661]
Con
figur
ação
do
Cha
veam
ento
do T
erm
inal
53
[26]
[166
2] E
ntra
da a
naló
gica
53
[27]
[166
3] C
onfig
uraç
ão d
o C
have
amen
todo
Ter
min
al 5
4[2
8][1
664]
Ent
rada
ana
lógi
ca 5
4[2
9][1
665]
Saí
da a
naló
gica
42
[mA
][3
0][1
671]
Saí
da d
o re
lé[3
1][1
672]
Con
tado
r A
[32]
[167
3] C
onta
dor
B[3
3][1
690]
Ala
rm W
ord
[34]
[169
2] W
arni
ng W
ord
[35]
[169
4] E
xt. S
tatu
s W
ord
8-5*
Dig
ital/B
us8-
50Se
leci
onar
par
ada
por
inér
cia
[0]
Entr
ada
digi
tal
[1]
Barr
amen
to[2
]Ló
gica
AN
D (E
)*[
3]Ló
gica
OR
(OU
)8-
51Se
leci
onar
Par
ada
Rápi
da[0
]En
trad
a di
gita
l[1
]Ba
rram
ento
[2]
Lógi
ca A
ND
(E)
*[3]
Lógi
ca O
R (O
U)
8-52
Sele
cion
ar F
reio
CC
[0]
Entr
ada
digi
tal
[1]
Barr
amen
to[2
]Ló
gica
AN
D (E
)*[
3]Ló
gica
OR
(OU
)8-
53Se
leci
onar
Par
tida
[0]
Entr
ada
digi
tal
[1]
Barr
amen
to[2
]Ló
gica
AN
D (E
)*[
3]Ló
gica
OR
(OU
)8-
54Se
leci
onar
Rev
ersã
o[0
]En
trad
a di
gita
l[1
]Ba
rram
ento
[2]
Lógi
ca A
ND
(E)
*[3]
Lógi
ca O
R (O
U)
8-55
Sele
cion
ar S
etup
[0]
Entr
ada
digi
tal
[1]
Barr
amen
to[2
]Ló
gica
AN
D (E
)*[
3]Ló
gica
OR
(OU
)8-
56Se
leci
onar
Ref
erên
cia
Pred
efini
da
[0]
Entr
ada
digi
tal
[1]
Barr
amen
to[2
]Ló
gica
AN
D (E
)*[
3]Ló
gica
OR
(OU
)8-
57Se
leci
onar
Pro
fidriv
e O
FF2
[0]
Entr
ada
digi
tal
[1]
Barr
amen
to[2
]Ló
gica
AN
D (E
)*[
3]Ló
gica
OR
(OU
)8-
58Se
leci
onar
Pro
fidriv
e O
FF3
[0]
Entr
ada
digi
tal
[1]
Barr
amen
to[2
]Ló
gica
AN
D (E
)*[
3]Ló
gica
OR
(OU
)8-
7*Ve
rsão
do
SW
de
Prot
ocol
o8-
79Ve
rsão
do
firm
war
e do
pro
toco
lo0
- 65
5 *R
elac
iona
do a
o t
aman
ho8-
8*D
iagn
óstic
o d
a Po
rta
do F
C8-
80Co
ntad
or d
e M
ensa
gens
do
Bus
0 -
4294
9672
95 *
08-
81Co
ntad
or d
e Er
ros
do B
us0
- 42
9496
7295
*0
8-82
Men
sage
ns d
o E
scra
vo R
eceb
idas
0 -
4294
9672
95 *
08-
83Co
ntad
or d
e Er
ros
do E
scra
vo0
- 42
9496
7295
*0
8-84
Men
sage
ns E
nvia
das
ao E
scra
vo0
- 42
9496
7295
*0
8-85
Erro
s de
Tim
eout
do
Esc
ravo
0 -
4294
9672
95 *
08-
88Re
inic
ializ
ar D
iagn
óstic
o d
a Po
rta
doFC
*[0]
Não
rei
nici
aliz
ar[1
]Re
set
cont
ador
8-9*
Feed
back
do
Bar
ram
ento
8-90
Velo
cida
de d
o J
og d
o B
us 1
0 -
1500
RPM
*10
0 RP
M8-
91Ve
loci
dade
do
Jog
do
Bus
20
- 15
00 R
PM *
200
RPM
9-**
PRO
FIdr
ive
9-00
Setp
oint
0 -
6553
5 *0
9-07
Valo
r Re
al0
- 65
535
*09-
15Co
nfigu
raçã
o d
e G
rava
ção
do
PCD
[0]
Nen
hum
[302
]Re
ferê
ncia
Mín
ima
[303
]Re
ferê
ncia
Máx
ima
[312
]Va
lor
de c
atch
-up/
slow
dow
n[3
41]
Tem
po d
e Ac
eler
ação
da
Ram
pa 1
[342
]Te
mpo
de
Des
acel
eraç
ão d
a Ra
mpa
1[3
51]
Tem
po d
e Ac
eler
ação
da
Ram
pa 2
[352
]Te
mpo
de
Des
acel
eraç
ão d
a Ra
mpa
2[3
80]
Tem
po d
e Ra
mpa
do
Jog
[381
]Te
mpo
de
Ram
pa d
a Pa
rada
Ráp
ida
[412
]Li
mite
Infe
rior
da V
eloc
idad
e do
Mot
or[H
z][4
14]
Lim
ite S
uper
ior
da V
eloc
idad
e do
Mot
or [H
z]
[416
]Li
mite
de
Torq
ue d
o M
odo
Mot
or[4
17]
Lim
ite d
e To
rque
do
Mod
o G
erad
or[5
53]
Term
. 29
Ref./
Feed
back
Alto
Val
or[5
58]
Term
. 33
Ref./
Feed
back
Alto
Val
or[5
90]
Cont
role
do
bus
dig
ital e
do
relé
[593
]Co
ntro
le d
o B
us d
a Sa
ída
de P
ulso
27
[615
]Te
rmin
al 5
3 Re
f./Fe
edba
ck A
lto V
alor
[625
]Te
rmin
al 5
4 Re
f./Fe
edba
ck A
lto V
alor
[696
]Te
rmin
al 4
2 Co
ntro
le d
e Sa
ída
do B
us[7
48]
Feed
For
war
d d
o P
CD[8
90]
Velo
cida
de d
o J
og d
o B
us 1
[891
]Ve
loci
dade
do
Jog
do
Bus
2[1
680]
CTW
1 d
o F
ield
bus
[168
2]RE
F 1
do F
ield
bus
[340
1]PC
D 1
gra
var
para
apl
icaç
ão[3
402]
PCD
2 g
rava
r pa
ra a
plic
ação
[340
3]PC
D 3
gra
var
para
apl
icaç
ão[3
404]
PCD
4 g
rava
r pa
ra a
plic
ação
[340
5]PC
D 5
gra
var
para
apl
icaç
ão[3
406]
PCD
6 g
rava
r pa
ra a
plic
ação
[340
7]PC
D 7
gra
var
para
apl
icaç
ão[3
408]
PCD
8 g
rava
r pa
ra a
plic
ação
[340
9]PC
D 9
gra
var
para
apl
icaç
ão[3
410]
PCD
10
grav
ar p
ara
aplic
ação
9-16
Confi
gura
ção
de
Leitu
ra d
o P
CD[0
]N
enhu
m[1
500]
Hor
as d
e fu
ncio
nam
ento
[150
1]H
oras
de
Func
iona
men
to[1
502]
Med
idor
de
kWh
[160
0]Co
ntro
l Wor
d[1
601]
Refe
rênc
ia [U
nida
de]
[160
2]Re
ferê
ncia
[%]
[160
3]St
atus
Wor
d[1
605]
Valo
r Re
al P
rinci
pal [
%]
[160
9]Le
itura
Per
sona
lizad
a[1
610]
Potê
ncia
[kW
][1
611]
Potê
ncia
[hp]
[161
2]Te
nsão
do
Mot
or[1
613]
Freq
üênc
ia[1
614]
Corr
ente
do
Mot
or[1
615]
Freq
uênc
ia [%
][1
616]
Torq
ue [N
m]
[161
7]Ve
loci
dade
[RPM
][1
618]
Térm
ico
Cal
cula
do d
o M
otor
[162
0]Â
ngul
o d
o M
otor
[162
2]To
rque
[%]
[163
0]Te
nsão
do
Bar
ram
ento
CC
[163
3]En
ergi
a do
Fre
io /
2 m
in[1
634]
Tem
pera
tura
do
Dis
sipa
dor
de C
alor
[163
5]Té
rmic
o d
o In
vers
or[1
638]
Esta
do d
o C
ontr
olad
or d
o S
L[1
639]
Tem
pera
tura
do
Car
tão
de
Cont
role
[165
0]Re
ferê
ncia
Ext
erna
[165
2]Fe
edba
ck[U
nida
de]
[165
3]Re
ferê
ncia
do
Dig
iPot
[165
7]Fe
edba
ck [r
pm]
[166
0]En
trad
a di
gita
l[1
661]
Prog
ram
ação
do
Ter
min
al 5
3[1
662]
Entr
ada
anal
ógic
a 53
Apêndice Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 77
10 10

[166
3]Pr
ogra
maç
ão d
o T
erm
inal
54
[166
4]En
trad
a an
alóg
ica
54[1
665]
Saíd
a an
alóg
ica
42 [m
A]
[166
6]Sa
ída
Dig
ital
[166
7]En
trad
a de
pul
so 2
9 [H
z][1
668]
Entr
ada
de p
ulso
33
[Hz]
[166
9]Sa
ída
de p
ulso
27
[Hz]
[167
1]Sa
ída
do re
lé[1
672]
Cont
ador
A[1
673]
Cont
ador
B[1
674]
Prec
. Par
ar C
onta
dor
[168
4]Co
mun
icaç
ão O
pcio
nal S
TW[1
685]
CTW
1 d
a Po
rta
do F
C[1
690]
Ala
rm W
ord
[169
1]A
larm
Wor
d 2
[169
2]W
arni
ng W
ord
[169
3]W
arni
ng W
ord
2[1
694]
Ext.
Sta
tus
Wor
d[1
695]
Ext.
Sta
tus
Wor
d 2
[169
7]A
larm
Wor
d 3
[169
8]W
arni
ng W
ord
3[3
421]
PCD
1 le
r pa
ra a
plic
ação
[342
2]PC
D 2
ler
para
apl
icaç
ão[3
423]
PCD
3 le
r pa
ra a
plic
ação
[342
4]PC
D 4
ler
para
apl
icaç
ão[3
425]
PCD
5 le
r pa
ra a
plic
ação
[342
6]PC
D 6
ler
para
apl
icaç
ão[3
427]
PCD
7 le
r pa
ra a
plic
ação
[342
8]PC
D 8
ler
para
apl
icaç
ão[3
429]
PCD
9 le
r pa
ra a
plic
ação
[343
0]PC
D 1
0 le
r pa
ra a
plic
ação
[345
0]Po
siçã
o R
eal
[345
6]Er
ro d
e Tr
ack
9-18
Ende
reço
do
Nó
1 -
126
*126
9-19
Núm
ero
do
sis
tem
a da
uni
dade
de
driv
e0
- 65
535
*103
79-
22Se
leçã
o d
e Te
legr
ama
[1]
Tele
gram
a pa
drão
1*[
100]
Nen
hum
[101
]PP
O 1
[102
]PP
O 2
[103
]PP
O 3
[104
]PP
O 4
[105
]PP
O 5
[106
]PP
O 6
[107
]PP
O 7
[108
]PP
O 8
[200
]Te
legr
ama
pers
onal
izad
o 1
9-23
Parâ
met
ros
para
Sin
ais
Mes
mas
esc
olha
s co
m 9
-15
e 9-
169-
27Ed
ição
do
Par
âmet
ro[0
]D
isab
led
(Des
ativ
ado)
*[1]
Ativ
ado
9-28
Cont
role
de
Proc
esso
[0]
Inat
ivo
*[1]
Ativ
ar m
estr
e cí
clic
o9-
44Co
ntad
or d
e M
ensa
gem
de
Falh
a
0 -
6553
5 *0
9-45
Códi
go d
e Fa
lha
0 -
0 *0
9-47
d
o D
efei
to0
- 0
*09-
52Co
ntad
or d
a Si
tuaç
ão d
o d
efei
to0
- 10
00 *
09-
53W
arni
ng W
ord
do
Pro
fibus
0 -
6553
5 *0
9-63
Baud
Rat
e Re
al[0
]9,
6 kb
it/s
[1]
19,2
kbi
t/s
[2]
93,7
5 kb
it/s
[3]
187,
5 kb
it/s
[4]
500
kbit/
s[6
]15
00 k
bit/
s[7
]30
00 k
bit/
s[8
]60
00 k
bit/
s[9
]12
000
kbit/
s[1
0]31
,25
kbit/
s[1
1]45
,45
kbit/
s*[
255]
Baud
Rate
ñ e
ncon
trad
9-64
Iden
tifica
ção
do
Dis
posi
tivo
0 -
0 *0
9-65
Núm
ero
do
Per
fil0
- 0
*09-
67Co
ntro
l Wor
d 1
0 -
6553
5 *0
9-68
Stat
us W
ord
10
- 65
535
*09-
70Ed
itar
Setu
p[1
]Se
tup
1[2
]Se
tup
2[3
]Se
tup
3[4
]Se
tup
4*[
9]Co
nfigu
raçã
o A
tiva
9-71
Valo
r do
s D
ados
Sal
vos
Profi
bus
*[0]
Off
(Des
ligad
o)[1
]G
rava
r to
dos
setu
ps9-
72Pr
ofibu
sDriv
eRes
et*[
0]N
enhu
ma
ação
[1]
Rese
t na
ene
rgiz
ação
[2]
Prep
d r
eset
d e
nerg
.[3
]Re
set
doO
pc d
Com
un9-
75Id
entifi
caçã
o d
o D
O0
- 65
535
*09-
80Pa
râm
etro
s D
efini
dos
(1)
0 -
9999
*0
9-81
Parâ
met
ros
Defi
nido
s (2
)0
- 99
99 *
09-
82Pa
râm
etro
s D
efini
dos
(3)
0 -
9999
*0
9-83
Parâ
met
ros
Defi
nido
s (4
)0
- 99
99 *
09-
84Pa
râm
etro
s D
efini
dos
(5)
0 -
9999
*0
9-85
Parâ
met
ros
Defi
nido
s (6
)0
- 99
99 *
09-
90Pa
râm
etro
s A
ltera
dos
(1)
0 -
9999
*0
9-91
Parâ
met
ros
Alte
rado
s (2
)0
- 99
99 *
09-
92Pa
râm
etro
s A
ltera
dos
(3)
0 -
9999
*0
9-93
Parâ
met
ros
Alte
rado
s (4
)0
- 99
99 *
09-
94Pa
râm
etro
s A
ltera
dos
(5)
0 -
9999
*0
9-99
Cont
ador
de
Revi
sões
do
Pro
fibus
0 -
6553
5 *0
10-*
*Fi
eldb
us C
AN
10-0
*Co
nfigu
raçõ
es c
omun
s10
-01
Sele
ção
de
Baud
Rat
e[1
6]10
Kbp
s[1
7]20
Kbp
s[1
8]50
Kbp
s*[
20]
125
Kbps
[21]
250
Kbps
[22]
500
Kbps
[23]
800
Kbps
[24]
1000
Kbp
s10
-02
ID d
o N
ó1
- 12
7 *1
2710
-05
Leitu
ra d
o C
onta
dor
de E
rros
de
Tran
smis
são
0 -
255
*010
-06
Leitu
ra d
o C
onta
dor
de E
rros
de
Rece
pção
0 -
255
*010
-3*
Ace
sso
ao
Par
âmet
ro10
-31
Arm
azen
ar V
alor
es d
os D
ados
*[0]
Off
(Des
ligad
o)[2
]G
rava
r to
dos
setu
ps[3
]G
rava
r se
tup
edi
ção
10-3
3G
rava
r Se
mpr
e*[
0]O
ff (D
eslig
ado)
[1]
On
12-*
*Et
hern
et12
-0*
Confi
gura
ções
IP12
-00
Alo
caçã
o d
o E
nder
eço
IP[0
]M
AN
UA
L[1
]D
HCP
[2]
BOO
TP*[
10]
DCP
[20]
Do
ID d
o n
ó12
-01
Ende
reço
IP0
- 42
9496
7295
*0
12-0
2M
ásca
ra d
e Su
b-re
de0
- 42
9496
7295
*0
12-0
3G
atew
ay P
adrã
o0
- 42
9496
7295
*0
12-0
4Se
rvid
or D
HCP
0 -
2147
4836
47 *
012
-05
Cont
rato
de
Alu
guel
Exp
ira0
- 42
9496
7295
*0
12-0
6Se
rvid
ores
de
Nom
e0
- 42
9496
7295
*0
12-0
7N
ome
do D
omín
io
1 -
48 *
012
-08
Nom
e do
Hos
t1
- 48
*0
12-0
9En
dere
ço F
ísic
o0
- 17
*0
12-1
*Pa
râm
etro
s de
Lin
k de
Eth
erne
t12
-10
Stat
us d
o L
ink
*[0]
Sem
link
[1]
Link
12-1
1D
uraç
ão d
o L
ink
0 -
0 *R
elac
iona
do a
o t
aman
ho12
-12
Neg
ocia
ção
Aut
omát
ica
[0]
Off
(Des
ligad
o)*[
1]O
n12
-13
Velo
cida
de d
o L
ink
*[0]
Nen
hum
[1]
10 M
bps
[2]
100
Mbp
s12
-14
Link
Dup
lex
[0]
Hal
f D
uple
x*[
1]Fu
ll D
uple
x12
-18
Supe
rvis
or M
AC0
- 21
4748
3647
*0
12-1
9Su
perv
isor
End
. IP
0 -
2147
4836
47 *
012
-2*
Dad
os d
o P
roce
sso
12-2
0In
stân
cia
de C
ontr
ole
0 -
255
*Rel
acio
nado
ao
tam
anho
12-2
1G
rava
ção
da
Confi
g d
os D
ados
de
Proc
esso
[0]
Nen
hum
[302
]Re
ferê
ncia
Mín
ima
[303
]Re
ferê
ncia
Máx
ima
[312
]Va
lor
de c
atch
-up/
slow
dow
n[3
41]
Tem
po d
e Ac
eler
ação
da
Ram
pa 1
[342
]Te
mpo
de
Des
acel
eraç
ão d
a Ra
mpa
1[3
51]
Tem
po d
e Ac
eler
ação
da
Ram
pa 2
[352
]Te
mpo
de
Des
acel
eraç
ão d
a Ra
mpa
2[3
80]
Tem
po d
e Ra
mpa
do
Jog
[381
]Te
mpo
de
Ram
pa d
a Pa
rada
Ráp
ida
[412
]Li
mite
Infe
rior
da V
eloc
idad
e do
Mot
or[H
z][4
14]
Lim
ite S
uper
ior
da V
eloc
idad
e do
Mot
or [H
z][4
16]
Lim
ite d
e To
rque
do
Mod
o M
otor
[417
]Li
mite
de
Torq
ue d
o M
odo
Ger
ador
[553
]Te
rm. 2
9 Re
f./Fe
edba
ck A
lto V
alor
[558
]Te
rm. 3
3 Re
f./Fe
edba
ck A
lto V
alor
[590
]Co
ntro
le d
o b
us d
igita
l e d
o re
lé[5
93]
Cont
role
do
Bus
da
Saíd
a de
Pul
so 2
7[6
15]
Term
inal
53
Ref./
Feed
back
Alto
Val
or[6
25]
Term
inal
54
Ref./
Feed
back
Alto
Val
or[6
96]
Term
inal
42
Cont
role
de
Saíd
a do
Bus
[748
]Fe
ed F
orw
ard
do
PCD
[890
]Ve
loci
dade
do
Jog
do
Bus
1[8
91]
Velo
cida
de d
o J
og d
o B
us 2
[168
0]C
TW 1
do
Fie
ldbu
s[1
682]
REF
1 do
Fie
ldbu
s[3
401]
PCD
1 g
rava
r pa
ra a
plic
ação
[340
2]PC
D 2
gra
var
para
apl
icaç
ão[3
403]
PCD
3 g
rava
r pa
ra a
plic
ação
[340
4]PC
D 4
gra
var
para
apl
icaç
ão[3
405]
PCD
5 g
rava
r pa
ra a
plic
ação
[340
6]PC
D 6
gra
var
para
apl
icaç
ão[3
407]
PCD
7 g
rava
r pa
ra a
plic
ação
[340
8]PC
D 8
gra
var
para
apl
icaç
ão[3
409]
PCD
9 g
rava
r pa
ra a
plic
ação
[341
0]PC
D 1
0 gr
avar
par
a ap
licaç
ão12
-22
Leitu
ra d
a Co
nfig
dos
Dad
os d
ePr
oces
so[0
]N
enhu
m[1
500]
Hor
as d
e fu
ncio
nam
ento
[150
1]H
oras
de
Func
iona
men
to[1
502]
Med
idor
de
kWh
[160
0]Co
ntro
l Wor
d[1
601]
Refe
rênc
ia [U
nida
de]
[160
2]Re
ferê
ncia
[%]
[160
3]St
atus
Wor
d[1
605]
Valo
r Re
al P
rinci
pal [
%]
[160
9]Le
itura
Per
sona
lizad
a[1
610]
Potê
ncia
[kW
][1
611]
Potê
ncia
[hp]
[161
2]Te
nsão
do
Mot
or[1
613]
Freq
üênc
ia[1
614]
Corr
ente
do
Mot
or[1
615]
Freq
uênc
ia [%
][1
616]
Torq
ue [N
m]
[161
7]Ve
loci
dade
[RPM
][1
618]
Térm
ico
Cal
cula
do d
o M
otor
[162
0]Â
ngul
o d
o M
otor
[162
2]To
rque
[%]
[163
0]Te
nsão
do
Bar
ram
ento
CC
[163
3]En
ergi
a do
Fre
io /
2 m
in[1
634]
Tem
pera
tura
do
Dis
sipa
dor
de C
alor
[163
5]Té
rmic
o d
o In
vers
or[1
638]
Esta
do d
o C
ontr
olad
or d
o S
L[1
639]
Tem
pera
tura
do
Car
tão
de
Cont
role
[165
0]Re
ferê
ncia
Ext
erna
[165
2]Fe
edba
ck[U
nida
de]
[165
3]Re
ferê
ncia
do
Dig
iPot
[165
7]Fe
edba
ck [r
pm]
[166
0]En
trad
a di
gita
l[1
661]
Prog
ram
ação
do
Ter
min
al 5
3[1
662]
Entr
ada
anal
ógic
a 53
[166
3]Pr
ogra
maç
ão d
o T
erm
inal
54
[166
4]En
trad
a an
alóg
ica
54[1
665]
Saíd
a an
alóg
ica
42 [m
A]
[166
6]Sa
ída
Dig
ital
[166
7]En
trad
a de
pul
so 2
9 [H
z][1
668]
Entr
ada
de p
ulso
33
[Hz]
[166
9]Sa
ída
de p
ulso
27
[Hz]
[167
1]Sa
ída
do r
elé
[167
2]Co
ntad
or A
[167
3]Co
ntad
or B
[167
4]Pr
ec. P
arar
Con
tado
r[1
684]
Com
unic
ação
Opc
iona
l STW
[168
5]C
TW 1
da
Port
a do
FC
[169
0]A
larm
Wor
d
Apêndice VLT® Midi Drive FC 280
78 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
1010

[169
1]A
larm
Wor
d 2
[169
2]W
arni
ng W
ord
[169
3]W
arni
ng W
ord
2[1
694]
Ext.
Sta
tus
Wor
d[1
695]
Ext.
Sta
tus
Wor
d 2
[169
7]A
larm
Wor
d 3
[169
8]W
arni
ng W
ord
3[3
421]
PCD
1 le
r pa
ra a
plic
ação
[342
2]PC
D 2
ler
para
apl
icaç
ão[3
423]
PCD
3 le
r pa
ra a
plic
ação
[342
4]PC
D 4
ler
para
apl
icaç
ão[3
425]
PCD
5 le
r pa
ra a
plic
ação
[342
6]PC
D 6
ler
para
apl
icaç
ão[3
427]
PCD
7 le
r pa
ra a
plic
ação
[342
8]PC
D 8
ler
para
apl
icaç
ão[3
429]
PCD
9 le
r pa
ra a
plic
ação
[343
0]PC
D 1
0 le
r pa
ra a
plic
ação
[345
0]Po
siçã
o R
eal
[345
6]Er
ro d
e Tr
ack
12-2
3Ta
man
ho d
a gr
avaç
ão d
a co
nfig
dos
dado
s de
pro
cess
o8
- 32
*16
12-2
4Ta
man
ho d
a le
itura
da
confi
g d
osda
dos
de p
roce
sso
8 -
32 *
1612
-28
Arm
azen
ar V
alor
es d
os D
ados
*[0]
Off
(Des
ligad
o)[2
]G
rava
r to
dos
setu
ps12
-29
Gra
var
Sem
pre
*[0]
Off
(Des
ligad
o)[1
]O
n12
-3*
Ethe
rNet
/IP12
-30
Parâ
met
ro d
e Ad
vert
ênci
a0
- 21
4748
3647
*0
12-3
1Re
ferê
ncia
da
Rede
*[0]
Off
(Des
ligad
o)[1
]O
n12
-32
Cont
role
da
Rede
*[0]
Off
(Des
ligad
o)[1
]O
n12
-33
Revi
são
do
CIP
0 -
6553
5 *R
elac
iona
do a
o t
aman
ho12
-34
Códi
go C
IP d
o P
rodu
to0
- 65
535
*Rel
acio
nado
ao
tam
anho
12-3
5Pa
râm
etro
do
ED
S0
- 0
*012
-37
Tem
poriz
ador
de
Inib
ição
do
CO
S0
- 65
535
*012
-38
Filtr
o C
OS
0 -
6553
5 *0
12-6
*Po
wer
Link
da
Ethe
rnet
12-6
0ID
do
Nó
1 -
239
*112
-62
Tim
eout
de
SDO
0 -
2000
0000
00 m
s *3
0000
ms
12-6
3Ti
meo
ut d
e Et
hern
et b
ásic
a0
- 20
0000
0,00
0 m
s *5
000,
000
ms
12-6
6Li
mite
s0
- 20
0000
0000
*15
12-6
7Co
ntad
ores
de
limite
0 -
4294
9672
95 *
012
-68
Cont
ador
es c
umul
ativ
os0
- 21
4748
3647
*0
12-6
9St
atus
do
Pow
erLi
nk d
e Et
hern
et0
- 42
9496
7295
*0
12-8
*O
utro
s Se
rviç
os E
ther
net
12-8
0Se
rvid
or d
e FT
P*[
0]D
isab
led
(Des
ativ
ado)
[1]
Ativ
ado
12-8
1Se
rvid
or H
TTP
*[0]
Dis
able
d (D
esat
ivad
o)[1
]A
tivad
o12
-82
Serv
iço
SM
TP*[
0]D
isab
led
(Des
ativ
ado)
[1]
Ativ
ado
12-8
3Ag
ente
SN
MP
[0]
Dis
able
d (D
esat
ivad
o)*[
1]A
tivad
o12
-84
Det
ecçã
o d
e co
nflito
de
ende
reço
s[0
]D
isab
led
(Des
ativ
ado)
*[1]
Ativ
ado
12-8
9Po
rta
do C
anal
de
Soqu
ete
Tran
spar
ente
0 -
6553
5 *4
000
12-9
*Se
rviç
os E
ther
net
Avan
çado
s12
-90
Dia
gnós
tico
de
Cabo
*[0]
Dis
able
d (D
esat
ivad
o)[1
]A
tivad
o12
-91
Cros
s-O
ver
Auto
mát
ico
[0]
Dis
able
d (D
esat
ivad
o)*[
1]A
tivad
o12
-92
Espi
onag
em IG
MP
[0]
Dis
able
d (D
esat
ivad
o)*[
1]A
tivad
o12
-93
Com
prim
ento
Err
ado
de
Cabo
0 -
6553
5 *0
12-9
4Pr
oteç
ão c
ontr
a Br
oadc
ast
Stor
m-1
- 2
0 %
*-1
%12
-95
Tim
eout
de
inat
ivid
ade
0 -
3600
*12
012
-96
Confi
g. d
a Po
rta
[0]
Nor
mal
[1]
Port
a es
pelh
o 1
par
a 2
[2]
Port
a es
pelh
o 2
par
a 1
[10]
Port
a 1
desa
tivad
a[1
1]Po
rta
2 de
sativ
ada
[254
]Es
pelh
o In
t. P
orta
par
a 1
[255
]Es
pelh
o In
t. P
orta
par
a 2
12-9
7Pr
iorid
ade
de Q
oS0
- 63
*Re
laci
onad
o a
o t
aman
ho12
-98
Cont
ador
es d
e In
terf
ace
0 -
4294
9672
95 *
4000
12-9
9Co
ntad
ores
de
Míd
ia0
- 42
9496
7295
*0
13-*
*Sm
art
Logi
c13
-0*
Defi
niçõ
es d
o S
LC13
-00
Mod
o C
ontr
olad
or d
o S
L*[
0]O
ff (D
eslig
ado)
[1]
On
13-0
1In
icia
r Ev
ento
[0]
Fals
e (F
also
)[1
]Tr
ue (
Verd
adei
ro)
[2]
Em fu
ncio
nam
ento
[3]
Na
faix
a[4
]N
a re
ferê
ncia
[7]
Fora
da
faix
a de
cor
rent
e[8
]A
baix
o d
a ba
ixa
I[9
]Ac
ima
da a
lta I
[16]
Adve
rtên
cia
térm
ica
[17]
Rede
elé
tric
a fo
ra d
a fa
ixa
[18]
Reve
rsão
[19]
Adve
rtên
cia
[20]
Ala
rme
(des
arm
e)[2
1]A
larm
e (b
loqu
eio
por
des
arm
e)[2
2]Co
mpa
rado
r 0
[23]
Com
para
dor
1[2
4]Co
mpa
rado
r 2
[25]
Com
para
dor
3[2
6]Re
gra
lógi
ca 0
[27]
Regr
a ló
gica
1[2
8]Re
gra
lógi
ca 2
[29]
Regr
a ló
gica
3[3
3]En
trad
a di
gita
l DI1
8[3
4]En
trad
a di
gita
l DI1
9[3
5]En
trad
a di
gita
l DI2
7[3
6]En
trad
a di
gita
l DI2
9*[
39]
Com
ando
de
part
ida
[40]
Conv
erso
r pa
rado
[42]
Des
arm
e de
Aut
o R
eset
[50]
Com
para
dor
4[5
1]Co
mpa
rado
r 5
[60]
Regr
a ló
gica
4[6
1]Re
gra
lógi
ca 5
[83]
Corr
eia
Part
ida
13-0
2Pa
rar
Even
to[0
]Fa
lse
(Fal
so)
[1]
True
(Ve
rdad
eiro
)[2
]Em
func
iona
men
to[3
]N
a fa
ixa
[4]
Na
refe
rênc
ia[7
]Fo
ra d
a fa
ixa
de c
orre
nte
[8]
Aba
ixo
da
baix
a I
[9]
Acim
a da
alta
I[1
6]Ad
vert
ênci
a té
rmic
a[1
7]Re
de e
létr
ica
fora
da
faix
a[1
8]Re
vers
ão[1
9]Ad
vert
ênci
a[2
0]A
larm
e (d
esar
me)
[21]
Ala
rme
(blo
quei
o p
or d
esar
me)
[22]
Com
para
dor
0[2
3]Co
mpa
rado
r 1
[24]
Com
para
dor
2[2
5]Co
mpa
rado
r 3
[26]
Regr
a ló
gica
0[2
7]Re
gra
lógi
ca 1
[28]
Regr
a ló
gica
2[2
9]Re
gra
lógi
ca 3
[30]
Tim
eout
0 d
o S
L[3
1]Ti
meo
ut 1
do
SL
[32]
Tim
eout
2 d
o S
L[3
3]En
trad
a di
gita
l DI1
8[3
4]En
trad
a di
gita
l DI1
9[3
5]En
trad
a di
gita
l DI2
7[3
6]En
trad
a di
gita
l DI2
9[3
9]Co
man
do d
e pa
rtid
a*[
40]
Conv
erso
r pa
rado
[42]
Des
arm
e de
Aut
o R
eset
[50]
Com
para
dor
4[5
1]Co
mpa
rado
r 5
[60]
Regr
a ló
gica
4[6
1]Re
gra
lógi
ca 5
[70]
Tim
eout
3 d
o S
L[7
1]Ti
meo
ut 4
do
SL
[72]
Tim
eout
5 d
o S
L[7
3]Ti
meo
ut 6
do
SL
[74]
Tim
eout
7 d
o S
L[8
3]Co
rrei
a Pa
rtid
a13
-03
Rein
icia
lizar
o S
LC*[
0]N
ão r
eini
cial
izar
o S
LC[1
]Re
inic
ializ
ar o
SLC
13-1
*Co
mpa
rado
res
13-1
0O
pera
ndo
do
Com
para
dor
*[0]
Dis
able
d (D
esat
ivad
o)[1
]Re
ferê
ncia
%[2
]Fe
edba
ck %
[3]
Velo
cida
de d
o m
otor
[4]
Corr
ente
do
Mot
or[6
]Po
tênc
ia d
o m
otor
[7]
Tens
ão d
o m
otor
[12]
Entr
ada
anal
ógic
a 53
[13]
Entr
ada
anal
ógic
a A
I54
[18]
Entr
ada
de p
ulso
FI2
9[1
9]En
trad
a de
pul
so F
I33
[20]
Núm
ero
do
ala
rme
[30]
Cont
ador
A[3
1]Co
ntad
or B
13-1
1O
pera
dor
do C
ompa
rado
r[0
]M
enor
que
(<)
*[1]
Apr
oxim
adam
ente
igua
l (~)
[2]
Mai
or q
ue (>
)13
-12
Valo
r do
Com
para
dor
-999
9 -
9999
*0
13-2
*Te
mpo
riza
dore
s13
-20
Tem
poriz
ador
do
Con
trol
ador
do
SL
0 -
3600
s *
0 s
13-4
*Re
gras
Lóg
icas
13-4
0Re
gra
Lógi
ca B
oole
ana
1*[
0]Fa
lse
(Fal
so)
[1]
True
(Ve
rdad
eiro
)[2
]Em
func
iona
men
to[3
]N
a fa
ixa
[4]
Na
refe
rênc
ia[7
]Fo
ra d
a fa
ixa
de c
orre
nte
[8]
Aba
ixo
da
baix
a I
[9]
Acim
a da
alta
I[1
6]Ad
vert
ênci
a té
rmic
a
[17]
Rede
elé
tric
a fo
ra d
a fa
ixa
[18]
Reve
rsão
[19]
Adve
rtên
cia
[20]
Ala
rme
(des
arm
e)[2
1]A
larm
e (b
loqu
eio
por
des
arm
e)[2
2]Co
mpa
rado
r 0
[23]
Com
para
dor
1[2
4]Co
mpa
rado
r 2
[25]
Com
para
dor
3[2
6]Re
gra
lógi
ca 0
[27]
Regr
a ló
gica
1[2
8]Re
gra
lógi
ca 2
[29]
Regr
a ló
gica
3[3
0]Ti
meo
ut 0
do
SL
[31]
Tim
eout
1 d
o S
L[3
2]Ti
meo
ut 2
do
SL
[33]
Entr
ada
digi
tal D
I18
[34]
Entr
ada
digi
tal D
I19
[35]
Entr
ada
digi
tal D
I27
[36]
Entr
ada
digi
tal D
I29
[39]
Com
ando
de
part
ida
[40]
Conv
erso
r pa
rado
[42]
Des
arm
e de
Aut
o R
eset
[50]
Com
para
dor
4[5
1]Co
mpa
rado
r 5
[60]
Regr
a ló
gica
4[6
1]Re
gra
lógi
ca 5
[70]
Tim
eout
3 d
o S
L[7
1]Ti
meo
ut 4
do
SL
[72]
Tim
eout
5 d
o S
L[7
3]Ti
meo
ut 6
do
SL
[74]
Tim
eout
7 d
o S
L[8
3]Co
rrei
a Pa
rtid
a13
-41
Ope
rado
r de
Reg
ra L
ógic
a 1
*[0]
Dis
able
d (D
esat
ivad
o)[1
]E
[2]
OU
[3]
E N
ÃO[4
]O
U N
ÃO[5
]N
ÃO E
[6]
NÃO
OU
[7]
NÃO
E N
ÃO[8
]N
ÃO O
U N
ÃO13
-42
Regr
a Ló
gica
Boo
lean
a 2
Mes
mas
esc
olha
s co
m 1
3-40
13-4
3O
pera
dor
de R
egra
Lóg
ica
2M
esm
as e
scol
has
com
13-
4113
-44
Regr
a Ló
gica
Boo
lean
a 3
Mes
mas
esc
olha
s co
m 1
3-42
13-5
*Es
tado
s13
-51
Even
to d
o C
ontr
olad
or d
o S
L*[
0]Fa
lse
(Fal
so)
[1]
True
(Ve
rdad
eiro
)[2
]Em
func
iona
men
to[3
]N
a fa
ixa
[4]
Na
refe
rênc
ia[7
]Fo
ra d
a fa
ixa
de c
orre
nte
[8]
Aba
ixo
da
baix
a I
[9]
Acim
a da
alta
I
Apêndice Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 79
10 10

[16]
Adve
rtên
cia
térm
ica
[17]
Rede
elé
tric
a fo
ra d
a fa
ixa
[18]
Reve
rsão
[19]
Adve
rtên
cia
[20]
Ala
rme
(des
arm
e)[2
1]A
larm
e (b
loqu
eio
por
des
arm
e)[2
2]Co
mpa
rado
r 0
[23]
Com
para
dor
1[2
4]Co
mpa
rado
r 2
[25]
Com
para
dor
3[2
6]Re
gra
lógi
ca 0
[27]
Regr
a ló
gica
1[2
8]Re
gra
lógi
ca 2
[29]
Regr
a ló
gica
3[3
0]Ti
meo
ut 0
do
SL
[31]
Tim
eout
1 d
o S
L[3
2]Ti
meo
ut 2
do
SL
[33]
Entr
ada
digi
tal D
I18
[34]
Entr
ada
digi
tal D
I19
[35]
Entr
ada
digi
tal D
I27
[36]
Entr
ada
digi
tal D
I29
[39]
Com
ando
de
part
ida
[40]
Conv
erso
r pa
rado
[42]
Des
arm
e de
Aut
o R
eset
[50]
Com
para
dor
4[5
1]Co
mpa
rado
r 5
[60]
Regr
a ló
gica
4[6
1]Re
gra
lógi
ca 5
[70]
Tim
eout
3 d
o S
L[7
1]Ti
meo
ut 4
do
SL
[72]
Tim
eout
5 d
o S
L[7
3]Ti
meo
ut 6
do
SL
[74]
Tim
eout
7 d
o S
L[8
3]Co
rrei
a Pa
rtid
a13
-52
Ação
do
Con
trol
ador
do
SL
*[0]
Dis
able
d (D
esat
ivad
o)[1
]N
enhu
ma
ação
[2]
Sele
cion
ar s
etup
1[3
]Se
leci
onar
set
up 2
[4]
Sele
cion
ar s
etup
3[5
]Se
leci
onar
set
up 4
[10]
Sele
cion
ar r
efer
ênci
a pr
edefi
nida
0[1
1]Se
leci
onar
ref
erên
cia
pred
efini
da 1
[12]
Sele
cion
ar re
ferê
ncia
pre
defin
ida
2[1
3]Se
leci
onar
refe
rênc
ia p
rede
finid
a 3
[14]
Sele
cion
ar r
efer
ênci
a pr
edefi
nida
4[1
5]Se
leci
onar
ref
erên
cia
pred
efini
da 5
[16]
Sele
cion
ar r
efer
ênci
a pr
edefi
nida
6[1
7]Se
leci
onar
refe
rênc
ia p
rede
finid
a 7
[18]
Sele
cion
ar r
ampa
1[1
9]Se
leci
onar
ram
pa 2
[22]
Func
iona
r[2
3]Fu
ncio
nar
reve
rso
[24]
Para
da[2
5]Q
stop
[26]
Frei
o C
C[2
7]Pa
rada
por
inér
cia
[28]
Cong
elar
freq
uênc
ia d
e sa
ída
[29]
Inic
iar
tem
poriz
ador
0
[30]
Inic
iar
tem
poriz
ador
1[3
1]In
icia
r te
mpo
rizad
or 2
[32]
Defi
n s
aíd
dig
.A b
aix
[33]
Defi
nir
saíd
a di
gita
l B b
aixa
[34]
Defi
nir
saíd
a di
gita
l C b
aixa
[35]
Defi
nir
saíd
a di
gita
l D b
aixa
[38]
Defi
nir
saíd
a di
gita
l A a
lta[3
9]D
efini
r sa
ída
digi
tal B
alta
[40]
Defi
nir
saíd
a di
gita
l C a
lta[4
1]D
efini
r sa
ída
digi
tal D
alta
[60]
Rese
t Co
ntad
or A
[61]
Rein
icia
lizar
o c
onta
dor
B[7
0]In
icia
r te
mpo
rizad
or 3
[71]
Inic
iar
tem
poriz
ador
4[7
2]In
icia
r te
mpo
rizad
or 5
[73]
Inic
iar
tem
poriz
ador
6[7
4]In
icia
r te
mpo
rizad
or 7
14-*
*Fu
nçõe
s Es
peci
ais
14-0
*Ch
avea
men
to d
o In
vers
or14
-01
Freq
uênc
ia d
e Ch
avea
men
to[0
]Ra
n3[1
]Ra
n5[2
]2,
0 kH
z[3
]3,
0 kH
z[4
]4,
0 kH
z[5
]5,
0 kH
z[6
]6,
0 kH
z[7
]8,
0 kH
z[8
]10
,0 k
Hz
[9]
12,0
kH
z[1
0]16
,0 k
Hz
14-0
3So
brem
odul
ação
[0]
Off
(Des
ligad
o)*[
1]O
n14
-07
Nív
el d
e Co
mpe
nsaç
ão d
e Te
mpo
Oci
oso
0 -
100
*Rel
acio
nado
ao
tam
anho
14-0
8Fa
tor
de G
anho
de
Am
orte
cim
ento
0 -
100
% *
Rela
cion
ado
ao
tam
anho
14-0
9N
ível
de
Corr
ente
de
Pola
rizaç
ão d
eTe
mpo
Oci
oso
0 -
100
% *
Rela
cion
ado
ao
tam
anho
14-1
*Li
ga/D
eslig
a Re
de E
létr
ica
14-1
0Fa
lha
de re
de e
létr
ica
*[0]
Sem
funç
ão[1
]D
esac
eler
ação
con
trol
ada
[2]
Des
acel
eraç
ão c
ontr
olad
a, d
esar
me
[3]
Para
da p
or in
érci
a[4
]Ba
ckup
cin
étic
o[5
]Ba
ckup
cin
étic
o, d
esar
me
[6]
Ala
rme
[7]
Back
up c
inét
ico,
des
arm
e co
mre
cupe
raçã
o14
-11
Nív
el d
e te
nsão
de
falh
a da
rede
elét
rica
100
- 80
0 V
*Re
laci
onad
o a
o t
aman
ho14
-12
Resp
osta
a d
esba
lanc
eam
ento
de
rede
*[0]
Des
arm
e[1
]Ad
vert
ênci
a
[2]
Dis
able
d (D
esat
ivad
o)14
-15
Cin.
Bac
kup,
des
arm
e co
m re
cupe
raçã
o0
- 60
000,
000
Refe
renc
eFee
dbac
kUni
t*R
elac
iona
do a
o t
aman
ho14
-2*
Funç
ões
Rese
t14
-20
Mod
o R
eini
cial
izar
*[0]
Rese
t m
anua
l[1
]Re
set
auto
mát
ico
x1
[2]
Rese
t au
tom
átic
o x
2[3
]Re
set
auto
mát
ico
x3
[4]
Rese
t au
tom
átic
o x
4[5
]Re
set
auto
mát
ico
x5
[6]
Rese
t au
tom
átic
o x
6[7
]Re
set
auto
mát
ico
x7
[8]
Rese
t au
tom
átic
o x
8[9
]Re
set
auto
mát
ico
x9
[10]
Rese
t au
tom
átic
o x
10[1
1]Re
set
auto
mát
ico
x15
[12]
Rese
t au
tom
átic
o x
20[1
3]Re
set
auto
mát
ico
infin
ito[1
4]Re
set
na e
nerg
izaç
ão14
-21
Tem
po d
e um
a N
ova
Part
ida
Auto
mát
ica
0 -
600
s *1
0 s
14-2
2M
odo
Ope
raçã
o*[
0]O
pera
ção
nor
mal
[2]
Inic
ializ
ação
14-2
4A
tras
o d
o D
esar
me
no L
imite
de
Corr
ente
0 -
60 s
*60
s14
-25
Atr
aso
do
Des
arm
e no
Lim
ite d
eTo
rque
0 -
60 s
*60
s14
-27
Ação
na
Falh
a do
Inve
rsor
[0]
Des
arm
e*[
1]Ad
vert
ênci
a14
-28
Prog
ram
açõe
s de
Pro
duçã
o*[
0]N
enhu
ma
ação
[1]
Rese
t de
ser
viço
[3]
Rese
t do
Sof
twar
e14
-29
Códi
go d
e Se
rviç
o0
- 0x
FFFF
FFFF
*0
14-3
*Ct
rl. L
imite
de
Corr
ente
14-3
0Ct
rl L
im C
orre
nte,
Gan
ho P
ropo
rcio
nal
0 -
500
% *
100
%14
-31
Ctrl
Lim
Cor
rent
e, T
empo
de
Inte
graç
ão0,
002
- 2
s *0
,020
s14
-32
Ctrl
Lim
Cor
rent
e, T
empo
do
Filt
ro1
- 10
0 m
s *5
ms
14-4
*O
timiz
ação
de
Ener
gia
14-4
0N
ível
do
VT
40 -
90
% *
66 %
14-4
1M
agne
tizaç
ão M
ínim
a do
AEO
40 -
75
% *
66 %
14-4
4O
timiz
ação
cor
rent
e do
eix
o d
p/IP
M0
- 20
0 %
*10
0 %
14-5
*A
mbi
ente
14-5
1Co
mpe
nsaç
ão d
a Te
nsão
do
Barr
amen
to C
C[0
]O
ff (D
eslig
ado)
*[1]
On
14-5
2Co
ntro
le d
o V
entil
ador
[5]
Mod
o c
onst
ante
men
te li
gado
[6]
Mod
o c
onst
ante
men
te d
eslig
ado
[7]
Mod
o li
g q
d in
vers
or n
ão e
stiv
er d
eslig
*[8]
Mod
o d
e ve
loci
dade
var
iáve
l14
-55
Filtr
o d
e Sa
ída
*[0]
Sem
filtr
o[1
]Fi
ltro
de
onda
sen
oida
l14
-6*
Der
ate
Aut
omát
ico
14-6
1Fu
nção
na
Sobr
ecar
ga d
o In
vers
or*[
0]D
esar
me
[1]
Der
ate
14-6
3Fr
equê
ncia
de
Chav
eam
ento
Mín
imo
*[2]
2,0
kHz
[3]
3,0
kHz
[4]
4,0
kHz
[5]
5,0
kHz
[6]
6,0
kHz
[7]
8,0
kHz
[8]
10,0
kH
z[9
]12
,0 k
Hz
[10]
16,0
kH
z14
-64
Nív
el d
e Co
rren
te Z
ero
par
aCo
mpe
nsaç
ão d
e Te
mpo
Oci
oso
*[0]
Dis
able
d (D
esat
ivad
o)[1
]A
tivad
o14
-65
Com
pens
ação
de
Tem
po O
cios
o d
eD
erat
e de
Vel
ocid
ade
20 -
100
0 H
z *R
elac
iona
do a
o t
aman
ho14
-7*
Com
patib
ilida
de14
-70
Sele
ções
de
com
patib
ilida
de*[
0]N
o F
unct
ion
[12]
VLT2
800
3M[1
3]VL
T280
0 3M
incl
. MAV
[14]
VLT2
800
12M
[15]
VLT2
800
12M
incl
. MAV
14-8
*O
pcio
nais
14-8
8A
rmaz
enag
em d
e da
dos
do o
pcio
nal
0 -
6553
5 *0
14-8
9D
etec
ção
de
Opc
iona
is*[
0]Co
nfigu
raçã
o d
e op
cion
al d
e pr
oteç
ão[1
]A
tivar
alte
raçã
o d
e op
cion
ais
14-9
*Co
nfigu
raçõ
es d
e D
efei
to14
-90
Nív
el d
e D
efei
to*[
3]Bl
oque
io p
or d
esar
me
[4]
Des
arm
c/r
eset
atr
asad
[5]
Flys
tart
15-*
*In
form
ação
do
Dri
ve15
-0*
Dad
os O
pera
cion
ais
15-0
0H
oras
de
func
iona
men
to0
- 0x
7ffffff
f. h
*0
h15
-01
Hor
as d
e Fu
ncio
nam
ento
0 -
0x7ff
fffff.
h *
0 h
15-0
2M
edid
or d
e kW
h0
- 21
4748
3647
kW
h *
0 kW
h
15-0
3En
ergi
zaçõ
es0
- 21
4748
3647
*0
15-0
4Su
pera
quec
imen
tos
0 -
6553
5 *0
15-0
5So
bret
ensõ
es0
- 65
535
*015
-06
Rein
icia
lizar
Con
tado
r de
kW
h*[
0]N
ão re
inic
ializ
ar[1
]Re
set
cont
ador
15-0
7Re
inic
ializ
ar C
onta
dor
de H
oras
de
Func
iona
men
to*[
0]N
ão re
inic
ializ
ar[1
]Re
set
cont
ador
15-3
*Re
gist
ro d
e A
larm
es15
-30
Regi
stro
de
Ala
rme:
Cód
igo
de
Erro
0 -
255
*015
-31
Mot
ivo
da
Falh
a In
tern
a-3
2767
- 3
2767
*0
15-4
*Id
entifi
caçã
o d
o d
rive
15-4
0Ti
po d
o F
C0
- 0
*015
-41
Seçã
o d
e Po
tênc
ia0
- 20
*0
15-4
2Te
nsão
0 -
20 *
015
-43
Vers
ão d
o S
oftw
are
0 -
0 *0
15-4
4Có
digo
do
tip
o s
olic
itado
0 -
41 *
015
-45
Strin
g d
o C
ódig
o d
o T
ipo
Rea
l0
- 40
*0
15-4
6N
úmer
o d
e ca
tálo
go d
o c
onve
rsor
de
freq
uênc
ia0
- 0
*015
-48
Nº
do Id
do
LCP
0 -
0 *0
15-4
9ID
do
SW
da
Plac
a de
Con
trol
e0
- 0
*015
-50
ID d
o S
W d
a Pl
aca
de P
otên
cia
0 -
0 *0
15-5
1N
úmer
o d
e Sé
rie d
o D
rive
0 -
0 *0
15-5
2In
form
açõe
s de
OEM
0 -
0 *0
15-5
3N
úmer
o d
e Sé
rie d
o C
artã
o d
ePo
tênc
ia0
- 0
*015
-57
Vers
ão d
o a
rqui
vo0
- 25
5 *0
15-5
9N
ome
do a
rqui
vo0
- 16
*0
15-6
*Id
ent.
do
Opc
iona
l15
-60
Opc
iona
l Mon
tado
0 -
30 *
Rela
cion
ado
ao
tam
anho
15-6
1Ve
rsão
do
SW
do
Opc
iona
l0
- 20
*Re
laci
onad
o a
o t
aman
ho15
-70
Opc
iona
l no
Slo
t A
0 -
30 *
015
-71
Vers
ão d
o S
W d
o O
pcio
nal -
Slo
t A
Apêndice VLT® Midi Drive FC 280
80 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
1010

0 -
20 *
015
-9*
Info
rmaç
ões
do P
arâm
etro
15-9
2Pa
râm
etro
s D
efini
dos
0 -
2000
*0
15-9
7Ti
po d
e A
plic
ação
0 -
0xFF
FFFF
FF *
015
-98
Iden
tifica
ção
do
driv
e0
- 56
*0
15-9
9M
etad
ados
de
Parâ
met
ro0
- 99
99 *
016
-**
Exib
ição
dos
Dad
os16
-0*
Stat
us G
eral
16-0
0Co
ntro
l Wor
d0
- 65
535
*016
-01
Refe
rênc
ia [U
nida
de]
-499
9 -
4999
Ref
eren
ceFe
edba
ckU
nit
*0Re
fere
nceF
eedb
ackU
nit
16-0
2Re
ferê
ncia
[%]
-200
- 2
00 %
*0
%16
-03
Stat
us W
ord
0 -
6553
5 *0
16-0
5Va
lor
Real
Prin
cipa
l [%
]-2
00 -
200
% *
0 %
16-0
9Le
itura
Per
sona
lizad
a0
- 99
99 C
usto
mRe
adou
tUni
t *0
Cust
omRe
adou
tUni
t16
-1*
Stat
us d
o M
otor
16-1
0Po
tênc
ia [k
W]
0 -
1000
kW
*0
kW16
-11
Potê
ncia
[hp]
0 -
1000
hp
*0
hp16
-12
Tens
ão d
o M
otor
0 -
6553
5 V
*0
V16
-13
Freq
üênc
ia0
- 65
53,5
Hz
*0 H
z16
-14
Corr
ente
do
Mot
or0
- 65
5,35
A *
0 A
16-1
5Fr
equê
ncia
[%]
0 -
6553
,5 %
*0
%16
-16
Torq
ue [N
m]
-300
00 -
300
00 N
m *
0 N
m16
-17
Velo
cida
de [R
PM]
-300
00 -
300
00 R
PM *
0 RP
M16
-18
Térm
ico
Cal
cula
do d
o M
otor
0 -
100
% *
0 %
16-2
0Â
ngul
o d
o M
otor
0 -
6553
5 *0
16-2
2To
rque
[%]
-200
- 2
00 %
*0
%16
-3*
Stat
us d
o c
onve
rsor
16-3
0Te
nsão
do
Bar
ram
ento
CC
0 -
6553
5 V
*0
V16
-33
Ener
gia
do F
reio
/2
min
0 -
1000
0 kW
*0
kW16
-34
Tem
pera
tura
do
Dis
sipa
dor
de C
alor
-128
- 1
27 °
C *
0 °C
16-3
5Té
rmic
o d
o In
vers
or0
- 25
5 %
*0
%16
-36
Inv.
Nom
. Cor
rent
e
0 -
655,
35 A
*0
A16
-37
Inv.
Cor
rent
e m
áx.
0 -
655,
35 A
*0
A16
-38
Esta
do d
o C
ontr
olad
or d
o S
L0
- 20
*0
16-3
9Te
mpe
ratu
ra d
o C
artã
o d
e Co
ntro
le0
- 65
535
°C *
0 °C
16-5
*Re
f. e
Feed
back
16-5
0Re
ferê
ncia
Ext
erna
-200
- 2
00 %
*0
%16
-52
Feed
back
[Uni
dade
]-4
999
- 49
99 U
nidC
ontr
Proc
es *
0U
nidC
ontr
Proc
es16
-53
Refe
rênc
ia d
o D
igiP
ot-2
00 -
200
*0
16-5
7Fe
edba
ck [r
pm]
-300
00 -
300
00 R
PM *
0 RP
M16
-6*
Entr
adas
e S
aída
s16
-60
Entr
ada
digi
tal
0 -
4095
*0
16-6
1Pr
ogra
maç
ão d
o T
erm
inal
53
[1]
Mod
o d
e te
nsão
[6]
Entr
ada
digi
tal
16-6
2En
trad
a an
alóg
ica
530
- 20
*1
16-6
3Pr
ogra
maç
ão d
o T
erm
inal
54
[0]
Mod
o d
e co
rren
te[1
]M
odo
de
tens
ão16
-64
Entr
ada
anal
ógic
a 54
0 -
20 *
116
-65
Saíd
a an
alóg
ica
42 [m
A]
0 -
20 m
A *
0 m
A16
-66
Saíd
a D
igita
l0
- 63
*0
16-6
7En
trad
a de
pul
so 2
9 [H
z]0
- 13
0000
*0
16-6
8En
trad
a de
pul
so 3
3 [H
z]0
- 13
0000
*0
16-6
9Sa
ída
de p
ulso
27
[Hz]
0 -
4000
0 *0
16-7
1Sa
ída
do r
elé
0 -
31 *
016
-72
Cont
ador
A-3
2768
- 3
2767
*0
16-7
3Co
ntad
or B
-327
68 -
327
67 *
016
-74
Prec
. Par
ar C
onta
dor
0 -
2147
4836
47 *
016
-8*
Port
a do
FC
e F
ield
bus
16-8
0C
TW 1
do
Fie
ldbu
s0
- 65
535
*016
-82
REF
1 do
Fie
ldbu
s-3
2768
- 3
2767
*0
16-8
4Co
mun
icaç
ão O
pcio
nal S
TW0
- 65
535
*016
-85
CTW
1 d
a Po
rta
do F
C0
- 65
535
*108
416
-86
REF
1 da
Por
ta d
o F
C-3
2768
- 3
2767
*0
16-9
*Le
itura
s de
Dia
gnós
tico
16-9
0A
larm
Wor
d0
- 0x
FFFF
FFFF
UL
*016
-91
Ala
rm W
ord
20
- 0x
FFFF
FFFF
UL
*016
-92
War
ning
Wor
d0
- 0x
FFFF
FFFF
UL
*016
-93
War
ning
Wor
d 2
0 -
0xFF
FFFF
FFU
L *0
16-9
4Ex
t. S
tatu
s W
ord
0 -
0xFF
FFFF
FFU
L *0
16-9
5Ex
t. S
tatu
s W
ord
20
- 0x
FFFF
FFFF
UL
*016
-97
Ala
rm W
ord
30
- 0x
FFFF
FFFF
UL
*016
-98
War
ning
Wor
d 3
0 -
4294
9672
95 *
018
-**
Leitu
ras
de D
ados
218
-5*
Leitu
ra d
o M
ódul
o d
e M
emór
ia18
-51
Mot
ivo
da
Adve
rtên
cia
do M
ódul
o d
eM
emór
ia0
- 0x
FFFF
FFFF
UL
*018
-52
ID d
o M
ódul
o d
e M
emór
ia0
- 0
*018
-9*
Leitu
ras
do P
ID18
-90
Erro
do
PID
de
Proc
esso
-200
- 2
00 %
*0
%18
-91
Saíd
a do
PID
de
Proc
esso
-200
- 2
00 %
*0
%18
-92
Saíd
a Pr
esa
do P
ID d
e Pr
oces
so-2
00 -
200
% *
0 %
18-9
3G
anho
esc
alon
ado
de
Saíd
a do
PID
de
Proc
esso
-200
- 2
00 %
*0
%21
-**
Ext.
Mal
ha F
echa
da21
-0*
Ext.
Sin
toni
zaçã
o A
utom
átic
a do
PID
21-0
9A
tivar
PID
est
endi
do*[
0]D
isab
led
(Des
ativ
ado)
[1]
PID
1 C
L Ex
t. A
tivad
o21
-1*
Ext.
CL
1 Re
f./Fb
.21
-11
Refe
rênc
ia M
ínim
a Ex
t. 1
-999
999.
999
- 99
9999
.999
Ext
PID
1Uni
t*0
Ext
PID
1Uni
t21
-12
Refe
rênc
ia M
áxim
a Ex
t. 1
-999
999.
999
- 99
9999
.999
Ext
PID
1Uni
t*1
00 E
xtPI
D1U
nit
21-1
3Fo
nte
da R
efer
ênci
a Ex
t. 1
*[0]
Sem
funç
ão[1
]En
trad
a an
alóg
ica
53[2
]En
trad
a an
alóg
ica
54[7
]En
trad
a de
freq
uênc
ia 2
9[8
]En
trad
a de
freq
uênc
ia 3
321
-14
Font
e do
Fee
dbac
k Ex
t. 1
*[0]
Sem
funç
ão[1
]En
trad
a an
alóg
ica
53[2
]En
trad
a an
alóg
ica
54[3
]En
trad
a de
freq
uênc
ia 2
9[4
]En
trad
a de
freq
uênc
ia 3
321
-15
Setp
oint
Ext
. 1
-999
999.
999
- 99
9999
.999
Ext
PID
1Uni
t*0
Ext
PID
1Uni
t21
-17
Refe
rênc
ia E
xt. 1
[Uni
dade
]-9
9999
9.99
9 -
9999
99.9
99 E
xtPI
D1U
nit
*0 E
xtPI
D1U
nit
21-1
8Fe
edba
ck E
xt. 1
[Uni
dade
]-9
9999
9.99
9 -
9999
99.9
99 E
xtPI
D1U
nit
*0 E
xtPI
D1U
nit
21-1
9Sa
ída
Ext.
1 [%
]0
- 10
0 %
*0
%21
-2*
Ext.
CL
1 PI
D21
-20
Cont
role
Nor
mal
/Inve
rso
Ext
. 1*[
0]N
orm
al[1
]In
vers
o21
-21
Gan
ho P
ropo
rcio
nal E
xt. 1
0 -
10 *
0,01
21-2
2Te
mpo
Inte
grad
o E
xt. 1
0,01
- 1
0000
s *
1000
0 s
21-2
3Te
mpo
de
Dife
renc
iaçã
o E
xt. 1
0 -
10 s
*0
s21
-24
Ext.
1 D
if. L
imite
de
Gan
ho1
- 50
*5
22-*
*A
plic
ação
Fun
ções
22-0
*D
iver
sos
22-0
2M
odo
de
cont
role
do
CL
do S
leep
Mod
e*[
0]N
orm
al[1
]Si
mpl
ifica
do22
-4*
Slee
p M
ode
22-4
0Te
mpo
de
Func
iona
men
to M
ínim
o0
- 60
0 s
*10
s22
-41
Slee
p T
ime
Mín
imo
0 -
600
s *1
0 s
22-4
3Ve
loci
dade
de
Ativ
ação
[Hz]
0 -
400,
0 *1
022
-44
Refe
rênc
ia d
e A
tivaç
ão/D
ifere
nça
de F
B0
- 10
0 %
*10
%22
-45
Boos
t de
Set
poin
t-1
00 -
100
% *
0 %
22-4
6Te
mpo
Máx
imo
de
Impu
lso
0 -
600
s *6
0 s
22-4
7Ve
loci
dade
de
Slee
p [H
z]0
- 40
0,0
*022
-48
Tem
po d
e A
tras
o d
o S
leep
0 -
3600
s *
0 s
22-4
9Te
mpo
de
Atr
aso
de
Ativ
ação
0 -
3600
s *
0 s
22-6
*D
etec
ção
de
Corr
eia
Part
ida
22-6
0Fu
nção
Cor
reia
Par
tida
*[0]
Off
(Des
ligad
o)[1
]Ad
vert
ênci
a[2
]D
esar
me
22-6
1To
rque
de
Corr
eia
Part
ida
5 -
100
% *
10 %
22-6
2A
tras
o d
e Co
rrei
a Pa
rtid
a0
- 60
0 s
*10
s30
-**
Recu
rsos
Esp
ecia
is30
-2*
Avan
çado
Aju
ste
de P
artid
a30
-20
Tem
po d
o T
orqu
e de
Par
tida
Alto
[s]
0 -
60 s
*Re
laci
onad
o a
o t
aman
ho30
-21
Corr
ente
de
Torq
ue d
e Pa
rtid
a A
lta [%
]0
- 20
0,0
% *
Rela
cion
ado
ao
tam
anho
30-2
2Pr
oteç
ão d
e Ro
tor
Bloq
uead
o*[
0]O
ff (D
eslig
ado)
[1]
On
30-2
3Te
mpo
de
Det
ecçã
o d
o R
otor
Bloq
uead
o [s
]0,
05 -
1 s
*0,
10 s
31-*
*O
pcio
nal e
spec
ial
31-4
*M
ódul
o d
e m
emór
ia31
-40
Funç
ão d
o M
ódul
o d
e M
emór
ia[0
]D
isab
led
(Des
ativ
ado)
*[1]
Onl
y A
llow
Dow
nloa
d[2
]O
nly
Allo
w U
ploa
d[3
]Pe
rmita
Dow
nloa
d e
Upl
oad
31-4
1In
form
açõe
s de
MM
0 -
2 *0
31-4
2Co
nfigu
re o
Ace
sso
ao
Mód
ulo
de
Mem
ória
*[0]
Nen
hum
a aç
ão[1
]Pr
ogra
me
MM
par
a so
men
te le
itura
[2]
Prog
ram
e M
M p
ara
leitu
ra e
gra
vaçã
o31
-43
Eras
e_M
M*[
0]Se
m fu
nção
[1]
Apa
gar
MM
31-4
7Fu
nção
Lim
ite d
e Te
mpo
*[0]
Dis
able
d (D
esat
ivad
o)[1
]A
tivad
o31
-48
Tem
po r
esta
nte
do L
imite
de
Tem
po0
- 72
0 h
*72
0 h
32-*
*Co
nfigu
raçõ
es b
ásic
as d
o c
ontr
ole
dem
ovim
ento
32-1
*U
nida
de d
o U
suár
io32
-11
Den
omin
ador
da
Uni
dade
do
Usu
ário
1 -
6553
5 *1
32-1
2N
umer
ador
da
Uni
dade
do
Usu
ário
1 -
6553
5 *1
32-6
*PI
D32
-67
Erro
Máx
imo
de
Posi
ção
Tol
erad
o1
- 21
4748
3648
*20
0000
032
-8*
Velo
cida
de e
Ace
lera
ção
32-8
0Ve
loci
dade
máx
ima
perm
itida
1 -
3000
0 RP
M *
1500
RPM
32-8
1Ra
mpa
de
para
da r
ápid
a do
con
trol
ede
mov
imen
to50
- 3
6000
00 m
s *1
000
ms
33-*
*Co
ntro
le d
e m
ovim
ento
ava
nçad
oCo
nfigu
raçõ
es33
-0*
Mov
imen
to d
e In
ício
33-0
0M
odo
Hom
ing
*[0]
Não
forç
ado
[1]
Hom
ing
man
ual f
orça
do[2
]H
omin
g a
utom
atiz
ado
forç
ado
33-0
1Co
mpe
nsar
Hom
e-1
0737
4182
4 -
1073
7418
24 *
033
-02
Tem
po d
e Ra
mpa
de
Hom
e1
- 10
00 m
s *1
0 m
s33
-03
Iníc
io v
eloc
idad
e
Apêndice Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 81
10 10

-150
0 -
1500
RPM
*10
0 RP
M33
-04
Com
port
amen
to H
omin
g*[
1]Re
vers
ão s
em ín
dice
[3]
Para
fren
te s
em ín
dice
33-4
*M
anus
eio
do
Lim
ite33
-41
Lim
ite N
egat
ivo
de
Soft
war
e-1
0737
4182
4 -
1073
7418
24 *
-500
000
33-4
2Li
mite
Pos
itivo
de
Soft
war
e-1
0737
4182
4 -
1073
7418
24 *
5000
0033
-43
Lim
ite N
egat
ivo
de
Soft
war
e A
tivo
*[0]
Inat
ivo
[1]
Refe
rênc
ia33
-44
Lim
ite P
ositi
vo d
e So
ftw
are
Ativ
o*[
0]In
ativ
o[1
]Re
ferê
ncia
33-4
7Po
siçã
o d
a Ja
nela
de
Des
tino
1 -
1000
0 *5
1234
-**
Leitu
ras
de D
ados
do
Con
trol
e de
Mov
imen
to34
-0*
Par.
Gra
vaçã
o P
CD34
-01
PCD
1 g
rava
r pa
ra a
plic
ação
0 -
6553
5 *0
34-0
2PC
D 2
gra
var
para
apl
icaç
ão0
- 65
535
*034
-03
PCD
3 g
rava
r pa
ra a
plic
ação
0 -
6553
5 *0
34-0
4PC
D 4
gra
var
para
apl
icaç
ão0
- 65
535
*034
-05
PCD
5 g
rava
r pa
ra a
plic
ação
0 -
6553
5 *0
34-0
6PC
D 6
gra
var
para
apl
icaç
ão0
- 65
535
*034
-07
PCD
7 g
rava
r pa
ra a
plic
ação
0 -
6553
5 *0
34-0
8PC
D 8
gra
var
para
apl
icaç
ão0
- 65
535
*034
-09
PCD
9 g
rava
r pa
ra a
plic
ação
0 -
6553
5 *0
34-1
0PC
D 1
0 gr
avar
par
a ap
licaç
ão0
- 65
535
*034
-2*
Par
Ler
PCD
34-2
1PC
D 1
ler
para
apl
icaç
ão0
- 65
535
*034
-22
PCD
2 le
r pa
ra a
plic
ação
0 -
6553
5 *0
34-2
3PC
D 3
ler
para
apl
icaç
ão0
- 65
535
*034
-24
PCD
4 le
r pa
ra a
plic
ação
0 -
6553
5 *0
34-2
5PC
D 5
ler
para
apl
icaç
ão0
- 65
535
*034
-26
PCD
6 le
r pa
ra a
plic
ação
0 -
6553
5 *0
34-2
7PC
D 7
ler
para
apl
icaç
ão0
- 65
535
*034
-28
PCD
8 le
r pa
ra a
plic
ação
0 -
6553
5 *0
34-2
9PC
D 9
ler
para
apl
icaç
ão0
- 65
535
*0
34-3
0PC
D 1
0 le
r pa
ra a
plic
ação
0 -
6553
5 *0
34-5
*D
ados
do
Pro
cess
o34
-50
Posi
ção
Rea
l-1
0737
4182
4 -
1073
7418
24 *
034
-56
Erro
de
Trac
k-2
1474
8364
7 -
2147
4836
47 *
037
-**
Confi
gura
ções
da
Apl
icaç
ão37
-0*
Mod
o d
e ap
licaç
ão37
-00
Mod
o d
e ap
licaç
ão*[
0]M
odo
Driv
e[2
]Co
ntro
le d
a Po
siçã
o37
-1*
Cont
role
da
Posi
ção
37-0
1Po
s. F
onte
do
Fee
dbac
k*[
0]En
code
r de
24
V37
-02
Pos.
Des
tino
-107
3741
824
- 10
7374
1824
*0
37-0
3Po
s. T
ipo
*[0]
Abs
olut
o[1
]Re
lativ
o37
-04
Pos.
Vel
ocid
ade
1 -
3000
0 RP
M *
100
RPM
37-0
5Po
s. T
empo
de
Acel
eraç
ão d
a Ra
mpa
50 -
100
000
ms
*500
0 m
s37
-06
Pos.
Tem
po d
e de
sace
lera
ção
50 -
100
000
ms
*500
0 m
s37
-07
Pos.
Con
trol
e de
frei
o a
utom
átic
o[0
]In
ativ
o*[
1]A
tivad
o37
-08
Pos.
Atr
aso
de
rete
nção
0 -
1000
0 m
s *0
ms
37-0
9Po
s. A
tras
o d
e pa
rada
por
inér
cia
0 -
1000
ms
*200
ms
37-1
0Po
s. A
tras
o d
e fr
eio
0 -
1000
ms
*200
ms
37-1
1Po
s. L
imite
de
desg
aste
do
frei
o0
- 10
7374
1824
*0
37-1
2Po
s. A
nti W
indu
p d
o P
ID[0
]In
ativ
o*[
1]A
tivad
o37
-13
Braç
adei
ra d
a sa
ída
do P
ID d
e po
siçã
o1
- 10
000
*100
037
-14
Pos.
Ctr
l. Fo
nte
*[0]
DI
[1]
Fiel
dBus
37-1
5Po
s. B
loqu
eio
de
sent
ido
*[0]
Sem
Blo
quei
o[1
]Bl
oque
ar R
ever
são
[2]
Bloq
uear
par
a fr
ente
37-1
7Po
s. C
ompo
rtam
ento
da
Falh
a de
Cont
role
*[0]
Des
acel
eraç
ão e
Fre
io[1
]Fr
ear
Dire
tam
ente
37-1
8Po
s. M
otiv
o d
a Fa
lha
de C
ontr
ole
*[0]
Sem
falh
a[1
]H
omin
g N
eces
sário
[2]
Lim
ite P
ositi
vo d
o H
W[3
]Li
mite
Neg
ativ
o d
o H
W[4
]Li
mite
Pos
itivo
do
SW
[5]
Lim
ite N
egat
ivo
do
SW
[7]
Lim
ite d
e de
sgas
te d
o fr
eio
[8]
Para
da R
ápid
a[9
]Er
ro d
o P
ID m
uito
gra
nde
[12]
Ope
raçã
o R
ever
sa[1
3]O
pera
ção
Par
a fr
ente
[20]
Não
é p
ossí
vel l
ocal
izar
a p
osiç
ãoin
icia
l37
-19
Pos.
Nov
o ín
dice
0 -
255
*0
Apêndice VLT® Midi Drive FC 280
82 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528
1010

Índice
AAbreviações............................................................................................ 71
Alta tensão.......................................................................................... 7, 24
AMA com T27 conectado.................................................................. 46
Ambiente de instalação..................................................................... 10
Aprovação e certificação...................................................................... 6
Armazenagem....................................................................................... 10
Aterramento...................................................................... 17, 18, 23, 24
Auto on (Automático ligado)..................................................... 31, 35
CCabo blindado....................................................................................... 23
Cartão de controleComunicação serial RS485............................................................ 64Comunicação serial USB................................................................ 64Desempenho..................................................................................... 64Saída +10 V CC.................................................................................. 64Saída 24 V CC..................................................................................... 64
Chave de desconexão......................................................................... 24
Choque..................................................................................................... 10
Classe de eficiência energética........................................................ 61
Comando Executar............................................................................... 35
Comando externo................................................................................... 5
Comando remoto.................................................................................... 4
Comprimento de cabo....................................................................... 62
Comprimento do fio............................................................................ 13
Comunicação serialComunicação serial.................................................... 22, 31, 49, 64Comunicação serial USB................................................................ 64
Condição ambiente............................................................................. 61
Conduzir................................................................................................... 23
Conexão de energia............................................................................. 13
Configuração padrão.......................................................................... 32
Controlador externo.............................................................................. 4
ControleCaracterística..................................................................................... 64Fiação..................................................................................... 13, 20, 23Terminal de controle................................................................ 31, 53
Controle do freio mecânico.............................................................. 21
Controle local......................................................................................... 31
Convenção.............................................................................................. 71
Corrente CC............................................................................................... 5
Corrente de fuga.............................................................................. 8, 13
Corrente de saída.................................................................................. 63
DDelta aterrado........................................................................................ 19
Delta flutuante....................................................................................... 19
Derating................................................................................................... 61
Disjuntor.................................................................................................. 23
Display numérico.................................................................................. 25
Disposição dos cabos.......................................................................... 23
EEficiência energética............................................................. 58, 59, 60
Elevação................................................................................................... 10
EMC............................................................................................................ 61
EntradaCorrente............................................................................................... 18Energia de entrada.......................................................................... 13Fiação da energia de entrada...................................................... 23Potência............................................................................ 5, 18, 23, 24Tensão de entrada........................................................................... 24Terminal número....................................................................... 18, 24
Entrada CA.......................................................................................... 5, 18
Entrada digital....................................................................................... 20
EntradasEntrada analógica............................................................................ 62Entrada de pulso.............................................................................. 63Entrada digital................................................................................... 62
Equalização do potencial................................................................... 14
Equipamento auxiliar.......................................................................... 23
Equipamento opcional....................................................................... 24
Espaço para ventilação....................................................................... 23
Especificação.......................................................................................... 23
Estrutura do menu............................................................................... 30
FFalha
Registro de falhas............................................................................. 30
Fator de potência............................................................................. 5, 23
Feedback................................................................................................. 23
Feedback do sistema............................................................................. 4
Fiação de energia de saída................................................................ 23
Filtro de RFI............................................................................................. 19
Forma de onda CA.................................................................................. 5
Fusível......................................................................................... 13, 23, 65
HHand On (Manual Ligado)................................................................. 31
IIEC 61800-3...................................................................................... 19, 61
InicializaçãoProcedimento.................................................................................... 32Procedimento manual.................................................................... 32
Instalação................................................................................................ 23
Índice Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 83

Instalação compatível com EMC..................................................... 13
Instalação lado a lado......................................................................... 10
Instruções para descarte...................................................................... 6
Isolação de interferência.................................................................... 23
JJumper...................................................................................................... 20
LLista de advertência e alarme.......................................................... 53
Load Sharing............................................................................................. 7
MMalha aberta.......................................................................................... 64
Manutenção........................................................................................... 49
Menu principal............................................................................... 28, 30
Montagem....................................................................................... 10, 23
Montagem horizontal......................................................................... 11
MotorCabo de motor........................................................................... 13, 17Corrente.......................................................................................... 5, 34Corrente do Motor........................................................................... 30Dados................................................................................................... 34Dados do motor............................................................................... 33Potência do motor.................................................................... 13, 30Proteção................................................................................................. 4Proteção térmica do motor............................................................. 6Rotação................................................................................................ 35Saída do motor................................................................................. 61Status...................................................................................................... 4
NNível de tensão...................................................................................... 62
Norma e conformidade para STO...................................................... 6
PPartida acidental.............................................................................. 7, 49
PELV.................................................................................................... 48, 64
Pessoal qualificado................................................................................. 7
Placa traseira.......................................................................................... 10
Plaqueta de identificação.................................................................... 9
Programação............................................................................ 20, 30, 31
Proteção de sobrecorrente................................................................ 13
Proteção de transiente.......................................................................... 5
Proteção do circuito de derivação.................................................. 65
Proteção térmica..................................................................................... 6
QQuick menu..................................................................................... 26, 30
RReciclagem................................................................................................ 6
Recurso adicional.................................................................................... 4
Rede elétricaAlimentação (L1/N, L2/L, L3)........................................................ 60Dados de alimentação................................................................... 58Tensão.................................................................................................. 30
Rede elétrica CA............................................................................... 5, 18
Rede elétrica isolada............................................................................ 19
Referência................................................................................................ 30
Referência de velocidade............................................................ 35, 46
Refrigeração........................................................................................... 10
Registro de Alarme............................................................................... 30
Reinicializar........................................................................ 30, 31, 32, 49
Relé do cliente....................................................................................... 43
Requisito de espaçamento................................................................ 10
Rotação do encoder............................................................................ 35
SSaída do relé........................................................................................... 64
SaídasSaída analógica................................................................................. 63Saída digital........................................................................................ 63
Seção transversal.................................................................................. 62
Segurança.................................................................................................. 8
Serviço...................................................................................................... 49
Setup......................................................................................................... 35
SIL2............................................................................................................... 6
SILCL de SIL2............................................................................................. 6
Símbolo.................................................................................................... 71
Start-up.................................................................................................... 32
STOAtivação............................................................................................... 42Dados técnicos.................................................................................. 45Desativação........................................................................................ 42Manutenção....................................................................................... 44Nova partida automática....................................................... 42, 43Reinicialização manual............................................................ 42, 43Teste de colocação em funcionamento................................... 43
TTamanho do cabo................................................................................. 17
Tecla.................................................................................................... 25, 30
Tecla de navegação....................................................................... 25, 30
Tecla de operação.......................................................................... 25, 30
Tempo de descarga................................................................................ 8
Tensão de alimentação................................................................ 24, 64
Índice VLT® Midi Drive FC 280
84 Danfoss A/S © 08/2018 Todos os direitos reservados. MG07A528

TerminaisTerminal de controle................................................................ 31, 53Terminal de saída............................................................................. 24
Termistor.................................................................................................. 48
TerraConexão do terra.............................................................................. 23Fio terra................................................................................................ 13
TorqueCaracterística do torque................................................................ 61
Torque de aperto dos terminais...................................................... 65
Transiente de ruptura.......................................................................... 14
UUso pretendido........................................................................................ 4
VVibração................................................................................................... 10
Índice Guia de Operação
MG07A528 Danfoss A/S © 08/2018 Todos os direitos reservados. 85
A Danfoss não aceita qualquer responsabilidade por possíveis erros constantes de catálogos, brochuras ou outros materiais impressos. A Danfoss reserva-se o direito de alterar os seus produtos semaviso prévio. Esta determinação aplica-se também a produtos já encomendados, desde que tais modificações não impliquem em mudanças nas especificações acordadas. Todas as marcasregistradas constantes deste material são propriedade das respectivas empresas. Danfoss e o logotipo Danfoss são marcas registradas da Danfoss A/S. Todos os direitos reservados.
Danfoss A/SUlsnaes 1DK-6300 Graastenvlt-drives.danfoss.com
*MG07A528*132R0153 MG07A528 08/2018